

Page 1
Features
• High-performance and Low-power AVR
– 118 Powerful Instructions - Most Single Cycle Execution
– 32 x 8 General Purpose Working Registers
– Up to 8 MIPS Throughput at 8 MHz
• Data and Nonvolatile Program Memory
– 2K/4K Bytes of In-System Programmable Flash
Endurance 1,000 Write/Erase Cycles
– 128 Bytes of SRAM
– 128/256 Bytes of In-System Programmable EEPROM
Endurance: 100,000 Write/Erase Cycles
– Programming Lock for Flash Program and EEPROM Data Security
• Peripheral Features
– One 8-bit Timer/Counter with Separate Prescaler
– Expanded 16-bit Timer/Counter with Separate Prescaler,
Compare, Capture Modes and 8-, 9- or 10-bit PWM
– On-chip Analog Comparator
– Programmable Watchdog Timer with Separate On-chip Oscillator
– Programmable UART
– 6-channel, 10-bit ADC
– Master/Slave SPI Serial Interface
• Special Microcontroller Features
– Brown-Out Reset Circuit
– Enhanced Power-on Reset Circuit
– Low-Power Idle and Power Down Modes
– External and Internal Interrupt Sources
• Specifications
– Low-power, High-speed CMOS Process Technology
– Fully Static Operation
• Power Consumption at 4 MHz, 3V, 25°C
– Active: 3.4 mA
– Idle Mode: 1.4 mA
– Power Down Mode: <1 µA
• I/O and Packages
– 20 Programmable I/O Lines
– 28-pin PDIP and 32-pin TQFP
• Operating Voltage
– 2.7V - 6.0V (AT90LS2333 and AT90LS4433)
– 4.0V - 6.0V (AT90S2333 and AT90S4433)
• Speed Grades
– 0 - 4 MHz (AT90LS2333 and AT90LS4433)
– 0 - 8 MHz (AT90S2333 and AT90S4433)
®
8-bit RISC Architecture
8-bit
Microcontroller
with 2K/4K bytes
In-System
Programmable
Flash
AT90S2333
AT90LS2333
AT90S4433
AT90LS4433
Preliminary
Pin Configurations
TQFP Top View PDIP
PD2 (INT0)
PD1 (TXD)
PD0 (RDX)
RESET
PC5 (ADC5)
PC4 (ADC4)
PC3 (ADC3)
PC2 (ADC2)
(INT1) PD3
(T0) PD4
VCC
GND
XTAL1
XTAL2
32313029282726
1
2
3
NC
4
5
6
NC
7
8
9101112131415
(T1) PD5
(AIN0) PD6
(AIN1) PD7
(SS) PB2
(ICP) PB0
(OC1) PB1
25
16
(MOS1) PB3
(MOS0) PB4
24
23
22
21
20
19
18
17
PC1 (ADC1)
PC0 (ADC0)
NC
AGND
AREF
NC
AVCC
PB5 (SCK)
RESET
(RXD) PD0
(TXD) PD1
(INT0) PD2
(INT1) PD3
(T0) PD4
VCC
GND
XTAL1
XTAL2
(T1) PD5
(AIN0) PD6
(AIN1) PD7
(ICP) PB0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
PC5 (ADC5)
PC4 (ADC4)
PC3 (ADC3)
PC2 (ADC2)
PC1 (ADC1)
PC0 (ADC0)
AGND
AREF
AVCC
PB5 (SCK)
PB4 (MISO)
PB3 (MOSI)
PB2 (SS)
PB1 (OC1)
Rev. 1042D–04/99
1
Page 2
Description
The AT90S2333/4433 is a low-power CMOS 8-bit microcontroller based on the AVR RISC architecture. By executing powerful instructions in a single clock cycle, the AT90S2333/4433 achieves throughputs approaching 1 MIPS per MHz allowing
the system designer to optimize power consumption versus processing speed.
The AVR core combines a rich instruction set with 32 general purpose working registers. All the 32 registers are directly
connected to the Arithmetic Logic Unit (ALU), allowing two independent registers to be accessed in one single instruction
executed in one clock cycle. The resulting architecture is more code efficient while achieving throughputs up to ten times
faster than conventional CISC microcontrollers.
The AT90S2333/4433 provides the following features: 2K/4K bytes of In-System Programmable Flash, 128/256 bytes
EEPROM, 128 bytes SRAM, 20 general purpose I/O lines, 32 general purpose working registers, two flexible
timer/counters with compare modes, internal and external interrupts, a programmable serial UART, 6-channel, 10-bit ADC,
programmable Watchdog Timer with internal oscillator, an SPI serial port and two software selectable power saving modes.
The Idle mode stops the CPU while allowing the SRAM, timer/counters, SPI port and interrupt system to continue functioning. The Power Down mode saves the register contents but freezes the oscillator, disabling all other chip functions until the
next interrupt or hardware reset.
The device is manufactured using Atmel’s hig h-density nonvolatile me mory technol ogy. The on-chi p Flash program memory can be reprogrammed in-system through an SPI serial interface or by a conventional nonvolatile memory programmer.
By combining a RISC 8-bit CPU with In-System Programmable Flash on a monolithic chip, the Atmel AT90S2333/4433 is a
powerful microcontroller that provides a highly flexible and cost effective solution to many embedded control applications.
The AT90S2333/4433 AVR is s uppo rt ed with a ful l s uit e of prog ra m and syste m de vel op men t tool s i nclud ing : C compilers,
macro assemblers, program debugger/simulators, in-circuit emulators, and evaluation kits.
Table 1. Comparison Table
Device Flash EEPROM SRAM Voltage Range Frequency
AT90S2333 2K 128B 128B 4.0V - 6.0V 0 - 8 MHz
AT90LS2333 2K 128B 128B 2.7V - 6.0V 0 - 4 MHz
AT90S4433 4K 256B 128B 4.0V - 6.0V 0 - 8 MHz
AT90LS4433 4K 256B 128B 2.7V - 6.0V 0 - 4 MHz
2
AT90S/LS2333 and AT90S/LS4433
Page 3
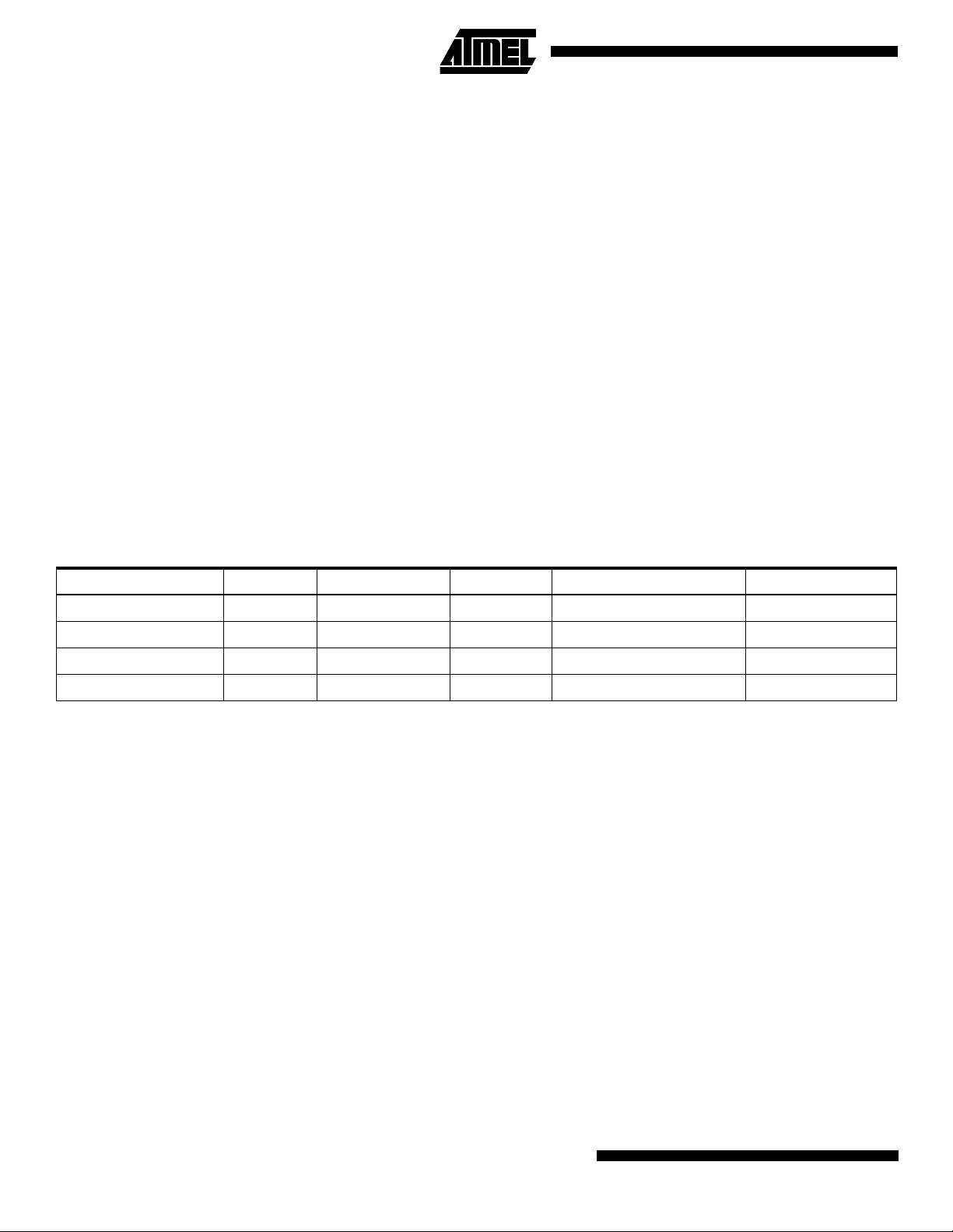
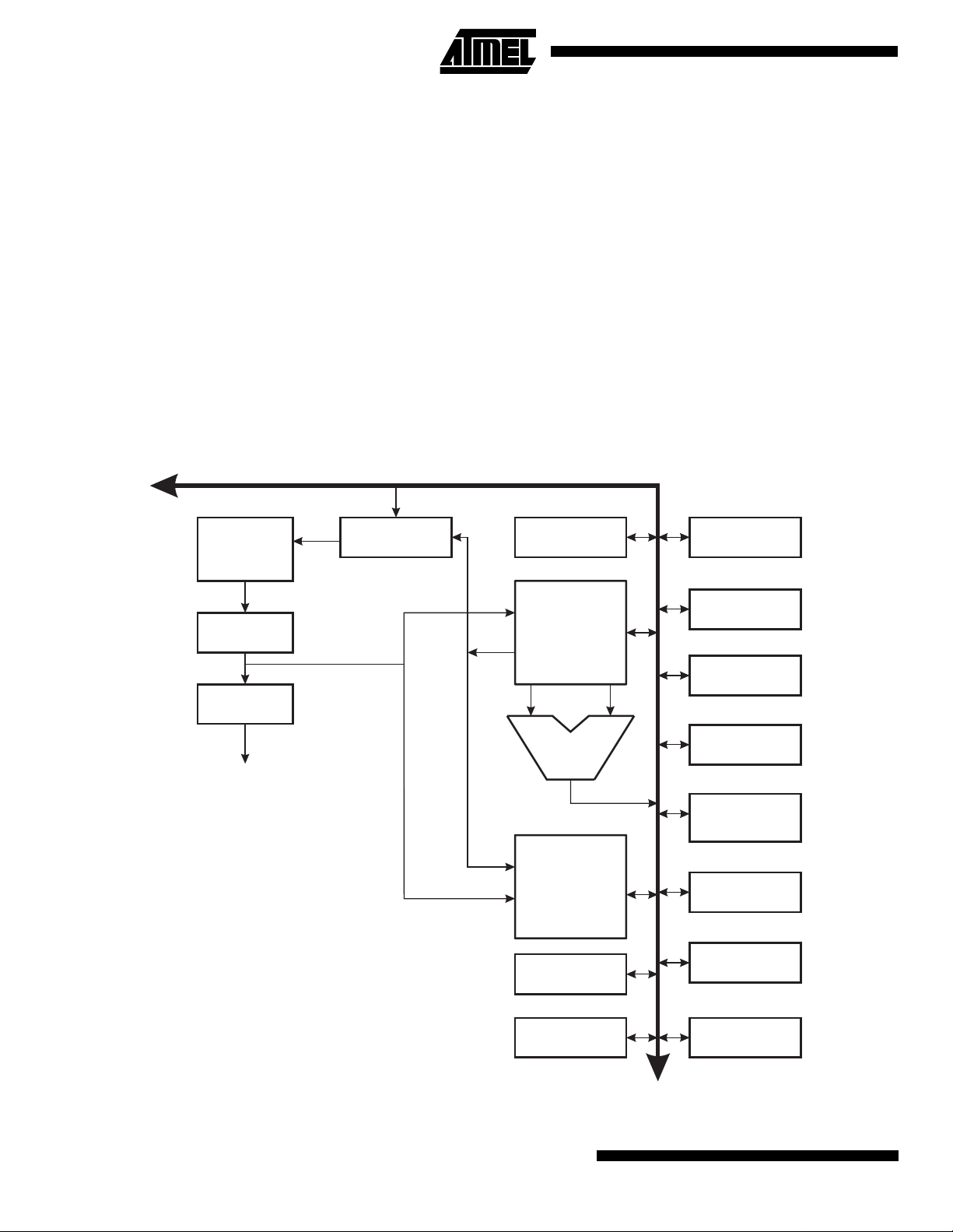
Block Diagram
Figure 1. The AT90S2333/4433 Block Diagram
VCC
AT90S/LS2333 and AT90S/LS4433
PC0 - PC5
PORTC DRIVERS
GND
AVCC
AGND
AREF
PROGRAM
COUNTER
PROGRAM
FLASH
INSTRUCTION
REGISTER
INSTRUCTION
DECODER
CONTROL
LINES
DATA REGISTER
PORTC
ANALOG MUX ADC
STACK
POINTER
SRAM
GENERAL
PURPOSE
REGISTERS
X
Y
Z
ALU
REG. PORTC
8-BIT DATA BUS
DATA DIR.
INTERNAL
OSCILLATOR
WATCHDOG
TIMER
MCU CONTROL
REGISTER
TIMER/
COUNTERS
INTERRUPT
UNIT
EEPROM
OSCILLATOR
TIMING AND
CONTROL
XTAL1
XTAL2
RESET
PROGRAMMING
LOGIC
DATA REGISTER
PORTB
PORTB DRIVERS
STATUS
REGISTER
PB0 - PB5
SPI
DATA DIR.
REG. PORTB
UART
DATA REGISTER
PORTD
PORTD DRIVERS
PD0 - PD7
DATA DIR.
REG. PORTD
+
COMPARATOR
ANALOG
3
Page 4

Pin Descriptions
VCC
Supply voltage
GND
Ground
Port B (PB5..PB0)
Port B is a 6-bit bi-directional I/O port with internal pullup resistors. The Port B output buffers can sink 20 mA. As inputs,
Port B pins that are externally pulled low will source current if the pull-up resistors are activated.
Port B also serves the functions of various special features of the AT90S2333/4433 as listed on page 60.
The port B pins are tristated when a reset condition becomes active, even if the clock is not running.
Port C (PC5..PC0)
Port C is a 6-bit bi-directional I/O port with internal pullup resistors. The Port C output buffers can sink 20 mA. As inputs,
Port C pins that are ex ter na lly pul le d l ow wi ll s our ce c ur rent if the pull-up resistor s ar e a ctiv ated . P or t C a lso s er ves as the
analog inputs to the A/D Converter.
The port C pins are tristated when a reset condition becomes active, even if the clock is not running.
Port D (PD7..PD0)
Port D is an 8-bit bi-di r ectio nal I/O port with internal pull-up resi st or s. The P or t D ou tput buff er s can si nk 20 m A. A s inp uts ,
Port D pins that are externally pulled low will source current if the pull-up resistors are activated.
Port D also serves the functions of various special features of the AT90S2333/4433 as listed on page 67.
The port D pins are tristated when a reset condition becomes active, even if the clock is not running.
RESET
Reset input. An exter nal res et is gen erate d by a lo w le vel on the RESET pin. Res et p ul ses l on ger th an 5 0 n s w ill g ener a te
a reset, even if the clock is not running. Shorter pulses are not guaranteed to generate a reset.
XTAL1
Input to the inverting oscillator amplifier and input to the internal clock operating circuit.
XTAL2
Output from the inverting oscillator amplifier
AVCC
This is the supply volt age pin for the A/D Conv erter. It should be ext ernally conn ected to V
page 52 for details on operation of the ADC.
AREF
This is the analog reference input for the A/D Converter. For ADC operations, a voltage in the range 2.7V to AVCC must be
applied to this pin.
AGND
If the board has a separate ana log ground plane, this pin should be con nec ted to thi s gro und pla ne. Ot he rwis e, c onn ec t to
GND.
via a low-pass filter. Se e
CC
4
AT90S/LS2333 and AT90S/LS4433
Page 5
AT90S/LS2333 and AT90S/LS4433
Clock Options
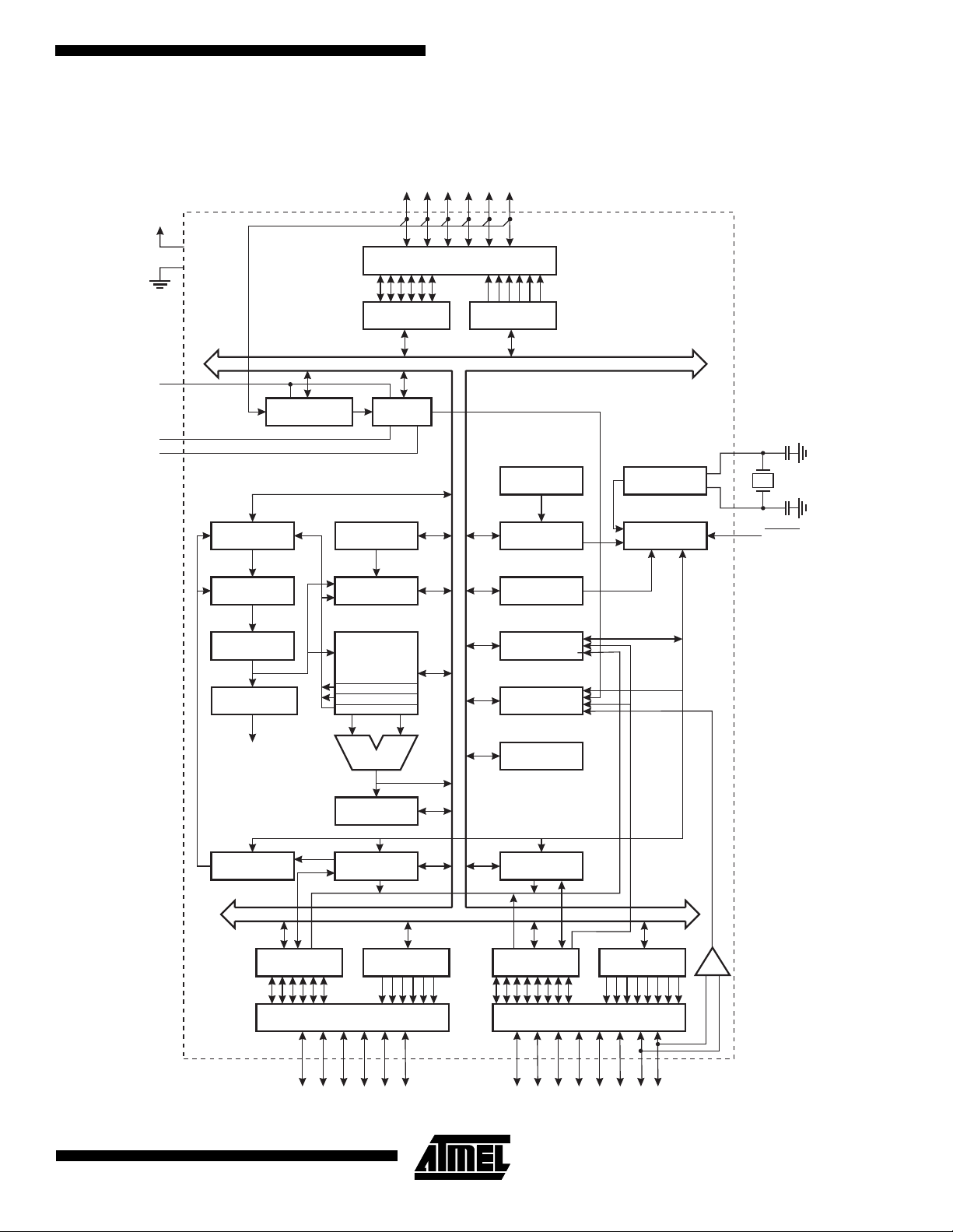
Crystal Oscillator
XTAL1 and XTAL2 are input and output, respectively, of an inverting amplifier which can be configured for use as an onchip oscillator, as shown in Figure 2 and Figure 3. Either a quartz crystal or a ceramic resonator may be used.
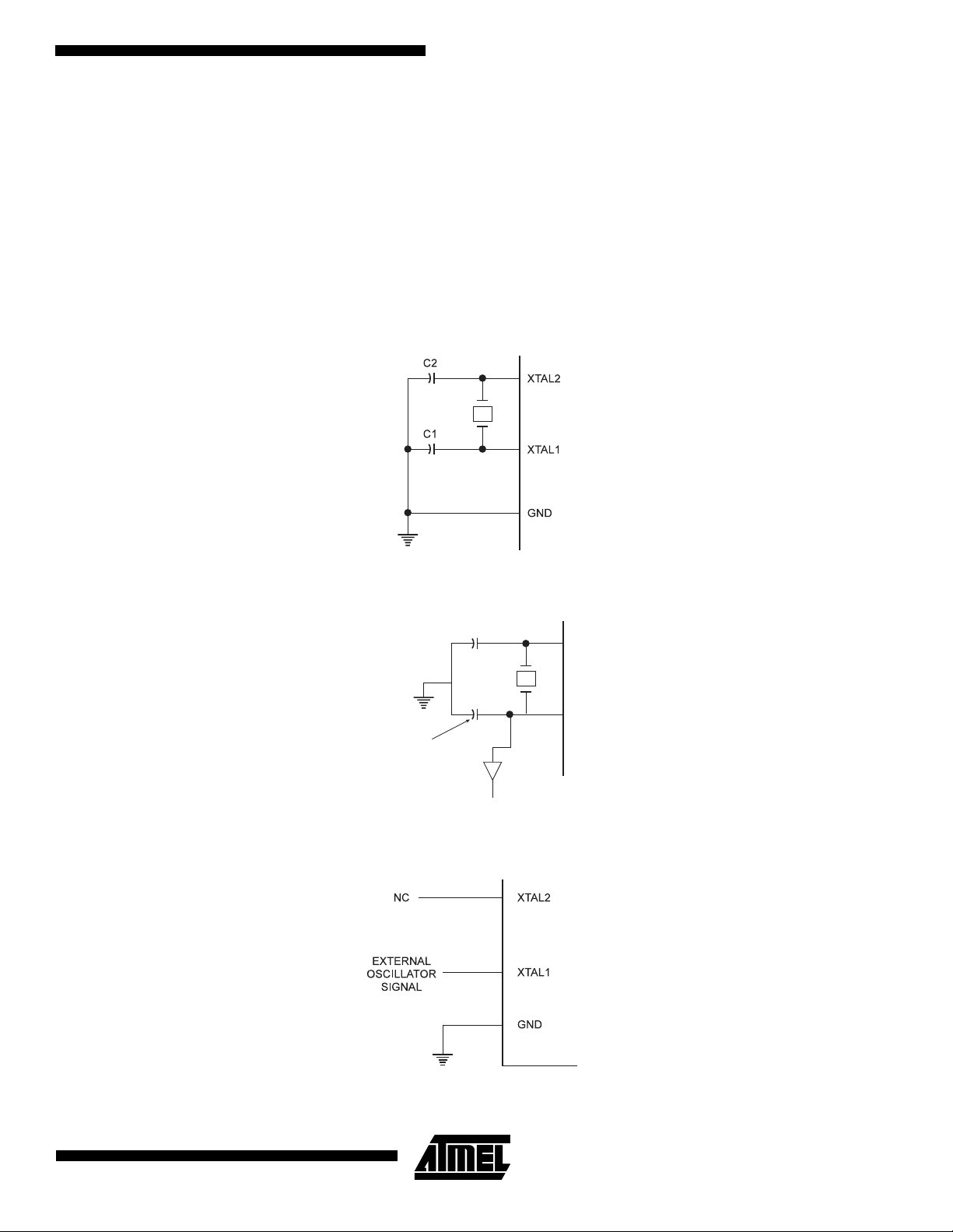
External Clock
If the oscillator is to be used as a clock for an external device, the clock signal from XTAL2 may be routed to one HC buffer,
while reducing the load capacitor by 5 pF, as shown in Figure 3. To drive the device from an external clock source, XTAL2
should be left unconnected while XTAL1 is driven as shown in Figure 4.
Figure 2. Oscillator Conn ec tion s
Figure 3. Using MCU Oscillator as a Clock for an External Device
REDUCE BY 5
F
P
HC
MAX 1 HC BUFFER
Figure 4. External Clock Drive Configuration
XTAL1
XTAL2
5
Page 6
Architectural Overview
The fast-access register file concept contains 32 x 8-bit general purpose working registers with a single clock cycle access
time. This means th at d ur ing one single clock cycle , on e A r ith meti c Log ic Uni t (A LU) op er ati on is ex ec ute d. Two ope ra nds
are output from the register file, the operation is executed, and the result is stored back in the register file - in one clock
cycle.
Six of the 32 registers can be used as three 16-bits indirect address register pointers for Data Space addressing - enabling
efficient address cal culation s. O ne of the three address point ers is also used a s the ad dress pointer for the c onst ant tabl e
look up function. These added function registers are the 16-bits X-register, Y-register and Z-register.
The ALU supports arithmetic and logic functions between registers or between a constant and a register. Single register
operations are also executed in the ALU. Figure 5 shows the AT90S2333/4433 AVR RISC microcontroller architecture.
In addition to the register operation, the conventional memory addressing modes can be used on the register file as well.
This is enabled by the fa ct th at the regis ter file is as signe d the 32 lowerm ost Data S pace a ddre sses ($00 - $1F) , al lowin g
them to be accessed as though they were ordinary memory locations.
Figure 5. The AT90S2333/4433 AVR RISC Architecture
AVR
1K/2K X 16
Program
Memory
Instruction
Register
Instruction
Decoder
Control Lines
AT90S2333/4433 Architecture
Data Bus 8-bit
Program
Counter
Direct Addressing
Indirect Addressing
Status
and Control
32 x 8
General
Purpose
Registrers
ALU
128 x 8
Data
SRAM
Interrupt
Unit
SPI
Unit
Serial
UART
8-bit
Timer/Counter
16-bit
Timer/Counter
with PWM
Watchdog
Timer
128/256 x 8
EEPROM
20
I/O Lines
6
AT90S/LS2333 and AT90S/LS4433
Analog to Digital
Converter
Analog
Comparator
Page 7
AT90S/LS2333 and AT90S/LS4433
The I/O memory space contains 64 addresses for CPU peripheral functions a s Control Registers, Timer/Counters, A/Dconverters, and other I/O functions. The I/O Memory can be accessed directly, or as the Data Space locations following
those of the register file, $20 - $5F.
The AVR uses a Harvard architecture concept - with separate memories and buses for program and data. The program
memory is executed with a two stage pipeline. While one instruction is being executed, the next instruction is pre-fetched
from the program memory. This concept enables instructions to be executed in every clock cycle.
The program memory is In-System Programmable Flash memory.
With the relativ e jump an d call i nstru ctions , the whol e 1K/2K word a ddress space is di rect ly acces sed. Mo st AVR i nstru c-
tions have a single 16-bit word format. Every program memory address contains a 16- or 32-bit instruction.
During interrupts and su broutine ca lls, the retu rn addr ess program counte r (P C) is s tored on the stack. The st ack is effec-
tively alloca ted in the ge neral da ta SRAM, an d conseq uently th e stack size is onl y limite d by the total SRAM size and the
usage of the SRAM. All use r progr ams must in itial ize the SP in the re set routi ne (bef ore su broutine s or inter rupts ar e executed). The 8-bit stack pointer SP is read/write accessible in the I/O space.
The 128 bytes data SRAM can be easily accessed through the five different addressing modes supported in the AVR
architecture.
The memory spaces in the AVR architecture are all linear and regular memory maps.
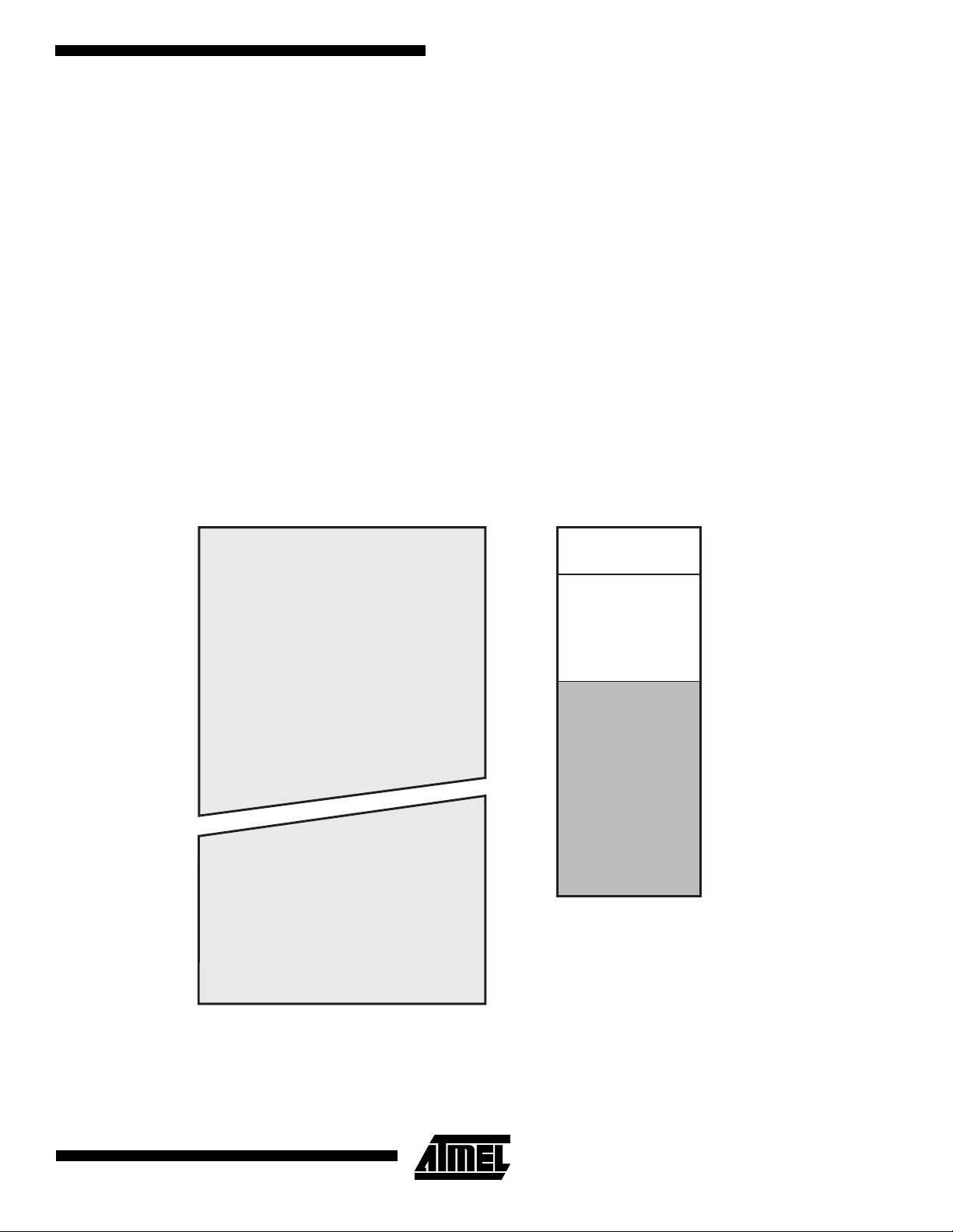
Figure 6. AT90S2333/4433 Memory Maps
Data MemoryProgram Memory
Program Flash
(1K/2K x 16)
$000
32 Gen. Purpose
Working Registers
64 I/O Registers
Internal SRAM
(128 x 8)
$0000
$001F
$0020
$005F
$0060
$00DF
$3FF/ $7FF
A flexible interrupt module has its control registers in the I/O space with an additional global interrupt enable bit in the status
register. All the different interrup ts have a sepa rate inter rupt vecto r in the interrupt ve ctor tab le at the beginn ing of the program memory. The different int errupts have pr iority in acco rdance with thei r interrupt vec tor position . The lower the
interrupt vector address, the higher the priority.
7
Page 8
General Purpose Register File
Figure 7 shows the structure of the 32 general purpose working registers in the CPU.
Figure 7. AVR CPU General Purpose Working Registers
70Addr.
R0 $00
R1 $01
R2 $02
…
R13 $0D
General R14 $0E
Purpose R15 $0F
Working R16 $10
Registers R17 $11
…
R26 $1A X-register low byte
R27 $1 B X-register high byte
R28 $1C Y-register low byte
R29 $1D Y-register high byte
R30 $1E Z-register low byte
R31 $1F Z-register high byte
All the register opera ting instructi ons in the instructio n set have direct and single cycle access to all registe rs. The only
exceptions are the five constant arithmetic and logic instructions SBCI, SUBI, CPI, ANDI, and ORI between a constant and
a register, and the LDI ins truc ti on for load i mm edi ate c on sta nt da ta. The se instr uct io ns appl y to the second half of the registers in the register file - R16..R31. The general SBC, SUB, CP, AND, and OR, and all other operations between two
registers or on a single register apply to the entire register file.
As shown in Figu re 7, each regi ster is als o as signe d a da ta mem ory addre ss, mappin g them dire ctly into the fi rst 32 locations of the user Data Space. Although not being physicall y implemented as SRAM locations, this memory or ganization
provides great flexibility in access of the registers, as the X, Y and Z registers can be set to index any register in the file.
X-register, Y-register, and Z-register
The registers R26..R 31 ha ve some a dded funct ions to th eir general pur pose us age. These regis ters a re a ddress poi nters
for indirect addressing of the Data Space. The three indirect address registers X, Y and Z are defined as:
Figure 8. X, Y and Z Registers
15 0
X - register 7 0 7 0
R27 ($1B) R26 ($1A)
15 0
Y - register 7 0 7 0
R29 ($1D) R28 ($1C)
15 0
Z - register 7 0 7 0
R31 ($1F) R30 ($1E)
In the different address ing mod es , thes e ad dr ess r egi st ers h ave func ti ons as fix ed di spla cement, automatic increm ent an d
decrement (see the descriptions for the different instructions).
8
AT90S/LS2333 and AT90S/LS4433
Page 9
AT90S/LS2333 and AT90S/LS4433
ALU - Arithmetic Logic Unit
The high-performance AVR ALU operates in direct connection with all the 32 general purpose working registers. Within a
single clock cy cl e, AL U operations between r egis ter s in the re gis te r f il e ar e exec uted . The ALU operations are div i ded in to
three main categories - arithmetic, logical, and bit-functions.
In-System Programmable Flash Program Memory
The AT90S2333/4433 contains 2K/4K bytes on-chip In-System Programmable Flash memory for program storage. Since
all instructions are 16-or 32-bit words, the Flash is organized as 1K/2K x 16. The Flash memory has an endurance of at
least 1000 write/erase cycles. The AT90S2333/4433 Program Counter (PC) is 10/11 bits wide, thus addressing the
1024/2048 progr am memo ry addr esses. See page 78 for a deta iled de scrip tion on Fl ash data dow nloadi ng. See page 10
for the different program memory addressing modes.
Figure 9. SRAM Organization
Register File Data Address Space
R0 $0000
R1 $0001
R2 $0002
……
R29 $001D
R30 $001E
R31 $001F
I/O Registers
$00 $0020
$01 $0021
$02 $0022
……
$3D $005D
$3E $005E
$3F $005F
Internal SRAM
$0060
$0061
…
$00DE
$00DF
SRAM Data Memory
The figure above shows how the AT90S2333/4433 SRAM Memory is organized.
The lower 224 Data Memory locations add ress the Regi ster file, the I/O Memo ry and the intern al data SRAM. The fir st 96
locations address the Register File and I/O Memory, and the next 128 locations address the internal data SRAM.
The five different addressing modes for the data memory cover: Direct, Indirect with Displacement, Indirect, Indirect with
Pre-Decrement, and Ind irect wit h Post-In crement . In the reg ister fil e, regis ters R26 to R31 featur e the indir ect add ressing
pointer registers.
The direct addressing reaches the entire data space. The Indirect with Displacement mode features a 63 address locations
reach from the base address given by the Y or Z-register.
When using register indirect addressing modes with automatic pre-decrement and post-increment, the address registers X,
Y and Z are decremented and incremented.
9
Page 10
The 32 general purpose working registers, 64 I/O registers and the 128 bytes of internal data SRAM in the
AT90S2333/4433 are all accessible through all these addressing modes.
See the next section for a detailed description of the different addressing modes.
Program and Data Addressing Modes
The AT90S2333/4433 AVR RISC microcontroller supports powerful and efficient addressing modes for access to the Flash
program memory, SRAM , Reg is ter File, a nd I/O data memory. This sec tio n de sc r ib es the different addressing modes s upported by the AVR architecture. In the figures, OP means the operation code part of the instruction word. To simplify, not all
figures show the exact location of the addressing bits.
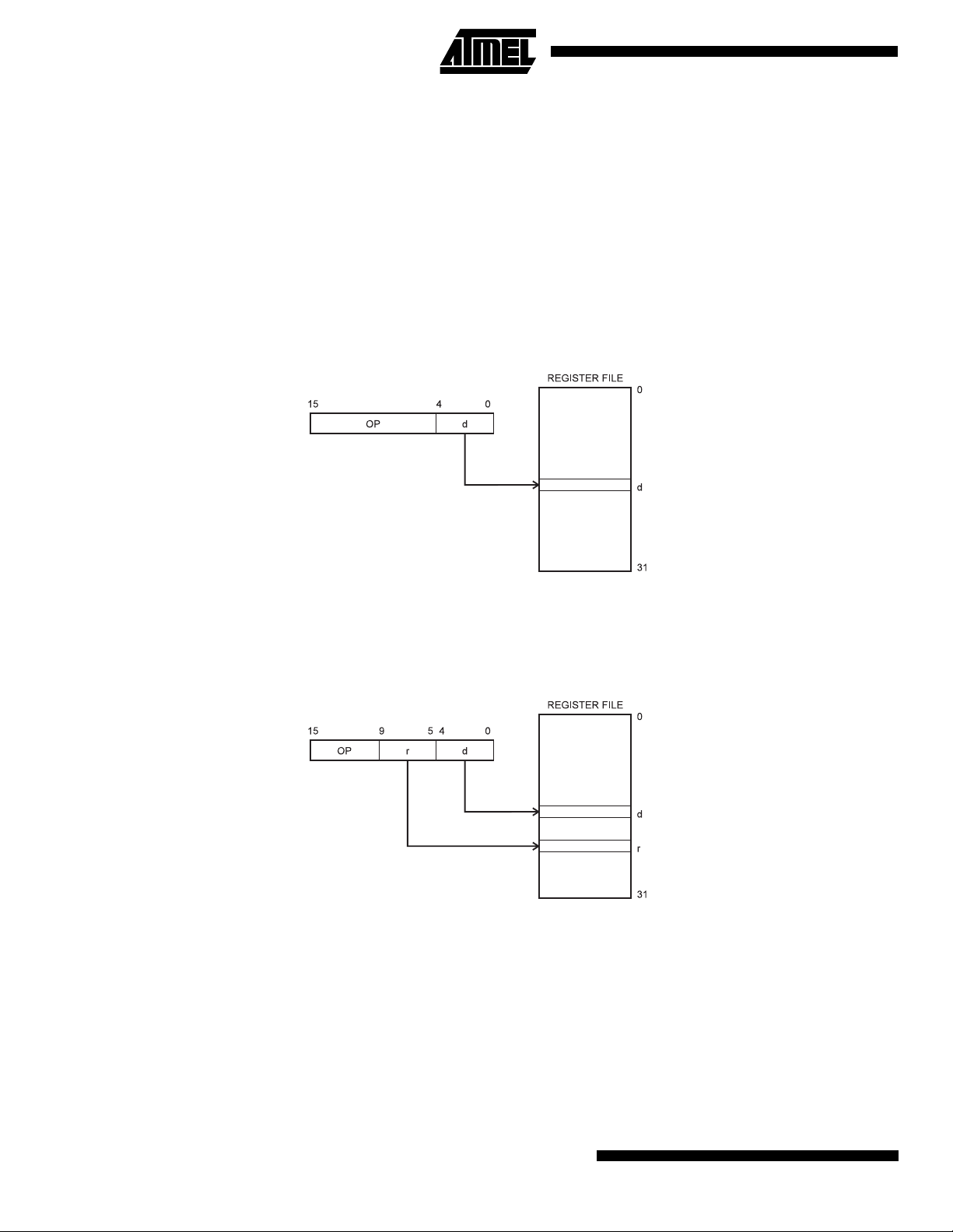
Register Direct, Single Register Rd
Figure 10. Direct Single Register Addressing
The operand is contained in register d (Rd).
Register Direct, Two Registers Rd and Rr
Figure 11. Direct Register Addressing, Two Registers
Operands are contained in register r (Rr) and d (Rd). The result is stored in register d (Rd).
10
AT90S/LS2333 and AT90S/LS4433
Page 11
AT90S/LS2333 and AT90S/LS4433
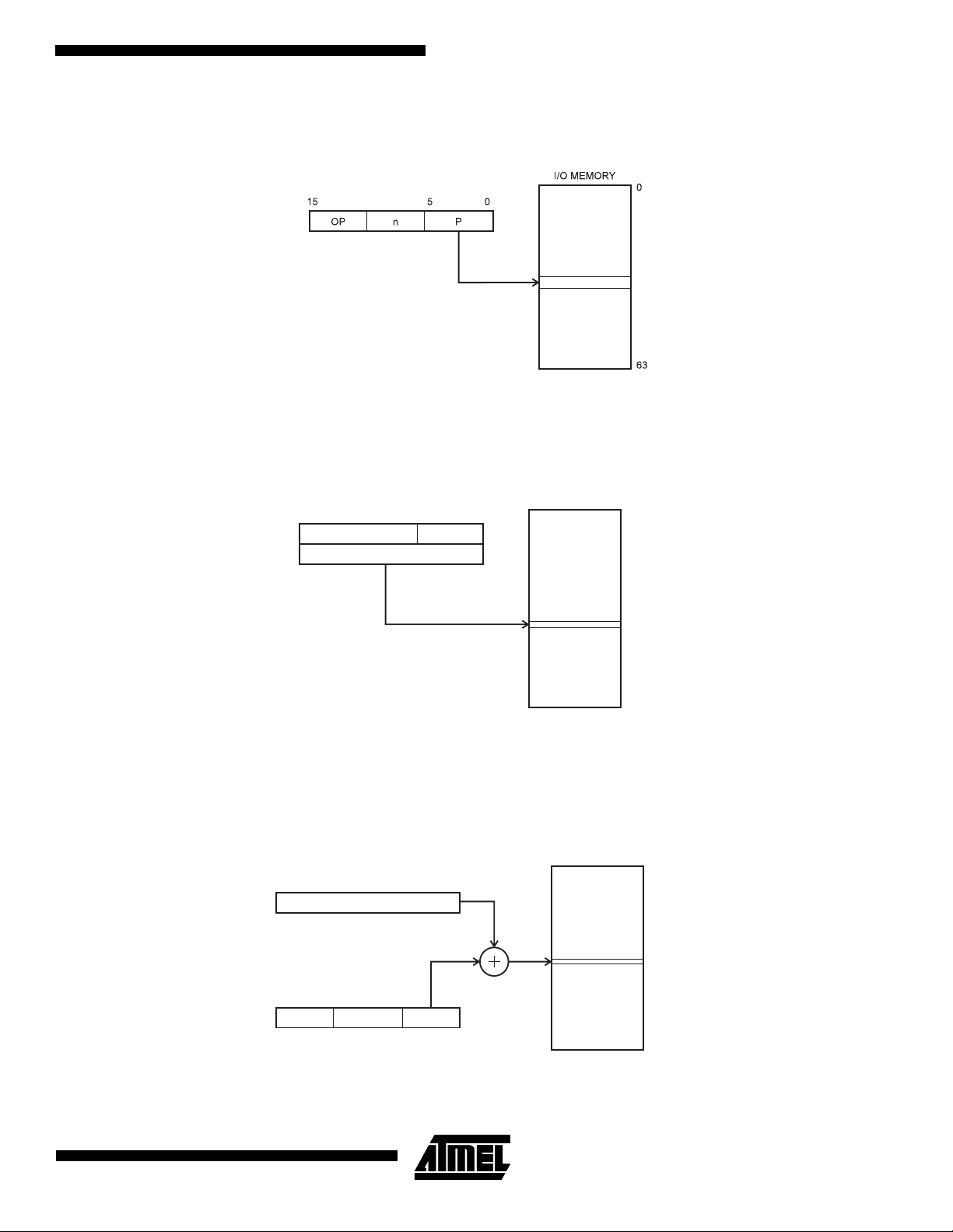
I/O Direct
Figure 12. I/O Direct Addressing
Operand address is contained in 6 bits of the instruction word. n is the destination or source register address.
Data Direct
Figure 13. Direct Data Addressing
31
OP Rr/Rd
15 0
20 19
16 LSBs
Data Space
16
$0000
$00DF
A 16-bit Data Address is contained in the 1 6 LSBs of a two-word instruction. Rd/Rr s pecify the destination or source
register.
Data Indirect with Displacement Figure 14. Data Indirect with Displacement
15
Y OR Z - REGISTER
15
OP an
Data Space
0
05610
$0000
$00DF
Operand address is the re sult of the Y or Z-register contents added to the address contained in 6 bits of the in struction
word.
11
Page 12
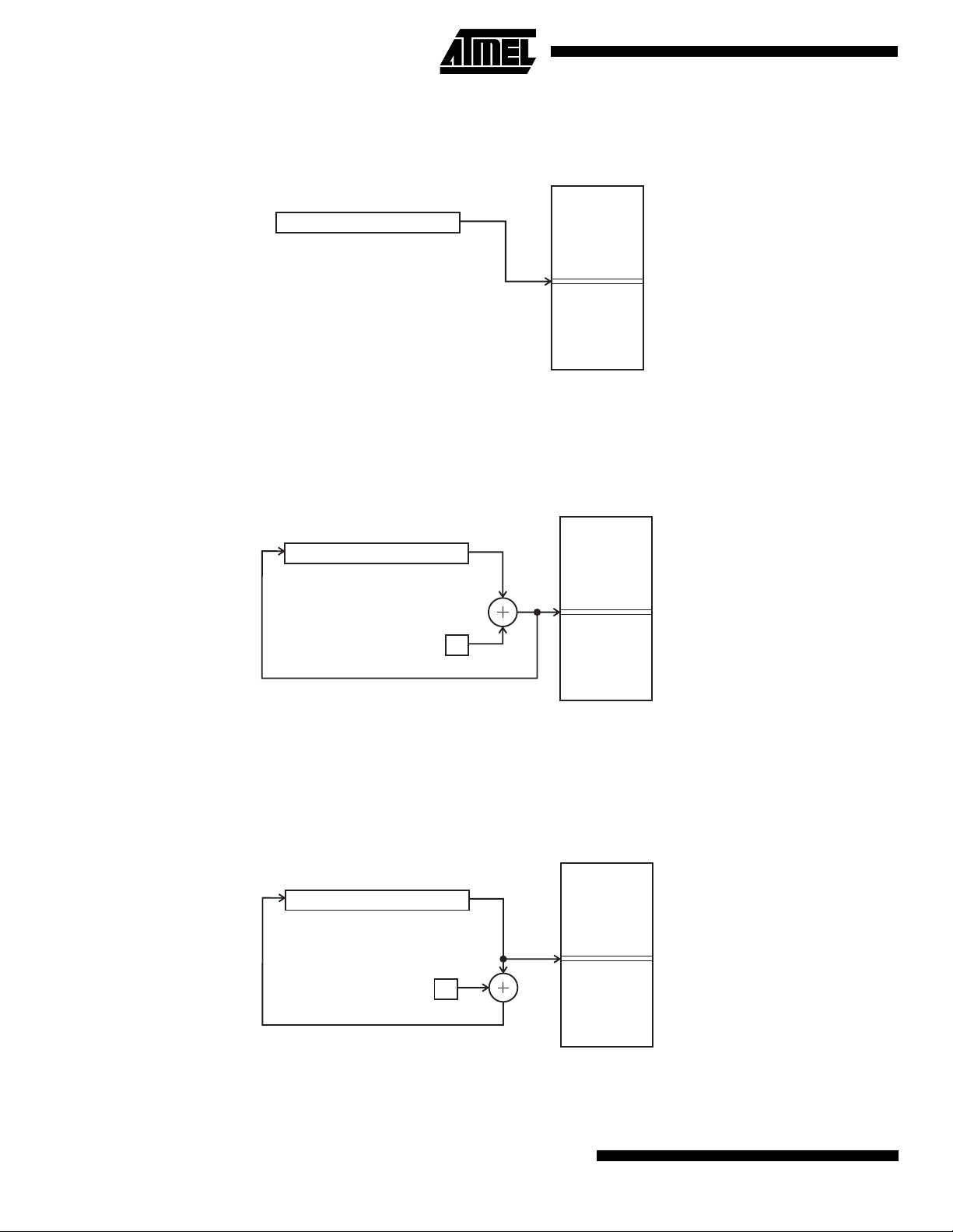
Data Indirect
Figure 15. Data Indirect Addressing
015
X, Y, OR Z - REGISTER
Operand address is the contents of the X, Y, or the Z-register.
Data Indirect with Pre-Decrement
Figure 16. Data Indirect Addressing with Pre-Decrement
015
X, Y, OR Z - REGISTER
Data Space
Data Space
$0000
$00DF
$0000
-1
$00DF
The X, Y, or the Z-register is decremented before the operation. Operand address is the decremented contents of the X, Y,
or the Z-register.
Data Indirect with Post-Increment
Figure 17. Data Indirect Addressing with Post-Increment
Data Space
015
X, Y, OR Z - REGISTER
1
$0000
$00DF
The X, Y, or the Z-register is inc r em ente d afte r th e ope ratio n. O perand address is the content of the X , Y, o r th e Z-reg ister
prior to incrementing.
12
AT90S/LS2333 and AT90S/LS4433
Page 13

AT90S/LS2333 and AT90S/LS4433
Constant Addressing Using the LPM Instruction
Figure 18. Code Memory Constant Addressing
PROGRAM MEMORY
Constant byte address is specified by the Z-register contents. The 15 MSBs select word address (0 - 1K/2K), the LSB
selects low byte if cleared (LSB = 0) or high byte if set (LSB = 1).
Indirect Program Addressing, IJMP and ICALL
Figure 19. Indirect Program Memory Addressing
PROGRAM MEMORY
$000
$3FF/$7FF
$000
$3FF/$7FF
Program execution continues at address contained by the Z-register (i.e. the PC is loaded with the contents of the Zregister).
Relative Program Addressing, RJMP and RCALL
Figure 20. Relative Program Memory Addressing
PROGRAM MEMORY
$000
$3FF/$7FF
Program execution continues at address PC + k + 1. The relative address k is from -2048 to 2047.
13
Page 14
EEPROM Data Memory
The AT90S2333/4433 contains 128/256 bytes of data EEPROM memory. It is organized as a separate data space, in
which single bytes can be read and written. The EEPROM has an e ndurance of at least 1 00,000 write/erase cy cles per
location. The access between the EEPROM and the CPU is described on page 44 specifying the EEPROM address registers, the EEPROM data register, and the EEPROM control register.
For the SPI data download ing, s ee page 78 for a detai led de script ion. The EEPRO M data memory is In-S ystem Progr am-
mable through the SPI port. Please refer to the “EEPRO M Read/Write Access” section on p age 38 for a thorough
description on EEPROM access.
Memory Access Times and Instruction Execution Timing
This section describes the general access timing concepts for instruction execution and internal memory access.
The AVR CPU is driven b y the S yste m Clock Ø, di rectly gener ated from the ex ternal c lock c rystal for the c hip. No interna l
clock division is used.
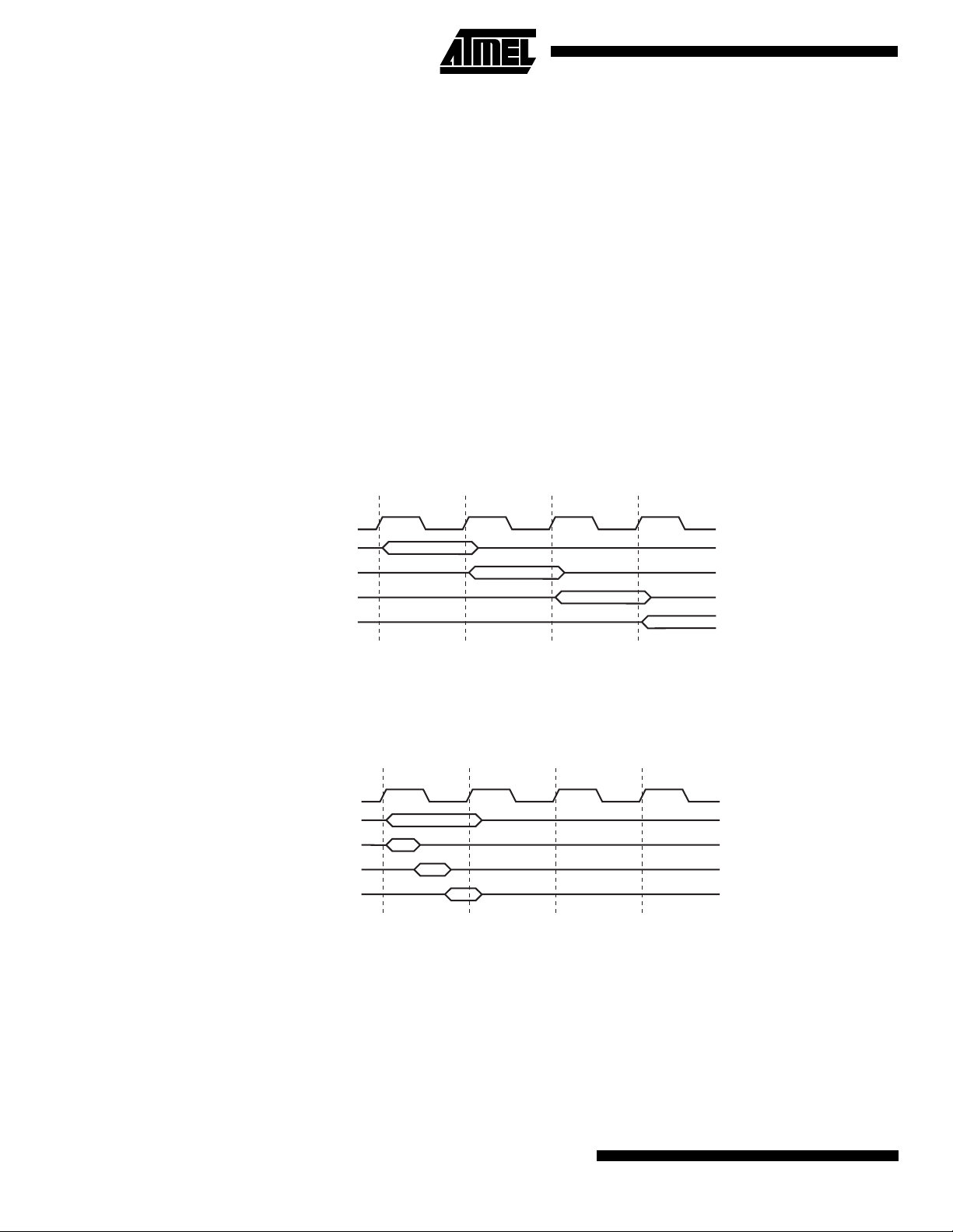
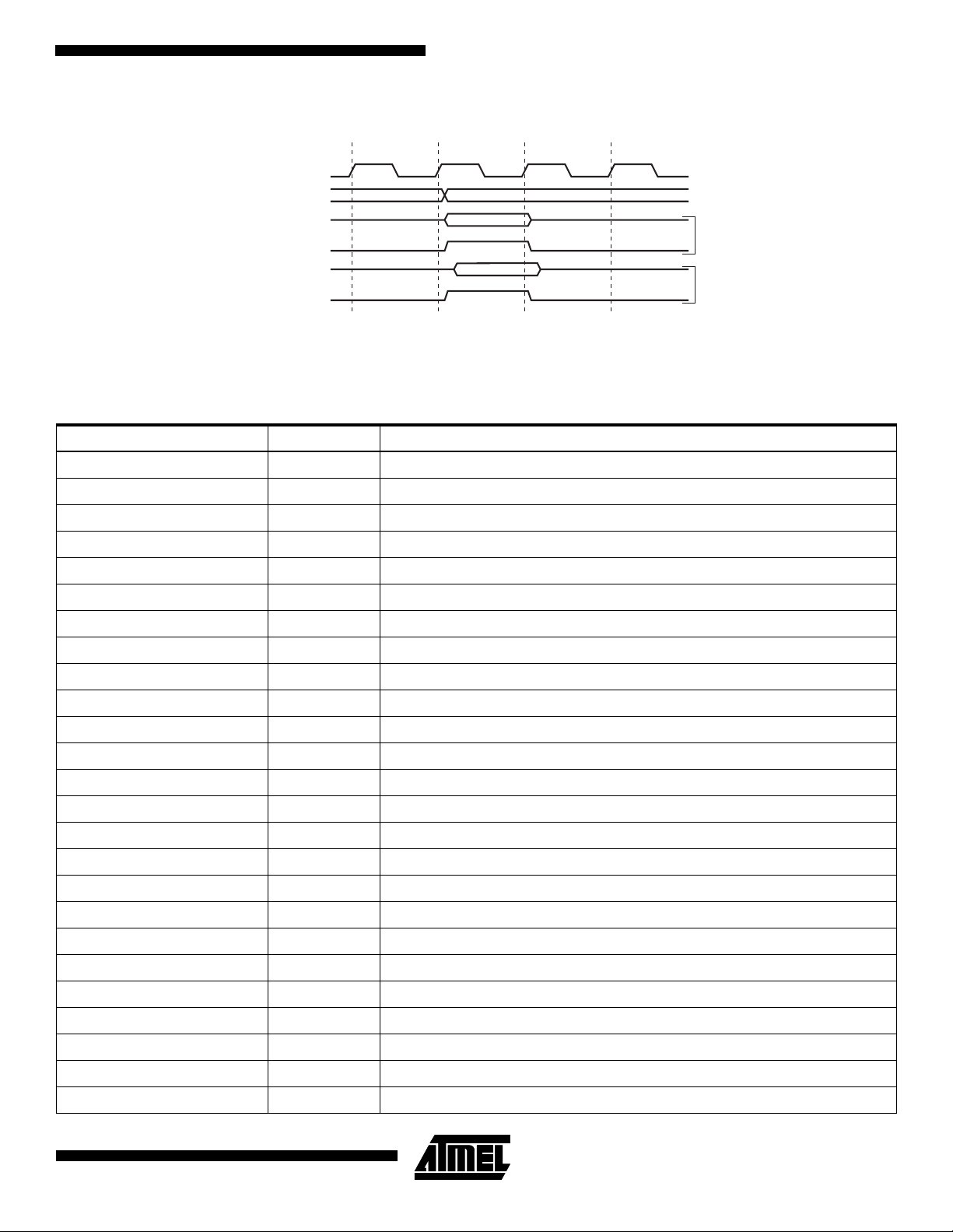
Figure 21 shows the parallel instructio n fetches and instructio n executions enabl ed by the Harvard architec ture and the
fast-access register file concept. This is the basic pipelining concept to obtain up to 1 MIPS per MHz with the corresponding
unique results for functions per cost, functions per clocks, and functions per power-unit.
Figure 21. The Parallel Instruction Fetches and Instruction Executions
T1 T2 T3 T4
System Clock Ø
1st Instruction Fetch
1st Instruction Execute
2nd Instruction Fetch
2nd Instruction Execute
3rd Instruction Fetch
3rd Instruction Execute
4th Instruction Fetch
Figure 22 shows the internal timing concept for the register file. In a single clock cycle an ALU operation using two register
operands is executed, and the result is stored back to the destination register.
Figure 22. Single Cycle ALU Operation
T1 T2 T3 T4
System Clock Ø
Total Execution Time
Register Operands Fetch
ALU Operation Execute
Result Write Back
The internal data SRAM access is performed in two System Clock cycles as described in Figure 23.
14
AT90S/LS2333 and AT90S/LS4433
Page 15
AT90S/LS2333 and AT90S/LS4433
Figure 23. On-Chip Data SRAM Access Cycles
T1 T2 T3 T4
System Clock Ø
Address
Data
WR
Data
RD
Prev. Address
I/O Memory
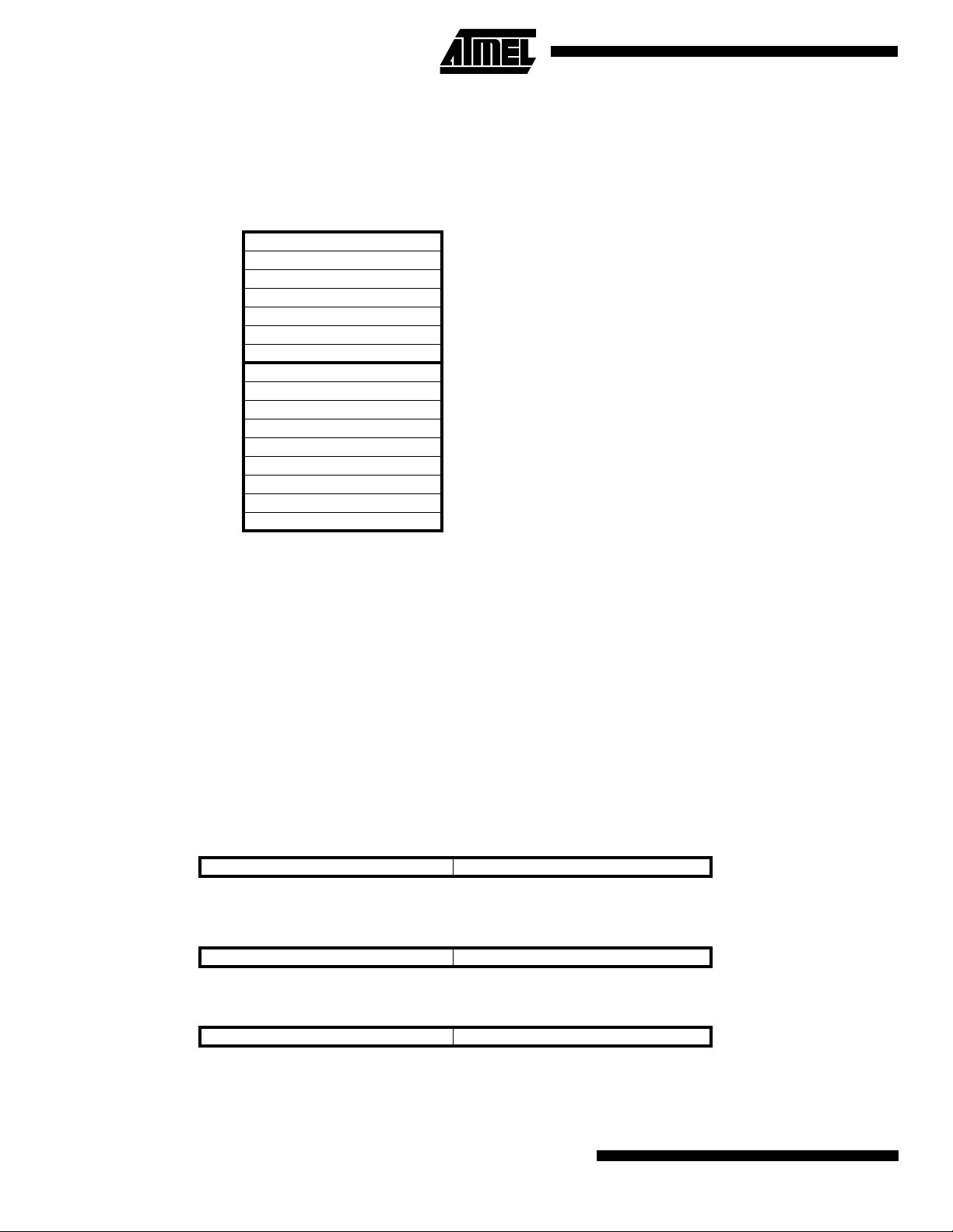
The I/O space definition of the AT90S2333/4433 is shown in the following table:
Table 2. AT90S2333/4433 I/O Space
I/O Address (SRAM Address) Name Function
$3F ($5F) SREG Status REGister
$3D ($5D) SP Stack Pointer
$3B ($5B) GIMSK General Interrupt MaSK register
Address
Read Write
$3A ($5A) GIFR General Interrupt Flag Register
$39 ($59) TIMSK Timer/Counter Interrupt MaSK register
$38 ($58) TIFR Timer/Counter Interrupt Flag register
$35 ($55) MCUCR MCU general Control Register
$34 ($54) MCUSR MCU general Status Register
$33 ($53) TCCR0 Timer/Counter0 Control Register
$32 ($52) TCNT0 Timer/Counter0 (8-bit)
$2F ($4F) TCCR1A Timer/Counter1 Control Register A
$2E ($4E) TCCR1 B Timer/Counter1 Control Register B
$2D ($4D) TCNT1H Timer/Counter1 High Byte
$2C ($4C) TCNT1L Timer/Counter1 Low Byte
$2B ($4B) OCR1H Timer/Counter1 Output Compare Register High Byte
$2A ($4A) OCR1L Timer/Counter1 Output Compare Register Low Byte
$27 ($47) ICR1H Timer/Counter1 Input Capture Register High Byte
$26 ($46) ICR1L Timer/Counter 1 Input Capture Register Low Byte
$21 ($41) WDTCR Watchdog Timer Control Register
$1E ($3E) EEAR EEPROM Address Register
$1D ($3D) EEDR EEPROM Data Register
$1C ($3C) EECR EEPROM Control Register
$18 ($38) PORTB Data Register, Port B
$17 ($37) DDRB Data Direction Register, Port B
$16 ($36) PINB Input Pins, Port B
15
Page 16
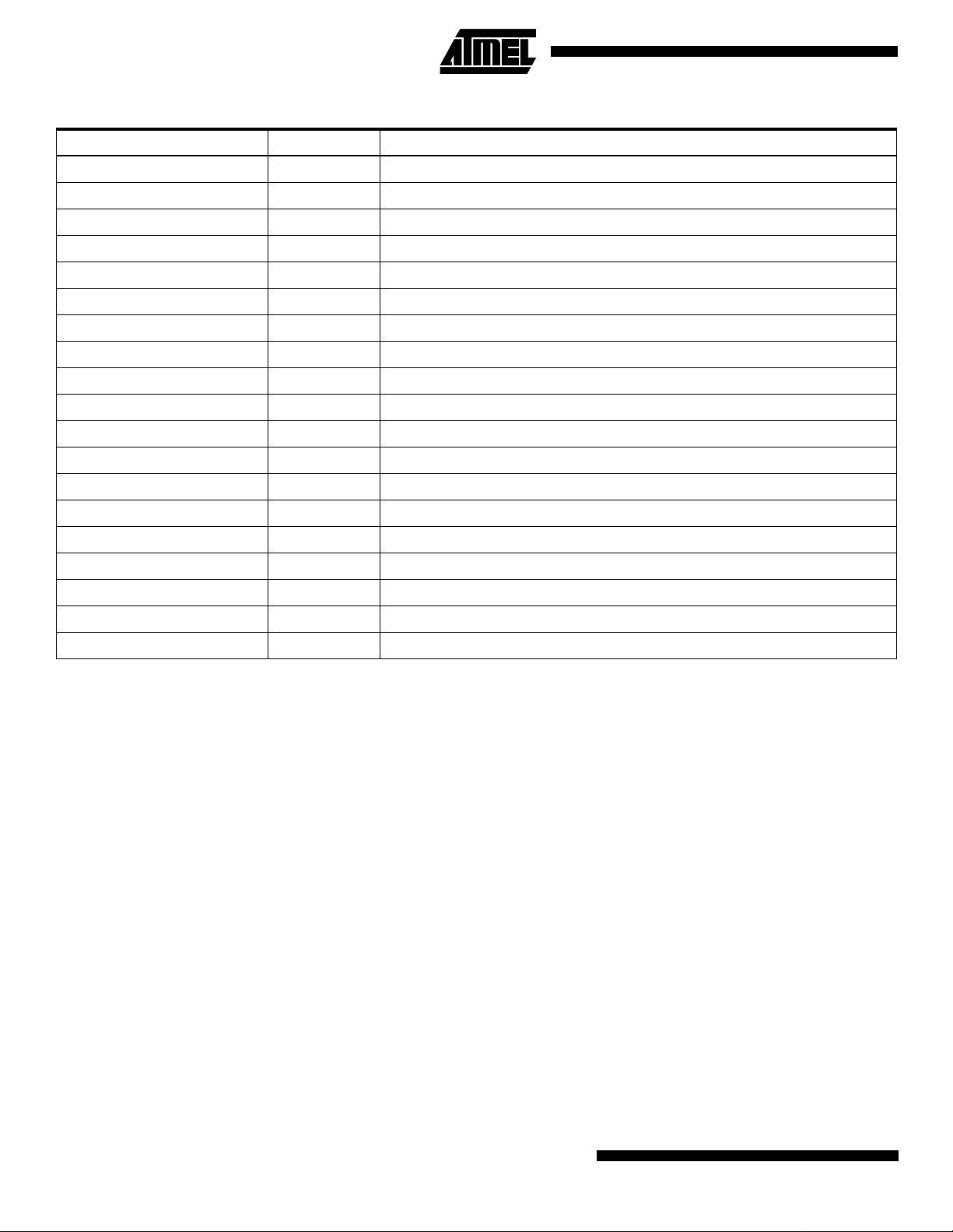
Table 2. AT90S2333/4433 I/O Space (Continued)
I/O Address (SRAM Address) Name Function
$15 ($35) PORTC Data Register, Port C
$14 ($34) DDRC Data Direction Register, Port C
$13 ($33) PINC Input Pins, Port C
$12 ($32) PORTD Data Register, Port D
$11 ($31) DDRD Data Direction Register, Port D
$10 ($30) PIND Input Pins, Port D
$0F ($2F) SPDR SPI I/O Data Register
$0E ($2E) SPSR SPI Status Register
$0D ($2D) SPCR SPI Control Register
$0C ($2C) UDR UART I/O Data Register
$0B ($2B) USR UART Status Register
$0A ($2A) UCR UART Co ntro l Regis ter
$09 ($29) UBRR UART Baud Rate Register
$08 ($28) ACSR Analog Comparator Control and Status Register
$07 ($27) ADMUX ADC Multiplexer Select Register
$06 ($26) ADCSR ADC Control and Status Register
$05 ($25) ADCH ADC Data Register High
$04 ($24) ADCL ADC Data Register Low
$03 ($23) UBRRHI UART Baud Rate Register High
Note: Reserved and unused locations are not shown in the table.
All AT90S2333/4433 I/Os and per ipheral s are plac ed in th e I/O space . The I/O lo catio ns are acces sed by the IN and OU T
instructions trans ferr ing d ata be tween th e 32 general purpose working registers and t he I/O s pa ce . I/ O r egi st ers within the
address range $00 - $1F are directly bit-a ccessibl e using the SBI and CBI instruct ions. In thes e registe rs, the value of single bits can be checked by using the SBIS and SBIC instructions. Refer to the instruction set chapter for more details.
When using the I/O specific commands IN, OUT the I/O addresses $00 - $3F must be used. When addressing I/O registers
as SRAM, $20 must be added to this address. All I/O r egister address es throughout thi s document are s hown with the
SRAM address in parentheses.
For compatibili ty with fu ture devices , reserv ed bits sho uld be wri tten to ze ro when a ccessed. R eserved I/O memory
addresses should never be written.
Some of the status flags are cleared by writing a logical one to them. Note that the CBI and SBI instructions will operate on
all bits in the I/O regi ster , writing a one ba ck in to any flag read as s et, thus cl earing t he f lag. The C BI and SB I instr ucti ons
work with registers $00 to $1F only.
The I/O and peripherals control registers are explained in the following sections.
16
AT90S/LS2333 and AT90S/LS4433
Page 17
AT90S/LS2333 and AT90S/LS4433
Status Register - SREG
The AVR status register - SREG - at I/O space location $3F ($5F) is defined as:
Bit 76543210
$3F ($5F) I T H S V N Z C SREG
Read/Write R/W R/W R/W R/W R/W R/W R/W R /W
Initial value 0 0 0 0 0 0 0 0
•
Bit 7 - I: Global Interrupt Enable
The global interr upt e nable bit must be set (one ) for the i nterrup ts to be e nable d. The indi vidu al in terrup t enab le c ontrol is
then performed in s eparate con trol regi sters. If the globa l inte rru pt ena ble r egist er is clear ed (zero ), non e of the i nter rupts
are enabled independent of the individual interrupt enable settings. The I-bit is cleared by hardware after an interrupt has
occurred, and is set by the RETI instruction to enable subsequent interrupts.
Bit 6 - T: Bit Copy Storage
•
The bit copy instructions BLD (Bit LoaD) and BST (Bit STore) use the T bit as source and destination for the operated bit. A
bit from a register in the regi ste r file can be copied into T by the BST instru ct ion , and a bit i n T can be c opi ed i nto a bit in a
register in the register file by the BLD instruction.
Bit 5 - H: Half Carry Flag
•
The half carry flag H indicates a half carry in some arithmeti cal operat ions. See the Instruc tion Set Des cription for detailed
information.
Bit 4 - S: Sign Bit, S = N ⊕ V
•
The S-bit is always an exclusive or between the negative flag N and the two’s complement overflow flag V. See the Instruc-
tion Set Description for detailed information.
Bit 3 - V: Two’s Complement Overflow Flag
•
The two’s complement overflow flag V supports two’s complement arithmetics. See the Instruction Set Description for
detailed information.
Bit 2 - N: Negative Flag
•
The negative flag N indicates a negative result from an arithmetical or logical operation. See the Instruction Set Description
for detailed information.
Bit 1 - Z: Zero Flag
•
The zero flag Z indi cates a zero r esult from an arithmetic al or logical operation. See the Instru ction Se t Descriptio n for
detailed information.
Bit 0 - C: Carry Flag
•
The carry flag C indicates a carry in an ari thmetical or logical opera tion. See the Instruction Se t Description for detailed
information.
Note that the status register is not automatically stored when entering an interrupt routine and restored when returning from
an interrupt routine. This must be handled by software.
Stack Pointer - SP
The AT90S2333/44 33 Stack Poi nter is imp lemented as an 8-bit regi ster in th e I/O space location $ 3D ($5D). As the
AT90S2333/4433 data memory has $0DF locations, 8 bits are used.
$3D ($5D) SP7 SP6 SP5 SP4 SP3 SP2 SP1 SP0 SP
76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
The Stack Pointe r poin ts to the data SRAM stac k are a whe re t he Su brouti ne an d Inte rrupt St acks are loca ted. Th is St ack
space in the d ata SRAM m ust be defi ned by the p rogram befor e any su broutine cal ls are execu ted or in terrupts are
enabled. The stack pointer must be set to point above $60. The Stack Pointer is decremented by one when data is pushed
onto the Stack with the PUSH instruction, and it is decremented by two when an address is pushed onto the Stack with
subroutine calls and interrupts. The Stack Pointer is incremented by one when data is popped from the Stack with the POP
17
Page 18

instruction, and it is incremente d by two when an address i s popped from the Stac k with return from subr outine RET or
return from interrupt RETI.
Reset and Interrupt Handling
The AT90S2333/4433 provi des 13 di fferen t int er ru pt sour c es. These interrupts and the separate re set vect or, ea ch hav e a
separate program vector in the program memory space. All interrupts are assigned individual enable bits which must be set
(one) together with the I-bit in the status register in order to enable the interrupt.
The lowest addresses i n the pro gram memory s pace are aut omatically defined a s the Reset an d Interru pt vectors. The
complete list of vectors is shown in Table 3. The list also determines the priority levels of the different interrupts. The lower
the address the higher is the priority level. RESET has the highest priority, and next is INT0 - the External Interrupt Request
0, etc.
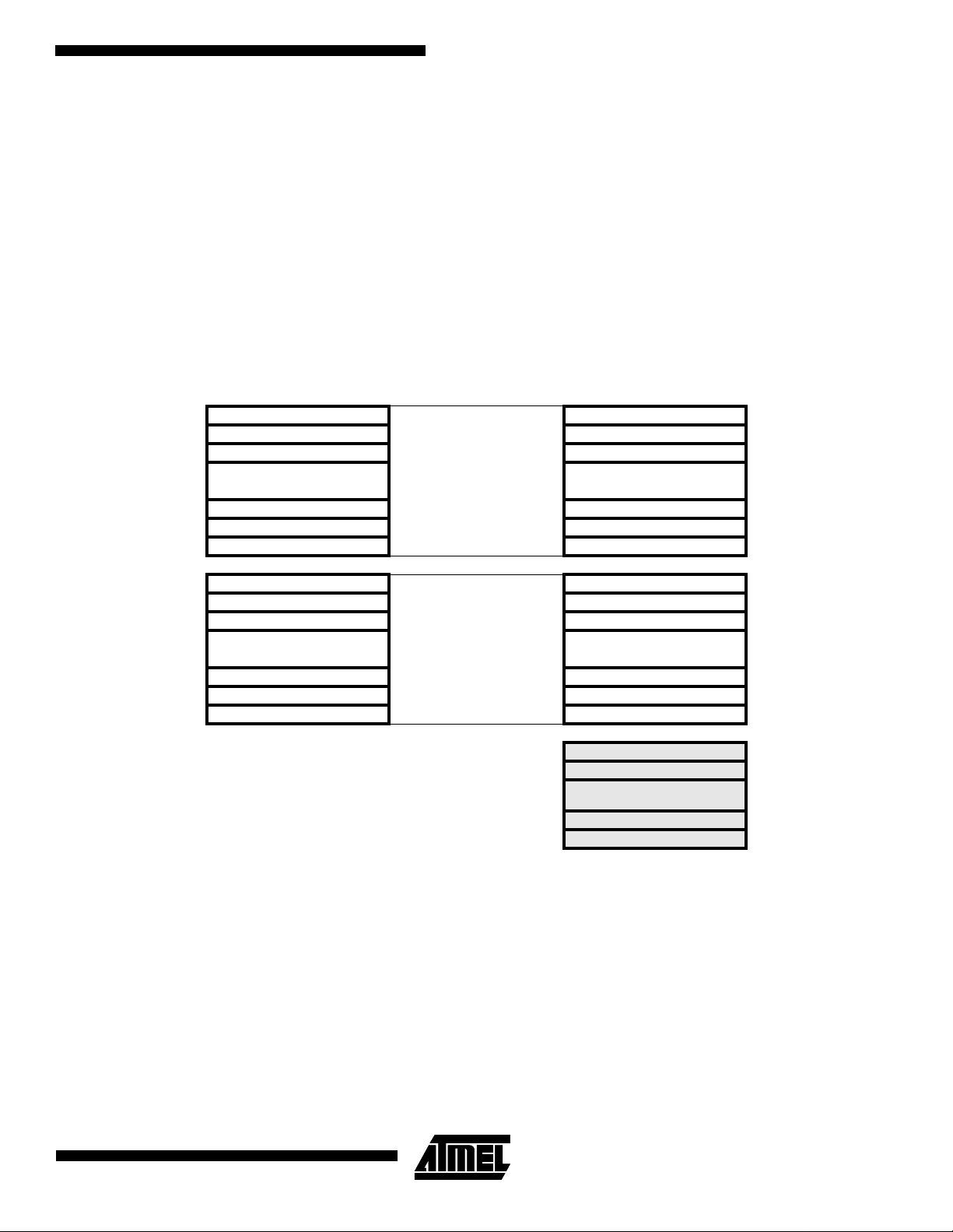
Table 3. Reset and Interrupt Vectors
Vector No. Program Address Source Interrupt Definition
1 $000 RESET External Pin, Power-On Reset, Brown-Out Reset and Watchdog Reset.
2 $001 INT0 External Interrupt Request 0
3 $002 INT1 External Interrupt Request 1
4 $003 TIMER1 CAPT Timer/Counter1 Capture Event
5 $004 TIMER1 COMP Timer/Counter1 Compare Match
6 $005 TIMER1 OVF Timer/Counter1 Overflow
7 $006 TIMER0 OVF Timer/Counter0 Overflow
8 $007 SPI, STC Serial Transfer Complete
9 $008 UART, RX UART, Rx Complete
10 $009 UART, UDRE UART Data Register Empty
11 $00A UART, TX UART, Tx Complete
12 $00B ADC ADC Conversion Complete
13 $00C EE_RDY EEPROM Ready
14 $00D ANA_COMP Analog Comparator
The most typical program setup for the Reset and Interrupt Vector Addresses are:
Address Labels Code Comments
$000 rjmp RESET ; Reset Handler
$001 rjmp EXT_INT0 ; IRQ0 Handler
$002 rjmp EXT_INT1 ; IRQ1 Handler
$003 rjmp TIM1_CAPT ; Timer1 Capture Handler
$004 rjmp TIM1_COMP ; Timer1 compare Handler
$005 rjmp TIM1_OVF ; Timer1 Overflow Handler
$006 rjmp TIM0_OVF ; Timer0 Overflow Handler
$007 rjmp SPI_STC; ; SPI Transfer Complete Handler
$008 rjmp UART_RXC ; UART RX Complete Handler
$009 rjmp UART_DRE ; UDR Empty Handler
$00a rjmp UART_TXC ; UART TX Complete Handler
$00b rjmp ADC ; ADC Conversion Complete Interrupt Handler
$00c rjmp EE_RDY ; EEPROM Ready Handler
$00d rjmp ANA_COMP ; Analog Comparator Handler
;
18
AT90S/LS2333 and AT90S/LS4433
Page 19
AT90S/LS2333 and AT90S/LS4433
$00e MAIN: ldi r16,low(RAMEND); Main program start
$00f out SP,r16;
$010 <instr> xxx ;
… … … …
Reset Sources
The AT90S2333/4433 has four sources of reset:
• Power-On Reset. The MCU is reset when the supply voltage is below the power-on reset threshold (V
• External Reset. The MCU is reset when a low level is present on the RESET
pin for more than 50 ns.
• Watchdog Reset. The MCU is reset when the Watchdog timer period expires and the Watchdog is enabled.
• Brown-Out Reset. The MCU is reset when the supply voltage V
falls below a certain voltage.
CC
During reset, all I/O regist ers are then se t to their initia l values , and the program starts executi on from addres s $000. The
instruction placed in address $000 must be an RJMP - relative jump - instruction to the reset handling routine. If the program never enables an interrupt sour ce, the interrupt vector s are not used, a nd regular program c ode can be pl aced at
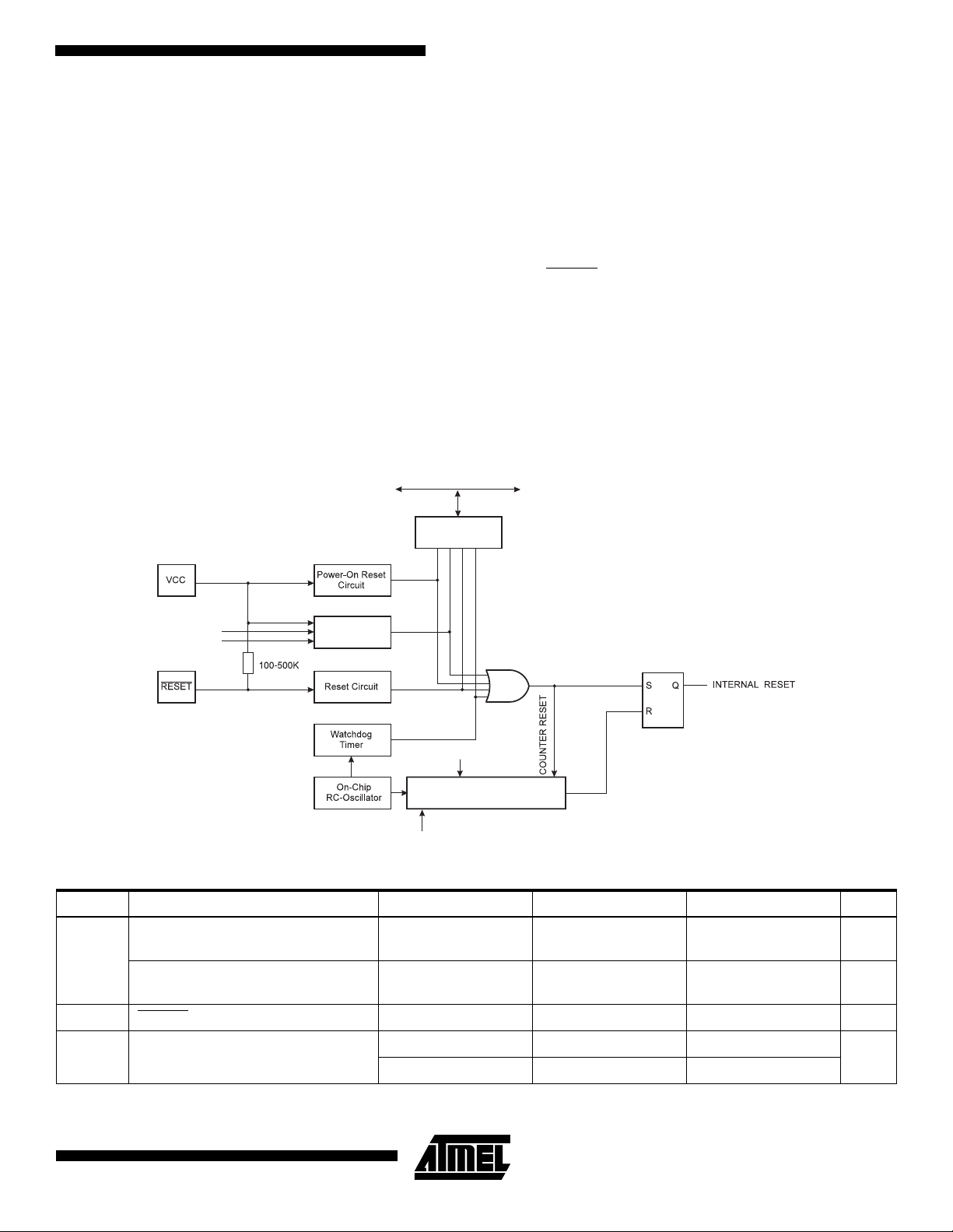
these locations. The circuit diagram in Figure 24 shows the reset logic. Table 4 and Table 5 define the timing and electrical
parameters of the reset circuitry.
Figure 24. Reset Logic
DATA BUS
POT
).
MCU Status
Register (MCUSR)
BORF
PORF
WDRF
EXTRF
BODEN
BODLEVEL
Brown-Out
Reset Circuit
CK
CKSEL[2:0]
Delay Counters
Full
Table 4. Reset Characteristics (VCC = 5.0V)
Symbol Parameter Min Typ Max Units
V
V
V
POT
RST
BOT
Power-On Reset Threshold Voltage,
rising
Power-On Reset Threshold Voltage,
falling
RESET Pin Threshold Voltage 0.6V
2.6 (BODLEVEL = 1) 2.7 (BODLEVEL = 1) 2.8 (BODLEVEL = 1)
Brown-Out Reset Threshold Voltage
3.8 (BODLEVEL = 0) 4.0 (BODLEVEL = 0) 4.2 (BODLEVEL = 0)
1.0 1.4 1.8 V
0.4 0.6 0.8 V
CC
V
V
Note: The Power-On Reset will not work unless the supply voltage has been below Vpot (falling).
19
Page 20
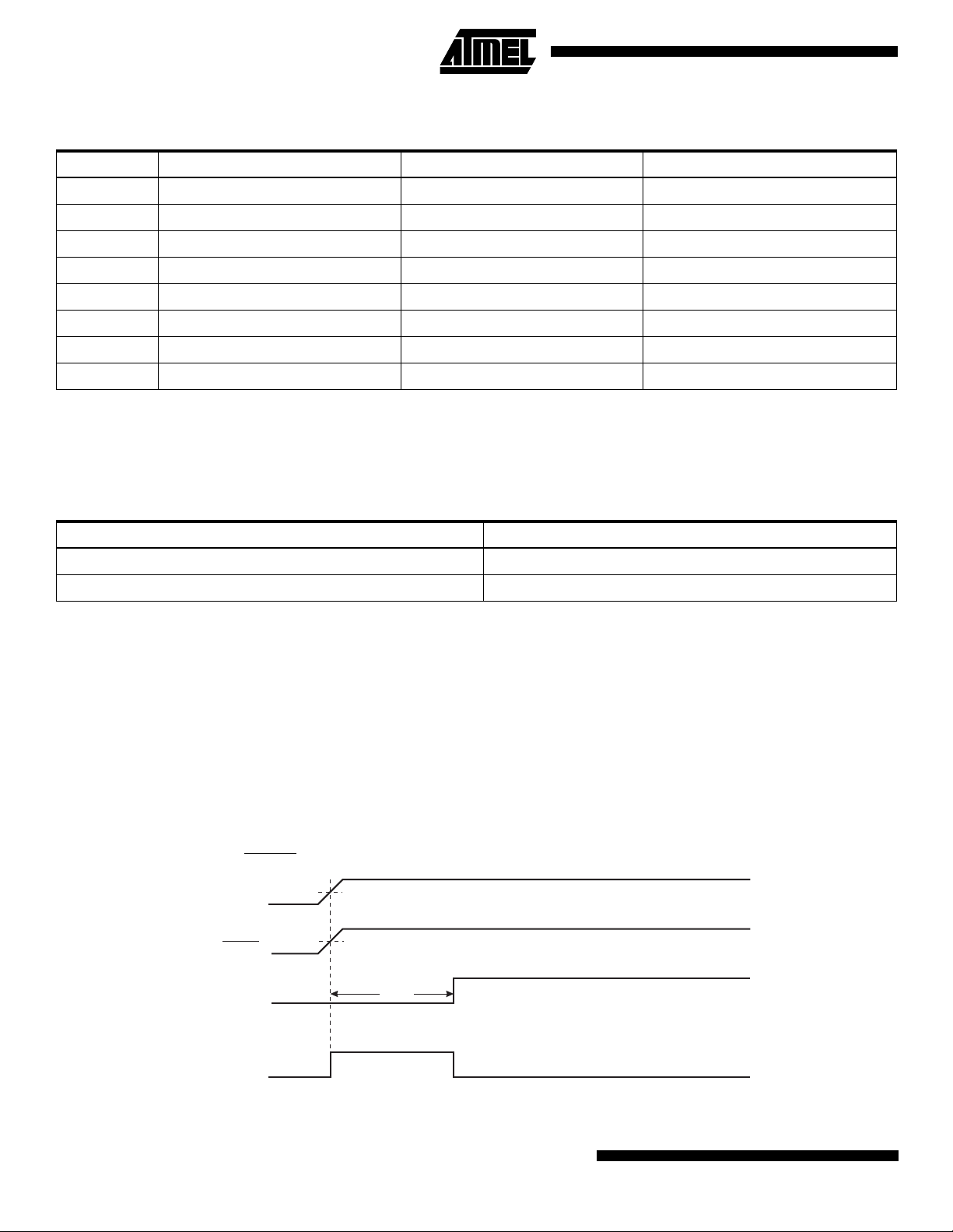
Table 5. Reset Delay Selections
CKSEL [2:0] Star t-Up Time, t
TOUT
at V
= 2.7V Start-Up Time, t
CC
TOUT
at V
= 5.0V Recommended Usage
CC
000 16 ms + 6 CK 4 ms + 6 CK External Clock, slowly rising power
001 6 CK 6 CK External Clock, BOD enabled
(1)
010 256 ms + 16K CK 64 ms + 16K CK Crystal Oscilla tor
011 16 ms + 16K CK 4 ms + 16K CK Crystal Oscillator, fast rising power
100 16K CK 16K CK Crystal Oscillator, BOD enabled
(1)
101 256 ms + 1K CK 64 ms + 1K CK Ceramic Resonator
110 16 ms + 1K CK 4 ms + 1K CK Ceramic Resonator, fast rising power
111 1K CK 1K CK Ceramic Resonator, BOD enabled
(1)
Notes: 1. Or external p ower-on reset.
This table shows the start-up times from reset. From sleep, only the clock counting part of the start-up time is used. The
watchdog oscillator is used for timing the real-time part of the start-up time. The number WDT oscillator cy cles used for
each time-out is shown in Table 6.
Table 6. Number of Watchdog Oscillator Cycles
Time-out Number of cycles
4.0 ms (at V
64 ms (at Vcc=5.0V) 64K
=5.0V) 4K
cc
The frequency of the watchdog oscillator is voltage dependent as shown in the Electrical Characteristics section.
Power-On Reset
A Power-On Reset (POR) pulse is generated by an on-chip detection circuit. The detection l evel is nominal ly 2.2V. The
POR is activated whenever V
is below the detection level. The POR circuit can be used to trigger the start-up reset, as
CC
well as detect a failure in supply voltage.
The Power-On Reset (POR) circuit ensures that the device is reset from power-on. Reaching the power-on reset threshold
voltage invokes a delay cou nter, which determines the delay, for which the device i s kept in RESET after V
rise. The
CC
time-out period of the delay counter is a combination of internal RC oscillator cycles and external oscillator cycles, and it
can be defined by the user through the CKSEL fuses. The eight different selections for the delay period are presented in
Table 5. The RESET signal is activated again, without any delay, when the V
Figure 25. MCU Start-Up, RESET
VCC
RESET
TIME-OUT
INTERNAL
RESET
Tied to VCC.
V
POT
V
RST
t
TOUT
decreases below detection level.
CC
20
AT90S/LS2333 and AT90S/LS4433
Page 21
AT90S/LS2333 and AT90S/LS4433
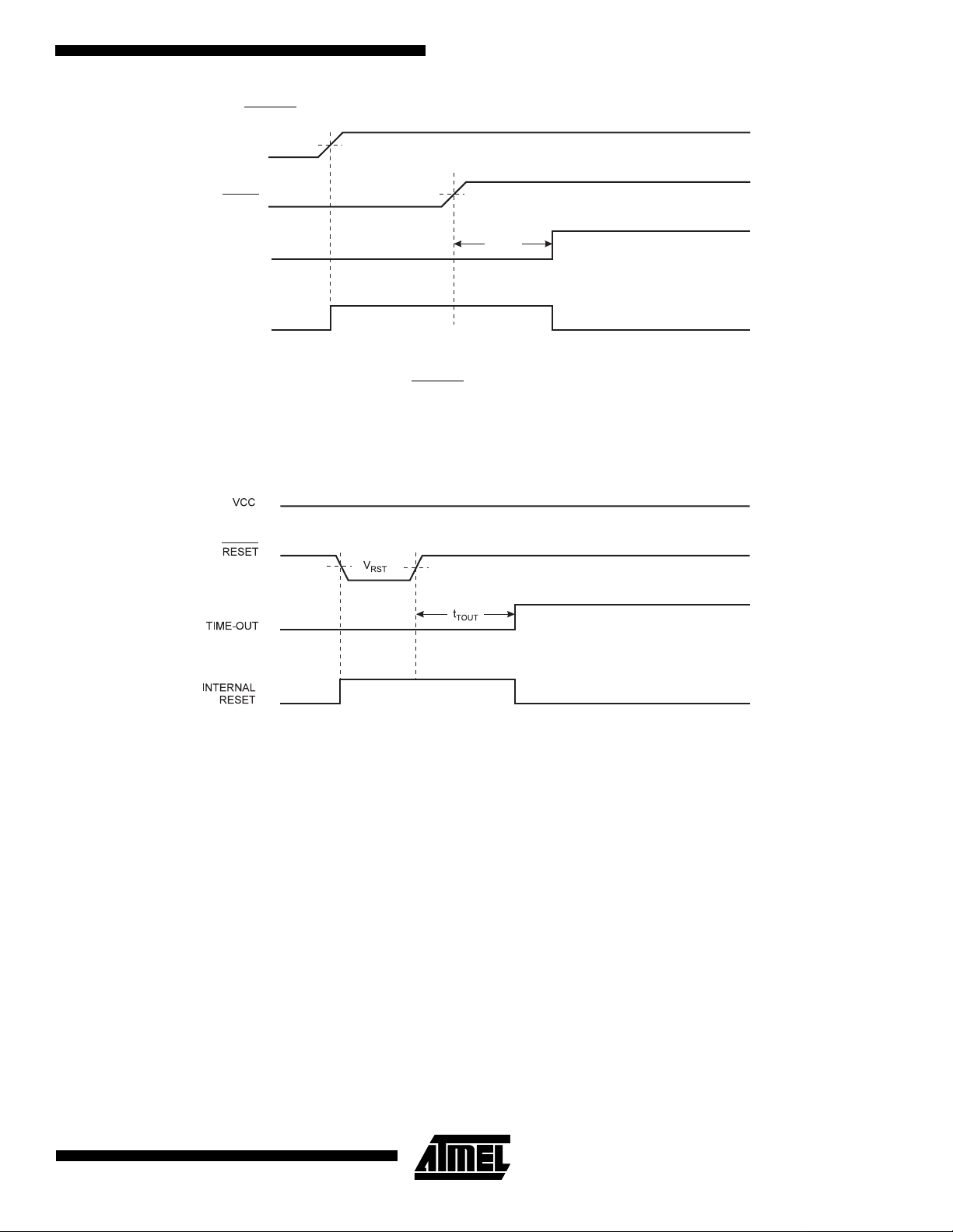
Figure 26. MCU Start-Up, RESET
VCC
RESET
TIME-OUT
INTERNAL
RESET
Controlled Externally
V
POT
V
RST
t
TOUT
External Reset
An external reset is generated by a low level on the RESET
pin. Reset pulses longer than 50 ns will generate a reset, even
if the clock is not running. Shorter pulses are not guaranteed to generate a reset.When the applied signal reaches the
Reset Thresh old V oltag e V
on its positive edge, the delay timer starts the MCU after the Time-out period t
RST
TOUT
has
expired.
Figure 27. External Reset During Operation
Brown-Out Detection
AT90S2333/4433 has an on-chip brown-out de tection (BOD ) circui t for monitorin g the V
level during the operati on. Th e
CC
power supply must be decoupl ed with a 47 n F to 100 nF capacitor if th e BOD func tion is used. T he BOD circu it can be
enabled/disabled by the fuse BODEN. W hen BODEN i s enabled (BODEN programmed), and V
below the trigger level, the brown-out reset is immediately activated. When V
increases above the trigger level, the
CC
decreases to a value
CC
brown-out reset is de ac tivate d after a delay. The delay is de fin ed b y the u ser in the sa me way as the delay of PO R s ignal ,
in Table 5. The trigger level for the BOD can be selected by the fuse BODLEVEL to be 2.7V (BODLEVEL unprogrammed),
or 4.0V (BODLEVEL programmed). The trigger level has a hysteresis of 50 mV to ensure spike free brown-out detection.
The BOD circuit will only detect a drop in V
if the voltage stays below the trigger level for longer than 3 µs for trigger level
CC
4.0V, 7 µs for trigger level 2.7V (typical values).
21
Page 22
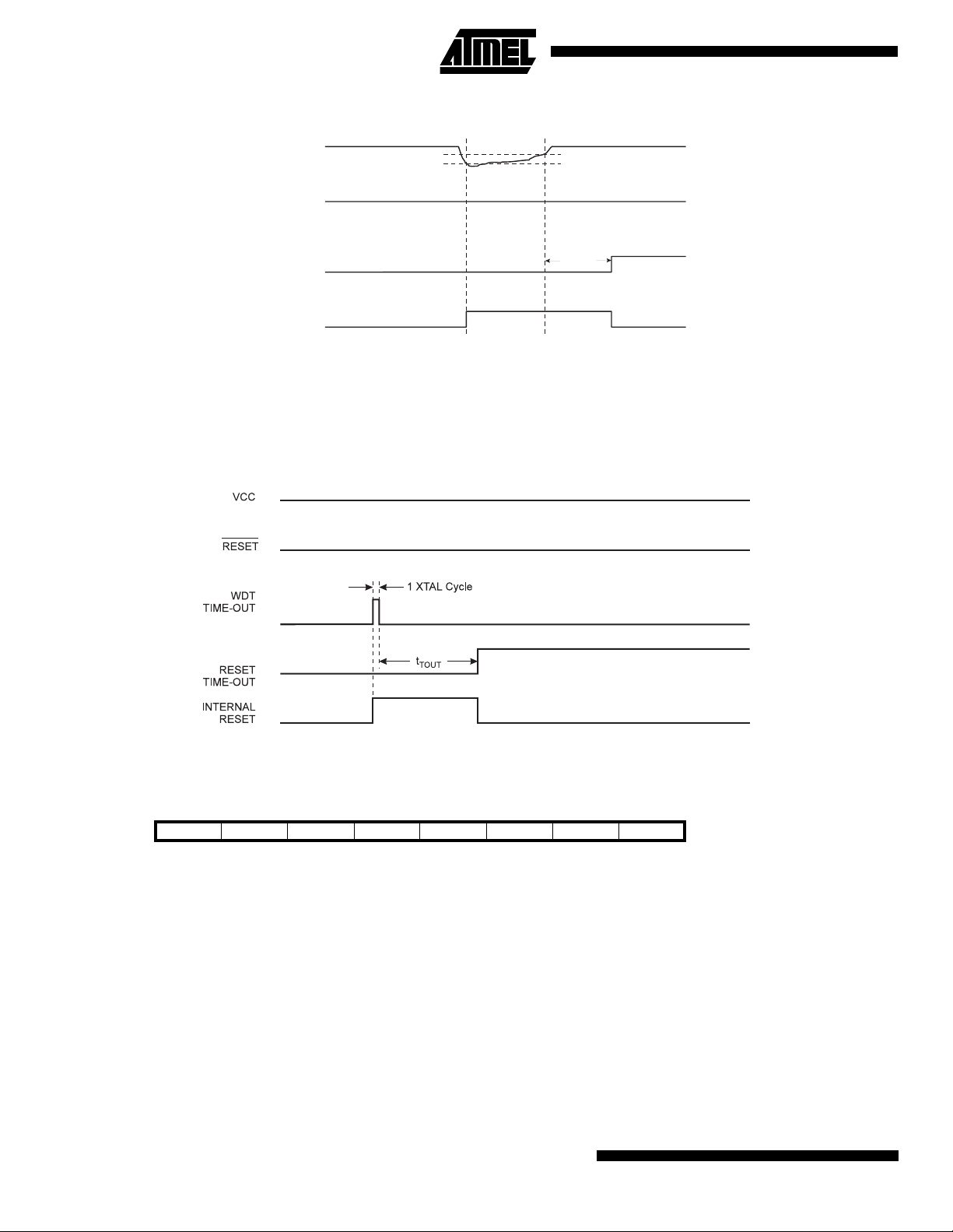
Figure 28. Brown-Out Reset During Operation
VCC
RESET
TIME-OUT
INTERNAL
RESET
V
BOT-
V
t
TOUT
BOT+
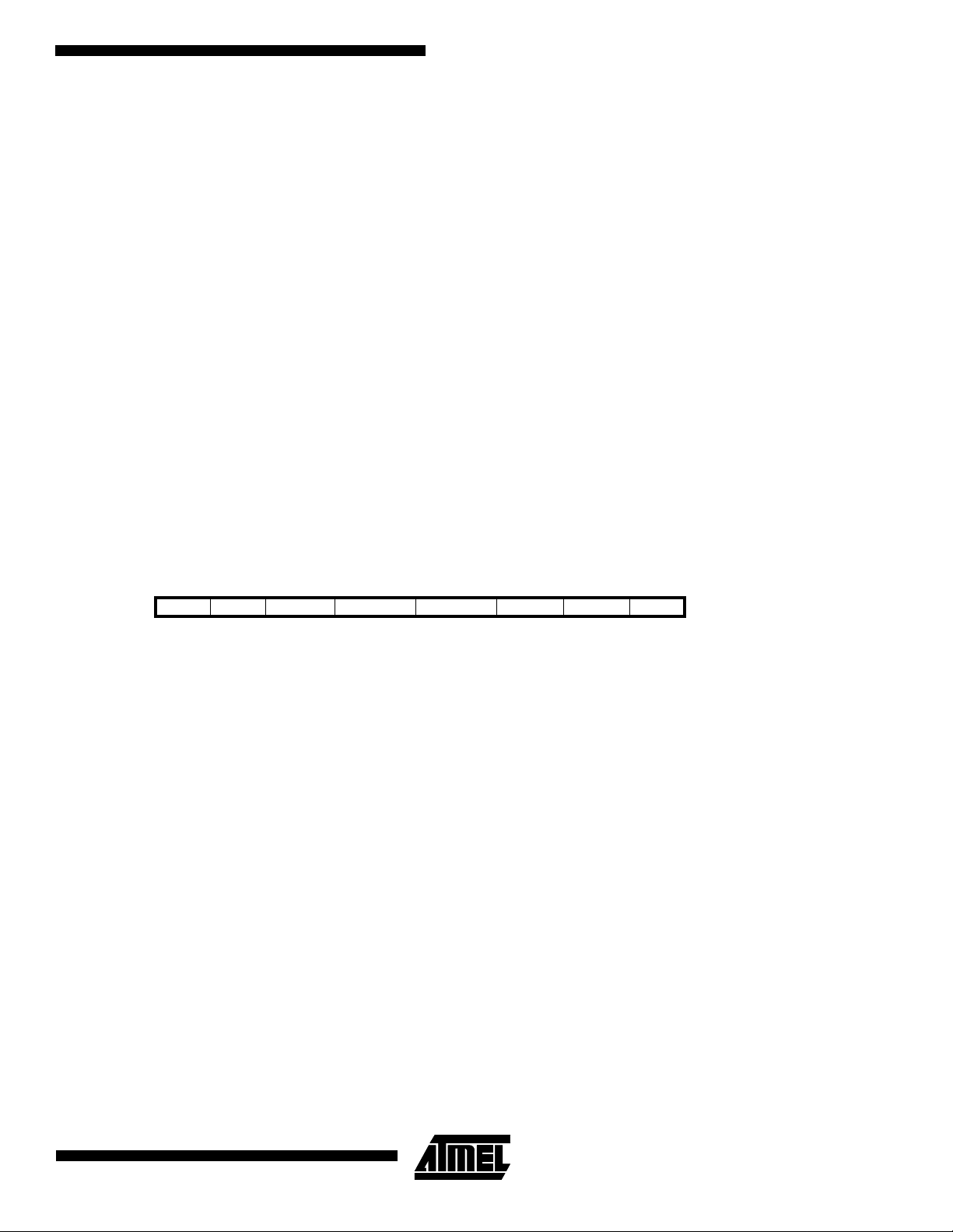
Watchdog Reset
When the Watchdo g tim es out, i t will generate a sh ort rese t pulse o f 1 XT AL cyc le durati on. On the falli ng edge of this
pulse, the delay timer starts counting the Time-out period t
. Refer to Page page 36 for details on operation of the
TOUT
Watchdog.
Figure 29. Watchdog Reset During Operation
MCU Status Register - MCUSR
The MCU Status Register provides information on which reset source caused an MCU reset.
Bit 76543210
$34 ($54) - - - - WDRF BORF EXTRF PORF MCUSR
Read/Write R R R R R/W R/W R/W R/W
Initial value 0 0 0 0 See bit description
Bits 7..4 - Res: Reserved Bits
•
These bits are reserved bits in the AT90S2333 and always read as zero.
Bit 3 - WDRF: Watchdog Reset Flag
•
This bit is set if a watchdog reset occurs. The bit is cleared by a power-on reset, or by writing a logic zero to the flag.
Bit 2 - BORF: Brown-Out Reset Flag
•
This bit is set if a brown-out reset occurs. The bit is cleared by a power-on reset, or by writing a logic zero to the flag.
Bit 1 - EXTRF: External Reset Flag
•
This bit is set if an external reset occurs. The bit is cleared by a power-on reset, or by writing a logic zero to the flag.
Bit 0 - PORF: Power-on Reset Flag
•
This bit is set if a power-on reset occurs. The bit is cleared only by writing a logic zero to the flag.
22
AT90S/LS2333 and AT90S/LS4433
Page 23
AT90S/LS2333 and AT90S/LS4433
To make use of the reset flags to identify a reset condition, the user should read and then clear the MCUSR as early as
possible in the program. If the register is cleared before another reset occurs, the source of the reset can be found by
examining the reset flags.
Interrupt Handling
The AT90S2333/4433 has two 8-bit Interrupt Mask control registers; GIMSK - General Interrupt Mask register and TIMSK Timer/Counter Interrupt Mask register.
When an interrupt occurs, the Global Interrupt Enable I-bit is cleared (zero) and all interrupts are disabled. The user software can set (one) the I-bit to enable nested interrupts. The I-bit is set (one) when a Return from Interrupt instruction - RETI
- is executed.
When the Program Counter is vectored to the actual interrupt vector in order to execute the interrupt handling routine, hard-
ware clears the corresponding flag that generated the interrupt. Some of the interrupt flags can also be cleared by writing a
logic one to the flag bit position(s) to be cleared.
If an interrupt condition occurs when the corresponding interrupt enable bit is cleared (zero), the interrupt flag will be set
and remembered until the interrupt is enabled, or the flag is cleared by software.
If one or more interrupt conditi ons occu r when the global interrupt ena ble bit is clea red (zero), th e correspondi ng interrup t
flag(s) will be set and remembered until the global interrupt enable bit is set (one), and will be executed by order of priority.
Note that external level interrupt does not have a flag, and will only be remembered for as long as the interrupt condition is
active.
Note that the status register is not automatically stored when entering an interrupt routine and restored when returning from
an interrupt routine. This must be handled by software.
General Interrupt Mask Register - GIMSK
Bit 7 6 5 4 3 2 1 0
$3B ($5B) INT1 INT0 - - - - - - GIMSK
Read/Write R/W R/W R R R R R R
Initial value 0 0 0 0 0 0 0 0
•
Bit 7 - INT1: External Interrupt Request 1 Enable
When the INT1 bit is set (one) and the I-bit in the Status Register (SREG) is set (one), the external pin interrupt is enabled.
The Interrupt Sense Control1 bits 1/0 (ISC11 and ISC10) in the MCU general Control Register (MCUCR) defines whet her
the external interrupt is activated on rising or falling edge of the INT1 pin or level sensed. Please note that INTF1 flag is not
set when level sensitive interrupt condition is met. However, INT1 interrupt is generated, provided that INT1 mask bit is set
in GIMSK register. Activity on the pin will cause an i nterrupt request even if INT1 is configured as an output. The corresponding interrupt of External Interrupt Req uest 1 is executed from program mem ory address $002. Se e also “Externa l
Interrupts”.
Bit 6 - INT0: External Interrupt Request 0 Enable
•
When the INT0 bit is set (one) and the I-bit in the Status Register (SREG) is set (one), the external pin interrupt is enabled.
The Interrupt Sense Control0 bits 1/0 (ISC01 and ISC00) in the MCU general Control Register (MCUCR) defines whet her
the external interrupt is activated on rising or falling edge of the INT0 pin or level sensed. Please note that INTF0 flag is not
set when level sensitive interrupt condition is met. However, INT0 interrupt is generated, provided that INT0 mask bit is set
in GIMSK register. Activity on the pin will cause an i nterrupt request even if INT0 is configured as an output. The corresponding interrupt of External Interrupt Req uest 0 is executed from program mem ory address $001. Se e also “Externa l
Interrupts.”
Bits 5..0 - Res: Reserved bits
•
These bits are reserved bits in the AT90S2333/4433 and always read as zero.
23
Page 24
General Interrupt Flag Register - GIFR
Bit 7 6 5 4 3 2 1 0
$3A ($5A) I NTF1 INTF0 - - - - - - GIFR
Read/Write R/W R/W R R R R R R
Initial value 0 0 0 0 0 0 0 0
•
Bit 7 - INTF1: External Interrupt Flag1
When an event on the INT1 pin triggers an interrupt request, INTF1 becomes set (one). If the I-bit in SREG and the INT1 bit
in GIMSK are set (one), the MCU will jump to the interrupt vector at address $002. The flag is cleared when the interrupt
routine is executed. Alternatively, the flag can be cleared by writing a logical one to it.
Bit 6 - INTF0: External Interrupt Flag0
•
When an event on the INT0 pin triggers an interrupt request, INTF0 becomes set (one). If the I-bit in SREG and the INT0 bit
in GIMSK are set (one), the MCU will jump to the interrupt vector at address $001. The flag is cleared when the interrupt
routine is executed. Alternatively, the flag can be cleared by writing a logical one to it.
Bits 5..0 - Res: Reserved bits
•
These bits are reserved bits in the AT90S2333/4433 and always read as zero.
Timer/Counter Interrupt Mask Register - TIMSK
Bit 7 6 5 4 3 2 1 0
$39 ($59) TOIE1 OCIE1 - - TICIE1 - TOIE0 - TIMSK
Read/Write R/W R/W R R R/W R R/W R
Initial value 0 0 0 0 0 0 0 0
Bit 7 - TOIE1: Timer/Counter1 Overflow Interrupt Enable
•
When the TOIE1 bit is set (one) and the I-bit in the Status Register is set (one), the Timer/Counter1 Overflow interrupt is
enabled. The corresponding interrupt (at vector $005) is executed if an overflow in Timer/Counter1 occurs, i.e., when the
TOV1 bit is set in the Timer/Counter Interrupt Flag Register - TIFR.
Bit 6 - OCIE1: Timer/Counter1 Output Compare Match Interrupt Enable
•
When the OCIE1 bit is set (on e) and the I- bi t in the S tatus Reg ister is set ( one ), th e Tim er/Cou nter 1 Co mpa re Match i nte r-
rupt is enabled. The corresponding interrupt (at vector $004) is executed if a Compare match in Timer/Counter1 occurs,
i.e., when the OCF1 bit is set in the Timer/Counter Interrupt Flag Register - TIFR.
Bit 5, 4 - Res: Reserved Bits
•
These bits are reserved bits in the AT90S2333/4433 and always read as 0.
Bit 3 - TICIE1: Timer/Counter1 Input Capture Interrupt Enable
•
When the TICIE1 bit is set (one) a nd the I-bit in the Statu s Register is set (one), th e Timer/Co unter1 Input Capt ure Event
Interrupt is enabled. The corresponding interrupt (at vector $003) is executed if a capture-triggering event occurs on pin 14,
PB0 (ICP), i.e., when the ICF1 bit is set in the Timer/Counter Interrupt Flag Register - TIFR.
Bit 2 - Res: Reserved Bit
•
This bit is a reserved bit in the AT90S2333/4433 and always reads as 0.
Bit 1 - TOIE0: Timer/Counter0 Overflow Interrupt Enable
•
When the TOIE0 bit is set (one) and the I-bit in the Status Register is set (one), the Timer/Counter0 Overflow interrupt is
enabled. The corresponding interrupt (at vector $006) is executed if an overflow in Timer/Counter0 occurs, i.e., when the
TOV0 bit is set in the Timer/Counter Interrupt Flag Register - TIFR.
Bit 0 - Res: Reserved bit
•
This bit is a reserved bit in the AT90S2333/4433 and always reads as zero.
24
AT90S/LS2333 and AT90S/LS4433
Page 25
AT90S/LS2333 and AT90S/LS4433
Timer/Counter Interrupt Flag Register - TIFR
Bit 7 6 5 4 3 2 1 0
$38 ($58) TOV1 OCF1 - - ICF1 - TOV0 - TIFR
Read/Write R/W R/W R R R/W R R/W R
Initial value 0 0 0 0 0 0 0 0
•
Bit 7 - TOV1: Timer/Counter1 Overflow Flag
The TOV1 is set (one) when an overflow occu rs i n Tim er /Co unte r1 . TOV1 is c lea red b y h ar dwa re when ex ec uti ng the co rresponding int errupt hand ling vecto r. Alterna tively, TOV 1 is clear ed by writin g a logic one to th e flag. Whe n the I-bit in
SREG, and TOIE1 (T imer/Counter 1 Overflow Inter rupt Enable ), and TOV1 ar e set (one), the Ti mer/Counter 1 Overflow
Interrupt is executed. In PWM mode, this bit is set when Timer/Counter1 advances from $0000.
Bit 6 - OCF1: Output Compare Flag 1
•
The OCF1 bit is set (one) whe n comp ar e ma tch oc c urs b etwe en t he Timer /Co unte r1 an d the dat a i n OCR1 - Out put Com-
pare Registe r 1. OC F1 is cl eared b y har dware when exe cuti ng the c orresp ondi ng inte rrupt hand ling ve ctor. Alter nati vely,
OCF1 is cleared by writing a logic one to the flag. When the I-bit in SREG, and OCIE1 (Timer/Counter1 Compare match
InterruptA Enable), and the OCF1 are set (one), the Timer/Counter1 Compare match Interrupt is executed.
Bit 5, 4 - Res: Reserved Bits
•
These bits are reserved bits in the AT90S2333/4433 and always read as 0.
Bit 3 - ICF1: Input Capture Flag 1
•
The ICF1 bit is set (one) to flag an input capture event, indicating that the Timer/Counter1 value has been transferred to the
input capture register - ICR1. ICF1 is cleared by har dware when executi ng the corresp onding interrupt han dling vector.
Alternatively, ICF1 is cleared by writing a logic one to the flag. When the SREG I-bit, and TICIE1 (Timer/Counter1 Input
Capture Interrupt Enable), and ICF1 are set (one), the Timer/Counter1 Capture Interrupt is executed.
Bit 2 - Res: Reserved Bit
•
This bit is a reserved bit in the AT90S2333/4433 and always reads as 0.
Bit 1 - TOV0: Timer/Counter0 Overflow Flag
•
The bit TOV0 is set (one) when an overflow occurs in Timer/Counter0. TOV0 is cleared by hardware when executing the
corresponding interrupt handling vector. Alternatively, TOV0 is cleared by writing a logic one to the flag. When the SREG Ibit, and TOIE0 (Timer/Counter0 Overflow Interrupt Enable), and TOV0 are set (one), the Timer/Counter0 Overflow interrupt
is executed.
Bit 0 - Res: Reserved bit
•
This bit is a reserved bit in the AT90S2333/4433 and always reads as zero.
External Interrupts
The external interrupts are triggered by the INT1 and INT0 pins. Observe that, if enabled, the interrupts will trigger even if
the INT0/INT1 pins are co nfi gured as ou tputs . Th is fea tur e p rovi de s a way o f ge nerati ng a s oftw ar e i nterr up t. The ex terna l
interrupts c an be t rigg ered by a fal ling or risin g edge or a low leve l. This is set up as i ndica ted in the sp ecifi catio n for th e
MCU Control Register - MCUCR. When the ex ternal int errupt is enabled and is configu red as level trig gered, the interru pt
will trigger as long as the pin is held low.
The external interrupts are set up as described in the specification for the MCU Control Register - MCUCR.
Interrupt Response Time
The interrupt execution res ponse for all the enabl ed AVR interrupts is 4 cloc k cycles minim um. 4 clock cycles after the
interrupt flag h as been set , the pro gram ve ctor addre ss for the actual interru pt handl ing routi ne is exec uted. Du ring this 4
clock cycle period, the Program Counter (2 bytes) is pushed onto the Stack, and the Stack Pointer is decremented by 2.
The vector is normally a relative jump to the interrupt routine, and this jump takes 2 clock cycles. If an interrupt occurs during execution of a multi-cycle instruction, this instruction is completed before the interrupt is served.
A return from an interrupt handling routine (same as for a subroutine call routine) takes 4 clock cycles. During these 4 clock
cycles, the Program Counter (2 bytes) is popped back from the Stack, the Stack Pointer is incremented by 2, and the I flag
in SREG is set . When th e AVR e xits from an inte rrupt, it will alway s return to the mai n program and ex ecute one more
instruction before any pending interrupt is served.
25
Page 26
MCU Control Register - MCUCR
The MCU Control Register contains control bits for general MCU functions.
Bit 76543210
$35 ($55) - - SE SM ISC11 ISC10 ISC01 ISC00 MCUCR
Read/Write R R R/W R/W R/W R /W R/W R/W
Initial value 0 0 0 0 0 0 0 0
•
Bits 7, 6 - Res: Reserved bit
These bits are reserved bits in the AT90S2333/4433 and always reads as zero.
Bit 5 - SE: Sleep Enable
•
The SE bit must be set (one) to make the MCU enter the sleep mode when the SLEEP instruction is executed. To avoid the
MCU entering the sleep mode unless it is the programmers purpose, it is recommended to set the Sleep Enable SE bit just
before the execution of the SLEEP instruction.
Bits 4 - SM: Sleep Mode
•
This bit selects between the two availabl e sleep modes. Whe n SM is cleared (zer o), Idle Mode is selected as sleep mode.
When SM is set (one), Power Down Mode is selected as Sleep Mode. For details, refer to the paragraph “Sleep Modes”
below.
Bits 3, 2 - ISC11, ISC10: Interrupt Sense Control 1 bit 1 and bit 0
•
The External Interrupt 1 is activated by the external pin INT1 if the SREG I-flag and the corresponding interrupt mask in the
GIMSK is set. The level and edges on the external INT1 pin that activate the interrupt are defined in the following table:
Table 7. Interrupt 1 Sense Control
ISC11 ISC10 Description
0 0 The low level of INT1 generates an interrupt request.
0 1 Any logical change on INT1 generates an interrupt request.
1 0 The falling edge of INT1 generates an interrupt request.
1 1 The rising edge of INT1 generates an interrupt request.
Note: When changing the ISC11/ISC10 bits, INT1 must be disabled by clearing its Interrupt Enable bit in the GIMSK Register. Other-
wise an interrupt can occur when the bits are changed.
The value on the INT1 pin is sampled before detecting edges. If edge or toggle interrupt is selected, pulses that last longer
than one clock period will generate an interru pt. Shorter pulses are not guaranteed to generate an in terrupt. If low leve l
interrupt is selected, the low level must be held until the completion of the currently executing instruction to generate an
interrupt
•
Bits 1, 0 - ISC01, ISC00: Interrupt Sense Control 0 bit 1 and bit 0
The External Interrupt 0 is activated by the external pin INT0 if the SREG I-flag and the corresponding interrupt mask is set.
The level and edges on the external INT0 pin that activate the interrupt are defined in the following table:
Table 8. Interrupt 0 Sense Control
ISC01 ISC00 Description
0 0 The low level of INT0 generates an interrupt request.
0 1 Any logical change on INT0 generates an interrupt request.
1 0 The falling edge of INT0 generates an interrupt request.
1 1 The rising edge of INT0 generates an interrupt request.
Note: When changing the ISC01/ISC00 bits, INT0 must be disabled by clearing its Interrupt Enable bit in the GIMSK Register. Other-
wise an interrupt can occur when the bits are changed.
26
AT90S/LS2333 and AT90S/LS4433
Page 27
AT90S/LS2333 and AT90S/LS4433
The value on the INT0 pin is sampled before detecting edges. If edge or toggle interrupt is selected, pulses that last longer
than one clock period will generate an interru pt. Shorter pulses are not guaranteed to generate an in terrupt. If low leve l
interrupt is selected, the low level must be held until the completion of the currently executing instruction to generate an
interrupt
Sleep Modes
To enter the sleep modes, the SE bit in MCUCR must be set (one) and a SLEEP instruction must be executed. The SM bit
in the MCUCR register selects which sleep mode (Idle or Power Down) will be activated by the SLEEP instruction. If an
enabled interrupt occur s whi le t he MCU is in a sleep mode, th e MCU a wak es, ex ec utes the int erru pt routine, and resumes
execution from the instruction following SLEEP. On wake-up from Power Down Mode on pin change, the two instructions
following SLEEP are executed before the pin change interrupt routine. The contents of the register file and I/O memory are
unaltered. If a reset occurs during sleep mode, the MCU wakes up and executes from the Reset vector.
Note that if a level triggered interrupt is used for wake-up from power down, the low level must be held for a time longer
than the reset delay time-out period t
Idle Mode
When the SM bit is cleared (zero), the SLEEP instruction forces the MCU into the Idle Mode stopping the CPU but allowing
Timer/Counters, Watchdog and the interrupt system to continue operating. This enables the MCU to wake up from external
triggered interrupts as well as internal ones like Timer Overflow interrupt and watchdog reset. If wake-up from the Analog
Comparator interrupt is not required, the analog comparator can be powered down by setting the ACD-bit in the Analog
Comparator Control and Status register - ACSR. This will reduce power consumption in Idle Mode.
. Otherwise, the device will not wake up.
TOUT
Power Down Mode
When the SM bit is set (one), the SLEEP instruction forces the MCU into the Power Down Mode. In this mode, the external
oscillator is stopped, while the external interrupts and the Watchdog (if enabled) continue operating. Only an external reset,
a watchdog reset (if enabled), an external level interrupt, or a pin change interrupt can wake up the MCU.
Note that if a level triggered or pin change interrupt is used for wake-up from Power Down Mode, the changed level must
be held for a time to wake up the MCU. This makes the MCU less sensitive to noise. The wake-up period is equal to the
clock-counting part of the r eset p er iod ( see Tab le 5 ). The M CU wi ll wake up fr om p owe r-down i f the inp ut h as the re qui red
level for two watchdog osci llator cycles . If the wake up period is shorter than two watchd og oscill ator cycles, the MCU will
wake up if the input has the required level for the duration of the wake-up period. If the wake-up condition disappears
before the wake-up period has expired, the MCU will wake up from power down without executing the corresponding
interrupt.
The period of the watchdog oscillator is 2.7µs (nominal) at 3.0V and 25°C. The frequency of the watchdog oscillator is volt-
age dependent as shown in the Electrical Characteristics section.
When waking up from Powe r Down Mode, ther e is a delay fro m the wake-up conditio n occurs un til the wake-u p becomes
effective. This a llows the clo ck to res tart a nd bec ome stab le aft er ha ving been s topped . The wak e-up pe riod is defi ned by
the same CKSEL fuses that define the reset time-out period.
27
Page 28
Timer / Counters
The AT90S2333/4433 pr ovid es two general purpose Timer/Cou nter s - one 8- bit T/C and one 16-bit T/C. Timer/ Coun ters 0
and 1 have individual prescaling selection from the same 10-bit prescaling timer. These Timer/Counters can either be used
as a timer with an internal clock timebase or as a counter with an external pin connection which triggers the counting.
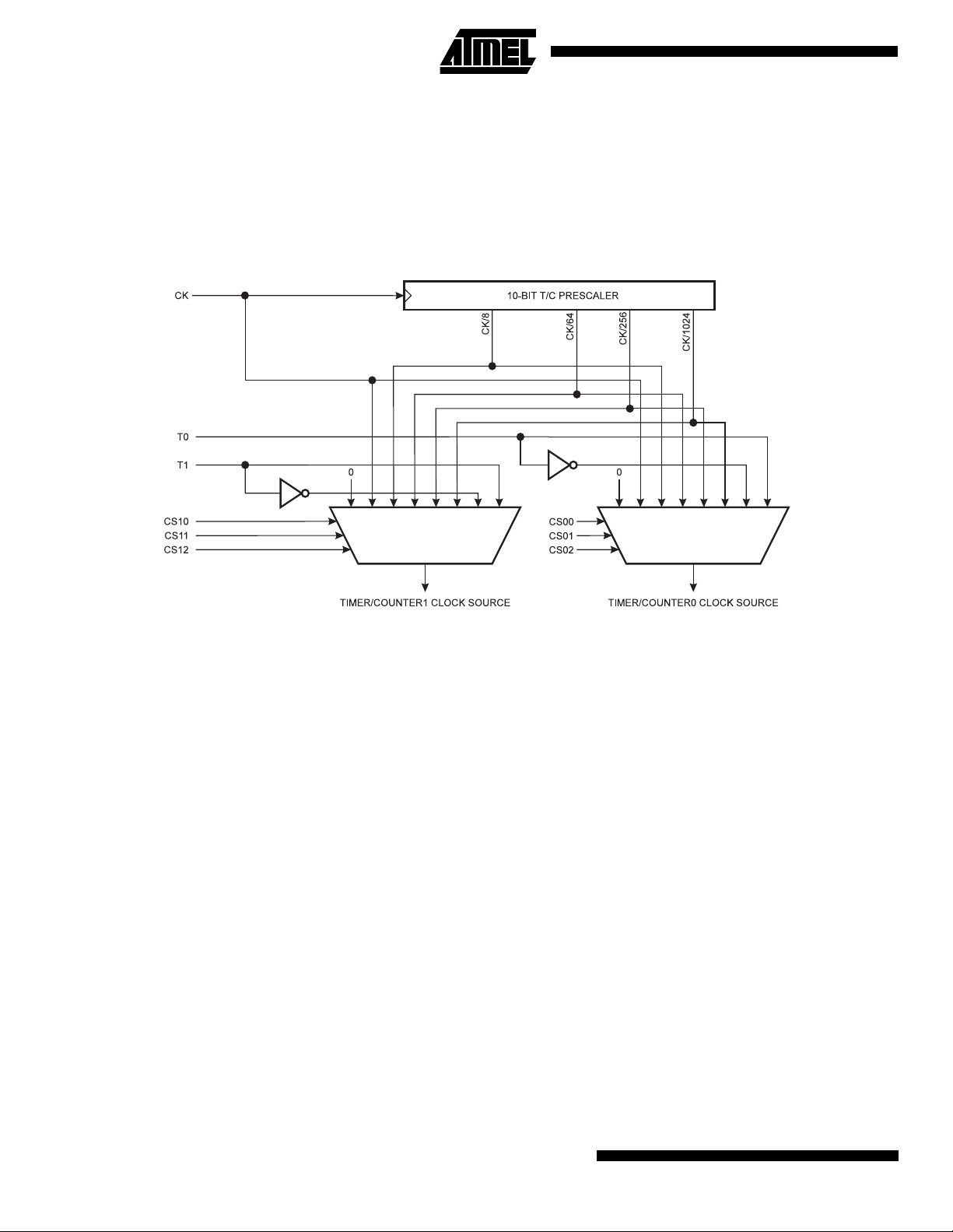
Timer/Counter Prescaler
Figure 30. Prescaler for Timer/Counter0 and 1
TCK1
For Timer/Counte rs 0 an d 1, the fou r d iffer ent pres caled sel ection s a re: C K/8, CK /64, CK/2 56 and CK/1 024, whe re CK is
the oscillator clock. For the two Timer/Counters 0 and 1, external source and stop can also be selected as clock sources.
TCK0
8-bit Timer/Counter0
The 8-bit Timer/Counter0 can select cl ock sou rce from CK, presc aled CK , or an exter nal pin. In a dditio n it can b e stoppe d
as described in the specification for the Timer/Counter0 Cont ro l Register - TCCR0. The overflo w status fl ag i s found in the
Timer/Counter Inter rupt Flag Register - TIF R. Contro l signals ar e found in the Timer/Co unter0 Con trol Re gister - TCCR0 .
The interrupt enable/disable settings for Timer/Counter0 are found in the Timer/Counter Interrupt Mask Register - TIMSK.
When Timer/Counter0 is externally clocked, the external signal is synchronized with the oscillator frequency of the CPU. To
assure proper sampling of the external clock, the minimum time between two external clock transitions must be at least one
internal CPU clock period. The external clock signal is sampled on the rising edge of the internal CPU clock.
The 8-bit Timer/Counter0 features both a high resolution and a high accuracy usage with the lower prescaling opportunities. Similarly, t he hig h pr escali ng opp ortuniti es ma ke th e Time r/Coun ter0 us eful fo r lower spe ed fun ctions or e xact tim ing
functions with infrequent actions. Figure 31 shows the block diagram for Timer/Counter0.
28
AT90S/LS2333 and AT90S/LS4433
Page 29
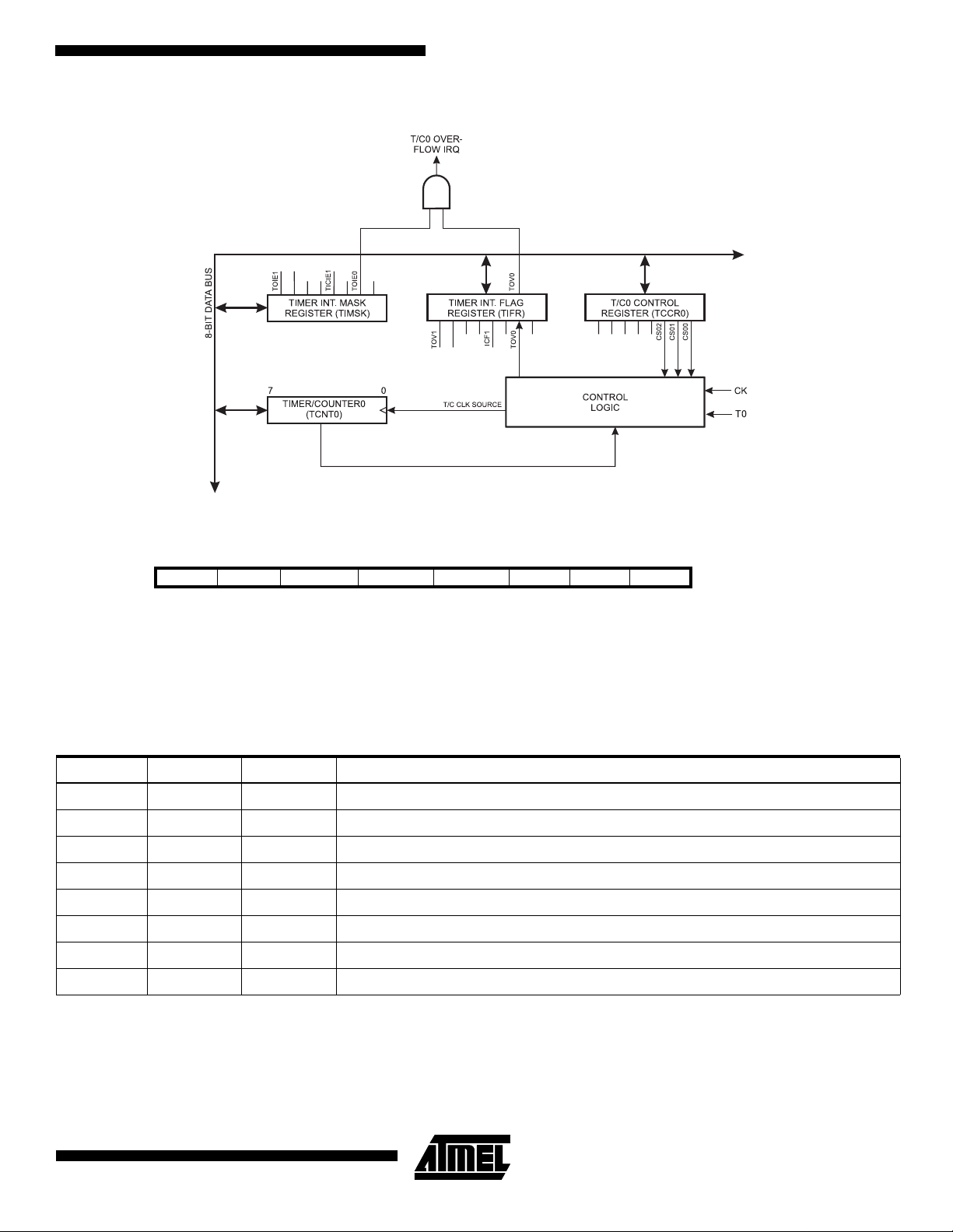
Figure 31. Timer/Counter0 Block Diagram
OCIE1
AT90S/LS2333 and AT90S/LS4433
OCF1
T0
Timer/Counter0 Control Register - TCCR0
Bit 7 6 5 4 3 2 1 0
$33 ($53) - - - - - CS02 CS01 CS00 TCCR0
Read/Write R R R R R R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
•
Bits 7-3 - Res: Reserved bits
These bits are reserved bits in the AT90S2333/4433 and always read as zero.
Bits 2,1,0 - CS02, CS01, CS00: Clock Select0, bit 2,1 and 0
•
The Clock Select0 bits 2,1, and 0 define the prescaling source of Timer0.
Table 9. Clock 0 Prescale Select
CS02 CS01 CS00 Description
0 0 0 Stop, Timer/Counter0 is stopped.
001CK
0 1 0 CK / 8
011CK / 64
1 0 0 CK / 256
1 0 1 CK / 1024
1 1 0 External Pin T0, falling edge
1 1 1 External Pin T0, rising edge
The Stop condition provides a Timer Enable/Disable function. The prescaled CK modes are scaled direct ly from the CK
oscillator clock. If the external pin modes are used, for Timer/Counter0, transitions on PD4/(T0) will clock the counter even
if the pin is configured as an output. This feature can give the user SW control of the counting.
29
Page 30
Timer Counter 0 - TCNT0
Bit 76543210
$32 ($52) MSB LSB TCNT0
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
The Timer/Count er0 is re alized as an up- counter with rea d and wri te acce ss. If the Timer/ Counter 0 is writt en and a clock
source is present, the Timer/Counter0 continues counting in the clock cycle following the write operation.
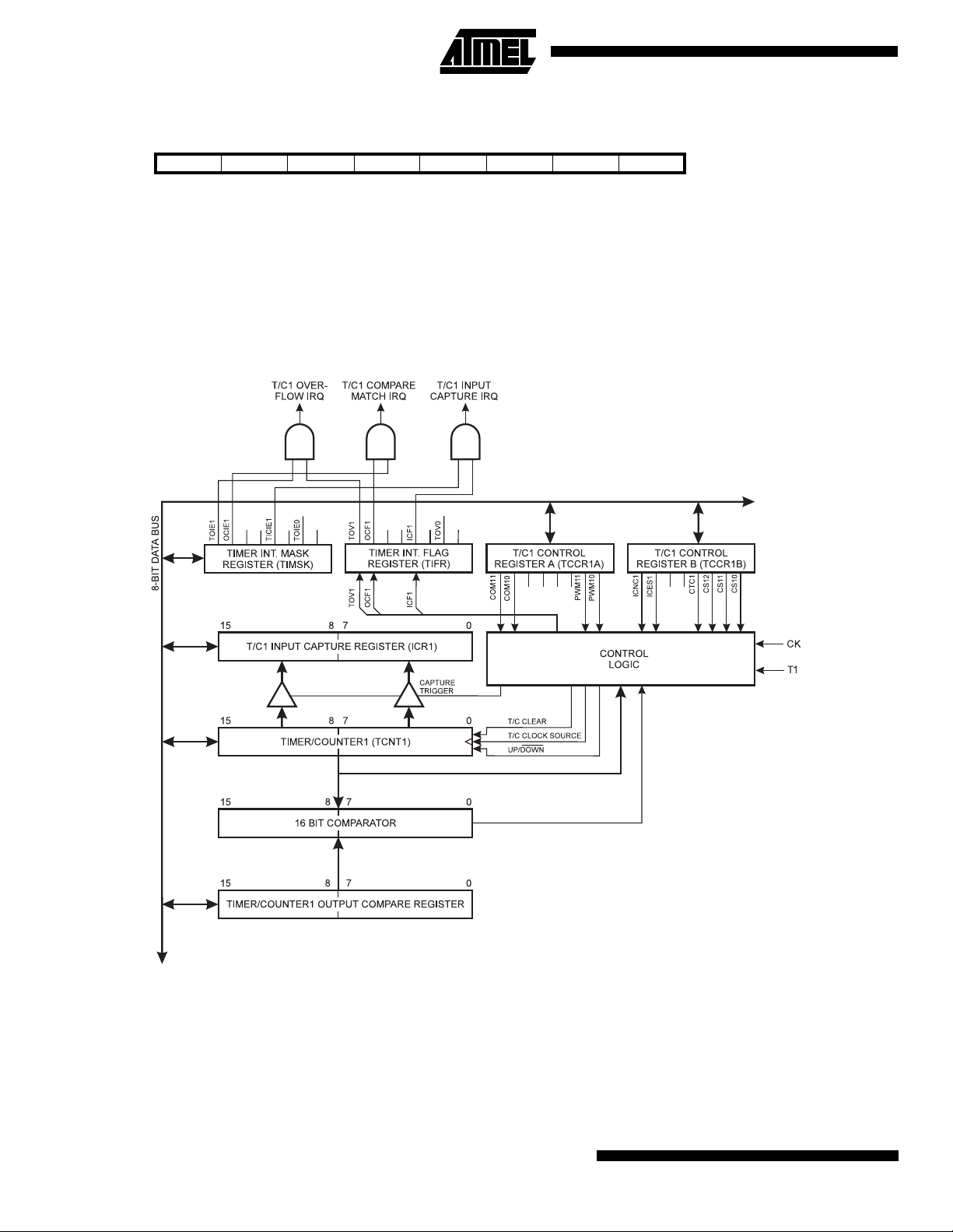
16-bit Timer/Counter1
Figure 32 shows the bl ock diagram for Timer/Counter1.
Figure 32. Timer/Counter1 Block Diagram
T1
The 16-bit Timer/Counter1 can select clock source from CK, prescaled CK, or an external pin. In addition it can be stopped
as described in the specification for the Timer/Counter1 Control Register - TCCR1A. The different status flags (overflow,
compare match and cap ture e vent) and contr ol si gnals ar e found in the Tim er/Co unter Inter rupt Flag R egist er - TIFR. The
interrupt enable/disable settings for Timer/Counter1 are found in the Timer/Counter Interrupt Mask Register - TIMSK.
30
AT90S/LS2333 and AT90S/LS4433
Page 31

AT90S/LS2333 and AT90S/LS4433
When Timer/Counter1 is externally clocked, the external signal is synchronized with the oscillator frequency of the CPU. To
assure proper sampling of the external clock, the minimum time between two external clock transitions must be at least one
internal CPU clock period. The external clock signal is sampled on the rising edge of the internal CPU clock.
The 16-bit Timer/Counter1 feat ures both a high re solut ion and a high accu racy usage w ith the lower presca ling op portun ities. Similarly, the high prescaling opportunities makes the Timer/Counter1 useful for lower speed functions or exact timing
functions with infrequent actions.
The Timer/Counter1 supports an Output Compare function using the Output Compare Register 1 - OCR1 as the data
source to be compar ed to the Ti mer/Counter1 c ontents. The Output Com pare function s inclu de optional c learing of th e
counter on compare matches, and actions on the Output Compare pin 1 on compare matches.
Timer/Counter1 can also be used as a 8, 9 or 10-bit Pulse With Modulator. In this mode the counter and the OCR1 register
serve as a glitch-free stand-alone PWM with centered pulses. Refer to page 34 for a detailed description on this function.
The Input Capture function of Timer/Counter1 provides a capture of the Timer/Counter1 contents to the Input Capture Register - ICR1, triggered by an external event on the Input Capture Pin - ICP. The actual capture event settings are defined by
the Timer/Counter1 Contr o l Re gist e r - TC CR1. I n ad di tio n, th e A nal og Comp ar ato r ca n be set to trigger the In put Captu r e.
Refer to the section, “The Analog Comparator”, for details on this. The ICP pin logic is shown in Figure 33.
Figure 33. ICP Pin Schematic Diagram
If the noise canceler function is enabled, the actual trigger condition for the capture event is monitored over 4 samples, and
all 4 must be equal to activate the capture flag. The input pin signal is sampled at XTAL clock frequency.
Timer/Counter1 Control Register A - TCCR1A
Bit 7 6 5 4 3 2 1 0
$2F ($4F) COM11 COM10 - - - - PWM11 PWM10 TCCR1A
Read/Write R/W R/W R R R R R/W R/W
Initial value 0 0 0 0 0 0 0 0
•
Bits 7,6 - COM11, COM10: Compare Output Mode1, bits 1 and 0
The COM11 and COM10 control bits determine any output pin action following a compare match in Timer/Counter1. Any
output pin actions affect pin OC1 - Output Compare pin 1. This is an alternative function to an I/O port, and the corresponding direction control bit must be set (one) to control an output pin. The control configuration is shown in Table 10.
Table 10. Compare 1 Mode Select
COM11 COM10 Description
0 0 Timer/Counter1 disconnected from output pin OC1
0 1 Toggle the OC1 output line.
1 0 Clear the OC1 output line (to zero).
1 1 Set the OC1 output line (to one).
In PWM mode, these bits have a different function. Refer to Table 11 for a detailed description.
31
Page 32

•
Bits 5..2 - Res: Reserved bits
These bits are reserved bits in the AT90S2333/4433 and always read zero.
Bits 1,0 - PWM11, PWM10: Pulse Width Modulator Select Bits
•
These bits select PWM operation of Timer/Counter1 as specified in Table 11. This mode is described on page 34.
Table 11. PWM Mode Select
PWM11 PWM10 Description
0 0 PWM operat ion of Timer/Counter1 is disabled
0 1 Timer/Counter1 is an 8-bit PWM
1 0 Timer/Counter1 is a 9-bit PWM
1 1 Timer/Counter1 is a 10-bit PWM
Timer/Counter1 Control Register B - TCCR1B
Bit 7 6 5 4 3 2 1 0
$2E ($4E) ICNC1 ICES1 - - CTC1 CS12 CS11 CS10 TCCR1B
Read/Write R/W R/W R R R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Bit 7 - ICNC1: Input Capture1 Noise Canceler (4 CKs)
•
When the ICNC1 bit is cleared (zero), the input capture trigger noise canceler function is disabled. The input capture is trig-
gered at the first rising/falling edge sampled on the ICP - input ca pture pin - as specif ied. W hen the ICNC1 bit is set (on e),
four successi ve samp les are measured on the ICP - input ca pture pi n, and all samples mu st be high /low acc ordin g to the
input capture trigger specification in the ICES1 bit. The actual sampling frequency is the XTAL clock frequency.
Bit 6 - ICES1: Input Capture1 Edge Select
•
While the ICES1 bit is cleared (zero), the Timer/Counter1 contents are transferred to the Input Capture Register - ICR1 - on
the falling edge of the input capture pin - ICP. While the ICES1 bit is set (one), the Timer/Counter1 contents are transferred
to the Input Capture Register - ICR1 - on the rising edge of the input capture pin - ICP.
Bits 5, 4 - Res: Reserved bits
•
These bits are reserved bits in the AT90S2333/4433 and always read zero.
Bit 3 - CTC1: Clear Timer/Counter1 on Compare match
•
When the CTC1 control bit is set (one), the Timer/Counter1 is reset to $0000 in the clock cycle after a compare match. If
the CTC1 control bit is cleared, Timer/Counter1 continues counting and is unaffected by a compare match. Since the compare match is detected in the CPU clock cycle following the match, this function will behave differently when a prescaling
higher than 1 is used for the timer. When a prescaling of 1 is used, and the compare register is set to C, the timer will count
as follows if CTC1 is set:
... | C-2 | C-1 | C | 0 | 1 | ...
When the prescaler is set to divide by 8, the timer will count like this:
... | C-2, C-2, C-2, C-2, C-2, C-2, C-2, C-2 | C-1, C-1, C-1, C-1, C-1, C-1, C-1, C-1 | C, 0, 0, 0, 0, 0, 0, 0, 0 | ...
In PWM mode, this bit has no effect.
Bits 2,1,0 - CS12, CS11, CS10: Clock Select1, bit 2,1 and 0
•
The Clock Select1 bits 2,1 and 0 define the prescaling source of Timer/Counter1.
32
AT90S/LS2333 and AT90S/LS4433
Page 33

AT90S/LS2333 and AT90S/LS4433
Table 12. Clock 1 Prescale Select
CS12 CS11 CS10 Description
0 0 0 Stop, the Timer/Counter1 is stopped.
001CK
0 1 0 CK / 8
011CK / 64
1 0 0 CK / 256
1 0 1 CK / 1024
1 1 0 External Pin T1, falling edge
1 1 1 External Pin T1, rising edge
The Stop condition provides a Timer Enable/Disable function. The prescaled CK modes are scaled direct ly from the CK
oscillator clock. If the external pin modes are used for Timer/Counter0, transitions on PD5/(T1) will clock the counter even if
the pin is configured as an output. This feature can give the user SW control of the counting.
Timer/Counter1 - TCNT1H and TCNT1L
Bit 151413121110 9 8
$2D ($4D) MSB TCNT1H
$2C ($4C) LSB TCNT1L
76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
00000000
This 16-bit register contain s the prescaled v alue of the 16-b it Timer/Counte r1. To ensure t hat both the high and low by tes
are read and written sim ultane ously w hen the CP U acce sses these regis ters, the ac cess is pe rfor med u sing an 8-bit t emporary register (TEMP). This temporary register is also used when accessing OCR1 and ICR1. If the main program and
also interrupt routines perform access to registers using TEMP, interrupts must be disabled during access from the main
program (and from interrupt routines if interrupts are allowed from within interrupt routines).
•
TCNT1 Timer/Counter1 Write
When the CPU writes to the high byte TCNT1H, the written data is placed in the TEMP register. Next, when the CPU writes
the low byte TCNT1L, this byte of data is combined with the byte data in the TEMP register, and all 16 bits are written to the
TCNT1 Timer/Counter1 register simultaneously. Consequently, the high byte TCNT1H must be accessed first for a full 16bit register write operation.
TCNT1 Timer/Counter1 Read
•
When the CPU reads the low by te TCNT1L, the da ta of the low byte TCNT1 L is sent to the CPU and the data of the high
byte TCNT1H is placed in the TEMP regi ster. Wh en the CPU reads the data i n the high byt e TCNT1H, the CPU r eceives
the data in the TEMP register. Consequently , the low byte TCNT1L must be accessed fir st for a full 16-bit regi ster read
operation.
The Timer/Counter1 is realized as an up or up/down (in PWM mode) counter with read and write access. If Timer/Counter1
is written to and a clock source is selected, the Timer/Counter1 continues counting in the timer clock cycle after it is preset
with the written value.
33
Page 34

Timer/Counter1 Output Compare Register - OCR1H and OCR1L
Bit 151413121110 9 8
$2B ($4B) MSB OCR1 H
$2A ($4A) LSB OCR1L
76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
R/W R/W R/W R/ W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
00000000
The output compare register is a 16-bit read/write register.
The Timer/Counter1 Outpu t Compare Regi ster contains the data to b e continuously compared with Timer/Counter 1.
Actions on compare matches are specified in the Timer/Counter1 Control and Status register.
Since the Output Compare Register - OCR1 - is a 16-bit register, a temporary register TEMP is used when OCR1 is written
to ensure that both bytes are updated simultaneously. When the CPU writes the high byte, OCR1H, the data is temporarily
stored in the TEMP register. When the CPU writes the low byte, OCR1L, the TEMP register is simultaneously written to
OCR1H. Consequently, the high byte OCR1H must be written first for a full 16-bit register write operation.
The TEMP register is also used when accessing TCNT1, and ICR1. If the main program and also interrupt routines perform
access to registers using TEMP, interrupts must be disabled during access from the main program.
Timer/Counter1 Input Capture Register - ICR1H and ICR1L
Bit 151413121110 9 8
$27 ($47) MSB ICR1H
$26 ($46) LSB ICR1L
76543210
Read/Write RRRRRRRR
RRRRRRRR
Initial value 0 0 0 0 0 0 0 0
00000000
The input capture register is a 16-bit read-only register.
When the rising or falling edge (a ccor di ng to the in put c ap ture edg e setting - ICES1) of the signal at the inp ut ca pture pin -
ICP - is detected, th e cur ren t v alue of the Timer/Counter1 is trans ferr ed to the In put Cap ture Register - ICR1. At th e s am e
time, the input capture flag - ICF1 - is set (one).
Since the Input Capture Re gister - ICR1 - is a 16- bit registe r, a temporary register T EMP is us ed when ICR1 is read to
ensure that both bytes are read simultaneously. When the CPU reads the low byte ICR1L, the data is sent to the CPU and
the data of the high byte I CR1H i s plac ed in th e TEM P reg is ter . When the CPU reads the data in the hig h by te ICR1H, the
CPU receives the data in the TEMP register. Consequently, the low byte ICR1L must be accessed first for a full 16-bit register read operation.
The TEMP register is also used when accessing TCNT1 and OCR1. If the main program and also interrupt routines perform access to registers using TEMP, interrupts must be disabled during access from the main program.
Timer/Counter1 in PWM mode
When the PWM mode is selected, Timer/Counter1 and the Output Compare Register1 - OCR1, form a 8, 9, or 10-bit, freerunning, glitch-free, and phase correct PWM with output on the PB1(OC1) pin. Timer/Counter1 acts as an up/down
counter, counting up fro m $0000 to TOP (se e Table 13), where it turns and coun ts down again to zer o before the cy cle is
repeated. When the counter value matches the co nte nts of th e 8 , 9 or 10 le as t s ig nif ic ant bi ts of O CR1, the P B1 (OC 1 ) pi n
34
AT90S/LS2333 and AT90S/LS4433
Page 35

AT90S/LS2333 and AT90S/LS4433
is set or cleared accord ing to the s etting s of the COM11 and CO M10 bits in the Timer /Counter1 Contr ol Reg ister TCCR 1.
Refer to Table 14 for details.
Table 13. Timer TOP Va lues and PWM F requency
PWM
Resolution
8-bit $00FF (255) f
9-bit $01FF (511) f
10-bit $03FF(1023) f
Timer TOP
value Frequency
TCK1
TCK1
TCK1
/510
/1022
/2046
Table 14. Compare1 Mode Select in PWM Mode
COM11 COM10 Effect on OC1
0 0 Not connected
0 1 Not connected
10
1 1 Cleared on compare match, dow n-co unting . Set on c ompar e matc h, up-co unting (in v erted PWM).
Cleared on compare match , up-counti ng. Set on compare match, down-counting
(non-inverted PWM).
Note that in the PWM mode, the 10 least significant OCR1 bits, when written, are transferred to a temporary location. They
are latched when Timer/Co unter1 reac hes TOP. This prev ents the occu rrence of odd -length PWM pulses (glitc hes) in the
event of an unsynchronized OCR1 write. See Figure 34 for an example.
Figure 34. Effects on Unsynchronized OCR1 Latching
During the time betwee n th e wr i te a nd the lat ch ope ra tio n, a read fr om O CR1 wil l rea d t he c on tent s of th e te mporary location. This means that the most recently written value always will read out of OCR1.
When OCR1 contains $0000 or TOP, the output OC1 is updated to low or high on the next compare match according to the
settings of COM11 and COM10. This is shown in Table 15.
35
Page 36

Table 15. PWM Outputs OCR = $0000 or TOP
COM11 COM10 OCR1 Output OC1
1 0 $0000 L
10TOP H
1 1 $0000 H
11TOP L
In PWM mode, the Timer Overflow Flag1, TOV1, is set when the counter changes direction at $0000. Timer Overflow
Interrupt1 operat es exactly as in normal T imer/Cou nter mo de, i.e. it is ex ecuted when TOV 1 is set provide d that T imer
Overflow Interrupt1 and global interrupts are enabled. This also applies to the Timer Output Compare1 flag and interrupt.
Watchdog Timer
The Watchdog Timer is clocked from a separate on-chip os cillator. By controlling the Watc hdog Timer prescaler, the
Watchdog reset interval can be adjusted as shown in Table 6. See characterization data for typical values at other V
els. The WDR - Watchdog Reset - instruct ion resets the Watchdog Timer. Eight different cloc k cycle periods can be
selected to determine the reset period. If the reset period expires without another Watchdog reset, the AT90S2333/4433
resets and executes from the reset vector. For timing details on the Watchdog reset, refer to page 22.
To prevent unintentional disabling of the watchdog, a special turn-off sequence must be followed when the watchdog is disabled. Refer to the description of the Watchdog Timer Control Register for details.
Figure 35. Watchdog Timer
CC
lev-
Watchdog Timer Control Register - WDTCR
Bit 76543210
$21 ($41) - - - WDTOE WDE WDP2 WDP1 WDP0 WDTCR
Read/Write R R R R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Bits 7..5 - Res: Reserved bits
•
These bits are reserved bits in the AT90S2333/4433 and will always read as zero.
Bit 4 - WDTOE: Watch Dog Turn-Off Enable
•
This bit must be set ( one ) whe n t he WDE b it is cleared. Otherwise, the watchdog will n ot be dis ab le d. On ce s et, hard w are
will clear this bit to zero after four clock cycles. Refer to the description of the WDE bit for a watchdog disable procedure.
36
AT90S/LS2333 and AT90S/LS4433
Page 37

AT90S/LS2333 and AT90S/LS4433
•
Bit 3 - WDE: Watch Dog Enable
When the WDE is set (one) the Watchdog Timer is enabled, and if the WDE is cleared (zero) the Watchdog Timer function
is disabled. WDE can only be cleared if the WDTOE bit is set(one). To disable an enabled watchdog timer, the following
procedure must be followed:
1. In the same operation, write a logical one to WDTOE and WDE. A logical one must be written to WDE even though
it is set to one before the disable operation starts.
2. Within the next four clock cycles, write a logical 0 to WDE. This disables the watchdog.
Bits 2..0 - WDP2, WDP1, WDP0: Watch Dog Timer Prescaler 2, 1 and 0
•
The WDP2, WDP1 and WDP0 bits determine the Watchdog Timer prescaling when the Watchdog Timer is enabled. The
different prescaling values and their corresponding time-out Periods are shown inTable 16. .
Table 16. Watch Dog Timer Prescale Select
Typical time-out
WDP2 WDP1 WDP0 Number of WDT Oscillator cycles
0 0 0 16K cycles 47 ms 15 ms
0 0 1 32K cycles 94 ms 30 ms
0 1 0 64K cycles 0.19 s 60 ms
0 1 1 128K cycles 0.38 s 0.12 s
1 0 0 256K cycles 0.75 s 0,24 s
1 0 1 512K cycles 1.5 s 0.49 s
1 1 0 1,024K cycles 3.0 s 0.97 s
1 1 1 2,048K cycles 6.0 s 1.9 s
Note: The frequency of the watchdog oscillator is voltage dependent as shown in the Electrical Characteristics section.
The WDR - Watchdog Reset - instruction should always be executed before the Watchdog Timer is enabled. This ensures that
the reset period will be in accordance with the Watchdog Timer prescale settings. If the Watchdog Timer is enabled without
reset, the watchdog timer may not start counting from zero.
at VCC = 3.0V
Typical time-out
at VCC = 5.0V
37
Page 38

EEPROM Read/Write Access
The EEPROM access registers are accessible in the I/O space.
The write access time is in th e r ang e of 2 .5 - 4ms , de pen di ng on the V
ware detect when the next byte can be written. A special EEPROM Ready interrupt can be set to trigger when the
EEPROM is ready to accept new data.
An ongoing EEPROM write operation will complete even if a reset condition occurs.
In order to prevent unintentional EEPROM writes, a two state write procedure must be followed. Refer to the description of
the EEPROM Control Register for details on this.
When the EEPROM is written, the CPU is halted for two clock cycles before the next instruction is executed.
When the EEPROM is read, the CPU is halted for four clock cycles before the next instruction is executed.
EEPROM Address Register - EEAR
Bit 76543210
$1E ($3E) EEAR7 EEAR6 EEAR5 EEAR4 EEAR3 EEAR2 EEAR1 EEAR0 EEAR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value XXXXXXXX
The EEPROM Addre ss Register - EEA R specifies the EEPROM add ress in the 128/25 6 bytes EEPRO M space. The
EEPROM data bytes are addressed linearly between 0 and 127/255. The initial value of EEAR is undefined. A proper value
must be written before the EEPROM may be accessed.
EEPROM Data Register - EEDR
voltages. A self- ti mi ng fu nc tio n le ts th e us er s oft-
CC
Bit 76543210
$1D ($3D) MSB LSB EEDR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Bits 7..0 - EEDR7.0: EEPROM Data
•
For the EEPROM writ e o peration , the E EDR reg ister contai ns th e data to be writ ten to the E EPROM in the ad dress give n
by the EEAR register. For the EEPROM read operation, the EEDR contains the data read out from the EEPROM at the
address given by EEAR.
EEPROM Control Register - EECR
Bit 76543210
$1C ($3C) - - - - EERIE EEMWE EEWE EERE EECR
Read/Write R R R R R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Bit 7..4 - Res: Reserved bits
•
These bits are reserved bits in the AT90S2333/4433 and will always read as zero.
Bit 3 - EERIE: EEPROM Ready Interrupt Enable
•
When the I bit in SREG and EERIE are set (one), the EEPROM Ready Interrupt is enabled. When cleared (zero), the inter-
rupt is disabled. The EEPROM Ready interrupt generates a constant interrupt when EEWE is cleared (zero).
Bit 2 - EEMWE: EEPROM Master Write Enable
•
The EEMWE bit determines whether setting EEWE to one causes the EEPROM to be written. When EEMWE is set(one)
setting EEWE will wri te d ata t o the EE PROM at the selected addr es s If E EM WE is zer o, s ett ing EE WE will hav e n o ef fec t.
When EEMWE has been set (one) by softwa re, hardwa re clears the bit to zero after four cloc k cycles. See the des criptio n
of the EEWE bit for a EEPROM write procedure.
38
AT90S/LS2333 and AT90S/LS4433
Page 39

AT90S/LS2333 and AT90S/LS4433
•
Bit 1 - EEWE: EEPROM Write Enable
The EEPROM Write Enable Signal EEWE is the write strobe to the EEPROM. When address and data are correctly set up,
the EEWE bit must be set to write the value into the EEPROM. The EEMWE bit must be set when the logical one is written
to EEWE, otherwise no EEP ROM write takes p lace. The following proc edure should be follow ed when writing the
EEPROM (the order of steps 2 and 3 is unessential):
1. Wait until EEWE becomes zero.
2. Write new EEPROM address to EEAR (optional).
3. Write new EEPROM data to EEDR (optional).
4. Write a logical one to the EEMWE bit in EECR.
5. Within four clock cycles after setting EEMWE, write a logical one to EEWE.
Caution: An interrupt between step 4 and step 5 will make the write cycle fail, since the EEPROM Master Write Enable will
time-out. If an interrupt routine accessing the EEPROM is interrupting another EEPROM access, the EEAR and EEDR register will be modified, causing the interrupted EEPROM access to fail. It is recommended to have the global interrupt flag
cleared during the 4 last steps to avoid these problems.
When the write access time (typically 2.5 ms at V
(zero) by hardware. The user software can poll this bit and wait for a zero before writing the next byte. When EEWE has
been set, the CPU is halted for two cycles before the next instruction is executed.
Bit 0 - EERE: EEPROM Read Enable
•
The EEPROM Read Enable Signal EERE is the read strobe to the EEPROM. When the correct address is s et up in the
EEAR register, the EERE bit must be set. When the EERE bit is cleared (zero) by hardware, requested data is found in the
EEDR register. The EEPROM read access takes one instruction and there is no need to poll the EERE bit. When EERE
has been set, the CPU is halted for four cycles before the next instruction is executed.
The user should poll t he EE WE bi t before star ting th e read op erati on. If a write op erati on is in prog ress wh en new data or
address is written to the EEPROM I/O registers, the write operation will be interrupted, and the result is undefined.
= 5V or 4 ms at VCC = 2.7V) has elap sed, th e EEWE bit is cle ared
CC
Prevent EEPROM Corruption
During periods of l ow V
EEPROM to operate properly. These issues are the same as for board level systems using the EEPROM, and the same
design solutions should be applied.
An EEPROM data cor ruptio n can be cau sed b y two si tuation s when the vo ltage is too low. Fi rst, a reg ular write s equenc e
to the EEPROM req uires a minim um vo ltage to opera te corr ectly . Sec ondly, th e CPU it se lf can execute i nstru ctio ns inco rrectly, if the supply voltage for executing instructions is too low.
EEPROM data corruption can easily be avoided by following these design recommendations (one is sufficient):
1. Keep the AVR RESET active (low) during periods of insufficient power supply voltage. This can be done by enabling
the internal Brown-Out Detector (BOD) if the operating speed matches the detection level. If not, an external low
Reset Protection circuit can be applied.
V
CC
2. Keep the AVR core in Power Down Sleep Mode during periods of low V
ing to decode and execute instructions, effectively protecting the EEPROM registers from unintentional writes.
3. Store constants in Flash memory if the ability to change memory contents from software is not required. Flash
memory can not be updated by the CPU, and will not be subject to corruption.
the EEPROM data c an be c orru pte d b ec aus e the s upp ly v ol tage i s too l ow for th e CPU and the
CC,
. This will prevent the CPU from attempt-
CC
39
Page 40

Serial Peripheral Interface - SPI
The Serial Peripheral Interface (SPI) allows high-speed synchronous data transfer between the AT90S2333/4433 and
peripheral devices or between several AVR devices. The AT90S2333/4433 SPI features include the following:
• Full-Duplex, 3-Wire Synchronous Data Transfer
• Master or Slave Operation
• LSB First or MSB First Data Transfer
• Four Programmable Bit Rates
• End of Transmission Interrupt Flag
• Write Collision Flag Protection
• Wake-up from Idle Mode
Figure 36. SPI Block Diagram
The interconnection between master and slave CPUs with SPI is shown in Figure 37. The PB5(SCK) pin is the clock output
in the master mode and is th e cl ock in put in the s lave mode . Writi ng to the S PI dat a regis ter of the master CPU s tarts th e
SPI clock generator, and the data written shifts out of the PB3(MOSI) pin and into the PB3(MOSI) pin of the slave CPU.
After shifting one byte, the SPI clock generator stops, setting the end of transmission flag (SPIF). If the SPI interrupt enable
bit (SPIE) in the SPCR register is set, an interrupt is requested. The Slave Select input, PB2(SS
individual slave SPI device. The two shift registers in the Master and the Slave can be considered as one distributed 16-bit
circular shift register. This is shown in Figure 37. When data is shifted from the master to the slave, data is also shifted in
the opposite direction, simultaneously. This means that during one shift cycle, data in the master and the slave are
interchanged.
40
AT90S/LS2333 and AT90S/LS4433
), is set low to select an
Page 41

AT90S/LS2333 and AT90S/LS4433
Figure 37. SPI Master-Slave Interconnection
The system is single buffered in the transmit direction and double buffered in the receive direction. This means that bytes to
be transmitted cannot be written to the SPI Data Reg ister befo re the entire sh ift cyc le is complete d. When re ceiving data,
however, a received byte must be read from the SPI Data Register before the next byte has been completely shifted in.
Otherwise, the first byte is lost.
When the SPI is enabled, the data direction of the M O SI, MIS O, SCK an d SS
table:
pins is overridden ac cording to the followin g
Table 17. SPI Pin Direction Overrides
Pin Direction Overrides, Master SPI Mode Direction Overrides, Slave SPI Modes
MOSI User Defined Input
MISO Input User Defined
SCK User Defined Input
SS
Note: See “Alternate Functions Of Port B” on page 60 for a detailed description og how to define the direction of the user defined
SPI pins.
User Defined Input
SS Pin Functionality
When the SPI is configured as a master (MSTR in SPCR is set), the user can determine the direction of the SS pin. If SS is
configured as an output, the pin i s a general output pin which does not affect the SPI s ystem. If SS
input, it must be hold high to ensure Master SPI operation. If the SS pin is driven low by peripheral circuitry when the SPI is
configured as master with the SS pin defined as an input, the SPI system interprets this as another master selecting the
SPI as a slave and starting to send data to it. To avoid bus contention, the SPI system takes the following actions:
1. The MSTR bit in SPCR is cleared and the SPI system becomes a slave. As a result of the SPI becoming a slave, the
MOSI and SCK pins become inputs.
2. The SPIF flag in SPSR is set, and if the SPI interrupt is enabled and the I-bit in SREG is set, the interrupt routine will
be executed.
Thus, when interrupt-driven SPI transmittal is used in master mode, and there exists a possibility that SS
interrupt should a lwa ys c he ck that the MSTR bit is s til l se t. O n ce the MS TR b it has b een c lear ed by a sl av e s elec t, i t mus t
be set by the user to re-enale the SPI master mode.
When the SPI is configured as a slave, the SS
becomes an output if configured so by the user. All other pins are inputs. When SS
inputs, and the SPI is passive, which means that it will not receive incoming data. Note that the SPI logic will be reset once
the SS
immediately and both data received and data sent must be considered as lost.
pin is brought high . If the SS pin i s brou ght hi gh duri ng a t ransm ission , the SPI wi ll sto p sen ding a nd rec eiving
pin is always input. When SS is held low, the SPI is activated and MISO
is driven high, externally all pins are
is configured as an
is driven low, the
41
Page 42

Data Modes
There are four combinations of SCK phase and polarity with respect to serial data, which are determined by control bits
CPHA and CPOL. The SPI data transfer formats are shown in Figure 38 and Figure 39.
Figure 38. SPI Transfer Format with CPHA = 0 and DORD = 0
Figure 39. SPI Transfer Format with CPHA = 1 and DORD = 0
SPI Control Register - SPCR
Bit 76543210
$0D ($2D) SPIE SPE DORD MSTR CPOL CPHA SPR1 SPR0 SPCR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Bit 7 - SPIE: SPI Interrupt Enable
•
This bit causes the SPI interrupt to be executed if SPIF bit in the SPSR register is set and the global interrupts are enabled.
Bit 6 - SPE: SPI Enable
•
When the SPE bit is set (one), the SPI is enabled. This bit must be set to enable any SPI operations.
Bit 5 - DORD: Data ORDer
•
When the DORD bit is set (one), the LSB of the data word is transmitted first.
When the DORD bit is cleared (zero), the MSB of the data word is transmitted first.
Bit 4 - MSTR: Master/Slave Select
•
This bit selects Master SPI mode when set (one), and Slave SPI mode when cleared (zero). If SS is configured as an input
and is driven low while MSTR is se t, MSTR will be cle ared, and SP IF in SPS R will be come set. The user will then have to
set MSTR to re-enable SPI master mode.
Bit 3 - CPOL: Clock POLarity
•
When this bit is s et (one) , SCK is hig h when idle. Wh en CPOL is c leared (zero), SCK i s low when i dle. Re fer to Fig ure 3 8
and Figure 39 for additional information.
Bit 2 - CPHA: Clock PHAse
•
Refer to Figure 38 or Figure 39 for the functionality of this bit.
42
AT90S/LS2333 and AT90S/LS4433
Page 43

AT90S/LS2333 and AT90S/LS4433
•
Bits 1,0 - SPR1, SPR0: SPI Clock Rate Select 1 and 0
These two bits control the SCK rate of the device configured as a master. SPR1 and SPR0 have no effect on the slave. The
relationship between SCK and the Oscillator Clock frequency f
Table 18. Relationship Bet ween SCK and the Os ci llator Frequency
SPR1 SPR0 SCK Frequency
is shown in the following table:
cl
00
01
10
11
f
/ 4
cl
fcl / 16
fcl / 64
f
/ 128
cl
SPI Status Register - SPSR
Bit 76543210
$0E ($2E) SPIF WCOL - - - - - - SPSR
Read/Write RRRRRRRR
Initial value 0 0 0 0 0 0 0 0
Bit 7 - SPIF: SPI Interrupt Flag
•
When a serial trans fer is complete, the SPIF bit is se t ( one) and an interrupt is ge nerat ed i f SP IE in S PC R is se t (o ne) an d
global interrupts are enabled. If SS
is an input and is driven low when the SPI is in master mode, this will also set the SPIF
flag. SPIF is cleared by hardware when executing the corresponding interrupt handling vector. Alternatively, the SPIF bit is
cleared by first reading the SPI status register with SPIF set (one), then accessing the SPI Data Register (SPDR).
Bit 6 - WCOL: Write COLlision flag
•
The WCOL bit is set if the SPI da ta registe r (SPDR) is written dur ing a dat a transfer . The WCOL bi t (and the SPIF bit) ar e
cleared (zero) by first reading the SPI Status Register with WCOL set (one), and then accessing the SPI Data Register.
Bit 5..0 - Res: Reserved bits
•
These bits are reserved bits in the AT90S2333/4433 and will always read as zero.
The SPI interface on the AT90S2333/4433 is also used for program memory and EEPROM downloading or uploading. See
page 78 for serial programming and verification.
SPI Data Register - SPDR
Bit 76543210
$0F ($2F) MSB LSB SPDR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value XXXXXXXXUndefined
The SPI Data Register is a read/write register used for data transfer between the register file and the SPI Shift register.
Writing to the register initiates data transmission. Reading the register causes the Shift Register Receive buffer to be read.
43
Page 44

UART
The AT90S2333/4433 features a full duplex (separate receive and transmit registers) Universal Asynchronous Receiver
and Transmitter (UART). The main features are:
• Baud rate generator generates any baud rate
• High baud rates at low XTAL frequencies
• 8 or 9 bits data
• Noise filtering
• Overrun detection
• Framing Error detection
• False Start Bit detection
• Three separate interrupts on TX Complete, TX Data Register Empty and RX Complete
• Multi-Processor Communication Mode
Data Transmission
A block schematic of the UART transmitter is shown in Figure 40.
Figure 40. UART Transmitter
Data transmission is initiated by writing the data to be transmitted to the UART I/O Data Register, UDR. Data is transferred
from UDR to the Transmit shift register when:
• A new character has been written to UDR after the stop bit from the previous character has been shifted out. The shift
register is loaded immediately.
44
AT90S/LS2333 and AT90S/LS4433
Page 45

AT90S/LS2333 and AT90S/LS4433
• A new character has been written to UDR before the stop bit from the previous character has been shifted out. The shift
register is loaded when the stop bit of the character currently being transmitted has been shifted out.
When data is transferred from UDR to the shift register, the UDRE (UART Data Register Empty) bit in the UART Status
Register, USR, is set. When this bit i s set (one ), the UART is read y to rece ive the next char acter. A t the sam e time a s the
data is transferred from UDR to the 10(11)-bit shift register, bit 0 of the shift register is clea red (start bit) and bit 9 or 10 is
set (stop bit). If 9 bit data word is selected (the CHR9 bit in the UART Control Register, UCR is set), the TXB8 bit in UCR is
transferred to bit 9 in the Transmit shift register.
On the Baud Rate clock following the transfer operation to the shift register, the start bit is shifted out on the TXD pin. Then
follows the data, LSB first. When the stop bit has been shifted out, the shift register is loaded if any new data has been written to the UDR during the transmission. During loading, UDRE is set. If there is no new data in the UDR register to send
when the stop bit is shifted out, the UDRE flag will remain set until UDR is written again. When no new data has been written, and the stop bit has been present on TXD for one bit length, the TX Complete Flag, TXC, in USR is set.
The TXEN bit in UCR enables the UART transmitter when set (one). When this bit is cleared (zero), the PD1 pin can be
used for general I/O. When TXEN is set, the UART Transmitter will be connected to PD1, which is forced to be an output
pin regardless of the setting of the DDD1 bit in DDRD.
Data Reception
Figure 41 shows a block diagram of the UART Receiver
Figure 41. UART Receiver
45
Page 46

The receiver front-end logic samples the signal on the RXD pin at a frequency 16 times the baud rate. While the line is idle,
one single sample of logical zero will be interpreted as the falling edge of a start bit, and the start bit detection sequence is
initiated. Let sample 1 denote the first zero-sample. Following the 1 to 0-transition, the receiver samples the RXD pin at
samples 8, 9 and 10. If two or m ore of these three samples are fou nd to be lo gic al one s, the s tar t bi t is r eje cte d as a no is e
spike and the receiver starts looking for the next 1 to 0-transition.
If however, a valid start bit is detected, sampling of the data bits following the start bit is performed. These bits are also
sampled at samples 8, 9 and 10. The logical value found in at least two of the three samples is taken as the bit value. All
bits are shifted into the transmitter shift register as they are sampled. Sampling of an incoming character is shown in Figure
42.
Figure 42. Sampling Received Data
When the stop bit e nte rs the receiv er, t he maj ority of the three sam ples must be on e to a ccept the stop bit. If two or m ore
samples are logic al zer os, the Fr aming Error ( FE) flag i n the U ART Stat us Reg ister (US R) is set. Be fore r eading the UDR
register, the user should always check the FE bit to detect Framing Errors.
Whether or not a valid stop bit is detected at the end of a character reception cycle, the data is transferred to UDR and the
RXC flag in USR is set. UDR is in fact two physically separate registers, one for transmitted data and one for received data.
When UDR is read, the Receive Data register is accessed, and when UDR is written, the Transmit Data register is
accessed. If 9 bit d ata word is select ed (the CHR9 bit in th e UART Contr ol Regist er, UCR is set ), the RXB 8 bit in UCR is
loaded with bit 9 in the Transmit shift register when data is transferred to UDR.
If, after having rece ived a ch aracter , the UDR reg ister has not been rea d since the last rece ive, the OverRun ( OR) flag in
UCR is set. This means that the last data byte shifted into to the shift register could not be transferred to UDR and has been
lost. The OR bit is buffered, and is updated when the valid data byte in UDR is read. Thu s, the user should always check
the OR bit after reading the UDR register in order to detect any overruns if the baud rate is high or CPU load is high.
When the RXEN bit in the UCR register is cleared (zero), the receiver is disabled. This means that the PD0 pin can be used
as a general I/O pin. When RXE N is set, the UART Receiver will be con nected to PD0, whi ch is for ced to be an input pin
regardless of the settin g o f t he DDD0 bi t i n DDRD. W hen P D0 is fo rced to i npu t b y the UA RT, the PO RTD0 b it can sti ll b e
used to control the pull-up resistor on the pin.
When the CHR9 bit in the UCR register is set, transmitted and received characters are 9-bit long plus start and stop bits.
The 9th data bit to be transmitt ed is the TXB8 bi t in UCR reg ister. This b it must be set to th e wanted v alue befor e a transmission is initated by writing to the UDR register. The 9th data bit received is the RXB8 bit in the UCR register.
Multi-Processor Communication Mode
The Multi-Process or Comm unica tion Mo de enabl es se vera l slave M CUs to re ceiv e data fr om a mas ter MCU . This is done
by first decoding an address byte to find out which MCU has been addressed. If a particular slave MCU has been
addressed, it will receive the following data bytes as normal, while the other slave MCUs will ignore the data by tes until
another address byte is received.
For an MCU to act as a mast er MCU, it should enter 9-bit tr ansmis sion mo de (CHR9 i n UCSRB se t). The 9th bi t must be
one to indicate that an address byte is being transmitted, and zero to indicate that a data byte is being transmitted.
For the slave MCUs, the m ec han is m a ppe ar s sl igh tly d iffe rentl y f or 8-bi t an d 9 -b it rece ptio n m ode . In 8-bit reception mode
(CHR9 in UCSRB cleared), the stop bit is one for an address byte and zero for a data byte. In 9-bit reception mode (CHR9
in UCSRB set), the 9th bit is one for an address byte and zero for a data byte, whereas the stop bit is always high.
The following procedure should be used to exchange data in Multi-Processor Communication Mode:
1. All slave MCUs are in Multi-Processor Communication Mode (MPCM in UCSRA is set).
2. The master MCU sends an address byte, and all slaves receive and read this byte. In the slave MCUs, the RXC flag
in UCSRA will be set as normal.
46
AT90S/LS2333 and AT90S/LS4433
Page 47

AT90S/LS2333 and AT90S/LS4433
3. Each slave MCU reads the UDR register and determines if it has been selected. If so, it clears the MPCM bit in
UCSRA, otherwise it waits for the next address byte.
4. For each received data byte, the receiving MCU will set the receive complete flag (RXC in UCSRA). In 8-bit mode,
the receiving MCU will also generate a framing error (FE in UCSRA set), since the stop bit is zero. The other slave
MCUs, which still have the MPCM bit set, will ignore the data byte. In this case, the UDR register and the RXC or FE
flags will not be affected.
5. After the last byte has been transferred, the process repeats from step 2.
UART Control
UART I/O Data Register - UDR
Bit 76543210
$0C ($2C) MSB LSB UDR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
The UDR register is actually two physi cally separate registers sharing the same I/O address. Wh en writi ng to the reg ister,
the UART Transmit Data register is written. When reading from UDR, the UART Receive Data register is read.
UART Control and Status Registers - UCSRA
Bit 76543210
$0B ($2B) RXC T XC UDRE FE OR - - MPCM UCSRA
Read/Write R R/W R R R R R R/W
Initial value 0 0 1 0 0 0 0 0
Bit 7 - RXC: UART Receive Complete
•
This bit is set (one) when a received character is transferred from the Receiver Shift register to UDR. The bit is set regard-
less of any detected framing errors. When the RXCIE bit in UCR is set, the UART Receive Complete interrupt will be
executed when RXC is set(one). RXC is cleared by reading UDR. Wh en interrupt -driven da ta recept ion is used, the UART
Receive Complete Interrupt routine must read UDR in order to clear RXC, otherwise a new interrupt will occur once the
interrupt routine terminates.
Bit 6 - TXC: UART Transmit Complete
•
This bit is set (one) when the entire character (including the stop bit) in the Transmit Shift register has been shifted out and
no new data has been written t o UDR. This fl ag is e speciall y useful in ha lf-duple x comm unicat ions i nterfaces , where a
transmitting application must enter r eceive mode and free th e communications bus immediately after compl eting the
transmission.
When the TXCIE bit in UCR is set, setting of TXC causes the UART Transmit Complete interrupt to be executed. TXC is
cleared by hardware when executing the corresponding interrupt handling vector. Alternatively, the TXC bit is cleared
(zero) by writing a logical one to the bit.
Bit 5 - UDRE: UART Data Register Empty
•
This bit is set (one) when a character written to UDR is transferred to the Transmit shift register. Setting of this bit indicates
that the transmitter is ready to receive a new character for transmission.
When the UDRIE bit in UCR is set, the UART Transmit Complete interrupt to be executed as long as UDRE is set. UDRE is
cleared by writing UDR. When interrupt-driven data transmittal is used, the UART Data Register Empty Interrupt routine
must write UDR in order to clear UDRE, otherwise a new interrupt will occur once the interrupt routine terminates.
UDRE is set (one) during reset to indicate that the transmitter is ready.
Bit 4 - FE: Framing Error
•
This bit is set if a Framing Error condition is detected, i.e. when the stop bit of an incoming character is zero.
The FE bit is cleared when the stop bit of received data is one.
47
Page 48

•
Bit 3 - OR: OverRun
This bit is set if an Overr un condit ion is d etected, i. e. when a character already pres ent in th e UDR registe r is n ot read
before the next ch aracter ha s been shift ed into the Rec eive r Shift reg ister. The OR bi t is b uffered, wh ich m eans that it w ill
be set once the valid data still in UDRE is read.
The OR bit is cleared (zero) when data is received and transferred to UDR.
Bits 2..1 - Res: Reserved bits
•
These bits are reserved bits in the AT90S2333/4433 and will always read as zero.
Bit 0 - MPCM: Multi-Processor Communication Mode
•
This bit is used to enter Multi-Processor Communication Mode. The bit is set when the slave MCU waits for an address
byte to be received. When the MCU has been addressed, the MCU switches off the MPCM bit, and starts data reception.
For a detailed description, see “ Multi-Proc essor Communication Mode”.
UART Control and Status Registers - UCSRB
Bit 76543210
$0A ($2A) RXCIE TXCIE UDRIE RXEN TXEN CHR9 RXB8 TXB8 UCSRB
Read/Write R/W R/W R/W R/W R/W R/W R W
Initial value 0 0 0 0 0 0 1 0
Bit 7 - RXCIE: RX Complete Interrupt Enable
•
When this bit is set (one), a setting of the RXC bit in USR will cause the Receive Complete interrupt routine to be executed
provided that global interrupts are enabled.
Bit 6 - TXCIE: TX Complete Interrupt Enable
•
When this bit is set (one), a setting of the TXC bit in USR will cause the Transmit Complete interrupt routine to be executed
provided that global interrupts are enabled.
Bit 5 - UDRIE: UART Data Register Empty Interrupt Enable
•
When this bit is set (one), a setting of the UDRE bit in USR will cause the UART Data Register Empty interrupt routine to be
executed provided that global interrupts are enabled.
Bit 4 - RXEN: Receiver Enable
•
This bit enables the UART receiver when set (one). When the receiver is disabled, the TXC, OR and FE status flags cannot
become set. If these flags are set, turning off RXEN does not cause them to be cleared.
Bit 3 - TXEN: Transmitter Enable
•
This bit enables the UART transmitter when set (one). When disabling the transmitter while transmitting a character, the
transmitter is not disabled before the character in the shift regi ster plus any fol lowing character in UDR has been completely transmitted.
Bit 2 - CHR9: 9 Bit Characters
•
When this bit is set (one) transmitted and received characters are 9 bit long plus start and stop bits. The 9th bit is read and
written by using the RXB8 and TXB8 bits in UCR, respectively. The 9th data bit can be used as an extra stop bit or a parity
bit.
Bit 1 - RXB8: Receive Data Bit 8
•
When CHR9 is set (one), RXB8 is the 9th data bit of the received character.
Bit 0 - TXB8: Transmit Data Bit 8
•
When CHR9 is set (one), TXB8 is the 9th data bit in the character to be transmitted.
Baud Rate Generator
The baud rate generator is a frequency divider which generates baud-rates according to the following equation:
f
CK
BAUD
---------------------------------=
16(UBR 1)+
• BAUD = Baud-Rate
= Crystal Clock frequency
•f
CK
• UBR = Contents of the UBRRH and UBRR registers, (0-4095)
48
AT90S/LS2333 and AT90S/LS4433
Page 49

AT90S/LS2333 and AT90S/LS4433
For standard crystal frequencies, the most commonly used baud rates can be generated by using the UBR settings in
Table 19. UBR values which yield an actual baud rate differing less than 2% from the target baud rate, are bold in the table.
However, using bau d rates that hav e more than 1 % error is n ot recommended. H igh error ratin gs give less noise
resistanse.
Table 19. UBR Settings at Various Crystal Frequencies
B aud Rate
2400
4800
9600
14400
19200
28800
38400
57600
76800
115200
1MHz
UBR=
UBR=
UBR= 6 7.5 UBR=
UBR= 3 7.8 UBR=
UBR= 2 7.8 UBR=
UBR= 1 7.8 UBR=
UBR= 1 22.9 UBR=
UBR= 0 7.8 UBR=
UB R= 0 22.9 U BR = 1 33.3 U BR = 1 22.9
UBR= 0 84.3 UBR=
% Erro r
25 0.2
12 0.2
1.8432 M H z
UBR=
UBR=
%Error
47 0.0
23 0.0
11 0.0
70.0
50.0
30.0
20.0
10.0
00.0
UBR=
UBR=
UBR=
UBR= 8 3.7
UBR= 6 7.5
UBR= 3 7.8
UBR= 2 7.8
UBR= 1 7.8
UBR= 0 7.8
2MHz
51 0.2
25 0.2
12 0.2
% Erro r
B aud Rate
2400
4800
9600
14400
19200
28800
38400
57600
76800
115200
B aud Rate
2400
4800
9600
14400
19200
28800
38400
57600
76800
115200
3.2768 M H z
UBR=
UBR=
UBR=
UBR=
UBR= 10 3.1 UBR=
UBR=
UBR= 4 6.3 UBR=
UBR= 3 12.5 UBR=
UBR= 2 12.5 UBR=
UBR= 1 12.5 UBR=
7.3728 M H z
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
% Erro r
84 0.4
42 0.8
20 1.6
13 1.6
61.6
% Erro r
191 0.0
95 0.0
47 0.0
31 0.0
23 0.0
15 0.0
11 0.0
70.0
50.0
30.0
3.6864 M H z
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
UBR= 16 2.1 UBR=
UBR=
UBR= 8 3.7 UBR=
UBR= 6 7.5 UBR= 7 6.7
UBR= 3 7.8 UBR=
95 0.0
47 0.0
23 0.0
15 0.0
11 0.0
70.0
50.0
30.0
20.0
10.0
8MHz
207 0.2
103 0.2
51 0.2
34 0.8
25 0.2
12 0.2
%Error
%Error
4MHz
UBR=
UBR=
UBR=
UBR= 16 2.1
UBR=
UBR= 8 3.7
UBR= 6 7.5
UBR= 3 7.8
UBR= 2 7.8
UBR= 1 7.8
9.216 M H z
UBR=
UBR=
UBR=
UBR=
UBR=
UBR=
% Erro r
103 0.2
51 0.2
25 0.2
12 0.2
% Erro r
239 0.0
119 0.0
59 0.0
39 0.0
29 0.0
19 0.0
14 0.0
90.0
40.0
49
Page 50

UART Baud Rate Register - UBRR
Bit 151413121110 9 8
$03 ($23) - - - - MSB LSB UBRRHI
$09 ($29) MSB LSB UBRR
76543210
Read/Write R R R R R/W R/W R/W R/W
R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
00000000
This is a 12-bit register which contains the UART Baud Rate according to the equation on the previous page. The UBRRHI
contains the 4 most significant bits, and the UBRR contains the 8 least significant bits of the UART Baud Rate.
Analog Comparator
The analog comparator com par es the input values on the positi ve inp ut P D6 ( AIN 0) and negative input PD7 (AIN1). Whe n
the voltage on the positive in put P D6 (AIN0) is higher than the voltage on the nega tiv e in put PD7 ( AIN1 ), the Ana lo g Com-
parator Output, ACO is set (one). The comparator’s output can be set to trigger the Timer/Counter1 Input Capture function.
In addition, the comparator can trigger a separate interrupt, exclusive to the Analog Comparator. The user can select Interrupt triggering on comparat or output r ise, fall or toggle. A b lock diagra m of the comp arator and i ts surrou nding logic is
shown in Figure 43.
Figure 43. Analog Comparator Block Diagram
Analog Comparator Control And Status Register - ACSR
Bit 76543210
$08 ($28) ACD AINBG ACO ACI ACIE ACIC ACIS1 ACIS0 ACSR
Read/Write R/W R/W R R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Bit 7 - ACD: Analog Comparator Disable
•
When this bit is set( one ), th e p ower to the analog comparato r is sw it ched off. This bit can be s et at any t ime to tu rn off the
analog compar ator . Whe n chan ging t he ACD bit , the Ana log Comp ara tor In terru pt mu st be d isab led by c leari ng t he A CIE
bit in ACSR. Otherwise an interrupt can occur when the bit is changed.
50
AT90S/LS2333 and AT90S/LS4433
Page 51

AT90S/LS2333 and AT90S/LS4433
•
Bit 6 - AINBG: Analog Comparator Bandgap Select
When this bit is set BOD is enabled and the BODEN is programmed, a fixed bandgap voltage of 1.22 ± 0.05V replaces the
normal input to th e po sitiv e inp ut ( A IN0) o f the comp ar ator . Wh en t his b it is cl ea red, the normal input pin P D6 i s app li ed to
the positive input of the comparator.
Bit 5 - ACO: Analog Comparator Output
•
ACO is directly connected to the comparator output.
Bit 4 - ACI: Analog Comparator Interrupt Flag
•
This bit is set (one) when a comparator output event triggers the interrupt mode defined by ACI1 and ACI0. The Analog
Comparator Interrupt routine is executed if the ACIE bit is set (one) and the I-bit in SREG is set (one). ACI is cleared by
hardware when executing the corresponding interrupt handling vector. Alternatively, ACI is cleared by writing a logic one to
the flag.
Bit 3 - ACIE: Analog Comparator Interrupt Enable
•
When the ACIE bit is set (one) and the I-bit in the Status Register is set (one), the analog comparator interrupt is activated.
When cleared (zero), the interrupt is disabled.
Bit 2 - ACIC: Analog Comparator Input Capture Enable
•
When set (one), this bit enables the Input Capture function in Timer/Counter1 to be triggered by the analog comparator.
The comparator output is in this case directly connected to the Input Capture front-end logic, making the comparator utilize
the noise canceler and edge select features of the Timer/Counter1 Input Capture interrupt. When cleared (zero), no connection between the analog comparator and the Input Capture function is giv en. To make the comparator trigger the
Timer/Counter1 Input Capture interrupt, the TICIE1 bit in the Timer Interrupt Mask Register (TIMSK) must be set (one).
Bits 1,0 - ACIS1, ACIS0: Analog Comparator Interrupt Mode Select
•
These bits determine which comparator events that trigger the Analog Comparator interrupt. The different settings are
shown in Table 20.
Table 20. ACIS1/ACIS0 Settings
ACIS1 ACIS0 Interrupt Mode
0 0 Comparator Interrupt on Output Toggle
01Reserved
1 0 Comparator Interrupt on Falling Output Edge
1 1 Comparator Interrupt on Rising Output Edge
Note: When changing the ACIS1/ACIS0 bits, The Analog Comparator Interrupt must be disabled by clearing its Interrupt Enable bit in
the ACSR register. Otherwise an interrupt can occur when the bits are changed.
Caution: Using the SBI or CB I intructi on on othe r bits than ACI in thi s register , will writ e a one bac k into ACI if i t is read as
set, thus clearing the flag.
51
Page 52

Analog to Digital Converter
Feature list:
• 10-bit Resolution
• ± 2 LSB Absolute Accuracy
• 0.5 LSB Integral Non-Linearity
• 65 - 260 µs Conversion Time
• Up to 15 kSPS
• 6 Multiplexed Input Channels
• Rail-to-Rail Input Range
• Free Run or Single Conversion Mode
• Interrupt on ADC conversion complete.
• Sleep Mode Noise Canceler
The AT90S2333/4433 features a 10-bit successive approximation ADC. The ADC is connected to a 6-channel Analog Mul-
tiplexer which allows each pin of Port C to be used as an input for the ADC. The ADC contains a Sample and Hold Amplifier
which ensures that the input voltag e to the ADC is held at a constant lev el dur ing conversion. A bloc k di agram of the ADC
is shown in Figure 44.
The ADC has two separate analog supply voltage pins, AVCC and AGND. AGND must be connected to GND, and the voltage on AVCC must not differ more than ± 0.3 V from V
connect these pins.
An external reference voltage must be applied to the AREF pin. This voltage must be in the range AGND - AVCC.
. See the paragraph ADC Noise Canceling Techniques on how to
CC
Figure 44. Analog to Digital Converter Block Schematic
ADC CONVERSION
COMPLETE IRQ
External
Reference
Voltage
Analog
Inputs
8-BIT DATA BUS
6-
CHANNEL
MUX
ADC MULTIPLEXER
SELECT (ADMUX)
-
+
SAMPLE & HOLD
COMPARATOR
MUX2
MUX1
MUX0
ADIF
ADC CTRL & STATUS
REGISTER (ADCSR)
ADIF
ADIE ADIE
ADFR
ADSC
ADEN
ADPS2
ADPS1
CONVERSION LOGIC10-BIT DAC
90
ADC DATA REGISTER
(ADCH/ADCL)
ADPS0
Operation
The ADC can operate in two modes - Single Conversion and Free Run Mode. In Single Conversion Mode, each conversion
will have to be in iti ate d b y the us er. In Fr ee Ru n M ode th e A DC is c ons tan tly sampling and upd atin g the ADC Dat a Register. The ADFR bit in ADCSR selects between the two available modes.
The ADMUX register selects which one of the six analog input channels to be used as input to the ADC.
52
AT90S/LS2333 and AT90S/LS4433
Page 53

AT90S/LS2333 and AT90S/LS4433
The ADC is enabled by writing a logical one to the ADC Enable bit, ADEN in ADCSR. The first conversion that is started
after enabling the A DC, wi ll be prec ed ed by a d umm y co nv er sion to initialize the A DC. To the user, the only diffe renc e w il l
be that this conversion takes 12 more clock cycles than a normal conversion.
A conversion is started by writing a logical one to the ADC Start Conversion bit, ADSC. This bit will stay high as long as the
conversion is in pr ogre ss an d be set to z ero b y ha rdwa re whe n the con vers ion is co mplet ed. I f a d iffer ent data chan nel is
selected while a co nversion is in progress, th e ADC will f inish the cur rent conversion be fore performi ng the channe l
change.
As the ADC generates a 10-bit result, two data registers, ADCH and ADCL, must be read to get the result when the conversion is complete . S pec ial data protection log ic i s us ed to en su re th at t he co nten ts of the data registers bel ong to th e s am e
result when they are read. This mechanism works as follows:
When reading data, ADCL must be read first. Once ADCL is read, ADC access to data registers is blocked. This means
that if ADCL has been read, an d a conv ersion c omple tes before ADCH is read, none of the regis ters are updated and the
result from the conversion is lost. When ADCH is read, ADC access to the ADCH and ADCL registers is re-enabled.
The ADC has its own interrupt, ADIF, which can be triggered when a conversion completes. When ADC access to the data
registers is prohibited between reading of ADCH and ADCL, the interrupt will trigger even if the result gets lost.
Prescaling
Figure 45. ADC Prescaler
ADEN
CK
ADPS0
ADPS1
ADPS2
Reset
7-BIT ADC PRESCALER
CK/2
CK/4
ADC CLOCK SOURCE
CK/8
CK/16
CK/32
CK/64
CK/128
The ADC contains a prescaler, which divides the system clock to an acceptable ADC clock frequency. The ADC accepts
input clock frequencies in the range 50 - 200 kHz. Applying a higher input frequency will result in a poorer accuracy, see
“ADC Characteristics” on page 58.
The ADPS0 - ADPS2 bits in A DCSR are used to g enerate a pr oper ADC cl ock input fre quency from any XTAL fre quency
above 100 kHz. The prescaler starts counting from the moment the ADC is switched on by setting the ADEN bit in ADCSR.
The prescaler keeps running for as long as the ADEN bit is set, and is continuously reset when ADEN is low.
When initiating a conversion by setting the ADSC bit in ADCSR, the conversion starts at the following rising edge of the
ADC clock cycle. The actual sample-and-hold takes place 1.5 ADC clock cycles after the start of the conversion. The result
is ready and written to the ADC Result Register after 13 cycles. In single conversion mode, the ADC needs one more clock
cycle before a new conv er sion can be started, s ee Fi gure 47. If ADSC is set hi gh in this period, the AD C wi ll s ta rt the n ew
conversion immediately. In Free Run Mode, a new conversion will be started immediately after the result is written to the
ADC Result Register. Using Free Run Mode and an ADC clock frequency of 200 kHz gives the lowest conversion time, 65
µs, equivalent to 15.4 kSPS. For a summary of conversion times, see Table 21.
53
Page 54

Figure 46. ADC Timing Diagram, First Convers io n (Single C onver si on Mode)
Cycle number
ADC clock
ADEN
ADSC
Hold strobe
ADIF
ADCH
ADCL
1 21213 14 15 16 17 18 19 20 21 22 23 24 25 26 1 2
MSB of result
LSB of result
Dummy Conversion Actual Conversion
Second
Conversion
Table 21. ADC Conversion Time
Result Ready (cyc le
Condition Sample Cycle Number
number)
1st Conversion, Free Run 14 25 25 125 - 500
1st Conversion, Single 14 25 26 130 - 520
T otal Conversion Time
(cycles)
T otal Conversion Time
(µs)
Free Run Conversion 2 13 13 65 - 260
Single Conversion 2 13 14 70 - 280
Figure 47. ADC Timing Diagram, Singl e Conv ersi on
Cycle number
ADC clock
ADSC
Hold strobe
ADIF
ADCH
ADCL
1 2 3 4 5 6 7 8 9 10 11 12 13
One Conversion Next Conversion
14
MSB of result
LSB of result
12
54
AT90S/LS2333 and AT90S/LS4433
Page 55

Figure 48. ADC Timing Diagram, Free Run Conversion
AT90S/LS2333 and AT90S/LS4433
Cycle number
ADC clock
ADSC
Hold strobe
ADIF
ADCH
ADCL
11 12 13
One Conversion Next
12
MSB of result
LSB of result
Conversion
ADC Noise Canceler Function
The ADC features a nois e canc el er th at e nabl es c onv ers ion du ring idl e m ode to r ed uc e no ise i ndu ce d fr om the CP U co r e.
To make use of this feature, the following procedure should be used:
1. Make sure that the ADC is enabled and is not busy converting. Single Conversion Mode must be selected and the
ADC conversion complete interrupt must be enabled. Thus:
ADEN = 1
ADSC = 0
ADFR = 0
ADIE = 1
2. Enter idle mode. The ADC will start a conversion once the CPU has been halted.
3. If no other interrupts occur before the ADC conversion completes, the ADC interrupt will wake up the MCU and execute the ADC conversion complete interrupt routine.
ADC Multiplexer Select Register - ADMUX
Bit 76543210
$07 ($27) - ADCBG - - - MUX2 MUX1 MUX0 ADMUX
Read/Write R R/W R R R R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Bit 7 - Res: Reserved Bits
•
These bits are reserved bits in the AT90S2333/4433, and should be written to zero if accessed.
Bit 6 - ADCBG: ADC Bandgap Select
•
When this bit is set and the BOD is enabled (BODEN fuse is programmed), a fixed bandgap vol tage of 1.22 ± 0.05V
replaces the normal input to the ADC. When this bit is cleared, the normal input pin (as selected by MUX2..MUX0) is
applied to the ADC.
Bit 5..3 - Res: Reserved Bits
•
These bits are reserved bits in the AT90S2333/4433, and should be written to zero if accessed.
Bits 2..0 - MUX2..MUX0: Analog Channel Select Bits 2-0
•
The value of these three bits selects which analog input 5-0 is connected to the ADC.
55
Page 56

ADC Control and Status Register - ADCSR
Bit
$06 ($26)
Read/Write
Initial value
•
Bit 7 - ADEN: ADC Enable
76543210
ADEN ADSC ADFR ADIF ADIE ADPS2 ADPS1 ADPS0 ADCSR
R/W R/W R/W R/W R/W R/W R/W R/W
00000000
Writing a logical ‘1’ to this bit enables the ADC. By clearing this bit to zero, the ADC is turned off. Turning the ADC off while
a conversion is in progress, will terminate this conversion.
Bit 6 - ADSC: ADC Start Conversion
•
In Single Conversion Mode, a logical ‘1’ must be written to this bit to start each conversion. In Free Run Mode, a logical ‘1’
must be written to this bit to sta rt the first conversion. The first time A DSC has been written afte r the ADC has be en
enabled, or if ADSC is written at the s ame time as the A DC is enabl ed , a dumm y c onv ers ion will pr ece de the ini tia ted c onversion. This dummy conversion performs initialization of the ADC.
ADSC remains high during the conversion. ADSC goes low after the conversion is complete, but before the result is written
to the ADC Da ta Regi st ers. This allo ws a ne w conv er sion to be i nitia te d be for e th e cur ren t co nver sion is compl ete . Th e ne w
conversion will the n star t imme diatel y after the cu rren t conv ersion c omple tes. W hen a dum my co nver sion p recedes a rea l
conversion, ADSC will stay high until the real conversion completes.
Writing a 0 to this bit has no effect.
Bit 5 - ADFR: ADC Free Run Select
•
When this bit is set (one) the ADC operates in Free Run Mode. In this mode, the ADC samples and updates the data registers continuously. Clearing this bit (zero) will terminate Free Run Mode.
Bit 4 - ADIF: ADC Interrupt Flag
•
This bit is set (one) when an ADC conversion completes and the data registers are updated. The ADC Conversion Complete Interrupt is executed if the ADIE bit and the I-bit in SREG are set (one). ADIF is cleared by hardware when executing
the corresponding interrupt handling vector. Alternatively, ADIF is cleared by writing a logical one to the flag. Beware that if
doing a read-modify-write on ADCSR, a pending interrupt can be disabled. This also applies if the SBI and CBI instructions
are used.
Bit 3 - ADIE: ADC Interrupt Enable
•
When this bit is set (one) and the I-bit in SREG is set (one), the ADC Conversion Complete Interrupt is activated.
Bits 2..0 - ADPS2..ADPS0: ADC Prescaler Select Bits
•
These bits determine the division factor between the XTAL frequency and the input clock to the ADC.
Table 22. ADC Prescaler Selections
ADPS2 ADPS1 ADPS0 Division Factor
000 2
001 2
010 4
011 8
100 16
101 32
110 64
111 128
56
AT90S/LS2333 and AT90S/LS4433
Page 57

AT90S/LS2333 and AT90S/LS4433
ADC Data Register - ADCL AND ADCH
Bit 151413121110 9 8
$05 ($25) - - - - - - ADC9 ADC8 ADCH
$04 ($26) ADC7 ADC6 ADC5 ADC4 ADC3 ADC2 ADC1 ADC0 ADCL
76543210
Read/Write RRRRRRRR
RRRRRRRR
Initial value 0 0 0 0 0 0 0 0
00000000
When an ADC conversion is co mplete, the re sult is found in these two regis ters. In free-r un mode, it is essenti al that both
registers are read, and that ADCL is read before ADCH.
Scanning Multiple Channels
Since change of anal og cha nnel a lways is dela yed un til a con versi on is finished , the Fre e Run Mo de ca n be us ed to sca n
multiple channels wi tho ut i nter rup ting the converter. Typical ly, th e A DC Con vers ion Co mpl ete in ter r upt will be us ed t o pe rform the channel shift. However, the user should take the following fact into consideration:
The interrupt trig gers onc e the r esult is ready to be read. In Free Run Mode , the nex t conver sion will start imm ediately
when the interrupt trigger s. If ADMUX is change d after the inte rrupt trigger s, the next conv ersion has already sta rted, and
the old setting is used.
ADC Noise Canceling Techniques
Digital circuitry inside and outside the AT90S2333/4433 generates EMI which might affect the accuracy of analog measurements. If conversion accuracy is critical, the noise level can be reduced by applying the following techniques:
1. The analog part of the AT90S2333/4433 and all analog components in the application should have a separate analog
ground plane on the PCB. This ground plane is connected to the digital ground plane via a single point on the PCB.
2. Keep analog signal paths as short as possible. Make sure analog tracks run over the analog ground plane, and keep
them well away from high-speed switching digital tracks.
3. The AV
shown in Figure 47.
4. Use the ADC noise canceler function to reduce induced noise from the CPU.
5. If some Port C pins are used as digital outputs, it is essential that these do not switch while a conversion is in progress.
pin on the AT90S2333/4433 should be connected to the digital VCC supply voltage via an RC network as
CC
57
Page 58

Figure 49. ADC Power Connections
AT90S2333/4433
28
27
26
25
24
23
22
21
20
19
PC5 (ADC5)
PC4 (ADC4)
PC3 (ADC3)
PC2 (ADC2)
PC1 (ADC1)
PC0 (ADC0)
AGND
AREF
AVCC
PB5
VCC
Analog Ground Plane
100R
10nF
Note that since AV
feeds the Port C output drivers, the RC network shown should not be employed if any Port C serve as
CC
outputs.
ADC Characteristics, TA = -40
Symbol Parameter Condition Min Typ Max Units
Resolution 10 Bits
Absolute accuracy
Absolute accuracy
Absolute accuracy
Integral Non-Linearity V
Differential Non-Linearity V
Zero Error (Offset) 1 LSB
Conversion Time 65 260 µs
Clock Frequency 50 200 kHz
AV
CC
V
REF
R
REF
R
AIN
Notes: 1. Minimum for AVCC is 2.7V.
Analog Supply Voltage VCC - 0.3
Reference Voltage AGND AV
Reference Input Resistance 6 10 13 kΩ
Analog Input Resistance 100 MΩ
2. Maximum for AV
is 6.0V.
CC
C to 85°C
°
VREF = 4V
ADC clock = 200 kHz
VREF = 4V
ADC clock = 1 MHz
VREF = 4V
ADC clock = 2 MHz
12LSB
4LSB
16 LSB
> 2V 0.5 LSB
REF
> 2V 0.5 LSB
REF
(1)
VCC + 0.3
(2)
CC
V
V
58
AT90S/LS2333 and AT90S/LS4433
Page 59

AT90S/LS2333 and AT90S/LS4433
I/O Ports
All AVR ports h ave true Read-Modify-Write fun ctionality when used as ge ner al digital I/O ports. Thi s mea ns th at the direction of one port pin can be changed without unintentionally changing the direction of any other pin with the SBI and CBI
instructions. The same applies for changing drive value (if configured as output) or enabling/disabling of pull-up resistors (if
configured as input).
Po rt B
Port B is a 6-bit bi-directional I/O port.
Three I/O memory address locations are allocated for the Port B, one each for the Data Register - PORTB, $18($38), Data
Direction Register - DDRB, $17($37) and the Port B Input Pins - PINB, $16($36). The Port B Input Pins address is read
only, while the Data Register and the Data Direction Register are read/write.
All port pins have individually selectable pull-up resistors. The Port B output buffers can sink 20mA and thus drive LED displays directly. When pins PB0 to PB7 are used as inputs and are externally pulled low, they will sour ce current if the
internal pull-up resistors are activated.
The Port B pins with alternate functions are shown in the following table:
Table 23. Port B Pins Alternate Functions
Port Pin Alternate Functions
PB0 ICP (Timer/Counter 1 input capture pin)
PB1 OC1 (Timer/Counter 1 output compare match output)
PB2 SS
PB3 MOSI (SPI Bus Master Output/Slave Input)
PB4 MISO (SPI Bus Master Input/Slave Output)
PB5 SCK (SPI Bus Serial Clock)
(SPI Slave Select input)
When the pins are used for the alternat e function, th e DDRB an d PORTB reg ister has to be set according t o the al ternate
function description.
Port B Data Register - PORTB
Bit 76543210
$18 ($38) - - PORTB5 PORTB4 PORTB3 PORTB2 PORTB1 PORTB0 PORTB
Read/Write R R R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Port B Data Direction Register - DDRB
Bit 76543210
$17 ($37) - - DDB5 DDB4 DDB3 DDB2 DDB1 DDB0 DDRB
Read/Write R R R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Port B Input Pins Address - PINB
Bit 76543210
$16 ($36) - - PINB5 PINB4 PINB3 PINB2 PINB1 PINB0 PINB
Read/Write RRRRRRRR
Initial value 0 0 Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z
59
Page 60

The Port B Input Pins address - PINB - is not a register, and this address enables access to the physical value on each Port
B pin. When reading PORTB, the Port B Data Latch is read, and when reading PINB, the logical values present on the pins
are read.
Port B As General Digital I/O
All 6 pins in Port B have equal functionality when used as digital I/O pins.
PBn, General I/O pin: The DDBn bit in the DDRB registe r selects the direction of t his pi n, i f DDBn is set (one ), PB n is con-
figured as an output pi n. I f DDB n is c lea red ( zer o) , PB n i s co nfi gured as an i nput pi n. If P O RTBn is set (o ne) when the pin
configured as an input pi n, the MOS pul l up resist or is activa ted. To switc h the pull up resistor off, th e PORTBn ha s to be
cleared (zero) or the pin ha s to be config ured as an output p in.The port pi ns are trist ated w hen a reset cond ition be comes
active, even if the clock is not running.
Table 24. DDBn Effects on Port B Pins
DDBn PORTBn I/O Pull Up Comment
0 0 Input No Tri-state (Hi-Z)
0 1 Input Yes PBn will source current if ext. pulled low.
1 0 Output No Push-Pull Zero Output
1 1 Output No Push-Pull One Output
Note: n: 5…0, pin number.
Alternate Functions Of Port B
The alternate pin configuration is as follows:
SCK - Port B, Bit 5
•
SCK: Master clock outpu t, sl av e cl oc k in put pi n for SP I cha nne l. Wh en the SPI is en abl ed as a sla ve, this pin is conf igu red
as an input regardless of the setting of DDB5. When the SPI is enabled as a master, the data direction of this pin is controlled by DDB5. When the pin is forced to be an input, the pull-up can still be controlled by the PORTB5 bit. See the
description of the SPI port for further details.
MISO - Port B, Bit 4
•
MISO: Master data input, slave data output pin for SPI channel. When the SPI is enabled as a master, this pin is configured
as an input regardless of the setting of DDB4. When the SPI is enabled as a slave, the data direction of this pin is controlled
by DDB4. When the pin is forced to be an input, the pull-up can still be controlled by the PORTB4 bit. See the description of
the SPI port for further details.
MOSI - Port B, Bit 3
•
MOSI: SPI Master data output, slave data input for SPI channel. When the SPI is enabled as a slave, this pin is configured
as an input regardless of the setting of DDB3. When the SPI is enabled as a master, the data direction of this pin is controlled by DDB3. When the pin is forced to be an input, the pull-up can still be controlled by the PORTB3 bit. See the
description of the SPI port for further details.
SS - Port B, Bit 2
•
SS: Slave port selec t inp ut. W hen t he SP I is enabled as a slave, this pin is c onf igu re d as an in put reg ar dle ss of th e se ttin g
of DDB2. As a slave, the SPI is activated when this pin is driven low. When the SPI is enabled as a master, the data direction of this pin is controlled by DDB 2. When the pin is forc ed to be an input, the pull- up can still be controlled by the
PORTB2 bit. See the description of the SPI port for further details.
OC1 - Port B, Bit1
•
OC1, Output compare match output: PB1 pin can serve as an external output for the Timer/Counter1 output compare. The
pin has to b e conf ig ured a s a n ou tput (DDB 1 se t (o ne)) to se rve this func tion. See the time r d escrip tion on h ow to e nabl e
this function. The OC1 pin is also the output pin for the PWM mode timer function.
ICP- Port B, Bit0
•
ICP, Input Capture Pin: PB0 pin can serve as an external input for the Timer/Counter1 input capture. The pin has to be configured as an input (DDB0 cleared (zero)) to serve this function. See the timer description on how to enable this function.
60
AT90S/LS2333 and AT90S/LS4433
Page 61

Figure 50. Port B Schematic Diagram (Pin PB0)
MOS
PULLUP
PB0
AT90S/LS2333 and AT90S/LS4433
RD
RESET
R
D
Q
DDB6
C
WD
RESET
R
D
Q
PORTB0
C
RL
RP
WP
DATA BUS
WP:
WRITE PORTB
WD:
WRITE DDRB
RL:
READ PORTB LATCH
RP:
READ PORTB PIN
RD:
READ DDRB
ACIC:
COMPARATOR IC ENABLE
ACO:
COMPARATOR OUTPUT
Figure 51. Port B Schematic Diagram (Pin PB1)
PB1
0
NOISE CANCELER EDGE SELECT ICF1
1
ICNC1 ICES1
DDB1
PORTB1
ACIC
ACO
WP:
WRITE PORTB
WD:
WRITE DDRB
RL:
READ PORTB LATCH
RP:
READ PORTB PIN
RD:
READ DDRB
61
Page 62

Figure 52. Port B Schematic Diagram (Pin PB2)
MOS
PULLUP
PB2
RD
RESET
D
Q
DDB2
C
WD
RESET
D
Q
PORTB2
C
RL
RP
WP
DATA BUS
WRITE PORTB
WP:
WRITE DDRB
WD:
READ PORTB LATCH
RL:
READ PORTB PIN
RP:
READ DDRB
RD:
SPI MASTER ENABLE
MSTR:
SPI ENABLE
SPE:
Figure 53. Port B Schematic Diagram (Pin PB3)
MOS
PULLUP
PB3
MSTR
SPE
SPI SS
RD
RESET
R
D
Q
DDB3
C
WD
RESET
R
Q
D
PORTB3
C
RL
WP
RP
DATA BUS
62
WRITE PORTB
WP:
WRITE DDRB
WD:
READ PORTB LATCH
RL:
READ PORTB PIN
RP:
READ DDRB
RD:
SPI ENABLE
SPE:
MASTER SELECT
MSTR
AT90S/LS2333 and AT90S/LS4433
MSTR
SPE
SPI MASTER
OUT
SPI SLAVE
IN
Page 63

Figure 54. Port B Schematic Diagram (Pin PB4)
MOS
PULLUP
PB4
WRITE PORTB
WP:
WRITE DDRB
WD:
READ PORTB LATCH
RL:
READ PORTB PIN
RP:
READ DDRB
RD:
SPI ENABLE
SPE:
MASTER SELECT
MSTR
AT90S/LS2333 and AT90S/LS4433
RD
RESET
R
D
Q
DDB4
C
WD
RESET
R
Q
D
PORTB4
C
RL
WP
RP
MSTR
SPE
SPI SLAVE
OUT
SPI MASTER
IN
DATA BUS
Figure 55. Port B Schematic Diagram (Pin PB5)
MOS
PULLUP
PB5
WRITE PORTB
WP:
WRITE DDRB
WD:
READ PORTB LATCH
RL:
READ PORTB PIN
RP:
READ DDRB
RD:
SPI ENABLE
SPE:
MASTER SELECT
MSTR
RD
RESET
R
D
Q
DDB5
C
WD
RESET
R
Q
D
PORTB5
C
RL
WP
RP
MSTR
SPE
SPI CLOCK
OUT
SPI CLOCK
IN
DATA BUS
63
Page 64

Po rt C
Port C is a 6-bit bi-directional I/O port.
Three I/O memory address locations are allocated for the Port C, one each for the Data Register - PORTC, $15($35), Data
Direction Register - DDRC, $14($34) and the Port C Input Pins - PINC, $13($33). The Port C Input Pins address is read
only, while the Data Register and the Data Direction Register are read/write.
All port pins have individually selectable pull-up resistors. The Port C output buffers can sink 20mA and thus drive LED displays directly. When pins PC0 to PC5 are used as inputs and are externally pulled low, they will source current if the
internal pull-up resistors are activated.
Port C has an alternate function as analog inputs for the ADC. If some Port C pins are configured as outputs, it is essential
that these do not switch when a conversion is in progress. This might corrupt the result of the conversion.
During Power Down Mode , the schmi tt tri ggers of th e dig ital input s ar e disc onne cted. This allo ws an a nalog vol tage c lose
/2 to be present during power down without causing excessive power consumption.
to V
CC
Port C Data Register - PORTC
Bit 76543210
$15 ($35) - - PORTC5 PORTC4 PORTC3 PORTC2 PORTC1 PORTC0 PORTC
Read/Write R R R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Port C Data Direction Register - DDRC
Bit 76543210
$14 ($34) - - DDC5 DDC4 DDC3 DDC2 DDC1 DDC0 DDRC
Read/Write R R R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Port C Input Pins Address - PINC
Bit 76543210
$13 ($33) - - PINC5 PINC4 PINC3 PINC2 PINC1 PINC0 PINC
Read/Write RRRRRRRR
Initial value Q Q Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z
The Port C Input Pins address - PINC - is not a register, and this address enables access to the physical value on each
Port C pin. When reading PORTC, the Port C Data Latch is read, and when reading PINC, the logical values present on the
pins are read.
Port C As General Digital I/O
All 6 pins in Port C have equal functionality when used as digital I/O pins.
PCn, General I/O pin: The DDCn bit in the DDRC register selects the direction of this pin, if DDCn is set (one), PCn is con-
figured as an output pin. If DDCn is cleared (zero), PCn is configured as an input pin. If POR TCn is set (one) when the pi n
configured as an input pin, the MOS pull up resistor is activated. To switch the pull up resistor off, PORTCn has to be
cleared (zero) or the pin ha s to be config ured as an output p in.The port pi ns are trist ated w hen a reset cond ition be comes
active, even if the clock is not running
64
AT90S/LS2333 and AT90S/LS4433
Page 65

AT90S/LS2333 and AT90S/LS4433
Table 25. DDCn Effects on Port C Pins
DDCn PORTCn I/O Pull Up Comment
0 0 Input No Tri-state (Hi-Z )
0 1 Input Yes PCn will source current if ext. pulled low.
1 0 Output No Push-Pull Zero Output
1 1 Output No Push-Pull One Output
Note: n: 5…0, pin number
Port C Schematics
Note that all port pins are synchronized. The synchronization latch is however, not shown in the figure.
Figure 56. Port C Schematic Diagrams (Pins PC0 - PC5)
RD
MOS
PULLUP
PCn
RL
RESET
Q
DDCn
WD
RESET
Q
PORTCn
WP
D
C
D
C
DATA BUS
WP:
WD:
RL:
RP:
RD:
PWRDN:
n:
PWRDN
WRITE PORTC
WRITE DDRC
READ PORTC LATCH
READ PORTC PIN
READ DDRC
POWER DOWN MODE
0 - 5
RP
TO ADC MUX
ADCn
Po rt D
Port D is an 8 bit bi-directional I/O port with internal pull-up resistors.
Three I/O memory address locations are allocated for Port D, one each for the Data Register - PORTD, $12($32), Data
Direction Register - DDRD, $11($31) and the Port D Input Pins - PIND, $10($30). The Port D Input Pins address is read
only, while the Data Register and the Data Direction Register are read/write.
The Port D output buffers can sink 20 mA. As inputs, Port D pins that are externally pulled low will source current if the pullup resistors are activated.
Some Port D pins have alternate functions as shown in the following table:
65
Page 66

Table 26. Port D Pins Alternate Functions
Port Pin Alternate Function
PD0 RXD (UART Input line)
PD1 TXD (UART Output line)
PD2 INT0 (External interrupt 0 input)
PD3 INT1 (External interrupt 1 input)
PD4 T0 (Timer/Counter 0 external counter input)
PD5 T1 (Timer/Counter 1 external counter input)
PD6 AIN0 (Analog comparator positive input)
PD7 AIN1 (Analog comparator negative input)
Port D Data Register - PORTD
Bit 76543210
$12 ($32) PORTD7 PORTD6 PORTD5 PORTD4 PORTD3 PORTD2 PORTD1 PORTD0 PORTD
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Port D Data Direction Register - DDRD
Bit 76543210
$11 ($31) DDD7 DDD6 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0 DDRD
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial value 0 0 0 0 0 0 0 0
Port D Input Pins Address - PIND
Bit 76543210
$10 ($30) PIND7 PIND6 PIND5 PIND4 PIND3 PIND2 PIND1 PIND0 PIND
Read/Write RRRRRRRR
Initial value Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z
The Port D Input Pins address - PIND - is not a register, and this address enables access to the physical value on each
Port D pin. When reading PORTD, the Port D Data Latch is read, and when reading PIND, the logical values present on the
pins are read.
Port D As General Digital I/O
PDn, General I/O pin: The DDDn bit in the DDRD register selects the direction of this pin. If DDDn is set (one), PDn is configured as an outpu t pin. If DDDn is c leared (zero), PDn is con figur ed as an inpu t pin. If PDn is s et (one ) when conf igured
as an input pin t he MO S pu ll up resi stor i s ac tivated. To swi tch the pu ll up resi stor off th e PDn has to be clear ed ( zero) or
the pin has to be configured as an output pin.The port pins are tristated when a reset condition becomes active, even if the
clock is not running.
66
AT90S/LS2333 and AT90S/LS4433
Page 67

AT90S/LS2333 and AT90S/LS4433
Table 27. DDDn Bits on Port D Pins
DDDn PORTDn I/O Pull Up Comment
0 0 Input No Tri-state (Hi-Z)
0 1 Input Yes PDn will source current if ext. pulled low.
1 0 Output No Push-Pull Zero Output
1 1 Output No Push-Pull One Output
Note: n: 7,6…0, pin number.
Alternate Functions Of Port D
AIN1 - Port D, Bit 7
•
AIN1, Analog Comparator Negative Input. When configured as an input (DDD7 is cleared (zero)) and with the internal MOS
pull up resistor switched off (PD7 is cleared (zero)), this pin also serves as the negative input of the on-chip analog comparator. During power down mode, the schmitt trigger of the digital input is disconnected. This allows analog signals which are
close to V
AIN0 - Port D, Bit 6
•
AIN0, Analog Comparator Positiv e Inpu t. Wh en c onfigured as an inp ut (DDD6 is cl ea red (zero)) and wi th the intern al MOS
pull up resistor switched off (PD6 is cleared (zero)), this pin also serves as the positive input of the on-chip analog comparator. During power down mode, the schmitt trigger of the digital input is disconnected. This allows analog signals which are
close to V
T1 - Port D, Bit 5
•
T1, Timer/Counter1 counter source. See the timer description for further details
T0 - Port D, Bit 4
•
T0: Timer/Counter0 counter source. See the timer description for further details.
INT1 - Port D, Bit 3
•
INT1, External Interrupt source 1: The P D3 pin can s erve as an externa l interrupt source to the MCU. See the interrupt
description for further details, and how to enable the source.
INT0 - Port D, Bit 2
•
INT0, External Interrupt source 0: The P D2 pin can s erve as an externa l interrupt source to the MCU. See the interrupt
description for further details, and how to enable the source.
TXD - Port D, Bit 1
•
Transmit Data (Data output pin for the UART). When the UART transmitter is enabled, this pin is configured as an output
regardless of the value of DDD1.
RXD - Port D, Bit 0
•
Receive Data (Data inp ut pin fo r the U ART) . W hen the UART rec ei ve r is ena bl ed th is pi n is c on figu r ed a s an in put regardless of the value of DD D0. When the UART forces this pin to be an inp ut, a log ical one in PORTD0 will turn on the in ter na l
pull-up.
/2 to be present during power down without causing excessive power consumption.
CC
/2 to be present during power down without causing excessive power consumption.
CC
67
Page 68

Port D Schematics
Note that all port pins are synchronized. The synchronization latches are however, not shown in the figures.
Figure 57. Port D Schematic Diagram (Pin PD0)
RD
MOS
PULLUP
PD0
RL
RP
RESET
Q
DDD0
WD
RESET
Q
PORTD0
WP
D
C
D
C
DATA BUS
WRITE PORTD
WP:
WRITE DDRD
WD:
READ PORTD LATCH
RL:
READ PORTD PIN
RP:
READ DDRD
RD:
UART RECEIVE DATA
RXD:
UART RECEIVE ENABLE
RXEN:
Figure 58. Port D Schematic Diagram (Pin PD1)
MOS
PULLUP
PD1
RXEN
RXD
RD
RESET
R
D
Q
DDD1
C
WD
RESET
R
Q
D
PORTD1
C
RL
RP
WP
DATA BUS
68
WRITE PORTD
WP:
WRITE DDRD
WD:
READ PORTD LATCH
RL:
READ PORTD PIN
RP:
READ DDRD
RD:
UART TRANSMIT DATA
TXD:
UART TRANSMIT ENABLE
TXEN:
AT90S/LS2333 and AT90S/LS4433
TXEN
TXD
Page 69

AT90S/LS2333 and AT90S/LS4433
Figure 59. Port D Schematic Diagram (Pins PD2 and PD3)
Figure 60. Port D Schematic Diagram (Pins PD4 and PD5)
PDn
WRITE PORTD
WP:
WRITE DDRD
WD:
READ PORTD LATCH
RL:
READ PORTD PIN
RP:
READ DDRD
RD:
4, 5
n:
DDDn
PORTBn
2
69
Page 70

Figure 61. Port D Schematic Diagram (Pins PD6 and PD7)
MOS
PULLUP
PDn
RD
RESET
D
Q
DDDn
C
WD
RESET
D
Q
PORTDn
C
RL
WP
DATA BUS
WP:
WD:
RP:
RD:
PWRDN:
RL:
n:
m:
WRITE PORTD
WRITE DDRD
READ PORTD LATCH
READ PORTD PIN
READ DDRD
POWER DOWN MODE
6, 7
0, 1
PWRDN
RP
TO COMPARATOR
AINm
70
AT90S/LS2333 and AT90S/LS4433
Page 71

AT90S/LS2333 and AT90S/LS4433
Memory Programming
Program and Data Memory Lock Bits
The AT90S2333/4433 MCU provides two Lock bits which can be left unprogrammed (‘1’) or can be programmed (‘0’) to
obtain the additional features listed in Table 28. The Lock bits can only be erased with the Chip Erase command.
Table 28. Lock Bit Protection Modes
Memory Lock Bits Protection Type
Mode LB1 LB2
1 1 1 No memory lock features enabled.
2 0 1 Further programming of the Flash and EEPROM is disabled.
3 0 0 Same as mode 2, and verif y is also disabled.
Note: 1. In Parallel mode, programming of the Fuse bits are also di sabled. Program the Fuse bits before programming t he Lock bits.
Fuse Bits
The AT90S2333/4433 has six Fuse bits, SPIEN, BODLEVEL, BODEN and CKSEL2..0.
• When the SPIEN Fuse is programmed (‘0’), Serial Program and Data Downloading is enabled. Default value is
programmed (‘0’). This bit is not accessible in serial programming mode.
• The BODLEVEL Fuse selects the Brown-Out Detection Level and changes the Start-up times. See “Brown-Out
Detection” on page 21. Default value is unprogrammed (‘1’).
• When the BODEN Fuse is programmed (‘0’), the Brown- Out Detector is enabled. See “Brown-Out Detection” on
page 21. Default value is unprogrammed (‘1’).
• CKSEL2..0: See Table 5, “Reset Delay Selections”, for which combination of CKSEL2..0 to use. Default value is ‘010’.
(1)
Signature Bytes
All Atmel microcontrollers have a three-byte signature code which identifies the device. This code can be read in both serial
and parallel mode. The three bytes reside in a separate address space.
(1)
(1)
they are:
they are:
For the AT90S4433
1. $000 : $1E (indicates manufactured by Atmel)
2. $001: $92 (indicates 4KB Flash memory)
3. $002: $03 (indicates A T90S4433 device when signature byte $001 is $92)
For AT90S2333
1. $000 : $1E (indicates manufactured by Atmel)
2. $001: $91 (indicates 2KB Flash memory)
3. $002: $05 (indicates A T90S2333 device when signature byte $001 is $91)
Note: 1. When both Lock bit s are pro gr amme d (Loc k m ode 3) , the si gnature by tes c an not b e read i n serial m ode . Rea ding th e sign a-
ture bytes will return: $00, $01 and $02.
Programming the Flash and EEPROM
Atmel’s AT90S2 333/443 3 offe rs 2K/4K bytes of in -syste m reprog rammabl e Flash Program memory an d 128/25 6 bytes of
EEPROM Data memory.
The AT90S2333/4433 is shipped with the on-chip Flash Program and EEPROM Data memory arrays in the erased state
(i.e. contents = $FF) and ready to be programmed. This device supports a High-Voltage (12V) Parallel programming mode
and a Low-Voltage Serial programming mode. The +12V is used for programming enable only, and no current of significance is drawn by this pin. The serial programming mode provides a convenient way to download program and data into
the AT90S2333/4433 inside the user’s system.
71
Page 72

The Program and Data memory arrays on the AT90S2333/4433 are programmed byte-by-byte in either programming
modes. For the EEPROM, a n au to-erase c ycle i s provi ded within the se lf-ti med write in structi on in t he seri al progr ammin g
mode. During programming, the supply voltage must be in accordance with Table 29.
Table 29. Supply voltage during programming
Part Serial programming Parallel programming
AT 90LS2333 2.7 - 6.0 V 4.5 - 5.5 V
AT90S2333 4.0 - 6.0 V 4.5 - 5.5 V
AT 90LS4433 2.7 - 6.0 V 4.5 - 5.5 V
AT90S4433 4.0 - 6.0 V 4.5 - 5.5 V
Parallel Programming
This section describes how to paral lel program and verify Flash Prog ram memory, EEPR OM Data mem ory, Lock bits and
Fuse bits in the AT90S2333/4433.
Signal Names
In this section, some pins of the AT90S23 33/4433 are reference d by sig nal names des cribi ng their func tion durin g paral lel
programming. See Figure 62 and Table 30. Pins not described in Table 30 are referenced by pin names.
The XA1/XA0 pins determine the ac tion ex ecuted when the XTAL 1 pin is given a positive pulse. The bi t coding are shown
in Table 31.
When pulsing WR
ent bits are assigned functions as shown in Table 32.
or OE, the command l oaded de termines the actio n exec uted. The Co mmand i s a byte whe re the di ffer-
Figure 62. Parallel Programming
RDY/BSY
OE
WR
BS
XA0
XA1
+12V
AT90S2333/4433
PD1
PD2
PD3
PD4
PD5
PD6
RESET
XTAL1
GND
VCC
PC1 - PC0,
PB5 - PB0
+5V
DATA
72
AT90S/LS2333 and AT90S/LS4433
Page 73

AT90S/LS2333 and AT90S/LS4433
Table 30. Pin Name Mapping
Signal Name in Programming Mode Pin Name I/O Function
RDY/BSY PD1 O 0: Device is busy programming, 1: Device is ready for new command
OE
WR
BS PD4 I Byte Select (‘0’ selects low byte, ‘1’ selects high byte)
XA0 PD5 I XTAL Action Bit 0
XA1 PD6 I XTAL Action Bit 1
DATA PC1-0, PB5-0 I/O Bidirectional Databus (Output when OE
PD2 I Output Enable (Active low)
PD3 I Write Pulse (Active low)
Table 31. XA1 and XA0 Coding
XA1 XA0 Action when XTAL1 is Pulsed
0 0 Load Flash or EEPROM Address (High or low address byte determined by BS)
0 1 Load Data (High or Low data byte for Flash determined by BS)
1 0 Load Command
1 1 No Action, Idle
Table 32. Command Byte Bit Coding
Command Byte Command Executed
1000 0000 Chip Erase
0100 0000 Write Fuse Bits
0010 0000 Write Lock Bits
is low)
0001 0000 Write Flash
0001 0001 Write EEPROM
0000 1000 Read Signature Bytes
0000 0100 Read Fuse and Lock Bits
0000 0010 Read Flash
0000 0011 Read EEPROM
Enter Programming Mode
The following algorithm puts the device in parallel programming mode:
1. Apply supply voltage according to Table 29, between V
2. Set the RESET
3. Apply 11.5 - 12.5V to RESET
and BS pin to ‘0’ and wait at least 100 ns.
. Any activity on BS within 100 ns after +12V has been applied to RESET, will cause
and GND.
CC
the device to fail entering programming mode.
Chip Erase
The Chip Erase command will erase the Flash and EEPROM memories, and the Lock bits. The Lock bits are not reset until
the Flash and EEPROM have been complete ly erased. The Fuse bits are n ot changed . Chip Eras e must be performed
before the Flash or EEPROM is reprogrammed.
Load Command “Chip Erase”
73
Page 74

1. Set XA1, XA0 to ‘10’. This enables command loading.
2. Set BS to ‘0’.
3. Set DATA to ‘1000 0000’. This is the command for Chip erase.
4. Give XTAL1 a positive pulse. This loads the command.
5. Give WR
generate any activity on the RDY/BSY
Programming the Flash
A: Load Command “Write Flash”
1. Set XA1, XA0 to ‘10’. This enables command loading.
2. Set BS to ‘0’
3. Set DATA to ‘0001 0000’. This is the command for Write Flash.
4. Give XTAL1 a positive pulse. This loads the command.
B: Load Address High Byte
1. Set XA1, XA0 to ‘00’. This enables address loading.
2. Set BS to ‘1’. This selects high byte.
3. Set DATA = Address high byte ($00 - $03/$07)
4. Give XTAL1 a positive pulse. This loads the address high byte.
C: Load Address Low Byte
1. Set XA1, XA0 to ‘00’. This enables address loading.
2. Set BS to ‘0’. This selects low byte.
3. Set DATA = Address low byte ($00 - $FF)
4. Give XTAL1 a positive pulse. This loads the address low byte.
D: Load Data Low Byte
1. Set XA1, XA0 to ‘01’. This enables data loading.
2. Set DATA = Data low byte ($00 - $FF)
3. Give XTAL1 a positive pulse. This loads the data low byte.
E: Write Data Low Byte
1. Set BS to ‘0’. This selects low data.
2. Give WR
3. Wait until RDY/BSY
(See Figure 63 for signal waveforms.)
F: Load Data High Byte
1. Set XA1, XA0 to ‘01’. This enables data loading.
2. Set DATA = Data high byte ($00 - $FF)
3. Give XTAL1 a positive pulse. This loads the data high byte.
G: Write Data High Byte
1. Set BS to ‘1’. This selects high data.
2. Give WR
3. Wait until RDY/BSY
(See Figure 64 for signal waveforms.)
The loaded command and address are retained in the device during programming. For efficient programming, the following
should be considered.
• The command needs only be loaded once when writing or reading multiple memory locations.
a t
WLWH_CE
a negative pulse. This starts programming of the data byte. RDY/BSY goes low.
a negative pulse. This starts programming of the data byte. RDY/BSY goes low.
wide negative pulse to execute Chip Erase. See Table 33 for t
pin.
goes high to program the next byte.
goes high to program the next byte.
WLWH_CE
value. Chip Erase does not
74
AT90S/LS2333 and AT90S/LS4433
Page 75

AT90S/LS2333 and AT90S/LS4433
• Address high byte needs only be loaded before programming a new 256 word page in the Flash.
• Skip writing the data value $FF, that is the contents of the entire Flash and EEPROM after a Chip Erase.
These considerations also applies to EEPROM programming, and Flash, EEPROM and Signature bytes reading.
Figure 63. Programming the Flash Waveforms
$10 ADDR. HIGH ADDR. LOW DATA LOWDATA
XA1
XA0
BS
XTAL1
WR
RDY/BSY
RESET
12V
OE
Figure 64. Programming the Flas h Wavefo rm s (con tin ued)
DATA
XA1
XA0
BS
XTAL1
WR
RDY/BSY
RESET
OE
DATA HIGH
+12V
Reading the Flash
The algorithm for reading the Flash memory is as fo llows (refer to Programming the Flash for details on Command and
Address loading):
1. A: Load Command ‘0000 0010’.
2. B: Load Address High Byte ($00 - $03/$07).
3. C: Load Address Low Byte ($00 - $FF).
4. Set OE
to ‘0’, and BS to ‘0’. The Flash word low byte can now be read at DATA.
5. Set BS to ‘1’. The Flash word high byte can now be read from DATA.
6. Set OE
to ‘1’.
75
Page 76

Programming the EEPROM
The programming algor ithm for th e EEPRO M data mem ory is a s follows ( refer to P rogramming the Flash for details on
Command, Address and Data loading):
1. A: Load Command ‘0001 0001’.
2. C: Load Address Low Byte ($00 - $7F/$FF).
3. D: Load Data Low Byte ($00 - $FF).
4. E: Write Data Low Byte.
Reading the EEPROM
The algorithm for reading the EEPROM memory is as follows (refer to Programming the Flash for details on Command and
Address loading):
1. A: Load Command ‘0000 0011’.
2. C: Load Address Low Byte ($00 - $7F/$FF).
3. Set OE
4. Set OE
Programming the Fuse Bits
The algorithm for programming the Fuse bits is as follows (refer to Programming the Flash for details on Command and
Data loading):
1. A: Load Command ‘0100 0000’.
2. D: Load Data Low Byte. Bit n = ‘0’ programs and bit n = ‘1’ erases the Fuse bit.
Bit 5 = SPIEN Fuse bit
Bit 4 = BODLEVEL Fuse bit
Bit 3 = BODEN Fuse bit
Bit 2 = CKSEL2 Fuse bit
Bit 1 = CKSEL1 Fuse bit
Bit 0 = CKSEL0 Fuse bit
Bit 7-6 = ‘1’. These bits are reserved and should be left unprogrammed (‘1’).
3. Give WR
the Fuse bits does not generate any activity on the RDY/BSY
to ‘0’, and BS to ‘0’. The EEPROM data byte can now be read at DATA.
to ‘1’.
a t
WLWH_PFB
wide negative pulse to execute the programming, t
pin.
WLWH_PFB
is found in Table 33. Programming
Programming the Lock Bits
The algorithm for programming the Lock bits is as follows (refer to Programming the Flash for details on Command and
Data loading):
1. A: Load Command ‘0010 0000’.
2. D: Load Data Low Byte. Bit n = ‘0’ programs the Lock bit.
Bit 2 = Lock Bit2
Bit 1 = Lock Bit1
Bit 7-3,0 = ‘1’. These bits are reserved and should be left unprogrammed (‘1’).
3. E: Write Data Low Byte.
The Lock bits can only be cleared by executing Chip Erase.
Reading the Fuse and Lock Bits
The algorithm for reading the Fuse and Lock bits is as follows (refer to Programming the Flash for details on Command
loading):
1. A: Load Command ‘0000 0100’.
2. Set OE
76
to ‘0’, and BS to ‘0’. The status of the Fuse bits can now be read at DATA (‘0’ means programmed).
AT90S/LS2333 and AT90S/LS4433
Page 77

AT90S/LS2333 and AT90S/LS4433
Bit 5 = SPIEN Fuse bit
Bit 4 = BODLEVEL Fuse bit
Bit 3 = BODEN Fuse bit
Bit 2 = CKSEL2 Fuse bit
Bit 1 = CKSEL1 Fuse bit
Bit 0 = CKSEL0 Fuse bit
3. Set BS to ‘1’. The status of the Lock bits can now be read at DATA (‘0’ means programmed).
Bit 2 = Lock Bit2
Bit 1= Lock Bit1
4. Set OE
Reading the Signature Bytes
The algorithm for reading the Signature bytes is as follows (refer to Programming the Flash for details on Command and
Address loading):
1. A: Load Command ‘0000 1000’.
2. C: Load Address Low Byte ($00 - $02).
Set OE
3. Set OE
to ‘1’.
to ‘0’, and BS to ‘0’. The selected Signature byte can now be read at DATA.
to ‘1’.
Parallel Programming Characteristics
Figure 65. Parallel Programming Timing
XTAL1
Data & Contol
(DATA, XA0/1, BS)
WR
RDY/BSY
OE
DATA
t
DVXH
t
XHXL
t
XLWL
t
XLDX
t
XLOL
t
BVWL
t
WLWH
t
OLDV
t
WHRL
t
RHBX
t
WLRH
t
OHDZ
Write
Read
77
Page 78

Table 33. Parallel Programming Characteristics T
= 25°C ± 10%, VCC =5V ± 10%
A
Symbol Parameter Min Typ Max Units
V
PP
I
PP
t
DVXH
t
XHXL
t
XLDX
t
XLWL
t
BVWL
t
RHBX
t
WLWH
t
WHRL
t
WLRH
t
XLOL
t
OLDV
t
OHDZ
t
WLWH_CE
Programming Enable Voltage 11.5 12.5 V
Programming Enable Current 250 µΑ
Data and Control Setup before XTAL1 High 67 ns
XTAL1 Pulse Width High 67 ns
Data and Control Hold after XTAL1 Low 67 ns
XTAL1 Low to WR Low 67 ns
BS Valid to WR Low 67 ns
BS Hold after RDY/BSY High 67 ns
WR Pulse Width Low
WR High to RDY/BSY Low
WR Low to RDY/BSY High
(1)
(2)
(2)
67 ns
20 ns
0.5 0.7 0.9 ms
XTAL1 Low to OE Low 67 ns
OE Low to DATA Valid 20 ns
OE High to DATA Tristated 20 ns
WR Pulse Width Low for Chip Erase 5 10 15 ms
WR Pulse Width Lo w for Programming the Fuse
t
WLWH_PFB
Notes: 1. Use t
2. If t
Bits 1.0 1.5 1.8 ms
WLWH_CE
WLWH
for Chip Erase and t
is held longer than t
WLWH_PFB
, no RDY/BSY pulse will be seen.
WLRH
for Programming the Fuse Bits.
Serial Downloading
Both the Program and Data memory arrays can be programmed using the SPI bus while RES ET is pulled to GND. The
serial interface consists of pins SCK, MOSI (input) and MISO (output), see Figure 66. After RESET
ming Enable instruction needs to be executed first before program/erase instructions can be executed.
Figure 66. Serial Programming and Verify
DATA OUT
INSTR. IN
CLOCK IN
1 to 8 MHz
GND
AT90S2333/4433
PB4(MISO)
PB3(MOSI)
PB5(SCK)
RESET
XTAL2
XTAL1
GND
+2.7 - 6.0 V
VCC
is set low, the Program-
78
AT90S/LS2333 and AT90S/LS4433
Page 79

AT90S/LS2333 and AT90S/LS4433
For the EEPROM, an auto-erase cycle is provided within the self-timed write instruction and there is no need to first execute the Chip Erase instruction. The Chip Erase instruction turns the content of every memory location in both the Program
and EEPROM arrays into $FF.
The Program and EEPROM memory arrays have separate address spaces:
0000 to $03FF/$07FF (AT90S2333/AT90S4433) for Program memory and $0000 to $007F/$00FF
(AT90S2333/AT90S4433) for EEPROM memory.
Either an external system clock is supplied at pin XT AL1 or a crystal needs to be connected across pins XTAL1 and
XTAL2.The minimum low and high periods for the serial clock (SCK) input are defined as follows:
Low:> 2 XTAL1 clock cycles
High:> 2 XTAL1 clock cycles
Serial Programming Algorithm
When writing serial data to the AT90S2333/AT90S4433, data is clocked on the rising edge of CLK.
When reading data from the AT90S2333/AT90S4433, data is clocked on the falling edge of CLK. See Figure 67, Figure 68
and Table 36 for details.
To program and verify the AT90S2333/AT90S4433 in the serial programming mode, the following sequence is recom-
mended (See four byte instruction formats in Table 35
1. Power-up sequence:
Apply power between V
and GND while RESET and SCK ar e set to ‘0’. If a crystal is not connecte d across pins
CC
XTAL1 and XTAL2, a pply a clock signal to the X TAL1 pin. In some systems, the programme r can not guarantee that
SCK is held low durin g power-up. In this case, RESET
duration after SCK has been set to ‘0’.
2. Wait for at least 20 ms and enable serial programming by sending the Programming Enable serial instruction to pin
MOSI/PB3.
3. The serial programming instructions will not work if the communication is out of syncronization. When in sync, the
second byte ($53) will echo back when issuing the third byte of the Programming Enable instruction. Wheter the
echo is correct or not, all 4 bytes of the instruction must be transmitted. If the $53 did not echo back, give SCK a
positive pulse and issue a new Programming Enable instruction. If the $53 is not seen within 32 attempts, there is
no functional device connected.
4. If a Chip Erase is performed (must be done to erase the Flash), wait t
positive pulse, and start over from Step 2. See Table 37 on page 82 for t
5. The Flash or EEPROM array is programmed one byte at a time by supplying the address and data together with the
appropriate Write instruction. An EEPROM memory location is first automatically erased before new data is written.
Use Data Polling to detect when the next byte in the Flash or EEPROM can be written. If polling is not used, wait
t
WD_PROG
grammed. See Table 38 on page 82 for t
before transmitting the next instruction. In an erased device, no $FFs in the data file(s) needs to be pro-
WD_PROG
6. Any memory location can be verified by using the Read instruction which returns the content at the selected
address at serial output MISO/PB4.
7. At the end of the programming session, RESET
8. Power-off sequence (if needed):
Set XTAL1 to ‘0’ (if a crystal is not used).
Set RESET
Turn V
to ‘1’.
power off
CC
):
must be given a positive pulse of at least two XTAL1 cycles
WD_ERASE
after the instruction, give RESET a
WD_ERASE
value.
value.
can be set high to commence normal operation.
79
Page 80

Data Polling EEPROM
When a byte is being pro gramm ed into the EEPROM, r eading the ad dress lo cation being progr ammed wi ll give the value
P1 until the auto-erase is finished, and then the value P2. See Table 34 for P1 and P2 values.
At the time the device is ready for a new EEPROM byte, the programmed value will read correctly. This is used to determine when the next byte can be written. This wil l no t work for the values P1 and P2, so when programmi ng the se val ues,
the user will have to wait for at least the prescribed time
t
WD_PROG
value. As a chip-er ased de vice contai ns $F F in all lo catio ns, pr ogram ming of ad dresse s th at are meant to con tain
t
WD_PROG
before programming the next byte. See Table 38 for
$FF, can be skipped. This does not apply if the EEPROM is reprogrammed without first chip-erasing the device.
Table 34. Read Back Value during EEPROM polling
Part P1 P2
AT90S/LS2333 $00 $FF
AT90S/LS4433 $00 $FF
Data Polling Flash
When a byte is being pr ogram me d i nto t he Fl as h, reading the address loc at ion bei ng progr am med wi ll giv e the val ue $FF.
At the time the device is ready for a new byte, the programmed value will read correctly. This is used to determine when the
next byte can be written. This will not work for the value $FF, so when programming this value, the user will have to wait for
at least t
WD_PROG
before programming the next byte. As a chip-erased device contains $FF in all locations, programming of
addresses that are meant to contain $FF, can be skipped.
Figure 67. Serial Progra mmi ng Wa ve for ms
SERIAL DATA INPUT
PB3(MOSI)
SERIAL DATA OUTPUT
PB4(MISO)
SERIAL CLOCK INPUT
PB5(SCK)
MSB
MSB
LSB
LSB
80
AT90S/LS2333 and AT90S/LS4433
Page 81

AT90S/LS2333 and AT90S/LS4433
Table 35. Serial Programming Instruction Set
Instruction Instruction Format Operation
Byte 1 Byte 2 Byte 3 Byte4
Programming Enable
Chip Erase
Read Program Memory
Write Program Me mory
Read EEPROM
Memory
Write EEPROM
Memory
Write Lock Bits
Read Lock Bits
Read Sigature Bytes
Write Fuse Bits
1010 1100 0101 0011 xxxx xxxx xxxx xxxx Enable Serial Programming while
is low.
RESET
1010 1100 100x xxxx xxxx xxxx xxxx xxxx Chip Erase Flash and EEPROM
memory arrays.
0010 H000 xxxx xaaa bbbb bbbb oooo oooo Read H (high or low) data o from
Program memory at word address
a:b.
0100 H000 xxxx xaaa bbbb bbbb iiii iiii Write H (high or low) data i to
Program memory at word address
a:b.
1010 0000 xxxx xxxx bbbb bbbb oooo oooo Read data o from EEPROM memory
at address a:b.
1100 0000 xxxx xxxx bbbb bbbb iiii iiii Write data i to EEPROM memory at
address a:b.
21
1010 1100 1111 1
0101 1000 xxxx xxxx xxxx xxxx xxxx x21x Rad Lock bits. ’0’ = programmed, ‘1’ =
0011 0000 xxxx xxxx xxxx xxbb oooo oooo Read Signature Byte o at address
1010 1100 1017
1 xxxx xxxx xxxx xxxx Write Lock bits. Set bits
program Lock bits.
unprogrammed .
(1)
b.
6543 xxxx xxxx xxxx xxxx Set bits 7 - 3 = ’0’ to program, ‘1’ to
unprogram.
1,2
=’0’ to
Read Fuse Bits
Note: a = address high bits
b = address low bits
H = 0 - Low byte, 1 - High Byte
o = data out
i = data in
x = don’t care
1
= Lock bit 1
2
= Lock bit 2
3 = CKSEL0 Fuse
4 = CKSEL1 Fuse
5 = CKSEL2 Fuse
6 = BODEN Fuse
7 = BODLEVEL Fuse
8 = SPIEN Fuse
Note: 1. The signature bytes are not readable in Lock mode 3, i.e. both Lock bits programmed.
0101 0000 xxxx xxxx xxxx xxxx xx87 6543 Read fuse bits. ’0’ = programmed, ‘1’
= unprogrammed.
81
Page 82

Serial Programming Characteristics
Figure 68. Serial Programmi ng Timi ng
MOSI
SCK
MISO
t
OVSH
t
SHSL
t
SHOX
t
SLSH
t
SLIV
Table 36. Serial Programming Characteristics
= -40°C to 85°C, VCC = 2.7 - 6.0V (Unless otherwise noted)
T
A
Symbol Parameter Min Typ Max Units
1/t
t
CLCL
1/t
t
CLCL
t
SHSL
t
SLSH
t
OVSH
t
SHOX
t
SLIV
CLCL
CLCL
Oscillator Frequency (VCC = 2.7 - 6.0V) 0 4 MHz
Oscillator Period (VCC = 2.7 - 6.0V) 250 ns
Oscillator Frequency (VCC = 4.0 - 6.0V) 0 8 MHz
Oscillator Period (VCC = 4.0 - 6.0V) 125 ns
SCK Pulse Width High 2 t
SCK Pulse Width Low 2 t
MOSI Setup to SCK High t
MOSI Hold after SCK High 2 t
CLCL
CLCL
CLCL
CLCL
SCK Low to MISO Valid 10 16 32 ns
ns
ns
ns
ns
Table 37. Minimum wait delay after the Chip Erase instruction
Symbol 3.2V 3.6V 4.0V 5.0V
t
WD_ERASE
18ms 14ms 12ms 8ms
Table 38. Minimum wait delay after writing a Flash or EEPROM location
Symbol 3.2V 3.6V 4.0V 5.0V
t
WD_PROG
82
9ms7ms6ms4ms
AT90S/LS2333 and AT90S/LS4433
Page 83

Electrical Characteristics
Absolute Maximum Ratings*
Operating Temperature.................................. -55°C to +125°C
Storage Temperature..................................... -65°C to +150°C
Voltage on any Pin except RESET
with respect to Ground................................-1.0V to VCC+0.5V
Voltage on RESET
Maximum Operating Voltage ............................................6.6V
DC Current per I/O Pin ................................ ............... 40.0 mA
with respect to Ground......-1.0V to +13.0V
AT90S/LS2333 and AT90S/LS4433
*NOTICE: Stresses beyond those listed under “Absolute
Maximum Ratings” may cause permanent damage to the device. This is a stress rating only and
functional operation of the device at these or
other conditions beyond those indicated in the
operational sections of this specification is not
implied. Exposure to absolute maximum rating
conditions f or e xtended p eriods ma y aff ect de vice
reliability .
DC Current
V
and GND Pins................................ 300.0 mA
CC
DC Characteristics
TA = -40°C to 85°C, VCC = 2.7V to 6.0V (unless otherwise noted)
Symbol Parameter Condition Min Typ Max Units
V
IL
V
IL1
V
IL1
V
IH
V
IH1
V
IH2
V
OL
V
OH
I
IL
I
IH
Input Low Voltage Except (XTAL, RESET)-0.5 0.3V
Input Low Voltage XTAL -0.5 0.1
Input Low Voltage RESET -0.5 0.2V
4.3
2.2
CC
CC
CC
(2)
(2)
(2)
Input High Voltage Except (XTAL, RESET)0.7 V
Input High Voltage XTAL 0.7 V
Input High Voltage RESET 0.85 V
Output Low Voltage
(Ports B, C, D)
Output High Voltage
(Ports B, C, D)
Input Leakage
Current I/O pin
Input Leakage
Current I/O pin
(3)
(4)
= 20 mA, VCC = 5V
I
OL
I
= 10 mA, VCC = 3V
OL
= -3 mA, VCC = 5V
I
OH
I
= -1.5 mA, VCC = 3V
OH
VCC = 6V, pin = low
(Absolute value)
VCC = 6V, pin = high
(Absolute value)
RRST Reset Pull-Up 100 500 kΩ
(1)
CC
(1)
(1)
CC
VCC + 0.5 V
VCC + 0.5 V
VCC+0.5 V
0.6
0.5
8.0 ua
8.0 ua
V
V
V
V
V
V
V
R
I/O
I/O Pin Pull-Up Resistor 35 120 kΩ
Active 4MHz, VCC = 3V 5.0 mA
Idle 4MHz, VCC = 3V 2.0 mA
I
CC
Power Supply Current
Power Down, V
WDT enabled
Power Down, V
WDT disbled
= 3V
CC
(5)
= 3V
CC
(5)
20.0 µA
10 µA
83
Page 84

DC Characteristics
TA = -40°C to 85°C, VCC = 2.7V to 6.0V (unless otherwise noted) (Continued)
Symbol Parameter Condition Min Typ Max Units
Analog Comparator Input
Offset Voltage
Analog Comparator Input
Leakage A
Analog Comparator
Propagation Delay
t
ACPD
V
ACIO
I
ACLK
Notes: 1. “Max” means the highest value where the pin is guaranteed to be read as low (logical zero).
2. “Min” means the lowest value where the pin is guaranteed to be read as high (logical one).
3. Although each I/O port can sink more than the test conditions (20mA at Vcc = 5V, 10mA at Vcc = 3V) under steady state
conditions ( non-transient), the following must be observed:
1] The sum of all IOL, for all ports, should not exceed 300 mA.
2] The sum of all IOL, for port C0-C5 , should not exceed 100 mA.
3] The sum of all IOL, for ports B0-B5, D0-D7 and XTAL2, should not exceed 200 mA.
If IOL exceeds th e tes t c ond iti on, VOL may exceed the related sp ec ifi ca tion . Pin s are not g uaranteed to sink current g rea ter
than the listed test condition.
4. Although each I/O port can source more than the test conditions (3mA at Vcc = 5V, 1.5mA at Vcc = 3V) under steady state
conditions ( non-transient), the following must be observed:
1] The sum of all IOL, for all ports, should not exceed 300 mA.
2] The sum of all IOL, for port C0-C5 , should not exceed 100 mA.
3] The sum of all IOL, for ports B0-B5, D0-D7 and XTAL2, should not exceed 200 mA.
If IOH exceeds the test condition, VOH may exceed the related specification. Pins are not guaranteed to source current
greater than the listed test condition.
5. Minimum V
for Power Down is 2V.
CC
= 5V 40 mV
V
CC
= 5V
V
CC
V
= VCC/2
in
VCC = 2.7V
V
= 4.0V
CC
-50 5 0 nA
750
500
ns
84
AT90S/LS2333 and AT90S/LS4433
Page 85

External Clock Drive Waveforms
Figure 69. External Clock
VIH1
VIL1
Table 39. External Clock Drive
Symbol Parameter
AT90S/LS2333 and AT90S/LS4433
VCC = 2.7V to 6.0V VCC = 4.0V to 6.0V
UnitsMin Max Min Max
1/t
t
CLCL
t
CHCX
t
CLCX
t
CLCH
t
CHCL
CLCL
Oscillator Frequency 0 4 0 8 MHz
Clock Peri od 250 125 ns
High Time 100 50 ns
Low Time 100 50 ns
Rise Time 1.6 0.5 µs
Fall Time 1.6 0.5 µs
85
Page 86

Typical Characteristics
The following charts show typical behavior. These data are characterized, but not tested. All current consumption measurements are perfor med with all I/O pins co nfigured as inputs an d with inte rnal pull -ups enab led. A si ne wave generator with
rail to rail output is used as clock source.
The power consumption in power-down mode is independent of clock selection.
The current consumption is a function of s everal factors such as: operating v oltage, operating frequenc y, loading of I/O
pins, switching rate of I/O pins, code executed and ambient temperature. The dominating factors are operating voltage and
frequency.
*V
The current drawn from capacitive loaded pins may be estimated (for one pin) as C
= operating voltage and f = average switching frequency of I/O pin.
V
CC
The parts are characteriz ed at frequenci es higher than test limits. Pa rts are not guar anted to functi on properly at frequencies higher than the ordering code indicates.
The difference between current consumption in Power Down mode with Watchdog timer enabled and Power Down mode
with Watchdog timer disabled represents the differential current drawn by the watchdog timer.
The difference between Power Down mode with Brown Out Detector enabled and Power Down mode with Watchdog timer
disabled represents the differential curre nt drawn by the brown out detector.
Figure 70. Active Supply Current vs. Frequency
*f where CL = load capacitance,
CC
L
ACTIVE SUPPLY CURRENT vs. FREQUENCY
T = 25˚C
A
35
30
25
20
(mA)
cc
I
15
10
V
= 2.7V
5
0
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Frequency (MHz)
cc
V
cc
= 3.0V
V
cc
V
cc
V
cc
V
cc
V
cc
V
cc
V
cc
= 6V
= 5.5V
= 5V
= 4.5V
= 4V
= 3.6V
= 3.3V
86
AT90S/LS2333 and AT90S/LS4433
Page 87

AT90S/LS2333 and AT90S/LS4433
Figure 71. Active Supply Current vs. V
14
12
10
8
(mA)
cc
I
6
4
2
0
2 2.5 3 3.5 4 4.5 5 5.5 6
CC
ACTIVE SUPPLY CURRENT vs. V
FREQUENCY = 4 MHz
V
(V)
cc
cc
T = 25˚C
A
T = 85˚C
A
Figure 72. Idle Supply Current vs. Frequency
IDLE SUPPLY CURRENT vs. FREQUENCY
18
16
14
12
10
(mA)
cc
I
8
6
4
2
0
0123456789101112131415
T = 25˚C
A
Frequency (MHz)
V
cc
= 2.7V
V
cc
= 3.0V
V
cc
V
cc
V
cc
V
cc
V
cc
V
cc
V
cc
= 6V
= 5.5V
= 5V
= 4.5V
= 4V
= 3.6V
= 3.3V
87
Page 88

Figure 73. Idle Supply Current vs. V
CC
6
5
4
(mA)
3
cc
I
2
1
0
2 2.5 3 3.5 4 4.5 5 5.5 6
Figure 74. Power Down Supply Current vs. V
IDLE SUPPLY CURRENT vs. V
FREQUENCY = 4 MHz
V
(V)
cc
CC
cc
T = 85˚C
A
T = 25˚C
A
POWER DOWN SUPPLY CURRENT vs. V
WATCHDOG TIMER DISABLED
cc
25
20
15
(µΑ)
cc
I
10
5
0
2 2.5 3 3.5 4 4.5 5 5.5 6
V
(V)
cc
T = 85˚C
A
T = 70˚C
A
T = 45˚C
A
T = 25˚C
A
88
AT90S/LS2333 and AT90S/LS4433
Page 89

AT90S/LS2333 and AT90S/LS4433
Figure 75. Power Down Supply Current vs. V
POWER DOWN SUPPLY CURRENT vs. V
120
100
80
60
(µΑ)
cc
I
40
20
0
2 2.5 3 3.5 4 4.5 5 5.5 6
CC
WATCHDOG TIMER ENABLED
V
(V)
cc
cc
T = 85˚C
A
T = 25˚C
A
Figure 76. Power Down Supply Current vs. V
POWER DOWN SUPPLY CURRENT vs. V
140
120
100
80
(µΑ)
60
cc
I
40
20
0
2 2.5 3 3.5 4 4.5 5 5.5 6
CC
BROWN OUT DETECTOR ENABLED
V
(V)
cc
cc
T = 85˚C
A
T = 25˚C
A
89
Page 90

Figure 77. Analog Comparator Current vs. V
CC
ANALOG COMPARATOR CURRENT vs. V
0.9
0.8
0.7
0.6
0.5
(mA)
cc
I
0.4
0.3
0.2
0.1
0
2 2.5 3 3.5 4 4.5 5 5.5 6
V
(V)
cc
Analog comparator offset voltage is measured as absolute offset
cc
T = 25˚C
A
T = 85˚C
A
Figure 78. Analog Comparator Offset Voltage vs. Common Mode Voltage
ANALOG COMPARATOR OFFSET VOLTAGE vs.
COMMON MODE VOLTAGE
18
16
14
12
10
8
Offset Voltage (mV)
6
4
2
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Common Mode Voltage (V)
V = 5V
cc
T = 25˚C
A
T = 85˚C
A
90
AT90S/LS2333 and AT90S/LS4433
Page 91

AT90S/LS2333 and AT90S/LS4433
Figure 79. Analog Comparator Offset Voltage vs. Common Mode Voltage
ANALOG COMPARATOR OFFSET VOLTAGE vs.
COMMON MODE VOLTAGE
10
8
V = 2.7V
cc
T = 25˚C
A
6
4
Offset Voltage (mV)
2
0
0 0.5 1 1.5 2 2.5 3
Common Mode Voltage (V)
Figure 80. Analog Comparator Input Leakage Current
ANALOG COMPARATOR INPUT LEAKAGE CURRENT
60
50
V = 6V
CC
T = 25˚C
A
T = 85˚C
A
40
30
ACLK
I (nA)
20
10
0
-10
0 0.5 1.51 2 2.5 3.53 4 4.5 5 6 6.5 75.5
V (V)
IN
91
Page 92

Figure 81. Watchdog Oscillator Frequency vs. V
CC
WATCHDOG OSCILLATOR FREQUENCY vs. V
1600
1400
1200
1000
800
RC
F (KHz)
600
400
200
0
2 2.5 3 3.5 4 4.5 5 5.5 6
V (V)
cc
cc
T = 25˚C
A
T = 85˚C
A
92
AT90S/LS2333 and AT90S/LS4433
Page 93

AT90S/LS2333 and AT90S/LS4433
Sink and source capabilities of I/O ports are measured on one pin at a time.
Figure 82. Pull-Up Resistor Current vs. Input Voltage
PULL-UP RESISTOR CURRENT vs. INPUT VOLTAGE
120
100
80
OP
60
I (µA)
40
20
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
T = 25˚C
A
T = 85˚C
A
Figure 83. Pull-Up Resistor Current vs. Input Voltage
V = 5V
cc
V (V)
OP
PULL-UP RESISTOR CURRENT vs. INPUT VOLTAGE
V = 2.7V
cc
30
T = 25˚C
A
25
T = 85˚C
A
20
15
OP
I (µA)
10
5
0
0 0.5 1 1.5 2 2.5 3
V (V)
OP
93
Page 94

Figure 84. I/O Pin Sink Current vs. Output Voltage
I/O PIN SINK CURRENT vs. OUTPUT VOLTAGE
80
70
T = 25˚C
60
A
50
40
T = 85˚C
OL
30
I (mA)
A
20
10
0
0 0.5 1 1.5 2 2.5 3
Figure 85. I/O Pin Source Current vs. Output Voltage
V = 5V
cc
V (V)
OL
I/O PIN SOURCE CURRENT vs. OUTPUT VOLTAGE
V = 5V
cc
18
16
14
12
10
8
OH
I (mA)
6
4
2
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
V (V)
OH
T = 25˚C
A
T = 85˚C
A
94
AT90S/LS2333 and AT90S/LS4433
Page 95

Figure 86. I/O Pin Sink Current vs. Output Voltage
I/O PIN SINK CURRENT vs. OUTPUT VOLTAGE
30
25
20
15
OL
I (mA)
10
5
0
0 0.5 1 1.5 2
AT90S/LS2333 and AT90S/LS4433
V = 2.7V
cc
T = 25˚C
A
T = 85˚C
A
V (V)
OL
Figure 87. I/O Pin Source Current vs. Output Voltage
I/O PIN SOURCE CURRENT vs. OUTPUT VOLTAGE
6
5
4
3
OH
I (mA)
2
1
0
0 0.5 1 1.5 2 2.5 3
V = 2.7V
cc
T = 25˚C
A
T = 85˚C
A
V (V)
OH
95
Page 96

Figure 88. I/O Pin Input Threshold Voltage vs. V
CC
2.5
2
1.5
1
Threshold Voltage (V)
0.5
0
2.7 4.0 5.0
Figure 89. I/O Pin Input Hysteresis vs. V
I/O PIN INPUT THRESHOLD VOLTAGE vs. V
T = 25˚C
A
V
cc
CC
cc
I/O PIN INPUT HYSTERESIS vs. V
T = 25˚C
A
0.18
0.16
0.14
0.12
0.1
0.08
Input hysteresis (V)
0.06
0.04
0.02
0
2.7 4.0 5.0
V
cc
cc
96
AT90S/LS2333 and AT90S/LS4433
Page 97

AT90S/LS2333 and AT90S/LS4433
Register Summary
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
$3F ($5F) SREG I T H S V N Z C page 17
$3E ($5E) Reserved
$3D ($5D) SP SP7 SP6 SP5 SP4 SP3 SP2 SP1 SP0 page 17
$3C ($5C) Reserved
$3B ($5B) GIM S K INT1 INT0 - - - - - -page23
$3A ($5A) GIF R INTF1 INTF0
$39 ($59) TIMSK TOIE1 OCIE1
$38 ($58) TIFR TOV1 OCF1
$37 ($57) Reserved
$36 ($56) Reserved
$35 ($55) MCUCR - SE SM ISC11 ISC10 ISC01 ISC00 page 26
$34 ($54) MCUSR
$33 ($53) TCCR0
$32 ($52) TCNT0 Timer/Counter0 (8 Bits) page 30
$31 ($51) Reserved
$30 ($50) Reserved
$2F ($4F) TCCR1A COM11 COM10 - - - -PWM11PWM10 page31
$2E ($4E) TCCR1B ICNC1 ICES1
$2D ($4D) TCNT1H Timer/Counter1 - Counter Register High Byte page 33
$2C ($4C) TCNT1L Timer/Counter1 - Counter Register Low Byte page 33
$2B ($4B) OCR1H Timer/Counter1 - Output Compare Register High Byte page 34
$2A ($4A) OCR1L Timer/Counter1 - Output Compare Register Low Byte page 34
$29 ($49) Reserved
$28 ($48) Reserved
$27 ($47) ICR1H Timer/Counter1 - Input Capture Register High Byte page 34
$26 ($46) ICR1L Timer/Counter1 - Input Capture Register Low Byte page 34
$25 ($45) Reserved
$24 ($44) Reserved
$23 ($43) Reserved
$22 ($42) Reserved
$21 ($41) WDTCR - - - WDTOE WDE WDP2 WDP1 WDP0 pa ge 36
$20 ($40) Reserved
$1F ($3F) Reserved
$1E ($3E) EEAR EEPROM Address Register page 38
$1D ($3D) EEDR EEPROM Data Register page 38
$1C ($3C) EECR
$1B ($3B) Reserved
$1A ($3A) Reserved
$19 ($39) Reserved
$18 ($38) PORTB - - PORTB5 PORTB4 PORTB3 PORTB2 PORTB1 PORTB0 page 59
$17 ($37) DDRB
$16 ($36) PINB
$15 ($35) PORTC
$14 ($34) DDRC
$13 ($33) PINC
$12 ($32) PORTD PORTD7 PORTD6 PORTD5 PORTD4 PORTD3 PORTD2 PORTD1 PORTD0 page 66
$11 ($31) DDRD DDD7 DDD6 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0 page 66
$10 ($30) PIND PIND7 PIND6 PIND5 PIND4 PIND3 PIND2 PIND1 PIND0 page 66
$0F ($2F) SPDR SPI Data Register page 43
$0E ($2E) SPSR SPIF WC OL
$0D ($2D) SPCR SPIE SPE DORD MSTR CPOL CPHA SPR1 SPR0 page 42
$0C ($2C) UDR UART I/O Data Register page 47
$0B ($2B) UCSRA RXC TXC UDRE FE OR
$0A ($2A) UCSRB RXCIE TXCIE UDRIE RXEN TXEN CHR9 RXB8 TXB8 page 48
$09 ($29) UBRR UART Baud Rate Register page 50
$08 ($28) ACSR ACD
$07 ($27) ADMUX
$06 ($26) ADCSR ADEN ADSC ADFR ADIF ADIE ADPS2 ADPS1 ADPS0 page 56
$05 ($25) ADCH
$04 ($24) ADCL ADC7 ADC6 ADC5 ADC4 ADC3 ADC2 ADC1 ADC0 page 57
$03 ($23) UBRRHI
- - - - - - - -page17
page 24
- - TICIE1 -TOIE0 - page 24
- - ICF1 -TOV0- page 25
- - - - WDRF BORF EXTRF PORF page 22
- - - - - CS02 CS01 CS00 page 29
- - CTC1 CS12 CS11 CS10 page 32
- - - - EERIE EEMWE EEWE EERE page 38
- - DDB5 DDB4 DDB3 DDB2 DDB1 DDB0 page 59
- - PINB5 PINB4 PINB3 PINB2 PINB1 PINB0 page 59
- - PORTC5 PORTC4 PORTC3 PORTC2 PORTC1 PORTC0 page 64
- - DDC5 DDC4 DDC3 DDC2 DDC1 DDC0 page 64
- - PINC5 PINC4 PINC3 PINC2 PINC1 PINC0 page 64
- - - - - -page43
- - -page47
AINBG ACO ACI ACIE ACIC ACIS1 ACIS0 page 50
- ADCBG - - - MUX2 MUX1 MUX0 page 55
- - - - - - ADC9 ADC8 page 57
UART Baud Rate Register High page 50
97
Page 98

Register Summary (Continued)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
$02 ($22) Reserved
$01 ($21) Reserved
$00 ($20) Reserved
Notes: 1. For compatibility with future devices, reserved bits should be written to zero if accessed. Reserved I/O memory addresses
should never be written.
2. Some of the status flags are cleared by writing a logical one to them. Note that the CBI and SBI instructions will operate on
all bits in the I/O register, writing a one back into any flag read as set, thus clearing the flag. The CBI and SBI instructions
work with registers $00 to $1F only.
98
AT90S/LS2333 and AT90S/LS4433
Page 99

AT90S/LS2333 and AT90S/LS4433
Instruction Set Summary
Mnemonics Operands Description Operation Flags #Clocks
ARITHMETIC AND LOGIC INSTRUCTIONS
ADD Rd, Rr Add two Registers Rd ← Rd + Rr Z,C,N,V,H 1
ADC Rd, Rr Add with Carry two Registers Rd ← Rd + Rr + C Z,C,N,V,H 1
ADIW Rdl,K Add Immediate to Word Rdh:Rdl ← Rdh:Rdl + K Z,C,N,V,S 2
SUB Rd, Rr Subtract two Registers Rd ← Rd - Rr Z,C,N,V,H 1
SUBI Rd, K Subtract Constant from Register Rd ← Rd - K Z,C,N,V,H 1
SBC Rd, Rr Subtract with Carry two Registers Rd ← Rd - Rr - C Z,C,N,V,H 1
SBCI Rd, K Subtract with Carry Constant from Reg. Rd ← Rd - K - C Z,C,N,V,H 1
SBIW Rdl,K Subtract Immediate from Word Rdh:Rdl ← Rdh:Rdl - K Z,C,N,V,S 2
AND Rd, Rr Logical AND Registers Rd ← Rd • Rr Z,N,V 1
ANDI Rd, K Logical AND Register and Constant Rd ← Rd • K Z,N,V 1
OR Rd, Rr Logical OR Registers Rd ← Rd v Rr Z,N,V 1
ORI Rd, K Logical OR Register and Constant Rd ← Rd v K Z,N,V 1
EOR Rd, Rr Exclusive OR Registers Rd ← Rd ⊕ Rr Z,N,V 1
COM Rd One’s Complement Rd ← $FF − Rd Z,C,N,V 1
NEG Rd Two’s Complement Rd ← $00 − Rd Z,C,N,V,H 1
SBR Rd,K Set Bit(s) in Register Rd ← Rd v K Z,N,V 1
CBR Rd ,K Clear Bit(s) in Register Rd ← Rd • ($FF - K) Z,N,V 1
INC Rd Increment Rd ← Rd + 1 Z,N,V 1
DEC Rd Decrement Rd ← Rd − 1 Z,N,V 1
TST Rd Test for Zero or Minus Rd ← Rd • Rd Z,N,V 1
CLR Rd Clear Register Rd ← Rd ⊕ Rd Z,N,V 1
SER Rd Set Register Rd ← $FF None 1
BRANCH INSTRUCTIONS
RJMP k Relative Jump PC ← PC + k + 1 None 2
IJMP Indirect Jump to (Z) PC ← Z None 2
RCALL k Relative Subroutine Call PC ← PC + k + 1 None 3
ICALL Indirect Call to (Z) PC ← ZNone3
RET Subroutine Return PC ← STACK None 4
RETI Interrupt Return PC ← STACK I 4
CPSE Rd,Rr Compare, Skip if Equal if (Rd = Rr) PC ← PC + 2 or 3 None 1 / 2 / 3
CP Rd,Rr Compare Rd − Rr Z, N,V,C,H 1
CPC Rd,Rr Compare with Carry Rd − Rr − C Z, N,V,C,H 1
CPI Rd,K Compare Register wi th Immediate Rd − K Z, N,V,C,H 1
SBRC Rr, b Skip if Bit in Register Cleared if (Rr(b)=0) PC ← PC + 2 or 3 None 1 / 2 / 3
SBRS Rr, b Skip if Bit in Register is Set if (Rr(b)=1) PC ← PC + 2 or 3 None 1 / 2 / 3
SBIC P, b Skip if Bit in I/O Register Cleared if (P(b)=0) PC ← PC + 2 or 3 None 1 / 2 / 3
SBIS P, b Skip if Bit in I/O Register is Set if (P(b)=1) PC ← PC + 2 or 3 None 1 / 2 / 3
BRBS s, k Branch if Status Flag Set if (SREG(s) = 1) then PC←PC+k + 1 None 1 / 2
BRBC s, k Branch if Status Flag Cleared if (SREG(s) = 0) then PC←PC+k + 1 None 1 / 2
BREQ k Branch if Equal if (Z = 1) then PC ← PC + k + 1 None 1 / 2
BRNE k Branch if Not Equal if (Z = 0) then PC ← PC + k + 1 None 1 / 2
BRCS k Branch if Carry Set if (C = 1) then PC ← PC + k + 1 None 1 / 2
BRCC k Branch if Carry Cleared if (C = 0) then PC ← PC + k + 1 None 1 / 2
BRSH k Branch if Same or Higher if (C = 0) then PC ← PC + k + 1 None 1 / 2
BRLO k Branch if Lower if (C = 1) then PC ← PC + k + 1 None 1 / 2
BRMI k Branch if Minus if (N = 1) then PC ← PC + k + 1 None 1 / 2
BRPL k Branch if Plus if (N = 0) then PC ← PC + k + 1 None 1 / 2
BRGE k Branch if Greater or Equal, Signed if (N ⊕ V= 0) then PC ← PC + k + 1 None 1 / 2
BRLT k Branch if Less Than Zero, Signed if (N ⊕ V= 1) then PC ← PC + k + 1 None 1 / 2
BRHS k Branch if Half Carry Flag Set if (H = 1) then PC ← PC + k + 1 None 1 / 2
BRHC k Branch if Half Carry Flag Cleared if (H = 0) then PC ← PC + k + 1 None 1 / 2
BRTS k Branch if T Flag Set if (T = 1) then PC ← PC + k + 1 None 1 / 2
BRTC k Branch if T Flag Cleared if (T = 0) then PC ← PC + k + 1 None 1 / 2
BRVS k Branch if Overflow Flag is Set if (V = 1) then PC ← PC + k + 1 None 1 / 2
BRVC k Branch if Overflow Flag is Cleared if (V = 0) then PC ← PC + k + 1 None 1 / 2
BRIE k Branch if Interrupt Enabled if ( I = 1) then PC ← PC + k + 1 None 1 / 2
BRID k Branch if Interrupt Disabled if ( I = 0) then PC ← PC + k + 1 None 1 / 2
99
Page 100

Instruction Set Summary (Continued)
Mnemonics Operands Description Operation Flags #Clocks
DATA TRANSFER INSTRUCTIONS
MOV Rd, Rr Move Between Registers Rd ← Rr None 1
LDI Rd, K Load Immediate Rd ← KNone1
LD Rd, X Load Indirect Rd ← (X) None 2
LD Rd, X+ Load Indirect and Post-Inc. Rd ← (X), X ← X + 1 None 2
LD Rd, - X Load Indirect and Pre-Dec. X ← X - 1, Rd ← (X) None 2
LD Rd, Y Load Indirect Rd ← (Y) None 2
LD Rd, Y+ Load Indirect and Post-Inc. Rd ← (Y), Y ← Y + 1 None 2
LD Rd, - Y Load Indirect and Pre-Dec. Y ← Y - 1, Rd ← (Y) None 2
LDD Rd,Y+q Load Indirect with Displacement Rd ← (Y + q) None 2
LD Rd, Z Load Indirect Rd ← (Z) None 2
LD Rd, Z+ Load Indirect and Post-Inc. Rd ← (Z), Z ← Z+1 None 2
LD Rd, -Z Load Indirect and Pre-Dec. Z ← Z - 1, Rd ← (Z) None 2
LDD Rd, Z+q Load Indirect with Displacement Rd ← (Z + q) None 2
LDS Rd, k Load Direct from SRAM Rd ← (k) None 2
ST X, Rr Store Indirect (X) ← Rr None 2
ST X+, Rr Store Indirect and Post-Inc. (X) ← Rr, X ← X + 1 None 2
ST - X, Rr Store Indirect and Pre-Dec. X ← X - 1, (X) ← Rr None 2
ST Y, Rr Store Indirect (Y) ← Rr None 2
ST Y+, Rr Store Indirect and Post-Inc. (Y) ← Rr, Y ← Y + 1 None 2
ST - Y, Rr Store Indirect and Pre-Dec. Y ← Y - 1, (Y) ← Rr None 2
STD Y+q,Rr Store Indirect with Displacement (Y + q) ← Rr None 2
ST Z, Rr Store Indirect (Z) ← Rr None 2
ST Z+, Rr Store Indirect and Post-Inc. (Z) ← Rr, Z ← Z + 1 None 2
ST -Z, Rr Store Indirect and Pre-Dec. Z ← Z - 1, (Z) ← Rr None 2
STD Z+q,Rr Store Indirect with Displacement (Z + q) ← Rr None 2
STS k, Rr Store Direct to SRAM (k) ← Rr None 2
LPM Load Program Memory R0 ← (Z) None 3
IN Rd, P In Port Rd ← PNone1
OUT P, Rr Out Port P ← Rr None 1
PUSH Rr Push Register on Stack STACK ← Rr None 2
POP Rd Pop Register from Stack Rd ← STACK None 2
BIT AND BIT-TEST INSTRUCTIONS
SBI P,b Set Bit in I/O Register I/O(P,b) ← 1None2
CBI P,b Clear Bit in I/O Register I/O(P,b) ← 0None2
LSL Rd Logical Shift Left Rd(n+1) ← Rd(n), Rd(0) ← 0 Z,C,N,V 1
LSR Rd Logical Shift Right Rd(n) ← Rd(n+1), Rd(7) ← 0 Z,C,N,V 1
ROL Rd Rotate Left Through Carry Rd(0)←C,Rd(n+1)← Rd(n),C←Rd(7) Z,C,N,V 1
ROR Rd Rotate Right Through Carry Rd (7)←C,Rd(n)← Rd(n+1),C←Rd(0) Z,C,N,V 1
ASR Rd Arithmetic Shift Right Rd(n) ← Rd(n+1), n=0..6 Z,C,N,V 1
SWAP Rd Swap Nibbles Rd(3..0)←Rd(7..4),Rd(7..4)←Rd(3..0) None 1
BSET s Flag Set SREG(s) ← 1 SREG(s) 1
BCLR s Flag Clear SREG(s) ← 0 SREG(s) 1
BST Rr, b Bit Store from Register to T T ← Rr(b) T 1
BLD Rd, b Bit load from T to Register Rd(b) ← TNone1
SEC Set Carry C ← 1C1
CLC Clear Carry C ← 0 C 1
SEN Set Negative Flag N ← 1N1
CLN Clear Negative Flag N ← 0 N 1
SEZ Set Zero Flag Z ← 1Z1
CLZ Cle ar Ze ro Flag Z ← 0 Z 1
SEI Global Interrupt Enable I ← 1I1
CLI Global Interrupt Disable I ← 0 I 1
SES Set Signed Test Flag S ← 1S1
CLS Clear Signed Test Flag S ← 0 S 1
SEV Set Twos Complement Overflow. V ← 1V1
CLV Clear Twos Complement Overflow V ← 0 V 1
SET Set T in SREG T ← 1T1
CLT Clear T in SREG T ← 0 T 1
SEH Set Half Carry Flag in SREG H ← 1H1
CLH Clear Half Carry Flag in SREG H ← 0 H 1
NOP No Operati on None 1
SLEEP Sleep (see specific descr. for Sleep function) None 3
WDR Watchdog Reset (see specific descr. for WDR/timer) None 1
100
AT90S/LS2333 and AT90S/LS4433
 Loading...
Loading...