

Page 1
DS2480
FEATURES
• Universal, common–ground serial port to 1–Wire
line driver for MicroLANTM applications
TM
• Works with all iButtons and MicroLAN–compatible
1–Wire slave devices
• Communicates at regular and Overdrive 1–Wire
speed and serial port data rates of 9600 (default),
19200, 57600 and 1 15200 bps
• Supports 12V EPROM programming and stiff 5V
pull–up for Crypto iButton, sensors and EEPROM
• Self–calibrating time base with ±5% tolerance for
serial and 1–Wire communication
• Slew rate controlled 1–Wire pull–down and active
pull–up to accommodate long lines and reduce radiation
• User–selectable RXD/TXD polarity minimizes com-
ponent count when interfacing to 5V based RS232
systems or directly to UARTs
• Programmable 1–Wire timing and driver characteris-
tics accommodate a wide range of MicroLAN configurations at regular speed
• Smart protocol combines data and control information
without requiring extra pins
• Compatible to optical, IR and RF to RS232 converters
• Low cost 8–pin SOIC surface mount package
• Operates over 4.5V to 5.5V from –40°C to +85°C
Serial 1–Wire
PIN ASSIGNMENT
GND
1–W
NC
V
DD
PIN DESCRIPTION
GND Ground
1–W 1–Wire Input/Output
NC No Connection
V
DD
V
PP
POL RXD/TXD Polarity Select
TXD Serial Data from UART
RXD Serial Data to UART
ORDERING INFORMATION
DS2480S 8–pin SOIC
TM
Line Driver
RXD
8
1
TXD
7
2
POL
6
3
5
4
8–PIN SOIC
(150 MIL)
4.5 to 5.5 Volts
Optional EPROM
Programming Voltage
V
PP
DS2480
DESCRIPTION
The DS2480 is a serial port to 1–Wire interface chip that
supports standard and Overdrive speeds. It connects
directly to UART s and 5V RS232 systems. Interfacing to
RS232C (±12V levels) requires a passive clamping circuit and one 5V to ±12V level translator. Internal timers
relieve the host of the burden of generating the time–
critical 1–Wire communication waveforms. In contrast
to the DS9097(E) where a full character must be sent by
the host for each 1–Wire time slot, the DS2480 can
translate each character into eight 1–Wire time slots
thereby increasing the data throughput significantly. In
addition, the DS2480 can be set to communicate at four
different data rates including 1 15.2 kbps, 57.6 kbps and
19.2 kbps with 9.6 kbps being the power–on default.
Command codes received from the host’s crystal controlled UART serve as a reference to continuously calibrate the on–chip timing generator . The DS2480 uses a
unique protocol that merges data and control information without requiring control pins. This approach maintains compatibility to off–the–shelf serial to wireless
converters allowing easy realization of 1–Wire media
jumpers. The various control functions of the DS2480
are optimized for MicroLAN 1–Wire networks and support the special needs of all current 1–Wire devices
including the Crypto i
Memories, EEPROM devices and 1–Wire Thermometers.
Button, EPROM–based Add–Only
042498 1/26
Page 2
DS2480
DETAILED PIN DESCRIPTION
PIN SYMBOL DESCRIPTION
1 GND Ground Pin: common ground reference and ground return for 1–Wire bus
2 1–W 1–Wire Input/Output Pin: 1–Wire bus with slew–rate–controlled pull–down,
active pull–up, ability to switch in V
through a low–impedance path to program EEPROM, perform a temper-
in V
DD
ature conversion or operate the Crypto i
3 NC No Connection Pin.
4 V
DD
Power Input Pin: power supply for the chip and 1–Wire pull–up voltage. 5V ±
10%; may be derived from 12V VPP with an external voltage regulator.
5 V
PP
EPROM Programming Voltage: 12V supply input for EPROM programming;
if EPROM programming is not required, this pin must be tied to V
come up before V
DD
.
6 POL RXD/TXD Polarity Select: RXD/TXD polarity select; tied to GND for RS232
(12V or 5V) connection, tied to V
7 TXD Serial Data from UART : data input from host (inverted or true); maximum volt-
age swing –0.3V to V
+ 0.3V; for logic thresholds see DC specifications.
DD
8 RXD Serial Data to UART: signal output to host; push–pull driver with CMOS com-
patible levels; for true ±12V RS232 systems an external level–translator must
be provided.
to program EPROM, and ability to switch
PP
Button.
for direct connection to UART chip.
DD
. VPP must
DD
OVERVIEW
The DS2480 directly interfaces a 5V serial communication port with its lines TXD (transmit) and RXD (receive)
to a 1–Wire bus. In addition the device performs a speed
conversion allowing the data rate at the communication
port to be different from the 1–Wire date rate. Several
parameters relating to the 1–Wire port and its timing as
well as the communication speed at both the port and
the 1–Wire bus are configurable. The circuit to achieve
these functions is outlined in Figure 1, Block Diagram.
The device gets its input data from the serial communication port of the host computer through pin TXD. For
compatibility with active–high as well as active–low systems, the incoming signal can be inverted by means of
the polarity input POL. The polarity chosen by hard–wiring the logic level of this pin is also valid for the output pin
RXD. If for minimizing the interface hardware an asymmetry between RXD and TXD is desired, this can be
achieved by setting the most significant bit of the Speed
Control parameter to a 1 (see Configuration Parameter
Value Codes). With the MS bit of the speed control set to
1, the polarity at TXD is still selected by the logic level at
POL, but the polarity at RXD will be the opposite of what
the logic level at POL specifies.
As data enters the core of the DS2480’s logic circuitry, it
is analyzed to separate data and command bytes and to
calibrate the device’s timing generator . The timing generator controls all speed relations of the communication
interface and the 1–Wire bus as well as the wave forms
on the 1–Wire bus.
Command bytes either affect the configuration setting
or generate certain wave forms on the 1–Wire bus. Data
bytes are simply translated by the protocol converter
into the appropriate 1–Wire activities. Each data byte
generates a return byte from the 1–Wire bus, that is
communicated back to the host through the RXD pin as
soon as the activity on the 1–Wire bus is completed.
The 1–Wire driver shapes the slopes of the 1–Wire
wave forms, applies programming pulses or strong
pull–up to 5 volts and reads the 1–Wire bus using a non–
TTL threshold to maximize the noise margin for best
performance on large 1–Wire MicroLAN networks.
042498 2/26
Page 3
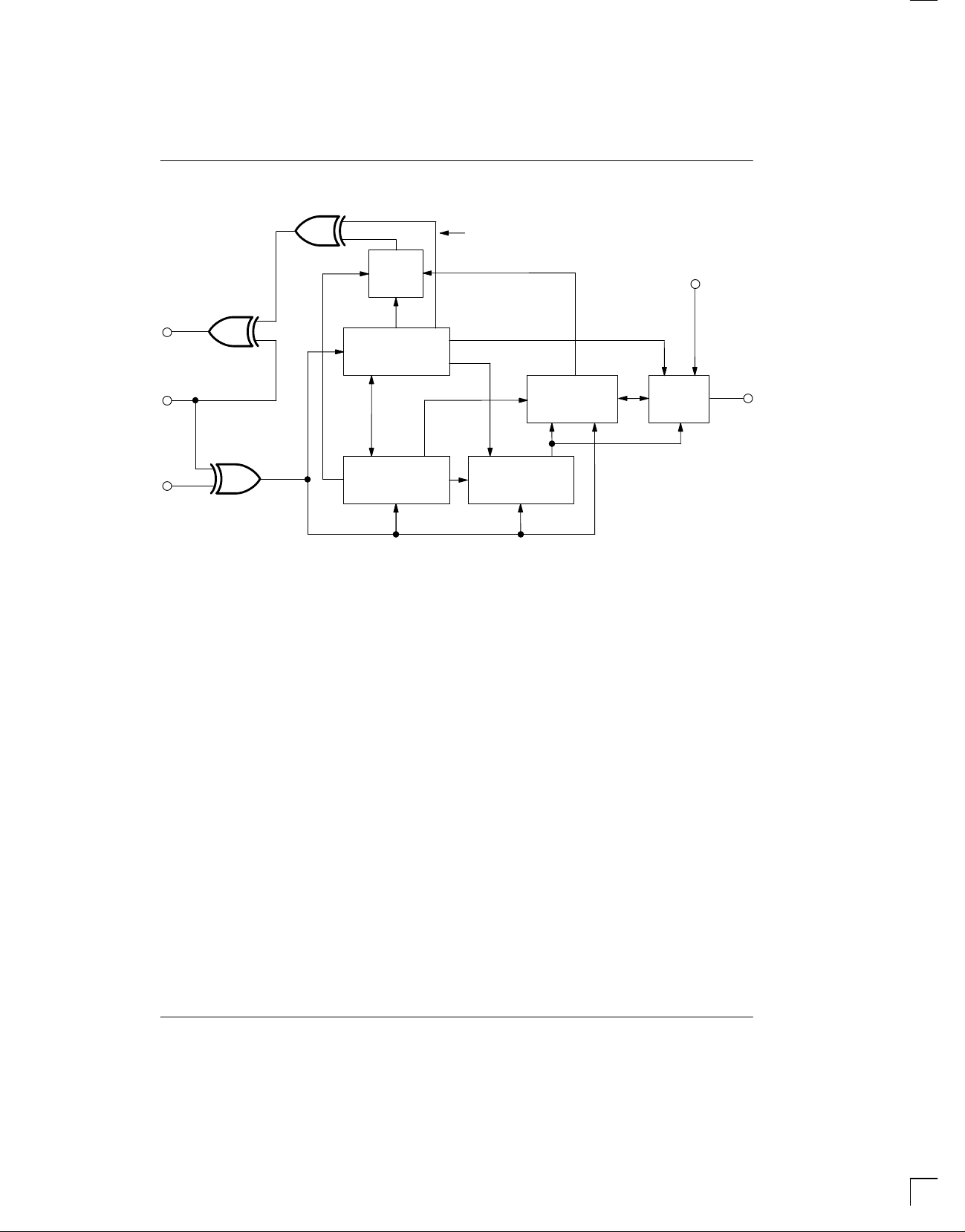
DS2480 BLOCK DIAGRAM Figure 1
RXD
CONFIGURATION
POL
MUX
REGISTER
MS BIT OF SPEED CONTROL
(1 = RXD IS INVERTED)
PROTOCOL
CONVERTER
1–WIRE
DRIVER
DS2480
V
PP
1–W
TXD
PROTOCOL
PROTOCOL
ANALYZER
ANALYZER
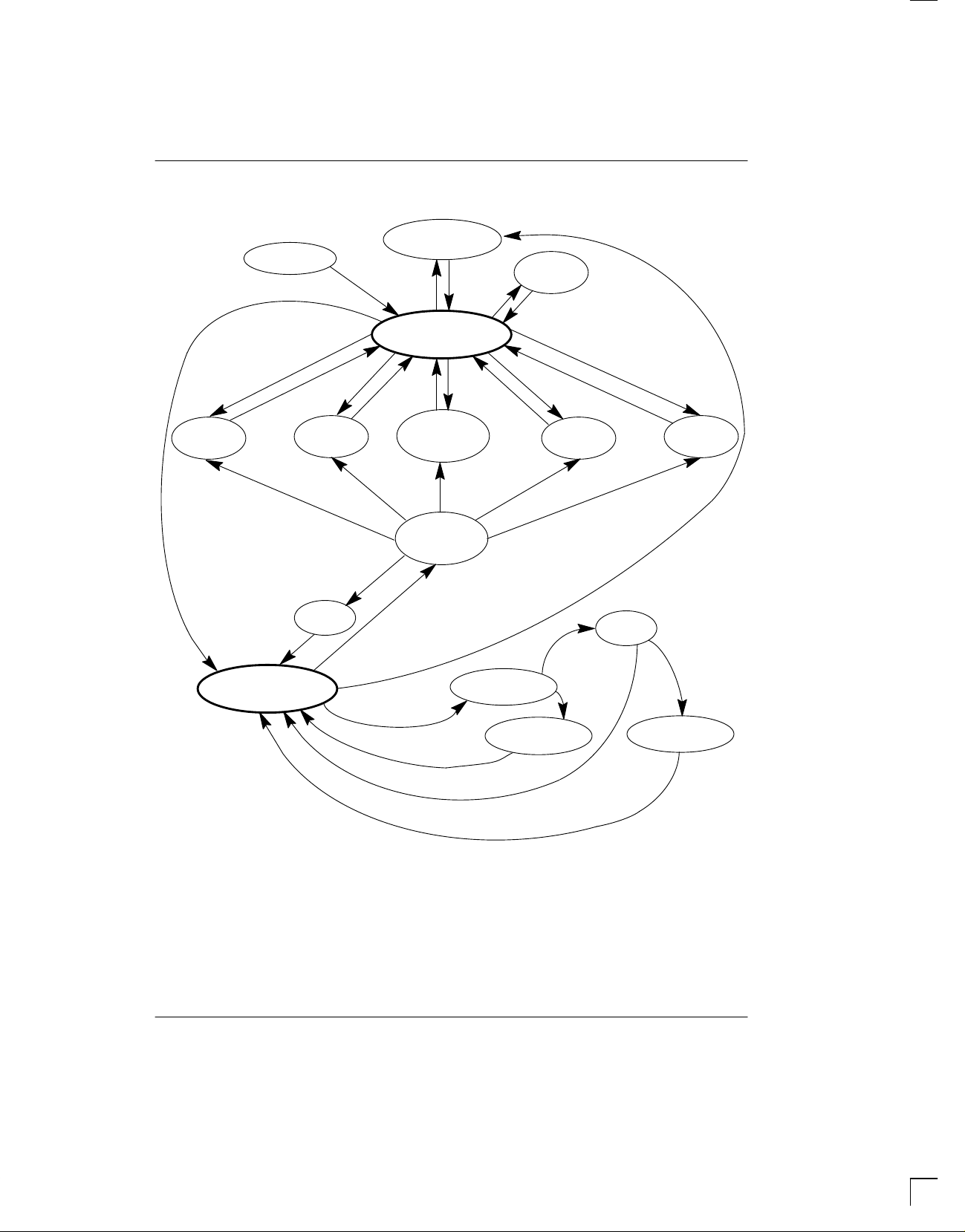
DEVICE OPERATION
The DS2480 can be described as a complex state
machine with two static and several dynamic states.
Two device–internal flags as well as functions assigned
to certain bit positions in the command codes determine
the behavior of the chip, as shown in the state transition
diagram (Figure 2). The DS2480 requires and generates a communication protocol of 8 data bits per character, 1 stop bit and no parity. It is permissible to use two
stop bits on the TXD line. However, the DS2480 will only
assert a single stop bit on RXD.
When powering up, the DS2480 performs a master
reset cycle and enters the Command Mode, which is
one of the two static states. The device now expects to
receive one 1–Wire reset command on the TXD line
sent by the host at a data rate of 9600 bits per second
(see section Communication Commands for details).
This command byte is required solely for calibration of
TIMING
GENERATOR
the timing generator the DS2480 and is not translated
into any activity on the 1–Wire bus. After this first command byte the device is ready to receive and execute
any command as described later in this document.
A master reset cycle can also be generated by means of
software. This may be necessary if the host for any reason has lost synchronization with the device. The
DS2480 will perform a master reset cycle equivalent to
the power–on reset if it detects start polarity in place of
the stop bit. The host has several options to generate
this condition. These include making the UART generate a break signal, sending a NULL character at a data
rate of 4800 bps and sending any character with parity
enabled and selecting space polarity for the parity bit.
As with the power–on reset, the DS2480 requires a
1–Wire reset command sent by the host at a data rate of
9600 bps for calibration.
042498 3/26
Page 4
DS2480
STATE TRANSITION DIAGRAM Figure 2
E1h
RESET
SOFTWARE
MASTER RESET
110XSS01
N.C.
110XSS01
111T11Q1
PULSE
TX E3h
N.C.
POWER OFF
N.C.
111T11Q1
E3h
CODE = E3h
INACTIVE
POWER
ON
ARRIVAL
COMMAND MODE
0ZZZVVV1
N.C.
CONFIGURATION
0ZZZVVV1
CHECK
MODE
ARRIVAL
N.C.
101HSS01
N.C.
ACC. OFF
TX
CODE
SEARCH
ACCEL.
101HSS01
100VSSP1
100VSSP1
TX BYTE
N.C.
POWER OFF
SINGLE BIT
FUNCTION
STR. PULL–UP
ARMED
DATA MODE
ALL OTHER
CODES
N.C. = UNCONDITIONAL
LEGEND: V BINARY VALUE (TYPE OF WRITE TIME SLOT)
042498 4/26
SS 1–WIRE SPEED SELECTION CODE
P IF LOGIC 1, GENERATES STRONG PULL–UP TO 5V IMMEDIATELY FOLLOWING THE TIME SLOT
T TYPE OF PULSE; 0 = STRONG PULL–UP (5V), 1 = PROGRAMMING PULSE (12V)
Q 1 = ARM STRONG PULL–UP AFTER EVERY BYTE; 0 = DISARM
H SEARCH ACCELERATOR CONTROL; 1 = ACCELERATOR ON, 0 = ACCELERATOR OFF
ZZZ CONFIGURATION PARAMETER CODE (WRITE), 000 = READ CONFIGURATION PARAMETER
VVV CONFIGURATION PARAMETER VALUE CODE (WRITE), CONFIGURATION PARAMETER CODE (READ)
X DON’T CARE
ACCELERATOR FLAG
N.C.
STR. PULL–UP NOT ARMED
CHECK SEARCH
PERFORM SEARCH
SEQUENCE
ACC.ON
GENERATE STRONG
PULL–UP TO 5V
N.C.
Page 5
DS2480
After the DS2480 has reached the command mode, the
host can send commands such as 1–Wire Reset, Pulse,
Configuration, Search Accelerator and Single Bit functions or switch over to the second static state called
Data Mode. In data mode the DS2480 simply converts
bytes it receives at the TXD pin into their equivalent
1–Wire wave forms and reports the results back to the
host through the RXD pin. If the Search Accelerator is
on, each byte seen at TXD will generate a 12–bit
sequence on the 1–Wire bus (see section Search
Accelerator for details). If the Strong Pull–up to 5V is
enabled (see Pulse command) each byte on the 1–Wire
bus will be followed by a pause of predefined duration
where the bus is pulled to 5V via a low impedance transistor in the 1–Wire driver circuit.
While being in the Data Mode the DS2480 checks each
byte received from the host for the reserved code that is
used to switch back to Command Mode. To be able to
write any possible code (including the reserved one) to
the 1–Wire bus, the transition to the Command Mode is
as follows: After having received the code for switching
to Command Mode, the device temporarily enters the
Check Mode where it waits for the next byte. If both
bytes are the same, the byte is sent once to the 1–Wire
bus and the device returns to the Data Mode. If the
second byte is different from the reserved code, it will be
executed as command and the device finally enters the
Command Mode. As a consequence, if the reserved
code that normally switches to Command Mode is to be
written to the 1–Wire bus, this code byte must be sent
twice (duplicated). This detail must be considered carefully when developing software drivers for the DS2480.
After having completed a memory function with a device
on the 1–Wire bus it is recommended to issue a Reset
Pulse. This means that the DS2480 has to be switched
to Command mode. The host then sends the appropriate command code and continues performing other
tasks. If during this time a device arrives at the 1–Wire
bus it will generate a presence pulse. The DS2480 will
recognize this unsolicited presence pulse and notify the
host by sending a byte such as XXXXXX01b. The Xs
represent undefined bit values. The fact that the host
receives the byte unsolicited together with the pattern
01b in the least significant two bits marks the bus arrival.
If the DS2480 is left in Data Mode after completing a
memory function command it will not report any bus
arrival to the host.
COMMAND CODE OVERVIEW
The DS2480 is controlled by a variety of commands. All
command codes are 8 bits long. The most significant bit
of each command code distinguishes between communication and configuration commands. Configuration
commands access the configuration registers. They
can write or read any of the configurable parameters.
Communication commands use data of the configuration register in order to generate activity on the 1–Wire
bus and/or (dis)arm the strong pull–up after every byte
or (de)activate the Search Accelerator without generating activity on the 1–Wire bus. Details on the command
codes are included in the State Transition diagram
(Figure 2). A full explanation is given in the subsequent
sections Communication Commands and Configuration Commands.
In addition to the command codes explained in the subsequent sections the DS2480 understands the following reserved command codes:
E1h switch to Data Mode
E3h switch to Command Mode
F1h pulse termination
Except for these reserved commands, the Search
Accelerator control and the first byte after power–on
reset or master reset cycle, every legal command byte
generates a response byte. The pulse termination code
triggers the response byte of the terminated pulse command. Illegal command bytes do not generate a command response byte.
Once the device is switched back from Data Mode to
Command Mode one must not repeat the E3h command while the Command Mode is still active.
COMMUNICATION COMMANDS
The DS2480 supports four communication function
commands: Reset, Single Bit, Pulse, and Search Accelerator control. Details on the assignment of each bit of
the command codes are shown in Table 1. The corresponding command response bytes are detailed in
Table 2. The Reset, Search Accelerator Control and
Single Bit commands include bits to select the 1–Wire
communication speed (regular, flexible regular, Overdrive). Even if a command does not generate activity on
the 1–Wire bus, these bits are latched inside the device
and will take effect immediately.
042498 5/26
Page 6
DS2480
COMMUNICATION COMMAND CODES Table 1
FUNCTION BIT 7 BIT 6 BIT 5 BIT 4 BIT 3, BIT 2 BIT 1 BIT 0
Single Bit 1 0 0 0 = write 0
1 = write 1
00 reg. speed
01 flex. speed
See Text 1
10 OD. speed
11 reg. speed
Search
Accelerator
Control
1 0 1 0 = accelerator off
1 = accelerator on
See Text
00 reg. speed
01 flex. speed
10 OD. speed
0 1
11 reg. speed
Reset 1 1 0 (don’t care) 00 reg. speed
0 1
01 flex. speed
10 OD. speed
11 reg. speed
Pulse 1 1 1 0 = 5V strong pull–up
11 pulse See Text 1
1 = 12V prog. pulse
COMMUNICATION COMMAND RESPONSE Table 2
FUNCTION BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Single Bit 1 0 0 same as sent 1–Wire read back,
Reset 1 1 See
01000 = 1–Wire shorted
Text
Pulse 1 1 1 same as sent undefined
both bits same value
01 = presence pulse
10 = alarming presence
pulse
11 = no presence pulse
(The Search Accelerator Control command does not generate a response byte.)
Reset
The Reset command must be used to begin all 1–Wire
end of the time slot reveal the value found on the 1–Wire
bus when reading.
communication. The speed selection included in the
command code immediately takes effect. The response
byte includes a code for the reaction on the 1–Wire bus
(bits 0 and 1) and a code for the chip revision (bits 2 to 4).
If bit 5 of the response byte reads ‘1’, a programming
voltage is present on the V
pin, indicating that one
PP
may try programming EPROM devices.
For a time slot without a subsequent strong pull–up, bit 1
of the command must be set to 0. For a time slot immedi-
ately followed by a strong pull–up bit 1 must be set to 1.
As soon as the strong pull–up is over, the device will
send a second response byte, code EFh (read 1) or ECh
(read 0), depending on the value found on the 1–Wire
bus when reading. The strong pull–up directly following
Single Bit
The Single Bit command is used to generate a single
the single bit is used in conjunction with the Crypto
i
Button.
time slot on the 1–Wire bus at the speed indicated by
bits 2 and 3. The type of the time slot (write zero or write
one) is determined by the logic value of bit 4. A read data
time slot is identical to the write one time slot. Bits 0 and
1 of the response byte transmitted by the DS2480 at the
042498 6/26
Search Accelerator Control
The Search Accelerator Control command is used to set
or reset the Search Accelerator control flag. Bit 4 of the
command code contains the state to which the acceler-
Page 7
DS2480
ator control flag is to be set. If the flag is set to a 1 (on) the
device translates every byte received in data mode into
a 12–bit sequence on the 1–Wire bus. For details on
how the Search Accelerator works please refer to the
section Search Accelerator Operation. Before activating the Search Accelerator, one must make sure that the
strong pull–up after every byte is disarmed (see Pulse
Command). The Search Accelerator command does
not generate a command response byte.
Although the Search Accelerator Control command
itself does not generate any 1–Wire activity, it can be
used to select the communication speed on the 1–Wire
bus. The speed selection (if different from the previous
setting, e.g., from a Reset command) will take effect
immediately.
Pulse
The Pulse command serves several functions that are
selected by the contents of bit 1 and bit 4 of the command code. The main functions are generating a strong
pull–up to 5V and generating 12V programming pulses
for EPROM devices (if the 12V are available at the V
pin). The secondary function of the pulse command is
arming and disarming a strong pull–up after every subsequent byte in data mode. The arm/disarm function is
controlled by bit 1 of the command code. Bit 4 determines whether the device will generate a strong pull–up
to 5V or a 12V programming pulse. The table below
summarizes these options.
BIT
BIT
4
1
FUNCTION
0 0 strong pull–up to 5V and disarm
1 0 12V Programming Pulse and disarm
0 1 strong pull–up to 5V and arm
1 1 12V Programming Pulse and arm
The strong pull–up to 5V is required to program
EEPROM devices or to operate special function
devices that require a higher current for a limited time
after having received a “go and convert” command.
Therefore and because it significantly reduces the
effective data throughput on the 1–Wire bus, the strong
pull–up is disarmed most of the time. Although arming or
disarming is simultaneously possible while generating a
programming pulse, this is not recommended since it is
PP
likely to destroy the DS2480 if non–EPROM devices are
connected to the 1–Wire bus.
The duration of the strong pull–up or programming
pulse is determined by configuration parameters and
ranges from a few microseconds up to unlimited (see
section Configuration Commands). However, unlimited
duration is not allowed in conjunction with arming the
strong–pull–up after every byte. As long as the DS2480
is in Command Mode the host may terminate a strong
pull–up or programming pulse prematurely at any time
by sending the command code F1h.
The response byte is generated as soon as the strong
pull–up or programming pulse is over (either because
the predefined time has elapsed or due to termination).
The response byte mainly returns the command code
as sent by the host, but the two least significant bits are
undefined.
If the strong pull–up is armed and the device is in Data
Mode, the end of the strong pull–up will be signaled as
code F6h if the most significant bit of the preceding data
byte on the 1–Wire bus was a 1 and 76h otherwise. The
host will see this response byte in addition to the
response on the data byte sent (see also section Wave
Forms later in this document).
SEARCH ACCELERATOR INTRODUCTION
The Search Accelerator is a logic block inside the
DS2480 that allows using the Search ROM function
very efficiently under modern operating systems such
as Windows and Windows 95/NT. Without the DS2480
all 1–Wire port adapters have to involve the computer’s
CPU for every single time slot or pulse to be generated
on the 1–Wire bus.
Under DOS, accessing peripherals such as the UART
or parallel port is very straight forward and therefore
fast. Under Windows the situation is different and it may
take several milliseconds or more to get the first time
slot generated on the 1–Wire bus. Every subsequent
time slot will be generated in much less time, since the
computer simply sends out (“streams”) a long chain of
bytes. This works reasonably well when reading or writing large blocks of data.
042498 7/26
Page 8
DS2480
Searching the 1–Wire bus to identify all ROM IDs of the
devices connected, however, requires reading two bits,
making a decision and then writing a bit. This procedure
is to be repeated 64 times to identify and address a
single device. With the overhead of modern operating
systems this fairly simple process takes a lot of time,
reducing the discovery rate of devices on the 1–Wire
bus from a typical value of 40 to 50 per second under
DOS to less than 10 under Windows. T o solve this problem the Search Accelerator was developed.
The Search Accelerator receives from the host information on the preferred path to chose during the execution
of the Search ROM function as one contiguous chain of
bytes and then translates it into the appropriate time
slots on the 1–Wire bus. In addition, the Search Accelerator reports back to the host the ROM ID of the device
actually addressed and the bit positions in which conflicts were found. (If the ROM ID of one device has a 0 in
a bit position where another device has a 1, this is called
a “conflict” on the electrical level and “discrepancy” on
the logical level. See the Book of DS19xx i
Button Standards for a more detailed discussion of the Search
ROM). This helps the host to select the preferred path
for the next Search ROM activity.
Since the ROM ID of all MicroLAN compatible devices is
64 bits long and a conflict may occur in any of these bits,
the total length of data reported to the host is 128 bits or
16 bytes. T o avoid data overrun (if the CPU sends data
faster than it can be processed) the protocol for the
Search Accelerator operation was defined so that one
has to send as many bytes as one will receive. This way
the CPU sends 16 bytes for each path and the UART
guarantees the correct data timing and frees the CPU
for other tasks while the DS2480 performs a Search
ROM function.
SEARCH ACCELERATOR OPERATION
After the Search Accelerator is activated and the data
mode is selected, the host must send 16 bytes to complete a single Search ROM pass on the 1–Wire bus.
These bytes are constructed as follows:
first byte
7
6 5 4 3 2 1 0
r
3
et cetera
x
3r2
x
2r1
x
1r0
x
0
16th byte
6 5 4 3 2 1 0
7
r
63x63r62x62r61x61r60x60
In this scheme, the index (values from 0 to 63, “n”) designates the position of the bit in the ROM ID of a MicroLAN compatible device. The character “x” marks bits
that act as filler and do not require a specific value (don’t
care bits). The character “r” marks the path to go at that
particular bit in case of a conflict during the execution of
the ROM Search.
For each bit position n (values from 0 to 63) the DS2480
will generate three time slots on the 1–Wire bus. These
are referenced as:
b0 for the first time slot (read data)
b1 for the second time slot (read data) and
b2 for the third time slot (write data).
The type of time slot b2 (write 1 or write 0) is determined
by the DS2480 as follows:
b2 = r
if conflict (as chosen by the host)
n
= b0 if no conflict (there is no alternative)
= 1 if error (there is no response)
The response the host will receive during a complete
pass through a Search ROM function using the Search
Accelerator consists of 16 bytes as follows:
first byte
7
6 5 4 3 2 1 0
r’3d3r’2d2r’1d1r’0d
0
et cetera
16th byte
7
6 5 4 3 2 1 0
r’63d63r’62d62r’61d61r’60d
60
As before, the index (values from 0 to 63, “n”) designates the position of the bit in the ROM ID of a MicroLAN
compatible device. The character “d” marks the discrepancy flag in that particular bit position. The discrepancy
flag will be 1 if there is a conflict or no response in that
particular bit position and 0 otherwise. The character
“r’ ” marks the actually chosen path at that particular bit
position. The chosen path is identical to b2 for the particular bit position of the ROM ID.
042498 8/26
Page 9

DS2480
T o perform a Search ROM sequence one starts with all
being 0s. In case of a bus error, all subsequent
bits r
n
response bits r’
deactivated. Thus, if r’
are 1’s until the Search Accelerator is
n
and d63 are both 1, an error has
63
occurred during the search procedure and the last
sequence has to be repeated. Otherwise r’n (n = 0 ... 63)
is the ROM code of the device that has been found and
addressed.
For the next Search ROM sequence one re–uses the
previous set r
(n = 0 ... 63) but sets rm to 1 with “m” being
n
the index number of the highest discrepancy flag that is
1 and sets all ri to 0 with i > m. This process is repeated
until the highest discrepancy occurs in the same bit
position for two consecutive passes.
The table below shows an example for the communication between host and DS2480 to perform one pass
through the Search ROM function using the Search
Accelerator. After a device has been identified and
addressed, a (not specified here) memory function is
executed and finally a reset pulse is generated. This
example assumes that the DS2480 was in Command
Mode and that regular 1–Wire speed is used.
Search Accelerator Usage Example
Action Sequence Host TX Host RX
Generate Reset Pulse C1 C9
Set Data Mode E1 (nothing)
Search ROM command F0 (as sent)
Set Command Mode E3 (nothing)
Search Accelerator On B1 (nothing)
Set Data Mode E1 (nothing)
Send 16 bytes data response
Set Command Mode E3 (nothing)
Search Accelerator Off A1 (nothing)
Set Data Mode E1 (nothing)
Do Memory Function
Set Command Mode E3 (nothing)
Generate Reset Pulse C1 C9
CONFIGURATION COMMANDS
The DS2480 is designed to be configurable for the varying requirements of its application. When the device
powers up and/or performs a master reset cycle, the
hard–wired default configuration settings take effect.
These settings will work on a short 1–Wire bus and
assume regular 1–Wire communication speed. To
change these default settings and to verify the current
settings, the logic of the DS2480 supports configuration
commands. A summary of the available configuration
parameters, their default settings at regular and Overdrive speed and their applicability is shown in Table 3.
Parameters not related to the communication speed on
the 1–Wire bus specify the duration of the 12V programming pulse, the duration of the strong pull–up to 5V and
the baud rate on the interface that connects the DS2480
to the host. The remaining three parameters are used to
modify the 1–Wire communication wave forms if one
selects “Flexible Speed” (see “Communication Commands” for speed selection).
Flexible speed is implemented to improve the performance of large MicroLAN Networks. This is accomplished by:
• limiting the slew rate on falling edges (e. g., at the
beginning of time slots, to reduce ringing),
• extending the Write 1 low time (allows the current flow
through the network to end slowly , to prevent voltage
spikes from inductive kickback),
• delaying the time point when reading a bit from the
1–Wire bus (gives the network more time to stabilize,
to get a higher voltage margin) and
• adding extra recovery time between Write 0 time slots
(allows more energy transfer through the network, to
replenish the parasite power supply of the devices on
the bus).
The latter two functions are controlled by a single
parameter. Taking advantage of flexible speed requires
changing one or more of these parameters from their
default values. Otherwise the waveforms will be identical to those at regular speed.
Each configuration parameter is identified by its 3–bit
parameter code and can be programmed for one of a
maximum 8 different values using a 3–bit value code. A
matrix of parameter codes and value codes with the
associated physical values in shown in Table 4.
042498 9/26
Page 10

DS2480
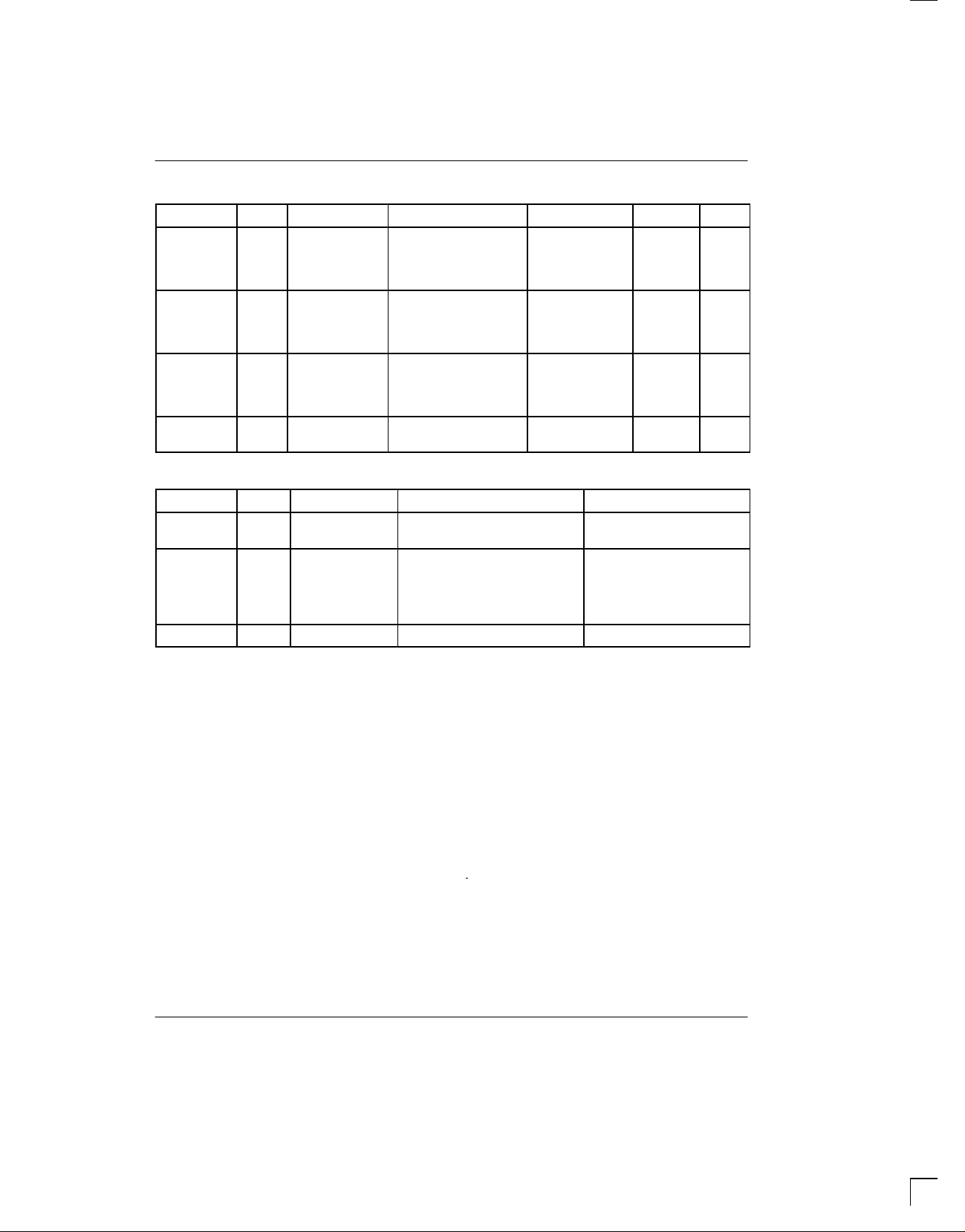
CONFIGURATION COMMAND OVERVIEW Table 3
Configurable at Default
Parameter Description Par . Code
Pull–Down Slew Rate Control 001 √ 15 V/µs 15 V/µs
Programming Pulse Duration 010 √ √ √ 512 µs 512 µs
Strong Pull–up Duration 011 √ √ √ 524 ms 524 ms
Write 1 low time 100 √ 8 µs 1 µs
Data Sample Offset and
101 √ 3 µs
Write 0 Recovery Time
RS232 Baud Rate 111 √ √ √ 9.6k bits/s 9.6k bits/s
Regular Flexible Overdrive Reg./Flex. Overdrive
1 µs
3 µs
3 µs
The numbers given for parameter 001 (Pull–Down Slew
Rate Control) are nominal values. They may vary as
specified in the Electrical Characteristics section and
are almost independent of the load on the 1–Wire bus.
Information on how to select the optimum value of this
parameter is given in section “Controlled Edges”.
Parameter 1 11 (RS232 Baud Rate) has two functions. It
selects the baud rate and allows inversion of the signal
at the RXD pin. Using one of the value codes 100 to 11 1
will set the polarity at RXD to the opposite of what is
defined by the logic level at the POL pin (asymmetry bit,
see Figure 1). This may reduce the component count in
some applications of the device. Note that when changFor the parameters 010 (Programming Pulse Duration)
and 011 (Strong Pull–Up Duration) one may select
ing the baud rate, the DS2480 will send the command
response byte at the new data rate.
indefinite duration. This value, however, should only be
selected if one is not going to switch the device to Data
Mode. As long as the device stays in Command Mode,
any pulse function (programming or strong pull–up) that
uses one of these parameters can be terminated by
sending the command code F1h. T ermination is not possible if the device is in Data Mode.
A short explanation on the use of parameters 100 (Write
1 low time) and 101 (Data Sample Offset/Write 0 Recov-
ery Time) is given in the section “Timing Diagrams” later
in this document. The parameter code 110 is reserved
for future extensions; one should not change the value
code from its default setting.
CONFIGURATION PARAMETER VALUE CODES Table 4
Value Codes
Parameter Code
001 (PDSRC) 15 2.2 1.65 1.37 1.1 0.83 0.7 0.55 V/µs
010 (PPD) 32 64 128 256 512 1024 2048 ∞ µs
011 (SPUD) 16.4 65.5 131 262 524 1048 2096 ∞ ms
100 (W1LT) 8 9 10 11 12 13 14 15 µs
101 (DSO/W0RT) 3 4 5 6 7 8 9 10 µs
111 (RBR) 9.6 19.2 57.6 115.2 9.6 19.2 57.6 115.2 kbits/s
000 001 010 011 100 101 110 111
Unit
042498 10/26
Page 11

DS2480
The syntax of configuration commands is very simple.
Each 8–bit code word contains a 3–bit parameter code
to specify the parameter and the 3–bit value code to be
selected. Bit 7 of the command code is set to 0 and bit 0
is always a 1. T o read the value code of a parameter, one
writes all zeros for the parameter code and puts the
parameter code in place of the parameter value code.
The configuration command response byte is similar to
the command byte itself. Bit 0 of the response byte is
always 0. When writing a parameter, the upper 7 bits are
the echo of the command code. When reading a parameter, the current value code is returned in bit positions 1
to 3 with the upper 4 bits being the same as sent (see
Table 6).
Table 5 shows the details.
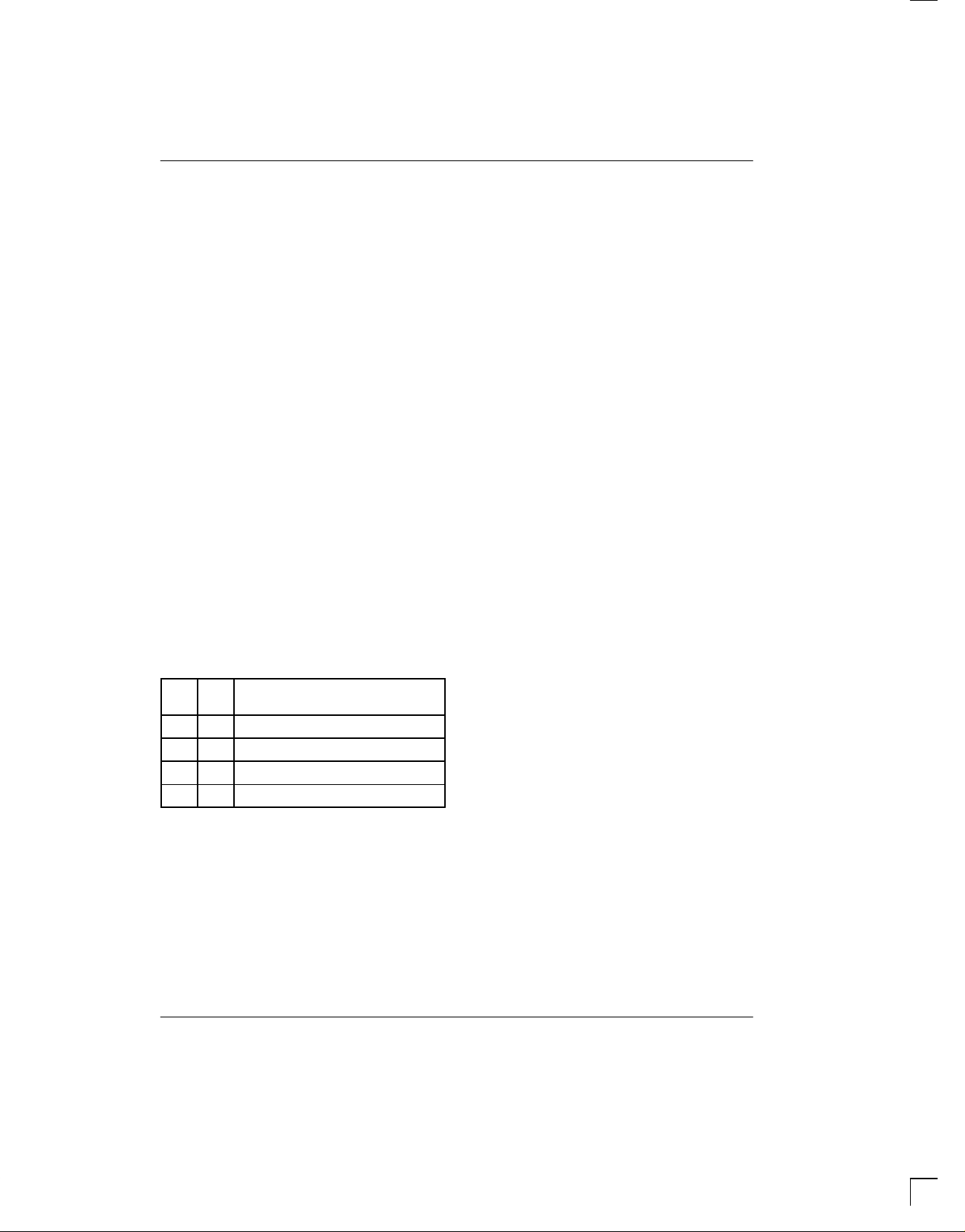
CONFIGURATION COMMAND CODES Table 5
FUNCTION BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Write Parameter 0 parameter code parameter value code 1
Read Parameter 0 0 0 0 parameter code 1
CONFIGURATION COMMAND RESPONSE BYTE Table 6
FUNCTION BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Write Parameter 0 same as sent same as sent 0
Read Parameter 0 same as sent parameter value code 0
042498 11/26
Page 12

DS2480
CONTROLLED EDGES
One of the tasks of the DS2480 is to actively shape the
edges of the 1–Wire communication waveforms. This
speeds up the recharging of the 1–Wire bus (rising
edges) and reduces ringing of long lines (falling edges).
The circuitry for shaping rising edges is always on. The
slew rate of falling edges is actively controlled only at
flexible speed and requires the parameter for slew rate
control being different from its power–on default value.
All Rising Edges
The active pull–up of the rising edges reduces the rise
time on the 1–Wire bus significantly compared to a simple resistive pull–up. Figure 4 shows how the DS2480 is
involved in shaping a rising edge.
ACTIVE PULL–UP Figure 4
t
APUOT
5V
V
IAPTO
V
IAPO
0V
1–WIRE BUS
IS DISCHARGED
The circuit operates as follows: At t1 the pull–down
(induced by the DS2480 or a device on the bus) ends.
From this point on the 1–Wire bus is pulled high by the
weak pull–up current I
The slope is determined by the load on the bus and the
value of the pull–up current. At t2 the voltage crosses the
threshold voltage V
over from the weak pull–up current I
higher current I
on the bus now rises faster. As the voltage on the bus
crosses the threshold V
long as this timer is on (t
continue to flow. After the timer is expired, the DS2480
will switch back to the weak pull–up current.
t
1
WEAKPU
. Now the DS2480 switches
IAPO
. As a consequence, the voltage
ACTPU
IAPTO
APUOT
t2t
provided by the DS2480.
WEAKPU
at t3, a timer is started. As
), the I
ACTPU
3
to the
current will
Falling Edges (DS2480–initiated)
Whenever the DS2480 begins pulling the 1–Wire bus
low to initiate a time slot, for example, it first turns off the
weak pull–up current I
. Then, at regular and
WEAKPU
Overdrive speed it will generate a falling edge at a slew
rate of typically 15V/µs. This value is acceptable for
short 1–Wire busses and adequate for communication
at Overdrive speed. For MicroLAN networks of more
than roughly 30 meters length one should always use
flexible speed. One of the parameters that is adjustable
at flexible speed is the slew rate of DS2480–initiated fal-
ling edges. The effect of the slew rate control is shown in
Figure 5.
SLEW RATE CONTROL Figure 5
t
F
5V
HIGH SLEW RATE
0.8V
0V
1–WIRE BUS
IS PULLED UP
WEAK PULL–UP ENDS,
PULL–DOWN BEGINS
t
1
As extensive tests have shown, MicroLAN networks at a
length of up to 300 meters will perform best if the fall time
tF is in the range of 4 ± 0.5 µs. This translates into a slew
rate of approximately 1V/µs. This slew rate is typically
achieved by setting the configuration parameter 001
(Pull–Down Slew Rate Control) to a value of 100 (see
Table 4). If the actual measured fall time is longer than
the target value, one should use a value code of 011 or
lower. If the fall time is shorter, one should use a value
code of 101 or higher.
Once determined, the value code for the Pull–Down
Slew Rate Control parameter should be stored in the
host and always be loaded into the DS2480 after a
power–on or master reset cycle.
TARGET FOR
LONG LINES:
4 ± 0.5 µs
LOW SLEW RATE
042498 12/26
Page 13

DS2480
TIMING DIAGRAMS
This section explains the wave forms generated by the
DS2480 on the 1–Wire bus in detail. First the communication wave forms such as the Reset/Presence
Detect Sequence and the time slots are discussed.
After that follows a detailed description of the pulse
function under various conditions. The wave forms as
generated by the DS2480 may deviate slightly from
specifications found in the “Book of DS19xx i
Button
Standards” or in data sheets of 1–Wire slave devices.
However, at a closer look one will find that all of the timing requirements are met.
1–WIRE COMMUNICATION WAVE FORMS
One of the major features of the DS2480 is that it
relieves the host from generating the timing of the
1–Wire signals and sampling the 1–Wire bus at the
appropriate times. How this is done for the reset/pres-
Reset/Presence Detect Figure 6a
RESET/PRESENCE SEQUENCE
t
5V
UNCONTROLLED
0V
TESTING FOR SHORT AND/OR INTERRUPT
FALLING EDGE
RSTL
t
SI
ence detect sequence is shown in Figure 6a. This
sequence is composed of four timing segments: the
reset low time t
, the presence detect sampling offset t
t
SI
time t
. The timing segments tSI, t
FILL
prise the reset high time t
, the short/interrupt sampling offset
RSTL
where 1–Wire slave
RSTH
PDT
and a delay
PDT
and t
FILL
com-
devices assert their presence or interrupt pulse. During
this time the DS2480 pulls the 1–Wire bus high with its
weak pull–up current.
The values of all timing segments for all 1–Wire speed
options are shown in the table. Since the reset/presence
sequence is slow compared to the time slots, the values
for regular and flexible speed are the same. Except for
the falling edge of the presence pulse all edges are controlled by the DS2480. The shape of the uncontrolled
falling edge is determined by the capacitance of the
1–Wire bus and the number, speed and sink capability
of the slave devices connected.
IDLE
t
RSTH
PRESENCE
PULSE
t
PDT
t
FILL
PRESENCE TESTING
TIME
TIME
SLOT
Speed t
RSTL
t
SI
t
PDT
t
FILL
Regular 512 µs 8 µs 64 µs 512 µs 584 µs
Overdrive 64 µs 2 µs 8 µs 64 µs 74 µs
Flexible 512 µs 8 µs 64 µs 512 µs 584 µs
After having received the command code for generating
a reset/presence sequence, the DS2480 pulls the
1–Wire bus low for t
and then lets it go back to 5V .
RSTL
The DS2480 will now wait for the short/interrupt sampling offset tSI to expire and then test the voltage on the
1–Wire bus to determine if there is a short or an interrupt
signal. If there is no short or interrupt (as shown in the
picture), the DS2480 will wait for t
and test the volt-
PDT
age on the 1–Wire bus for a presence pulse. Regardless
of the result of the presence test, the DS2480 will then
wait for t
to expire and then send the command
FILL
response byte to the host.
If the test for interrupt or short reveals a logic 0, the
DS2480 will wait for 4096 µs and then test the 1–Wire
bus again. If a logic 0 is detected, the 1–Wire bus is
shorted and a command response byte with the code for
SHORT will be sent immediately . If a logic 1 is detected,
the device will wait for t
to expire after which it will
FILL
send the command response byte with the code for an
alarming presence pulse. No additional testing for a
presence pulse will be done. The DS2480 will perform
the short/interrupt testing as described also at Overdrive speed, although interrupt signaling is only defined
for regular speed.
t
RSTH
042498 13/26
Page 14

DS2480
The idle time following the Reset/Presence Detect
sequence depends on the serial communication speed
and the host’s response time.
time to recharge, it is also recommended to delay sampling the bus for reading. A higher value for t
increase the voltage margin and also provide extra
energy to the slave devices when generating a long
A Write 1 and Read Data time slot is comprised of the
segments t
slots, after the write 1 low time t
LOW1
, t
DSO
and t
. During write 1 time
HIGH
is over, the
LOW1
DS2480 waits for the duration of the data sample offset
series of write 0 time slots. However, the total of t
t
should not exceed 22 µs*. Otherwise the slave
DSO
device responding may have stopped pulling the bus
low when transmitting a logic 0.
and then samples the voltage at the 1–Wire bus to read
the response. After this, the waiting time t
HIGH1
must
expire before the time slot is complete. A Write 0 time
slot only consists of the two segments t
LOW0
and t
REC0
The idle time between time slots within a byte or during a
12–bit sequence while the Search Accelerator is on is
zero. Between bytes, 12–bit search sequences and
.
single bits the idle time depends on the RS232 data rate
If the network is large or heavily loaded, one should
select flexible speed and extend t
to more than 8
LOW1
µs to allow the 1–Wire bus to completely discharge.
and the host’s response time. The response byte is sent
to the host as soon as the last time slot of a byte, 12–bit
sequence or the command is completed.
Since a large or heavily loaded network needs more
WRITE 1 AND READ DATA TIME SLOT Figure 6b
HIGH1
IDLE
TIME
5V
0V
t
LOW1
Speed t
TIME SLOT DURATION t
t
DSO
SAMPLING
LOW1
t
DSO
SLOT
t
HIGH1
t
Regular 8 µs 3 µs 49 µs 60 µs
Overdrive 1 µs 1 µs 8 µs 10 µs
Flexible 8 to 15 µs 3 to 10 µs 49 µs 60 to 74 µs
NEXT
T.S.
t
SLOT
*
DSO
LOW1
will
+
WRITE 0 TIME SLOT Figure 6c
5V
0V
Speed t
TIME SLOT DURATION t
t
LOW0
* t
LOW0
SLOT
REC0
t
RECO
Regular 57 µs 3 µs 60 µs
Overdrive 7 µs 3 µs 10 µs
Flexible 57 µs 3 to 10 µs 60 to 67 µs
*In a 5V environment (± 1V , full temperature range) the tolerance of the internal time base of 1–Wire slave devices is
much narrower than what it is when operated at the minimum voltage of 2.8V . Therefore, the timing generated by the
DS2480 is in compliance with the requirements of all MicroLAN–compatible 1–Wire devices.
042498 14/26
IDLE
TIME
NEXT
T.S.
t
SLOT
*
Page 15

DS2480
PULSE WAVE FORMS, DISARMED
The pulse command can be used to generate a strong
pull–up to 5V and a 12V programming pulse, respectively. The duration of the pulse is predefined if the
parameter value code of parameter 010 (Programming
Pulse Duration) and parameter 011 (Strong Pull–Up
Duration), has a value from 000 to 110 (see Table 4).
Figures 7a and 7b show the timing of a pulse with prede-
fined duration, which should be considered the normal
case. If an infinite duration is chosen (parameter value
code 11 1), the host must terminate the pulse command,
as shown in Figures 7c and 7d. All versions of Figure 7
assume that bit 1 of the pulse command is 0, i.e., disarmed mode. See section Communication Commands,
Pulse, for more details on possibilities of the pulse
command.
STRONG PULL–UP TO 5V, PREDEFINED DURATION Figure 7a
END OF PREVIOUS
TIME SLOT
5V
0V
The processing of a pulse command is essentially the
same, regardless if a strong pull–up or a programming
pulse is requested. At t
pulse command byte. At t2 the DS2480 has received the
command and immediately generates the pulse. The
pulse ends at t
and the DS2480 sends out the com-
3
mand response byte to inform the host that the com-
IDLE
TIME
t
t
1
2
the host starts sending the
1
t
SPU
t
3
mand is completed. The idle time between t
determined by the time to transmit the command byte at
the selected baud rate. The idle time between t
comprised of the time to transmit the response byte,
plus the response time of the host plus the time to transmit the command and/or data to generate the next time
slot.
IDLE
TIME
BEGIN OF NEXT
TIME SLOT
t
4
and t2 is
1
and t4 is
3
12V PROGRAMMING PULSE, PREDEFINED DURATION Figure 7b
12V
END OF PREVIOUS
TIME SLOT
5V
0V
IDLE
TIME
t
t
1
2
A correct programming pulse can only be generated if
the 12V programming voltage is available at the Vpp pin
of the DS2480. The slew rate of the rising and falling
edge of the programming pulse (“steep slopes”) is not
actively controlled by DS2480.
STEEP SLOPES
t
PP
For EPROM programming, only a single slave device
should be connected to the 1–Wire bus and the cable
must to be short, not to exceed a few meters. One
should not attempt generating a programming pulse
with a non–EPROM device on the bus; this may damage the device as well as the DS2480.
t
3
IDLE
TIME
BEGIN OF NEXT
TIME SLOT
t
4
042498 15/26
Page 16

DS2480
Certain applications may require a duration for a strong
pull–up or programming pulse that cannot be realized
using one of the predefined values. Selecting infinite
duration allows the host to generate pulses of any
length. As a consequence, however, the host becomes
responsible to actively control the duration of the pulse.
The time to end a pulse of infinite duration strongly
depends on the baud rate of the communication
between host and DS2480. Neglecting the response
time of the host, the minimum pulse durations are:
86.8 µs at 115.2 kbps, 173.6 µs at 57.6 kbps, 520 µs at
19.2 kbps and 1.04 ms at 9.6 kbps.
Failing to do so may require a power–on reset or master
reset cycle of the DS2480. For this reason, infinite duration should only be used if absolutely necessary.
STRONG PULL–UP TO 5V, INFINITE DURATION Figure 7c
IDLE
END OF PREVIOUS
TIME SLOT
5V
0V
TIME
t
1
As before, processing the command is essentially the
same, regardless if it is for a strong pull–up or a programming pulse. At t
the host starts sending the pulse
1
command byte. At t2 the DS2480 has received the command and immediately activates the strong pull–up or
switches in the 12V programming voltage. To end the
pulse, the DS2480 must receive a termination command, code F1h, which occurs at t
command does not generate a response byte. The
STRONG PULL–UP ON
t
2
. The termination
3
DS2480 will immediately end the pulse and send out the
response byte of the pulse command. The idle time
between t
the command byte at the selected baud rate. The idle
time between t3 and t4 is comprised of the time to transmit the pulse response byte, plus the response time of
the host plus the time to transmit the command and/or
data to generate the next time slot.
IDLE
TIME
t
3
and t2 is determined by the time to transmit
1
BEGIN OF NEXT
TIME SLOT
t
4
12V PROGRAMMING PULSE, INFINITE DURATION Figure 7d
12V
STEEP SLOPES
PROGRAMMING VOLTAGE
IS APPLIED
5V
0V
042498 16/26
END OF PREVIOUS
TIME SLOT
IDLE
TIME
t
t
1
2
IDLE
TIME
t
3
BEGIN OF NEXT
TIME SLOT
t
4
Page 17

DS2480
PULSE WAVE FORM, ARMED
As explained in section Communication Commands, bit
1 of the pulse command allows the arming of a strong
pull–up to 5V if the bit is set to 1. If the strong pull–up is
armed and the device is switched to data mode, there
will be a strong pull–up immediately following every byte
on the 1–Wire bus. This mode is implemented to provide
extra energy when writing to EEPROM devices or to do
a temperature conversion with the DS1920 Tempera-
Button, for example. These devices need a strong
ture i
pull–up immediately after the power–consuming activity
has been initiated by a command code.
To arm the strong pull–up, one usually generates a
“dummy” pulse with bit 1 being 1 while the device is in
command mode. To save time, the dummy pulse may
immediately be terminated by sending the termination
command, code F1h. Then one switches to data mode
and sends a command code that makes one or more
slaves on the 1–Wire bus require extra energy. After the
command execution is finished, one switches back to
command mode and disarms the strong pull–up by generating another dummy pulse. A complete temperature
conversion sequence that shows the use of the armed
pulse is included in Section “Software Driver
Examples”.
STRONG PULL–UP TO 5V, ARMED, PREDEFINED DURATION Figure 8
IDLE
TIME
t
2
5V
0V
END OF 8th
TIME SLOT
t
1
t
SPU
Figures 8 shows the timing of the strong pull–up in data
mode. At t1 the 8th time slot of the byte sent to the
1–Wire bus is completed. Without any delay the
DS2480 now activates the strong pull–up and simultaneously starts sending the data response byte to the
host. At t
the strong pull–up ends and the DS2480
2
sends a pulse response byte to the host. The idle time
between t2 and t3 is comprised of the time to transmit the
pulse response byte, plus the response time of the host
plus the time to transmit the command and/or data to
generate the next time slot.
Since in data mode the pulse termination command is
not applicable, the duration of the strong pull–up must
be limited. See T able 4, parameter 01 1 (Strong Pull–Up
Duration) for details. Selecting infinite duration will
require a power–on or master reset cycle to get the
DS2480 back to communicating with the host.
BEGIN OF NEXT
TIME SLOT
t
3
042498 17/26
Page 18

DS2480
SINGLE BIT WITH STRONG PULL–UP
Similar to the pulse command the Single Bit command
also allows generating a strong pull–up immediately following a time slot. The strong pull–up of the Single Bit
command, however, is controlled directly by bit 1 of the
command code and therefore needs not be armed.
Since the DS2480 remains in command mode when
using the Single Bit command, any duration of the
Figure 9 shows the timing of the Single Bit command
with the immediately following strong pull–up. Strong
pull–up immediately following a single time slot is implemented to support the DS1954 Crypto i
having received the command code to run a program,
the Crypto iButton sends out an acknowledge bit and
then starts the microcomputer to run the firmware program for a predefined time.
strong pull–up including infinite may be selected.
SINGLE BIT WITH STRONG PULL–UP, PREDEFINED DURATION Figure 9a
IDLE
END OF PREVIOUS
5V
0V
TIME SLOT
t
1
t
SPU
For predefined duration (Figure 9a) the timing is as follows: At t
the time slot is completed. Now the DS2480
1
activates the strong pull–up and simultaneously starts
sending the response byte of the Single Bit command to
the host. At t2 the strong pull–up ends and the DS2480
sends out a pulse response byte. The idle time between
and t3 is comprised of the time to transmit the pulse
t
2
response byte, plus the response time of the host plus
the time to transmit the command and/or data to generate the next time slot.
For infinite duration (Figure 9b) the strong pull–up also
begins immediately after the time slot is completed. To
end the strong pull–up, the DS2480 must receive a termination command, code F1h, which occurs at t
termination command does not generate a response
byte. The DS2480 will then immediately end the strong
pull–up and send out a pulse response byte. Everything
else is the same as with predefined duration.
TIME
t
2
BEGIN OF NEXT
ACTIVITY
t
3
Button. After
. The
2
SINGLE BIT WITH STRONG PULL–UP, INFINITE DURATION Figure 9b
END OF PREVIOUS
TIME SLOT
5V
0V
t
1
STRONG PULL–UP ON
The minimum duration of a strong pull–up of infinite
duration strongly depends on the baud rate of the communication between host and DS2480. The host must
first receive the response byte of the single–bit command, react to it and then transmit the termination com-
042498 18/26
mand. Neglecting the hosts response time, the shortest
duration of an infinite strong pull–up therefore is
173.6 µs at 115.2 kbps, 347.2 µs at 57.6 kbps, 1.04 ms
at 19.2 kbps and 2.08 ms at 9.6 kbps.
IDLE
TIME
t
2
BEGIN OF NEXT
ACTIVITY
t
3
Page 19

DS2480
SOFTWARE DRIVER EXAMPLES
The DS2480 requires a software driver that translates
the activities to be generated on the 1–Wire bus into the
appropriate commands. The examples below cover typical situations, such as reading the ROM, writing to the
scratchpad of a Memory i
a Memory iButton, programming an Add–Only iButton
EPROM and performing a temperature conversion with
the Temperature iButton DS1920. An example for the
use of the Search Accelerator is included in the description of the Search Accelerator, earlier in this document.
The DS2480 command codes used in these examples
are valid for regular speed and will work properly on
short 1–Wire busses (< 10 meters). The response byte
on the reset command assumes a normal presence
pulse, no alarm or short.
The DS2480 includes a 1–byte buffer that stores a byte
received from the host while the previous byte is being
translated into activity on the 1–Wire bus. For this reason the host may send another byte even without having
received the response byte. Sending bytes faster than
they can be translated into 1–Wire activities may result
in loss of data and/or synchronization and therefore
should be avoided.
Button, reading the memory of
READ ROM SEQUENCE
Action Sequence Host TX Host RX
Generate Reset Pulse C1 C9
Set data mode E1 (nothing)
Read ROM Command 33 (as sent)
Read ROM ID (8 bytes) FF (x8) ROM ID
Set command mode E3 (nothing)
Generate Reset Pulse C1 C9
WRITE SCRATCHPAD SEQUENCE
Write 2 bytes to scratchpad at memory locations 16h
and 17h
Action Sequence Host TX Host RX
Generate Reset Pulse C1 C9
Set data mode E1 (nothing)
Skip ROM Command CC CC
Write Scratchpad Cmd. 0F (as sent)
Starting Address TA1 16 (as sent)
Starting Address TA2 00 (as sent)
Write to the Scratchpad (2 bytes) (as sent)
Set command mode E3 (nothing)
Generate Reset Pulse C1 C9
READ MEMORY SEQUENCE
Read 8 bytes from memory address 0040h
Action Sequence Host TX Host RX
Generate Reset Pulse C1 C9
Set data mode E1 (nothing)
Skip ROM Command CC (as sent)
Read Memory Command F0 (as sent)
Starting Address TA1 40 (as sent)
Starting Address TA2 00 (as sent)
Read 8 bytes of data FF (x8) data
Set command mode E3 (nothing)
Generate Reset Pulse C1 C9
042498 19/26
Page 20

DS2480
WRITE EPROM SEQUENCE (DS2505)
Write memory starting at address 40h
Action Sequence Host TX Host RX
Set Vpp dur. = 512 µs 29 28
Generate Reset Pulse C1 C9
Set data mode E1 (nothing)
Skip ROM Command CC (as sent)
Write Memory Command 0F (as sent)
Starting Address TA1 40 (as sent)
Starting Address TA2 00 (as sent)
*** Send data byte (data) (as sent)
Receive CRC16 FF (x2) CRC16
Set command mode E3 (nothing)
Generate Program Pulse FD response
Set data mode E1 (nothing)
Read written byte FF (data)
Go to *** to write the next byte or end the sequence
as shown below.
Set command mode E3 (nothing)
Generate Reset Pulse C1 C9
TEMPERATURE CONVERSION SEQUENCE
Action Sequence Host TX Host RX
Set pull–up dur. = 524 ms 39 38
Generate Reset Pulse C1 C9
Set data mode E1 (nothing)
Skip ROM Command CC (as sent)
Set command mode E3 (nothing)
Arm strong pull–up EF (nothing)
Terminate pulse F1 response
Set data mode E1 (nothing)
Convert Temperature 44 (as sent)
Wait for pulse response (nothing) response
Set command mode E3 (nothing)
Disarm strong pull–up ED (nothing)
Terminate pulse F1 response
Generate Reset Pulse C1 C9
042498 20/26
Page 21

DS2480
HARDWARE APPLICATION EXAMPLES
This section discusses five typical application scenarios
of the DS2480. When directly designed into a new product, the device can be connected as shown in Figure
10a.
UART DIRECT Figure 10a
UART
OR µC
START
SIN (RXD)
SOUT (TXD)
1
LM
+/(–) 5V RS232 Figure 10b
POWER
STEALING
DTR
RTS
RXD
TXD
GND
0
LM
START
1
UART
OR µC
DRIVER/
LEVEL SHIFTER
The circuit becomes more complex if a 1–Wire bus is to
be interfaced to a port that provides and expects
inverted signals, but does not necessarily meet the
RS232C (± 12V) standard (Figure 10b).
5V
V
V
PP
RXD
TXD
DD
DS2480
GND
V
PP
RXD
DS2480
TXD
V
GND
POL
1–W
DD
1–WIRE BUS
RETURN
POL
1–WIRE BUS
1–W
RETURN
STOP0
VOLTAGE
REGULATOR
STOP
12V
(5V)
5V
12V
(5V)
SEE TEXT
The signals DTR and RTS provide the power to operate
the DS2480. The resistor in the TXD line and the
Schottky diode limit the negative voltage at the TXD pin
of the DS2480 to 0.3V maximum. The resistor is typically 4.7 kΩ. If the inverting driver is current–limited to 1
mA the resistor is not required.
From the DS2480’s perspective, this circuit will work
with inverted signals of ± 5V as well as 0 to 5V. Depend-
ing on the voltage levels the host expects, it may be necessary to generate a negative voltage on the RXD line.
Figure 10c shows how this can be accomplished for a
true RS232C system.
042498 21/26
Page 22

DS2480
+ 12V RS232 Figure 10c
POWER
STEALING
DTR
RTS
UART
OR µC
RXD
2.7 k
TXD
1µ
GND
LM
START
In the interface to a true RS232C system (± 12V, Figure
10c) the power for the DS2480 is stolen from DTR and
RTS. The software must make sure that at least one of
these signals constantly provides the 12V operating
voltage. The 6.8 kΩ resistor and the 4.7 V Zener diode in
the TXD line limit the positive voltage at the TXD pin of
the DS2480. The Schottky diode limits the negative voltage to 0.3V maximum. The Schottky diode in series with
the capacitor forms a parasitic supply to generate the
negative bias for the host’s receive channel. The positive signal is switched in through the P–channel MOS-
5V
VOLTAGE
REGULATOR
V
V
PP
RXD
TXD
DD
DS2480
GND
POL
1–W
1–WIRE BUS
RETURN
BSS110
6.8 k
4.7V
0
1
12V
(5V)
S
D
SEE TEXT
STOP
FET that connects to the RXD output of the DS2480. In
this circuit diagram the MOSFET switches the RXD line
to +5V, which normally is sufficient for RS232C
systems.
Switching to 12V is also possible, but requires a
P–channel transistor with a different threshold voltage.
The signal inversion caused by the transistor is compensated through the DS2480 by using a value code of
100, 101, 110 or 11 1 for the RS232 baud rate setting.
UART DIRECT OPTO ISOLATED Figure 10d
DC TO DC
CONVERTER
5V
2.7 k
SIN
UART
OR µC
SOUT
The circuit in Figure 10d is essentially the same as in
Figure 10a. The main difference is the opto–isolation.
The characteristics of the opto–isolators are not very
042498 22/26
6.8 k
HCPL–2300
OPTOCOUPLER
LM
START
5V
12V
2.7 k
V
DD
V
POL
PP
(5V)
1–W
1–WIRE BUS
RETURN
RXD
DS2480
TXD
1
STOP
0
GND
critical. Using a different type, will affect the values of the
resistors that limit the current through the LEDs and bias
the photo transistors.
Page 23

+ 5 TO 12V RS232 OPTO ISOLATED Figure 10e
UART
OR µC
POWER
STEALING
DTR
RTS
RXD
TXD
1µ
GND
START
LM
5V
REGULATOR
0
1
STOP
5.1 k
POWER
SUPPLY
HCPL–2202
HCPL–2300
1.5 k
5V
12V
2.7 k
V
PP
RXD
TXD
V
DD
DS2480
GND
POL
1–W
DS2480
1–WIRE BUS
RETURN
The circuit in Figure 10e combines the true RS232C
interface with opto–isolation. The energy to power the
LED in the TXD channel and to provide the positive voltage for the host’s RXD input is stolen from DTR and
RTS. The negative voltage for the RXD input is taken
from the TXD line through a parasitic supply consisting
of a Schottky diode in series with a capacitor. The
HCPL–2202 opto–isolator has a totem pole output that
allows switching in positive as well as negative voltage.
The +5V are sufficient for most RS232C systems.
Switching in 12V requires a opto–isolator with different
voltage characteristics.
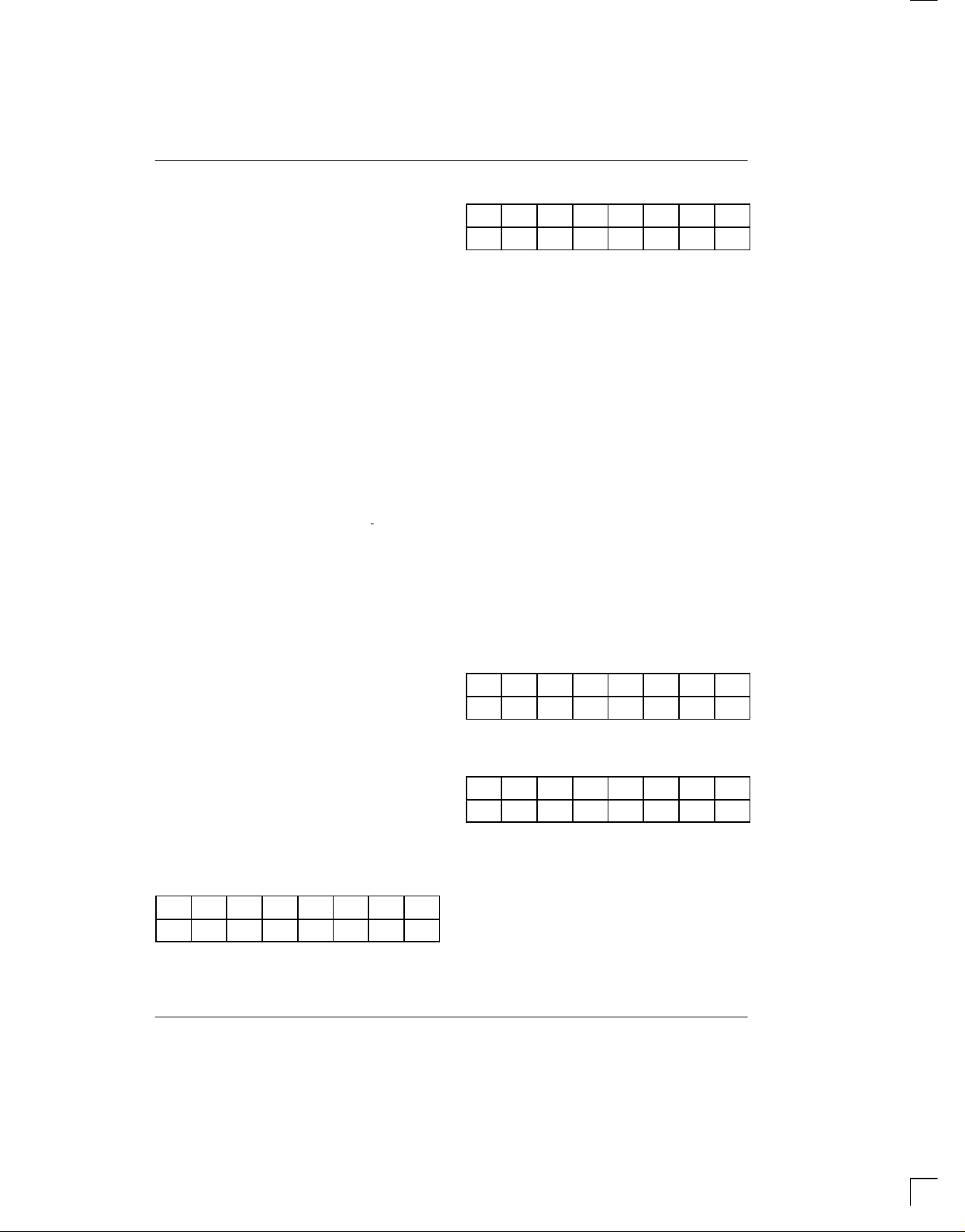
RS232 DATA TIMING RXD LINE Figure 11
t
START
FR
BIT 0 BIT 1 BIT 2 BIT 3 BIT 4 BIT 5 BIT 6 BIT 7 STOP
t
RR
T
R
(DIAGRAM DRAWN FOR POL = 5V)
RECEIVE DELAY TIMING Figure 12
BIT 6 BIT 7 STOP
TXD
INPUT SAMPLING 8.5TR9.5T
R
In the schematic the HCPL–2202 opto–isolator is
sourced by the RXD pin of the DS2480. It can as well be
connected the traditional way where the DS2480 sinks
the current through the LED. This, however, causes a
signal inversion that has to be compensated through the
DS2480 by using a value code of 100, 101, 1 10 or 11 1 for
the RS232 baud rate setting. Using other types of opto–
isolators than shown in the schematic will at least
require changing the values of the resistors.
t
IDLER
10 T
R
(DIAGRAM DRAWN FOR POL = 5V)
t
RESP
RXD
START BIT 0
042498 23/26
Page 24

DS2480
9600 b
19200 b
57600 b
115200 b
RS232 DATA TIMING TXD LINE Figure 13
START BIT 0 BIT 1 BIT 2 BIT 3 BIT 4 BIT 5 BIT 6 BIT 7 STOP
T
T
V
V
IL
IH
1.5 T
R
2.5 TR3.5 TR4.5 TR5.5 TR6.5 TR7.5 TR8.5 TR9.5 T
TT = 1/BAUD RATE OF UART
FUNCTION AND SPEED MATRIX Table 7
Baud Rate
ps
ps
ps
ps
Regular Flexible Overdrive
√ √ √ Search
√ √ √ Command/Data
X X √ Search
√ X √ Command/Data
X X √ Search
X X √ Command/Data
X X X Search
X X √ Command/Data
DIAGRAM DRAWN FOR POL = 5V)
10 T
T
TR = 1/BAUD RATE OF DEVICE
1–Wire Speed
t
IDLET
Function
R
√ t
X not recommended unless t
is guaranteed by the UART; no precautions necessary
IDLET
IDLET
TXD LINE ASYMMETRY Figure 14
STOP
t
START
042498 24/26
is controlled by the host through a wait function
2t
START
(DIAGRAM DRAWN FOR POL = 5V)
= TT + (–) t
ASYM
2T
ASYM
BIT 0 BIT 1
T
t
= TT – (+) t
BIT0
ASYM
Page 25

DS2480
ABSOLUTE MAXIMUM RATINGS*
Voltage on 1–W to Ground –0.5V to +14.0V
Voltage on RXD, TXD, POL to Ground –0.5V to +7.0V
Operating Temperature –40°C to +85°C
Storage Temperature –55°C to +125°C
Soldering Temperature 260°C for 10 seconds
* This is a stress rating only and functional operation of the device at these or any other conditions above those
indicated in the operation sections of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods of time may affect reliability.
DC ELECTRICAL CHARACTERISTICS (VDD = 4.5V to 5.5V;–40°C to 85°C)
PARAMETER SYMBOL MIN TYP MAX UNITS NOTES
Supply Voltage V
Programming Voltage V
Operating Current I
Idle Current on V
Active Pull–up Timer Threshold V
PP
IAPTO
Active Pull–up On Threshold V
1–Wire Input High V
1–Wire Input Low V
TXD/POL input resistor R
TXD/POL input levels V
TXD/POL input levels V
1–Wire weak pull–up current I
1–Wire active pull–up current I
Strong pull–up voltage drop
WEAKPU
ACTPU
∆V
@ 10 mA load on 1–W
Programming voltage drop
∆V
@ 10 mA load on 1–W
RXD sink current @ 0.4V I
RXD source current @ VDD–0.4V I
Power On Reset Trip Point V
VPP Sensor Trip Point V
PPTRIP
CC
PP
DD
I
PP
IAPO
IH1
IL1
I
IH
IL
STRPU
PROG
OLR
OHR
POR
4.5 5.0 5.5 V
11.75 12.25 V 1
3.0 5.0 mA
20 µA 2
VDD–1.4 VDD–1.1 V
0.95 1.2 V
3.4 V
1.8 V
30 kΩ 3
2.7 V
0.8 V
1.5 3.0 5.0 mA
9 15 mA
0.6 V 4
0.24 V 5
6 mA
–4 mA
3.3 V
9.5 V
CAPACITANCES (tA = 25°C)
PARAMETER SYMBOL MIN TYP MAX UNITS NOTES
TXD/POL input capacitance C
1–Wire input capacitance C
IN
IN1
5 pF
10 pF
042498 25/26
Page 26

DS2480
AC ELECTRICAL CHARACTERISTICS (VDD = 4.5V to 5.5V;–40°C to 85°C)
PARAMETER SYMBOL MIN TYP MAX UNITS NOTES
UART Bit Time T
Device Bit Time T
Fall Time RXD t
Rise Time RXD t
Transmit Idle Time t
Receive Idle Time t
Asymmetry t
IDLET
IDLER
ASYM
Arrival Response Time t
Master Reset Time t
Active Pull–Up on Time t
APUOT
Response Time t
T
R
FR
RR
ARR
MR
RESP
8.68 104 µs 6
8.68 104 µs 6, 7
8 20 ns 8
13 27 ns 8
0 µs 9
t
IDLET
µs
1 µs 10
4.4 52 µs 11
104 µs 12
0.5 2.0 µs 13
8.68 + ∆ 104 + ∆ µs 11, 14
NOTES:
1. VPP – ∆V
2. Applies only if a 12.0V supply is connected. If V
3. Input load is to GND.
4. Voltage dif ference between V
5. Voltage dif ference between V
6. 8.68 µs (115.2 kbps), 52 µs (19.2 kbps), 17.36 µs (57.6 kbps), 104 µs (9.6 kbps).
7. Nominal values; tolerance = ±5%.
8. At V
CC
9. See Table 7, Function and Speed Matrix.
10.Independent of baud rate.
11.Minimum at 115.2 kbps, maximum at 9.6 kbps.
12.The master reset cycle is complete after t
13.Minimum value at Overdrive speed; maximum value at regular speed.
14.∆ is the time to complete the activity on the 1–Wire bus; values range from 0 (configuration command) up to
5130 µs (alarming presence pulse)
must be within 11.5 to 12.0V.
PROG
and 1–W.
DD
and 1–W.
PP
= 5.0V and 100 pF load to GND.
MR
and VDD are tied together , current is less than 1 µA.
PP
is over.
042498 26/26
 Loading...
Loading...