

Page 1
Differential Magnetoresistive Sensor FP 210 D 250-22
Features
• High operating
temperature
• High output voltage
• Robust cylindrical
housing
• Biasing magnet build in
• Signal amplitude
independent of speed
• Easily connectable
Typical applications
• Detection of speed
• Detection of position
• Detection of sense of
rotation
• Angle encoder
• Linear position sensing
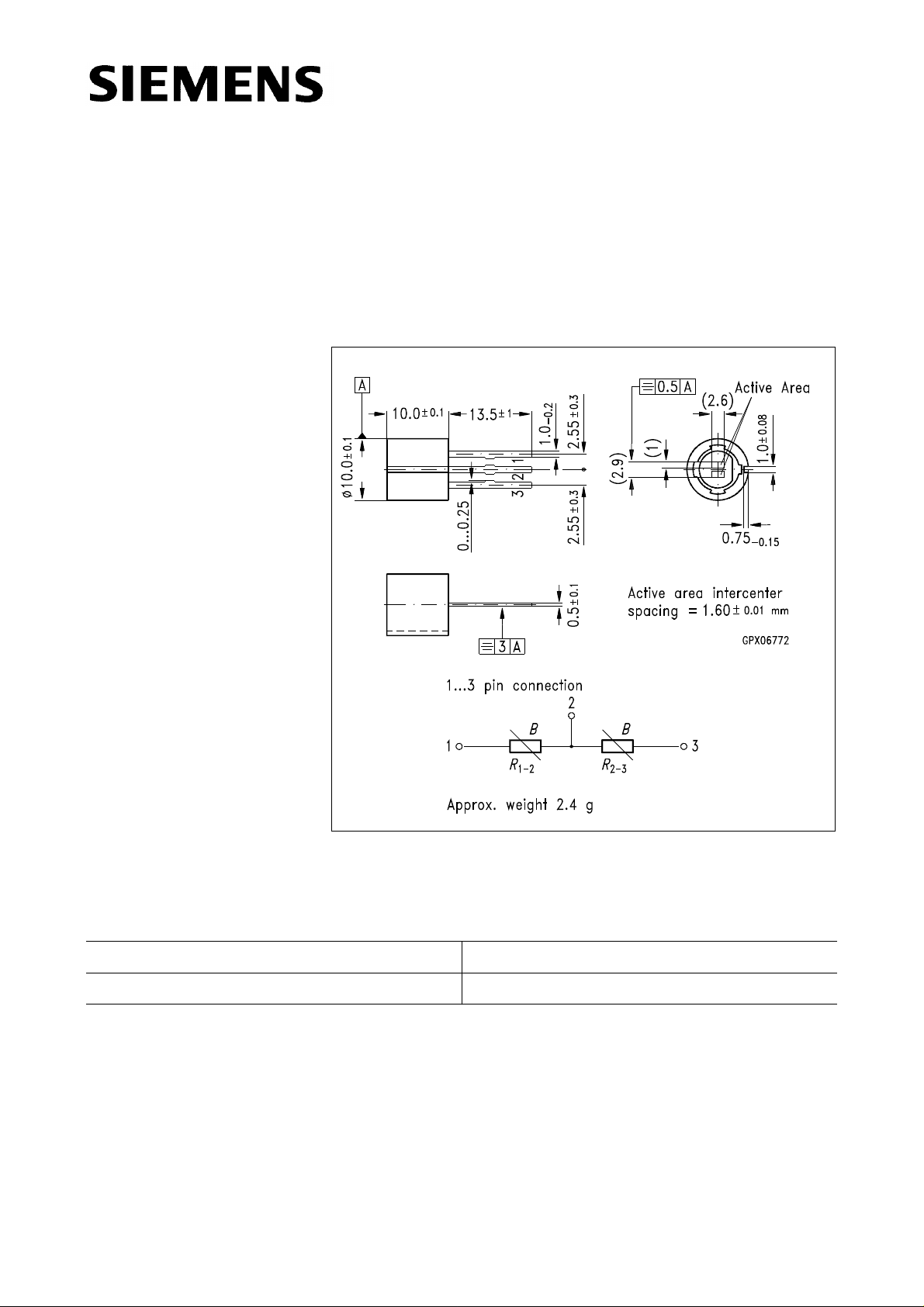
Dimensions in mm
Type Ordering Code
FP 210 D 250-22 Q65210-D250-W5
The differential magnetoresistive sensor FP 201 D 250-22 consists of two series coupled
D-type InSb/NiSb semiconductor resistors. The resitance value of the MRs, which are
mounted onto an insulated ferrite substrate, can be magnetically controlled. The sensor
is encapsuled in a plastic package with three in-line contacts extending from the base.
The basic resistance of the total system in the unbiased state is 2 × 250 Ω. A permanent
magnet which supplies a biasing magnetic field is built into the housing.
Semiconductor Group 1 07.96
Page 2
FP 210 D 250-22
Maximum ratings
Parameter Symbol Value Unit
Operating temperature
Storage temperature
Power dissipation
Supply voltage
1)
2)
Insulation voltage between
terminals and casing
Thermal conductivity
Characteristics (
T
= 25 °C)
A
Nominal supply voltage
Total resistance, (δ = ∞,
4)
3)
(δ = ∞)
Center symmetry
Offset voltage
(at V
and δ = ∞)
IN N
I ≤ 1 mA) R
Open circuit output voltage
(at V
and δ = 0.2 mm)
IN N
5)
T
T
P
V
V
G
V
M
V
V
A
stg
tot
IN
I
thA
IN N
1-3
0
out pp
– 40 / + 140 °C
– 40 / + 150 °C
400 mW
7.5 V
> 100 V
≥ 5 mW/K
5V
1000…1600 Ω
≤ 10 %
≤ 130 mV
> 1100 mV
Cut-off frequency
f
c
> 20 kHz
Measuring arrangements
By approaching a soft iron part close to the sensor a change in its resistance is obtained.
The potential divider circuit of the magneto resistor causes a reduction in the
temperature dependence of the output voltage
1) Corresponding to diagram P
2) Corresponding to diagram
3)
M
4) Corresponding to measuring circuit in Fig. 2
5) Corresponding to measuring circuit in Fig. 2 and arrangement as shown in Fig.
R
----------------------------=
–
12–R23–
R
12–
= f(TA)
tot
V
= f(T
IN
A
× 100% for R
)
> R
1-2
2-3
V
OUT
.
1
Semiconductor Group 2
Page 3

FP 210 D 250-22
1. Digital revolution counting
For digital revolution counting, the sensor should be actuated by a magnetically soft iron
toothed wheel. The tooth spacing should correspond to about twice the magneto resistor
intercenter spacing (see Fig. 1).
The two resistors of the sensor are supplemented by two additional resistors in order to
V
obtain the sensor output voltage as a bridge voltage
without excitation then is 0 V when the offset is compensated.
. The output voltage V
OUT
OUT
Fig. 1
Schematic representation of a toothed wheel actuating an FP 210 D 250-22
Fig. 2
Measuring circuit and output voltage V
waveform
OUT
Semiconductor Group 3
Page 4

FP 210 D 250-22
2. Linear distance measurement
To convert small distances into a proportional electric signal, a small soft iron part of
definite width (e.g.
Proportional signals for distances up to 1.5 mm can be obtained in this way. The
sinusoidal output signal gives a voltage proportional to distance in the zero crossover
region (see Fig. 3).
b = 1.8 mm) is moved over the face of the sensor.
Fig. 3
Arrangement for analogue application
Maximum supply voltage
versus temperature
V
= f(TA), δ = ∞
IN
Semiconductor Group 4
Page 5

FP 210 D 250-22
Output voltage (typical) versus
temperature
V
at TA = 25 °C 100%
OUTpp
V
OUTpp
= f(TA), δ = 0.2 mm
^
=
Output voltage (typical) versus
airgap
V
OUTpp
V
at δ = 0.2 mm 100%
= f(δ), TA = 25 °C
OUTpp
^
=
Total resistance (typical)
versus temperature
R
= f(TA), δ = ∞
1-3
Max. power dissipation
versus temperature
P
= f(TA), δ = ∞
tot
Semiconductor Group 5
 Loading...
Loading...