

Page 1
HSP50016-EV
User’s Manual January 1999 File Number
DDC Evaluation Platform
The HSP50016-EV is the evaluation board for the
HSP50016 Digital Down Converter (DDC). It provides a
mechanism for rapid evaluation and prototyping. The
HSP50016-EV consists of a series of busses which provide
input, output, and control to the DDC. These busses are
brought out through dual 96 Pin connectors to support daisy
chaining HSP50016-EVs with other Intersil evaluation
boards for multichip prototyping and evaluation.
For added flexibility, the input and control busses can be
driven by registers on-board the HSP50016-EV which have
been downloadedwithdata via the parallel printer port of an
IBM PC™ or compatible. In addition, the DDC output can be
read into the PC via the status lines of the parallel port.
Together, the I/O and Control Registers can be used to drive
the target DDC with a PC based vector set while collecting
output data on the PC’s disk.
Jumper selectable clock sources provide three different
methods of clocking the part under evaluation. In mode one,
the clock signal is generated under PC based software
control. In mode two, the HSP50016-EV’son-board oscillator
maybe selected as the clock source. In mode three, the user
may provide an external clock through the 96 pin input
connector.
3637.1
Features
• Single HSP50016-EV May be Used to Evaluate the
HSP50016
• Maybe Daisy Chained to Support Evaluation of Multi-Chip
Solutions
• Parallel Port Interface to Support IBM PC™ Based
Evaluation and Control
• Three Clocking Modes for Flexibility in Performance
Analysis and Prototyping
• Dual 96-Pin Input/Output Connectors Conforming to the
VME J2/P2 Connector Standard
Applications
• PC Based Performance Analysis of HSP50016
• Rapid Prototyping
The HSP50016-EV was builtinto a 3U Euro-Card form factor
with dual 96 Pin Input/Output connectors. The I/O
connectors conform to the VME J2/P2 Connector Standard.
HSP50016 Evaluation Platform
1
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
http://www.intersil.com or 407-727-9207
| Copyright © Intersil Corporation 1999
Page 2

HSP50016-EV
Getting Started
This section describes the initial evaluation system setup for
the HSP50016-EV evaluation board. The system setup
consists of the evaluation board, software installation, and
system test to verify proper operation of the board.
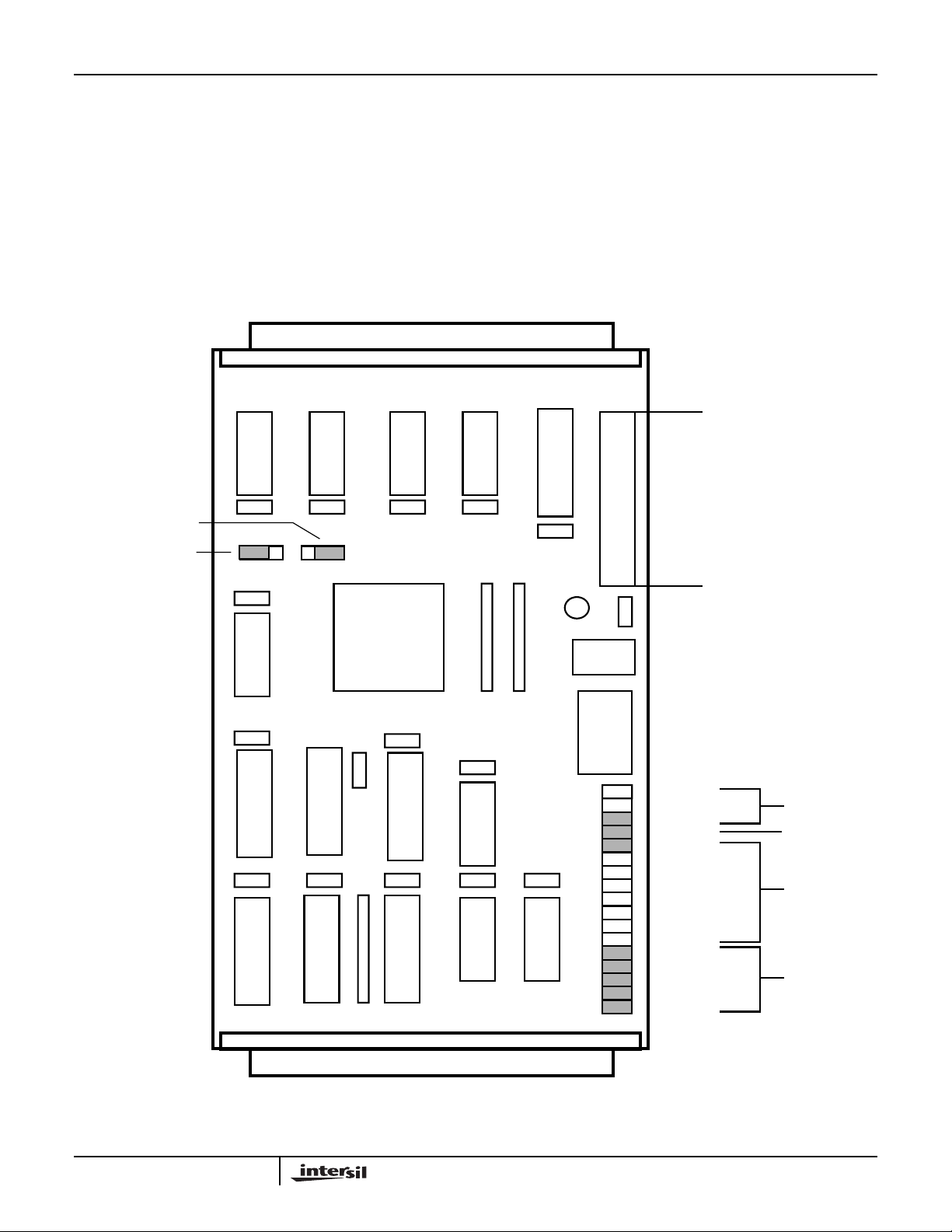
Assembly
As part of the initial assembly, the HSP50016-EV must be
provided with the default jumper configuration to ensure
proper operation with the system test software. Each board
leaving the factory is supplied with the default configuration
as shown in Figure 1.
Before using the board with the supplied software, power
must be supplied to the board, and the HSP50016-EV must
be connected to the parallel port of the PC.
❏ Power is provided to the board by connecting the wall
mount power supply provided to connector J2. As an
alternative, power may be supplied by a standard 5V ±5%
supply through the J3 header or the HSP50016-EV’s 96
Pin DIN connectors P1 or P2.
❏ The HSP50016-EV is connected to the target PC by
connecting the HSP50016-EV’s26 Pin connector J1 to the
PC’s parallel port using the supplied ribbon cable.
System Requirements for the Evaluation Board
Software
The PC system targeted to run the HSP50016-EV software
(DDC-SOFT) and interface with the evaluation board must
meet the following requirements:
❏ IBM PC/XT/AT, PS/2, or 100% compatible with a minimum
of 640K of random access memory (RAM) (DDC-SOFT
does not require extended memory)
❏ At least 250kB of free disk space on the hard disk
❏ DOS Version 3.0 or higher
❏ One parallel port with 27 Pin D-Sub connector
Software Installation
The distribution diskette contains a program called
INSTALL.EXE which installs the DDC-SOFT software onto
the target hard disk. Note: The steps in this section assume
you are installing DDC-SOFT from a diskette in drive A: onto
a hard drive C:. If a different configuration is used, substitute
the letter of the drive where the diskette is located for drive
A: Substitute the letter for the hard drive for drive C:.
To start the installation program:
Make sure computer is on and the DOS prompt is displayed.
❏ Type: C:<Enter>
Create a subdirectory to contain the DDC-SOFT Programs
by typing:
❏ MD \DDCSOFT <Enter>
Change current directory to the DDCSOFT directory
❏ CD \DDCSOFT <Enter>
Start the installation process by typing:
❏ A:INSTALL <Enter>
The INSTALLprogram downloadsthe DDC-SOFTprograms,
DDCCTRL and DDCCMD, to the DDCSOFT subdirectory on
the target hard drive. In addition, a subdirectory called
DDC_CHK is created into which files used to perform
functional verification are downloaded.
Modifications to AUTOEXEC.BAT
To run the DDC-SOFT programs, DOS must be able to find
the executable files. To ensure that DOS can always find the
DDC-SOFT executables, modify the search path to include
the location of the DDC-SOFT directory. For example, if the
DDC-SOFT programs are installed on drive C: in a
subdirectory called\DDCSOFT, add the following line to the
end of the existing Path command in the AUTOEXEC.BAT
file:
❏ ;C:\DDCSOFT
If your AUTOEXEC.BAT file does not contain a PATH
command, add the following command to the file:
PATH=C:\DDCSOFT
❏ Reboot the PC so that the search path changes will take
effect.
System Test
Test software is provided to verify operation of the
HSP50016-EV Board. Prior to performing the system test, it
is assumed that the evaluation board has been assembled
and configured as described above, power has been applied
to the board, and the 26 Pin Connector J1 on board the
HSP50016-EV has been connected to the parallelport of the
target PC via the supplied cable. The system test is initiated
by the following:
Change the current directory to that which contains the
software required for the system test by typing:
❏ CD C:\DDCSOFT\DDC_CHK <Enter>
Run the system test software by typing:
❏ DDCCHK <Enter>
The DDCCHK.EXE batch file makes use of the Command
Line Interface (see Command Line Interface Section) to
initialize the evaluation board, clock a data vector through
the HSP50016-EV, and store the output to a file. The output
file is then compared, using the DOS command COMP, to a
file containing a set of vectors generated by a properly
functioning board. If the TEST_IN.DAT and TEST.OUT.DAT
files match, the assembled board passes operational
verification.
2
Page 3
HSP50016-EV
When a successful compare has been done, the software
message returned is:
- Comparing files TEST_OUT.DAT and CMPRFILE.DAT
- FC: No differences encountered
The most common causes of test failuresare incorrect board
jumper settings, incorrect comm port selection, or a
corrupted eval.cfg file. It is helpful to delete the file
TEST_OUT.DAT, prior to the test, to ensure that DDC.CHK
runs properly and that a new TEST_OUT.DAT file was
created.
IQSTB SELECT
QOUT SELECT
JP20
11
JP19
P2
NOTE: if the operating system precedes DOS 6.0, the
user should answer NO to the COMP command prompt
to compare additional files. DOS Version 6.0 and above
use a different file compare command, so this step is
not necessary. DDCCHK checks the version
automatically and executes the proper compare routine.
The DDCCHK system test assumes that the LPT1 printer port
is being used for communication with the HSP50016-EV. If
another printer port is used, the Command Line Interface,
DDCCMD, m ust be used to configure the software for using
the correct port (see DDCCMD’s PPC and PP# command).
J1
CABLE
P1
JP1
JP2
JP3
JP5
JP6
JP7
JP8
JP9
JP10
JP11
JP12
JP13
JP14
JP15
JP16
JP17
JP18
J3
J2
EXT_CLK
OSC_CLK
PC_CLK
DATA_OE
ADDR0
ADDR1
ADDR2
ADDR3
ADDR4
ADDR5
ADDR6
ADDR7
DDC_CLK_INV
OUT_CLK_INV
CLK_OUT
CLK_IN
TAP_SEL
CLOCK
SELECT
OUTPUT
ENABLE
BOARD
ADDRESS
CLOCK
SELECT
FIGURE 1. LAYOUT OF HSP50016-EV SHOWING DEFAULT JUMPER CONFIGURATION
3
Page 4

HSP50016-EV
HSP50016-EV Control Panel Software
The HSP50016-EV Control Panel is a graphical user
interface for controlling the operation of the HSP50016-EV
Board via an IBM PC or compatible. The control panel,
shown in Figure 3, supports loading the HSP50016's control
words; setting the state of control inputs; and specifying files
which serve as the sources and destinations for the
HSP50016's data and TAP inputs and outputs. Operation of
the control panel software is dependent on the clock source
provided to the HSP50016-EV as specified in the clock
select portion of the control panel. The HSP50016-EV
Control Panel is invoked by typing:
DDCCTRL <Enter>
Port Configuration
Communication between the Control Panel software and the
evaluationboard requires that the software knows which one
of the PC's parallel ports is being used for communication
with the HSP50016-EV and which board address the
HSP50016-EV has been configured for. The default
configuration assumes that LPT1 is being used and that the
HSP50016-EV has been configured for a board address of
0. The Port Configuration can be inspected by opening up
the port configuration window using the F9 function key. As
shown in Figure 4, the window displays the availableparallel
ports and their addresses. Also displayed are the current
port and HSP50016-EV board address being used by the
Control Panel software.
The current port and HSP50016-EV address are changed by
opening up the Port Configuration Window, using the
up/down arrow keys to select the desired parameter, and
toggling the space bar to change the selection. Proper
operation of the control panel software requires that the
HSP50016-EV board address specified in the port
configuration window matches the address jumpered in the
Address Selection Section of the HSP50016-EV’s headers
JP6-13.
Clock Select
The Clock Select portion of the control panel is used to tell
the Control Panel software which of four different clock
sources is being supplied to the HSP50016-EV. The choices
include one of two different software generated clocks
(Manual CLK or Port CLK), an oscillator clock provided by
the HSP50016-EV (Oscillator CLK), or an externally
supplied clock (External CLK). The clock mode selected
must be consistent with the Clock Select jumper position in
the HSP50016-EV’s headers JP1-3. If either Manual CLK or
Port CLK are specified in the Control Panel, the clock select
jumper must be inserted in JP3. If either Oscillator CLK or
External CLK is specified, the jumper must be inserted in
JP2 or JP1 respectively.
In Manual CLK mode, single clock pulses are sent to the
HSP50016 by depressing the F2 function key .The clock pulse
is software generatedby setting and clearing the PCCLK bit of
the Control Register U16 on the HSP50016-EV. After each
clock the HSP50016-EV's data outputs are inspected to see if
theyare ready to be read. If so, the data is read into the PC for
displayin the Control Panel. In this mode, file input and output
are supported (See File I/O Select Section).
In Port CLK mode, a free running clock is sent to the
HSP50016. The clock is started and stopped by depressing
the F2 function key. The clock pulses are software generated
by continually setting and clearing the PCCLK bit of Control
Register U16. After each clock the HSP50016-EV's data
outputs are inspected to see if they are ready to be read. If
so, the data is read into the PC for display in the Control
Panel. In this mode, file input and output are supported (see
File I/O Select Section).
In Oscillator CLK mode, the HSP50016 is supplied with a
clock by the oscillator on board the HSP50016-EV. In this
mode, the Control Panel can be used for modifying
and
IQSTRT, the control words, and the data and TAPinputs
to the DDC. However, the software is unable to provide file
based I/O to the evaluation board since the data rate
provided by the oscillator is much greater than that possible
through the parallel port of the PC. As a result, the Control
Panel disables file based I/O and the display of DDC output
in this mode.
Operation in External CLK mode is identical to that in
Oscillator CLK mode, except that the HSP50016 is supplied
with a clock through the 96 Pin DIN connector P1 on the
HSP50016-EV. Because this clock is asynchronous to the
PC, file based I/O and the DDC output displays are disabled.
The clocking mode used by the control panel is indicated by
the position of the “check mark” symbol within the Clock
Select portion of the Control Panel. A different clocking
mode may be selected by positioning the “check mark”
symbol in front of the desired clocking mode. The position of
the “check mark” is changed by using the cursor keys to
move the active window to the desired position and then
toggling the space bar to move the “check mark”.
RESET
File I/O Select
The File I/O Select portion of the Control Panel allows the
user to specify files which can be used as an input data
source or an output data destination for the HSP50016-EV.
The input data is loaded on to the input bus prior to the
software generated clock and the output data is read from
the output bus following the software generated clock.
If file based input is selected, the Control Panel software
down loads data from the specified file to registers on the
HSP50016-EV and clocks the data into the DATA0-15inputs
of the DDC. The Loop Count allows the user to simulate long
data streams by repeatedly sending the same input file.
If file based output is specified, the software reads the data
on the I and Q outputs of the HSP50016 and stores the data
in the specified file. The software automatically reads the
4
Page 5

HSP50016-EV
output data and writes it into the output file as two’s
complement complex or real data. The configuration of the I,
Q, IQCLK and IQSTB pins is transparent to the user,
provided that none of the pins are three-stated and the DDC
Control Word fields Real Output, HDF Decimation Rate,
Number of Output Bits, I followed by Q and IQCLK rate are
compatible with each other. All valid output modes are
supported.
File based I/O is activated by using the space bar to toggle
the “check mark” symbol in the window proceeding the input
and output file identifiers in the control panel's file I/O
Section. If either file input or output is activated, the
respective file name must be entered in the window to the
right of the file identifier.File input or output may be disabled
at any time by toggling the respective “check mark”.
Note: File I/O is only valid when either the ‘Manual CLK’
or ‘Port CLK’ clocking modes are selected and it is
disabled if other clocking modes are specified.
Input and output data files are ASCII files whose format is
described in Appendix A. There is no limitation to the input
and output file size. Care must be taken if file output is
specified since data is collected in the file until file output is
deactivated or the DDCCTRL Program is exited.
TAP I/O files are similar, except that the TAP is available
regardless of the CLK setting. The format for the TAP input
and output files is given in Appendix B.
HSP50016 Data Inputs
The data window to the left of the HSP50016 icon is used to
specify hexadecimal values which drive the DDC's data
inputs DATA0-15. Data is entered into this window in
hexadecimal format starting with the most significant digit.
The contents of a particular data window may be edited by
following the window editing instructions in Appendix C.
If file input is selected, the data input is driven with data from
the specified file. On each clock the data window is updated
with the data sample down loaded from the file. In this mode
the data input window may not be manually updated.
HSP50016 Data I&Q Outputs
There are 32 bits available at P2. The control software for
the evaluation board performs a serial read via the PC Port.
Control Signals
The control signal portion of the control panel is used to
define the state of the DDC control signals
IQSTRT. The logical state of a control signal is set by using
the space bar to toggle the signal state in the window
preceding the specified control signal. When the evaluation
board is in Port CLK mode and
high, the DDC is automatically clocked five times. See the
HSP50016 Data Sheet for a complete description of the
control signals.
once after power up. The software DOES NOT do this
automatically.
RESET must be toggled low and high
RESET is set either low or
RESET and
Control Words
In the lower left hand corner of the control panel is a data
window which contains the hexadecimal values loaded into
the HSP50016's eight control words. The contents of a
particular control word may be updated by movingthe cursor
to the data window which is to be modified, selecting the
control word by pressing the space bar (which moves the
check mark to the desired control word) and depressing the
F4 key. A submenu pops up which parses that control word
into its various fields so that they may be examined or
modified individually.
The value entered into the data window is down loaded to
the HSP50016 and the submenu disappears when the user
depresses the F2 key. Leaving the window via the <Esc> key
ignores any changes made and returns to the main control
panel screen. If the update bit has been set, the new values
will update the configuration of the DDC and this will be
reflected in the submenu screen.
Note that all values displayed in this window are the last
values written to the control words, as opposed to
having been read from the DDC itself.
Help
Help windows are provided as a source of information for
control panel usage. The help window is activated by the F1
function key, and contains information based on the window
which is currently active.
Command Line Interface
As an alternative to the control panel, a command line
interface is provided which allows the user to control the
HSP50016-EV by issuing commands from the DOS prompt.
The commands perform basic I/O and configuration
functions by up or down loading data to the HSP50016
through the HSP50016-EV. The Command Line Program
has the following usage:
DDCCMD [Command] [ARG 1] [ARG 2] [ARG 3]
The Command specifies the action to be taken, and the
Arguments (ARG1, ARG2) represent additional data
required by the command. For example, to load Control
Word 1 with a value of 200000005(HEX) and set the update
bit, the user would type:
DDCCMD WCW 1 1 200000005 <Enter>
A summary of the command set is given in Table 2.
When several commands are to be entered consecutively,
the user may initiate the interactive command mode by
entering:
DDCCMD <Enter>
All commands are then entered as before, except that
control does not return to DOS between commands, and it is
not necessary to enter DDCCMD for each command. Note
5
Page 6
HSP50016-EV
that the software automatically updates the control words
from the EVAL.CFG file upon entering the interactive mode.
Leaving the interactive mode is accomplished by typing
“quit” or “exit.”
DDCCMD gives the user the ability to control the evaluation
board via DOS batch files or system calls from a
programming language. The DDC_CHK6.BAT file discussed
in the System Test Section is an example of how the
Command Line Program might be used in a DOS batch file.
Configuration Jumpers
The Configuration Jumpers consists of the jumper headers
JP1-3 and JP5-20 as shown in Figure 1 and Table 1. Refer to
the evaluation board schematic found in the Appendices.
Most of these are self-explanatory, but the following bear
further discussion.
JP16
JP17
JP18
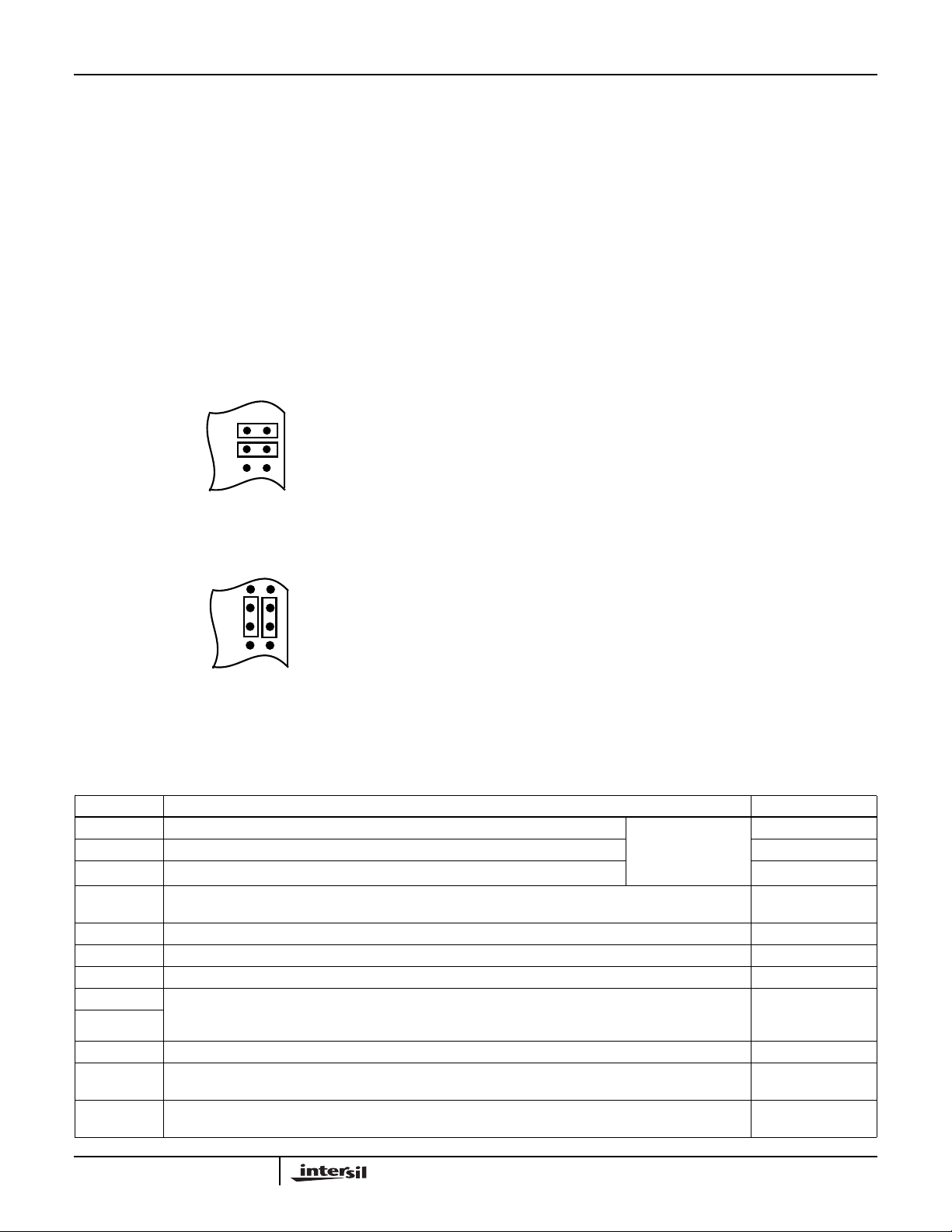
FIGURE 2. JUMPER CONFIGURATION IF CLOCK IS
SUPPLIED THROUGH P1 INPUT HEADER
JP15
JP16
JP17
JP18
FIGURE 3. JUMPER CONFIGURATION IF CLOCK IS
SUPPLIED THROUGH P2 OUTPUT HEADER
The jumpers JP16 and JP17 are used to select whether the
HSP50016's clock source is provided through the P1
connector or the P2 connector. If jumpers are inserted as
shown in Figure 2, a clock signal supplied through the
CLK_IN pin of the P1 input header drives a buffer whose
output clocks the HSP50016. The jumper inserted on JP16
feedsthe bufferedclock signal to the CLK_OUT pin of the P2
connector. If jumpers are inserted as shown in Figure 3, the
CLK_OUT pin of the P2 connector drives the clock buffer
which in turn drives the clock input of the HSP50016. The
jumper inserted between JP16 pin 2 and JP17 pin 2 allows
the CLKIN pin to be driven by the buffer output. NOTE: The
jumper placement shown in Figure 2 is the standard
configuration.
It is possible to configure the DDC so that the I, Q, IQCLK
and IQSTB outputs are in a high impedance state. Except for
IQSTB, these pins are pulled up on the evaluation board so
that they will not float under these conditions. Since IQSTB
can be either active high or low, it must be capable of being
pulled either way. JP19 determines whether IQSTB is pulled
up or down when it is three-stated. This jumper should be
installed such that IQSTB is pulled to its inactive state.
Note: The position of JP20 comes into play only when
parallel output from P2 is desired.
The jumper should be placed between pins 1 and 2 when
the DDC is configured for I followed by Q mode; the jumper
should be from JP20-2 to JP20-3 when I and Q are output
separately. The HSP50016-EV is shipped from the factory
with the default jumper configuration shown in Figure 1 and
Table 1. For the supplied software to properly control
operation of the HSP50016, it is assumed that the jumpers
are as specified in the default configuration; of course, once
the user is familiar with the operation of the board, this
configuration may be modified as required. The system test
software, DDCCHK, must be run using the default
configuration.
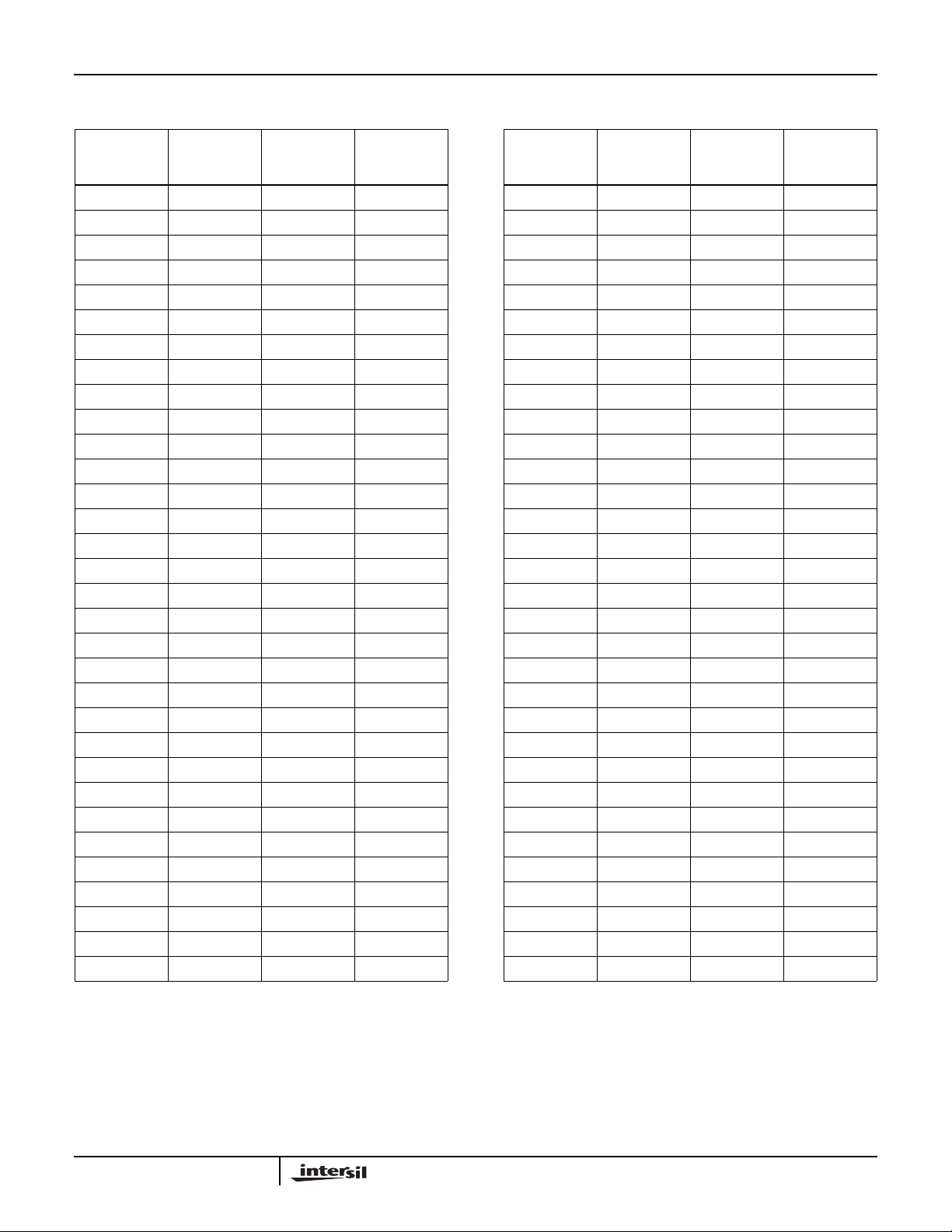
TABLE 1. DESCRIPTION OF JUMPER CONNECTIONS
JP DESCRIPTION DEFAULT
1 DDC CLK driven from external source when this jumper is installed. Only one of
2 DDC CLK driven from on board oscillator when this jumper is installed. 3 DDC CLK driven from PC software when this jumper is installed. Installed
5 DDC DATA0-15 driven from PC software when installed, otherwise data is from external source. Must be
installed or DATA0-15 lines must be driven to avoid damage to DDC.
6-13 Selects evaluation board address. Only one of these jumpers should be installed at a time. JP6 Installed
14 Selects input clock as inverted. Installed = non-inverted. Installed
15 Selects output clock as inverted. Installed = non-inverted. Installed
16 Direct flow of input and output clocks. JP16-1 is shorted to JP16-2 and JP17-1 is shorted to JP17-2 for the
17
18 TAP inputs driven by PC (installed) or from P2 (not installed). Installed
19 IQSTB pulled up (JP19-1 shorted to JP19-2) or pulled down (JP19-2 to JP19-3). Must be installed (in ei-
20 Serial to parallel converters configured for up to 32-bit, I followed by Q (JP20-1 to JP20-2) or 16 bit, I and
DDC CLK to be driven by the PC, on board oscillator, or connector pin P1C-20. To drive CLK from P2C20, jumper JP16-1 to JP17-1 and JP16-2 to JP17-2. JP1 must be installed in this configuration.
ther position) to avoid damage to evaluation board.
Q output separately (JP20-2 to JP20-3).
JP1, JP2 and JP3
selected
at a time.
JP16-1 to JP16-2,
-
Installed
JP17-1 to JP17-2
JP19-1 to JP19-2
JP20-2 to JP20-3
6
Page 7

HSP50016-EV
HSP50016-EV CONTROL PANEL
CLOCK SELECT
MANUAL CLK
√
PORT CLK
OSC. CLK
EXTERNAL CLK
CONTROL SIGNALS
1 RESET
0 IQSTRT
CONTROL WORDS
0 000000000
1 200000001
√
2 000000000
3 000000000
4 00000006E
5 00D002100
6 000000000
7 000000002
F1 - HELP F2 - START CLOCK F3 - START JTAG F4 - CONTROL WORD F9 - PORT CFG F10 - QUIT
INPUT FILE: INPUT.DAT
√
LOOP COUNT: 1
OUTPUT FILE: OUTPUT.DAT
√
DATA FORMAT: HEX
DATA0-15 7FFF
INPUT FILE: J_INPUT.DAT
√
OUTPUT FILE: J_OUTPUT.DAT
√
DATA FILE I/O SELECT
HSP50016
DDC
CLOCK NUMBER 0
JTAG FILE I/O SELECT
(I) 0000000000
(Q) 0000000000
FIGURE 4. CONTROL PANEL SCREEN AS DISPLAYED ON PC
HSP50016-EV CONTROL PANEL
PORT CONFIGURATION
CLOCK SELECT
MANUAL CLK
√
PORT CLK
OSC. CLK
EXTERNAL CLK
AVAILABLE PRINTER PORTS
INPUT FILE: INPUT.DAT
OUTPUT FILE: OUTPUT.DAT
LPT1
FILE I/O SELECT
ADDRESS (HEX)
0x3BC
CONTROL SIGNALS
1 RESET#
0 IQSTRT#
CONTROL WORDS
0 000000000
1 200000001
√
2 000000000
3 000000000
4 00000006E
5 00D002100
6 000000000
7 000000002
F1 - HELP F2 - START CLOCK F3 - START JTAG F4 - CONTROL WORD F9 - PORT CFG F10 - QUIT
CURRENT PORT SELECTION : LPT1
CURRENT HSP50016-EV ADDRESS : 0
LPT2
LPT3
INPUT FILE: J_INPUT.DAT
√
OUTPUT FILE: J_OUTPUT.DAT
√
0x378
0x3BC
(i) 0000000000
(Q) 0000000000
FIGURE 5. PORT CONFIGURATION WINDOW AS DISPLAYED ON PC
7
Page 8
HSP50016-EV
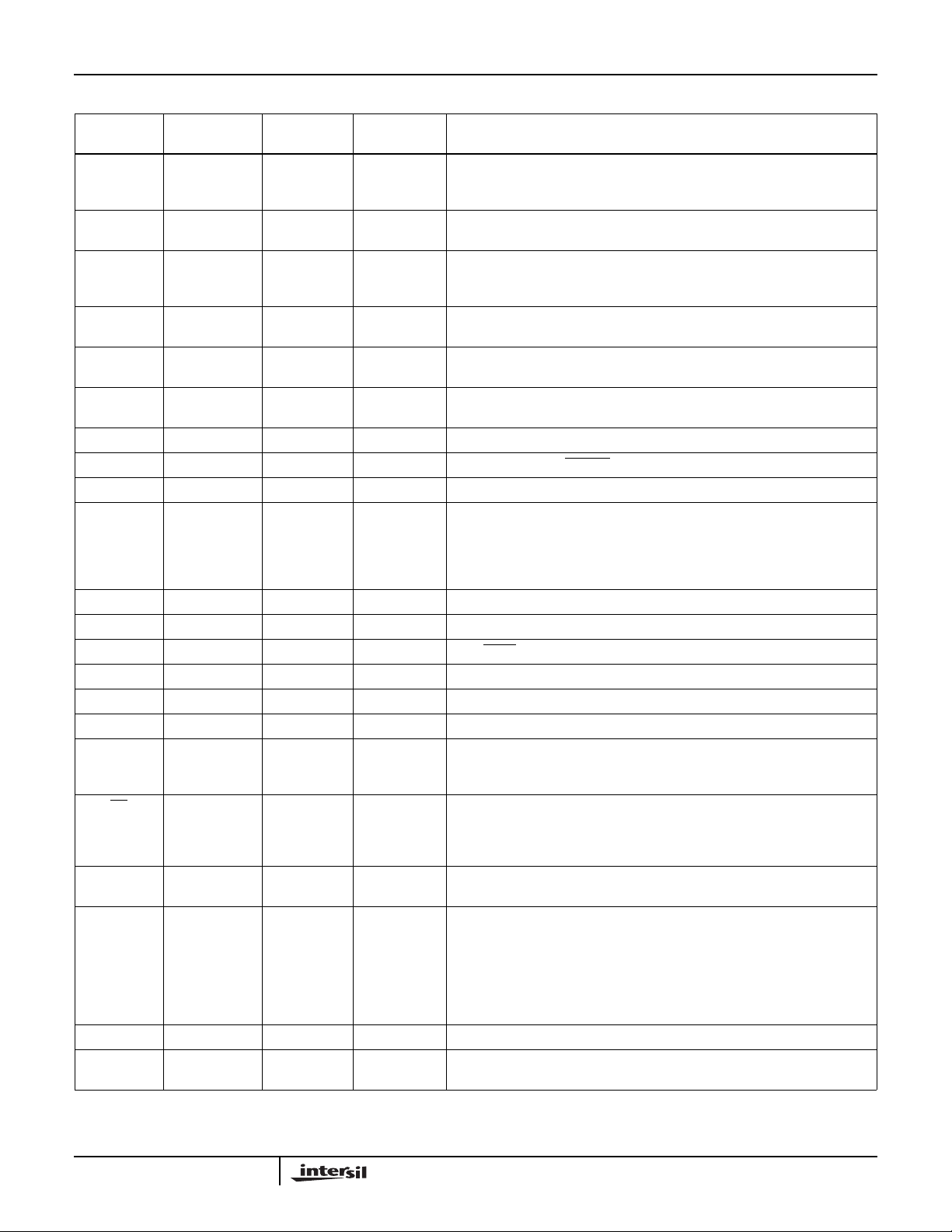
TABLE 2. COMMAND LIST FOR COMMAND LINE INTERFACE SOFTWARE
ARGUMENT
COMMAND
WCW WORD
RCW WORD
WCS CONTROL
RCS Displays the last value loaded into the evaluation board’s control register.
DIN INPUT
CLK COUNT Toggles PCCLK, the software clock to the DDC, the specified number of
RES Resets the DDC and cycles CLK five times.
IQS 0/1 Sets the state of the IQSTRT line.
RDO Reads the output I and Q data of the DDC to the screen.
PDF INPUT
ODF 0/1 Output data file format: 0 = hexadecimal, 1 = floating point.
TCK Toggle TCLK one cycle.
TRS Write TRST low, then high.
TMS 0/1 Write one bit to TMS pin.
TDI 0/1 Write one bit to TDI pin.
TDO Read one bit from TDO pin.
PTF INPUT
PP PORT
PPC S Display the printer port and HSP50016-EV board address that the DDCCMD
ERR Display the state of the error bit:
? List available commands together with a brief description.
BYE, EXIT,
QUIT
#1
NUMBER
NUMBER
REGISTER
CONTENTS
DATA
FILE
NAME
FILE
NAME
NUMBER
(1 - 3)
ARGUMENT#2ARGUMENT
#3 COMMAND DESCRIPTION
UPDATE
BIT
OUTPUT
FILE
NAME
OUTPUT
FILE
NAME
BOARD
ADDRESS
(0 - 7)
CONTROL
WORD
COUNT Process Data File: Read one sample from input file, write it to DATA0-15, re-
Loads the specified control word of the HSP50016 with the 36-bit hexadecimal value specified in Argument #3. Setting the update bit = 1 updates the
configuration of the DDC; update bit = 0 only modifies the control word.
Reads one of the HSP50016’s control words to the screen. If Argument #1 is
omitted, all control words are displayed.
Loads the evaluation board’s control register with a 16-bit hexadecimal value.
Does not read the current contents of the register.
Loads the HSP50016’s DATA0-15 input with the 16-bit value specified in Ar-
gument #1.
times. If Argument #1 is omitted, COUNT = 1.
peat until output data becomes available, then read outputs, write to output
file. Repeat until all samplesin the data input filehave been read. Perform this
entire process for the number of times specified by Argument #3. If Argument
#3 is omitted, input file is read one time.
Process Test File: Write bit patterns specified in input file to TAP; read TAP
output and store in output file. See Appendix B for TAP file format.
Change the printer port and HSP50016-EV board address that the DDCCMD
programisusing for communication between the PC and the evaluationboard
to those specified in arguments 1 and2. The boardaddress is set by inserting
a jumper one of the headers JP6-13.
Program is using for communication to the PC.
0 =...No error.
1 =...Software unable to execute command; e.g., a syntax error was detected
in the command line, an RDO command was executed while DDC was executing a data output cycle, and so on. A correctly executed command clears
the bit, except for ERR, BYE, EXIT and QUIT, which have no effect on the error bit.
Any one of these terminates interactive mode.
8
Page 9

HSP50016-EV
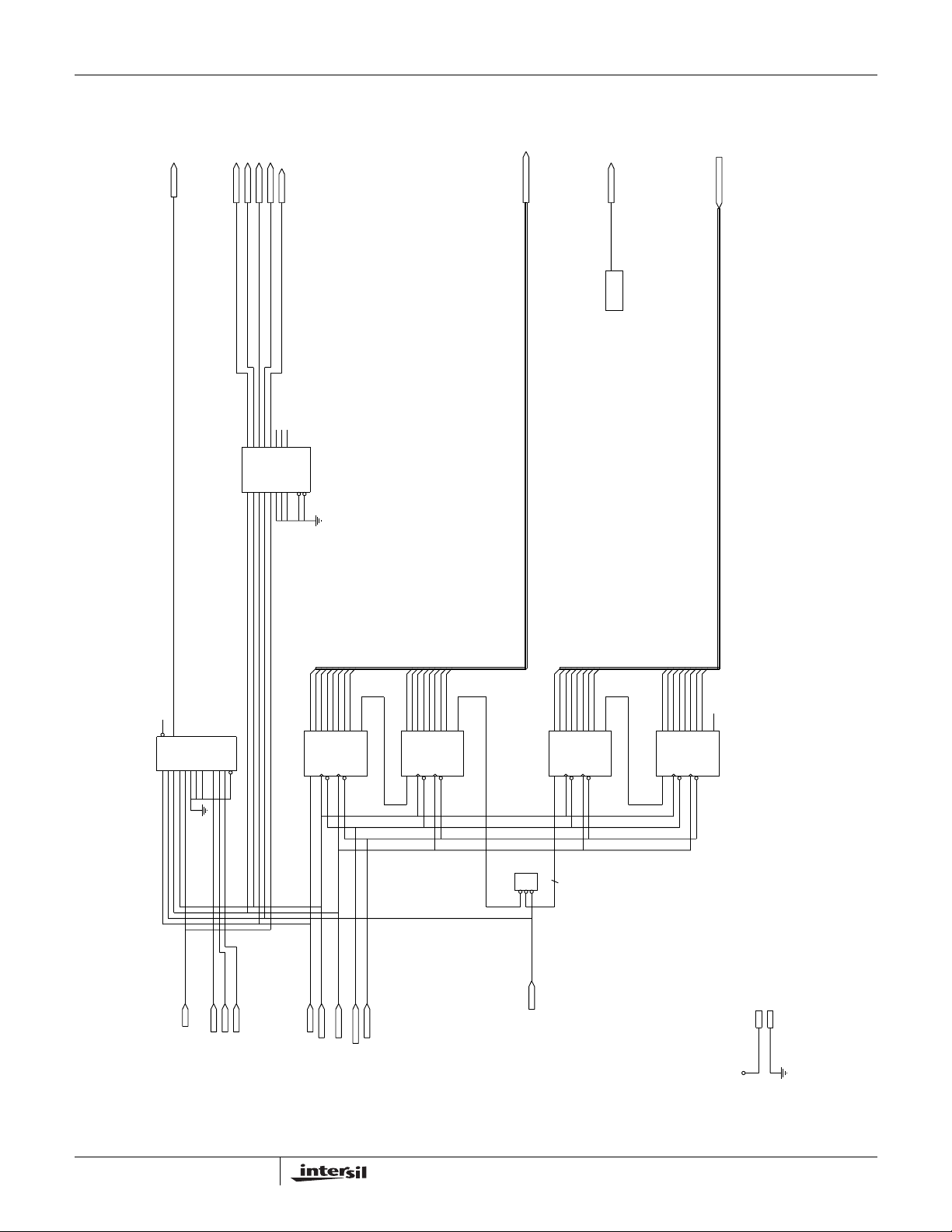
Hardware Overview
The HSP50016-EV was designed to facilitate prototyping
with the HSP50016 Digital Down Converter.It can be used in
a stand alone mode, in conjunction with other Intersil
evaluation boards, or be inserted into a card cage and
operate as a part of a larger system. The following
description of the board references both the Block Diagram
in Figure 6 and the Schematic Diagrams, which are included
at the back of this manual.
Bus Structure
The HSP50016-EV utilizes a set of busses for DDC input,
output and control as shown in Figure 6. The input and
output bussesconnect the DDC to the outside world through
96 Pin DIN connectors conforming to the VME J2/P2
Connector Standard. DDC control information is provided
either by control registers down loaded via the parallel port
of a PC or from the 96 Pin DIN connectors
The DDC’s input data bus,DIN0-15, is driven from the 96 Pin
DIN connector P1 (Pinout shown in Table 3). DIN0-15 may
be driven by Registers U12 and U13 which have been down
loaded with data through the ParallelPort Bus.The source of
the input data is selected by jumper JP5. Installing the
shorting jumper on JP5 selects the PC as the data source.
Removing the jumper puts the registers driving the DIN0-15
bus in a high impedance state so that the input data can be
driven from P1.
The control lines of the DDC and the board are driven by the
outputs of the Control Registers (U11, U16). These registers
are down loaded with data via the Parallel Port Bus or
through the PCD0-7 lines on P1 or P2. when the board is
controlled through the 96 Pin DIN connectors, the user must
emulate the operation of the PC interface. A description of
this operation is given below in the section describing the
Parallel Port Bus.
The DDC output is available through three different paths: It
is connected to the Select line of the PC Parallel Port
through the eight to one multiplexer U6; it is connected to the
96 Pin DIN connector P2 through the buffer U1; finally, it is
converted to parallel data by the Shift Registers U2-5 and
driven out on P2. The mapping for P2 is given in Table 4.
Parallel Port Bus
The Parallel Port Bus carries the write only parallel data and
signals required to support bidirectional data transfers
between the HSP50016-EV and the parallel port of the PC.
This bus contains eight data lines, PCD0-7, two control lines,
PCWR0-1, and the serial output line PCRD1. The control
and data lines are used to down load data into the on board
registers of the HSP50016-EV. The serial output line carries
the DDC output data back to the PC.
The Parallel Port Bus is attached to the PC by connecting
the ribbon cable provided to the PC's parallel port and to the
26 pin connector J1 on the DDC Evaluation Board. The
ribbon cable maps the Parallel Port Bus signals to the PC's
parallel port as shown in Table 5.
The Parallel Port Bus is brought out through each of the 96
Pin DIN connectors (P1, P2) so that multiple Intersil
evaluation boards can be daisy chained. This allows all of
the evaluation boards in the chain to be controlled through a
single board which has been connected to a host PC.
96 PIN INPUT CONNECTOR (P1)
EXT CLK
INPUT BUS 1
(DIN0-15)
OSC
16
CLK IN
INPUT
REG 1
SELECT ENABLE SELECT
CONFIGURATION JUMPER FIELD (JP1-3, 5-18)
OUTPUTADDRESSCLK
FIGURE 6. BLOCK DIAGRAM OF HSP50016-EV
HSP50016JC-52
PARALLEL PORT BUS
9
CONTROL BUS
CONTROL
REG
PARALLEL PORT
INTERFACE
PARALLEL PORT CONNECTOR
26 PIN CONNECTOR
16
I0-15
16
Q0-15
SHIFT REGISTER
CLK OUT
(J1)
96 PIN OUTPUT CONNECTOR (P2)
13
Page 10
HSP50016-EV
TABLE 3. PIN ASSIGNMENTS FOR 96 PIN INPUT
CONNECTOR P1
ROW A
PIN
NUMBER
1 N.C. V
2 DIN0 GND DIN1
3 DIN2 N.C. DIN3
4 DIN4 N.C. DIN5
5 DIN6 N.C. DIN7
6 GND N.C. DIN8
7 DIN9 N.C. DIN10
8 DIN11 N.C. DIN12
9 DIN13 N.C. DIN14
10 DIN15 N.C. GND
11 N.C. N.C. N.C.
12 N.C. GND N.C.
13 N.C. V
14 N.C. N.C. N.C.
15 N.C. N.C. GND
16 N.C. N.C. N.C.
17 N.C. N.C. N.C.
18 N.C. N.C. N.C.
19 N.C. N.C. N.C.
20 GND N.C. CLKIN
21 GND N.C. N.C.
22 GND GND N.C.
23 GND N.C. N.C.
24 GND N.C. N.C.
25 GND N.C. N.C.
26 PCD0 N.C. PCD1
27 PCD2 N.C. PCD3
28 PCD4 N.C. PCD5
29 PCD6 N.C. PCD7
30 PCWR0 N.C. GND
31 PCWR1 GND PCRD0
32 PCRD1 V
SIGNAL
MNEMONIC
ROW B
SIGNAL
MNEMONIC
CC
CC
CC
ROW C
SIGNAL
MNEMONIC
GND
N.C.
PCRD2
TABLE 4. PIN ASSIGNMENTS FOR 96 PIN OUTPUT
CONNECTOR P2
ROW A
PIN
NUMBER
1 N.C. V
2 QO0 GND QO1
3 QO2 N.C. QO3
4 QO4 N.C. QO5
5 QO6 N.C. QO7
6 GND N.C. QO8
7 QO9 N.C. QO10
8 QO11 N.C. QO12
9 QO13 N.C. QO14
10 QO15 N.C. GND
11 N.C. N.C. IO0
12 IO1 GND IO2
13 IO3 V
14 IO5 N.C. IO6
15 IO7 N.C. GND
16 IO8 N.C. IO9
17 IO10 N.C. IO11
18 IO12 N.C. IO13
19 IO14 N.C. IO15
20 TCK.E N.C. CLKOUT
21 TMS.E N.C. IQSTB.B
22 TRST.E GND IQCLK.B
23 TDI.E N.C. IOUT.B
24 TDO.B N.C. QOUT.B
25 GND N.C. GND
26 PCD0 N.C. PCD1
27 PCD2 N.C. PCD3
28 PCD4 N.C. PCD5
29 PCD6 N.C. PCD7
30 PCWR0 N.C. GND
31 PCWR1 GND PCRD0
32 PCRD1 V
SIGNAL
MNEMONIC
ROW B
SIGNAL
MNEMONIC
CC
CC
CC
ROW C
SIGNAL
MNEMONIC
GND
IO4
PCRD2
10
Page 11

HSP50016-EV
TABLE 5. SIGNAL MAPPING FOR CONNECTOR J1
PIN
NUMBER
1 N.C. N.C.
2 PCD0 (D0) N.C.
3 PCD1 (D1) PCWR0 (INIT
4 PCD2 (D2) PCWR1 (SELECT
5 PCD3 (D3) GND
6 PCD4 (D4) GND
7 PCD5 (D5) GND
8 PCD6 (D6) GND
9 PCD7 (D7) GND
10 N.C. GND
11 PCRD0 (BUSY) GND
12 PCRD2 (PAPER
13 PCRD1 (SELECT) GND
PCRD = PC Read; PCD = PC Data
TABLE 6. REGISTER TO INPUT/CONTROL BUS MAPPINGS
REGISTER
ADDRESS
0 U16 Clock and control
1 U11 DDC Control, TAP
2 U13 DDC Data input LS
3 U12 DDC Data Input MS
4-7 Not Used N.C.
J1A SIGNAL
MNEMONIC
END)
DESTINATION
REGISTER
J1B SIGNAL
MNEMONIC
PRINTER)
IN)
GND
REGISTER
FUNCTION
Byte
Byte
register. The On-Board Registers are down loaded by first
writing data to the Parallel P ort Interface's Holding Register
U17 followed b y tw o writes to the Address Register U18. By
writing the address register, data in the holding register is
loaded into one of the Registers U11, 12, 13, 16. The address
register specifies the particular register for loading as well as
the board address of the HSP50016-EV targeted for the data
download. The HSP50016-EV board address is selected by
placing a shorting jumper on one of the headers JP6-13 (see
Configuration Jumper Field Section), and the memory map for
the 8 data registers is shown in Table 6. The bit map for the
Parallel Port Interface’s Address Register is given in Table 7.
The Parallel Port Interface's Address and Holding Registers
are loaded with data from the PCD0-7 data lines of the
parallel port bus by a “low” to “high” transition on the
appropriate bus control line. Specifically, the address
register is loaded with data when a “low” to “high” transition
occurs on the PCWR0 line of the Parallel Port Bus, and the
holding register is loaded by a like transition on the PCWR1
line. The mapping of the parallel port bus signals to the PC's
parallel port is given in Table 5.
As an example, consider the loading of the least significant
byte of the data input, Register U13, as shown by the Timing
Diagram in Figure 7. First, data is down loaded to the
Parallel Port Interface's Holding Register. Next, the address
register is written with a value which contains the address of
U13 (see Table 6 for memory map), the HSP50016-EV
board address (assumed to be zero in this example), and a
“high” in the LD bit position (see Table 7 for Address Register
Bit Map). Finally, data is latched into the targeted register by
rewriting the address register with the same board and
register address but with a “low” in the LD bit position. The
“high/low” transition of the LD bit loads the data in the
holding register into the target data register on the specified
HSP50016-EV.
TABLE 7. ADDRESS REGISTER BIT MAP
LOAD
ADDRESS
NOT USED
D7 D6 D5-3 D2-0
RANGE
BOARD
ADDRESS
REGISTER
ADDRESS
Register Structure
The HSP50016-EV provides a set of registers which may be
used as a source for DDC input and control. They can be
loaded from either the parallel port or from the P1 connector.
Down Loading Data via Parallel Port
Interface
The control and input registers are down loaded from the PC
by a series of single byte writes to the to the Parallel Port
Interface. The Parallel Port Interface consists of two
decoders, an 8-bit address register, and an 8-bit holding
11
PCWR0
PCWR1
PCD0-7
FIGURE 7. TIMING DIAGRAM FOR LOADING DATA INTO
DAT A 0x42 (HEX) 0x02 (HEX)
DATA FOR
LSBYTE OF
DATA INPUT
WRITTEN TO
HOLDING REG
LSBYTE OF DATA INPUT REGISTER
ADDRESSOF
DATA INPUT
REG WRIT-
TEN TO
ADDRESS
REG
CODE TO TOG-
GLELOAD DATA
LINE FOR U13
Page 12

HSP50016-EV
Up Loading Data via PC's Parallel Port
Data is up loaded to the host PC through the “Select” serial
status line of the PC's parallel port. The PC up loads data by
monitoring the state of the PCRD1 serial output line on the
HSP50016-EV's Parallel Port Bus. The mapping of the
evaluation board signals to the PC’s parallel port is given in
Table 5.
DDC Data and Control via P1 Connector
When it is desired to use P1 connector for data input, the
registers driving the data bus are three-stated by removing
the jumper JP5 (see Configuration Jumper Field Section).
The DIN0-15 pins on P1 are then used to drive the input
pins of the HSP50016. If all 16 pins are not used, then the
DIN bus should be loaded starting from bit 15 down. When
JP5 is not installed, all data input pins must either be
driven by an external data source or grounded to avoid
damage to the board.
To control the DDC from the P1 or P2 connector, the PCD07 bus is exercised via the connector. In this case, the user
must operate this bus in the same manner as the PC
exercises it from the parallel port as described above. No
jumper selection is necessary in this case; it is only
necessary to leave the parallel port connector J1
unconnected.
To operate the Test Access Port from P2, the shorting
jumper on JP18 is removed. The TAP pins are then
controlled directly from P2 according to the TAP
Specification. In this case, the SEL0-2 lines should be set to
0, 0, and 1 respectively.
DDC Clocking Modes
The HSP50016-EV provides the DDC with one of three
jumper selectable clock sources. The three clock choices
consist of an on-board oscillator, a user provided external
clock, and a clock generated by toggling the LSB of the
Control Register U16. The clock source is select by placing a
jumper on either JP1, 2 or 3. To support applications in
which multiple evaluation boards are daisy chained together,
a clock output line is routed to the HSP50016-EV's output
connector P2.
An external clock may be selected by inserting a jumper on
the header JP1. In this mode, an external clock supplied to
the CLKIN pin of the 96 pin Input Connector is provided to
the DDC. This configuration supports the use of a common
clock between daisy-chained evaluation boards by wiring
CLKOUT from the P2 Output Connector of one board to the
CLKIN pin of another board's P1 Input Connector. Since
there is no synchronization between the externally provided
clock and data transfers to the HSP50016-EV's I/O
Registers, the PC would typically provide the DDC with
asynchronous control in this mode.
The on-board oscillator is selected as a clock source by JP2.
In this mode, the oscillator on board the HSP50016-EV is
supplied as a clock to the DDC. Since data transfers to the
DDC via the HSP50016-EV’s I/O Registers are much slower
than the DDC’s data rate using the oscillator clock, the PC
can only be used to provide the DDC with asynchronous
control in this mode.
The LSB of the Control Register U16 is selected as the clock
source if a jumper is inserted in the header JP3. In this
mode, the clock signal is generated by using register writes
to toggle the PCCLK bit. Since the clock may be controlled
by software, input and control register writes and the output
shift register reads can be performed synchronously with the
clock. Consequently, the HSP50016-EV can be used as a
hardware modeler where input and output data vectors are
transferred via the PC's parallel port.
Configuration Jumper Field
The HSP50016-EV is configured for operation by placing
jumpers in the headers JP1-3 and JP5-18. As shown in
Table 1, the jumper field has areas dedicated for clock
selection, register output enables and board address
selection. The default jumper placement is shown in Figure 1
and Table 1. Each HSP50016-EV leaves the factory
jumpered with the default configuration.
The Clock Select jumpers are used to specify one of the
three available DDC clocking modes. These include
EXT_CLK for selection of an external clock source,
OSC_CLK for selection of the on board oscillator clock, and
PC_CLK for selection of a register driven clock using the
LSB of the CTL Control Register. The clocking modes are
described in the DDC Clocking Modes Section of this
manual. Note: Normally, only one clock source may be
selected at a time. In any mode, the input and output clocks
may be negated independently by removing the jumpers on
JP14 and JP15.
The output of the Input Registers U12 and U13 are enabled
by placing a jumper on JP5 (see Bus and Register Structure
Sections) If a jumper is removed, the output of the respective
register is three stated.
The Board Address Jumpers are used to specify the
HSP50016-EV board address used for data transfers via the
ParallelPort Bus. An address from 0 to 7 may be selected by
inserting a jumper in positions ADDR0 thru ADDR7
respectively. Only one jumper may be inserted in this field.
The jumper JP18 is used to select the source of data for the
IEEE 1149.1 Test Access Port (TAP) bus. Inserting this
jumper enables the PC to drive this bus, while removing it
enables control from the P1 connector.
JP19 selects whether the IQSTB line is pulled up or down.
Placing the jumper between header pins 1 and 2 pulls
IQSTB up, while shorting pins 2 and 3 pulls IQSTB down.
The position of the jumper is only meaningful when IQSTB is
12
Page 13

HSP50016-EV
three stated, which can be programmed by setting the
proper control bits of the DDC. Even if the user has no
intention of operating in this mode, it is recommended that
JP19 be put in one position or the other to avoid the
possibility of this line floating after power up or due to being
inadvertently placed in the high impedance state. If the
shorting jumper is not installed on JP19, the IQSTB line
may oscillate and cause damage to U6.
When parallel output is desired from the P2 connector, JP20
controls the flow of data to the Shift Registers U4 and U5.
The user may read the I and Q outputs separately with 16
bits of precision by configuring the DDC to output data
separately overthe I and Q pins, setting the output precision
to 16 bits and inserting a shorting jumper on header pins 2
and 3. The parallel outputs can be read with any precision by
setting the DDC for I followed byQ and setting the jumper on
header pins 1 and 2. For this circuit to operate correctly, the
DDC must also be set for IQCLK Rate > 1, and data stable
on the falling edge of IQCLK. Note that in the schematic, the
parallel output lines are numbered assuming that the DDC
output is MSB first, although the circuit will work just as well
in LSB first mode.
HSP50016-EV Limited Warranty
Intersil warrants the HSP50016-EV to be free of defects in
material and workmanship under normal use for a period of
ninety (90) days. Intersil also warrants that the HSP50016EV User's Manual is substantially complete and contains all
the information which Intersil considers necessary to use the
HSP50016-EV, and that the HSP50016-EV functions
substantially as described in the HSP50016-EV User's
Manual. Intersil will replace the HSP50016-EV as Intersil's
sole duty under this warranty only if you ship it, postage
prepaid, to Intersil within 90 days of such acquisition and
provide proof of date of acquisition.
HSP50016-EV Software License
Agreement
In return for the purchase price of the HSP50016-EV
product, the Purchaser receives from Intersil Corporation
(“Intersil”) a non-exclusive nontransferable (except as set
forth below) license under Intersil copyrights to use the
software subject to the following terms and conditions:
[1] The Software is protected by both United States
Copyright Law and International Treaty Provisions.
Therefore, you must treat the Software like any other
copyrighted material (e.g., a book) and may not copy,
distribute or make derivatives of any part thereof except
that the you may either a) make one copy of the Software
solely for archival purposes, or b) transfer the Software
to a single hard disk provided you keep the original
solely for backup or archival purposes.
[2] The Software may be transferred to a third party on a
permanent basis, provided you retain no copies and the
recipient agrees, in writing to Intersil, to the terms of this
Agreement.
[3] If the software package contains both 3.5" and 5.25"
disks, then you may use only the disks appropriate for
your single-user computer. You may not use the other
disks on another computer or loan, rent, lease, or
transfer them to another user except as part of the
permanent transfer (as provided above) of all Software.
This limited warranty does not extend to any products which
have been damaged as a result of accident, misuse, abuse,
or as a result of service or modification by anyone other than
Intersil or Intersil's authorized representatives.
Intersil makes no other express or implied warranty with
respect to the HSP50016-EV other than the limited warranty
set forth above. Intersil disclaims all implied warranties of
merchantability and/or fitness fora particular purpose. In any
event,all implied warranties shall be limited to the duration of
this warranty. The liability of Intersil, if any, shall under
any tort, contract or other legal theory be limited to the
actual price paid for such product and shall in no event
include incidental, consequential, special or indirect
damages of any kind, even if Intersil is aware of the
possibility of such damages.
Intersil reserves the right to reviseand make changes to this
manual and the HSP50016-EV from time to time without
obligation to notify any person of, or to provide any person
with, such revisions or changes.
13
Page 14

HSP50016-EV
Appendix A
Data File Structures
The Input/Output data files used by the HSP50016-EV
Control Panel and Command Line Interface Software
contain data samples. The data files consist of a seven line
header followed by the data itself. The Header Section must
follow this format:
Line 1: Comment #1
Line 2: Comment #2
Line 3: Comment #3
Line 4: Comment #4
Line 5: Comment #6
Line 7: r 1 n
(Data sample) •
•
•
The ‘n’ on the 7th line of the header should be replaced by
the number of data samples in the file. Followingthe header,
the data samples are listed one per row.The data sample is
represented as a two’s complement floating point value
bounded by +1.0 and -1.0.
The output file format is similar, except that the data samples
are usually complex, with the real part in the first column and
the imaginary part in the second column. In this case, the “r”
int line 7 of the file header is replaced with a “c”. The
exception to this is when the DDC is in real output mode, in
which case the output file consists of one column of real data
as shown above. The file CMPRFILE.DAT installed in the
DDC_CHK subdirectory is an example of the output data file
structure.
Appendix B: TAP File Format
The input test vector file is read line by line; each set of
inputs is supplied to the part simultaneously. On the falling
edges of TCK, the output pins are read and their states are
stored in the output file. Input and output files are ASCII text.
The input file has no header or trailer, but for purposes of
clarity, it is recommended that the user include a header
such as the one shown in the example below. The first
column of bits is applied to the TDI pin, the next to TRST,
and so on as shown.
Input file example:
# Comment lines denoted by # in column 1
#TTTT
#DRMC
#I SSK
#T
1110
1011
1010
1111
1110
The output file is similar in format, with each column
corresponding to an output pin and each row representing
the state of the pins on each falling edge of TCK.
Output file example:
II
QQ
TSC
DTL
OI QBK
11100
10110
10100
Appendix C: Window Editing
KEY FUNCTION
Control-Y Deletes contents of field.
Insert Toggles insert/overwrite editing modes.
Any Character Inserts or replaces character at current cursor location.
Delete Deletes character at current cursor location.
Backspace Deletes character to the left of the cursor.
Right/Left Arrow Moves cursor right or left.
Home Positions cursor at the beginning of the current line.
End Positions cursor at the end of the current line.
Enter/Up/Down Arrow Keys Enter edited data and exit window. DDCCTRL does not accept changes until window is exited.
Space Bar Toggles control signals
All Intersil semiconductor products are manufactured, assembled and tested under ISO9000 quality systems certification.
Intersil semiconductor products are sold by description only.Intersil Corporation reserves the right to make changes in circuit design and/or specifications at any time without notice. Accordingly, the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be accurate and
reliable. However,no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may result
from its use. No license is granted by implication or otherwise under any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see web site http://www.intersil.com
14
Page 15

HSP50016-EV
PCCLK
SEL0
SEL1
SRRST#
SRO E#
SEL2
PCCLK
SEL0
SEL1
SEL2
SRO E#
SRRST #
U7
U16
IQSTB SELECT
MUST BE
INSTALLED!
JP19
123
R4
10K
CLK14DATA017DATA116DATA215DATA311DATA410DATA59DATA68DATA729DATA830DATA931DATA1 032DATA1 133DATA1 235DATA1 336DATA1 437DATA1 538CCLK41CDATA44CSTB42CS#43IQSTRT#2RESET#26TCK25TMS24TRS T#21TDI
DI N0
DI N1
DI N2
DI N3
DI N4
DI N5
DI N6
DI N7
DI N8
DI N9
DI N10
DI N11
DI N12
DI N13
DI N14
DDCCLK
IQSTRT#
RESET#
PCCLK
SRRST#
SRO E#
SEL0
SEL1
SEL2
12
Q119Q218Q317Q416Q515Q614Q713Q8
D12D23D34D45D56D67D78D89CLK11OC
D0D1D2D3D4D5D6
D7
DI N15
U11
74ACT574
1
QOUT
IOUT
IQCLK
IQSTB
IQSTB
IQCLK
IOUT
QOUT
5
1
I4Q
IQCLK3IQSTB
CCLK
CDATA
CSTB
CS#
TDI . R
TRS T. R#
TMS. R
TCK. R
12
Q119Q218Q317Q416Q515Q614Q713Q8
D12D23D34D45D56D67D78D89CLK11OC
D0D1D2D3D4D5D6
D7
74ACT574
1
TDO
TDO
22
TDO
20
DI N[ 0 . . 15 ]
DI N[ 0 . . 1 5 ]
HSP50016
DI N0
DI N1
DI N2
DI N3
DI N4
DI N5
DI N6
Q119Q218Q317Q416Q515Q614Q713Q8
D12D23D34D45D56D67D78D89CLK11OC
U13
D0D1D2D3D4D5D6
1Y42Y73Y94Y
1A21B32A52B63A113B104A144B
U8
TCK. R
TMS. R
TCK. E
DI N7
12
1
D7
12
1
13
TRS T. R#
TDI . R
TMS. E
TRS T. E#
TDI . E
TSEL. R#
DI N8
DI N9
DI N10
Q119Q218Q317Q416Q515Q614Q713Q8
D12D23D34D45D56D67D78D89CLK11OC
U12
74ACT574
D0D1D2D3D4D5D6
ADRNG[ 0. . 7]
G
A/B
74ACT157
15
DI N11
DI N12
DI N13
DI N14
DI N15
12
74ACT574
1
D7
TAP SELECT
1
JP18
TSELR#
2
JP19: SELECT IQSTB# TO INACTIVE STATE WHEN 3-STATED.
WARNING: IN ORDER TO AVOID DAMAGE TO BOARD
THIS JUMPER MUST BE INSTALLED ON POWER UP!
JP18: WHEN INSTALLED, IEEE-1149 BUS IS CONTROLLED THROUGH PCD0-7;
ELSE CONTROL IS EXTERNAL
SHADING INDICATES INSTALLED FOR PC OPERATION.
IQCLK
10
R2
DDCCLK
DDCCLK
Schematic
1
2
JP5
DATA
OUTPUT
ENABLE
ADRNG0
ADRNG1
ADRNG2
ADRNG3
ADRNG4
ADRNG5
ADRNG6
Y015Y114Y213Y312Y411Y510Y69Y7
A1B2C3G16G2 A4G2 B
ADRNG7
7
5
74ACT138
D0D1D2D3D4D5D6
Q119Q218Q317Q416Q515Q614Q713Q8
D12D23D34D45D56D67D78D89CLK11OC
U17
PCD0
PCD1
PCD2
PCD3
PCD4
PCD5
7
Y015Y114Y213Y312Y411Y510Y69Y7
A1B2C3G16G2 A4G2 B
U10
TSELR#
IQSTB.P
IOUT
QOUT
OEDI N
213456789
VCC
VCC
R1
213456789
PCD0
PCD1
RNGSEL
RNG SEL
74ACT138
5
12
Q119Q218Q317Q416Q515Q614Q713Q8
D12D23D34D45D56D67D78D89CLK11OC
U18
10
PCD2
PCD3
PCD4
PCD5
PCD6
PCD7
PCD0
PCD1
PCD2
PCD3
PCD4
PCD5
PCD6
PCD7
U14
74ACT574
1
PCWR0
PCWR0
D[0..7]
ADRNG[ 0. . 7]
D7
12
74ACT574
1
PCD6
PCD7
PCWR1
PCWR1
TCK. E
PCD[ 0 . . 7 ]
TCK. E
PCD[ 0. . 7]
VCC
TDI.E
TMS. E
TRS T. E#
vcc
gnd
DI . E
T
TMS. E
TRS T. E#
vcc
gnd
15
Page 16
HSP50016-EV
PCRD 1
PCRD 1
IQCLK.B
IQSTB.B
IQSTB.B
IQCLK.B
1Y1181Y2161Y3141Y4122Y192Y272Y352Y4
1A121A241A361A482A1112A2132A3152A4
U1
IQSTB
IQCLK
QOUT . B
TDO. B
IOUT.B
IOUT.B
QOUT . B
TDO. B
3
1G12G
74F244
19
17
IOUT
QOUT
TDO
IO[0..15]
IO[0..15]
OSCOUT
OSCOUT
8
OUT
U9
OSC
QO[0. . 15]
QO[0..15]
(Continued)
Schematic
5
W6Y
D04D13D22D31D415D514D613D712A11B10C
U6
IOUT
QOUT
IQSTB
IQCLK
TDO
TDO
TDO
O4
O7
IO0IO1IO2IO3I
IO5IO6I
7
9
QA15QB1QC2QD3QE4QF5QG6QH
G
74ACT151
9
7
SEL0
SEL1
SEL2
SEL0
SEL1
SEL2
SER
U3
14
IOUT
IOUT
SRCLK11SRCLR10RCLK12G
IQCLK
IQCLK
QH'
13
SRRST#
SRO E#
IQSTB
SRO E#
IQSTB
SRRST#
74F595
O1 0IO1 1IO1 2IO1 3IO1 4
IO8IO9I
QA15QB1QC2QD3QE4QF5QG6QH
SER
SRCLK11SRCLR10RCLK12G
U2
14
O1 5
I
7
9
QH'
74F595
13
QO0
QO1
QO2
QO3
QO4
QO5
QO6
QO7
7
9
QA15QB1QC2QD3QE4QF5QG6QH
SER
U5
14
123
JP20
QOUT
SELECT
QOUT
QOUT
QH'
SRCLK11SRCLR10RCLK12G
13
JUMPER PINS 1 - 2 FOR I FOLLOWED
BY Q (UP TO 32-BIT OUTPUT). NOTE
THAT THIS IS LESS THAN THE 38 BITS
THE DDC IS CAPABLE OF OUTPUTTING.
QO8
QO9
QO1 0
QO1 1
QO1 2
QO1 3
QO1 4
QO1 5
7
9
QA15QB1QC2QD3QE4QF5QG6QH
74F595
SER
U4
14
SRCLK11SRCLR10RCLK12G
QH'
74F595
13
JUMPER PINS 2 - 3 FOR SEPARATE I,
Q 16-BIT OUTPUT ONLY.
THE IQCLK RATE ≠0, BECAUSE THIS WILL
DISABLE IQCLK WHEN SET TO ZERO.
vcc
gnd
vcc
VCC
gnd
16
Page 17

VCC
DI N1
DI N3
DI N5
DI N7
123456789
P1C
CLKI N
DI N8
DI N10
DI N12
DI N14
1011121314151617181920212223242526272829303132
CLKI N
HSP50016-EV
PCD1
PCD3
PCD5
PCD7
PCRD1
PCRD2
PCRD[ 0. . 2 ]
PCD[ 0 . . 7 ]
DI N[ 0 . . 15 ]
PCD[ 0. . 7 ]
DI N[ 0 . . 15]
TCK. E
TMS. E
PCRD[ 0. . 2]
TCK. E
TMS. E
PCWR0
TDI . E
TDI.E
PCWR1
PCWR0
PCWR1
vcc
gnd
vcc
gnd
VCC
TRST. E#
TRST. E#
VCC
123456789
P1B
DI N0
DI N2
DI N4
DI N6
123456789
P1A
QO1
QO3
QO5
QO7
123456789
P2C
123456789
P2B
1011121314151617181920212223242526272829303132
DI N9
DI N11
DI N13
DI N15
1011121314151617181920212223242526272829303132
QO8
QO1 0
QO1 2
QO1 4
IO0
IO2
IO4
IO6
IO9
IO11
IO13
IO15
CKOUT
IQSTB.B
IQCLK.B
IOUT.B
1011121314151617181920212223242526272829303132
1011121314151617181920212223242526272829303132
PCD0
PCD2
PCD4
PCD6
PCWR0
PCRD0
PCWR1
PCD1
PCD3
PCD5
PCD7
QOUT . B
PCRD1
PCRD2
(Continued)
Schematic
QO0
QO4
QO6
QO9
QO1 1
QO1 3
QO2
123456789
P2A
CKOUT
CKOUT
QO1 5
IO1
IO3
IO5
IO7
IO8
IO10
IO12
IO14
1011121314151617181920212223242526272829303132
PCD0
PCD2
PCD4
PCD6
TCK. E
TMS. E
TRST. E#
TDI . E
PCWR0
TDO. B
PCWR1
PCRD0
IO[0..15]
QO[0..15]
QO[ 0 . . 1 5 ]
IO[0..15]
TDO. B
TDO. B
IQSTB.B
I QCLK. B
IOUT.B
QOUT . B
IQSTB.B
IQCLK.B
IOUT.B
QOUT . B
17
Page 18

HSP50016-EV
C7
.01 uF
C14
.01 uF
C21
.01 uF
C6
.01 uF
C13
.01 uF
C20
.01 uF
C5
.01 uF
C12
.01 uF
C19
.01 uF
C4
.01 uF
C11
.01 uF
C18
TCK. E
TDI . E
PCWR1
PCWR0
TMS. E
TRST. E#
TCK. E
TDI . E
PCWR1
PCWR0
TMS. E
TRST. E#
12345678910111213
J1B
PCD0
PCD1
PCD2
PCD3
PCD4
PCD5
PCD6
PCD7
123456789
J1A
PCRD2
PCRD0
101112
CONNECTER TO
PCRD1
13
CONNECTER TO
PCD[ 0. . 7]
COMPUTER
PCD[ 0 . . 7]
COMPUTER
PCRD[ 0. . 2 ]
PCRD [ 0 . . 2]
RNGSEL
DDCCLK
C3
.01 uF
C10
RNGSEL
DDCCLK
C9
C2
.01 uF
C22
22 uF
C1
.01 uF
C8
VCC
123
1
J2
2
J3
.01 uF
.01 uF
C17
.01 uF
.01 uF
C16
.01 uF
.01 uF
C15
.01 uF
(Continued)
1
2
CLKIN
EXT CLK
1
2
JP16 JP17
CLKOUT
11
U15D
74ACT86
12
13
8
U15C
74ACT86
9
10
TCK. E
TDI . E
PCWR1
TMS. E
TRST. E#
213456789
R3
VCC
10
3
U15A
1
2
1
2
JP14
DDC CLK INV
74ACT86
SHADING INDICATES
INSTALLED
FOR PC OPERATION
CKOUT
U15B
4
CKOUT
6
74ACT86
5
1
2
JP15
OUTCLK INV
JP1
CKI N
OSC CLK
1
2
1
2
JP2
JP3
OSCOUT
CLKI N
PC CLK
1
2
PCCLK
JP6
ADRNG0
1
2
ADDR 0
ADRNG1
1
2
JP7
ADDR 1
JP16, 17: NORMALLY CONNECT PIN 1 TO PIN 2 ON BOTH HEADERS;
JP14, 15: INVERT CLOCKS
JP8
TO SOURCE CLOCK FROM CKOUT, CONNECT JP6-1 TO JP7-1
AND JP6-2 TO JP7-2
ADRNG2
1
2
JP9
ADDR 2
JP1, 2, 3: SELECT EXTERNAL CLOCK, OSCILLATOR CLOCK
OR PC CLOCK WITH JUMPER OR APPROPRIATE HEADER
JP6-13: SELECT BOARD ADDRESS WITH JUMPER ACROSS ONE HEADER
ADRNG3
1
2
ADDR 3
JP10
ADRNG4
1
2
ADDR 4
JP11
ADRNG5
1
2
ADDR 5
VCC
vcc
vcc
JP12
ADRNG6
1
ADDR 6
gnd
gnd
ADRNG7
2
1
2
JP13
ADDR 7
ADRNG[ 0. . 7]
Schematic
18
CKOUT
CLKI N
PCCLK
OSCOUT
 Loading...
Loading...