

Page 1
HD49235FS
Digital Signal Processor for CD
ADE-207-162A(Z)
2nd. Edition
August 1995
Description
The HD49235FS is a digital signal processor for compact disc (CD) applications.
Features
• Powerful error correction capability: two-symbol C1 correction and four-symbol C2 correction
• Quadruple-speed reproduction supported (maintaining two-symbol C1 and four-symbol C2 error
correction)
• On-chip analog PLL and digital PLL (VCO and phase detector)
• Automatic adjustment of the free-running frequency of the VCO
• Built-in microprocessor in terface
• On-chip 80-bit shift registers for Q-code buffering
• Cyclic redundancy check on Q-code values
• Audio output functions: monaural output, single-channel mute, left-right reverse, soft mute, –12-dB
attenuation
• 16-kbit RAM on-chip
Page 2
HD49235FS
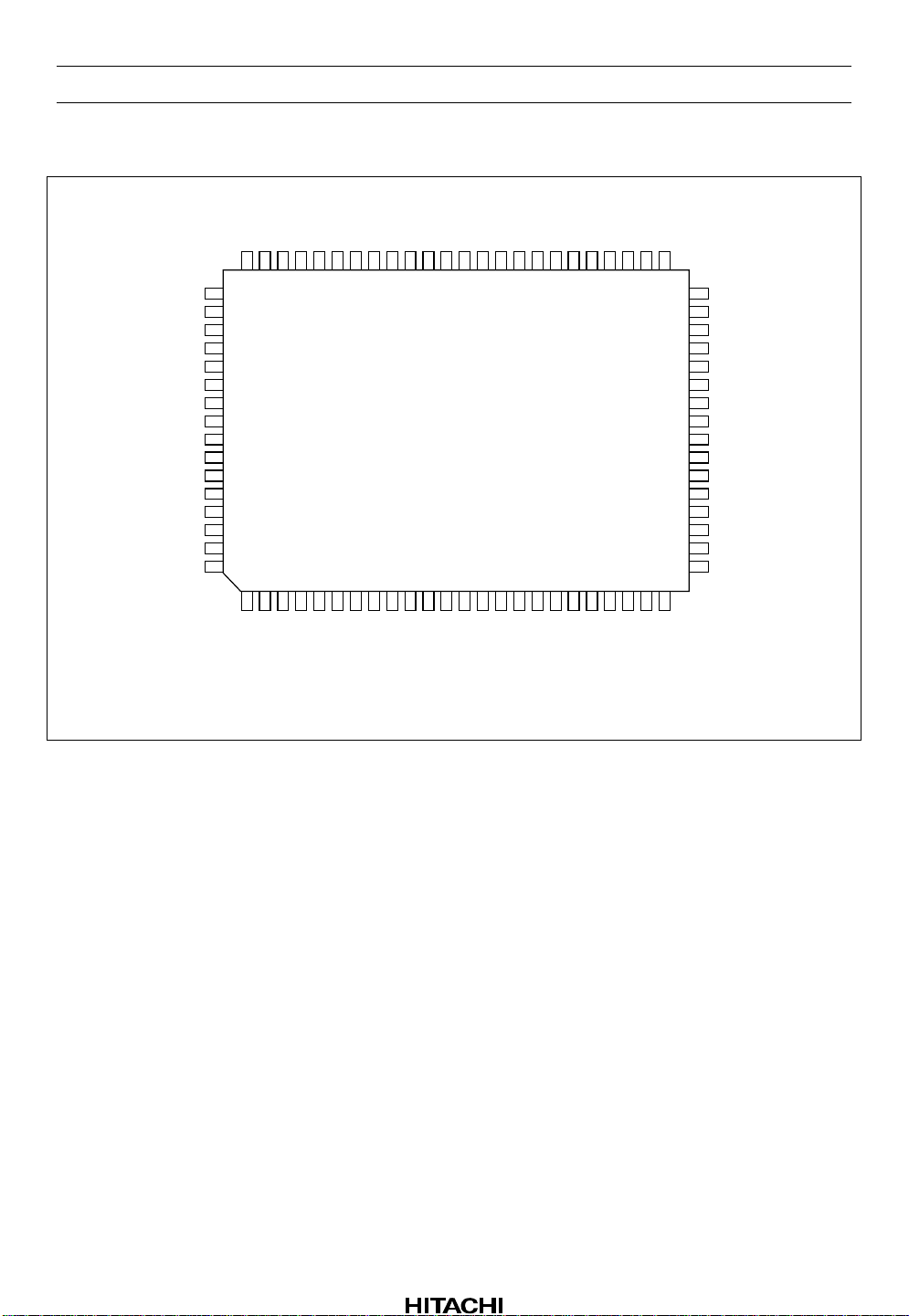
Pin Arrangement
QDSEL
DSLCO
DSLCI
EFMI
DEFCT
TEST2
TEST3
UCKSL
V (D)
DD
PWM
MON
MSTOP
PW64
ROTD
CLVS
SLOCK
DD
PDOUT1
V (A)
AMPP
AMPM
SS
AMPOACV (A)
PDOUT2
TEST1
MRST
DD
PLLCKNCV (D)NCNCNCNCNCNCNCNCNCNC
64 41
65
80
CNIN
XRST
DATA
SENS
CLK
XLT
SS
OVFW
V (D)
QOK
CKEXT
QDATA
CFCKP
SUBCK
SUBOUT
EMP
MUTE
BIDAT
DAS
CKX
MPX
C2F
S1
(Top view)
241
QMX
NC
40
25
DMX
NC
NC
NC
NC
NC
NC
NC
NC
NC
V (D)
SS
XCI
XCO
NC
MCK
TC1
UCK
Rev.2, Aug. 1995, page 2 of 41
Page 3
HD49235FS
Pin Description
Pin Polarity
No. Symbol Name I/O* Connection Function H L
1 XRST X (µ-com)
reset
2 CNIN Counter clock
input
3 SENS Sensor TO Microprocessor Servo status output
4 DATA Data I Microprocessor Data input for microprocessor
5 CLK Clock I Microprocessor Clock input for microprocessor
6 XLT X (µ-com) latch I Microprocessor Strobe input for
7VSS (D) VSS (digital) — Digital ground
8 OVFW RAM- overflow O On-chip RAM overflow signal
9 S1 Subcode sync1O Microprocessor Subcode sync signal
10 QOK Q-code OK O Microprocessor Subcode CRC result output OK NG
11 QDATA Q-code data O Microprocessor Subcode Q data output
12 CKEXT Clock-EXT I Microprocessor Clock input for Q data readout
13 SUBOUT Subcode out O CD graphics Subcode data output for CD
14 SUBCK Subcode clock I CD graphics Clock input for SUBOUT
15 CFCKP C&D frame
clock out
16 EMP Emphasis
output
17 BIDAT Biphase date TO Digital audio interface output
18 MUTE Mute I Microprocessor Audio mute input Mute
19 DAS Data serial out O DAC or ROM
20 CKX Clock X O DAC or ROM
I Microp rocessor Microprocessor interface
register reset
I Servo IC Pulse input for track counter
interface
interface
microprocessor interface
output
(with protection)
graphics
subcode readout
O CD graphics Subcode frame
synchronization signal ( 7.35
kHz at normal speed,
synchronized with PLL)
O Emphasis on/off status output ON OFF
Serial data output for audio or
decoder
decoder
ROM
Strobe clock output for DAS
signal
Reset
Overflow
Rev.2, Aug. 1995, page 3 of 41
Page 4
HD49235FS
Pin Description (cont)
Pin Polarity
No. Symbol Name I/O* Connection Function H L
21 MPX Multiplex O DAC or ROM
decoder
22 C2F C2 flag O ROM decoder C2 error flag output Error
23 QMX Quad multiplex O 4 × MPX clock signal
24 DMX Double
multiplex
25 UCK µ-com clock O Microprocessor Clock output for
26 TC1 Test C1 flag O C1 error flag monitor pin Error
27 MCK Master clock O Master clock output
28 NC No connection — Open or VDD Not connected
29 XCO X’tal clock
output
30 XCI X’tal clock
input
31 VSS (D) VSS (digital) — Digital ground
32 NC No connection — Open Not connected
33 NC No connection — Open Not connected
34 NC No connection — Open Not connected
35 NC No connection — Open Not connected
36 NC No connection — Open Not connected
37 NC No connection — Open Not connected
38 NC No connection — Open Not connected
39 NC No connection — Open Not connected
40 NC No connection — Open Not connected
41 NC No connection — Open Not connected
42 NC No connection — Open Not connected
43 NC No connection — Open Not connected
44 NC No connection — Open Not connected
O2 × MPX clock signal
XO Crystal
oscillator
XI Crystal
oscillator
Left/right channel switching
signal output (44.1 kHz at
normal speed, synchronized
with DAS)
(176.4 kHz at normal speed,
synchronized with DAS)
(88.2 kHz at normal speed,
synchronized with DAS)
microprocessor
(8.5 MHz or 17 MHz)
(33.8688 MHz)
Crystal oscillator output
Crystal oscillator input
Rev.2, Aug. 1995, page 4 of 41
Page 5
HD49235FS
Pin Description (cont)
Pin Polarity
No. Symbol Name I/O* Connection Function H L
45 NC No connection — Open Not connected
46 NC No connection — Open Not connected
47 NC No connection — Open Not connected
48 NC No connection — Open Not connected
49 NC No connection — Open Not connected
50 NC No connection — Open Not connected
51 NC No connection — Open Not connected
52 VDD (D) VDD (digital) — Digital power supply
53 NC No connection — Open or V
54 PLLCK PLL clock O PLL clock output monitor
55 MRST Master reset IU Open or V
56 TEST1 TEST 1 IU Open or V
57 PDOUT2 Phase detect
out 2
TO External RC
circuit
58 VSS (A) VSS (analog) — Analog ground
59 AC Amp
compensation
AExternal RC
circuit
60 AMPO Amp output AO External RC
circuit
61 AMPM Amp minus
input
AI External RC
circuit
62 AMPP Amp plus input AI External RC
circuit
63 VDD (A) VDD (analog) — Analog power supply
64 PDOUT1 Phase detect
out 1
65 QDSEL Q-data clock
TO External RC
circuit
IU Q data readout mode
select
66 DSLCO DSL control
output
67 DSLCI DSL control
input
68 EFMI EFM signal
OExternal RC
circuit
AI External RC
circuit
AI EFM signal input
input
69 DEFCT Defect I Servo IC Defect detection signal input Defect
70 TEST2 TEST 2 IU Open or V
Not connected
DD
Master reset of chip Reset
DD
Test pin
DD
PLL auto-adjust phase
detector output
Amplifier phase compensat ion
pin
PLL amplifier output
PLL amplifier inverting input
PLL amplifier non-inverting
input
PLL EFM phase detector
output
Internal
switching signal input
sync
EFM comparator slice level
control output
EFM comparator slice level
control input
Test pin
DD
External
sync
Rev.2, Aug. 1995, page 5 of 41
Page 6
HD49235FS
Pin Description (cont)
Pin Polarity
No. Symbol Name I/O* Connection Function H L
71 TEST3 TEST 3 IU Open or V
72 UCKSL Microcomputer
clock selection
73 VDD (D) VDD (digital) — Digital power supply
74 PWM Pulse width
modulate
75 MON Motor on O Disc-motor-on status detection
76 MSTOP Motor stop TO CLV phase control signal
77 PW64 Pulse width
64T
78 ROTD Rotate
direction
79 CLVS CLV status O Microprocessor Output indicating normal or
80 SLOCK Sync lock O Microprocessor Disc motor rotation lock signal Lock
Note: * I—input; O—output; IO—input/output; IU—pulled-up input; TO—three-state output; A—analog pin;
AI—analog input; AO—analog output; XI—oscillator input; XO—oscillator output
IU Microprocessor clock
TO Constant linear velocity (CLV)
O Microprocessor Brake release signal
O Microprocessor MSB of PWM pin output, for
Test pin
DD
switching signal input
control signal for disc motor
output
monitoring
starting mode of CLV control
16.9344
MHz
On
Normal Starting
8.4672
MHz
Rev.2, Aug. 1995, page 6 of 41
Page 7
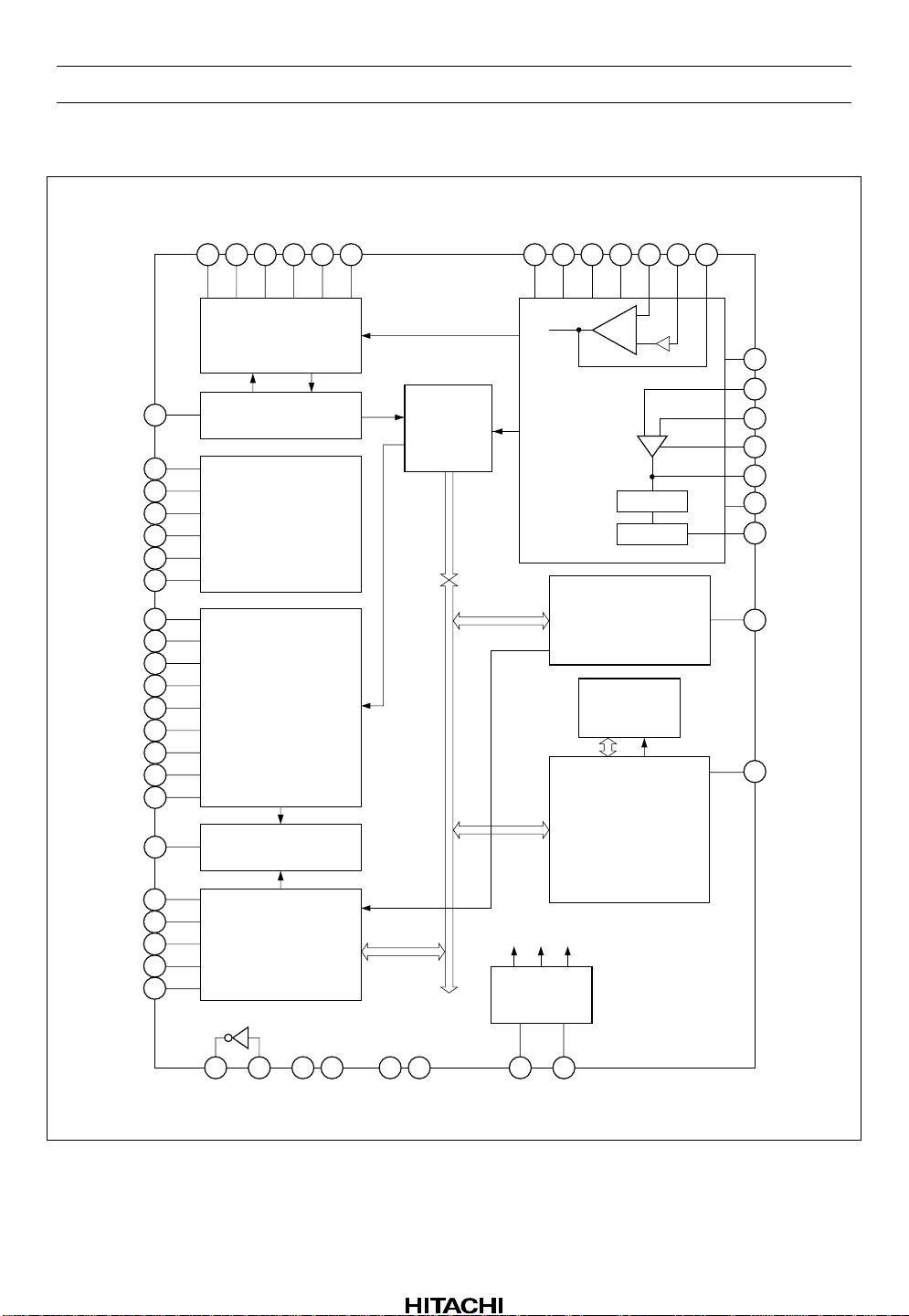
Block Diagram
CLVS
ROTD
PW64
MSTOP
MON
PWM
79 78 77 76 75 74 72 25 27 69 68
UCKSL
UCK
MCK
DEFCT
EFMI
67
HD49235FS
DSLCI
DSLCO
66
SLOCK
XRST
CNIN
SENS
DATA
CLK
XLT
QDSEL
S1
QOK
QDATA
CKEXT
SUBOUT
SUBCK
CFCKP
EMP
BIDAT
80
65
10
11
12
13
14
15
16
17
CLV servo control
Sync protection
1
2
3
4
5
6
9
Microprocessor
interface
Subcode signal
processing
Digital output
demodula-
Data bus
EFM
Data strobe
tion
Cmp
+
-
VCO
Freq. Div.
Error correction unit
(ECU)
16 k SRAM
RAM control
64
62
61
59
60
57
54
26
8
PDOUT1
AMPP
AMPM
AC
AMPO
PDOUT2
PLLCK
TC1
OVFW
MUTE
DAS
CKX
MPX
C2F
18
19
20
21
22
Interpolation
XCI
XCO
MRST
TEST1
TEST2
TEST3
Timing
generator
2423717056553029
QMX
DMX
Rev.2, Aug. 1995, page 7 of 41
Page 8
HD49235FS
Microprocessor Commands
Data
SENS
Register
(Address) Command D7 D6 D5 D4 D3 D2 D1 D0
8 (1000) Mode
selections
9 (1001) Function
selections
A (1010) Audio
control
B (1011) Trac k
counter
setting
C (1100) CLV control AINTV ATH GA IN1 GAIN0 SGAIN1 SGAIN0 PDGAIN1 PDGAIN0 Count
D (1101) CLV kick
control
E (1110) CLV m ode ED3 ED2 ED1 ED0 0 * * * BRAKE
F (1111) ECU mode 0 0 AS0 * * * * * Z
ROM ROMEF DOOFF SUBCO SLTSW 0 DCOND DWIDTH Z
1 BI1 BI0 WG10TL SYLCK1 SYLCK0 CRCQ * Z
MUTEL MUTER MONO ATT BLGMAIN BLGSUB SOFTMT SWLR Z
TC7 TC6 TC5 TC4 TC3 TC2 TC1 TC0 Complete
KICK7 KICK6 KICK5 KICK4 KICK3 KICK2 KICK1 * Z
Asterisks indicate don’t-care bits
Pin
Output
Register 8
01
ROM D7 Audio (with interpolation) CD-ROM (no interpolation)
ROMEF D6 C2 flag output order: lower first C2 flag output order: upper first
DOOFF D5 Digital output on Digital output off
SUBCO D4 Subcode data not inserted in DAS signal Subcode data inserted in DAS signal
SLTSW D3 48-fs clock 64-fs clock
D2 Normal operation Illegal setting
DCOND D1 Condition for switching between digital and
analog PLLs: digital PLL when defect
detection signal width is 4 frames or more
DWIDTH D0 Digital PLL termination timing:
• 8 frames after fall of defect detection
signal if width of defect detection signal
width is less than 12 frames
• 16 frames after fall of defect detection
signal if width of defect detection signal
width is 12 frames or more
Condition for switching between digital and
analog PLLs: digital PLL when defect
detection signal width is 8 frames or more
• 4 frames after fall of defect detection
signal if width of defect detection signal
width is less than 12 frames
• 8 frames after fall of defect detection
signal if width of defect detection signal
width is 12 frames or more
Rev.2, Aug. 1995, page 8 of 41
Page 9
HD49235FS
Register 9
01
D7 Illegal setting Normal operation
BI1 D6 00: Normal play 01: Double-speed play
BI0 D5 10: Quadruple-speed play 11: Quadruple-speed play
WG10TL D4 Sync detection window width: ±10 T Sync detection window width: ±19 T
SYLCK1 D3 Length of time sync lock state is maintained when sync signal is missing
SYLCK0 D2 00: 2 frames 01: 4 frames
10: 8 frames 11: 12 frames
CRCQ D1 QOK flag is not inserted in QDATA output QOK flag is inserted in QDATA output
Register A
01
MUTEL D7 Left-channel mute off Left-channel mute on
MUTER D6 Right-channel mute off Right-channel mute on
MONO D5 Stereo Monaural
ATT D4 Attenuation off Attenuation (–12 dB) on
BLGMAIN D3 00: Stereo 01: Bilingual, right channel
BLGSUB D2 10: Bilingual, left channel 11: Bilingual, left channel
SOFTMT D1 Soft mute off Soft mute on
SWLR D0 Normal Left-right reverse
Notes: 1. Priority for mute and attenation as follows.
“Mute” port > SOFTMT > MUTE L, MUTE R > ATT
2. In the case of setting “ROM” = 1 (CD-ROM mode), the data of register “A” is ignored and is
considered all zero.
It is recovered as it were, after setting “ROM” = 0.
3. “BLGMAIN” and “BLG SUB” commands are ignored if “SWLR” = 1, and set stereo.
Register B
D7 D6 D5 D4 D3 D2 D1 D0
Track counter setting TC7 TC6 TC5 TC4 TC3 TC2 TC1 TC0
1286432168421
Rev.2, Aug. 1995, page 9 of 41
Page 10
HD49235FS
Register C
01
AINTV D7 Sync detection count is tested at 32-frame
intervals
ATH D6 Sync must be detected 4 times or more Sync must be detected 8 times or more
GAIN1 D5 Speed error (PWM pin output) gain in CLV steady state operation
GAIN0 D4 00: –6 dB 01: 0 dB
10: +6 dB 11: 0 dB
SGAIN1 D3 Speed error gain and access
SGAIN0 D2 00: –6 dB 01: 0 dB
10: +6 dB 11: 0 dB
PDGAIN1 D1 CLV phase error (MSTOP pin output) gain
PDGAIN0 D0 00: –6 dB 01: 0 dB
10: +6 dB 11: 0 dB
Register D
Sync detection count is tested at 64-frame
intervals
D7 D6 D5 D4 D3 D2 D1 D0
CLV kick control KICK7 KICK6 KICK5 KICK4 KICK3 KICK2 KICK1 *
(PWM duty cycle) 64/128 32/128 16/128 8/128 4/128 2/128 1/128 *
Asterisks indicate don’t-care bits
Rev.2, Aug. 1995, page 10 of 41
Page 11
HD49235FS
CLV Mode
ED3 to ED0/HEX Mode Status
0000 0 STOP Motor stop
0110 6 PLAY Starting mode
1000 8 ROT Disc motor driven forward
1001 9 KICK Kick control
1010 A BRAKE Disc motor driven in reverse
1100 C ACS Access mode
1110 E START Forced starting mode
1111 F NORM Forced normal mode
ECU Mode
AS0 Mode Status
0 FULL Error correction: C1—two symbols; C2—four symbols
1 E4IHD C2—four symbol error correction inhibited on track jump
(Register E)
Normal mode
(Register F)
Rev.2, Aug. 1995, page 11 of 41
Page 12
HD49235FS
Functional Description
Data Strobe
The main functions of this block are described below.
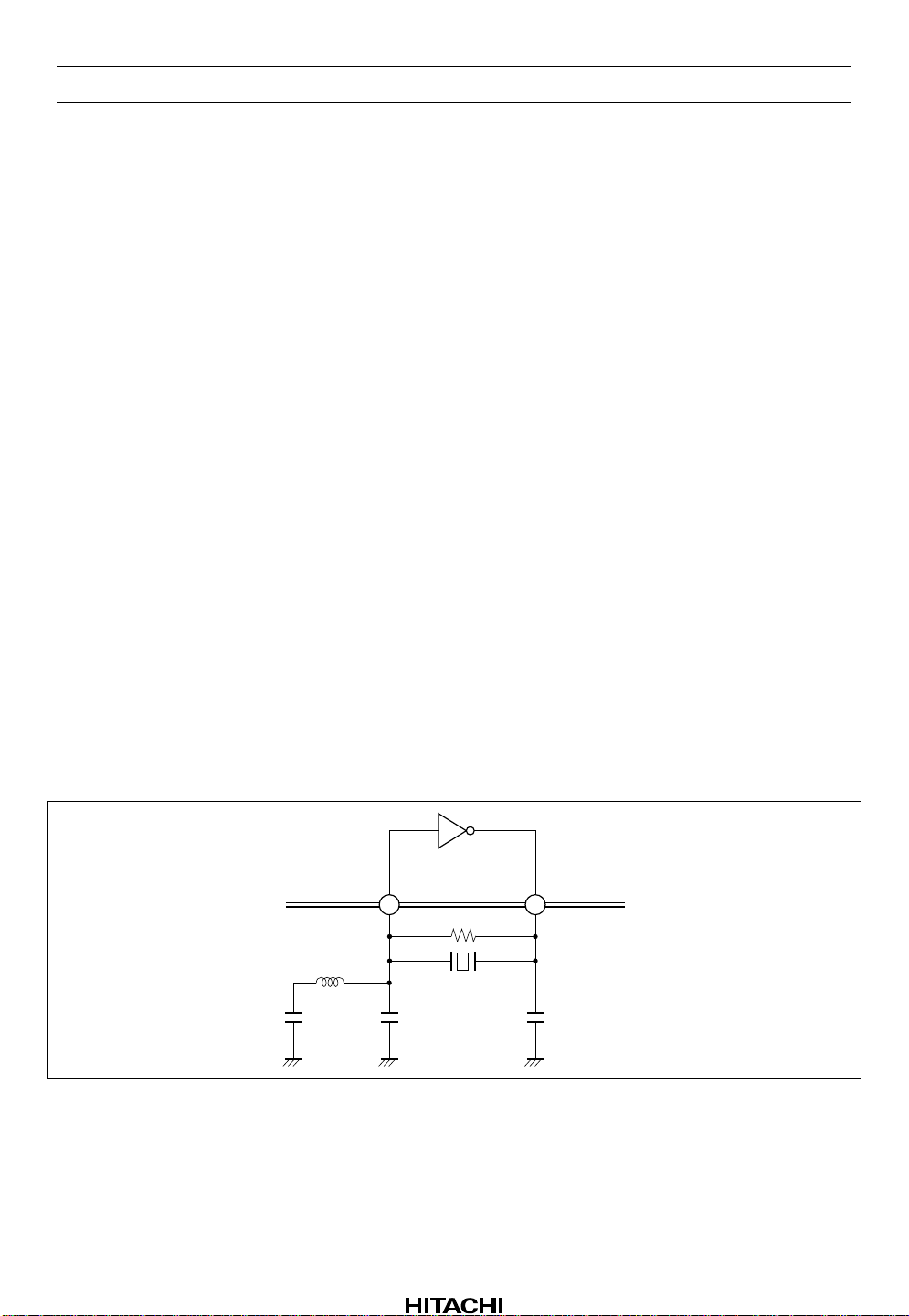
1. Generation of Basic Crystal Clock
Is the inverter input pin for the crystal oscillator.
XCI:
Is the inverter output pin for the crystal oscillator.
XCO:
A 33.8688-MHz crystal oscillator clock signal is generated at the XCI and XCO pins. Figure 1 shows
the standard external components when a 33.8688-MHz crystal is used.
2. Generation of Basic PLL Clock
PLLCK:
the frequency is 4.3218 MHz at standard speed, 8.6436 MHz at double speed, or 17.2872 MHz at
quadruple speed.
PDOUT1:
impedance state in the CLV stop mode. In other CLV modes, this pin outputs the result of phase
detection in a phase-locked loop formed with the VCO and the EFM signal input at the EFMI pin.
PDOUT2:
VCO. In CLV stop mode, this pin outputs a pulse-width modulated waveform equivalent to the phase
error in a phase-locked loop formed with the VCO and a crystal-o scillato r - derived clock signal. In other
CLV modes, this pin maintains a pulse-width modulated output with the same duty cycle as in stop
mode.
AC:
AMPO:
AMPM:
This is an output pin used for monitoring the VCO oscillator sig nal. When the PLL is in lock,
This is a phase detector output pin, for use in data strobing. This pin is in the high-
This is a phase detector output pin, for use in adjusting the free-running frequency of the
Connect a capacitor for phase compensation of the amplifier.
Amplifier output pin.
Inverting input to the amplifier.
Figure 1 33.8688-MHz Crystal Oscillator Circuit
Rev.2, Aug. 1995, page 12 of 41
3.3 µH
100 pF
XCI
30 29
XCO
1 MΩ
15 pF15 pF
Page 13

HD49235FS
AMPP:
Non-inverting input to the amplifier.
This chip uses a PLL for recovery of the bit clock. A built-in circuit au tomatically adjusts the freerunning frequency of the PLL, so fewer adjustments are required on the production line. The chip can
be forced to adjust its own free-running frequency whenever power is turned on or the speed is changed
by switching to CLV stop mode. Thus the free-running frequency is always set to the center of the lock
frequency range even if changes occur in the VCO and external circuit constants due to aging.
The principle and usage of automatic adjustment of the free-running frequency will b e described below.
a. In automatic adjustment of the VCO free-running frequency, this chip uses the disc stop signal. The
disc stop signal is turned on when the microprocessor writes 0000 in bits ED3, ED2, ED1, and ED0
of register E in the chip’s microprocessor interface. (See section 6, Microprocessor Interface.)
b. When the disc stop signal is turned on, counter (A) in figure 2 becomes a divide-by-98 counter,
switch (A) is connected to the output from the VCO, and switch (B) is connected to digital 0.
At this time, the circuit for the PDOUT1 output is stopped, so the output of the LPF1 connected to
PDOUT1 goes to the fixed DC bias level, which is 1/2 V
.
DD
The loop formed by PDOUT2 → LPF2 → amplifier → VCO → counter (A) now operates to lock
the VCO oscillator frequency to 34.5744 MHz, which is 8 times th e standard CD bit rate (4.3218
MHz).
Rev.2, Aug. 1995, page 13 of 41
Page 14

HD49235FS
4.2336 / 8.4672 / 16.9344 MHz
derived from
crystal oscillator clock
Disc stop
signal
44.1 / 88.2 / 176.4 kHz
derived from
crystal oscillator clock
EFM signal
Digital 0
×1 speed, ×2 speed,
×4 speed Playback
speed select signal
SW A
1/98 or 1/96
frequency
division
44.1 / 88.2 / 176.4 kHz
SW B
Disc stop
signal
4.3218 / 8.6436 / 17.2872 MHz
Counter A
Phase
detector 1
VCO
34.5744 MHz
1/8, 1/4, 1/2
frequency
division
Phase
detector 2
3.3 kΩ
3.3 kΩ
–+
10 kΩ
10 kΩ
64
62
61
59
60
55
57
LPF1
PDOUT1
AMPP
AMPM
AC
AMPO
Automatic
adjustment
loop of the
free-running
frequency
PLLCK
LPF2
PDOUT2
Note:
When changing the playback speed, always switch the system to CLV stop mode so that the freerunning frequency is adjusted automatically. The period of setting is 30 msec or more.
Within five second after turning on power, switch the sytem to CLV stop mode two times or more
in an interval from one to two second so that the free-running frequency is adjusted automatically.
The period of setting is 30 msec or more.
Rev.2, Aug. 1995, page 14 of 41
Figure 2
Page 15

HD49235FS
c. Next, rep r oduction from the disc will begin. When the microprocessor sends com mand data to start
disc rotation, the disc stop signal is turned off.
Switch (A) is now connected to receive a 4.2336 MHz clock from the crystal oscillator and counter
(A) is changed to be a divide-by-96 counter. The counter (A) output is held at 44.1 kHz by
switching the divisor. Here, switching is performed on the counter (A) output edge. The phase error
existing between the VCO and the crystal oscillator clock (the phase error that was detected at
adjustment step 2) is maintained.
d. When the disc is rotating and reproduction starts, switch (B) is connected to receive the EFM signal.
The phase detector PDOUT1 in figure 2 compares the phases of the EFM signal, which was
converted to binary by the EFM comparator, and the bit clock and outputs phase comparison
information from the PDOUT1 pin.
As shown in figure 3, when the EFM signal is in phase with the clock produced by the VCO, the
PDOUT1 output is high and low for equal lengths of time. When the EFM signal leads the on-chip
VCO clock, the high length is longer than the low length. When the EFM signal lags the on-chip
VCO clock, the high length is shorter.
(In phase)
EFMI
Bit clock
PDOUT1
EFMI
Bit clock
PDOUT1
EFMI
Bit clock
PDOUT1
High impedance
(Phase leads)
High impedance
(Phase lags)
High impedance
Figure 3 Timing of PDOUT1 Output Signal
Rev.2, Aug. 1995, page 15 of 41
Page 16

HD49235FS
3. Data Slice Level Output
This pin inputs the EFM RF signal.
EFMI:
DSLCO:
signal. This signal is used as a control sign al to keep the data slice level of the EFM signal centered, by
forming a negative-feedback loop with the EFM comparator.
DSLCI:
Figure 4 shows the EFM comparator circuit. The EFM RF signal is input through a capacitive coupling,
and binarized by comparison with a slice level generated by the DSLC amplifier.
When not in stop mode
The DSLCO pin outputs the inverse of the binarized EFM signal. Even if the EFM signal is
In stop mode
The DSLCO pin outputs a square wave with a 50% duty cycle and the same period as the output at
4. Control When a Defect is Detected
DEFCT: This pin inputs a disc defect detection signal. Both a digital PLL and an analog PLL are
provided on-chip. Normally the analog PLL is used, because of its good error-rate characteristic, but
when a defect detection signal is received at this pin, the chip switches over to its digital PLL for quick
pull-in after the defect disappears. After pull-in, the chip autom atically switches back to its analog PLL.
UCK:
UCKSL:
MHz when UCKSL is high, and 8.4672 MHz when UCKSL is low.
MCK:
This pin outputs an error signal for correcting deviation in the data slice level of the EFM
This pin inputs the above error signal through a low-pass filter to the EFM comparator.
asymmetrical before slicing, an appropriate slice level is obtained by feeding the dc component of
the sliced EFM signal back through an external low-pass RC filter.
the MPX pin, and the slice level is kept at 1/2 V
. This permits rapid optimization of the slice level
DD
when the device leaves stop mode, and prevents oscillation by cutting off the loop through the lowpass filter.
This pin outputs a clock signal for the microprocessor.
This pin selects the frequency of the microprocessor clock (UCK). The frequency is 16.9344
This pin outputs the master clock (33.8688 MHz).
DSLCO
66
LPF
EFM
Rev.2, Aug. 1995, page 16 of 41
RF signal
67
68
1/2 V
DSLCI
EFMI
STOP
DSLC amplifier
DD
–
Amp.
+
–
Comp.
+
EFM comparator
Figure 4 EFM Comparator Circuit
MPX
×1 ×2 ×4 speed
44.1/88.2/176.4 kHz
To internal circuits
EFMS
STOP
Page 17

HD49235FS
EFM Demodulation
After being processed in the data strobe block, the EFM signal is converted to NRZ by an NRZ-I
conversion using a PLL-synchronized clock signal (PLL clock, 4.3218 MHz when the PLL is locked in
standard speed playback mode).
The 24-bit frame synchronization signal is detected from this EFM signal. Operation of the EFM
demodulation block is timed according to the occurrence of the frame synchronization signal.
Due to disc defects and other causes, frame synchronization signals may sometimes be detected at false
positions in the EFM signal read from the disc. The sync protection block therefore opens a window around
the time when the correct synchronization signal is expected, and frame synchronization signals are used
for timing purposes only if they are detected within this window.
If the frame synchronization signal is not detected, it is automatically interpolated at the time when the
correct frame synchronization signal would be expected to occur. Detection and interpolation of the frame
synchronization signal will be d escribed in detail in the description of the sync pro tectio n block.
After being converted to NRZ form, the EFM signal is converted to 14-bit parallel data by the EFM
demodulation block. This conversion is timed to the occurrence of the above frame synchronization signal.
Next, 14-bit-to-8-bit demodulation is perfo rmed: the 14-bit parallel data is fed to the EFM demodulation
ROM and converted to 8 bits.
After EFM demodulation, the 8-bit data is separated into subcode data, which is passed to the subcode
signal-processing block, and audio data, which is output to the internal data bus. The data bus is connected
to the error correction unit (ECU) and the RAM control block.
Subcode Signal Processing
: The CD format groups subcode data into 98-frame blocks. Each block begins with two subcode
S1
synchronization signals: S0 and S1. In this chip, S0 and S1 are detected in the EFM demodulation
block. S0 is delayed by one frame, then ANDed with S1, and the result (S0delay⋅S1) is output at the S1
pin.
Due to disc defects and other causes, the above S0 and S1 signals may sometimes fail to be detected.
The chip accordingly has a divide-by-98 counter that takes S0delay⋅S1 as its clear input and CFCKP* as
its clock input. When S0delay⋅S1 is not detected, it is interpolated by this counter. See figure 5.
Note: * CFCKP is derived from the PLL clock and has a frequency of 7.35 kHz (×1 speed), 14.7 kHz (×2
speed), 29.4 kHz (×4 speed) when the PLL is in lock.
Rev.2, Aug. 1995, page 17 of 41
Page 18

HD49235FS
S0
S1
CFCKP
D
Q
Decoder
Clear
Divide-by-98 counter
S0 delay · S1
"97"
Interpolated S1 signal
Figure 5 Block Diagram of S1 Signal Detection Circuit
S1 output pin
Rev.2, Aug. 1995, page 18 of 41
Page 19

HD49235FS
QDATA:
QDSEL:
This is the output pin for the Q subcode data.
This pin selects one of the following two modes.
a. Q code buffer mode (selected when QDSEL is low)
When the QDSEL pin is low, the chip uses its 80-bit Q code buffer function, and outputs the Q
subcode from the QDATA pin in synchronization with an external clock sign al (for example, a
clock signal from a microprocessor).
As shown in figure 6, the chip has two 80 - bit registers. While Q code data is being written in one
register, the Q code can be read from the other register asynchronously, by input of clock signals
from the microprocessor at the CKEXT pin. This feature places less of a load on the microprocessor.
To switch between reading and writing of the shift registers, the S1 and QOK sign als are ANDed, so
before sending clock pulses for input to CKEXT, th e microprocessor should check for the fall of S1,
then check that QOK is high (indicating that the cyclic redundancy check of the Q data passed) .
These checks will enable the Q subcode to be read correctly.
The 80-bit shift register is designed to store data in 4-bit nibbles, LSB first. If the microprocessor
inputs serial data in LSB-first form, it does not have to rearrange the 4 bits.
Figure 7 shows the timing chart.
b. Q code internal synchronization mode (selected when QDSEL is high)
When the QDSEL pin is high, a Q code strobe clock generated in the HD49235 is output from the
CFCKP pin, and the Q code is output from the QDATA pin at a rate of one bit per frame,
synchronized with the strobe clock (CFCKP). This is referred to as Q code internal synchronization
mode. Figure 8 shows the timing.
Subcode
Q
S1 · QOK
4-bit
rearrangement
CKEXT
80-bit shift register
CK
80-bit shift register
CK
Figure 6 Block Diagram of Q Code Buffer When QDSEL is Low
QDATA
Rev.2, Aug. 1995, page 19 of 41
Page 20

HD49235FS
The output at this pin indicates whether or not the Q subcode is correct.
QOK:
One block of Q subcode data consists of 98 bits, of which 16 bits are parity bits that indicate whether
the data read from the disc was correct or in error. An on-chip cyclic redundancy check circuit decides
whether the 98-bit data string is correct or not, and outputs the result at the QOK pin. A high-level
output indicates OK. Figures 7 and 8 show the output timing.
In modes using the Q code buffer register, when the microprocessor sets the CRCQ bit to 1, QOK is
inserted in QDATA at the rise of S1.
See the note in the timing chart shown in figure 7.
This output pin indicates the presence or absence of pre-emphasis. The pre-emphasis signal is
EMP:
detected from the Q subcode and output at the EMP pin. High output indicates audio with pre-emphasis.
Low output indicates audio without
pre-emphasis.
SUBOUT:
CFCKP:
S1
QOK
This pin outputs codes R to W for use in display of graphics.
This pin outputs a subcode frame synchronization signal.
CKEXT
QDATA
Note:
12345
Q4 Q3 Q2 Q1 Q8 Q77 Q4 Q3 Q2
* Undefined when CRCQ = 0; QOK when CRCQ = 1 (high when CRC result is OK)
80
**
123
Figure 7 Timing When QDSEL is Low (Q Code Buffer Mode)
CKEXT
7.35 kHz
CFCKP
QDATA
S1
QOK
Q96 S0 S1 Q1
CRC result data: high when OK
Figure 8 Timing When QDSEL is High(Q Code Internal Synchronization Mode,
Rev.2, Aug. 1995, page 20 of 41
Standard Speed Playback)
Page 21

HD49235FS
SUBCK:
This pin inputs a subcode read clock.
Codes R to W are output together with codes P and Q. The codes are output in order, starting with the P
code, as serial data from the SUBOUT pin when read clock pulses are input at the SUBCK pin. Figure 9
shows the timing, which basically conforms to EIAJ CP-2401.
Signal Configuration:
Figure 9 shows the signals output for use in display of graphics. (SF: subcode
frame)
To read the subcode data, eight subcode clock pulses (SUBCK) should be input after the fall of the
subcode frame synchronization signal (CFCKP). The data for subcode channel P is output at the fall of
CFCKP. Data in channels Q to W is output at the rise of SUBCK. See figure 10.
SF0
S1
CFCKP
** *
SUBCK
*
SUB
OUT
SF1 SF2 SF3 SF4 SF97 SF0
*
P to W
P to W P to W
*
Notes:
CFCKP
SUBCK
SUB
OUT
Segments marked with X's are don't-care segments.
* SUBCK input during SF0 and SF1 is permissible, but the resulting output from SUBOUT
will not necessarily be correct.
Figure 9 Output Timing for Graphics Disp lay (1)
Subcode frame (SF)
PQRSTUVW
P
Figure 10 Output Timing for Graphics Display (2)
Rev.2, Aug. 1995, page 21 of 41
Page 22

HD49235FS
Control of 16-kbit On-Chip SRAM
The demodulated EFM data is synchronized with the PLL clock, and its outp u t tim ing m a y contain jitter
due to disturbances in the CLV servo that controls disc r otation. To absorb the jitter, the demodulated EFM
data is stored in the on-chip RAM, then read out in synchronization with a clock signal derived from the
crystal oscillator. The RAM capacity sets a limit on the amount of jitter that can be absorbed. In this chip, a
delay of ±5 frames between RAM read and write would lead to overwriting of existing data. The
overwritten data would be destroyed, making the reproduced sound unreliable.
To avoid this, if the read and write base counters get more than ±5 frames out of step, the write b ase
counter is set to the value of the read base counter and the frame jitter margin is set to the maximum, ±5
frames.
OVFW:
This pin outputs a high RAM overflow flag signal to indicate that the difference between the
read and write base counters exceeded ±5 frames and the write base counter was set to the value of the
read base counter.
MUTE:
This pin is used to force the audio data to the mute state.
When MUTE is low, muting is not performed.
When MUTE is high, muting is performed.
When MUTE goes high, the address control circuit is initialized so as to maximize the RAM frame jitter
margin at that point. This initialization is performed continuously while MUTE is high. Normal
reproduction resumes when MUTE goes low.
Error Correction Unit (ECU)
The error correction unit can correct two-symbol C1 errors and four-symbol C2 errors.
The results of C1 error correction are flagged by a C1 flag. Since two-symbol errors can be corrected, each
C1 correction produces a 2-bit C1 flag. The C1 flag data is written into an internal buffer RAM area and is
read out again during C2 correction.
C2 error correction is carried out using the calculated error locations and error values, and the C1 error
status and error positions indicated by the C1 error flags.
The interpolation block reads audio data and the corresponding C1 and C2 flags. If it decides from the C1
and C2 flags that the audio data is unreliable, it performs mean-value interpolation or preceding-value
interpolation.
This pin outputs a signal indicating whether each frame of data read from the disc contained an
TC1:
error. See figure 11 for the output timing.
TC1
354 ns
Figure 11 TC1 Timing (Standard Speed Playback)
Rev.2, Aug. 1995, page 22 of 41
High if no error
136 µs
Page 23

Microprocessor Interface
HD49235FS
DATA:
CLK:
XLT:
Input pin for receiving microprocessor command data.
Clock input pin for receiving microprocessor command data.
Latch clock input pin for storing microprocessor command data in an internal register after serial
input.
Input pin for clearing the microprocessor command registers.
XRST:
This output pin provides the microprocessor with the following servo information. For details,
SENS:
see the microprocessor command descriptions.
The SENS signal goes low when the number of pulses input at the CNIN pin reaches a value set by
the microprocessor. Alternatively, SENS toggles between low and high each time this value is
reached.
When the constant linear velocity (CLV) servo ope r a tes in brake mode, SENS goes low to indicate
detection of an interval of 32 T or more. This indicates that braking has operated and the velocity
has fallen to 1/3 or less.
This pin receives track-crossing pulses from the servo IC, so that the number of tracks can be
CNIN:
counted.
1. Data Transfer Format
The microprocessor interface transfers serial data using three signal lines: XLT, CLK, and DATA. See
the timing diagram in figure 12. D11 to D8 specify a register address and D7 to D0 give bit values to be
set in that register.
Notes: 1. When the external reset input signal (XRST) goes low all registers are reset to their default
values. See table 1.
2. Always write 0 in the following register bits:
D2 in register 8
D3 in register E
D7 and D6 in register F
3. Always write 1 in the following register bit:
D7 in register 9
Table 1 Default Values
Register Code D7 D6 D5 D4 D3 D2 D1 D0
8 (1000) 0 0 0 0 0 0 0 0
9 (1001) 1 0 0 0 1 1 0
A (1010) 0 0 0 0 0 0 0 0
B (1011) 0 0 0 0 0 0 0 0
C (1100) 1 1 1 0 0 0 0 1
D (1101) 0 0 0 0 0 0 0
E (1110) 0 0 0 0 0
F (1111) 0 0 0
Rev.2, Aug. 1995, page 23 of 41
Page 24

HD49235FS
DATA
CLK
XLT
D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11
Figure 12 Microprocessor Interface Timing
2. Microprocessor Commands
These commands are summarized in the microprocessor command tables. Further details and notes are
given below.
a. Mode Selections (Register 8)
This bit controls whether or not interpolation is performed on audio data output from DAS.
ROM:
When ROM = 0, interpolation is performed (for audio applications).
When ROM = 1, interpolation is not performed (for CD-ROM applications).
ROMEF:
When ROM = 1 (for CD-ROM applications), the upper and lower C2 flag data is output in
two 8-bit segments. ROMEF selects which is output first: the upper or lower data.
When ROMEF = 0, the lower data is output first.
When ROMEF = 1, the upper data is output first.
DOOFF:
This bit switches the digital audio interface output from pin 17 (BIDAT) on or off.
When DOOFF = 0, a signal is output.
When DOOFF = 1, the BIDAT pin is in the high-impedance state.
SUBCO:
This bit selects whether to insert subc ode data in the DAS output on the DAC output interface
(MPX, CKX, DAS) in 48fs clock mode (when microprocessor command bit SLTSW is 0).
When SUBCO = 0, subcode data is not inserted.
When SUBCO = 1, subcode data is inserted.
SLTSW:
This bit selects 48fs clock mode or 64fs clock mode for the DAS output.
When SLTSW = 0, DAS data is output in 48fs clock mode.
When SLTSW = 1, DAS data is output in 64fs clock mode.
DCOND:
This bit selects the condition for switching from the analog PLL to the digital PLL when a
defect is detected, in terms of the width of the defect detection signal input at the DEFCT pin (pin 69).
When DCOND = 0, the width must be at least four frames.
When DCOND = 1, the width must be at least eight frames.
DEFCT (defect
detection signal)
PLL
Analog Digital Analog
Figure 13 PLL Modes when a Defect is Detected
Rev.2, Aug. 1995, page 24 of 41
Set by DWIDTHSet by DCOND
Page 25

HD49235FS
DWIDTH:
until termination of the digital PLL (and return to the analog PLL).
When DWIDTH = 0, termination occurs 8 frames past the fall of the defect detection signal if the defect
detection signal width was less than 12 frames, and 16 frames past the fall of the defect detection signal
if the defect detection signal width was 12 frames or more.
When DWIDTH = 1, termination occurs 4 frames past the fall of the defect detection signal if the defect
detection signal width was less than 12 frames, and 8 frames past the fall of the defect detection signal
if the defect detection signal width was 12 frames or more.
b. Function Selections (Register 9)
BI0 and BI1:
Note: When changing the playback speed, always switch the system to CLV stop mode so that the free-
WG10TL:
WG10TL = 0: The window width is ±10 T.
WG10TL = 1: The window width is ±19 T.
SYLCK0 and SYLCK1:
12 consecutive frames in which the frame synchronization signal (SYNC) is not detected.
CRCQ:
not to insert the QOK flag into the Q code data.
c. Audio Control (Register A)
The audio control commands concerning the DAS output are all ignored in CD-ROM mode, which is
selected when the ROM microprocessor command bit is set to 1.
MUTEL and MUTER:
Attenuation is carried out in eight steps (7/8, 6/8, 5/8, 4/8, 3/8, 2/8, 1/8, 0) with 136 µs per step (at
standard speed).
Notes: 1. Muting begins as soon as the command is input, without waiting for a zero-crossing point.
MONO:
Note: When MONO is set to 1, mean-value in terpolatio n is not performed. The only type of interpolation
ATT:
Note: If the external MUTE signal is hig h, both channels are muted regardless of this command bit.
BLGMAIN and BLGSUB:
right channels. This command is ignored if “SWLR” = 1.
SOFTMT:
carried out in eight steps with 136 µs per step (at standard speed).
Note: If the external MUTE signal is hig h, both channels are muted regardless of this command bit.
SWLR:
Note: Clear this bit to 0 when u sin g DAS subcode output.
This bit selects the interval from the high-to-lo w tr ansition of the defect detection signal
These bits select normal play, double-speed play, or quadruple-speed play.
running frequency is adjusted automatically. The period of setting is 30 msec or more.
This bit selects the width of the frame synchronization signal (SYNC) detection window.
These bits select whether the sync protection state is maintained for 2, 4, 8, or
In Q code buffer mode (when the QDSEL signal at pin 65 is low), this bit selects whether or
These command bits mute the left and right channels independently.
2. If the external MUTE signal is high, both channels are muted regardless of these commands.
This bit selects monaural audio output.
performed is to hold the preceding value.
This bit attenuates the audio output level by –12 dB in six steps (7/8, 6/8, 5/8, 4/8, 3/8, 2/8).
These bits select whether or not to output bilingual audio on the left and
This command bit mutes both the left and right channels simultaneously. Attenuation is
Reverses the left- and right-channel outputs, by reversing DATA from RAM.
Rev.2, Aug. 1995, page 25 of 41
Page 26

HD49235FS
d. Track Counter Setting (Register B)
An internal counter counts the track-crossing signal input at the CNIN pin. When the count reaches the
value set in register B, the SENS output inverts.
Depending on the order in which registers B and C are set, tracks are counted in complete mode (once
only) or count mode (repeatedly). See the timing diagram in figure 14.
Complete mode
Step 1: Set desired values in all registers other than registers B and C.
Step 2: Set register C.
Step 3: Set the count value in register B.
Step 4: Monitor the SENS line at the microprocessor.
Microprocessor
command
XLT
CNIN
SENS
Step 1 Step 2 Step 3 Step 4
Complete mode
Count mode
n counts
n counts
n counts
n counts
Figure 14 Track Counting
Count mode
Step 1: Same as complete mode.
Step 2: Set the count value in register B.
Step 3: Set register C.
Step 4: Monitor the SENS line at the microprocessor.
Notes: 1. Do not use the microprocessor interface while the microprocessor is monitoring the SENS line.
2. If all zero s are wr itten in register B, the count setting is 256.
3. Do not monitor the SENS pin between steps 2 and 3.
Rev.2, Aug. 1995, page 26 of 41
Page 27

HD49235FS
e. CLV Contro l ( Reg ister C)
AINTV:
servo modes is made automatically by testing the number of sync pulses per interval. The AINTV bit
selects the length of the interval.
ATH:
modes is made automatically by testing the number of sync pulses per interval. The ATH bit selects the
threshold number of pulses. Starting servo mode is used if the number of sync pulses detected in the
interval selected by AINTV is less than the threshold value selected by ATH. Normal servo mode is
used if the number exceeds this threshold. Only sync pulses that are validated by the sync protection
function are counted.
GAIN1 and GAIN0:
servo mode. There are three selections: –6 dB, 0 dB, and +6 dB.
SGAIN1 and SGAIN0:
in start mode.
PDGAIN1 and PDGAIN0:
of three values, –6 dB, 0 dB or 6 dB.
f. CLV Kick Contro l (Register D)
KICK7 to KICK1:
mode, these bits select the CLV control output pin PWM duty cycle to be one of 128 levels. For
example, to set the duty to be 74/128, set bits D7 to D0 in microprocessor control register D to be
1001010 (base 2).
When a disc is played in CLV mode, the switchover between the starting servo and normal
When a disc is played in CLV mode, the switchover between the starting servo and normal servo
These command bits select the gain of the output at the PWM pin in normal CLV
These bits select the PWM gain to be one of three values, –6 dB, 0 dB or 6 dB,
These bits select the MSTOP pin output (CLV phase error) gain to be one
When kick control is enabled (by microprocessor command register E) in CLV
PWM
*:
*
1
64
× + D6 × + D5 × + D4 × + D3 × + D2 × + D1 ×
D
7
128
32
128
16
128
8
128
4
128
2
128
Figure 15 CLV Kick Control Output
1
128
Rev.2, Aug. 1995, page 27 of 41
Page 28

HD49235FS
g. CLV Mode (Register E)
This register determines the constant linear velo city control mode. Command data written in bits D7 to
D4 (ED3 to ED0) of register E selects stop, play, rotate, kick, brake, access, start, or normal mode. For
details of these operating modes, see the description of the CLV servo block.
h. ECU Mode (Register F)
The error-correcting capability of the error-correcting unit (ECU) can be selected. Cor r ection when a
track jump occurs can be limited to two symbols at the C1 level and three symbols at the C2 level by
setting bit AS0 to 1, to reduce the likelihood of false co r rections.
Sync Protection Block
The pulse width of the EFM signal read from the disc is measured, using the crystal o scillator clock as a
time base. The pulse width value is used to detect the synchronization pattern consisting of the first 24 bits
in each frame, and produce a synchronization pulse named ASYNC.
Due to disc defects and other causes, ASYNC may be detected in an incorrect position, so a divide-by-576
counter* is used to establish a window, and only ASYNC pulses detected within this window are regarded
as valid synchronization pulses (referred to as valid ASYNC pulses). Other synchronization pulses are
disregarded. The width of this window can be set to one of two values by the microprocessor command
WG10TL as follows.
WG10TL = 0: The window width is set to ±10T (±1.7%)
WG10TL = 1: The window width is set to ±19T (±3.1%)
Valid ASYNC pulses occur with correct synchronization timing, but they may sometimes be missing, e.g.
because of rejection of pulses outside the detection window. Where valid ASYNC pulses are missing,
PSYNC pulses are generated by interpolation. Valid ASYNC and PSYNC are the basic constant linear
velocity control signals used in the CLV motor control circuit.
When two consecutive valid ASYNC pulses are detected, the chip assumes that it has acquired
synchronization lock and drives the SLOCK pin high.
If valid ASYNCs are not detected for a consecutive number of times set by the SYLCK0 and SYLCK1
microprocessor command bits, interpolation is stopped and the SLOCK pin is driven low.
When (SYLCK1, SYLCK0) are (0, 0): if ASYNCs are missing for 2 consecutive times interpolation is
stopped and the SLOCK pin goes low.
When (SYLCK1, SYLCK0) are (0, 1): if ASYNCs are missing for 4 consecutive times interpolation is
stopped and the SLOCK pin goes low.
When (SYLCK1, SYLCK0) are (1, 0): if ASYNCs are missing for 8 consecutive times interpolation is
stopped and the SLOCK pin goes low.
When (SYLCK1, SYLCK0) are (1, 1): if ASYNCs are missing for 12 consecutive times interpolation is
stopped and the SLOCK pin goes low.
Figure 17 is a timing diagram for the valid ASYNC and SLOCK relationships for the case where detection
of two consecutive missing valid ASYNCs was specified by microprocessor command.
Note: * 4.2336 MHz/576 = 7.35 kHz (standard speed playback)
Rev.2, Aug. 1995, page 28 of 41
Page 29

HD49235FS
SLOCK:
This output pin indicates whether sync signals were detected correctly during disc playback.
This signal goes high when correct sync signals are detected in two consecutive frames, and goes low
when sync signals are missing consecutively for the number of times specified by the SYLCK0 and
SYLCK1 microprocessor command bits.
PWL PWH
Sync pattern
Figure 16 Sync Pattern at Start of Frame
Valid ASYNC missing Valid ASYNC
×××××
Valid ASYNC
SLOCK
Goes high when valid
ASYNC is detected
twice consecutively
Goes low when valid ASYNC is missing
consecutively a number of times
selected by microprocessor command
bits SYLCK0 and SYLCK1*
Note: * This figure is for the case when two consecutive missing ASYNCs is specified.
Figure 17 Valid ASYNC and SLOCK Relationships
Rev.2, Aug. 1995, page 29 of 41
Page 30

HD49235FS
CLV Servo Control
Compact discs (CDs) are recorded at a constant linear velocity (CLV). This block performs CLV motor
control.
MSTOP:
This CLV phase error output pin either is in the high-impedance state, or outputs a constant
low signal, a constant high signal, or a pulse-width modulated waveform with a duty cycle of 0 to
100%, depending on the CLV operating mode.
This CLV velocity error output pin either is in the high-impedance state, outputs a constant low
PWM:
signal, outputs a constant high signal, or outputs a pulse-width modulated waveform with a duty cycle
of 0 to 100%, depending on the CLV operating mode.
This output signal indicates when the disc motor is on. When the disc motor is on, this pin is at
MON:
the high level, except in stop mode.
This pin outputs the brake release signal.
PW64:
ROTD:
This pin can be used to monitor the most significant bit of the 7-bit (128-step) output at the
PWM pin.
This output pin differentiates between the starting and normal CLV modes. High output
CLVS:
indicates normal mode.
Next the operating modes will be described. Table 2 indicates the CLV control output states in each
mode.
Table 2 CLV Control Output
Outputs Signals
CLV Mode ED3 to 0 MON MSTOP (Phase Error) PWM (Speed Error)
STOP 0000 L Z Z
PLAY 0110 H 50% (starting mode)
0 to 100% (normal mode)
ROT 1000 H 50% H
KICK 1001 H 50% Set by microprocessor
BRAKE 1010 H 50% L
ACS 1100 H 50% 0 to 100%
START 1110 H 50% 0 to 100%
NORM 1111 H 0 to 100% 0 to 100%
0 to 100%
1. Stop Mode
This is the state in which the motor is stopped. The free-running frequency of the data strobe VCO is
automatically adjusted in this mode.
Rev.2, Aug. 1995, page 30 of 41
Page 31

HD49235FS
2. Play Mode
This mode is automatically subdivided into a starting mode (rough servo control) and normal mode
(fine servo control) according to the rate at which sync signals are detected from the disc. The AINTV
and ATH bits in register C (CLV control) select an interval length and threshold value. Starting mode is
used if the number of sync signals in the selected in ter val is less than the threshold value. Normal mode
is used if the number exceeds the threshold value. Starting and normal modes operate as follows.
Starting Mode:
rectangular wave with a duty cycle corresponding to the arithmetic mean of the pulse width on the 11-T
low side and 11-T high side in the sync signal detected from the disc. See the PWM output duty cycle
characteristic in figure 18.
See table 2 for the outputs at the MON and MSTOP pins. The PWM pin outputs a
Center of S-curve of starting servo
Center during play
100
92.1
83.5
79.5
74.8
70.9
66.9
64.6
58.3
54.3
52.0
45.7
41.7
39.4
PWM duty cycle (%)
33.1
29.1
25.2
Gain: +6 dB
Gain: 0 dB
Gain: –6 dB
PWL PWH
Sync pattern
11T
Fast rotation
0
–4.6 –2.3
–0.3
0.852.3 4.6 6.9 9.2
0
Slow rotation
PWL + PWH
2
11T – 1
× 100 [%]
Figure 18 Duty Cycle Characteristic of PWM Output (Speed Error) in CLV Starting Mode
Rev.2, Aug. 1995, page 31 of 41
Page 32

HD49235FS
Normal Mode:
The MON output pin is held high. The PWM pin outputs a rectangular wave with a
duty cycle that depends on the length of four cycles of the sync signal reproduced from the disc (four
frames). See the PWM output duty cycle characteristic in figure 19. The MSTOP pin outputs a phase
error signal obtained by comparing the phase of a signal obtained by prescaling the sync signal by a
factor of four (to give a cycle length of four frames) with the phase of an internal reference signal. See
the MSTOP output duty cycle characteristic in figure 20.
3. Rotate Mode
The MON and PWM outputs are held high. The MSTOP pin outputs a square wave with a 50% duty
cycle. This mode is used to force the disc motor to rotate.
4. Kick Mode
The MON output pin is held high. The MSTOP pin outputs a square wave with a 50% duty cycle. The
PWM pin outputs a rectangular wave with a duty cycle that can be set to any value from 0 to 100% in
128 steps by setting bits KICK7 to KICK1 in microprocessor command register D.
5. Brake Mode
The MON output is held high. The MSTOP pin outputs a square wave with a 50% duty cycle. The
PWM output is held low. This mode is used to force the disc motor to rotate in reverse. In brake mode,
the interval between edges of the EFM signal is measured. If the interval is 32 T or more (T = 1/4.3218
MHz) the SENS output is driven low and the PW64 output is driven low. These outputs can be
monitored to find if braking has been effective.
6. Access (ACS) Mode
Operation is the same as in the starting submode of play mode. This mode is used in track access.
7. Start mode
Operation is the same as in the starting submode of play mode.
8. Normal Mode
Operation is the same as in the normal submode of play mode.
PWM duty cycle
–64T –32T 32T 64T
–6 dB
0 dB +6 dB
(%)
100
75
25
0
+6 dB
0 dB
7 bit 128 step
–6 dB
Center: 588 T (1 frame) × 4 = 2352 T
Figure 19 Duty Cycle Characteristic of PWM Output (Speed Error) in CLV Normal Mode
Rev.2, Aug. 1995, page 32 of 41
Page 33

100%
HD49235FS
– π + π0
0%
Four frames
Figure 20 Duty Cycle Characteristic of MSTOP Output for Constant Linear Velocity Control
Microprocessor
command
XLT
SENS
Selecting register E
Interval between EFM edges ≥ 32 T
Figure 21 SENS Output in Brake Mode
Digital Audio Interface
BIDAT:
Digital audio interface output pin. The output can be switched on or off by microprocessor
command DOOFF (in register 8).
Interpolation
A microprocessor command SLTSW (register 8) can select the 48-fs or 64-fs clock. Figures 22 and 23
show the output timing. With the 48-fs clock, a microprocessor command SUBCO (register 8) can select
whether or not to insert subcode data in the DAS output. Figures 24 and 25 show the output timing.
This pin outputs audio or ROM data. The ROM microprocessor command (in register 8) can select
DAS:
whether or not to carry out interpolation. Preceding-value and mean-value interpolation are carried out.
With a 48-fs clock, the data is output MSB first and squeezed to the rear. With a 64-fs clock, the data is
output LSB first and squeezed to the rear.
This pin outputs the data transfer clock.
CKX:
This pin outputs a signal that distinguishes between the left and right channels. With a 64-fs clock,
MPX:
low output indicates the left channel and high output indicates the right channel. With a
48-fs clock, this polarity is reversed.
This pin outputs a clock signal with four times the frequency of MPX.
QMX:
This pin outputs a clock signal with two times the frequency of MPX.
DMX:
Rev.2, Aug. 1995, page 33 of 41
Page 34

HD49235FS
This output pin goes high to flag data errors that could not be corrected by C2 error correction. C2F is
C2F:
low when there are no such uncorrectable errors. C2F is synchronized to the data output on the DAS line.
When audio is selected by the ROM microprocessor command, this signal is output once for every two
bytes on the left and right channels. When CD-ROM is selected, the signal is output once per byte (every 8
bits).
See figure 26 for the output timing.
MUTE:
Selects whether to mute the audio data.
Low: Muting is not performed.
High: Muting is performed.
When MUTE goes high, the address control circuit is initialized so as to maximize the RAM frame jitter
margin at that point. This initialization is performed continuously while MUTE is high. Normal
reproduction resumes when MUTE goes low.
Other Pins
MRST:
MRST is high. This pin has a pull-up resistor, so it can be either left open or connected to V
TEST1 to TEST3:
either left open or connected to V
V
V
NC:
Master reset. The HD49235FS chip resets when MRST goes low, and operates normally when
These pins input test control signals. These pins have pull-up resistors, so they can be
.
DD
Power supply pin.
:
DD
Ground pin.
:
SS
These pins should be left unconnected. Correct operation is not assured if they are connected.
.
DD
Rev.2, Aug. 1995, page 34 of 41
Page 35

HD49235FS
MPX
DAS
R0
8 bit 16 bit
L1-MSB L1 R1-MSB R1 L2-MSB L2
LSB
MSB
LSB
MSB
LSB
CKX
(2.12 MHz)
Figure 22 Audio/ROM Data Output Sequence (When 48-fs Clock is Selected):
DAS Switched at Fall of CKX
MPX
DAS
CKX
(2.82 MHz)
LSB
R0
16 bit
L1-LSB L1 R1-LSB R1 L2-LSB L2
MSB
16 bit
LSB
MSB
LSB
MSB
Figure 23 Audio/ROM Data Output Sequence (When 64-fs Clock is Selected):
DAS Switched at Rise of CKX
MPX
DAS
CKX
(2.12 MHz)
R0
LSB
F/B
SYNC
L1 R1 L2
MSB
LSB
8 bit
SUB
CODE
MSB
LSB
F/B
SYNC
MSB
LSB
MSB
F SYNC
B SYNC
Don't care
Don't care
Don't care
Don't care
Don't care
Don't care
P CODE
Q CODE
R CODE
S CODE
T CODE
U CODE
V CODE
W CODE
Figure 24 Audio/ROM Data Output Sequence with Subcode Data Inserted (When 48-fs
Clock is Selected): DAS Switched at Fall of CKX
1 frame
DAS
FSYNC
DAS
R5 L0 R0 L1 R1 L2 R2 L3 R3 L4 R4 L5 R5 L0 R0 L1 R1
(a) FSYNC Timing
1 frame
S96 S97 S0 S1 S2 S3
1 sector
...
S96 S97 S0 S1 S2
In audio mode,
FSYNC goes
low at the timing
of the L2 data
FSYNC
BSYNC
(b) F/B SYNC Timing
Figure 25 F/B SYNC Signal Timing Diagram
Rev.2, Aug. 1995, page 35 of 41
Page 36

HD49235FS
MPX
DMX
QMX
DAS
C2F
"CDROM = 1"
"CDROM = 0"
L0 R0 L1
C2 flag for L0:
upper symbol
C2 flag for R0:
lower symbol
C2 flag for R0C2 flag for L0
C2 flag for R0:
upper symbol
C2F = "H": error
Figure 26 Error Flag Output (Switchable by Upper/Lower-1st Command in ROM Mode)
Rev.2, Aug. 1995, page 36 of 41
Page 37

HD49235FS
Absolute Maximum Ratings (Ta = 25°C, VSS = 0 V)
Item Symbol Value Unit
Supply voltage V
Pin voltage* V
DD
T
Allowable power dissipation Pd 450 mW
Operating temperature Topr 0 to +75 °C
Storage temperature Tstg –55 to +125 °C
Note: * VDD + 0.3 V < 7.0 V
–0.3 to +7.0 V
–0.3 to VDD + 0.3 V
Rev.2, Aug. 1995, page 37 of 41
Page 38

HD49235FS
Electrical Characteristics
Applicable
Item Symbol Min Typ Max Unit Test Conditions
Operating
supply voltage
V
DD
4.5 5.0 5.5 V Normal-speed, doublespeed, or quadruple-speed
play
Input voltage
V
IH
0.7 × VDD—— V *1
(high)
Input voltage
V
IL
— — 0.3 × VDDV
(low)
Output high
V
OH1
VDD–0.5 — — V –IOH = 0.6 mA *2
voltage 1
Output low
V
OL1
——0.4VI
= 0.6 mA
OL
voltage 1
Input leakage
I
IL
–5 0 5 µA *1
current
Three-state
leakage current
Input pin pull-up
I
TOL
–5 0 5 µA Three-state output pins in
high-impedance state
Rip102040kΩ 55, 56, 65,
resistance
Amplifier output V
AO
2.4 2 .5 2.6 V VAP input (at AP pin): 2.5 V 60
VCO output PLLCK 4.2 4.7 5.2 MHz Normal speed 54
Notes: 1. Input pins and I/O pins in input mode (except analog pins): 1, 2, 4, 5, 6, 12, 14, 18, 55, 65, 67,
69, 72.
2. The following output pins, I/O pins in output mode, and three-state output pins: 3, 8 to 11, 13, 15,
16, 17, 19 to 27, 57, 64, 66, 74 to 80
Pin(s)
52, 63, 73
3, 17, 74,
75
72
Rev.2, Aug. 1995, page 38 of 41
Page 39

Application External
Servo IC
Microprocessor
CD-G
Digital output
DAC
CLV Servo IC
80 79 78 7776 7574 73 72 71 7069 6867 66 65
(D)
MON
PWM
CLVS
PW64
ROTD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
SLOCK
XRST
CNIN
SENS
DATA
CLK
XLT
V (D)
SS
OVFW
S1
QOK
QDATA
CKEXT
SUBOUT
SUBCK
CFCKP
EMP
BIDAT
MUTE
DAS
CKX
MPX
C2F
QMX
DMX
UCK
TC1
MCKNCXCO
25 26 27 2829 3031 32 33 34 3536 3738 39 40
DD
V
MSTOP
HD49235FS
(D)
SS
NCNCNCNCNCNCNCNCNC
XCI
V
TEST3
UCKSL
TEST2
DEFCT
EFMI
DSLCI
DSLCO
QDSEL
PDOUT1
V (A)
DD
AMPP
AMPM
AMPO
AC
V (A)
SS
PIOUT2
TEST1
MRST
PLLCK
NC
V (D)
DD
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
HD49235FS
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
44
43
42
41
Rev.2, Aug. 1995, page 39 of 41
Page 40

HD49235FS
Package Dimensions
64
Unit: mm
24.8 ± 0.4
20
41
65
14
18.8 ± 0.4
80
0.37 ± 0.08
0.35 ± 0.06
40
0.8
25
1
0.15
24
M
2.4
0.8 1.0
3.10 Max
0.15
2.70
+0.10
–0.20
0.20
0.17 ± 0.05
0.15 ± 0.04
Hitachi Code
JEDEC Code
EIAJ Code
Weight
1.2 ± 0.2
FP-80B
—
—
1.7 g
0 – 10˚
Rev.2, Aug. 1995, page 40 of 41
Page 41

HD49235FS
Disclaimer
1. Hitachi neither warrants nor grants licenses of any rights of Hitachi’s or any third party’s patent,
copyright, trademark, or other intellectual property rights for information contained in this document.
Hitachi bears no responsibility for problems that may arise with third party’s rights, in cluding
intellectual property rights, in connection with u se of the information contained in this document.
2. Products and product specifications may be subject to change without notice. Confirm that you have
received the latest product standards or specifications before final design, purchase or use.
3. Hitachi makes every attempt to ensure that its products are of high quality and reliability. However,
contact Hitachi’s sales office before using the product in an application that demands especially high
quality and reliability or where its failure or malfunction may directly threaten human life or cause risk
of bodily injury, such as aerospace, aeronautics, nuclear power, combustion control, transportation,
traffic, safety equipment or medical equipment for life support.
4. Design your application so that the product is used within the ranges guaranteed by Hitachi particularly
for maximum rating, operating supply voltage range, heat radiation characteristics, installation
conditions and other characteristics. Hitachi bears no responsibility for failure or damage when used
beyond the guaranteed ranges. Even within the guaranteed ranges, consider normally foreseeable
failure rates or failure modes in semiconductor devices and employ systemic measures such as failsafes, so that the equipment incorporating Hitachi product does not cause bodily injury, fire or other
consequential damage due to operation of the Hitachi product.
5. This product is not designed to be radiation resistant.
6. No one is permitted to reproduce or duplicate, in any form, the whole or part of this document without
written approval from Hitachi.
7. Contact Hitachi’s sales office for any questions regarding this document or Hitachi semiconductor
products.
Sales Offices
Hitachi, Ltd.
Semiconductor & Integrated Circuits.
Nippon Bldg., 2-6-2, Ohte-machi, Chiyoda-ku, Tokyo 100-0004, Japan
Tel: Tokyo (03) 3270-2111 Fax: (03) 3270-5109
URL NorthAmerica : http://semiconductor.hitachi.com/
For further information write to:
Hitachi Semiconductor
(America) Inc.
179 East Tasman Drive,
San Jose,CA 95134
Tel: <1> (408) 433-1990
Fax: <1>(408) 433-0223
Europe : http://www.hitachi-eu.com/hel/ecg
Asia : http://sicapac.hitachi-asia.com
Japan : http://www.hitachi.co.jp/Sicd/indx.htm
Hitachi Europe GmbH
Electronic Components Group
Dornacher Straße 3
D-85622 Feldkirchen, Munich
Germany
Tel: <49> (89) 9 9180-0
Fax: <49> (89) 9 29 30 00
Hitachi Europe Ltd.
Electronic Components Group.
Whitebrook Park
Lower Cookham Road
Maidenhead
Berkshire SL6 8YA, United Kingdom
Tel: <44> (1628) 585000
Fax: <44> (1628) 585160
Hitachi Asia Ltd.
Hitachi Tower
16 Collyer Quay #20-00,
Singapore 049318
Tel : <65>-538-6533/538-8577
Fax : <65>-538-6933/538-3877
URL : http://www.hitachi.com.sg
Hitachi Asia Ltd.
(Taipei Branch Office)
4/F, No. 167, Tun Hwa North Road,
Hung-Kuo Building,
Taipei (105), Taiwan
Tel : <886>-(2)-2718-3666
Fax : <886>-(2)-2718-8180
Telex : 23222 HAS-TP
URL : http://www.hitachi.com.tw
Copyright Hitachi, Ltd., 2000. All rights reserved. Printed in Japan.
Hitachi Asia (Hong Kong) Ltd.
Group III (Electronic Components)
7/F., North Tower,
World Finance Centre,
Harbour City, Canton Road
Tsim Sha Tsui, Kowloon,
Hong Kong
Tel : <852>-(2)-735-9218
Fax : <852>-(2)-730-0281
URL : http://www.hitachi.com.hk
Colophon 2.0
Rev.2, Aug. 1995, page 41 of 41
 Loading...
Loading...