

Page 1
Low Cost ⴞ100 gSingle Axis
SELF-TEST
+V
S
2
25kV
5kV
ADXL190
GAIN
AMP
ZERO g ADJUST
COM
0.1mF
BUFFER
AMP
DEMODULATOR
SENSOR
+V
S
TP
(DO NOT CONNECT)
V
OUT
9
CLOCK
a
FEATURES
®
iMEMS
40 MilliLow Power 2 mA
400 Hz Bandwidth
+5.0 V Single Supply Operation
2000
APPLICATIONS
Shock and Vibration Measurement
Machine Health
Shipping Recorders
Military Fuze, Safe and Arm
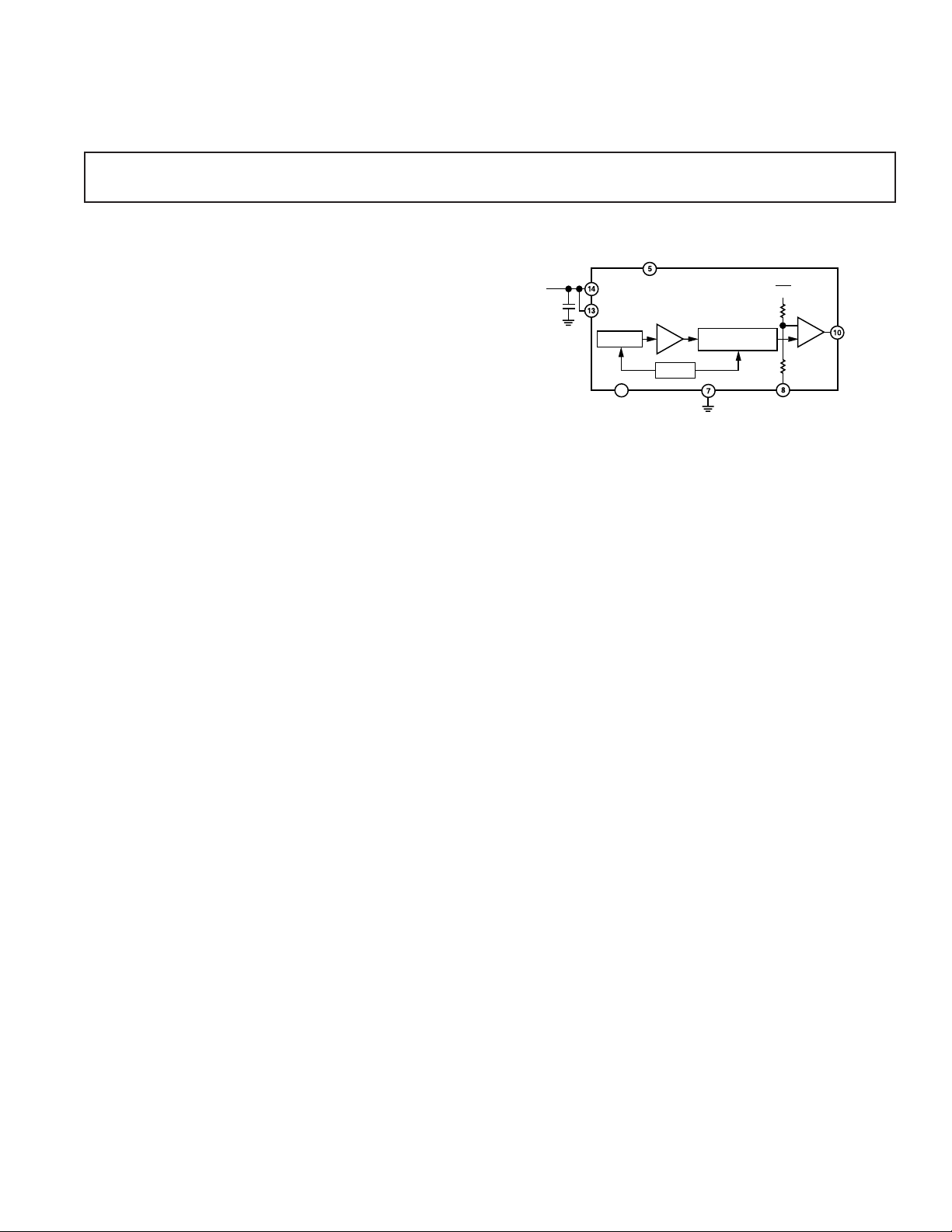
GENERAL DESCRIPTION
Single Chip IC Accelerometer
g
Resolution
g
Shock Survival
Accelerometer with Analog Output
The ADXL190 is a complete acceleration measurement system
on a single monolithic IC. It contains a polysilicon surfacemicromachined sensor and signal conditioning circuitry to
implement an open-loop acceleration measurement architecture.
The ADXL190 is capable of measuring both positive and nega-
tive accelerations up to ±100 g, making it suitable for shock and
vibration measurement.
Typical noise floor is 4 mg/√Hz allowing signals below 40 milli-g
to be resolved. The ADXL190 can measure both dynamic accelerations, (typical of vibration) or static accelerations, (such as
inertial force or gravity).
The ADXL190 has a two-pole Bessel switched-capacitor filter.
Bessel filters, sometimes called linear phase filters, have a step
response with minimal overshoot and a maximally flat group
ADXL190*
FUNCTIONAL BLOCK DIAGRAM
delay. The –3 dB frequency of the poles is preset at the factory
to 400 Hz. These filters are also completely self-contained and
buffered, requiring no external components.
The product features a built-in self-test feature that exercises
both the mechanical structure and electrical circuitry. When
triggered by a logic high on the self-test pin, an electrostatic
force acts on the beam equivalent to approximately 20% of fullscale acceleration input, and thus a proportional voltage change
appears on the output pin. No external components other than a
decoupling capacitor are required.
The ADXL190 is available in a hermetic 14-lead surface mount
cerpak, specified over the –40°C to +105°C temperature range.
*Patent Pending.
i
MEM
S
is a registered trademark of Analog Devices, Inc.
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 1999
Page 2
ADXL190–SPECIFICATIONS
(TA = T
MIN
to T
, VS = +5 V, Acceleration = 0 g unless otherwise noted)
MAX
ADXL190WQC
Parameter Conditions Min Typ Max Units
SENSOR INPUT
Dynamic Range
1, 2, 3
Without Zero-g Adjust ±105 g
Alignment Error ±1 Degrees
Nonlinearity 0.2 %
Cross Axis Sensitivity ±2%
SENSITIVITY
ZERO g BIAS LEVEL
4
Initial
Temperature Drift
2, 3
Initial
5
0 g Offset vs. Temperature
5
Ratiometric 16.5 18.0 19.5 mV/g
∆ from +25°C ±0.5 %
Ratiometric 2.3 2.5 2.7 V
∆ from +25°C 1.0 g
Zero g Adjustment Gain 0.45 0.50 0.55 ∆V
/∆V 0 g Adjust
OUT
Zero g Adjust Pin Input Impedance 20 30 40 kΩ
NOISE PERFORMANCE
Noise Density 4 12 mg/√Hz rms
FREQUENCY RESPONSE
3 dB Bandwidth 360 400 Hz
Sensor Resonant Frequency 24 kHz
SELF-TEST
Output Change
6
450 990 mV
Logic “1” Voltage 3.5 V
Logic “0” Voltage 1.0 V
Input Impedance 50 kΩ
ANALOG OUTPUT
Output Voltage Range I
= ±100 µA0.25 V
OUT
– 0.25 V
S
Capacitive Load Drive 1000 pF
POWER SUPPLY
Specified Performance 4.75 5.25 V
Quiescent Supply Current 2.0 5.0 mA
TEMPERATURE RANGE
Specified Performance –40 +105 °C
NOTES
1
Product is tested at ±50 g, and the combination of 0-g error, sensitivity error, and output voltage swing measurements provide the calculations for dynamic range.
2
0-g is nominally VS/2. Use of the 0-g adjustment pin is used to null the 0-g error, resulting in increased dynamic range. It can also be used to create an asymmetrical
dynamic range if so desired.
3
The output response is ratiometric and is described by the following equation. V
Where a = 0.2 V, b = 2.712 × 10–3 1/g , c = 0.178 × 10
4
Measured at 100 Hz, ±50 g.
5
Specification refers to the maximum change in parameter from its initial value at +25 °C to its worst case value at T
6
ST pin Logic “0” to “1”; ∆V
All min and max specifications are guaranteed. Typical specifications are not tested or guaranteed.
Specifications subject to change without notice.
OUT
= (∆V
@ 5 V) × (V
OUT
–3
1/g/V.
/5 V).
S
(accel, VS) = [V
OUT
/2 ±(a V
S
/5 V)] + [(accel) (b VS + c V
S
MIN
or T
MAX
.
2
)(1 ± 0.08)]
S
–2–
REV. 0
Page 3

ADXL190
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS*
Acceleration (Any Axis, Unpowered for 0.5 ms) . . . . . . 2000 g
Acceleration (Any Axis, Powered for 0.5 ms) . . . . . . . .1000 g
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .–0.3 V to +7.0 V
+V
S
Short Circuit Duration (Any Pin to Common) . . . . Indefinite
Operating Temperature . . . . . . . . . . . . . . . . –55°C to +125°C
Storage Temperature . . . . . . . . . . . . . . . . . . –65°C to +150°C
*Stresses above those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; the functional operation of
the device at these or any other conditions above those indicated in the operational
sections of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
Drops onto hard surfaces can cause shocks of greater than 2000 g
and exceed the absolute maximum rating of the device. Care
should be exercised in handling to avoid damage.
PIN FUNCTION DESCRIPTIONS
Pin No. Function
1, 2, 3, 4, 6, 11, 12 No Connect
5 Test Point (Do Not Connect)
7 Common
8 Zero g Adjust
9 Self-Test
10 V
13, 14 V
OUT
S
PACKAGE CHARACTERISTICS
Package
JA
JC
Device Weight
14-Lead Cerpak +110°C/W +30°C/W 5 Grams
PIN CONFIGURATION
NC
NC
NC
NC
TEST POINT
(DO NOT CONNECT)
NC
COMMON
1
2
3
ADXL190
4
TOP VIEW
(Not to Scale)
5
6
7
NC = NO CONNECT
14
13
12
11
10
9
8
V
S
V
S
NC
NC
V
OUT
SELF-TEST
g
ADJUST
ZERO
Figure 1 shows the response of the ADXL190 to the earth’s
gravitational field. The output values shown are nominal. They
are presented to show the user what type of response to expect
from each of the output pins due to changes in orientation with
respect to the earth.
PIN 1
PIN 1
1
7
814
TYPICAL OUTPUT AT
PIN 10 = 2.500V
1
PIN 1
TYPICAL OUTPUT AT
PIN 10 = 2.500V
1
TYPICAL OUTPUT AT
814
7
TYPICAL OUTPUT AT
EARTH'S SURFACE
14
7
8
PIN 10 = 2.482V
78
1
14
PIN 10 = 2.518V
PIN 1
1
g
Figure 1. ADXL190 Response Due to Gravity
ORDERING GUIDE
# Specified Temperature Package Package
Model Axis Voltage Range Description Option
ADXL190WQC 1 +5 V –40°C to +105°C 14-Lead Cerpak QC-14
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the ADXL190 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
REV. 0
–3–
Page 4

ADXL190
APPLICATIONS
All the circuitry needed to drive the sensor and convert the
capacitance change to voltage is incorporated on-chip requiring
no external components except for standard power supply decoupling. Both sensitivity and the zero-g value are ratiometric to
the supply voltage, so that ratiometric devices following the
accelerometer (such as an ADC, etc.) will track the accelerometer if the supply voltage changes. The output voltage (V
OUT
) is
a function of both the acceleration input (a) and the power
V
OUT
) as follows:
S
= V
/2 – (Sensitivity × VS/5 V × a)
S
supply voltage (V
Adjusting the 0 g Bias Level
In some cases the user may have an asymmetrical input or may
want to fine adjust the zero-g output level to obtain maximum
dynamic range. The zero-g level is adjusted by supplying a
voltage to the zero-g adjustment pin (see Figure 2).
+V
S
ADXL190
ACCELERATION
SIGNAL
C2
0.1mF
2
5kV
25kV
FILTER
ZERO g ADJUST
+V
200kV
GAIN = 3
S
V
OUT
Figure 2. Optional Zero-g Adjust Circuit Detail
Any voltage difference between the zero-g adjustment pin and
/2 is reduced by a factor of 6 by the internal resistor divider.
V
S
This is then gained by the factor of 3 in the output stage for a
total gain of 0.5 for the zero-g adjustment. (Note: The ratio of
the resistors in the divider is consistent from part-to-part; how-
ever, the absolute values can have a ±30% tolerance). The
zero-g adjustment voltage can be set up by a variety of methods
including a potentiometer (as shown in Figure 2), a PWM signal, or with a simple three-state output.
The simplest way is by adding a resistor between the ZERO g
ADJUST pin and V
where R is in kΩ and connected to V
or ground. The output will be offset by:
S
Offset (V) = (7.5 × V
Offset (V) = (–7.5 × V
)/(30 + R)
S
.
S
)/(30 + R)
S
where R is in kΩ and connected to ground.
Resistors may also be connected to microcontroller I/O pins as
shown in Figure 3. Using two I/Os that may be set to V
, ground,
S
or three-state, there are seven possibilities as shown in Table I
(one cannot set one I/O pin to V
and the other to ground).
S
Using such a system, any ADXL190 may be user trimmed to
output 2.5 V ± 35 mV at zero g.
Table I. Offsets Produced Using the Circuit in Figure 3 for V
S
= 5 V
Offset Voltage
P1 P0 Produced Offset in g
Three-State Three-State 0 mV 0
Three-State 0 –71 mV –4
0 Three-State –134 mV –7.4
0 0 –191 mV –10.6
Three-State 1 71 mV 4
1 Three-State 134 mV 7.4
1 1 191 mV 10.6
Another way to adjust the zero g offset is to supply a voltage to
the ZERO g ADJUST pin. The difference between V
/2 and
S
the voltage at the ZERO g ADJUST pin is reduced by a factor
of 6 (as a result of the internal 5 kΩ and 25 kΩ voltage divider)
and then multiplied by a factor of 3 in the output stage of the
ADXL190 resulting in a total gain of 0.5. Offset is thus described by the following equation:
Offset (V) = (Voltage at the ZERO g ADJUST Pin – V
/2)/2
S
This voltage may be produced by a variety of methods including a PWM signal from a microcontroller. Care must be taken
that the output impedance of this voltage source is less than
5 kΩ and that there is very little ripple (noise). Any noise at the
ZERO g ADJUST pin will cause output errors.
If an asymmetric range of acceleration is required (e.g., +75 g
to –125 g) a resistor may be connected between the ZERO g
ADJUST and ground or V
as described above. For example:
S
For a range of +75 g to –125 g the offset required is –25 g.
–25 g at 18 mV/g = 450 mV of offset is required.
Rearranging the offset equations above:
R = [(7.5 × V
)/offset] –30 = 53.3 kΩ connected to ground.
S
For asymmetric operation the g range midpoint may be shifted
up to ±80 g typically.
MICROCONTROLLER
250kV
P1
500kV
P0
ZERO
ADJUST
g
ADXL190
Figure 3. An Offset Adjustment Scheme
–4–
REV. 0
Page 5

OUTLINE DIMENSIONS
17
8
14
0.291 (7.391)
0.285 (7.239)
0.485 (12 .319)
MAX
PIN 1
0.300 (7 .62)
0.419 (10.643)
0.394 (10.008)
0.345 (8.763)
0.290 (7.366)
8
0
0.050 (1.270)
0.016 (0.406)
0.013 (0.318)
0.009 (0.229)
SEATING
PLANE
0.195 (4.953)
0.115 (2.921)
0.215 (5.461)
0.119 (3.023)
0.020 (0.508)
0.013 (0.330)
0.050
(1.27)
BSC
0.020 (0.508)
0.004 (0.102)
Dimensions shown in inches and (mm).
14-Lead Cerpak
(QC-14)
ADXL190
C3457–8–2/99
REV. 0
PRINTED IN U.S.A.
–5–
 Loading...
Loading...