

Page 1
Precision, ±5 g, Dual-Axis,
V
High Temperature iMEMS Accelerometer
FEATURES
High performance, dual-axis accelerometer
on a single IC
−40°C to +175°C ambient temperature range
Long life: guaranteed 1000 hours at T
13 mm × 8 mm × 2 mm side-brazed ceramic dual in-line
package
1 mg resolution at 60 Hz
Low power: 700 μA at V
= 5 V (typical)
S
High zero g bias repeatability
High sensitivity accuracy
Bandwidth adjustment with a single capacitor
Single-supply operation
RoHS-compliant
Compatible with Sn/Pb and Pb-free solder processes
APPLICATIONS
Geological exploration tilt and vibration measurement
Extreme high temperature industrial products
= 175°C
A
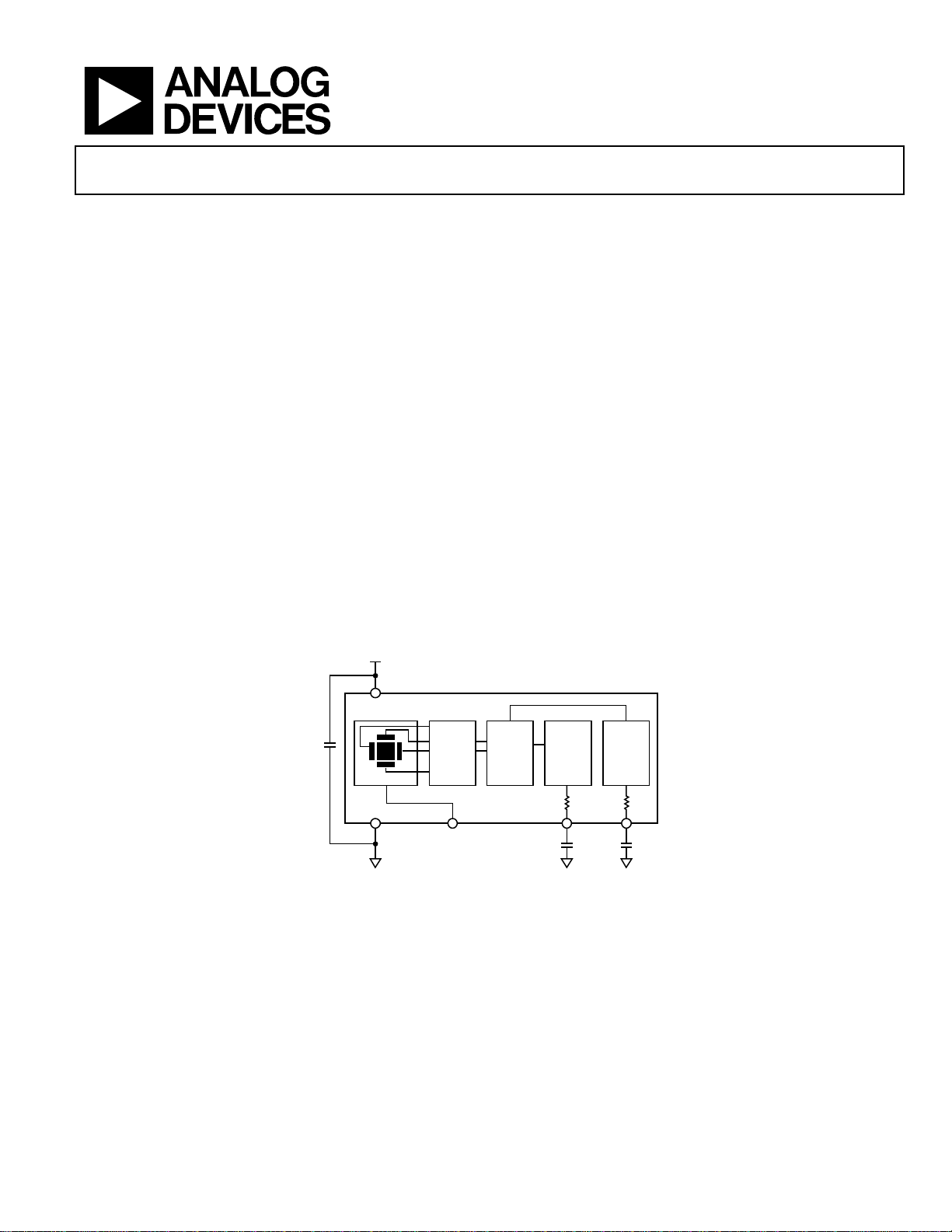
FUNCTIONAL BLOCK DIAGRAM
+5
ADXL206
GENERAL DESCRIPTION
The ADXL206 is a precision, low power, complete dual-axis
iMEMS® accelerometer for use in high temperature environments. The accelerometer integrates the sensor with signal
conditioned voltage outputs on a single, monolithic IC.
The ADXL206 measures acceleration with a full-scale range
of ±5 g. The ADXL206 can measure both dynamic acceleration
(for example, vibration) and static acceleration (for example,
gravity).
The typical noise floor is 110 g/√Hz, allowing signals below
1 mg (0.06° of inclination) to be resolved in tilt sensing applications using narrow bandwidths (<60 Hz).
The user selects the bandwidth of the accelerometer using
Capacitors C
Bandwidths of 0.5 Hz to 2.5 kHz can be selected to suit the
application.
The ADXL206 is available in a 13 mm × 8 mm × 2 mm, 8-lead,
side-brazed ceramic dual in-line package (SBDIP).
and CY at the X
X
OUT
and Y
pins, respectively.
OUT
V
S
ADXL206
C
DC
SENSOR
COM ST Y
AC
AMP
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
DEMOD
Figure 1.
OUTPUT
AMP
R
FILT
32kΩ
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2011 Analog Devices, Inc. All rights reserved.
OUTPUT
AMP
R
FILT
32kΩ
OUT
C
Y
X
OUT
C
X
09600-001
Page 2

ADXL206
TABLE OF CONTENTS
Features .............................................................................................. 1
Applications ....................................................................................... 1
General Description ......................................................................... 1
Functional Block Diagram .............................................................. 1
Revision History ............................................................................... 2
Specifications ..................................................................................... 3
Absolute Maximum Ratings ............................................................ 4
Thermal Resistance ...................................................................... 4
ESD Caution .................................................................................. 4
Pin Configuration and Function Descriptions ............................. 5
Typical Performance Characteristics ............................................. 6
REVISION HISTORY
4/11—Revision 0: Initial Version
Theory of Operation .........................................................................9
Performance ...................................................................................9
Applications Information .............................................................. 10
Power Supply Decoupling ......................................................... 10
Setting the Bandwidth Using CX and CY ................................. 10
Self-Test ....................................................................................... 10
Design Trade-Offs for Selecting Filter Characteristics:
Noise/Bandwidth Trade-Off ........................................................ 10
Using the ADXL206 with Operating Voltages
Other Than 5 V .......................................................................... 11
Using the ADXL206 As a Dual-Axis Tilt Sensor ................... 11
Outline Dimensions ....................................................................... 12
Ordering Guide .......................................................................... 12
Rev. 0 | Page 2 of 12
Page 3
ADXL206
SPECIFICATIONS
TA = −40°C to +175°C, VS = 5 V, CX = 0.1 F, acceleration = 0 g, unless otherwise noted.1
Table 1.
Parameter Test Conditions/Comments Min Typ Max Unit
SENSOR INPUT Each axis
Measurement Range
Nonlinearity ±0.2 % FS
Package Alignment Error ±1 Degrees
Alignment Error X sensor to Y sensor ±0.1 Degrees
Cross-Axis Sensitivity ±1.5 %
SENSITIVITY (RATIOMETRIC)
Sensitivity at X
Sensitivity Change Due to Temperature
ZERO g BIAS LEVEL (RATIOMETRIC)
0 g Voltage at X
0 g Bias Repeatability −40°C ≤ TA ≤ +175°C ±10 mg
NOISE PERFORMANCE
Noise Density VS = 5 V, TA = 25°C 110 μg/√Hz rms
FREQUENCY RESPONSE
CX, CY Range
R
Tolerance 24 32 40 kΩ
FILT
6
Sensor Resonant Frequency 5.5 kHz
SELF-TEST
7
Logic Input Low 1 V
Logic Input High 4 V
ST Input Resistance to Ground 30 50 kΩ
Output Change at X
OUTPUT AMPLIFIER No load
Output Swing Low 0.05 0.2 V
Output Swing High 4.5 V
LIFESPAN
Usable Life Expectancy TA = 175°C 1000 Hours
POWER SUPPLY
Operating Voltage Range 4.75 5.25 V
Supply Current 0.7 1.5 mA
Turn-On Time
1
Minimum and maximum specifications are guaranteed. Typical specifications are not guaranteed.
2
Guaranteed by measurement of initial offset and sensitivity.
3
Sensitivity is essentially ratiometric to VS. For VS = 4.75 V to 5.25 V, sensitivity is 186 mV/V/g to 215 mV/V/g.
4
Defined as the output change from ambient temperature to maximum temperature or from ambient temperature to minimum temperature.
5
Actual frequency response controlled by user-supplied external capacitors (CX, CY).
6
Bandwidth = 1/(2 × π × 32 kΩ × C). For CX, CY = 0.002 μF, bandwidth = 2500 Hz. For CX, CY = 10 μF, bandwidth = 0.5 Hz. Minimum/maximum values are not tested.
7
Self-test response changes cubically with VS.
8
Larger values of CX, CY increase turn-on time. Turn-on time is approximately 160 × CX or CY + 4 ms, where CX and CY are in microfarads (μF).
2
±5
3
, Y
V
OUT
OUT
, Y
V
OUT
OUT
5
0.002 10 μF
, Y
ST pin Logic 0 to Logic 1 150 250 350 mV
OUT
OUT
8
20 ms
= 5 V 296 312 328 mV/g
S
4
V
= 5 V ±0.3 %
S
= 5 V, TA = 25°C 2.5 ± 0.025 V
S
g
Rev. 0 | Page 3 of 12
Page 4
ADXL206
ABSOLUTE MAXIMUM RATINGS
Table 2.
Parameter Rating
Acceleration (Any Axis)
Unpowered 500 g
Powered 500 g
VS −0.3 V to +7.0 V
All Other Pins
Output Short-Circuit Duration
(COM − 0.3 V) to
+ 0.3 V)
(V
S
Indefinite
(Any Pin to Common)
Ambient Operating Temperature
Range (T
)
A
−55°C to +175°C
Storage Temperature Range −65°C to +200°C
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
T
P
T
L
T
SMAX
RAMP-UP
THERMAL RESISTANCE
θJA is specified for the worst-case conditions, that is, for a device
soldered in a printed circuit board (PCB) for surface-mount
packages.
Table 3. Thermal Resistance
Package Type θJA θ
Unit
JC
8-Lead SBDIP 120 20 °C/W
ESD CAUTION
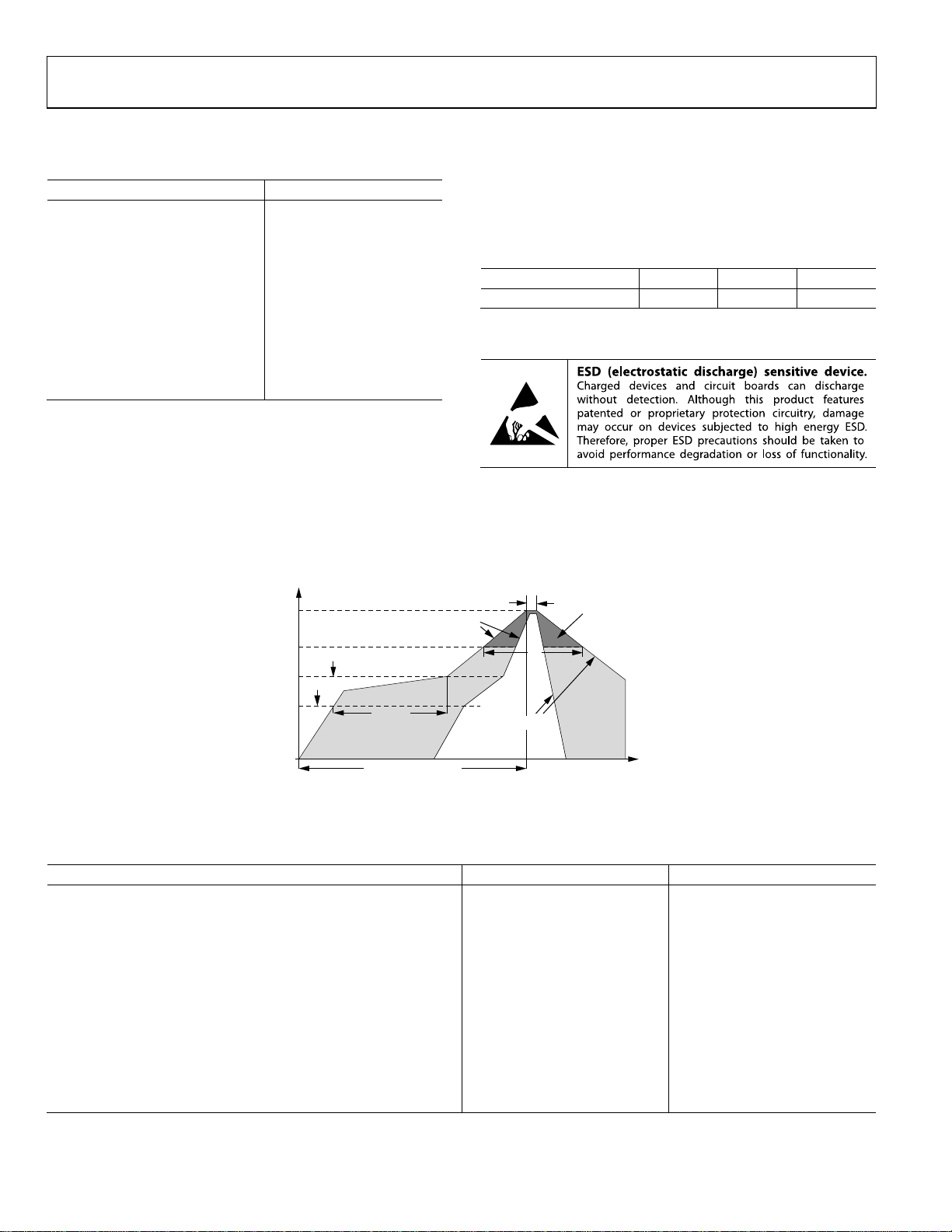
CRITICAL Z ONE
TO T
t
P
T
L
P
t
L
T
SMIN
TEMPERATURE
t
S
PREHEAT
TIME
25°C TO PEAK
Figure 2. Recommended Soldering Profile
RAMP-DOWN
TIME
09600-002
Table 4. Recommended Soldering Profile Limits
Profile Feature Sn63/Pb37 Pb-Free
Average Ramp Rate (TL to TP) 3°C/sec max 3°C/sec max
Preheat
Minimum Temperature (T
Maximum Temperature (T
Time (T
Ramp-Up Rate (T
SMIN
to T
), tS 60 sec to 120 sec 60 sec to 150 sec
SMAX
to TL) 3°C/sec max 3°C/sec max
SMAX
) 100°C 150°C
SMIN
) 150°C 200°C
SMAX
Time Maintained Above Liquidous (tL) 60 sec to 150 sec 60 sec to 150 sec
Liquidous Temperature (TL) 183°C 217°C
Peak Temperature (TP) 240°C + 0°C/−5°C 260°C + 0°C/−5°C
Time Within 5°C of Actual Peak Temperature (tP) 10 sec to 30 sec 20 sec to 40 sec
Ramp-Down Rate (TP to TL) 6°C/sec max 6°C/sec max
Time 25°C to Peak Temperature 6 minutes max 8 minutes max
Rev. 0 | Page 4 of 12
Page 5

ADXL206
Y
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
COM
1
2
ADXL206
3
TOP VIEW
(Not to Scale)
4
+X
NC
COM
OUT
NC = NO CONNECT. DO NOT
CONNECT TO T HIS PIN.
ST
8
V
2
7
S
V
6
S
X
5
OUT
09600-003
Figure 3. Pin Configuration
Table 5. Pin Function Descriptions
Pin No. Mnemonic Description
1, 3 COM Common.
2 NC No Connect. Do not connect to this pin.
4 Y
5 X
Y Channel Output.
OUT
X Channel Output.
OUT
6 VS Supply.
7 VS2 Supply. Must be connected to VS.
8 ST Self-Test.
Rev. 0 | Page 5 of 12
Page 6

ADXL206
TYPICAL PERFORMANCE CHARACTERISTICS
VS = 5 V, unless otherwise noted.
60
70
50
40
30
20
PERCENT OF POPULATION (%)
10
0
2.43
2.44
2.45
2.46
2.47
2.48
2.49
2.50
2.51
2.52
2.53
2.54
2.55
2.56
VOLTAGE (V)
2.57
09600-004
Figure 4. X-Axis Zero g Bias at TA = 25°C
25
20
15
10
60
50
40
30
20
PERCENT OF POPULATION (%)
10
0
2.43
2.44
2.45
2.46
2.47
2.48
2.49
2.50
2.51
2.52
2.53
2.54
2.55
2.56
VOLTAGE (V)
2.57
09600-007
Figure 7. Y-Axis Zero g Bias at TA = 25°C
25
20
15
10
PERCENT OF POPULATION (%)
5
0
–1.2
–1.0
–0.8
–0.6
TEMPERATURE CO EFFICI ENT (mg/°C)
0
–0.4
0.2
–0.2
Figure 5. X-Axis Zero g Bias Temperature Coefficient
90
80
70
60
50
40
30
20
PERCENT OF POPULATION (%)
10
0
0.287
0.297
0.307
0.317
0.327
SENSITIVITY (V/g)
0.337
0.347
Figure 6. X-Axis Sensitivity at TA = 25°C
5
PERCENT OF POPULATION (%)
0.4
0.6
0.8
1.0
1.2
09600-005
0
–1.2
–1.0
–0.8
–0.6
TEMPERATURE CO EFFICI ENT (mg/°C)
0
0.2
0.4
0.6
0.8
1.0
–0.4
–0.2
1.2
09600-008
Figure 8. Y-Axis Zero g Bias Temperature Coefficient
80
70
60
50
40
30
20
PERCENT OF POPULATION (%)
10
0
0.347
0.357
0.367
0.377
0.357
0.367
0.377
0.387
0.287
0.297
0.307
0.317
0.327
0.337
09600-006
Figure 9. Y-Axis Sensitivity at T
SENSITIVITY (V/g)
= 25°C
A
0.387
09600-009
Rev. 0 | Page 6 of 12
Page 7

ADXL206
40
40
35
30
25
20
15
10
PERCENT OF POPULATION (%)
5
0
–5 –4 –3 –2 –1 0 1 2 3 4 5
CROSS-AXIS RESPONSE (%)
Figure 10. Cross-Axis Response, Z-Axis vs. X-Axis
325
320
315
310
SENSITIVITY (mV/g)
305
35
30
25
20
15
10
PERCENT OF POPULATION (%)
5
0
–5 –4 –3 –2 –1 0 1 2 3 4 5
09600-010
CROSS-AXIS RESPONSE (%)
09600-011
Figure 13. Cross-Axis Response, Z-Axis vs. Y-Axis
325
320
315
310
SENSITIVITY (mV/g)
305
300
–100 –50 0 50 100 150 200
AMBIENT TEM PERATURE (°C)
Figure 11. X-Axis Sensitivity over Temperature, Nine Devices
100
75
50
25
0
–25
–50
–75
–100
OUTPUT BIAS DRIFT (mV)
–125
–150
–175
–200
–50 –25 0 25 50 75 100 125 150 175 200
AMBIENT TEM PERATURE (°C)
Y-AX IS
X-AXIS
Figure 12. Zero g Output Bias Drift over Temperature, Eight Devices
300
–100 –50 0 50 100 150 200
09600-016
AMBIENT TEMPERATURE (°C)
09600-017
Figure 14. Y-Axis Sensitivity over Temperature, Nine Devices
INPUT5V
OUTPUT
VOLTAGE (1V/DIV)
0V
TIME (2ms/DIV)
09600-015
Figure 15. Turn-On Time, C
, CY = 0.1 μF, Time Scale = 2 ms/div
X
09600-014
Rev. 0 | Page 7 of 12
Page 8

ADXL206
25
20
15
10
PERCENT OF POPULATION (%)
5
0
–40 –30 –20 0 10 20
–10
OUTPUT BIAS DRIFT (mV)
Figure 16. X-Axis Zero g Output Bias Drift over 1000 Hours
= 175°C, Powered
at T
A
100
VS = 5V
90
80
70
60
50
40
30
20
PERCENT OF POPULATION (%)
10
0
200 300 400 500 600 700 800 900 1000
CURRENT (µA)
Figure 17. Supply Current at TA = 25°C
25
20
15
10
PERCENT OF POPULATION (%)
5
0
09600-018
–10–20 0 10
OUTPUT BIAS DRIFT (mV)
09600-019
Figure 18. Y-Axis Zero g Output Bias Drift over 1000 Hours
= 175°C, Powered
at T
A
0.9
VS = 5V
0.8
0.7
0.6
CURRENT (mA)
0.5
0.4
0.3
–50 0 50 100 150
09600-013
AMBIENT TEMPERATURE (°C)
09600-012
Figure 19. Supply Current vs. Temperature
Rev. 0 | Page 8 of 12
Page 9

ADXL206
THEORY OF OPERATION
The ADXL206 is a complete acceleration measurement system
on a single, monolithic IC. The part contains a polysilicon, surfacemicromachined sensor and signal conditioning circuitry to implement an open-loop acceleration measurement architecture. The
output signals are analog voltages proportional to acceleration.
The ADXL206 is capable of measuring both positive and negative
accelerations to at least ±5 g. The accelerometer can measure
static acceleration forces such as gravity, allowing it to be used
as a tilt sensor.
The sensor is a surface-micromachined, polysilicon structure
built on top of the silicon wafer. Polysilicon springs suspend the
structure over the surface of the wafer and provide resistance
against acceleration forces. Deflection of the structure is measured
using a differential capacitor that consists of independent fixed
plates and plates attached to the moving mass. The fixed plates
are driven by 180° out-of-phase square waves. Acceleration deflects
the beam and unbalances the differential capacitor, resulting in
an output square wave whose amplitude is proportional to acceleration. Phase-sensitive demodulation techniques are then used
to rectify the signal and determine the direction of the acceleration.
The output of the demodulator is amplified and brought off chip
through a 32 kΩ resistor. At this point, the user can set the signal
bandwidth of the device by adding a capacitor. This filtering
improves measurement resolution and helps prevent aliasing.
PERFORMANCE
Rather than using additional temperature compensation circuitry,
innovative design techniques have been used to ensure that high
performance is built in. As a result, there is essentially no quantization error or nonmonotonic behavior, and temperature hysteresis
is very low (typically less than 2 mg over the −40°C to +175°C
temperature range).
Figure 12 shows the 0 g output performance of eight parts over
the −40°C to +175°C temperature range.
Figure 11 and Figure 14 show the typical sensitivity shift over
temperature for V
V
= 5 V, but it is very good over the full supply voltage range.
S
= 5 V. Sensitivity stability is optimized for
S
Rev. 0 | Page 9 of 12
Page 10

ADXL206
()(
)
(
)
(
)
APPLICATIONS INFORMATION
POWER SUPPLY DECOUPLING
For most applications, a single 0.1 µF capacitor, CDC, adequately
decouples the accelerometer from noise on the power supply. In
some cases, however, particularly where noise is present at the
140 kHz internal clock frequency (or any harmonic thereof),
noise on the supply can cause interference on the ADXL206
output. If additional decoupling is needed, a 100 Ω (or smaller)
resistor or ferrite bead can be inserted in the supply line of the
ADXL206. Additionally, a larger bulk bypass capacitor (in the
1 µF to 22 µF range) can be added in parallel to C
DC
.
SETTING THE BANDWIDTH USING CX AND CY
The ADXL206 has provisions for band-limiting the X
pins. A capacitor must be added to the pin to implement
Y
OUT
low-pass filtering for antialiasing and noise reduction. The
equation for the 3 dB bandwidth is
f
= 1/(2π(32 kΩ) × Cx)
−3 dB
or more simply,
f
= 5 µF/Cx
−3 dB
The tolerance of the internal resistor (R
) can vary typically
FILT
as much as ±25% of its nominal value (32 kΩ); thus, the bandwidth varies accordingly. A minimum capacitance of 2000 pF
for C
and CY is required in all cases.
X
Table 6. Filter Capacitor Selection, C
Bandwidth (Hz) Capacitor (μF)
1 4.7
10 0.47
50 0.10
100 0.05
200 0.027
500 0.01
and CY
X
OUT
and
SELF-TEST
The ST pin controls the self-test feature. When this pin is set to
, an electrostatic force is exerted on the beam of the acceler-
V
S
ometer. The resulting movement of the beam allows the user to
test whether the accelerometer is functional. The typical change
in output is 800 mg (corresponding to 250 mV). This pin can be
left open-circuit or connected to common in normal use.
The ST pin should never be exposed to voltage greater than
V
+ 0.3 V. If the system design is such that this condition
S
cannot be guaranteed (that is, multiple supply voltages are
present), it is recommended that a clamping diode with low
forward voltage be connected between ST and V
.
S
DESIGN TRADE-OFFS FOR SELECTING FILTER CHARACTERISTICS: NOISE/BANDWIDTH TRADE-OFF
The accelerometer bandwidth selected ultimately determines
the measurement resolution (smallest detectable acceleration).
Filtering can be used to lower the noise floor, improving the
resolution of the accelerometer. Resolution is dependent on the
analog filter bandwidth at X
The output of the ADXL206 has a typical bandwidth of 2.5 kHz.
The user must filter the signal at this point to limit aliasing
errors. The analog bandwidth must be no more than half the
analog-to-digital sampling frequency to minimize aliasing. The
analog bandwidth can be further decreased to reduce noise and
improve resolution.
The ADXL206 noise has the characteristics of white Gaussian noise,
which contributes equally at all frequencies and is described in
terms of µg/√Hz (that is, the noise is proportional to the square root
of the accelerometer bandwidth). The user should limit bandwidth
to the lowest frequency needed by the application to maximize
the resolution and dynamic range of the accelerometer.
With the single-pole roll-off characteristic, the typical noise of
the ADXL206 is determined by
At 100 Hz, the noise is
Often, the peak value of the noise is desired. Peak-to-peak noise
can only be estimated by statistical methods. Ta bl e 7 is useful
for estimating the probability of exceeding various peak values,
given the rms value.
Table 7. Estimation of Peak-to-Peak Noise
Peak-to-Peak Value
2 × rms 32
4 × rms 4.6
6 × rms 0.27
8 × rms 0.006
Peak-to-peak noise values give the best estimate of the uncertainty in a single measurement; peak-to-peak noise is estimated
by 6 × rms. Tabl e 8 gives the typical noise output of the ADXL206
for various C
and CY values.
X
Table 8. Typical Noise Output for Various Capacitor Values
C
, CY
Bandwidth (Hz)
10 0.47 0.4 2.6
50 0.1 1.0 6
100 0.047 1.4 8.4
500 0.01 3.1 18.7
X
(μF)
.
OUT
6.1Hz/110 BWg Noise rms ××μ=
% of Time That Noise Exceeds
Nominal Peak-to-Peak Value
RMS Noise
(mg)
Peak-to-Peak Noise
Estimate (mg)
g g Noise rms m4.16.1100Hz/110 =××μ=
Rev. 0 | Page 10 of 12
Page 11

ADXL206
USING THE ADXL206 WITH OPERATING VOLTAGES OTHER THAN 5 V
The ADXL206 is tested and specified at VS = 5 V; however, it
can be powered with V
performance parameters change as the supply voltage is varied.
The ADXL206 output is ratiometric; therefore, the output
sensitivity (or scale factor) varies proportionally to the supply
voltage. The zero g bias output is also ratiometric; therefore, the
zero g output is nominally equal to V
The output noise is not ratiometric but is absolute in volts;
therefore, the noise density decreases as the supply voltage
increases.
Self-test response in g is roughly proportional to the square of
the supply voltage. However, when ratiometricity of sensitivity
is factored in with supply voltage, self-test response in volts is
roughly proportional to the cube of the supply voltage. Therefore, at V
= 3 V, the typical self-test response is approximately
S
50 mV or about 160 mg.
as low as 3 V or as high as 6 V. Some
S
/2 at all supply voltages.
S
USING THE ADXL206 AS A DUAL-AXIS TILT SENSOR
One of the most popular applications of the ADXL206 is tilt
measurement. An accelerometer uses the force of gravity as an
input vector to determine the orientation of an object in space.
An accelerometer is most sensitive to tilt when its sensitive axis
is perpendicular to the force of gravity, that is, parallel to the
earth’s surface. At this orientation, the sensitivity of the accelerometer to changes in tilt is highest. When the axis of sensitivity
is parallel to gravity, that is, near its +1 g or −1 g reading, the
change in output acceleration per degree of tilt is negligible.
When the accelerometer is perpendicular to gravity, its output
changes nearly 17.5 mg per degree of tilt. At 45°, its output
changes at only 12.2 mg per degree and resolution declines.
Dual-Axis Tilt Sensor: Converting Acceleration to Tilt
When the accelerometer is oriented so that both its x-axis and
y-axis are parallel to the earth’s surface, it can be used as a 2-axis
tilt sensor with a roll axis and a pitch axis. After the output signal
from the accelerometer is converted to an acceleration that varies
between −1 g and +1 g, the output tilt in degrees is calculated
as follows:
PITCH = arcsin(A
ROLL = arcsin(A
Make sure to account for overranges. It is possible for the
accelerometer to output a signal greater than ±1 g due to
vibration, shock, or other accelerations.
X
/1 g)
Y
/1 g)
Rev. 0 | Page 11 of 12
Page 12

ADXL206
OUTLINE DIMENSIONS
0.528
0.520
0.512
85
14
INDEX
MARK
0.105
0.095
0.085
SEATING
PLANE
0.175 NOM
0.105
0.100
0.095
0.011
0.010
0.009
0.305
0.300
0.295
0.032
NOM
Figure 20. 8-Lead Side-Brazed Ceramic Dual In-Line Package [SBDIP]
Dimensions shown in inches
0.054
NOM
0.020
0.018
0.016
0.298
0.290
0.282
0.125
0.110
0.095
(D-8-1)
0.320
0.310
0.300
0.130 NOM
0.045
0.035
0.025
0.310
0.300
0.290
0.011
0.010
0.009
07-08-2010-B
ORDERING GUIDE
1, 2
Model
ADXL206HDZ 2 5 −40°C to +175°C 8-Lead SBDIP D-8-1
1
Lead finish. Gold over nickel over tungsten.
2
Z = RoHS Compliant Part.
Number of Axes Specified Voltage (V) Temperature Range Package Description Package Option
©2011 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D09600-0-4/11(0)
Rev. 0 | Page 12 of 12
 Loading...
Loading...