

Page 1

8-BIT SINGLE CHIP MICROCOMPUTERS
GMS810 SERIES
USER`S MANUAL
• GMS81004
• GMS81008
• GMS81016
• GMS81024
• GMS81032
Page 2
Revision 3.0
Published by
MCU Application Team in HYUNDAI ELCETRONICS Co., Ltd.
¨Ï
HYUNDAI ELECTRONICS Co., Ltd. 1998 All Right Reserved.
Additional information of this manual may be served by HYUNDAI ELECTIONICS Offices in Korea or
Distributors and Representative listed at address directory.
HYUNDAI ELECTIONICS reserves the right to make changes to any Information here in at any time
without notice.
The information, diagrams, and other data in this manual are correct and reliable; however, HYUNDAI
ELECTIONICS Co., Ltd. is in no way responsible for any violations of patents or other rights of the
third party generated by the use of this manual.
Page 3
Table of Contents
Chapter 1
Overview
1.1 Features & Pin Assignments . . . . . . . . . . . . . . . . . . . . . 1-1
1.2 Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.3 Package Dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.4 Pin Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
1.5 Port Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1.6 Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . 1-10
Chapter 2
Function Description
Table of Contents
2.1 Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.2 Memory Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.3 TCALL Vector Area . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.4 Zero-Page Peripheral Registers . . . . . . . . . . . . . . . . . . . 2-8
Chapter 3
I/O PORT
3.1 Port R0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.2 Port R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.3 Port R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Chapter 4
Peripheral Hardware
4.1 Clock Generating Circuit . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.2 Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10
Page 4
Table of Contents
Chapter 5
Interrupt
5.1 Interrupt Source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5.2 Interrupt Control Register . . . . . . . . . . . . . . . . . . . . . . . . 5-3
5.3 Interrupt Accept Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-4
5.4 Interrupt Processing Sequence . . . . . . . . . . . . . . . . . . . . 5-7
5.5 Software Interrupt . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-8
5.6 Multiple Interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-9
5.7 Key Scan Input Processing . . . . . . . . . . . . . . . . . . . . . . . 5-11
Chapter 6
Standby Function
6.1 Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6.2 Standby Mode Release . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
6.3 Release Operation of Standby Mode . . . . . . . . . . . . . . . 6-5
Chapter 7
Reset Function
7.1 External RESET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
7.2 Power On Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
7.3 Low Voltage Detection Mode . . . . . . . . . . . . . . . . . . . . . 7-4
Appendix
Instruction Set Table
Programmer`s guide
Mask option list
Page 5
OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 6
Chapter 1. Overview
CHAPTER 1. OVERVIEW
The GMS810 Series is the high speed and Low voltage operating 8-bit single chip
microcomputers. This MCU contains G8MC core, ROM, RAM, input/output ports and five
multi-function timer/counters.
1.1 FEATURES & PIN ASSIGNMENTS (TOP VIEW)
¡á
ROM size . . . . . . . . . . . . . 4,096 Bytes ( GMS81004 ) , 8,192 Bytes (GMS81008 )
. . . . . . . . . . . . . 16,384 Bytes ( GMS81016 ) ,24,576 Bytes(GMS81024 )
. . . . . . . . . . . . . 32,768 Bytes ( GMS81032 )
¡á
RAM size . . . . . . . . . . . . . 448 Bytes
¡á
Instruction Execution Time . . 1us @Xin=4MHz
¡á
Timer
¡Ü Timer/Counter . . . . . . 8Bit * 2ch , 16Bit * 1ch
¡Ü Basic Interval Time . . . 8Bit * 1ch
¡Ü Watch Dog Timer . . . . 6Bit * 1ch
¡á
Power On Reset
¡á
Power Saving Operation Modes
¡Ü STOP
¡á
8 Interrupt Sources
¡Ü Nested Interrupt Control is Available
¡á
Operating Voltage
¡Ü 2.0~4.0V @2MHz
¡Ü 2.2~4.0V @4MHz
¡á
Low Voltage Detection Circuit
¡á
Watch dog Timer Auto Start ( During 1Second after Power on Reset )
¡á
Package
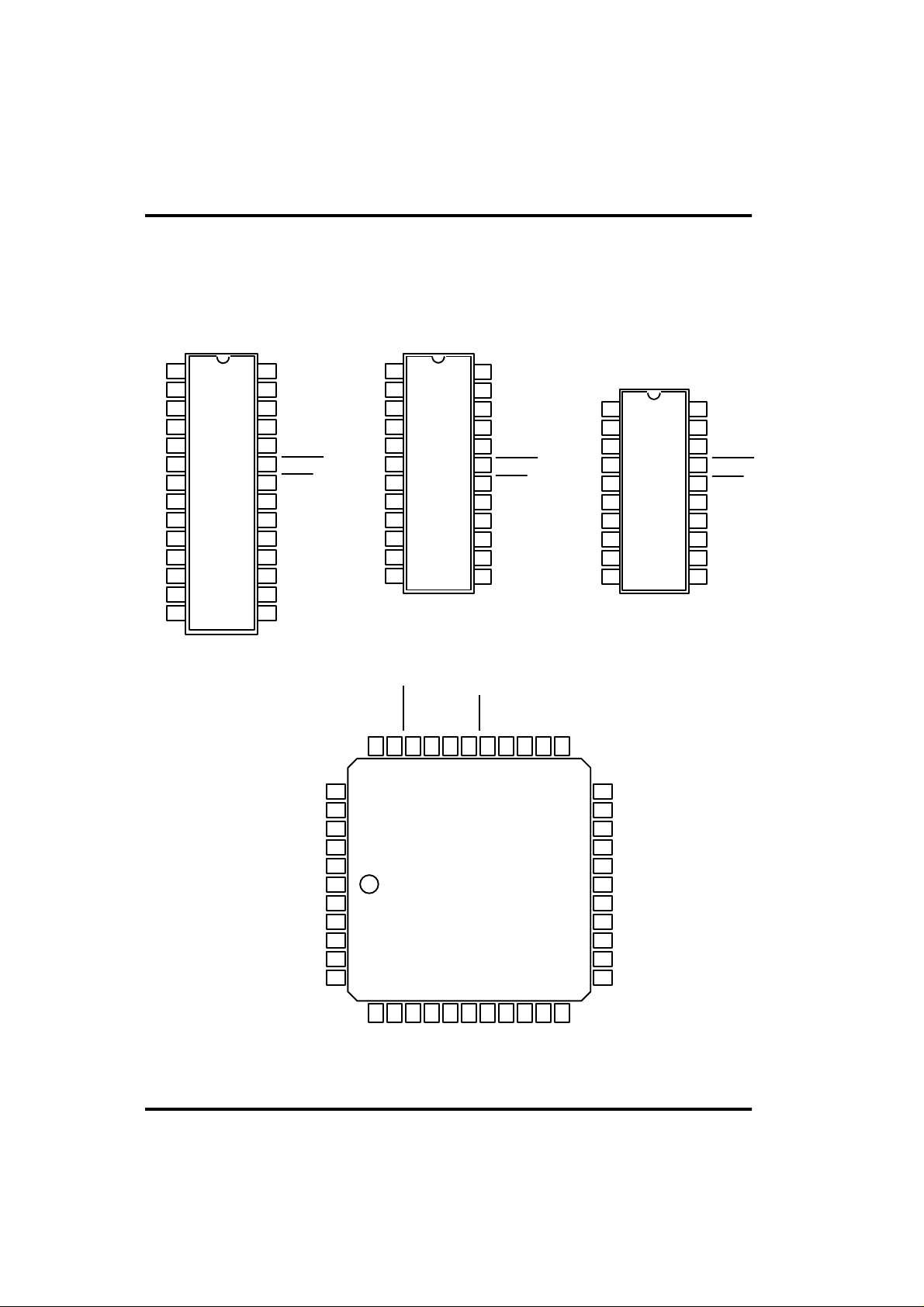
¡Ü 20SOP/20PDIP/24SOP/24Skinny DIP/28SOP/28Skinny DIP
¡Ü 44PLCC
¡á
I/O Port
20pin 24pin 28pin 44pin
input 3 3 3 3
output 2 2 2 2
I/O 13 17 21 24
1 - 1
Page 7
Chapter 1. Overview
PIN ASSIGNMENT
R13
R12
R11
R10
VDD
XOUT
XIN
R00
R01
R02
R03
R20
R21
R22
1
2
3
4
5
6
7
28PIN
8
9
10
11
12
13
14
28
R14
27
R15
26
R16
25
R17
24
REMOUT
23
RESET
22
TEST
21
R07
20
R06
19
R05
18
R04
17
VSS
16
R24
15
R23
NC
R17
R16
R15
R14
NC
R13
R12
R11
R10
NC
40
41
42
43
44
1
2
3
4
5
6
1
R13
2
R12
3
R11
4
R10
5
VDD
6
XOUT
XIN
R00
R01
R02
R03
R20
NC
3938373635343332313029
24PIN
7
24PIN 20PIN
8
9
10
11
12
REMOUT
RESET
R27
VSS
24
23
22
21
20
19
18
17
16
15
14
13
NC
TEST
R14
R15
R16
R17
REMOUT
RESET
TEST
R07
R06
R05
R04
VSS
44PLCC
R07
R06
R05
R11
R10
VDD
XOUT
XIN
R00
R01
R02
R03
R20
NC
1
2
3
4
5
6
7
8
9
10
28
NC
27
R04
26
VSS
25
R24
24
R23
23
NC
22
R22
21
R21
20
R20
19
R03
18
NC
20
R16
19
R17
18
REMOUT
17
RESET
16
TEST
15
R07
14
R06
13
R05
12
R04
11
VSS
7
NC
8
VDD
9
XOUT
1011121314
NC
R00
R25
XIN
1 - 2
151617
R26
R01
R02
NC
Page 8
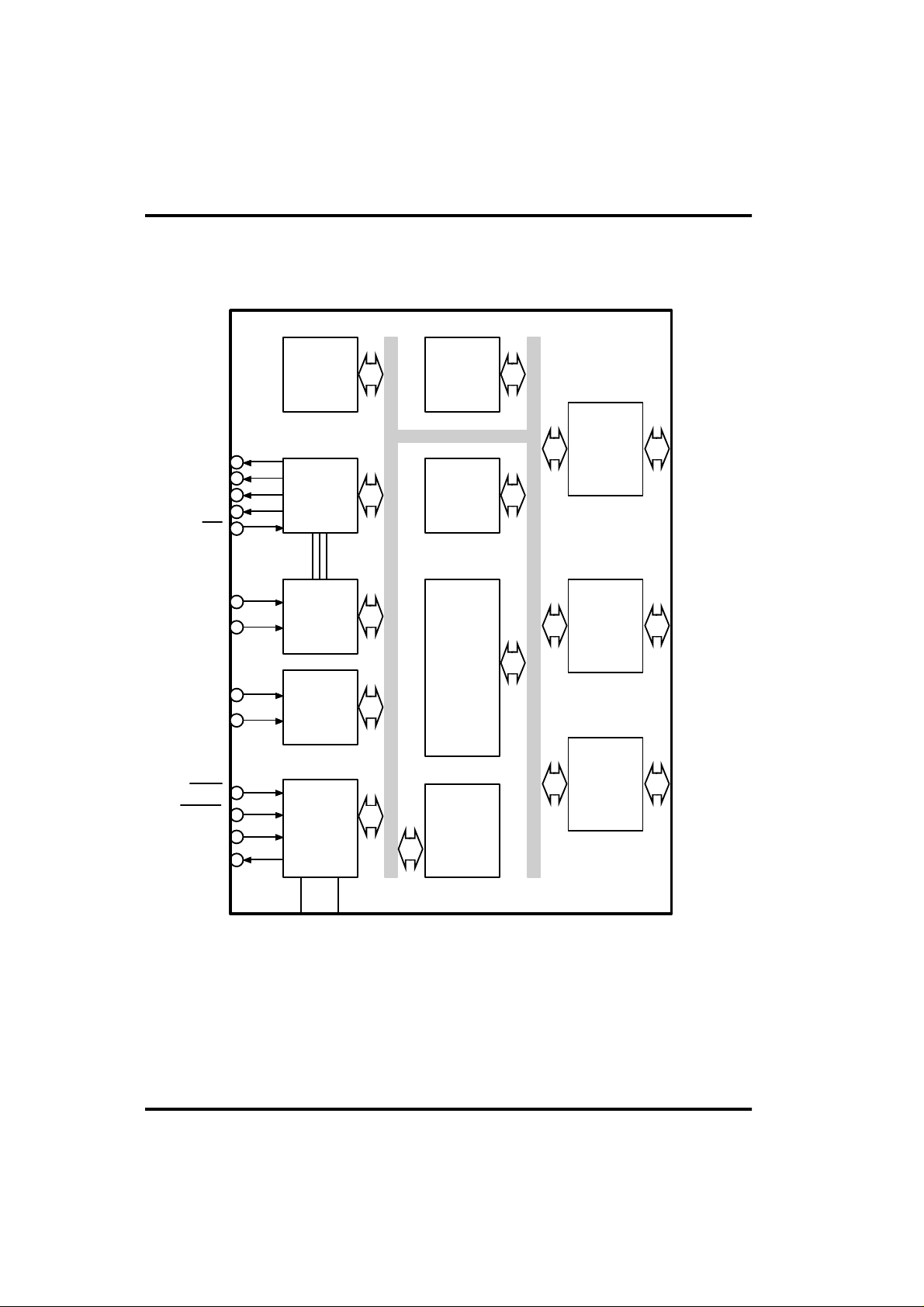
1.2 Block Diagram
Chapter 1. Overview
REMOUT
R17/T0
R16/T1
R15/T2
R14/EC
R12/INT2
R11/INT1
R00~R07
R10~R17
TEST
RESET
Xin
Xout
WATCHDOG
TIMER
TIMER
INTERRUPT
Key scan
INT.
generation
Block
CLOCK
GEN. /
SYSTEM
CONTROL
G8MC
CORE
RAM
(448byte)
`
ROM
(16K byte)
PRESCALER
/
B.I.T
R0
R00~R07
PORT
R1
R10~R17
PORT
R2
R20~R27
PORT
Vdd Vss
1 - 3
Page 9
Chapter 1. Overview
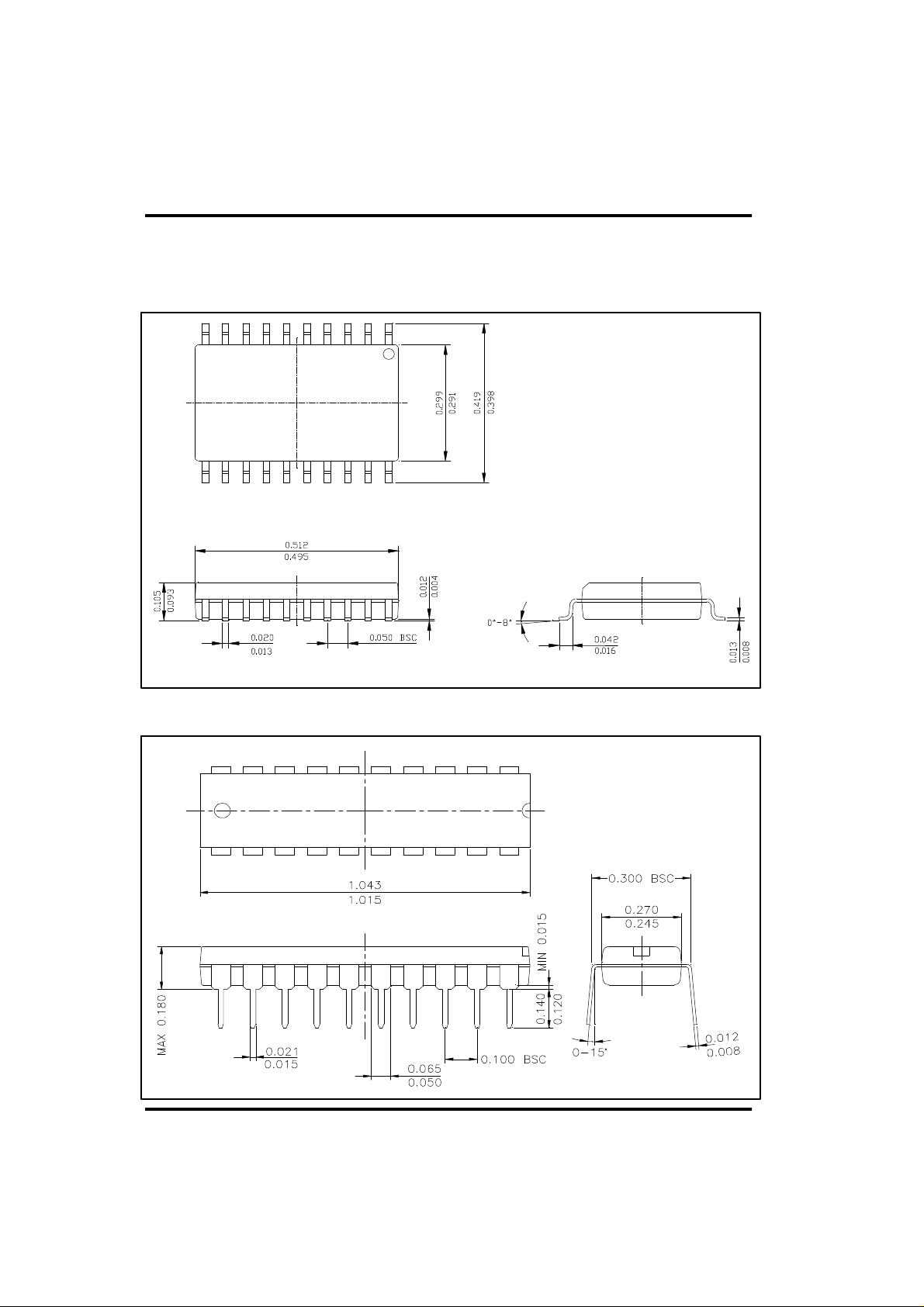
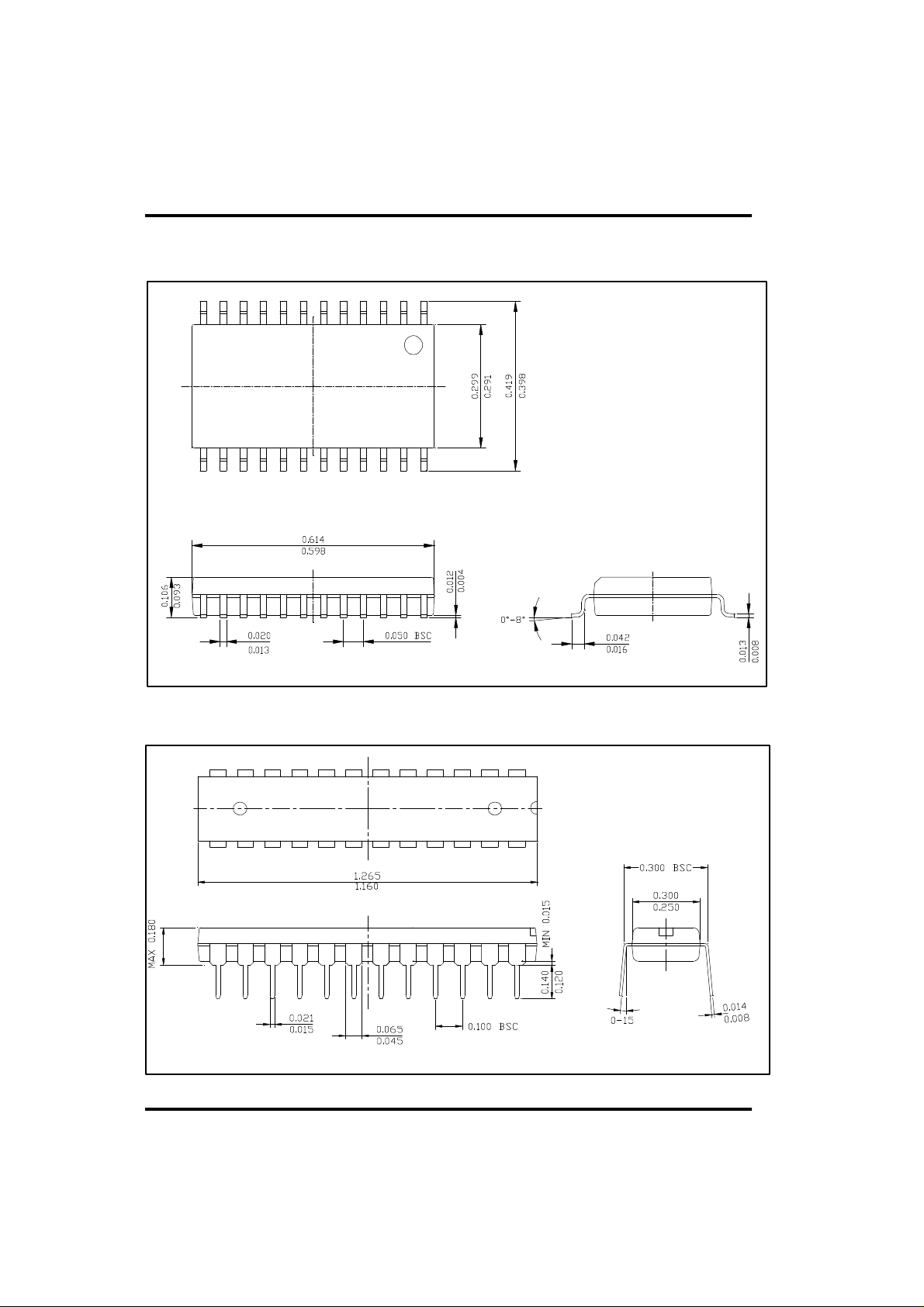
1.3 Package Dimension
1.3.1 20SOP Pin Dimension(dimensions in inch)
1.3.2 20PDIP Pin Dimension (dimensions in inch)
1 - 4
Page 10
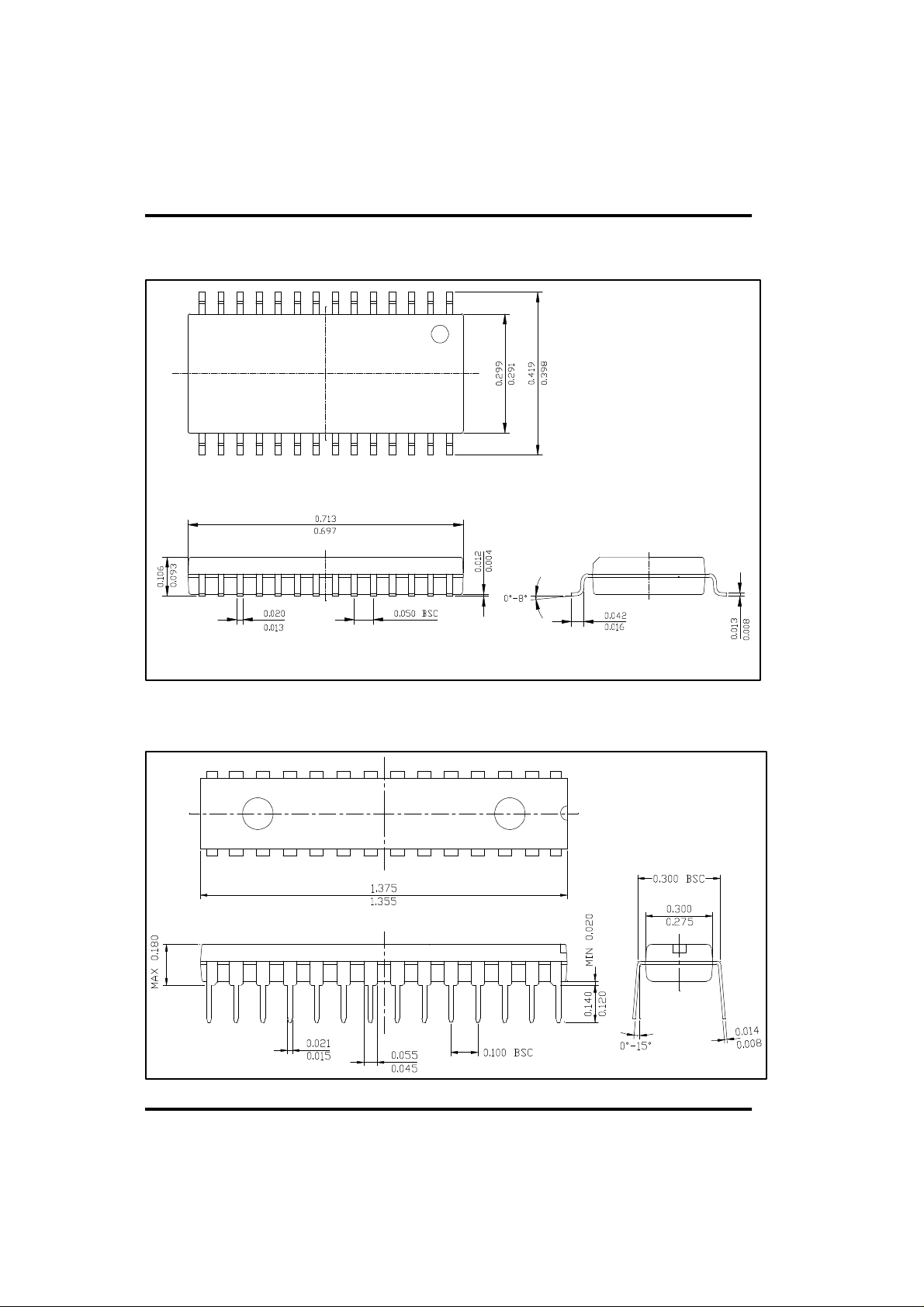
1.3.3 24SOP Pin Dimension (dimensions in inch)
Chapter 1. Overview
1.3.4 24skinnyDIP Pin Dimension (dimensions in inch)
1 - 5
Page 11
Chapter 1. Overview
1.3.5 28SOP Pin Dimension (dimensions in inch)
1.3.6 28skinnyDIP Pin Dimension (dimensions in inch)
1 - 6
Page 12
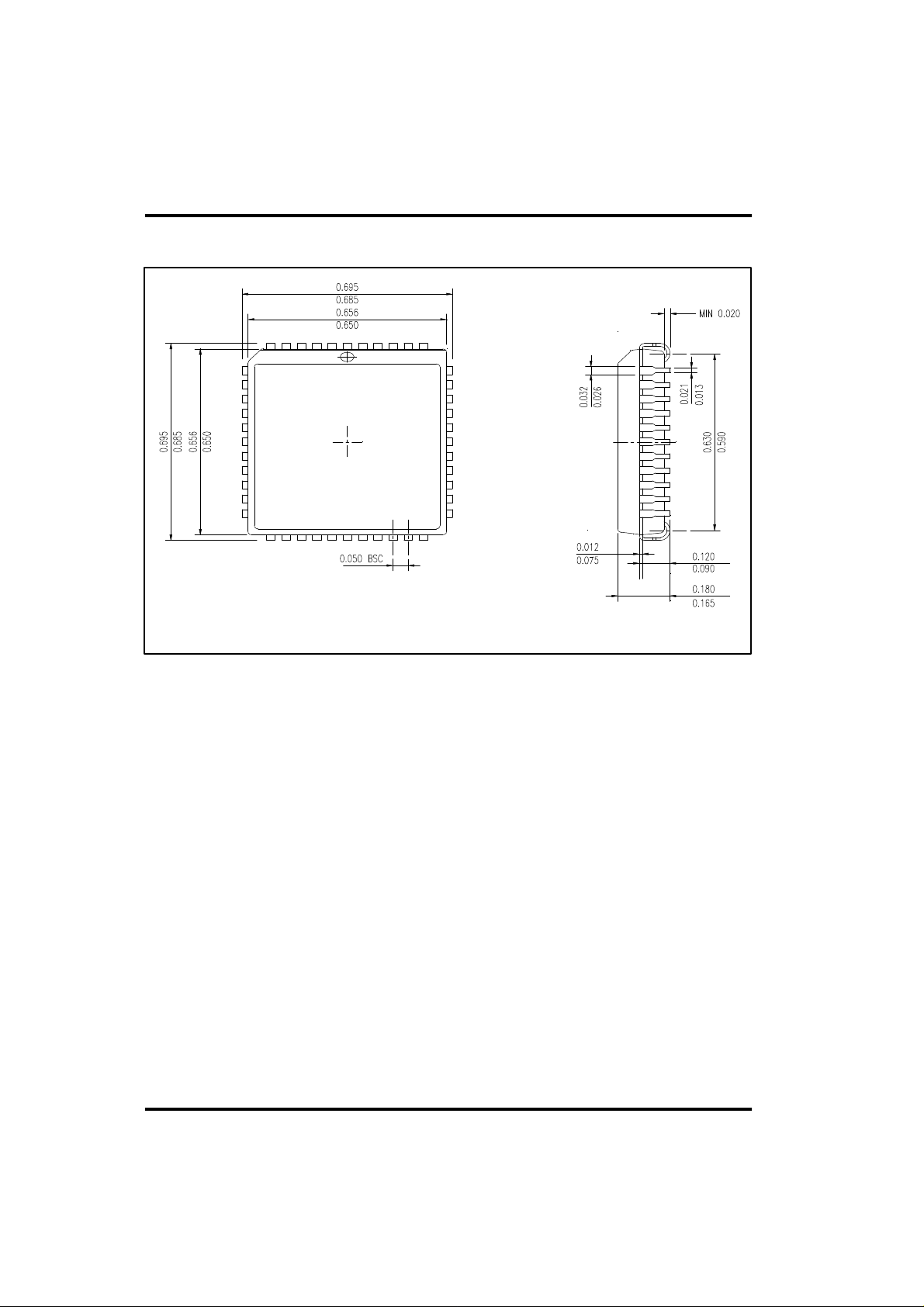
1.3.7 44PLCC Pin Dimension (dimensions in mm)
Chapter 1. Overview
1 - 7
Page 13
Chapter 1. Overview
1.4 Pin Function
PIN NAME
R00 I/O
R01
R02
R03
R04
R05
R06
R07
R10
R11/INT1
R12/INT2
R13
R14/EC
R15/T2
R16/T1
R17/T0
R20
R21
R22
R23
R24
R25 I/O
R26 I/O
R27 I/O
XIN
XOUT
REMOUT
RESET
TEST
VDD
VSS
VSS P
INPUT/
OUTPUT
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I
O
O
I
I
P
P
INPUT
20Pin 24Pin 28Pin 44Pin
6 8 8 11
7 9 9 15
8 10 10 16
9 11 11 19
12 14 18 27
13 15 19 30
14 16 20 31
15 17 21 32
2 4 4 5
1 3 3 4
- 2 2 3
- 1 1 2
- 24 28 44
- 23 27 43
20 22 26 42
19 21 25 41
10 12 12 20
- - 13 21
- - 14 22
- - 15 24
- - 16 25
- - - 13
- - - 14
- - - 36
5 7 7 10
4 6 6 9
18 20 24 38
17 19 23 37
16 18 22 33
3 5 5 8
11 13 17 26
- - - 35
Function @ RESET @ STOP
- Each bit of the port can be
individually configured as an
input or an output by user
software
- Push-pull output
- CMOS input with pull-up resistor
(option)
- Can be programmable as Key
Scan Input
- Pull-ups are automatically
disabled at output mode
- CMOS input with pull-up resistor
(option)
- Push-pull output
- Can be programmable as Key
Scan Input or Open drain output
- Direct Driving of LED(N-TR)
- Pull-ups are disabled at output
mode
- CMOS input with pull-up resistor
(option)
- Push-pull output
- Direct Driving of LED(N-TR)
- Pull-ups are disabled at output
mode
- Oscillator Input
- Oscillator Output
- High Current Output
- Includes pull-up resistor
- Includes pull-up resistor
- Positive power supply
- Ground
INPUT
INPUT
INPUT
`L` output
`L` level
State
of before
STOP
State
of before
STOP
State
of before
STOP
Low
High
`L` Output
state
of before
STOP
1 - 8
Page 14
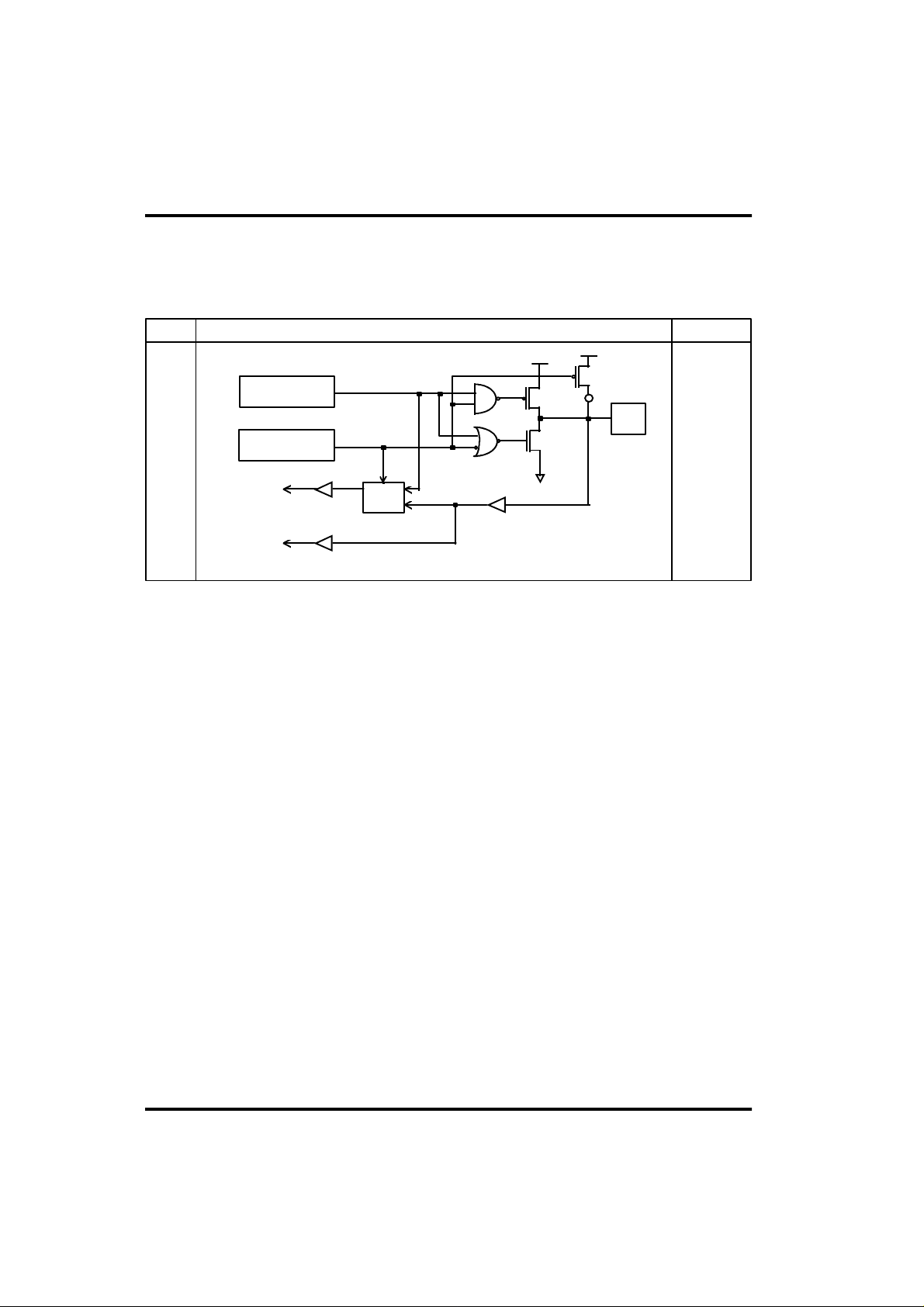
1.5 Port Structure
1.5.1 R0 PORT
Chapter 1. Overview
PIN @ RESET
Data Reg
R00
R01
R02
R03
R04
R05
R06
R07
Direction Reg
Data Bus
¡è
Rd
Data Bus
¡è
Rd
CIRCUIT TYPE
MUX
VDD
VSS
VDD
pull-up
option
PAD
Hi - Z
OR
High-Input
(with pullup)
1 - 9
Page 15
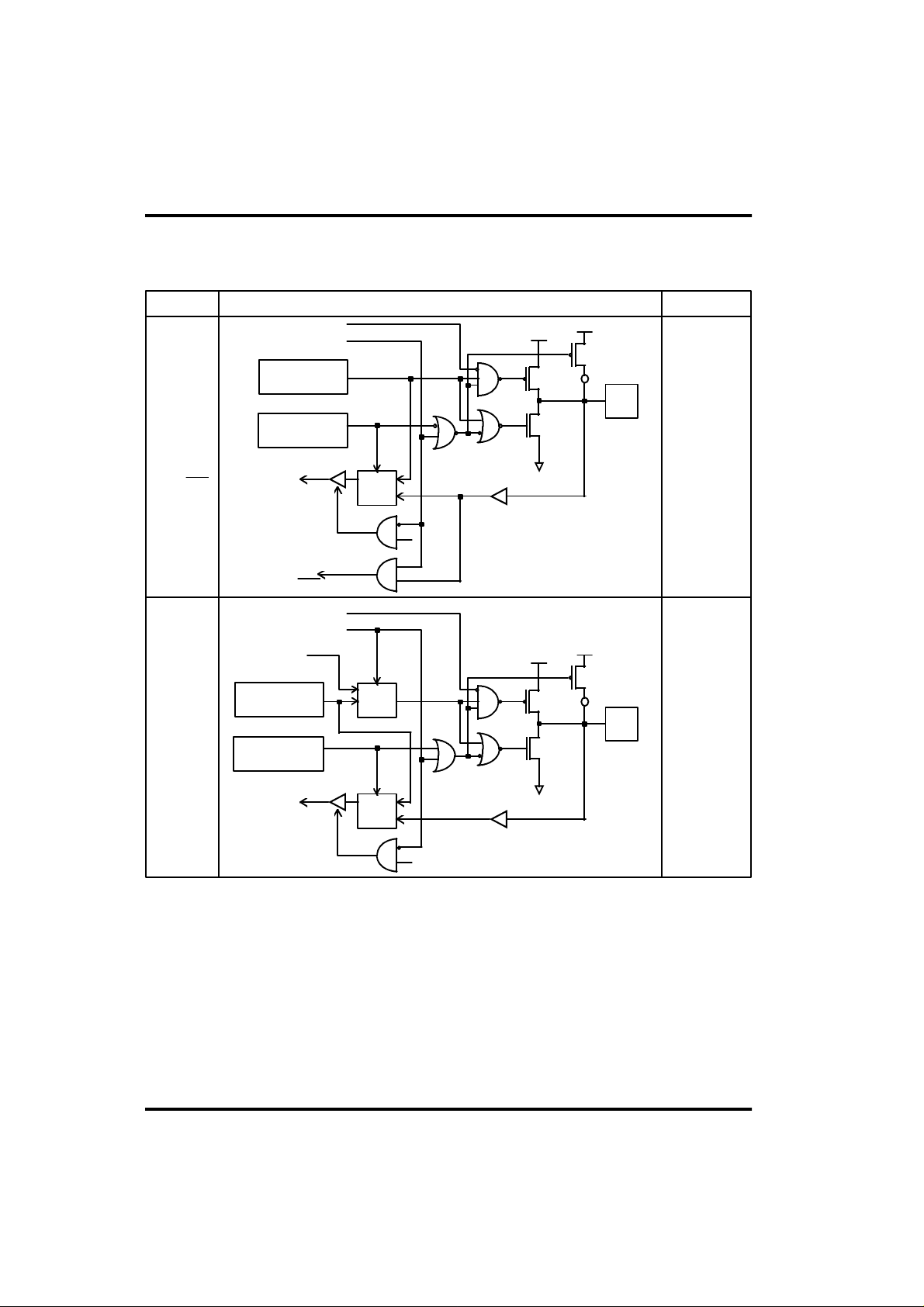
Chapter 1. Overview
1.5.2 R1 PORT
PIN CIRCUIT TYPE @ RESET
VSS
VDD
pull-up
option
PAD
High-Input
(with pullup)
R10
R11/INT1
R12/INT2
R13
R14/EC
open drain
selection
Data Reg
Direction Reg
Data Bus
VDD
MUX
Hi - Z
OR
R15 / T2
R16 / T1
R17 / T0
T0 R11...INT1
T0 R12...INT2
T0 R14...EC
open drain
selection
from R15...T2
from R16...T1
from R17...T0
Data Reg
Direction Reg
Data Bus
MUX
MUX
Rd
Rd
VDD
VSS
VDD
pull-up
option
PAD
Hi - Z
OR
High-Input
(with pullup)
1 - 10
Page 16
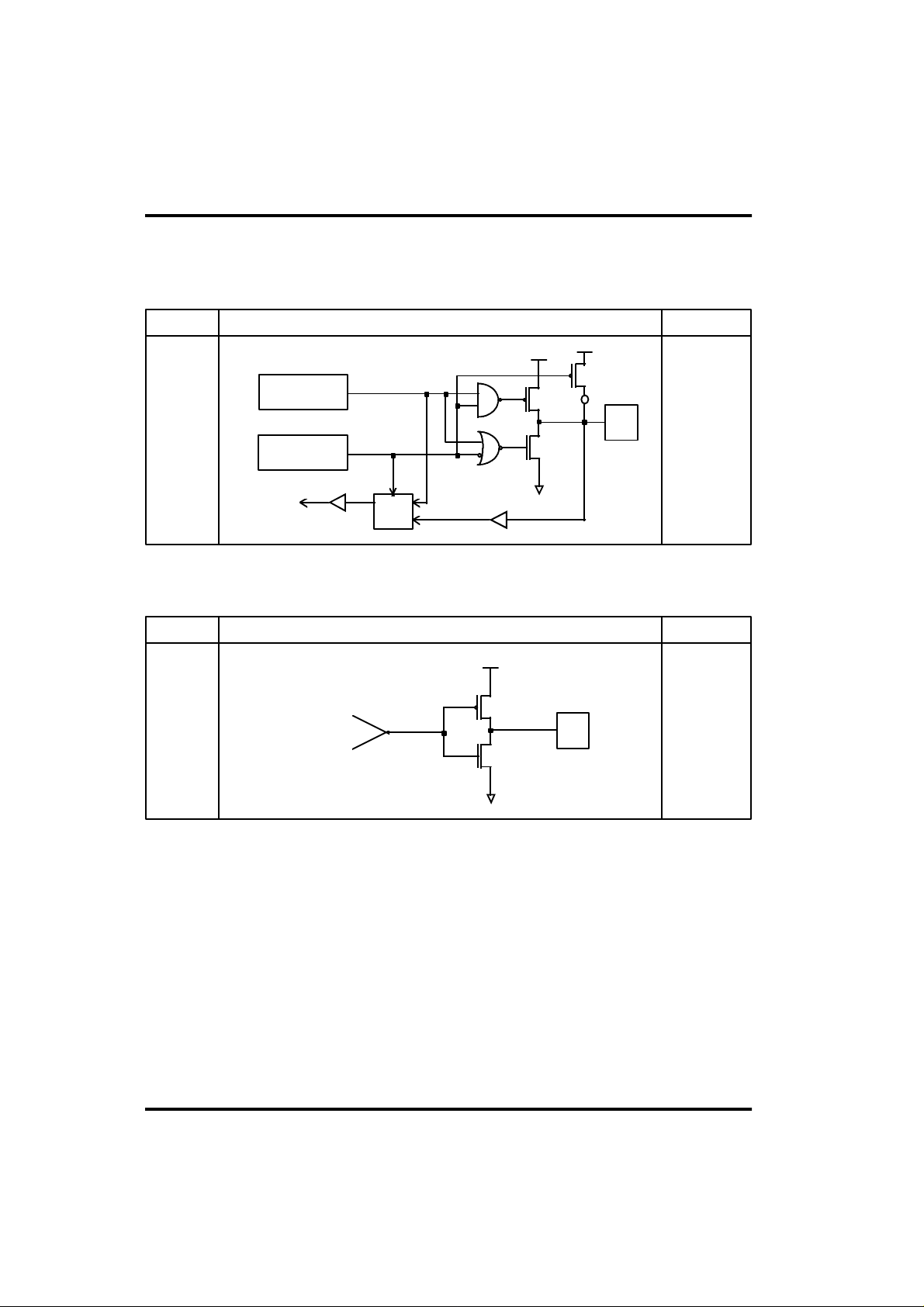
Chapter 1. Overview
1.5.3 R2 PORT
PIN CIRCUIT TYPE @ RESET
VDD
pull-up
option
PAD
High-Input
(with pullup)
VSS
R20
R21
R22
R23
R24
R25
R26
R27
Data Reg
Direction Reg
Data Bus
¡è
Rd
VDD
MUX
REMOUT PORT
PIN CIRCUIT TYPE @ RESET
Hi - Z
OR
REMOUT
internal signal
VDD
VSS
PAD
Low level
1 - 11
Page 17
Chapter 1. Overview
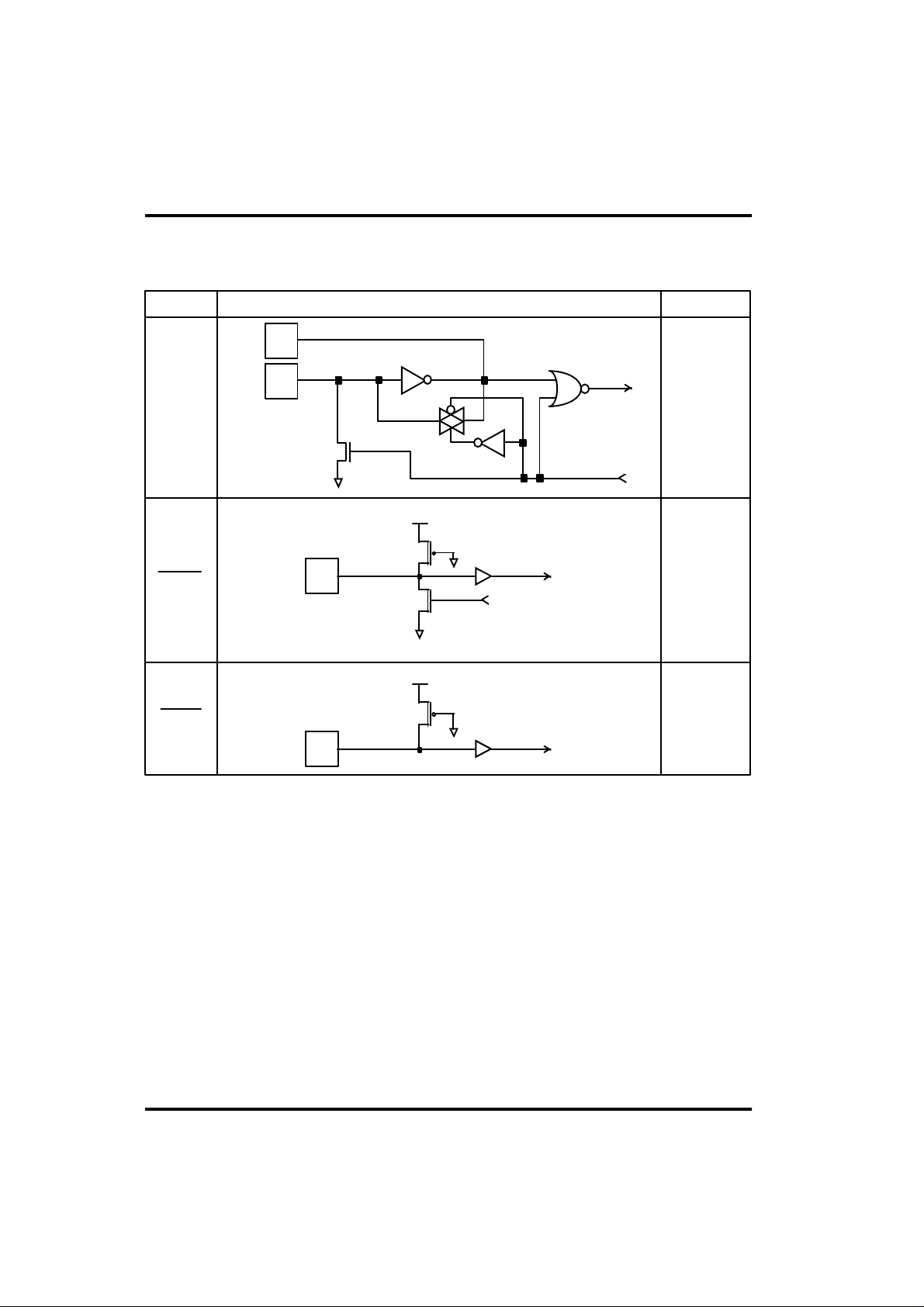
1.5.4 Miscellaneous Ports
PIN CIRCUIT TYPE @ RESET
Xout
Xin
Xin
Xout
RESET
from STOP circuit
VSS
VDD
pull-up resistor
VSS
PAD
from POWER on RESET circuit
VSS
oscillation
Low level
VDD
TEST High level
PAD
pull-up resistor
VSS
1 - 12
Page 18
1.6 Electrical Characteristics
1.6.1 Absolute Maximum Ratings (Ta = 25¡É)
Chapter 1. Overview
PARAMETER
Supply Voltage
Input Voltage
Output Voltage
Operating Temperature
Storage Temperature
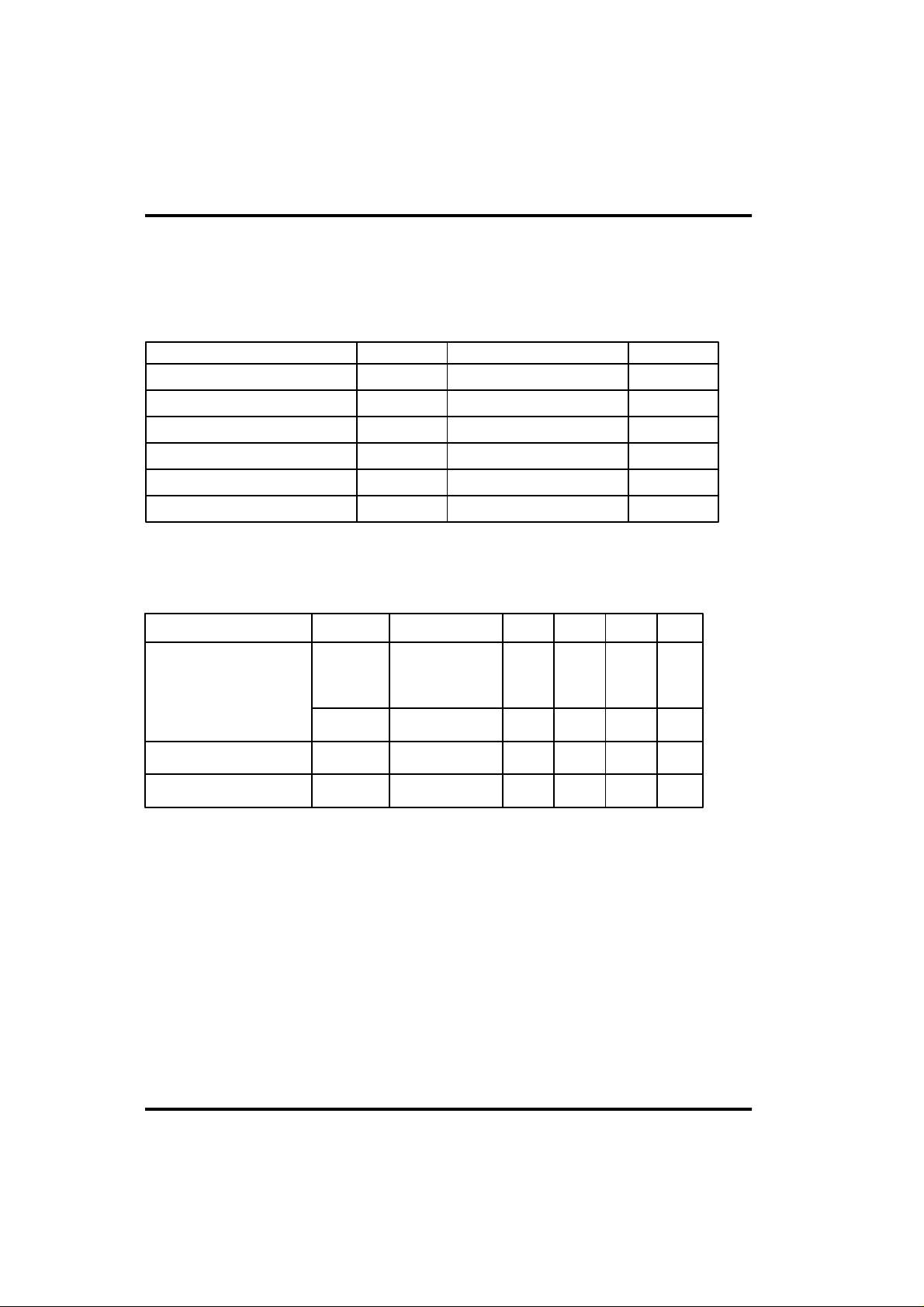
1.6.2 Recommended Operating Ranges
Power Dissipation
SYMBOL
VDD
VI
VO
Topr
Tstg
PD
RATINGS
-0.3 ~ +7.0
-0.3 ~ VDD + 0.3
-0.3 ~ VDD + 0.3
0 ~ 70
-65 ~ 150
700
1.6.2 Recommended Operating Ranges
PARAMETER SYMBOL CONDITION UNIT
VDD1
Supply Voltage
VDD2
Oscillation Frequency fXin
Operating Temperature Topr
fXin = 1MHz
fXin = 2MHz
fXin = 4MHz
MIN. TYP. MAX.
2.0
2.2 4.0
0 70
4.0
4.02.01.0
UNIT
V
V
V
¡É
¡É
mW
V
V
MHz
¡É
1 - 13
Page 19
Chapter 1. Overview
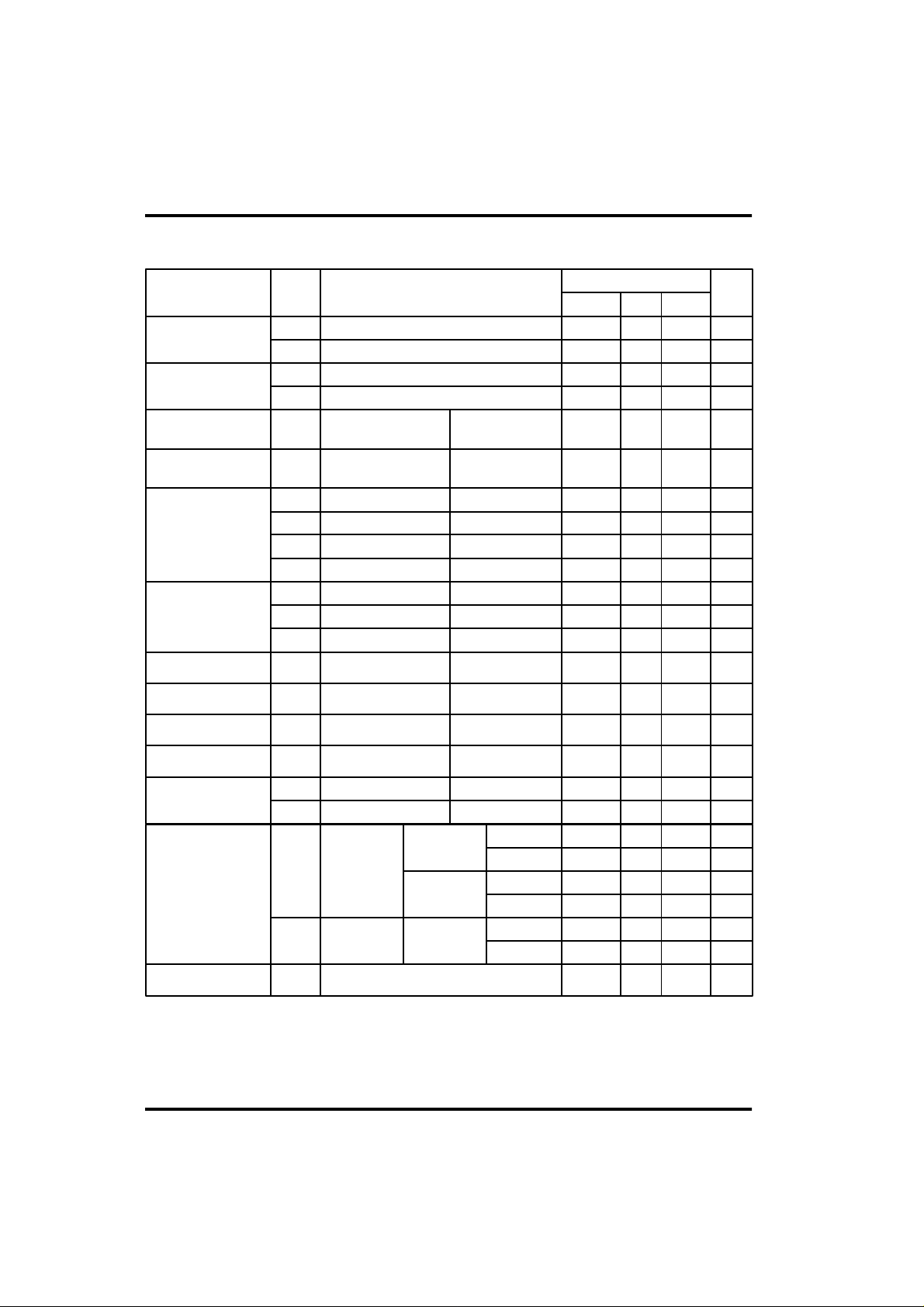
1.6.3 DC Characteristics (VDD = 2.0~4.0, Vss = 0V, Ta = 0¡É ~ 70¡É)
Parameter Symbol Condition
high level
input voltage
low level
input voltage
high level input
leakage current
low level input
leakage current
high level
output voltage
low level
output voltage
high level output
leakage current
low level output
leakage current
high level output
current
low level output
current
input pull-up
current
POWER
SUPPLY
CURRENT
RAM retention
supply voltage
VIH1 R11, R12, R14, RESETB
VIH2
VIL1 R11, R12, R14, RESETB
VIL2 R0, R1(Except R11,R12,R14 ) , R2
IIH
R0,R1,R2,RESETB
R0,R1,R2,RESETB
IIL
(without pull-up)
VOH1
VOH2
VOH3
VOH5 OSC IOH=-200uA VDD-0.9 V
VOL1
VOL2
VOL5 OSC IOL=200uA 0.8 V
IOHL
IOLL
ISTOP
VRET 0.7 V
R0
R1(ExceptR17),R2
R17
R0
R1, R2
R0, R1, R2
R0, R1, R2
IOH REMOUT VOH=2V -30 -12 -5 mA
IOL REMOUT VOL=1V 0.5
IP1 RESETB
IP2 R0, R1, R2
fXIN=4MHz
operating
IDD
current
fXIN=2MHz
stop
mode
current
oscillator
stop
VIH=VDD
VIL=0V
IOH=-0.5mA
IOH=-1mA
IOH=-8mA
IOL=1mA
IOL=5mA
VOH=VDD
VOL=0V
VDD=3V
VDD=3V
VDD=4V
VDD=2.2V
VDD=4V
VDD=2V
VDD=4V
VDD=2V
Specification
VDD-0.4
VDD-0.4
VDD-0.9
---
---
-
maxtypmin
VDD0.8VDD
0.2VDD0
0.3VDD0
1
-1uAuA
0.4
0.8
1
-1uAuA
3 mA
603015
402010
104
62.4
62.4
31.2
103
82
Unit
V
VVDD0.7VDDR0, R1(Except R11,R12,R14 ) , R2
V
V
V
V
V
V
V
uA
uA
mA
mA
mA
mA
uA
uA
1 - 14
Page 20
Chapter 1. Overview
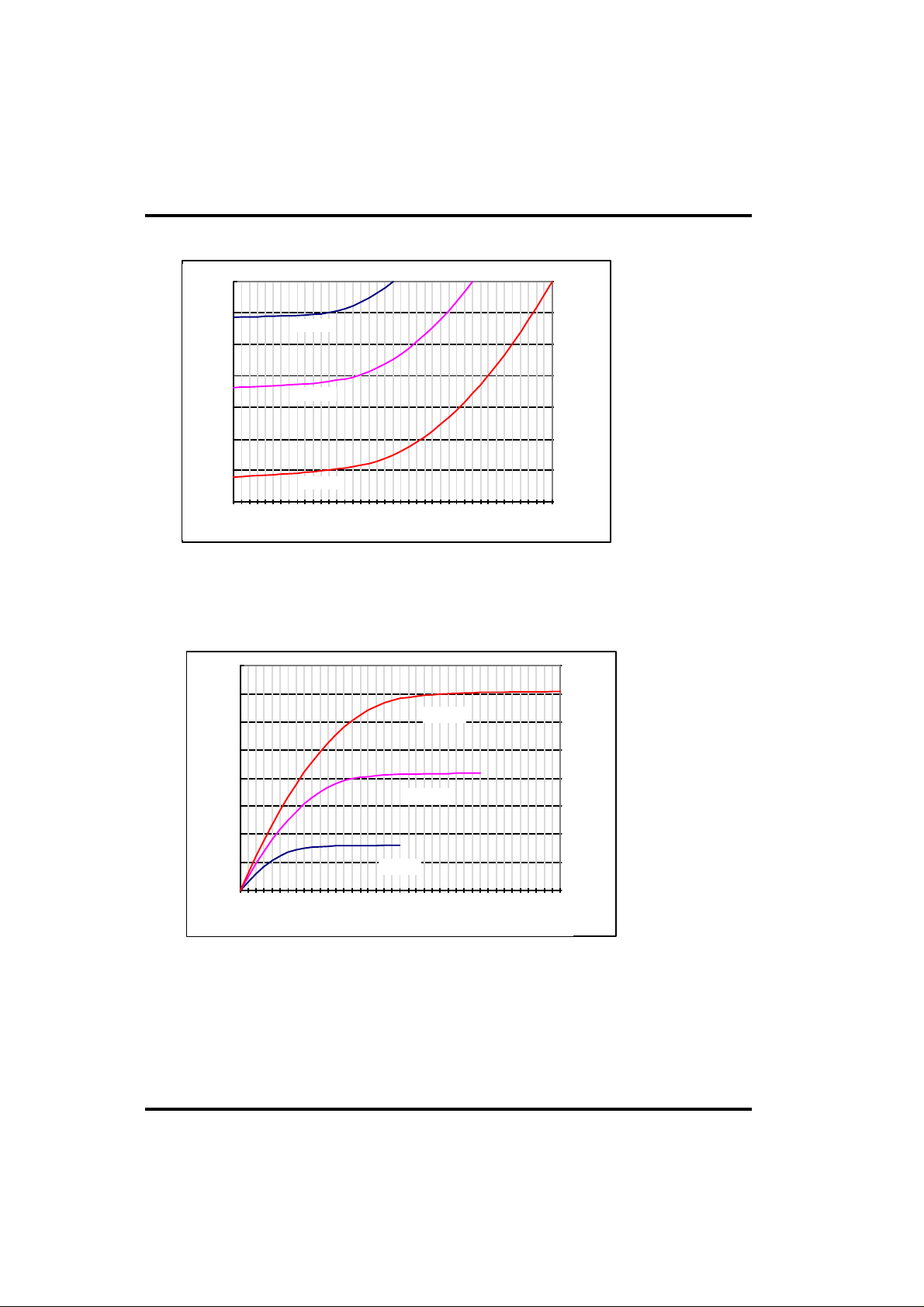
¡Ü GMS810 Series REMOUT port IOH Characteristics graph
0.0
-5.0
-10.0
-15.0
-20.0
IOH(mA)
-25.0
-30.0
-35.0
0 1 2 3 4
VDD=2V
VDD=3V
VDD=4V
VOH(V)
¡Ü GMS810 Series REMOUT port IOL Characteristics graph
8.00
7.00
6.00
5.00
VDD=4V
4.00
IOL(mA)
3.00
2.00
1.00
0.00
0 1 2 3 4
VDD=3V
VDD=2V
VOL(V)
1 - 15
Page 21
Chapter 1. Overview
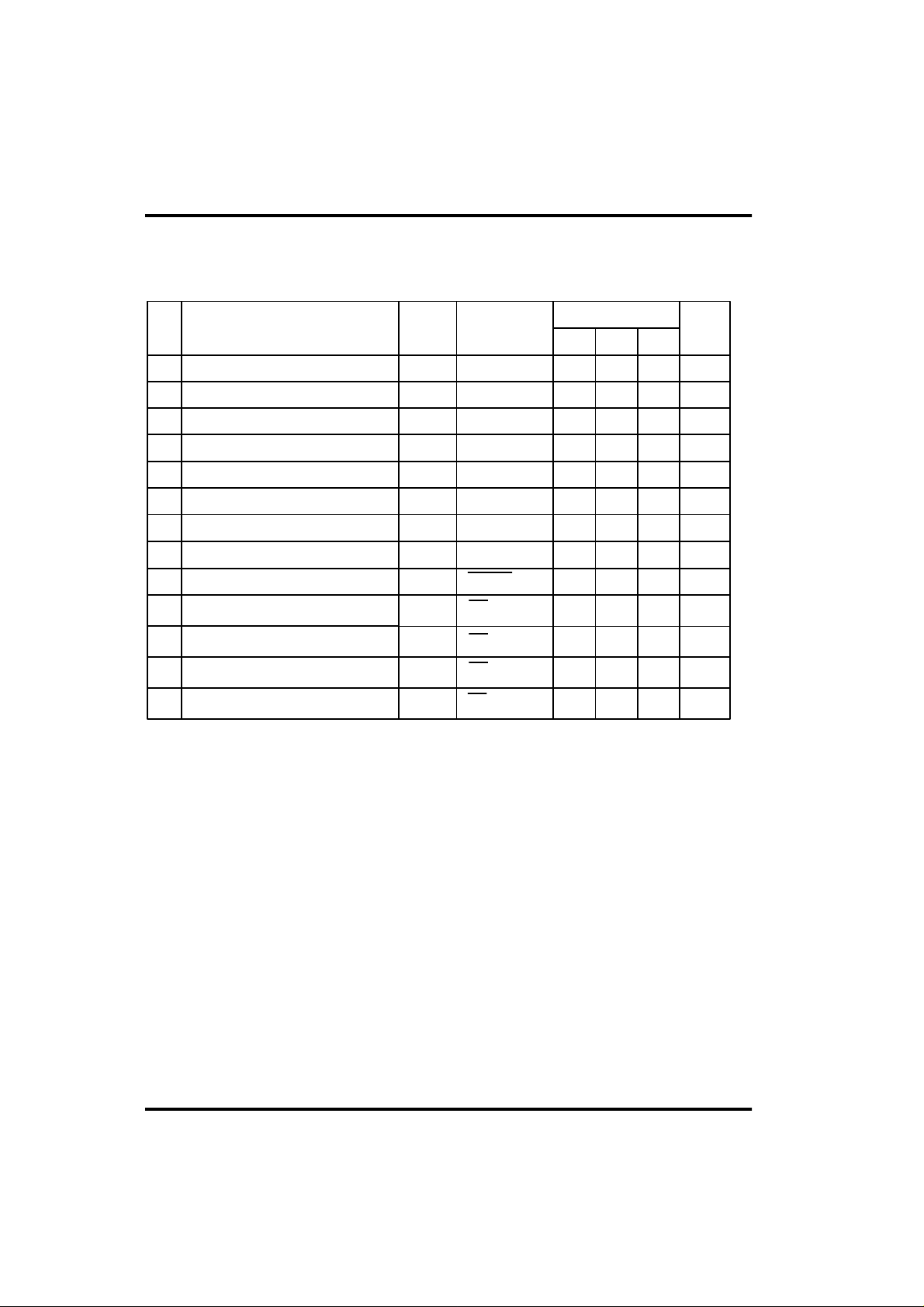
1.6.4 AC Characteristics (VDD = 2.0~4.0, Vss = 0V, Ta = 0¡É ~ 70¡É)
No Parameter Symbol UnitPin
External clock input cycle time
System clock cycle time
2
External clock pulse width High
3
External clock pulse width Low
4
External clock rising time
5
External clock falling time
6
interrupt pulse width High
7
Interrupt pulse width Low
8
Reset input pulse width low9
Event counter input pulse
10
width high
Event counter input pulse
11
width low
Event counter input pulse
12
rising time
Event counter input pulse
13
falling time
* Refer to Fig 1-1
tcp nsXin 250 500 10001
tsys
tcpH
tcpL
trcp
tfcp
tIH
tIL
tRSTL
tECH
tECL
trEC
tfEC
Xin
Xin
Xin
Xin
INT1~INT2
INT1~INT2
RESET
EC
EC
EC
EC
Specification
min typ max
500 1000 2000
40
40
40
40
2
2
8
2
2
40
40
ns
ns
ns
ns
ns
tsys
tsys
tsys
tsys
tsys
ns
ns
1 - 16
Page 22
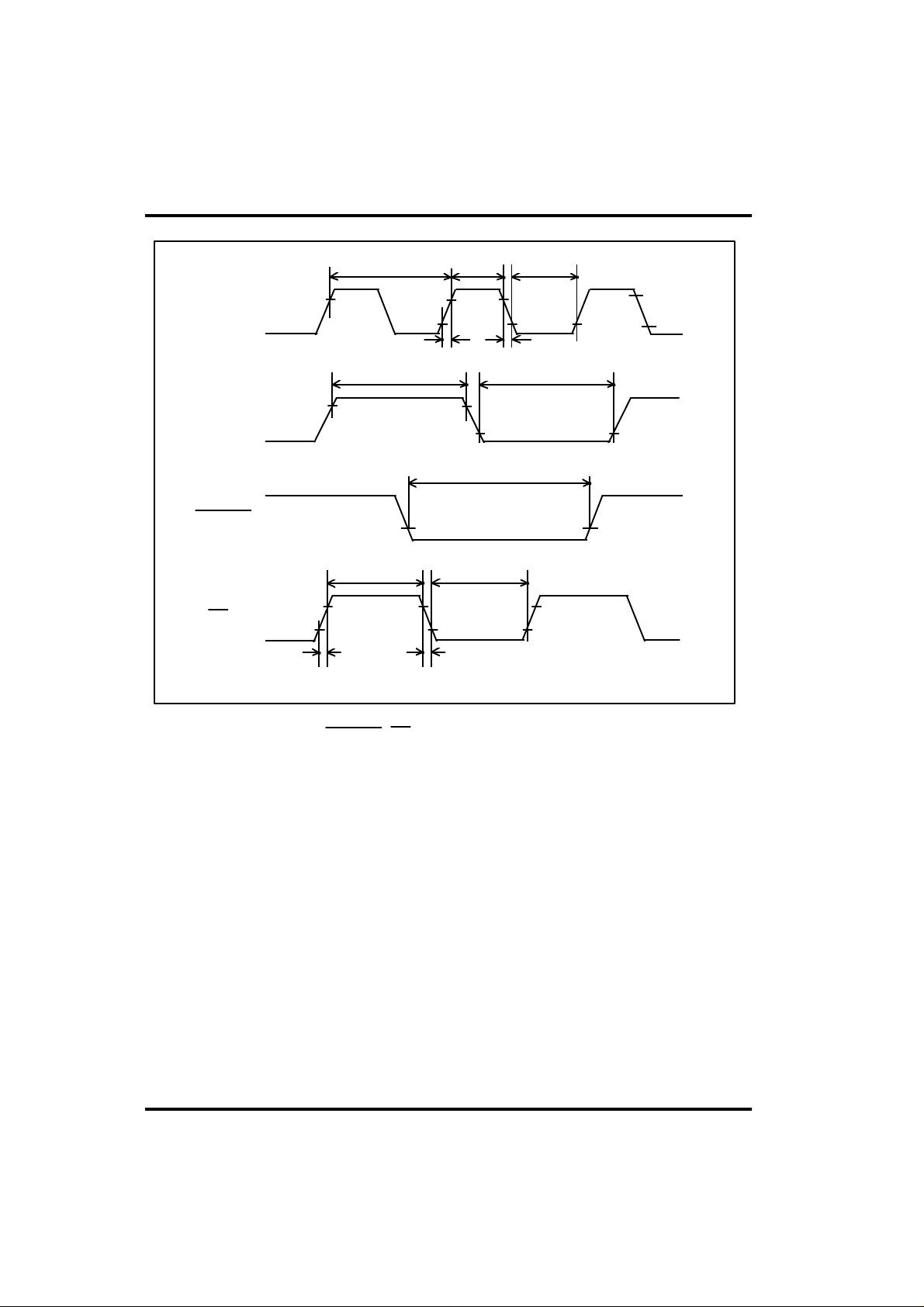
Chapter 1. Overview
Xin
INT1
INT2
RESET
EC
trCP
0.8Vcc
tfEC
tCPH
tfCP
tRSTL
tCP
tIH
tECH tECL
0.8Vcc 0.8Vcc
trEC
tCPL
Vcc-0.5V
0.5V
tIL
0.2Vcc
0.2Vcc
0.2Vcc
* FIG-1 : Clock, INT, RESET. EC input timing
1 - 17
Page 23

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 24
CHAPTER 2. FUNCTION DESCRIPTION
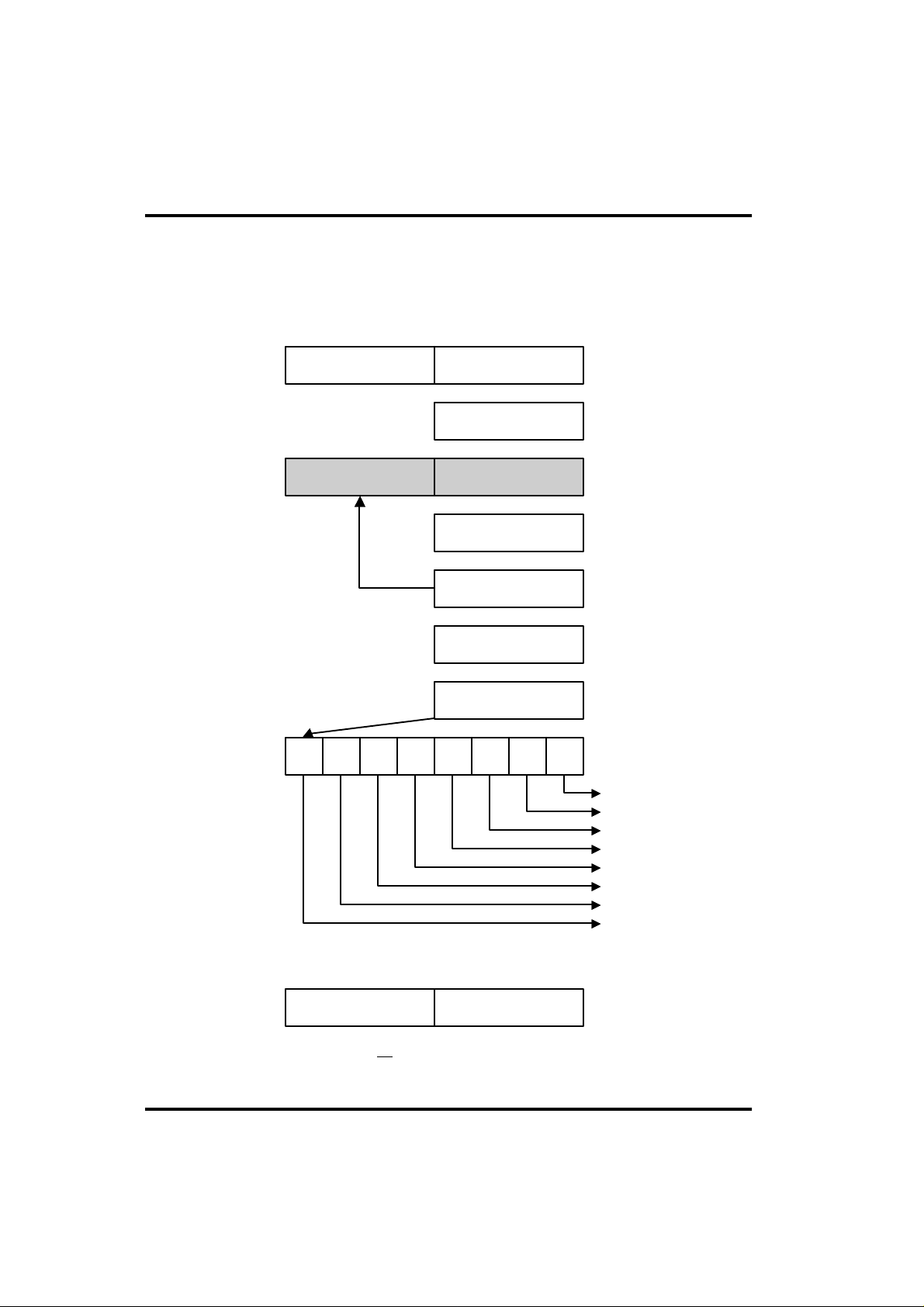
2.1 REGISTERS
15 7 0
Chapter 2. Function Description
PCH PCL
7 0
A
15 7 0
7 0
7 0
7 0
7 0
N V G B H I Z C
¡é
X
Y
SP
PSW
Program Counter
A-Register
YA (16bit Accumulator)
X-Register
Y-Register
Stack Pointer ¡Ø1
Program Status Word
¡é
Carry Flag
Zero Flag
Interrupt Enable Flag
Half Carry Flag
Break Flag
G Flag
Overflow Flag
Negative Flag
¡Ø
1 Stack Address
15 7 0
PCH PCL
¡é
Fixed as 01XXh (=RAM 1page)
¡é
SP
2 - 1
Page 25
Chapter 2. Function Description
2.1.1 A register
- 8bit Accumulator.
- In the case of 16-bit operation, compose the lower 8-bit of A, upper 8bit in Y (16-bit
Accumulator)
- In the case of multiplication instruction, execute as a multiplier register. After
multiplication operation, the lower 8-bit of the result enters. (Y*A ¡æ YA)
- In the case of division instruction, execute as the lower 8-bit of dividend. After
division operation, quotient enters.
2.1.2 X register
- General-purpose 8-bit register
- In the case of index addressing mode within direct page(RAM area), execute as
index register.
- In the case of division instruction, execute as register.
2.1.3 Y register
- General-purpose 8-bit register
- In the case of index addressing mode, execute as index register
- In the case of 16-bit operation instruction, execute as the upper 8-bit of YA (16-bit
accumulator).
- In the case of multiplication instruction, execute as a multiplicand register. After
multiplication operation, the upper 8-bit of the result enters.
- In the case of division instruction, execute as the upper 8-bit of dividend. After
division operation, remains enters.
- Can be used as loop counter of conditional branch command. (e.g.DBNE Y, rel)
2.1.4 Stack Pointer
- In the cases of subroutine call, Interrupt and PUSH, POP, RETI, RET instruction,
stack data on RAM or in the case of returning, assign the storage location having
stacked data.
- Stack area is constrained within 1-page (00H-FFH). The SP is post-decremented
when a subroutine call or a push instruction is executed, or when an interrupt is
accepted; and the SP is pre-incremented when a return or a pop instruction is
executed.
- SP should be initialized as follows
ex) LDX #0FEH : 0FEH ¡æ X reg.
TXSP : X reg. ¡æ SP
- The behaviors of stack pointer according to each instruction are the following.
2 - 2
Page 26
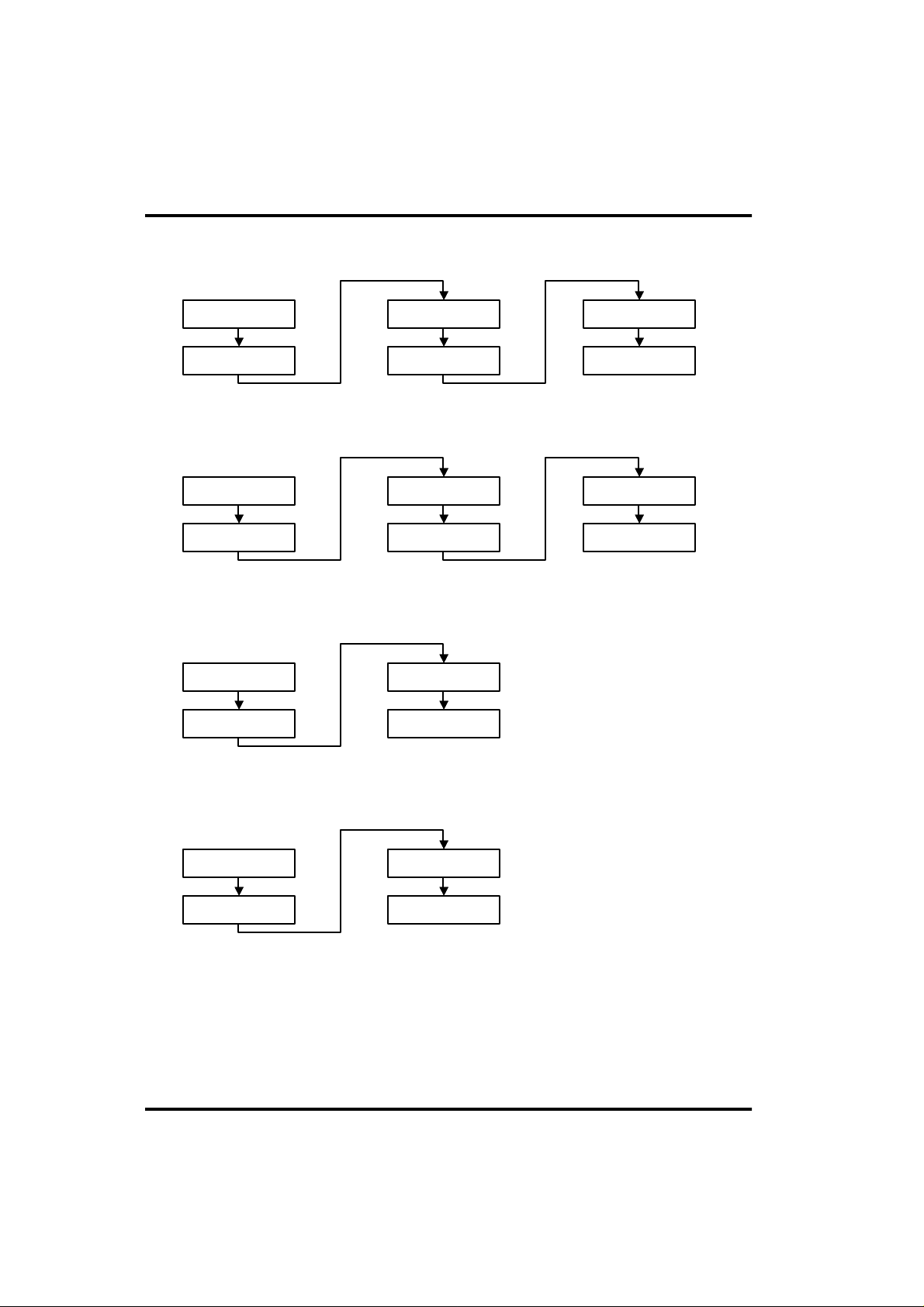
2.1.4.1 Interrupt
Chapter 2. Function Description
M(SP) ¡ç (PCH)
SP ¡ç SP - 1
2.1.4.2 RETI( Return from interrupt )
SP ¡ç SP + 1
(PSW) ¡ç M(SP)
2.1.4.3 Subroutine call
M(SP) ¡ç (PCH)
SP ¡ç SP - 1
M(SP) ¡ç (PCL)
SP ¡ç SP - 1
SP ¡ç SP + 1
(PCL) ¡ç M(SP)
M(SP) ¡ç (PCL)
SP ¡ç SP - 1
M(SP) ¡ç (PSW)
SP ¡ç SP - 1
SP ¡ç SP + 1
(PCH) ¡ç M(SP)
2.1.4.4 RET(Return from subroutine)
SP ¡ç SP + 1
(PCL) ¡ç M(SP)
SP ¡ç SP + 1
(PCH) ¡ç M(SP)
2 - 3
Page 27
Chapter 2. Function Description
2.1.4.5 PUSH A(X, Y, PSW)
M(SP) ¡ç A
SP ¡ç SP - 1
2.1.4.6 POP A(X, Y, PSW)
SP ¡ç SP + 1
A ¡ç M(SP)
2.1.5 PC (Program Counter)
- Program counter is a 16-bit counter consisted of 8-bit register PCH and PCL.
- Addressing space is 64K bytes.
2.1.6 PSW (Program Status Word)
- PSW is an 8-bit register.
- Consisted of the flags showing the post state of operation and the flags determining
the CPU operation, initialized as 00H in reset state.
2.1.7 Flag register.
2.1.7.1 Carry flag (C)
- After operation, set when there is a carry from bit7 of ALU or there is not a borrow.
- Set by SETC and clear by CLRC.
- Executable as 1-bit accumulator.
- Branch condition flag of BCS, BCC.
2.1.7.2 Zero flag (Z)
- After operation also including 16-bit operatiion, set if the result is ¡È0
¡È
- Branch condition flag of BEQ, BNE.
2.1.7.3 Interrupt enable flag (I)
- Master enable flag of interrupt except for RST (reset).
- Set and cleared by EI, DI
2 - 4
Page 28
Chapter 2. Function Description
2.1.7.4 Half carry flag (H)
- After operation, set when there is a carry from bit3 of ALU or there is not a borrow
from bit4 of ALU.
- Can not be set by any instruction.
- Cleared by CLRV instruction like V flag.
2.1.7.5 Break flag (B)
- Set by BRK (S/W interrupt) instruction to distinguish BRK and TCALL instruction
having the same vector address.
2.1.7.6 G flag (G)
- Set and cleared by SETG, CLRG instruction.
- Assign direct page (0-page, 1-page).
- Addressable directly to RAM 1-page by SETG. and to RAM 0-page by CLRG.
2.1.7.7 Overflow flag (V)
- After operation, set when overflow or underflow occurs.
- In the case of BIT instruction, bit6 memory location is transferred to V-flag.
- Cleared by CLRV instruction, but not set by any instruction.
- Branch condition flag of BVS, BVC.
2.1.7.8 Negative flag (N)
- Set whenever the result of a data transfer or operation is negative (bit7 is set to
¡È1¡È
).
- In the case of BIT instruction, bit7 of memory location is transferred to N-flag
- N-flag is not affected by CLR or SET instruction.
- Branch condition flag of BPL, BMI.
2 - 5
Page 29

Chapter 2. Function Description
2.2 MEMORY MAP
0000h
RAM
(192 BYTES)
00BFh
PERIPHERAL REGISTERS
0100h
0-PAGE
DIRECT PAGE
0200h
8000h
A000h
C000h
E000h
F000h
FF00h
FFC0h
FFE0h
FFFFh
RAM (STACK)
(256 BYTES)
NON-USE
ROM
(32,768 BYTES)
ROM
(24,576 BYTES)
ROM
(16,384 BYTES)
ROM
(8,192 BYTES)
ROM
(4,096 BYTES)
PCALL AREA
TCALL VECTOR AREA
INTERRUPT VECTOR AREA
1-PAGE
GMS81032
GMS81024
GMS81016
PROGRAM ROM
GMS81008
GMS81004
U-PAGE
2 - 6
Page 30
2.3 TCALL VECTOR AREA
Chapter 2. Function Description
FFC0h
FFC1h
FFC2h
FFC3h
FFC4h
FFC5h
FFC6h
FFC7h
FFC8h
FFC9h
FFCAh
FFCBh
FFCCh
FFCDh
FFCEh
FFCFh
FFD0h
FFD1h
FFD2h
FFD3h
FFD4h
FFD5h
FFD6h
FFD7h
FFD8h
FFD9h
FFDAh
FFDBh
FFDCh
FFDDh
FFDEh
FFDFh
TCALL 15
TCALL 14
TCALL 13
TCALL 12
TCALL 11
TCALL 10
TCALL 9
TCALL 8
TCALL 7
TCALL 6
TCALL 5
TCALL 4
TCALL 3
TCALL 2
TCALL 1
TCALL 0
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
(L)
(H)
*
* This vector area is used in BRK command and TCALL0 command.
2 - 7
Page 31

Chapter 2. Function Description
2.4 ZERO-PAGE PERIPHERAL REGISTERS
ADDRESS
FUNCTION REGISTERS
R/W
SYMBOL
7 6 5 4 3 2 1 0
RESET VALUE
00C0H
00C1H PORT R0 DATA DIRECTION REG. W R0DD 00
00C2H PORT R1 DATA REG. R/W R1 Undefined
00C3H PORT R1 DATA DIRECTION REG. W R1DD 00
00C4H PORT R2 DATA REG. R/W R2 Undefined
00C5H PORT R2 DATA DIRECTION REG. W R2DD 00
00C6H Reserved
00C7H
00C8H WATCH DOG TIMER REG. W WDTR
00C9H PORT R1 MODE REG. W PMR1 00
00CAH INT. MODE REG. R/W IMOD
00CBH EXT. INT. EDGE SELECTION W IEDS 00
00CCH INT. ENABLE REG. HIGH R/W IENL
00CDH INT. REQUEST FLAG REG. LOW R/W IRQL
00CEH INT. ENABLE REG. HIGH R/W IENH
00CFH INT. REQUEST FLAG REG. HIGH R/W IRQH
00D0H TIMER 0 (16bit) MODE REG. R/W TM0 00
00D1H TIMER 1 (8bit) MODE REG. R/W TM1 00
00D2H TIMER 2 (8bit) MODE REG. R/W TM2 00
00D3H TIMER 0 HIGH-MSB DATA REG. W T0HMD Undefined
00D4H TIMER 0 HIGH-LSB DATA REG. W T0HLD Undefined
00D5H
00D6H
00D7H TIMER 1 HIGH DATA REG. W T1HD Undefined
00D8H
00D9H
00DAH TIMER 0/ TIMER1 MODE REG. R/W TM01 00
00DBH Reserved
00DCH STANDBY MODE RELEASE REG0 W SMRR0 00
00DDH STANDBY MODE RELEASE REG1 W SMRR1 00
00DEH PORT R1 OPEN DRAIN ASSIGN REG. W R1ODC 00
PORT R0 DATA REG.
CLOCK CONTROL REG. W CKCTLR
BASIC INTERVAL REG. R BITR Undefined
TIMER0 LOW-MSB DATA REG. W T0LMD Undefined
TIMER0 LOW-MSB COUNT REG. R Undefined
TIMER0 LOW-LSB DATA REG. W T0LLD Undefined
TIMER0 LOW-LSB COUNT REG. R Undefined
TIMER1 LOW DATA REG. W T1LD Undefined
TIMER1 LOW COUNT REG. R Undefined
TIMER2 DATA REG. W T2DR Undefined
TIMER2 COUNT REG. R Undefined
R/W
R0
Undefined
- - 1 1 0 1 1 1
- 0 0 0 1 1 1 1
- - 0 0 0 0 0 0
- 0 0 - - - - -
- 0 0 - - - - 0 0 0 - 0 0 0 0 0 0 - 0 0 0 -
- ; Not used
* Caution : Write only register can not be accessed by bit manipulation instruction.
: Do not access the Reserved registers .
2 - 8
Page 32

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 33

Chapter 3. I/O PORT
CHAPTER 3. I/O PORTS
The GMS810series has 21 I/O ports which are PORT0(8 I/O), PORT1 (8 I/O) and
PORT2 (8 I/O). Each port contains data direction register which controls I/O and data
register which stores port data.
3.1 PORT R0
3.1.1 PORT R0 Registers
REGISTER
R0 I/O Data Direction Register
R0 Data Register R0 R/W Undefined 00C0H
SYMBOL R/W RESET VALUE ADDRESS
R0DD W 00H 00C1H
Table 3.1 Port R0 Registers
3.1.2 I/O Data Direction Register (R0DD)
bit
initial value
R/W
7
R0DD7 R0DD6 R0DD5 R0DD4 R0DD3 R0DD2 R0DD1 R0DD0
0
W
6
0
W
5
0
W
4
0
W
3
0
W
2
0
W
1
0
W
0
<00C1H>R0DD
0
W
R0 I/O Data Direction Register(R0DD) is 8-bit register, and can assign input state or
output state to each bit. If R0DD is ¡È1¡È, port R0 is in the output state, and if ¡È0¡È, it is
in the input state. R0DD is write-only register. Since R0DD is initialized as ¡È00H¡È in
reset state, the whole port R0 becomes input state.
3.1.1 Data Register(R0)
bit
initial value
R/W
7
R07 R06 R05 R04 R03 R02 R01 R00
X
R/W
6
X
R/W
5
X
R/W
4
X
R/W
3
X
R/W
2
X
R/W
1
X
R/W
0
<00C0H>R0
X
R/W
PORT0 data register (R0) is 8-bit register to store data of port R0.
When setted as the output state by R0DD, and data is written in R0, data is outputted
into R0 pin. When set as the input state, input state of pin is read.
The initial value of R0 is unknown in reset state.
3 - 1
Page 34

Chapter 3. I/O PORT
3.2 PORT R1
PIN NAME
R10
R11/INT1
R12/INT2
R13
R14/EC
R15/T2
R16/T1
R17/T0
3.2.1 PORT R1 Register
REGISTER
R1 I/O Data Direction Register
R1 Data Register R1 R/W Undefined 00C2H
R1 Port Mode Register PMR1 W 00H 00C9H
R1 Port Open drain Assign
Register
PORT SELECTION FUNCTION SELECTION
R10(I/O)
R11(I/O)
R12(I/O)
R13(I/O)
R14(I/O)
R15(I/O)
R16(I/O)
R17(I/O)
INT1 (INPUT)
INT2 (INPUT)
EC (INPUT)
T2 (OUTPUT)
T1 (OUTPUT)
T0 (OUTPUT)
Fig 3.1 Pin Function of port R1
SYMBOL R/W RESET VALUE ADDRESS
R1DD W 00H 00C3H
R10DC W 00H 00CEH
Table 3.1 Port R1 Registers
3.2.2 I/O Data Direction Register (R1DD)
bit
initial value
R/W
7
R1DD7 R1DD6 R1DD5 R1DD4 R1DD3 R1DD2 R1DD1 R1DD0
0
W
6
0
W
5
0
W
4
0
W
3
0
W
2
0
W
1
0
W
0
<00C3H>R1DD
0
W
R1 Data Direction Register(R1DD) is 8-bit register, and can assign input state or output
state to each bit. If R1DD is ¡È1¡È, port R1 is in the output state, and if ¡È0¡È, it is in the
input state. R1DD is write-only register. Since R1DD is initialized as ¡È00H¡È in reset
state, the whole port R1 becomes input state.
3 - 2
Page 35

Chapter 3. I/O PORT
3.2.3 Data Register(R1)
R1 Data Register(R1) is 8-bit register to store data of port R1. When set as the output
state by R1DD, and data is written in R1, data is output into R1 pin.
The initial value of R1 is unknown in reset state.
bit
7
6
5
4
3
2
1
0
initial value
R/W
R17 R16 R15 R14 R13 R12 R11 R10
X
R/W
X
R/W
X
R/W
X
R/W
X
R/W
X
R/W
X
R/W
R/W
<00C2H>R1
X
3.2.4 Port R1 Open drain Assign Register (R1ODC)
bit
initial value
R/W
7
R17OD R16OD R15OD R14OD R13OD R12OD R11OD R10OD
0
W
6
0
W
5
0
W
4
0
W
3
0
W
2
0
W
1
0
W
0
<00DEH>R1ODC
0
W
Port R1 Open Drain Assign Register(R1ODC) is 8bit register, and can assign R1 port as
open drain output port each bit, if corresponding port is selected as output. If R1ODC is
selected as ¡È1¡È, port R1 is open drain output, and if selected as¡È0¡È, it is push-pull
output. R1ODC is write-only register and initialized as ¡È00H¡È in reset state.
3 - 3
Page 36

Chapter 3. I/O PORT
3.2.5 Port R1 Mode Register (PMR1)
bit
7
6
5
4
3
2
1
0
initial value
R/W
T0S T1S T2S ECS - INT2S INT1S -
0
W
0
W
0
W
0
W
0
W
0
W
0
W
<00C9H>PMR1
0
W
R1 Port Mode Register(PMR1) is 8-bit register, and can assign the selection mode for
each bit. When set as¡È0¡È, corresponding bit of PMR1 acts as port R1 selection mode,
and when set as¡È1¡È, it becomes function selection mode.
BIT NAME
T0S
T1S
T2S
ECS
-
INT2S
INT1S
-
PMR1 Selection Mode Remarks
0
1
0
1
0
1
0
1
0
1
0
1
0
1
R17 Sel(I/O)
T0 Sel (Output)
R16 Sel (I/O)
T1 Sel (Output)
R15 Sel (I/O)
T2 Sel (Output)
R14 Sel (I/O)
EC Sel (Input)
R12 sel (I/O)
INT2 Sel (Input)
R11 Sel (I/O)
INT1 Sel (Input)
Output Port of Timer0
Output Port of Timer1
Output Port of Timer2
Input Port of Timer0 Event Input
Input Port of Timer0 Input capture
-
-
Table 3.3 Selection Mode of PMR1
PMR1 is write-only register and initialized as ¡È 00H¡È in reset state. Therefore,
becomes Port selection mode. Port R1 can be I/O port by manipulating each R1DD bit,
if corresponding PMR1 bit is selected as ¡È0¡È.
3 - 4
Page 37

3.3 PORT R2
3.3.1 PORT R2 Registers
Chapter 3. I/O PORT
REGISTERS
R2 I/O Data Direction Register
R2 Data Register R2 R/W Undefined 00C4H
SYMBOL R/W RESET VALUE ADDRESS
R2DD W 00H 00C5H
Table 3.3 Port R2 Registers
3.3.2 I/O Data Direction Register (R2DD)
bit
initial value
R/W
7
R2DD7 R2DD6 R2DD5 R2DD4 R2DD3 R2DD2 R2DD1 R2DD0
0
W
6
0
W
5
0
W
4
0
W
3
0
W
2
0
W
1
0
W
0
<00C5H>R2DD
0
W
R2 Data Direction Register(R2DD) is 8-bit register, and can assign input state or output
state or output state to each bit. If R2DD is ¡È1¡È, port R2 is in the output state, and if
¡È0¡È
, it is in the input state.
R2DD is write-only register. Since R2DD is initialized as ¡È00H¡È in reset state, the
whole port R2 becomes input state.
3.3.3 Data Register (R2)
bit
initial value
R/W
7
R27 R26 R25 R24 R23 R22 R21 R20
X
R/W
6
X
R/W
5
X
R/W
4
X
R/W
3
X
R/W
2
X
R/W
1
X
R/W
0
<00C4H>R2
X
R/W
R2 Data Register(R2) is 8-bit register to store data of port R2.
When setted as the output state by R2DD, and data is written in R2, data is output into
R2 pin. When setted as input state, input state of pin is read.
The initial value of R2 is unknown in reset state.
3 - 5
Page 38

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 39

Chapter 4. Peripheral Hardware
CHAPTER 4. PERIPHERAL HARDWARE
4.1 CLOCK GENERATING CIRCUIT
Clock generating circuit consists of Clock Pulse Generator(C.P.G), Prescaler, Basic
Interval Timer(B.I.T) and Watch Dog Timer.
The clock applied to the Xin pin divided by two is used as the internal system clock.
Circuit
PRESCALER
8
Peripheral
CKCTLR
OSC
ENPCK
0 1 2 3 4
C.P.G
PS1
MUX
BTCL
3
5
fcpufex
B.I.T (8)
Internal Data Bus
COMPARATOR
WDTON
0
WDT (6)
6
WDTR
Fig. 4.1 Block diagram of clock generating circuit
Internal System Clock
IFBIT
5070
WDTCL
9
IFWDT
5 6
To Reset
6
Circuit
4 - 1
Page 40

Chapter 4. Peripheral Hardware
4.1.1 Oscillation Circuit
Oscillation circuit is designed to be used either with a ceramic resonator or crystal
oscillator. Fig. 4.2-(a) shows circuit diagrams using a crystal (or ceramic) oscillator.
As shown in the diagram, oscillation circuits can be constructed by connecting a
oscillator between Xout and Xin. Clock from oscillation circuit makes CPU clock via
clock pulse generator, and then enters prescaler to make peripheral hardware clock.
alternately, the oscillator may be driven from an external source as shown is Fig. 4.2.(b). In the Standby(STOP) mode, oscillatiion stop, Xout state goes to ¡ÈHIGH¡È, Xin
state goes to ¡ÈLOW¡È, and built-in feed back resistor is disabled.
(a) External Crystal (Ceramic) oscillator circuit
Cout
Xout
Xin
Cin
(b) External clock input circuit
Xout
Xin
External clock
Fig. 4.2 Oscillator configurations
*. Recommendable resonator
Frequency Resonator Maker Part Name Load Capacitor Operating Voltage
CQ
4.0MHz
¡Ø
MC type is building in load capacitior.CCR type is chip type.
TDK
ZTA4.00MG Cin=Cout=30pF 2.2 ~ 4.0V
KBR- 4.0MKC Cin=Cout=open 2.2 ~ 4.0VKYOCERA
KBR- 4.0MSB Cin=Cout=33pF 2.2 ~ 4.0VKYOCERA
FCR4.0MC5 Cin=Cout=open 2.2 ~ 4.0V
FCR4.0M5 Cin=Cout=33pF 2.2 ~ 4.0VTDK
CCR4.0MC3 Cin=Cout=open 2.2 ~ 4.0VTDK
4 - 2
Page 41

Chapter 4. Peripheral Hardware
4.1.2 Prescaler
Prescaler consists of 12-bit binary counter. The clock supplied from oscillation circuit is
input to prescaler (fex). The divided output from each bit of prescaler is provided to
peripheral hardware.
4.1.3 Peripheral hardware clock control
Clock to peripheral hardware can be stopped by bit4 (ENPCK) of CKCTLR Register.
ENPCK is set to ¡È1¡È in reset state.
fex
ENPCK
4
2
fcpu
fex(MHz)
Period(s)
Period(s)
PS1 PS2 PS3 PS4 PS5 PS6 PS7 PS8 PS9 PS10 PS11 PS12
PS0 PS1 PS2 PS3 PS4 PS5 PS6 PS7 PS8 PS9 PS10 PS11 PS12
PS1 PS2 PS3 PS4 PS5 PS6 PS7 PS8 PS9 PS10 PS11 PS12PS0
Freq
Freq
2M 1M 500K 250K 125K 62.5K 31.25K 15.63K 7.183K 3.906K 1.953K 0.976K4M
500n 1u 2u 4u 8u 16u 32u 64u 128u 256u 512u 1024u250n
1M 500k 250K 125K 62.5K 31.25K 15.63K 7.183K 3.906K 1.953K 0.976K2M
500n 1u 2u 4u 8u 16u 32u 64u 128u 256u 512u 1024u
Fig. 4.3 Block diagram of Prescaler
B.I.T
Peripheral
0.488K
2048u
4 - 3
Page 42

Chapter 4. Peripheral Hardware
Clock Control Register
7 0
CKCTLR W <00C7H>
- - WDTON ENPCK BTCL BTS2 BTS1 BTS0
ENPCK
0
1
Peripheral Clock
Stopped
Provided
4.1.4 Basic Interval Timer (B.I.T)
- 8bit binary counter
- Use the bit output of prescaler as input to secure the oscillation stabilization time
after power-on
- Secures the oscillation stabilization time in standby mode (stop mode) release
- Contents of B.I.T can be read
- Provides the clock for watch dog timer.
DATA BUS
- - WTON ENPCK BTCL BTS2 BTS1 BTS0
CKCTLR
PS3
PS4
PS5
PS6
PS7
PS8
PS9
PS10
MUX
BIT0 BIT1 BIT2 BIT3 BIT4 BIT5 BIT6 BIT7
Fig. 4.4 Block diagram of Basic Interval Timer
4 - 4
BITR
IFBIT
DATA BUS
Page 43

Chapter 4. Peripheral Hardware
4.1.4.1 Control of B.I.T
If bit3(BTCL) of CKCTLR is set to ¡È1¡È, B.I.T is cleared, and then, after one machine
cycle, BTCL becomes ¡È0¡È, and B.I.T starts counting. BTCL is set to ¡È0¡È in reset
state.
Clock Control Register
7 0
CKCTLR W <00C7H>
- - WDTON ENPCK BTCL BTS2 BTS1 BTS0
BTCL
0
1
B.I.T Operation
free-run
Automatically cleared, after one cycle
4.1.4.2 Input Clock Selection of Basic Interval Timer
The input clock of B.I.T can be selected from the prescaler within a range of 2us to
256us by clock input selection bits(BTS2~BTS0). (at fex = 4MHz).
In reset state, or power on reset, BTS2=1, BTS1=1, BTS0=1 to secure the longest
oscillation stabilization time.
B.I.T can generate the wide range of basic interval time interrupt request(IFBIT) by
selecting prescaler output.
Interrupt interval can be selected to 8 kinds of interval time as shown in Table. 4.1.
4 - 5
Page 44

Chapter 4. Peripheral Hardware
7 0
CKCTLR W <00C7H>
- - WDTON ENPCK BTCL BTS2 BTS1 BTS0
BTS2
BTS1
0
0
0
0
1
1
1
1
BTS0
0
0
1
1
0
0
1
1
B.I.T. Input clock
0
1
0
1
0
1
0
1
PS3 (2us)
PS4 (4us)
PS5 (8us)
PS6 (16us)
PS7 (32us)
PS8 (64us)
PS9 (128us)
PS10 (256us)
Standby release time
512 us
1,024 us
2,048 us
4,096 us
8,192 us
16,384 us
32,768 us
65,536 us
Table 4.1 Standby release time according to BTS
4.1.4.3 Reading Basic Interval Timer
By reading of the Basic Interval Timer Register(BITR), we can read counter value of
B.I.T. Because B.I.T can be cleared or read, the spending time up to maximum 65.5ms
can be available. B.I.T is read-only register. If B.I.T register is written, then CKCTLR
register with same address is written.
Basic Interval Timer Register
7 0
BITR R <00C7H>
BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
4 - 6
Page 45

Chapter 4. Peripheral Hardware
4.1.5 Watch Dog Timer
Watch Dog Timer(WDT) consists of 6-bit binary counter, 6-bit comparator, and Watch
Dog Timer Register (WDTR).
IFBIT
0 5
WDT0 WDT1 WDT2 WDT3 WDT4 WDT5
CLR WDTON
To Reset circuit
6BIT COMPARATOR
IF WDT
0 6
WDTR
WDTR0 WDTR1 WDTR2 WDTR3 WDTR4 WDTR5 WDTCL
W <00C8H>
Internal Data Bus
Fig. 4.5 Block diagram of Watch Dog Timer
4.1.5.1 Control of WDT
Watch Dog Timer can be used 6-bit general Timer or specific Watch dog timer by setting
bit5(WDTON) of Clock Control Register(CKCTLR).
Clock Control Register
7 0
CKCTLR W <00C7H>
- - WDTON ENPCK BTCL BTS2 BTS1 BTS0
WDTON
0
1
Watch Dog Timer Function Control
6-bit Timer
Watch Dog Timer
4 - 7
Page 46

Chapter 4. Peripheral Hardware
By assigning bit6(WDTCL) of WDTR, 6-bit counter can be cleared
Watch Dog Timer Register
7 0
WDTR W <00C8H>
- WDTCL WDTR5 WDTR4 WDTR3 WDTR2 WDTR1 WDTR0
Determine Interval of IFWDT
Interval of IFWDT = Value of WDTR ¡¿ Interval of IFBIT
WDTCL
0
1
Watch Dog Timer Operation
Free-run
Automatically cleared, after one machine cycle
(Caution) : after WDTCL = 1, timer maximum error is one cycle of IFBIT.
4.1.5.2 WDT Interrupt Interval
WDT Interrupt(IFWDT) interval is determined by the interrupt IFBIT interval of Basic
Interval Timer and the value of WDT Register.
Interval of IFWDT = (IFBIT interval) * (WDTR value)
Interval of IFWDT : 512us ¡¿ 1 = 512us (MIN>)
: 65,536us ¡¿ 63 = 4,128,768us (MAX>)
As IFBIT (Basic Interval Timer Interrupt Request) is used for input clock of WDT, Input
clock cycle is possible from 512us to 65,536us by BTS. (at fex = 4MHz)
*At Hardware reset time ,WDT starts automatically.Therefore, the user must select
the CKCTLR,WDTR before WDT overflow.
( Reset WDTR value = 0Fh,15
interval of WDT = 65,536 ¡¿ 15 = 983040 uS (about 1second ) )
4 - 8
Page 47

Chapter 4. Peripheral Hardware
7 0
CKCTLR W <00C7H>
- - WDTON ENPCK BTCL BTS2 BTS1 BTS0
BTS2
0
0
0
0
1
1
1
1
BTS1
0
0
1
1
0
0
1
1
BTS0
0
1
0
1
0
1
0
1
Input clock of WDT
512 us
1,024 us
2,048 us
4,096 us
8,192 us
16,384 us
32,768 us
65,536 us
Max. Interval of WDT
output (*note1)
32,756 us
64,512 us
129,024 us
258,048 us
516,096 us
1,032,192 us
2,064,384 us
4,128,768 us
*note1) When WDTR Register value is 63(3FH)
Caution : Do not use ¡È0¡È for WDTR Register value.
Device come into the reset state by WDT
4 - 9
Page 48

Chapter 4. Peripheral Hardware
4.2 TIMER
4.2.1 Timer operation mode
Timer consists of 16bit binary counter Timer0(T0), 8bit binary Timer1(T1), Timer2(T2),
Timer Data Register, Timer Mode Register (TM01, TM0, TM1, TM2) and control circuit.
Timer Data Register Consists of Timer0 High-MSB Data Register(T0HMD), Timer0 HighLSB Data Register(T0HLD), Timer0 Low-MSB Data Register(T0LMD), Timer0 Low-LSB
Data Register(T0LLD), Timer1 High Data Register(T1HD), Timer1 Low Data
Register(T1LD), Timer2 Data Register(T2DR).
Any of the PS0~PS5, PS11 and external event input EC can be selected as clock source
for T0. Any of the PS0~PS3, PS7~PS10 can be selected as clock T1. Any of the
PS5~PS12 can be selected as clock source for T2.
- 16-bit Interval Timer
Timer0
Timer1
- 16-bit Event Counter
- 16-bit Input Capture
- 16-bit rectangular-wave output
- 8-bit Interval Timer
-8-bit rectangular-wave output
- Single/Modulo-N Mode
- Timer Output Initial Value Setting
- Timer0~Timer1 combination Logic Output
- One Interrupt Generating Every 2nd Counter Overflow
Timer2
- 8-bit Interval Timer
-8-bit rectangular-wave output
- Modulo-N Mode
*Relevant Port Mode Register (PMR1 : 00C9H) value should be assigned for event counter,
rectangular-wave output and input capture mode.
4 - 10
Page 49

Chapter 4. Peripheral Hardware
INT2/R12
(Capture
Signal)
EC/R14
TIMER0 (16 BIT)
EDGE
Selection
8 8 8 8
T0HMD T0HLD T0LMD T0LLD
T1 HD T1 LD
8 8
TIMER1 (8 BIT)
16
T2DR
TIMER2 (8 BIT)
16
Polarity
Selection
Tout LOGIC
T0 OUT/R17
REMOUT
T1 OUT/R16
T2 OUT/R15
Fig. 4.6 Timer/Counter Block diagram
4 - 11
Page 50

Chapter 4. Peripheral Hardware
4.2.2 Function of Timer & Counter
fex = 4MHz
16bit Timer (T0) 8bit Timer (T1) 8bit Timer (T2)
Resolution (CK) MAX.Count Resolution (CK) MAX.Count Resolution (CK) MAX.Count
PS0 ( 0.25us) 16,384us PS0 (0,.25us) 64us PS5 ( 8us) 2.048us
PS1 ( 0. 5us) 32,768us PS1 ( 0,5us) 128us PS6 ( 16us) 4,096us
PS2 ( 1us) 65,536us PS2 ( 1us) 256us PS7 ( 32us) 8,192us
PS3 ( 2us) 131,072us PS3 ( 2us) 512us PS8 ( 64us) 16,384us
PS4 ( 4us) 262,144us PS7 ( 32us) 8,192us PS9 ( 128us) 32,768us
PS5 ( 8us) 524,288us PS8 ( 64us) 16,384us PS10 ( 256us) 65,536us
PS11 (512us) 33,554,432us PS9 ( 128us) 32,768us PS11 ( 512us) 131,072us
EC - PS10 (256us) 65,536us PS12 (1,024us) 262,144us
4 - 12
Page 51

Internal Data Bus
Chapter 4. Peripheral Hardware
TM0
PS0
PS1
PS2
PS3
PS4
PS5
PS11
EC
INT2
R/W
<00D0H>
7 6 5 4 3 2 1 0
SINGLE/
MODULO-N
SELECTION
MUX
EDGE
SELECTION
<00D5H> <00D6H> <00D3H> <00D4H>
TIMER0 H
COUNT
REG
TIMER0 L
COUNT
REG
TIMER0
HM
DATA
REG
CK
T0 COUNTER
(16 BIT)
M
D
U
E
X
L
Clear
A
Y
TIMER0
HL
DATA
REG
<00D5H> <00D6H>
TIMER0
LM
DATA
REG
DATA READ
TIMER0
LL
DATA
REG
Int.
Gen.
IFT0
1616
MUX
16
T0INT
Fig. 4.7 Block Diagram of Timer0
4 - 13
OUTPUT GEN.
T0 OUT
Page 52

Chapter 4. Peripheral Hardware
Timer0 mode Register
7 0
TM0 R/W <00D0H>
CAP0 T0ST T0CN T0MOD T0IFS T0SL2 T0SL1 T0SL0
T0SL2 T0SL1 T0SL0 Input Clock Sel. Notes
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
PS0 (250ns)
PS1 (500ns)
PS2 ( 1us)
PS3 ( 2us)
PS4 ( 4us)
PS5 ( 8us)
PS11 (512us)
EC
*
Event
Counter
T0IFS Timer0 Interrupt Sel.
0
Interrupt Every Counter Overflow
Interrupt Every 2nd Counter Overflow
1
T0MOD Timer0 Single / Modulo-N Sel.
0
1
T0CN Timer0 Counter Continuation / Pause Control
0
1
T0ST Timer0 Start/Stop control
0
1
CAP0 Timer0 Interrupt Sel.
0
1
*PS1 : not supporting input capture.
Modulo-N
Single Mode
Count Pause
Count Continuation
Timer0 Stop
Timer0 Start after Clear
Timer/Counter
Input Capture*
4 - 14
Page 53

Internal Data Bus
Chapter 4. Peripheral Hardware
<00D1H>
7 6 5 4 3 2 1 0
TM1 R/W
X
SINGLE/
MODULO-N
SELECTION
PS0
PS1
PS2
PS3
PS7
PS8
PS9
PS10
MUX
T1INT
<00D8H>
TIMER1
COUNT REG
TIMER1
DATA
CK
T1 COUNTER
(8 BIT)
<00D7H> <00D8H>
H
REG
OUTPUT GEN.
OUTPUT GEN.
TIMER1
L
DATA
REG
Int.
Gen.
IFT1
T1OUT
Fig. 4.8 Block Diagram of Timer1
4 - 15
Page 54

Chapter 4. Peripheral Hardware
7 0
Timer1 mode Register
TM1 R/W <00D1H>
T1ST T1CN T1MOD T1IFS - T1SL2 T1SL1 T1SL0
T1SL2 T1SL1 T1SL0 Input Clock Sel.
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
PS0 (250ns)
PS1 (500ns)
PS2 ( 1us)
PS3 ( 2us)
PS7 ( 32us)
PS8 ( 64us)
PS9 (128us)
PS10 (256us)
T1IFS Timer1 Interrupt Sel.
0
Interrupt Every Counter Overflow
Interrupt Every 2nd Counter Overflow
1
T1MOD Timer1 Single / Modulo-N Sel.
0
Modulo-N
Single Mode
1
T1CN Timer1 Countern Continuation / Pause Control
0
Count Pause
Count Continuation
1
T1ST Timer1 Start/Stop control
0
Timer1 Stop
Timer1 Start after Clear
1
4 - 16
Page 55

Chapter 4. Peripheral Hardware
Timer0/Timer1 mode Register
7 0
TOUTS TOUTB - T0OUTP T0INIT T1INIT TOUT1 TPIT0
TM01 R/W <00DAH>
T0UT1 T0UT0 TOUT LOGIC
0
0
1
1
0
AND of T0 OUTPUT and T1 OUTPUT
1
NAND of T0 OUTPUT and T1 OUTPUT
0
OR of T0 OUTPUT and T1 OUTPUT
1
NOR of T0 OUTPUT and T1 OUTPUT
T1INIT Timer1 Output Initial Value
0
Timer1 Output Low
Timer1 Output HIgh
1
T0INIT Timer0 Output Initial Value
0
Timer0 Output Low
Timer0 Output High
1
T0OUTP T0OUTPolarity Selection
0
T0OUT Polarity Equal to TOUT Logic Input Signal
T0OUT Polarity Reverse to TOUT Logic Input Signal
1
TOUTB REMOUT Port Bit Control
0
REMOUT Output Low
REMOUT Output High
1
TOUTS
0
1
REMOUT Port Output Selection
(TOUT Logic or TOUTB)
Bit(TOUTB) Output Through REMOUT
TOUT Logic Output Through REMOUT
4 - 17
Page 56

Chapter 4. Peripheral Hardware
Internal Data Bus
<00D2H>
7 6 5 4 3 2 1 0
TM2 R/W
PS5
PS6
PS7
PS8
PS9
PS10
PS11
PS12
MUX
<00D9H>
TIMER2
COUNT REG
CK
T2 COUNTER
(8 BIT)
TIMER2
DATA REG
Fig. 4.9 Block Diagram of Timer2
<00D9H>
OUTPUT GEN.
IFT2
T2 OUT
4 - 18
Page 57

Chapter 4. Peripheral Hardware
Timer2 mode Register
7 0
TM2 R/W <00D2H>
- - - T2ST T2CN T2SL2 T2SL1 T2SL0
T2SL2 T2SL1 T2SL0 Input Clock Sel.
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
PS5 ( 8us)
PS6 ( 16us)
PS7 ( 32us)
PS8 ( 64us)
PS9 ( 128us)
PS10 ( 256us)
PS11 ( 512us)
PS12 (1,024us)
T2cn Timer2 Counter Continuation / Pause Control
0
Count Pause
Count Continuation
1
T2ST Timer2 Start / Stop Control
0
Timer2 Stop
Timer2 Start after Clear
1
4 - 19
Page 58

Chapter 4. Peripheral Hardware
PORT mode Register1
7 0
PMR1 W <00C9H>
T0S T1S T2S ECS - INT2S INT1S -
PMR1
0
T0S
1
0
T1S
1
0
T2S
1
0
ECS
1
-
-
-
0
INT2S
1
0
INT1S
1
PORT Sel. Remarks
R17 (I/O)
T0 (Output)
R16 (I/O)
T1 (Output)
R15 (I/O)
T2 (Output)
R14 (I/O)
EC (Input)
-
-
R12 (I/O)
INT2 (Input)
R11 (I/O)
INT1 (Input)
Output Port of Timer0
Output Port of Timer1
Output Port of Timer2
Input Port of Timer0 Event
-
Input Port of Timer0 Input Capture
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
External Interrupt Signal Edge Selectin Register
7 0
IEDS W <00CBH>
- - IED2H IED2L IED1H IED1L - -
IED*H IED*L INT*
0
0
1
1
0
1
0
1
4 - 20
-FallingEdge Selection
Rising Edge Selection
Both Edge Selection
Page 59

Chapter 4. Peripheral Hardware
4.2.3 Timer0, Timer1
TIMER0 and TIMER1 have an up-counter. When value of the up-counter
reaches the content of Timer Data Register(TDR), the up-counter is cleared to
¡È
00H¡È, and interrupt(IFT0, IFT1) is occured at the next clock
Fig. 4. 10 Operatiion of Timer0
T0 Data
Registers
Value
T0 Value
0
Concurrence Concurrence Concurrence
CLEARCLEAR CLEAR
INTERRUPT INTERRUPT INTERRUPT
IFT0
Interval period
For Timer0, the internal clock(PS) and the external clock(EC) can be selected as
counter clock. But Timer1 and Timer2 use only internal clock. As internal clock.
Timer0 can be used as internal-timer which period is determined by Timer Data
Register(TDR). Chosen as external clock, Timer0 executes as event-counter.
The counter execution of Timer0 and Timer1 is controlled by T0CN, T0ST,
CAP0, T1CN, T1ST, of Timer Mode Register TM0 and TM1. T0CN, T1CN are
used to stop and start Timer0 and Timer1 without clearing the counter. T0ST,
T1ST is used to clear the counter. For clearing and starting the counter, T0ST
or T1ST should be temporarily set to ¡È0¡È and then set to ¡È1¡È. T0CN,
T1CN, T0ST and T1ST should be set ¡È1¡È, when Timer counting-up.
Controlling of CAP0 enables Timer0 as input capture. By programming of CAP0
to ¡È1¡È, the period of signal from INT2 can be measured and then, event
counter value for INT2 can be read.
4 - 21
Page 60

Chapter 4. Peripheral Hardware
T0 Data
Register
Value
T0 Value
Counter
0
IFT0
T0ST
T0CN
Concurrence
CLEAR
INTERRUPT
Count
Fig. 4. 11. Start/Stop operation of Timer0
0 1
Stop Clear
& Count
Clear & Start
0 1
Stop Count
Concurrence
CLEAR
INTERRUPT
Clear & Start
continue
INT0
T3
T2
T1
T0
Fig. 4. 12. Input capture operation of Timer0
4 - 22
Page 61

Chapter 4. Peripheral Hardware
During counting-up, value of counter can be read. Timer execution is stopped by the
reset signal (RESET = ¡ÈL¡È)
(Note) in the process of reading 16-bit Timer Data, first read the upper 8-bit data. Then
read the lower 8-bit data, and read the upper 8-bit data again. If the earlier read upper
8-bit data are matched with the later read upper 8-bit data, read 16-bit data are correct.
If not, caution should be taken in the selection of upper 8-bit data.
Example)
1) Upper 8-bit Read 0A 0A
2) Lower 8-bit Read FF 01
3) Upper 8-bit Read 0B 0B
¡é ¡é
0AFF0B01
4.2.3.1 Single/Modulo-N Mode
Timer0 (Timer1) can select initial (T0INIT, T1INIT of TM0, TM1) output level of Timer
Output port. If initial level is ¡ÈL¡È, Low-Data Register value of Timer Data Register is
transferred to comparator and T0OUT(T1OUT) is to be ¡ÈLow¡È, if initial level is
¡È
High¡È, High -Data Register is transferred and to be ¡ÈHigh¡È. Single Mode can be
set by Mode Select bit(T0MOD, T1MOD) of Timer Mode Register (TM0, TM1) to ¡È1
¡È
When used as Single Mode, Timer counts up and compares with value of Data Register.
If the result is same, Time Out interrupt occurs and level of Timer Output port toggle,
then counter stops as reset state. When used as Modulo-N Mode, T0MOD(T1MOD)
should be set ¡È0¡È. Counter counts up until the value of Data Register and occurs
Time-out interrupt. The level of Timer Output port toggle and repeats process of
counting the value which is selected in Data Register. During Modulo-N Mode, If
interrupt select bit(T0IFS, T1IFS) of Mode Register is ¡È0¡È, Interrupt occurs on every
Time-out. If it is ¡È1¡È, Interrupt occurs every second time-out.
(*note. Timer Output is toggled whenever time out happen)
4 - 23
Page 62

Chapter 4. Peripheral Hardware
8bit / 16bit
counting
Timer Enable initial.
value toggle.
Timer Enable initial.
value toggle.
Timer-output toggle.
interrupt occurs.
count stop.
< Single Mode >
8bit / 16bit
counting
Timer-Output Toggle.
Int occurs(IFS = 1) Each 2nd time out.
Int occurs(IFS = 0) When Time out.
< Modulo-N Mode >
Fig. 4. 13 Operation Diagram for Single/Modulo-N Mode
4 - 24
Page 63

Chapter 4. Peripheral Hardware
4.2.4 Timer2
Timer2 operates as a up-counter. The content of T2DR are compared with the
contents of up-counter. If a match is found. Timer2 interrupt (IFT2) is generated
and the up-counter is cleared to ¡È00H¡È. Therefore, Timer2 executes as a
interval timer. Interrupt period is determined by the count source clock for the
Timer2 and content of T2DR.
When T2ST is set to 1, count value of Timer 2 is cleared and starts countingcup. For clearing and starting the Timer2. T2ST have to set to ¡È1¡È after set to
¡È0¡È
. In order to write a value directly into the T2DR, T2ST should be set to
¡È0¡È
. Count value of Timer2 can be read at any time.
T2 Data
Registers
Value
T2 Value
Concurrence Concurrence Concurrence
0
INTERRUPT INTERRUPT INTERRUPT
IFT0
Interval period
Fig. 4. 14 Operation of Timer2
CLEARCLEAR CLEAR
4 - 25
Page 64

Chapter 4. Peripheral Hardware
T2 Data
Register
Value
T2 Value
0
IFT2
T2ST
Counter
Concurrence
CLEAR
INTERRUPT
count stop by 0 count start clear by 1
Count up
Count Stop
Concurrence
CLEAR
Count
continue
INTERRUPT
Count up after clear
Fig. 4. 15. Start/Stop of Timer2
4 - 26
Page 65

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 66

Chapter 5. Interrupt
CHAPTER 5. INTERRUPT
The GMS810 Series contains 8 interrupt sources; 3 externals and 5 internals. Nested
interrupt services with priority control is also possible. Software interrupt is nonmaskable interrupt, the others are all maskable interrupts.
- 8 interrupt source (2Ext, 3Timer, BIT, WDT and Key Scan)
- 8 interrupt vector
- Nested interrupt control is possible
- Programmable interrupt mode
¡Ü Hardware accept mode
¡Ü Software selection accept mode
- Read and write of interrupt request flag are possible.
- In interrupt accept, request flag is automatically cleared.
Interrupt hardware consists of Interrupt Mode Register(MOD), Interrupt Enable Register
High (IENH), Interrupt Enable Register Low(IENL), Interrupt Request Register
High(IRQH), Interrupt Request Register Low(IRQL) and priority circuit. Interrupt function
block diagram is shown in Fig. 5.1
5.1 INTERRUPT SOURCE
Each interrupt vector is independent and has its own priority. Software interrupt(BRK) is
also available. Interrupt source classification is shown in Table 5.1
5 - 1
Page 67

Chapter 5. Interrupt
0 7 0 7 0 7
- - - - - - - - - -
IENL IENH IMOD
Internal Data Bus
KSCN
INT1
INT2
IFT0
IFT1
IFT2
IFWDT
IFBIT
KSCNR
INT1R
INT2R
T0R
T1R
T2R
WDTR
BITR
IRQ
Hardware
Interrupt
Mask
Non-maskable
Maskable
PRIORITY
CONTROL
Fig. 5.1 Interrupt Source
Priority
-
0 KSCNR (Key Scan) FFFB FFFA
1 INT1R(External Interrupt 1) FFF9 FFF8
2 INT2R(External Interrupt 2) FFF7 FFF6
3 T0R (Timer0) FFF3 FFF2
4 T1R (Timer1) FFF1 FFF0
Interrupt Source
RST (RESET PIN)
INT Vector H
FFFF
INT.
VECTOR
ADDR.
BRK
Standby Mode Release
INT Vector L
FFFE
Software
Interrupt
5 T2R (Timer2) FFEF FFEE
6 WDTR (Watch Dog Timer) FFE9 FFE8
7 BITR (Basic Interval Timer) FFE7 FFE6
- - BRK Instruction FFDF FFDE
Table 5.1 Interrupt Source
5 - 2
Page 68

Chapter 5. Interrupt
5.2 INTERRUPT CONTROL REGISTER
I flag of PSW is a interrupt mask enable flag. When I flag = ¡È0¡È, all interrupts become
disable. When I flag = ¡È1¡È, interrupts can be selectively enabled and disabled by
contents of corresponding Interrupt Enable Register.
When interrupt is occured, interrupt request flag is set, and Interrupt request is detected
at the edge of interrupt signal. The accepted interrupt request flag is automatically
cleared during interrupt cycle process. The interrupt request flag maintains ¡È1¡È until
the interrupt is accepted or is cleared in program.
In reset state, interrupt request flag register(IRQH, IRQL) is cleared to ¡È0¡È. It is
possible to read the state of interrupt register and to mainpulate the contents of register
and to generate interrupt. (Refer to software interrupt).
7 0
IENL R/W <00CCH>
IENH R/W <00CEH>
IRQL R/W <00CDH>
IRQH R/W <00CFH>
- WDTR BITE - - - - -
7 0
KSCNE INT1E INT2E - T0E T1E T2E -
7 0
- WDTR BITE - - - - -
7 0
KSCNR INT1R INT2R - T0R T1R T2R -
Interrupt Enable Register Low
Interrupt Enable Register High
Interrupt Request Register Low
Interrupt Request Register High
5 - 3
Page 69

Chapter 5. Interrupt
5.3 INTERRUPT ACCEPT MODE
The interrupt priority order is determined by bit(IM1, IM0) of IMOD register.
Interrupt Mode Register
7 0
IMOD R/W <00CAH>
- - IM1 IM0 IP3 IP2 IP1 IP0
Assigning by interrupt accept mode bit
IM1 IM0 Priority
0 0 Fixed by H/W
0 1 Changeable by IP 3-0
1 * Interrupt is inhibited
5.3.1 Selection of interrupt by IP3 - IP0
The condition allow for accepting interrupt is set state of the interrupt mask enable flag
and the interrupt enable bit must be ¡È1¡È.
IP3
0
0
0
0
0
0
0
1
1
1
1
1
IP2
IP1
0
0
0
1
1
1
1
0
0
0
0
1
0
1
1
0
0
1
1
0
0
1
1
0
IP0
Selection interrupt
1
0
1
0
1
0
1
0
1
0
1
0
KSCNR (Key Scan)
INT1R (External interrupt 1)
INT2R (External interrupt 2)
Reserved
T0R (Timer 0)
T1R (Timer 1)
T2R (Timer 2)
Reserved
Reserved
WDTR (Watch Dog Timer)
BITR (Basic Interval Timer)
Reserved
Table 5.2 Interrupt Selection by IP3 - IP0
*In Reset state, these IP3 - IP0 registers become all ¡È0¡È.
5 - 4
Page 70

5.3.2 Interrupt Timing
Chapter 5. Interrupt
CLOCK
SYNC
A command before interrupt interrupt process step
Interrupt Request Sampling
Fig. 5.2 Interrupt Enable Accept Timing
Interrupt Request
sampling time
Maximum 12 machine cycle (When execute DIV instruction)
Minimum 0 machine cycle
Interrupt preprocess step is 8 machine cycle
Maximum 1 + 12 + 8 = 21 machine cycle
Interrupt overhead
Minimum 1 + 0 + 8 = 9 machine cycle
5.3.3 The valid timing after executing Interrupt control instructions
I flag is valid just after executing of EI/DI on the contrary.
Interrupt Enable register is valid one instruction after controlling interrupt Enable
Register.
5 - 5
Page 71

Chapter 5. Interrupt
5.4 INTERRUPT PROCESSING SEQUENCE
When an interrupt is accepted, the on-going process is stopped and the interrupt service
routine is executed. After the interrupt service routine is completed it is necessary to
restore everything to the state before the interrupt occured.
As soon as an interrupt is accepted, the content of the program counter and PSW are
saved in the stack area.
At the same time, the content of the vector address corresponding to the accepted
interrupt, which is in the interrupt vector table, enters into the program counter and
interrupt service is executed. In order to execute the interrupt service routine, it is
necessary to write the jump addresses in the vector table (FFEOH-FFFFH)
corresponding to each interrupt
Interrupt Processing Step
1) Store upper byte of Program Counter, SP ¡ç SP
2) Store lower byte of Program Counter, SP ¡ç SP - 1
3) Store Program Status Word, SP ¡ç SP - 2
4) After resetting of I-flag, clear accepted Interrupt
Request Flag.(Set B-flag for BRK Instruction)
5) Call Interrupt service routine
5 - 6
Page 72

Clock
SYNC
R/W
Chapter 5. Interrupt
Interrupt Process Step ISR
*1
INTERNAL
ADDR. BUS
INTERNAL
DATA BUS
INTERNAL
READ
INTERNAL
WRITE
PC SP SP-1 SP-2 LVA*2 HVA*3 NEW PC
OP
CODEOPCODE
PCH PCL PSW
¡ÈL¡È
VECTOR
¡ÈH¡È
VECTOR
Fig. 5. 3 Interrupt Procesing Step Timing
*1 ISR : Interrupt Service Routine
*2 LVA : Low Vector Address
*3 HVA : High Vector Address
5.1 SOFTWARE INTERRUPT
5.5.1 Interrupt by Break(BRK) Instruction
Software interrupt is available just by writing ¡ÈBreak(BRK)¡È instruction.
The values of PC and PSW is stacked by BRK instruction and then B flag of PSW is set
and I flag is reset.
Flag change by BRK execution
N V G B H I Z C
set reset
N V G 1 H 0 Z C
(Right after BRK execution)
5 - 7
PSW
PSW
Page 73

Chapter 5. Interrupt
Interrupt vector of BRK instruction is shared by vector of Table Call(TCALL0). When
both instruction of BRK and TCALL0 are used, as shown in Fig. 5.4 each processing
routine is judged by contents of B flag.
There is no instruction to reset directly B flag.
0
BRK or
TCALL0
B flag
1
BRK INTERRUPT ROUTINE TCALL0 ROUTINE
RETI RET
Fig. 5.4 Execution of BRK or TCALL0
5.6 MULTIPLE INTERRUPT
If there is an interrupt, Interrupt Mask Enable Flag is automatically cleared before
entering the Interrupt Service Routine. After then, no interrupt is accepted. If EI
instruction is executed, interrupt mask enable bit becomes ¡È1¡È, and each enable bit
can accept interrupt request. When two or more interrupts are generated
simultaneously, the highest priority interrupt set by Interrupt Mode Register is accepted.
5 - 8
Page 74

Chapter 5. Interrupt
5.7 Key Scan Input Processing
Key Scan Interrupt is generated by detecting low Input from each Input pin (R0, R1) or
standby(SLEEP, STOP) release signal. Key Scan ports are all 16bit which are
controlled by Stand-by Mode Release Register (SMRR0, SMRR1). Key Input is
considered as Interrupt, therefore, KSCNE bit of IEHN should be set for correct interrupt
executing, SLEEP mode and STOP mode, the rest of executing is the same as that of
external Interrupt. Each SMRR Register bit is allowed for each port(for Bit=0, no Key
Input, for Bit=1, Key Input available). At reset, SMRR becomes ¡È00H¡È. So, there is
no Key Input source.
7 0
SMRR0 W <00DCH>
R00
R01
.
.
R07
7 0
R0 port
Selection Logic
Internal
Key Scan
Interrupt
W <00DDH>SMRR1
R10
R11
R17
.
.
R1 port
Selection Logic
<Key Scan Block>
5 - 9
Page 75

Chapter 5. Interrupt
SMRR0 Mode Register
7 0
SMRR0 W <00DCH>
KR07 KR06 KR05 KR04 KR03 KR02 KR01 KR00
KR00 Key Input Selection
0
1
KR01 Key Input Selection
0
1
KR02 Key Input Selection
0
1
KR03 Key Input Selection
0
1
KR04 Key Input Selection
0
1
no select
select
no select
select
no select
select
no select
select
no select
select
5 - 10
KR05 Key Input Selection
0
1
KR06 Key Input Selection
0
1
KR07 Key Input Selection
0
1
no select
select
no select
select
no select
select
Page 76

SMRR1 Mode Register
7 0
Chapter 5. Interrupt
SMRR1 W <00DDH>
KR17 KR16 KR15 KR14 KR13 KR12 KR11 KR10
KR10 Key Input Selection
0
1
KR11 Key Input Selection
0
1
KR12 Key Input Selection
0
1
KR13 Key Input Selection
0
1
KR14 Key Input Selection
0
1
no select
select
no select
select
no select
select
no select
select
no select
select
5 - 11
KR15 Key Input Selection
0
1
KR16 Key Input Selection
0
1
KR17 Key Input Selection
0
1
no select
select
no select
select
no select
select
Page 77

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 78

Chapter6. Standby Function
CHAPTER 6. STANDBY FUNCTION
To save power consumption, there is STOP modes. In this modes, the execution of
program stops.
6.1 STOP MODE
STOP mode can be entered by STOP instruction during program. In STOP mode,
oscillator is stopped to make all clocks stop, which leads to less power consumption. All
registers and RAM data are preserved. ¡ÈNOP¡È instruction should be follows STOP
instruction for rising precharge time of Data Bus line.
ex) STOP : STOP instructiion excution
NOP : NOP instruction
6 - 1
Page 79

Chapter6. Standby Function
STOP
Control
Signal
OSC.
Circuit
S Q
R
Clock Pulse GEN
CLR
MUX
Prescaler
CLR
S Q
R
Release Signal From Interrupt Circuit
RESET
Fig. 6.1 Block Diagram of Standby Circuit
CPU Clock
Basic Interval Timer
CLR
Overflow Detection
B.I.T 7
ENPCK
Prescaler
Peripheral
PS10
Selector
Basic Interval Timer
Fig. 6.2 ENPCK and Basic Interval Timer Clock
6 - 2
Page 80

Chapter6. Standby Function
6.2 STANDBY MODE RELEASE
6.2.1 STOP Mode Release
Release of STANDBY mode is executed by RESET input and Interrupt signal. Register
value is defined when Reset. When there is a release signal of STOP mode (Interrupt,
RESET input), the instruction execution starts after stabilization oscillation time is set by
value of BTS2~BTS0 and set ENPCK to 1.
Table 6.1. Standby Mode Register
Release Signal STOP
RESET 0
KSCN (Key input) 0
INT1 - INT2 0
Table 6.2 Standby Mode Release
Release Factor Release Method
RESET Pin By RESET Pin = Low level, Standby mode is release and system is initialized
KSCN
(Key input)
INT 1 pin
INT 2 pin
Standby mode is released by Low input of selected pin by Key Scan Input
(SMRR0, SMRR1)
In case of interrupt Mask Enable flag = 0, program executes just after standby
instruction, if flag = 1, enters each interrupt service routine.
When external interrupt (INT1, INT2) enable flag is ¡È1¡È, standby mode is
released at the rising edge of each terminal.
When Standby mode is released at interrupt. Mask Enable flag = 0, program
executes from the next instruction of standby instruction.
When 1, enters each interrupt service routine.
6 - 3
Page 81

Chapter6. Standby Function
<STOP MODE>
CLCOK
STOP Mode
Release By Interrupt
Program Setting Time by CKCTLR
RESET
Stable
OSC. time
Refer to Table 4-1
Longer than stable OSC. Time
Fig. 6.3 Release Timing of Standby Mode
6.3 RELEASE OPERATION OF STANDBY MODE
After Standby mode is released, the operation begins according to content of
related interrupt register just before Standby mode start(Fig. 6.3)
6.3.1 In Case of Interrupt Enable Flag(I) of PSW = 0
Release by only interrupt which interrupt enable flag = 1, and starts to execute from next
to Standby instruction (STOP).
6 - 4
Page 82

Chapter6. Standby Function
6.3.2 In Case of Interrupt Enable Flag(I) of PSW = 1
Released by only interrupt which each interrupt enable flag = 1, and jump to the relevant
interrupt service routine.
Note) When STOP instruction is used, B.I.T should guarantee the stabilization oscillation
time. Thus, just before entering STOP mode, clock of bit10(PS10) of Prescaler is
selected or peripheral hardware clock control bit(ENPCK) to 1, Therefore the clock
necessary for stabilization oscillation time should be input into B.I.T. otherwise, Standby
mode is released by reset signal. In case of interrupt request flag and interrupt enable
flag are both ¡È1¡È, Standby mode is not entered.
Fig. 6.5 Standby Mode Release Flow
STOP Command
Standby Mode
Interrupt Request GEN.
IE Flag
1
Standby Mode Release
PSW
IE Flag
1
Interrupt Service Routine
0
0
Standby Next Command
Execution
6 - 5
Page 83

Chapter6. Standby Function
Internal circuit STOP Mode
Oscillator Stop
Internal CPU clock Stop
Register Retained
I/O port Retained
Prescaler Stop
Basic Interval Timer Stop
Watch Dog Timer Stop
Address Bus, Data Bus Retained
Table 6.3 Operation State in Standby Mode
RAM Retained
Timer Stop
6 - 6
Page 84

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 85

Chapter7. Reset Function
CHAPTER 7. RESET FUNCTION
7.1 EXTERNAL RESET
The RESET pin should be held at low for at least 2machine cycles with the power supply
voltage within the operating voltage range and must be connected 0.1uF capacitor
for stable system initialization.
The RESET pin contains a Schmitt trigger with an internal pull-up resistor.
RESET
0.1uF capacitor
Fig 7.0 RESET Pin connection.
7.2 POWER ON RESET
Power On Reset circuit automatically detects the rise of power voltage (the rising time
should be within 50ms) the power voltage reaches a certain level, RESET terminal is
maintained at ¡ÈL¡È Level until a crystal ceramic oscillator oscillates stably. After power
applies and starting of oscillation, this reset state is maintained for about oscillation cycle of
219 (about 65.5ms : at 4MHz).
The execution of built-in Power On Reset circuit is as follows :
(1) Latch the pulse from Power On Detection Pulse Generator circuit, and reset
Prescaler, B.I.T and B.I.T Overflow detection circuit.
(2) Once B.I.T Overflow detection circuit is reset. Then, Prescaler starts to count.
(3) Prescaler output is inputted into B.I.T and PS10 of Prescaler output is automatically
selected. If overflow of B.I.T is detected, Overflow detection circuit is set.
(4) Reset circuit generates maximum period of reset pulse from Prescaler and B.I.T.
7 - 1
Page 86

Chapter7. Reset Function
Internal IC
RESET
0.1uF
XTAL PS10 MSB
OSC.
VDD
VSS
CLR
Prescaler
CLR
Basic Interval
Tiemr
Internal Reset
Power On DET
Pulse GEN.
CLR
Basic Interval
Tiemr
Fig. 7.1 Block Diagram of Power On Reset Circuit
Notice ; When Power On Reset, oscillator stabilization time doesn`t include OSC. Start time.
VDD
OSC. START TIMING
PRESCALER COUNT START
Fig. 7.2 Oscillator stabilization diagram
7 - 2
Page 87

RESET
INTERNAL
RESET
Chapter7. Reset Function
ADDR. BUS
INTERNAL
DATA BUS
SP SP-1 SP-2 FFFE FFFF NEW PC
FE LSB
VECTOR
Fig. 7.3 Reset Timing by Diagram
MSB
VECTOR
7 - 3
Page 88

Chapter7. Reset Function
7.3 Low Voltage Detection Mode
7.3.1 Low voltage detection condition
An on board voltage comparator checks that VDD is at the required level to ensure
correct operation of the device. If VDD is below a certain level, Low voltage detector
forces the device into low voltage detection mode.
7.3.2 Low Voltage Detection Mode
There is no power consumption except stop current, stop mode release function is
disabled. All I/O port is configured as input mode and Data memory is retained until
voltage through external capacitor is worn out. In this mode, all port can be selected with
Pull-up resistor by Mask option. If there is no information on the Mask option sheet ,the
default pull up option (all port connect to pull-up resistor ) is selected.
7.3.3 Release of Low Voltage Detection Mode
Reset signal result from new battery(normally 3V) wakes the low voltage detection mode
and come into normal reset state. It depends on user whether to execute RAM clear
routine or not.
Low Voltage (V)
3.0
2.8
2.6
2.4
2.2
2.0
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
0¡É 10¡É 20¡É 30¡É 40¡É 50¡É 60¡É 70¡É
Temperature(¡É)
Fig 7.5 Low Voltage vs Temperature
7 - 4
Page 89

* SRAM BACK-UP after Low Voltage Detection.
3.0V
about hours depend on Vcc-Gnd Capacitor
Chapter7. Reset Function
MCU OPR.
Voltage
1.8V(TYP)
( 20¡É)
Low Voltage Detection
point
0.7V(VRET)
0V
* SRAM Data Backup
* The operation after Low voltage detection
Interrupt : disable
User
Removes
Batteries
Stop release : disable
All I/O port : input Mode
Remout port : Low Level
OSC : STOP
All I/O port pull-up ON (Mask Option )
SRAM Data retention
* S/W flow chart example after Reset using SRAM Back-up
RESET
Stack Pointer initialize
Power On Reset
( SRAM retention)
Power On Reset
( SRAM unstable )
User
Replace
Batteries
Check the SRAM value
(RAM Pattern, Check sum..)
SRAM DATA IS VALID?
Y
Use saved SRAM
value
7 - 5
N
Clear All Ram area
Page 90

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 91

APPENDIX A. INSTRUCTION SET TABLE
Appendix A. Instruction Set Table
No. MNEMONIC OP CODE Words
1
ADC #imm
2
ADC dp
3
ADC dp+X
4
ADC !abs
5
ADC !abs+Y
6
ADC [dp+X]
7
ADC [dp]+Y
8
ADC {X}
9
AND #imm
10
AND dp
11
AND dp+X
12
AND !abs
13
AND !abs+Y
14
AND [dp+X]
15
AND [dp]+Y
16
AND {X}
17
ASL A
18
ASL dp
19
ASL dp+X
20
ASL !abs
21
BBC A.bit, rel
22
BBC dp.bit, rel
23
BBS A.bit, rel
24
BBS dp.bit, rel
25
BCC rel
26
BCS rel
27
BEQ rel
28
BIT dp
29
BIT !abs
30
BMI rel
31
BNE rel
32
BPL rel
33
BRA rel
34
BRK
35
BVC rel
36
BVS rel
37
CLR1 dp.bit
38
CLRA1 A.bit
39
CLRC
40
CLRG
41
CLRV
D0
F0
0C
1C
2F
0F
B0
2B
04
05
06
07
15
16
17
14
84
85
86
87
95
96
97
94
08
09
19
18
y2
y3
x2
x3
50
90
70
10
30
y1
20
40
80
2
2
2
3
3
2
2
1
2
2
2
3
3
2
2
1
1
2
2
3
2
3
2
3
2
2
2
2
3
2
2
2
2
1
2
2
2
2
1
1
1
Exec.
Cycle
2
3
4
4
5
6
6
3
2
3
4
4
5
6
6
3
2
4
5
5
4/6
5/7
4/6
5/7
2/4
2/4
2/4
4
5
2/4
2/4
2/4
4
8
2/4
2/4
4
2
2
2
2
OPERATION
A = A + op + C
¡È
¡È
¡È
¡È
¡È
¡È
¡È
A = A & op
¡È
¡È
¡È
¡È
¡È
¡È
¡È
op = op << 1
¡È
¡È
¡È
if (bit = 0)
then branch
if (bit = 1)
then branch
if (C=0) branch
if (C=1) branch
if (Z=1) branch
Z = A & op
¡È
if (N=1) branch
if (Z=0) branch
if (N=0) branch
Branch
S/W interrupt
if (V=0) branch
if (V=1) branch
op.bit = 0
¡È
C = 0
G = 0
V = 0
Flag
MVG HIZC
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
N N . . . . Z .
N N . . . . Z .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . 1 . 0 . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . 0
. . 0 . . . . .
. 0 . . 0 . . .
A -1
Page 92

Appendix A. Instruction Set Table
No. MNEMONIC OP CODE Words
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
CMP #imm
CMP dp
CMP dp+X
CMP !abs
CMP !abs+Y
CMP [dp+X]
CMP [dp]+Y
CMP {X}
COM dp
CMPX #imm
CMPX dp
CMPX !abs
CMPY #imm
CMPY dp
CMPY !abs
DAA
DAS
DEC A
DEC dp
DEC dp + X
DEC !abs
DEC X
DEC Y
DIV
DI
EI
EOR #imm
EOR dp
EOR dp+X
EOR !abs
EOR !abs+Y
EOR [dp+X]
EOR [dp]+Y
EOR {X}
INC A
INC dp
INC dp + X
INC !abs
INC X
INC Y
JMP !abs
JMP [!abs]
JMP [dp]
CALL !abs
CALL [dp]
PCALL upage
TCALL n
44
45
46
47
55
56
57
54
2C
5E
6C
7C
7E
8C
9C
DF
CF
A8
A9
B9
B8
AF
BE
9B
60
E0
A4
A5
A6
A7
B5
B6
B7
B4
88
89
99
98
8F
9E
1B
1F
3F
3B
5F
4F
nA
2
2
2
3
3
2
2
1
2
2
2
3
2
2
3
1
1
1
2
2
3
1
1
1
1
1
2
2
2
3
3
2
2
1
1
2
2
3
1
1
3
3
2
3
2
2
1
Exec.
Cycle
2
3
4
4
5
6
6
3
4
2
3
4
2
3
4
3
3
2
4
5
5
2
2
12
3
3
2
3
4
4
5
6
6
3
2
4
5
5
2
2
3
5
4
8
8
6
8
OPERATION
Compare A, op
¡È
¡È
¡È
¡È
¡È
¡È
¡È
dp = dp
Compare X, op
¡È
¡È
Compare Y, op
¡È
¡È
¡È
Dec. adjustment (Add)
Dec. adjustment (Sub)
op = op -1
¡È
¡È
¡È
¡È
¡È
Q:A, R:Y ¡ç YA/X
I = 0
I = 1
A = A + op
¡È
¡È
¡È
¡È
¡È
¡È
¡È
OP = OP + 1
¡È
¡È
¡È
¡È
¡È
Branch
¡È
¡È
Subroutine call
¡È
¡È
¡È
Flag
MVG HIZC
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z .
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N V . . H . Z .
. . . . . 0 . .
. . . . . 1 . .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
A -2
Page 93

Appendix A. Instruction Set Table
No. MNEMONIC OP CODE Words
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
LDA #imm
LDA dp
LDA dp+X
LDA !abs
LDA !abs+Y
LDA [dp+X]
LDA [dp]+Y
LDA {X}
LDA {X}+
LDM dp, #imm
LDX #imm
LDX dp
LDX dp+Y
LDX !abs
LDY #imm
LDY dp
LDY dp+X
LDY !abs
LSR A
LSR dp
LSR dp + X
LSR !abs
MUL
NOP
OR #imm
OR dp
OR dp+X
OR !abs
OR !abs+Y
OR [dp+X]
OR [dp]+Y
OR {X}
PUSH A
PUSH X
PUSH Y
PUSH PSW
POP A
POP X
POP Y
POP PSW
ROL A
ROL dp
ROL dp+X
ROL !abs
ROR A
ROR dp
ROR dp+X
ROR !abs
C4
C5
C6
C7
D5
D6
D7
D4
DB
E4
1E
CC
CD
DC
3E
C9
D9
D8
48
49
59
58
5B
FF
64
65
66
67
75
76
77
74
0E
2E
4E
6E
0D
2D
4D
6D
28
29
39
38
68
69
79
78
2
2
2
3
3
2
2
1
1
3
2
2
2
3
2
2
2
3
1
2
2
3
1
1
2
2
2
3
3
2
2
1
1
1
1
1
1
1
1
1
1
2
2
3
1
2
2
3
Exec.
Cycle
2
3
4
4
5
6
6
3
4
5
2
3
4
4
2
3
4
4
2
4
5
5
9
2
2
3
4
4
5
6
6
3
4
4
4
4
4
4
4
4
2
4
5
5
2
4
5
5
OPERATION
A = op
¡È
¡È
¡È
¡È
¡È
¡È
¡È
A = op, X = X+1
dp = #imm
X = op
¡È
¡È
¡È
Y = op
¡È
¡È
¡È
op = op >>1
¡È
¡È
¡È
YA = Y * A
No operation
A = A : op
¡È
¡È
¡È
¡È
¡È
¡È
¡È
Push op, SP = SP - 1
¡È
¡È
¡È
Pop op, SP = SP + 1
¡È
¡È
¡È
op = op << 1, with C
¡È
¡È
¡È
op = op >> 1, with C
¡È
¡È
¡È
Flag
MVG HIZC
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
. . . . . . . .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z .
. . . . . . . .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
(restored)
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
N . . . . . Z C
A -3
Page 94

Appendix A. Instruction Set Table
No. MNEMONIC OP CODE Words
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
RETI
RET
SBC #imm
SBC dp
SBC dp+X
SBC !abs
SBC !abs+Y
SBC [dp+X]
SBC [dp]+Y
SBC {X}
SETI dp.bit
SETA1 A.bit
SETC
SETG
STA dp
STA dp+X
STA !abs
STA !abs+Y
STA [dp+X]
STA [dp]+Y
STA {X}
STA {X}+
STOP
STX dp
STX dp+Y
STX !abs
STY dp
STY dp+X
STY !abs
TAX
TAY
TST dp
TSPX
TXA
TXSP
TYA
XAX
XAY
XCN
XMA dp
XMA dp+X
XMA {X}
XYX
7F
6F
24
25
26
27
35
36
37
34
x1
0B
A0
C0
E5
E6
E7
F5
F6
F7
F4
FB
EF
EC
ED
FC
E9
F9
F8
E8
9F
4C
AE
C8
8E
BF
EE
DE
CE
BC
AD
BB
FE
1
1
2
2
2
3
3
2
2
1
2
2
1
1
2
2
3
3
2
2
1
1
1
2
2
3
2
2
3
1
1
2
1
1
1
1
1
1
1
2
2
1
1
Exec.
Cycle
6
5
2
3
4
4
5
6
6
3
4
2
2
2
4
5
5
6
7
7
4
4
3
4
5
5
4
5
5
2
2
3
2
2
2
2
4
4
5
5
6
5
4
OPERATION
Interrupt end
Subroutine end
A = A - op - C
¡È
¡È
¡È
¡È
¡È
¡È
¡È
op.bit = 1
¡È
C = 1
G = 1
op = A
¡È
¡È
¡È
¡È
¡È
¡È
op = A, X=X+1
CPU, OSC stop
op = X
¡È
¡È
op = Y
¡È
¡È
X= A
Y = A
Test dp = 0 or not
X = SP
A = X
SP = X
A = Y
A ¡ê X
A ¡ê Y
A7-4 A3-0
A ¡ê op
¡È
¡È
X ¡ê Y
Flag
MVG HIZC
(restored)
. . . . . . . .
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
N V . . H . Z C
. . . . . . . .
. . . . . . . .
. . . . . . . 1
. . 1 . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
. . . . . . . .
N . . . . . Z .
. . . . . . . .
. . . . . . . .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
N . . . . . Z .
. . . . . . .
A -4
Page 95

Appendix A. Instruction Set Table
No. MNEMONIC OP CODE Words
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
LDYA dp
STYA dp
INCW dp
DECW dp
ADDW dp
SUBW dp
CMPW dp
CBNE dp, rel
CBNE dp+X, rel
DBNE dp, rel
DBNE Y, rel
NOT1 M.bit
OR1 M.bit
OR1B M.bit
AND1 M.bit
AND1B M.bit
EOR1 M.bit
EOR1B M.bit
LDC M.bit
LDCB M.bit
STC M.bit
TCLR1 !abs
TSET1 !abs
7D
DD
9D
BD
1D
3D
5D
FD
8D
AC
7B
4B
6B
6B
8B
8B
AB
AB
CB
CB
EB
5C
3C
2
2
2
2
2
2
2
3
3
3
2
3
3
3
3
3
3
3
3
3
3
3
3
Exec.
Cycle
5
5
6
6
5
5
4
5/7
6/8
5/7
4/6
5
5
5
4
4
5
5
4
4
6
6
6
OPERATION
YA = (dp+1)(dp)
(dp+1)(dp) = YA
(dp+1)(dp)++
(dp+1)(dp)-YA + (dp+1)(dp)
YA - (dp+1)(dp)
CP YA, (dp+1)(dp)
if (op !=A)
then branch
Dec op, if (Z=0)
then branch
M.bit = M.bit
C = M.bit : C
C = (M.bit) : C
C = M.bit & C
C = (M.bit) & C
C= M.bit + C
C = (M.bit) + C
C = M.bit
C = (M.bit)
M.bit = C
!abs = A & !abs
!abs = A : !abs
Flag
MVG HIZC
N . . . . . Z .
. . . . . . . .
N . . . . . Z .
N . . . . . Z .
N V . . H . Z C
N V . . H . Z C
N . . . . . Z C
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . C
. . . . . . . C
. . . . . . . C
. . . . . . . C
. . . . . . . C
. . . . . . . C
. . . . . . . C
. . . . . . . C
. . . . . . . .
N . . . . . Z .
N . . . . . Z .
A -5
Page 96

OVERVIEW 1
FUNCTION DESCRIPTION 2
I/O PORT 3
PERIPHERAL HARDWARE 4
INTERRUPT 5
STANDBY FUNCTION 6
RESET FUNCTION 7
APPENDIX A. 8
APPENDIX B. 9
Page 97

Appendix B. PROGRAMMER`S GUIDE
APPENDIX B.
General Circuit Diagram of GMS810series.
VCC
4MHz
OSC
VCC
Indicator LED
R13 R14
1
2
R12 R15
3
R11 R16
4
R10 R17
5
VDD REMOUT
GMS 81016
Xout RESET
Xin TEST
R00 R07
R01 R06
R02 R05
R03 R04
R20 VSS
6
7
8
9
10
11
12
24
23
22
21
20
19
18
17
16
15
14
13
0.1uF
vcc
Filter for Vcc-GND
TR1
noise
Infrared LED
capacitor for prevent power drop
VCC
Normally use the above 100uF
during pulse is transmitted.
If you use the SRAM back-up,
use at least 220uF
0.1uF
220uF
DC3V
We recommend to
use ALKALINE battery.
GND
KEY MATRIX
= KEY
B-1 Circuit Diagram
B -1
49
50
51
52
53
54
55
56
R16
41
42
43
44
45
46
47
48
R15
33
34
35
36
37
38
39
40
R14
R13
25
26
27
28
29
30
31
32
R11
R12
17 9 1
18 10 2
19 11 3
20 12 4
21 13 5
22 14 6
23 15 7
24 16 8
R10
R00
R01
R02
R03
R04
R05
R06
R07
Page 98

Appendix B. PROGRAMMER`S GUIDE
Mask Option List Example Refer to Circuit B-1
GMS810 MASK OPTION LIST
Code Name : GMS81016 - UAxxx
1. Device & Package
GMS81004
GMS81008
GMS81016
20PIN : SOP PDIP
24PIN : SOP Skinny DIP
28PIN : SOP Skinny DIP
44PIN : PLCC
2. Inclusion of Pull up Resistor
- R0 PORT
Port R00
Y/N
Y/N
*0
- R1 PORT
Port R10
Y/N
Y/N
*0
- R2 PORT
Port R20
Y/N
Y/N
*0
< NOTICE >
. *0 : is only available in Low Voltage detection Option = Y (No . 3)
*1 : is not available for 20PIN & 24PIN. So, Default option is Pull-Up.
. *2 : is not available for 20PIN. So, Default Option is Pull-Up.
3. Low Voltage Detection
Y/N
GMS81024
GMS81032
R01yR02yR03yR04yR05yR06yR07
y
R11nR12*2nR13*2nR14*2nR15*2nR16
n
R21*1 R22*1 R23*1 R24*1
n
n
HYUNDAI ELCTRONICS Co., Ltd.
Please enter check marks as
n
Y : Yes
N : No
Date :
Company Name :
Section Name :
Signature :
MCU Application Team.
Y : Yes
N : No
y
Y : Yes
N : No
R17
n
S/W example Refer to Circuit B-1
B-1 ,Circuit Description:
device : GMS81016
package : 24PIN SOP
port R0x : All input port with pull-up resistor
port R1x : All output port with N-MOS
Open drain
port R20 : LED Drive port
; Example program for Port setting.
ORG 0C000H ; GMS81016 Program Start Address
Reset :
clrg ; Clear G-Flag
ldx #0feh ; Stack Pointer Initialize
txsp
DI ; Interrupt disable
ldm R2dd,#0001_1111b ; R2 direction setting,R20: Output
ldm R2,#1111_1111b ; R2 data setting , R20 : High,Led off
ldm R1odc,#1111_1111b ; R1 port all open drain
ldm R1dd,#1111_1111b ; R1 direction setting ,All output
ldm R1,#0000_0000b ; R1 data setting , all Low for key scan
ldm R0dd,#0000_0000b ; R0 direction setting ,All input
ldm smrr0,#1111_1111b ; Stop mode release by R0
ldm smrr1,#0000_0000b ; Stop disable by R1
ldm Ienh,#1000_0000b ; Key scan interrupt setting
ldm ckctlr,#0001_1101b ; Ckctlr setting for 16mS time delay after
; release from stop mode, WDT disable.
clr1 IRQKSCN ; key scan interrupt request flag clear
STOP
NOP ; `NOP instruction must to be used after
ldm R1,#1111_1111b ; Stop instruction
B -2
Page 99

Appendix B. PROGRAMMER`S GUIDE
Key Scan
- To secure the key board scanning , read the input port after minimum 60uS delay time from
output port set to `Low `. This time delay is for the port rising time depend on the
input pull-up resistor .
; program example ,See the circuit B-1
.
ldm R1,#1111_1110b ;R10 port set to LOW
call delay_60uS ;60uS time delay routine
lda R0 ;R0 port Read
.
.
R0 port Read timing
R10
R11
60uS
60uS
Fig B-2 , Input with pull-up port read time method
B -3
Page 100

GMS810 MASK OPTION LIST
Code Name :
1. Device & Package
GMS81004
GMS81008
GMS81024
GMS81032
GMS81016
20PIN : SOP PDIP
24PIN : SOP Skinny DIP
28PIN : SOP
44PIN : PLCC
2. Inclusion of Pull up Resistor
- R0 PORT
Y/N
*0
Y/N
- R1 PORT
Y/N
*0
Y/N
Skinny DIP
HYUNDAI ELECTRONICS Co., Ltd.
R04 R05 R06 R07Port R00 R01 R02 R03
*2 *2 *2 *2
R14 R15 R16 R17Port R10 R11 R12 R13
MCU Application Team.
Please enter check marks as
Y : Yes
N : No
Y : Yes
N : No
- R2 PORT
Y/N
Y/N
*1 *1 *1*1
*0
R24Port R20 R21 R22 R23
Y : Yes
N : No
< NOTICE >
. *0 : is only available in .Low Voltage detection Option = Y ( No. 3 )
*1 : is not available for 20PIN & 24PIN. So, Default Option is Pull-Up.
. *2 : is not available for 20PIN. So Default Option is Pull-Up.
3. Low Voltage Detection
Y/N
Date :
Company Name :
Section Name :
Signature :
 Loading...
Loading...