

Page 1
(3.3V,
EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
EL7562C - Preliminary
Features
• Integrated synchronous MOSFETs
and current mode controller
• 2A continuous output current
• Up to 95% efficiency
• 4.5V to 5.5V input voltage
• Adjustable output from 1V to 3.8V
• Cycle-by-cycle current limit
• Precision reference
• ±0.5% load and line regulation
• Adjustable switching frequency to
1MHz
• Oscillator synchronization
possible
• Internal soft start
• Over temperature protection
• Under voltage lockout
• 16-pin QSOP package
Applications
• DSP, CPU Core and IO Supplies
• Logic/Bus Supplies
• Portable Equipment
• DC:DC Converter Modules
• GTL + Bus Power Supply
Ordering Information
Part No Package Tape & Reel Outline #
EL7562CU 16-Pin QSOP - MDP0040
General Description
The EL7562C is an integrated, synchronous step-down regulator with
output voltage adjustable from 1.0V to 3.8V. It is capable of delivering
2A continuous current at up to 95% efficiency. The EL7562C operates
at a constant frequency pulse width modulation (PWM) mode, making
external synchronization possible. Patented on-chip resistorless current sensing enables current mode control, which provides cycle-bycycle current limiting, over-current protection, and excellent step load
response. The EL7562C is available in a fused-lead 16-pin QSOP
package. With proper external components, the whole converter fits
into a less than 0.5 in2 area. The minimal external components and
small size make this EL7562C ideal for desktop and portable
applications.
The EL7562C is specified for operation over the -40°C to +85°C temperature range.
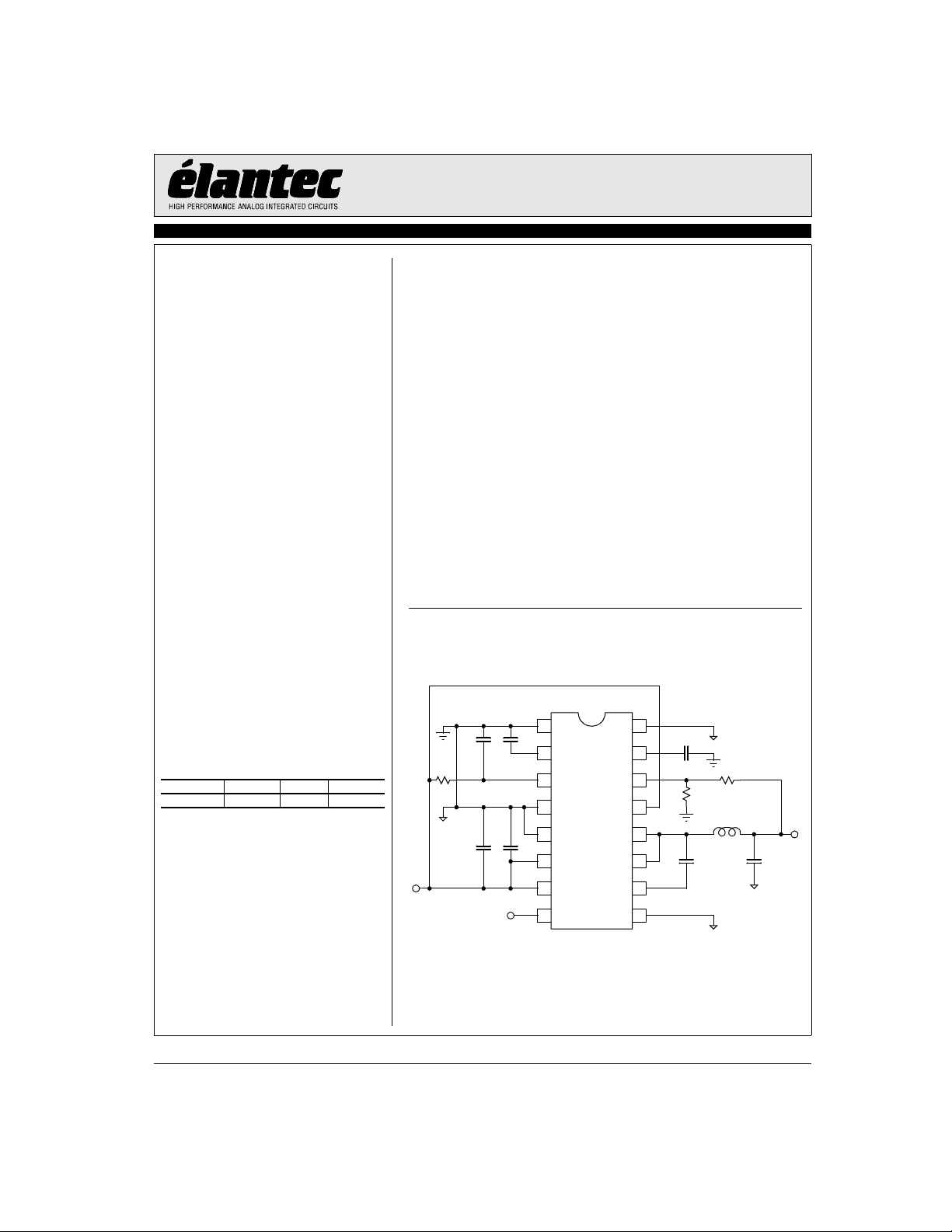
Typical Application Diagram
V
5.5V)
1
C3C
4
0.1µF 270pF
R
3
39Ω
C1C
2
100µF 0.1µF
IN
SGND
2
COSC
3
VDD
4
PGND
5
PGND
6
VIN
7
VIN
8 9
EN
PGND
VREF
VDRV
VHI
PGND
16
15
14
FB
13
12
LX
11
LX
10
C
0.1µF
5
R
1
1kΩ
C
6
0.1µF
R
2.37k
L
4.7µF
2
1
C
7
100µF
2A)
V
O
October 25, 2001
Manufactured under U.S. Patent No. 57,323,974
Note: All information contained in this data sheet has been carefully checked and is believed to be accurate as of the date of publication; however, this data sheet cannot be a “controlled document”. Current revisions, if any, to these
specifications are maintained at the factory and are available upon your request. We recommend checking the revision level before finalization of your design documentation.
© 2001 Elantec Semiconductor, Inc.
Page 2
EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
Absolute Maximum Ratings (T
Supply Voltage between VIN or VDD and GND +6.5V
VLX Voltage VIN +0.3V
Input Voltage GND -0.3V, VDD +0.3V
VHI Voltage GND -0.3V, V
EL7562C - Preliminary
= 25°C)
A
LX
Storage Temperature -65°C to +150°C
Operating Ambient Temperature -40°C to +85°C
Operating Junction Temperature +135°C
+6V
Important Note:
All parameters having Min/Max specifications are guaranteed. Typ values are for information purposes only. Unless otherwise noted, all tests are at the
specified temperature and are pulsed tests, therefore: TJ = TC = TA.
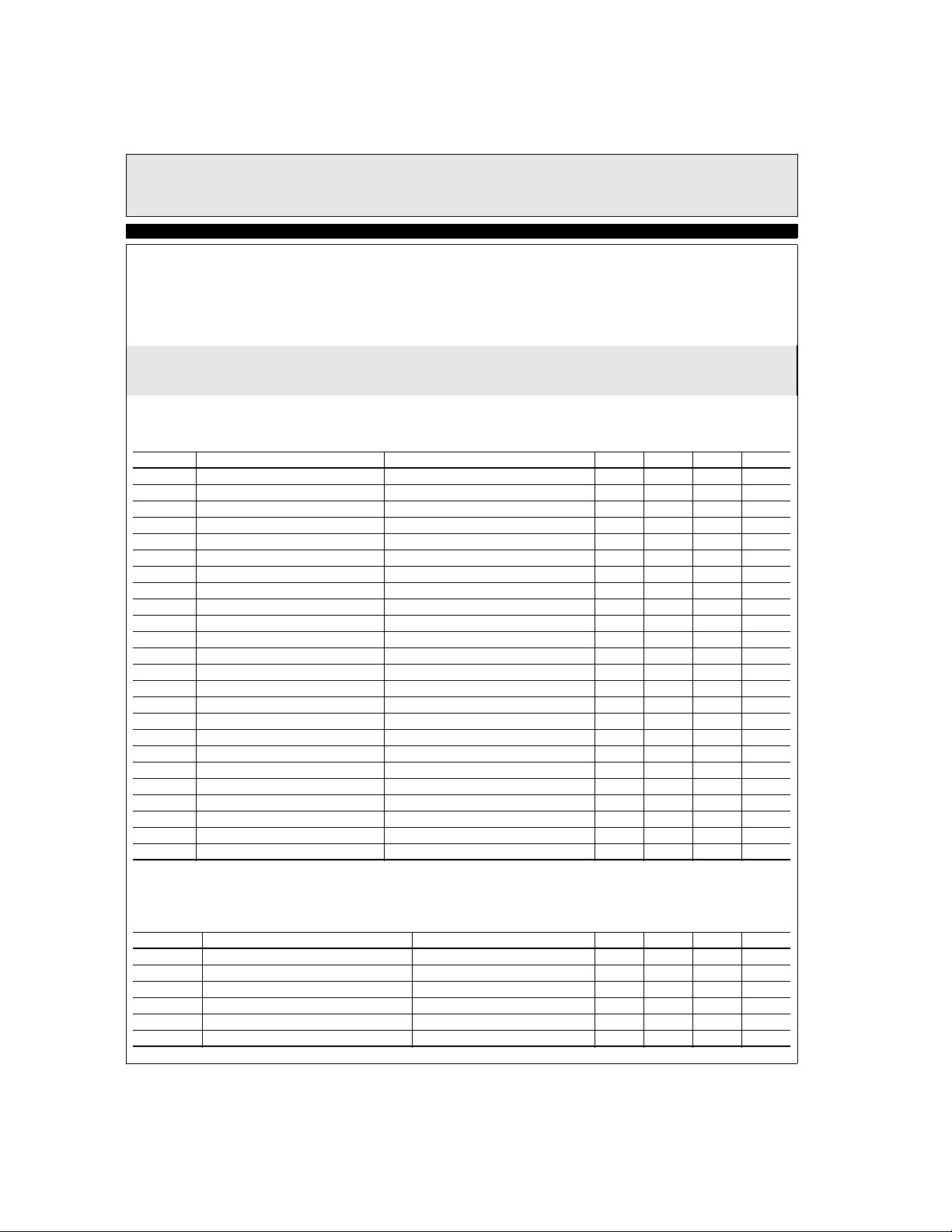
DC Characteristics
V
= V
= 5V, TA = TJ = 25°C, C
DD
IN
Parameter Description Conditions Min Typ Max Unit
V
REF
V
REFTC
V
REFLOAD
V
RAMP
I
OSC_CHG
I
OSC_DIS
I
VDD+VDRVVDD+VDRV
I
VDD_OFF
V
DD_OFF
V
DD_ON
T
OT
T
HYS
I
LEAK
I
LMAX
R
DSON
R
DSONTC
V
FB
V
FB_LINE
V
FB_LOAD
V
FB_TC
I
FB
V
EN_HI
V
EN_LO
I
EN
Reference Accuracy 1.24 1.26 1.28 V
Reference Temperature Coefficient 50 ppm/°C
Reference Load Regulation 0 < I
Oscillator Ramp Amplitude 1.15 V
Oscillator Charge Current 0.1V < V
Oscillator Discharge Current 0.1V < V
Supply Current VEN = 4V, F
V
Standby Current EN = 0 1 1.5 mA
DD
VDD for Shutdown 3.5 3.9 V
VDD for Startup 3.95 4.35 V
Over Temperature Threshold 135 °C
Over Temperature Hysteresis 20 °C
Internal FET Leakage Current EN = 0, LX = 5V (low FET), LX = 0V (high FET) 10 µA
Peak Current Limit 3 A
FET On Resistance Wafer level test only 60 120 mΩ
R
Tempco 0.2 mΩ/°C
DSON
Output Initial Accuracy I
Output Line Regulation V
Output Load Regulation 0.1A < I
Output Temperature Stability -40°C < TA < 85°C, I
Feedback Input Pull Up Current V
EN Input High Level 3.2 4 V
EN Input Low Level 1 V
Enable Pull Up Current VEN = 0 -4 -2.5 µA
= 1.2nF, unless otherwise specified.
OSC
LOAD
IN
FB
< 50µA -1 %
REF
< 1.25V 200 µA
OSC
< 1.25V 8 mA
OSC
= 120kHz 2 3.5 5 mA
OSC
= 0A 0.960 0.975 0.99 V
= 5V, ∆V
= 10%, I
IN
< 1A 0.5 %
LOAD
= 0A 0.5 %
LOAD
= 0.5A ±1 %
LOAD
= 0V 100 200 nA
Closed Loop AC Electrical Characteristics
VS = V
= 5V, TA = TJ = 25°C, C
IN
Parameter Description Conditions Min Typ Max Unit
F
OSC
t
SYNC
M
t
BRM
t
LEB
D
SS
MAX
Oscillator Initial Accuracy 105 117 130 kHz
Minimum Oscillator Sync Width 25 ns
Soft Start Slope 0.5 V/ms
FET Break Before Make Delay 15 ns
High Side FET Minimum On Time 150 ns
Maximum Duty Cycle 95 %
= 1.2nF, unless otherwise specified.
OSC
2
Page 3
EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
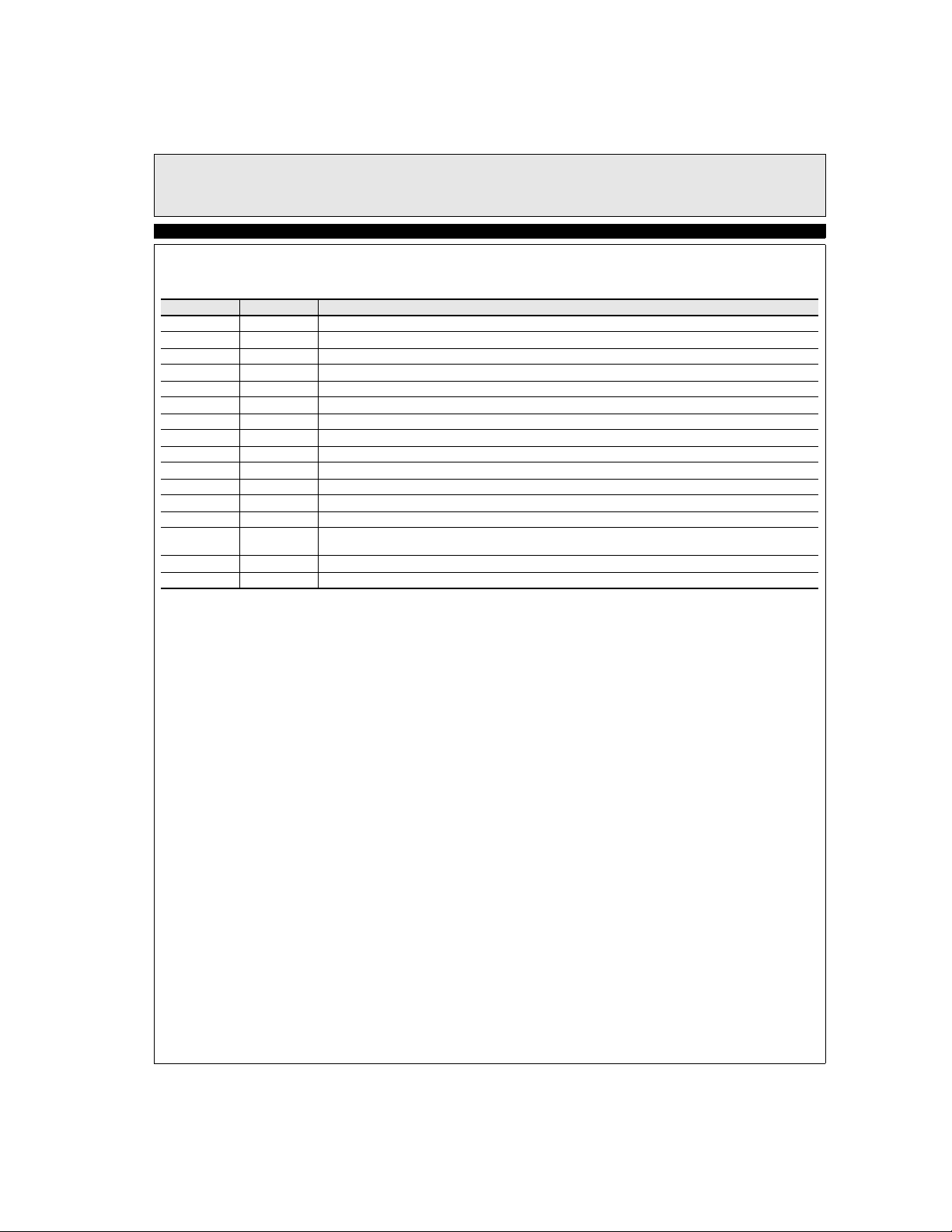
Pin Descriptions
Pin Number Pin Name Pin Function
1 SGND Control circuit negative supply.
2 COSC Oscillator timing capacitor. FOSC can be approximated by: FOSC (kHz) = 0.1843/COSC, COSC in µF.
3 VDD Control circuit positive supply.
4 PGND Ground return of the regulator. Connected to the source of the low-side synchronous NMOS power FET.
5 PGND Ground return of the regulator. Connected to the source of the low-side synchronous NMOS power FET.
6 VIN Power supply input of the regulator. Connected to the drain of the high-side NMOS power FET.
7 VIN Power supply input of the regulator. Connected to the drain of the high-side NMOS power FET.
8 EN Chip Enable, active high. A 2µA internal pull-up current enables the device if the pin is left open.
9 PGND Ground return of the regulator.
10 VHI Positive supply of the high-side driver.
11 LX Inductor drive pin. High current digital output whose average voltage equals the regulator output voltage.
12 LX Inductor drive pin. High current digital output whose average voltage equals the regulator output voltage.
13 VDRV Positive supply of the low-side driver and input voltage for the high-side boot strap.
14 FB Voltage feedback input. Connected to an external resistor divider between VOUT and GND. A 125nA pull-up current
15 VREF Bandgap reference bypass capacitor. Typically 0.1µF to GND.
16 PGND Ground return of the regulator.
forces VOUT to VS in the event that FB is floating.
EL7562C - Preliminary
3
Page 4

EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
Typical Performance Curves
Efficiency vs I
EL7562C - Preliminary
VIN=5V
100
95
90
85
80
75
Efficiency (%)
70
65
60
0.1 1 2
Efficiency vs I
VO=3.3V
100
95
90
85
80
75
Efficiency (%)
70
65
60
0 0.5 1 1.5 2
VIN=4.5V
VIN=5.5V
O
VO=1.8V
Load Current IO (A)
O
VIN=5V
Load Current IO (A)
VO=2.5V
VO=1.5V
VO=1.2V
FS=500kHz
L=Coilcraft DO3316P-472
VO=3.3V
Power Loss vs I
Power Loss vs I
VIN=5V
VIN=5V
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
Power Loss (W)
Power Loss (W)
0.2
0.2
0.1
0.1
0
0
0 0.5 1 1.5 2
0 0.5 1 1.5 2
Load Regulation
VO=3.3V
0.8
0.6
0.4
0.2
0
Output Voltage (%)
-0.2
-0.4
-0.6
0 0.5 1 1.5 2
O
O
VO=1.8V
Load Current IO (A)
Load Current IO (A)
VIN=5.5V
VIN=5V
Load Current IO (A)
VO=3.3V
VO=2.5V
VO=1.2V
VO=1.5V
VIN=4.5V
Line Regulation
VO=3.3V
0.6
0.4
IO=0.1A
0.2
0
(%)
O
V
-0.2
-0.4
-0.6
4.5 4.7 5.1 5.3 5.5
IO=1A
IO=2A
4.9
VIN (V)
V
vs Temperature
REF
1.258
1.256
1.254
1.252
(V)
1.25
REF
V
1.248
1.246
1.244
1.242
-40 10 60 110 160
Temperature (°C)
4
Page 5

Typical Performance Curves
EL7562C - Preliminary
EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
Oscillator Frequency vs Temperature
390
385
380
375
370
Oscillator Frequency (kHz)
365
360
-40 10 60 110 160
Temperature (°C)
Switching Frequency vs C
1400
1200
1000
800
(kHz)
S
600
F
400
200
0
0 400 600 800 1000
200
OSC
C
(pF)
OSC
Input Current vs Temperature
(Enable connected to GND)
0.96
0.94
0.92
0.9
0.88
0.86
Input Current (A)
0.84
0.82
0.8
-40 10 60 110 160
Temperature (°C)
VIN=5.5V
VIN=4.5VVIN=5V
5
Page 6

EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
Block Diagram
EL7562C - Preliminary
VREF COSC
270pF0.1µF
Junction
Temperature
Controlle
VDD
SGND
r Supply
FB
39Ω
0.1µF
EN
Voltage
Reference
PWM
Controller
Current
Sense
Oscillator
Drivers
Power
FET
Power
FET
VDRV
VHI
VIN
PGND
0.1µF
4.7µH
100µF
2370Ω
1kΩ
V
OUT
6
Page 7

Applications Information
EL7562C - Preliminary
EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
Circuit Description
General
The EL7562C is a fixed frequency, current mode controlled DC:DC converter with integrated N-channel
power MOSFETs and a high precision reference. The
device incorporates all the active circuitry required to
implement a cost effective, user-programmable 2A synchronous step-down regulator suitable for use in DSP
core power supplies.
Theory of Operation
The EL7562C is composed of 5 major blocks:
1. PWM Controller
2. NMOS Power FETs and Drive Circuitry
3. Bandgap Reference
4. Oscillator
5. Thermal Shut-down
PWM Controller
The EL7562C regulates output voltage through the use
of current-mode controlled pulse width modulation. The
three main elements in a PWM controller are the feedback loop and reference, a pulse width modulator whose
duty cycle is controlled by the feedback error signal, and
a filter which averages the logic level modulator output.
In a step-down (buck) converter, the feedback loop
forces the time-averaged output of the modulator to
equal the desired output voltage. Unlike pure voltagemode control systems, current-mode control utilizes
dual feedback loops to provide both output voltage and
inductor current information to the controller. The voltage loop minimizes DC and transient errors in the output
voltage by adjusting the PWM duty-cycle in response to
changes in line or load conditions. Since the output voltage is equal to the time-averaged of the modulator
output, the relatively large LC time constant found in
power supply applications generally results in low bandwidth and poor transient response. By directly
monitoring changes in inductor current via a series sense
resistor the controller's response time is not entirely lim-
ited by the output LC filter and can react more quickly to
changes in line and load conditions. This feed-forward
characteristic also simplifies AC loop compensation
since it adds a zero to the overall loop response. Through
proper selection of the current-feedback to voltage-feedback ratio the overall loop response will approach a onepole system. The resulting system offers several advantages over traditional voltage control systems, including
simpler loop compensation, pulse by pulse current limiting, rapid response to line variation and good load step
response.
The heart of the controller is an input direct summing
comparator which sum voltage feedback, current feedback, slope compensation ramp and power tracking
signals together. Slope compensation is required to prevent system instability that occurs in current-mode
topologies operating at duty-cycles greater than 50%
and is also used to define the open-loop gain of the overall system. The slope compensation is fixed internally
and optimized for 500mA inductor ripple current. The
power tracking will not contribute any input to the comparator steady-state operation. Current feedback is
measured by the patented sensing scheme that senses the
inductor current flowing through the high-side switch
whenever it is conducting. At the beginning of each
oscillator period the high-side NMOS switch is turned
on. The comparator inputs are gated off for a minimum
period of time of about 150ns (LEB) after the high-side
switch is turned on to allow the system to settle. The
Leading Edge Blanking (LEB) period prevents the
detection of erroneous voltages at the comparator inputs
due to switching noise. If the inductor current exceeds
the maximum current limit (ILMAX) a secondary overcurrent comparator will terminate the high-side switch
on time. If ILMAX has not been reached, the feedback
voltage FB derived from the regulator output voltage
VOUT is then compared to the internal feedback reference voltage. The resultant error voltage is summed with
the current feedback and slope compensation ramp. The
high-side switch remains on until all four comparator
inputs have summed to zero, at which time the high-side
switch is turned off and the low-side switch is turned on.
However, the maximum on-duty ratio of the high-side
switch is limited to 95%. In order to eliminate cross-con-
7
Page 8

EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
duction of the high-side and low-side switches a 15ns
break-before-make delay is incorporated in the switch
drive circuitry. The output enable (EN) input allows the
regulator output to be disabled by an external logic control signal.
EL7562C - Preliminary
Output Voltage Setting
In general:
R
2
V
OUT
0.975V 1
------
+
×=
R
1
However, due to the relatively low open loop gain of the
system, gain errors will occur as the output voltage and
loop-gain is changed. This is shown in the performance
curves. A 100nA pull-up current from FB to VDD forces
VOUT to GND in the event that FB is floating.
NMOS Power FETs and Drive Circuitry
The EL7562C integrates low on-resistance (60mΩ)
NMOS FETs to achieve high efficiency at 2A. In order
to use an NMOS switch for the high-side drive it is necessary to drive the gate voltage above the source voltage
(LX). This is accomplished by bootstrapping the VHI
pin above the LX voltage with an external capacitor
CVHI and internal switch and diode. When the low-side
switch is turned on and the LX voltage is close to GND
potential, capacitor CVHI is charged through internal
switch to VDRV, typically 5V. At the beginning of the
next cycle the high-side switch turns on and the LX pins
begin to rise from GND to VIN potential. As the LX pin
rises the positive plate of capacitor CVHI follows and
eventually reaches a value of VDRV+VIN, typically
10V, for VDRV=VIN=5V. This voltage is then level
shifted and used to drive the gate of the high-side FET,
via the VHI pin. A value of 0.1µF for CVHI is
recommended.
Reference
A 1.5% temperature compensated bandgap reference is
integrated in the EL7562C. The external VREF capacitor acts as the dominant pole of the amplifier and can be
increased in size to maximize transient noise rejection.
A value of 0.1µF is recommended.
Oscillator
The system clock is generated by an internal relaxation
oscillator with a maximum duty-cycle of approximately
95%. Operating frequency can be adjusted through the
COSC pin or can be driven by an external source. If the
oscillator is driven by an external source care must be
taken in selecting the ramp amplitude. Since CSLOPE
value is derived from the COSC ramp, changes to COSC
ramp will change the CSLOPE compensation ramp
which determine the open-loop gain of the system.
When external synchronization is required, always
choose C
such that the free-running frequency is at
OSC
least 20% lower than that of sync source to accommodate component and temperature variations. Figure 1
shows a typical connection.
1 16
2
3
6
7
8
EL7562C
15
14
11
10
9
External
Oscillator
BAT54S100pF
Figure 1. Oscillator Synchronization
Thermal Shut-down
An internal temperature sensor continuously monitors
die temperature. In the event that die temperature
exceeds the thermal trip-point, the system is in fault state
and will be shut down. The upper and low trip-points are
set to 135°C and 115°C respectively.
8
Page 9

Start-up Delay
A capacitor can be added to the EN pin to delay the converter start-up (Figure 2) by utilizing the pull-up current.
The delay time is approximately:
t
ms() 1200 C µF()×=
d
1 16
EL7562C - Preliminary
EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
2
3
6
7
C
8
EL7562C
15
14
11
10
9
Figure 2. Start-up Delay
Layout Considerations
The layout is very important for the converter to function properly. Power Ground ( ) and Signal Ground (---)
should be separated to ensure that the high pulse current
in the Power Ground never interferes with the sensitive
signals connected to Signal Ground. They should only
be connected at one point (normally at the negative side
of either the input or output capacitor.)
The trace connected to pin 14 (FB) is the most sensitive
trace. It needs to be as short as possible and in a “quiet”
place, preferably between PGND or SGND traces.
V
OUT
t
d
TIME
V
IN
V
O
In addition, the bypass capacitor connected to the VDD
pin needs to be as close to the pin as possible.
The heat of the chip is mainly dissipated through the
PGND pins. Maximizing the copper area around these
pins is preferable. In addition, a solid ground plane is
always helpful for the EMI performance.
The demo board is a good example of layout based on
these principles. Please refer to the EL7562C Application Brief for the layout.
9
Page 10

EL7562C - Preliminary
Monolithic 2 Amp DC:DC Step-down Regulator
EL7562C - Preliminary
General Disclaimer
Specifications contained in this data sheet are in effect as of the publication date shown. Elantec, Inc. reserves the right to make changes in the circuitry or specifications contained herein at any time without notice. Elantec, Inc. assumes no responsibility for the use of any circuits described
herein and makes no representations that they are free from patent infringement.
WARNING - Life Support Policy
Elantec, Inc. products are not authorized for and should not be used
within Life Support Systems without the specific written consent of
Elantec, Inc. Life Support systems are equipment intended to sup-
Elantec Semiconductor, Inc.
675 Trade Zone Blvd.
Milpitas, CA 95035
Telephone: (408) 945-1323
(888) ELANTEC
Fax: (408) 945-9305
European Office: +44-118-977-6020
Japan Technical Center: +81-45-682-5820
port or sustain life and whose failure to perform when properly used
in accordance with instructions provided can be reasonably
expected to result in significant personal injury or death. Users contemplating application of Elantec, Inc. Products in Life Support
Systems are requested to contact Elantec, Inc. factory headquarters
to establish suitable terms & conditions for these applications. Elantec, Inc.’s warranty is limited to replacement of defective
components and does not cover injury to persons or property or
other consequential damages.
October 25, 2001
10
Printed in U.S.A.
 Loading...
Loading...