

Page 1

Industrial Automation Headquarters
Delta Electronics, Inc.
Taoyuan Technology Center
No.18, Xinglong Rd., Taoyuan City,
Taoyuan County 33068, Taiwan
TEL: 886-3-362-6301 / FAX: 886-3-371-6301
Asia
Delta Electronics (Jiangsu) Ltd.
Wujiang Plant 3
1688 Jiangxing East Road,
Wujiang Economic Development Zone
Wujiang City, Jiang Su Province, P.R.C. 215200
TEL: 86-512-6340-3008 / FAX: 86-769-6340-7290
Delta Greentech (China) Co., Ltd.
238 Min-Xia Road, Pudong District,
ShangHai, P.R.C. 201209
TEL: 86-21-58635678 / FAX: 86-21-58630003
Delta Electronics (Japan), Inc.
Tokyo Ofce
2-1-14 Minato-ku Shibadaimon,
Tokyo 105-0012, Japan
TEL: 81-3-5733-1111 / FAX: 81-3-5733-1211
DVP15MC
Operation Manual
Delta Electronics (Korea), Inc.
1511, Byucksan Digital Valley 6-cha, Gasan-dong,
Geumcheon-gu, Seoul, Korea, 153-704
TEL: 82-2-515-5303 / FAX: 82-2-515-5302
Delta Electronics Int’l (S) Pte Ltd.
4 Kaki Bukit Ave 1, #05-05, Singapore 417939
TEL: 65-6747-5155 / FAX: 65-6744-9228
Delta Electronics (India) Pvt. Ltd.
Plot No 43 Sector 35, HSIIDC
Gurgaon, PIN 122001, Haryana, India
TEL : 91-124-4874900 / FAX : 91-124-4874945
Americas
Delta Products Corporation (USA)
Raleigh Ofce
P.O. Box 12173,5101 Davis Drive,
Research Triangle Park, NC 27709, U.S.A.
TEL: 1-919-767-3800 / FAX: 1-919-767-8080
Delta Greentech (Brasil) S.A.
Sao Paulo Ofce
Rua Itapeva, 26 - 3° andar Edicio Itapeva One-Bela Vista
01332-000-São Paulo-SP-Brazil
TEL: 55 11 3568-3855 / FAX: 55 11 3568-3865
Europe
Delta Electronics (Netherlands) B.V.
Eindhoven Ofce
De Witbogt 20, 5652 AG Eindhoven, The Netherlands
TEL : +31 (0)40-8003800 / FAX : +31 (0)40-8003898
DVP15MC
Operation Manual
DVP-0191920-00
*We reserve the right to change the information in this manual without prior notice.
2016-06-30
www.deltaww.com
Page 2

DVP15MC11T Operation Manual
Table of Contents
Chapter 1 Preface ................................................................................................ 1-1
1.1 Explanation of Symbols in This Manual ...................................................... 1-2
1.2 Revision History ......................................................................................... 1-2
Chapter 2 Overview of DVP15MC11 T ................................................................... 2-1
2.1 Product Description .................................................................................... 2-2
2.2 Functions ................................................................................................... 2-2
2.3 Profile and Components ............................................................................. 2-3
Chapter 3 Specifications ...................................................................................... 3-1
3.1 Function Specifications .............................................................................. 3-2
3.1.1 Specifications ........................................................................................ 3-2
3.1.2 Devices and Data Types ......................................................................... 3-3
3.1.2.1 Devices ............................................................................................. 3-3
3.1.2.2 Valid Ranges of Devices ...................................................................... 3-4
3.1.2.3 Latched Devices ................................................................................. 3-5
3.1.2.4 Data Types and Valid Ranges Supported ................................................ 3-6
3.2 Electrical Specifications ............................................................................. 3-7
Chapter 4 System Architecture ............................................................................ 4-1
4.1 System Constitution ................................................................................... 4-2
4.2 Power Supply ............................................................................................. 4-2
4.3 Left-side Extension .................................................................................... 4-2
4.3.1 Connectable Left-side Extension Module .................................................... 4-2
4.3.2 Allocation of Left-side Network Module Addresses ....................................... 4-3
4.3.3 Method of Reading/Writing of Left-side Modules ......................................... 4-3
4.4 Right-side Extension .................................................................................. 4-3
4.4.1 Connectable Right-side Extension Modules ................................................ 4-3
4.4.2 Allocation of Right-side Extension Module Addresses ................................... 4-4
4.5 Connectable Servo Drives........................................................................... 4-4
4.6 SD Memory Card ......................................................................................... 4-6
4.6.1 Model and Specification .......................................................................... 4-6
4.6.2 Function ............................................................................................... 4-8
Chapter 5 Installation .......................................................................................... 5-1
i
Page 3

5.1 Dimensions ................................................................................................ 5-2
5.1.1 Profile and Dimensions of DVP15MC11T .................................................... 5-2
5.1.2 Dimensions of Left-side and Right-side Extension Modules ........................... 5-2
5.1.3 Connecting to the Left-side Extension Module ............................................ 5-3
5.1.4 Connecting to the Right-side Extension Module .......................................... 5-4
5.1.5 SD Card Installing and Removing ............................................................. 5-5
5.2 Installing the Module in the Control Cabinet .............................................. 5-7
5.2.1 Installing the Module to DIN rail .............................................................. 5-7
5.2.2 Illustration of Installation Inside the Control Cabinet .................................. 5-7
5.2.3 Environmental Temperature in the Control Cabinet ..................................... 5-7
5.2.4 Actions for Anti-interference ................................................................... 5-8
5.2.5 Dimension Requirement in the Control Cabinet .......................................... 5-8
Chapter 6 Wiring, Communication Setting and Network Construction ................. 6-1
6.1 Wiring ........................................................................................................ 6-3
6.1.1 Power Supply ........................................................................................ 6-3
6.1.2 Safety Circuit Wiring .............................................................................. 6-3
6.2 Input Point and Output Point Wiring .......................................................... 6-4
6.2.1 Function that Input Points Suppo r t ........................................................... 6-4
6.2.2 Input Point Wiring ................................................................................. 6-5
6.2.3 Output Point Wiring ............................................................................... 6-6
6.3 RS-485 Communication Port ...................................................................... 6-8
6.3.1 Function that RS-485 Port Supports ......................................................... 6-8
6.3.2 Definitions of RS-485 Port Pins ................................................................ 6-8
6.3.3 RS-485 Hardware Connection .................................................................. 6-8
6.3.4 Supported Function Codes and Exception Codes ...................................... 6-10
6.4 RS-232 Communication Port .................................................................... 6-11
6.4.1 Function that RS-232 Port Supports ....................................................... 6-11
6.4.2 Definitions of RS-232 Port Pins .............................................................. 6-11
6.4.3 RS-232 Hardware Connection ................................................................ 6-11
6.4.4 Supported Function Codes and Exception Codes ...................................... 6-12
6.5 SSI Absolute Encoder Port ....................................................................... 6-13
6.5.1 Function of SSI Absolute Encoder .......................................................... 6-13
6.5.2 Definitions of SSI Port Pins ................................................................... 6-13
6.5.3 SSI Absolute Encoder Hardware Connection ............................................ 6-13
6.6 Incremental Encoders .............................................................................. 6-15
6.6.1 Function of Incremental Encoder ........................................................... 6-15
6.6.2 Definition of Incremental Encoder Port Pins ............................................. 6-15
6.6.3 Incremental Encoder Hardware Connection ............................................. 6-16
6.7 Ethernet Communication Port .................................................................. 6-17
6.7.1 Function that Ethernet Communication Port Supports ............................... 6-17
6.7.2 Pins of Ethernet Communication Port ...................................................... 6-17
6.7.3 Network Connection of Ether ne t Communication Port ............................... 6-17
6.7.4 Function Codes that Ethernet Communication Port Supports ...................... 6-18
6.8 Motion Communication Port ..................................................................... 6-18
6.8.1 Function that Motion Communication Port Supports .................................. 6-18
ii
Page 4

6.8.2 Pins of Motion Communication Port ........................................................ 6-18
6.8.3 Motion Network Connection ................................................................... 6-19
6.8.4 Communication Speed and Co m m unication Distance ................................. 6-19
6.9 CANopen Communication Port.................................................................. 6-20
6.9.1 Functions that CANopen Comm unication Port Supports ............................. 6-20
6.9.2 Pins of CANopen Communication Port ..................................................... 6-21
6.9.3 PDO Mapping at CANopen Communication Port ........................................ 6-21
6.9.4 Network Connection at CANopen Communication Port ............................... 6-21
6.9.5 CANopen Communication Rate and Communication Distance ..................... 6-22
Chapter 7 Execution Principle of DVP15MC11T Controller ................................... 7-1
7.1 Tasks .......................................................................................................... 7-2
7.1.1 Task Types ........................................................................................... 7-2
7.1.2 Priority levels of Tasks ............................................................................ 7-4
7.1.3 Watchdog for a Task .............................................................................. 7-6
7.1.4 Motion Instructions for Each Task Type ..................................................... 7-7
7.2 The Impact of PLC RUN or STOP on Variables and Devices ......................... 7-8
7.3 Relationship between Motion Program and Motion Bus .............................. 7-8
7.4 Synchronization Cycle Period Setting ......................................................... 7-9
Chapter 8 Logic Instructions ............................................................................... 8-1
8.1 Table of Logic Instructions ......................................................................... 8-4
8.2 Explanation of Logic Instructions ............................................................... 8-7
8.2.1 EN and ENO .......................................................................................... 8-7
8.3 Sequence Input /Output Instructions ........................................................ 8-7
8.3.1 R_TRIG ................................................................................................ 8-7
8.3.2 F_TRIG ................................................................................................ 8-9
8.3.3 RS ..................................................................................................... 8-11
8.3.4 SR ..................................................................................................... 8-13
8.3.5 SEMA ................................................................................................. 8-15
8.4 Data Movement Instructions .................................................................... 8-17
8.4.1 MOVE ................................................................................................ 8-17
8.4.2 MoveBit .............................................................................................. 8-18
8.4.3 TransBit ............................................................................................. 8-20
8.4.4 MoveDigit ........................................................................................... 8-22
8.4.5 Exchange ........................................................................................... 8-24
8.4.6 Swap ................................................................................................. 8-26
8.5 Comparison Instructions .......................................................................... 8-28
8.5.1 LT ..................................................................................................... 8-28
8.5.2 LE ..................................................................................................... 8-30
8.5.3 GT ..................................................................................................... 8-32
8.5.4 GE ..................................................................................................... 8-34
8.5.5 EQ ..................................................................................................... 8-36
8.5.6 NE ..................................................................................................... 8-38
8.6 Timer Instructions ................................................................................... 8-40
iii
Page 5

8.6.1 TON .................................................................................................. 8-40
8.6.2 TOF ................................................................................................... 8-42
8.6.3 TP ..................................................................................................... 8-44
8.7 Counter Instructions ................................................................................ 8-46
8.7.1 CTU ................................................................................................... 8-46
8.7.2 CTD ................................................................................................... 8-48
8.7.3 CTUD ................................................................................................. 8-50
8.8 Math Instructions ..................................................................................... 8-53
8.8.1 ADD .................................................................................................. 8-53
8.8.2 SUB .................................................................................................. 8-56
8.8.3 MUL .................................................................................................. 8-59
8.8.4 DIV ................................................................................................... 8-62
8.8.5 MOD .................................................................................................. 8-65
8.8.6 MODREAL ........................................................................................... 8-67
8.8.7 MODTURNS ........................................................................................ 8-69
8.8.8 MODABS ............................................................................................ 8-71
8.8.9 ABS ................................................................................................... 8-73
8.8.10 DegToRad .......................................................................................... 8-75
8.8.11 RadToDeg .......................................................................................... 8-77
8.8.12 SIN ................................................................................................... 8-79
8.8.13 COS .................................................................................................. 8-81
8.8.14 TAN ................................................................................................... 8-83
8.8.15 ASIN ................................................................................................. 8-85
8.8.16 ACOS ................................................................................................ 8-88
8.8.17 ATAN ................................................................................................. 8-90
8.8.18 LN ..................................................................................................... 8-92
8.8.19 LOG .................................................................................................. 8-94
8.8.20 SQRT ................................................................................................. 8-96
8.8.21 EXP ................................................................................................... 8-98
8.8.22 EXPT ................................................................................................ 8-100
8.8.23 RAND ............................................................................................... 8-102
8.8.24 TRUNC .............................................................................................. 8-104
8.8.25 FLOOR .............................................................................................. 8-106
8.8.26 FRACTION ......................................................................................... 8-108
8.9 Bit String Instructions ........................................................................... 8-110
8.9.1 AND ................................................................................................. 8-110
8.9.2 OR ................................................................................................... 8-113
8.9.3 NOT ................................................................................................. 8-116
8.9.4 XOR ................................................................................................. 8-118
8.9.5 XORN ............................................................................................... 8-121
8.10 Shift Instructions ................................................................................... 8-124
8.10.1 SHL .................................................................................................. 8-124
8.10.2 SHR ................................................................................................. 8-126
8.10.3 ROL .................................................................................................. 8-128
8.10.4 ROR ................................................................................................. 8-130
8.11 Selection Instructions ............................................................................ 8-132
8.11.1 MAX ................................................................................................. 8-132
8.11.2 MIN .................................................................................................. 8-134
iv
Page 6

8.11.3 SEL ................................................................................................. 8-136
8.11.4 MUX ................................................................................................ 8-138
8.11.5 LIMIT ............................................................................................... 8-140
8.11.6 BAND ............................................................................................... 8-143
8.11.7 ZONE ............................................................................................... 8-146
8.12 Data Type Conversion Instructions ........................................................ 8-149
8.12.1 BOOL_TO_*** .................................................................................. 8-149
8.12.2 Bit strings_TO_*** ............................................................................ 8-152
8.12.3 Integers_TO_*** .............................................................................. 8-159
8.12.4 Real numbers_TO_*** ....................................................................... 8-168
8.12.5 Times,dates_TO_*** ......................................................................... 8-171
8.12.6 Strings_TO_*** ................................................................................ 8-173
8.13 CANopen Communic atio n Instructions ................................................... 8-176
8.13.1 DMC_ReadParameter_CANopen ........................................................... 8-176
8.13.2 DMC_WriteParameter_CANopen ........................................................... 8-182
8.14 String Processing Instructions ............................................................... 8-187
8.14.1 CONCAT ........................................................................................... 8-187
8.14.2 DELETE ............................................................................................ 8-189
8.14.3 INSERT ............................................................................................ 8-191
8.14.4 LEFT / RIGHT .................................................................................... 8-193
8.14.5 MID ................................................................................................. 8-195
8.14.6 REPLACE .......................................................................................... 8-197
8.14.7 LEN ................................................................................................. 8-199
8.14.8 FIND ................................................................................................ 8-200
8.15 Immediate Refresh Instructi o ns ............................................................ 8-202
8.15.1 FROM ............................................................................................... 8-202
8.15.2 TO ................................................................................................... 8-206
8.15.3 ImmediateInput ................................................................................ 8-210
8.15.4 ImmediateOutput .............................................................................. 8-212
Chapter 9 Introductions of Axis Parameters ........................................................ 9-1
9.1 Description of Axis Parameters .................................................................. 9-2
Chapter 10 Motion Control Function .................................................................... 10-1
10.1 EN and ENO .............................................................................................. 10-2
10.2 Relation among Velocity, Acceleration and Jerk ....................................... 10-3
10.3 Introduction of BufferMode ...................................................................... 10-6
10.4 The State Machine .................................................................................. 10-32
Chapter 11 Motion Control Instructions ............................................................... 11-1
11.1 Table of Motion Control Instructions ........................................................ 11-3
11.2 About Motion Control Instructions ........................................................... 11-4
11.2.1 Composition of A Motion Control Instruction ............................................ 11-4
11.2.2 Program Languages that Motion Control Instructions Support .................... 11-4
11.2.3 Configuration of Motion Control Instructions ............................................ 11-4
v
Page 7

11.3 Single-axis Instructions ........................................................................... 11-5
11.3.1 MC_Power .......................................................................................... 11-5
11.3.2 MC_Home ......................................................................................... 11-14
11.3.3 MC_MoveVelocity ............................................................................... 11-19
11.3.4 MC_Halt ............................................................................................ 11-26
11.3.5 MC_Stop ........................................................................................... 11-31
11.3.6 MC_MoveRelative ............................................................................... 11-36
11.3.7 MC_MoveAdditive ............................................................................... 11-44
11.3.8 MC_MoveAbsolute .............................................................................. 11-52
11.3.9 MC_MoveSuperimposed ...................................................................... 11-61
11.3.10 MC_HaltSuperimposed ........................................................................ 11-68
11.3.11 MC_SetPosition .................................................................................. 11-73
11.3.12 MC_SetOverride ................................................................................. 11-83
11.3.13 MC_Reset .......................................................................................... 11-87
11.3.14 DMC_SetTorque ................................................................................. 11-90
11.3.15 MC_ReadAxisError .............................................................................. 11-94
11.3.16 MC_ReadActualPosition ....................................................................... 11-96
11.3.17 MC_ReadStatus ................................................................................ 11-101
11.3.18 MC_ReadMotionState ........................................................................ 11-106
11.3.19 DMC_ReadParameter_Motion ............................................................. 11-111
11.3.20 DMC_WriteParameter_Motion ............................................................. 11-115
11.3.21 DMC_TouchProbe ............................................................................. 11-119
11.4 Multi-axis Instructi ons ......................................................................... 11-128
11.4.1 MC_GearIn ...................................................................................... 11-128
11.4.2 MC_GearOut .................................................................................... 11-134
11.4.3 MC_CombineAxes ............................................................................. 11-139
11.4.4 Introduction of Electronic Cam ........................................................... 11-147
11.4.5 MC_CamIn ...................................................................................... 11-148
11.4.6 MC_CamOut .................................................................................... 11-169
11.5 Application Instructions ....................................................................... 11-175
11.5.1 Rotary Cut Technology ...................................................................... 11-175
11.5.2 Rotary Cut Parameters ...................................................................... 11-176
11.5.3 Control Feature of Rotary Cut Function ................................................ 11-177
11.5.4 Introduction to Cam Curve with Rotary Cut Function ............................. 11-178
11.5.5 Rotary-cut Instructions ..................................................................... 11-182
11.5.5.1 APF_RotaryCut_Init ....................................................................... 11-182
11.5.5.2 APF_RotaryCut_In ......................................................................... 11-185
11.5.5.3 APF_RotaryCut_Out ....................................................................... 11-187
11.5.6 Application Example of Rotary Cut Instructions ..................................... 11-189
Chapter 12 Troubleshooting ................................................................................ 12-1
12.1 Explanation of LED Indicators .................................................................. 12-2
12.2 Table of Error IDs in Motion Instructions ................................................. 12-8
12.3 System Trouble Diagnosis through System Error Codes ......................... 12-12
Appendix A Modbus Communication ...................................................................... A-1
A.1 Message Format in ASCII Mode .................................................................. A-2
vi
Page 8

A.2 Message Format in RTU Mode ..................................................................... A-5
A.3 Modbus Function Codes Supported ............................................................. A-7
A.4 Modbus Exception Response Code Supported ............................................ A-7
A.5 Introduction to Modbus Function Codes ..................................................... A-8
A.6 Table of Registers and Corresponding Modbus addresses ........................ A-15
Appendix B Modbus TCP Communication ................................................................ B-1
B.1 Modbus TCP Message Structure .................................................................. B-2
B.2 Modbus Function Codes Supported in Modbus TCP ..................................... B-2
B.3 Exception Response Code in Modbus TCP ................................................... B-3
B.4 Modbus Function Codes in Modbus TCP ...................................................... B-3
B.5 Registers in DVP15MC11T and Corresponding Modbus Addresses ............ B-12
Appendix C CANopen Protocol ................................................................................ C-1
C.1 Node States ................................................................................................ C-4
C.2 Network Management (NMT) ..................................................................... C-7
C.3 PDO (Process Data Object) ........................................................................ C-7
C.4 SDO (Service Data Object) ......................................................................... C-9
Appendix D Explanation of Homing Modes ............................................................ D-1
D.1 Explanation of Homing Modes ................................................................... D-2
Appendix E List of Accessories ............................................................................... E-1
E.1 Accessories for CANopen Communication .................................................. E-2
E.2 Accessories for PROFIBUS DP Communication ........................................... E-4
E.3 Accessories for DeviceNet Communication ................................................. E-4
vii
Page 9

Memo
viii
Page 10

1
Chapter 1 Preface
Table of Contents
1.1 Explanation of Symbols in This Manual ...................................................... 1-2
1.2 Revision History ......................................................................................... 1-2
1-1
Page 11

DVP15MC11T Operation Manual
_1
! Danger
!
Warning
!
Caution
Thank you for purchasing DVP15MC11T motion controller which is created on the basis of motion control and
we are providing you with a high-end motion control system.
This manual describes the product specifications, functions, system architecture, installation, wiring,
execution principle, logic instructions and motion control instructions, trouble-shooting, communication
protocols, homing modes and other relevant information.
Make sure that you have well known about the motion control system configuration and product operation
before using DVP15MC11T.
1.1 Explanation of Symbols in This Manual
Precautions before operation
Before operation, please read relevant safety instructions carefully so as to prevent an injury t o personnel and
damage to products.
It indicates the highly potential hazards. It is possible to cause a severe injury or even
fatal harm to personnel if you do not follow the instructions.
It indicates the potential hazards. It is possible to cause a minor injury or even fatal
harm to personnel if you do not follow the instructions.
It indicates much attention should be paid. An unex pected result may occur if you do
not follow the instructions.
1.2 Revision History
Version Revision Release Date
1st The first version was published. May 30, 2018
1-2
Page 12

2
Chapter 2 Overview of DVP15MC11T
Table of Contents
2.1 Product Description .................................................................................... 2-2
2.2 Functions ................................................................................................... 2-2
2.3 Profile and Components ............................................................................. 2-3
2-1
Page 13

DVP15MC11T Operation Manual
_2
2.1 Product Description
DVP15MC11T is a type of multi-axis motion controller researched and produced by Delta autonomously on
the basis of CANopen field bus. It complies with CANopen DS301 basic communication protocol and
DSP402 motion control protocol. In addition, i t also supports standard instruction libraries defined by
international organizations for motion control . It brings great convenience to user to learn and develop
projects quickly. Maximum 24 axes can be controlled by means of Motion port. The single-axis motion
instructions including velocity, position, torque and homing instruct ions as well as multi-axis in structio ns such
as electronic gear, electronic cam, rotary cut and G code are supported.
Multiple communication ports are built in DVP 15MC11T. And thus various communication function s c an be
realized without adding modules. DVP15MC11T has left-side and right-side extension ports for adding
DVP-S series modules to its left and right sides. (The left-side port is a high-speed parallel extension port.)
The communication system adopts highly reliable CAN bus as the main line and hence users just need
simple cables for wiring.
Thanks to the high-speed reliable motio n control system , DVP15M C11T can be widely a pplied to a variety of
automation control industries such as packagi ng, printing, encapsulating, wire cutting, drug manufact uring
and so on.
2.2 Functions
Able to control up to 24 real axes (with axis No. ranging from 1 to 32).
The virtual axis and encoder axis can be built inside DVP15MC11T (with the axis No. ranging from 1
to 32, which can not be the same as that of real axes).
Equipped with 1GHz high-speed floating-point operation processor; supporting 64-bit floating point
(Lreal) and capable to meet various complicated motion control.
With two built-in incremental encoder ports and one SSI absolute encoder port.
With one RS232 port, one RS485 port and two Ethernet ports.
With one built-in CAN port serving as CANopen master or slave.
Supports powerful field network (as Ethernet master or slave, CANopen master or slave and
Profibus-DP slave) for construction of a function-complicated control system.
With a variety of I/O extensions (Left-side high-speed AIAO; right-side low-speed A IAO and DIDO
and temperature modules).
Using the easy-to-use software interface with the features of complete function and conv enient
application.
Providing standard bus cables, terminal resistors, distributor boxes and other acce ssorie s as well as
easy and convenient plug-and-play wiring.
2-2
Page 14

_
2.3 Profile and Components
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
02
12
02
03
13
03
04
14
04
05
15
05
06
16
06
07
17
07
EXTENSION
PORT
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Chapter 2 Specifications
2
1E
○
A
2E
○
A
3E
○
A
4E
○
A
5E
○
A
6E
○
A
7E
○
A
8E
○
A
9E
○
Model name
State indicators
IO indicators
COM/SSI communication port
Incremental encoder port
Ethernet communication port
CANopen communication port
CANmotion communication port
Input and output pins and symbols
A
10E
○
A
11E
○
A
12E
○
A
13E
○
A
14E
○
A
15E
○
A
16E
○
A
17E
○
SD card slot
Right-side extension module port
24V power port
Screw fixing clip
Extension module fixing clip
Left-side extension module port
Nameplate
DIN rail fixing clip
2-3
Page 15

DVP15MC11T Operation Manual
_2
MEMO
2-4
Page 16

3
Chapter 3 Specifications
Table of Contents
3.1 Function Specifications .............................................................................. 3-2
3.1.1 Specifications ........................................................................................ 3-2
3.1.2 Devices and Data Types ......................................................................... 3-3
3.1.2.1 Devices ............................................................................................. 3-3
3.1.2.2 Valid Ranges of Devices ...................................................................... 3-4
3.1.2.3 Latched Devices ................................................................................. 3-5
3.1.2.4 Data Types and Valid Ranges Supported ................................................ 3-6
3.2 Electrical Specifications ............................................................................. 3-7
3-1
Page 17

DVP15MC11T Operation Manual
_3
Size
20M
Number of
Memory
variables
Retained
Size
128K
One single G code
program
G code programs
Quantity
64
Real axis: 1~24, Virtual axis: 1~32.
Max. number of axes for linear
interpolation
Max. number of axes for circular
interpolation
Number of
cams
Cam key
points
Key points of one
single cam
One CAN port supports the
Ethernet
2
Two independent Ethernet ports
RS-232
1
Used as a master or slave
RS485
1
Used as a master or slave
Incremental
encoder
Builds an encoder axis. Z signal can
trigger an interrupt program.
SSI absolute
16 points (External interrupt trigger
is supported.)
Output points
Quantity
8 points
Left-side extension
port
Slim-series left-side extension
module
Right-side
extension port
Left-side
Left-side extension
8 pieces of Slim series left-side
8 pieces of Slim series special
modules
Number of
points
240 input points and 240 output
points
3.1 Function Specifications
3.1.1 Specifications
Item Specification
Program
capacity
Quantity
POU
definitions
1024
Programming
Motion
control
capacity for
G code
Number of
controlled
axes
Non-retained Size 20M
Size 256K
Max. number of axes for
single-axis control
Size Quantity 64
Quantity 2048
CAN 2
The virtual axis number is different
from the real axis number.
8
3
standard CANopen protocol and the
other CAN port is used in Motion.
Built-in ports of DVP15MC11T
Left-side and
right-side
extension
3-2
extension
Right-side
extension
2
encoder
Input points Quantity
modules
Special modules Quantity
Digital modules
1 Builds an encoder axis
1
1 Slim series special module
Quantity
extension modules
Page 18

3_
3.1.2 Devices and Data Types
% I X 0 0.
Digital point number
Prefix 2 symbol
Prefix 1 symbol
A fixed character
No.
Item
Content
1
Prefix 1 symbol
I Q M
Input
device
Output
device
Intermediate
device
3
Prefix 2 symbol
X B W D L
4
Data type of prefix 2
BIT
BYTE
WORD
DWORD
QWORD
5
%IX0.0
%IB0
%IW0
%ID0
%IL0
6
%QX0.0
%QB0
%QW0
%QD0
%QL0
7
%MX0.0
%MB0
%MW0
%MD0
%ML0
Device
Corresponding relationships
The 1st WORD
The 2nd WORD
The 3rd WORD
The 4th WORD
0
7
8
15
0
8
15
0
7
8
15
0
8
15
%MB
%MB0
%MB1
%MB2
%MB3
%MB4
%MB5
%MB6
%MB7
%MW
%MW0
%MW1
%MW2
%MW3
%MD
%MD0
%MD1
%ML
%ML0
Device
Corresponding relationships
%MX
3.1.2.1 Devices
Device Name Explanation
Relevant Devices of DVP15MC11T Used in the Software
Chapter 3 Specifications
2 Prefix 1 name
Device example
The Corresponding Relationships of Devices
%ML0 includes %MB0~%MB7, %MD0 includes %MB0~%MB3 and %MW0 includes %MB0~%MB1 as shown
in the following table.
name
%MX
Bit
%MX0.0~0.7 %MX1.0~1.7 %MX2.0~2.7 %MX3.0~3.7 %MX4.0~4.7 %MX5.0~5.7 %MX6.0~6.7 %MX7.0~7.7
...
Bit
Bit
…
Bit
Bit
...
Bit 7 Bit
…
Bit
Bit
...
Bit
Bit
…
Bit
Bit
...
Bit 7 Bit
…
Bit
%ML1 includes %MB8~%MB15, %MD2 includes %MB8~%MB11, %MW4 includes %MB8~%MB9
and %MB8 includes %MX8.0~8.7 as shown in the following table.
name
%MX
%MB
%MW
%MD
The 5th WORD The 6th WORD The 7th WORD The 8th WORD
Bit
0
%MX8.0~8.7 %MX9.0~9.7
Bit 7 Bit
...
%MB8 %MB9 %MB10 %MB11 %MB12 %MB13 %MB14 %MB15
8
%MW4 %MW5 %MW6 %MW7
Bit
…
Bit
15
0
%MX10.0~10.7 %MX11.0~11.7 %MX12.0~12.7 %MX13.0~13.7 %MX14.0~14.
%MD2 %MD3
...
Bit 7 Bit
8
…
Bit
15
Bit
0
...
Bit 7 Bit
8
…
Bit
15
Bit
0
...
7
Bit 7 Bit
8
Bit
…
15
15.0~15.
7
3-3
Page 19

DVP15MC11T Operation Manual
_3
Device
Device name
Expression
Range
The 5th WORD The 6th WORD The 7th WORD The 8th WORD
name
Bit
0
...
Bit 7 Bit
8
…
Bit
15
Bit
0
Corresponding relationships
...
Bit 7 Bit
8
…
Bit
15
Bit
0
...
Bit 7 Bit
8
…
Bit
15
Bit
0
...
Bit 7 Bit
8
…
Bit
15
%ML
%ML1
3.1.2.2 Valid Ranges of Devices
The table of valid ranges of the devices in DVP15MC11T
%IX %IX0.0~%IX0.7 %IX0.0~%IX127.7
%QX %QX0.0~%QX0.7 %QX0.0~%QX127.7
%MX %MX0.0 %MX0.0~%MX131071.7
%IB %IB0 %IB0~%IB127
%QB %QB0 %QB0~%QB127
%MB %MB0 %MB0~%MB131071
%IW %IW0 %IW0~%IW63
%QW %QW0 %QW0~%QW63
%MW
%ID %ID0 %ID0~%ID31
%QD %QD0 %QD0~%QD31
%MD %MD0 %MD0~%MD32767
%MW0
%MW0~%MW65535
%IL %IL0 %IL0~%IL15
%QL %QL0 %QL0~%QL15
%ML %ML0 %ML0~%ML16383
3-4
Page 20

3_
The table of Modbus device addresses
Device
type
Modbus address
type
%IX0.0~%IX0.7
0x6000~0x6007
%IX1.0~%IX1.7
0x6008~0x600F
……
……
%IX127.0~%IX127.7
0x63F8~0x63FF
Word
%IW0~%IW63
0x8000~0x803F
%QX0.0~%QX0.7
0xA000~0xA007
%QX1.0~%QX1.7
0xA008~0xA00F
……
……
%QX127.0~%QX127.7
0xA3F8~0xA3FF
Word
%QW0~%QW63
0xA000~0xA03F
%MX0.0~%MX0.7
0x10000000~0x10000007
addresses
%MX1.0~%MX1.7
0x10000008~0x1000000F
……
……
%MX131071.0~%MX131071.7
0x100FFFF8~0x100FFFFF
Standard Modbus
address
Delta-extended
Modbus addresses
Chapter 3 Specifications
Device area
I
(Input)
Q
(Output)
M
(Register)
Bit
Bit
Bit
Word
Word
%MW0~%MW32767 0x0000~0x7FFF
%MW32768~%MW65535 0x20008000~0x2000FFFF
3.1.2.3 Latched Devices
Range Modbus address
Standard Modbus
address
Delta-extended
Modbus
The %MW0~%MW999 devices are latched devices in which data are retained when power off. Besides, the
variables defined in the software can select Retain as its property. The capacity of latched devices is 128K
bytes.
3-5
Page 21

DVP15MC11T Operation Manual
_3
No.
Data type
Valid range
Initial value
1
BOOL
TRUE or FALSE
FALSE
2
BYTE
16#00 ~ FF
16#00
3
WORD
16#0000 ~ FFFF
16#0000
4
DWORD
16#00000000 ~ FFFFFFFF
16#00000000
5
LWORD
16#0000000000000000 ~ FFFFFFFFFFFFFFFF
16#0000000000000000
6
USINT
0 ~ +255
0
7
UINT
0 ~ +65535
0
8
UDINT
0 ~ +4294967295
0
9
ULINT
0 ~ +18446744073709551615
0
10
SINT
−128 ~ +127
0
11
INT
−32768 ~ +32767
0
12
DINT
−2147483648 ~ +2147483647
0
13
LINT
−9223372036854775808 ~ +9223372036854775807
0
−3.402823e+38 ~ −1.175495e-38,
+1.175495e-38 ~ +3.402823e+38
−1.79769313486231e+308 ~
Range:T#0ns~213503d23h34m33s709.551ms
D#Y-M-D. Range: D#1970-01-01~D#2106-02-07. Unit:
TOD#H:M:S:MS, Range:TOD#00:00:00~23:59:59.999.
is displayed. If 1 is
DT#Y-M-D-H-M-S. Range:
DT#1970-01-01-0:0:0~2106-02-07-6:28:15. Unit: s.
20
STRING
0~32000 characters
‘’
3.1.2.4 Data Types and Valid Ranges Supported
The data types and valid ranges of the variables in the software that DVP15MC11T uses are shown in the
following table.
14 REAL
15 LREAL
16 TIME
17 DATE
18 TOD
19 DT
0,
−2.22507385850721e-308,
0,
+2.22507385850721e−308 ~
+1.79769313486231e+308,
T#XXXXXXdXXhXXmXXsXXXms,Unit: ns.
s.
Unit: ms. If 0 is written, TOD#00:00:00
written, TOD#00:00:00.001 is displayed. If 86399999 is
written, TOD#23:59:59.999 is displayed. If 86400000 is
written, TOD#00:00:00 is displayed. If 4294967295 is
written, TOD#17:2:47.295 is displayed.
0.0
0.0
T#0ms
D#1970-01-01
TOD#00:00:00
DT#1970-01-01-0:0:0
3-6
Page 22

3_
3.2 Electrical Specifications
Item
Content
Fuse capacity
3 A/30 VDC, Polyswitch
Consumption
power
Static electricity: 8KV Air Discharge, 4KV Contact Discharge
Work: 0°C ~ 55°C (Temperature), 5 ~ 95% (Humidity), pol lution level 2
Weight
About 425g
Item
Content
Number of input
channels
Channel type
High-speed digital input type for the 16 channels
Common terminal
24 VDC, 5mA
The unshielded cable: 300m
Item
Content
Number of output
channels
Common terminal
for output points
Power voltage for
output points
Electrical specification
Chapter 3 Specifications
Power voltage
Isolation voltage
Vibration/shock
immunity
Interference
immunity
Environment
Electrical specificati on for input points
24 VDC(-15% ~ +20%)
500 VDC(Secondary-PE)
8W Max
Standard: IEC61131-2,IEC 68-2-6 (TEST Fc)/IEC61131-2 & IEC 68-2-27 (TEST
Ea)
EFT: Power Line: ±2KV, Digital Input: ±1KV,
Communication I/O: ±1KV
RS: 80MHz ~ 1000MHz, 10V/m.
Conducted Susceptibility Test: 150kHz ~ 80MHz, 3V/m
Surge Test: Power line 0.5KV DM/CM
Storage: -25°C ~ 70°C (Temperature), 5 ~ 95% (Humidity).
16 channels
Input terminals
for input points
Input type Sink or Source mode
Input delay
Input current
Max. cable length
Electrical specificati on for output points
Channel type High-speed digital output type for 8 channels
Output terminals Terminal Q0~Q7
Output delay
Terminal I0~I7,I10~I17
Terminal S0/S1
2.5µS (OFF ->ON), 5 µS (ON -> OFF)
The shielded cable: 500m;
8 transistors for output (N-MOS)
Terminal UP/ZP (Used for connection of anode or cathode of supply power)
24 VDC(-15% ~ +20%)#1
2µS ( OFF -> ON), 3µS ( ON -> OFF)
3-7
Page 23

DVP15MC11T Operation Manual
_3
Item
Content
Max. switch
frequency
The shielded cable: 500m
The unshielded cable: 300m
1KHZ
Resistance: 0.5A/1point (2A/ZP)
Max. loading
Max. cable length
#1: UP and ZP must connect the auxiliary power 24VDC (-15%~20%).
Inductance: 13W(24VDC)
Bulb: 2.5W(24VDC)
3-8
Page 24

4
Chapter 4 System Architecture
Table of Contents
4.1 System Constitution ................................................................................... 4-2
4.2 Power Supply ............................................................................................. 4-2
4.3 Left-side Extension .................................................................................... 4-2
4.3.1 Connectable Left-side Extension Module .................................................... 4-2
4.3.2 Allocation of Left-side Network Module Addresses ....................................... 4-3
4.3.3 Method of Reading/Writing of Left-side Modules ......................................... 4-3
4.4 Right-side Extension .................................................................................. 4-3
4.4.1 Connectable Right-side Extension Modules ................................................ 4-3
4.4.2 Allocation of Right-side Extension Module Addresses ................................... 4-4
4.5 Connectable Servo Drives........................................................................... 4-4
4.6 SD Memory Card ......................................................................................... 4-6
4.6.1 Model and Specification .......................................................................... 4-6
4.6.2 Function ............................................................................................... 4-8
4-1
Page 25

DVP15MC11T Operation Manual
_4
Module
name
Input
voltage
Output
voltage
Output
current
International
Standard
1
DVP04AD-SL
Analog module
Analog input
2
DVP04DA-SL
Analog module
Analog output
4.1 System Constitution
A multi-layer industrial network can be built by means of DVP15MC11T. By using DVP15MC11T, the
network can consist of top-layer Ethernet, middle-layer CANopen and Profibus bus as well as bottom-layer
RS-485 bus which supports Modbus as follows.
The figure above illustrates the peripheral device s which are connected to various ports of DVP15MC11T in
the entire system. Refer to chapter 6 for details on the functions of communication ports.
4.2 Power Supply
Delta power modules are recommended as the power supply for DVP15MC11T. The information of Delta
power modules is shown in the following table.
No.
1 DVPPS02
2 DVPPS05 120W 5A
Phase
Single
phase
Power
48W 2A
85~264VAC 24VDC
4.3 Left-side Extension
4.3.1 Connectable Left-side Extension Module
Max. 8 high-speed extension modules can be connected to the left side of DVP15MC11T and the
connectable modules are listed in the following table.
No. Module name Module type Description
3
4-2
DVPPF02-SL
Network module Profibus communication
Page 26

Chapter 4 System Architecture
4_
Mapping
Position
Input data
length
Output data
length
7
DVP16SP11R/T
8 bits
8 bits
4.3.2 Allocation of Left-side Network Module Addresses
About Input and Output Mapping Areas of Left-side Network Modules
The input and output mapping areas of different po sitions of the left side of PLC CPU are listed as follows
when the network modules connected to the left side of DVP15MC11T serve as a slave. The position 1 is for
the first module connected to the left side of P LC CPU; the position 2 is for the second one connected to the
left side of PLC CPU and so on.
area
1
2
3
4
5
6
7
8
Refer to the operation manuals of modules for details on al location of left-side extension module mapping
areas. Pay attention to how the mapping address expression format is changed in the operation manual.
For example, the output mapping area for DVPPF02-SL is D6250~D6349. But the area address is expressed
as %MW6250~%MW6349 when the module is connected to the left of DVP15MC11T.
Output mapping area Input mapping area
%MW6250~%MW6377 %MW6000~%MW6127
%MW6750~%MW6877 %MW6500~%MW6627
%MW7250~%MW7377 %MW7000~%MW7127
%MW7750~%MW7877 %MW7500~%MW7627
%MW8250~%MW8377 %MW8000~%MW8127
%MW8750~%MW8877 %MW8500~%MW8627
%MW9250~%MW9377 %MW9000~%MW9127
%MW9750~%MW9877 %MW9500~%MW9627
4.3.3 Method of Reading/Writing of Left-side Modules
The controller can read and write the data in CR regi st ers of the left-side extension modules via FROM/TO
instruction. For instance, the modules such as DVP04AD-SL and DVP04DA-SL may use FROM/TO to read
and write data in CR.
4.4 Right-side Extension
4.4.1 Connectable Right-side Extension Modules
Slim-series extension modules including digital modules, analog modules and temperature modules can be
connected to the right side of DVP15MC11T. Digital m odules can conne ct maximum 240 inp ut points and 24 0
output points. Maximum 8 analog modules can be connected. The connectable right-side extension module s
are listed in the following table.
No. Module name
1 DVP08SM11N 8 bits 2 DVP16SM11N 16 bits 3 DVP06SN11R - 6 bits
4 DVP08SN11R/T - 8 bits
5 DVP16SN11T - 16 bits
6
DVP08SP11R/T
8
DVP16SP11TS(PNP)
9 DVP32SM11N 32 bits - Pin-connector input
4 bits
8 bits 8 bits
4 bits
Input point extension
Output point extension
Input extension and output
extension
Extension type
4-3
Page 27

DVP15MC11T Operation Manual
_4
Input data
length
Output data
length
16
DVP06XA-S
4 words
2 words
Analog input and analog output
-
-
Sensor
(Model: J, K, R, S, T thermocouples)
No. Module name
10 DVP32SN11TN - 32 bits Pin-connector output
11 DVP08ST11N 8 bits - Digital switch
12 DVP04AD-S 4 words 13 DVP06AD-S 6 words 14 DVP04DA-S - 4 words
15 DVP02DA-S
17 DVP04PT-S
18 DVP06PT-S
19 DVP04TC-S 4 words -
-
4 words
6 words
2 words
Analog input
Analog output
Sensor
(Model: PT100)
Extension type
4.4.2 Allocation of Right-side Extension Module Addresses
DVP15MC11T can connect Slim-series extension modules to its right side and max. 240 di gital input points
and 240 digital output points are connectable. Max. 8 special modules are connectable such as analog
modules, temperature modules and pulse modules. Up to 14 digi tal modul es and special m odules at mo st are
connectable to the right side of DVP15MC11T.
Input point number and output point number of right-side digital extension modules
The input point number and output point number of t he digi tal extension modules connected to the right of
DVP15MC11T start from 2.0. For example, the input point for the first digital module starts from %IX2.0 and
the output point starts from %QX2.0. It is counted as 8 points if the n um ber is less than 8.
Digital input points and output points are numbe red as below: (Octal)
%IX2.0 ~%IX2.7,......, %IX16.0 ~%IX16.7,......, %IX31.0 ~ %IX31.7
%QX2.0 ~ %QX2.7,......, %QX16.0 ~ %QX16.7,......, %QX31.0 ~ %QX31.7
About the right-side special module and serial number
The right-side extension modules such as analog modules, temperature modules and pulse
modules are regarded as special modules.
The serial number of the first special module to the right side of DVP15MC11T is 0; the serial
number of the second one is 1, and so on. Maximum 8 special modules can be connect ed. The start
address for input of the right-side special module is %MW10000 an d t he start address for output of
the right-side special module is %MW10500.
DVP15MC11T can directly read and write the right-side module parameters through the hardware
configuration interface of the software. Also, it can grant a value to an address or grant a value to a
variable with which an address is combined in a prog ram to read and write right-side module
parameters.
4.5 Connectable Servo Drives
There are many models for ASDA-A2-series servo drives. ASDA-A2-XXXX-M model supports CANopen
communication. Only ASDA-A2-XXXX-M servo drives can be used to build CANopen motion control network
through connecting the motion port of DVP15MC11T. The connection between DVP15MC11T and the servo
drive can be made with UC-CMC003-01A or UC-CMC005-01A cable through CN6 po rt.
4-4
Page 28

4_
Illustration of the servo drive model
address of the servo in the CANopen
corresponds to must be consistent with that of
0203: CANopen baud rate is 500Kbps
Chapter 4 System Architecture
Relevant servo parameter settings are shown in the following table when DVP15MC11T and the
servo drive are connected.
Parameter Explanation Setting value Explanation
P1-01
P3-00
P3-01
*1:The output directions of the torque are illustrated as below w hen the value of X is 0 and 1 respectively.
Setting the control
mode of the servo
Setting a node ID
Baud rate
X0B*1 Set as CANopen mode
Setting range:
1~24
0403
The setting of this parameter corresponds to
the node
network
The baud rate that the parameter value
DVP15MC11T.
0403: CANopen baud rate is 1Mbps
4-5
Page 29

DVP15MC11T Operation Manual
_4
0
1
P CCW( )
N CW( )
N CW( )
P CCW( )
Positive
direction
Negative
direction
The wiring figure of DVP15MC11T and ASDA-A2-XXXX-M-series servo drives
Notes:
1. Please refer to the servo user manual for the wiring of ASDA-A2-XXXX-M-series servo drives, servo
motors and encoders.
2. Choose UC-CMC003-01A or UC-CMC005-01A or UC-CMC010-01A communication cable according
to the field status.
3. There is one 120Ω terminal resistor embedded at Motion port. In the CANopen network consisting of
Motion port and servos, the other end of the network must be connected with a terminal resistor
TAP-TR01 which could be found in the packing box of DVP15MC11T.
4.6 SD Memory Card
4.6.1 Model and Specification
Model and Appearance
SD memory cards can be classified into SD, Mini S D and Mic ro SD acc ording to it s size. DVP15MC11T only
supports the standard-dimension SD.
4-6
Page 30

Chapter 4 System Architecture
4_
Class
SD
SDHC
SDXC
Capacity
32MB~2GB
4GB~32GB
32GB~2TB
Size
SD
SDHC
Mini SDHC
Micro SDHC
SDXC
Micro SDXC
SD
Mini SD
Micro SD
Specification
There are various SD card specifications on current m ark et. Except that SD cards are different in size, they
can be classified into SD, SDHC and SDXC according to its capacity . However, DVP15MC11T only supports
basic SD specification currently. The following table includes the information of SD card family members.
DVP15MC11T only supports SD and SDHC. Please make sure to purcha se t he SD card of the right
specification that DVP15MC11T supports.
SD card classification
File system
SD speed
level
* Please notice that there is a kind of MMC card which is v ery similar to SD card in appearance and thus
please differentiate them carefully during pur chase.
Before use of SD card
Write-protection function of the memory card
There is a write-protection switch for general SD cards. The data can not be written into SD card if the
switch is moved to the Lock position. Hence, please ensure that the write-protection switch of SD card
has been released correctly before SD card is used and then the write-into function can be executed in
DVP15MC11T.
FAT16/FAT32 FAT32
CLASS 2 (Min. 2MB/Sec.)
N/A
CLASS 4 (Min. 4MB/Sec.)
CLASS 6 (Min. 6MB/Sec.) CLASS 10
(Min. 10MB/Sec.)
exFAT(FAT64)
CLASS 2 (Min. 2MB/Sec.)
CLASS 4 (Min. 4MB/Sec.)
CLASS 6 (Min. 6MB/Sec.)
CLASS 10 (Min. 10MB/Sec.)
4-7
Page 31

DVP15MC11T Operation Manual
_4
Write-
protected
Released
4.6.2 Function
The main purpose of SD card is to upgrade the firmware of DVP15MC11T.
4-8
Page 32

5
Chapter 5 Installation
Table of Contents
5.1 Dimensions ................................................................................................ 5-2
5.1.1 Profile and Dimensions of DVP15MC11T .................................................... 5-2
5.1.2 Dimensions of Left-side and Right-side Extension Modules ........................... 5-2
5.1.3 Connecting to the Left-side Extension Module ............................................ 5-3
5.1.4 Connecting to the Right-side Extension Module .......................................... 5-4
5.1.5 SD Card Installing and Removing ............................................................. 5-5
5.2 Installing the Module in the Control Cabinet .............................................. 5-7
5.2.1 Installing the Module to DIN rail .............................................................. 5-7
5.2.2 Illustration of Installation Inside the Control Cabinet ................................... 5-7
5.2.3 Environmental Temperature in the Control Cabinet ..................................... 5-7
5.2.4 Actions for Anti-interference .................................................................... 5-8
5.2.5 Dimension Requirement in the Control Cabinet .......................................... 5-8
5-1
Page 33

DVP15MC11T Operation Manual
_5
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
02
12
02
03
13
03
04
14
04
05
15
05
06
16
06
07
17
07
128
EXTENSION
PORT
110
68.4
116.2
96
90
33.1 60
5.1 Dimensions
5.1.1 Profile and Dimensions of DVP15MC11T
Unit: mm
5.1.2 Dimensions of Left-side and Right-side Extension Modules
See the following dimension figure of a left-side extension module by taking DVPCOPM-SL for example.
The length, width and height of all left-side modules are the same as that of DVPCOPM-SL.
Unit: mm
See the following dimension figure of a right-side extension module, which takes DVP04AD-S for
example. The length, width and height of all left-side modules are the same as that of DVP04AD-S.
5-2
Page 34

5_
96
90
25.2
60
Unit: mm
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
02
12
02
03
13
03
04
14
04
05
1 5
05
06
1 6
06
07
1 7
07
1
2
2
Chapter 5 Installation
5.1.3 Connecting to the Left-side Extension Module
Connection of DVP15MC11T and DVPDNET-SL
Pull open the extension module clips on the top left and bottom left of DVP15MC11T and
install DVPDNET-SL along four mounting holes in the four angles of DVP15MC11T as step 1
in figure 5.1.3.1.
Press the clips respectively on the top left and bottom left of DVP15MC11T to fix the module tightly
and ensure that their contact is normal as step 2 in figure 5.1.3.1.
Figure 5.1.3.1
Installing DVP15MC11T and DVPDNET-SL into DIN rail
Use standard 35mm DIN rail.
Pull open DIN rail clips of DVP15MC11T and DVPDNET-SL and then insert the two modules into
DIN rail.
5-3
Page 35

DVP15MC11T Operation Manual
_5
35mm
Din Rail
CA N
ER R
1
RU N
ER R
2
RU N
0 0
1 0
0 0
0 1
11
0 1
0 2
12
0 2
03
13
03
04
14
04
05
15
05
06
16
06
07
17
07
CA N
E RR
1
RU N
E RR
2
RU N
0 0
1 0
0 0
0 1
1 1
0 1
0 2
1 2
0 2
0 3
1 3
0 3
0 4
1 4
0 4
0 5
15
0 5
0 6
16
0 6
0 7
17
0 7
1
2
2
Press the DIN rail clips into DVP15MC11T and DVPDNET-SL to fix the two modules in DIN rail as
figure 5.1.3.2.
Figure 5.1.3.2
5.1.4 Connecting to the Right-side Extension Module
Connection of DVP15MC11T and DVP16SP11T
Pull open the extension module clips on the top right and bottom rig ht of DVP15MC11T and
install DVP16SP11T along four mounting holes in the four angles of DVP15M C11T as step 1
in figure 5.1.4.1.
Press the clips on the upper right and bottom right of DVP15MC11T to fix the module tightly
and ensure that their contact is normal as step 2 in figure 5.1.4.1
Installing DVP15MC11T and DVP16SP11T in DIN Rail
Use standard 35mm DIN rail.
Pull open DIN rail clips of DVP15MC11T and DVP16SP11T and then insert the two modules into
DIN rail.
Figure 5.1.4.1
Press the DIN rail clips into DVP15MC11T and DVP16SP11T to fix the two modules in DIN rail as
figure 5.1.4.2.
5-4
Page 36

Chapter 5 Installation
5_
35mm
Din Rail
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
02
12
02
03
1 3
03
04
1 4
04
0 5
1 5
0 5
0 6
1 6
0 6
0 7
1 7
0 7
CA N
ER R
1
RU N
ER R
2
RU N
0 0
1 0
0 0
0 1
1 1
0 1
0 2
1 2
0 2
0 3
1 3
0 3
0 4
1 4
0 4
0 5
15
0 5
0 6
16
0 6
0 7
17
0 7
Me mor y
card slo t
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
02
1 2
02
03
13
03
04
14
04
05
15
05
06
16
06
07
17
07
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
0 2
12
0 2
03
13
03
04
14
04
05
15
05
06
16
06
07
17
07
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
02
12
02
03
13
03
04
14
04
0 5
15
0 5
06
16
06
07
17
07
Figure 5.1.4.2
5.1.5 SD Card Installing and Removing
The memory card slot of DVP15MC11T
The memory card slot is seated in the right side of the front of DVP15MC11T as illustrated below.
Installing SD card
Insert an SD card to the memory card slot directly and push it to the end of the slot until hearing a click. After
the installation is finished, the SD card should be f i xed tightly. If the SD card inserted to the slot is loose, the
installation is unsuccessful. In addition, the SD card has a fool-proofing design. If the direction in which SD
card is inserted is wrong, the card will fail to reach the end of the slot. In this case, do not force to push the
SD card toward the end of the slot in order to avoid the damage to the module and SD card.
Follow the instructions in the figures below to insert the SD card in the right direction.
5-5
Page 37

DVP15MC11T Operation Manual
_5
CAN
ERR
1
RUN
ERR
2
RUN
0 0
10
0 0
01
11
01
02
12
02
03
13
03
04
14
04
05
15
05
06
1 6
06
0 7
17
0 7
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
02
12
02
03
1 3
03
04
14
04
05
15
05
06
16
06
07
17
07
CAN
ERR
1
RUN
ERR
2
RUN
00
10
00
01
11
01
0 2
12
0 2
03
13
03
04
14
04
05
15
05
06
16
06
07
17
07
Removing SD card
Just push the SD card to t he end of the slot so that the SD card will l oosen and rebound f rom inside the slot.
And then remove the SD card out of the slot easily.
5-6
Page 38

Chapter 5 Installation
5_
Ethernet
LAN1 LAN 2 CAN1 CAN2
CANopen M otion
OUT
IN
DVP15MC11T
000 102 030 4 0506 07
1011 12 131 4 1516 17
000 102 030 4 0506 07
00
01
02
03
04
05
06
07
S0
10
11
12
13
14
15
16
17
S1
00
01
02
03
04
05
06
07
UPZP
0V 24V
15
10
5 1
6
11 15
10
5 1
6
11
ENCODER COM /SSI
CAN
ERR
1
RUN
ERR
2RUN
PWR
RUN
ERR
SD
RS232
RS485
LAN1
LAN2
5.2 Installing the Module in the Control Cabinet
5.2.1 Installing the Module to DIN rail
Pull down the clips at the bottom of DVP15MC11T. T hen st i ck the h oriz ontal slots at the rear of t he modul e on
the DIN rail. Finally, push up the clips to fix the module inside the control cabinet.
5.2.2 Illustration of Installation Inside the Control Cabinet
5.2.3 Environmental Temperature in the Control Cabinet
Requirements
1. The environment inside the control cabinet for DVP15MC11T is 0°C ~ 55°C in temperature and 5 ~
95% in humidity.
2. Please do not make the installation near the equipment of high temperature.
5-7
Page 39

DVP15MC11T Operation Manual
_5
. In order to ensure that the
3. Keep enough space for ai r ventilation.
4. The fan or air conditio ner must be installed if the environment temperature is higher than 55°C.
Notes:
1. The control cabinet of the height 1.0m~2.0m is easy for installation and operation.
2. Make the installation away from the high-voltage equipment and po wer equipment.
3. The power supply in the control cabinet must be cut before installation.
5.2.4 Actions for Anti-interference
Do not install the controller in the control cabinet where there is high-voltage equipment.
Please keep at least 200mm far away from the power wire for the installation.
There should be a grounding wire for the control cabinet.
5.2.5 Dimension Requirement in the Control Cabinet
Installation Figure
DVP15MC11T has to be installed in an
enclosure
controller radiates heat normally, the space
between the controller and the enclosure has
to be larger than 50 millimeters. D > 50mm
5-8
Page 40
6
Chapter 6 Wiring, Communication
Setting and Network
Construction
Table of Contents
6.1 Wiring ........................................................................................................ 6-3
6.1.1 Power Supply ........................................................................................ 6-3
6.1.2 Safety Circuit Wiring .............................................................................. 6-3
6.2 Input Point and Output Point Wiring .......................................................... 6-4
6.2.1 Function that Input Points Suppo r t ........................................................... 6-4
6.2.2 Input Point Wiring ................................................................................. 6-5
6.2.3 Output Point Wiring ............................................................................... 6-6
6.3 RS-485 Communication Port ...................................................................... 6-8
6.3.1 Function that RS-485 Port Supports ......................................................... 6-8
6.3.2 Definitions of RS-485 Port Pins ................................................................ 6-8
6.3.3 RS-485 Hardware Connection .................................................................. 6-8
6.3.4 Supported Function Codes and Exception Codes ....................................... 6-10
6.4 RS-232 Communication Port .................................................................... 6-11
6.4.1 Function that RS-232 Port Supports ....................................................... 6-11
6.4.2 Definitions of RS-232 Port Pins .............................................................. 6-11
6.4.3 RS-232 Hardware Connection ................................................................ 6-11
6.4.4 Supported Function Codes and Exception Codes ....................................... 6-12
6.5 SSI Absolute Encoder Port ....................................................................... 6-13
6.5.1 Function of SSI Absolute Encoder ........................................................... 6-13
6.5.2 Definitions of SSI Port Pins ................................................................... 6-13
6.5.3 SSI Absolute Encoder Hardware Connection ............................................ 6-13
6.6 Incremental Encoders .............................................................................. 6-15
6.6.1 Function of Incremental Encoder ............................................................ 6-15
6.6.2 Definition of Incremental Encoder Port Pins ............................................. 6-15
6.6.3 Incremental Encoder Hardware Connection ............................................. 6-16
6.7 Ethernet Communication Port .................................................................. 6-17
6.7.1 Function that Ethernet Communication Port Supports ............................... 6-17
6.7.2 Pins of Ethernet Communication Port ...................................................... 6-17
6.7.3 Network Connection of Ether ne t Communication Port ................................ 6-17
6.7.4 Function Codes that Ethernet Communication Port Supports ...................... 6-18
6.8 Motion Communication Port ..................................................................... 6-18
6-1
Page 41

DVP15MC11T Operation Manual
_6
6.8.1 Function that Motion Communication Port Supports .................................. 6-18
6.8.2 Pins of Motion Communication Port ........................................................ 6-18
6.8.3 Motion Network Connection .................................................................. 6-19
6.8.4 Communication Speed and Co m m unication Distance ................................ 6-19
6.9 CANopen Communication Port ................................................................. 6-20
6.9.1 Functions that CANopen Comm unication Port Supports ............................. 6-20
6.9.2 Pins of CANopen Communication Port ..................................................... 6-21
6.9.3 PDO Mapping at CANopen Communication Port ........................................ 6-21
6.9.4 Network Connection at CANopen Communication Port ............................... 6-21
6.9.5 CANopen Communication Rate and Communication Distance ..................... 6-22
6-2
Page 42

Chapter 6 Wiring, Communication Setting and Network Construction
_
System circuit isolation device: The electromagnetic contactor, relay and other switch can be used as the
isolation device to prevent the system from becomin g unstable when the power supply is discontinuous.
9
1
2
3
4
5
6
7
8
DVP-PS01
DVP15MC11T
24V
0V
0V24VNL
6.1 Wiring
6.1.1 Power Supply
The power input of DVP15MC11T CPU is 24V DC inp ut. Please notice the following points when operating
DVP15MC11T.
1. The range of the power is 20.4VDC~ 28.8VDC. The power is connected to two terminals, 24V and 0V
and the grounding terminal should be in the ground connection. Please note that DVP15MC11T will
probably be damaged if the positive and negative pol arities of the power are connected wrongly.
2. The cable of 1.6mm or above is used for connecting t he ground terminal of DVP15MC11T.
3. Too long power shutdown time or power voltage drop will stop DVP15MC11T running and
communicating with the servo drive an d all o utput wi ll turn off. DVP15MC11T will resume the connection
with the servo drive when the power returns to normal.
6.1.2 Safety Circuit Wiring
The action of any device inside DVP15MC11T may affect the behavior of the external equipment under
DVP15MC11T’s control over the servo drive. Therefore, any device trouble may cause the whole automatic
control system to lose control and even result in injuries and death of personnel. For these reasons, we
suggest the following safety device should be add ed to the power input circuit.
6
Figure 3.2.1
AC power supply: 100~240VAC;50/60Hz。
Power supply circuit protection fuse
Power indicator
Emergency stop button: The button cuts off the system power supply when an accidental emergency
takes place.
Delta power module DVPPS02/24VDC (DVPPS02 is re commended for DVP15MC11T)
6-3
Page 43

DVP15MC11T Operation Manual
_6
t(us) t(us)
Input
signals
Input signal s
after being filte d re
Input
Input signals
withou tfilter set
DVP15MC11T
Ground
Safety circuit
6.2 Input Point and Output Point Wiring
6.2.1 Function that Input Points Support
There are 16 input points which support external interrupt and filter functions in DVP15MC11T. In addition,
the input points can be used to capture the encoder position.
Refer to the explanation of the DMC_TouchProbe instruction for details on position capture.
The work principle of the input filter
The input filter filters short pulse signals via the 16 I points I0~I7 and I10~I17 to reduce the influence of
the input interference signals. Increasing the filter val ue can decrea se the vibration of input signal s or the
influence from external interference.
Input filter time: t=31us *(0~255). So the filter time is a multiple of 31us and 0 is the default val ue. The
input filter time can be set through the software.
When there is the set filter:
When the filter time is set to t (us), the signal is valid if the ON or OFF time of the input signal is
greater than t (us). If the ON or OFF time of input signal is less than t (us), the signal will be
eliminated. The input signal left after being filtered will be input after being d el ayed by t (us).
When there is no filter set:
6-4
Figure 6.2.1.1
The input signals have no change when no filter time is set.
Figure 6.2.1.2
Page 44

Chapter 6 Wiring, Communication Setting and Network Construction
_
S0
00
Sinking
DVP15 MC11T
24VDC
S1
10
Sinking
DVP15 MC11T
24VDC
DVP15MC11T
00( )
Input
Switch
S0 C( o mmon po rt
)
24VD C
DVP15MC11T
10( )I nput
Switch
S1 Comm on port( )
24VD C
6.2.2 Input Point Wiring
There are two types of DC inputs, SINK and SOURCE. See the details for the wiring in the following two
modes.
Sink Mode
Under Sink mode, the simplified model is shown below and t he current flows into the common ports S0
and S1.
Figure 6.2.2.1
See the relevant wiring circuit in the following figures.
1. The input points of DVP15MC11T, 00~07 correspond to S0 as shown below.
Figure 6.2.2.2
2. The input points of DVP15MC11T, 10~17 correspond to S1 as shown below.
Figure 6.2.2.3
Source Mode
Under Source mode, the simplified mo del is illustrated below and the current flows into the co mmon port s
S0 and S1.
6
6-5
Page 45

DVP15MC11T Operation Manual
_6
S0
00
DVP15MC11T
Sourcing
24VDC
S1
10
DVP15MC11T
Sourcing
24VDC
DVP15MC11T
Switch
24VDC
S0 Common port( )
00 Input( )
DVP15MC11T
Switch
24VDC
S1 Common port( )
10 Input( )
See the wiring circuit below
Figure 6.2.2.4
Figure 6.2.2.5
Figure 6.2.2.6
6.2.3 Output Point Wiring
All transistor outputs in DVP15MC11T contain diodes for suppression which are sufficient for use in the
inductive load of smaller power and infrequent O n/Off. However, in the event of larger power and frequent
On/Off, the following suppression circuit is necess a ry for reducing interferences and preventing the transistor
output circuit from being damaged due to overv ol t age or overheat.
6-6
Page 46

Chapter 6 Wiring, Communication Setting and Network Construction
_
DC power supply of 24 V
Circuit protection fuse
Emergency stop button
Switch, inductive load
component for suppression ( is not used but when in smaller power ).
9V Zener diode, 5W ( and are both used when in bigger power and frequent On/Off.
DVP15MC11T
圖 3.2.6
6
6-7
Page 47

DVP15MC11T Operation Manual
_6
Pin
No.
Device
No.
Commun
cable
AC
drive
2
3
1
5
2
22
6
2
5
4
DVP 1 5M C11T
4
DVP 15 MC 11T
6.3 RS-485 Communication Port
6.3.1 Function that RS-485 Port Supports
The RS-485 communication port of DVP15MC11T can function as Modbus master or slave. HMI, PLC or
other Modbus master device can read and write dat a in the devices inside DVP15MC11T. The interval time
when the Modbus master accesses DVP15MC11T should exceed 5ms.
The progrom can not be downloaded via RS-485 port. RS -485 supports Modbus protocol, ASCII as well as
RTU mode. The function codes which RS-485 port supports include 0x01, 0x02, 0x03, 0x05, 0x06, 0x0F and
0x10. The station addresses that RS-485 port supports are 1~255. The broadcast function is not suppo rt ed.
Refer to appendix A for details on Modbus communic ation and Modbus device addresses.
6.3.2 Definitions of RS-485 Port Pins
DVP15MC11T’s COM/SSI port consists of 15 pins. The external por t is commonly used for RS-485
communication and SSI absolute encoder. See the table bel ow f or definitions of respective RS-485
communication port pins.
Signal Definition
11 D+ Positive pole
12 D- Negtive pole
5 SG Signal ground
6.3.3 RS-485 Hardware Connection
Example on Connection of DVP15MC11T into Modbus Network
DVP15MC11T is connected to Modbus network via RS -485.
COM/SSI
6-8
Device
name
1 2 3 4 5 6
Modbus
master
ication
VFD-CM08 DVP15MC11T
motor
Servo drive
Page 48

Chapter 6 Wiring, Communication Setting and Network Construction
_
Terminal
resistor
Shielded
cable
Baud rate
9600, 19200, 38400, 57600, 115200
Mode
ASCII
RTU
7,E,1
7,E,2
7,N,1
7,N,2
8,E,1
8,E,2
7,O,1
7,O,2
8,E,1
8,E,2
8,N,1
8,N,2
8,N,1
8,N,2
8,O,1
8,O,2
8,O,1
8,O,2
Figure 19
D+
D-
SG
D+
D-
SG SG
D+ D-
3
4
1
2
2
3
4
RS-485 Wiring:
Explanation of numbers
Master Slave
Notes:
1. Terminal resistors with the value of 120Ω are recommended to connect to both ends of the bus.
2. To ensure high communication quality, please use the shielded t wisted pair cable (20AWG).
3. When the internal voltages of two device s are different , make SG (Signal Ground) of the two devi ces
connected with each other to balance their SG voltages and make the communication more stable.
Communication Format that RS-485 S upports
RS-485 communication port supports ASCII or RTU communi cati on f ormats an d the supported baud rate can
be up to 115200bps.
Communication
format
6
6-9
Page 49

DVP15MC11T Operation Manual
_6
(Y/N)
Read one single or multiple
word register values.
Word
register
Write one single bit register
value.
Write one single word register
value.
Word
register
Write multiple word register
values.
Word
register
code
6.3.4 Supported Function Codes and Exception Codes
Modbus Function Codes:
1. The function codes that RS-485 port of DVP15MC11T supports are listed in the following t able.
Whether
Function
code
0x01 Read output bit register values. N 256 Bit register
0x02 Read bit register values. N 256 Bit register
0x03
0x05
0x06
0x0F Write multiple bit register values. Y 256 Bit register
0x10
2. The exception codes that RS-485 port of DVP15MC11T supports are listed in the following table.
Exception
response
Indication
to
broadcast
N 100
Y 1 Bit register
Y 1
Y 100
Indication
Max. number of
writable/readable
registers
Available
register
0x01
0x02 Unsupportive Modbus address
0x03
Unsupportive function code
The data length is out of the valid range.
6-10
Page 50

Chapter 6 Wiring, Communication Setting and Network Construction
_
Pin
No.
6.4 RS-232 Communication Port
6.4.1 Function that RS-232 Port Supports
The RS-232 communication port of DVP15MC11T can function as Modbus master or slave. HMI, PLC or
other Modbus device can read and write data in the devices inside DVP15MC11T. The progrom can not be
downloaded through RS-232 port. RS-232 supports Modbus protocol, ASCII mode as well as RTU mode. The
function codes which RS-232 port supports include 0x01, 0x02, 0x03, 0x05, 0x06, 0x0F and 0x10. The station
addresses that RS-232 port supports are 1~255. The broadcast function is not supported.
Refer to appendix A for details on Modbus communic ation and Modbus device addresses.
6.4.2 Definitions of RS-232 Port Pins
DVP15MC11T’s COM/SSI port consists of 15 pins. See the table be l ow f or def i ni tions of respective RS-232
communication port pins.
Signal Definition
3 Tx Transmitting data
9 Rx Receiving data
5 GND Signal ground
6.4.3 RS-232 Hardware Connection
COM/SSI
6
6-11
Page 51

DVP15MC11T Operation Manual
_6
7,O,1
7,O,2
8,E,1
8,E,2
8,N,1
8,N,2
8,N,1
8,N,2
8,O,1
8,O,2
8,O,1
8,O,2
Max. number of
registers
Read one single or multiple
word register values.
Word
register
Write one single bit register
value.
Write one single word register
value.
Word
register
Write multiple bit register
values.
Write multiple word register
values.
Word
register
RS-232 port is conne ct ed to HMI when DVP15MC11T functions as a slave.
The communication format that RS-232 supports
Baud rate
Mode ASCII
Communication
format
9600, 19200, 38400, 57600, 115200
7,E,1
7,E,2
7,N,1
7,N,2
RTU
8,E,1
6.4.4 Supported Function Codes and Exception Codes
Modbus Function Codes:
1. The function codes that RS-232 port of DVP15MC11T supports are listed in the following table.
Function
code
0x01 Read output bit register values. 256 Bit register
0x02 Read bit register values. 256 Bit register
0x03
0x05
Indication
writable/readable
100
1 Bit register
Available
register
8,E,2
0x06
0x0F
0x10
2. The exception codes that RS-232 port of DVP15MC11T supports are listed in the following table.
Exception code Indication
0x01 Unsupportive function code
0x02 Unsupportive Modbus address
0x03 The data length is out of the valid range.
6-12
1
256 Bit register
100
Page 52

Chapter 6 Wiring, Communication Setting and Network Construction
_
Pin
No.
2
DATA-
Negative pole of absolute encoder data
6
CLK+
Power ground of the absolute encoder
6.5 SSI Absolute Encoder Port
6.5.1 Function of SSI Absolute Encoder
DVP15MC11T’s COM/SSI port is a 15-pin D-SUB interface which can be used to connect SSI encoder. In
addition, the port also includes the 5V (400m A) power out put which provides the power supply to the encoder.
Users can create an SSI encoder axis to control the motion of slave axes according to the number of pulses
received via the encoder port.
6.5.2 Definitions of SSI Port Pins
DVP15MC11T’s COM/SSI port is a 15-pin D-SUB interface. See the table below for definitions of respective
SSI communication port pins.
Signal Definition
1 DATA+
14 CLK-
8 GND
15 5V
Positive pole of absolute encoder data
Positive pole of absolute encoder clock
Negative pole of absolute encoder clock
Absolute encoder power
6.5.3 SSI Absolute Encoder Hardware Connection
Illustration of SSI Absolute Encoder Wiring
COM/SSI
6
Specification for SSI Absolute Encoder Interface Wiring
SSI encoder interface of DVP15MC11T and the wiring method are shown below.
6-13
Page 53

DVP15MC11T Operation Manual
_6
Note: The power supply for COM/SSI port of DVP15MC11T is 5V power.
When VCC = 5V, connect the power voltage VCC of SSI encoder to pin 15 of COM/SSI interface and 0V
of SSI encoder to pin 8 of COM/SSI interface.
When VCC ǂ 5V, the power is supplied to SSI encoder alone according to the actual power voltage of
the SSI encoder which is connected.
Specification for SSI Absolute Encoder Communication Cable
Please use the shielded pair-twisted cable for CLK+, CLK-, DATA+ and DATA- signal transmission.
6-14
Page 54
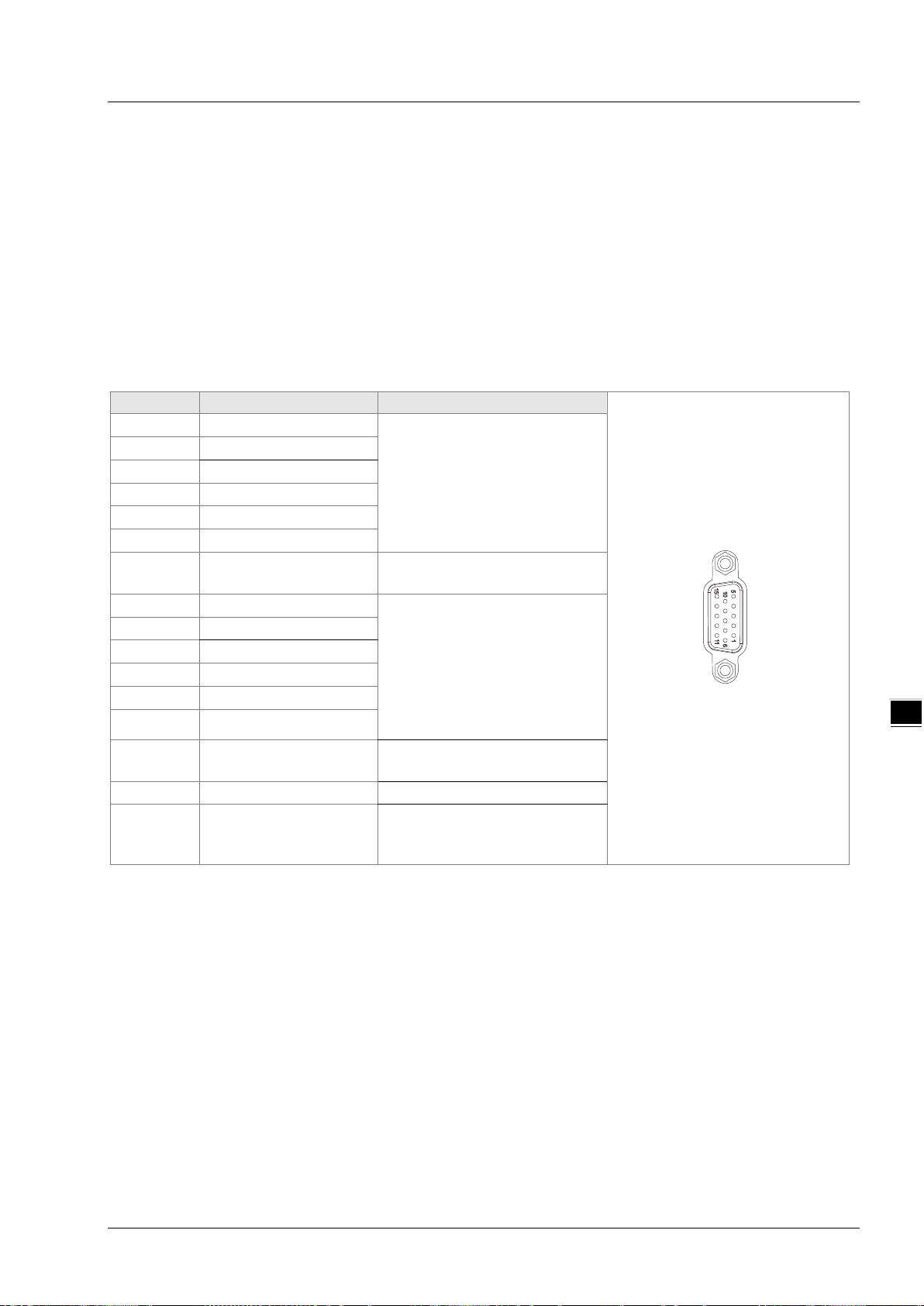
Chapter 6 Wiring, Communication Setting and Network Construction
_
Pin No.
Signal
Definition
1
A1+
he first
2
A1-
10
B1+
11
B1-
encoder 3 A2+
9
A2-
6
B2+
12
B2-
13
Z2+
Power supply for the second
encoder 8 0V
0V shared by the two encoders
Outer
shell
6.6 Incremental Encoders
6.6.1 Function of Incremental Encoder
DVP15MC11T’s incremental encoder port is a 15-pin D-SUB interface which can connect two independent
incremental encoders. Both of the two encoder ports support differential signal input with maximum work
frequency of 1MHz (250Kx 4 = 1MHz) per one. Additi onal l y, the port integrates two 5V (400mA) power
outputs to supply power to the two encoders. Users can create an incremental encoder axis for either of the
two encoders to control the motion of slave axes according to the number of pulses received at the encoder
port.
6.6.2 Definition of Incremental Encoder Port Pins
DVP15MC11T’s incremental encoder port is a 15-pin interface. See the table below for definitions of
respective encoder communication port pins.
Differential signals of t
incremental encoder
4 Z1+
5 Z1-
15 +5V
Power supply for the first
14 Z2-
7 +5V
metal
Differential signals of the
second incremental encoder
Shielding layer
Encoder
6
6-15
Page 55

DVP15MC11T Operation Manual
_6
6.6.3 Incremental Encoder Hardware Connection
Illustration of Incremental Encoder Wiring
Specification for Incremental Encoder Port Wiring
The incremental encoder interface of DVP15MC11T and the wiring method are shown below.
Note: The power supply for Encoder port of DVP15MC11T is 5V power.
When VCC = 5V, connect the power voltage VCC of an encoder to pin 15 of DVP15MC11T’s Encoder
interface and 0V of the encoder to pin 8 of Encoder interface.
When VCC ǂ 5V, the power is supplied to the enc oder alone according to the actual power voltage of
the encoder which is connected.
6-16
Page 56

Chapter 6 Wiring, Communication Setting and Network Construction
_
Positive pole for transmiting
data
Negative pole for transmitting
data
3
Rx+
Positive pole for receiving data
4
Reserved
Reserved
5
Reserved
Reserved
data
LAN 2LAN 1
1234567812345678
6.7 Ethernet Communication Port
6.7.1 Function that Ethernet Communication Port Supports
There are two independent Ethernet communication ports in DVP15MC11T, which both support Modbus TCP
protocol. Of the two Ethernet ports, LAN1 port can only work as a slave and LAN2 port can work as a master
or a slave in the Ethernet network. Either of them can accept a maximum of 4 master access at a time and
their IP addresses need be set separately. HMI, PLC or other Modbus TCP master device can read and write
data in the devices inside DVP15MC11T via the two E thernet ports. For details on Modbus TCP
communication, refer to appendix A.
Both of the two Ethernet ports can be used to downlo ad configuration files, execution files and CAM files.
They also support automatic jumper function an d users do not need to additionally select wire jumper when
the Ethernet port is connected to the computer or switchboard. Besides, they can automatically detect the
transmission speed of 10Mbps and 100 Mbps as well.
The Ethernet communication port supports Ethernet/IP protocol, Ethernet/IP slaves only as well as maximum
200 bytes of input and maximum 200 bytes of output
6.7.2 Pins of Ethernet Communication Port
DVP15MC11T has two independant Ethernet ports supporting Modbus TCP protocol with the pins shown in
the following table. The IP addresses of the two Et hernet ports need be set respectively. The default IP
address for LAN1 is 192.168.0.1 and the default IP address for LAN2 is 192.168.1.1.
Pin No. Signal Definition
1 Tx+
2 Tx-
6 Rx7 Reserved Reserved
8 Reserved Reserved
Negative pole for receiving
6.7.3 Network Connection of Ethernet Communication Port
6
6-17
Page 57

DVP15MC11T Operation Manual
_6
Max. number of
registers
Read one single or multiple word register
values.
Exception
code
12345678
CAN2
Motion
1
CAN_H
Signal+
2
CAN_L
Signal-
3
CAN_GND
0 VDC
6
Reserved
Reserved
7
CAN_GND
0 VDC
8
Reserved
Reserved
6.7.4 Function Codes that Ethernet Communication Port Supports
Below is the list of the function codes and exception response codes which are sup port ed when
DVP15MC11T’s Ethernet communication port s LA N1 and LAN2 use Modbus TCP protocol.
Function code Indication
0x02 Read bit register values. 256 Bit register
0x03
0x05 Write one single bit register value. 1 Bit register
0x06 Write one single word register value. 1 Word register
0x0F Write multiple bit register values. 256 Bit register
0x10 Write multiple word register values. 100 Word register
response
0x01
0x02 Unsupportive Modbus address
0x03
Unsupportive function code
The data length is out of the valid range.
Indication
writable/readable
100 Word register
Available
register
6.8 Motion Communication Port
6.8.1 Function that Motion Communication Port Supports
Motion communication port is used for motion control. Motion instructions control a servo via the
communication port. SDO command can be sent out through t he comm unicatio n port. But users can not carry
out the PDO configuration through the communicati on port.
6.8.2 Pins of Motion Communication Port
The following table lists the pins of Motion communica tion port which is used for the motion control.
Pin No. Signal Definition
4 Reserved Reserved
5 Reserved Reserved
6-18
Page 58

Chapter 6 Wiring, Communication Setting and Network Construction
_
(Bit/second)
6.8.3 Motion Network Connection
Note: DVP15MC11T is embedded with one 120 Ohm terminal resistor in its Motion interface.
6.8.4 Communication Speed and Communication Distance
The transmission distance of the bus network d epends on the t ransmission speed of Motion b us. Below is the
table where the maximum communication distances correspond to different transmission speeds.
Transmission speed
Max. communication
distance (Meter)
500K 1M
100 25
6
6-19
Page 59

DVP15MC11T Operation Manual
_6
6.9 CANopen Communication Port
6.9.1 Functions that CANopen Communication Port Supports
CANopen communication port can be used as CANopen network master or as a slave of other master.
As a master, CAN1 communication port supports following functions.
Standard CANopen protocol DS301V4.02;
NMT (Network Management Object) Master service;
NMT Error control;
NMT error control is used t o watch if so me slave is of fl ine. NMT error control includes Heartbeat and
Node Guarding. The module supports Heartbeat function.
Connects max. 32 slaves.
PDO (Process Data Object) service.
The number of RxPDOs: max. 200, data length: max. 1000 bytes
The number of TxPDOs: max. 200, data length: max. 1000 bytes
Maximum 8 TxPDOs and 8 RxPDOs are configured for each slave.
PDO transmission type: supporting event trigger, time trigger, synchronous and cyclic, synchronous
and acyclic
PDO mapping: every PDO can map 32 parameters at most.
The data type that CAN communication port support s
Storage capacity Data type
1bit BOOL
8bit SINT, USINT,BYTE
16bit INT, UINT, WORD
32bit DINT, UDINT, REAL, DWORD
64bit LINT, ULINT, LREAL, LWORD
Supports SDO service
Supports standard expedited SDO transmission mode;
Supports Auto SDO function; capable of sending a maxi m um of 30 Auto SDOs to each slave;
Supports reading and writing of slave data by using SDO service in PLC ladder diagram program.
SYNC producer, range 0-65535ms
Multiple devices perform an action synchronously t hrough SYNC message.
As the connection interface between Delta CANopen Builder configuration software and
CANopen network, the configuration software can be directly used to confi gure the network throu gh
DVPCOPM-SL module
Supports the CANopen communication speeds: 20K, 50K, 125K, 250K, 500K, 1Mbps
As a slave, CAN1 communication port supports following functions.
Standard CANopen protocol DS301V4.02
NMT slave service
NMT Error control
Supporting Heartbeat Protocol error control instea d of Node Guarding error control
PDO service
The number of RxPDOs: max. 8, data length: max. 64 bytes
The number of TxPDOs: max .8, data length: max. 64 bytes
PDO transmission type: event trigger, time trigger, synch ronous and cycli c, synchronou s and acyclic
SDO service
Supporting standard expedited SDO transmission mode.
6-20
Page 60

Chapter 6 Wiring, Communication Setting and Network Construction
_
Pin No.
Signal
Definition
1
CAN_H
Signal+
2
CAN_L
Signal-
3
CAN_GND
0 VDC
4
Reserved
Reserved
5
Reserved
Reserved
6
Reserved
Reserved
7
CAN_GND
0 VDC
8
Reserved
Reserved
120 Ω
120Ω
CAN 1node CAN 2node
CAN 3node
CAN_H
CAN_L
12345678
CAN1
CANopen
6.9.2 Pins of CANopen Communication Port
DVP15MC11T’s CANopen communication port is used in the standard CANopen communication and its pin
descriptions are listed in the following table.
6.9.3 PDO Mapping at CANopen Communication Port
The input mapping area is %MW5000~%MW5499 and output mapping area is %MW5500~%MW5999 when
DVP15MC11T works as CANopen master.
The input mapping area is %MW5000~%MW5031 and output mapping area is %MW5500~%MW5531 when
DVP15MC11T works as CANopen slave.
6.9.4 Network Connection at CANopen Communication Port
CANopen Bus Terminals and Network Topology
Both of the two ends of a CANopen network need be connected with the terminal resistors of 120Ω to
enhance the stability of CANopen communication. See the illustration of a basic CANopen network topology
below.
6
6-21
Page 61

DVP15MC11T Operation Manual
_6
Transmission speed
(Bit/second)
Max. communication
distance (Meter)
CANopen Bus Network Topology
1> Delta’s standard cables such as UC-DN01Z-01A thick cable, UC-DN01Z-02A thin cable and
UC-CMC010-01A thin cable are recommended to use in construction of a CANopen network. The
communication cable must keep away from the power cable.
2> The terminal resistor of 120Ω should be connected between CAN_H and CAN_L of two respective
ends of the network. Users can purchase Delta termi nal resistor, TAP-TR01.
6.9.5 CANopen Communication Rate and Communication Distance
The transmission distance of CANopen bus network depends on the transmission speed of CANopen bus.
Below is the table where the maximum communicatio n dist ances correspond to different transmission
speeds.
20K 50K 125K 250K 500K 1M
2500 1000 500 250 100 25
6-22
Page 62

7
Chapter 7 Execution Principle of
DVP15MC11T Controller
Table of Contents
7.1 Tasks .......................................................................................................... 7-2
7.1.1 Task Types ........................................................................................... 7-2
7.1.2 Priority levels of Tasks ............................................................................ 7-4
7.1.3 Watchdog for a Task .............................................................................. 7-6
7.1.4 Motion Instructions for Each Task Type ..................................................... 7-7
7.2 The Impact of PLC RUN or STOP on Variables and Devices ......................... 7-8
7.3 Relationship between Motion Program and Motion Bus .............................. 7-8
7.4 Synchronization Cycle Period Setting ......................................................... 7-9
7-1
Page 63

DVP15MC11T Operation Manual
_7
IO User program
Remaining
interval
Time interval b etween tasks
Cyclic
task
System
processing
Priority
High
Low
System
processing
IO User program
Remaining
interval
Time interval between tasks
System
processing
7.1 Tasks
Tasks are a series of functions of processing specified execution co nditions and executi on sequences f or
I/O refresh and user program execution.
A task is defined with a name, priority level and type. Tasks can be classified into three types, the cyclic
task, freewheeling task and event-triggered task.
For every task, a group of POUs which are triggered by the task can be specif i ed. If the task is executed
in current period, the POUs will be processed withi n a peri od of time.
The priority level and task type determine the execution sequence of the t ask.
A watchdog can be assigned for every task.
7.1.1 Task Types
Three task types that DVP15MC11T supports
1. Cyclic
2. Freewheeling
3. Triggered by event
Maximum 24 tasks that DVP15MC11T supports are respectively described below.
Cyclic task
The cyclic task will be executed cyclically according to the set time interval.
The way the cyclic task is executed
IO: IO means I/O refresh. I/O includes local I/O points and left-side and right-side extension
module data and CANopen data. The data can be specified to refresh before the set task is
executed. If not specified, the data will be refreshed during the system processing.
User Program: User Program stands for user program execution which is based on the
execution sequences of programs assigned in a tas k.
Remaining interval:
When the controller is to perform system processing, the low-priority task is executed first if any
and then the system processing is performed.
System processing:
The controller will perform the system processing which includes Ethernet, RS232 and RS485
communication processing after all task requests are completed.
The four terms mentioned above have the same meanings as those in the following sections.
Note: If the cycle set for a cyclic task is too short, after the user program execution is finished, the
task execution will be repeated immediately and no low-priority task or no system processing
will be executed. In this case, the executi on of all tasks will be affected. If the watchd og is set for
the task, the watchdog timeout will occur, the c ontroll er will ent er E rror status an d user p ro gram
execution will stop. If the watchdog is not set for the task, the controller will not be able to
perform system processing and the problems such as communication timeout will take place.
7-2
Page 64

Chapter 7 Introduction of Axis Parameters
_
IO User program
Task exe cution time 1
Freewhe eling
tas k
Priority
High
Low
System
processing
IO User program
Task execution time 2
System
processing
System
processing
IO User program
Task execution time
Task triggered
by event
System
processing
Priority
High
Low
System
processing
Task execution
condition met
Freewheeling task
Freewheeling task: The task will be handled as soon as the program running starts. The task will be
restarted automatically in the next cycle after one execution cycle ends.
The way a freewheeling task is executed
Note: There is no fixed execution time for the free wheeling task. So the values of task execution t im e
1 and task execution time 2 may not be equal in the above f i gure.
Task triggered by event
Event task: An event task is executed once just when the specified event happens. The timing for
execution of an event task depends on the tim ing for oc curring of the event an d t he priority level of t he
event task.
The way an event task is executed
The event tasks for option contain following few types.
- Motion event (Motion control task)
- Rising edge or falling edge of local input points (I0~I7 and I10~I17)
- CANopen SYNC signal
- Z pulse rising edge of incremental encoder 1 or encoder 2
The condition for the second-time execution is ignored when the conditi on required for execution of the
event task is met again before the event task is compl eted. The period before an event task is completed
is the course while the event task is being executed or is waiting to be executed.
Motion Event
7
Motion port of the controller sends out SYNC signal and the task is triggered.
Note: The motion task is set to priority 1 by default. The priority lev el can be modified. However, make
sure that there is enough time for execution of the motion task within CANopen SYNC period.
SYNC cycle setting should meet following conditions.
There must be enough time for execution of the program defined in a motion task.
There must be sufficient time f or PDO and SD O data excha nge bet ween the con troller and servo
drive.
7-3
Page 65

DVP15MC11T Operation Manual
_7
IO
User
program
Time interval between tasks
Cyclic task
( )Priority 1
System
processing
Priority
High
Low
IO
User
program
Time interval between tasks
Task execution
condition met
IO
System
processing
Pause
User
program
IO
User
program
Pause IO
User
program
Fre ewh eelin g task
( )Priority 2
Task execution
finished
Task execution
condition met
Task execution
finished
Task execution
condition met
Task execution
finished
Task execution
condition met
Task execution
condition met
Task execu tion tim e
Task execu tion time
Task e xecut ion time
Task execution
finished
1 2
3
5 6
7
8
4
System
processing
User
program
System
processing
Insufficient SYNC period time will result in t he cont rolled device to fail to receive SYNC signal and
unpredictable operations. Refer to section 7.3 for SYNC period setting.
Rising edge or falling edge of local input points (I0~I7,I10~I17)
The task is triggered when rising edge or falling edge of input point sign al i s dete cted. The res ponse t ime
of input points can be set through the filter functio n.
CANopen bus SYNC message
The task is triggered when SYNC signal is produced a t CA Nopen port of the controller.
Z pulse rising edge for incremental encoder 1
The task is triggered when the rising edge of Z signal of the first encoder is detected at Encoder port of
the controller.
Z pulse rising edge for incremental encoder 2
The task is triggered when the rising edge of Z signal of the second encoder is d etected at Encoder port of
the controller.
7.1.2 Priority levels of Tasks
The controller can not perform multiple tasks sim ul taneously. Every task must be given a priority level and
they are executed according to preset priorities. Prio rity level can be set within the range of 1 to 24. (1 is the
highest priority and 24 is the lowest priority.) The priority level of each task must be unique. The task with
higher priority takes priority to perform. The high-priority task can interrupt the low-priority task.
We recommend that the task which has a high req uirement of real t ime should be given a high priority and the
task which has a low requirement of real ti me should be given a low priority. The priority of the default motion
control task built in the CANopen Builder software i s 1 by default.
The principle for multi-task execution
When the execution conditions of two tasks are met simultaneously (Cyclic task and
freewheeling task)
1E A The execution conditions for the cyclic task and freewheeling task are met at t he same time. The
○
A
2E A When the cyclic task execution is finished, the freewheeling task execution sta rt s.
○
cyclic task is executed first because of its high er priority.
7-4
Page 66

Chapter 7 Introduction of Axis Parameters
_
Task trigg ered by
eve nt
( )P rio rit y 1
System
pro ces sing
Priorit y
High
Low
IO
User
program
IO
User
program
Fre ewheelin g task
( )Priority 2
Task execution
condition met
Task execution
finished
Cyclic task
(Prior ity 3)
User
program
Pau se
Paus e
The event task has not been triggered
Task execution time
Task execution
finished
Task execution
condition met
IO
User
program
Time interval between tasks Time interval between tasks
IO
User
program
System
processi ng
IO
User
program
Task execution time
IO
User
program
IO
User
program
Task execution
condition met
Task execution
finished
Task execution
condition met
Pause
Task
execution
finished
Task execution
condition met
Task execution
finished
Task execution
condition met
Task execution
finished
Task execution
condition met
Task executi on t im e
Task execution time
Task execution time
Time interval between tasks
System
proces sing
System
processi ng
1 2
3
4 5
6
8 9
10
11
12
7
3E A The controller will execute the system processing if there is no other task after the execution of
○
the freewheeling task is completed.
A
4E A The execution of the freewheeling task continues since the high-priority cyclic task request has
○
not arrived.
A
5E A The cyclic task interrupts the freewheeling task execution and the controller executes the cyclic
○
task because of the arrival of the high-priori ty cyclic task request during the exec ution of the
freewheeling task.
A
6E A The controller continues to execute the part of the low-priority freewheeling task, which has not
○
been executed yet when the execution of the cycli c t ask is completed.
A
7E A When the execution of the freewheeling task is completed, the controller executes the system
○
processing due to no other task request.
A
8E A When the system processing is completed, the execution of the freewheeling tas k co ntinues due
○
to no high-priority cyclic ta sk request.
When three tasks are executed in mixture (Event task, Cyclic task and Freewheeling task)
A
1E A When the conditions for execution of the freewheeling task and cyclic task a re both met, the
○
freewheeling task is executed first because the p riority of the freewheeling task is higher.
A
2E A The cyclic task execution starts when the freewheeling task execution is completed.
○
A
3E A When the cyclic task execution is completed, the controller executes the system processing due
○
to no other task request.
A
4E A The freewheeling task is executed when the system processing is completed.
○
A
5E A When the freewheeling task execution is completed, the controller executes the system
○
processing due to no other task request.
A
6E A The freewheeling task is executed when the system processing is completed.
○
A
7E A The freewheeling task execution continues because the freewheeling task has a higher priority
○
than the cyclic task although the execution condition for the cyclic t ask is met. And the cyclic t ask
waits to execute.
7
7-5
Page 67

DVP15MC11T Operation Manual
_7
8E A The event task interrupts the freewheeling task execution because the event task has the highest
○
priority and the execution condition for the event t ask is met.
A
9E A The controller continues to execute the part of the low-priority freewheeling task, which has not
○
been executed yet when the event task execution is c om pl eted.
A
10E A The freewheeling task execution is compl et ed. The controller executes the cyclic task since the
○
cyclic task request in ⑦ is not responded yet.
A
11E A The cyclic task execution is completed. The controller executes the system pr ocessing due to no
○
other task request.
7.1.3 Watchdog for a Task
Every task can be given a watchdog. When the tas k execution time exceeds the set watchdog time, the
controller will enter Error state and the user program execution will stop.
Watchdog time: The longest time allowed for the exe cuti on of a task
7-6
Page 68

Chapter 7 Introduction of Axis Parameters
_
Task type
Event-triggered task
Motion
task
Non-motion
task
7.1.4 Motion Instructions for Each Task Type
Here is the table of motion instructions for different t ask types. “V” means the motion instruction can be
executed for the task type and “–” means the motion instruction can not be executed for the task type.
Classification Instruction name
MC_Power V
MC_MoveAbsolute V
MC_MoveRelative V
MC_MoveAdditive V
MC_MoveSuperimposed V
MC_Haltsuperimposed V
MC_MoveVelocity V
MC_Stop V
MC_Halt V
MC_Home V
Single-axis
instructions
MC_Reset V
MC_ReadStatus V V V V
MC_ReadActualPosition V V V V
MC_SetOverride V
MC_SetPosition V
Cyclic
task
Freewheeling
task
Multi-axis
instructions
CANopen
MC_ReadAxisError V V V V
MC_ReadMotionState V V V V
DMC_SetTorque V
DMC_ReadParameter_Motion V V V V
DMC_WriteParameter_Motion V
DMC_TouchProbe V
MC_CombineAxes V
MC_GearIn V
MC_GearOut V
MC_CamIn V
MC_CamOut V
DMC_WriteParameter_CANopen V V V V
DMC_ReadParameter_CANopen V V V V
7
7-7
Page 69

DVP15MC11T Operation Manual
_7
7.2 The Impact of PLC RUN or STOP on Variables and Devices
When DVP15MC11T is switched from RUN to STOP, variables and devices keep current values. When
DVP15MC11T is switched from STOP to RUN, users can select one option that the values of variables and
non-latched devices are cleared or retained as below.
The values of variables and non-latched devices are cleared.
When DVP15MC11T is switched from STOP to RUN, the values of v ariables and non-latched dev ices are
cleared and restored to the initial values. If variables and non-latched devices have no initial values, the
values of variables and non-latched areas will be restored to the default value 0.
The values of variables and devices are retained.
When DVP15MC11T is switched from STOP to RUN, variables and devices keep current values.
7.3 Relationship between Motion Progr am a nd Motion Bus
DVP15MC11T makes the synchronization achieved through issuing SYNC signal in the method of
broadcasting while more than one servo is connected with DVP15MC11T. The servo drives receive the
control data sent by DVP15MC11T. But the control data received will not be effective right away until the
SYNC signal comes to the servos so as to realize the sy nchronization of multiple servos.
In the following figure, DVP15MC11T is connected with 4 servo drives and T is the synchronization period.
The four servo drives receive control data at different tim e (t1, t2, t3 and t4) but the control data received are
not effective at once. As the servo drives receive SYNC signal, the control dat a will go ef fective i mmediate ly.
7-8
Page 70

Chapter 7 Introduction of Axis Parameters
_
7.4 Synchronization Cycle Period Setting
The synchronization cycle is a very important param eter for the bus motion control. If the synchronization
period is not set properly, the servo may display AL303/AL302/AL301 fault alarm in communication or the
servo could not run normally.
Let’s introduce the constitution of the synchronization period first.
The motion control program is scanned at the v ery beginning of the synchronization period, and then the
control messages got through calculation are sent to all axes. So we can regard the synchronization period
as the time for execution of motion control program plus the ti me for communicat ion between DVP15MC an d
all servos.
The time for execution of motion control program is the maximum execution time of motion event tasks with
the unit: μs (microsecond) which can be viewed by double clicks on Task on the CANopen Builder software
interface. 1000μs (microseconds) are 1ms (millisecond).
The value is rounded up to an integer in the actual app l i cat ion. For example, the maximum time for program
execution is 2567μs=2.5ms, in this case, we can regard 3ms as the time for program execution.
It is about 0.5ms for the communication between DVP15MC and a servo.
We recommend that the value is rounded up to an integer in application. For example, 5 servos are
configured in an application. And the communication time is 5*0.5ms=2.5ms. In this case, we can regard
3ms as the time for communication.
Therefore, we can get the formula: a synchronizatio n time (ms) = an integer obtained by rounding up the
value of maximum program execution time (ms) + time for the communication between DVP15MC11T and
all servos (ms) +1 (time reserved for a program change) (ms).
If the running time of the program is increased too much af ter the program changes, the preset
synchronization time will not fit any more. So the reserved ti m e should be set to 1~2ms.
For example, the maximum program execution time i s 1634μs and there are totally 5 servos in the
application. The reserved time for a program chan ge is 1ms.
A synchronization cycle period= 2ms (obtained by rounding up the maximum program execution time,
1634μs) + 3ms (obtained by rounding up 5*0.5) +1ms (reserved for a program change)=6ms
Note:
The above method is used for getting an estimated time, which is suitable for most applications. If you need
a more precise synchronization cycle period, the actu al time can be recalculated by omitting the reserved
time after the application development is completed.
7
7-9
Page 71

DVP15MC11T Operation Manual
_7
Memo
7-10
Page 72

8
Chapter 8 Logic Instructions
Table of Contents
8.1 Table of Logic Instructions ......................................................................... 8-4
8.2 Explanation of Logic Instructions ............................................................... 8-7
8.2.1 EN and ENO .......................................................................................... 8-7
8.3 Sequence Input /Output Instructions ........................................................ 8-7
8.3.1 R_TRIG ................................................................................................ 8-7
8.3.2 F_TRIG ................................................................................................ 8-9
8.3.3 RS ..................................................................................................... 8-11
8.3.4 SR ..................................................................................................... 8-13
8.3.5 SEMA ................................................................................................. 8-15
8.4 Data Movement Instructions .................................................................... 8-17
8.4.1 MOVE ................................................................................................ 8-17
8.4.2 MoveBit .............................................................................................. 8-18
8.4.3 TransBit ............................................................................................. 8-20
8.4.4 MoveDigit ........................................................................................... 8-22
8.4.5 Exchange ........................................................................................... 8-24
8.4.6 Swap ................................................................................................. 8-26
8.5 Comparison Instructions .......................................................................... 8-28
8.5.1 LT ..................................................................................................... 8-28
8.5.2 LE ..................................................................................................... 8-30
8.5.3 GT ..................................................................................................... 8-32
8.5.4 GE ..................................................................................................... 8-34
8.5.5 EQ ..................................................................................................... 8-36
8.5.6 NE ..................................................................................................... 8-38
8.6 Timer Instructions ................................................................................... 8-40
8.6.1 TON ................................................................................................... 8-40
8.6.2 TOF ................................................................................................... 8-42
8.6.3 TP ..................................................................................................... 8-44
8.7 Counter Instructions ................................................................................ 8-46
8.7.1 CTU ................................................................................................... 8-46
8.7.2 CTD ................................................................................................... 8-48
8.7.3 CTUD ................................................................................................. 8-50
8.8 Math Instructions ..................................................................................... 8-53
8.8.1 ADD .................................................................................................. 8-53
8.8.2 SUB ................................................................................................... 8-56
8.8.3 MUL ................................................................................................... 8-59
8.8.4 DIV ................................................................................................... 8-62
8-1
Page 73

DVP15MC11T Operation Manual
_8
8.8.5 MOD .................................................................................................. 8-65
8.8.6 MODREAL ........................................................................................... 8-67
8.8.7 MODTURNS ........................................................................................ 8-69
8.8.8 MODABS ............................................................................................ 8-71
8.8.9 ABS ................................................................................................... 8-73
8.8.10 DegToRad .......................................................................................... 8-75
8.8.11 RadToDeg .......................................................................................... 8-77
8.8.12 SIN ................................................................................................... 8-79
8.8.13 COS .................................................................................................. 8-81
8.8.14 TAN ................................................................................................... 8-83
8.8.15 ASIN ................................................................................................. 8-85
8.8.16 ACOS ................................................................................................ 8-88
8.8.17 ATAN ................................................................................................. 8-90
8.8.18 LN ..................................................................................................... 8-92
8.8.19 LOG .................................................................................................. 8-94
8.8.20 SQRT ................................................................................................. 8-96
8.8.21 EXP ................................................................................................... 8-98
8.8.22 EXPT ................................................................................................ 8-100
8.8.23 RAND ............................................................................................... 8-102
8.8.24 TRUNC .............................................................................................. 8-104
8.8.25 FLOOR .............................................................................................. 8-106
8.8.26 FRACTION ......................................................................................... 8-108
8.9 Bit String Instructions ........................................................................... 8-110
8.9.1 AND ................................................................................................. 8-110
8.9.2 OR ................................................................................................... 8-113
8.9.3 NOT ................................................................................................. 8-116
8.9.4 XOR ................................................................................................. 8-118
8.9.5 XORN ............................................................................................... 8-121
8.10 Shift Instructions ................................................................................... 8-124
8.10.1 SHL .................................................................................................. 8-124
8.10.2 SHR ................................................................................................. 8-126
8.10.3 ROL .................................................................................................. 8-128
8.10.4 ROR ................................................................................................. 8-130
8.11 Selection Instructions ............................................................................ 8-132
8.11.1 MAX ................................................................................................. 8-132
8.11.2 MIN .................................................................................................. 8-134
8.11.3 SEL .................................................................................................. 8-136
8.11.4 MUX ................................................................................................. 8-138
8.11.5 LIMIT ............................................................................................... 8-140
8.11.6 BAND ............................................................................................... 8-143
8.11.7 ZONE ............................................................................................... 8-146
8.12 Data Type Conversion Instructions ........................................................ 8-149
8.12.1 BOOL_TO_*** ................................................................................... 8-149
8.12.2 Bit strings_TO_*** ............................................................................. 8-152
8.12.3 Integers_TO_*** ............................................................................... 8-159
8.12.4 Real numbers_TO_*** ........................................................................ 8-168
8.12.5 Times,dates_TO_*** .......................................................................... 8-171
8.12.6 Strings_TO_*** ................................................................................. 8-173
8-2
Page 74

Chapter 8 Logic Instructions
8_
8.13 CANopen Communic atio n Instructions ................................................... 8-176
8.13.1 DMC_ReadParameter_CANopen ........................................................... 8-176
8.13.2 DMC_WriteParameter_CANopen ........................................................... 8-182
8.14 String Processing Instructions ............................................................... 8-187
8.14.1 CONCAT ........................................................................................... 8-187
8.14.2 DELETE ............................................................................................ 8-189
8.14.3 INSERT ............................................................................................ 8-191
8.14.4 LEFT / RIGHT .................................................................................... 8-193
8.14.5 MID ................................................................................................. 8-195
8.14.6 REPLACE .......................................................................................... 8-197
8.14.7 LEN ................................................................................................. 8-199
8.14.8 FIND ................................................................................................ 8-200
8.15 Immediate Refresh Instructi o ns ............................................................ 8-202
8.15.1 FROM ............................................................................................... 8-202
8.15.2 TO ................................................................................................... 8-206
8.15.3 ImmediateInput ................................................................................ 8-210
8.15.4 ImmediateOutput .............................................................................. 8-212
8-3
Page 75

DVP15MC11T Operation Manual
_8
Integer Modulo Division to Get the
Real-Number Modulo Division to
Get the Remainder
Real-Number Modulo Division to
Get Signed Integral Part
8.1 Table of Logic Instructions
Instruction set Instruction code Name
R_TRIG Rising Edge Trigger
F_TRIG Falling Edge Trigger
Sequence Input/Output
Instructions
RS Reset–Priority Instruction
SR SET–Priority Instruction
SEMA Claim-Priority Instruction
MOVE Move
MoveBit Move One Bit
Data Movement
Instructions
Comparison Instructions
Timer Instructions
Counter Instructions
TransBit Move Bits
MoveDigit Move Digits
Exchange Data Exchange
Swap Swap Bytes
LT Less Than
LE Less Than or Equal
GT Greater Than
GE Greater Than or Equal
EQ Equal
NE Not Equal
TON On-Delay Timer
TOF Off-Delay Timer
TP Pulse-type Timer
CTU Up-Counter
CTD Down-Counter
Math Instructions
8-4
CTUD Up-Down Counter
ADD Addition
SUB Subtraction
MUL Multiplication
DIV Division
MOD
MODREAL
MODTURNS
Remainder
Page 76

Chapter 8 Logic Instructions
8_
Real-Number Modulo Division to
Get the Unsigned Modulo Value
Instruction set Instruction code Name
MODABS
ABS Absolute value
DegToRad Degrees to Radians
RadToDeg Radians to Degrees
SIN Sine
COS Cosine
TAN Tangent
ASIN Arc sine
ACOS Arc cosine
ATAN Arc tangent
LN Natural Logarithm
LOG Base-10 Logarithm
Bit String Instructions
Shift Instructions
SQRT Square Root
EXP Natural Exponential Operation
EXPT Exponentiation
RAND Random Number
TRUNC Truncate
FLOOR Real-Number Floor
FRACTION Real-Number Fraction
AND Logical AND
OR Logical OR
NOT Bit Reversal
XOR Logical Exclusive OR
XORN Logical Exclusive NOR
SHL Shift Bits Left
SHR Shift Bits Right
ROL Rotate Bits Left
Selection Instructions
ROR Rotate Bits Right
MAX Maximum
MIN Minimum
SEL Selection
MUX Multiplexer
8-5
Page 77

DVP15MC11T Operation Manual
_8
Instruction set Instruction code Name
LIMIT Limiter
BAND Deadband Control
ZONE Dead Zone Control
BOOL_TO_*** Bool Conversion Group
Bit strings_TO_*** Bit String Conversion Group
Data Type Conversion
Instructions
CANopen
Communication
Instructions
String Processing
Instructions
Integers_TO_*** Integer Conversion Group
Real numbers_TO_*** Real Number Conversion Group
Times,dates_TO_*** Time and Data Conversion Group
Text strings_TO_*** String Conv ersion Group
DMC_ReadParameter_CANopen Read a slave parameter value
DMC_WriteParameter_CANopen Write a slave parameter value
CONCAT Concatenate String
DELETE Delete String
INSERT Insert String
LEFT / RIGHT Get String Left/Right
MID Get String
REPLACE Replace String
LEN String Length
FIND Find String
FROM Read CR value
Immediate Refresh
Instructions
8-6
TO Write Value to CR
ImmediateInput Immediate Refresh of Input Points
ImmediateOutput Immediate Refresh of Output Points
Page 78

Chapter 8 Logic Instructions
8_
Applicable
model
Parameter
name
Input/
Output
Input
signal
Output
signal
R_TRIG
EN ENO
CLK
Q
R_TRIG_instance
8.2 Explanation of Logic Instructions
8.2.1 EN and ENO
If the used instruction has EN and EN O input parameters and the value of EN is FALS E (0), the functio n of the
instruction will not be performed and the output of the instruction will not be updated. However, if the value of
EN of the instruction is TRUE (1), the function of t he instruction will be performed and the output will be
updated.
The output state of ENO is consistent with that of EN. When EN is TRUE, ENO changes to TRUE. When EN
is FALSE, ENO changes to FALSE.
When the instruction is a function block (FB) and its E N changes fr om TRUE to FALS E after the FB instruction
is executed, the execution of the FB instructio n will continue, but the output values of the FB instruction will
not be updated.
8.3 Sequence Input /Output Instructions
8.3.1 R_TRIG
FB/FC
FB
R_TRIG is used for the rising edge trigger. DVP15MC11T
Parameters
Meaning
CLK
Q
Boolean
BOOL
BYTE
Explanation
Description Vali d range
Input Rising edge trigger signal TRUE or FALSE
Output Output for a period TRUE or FALSE
Bit string Integer
WORD
DWORD
LWORD
USINT
UINT
UDINT
ULINT
SINT
String
Real
number
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
TOD
DT
STRING
CLK
Q
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
●
●
Function Explanation
When CLK of R_TRIG changes from FALS E to TRUE, Q output is TRUE for only one period. In other
circumstances, Q is FALSE.
Precautions for Correct Use
Q will have no output until the rising edge signal at CLK i s det ected.
8-7
Page 79

DVP15MC11T Operation Manual
_8
R_TRG
R_TRIG
R_TRG_EN
BOOL
FALSE
R_TRG_CLK
BOOL
FALSE
R_TRG_Q
BOOL
1
R_TRIG
EN ENO
CLK Q
R_TRG
R_TRG_ EN
R_TRG_CLK R_TRG_Q
R_TRG_CLK
R_TRG_Q
Programming Example
The variable table and program
Variable name Data type Initial value
Timing Chart:
8-8
Page 80

8_
8.3.2 F_TRIG
Applicable
model
Parameter
name
Input/
Output
Input
signal
Output
signal
Variable name
Data type
Initial value
F_TRG
F_TRIG
F_TRG_EN
BOOL
FALSE
F_TRG_CLK
BOOL
FALSE
F_TRG_Q
BOOL
F_TRIG
EN ENO
CLK
Q
F_TRIG_instance
1
F_TRIG
EN ENO
CLK Q
F_TRG
F_TRG_EN
F_TRG_CLK
F_TRG_Q
Chapter 8 Logic Instructions
FB/FC
FB
F_TRIG is used for the falling edge trigger. DVP15MC11T
Parameters
Meaning
CLK
Q
Boolean
BOOL
BYTE
Explanation
Description Vali d range
Input Falling edge trigger signal TRUE or FALSE
Output Output for a period TRUE or FALSE
Bit string Integer
WORD
DWORD
LWORD
USINT
UINT
UDINT
ULINT
SINT
String
Real
number
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
TOD
DT
STRING
CLK
Q
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
●
●
Function Explanation
When CLK of F_TRIG changes from TRUE to FALSE, Q out put is TRUE for only one period. In other
circumstances, Q is FA L SE.
Precautions for Correct Use
Q will have no output until the falling edge signal at CLK is detected.
Programming Example
The variable table and program
8-9
Page 81

DVP15MC11T Operation Manual
_8
F_TRG_CLK
F_TRG_Q
Timing Chart:
8-10
Page 82

8_
8.3.3 RS
Applicable
model
Parameter
name
Input/
Output
signal
signal
Variable name
Data type
Initial value
RS1
RS
RS1_EN
BOOL
FALSE
RS1_SET
BOOL
FALSE
RS
EN ENO
SET
Q
RS_instance
Q
Reset
Chapter 8 Logic Instructions
FB/FC
FB
RS is used for giving priority to the Reset input. DVP15MC11T
Parameters
Meaning
SET
Reset
Q
Input
Input
Output
signal
Boolean
Explanation
Description Vali d range
Input
Input
Output Output signal TRUE or FALSE
Bit string Integer
SET signal TRUE or FALSE
Reset signal TRUE or FALSE
String
Real
number
Time, date
BOOL
BYTE
WORD
DWORD
LWORD
USINT
UINT
UDINT
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
TIME
DATE
TOD
DT
STRING
SET
Reset
Q
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
●
●
●
Function Explanation
When the SET and Reset inputs of RS are both TRUE, Reset is given the priority.
Programming Example
The variable table and program
RS1_Reset BOOL FALSE
RS1_Q
BOOL
8-11
Page 83

DVP15MC11T Operation Manual
_8
1
RS
EN ENO
SET Q
Reset
RS1_EN
RS1_SET
RS1_Reset
RS1_Q
1RS
RS1_ SET
RS1_Reset
RS1_Q
Case 1
Case 2
Timing Chart:
Case 1: When RS1_SET is TRUE, the output RS1_Q is TRUE. If RS1_Reset is TRUE, RS1_Q is
FALSE.
Case 2: When RS1_Reset is TRUE, RS1_Q is always FALSE.
8-12
Page 84

8_
8.3.4 SR
Applicable
model
Parameter
name
Input/
Output
signal
Input
signal
Input
SR
EN ENO
SET
Q
SR_instance
Q
Reset
Chapter 8 Logic Instructions
FB/FC
FB
SR is used for giving priority to the Set input. DVP15MC11T
Parameters
Meaning
SET
Reset
Q
Input
Input
Output
signal
Boolean
Explanation
Description Vali d range
SET signal TRUE or FALSE
Reset signal TRUE or FALSE
Output Output signal TRUE or FALSE
Bit string Integer
String
Real
number
Time, date
BOOL
BYTE
WORD
DWORD
LWORD
USINT
UINT
UDINT
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
TIME
DATE
TOD
DT
STRING
SET
Reset
Q
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
●
●
●
Function Explanation
When the SET and Reset inputs of RS are both TRUE, SET is given the priority.
8-13
Page 85

DVP15MC11T Operation Manual
_8
SR1
SR
SR1_EN
BOOL
FALSE
SR1_SET
BOOL
FALSE
SR1_Reset
BOOL
FALSE
SR1_Q
BOOL
1
SR
EN ENO
SET Q
1
Reset
SR1_EN
SR1_SET
SR1_Reset
SR1_Q
SR
SR1_SET
SR1_Reset
SR1_Q
Case 1
Case 2
Programming Example
The variable table and program
Variable name Data type Initial value
Timing Chart:
Case 1: When SR1_SET is TRUE, SR1_Q is TRUE. When SR1_Reset is TRUE, SR1_Q is FALSE.
Case 2: SR1_SET is given the priority when SR1_SET and SR1_Reset ar e both TRUE.
8-14
Page 86

8_
8.3.5 SEMA
Applicable
model
SEMA is used for giving priority to CLAIM. (The output will be valid in t he
second period.)
Parameter
name
Input/
Output
Input
signal
Input
Input
signal
Input
Output
signal
BYTE
LWORD
SEMA1
SEMA
SEMA1_EN
BOOL
FALSE
SEMA1_CLAIM
BOOL
FALSE
SEMA1_RELEASE
BOOL
FALSE
SEMA
EN ENO
CLAIM
Q
SEMA_ instance
RELEASE
Chapter 8 Logic Instructions
FB/FC
FB
Parameters
Meaning
CLAIM
RELEASE
Q
Boolean
Explanation
Description Vali d range
Set signal TRUE or FALSE
Reset signal TRUE or FALSE
Output Output signal TRUE or FALSE
Bit string Integer
Real
number
DVP15MC11T
String
Time, date
CLAIM
RELEASE
Q
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
BOOL
●
●
●
WORD
DWORD
USINT
UINT
UDINT
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
TIME
DATE
TOD
DT
STRING
Function Explanation
When CLAIM of SEMA is TRUE, Q is TRUE. When RELEASE is TRUE, Q is FALSE. When CLAIM and
RELEASE are both TRUE, Q is TRUE.
Precautions for Correct Use
When CLAIM is TRUE, Q will be TRUE in the second period.
Programming Example
The variable table and program
Variable name Data type Initial value
8-15
Page 87

DVP15MC11T Operation Manual
_8
Variable name
Data type
Initial value
SEMA1_Q
BOOL
1
SEMA
EN ENO
CLAIM Q
SEMA1
RELEAS E
SEMA1_EN
SEMA1_CLAIM
SEMA1_RELEASE
SEMA1_Q
SEMA1_CLAIM
SEMA1_RELEASE
SEMA1_Q
Case 1 Case 2
Timing Chart:
Case 1: When SEMA1_CLAIM is TRUE, SEMA1_Q is TRUE in the second period. When
SEMA1_RELEASE is TRUE, SEMA1_Q changes to FALSE immediately.
Case 2: When SEMA1_CLAIM is TRUE, SEMA1_Q is TRUE in the second period no matter
whether SEMA1_RELEASE is TRUE or FALSE.
8-16
Page 88

8_
8.4 Data Movement Instructions
Applicable
model
Parameter
name
Input/
Output
Input
signal
Depends on the data type of the variable
that the input parameter is connected to.
Depends on the data type of the variable
to.
MOVE_EN
BOOL
TRUE
MOVE_In
INT
200
Out1
INT
200
MOVE
EN ENO
In Ou t
1
MOVE
EN ENO
In Out
MOVE_EN
MOVE_In Out1
8.4.1 MOVE
Chapter 8 Logic Instructions
FB/FC
FC
Move is used for moving data. DVP15MC11T
Parameters
Meaning
In
Boolean
BOOL
Output
signal
BYTE
Out
Explanation
Description Vali d range
Input Move Source
Output Move destination
Bit string Integer
WORD
DWORD
LWORD
USINT
UINT
UDINT
ULINT
SINT
that the output parameter is connected
Real
number
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
String
TOD
DT
STRING
In
Out
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
Function Explanation
The Move instruction moves the value of move source In to move destination Out.
The instruction supports the transmission of the values of array elements.
Precautions for Correct Use
The data type of Out must be the same as that of In. Otherwise, an error will occur in the compiling of
the software.
Programming Example
The variable table and program
Variable name Data type Current value
8-17
Page 89

DVP15MC11T Operation Manual
_8
Applicable
model
Parameter
name
Input/
Output
Input
signal
Depends on the data type of the variable
that the input parameter is connected to.
Input
signal
Depends on the data type of the variable
that the input parameter is connected to.
Input
signal
Depends on the data type of the variable
that the input parameter is connected to.
signal
that the input parameter is connected to.
MoveBit
EN ENO
In
InPos
InOutPos
InOut
8.4.2 MoveBit
FB/FC
FC
MoveBit is used for sending one bit in a string. DVP15MC11T
Parameters
Meaning
In
InPos
InOutPos
InOut
Input
Boolean
BOOL
Explanation
Description Vali d range
Input Move source
Input Move source bit
Input Move destination bit
Input Move destination
Bit string Integer
BYTE
WORD
DWORD
LWORD
USINT
UINT
UDINT
Depends on the data type of the variable
String
Real
number
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
TOD
DT
STRING
In
InPos
InOutPos
InOut
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
● ● ● ● ● ● ● ●
●
●
● ● ● ● ● ● ● ●
Function Explanation
MoveBit moves one bit value from the bit position InPos in move sour ce In to the bit position InOutPos in
move destination InOut.
Precautions for Correct Use
The instruction has no ouput but input.
If the value of InPos exceeds the range of the data type of In, the movement of one bit is not
performed.
If the value of InOutPos exceeds the range of the data type of InOut, the movement of one bit is not
8-18
performed.
Page 90

Chapter 8 Logic Instructions
8_
Variable name
Data type
Current value
MovBit_Inpos
UINT
2
MovBit_InOutPos
UINT
3
MovBit_Inout
USINT
8
0 0
bit0bit7
MovBit_In
0 10 0 0 00 0MovBit_InOut
0 1111 1
bit0bit7
MovBit_InPos=U INT#2
MovBit_InOutPos=UINT#3
1
MoveBit
EN ENO
In
InPos
InOutPos
InOut
MovBit_EN
MovBit_In
MovBit_InOutPos
MovBit_InPos
MovBit_InOut
Programming Example
The variable table and program
MovBit_EN BOOL TRUE
MovBit_In
USINT 31
Move Figure
8-19
Page 91

DVP15MC11T Operation Manual
_8
Applicable
model
Parameter
Input/
signal
that the input parameter is connected to.
Input
Depends on the data type of the variable
Input
signal
Input
Depends on the data type of the variable
that the input parameter is connected to.
Input
signal
Input
Depends on the data type of the variable
that the input parameter is connected to.
Input
signal
Input
Depends on the data type of the variable
that the input parameter is connected to.
TransBit
EN ENO
In
InPos
InOutPos
Size
InOut
8.4.3 TransBit
FB/FC
FC
TransBit is used for sending one or more bits in a bit st ring. DVP15MC11T
Parameters
name
In
InPos
InOutPos
Size
Meaning
Input
signal
Explanation
Output
Description Vali d range
Input Move source
Input Move source bit
Move destination bit
Number of bits to move
Depends on the data type of the variable
that the input parameter is connected to.
InOut
Move destination
In
InPos
InOutPos
Size
InOut
Boolean
Bit string Integer
BOOL
BYTE
WORD
DWORD
LWORD
USINT
UINT
UDINT
● ● ● ● ● ● ● ●
●
●
●
● ● ● ● ● ● ● ●
Real
number
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
TOD
String
DT
STRING
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
Function Explanation
TransBit moves data of Size bits from the bit InPos in move source In to the bit InOutPos in move
destination InOut.
Precautions for Correct Use
The instruction has no output but input.
The movement can not be performed if the value of Size is 0.
8-20
Page 92

Chapter 8 Logic Instructions
8_
Variable name
Data type
Current value
TrsBit_EN
BOOL
TRUE
TrsBit_In
USINT
63
TrsBit_InPos
UINT
1
TrsBit_InOutPos
UINT
2
TrsBit_Size
UINT
2
TrsBit_Inout
USINT
12
bit0bit7
TrsBit_In
0 10 0 0 00TrsBit_InOut
1111 1
bit0bit7
TrsBit_InPos=UINT #1
TrsBit_InOutPos= UINT#2
111
1
TrsBit_Size=UINT#2
1
TransBit
EN ENO
In
InPos
InOutPos
Size
InOut
TrsBit_EN
TrsBit_In
TrsBit_InOutPos
TrsBit_InPos
TrsBit_Size
TrsBit_InOut
If the value of InPos exceeds the range of the data type of In, the movement is not performe d.
If the value of InOutPos exceeds the range of the data type of InOut, the movement is not
performed.
If the value of Size exceeds the range, the movement is not performed.
Programming Example
The variable table and program
Move Figure
8-21
Page 93

DVP15MC11T Operation Manual
_8
Applicable
model
Parameter
Input/
Input
signal
Depends on the data type of the variable
that the input parameter is connected to.
Input
signal
Position of digit in In to
move
Depends on the data type of the variable
that the input parameter is connected to.
signal
receive the digit
Depends on the data type of the variable
that the input parameter is connected to.
Input
signal
Depends on the data type of the variable
that the input parameter is connected to.
Input
signal
Depends on the data type of the variable
MoveDigit
EN ENO
In
InPos
InOutPos
Size
InOut
8.4.4 MoveDigit
FB/FC
FC
MoveDigit is used for moving digits. DVP15MC11T
Parameters
name
In
InPos
InOutPos
Size
Meaning
Input
Output
Input
Input
Input
Input
Explanation
Description Vali d range
Move source
Position of digit in Out to
Number of digits to move
InOut
Input
Move destination
that the input parameter is connected to.
In
InPos
InOutPos
Size
InOut
Boolean
Bit string Integer
BOOL
BYTE
WORD
DWORD
LWORD
USINT
UINT
UDINT
● ● ● ● ● ● ● ●
●
●
●
● ● ● ● ● ● ● ●
Real
number
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
TOD
String
DT
STRING
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
Function Explanation
MoveDigit moves Size digits from InPos of move source In to InOutPos of move destination InOut.
Precautions for Correct Use
The instruction has no output but input parameter.
The move can not be performed if the value of Size is 0.
If the value of InPos exceeds the range of the data type of In, the move will not be performed.
8-22
Page 94

Chapter 8 Logic Instructions
8_
Variable name
Data type
Current value
MovDigt_EN
BOOL
TRUE
MovDigt_Size
UINT
2
MovDigt_Inout
UDINT
16#2300
00101100
In=16#1234
Bit0
Bit3Bit4Bit7
01001000
Bit8Bit11Bit12Bit15
Digit 0
Digit 1
Digit 2Digit 3
00000000
Bit0Bit3Bit4Bit7
11000100
Bit8Bit11Bit12Bit15
Digit 0Digit 1Digit 2
Digit 3
......
...... ...... ......
..................
......
InPos=1
Size=2
InOutPos=2
InOut=16#2300
1
MoveDigit
EN ENO
In
InPos
InOutPos
Size
InOut
MovDigt_EN
MovDigt_In
MovDigt_InOutPos
MovDigt_InPos
MovDigt_Size
MovDigt_InOut
If the value of InOutPos exceeds the range of the data type of InOut, the movement is not
performed.
If the value of Size exceeds the range, the movement is not performed.
Programming Example
The variable table and program
MovDigt_In
MovDigt_InPos
MovDigt_InOutPos
Move Figure
UDINT 16#1234
UINT 1
UINT 2
8-23
Page 95

DVP15MC11T Operation Manual
_8
Applicable
model
Parameter
Input/
signal
that the input parameter is connected to.
Input
signal
Depends on the data type of the variable
that the input parameter is connected to.
Variable name
Data type
Current value
Exchg_EN
BOOL
TRUE
Exchg_In1
INT
30
Exchg_In2
INT
10
Exchange
EN ENO
In1
In2
1
Exchange
EN ENO
In1
In2
Exchg_EN
Exchg_In1
Exchg_In2
8.4.5 Exchange
FB/FC
FC
Exchange is used for the data exchange. DVP15MC11T
Parameters
name
In1
In2
Meaning
Input
Boolean
BOOL
Explanation
Output
Input Data to exchange
Input Data to exchange
Bit string Integer
BYTE
WORD
DWORD
LWORD
USINT
Description Vali d range
UINT
UDINT
Depends on the data type of the variable
String
Real
number
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
TOD
DT
STRING
In1
In2
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
Function Explanation
The Exchange instruction exchanges the val ues of In1 and In2.
Precautions for Correct Use
The data types of In1 and In2 must be same.
The instruction has no output but two input parameters.
Programming Example
The variable table and program
8-24
Page 96

8_
Exchange Figure
In1
Input parameter Input value
Exchg_In1
In2
Exchg_In2
In1
Exchg_In2
In2
Exchg_In1
Exchange
Input value
Input parameter
The values of In1 and In2 are exchanged.
While the Exchange instruction is executed, the val ues of Exchg_In1 and Exchg_In2 are
always exchanged.
Chapter 8 Logic Instructions
8-25
Page 97

DVP15MC11T Operation Manual
_8
Applicable
model
Parameter
name
Input/
Output
Input
signal
Output
signal
Variable name
Data type
Current value
Swap_EN
BOOL
TRUE
Swap_In
UINT
32768
Out1
UINT
128
Swap
EN ENO
In Ou t
1
Swap
EN ENO
In Out
Swap_EN
Swap_In Out1
8.4.6 Swap
FB/FC
FC
Swap is used for swapping the high byte and low byte of a 16-bit value. DVP15MC11T
Parameters
Meaning
In
Out
Boolean
BOOL
Explanation
Description Vali d range
Input Data to swap 0~65535 for word data type
Output Result 0~65535 for word data type
Bit string Integer
BYTE
WORD
DWORD
LWORD
USINT
UINT
UDINT
String
Real
number
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
Time, date
TIME
DATE
TOD
DT
STRING
In
Out
Note:
The symbol ● indicates that the parameter is all owed t o connect to the variabl e or constant of the data type.
● ●
● ●
Function Explanation
The Swap instruction exchanges the high byte and low byte of the value of In and the result is output to
Out.
Programming Example
The variable table and program
8-26
Page 98

8_
Swap Figure
01 0 0 0 0 0 0 0 0 0 0 0 0 0 0
bit0bit15
Swap_In
High byte Low byte
0 10 0 0 0 0 00 0 0 0 0 0 0 0
Out1
High byte Low byte
bit0bit15
Chapter 8 Logic Instructions
8-27
Page 99

DVP15MC11T Operation Manual
_8
Applicable
model
Parameter
name
Input/
Output
Depends on the data type
Depends on the data type
connected to.
LT
EN ENO
In1 Out
InN
...
.
..
8.5 Comparison Instructions
8.5.1 LT
FB/FC Explanation
FC
LT is used for a less-than comparison of two or more v ariables or constants. DVP15MC11T
Parameters
In1 to InN
Out
Boolean
Comparison
data
Comparison
result
Meaning
The number of comparison data can be
increased or decreased through the
Input
Output Comparison result
Bit string Integer
programming software. Maximum: 8.
Minimum: 2. That is N=2~8.
Description Valid ran ge
of the variable that the
input parameter is
connected to.
of the variable that the
output parameter is
String
Real
number
Time, date
BOOL
BYTE
In1
to
InN
Out
Note:
The symbol ● indicates that the parameter is allowed to connect to the variable or constant of the data type.
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
●
Function Explanation
LT is used for a less-than comparison of two or more variables or co nstants. if In1<In2<…<InN, Out
is TRUE. Otherwise, Out is FALSE.
The input parameters In1~InN are allowed to be the variables of different data types in this
instruction when the data types of input variables are not BOOL, TIME , DATE, TOD and STRING.
When the data type of one input variable is one of BOOL, TIME, DATE, TOD and STRING, input
parameters In1~InN are all required to be of the data type. For example, if the data type of In1 is
TIME, the data type of In2~InN must be TIME. O t herwise, an error will occur in the compiling of the
software.
8-28
WORD
DWORD
LWORD
USINT
UINT
UDINT
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
TIME
DATE
TOD
DT
STRING
Page 100

Chapter 8 Logic Instructions
8_
Variable name
Data type
Current value
LT_EN
BOOL
TRUE
LT_In1
INT
-10
LT_In2
UINT
50
LT_In3
DINT
100
Out1
BOOL
TRUE
LT_EN
BOOL
TRUE
LT_In1
INT
20
LT_In2
UINT
10
LT_In3
DINT
100
Out1
BOOL
FALSE
Variable name
Data type
Current value
LT_EN
BOOL
TRUE
LT_In1
TIME
T#1ms
LT_In2
TIME
T#50ms
Out1
BOOL
TRUE
1
LT
EN ENO
In1 Out
In3
In2
LT_EN
LT_In1
LT_In3
LT_In2
Out1
1
LT
EN ENO
In1 Out
In2
LT_EN
LT_In1
LT_In2
Out1
Precautions for Correct Use
The input variables are not allowed to omit. An error will occur duri ng the compi ling of the soft ware if
any input variable is omitted. But the output variabl e is allowed to omit.
The data type of output variables must be BOOL. Otherwise, an error will occur during the compil ing
of the software.
Programming Example
The data types of LT_In1, LT_In2 and LT_In3 are INT, UINT and DINT respectively and the
data type of Out1 is BOOL.
Out1 changes to TRUE when the values of LT_In1, LT_In2 and LT_In3 are -10, 50 and 100
respectively and LT_EN changes to TRUE as shown in Variable 1.
Out1 changes to FALSE when the values of LT_In1, LT_In2 and LT_In3 are 20, 10 and 100
respectively and LT_EN changes to TRUE as shown in Variable 2.
Variable 1
Variable 2
Variable name Data type Current value
The Program
The data types of LT_In1 and LT_In2 are both TIME and the data type of Out1 is BOOL.
Out1 changes to TRUE when the values of LT_In1 and LT_In2 are T#1ms and T#50ms respectively
and LT_EN is TRUE.
The variable table and program
8-29
 Loading...
Loading...