

Page 1

PRELIMINARY DATA SHEET
MICRONAS
HAL 800
Programmable Linear
Hall Effect Sensor
Edition Oct. 20, 1999
6251-441-1DS
MICRONAS
Page 2

HAL800
Contents
Page Section Title
3 1. Introduction
3 1.1. Major Applications
3 1.2. Features
4 1.3. Marking Code
4 1.4. Operating Junction Temperature Range (T
4 1.5. Hall Sensor Package Codes
4 1.6. Solderability
4 1.7. Pin Connections and Short Descriptions
5 2. Functional Description
5 2.1. General Function
7 2.2. Digital Signal Processing and EEPROM
9 2.3. Calibration Procedure
9 2.3.1. General Procedure
10 2.3.2. Calibration of Angle Sensor
)
J
11 3. Specifications
11 3.1. Outline Dimensions
11 3.2. Dimensions of Sensitive Area
11 3.3. Position of Sensitive Area
12 3.4. Absolute Maximum Ratings
12 3.5. Recommended Operating Conditions
13 3.6. Electrical Characteristics
14 3.7. Magnetic Characteristics
14 3.8. Typical Characteristics
17 4. Application Notes
17 4.1. Application Circuit
17 4.2. Temperature Compensation
18 4.3. Am bi ent Te mpe ratur e
18 4.4. EMC and ESD
19 5. Programming of the Sensor
19 5.1. Definition of Programming Pulses
19 5.2. Definition of the Telegram
21 5.3. Telegram Codes
22 5.4. Number Formats
23 5.5. Register Information
23 5.6. Programming Information
24 6. Data Sheet History
2 Micronas
Page 3

HAL800
Programmable Linear Hall Effect Sensor
1. Introduction
The
HAL 800 is an universal magnetic field sensor with
a linear output based on the Hall effect. The IC is
designed and produ ced in sub-mic ron CMOS techn ology and can be used for angle or distance measurements if combined wit h a rotating or moving magnet.
The major characteristics like magnetic field range,
sensitivity, output quiescent voltage (output voltage at
B = 0 mT), and output voltage range are p rogrammable in a non-volatile memo ry. The sensor has a ratiometric output ch aracter isti c, which mean s th at the output voltage is propor ti on al to the m agn eti c flux and t he
supply voltage.
HAL 800 features a temperature compensated
The
Hall plate with choppered offset compensation, an A/D
converter, digital signal processing, a D/A converter
with output driver, an EEPROM memory with redundancy and lock function for the calibration data, a serial
interface for programming the EEPROM, and protection devices at all pins. The internal di gital signal processing is of great benefit because analog offsets,
temperature shifts, and mechanical stress do not
degrade the sensor accuracy.
1.1. Major Applications
Due to the sensor’s versatile programming characteristics, the
applications such as:
– contactless potentiometers,
– rotary position measurement,
– linear position detection,
– magnetic field and current measurement.
1.2. Features
– high precision linear Hall effect sensor with
ratiometric output
– multiple programmable magnetic characteristics
with non-volatile memory
– digital signal processing
– temperature characteristics programmable for
matching all common magnetic materials
– programmable clamping voltages
– programming with a modulation of the supply
voltage
HAL 800 is the optimal system solution for
HAL 800 is programmable by modulating the sup-
The
ply voltage. No additional programming pi n is needed.
The easy programmab ility allows a 2-point calib ration
by adjusting the output voltage directly to the input signal (like mechanical angle, distance or current). An
individual adjustment of each sensor during the customers manufacturing process is possible. With this
calibration procedur e the tolera nces of the sensor, the
magnet, and the mechanical positioning can be compensated in the final assembly.
In addition, the t emperature compensation of the Hall
IC can be fit to all commo n magne tic mat er ials by programming first and second order temperature coefficients of the Hall sensor sensitivity. This enables an
operation over the full temperature range with high
accuracy.
The calculation of the indiv idual se nsor cha racteristi cs
and the programming of the EEPROM memory can
easily be done with a PC and the applic ation kit from
Micronas. The
characteristics can be programmed in a wide range.
Therefore, one Hall IC type can be used for various
applications.
HAL 800 eases logistic because its
– lock function and redundancy for EEPROM memory
– operates from −40 °C up to 150 °C
ambient temperature
– operates from 4.5 V up to 5.5 V supply voltage
– operates with static magnetic fields and dynamic
magnetic fields up to 2 kHz
– choppered offset compensa tio n
– overvoltage and reverse-voltage protection at all
pins
– magnetic characteristics extremely robust against
mechanical stress
– short-circuit protected push-pull output
– EMC optimized design
The sensor is desig ned for hostile indus trial and a utomotive applications and operates with typically 5 V
supply voltage in the amb ient temperature range from
−40 °C up to 150 °C.
The
HAL 800 is available in the very small leaded
package TO-92UT.
Micronas 3
Page 4
HAL800
HALXXXPA-T
Temperature Range: A, K, E, or C
Package: UT for TO-92UT
Type: 800
1.3. Marki n g C o de
HAL 800 has a marking on the package surface
The
(branded side). T his m ark ing in clud es the name o f th e
sensor and the temperature range.
Type Temperature Range
A K E C
HAL 800 800A 800K 800E 800C
1.4. Operating Junction Temperature Range (T
A: TJ =
K: TJ =
E: TJ =
−40 °C to +170 °C
−40 °C to +140 °C
−40 °C to +100 °C
)
J
C: TJ = 0 °C to +100 °C
The Hall sensors from Micronas are specified to the
chip temperature (junction temperature T
The relationship between ambient temperature (T
and junction temperature is explained in
on page 18
.
).
J
Section 4.3.
A
1.6. Solderability
Package TO-92UT: according to IEC68-2-58
During soldering reflow processing and manual
reworking, a component body temperature of 260 °C
should not be exceeded.
Components stored in the original packaging should
provide a shelf life of at least 12 m onths, starting fro m
the date code prin ted on the labels, even in environments as extreme as 40 °C and 90% relative humidity.
1.7. Pin Connections and Short Descriptions
Pin
Pin Name Type Short Description
No.
1V
DD
IN Supply Voltage and
Programming Pin
2 GND Ground
)
3 OUT OUT Push Pull Output
V
1
DD
1.5. Hall Sensor Package Codes
Example: HAL800UT-A
→ Type: 800
→ Package: TO-92UT
→ Temperature Range: T
= −40°C to +170°C
J
Hall sensors are available in a wide variety of packaging versions and quantities. For more detailed information, please refer to the brochure: “Ordering Co des for
Hall Sensors”.
OUT
3
2
GND
Fig. 1–1: Pin configuration
4 Micronas
Page 5
HAL800
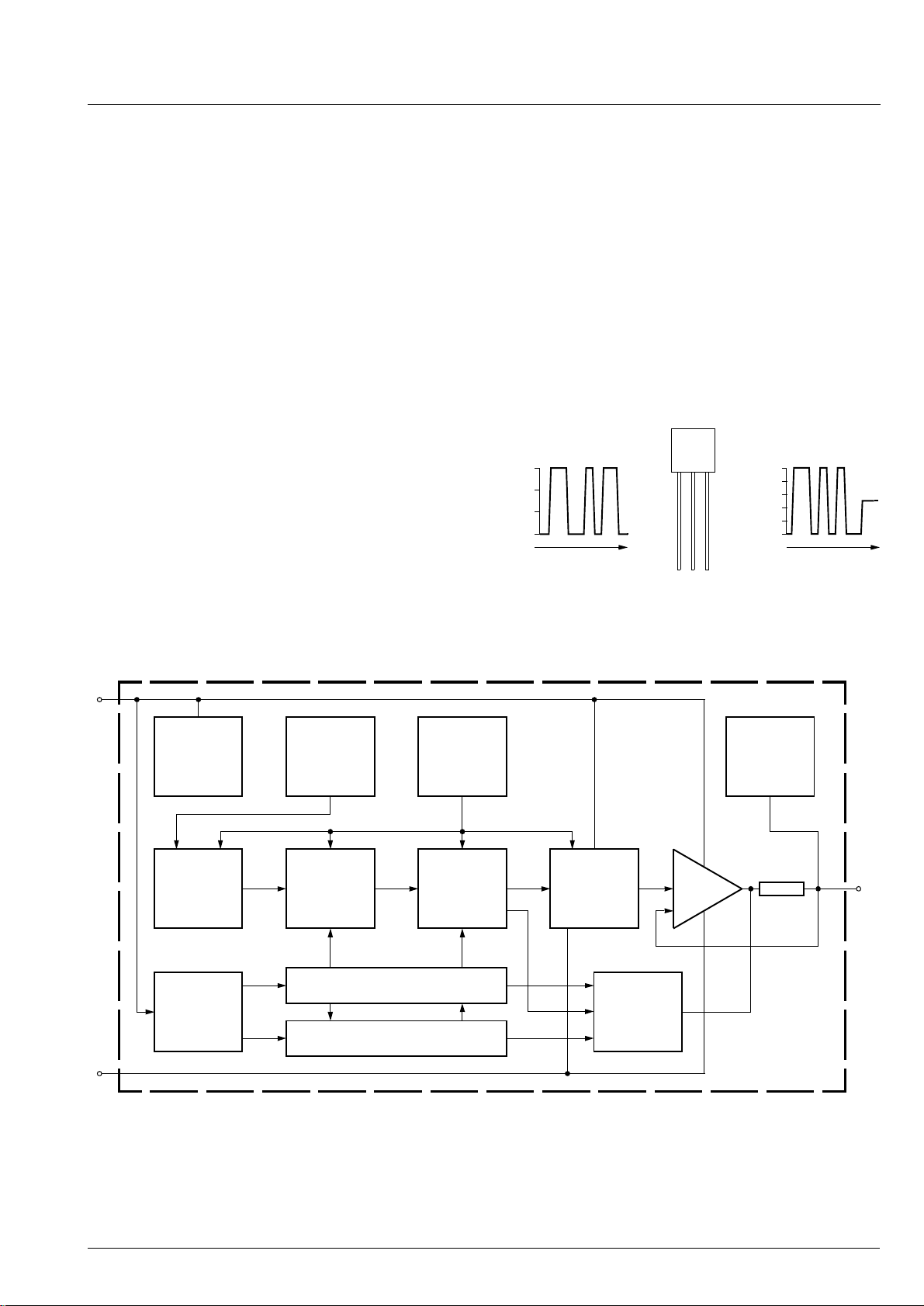
2. Functional Description
2.1. General Function
HAL 800 is a monolithic integrated circuit which
The
provides an output voltage proportional to the magnetic flux through the Hall pla te an d pr oportional to the
supply voltage.
The external magnetic field component perpendi cular
to the branded side of th e package generates a Hall
voltage. This voltage is converted to a digital value,
processed in the Digital S ignal Processing Uni t (DSP)
according to the EEPROM programming, converted to
an analog voltage with ratio metr ic behavior, and stabilized by a push-pull output transis tor stage. The function and the parameters for the DSP are detailed
explained in
Section 2.2. on page 7.
The setting of the LOCK register disables the programming of the EE PROM memor y for all time. This r egister cannot be reset.
As long as the LOCK register is not set, the output
characteristic can be adjusted by modifying the
EEPROM registers. The IC is addressed by modulating the supply voltage
(see Fig. 2–1). In the supply
voltage range from 4.5 V up to 5.5 V , the sensor gener-
ates an analog outp ut voltage. After detecting a command, the sensor reads or writes the memory and
answers with a digital signal on the output pin. The
analog output is switched off during the communication.
Internal temperature compensation circuitry and the
choppered offset compensation enables operation
over the full temperature range with minim al changes
in accuracy and high o ffset stability. The circuitry also
rejects offset shifts d ue to mechanical stres s from the
package. The non-volatile memory is equipped with
redundant EEPROM cells. In addi ti on, th e s ensor IC i s
equipped with devices for overvoltage and reverse voltage protection at all pins.
HAL
8
7
(V)
DD
6
V
5
800A
V
DD
GND
Fig. 2–1: Programming with V
OUT
DD
V
DD
(V)
OUT
V
digital
modulation
analog
V
DD
Internally
stabilized
Supply and
Protection
Devices
Switched A/D
Hall Plate Converter
Supply
Level
Detection
GND
Temperature
Dependent
Bias
Fig. 2–2: HAL800 block diagram
Digital
Signal
Processing
EEPROM Memory
Lock Control
Oscillator
D/A Analog
Converter Output
Digital
Output
Protection
Devices
100 Ω
OUT
Micronas 5
Page 6
HAL800
0
1
2
3
4
5
–40 –20 0 20 40
mT
V
B
V
OUT
Clamp-high = 4 V
Sensitivity = 0.15
V
OQ
= 2.5 V
Clamp-low = 1 V
Range = 30 mT
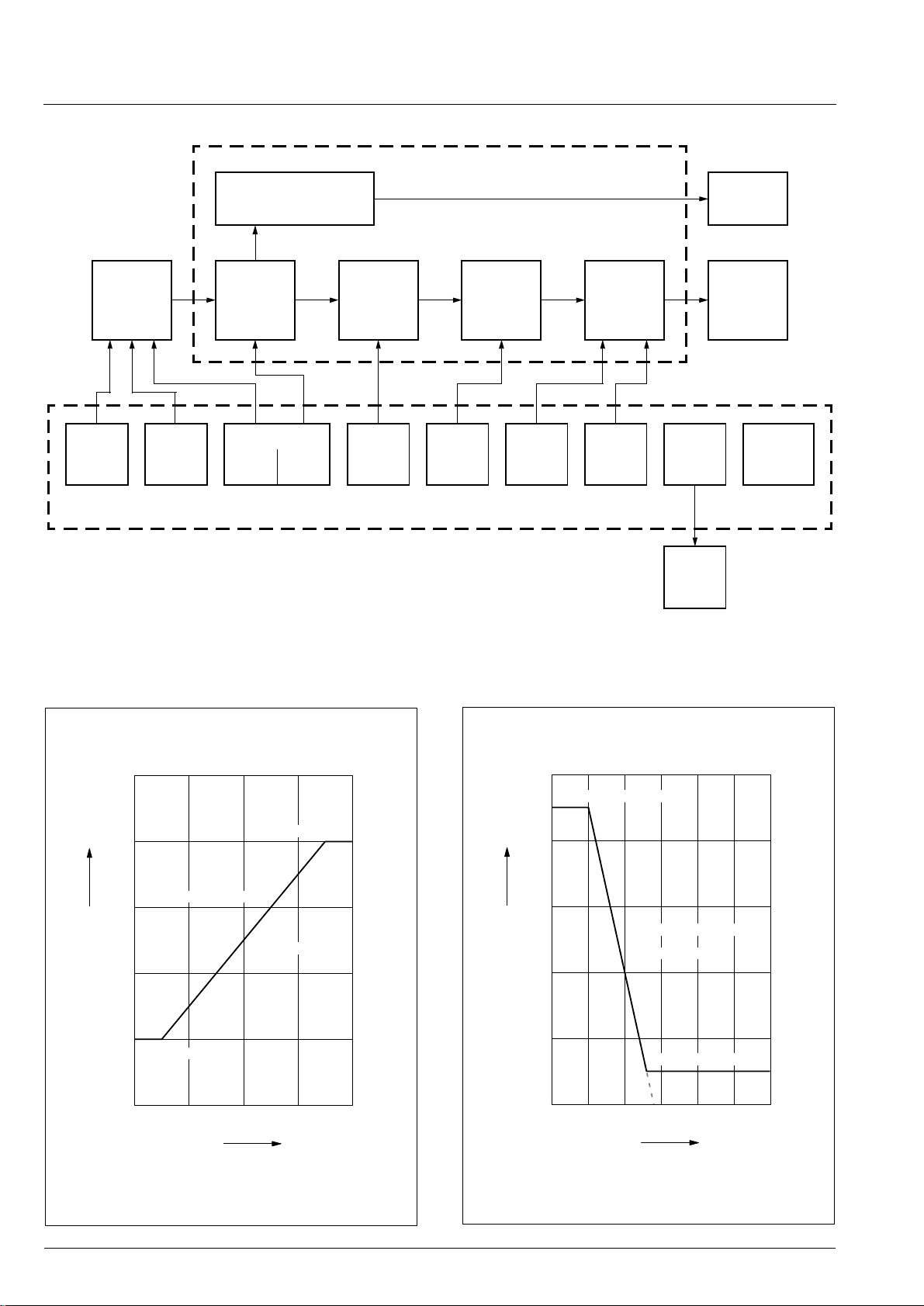
Fig. 2–4: Example for output characteristics
ADC-READOUT Register
14 bit
Digital Signal Processing
TC
6 bit
A/D
Converter
TCSQ
5 bit
Digital
Filter
MODE Register
RANGE
2 bit
FILTER
1 bit
Multiplier Adder Limiter D/A
SENSITIVITY LOW
14 bit
VOQ
11 bit
EEPROM Memory
Fig. 2–3: Details of EEPROM and Digital Signal Processing
CLAMP-
10 bit
CLAMPHIGH
11 bit
LOCK
1 bit
Lock
Control
Digital
Output
Converter
Micronas
Registers
V
V
5
Clamp-high = 4.5 V
OUT
4
3
2
1
0
–150 –100 –50 0 50 100 150
Range = 150 mT
Sensitivity = –0.45
V
= –0.5 V
OQ
Clamp-low = 0.5 V
B
Fig. 2–5: Example for output characteristics
mT
6 Micronas
Page 7
HAL800
2.2. Digital Signal Processing and EEPROM
The DSP is the m a jo r pa rt of thi s s ens or a nd performs
the signal conditioning. The parameters for the DSP
are stored in the EEPROM r egisters. The details are
shown in
Fig. 2–3.
Terminology:
SENSITIVITY:name of the register or register value
Sensitivity: name of the parameter
The EEPROM registers consist of three groups:
Group 1 contains the r egisters for the adaption of the
sensor to the magnetic system:
MODE for selecting the magnetic fie ld range and filter
frequency, TC and TCSQ for temperature characteristics of the magnetic sensitivity.
Group 2 contains the registers for defining the output
characteristics: SENSITIVITY, VOQ, CLAMP-LOW,
and CLAMP-HIGH. The output characteristic of the
sensor is defined by these 4 parameters (see
Fig. 2–4
and Fig. 2–5 for examples).
– The parameter V
(Output Quiescent Voltage) cor-
OQ
responds to the output voltage at B = 0 mT.
– The parameter Sensitivity is defined as:
∆V
Sensitivity =
OUT
∆B
– The output voltage can be calculated as:
∼ Sensitivity × B + V
V
OUT
OQ
The output voltage range can be clamped by setting
the registers CLAMP -LOW and CLA MP-H IGH in order
to enable failure detection (such as short-circuits to
or GND).
V
DD
Group 3 contains the Micronas registers and LOCK for
the locking of all registers. The Micronas registers are
programmed and locked during production and are
read-only for the customer. These registers are used
for oscillator frequency tr imming, A/D converter offset
compensation, and several other special settings.
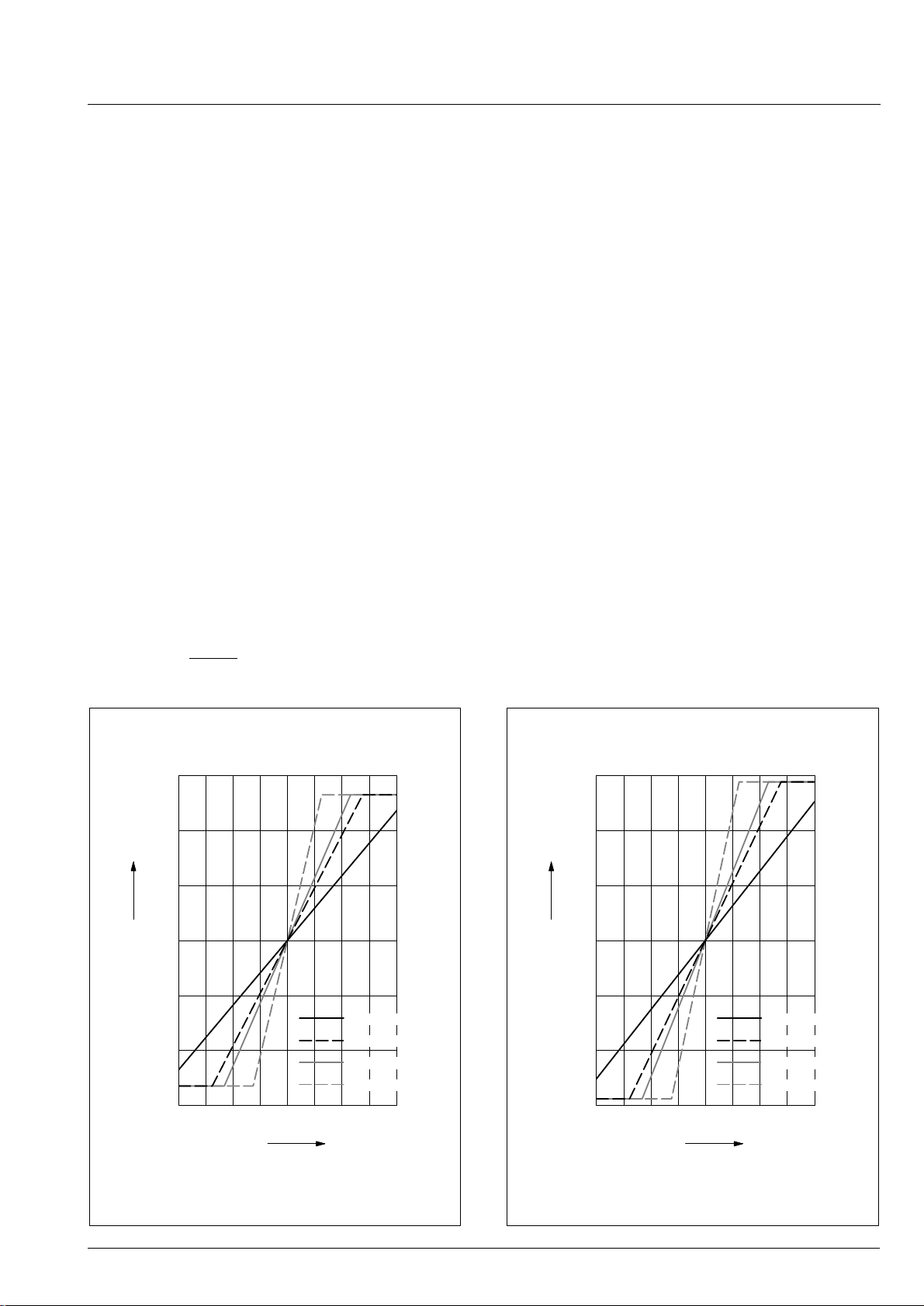
The ADC converts positive or negative Hall voltages
(operates with m agnetic north and south poles at the
branded side of the package) in a digital value. This
signal is filtered in the Di gital Filter and is readable in
the ADC-READOUT regi ster as long as the LOCK b it
is not set.
Note: The ADC-READOUT values and the resolution
of the system depe nds on the filte r freque ncy. Po sitive
values accord to a magnetic north pole on the branded
side of the package.
Fig. 2–6 and Fig. 2–7 show typi-
cal ADC-READOUT values for the different magneti c
field ranges and filter frequencies.
6000
4000
ADCREADOUT
2000
–2000
–4000
–6000
0
–200–150–100–50 0 50 100 150 200
Filter = 500 Hz
Fig. 2–6: Typical ADC-READOUT
versus magnetic field for filter = 500 Hz
Range 150 mT
Range 90 mT
Range 75 mT
Range 30 mT
B
mT
1500
1000
ADCREADOUT
500
0
–500
–1000
–1500
–200–150–100–50 0 50 100 150 200
Fig. 2–7: Typical ADC-READOUT
versus magnetic field for filter = 2 kHz
Filter = 2 kHz
Range 150 mT
Range 90 mT
Range 75 mT
Range 30 mT
mT
B
Micronas 7
Page 8
HAL800
Range
The RANGE bits are the two lowest bits of the MODE
register; they define the magnetic field range of the
A/D converter.
RANGE Magnetic Field Range
0 −30 mT...30 mT
1 −75 mT...75 mT
2 −90 mT...90 mT
3 −150 mT...15 0 mT
Filter
The FILTER bit is the highest bit of the MODE register;
it defines the
−3 dB frequency of the digital low pass fil-
ter
FILTER −3 dB Frequency
02 kHz
For all calculations, the di gi tal value from th e magnetic
field of the A/D converter is use d. This digital i nformation is readable from the ADC-READOUT register.
∆V
* 2048
Sensitivity =
∆ADC-READOUT * V
OUT
DD
VOQ
The VOQ register contains the parameter for the
Adder in the DSP. V
is the output voltage without
OQ
external magnetic fie ld (B = 0 mT) and programmable
− V
from
up to VDD. For VDD = 5 V the register can
DD
be changed in steps of 4.9 mV.
Note: If V
is programmed to a negative voltage, the
OQ
maximum output voltage is limited to:
V
OUTmax
= VOQ + V
DD
For calibration in the system environment, a 2-point
adjustment procedure
mended. The suitable Sensitivity and V
(see Section 2.3.) is recom-
valu es for
OQ
each sensor can be ca lculated indi viduall y by this procedure.
1 500 Hz
TC and TCSQ
The temperature dependence of the magnetic sensitivity can be adapted to different magnetic materials in
order to compensate for the change of the magnetic
strength with temperature. The adaption is done by
programming the TC (Temperature Coefficient) and
the TCSQ registers (Quadratic Temperature Coefficient). Thereby, the slope and the curvature of the
magnetic sensitivity can be matched to the magnet
and the sensor as sembly. As a result, the output voltage characteristic c an be fixed over the full temperature range. The sensor can compensate for linear temperature coefficients in the range from about -2900
ppm/K up to 700 ppm/K and quadratic coefficients
from about -5 ppm/K² to 5 ppm/K². Please refer to
Section 4.2. on page 17 for the recommended setti ngs
for different linear temperature coefficients.
Sensitivity
The SENSITIVITY register contains the parameter for
the Multiplier in the DSP. The Sensitivity is programmable between -4 and 4. For V
= 5 V the register can
DD
be changed in steps of 0.00049. Sensiti vity = 1 corresponds to an increase o f the output voltage by V
DD
if
the ADC-READOUT increases by 2048.
Clamping Voltage
The output voltage range can be clamped in order to
detect failures like shorts to V
or GND.
DD
The CLAMP-LOW register co ntains the parameter for
the lower limit. The lower clamping voltage is programmable between 0 V and V
/2. For VDD = 5 V the reg-
DD
ister can be changed in steps of 2.44 mV.
The CLAMP-HIGH reg ister contains the parameter for
the higher limit. The higher clamping voltage is programmable between 0 V and V
. For VDD = 5 V in
DD
steps of 2.44 mV.
LOCK
By setting this 1-bit register, all registers will be locked,
and the sensor will no longer respond to any supply
voltage modulation.
Warning: This register cannot be reset!
ADC-READOUT
This 14-bit register delivers the actual digital value of
the applied magnetic field before the signal processing. This regist er can be read o ut and is the bas is for
the calibration proce dure of the sensor in the s ystem
environment.
8 Micronas
Page 9

HAL800
2.3. Calibration Procedure
2.3.1. General Procedure
For calibration in the system environm ent , the applic ation kit from Micronas i s recom mended. It contai ns the
hardware for the generation of the se rial telegram for
programming and the corresponding software for the
input of the register values.
In this section, programming of the sensor with this
programming tool is explained. Please refer to
Section 5. on page 19 for information about program-
ming without this tool.
For the individual calibration of each sensor in the cus-
tomer application, a two point adjustment is recommended (see
Fig. 2–8 for an example). When using
the application ki t, the cali bration can b e done i n thr ee
steps:
Step 1: Input of the registers which need not be
adjusted individually
The magnetic circuit, the magnetic material with its
temperature characteristics, the filter frequency, and
low and high clamping voltage are given for this application.
Therefore, the values of the following registers should
be identical for all sensors of the customer application.
– FILTER
(according to the maximum signal frequency)
Step 2: Calculation of V
and Sensitivity
OQ
The calibration points 1 and 2 can be set inside the
specified range. The corresponding values for V
and V
Low clamping voltage ≤ V
result from the application requirements.
OUT2
≤ High clamping voltage
OUT1,2
OUT1
For highest accuracy of the sensor, calibration poin ts
near the minimum an d maximum input s ignal are recommended. The difference of the output voltage
between calibration point 1 and calibration point 2
should be more than 3.5 V.
Set the system to calibrat ion point 1 a nd read the reg ister ADC-READOUT. The result is the value ADCREADOUT1.
Now, set the system to calibration point 2, read the
register ADC-READOUT again, and get the value
ADC-READOUT2.
With these values and the target values V
, for the calibration points 1 and 2, respecti vely,
V
OUT2
the values for Sensitivity and V
V
− V
Sensitivity =
VOQ = V
OUT1
ADC-READOUT1 − ADC-READOUT2
ADC-READOUT1 * Sensitivity * V
−
OUT1
2048
are calculated as:
OQ
OUT2
*
DD
OUT1
2048
V
DD
and
This calculation has to be done individually for each
sensor.
– RANGE
(according to the maximum magnetic field at the
sensor position)
– TC and TCSQ
(depends on the material of the magnet and the
other temperature dependencies of the application)
– CLAMP-LOW and CLAMP-HIGH
(according to the application requirements)
Write the appr opriate settings into the
HAL 800 regis-
ters.
After writing, the information is stored in an internal
RAM and not in the EEPROM. It is valid until switching
off the supply voltage. If the values should be per manently stored in the EEPROM, the “STORE” comma nd
must be used before switching off the supply voltage.
Now, write the calculated values for Sensitivity and
for adjusting the sensor.
V
OQ
Use the “STORE” command for permanently storing
the EEPROM registers. The sensor is now calibrated
for the customer application. However, the programming can be changed again and again if necessary.
Step 3: Locking the Sensor
The last step is activating the LOCK function with the
“LOCK” command. The sensor is now locked and does
not respond to any programming or reading commands.
Warning: This register cannot be reset!
Micronas 9
Page 10

HAL800
4.5 V − 0.5 V
−2500 − 2350
Sensitivity =
5V
2048
*
=
−0.3378
VOQ = 4.5 V −
2048
−2500 * (−0.3378) * 5 V
= 2.438 V
2.3.2. Calibration of Angle Sensor
The following description explains the calibrati on procedure using an angle sensor as an example. The
required output characteristic is shown in
Fig. 2–8.
– the angle range is from −25° to 25°
– temperature coefficient of the magnet: −500 ppm/K
Step 1: Input of the registers which need not to be
adjusted individually
The register values for the following registers are given
for all applications:
– FILTER
Select the filter frequency: 500 Hz
– RANGE
Select the magnetic field range: 30 mT
– TC
For this magnetic material: 1
– TCSQ
For this magnetic material: 12
– CLAMP-LOW
For our example: 0.5 V
V
5
Clamp-high = 4.5 V
Calibration point 1
V
OUT
4
3
2
1
0
–30 –20 –10 0 10 20 30
Clamp-low = 0.5 V
Calibration point 2
Angle
Fig. 2–8: Example for output characteristics
°
– CLAMP-HIGH
For our example: 4.5 V
Enter these values in the software, and use the
“WRITE” command for wr iting the values in the registers.
Step 2: Calculation of V
There are 2 ways to calculate the values for V
and Sensitivity
OQ
OQ
and
Sensitivity
Manual Calculation:
Set the system to c alibration point 1 (angl e 1 =
−25°)
and read the register A DC-READOUT. For our example, the result is ADC-READOUT1 =
−2500.
Now, set the system to calibration point 2 (angle 2 =
25°), and read th e reg is ter ADC-READOUT again . For
our example, the result is ADC-READOUT2 =
With these measurements and the targets V
4.5 V and V
are
V
OQ
= 0.5 V, the values for Sensiti vity an d
OUT2
+2350.
OUT1
=
This calculation has to be done individually for each
sensor.
Automatic Calibration:
Use the menu CALIBRATE from the PC sof tware and
enter the values 4.5 V for V
Set the system to cali bration point 1 (angl e 1 =
and 0.5 V for V
OUT1
OUT2
−25°),
hit the button Read ADC-Readou t1, set the syst em to
calibration point 2 (angle 2 = 25 °), hit the button Read
ADC-Readout2, and hit the button Calcul ate. The software will then calc ulate th e approp riate V
and Sen-
OQ
sitivity.
Now, write the calculated values into the
HAL 800 for
programming the sensor a nd use the “STORE” command for permanently storing the EEPROM registers.
Step 3: Locking the Sensor
The last step is activating the LO CK function with the
“LOCK” command. The sensor is now locked and does
not respond to any programming or reading commands.
.
Warning: This register cannot be reset!
10 Micronas
Page 11

HAL800
3. Specifications
3.1. Outline Dimensions
±0.1
0.48
0.55
0.42
4.06
x2
x1
123
1.271.27
(2.54)
branded side
1.5
0.3
0.36
45°
SPGS0014-3-A/1E
±0.2
0.75
y
4.05
±0.2
2.1
13.0
min.
3.2. Dimensions of Sensitive Area
0.25 mm x 0.25 mm
sensitive area
3.3. Position of Sensitive Area
TO-92UT
±0.1
x1 − x2/ 2 ≤ 0.2 mm
y = 1.5 mm ± 0.2 mm
0.8
Fig. 3–1:
Plastic Transist or Single Outline Package
(TO-92UT)
Weight approximately 0.14 g
Dimensions in mm
A mechanical tolerance of
±50 µm applies to all
dimensions where no tolerance is explicitly given.
Micronas 11
Page 12

HAL800
3.4. Abso lute Max imum Ratings
Symbol Parameter Pin No. Min. Max. Unit
V
V
−I
I
V
V
DD
DD
Z
OUT
OUT
DD
− V
Supply Voltage 1 −8.5 8.5 V
Supply Voltage 1 −14.4
Reverse Supply C ur ren t 1 − 50
Current through Protection Device 1 or 3 −300
Output Voltage 3 −5
Excess of Output Voltage
DD
over Supply Voltage
I
OUT
t
Sh
T
S
T
J
1)
as long as T
2)
t < 10 minutes (V
3)
as long as T
4)
t < 2 ms
5)
t < 1000h
6)
internal protection resistor = 100 Ω
Continuous Output Current 3 −10 10 mA
Output Short Circuit Duration 3 − 10 min
Storage Temperature Range −65 150 °C
Junction Temperature Range −40
is not exceeded
Jmax
Jmax
= −15 V for t < 1min, V
DDmin
is not exceeded, output is not protected to external 14 V-line (or to −14 V)
−5
1) 2)
4)
6)
6)
14.4
1)
300
8.5
14.4
1) 2)
4)
3)
3) 2)
3,1 2 V
5)
170
= 16 V for t < 1min)
DDmax
−40
150
V
mA
mA
V
°C
°C
Stresses beyond those listed in the “Absolute Maximum Ratings” may cause permanent damage to the device. This
is a stress rating onl y. Functional operation of the device at these or any oth er condi tions beyond those indic ated i n
the “Rec ommended Operating Conditions/Character istics” of this specificati on is not i mplied. Ex posure to abs olute
maximum ratings conditions for extended periods may affect device reliability.
3.5. Recommended Operating Conditions
Symbol Parameter Pin No. Min. Typ. Max. Unit
V
I
OUT
R
C
DD
L
L
Supply Voltage 1 4.5 5 5.5 V
Continuous Output Current 3 −1 − 1mA
Load Resistor 3 4.5 −−kΩ
Load Capacitance 3 0.33 10 1000 nF
12 Micronas
Page 13

3.6. Electrical Characteristics
= −40 °C to +170 °C, VDD = 4.5 V to 5.5 V, after programming, as not otherwise specified in Conditions.
at T
J
Typical Characteristics for T
Symbol Parameter Pin No. Min. Typ. Max. Unit Conditions
= 25 °C and VDD = 5 V.
J
HAL800
I
DD
I
DD
V
DDZ
V
OZ
Supply Current 1 7 10 mA TJ = 25 °C, VDD = 4.5 V to 8.5 V
Supply Current
over Temperature Range
Overvoltage Protection
at Supply
Overvoltage Protection
at Output
Resolution 3 12 bit ratiometric to V
E
A
Accuracy Error over all 3 −202%R
INL Non-Linearity of Output Voltage
over Temperature
E
∆V
R
OUTCL
Ratiometric Error of Output
over Temperature
(Error in V
OUT
/ VDD)
Accuracy of Output Voltage at
Clamping Low Voltage over
Temperature Range
∆V
OUTCH
Accuracy of Output Voltage at
Clamping High Voltage over
Temperature Range
V
OUTH
Output High Voltage 3 4.65 4.8 V V
1710mA
1 17.5 20 V IDD = 25 mA, TJ = 25 °C, t = 20 ms
31719.5VI
3 −1 0 1 % % of supply voltage
3
3
3
−101% V
−45 0 45 mV R
−45 0 45 mV R
= 10 mA, TJ = 25 °C, t = 20 ms
O
1)
DD
= 4.7 kΩ (% of supply voltage)
L
3)
- V
OUT2
> 2 V
DD
DD
= 5 V
= 5 V
OUT
≤ 1mA
OUT1
during calibration procedure
= 4.7 kΩ, V
L
= 4.7 kΩ, V
L
= 5 V, −1 mA ≤ I
DD
3)
V
f
ADC
f
ADC
t
r(O)
t
d(O)
t
POD
OUTL
Output Low Voltage 3 0.2 0.35 V V
= 5 V, −1 mA ≤ I
DD
Internal ADC Frequency − 120 128 140 kHz TJ = 25 °C
Internal ADC Frequency over
Temperature Range
Response Time of Output 3 − 2
− 110 128 150 kHz V
1
2
4
ms
ms
= 4.5 V to 8.5 V
DD
3 dB Filter frequency = 500 Hz
3 dB Filter frequency = 2 kHz
C
= 10 nF, time from 10% to 90% of
L
final output voltage for a steplike
signal B
step
Delay Time of Output 3 0.1 0.5 ms
Power-Up Time (Time to reach
stabilized Output Voltage)
3
2
5
3
ms 3 dB Filter frequency = 500 Hz
3 dB Filter frequency = 2 kHz
90% of V
OUT
BW Small Signal Bandwidth (−3dB) 3 − 2 − kHz BAC < 10 mT;
3 dB Filter frequency = 2 kHz
V
OUTn
R
OUT
R
thJA
TO-92UT
1)
Output DAC full scale = 5 V ratiometric, Output DAC offset = 0 V, Output DAC LSB = VDD/4096
2)
peak-to-peak value exceeded: 5%
3)
if more than 50% of the selected magnetic field range are used
Noise Output Voltage
pp
Output Resistance over Recommended Operating Range
Thermal Resistance Junction to
Soldering Point
3 − 36mV2) magnetic range = 90 mT
3 − 110Ω V
OUTL
≤ V
OUT
−−150 200 K/W
OUT
from 0 mT to B
≤ V
OUTH
≤ 1mA
max
Micronas 13
Page 14

HAL800
–20
–15
–10
–5
0
5
10
15
20
–15 –10 –50 5101520
V
mA
V
DD
I
DD
T
A
= –40 °C
T
A
= 25 °C
TA=150 °C
Fig. 3–2: Typical current consumption
versus supply voltage
3.7. Magnetic Characteristics
= −40 °C to +170 °C, VDD = 4.5 V to 5.5 V, after programming, as not otherwise specified in Conditions.
at T
J
Typical Characteristics for T
Symbol Parameter Pin No. Min. Typ. Max. Unit Test Conditions
= 25 °C and VDD = 5 V.
J
B
Offset
∆B
Offset
B
Hysteresis
SR Magnetic Slew Rate 3
n
meff
f
Cflicker
f
Cflicker
Magnetic Offset 3 −101mTB = 0 mT, I
/∆T Magnetic Offset Change
due to T
J
Magnetic Hysteresis −20 0 20 µT Range = 30 mT, Filter = 500 Hz
Magnetic RMS Broadband
Noise
Corner Frequency of 1/f Noise 3 − 20 Hz B = 0 mT
Corner Frequency of 1/frms
Noise
3.8. Typical Characteristics
= 0 mA, TJ = 25 °C
OUT
−15 0 15 µT/K B = 0 mT, I
− 12
50
3 − 10 −µT BW = 10 Hz to 2 kHz
3 − 100 Hz B = 65 mT, TJ = 25 °C
− mT/ms Filter frequency = 500 Hz
Filter frequency = 2 kHz
OUT
= 0 mA
mA
10
V
= 5 V
DD
I
8
DD
6
4
2
0
–50 0 50 100 150 200
T
A
°
C
Fig. 3–3: Typical current consumption
versus ambient temperature
14 Micronas
Page 15

HAL800
mA
10
T
= 25 °C
A
V
= 5 V
DD
I
8
DD
6
4
2
0
–1.5 –1.0 –0.5 0.0 0.5 1.0 1.5
I
OUT
Fig. 3–4: Typical current consumption
versus output current
mA
%
1.0
0.8
E
R
0.6
0.4
0.2
–0.0
–0.2
V
–0.4
–0.6
–0.8
–1
45678
OUT/VDD
V
OUT/VDD
V
OUT/VDD
V
OUT/VDD
V
OUT/VDD
= 0.82
= 0.66
= 0.5
= 0.34
= 0.18
Fig. 3–6: Typical ratiometric error
versus supply voltage
V
V
DD
dB
5
0
V
OUT
–5
–10
–15
–20
–25
–30
Filter: 500 Hz
–35
Filter: 2 kHz
–40
10 100 1000 10000
Fig. 3–5: Typical output voltage
versus signal frequency
f
signal
–3
Hz
%
120
1/sensitivity
100
80
60
40
TC = 16, TCSQ = 8
20
TC = 0, TCSQ = 12
TC = –20, TCSQ = 12
TC = –31, TCSQ = 0
0
–50 0 50 100 150 200
Fig. 3–7: Typical 1/sensitivity
versus ambient temperature
°C
T
A
Micronas 15
Page 16

HAL800
–1
–0.8
–0.6
–0.4
–0.2
–0.0
0.2
0.4
0.6
0.8
1.0
–50 0 50 100 150 200
°C
mT
T
A
B
Offset
TC = 16, TCSQ = 8
TC = 0, TCSQ = 12
TC = –20, TCSQ = 12
Fig. 3–8: Typical magnetic offset
versus ambient temperature
INL
%
1.0
0.8
0.6
0.4
0.2
–0.0
–0.2
–0.4
–0.6
Range = 30 mT
–0.8
–1
–40 –20 0 20 40
Fig. 3–9: Typical nonlinearity
versus magnetic field
mT
B
16 Micronas
Page 17

HAL800
4. Application Notes
4.1. Application Circuit
For EMC protection, it is recomm ended to add eac h a
ceramic 4.7 nF capacitor between ground and the supply voltage respectively the output voltage pin. In addition, the input of the con troller unit should be pulleddown with a 4.7 k Ohm resistor and a ceramic 4.7 nF
capacitor.
Please note that during programming , the sensor will
be supplied repeatedl y with the programming voltage
of 12 V for 100 ms. All components conn ected to the
line at this time must be able to resist this voltage.
V
DD
V
DD
OUT
4.7 k
µ
C
Ω
4.7 nF
GND
HAL800
4.7 nF 4.7 nF
Temperature
TC TCSQ
Coefficient of
Magnet (ppm/K)
01110
−100 8 10
−200 6 11
−300 4 11
−400 3 12
−500 1 12
−600 −113
−700 −313
−800 −514
−900 −614
−1000 −815
−1100 −915
−1200 −11 16
Fig. 4–1: Recommended application circuit
4.2. Temperature Compensation
The relation between the temperature coefficient of the
magnet and the corresponding TC and TCSQ code s
for a linear compensation is given in the following
table. In addition to the linear chang e of the magnetic
field with temperature, the cur vature can be adjusted,
too. For that purpose, TC and TCSQ have to be
changed to combinations that are not given in the
table. Please contact Micr onas for more de tailed in formation.
Temperature
TC TCSQ
Coefficient of
Magnet (ppm/K)
700 29 8
600 26 9
500 23 9
−1300 −13 17
−1400 −14 17
−1500 −15 18
−1600 −17 18
−1700 −18 18
−1800 −19 19
−1900 −20 19
−2000 −22 20
−2100 −23 21
−2200 −24 21
−2300 −25 22
−2400 −26 22
−2500 −27 23
−2600 −28 23
400 21 9
300 18 9
200 16 9
−2700 −29 24
−2800 −30 24
−2900 −31 26
100 14 10
Micronas 17
Page 18

HAL800
4.3. Ambient Temperature
Due to the intern al power dissipation , the temperature
on the silicon c hip (junction temperature T
) is higher
J
than the temperature outside the package (ambient
temperature T
= TA + ∆T
T
J
).
A
At static conditions, the following equation is valid:
∆T = I
* VDD * R
DD
thJA
For typical values, use the typical parameters. For
worst case calculation, use the max. parameters for
and Rth, and the max. value for VDD from the appli-
I
DD
cation.
For V
temperature difference
For all sensors, the junction temperature T
fied. The maximum ambient temperature T
= 5.5 V, Rth = 200 K/W and IDD = 10 mA the
DD
∆T = 11 K.
is speci-
J
can be
Amax
calculated as:
T
Amax
= T
Jmax
−∆T
4.4. EMC and ESD
HAL 800 is designed for a stabilized 5 V supply.
The
Interferences and disturbances conducted along the
12 V onboard system (product standards DIN40839
part 1 or ISO 7637 part 1) are not relevant for these
applications.
For applications with disturbances by capacitive or
inductive coupling on the supply line or radiat ed disturbances, the application circuit shown in Fig. 4–1 is recommended.
Applications with this arrangement passed the EMC
tests according to the product standards DIN 40839
part 3 (Electrical transient transmission by capacitive
or inductive coupling) and part 4 (Radiated disturbances).
Please contact M icronas for the detailed investigation
reports with the EMC and ESD results.
18 Micronas
Page 19

HAL800
5. Programming of the Sensor
5.1. Definition of Programming Pulses
The sensor is addre ssed by modulating a serial telegram on t he su ppl y voltage. The sensor answers with a
serial telegram on the output pin.
The bits in the s er ial tel egram have a different Bit tim e
for the V
V
-line is defined through the length of the S ync Bit
DD
-line and the output. The Bit time for the
DD
at the beginning of ea ch telegram. The Bi t time for the
output is defined through the Acknowledge Bit.
A logical 0 is coded as no voltage change within the Bit
time. A logical 1 is coded as a voltage change between
50% and 80% of the Bit time. After each bi t a voltage
change occurs.
5.2. Definition of the Telegram
Each telegram starts with the Sync Bit (logical 0), 3
bits for the Command (COM), th e Comm and Parity B it
(CP), 4 bits for the Address ( ADR), and the Address
Parity Bit (AP).
command has been proces sed the sensor answers
with an Acknowledge Bit (logical 0) on the output.
– Read a register (see Fig. 5–3)
After evaluating this command the sensor answers
with the Acknowledge Bit, 14 Data Bits, and the
Data Parity Bit on the output.
– Programming the EEPROM cells (see Fig. 5–4)
After evaluating this command the sensor answers
with the Acknowledge Bit. After the delay time t
supply voltage rises up to the programming voltage.
logical 0
logical 1
V
V
V
V
DDH
DDL
DDH
DDL
t
r
t
p1
t
f
t
p0
t
p0
or
or
t
p0
t
p1
t
p0
w
the
There are 3 kinds of telegrams:
Fig. 5–1: Definition of logical 0 and 1 bit
– Write a register (see Fig. 5–2)
After the AP Bit follow 14 Data Bits (DAT) and the
Data Parity Bit (DP). If the telegram is valid and the
Table 5–1: Telegram parameters
Symbol Parameter Pin Min. Typ. Max. Unit Remarks
V
DDL
V
DDH
t
r
t
f
t
p0
t
pOUT
t
p1
V
DDPROG
Supply Voltage for Low Level
during Programming
Supply Voltage for High Level
during Programming
Rise time 1 0.05 ms
Fall time 1 0.05 ms
Bit time on V
Bit time on output pin 3 4 6 8 ms t
Voltage Change for logical 1 1, 3 50 65 80 % % of t
Supply Voltage for
Programming the EEPROM
DD
155.66V
16.88.08.5V
13.43.53.6mst
1 11.95 12 12.1 V
is defined through the Sync Bit
p0
pOUT
Acknowledge Bit
is defined through the
or t
p0
pOUT
t
PROG
t
rp
t
fp
t
w
Programming Time for EEPROM 1 95 100 105 m s
Rise time of programming voltage 1 0.2 0.5 1 ms
Fall time of programming voltage 1 0 1 ms
Delay time of programming voltage
after Acknowledge
10.50.71ms
Micronas 19
Page 20

HAL800
WRITE
Sync COM CP ADR AP DAT DP
V
DD
V
OUT
Fig. 5–2: Telegram f or coding a Write command
READ
Acknowledge
Sync COM CP ADR
V
DD
V
OUT
AP
Fig. 5–3: Telegram for coding a Read command
ERASE, PROM, LOCK, and LOCKI t
V
DDPROG
Sync COM CP ADR
V
DD
V
OUT
AP
Acknowledge
t
w
DA T DPAcknowledge
t
rp
PROG
t
fp
Fig. 5–4: Telegram for coding the EEPROM programming
20 Micronas
Page 21

HAL800
5.3. Telegram Codes
Sync Bit
Each telegram star ts with the Sync Bit. This logical 0
pulse defines the exact timing for t
Command Bits (COM)
The Command code contains 3 bits and is a binar y
number.
the corresponding codes for the
Command Parity Bit (CP)
This parity bit is 1, if the number of zeros within the 3
Command Bits is uneven. The parity bit is 0, if the
number of zeros is even.
Address Bits (ADR)
The Address code contains 4 bits and is a binary number.
HAL 800 registers.
Table 5–2 shows the available commands and
Table 5–3 s hows the available addresses for the
.
p0
HAL 800.
Address parity bit (AP)
This parity bit is 1, if the number of zeros within the 4
Address bits is uneven. The par ity bit is 0, if the number of zeros is even.
Data Bits (DAT)
The 14 Data Bits contain the register information.
The registers use different number formats for the Data
Bits. These formats are explained in
In the Write command the last bits are valid. If for
example the TC register (6 bits) is written, only the last
6 bits are valid.
In the Read command the first bits are valid. If for
example the TC register (6 bits) is re ad, on ly the fi rst 6
bits are valid.
Data Parity Bit (DP)
This parity bit is 1, if the number of zeros within the
binary number is e ven. The parity bit is 0, if th e n umb er
of zeros is uneven.
Section 5.4.
Table 5–2: Available Commands
Command Code Explanation
READ 2 read a register
WRITE 3 write a register
PROM 4 program all nonvolatile registers (except the lock bits)
ERASE 5 erase all nonvolatile registers (except the lock bits)
LOCKI 6 lock Micronas lockable register
LOCK 7 lock the whole device and switch permanently to the analog-mode
Please note:
The Micronas lock bit (LOCKI) has already been set during production and cannot be reset.
Micronas 21
Page 22

HAL800
5.4. Number Formats
Binary number:
The most significant bit is given as first, the least significant bit as last digit.
Example:
Signed binary number:
The first digit represents the sign of the following
binary number (1 for negative, 0 for positive sign).
Example:
101001 represents 41 decimal.
0101001 represents +41 decimal
1101001 represents −41 decimal
Table 5–3: Available register addresses
Parameter Code Data
Bits
Format Customer Remark
Two-complementary number:
The first digit of positive numbers is 0, the r est of the
number is a binary number. Negative numbers start
with 1. In order to calculate the abs olute value of the
number, you have to calculate the complement of the
remaining digits and to add 1.
Example:
0101001 represents +41 decimal
1010111 represents −41 decimal
CLAMP-LOW 1 10 binary read/write/program Low clamping voltage
CLAMP-HIGH 2 11 binary read/write/program High clamping voltage
VOQ 3 11 two compl.
binary
SENSITIVITY 4 14 signed binary read/write/program
MODE 5 3 binary read/write/program Range and filter parameters
LOCKR 6 1 binary lock Lock Bit
ADC-READOUT 7 14 two compl.
binary
TC 11 6 signed binary read/write/program
TCSQ 12 5 binary read/write/program
Micronas registers (read only for customers)
Parameter Code Data
Bits
Format Remark
read/write/program
read
see
Table 5–4 for details
OFFSET 8 4 two compl. binary ADC offset adjustment
FOSCAD 9 5 binary Oscillator frequency adjustment
SPECIAL 13 6 special settings
IMLOCK 14 1 binary Lock Bit for the Micronas registers
22 Micronas
Page 23

HAL800
5.5. Register Information
CLAMP-LOW
– The register range is from 0 up to 1023.
– The register value is calculated by:
Low Clamping Voltage
V
DD
* 2048CLAMP-LOW =
CLAMP-HIGH
– The register range is from 0 up to 2047.
– The register value is calculated by:
High Clamping Voltage
V
DD
* 2048CLAMP-HIGH =
VOQ
– The register range is from −1024 up to 1023.
– The register value is calculated by:
V
OQ
* 1024VOQ =
V
DD
SENSITIVITY
– The register range is from −8192 up to 8191.
– The register value is calculated by:
SENSITIVITY =
Sensitivity
2048
MODE
– The register range is from 0 up to 7 and contains the
settings for FILTER and RANGE
ADC-READOUT
– This register is read only.
– The register range is from −8192 up to 8191.
TC and TCSQ
– The TC register range is from −31 up to 31,
– The TCSQ register range is from 0 up to 31.
Please refer
Section 4.2. on page 17 for the recom-
mended values.
5.6. Programming Information
If you want to change the content of any register
(except the lock registers) you have to write the
desired value into the correspo nding RAM register at
first.
If you want to permanently store the value in the
EEPROM, you have to send an ERASE command first
and a PROM command afterwards. The address within
the ERASE and PROM command is not important.
ERASE and PROM acts on all registers in parallel.
If you want to change all r eg ist ers of the
HAL 800, you
can send all writing commands one after each other
and send one ERASE and PROM command at the
end.
Table 5–4: Parameters for the MODE register
MODE FILTER −3 dB Frequency RANGE Magnetic Field Range
00 2 kHz 0
10 2 kHz 1
20 2 kHz 2
30 2 kHz 3
4 1 500 Hz 0
5 1 500 Hz 1
6 1 500 Hz 2
7 1 500 Hz 3
−30 mT...30 mT
−75 mT...75 mT
−90 mT...90 mT
−150 mT...150 mT
−30 mT...30 mT
−75 mT...75 mT
−90 mT...90 mT
−150 mT...150 mT
Micronas 23
Page 24

HAL800
6. Data Sheet History
1. Advance information: “HAL 800 Programmable Linear Hall Effect Sensor, Aug. 24, 1998, 6251-441-1AI.
First release of the advance information.
2. Fina l data sh eet: “HAL 800 Programmable Linear
Hall Effect Sensor, Oct. 20, 1999, 6251-441-1DS. First
release of the final data sheet.
Micronas GmbH
Hans-Bunte-Strasse 19
D-79108 Freiburg (Germany)
P.O. Box 840
D-79008 Freiburg (Germany)
Tel. +49-761-517-0
Fax +49-761-517-2174
E-mail: docservice@micronas.com
Internet: www.micronas.com
Printed in Germany
Order No. 6251-441-1DS
All information and data contained in this data sheet are without any
commitment, are not to be considered as an offer for conclusion of a
contract, nor shall they be construed as to create any liability. Any new
issue of this data sheet invalidates previous issues. Product availability
and delivery are exclusively subject to our respective order confirmation
form; the same applies to orders based on development samples delivered. By this publication, Micronas GmbH does not assume responsibility for patent infr ingements or other right s of third parties whic h may
result from its use.
Further, Micronas GmbH reserves the right to revise this publication and
to make changes to its conte nt, at any t ime, withou t obligatio n to noti fy
any person or entity of such revisions or changes.
No part of this publication may be reproduced, photocopied, stored on a
retrieval system, or transmitted without the express written consent of
Micronas GmbH .
24 Micronas
 Loading...
Loading...