

Page 1

Multiphase PWM Regulator for IMVP-6.5™ Mobile CPUs
ISL62883, ISL62883B
The ISL62883 is a multiphase PWM buck regulator for
miroprocessor core power supply. The multiphase buck converter
uses interleaved phase to reduce the total output voltage ripple with
each phase carrying a portion of the total load current, providing
better system performance, superior thermal management, lower
component cost, reduced power dissipation, and smaller
implementation area. The ISL62883 uses two integrated gate
drivers and an external gate driver to provide a complete solution.
The PWM modulator is based on Intersil's Robust Ripple Regulator
3
) technology™. Compared with traditional modulators, the R3™
(R
modulator commands variable switching frequency during load
transients, achieving faster transient response. With the same
modulator, the switching frequency is reduced at light load,
increasing the regulator efficiency.
The ISL62883 is fully compliant with IMVP-6.5™ specifications. It
responds to PSI# and DPRSLPVR signals by adding or dropping
PWM3 and Phase-2 respectively, adjusting overcurrent protection
threshold accordingly, and entering/exiting diode emulation mode.
It reports the regulator output current through the IMON pin. It
senses the current by using either a discrete resistor or inductor
DCR whose variation over temperature can be thermally
compensated by a single NTC thermistor. It uses differential
remote voltage sensing to accurately regulate the processor die
voltage. The adaptive body diode conduction time reduction
function minimizes the body diode conduction loss in diode
emulation mode. User-selectable overshoot reduction function
offers an option to aggressively reduce the output capacitors as
well as the option to disable it for users concerned about
increased system thermal stress. In 2-Phase configuration, the
ISL62883 offers the FB2 function to optimize 1-Phase
performance.
The ISL62883B has the same functions as the ISL62883, but
comes in a different package.
Features
• Precision Multiphase Core Voltage Regulation
- 0.5% System Accuracy Over-Temperature
- Enhanced Load Line Accuracy
• Microprocessor Voltage Identification Input
- 7-Bit VID Input, 0.300V to 1.500V in 12.5mV Steps
- Supports VID Changes On-The-Fly
• Supports Multiple Current Sensing Methods
- Lossless Inductor DCR Current Sensing
- Precision Resistor Current Sensing
• Supports PSI# and DPRSLPVR modes
• Superior Noise Immunity and Transient Response
• Current Monitor and Thermal Monitor
• Differential Remote Voltage Sensing
• High Efficiency Across Entire Load Range
• Programmable 1-, 2- or 3-Phase Operation
• Two Integrated Gate Drivers
• Excellent Dynamic Current Balance Between Phases
• FB2 Function in 2-Phase Configuration to Optimize 1-Phase
Performance
• Adaptive Body Diode Conduction Time Reduction
• User-selectable Overshoot Reduction Function
• Small Footprint 40 Ld 5x5 or 48 Ld 6x6 TQFN Package
• Pb-Free (RoHS Compliant)
Applications
• Notebook Computers
June 21, 2011
FN6891.4
1
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
1-888-INTERSIL or 1-888-468-3774 | Copyright Intersil Americas Inc. 2009-2011. All Rights Reserved
Intersil (and design) is a trademark owned by Intersil Corporation or one of its subsidiaries.
All other trademarks mentioned are the property of their respective owners.
Page 2
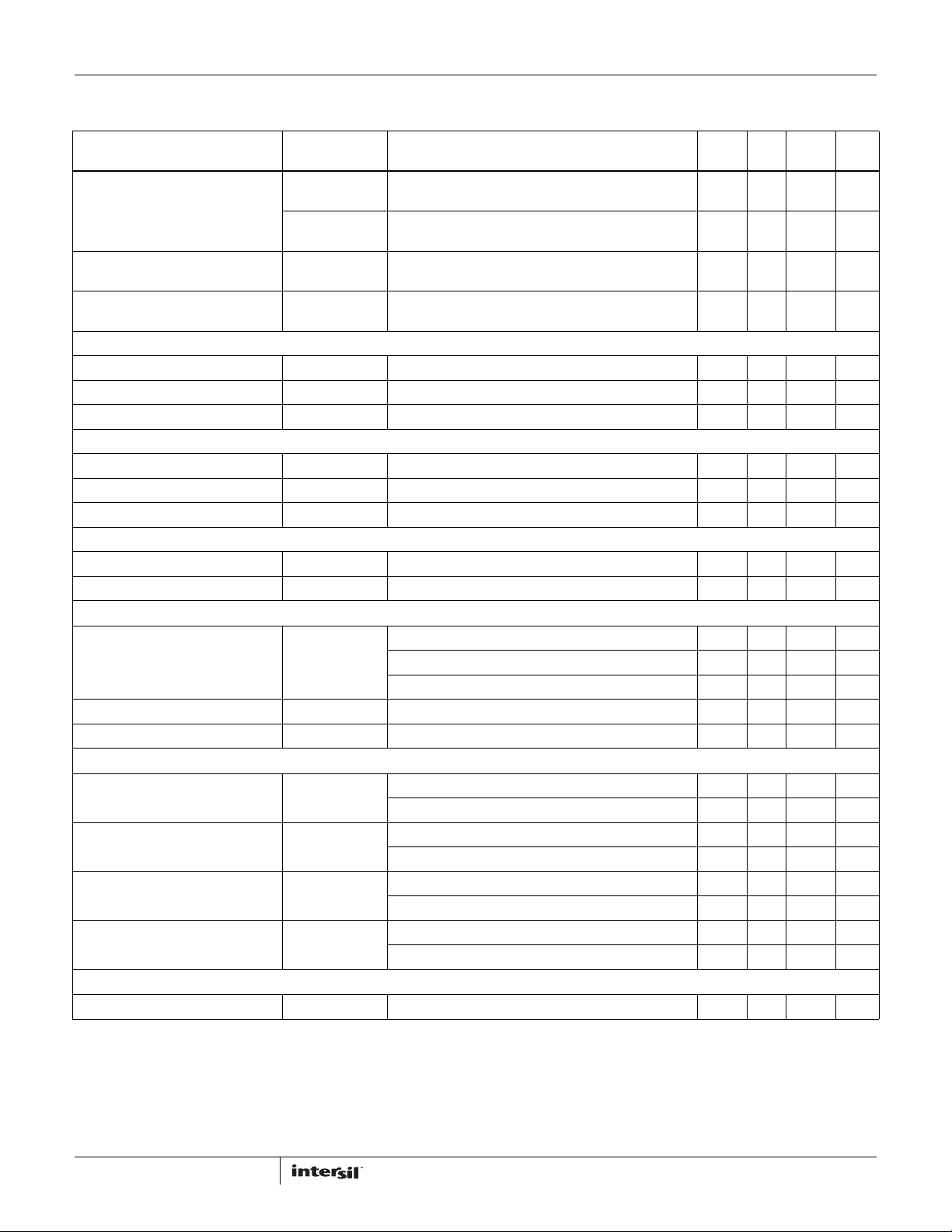
Ordering Information
ISL62883, ISL62883B
PART NUMBER
(Notes 1, 2, 3)
PART
MARKING
TEMP. RANGE
(°C)
PACKAGE
(Pb-Free)
PKG.
DWG. #
ISL62883HRTZ 62883 HRTZ -10 to +100 40 Ld 5x5 TQFN L40.5x5
ISL62883IRTZ 62883 IRTZ -40 to +100 40 Ld 5x5 TQFN L40.5x5
ISL62883BHRTZ 62883 BHRTZ -10 to +100 48 Ld 6x6 TQFN L48.6x6
NOTES:
1. Add “-T*” suffix for tape and reel. Please refer to TB347
for details on reel specifications.
2. These Intersil Pb-free plastic packaged products employ special Pb-free material sets, molding compounds/die attach materials, and 100% matte
tin plate plus anneal (e3 termination finish, which is RoHS compliant and compatible with both SnPb and Pb-free soldering operations). Intersil Pbfree products are MSL classified at Pb-free peak reflow temperatures that meet or exceed the Pb-free requirements of IPC/JEDEC J STD-020.
3. For Moisture Sensitivity Level (MSL), please see device information page for ISL62883
TB363
.
, ISL62883B. For more information on MSL please see techbrief
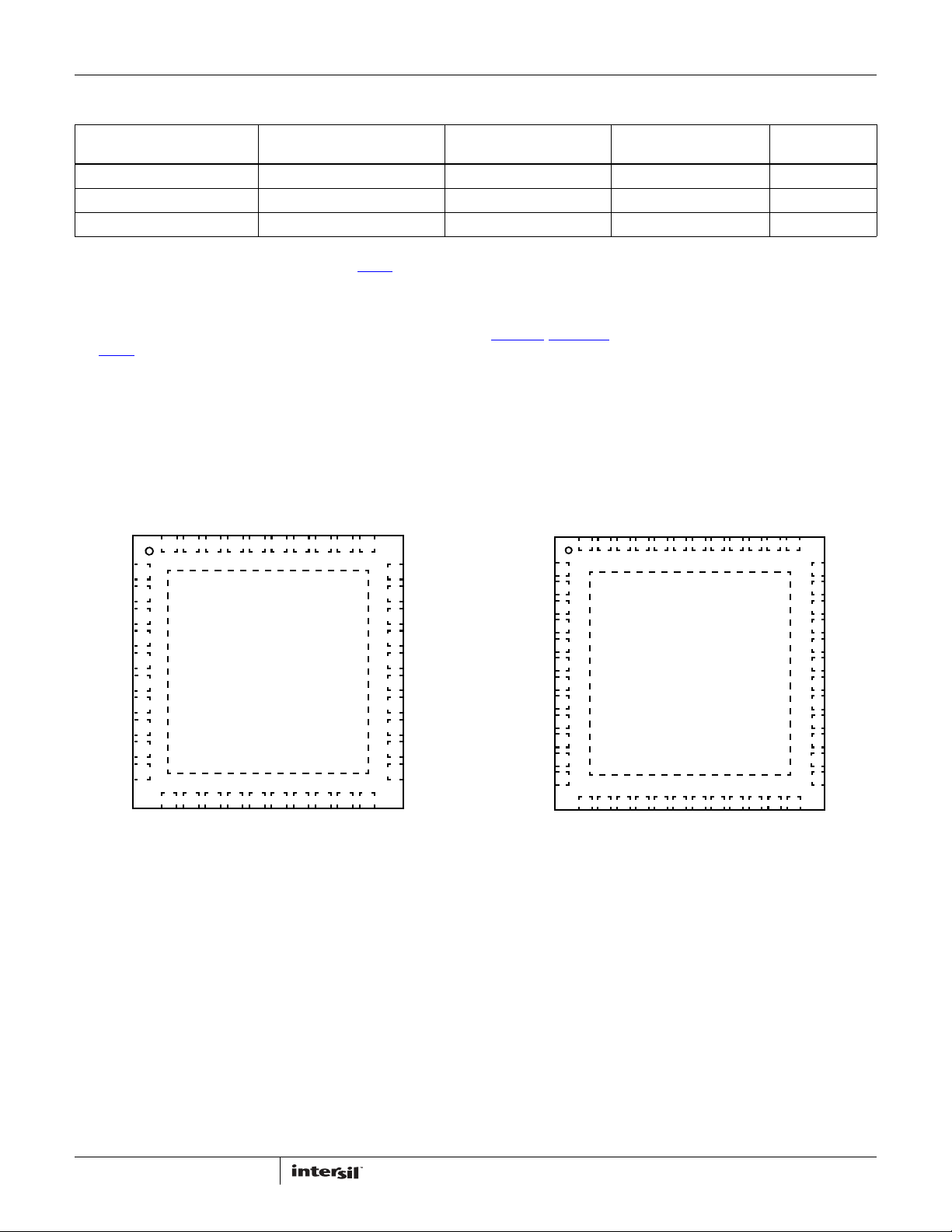
Pin Configurations
N#
_E
CLK
ISEN1
R
LPV
PRS
D
VSEN
ISL62883B
(48 LD TQFN)
TOP VIEW
6
_ON
VR
RTN
VID
VID5
(BOTTOM)
ISUM-
ISUM+
D4
VI
VDD
ID3VID2
V
NC
VIN
D1
VI
IMON
ID0
V
38 37
23 24
NC
NC
36
35
34
33
32
31
30
29
28
27
26
25
BOOT1
BOOT2
UGATE2
PHASE2
VSSP2
LGATE2
NC
VCCP
PWM3
LGATE1
VSSP1
PHASE1
UGATE1
PGOOD
PSI#
RBIAS
VR_TT#
NTC
VW
COMP
FB
SEN3/FB2
ISEN2
ISL62883
(40 LD TQFN)
TOP VIEW
R
V
#
P
N
L
N
E
S
_
O
R
_
K
L
P
R
V
C
D
39 38 37 36 35 34 33 32 31
40
1
2
3
4
5
6
7
8
9
10
11 12 13 14 15 16 17 18 19 20
RTN
VSEN
ISEN1
6
5
D
D
I
I
V
V
GND PAD
(BOTTOM)
ISUM-
ISUM+
4
D
I
V
VDD
2
1
3
D
I
V
VIN
D
I
V
IMON
0
D
D
I
I
V
V
BOOT1
UGATE1
30
29
28
27
26
25
24
23
22
21
BOOT2
UGATE2
PHASE2
VSSP2
LGATE2
VCCP
PWM3
LGATE1
VSSP1
PHASE1
NC
PGOOD
PSI#
RBIAS
VR_TT#
NTC
GND
VW
COMP
FB
ISEN3/FB2
NC
NC
48
47 46 45 44 43 42 41 40 39
1
2
3
4
5
6
7
8
9
10
11
12
13 14 15 16 17 18 19 20 21 22
ISEN2
2
FN6891.4
June 21, 2011
Page 3

ISL62883, ISL62883B
Pin Function Descriptions
GND
Signal common of the IC. Unless otherwise stated, signals are
referenced to the GND pin.
PGOOD
Power-Good open-drain output indicating when the regulator is
able to supply regulated voltage. Pull-up externally with a 680Ω
resistor to VCCP or 1.9kΩ to 3.3V.
PSI#
Low load current indicator input. When asserted low, indicates a
reduced load-current condition. For ISL62883, when PSI# is
asserted low, PWM3 will be disabled.
RBIAS
147k resistor to GND sets internal current reference.
VR_TT#
Thermal overload output indicator.
NTC
Thermistor input to VR_TT# circuit.
VW
A resistor from this pin to COMP programs the switching
frequency (8kΩ gives approximately 300kHz).
COMP
This pin is the output of the error amplifier. Also, a resistor across
this pin and GND adjusts the overcurrent threshold.
FB
This pin is the inverting input of the error amplifier.
ISEN3/FB2
When the ISL62883 is configured in 3-phase mode, this pin is
ISEN3. ISEN3 is the individual current sensing for phase 3. When
the ISL62883 is configured in 2-phase mode, this pin is FB2.
There is a switch between the FB2 pin and the FB pin. The switch
is on in 2-phase mode and is off in 1-phase mode. The
components connecting to FB2 are used to adjust the
compensation in 1-phase mode to achieve optimum
performance.
ISEN2
Individual current sensing for Phase-2. When ISEN2 is pulled to
5V VDD, the controller will disable Phase-2 and allow other
phases to operate.
ISEN1
Individual current sensing for Phase-1.
RTN
Remote voltage sensing return. Connect to ground at
microprocessor die.
ISUM- and ISUM+
Droop current sense input.
VDD
5V bias power.
VIN
Battery supply voltage, used for feed-forward.
IMON
An analog output. IMON outputs a current proportional to the
regulator output current.
BOOT1
Connect an MLCC capacitor across the BOOT1 and the PHASE1
pins. The boot capacitor is charged through an internal boot
diode connected from the VCCP pin to the BOOT1 pin, each time
the PHASE1 pin drops below VCCP minus the voltage dropped
across the internal boot diode.
UGATE1
Output of the Phase-1 high-side MOSFET gate driver. Connect the
UGATE1 pin to the gate of the Phase-1 high-side MOSFET.
PHASE1
Current return path for the Phase-1 high-side MOSFET gate driver.
Connect the PHASE1 pin to the node consisting of the high-side
MOSFET source, the low-side MOSFET drain, and the output
inductor of Phase-1.
VSSP1
Current return path for the Phase-1 low-side MOSFET gate driver.
Connect the VSSP1 pin to the source of the Phase-1 low-side
MOSFET through a low impedance path, preferably in parallel
with the trace connecting the LGATE1 pin to the gate of the
Phase-1 low-side MOSFET.
LGATE1
Output of the Phase-1 low-side MOSFET gate driver. Connect the
LGATE1 pin to the gate of the Phase-1 low-side MOSFET.
PWM3
PWM output for Channel 3. When PWM3 is pulled to 5V VDD, the
controller will disable Phase-3 and allow other phases to operate.
VCCP
Input voltage bias for the internal gate drivers. Connect +5V to
the VCCP pin. Decouple with at least 1µF of an MLCC capacitor to
VSSP1 and VSSP2 pins respectively.
VSEN
Remote core voltage sense input. Connect to microprocessor die.
3
LGATE2
Output of the Phase-2 low-side MOSFET gate driver. Connect the
LGATE2 pin to the gate of the Phase-2 low-side MOSFET.
FN6891.4
June 21, 2011
Page 4

ISL62883, ISL62883B
VSSP2
Current return path for the Phase-2 converter low-side MOSFET
gate driver. Connect the VSSP2 pin to the source of the Phase-2
low-side MOSFET through a low impedance path, preferably in
parallel with the trace connecting the LGATE2 pin to the gate of
the Phase-2 low-side MOSFET.
PHASE2
Current return path for the Phase-2 high-side MOSFET gate driver.
Connect the PHASE2 pin to the node consisting of the high-side
MOSFET source, the low-side MOSFET drain, and the output
inductor of Phase-2.
UGATE2
Output of the Phase-2 high-side MOSFET gate driver. Connect the
UGATE2 pin to the gate of the Phase-2 high-side MOSFET.
BOOT2
Connect an MLCC capacitor across the BOOT2 and the PHASE2
pins. The boot capacitor is charged through an internal boot
diode connected from the VCCP pin to the BOOT2 pin, each time
the PHASE2 pin drops below VCCP minus the voltage dropped
across the internal boot diode.
VID0, VID1, VID2, VID3, VID4, VID5, VID6
VID input with VID0 = LSB and VID6 = MSB.
VR_ON
Voltage regulator enable input. A high level logic signal on this
pin enables the regulator.
DPRSLPVR
Deeper sleep enable signal. A high level logic signal on this pin
indicates that the microprocessor is in deeper sleep mode.
CLK_EN#
Open drain output to enable system PLL clock. It goes low 13
switching cycles after V
is within 10% of V
core
boot
.
NC
No Connect.
BOTTOM (on ISL62883B)
The bottom pad of ISL62883B is electrically connected to the
GND pin inside the IC.
4
FN6891.4
June 21, 2011
Page 5
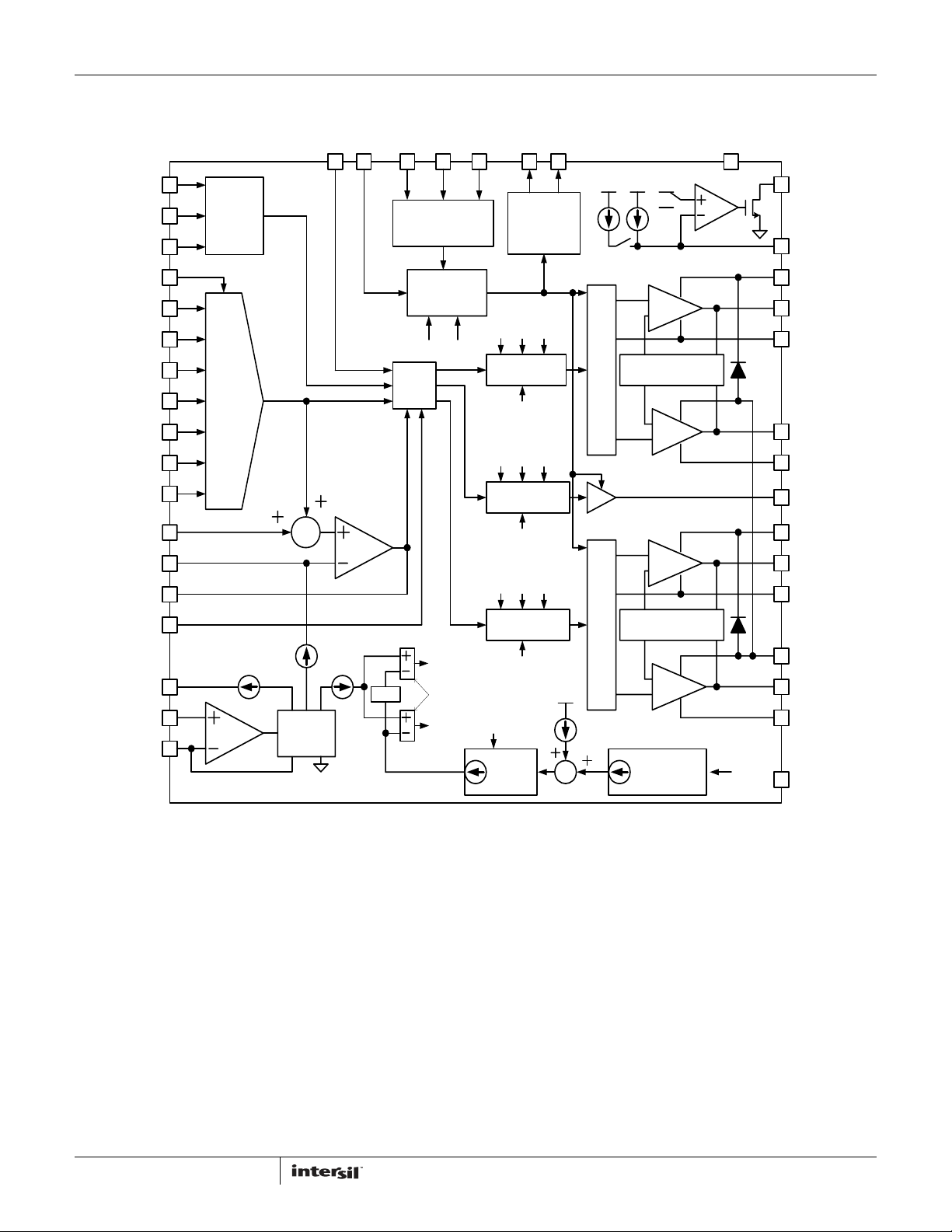
Block Diagram
Σ
ISL62883, ISL62883B
VR_ON
PSI#
DPRSLPVR
RBIAS
VID0
VID1
VID2
VID3
VID4
VID5
VID6
RTN
FB
COMP
VW
IMON
ISUM+
ISUM-
MODE
CONTROL
DAC
AND
SOFT
START
IMON
IDROOP
CURRENT
SENSE
Σ
VIN
VSEN
ISEN1 ISEN3 ISEN2
VIN
CLOCK
VDAC
COMP VW
E/A
2.5X
CURRENT
BALANCE
IBAL
PROTECTION
WOC OC
WOC
CURRENT
COMPARATORS
OC
PGOOD CLK_EN#
PGOOD &
CLK_EN#
LOGIC
FLT
IBAL VIN VDAC
MODULATOR
COMP
COMP
IBAL VIN VDAC
MODULATOR
COMP
IBAL VIN VDAC
MODULATOR
COMP
NUMBER OF
PHASES
GAIN
SELECT
60UA
6µA
54µA
1.24V
DRIVER
SHOOT THROUGH
PROTECTION
PWM CONTROL LOGIC
DRIVER
SHOOT THROUGH
PROTECTION
PWM CONTROL LOGIC
ADJ. OCP
THRESHOLD
1.20V
DRIVER
DRIVER
VDD
COMP
VR_TT#
NTC
BOOT2
UGATE2
PHASE2
LGATE2
VSSP2
PWM3
BOOT1
UGATE1
PHASE1
VCCP
LGATE1
VSSP1
GND
5
FN6891.4
June 21, 2011
Page 6
ISL62883, ISL62883B
Absolute Maximum Ratings Thermal Information
Supply Voltage, VDD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -0.3V to +7V
Battery Voltage, VIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +28V
Boot Voltage (BOOT). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -0.3V to +33V
Boot to Phase Voltage (BOOT-PHASE) . . . . . . . . . . . . . . . . -0.3V to +7V(DC)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -0.3V to +9V(<10ns)
Phase Voltage (PHASE) . . . . . . . . . . . . . . . . -7V (<20ns Pulse Width, 10µJ)
UGATE Voltage (UGATE) . . . . . . . . . . . . . . . . . . . PHASE - 0.3V (DC) to BOOT
. . . . . . . . . . . . . . . . . . . . . . . PHASE-5V (<20ns Pulse Width, 10µJ) to BOOT
LGATE Voltage (LGATE). . . . . . . . . . . . . . . . . . . . . . -0.3V (DC) to VDD + 0.3V
. . . . . . . . . . . . . . . . . . . . . . . -2.5V (<20ns Pulse Width, 5µJ) to VDD + 0.3V
All Other Pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -0.3V to (VDD +0.3V)
Open Drain Outputs, PGOOD, VR_TT#,
CLK_EN# . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -0.3V to +7V
CAUTION: Do not operate at or near the maximum ratings listed for extended periods of time. Exposure to such conditions may adversely impact product
reliability and result in failures not covered by warranty.
NOTES:
4. θ
is measured in free air with the component mounted on a high effective thermal conductivity test board with “direct attach” features. See Tech
JA
Brief TB379.
5. For θ
, the “case temp” location is the center of the exposed metal pad on the package underside.
JC
Thermal Resistance (Typical) θ
40 Ld TQFN Package (Notes 4, 5) . . . . . . . 32 3
48 Ld TQFN Package (Notes 4, 5) . . . . . . . 29 2
Maximum Junction Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . .+150°C
Maximum Storage Temperature Range . . . . . . . . . . . . . .-65°C to +150°C
Pb-Free Reflow Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . see link below
http://www.intersil.com/pbfree/Pb-FreeReflow.asp
(°C/W) θJC (°C/W)
JA
Recommended Operating Conditions
Supply Voltage, VDD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +5V ±5%
Battery Voltage, VIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +4.5V to 25V
Ambient Temperature
ISL62883HRTZ, ISL62883BHRTZ . . . . . . . . . . . . . . . . .-10°C to +100°C
ISL62883IRTZ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .-40°C to +100°C
Junction Temperature
ISL62883HRTZ, ISL62883BHRTZ . . . . . . . . . . . . . . . . .-10°C to +125°C
ISL62883IRTZ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .-40°C to +125°C
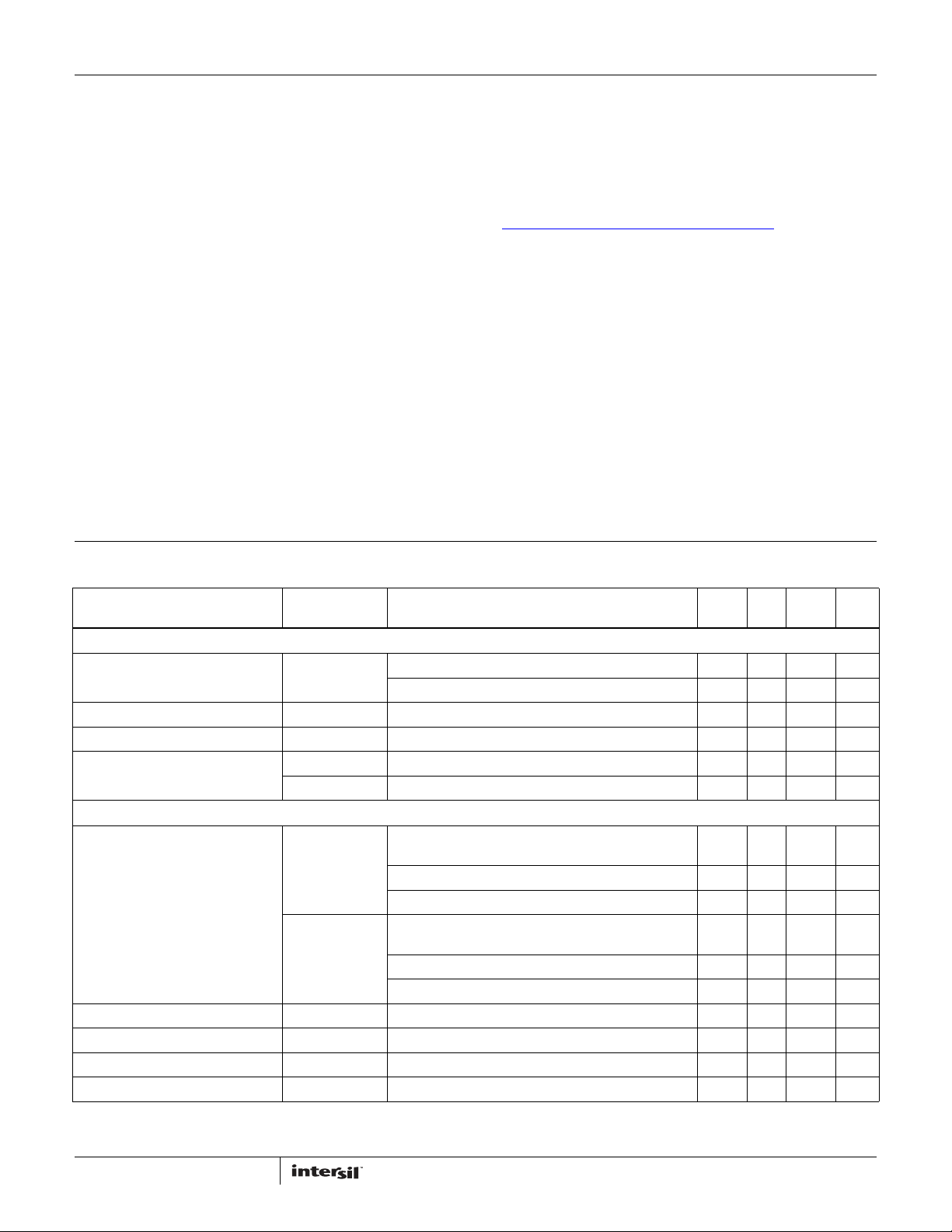
Electrical Specifications Operating Conditions: VDD = 5V, T
limits apply over the operating temperature range, -40°C to +100°C.
PARAMETER SYMBOL TEST CONDITIONS
INPUT POWER SUPPLY
+5V Supply Current I
Battery Supply Current I
V
Input Resistance R
IN
Power-On-Reset Threshold POR
VDD
VIN
VIN
POR
SYSTEM AND REFERENCES
System Accuracy HRTZ
V
BOOT
Maximum Output Voltage V
Minimum Output Voltage V
R
Voltage R
BIAS
%Error (V
IRTZ
%Error (V
CC_CORE(max)
CC_CORE(min)
CC_CORE
CC_CORE
VR_ON = 1V 4 4.6 mA
VR_ON = 0V 1 µA
VR_ON = 0V 1 µA
VR_ON = 1V 900 kΩ
VDD rising 4.35 4.5 V
r
VDD falling 4.00 4.15 V
f
No load; closed loop, active mode range
)
VID = 0.75V to 1.50V
VID = 0.5V to 0.7375V -8 +8 mV
VID = 0.3V to 0.4875V -15 +15 mV
No load; closed loop, active mode range
)
VID = 0.75V to 1.50V
VID = 0.5V to 0.7375V -10 +10 mV
VID = 0.3V to 0.4875V -18 +18 mV
VID = [0000000] 1.500 V
VID = [1100000] 0.300 V
= 147kΩ 1.45 1.47 1.49 V
BIAS
= -40°C to +100°C, fSW = 300kHz, unless otherwise noted. Boldface
A
MIN
(Note 6) TYP
-0.5 +0.5 %
-0.8 +0.8 %
1.0945 1.100 1.1055 V
MAX
(Note 6) UNITS
6
FN6891.4
June 21, 2011
Page 7
ISL62883, ISL62883B
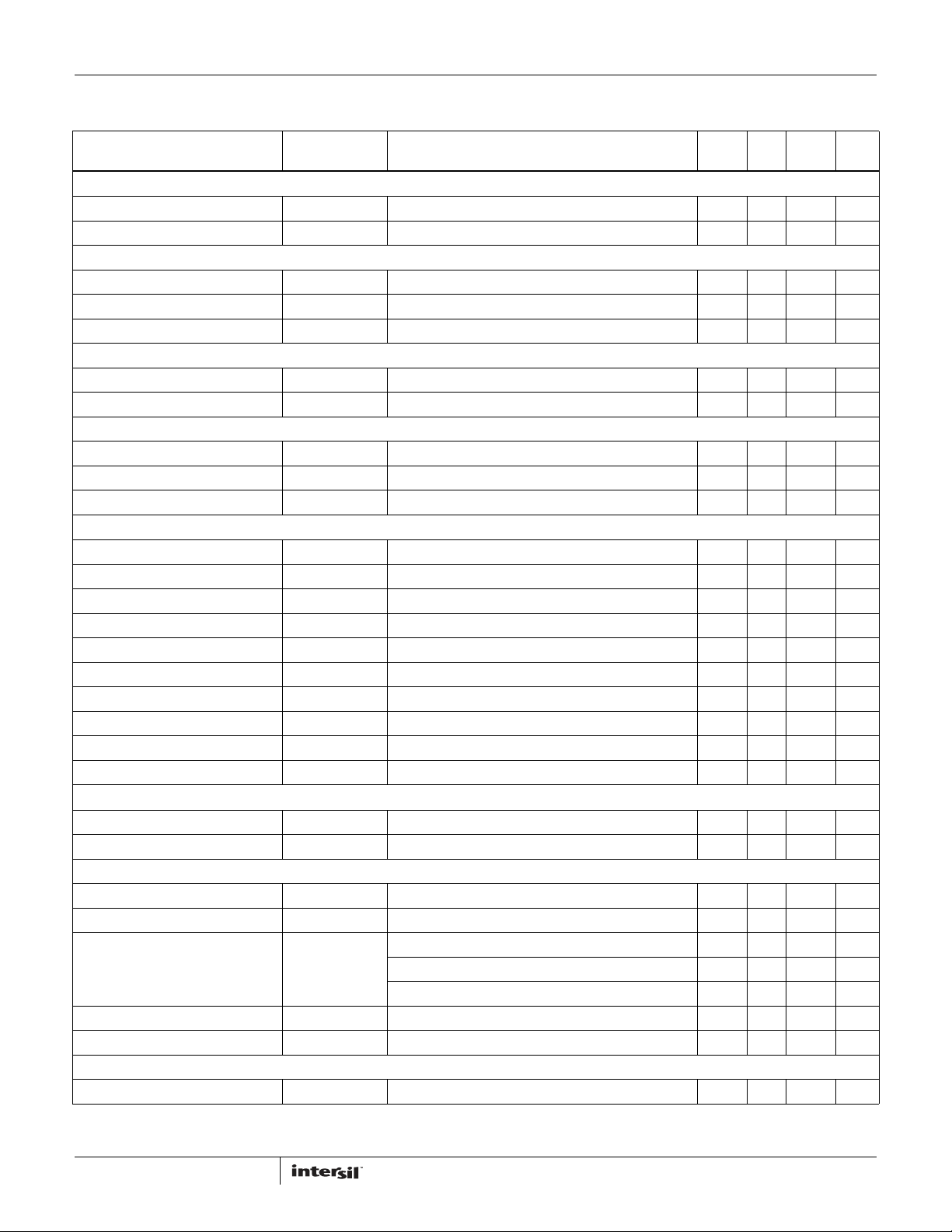
Electrical Specifications Operating Conditions: VDD = 5V, T
= -40°C to +100°C, fSW = 300kHz, unless otherwise noted. Boldface
A
limits apply over the operating temperature range, -40°C to +100°C. (Continued)
PARAMETER SYMBOL TEST CONDITIONS
MIN
(Note 6) TYP
MAX
(Note 6) UNITS
CHANNEL FREQUENCY
Nominal Channel Frequency f
SW(nom)
Rfset = 7kΩ, 3 channel operation, V
= 1V 285 300 315 kHz
COMP
Adjustment Range 200 500 kHz
AMPLIFIERS
Current-Sense Amplifier Input Offset I
Error Amp DC Gain A
v0
Error Amp Gain-Bandwidth Product GBW C
= 0A -0.15 +0.15 mV
FB
90 dB
= 20pF 18 MHz
L
ISEN
Imbalance Voltage Maximum of ISENs - Minimum of ISENs 1 mV
Input Bias Current 20 nA
POWER GOOD AND PROTECTION MONITORS
PGOOD Low Voltage V
PGOOD Leakage Current I
OL
OH
I
= 4mA 0.26 0.4 V
PGOOD
PGOOD = 3.3V -1 1 µA
PGOOD Delay tpgd CLK_EN# LOW to PGOOD HIGH 6.3 7. 6 8.9 ms
GATE DRIVER
UGATE Pull-Up Resistance R
UGATE Source Current I
UGATE Sink Resistance R
UGATE Sink Current I
LGATE Pull-Up Resistance R
LGATE Source Current I
LGATE Sink Resistance R
LGATE Sink Current I
UGATE to LGATE Deadtime t
LGATE to UGAT E De adtim e t
UGPU
UGSRC
UGPD
UGSNK
LGPU
LGSRC
LGPD
LGSNK
UGFLGR
LGFUGR
200mA Source Current 1.0 1.5 Ω
UGATE - PHASE = 2.5V 2.0 A
250mA Sink Current 1.0 1.5 Ω
UGATE - PHASE = 2.5V 2.0 A
250mA Source Current 1.0 1.5 Ω
LGATE - VSSP = 2.5V 2.0 A
250mA Sink Current 0.5 0.9 Ω
LGATE - VSSP = 2.5V 4.0 A
UGATE falling to LGATE rising, no load 23 ns
LGATE falling to UGATE rising, no load 28 ns
BOOTSTRAP DIODE
Forward Voltage V
Reverse Leakage I
F
R
PVCC = 5V, IF = 2mA 0.58 V
VR = 25V 0.2 µA
PROTECTION
Overvoltage Threshold OV
Severe Overvoltage Threshold OV
OC Threshold Offset at Rcomp = Open
Circuit
H
HS
VSEN rising above setpoint for >1ms 150 195 240 mV
VSEN rising for >2µs 1.525 1.55 1.575 V
3-phase configuration, ISUM- pin current 28.4 30.3 32.2 µA
2-phase configuration, ISUM- pin current 18.3 20.2 22.1 µA
1-phase configuration, ISUM- pin current 8.2 10.1 12.0 µA
Current Imbalance Threshold One ISEN above another ISEN for >1.2ms 9 mV
Undervoltage Threshold UV
f
VSEN falling below setpoint for >1.2ms -355 -295 -235 mV
LOGIC THRESHOLDS
VR_ON Input Low V
IL(1.0V)
0.3 V
7
FN6891.4
June 21, 2011
Page 8
ISL62883, ISL62883B
Electrical Specifications Operating Conditions: VDD = 5V, T
= -40°C to +100°C, fSW = 300kHz, unless otherwise noted. Boldface
A
limits apply over the operating temperature range, -40°C to +100°C. (Continued)
PARAMETER SYMBOL TEST CONDITIONS
VR_ON Input High HRTZ
VID0-VID6, PSI#, and DPRSLPVR Input
Low
VID0-VID6, PSI#, and DPRSLPVR Input
High
PWM
PWM3 Output Low V
PWM3 Output High V
PWM Tri-State Leakage PWM = 2.5V 2 µA
THERMAL MONITOR
NTC Source Current NTC = 1.3V 53 60 67 µA
Over-Temperature Threshold V (NTC) falling 1.18 1.2 1.22 V
VR_TT# Low Output Resistance R
CLK_EN# OUTPUT LEVELS
CLK_EN# Low Output Voltage V
CLK_EN# Leakage Current I
V
IH(1.0V)
IRTZ
V
IH(1.0V)
V
IL(1.0V)
V
IH(1.0V)
OL(5.0V)
OH(5.0V)
TT
OL
OH
Sinking 5mA 1.0 V
Sourcing 5mA 3.5 V
I = 20mA 6.5 9 Ω
I = 4mA 0.26 0.4 V
CLK_EN# = 3.3V -1 1 µA
MIN
(Note 6) TYP
0.7 V
0.75 V
0.7 V
MAX
(Note 6) UNITS
0.3 V
CURRENT MONITOR
IMON Output Current I
IMON Clamp Voltage V
Current Sinking Capability 275 µA
IMON
IMONCLAMP
ISUM- pin current = 20μA 108 120 132 µA
ISUM- pin current = 10μA 51 60 69 µA
ISUM- pin current = 5μA 22 30 37.5 µA
1.1 1.15 V
INPUTS
VR_ON Leakage Current I
VIDx Leakage Current I
PSI# Leakage Current I
DPRSLPVR Leakage Current I
DPRSLPVR
VR_ON
VIDx
PSI#
VR_ON = 0V -1 0µA
VR_ON = 1V 0 1 µA
VIDx = 0V -1 0µA
VIDx = 1V 0.45 1 µA
PSI# = 0V -1 0µA
PSI# = 1V 0.45 1 µA
DPRSLPVR = 0V -1 0µA
DPRSLPVR = 1V 0.45 1 µA
SLEW RATE
Slew Rate (For VID Change) SR 56.5mV/µs
NOTE:
6. Parameters with MIN and/or MAX limits are 100% tested at +25°C, unless otherwise specified. Temperature limits established by characterization
and are not production tested.
8
FN6891.4
June 21, 2011
Page 9
ISL62883, ISL62883B
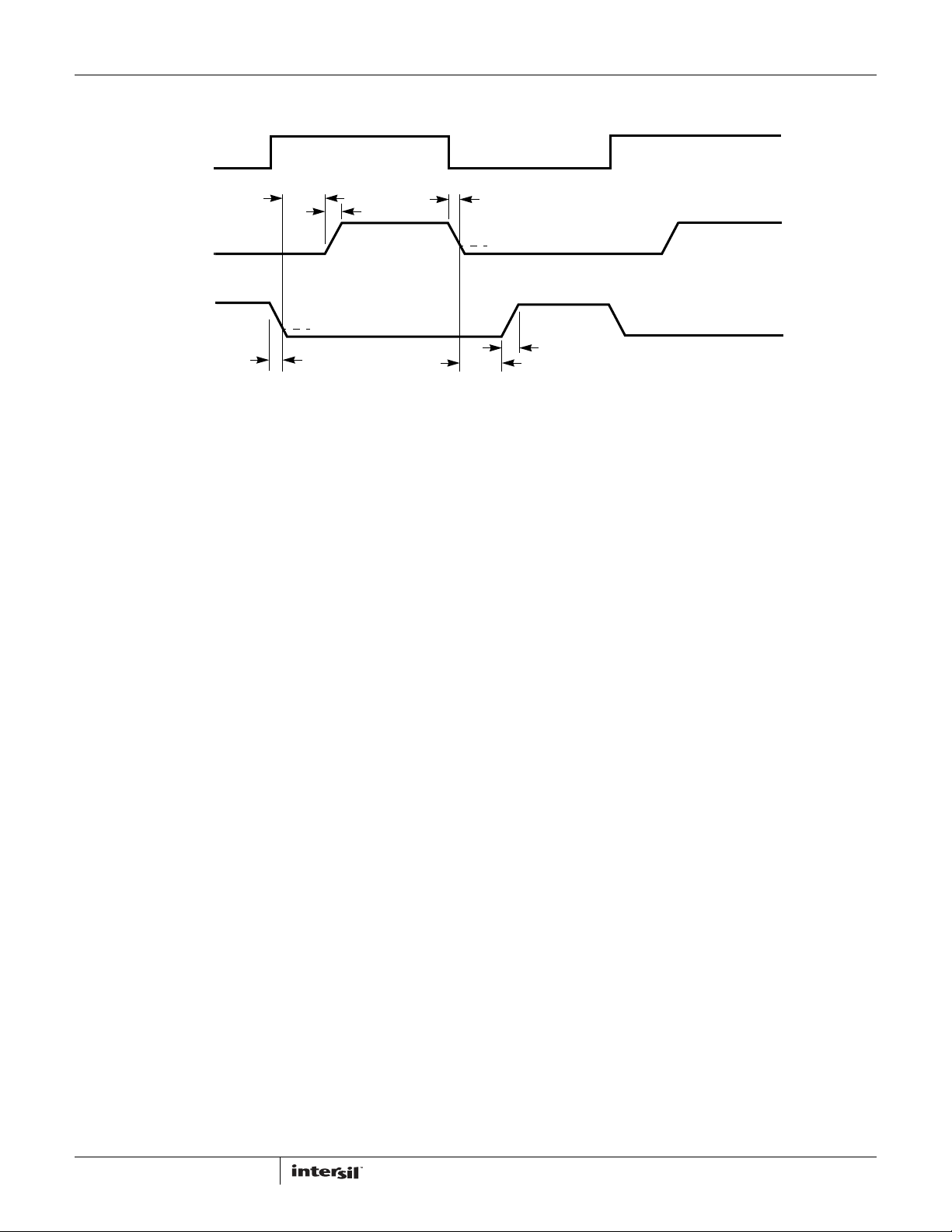
Gate Driver Timing Diagram
PWM
t
LGFUGR
UGATE
t
RU
1V
t
FU
LGATE
1V
t
t
FL
t
UGFLGR
RL
9
FN6891.4
June 21, 2011
Page 10
ISL62883, ISL62883B
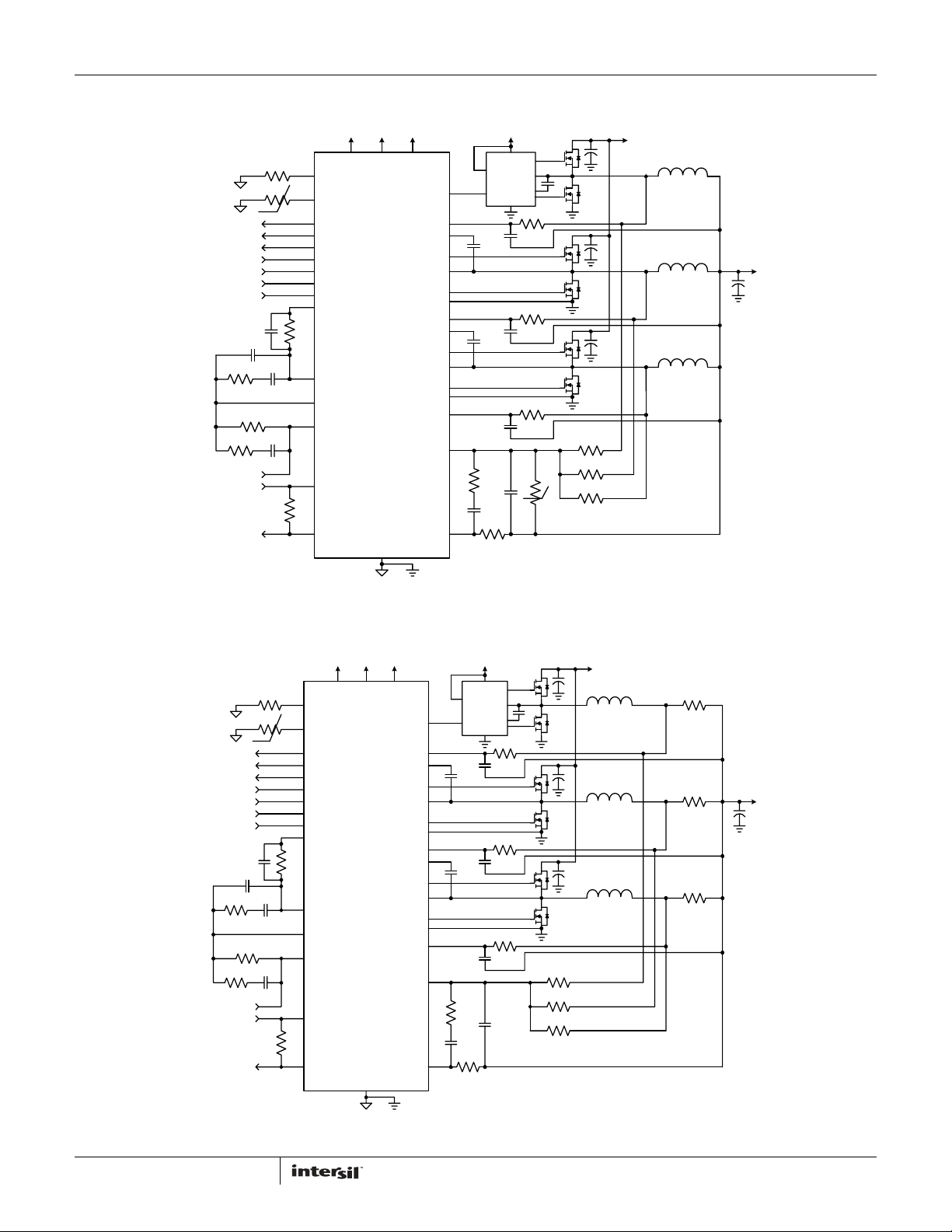
Simplified Application Circuits
V+5 Vin
V+5
VCCP
ISL62883
VSS
VINVDD
PWM3
ISEN3
BOOT2
UGATE2
PHASE2
LGATE2
VSSP2
ISEN2
BOOT1
UGATE1
PHASE1
LGATE1
VSSP1
ISEN1
ISUM+
ISUM-
PGOOD
CLK_EN#
VID<0:6>
PSI#
DPRSLPVR
VR_ON
Rdroop
VCCSENSE
VSSSENSE
IMON
Rbias
Rntc
o
C
Rimon
Rfset
RBIAS
NTC
PGOOD
VR_TT#VR_TT#
CLK_EN#
VIDs
PSI#
DPRSLPVR
VR_ON
VW
COMP
FB
VSEN
RTN
IMON
(Bottom Pad)
Cis
Ris
V+5
FCCM
ISL6208
PWM
Cs3
Cs2
Cs1
Cn
Ri
VCC
GND
UGATE
PHASE
BOOT
LGATE
o
Rs3
Rs2
Rs1
C
Rn
Rsum3
Rsum2
Rsum1
Vin
L3
L2
L1
V
o
PGOOD
CLK_EN#
VID<0:6>
PSI#
DPRSLPVR
VR_ON
Rdroop
VCCSENSE
VSSSENSE
IMON
Rbias
Rntc
o
C
Rimon
FIGURE 1. TYPICAL APPLICATION CIRCUIT USING DCR SENSING
FCCM
PWM
Cs3
Cs2
Cs2
Cn
Ri
V+5
VCC
ISL6208
LGATE
GND
UGATE
PHASE
BOOT
Vin
L3
Rs3
L2
Rs2
L1
Rs1
Rsum3
Rsum2
Rsum1
Rfset
V+5 Vin
RBIAS
NTC
PGOOD
VR_TT#VR_TT#
CLK_EN#
VIDs
PSI#
DPRSLPVR
VR_ON
VW
ISL62883
COMP
FB
VSEN
RTN
IMON
(Bottom Pad)
V+5
VCCP
VSS
VINVDD
PWM3
ISEN3
BOOT2
UGATE2
PHASE2
LGATE2
VSSP2
ISEN2
BOOT1
UGATE1
PHASE1
LGATE1
VSSP1
ISEN1
ISUM+
ISUM-
Ris
Cis
Rsen3
Rsen2
Rsen1
V
o
FIGURE 2. TYPICAL APPLICATION CIRCUIT USING RESISTOR SENSING
10
FN6891.4
June 21, 2011
Page 11
ISL62883, ISL62883B
Theory of Operation
Multiphase R
MASTER
CLOCK
gmVo
Vcrs1
Crs1
Vcrs2
Crs2
Vcrs3
Crs3
VW
Vcrm
COMP
Master
Clock
Clock1
PWM1
Clock2
PWM2
Clock3
PWM3
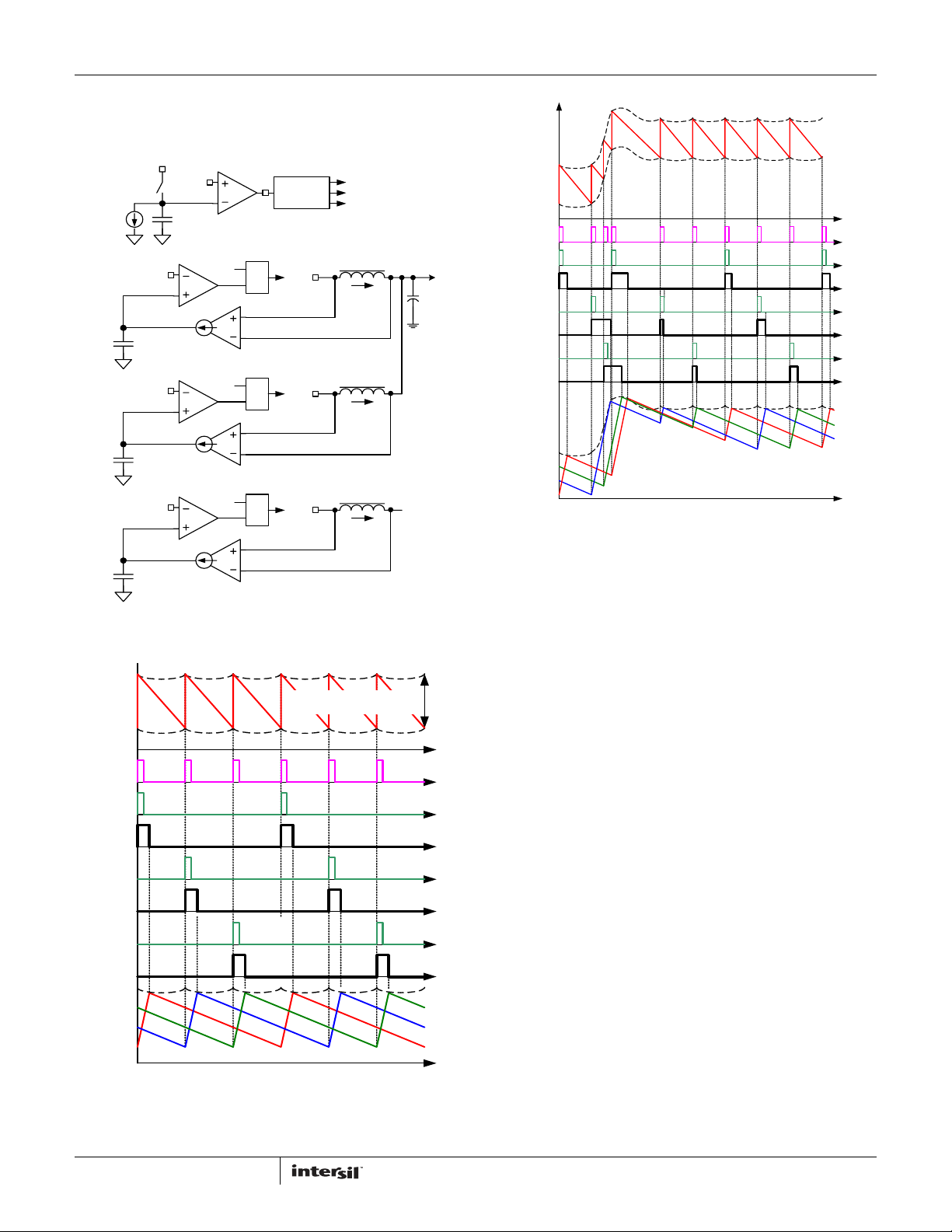
FIGURE 4. R
3
™
Modulator
MASTER CLOCK CIRCUIT
VW
COMP
Vcrm
Crm
VW
VW
VW
FIGURE 3. R
MASTER
CLOCK
Phase
Sequencer
SLAVE CIRCUIT 1
Clock1
gm
SLAVE CIRCUIT 2
Clock2
gm
SLAVE CIRCUIT 3
Clock3
gm
3
PWM1
S
Q
R
PWM2
S
Q
R
PWM3
S
Q
R
™ MODULATORCIRCUIT
VW
Vcrs3
Vcrs2 Vcrs1
3
™ MODULATOR OPERATION PRINCIPLES IN
STEADY STATE
Phase1
Phase2
Phase3
Hysteretic
Window
Clock1
Clock2
Clock3
L1
I
L1
L2
I
L2
L3
I
L3
Vo
Co
VW
COMP
Vcrm
Master
Clock
Clock1
PWM1
Clock2
PWM2
Clock3
PWM3
VW
Vcrs1
Vcrs3
Vcrs2
FIGURE 5. R
3
™ MODULATOROPERATION PRINCIPLES IN LOAD
INSERTION RESPONSE
The ISL62883 is a multiphase regulator, which implements Intel™
IMVP-6.5™ protocol. It can be programmed for 1-, 2- or 3-phase
operation for microprocessor core applications. It uses Intersil
patented R
3
™ (Robust Ripple Regulator™) modulator. The R3™
modulator combines the best features of fixed frequency PWM
and hysteretic PWM while eliminating many of their shortcomings.
Figure 3 conceptually shows the ISL62883 multiphase R
3
™
modulator circuit, and Figure 4 shows the operation principles.
A current source flows from the VW pin to the COMP pin, creating
a voltage window set by the resistor between the two pins. This
voltage window is called VW window in the following discussion.
Inside the IC, the modulator uses the master clock circuit to
generate the clocks for the slave circuits. The modulator
discharges the ripple capacitor C
to gmVo, where gm is a gain factor. Crm voltage V
with a current source equal
rm
crm
is a
sawtooth waveform traversing between the VW and COMP
voltages. It resets to VW when it hits COMP, and generates a oneshot master clock signal. A phase sequencer distributes the
master clock signal to the slave circuits. If the ISL62883 is in
3-phase mode, the master clock signal will be distributed to the
three phases, and the Clock1~3 signals will be 120° out-ofphase. If the ISL62883 is in 2-phase mode, the master clock
signal will be distributed to Phases 1 and 2, and the Clock1 and
Clock2 signals will be 180° out-of-phase. If the ISL62883 is in
1-phase mode, the master clock signal will be distributed to
Phases 1 only and be the Clock1 signal.
Each slave circuit has its own ripple capacitor C
, whose voltage
rs
mimics the inductor ripple current. A gm amplifier converts the
inductor voltage into a current source to charge and discharge
. The slave circuit turns on its PWM pulse upon receiving the
C
rs
clock signal, and the current source charges Crs. When Crs
11
FN6891.4
June 21, 2011
Page 12
ISL62883, ISL62883B
voltage V
hits VW, the slave circuit turns off the PWM pulse,
Crs
and the current source discharges Crs.
Since the ISL62883 works with V
, which are large-amplitude
crs
and noise-free synthesized signals, the ISL62883 achieves lower
phase jitter than conventional hysteretic mode and fixed PWM
mode controllers. Unlike conventional hysteretic mode
converters, the ISL62883 has an error amplifier that allows the
controller to maintain a 0.5% output voltage accuracy.
Figure 5 shows the operation principles during load insertion
response. The COMP voltage rises during load insertion,
generating the master clock signal more quickly, so the PWM
pulses turn on earlier, increasing the effective switching
frequency, which allows for higher control loop bandwidth than
conventional fixed frequency PWM controllers. The VW voltage
rises as the COMP voltage rises, making the PWM pulses wider.
During load release response, the COMP voltage falls. It takes
the master clock circuit longer to generate the next master clock
signal so the PWM pulse is held off until needed. The VW voltage
falls as the VW voltage falls, reducing the current PWM pulse
width. This kind of behavior gives the ISL62883 excellent
response speed.
The fact that all the phases share the same VW window voltage
also ensures excellent dynamic current balance among phases.
Diode Emulation and Period Stretching
Phase
UGATE
LGATE
IL
FIGURE 6. DIODE EMULATION
ISL62883 can operate in diode emulation (DE) mode to improve
light load efficiency. In DE mode, the low-side MOSFET conducts
when the current is flowing from source to drain and doesn’t not
allow reverse current, emulating a diode. As Figure 6 shows, when
LGATE is on, the low-side MOSFET carries current, creating
negative voltage on the phase node due to the voltage drop across
the ON-resistance. The ISL62883 monitors the current through
monitoring the phase node voltage. It turns off LGATE when the
phase node voltage reaches zero to prevent the inductor current
from reversing the direction and creating unnecessary power loss.
If the load current is light enough, as Figure 6 shows, the inductor
current will reach and stay at zero before the next phase node
pulse, and the regulator is in discontinuous conduction mode
(DCM). If the load current is heavy enough, the inductor current
will never reach 0A, and the regulator is in CCM although the
controller is in DE mode.
CCM/DCM BOUNDARY
VW
Vcrs
iL
LIGHT DCM
VW
Vcrs
iL
DEEP DCM
Vcrs
iL
VW
FIGURE 7. PERIOD STRETCHING
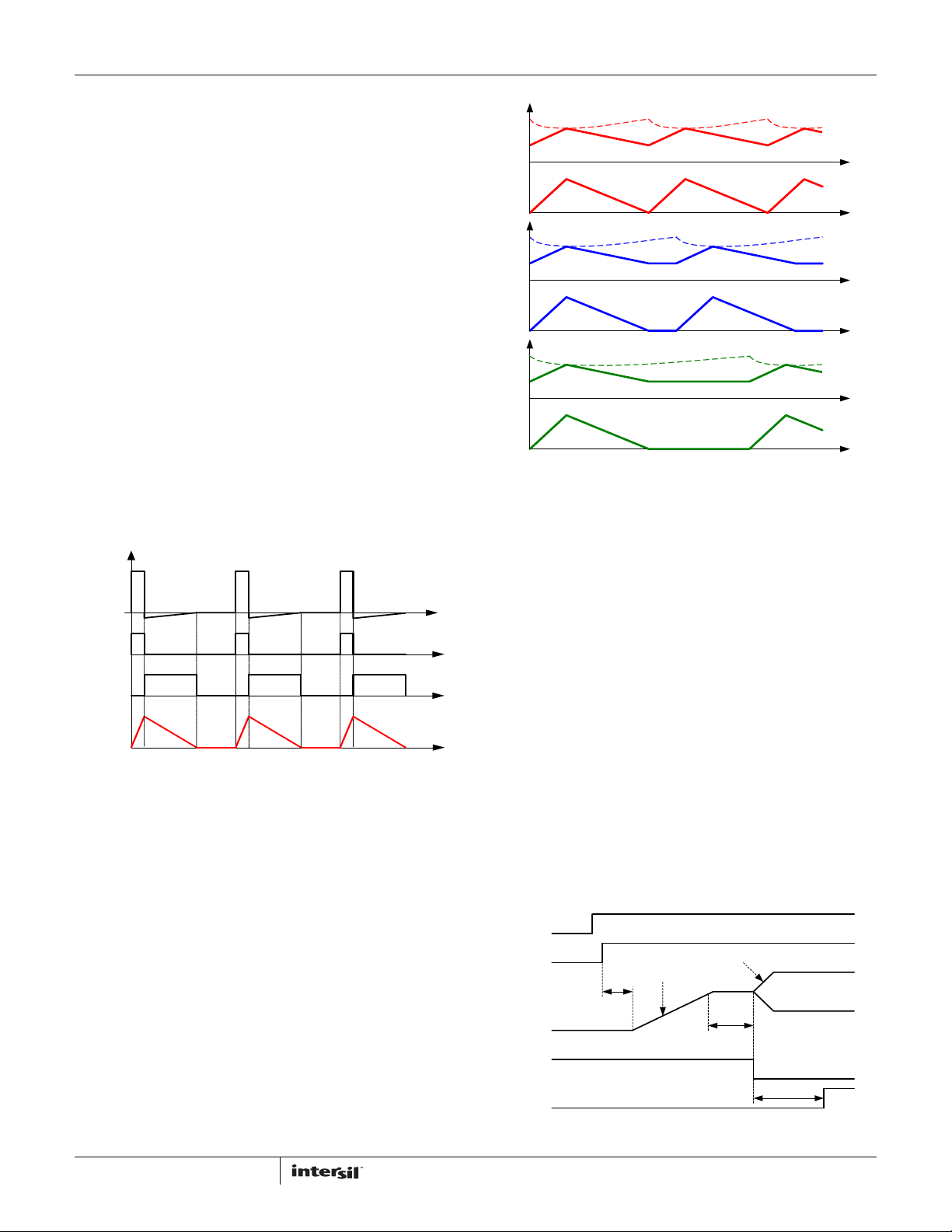
Figure 7 shows the operation principle in diode emulation mode at
light load. The load gets incrementally lighter in the three cases
from top to bottom. The PWM on-time is determined by the VW
window size, therefore is the same, making the inductor current
triangle the same in the three cases. The ISL62883 clamps the
ripple capacitor voltage V
inductor current. It takes the COMP voltage longer to hit V
in DE mode to make it mimic the
crs
crs
,
naturally stretching the switching period. The inductor current
triangles move further apart from each other such that the
inductor current average value is equal to the load current. The
reduced switching frequency helps increase light load efficiency.
Start-up Timing
With the controller's VDD voltage above the POR threshold, the
start-up sequence begins when VR_ON exceeds the 3.3V logic
high threshold. The ISL62883 uses digital soft start to ramp up
DAC to the boot voltage of 1.1V at about 2.5mV/µs. Once the
output voltage is within 10% of the boot voltage for 13 PWM
cycles (43µs for frequency = 300kHz), CLK_EN# is pulled low and
DAC slews at 5mV/µs to the voltage set by the VID pins. PGOOD
is asser ted high in approximately 7ms. Figure 8 shows the typical
start-up timing. Similar results occur if VR_ON is tied to V
the soft-start sequence starting 120µs after V
crosses the
DD
POR threshold.
VDD
VR_ON
2.5mV/µs
800µs
DAC
CLK_EN#
PGOOD
FIGURE 8. SOFT-START WAVEFORMS
5mV/µs
VBOOT
90%
13 SWITCHING
CYCLES
VID
COMMAND
VOLTAGE
~7ms
DD
, with
12
FN6891.4
June 21, 2011
Page 13

ISL62883, ISL62883B
Voltage Regulation and Load Line
Implementation
After the start sequence, the ISL62883 regulates the output
voltage to the value set by the VID inputs per Table 1. The
ISL62883 will control the no-load output voltage to an accuracy of
±0.5% over the range of 0.75V to 1.5V. A differential amplifier
allows voltage sensing for precise voltage regulation at the
microprocessor die.
TAB LE 1 . V ID TA BLE
VID6 VID5 VID4 VID3 VID2 VID1 VID0 V
00000001.5000
00000011.4875
00000101.4750
00000111.4625
00001001.4500
00001011.4375
00001101.4250
00001111.4125
00010001.4000
00010011.3875
00010101.3750
00010111.3625
00011001.3500
00011011.3375
00011101.3250
00011111.3125
00100001.3000
00100011.2875
00100101.2750
00100111.2625
00101001.2500
00101011.2375
00101101.2250
00101111.2125
00110001.2000
00110011.1875
00110101.1750
00110111.1625
00111001.1500
00111011.1375
00111101.1250
00111111.1125
01000001.1000
01000011.0875
01000101.0750
01000111.0625
(V)
O
TAB LE 1 . V ID TA BLE
VID6 VID5 VID4 VID3 VID2 VID1 VID0 VO (V)
01001001.0500
01001011.0375
01001101.0250
01001111.0125
01010001.0000
01010010.9875
01010100.9750
01010110.9625
01011000.9500
01011010.9375
01011100.9250
01011110.9125
01100000.9000
01100010.8875
01100100.8750
01100110.8625
01101000.8500
01101010.8375
01101100.8250
01101110.8125
01110000.8000
01110010.7875
01110100.7750
01110110.7625
01111000.7500
01111010.7375
01111100.7250
01111110.7125
10000000.7000
10000010.6875
10000100.6750
10000110.6625
10001000.6500
10001010.6375
10001100.6250
10001110.6125
10010000.6000
10010010.5875
10010100.5750
10010110.5625
10011000.5500
10011010.5375
10011100.5250
(Continued)
13
FN6891.4
June 21, 2011
Page 14

ISL62883, ISL62883B
Σ
TABLE 1. VID TABLE
VID6 VID5 VID4 VID3 VID2 VID1 VID0 VO (V)
10011110.5125
10100000.5000
10100010.4875
10100100.4750
10100110.4625
10101000.4500
10101010.4375
10101100.4250
10101110.4125
10110000.4000
10110010.3875
10110100.3750
10110110.3625
10111000.3500
10111010.3375
10111100.3250
10111110.3125
11000000.3000
11000010.2875
11000100.2750
11000110.2625
11001000.2500
11001010.2375
11001100.2250
11001110.2125
11010000.2000
11010010.1875
11010100.1750
11010110.1625
11011000.1500
11011010.1375
11011100.1250
11011110.1125
11100000.1000
11100010.0875
11100100.0750
11100110.0625
11101000.0500
11101010.0375
11101100.0250
11101110.0125
11110000.0000
11110010.0000
(Continued)
TAB LE 1 . V ID TA BLE
VID6 VID5 VID4 VID3 VID2 VID1 VID0 VO (V)
11110100.0000
11110110.0000
11111000.0000
11111010.0000
11111100.0000
11111110.0000
FB
IDROOP
COMP
FIGURE 9. DIFFERENTIAL SENSING AND LOAD LINE
E/A
VDAC
INTERNAL TO IC
IMPLEMENTATION
RDROOP
VDROOP
DAC
X 1
(Continued)
VIDS
RTN
VSS
VCC
“CATCH”
RESISTOR
VID<0:6>
VSS
“CATCH”
RESISTOR
SENSE
VR LOCAL
VO
SENSE
As the load current increases from zero, the output voltage will
droop from the VID table value by an amount proportional to the
load current to achieve the load line. The ISL62883 can sense the
inductor current through the intrinsic DC Resistance (DCR)
resistance of the inductors Figure 1 shows on page 10 or through
resistors in series with the inductors as Figure 2 shows also on
page 10. In both methods, capacitor C
voltage represents the
n
inductor total currents. A droop amplifier converts Cn voltage into
an internal current source with the gain set by resistor Ri. The
current source is used for load line implementation, current
monitor and overcurrent protection.
Figure 9 shows the load line implementation. The ISL62883
drives a current source I
out of the FB pin, described by
droop
Equation 1.
2xV
Cn
=
----------------
R
i
(EQ. 1)
I
droop
When using inductor DCR current sensing, a single NTC element
is used to compensate the positive temperature coefficient of the
copper winding thus sustaining the load line accuracy with
reduced cost.
I
flows through resistor R
droop
and creates a voltage drop
droop
of:
V
droopRdroopIdroop
V
is the droop voltage required to implement load line.
droop
Changing R
slope. Since I
recommended to first scale I
then select an appropriate R
×=
or scaling I
droop
also sets the overcurrent protection level, it is
droop
can both change the load line
droop
based on OCP requirement,
droop
value to obtain the desired
droop
(EQ. 2)
load line slope.
14
FN6891.4
June 21, 2011
Page 15

ISL62883, ISL62883B
Differential Sensing
Figure 9 also shows the differential voltage sensing scheme.
VCC
SENSE
and VSS
are the remote voltage sensing signals
SENSE
from the processor die. A unity gain differential amplifier senses the
VSS
voltage and add it to the DAC output. The error amplifier
SENSE
regulates the inverting and the non-inverting input voltages to be
equal as shown in Equation 3:
VCC
SENSE
V+
droop
V
DAC
+=
VSS
SENSE
(EQ. 3)
Rewriting Equation 3 and substitution of Equation 2 gives:
VCC
SENSE
VSS
– V
SENSE
DACRdroopIdroop
×–=
(EQ. 4)
Equation 4 is the exact equation required for load line
implementation.
The VCC
SENSE
and VSS
signals come from the processor
SENSE
die. The feedback will be open circuit in the absence of the
processor. As shown in Figure 9, it is recommended to add a
“catch” resistor to feed the VR local output voltage back to the
compensator, and add another “catch” resistor to connect the VR
local output ground to the RTN pin. These resistors, typically
10Ω~100Ω, will provide voltage feedback if the system is
powered up without a processor installed.
Phase Current Balancing
Rdcr3
L3
Phase3
ISEN3
INTERNAL
TO IC
ISEN2
ISEN1
Rs
Cs
Phase2
Rs
Cs
Phase1
Rs
Cs
FIGURE 10. CURRENT BALANCING CIRCUIT
IL3
L2
IL2
L1
IL1
The ISL62883 monitors individual phase average current by
monitoring the ISEN1, ISEN2, and ISEN3 voltages. Figure 10
shows the current balancing circuit recommended for ISL62883.
Each phase node voltage is averaged by a low-pass filter
consisting of R
should be routed to inductor phase-node pad in order to
pin. R
s
and Cs, and presented to the corresponding ISEN
s
eliminate the effect of phase node parasitic PCB DCR.
Equations 5 thru 7 give the ISEN pin voltages:
V
ISEN1
V
ISEN2
V
ISEN3
where R
and R
R
+()IL1×=
dcr1Rpcb1
R
+()IL2×=
dcr2Rpcb2
R
+()IL3×=
dcr3Rpcb3
, R
dcr2
and R
dcr1
are parasitic PCB DCR between the inductor output
pcb3
are inductor DCR; R
dcr3
side pad and the output voltage rail; and I
inductor average currents.
Rpcb3
Rdcr2
Rpcb2
Rdcr1
Rpcb1
pcb1
, IL2 and IL3 are
L1
(EQ. 5)
(EQ. 6)
(EQ. 7)
, R
pcb2
V
o
The ISL62883 will adjust the phase pulse-width relative to the
other phases to make V
ISEN1=VISEN2=VISEN3
IL1=IL2=IL3, when there are R
R
pcb1=Rpcb2=Rpcb3
.
dcr1=Rdcr2=Rdcr3
, thus to achieve
and
Using same components for L1, L2 and L3 will provide a good
match of R
, R
R
pcb1
pcb2
dcr1
and R
and R
dcr2
. It is recommended to have symmetrical
pcb3
. Board layout will determine
dcr3
, R
layout for the power delivery path between each inductor and the
V3n
V2n
V1n
Rpcb3
Rpcb2
Rpcb1
.
V
o
output voltage rail, such that R
Phase3
ISEN3
Cs
INTERNAL
TO IC
Phase2
ISEN2
Cs
Phase1
ISEN1
Cs
FIGURE 11. DIFFERENTIAL-SENSING CURRENT BALANCING
CIRCUIT
pcb1=Rpcb2=Rpcb3
V3p
Rs
Rs
Rs
V2p
Rs
Rs
Rs
V1p
Rs
Rs
Rs
L3
L2
L1
Rdcr3
IL3
Rdcr2
IL2
Rdcr1
IL1
Sometimes, it is difficult to implement symmetrical layout. For
the circuit shown in Figure 10, asymmetric layout causes
different R
pcb1
, R
pcb2
and R
thus current imbalance.
pcb3
Figure 11 shows a differential-sensing current balancing circuit
recommended for ISL62883. The current sensing traces should
be routed to the inductor pads so they only pick up the inductor
DCR voltage. Each ISEN pin sees the average voltage of three
sources: its own phase inductor phase-node pad, and the other
two phases inductor output side pads. Equations 8 thru 10 give
the ISEN pin voltages:
V
ISEN1V1pV2nV3n
V
ISEN2V1nV2pV3n
V
ISEN3V1nV2nV3p
The ISL62883 will make V
++ V1nV2pV
V
1pV2nV3n
++ V1nV2nV
V
1nV2pV3n
++=
++=
++=
++=
++=
ISEN1
= V
3n
3p
ISEN2
= V
ISEN3
(EQ. 8)
(EQ. 9)
(EQ. 10)
as in:
(EQ. 11)
(EQ. 12)
Rewriting Equation 11 gives:
– V2pV2n–=
V
1pV1n
(EQ. 13)
and rewriting Equation 12 gives:
V
– V3pV3n–=
2pV2n
(EQ. 14)
Combining Equations 13 and 14 gives:
– V2pV2n– V3pV3n–==
V
1pV1n
(EQ. 15)
Therefore:
R
× R
dcr1IL1
× R
dcr2IL2
×==
dcr3IL3
(EQ. 16)
15
FN6891.4
June 21, 2011
Page 16

ISL62883, ISL62883B
Current balancing (IL1=IL2=IL3) will be achieved when there is
R
dcr1=Rdcr2=Rdcr3
. R
pcb1
, R
pcb2
and R
will not have any
pcb3
effect.
REP RATE = 10kHz
REP RATE = 25kHz
REP RATE = 50kHz
Since the slave ripple capacitor voltages mimic the inductor
currents, R3™ modulator can naturally achieve excellent current
balancing during steady state and dynamic operations. Figure 12
shows current balancing performance of the ISL62883
evaluation board with load transient of 12A/51A at different rep
rates. The inductor currents follow the load current dynamic
change with the output capacitors supplying the difference. The
inductor currents can track the load current well at low rep rate,
but cannot keep up when the rep rate gets into the hundred-kHz
range, where it’s out of the control loop bandwidth. The controller
achieves excellent current balancing in all cases.
CCM Switching Frequency
The R
sets the VW windows size, therefore sets the switching frequency.
When the ISL62883 is in continuous conduction mode (CCM),
the switching frequency is not absolutely constant due to the
nature of the R
R3™ Modulator section, the effective switching frequency will
increase during load insertion and will decrease during load
release to achieve fast response. On the other hand, the
switching frequency is relatively constant at steady state.
Variation is expected when the power stage condition, such as
input voltage, output voltage, load, etc. changes. The variation is
usually less than 15% and doesn’t have any significant effect on
output voltage ripple magnitude. Equation 17 gives an estimate
of the frequency-setting resistor R
approximately 300kHz switching frequency. Lower resistance
gives higher switching frequency.
resistor between the COMP and the VW pins sets the
fset
3
™ modulator. As explained in the Multiphase
value. 8kΩ R
fset
fset
gives
REP RATE = 100kHz
REP RATE = 200kHz
FIGURE 12. ISL62883 EVALUATION BOARD CURRENT BALANCING
DURING DYNAMIC OPERATION. CH1: IL1, CH2: I
CH3: IL2, CH4: IL3
LOAD
R
kΩ() Period μs()0.29–()2.65×=
fset
Phase Count Configurations
The ISL62883 can be configured for 3-, 2- or 1-phase operation.
For 2-phase configuration, tie the PWM3 pin to 5V. Phase-1 and
Phase-2 PWM pulses are 180° out-of-phase. In this
configuration, the ISEN3/FB2 pin (pin 9) serves the FB2 function.
For 1-phase configuration, tie the PWM3 and ISEN2 pins to 5V. In
this configuration, only Phase-1 is active. The ISEN3/FB2, ISEN2,
and ISEN1 pins are not used because there is no need for either
current balancing or FB2 function.
,
(EQ. 17)
16
FN6891.4
June 21, 2011
Page 17

ISL62883, ISL62883B
Modes of Operation
TABLE 2. ISL62883 MODES OF OPERATION
OPERATIONAL
CONFIGURATION PSI# DPRSLPVR
3-phase Configuration 0 0 2-phase CCM
011-phase DE
1 0 3-phase CCM
111-phase DE
2-phase Configuration 0 0 1-phase CCM
011-phase DE
1 0 2-phase CCM
111-phase DE
1-phase Configuration 0 0 1-phase CCM
011-phase DE
1 0 1-phase CCM
111-phase DE
MODE
Table 2 shows the ISL62883 operational modes, programmed by
the logic status of the PSI# and the DPRSLPVR pins. In 3-phase
configuration, the ISL62883 enters 2-phase CCM for (PSI# = 0 and
DPRSLPVR = 0) by dropping PWM3 and operating phases 1 and 2
180° out-of-phase. It also reduces the overcurrent and the
way-overcurrent protection levels to 2/3 of the initial values. The
ISL62883 enters 1-phase DE mode when DPRSLPVR = 1. It drops
phases 2 and 3, and reduces the overcurrent and the wayovercurrent protection levels to 1/3 of the initial values.
In 2-phase configuration, the ISL62883 enters 1-phase CCM for
(PSI# = 0 and DPRSLPVR = 0). It drops Phase-2 and reduces the
overcurrent and the way-overcurrent protection levels to 1/2 of
the initial values. The ISL62883 enters 1-phase DE mode when
DPRSLPVR = 1 by dropping phase 2.
In 1-phase configuration, the ISL62883 does not change the
operational mode when the PSI# signal changes status. It enters
1-phase DE mode when DPRSLPVR = 1.
Dynamic Operation
The ISL62883 responds to VID changes by slewing to the new
voltage at 5mV/µs slew rate. As the output approaches the VID
command voltage, the dv/dt moderates to prevent overshoot.
Geyserville-III transitions commands one LSB VID step (12.5mV)
every 2.5µs, controlling the effective dv/dt at 5mv/µs. The
ISL62883 is capable of 5mV/µs slew rate.
When the ISL62883 is in DE mode, it will actively drive the output
voltage up when the VID changes to a higher value. It’ll resume
DE mode operation after reaching the new voltage level. If the
load is light enough to warrant DCM, it will enter DCM after the
inductor current has crossed zero for four consecutive cycles. The
ISL62883 will remain in DE mode when the VID changes to a
lower value. The output voltage will decay to the new value and
the load will determine the slew rate.
During load insertion response, the Fast Clock function increases
the PWM pulse response speed. The ISL62883 monitors the
VSEN pin voltage and compares it to 100ns - filtered version.
When the unfiltered version is 20mV below the filtered version,
the controller knows there is a fast voltage dip due to load
insertion, hence issues an additional master clock signal to
deliver a PWM pulse immediately.
3
™ modulator intrinsically has voltage feed forward. The
The R
output voltage is insensitive to a fast slew rate input voltage
change.
Protections
The ISL62883 provides overcurrent, current-balance,
undervoltage, overvoltage, and over-temperature protections.
The ISL62883 determines overcurrent protection (OCP) by
comparing the average value of the droop current I
internal current source threshold. It declares OCP when I
above the threshold for 120µs. A resistor R
comp
pin to GND programs the OCP current source threshold, as Table 3
shows. It is recommended to use the nominal R
ISL62883 detects the R
value at the beginning of start up,
comp
comp
and sets the internal OCP threshold accordingly. It remembers the
R
value until the VR_ON signal drops below the POR
comp
threshold.
TABLE 3. ISL62883 OCP THRESHOLD
R
comp
MIN. (kΩ)
320 400 480 22.7 45.3 68
210 235 260 20.7 41.3 62
155 165 175 18 36 54
104 120 136 20 37.33 56
NOMINAL
(kΩ)
none none 20 40 60
78 85 92 22.7 38.7 58
62 66 70 20.7 42.7 64
45 50 55 18 44 66
MAX.
(kΩ)
The default OCP threshold is the value when R
OCP THRESHOLD (µA)
1-PHASE
MODE
2-PHASE
MODE
comp
populated. It is recommended to scale the droop current I
such that the default OCP threshold gives approximately the
desired OCP level, then use R
to fine tune the OCP level if
comp
necessary.
For overcurrent conditions above 2.5 times the OCP level, the
PWM outputs will immediately shut off and PGOOD will go low to
maximize protection. This protection is also referred to as
way-overcurrent protection or fast-overcurrent protection, for
short-circuit protections.
The ISL62883 monitors the ISEN pin voltages to determine
current-balance protection. If the ISEN pin voltage difference is
greater than 9mV for 1ms, the controller will declare a fault and
latch off.
The ISL62883 will declare undervoltage (UV) fault and latch off if
the output voltage is less than the VID set value by 300mV or
more for 1ms. It’ll turn off the PWM outputs and dessert PGOOD.
The ISL62883 has two levels of overvoltage protections. The first
level of overvoltage protection is referred to as PGOOD
overvoltage protection. If the output voltage exceeds the VID set
with an
droop
droop
is
from the COMP
value. The
3-PHASE
MODE
is not
droop
17
FN6891.4
June 21, 2011
Page 18

ISL62883, ISL62883B
value by +200mV for 1ms, the ISL62883 will declare a fault and
dessert PGOOD.
The ISL62883 takes the same actions for all of the above fault
protections: desertion of PGOOD and turn-off of the high-side and
low-side power MOSFETs. Any residual inductor current will decay
through the MOSFET body diodes. These fault conditions can be
reset by bringing VR_ON low or by bringing V
below the POR
DD
threshold. When VR_ON and VDD return to their high operating
levels, a soft-start will occur.
The second level of overvoltage protection is different. If the
output voltage exceeds 1.55V, the ISL62883 will immediately
declare an OV fault, dessert PGOOD, and turn on the low-side
power MOSFETs. The low-side power MOSFETs remain on until
the output voltage is pulled down below 0.85V when all power
MOSFETs are turned off. If the output voltage rises above 1.55V
again, the protection process is repeated. This behavior provides
the maximum amount of protection against shorted high-side
power MOSFETs while preventing output ringing below ground.
Resetting VR_ON cannot clear the 1.55V OVP. Only resetting V
DD
will clear it. The 1.55V OVP is active all the time when the
controller is enabled, even if one of the other faults have been
declared. This ensures that the processor is protected against
high-side power MOSFET leakage while the MOSFETs are
commanded off.
The ISL62883 has a thermal throttling feature. If the voltage on
the NTC pin goes below the 1.18V OT threshold, the VR_TT# pin is
pulled low indicating the need for thermal throttling to the
system. No other action is taken within the ISL62883 in response
to NTC pin voltage.
Table 4 summarizes the fault protections.
.
FAULT TYPE
Overcurrent 120µs PWM tri-state,
Way-Overcurrent
(2.5xOC)
Overvoltage +200mV 1ms
Undervoltage -300mV
Phase Current
Unbalance
Overvoltage 1.55V Immediately Low-side MOSFET
Over-Temperature 1ms N/A
TABLE 4. FAULT PROTECTION SUMMARY
FAULT DURATION
BEFORE
PROTECTION
<2µs
PROTECTION
ACTION
PGOOD latched
low
on until V
<0.85V, then
PWM tri-state,
PGOOD latched
core
low.
FAULT
RESET
VR_ON
toggle or
VDD toggle
VDD toggle
Current Monitor
The ISL62883 provides the current monitor function. The IMON
pin outputs a high-speed analog current source that is 3 times of
the droop current flowing out of the FB pin. Thus Equation 18:
I
IMON
3I
×=
droop
(EQ. 18)
As Figures 1 and 2 show, a resistor R
is connected to the
imon
IMON pin to convert the IMON pin current to voltage. A capacitor
can be paralleled with R
to filter the voltage information. The
imon
IMVP-6.5™ specification requires that the IMON voltage
information be referenced to VSSSENSE.
The IMON pin voltage range is 0V to 1.1V. A clamp circuit
prevents the IMON pin voltage from going above 1.1V.
FB2 Function
The FB2 function is only available when the ISL62883 is in
2-phase configuration, when pin 9 serves the FB2 function
instead of the ISEN3 function.
C1
FB2
Vref
R2
C3.1
C3.2
E/A
FB
VSEN
COMP
CONTROLLER I N
1-PHAS E MODE
C2
R1
CONTROLLER I N
2-PHASE MODE
C2
R3
VSEN
R1
FIGURE 13. FB2 FUNCTION IN 2-PHASE MODE
C1
C3.1
FB2
Vref
C3.2
E/A
FB
R3
Figure 13 shows the FB2 function. A switch (called FB2 switch)
turns on to short the FB and the FB2 pins when the controller is in
2-phase mode. Capacitors C3.1 and C3.2 are in parallel, serving
as part of the compensator. When the controller enters 1-phase
mode, the FB2 switch turns off, removing C3.2 and leaving only
C3.1 in the compensator. The compensator gain will increase
with the removal of C3.2. By properly sizing C3.1 and C3.2, the
compensator cab be optimal for both 2-phase mode and 1-phase
mode.
When the FB2 switch is off, C3.2 is disconnected from the FB pin.
However, the controller still actively drives the FB2 pin voltage to
follow the FB pin voltage such that C3.2 voltage always follows
C3.1 voltage. When the controller turns on the FB2 switch, C3.2
will be reconnected to the compensator smoothly.
The FB2 function ensures excellent transient response in both
2-phase mode and 1-phase mode. If one decides not to use the
FB2 function, simply populate C3.1 only.
Adaptive Body Diode Conduction Time
Reduction
In DCM, the controller turns off the low-side MOSFET when the
inductor current approaches zero. During on-time of the low-side
MOSFET, phase voltage is negative and the amount is the
MOSFET R
current. A phase comparator inside the controller monitors the
phase voltage during on-time of the low-side MOSFET and
compares it with a threshold to determine the zero-crossing point
of the inductor current. If the inductor current has not reached
zero when the low-side MOSFET turns off, it’ll flow through the
low-side MOSFET body diode, causing the phase node to have a
larger voltage drop until it decays to zero. If the inductor current
has crossed zero and reversed the direction when the low-side
MOSFET turns off, it’ll flow through the high-side MOSFET body
diode, causing the phase node to have a spike until it decays to
zero. The controller continues monitoring the phase voltage after
turning off the low-side MOSFET and adjusts the phase
voltage drop, which is proportional to the inductor
dson
R2
COMP
18
FN6891.4
June 21, 2011
Page 19

ISL62883, ISL62883B
comparator threshold voltage accordingly in iterative steps such
that the low-side MOSFET body diode conducts for approximately
40ns to minimize the body diode-related loss.
Overshoot Reduction Function
The ISL62883 has an optional overshoot reduction function.
Using R
R
BIAS
= 47kΩ enables this function and using
BIAS
=147kΩ disables this function.
When a load release occurs, the energy stored in the inductors
will dump to the output capacitor, causing output voltage
overshoot. The inductor current freewheels through the low-side
MOSFET during this period of time. The overshoot reduction
function turns off the low-side MOSFET during the output voltage
overshoot, forcing the inductor current to freewheel through the
low-side MOSFET body diode. Since the body diode voltage drop
is much higher than MOSFET R
voltage drop, more energy is
dson
dissipated on the low-side MOSFET therefore the output voltage
overshoot is lower.
If the overshoot reduction function is enabled, the ISL62883
monitors the COMP pin voltage to determine the output voltage
overshoot condition. The COMP voltage will fall and hit the clamp
voltage when the output voltage overshoots. The ISL62883 will
turn off LGATE1 and LGATE2, and tri-state PWM3 when COMP is
being clamped. All the low-side MOSFETs in the power stage will
be turned off. When the output voltage has reached its peak and
starts to come down, the COMP voltage starts to rise and is no
longer clamped. The ISL62883 will resume normal PWM
operation.
When PSI# is low, indicating a low power state of the CPU, the
controller will disable the overshoot reduction function as large
magnitude transient event is not expected and overshoot is not a
concern.
While the overshoot reduction function reduces the output voltage
overshoot, energy is dissipated on the low-side MOSFET, causing
additional power loss. The more frequent transient event, the more
power loss dissipated on the low-side MOSFET. The MOSFET may
face severe thermal stress when transient events happen at a high
repetitive rate. User discretion is advised when this function is
enabled.
Key Component Selection
R
BIAS
The ISL62883 uses a resistor (1% or better tolerance is
recommended) from the RBIAS pin to GND to establish highly
accurate reference current sources inside the IC. Using
=47kΩ enables the overshoot reduction function and using
R
BIAS
= 147kΩ disables this function. Do not connect any other
R
BIAS
components to this pin. Do not connect any capacitor to the RBIAS
pin as it will create instability.
Care should be taken in layout that the resistor is placed very close
to the RBIAS pin and that a good quality signal ground is
connected to the opposite side of the R
Ris and C
is
As Figures 1 and 2, show, the ISL62883 needs the Ris-Cis
network across the ISUM+ and the ISUM- pins to stabilize the
BIAS
resistor.
droop amplifier. The preferred values are R
= 82.5Ω and
is
Cis= 0.01µF. Slight deviations from the recommended values are
acceptable. Large deviations may result in instability.
Inductor DCR Current-Sensing Network
Phase1
L
DCR
Figure 14 shows the inductor DCR current-sensing network for a
3-phase solution. An inductor current flows through the DCR and
creates a voltage drop. Each inductor has two resistors in R
and Ro connected to the pads to accurately sense the inductor
current by sensing the DCR voltage drop. The R
resistors are connected in a summing network as shown, and feed
the total current information to the NTC network (consisting of
R
ntcs
temperature coefficient (NTC) thermistor, used to
temperature-compensate the inductor DCR change.
The inductor output side pads are electrically shorted in the
schematic, but have some parasitic impedance in actual board
layout, which is why one cannot simply short them together for the
current-sensing summing network. It is recommended to use
1Ω~10Ω R
smaller than the rest of the current sensing circuit, the following
analysis will ignore it for simplicity.
The summed inductor current information is presented to the
capacitor C
frequency-domain relationship between inductor total current
(s) and Cn voltage VCn(s):
I
o
VCns()
R
ntcnet
A
cs
where N is the number of phases.
Phase2 Phase3
Rsum
Rsum
Rsum
×
DCR
----------- -
N
Rntcs
Rntc
Ro
Ro
Ro
Rp
is a negative
ntc
s()× Acs× s()=
I
o
L
DCRLDCR
Io
FIGURE 14. DCR CURRENT-SENSING NETWORK
, R
and Rp) and capacitor Cn. R
ntc
to create quality signals. Since Ro value is much
o
. Equations 19 thru 23 describe the
n
⎛⎞
R
⎜⎟
ntcnet
-----------------------------------------
⎜⎟
⎜⎟
R
⎝⎠
R
-------------------------------------------------- -
=
R
1
----------------------
s()
=
1
+
R
sum
--------------
+
ntcnet
ntcsRntc
ntcsRntcRp
+
------------
ω
+()Rp×
++
s
------
ω
L
s
sns
N
sum
Cn
Vcn
Ri
and Ro
(EQ. 19)
(EQ. 20)
(EQ. 21)
ISUM+
ISUM-
sum
19
FN6891.4
June 21, 2011
Page 20

ISL62883, ISL62883B
DCR
----------- -
ω
=
L
L
------------------------------------------------------
=
ω
sns
R
ntcnet
-----------------------------------------
R
ntcnet
×
+
1
R
sum
--------------
R
sum
--------------
N
×
C
n
N
(EQ. 22)
(EQ. 23)
Transf er funct ion Acs(s) always has unity gain at DC. The inductor
DCR value increases as the winding temperature increases,
giving higher reading of the inductor DC current. The NTC R
ntc
values decreases as its temperature decreases. Proper
, R
selections of R
represent the inductor total DC current over the temperature
V
Cn
sum
ntcs
, Rp and R
parameters ensure that
ntc
range of interest.
There are many sets of parameters that can properly temperaturecompensate the DCR change. Since the NTC network and the R
resistors form a voltage divider, V
is always a fraction of the
cn
sum
inductor DCR voltage. It is recommended to have a higher ratio of
Vcn to the inductor DCR voltage, so the droop circuit has higher
signal level to work with.
A typical set of parameters that provide good temperature
compensation are: R
and R
= 10kΩ (ERT-J1VR103J). The NTC network parameters
ntc
= 3.65kΩ, Rp= 11kΩ, R
sum
ntcs
= 2.61kΩ
may need to be fine tuned on actual boards. One can apply full
load DC current and record the output voltage reading
immediately; then record the output voltage reading again when
the board has reached the thermal steady state. A good NTC
network can limit the output voltage drift to within 2mV. It is
recommended to follow the Intersil evaluation board layout and
current-sensing network parameters to minimize engineering
time.
(s) also needs to represent real-time Io(s) for the controller to
V
Cn
achieve good transient response. Transfer function Acs(s) has a
pole ω
A
cs
and a zero ωL. One needs to match ωL and ω
sns
(s) is unity gain at all frequencies. By forcing ωL equal to ω
sns
so
sns
and solving for the solution, Equation 24 solves for the value of
Cn.
×
+
L
R
sum
--------------
N
R
sum
--------------
N
(EQ. 24)
DCR×
------------------------------------------------------------
=
C
n
R
ntcnet
-----------------------------------------
R
ntcnet
i
o
V
o
FIGURE 16. LOAD TRANSIENT RESPONSE WHEN Cn IS TOO
SMALL
i
o
V
o
FIGURE 17. LOAD TRANSIENT RESPONSE WHEN Cn IS TOO
LARGE
For example, given N = 3, R
R
ntcs
=2.61kΩ, R
= 10kΩ, DCR = 0.88mΩ and L = 0.36µH,
ntc
= 3.65kΩ, Rp=11kΩ,
sum
Equation 24 gives Cn= 0.406µF.
Assuming the compensator design is correct, Figure 15 shows the
expected load transient response waveforms if C
selected. When the load current I
output voltage V
If C
value is too large or too small, VCn(s) will not accurately
n
also has a square response.
core
has a square change, the
core
is correctly
n
represent real-time Io(s) and will worsen the transient response.
Figure 16 shows the load transient response when Cn is too
small. V
will sag excessively upon load insertion and may
core
create a system failure. Figure 17 shows the transient response
when Cn is too large. V
is sluggish in drooping to its final
core
value. There will be excessive overshoot if load insertion occurs
during this time, which may potentially hurt the CPU reliability.
i
o
i
L
i
o
V
o
FIGURE 15. DESIRED LOAD TRANSIENT RESPONSE
WAVEFORMS
20
V
o
RING
BACK
FIGURE 18. OUTPUT VOLTAGE RING BACK PROBLEM
June 21, 2011
FN6891.4
Page 21

ISL62883, ISL62883B
ISUM+
Rntcs
Rntc
FIGURE 19. OPTIONAL CIRCUITS FOR RING BACK REDUCTION
Rp
Cn.1
Rn
OPTIONAL
Vcn
Cn.2
Ri
Cip
Rip
OPTIONAL
ISUM-
Figure 18 shows the output voltage ring back problem during
load transient response. The load current i
change, but the inductor current i
cannot accurately follow.
L
has a fast step
o
Instead, iL responds in first order system fashion due to the
nature of current loop. The ESR and ESL effect of the output
capacitors makes the output voltage V
dip quickly upon load
o
current change. However, the controller regulates Vo according to
the droop current i
, which is a real-time representation of iL;
droop
therefore it pulls Vo back to the level dictated by iL, causing the
ring back problem. This phenomenon is not observed when the
output capacitor have very low ESR and ESL, such as all ceramic
capacitors.
Figure 19 shows two optional circuits for reduction of the ring
back. R
and Cip form an R-C branch in parallel with Ri, providing
ip
a lower impedance path than Ri at the beginning of io change.
Rip and Cip do not have any effect at steady state. Through
proper selection of R
and Cip values, i
ip
can resemble io
droop
rather than iL, and Vo will not ring back. The recommended value
for Rip is100Ω. Cip should be determined through tuning the load
transient response waveforms on an actual board. The
recommended range for C
is the capacitor used to match the inductor time constant. It
C
n
is 100pF~2000pF.
ip
usually takes the parallel of two (or more) capacitors to get the
desired value. Figure 19 shows that two capacitors C
are in parallel. Resistor R
ring back. At steady state, C
the V
o
is an optional component to reduce
n
n.1+Cn.2
provides the desired
n.1
and C
n.2
Cn capacitance. At the beginning of io change, the effective
capacitance is less because R
branch. As explained in Figure 16, Vo tends to dip when Cn is
C
n.1
too small, and this effect will reduce the V
is more pronounced when C
more pronounced when R
R
increases the ripple of the Vn signal if C
n
recommended to keep C
usually is a few ohms. C
increases the impedance of the
n
ring back. This effect
is much larger than C
n.1
is bigger. However, the presence of
n
greater than 2200pF. Rn value
n.2
, C
n.1
and Rn values should be
n.2
o
n.2
is too small. It is
n.2
. It is also
determined through tuning the load transient response
waveforms on an actual board.
Resistor Current-Sensing Network
Phase1
L
DCR
Rsen
Figure 20 shows the resistor current-sensing network for a
3-phase solution. Each inductor has a series current-sensing
resistor R
accurately capture the inductor current information. The R
and Ro resistors are connected to capacitor Cn. R
form a a filter for noise attenuation. Equations 25 thru 27 give
(s) expression:
V
Cn
VCns()
A
Rsen
ω
Rsen
Transfer function A
Current-sensing resistor R
variation over temperature, so there is no need for the NTC
network.
The recommended values are R
Phase2 Phase3
L
DCRLDCR
Rsen Rsen
Io
FIGURE 20. RESISTOR CURRENT-SENSING NETWORK
. R
sen
R
------------
s()
=
---------------------------
=
R
--------------
and Ro are connected to the R
sum
sen
sum
N
N
1
----------------------
------------
1
+
ω
1
×
I
o
s
sns
C
n
Rsen
s()× A
Rsum
Rsum
Rsum
Vcn
Ro
Ro
Ro
× s()=
Rsen
Cn
sen
sum
(s) always has unity gain at DC.
value will not have significant
sen
=1kΩ and Cn= 5600pF.
sum
Ri
Overcurrent Protection
Refer to Equation 1 and Figures 9, 14 and 20; resistor Ri sets the
droop current I
is recommended to design I
resistor.
For example, the OCP threshold is 60µA for 3-phase solution. We
will design I
droop
1.55 times of the full load current.
For inductor DCR sensing, Equation 28 gives the DC relationship
(s) and Io(s).
of V
cn
⎛⎞
⎜⎟
-----------------------------------------
V
⎜⎟
Cn
⎜⎟
R
⎝⎠
ntcnet
. Table 3 shows the internal OCP threshold. It
droop
without using the R
droop
to be 38.8µA at full load, so the OCP trip level is
R
ntcnet
+
R
sum
--------------
N
×
DCR
----------- -
N
×=
I
o
ISUM+
ISUM-
pads to
sum
and Cn
(EQ. 25)
(EQ. 26)
(EQ. 27)
comp
(EQ. 28)
21
FN6891.4
June 21, 2011
Page 22

ISL62883, ISL62883B
Substitution of Equation 28 into Equation 1 gives Equation 29:
droop
R
2
-----------------------------------------
---- -
R
i
R
ntcnet
ntcnet
+
R
sum
--------------
N
DCR
----------- -
×=
×× I
N
o
(EQ. 29)
Therefore:
2R
------------------------------------------------------------------------------- -
R
=
i
⎛⎞
NR
× I
ntcnet
⎝⎠
ntcnet
+
DCR× Io×
R
sum
--------------
N
×
(EQ. 30)
droop
Substitution of Equation 20 and application of the OCP condition
in Equation 30 gives Equation 31:
2
× DCR× I
-------------------------------------------------------------------------------------------------------------------------
R
=
i
where I
R
⎛⎞
-------------------------------------------------- -
N
× I
⎜⎟
R
⎝⎠
is the full load current, I
omax
++
R
ntcsRntcRp
+()Rp×
ntcsRntc
++
ntcsRntcRp
+
R
sum
--------------
N
×
omax
×
droopmax
droopmax
(EQ. 31)
is the
+()Rp×
R
ntcsRntc
-------------------------------------------------- -
corresponding droop current. For example, given N = 3,
R
= 3.65kΩ, Rp= 11kΩ, R
sum
DCR = 0.88mΩ, I
omax
=51A and I
=2.61kΩ, R
ntcs
droopmax
=10kΩ,
ntc
= 40.9µA, Equation
31 gives Ri= 606Ω.
For resistor sensing, Equation 32 gives the DC relationship of
(s) and Io(s).
V
cn
R
sen
------------
V
Cn
×=
I
o
N
(EQ. 32)
Substitution of Equation 32 into Equation 1 gives Equation 33:
I
droop
sen
---- -
------------
××=
I
o
N
R
i
(EQ. 33)
R
2
Therefore:
2R
×
R
i
---------------------------
=
×
NI
senIo
droop
(EQ. 34)
Substitution of Equation 34 and application of the OCP condition
in Equation 30 gives:
2R
×
R
=
i
where I
senIomax
--------------------------------------
×
NI
droopmax
is the full load current, I
omax
droopmax
is the
(EQ. 35)
corresponding droop current. For example, given N = 3,
R
sen
gives R
=1mΩ, I
=831Ω.
i
omax
=51A and I
droopmax
= 40.9µA, Equation 35
A resistor from COMP to GND can adjust the internal OCP
threshold, providing another dimension of fine-tune flexibility.
Table 3 shows the detail. It is recommended to scale I
droop
such
that the default OCP threshold gives approximately the desired
OCP level, then use R
to fine tune the OCP level if necessary.
comp
Load Line Slope
Refer to Figure 9.
For inductor DCR sensing, substitution of Equation 29 into
Equation 2 gives the load line slope expression:
LL
V
droop
----------------- -
I
o
2R
droop
----------------------
R
i
R
ntcnet
-----------------------------------------
R
ntcnet
+
R
sum
--------------
N
DCR
----------- -
××== (EQ. 36)
N
For resistor sensing, substitution of Equation 33 into Equation 2
gives the load line slope expression:
2R
V
droop
----------------- -
LL
==
I
o
×
senRdroop
-----------------------------------------
NR
×
i
(EQ. 37)
Substitution of Equation 30 and rewriting Equation 36, or
substitution of Equation 34 and rewriting Equation 37 gives the
same result in Equation 38:
I
o
----------------
R
droop
One can use the full load condition to calculate R
example, given I
LL = 1.9mΩ, Equation 38 gives R
It is recommended to start with the R
I
droop
omax
LL×=
=51A, I
droopmax
droop
= 40.9µA and
droop
=2.37kΩ.
value calculated by
droop
(EQ. 38)
. For
Equation 38, and fine tune it on the actual board to get accurate
load line slope. One should record the output voltage readings at
no load and at full load for load line slope calculation. Reading
the output voltage at lighter load instead of full load will increase
the measurement error.
Current Monitor
Refer to Equation 18 for the IMON pin current expression.
Refer to Figures 1 and 2, the IMON pin current flows through
R
. The voltage across R
imon
V
Rimon
3I×
×=
droopRimon
is expressed in Equation 39:
imon
(EQ. 39)
Rewriting Equation 38 gives Equation 40:
I
o
I
droop
------------------
R
droop
LL×=
(EQ. 40)
Substitution of Equation 40 into Equation 39 gives Equation 41:
3IoLL×
V
Rimon
---------------------
R
droop
×=
R
imon
(EQ. 41)
Rewriting Equation 41 and application of full load condition gives
Equation 42:
V
×
RimonRdroop
=
imon
= 963mV at I
=7.85kΩ.
--------------------------------------------
imon
LL×
3I
o
= 51A, Equation 42 gives
omax
can be paralleled with R
imonCimon
(EQ. 42)
=2.37kΩ,
droop
to filter the IMON
imon
time constant is the user’s choice. It
R
For example, given LL = 1.9mΩ, R
V
Rimon
R
imon
A capacitor C
pin voltage. The R
is recommended to have a time constant long enough such that
switching frequency ripples are removed.
Compensator
Figure 15 shows the desired load transient response waveforms.
Figure 21 shows the equivalent circuit of a voltage regulator (VR)
with the droop function. A VR is equivalent to a voltage source
(= VID) and output impedance Z
out
(s). If Z
load line slope LL, i.e. constant output impedance, in the entire
frequency range, V
will have square response when Io has a
o
square change.
(s) is equal to the
out
22
FN6891.4
June 21, 2011
Page 23

ISL62883, ISL62883B
Zout(s)=LL
VID
VR
i
o
Load
V
o
FIGURE 21. VOLTAGE REGULATOR EQUIVALENT CIRCUIT
Intersil provides a Microsoft Excel-based spreadsheet to help design
the compensator and the current sensing network, so the VR
achieves constant output impedance as a stable system. Please
contact Intersil Application support at www.intersil.com/design/
Figure 24
shows a screenshot of the spreadsheet.
.
A VR with active droop function is a dual-loop system consisting
of a voltage loop and a droop loop which is a current loop.
However, neither loop alone is sufficient to describe the entire
system. The spreadsheet shows two loop gain transfer functions,
T1(s) and T2(s), that describe the entire system. Figure 22
conceptually shows T1(s) measurement set-up and Figure 23
conceptually shows T2(s) measurement set-up. The VR senses
the inductor current, multiplies it by a gain of the load line slope,
then adds it on top of the sensed output voltage and feeds it to
the compensator. T(1) is measured after the summing node, and
T2(s) is measured in the voltage loop before the summing node.
The spreadsheet gives both T1(s) and T2(s) plots. However, only
T2(s) can be actually measured on an ISL62883 regulator.
T1(s) is the total loop gain of the voltage loop and the droop loop.
It always has a higher crossover frequency than T2(s) and has
more meaning of system stability.
T2(s) is the voltage loop gain with closed droop loop. It has more
meaning of output voltage response.
Design the compensator to get stable T1(s) and T2(s) with
sufficient phase margin, and output impedance equal or smaller
than the load line slope.
C
out
EXCITATION
OUTPUT
V
o
i
o
Ω
20
ISOLATION
TRANSFORMER
Q1
V
in
LOOP GAIN =
GATE
DRIVER
Q2
Mod.
Comp
CHANNEL B
CHANNEL A
NETWORK
ANALYZER
L
LOAD LINE SLOPE
EA
VID
FIGURE 22. LOOP GAIN T1(s) MEASUREMENT SET-UP
C
VID
out
Ω
V
o
i
o
20
EXCITATION
OUTPUT
ISOLATION
TRANSFORMER
Q1
V
in
LOOP GAIN =
GATE
DRIVER
Q2
Mod.
Comp
CHANNEL B
CHANNEL A
L
LOAD LINE SLOPE
EA
NETWORK
ANALYZER
FIGURE 23. LOOP GAIN T2(s) MEASUREMENT SET-UP
CHANNEL BCHANNEL A
CHANNEL BCHANNEL A
23
FN6891.4
June 21, 2011
Page 24

:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
Compensation & Current Sensing Network Design for Intersil Multiphase R^3 Regulators for IMVP-6.5
)UHTXHQF\+]
*DLQG%
)UHTXHQF\+]
0DJQLWXGH PRKP
)UHTXHQF\+]
3KDVHGHJUHH
)UHTXHQF\+]
3KDVHGHJUHH
Jia Wei, jwei@intersil.com, 919-405-3605
Attention: 1. "Analysis ToolPak" Add-in is required. To turn on, go to Tools--Add-Ins, and check "Analysis ToolPak"
2. Green cells require user input
Operation Parameters
Controller Part Number:
Phase Number: 3
Full Load Current: 51 Amps
Switching Frequency: 300 kHz
Inductance Per Phase: 0.36 uH
CPU Socket Resistance: 0.9
Desired Load-Line Slope: 1.9
Loop Gain, Gain Curve
24
Estimated Full-Load Efficiency: 87 %
Number of Output Bulk Capacitors: 4
Capacitance of Each Output Bulk Capacitor: 270 uF
ESR of Each Output Bulk Capacitor: 4.5
ESL of Each Output Bulk Capacitor: 0.6 nH R2 338.213
Number of Output Ceramic Capacitors: 24 R3 0.530
Capacitance of Each Output Ceramic Capacitor: 10 uF C1 148.140 pF C1 150 pF
ESR of Each Output Ceramic Capacitor: 3
ESL of Each Output Ceramic Capacitor: 3 nH C3 40.069 pF C3 39 pF
Desired ISUM- Pin Current at Full Load: 40.9 uA T1 Bandwidth: 212kHz T2 Bandwidth: 66kHz
(This sets the over-current protection level) T1 Phase Margin: 58.9° T2 Phase Margin: 89.3°
Changing the settings in red requires deep understanding of control loop design
Place the 2nd compensator pole fp2 at: 2.2 Rsum 3.65
Tune Ki to get the desired loop gain bandwidth Rntc 10
Tune the compensator gain factor Ki:
(Recommended Ki range is 0.8~2) Rp 11
( ( ( ( ( (
Loop Gain, Phase Curve
ISL6288x
Vin: 12 volts
Vo: 1.15 volts
m
m
m
m
xfs
1.3 Rntcs 2.61
7V
7V
Recommended Value User-Selected Value
R1 2.369
C2 455.369 pF C2 390 pF
(Switching Frequency)
( ( ( ( ( (
Compensator Parameters Current Sensing Network Parameters
iK
)(
sA
V
s
k
k
k
R1 2.37
R2 324
R3 0.536
Use User-Selected Value (Y/N)?
§
s
¨
ZZ
1
i
¨
2
f
©
§
·
s
¨
¸
1
¨
¸
2
f
©
¹
N
s
¸
¨
¸
1
¸
¨
¸
SS
2
f
¹
©
¹
21
zz
§
·
s
¨
¸
1
¨
¸
2
f
SS
21
pp
©
¹
k
k
k
·
§
·
Performance and Stability
Operation Parameters
Inductor DCR 0.88
Output Impedance, Gain Curve
Recommended Value User Selected Value
Cn 0.406 uF Cn 0.406 uF
Ri 606.036
Output Impedance, Phase Curve
m
k
k
k
k
ISL62883, ISL62883B
Ri 604
June 21, 2011
FN6891.4
( ( ( ( ( (
7V
7V
( ( ( ( ( (
FIGURE 24. SCREENSHOT OF THE COMPENSATOR DESIGN SPREADSHEET
Page 25

ISL62883, ISL62883B
Optional Slew Rate Compensation Circuit For
1-Tick VID Transition
Rdroop
Cvid
Rvid
COMP
FB
E/A
INTERNAL
Idroop_vid
Σ
VDAC
Ivid
DAC
X 1
TO IC
VID<0:6>
Vfb
Ivid
Vcore
Idroop_vid
FIGURE 25. OPTIONAL SLEW RATE COMPENSATION CIRCUIT
FOR1-TICK VID TRANSITION
VIDs
RTN
VSS
Vcore
OPTIONAL
VID<0:6>
VSSSENSE
In the mean time, the R
branch current I
vid-Cvid
time domain
vid
expression is shown in Equation 44:
t–
------------------------------
⎛⎞
I
vid
t() C
× 1e
vid
It is desired to let I
dV
C
fb
out
------------------------
----------- -
C
×
vid
dt
R
dV
----------- -
dt
vid
droop
fb
R
–
dV
core
----------------- -
dt
×
vidCvid
droop_vid
(t). So there are:
⎜⎟
×=
⎜⎟
⎝⎠
(t) cancel I
LL×
×=
(EQ. 44)
(EQ. 45)
and:
× C
R
vidCvid
out
LL×=
(EQ. 46)
The result is expressed in Equation 47:
R
=
vidRdroop
(EQ. 47)
and:
dV
core
C
out
------------------------
C
vid
R
droop
For example: given LL = 1.9mΩ, R
C
= 1320µF, dV
out
Equation 47 gives R
C
= 350pF.
vid
It’s recommended to select the calculated R
with the calculated C
----------------- -
LL×
dt
----------------- -
×=
dV
fb
----------- -
dt
=2.37kΩ,
/dt = 5mV/us and dVfb/dt = 15mV/µs,
core
=2.37kΩ and Equation 48 gives
vid
droop
vid
value and tweak it on the actual board to
vid
(EQ. 48)
value and start
get the best performance.
During normal transient response, the FB pin voltage is held
constant, therefore is virtual ground in small signal sense. The
R
network is between the virtual ground and the real
vid-Cvid
ground, and hence has no effect on transient response.
Voltage Regulator Thermal Throttling
During a large VID transition, the DAC steps through the VIDs at a
controlled slew rate of 2.5µs per tick (12.5mV), controlling
output voltage V
slew rate at 5mV/µs.
core
Figure 25 shows the waveforms of 1-tick VID transition. During
1-tick VID transition, the DAC output changes at approximately
15mV/µs slew rate, but the DAC cannot step through multiple
VIDs to control the slew rate. Instead, the control loop response
speed determines V
slew rate. Ideally, V
core
will follow the FB
core
pin voltage slew rate. However, the controller senses the inductor
core
current increase during the up transition, as the I
droop_vid
waveform shows, and will droop the output voltage V
accordingly, making V
slew rate slow. Similar behavior occurs
core
during the down transition.
To cont rol V
the R
vid-Cvid
When V
induced I
I
droop
where C
slew rate during 1-tick VID transition, one can add
core
branch, whose current I
increases, the time domain expression of the
core
change is expressed in Equation 43:
droop
dV
LL×
C
out
------------------------
t()
R
droop
is the total output capacitance.
out
core
----------------- -
× 1e
dt
cancels I
vid
-------------------------
⎛⎞
C
⎜⎟
–
×=
⎜⎟
⎝⎠
out
droop_vid
t–
LL×
.
(EQ. 43)
25
54uA
NTC
+
V
R
NTC
NTC
-
1.24V
R
s
FIGURE 26. CIRCUITRY ASSOCIATED WITH THE THERMAL
THROTTLING FEATURE OF THE ISL62882
64uA
SW1
-
+
SW2
1.20V
INTERNAL TO
ISL62882
VR_TT#
FN6891.4
June 21, 2011
Page 26

ISL62883, ISL62883B
Figure 26 shows the thermal throttling feature with hysteresis.
An NTC network is connected between the NTC pin and GND. At
low temperature, SW1 is on and SW2 connects to the 1.20V side.
The total current flowing out of the NTC pin is 60µA. The voltage
on NTC pin is higher than threshold voltage of 1.20V and the
comparator output is low. VR_TT# is pulled up by the external
resistor.
When temperature increases, the NTC thermistor resistance
decreases so the NTC pin voltage drops. When the NTC pin
voltage drops below 1.20V, the comparator changes polarity and
turns SW1 off and throws SW2 to 1.24V. This pulls VR_TT# low
and sends the signal to start thermal throttle. There is a 6µA
current reduction on NTC pin and 40mV voltage increase on
threshold voltage of the comparator in this state. The VR_TT#
signal will be used to change the CPU operation and decrease
the power consumption. When the temperature drops down, the
NTC thermistor voltage will go up. If NTC voltage increases to
above 1.24V, the comparator will flip back. The external
resistance difference in these two conditions is expressed in
Equation 49:
1.24V
---------------
54μ A
1.20V
---------------
– 2.96 k=
60μ A
(EQ. 49)
One needs to properly select the NTC thermistor value such that
the required temperature hysteresis correlates to 2.96kΩ
resistance change. A regular resistor may need to be in series
with the NTC thermistor to meet the threshold voltage values.
For example, given Panasonic NTC thermistor with B = 4700, the
resistance will drop to 0.03322 of its nominal at +105°C, and
drop to 0.03956 of its nominal at +100°C. If the required
temperature hysteresis is +105°C to +100°C, the required
resistance of NTC will be:
2.96k Ω
-------------------------------------------------------
0.03956 0.03322–()
467k Ω=
(EQ. 50)
Therefore a larger value thermistor, such as 470k NTC should be
used.
At +105°C, 470kΩ NTC resistance becomes
(0.03322×470kΩ) = 15.6kΩ. With 60µA on the NTC pin, the
voltage is only (15.6kΩ×60µA) = 0.937V. This value is much
lower than the threshold voltage of 1.20V. Therefore, a regular
resistor needs to be in series with the NTC. The required
resistance can be calculated by Equation 51:
1.20V
---------------
60μ A
15.6k Ω– 4.4kΩ=
(EQ. 51)
represent the DC current flowing through the inductors.
Recommended values are R
= 10kΩ and Cs= 0.22µF.
s
Layout Guidelines
Table 5 shows the layout considerations. The designators refer to
the reference design shown in Figure 27.
TABLE 5. LAYOUT CONSIDERATION
PIN NAME LAYOUT CONSIDERATION
EP GND Create analog ground plane underneath the
controller and the analog signal processing
components. Don’t let the power ground plane
overlap with the analog ground plane. Avoid noisy
planes/traces (e.g.: phase node) from crossing
over/overlapping with the analog plane.
1 PGOOD No special consideration
2 PSI# No special consideration
3 RBIAS Place the Rbias resistor (R16) in general proximity
of the controller. Low impedance connection to the
analog ground plane.
4 VR_TT# No special consideration
5 NTC The NTC thermistor (R9) needs to be placed close
to the thermal source that is monitor to determine
thermal throttling. Usually it’s placed close to
Phase-1 high-side MOSFET.
6 VW Place the capacitor (C4) across VW and COMP in
close proximity of the controller
7 COMP Place the compensator components (C3, C6 R7,
8FB
9 ISEN3/FB2 A capacitor (C7) decouples it to VSUM-. Place it in
10 ISEN2 A capacitor (C9) decouples it to VSUM-. Place it in
11 ISEN1 A capacitor (C10) decouples it to VSUM-. Place it in
12 VSEN Place the VSEN/RTN filter (C12, C13) in close
13 RTN
R11, R10 and C11) in general proximity of the
controller.
general proximity of the controller.
An optional capacitor is placed between this pin
and COMP. (It’s only used when the controller is
configured 2-phase). Place it in general proximity
of the controller.
general proximity of the controller.
general proximity of the controller.
proximity of the controller for good decoupling.
4.42k is a standard resistor value. Therefore, the NTC branch
should have a 470k NTC and 4.42k resistor in series. The part
number for the NTC thermistor is ERTJ0EV474J. It is a 0402
package. The NTC thermistor will be placed in the hot spot of the
board.
Current Balancing
Refer to Figures 1 and 2. The ISL62883 achieves current
balancing through matching the ISEN pin voltages. R
form filters to remove the switching ripple of the phase node
voltages. It is recommended to use rather long R
constant such that the ISEN voltages have minimal ripple and
26
sCs
and Cs
s
time
FN6891.4
June 21, 2011
Page 27

ISL62883, ISL62883B
TABLE 5. LAYOUT CONSIDERATION
PIN NAME LAYOUT CONSIDERATION
14 ISUM- Place the current sensing circuit in general
15 ISUM+
proximity of the controller.
Place C82 very close to the controller.
Place NTC thermistors R42 next to Phase-1
inductor (L1) so it senses the inductor temperature
correctly.
Each phase of the power stage sends a pair of
VSUM+ and VSUM- signals to the controller. Run
these two signals traces in parallel fashion with
decent width (>20mil).
IMPORTANT: Sense the inductor current by routing
the sensing circuit to the inductor pads.
Route R63 and R71 to the Phase-1 side pad of
inductor L1. Route R88 to the output side pad of
inductor L1.
Route R65 and R72 to the Phase-2 side pad of
inductor L2. Route R90 to the output side pad of
inductor L2.
Route R67 and R73 to the Phase-3 side pad of
inductor L3. Route R92 to the output side pad of
inductor L3.
If possible. Route the traces on a different layer
from the inductor pad layer and use vias to
connect the traces to the center of the pads. If no
via is allowed on the pad, consider routing the
traces into the pads from the inside of the
inductor. The following drawings show the two
preferred ways of routing current sensing traces.
Inductor
(Continued)
Inductor
Vias
TABLE 5. LAYOUT CONSIDERATION
PIN NAME LAYOUT CONSIDERATION
25 VCCP A capacitor (C22) decouples it to GND. Place it in
close proximity of the controller.
26 LGATE2 Run these two traces in parallel fashion with
27 VSSP2
28 PHASE2 Run these two traces in parallel fashion with
29 UGATE2
30 BOOT2 Use decent wide trace (>30mil). Avoid any
31~37 VID0~6 No special consideration.
38 VR_ON No special consideration.
39 DPRSLPVR No special consideration.
40 CLK_EN# No special consideration.
Other Phase Node Minimize phase node copper area. Don’t let the
Other Minimize the loop consisting of input capacitor,
decent width (>30mil). Avoid any sensitive analog
signal trace from crossing over or getting close.
Recommend routing VSSP2 to the Phase-2 lowside MOSFET (Q5 and Q1) source pins instead of
general power ground plane for better
performance.
decent width (>30mil). Avoid any sensitive analog
signal trace from crossing over or getting close.
Recommend routing PHASE2 trace to the Phase-2
high-side MOSFET (Q4 and Q10) source pins
instead of general Phase-2 node copper.
sensitive analog signal trace from crossing over or
getting close.
phase node copper overlap with/getting close to
other sensitive traces. Cut the power ground plane
to avoid overlapping with phase node copper.
high-side MOSFETs and low-side MOSFETs (e.g.:
C27, C33, Q2, Q8, Q3 and Q9).
(Continued)
Current-Sensing
Traces
16 VDD A capacitor (C16) decouples it to GND. Place it in
close proximity of the controller.
17 VIN A capacitor (C17) decouples it to GND. Place it in
close proximity of the controller.
18 IMON Place the filter capacitor (C21) close to the CPU.
19 BOOT1 Use decent wide trace (>30mil). Avoid any
sensitive analog signal trace from crossing over or
getting close.
20 UGATE1 Run these two traces in parallel fashion with
21 PHASE1
22 VSSP1 Run these two traces in parallel fashion with
23 LGATE1
24 PWM3 No special consideration.
decent width (>30mil). Avoid any sensitive analog
signal trace from crossing over or getting close.
Recommend routing PHASE1 trace to the Phase-1
high-side MOSFET (Q2 and Q8) source pins instead
of general
Phase-1 node copper.
decent width (>30mil). Avoid any sensitive analog
signal trace from crossing over or getting close.
Recommend routing VSSP1 to the Phase-1 lowside MOSFET (Q3 and Q9) source pins instead of
general power ground plane for better
performance.
Current-Sensing
Traces
27
FN6891.4
June 21, 2011
Page 28

28
34
DNP
IRF7821
Q10
IRF7832 IRF7832
Q11
DNP
IRF7821
Q8
IRF7832 IRF7832
Q9
DNP
IRF7821
Q12
IRF7832 IRF7832
Q13
TITLE:
1UF
C26
ENGINEER:
L2
0.36UH
10K
R72
3.65K3.65K
OUT
VSUM+
L1
R90
ISEN2
R65R63
OUT
0.36UH
10K
R88
R71
3.65K
OUT
OUT
ISEN1
VSUM+
L3
0.36UH
10K
R67
R73
R92
OUT
OUT
ISEN3
VSUM+
IN
+5V
ISL62883 REFERENCE DESIGN
3-PHASE, DCR SENSING
BOOT2
UGATE2
PHASE2
VSSP2
LGATE2
VCCP
PWM3
LGATE1
VSSP1
PHASE1
IN
+5V
IN
VIN
0.47UF
C20
56
IN
VIN
30
29
28
27
26
25
IN
24
23
22
21
1UF
C22
R50
C21
7.87K
R41
2.61K
R38
11K
R42
10K
NTC
----->
PLACE NEAR L1
0.1UF
C25
C24
56UF
+5V
OUT
0.22UF
IN
IN
IN
56UF
IMON
VSSSENSE
VSUM+
VSUM-
45
C28
C34
10UF
R57
C31
0
0.22UF
C27
C33
10UF
C30
R56
0
0.22UF
C29
C35
10UF
C32
R58
0
0.22UF
U3
PHASE
UGATE
GND LGATE
ISL6208
10UF
Q4
Q5
10UF
Q2
Q3
10UF
Q6
Q7
FCCMBOOT
VCCPWM
78
IN
VID0
IN
VID1
IN
VID2
IN
VID3
IN
D
C C
B B
A A
VID4
IN
VID5
IN
VID6
IN
VR_ON
DPRSLPVR
----
-------
----
----
R110
C83
-------------
---ISEN3
ISEN2
ISEN1
IN
OUT
CLK_EN#
IN
+3.3V
OUT
PGOOD
IN
PSI#
IN
+1.1V
OUT
VR_TT#
OPTIONAL
R4
R6
C4
8.66K
-------
DNP
OPTIONAL
C6
2.37K
39PF
C3
R7
560PF
150PF
324K
-------------
IN
IN
IN
C7
8
1000PF
R10
536
R11
2.37K
C9
0.22UF
0.22UF
VCORE
R12
499
R8
C11
390PF
C10
0.22UF
IN
VCCSENSE
VSSSENSE
R16
147K
R9
NTCTBD
TBD
R17
10
IN
IN
R18
10
R19
1.91K
1
2
3
4
5
6
7
8
9
10
41
R23
1.91K
PGOOD
PSI#
RBIAS
VR_TT#
NTC
VW
COMP
FB
ISEN3
ISEN2
R20
0
EP
OPTIONAL
----
-----
----
C13 C12
38
40
39
VR_ON
CLK_EN#
DPRSLPVR
ISL62883HRZ
ISEN1
RTN
VSEN
12
11
-----
330PF
1000PF
-------------
----
-------------
36
35
37
VID5
VID6
U6
ISUM+
ISUM-
14
16
151318
C16
R26
C15
604
C81
820PF
OPTIONAL
67
33
34
VID3
VID4
VID2
IMON
VDD
VIN
17
R37
1
1UF
C17
82.5
C82
R30
0.01UF
R109
100
32
31
VID0
VID1
UGATE1
BOOT1
19
20
R40
0
0.22UF
C18
0.039UF
----
2
C39
C52
C57
270UF
C42
10UF
C44
270UF
C43
10UF
OUT
C40
270UF
C41
10UF
11
VSUM-
C55
C54
C50
OUT
C49
C60
C67
10UF10UF
10UF
C61
C68
10UF
C63
10UF
C71
10UF
10UF
C64
10UF
C72
10UF
VSUM-
LAYOUT NOTE:
ROUTE UGATE1 TRACE IN PARALLEL
WITH THE PHASE1 TRACE GOING TO
THE SOURCE OF Q2 AND Q8
1
ROUTE LGATE1 TRACE IN PARALLEL
WITH THE VSSP1 TRACE GOING TO
OUT
THE SOURCE OF Q3 AND Q9
SAME RULE APPLIES TO OTHER PHASES
VSUM-
JIA WEI
23
OUT
270UF
C47
10UF
C56
10UF
C65
10UF
C73
10UF
DATE:
JULY 2009
PAGE:
1
VCORE
C48
10UF
C59
10UF
C66
10UF
C74
10UF
1OF1
1
10UF10UF
10UF
10UF
D
ISL62883, ISL62883B
FIGURE 27. 3-PHASE REFERENCE DESIGN
June 21, 2011
FN6891.4
Page 29

ISL62883, ISL62883B
Reference Design Bill of Materials
QTY REFERENCE VALUE DESCRIPTION MANUFACTURER PART NUMBER PACKAGE
1 C11 390pF Multilayer Cap, 16V, 10% GENERIC H1045-00391-16V10 SM0603
1 C12 330pF Multilayer Cap, 16V, 10% GENERIC H1045-00331-16V10 SM0603
1 C13 1000pF Multilayer Cap, 16V, 10% GENERIC H1045-00102-16V10 SM0603
1 C15 0.01µF Multilayer Cap, 16V, 10% GENERIC H1045-00103-16V10 SM0603
3 C16, C22, C26 1µF Multilayer Cap, 16V, 20% GENERIC H1045-00105-16V20 SM0603
1 C18 0.47µF Multilayer Cap, 16V, 10% GENERIC H1045-00474-16V10 SM0603
1 C20 0.1µF Multilayer Cap, 16V, 10% GENERIC H1045-00104-16V10 SM0603
8 C21, C7, C9, C10, C17,
C30, C31, C32
2 C24, C25 56µF Radial SP Series Cap, 25V, 20% SANYO 25SP56M CASE-CC
6 C27, C28, C29, C33,
C34, C35
1 C3 150pF Multilayer Cap, 16V, 10% GENERIC H1045-00151-16V10 SM0603
4 C39, C44, C52, C57 270µF SPCAP, 2V, 4.5MOHM
1 C4 1000pF Multilayer Cap, 16V, 10% GENERIC H1045-00102-16V10 SM0603
24 C40-C43, C47-C50,
C53-C56, C59-C69,
C78
1 C6 39pF Multilayer Cap, 16V, 10% GENERIC H1045-00390-16V10 SM0603
1 C81 820pF Multilayer Cap, 16V, 10% GENERIC H1045-00821-16V10 SM0603
1 C82 0.039µF Multilayer Cap, 16V, 10% GENERIC H1045-00393-16V10 SM0603
1 C83 560pF Multilayer Cap, 16V, 10% GENERIC H1045-00561-16V10 SM0603
3 L1, L2, L3 0.36µH Inductor, Inductance 20%, DCR 5% NEC-TOKIN
3 Q2, Q4, Q6 N-Channel Power MOSFET IR IRF7821 PWRPAKSO8
6 Q3, Q5, Q7, Q9, Q11,
Q13
3 Q8, Q10, Q12 DNP
1 R10 536 Thick Film Chip Resistor, 1% GENERIC H2511-05360-1/16W1 SM0603
1 R109 100 Thick Film Chip Resistor, 1% GENERIC H2511-01000-1/16W1 SM0603
1 R11 2.37k Thick Film Chip Resistor, 1% GENERIC H2511-02371-1/16W1 SM0603
1 R110 2.37k Thick Film Chip Resistor, 1% GENERIC H2511-02371-1/16W1 SM0603
1 R12 499 Thick Film Chip Resistor, 1% GENERIC H2511-04990-1/16W1 SM0603
1 R16 147k Thick Film Chip Resistor, 1% GENERIC H2511-01473-1/16W1 SM0603
2 R17, R18 10 Thick Film Chip Resistor, 1% GENERIC H2511-00100-1/16W1 SM0603
4 R19, R71, R72, R73 10k Thick Film Chip Resistor, 1% GENERIC H2511-01002-1/16W1 SM0603
1 R23 1.91k Thick Film Chip Resistor, 1% GENERIC H2511-01911-1/16W1 SM0603
1 R26 82.5 Thick Film Chip Resistor, 1% GENERIC H2511-082R5-1/16W1 SM0603
5 R20, R40, R56, R57,
R58
1 R30 604 Thick Film Chip Resistor, 1% GENERIC H2511-06040-1/16W1 SM0603
0.22µF Multilayer Cap, 16V, 10% GENERIC H1045-00224-16V10 SM0603
10µF Multilayer Cap, 25V, 20% GENERIC H1065-00106-25V20 SM1206
PANASONIC
POLYMER CAP, 2.5V, 4.5mΩ
10µF Multilayer Cap, 6.3V, 20% MURATA
N-Channel Power MOSFET IR IRF7832 PWRPAKSO8
0 Thick Film Chip Resistor, 1% GENERIC H2511-00R00-1/16W1 SM0603
KEMET
PANASONIC
TDK
PANASONIC
EEFS X0D471E4
T520V477M2R5A(1)E4R5
GRM21BR61C106KE15L
ECJ2FB0J106K
C2012X5R0J106K
MPCH1040LR36
ETQP4LR36AFC
SM0805
10mmx10mm
29
FN6891.4
June 21, 2011
Page 30

ISL62883, ISL62883B
Reference Design Bill of Materials (Continued)
QTY REFERENCE VALUE DESCRIPTION MANUFACTURER PART NUMBER PACKAGE
4 R37, R88, R90, R92 1 Thick Film Chip Resistor, 1% GENERIC H2511-01R00-1/16W1 SM0603
1 R38 11k Thick Film Chip Resistor, 1% GENERIC H2511-01102-1/16W1 SM0603
1R4 DNP
1 R41 2.61k Thick Film Chip Resistor, 1% GENERIC H2511-02611-1/16W1 SM0603
1 R42 10k NTC Thermistor, 10k NTC PANASONIC ERT-J1VR103J SM0603
1 R50 7.87k Thick Film Chip Resistor, 1% GENERIC H2511-07871-1/16W1 SM0603
1 R6 8.66k Thick Film Chip Resistor, 1% GENERIC H2511-08662-1/16W1 SM0603
3 R63, R65, R67 3.65k Thick Film Chip Resistor, 1% GENERIC H2511-03651-1/16W1 SM0805
2 R8, R9 DNP
1 R7 324k Thick Film Chip Resistor, 1% GENERIC H2511-03243-1/16W1 SM0603
1 U3 Synchronous Rectified MOSFET
Driver
1 U6 IMVP-6.5 PWM Controller INTERSIL ISL62883HRTZ QFN-40
INTERSIL ISL6208CBZ SOIC8_150_50
30
FN6891.4
June 21, 2011
Page 31

Typical Performance
V
(V)
ISL62883, ISL62883B
92
90
88
86
84
82
80
78
EFFICIENCY(%)
76
74
72
70
0 5 10 15 20 25 30 35 40 45 50 55 60 65
V
= 8V
IN
V
= 12V
IN
V
= 19V
IN
I
(A)
OUT
FIGURE 28. 3-PHASE CCM EFFICIENCY, VID = 1.075V,
V
=8V, V
IN1
95
90
85
80
75
EFFICIENCY (%)
70
65
VIN = 8V
= 12.6V AND V
IN2
VIN = 12V
IN3
VIN = 19V
= 19V
1.10
1.08
1.06
1.04
1.02
(V)
1.00
OUT
V
0.98
0.96
0.94
0.92
0 5 10 15 20 25 30 35 40 45 50 55 60 65
I
OUT
(A)
FIGURE 29. 3-PHASE CCM LOAD LINE, VID = 1.075V,
V
OUT
0.885
0.875
0.865
0.855
0.845
0.835
IN1
=8V, V
= 12.6V AND V
IN2
IN3
= 19V
60
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
I
OUT
(A)
FIGURE 30. 2-PHASE CCM EFFICIENCY, VID = 0.875V,
V
=8V, V
IN1
95
90
85
80
75
EFFICIENCY (%)
70
65
60
0.1 1 10 100
VIN = 8V
VIN = 19V
= 12.6V AND V
IN2
I
OUT
VIN = 12V
(A)
IN3
= 19V
FIGURE 32. 1-PHASE DEM EFFICIENCY, VID = 0.875V,
V
=8V, V
IN1
= 12.6V AND V
IN2
IN3
= 19V
0.825
0 101112131415
123456789
I
OUT
(A)
FIGURE 31. 2-PHASE CCM LOAD LINE, VID = 0.875V,
V
=8V, V
IN1
0.885
0.875
0.865
(V)
0.855
OUT
V
0.845
0.835
0.825
0 101112131415
123456789
= 12.6V AND V
IN2
I
OUT
(A)
IN3
= 19V
FIGURE 33. 1-PHASE DEM LOAD LINE, VID = 0.875V,
V
IN1
=8V, V
= 12.6V AND V
IN2
IN3
= 19V
31
FN6891.4
June 21, 2011
Page 32

ISL62883, ISL62883B
Typical Performance (Continued)
FIGURE 34. SOFT-START, VIN= 19V, IO= 0A, VID = 0.95V,
Ch1: PHASE1, Ch2: V
FIGURE 36. CLK_EN# DELAY, V
Ch1: PHASE1, Ch2: V
, Ch3: PHASE2, Ch4: PHASE3
O
= 19V, IO=2A, VID=1.5V,
IN
, Ch3: IMON, Ch4: CLK_EN#
O
FIGURE 35. SHUT DOWN, V
Ch1: PHASE1, Ch2: V
= 19V, IO= 1A, VID = 0.95V,
IN
, Ch3: PHASE2, Ch4: PHASE3
O
FIGURE 37. PRE-CHARGED START UP, V
Ch1: PHASE1, Ch2: V
, Ch3: IMON, Ch4: VR_ON
O
= 19V, VID = 0.95V,
IN
FIGURE 38. STEADY STATE, V
Ch1: PHASE1, Ch2: V
= 19V, IO= 51A, VID = 0.95V,
IN
, Ch3: PHASE2, Ch4: PHASE3
O
32
1000
900
800
(mV)
700
600
SENSE
500
400
SPEC
300
IMON-VSS
200
100
0
0 5 10 15 20 25 30 35 40 45 50
VIN = 8V
I
OUT
VIN = 12V
(A)
VIN = 19V
FIGURE 39. IMON, VID = 1.075V
FN6891.4
June 21, 2011
Page 33

ISL62883, ISL62883B
Typical Performance (Continued)
FIGURE 40. LOAD TRANSIENT RESPONSE WITH OVERSHOOT
FIGURE 42. LOAD TRANSIENT RESPONSE WITH OVERSHOOT
REDUCTION FUNCTION DISABLED, V
CLARKSFIELD CPU TEST CONDITION: VID = 0.95V,
I
= 12A/51A, di/dt = “FASTEST”, LL = 1.9mΩ
O
REDUCTION FUNCTION DISABLED, V
CLARKSFIELD CPU TEST CONDITION: VID = 0.95V,
I
= 12A/51A, di/dt = “FASTEST”, LL = 1.9mΩ
O
=12V, SV
IN
=12V, SV
IN
FIGURE 41. LOAD TRANSIENT RESPONSE WITH OVERSHOOT
REDUCTION FUNCTION DISABLED, V
CLARKSFIELD CPU TEST CONDITION: VID = 0.95V,
I
= 12A/51A, di/dt = “FASTEST”, LL = 1.9mΩ
O
FIGURE 43. LOAD TRANSIENT RESPONSE WITH OVERSHOOT
REDUCTION FUNCTION DISABLED, V
CLARKSFIELD CPU TEST CONDITION: VID = 0.95V,
I
= 12A/51A, di/dt = “FASTEST”, LL = 1.9mΩ
O
=12V, SV
IN
=12V, SV
IN
FIGURE 44. 2-PHASE MODE LOAD INSERTION RESPONSE WITH
OVERSHOOT REDUCTION FUNCTION DISABLED,
3-PHASE CONFIGURATION, PSI# = 0, DPRSLPVR =
0, V
= 12V, VID = 0.875V, IO=4A/17A,
IN
di/d = “FASTEST
33
FIGURE 45. 2-PHASE MODE LOAD INSERTION RESPONSE WITH
OVERSHOOT REDUCTION FUNCTION DISABLED,
3-PHASE CONFIGURATION, PSI# = 0, DPRSLPVR=0,
V
= 12V, VID = 0.875V, IO= 4A/17A, di/dt =
IN
“FASTEST”
FN6891.4
June 21, 2011
Page 34

ISL62883, ISL62883B
Typical Performance (Continued)
FIGURE 46. PHASE ADDING/DROPPING (PSI# TOGGLE),
I
= 15A, VID = 1.075V, Ch1: PHASE1, Ch2: VO,
O
Ch3: PHASE2, Ch4: PHASE3
FIGURE 48. VID ON THE FLY, 1.075V/0.875V, 3-PHASE
CONFIGURATION, PSI#=1, DPRSLPVR=0, Ch1:
PHASE1, Ch2: V
, Ch3: PHASE2, Ch4: PHASE3
O
FIGURE 47. DEEPER SLEEP MODE ENTRY/EXIT,
I
= 1.5A, HFM VID = 1.075V, LFM VID = 0.875V,
O
DEEPER SLEEP VID = 0.875V, Ch1: PHASE1, Ch2:
V
, Ch3: PHASE2, Ch4: PHASE3
O
FIGURE 49. VID ON THE FLY, 1.075V/0.875V, 3-PHASE
CONFIGURATION, PSI#=0, DPRSLPVR=0, Ch1:
PHASE1, Ch2: V
, Ch3: PHASE2, Ch4: PHASE3
O
FIGURE 50. VID ON THE FLY, 1.075V/0.875V, 3-PHASE
CONFIGURATION, PSI# = 0, DPRSLPVR = 1, Ch1:
PHASE1, Ch2: V
, Ch3: PHASE2, Ch4: PHASE3
O
34
FIGURE 51 . VID ON THE FLY, 1 .075V /0.875V, 3-P HASE
CONFIGURATION, PSI# = 1, DPRSLPVR = 1, Ch1:
PHASE1, Ch2: V
, Ch3: PHASE2, Ch4: PHASE3
O
June 21, 2011
FN6891.4
Page 35

ISL62883, ISL62883B
Typical Performance (Continued)
Phase Margin
Gain
FIGURE 52. LOAD TRANSIENT RESPONSE WITH OVERSHOOT
REDUCTION FUNCTION ENABLED, V
=12V, SV
IN
CLARKSFIELD CPU TEST CONDITION: VID = 0.95V,
I
= 12A/51A, di/dt = “FASTEST”, LL = 1.9mΩ,
O
Ch1: LGATE1, Ch2: V
, Ch3: LGATE2, Ch4: ISL6208
O
LGATE
1000
900
800
700
(mV)
600
SENSE
500
400
SPEC
300
IMON-VSS
200
100
0
0 5 10 15 20 25 30 35 40 45 50
VIN = 8V
I
(A)
OUT
VIN = 12V
VIN = 19V
FIGURE 54. IMON, VID = 1.075V
FIGURE 53. REFERENCE DESIGN LOOP GAIN T2(s)
MEASUREMENT RESULT
5.0
4.5
4.0
3.5
3.0
PSI# = 0, DPRSLPVR = 0, 2-PHASE CCM
2.5
2.0
Z(f) (mΩ)
1.5
1.0
0.5
0.0
1k 10k
PSI# = 1, DPRSLPVR = 0, 3-PHASE CCM
100k
FREQUENCY (Hz)
FIGURE 55. REFERENCE DESIGN FDIM RESULT
1M
For additional products, see www.intersil.com/product_tree
Intersil products are manufactured, assembled and tested utilizing ISO9000 quality systems as noted
in the quality certifications found at www.intersil.com/design/quality
Intersil products are sold by description only. Intersil Corporation reserves the right to make changes in circuit design, software and/or specifications at any time
without notice. Accordingly, the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be
accurate and reliable. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third
parties which may result from its use. No license is granted by implication or otherwise under any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see www.intersil.com
35
FN6891.4
June 21, 2011
Page 36

ISL62883, ISL62883B
Package Outline Drawing
L40.5x5
40 LEAD THIN QUAD FLAT NO-LEAD PLASTIC PACKAGE
Rev 1, 9/10
6
PIN 1
INDEX AREA
(4X)
0.15
PACKAGE OUTLINE
3.50
5.00
5.00
TOP VIEW
A
B
0.40
4X 3.60
36X 0.40
5.00
40X 0.4± 0 .1
0.750
0.050
(36X 0.40
BOTTOM VIEW
SIDE VIEW
6
PIN #1 INDEX AREA
0.20
b
4
SEE DETAIL “X”
//
BASE PLANE
SEATING PLANE
3.50
B0.10 M AC
C0.10
C
0.08
C
TYPICAL RECOMMENDED LAND PATTERN
36
(40X 0.20)
(40X 0.60)
0.2 REF
C
NOTES:
Dimensions are in millimeters.1.
Dimensions in ( ) for Reference Only.
Dimensioning and tolerancing conform to AMSE Y14.5m-1994.
2.
3.
Unless otherwise specified, tolerance : Decimal ± 0.05
Dimension b applies to the metallized terminal and is measured
4.
between 0.15mm and 0.27mm from the terminal tip.
Tiebar shown (if present) is a non-functional feature.
5.
The configuration of the pin #1 identifier is optional, but must be
6.
located within the zone indicated. The pin #1 identifier may be
either a mold or mark feature.
JEDEC reference drawing: MO-220WHHE-1
7.
5
0.00 MIN
0.05 MAX
DETAIL "X"
FN6891.4
June 21, 2011
Page 37

ISL62883, ISL62883B
Package Outline Drawing
L48.6x6
48 LEAD THIN QUAD FLAT NO-LEAD PLASTIC PACKAGE
Rev 1, 4/07
6
PIN 1
INDEX AREA
6.00
A
B
4X
4.4
0.40
44X
37
36
48
6
PIN #1 INDEX AREA
1
(4X)
( 5. 75 TYP )
0.15
( 4. 40 )
TOP VIEW
TYPICAL RECOMMENDED LAND PATTERN
6.00
( 44 X 0 . 40 )
( 48X 0 . 20 )
( 48X 0 . 65 )
MAX 0.80
4 .40 ± 0.15
25
24
48X 0.45 ± 0.10
BOTTOM VIEW
SIDE VIEW
0 . 2 REF
C
0 . 00 MIN.
0 . 05 MAX.
5
12
13
4
0.10 CM
0.05 M
48X 0.20
SEE DETAIL "X"
BASE PLANE
AB
C
C
0.10
SEATING PLANE
C
0.08 C
DETAIL "X"
37
NOTES:
Dimensions are in millimeters.1.
Dimensions in ( ) for Reference Only.
2.
Dimensioning and tolerancing conform to AMSE Y14.5m-1994.
3.
Unless otherwise specified, tolerance : Decimal ± 0.05
4.
Dimension b applies to the metallized terminal and is measured
between 0.15mm and 0.30mm from the terminal tip.
Tiebar shown (if present) is a non-functional feature.
5.
The configuration of the pin #1 identifier is optional, but must be
6.
located within the zone indicated. The pin #1 identifier may be
either a mold or mark feature.
FN6891.4
June 21, 2011
Page 38

 Loading...
Loading...