

Page 1
Advisory
May 1999
Clarification to the Serial I/O Control Register
Description for the DSP1620/27/28/29 Devices
Active Clock Frequency
The purpose of this advisory is to clarify the function of the serial I/O control registers in the DSP1620/27/28/29
devices. Specifically, it clarifies the function of the control register field that specifies the active clock frequency .
The device data sheets state that the active clock frequency is a ratio of the
pin (DSP1627/28/29 devices) or the output clock frequency on the CKO pin (DSP1620 device). For all four
devices, the actual active clock frequency is a ratio of the
as either the input clock frequency on the CKI pin or the output of an internal clock synthesizer (PLL).
Table 1 summarizes information for each of the four devices. It lists the document number for each device data
sheet. For example, the data sheet for the DSP1620, entitled
ment number DS97-321WDSP. Table 1 also lists the name of each serial I/O unit on each device, the corresponding control register, the data sheet page number that describes the register, and the corresponding field
within the register that specifies the active clock frequency. For e xample, the DSP1620 contains two serial I/O
units named SIO and SSIO. The control register for SIO is
Bits 8—7 within
sioc
(CLK1 field) specify the active clock frequency of the SIO.
internal
clock frequency, which can be programmed
DSP1620 Digital Signal Processor
sioc
described on page 94 of the data sheet.
input
clock frequency on the CKI
, has the docu-
Table 1. Data Sheet and Serial I/O Information for the DSP1620/27/28/29 Devices
Device Data Sheet
Document Number
DSP1620 DS97-321WDSP SIO
DSP1627 DS96-188WDSP SIO
DSP1628 DS97-040WDSP SIO
DSP1629 DS96-039WDSP SIO
Table 2 shows a corrected description of the CLK/CLK1/CLK2 field of the serial I/O control register. The
specific correction is shown in bold type—the active clock frequency is a ratio of f
Table 2. Corrected Description of CLK/CLK1/CLK2 Field
Field Value Description
CLK
CLK1
CLK2
Active clock frequency =
00
01
Active clock frequency =
10
Active clock frequency =
11
Active clock frequency =
Name Control
Register
sioc
SSIO
SIO2
SIO2
SIO2
SSIOC
sioc
sioc
sioc
f
internal clock
f
internal clock
f
internal clock
f
internal clock
Serial I/O Units
Data Sheet
Page No.
94 8—7 CLK1
96 8—7 CLK2
45 8—7 CLK
55 8—7 CLK
46 8—7 CLK
÷ 2
÷ 6
÷ 8
÷ 10
Active Clock Frequency
Control Field
Bits Name
internal clock
, not of CKI or CKO.
DRAFT COPY
Page 2
For additional information, contact your Microelectronics Group Account Manager or the following:
INTERNET:
E-MAIL:
N. AMERICA: Microelectronics Group, Lucent Tech nologies Inc., 555 Union Boulevard, Room 30L-15P-BA, Allentown, PA 1 81 03
ASIA PACIFIC: Microelectronics Group, Lucent Technologies Singap ore Pte. Ltd., 77 Science Park Drive, #03-18 Cintech III, Singapore 118256
CHINA: Microelectr on ic s G r ou p, Lucent Technologies (China) Co., Ltd., A-F2, 23/F, Zao Fong Uni verse Buildin g, 1800 Zhong Shan Xi Ro ad, Shanghai
JAPAN: Microelectronics Group, Lucent Technologies Japan Ltd., 7-18, Higashi-Gotanda 2-chome, Shinagawa-ku, Tokyo 141, Japan
EUROPE: Data Requests: MICROELECTRONICS GROUP DATALINE:
Lucent Technologies Inc. reserves the right to make changes to the product(s) or information contained herein without notice. No liability is assumed as a result of their use or application. No
rights under any patent accompany the sale of any such product(s) or information.
http://www.lucent.com/micro
docmaster@micro.lucent.com
1-800-372-2447
Tel. (65) 778 8833
200233 P. R. China
Tel. (81) 3 5421 1600
Techni cal Inquiries: GERMANY:
, FAX 610-712-4106 (In CANADA:
, FAX (65) 777 7495
Tel . ( 86) 21 6440 0468, ext. 316
, FAX (81) 3 5421 1700
FRANCE:
(39) 02 6608131
ITAL Y:
(49) 89 95086 0
(33) 1 40 83 68 00
(Milan), SPAIN:
1-800-553-2448
, F A X ( 86) 21 6440 0652
(Munich), UNITED KINGDOM:
(Paris), SWEDEN:
, FAX 610-712-4106)
Tel. (44) 1189 324 299
(46) 8 594 607 00
(34) 1 807 1441
(Madrid)
, FAX (44) 1189 328 148
(44) 1344 865 900
(Stockholm), FINLAND:
(Ascot),
(358) 9 4354 2800
(Helsinki),
Copyright © 1999 Lucent Technologies Inc.
All Rights Reserved
May 1999
AY99-001WDSP
(must accompany DS97-321WDSP, DS96-188WDSP, DS97-040WDSP, and DS96-039WDSP)
Page 3

Preliminary Data Sheet
February 1997
DSP1628 Digital Signal Processor
1 Features
■
Optimized for digital cellular applications with a bit
manipulation unit for higher coding efficiency and
an error correction coprocessor for equalization
and channel coding support.
■
On-chip, programmable, PLL clock synthesizer.
■
19.2 ns and 12.5 ns instruction cycle times at
2.7 V.
■
Mask-programmable memory map option: The
DSP1628x16 features 16 Kwords on-chip dualport RAM. The DSP1628x08 features 8 Kwords
on-chip dual-port RAM. Both feature 48 Kwords
on-chip ROM with a secure option.
■
Low power consumption:
— <1.9 mW/MIPS typical at 2.7 V.
■
Flexible power management modes:
—Standard sleep: 0.2 mW/MIPS at 2.7 V.
—Sleep with slow internal clock: 0.7 mW at 2.7 V.
—Hardware STOP (pin halts DSP): <20 µA.
■
Mask-programmable clock options: small signal,
and CMOS.
■
144 PBGA package (13 mm x 13 mm) available.
■
Sequenced accesses to X and Y external
memory.
■
Object code compatible with the DSP1618.
■
Single-cycle squaring.
■
16 x 16-bit multiplication and 36-bit accumulation
in one instruction cycle.
■
Instruction cache for high-speed, programefficient, zero-overhead looping.
■
Dual 25 Mbit/s serial I/O ports with multiprocessor
capability—16-bit data channel, 8-bit protocol
channel.
■
8-bit parallel host interface
— Supports 8- or 16-bit transfers.
—
Motorola
■
8-bit control I/O interface.
■
256 memory-mapped I/O ports.
■
■
‡
IEEE
Full-speed in-circuit emulation hardware development system on-chip.
Supported by DSP1628 software and hardware
■
development tools.
*
or
Intel
†
compatible.
P1149.1 test port (JTAG boundary scan).
2 Description
The DSP1628 digital signal processor offers 80 MIPS
and 52 MIPS operation at 2.7 V. Designed specifically
for applications requiring low power dissipation in digital cellular systems, the DSP1628 is a signal-coding
device that can be programmed to perform a wide
variety of fixed-point signal processing functions. The
device is based on the DSP1600 core with a bit
manipulation unit for enhanced signal coding efficiency, an external memory sequencer, an error correction coprocessor (ECCP) for more efficient Viterbi
decoding, and an 8-bit parallel host interface for hardware flexibility. The DSP1628 includes a mix of
peripherals specifically intended to support processing-intensive but cost-sensitive applications in the
area of digital wireless communications.
The DSP1628x16 contains 16 Kwords of internal
dual-port RAM (DPRAM), which allows simultaneous
access to two RAM locations in a single instruction cycle. The DSP1628x08 supports the use of 8 Kwords
of DPRAM. Both devices contain 48 Kwords of internal ROM (IROM).
The DSP1628 is object code compatible with the
DSP1618, while providing more memory. The
DSP1628 is pin compatible with the DSP1627. Note
that TRST (JTAG test reset), replaces a VDD pin.
The DSP1628 supports 2.7 V operation with flexible
power management modes required for portable cellular terminals. Several control mechanisms achieve
low-power operation, including a STOP pin for placing
the DSP into a fully static, halted state and a programmable power control register used to power down unused on-chip I/O units. These power management
modes allow for trade-offs between power reduction
and wake-up latency requirements. During system
standby, power consumption is reduced to less than
20 µA.
The on-chip clock synthesizer can be driven by an
external clock whose frequency is a fraction of the
instruction rate.
The device is packaged in a 144-pin PBGA, a 100-pin
BQFP, or a 100-pin TQFP and is available with
19.2 ns and 12.5 ns instruction cycle times at 2.7 V.
*
Motorola
†
‡
is a registered trademark of Motorola, Inc.
Intel
is a registered trademark of Intel Corporation.
IEEE
is a registered trademark of The Institute of Electrical
and Electronics Engineers, Inc.
Page 4

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
Table of Contents
Contents Page
1 Features...................................................................1
2 Description ...............................................................1
3 Pin Information.........................................................3
4 Hardware Architecture..............................................8
4.1 DSP1628 Architectural Overview.......................8
4.2 DSP1600 Core Architectural Overview............12
4.3 Interrupts and Trap...........................................13
4.4 Memory Maps and Wait-States........................18
4.5 External Memory Interface (EMI).....................21
4.6 Bit Manipulation Unit (BMU).............................22
4.7 Serial I/O Units (SIOs)......................................22
4.8 Parallel Host Interface (PHIF)..........................24
4.9 Bit Input/Output Unit (BIO)...............................25
4.10 Timer..............................................................26
4.11 Error Correction Coprocessor (ECCP)...........26
4.12 JTAG Test Port ..............................................34
4.13 Clock Synthesis..............................................36
4.14 Power Management.......................................39
5 Software Architecture.............................................46
5.1 Instruction Set..................................................46
5.2 Register Settings..............................................55
5.3 Instruction Set Formats....................................66
6 Signal Descriptions.................................................72
6.1 System Interface..............................................72
6.2 External Memory Interface...............................74
6.3 Serial Interface #1............................................75
6.4 Parallel Host Interface or Serial
Interface #2 and Control I/O Interface..............76
6.5 Control I/O Interface.........................................76
6.6 JTAG Test Interface.........................................77
7 Mask-Programmable Options.................................78
7.1 Input Clock Options..........................................78
7.2 Memory Map Options.......................................78
7.3 ROM Security Options .....................................78
8 Device Characteristics............................................79
8.1 Absolute Maximum Ratings .............................79
8.2 Handling Precautions.......................................79
8.3 Recommended Operating Conditions..............79
8.4 Package Thermal Considerations....................80
9 Electrical Characteristics and Requirements..........81
9.1 Power Dissipation ............................................84
Contents Page
10 Timing Characteristics for 2.7 V Operation...........86
10.1 DSP Clock Generation...................................87
10.2 Reset Circuit...................................................88
10.3 Reset Synchronization ...................................89
10.4 JTAG I/O Specifications.................................90
10.5 Interrupt..........................................................91
10.6 Bit Input/Output (BIO).....................................92
10.7 External Memory Interface.............................93
10.8 PHIF Specifications........................................97
10.9 Serial I/O Specifications...............................103
10.10 Multiprocessor Communication..................108
11 Outline Diagrams................................................109
11.1 100-Pin BQFP (Bumpered Quad
Flat Pack) ....................................................109
11.2 100-Pin TQFP (Thin Quad Flat Pack)..........110
11.3 144-Pin PBGA (Plastic Ball Grid Array)........111
2 Lucent Technologies Inc.
Page 5
Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
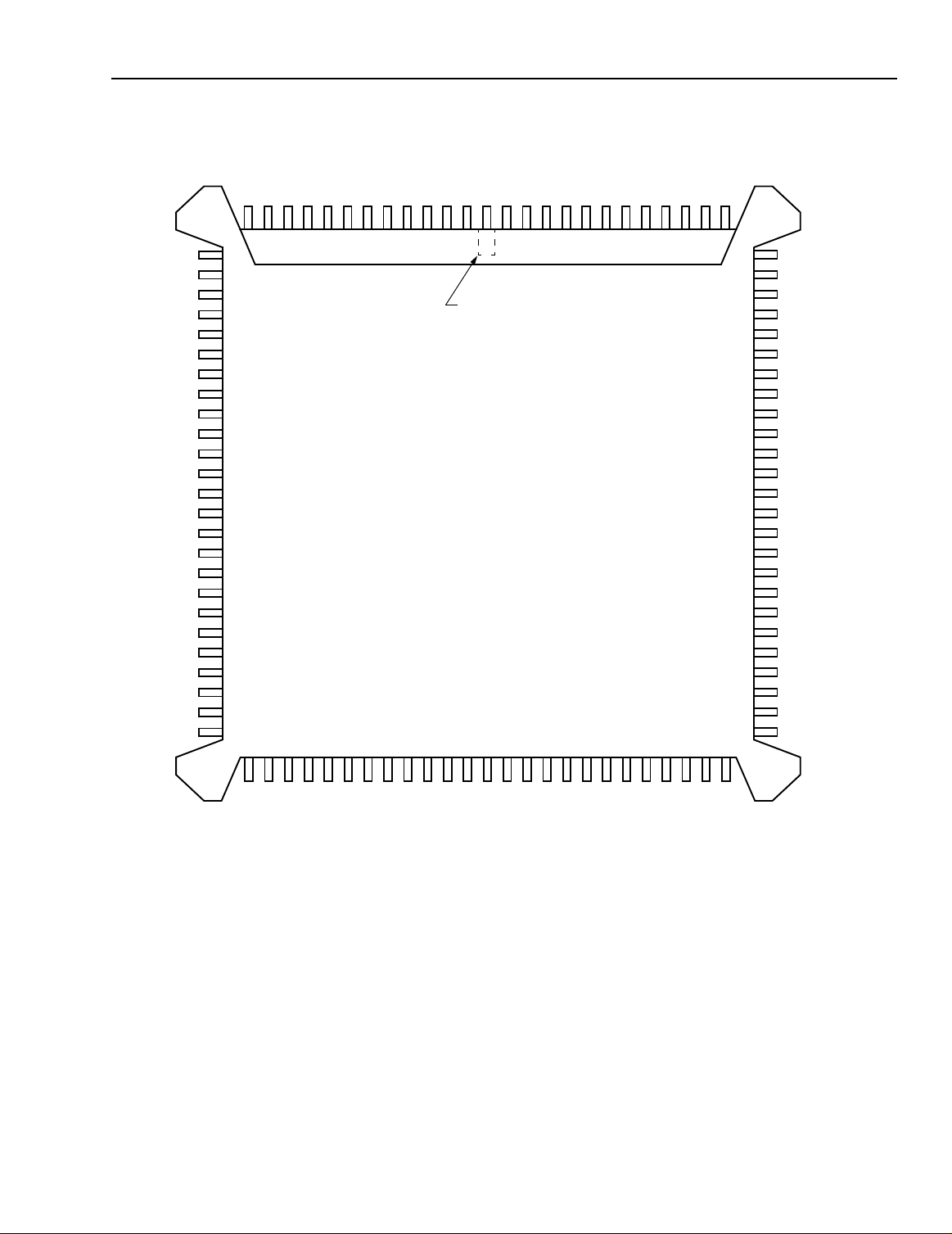
3 Pin Information
V
DB4
DB3
DB2
DB1
DB0
ERAMHI
V
ERAMLO
EROM
RWN
V
EXM
AB15
AB14
VDD
AB13
AB12
AB11
AB10
AB9
AB8
AB7
V
IO
DD
DD
V
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
13
14
15
16
17
18
19
39
SS
SS
SS
DB5
12
40
DB6
11
41
DB7
10
42
DB8
9
43
DB9
8
44
DB10
7
45
VSS
6
46
DB11
5
47
DB13
DB12
4
321
DSP1628
48
49
VDDIBF1
DB15
DB14
100
PIN #1
IDENTIFIER
ZONE
50
515253545556575859
OBE1
99
SS
V
97
98
DI1
96
ILD1
95
ICK1
94
OCK1
93
OLD1
92
60
DO1
SYNC1
90
91
616263
VSS
89
88
87
86
85
84
83
82
81
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
DD
V
SADD1
DOEN1
OCK2/PCSN
DO2/PSTAT
SYNC2/PBSEL
ILD2/PIDS
OLD2/PODS
IBF2/PIBF
OBE2/POBE
ICK2/PB0
DI2/PB1
V
SS
DOEN2/PB2
SADD2/PB3
*
TRST
IOBIT0/PB4
IOBIT1/PB5
IOBIT2/PB6
IOBIT3/PB7
VEC3/IOBIT4
VEC2/IOBIT5
VEC1/IOBIT6
VEC0/IOBIT7
V
SS
VDD
AB6
AB5
AB4
AB3
AB2
AB1
AB0
INT1
INT0
SS
V
IACK
TRAP
STOP
RSTB
CKO
DD
V
TCK
TMS
TDO
TDI
DDA
V
CKI
CKI2
VSSA
5-4218 (F).c
* Note the difference from the DSP1627 pinout.
Figure 1. DSP1628 BQFP Pin Diagram
Lucent Technologies Inc. 3
Page 6
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
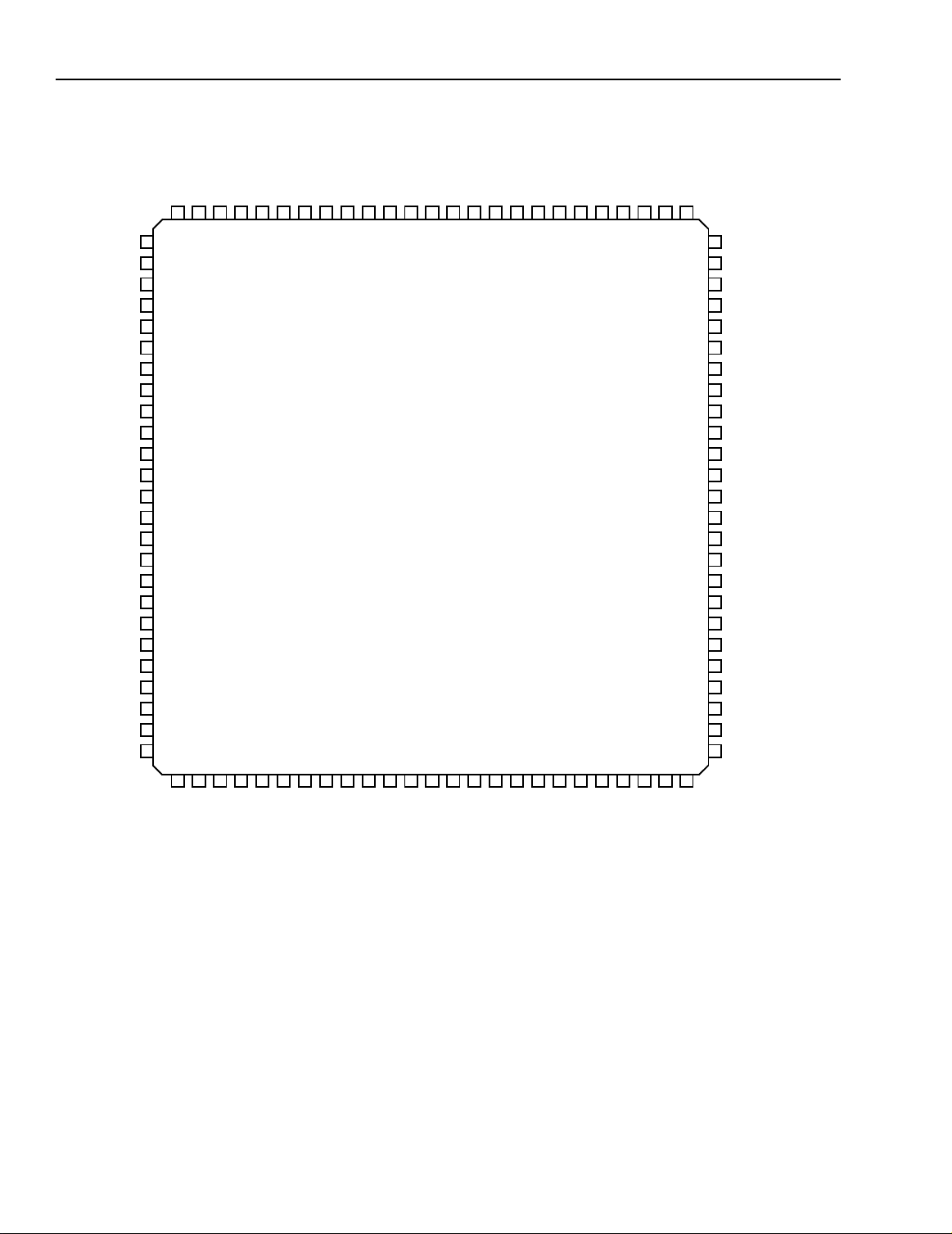
3 Pin Information
VDD
DB5
99
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
100
26
27
V
DB4
DB3
DB2
DB1
DB0
ERAMHI
V
ERAMLO
ERAM
RWN
V
EXM
AB15
AB14
V
AB13
AB12
AB11
AB10
AB9
AB8
AB7
V
SS
IO
DD
SS
DD
SS
(continued)
DB6
DB7
DB8
96
97
98
30
29
28
DB9
95
31
DB10
94
32
VSSDB11
92
93
33
34
DB12
91
35
DB13
90
36
DB14
DB15
88
89
DSP1628
37
38
VDDOBE1
IBF1
VSSDI1
ILD1
82
83
84
85
86
87
40
414243444546474849
39
ICK1
81
OCK1
80
OLD1
79
DO1
78
SS
SYNC1
V
76
77
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
V
DD
SADD1
DOEN1
OCK2/PCSN
DO2/PSTAT
SYNC2/PBSEL
ILD2/PIDS
OLD2/PODS
IBF2/PIBF
OBE2/POBE
ICK2/PB0
DI2/PB1
V
SS
DOEN2/PB2
SADD2/PB3
*
TRST
IOBIT0/PB4
IOBIT1/PB5
IOBIT2/PB6
IOBIT3/PB7
VEC3/IOBIT4
VEC2/IOBIT5
VEC1/IOBIT6
VEC0/IOBIT7
V
SS
DD
V
AB6
AB5
AB4
AB3
AB2
AB1
AB0
INT1
INT0
SS
V
IACK
TRAP
STOP
RSTB
DD
V
TCK
CKO
TMS
TDO
TDI
DDA
V
CKI
CKI2
SSA
V
5-4219 (F).c
* Note the difference from the DSP1627 pinout.
Figure 2. DSP1628 TQFP Pin Diagram
4 Lucent Technologies Inc.
Page 7
Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
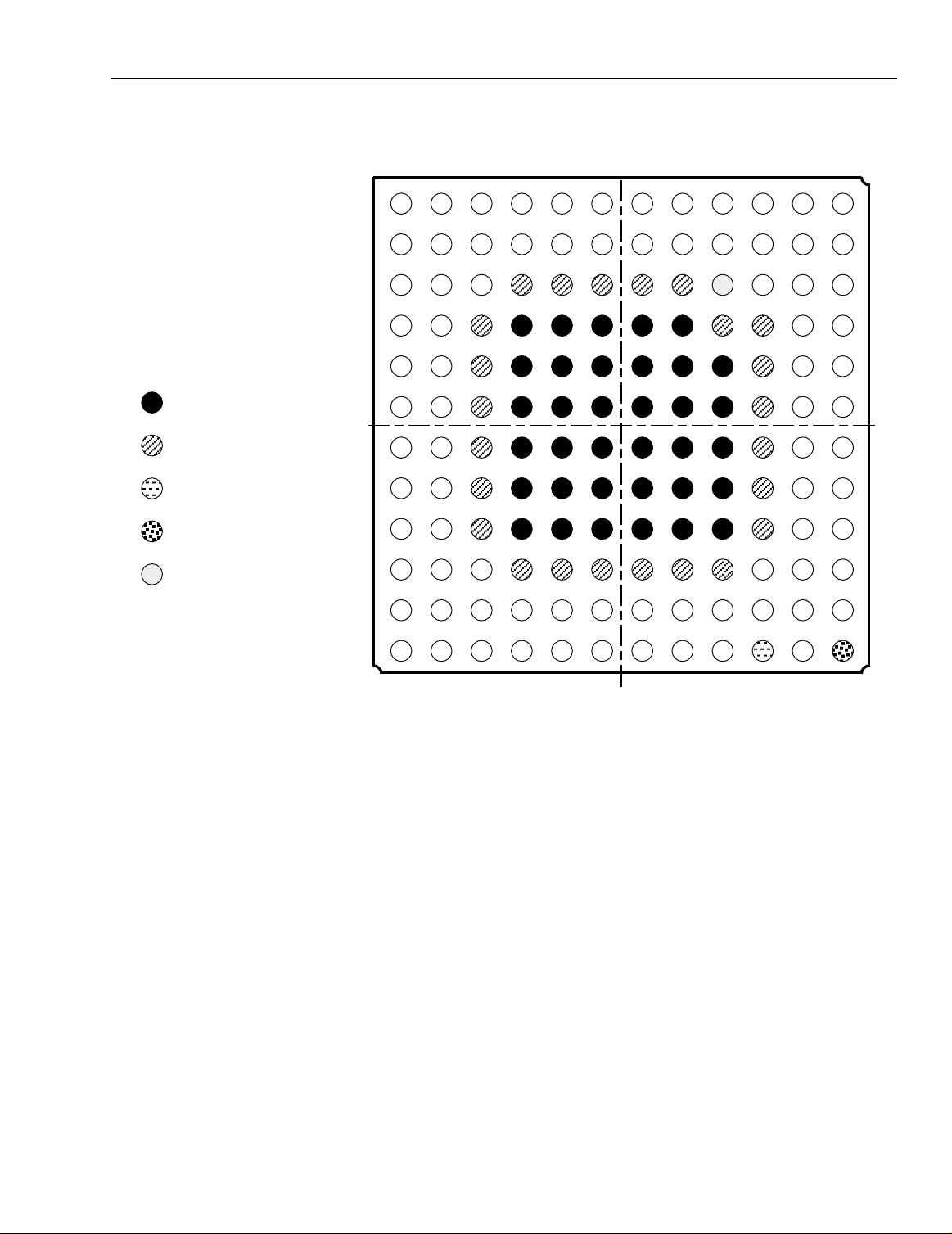
3 Pin Information
VSS
VDD
VDDA
VSSA
SPARE PACKAGE BALLS
SHOULD BE TIED TO
"SOFT GND" OR "SIG GND"
(continued)
1 2 3 4 5 6 7 8 9 10 11 12
A
B
C
D
E
F
G
H
J
K
L
Note: Solder balls viewed thru package.
Figure 3. 144-Pin Plastic Ball Grid Array (Top View)
M
5-5224 (C)
Lucent Technologies Inc. 5
Page 8
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
3 Pin Information
(continued)
Functional descriptions of pins 1—100 are found in Section 6, Signal Descriptions. The functionality of CKI and CKI2
pins are mask-programmable (see Section 7, Mask-Programmable Options). Input levels on all I and I/O type pins
are designed to remain at full CMOS levels when not driven by the DSP.
Table 1. Pin Descriptions
PBGA Pin BQFP Pin TQFP Pin Symbol Type Name/Function
B6, A6, B5,
A5, B4, A4,
B3, A3, B2,
A2, A1, B1,
C2, C1, C3,
1, 2, 3, 4,
5, 7, 8, 9,
10, 11, 12,
15, 16, 17,
18, 19
88, 89, 90,
91, 92, 94,
95, 96, 97,
98, 99, 2,
3, 4, 5, 6
DB[15:0] I/O* External Memory Data Bus 15—0.
D1
D2 20 7 IO
E1 21 8 ERAMHI
E2 23 10 ERAMLO
F1 24 11 EROM
F2 25 12 RWN
†
Data Address 0x4000 to 0x40FF I/O Enable.
O
†
Data Address 0x8000 to 0xFFFF External RAM
O
Enable.
†
Data Address 0x4100 to 0x7FFF External RAM
O
Enable.
†
Program Address External ROM Enable.
O
†
Read/Write Not.
O
G1 27 14 EXM I External ROM Enable.
G2, H1, H2,
J1, J2, K1,
K2, L1, L2,
M1, K3, M2,
L3, M3, L4,
M4
28, 29, 31,
32, 33, 34,
35, 36, 37,
40, 41, 42,
43, 44, 45,
46
15, 16, 18,
19, 20, 21,
22, 23, 24,
27, 28, 29,
30, 31, 32,
33
AB[15:0] O* External Memory Address Bus 15—0.
L5 47 34 INT1 I Vectored Interrupt 1.
M5 48 35 INT0 I Vectored Interrupt 0.
L6 50 37 IACK O* Interrupt Acknowledge.
M6 51 38 STOP I STOP Input Clock.
L7 52 39 TRAP I/O* Nonmaskable Program Trap/Breakpoint Indication.
M7 53 40 RSTB I Reset Bar.
L8 54 41 CKO
†
Processor Clock Output.
O
M8 56 43 TCK I JTAG Test Clock.
L9 57 44 TMS
M9 58 45 TDO
L10 59 46 TDI
‡
JTAG Test Mode Select.
I
§
JTAG Test Data Output.
O
‡
JTAG Test Data Input.
I
Mask-Programmable Input Clock Option
CMOS Small Signal
L11 61 48 CKI** I CKI VAC
M11 62 49 CKI2** I V
SSA
VCM
K10 65 52 VEC0/IOBIT7 I/O* Vectored Interrupt Indication 0/Status/Control Bit 7.
L12 66 53 VEC1/IOBIT6 I/O* Vectored Interrupt Indication 1/Status/Control Bit 6.
K11 67 54 VEC2/IOBIT5 I/O* Vectored Interrupt Indication 2/Status/Control Bit 5.
K12 68 55 VEC3/IOBIT4 I/O* Vectored Interrupt Indication 3/Status/Control Bit 4.
J11 69 56 IOBIT3/PB7 I/O* Status/Control Bit 3/PHIF Data Bus Bit 7.
J12 70 57 IOBIT2/PB6 I/O* Status/Control Bit 2/PHIF Data Bus Bit 6.
* 3-states when RSTB = 0, or by JTAG control.
† 3-states when RSTB = 0 and INT0 = 1. Output = 1 when RSTB = 0 and INT0 = 0, except CKO which is free-running.
‡ Pull-up devices on input.
§ 3-states by JTAG control.
** See Section 7, Mask-Programmable Options.
†† For SIO multiprocessor applications, add 5 kΩ external pull-up resistors to SADD1 and/or SADD2 for proper initialization.
6 Lucent Technologies Inc.
Page 9
Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
3 Pin Information
(continued)
Functional descriptions of pins 1—100 are found in Section 6, Signal Descriptions.
Table 1. Pin Descriptions
(continued)
PBGA Pin BQFP Pin TQFP Pin Symbol Type Name/Function
H11 71 58 IOBIT1/PB5 I/O* Status/Control Bit 1/PHIF Data Bus Bit 5.
H12 72 59 IOBIT0/PB4 I/O* Status/Control Bit 0/PHIF Data Bus Bit 4.
††
‡
JTAG Test Reset.
I
SIO2 Multiprocessor Address/PHIF Data Bus
I/O*
Bit 3.
G11 73 60 TRST
G12 74 61
SADD2/PB3
F11 75 62 DOEN2/PB2 I/O* SIO2 Data Output Enable/PHIF Data Bus Bit 2.
F12 77 64 DI2/PB1 I/O* SIO2 Data Input/PHIF Data Bus Bit 1.
E11 78 65 ICK2/PB0 I/O* SIO2 Input Clock/PHIF Data Bus Bit 0.
E12 79 66 OBE2/POBE O*
SIO2 Output Buffer Empty/PHIF Output Buffer
Empty.
D11 80 67 IBF2/PIBF O* SIO2 Input Buffer Full/PHIF Input Buffer Full.
D12 81 68 OLD2/PODS I/O* SIO2 Output Load/PHIF Output Data Strobe.
C11 82 69 ILD2/PIDS I/O* SIO2 Input Load/PHIF Input Data Strobe.
C12 83 70 SYNC2/PBSEL I/O*
SIO2 Multiprocessor Synchronization/PHIF
Byte Select.
C10 84 71 DO2/PSTAT I/O* SIO2 Data Output/PHIF Status Register Select.
B12 85 72 OCK2/PCSN I/O* SIO2 Output Clock/PHIF Chip Select Not.
B11 86 73 DOEN1 I/O* SIO1 Data Output Enable.
A12 87 74
SADD1
††
I/O* SIO1 Multiprocessor Address.
A11 90 77 SYNC1 I/O* SIO1 Multiprocessor Synchronization.
B10 91 78 DO1 O* SIO1 Data Output.
A10 92 79 OLD1 I/O* SIO1 Output Load.
B9 93 80 OCK1 I/O* SIO1 Output Clock.
A9 94 81 ICK1 I/O* SIO1 Input Clock.
B8 95 82 ILD1 I/O* SIO1 Input Load.
A8 96 83 DI1 I SIO1 Data Input.
B7 98 85 IBF1 O* SIO1 Input Buffer Full.
A7 99 86 OBE1 O* SIO1 Output Buffer Empty.
D4, D5, D6, D7, D8,
E4, E5, E6, E7, E8,
E9, F4, F5, F6, F7,
6, 14, 26,
38, 49, 64,
76, 89, 97
93, 1, 13,
25, 36, 51,
63, 76, 84
V
SS
P
Ground.
F8, F9, G4, G5, G6,
G7, G8, G9, H4,
H5, H6, H7, H8, H9,
J4, J5, J6, J7, J8, J9
C4, C5, C6, C7, C8,
D3, D9, D10, E3,
E10, F3, F10, G3,
13, 22, 30,
39, 55, 88,
100
100, 9, 17,
26, 42, 75,
87
V
DD
Power Supply.
P
G10, H3, H10, J3,
J10, K4, K5, K6, K7,
K8, K9,
M10 60 47 V
M12 63 50 V
DDA
SSA
P Analog Power Supply.
P Analog Ground.
C9 — — — — No Die Connect—unused.
* 3-states when RSTB = 0, or by JTAG control.
† 3-states when RSTB = 0 and INT0 = 1. Output = 1 when RSTB = 0 and INT0 = 0, except CKO which is free-running.
‡ Pull-up devices on input.
§ 3-states by JTAG control.
** See Section 7, Mask-Programmable Options.
†† For SIO multiprocessor applications, add 5 kΩ external pull-up resistors to SADD1 and/or SADD2 for proper initialization.
Lucent Technologies Inc. 7
Page 10

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture
The DSP1628 device is a 16-bit, fixed-point programmable digital signal processor (DSP). The DSP1628
consists of a DSP1600 core together with on-chip memory and peripherals. Added architectural features give
the DSP1628 high program efficiency for signal coding
applications.
4.1 DSP1628 Architectural Overview
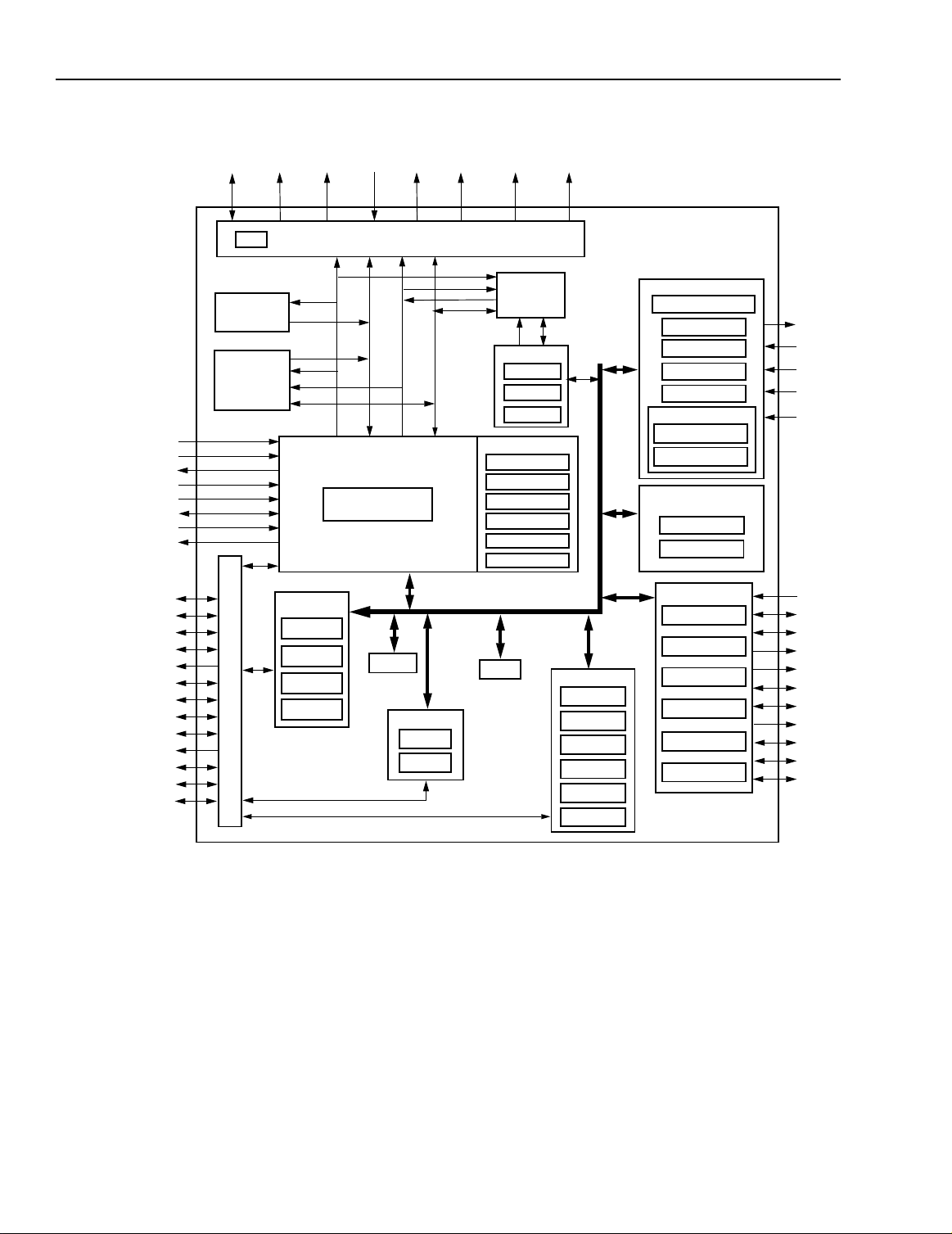
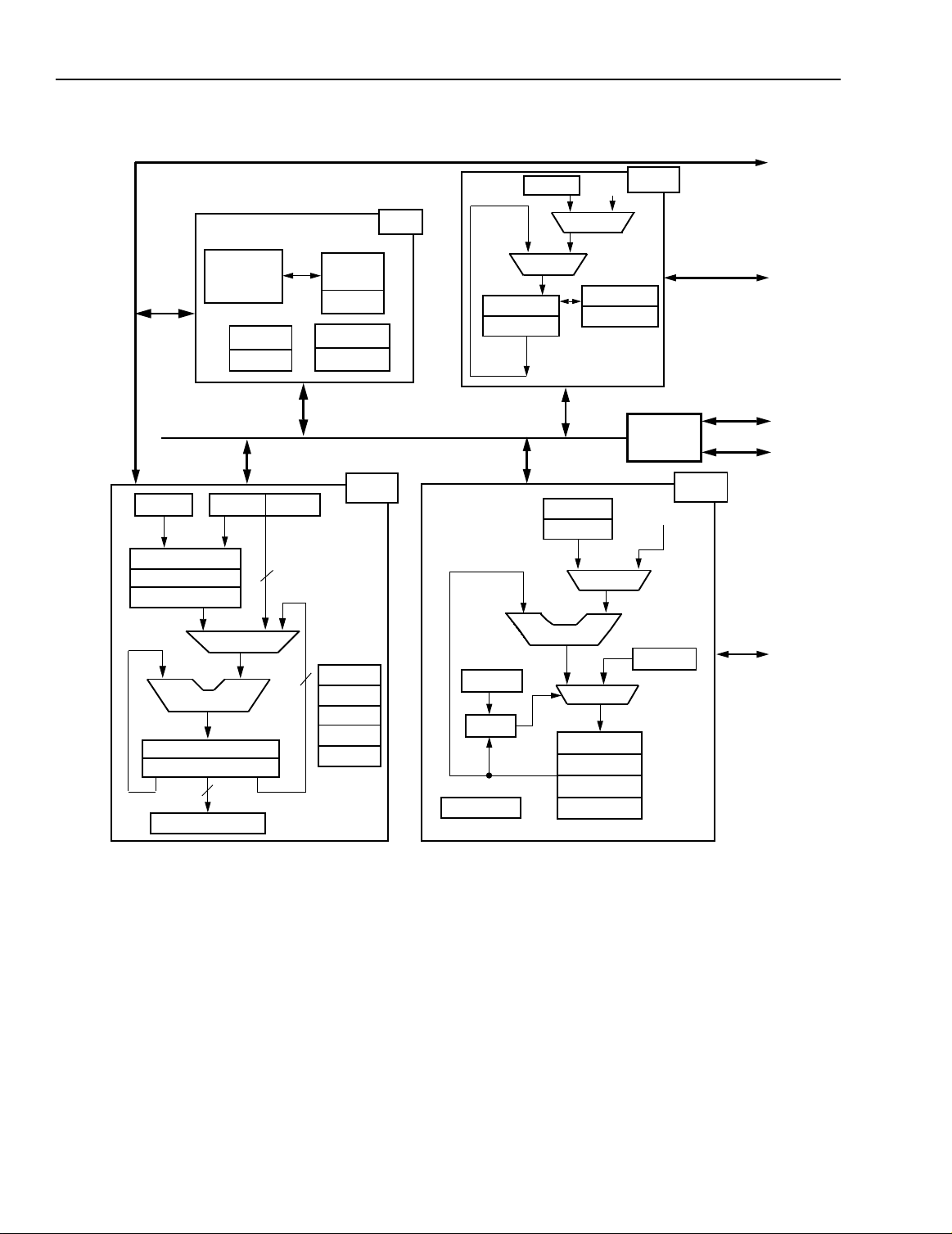
Figure 4 shows a block diagram of the DSP1628. The
following modules make up the DSP1628.
DSP1600 Core
The DSP1600 core is the heart of the DSP1628 chip.
The core contains data and address arithmetic units,
and control for on-chip memory and peripherals. The
core provides support for external memory wait-states
and on-chip dual-port RAM and features vectored interrupts and a trap mechanism.
Dual-Port RAM (DPRAM)
The DSP1628x16 contains 16 banks of zero wait-state
memory and the DSP1628x08 contains 8 banks of zero
wait-state memory. Each bank consists of 1K 16-bit
words and has separate address and data ports to the
instruction/coefficient and data memory spaces. A program can reference memory from either space. The
DSP1600 core automatically performs the required multiplexing. If references to both ports of a single bank are
made simultaneously, the DSP1600 core automatically
inserts a wait-state and performs the data port access
first, followed by the instruction/coefficient port access.
A program can be downloaded from slow, off-chip memory into DPRAM, and then executed without wait-states.
DPRAM is also useful for improving convolution performance in cases where the coefficients are adaptive.
Since DPRAM can be downloaded through the JTAG
port, full-speed remote in-circuit emulation is possible.
DPRAM can also be used for downloading self-test
code via the JTAG port.
Read-Only Memory (ROM)
The DSP1628 contains 48K 16-bit words of zero waitstate mask-programmable ROM for program and fixed
coefficients.
External Memory Multiplexer (EMUX)
The EMUX is used to connect the DSP1628 to external
memory and I/O devices. It supports read/write operations from/to instruction/coefficient memory (X memory
space) and data memory (Y memory space). The
DSP1600 core automatically controls the EMUX. Instructions can transparently reference external memory
from either set of internal buses. A sequencer allows a
single instruction to access both the X and the Y external memory spaces.
Clock Synthesis
The DSP powers up with a 1X input clock (CKI/CKI2) as
the source for the processor clock. An on-chip clock
synthesizer (PLL) can also be used to generate the system clock for the DSP, which will run at a frequency multiple of the input clock. The clock synthesizer is
deselected and powered down on reset. For low-power
operation, an internally generated slow clock can be
used to drive the DSP. If both the clock synthesizer and
the internally generated slow clock are selected, the
slow clock will drive the DSP; however, the synthesizer
will continue to run.
The clock synthesizer and other programmable clock
sources are discussed in Section 4.13. The use of these
programmable clock sources for power management is
discussed in Section 4.14.
8 Lucent Technologies Inc.
Page 11

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Bit Manipulation Unit (BMU)
The BMU extends the DSP1600 core instruction set to
provide more efficient bit operations on accumulators.
The BMU contains logic for barrel shifting, normalization, and bit field insertion/extraction. The unit also contains a set of 36-bit alternate accumulators. The data in
the alternate accumulators can be shuffled with the data
in the main accumulators. Flags returned by the BMU
mesh seamlessly with the DSP1600 conditional instructions.
Error Correction Coprocessor (ECCP)
The ECCP performs full Viterbi decoding with instructions for MLSE equalization and convolutional decoding. It is designed for 2-tap to 6-tap MLSE equalization
with Euclidean branch metrics and rate 1/1 to 1/6 convolutional decoding using constraint lengths from 2 to 7
with Euclidean or Manhattan branch metrics. Two variants of soft-decoded symbols, as well as hard-decoded
symbols may be programmed. The ECCP operates in
parallel with the DSP1600 core, increasing the throughput rate. Single instruction Viterbi decoding provides
significant code compression required for single DSP
solutions in modern digital cellular applications. The
ECCP is the source of two interrupts and one flag to the
DSP1600 core.
Bit Input/Output (BIO)
The BIO provides convenient and efficient monitoring
and control of eight individually configurable pins. When
configured as outputs, the pins can be individually set,
cleared, or toggled. When configured as inputs, individual pins or combinations of pins can be tested for patterns. Flags returned by the BIO mesh seamlessly with
conditional instructions.
Serial Input/Output Units (SIO and SIO2)
SIO and SIO2 offer asynchronous, full-duplex, doublebuffered channels that operate at up to 25 Mbits/s (for
20 ns instruction cycle in a nonmultiprocessor configuration), and easily interface with other Lucent Technologies fixed-point DSPs in a multiple-processor
environment. Commercially available codecs and timedivision multiplex (TDM) channels can be interfaced to
the serial I/O ports with few, if any, additional components. SIO2 is identical to SIO.
An 8-bit serial protocol channel may be transmitted in
addition to the address of the called processor in multiprocessor mode. This feature is useful for transmitting
high-level framing information or for error detection and
correction. SIO2 and BIO are pin-multiplexed with the
PHIF.
Lucent Technologies Inc. 9
Page 12
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
CKI
CKI2
CKO
RSTB
STOP
TRAP
INT[1:0]
IACK
VEC[3:0] OR IOBIT[7:4]
DO2 OR PSTAT
OLD2 OR PODS
OCK2 OR PCSN
OBE2 OR POBE
SYNC2 OR PBSEL
ICK2 OR PB0
ILD2 OR PIDS
DI2 OR PB1
IBF2 OR PIBF
DOEN2 OR PB2
SADD2 OR PB3
IO BIT[3:0] OR PB[7:4]
AB[15:0]DB[15:0]
ioc
ROM
48K x 16
DUAL-PORT
RAM
[16/8:5,3:1]
15/7K x 16
M
U
X
RWN EXM EROM ERAMHI
EXTERNAL MEMORY INTERFACE & EMUX
†
DSP1600 CORE
PHIF
phifc
*
PSTAT
pdx0(IN)
pdx0(OUT)
I/O
YAB YDBXDBXAB
IDB
powerc
BIO
sbit
cbit
pllc
RAM4
1K x 16
ECCP
eir
ear
edr
BMU
aa0
aa1
ar0
ar1
ar2
ar3
ERAMLO
†
sdx2(OUT)
sdx2(IN)
saddx2
SIO2
srta2
tdms2
sioc2
JTAG
BOUNDARY SCAN
jtag
*
JCON
*
ID
*
BYPASS
HDS
BREAK POINT
*
TRACE
TIMER
timerc
timer0
SIO
sdx(OUT)
srta
tdms
sdx(IN)
sioc
saddx
*
TDO
TDI
TCK
TMS
TRST
*
DI1
ICK1
ILD1
IBF1
DO1
OCK1
OLD1
OBE1
SYNC1
SADD1
DOEN1
5-4142 (F).f
* These registers are accessible through the pins only.
† 16K x 16 for the DSP1628x16, 8K x 16 for the DSP1628x08.
Figure 4. DSP1628 Block Diagram
10 Lucent Technologies Inc.
Page 13
Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Table 2. DSP1628 Block Diagram Legend
Symbol Name
aa<0—1> Alternate Accumulators.
ar<0—3> Auxiliary BMU Registers.
BIO Bit Input/Output Unit.
BMU Bit Manipulation Unit.
BREAKPOINT Four Instruction Breakpoint Registers.
BYPASS JTAG Bypass Register.
cbit Control Register for BIO.
Dual-Port RAM Internal RAM (16 Kwords for DSP1628x16, 8 Kwords for DSP1628x08).
ECCP Error Correction Coprocessor.
ear Error Correction Coprocessor Address Register.
edr Error Correction Coprocessor Data Register.
eir Error Correction Coprocessor Instruction Register.
EMUX External Memory Multiplexer.
HDS Hardware Development System.
ID JTAG Device Identification Register.
IDB Internal Data Bus.
ioc I/O Configuration Register.
JCON JTAG Configuration Registers.
jtag 16-bit Serial/Parallel Register.
pdx0(in) Parallel Data Transmit Input Register 0.
pdx0(out) Parallel Data Transmit Output Register 0.
PHIF Parallel Host Interface.
phifc Parallel Host Interface Control Register.
pllc Phase-Locked Loop Control Register.
powerc Power Control Register.
PSTAT Parallel Host Interface Status Register.
saddx Multiprocessor Protocol Register.
saddx2 Multiprocessor Protocol Register for SIO2.
sbit Status Register for BIO.
sdx(in) Serial Data Transmit Input Register.
sdx2(in) Serial Data Transmit Input Register for SIO2.
sdx(out) Serial Data Transmit Output Register.
sdx2(out) Serial Data Transmit Output Register for SIO2.
SIO Serial Input/Output Unit.
SIO2 Serial Input/Output Unit #2.
sioc Serial I/O Control Register.
sioc2 Serial I/O Control Register for SIO2.
srta Serial Receive/Transmit Address Register.
srta2 Serial Receive/Transmit Address Register for SIO2.
tdms Serial I/O Time-division Multiplex Signal Control Register.
tdms2 Serial I/O Time-division Multiplex Signal Control Register for SIO2.
TIMER Programmable Timer.
timer0 Timer Running Count Register.
timerc Timer Control Register.
TRACE Program Discontinuity Trace Buffer.
XAB Program Memory Address Bus.
XDB Program Memory Data Bus.
YAB Data Memory Address Bus.
YDB Data Memory Data Bus.
Lucent Technologies Inc. 11
Page 14

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
Parallel Host Interface (PHIF)
The PHIF is a passive, 8-bit parallel port which can interface to an 8-bit bus containing other Lucent Technologies DSPs (e.g., DSP1620, DSP1627, DSP1628,
DSP1629, DSP1611, DSP1616, DSP1617, DSP1618),
microprocessors, or peripheral I/O devices. The PHIF
port supports either
as 8-bit or 16-bit transfers, configured in software. The
port data rate depends upon the instruction cycle rate.
A 25 ns instruction cycle allows the PHIF to support
data rates up to 11.85 Mbytes/s, assuming the external
host device can transfer 1 byte of data in 25 ns.
The PHIF is accessed in two basic modes, 8-bit or
16-bit mode. In 16-bit mode, the host determines an access of the high or low byte. In 8-bit mode, only the low
byte is accessed. Software-programmable features allow for a glueless host interface to microprocessors
(see Section 4.8, Parallel Host Interface).
Timer
The timer can be used to provide an interrupt at the expiration of a programmed interval. The interrupt may be
single or repetitive. More than nine orders of magnitude
of interval selection are provided. The timer may be
stopped and restarted at any time.
Hardware Development System (HDS) Module
The on-chip HDS performs instruction breakpointing
and branch tracing at full speed without additional offchip hardware. Using the JTAG port, the breakpointing
is set up, and the trace history is read back. The port
works in conjunction with the HDS code in the on-chip
ROM and the hardware and software in a remote computer. The HDS code must be linked to the user's application code and reside in the first 4 Kwords of ROM.
The on-chip HDS cannot be used with the secure ROM
masking option (see Section 7.2, ROM Security Options).
Four hardware breakpoints can be set on instruction addresses. A counter can be preset with the number of
breakpoints to receive before trapping the core. Breakpoints can be set in interrupt service routines. Alternately, the counter can be preset with the number of cache
instructions to execute before trapping the core.
Every time the program branches instead of executing
the next sequential instruction, the addresses of the instructions executed before and after the branch are
caught in circular memory. The memory contains the
last four pairs of program discontinuities for hardware
tracing.
In systems with multiple processors, the processors
may be configured such that any processor reaching a
breakpoint will cause all the other processors to be
trapped (see Section 4.3, Interrupts and Trap).
12 Lucent Technologies Inc.
Motorola
or
Intel
protocols, as well
Pin Multiplexing
In order to allow flexible device interfacing while maintaining a low package pin count, the DSP1628 multiplexes 16 package pins between BIO, PHIF, VEC[3:0],
and SIO2.
Upon reset, the vectored interrupt indication signals,
VEC[3:0], are connected to the package pins while
IOBIT[4:7] are disconnected. Setting bit 12, EBIOH, of
the ioc register connects IOBIT[4:7] to the package pins
and disconnects VEC[3:0].
Upon reset, the parallel host interface (PHIF) is connected to the package pins while the second serial port
(SIO2) and IOBIT[3:0] are disconnected. Setting bit 10,
ESIO2, of the ioc register connects the SIO2 and
IOBIT[3:0] and disconnects the PHIF.
Power Management
Many applications, such as portable cellular terminals,
require programmable sleep modes for power management. There are three different control mechanisms for
achieving low-power operation: the powerc control
register, the STOP pin, and the AWAIT bit in the alf register. The AWAIT bit in the alf register allows the processor to go into a power-saving standby mode until an
interrupt occurs. The powerc register configures various power-saving modes by controlling internal clocks
and peripheral I/O units. The STOP pin controls the internal processor clock. The various power management
options may be chosen based on power consumption
and/or wake-up latency requirements.
4.2 DSP1600 Core Architectural Overview
Figure 5 shows a block diagram of the DSP1600 core.
System Cache and Control Section (SYS)
This section of the core contains a 15-word cache memory and controls the instruction sequencing. It handles
vectored interrupts and traps, and also provides decoding for registers outside of the DSP1600 core. SYS
stretches the processor cycle if wait-states are required
(wait-states are programmable for external memory accesses). SYS sequences downloading via JTAG of selftest programs to on-chip, dual-port RAM.
The cache loop iteration count can be specified at run
time under program control as well as at assembly time.
Page 15

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Data Arithmetic Unit (DAU)
The data arithmetic unit (DAU) contains a 16 x 16-bit
parallel multiplier that generates a full 32-bit product in
one instruction cycle. The product can be accumulated
with one of two 36-bit accumulators. The accumulator
data can be directly loaded from, or stored to, memory
in two 16-bit words with optional saturation on overflow.
The arithmetic logic unit (ALU) supports a full set of
arithmetic and logical operations on either 16- or 32-bit
data. A standard set of flags can be tested for conditional ALU operations, branches, and subroutine calls. This
procedure allows the processor to perform as a powerful 16- or 32-bit microprocessor for logical and control
applications. The available instruction set is compatible
with the DSP1618 instruction set. See Section 5.1 for
more information on the instruction set.
The user also has access to two additional DAU registers. The psw register contains status information from
the DAU (see Table 30, Processor Status Word Register). The arithmetic control register, auc, is used to configure some of the features of the DAU (see Table 31)
including single-cycle squaring. The auc register alignment field supports an arithmetic shift left by one and
left or right by two. The auc register is cleared by reset.
The counters c0 to c2 are signed, 8 bits wide, and may
be used to count events such as the number of times
the program has executed a sequence of code. They
are controlled by the conditional instructions and provide a convenient method of program looping.
The YAAU allows direct (or indexed) addressing of data
memory. In direct addressing, the 16-bit base register
(ybase) supplies the 11 most significant bits of the address. The direct data instruction supplies the remaining
5 bits to form an address to Y memory space and also
specifies one of 16 registers for the source or destination.
X Space Address Arithmetic Unit (XAAU)
The XAAU supports high-speed, register-indirect, instruction/coefficient memory addressing with postmodification of the register. The 16-bit pt register is used for
addressing coefficients. The signed register i holds a
user-defined postincrement. A fixed postincrement of
+1 is also available. Register PC is the program
counter. Registers pr and pi hold the return address for
subroutine calls and interrupts, respectively.
The XAAU decodes the 16-bit instruction/coefficient address and produces enable signals for the appropriate
X memory segment. The addressable X segments are
48 Kwords of internal ROM, up to 16 Kwords of DPRAM
for the DSP1628x16 or up to 8 Kwords of DPRAM for
the DSP1628x08, and external ROM.
The locations of these memory segments depend upon
the memory map selected (see Table 5). A security
mode can be selected by mask option. This prevents
unauthorized access to the contents of on-chip ROM
(see Section 7, Mask-Programmable Options).
4.3 Interrupts and Trap
Y Space Address Arithmetic Unit (YAAU)
The YAAU supports high-speed, register-indirect, compound, and direct addressing of data (Y) memory. Four
general-purpose, 16-bit registers, r0 to r3, are available
in the YAAU. These registers can be used to supply the
read or write addresses for Y space data. The YAAU
also decodes the 16-bit data memory address and outputs individual memory enables for the data access.
The YAAU can address the six 1 Kword banks of onchip DPRAM or three external data memory segments.
Up to 48 Kwords of off-chip RAM are addressable, with
16K addresses reserved for internal RAM.
Two 16-bit registers, rb and re, allow zero-overhead
modulo addressing of data for efficient filter implementations. Two 16-bit signed registers, j and k, are used to
hold user-defined postmodification increments. Fixed
increments of +1, –1, and +2 are also available. Four
compound-addressing modes are provided to make
read/write operations more efficient.
The DSP1628 supports prioritized, vectored interrupts
and a trap. The device has eight internal hardware
sources of program interrupt and two external interrupt
pins. Additionally, there is a trap pin and a trap signal
from the hardware development system (HDS). A software interrupt is available through the icall instruction.
The icall instruction is reserved for use by the HDS.
Each of these sources of interrupt and trap has a unique
vector address and priority assigned to it. DSP16A interrupt compatibility is not maintained.
The software interrupt and the traps are always enabled
and do not have a corresponding bit in the ins register.
Other vectored interrupts are enabled in the inc register
(see Table 33, Interrupt Control (inc) Register) and
monitored in the ins register (see Table 34, Interrupt
Status (ins) Register). When the DSP1628 goes into an
interrupt or trap service routine, the IACK pin is asserted. In addition, pins VEC[3:0] encode which interrupt/
trap is being serviced. Table 4 details the encoding
used for VEC[3:0].
Lucent Technologies Inc. 13
Page 16
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
CONTROL
x (16)
16 x 16 MPY
SHIFT (–2, 0, 1, 2)
EXTRACT/SAT
yh (16)
p (32)
ALU/SHIFT
a0 (36)
a1 (36)
16
MUX
ins (16)
inc (16)
32
yl (16)
36
CACHE
cloop (7)
alf (16)
mwait (16)
DAU
c0 (8)
c1 (8)
c2 (8)
auc (16)
psw (16)
SYS
re (16)
CMP
ybase (16)
ADDER
pc (16)
pt (16)
i (16)
k (16)
ADDER
j (16)
MUX
pr (16)
pi (16)
MUX
MUX
r0 (16)
r1 (16)
r2 (16)
r3 (16)
1
XAAU
BRIDGE
–1, 0, 1, 2
rb (16)
XDB
XAB
IDB
YDB
YAAU
YAB
5-1741 (F).b
Figure 5. DSP1600 Core Block Diagram
14 Lucent Technologies Inc.
Page 17

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Table 3. DSP1600 Core Block Diagram Legend
Symbol Name
16 x 16 MPY 16-bit x 16-bit Multiplier.
a0—a1 Accumulators 0 and 1 (16-bit halves specified as a0, a0l, a1, and a1l)*.
alf AWAIT, LOWPR, Flags.
ALU/SHIFT Arithmetic Logic Unit/Shifter.
auc Arithmetic Unit Control.
c0—c2 Counters 0—2.
cloop Cache Loop Count.
CMP Comparator.
DAU Digital Arithmetic Unit.
i Increment Register for the X Address Space.
IDB Internal Data Bus.
inc Interrupt Control.
ins Interrupt Status.
j Increment Register for the Y Address Space.
k Increment Register for the Y Address Space.
MUX Multiplexer.
mwait External Memory Wait-states Register.
p Product Register (16-bit halves specified as p, pl).
PC Program Counter.
pi Program Interrupt Return Register.
pr Program Return Register.
psw Processor Status Word.
pt X Address Space Pointer.
r0—r3 Y Address Space Pointers.
rb Modulo Addressing Register (begin address).
re Modulo Addressing Register (end address).
SYS System Cache and Control Section.
x Multiplier Input Register.
XAAU X Space Address Arithmetic Unit.
XAB X Space Address Bus.
XDB X Space Data Bus.
YAAU Y Space Address Arithmetic Unit.
YAB Y Space Address Bus.
YDB Y Space Data Bus.
ybase Direct Addressing Base Register.
y DAU Register (16-bit halves specified as y, yl).
* F3 ALU instructions with immediates require specifying the high half of the accumulators as a0h and a1h.
Lucent Technologies Inc. 15
Page 18
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
Interruptibility
Vectored interrupts are serviced only after the execution
of an interruptible instruction. If more than one
vectored interrupt is asserted at the same time, the interrupts are serviced sequentially according to their assigned priorities. See Table 4 for the priorities assigned
to the vectored interrupts. Interrupt service routines,
branch and conditional branch instructions, cache
loops, and instructions that only decrement one of the
RAM pointers, r0 to r3 (e.g., *r3− −), are not interruptible.
A trap is similar to an interrupt, but it gains control of the
processor by branching to the trap service routine even
when the current instruction is noninterruptible. It may
not be possible to return to normal instruction execution
from the trap service routine since the machine state
cannot always be saved. In particular, program execution cannot be continued from a trapped cache loop or
interrupt service routine. While in a trap service routine,
another trap is ignored.
When set to 1, the status bits in the ins register indicate
that an interrupt has occurred. The processor must
reach an interruptible state (completion of an interruptible instruction) before an enabled vectored interrupt will
be acted on. An interrupt will not be serviced if it is not
enabled. Polled interrupt service can be implemented
by disabling the interrupt in the inc register and then
polling the ins register for the expected event.
Vectored Interrupts
Tables 33 and 34 show the inc and ins registers. A logic
1 written to any bit of inc enables (or unmasks) the associated interrupt. If the bit is cleared to a logic 0, the interrupt is masked. Note that neither the software
interrupt nor traps can be masked.
The occurrence of an interrupt that is not masked will
cause the program execution to transfer to the memory
location pointed to by that interrupt's vector address,
assuming no other interrupt is being serviced (see
Table 4, Interrupt Vector Table). The occurrence of an
interrupt that is masked causes no automatic processor
action, but will set the corresponding status bit in the ins
register. If a masked interrupt occurs, it is latched in the
ins register, but the interrupt is not taken. When unlatched, this latched interrupt will initiate automatic processor interrupt action. See the
Digital Signal Processor Information Manual
detailed description of the interrupts.
DSP1611/17/18/27
for a more
Signaling Interrupt Service Status
Five pins of DSP1628 are devoted to signaling interrupt
service status. The IACK pin goes high while any interrupt or user trap is being serviced, and goes low when
the ireturn instruction from the service routine is issued.
Four pins, VEC[3:0], carry a code indicating which of the
interrupts or trap is being serviced. Table 4 contains the
encodings used by each interrupt.
Traps due to HDS breakpoints have no effect on either
the IACK or VEC[3:0] pins. Instead, they show the interrupt state or interrupt source of the DSP when the trap
occurred.
Clearing Interrupts
The PHIF interrupts (PIBF and POBE) are cleared by
reading or writing the parallel host interface data transmit registers pdx0[in] and pdx0[out], respectively. The
SIO and SIO2 interrupts (IBF, IBF2, OBE, and OBE2)
are cleared one instruction cycle AFTER reading or writing the serial data registers, (sdx[in], sdx2[in], sdx[out],
or sdx2[out]). To account for this added latency, the
user must ensure that a single instruction (NOP or any
other valid DSP16XX instruction) follows the sdx register read or write instruction prior to exiting an interrupt
service routine (via an ireturn or goto pi instruction) or
before checking the ins register for the SIO flag status.
Adding this instruction ensures that interrupts are not
reported incorrectly following an ireturn or that stale
flags are not read from the ins register.The JTAG interrupt (JINT) is cleared by reading the jtag register.
Five of the vectored interrupts are cleared by writing to
the ins register. Writing a 1 to the INT0, INT1, EREADY,
EOVF, or TIME bits in the ins will cause the corresponding interrupt status bit to be cleared to a logic 0.
The status bit for these vectored interrupts is also
cleared when the ireturn instruction is executed, leaving
set any other vectored interrupts that are pending.
Traps
The TRAP pin of the DSP1628 is a bidirectional signal.
At reset, it is configured as an input to the processor.
Asserting the TRAP pin will force a user trap. The trap
mechanism is used for two purposes. It can be used by
an application to rapidly gain control of the processor for
asynchronous time-critical event handling (typically for
catastrophic error recovery). It is also used by the HDS
for breakpointing and gaining control of the processor.
Separate vectors are provided for the user trap (0x46)
and the HDS trap (0x3). Traps are not maskable.
16 Lucent Technologies Inc.
Page 19
Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Table 4. Interrupt Vector Table
Source Vector Priority VEC[3:0] Issued by
No Interrupt — — 0x0 —
Software Interrupt 0x2 1 0x1 icall
INT0 0x1 2 0x2 pin
JINT 0x42 3 0x8 jtag in
INT1 0x4 4 0x9 pin
TIME 0x10 7 0xc timer
IBF2 0x14 8 0xd SIO2 in
OBE2 0x18 9 0xe SIO2 out
Reserved 0x1c 10 0x0 —
EREADY 0x20 11 0x1 ECCP ready
EOVF 0x24 12 0x2 ECCP overflow
IBF 0x2c 14 0x3 SIO in
OBE 0x30 15 0x4 SIO out
PIBF 0x34 16 0x5 PHIF in
POBE 0x38 17 0x6 PHIF out
TRAP from HDS 0x3 18 * breakpoint, jtag, or pin
TRAP from User 0x46 19 = highest 0x7 pin
* Traps due to HDS breakpoints have no effect on VEC[3:0] pins.
A trap has four cycles of latency. At most, two instructions will execute from the time the trap is received at
the pin to when it gains control. An instruction that is executing when a trap occurs is allowed to complete before the trap service routine is entered. (Note that the
instruction could be lengthened by wait-states.) During
normal program execution, the pi register contains either the address of the next instruction (two-cycle instruction executing) or the address following the next
instruction (one-cycle instruction executing). In an interrupt service routine, pi contains the interrupt return address. When a trap occurs during an interrupt service
routine, the value of the pi register may be overwritten.
Specifically, it is not possible to return to an interrupt
service routine from a user trap (0x46) service routine.
Continuing program execution when a trap occurs during a cache loop is also not possible.
The HDS trap causes circuitry to force the program
memory map to MAP1 (with on-chip ROM starting at address 0x0) when the trap is taken. The previous memory map is restored when the trap service routine exits by
issuing an ireturn. The map is forced to MAP1 because
the HDS code, if present, resides in the on-chip ROM.
Using the Lucent Technologies development tools, the
TRAP pin may be configured to be an output, or an input
vectoring to address 0x3. In a multiprocessor environment, the TRAP pins of all the DSPs present can be tied
together. During HDS operations, one DSP is selected
by the host software to be the master. The master processor's TRAP pin is configured to be an output.
The TRAP pins of the slave processors are configured
as inputs. When the master processor reaches a breakpoint, the master's TRAP pin is asserted. The slave processors will respond to their TRAP input by beginning to
execute the HDS code.
AWAIT Interrupt (Standby or Sleep Mode)
Setting the AWAIT bit (bit 15) of the alf register
(alf = 0x8000) causes the processor to go into a powersaving standby or sleep mode. Only the minimum circuitry on the chip required to process an incoming interrupt remains active. After the AWAIT bit is set, one
additional instruction will be executed before the standby power-saving mode is entered. A PHIF or SIO word
transfer will complete if already in progress. The AWAIT
bit is reset when the first interrupt occurs. The chip then
wakes up and continues executing.
Two nop instructions should be programmed after the
AWAIT bit is set. The first nop (one cycle) will be executed before sleeping; the second will be executed after
the interrupt signal awakens the DSP and before the interrupt service routine is executed.
Lucent Technologies Inc. 17
Page 20

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
The AWAIT bit should be set from within the cache if the
code which is executing resides in external ROM where
more than one wait-state has been programmed. This
ensures that an interrupt will not disturb the device from
completely entering the sleep state.
For additional power savings, set ioc = 0x0180 and tim-
erc = 0x0040 in addition to setting alf = 0x8000. This
will hold the CKO pin low and shut down the timer and
prescaler (see Table 42 and Table 35).
For a description of the control mechanisms for putting
the DSP into low-power modes, see Section 4.13, Power Management.
4.4 Memory Maps and Wait-States
The DSP1600 core implements a modified Harvard architecture that has separate on-chip 16-bit address and
data buses for the instruction/coefficient (X) and data
(Y) memory spaces. Table 5 shows the instruction/coefficient memory space maps for both the DSP1628x16
and DSP1628x08.
The DSP1628 provides a multiplexed external bus
which accesses external RAM (ERAM) and ROM (EROM). Programmable wait-states are provided for external memory accesses. The instruction/coefficient
memory map is configurable to provide application flexibility. Table 6 shows the data memory space, which
has one map.
Instruction/Coefficient Memory Map Selection
In determining which memory map to use, the processor evaluates the state of two parameters. The first is
the LOWPR bit (bit 14) of the alf register. The LOWPR
bit of the alf register is initialized to 0 automatically at reset. LOWPR controls the starting address in memory
assigned to 1K banks of dual-port RAM. If LOWPR is
low, internal dual-port RAM begins at address 0xC000.
If LOWPR is high, internal dual-port RAM begins at address 0x0. LOWPR also moves IROM from 0x0 in
MAP1 to 0x4000 in MAP3, and EROM from 0x0 in
MAP2 to 0x4000 in MAP4.
The second parameter is the value at reset of the EXM
pin (pin 27 or pin 14, depending upon the package
type). EXM determines whether the internal 48 Kwords
ROM (IROM) will be addressable in the memory map.
The Lucent Technologies development system tools,
together with the on-chip HDS circuitry and the JTAG
port, can independently set the memory map. Specifically, during an HDS trap, the memory map is forced to
MAP1. The user's map selection is restored when the
trap service routine has completed execution.
MAP1
MAP1 has the IROM starting at 0x0 and 1 Kword banks
of DPRAM starting at 0xC000. MAP1 is used if
DSP1628 has EXM low at reset and the LOWPR parameter is programmed to zero. It is also used during an
HDS trap.
MAP2
MAP2 differs from MAP1 in that the lowest 48 Kwords
reference external ROM (EROM). MAP2 is used if EXM
is high at reset, the LOWPR parameter is programmed
to zero, and an HDS trap is not in progress.
MAP3
MAP3 has the 1 Kword banks of DPRAM starting at
address 0x0. In MAP3, the 48 Kwords of IROM start at
0x4000. MAP3 is used if EXM is low at reset, the
LOWPR bit is programmed to 1, and an HDS trap is not
in progress. Note that this map is not available if the
secure mask-programmable option has been ordered.
MAP4
MAP4 differs from MAP3 in that addresses above
0x4000 reference external ROM (EROM). This map is
used if the LOWPR bit is programmed to 1, an HDS trap
is not in progress, and, either EXM is high during reset,
or the secure mask-programmable option has been ordered.
Whenever the chip is reset using the RSTB pin, the default memory map will be MAP1 or MAP2, depending
upon the state of the EXM pin at reset. A reset through
the HDS will not reinitialize the alf register, so the previous memory map is retained.
Boot from External ROM
After RSTB goes from low to high, the DSP1628 comes
out of reset and fetches an instruction from address
zero of the instruction/coefficient space. The physical
location of address zero is determined by the memory
map in effect. If EXM is high at the rising edge of RSTB,
MAP2 is selected. MAP2 has EROM at location zero;
thus, program execution begins from external memory.
If EXM is high and INT1 is low when RSTB rises, the
mwait register defaults to 15 wait-states for all external
memory segments. If INT1 is high, the mwait register
defaults to 0 wait-states.
18 Lucent Technologies Inc.
Page 21

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Table 5. Instruction/Coefficient Memory Maps
DSP1628x16
MAP 3
EXM = 0
DPRAM
(16K)
IROM
(48K)
‡
MAP 4
EXM = 1
LOWPR = 1
DPRAM
(16K)
EROM
(48K)
X Address AB[0:15]
0 0x0000
4K 0x1000
8K 0x2000
12K 0x3000
16K 0x4000
20K 0x5000
24K 0x6000
28K 0x7000
32K 0x8000
36K 0x9000
40K 0xA000
44K 0xB000
48K 0xC000
52K 0xD000
54K 0xD800
56K 0xE000
60K—64K 0xFFFF
MAP 1*
EXM = 0
LOWPR = 0
IROM
(48K)
DPRAM
(16K)
†
MAP 2
EXM = 1
LOWPR = 0
EROM
(48K)
DPRAM
(16K)
LOWPR = 1
DSP1628x08
MAP 1*
X Address AB[0:15]
0 0x0000
4K 0x1000
6K 0x1800
8K 0x2000
12K 0x3000
16K 0x4000
20K 0x5000
24K 0x6000
28K 0x7000
32K 0x8000
36K 0x9000
40K 0xA000
44K 0xB000
48K 0xC000
52K 0xD000
54K 0xD800
56K 0xE000
58K 0xE800
60K—64K 0xFFFF
* MAP1 is set automatically during an HDS trap. The user-selected map is restored at the end of the HDS trap service routine.
† LOWPR is an alf register bit. The Lucent Technologies development system tools can independently set the memory map.
‡ MAP3 is not available if the secure mask-programmable option is selected.
EXM = 0
LOWPR = 0
IROM
(48K)
DPRAM
(8K)
Reserved
(8K)
†
MAP 2
EXM = 1
LOWPR = 0
EROM
(48K)
DPRAM
(8K)
Reserved
(8K)
LOWPR = 1
Reserved
MAP 3
EXM = 0
DPRAM
(8K)
(8K)
IROM
(48K)
‡
MAP 4
EXM = 1
LOWPR = 1
DPRAM
(8K)
Reserved
(8K)
EROM
(48K)
Lucent Technologies Inc. 19
Page 22
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
Table 6. Data Memory Maps
1628x16 Data Memory Map (Not to Scale)
1628x08 Data Memory Map (Not to Scale)
Decimal
Address
0 0x0000 DPRAM[1:16]
16K 0x4000 IO
16,640 0x4100 ERAMLO
32K 0x8000 ERAMHI
Address in
r0, r1, r2, r3
Segment
Decimal
Address
0 0x0000 DPRAM[1:8]
8K 0x2000 Reserved
16K 0x4000 IO
16,640 0x4100 ERAMLO
32K 0x8000 ERAMHI
Address in
r0, r1, r2, r3
Segment
64K – 1 0xFFFF
On the data memory side (see Table ), the 1K banks of
dual-port RAM are located starting at address 0. Addresses from 0x4000 to 0x40FF reference a 256-word
memory-mapped I/O segment (IO). Addresses from
0x4100 to 0x7FFF reference the low external data RAM
segment (ERAMLO). Addresses above 0x8000 reference high external data RAM (ERAMHI).
20 Lucent Technologies Inc.
64K – 1 0xFFFF
Wait-States
The number of wait-states (from 0 to 15) used when accessing each of the four external memory segments
(ERAMLO, IO, ERAMHI, and EROM) is programmable
in the mwait register (see Table 40). When the program
references memory in one of the four external segments, the internal multiplexer is automatically switched
to the appropriate set of internal buses, and the associated external enable of ERAMLO, IO, ERAMHI, or
EROM is issued. The external memory cycle is automatically stretched by the number of wait-states configured in the appropriate field of the mwait register.
Page 23

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
4.5 External Memory Interface (EMI)
The external memory interface supports read/write operations from instruction/coefficient memory, data
memory, and memory-mapped I/O devices. The
DSP1628 provides a 16-bit external address bus,
AB[15:0], and a 16-bit external data bus, DB[15:0].
These buses are multiplexed between the internal buses for the instruction/coefficient memory and the data
memory. Four external memory segment enables,
ERAMLO, IO, ERAMHI, and EROM, select the external
memory segment to be addressed.
If a data memory location with an address between
0x4100 and 0x7FFF is addressed, ERAMLO is asserted
low.
If one of the 256 external data memory locations, with
an address greater than or equal to 0x4000, and less
than or equal to 0x40FF, is addressed, IO is asserted
low. IO is intended for memory-mapped I/O.
If a data memory location with an address greater than
or equal to 0x8000 is addressed, ERAMHI is asserted
low. When the external instruction/coefficient memory is
addressed, EROM is asserted low.
The flexibility provided by the programmable options of
the external memory interface (see Table 40, mwait
Register and Table 42, ioc Register) allows the
DSP1628 to interface gluelessly with a variety of commercial memory chips.
Each of the four external memory segments, ERAMLO,
IO, ERAMHI, and EROM, has a number of wait-states
that is programmable (from 0 to 15) by writing to the
mwait register. When the program references memory
in one of the four external segments, the internal multiplexer is automatically switched to the appropriate set of
internal buses, and the associated external enable of
ERAMLO, IO, ERAMHI, or EROM is issued. The external memory cycle is automatically stretched by the number of wait-states in the appropriate field of the mwait
register.
When writing to external memory, the RWN pin goes
low for the external cycle. The external data bus,
DB[15:0], is driven by the DSP1628 starting halfway
through the cycle. The data driven on the external data
bus is automatically held after the cycle for one additional clock period unless an external read cycle immediately follows.
The DSP1628 has one external address bus and one
external data bus for both memory spaces. Since some
instructions provide the capability of simultaneous access to both X space and Y space, some provision must
be made to avoid collisions for external accesses. The
DSP1628 has a sequencer that does the external X access first, and then the external Y access, transparently
to the programmer. Wait-states are maintained as programmed in the mwait register. For example, let two in-
structions be executed: the first reads a coefficient from
EROM and writes data to ERAM; the second reads a
coefficient from EROM and reads data from ERAM. The
sequencer carries out the following steps at the external
memory interface: read EROM, write ERAM, read EROM, and read ERAM. Each step is done in sequential
one-instruction cycle steps, assuming zero wait-states
are programmed. Note that the number of instruction
cycles taken by the two instructions is four. Also, in this
case, the write hold time is zero.
The DSP1628 allows writing into external instruction/
coefficient memory. By setting bit 11, WEROM, of the
ioc register (see Table 42), writing to (or reading from)
data memory or memory-mapped I/O asserts the
EROM strobe instead of ERAMLO, IO, or ERAMHI.
Therefore, with WEROM set, EROM appears in both Y
space (replacing ERAM) and X space, in its normal position.
Bit 14 of the ioc register (see Table 42), EXTROM, may
be used with WEROM to download to a full 64K of external memory. When WEROM and EXTROM are both
asserted, address bit 15 (AB15) is held low, aliasing the
upper 32K of external memory into the lower 32K.
When an access to internal memory is made, the
AB[15:0] bus holds the last valid external memory address. Asserting the RSTB pin low 3-states the AB[15:0]
bus. After reset, the AB[15:0] value is undefined.
The leading edge of the memory segment enables can
be delayed by approximately one-half a CKO period by
programming the ioc register (see Table 42). This is
used to avoid a situation in which two devices drive the
data bus simultaneously.
Bits 7, 8, and 13 of the ioc register select the mode of
operation for the CKO pin (see Table 42). Available options are a free-running unstretched clock, a wait-stated
sequenced clock (runs through two complete cycles
during a sequenced external memory access), and a
wait-stated clock based on the internal instruction cycle.
These clocks drop to the low-speed internal ring oscillator when SLOWCKI is enabled (see 4.13, Power Management). The high-to-low transitions of the wait-stated
clock are synchronized to the high-to-low transition of
the free-running clock. Also, the CKO pin provides either a continuously high level, a continuously low level,
or changes at the rate of the internal processor clock.
This last option, only available with the small-signal input clock options, enables the DSP1628 CKI input buffer to deliver a full-rate clock to other devices while the
DSP1628 itself is in one of the low-power modes.
Lucent Technologies Inc. 21
Page 24

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
4.6 Bit Manipulation Unit (BMU)
The BMU interfaces directly to the main accumulators in
the DAU providing the following features:
■ Barrel shifting—logical and arithmetic, left and right
shift
■ Normalization and extraction of exponent
■ Bit-field extraction and insertion
These features increase the efficiency of the DSP in applications such as control or data encoding and decoding. For example, data packing and unpacking, in which
short data words are packed into one 16-bit word for
more efficient memory storage, is very easy.
In addition, the BMU provides two auxiliary accumulators, aa0 and aa1. In one instruction cycle, 36-bit data
can be shuffled, or swapped, between one of the main
accumulators and one of the alternate accumulators.
The ar<0—3> registers are 16-bit registers that control
the operations of the BMU. They store a value that determines the amount of shift or the width and offset
fields for bit extraction or insertion. Certain operations in
the BMU set flags in the DAU psw register and the alf
register (see Table 30, Processor Status Word (psw)
Register, and Table 39, alf Register). The ar<0—3>
registers can also be used as general-purpose registers.
The BMU instructions are detailed in Section 5.1. For a
thorough description of the BMU, see the
18/27 Digital Signal Processor Information Manual
4.7 Serial I/O Units (SIOs)
DSP1611/17/
.
ercise loopback, the SIO clocks (ICK1, ICK2, OCK1,
and OCK2) should either all be in the active mode,
16-bit condition, or each pair should be driven from one
external source in passive mode. Similarly, pins ILD1
(ILD2) and OLD1 (OLD2) must both be in active mode
or tied together and driven from one external frame
clock in passive mode. During loopback, DO1, DO2,
DI1, DI2, ICK1, ICK2, OCK1, OCK2, ILD1, ILD2, OLD1,
OLD2, SADD1, SADD2, SYNC1, SYNC2, DOEN1, and
DOEN2 are 3-stated.
Setting DODLY = 1 (sioc and sioc2) delays DO by one
phase of OCK so that DO changes on the falling edge
of OCK instead of the rising edge (DODLY = 0). This reduces the time available for DO to drive DI and to be valid for the rising edge of ICK, but increases the hold time
on DO by half a cycle on OCK.
Programmable Modes
Programmable modes of operation for the SIO and
SIO2 are controlled by the serial I/O control registers
(sioc and sioc2). These registers, shown in Table 26,
are used to set the ports into various configurations.
Both input and output operations can be independently
configured as either active or passive. When active, the
DSP1628 generates load and clock signals. When passive, load and clock signal pins are inputs.
Since input and output can be independently configured, each SIO has four different modes of operation.
Each of the sioc registers is also used to select the frequency of active clocks for that SIO. Finally, these registers are used to configure the serial I/O data formats.
The data can be 8 or 16 bits long, and can also be input/
output MSB first or LSB first. Input and output data formats can be independently configured.
Multiprocessor Mode
The serial I/O ports on the DSP1628 device provide a
serial interface to many codecs and signal processors
with little, if any, external hardware required. Each highspeed, double-buffered port (sdx and sdx2) supports
back-to-back transmissions of data. SIO and SIO2 are
identical. The output buffer empty (OBE and OBE2) and
input buffer full (IBF and IBF2) flags facilitate the reading and/or writing of each serial I/O port by programor interrupt-driven I/O. There are four selectable active
clock speeds.
A bit-reversal mode provides compatibility with either
the most significant bit (MSB) first or least significant bit
(LSB) first serial I/O formats (see Table 26, Serial I/O
Control Registers (sioc and sioc2)). A multiprocessor
I/O configuration is supported. This feature allows up to
eight DSP161X devices to be connected together on an
SIO port without requiring external glue logic.
The serial data may be internally looped back by setting
the SIO loopback control bit, SIOLBC, of the ioc register. SIOLBC affects both the SIO and SIO2. The data
output signals are wrapped around internally from the
output to the input (DO1 to DI1 and DO2 to DI2). To ex-
22 Lucent Technologies Inc.
The multiprocessor mode allows up to eight devices
that support multiprocessor mode (codecs or DSP16XX
devices) to be connected together to provide data transmission among any of the multiprocessor devices in the
system. Either of the DSP1628’s SIO ports (SIO or
SIO2) may be independently used for the multiprocessor mode. The multiprocessor interface is a four-wire interface, consisting of a data channel, an address/
protocol channel, a transmit/receive clock, and a sync
signal (see Figure 6). The DI1 and DO1 pins of all the
DSPs are connected to transmit and receive the data
channel. The SADD1 pins of all the DSPs are connected to transmit and receive the address/protocol channel. ICK1 and OCK1 should be tied together and driven
from one source. The SYNC1 pins of all the DSPs are
connected.
In the configuration shown in Figure 6, the master DSP
(DSP0) generates active SYNC1 and OCK1 signals
while the slave DSPs use the SYNC1 and OCK1 signals
in passive mode to synchronize operations. In addition,
all DSPs must have their ILD1 and OLD1 signals in active mode.
Page 25

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
While ILD1 and OLD1 are not required externally for
multiprocessor operation, they are used internally in the
DSP's SIO. Setting the LD field of the master's sioc register to a logic level 1 will ensure that the active generation of SYNC1, ILD1, and OLD1 is derived from OCK1
(see Table 26). With this configuration, all DSPs should
use ICK1 (tied to OCK1) in passive mode to avoid conflicts on the clock (CK) line (see the
Digital Signal Processor Information Manual
information).
Four registers (per SIO) configure the multiprocessor
mode: the time-division multiplexed slot register (tdms
or tdms2), the serial receive and transmit address register (srta or srta2), the serial data transmit register
(sdx or sdx2), and the multiprocessor serial address/
protocol register (saddx or saddx2).
Multiprocessor mode requires no external logic and
uses a TDM interface with eight 16-bit time slots per
frame. The transmission in any time slot consists of
16 bits of serial data in the data channel and 16 bits of
address and protocol information in the address/protocol channel. The address information consists of the
transmit address field of the srta register of the transmitting device. The address information is transmitted
concurrently with the transmission of the first 8 bits of
data. The protocol information consists of the transmit
protocol field written to the saddx register and is transmitted concurrently with the last 8 bits of data (see
Table 29, Multiprocessor Protocol Register). Data is received or recognized by other DSP(s) whose receive
address matches the address in the address/protocol
channel. Each SIO port has a user-programmable receive address and transmit address associated with it.
The transmit and receive addresses are programmed in
the srta register.
In multiprocessor mode, each device can send data in
a unique time slot designated by the tdms register
transmit slot field (bits 7—0). The tdms register has a
fully decoded transmit slot field in order to allow one
DSP1628 device to transmit in more than one time slot.
This procedure is useful for multiprocessor systems
with less than eight DSP1628 devices when a higher
bandwidth is necessary between certain devices in that
system. The DSP operating during time slot 0 also
drives SYNC1.
DSP1611/17/18/27
for more
In order to prevent multiple bus drivers, only one DSP
can be programmed to transmit in a particular time slot.
In addition, it is important to note that the address/protocol channel is 3-stated in any time slot that is not being
driven.
Therefore, to prevent spurious inputs, the address/protocol channel should be pulled up to VDD with a 5 kΩ resistor, or it should be guaranteed that the bus is driven
in every time slot. (If the SYNC1 signal is externally generated, then this pull-up is required for correct initialization.)
Each SIO also has a fully decoded transmitting address
specified by the srta register transmit address field (bits
7—0). This is used to transmit information regarding the
destination(s) of the data. The fully decoded receive address specified by the srta register receive address field
(bits 15—8) determines which data will be received. The
SIO protocol channel data is controlled via the saddx
register. When the saddx register is written, the lower 8
bits contain the 8-bit protocol field. On a read, the highorder 8 bits read from saddx are the most recently received protocol field sent from the transmitting DSP's
saddx output register. The low-order 8 bits are read as
0s.
An example use of the protocol channel is to use the top
3 bits of the saddx value as an encoded source address
for the DSPs on the multiprocessor bus. This leaves the
remaining 5 bits available to convey additional control
information, such as whether the associated field is an
opcode or data, or whether it is the last word in a transfer, etc. These bits can also be used to transfer parity information about the data. Alternatively, the entire field
can be used for data transmission, boosting the bandwidth of the port by 50%.
Using SIO2
The SIO2 functions the same as the SIO. Please refer
to Pin Multiplexing in Section 4.1 for a description of pin
multiplexing of BIO, PHIF, VEC[3:0], and SIO2.
Lucent Technologies Inc. 23
Page 26
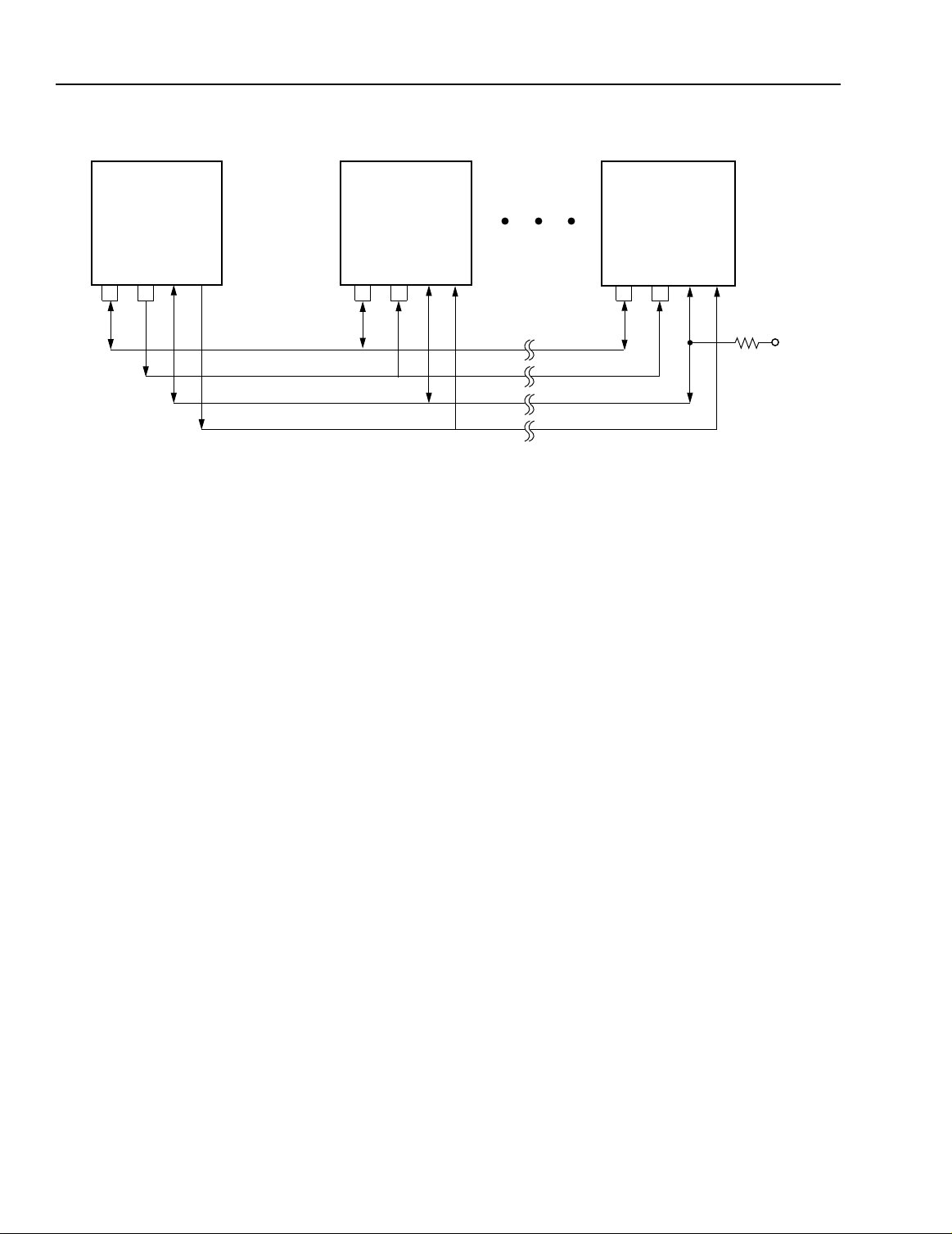
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
DO
DI
DSP 0
ICK
OCK
SADD
SYNC
DATA CHANNEL
CLOCK
ADDRESS/PROTOCOL CHANNEL
SYNC SIGNAL
DO
DI
DSP 1
ICK
OCK
Figure 6. Multiprocessor Communication and Connections
4.8 Parallel Host Interface (PHIF)
The DSP1628 has an 8-bit parallel host interface for
rapid transfer of data with external devices. This parallel
port is passive (data strobes provided by an external
device) and supports either
controller protocols. The PHIF also provides for 8-bit or
16-bit data transfers. As a flexible host interface, it requires little or no glue logic to interface to other devices
(e.g., microcontrollers, microprocessors, or another
DSP).
The data path of the PHIF consists of a 16-bit input buffer, pdx0(in), and a 16-bit output buffer, pdx0(out). Two
output pins, parallel input buffer full (PIBF) and parallel
output buffer empty (POBE), indicate the state of the
buffers. In addition, there are two registers used to control and monitor the PHIF's operation: the parallel host
interface control register (phifc, see Table 32), and the
PHIF status register (PSTAT, see Table 8). The PSTAT
register, which reflects the state of the PIBF and POBE
flags, can only be read by an external device when the
PSTAT input pin is asserted. The phifc register defines
the programmable options for this port.
The function of the pins, PIDS and PODS, is programmable to support both the
The pin, PCSN, is an input that, when low, enables
PIDS and PODS (or PRWN and PDS, depending on the
protocol used). While PCSN is high, the DSP1628 ignores any activity on PIDS and/or PODS. If a DSP1628
is intended to be continuously accessed through the
PHIF port, PCSN should be grounded. If PCSN is low
and their respective bits in the inc register are set, the
assertion of PIDS and PODS by an external device
causes the DSP1628 device to recognize an interrupt.
Motorola
Intel
and
or
Intel
Motorola
micro-
protocols.
DSP 7
SADD
SYNC
DO
ICK
SADD
DI
OCK
SYNC
5 kΩ
5-4181 (F).a
Programmability
The parallel host interface can be programmed for 8-bit
or 16-bit data transfers using bit 0, PMODE, of the phifc
register. Setting PMODE selects 16-bit transfer mode.
An input pin controlled by the host, PBSEL, determines
an access of either the high or low bytes. The assertion
level of the PBSEL input pin is configurable in software
using bit 3 of the phifc register, PBSELF. Table 7 summarizes the port's functionality as controlled by the
PSTAT and PBSEL pins and the PBSELF and PMODE
fields.
For 16-bit transfers, if PBSELF is zero, the PIBF and
POBE flags are set after the high byte is transferred. If
PBSELF is one, the flags are set after the low byte is
transferred. In 8-bit mode, only the low byte is accessed, and every completion of an input or output access
sets PIBF or POBE.
Bit 1 of the phifc register, PSTROBE, configures the
port to operate either with an
Intel
protocol where only
the chip select (PCSN) and either of the data strobes
(PIDS or PODS) are needed to make an access, or with
a
Motorola
protocol where the chip select (PCSN), a
data strobe (PDS), and a read/write strobe (PRWN) are
needed. PIDS and PODS are negative assertion data
strobes while the assertion level of PDS is programmable through bit 2, PSTRB, of the phifc register.
DD
V
24 Lucent Technologies Inc.
Page 27
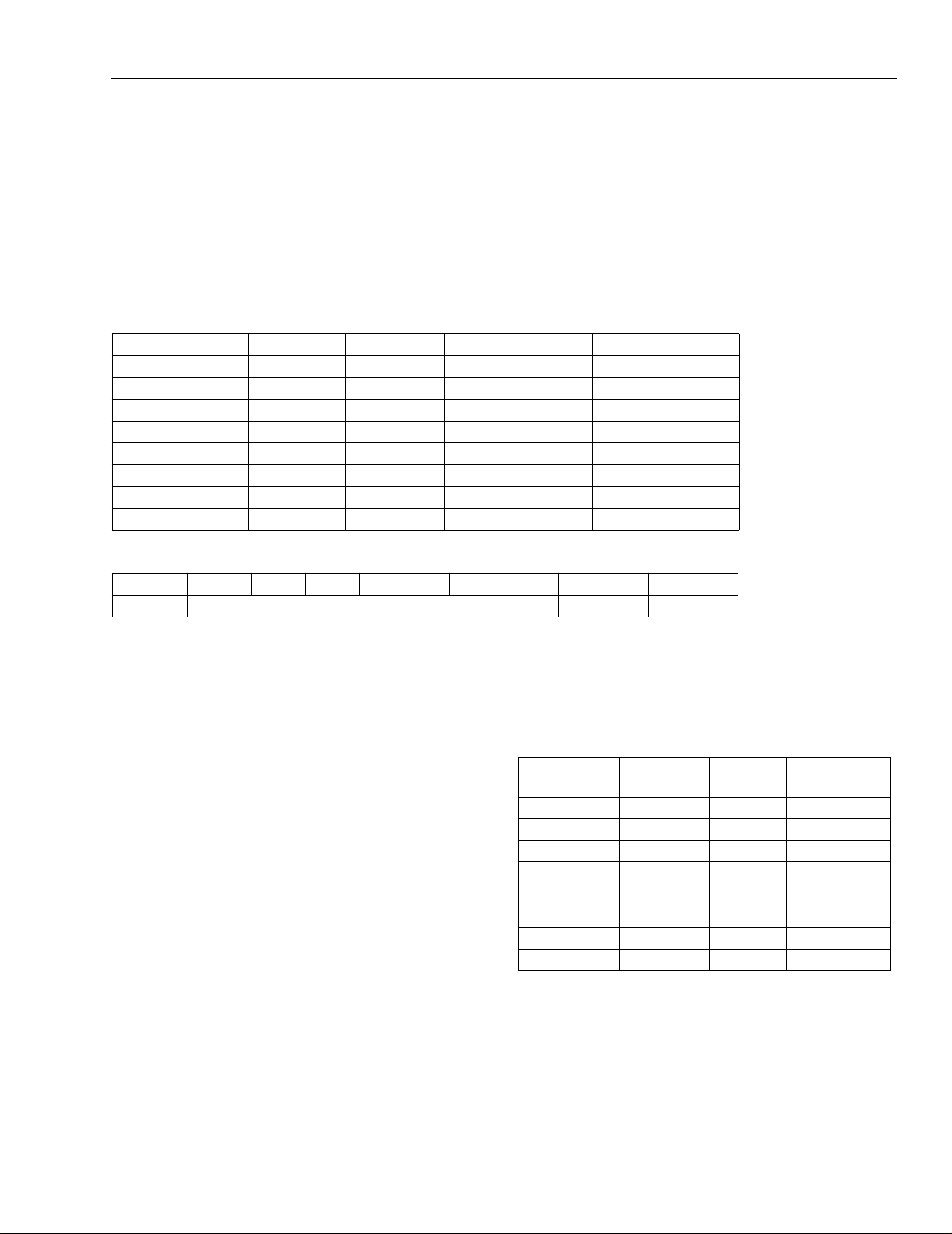
Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Finally, the assertion level of the output pins, PIBF and POBE, is controlled through bit 4, PFLAG. When PFLAG is
set low, PIBF and POBE output pins have positive assertion levels. By setting bit 5, PFLAGSEL, the logical OR of
PIBF and POBE flags (positive assertion) is seen at the output pin PIBF. By setting bit 7 in phifc, PSOBEF, the
polarity of the POBE flag in the status register, PSTAT, can be changed. PSOBEF has no effect on the POBE pin.
Pin Multiplexing
Please refer to Pin Multiplexing in Section 4.1 for a description of BIO, PHIF, VEC[3:0], and SIO2 pins.
Table 7. PHIF Function (8-bit and 16-bit Modes)
PMODE Field PSTAT Pin PBSEL Pin PBSELF Field = 0 PBSELF Field = 1
0 (8-bit) 0 0 pdx0 low byte reserved
0 0 1 reserved pdx0 low byte
0 1 0 PSTAT reserved
0 1 1 reserved PSTAT
1 (16-bit) 0 0 pdx0 low byte pdx0 high byte
1 0 1 pdx0 high byte pdx0 low byte
1 1 0 PSTAT reserved
1 1 1 reserved PSTAT
Table 8. pstat Register as Seen on PB[7:0]
Bit 76543 2 1 0
Field RESERVED PIBF POBE
4.9 Bit Input/Output Unit (BIO)
The BIO controls the directions of eight bidirectional
control I/O pins, IOBIT[7:0]. If a pin is configured as an
output, it can be individually set, cleared, or toggled. If a
pin is configured as an input, it can be read and/or tested.
The lower half of the sbit register (see Table 37) contains current values (VALUE[7:0]) of the eight bidirectional pins IOBIT[7:0]. The upper half of the sbit register
(DIREC[7:0]) controls the direction of each of the pins.
A logic 1 configures the corresponding pin as an output;
a logic 0 configures it as an input. The upper half of the
sbit register is cleared upon reset.
The cbit register (see Table 38) contains two 8-bit
fields, MODE/MASK[7:0] and DATA/PAT[7:0]. The values of DATA/PAT[7:0] are cleared upon reset. The
meaning of a bit in either field depends on whether it has
been configured as an input or an output in sbit. If a pin
has been configured to be an output, the meanings are
MODE and DATA. For an input, the meanings are
MASK and PAT(tern). Table 9 shows the functionality of
the MODE/MASK and DATA/PAT bits based on the direction selected for the associated IOBIT pin.
Those bits that have been configured as inputs can be
individually tested for 1 or 0. For those inputs that are
being tested, there are four flags produced: allt (all true),
allf (all false), somet (some true), and somef (some
false). These flags can be used for conditional branch or
special instructions. The state of these flags can be
saved and restored by reading and writing bits 0 to 3 of
the alf register (see Table 39).
Table 9. BIO Operations
DIREC[n]*
1 (Output) 0 0 Clear
1 (Output) 0 1 Set
1 (Output) 1 0 No Change
1 (Output) 1 1 Toggle
0 (Input) 0 0 No Test
0 (Input) 0 1 No Test
0 (Input) 1 0 Test for Zero
0 (Input) 1 1 Test for One
*0 ≤ n ≤ 7.
If a BIO pin is switched from being configured as an output to being configured as an input and then back to being configured as an output, the pin retains the previous
output value.
Pin Multiplexing
Please refer to Pin Multiplexing in Section 4.1 for a
description of BIO, PHIF, VEC[3:0], and SIO2 pins.
MODE/
MASK[n]
PAT[n]
DATA/
Action
Lucent Technologies Inc. 25
Page 28

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
4.10 Timer
The interrupt timer is composed of the timerc (control)
register, the timer0 register, the prescaler, and the
counter itself. The timer control register (see Table 35,
timerc Register) sets up the operational state of the timer and prescaler. The timer0 register is used to hold the
counter reload value (or period register) and to set the
initial value of the counter. The prescaler slows the
clock to the timer by a number of binary divisors to allow
for a wide range of interrupt delay periods.
The counter is a 16-bit down counter that can be loaded
with an arbitrary number from software. It counts down
to 0 at the clock rate provided by the prescaler. Upon
reaching 0 count, a vectored interrupt to program address 0x08 is issued to the DSP1628, providing the interrupt is enabled (bit 8 of inc and ins registers). The
counter will then either wait in an inactive state for another command from software, or will automatically repeat the last interrupting period, depending upon the
state of the RELOAD bit in the timerc register.
When RELOAD is 0, the counter counts down from its
initial value to 0, interrupts the DSP1628, and then
stops, remaining inactive until another value is written to
the timer0 register. Writing to the timer0 register causes both the counter and the period register to be written
with the specified 16-bit number. When RELOAD is 1,
the counter counts down from its initial value to 0, interrupts the DSP1628, automatically reloads the specified
initial value from the period register into the counter,
and repeats indefinitely. This provides for either a single
timed interrupt event or a regular interrupt clock of arbitrary period.
The timer can be stopped and started by software, and
can be reloaded with a new period at any time. Its count
value, at the time of the read, can also be read by software. Due to pipeline stages, stopping and starting the
timer may result in one inaccurate count or prescaled
period. When the DSP1628 is reset, the bottom 6 bits of
the timerc register and the timer0 register and counter
are initialized to 0. This sets the prescaler to CKO/2
turns off the reload feature, disables timer counting, and
initializes the timer to its inactive state. The act of resetting the chip does not cause a timer interrupt. Note that
the period register is not initialized on reset.
The T0EN bit of the timerc register enables the clock to
the timer. When T0EN is a 1, the timer counts down towards 0. When T0EN is a 0, the timer holds its current
count.
The PRESCALE field of the timerc register selects one
of 16 possible clock rates for the timer input clock (see
Table 35, timerc Register).
Setting the DISABLE bit of the timerc register to a logic
*
,
1 shuts down the timer and the prescaler for power savings. Setting the TIMERDIS, bit 4, in the powerc register has the same effect of shutting down the timer. The
DISABLE bit and the TIMERDIS bit are cleared by writing a 0 to their respective registers to restore the normal
operating mode.
4.11 Error Correction Coprocessor
The error correction coprocessor (ECCP) performs full
Viterbi decoding with single instructions for a wide
range of maximum likelihood sequence estimation
(MLSE) equalization and convolutional decoding. The
ECCP operates in parallel with the DSP core, increasing the throughput rate, and single-instruction Viterbi
decoding provides significant code compression required for a single DSP solution for modern digital cellular applications.
System Description
The ECCP is a loosely coupled, programmable, internal
coprocessor that operates in parallel with the DSP1600
core. A complete Viterbi decoding for MLSE equalization or convolutional decoding is performed with a single
DSP instruction.
The core communicates with the ECCP module via
three interface registers. An address register, ear, is
used to indirectly access the ECCP internal memorymapped registers. A data register, edr, works in concert
with the address register to indirectly read from or write
to an ECCP internal memory-mapped register addressed by the contents of the address register. After
each edr access, the contents of the address register is
postincremented by one. Upon writing an ECCP op
code to instruction register, eir, either MLSE equalization, convolutional decoding, a simple traceback operation, or ECCP reset is invoked.
The mode of operation of the ECCP is set up by writing
appropriate fields of a memory-mapped control register.
In MLSE equalization, the control register may be configured for 2-tap to 6-tap equalization. In convolutional
decoding, the control register may be configured for
constraint lengths 2 through 7 and code rates 1/1
through 1/6. One of two variants of the soft-decoded
output may be programmed, or a hard-decoded output
may be chosen.
Usually, convolutional decoding is performed after
MLSE equalization. For receiver configuration with
MLSE equalization followed by convolutional decoding,
a Manhattan branch metric computation for convolutional decoding may be selected by setting a branch
metric select bit in the control register.
* Frequency of CKO/2 is equivalent to either CKI/2 for the PLL by-
passed or related to CKI by the PLL multiplying factors. See
Section 4.13, Clock Synthesis.
26 Lucent Technologies Inc.
Page 29
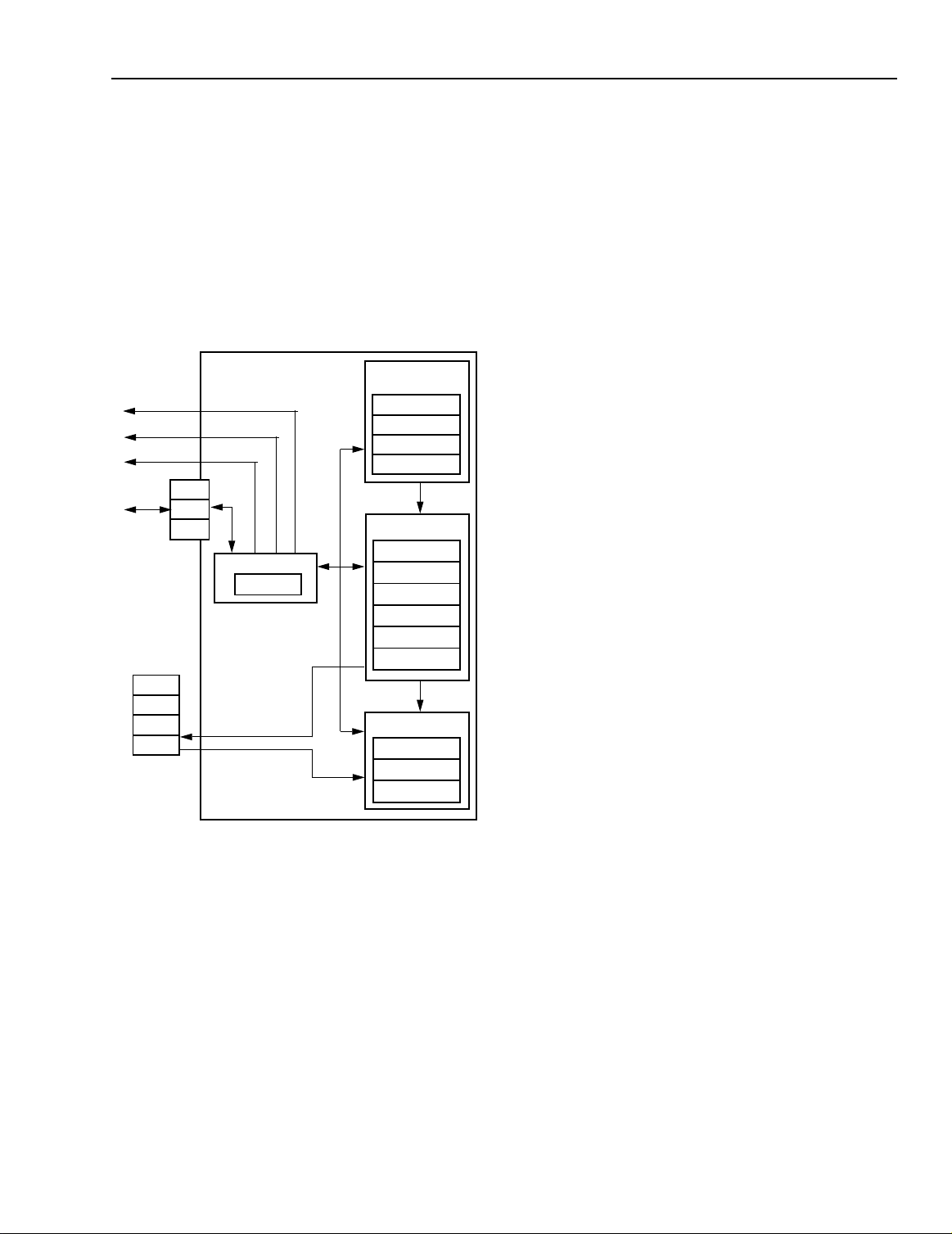
Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
multaneous DSP-ECCP activity, however, ECCP internal edr registers as well as the shared bank of RAM,
In wideband low data rate applications, additive white
Gaussian noise (AWGN) is the principle channel impairment, and Euclidean branch metric computation for
convolutional decoding is selected by resetting the
branch metric select bit to zero.
A traceback-length register is provided for programming
the traceback decode length.
A block diagram of the coprocessor and its interface to
the DSP1600 core is shown in the following figure:
RAM4, are not accessible to the user's DSP code.
Branch Metric Unit: The branch metric unit of the
ECCP performs full-precision real and complex arithmetic for computing 16-bit incremental branch metrics
required for MLSE equalization and convolutional decoding.
MLSE Branch Metric Unit: To generate the estimated
received complex signal at instance n, E(n, k) = EI(n, k)
+ j EQ(n, k), at the receiver, all possible states, k = 0 to
2C – 1 – 1, taking part in the Viterbi state transition are
convolved with the estimated channel impulse response, H(n) = [h(n), h(n – 1), h(n – 2), . . . , h(n – C +
1)] T, where the constraint length C = {2 to 6}. Each inphase and quadrature-phase part of the channel tap,
h(n) = hI(n) + j hQ(n), is quantized to an 8-bit 2's complement number.
The channel estimates are normalized prior to loading
into the ECCP such that the worst-case summation of
the hI(n) or hQ(n) are confined within a 10-bit 2's complement number. The in-phase and quadrature-phase
parts of the received complex signal Z(n) = ZI(n) + j
ZQ(n) are also confined within a10-bit 2's complement
number. The Euclidean branch metric associated with
each of the 2C state transitions is calculated as:
BM(n, k) = XI(n, k)2 + XQ(n, k)2
where
XI(n, k) = abs{ZI(n) – EI(n, k)}
EOVF
EREADY
EBUSY
IDB
ear
edr
eir
CONTROL UNIT
ECON
ECCP
BRANCH METRIC
UNIT
SiHi, i = 0, . . . ,5
ZIG10
ZQG32
G54
UPDATE UNIT
NS[63:0]
PS[63:0]
SYC
MDX
MACH
MACL
and
XQ(n, k) = abs{ZQ(n) – EQ(n, k)}
RAM4
TRACEBACK UNIT
TBLR
DSR
TBSR
The absolute values of the difference signal are saturated at level 0xFF. The sixteen most significant bits of this
17-bit incremental branch metric are retained for the
add-compare-select operation of the Viterbi algorithm.
The in-phase and quadrature-phase parts of the re-
5-4500 (F)
ceived complex signal are stored in ZIG10 and ZQG32
registers, respectively. The complex estimated channel
taps H5 through H0 are stored in S5H5 through S0H0
Figure 7. Error Correction Coprocessor Block
Diagram/Programming Model
registers, such that the in-phase part of the channel occupies the upper byte and the quadrature-phase part of
the channel occupies the lower byte.
The ECCP internal registers are accessed indirectly
through the address and data registers, ear and edr.
The control register, ECON, and the traceback length
register, TBLR, are used to program the operating
mode of the ECCP. The symbol registers (S0H0—
S5H5, ZIG10, ZQG32), the generating polynomial registers (ZIG10, ZQG32, G54), and the channel impulse
registers (S0H0—S5H5) are used as input to the ECCP
for MLSE or convolutional decoding. Following a Viterbi
Convolutional Branch Metric Unit: Two types of distance
computation are implemented for convolutional decoding. Convolutional decoding over a Gaussian channel is
supported with Euclidean distance measure for rate 1/1
and 1/2 convolutional encoding. Convolutional decoding preceded by the MLSE equalization or other linear/
nonlinear equalization is supported with Manhattan distance measure for rate 1/1 through 1/6 convolutional
encoding.
decoding operation, the decoded symbol is read out of
the decoded symbol register, DSR. All internal states of
these memory-mapped registers are accessible and
controllable by the DSP program. During periods of siLucent Technologies Inc. 27
Page 30
Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
Generating polynomials, G(0), . . . , G(5), up to six-delays corresponding to a constraint length of seven, may take
part in computing the estimated received signals, E(0, k), . . . , E(5, k), within the ECCP associated with all possible
state transitions, k = 0, 1, 2C – 1.
Six 8-bit soft symbols, S(0), . . . , S(5), are loaded into the ECCP. The incremental branch metrics associated with
all 2C state transitions are calculated as indicated in Table 10:
Table 10. Incremental Branch Metrics
Distance Measure Code Rate 16-bit Incremental Branch Metric
Euclidean 1/1
Euclidean 1/2
Manhattan 1/1 [S(i) – E(i)] << 8, i = 0
Manhattan 1/2 [(S(i) – E(i))] << 7, i = 0, 1
Manhattan 1/3 or 1/4 [(S(i) – E(i))] << 6, i = 0, 1, 2, or 3
Manhattan 1/5 or 1/6 [(S(i) – E(i))] << 5, i = 0, 1, . . . , 4 or 5
The received 8-bit signals S(5) through S(0) are stored in the S5H5 through S0H0 registers. The generating polynomials G(1) and G(0) are stored in the upper and lower bytes of the ZIG10 register, respectively. The generating
polynomials G(3) and G(2) are stored in the upper and lower bytes of the ZQG32 register, respectively. The generating polynomials G(5) and G(4) are stored in the upper and lower bytes of the G54 register, respectively.
Update Unit: The add-compare-select operation of the Viterbi algorithm is performed in this unit. At every time instant, there are 2C state transitions of which 2C – 1 state transitions survive. The update unit selects and updates
2C – 1 surviving sequences in the traceback RAM that consists of the 4th bank of the internal RAM, RAM4. The
accumulated cost of the path p at the Jth instant, ACC(J, p), is the sum of the incremental branch metrics belonging
to the path p up to the time instant J:
The update unit computes and stores full precision 24-bit resolution path metrics of the bit sequence. To assist the
detection of a near overflow in the accumulated path cost, an internal vectored interrupt, EOVF, is provided.
Traceback Unit: The traceback unit selects a path with the smallest path metric among 2C – 1 survivor paths at
every instant. The last signal of the path corresponding to the maximum likelihood sequence is delivered to the
decoder output. The depth of this last signal is programmable at the symbol rate. The traceback decoding starts
from the minimum cost index associated with the state with the minimum cost, min {Acc(j, p1), . . . , Acc(j, p2C – 1)}.
If the end state is known, the traceback decoding may be forced in the direction of the right path by writing the desired end state into the minimum cost index register, MIDX.
Interrupts and Flags: The ECCP interrupts the DSP1600 core when the ECCP has completed an instruction,
EREADY, or when an overflow in the accumulated cost is imminent, EOVF. Also, an EBUSY flag is provided to the
core to indicate when the ECCP is in operation.
Traceback RAM: The fourth 1 Kword bank of dual-port RAM is shared between the DSP1600 core and the ECCP.
RAM4, located in the Y memory space in the address range 0x0C00 to 0x0FFF, is used by the ECCP for storing
traceback information. When the ECCP is active, i.e., the EBUSY flag is asserted, the DSP core cannot access this
traceback RAM.
(S(0) – E(0))
[∑(S(i) – E(i))
ACC(J, p) = ∑BM(j, p), j = 1, . . . , J
2
2
] >> 1, i = 0, 1
28 Lucent Technologies Inc.
Page 31

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
DSP Decoding Operation Sequence
The DSP operation sequence for invoking the ECCP for an MLSE equalization or convolutional decoding operation
is explained with the operation flow diagram in Figure 7.
PROGRAM
ECCP
LOAD N SET
OF RECEIVED
SYMBOLS
AND
EXECUTE N
UPDATE
INSTRUCTIONS
EXECUTE
TL TRACEBACK
INSTRUCTIONS
EBUSY = FALSE
ECCP OFF
(LOAD ECCP)
PROGRAM ECCP
{ECON = VALUE, TBLR = TL
H, G = CHANNEL, GEN. POLY.}
LOAD SYMBOL 1
INTO ZI:ZQ/S[5:0]
LOAD SYMBOL TL
INTO ZI:ZQ/S[5:0]
LOAD SYMBOL TL + 1
INTO ZI:ZQ/S[5:0]
LOAD SYMBOL N
INTO ZI:ZQ/S[5:0]
EBUSY = TRUE
ECCP ON
(EXEC ECCP)
UPDATE MLSE/CONV INSTR 1
UPDATE MLSE/CONV INSTR TL
UPDATE MLSE/CONV INSTR TL + 1
UPDATE MLSE/CONV INSTR N
TRACEBACK INSTR 1
EBUSY = FALSE
ECCP OFF
(UNLOAD ECCP)
INVALID DECODED SYMBOL 1
INVALID DECODED SYMBOL TL
VALID DECODED SYMBOL 1
VALID DECODED SYMBOL N + TL
VALID DECODED SYMBOL N + TL + 1
DISCARD TL
INVALID
DECODED
SYMBOLS
ACCEPT N
VALID
DECODED
SYMBOLS
TRACEBACK INSTR TL
VALID DECODED SYMBOL N
5-4501(F).a
Figure 8. DSP Core Operation Sequence
Lucent Technologies Inc. 29
Page 32

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
Operation of the ECCP
To operate the ECCP, the user first programs its mode of operation by setting the control register, ECON, the traceback length register, TBLR, and appropriately initializing the present state accumulated costs. The complete Viterbi decoding operation is achieved by recursively loading the received symbols into the ECCP, executing the ECCP
with an UpdateMLSE, an UpdateConv, or a TraceBack instruction, and unloading the decoded symbol from the
ECCP. The operation of the ECCP is captured in the signal flow diagram in Figure 8.
DSP PROGRAMS ECCP
YES
NEW
ADAPTED
CHANNEL
?
DECREMENT
TBLR BY ONE
NO
FETCH MINIMUM COST INDEX
CALCULATE
REVERSED PATH
NO
YES
TRACEBACK
DECODED SYMBOL
TL = TBLR
TL = TL – 1
IS
TL = 0?
YES
IS
INSTR.
?
OUTPUT
NO
DSP LOADS CHANNEL/GENERATING
POLYNOMIALS INTO THE ECCP
DSP LOADS RECEIVED
SYMBOLS INTO THE ECCP
DSP EXECUTES
UPDATE INSTRUCTION
VITERBI
DECODING
COMPLETE
YES
ALL
SYMBOLS
DECODED
?
NO
SET K = 0
CALCULATE BRANCH METRIC
FOR BOTH STATE TRANSITIONS TO K
CALCULATE ACCUMULATED COST
FOR STATE TRANSITIONS TO K
SELECT MINIMUM ACCUMULATED
COST AS SURVIVOR PATH
UPDATE MINIMUM COST INDEX
STORE SURVIVOR PATH
INCREMENT
K BY ONE
NO
K < 2
IS
(C – 1)
?
– 1
YES
5-4502(F)
Figure 9. ECCP Operation Sequence
30 Lucent Technologies Inc.
Page 33

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Software Architecture
The ECCP registers are grouped into two categories:
the R-field registers and the internal memory-mapped
registers.
R-Field Registers: Three registers (ear, edr, and eir)
are defined in the core instruction set as programmable
registers for executing the ECCP and establishing the
data interface between the ECCP and the core. Reserved bits are always zero when read and should be
written with zeros to make the program compatible with
future chip revisions.
Address Register (ear): The address register holds
the address of the ECCP internal memory-mapped registers. Each time the core accesses an internal ECCP
register through edr, the content of the address register
is postincremented by one. During a DSP compound
addressing instruction, the same edr register is accessed for both the read and the write operation.
Data Register (edr): The contents of the ECCP internal
memory-mapped registers are indirectly accessed by
the DSP through this register. A write to the data register is directed to the ECCP internal register addressed
by the contents of the address register. A read from the
data register fetches the contents of the ECCP internal
register addressed by the address register. Every access to the edr autoincrements the address register,
ear.
Instruction Register (eir): Four instructions are de-
fined for the ECCP operation. These instructions will be
executed upon writing appropriate values in the eir register. Table 11 indicates the instruction encoding and
their mnemonics.
The UpdateMLSE instruction and the UpdateConv instruction each perform an appropriate branch metric
calculation, a complete Viterbi add-compare-select operation, and a concurrent traceback decoding operation. The TraceBack instruction performs the traceback
decoding alone.
The ResetECCP instruction performs a proper reset operation to initialize various registers as described in Ta-
ble 12.
Table 12. Reset State of ECCP Registers
Register Reset State
eir 0x4
— 0xf (on pin reset)
ear 0x0
SYC 0x0
ECON 0x0
MIDX 0x0
MACH 0xff
MACL 0xffff
During periods of ECCP activity, write operations to the
eir and edr registers as well as the read operation of the
edr register by the DSP code will be blocked. The
ECCP address register, ear, however, can be read or
written during ECCP operation to set up the ECCP address for the next edr access after the completion of the
ECCP instruction. Note that the eir register can be read
during ECCP activity.
Table 11. ECCP Instruction Encoding
eir Value in hex Instruction
0000 UpdateMLSE
0001 UpdateConv
0002 TraceBack
0003 Reserved
0004 ResetECCP
0005—FFFF Reserved
Lucent Technologies Inc. 31
Page 34

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
ECCP Internal Memory-Mapped Registers: Internal memory-mapped registers are defined in the ECCP address space
for control and status purposes and to hold data. A summary of the contents of these registers is given in Table 13.
Table 13. Memory-Mapped Registers
Address Register Register Bit Field
0x0000—0x007F Next State Register
NS[0:63]—24-bit words split across two address locations
0x0080—0x01FF Reserved Bit 15: 0 is addressed by odd address.
0x0200—0x027F Present State Register
PS[0:63]—24-bit words split across two address locations
0x0280—0x03FF Reserved Bit 15:0 is addressed by odd address.
0x400 Current Symbol Pointer
SYC
0x401 Control Register
ECON
0x402 Traceback Length Register
TBLR
0x403 Received Symbol/Channel Tap Register
S5H5
0x404 Received Symbol/Channel Tap Register
S4H4
0x405 Received Symbol/Channel Tap Register
S3H3
0x406 Received Symbol/Channel Tap Register
S2H2
Bit 31:16 is addressed by even address.
Bit 31:24 zero.
Bit 23:16 most significant byte of path cost.
Bit 15:0 lower 2 bytes of path cost.
Bit 31:16 is addressed by even address.
Bit 31:24 zero.
Bit 23:16 most significant byte of path cost.
Bit 15:0 lower 2 bytes of path cost.
Bit 5:0 is used.
Bit 15:6 reserved.
Bit 0 is soft decision select.
Bit 1 is Manhattan/Euclidean branch metric select.
Bit 2 is soft/hard decision select.
Bit 3 is reserved.
Bit 7:4 is reserved.
Bit 10:8 is code rate select.
Bit 11 is reserved.
Bit 14:12 is constraint length select.
Bit 15 is reserved.
Bit 5:0 is used.
Bit 15:6 is reserved.
Convolutional decoding case:
Bit 7:0 is reserved.
Bit 15:8 is S5.
MLSE equalization case:
Bit 7:0 is HQ5.
Bit 15:8 is HI5.
Convolutional decoding case:
Bit 7:0 is reserved.
Bit 15:8 is S4.
MLSE equalization case:
Bit 7:0 is HQ4.
Bit 15:8 is HI4.
Convolutional decoding case:
Bit 7:0 is reserved.
Bit 15:8 is S3.
MLSE equalization case:
Bit 7:0 is HQ3.
Bit 15:8 is HI3.
Convolutional decoding case:
Bit 7:0 is reserved.
Bit 15:8 is S2.
MLSE equalization case:
Bit 7:0 is HQ2.
Bit 15:8 is HI2.
32 Lucent Technologies Inc.
Page 35

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Table 13. Memory-Mapped Registers (continued)
Address Register Register Bit Field
0x407 Received Symbol/Channel Tap Register
S1H1
0x408 Received Symbol/Channel Tap Register
S0H0
0x409 Decoded Symbol Register
DSR
0x40a Received Real Signal/Generating Polynomial
ZIG10
0x40b Received Imaginary Signal/Generating Polynomial
ZQG32
0x40c Generating Polynomial
G54
0x40d Minimum Cost Index Register
MIDX
0x40e—f Minimum Accumulated Cost Register
MACH
MACL
0x410 Traceback Shift Register
TBSR
0x411—0x7FF Reserved Registers Reserved.
Convolutional decoding case:
Bit 7:0 is reserved.
Bit 15:8 is S1.
MLSE equalization case:
Bit 7:0 is HQ1.
Bit 15:8 is HI1.
Convolutional decoding case:
Bit 7:0 is reserved.
Bit 15:8 is S0.
MLSE equalization case:
Bit 7:0 is HQ0.
Bit 15:8 is HI0.
Bit 7:0 is zero.
Bit 15:8 is decoded symbol.
Convolutional case:
Bit 7:0 is G0.
Bit 15:8 is G1.
MLSE case:
Bit 9:0 is in-phase part of received signal.
Bit 15:10 is reserved.
Convolutional case:
Bit 7:0 is G2.
Bit 15:8 is G3.
MLSE case:
Bit 9:0 is quadrature-phase part of received signal.
Bit 15:10 is reserved.
Convolutional case:
Bit 7:0 is G4.
Bit 15:8 is G5.
MLSE case:
Bit 15:0 is reserved.
Bit 7:0 is used.
Bit 15:8 is reserved.
0x040E
Bit 15:8 is zero.
Bit 7:0 is upper byte of the minimum accumulated cost 0x040F.
Bit 15:0 is the lower 2 bytes of the minimum accumulated cost.
Traceback shift register (TBSR)
Bit 7:0 TBSR.
Bit 15:8 is reserved.
Lucent Technologies Inc. 33
Page 36

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
4.12 JTAG Test Port
The DSP1628 uses a JTAG/
wire test port (TDI, TDO, TCK, TMS, TRST) for self-test
and hardware emulation. An instruction register, a
boundary-scan register, a bypass register, and a device
identification register have been implemented. The device identification register coding for the DSP1628 is
shown in Table 41. The instruction register (IR) is 4 bits
long. The instruction for accessing the device ID is 0xE
(1110). The behavior of the instruction register is summarized in Table 14. Cell 0 is the LSB (closest to TDO).
Table 14. JTAG Instruction Register
IR Cell #: 3 2 1 0
parallel input? Y Y N N
always logic 1? N N N Y
always logic 0? N N Y N
The first line shows the cells in the IR that capture from
a parallel input in the capture-IR controller state. The
second line shows the cells that always load a logic 1 in
the capture-IR controller state. The third line shows the
cells that always load a logic 0 in the capture-IR controller state. Cell 3 (MSB of IR) is tied to status signal PINT,
and cell 2 is tied to status signal JINT. The state of these
signals can therefore be captured during capture-IR and
shifted out during SHIFT-IR controller states.
IEEE
1149.1 standard five-
Boundary-Scan Register
All of the chip's inputs and outputs are incorporated in a
JTAG scan path shown in Table 15. The types of
boundary-scan cells are as follows:
■ I = input cell
■ O = 3-state output cell
■ B = bidirectional (I/O) cell
■ OE = 3-state control cell
■ DC = bidirectional control cell
34 Lucent Technologies Inc.
Page 37

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Table 15. JTAG Boundary-Scan Register
Note: The direction of shifting is from TDI to cell 104 to cell 103 . . . to cell 0 of TDO.
Cell Type Signal Name/Function Cell Type Signal Name/Function
0 OE Controls cells 1, 27—31 69 B
1 O CKO 70 DC Controls cell 71
2 I RSTB 71 B
3 DC Controls cell 4 72 DC Controls cell 73
4 B TRAP 73 B
5I
STOP
†
74 DC Controls cell 75
6 O IACK 75 B
7 I INT0 76 DC Controls cell 77
8 OE Controls cells 6, 10—25, 49, 50, 78, 79 77 B
9 I INT1 78 O
10—25 O AB[0:15] 79 O
26 I EXM 80 DC Controls cell 81
27 O RWN 81 B
28—31 O EROM, ERAMLO, ERAMHI, IO 82 DC Controls cell 83
32—36 B DB[0:4] 83 B
37 DC Controls cells 32—36, 38—48 84 DC Controls cell 85
38—48 B DB[5:15] 85 B
49 O OBE1 86 DC Controls cell 87
50 O IBF1 87 B
51 I DI1 88 DC Controls cell 89
52 DC Controls cell 53 89 B
53 B ILD1 90 DC Controls cell 91
54 DC Controls cell 55 91 B
55 B ICK1 92 DC Controls cell 93
56 DC Controls cell 57 93 B
57 B OCK1 94 DC Controls cell 95
58 DC Controls cell 59 95 B
59 B OLD1 96 DC Controls cell 97
60 OE Controls cell 61 97 B
61 O DO1 98 DC Controls cell 99
62 DC Controls cell 63 99 B
63 B SYNC1 100 DC Controls cell 101
64 DC Controls cell 65 101 B
65 B SADD1 102 DC Controls cell 103
66 DC Controls cell 67 103 B
67 B DOEN1 104 I
68 DC Controls cell 69 — — —
* Please refer to Pin Multiplexing in Section 4.1 for a description of pin multiplexing of BIO, PHIF, VEC[3:0], and SIO2.
† Note that shifting a zero into this cell in the mode to scan a zero into the chip will disable the processor clocks just as the STOP pin will.
‡ When the JTAG SAMPLE instruction is used, this cell will have a logic one regardless of the state of the pin.
OCK2/PCSN*
DO2/PSTAT
*
SYNC2/PBSEL
ILD2/PIDS
*
OLD2/PODS*
IBF2/PIBF
OBE2/POBE
ICK2/PB0
DI2/PB1
DOEN2/PB2
SADD2/PB3
IOBIT0/PB4
*
*
*
*
*
*
*
IOBIT1/PB5*
IOBIT2/PB6
IOBIT3/PB7
*
*
VEC3/IOBIT4
VEC2/IOBIT5
VEC1/IOBIT6
VEC0/IOBIT7
‡
CKI
*
*
*
*
*
Lucent Technologies Inc. 35
Page 38

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
4.13 Clock Synthesis
CKI INPUT CLOCK
CKI
f
÷ N
Nbits[2:0]
PLL/SYNTHESIZER
PHASE
DETECTOR
powerc
RING
OSCILLATOR
VCO CLOCK
f
VCO
LOCK
(FLAG TO INDICATE LOCK
CONDITION OF PLL)
CHARGE
PUMP
LOOP
FILTER
÷ M
LF[3:0]Mbits[4:0]
VCO
Figure 10. Clock Source Block Diagram
SLOWCKI
fSLOW CLOCK
CKI
f
÷ 2
PLLEN
M
U
X
f
INTERNAL CLOCK
PLLSEL
5-4520 (F)
INTERNAL
PROCESSOR
CLOCK
pllc
The DSP1628 provides an on-chip, programmable
PLL Control Signals
clock synthesizer. Figure 10 is the clock source diagram. The 1X CKI input clock, the output of the synthesizer, or a slow internal ring oscillator can be used as
the source for the internal DSP clock. The clock synthesizer is based on a phase-locked loop (PLL), and the
terms clock synthesizer and PLL are used interchangeably.
On powerup, CKI is used as the clock source for the
DSP. This clock is used to generate the internal processor clocks and CKO, where fCKI = fCKO. Setting the appropriate bits in the pllc control register (described in
Table 36) will enable the clock synthesizer to become
the clock source. The powerc register, which is discussed in Section 4.14, can override the selection to
The input to the PLL comes from one of the three maskprogrammable clock options: CMOS, or small-signal.
The PLL cannot operate without an external input clock.
To use the PLL, the PLL must first be allowed to stabilize and lock to the programmed frequency. After the
PLL has locked, the LOCK flag is set and the lock detect
circuitry is disabled. The synthesizer can then be used
as the clock source. Setting the PLLSEL bit in the pllc
register will switch sources from fCKI to fVCO/2 without
glitching. It is important to note that the setting of the
pllc register must be maintained. Otherwise, the PLL
will seek the new set point. Every time the pllc register
is written, the LOCK flag is reset.
stop clocks or force the use of the slow clock for lowpower operation.
36 Lucent Technologies Inc.
Page 39

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
The frequency of the PLL output clock, fVCO, is determined by the values loaded into the 3-bit N divider and
the 5-bit M divider. When the PLL is selected and
locked, the frequency of the internal processor clock is
related to the frequency of CKI by the following equations:
fVCO = fCKI * M/N
fINTERNAL CLOCK = fCKO = fVCO ÷ 2
The frequency of the VCO, fVCO, must fall within the
range listed in Table 63. Also note that fVCO must be at
least twice f
The coding of the Mbits and Nbits is described as follows:
where N ranges from 1 to 8 and M ranges from 2 to 20.
The loop filter bits LF[3:0] should be programmed ac-
cording to Table 64.
CKI.
Mbits = M − 2
if (N = 1)
Nbits = 0x7
else
Nbits = N − 2
Two other bits in the pllc register control the PLL. Clearing the PLLEN bit powers down the PLL; setting this bit
powers up the PLL. Clearing the PLLSEL bit deselects
the PLL so that the DSP is clocked by a 1X version of
the CKI input; setting the PLLSEL bit selects the PLLgenerated clock for the source of the DSP internal processor clock. The pllc register is cleared on reset and
powerup. Therefore, the DSP comes out of reset with
the PLL deselected and powered down. M and N should
be changed only while the PLL is deselected. The values of M and N should not be changed when powering
down or deselecting the PLL.
As previously mentioned, the PLL also provides a user
flag, LOCK, to indicate when the loop has locked. When
this flag is not asserted, the PLL output is unstable. The
DSP should not be switched to the PLL-based clock
without first checking that the lock flag is set. The lock
flag is cleared by writing to the pllc register. When the
PLL is deselected, it is necessary to wait for the PLL to
relock before the DSP can be switched to the PLLbased clock. Before the input clock is stopped, the PLL
should be powered down. Otherwise, the LOCK flag will
not be reset and there may be no way to determine if the
PLL is stable, once the input clock is applied again.
The lock-in time depends on the frequency of operation
and the values programmed for M and N (see Table 64).
Lucent Technologies Inc. 37
Page 40

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
PLL Programming Examples
The following section of code illustrates how the PLL would be initialized on powerup, assuming the following operating conditions:
CKI input frequency = 10 MHz
Internal clock and CKO frequency = 50 MHz
VCO frequency = 100 MHz
Input divide down count N = 2 (Set Nbits[2:0] = 000 to get N = 2, as described in Table 36.)
Feedback down count M = 20 (Set Mbits[4:0] = 10010 to get M = 18 + 2 = 20, as described in Table 36.)
The device would come out of reset with the PLL disabled and deselected.
pllinit: pllc = 0x2912 /* Running CKI input clock at 10 MHz, set up counters in PLL */
pllc = 0xA912 /* Power on PLL, but PLL remains deselected */
call pllwait /* Loop to check for LOCK flag assertion */
pllc = 0xE912 /* Select high-speed, PLL clock */
goto start /* User's code, now running at 50 MHz */
pllwait: if lock return
goto pllwait
Programming examples which illustrate how to use the PLL with the various power management modes are listed
in Section 4.14.
Latency
The switch between the CKI-based clock and the PLL-based clock is synchronous. This method results in the actual
switch taking place several cycles after the PLLSEL bit is changed. During this time, actual code can be executed,
but it will be at the previous clock rate. Table 16 shows the latency times for switching between CKI-based and PLLbased clocks. In the example given, the delay to switch to the PLL source is 1—4 CKO cycles and to switch back is
11—31 CKO cycles.
Table 16. Latency Times for Switching Between CKI and PLL-Based Clocks
Minimum
Latency (cycles)
Switch to PLL-based clock 1 N + 2
Switch from PLL-based clock M/N + 1 M + M/N + 1
Frequency Accuracy and Jitter
When using the PLL to multiply the input clock frequency up to the instruction clock rate, it is important to realize
that although the average frequency of the internal clock and CKO will have about the same relative accuracy as
the input clock, noise sources within the DSP will produce jitter on the PLL clock such that each individual clock
period will have some error associated with it. The PLL is guaranteed only to have sufficiently low jitter to operate
the DSP, and thus, this clock should not be used as an input to jitter-sensitive devices in the system.
Maximum
Latency (cycles)
DDA and VSSA Connections
V
The PLL has its own power and ground pins, VDDA and VSSA. Additional filtering should be provided for VDDA in the
form of a ferrite bead connected from VDDA to VDD and two decoupling capacitors (4.7 µF tantalum in parallel with
a 0.01 µF ceramic) from VDDA to VSS. VSSA can be connected directly to the main ground plane. This recommendation is subject to change and may need to be modified for specific applications depending on the characteristics
of the supply noise.
Note: For devices with the CMOS clock input option, the CKI2 pin should be connected to VSSA.
38 Lucent Technologies Inc.
Page 41

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
4.14 Power Management
There are three different control mechanisms for putting
the DSP1628 into low-power modes: the powerc control register, the STOP pin, and the AWAIT bit in the alf
register. The PLL can also be disabled with the PLLEN
bit of the pllc register for more power saving.
Powerc Control Register Bits
The powerc register has 10 bits that power down various portions of the chip and select the clock source:
XTLOFF: Assertion of the XTLOFF bit powers down the
small-signal input circuit, disabling the internal processor clock. Since the small-signal input circuit takes
many cycles to stabilize, care must be taken with the
turn-on sequence, as described later.
SLOWCKI: Assertion of the SLOWCKI bit selects the
ring oscillator as the clock source for the internal processor clock instead of CKI or the PLL. When CKI or the
PLL is selected, the ring oscillator is powered down.
Switching of the clocks is synchronized so that no partial or short clock pulses occur. Two nops should follow
the instruction that sets or clears SLOWCKI.
NOCK: Assertion of the NOCK bit synchronously turns
off the internal processor clock, regardless of whether
its source is provided by CKI, the PLL, or the ring oscillator. The NOCK bit can be cleared by resetting the chip
with the RSTB pin, or asserting the INT0 or INT1 pins.
Two nops should follow the instruction that sets NOCK.
The PLL remains running, if enabled, while NOCK is
set.
INT0EN: This bit allows the INT0 pin to asynchronously
clear the NOCK bit, thereby allowing the device to continue program execution from where it left off without
any loss of state. No chip reset is required. It is recommended that, when INT0EN is to be used, the INT0
interrupt be disabled in the inc register so that an unintended interrupt does not occur. After the program resumes, the INT0 interrupt in the ins register should be
cleared.
INT1EN: This bit enables the INT1 pin to be used as the
NOCK clear, exactly like INT0EN previously described.
The following control bits power down the peripheral
I/O units of the DSP. These bits can be used to further
reduce the power consumption during standard sleep
mode.
SIO1DIS: This is a powerdown signal to the SIO1 I/O
unit. It disables the clock input to the unit, thus eliminating any sleep power associated with the SIO1.
Since the gating of the clocks may result in incomplete
transactions, it is recommended that this option be
used in applications where the SIO1 is not used or
when reset may be used to reenable the SIO1 unit.
Otherwise, the first transaction after reenabling the unit
may be corrupted.
SIO2DIS: This bit powers down the SIO2 in the same
way SIO1DIS powers down the SIO1.
PHIFDIS: This is a powerdown signal to the parallel
host interface. It disables the clock input to the unit,
thus eliminating any sleep power associated with the
PHIF. Since the gating of the clocks may result in incomplete transactions, it is recommended that this option be used in applications where the PHIF is not
used, or when reset may be used to reenable the
PHIF. Otherwise, the first transaction after reenabling
the unit may be corrupted.
TIMERDIS: This is a timer disable signal which disables the clock input to the timer unit. Its function is
identical to the DISABLE field of the timerc control
register. Writing a 0 to the TIMERDIS field will continue
the timer operation.
Figure 11 shows a functional view of the effect of the
bits of the powerc register on the clock circuitry. It
shows only the high-level operation of each bit. Not
shown are the bits that power down the peripheral
units.
STOP Pin
Assertion (active-low) of the STOP pin has the same
effect as setting the NOCK bit in the powerc register.
The internal processor clock is synchronously disabled
until the STOP pin is returned high. Once the STOP
pin is returned high, program execution will continue
from where it left off without any loss of state. No chip
reset is required. The PLL remains running, if enabled,
during STOP assertion.
The pllc Register Bits
The PLLEN bit of the pllc register can be used to power down the clock synthesizer circuitry. Before shutting
down the clock synthesizer circuitry, the system clock
should be switched to either CKI using the PLLSEL bit
of pllc, or to the ring oscillator using the SLOWCKI bit
of powerc.
Lucent Technologies Inc. 39
Page 42

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
CKI2
CKI
STOP
RSTB
XTLOFF
SMALL SIGNAL
CLOCK
MASK-PROGRAMMABLE
OPTION
CMOS
INPUT
CLOCK
HW STOP
NOCK
SW STOP
CLEAR NOCK
OFF
PLLSEL
PLLEN
PLL
fCKI
DEEP
SLEEP
DISABLE
RING
OSCILLATOR
f
VCO/2
SYNC.
MUX
SYNC.
GATE
fINTERNAL CLOCK
fSLOW CLOCK
ON
DEEP
SLEEP
SLOWCKI
INT0
INT0EN
INT1
INT1EN
Notes:
The functions in the shaded ovals are bits in the powerc control register. The functions in the nonshaded ovals are bits in the pllc control
register.
Deep sleep is the state arrived at either by a hardware or software stop of the internal processor clock.
The switching of the multiplexers and the synchronous gate is designed so that no partial clocks or glitching will occur.
When the deep sleep state is entered with the ring oscillator selected, the internal processor clock is turned off before the ring oscillator is
powered down.
PLL select is the PLLSEL bit of pllc; PLL powerdown is the PLLEN bit of pllc.
INTERNAL
PROCESSOR
CLOCK
5-4124 (F).c
Figure 11. Power Management Using the powerc and the pllc Registers
40 Lucent Technologies Inc.
Page 43

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Await Bit of the alf Register
Setting the AWAIT bit of the alf register causes the processor to go into the standard sleep state or power-saving
standby mode. Operation of the AWAIT bit is the same as in the DSP1610, DSP1611, DSP1616, DSP1617, and
DSP1618. In this mode, the minimum circuitry required to process an incoming interrupt remains active, and the PLL
remains active if enabled. An interrupt will return the processor to the previous state, and program execution will
continue. The action resulting from setting the AWAIT bit and the action resulting from setting bits in the powerc
register are mostly independent. As long as the processor is receiving a clock, whether slow or fast, the DSP may
be put into standard sleep mode with the AWAIT bit. Once the AWAIT bit is set, the STOP pin can be used to stop
and later restart the processor clock, returning to the standard sleep state. If the processor clock is not running, however, the AWAIT bit cannot be set.
Power Management Sequencing
There are important considerations for sequencing the power management modes. The small-signal clock input
circuit has a start-up delay which must be taken into account, and the PLL requires a delay to reach lock-in. Also,
the chip may or may not need to be reset following a return from a low-power state.
Devices with a small-signal input clocking option may use the XTLOFF bit in the powerc register to power down the
on-chip oscillator or small-signal circuitry, thereby reducing the power dissipation. When reenabling the oscillator or
the small-signal circuitry, it is important to bear in mind that a start-up interval exists during which time the clocks
are not stable. Two scenarios exist here:
1. Immediate Turn-Off, Turn-On with RSTB: This scenario applies to situations where the target device is not required to execute any code while the small-signal input circuit is powered down and where restart from a reset
state can be tolerated. In this case, the processor clock derived from either the oscillator or the small-signal input
is running when XTLOFF is asserted. This effectively stops the internal processor clock. When the system chooses to reenable the oscillator or small-signal input, a reset of the device will be required. The reset pulse must be
of sufficient duration for the small-signal start-up interval to be satisfied (required for the small-signal input circuit
to reach its dc operating point). A minimum reset pulse of 20 µs will be adequate. The falling edge of the reset
signal, RSTB, will asynchronously clear the XTLOFF field, thus reenabling the power to the small-signal circuitry.
The target DSP will then start execution from a reset state, following the rising edge of RSTB.
2. Running from Slow Clock While XTLOFF Active: The second scenario applies to situations where the device
needs to continue execution of its target code. In this case, the device switches to the slow ring oscillator clock
first, by enabling the SLOWCKI field. Then, if the small-signal input is being used, power down this circuitry by
writing a 1 to the XTLOFF field. Two nops are needed in between the two write operations to the powerc register.
The target device will then continue execution of its code at slow speed, while the small-signal input clock is
turned off. Switching from the slow clock back to the high-speed clock is then accomplished in three user steps.
First, XTLOFF is cleared. Then, a user-programmed routine sets the internal timer to a delay to wait for the smallsignal input oscillations to become stable. When the timer counts down to zero, the high-speed clock is selected
by clearing the SLOWCKI field, either in the timer's interrupt service routine or following a timer polling loop. If
PLL operation is desired, then an additional routine is necessary to enable the PLL and wait for it to lock.
Lucent Technologies Inc. 41
Page 44

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
Power Management Examples Without the PLL
The following examples show the more significant options for reducing the power dissipation. These are valid only
if the pllc register is set to disable and deselect the PLL (PLLEN = 0, PLLSEL = 0).
Standard Sleep Mode. This is the standard sleep mode. While the processor is clocked with a high-speed clock,
CKI, the alf register's AWAIT bit is set. Peripheral units may be turned off to further reduce the sleep power.
powerc = 0X00F0 /* Turn off peripherals, core running with CKI */
sleep:a0 = 0x8000 /* Set alf register in cache loop if running from */
do 1 { /* external memory with >1 wait state */
alf = a0 /* Stop internal processor clock, interrupt circuits */
nop /* active */
}
nop /* Needed for bedtime execution. Only sleep power */
nop /* consumed here until.... interrupt wakes up the device */
cont: . . . /* User code executes here */
powerc = 0x0 /* Turn peripheral units back on */
Sleep with Slow Internal Clock. In this case, the ring oscillator is selected to clock the processor before the device
is put to sleep. This will reduce the power dissipation while waiting for an interrupt to continue program execution.
powerc = 0x40F0 /* Turn off peripherals and select slow clock */
2*nop /* Wait for it to take effect */
sleep:a0 = 0x8000 /* Set alf register in cache loop if running from */
do 1 { /* external memory with >1 wait state */
alf = a0 /* Stop internal processor clock, interrupt circuits */
nop /* active */
}
nop /* Needed for bedtime execution. Reduced sleep power */
nop /* consumed here.... Interrupt wakes up the device */
cont: . . . /* User code executes here */
powerc = 0x00F0 /* Select high-speed clock */
2*nop /* Wait for it to take effect */
powerc = 0x0000 /* Turn peripheral units back on */
Note that, in this case, the wake-up latency is determined by the period of the ring oscillator clock.
Sleep with Slow Internal Clock and Small-Signal Disabled. If the target device contains the small-signal clock
option, the clock input circuitry can be powered down to further reduce power. In this case, the slow clock must be
selected first.
powerc = 0x40F0 /* Turn off peripherals and select slow clock */
2*nop /* Wait for it to take effect */
powerc = 0xC0F0 /* Turn off the small-signal input buffer */
sleep:a0 = 0x8000 /* Set alf register in cache loop if running from */
do 1 { /* external memory with >1 wait state */
alf = a0 /* Stop internal processor clock, interrupt circuits */
nop /* active */
}
nop /* Needed for bedtime execution. Reduced sleep power */
nop /* consumed here.... Interrupt wakes up the device */
powerc = 0x40F0 /* Clear XTLOFF, reenable small-signal */
call xtlwait /* Wait until small-signal is stable */
cont: powerc = 0x00F0 /* Select high-speed clock */
2*nop /* Wait for it to take effect */
powerc = 0x0000 /* Turn peripheral units back on */
Note that, in this case, the wake-up latency is dominated by the small-signal start-up period.
42 Lucent Technologies Inc.
Page 45

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Software Stop. In this case, all internal clocking is disabled. INT0, INT1, or RSTB may be used to reenable the
clocks. The power management must be done in correct sequence.
powerc = 0x4000 /* SLOWCKI asserted */
2*nop /* Wait for it to take effect */
powerc = 0xD000 /* XTLOFF asserted if applicable and INT0EN asserted */
inc = NOINT0 /* Disable the INT0 interrupt */
sopor:powerc = 0xF000 /* NOCK asserted, all clocks stop */
/* Minimum switching power consumed here */
3*nop /* Some nops will be needed */
/* INT0 pin clears the NOCK field, clocking resumes */
cont: powerc = 0x4000 /* INT0EN cleared and XTLOFF cleared, if applicable*/
call waitxtl /* Wait for the small-signal to */
/* stabilize, if applicable*/
powerc = 0x0 /* Clear SLOWCKI field, back to high speed */
2*nop /* Wait for it to take effect */
ins = 0x0010 /* Clear the INT0 status bit */
In this case also, the wake-up latency is dominated by the small-signal start-up period.
The previous examples do not provide an exhaustive list of options available to the user. Many different clocking
possibilities exist for which the target device may be programmed, depending on:
■ The clock source to the processor.
■ Whether the user chooses to power down the peripheral units.
■ The operational state of the small-signal clock input, powered or unpowered.
■ Whether the internal processor clock is disabled through hardware or software.
■ The combination of power management modes the user chooses.
■ Whether or not the PLL is enabled.
An example subroutine for xtlwait follows:
xtlwait: timer0 = 0x2710 /* Load a count of 10,000 into the timer */
timerc = 0x0010 /* Start the timer with a PRESCALE of two */
inc = 0x0000 /* Disable the interrupts */
loop1: a0 = ins /* Poll the ins register */
a0 = a0 & 0x0100 /* Check bit 8 (TIME) of the ins register */
if eq goto loop1 /* Loop if the bit is not set */
ins = 0x0100 /* Clear the TIME interrupt bit */
return /* Return to the main program */
Lucent Technologies Inc. 43
Page 46

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
4 Hardware Architecture (continued)
Power Management Examples with the PLL
The following examples show the more significant options for reducing power dissipation if operation with the PLL
clock synthesizer is desired.
Standard Sleep Mode, PLL Running. This mode would be entered in the same manner as without the PLL. While
the input to the clock synthesizer, CKI, remains running, the alf register's AWAIT bit is set. The PLL will continue to
run and dissipate power. Peripheral units may be turned off to further reduce the sleep power.
powerc = 0x00F0 /* Turn off peripherals, core running with PLL */
sleep:a0 = 0x8000 /* Set alf register in cache loop if running from */
do 1 { /* external memory with >1 wait state */
alf = a0 /* Stop internal processor clock, interrupt circuits */
nop /* active */
}
nop /* Needed for bedtime execution. Only sleep power plus PLL */
nop /* power consumed here.... Interrupt wakes up the device */
cont: . . . /* User code executes here */
powerc = 0x0 /* Turn peripheral units back on */
Sleep with Slow Internal Clock, PLL Running. In this case, the ring oscillator is selected to clock the processor
before the device is put to sleep. This will reduce power dissipation while waiting for an interrupt to continue program
execution.
powerc = 0x40F0 /* Turn off peripherals and select slow clock */
2*nop /* Wait for slow clock to take effect */
sleep:a0 = 0x8000 /* Set alf register in cache loop if running from */
do 1 { /* external memory with >1 wait state */
alf = a0 /* Stop internal processor clock, interrupt circuits */
nop /* active */
}
nop /* Needed for bedtime execution. Reduced sleep power, PLL */
nop /* power, and ring oscillator power consumed here... */
/* Interrupt wakes up the device */
cont: . . . /* User code executes here */
powerc = 0x00F0 /* Select high-speed PLL based clock */
2*nop /* Wait for it to take effect */
powerc = 0x0000 /* Turn peripheral units back on */
44 Lucent Technologies Inc.
Page 47

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
4 Hardware Architecture (continued)
Sleep with Slow Internal Clock and Small-Signal Disabled, PLL Disabled. If the target device contains the small-
signal clock option, the clock input circuitry can be powered down to further reduce power. In this case, the slow
clock must be selected first, and then the PLL must be disabled, since the PLL cannot run without the clock input
circuitry being active.
powerc = 0x40F0 /* Turn off peripherals and select slow clock */
2*nop /* Wait for slow clock to take effect */
pllc = 0x29F2 /* Disable PLL (assume N = 1,M = 20, LF = 1001) */
powerc = 0xC0F0 /* Disable small-signal input buffer */
sleep:a0 = 0x8000 /* Set alf register in cache loop if running from */
do 1 { /* external memory with >1 wait state */
alf = a0 /* Stop internal processor clock, interrupt circuits */
nop /* active */
}
nop /* Needed for bedtime execution. Reduced sleep power
nop /* consumed here.... Interrupt wakes up device */
powerc = 0x40F0 /* Clear XTLOFF, leave PLL disabled */
call xtlwait /* Wait until small-signal is stable */
pllc = 0xE9F2 /* Enable PLL, continue to run off slow clock */
call pllwait /* Loop to check for LOCK flag assertion */
cont: powerc = 0x00F0 /* Select high-speed PLL based clock */
2*nop /* Wait for it to take effect */
powerc = 0x0000 /* Turn peripherals back on */
Software Stop, PLL Disabled. In this case, all internal clocking is disabled. INT0, INT1, or RSTB may be used to
reenable the clocks. The power management must be done in the correct sequence, with the PLL being disabled
before shutting down the clock input buffer.
powerc = 0x4000 /* SLOWCKI asserted */
2*nop /* Wait for slow clock to take effect */
pllc = 0x29F2 /* Disable PLL (assume N = 1, M = 20, LF = 1001) */
powerc = 0xD000 /* XTLOFF asserted, if applicable and INT0EN
/* asserted */
sopor:powerc = 0xF000 /* NOCK asserted, all clocks stop */
/* Minimum switching power consumed here */
3*nop /* Some nops will be needed */
/* INT0 pin clears NOCK field, clocking resumes */
cont: powerc = 0x4000 /* INTOEN cleared and XTLOFF cleared, if applicable */
call xtlwait /* Wait until small-signal is stable */
/* if applicable */
pllc = 0xE9F2 /* Enable PLL, continue to run off slow clock */
call pllwait /* Loop to check for LOCK flag assertion */
powerc = 0x0 /* Select high-speed PLL based clock */
2*nop /* Wait for it to take effect */
ins = 0x0010 /* Clear the INT0 status bit */
Lucent Technologies Inc. 45
Page 48

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture
5.1 Instruction Set
The DSP1628 processor has seven types of instructions: multiply/ALU, special function, control, F3 ALU,
BMU, cache, and data move. The multiply/ALU instructions are the primary instructions used to implement signal processing algorithms. Statements from this group
can be combined to generate multiply/accumulate, logical, and other ALU functions and to transfer data between memory and registers in the data arithmetic unit.
The special function instructions can be conditionally
executed based on flags from the previous ALU or BMU
operation, the condition of one of the counters, or the
value of a pseudorandom bit in the DSP1628 device.
Special function instructions perform shift, round, and
complement functions. The F3 ALU instructions enrich
the operations available on accumulators. The BMU instructions provide high-performance bit manipulation.
The control instructions implement the goto and call
commands. Control instructions can also be executed
conditionally. Cache instructions are used to implement
low-overhead loops, conserve program memory, and
decrease the execution time of certain multiply/ALU instructions. Data move instructions are used to transfer
data between memory and registers or between accumulators and registers. See the
Digital Signal Processor Information Manual
tailed description of the instruction set.
The following operators are used in describing the in-
struction set:
* 16 x 16-bit –> 32-bit multiplication or register-in-
direct addressing when used as a prefix to an address register or denotes direct addressing when
used as a prefix to an immediate
+ 36-bit addition
– 36-bit subtraction
†
†
>> Arithmetic right shift
>>> Logical right shift
<< Arithmetic left shift
<<< Logical left shift
| 36-bit bitwise OR
& 36-bit bitwise AND
†
†
^ 36-bit bitwise EXCLUSIVE OR
: Compound address swapping, accumulator
shuffling
~ One's complement
DSP1611/17/18/27
for a de-
†
Object Code Compatibility
The DSP1628 is object code compatible with the
DSP1618 with the following exceptions:
■ ECCP user flag, EBUSY, which indicates error
correction coprocessor activity, has changed its
condition field.
Condition
CON DSP1618 DSP1628
11100 ebusy lock
11101 reserved ebusy
The EBUSY flag is used in conjunction with the
if CON F2 or if CON goto/call/return instructions
to monitor the ECCP operation. The object code
corresponding to ifc EBUSY, for example, must be
modified to reflect the change in condition codes.
Alternately , the source code can be assembled using
DSP1628 development tools.
■ The SIO and SIO2 interrupts (IBF, IBF2, OBE, and
OBE2) are cleared one instruction cycle AFTER
reading or writing the serial data registers, (sdx[in],
sdx2[in], sdx[out], or sdx2[out]). To account for this
added latency, the user must ensure that a single
instruction (NOP or any other valid DSP16XX
instruction) follows the sdx register read or write
instruction prior to exiting an interrupt service routine
(via an ireturn or goto pi instruction) or before checking the ins register for the SIO flag status. Adding
this instruction ensures that interrupts are not
reported incorrectly following an ireturn or that stale
flags are not read from the ins register. Refer to
TECHNICAL ADVISORY #23.
Multiply/ALU Instructions
Note that the function statements and transfer statements in Table 17 are chosen independently. Any function statement (F1) can be combined with any transfer
statement to form a valid multiply/ALU instruction. If either statement is not required, a single statement from
either column also constitutes a valid instruction. The
number of cycles to execute the instruction is a function
of the transfer column. (An instruction with no transfer
statement executes in one instruction cycle.) Whenever
PC, pt, or rM is used in the instruction and points to external memory, the programmed number of wait-states
must be added to the instruction cycle count. All multiply/ALU instructions require one word of program memory. The no-operation (nop) instruction is a special case
encoding of a multiply/ALU instruction and executes in
one cycle. The assembly-language representation of a
nop is either nop or a single semicolon.
† These are 36-bit operations. One operand is 36-bit data in an accu-
mulator; the other operand may be 16, 32, or 36 bits.
46 Lucent Technologies Inc.
Page 49

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
A single-cycle squaring function is provided in DSP1628. By setting the X = Y = bit in the auc register, any instruction
that loads the high half of the y register also loads the x register with the same value. A subsequent instruction to
multiply the x register and y register results in the square of the value being placed in the p register. The instruction
a0 = p p = x*y y = *r0++ with the X = Y = bit set to one will read the value pointed to by r0, load it to both x and
y, multiply the previously fetched value of x and y, and transfer the previous product to a0. A table of values pointed
to by r0 can thus be squared in a pipeline with one instruction cycle per each value. Multiply/ALU instructions that
use x = X transfer statements (such as a0 = p p = x*y y = *r0++ x = *pt++) are not recommended for squaring
because pt will be incremented even though x is not loaded from the value pointed to by pt. Also, the same conflict
wait occurrences from reading the same bank of internal memory or reading from external memory apply, since the
X space fetch occurs (even though its value is not used).
Table 17. Multiply/ALU Instructions
Function Statement
p = x * y
aD = p p = x * y
aD = aS + p p = x * y
aD = aS – p p = x * y
Transfer Statement
y = Y x = X 2/1
y = aT x = X 2/1
y[l] = Y 1/1
aT[l] = Y 1/1
†
Cycles (Out/In Cache)
aD = p x = Y 1/1
aD = aS + p Y 1/1
aD = aS – p Y = y[l] 2/2
aD = y Y = aT[l] 2/2
aD = aS + y Z:y x = X 2/2
aD = aS – y Z:y[l] 2/2
aD = aS & y Z:aT[l] 2/2
aD = aS | y
aD = aS ^ y
aS – y
aS & y
‡
† The l in [ ] is an optional argument that specifies the low 16 bits of aT or y.
‡ Add cycles for:
1. When an external memory access is made in X or Y space and wait-states are programmed, add the number of wait-states.
2. If an X space access and a Y space access are made to the same bank of DPRAM in one instruction, add one cycle.
Note: For transfer statements when loading the upper half of an accumulator, the lower half is cleared if the corresponding CLR bit in the auc
register is zero. auc is cleared by reset.
Table 18. Replacement Table for Multiply/ALU Instructions
Replace Value Meaning
aD, aS, aT a0, a1 One of two DAU accumulators.
X *pt++, *pt++i X memory space location pointed to by pt. pt is postmodified by +1
and i, respectively.
Y *rM, *rM++, *rM--, rM++j RAM location pointed to by rM (M = 0, 1, 2, 3). rM is postmodified by
0, +1, –1, or j, respectively.
Z *rMzp, *rMpz, *rMm2, *rMjk Read/Write compound addressing. rM (M = 0, 1, 2, 3) is used twice.
First, postmodified by 0, +1, –1, or j, respectively; and, second, postmodified by +1, 0, +2, or k, respectively.
Lucent Technologies Inc. 47
Page 50

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Special Function Instructions
All forms of the special function require one word of program memory and execute in one instruction cycle. (If PC
points to external memory, add programmed wait-states.)
aD = aS >> 1
aD = aS >> 4
aD = aS >> 8
aD = aS >> 16
aD = aS — Load destination accumulator from source accumulator
aD = –aS — 2's complement
aD = ~aS
aD = rnd(aS) — Round upper 20 bits of accumulator
aDh = aSh + 1 — Increment upper half of accumulator (lower half cleared)
aD = aS + 1 — Increment accumulator
aD = y — Load accumulator with 32-bit y register value with sign extend
aD = p — Load accumulator with 32-bit p register value with sign extend
}
†
Arithmetic right shift (sign preserved) of 36-bit accumulators
— 1's complement
aD = aS << 1
aD = aS << 4
aD = aS << 8
aD = aS << 16
The above special functions can be conditionally executed, as in:
if CON instruction
and with an event counter
ifc CON instruction
which means:
if CON is true then
else
The above special function statements can be executed unconditionally by writing them directly, e.g., a0 = a1.
Table 19. Replacement Table for Special Function Instructions
Replace Value Meaning
aD
aS
CON mi, pl, eq, ne, gt, le, lvs, lvc, mvs, mvc, c0ge, c0lt,
}
c1 = c1 + 1
instruction
c2 = c1
c1 = c1 + 1
Arithmetic left shift (sign not preserved) of the lower 32 bits of accumulators
(upper 4 bits are sign-bit-extended from bit 31 at the completion of the shift)
a0, a1 One of two DAU accumulators.
See Table 21 for definitions of mnemonics.
c1ge, c1lt, heads, tails, true, false, allt, allf,
somet, somef, oddp, evenp, mns1, nmns1,
npint, njint, lock, ebusy
† This function is not available for the DSP16A.
48 Lucent Technologies Inc.
Page 51

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Control Instructions
All control instructions executed unconditionally execute in two cycles, except icall which takes three cycles. Control
instructions executed conditionally execute in three instruction cycles. (If PC, pt, or pr point to external memory, add
programmed wait-states.) Control instructions executed unconditionally require one word of program memory, while
control instructions executed conditionally require two words. Control instructions cannot be executed from the
cache.
goto JA
goto pt
call JA
call pt
icall
return (goto pr)
ireturn (goto pi)
† The goto JA and call JA instructions should not be placed in the last or next-to-last instruction before the boundary of a 4 Kwords page. If the
goto or call is placed there, the program counter will have incremented to the next page and the jump will be to the next page, rather than to
the desired current page.
‡ The icall instruction is reserved for development system use.
The above control instructions, with the exception of ireturn and icall, can be conditionally executed. For example:
if le goto 0x0345
†
†
‡
Table 20. Replacement Table for Control Instructions
Replace Value Meaning
CON mi, pl, eq, ne, gt, le, nlvs, lvc, mvs, mvc, c0ge, c0lt,
See Table 21 for definitions of mnemonics.
c1ge, c1lt, heads, tails, true, false, allt, allf, somet,
somef, oddp, evenp, mns1, nmns1, npint, njint, lock,
ebusy
JA 12-bit value Least significant 12 bits of absolute address
within the same 4 Kwords memory section.
Lucent Technologies Inc. 49
Page 52

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Conditional Mnemonics (Flags)
Table 21 lists mnemonics used in conditional execution of special function and control instructions.
Table 21. DSP1628 Conditional Mnemonics
Test Meaning Test Meaning
pl Result is nonnegative (sign bit is bit 35). ≥ 0 mi Result is negative. < 0
eq Result is equal to 0. = 0 ne Result is not equal to 0. ≠ 0
gt Result is greater than 0. > 0 le Result is less than or equal to 0. ≤ 0
lvs
mvs
Logical overflow set.
Mathematical overflow set.
c0ge Counter 0 greater than or equal to 0. c0lt Counter 0 less than 0.
c1ge Counter 1 greater than or equal to 0. c1lt Counter 1 less than 0.
heads Pseudorandom sequence bit set. tails Pseudorandom sequence bit clear.
true
allt
somet
The condition is always satisfied in an if in-
struction.
All True, all BIO input bits tested compared
successfully.
Some True, some BIO input bits tested com-
pared successfully.
oddp Odd Parity, from BMU operation. evenp Even Parity, from BMU operation.
mns1 Minus 1, result of BMU operation. nmns1 Not Minus 1, result of BMU operation.
npint
Not PINT, used by hardware development
system.
lock The PLL has achieved lock and is stable. ebusy
* Result is not representable in the 36-bit accumulators (36-bit overflow).
† Bits 35—31 are not the same (32-bit overflow).
Notes:
Testing the state of the counters (c0 or c1) automatically increments the counter by one.
The heads or tails condition is determined by a randomly set or cleared bit, respectively. The bit is randomly set with a probability of 0.5. A random
rounding function can be implemented with either heads or tails. The random bit is generated by a ten-stage pseudorandom sequence generator
(PSG) that is updated after either a heads or tails test. The pseudorandom sequence may be reset by writing any value to the pi register, except
during an interrupt service routine (ISR). While in an ISR, writing to the pi register updates the register and does not reset the PSG. If not in an
ISR, writing to the pi register resets the PSG. (The pi register is updated, but will be written with the contents of the PC on the next instruction.)
Interrupts must be disabled when writing to the pi register. If an interrupt is taken after the pi write, but before pi is updated with the PC
value, the ireturn instruction will not return to the correct location. If the RAND bit in the auc register is set, however, writing the pi register never
resets the PSG.
*
†
lvc Logical overflow clear.
mvc Mathematical overflow clear.
false
allf
somef
njint
The condition is never satisfied in an if instruction.
All False, no BIO input bits tested compared
successfully.
Some False, some BIO input bits tested did
not compare successfully.
Not JINT, used by hardware development
system.
ECCP Busy, indicates error correction coprocessor activity.
50 Lucent Technologies Inc.
Page 53

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
F3 ALU Instructions
These instructions are implemented in the DSP1600 core. They allow accumulator two-operand operations with either another accumulator, the p register, or a 16-bit immediate operand (IM16). The result is placed in a destination
accumulator that can be independently specified. All operations are done with the full 36 bits. For the accumulator
with accumulator operations, both inputs are 36 bits. For the accumulator with p register operations, the p register
is sign-extended into bits 35—32 before the operation. For the accumulator high with immediate operations, the immediate is sign-extended into bits 35—32 and the lower bits 15—0 are filled with zeros, except for the AND operation, for which they are filled with ones. These conventions allow the user to do operations with 32-bit immediates
by programming two consecutive 16-bit immediate operations. The F3 ALU instructions are shown in Table 22.
Table 22. F3 ALU Instructions
Note: The F3 ALU instructions that do not have a destination accumulator are used to set flags for conditional
operations, i.e., bit test operations.
F3 ALU Instructions
Cacheable (one-cycle)
aD = aS + aT
aD = aS – aT
aD = aS & aT
aD = aS | aT
aD = aS ^ aT
aS – aT
aS & aT
aD = aS + p
aD = aS – p
aD = aS & p
aD = aS | p
aD = aS ^ p
aS – p
aS & p
† If PC points to external memory, add programmed wait-states.
‡ The h and l are required notation in these instructions.
†
Not Cacheable (two-cycle)
aD = aSh + IM16
aD = aSh – IM16
aD = aSh & IM16
aD = aSh | IM16
aD = aSh ^ IM16
aSh – IM16
aSh & IM16
aD = aSl + IM16
aD = aSl – IM16
aD = aSl & IM16
aD = aSl | IM16
aD = aSl ^ IM16
aSl – IM16
aSl & IM16
‡
F4 BMU Instructions
The bit manipulation unit in the DSP1628 provides a set of efficient bit manipulation operations on accumulators. It
contains four auxiliary registers, ar<0—3> (arM, M = 0, 1, 2, 3), two alternate accumulators (aa0—aa1), which can
be shuffled with the working set, and four flags (oddp, evenp, mns1, and nmns1). The flags are testable by conditional instructions and can be read and written via bits 4—7 of the alf register. The BMU also sets the LMI, LEQ,
LLV, and LMV flags in the psw register:
LMI = 1 if negative (i.e., bit 35 = 1)
LEQ = 1 if zero (i.e., bits 35—0 are 0)
LLV = 1 if (a) 36-bit overflow, or if (b) illegal shift on field width/offset condition
LMV = 1 if bits 31—35 are not the same (32-bit overflow)
The BMU instructions and cycle times follow. (If PC points to external memory, add programmed wait-states.) All
BMU instructions require 1 word of program memory unless otherwise noted. Please refer to the
27 Digital Signal Processor Information Manual
for further discussion of the BMU instructions.
DSP1611/17/18/
Lucent Technologies Inc. 51
Page 54

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
■ Barrel Shifter
aD = aS >> IM16 Arithmetic right shift by immediate (36-bit, sign filled in); 2-cycle, 2-word.
aD = aS >> arM Arithmetic right shift by arM (36-bit, sign filled in); 1-cycle.
aD = aS >> aS Arithmetic right shift by aS (36-bit, sign filled in); 2-cycle.
aD = aS >>> IM16 Logical right shift by immediate (32-bit shift, 0s filled in); 2-cycle, 2-word.
aD = aS >>> arM Logical right shift by arM (32-bit shift, 0s filled in); 1-cycle.
aD = aS >>> aS Logical right shift by aS (32-bit shift, 0s filled in); 2-cycle.
†
aD = aS << IM16 Arithmetic left shift
aD = aS << arM Arithmetic left shift
aD = aS
<< aS Arithmetic left shift† by aS (36-bit shift, 0s filled in); 2-cycle.
aD = aS <<< IM16 Logical left shift by immediate (36-bit shift, 0s filled in); 2-cycle, 2-word.
aD = aS <<< arM Logical left shift by arM (36-bit shift, 0s filled in); 1-cycle.
aD = aS <<< aS Logical left shift by aS (36-bit shift, 0s filled in); 2-cycle.
† Not the same as the special function arithmetic left shift. Here, the guard bits in the destination accumulator are shifted into, not sign-extended.
by immediate (36-bit shift, 0s filled in); 2-cycle, 2-word.
†
by arM (36-bit shift, 0s filled in); 1-cycle.
■ Normalization and Exponent Computation
aD = exp(aS) Detect the number of redundant sign bits in accumulator; 1-cycle.
aD = norm(aS, arM) Normalize aS with respect to bit 31, with exponent in arM; 1-cycle.
■ Bit Field Extraction and Insertion
aD = extracts(aS, IM16) Extraction with sign extension, field specified as immediate; 2-cycle, 2-word.
aD = extracts(aS, arM) Extraction with sign extension, field specified in arM; 1-cycle.
aD = extractz(aS, IM16) Extraction with zero extension, field specified as immediate; 2-cycle, 2-word.
aD = extractz(aS, arM) Extraction with zero extension, field specified in arM; 1-cycle.
aD = insert(aS, IM16) Bit field insertion, field specified as immediate; 2-cycle, 2-word.
aD = insert(aS, arM) Bit field insertion, field specified in arM; 2-cycle.
Note: The bit field to be inserted or extracted is specified as follows. The width (in bits) of the field is the upper
byte of the operand (immediate or arM), and the offset from the LSB is in the lower byte.
■ Alternate Accumulator Set
aD = aS:aa0 Shuffle accumulators with alternate accumulator 0 (aa0); 1-cycle.
aD = aS:aa1 Shuffle accumulators with alternate accumulator 1 (aa1); 1-cycle.
Note: The alternate accumulator gets what was in aS. aD gets what was in the alternate accumulator.
Table 23. Replacement Table for F3 ALU Instructions and F4 BMU Instructions
Replace Value Meaning
aD, aT, aS a0 or a1 One of the two accumulators.
IM16 immediate 16-bit data, sign-, zero-, or one-extended as appropriate.
arM ar<0—3> One of the auxiliary BMU registers.
52 Lucent Technologies Inc.
Page 55

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Cache Instructions
Cache instructions require one word of program memory. The do instruction executes in one instruction cycle, and
the redo instruction executes in two instruction cycles. (If PC points to external memory, add programmed waitstates.) Control instructions and long immediate values cannot be stored inside the cache. The instruction formats
are as follows:
do K {
instr1
instr2
.
.
.
instrN
}
redo K
Table 24. Replacement Table for Cache Instructions
Replace
K
N 1 to 15 1 to 15 instructions can be included.
† The assembly-language statement, do cloop (or redo cloop), is used to specify that the number of iterations is to be taken from the cloop
register. K is encoded as 0 in the instruction encoding to select cloop.
When the cache is used to execute a block of instructions, the cycle timings of the instructions are as follows:
1. In the first pass, the instructions are fetched from program memory and the cycle times are the normal out-of-
cache values, except for the last instruction in the block of N instructions. This instruction executes in two cycles.
2. During pass two through pass K – 1, each instruction is fetched from cache and the in-cache timings apply.
3. During the last (Kth) pass, the block of instructions is fetched from cache and the in-cache timings apply, except
that the timing of the last instruction is the same as if it were out-of-cache.
4. If any of the instructions access external memory, programmed wait-states must be added to the cycle counts.
The redo instruction treats the instructions currently in the cache memory as another loop to be executed K times.
Using the redo instruction, instructions are reexecuted from the cache without reloading the cache.
The number of iterations, K, for a do or redo can be set at run time by first moving the number of iterations into the
cloop register (7 bits unsigned), and then issuing the do cloop or redo cloop. At the completion of the loop, the
value of cloop is decremented to 0; hence, cloop needs to be written before each do cloop or redo cloop.
Instruction
Encoding
†
cloop
1 to 127 Number of times the instructions to be executed is encoded in the instruction.
Number of times the instructions are to be executed taken from bits 0—6 of the cloop
register.
Meaning
Lucent Technologies Inc. 53
Page 56

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Data Move Instructions
Data move instructions normally execute in two instruction cycles. (If PC or rM point to external memory, any programmed wait-states must be added. In addition, if PC and rM point to the same bank of DPRAM, then one cycle
must be added.) Immediate data move instructions require two words of program memory; all other data move instructions require only one word. The only exception to these statements is a special case immediate load (short
immediate) instruction. If a YAAU register is loaded with a 9-bit short immediate value, the instruction requires only
one word of memory and executes in one instruction cycle. All data move instructions, except those doing long immediate loads, can be executed from within the cache. The data move instructions are as follows:
R = IM16
aT[l] = R
SR = IM9
Y = R
R = Y
Z : R
R = aS[l]
DR = *(OFFSET)
(OFFSET) = DR
*
Table 25. Replacement Table for Data Move Instructions
Replace Value Meaning
R Any of the registers in Table 55 —
DR r<0—3>, a0[l], a1[l], y[l], p, pl, x,
pt, pr, psw
Subset of registers accessible with direct addressing.
aS, aT a0, a1 High half of accumulator.
Y
Z
rM, *rM++, *rM--, *rM++j
*
rMzp, *rMpz, *rMm2, *rMjk
*
Same as in multiply/ALU instructions.
Same as in multiply/ALU instructions.
IM16 16-bit value Long immediate data.
IM9 9-bit value Short immediate data for YAAU registers.
OFFSET 5-bit value from instruction
11-bit value in base register
Value in bits [15:5] of ybase register form the 11 most significant
bits of the base address. The 5-bit offset is concatenated to this
to form a 16-bit address.
SR r<0—3>, rb, re, j, k Subset of registers for short immediate.
Notes:
sioc, sioc2, tdms, tdms2, srta, and srta2 registers are not readable.
When signed registers less than 16 bits wide (c0, c1, c2) are read, their contents are sign-extended to 16 bits. When unsigned registers less
than 16 bits wide are read, their contents are zero-extended to 16 bits.
Loading an accumulator with a data move instruction does not affect the flags.
54 Lucent Technologies Inc.
Page 57

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
5.2 Register Settings
Tables 26 through 42 describe the programmable registers of the DSP1628 device. Table 44 describes the register
settings after reset.
Note that the following abbreviations are used in the tables:
x = don't care
R = read only
W = read/write
The reserved (rsrvd) bits in the tables should always be written with zeros to make the program compatible with
future chip versions.
Table 26. Serial I/O Control Registers
sioc
Bit 109876543210
Field DODLY LD CLK MSB OLD ILD OCK ICK OLEN ILEN
Field Value Description
DODLY 0
LD 0
CLK 00
MSB 0
OLD 0
ILD 0
OCK 0
ICK 0
OLEN 0
ILEN 0
‡
sioc2
01
10
11
DO changes on the rising edge of OCK.
1
DO changes on the falling edge of OCK. This delay in driving DO increases the hold
time on DO by half a cycle of OCK.
In active mode, ILD1 and/or OLD1 = ICK1/16, active SYNC1 = ICK1/[128/256
1
In active mode, ILD1 and/or OLD1 = OCK1/16, active SYNC1 = OCK1/[128/256
Active clock = CKI/2 (1X).
Active clock = CKI/6 (1X).
Active clock = CKI/8 (1X).
Active clock = CKI/10 (1X).
LSB first.
1
MSB first.
OLD1 is an input (passive mode).
1
OLD1 is an output (active mode).
ILD1 is an input (passive mode).
1
ILD1 is an output (active mode).
OCK1 is an input (passive mode).
1
OCK1 is an output (active mode).
ICK1 is an input (passive mode).
1
ICK1 is an output (active mode).
16-bit output.
1
8-bit output.
16-bit input.
1
8-bit input.
†
].
†
].
Bit 109876543210
Field DODLY2 LD2 CLK2 MSB2 OLD2 ILD2 OCK2 ICK2 OLEN2 ILEN2
† See tdms register, SYNC field.
‡ The bit definitions of the sioc2 register are identical to the sioc register bit definitions.
Lucent Technologies Inc. 55
Page 58

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Table 27. Time-Division Multiplex Slot Registers
tdms
Bit 9 8 7654321 0
Field SYNCSP MODE TRANSMIT SLOT SYNC
Field Value Description
SYNCSP
MODE 0 Multiprocessor mode off; DOEN1 is an input (passive
TRANSMIT SLOT
SYNC 1 Transmit slot 0, SYNC1 is an output (active mode).
§
tdms2
†
‡
0
1
SYNC1 = ICK1/128 if LD = 0†.
SYNC1 = OCK1/128 if LD = 1
SYNC1 = ICK1/256 if LD = 0
SYNC1 = OCK1/256 if LD = 1
†
.
†
.
†
.
mode).
1 Multiprocessor mode on; DOEN1 is an output (active
mode).
1xxxxxx Transmit slot 7.
x1xxxxx Transmit slot 6.
xx1xxxx Transmit slot 5.
xxx1xxx Transmit slot 4.
xxxx1xx Transmit slot 3.
xxxxx1x Transmit slot 2.
xxxxxx1 Transmit slot 1.
0 SYNC1 is an input (passive mode).
Bit 9 8 7654321 0
Field
† See sioc register, LD field.
‡ Select this mode when in multiprocessor mode.
§ The tdms2 register bit definitions are identical to the tdms register bit definitions.
SYNCSP2
†
MODE2 TRANSMIT SLOT2 SYNC2
56 Lucent Technologies Inc.
Page 59

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Table 28. Serial Receive/Transmit Address Registers
srta
Bit 1514131211109876543210
Field RECEIVE ADDRESS TRANSMIT ADDRESS
Field Value Description
RECEIVE ADDRESS 1xxxxxxx Receive address 7.
x1xxxxxx Receive address 6.
xx1xxxxx Receive address 5.
xxx1xxxx Receive address 4.
xxxx1xxx Receive address 3.
xxxxx1xx Receive address 2.
xxxxxx1x Receive address 1.
xxxxxxx1 Receive address 0.
TRANSMIT ADDRESS 1xxxxxxx Transmit address 7.
x1xxxxxx Transmit address 6.
xx1xxxxx Transmit address 5.
xxx1xxxx Transmit address 4.
xxxx1xxx Transmit address 3.
xxxxx1xx Transmit address 2.
xxxxxx1x Transmit address 1.
xxxxxxx1 Transmit address 0.
†
srta2
Bit 1514131211109876543210
Field RECEIVE ADDRESS2 TRANSMIT ADDRESS2
† The srta2 field definitions are identical to the srta register field definitions.
Table 29. Multiprocessor Protocol Registers
saddx
Bit Field 15—8 7—0
Write X Write Protocol Field [7:0]
Read Read Protocol Field [7:0] 0
saddx2
‡
Bit Field 15—8 7—0
Write X Write Protocol2 Field [7:0]
Read Read Protocol2 Field [7:0] 0
‡ The saddx2 field definitions are identical to the saddx register field definitions.
Lucent Technologies Inc. 57
Page 60

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Table 30. Processor Status Word (psw) Register
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Field DAU FLAGS X X a1[V] a1[35:32] a0[V] a0[35:32]
Field Value Description
DAU FLAGS* Wxxx LMI—logical minus when set (bit 35 = 1).
xWxx LEQ—logical equal when set (bit [35:0] = 0).
xxWx LLV—logical overflow when set.
xxxW LMV—mathematical overflow when set.
a1[V] W Accumulator 1 (a1) overflow when set.
a1[35:32] Wxxx Accumulator 1 (a1) bit 35.
xWxx Accumulator 1 (a1) bit 34.
xxWx Accumulator 1 (a1) bit 33.
xxxW Accumulator 1 (a1) bit 32.
a0[V] W Accumulator 0 (a0) overflow when set.
a0[35:32] Wxxx Accumulator 0 (a0) bit 35.
xWxx Accumulator 0 (a0) bit 34.
xxWx Accumulator 0 (a0) bit 33.
xxxW Accumulator 0 (a0) bit 32.
* The DAU flags can be set by either BMU or DAU operations.
Table 31. Arithmetic Unit Control (auc) Register
†
Bit 8 7 6543210
Field RAND X=Y= CLR SAT ALIGN
Field Value Description
RAND 0
Pseudorandom sequence generator (PSG) reset by writing the
pi register only outside an interrupt service routine.
1
X=Y= 0
1
PSG never reset by writing the pi register.
Normal operation.
All instructions which load the high half of the y register also
load the x register, allowing single-cycle squaring with p = x * y.
CLR 1xx Clearing yl is disabled (enabled when 0).
x1x Clearing a1l is disabled (enabled when 0).
xx1 Clearing a0l is disabled (enabled when 0).
SAT 1x a1 saturation on overflow is disabled (enabled when 0).
x1 a0 saturation on overflow is disabled (enabled when 0).
ALIGN 00 a0, a1 ← p.
01 a0, a1 ← p/4.
10 a0, a1 ← p x 4 (and zeros written to the two LSBs).
11 a0, a1 ← p x 2 (and zero written to the LSB).
† The auc is 9 bits [8:0]. The upper 7 bits [15:9] are always zero when read and should always be written with zeros to make the program
compatible with future chip versions. The auc register is cleared at reset.
58 Lucent Technologies Inc.
Page 61

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Table 32. Parallel Host Interface Control (phifc) Register
Bit 15—7 6 5 4 3 2 1 0
Field Reserved PSOBEF PFLAGSEL PFLAG PBSELF PSTRB PSTROBE PMODE
Field Value Description
PMODE 0
1
PSTROBE 0
1
PSTRB 0
1
PBSELF 0
1
PFLAG 0
1
PFLAGSEL 0
1
PSOBEF 0
1
8-bit data transfers.
16-bit data transfers.
Intel
protocol: PIDS and PODS data strobes.
Motorola
When PSTROBE = 1, PODS pin (PDS) active-low.
When PSTROBE = 1, PODS pin (PDS) active-high.
In either mode, PBSEL pin = 0 -> pdx0 low byte. See Table 7.
If PMODE = 0, PBSEL pin = 1 -> pdx0 low byte.
If PMODE = 1, PBSEL pin = 0 -> pdx0 high byte.
PIBF and POBE pins active-high.
PIBF and POBE pins active-low.
Normal.
PIBF flag ORed with POBE flag and output on PIBF pin; POBE pin unchanged (output buffer empty).
Normal.
POBE flag as read through PSTAT register is active-low.
protocol: PRWN and PDS data strobes.
Table 33. Interrupt Control (inc) Register
Bit 15 14 13 12 11 10 9 8 7—6 5—4 3 2 1 0
Field JINT* rsrvd EREADY EOVF rsrvd OBE2 IBF2 TIME rsrvd INT[1:0] PIBF POBE OBE IBF
* JINT is a JTAG interrupt and is controlled by the HDS. It may be made unmaskable by the Lucent Technologies development system tools.
Encoding: A 0 disables an interrupt; a 1 enables an interrupt.
Table 34. Interrupt Status (ins) Register
Bit 15 14 13 12 11 10 9 8 7—6 5—4 3 2 1 0
Field JINT rsrvd EREADY EOVF rsrvd OBE2 IBF2 TIME rsrvd INT[1:0] PIBF POBE OBE IBF
Encoding: A 0 indicates no interrupt. A 1 indicates an interrupt has been recognized and is pending or being ser-
viced. If a 1 is written to bits 4, 5, 8, 12, or 13 of ins, the corresponding interrupt is cleared.
Lucent Technologies Inc. 59
Page 62

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Table 35. timerc Register
Bit 15—7 6 5 4 3—0
Field Reserved DISABLE RELOAD T0EN PRESCALE
Field Value Description
DISABLE 0
RELOAD 0
T0EN 0
PRESCALE — See table below.
PRESCALE Field
Timer enabled.
1
Timer and prescaler disabled. The period register and timer0 are
not reset.
Timer stops after counting down to 0.
1
Timer automatically reloads and repeats indefinitely.
Timer holds current count.
1
Timer counts down to 0.
Frequency of
PRESCALE
0000 CKO/2 1000 CKO/512
0001 CKO/4 1001 CKO/1024
0010 CKO/8 1010 CKO/2048
0011 CKO/16 1011 CKO/4096
0100 CKO/32 1100 CKO/8192
0101 CKO/64 1101 CKO/16384
0110 CKO/128 1110 CKO/32768
0111 CKO/256 1111 CKO/65536
Table 36. Phase-Locked Loop Control (pllc) Register
Bit 15 14 13 12 11—8 7—5 4—0
Field PLLEN PLLSEL ICP Reserved LF[3:0] Nbits[2:0] Mbits[4:0]
Field Value Description
PLLEN 0
PLLSEL 0
ICP — Charge pump current selection (see Table 64 for proper value).
Reserved 0 —
LF[3:0] — Loop filter setting (see Table 64 for proper value).
Nbits[2:0] — Encodes N, 1 ≤ N ≤ 8, where N = Nbits[2:0] + 2, unless Nbits[2:0] = 111, then N = 1.
Mbits[4:0] — Encodes M, 2 ≤ M ≤ 20, where M = Mbits[4:0] + 2, f
Timer Interrupts PRESCALE
PLL powered down.
1
PLL powered up.
DSP internal clock taken directly from CKI.
1
DSP internal clock taken from PLL.
Frequency of
Timer Interrupts
INTERNAL CLOCK = fCKI x (M/(2N)).
60 Lucent Technologies Inc.
Page 63

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Table 37. sbit Register
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Field DIREC[7:0] VALUE[7:0]
Field Value Description
DIREC 1xxxxxxx IOBIT7 is an output (input when 0).
x1xxxxxx IOBIT6 is an output (input when 0).
xx1xxxxx IOBIT5 is an output (input when 0).
xxx1xxxx IOBIT4 is an output (input when 0).
xxxx1xxx IOBIT3 is an output (input when 0).
xxxxx1xx IOBIT2 is an output (input when 0).
xxxxxx1x IOBIT1 is an output (input when 0).
xxxxxxx1 IOBIT0 is an output (input when 0).
VALUE Rxxxxxxx Reads the current value of IOBIT7.
xRxxxxxx Reads the current value of IOBIT6.
xxRxxxxx Reads the current value of IOBIT5.
xxxRxxxx Reads the current value of IOBIT4.
xxxxRxxx Reads the current value of IOBIT3.
xxxxxRxx Reads the current value of IOBIT2.
xxxxxxRx Reads the current value of IOBIT1.
xxxxxxxR Reads the current value of IOBIT0.
Table 38. cbit Register
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Field MODE/MASK[7:4] MODE/MASK[3:0] DATA/PAT[7:4] DATA/PAT[3:0]
DIREC[n]*
1 (Output) 0 0 Clear
1 (Output) 0 1 Set
1 (Output) 1 0 No Change
1 (Output) 1 1 Toggle
0 (Input) 0 0 No Test
0 (Input) 0 1 No Test
0 (Input) 1 0 Test for Zero
0 (Input) 1 1 Test for One
*0 ≤ n ≤ 7.
MODE/
MASK[n]
DATA/
PAT[n]
Action
Lucent Technologies Inc. 61
Page 64

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Table 39. alf Register
Bit 15 14 13—0
Field AWAIT LOWPR FLAGS
Field Value Action
AWAIT 1
0
LOWPR 1
0
FLAGS — See table below.
Bit Flag Use
13—9 Reserved —
8 ebusy* ECCP BUSY
7 nmns1 NOT-MINUS-ONE from BMU
6 mns1 MINUS-ONE from BMU
5 evenp EVEN PARITY from BMU
4 oddp ODD PARITY from BMU
3 somef SOME FALSE from BIO
2 somet SOME TRUE from BIO
1 allf ALL FALSE from BIO
0 allt ALL TRUE from BIO
* The ebusy flag cannot be written by the user.
Power-saving standby mode or standard sleep enabled.
Normal operation.
The internal DPRAM is addressed beginning at 0x0000 in X space.
The internal DPRAM is addressed beginning at 0xc000 in X space.
Table 40. mwait Register
Bit 15—12 11—8 7—4 3—0
Field EROM[3:0] ERAMHI[3:0] IO[3:0] ERAMLO[3:0]
If the EXM pin is high and the INT1 is low upon reset, the mwait register is initialized to all 1s (15 wait-states for all
external memory). Otherwise, the mwait register is initialized to all 0s (0 wait-states) upon reset.
Table 41. DSP1628 32-Bit JTAG ID Register
Bit 31 30 29—28 27—19 18—12 11—0
Field RESERVED SECURE CLOCK ROMCODE PART ID 0x03B
Field Value Mask-Programmable Features
RESERVED 0 —
SECURE 0
1
CLOCK 01
11
ROMCODE
PART ID 0x2A DSP1628
ROMCODE Letter ABCDEFGHJKLMNPRSTUWY
Value 012345678910111213141516171819
—
Nonsecure ROM option.
Secure ROM option.
Small-signal input clock option.
CMOS level input clock option.
Users ROMCODE ID:
The ROMCODE ID is the 9-bit binary value of the following expression:
(20 x value for first letter) + (value of second letter), where the values of the letters
are in the following table. For example, ROMCODE GK is (20 x 6) + (9) = 129
or 0 1000 0001.
62 Lucent Technologies Inc.
Page 65

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Table 42. ioc Register*
Bit 15 14 13
Field Reserved EXTROM CKO2
* The field definitions for the ioc register are different from the DSP1610.
12 11 10
EBIOH WEROM ESIO2
9 8—7 6—4 3—0
SIOLBC CKO[1:0] Reserved DENB[3:0]
ioc Fields
ioc Field Description
EXTROM If 1, sets AB15 low during external memory accesses when WEROM = 1.
CKO2 CKO configuration (see below).
EBIOH If 1, enables high half of BIO, IOBIT[4:7], and disables VEC[3:0] from pins.
WEROM If 1, allows writing into external program (X) memory.
ESIO2 If 1, enables SIO2 and low half of BIO, and disables PHIF from pins.
SIOLBC If 1, DO1 and DO2 looped back to DI1 and DI2.
CKO[1:0] CKO configuration (see below).
DENB3 If 1, delay EROM.
DENB2 If 1, delay ERAMHI.
DENB1 If 1, delay IO.
DENB0 If 1, delay ERAMLO.
CKO2 CKO1 CKO0 CKO Output Description
——— 1X PLL —
0 0 0 CKI CKI x M/(2N)
0 0 1 CKI/(1 + W) CKI x (M/(2N)) / [1 + W]
Free-running clock.
Wait-stated clock.
1, 2
1—3
0 1 0 1 1 Held high.
0 1 1 0 0 Held low.
1 0 0 CKI CKI Output of CKI buffer.
1 0 1 CKI/(1 + W) CKI x (M/(2N)) / [1 + W]
Sequenced, wait-stated clock.
1—4
1 1 0 Reserved
1 1 1 Reserved
1. The phase of CKI is synchronized by the rising edge of RSTB.
2. When SLOWCKI is enabled in the powerc register, these options reflect the low-speed internal ring oscillator.
3. The wait-stated clock reflects the internal instruction cycle and may be stretched based on the mwait register setting (see Table 40).
During sequenced external memory accesses, it completes one cycle.
4. The sequenced wait-stated clock completes two cycles during a sequenced external memory access and may be stretched based
on the mwait register setting (see Table 40).
Lucent Technologies Inc. 63
Page 66

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Table 43. powerc Register
The powerc register configures various power management modes.
Bit 15 14 13 12 11 10 9—8 7 6 5 4 3—1 0
Field XTLOFF SLOWCKI NOCK INT0EN rsrvd INT1EN rsrvd SIO1DIS SIO2DIS PHIFDIS TIMERDIS rsrvd ECCPDIS
Note: The reserved (rsrvd) bits should always be written with zeros to make the program compatible with future chip versions.
powerc fields
Field Description
XTLOFF 1 = power down small-signal clock input.
SLOWCKI 1 = select ring oscillator clock (internal slow clock).
NOCK 1 = disable internal processor clock.
INT0EN 1 = INT0 clears NOCK field.
INT1EN 1 = INT1 clears NOCK field.
SIO1DIS 1 = disable SIO1.
SIO2DIS 1 = disable SIO2.
PHIFDIS 1 = disable PHIF.
TIMERDIS 1 = disable timer.
ECCPDIS 1 = disable ECCP.
64 Lucent Technologies Inc.
Page 67

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Table 44. Register Settings After Reset
A • indicates that this bit is unknown on powerup reset and unaffected on subsequent reset. An S indicates that this
bit shadows the PC. P indicates the value on an input pin, i.e., the bit in the register reflects the value on the corresponding input pin.
Register Bits 15—0 Register Bits 15—0
r0 •••••••••••••••• inc 0000000000000000
r1 •••••••••••••••• ins 0000010000000110
r2 •••••••••••••••• sdx2 ••••••••••••••••
r3 •••••••••••••••• saddx ••••••••••••••••
j •••••••••••••••• cloop 000000000•••••••
k •••••••••••••••• mwait
rb 0000000000000000 saddx2 ••••••••••••••••
re 0000000000000000 sioc2 ••••••0000000000
pt •••••••••••••••• cbit ••••••••••••••••
pr •••••••••••••••• sbit 00000000PPPPPPPP
pi SSSSSSSSSSSSSSSS ioc 0000000000000000
i •••••••••••••••• jtag ••••••••••••••••
p •••••••••••••••• eir 0000000000001111
pl •••••••••••••••• a0 ••••••••••••••••
pllc 0000000000000000
x •••••••••••••••• a0l ••••••••••••••••
y •••••••••••••••• a1 ••••••••••••••••
yl •••••••••••••••• a1l ••••••••••••••••
auc 0000000000000000 timerc ••••••••00000000
psw ••••00•••••••••• timer0 0000000000000000
c0 •••••••••••••••• tdms2 ••••••0000000000
c1 ••••••••••••••• srta2 ••••••••••••••••
c2 •••••••••••••••• powerc 0000000000000000
sioc ••••••0000000000 edr •••••••••••••••
srta •••••••••••••••• ar0 ••••••••••••••••
sdx •••••••••••••••• ar1 ••••••••••••••••
tdms ••••••0000000000 ar2 ••••••••••••••••
phifc 0000000000000000 ar3 ••••••••••••••••
pdx0 0000000000000000 ear 0000000000000000
ybase •••••••••••••••• alf 00000000••••••••
† If EXM is high and INT1 is low when RSTB goes high, mwait will contain all ones instead of all zeros.
0000000000000000
†
Lucent Technologies Inc. 65
Page 68

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
5.3 Instruction Set Formats
This section defines the hardware-level encoding of the DSP1628 device instructions.
Multiply/ALU Instructions
Format 1: Multiply/ALU Read/Write Group
Field TDSF1XY
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Format 1a: Multiply/ALU Read/Write Group
Field TaTSF1 X Y
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Format 2: Multiply/ALU Read/Write Group
Field TDSF1XY
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Format 2a: Multiply/ALU Read/Write Group
Field TaTSF1 X Y
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Special Function Instructions
Format 3: F2 ALU Special Functions
Field T D S F2 CON
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Format 3a: F3 ALU Operations
Field T D S F3 SRC2 aT 0 1
Immediate Operand (IM16)
Bit 1514131211109876543210
Format 3b: BMU Operations
Field T D S F4[3—1] 0 F4[0] AR
Immediate Operand (IM16)
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
66 Lucent Technologies Inc.
Page 69

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Control Instructions
Format 4: Branch Direct Group
Field TJA
Bit 1514131211109876543210
Format 5: Branch Indirect Group
Field T B reserved 0
Bit 1514131211109876543210
Format 6: Conditional Branch Qualifier/Software Interrupt (icall)
Note that a branch instruction immediately follows except for a software interrupt (icall).
Field T SI reserved CON
Bit 1514131211109876543210
Data Move Instructions
Format 7: Data Move Group
Field TaT
Bit 1514131211109876543210
Format 8: Data Move (immediate operand — 2 words)
Field T D R reserved
Immediate Operand (IM16)
Bit 1514131211109876543210
Format 9: Short Immediate Group
Field T I Short Immediate Operand (IM9)
Bit 1514131211109876543210
Format 9a: Direct Addressing
Field T R/W DR 1 OFFSET
Bit 1514131211109876543210
Cache Instructions
Format 10: Do/Redo
Field TN K
Bit 1514131211109876543210
R Y/Z
Lucent Technologies Inc. 67
Page 70

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Field Descriptions
Table 45. T Field
Specifies the type of instruction.
T Operation Format
0000x goto JA 4
00010 Short imm j, k, rb, re 9
00011 Short imm r0, r1, r2, r3 9
00100 Y = a1[l] F1 1
00101 Z : aT[l] F1 2a
00110 Y F1 1
00111 aT[l] = Y F1 1a
01000 Bit 0 = 0, aT = R 7
01000 Bit 0 = 1, aTl = R 7
01001 Bit 10 = 0, R = a0 7
01001 Bit 10 = 1, R = a0l 7
01010 R = IM16 8
01011 Bit 10 = 0, R = a1 7
01011 Bit 10 = 1, R = a1l 7
01100 Y = R 7
01101 Z : R 7
01110 do, redo 10
01111 R = Y 7
1000x call JA 4
10010 ifc CON F2 3
10011 if CON F2 3
10100 Y = y[l] F1 1
10101 Z : y[l] F1 2
10110 x = Y F1 1
10111 y[l] = Y F1 1
11000 Bit 0 = 0, branch indirect 5
11000 Bit 0 = 1, F3 ALU 3a
11001 y = a0 x = X F1 1
11010 Cond. branch qualifier 6
11011 y = a1 x = X F1 1
11100 Y = a0[l] F1 1
11101 Z : y x = X F1 2
11110 Bit 5 = 0, F4 ALU (BMU) 3b
11110 Bit 5 = 1, direct addressing 9a
11111 y = Y x = X F1 1
Table 46. D Field
Specifies a destination accumulator.
D Register
0 Accumulator 0
1 Accumulator 1
Table 47. aT Field
Specifies transfer accumulator.
aT
0 Accumulator 1
1 Accumulator 0
Table 48. S Field
Specifies a source accumulator.
S Register
0 Accumulator 0
1 Accumulator 1
Table 49. F1 Field
Specifies the multiply/ALU function.
F1 Operation
0000 aD = p p = x * y
0001 aD = aS + p p = x * y
0010 p = x *
0011 aD = aS – p p = x * y
0100 aD = p
0101 aD = aS + p
0110 nop
0111 aD = aS – p
1000 aD = aS | y
1001 aD = aS ^ y
1010 aS & y
1011 aS – y
1100 aD = y
1101 aD = aS + y
1110 aD = aS & y
1111 aD = aS – y
Table 50. X Field
Specifies the addressing of ROM data in two-operand
multiply/ALU instructions. Specifies the high or low half
of an accumulator or the y register in one-operand multiply/ALU instructions.
X Operation
0
1
0 aTl, yl
1 aTh, yh
Register
y
Two-Operand Multiply/ALU
pt++
*
pt++i
*
One-Operand Multiply/ALU
68 Lucent Technologies Inc.
Page 71

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
Table 51. Y Field
Specifies the form of register indirect addressing with
postmodification.
Y Operation
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
Table 52. Z Field
Specifies the form of register indirect compound addressing with postmodification.
Z Operation
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
r0zp
*
r0pz
*
r0m2
*
r0jk
*
r1zp
*
r1pz
*
r1m2
*
r1jk
*
r2zp
*
r2pz
*
r2m2
*
r2jk
*
r3zp
*
r3pz
*
r3m2
*
r3jk
*
r0
r0++
r0-r0++j
r1
r1++
r1-r1++j
r2
r2++
r2-r2++j
r3
r3++
r3-r3++j
Table 53. F2 Field
Specifies the special function to be performed.
F2 Operation
0000 aD = aS >> 1
0001 aD = aS << 1
0010 aD = aS >> 4
0011 aD = aS << 4
0100 aD = aS >> 8
0101 aD = aS << 8
0110 aD = aS >> 16
0111 aD = aS << 16
1000 aD = p
1001 aDh = aSh + 1
1010 aD = ~aS
1011 aD = rnd(aS)
1100 aD = y
1101 aD = aS + 1
1110 aD = aS
1111 aD = – aS
Table 54. CON Field
Specifies the condition for special functions and conditional control instructions.
CON Condition CON Condition
00000 mi 01110 true
00001 pl 01111 false
00010 eq 10000 gt
00011 ne 10001 le
00100 lvs 10010 allt
00101 lvc 10011 allf
00110 mvs 10100 somet
00111 mvc 10101 somef
01000 heads 10110 oddp
01001 tails 10111 evenp
01010 c0ge 11000 mns1
01011 c0lt 11001 nmns1
01100 c1ge 11010 npint
01101 c1lt 11011 njint
11100 lock
11101 ebusy
Other
codes
Reserved — —
Lucent Technologies Inc. 69
Page 72

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
5 Software Architecture (continued)
Table 55. R Field
Specifies the register for data move instructions.
R Register R Register
000000 r0 100000 inc
000001 r1 100001 ins
000010 r2 100010 sdx2
000011 r3 100011 saddx
000100 j 100100 cloop
000101 k 100101 mwait
000110 rb 100110 saddx2
000111 re 100111 sioc2
001000 pt 101000 cbit
001001 pr 101001 sbit
001010 pi 101010 ioc
001011 i 101011 jtag
001100 p 101100 Reserved
001101 pl 101101 Reserved
001110 pllc 101110 Reserved
001111 Reserved 101111 eir
010000 x 110000 a0
010001 y 110001 a0l
010010 yl 110010 a1
010011 auc 110011 a1l
010100 psw 110100 timerc
010101 c0 110101 timer0
010110 c1 110110 tdms2
010111 c2 110111 srta2
011000 sioc 111000 powerc
011001 srta 111001 edr
011010 sdx 111010 ar0
011011 tdms 111011 ar1
011100 phifc 111100 ar2
011101 pdx0 111101 ar3
011110 Reserved 111110 ear
011111 ybase 111111 alf
Table 56. B Field
Specifies the type of branch instruction (except software
interrupt).
B Operation
000 return
001 ireturn
010 goto pt
011 call pt
1xx Reserved
Table 57. DR Field
DR Value Register
0000 r0
0001 r1
0010 r2
0011 r3
0100 a0
0101 a0l
0110 a1
0111 a1l
1000 y
1001 yl
1010 p
1011 pl
1100 x
1101 pt
1110 pr
1111 psw
Table 58. I Field
Specifies a register for short immediate data move instructions.
I Register
00 r0/j
01 r1/k
10 r2/rb
11 r3/re
Table 59. SI Field
Specifies when the conditional branch qualifier instruction should be interpreted as a software interrupt instruction.
SI Operation
0 Not a software interrupt
1 Software interrupt
70 Lucent Technologies Inc.
Page 73

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
5 Software Architecture (continued)
N Field
Number of instructions to be loaded into the cache. Zero
implies redo operation.
K Field
Number of times the N instructions in cache are to be
executed. Zero specifies use of value in cloop register.
JA Field
12-bit jump address.
R/W Field
A zero specifies a write, *(OFFSET) = DR.
A one specifies a read, DR = *(OFFSET).
Table 60. F3 Field
Specifies the operation in an F3 ALU instruction.
F3 Operation
1000 aD = aS[h, l] | {aT, IM16, p}
1001 aD = aS[h, l] ^ {aT, IM16, p}
1010 aS[h, l] & {aT, IM16, p}
1011 aS[h, l] – {aT, IM16, p}
1101 aD = aS[h, l] + {aT, IM16, p}
1110 aD = aS[h, l] & {aT, IM16, p}
1111 aD = aS[h, l] – {aT, IM16, p}
Table 62. BMU Encodings
F4 AR Operation
0000 00xx aD = aS >> arM
0001 00xx aD = aS << arM
0000 10xx aD = aS >>> arM
0001 10xx aD = aS <<< arM
1000 0000 aD = aS >> aS
1001 0000 aD = aS << aS
1000 1000 aD = aS >>> aS
1001 1000 aD = aS
1100 0000 aD = aS >> IM16
1101 0000 aD = aS << IM16
1100 1000 aD = aS >>> IM16
1101 1000 aD = aS <<< IM16
0000 1100 aD = exp(aS)
0001 11xx aD = norm(aS, arM)
1110 0000 aD = extracts(aS, IM16)
0010 00xx aD = extracts(aS, arM)
1110 0100 aD = extractz(aS, IM16)
0010 01xx aD = extractz(aS, arM)
1110 1000 aD = insert(aS, IM16)
1010 10xx aD = insert(aS, arM)
0111 0000 aD = aS:aa0
0111 0001 aD = aS:aa1
Note: xx encodes the auxiliary register to be used; 00 (ar0),
01(ar1), 10 (ar2), or 11(ar3).
<<< aS
Table 61. SRC2 Field
Specifies operands in an F3 ALU instruction.
SRC2 Operands
00 aSl, IM16
10 aSh, IM16
01 aS, aT
11 aS, p
Lucent Technologies Inc. 71
Page 74

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
6 Signal Descriptions
EXTERNAL
MEMORY
INTERFACE
SERIAL
INTERFACE #1
AB[15:0]
DB[15:0]
RWN
EXM
EROM
ERAMHI
ERAMLO
DSEL
DO1
OLD1
OCK1
OBE1
DI1
ILD1
ICK1
IBF1
SYNC1
SADD1
DOEN1
16
16
IO
DSP1628
RSTB
CKO
CKI2
CKI
STOP
2
INT[1:0]
4
VEC[3:0] OR IOBIT[4:7]
IACK
TRAP
PSTAT OR DO2
PODS OR OLD2
PCSN OR OCK2
POBE OR OBE2
PBSEL OR SYNC2
PB0 OR ICK2
PIDS OR ILD2
PB1 OR DI2
PIBF OR IBF2
PB2 OR DOEN2
PB3 OR SADD2
4
PB[7:4] OR IOBIT[3:O]
TRST
TDI
TDO
TCK
TMS
SYSTEM
INTERFACE
OR
CONTROL I/O
INTERFACE
PARALLEL HOST
INTERFACE
SERIAL INTERFACE #2
OR
AND CONTROL I/O
INTERFACE
JTAG TEST
INTERFACE
5-4006 (C).h
Figure 12. DSP1628 Pinout by Interface
Figure 12 shows the pinout for the DSP1628. The signals can be separated into five interfaces as shown.
These interfaces and the signals that comprise them
are described below.
Reset clears IACK, VEC[3:0]/IOBIT[4:7], IBF, and IBF2.
The DAU condition flags are not affected by reset.
IOBIT[7:0] are initialized as inputs. If any of the IOBIT
pins are switched to outputs (by writing sbit), their initial
value will be logic zero (see Figure 44, Register Settings
After Reset).
6.1 System Interface
The system interface consists of the clock, interrupt,
and reset signals for the processor.
RSTB
Reset: Negative assertion. A high-to-low transition
causes the processor to enter the reset state. The auc,
powerc, sioc, sioc2, phifc, pdx0, tdms, tdms2, timerc, timer0, sbit (upper byte), inc, ins (except OBE,
OBE2, and PODS status bits set), alf (upper 2 bits,
AWAIT and LOWPR), ioc, rb, and re registers are
cleared. The mwait register is initialized to all 0s (zero
wait-states) unless the EXM pin is high and the INT1 pin
Upon negation of the signal, the processor begins execution at location 0x0000 in the active memory map
(see Section 4.4, Memory Maps and Wait-States).
CKI
Input Clock: A mask-programmable option selects one
of three possible input buffers for the CKI pin (see Section 7, Mask-Programmable Options, and Table 1, Pin
Descriptions). The internal CKI from the output of the
selected input buffer can then drive the internal processor clock directly (1X) or drive the on-chip PLL (see
Section 4.13). The PLL allows the CKI input clock to be
at a lower frequency than the internal processor clock.
is low. In that case, the mwait register is initialized to all
1s (15 wait-states).
72 Lucent Technologies Inc.
Page 75

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
6 Signal Descriptions (continued)
CKI2
Input Clock 2: Used with mask-programmable input
clock options which require an external small signal differential across CKI and CKI2 (see Table 1, Pin Descriptions). When the CMOS option is selected, this pin
should be tied to VSSA.
STOP
Stop Input Clock: Negative assertion. A high-to-low
transition synchronously stops all of the internal processor clocks leaving the processor in a defined state. Returning the pin high will synchronously restart the
processor clocks to continue program execution from
where it left off without any loss of state. This hardware
feature has the same effect as setting the NOCK bit in
the powerc register (see Table 43).
CKO
Clock Out: Buffered output clock with options pro-
grammable via the ioc register (see Table 42). The selectable CKO options (see Tables 42 and 33) are as
follows:
■ A free-running output clock at the frequency of the
internal processor clock; runs at the internal ring oscillator frequency when SLOWCKI is enabled.
■ A wait-stated clock based on the internal instruction
cycle; runs at the internal ring oscillator frequency
when SLOWCKI is enabled.
■ A sequenced, wait-stated clock based on the EMI
sequencer cycle; runs at the internal ring oscillator
frequency when SLOWCKI is enabled.
■ A free-running output clock that runs at the CKI rate,
independent of the powerc register setting. This
option is only available with the small-signal clock
options. When the PLL is selected, the CKO frequency equals the input CKI frequency regardless
of how the PLL is programmed.
■ A logic 0.
■ A logic 1.
INT[1:0]
Processor Interrupts 0 and 1: Positive assertion.
Hardware interrupt inputs to the DSP1628. Each is enabled via the inc register. When enabled and asserted,
each cause the processor to vector to the memory location described in Table 4. INT1 is used in conjunction
with EXM to select the desired reset initialization of the
mwait register (see Table 40). When both INT0 and
RSTB are asserted, all output and bidirectional pins
(except TDO, which 3-states by JTAG control) are
put in a 3-state condition.
VEC[3:0]
Interrupt Output Vector: These four pins indicate
which interrupt is currently being serviced by the device.
Table 4 shows the code associated with each interrupt
condition. VEC[3:0] are multiplexed with IOBIT[4:7].
IACK
Interrupt Acknowledge: Positive assertion. IACK
signals when an interrupt is being serviced by the
DSP1628. IACK remains asserted while in an interrupt
service routine, and is cleared when the ireturn instruction is executed.
TRAP
Trap Signal: Positive assertion. When asserted, the
processor is put into the trap condition, which normally
causes a branch to the location 0x0046. The hardware
development system (HDS) can configure the trap pin
to cause an HDS trap, which causes a branch to location 0x0003. Although normally an input, the pin can be
configured as an output by the HDS. As an output, the
pin can be used to signal an HDS breakpoint in a multiple processor environment.
Lucent Technologies Inc. 73
Page 76

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
6 Signal Descriptions (continued)
6.2 External Memory Interface
The external memory interface is used to interface the
DSP1628 to external memory and I/O devices. It supports read/write operations from/to program and data
memory spaces. The interface supports four external
memory segments. Each external memory segment
can have an independent number of software-programmable wait-states. One hardware address is decoded,
and an enable line is provided, to allow glueless I/O interfacing.
AB[15:0]
External Memory Address Bus: Output only.
This 16-bit bus supplies the address for read or write
operations to the external memory or I/O. During external memory accesses, AB[15:0] retain the value of the
last valid external access.
DB[15:0]
External Memory Data Bus: This 16-bit bidirectional
data bus is used for read or write operations to the external memory or I/O.
EROM
External ROM Enable Signal: Negative assertion.
When asserted, the signal indicates an access to
external program memory (see Table 5, Instruction/
Coefficient Memory Maps). This signal's leading edge
can be delayed via the ioc register (see Table 42).
ERAMHI
External RAM High Enable Signal: Negative asser-
tion. When asserted, the signal indicates an access to
external data memory addresses 0x8000 through
0xFFFF (see Table 6, Data Memory Map). This signal's
leading edge can be delayed via the ioc register (see
Table 42).
ERAMLO
External RAM Low Enable Signal: Negative asser-
tion. When asserted, the signal indicates an access to
external data memory addresses 0x4100 through
0x7FFF (see Table 6, Data Memory Map). This signal's
leading edge can be delayed via the ioc register (see
Table 42).
IO
RWN
Read/Write Not: When a logic 1, the pin indicates that
the memory access is a read operation. When a logic 0,
the memory access is a write operation.
EXM
External Memory Select: Input only. This signal is
latched into the device on the rising edge of RSTB. The
value of EXM latched in determines whether the internal
ROM is addressable in the instruction/coefficient memory map. If EXM is low, internal ROM is addressable. If
EXM is high, only external ROM is addressable in the
instruction/coefficient memory map (see Table 5, Instruction/Coefficient Memory Maps). EXM chooses between MAP1 or MAP2 and between MAP3 or MAP4.
External I/O Enable Signal: Negative assertion. When
asserted, the signal indicates an access to external data
memory addresses 0x4000 through 0x40FF (see
Table , Data Memory Map). This memory segment is intended for memory-mapped I/O. This signal's leading
edge can be delayed via the ioc register (see Table 42).
74 Lucent Technologies Inc.
Page 77

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
6 Signal Descriptions (continued)
6.3 Serial Interface #1
The serial interface pins implement a full-featured synchronous/asynchronous serial I/O channel. In addition,
several pins offer a glueless TDM interface for multiprocessing communication applications (see Figure 6, Multiprocessor Communications and Connections).
DI1
Data Input: Serial data is latched on the rising edge of
ICK1, either LSB or MSB first, according to the sioc register MSB field (see Table 26).
ICK1
Input Clock: The clock for serial input data. In active
mode, ICK1 is an output; in passive mode, ICK1 is an
input, according to the sioc register ICK field (see
Table 26). Input has typically 0.7 V hysteresis.
ILD1
Input Load: The clock for loading the input buffer,
sdx[in], from the input shift register isr. A falling edge of
ILD1 indicates the beginning of a serial input word. In
active mode, ILD1 is an output; in passive mode, ILD1
is an input, according to the sioc register ILD field (see
Table 26). Input has typically 0.7 V hysteresis.
IBF1
Input Buffer Full: Positive assertion. IBF1 is asserted
when the input buffer, sdx[in], is filled. IBF1 is negated
by a read of the buffer, as in a0 = sdx. IBF1 is also negated by asserting RSTB.
OCK1
Output Clock: The clock for serial output data. In ac-
tive mode, OCK1 is an output; in passive mode, OCK1
is an input, according to the sioc register OCK field (see
Table 26). Input has typically 0.7 V hysteresis.
OLD1
Output Load: The clock for loading the output shift reg-
ister, osr, from the output buffer sdx[out]. A falling edge
of OLD1 indicates the beginning of a serial output word.
In active mode, OLD1 is an output; in passive, OLD1 is
an input, according to the sioc register OLD field (see
Table 26). Input has typically 0.7 V hysteresis.
OBE1
Output Buffer Empty: Positive assertion. OBE1 is as-
serted when the output buffer, sdx[out], is emptied
(moved to the output shift register for transmission).
It is cleared with a write to the buffer, as in sdx = a0.
OBE1 is also set by asserting RSTB.
SADD1
Serial Address: Negative assertion. A 16-bit serial bit
stream typically used for addressing during multiprocessor communication between multiple DSP16xx devices. In multiprocessor mode, SADD1 is an output
when the tdms time slot dictates a serial transmission;
otherwise, it is an input. Both the source and destination
DSP can be identified in the transmission. SADD1 is always an output when not in multiprocessor mode and
can be used as a second 16-bit serial output. See the
DSP1611/17/18/27 Digital Signal Processor Information Manual
stated when DOEN1 is high. When used on a bus,
SADD1 should be pulled high through a 5 kΩ resistor.
for additional information. SADD1 is 3-
DO1
Data Output: The serial data output from the output
shift register (osr), either LSB or MSB first (according to
the sioc register MSB field). DO1 changes on the rising
edges of OCK1. DO1 is 3-stated when DOEN1 is high.
DOEN1
Data Output Enable: Negative assertion. An input
when not in the multiprocessor mode. DO1 and SADD1
are enabled only if DOEN1 is low. DOEN1 is bidirectional when in the multiprocessor mode (tdms register
MODE field set). In the multiprocessor mode, DOEN1
indicates a valid time slot for a serial output.
Lucent Technologies Inc. 75
SYNC1
Multiprocessor Synchronization: Typically used in
the multiprocessor mode, a falling edge of SYNC1 indicates the first word (time slot 0) of a TDM I/O stream
and causes the resynchronization of the active ILD1
and OLD1 generators. SYNC1 is an output when the
tdms register SYNC field is set (i.e., selects the master
DSP and uses time slot 0 for transmit). As an input,
SYNC1 must be tied low unless part of a TDM interface.
When used as an output, SYNC1 = [ILD1/OLD1]/8 or
16, depending on the setting of the SYNCSP field of the
tdms register. When configured as described above,
SYNC1 can be used to generate a slow clock for SIO
operations. Input has typically 0.7 V hysteresis.
Page 78

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
6 Signal Descriptions (continued)
6.4 Parallel Host Interface or Serial
Interface #2 and Control I/O Interface
This interface pin multiplexes a parallel host interface
with a second serial I/O interface and a 4-bit I/O interface. The interface selection is made by writing the
ESIO2 bit in the ioc register (see Table 42 and
Section 4.1). The functions and signals for the second
SIO correspond exactly with those in SIO #1. Therefore,
the pin descriptions below discuss only PHIF and BIO
pin functionality.
PB[7:0]
Parallel I/O Data Bus: This 8-bit bidirectional bus is
used to input data to, or output data from, the PHIF.
Note that PB[3:0] are pin multiplexed with SIO2 func-
tionality, and PB[7:4] are pin multiplexed with BIO unit
pins IOBIT[3:0] (see Section 4.1).
PCSN
Peripheral Chip Select Not: Negative assertion.
PCSN is an input. While PCSN is low, the data strobes
PIDS and PODS are enabled. While PCSN is high, the
DSP1628 ignores any activity on PIDS and PODS.
PODS
Parallel Output Data Strobe: An input pin, software
configurable to support both
cols.
In
Intel
mode: Negative assertion. When PODS is
pulled low by an external device, the DSP1628 places
the contents of the parallel output register, pdx0, onto
the PB bus.
In
Motorola
level. The external device uses PODS/PDS as its data
strobe for both read and write operations.
PIBF
Parallel Input Buffer Full: An output pin with positive
assertion; configurable in software. This flag is cleared
after reset, indicating an empty input buffer pdx0[in].
PIBF is set immediately after the rising edge of PIDS or
PCSN, indicating that data has been latched into the
pdx0[in] register. When the DSP1628 reads the contents of this register, emptying the buffer, the flag is
cleared.
Configured in software, PIBF may become the logical
OR of the PIBF and POBE flags.
POBE
mode: Software-configurable assertion
Intel
and
Motorola
proto-
PBSEL
Peripheral Byte Select: An input pin, configurable in
software. Selects the high or low byte of pdx0 available
for host accesses.
PSTAT
Peripheral Status Select: PSTAT is an input. When a
logic 0, the PHIF will output the pdx0[out] register on
the PB bus. When a logic 1, the PHIF will output the
contents of the PSTAT register on PB[7:0].
PIDS
Parallel Input Data Strobe: An input pin, software con-
Intel
and
figurable to support both
In
Intel
mode: Negative assertion. PIDS is pulled low by
an external device to indicate that data is available on
the PB bus. The DSP latches data on the PB bus on the
rising edge (low-to-high transition) of PIDS or PCSN,
whichever comes first.
In
Motorola
write strobe. The external device sets PIDS/PRWN to a
logic 0 to indicate that data is available on the PB bus
(write operation by the external device). A logic 1 on
PIDS/PRWN indicates an external read operation by
the external device.
mode: PIDS/PRWN functions as a read/
Motorola
protocols.
Parallel Output Buffer Empty: An output pin with positive assertion; configurable in software. This flag is set
after reset, indicating an empty output buffer pdx0[out].
POBE is set immediately after the rising edge of PODS
or PCSN, indicating that the data in pdx0[out] has been
driven onto the PB bus. When the DSP1628 writes to
pdx0[out], filling the buffer, this flag is cleared.
6.5 Control I/O Interface
This interface is used for status and control operations
provided by the bit I/O unit of the DSP1628. It is pin multiplexed with the PHIF and VEC[3:0] pins (see Section
4.1). Setting the ESIO2 and EBIOH bits in the ioc register provides a full 8-bit BIO interface at the associated
pins.
IOBIT[7:0]
I/O Bits [7:0]: Each of these bits can be independently
configured as either an input or an output. As outputs,
they can be independently set, toggled, or cleared. As
inputs, they can be tested independently or in combinations for various data patterns.
76 Lucent Technologies Inc.
Page 79

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
6 Signal Descriptions (continued)
6.6 JTAG Test Interface
The JTAG test interface has features that allow programs and data to be downloaded into the DSP via four
pins. This provides extensive test and diagnostic capability. In addition, internal circuitry allows the device to
be controlled through the JTAG port to provide on-chip
in-circuit emulation. Lucent Technologies provides
hardware and software tools to interface to the on-chip
HDS via the JTAG port.
Note: The DSP1628 provides all JTAG/
standard test capabilities including boundary
scan. See the
DSP1611/17/18/27 Digital Signal
Processor Information Manual
formation on the JTAG test interface.
IEEE
1149.1
for additional in-
TDI
Test Data Input: JTAG serial input signal. All serial-
scanned data and instructions are input on this pin. This
pin has an internal pull-up resistor.
TDO
Test Data Output: JTAG serial output signal. Serial-
scanned data and status bits are output on this pin.
TMS
Test Mode Select: JTAG mode control signal that,
when combined with TCK, controls the scan operations.
This pin has an internal pull-up resistor.
TCK
Test Clock: JTAG serial shift clock. This signal clocks
all data into the port through TDI, and out of the port
through TDO, and controls the port by latching the TMS
signal inside the state-machine controller.
TRST
Test Reset: Negative assertion. JTAG test reset. When
asserted low, asynchronously resets JTAG TAP controller. In an application environment, this pin must be
asserted prior to or concurrent with RSTB. This pin has
an internal pull-up resistor.
Lucent Technologies Inc. 77
Page 80

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
7 Mask-Programmable Options
The DSP1628 contains a ROM that is mask-programmable. The selection of several programmable features is
made when a custom ROM is encoded. These features select the input clock options, the instruction/coefficient
memory map option, and the hardware emulation or ROM security option, as summarized in Table 63.
Table 63. DSP1628 ROM Options
Features Options Comments
Input Clock CMOS Level
Small Signal
Memory Map DSP1628x16
DSP1628x08
ROM Security Nonsecure
Secure
Specify and link 1628hds.v
Specify and link crc16.v
no emulation capability.
* 1628hds.v
and must reside in the first 4 Kwords of ROM.
† crc16.v# is the cyclic redundancy check object code. It uses approximately 75 words and must reside in the first 4 Kwords
of ROM. See the
#
(# indicates the current version number) is the relocatable HDS object code. It uses approximately 140 words
DSP1600 Support Tools Manual
for detailed information.
2.7 V
2.7 V
16 Kwords DPRAM
8 Kwords DPRAM
allows emulation.
#
#
*,
†
,
7.1 Input Clock Options
For all input options, the input clock CKI can run at some fraction of the internal clock frequency by setting the PLL
multiplication factors appropriately (see Section 4.13, Clock Synthesis). When the PLL is bypassed, the input clock
CKI frequency is the internal clock frequency.
7.2 Memory Map Options
The DSP1628 offers a DSP1628x16 or a DSP1628x08 where the difference is in the memory maps. The
DSP1628x16 contains 16 Kwords of internal RAM (DPRAM). The DSP1628x08 supports the use of only 8 Kwords
of DPRAM. See Section 4.4 Memory Maps and Wait-States for further description.
7.3 ROM Security Options
The DSP1600 hardware development system (HDS) provides on-chip in-circuit emulation and requires that the relocatable HDS code be linked to the application code. This code's object file is called 1628hds.v#, where # is a
unique version identifier. Refer to the DSP1628-ST software tools release for more specific information. If on-chip
in-circuit emulation is desired, a nonsecure ROM must be chosen. If ROM security is desired with the DSP1628, the
HDS cannot be used. To provide testing of the internal ROM contents on a secure ROM device, a cyclic redundancy
check (CRC) program is called by and linked with the user's source code. The CRC code resides in the first
4 Kwords of ROM.
See the
DSP1600 Support Tools Manual
for more detailed information.
78 Lucent Technologies Inc.
Page 81

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
8 Device Characteristics
8.1 Absolute Maximum Ratings
Stresses in excess of the absolute maximum ratings can cause permanent damage to the device. These are absolute stress ratings only. Functional operation of the device is not implied at these or any other conditions in excess
of those given in the operational sections of the data sheet. Exposure to absolute maximum ratings for extended
periods can adversely affect device reliability.
External leads can be bonded and soldered safely at temperatures of up to 300 °C..........(TBD for 144-pin PBGA)
Voltage Range on VDD with Respect to Ground Using Devices Designed for 3 V Operation..........–0.5 V to +4.6 V
Voltage Range on Any Pin ............................................................................................ .VSS – 0.5 V to VDD + 0.5 V
Power Dissipation................................................................................................................................................1 W
Ambient Temperature Range......................................................................................................... –40 °C to +85 °C
Storage Temperature Range.....................................................................................................................–65 °C to +150 °C
8.2 Handling Precautions
All MOS devices must be handled with certain precautions to avoid damage due to the accumulation of static
charge. Although input protection circuitry has been incorporated into the devices to minimize the effect of this static
buildup, proper precautions should be taken to avoid exposure to electrostatic discharge during handling and mounting. Lucent Technologies employs a human-body model for ESD susceptibility testing. Since the failure voltage of
electronic devices is dependent on the current, voltage, and hence, the resistance and capacitance, it is important
that standard values be employed to establish a reference by which to compare test data. Values of 100 pF and
1500 Ω are the most common and are the values used in the Lucent Technologies human-body model test circuit.
The breakdown voltage for the DSP1628 is greater than 2000 V.
8.3 Recommended Operating Conditions
Table 64. Recommended Operating Conditions
Maximum
Instruction Rate
(MIPS)
52 19.2 ns CMOS, small-signal PBGA
80 12.5 ns CMOS, small-signal PBGA
The ratio of the instruction cycle rate to the input clock frequency is 1:1 without the PLL (referred to as 1X operation)
and M/(2N) with the PLL selected (see Section 4.13). Device speeds greater than 50 MIPS do not support 1X
operation; use the PLL.
Device
Speed
Input Clock Package
BQFP
or TQFP
BQFP
or TQFP
Supply Voltage
VDD (V)
Min Max Min Max
2.7 3.3 –40 85
2.7 3.3 –40 85
Ambient Tem-
perature TA (°C)
Lucent Technologies Inc. 79
Page 82

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
8 Device Characteristics (continued)
8.4 Package Thermal Considerations
The recommended operating temperature specified above is based on the maximum power, package type, and
maximum junction temperature. The following equations describe the relationship between these parameters. If the
applications' maximum power is less than the worst-case value, this relationship determines a higher maximum ambient temperature or the maximum temperature measured at top dead center of the package.
TA = TJ – P x ΘJA
TTDC = TJ – P x ΘJ-TDC
where TA is the still-air ambient temperature and TTDC is the temperature measured by a thermocouple at the top
dead center of the package.
Maximum Junction Temperature (TJ) in 100-Pin BQFP............................................................................ 100 °C
100-pin BQFP Maximum Thermal Resistance in Still-Air-Ambient (ΘJA)................................................55 °C/W
100-pin BQFP Maximum Thermal Resistance, Junction to Top Dead Center (Θ
Maximum Junction Temperature (TJ) in 100-Pin TQFP............................................................................100 °C
100-pin TQFP Maximum Thermal Resistance in Still-Air-Ambient (ΘJA) ................................................64 °C/W
100-pin TQFP Maximum Thermal Resistance, Junction to Top Dead Center (ΘJ-TDC)............................6 °C/W
Maximum Junction Temperature (TJ) in 144-Pin PBGA............................................................................ 100 °C
144-pin PBGA Maximum Thermal Resistance in Still-Air-Ambient (ΘJA).....................TBD (estimated 30 °C/W)
144-pin PBGA Maximum Thermal Resistance, Junction to Top Dead Center (ΘJ-TDC)................................TBD
WARNING: Due to package thermal constraints, proper precautions in the user's application should be
taken to avoid exceeding the maximum junction temperature of 100 °C. Otherwise, the device
will be affected adversely.
The applications' maximum power, the package type, and the maximum ambient temperature determine the maximum activity factors for the error correction coprocessor as well as for the DSP core and its peripherals. The following equations describe the relationship between these parameters. If the applications' maximum power is less than
the worst-case value, this relationship permits higher activity factors. For these calculations, refer to Section 4.13,
Power Management and Section 9.1, Power Dissipation.
P = MIPS x [AFECCP(PECCP/MIPS) + AFDSP(PDSP/MIPS) + (1 – AFDSP) (PSLEEP/MIPS)]
P x ΘJA + 85 °C <= 125 °C
where:
P = Maximum power in mW
MIPS = Device speed (internal clock speed ÷ 10
AFECCP = Activity factor for error correction coprocessor (ECCP)
AFDSP = Activity factor for DSP core and peripherals
AFSLEEP = Activity factor for sleep mode operation = 1 – AFDSP
PECCP = Power dissipation in mW for ECCP
PDSP = Power dissipation in mW for DSP core and peripherals
PSLEEP = Power dissipation in mW for sleep mode operation
For example, for a TQFP device operating at 50 MIPS in a 3 V application with 40% ECCP activity, 100% DSP activity, and 0% sleep activity, the equation would look like this:
50 MIPS x [0.4 (35 mW/50 MIPS) + 1.0(125 mW/50 MIPS) + 0] = 139 mW
139 mW x 64 °C/W + 85 °C = 94 °C <= 100 °C
The above example demonstrates the maximum operating capability in the TQFP package.
Note: The power calculations listed are for internal power dissipation only. The external power dissipation due to
output pins switching must also be included.
6)
J-TDC)..........................12 °C/W
80 Lucent Technologies Inc.
Page 83

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
9 Electrical Characteristics and Requirements
The following electrical characteristics are preliminary and are subject to change. Electrical characteristics refer to
the behavior of the device under specified conditions. Electrical requirements refer to conditions imposed on the
user for proper operation of the device. The parameters below are valid for the conditions described in Section 8.3,
Recommended Operating Conditions.
Table 61. Electrical Characteristics and Requirements
Parameter Symbol Min Max Unit
Input Voltage:
Low V
High V
Input Current (except TMS, TDI):
Low (V
High (V
= 0 V, VDD = 5.25 V) I
IL
IH
= 5.25 V, VDD = 5.25 V) I
Input Current (TMS, TDI):
Low (V
IL
= 0 V, VDD = 5.25 V) I
High (VIH = 5.25 V, VDD = 5.25 V) I
Output Low Voltage:
Low (I
OL
= 2.0 mA) V
Low (IOL = 50 µA) V
Output High Voltage:
High (I
High (I
= –2.0 mA) V
OH
OH
= –50 µA) V
Output 3-State Current:
Low (V
DD
= 5.25 V, VIL = 0 V) I
High (VDD = 5.25 V, VIH = 5.25 V) I
Input Capacitance C
IL
IH
IL
IH
IL
IH
OL
OL
OH
OH
OZL
OZH
–0.3 0.3 * V
0.7 * V
DD
–5 —
—5
–100 —
—5
— 0.4 V
— 0.2 V
VDD – 0.7 — V
DD
V
– 0.2 — V
–10 —
—10
I
—5pF
DD
V
+ 0.3 V
DD
V
µ
A
µ
A
µ
A
µ
A
µ
A
µ
A
Table 62. Electrical Requirements for Mask-Programmable Input Clock Options
Parameter Symbol Min Max Unit Note
CKI CMOS Level Input Voltage:
Low VIL –0.3 0.3 * V
High VIH 0.7 * V
DD
DD
V—
VDD + 0.3 V —
Small-Signal Peak-to-Peak Voltage Vpp 0.6 — V Note 1
(on CKI)
Small-Signal Input Duty Cycle DCyc 45 55 % Note 2
Small-Signal Input Voltage Range Vin 0.2 * V
DD
0.6 * V
DD
V—
(pins: CKI, CKI2)
Small-Signal Buffer Frequency Range fss — 35 MHz —
Note 1.The small-signal buffer must be used in single-ended mode where an ac waveform (sine or square) is applied to CKI and a dc voltage
approximately equal to the average value of CKI is applied to CKI2, as shown in the figure below. The maximum allowable ripple on CKI2
is 100 mV.
CKI
CKI2
Note 2.Duty cycle for a sine wave is defined as the percentage of time during each clock cycle that the voltage on CKI exceeds the voltage on
CKI2.
81 Lucent Technologies Inc.
Page 84

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
9 Electrical Characteristics and Requirements
(continued)
Table 63. PLL Electrical Specifications, VCO Frequency Ranges
Parameter Symbol Min Max Unit Note
VCO frequency range
(VDD = 3 V
±
10%)
f
VCO
50
160 MHz 1
Input Jitter at CKI — — 200 ps-rms —
Table 64. PLL Electrical Specifications and pllc Register Settings
MV
DD
pllc13
(ICP)
pllc12
Reserved
pllc[11:8]
(LF[3:0])
Typical Lock-in Time (µs)
(See Note 2.)
23—24 2.7 V – 3.3 V 1 0 1011 30
21—22 2.7 V – 3.3 V 1 0 1010 30
19—20 2.7 V – 3.3 V 1 0 1001 30
16—18 2.7 V – 3.3 V 1 0 1000 30
12—15 2.7 V – 3.3 V 1 0 0111 30
8—11 2.7 V – 3.3 V 1 0 0110 30
2—7 2.7 V – 3.3 V 1 0 0100 30
Note 1. The M and N counter values in the
Note 2. Lock-in time represents the time following assertion of the PLLEN bit of the
priate range (see Table 63). Choose the lowest value of N and then the appropriate value of M for
INTERNAL CLOCK
f
the PLL output clock is unstable. The DSP must operate from the 1X CKI input clock or from the slow
ring oscillator while the PLL is locking. Completion of the lock-in interval is indicated by assertion of the
LOCK flag.
=
CKI
f
x (M/(2N)) =
pllc
register must be set so that the VCO will operate in the appro-
VCO
/2.
f
pllc
register during which
Lucent Technologies Inc. 82
Page 85

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
9 Electrical Characteristics and Requirements
VDD
VDD – 0.1
DD – 0.2
V
VOH (V)
VDD – 0.3
V
DD – 0.4
0 102030405 1525354550
IOH (mA)
(continued)
DEVICE
UNDER
TEST
VOH
IOH
5-4007 (C).a
VOL (V)
Figure 9. Plot of VOH vs. IOH Under Typical Operating Conditions
0.4
0.3
0.2
0.1
0
0 5 10 15 20 25 30 35 40 45 50
IOL (mA)
Figure 10. Plot of VOL vs. IOL Under Typical Operating Conditions
DEVICE
UNDER
TEST
VOL
IOL
5-4008 (C).b
83 Lucent Technologies Inc.
Page 86

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
9 Electrical Characteristics and Requirements
(continued)
9.1 Power Dissipation
Power dissipation is highly dependent on DSP program activity and the frequency of operation. The typical power
dissipation listed is for a selected application. The following electrical characteristics are preliminary and are subject
to change.
Table 65. Power Dissipation and Wake-Up Latency
Operating Mode
(Unused inputs at VDD or V
V
SS)
DD=
ECCP Operation
CKI = 40 MHz
Normal Operation ioc = 0x0180
PLL Disabled
CKI & CKO = 40 MHz
CMOS 93.7 91.2 — —
Small Signal 96.3 93.7 — —
CKI & CKO = 0 MHz
CMOS 0.17 0.17 — —
Small Signal 2.75 2.75 — —
Normal Operation ioc = 0x0180
PLL Enabled
pllc = 0xFC0E
CKI = 10 MHz CKO = 40 MHz
CMOS 96.7 94.2 — —
Small Signal 99.3 96.7 — —
Power Management Modes
CKO = 40 MHz
Standard Sleep, External Interrupt
alf[15] = 1, ioc = 0x0180
PLL Disabled During Sleep
CMOS 14.0 9.3 3T*
Small Signal 16.3 12.0 3T*
Standard Sleep, External Interrupt
alf[15] = 1, ioc = 0x0180
PLL Enabled During Sleep
CMOS 16.5 11.2 — 3T*
Small Signal 18.9 14.0 — 3T*
Sleep with Slow Internal Clock
Small Signal Enabled
powerc[15:14] = 01,
alf[15] = 1, ioc = 0x0180
PLL Disabled During Sleep
CMOS 0.7 0.5 5.0 µs
Small Signal 3.7 3.5 5.0 µs
Sleep with Slow Internal Clock
Small Signal Enabled
powerc[15:14] = 01,
alf[15] = 1, ioc = 0x0180
PLL Enabled During Sleep
CMOS 3.3 2.9 — 5.0 µs
Small Signal 6.1 5.5 — 5.0 µs
* T = CKI clock cycle for 1X input clock option or T = CKI clock cycle divided by M/(2N) for PLL clock option (see Section 4.12).
t
†
= PLL lock time (see Table 64).
L
Typical Power Dissipation (mW) Wake-Up Latency
3 V 3 V 3 V 3 V
P
ECCP
28.1 — — —
I/O Units ON, ECCP OFF
powerc[7:4,0] = 0x01
I/O Units OFF, ECCP OFF
powerc[7:4,0] = 0xF1
P
P
P
(PLL Not Used
During Wake State)
DSP
DSP
SLEEP
(PLL Used
During Wake State)
†
L
3T* + t
†
3T* + tL
5.0 µs + t
5.0 µs + t
†
L
†
L
Lucent Technologies Inc. 84
Page 87

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
9 Electrical Characteristics and Requirements
Table 65. Power Dissipation and Wake-Up Latency
Operating Mode
(Unused inputs at VDD or V
V
SS)
DD=
Typical Power Dissipation (mW) Wake-Up Latency
3 V 3 V 3 V 3 V
I/O Units ON, ECCP OFF
powerc[7:4,0] = 0x01
(continued)
I/O Units OFF, ECCP OFF
powerc[7:4,0] = 0xF1
(continued)
During Wake State)
(PLL Not Used
(PLL Used
During Wake State)
Sleep with Slow Internal Clock
Small Signal Disabled
powerc[15:14] = 11,
alf[15] = 1, ioc = 0x0180
PLL Disabled During Sleep
Small Signal 0.40 0.30 20 µs
20 µs + t
†
L
Software Stop
powerc[15:12] = 0011
PLL Disabled During STOP
CMOS 0.060 0.060 3T*
3T* + t
†
L
Software Stop
powerc[15:12] = 1111
PLL Disabled During STOP
Small Signal 0.060 0.060 20 µs
20 µs + t
†
L
Hardware Stop (STOP = VSS)
powerc[15:12] = 0000
PLL Disabled During STOP
CMOS 0.060 0.060 3T* —
Small Signal 1.20 1.20 3T* —
Hardware Stop (STOP = V
SS)
powerc[15:12] = 0000
PLL Enabled During STOP
CMOS 2.5 2.5 3T* 3T*
Small Signal 3.6 3.6 3T* 3T*
* T = CKI clock cycle for 1X input clock option or T = CKI clock cycle divided by M/(2N) for PLL clock option (see Section 4.12).
t
L
†
= PLL lock time (see Table 64).
The power dissipation listed is for internal power dissipation only. Total power dissipation can be calculated on the
basis of the application by adding C x V
2
x f for each output, where C is the additional load capacitance and f is
DD
the output frequency.
Power dissipation due to the input buffers is highly dependent on the input voltage level. At full CMOS levels, es-
sentially no dc current is drawn. However, for levels between the power supply rails, especially at or near the threshold of VDD/2, high currents can flow. Although input and I/O buffers may be left untied (since the input voltage levels
of the input and I/O buffers are designed to remain at full CMOS levels when not driven by the DSP), it is still recommended that unused input and I/O pins be tied to VSS or VDD through a 10 kΩ resistor to avoid application ambiguities. Further, if I/O pins are tied high or low, they should be pulled fully to VSS or VDD.
WARNING: The device needs to be clocked for at least six CKI cycles during reset after powerup. Other-
wise, high currents may flow.
85 Lucent Technologies Inc.
Page 88

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
10 Timing Characteristics for 2.7 V Operation
The following timing characteristics and requirements are preliminary information and are subject to change. Timing
characteristics refer to the behavior of the device under specified conditions. Timing requirements refer to conditions
imposed on the user for proper operation of the device. All timing data is valid for the following conditions:
TA = –40 °C to +85 °C (See Section 8.3.)
VDD = 3 V ± 10%, VSS = 0 V (See Section 8.3.)
Capacitance load on outputs (CL) = 50 pF, except for CKO, where CL = 20 pF
Output characteristics can be derated as a function of load capacitance (CL).
All outputs: 0.03 ns/pF ≤ dt/dCL ≤ 0.07 ns/pF for 10 ≤ CL ≤ 100 pF
at VIH for rising edge and at VIL for falling edge
For example, if the actual load capacitance is 30 pF instead of 50 pF, the derating for a rising edge is (30 – 50) pF
x 0.06 ns/pF = 1.2 ns less than the specified rise time or delay that includes a rise time.
Test conditions for inputs:
■ Rise and fall times of 4 ns or less
■ Timing reference levels for delays = VIH, VIL
Test conditions for outputs (unless noted otherwise):
■ CLOAD = 50 pF; except for CKO, where CLOAD = 20 pF
■ Timing reference levels for delays = VIH, VIL
■ 3-state delays measured to the high-impedance state of the output driver
For the timing diagrams, see Table 62 for input clock requirements.
Unless otherwise noted, CKO in the timing diagrams is the free-running CKO.
Lucent Technologies Inc. 86
Page 89

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
10 Timing Characteristics for 2.7 V Operation (continued)
10.1 DSP Clock Generation
t1
t2
1X CKI*
VIH
VIL
t3
t5
VOH
†
CKO
VOL
VOH
‡
CKO
VOL
* See Table 62 for input clock electrical requirements.
† Free-running clock.
‡ Wait-stated clock (see Table 38).
§ W = number of wait-states.
t4
t6, t6a
EXTERNAL MEMORY CYCLE
W = 1
§
Figure 11. I/O Clock Timing Diagram
Table 66. Timing Requirements for Input Clock
Abbreviated Reference Parameter
19.2 ns and 12.5 ns
Min Max Unit
t1 Clock In Period (high to high) 20 —† ns
t2 Clock In Low Time (low to high) 10 — ns
t3 Clock In High Time (high to low) 10 — ns
* Device speeds greater than 50 MIPS do not support 1X operation. Use the PLL.
† Device is fully static, t1 is tested at 100 ns for 1X input clock option, and memory hold time is tested at 0.1 s.
5-4009 (C).a
*
Table 67. Timing Characteristics for Input Clock and Output Clock
19.2 ns 12.5 ns
Abbreviated Reference Parameter
Unit
Min Max Min Max
t4 Clock Out High Delay — 14 — 10 ns
t5 Clock Out Low Delay (high to low) — 14 — 10 ns
t6 Clock Out Period (low to low) T* — T* — ns
t6a
* T = internal clock period, set by CKI or by CKI and the PLL parameters.
Clock Out Period with SLOWCKI Bit
Set in powerc Register (low to low)
0.74 3.8 0.74 3.8 µs
87 Lucent Technologies Inc.
Page 90

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
10 Timing Characteristics for 2.7 V Operation (continued)
10.2 Reset Circuit
The DSP1628 has two external reset pins: RSTB and TRST. At initial powerup, or if the supply voltage falls below
VDD MIN* and a device reset is required, both TRST and RSTB must be asserted to initialize the device. Figure 12
shows two separate events:
1. Chip reset at initial powerup.
2. Chip reset following a drop in power supply.
Note: The TRST pin must be asserted even if the JTAG controller is not used by the application.
* See Table 60, Recommended Operating Conditions.
VDD
RAMP
VIH
RSTB,
VIL
TRST
PINS *
CKI
VOH
VOL
†
OUTPUT
* When both INT0 and RSTB are asserted, all output and bidirectional pins (except TDO, which 3-states by JTAG control) are put in a
3-state condition. With RSTB asserted and INT0 not asserted, EROM, ERAMHI, ERAMLO, IO, and RWN outputs remain high, and CKO
remains a free-running clock.
† See Table 62 for input clock electrical requirements.
0.4 V
VDD MIN
t9
t146
t10
t153
t8
t11
0.4 V
t146
t9
VDD MIN
t153
t8
t10
5-4010 (C).a
Figure 12. Powerup Reset and Chip Reset Timing Diagram
Table 68. Timing Requirements for Powerup Reset and Chip Reset
Abbreviated Reference Parameter Min Max Unit
t8 RSTB and TRST Reset Pulse (low to high) 6T — ns
t9 VDD Ramp — 10 ms
t146
VDD MIN to RSTB Low CMOS
Small-signal
2T
20
—
—
t153 RSTB (low to high) — 54 ns
t11
ns
µs
Table 69. Timing Characteristics for Powerup Reset and Chip Reset
Abbreviated Reference Parameter Min Max Unit
t10 RSTB Disable Time (low to 3-state) — 100 ns
t11 RSTB Enable Time (high to valid) — 100 ns
Note: The device needs to be clocked for at least six CKI cycles during reset after powerup. Otherwise,
high currents may flow.
Lucent Technologies Inc. 88
Page 91

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
10 Timing Characteristics for 2.7 V Operation (continued)
10.3 Reset Synchronization
t5 + 2 x t6
VIH
CKI*
VIL
t126
VIH
RSTB
VIL
VOH
CKO1
VOL
VOH
CKO2
VOL
* See Table 62 for input clock electrical requirements.
Note 1: CKO1 and CKO2 are two possible CKO states before reset. CKO is free-running.
Note 2: If the rising edge of RSTB (low to high) is captured instead by the falling edge of CKO (high to low), CKO and CKI will be in-phase
at t5 + 2 x t6.
5-4011 (C).a
Figure 13. Reset Synchronization Timing
Table 70. Timing Requirements for Reset Synchronization Timing
Abbreviated Reference Parameter Min Max Unit
t126 Reset Setup (high to high) 3 T/2 – 1 ns
89 Lucent Technologies Inc.
Page 92

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
10 Timing Characteristics for 2.7 V Operation (continued)
10.4 JTAG I/O Specifications
t13
t20
t12
t14
t156
t19
TCK
TMS
TDI
TDO
VIH
VIL
VIH
VIL
VIH
VIL
VOH
VOL
t17
t155
t15
t16
t18
Figure 14. JTAG Timing Diagram
Table 71. Timing Requirements for JTAG Input/Output
Abbreviated Reference Parameter Min Max Unit
t12 TCK Period (high to high) 50 — ns
t13 TCK High Time (high to low) 22.5 — ns
t14 TCK Low Time (low to high) 22.5 — ns
t155 TCK Rise Transition Time (low to high) 0.6 — V/ns
t156 TCK Fall Transition Time (high to low) 0.6 — V/ns
t15 TMS Setup Time (valid to high) 7.5 — ns
t16 TMS Hold Time (high to invalid) 2 — ns
t17 TDI Setup Time (valid to high) 7.5 — ns
t18 TDI Hold Time (high to invalid) 2 — ns
5-4017 (C)
Table 72. Timing Characteristics for JTAG Input/Output
Abbreviated Reference Parameter Min Max Unit
t19 TDO Delay (low to valid) — 19 ns
t20 TDO Hold (low to invalid) 0 — ns
Lucent Technologies Inc. 90
Page 93

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
10 Timing Characteristics for 2.7 V Operation (continued)
10.5 Interrupt
V
CKO*
INT[1:0]
IACK
OH
V
OL
t21
V
IH
V
IL
t22
t23
V
OH
†
V
OL
t25
t24
V
VEC[3:0]
* CKO is free-running.
† IACK assertion is guaranteed to be enclosed by VEC[3:0] assertion.
OH
V
OL
Figure 15. Interrupt Timing Diagram
Table 73. Timing Requirements for Interrupt
Note: Interrupt is asserted during an interruptible instruction and no other pending interrupts.
Abbreviated Reference Parameter Min Max Unit
t21 Interrupt Setup (high to low) 19 — ns
t22 INT Assertion Time (high to low) 2T — ns
Table 74. Timing Characteristics for Interrupt
Note: Interrupt is asserted during an interruptible instruction and no other pending interrupts.
Abbreviated Reference Parameter Min Max Unit
t23 IACK Assertion Time (low to high) — T/2 + 10 ns
t24 VEC Assertion Time (low to high) — 12.5 ns
t25 IACK Invalid Time (low to low) — 10 ns
t26 VEC Invalid Time (low to low) — 12.5 ns
t26
5-4018 (C).
91 Lucent Technologies Inc.
Page 94

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
10 Timing Characteristics for 2.7 V Operation (continued)
10.6 Bit Input/Output (BIO)
t144
V
OH
CKO
V
OL
t29
IOBIT
(OUTPUT)
(INPUT)
Table 75. Timing Requirements for BIO Input Read
IOBIT
V
OH
V
OL
t27
V
IH
V
IL
DATA INPUT
t28
VALID OUTPUT
Figure 16. Write Outputs Followed by Read Inputs (cbit = Immediate; a1 = sbit)
5-4019 (C).a
Abbreviated Reference Parameter Min Max Unit
t27 IOBIT Input Setup Time (valid to high) 15 — ns
t28 IOBIT Input Hold Time (high to invalid) 0 — ns
Table 76. Timing Characteristics for BIO Output
Abbreviated Reference Parameter Min Max Unit
t29 IOBIT Output Valid Time (low to valid) — 9 ns
t144 IOBIT Output Hold Time (low to invalid) 1 — ns
t144
V
OH
CKO
V
OL
t29
V
IOBIT
(OUTPUT)
IOBIT
(INPUT)
OH
V
OL
t141
V
IH
V
IL
TEST INPUT
t142
VALID OUTPUT
5-4019 (C).b
Figure 17. Write Outputs and Test Inputs (cbit = Immediate)
Table 77. Timing Requirements for BIO Input Test
Abbreviated Reference Parameter Min Max Unit
t141 IOBIT Input Setup Time (valid to low) 15 — ns
t142 IOBIT Input Hold Time (low to invalid) 0 — ns
Lucent Technologies Inc. 92
Page 95

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
10 Timing Characteristics for 2.7 V Operation (continued)
10.7 External Memory Interface
The following timing diagrams, characteristics, and requirements do not apply to interactions with delayed external
memory enables unless so stated. See the
detailed description of the external memory interface including other functional diagrams.
V
CKO
ENABLE
* W = number of wait-states.
OH
VOL
t33
VOH
VOL
Table 78. Timing Characteristics for External Memory Enables (EROM, ERAMHI, IO, ERAMLO)
Abbreviated Reference Parameter Min Max Unit
t33 CKO to ENABLE Active (low to low) 0 5 ns
t34 CKO to ENABLE Inactive (low to high) –1 4.5 ns
DSP1611/17/18/27 Digital Signal Processor Information Manual
t34
W* = 0
Figure 18. Enable Transition Timing
for a
5-4020 (C).b
Table 79. Timing Characteristics for Delayed External Memory Enables (ioc = 0x000F)
Abbreviated Reference Parameter Min Max Unit
t33 CKO to Delayed ENABLE Active (low to low) T/2 T/2 + 7 ns
93 Lucent Technologies Inc.
Page 96

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
10 Timing Characteristics for 2.7 V Operation (continued)
(MWAIT = 0x2222)
W* = 2
VOH
CKO
VOL
t127
DB
AB
VOH
VOL
VIH
VIL
VOH
VOL
t128
t150
t129
READ DATA
READ ADDRESS
t130
ENABLE
* W = number of wait-states.
Figure 19. External Memory Data Read Timing Diagram
Table 80. Timing Characteristics for External Memory Access
Abbreviated Reference Parameter Min Max Unit
t127 Enable Width (low to high) T(1 + W) – 1.5 — ns
t128 Address Valid (enable low to valid) — 2.5 ns
Table 81. Timing Requirements for External Memory Read (EROM, ERAMHI, IO, ERAMLO)
Abbreviated
Reference
Parameter
19.2 ns 12.5 ns
Min Max Min Max
t129 Read Data Setup (valid to enable high) 15 — 13 — ns
t130 Read Data Hold (enable high to hold) 0 — 0 — ns
t150 External Memory Access Time (valid to valid) — T(1 + W) – 15 — T(1 + W) – 14 ns
5-4021 (C).a
Unit
Lucent Technologies Inc. 94
Page 97

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
10 Timing Characteristics for 2.7 V Operation (continued)
VOH
CKO
VOL
DB
RWN
AB
VOH
VOL
V
VOL
VOH
VOL
VOH
VOL
VOH
VOL
OH
ERAMLO
EROM
* W = number of wait-states.
(MWAIT = 0x1002)
W* = 2
WRITE DATA
t133
t135
t136
WRITE ADDRESS READ ADDRESS
t134
t132
W* = 1
t131
Figure 20. External Memory Data Write Timing Diagram
READ
5-4022 (C).a
Table 82. Timing Characteristics for External Memory Data Write (All Enables)
Abbreviated
Reference
Parameter
19.2 ns 12.5 ns
Min Max Min Max
t131 Write Overlap (enable low to 3-state) —0—0ns
t132 RWN Advance (RWN high to enable high) 0—0—ns
t133 RWN Delay (enable low to RWN low) 0—0—ns
t134 Write Data Setup (data valid to RWN high) T(1 + W)/2 – 4 — T(1 + W)/2 – 3 — ns
t135 RWN Width (low to high) T(1 + W) – 5 — T(1 + W) – 4 — ns
t136
Write Address Setup (address valid to RWN
low)
0—0—ns
Unit
95 Lucent Technologies Inc.
Page 98

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
10 Timing Characteristics for 2.7 V Operation (continued)
VOH
CKO
VOL
DB
RWN
AB
VOH
VOL
VOH
VOL
VOH
VOL
VOH
VOL
VOH
VOL
ERAMLO
EROM
* W = number of wait-states.
(MWAIT = 0x1002)
W* = 2
WRITE READ
t138
WRITE ADDRESS READ ADDRESS
W* = 1
t131
t137
t139
5-4023 (C).a
Figure 21. Write Cycle Followed by Read Cycle
Table 83. Timing Characteristics for Write Cycle Followed by Read Cycle
Abbreviated Reference Parameter Min Max Unit
t131 Write Overlap (enable low to 3-state) — 0 ns
t137 Write Data 3-state (RWN high to 3-state) — 2 ns
t138 Write Data Hold (RWN high to data hold) 0 — ns
t139 Write Address Hold (RWN high to address hold) 0 — ns
Lucent Technologies Inc. 96
Page 99

Preliminary Data Sheet
DSP1628 Digital Signal Processor February 1997
10 Timing Characteristics for 2.7 V Operation (continued)
10.8 PHIF Specifications
For the PHIF, read means read by the external user (output by the DSP); write is similarly defined. The 8-bit reads/
writes are identical to one-half of a 16-bit access.
16-bit READ
IH
V
PCSN
V
IL
V
PIDS
IH
V
IL
t41
V
IH
V
IL
V
IH
V
IL
V
IH
V
IL
t45
t49
Figure 22. PHIF
Intel
Mode Signaling (Read and Write) Timing Diagram
PODS
PBSEL
PSTAT
PB[7:0]
Table 84. Timing Requirements for PHIF
t42
t46
t50
t154
Intel
Mode Signaling
t43
t47
t51 t52
16-bit WRITE
t44
t48
Abbreviated Reference Parameter Min Max Unit
t41 PODS to PCSN Setup (low to low) 0 — ns
t42 PCSN to PODS Hold (high to high) 0 — ns
t43 PIDS to PCSN Setup (low to low) 0 — ns
t44 PCSN to PIDS Hold (high to high) 0 — ns
t45* PSTAT to PCSN Setup (valid to low) 4 — ns
t46* PCSN to PSTAT Hold (high to invalid) 0 — ns
t47* PBSEL to PCSN Setup (valid to low) 6 — ns
t48* PCSN to PBSEL Hold (high to invalid) 0 — ns
t51* PB Write to PCSN Setup (valid to high) 10 — ns
t52* PCSN to PB Write Hold (high to invalid) 4 — ns
5-4036 (C)
Table 85. Timing Characteristics for PHIF
Intel
Mode Signaling
Abbreviated Reference Parameter Min Max Unit
t49* PCSN to PB Read (low to valid) — 12 ns
t50* PCSN to PB Read Hold (high to invalid) 0 — ns
t154 PCSN to PB Read 3-state (high to 3-state) — 8 ns
* This timing diagram for the PHIF port shows accesses using the PCSN signal to initiate and complete a transaction. The transactions can also
be initiated and completed with the PIDS and PODS signals. An output transaction (read) is initiated by PCSN or PODS going low, whichever
comes last. For example, the timing requirements referenced to PCSN going low, t45 and t49, should be referenced to PODS going low, if
PODS goes low after PCSN. An output transaction is completed by PCSN or PODS going high, whichever comes first. An input transaction is
initiated by PCSN or PIDS going low, whichever comes last. An input transaction is completed by PCSN or PIDS going high, whichever comes
first. All requirements referenced to PCSN apply to PIDS or PODS, if PIDS or PODS is the controlling signal.
97 Lucent Technologies Inc.
Page 100

Preliminary Data Sheet
February 1997 DSP1628 Digital Signal Processor
10 Timing Characteristics for 2.7 V Operation (continued)
PCSN
PODS
PIDS
PBSEL
POBE
PIBF
16-bit READ
IH
V
V
IL
t55
V
IH
V
IL
t56
V
IH
V
IL
V
OH
V
OL
t53
V
OH
V
OL
V
OH
V
OL
16-bit WRITE
t55
t55
t54
t56
t56
8-bit READ
t53
t56
8-bit WRITE
t55
t56
t54
5-4037 (C).a
Figure 23. PHIF
Table 86. Timing Requirements for PHIF
Intel
Mode Signaling (Pulse Period and Flags) Timing Diagram
Intel
Mode Signaling
Abbreviated Reference Parameter Min Max Unit
t55 PCSN/PODS/PIDS Pulse Width (high to low) 20.5 — ns
t56 PCSN/PODS/PIDS Pulse Width (low to high) 20.5 — ns
Table 87. Timing Characteristics for PHIF
Intel
Mode Signaling
Abbreviated Reference Parameter Min Max Unit
t53*
t54*
* t53 should be referenced to the rising edge of PCSN or PODS, whichever comes first. t54 should be referenced to the rising edge of
PCSN or PIDS, whichever comes first.
† POBE and PIBF may be programmed to be the opposite logic levels shown in the diagram (positive assertion levels shown). t53 and
t54 apply to the inverted levels as well as those shown.
PCSN/PODS to POBE
PCSN/PIDS to PIBF
†
(high to high)
†
(high to high)
—17ns
—17ns
Lucent Technologies Inc. 98
 Loading...
Loading...