

Page 1
SELF-TEST
+V
S
2
25kV
5kV
ADXL150
GAIN
AMP
OFFSET
NULL
COM
0.1mF
BUFFER
AMP
DEMODULATORSENSOR
+V
S
TP
(DO NOT CONNECT)
V
OUT
9
CLOCK
SELF-TEST
5kV
25kV
ADXL250
GAIN
AMP
Y OFFSET
NULL
COM
0.1mF
BUFFER
AMP
DEMODULATOR
+V
S
TP
(DO NOT CONNECT)
25kV
5kV
GAIN
AMP
BUFFER
AMP
DEMODULATOR
V
OUT
Y
X OFFSET
NULL
SENSOR
+V
S
2
CLOCK
SENSOR
V
OUT
X
65 g to 650 g, Low Noise, Low Power,
a
Single/Dual Axis i
FEATURES
Complete Acceleration Measurement System
on a Single Monolithic IC
80 dB Dynamic Range
Pin Programmable 650
Low Noise: 1 m
g
g
or 625g Full Scale
/√Hz Typical
Low Power: <2 mA per Axis
Supply Voltages as Low as 4 V
2-Pole Filter On-Chip
Ratiometric Operation
Complete Mechanical & Electrical Self-Test
Dual & Single Axis Versions Available
Surface Mount Package
GENERAL DESCRIPTION
The ADXL150 and ADXL250 are third generation ± 50 g sur-
face micromachined accelerometers. These improved replacements for the ADXL50 offer lower noise, wider dynamic range,
reduced power consumption and improved zero g bias drift.
The ADXL150 is a single axis product; the ADXL250 is a fully
integrated dual axis accelerometer with signal conditioning on a
single monolithic IC, the first of its kind available on the commercial market. The two sensitive axes of the ADXL250 are
orthogonal (90°) to each other. Both devices have their sensitive
axes in the same plane as the silicon chip.
The ADXL150/ADXL250 offer lower noise and improved
signal-to-noise ratio over the ADXL50. Typical S/N is 80 dB,
allowing resolution of signals as low as 10 mg, yet still providing
a ±50 g full-scale range. Device scale factor can be increased
from 38 mV/g to 76 mV/g by connecting a jumper between
and the offset null pin. Zero g drift has been reduced to
V
OUT
0.4 g over the industrial temperature range, a 10× improvement
over the ADXL50. Power consumption is a modest 1.8 mA
per axis. The scale factor and zero g output level are both
MEM
S
Accelerometers
ADXL150/ADXL250
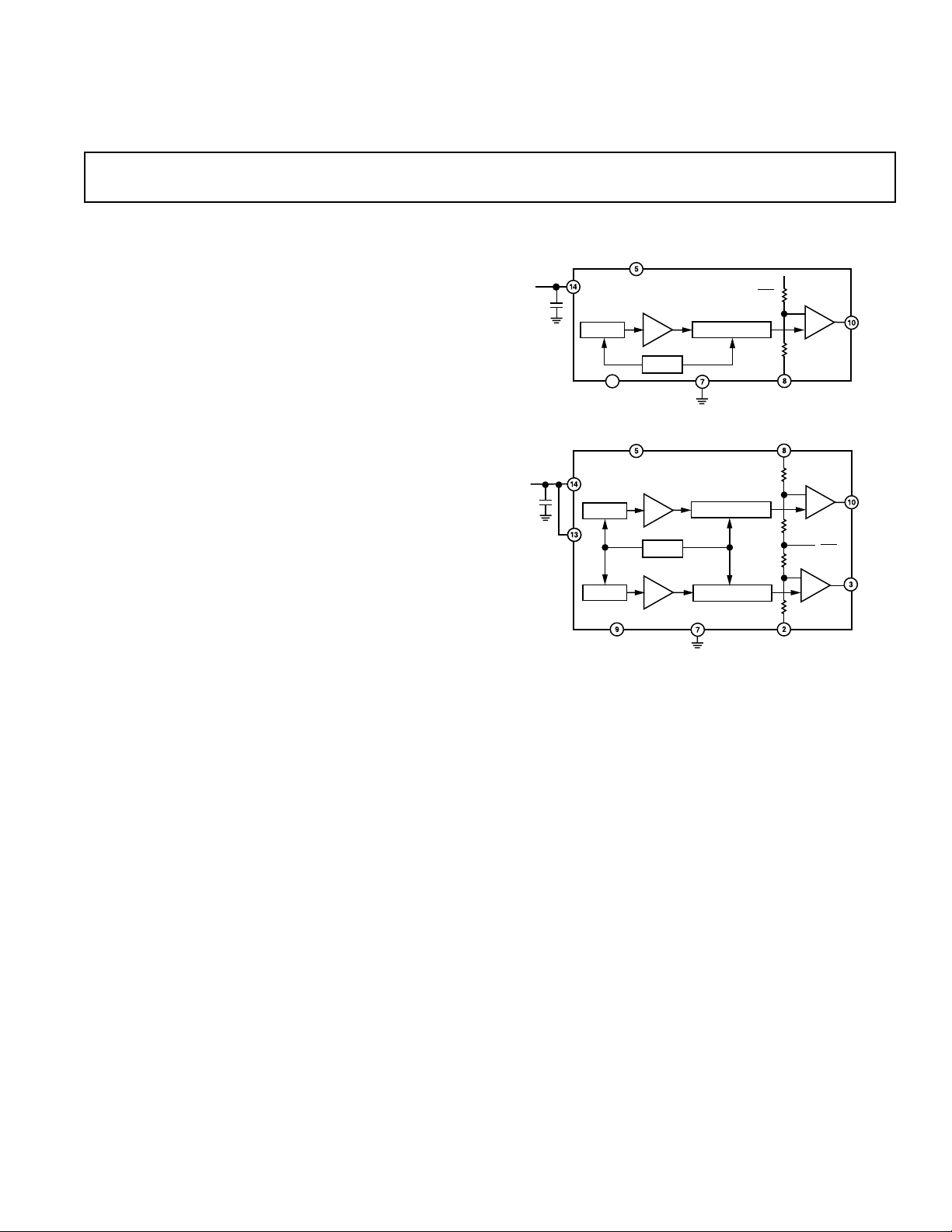
FUNCTIONAL BLOCK DIAGRAMS
ratiometric to the power supply, eliminating the need for a voltage reference when driving ratiometric A/D converters such as
those found in most microprocessors. A power supply bypass
capacitor is the only external component needed for normal
operation.
The ADXL150/ADXL250 are available in a hermetic 14-lead
surface mount cerpac package specified over the 0°C to +70°C
commercial and –40°C to +85°C industrial temperature ranges.
Contact factory for availability of devices specified over automotive and military temperature ranges.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 1998
i
MEM
S
is a registered trademark of Analog Devices, Inc.
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
Page 2
(TA = +258C for J Grade, TA = –408C to +858C for A Grade,
ADXL150/ADXL250–SPECIFICATIONS
Parameter Conditions Min Typ Max Min Typ Max Units
SENSOR
Guaranteed Full-Scale Range ±40 ±50 ±40 ±50 g
Nonlinearity 0.2 0.2 % of FS
Package Alignment Error
Sensor-to-Sensor Alignment Error ±0.1 Degrees
Transverse Sensitivity
SENSITIVITY
Sensitivity (Ratiometric)
Sensitivity Drift Due to Temperature Delta from 25°C to T
ZERO g BIAS LEVEL
Output Bias Voltage
Zero g Drift Due to Temperature Delta from 25°C to T
ZERO-g OFFSET ADJUSTMENT
Voltage Gain Delta V
Input Impedance 20 30 20 30 kΩ
NOISE PERFORMANCE
Noise Density
5
Clock Noise 5 5 mV p-p
FREQUENCY RESPONSE
–3 dB Bandwidth 900 1000 900 1000 Hz
Bandwidth Temperature Drift T
Sensor Resonant Frequency Q = 5 24 24 kHz
SELF-TEST
Output Change
6
Logic “1” Voltage V
Logic “0” Voltage 1.0 1.0 V
Input Resistance To Common 30 50 30 50 kΩ
OUTPUT AMPLIFIER
Output Voltage Swing I
Capacitive Load Drive 1000 1000 pF
POWER SUPPLY (V
Functional Voltage Range 4.0 6.0 4.0 6.0 V
Quiescent Supply Current ADXL150 1.8 3.0 mA
TEMPERATURE RANGE
Operating Range J 0 +70 0 +70 °C
Specified Performance A –40 +85 –40 +85 °C
NOTES
1
Alignment error is specified as the angle between the true axis of sensitivity and the edge of the package.
2
Transverse sensitivity is measured with an applied acceleration that is 90 degrees from the indicated axis of sensitivity.
3
Ratiometric: V
doubled by connecting V
4
Ratiometric, proportional to VS/2. See Figure 21.
5
See Figure 11 and Device Bandwidth vs. Resolution section.
6
Self-test output varies with supply voltage.
7
When using ADXL250, both Pins 13 and 14 must be connected to the supply for the device to function.
Specifications subject to change without notice.
OUT
= V
1
2
3
Y Channel 33.0 38.0 43.0 mV/g
X Channel 33.0 38.0 43.0 33.0 38.0 43.0 mV/g
or T
MIN
MAX
4
or T
MIN
MAX
/Delta V
MIN
OUT
to T
MAX
OS PIN
ST Pin from Logic “0” to “1” 0.25 0.40 0.60 0.25 0.40 0.60 V
= ±100 µA 0.25 V
OUT
7
)
S
ADXL250 (Total 2 Channels) 3.5 5.0 mA
/2 + (Sensitivity × VS/5 V × a) where a = applied acceleration in gs, and V
S
to the offset null pin.
OUT
VS = +5.00 V, Acceleration = Zero g, unless otherwise noted)
ADXL150JQC/AQC ADXL250JQC/AQC
±1 ±1 Degrees
±2 ±2%
±0.5 ±0.5 %
VS/2 – 0.35 VS/2 VS/2 + 0.35 VS/2 – 0.35 VS/2 VS/2 + 0.35 V
0.2 0.3 g
0.45 0.50 0.55 0.45 0.50 0.55 V/V
1 2.5 1 2.5 mg/√Hz
50 50 Hz
– 1 VS – 1 V
S
– 0.25 0.25 VS – 0.25 V
S
= supply voltage. See Figure 21. Output scale factor can be
S
–2–
REV. 0
Page 3
ADXL150/ADXL250
TOP VIEW
(Not to Scale)
ADXL150
14
1
78
NC
NC
NC
NC
NC
COMMON
V
S
NC
NC
V
OUT
SELF-TEST
ZERO
g
ADJ
TP (DO NOT CONNECT)
NC = NO CONNECT
ZERO
g
ADJ Y
V
OUT
Y
NC
NC
COMMON
V
S
V
S
NC
NC
ZERO
g
ADJ X
SELF-TEST
V
OUT
X
TOP VIEW
(Not to Scale)
ADXL250
14
1
78
NC
TP (DO NOT CONNECT)
NOTE: WHEN USING ADXL250, BOTH PINS 13 AND 14 NEED
TO BE CONNECTED TO SUPPLY FOR DEVICE TO FUNCTION
NC
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS*
Acceleration (Any Axis, Unpowered for 0.5 ms) . . . . . . 2000 g
Acceleration (Any Axis, Powered for 0.5 ms) . . . . . . . . . 500 g
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7.0 V
+V
S
Output Short Circuit Duration
, V
(V
OUT
Terminals to Common) . . . . . . . . . . . Indefinite
REF
Operating Temperature . . . . . . . . . . . . . . . . . –55°C to +125°C
Storage Temperature . . . . . . . . . . . . . . . . . . . –65°C to +150°C
*Stresses above those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; the functional operation of
the device at these or any other conditions above those indicated in the operational
sections of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
Drops onto hard surfaces can cause shocks of greater than 2000 g
and exceed the absolute maximum rating of the device. Care
should be exercised in handling to avoid damage.
1
ADXL150
TOP VIEW
(Not to Scale)
78
14
A
X
1
ADXL250
TOP VIEW
(Not to Scale)
A
78
14
A
X
908
Y
Package Characteristics
Package u
JA
u
JC
Device Weight
14-Lead Cerpac 110°C/W 30°C/W 5 Grams
ORDERING GUIDE
Model Temperature Range
ADXL150JQC 0°C to +70°C
ADXL150AQC –40°C to +85°C
ADXL250JQC 0°C to +70°C
ADXL250AQC –40°C to +85°C
PIN CONNECTIONS
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the ADXL150/ADXL250 feature proprietary ESD protection circuitry, permanent
damage may occur on devices subjected to high energy electrostatic discharges. Therefore, proper
ESD precautions are recommended to avoid performance degradation or loss of functionality.
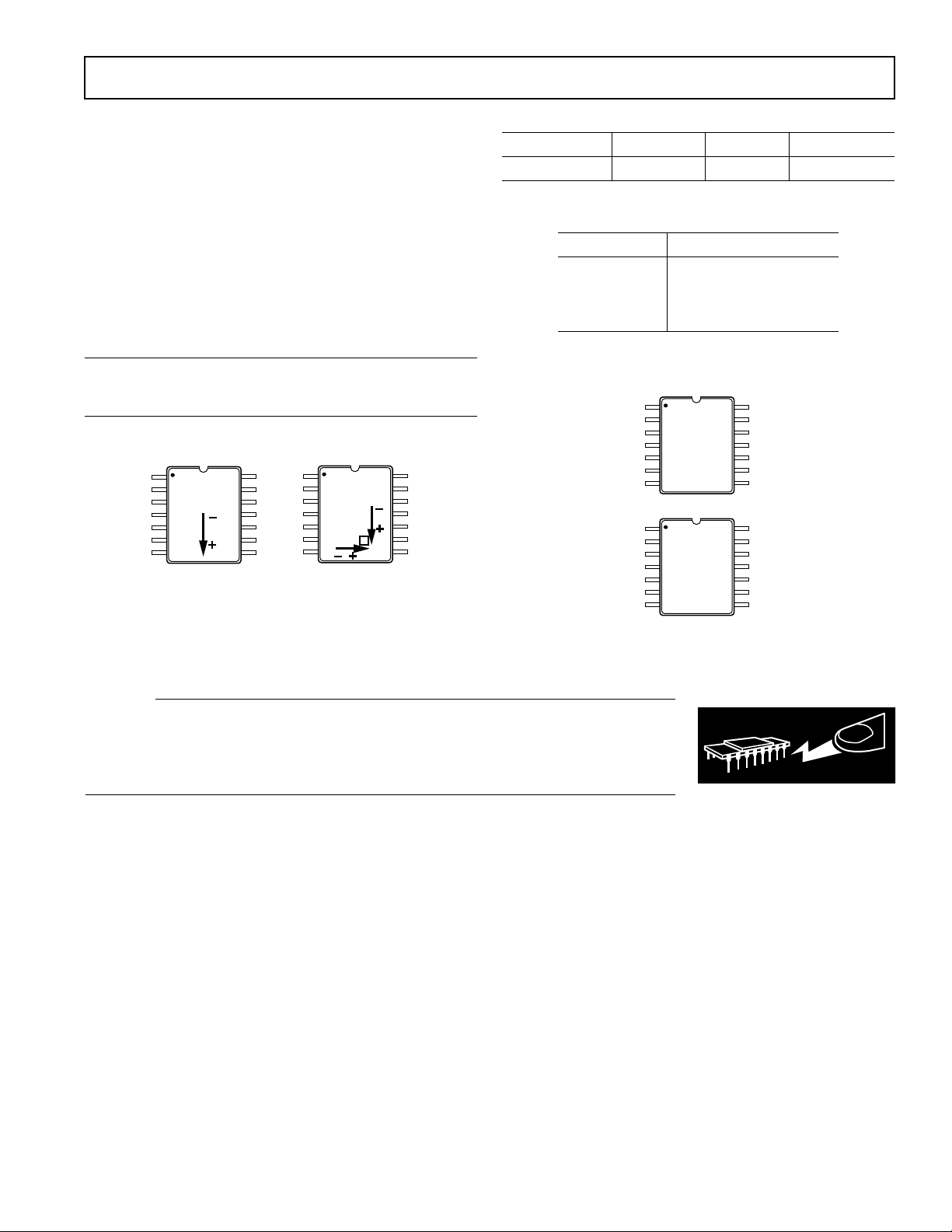
POSITIVE A = POSITIVE V
POSITIVE A = POSITIVE V
OUT
OUT
Figure 1. ADXL150 and ADXL250 Sensitive Axis
Orientation
REV. 0
–3–
Page 4
ADXL150/ADXL250
14
1
78
A
X
ADXL150
14
1
78
A
X
ADXL250
A
Y
GLOSSARY OF TERMS
Acceleration: Change in velocity per unit time.
Acceleration Vector: Vector describing the net acceleration
acting upon the ADXL150/ADXL250.
g: A unit of acceleration equal to the average force of gravity
occurring at the earth’s surface. A g is approximately equal to
32.17 feet/s
2
or 9.807 meters/s2.
Nonlinearity: The maximum deviation of the ADXL150/
ADXL250 output voltage from a best fit straight line fitted to a
plot of acceleration vs. output voltage, calculated as a % of the
full-scale output voltage (at 50 g).
Resonant Frequency: The natural frequency of vibration of
the ADXL150/ADXL250 sensor’s central plate (or “beam”). At
its resonant frequency of 24 kHz, the ADXL150/ADXL250’s
moving center plate has a slight peak in its frequency response.
Sensitivity: The output voltage change per g unit of accelera-
tion applied, specified at the V
pin in mV/g.
OUT
Total Alignment Error: Net misalignment of the ADXL150/
ADXL250’s on-chip sensor and the measurement axis of the
application. This error includes errors due to sensor die alignment to the package, and any misalignment due to installation
of the sensor package in a circuit board or module.
Transverse Acceleration: Any acceleration applied 90° to the
axis of sensitivity.
Transverse Sensitivity Error: The percent of a transverse
acceleration that appears at V
OUT
.
Transverse Axis: The axis perpendicular (90°) to the axis of
sensitivity.
Zero g Bias Level: The output voltage of the ADXL150/
ADXL250 when there is no acceleration (or gravity) acting
upon the axis of sensitivity. The output offset is the difference
between the actual zero g bias level and (V
S
/2).
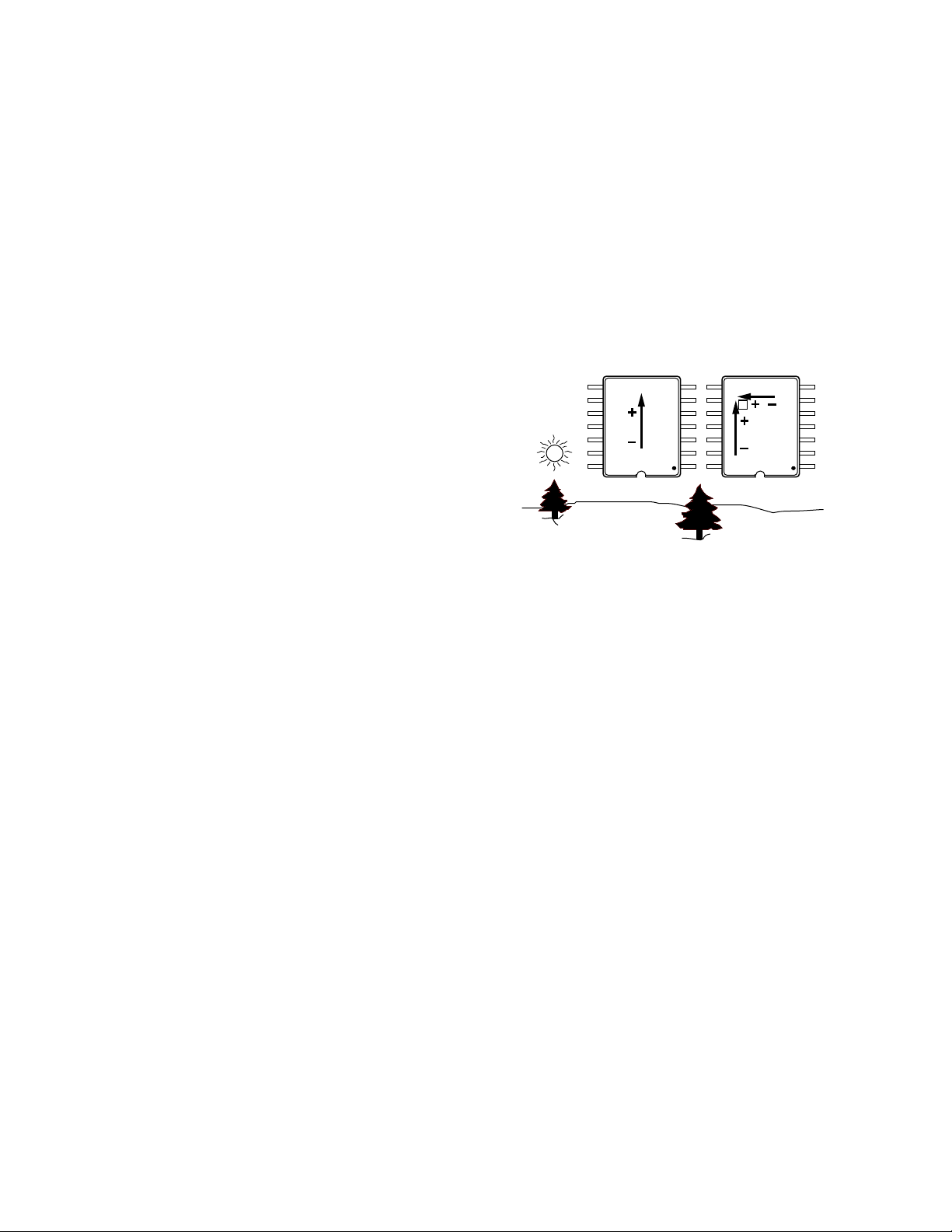
Polarity of the Acceleration Output
The polarity of the ADXL150/ADXL250 output is shown in
Figure 1. When its sensitive axis is oriented to the earth’s gravity
(and held in place), it will experience an acceleration of +1 g.
This corresponds to a change of approximately +38 mV at the
output pin. Note that the polarity will be reversed if the package
is rotated 180°. The figure shows the ADXL250 oriented so that
its “X” axis measures +1 g. If the package is rotated 90° clock-
wise (Pin 14 up, Pin 1 down), the ADXL250’s “Y” axis will now
measure +1 g.
Figure 2. Output Polarity
Acceleration Vectors
The ADXL150/ADXL250 is a sensor designed to measure
accelerations that result from an applied force. It responds to
the component of acceleration on its sensitive X axis (ADXL150)
or on both the “X” and “Y” axis (ADXL250).
–4–
REV. 0
Page 5
ADXL150/ADXL250
TIME – 0.2ms/Div
OUTPUT RESPONSE
500g INPUT
600
g
500
g
400
g
300
g
200
g
100
g
0
g
60
g
50
g
40
g
30
g
20
g
10
g
0
g
Typical Characteristics
5.0
4.0
3.0
2.0
1.0
0
–1.0
–2.0
ERROR FROM IDEAL – %
–3.0
–4.0
–5.0
4.0 4.5 5.0 5.5 6.0
POWER SUPPLY VOLTAGE
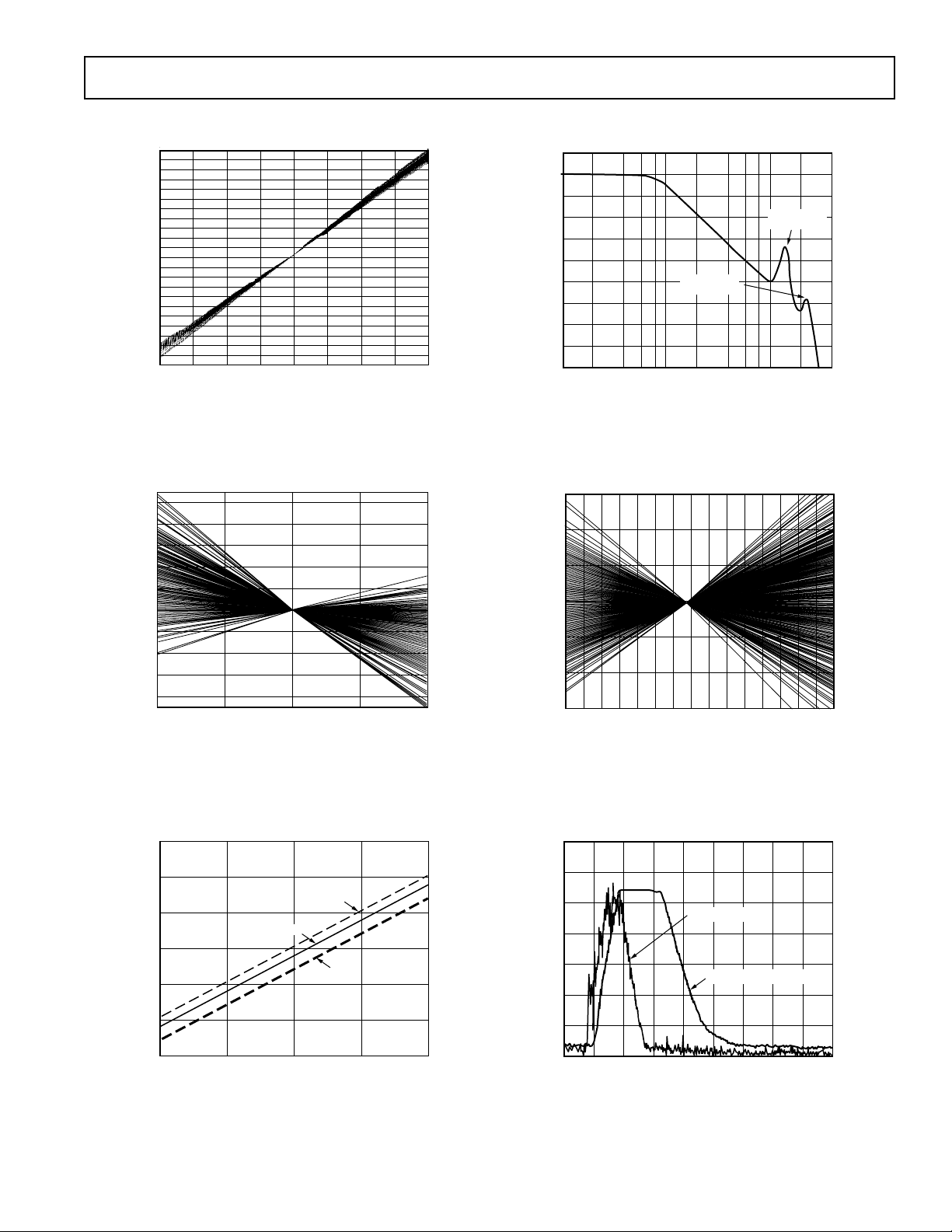
(@+5 V dc, +258C with a 38 mV/g Scale Factor unless otherwise noted)
Figure 3. Typical Sensitivity Error from Ideal Ratiometric
Response for a Number of Units
2.5
2.0
1.5
1.0
0.5
0
ERROR – %
–0.5
–1.0
–1.5
–2.0
4.0 4.5 5.0 5.5 6.0
SUPPLY VOLTAGE
Figure 4. Offset Error of Zero g Level from Ideal
V
/2 Response as a Percent of Full-Scale for a Number
S
of Units
6
0
–6
–12
–18
–24
–30
–36
–42
TYPICAL OUTPUT RESPONSE IN dB
–48
100 1k
RESONANCE
FREQUENCY – Hz
BEAM
PACKAGE
RESONANCE
10k
Figure 6. Typical Output Response vs. Frequency of
ADXL150/ADXL250 on a PC Board that Has Been
Conformally Coated
30
20
10
0
DRIFT – mV
g
–10
ZERO
–20
–30
–40 –30 –20 –10 10 20 30 60
05040 80 90 100
TEMPERATURE – 8C
70
Figure 7. Typical Zero g Drift for a Number of Units
2.4
2.2
2
1.8
1.6
SUPPLY CURRENT – mA
1.4
1.2
464.5
SUPPLY VOLTAGE – Volts
Figure 5. Typical Supply Current vs. Supply Voltage
REV. 0
+1058C
+258C
–408C
5 5.5
Figure 8. Typical 500 g Step Recovery at the Output
–5–
Page 6

ADXL150/ADXL250
FREQUENCY – kHz
30
25
0
100 100001000
RMS BASEBAND ERROR – mV
20
15
10
5
20
15
10
5
0
–5
OUTPUT VOLTAGE – mV
g
–10
ZERO
–15
–20
02468101214161820
NOISE FROM INTERNAL CLOCK
TIME – ms
Figure 9. Typical Output Noise Voltage with Spikes
Generated by Internal Clock
SELF-TEST
OUTPUT
(0.2V/DIV)
1.6
1.4
Hz
/
g
1.2
1.0
RMS NOISE – m
0.8
0.6
4.0
4.5 5.5 6.0
SUPPLY VOLTAGE – Volts
5.0
Figure 12. Noise vs. Supply Voltage
SELF-TEST
INPUT
(2V/DIV)
02468101214161820
Figure 10. Typical Self-Test Response
2.50
2.25
2.00
1.75
1.50
1.25
1.00
rms
g
0.75
NOISE – m
0.50
0.25
TIME – ms
Figure 13. Baseband Error Graph
Figure 13 shows the mV rms error in the output signal if there is
a noise on the power supply pin of 1 mV rms at the internal
clock frequency or its odd harmonics. This is a baseband noise
and can be at any frequency in the 1 kHz passband or at dc.
2k10 100 1k
FREQUENCY – Hz
Figure 11. Noise Spectral Density
–6–
REV. 0
Page 7

ADXL150/ADXL250
THEORY OF OPERATION
The ADXL150 and ADXL250 are fabricated using a proprietary surface micromachining process that has been in high
volume production since 1993. The fabrication technique uses
standard integrated circuit manufacturing methods enabling all
the signal processing circuitry to be combined on the same chip
with the sensor.
The surface micromachined sensor element is made by depositing polysilicon on a sacrificial oxide layer that is then etched
away leaving the suspended sensor element. Figure 14 is a
simplified view of the sensor structure. The actual sensor has
42 unit cells for sensing acceleration. The differential capacitor
sensor is composed of fixed plates and moving plates attached to
the beam that moves in response to acceleration. Movement of
the beam changes the differential capacitance, which is measured
by the on chip circuitry.
The sensor has 12-unit capacitance cells for electrostatically
forcing the beam during a self-test. Self-test is activated by the
user with a logic high on the self-test input pin. During a logic
high, an electrostatic force acts on the beam equivalent to
approximately 20% of full-scale acceleration input, and thus a
proportional voltage change appears on the output pin. When
activated, the self-test feature exercises both the entire mechanical structure and the electrical circuitry.
BEAM
PLATE
CAPACITANCES
FIXED
PLATE
ANCHOR
UNIT CELL
ACCELERATION
Figure 14. Simplified View of Sensor Under Acceleration
All the circuitry needed to drive the sensor and convert the
capacitance change to voltage is incorporated on the chip requiring
no external components except for standard power supply decoupling. Both sensitivity and the zero-g value are ratiometric to
the supply voltage, so that ratiometeric devices following the
accelerometer (such as an ADC, etc.) will track the accelerometer if the supply voltage changes. The output voltage (V
OUT
) is
a function of both the acceleration input (a) and the power
supply voltage (V
) as follows:
S
V
= V
OUT
/2 – (Sensitivity ×
S
V
5V
S
× a)
Both the ADXL150 and ADXL250 have a 2-pole Bessel switchedcapacitor filter. Bessel filters, sometimes called linear phase
filters, have a step response with minimal overshoot and a maximally flat group delay. The –3 dB frequency of the poles is
preset at the factory to 1 kHz. These filters are also completely
self-contained and buffered, requiring no external components.
MEASURING ACCELERATIONS LESS THAN 50 g
The ADXL150/ADXL250 require only a power supply bypass
capacitor to measure ± 50 g accelerations. For measuring ±50 g
accelerations, the accelerometer may be directly connected to an
ADC (see Figure 25). The device may also be easily modified to
measure lower g signals by increasing its output scale factor.
The scale factor of an accelerometer specifies the voltage change
of the output per g of applied acceleration. This should not be
confused with its resolution. The resolution of the device is the
lowest g level the accelerometer is capable of measuring. Resolution is principally determined by the device noise and the measurement bandwidth.
The zero g bias level is simply the dc output level of the accelerometer when it is not in motion or being acted upon by the earth’s
gravity.
Pin Programmable Scale Factor Option
In its normal state, the ADXL150/ADXL250’s buffer amplifier
provides an output scale factor of 38 mV/g, which is set by an
internal voltage divider. This gives a full-scale range of ±50 g
and a nominal bandwidth of 1 kHz.
A factor-of-two increase in sensitivity can be obtained by connecting the V
pin to the offset null pin, assuming that it is
OUT
not needed for offset adjustment. This connection has the effect
of reducing the internal feedback by a factor of two, doubling
the buffer’s gain. This increases the output scale factor to 76 mV/g
and provides a ±25 g full-scale range.
Simultaneously, connecting these two pins also increases the
amount of internal post filtering, reducing the noise floor and
changing the nominal 3 dB bandwidth of the ADXL150/
ADXL250 to 500 Hz. Note that the post filter’s “Q” will also
be reduced by a factor of √2 from 0.58 (Bessel response) to a
much gentler “Q” value of 0.41. The primary effect of this
change in “Q” is only at frequencies within two octaves of the
corner frequency; above this the two filter slopes are essentially
the same. In applications where a flat response up to 500 Hz is
needed, it is better to operate the device at 38 mV/g and use an
external post filter. Note also that connecting V
to V
pin adds a 30 kΩ load from V
, this added load will consume ±60 µA of the ADXL150/
at V
OUT
OUT
/2. When swinging ±2 V
S
to the offset
OUT
ADXL250’s 100 µA (typical) output current drive.
REV. 0
–7–
Page 8

ADXL150/ADXL250
Increasing the
i
MEM
S
Accelerometer’s Output
Scale Factor
Figure 15 shows the basic connections for using an external
buffer amplifier to increase the output scale factor.
The output multiplied by the gain of the buffer, which is simply
the value of resistor R3 divided by R1. Choose a convenient
scale factor, keeping in mind that the buffer gain not only amplifies the signal, but any noise or drift as well. Too much gain can
also cause the buffer to saturate and clip the output waveform.
Note that the “+” input of the external op amp uses the offset
null pin of the ADXL150/ADXL250 as a reference, biasing the
op amp at midsupply, saving two resistors and reducing power
consumption. The offset null pin connects to the V
/2 reference
S
point inside the accelerometer via 30 kΩ, so it is important not
to load this pin with more than a few microamps.
It is important to use a single-supply or “rail-to-rail” op amp for
the external buffer as it needs to be able to swing close to the
supply and ground.
The circuit of Figure 15 is entirely adequate for many applications, but its accuracy is dependent on the pretrimmed accuracy
of the accelerometer and this will vary by product type and grade.
TP
(DO NOT CONNECT)
+V
0.1mF
5
14
S
C1
ADXL150
SENSOR
9
SELF-TEST
GAIN
AMP
CLOCK
DEMODULATOR
7
COM
+V
S
5kV
2
25kV
OFFSET
0.1mF
8
NULL
+V
C2
OUTPUT SCALE FACTOR = 38mV/g ––
Figure 15. Using an External Op Amp to Increase Output Scale Factor
For the highest possible accuracy, an external trim is recommended. As shown by Figure 20, this consists of a potentiometer, R1a, in series with a fixed resistor, R1b. Another option is
to select resistor values after measuring the device’s scale factor
(see Figure 17).
AC Coupling
If a dc (gravity) response is not required—for example in vibration measurement applications—ac coupling can be used between the accelerometer’s output and the external op amp’s
input as shown in Figure 16. The use of ac coupling virtually
eliminates any zero g drift and allows the maximum external
amp gain without clipping.
Resistor R2 and capacitor C3 together form a high pass filter
whose corner frequency is 1/(2 π R2 C3). This filter will reduce
the signal from the accelerometer by 3 dB at the corner frequency, and it will continue to reduce it at a rate of 6 dB/octave
(20 dB per decade) for signals below the corner frequency.
Capacitor C3 should be a nonpolarized, low leakage type.
If ac coupling is used, the self-test feature must be monitored at
the accelerometer’s output rather than at the external amplifier
output (since the self-test output is a dc voltage).
2
OP196
3
R3
C4
0.1mF
V
OUT
6
7
4
R3
+V
S
R1
BUFFER
S
2
AMP
R1
10
+V
S
0.1mF
TP
(DO NOT CONNECT)
5
14
C1
ADXL150
9
SELF-TEST
GAIN
AMP
DEMODULATORSENSOR
CLOCK
7
COM
TYPICAL COMPONENT VALUES FOR AC COUPLED CIRCUIT
BUFFER
FS RANGE
GAIN
2 625
4 612.5
5 610
g
1MV 0.15mF 0.05mF 0.015mF 0.0075mF
g
g
249kV 0.68mF 0.22mF 0.022mF 0.01mF
+V
S
2
5kV
C3
R2
10
V
25kV
OFFSET
NULL
0.1mF
R2
332kV 0.47mF 0.15mF 0.047mF 0.022mF
BUFFER
8
+V
S
2
C2
C3 VALUE FOR 3dB CORNER FREQ
1Hz 3Hz 10Hz 20Hz
OUT
AMP
+V
1MV
+V
S
C4
0.1mF
7
2
OP196
3
S
2
EXTERNAL AMP GAIN = ––––
6
4
OUTPUT
1MV
R2
Figure 16. AC Coupled Connection Using an External Op Amp
–8–
REV. 0
Page 9

ADXL150/ADXL250
TP
(DO NOT CONNECT)
5
+V
NOTES:
0g “QUICK” CALIBRATION METHOD USING RESISTOR R2 AND A +5V SUPPLY.
(a)
WITH ACCELEROMETER ORIENTED AWAY FROM EARTH’S
GRAVITY (i.e., SIDEWAYS), MEASURE PIN 10 OF THE ADXL150.
(b)
CALCULATE THE OFFSET VOLTAGE THAT NEEDS TO BE NULLED:
V
(
c)
R2 = ––––––––
(d)
FOR V
(e)
FOR V
14
S
C1
0.1mF
=(+2.5V – V
OS
2.5V (R3)
V
OS
10 > +2.5V, R2 CONNECTS TO GND.
PIN
10 < +2.5V, R2 CONNECTS TO +VS.
PIN
ADXL150
9
SELF-TEST
10)(R3/R1).
PIN
CLOCK
GAIN
AMP
COM
DEMODULATORSENSOR
7
OFFSET
NULL
C2
0.1mF
+V
2
25kV
S
Figure 17. “Quick Zero g Calibration” Connection
Adjusting the Zero g Bias Level
When a true dc (gravity) response is needed, the output from
the accelerometer
must be dc coupled to the external amplifier’s
input. For high gain applications, a zero g offset trim will also be
needed. The external offset trim permits the user to set the zero g
offset voltage to exactly +2.5 volts (allowing the maximum output
swing from the external amplifier without clipping with a +5
supply).
With a dc coupled connection, any difference between the zero g
output and +2.5 V will be amplified along with the signal. To
obtain the exact zero g output desired or to allow the maximum
output voltage swing from the external amplifier, the zero g offset
will need to be externally trimmed using the circuit of Figure 20.
The external amplifier’s maximum output swing should be
limited to ±2 volts, which provides a safety margin of ±0.25
volts before clipping. With a +2.5 volt zero g level, the maximum gain will equal:
2 Volts
38
mV/g Times the Max Applied Acceleration in g
+VS OR GND
5kV
BUFFER
AMP
8
+V
S
2
R2 (SEE NOTES)
R1
10
DESIRED
OUTPUT
SCALE FACTOR
g
76mV/
100mV/
g
200mV/
g
400mV/
g
R3
100kV
C4
+V
S
0.1mF
7
2
OP196
3
FS
RANGE
625g2.0 49.9kV
620g2.6 38.3kV
610g5.3 18.7kV
65
g
4
EXT
AMP
GAIN
10.5 9.53kV
6
R1
VALUE
V
OUT
The device scale factor and zero g offset levels can be calibrated
using the earth’s gravity, as explained in the section “calibrating
the ADXL150/ADXL250.”
Using the Zero g “Quick-Cal” Method
In Figure 18 (accelerometer alone, no external op amp), a trim
potentiometer connects directly to the accelerometer’s zero g
null pin. The “quick offset calibration” scheme shown in Figure
17 is preferred over using a potentiometer, which could change
its setting over time due to vibration. The “quick offset calibration” method requires measuring only the output voltage of
the ADXL150/ADXL250 while it is oriented normal to the
earth’s gravity. Then, by using the simple equations shown in
the figures, the correct resistance value for R2 can be calculated.
In Figure 17, an external op amp is used to amplify the signal. A
resistor, R2, is connected to the op amp’s summing junction.
The other side of R2 connects to either ground or +V
depend-
S
ing on which direction the offset needs to be shifted.
REV. 0
TP
(DO NOT CONNECT)
+V
S
C1
0.1mF
14
SENSOR
SELF-TEST
5
ADXL150
9
AT PIN 8
R
IN
30kV 610kV
GAIN
AMP
CLOCK
COM
DEMODULATOR
7
0.1mF
+V
S
2
5kV
V
10
OUT
BUFFER
8
OFFSET
NULL
AMP
+V
S
25kV
C2
200kV
Figure 18. Offset Nulling the ADXL150/ADXL250 Using a Trim Potentiometer
–9–
Page 10

ADXL150/ADXL250
DEVICE BANDWIDTH VS. MEASUREMENT RESOLUTION
Although an accelerometer is usually specified according to its
full-scale g level, the limiting resolution of the device, i.e., its
minimum discernible input level, is extremely important when
measuring low g accelerations.
g
100m
10m
g
NOISE LEVEL – rms
1m
g
10 1k100
3dB BANDWIDTH – Hz
660m
g
66m
g
NOISE LEVEL – Peak to Peak
6.6m
g
Figure 19.␣ ADXL150/ADXL250 Noise Level vs. 3 dB
Bandwidth (Using a “Brickwall” Filter)
The limiting resolution is predominantly set by the measurement noise “floor,” which includes the ambient background
noise and the noise of the ADXL150/ADXL250 itself. The level
of the noise floor varies directly with the bandwidth of the measurement. As the measurement bandwidth is reduced, the noise
floor drops, improving the signal-to-noise ratio of the measurement and increasing its resolution.
The bandwidth of the accelerometer can be easily reduced by
adding low-pass or bandpass filtering. Figure 19 shows the
typical noise vs. bandwidth characteristic of the ADXL150/
ADXL250.
The output noise of the ADXL150/ADXL250 scales with the
square root of the measurement bandwidth. With a single pole
roll-off, the equivalent rms noise bandwidth is π divided by 2 or
approximately 1.6 times the 3 dB bandwidth. For example, the
typical rms noise of the ADXL150 using a 100 Hz one pole post
filter is:
Noise rms
=1mg/ Hz × 100 1.6
()
=12.25mg
()
Because the ADXL150/ADXL250’s noise is, for all practical
purposes, Gaussian in amplitude distribution, the highest noise
amplitudes have the smallest (yet nonzero) probability. Peakto-peak noise is therefore difficult to measure and can only be
estimated due to its statistical nature. Table I is useful for estimating the probabilities of exceeding various peak values, given
the rms value.
Table I.
Nominal Peak-to- % of Time that Noise Will Exceed
Peak Value Nominal Peak-to-Peak Value
2.0 × rms 32%
4.0 × rms 4.6%
6.0 × rms 0.27%
6.6 × rms 0.1%
8.0 × rms 0.006%
RMS and peak-to-peak noise (for 0.1% uncertainty) for various
bandwidths are estimated in Figure 19. As shown by the figure,
device noise drops dramatically as the operating bandwidth is
reduced. For example, when operated in a 1 kHz bandwidth,
the ADXL150/ADXL250 typically have an rms noise level of
32 mg. When the device bandwidth is rolled off to 100 Hz, the
noise level is reduced to approximately 10 mg.
Alternatively, the signal-to-noise ratio may be improved considerably by using a microprocessor to perform multiple measurements and then to compute the average signal level.
Low-Pass Filtering
The bandwidth of the accelerometer can easily be reduced by using
post filtering. Figure 20 shows how the buffer amplifier can be
connected to provide 1-pole post filtering, zero g offset trimming,
and output scaling. The table provides practical component values
+V
S
C1
0.1mF
+V
S
R2
RT
R1a
75kV
SCALE
FACTOR
TRIM
(OPTIONAL)
Cf (mF)
100Hz
0.0082
0.0056
0.0033
0.0015
1MV
R1b
50kV
Cf (mF)
30Hz
0.027
0.022
0.010
0.0056
3
Cf (mF)
10Hz
0.082
0.056
0.033
0.015
2
Cf
+V
OP196
100kV
S
7
4
R3
0.1mF
6
(DO NOT CONNECT)
14
ADXL150
9
SELF-TEST
TP
5
CLOCK
GAIN
AMP
DEMODULATORSENSOR
7
COM
DESIRED
OUTPUT
SCALE FACTOR
76mV/
g
100mV/
200mV/
400mV/
+V
2
25kV
OFFSET
NULL
0.1mF
F.S.
RANGE
625g2.0 200kV
g
620g2.6 261kV
g
610g5.3 536kV
g
65
g
S
8
5kV
BUFFER
AMP
+V
S
2
EXT
AMP
GAIN
10.5 1MV
0
R3
VALUE
200kV
g
TRIM
10
Figure 20.␣ One-Pole Post Filter Circuit with SF and Zero g Offset Trims
–10–
V
OUT
REV. 0
Page 11

ADXL150/ADXL250
POWER SUPPLY VOLTAGE
2.65
2.50
2.35
5.25 5.20 5.15 5.10 5.05 5.00 4.95 4.90 4.85 4.80 4.75
2.60
2.55
2.45
2.40
40.25
38.00
35.75
SENSITIVITY
39.50
38.75
37.25
36.50
0
g
OFFSET
for various full-scale g levels and approximate circuit bandwidths. For bandwidths other than those listed, use the
formula:
Cf =
2π R3
()
Desired 3 dB Bandwidth in Hz
1
or simply scale the value of capacitor Cf accordingly; i.e., for an
application with a 50 Hz bandwidth, the value of Cf will need
to be twice as large as its 100 Hz value. If further noise reduction is needed while maintaining the maximum possible bandwidth, a 2- or 3-pole post filter is recommended. These provide
a much steeper roll-off of noise above the pole frequency. Figure 21 shows a circuit that provides 2-pole post filtering. Component values for the 2-pole filter were selected to operate the
first op amp at unity gain. Capacitors C3 and C4 were chosen
to provide 3 dB bandwidths of 10 Hz, 30 Hz, 100 Hz and
300 Hz.
The second op amp offsets and scales the output to provide a
+2.5 V ± 2 V output over a wide range of full-scale g levels.
APPLICATION HINTS
ADXL250 Power Supply Pins
When wiring the ADXL250, be sure to connect BOTH power
supply terminals, Pins 14 and 13.
Ratiometric Operation
Ratiometric operation means that the circuit uses the power
supply as its voltage reference. If the supply voltage varies, the
accelerometer and the other circuit components (such as an
ADC, etc.) track each other and compensate for the change.
Figure 22 shows how both the zero g offset and output sensitivity of the ADXL150/ADXL250 vary with changes in supply
voltage. If they are to be used with nonratiometric devices, such
as an ADC with a built-in 5 V reference, then both components
should be referenced to the same source, in this case the ADC
reference. Alternatively, the circuit can be powered from an
external +5 volt reference.
Figure 22. Typical Ratiometric Operation
Since any voltage variation is transferred to the accelerometer’s
output, it is important to reduce any power supply noise. Simply
following good engineering practice of bypassing the power supply
right at Pin 14 of the ADXL150/ADXL250 with a 0.1 µF ca-
pacitor should be sufficient.
+V
S
C1
0.1mF
TYPICAL FILTER VALUES
BW C3 C4
300Hz 0.027mF 0.0033mF
100Hz 0.082mF 0.01mF
30Hz 0.27mF 0.033mF
10Hz 0.82mF 0.1mF
DESIRED
OUTPUT
SCALE FACTOR
g
76mV/
100mV/
200mV/
400mV/
F.S.
RANGE
±25
±20
±10
±5
g
g
g
g
g
g
g
14
SENSOR
SELF-TEST
EXT
AMP
VALUE
GAIN
2.0 200kV
2.6 261kV
5.3 536kV
10.5 1MV
TP
(DO NOT CONNECT)
ADXL150
9
R5
5
CLOCK
GAIN
AMP
COM
DEMODULATOR
7
OFFSET
NULL
C2
0.1mF
+V
S
2
25kV
OUTPUT
5kV
8
+V
S
2
AMPLIFIER
BUFFER
AMP
SCALING
Figure 21. Two-Pole Post Filter Circuit
R3
82.5kV
C4
+V
S
2
OP296
3
1/2
0.1mF
8
2-POLE
FILTER
+V
S
200kV
0g TRIM
1
R2
R1
42.2kV
82.5kV
10
C3
+V
S
2
5
1/2
7
OP296
4
R5
R4
100kV
6
R6
1MV
REV. 0
–11–
Page 12

ADXL150/ADXL250
0
g
(a)
0
g
(b)
+1
g
(c)
–1
g
(d)
8
14
1
7
8
14
7
1
8
7
1
14
1
14
7
8
Additional Noise Reduction Techniques
Shielded wire should be used for connecting the accelerometer to
any circuitry that is more than a few inches away—to avoid 60 Hz
pickup from ac line voltage. Ground the cable’s shield at only one
end and connect a separate common lead between the circuits;
this will help to prevent ground loops. Also, if the accelerometer
is inside a metal enclosure, this should be grounded as well.
Mounting Fixture Resonances
A common source of error in acceleration sensing is resonance
of the mounting fixture. For example, the circuit board that the
ADXL150/ADXL250 mounts to may have resonant frequencies
in the same range as the signals of interest. This could cause the
CALIBRATING THE ADXL150/ADXL250
If a calibrated shaker is not available, both the zero g level and
scale factor of the ADXL150/ADXL250 may be easily set to fair
accuracy by using a self-calibration technique based on the 1 g
acceleration of the earth’s gravity. Figure 24 shows how gravity
and package orientation affect the ADXL150/ADXL250’s
output. With its axis of sensitivity in the vertical plane, the
ADXL150/ADXL250 should register a 1 g acceleration, either
positive or negative, depending on orientation. With the axis of
sensitivity in the horizontal plane, no acceleration (the zero g
bias level) should be indicated. The use of an external buffer
amplifier may invert the polarity of the signal.
signals measured to be larger than they really are. A common
solution to this problem is to damp these resonances by mounting the ADXL150/ADXL250 near a mounting post or by adding extra screws to hold the board more securely in place.
When testing the accelerometer in your end application, it is
recommended that you test the application at a variety of frequencies to ensure that no major resonance problems exist.
REDUCING POWER CONSUMPTION
The use of a simple power cycling circuit provides a dramatic
reduction in the accelerometer’s average current consumption.
In low bandwidth applications such as shipping recorders, a
simple, low cost circuit can provide substantial power reduction.
If a microprocessor is available, it can supply a TTL clock pulse
to toggle the accelerometer’s power on and off.
A 10% duty cycle, 1 ms on, 9 ms off, reduces the average cur-
rent consumption of the accelerometer from 1.8 mA to 180 µA,
providing a power reduction of 90%.
Figure 23 shows the typical power-on settling time of the
ADXL150/ADXL250.
V
5.0
4.5
4.0
3.5
3.0
2.5
2.0
VOLTAGE – Volts
1.5
1.0
0.5
0
0 0.04
0.08 0.12 0.16 0.20 0.24 0.28 0.32 0.36
TIME – ms
S
0.5V
V
– 50
g
OUT
V
= 0
g
OUT
V
+ 50
g
OUT
0.5V
Figure 23. Typical Power-On Settling with Full-Scale
Input. Time Constant of Post Filter Dominates the
Response When a Signal Is Present.
Figure 24. Using the Earth’s Gravity to SelfCalibrate the ADXL150/ADXL250
Figure 24 shows how to self-calibrate the ADXL150/ADXL250.
Place the accelerometer on its side with its axis of sensitivity
oriented as shown in “a.” (For the ADXL250 this would be the
“X” axis—its “Y” axis is calibrated in the same manner, but the
part is rotated 90° clockwise.) The zero g offset potentiometer
RT is then roughly adjusted for midscale: +2.5 V at the external
amp output (see Figure 20).
Next, the package axis should be oriented as in “c” (pointing
down) and the output reading noted. The package axis should
then be rotated 180° to position “d” and the scale factor poten-
tiometer, R1b, adjusted so that the output voltage indicates a
change of 2 gs in acceleration. For example, if the circuit scale
factor at the external buffer’s output is 100 mV per g, the scale
factor trim should be adjusted so that an output change of
200 mV is indicated.
Self-Test Function
A Logic “1” applied to the self-test (ST) input will cause an
electrostatic force to be applied to the sensor that will cause it to
deflect. If the accelerometer is experiencing an acceleration
when the self-test is initiated, the output will equal the algebraic
sum of the two inputs. The output will stay at the self-test level
as long as the ST input remains high, and will return to the
actual acceleration level when the ST voltage is removed.
Using an external amplifier to increase output scale factor may
cause the self-test output to overdrive the buffer into saturation.
The self-test may still be used in this case, but the change in the
output must then be monitored at the accelerometer’s output
instead of the external amplifier’s output.
Note that the value of the self-test delta is not an exact indication of the sensitivity (mV/g) and therefore may not be used to
calibrate the device for sensitivity error.
–12–
REV. 0
Page 13

ADXL150/ADXL250
MINIMIZING EMI/RFI
The architecture of the ADXL150/ADXL250, and its use of
synchronous demodulation, makes the device immune to most
electromagnetic (EMI) and radio frequency (RFI) interference.
The use of synchronous demodulation allows the circuit to
reject all signals except those at the frequency of the oscillator
driving the sensor element. However, the ADXL150/ADXL250
have a sensitivity to noise on the supply lines that is near its
internal clock frequency (approximately 100 kHz) or its odd
harmonics and can exhibit baseband errors at the output. These
error signals are the beat frequency signals between the clock
and the supply noise.
Such noise can be generated by digital switching elsewhere in
the system and must be attenuated by proper bypassing. By
inserting a small value resistor between the accelerometer and
its power supply, an RC filter is created. This consists of the
resistor and the accelerometer’s normal 0.1 µF bypass capacitor.
For example if R = 20 Ω and C = 0.1 µF, a filter with a pole at
80 kHz is created, which is adequate to attenuate noise on the
supply from most digital circuits, with proper ground and supply layout.
Power supply decoupling, short component leads, physically
small (surface mount, etc.) components and attention to good
grounding practices all help to prevent RFI and EMI problems.
Good grounding practices include having separate analog and
digital grounds (as well as separate power supplies or very good
decoupling) on the printed circuit boards.
INTERFACING THE ADXL150/ADXL250 SERIES
ACCELEROMETERS WITH POPULAR ANALOG-TODIGITAL CONVERTERS.
Basic Issues
i
MEM
S
The ADXL150/ADXL250 Series accelerometers were designed
to drive popular analog-to-digital converters (ADCs) directly.
In applications where both a ±50 g full-scale measurement range
and a 1 kHz bandwidth are needed, the V
accelerometer is simply connected to the V
terminal of the
OUT
terminal of the
IN
ADC as shown in Figure 25a. The accelerometer provides its
(nominal) factory preset scale factor of +2.5 V ±38 mV/g which
drives the ADC input with +2.5 V ±1.9 V when measuring a
50 g full-scale signal (38 mV/g × 50 g = 1.9 V).
As stated earlier, the use of post filtering will dramatically
improve the accelerometer’s low g resolution. Figure 25b shows
a simple post filter connected between the accelerometer and
the ADC. This connection, although easy to implement, will
require fairly large values of Cf, and the accelerometer’s signal
will be loaded down (causing a scale factor error) unless the
ADC’s input impedance is much greater than the value of Rf.
ADC input impedance’s range from less than 1.5 kΩ up to
greater than 15 kΩ with 5 kΩ values being typical. Figure 25c is
the preferred connection for implementing low-pass filtering
with the added advantage of providing an increase in scale
factor, if desired.
Calculating ADC Requirements
The resolution of commercial ADCs is specified in bits. In an
ADC, the available resolution equals 2
of bits. For example, an 8-bit converter provides a resolution of
8
whi ch equals 256. So the full-scale input range of the converter
2
n
, where n is the number
divided by 256 will equal the smallest signal it can resolve.
In selecting an appropriate ADC to use with our accelerometer
we need to find a device that has a resolution better than the
measurement resolution but, for economy’s sake, not a great
deal better.
For most applications, an 8- or 10-bit converter is appropriate.
The decision to use a 10-bit converter alone, or to use a gain
stage together with an 8-bit converter, depends on which is more
important: component cost or parts count and ease of assembly.
Table II shows some of the tradeoffs involved.
Table II.
8-Bit Converter and 10-Bit (or 12-Bit)
Op Amp Preamp Converter
Advantages:
Low Cost Converter No Zero g Trim Required
Disadvantages:
Needs Op Amp Higher Cost Converter
Needs Zero g Trim
Adding amplification between the accelerometer and the ADC
will reduce the circuit’s full-scale input range but will greatly
reduce the resolution requirements (and therefore the cost) of
the ADC. For example, using an op amp with a gain of 5.3
following the accelerometer will increase the input drive to the
ADC from 38 mV/g to 200 mV/g. Since the signal has been
gained up, but the maximum full-scale (clipping) level is still the
same, the dynamic range of the measurement has also been
reduced by 5.3.
Table III. Typical System Resolution Using Some Popular
ADCs Being Driven with and without an Op Amp Preamp
Converter SF FS System
Converter mV/Bit Preamp in Range Resolution
Type 2
8 Bit 256 19.5 mV None 38 ±50 0.51
10 Bit 1,024 4.9 mV None 38 ±50 0.13
12 Bit 4,096 1.2 mV None 38 ±50 0.03
n
(5 V/2n) Gain mV/g in g’s in g’s (p-p)
256 19.5 mV 2 76 ±25 0.26
256 19.5 mV 2.63 100 ±20 0.20
256 19.5 mV 5.26 200 ±10 0.10
1,024 4.9 mV 2 76 ±25 0.06
1,024 4.9 mV 2.63 100 ±20 0.05
1,024 4.9 mV 5.26 200 ±10 0.02
4,096 1.2 mV 2 76 ±25 0.02
4,096 1.2 mV 2.63 100 ±20 0.01
4,096 1.2 mV 5.26 200 ±10 0.006
Table III is a chart showing the required ADC resolution vs. the
scale factor of the accelerometer with or without a gain amplifier. Note that the system resolution specified in the table refers
REV. 0
–13–
Page 14

ADXL150/ADXL250
+V
S
V
OUT
XL
+V
S
ADC
V
OS
NULL PIN
0
g
OFFSET
ADJUST
+V
S
V
OUT
XL
+V
S
ADC
R
F
Cf
R1
to that provided by the converter and preamp (if used). It is
necessary to use sufficient post filtering with the accelerometer
to reduce its noise floor to allow full use of the converter’s resolution (see post filtering section).
The use of a gain stage following the accelerometer will normally require the user to adjust the zero g offset level (either by
trimming or by resistor selection—see previous sections).
For many applications, a modern “economy priced” 10-bit
converter, such as the AD7810 allows you to have high resolution without using a preamp or adding much to the overall
circuit cost. In addition to simplicity and cost, it also meets two
other necessary requirements: it operates from a single +5 V
supply and is very low power.
a. Direct Connection, No Signal Amplification or
Post Filtering
+V
S
R
XL
F
V
OUT
Cf
+V
S
ADC
INPUT
RESISTANCE
b. Single-Pole Post Filtering, No Signal Amplification
c. Single-Pole Post Filtering and Signal Amplification
Figure 25. Interfacing the ADXL150/ADXL250 Series
Accelerometers to an ADC
–14–
REV. 0
Page 15

OUTLINE DIMENSIONS
0.291 (7.391)
0.285 (7.239)
0.390 (9.906)
MAX
PIN 1
0.419 (10.643)
0.394 (10.008)
7
14 8
1
0.300 (7.62)
0.345 (8.763)
0.290 (7.366)
0.0125 (0.318)
0.009 (0.229)
0.050 (1.270)
0.016 (0.406)
88
08
SEATING
PLANE
0.020 (0.508)
0.004 (0.102)
0.020 (0.508)
0.013 (0.330)
0.050
(1.27)
BSC
0.195 (4.953)
0.115 (2.921)
0.215 (5.461)
0.119 (3.023)
Dimensions shown in inches and (mm).
14-Lead Cerpac
(QC-14)
ADXL150/ADXL250
C2949–8–4/98
REV. 0
PRINTED IN U.S.A.
–15–
 Loading...
Loading...