

Page 1
Features
■ Nonsynchronous Buck
Design
■ V
2
ª
Control Topology
■ 100ns Transient Loop
Response
■ Programmable Oscillator
Frequency
■ 30ns Typical Gate Rise
and 10ns Fall Times
(No Load)
■ Frequency
Synchronization Input
■ ENABLE Input Controls
Channel 2 Gate Driver
■ 5V/10mA Reference
Output
Package Option
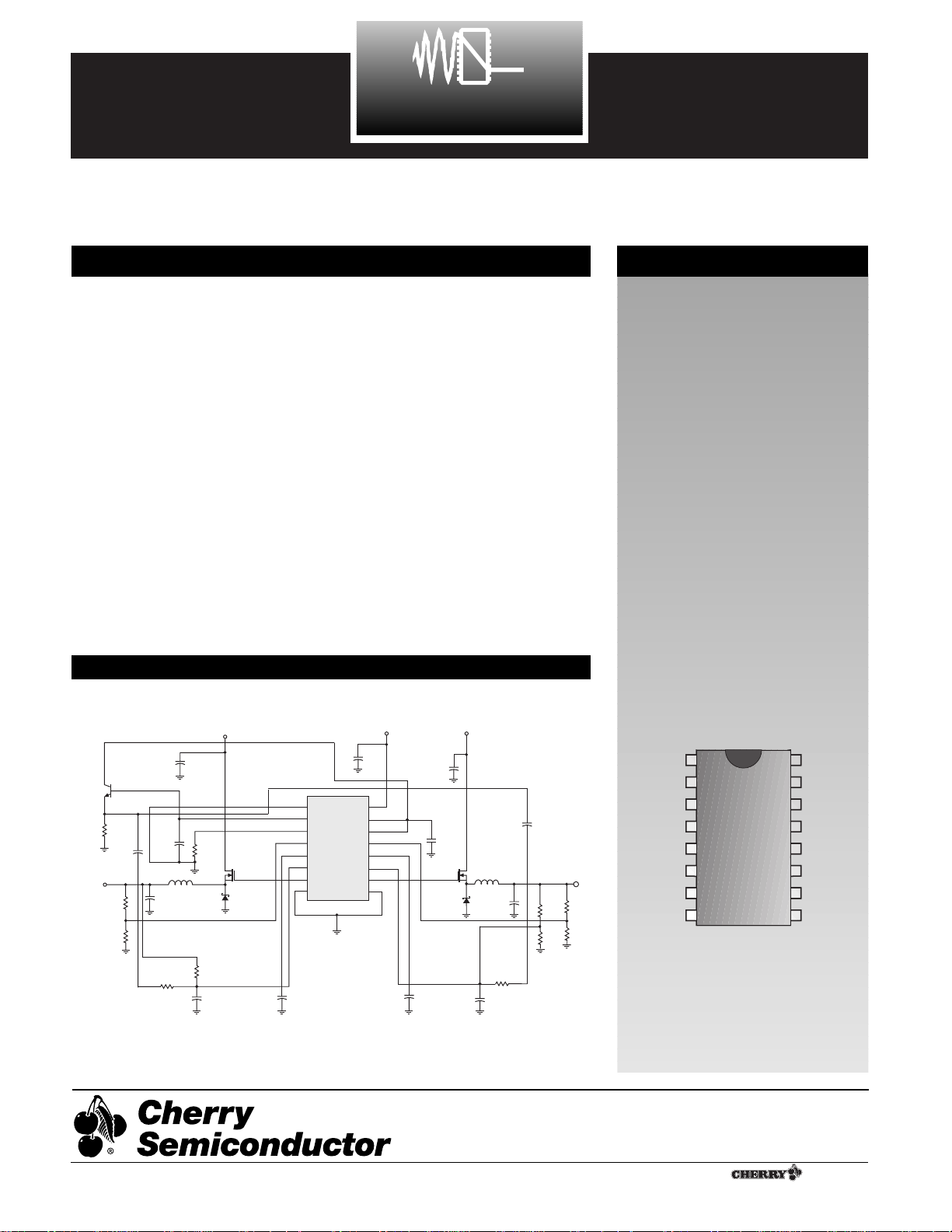
CS5127
Dual Output Nonsynchronous Buck Controller
with Sync Function and Second Channel Enable
CS5127
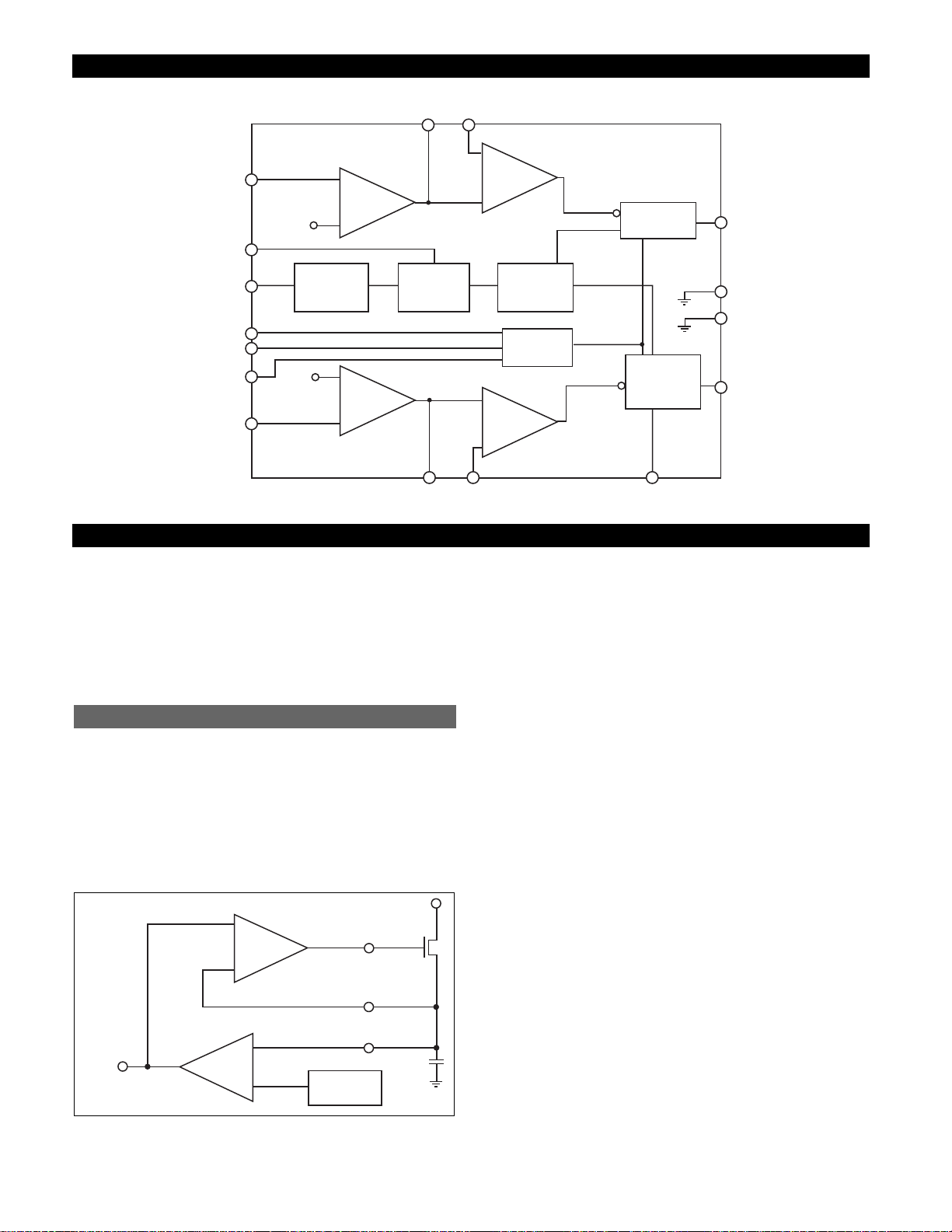
Description
The CS5127 is a fixed frequency
dual output nonsynchronous buck
controller. It contains circuitry for
regulating two separate outputs.
Each output channel contains a
high gain error amplifier, a comparator and latch, and a totem-pole
output driver capable of providing
DC current of 100mA and peak current in excess of 0.5A. A common
oscillator controls switching for
both channels, and a sync lead is
provided to allow parallel supply
operation or shifting of the switching noise spectrum. An on-chip 5V
reference is capable of providing as
much as 10mA of current for external circuitry. The CS5127 also
contains two undervoltage lockout
circuits. The first lockout releases
when VINreaches 8.4V, while the
second lockout ensures that V
REF
is
higher than 3.6V. The outputs are
held in a low state until both lockouts have released. The controller is
configured to utilize the V
2
ª
control method to achieve the fastest
possible transient response and
best overall regulation. This dual
controller is a cost-effective solution for providing V
CORE
and V
IO
power solutions in computing
applications using a single controller. The CS5127 will operate
over an input voltage range of 9.4V
to 20V and is available in a 16 lead
wide body surface mount package.
Applications Diagram
16 Lead SOIC Wide
1
C
T
SYNC
COMP2
PGND
COMP1
ENABLE
LGND
V
FB1
V
FB2
V
REF
V
IN
GATE1
GATE2
V
FFB1
V
FFB2
R
T
12V, 5V to 2.8V @ 7A and 3.3V @ 7A for 233MHz Pentium¨Processor with MMXª Technology
V2is a trademark of Switch Power, Inc.
Pentium is a registered trademark and MMX is a trademark of Intel Corporation
Rev. 11/3/98
Cherry Semiconductor Corporation
2000 South County Trail, East Greenwich, RI 02818
Tel: (401)885-3600 Fax: (401)885-5786
Email: info@cherry-semi.com
Web Site: www.cherry-semi.com
A Company
¨
C1, C2
2 x 680mF
R2
27k
5V
Q2
IRL3103S
D1
1N5821
+
Q1
FMMT2222ACT
R1
2.8V
20k
1540
1270
0.1mF
R4
R5
C7
330pF
C6
L1
5mH
+
C10, C11
2 x 680mF
C4, C5
+
C8
1mF
IRL3103S
1N5821
+5V
+
C9
0.1mF
Q3
L2
5mH
D2
C12, C13
2 x 680mF
+
SYNC
C
T
R
T
V
FB1
COMP1
V
FFB1
GATE1
LGnd
1mF
CS5127
C3
ENABLE
COMP2
GATE2
V
V
V
FFB2
PGnd
12V
+
2 x 680mF
V
IN
REF
FB2
R9
2k
R3
18k
3.3V
R7
2400
R8
1500
1
R6
1k
R10
20k
C14
330pF
C15
100mF
C16
100mF
C17
330pF
R11
20k
Page 2
CS5127
2
Absolute Maximum Ratings
Lead Symbol Lead Name
V
MAX
V
MIN
I
SOURCE
I
SINK
Operating Junction Temperature, TJ..................................................................................................................................... 150¡C
Storage Temperature Range, TS...................................................................................................................................-65 to 150¡C
ESD (Human Body Model).........................................................................................................................................................2kV
Lead Temperature Soldering: Reflow (SMD styles only).............................................60 sec. max above 183¡C, 230¡C peak
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Electrical Characteristics: 0¡C < TA< 70¡C; 0¡C < TJ< 125¡C; 9.4V < VIN< 20V; CT= 330 pF; RT= 27k½;
unless otherwise stated.
SYNC Oscillator Synchronization Input 5.5V -0.3V 5 mA 5 mA
CT Oscillator Integrating Capacitor 5.5V -0.3V 1mA 1mA
RT Oscillator Charge Current Resistor 5.5V -0.3V 1mA 1mA
V
FB1
, V
FB2
Voltage Feedback Inputs 5.5V -0.3V N/A N/A
COMP1, COMP2 Error Amplifier Outputs 7.5V -0.3V 2mA 50mA
V
FFB1
, V
FFB2
PWM Ramp Inputs 5.5V -0.3V 1mA 1mA
GATE1, GATE2 FET Gate Drive Outputs 20V -0.3V DC, 200mA DC, 200mA DC,
-2.0V for 1A peak 1A peak
t < 50ns (t < 100µs) (t < 100µs)
LGnd Reference Ground and IC Substrate 0V 0V 25 mA N/A
PGnd Power Ground 0V 0V 1A Peak, N/A
200mA DC
ENABLE Channel 2 Enable 5.5V -0.3V 1mA N/A
V
REF
Reference Voltage Output 5.5V -0.3V 150mA 5mA
(short circuit)
V
IN
Power Supply Input 20V -0.3V N/A 200mA DC,
1A peak
(t < 100µs)
■ Reference Section
V
REF
Output Voltage Room Temperature, 4.9 5.0 5.1 V
I
VREF
= 1mA, VIN= 12V
Line Regulation 1 20 mV
Load Regulation 1 mA < I
VREF
< 10 mA 15 26 mV
V
REF
Variation over Line, Load 4.85 5.15 V
and Temperature
Output Short Circuit Current 30 100 150 mA
■ Oscillator Section
Oscillator Frequency Variation 175 210 245 kHz
over Line and Temperature
Maximum Duty Cycle 80 90 98 %
Sync Threshold 0.8 1.6 2.4 V
Sync Bias Current V
SYNC
= 2.4V 170 250 µA
V
SYNC
= 5.0V 430 750
Sync Propagation Delay 230 ns
Page 3
CS5127
3
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Electrical Characteristics: 0¡C < TA< 70¡C; 0¡C < TJ< 125¡C; 9.4V < VIN< 20V; CT= 330 pF; RT= 27k½;
unless otherwise stated.
■ Error Amplifiers
VFBReference Voltage V
COMP
= V
VFB
1.245 1.275 1.300 V
Input Bias Current VFB= 1.275V 0.1 1.0 µA
Open Loop Gain 85 dB
Unity Gain Bandwidth 1.0 MHz
PSRR f = 120Hz 80 dB
COMP Source Current V
COMP
= 3V, V
VFB
= 1.1V 0.9 1.3 2.0 mA
COMP Sink Current V
COMP
= 1.2V, V
VFB
= 1.45V 10 16 24 mA
COMP Output Low Voltage V
VFB
= 1.45V, I
COMP
= 0.3 mA 0.50 0.85 1.00 V
■ PWM Comparators
V
FFB
Bias Current V
FFB
= 0 2.0 20 µA
Propagation Delay V
FFB
rising to V
GATE
falling 100 250 ns
Common Mode 2.9 3.3 V
Maximum Input Voltage
■ ENABLE Lead
ENABLE High Threshold channel 2 enabled 1.5 2.5 3.5 V
ENABLE Bias Current V
ENABLE
= 0 100 250 400 µA
■ Gate Driver Outputs
Output Low Saturation Voltage I
GATE
= 20 mA 0.1 0.4 V
I
GATE
= 100 mA 0.25 2.50 V
Output High Saturation Voltage I
GATE
= 20 mA 1.5 2.0 V
I
GATE
= 100 mA 1.6 3.0 V
Output Voltage under Lockout VIN= 6V, I
GATE
= 1 mA 0.1 0.2 V
Output Rise Time no load 30 ns
Output Fall Time no load 10 ns
■ Undervoltage Lockout
Turn On Threshold 7.4 8.4 9.4 V
Turn Off Threshold 6.8 7.8 8.8 V
■ Supply Current
Start Up Current VIN= 6V 0.4 0.8 mA
Operating Current VCT= 0V, no load 17.5 25 mA
Page 4
CS5127
4
Package Lead Description
PACKAGE LEAD # LEAD SYMBOL FUNCTION
16 Lead SO Wide
1 SYNC A pulse train on this lead will synchronize the oscillator. Sync threshold level
is 2.4V. Synchronization frequency should be at least 10% higher than the regular operating frequency. The sync feature is level sensitive.
2C
T
The oscillator integrating capacitor is connected to this lead.
3R
T
The oscillator charge current setting resistor is connected to this lead.
4V
FB1
The inverting input of the channel 1 error amplifier is brought out to this lead.
The lead is connected to a resistor divider which provides a measure of the
output voltage. The input is compared to a 1.275V reference, and channel 1
error amp output is used as the V
2
ª
PWM control voltage.
5 COMP1 Channel 1 error amp output and PWM comparator input.
6V
FFB1
This lead connects to the non-inverting input of the channel 1 PWM comparator.
7 GATE1 This lead is the gate driver for the channel 1 FET. It is capable of providing
nearly 1A of peak current.
8 LGND This lead provides a ÒquietÓ ground for low power circuitry in the IC. This
lead should be shorted to the PGND lead as close as possible to the IC for best
operating results.
9 PGND This lead is the power ground. It provides the return path for the FET gate dis-
charge. It should be shorted to the LGND lead as close as possible to the IC for
best operating results.
10 GATE2 This lead is the gate driver for the channel 2 FET. See GATE1 lead description
for more details.
11 V
FFB2
This lead connects to the non-inverting input of the channel 2 PWM comparator.
12 COMP2 Channel 2 error amp output and PWM comparator input.
13 V
FB2
Inverting input for the channel 2 error amp. See V
FBI
for more details.
14 ENABLE The regulator controlled by channel 2 may be turned on and off selectively by
the user. Pulling the ENABLE lead above 3.5V will turn channel 2 on. Setting
the ENABLE lead voltage below 1.5V guarantees that channel 2 is off.
15 V
REF
This lead is the output of a ± 3% reference. This reference drives most of the
on-chip circuitry, but will provide a minimum of 10 mA to external circuitry if
needed. The reference is inherently stable and does not require a compensation capacitor, but use of a decoupling capacitor will reduce noise in the IC.
16 V
IN
This lead is the power supply input to the IC. The maximum input voltage
that can be withstood without damage to the IC is 20V.
Page 5
CS5127
5
Theory of Operation
The CS5127 is a dual power supply controller that utilizes
the V
2
ª
control method. Two nonsynchronous V
2
ª
buck
regulators can be built using a single controller IC. This IC
is a perfect choice for efficiently and economically providing core power and I/O power for the latest
high-performance CPUs. Both switching regulators
employ a fixed frequency architecture driven from a
common oscillator circuit.
The V
2
ª
method of control uses a ramp signal generated
by the ESR of the output capacitors. This ramp is proportional to the AC current in the inductor and is offset by the
DC output voltage. V
2
ª
inherently compensates for variation in both line and load conditions since the ramp signal
is generated from the output voltage. This differs from traditional methods such as voltage mode control, where an
artificial ramp signal must be generated, and current mode
control, where a ramp is generated from inductor current.
Figure 1: V
2
ª
control diagram.
The V
2
ª
control method is illustrated in Figure 1. Both
the ramp signal and the error signal are generated by the
output voltage. Since the ramp voltage is defined as the
output voltage, the ramp signal is affected by any change
in the output, regardless of the origin of that change. The
ramp signal also contains the DC portion of the output
voltage, allowing the control circuit to drive the output
switch from 0% to about 90% duty cycle.
Changes in line voltage will change the current ramp in
the inductor, affecting the ramp signal and causing the
V
2
ª
control loop to adjust the duty cycle. Since a change
in inductor current changes the ramp signal, the V
2
ª
method has the characteristics and advantages of current
mode control for line transient response.
Changes in load current will affect the output voltage and
thus will also change the ramp signal. A load step will
immediately change the state of the comparator output
that controls the output switch. In this case, load transient
response time is limited by the comparator response time
and the transition speed of the switch. Notice that the reaction time of the V
2
ª
loop to a load transient is not
dependent on the crossover frequency of the error signal
loop. Traditional voltage mode and current mode methods
are dependent on the compensation of the error signal
loop.
The V
2
ª
error signal loop can have a low crossover frequency, since transient response is handled by the ramp
signal loop. The ÒslowÓ error signal loop provides DC
accuracy. Low frequency roll-off of the error amplifier
bandwidth will significantly improve noise immunity.
This also improves remote sensing of the output voltage,
since switching noise picked up in long feedback traces
can be effectively filtered.
V
2
ª
line and load regulation are dramatically improved
because there are two separate control loops. A voltage
V
2
ª
Control Method
Block Diagram
V
FB1
V
REF
V
IN
SYNC
R
C
V
FB2
COMP1
V
FFB1
+
PWM
Comparator
-
Reference
Undervoltage
Lockout
Channel 2
Gate Driver
GATE1
LGND
1.275V
Undervoltage
Lockout
V
-
Error
Amplifier
+
IN
Bandgap
Voltage
Reference
PGND
T
T
1.275V
+
Error
Amplifier
-
Oscillator
-
PWM
Comparator
Channel 2
Gate Driver
GATE2
+
COMP2
+
PWM
Comparator
GATE
-
V
FFB
V
Reference
Voltage
FB
COMP
Ramp Signal
Error
Amplifier
+
Error Signal
-
V
FFB2
ENABLE
Page 6
CS5127
6
Theory of Operation: continued
mode controller relies on a change in the error signal to
indicate a change in the line and/or load conditions. The
error signal change causes the error loop to respond with a
correction that is dependent on the gain of the error amplifier. A current mode controller has a constant error signal
during line transients, since the slope of the ramp signal
will change in this case. However, regulation of load transients still requires a change in the error signal. V
2
ª
control maintains a fixed error signal for both line and
load variation, since the ramp signal is affected by both.
The CS5127 can be operated in voltage mode if necessary.
For example, if very small values of output ripple voltage
are required, V
2
ª
control may not operate correctly.
Details on how to choose the components for voltage
mode operation are provided in the section on V
FFB
com-
ponent selection.
As output line and load conditions change, the V
2
ª
control loop modifies the switch duty cycle to regulate the
output voltage. The CS5127 uses a fixed frequency architecture. Both output channels are controlled from a
common oscillator. The CS5127 can typically provide a
maximum duty cycle of about 90%.
It is sometimes desirable to shift the switching noise spectrum to different frequencies. A pulse train applied to the
SYNC lead will terminate charging of the C
T
lead capacitor
and pull the CTlead voltage to ground for the duration of
the positive pulse level. This reduces the period of oscillation and increases the switching frequency.
Synchronization must always be done at a frequency
higher than the typical oscillator frequency. Using a lower
frequency will lead to erratic operation and poor regulation. The SYNC pulse train frequency should be at least 10
% higher than the unsynchronized oscillator frequency.
Synchronizing the oscillator will also decrease the maximum duty cycle. If the nominal oscillator frequency is
200kHz, increasing the oscillator frequency by 10% (to
220kHz) will decrease the maximum duty cycle from a
typical of 90% to about 89%. Increasing the frequency by
25% (to 250kHz) will change the maximum duty cycle to
about 87%. A 50% increase (to 300kHz) gives a maximum
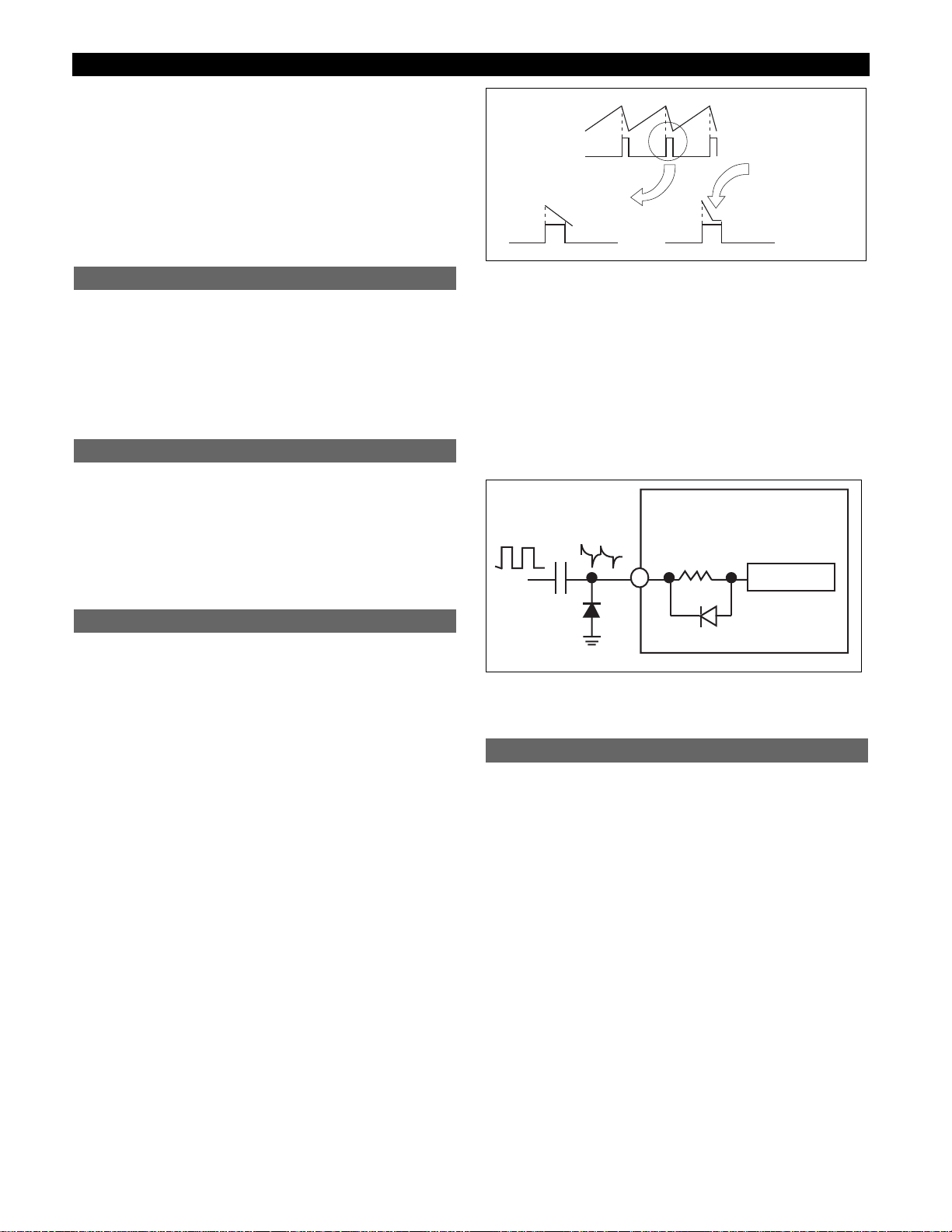
duty cycle of about 85%. The width of the SYNC pulse
should be slightly shorter than the duration of the falling
edge of the CTlead waveform (see Figure 2a) so the SYNC
pulse doesnÕt interfere with the oscillator function.
Figure 2a: Sync pulse duration vs. CTlead discharge time.
The best way to determine if the pulse width is sufficiently
short is to examine the CTlead waveform with an oscilloscope. If Òdead spotsÓ are observed in the CTlead waveform,
decreasing the SYNC pulse width should be considered.
Alternatively, the SYNC signal may be AC coupled through
a small capacitor. In this case, care must be taken to ensure
that current pulled out of the IC during the high-to-low transition of the SYNC signal is limited to less than 5mA.
Figure 2b: Capacitive coupling of the SYNC signal. The external diode
is used to clamp the IC substrate diode if I
SYNC
is greater than 5mA
during the negative portion of the input waveform.
The CS5127 has no on-board current limit circuitry. An
example current limit circuit is provided in the Additional
Application Circuits section of this data sheet.
Overcurrent Protection
Sync Function
Constant Frequency
Voltage Mode Control
CT Lead Waveform
Sync Lead Waveform
If the sync pulse is longer
than the C
lead discharge
T
time, a short Òdead spotÓ
will exist during which the
output driver is off.
SYNC
Oscillator
20k
2200p
Page 7
The feedback (V
FB)
leads are connected to external resistor
dividers to set the output voltage. The on-chip error amplifier is referenced to 1.275V, and the resistor divider values
are determined by selecting the desired output voltage
and the value of the divider resistor connected between
the VFBlead and ground.
Resistor R1 is chosen first based on a design trade-off of
system efficiency vs. output voltage accuracy. Low values
of divider resistance consume more current which decreases system efficiency. However, the VFBlead has a 1µA
maximum bias current which can introduce errors in the
output voltage if large resistance values are used. The
approximate value of current sinking through the resistor
divider is given by
I
V(FB)
=
The output voltage error that can be expected due to the
bias current is given by
Error Percentage = ´ 100%
where R1 is given in ohms. For example, setting R1 = 5K
yields an output voltage error of 0.39% while setting the
feedback divider current at 255µA. Larger currents will
result in reduced error.
Figure 3: Feedback resistor divider.
R2 can be sized according to the following formula once
the desired output voltage and the value of R1 have been
determined:
R2 = R1 -1
There are many factors to consider when choosing the
inductor. Maximum load current, core losses, winding
losses, output voltage ripple, short circuit current, saturation, component height, EMI/EMC and cost are all
variables the designer must consider. Inductance values
between 1µH and 50µH are suitable for use with the CS5127.
Low values within this range minimize the component size
and improve transient response, but larger values reduce
ripple current. Choosing the inductor value requires the
designer to make some choices early in the design. Output
current, output voltage and the input voltage range should
be known in order to make a good choice.
The input voltage range is bracketed by the maximum and
minimum expected values of V
IN
. Most computer applications use a fairly well-regulated supply with a typical
output voltage tolerance on the order of ±5%. The values
of V
IN(MAX)
and V
IN(MIN)
are used to calculate peak current
and minimum inductance value, respectively. However, if
the supply is well-regulated, these calculations may both
be made using the typical input voltage value with very
little error.
Current in the inductor while operating in the continuous
current mode (CCM) is defined as the load current plus
the inductor ripple current:
IL= I
OUT
+ I
RIPPLE
The ripple current waveform is triangular, and the current
is a function of the voltage across the inductor, the switch
on-time and the inductor value. Switch on-time is the duty
cycle divided by the operating frequency, and duty cycle
can be defined as the ratio of V
OUT
to VIN, such that
I
RIPPLE
=
The peak current can be described as the load current plus
half of the ripple current. Peak current must be less than
the maximum rated switch current. This limits the maximum load current that can be provided. It is also
important that the inductor can deliver the peak current
without saturating.
I
OUT(MAX)
= I
SWITCH(MAX)
-
Since the peak inductor current must be less than or equal
to the peak switch current, the minimum value of inductance can be calculated:
L
MIN
=
The theoretical limit on load current transient response is a
function of the inductor value, the load transient and the
voltage across the inductor. In conventionally-controlled
regulators, the actual limit is the time required by the control loop. Conventional current-mode and voltage-mode
control loops adjust the switch duty cycle over many oscillator periods, often requiring tens or even hundreds of
Load Current Transient Response
(V
IN(MIN)
- V
OUT)VOUT
f ´ V
IN(MIN)
´ I
SWITCH(MAX)
(V
IN(MAX)
- V
OUT)VOUT
2f ´ L ´ V
IN(MAX)
(VIN- V
OUT)VOUT
f ´ L ´ V
IN
Selecting the Inductor
)
V
OUT
1.275
(
(1E - 6) ´ R1
1.275
1.275V
R1
Selection of Feedback Lead Divider Resistor Values
CS5127
7
Applications Information
Output
Driver
V
1.275V
+
-
COMP
V
FB
GATE
R2
R1
OUT
Page 8
CS5127
8
Applications Information: continued
microseconds to return to a steady-state. V
2
ª
control uses
the ripple voltage from the output capacitor and a ÒfastÓ
control loop to respond to load transients, with the result
that the transient response of the CS5127 is very close to
the theoretical limit. Response times are defined below.
t
RESPONSE(INCREASING)
=
t
RESPONSE(DECREASING)
=
Note that the response time to a load decrease is limited
only by the inductor value.
Inductor current rating is an important consideration. If
the regulated output is subject to short circuit or overcurrent conditions, the inductor must be sized to handle the
fault without damage. Sizing the inductor to handle fault
conditions within the maximum DC current rating helps to
ensure the coil doesnÕt overheat. Not only does this prevent damage to the inductor, but it reduces unwanted heat
generated by the system and makes thermal management
easier.
Selecting an open core inductor will minimize cost, but
EMI/EMC performance may be degraded. This is a tough
choice, since there are no guidelines to ensure these components will not prove troublesome.
Core materials influence the saturation current and saturation characteristics of the inductor. For example, a slightly
undersized inductor with a powdered iron core may provide satisfactory operation because powdered iron cores
have a ÒsoftÓ saturation curve compared to other core
materials.
Small physical size, low core losses and high temperature
operation will also increase cost. Finally, consider whether
an alternate supplier is an important consideration. All of
these factors can increase the cost of the inductor.
For light load designs, the CS5127 will operate in discontinuous current mode (DCM). In this regime, external
components can be smaller, since high power dissipation is
not an issue. In discontinuous mode, maximum output
current is defined as:
I
OUT(MAX)
=
where IPKis the maximum current allowed in the switch
FET.
Output capacitors are chosen primarily on the value of
equivalent series resistance, because this is what determines how much output ripple voltage will be present.
Most polarized capacitors appear resistive at the typical
oscillator frequencies of the CS5127. As a rule of thumb,
physically larger capacitors have lower ESR. The capacitorÕs value in µF is not of great importance, and values
from a few tens of µF to several hundreds of µF will work
well. Tantalum capacitors serve very well as output capacitors, despite their bad reputation for spectacular failure
due to excessive inrush current. This is not usually an issue
for output capacitors, because the failure is not associated
with discharge surges. Ripple current in the output capacitor is usually small enough that the ripple current rating is
not an issue. The ripple current waveform is triangular,
and the formula to calculate the ripple current value is:
I
RIPPLE
=
and output ripple voltage due to inductor ripple current is
given by:
V
RIPPLE(ESR)
=
A load step will produce an instantaneous change in
output voltage defined by the magnitude of the load step,
capacitor ESR and ESL.
DVO= (DIO´ ESD) + ESL
A good practice is to first choose the output capacitor to
accommodate voltage transient requirements and then to
choose the inductor value to provide an adequate ripple
voltage.
Increasing a capacitorÕs value typically reduces its ESR, but
there is a limit to how much improvement can be had. In
most applications, placing several smaller capacitors in
parallel will result in acceptable ESR while maintaining a
small PC board footprint. A warning is necessary at this
point. The V
2
ª
topology relies on the presence of some
amount of output ripple voltage being present to provide
the input signal for the ÒfastÓ control loop, and it is important that some ripple voltage be present at the lightest load
condition in normal operation to avoid subharmonic oscillation. Externally generated slope compensation can be
added to ensure proper operation.
The V
FFB
lead is tied to the PWM comparatorÕs non-inverting input, and provides the connection for the
externally-generated artificial ramp signal that is required
whenever duty cycle is greater than 50%.
Selecting the V
FFB
Lead Components
D
I
DT
(V
IN
- V
OUT
) ´ V
OUT
´ ESR
f ´ L ´ V
IN
(VIN- V
OUT)VOUT
f ´ L ´ V
IN
Selecting the Output Capacitor
(I
PK
)2f ´ L(VIN)
2V
OUT
´ (V
IN(MAX)
- V
OUT
)
Operating in Discontinuous Current Mode
Other Inductor Selection Concerns
L(ÆI
OUT
)
V
OUT
L(ÆI
OUT
)
(V
IN
- V
OUT
) ´ 0.85
Page 9

CS5127
Applications Information: continued
9
The DC voltage for the V
FFB
pin is usually provided from
the output voltage through an RC filter if V
OUT
is less than
3V. If V
OUT
is greater than 2.9V, a resistor divider from
V
OUT
is recommended for proper circuit bias due to the
common mode input range limitations of the PWM comparator. In most cases, the FB pin resistor divider can be
used for this purpose with very little error, but a separate
divider is recommended if high accuracy is required. The
filter network is typically composed of a 1K resistor (R
FFB
)
and a 330 pF capacitor (C
FFB
). This filter gives a 330 ns
time constant which is sufficient to remove switching
noise from the DC voltage. Note that in cases where a
resistor divider provides the ramp signal, the resistor
between V
OUT
and the V
FFB
pin serves as R
FFB
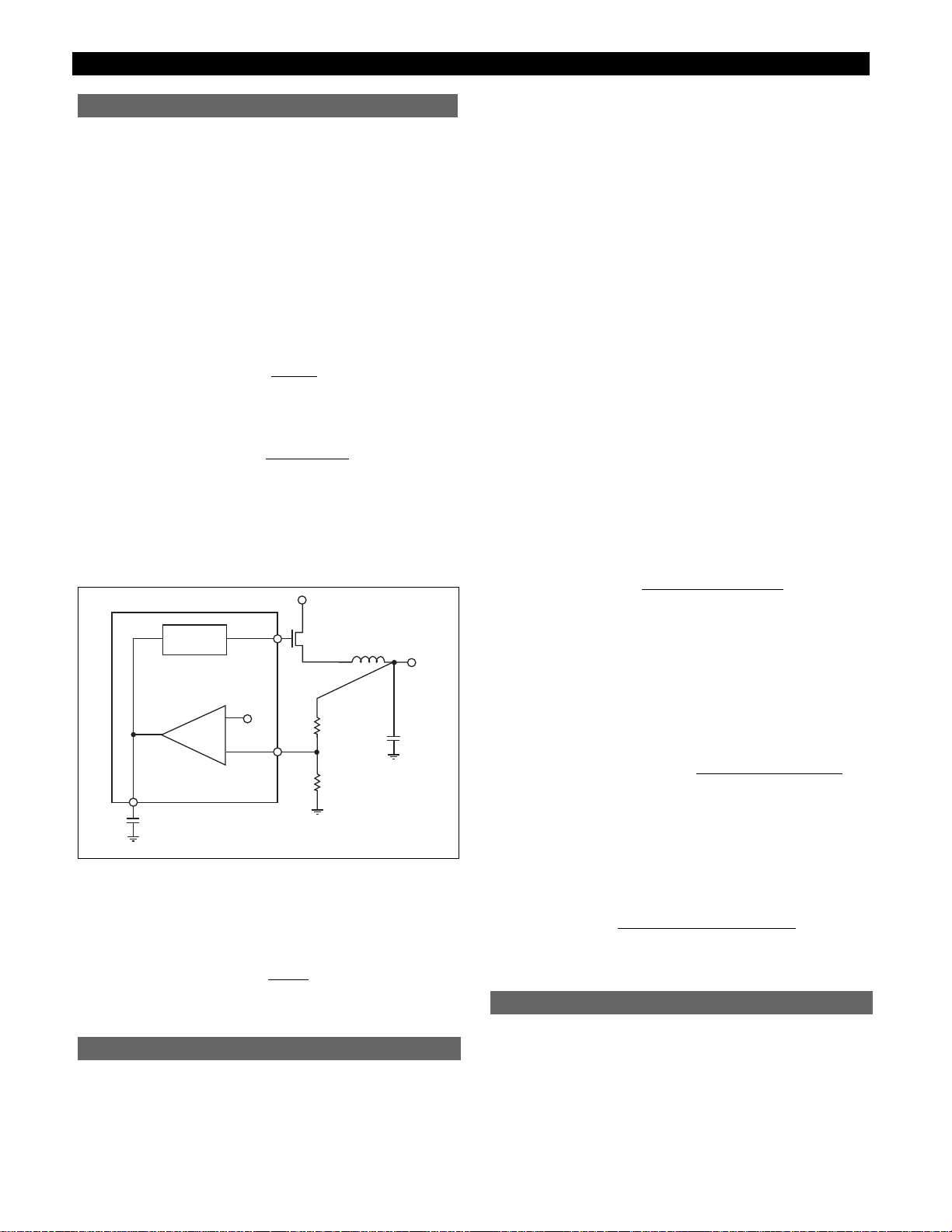
. An artificial
ramp signal is generated using an NPN transistor (Q1), a
small coupling capacitor (CC) and a second resistor (RR).
The NPN transistor collector is connected either to the
external 5V supply or to the ICÕs 5V on-chip reference. The
transistorÕs base is connected to the CT pin, and the ramp
on the CT pin is used to provide the artificial ramp. The
transistorÕs emitter is connected to the coupling capacitor.
The capacitor value should provide a low impedance at
the switching frequency. A 0.1 µF capacitor represents 6.4
ohms at 250 kHz. A resistor is placed in series between this
capacitor and the V
FFB
pin to set the amplitude of the ramp
signal.
Figure 4: Artificial ramp components CC, C
FFB
, RR and R
FFB
must be
provided for each channel if duty cycle for that channel exceeds 50%. Q1
and RE are common to both channels. DC voltage is shown supplied to
V
FFB
through the VFBresistor divider.
The amount of artificial ramp is dependent on oscillator
frequency, output voltage, output capacitor equivalent
series resistance (ESR), and inductor value. It also assumes
very small voltage fluctuations on the COMP pin. If the
added ramp is too small, it will not be sufficient to prevent
subharmonic oscillation. If the ramp is too large, V
2
ª
control will be defeated, and loop regulation will enter voltage
mode control. DC regulation will be adequate, but transient response will be degraded. However, this may be
desirable in cases where very low values of output ripple
voltage are desired.
The artificial ramp amplitude can be calculated as follows:
V
RAMP
=
if DC voltage is provided from the output, or
V
RAMP
=
if DC voltage is provided from a resistor divider as in
figure 5.
where R
ESR
is the equivalent series resistance in ohms of
the total output capacitance, V
OUT
is the output voltage in
volts and L
OUT
is the inductor value in Henries. The result
is V
RAMP
given in millivolts per oscillator period. This
value is the optimum amplitude for the artificial ramp.
Note that COMP pin voltage changes and output ripple
voltage must be added to the ramp amplitude for proper
operation.
Once the total ramp signal has been determined, the value
of the ramp resistor (RR) can be determined. The ramp
resistor and filter resistor R
FFB
create a resistor divider
between the output voltage and the artificial ramp voltage.
We can assume the output does not change, and that the
maximum input voltage to the divider is equal to the DC
output voltage plus the CT pin voltage swing of 2.1V. The
ramp amplitude on the filter capacitor is then the divider
output voltage:
V
RAMP
=
Rearranging, we have
RR = R
FFB
(
- 1
)
The schottky ÒcatchÓ diode must be capable of handling
the peak inductor current and must withstand a reverse
voltage at least equal to the value of VIN. Since the catch
diode only conducts during switch off-time, the average
current through the catch diode is defined as:
I
CATCH
= I
OUT
Minimizing the diode on-voltage will improve efficiency.
The on-chip oscillator frequency is set by two external
components. R
T
sets the oscillator charge current. It is connected to a voltage reference approximately equal to 2.5V.
The current generated in this fashion charges the CTcapacitor between threshold levels of 1.5V and 3.6V. C
T
capacitor discharge is done by a saturating NPN, and the
Selecting Oscillator Components RTand C
T
)
VIN- V
OUT
V
IN
(
Selecting the Catch Diode
2.1V
V
RAMP
(2.1V) (R
FFB
)
(RR + R
FFB
)
(R
ESR
) (V
OUT
)(R1)
2000 (L
OUT
) (R1 + R2)
(R
ESR
) (V
OUT
)
2000 (L
OUT
)
GATE
R2
V
5V
C
T
FB
V
FFB
V
OUT
+
Q1
RR
CT
CC
RE
C
FFB
R
FFB
R1
Page 10

discharge time is typically less than 10% of the charge
time. External components CT and RTallow the switching
frequency to be set by the user in the range between 10kHz
and 500kHz. CTcan be chosen first based on size and cost
constraints. For proper operation over temperature, the
value of RTshould be chosen within the range from 20k½
to 40k½. Any type of one-eighth watt resistor will be adequate. Larger values of RTwill decrease the maximum
duty cycle slightly. This occurs because the sink current on
the CTlead has an exponential relationship to the charge
current. Higher charge currents will discharge the CTlead
capacitor more quickly than lower currents, and a shorter
discharge time will result in a higher maximum duty
cycle.
Once the oscillator frequency and a value of CThave been
selected, the necessary value of RTcan be calculated as follows:
RT =
where f
OSC
is the oscillator frequency in hertz, CTis given
in farads, and the value of RTis given in ohms. ESR effects
are negligible since the charge and discharge currents are
fairly small, and any type of capacitor is adequate for CT.
As previously noted, the error amplifier does not contribute greatly to transient response, but it does influence
noise immunity. The fast feedback loop input is compared
against the COMP pin voltage. The DC bias to the V
FFB
pin
may be provided directly from the output voltage, or
through a resistor divider if output voltage is greater than
2.9V. The desired percentage value of DC accuracy translates directly to the V
FFB
pin, and the minimum COMP pin
capacitor value can be calculated:
C
COMP
=
If f
OSC
= 200kHz, V
FFB
DC bias voltage is 2.8V and toler-
ance is 0.1%, C
COMP
= 28.6µF. This is the minimum value
of COMP pin capacitance that should be used. It is a good
practice to guard band the tolerance used in the calculation. Larger values of capacitance will improve noise
immunity, and a 100µF capacitor will work well in most
applications.
The type of capacitor is not critical, since the amplifier
output sink current of 16mA into a fairly large value or
wide range of ESR will typically result in a very small DC
output voltage error. The COMP pin capacitor also determines the length of the soft start interval.
The input bypass capacitors minimize the ripple current in
the input supply, help to minimize EMI, and provide a
charge reservoir to improve transient response. The capacitor ripple current rating places the biggest constraint on
component selection. The input bypass capacitor network
should conduct all the ripple current. RMS ripple current
can be as large as half the load current, and can be calculated as:
I
RIPPLE(RMS)=IOUT
Peak current requirement, load transients, ambient operating temperature and product reliability requirements all
play a role in choosing this component. Capacitor ESR and
the maximum load current step will determine the maximum transient variation of the supply voltage during
normal operation. The drop in the supply voltage due to
load transient response is given as:
ÆV = I
RIPPLE(RMS)
´ ESR
The type of capacitor is also an important consideration.
Aluminum electrolytic capacitors are inexpensive, but they
typically have low ripple current ratings. Choosing larger
values of capacitance will increase the ripple current
rating, but physical size will increase as well. Size constraints may eliminate aluminum electrolytics fro
consideration. Aluminum electrolytics typically have
shorter operating life because the electrolyte evaporates
during operation. Tantalum electrolytic capacitors have
been associated with failure from inrush current, and manufacturers of these components recommended derating the
capacitor voltage by a ratio 2:1 in surge applications. Some
manufacturers have product lines specifically tested to
withstand high inrush current. AVX TPS capacitors are
one such product. Ceramic capacitors perform well, but
they are also large and fairly expensive.
At startup, output switching does not occur until two
undervoltage lockouts release. The first lockout monitors
the V
IN
lead voltage. No internal IC activity occurs until
VINlead voltage exceeds the VINturn-on threshold. This
threshold is typically 8.4V. Once this condition is met, the
on-chip reference turns on. As the reference voltage begins
to rise, a second undervoltage lockout disables switching
until V
REF
lead voltage is about 3.5V. The GATE leads are
held in a low state until both lockouts are released.
As switching begins, the VFBlead voltage is lower than the
output voltage. This causes the error amplifier to source
current to the COMP lead capacitor. The COMP lead voltage will begin to rise. As the COMP lead voltage begins to
rise, it sets the threshold level at which the rising V
FFB
lead
voltage will trip the PWM comparator and terminate
switch conduction. This process results in a soft start interval. The DC bias voltage on V
FFB
will determine the final
COMP voltage after startup, and the soft start time can be
approximately calculated as:
T
SOFT START
=
V
FFB
´ C
COMP
I
COMP(SOURCE)
Startup
V
OUT(VIN
- V
OUT
)
V
IN
2
Selecting the Input Bypass Capacitor
(16mA)(T
OSC
)
(V
FFB
DC Bias Voltage)(tolerance)
Selecting the Compensation Capacitor
1.88
(f
OSC
)(CT)
CS5127
10
Applications Information: continued
Page 11

Applications Information: continued
where T
SOFT START
is given in seconds if C
COMP
is given in
farads, I
COMP(SOURCE)
in amperes, and V
FFB
in volts. Note
that a design trade off will be made in choosing the value
of the COMP lead capacitor. Larger values of capacitance
will result in better regulation and improved noise immunity, but the soft start interval will be longer and capacitor
price may increase.
Figure 5: Measured performance of the CS5127 at start up.
C
COMP
=100µF, I
COMP(SOURCE)
=1.3mA, V
FFB
= 2.8V, T
SOFTSTART
= 0.22s.
During normal operation, the gate driver switching duty
cycle will remain approximately constant as the V
2
ª
control loop maintains the regulated output voltage under
steady state conditions. Changes in supply line or output
load conditions will result in changes in duty cycle to
maintain regulation.
Voltage Mode Operation
There are two methods by which a user can operate the
CS5127 in voltage mode. The first method is simple, but
the transient response is typically very poor. This method
uses the same components as V
2
ª
operation, but by
increasing the amplitude of the artificial ramp signal, V
2
ª
control is defeated and the controller operates in voltage
mode. Calculate RR using the formula above and divide
the value obtained by 10. This should provide an adequately large artificial ramp signal and cause operation
under voltage mode control. There may be some dependence on board layout, and further optimization of the
value for RR may be done empirically if required.
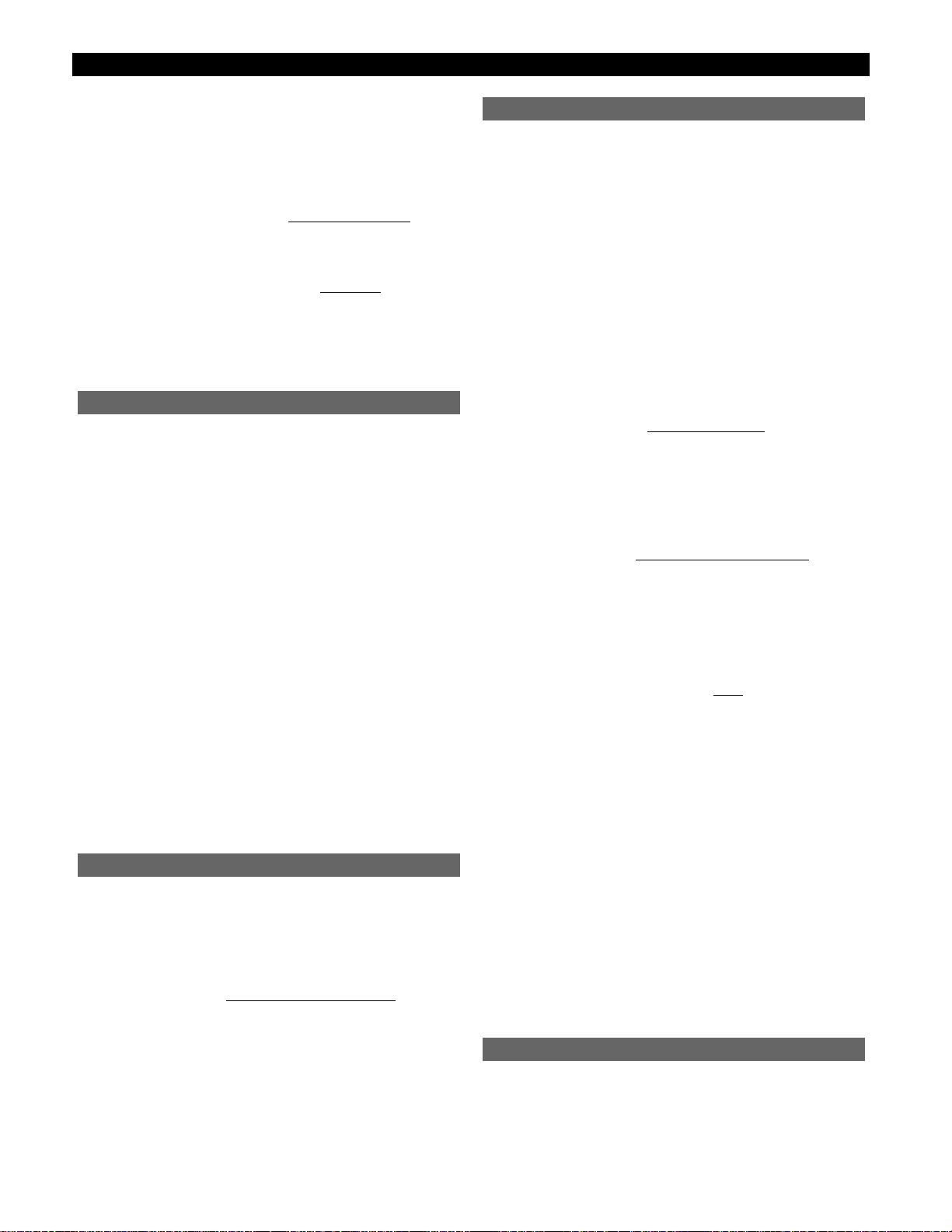
Voltage mode control may be refined by removing the
COMP pin capacitor and adding a two pole, one zero compensation network. Consider the system block diagram
shown in figure 6.
Figure 6: Voltage mode control equivalent circuit with two pole, one
zero compensation network.
VINis the switch supply voltage, R represents the load, RL
is the combined resistance of the FET RDS (on) and the
inductor DC resistance, L is the inductor value, C is the
output capacitance, RC is the output capacitor ESR, RA
and RB are the feedback resistors and VR is the peak to
peak amplitude of the artificial ramp signal at the V
FFB
pin. C1, C2, R1 and R2 are the components of the compensation network. Based on the application circuit from page
1, values for the 2.8V output equivalent circuit are:
VIN= 5V
R = 0.4½
RL = 0.02½
C = 1320µF
RC = 0.025½
RA = 1540½
RB = 1270½
L = 5µH
A resistor change is necessary to increase the artificial
ramp magnitude to V
FFB1
. Changing R10 from 20k to 2k
will give a peak to peak amplitude of about 2V. Thus, VR=
2V.
The transfer function from V
CONTROL
to V
OUT
is
=
´
Using the component values provided, this reduces to
1
V
R
R ´ V
IN
´ (sCRC+ 1)
s2LC (R + RC) + s[L + RLC(R + RC) + RCRC] + R + R
C
V
OUT
V
CONTROL
Voltage Mode Control
Normal Operation
11
CS5127
V
V
IN
CONTROL
LOGIC
PWM
V
CONTROL
L
V
FFB
COMP
R
L
C
R
C
V
R
C2
V
FB
EA
1.275V
OUT
R
A
R
R
B
R1
R2
C1
Page 12

CS5127
12
Applications Information: continued
The zero frequency due to the output capacitor ESR is
given as
= 4.8 kHz.
The double pole frequency of the power output stage is
= = 1.95 kHz.
The ESR zero approximately cancels one of the poles, and
the total phase shift is limited to 90. Bode plots are provided below.
Figure 7: Bode plot of gain response for V
OUT/VCONTROL
.
Figure 8: Bode plot of phase response for V
OUT/VCONTROL
.
This uncompensated system is stable, but the low gain will
result in poor DC accuracy, and the low cutoff frequency
will result in poor transient response. Note that we have
not yet included the gain factor from the feedback resistor
divider. This factor will further reduce the overall system
gain.
By adding the two pole, one zero compensation network
shown in figure 6, we can maximize the DC gain and push
out the crossover frequency. The transfer function for the
compensation network is
=
This can be rewritten in terms of pole and zero frequencies
and a gain constant A.
=
where
f
Z
=
fP= and A = R1 C2
Note that, due to the first s term in the denominator, a pole
is located at f = 0. This will provide the maximum DC
gain.
The optimum performance can be obtained by choosing f
Z
equal to the output double pole frequency and setting fPto
approximately half of the switching frequency. Gain factors can be chosen somewhat arbitrarily.
Values between
1E-6½F and 20E-6½F are practical. We then have a set of
equations that can be solved for component values:
C1 R1
=
[
-
]
, C1 R2 = , C2 =
Since there are only three equations, we must arbitrarily
choose one of the components. One option is to set the
value of R1 fairly large. This provides a high impedance
path between the VFBpin and the COMP pin.
For our design, we have fZ= the double pole frequency =
1.95 kHz and fP= f
OSC
/2 = 100kHz. LetÕs arbitrarily choose
R1 = 4.7K. Then we solve the first equation for C1 and
obtain C1 = 17nF. Use a standard value of 22 nF.
We next solve for R2. With C1 =22 nF, R2= 72½. Use a
standard value of 75½.
We can choose a gain factor from somewhere in the
middle of our range and solve for C2. If A = 10E-6½F, we
have
C2 = 2.1 nF. Use a standard value of 2.2 nF.
A
R1
1
2¹f
P
1
f
P
1
f
Z
1
2¹
1
2¹ C1R2
1
(2¹ C1 (R1 + R2))
s/(2¹fZ+ 1)
-A s ((s/2fP) + 1)
V
CONTROL
V
FB
s C1(R1 + R2) + 1
-s C2 R1(s C1 R2 + 1)
V
CONTROL
V
FB
R + R
1
LC(R + RC)
1
(2¹)
1
(2¹CRC)
1 + s(3.3E-5)
s2(2.772E-9) + s(2.902E-5) + 0.42
20
0
-20
Gain, (dB)
-40
-60.0
1
90
0
10
10210
Frequency (Hz)
3
4
10
5
10
6
10
10
7
-90
Phase, (degree)
-180
-270.0
1
10210
10
3
Frequency (Hz)
10
5
4
10
7
6
10
10
Page 13

Applications Information: continued
13
Now that we have the compensation components chosen,
we can put together a transfer function for the entire control loop. The transfer function is the product of the VOUT
to V
CONTROL
transfer function, the gain of the feedback
resistor divider and the negative inverse of the compensation loop transfer function. That is,
T
LOOP
= - (T
VC-VO
´ T
DIVIDER
´ T
COMPENSATION
)
or
T
LOOP
=
[]
´
[]
´
[]
´
[]
Bode plots for this transfer function are shown below.
Figure 9: Bode plot of gain response for compensated voltage mode
system.
Figure 10: Bode plot of phase response for compensated voltage mode
system.
Entering the loop transfer function in a mathematics program or a spreadsheet and evaluating the performance
from resulting Bode plots may help to further optimize the
compensation network component values.
Compensation may be further optimized by using a two
poleÐtwo zero compensation network as shown below.
Figure 11: Two poleÐtwo zero compensation network.
The two zeros are placed close to the resonant frequency of
the LC output circuit. That is,
ÅÅ
The two poles are placed near half the switching frequency, or
ÅÅ
The ENABLE lead controls operation of channel 2. Channel
2 operates normally if the ENABLE lead voltage is greater
than 3.5V. Setting the ENABLE lead voltage below 1.5V
will guarantee that channel 2 is disabled. In this case, the
GATE2 lead will be held low and no switching will occur.
This feature can be used to selectively power up or power
down circuitry that may not always need to be on. For
example, in a laptop computer, channel 1 could power the
microprocessor while channel 2 controlled the disk drive.
Channel 2 could be turned off if the drive was not in use.
Semiconductor components will deteriorate in high temperature environments. It is necessary to limit the junction
temperature of control ICs, power MOSFETs and diodes in
order to maintain high levels of reliability. Most semiconductor devices have a maximum junction temperature of
125¡C, and manufacturers recommend operating their
products at lower temperatures if at all possible.
Power dissipation in a semiconductor device results in the
generation of heat in the pin junctions at the surface of the
Thermal Management for Semiconductor Components
Channel 2 ENABLE Feature
1
2¹ R3 C2
1
2¹ C1 R1
f
SW
2
1
2¹ R3 C3
1
2¹ C1 R2
1
2¹ LC
sC1 (R1 + R2)+ 1
sC2 R1 (sC1 R2 + 1)
RB
RA + RB
1
V
R
R ´ V
IN
´ (sCRC+ 1)
s2LC (R + RC) + s[L + RLC(R + RC) + RCRC] + R + R
C
CS5127
C1
From V
OUT
R1
R2
V
FB
R3
C2
C3
COMP
100
60
20
Gain, (dB)
-20
-60.0
-100.0
1
10
90
0
-90
Phase, (degree)
-180
-270.0
1
10
10210
Frequency (Hz)
10210
Frequency (Hz)
3
3
5
4
10
10
5
4
10
10
7
6
10
10
6
10
10
7
Page 14

14
Applications Information: continued
IC. This heat is transferred to the surface of the IC package,
but a thermal gradient exists due to the thermal properties
of the package molding compound. The magnitude of this
thermal gradient is denoted in manufacturerÕs data sheets
as QJA, or junction-to-air thermal resistance. The on-chip
junction temperature can be calculated if Q
JA
, the air temperature at the ICÕs surface and the on-chip power
dissipation are known:
TJ = TA+ (QJA´ P)
TJand TA are given in degrees centigrade, P is IC power
dissipation in watts and QJAis thermal resistance in
degrees centigrade per watt. Junction temperature should
be calculated for all semiconductor devices to ensure they
are operated below the manufacturerÕs maximum junction
temperature specification. If any componentÕs temperature
exceeds the manufacturerÕs maximum specification, some
form of heatsink will be required.
Heatsinking will improve the thermal performance of any
IC. Adding a heatsink will reduce the magnitude of QJAby
providing a larger surface area for heat transfer to the surrounding air. Typical heat sinking techniques include the
use of commercial heatsinks for devices in TO-220 packages, or printed circuit board techniques such as thermal
bias and large copper foil areas for surface mount packages.
When choosing a heatsink, it is important to break Q
JA
into several different components.
QJA= QJC+ QCS+ Q
SA
where all components of Q
JA
are given in ¡C/W.
QJCis the thermal impedance from the junction to the sur-
face of the package case. This parameter is also included in
manufacturerÕs data sheets. Its value is dependent on the
mold compound and lead frames used in assembly of the
semiconductor device in question.
QCSis the thermal impedance from the surface of the case
to the heatsink. This component of the thermal impedance
can be modified by using thermal pads or thermal grease
between the case and the heat sink. These materials replace
the air gap normally found between heatsink and case with
a higher thermal conductivity path. Values of QCSare
found in catalogs published by manufacturers of heatsinks
and thermal compounds.
Finally, QSAis the thermal impedance from the heatsink to
ambient temperature. QSAis the important parameter
when choosing a heatsink. Smaller values of QSAallow
higher power dissipation without exceeding the maximum
junction temperature of the semiconductor device. Values
of QSAare typically provided in catalogs published by
heatsink manufacturers.
The basic equation for selecting a heatsink is
P
D
=
where PDis on-chip power dissipation in watts, TJis junction temperature in ¡C, TAis ambient temperature in¡C,
and thermal impedance QJC, QCS, and QSAare in¡C/W.
All these quantities can be calculated or obtained from data
sheets. The choice of a heatsink is based on the value of
QSArequired such that the calculated power dissipation
does not cause junction temperature to exceed the manufacturerÕs maximum specification.
Switching regulators generate noise a consequence of the
large values of current being switched on and off in normal
operation. Careful attention to layout of the printed circuit
board will usually minimize noise problems. Layout guidelines are provided in the next section. However, it may be
necessary in some cases to add filter inductors or bypass
capacitors to the circuitry to achieve the desired performance.
The following guidelines should be observed in the layout
of PC boards for the CS5127:
1. Connect the PGND lead to the external ground with a
wide metal trace.
2. Connect both LGND and PGND together with a wide
trace as close to the IC as possible.
3. Make all ground connections to a common ground
plane with as few interruptions as possible. Breaks in
the ground plane metal should be made parallel to an
imaginary line between the supply connections and the
load.
4. Connect the ground side of the COMP lead capacitors
back to LGND with separate traces.
5. Place the V
FFB
lead capacitors as close to the V
FFB
leads
as possible.
6. Place the 5V line bypass capacitors as close to the
switch FETs as possible.
7. Place the output capacitor network as close to the load
as possible.
8. Route the GATE lead signals to the FET gates with a
metal trace at least 0.025 inches wide.
9. Use wide straight metal traces to connect between the
5V line and FETs, between FETs and inductors and
between inductors and loads to minimize resistance in
the high current paths. Avoid sharp turns, loops and
long lengths.
Layout Considerations
EMI Management
T
J
- T
A
QJC+ QCS+ Q
SA
CS5127
Page 15

15
5V
Figure 12: Example external over voltage protection circuit. If V
OUT
exceeds V
OVP
, OVP out goes high. Resistor values shown above pro-
vide a +10% tolerance for a 3.3V output.
Figure 13: Example external Power GOOD circuit. P
GOOD(OUT)
is low
until V
OUT
exceeds V
PGOOD
. V
PGOOD
is typically chosen to be 10%
below nominal V
OUT
. Resistor values above provide a -10% tolerance
on V
OUT
=3.3V.
Figure 14: An external circuit can be built to provide an enable function for channel 1. The circuit shown above connects to the V
FB1
and
COMP1 pins as indicated. If the ENABLE1 signal is left floating or is
pulled high, channel 1 is enabled. If the ENABLE1 pin is pulled
below 1V, Q1 will conduct, and mirror Q3 pulls V
FFB1
up at the same
time as Q2 and Q4 pull COMP1 low. This will force GATE1 to go low
and turn off the switch FET. The circuit above will provide about
1mA of additional drive to the V
FFB1
pin components. This additional
current must be sufficient to pull V
FFB1
up to about 1V in order to
guarantee GATE1 is held low.
Additional Application Circuits
V
OVP
=
(R1 + R2)(0.65V)
R2
V
PGOOD
=
(R1 + R2)(0.65V)
R2
CS5127
5V
R3
V
OUT
R1
24K
R2
5K
10K
R4
10K
Q1
FMMT2222ACT
Q2
FMMT2907ACT
OVP OUT
5V
V
OUT
R1
6.3K
R2
1k
ENABLE 1
SIGNAL
Q1
FMMT2907ACT
Q2
FMMT2907ACT
R3
1K
Q3
FMMT2907ACT
TO COMP1
Q4
FMMT2222ACT
TO V
FFB1
PGOOD OUT
18K
R2
5K
R1
R3
10K
Q1
FMMT2222ACT
Q2
FMMT2222ACT
Page 16

Figure 15: CS5127 12V, 5V input to 2.8V @ 7A and 3.3V @ 7A Voltage Mode Control Application Circuit with External Soft Start.
Figure 16: CS5127 12V only to 2.8V @ 7A and 3.3V @ 7A Application Circuit.
Additional Application Circuits continued
16
CS5127
+5V +12V +5V
C1
680mF
C2
680mF
+
1UF
+C3
C4
680mF
C5
680mF
+
R1
3.3K
R2
100K
C6
390pF
R4
1540
R5
1270
C10
680mF
+
R7
10
2.8V 3.3V
C11
680mF
L1 5mH
R3
24K
IRL3103S
R6
2K
Q1
C14
0.2mF
D1
1N5821
7pF
R65
18K
C7
C50
0.22mF
C15
0.01mF
1
2
3
4
5
6
7
8
2N3906
Q4
m1
SYNC
CT
RT
V
FB1
COMP1
V
FFB1
GATE1
LGND
CS5127
V
V
REF
ENABLE
V
FB2
COMP2
V
FFB2
GATE2
PGND
16
IN
15
R48
100K
14
13
12
11
10
09
Q7
2N3906
C15
0.1mF
+12V
C16
0.22mF
C24
0.01mF
C52
7pF
R11
2.2K
Q2
IRL3103S
D2
1N5821
C17
0.2mF
+C8
1mF
L2
5mH
R10
C12
680UF
+
2K
R66
10
C13
680mF
R7
2400
R8
1500
C2
C1
680mF
680mF
C14
330PF
+
C18
0.1mF
50V
Q2
D1
1N5821
C15
100mF
1
2
3
4
5
6
7
8
m1
SYNC
CT
RT
V
FB1
COMP1
V
FFB1
GATE1
LGND
CS5127
2.8V
20K
R1
C6
0.1mF
R4
1540
1270
R5
Q1
FMMT2222ACT
C7
330PF
C10
680mF
+
R10
20K
R6
1K
L1
680mF
5mH
+
R2
27k
IRL3103S
V
REF
ENABLE
V
FB2
COMP2
V
FFB2
GATE2
PGND
D3
1N5818
D4
1N5818
V
IN
R12
30
C4
C5
680mF
D5
1N5248
L2
5mH
C12
680mFC11
R11
20K
680mF
0.1mF
680mF
+
C9
C13
+
3.3V
R7
2400
R8
R9
1500
2K
R3
18K
16
15
14
13
12
11
10
09
C8
1mF
C16
100mF
C3
10mF
IRL3103S
D2
1N5821
+
Q3
C17
330PF
Page 17

CS5127
Additional Application Circuits continued
17
Figure 17: 200kHz, V
2
ª
, 5V/12V input, 2.8V@ 7A and 3.3V @ 7A outputs with current limit.
Figure 18: CS5127 12V, 5V input to 2.8V @7A and 3.3V @ 7A Switching Regulator with External 1A, 2.5V Linear Output for Vclock.
+5V
+12V
+12V
+5V
+12V
R1
20K
2.8V
R4
1.54K
R5
1.27K
R69
10K
R70
20K
LM2903
U4A
C15
100mF
2N2907
1
2
3
4
5
6
7
8
C2
C1
680mF
680mF
Q1
FMMT2222ACT
C7
330PF
C6
0.1mF
C10
RDROOP
680mF
.008
+
+
C11
680mF
20K
R10
R6
1K
R66
R65
1M
1M
+
C24
0.1mF
-
R67
R68
15k
15k
Q2
IRL3103S
L1
5mH
C14
330PF
D1
1N5821
Q7
R73
1K
m1
SYNC
CT
RT
V
COMP1
V
GATE1
LGND
FB1
8
FFB1
CS5127
Q4
2N2907
R74
1K
V
ENABLE
COMP2
V
GATE2
PGND
V
REF
FFB2
R71
10K
R72
20K
LM2903
U4B
16
V
IN
15
14
13
FB2
12
11
10
09
+
-
C16
100mF
C25
0.1mF
D2
1N5821
C5
680mF
RDROOP
C4
680mF
C3
1mF
+
C9
0.1mF
C12
C13
680mF
680mF
.008
+
R11
20K
R8
1.50K
R7
2.40K
3.3V
R9
2K
R3
18K
R76
R75
1M
1M
R77
R78
15K
15K
+
C8
1mF
Q3
IRL3103S
L2
5mF
C17
330PF
2.8V
C3
1mF
V
V
REF
V
FB2
V
FFB2
GATE2
PGND
U2A
1/2 LM358
3
2
+12V
R17
2400
R18
2400
C4
680mF
+
16
IN
15
14
13
12
11
10
09
C16
100mF
C5
680mF
+
IRL3103S
D2
1N5821
+5V
+
C8
1mF
C9
L2
10mH
C12
680mFC11
0.1mF
C13
680mF
+
R11
20K
3.3V
R7
2400
R8
1500
R9
2K
R3
18K
Q3
C17
330pF
+5V
C1
C2
680mF
680mF
+
Q1
FMMT2222ACT
R1
20K
C6
0.1mF
R4
1540
R5
1270
C10
680mF
C7
330PF
+
R10
20K
R6
1K
L1
680mF
10mH
R2
27K
IRL3103S
C14
330pF
Q2
D1
1N5821
C15
100mF
Q4
IRL3103S
2.5V
C18
47mF
1
2
3
4
5
6
7
8
m1
SYNC
CT
RT
V
FB1
COMP1
V
FFB1
GATE1
LGND
CS5127
1
4
ENABLE
COMP2
8
+
-
Page 18

Figure 24: Oscillator Frequency vs RT,CT(VIN= 12V, T = 25C)
Figure 23: V
REF
Short Circuit Current vs Temperature.
18
Typical Performance Characteristics
Figure 19: V
REF
vs Temperature, 1mA Load.
Figure 21: V
REF
vs Temperature, 10mA Load.
Figure 20: Load Regulation vs Temperature 1mA to 10mA.
Figure 22: Line Regulation vs Temperature 9V to 20V.
CS5127
(V)
REF
V
5.005
5.004
5.003
5.002
5.001
5.000
18
16
14
12
Line Regulation (mV)
10
4.999
0
18
16
14
12
Load Regulation (mV)
10
8
10 20 30 40 50
0
10 20 30 40 50
Temperature (C)
Temperature (C)
60 70
7060
8
0
10 20 30 40 50
Temperature (C)
130
120
110
100
90
Short Circuit Current (mA)
80
70
0
10 20 30 40 50
Temperature(C)
60 70
60 70
4.992
4.990
4.998
4.988
VREF (V)
4.986
4.980
4.978
0
10 20 30 40 50
Temperature (C)
60 70
1.00E+06
5.00E+05
2.00E+05
1.00E+05
5.00E+04
Frequency (kHz)
2.00E+04
1.00E+04
20 22 26 28 30 34
24 32 38
3.3nF
RT (kW)
150pF
390pF
680pF
1.5nF
36 40
Page 19

Figure 27: Oscillator Duty Cycle vs CT, RT(VIN= 12V, T = 25C).
91.5
Figure 25: Oscillator Maximum Duty Cycle vs Temperature. Figure 28: SYNC Threshold vs Temperature.
Typical Performance Characteristics: continued
19
Figure 26: Oscillator Frequency vs Temperature. CT= 330pF, RT=27k
CS5127
Figure 30: VFBReference Voltage vs Temperature.
Figure 29: SYNC Input Current vs Temperature (V
SYNC
= 2.4V).
91.0
90.5
90.0
89.5
Maximum Duty Cycle (%)
89.0
88.5
010 304050 70
20 60
Temperature (C)
Sync Threshhold (V)
1.65
1.60
1.55
1.50
1.45
1.40
1.35
1.30
1.25
1.20
010 304050 70
20 60
Temperature (C)
210
208
206
204
Oscillator Frequency (kHz)
202
200
0
10 20 30 40 50
Temperature (C)
60 70
95
90
85
80
Duty Cycle (%)
75
70
20 22 26 28 30 34
24 32 38
RT (kW)
3.3nF
36 40
150pF
390pF
680pF
1.5nF
170
165
160
155
150
Sync Input Curernt (mA)
145
140
010 304050 70
20 60
Temperature (C)
1.2785
1.2780
1.2775
1.2770
1.2765
Reference Voltage (V)
FB
V
1.2760
1.2755
010 304050 70
20 60
Temperature (C)
Page 20

Figure 36: Error Amplifier Output Low Voltage (500µA) vs
Temperature.
Figure 35: Error Amplifier Source Current vs Temperature.
Figure 33: VFBBias Current vs Temperature.
Figure 31: Error Amplifier Gain vs Frequency. Figure 34: Error Amplifier Phase vs Frequency.
Figure 32: SYNC Input Current vs Temperature (V
SYNC
= 5V).
20
Typical Performance Characteristics: continued
CS5127
70
60
50
40
30
20
Gain (dB)
10
0
-10
-20
-30
1.00E +00
1.00E +01 1.00E +02 1.00E +03
1.00E +04 1.00E +05 1.00E +06 1.00E +07
Frequency (Hz)
225
180
135
90
45
0
Phase (degrees)
-45
1.00E+00
1.00E+01 1.00E+02 1.00E+03
Frequency (Hz)
1.00E+04
1.00E+05 1.00E+06 1.00E+07
450
430
410
390
Input Curernt (mA)
370
350
010 304050 70
20 60
Temperature (C)
0.105
0.103
0.101
0.099
Bias Current (mA)
FB
V
0.097
0.095
010 304050 70
20 60
Temperature (C)
1.310
1.305
1.300
1.295
1.290
Source Current (mA)
1.285
1.280
0
10 50 7020 40 40 60
Temperature (C)
0.90
0.85
0.80
0.75
Output Low Voltage (V)
0.70
0
10 50 7020 30 6040
Temperature (C)
Page 21

Figure 39: V
FFB
Bias Current vs Temperature.
3.37
Figure 37: PWM Comparator Maximum Common Mode Input Voltage
vs Temperature.
Figure 40: ENABLE Threshold vs Temperature.
Typical Performance Characteristics: continued
Figure 38: Error Amplifier Sink Current vs Temperature.
CS5127
Figure 41: ENABLE Bias Current vs Temperature.
Figure 42: GATE Low Voltage (100mA) vs Temperature.
21
2.28
3.35
3.33
3.31
3.29
Maximum Common Mode Voltage (V)
3.27
0
10 50 7020 30 6040
Temperature (C)
17.5
17.0
16.5
16.0
15.5
15.0
Sink Current (mA)
14.5
0
10 50 7020 30 6040
Temperature (C)
2.26
2.24
2.22
ENABLE Threshold (V)
2.20
0
10 50 7020 30 6040
Temperature (C)
280
270
260
250
240
230
220
ENABLE Bias Current (mA)
210
010 304050 70
20 60
Temperature (C)
1.07
1.06
1.05
1.04
1.03
Bias (mA)
1.02
FFB
V
1.01
1.00
0.99
0
10 20 30 40 50 60 70
Temperature (C)
215
210
205
200
195
GATE Low Voltage (mV)
190
185
180
010 304050 70
20 60
Temperature (C)
Page 22

Figure 48: Start-up Current vs Temperature.
Figure 47: VINStart-up Threshold vs Temperature.
Figure 44: GATE low voltage (20mA) vs Temperature.
Figure 45: GATE High Voltage (20mA) vs Temperature.
Figure 43: GATE High Voltage (100mA) vs Temperature. Figure 46: GATE Low Voltage (Lockout) vs Temperature.
22
Typical Performance Characteristics: continued
CS5127
1.70
1.65
18.0
17.5
1.60
1.55
1.50
GATE High Voltage (mV)
1.45
1.40
0
10
Temperature (C)
40
50 7020 30 60
17.0
16.5
16.0
Lockout Voltage (mV)
15.5
15.0
0
10 50 7020 30 6040
Temperature (C)
48
47
46
45
44
43
42
41
GATE Low Voltage (mV)
40
39
010 304050 70
20 60
Temperature (C)
8.615
8.613
8.611
8.609
Start up Threshold (V)
8.607
8.605
0
10
Temperature (C)
40
50 7020 30 60
1.60
1.55
1.50
1.45
1.40
1.35
1.30
GATE High Voltage (V)
1.25
1.20
010 304050 70
20 60
Temperature (C)
400
380
360
340
Start up Current (mA)
320
300
0
10
Temperature (C)
50 7020 30 60
40
Page 23

Figure 50: IC Supply Current vs Temperature. No Load on GATE pins.
RT= 27k, CT= 330pF
23
Typical Performance Characteristics: continued
7.924
Figure 49: VINShutdown Threshold vs Temperature.
CS5127
7.922
7.92
(V)
7.918
7.914
7.912
7.91
Shutdown Threshhold
7.908
7.906
0
10 20 30 40 50 60 70
Temperature (C)
18.5
18.0
17.5
17.0
16.5
IC Supply Current (mA)
16.0
15.5
0
10
Temperature (C)
40
50 7020 30 60
Page 24

24
Rev. 11/3/98
© 1999 Cherry Semiconductor Corporation
1.27 (.050) BSC
7.60 (.299)
7.40 (.291)
10.65 (.419)
10.00 (.394)
D
0.32 (.013)
0.23 (.009)
1.27 (.050)
0.40 (.016)
REF: JEDEC MS-013
2.49 (.098)
2.24 (.088)
0.51 (.020)
0.33 (.013)
2.65 (.104)
2.35 (.093)
0.30 (.012)
0.10 (.004)
Package Specification
PACKAGE DIMENSIONS IN mm (INCHES)
PACKAGE THERMAL DATA
Thermal Data 16 Lead SOIC Wide
R
QJC
typ 23 ûC/W
R
QJA
typ 105 ûC/W
D
Lead Count Metric English
Max Min Max Min
16 Lead SOIC Wide 10.50 10.10 .413 .398
Ordering Information
Part Number Description
CS5127GDW16 16 Lead SOIC Wide
CS5127GDWR16 16 Lead SOIC Wide (tape & reel)
Surface Mount Wide Body (DW); 300mil wide
Cherry Semiconductor Corporation reserves the
right to make changes to the specifications without
notice. Please contact Cherry Semiconductor
Corporation for the latest available information.
CS5127
 Loading...
Loading...