

Page 1
r
www.dalsemi.com
2
3
4
7
PRELIMINARY
DS18B20
Programmable Resolution
®
1-Wire
Digital Thermomete
FEATURES
Unique 1-Wire interface requires only one
port pin for communication
Multidrop capability simplifies distributed
temperature sensing applications
Requires no external components
Can be powered from data line. Power supply
range is 3.0V to 5.5V
Zero standby power required
Measures temperatures from -55°C to
+125°C. Fahrenheit equivalent is -67°F to
+257°F
±0.5°C accuracy from -10°C to +85°C
Thermometer resolution is programmable
from 9 to 12 bits
Converts 12-bit temperature to digital word in
750 ms (max.)
User-definable, nonvolatile temperature alarm
settings
Alarm search command identifies and
addresses devices whose temperature is
outside of programmed limits (temperature
alarm condition)
Applications include thermostatic controls,
industrial systems, consumer products,
thermometers, or any thermally sensitive
system
PIN ASSIGNMENT
DALLAS
DS1820
1 2 3
NC
NC
V
DD
DQ
VDD
GND
DQ
8-Pin SOIC (150 mil)
PIN DESCRIPTION
GND - Ground
DQ - Data In/Out
V
NC - No Connect
- Power Supply Voltage
DD
BOTTOM VIEW
1 2 3
DS18B20 To-92
Package
1
8
6
5
DS18B20Z
NC
NC
NC
GND
DESCRIPTION
The DS18B20 Digital Thermometer provides 9 to 12-bit (configurable) temperature readings which
indicate the temperature of the device.
Information is sent to/from the DS18B20 over a 1-Wire interface, so that only one wire (and ground)
needs to be connected from a central microprocessor to a DS18B20. Power for reading, writing, and
performing temperature conversions can be derived from the data line itself with no need for an ex ternal
power source.
Because each DS18B20 contains a unique silicon serial number, multiple DS18B20s can exist on the
same 1-Wire bus. This allows for placing temperature sensors in many differ ent places. Applications
where this feature is useful include HVAC environmental controls, sensing temperatur es inside buildings,
equipment or machinery, and process monitoring and control.
1 of 27 050400
Page 2
DS18B20
DETAILED PIN DESCRIPTION Table 1
PIN
8PIN SOIC
5 1 GND Ground.
42DQData Input/Output pin. For 1-Wire operation: Open
33VDDOptional VDD pin. See “Parasite Power” section for
DS18B20Z (8-pin SOIC): All pins not specified in this table are not to be connected.
PIN
TO92 SYMBOL DESCRIPTION
drain. (See “Parasite Power” section.)
details of connection. VDD must be grounded for
operation in parasite power mode.
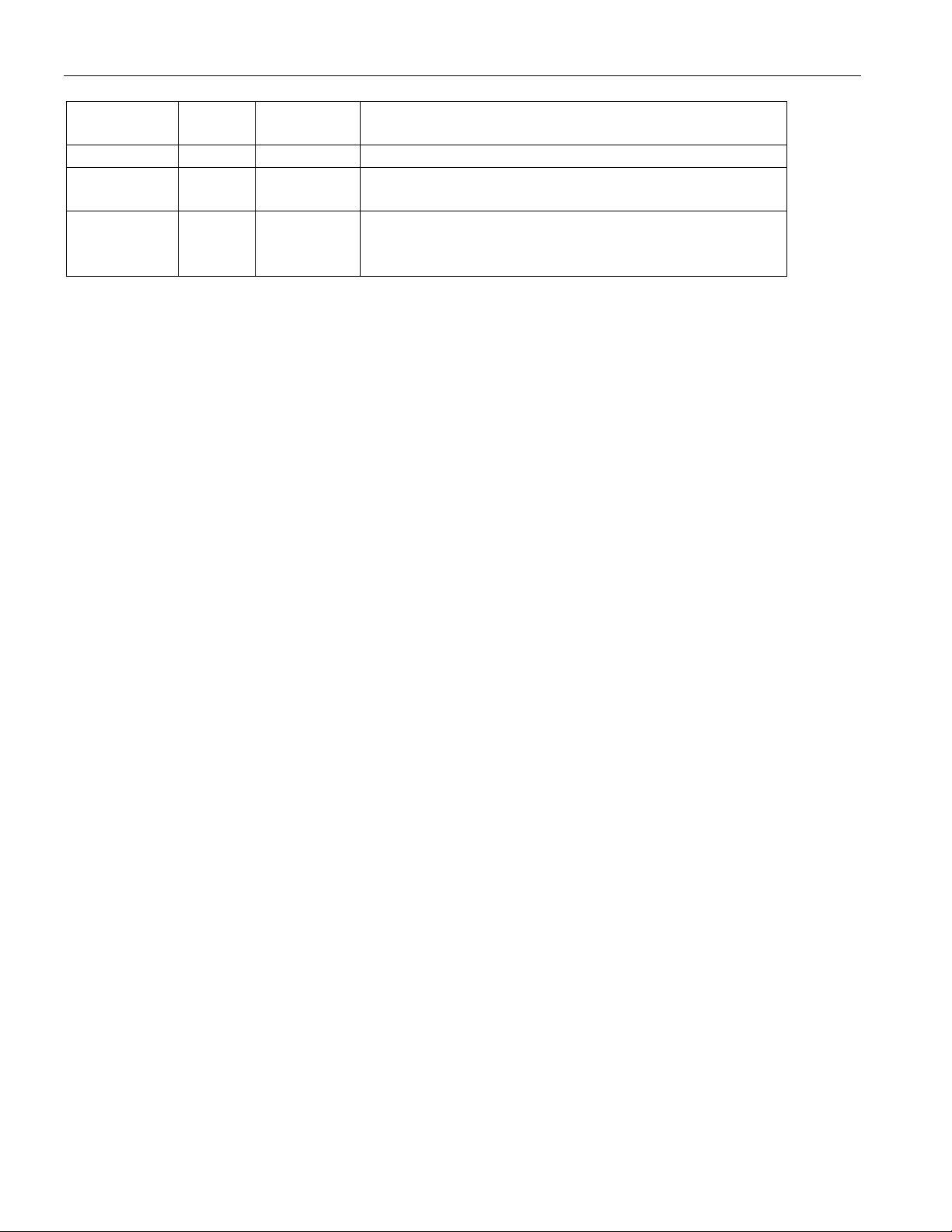
OVERVIEW
The block diagram of Figure 1 shows the major components of the DS18B20. The DS18B20 has four
main data components: 1) 64-bit lasered ROM, 2) temperature sensor, 3 ) nonvolatile temperature alarm
triggers TH and TL, and 4) a configuration register. The device derives its power from the 1-Wire
communication line by storing energy on an internal capacitor during periods of time when the signal line
is high and continues to operate off this power source during the low times of the 1-Wire line until it
returns high to replenish the parasite (capacitor) supply. As an alternative, the DS18B20 ma y also be
powered from an external 3 volt - 5.5 volt supply.
Communication to the DS18B20 is via a 1-Wire port. With the 1-Wire port, the memory and control
functions will not be available before the ROM function protocol has been established. The master must
first provide one of five ROM function commands: 1) Read ROM, 2) Match ROM, 3) Search ROM, 4)
Skip ROM, or 5) Alarm Search. These commands operate on the 64-bit lasered ROM portion of each
device and can single out a specific d evice if many are present on the 1-W ire line as well as indicate to
the bus master how many and what types of devices are present. After a ROM functi on sequence has
been successfully executed, the memory and control functions are accessible and the master may then
provide any one of the six memory and control function commands.
One control function command instructs the DS18B20 to perform a temperature m e asurement. Th e result
of this measurement will be placed in the DS18B20’s scratch-pad memory, and may be read by issuing a
memory function command which reads the contents of the scratchpad memory. The temperature alarm
triggers TH and TL consist of 1 byte EEPROM each. If the alarm search command is not applied to the
DS18B20, these registers may be used as general purpose user memory. The scratchpad also contains a
configuration byte to set the desired resolution of the temperature to digital conversion. Writing TH, TL,
and the configuration byte is done using a memory function command. Read access to these registers is
through the scratchpad. All data is read and written least significant bit first.
2 of 27
Page 3
DS18B20 BLOCK DIAGRAM Figure 1
G
64-BIT ROM
DQ
AND
1-WIRE PORT
DS18B20
MEMORY AND
CONTROL LOGIC
TEMPERATURE SENSOR
INTERNAL V
V
DD
POWER
SUPPLY
DD
SCRATCHPAD
8-BIT CRC
ENERATOR
HIGH TEMPERATURE
TRIGGER, TH
LOW TEMPERATURE
CONFIGURATION
REGISTER
PARASITE POWER
The block diagram (Figure 1) shows the parasite-powered circuitry. This circuitry “steals” power
whenever the DQ or V
and voltage requirements are met (see the section titled “1-Wire Bus System”). The advantages of
parasite power are twofold: 1) by parasiting off this pin, no local power source is needed for remote
sensing of temperature, and 2) the ROM may be read in absence of normal power.
In order for the DS18B20 to be able to perform accurate temperature conv ersions, sufficient power must
be provided over the DQ line when a temperature conversion is taking place. Since the operating current
of the DS18B20 is up to 1.5 mA, the DQ line will not have sufficient drive due to the 5k pullup resistor.
This problem is particularly acute if several DS18B20s are on the same DQ and attempting to convert
simultaneously.
pins are high. DQ will provide sufficient power as long as the specified timing
DD
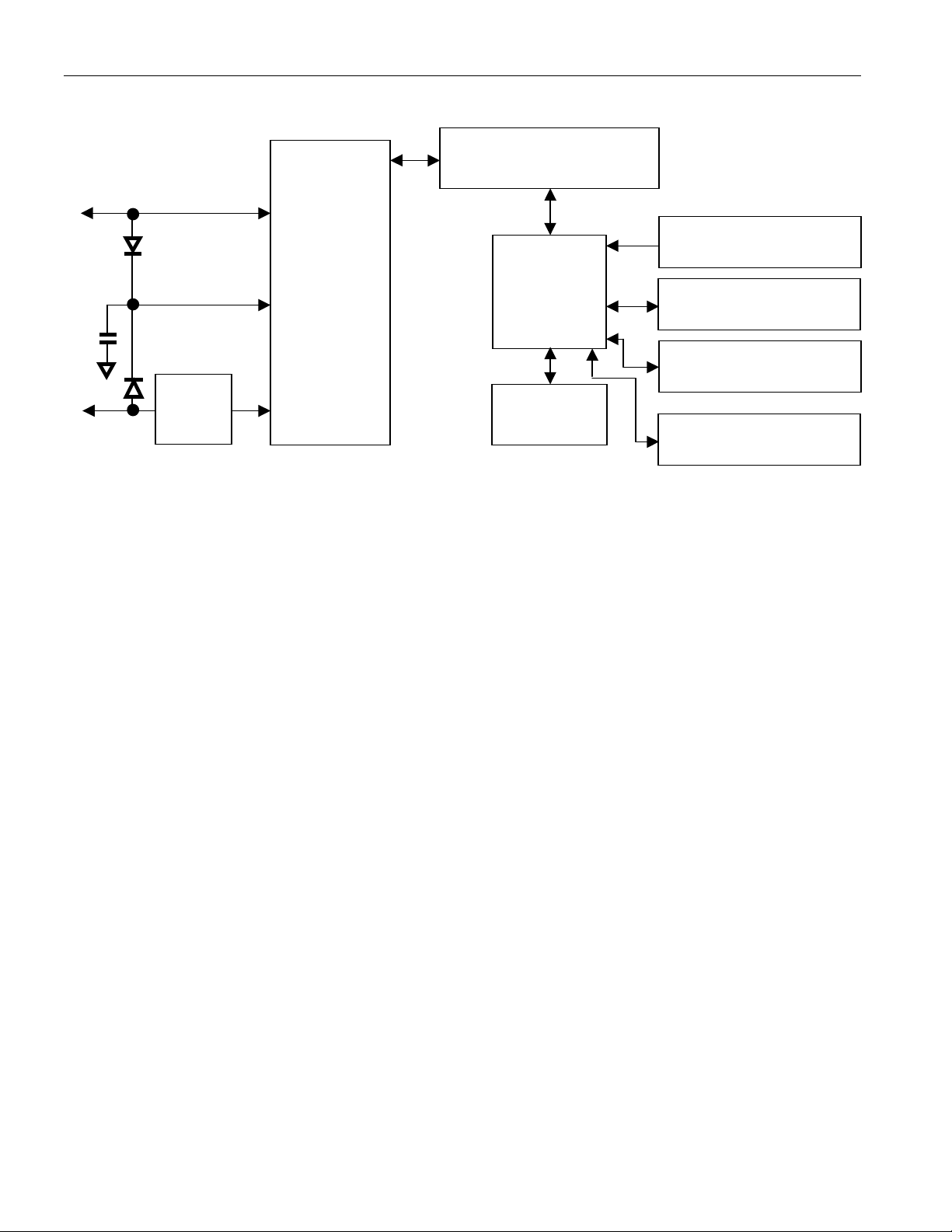
There are two ways to assure that the DS18B20 has sufficient supply current during its active conversion
cycle. The first is to provide a strong pullup on the DQ line whenever temperature conversions or copies
2
to the E
memory are taking place. This may be accomplished by using a MOSFET to pull the DQ line
directly to the power supply as shown in Figure 2. The DQ line must be switched over to the strong pullup within 10 µs maximum after issuing any protocol that involves copying to the E2 memory or initiates
temperature conversions. When using the parasite power mode, the VDD pin must be tied to ground.
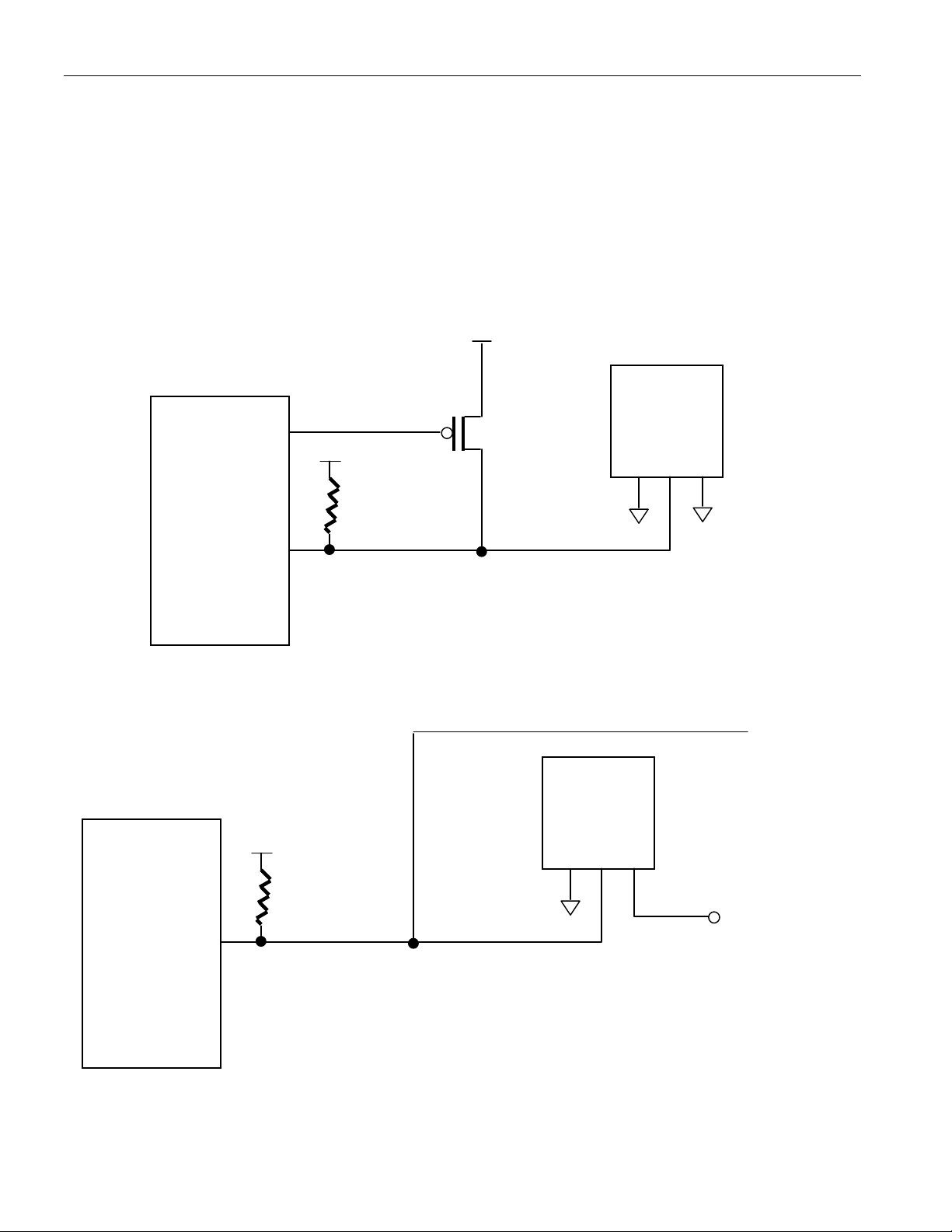
Another method of supplying current to the DS18B20 is through the use of an ex ternal power suppl y tied
to the VDD pin, as shown in Figure 3. The advantage to this is that the strong pullup is not required on the
DQ line, and the bus master need not be tied up holding that line high during temperature conversions.
This allows other data traffic on the 1-Wire bus during the conversion time. In addition, any number of
DS18B20s may be placed on the 1-Wire bus, and if they all use external power, they may all
simultaneously perform temperature conversions by issuing the Skip ROM command and then issuing the
Convert T command. Note that as long as the external power supply is active, the GND pin may not be
floating.
The use of parasite power is not recommended above 100°C, since it may not be able to sustain
communications given the higher leakage currents the DS18B20 exhibits at these temperatures. For
applications in which such temperatures are likely, it is strongly recommended that V
be applied to the
DD
DS18B20.
3 of 27
Page 4
DS18B20
For situations where the bus master does not know whether the DS18B20s on the bus are parasite
powered or supplied with external VDD, a provision is made in the DS18B20 to signal the power supply
scheme used. The bus master can determine if any DS18B20s are on the bus which require the strong
pullup by sending a Skip ROM protocol, then issuing the read power supply command. After this
command is issued, the master then issues read time slots. The DS18B20 will send back “0” on the
1-Wire bus if it is parasite powered; it will send back a “1” if it is powered from the V
pin. If the
DD
master receives a “0,” it knows that it must supply the strong pullup on the DQ line du ring temperature
conversions. See “Memory Command Functions” section for more detail on this command protocol.
STRONG PULLUP FOR SUPPLYING DS18B20 DURING TEMPERATURE
CONVERSION Figure 2
+3V - +5.5V
DS18B20
+3V - +5.5V
V
DD
µP
4.7k
GND
I/O
USING V
µP
TO SUPPLY TEMPERATURE CONVERSION CURRENT Figure 3
DD
TO OTHER
1-WIRE
EXTERNAL
+3V - +5.5V
+3V - +5.5V
4.7k
I/O
DS18B20
V
DD
4 of 27
Page 5
DS18B20
OPERATION - MEASURING TEMPERATURE
The core functionality of the DS18B20 is its direct-to-digital temperature sensor. The resolution of the
DS18B20 is configurable (9, 10, 11, or 12 bits), with 12-bit readings the factory default state. This
equates to a temperature resolution of 0.5°C, 0.25°C, 0.125°C, or 0.0625°C. Following the issuan ce of
the Convert T [44h] command, a temperature conversion is performed and the thermal data is stored in
the scratchpad memory in a 16-bit, sign-extended two’s complement format. The temperature
information can be retrieved over the 1-Wire interface by issuing a Read Scratchpad [BEh] command
once the conversion has been performed. The data is transferred over the 1-Wire bus, LSB first. The
MSB of the temperature register contains the “sign” (S) bit, denoting whether the temperature is positive
or negative.
Table 2 describes the exact relationship of output data to measured temperature. The table assumes 12-bit
resolution. If the DS18B20 is configured for a lower resolution, insignificant bits will contain zeros. For
Fahrenheit usage, a lookup table or conversion routine must be used.
Temperature/Data Relationships Table 2
232221202-12-22-32-4LSB
MSb
SSSSS262524MSB
TEMPERATURE DIGITAL OUTPUT
+125°C 0000 0111 1101 0000 07D0h
+85°C 0000 0101 0101 0000 0550h*
+25.0625°C 0000 0001 1001 0001 0191h
+10.125°C 0000 0000 1010 0010 00A2h
+0.5°C 0000 0000 0000 1000 0008h
0°C 0000 0000 0000 0000 0000h
-0.5°C 1111 1111 1111 1000 FFF8h
-10.125°C 1111 1111 0101 1110 FF5Eh
-25.0625°C 1111 1110 0110 1111 FF6Fh
-55°C 1111 1100 1001 0000 FC90h
*The power on reset register value is +85°C.
(unit = °C)
(Binary)
LSb
DIGITAL
OUTPUT
(Hex)
OPERATION - ALARM SIGNALING
After the DS18B20 has performed a temperature conversion, the temper ature value is compared to the
trigger values stored in TH and TL. Since these registers are 8-bit only, bits 9-12 are ignored for
comparison. The most significant bit of TH or TL directly corresponds to the sign bit of the 16-bit
temperature register. If the result of a temperature measur ement is higher than TH or lower th an TL, an
alarm flag inside the device is set. This flag is updated with every temperature measurement. As long as
the alarm flag is set, the DS18B20 will respond to the alarm search command. This allows many
DS18B20s to be connected in parallel doing simultaneous temperature measurements. If somewhere the
temperature exceeds the limits, the alarming device(s) can be identified and read immediately without
having to read non-alarming devices.
5 of 27
Page 6

DS18B20
64-BIT LASERED ROM
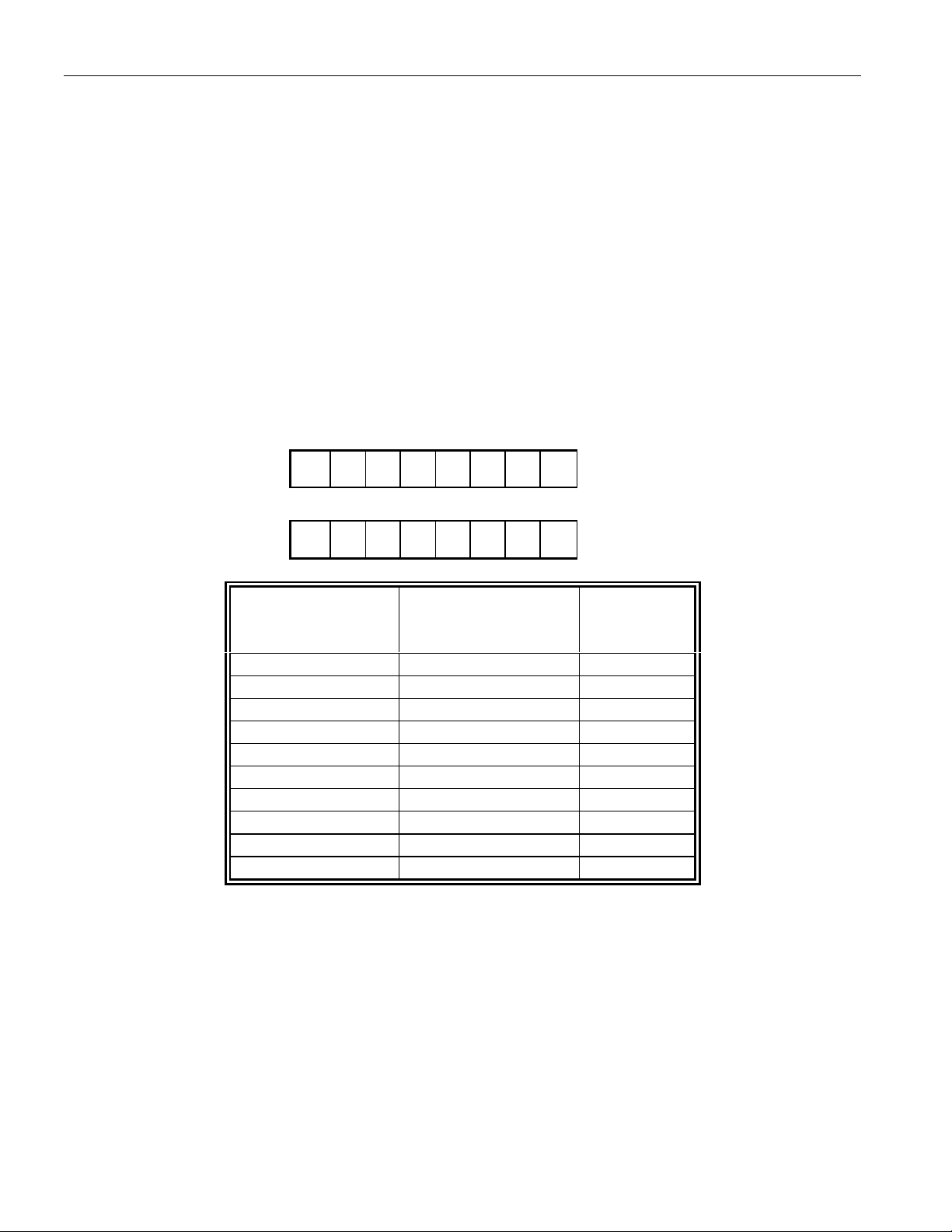
Each DS18B20 contains a unique ROM code that is 64-bits long. The first 8 bits are a 1-Wire family
code (DS18B20 code is 28h). The next 48 bits are a unique serial number. The last 8 bits are a CRC of
the first 56 bits. (See Figure 4.) The 64-bit ROM and ROM Function Control section allow the DS18B20
to operate as a 1-Wire device and follow the 1-Wire protocol detailed in the section “1-Wire Bus
System.” The functions required to control sections of the DS18B20 are not accessible until the ROM
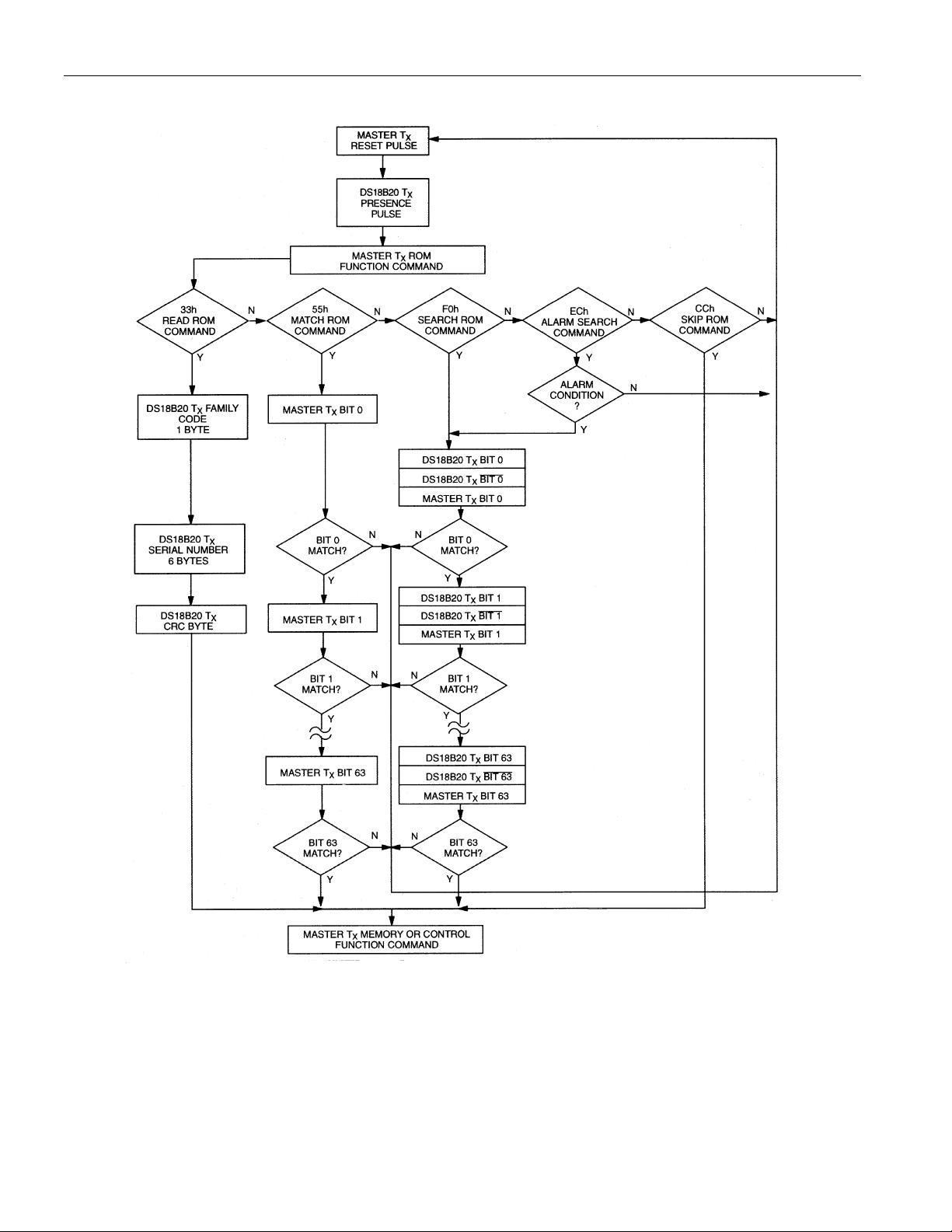
function protocol has been satisfied. This protocol is described in the ROM function protocol flowchart
(Figure 5). The 1-Wire bus master must first provide one of five ROM function commands: 1) Read
ROM, 2) Match ROM, 3) Search ROM, 4) Skip ROM, or 5) Alarm Search. After a ROM function
sequence has been successfully executed, the functions specific to the DS18B20 are ac cessible and the
bus master may then provide one of the six memory and control function commands.
CRC GENERATION
The DS18B20 has an 8-bit CRC stored in the most significant byte of the 64-bit ROM. The bus master
can compute a CRC value from the first 56-bits of the 64-bit ROM and compare it to the value stored
within the DS18B20 to determine if the ROM data has been received error-fre e by the bus master. The
equivalent polynomial function of this CRC is:
CRC = X8 + X5 + X4 + 1
The DS18B20 also generates an 8-bit CRC value using the same polynomial function shown above and
provides this value to the bus master to validate the transfer of data bytes. In each case where a CRC is
used for data transfer validation, the bus master must calculate a CRC value using the polynomial
function given above and compare the calculated value to either the 8-bit CRC value stored in the 64-bit
ROM portion of the DS18B20 (for ROM reads) or the 8-bit CRC value computed within the DS18B20
(which is read as a ninth byte when the scratchpad is read). The comparison of CRC values and decision
to continue with an operation are determined entirely by the bus master. There is no circuitry inside the
DS18B20 that prevents a command sequence from proceeding if the CRC stored in or calculated by the
DS18B20 does not match the value generated by the bus master.
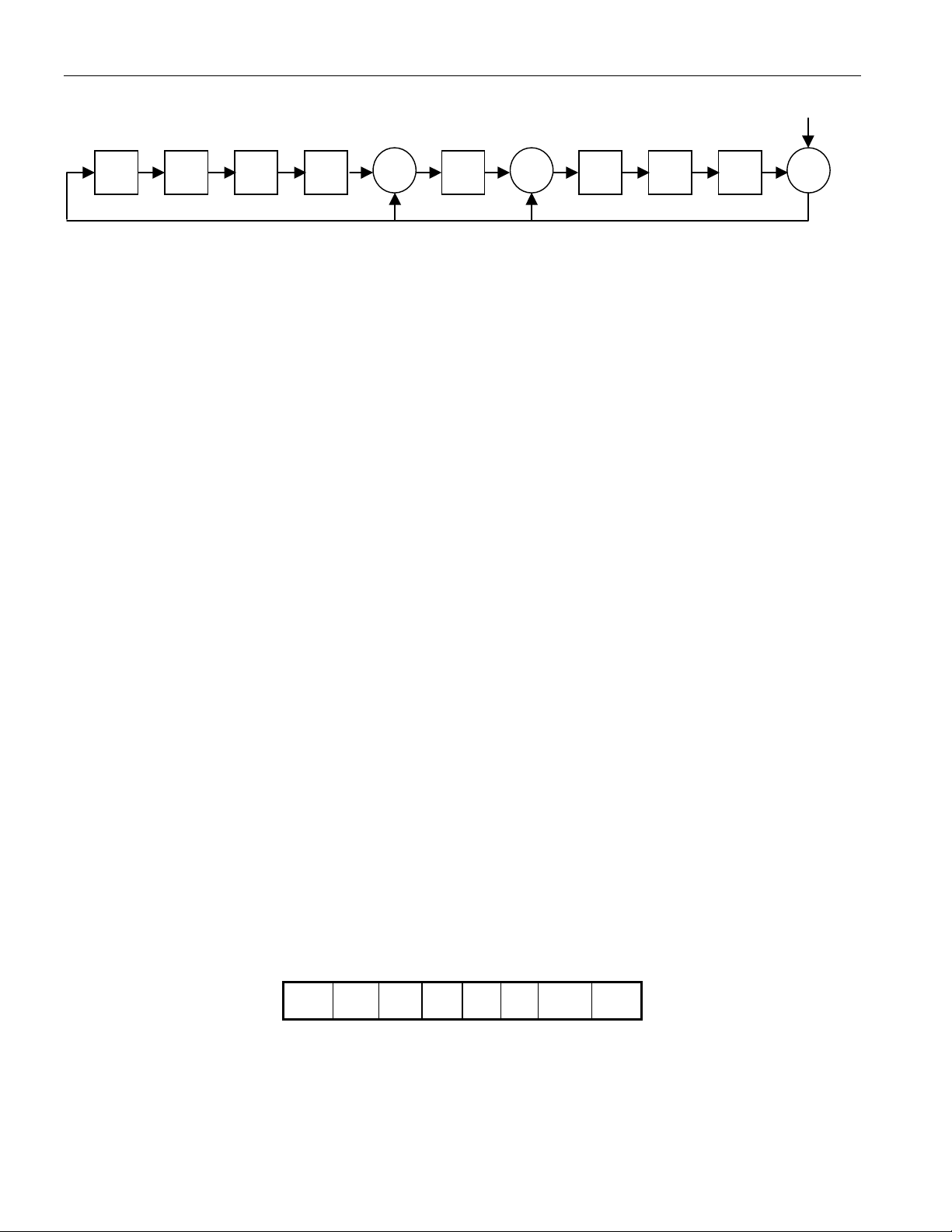
The 1-Wire CRC can be generated using a polynomial generator consisting of a shift register and XOR
gates as shown in Figure 6. Additional information about the Dallas 1-Wire Cyclic Redundanc y Check is
available in Application Note 27 entitled “Understanding and Using Cyclic Redundancy Checks with
Dallas Semiconductor Touch Memory Products.”
The shift register bits are initialized to 0. Then starting with the least significant bit of the family code,
1 bit at a time is shifted in. After the 8th bit of the family code has been entered, then the serial number is
entered. After the 48th bit of the serial number has been entered, the shift register contains the CRC
value. Shifting in the 8 bits of CRC should return the shift register to all 0s.
64-BIT LASERED ROM Figure 4
8-BIT CRC CODE 48-BIT SERIAL NUMBER
MSB LSB MSB LSB MSB LSB
6 of 27
8-BIT FAMILY CODE
(28h)
Page 7
ROM FUNCTIONS FLOW CHART Figure 5
DS18B20
7 of 27
Page 8
1-WIRE CRC CODE Figure 6
(
)
(
)
DS18B20
INPUT
MSB
LSB
MEMORY
The DS18B20’s memory is organized as shown in Figure 8. The memory consists of a scratchpad RAM
and a nonvolatile, electrically erasable (E2) RAM, which stores the high and low temperature triggers TH
and TL, and the configuration register. The scratchpad helps insure data integrity when communicating
over the 1-Wire bus. Data is first written to the scratchpad using the Write Scratchpad [4Eh] command.
It can then be verified by using the Read Scratchpad [BEh] command. After the dat a has been verifi ed, a
Copy Scratchpad [48h] command will transfer the data to the nonvolatile (E2) RAM. This process insures
data integrity when modifying memory. The DS18B20 EEPROM is rated for a minimum of 50,000
writes and 10 years data retention at T = +55°C.
The scratchpad is organized as eight bytes of memory. The first 2 bytes contain the LSB and the MSB of
the measured temperature information, respectively. The third and fourth bytes are volatile copies of T H
and TL and are refreshed with every power-on reset. The fifth byte is a volatile copy of the configuration
register and is refreshed with every power-on reset. The configuration register will be explained in more
detail later in this section of the datasheet. The sixth, seventh, and eighth bytes are used for internal
computations, and thus will not read out any predictable pattern.
It is imperative that one writes TH, TL, and config in succession; i.e. a write is not valid if one writes
only to TH and TL, for example, and then issues a reset. If any of these bytes must be written, all three
must be written before a reset is issued.
There is a ninth byte which may be read with a Read Scratchpad [BEh] command. This b yte contains a
cyclic redundancy check (CRC) byte which is the CRC over all of the eight previous bytes. This CRC is
implemented in the fashion described in the section titled “CRC Generation”.
Configuration Register
The fifth byte of the scratchpad memory is the configuration register.
It contains information which will be used by the device to determine the resolution of the temperature to
digital conversion. The bits are organized as shown in Figure 7.
DS18B20 CONFIGURATION REGISTER Figure 7
0R1R0111 1 1
MSb LSb
Bits 0-4 are don’t cares on a write but will always read out “1”.
Bit 7 is a don’t care on a write but will always read out “0”.
8 of 27
Page 9
DS18B20
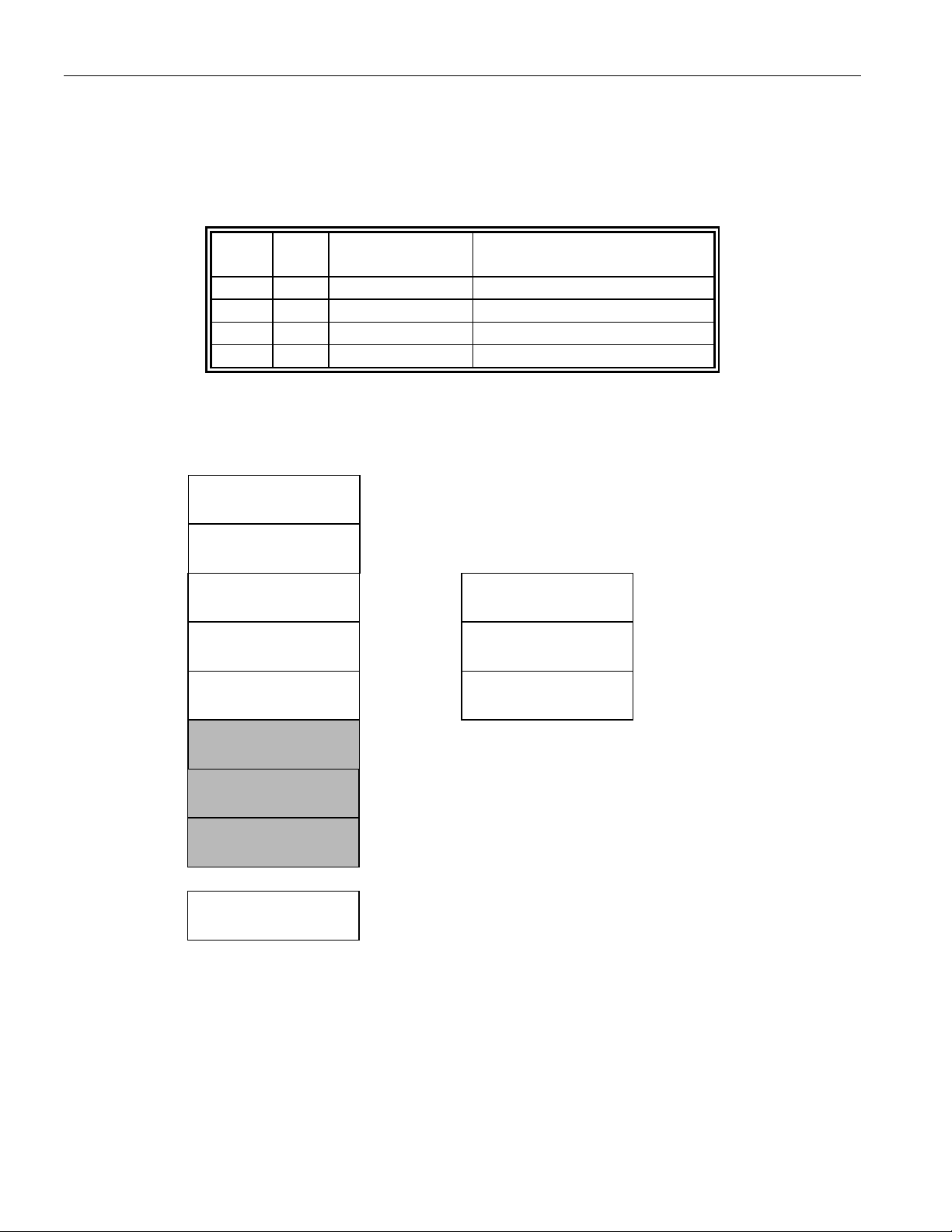
R0, R1: Thermometer resolution bits. Table 3 below defines the resolution of the digital thermometer,
based on the settings of these 2 bits. There is a direct tradeoff between resolution and conversion time, as
depicted in the AC Electrical C haracteristics. The factory default of these EEPROM bits is R0=1 and
R1=1 (12-bit conversions).
Thermometer Resolution Configuration Table 3
R1 R0 Thermometer
Resolution
0 0 9 bit 93.75 ms (t
0 1 10 bit 187.5 ms (t
1 0 11 bit 375 ms (t
1 1 12 bit 750 ms (t
DS18B20 MEMORY MAP Figure 8
SCRATCHPAD
BYTE
TEMPERATURE LSB
TEMPERATURE MSB
TH/USER BYTE 1
TL/USER BYTE 2
CONFIG
0
1
2
3
4
Max Conversion
Time
2
E
RAM
TH/USER BYTE 1
TL/USER BYTE 2
CONFIG
conv
conv
conv
conv
/8)
/4)
/2)
)
RESERVED
RESERVED
RESERVED
CRC
5
6
7
8
9 of 27
Page 10

DS18B20
yp
OS
X
1-WIRE BUS SYSTEM
The 1-Wire bus is a system which has a single bus master and one or more slaves. The DS18B20
behaves as a slave. The discussion of this bus system is broken down into three topics: hardware
configuration, transaction sequence, and 1-Wire signaling (signal types and timing).
HARDWARE CONFIGURATION
The 1-Wire bus has only a single line by definition; it is import ant that each device on the bus be able t o
drive it at the appropriate time. To facilitate this, each device attached to the 1-Wire bus must have open
drain or 3-state outputs. The 1-Wire port of the DS18B20 (DQ pin) is open drain with an internal circuit
equivalent to that shown in Figure 9. A multidrop bus consists of a 1-Wire bus with multiple slaves
attached. The 1-Wire bus requires a pullup resistor of approximately 5 kΩ.
HARDWARE CONFIGURATION Figure 9
+3V - +5V
BUS MASTER
R
X
T
X
4.7K
R
= RECEIVE
X
T
= TRANSMIT
DS18B20 1-WIRE PORT
5 µA
T
.
100 OHM
M
FET
R
X
T
X
The idle state for the 1-Wire bus is high. If for any reason a transaction needs to be suspended, the bus
MUST be left in the idle state if the transaction is to resume. Infinite recovery time can occur between
bits so long as the 1-Wire bus is in the inactive (high) state during the recovery period. If this does not
occur and the bus is left low for more than 480 µs, all components on the bus will be reset.
TRANSACTION SEQUENCE
The protocol for accessing the DS18B20 via the 1-Wire port is as follows:
Initialization
ROM Function Command
Memory Function Command
Transaction/Data
10 of 27
Page 11

DS18B20
INITIALIZATION
All transactions on the 1-Wire bus begin with an initialization sequence. The initialization sequence
consists of a reset pulse transmitted by the bus master followed by presence pulse(s) transmitted by the
slave(s).
The presence pulse lets the bus master know that the DS18B20 is on the bus and is ready to operate. For
more details, see the “1-Wire Signaling” section.
ROM FUNCTION COMM ANDS
Once the bus master has detected a presence, it can issue one of the five ROM fun ction commands. All
ROM function commands are 8 bits long. A list of these commands follows (refer to flowchart in
Figure 5):
Read ROM [33h]
This command allows the bus master to read the DS18B20’s 8-bit family code, unique 48-bit serial
number, and 8-bit CRC. This command can only be used if there is a single DS18B20 on the bus. If
more than one slave is present on the bus, a data collision will occur when all slaves try to transmit at the
same time (open drain will produce a wired AND result).
Match ROM [55h]
The match ROM command, followed by a 64-bit ROM sequence, allows the bus master to address a
specific DS18B20 on a multidrop bus. Only the DS18B20 that exactly matches the 64-bit ROM sequence
will respond to the following memory function command. All slaves that do not match the 64-bit ROM
sequence will wait for a reset pulse. This command can be used with a single or multiple devices on the
bus.
Skip ROM [CCh]
This command can save time in a single drop bus system by allowing the bus master to access the
memory functions without providing the 64-bit ROM code. If more than one slave is present on the bus
and a Read command is issued following the Skip ROM command, data collision will occur on the bus as
multiple slaves transmit simultaneously (open drain pulldowns will produce a wired AND result).
Search ROM [F0h]
When a system is initially brought up, the bus master might not know the number of devices on the
1-Wire bus or their 64-bit ROM codes. The search ROM command allows the bus master to use a
process of elimination to identify the 64-bit ROM codes of all slave devices on the bus.
Alarm Search [ECh]
The flowchart of this command is identical to the Search ROM command. However, the DS18B20 will
respond to this command only if an alarm condition has been encountered at the last temperature
measurement. An alarm condition is defined as a tempe rature higher than TH or lower than TL. The
alarm condition remains set as long as the DS18B20 is powered up, or until another temperature
measurement reveals a non-alarming value. For alarming, the trigger values stored in EEPROM are taken
into account. If an alarm condition exists and the TH or TL settings are changed, another temperature
conversion should be done to validate any alarm conditions.
11 of 27
Page 12

DS18B20
Example of a ROM Search
The ROM search process is the repetition of a simple three-step routine: read a bit, read the complement
of the bit, then write the desired value of that bit. The bus master performs this simple, three-step routine
on each bit of the ROM. After one complete pass, the bus master knows the contents of the ROM in one
device. The remaining number of devices and their ROM codes may be identified by additional passes.
The following example of the ROM search process assumes four diff erent devices are connected to the
same 1-Wire bus. The ROM data of the four devices is as shown:
ROM1 00110101...
ROM2 10101010...
ROM3 11110101...
ROM4 00010001...
The search process is as follows:
1. The bus master begins the initialization sequence by issuing a reset pulse. The sl ave devices respond
by issuing simultaneous presence pulses.
2. The bus master will then issue the Search ROM command on the 1-Wire bus.
3. The bus master reads a bit from the 1-Wire bus. Each device will respond by placing the v alue of the
first bit of their respective ROM data onto the 1-Wire bus. ROM1 and ROM4 will place a 0 onto the
1-Wire bus, i.e., pull it low. ROM2 and ROM3 will place a 1 onto the 1-Wire bus b y allowing the
line to stay high. The result is the logical AND of all devices on the line, therefore the bus mast er
sees a 0. The bus master reads another bit. Si nce the Search ROM dat a command is bein g executed,
all of the devices on the 1-Wire bus respond to this second read by placing the complement of the first
bit of their respective ROM data onto the 1-Wire bus. ROM1 and ROM4 will place a 1 onto the
1-Wire, allowing the line to stay high. ROM2 and ROM3 will place a 0 onto the 1-Wire, thus it will
be pulled low. The bus master again observes a 0 for the complement of the first ROM data bit. The
bus master has determined that there are some devices on the 1-Wire bus that hav e a 0 in the first
position and others that have a 1.
The data obtained from the two reads of the three-step routine have the following interpretations:
00 There are still devices attached which have conflicting bits in this position.
01 All devices still coupled have a 0-bit in this bit position.
10 All devices still coupled have a 1-bit in this bit position.
11 There are no devices attached to the 1-Wire bus.
4. The bus master writes a 0. This deselects ROM2 and ROM3 for the remainder of this search pass,
leaving only ROM1 and ROM4 connected to the 1-Wire bus.
5. The bus master performs two more reads and receiv es a 0-bit followed b y a 1-bit. This i ndicates that
all devices still coupled to the bus have 0s as their second ROM data bit.
6. The bus master then writes a 0 to keep both ROM1 and ROM4 coupled.
7. The bus master executes two reads and receives two 0-bits. This indicates that both 1-bits and 0-bits
exist as the 3rd bit of the ROM data of the attached devices.
12 of 27
Page 13

DS18B20
8. The bus master writes a 0-bit. This deselects ROM1, leaving ROM4 as the only device still
connected.
9. The bus master reads the remainder of the ROM bits for ROM4 and continues to access the part if
desired. This completes the first pass and uniquely identifies one part on the 1-Wire bus.
10. The bus master starts a new ROM search sequence by repeating steps 1 through 7.
11. The bus master writes a 1-bit. This decouples ROM4, leaving only ROM1 still coupled.
12. The bus master reads the remainder of the ROM bits for ROM1 and communicates to the underlying
logic if desired. This completes the second ROM search pass, in which another of the ROMs was
found.
13. The bus master starts a new ROM search by repeating steps 1 through 3.
14. The bus master writes a 1-bit. This deselects ROM1 and ROM4 for the remainder of this search pass,
leaving only ROM2 and ROM3 coupled to the system.
15. The bus master executes two Read time slots and receives two 0s.
16. The bus master writes a 0-bit. This decouples ROM3 leaving only ROM2.
17. The bus master reads the remainder of the ROM bits for ROM2 and communicates to the underlying
logic if desired. This completes the third ROM search pass, in which another of the ROMs was
found.
18. The bus master starts a new ROM search by repeating steps 13 through 15.
19. The bus master writes a 1-bit. This decouples ROM2, leaving only ROM3.
20. The bus master reads the remainder of the ROM bits for ROM3 and communicates to the underlying
logic if desired. This completes the fourth ROM search pass, in which another of the ROMs was
found.
NOTE:
The bus master learns the unique ID number (ROM data pattern) of one 1-Wire device on each ROM
Search operation. The time required to derive the part’s unique ROM code is:
960 µs + (8 + 3 x 64) 61 µs = 13.16 ms
The bus master is therefore capable of identifying 75 different 1-Wire devices per second.
I/O SIGNALING
The DS18B20 requires strict protocols to insure data integrity. The protocol consists of several types of
signaling on one line: reset pulse, presence pulse, write 0, write 1, read 0, and read 1. All of these signals,
with the exception of the presence pulse, are initiated by the bus master.
13 of 27
Page 14

DS18B20
The initialization sequence required to begin any communication with the DS18B20 is shown in
Figure 11. A reset pulse followed by a presence pulse indicates the DS18B20 is ready to send or receive
data given the correct ROM command and memory function command.
The bus master transmits (TX) a reset pulse (a low signal for a minimum of 480 µs). The bus master then
releases the line and goes into a receive mode (RX). The 1-Wire bus is pulled to a high state via the 5k
pullup resistor. After detecting the rising edge on the DQ pin, the DS18B20 waits 15-60 µs and then
transmits the presence pulse (a low signal for 60-240 µs).
MEMORY COMMAND FUNCTIONS
The following command protocols are summarized in Table 4, and by the flowchart of Figure 10.
Write Scratchpad [4Eh]
This command writes to the scratchpad of the DS18B20, starting at the TH re gister. The next 3 bytes
written will be saved in scratchpad memory at address locations 2 through 4. All 3 bytes must be written
before a reset is issued.
Read Scratchpad [BEh]
This command reads the contents of the scratchpad. Reading will commence at byte 0 and will continue
through the scratchpad until the ninth (byte 8, CRC) byte is read. If not all locations are to be read, the
master may issue a reset to terminate reading at any time.
Copy Scratchpad [48h]
This command copies the scratchpad into the E
bytes in nonvolatile memory. If the bus master issues read time slots following this command, the
DS18B20 will output 0 on the bus as long as it is busy copying the scratchpad to E2; it will return a 1
when the copy process is complete. If parasite-pow ered, the bus master has t o enable a strong pul lup for
at least 10 ms immediately after issuing this command. The DS18B20 EEPROM is rated for a minimum
of 50,000 writes and 10 years data retention at T=+55°C.
2
memory of the DS18B20, storing the temperature trigger
Convert T [44h]
This command begins a temperature conversion. No further data is required. The temperature
conversion will be performed and then the DS18B20 will remain idle. If the bus master issues read time
slots following this command, the DS18B20 will output 0 on the bus as long as it is busy making a
temperature conversion; it will return a 1 when the temperature conversion is complete. If parasitepowered, the bus master has to enable a strong pullup for a period greater than t
immediately after
conv
issuing this command.
Recall E2 [B8h]
This command recalls the temperature trigger values and configuration register stored in E2 to the
scratchpad. This recall operation happens automatically upon power-up to the DS18B20 as well, so valid
data is available in the scratchpad as soon as the device has power applied. With every read data time slot
issued after this command has been sent, the device will output its temperature converter busy flag:
0=busy, 1=ready.
Read Power Supply [B4h]
With every read data time slot issued after this command has been sent to the DS18B20, the device will
signal its power mode: 0=parasite power, 1=external power supply provided.
14 of 27
Page 15

MEMORY FUNCTIONS FLOW CHART Figure 10
DS18B20
15 of 27
Page 16

MEMORY FUNCTIONS FLOW CHART Figure 10 (cont’d)
DS18B20
16 of 27
Page 17

MEMORY FUNCTIONS FLOW CHART Figure 10 (cont’d)
DS18B20
17 of 27
Page 18

DS18B20
INITIALIZATION PROCEDURE “RESET AND PRESENCE PULSES” Figure 11
DS18B20 COMMAND SET Table 4
1-WIRE BUS
AFTER ISSUING
INSTRUCTION DESCRIPTION PROTOCOL
TEMPERATURE CONVERSION COMMANDS
Convert T Initiates temperature
44h <read temperature busy
conversion.
MEMORY COMMANDS
Read Scratchpad Reads bytes from
BEh <read data up to 9 bytes>
scratchpad and reads
CRC byte.
Write Scratchpad Writes bytes into
4Eh <write data into 3 bytes
scratchpad at addresses 2
through 4 (TH and TL
temperature triggers and
config).
Copy Scratchpad Copies scratchpad into
48h <read copy status> 2
nonvolatile memory
(addresses 2 through 4
only).
Recall E
2
Recalls values stored in
B8h <read temperature busy
nonvolatile memory into
scratchpad (temperature
triggers).
Read Power Supply Signals the mode of
B4h <read supply status>
DS18B20 power supply
to the master.
PROTOCOL NOTES
1
status>
3
at addr. 2 through. 4>
status>
18 of 27
Page 19

DS18B20
NOTES:
1. Temperature conversion takes up to 750 ms. After receiving the Convert T protocol, if the part does
not receive power from the VDD pin, the DQ line for the DS18B20 must be held high for at least a
period greater than t
to provide power during the conversion process. As such, no other activity
conv
may take place on the 1-Wire bus for at least this period after a Convert T command has been issued.
2. After receiving the Copy Scratchpad protocol, if the part does not receive power from the VDD pin, the
DQ line for the DS18B20 must be held high for at least 10 ms to provide power during the copy
process. As such, no other activity may take place on the 1-Wire bus for at least this period after a
Copy Scratchpad command has been issued.
3. All 3 bytes must be written before a reset is issued.
READ/WRITE TIME SLOTS
DS18B20 data is read and written through the use of time slots to manipulate bits and a command word to
specify the transaction.
Write Time Slots
A write time slot is initiated when the host pulls the data line from a high logic level to a low logic level.
There are two types of write time slots: Write 1 time slots and Write 0 time slots. All write time slots
must be a minimum of 60 µs in duration with a minimum of a 1-µs recovery time between individual
write cycles.
The DS18B20 samples the DQ line in a window of 15 µs to 60 µs after the DQ line falls. If the line is
high, a Write 1 occurs. If the line is low, a Write 0 occurs (see Figure 12).
For the host to generate a Write 1 time slot, the data line must be pulled to a logic low level and then
released, allowing the data line to pull up to a high level within 15 µs after the start of the write time slot.
For the host to generate a Write 0 time slot, the data line must be pulled to a logic low level and remain
low for 60 µs.
Read Time Slots
The host generates read time slots when data is to be read from the DS18B20. A read time slot is initiated
when the host pulls the data line from a logic high level to logic low level. The data line must remain at a
low logic level for a minimum of 1 µs; output data from the DS18B20 is valid for 15 µs after the falling
edge of the read time slot. The host therefore must stop driving the DQ pin low in order to read its state
15 µs from the start of the read slot (see Figure 12). By the end of the read time slot, the DQ pin will pull
back high via the external pullup resistor. All read time slots must be a minimum of 60 µs in duration
with a minimum of a 1-µs recovery time between individual read slots.
Figure 12 shows that the sum of T
system timing margin is maximized by keeping T
master sample time towards the end of the 15-µs period.
, TRC, and T
INIT
SAMPLE
must be less than 15 µs. Figure 14 shows that
and TRC as small as possible and by locating the
INIT
19 of 27
Page 20

READ/WRITE TIMING DIAGRAM Figure 12
DS18B20
20 of 27
Page 21

DETAILED MASTER READ 1 TIMING Figure 13
RECOMMENDED MASTER READ 1 TIMING Figure 14
DS18B20
21 of 27
Page 22

DS18B20
Related Application Notes
The following Application Notes can be applied to the DS18B20. These notes can be obtained from the
Dallas Semiconductor “Application Note Book,” via our website at http://www.dalsemi.com/.
Application Note 27: “Understanding and Using Cyclic Redundancy Checks with Dallas Semiconductor
Touch Memory Product”
Application Note 55: “Extending the Contact Range of Touch Memories”
Application Note 74: “Reading and Writing Touch Memories via Serial Interfaces”
Application Note 104: “Minimalist Temperature Control Demo”
Application Note 106: “Complex MicroLANs”
Application Note 108: “MicroLAN - In the Long Run”
Sample 1-Wire subroutines that can be used in conjunction with AN74 can be downloaded from the
website or our Anonymous FTP Site.
MEMORY FUNCTION EXAMPLE Table 5
Example: Bus Master initiates temperature conversion, then reads temperature (parasite power assumed).
MASTER MODE DATA (LSB FIRST) COMMENTS
TX Reset Reset pulse (480-960 µs).
RX Presence Presence pulse.
TX 55h Issue “Match ROM” command.
TX <64-bit ROM code> Issue address for DS18B20.
TX 44h Issue “ Convert T” command.
TX <I/O LINE HIGH> I/O line is held high for at least a period of time greater
than t
TX Reset Reset pulse.
RX Presence Presence pulse.
TX 55h Issue “Match ROM” command.
TX <64-bit ROM code> Issue address for DS18B20.
TX BEh Issue “Read Scratchpad” command.
RX <9 data bytes> Read entire scratchpad plus CRC; the master now
recalculates the CRC of the eight data bytes received
from the scratchpad, compares the CRC calculated and
the CRC read. If they match, the master continues; if
not, this read operation is repeated.
TX Reset Reset pulse.
RX Presence Presence pulse, done.
by bus master to allow conversion to complete.
conv
22 of 27
Page 23

MEMORY FUNCTION EXAMPLE Table 6
Example: Bus Master writes memory (parasite power and only one DS18B20 assumed).
MASTER MODE DATA (LSB FIRST) COMMENTS
TX Reset Reset pulse.
RX Presence Presence pulse.
TX CCh Skip ROM command.
TX 4Eh Write Scratchpad command.
TX <3 data bytes> Writes three bytes to scratchpad (TH, TL, and config).
TX Reset Reset pulse.
RX Presence Presence pulse.
TX CCh Skip ROM command.
TX BEh Read Scratchpad command.
RX <9 data bytes> Read entire scratchpad plus CRC. The master now
recalculates the CRC of the eight data bytes received
from the scratchpad, compares the CRC and the two
other bytes read back from the scratchpad. If data match,
the master continues; if not, repeat the sequence.
TX Reset Reset pulse.
RX Presence Presence pulse.
TX CCh Skip ROM command.
TX 48h Copy Scratchpad command; after issuing this command,
the master must wait 10 ms for copy operation to
complete.
TX Reset Reset pulse.
RX Presence Presence pulse, done.
DS18B20
23 of 27
Page 24

DS18B20
ABSOLUTE MAXIMUM RATINGS*
Voltage on Any Pin Relative to Ground -0.5V to +6.0V
Operating Temperature -55°C to +125°C
Storage Temperature -55°C to +125°C
Soldering Temperature See J-STD-020A specification
* This is a stress rating only and functional operation of the d evice at these or a n y other conditions above
those indicated in the operation sections of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods of time may affect reliability.
RECOMMENDED DC OPERATING CONDITIONS
PARAMETER SYMBOL CONDITION MIN TYP MAX UNITS NOTES
Supply Voltage V
DD
Local Power 3.0 5.5 V 1
Data Pin DQ -0.3 +5.5 V 1
V
+
Logic 1 V
Logic 0 V
IH
2.2
IL
-0.3 +0.8 V 1,3,7
CC
0.3
V 1,2
DC ELECTRICAL CHARACTERISTICS (-55°C to +125°C; VDD=3.0V to 5.5V)
PARAMETER SYMBOL CONDITION MIN TYP MAX UNITS NOTES
Thermometer Error t
ERR
-10°C to +85°C
±½ °C
-55°C to +125°C ±2
Input Logic High V
Input Logic Low V
Sink Current I
Standby Current I
Active Current I
DQ-Input Load
Current
I
IH
IL
L
DDS
DD
DQ
Local Power
Parasite Power
V
=0.4V -4.0 mA 1
I/O
2.2
3.0
5.5 V
V
-0.3 +0.8 V 1,3,7
750 1000 nA 6,8
1 1.5 mA 4
5µA5
AC ELECTRICAL CHARACTERISTICS: NV MEMORY
(-55°C to +125°C; V
PARAMETER SYMBOL CONDITION MIN TYP MAX UNITS NOTES
NV Write Cycle
Time
EEPROM Writes N
EEPROM Data
Retention
t
wr
EEWR
t
EEDR
-55°C to +55°C 50k writes
-55°C to +55°C 10 years
210ms
=3.0V to 5.5V)
DD
1,2
1,2
24 of 27
Page 25

DS18B20
AC ELECTRICAL CHARACTERISTICS: (-55°C to +125°C; VDD=3.0V to 5.5V)
PARAMETER SYMBOL CONDITION MIN TYP MAX UNITS NOTES
Temperature
Conversion
t
CONV
9 bit 93.75 ms
Time 10 bit 187.5
11 bit 375
12 bit 750
Time Slot t
Recovery Time t
Write 0 Low Time r
Write 1 Low Time t
Read Data Valid t
Reset Time High t
Reset Time Low t
Presence Detect High t
Presence Detect Low t
Capacitance C
SLOT
REC
LOW0
LOW1
RDV
RSTH
RSTL
PDHIGH
PDLOW
IN/OUT
60 120 µs
1µs
60 120 µs
115µs
15 µs
480 µs
480 µs 9
15 60 µs
60 240 µs
25 pF
NOTES:
1. All voltages are referenced to ground.
2. Logic one voltages are specified at a source current of 1 mA.
3. Logic zero voltages are specified at a sink current of 4 mA.
4. Active current refers to either temperature conversion or writing to the E
2
memory. Writing to E
memory consumes approximately 200 µA for up to 10 ms.
5. Input load is to ground.
6. Standby current specified up to 70°C. Standby current typically is 3 µA at 125°C.
7. To always guarantee a presence pulse under low voltage parasite power conditions, V
to be reduced to as much as 0.5V.
8. To minimize I
9. Under parasite power, the max t
, DQ should be: GND ≤ DQ ≤ GND +0.3V or VDD – 0.3V ≤ DQ ≤ VDD.
DDS
before a power on reset occurs is 960 µS.
RSTL
ILMAX
2
may have
25 of 27
Page 26

DS18B20
26 of 27
Page 27

TYPICAL PERFORMANCE CURVE
DS18B20 Typical Error Curve
0.5
0.4
DS18B20
0.3
0.2
0.1
0
0 10203040506070
-0.1
-0.2
Mean Error
-0.3
-0.4
-0.5
Reference Temp (C)
+3σ Error
-3σ Error
27 of 27
 Loading...
Loading...