

Page 1
www.BDTIC.com/ADI
JPEG 2000 Video Codec
FEATURES
Complete single-chip JPEG 2000 compression and
decompression solution for video and still images
Identical in pinout and footprint to the ADV202 and
supports all the functionality of the ADV202
Power reduction of at least 30% compared with ADV202
JTAG/boundary scan support
Patented SURF® (spatial ultraefficient recursive filtering)
technology enables low power, low cost wavelet-based
compression
Supports both 9/7 and 5/3 wavelet transforms with up to
6 levels of transform
Video interface directly supporting ITU-R BT.656,
SMPTE 125M PAL/NTSC, SMPTE 274M, SMPTE 293M
(525p), and ITU-R BT.1358 (625p), or any video format with
a maximum input rate of 65 MSPS for irreversible mode or
40 MSPS for reversible mode
Programmable tile/image size with widths up to 4096 pixels
in single-component mode; maximum tile/image height:
4096 pixels
2 or more ADV212s can be combined to support full-frame
SMPTE 274M HDTV (1080i) or SMPTE 296M (720p)
Flexible, asynchronous SRAM-style host interface allows glue-
less connection to most 16-/32-bit microcontrollers and ASICs
2.5 V or 3.3 V input/output and 1.5 V core supply
12 mm × 12 mm, 121-ball CSPBGA with a speed grade of
115 MHz, or 13 mm × 13 mm, 144-ball CSPBGA with a
speed grade of 150 MHz
APPLICATIONS
Networked video and image distribution systems
Wireless video and image distribution
Image archival/retrieval
Digital CCTV and surveillance systems
Digital cinema systems
Professional video editing and recording
Digital still cameras
Digital camcorders
ADV212
GENERAL DESCRIPTION
The ADV212 is a single-chip JPEG 2000 codec targeted for
video and high bandwidth image compression applications that
can benefit from the enhanced quality and features provided by
the JPEG 2000 (J2K)—ISO/IEC15444-1 image compression
standard. The part implements the computationally intensive
operations of the JPEG 2000 image compression standard and
provides fully compliant code-stream generation for most
applications.
The dedicated video port of the ADV212 provides glueless connection to common digital video standards such as ITU-R BT.656,
SMPTE 125M, SMPTE 293M (525p), ITU-R BT.1358 (625p),
SMPTE 274M (1080i), or SMPTE 296M (720p). A variety of
other high speed, synchronous pixel and video formats can also
be supported by using the programmable framing and
validation signals.
The ADV212 is an upgrade version of the ADV202 that is
identical in pinout and footprint. It supports all the functionality
of the ADV202 and has the following additional options:
• JTAG/boundary scan support
• Power reduction of at least 30% compared with the
ADV202
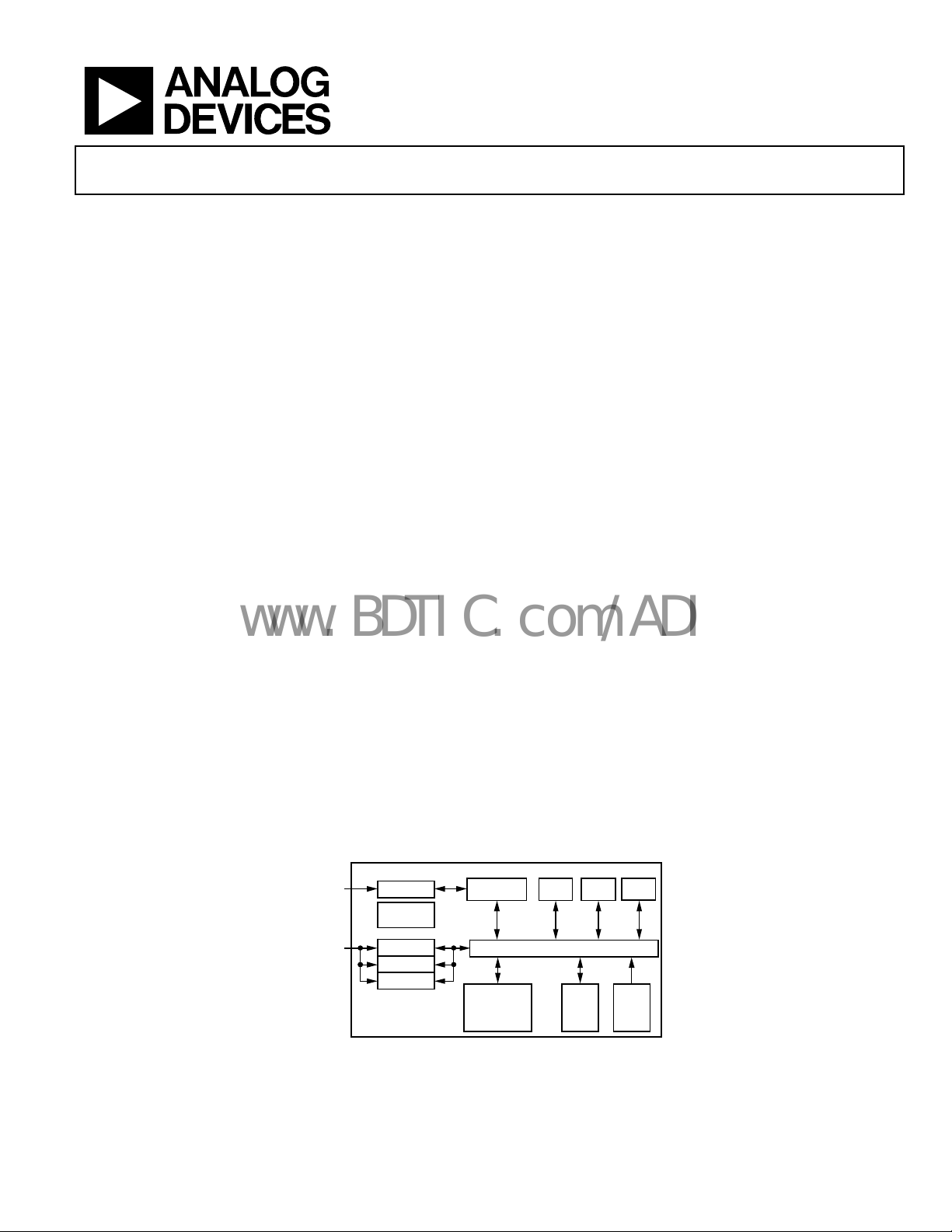
FUNCTIONAL BLOCK DIAGRAM
PIXEL I/F
HOST I/F
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Anal og Devices for its use, nor for any infringements of patents or ot her
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
PIXEL I/F
EXTERNAL
DMA CTRL
PIXEL FIFO
CODE FIF O
ATTR FIFO
ADV212
WAVELET
ENGINE
INTERNAL BUS AND DMA ENGINE
EMBEDDED
RISC
PROCESSOR
SYSTEM
Figure 1.
EC1 EC2 EC3
RAM ROM
06389-001
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2006 Analog Devices, Inc. All rights reserved.
Page 2

ADV212
www.BDTIC.com/ADI
TABLE OF CONTENTS
Features.............................................................................................. 1
Applications....................................................................................... 1
General Description ......................................................................... 1
Revision History ............................................................................... 2
JPEG 2000 Feature Support......................................................... 3
Specificatons...................................................................................... 4
Supply Voltages and Current ...................................................... 4
Input/Output Specifications........................................................ 4
Clock and
Normal Host Mode—Write Operation ..................................... 6
Normal Host Mode—Read Operation ...................................... 7
DREQ
DREQ
External DMA Mode—FIFO Write, Burst Mode .................. 12
External DMA Mode—FIFO Read, Burst Mode ................... 13
Streaming Mode (JDATA)—FIFO Read/Write...................... 14
VDATA Mode Timing............................................................... 15
Raw Pixel Mode Timing............................................................ 17
JTAG Timing............................................................................... 18
Absolute Maximum Ratings.......................................................... 19
Thermal Resistance .................................................................... 19
ESD Caution................................................................................ 19
Pin Configurations and Function Descriptions ......................... 20
Theory of Operation ...................................................................... 25
Wavelet Engine ........................................................................... 25
Entropy Codecs........................................................................... 25
Embedded Processor System.................................................... 25
RESET
Specifications................................................ 5
DACK
/
DMA Mode—Single FIFO Write Operation .. 8
DACK
/
DMA Mode—Single FIFO Read Operation. 10
Memory System.......................................................................... 25
Internal DMA Engine................................................................ 25
ADV212 Interface .......................................................................... 26
Video Interface (VDATA Bus).................................................. 26
Host Interface (HDATA Bus) ................................................... 26
Direct and Indirect Registers.................................................... 26
Control Access Registers........................................................... 27
Pin Configuration and Bus Sizes/Modes ................................ 27
Stage Register.............................................................................. 27
JDATA Mode............................................................................... 27
External DMA Engine ............................................................... 27
Internal Registers............................................................................ 28
Direct Registers........................................................................... 28
Indirect Registers........................................................................ 29
PLL ............................................................................................... 30
Hardware Boot............................................................................ 31
Video Input Formats ...................................................................... 32
Applications..................................................................................... 34
Encode—Multichip Mode......................................................... 34
Decode—Multichip Master/Slave ............................................ 35
Digital Still Camera/Camcorder .............................................. 36
Encode/Decode SDTV Video Application............................. 37
32-Bit Host Application............................................................. 38
HIPI (Host Interface—Pixel Interface) ................................... 39
JDATA Interface ......................................................................... 40
Outline Dimensions....................................................................... 41
Ordering Guide .......................................................................... 42
REVISION HISTORY
10/06—Revision 0: Initial Version
Rev. 0 | Page 2 of 44
Page 3

ADV212
www.BDTIC.com/ADI
The ADV212 can process images at a rate of 40 MSPS in reversible
mode and at higher rates when used in irreversible mode. The
ADV212 contains a dedicated wavelet transform engine, three
entropy codecs, an on-board memory system, and an embedded
reduced instruction set computer (RISC) processor that can
provide a complete JPEG 2000 compression/decompression
solution.
The wavelet processor supports the 9/7 irreversible wavelet
transform and the 5/3 wavelet transform in reversible and
irreversible modes. The entropy codecs support all features in
the JPEG 2000 Part 1 specification, except maximum shift
region of interest (ROI).
The ADV212 operates on a rectangular array of pixel samples
called a tile. A tile can contain a complete image, up to the
maximum supported size, or some portion of an image. The
maximum horizontal tile size supported depends on the wavelet
transform selected and the number of samples in the tile.
Images larger than the ADV212’s maximum tile size can be
broken into individual tiles and then sent sequentially to the
chip while maintaining a single, fully compliant JPEG 2000
code stream for the entire image.
JPEG 2000 FEATURE SUPPORT
The ADV212 supports a broad set of features that are included
in Part 1 of the JPEG 2000 standard (ISO/IEC 15444). See
ADV212 User’s Guide f
that the ADV212 currently supports.
Depending on the particular application requirements, the
ADV212 can provide varying levels of JPEG 2000 compression
support. It can provide raw code block and attribute data output,
which allows the host software to have complete control over
the generation of the JPEG 2000 code stream and other aspects
of the compression process such as bit-rate control. Otherwise,
the ADV212 can create a complete, fully compliant JPEG 2000
code stream (J2C) and enhanced file formats such as JP2.
or information on the JPEG 2000 features
Rev. 0 | Page 3 of 44
Page 4
ADV212
www.BDTIC.com/ADI
SPECIFICATONS
Specifications apply to IOVDD = 2.5 V or 3.3 V over operating temperature range, unless otherwise specified.
SUPPLY VOLTAGES AND CURRENT
Table 1.
Parameter Mnemonic Min Typ Max Unit
DC Supply Voltage, Core VDD 1.425 1.5 1.575 V
DC Supply Voltage, Input/Output IOVDD 2.375 2.5 2.625 V
DC Supply Voltage, Input/Output IOVDD 3.135 3.3 3.465 V
Input Range VIN −0.3 V
Operating Ambient Temperature Range in Free Air T −40 +25 +85 °C
Static Current1 IDD 15 30 mA
Dynamic Current, Core (JCLK Frequency = 150 MHz)2 380 440 mA
Dynamic Current, Core (JCLK Frequency = 108 MHz) 280 320 mA
Dynamic Current, Core (JCLK Frequency = 81 MHz) 210 290 mA
Dynamic Current, Input/Output 40 50 mA
1
No clock or input/output activity.
2
ADV212-150 only.
INPUT/OUTPUT SPECIFICATIONS
+ 0.3 V
DDI/O
Table 2.
Parameter Mnemonic Min Typ Max Unit Test Conditions
High Level Input Voltage V
High Level Input Voltage V
Low Level Input Voltage V
High Level Output Voltage V
High Level Output Voltage V
Low Level Output Voltage V
High Level Input Current IIH 1.0 μA VDD = maximum, VIN = VDD
Low Level Input Current IIL 1.0 μA VDD = maximum, VIN = 0 V
High Level Three-State Leakage Current I
Low Level Three-State Leakage Current I
Input Pin Capacitance CI 8 pF
Output Pin Capacitance CO 8 pF
2.2 V VDD = maximum
IH (3.3 V)
1.9 V VDD = maximum
IH (2.5 V)
IL (3.3 V, 2.5 V )
OH (3.3 V)
OH (2.5 V)
OL (3.3 V, 2.5 V )
OZH
OZL
0.6 V VDD = minimum
2.4 V VDD = minimum, IOH = −0.5 mA
2.0 V VDD = minimum, IOH = −0.5 mA
0.4 V VDD = minimum, IOL = +2 mA
1.0 μA VDD = maximum, VIN = VDD
1.0 μA VDD = maximum, VIN = 0V
Rev. 0 | Page 4 of 44
Page 5
ADV212
www.BDTIC.com/ADI
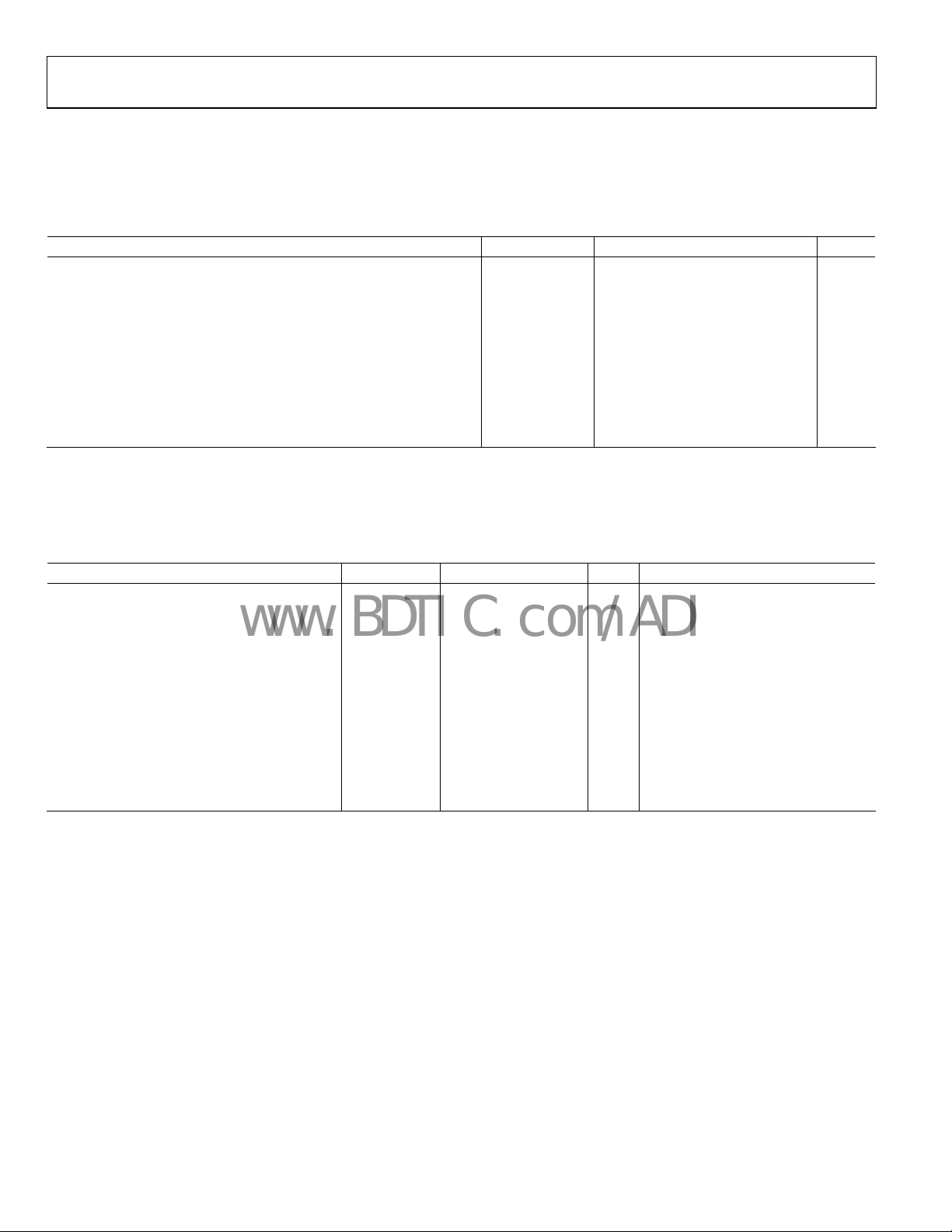
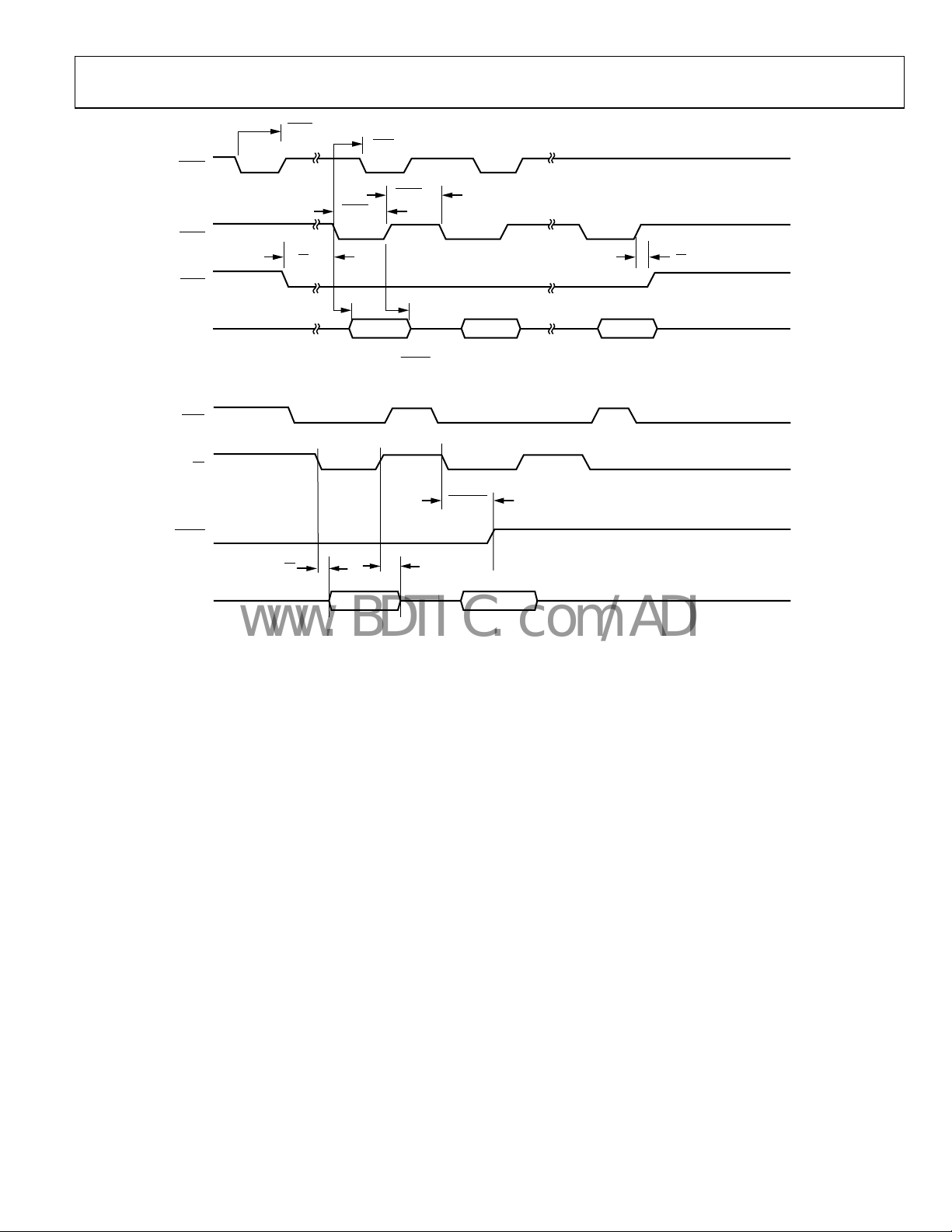
CLOCK AND RESET SPECIFICATIONS
Table 3.
Parameter Mnemonic Min Typ Max Unit
MCLK Period t
MCLK Frequency f
MCLK Width Low t
MCLK Width High t
VCLK Period t
VCLK Frequency f
VCLK Width Low t
VCLK Width High t
RESET Width Low
1
For a definition of MCLK, see Figure 32.
MCLK
13.3 100 ns
MCLK
10 75.18 MHz
MCLK
6 ns
MCLKL
6 ns
MCLKH
13.4 50 ns
VCLK
20 74.60 MHz
VCLK
5 ns
VCLKL
5 ns
VCLKH
t
5 MCLK cycles1
RESET
t
MCLK
VCLK
t
MCLKH
t
VCLKH
t
MCLKL
t
VCLKL
t
VCLK
Figure 2. Input Clock
06389-010
Rev. 0 | Page 5 of 44
Page 6
ADV212
A
www.BDTIC.com/ADI
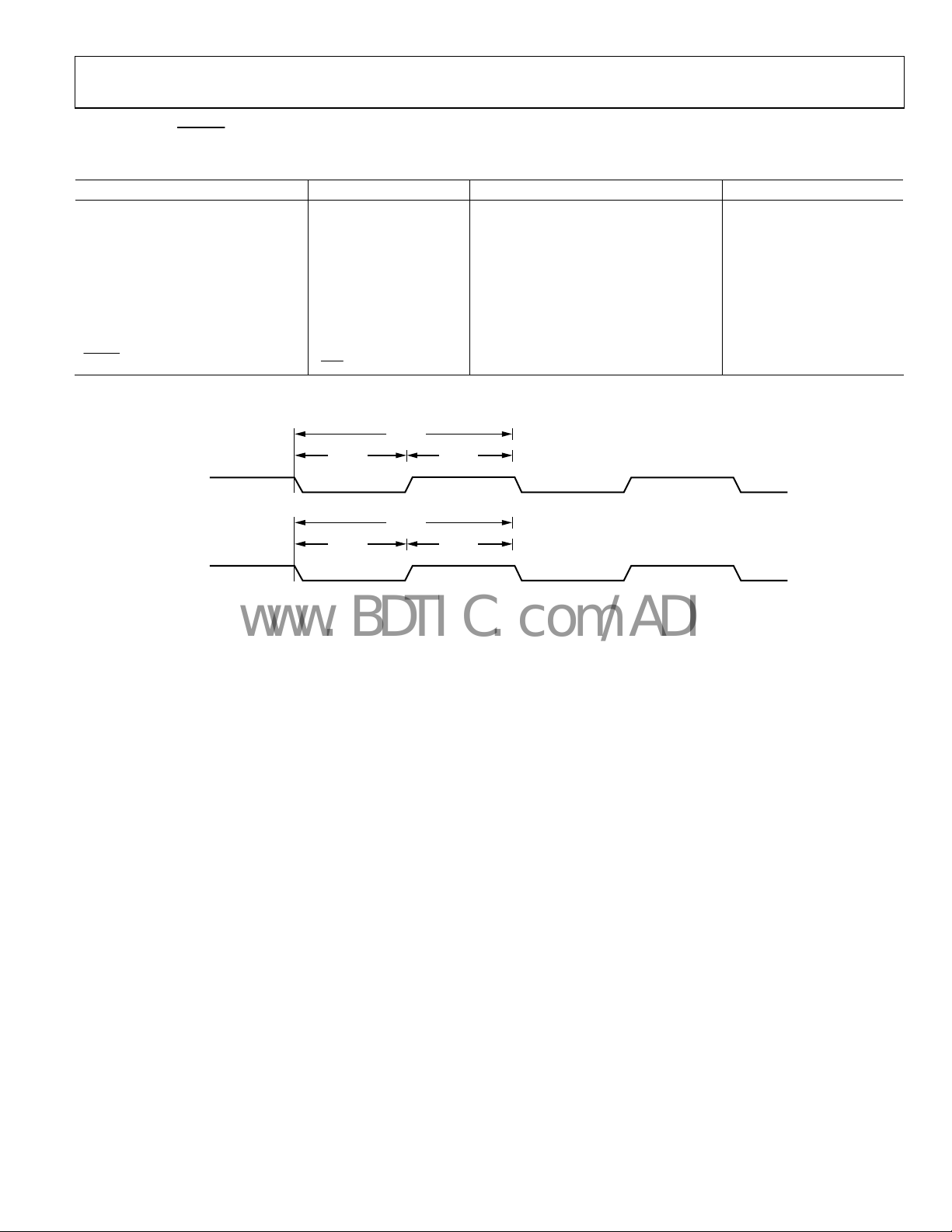
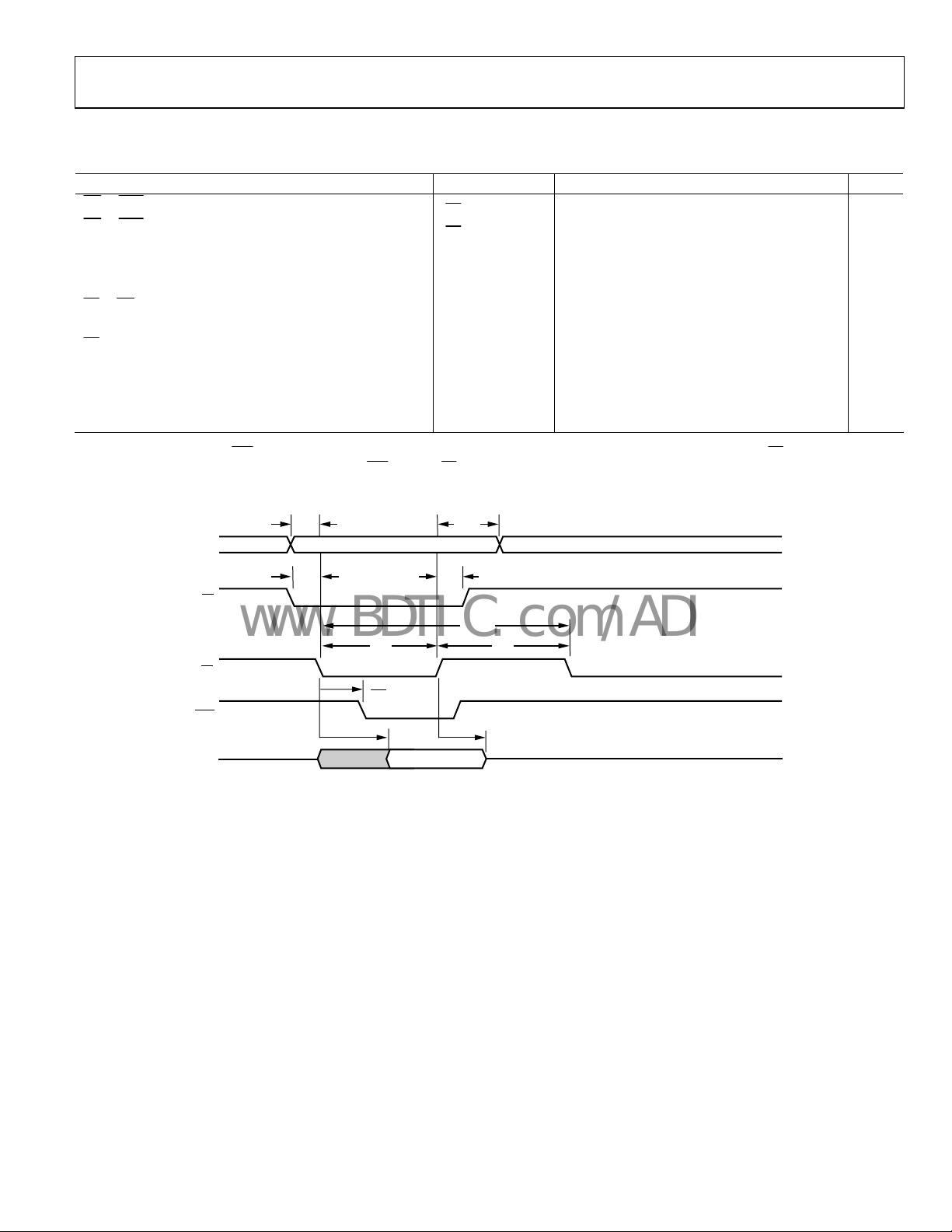
NORMAL HOST MODE—WRITE OPERATION
Table 4.
Parameter Mnemonic Min Typ Max Unit
t
WE to ACK, Direct Registers and FIFO Accesses
WE to ACK, Indirect Registers
Data Setup tSD 3.0 ns
Data Hold tHD 1.5 ns
Address Setup tSA 2 ns
Address Hold t
CS to WE Setup
CS Hold
Write Inactive Pulse Width (Minimum Time Until Next WE Pulse)
Write Active Pulse Width tWL 2.5 JCLK ns
Write Cycle Time t
1
For a definition of JCLK, see Figure 32.
t
SA
ADDR
(direct) 5 1.5 × JCLK + 7.0 ns
ACK
t
(indirect) 5 2.5 × JCLK + 7.0 ns
ACK
2 ns
HA
t
0 ns
SC
t
0 ns
HC
t
2.5 JCLK1 ns
WH
5 JCLK ns
WCYC
t
HA
ACK
HDAT
CS
WE
t
SC
t
WL
t
ACK
t
SD
VALID
t
HC
t
WCYC
t
WH
t
HD
06389-012
Figure 3. Normal Host Mode—Write Operation
Rev. 0 | Page 6 of 44
Page 7
ADV212
www.BDTIC.com/ADI
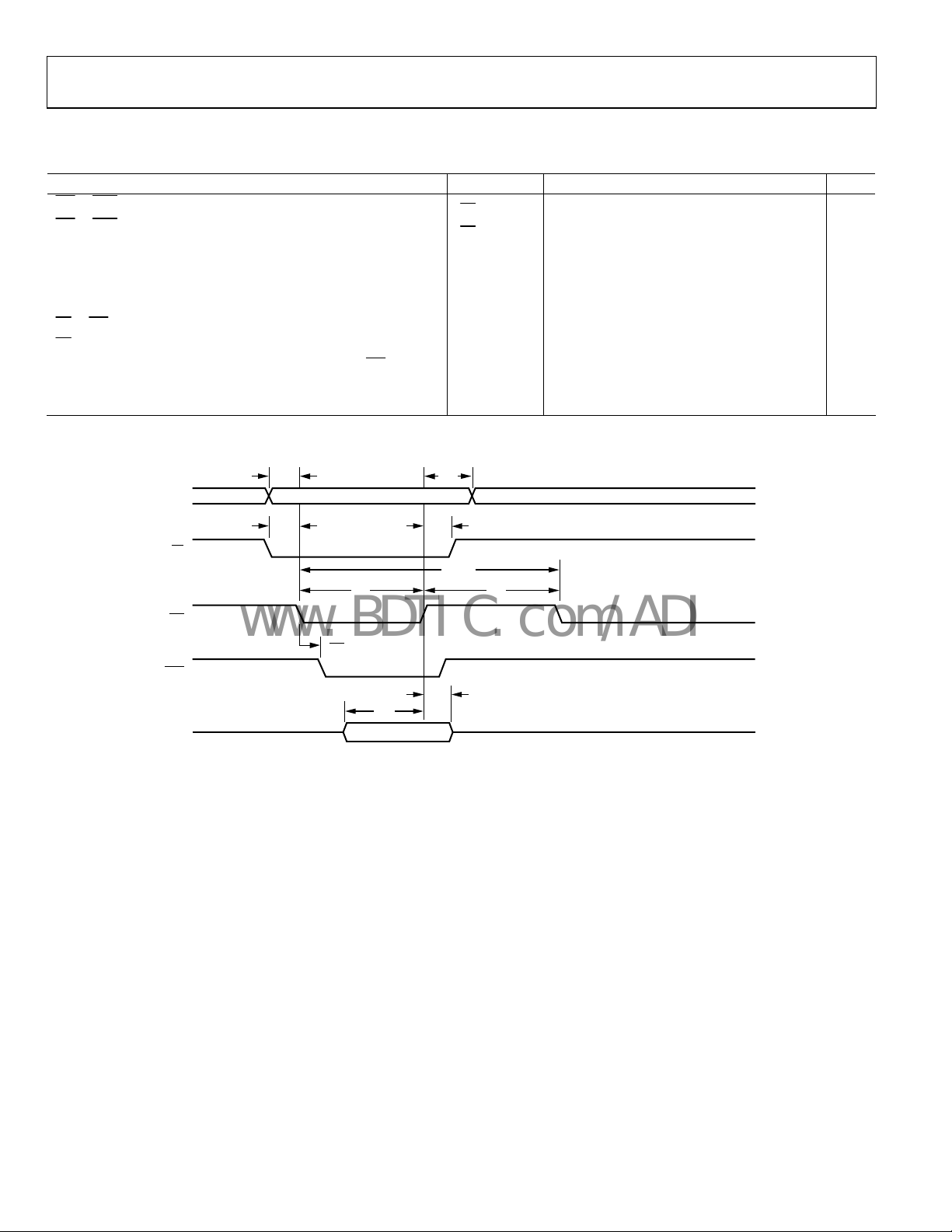
NORMAL HOST MODE—READ OPERATION
Table 5.
Parameter Mnemonic Min Typ Max Unit
RD to ACK, Direct Registers and FIFO Accesses
RD to ACK, Indirect Registers
Read Access Time, Direct Registers t
Read Access Time, Indirect Registers t
Data Hold t
CS to RD Setup
t
ACK
t
ACK
DRD
DRD
HZRD
t
0 ns
SC
Address Setup tSA 2 ns
t
CS Hold
Address Hold t
0 ns
HC
2 ns
HA
Read Inactive Pulse Width tRH 2.5 JCLK 2 ns
Read Active Pulse Width tRL 2.5 JCLK ns
Read Cycle Time, Direct Registers t
1
Timing relationship between
minimum of three JCLK cycles is recommended between
2
For a definition of JCLK, see Figure 32.
ACK
falling transition and HDATA valid is not guaranteed. HDATA valid hold time is guaranteed with respect to RD rising transition. A
ACK
assert and RD deassert.
RCYC
t
SA
ADDR
1
(direct)
(indirect)
1
5 1.5 × JCLK + 7.0 ns
10.5 × JCLK 15.5 × JCLK + 7.0 ns
(direct) 5 1.5 × JCLK + 7.0 ns
(indirect) 10.5 × JCLK 15.5 × JCLK + 7.0 ns
2 8.5 ns
5.0 JCLK ns
t
HA
CS
RD
ACK
HDATA
t
SC
t
RL
t
ACK
t
DRD
VALID
t
HC
t
RCYC
t
RH
t
HZRD
06389-011
Figure 4. Normal Host Mode—Read Operation
Rev. 0 | Page 7 of 44
Page 8
ADV212
A
A
www.BDTIC.com/ADI
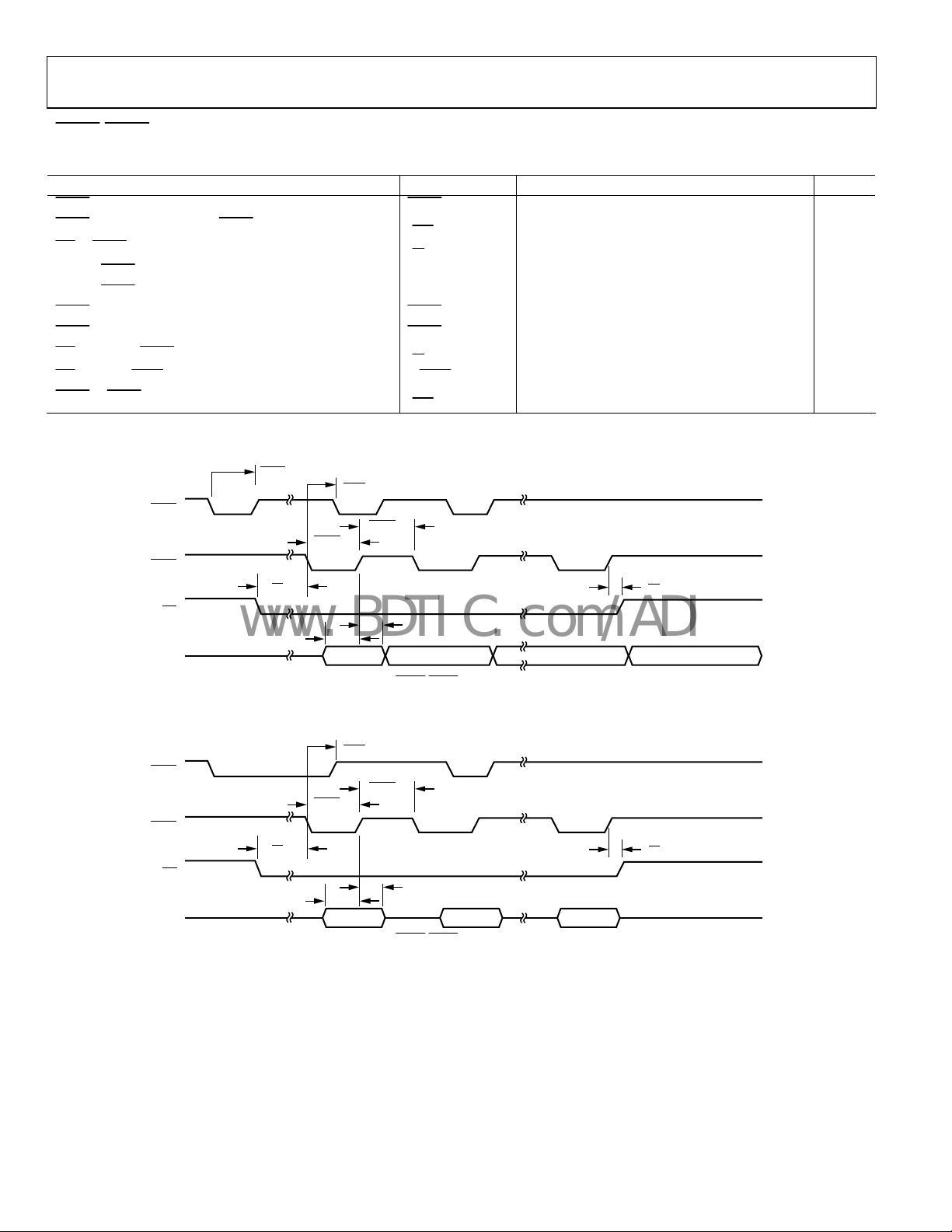
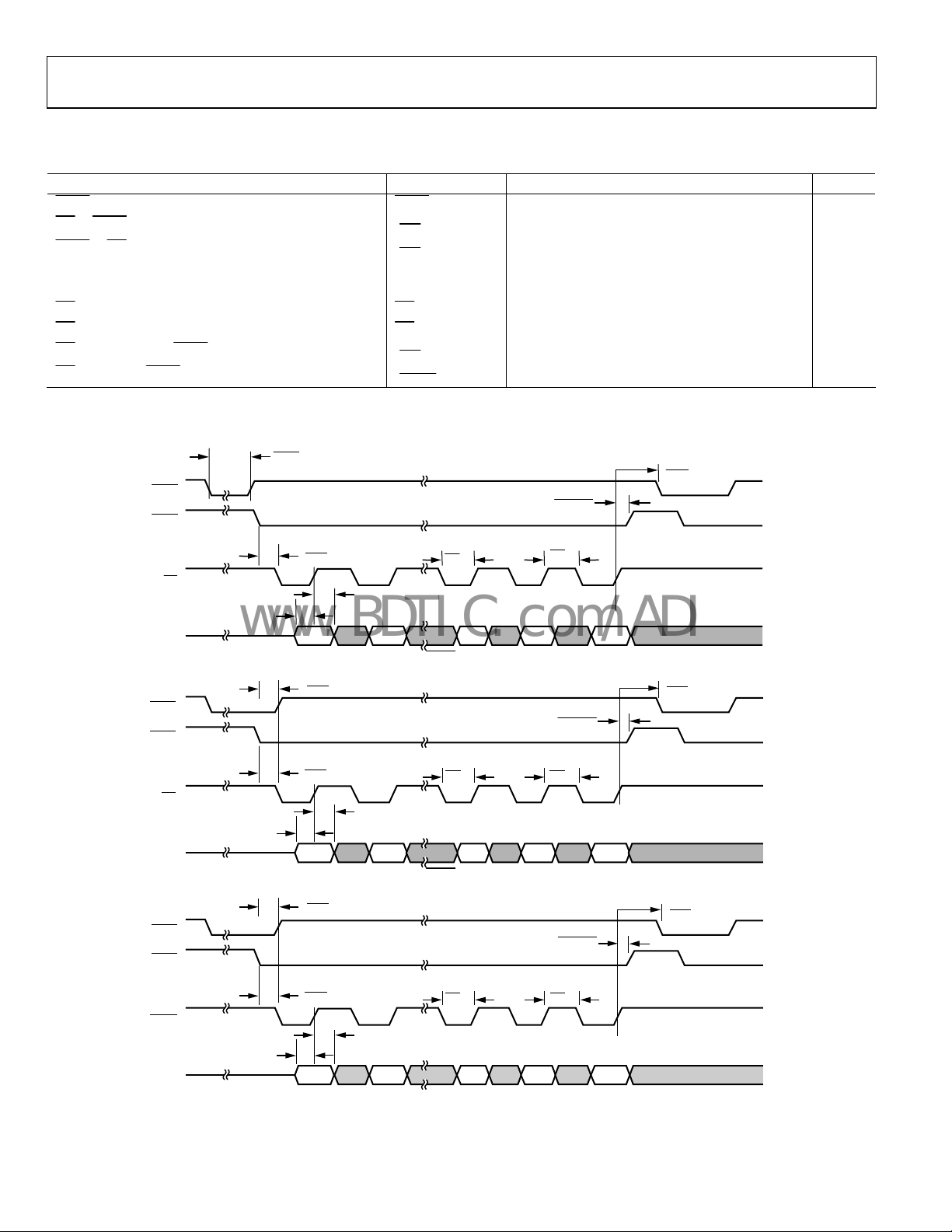
DREQ/DACK DMA MODE—SINGLE FIFO WRITE OPERATION
Table 6.
Parameter Mnemonic Min Typ Max Unit
DREQ Pulse Width DREQ
DACK Assert to Subsequent DREQ Delay
WE to DACK Setup
Data to DACK Deassert Setup
Data to DACK Deassert Hold
t
DREQ
t
WE
t
SU
t
HD
PULSE
2.5 JCLK 3.5 × JCLK + 8.5 ns
0 ns
SU
2 ns
2 ns
DACK Assert Pulse Width DACKLO
DACK Deassert Pulse Width DACKHI
t
WE Hold After DACK Deassert
0 ns
WE
HD
WE Assert to FSRQ Deassert (FIFO Full) WFSRQ
t
DACK to DREQ Deassert (DR × PULS = 0)
1
For a definition of JCLK, see Figure 32.
2.5 JCLK 3.5 × JCLK + 9.0 ns
DREQ
RTN
DREQ
DREQ
DACK
HDAT
WE
PULSE
t
WESU
Figure 5. Single Write for
DACK
t
DREQ
DACK
HI
LO
t
HD
t
SU
DACK
DREQ
/
DMA Mode for Assigned DMA Channel
(EDMOD0/EDMOD1 <14:11> Not Programmed to a Value of 0000)
t
DREQRTN
DREQ
DACK
HI
t
HD
0 1 2
DACK
DREQ
/
DMA Mode for Assigned DMA Channel
DACK
HDAT
WE
DACK
LO
t
WESU
t
SU
Figure 6. Single Write for
(EDMOD0/EDMOD1 <14:11> Programmed to a Value of 0000)
1
1 JCLK
15 JCLK ns
2 JCLK ns
2 JCLK ns
1.5 JCLK 2.5 × JCLK + 7.5 ns
t
WEHD
t
WEHD
3210
6389-013
06389-014
Rev. 0 | Page 8 of 44
Page 9
ADV212
A
A
www.BDTIC.com/ADI
DREQ
DREQ
DACK
WEFB
HDAT
t
WESU
PULSE
t
DREQ
DACK
DACK
LO
t
SU
HI
t
HD
0 1 2
t
WEHD
06389-015
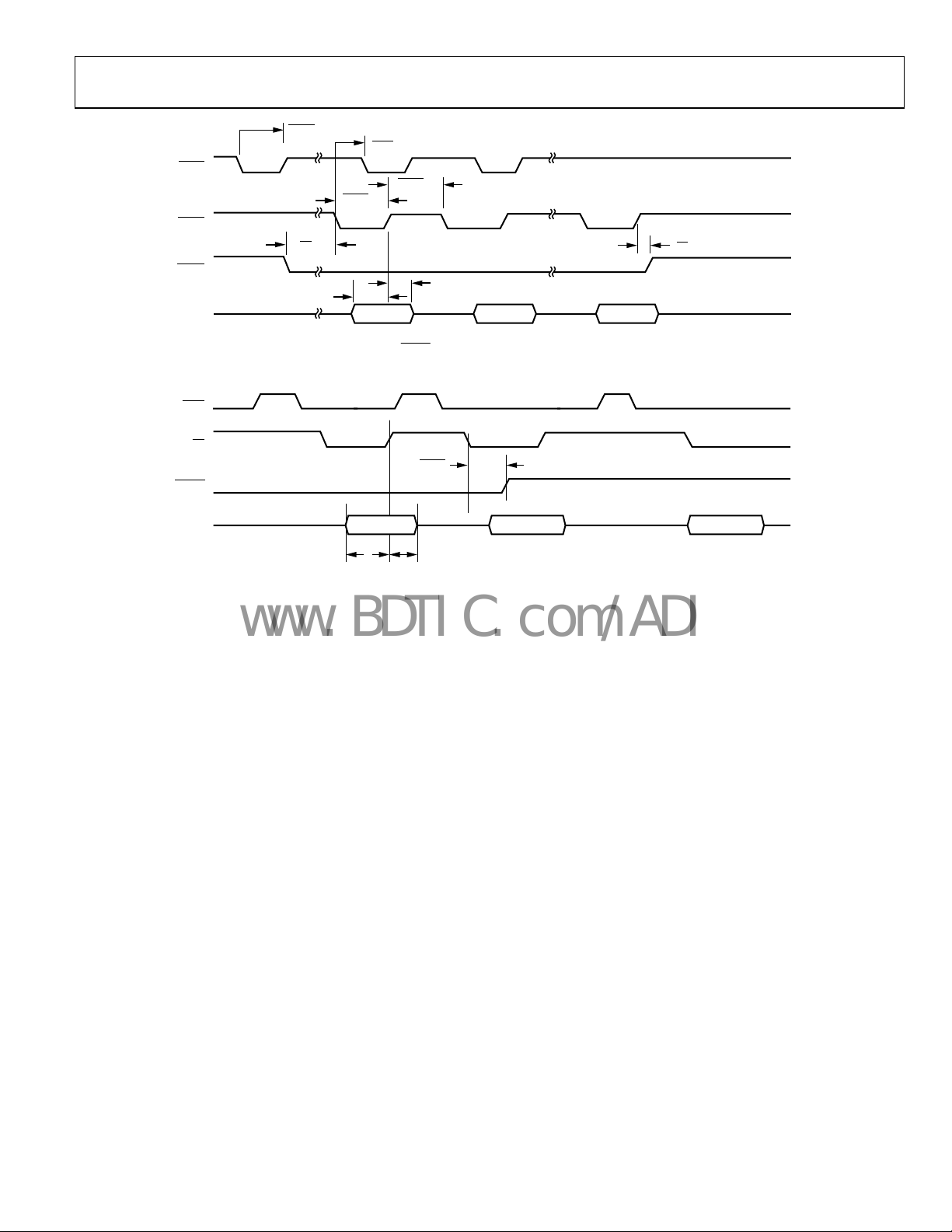
Figure 7. Single Write Cycle for Fly-By DMA Mode
DREQ
(
Pulse Width Is Programmable)
FCS0
RD
WFSRQ
0
SUtHD
1 2
Figure 8. Single Write Access for DCS DMA Mode
FIFO FULL
NOT WRITTEN TO FIFO
6389-021
FSRQ0
HDAT
FIFO NOT FULL
t
Rev. 0 | Page 9 of 44
Page 10
ADV212
A
A
www.BDTIC.com/ADI
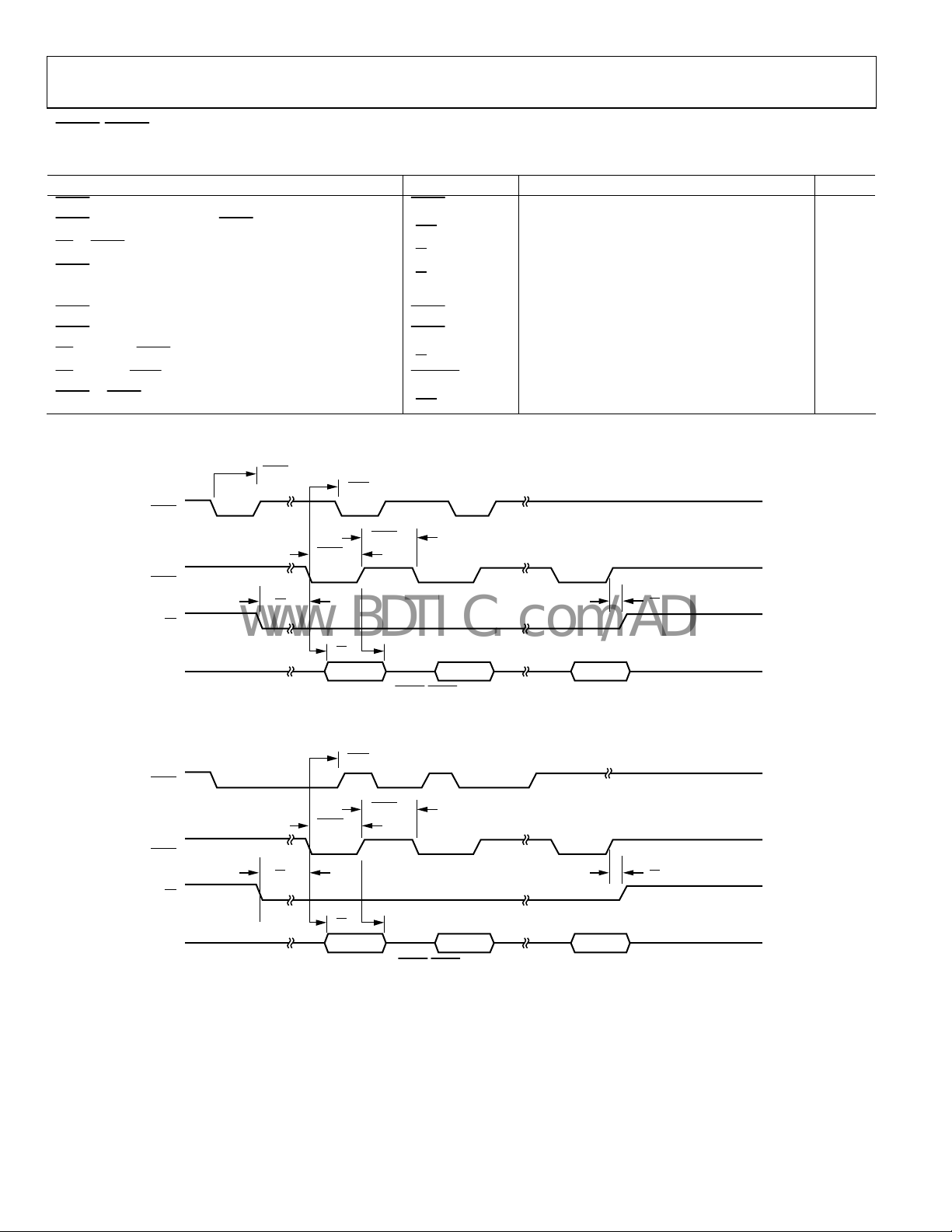
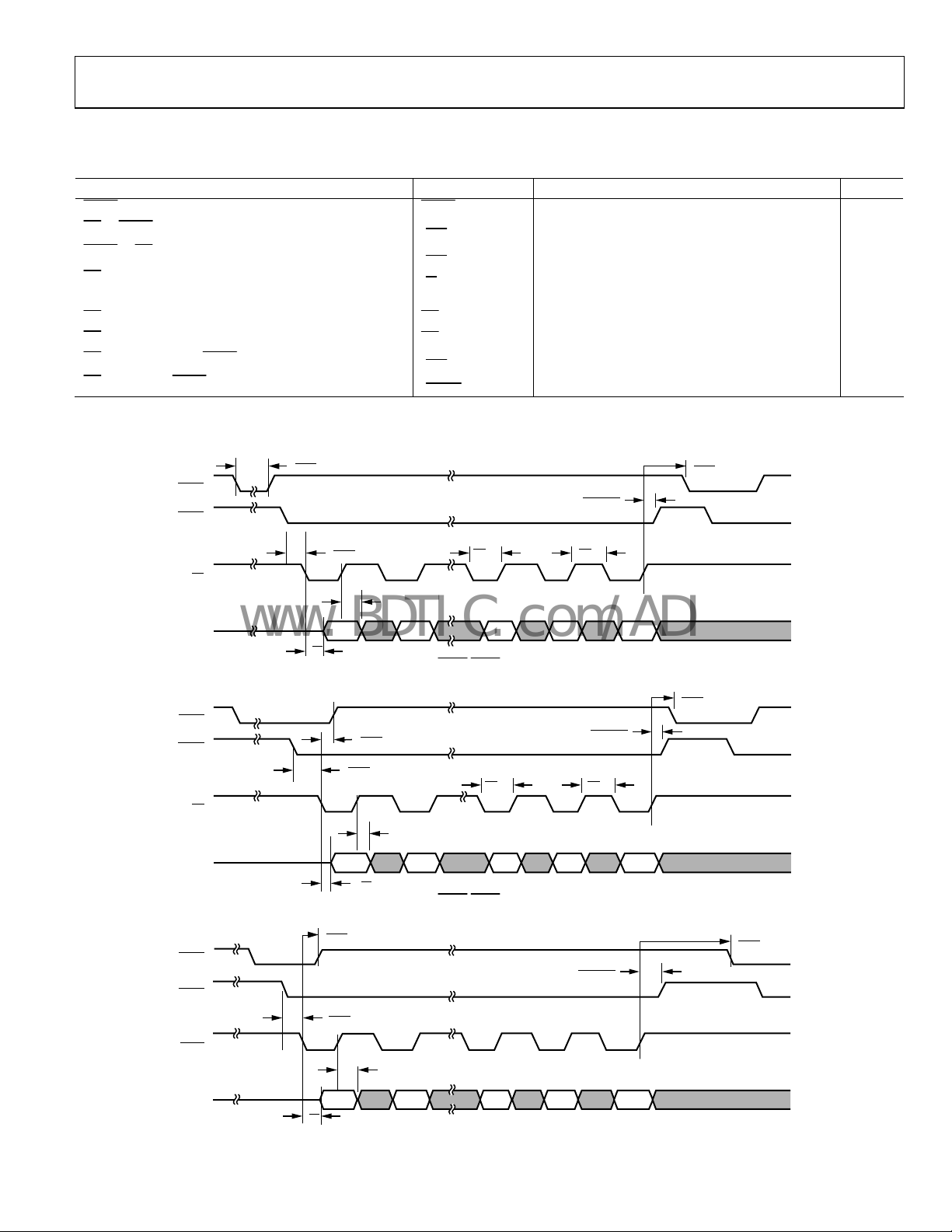
DREQ/DACK DMA MODE—SINGLE FIFO READ OPERATION
Table 7.
Parameter Mnemonic Min Typ Max Unit
DREQ Pulse Width DREQ
DACK Assert to Subsequent DREQ Delay
RD to DACK Setup
DACK to Data Valid
t
t
t
DREQ
RD
RD
PULSE
2.5 JCLK 3.5 × JCLK + 9.0 ns
0 ns
SU
2.5 11 ns
Data Hold tHD 1.5 ns
DACK Assert Pulse Width DACKLO
DACK Deassert Pulse Width DACKHI
t
RD Hold after DACK Deassert
0 ns
RD
HD
RD Assert to FSRQ Deassert (FIFO Empty) RDFSRQ
t
DACK to DREQ Deassert (DR × PULS = 0)
1
For a definition of JCLK, see Figure 32.
2.5 JCLK
DREQ
RTN
DREQ
PULSE
DREQ
DACK
t
DREQ
LO
DACK
HI
1
1 JCLK
15 JCLK ns
2 JCLK ns
2 JCLK ns
1.5 JCLK
2.5 × JCLK + 9.0
3.5 × JCLK + 9.0
ns
ns
DACK
HDAT
RD
t
RDSU
t
RD
0 1 2
Figure 9. Single Read for
t
HD
DREQ
DACK
/
DMA Mode for Assigned DMA Channel
t
RDHD
6389-018
(EDMOD0/EDMOD1 <14:11> Not Programmed to a Value of 0000)
t
DREQRTN
DREQ
DACK
HI
t
HD
0 1 2
DACK
DREQ
/
DMA Mode for Assigned DMA Channel
t
RDHD
06389-019
DACK
HDAT
RD
DACK
LO
t
RDSU
t
RD
Figure 10. Single Read for
(EDMOD0/EDMOD1 <14:11> Programmed to a Value of 0000)
Rev. 0 | Page 10 of 44
Page 11
ADV212
A
www.BDTIC.com/ADI
DREQ
DACK
RDFB
HDAT
DREQ
t
RDSU
PULSE
t
DREQ
DACK
DACK
LO
t
RD
HI
t
HD
0 1 2
t
RDHD
6389-020
Figure 11. Single Read Cycle for Fly-By DMA Mode
DREQ
(
Pulse Width Is Programmable)
FCS0
RD
RDFSRQ
FSRQ0
FIFO NOT EMPTY
t
RD
FIFO EMPTY
t
HD
HDATA
0
Figure 12. Single Read Access for DCS DMA Mode
1
6389-090
Rev. 0 | Page 11 of 44
Page 12
ADV212
A
A
www.BDTIC.com/ADI
EXTERNAL DMA MODE—FIFO WRITE, BURST MODE
Table 8.
Parameter Mnemonic Min Typ Max Unit
DREQ Pulse Width1 DREQ
WE to DREQ Deassert (DR × PULS = 0)
DACK to WE Setup
t
t
DREQ
DACK
PULSE
2.5 JCLK 3.5 × JCLK + 7.5 ns
RTN
0 ns
SU
Data Setup tSU 2.5 ns
Data Hold tHD 2 ns
WE Assert Pulse Width WELO
WE Deassert Pulse Width WEHI
t
WEDeassert to Next DREQ
WE Deassert to DACK Deassert
1
Applies to assigned DMA channel, if EDMOD0 or EDMOD1 <14:11> is programmed to a nonzero value.
2
For a definition of JCLK, see Figure 32.
2.5 JCLK 4.5 × JCLK + 9.0 ns
DREQ
WAIT
t
WE_DACK
DREQ
PULSE
DREQ
DACK
2
1 JCLK
15 JCLK ns
1.5 JCLK ns
1.5 JCLK ns
0 ns
t
DREQWAIT
t
WE_DACK
WE
HDATA
DREQ
DACK
WE
HDAT
DREQ
DACK
WEFB
HDAT
t
DACKSU
t
HD
t
SU
01 13
Figure 13. Burst Write Cycle for
WE
DREQ
/DMA Mode for Assigned DMA Channel
LO
WE
HI
14 15
(EDMOD0/EDMOD1 <14:11> Not Programmed to a Value of 0000)
t
DREQRTN
t
WE_DACK
t
DACKSU
t
HD
t
SU
0 1 13 14 15
Figure 14. Burst Write Cycle for
WE
LO
DREQ
/DMA Mode for Assigned DMA Channel
WE
HI
(EDMOD0/EDMOD1 <14:11> Programmed to a Value of 0000)
t
DREQRTN
t
WE_DACK
t
DACKSU
t
HD
t
SU
0 1 13 14 15
WE
LO
WE
HI
Figure 15. Burst Write Cycle for Fly-By DMA Mode
t
DREQWAIT
t
DREQWAIT
06389-022
06389-023
6389-024
Rev. 0 | Page 12 of 44
Page 13
ADV212
A
A
A
www.BDTIC.com/ADI
EXTERNAL DMA MODE—FIFO READ, BURST MODE
Table 9.
Parameter Mnemonic Min Typ Max Unit
DREQ Pulse Width1 DREQ
RD to DREQ Deassert (DR × PULS = 0)
DACK to RD Setup
RD to Data Valid
t
DREQ
t
DACK
t
RD
PULSE
2.5 JCLK 3.5 × JCLK + 7.5 ns
RTN
0 ns
SU
2.5 9.7 ns
Data Hold tHD 2.5 ns
RD Assert Pulse Width
RD Deassert Pulse Width
RD Deassert to Next DREQ
RD Deassert to DACK Deassert
1
Applies to assigned DMA channel if EDMOD0 or EDMOD1 <14:11> is programmed to a nonzero value.
2
For a definition of JCLK, see Figure 32.
RD
LO
RD
HI
t
2.5 JCLK 3.5 × JCLK + 7.5 ns
DREQ
WAIT
t
RD_DACK
t
DREQPULSE
DREQ
DACK
2
1 JCLK
15 JCLK ns
1.5 JCLK ns
1.5 JCLK ns
0 ns
t
DREQWAIT
t
RD_DACK
HDAT
DREQ
DACK
HDAT
DREQ
DACK
RD
RD
t
DACKSU
t
HD
0 1 13 14 15
t
RD
Figure 16. Burst Read Cycle for
(EMOD0/EDMOD1 <14:11> Not Programmed to a Value of 0
t
DREQRTN
t
DACKSU
t
HD
0 1 13 14 15
t
RD
Figure 17. Burst Read Cycle for
(EMOD0/EDMOD1 <14:11> Programmed to a Value of 0000)
t
DREQRTN
t
DACKSU
DREQ
DREQ
RD
LO
DACK
/
DMA Mode for Assigned DMA Channel
RD
LO
DACK
/
DMA Mode for Assigned DMA Channel
RD
HI
t
RD_DACK
RD
t
RD_DACK
HI
t
DREQWAIT
t
DREQWAIT
06389-025
06389-026
RDFB
t
HD
HDAT
0 1 13 14 15
t
RD
RD
Figure 18. Burst Read Cycle for Fly-By DMA Mode
Rev. 0 | Page 13 of 44
06389-027
Page 14
ADV212
A
A
www.BDTIC.com/ADI
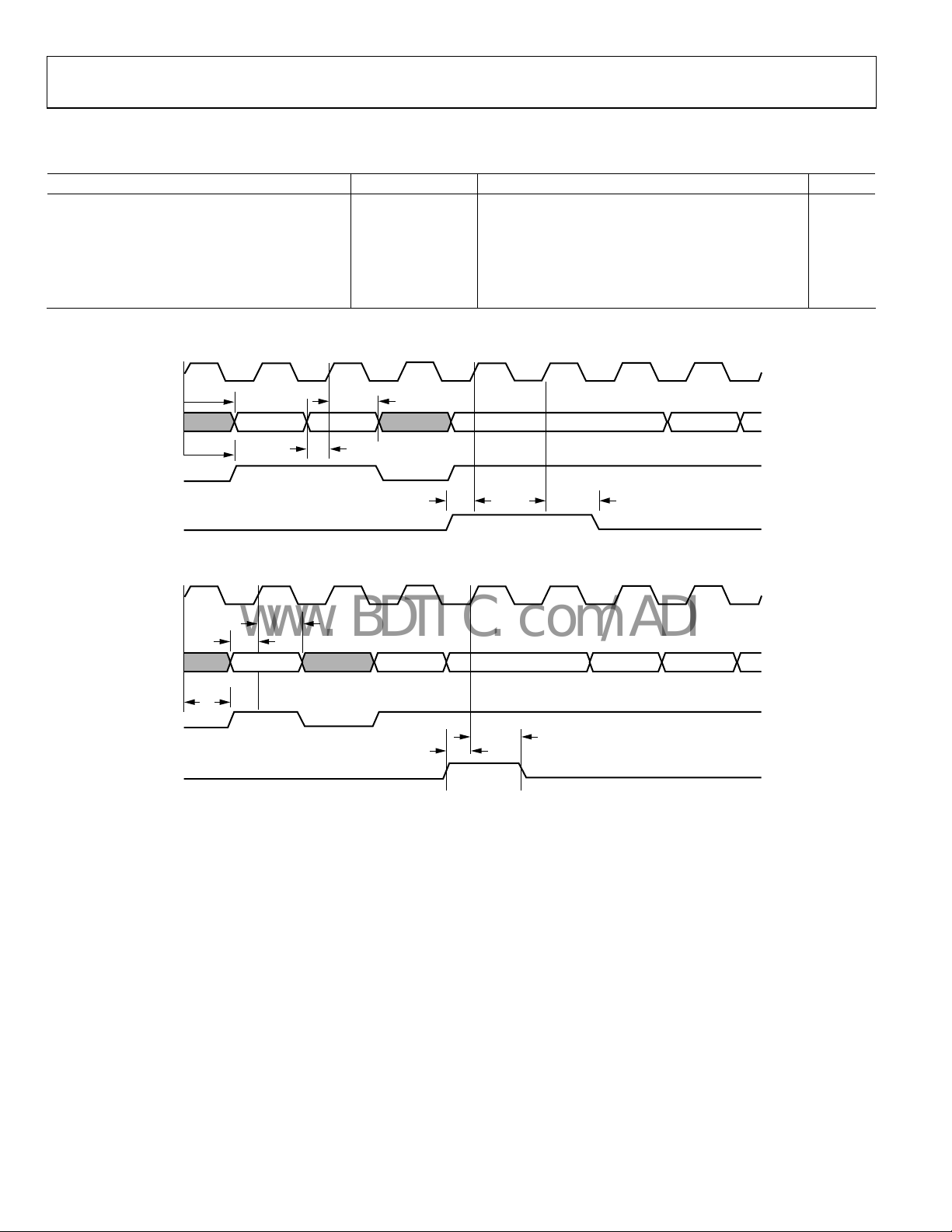
STREAMING MODE (JDATA)—FIFO READ/WRITE
Table 10.
Parameter Mnemonic Min Typ Max Unit
MCLK to JDATA Valid JDATATD 1.5 JCLK1 2.5 × JCLK + 9.5 ns
MCLK to VALID Assert/Deassert VALIDTD 1.5 JCLK 2.5 × JCLK + 8.0 ns
HOLD Setup to Rising MCLK HOLDSU 3 ns
HOLD Hold from Rising MCLK HOLDHD 3 ns
JDATA Setup to Rising MCLK JDATASU 3 ns
JDATA Hold from Rising MCLK JDATAHD 3 ns
1
For a definition of JCLK, see Figure 32.
MCLK
JDATA
JDATA
HD
SU
JDAT
VALID
JDATA
VALID
TD
TD
HOLD
HD
06389-028
HOLD
HOLD
SU
Figure 19. Streaming Mode Timing—Encode Mode JDATA Output
MCLK
JDATA
HD
HOLD
HOLD
SU
HD
06389-029
JDAT
VALID
HOLD
JDATA
VALID
SU
TD
Figure 20. Streaming Mode Timing—Decode Mode JDATA Input
Rev. 0 | Page 14 of 44
Page 15

ADV212
V
V
C
www.BDTIC.com/ADI
VDATA MODE TIMING
Table 11.
Parameter Mnemonic Min Typ Max Unit
VCLK to VDATA Valid Delay (VDATA Output) VDATATD 12 ns
VDATA Setup to Rising VCLK (VDATA Input) VDATASU 4 ns
VDATA Hold from Rising VCLK (VDATA Input) VDATAHD 4 ns
HSYNC Setup to Rising VCLK HSYNCSU 3 ns
HSYNC Hold from Rising VCLK HSYNC
VCLK to HSYNC Valid Delay HSYNCTD 12 ns
VSYNC Setup to Rising VCLK VSYNC
VSYNC Hold from Rising VCLK VSYNCHD 4 ns
VCLK to VSYNC Valid Delay VSYNCTD 12 ns
FIELD Setup to Rising VCLK FIELD
FIELD Hold from Rising VCLK FIELDHD 3 ns
VCLK to FIELD Valid FIELDTD 12
Decode Slave Data Sync Delay
SYNC DELAY 8
(HSYNC Low to First 0xFF of EAV/SAV Code)
Decode Slave Data Sync Delay
10
(HSYNC Low to First Data for HVF Mode)
1
The sync delay value varies according to the application. Refer to the ADV212 User Guide for more information.
4 ns
HD
3 ns
SU
4 ns
SU
1
VCLK cycles
1
VCLK cycles
HSYNC
DATA (IN)
VCLK
SYN
FIELD
VDATA (IN)
VCLK
VCLK
VDATA
SU
Cr Y Cb YFF EAV FF SAV Cb Y Cr
VDATA
HD
00 00 00 00
Figure 21. Encode Video Mode Timing—CCIR 656 Mode
HSYNC
SU
Cb YCbY Cr Y
Cr Y
HSYNC
HD
Figure 22. Encode Video Mode Timing—HVF Mode (HSYNC Timing)
(HSYNC Programmed for Negative Polarity)
VSYNC
HD
FIELD
HD
FIELD
VSYNC
SU
SU
Figure 23. Encode Video Mode Timing—HVF Mode (VSYNC and FIELD Timing)
(VSYNC and FIELD Programmed for Negative Polarity)
06389-091
6389-092
06389-093
Rev. 0 | Page 15 of 44
Page 16

ADV212
V
V
www.BDTIC.com/ADI
VCLK
VDATA
TD
DATA (OUT)
HSYNC (IN)
VSYNC (IN)
FIELD (IN)
VCLK
DATA (OUT)
HSYNC (IN)
VSYNC (IN)
FIELD (IN)
VDATA
FIELD
SU
VSYNC
00 00
HSYNC
SU
HD
VSYNC
SU
SYNC DELAY
HSYNC
HD
YCbEAVFF
06389-094
Figure 24. Decode Video Mode Timing—CCIR 656 Mode, Decode Slave
(HSYNC, VSYNC, and FIELD Programmed to Negative Polarity)
TD
YCr YCbYCb
HSYNC
FIELD
SU
VSYNC
HD
SU
VSYNC
SU
SYNC DELAY
HSYNC
HD
06389-095
Figure 25. Decode Video Mode Timing—HVF Mode, Decode Slave
(HSYNC, VSYNC, and FIELD Programmed to Negative Polarity)
VCLK
HSYNC (OUT)
VSYNC (OUT)
FIELD (OUT)
VCLK
VDATA (OUT)
HSYNC (OUT)
VSYNC (OUT)
FIELD (OUT)
FIELD
FIELD
VDATA
TD
Cb
HSYNC
VSYNC
TD
TD
FF
TD
00
00
SAV
Cb
CrVDATA (OUT)
Y
06389-096
Figure 26. Decode Video Mode Timing—CCIR 656 Mode, Decode Master
(HSYNC, VSYNC, and FIELD Programmed to Negative Polarity)
VDATA
TD
Cb Y
VSYNC
TD
TD
Cr Y Cb Y
Cb Y Cr
06389-097
Figure 27. Decode Video Mode Timing—HVF Mode, Decode Master
(HSYNC, VSYNC, and FIELD Programmed to Negative Polarity)
Rev. 0 | Page 16 of 44
Page 17

ADV212
www.BDTIC.com/ADI
RAW PIXEL MODE TIMING
Table 12.
Parameter Mnemonic Min Typ Max Unit
VCLK to PIXELDATA Valid Delay (PIXELDATA Output) VDATATD 12 ns
PIXELDATA Setup to Rising VCLK (PIXELDATA Input) VDATASU 4 ns
PIXELDATA Hold from Rising VCLK (PIXELDATA Input) VDATAHD 4 ns
VCLK to VRDY Valid Delay VRDY
VFRM Setup to Rising VCLK (VFRAME Input) VFRMSU 3 ns
VFRM Hold from Rising VCLK (VFRAME Input) VFRMHD 4 ns
VCLK to VFRM Valid Delay (VFRAME Output) VFRM
VSTRB Setup to Rising VCLK VSTRB
VSTRB Hold from Rising VCLK VSTRBHD 3 ns
VCLK
VDATA
VDATA
SU
HD
12 ns
TD
12 ns
TD
4 ns
SU
PIXEL DATA (IN)
VFRM (IN)
VRDY (OUT)
VSTRB (IN)
VCLK
PIXELDATA (OUT)
VFRM (OUT )
VRDY (OUT)
VSTRB
VSTRB
PIXEL 1 PIXEL 2 PIXEL 3
VFRM
SU
VFRM
HD
VRDY
TD
VSTRB
VSTRB
HD
HD
SU
RAW PIXEL MODE—ENCO DE
VDATA
TD
PIXEL 1 PIXEL 2
VFRM
TD
VRDY
TD
SU
PIXEL 3
VSTRB (IN)
RAW PIXEL MODE—DECODE
Figure 28. Raw Pixel Modes
Rev. 0 | Page 17 of 44
06389-031
Page 18

ADV212
www.BDTIC.com/ADI
JTAG TIMING
Table 13.
Parameter Mnemonic Min Typ Max Unit
TCK Period TCK 134 ns
TDI or TMS Setup Time TDISU 4.0 ns
TDI or TMS Hold Time TDIHD 4.0 ns
TDO Hold Time TDOHD 0.0 ns
TDO Valid TDO
TRST Hold Time TRSTHD 4.0 ns
TRST Setup Time TRSTSU 4.0 ns
TRST Pulse Width Low TRSTLO 4 TCK cycles
TCK
TDO
TDI
TMS
TRST
SU
TRST
10.0 ns
VALI D
TDO
TDI
TDI
SU
TRST
Figure 29. JTAG Timing
VALID
HD
HD
TDO
HD
06389-032
Rev. 0 | Page 18 of 44
Page 19

ADV212
www.BDTIC.com/ADI
ABSOLUTE MAXIMUM RATINGS
Table 14.
Parameter Rating
VDD − Supply Voltage, Core −0.3 V to +1.65 V
IOVDD − Supply Voltage,
Input/Output
Storage Temperature [TS] −65°C to +150°C
Reflow Soldering
Pb-Free, 121-Ball 260°C [20 sec to 40 sec]
Pb-Free, 144-Ball 260°C [20 sec to 40 sec]
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
−0.3 V to 3.63 V
THERMAL RESISTANCE
θJA is specified for the worst-case conditions, that is, a device
soldered in a circuit board for surface-mount packages.
Table 15. Thermal Resistance
Package Type θJA θ
144-Ball ADV212BBCZ 22.5 3.8 °C/W
121-Ball ADV212BBCZ 32.8 7.92 °C/W
Unit
JC
ESD CAUTION
Rev. 0 | Page 19 of 44
Page 20

ADV212
www.BDTIC.com/ADI
PIN CONFIGURATIONS AND FUNCTION DESCRIPTIONS
10 876
BOTTOM VIEW
(Not to S cale)
2195411
3
A
B
C
D
E
F
G
H
J
K
L
Figure 30.121-Ball Pin Configuration
6389-035
121110 876
9
BOTTOM VIEW
(Not to S cale)
Figure 31. 144-Ball Pin Configuration
4
321
5
A
B
C
D
E
F
G
H
J
K
L
M
06389-036
Rev. 0 | Page 20 of 44
Page 21

ADV212
www.BDTIC.com/ADI
Table 16. Pin Function Descriptions
121-Ball Package 144-Ball Package
Pins
Pin No. Location Pin No. Location Mnemonic
119 L9 132 L12 MCLK 1 I System Input Clock. See the PLL section.
117 L7 131 L11
37 to 34,
27 to 25,
16, 15, 24,
14 to 12,
2, 6, 5
88, 107,
87, 97
96 J8 95 H11
95 J7 94 H10
86 H9 84 G12
85 H8 83 G11
76 G10 82 G10
D4 to D1,
C5 to C3,
B5, B4, C2,
B3 to B1,
A2, A6, A5
H11, K8,
H10, J9
64, 49 to 51,
37 to 39, 25
to 27, 13 to
15, 2 to 4
108 to 106,
96
F4, E1 to E3,
D1 to D3,
C1 to C3,
B1 to B3,
A2 to A4
J12, J11,
J10, H12
RESET
HDATA
[15:0]
ADDR [3:0]
CS
1
WE
2
RDFB
1
RD
3
WEFB
ACK
IRQ
Used Type Description
1 I
16 I/O
Reset. Causes the ADV212 to immediately reset.
CS, RD, WE, DACK0, DACK1, DREQ0, and DREQ1
must be held high when a RESET
Host Data Bus. With HDATA [23:16],
HDATA [27:24], and HDATA [31:28], these pins
make up the 32-bit wide host data bus. The
async host interface is interfaced together
with ADDR[3:0], CS
Unused HDATA pins should be pulled down
via a 10 kΩ resistor.
, WE, RD, and ACK.
is applied.
4 I Address Bus for the Host Interface.
1 I
1 I Write Enable Used with the Host Interface.
1 I Read Enable Used with the Host Interface.
1 O
1 O
Chip Select. This signal is used to qualify
addressed read and write access to the
ADV212 using the host interface.
Read Enable When Fly-By DMA Is Enabled.
Simultaneous assertion of WE
activates the HDATA bus, even if the DMA
channels are disabled.
Write Enable When Fly-By DMA Is Enabled.
Simultaneous assertion of RD and DACK low
activates the HDATA bus, even if the DMA
channels are disabled.
Acknowledge. Used for direct register accesses.
This signal indicates that the last register access
was successful. Due to synchronization issues,
control and status register accesses might incur
an additional delay; therefore, the host software
should wait for acknowledgment from the
ADV212 before attempting another register
access.
Accesses to the FIFOs (external DMA modes),
on the other hand, are guaranteed to occur
immediately, provided that space is available;
therefore, the host software does not need to
wait for ACK
access, provided that the timing constraints
are observed.
If ACK
should be connected to a pull-up resistor (10 kΩ)
and the PLL_HI register, Bit 4, must be set to 1.
Interrupt. This pin indicates that the ADV212
requires the attention of the host processor.
This pin can be programmed to indicate the
status of the internal interrupt conditions
within the ADV212. The interrupt sources are
enabled via the bits in register EIRQIE.
before attempting another register
is shared with more than one device, ACK
and DACK low
Rev. 0 | Page 21 of 44
Page 22

ADV212
www.BDTIC.com/ADI
121-Ball Package 144-Ball Package
Pins
Pin No. Location Pin No. Location Mnemonic
63 F8 72 F12
CFG1 I
64 F9 71 F11
65 F10 70 F10
CFG2 I
75 G9 69 F9
90 to 92, 78 J2 to J4, H1 111,97 to 99 K3, J1 to J3
JDATA [7:4] I/O JDATA Bus (JDATA Mode).
79 to 81, 70 H2 to H4, G4 100, 85 to 87 J4, H1 to H3
JDATA [3:0] I/O JDATA Bus (JDATA Mode).
DREQ0
FSRQ0
VALID
DACK0
HOLD
FCS0
DREQ1
FSRQ1
DACK1
FCS1
HDATA
[31:28]
HDATA
[27:24]
Used
1 O
O
O
1 I
I
I
1 O
O
1 I
I
4 I/O Host Expansion Bus.
4 I/O Host Expansion Bus.
Type Description
Data Request for External DMA Interface.
Indicates that the ADV212 is ready to
send/receive data to/from the FIFO assigned
to DMA Channel 0.
FIFO Service Request. Used in DCS-DMA
Mode. Service request from the FIFO assigned
to Channel 0 (asynchronous mode).
Valid Indication for JDATA Input/Output Stream.
Polarity of this pin is programmable in the
EDMOD0 register. VALID is always an output.
Boot Mode Configuration. This pin is read on
reset to determine the boot configuration of
the on-board processor. The pin should be tied
to IOVDD or DGND through a 10 kΩ resistor.
Data Acknowledge for External DMA Interface.
Signal from the host CPU, which indicates that
the data transfer request (DREQ0
acknowledged and that the data transfer can
proceed. This pin must be held high at all
times if the DMA interface is not used, even if
the DMA channels are disabled.
External Hold Indication for JDATA Input/Output
Stream. Polarity is programmable in the
EDMOD0 register. This pin is always an input.
FIFO Chip Select. Used in DCS-DMA Mode.
Chip select for the FIFO assigned to Channel 0
(asynchronous mode).
Data Request for External DMA Interface.
Indicates that the ADV212 is ready to
send/receive data to/from the FIFO assigned
to DMA Channel 1.
FIFO Service Request. Used in DCS-DMA
Mode. Service request from the FIFO assigned
to Channel 1 (asynchronous mode).
Boot Mode Configuration. This pin is read on
reset to determine the boot configuration of
the on-board processor. The pin should be tied
to IOVDD or DGND through a 10 kΩ resistor.
Data Acknowledge for External DMA Interface.
Signal from the host CPU, which indicates that
the data transfer request (DREQ1
acknowledged and data transfer can proceed.
This pin must be held high at all times unless a
DMA or JDATA access is occurring. This pin
must be held high at all times if the DMA
interface is not used, even if the DMA channels
are disabled.
FIFO Chip Select. Used in DCS-DMA Mode.
Chip select for the FIFO assigned to Channel 1
(asynchronous mode).
) has been
) has been
Rev. 0 | Page 22 of 44
Page 23

ADV212
www.BDTIC.com/ADI
121-Ball Package 144-Ball Package
Pins
Pin No. Location Pin No. Location Mnemonic
69, 68,
59, 58
57, 46 to 48
112 L2 134 M2 SCOMM7 8 I/O
113 L3 135 M3 SCOMM6 I/O
114 L4 136 M4 SCOMM5 I/O
100 K1 121 L1 SCOMM4 O
101 K2 122 L2 SCOMM3 I
115 L5 123 L3 SCOMM2 O
103 K4 109 K1 SCOMM1 I
102 K3 110 K2 SCOMM0 O
53 E9 60 E12 VCLK 1 I
44, 43, 29,
31, 32, 18 to
20, 22, 21, 7,
10
41 D8 58 E10 VSYNC 1 I/O Vertical Sync for Video Mode.
VFRM
42 D9 59 E11 HSYNC 1 I/O Horizontal Sync for Video Mode.
VRDY O Raw Pixel Mode Ready Signal.
54 E10 57 E9 FIELD 1 I/O Field Sync for Video Mode.
VSTRB I Raw Pixel Mode Transfer Strobe.
94 J6 120 K12 TCK 1 I
108 K9 119 K11 TRS 1 I
G3, G2,
F4, F3
F2, E2, E3,
E4
D11, D10,
C7, C9, C10,
B7, B8, B9,
B11, B10,
A7, A10
88,73 to 75 H4, G1 to G3
76, 61 to 63 G4, F1 to F3
46 to 48,
34 to 36,
22 to 24,
9 to 11
D10 to D12,
C10 to C12,
B10 to B12,
A9 to A11
HDATA
[23:20]
HDATA
[19:16]
VDATA
[15:12]
VDATA
[11:0]
Used
4 I/O Host Expansion Bus.
4 I/O Host Expansion Bus.
I/O
12 I/O
Type Description
Video Data. Only used for raw pixel video
mode. Unused pins should be pulled down via
a 10 kΩ resistor.
Serial Communication. For internal use only.
This pin should be tied low via a 10 kΩ resistor.
Serial Communication. For internal use only.
This pin should be tied low via a 10 kΩ resistor.
Serial Communication. This pin must be used
in multiple chip mode to align the outputs of
two or more ADV212s. For details, see the
Applications section and the AN-796
Applic
ation Note. When not used, this pin
should be tied low via a 10 kΩ resistor.
LCODE Output in Encode Mode. When LCODE
is enabled, the output on this pin indicates on
a high transition that the last data-word for a
field has been read from the FIFO. For an 8-bit
interface, such as JDATA, LCODE is asserted for
four consecutive bytes and is enabled
by default.
Serial Communication. For internal use only.
This pin should be tied low via a 10 kΩ resistor.
Serial Communication. For internal use only.
This pin should be tied low via a 10 kΩ resistor.
Serial Communication. For internal use only.
This pin should be tied low via a 10 kΩ resistor.
Serial Communication. This pin should be tied
low via a10 kΩ resistor.
Video Data Clock. This pin must be supplied if
video data is input/output on the VDATA bus.
Video Data. Unused pins should be pulled
down via a 10 kΩ resistor.
Raw Pixel Mode Framing Signal. When this pin
is asserted high, it indicates the first sample of
a tile.
JTAG Clock. If not used, this pin should be
connected to ground via a pull-down resistor.
JTAG Reset. If the JTAG is used, this pin must
be toggled low to high. If JTAG is not used, this
pin must be held low.
Rev. 0 | Page 23 of 44
Page 24

ADV212
www.BDTIC.com/ADI
121-Ball Package 144-Ball Package
Pins
Pin No. Location Pin No. Location Mnemonic
98 J10 118 K10 TMS 1 I
116 L6 141 M9 TDI 1 I
109 K10 130 L10 TDO 1 O
3, 8, 40, 84,
120
1, 4, 9,11,
23, 33, 39,
45, 49 to 51,
55, 56, 60 to
62, 66, 67,
71 to 73, 77,
83, 89,99,
110, 111,
118, 121
17, 28, 30,
38, 52, 74,
82, 93, 104
to 106
1
In fly-by mode DMA, the function of the RD and WE signals (for DMA only) are reversed. This allows a host to move data between an external device and the ADV212
with the use of a single strobe.
2
In encode mode with fly-by DMA, the host can use the
3
In decode mode with fly-by DMA, the host can use the
A3, A8, D7,
H7, L10
A1, A4, A9,
A11, C1,
C11, D6, E1,
E5 to E7,
E11, F1, F5
to F7, F11,
G1, G5 to
G7, G11, H6,
J1, J11, K11,
L1, L8, L11
B6, C6, C8,
D5, E8, G8,
H5, J5, K5 to
K7
18, 19, 30,
31, 42, 43,
102, 103,
114, 115,
126, 127,
142
1, 5 to 8, 12,
17, 20, 29,
32, 41, 44,
52 to 56, 65
to 68, 77 to
81, 89 to 93,
101, 104,
105, 113,
116, 125,
128, 133,
137 to 140,
143, 144
16, 21, 28,
33, 40, 45,
112, 117,
124, 129
B6, B7, C6,
C7, D6, D7,
J6, J7, K6,
K7, L6, L7,
M10
A1, A5 to
A8, A12, B5,
B8, C5, C8,
D5, D8, E4
to E8, F5 to
F8, G5 to
G9, H5 to
H9, J5, J8,
J9, K5, K8,
L5, L8, M1,
M5 to M8,
M11, M12
B4, B9, C4,
C9, D4, D9,
K4, K9, L4,
L9
RDFB
signal (WE pin) to simultaneously read from the ADV212 and write to an external device like memory.
WEFB
signal (RD pin) to simultaneously read from the external device and write to the ADV212.
VDD V Positive Supply for Core.
DGND GND Ground.
IOVDD V Positive Supply for Input/Output.
Used
Type Description
JTAG Mode Select. If JTAG is used, connect
10 kΩ pull-up resistor to this pin. If not used,
this pin should be connected to ground via a
pull-down resistor.
JTAG Serial Data Input. If JTAG is used, connect
a 10 kΩ pull-up resistor to this pin. If JTAG is
not used, this pin should be connected to
ground via a pull-down resistor.
JTAG Serial Data Output. If this pin is not used,
do not connect it.
Rev. 0 | Page 24 of 44
Page 25

ADV212
www.BDTIC.com/ADI
THEORY OF OPERATION
The input video or pixel data is passed on to the ADV212’s pixel
interface, and samples are deinterleaved and passed on to the
wavelet engine, which decomposes each tile or frame into
subbands using the 5/3 or 9/7 filters. The resultant wavelet
coefficients are then written to the internal memory. The
entropy codecs code the image data so that it conforms to the
JPEG 2000 standard. An internal DMA provides high
bandwidth memory-to-memory transfers, as well as high
performance transfers between functional blocks and memory.
WAVELET ENGINE
The ADV212 provides a dedicated wavelet transform processor
based on the Analog Devices proven and patented SURF
technology. This processor can perform up to six wavelet
decomposition levels on a tile. In encode mode, the wavelet
transform processor takes in uncompressed samples, performs
the wavelet transform and quantization, and writes the wavelet
coefficients in all frequency subbands to the internal memory.
Each of these subbands is further broken down into code
blocks. The code-block dimensions can be user defined and are
used by the wavelet transform processor to organize the wavelet
coefficients into code blocks when writing to the internal
memory. Each completed code block is then entropy coded by
one of the entropy codecs.
In decode mode, wavelet coefficients are read from internal
memory and recomposed into uncompressed samples.
ENTROPY CODECS
The entropy codec block performs context modeling and
arithmetic coding on a code block of the wavelet coefficients.
Additionally, this block also performs the distortion metric
calculations during compression that are required for optimal
rate and distortion performance. Because the entropy coding
process is the most computationally intensive operation in the
JPEG 2000 compression process, three dedicated hardware
entropy codecs are provided on the ADV212.
EMBEDDED PROCESSOR SYSTEM
The ADV212 incorporates an embedded 32-bit RISC processor.
This processor is used for configuration, control, and management of the dedicated hardware functions, as well as for parsing
and generation of the JPEG 2000 code stream. The processor
system includes memory for both the program and data
memory, the interrupt controller, the standard bus interfaces,
and other hardware functions such as timers and counters.
MEMORY SYSTEM
The main function of the memory system is to manage wavelet
coefficient data, interim code-block attribute data, and
temporary workspace for creating, parsing, and storing the
JPEG 2000 code stream. The memory system can also be used
for the program and data memory for the embedded processor.
INTERNAL DMA ENGINE
The internal DMA engine provides high bandwidth memoryto-memory transfers, as well as high performance transfers
between memory and functional blocks. This function is critical
for high speed generation and parsing of the code stream.
Rev. 0 | Page 25 of 44
Page 26

ADV212
www.BDTIC.com/ADI
ADV212 INTERFACE
There are several possible modes to interface to the ADV212 using
the VDATA bus and t he HDATA bus or the HDATA bus alone.
VIDEO INTERFACE (VDATA BUS)
The video interface can be used in applications in which
uncompressed pixel data is on a separate bus from compressed
data. For example, it is possible to use the VDATA bus to input
uncompressed video while using the HDATA bus to output the
compressed data. This interface is ideal for applications
requiring very high throughput, such as live video capture.
Optionally, the ADV212 interlaces ITU-R BT.656 resolution
video on the fly prior to wavelet processing, which yields
significantly better compression performance for temporally
coherent frame-based video sources. Additionally, high
definition digital video such as SMPTE 274M (1080i) is
supported using two or more ADV212 devices.
The video interface can support video data or still image data
input/output in 8-/10-/12-bit formats, in YCbCr format, or in
single input mode. YCbCr data must be in 4:2:2 format.
Video data can be input/output in several different modes on
the VDATA bus, as described in Table 17. In all these modes,
the pixel clock must be input on the VCLK pin.
Table 17. Video Input/Output Modes
Mode Description
EAV/SAV
HVF
Raw Video
Accepts video with embedded EAV/SAV codes, where
the YCbCr data is interleaved onto a single bus.
Accepts video data accompanied with separate H,
V, and F signals, where YCbCr data is interleaved
onto a single bus.
Used for still picture data and nonstandard video.
VFRM, VSTRB, and VRDY are used to program the
dimensions of the image.
HOST INTERFACE (HDATA BUS)
The ADV212 can connect directly to a wide variety of host
processors and ASICs using an asynchronous SRAM-style
interface, DMA accesses, or streaming mode (JDATA) interface.
The ADV212 supports 16- and 32-bit buses for control and
8-/16-/32-bit buses for data transfer.
The control and data channel bus widths can be specified
independently, which allows the ADV212 to support
applications that require control and data buses of different
widths.
The host interface is used for configuration, control, and status
functions, as well as for transferring compressed data streams. It
can be used for uncompressed data transfers in certain modes.
The host interface can be shared by as many as three concurrent
data streams in addition to control and status communications.
The data streams are
• Uncompressed tile data (for example, still image data)
• Fully encoded JPEG 2000 code stream (or unpackaged
code blocks)
• Code-block attributes
The ADV212 uses big endian byte alignment for 16- and 32-bit
transfers. All data is left-justified (MSB).
Pixel Input on the Host Interface
Pixel input on the host interface supports 8-/10-/12-/14-/16-bit
raw pixel data formats. It can be used for pixel (still image)
input/output or compressed video output. Because there are no
timing codes or sync signals associated with the input data on
the host interface, dimension registers and internal counters are
used and must be programmed to indicate the start and end of
the frame. Refer to the
information about using the ADV212 in this mode.
ADV202 in HIPI Mode te
chnical note for
Host Bus Configuration
For maximum flexibility, the host interface provides several
configurations to meet particular system requirements. The
default bus mode uses the same pins to transfer control, status,
and data to and from the ADV212. In this mode, the ADV212
can support 16- and 32-bit control transfers and 8-/16-/32-bit
data transfers. The size of these buses can be selected
independently, allowing, for example, a 16-bit microcontroller
to configure and control the ADV212 while still providing
32-bit data transfers to an ASIC or external memory system.
DIRECT AND INDIRECT REGISTERS
To minimize pin count and cost, the number of address pins
is limited to four, which yields a total direct address space of
16 locations. These locations are most commonly used by the
external controller and are, therefore, accessible directly. All
other registers in the ADV212 can be accessed indirectly
through the IADDR and IDATA registers.
Rev. 0 | Page 26 of 44
Page 27

ADV212
www.BDTIC.com/ADI
CONTROL ACCESS REGISTERS
With the exception of the indirect address and data registers
(IADDR and IDATA), all control/status registers in the
ADV212 are 16 bits wide and are half-word (16-bit) addressable
only. When 32-bit host mode is enabled, the upper 16 bits of the
HDATA bus are ignored on writes and return all zeros on reads
of 16-bit registers.
PIN CONFIGURATION AND BUS SIZES/MODES
The ADV212 provides a wide variety of control and data
configurations, which allows it to be used in many applications
with little or no glue logic. The modes described in this section
are configured using the BUSMODE register. In this section,
host refers to normal addressed accesses (
and data refers to external DMA accesses (
CS
/RD/WE/ADDR)
DREQ
DACK
/
).
32-Bit Host/32-Bit Data
In this mode, the HDATA<31:0> pins provide full 32-bit wide
data access to PIXEL, CODE, ATTR FIFOs.
16-Bit Host/32-Bit Data
This mode allows a 16-bit host to configure and communicate
with the ADV212 while allowing 32-bit accesses to the PIXEL,
CODE, ATTR FIFOs using the external DMA capability.
All addressed host accesses are 16 bits and, therefore, use only
the HDATA<15:0> pins. The HDATA<31:16> pins provide the
additional 16 bits necessary to support the 32-bit external DMA
transfers to and from the FIFOs only.
16-Bit Host/16-Bit Data
This mode uses 16-bit transfers if used for host or external
DMA data transfers.
16-Bit Host/8-Bit Data (JDATA Bus Mode)
This mode provides separate data input/output and host
control interface pins. Host control accesses are 16 bits and use
HDATA<15:0>, whereas the dedicated data bus uses JDATA<7:0>.
JDATA uses a valid/hold synchronous transfer protocol. The
direction of the JDATA bus is determined by the mode of the
ADV212. If the ADV212 is encoding (compression),
JDATA<7:0> is an output. If the ADV212 is decoding
(decompression), JDATA<7:0> is an input. Host control
accesses remain asynchronous. See also JDATA section below.
STAGE REGISTER
Because the ADV212 contains both 16-bit and 32-bit registers
and its internal memory is mapped as 32-bit data, a mechanism
has been provided to allow 16-bit hosts to access these registers
and memory locations using the stage register (STAGE). STAGE
is accessed as a 16-bit register using HDATA [15:0]. Prior to
writing to the desired register, the stage register must be written
with the upper (most significant) half-word.
When the host subsequently writes the lower half-word to the
desired control register, HDATA is combined with the
previously staged value to create the required 32-bit value that is
written. When a register is read, the upper (most significant)
half-word is returned immediately on HDATA and the lower
half-word can be retrieved by reading the stage register on a
subsequent access. For details on using the stage register, see the
ADV212 User’s Guide.
ote that the stage register does not apply to the three data
N
channels (PIXEL, CODE, ATTR). These channels are always
accessed at the specified data width and do not require the use
of the stage register.
JDATA MODE
JDATA mode is typically used only when the dedicated video
interface (VDATA) is also enabled. This mode allows code
stream data (compressed data compliant with JPEG 2000) to be
input or output on a single dedicated 8-bit bus (JDATA<7:0>).
The bus is always an output during compression operations,
and is an input during decompression.
A 2-pin handshake is used to transfer data over this
synchronous interface. VALID is used to indicate that the
ADV212 is ready to provide or accept data and is always an
output. HOLD is always an input and is asserted by the host if it
cannot accept/provide data. For example, JDATA mode allows
real-time applications, in which pixel data is input over the
VDATA bus while the compressed data stream is output over
the JDATA bus.
EXTERNAL DMA ENGINE
The external DMA interface is provided to enable high
bandwidth data input/output between an external DMA
controller and the ADV212 data FIFOs. Two independent DMA
channels can each be assigned to any one of the three data
stream FIFOs (PIXEL, CODE, ATTR).
The controller supports asynchronous DMA using a
DREQ
data-request/data-acknowledge (
either single or burst access modes. Additional functionality is
provided for single address compatibility (fly-by) and dedicated
chip select (DCS) modes.
DACK
/
) protocol in
Rev. 0 | Page 27 of 44
Page 28

ADV212
www.BDTIC.com/ADI
INTERNAL REGISTERS
This section describes the internal registers of the ADV212.
DIRECT REGISTERS
The ADV212 has 16 direct registers, as listed in Table 18. The
direct registers are accessed over the ADDR [3:0], HDATA [31:0],
CS
, RD, WE, and
ACK
pins.
The host must first initialize the direct registers before any
application-specific operation can be implemented.
For additional information on accessing and configuring these
registers, see the
ADV212 User’s Guide.
Table 18. Direct
Address Name Description
0x00 PIXEL Pixel FIFO access register
0x01 CODE Compressed code stream access register
0x02 ATTR Attribute FIFO access register
0x03 Reserved Reserved
0x04 CMDSTA Command stack
0x05 EIRQIE External interrupt enabled
0x06 EIRQFLG External interrupt flags
0x07 SWFLAG Software flag register
0x08 BUSMODE Bus mode configuration register
0x09 MMODE Miscellaneous mode register
0x0A STAGE Staging register
0x0B IADDR Indirect address register
0x0C IDATA Indirect data register
0x0D BOOT Boot mode register
0x0E PLL_HI PLL control register—high byte
0x0F PLL_LO PLL control register—low byte
Registers
Rev. 0 | Page 28 of 44
Page 29

ADV212
www.BDTIC.com/ADI
INDIRECT REGISTERS
In certain modes, such as custom-specific input format or HIPI
mode, indirect registers must be accessed by the user through
the use of the IADDR and IDATA registers. The indirect
register address space starts at Internal Address 0xFFFF0000.
Table
19. Indirect Registers
Address Name Description
0xFFFF0400 PMODE1 Pixel/video format
0xFFFF0404 COMP_CNT_STATUS Horizontal count
0xFFFF0408 LINE_CNT_STATUS Vertical count
0xFFFF040C XTOT Total samples per line
0xFFFF0410 YTOT Total lines per frame
0xFFFF0414 F0_START Start line of Field 0 [F0]
0xFFFF0418 F1_START Start line of Field 1 [F1]
0xFFFF041C V0_START Start of active video Field 0 [F0]
0xFFFF0420 V1_START Start of active video Field 1 [F1]
0xFFFF0424 V0_END End of active video Field 0 [F0]
0xFFFF0428 V1_END End of active video Field 1 [F1]
0xFFFF042C PIXEL_START Horizontal start of active video
0xFFFF0430 PIXEL_END Horizontal end of active video
0xFFFF0440 MS_CNT_DEL Master/slave delay
0xFFFF0444 Reserved Reserved
0xFFFF0448 PMODE2 Pixel Mode 2
0xFFFF044C VMODE Video mode
0xFFFF1408 EDMOD0 External DMA Mode Register 0
0xFFFF140C EDMOD1 External DMA Mode Register 1
0xFFFF1410 FFTHRP FIFO threshold for pixel FIFO
0xFFFF1414 Reserved Reserved
0xFFFF1418 Reserved Reserved
0xFFFF141C FFTHRC FIFO threshold for code FIFO
0xFFFF1420 FFTHRA FIFO threshold for ATTR FIFO
0xFFFF1424 to 0xFFFF14FC Reserved Reserved
Both 32-bit and 16-bit hosts can access the indirect registers.
32-bit hosts use the IADDR and IDATA registers, and the 16-bit
hosts use the IADDR, the IDATA, and the stage register.
For additional information on accessing and configuring these
registers, see the
ADV212 User’s Guide.
Rev. 0 | Page 29 of 44
Page 30

ADV212
www.BDTIC.com/ADI
PLL
The ADV212 uses the PLL_HI and PLL_LO direct registers to
configure the PLL. Any time the PLL_LO register is modified,
the host must wait at least 20 μs before reading from or writing
to another register. If this delay is not implemented, erratic
behavior might result.
MCLK is the input clock to the ADV212 PLL and is used to
generate the internal JCLK (JPEG 2000 processor clock) and
HCLK (embedded CPU clock).
The PLL can be programmed to have any possible final
multiplier value as long as
• JCLK > 50 MHz and < 150 MHz (144-pin version).
• JCLK > 50 MHz and < 115 MHz (121-pin version).
• HCLK < 81 MHz (121-pin version), or HCLK < 108 MHz
(144-pin version).
• JCLK ≥ 2 × VCLK for single-component input.
• JCLK ≥ 2 × VCLK for YCbCr [4:2:2] input.
• In JDATA mode (JDATA), JCLK must be 4 × MCLK
or higher.
• The maximum burst frequency for external DMA modes is
≤ 0.36 JCLK.
• For MCLK frequencies greater than 50 MHz, the input clock
divider must be enabled, that is, IPD must be set to 1.
• IPD cannot be enabled for MCLK frequencies below 20 MHz.
• Deinterlace modes require JCLK ≥ 4 × MCLK.
• It is not recommended to use an LLC output from a video
decoder as a clock source for MCLK.
To achieve the lowest power consumption, an MCLK frequency
of 27 MHz is recommended for a standard definition CCIR 656
input. The PLL circuit is recommended to have a multiplier of 3.
This sets JCLK and HCLK to 81 MHz.
MCLK
IPD
÷2
Figure 32. PLL Architecture and Control Functions
PHASE
DETECT
LFB
BYPASS
LPF
÷PLLMULT÷2
VCO
÷2
÷2
HCLKD
JCLK
HCLK
÷2
06389-009
Table 20. Recommended PLL Register Settings
IPD LFB PLLMULT HCLKD HCLK JCLK
0 0 N 0 N × MCLK N × MCLK
0 0 N 1 N × MCLK/2 N × MCLK
0 1 N 0 2 × N × MCLK 2 × N × MCLK
0 1 N 1 N × MCLK 2 × N × MCLK
1 0 N 0 N × MCLK/2 N × MCLK/2
1 0 N 1 N × MCLK/4 N × MCLK/2
1 1 N 0 N × MCLK N × MCLK
1 1 N 1 N × MCLK/2 N × MCLK
Table 21. Recommended Values for PLL_HI and PLL_LO Registers
Video Standard CLKIN Frequency on MCLK PLL_HI PLL_LO
SMPTE 125M or ITU-R BT.656 (NTSC or PAL) 27 MHz 0x0008 0x0004
SMPTE 293M (525p) 27 MHz 0x0008 0x0004
ITU-R BT.1358 (625p) 27 MHz 0x0008 0x0004
SMPTE 274M (1080i) 74.25 MHz 0x0008 0x0084
Rev. 0 | Page 30 of 44
Page 31

ADV212
www.BDTIC.com/ADI
HARDWARE BOOT
The boot mode can be configured via hardware using the CFG pins or via software. The first boot mode after power-up is set by the CFG pins.
Table 22. Hardware Boot Modes
Boot Mode Settings Description
Hardware Boot Mode 2 CFG<1> tied high, CFG<2> tied low
Hardware Boot Mode 4 CFG<1> tied low, CFG<2> tied high Reserved.
Hardware Boot Mode 6 CFG<1> and CFG<2> tied high Reserved.
No boot host mode. ADV212 does not boot, but all internal registers and
memory are accessible through normal host input/output operations.
Rev. 0 | Page 31 of 44
Page 32

ADV212
www.BDTIC.com/ADI
VIDEO INPUT FORMATS
The ADV212 supports a wide variety of formats for
uncompressed video and still image data. The actual interface
and bus modes selected for transferring uncompressed data
dictates the allowed size of the input data and the number of
samples transferred with each access.
The host interface can support 8-/10-/12-/14-/16-bit data
formats. The video interface can support video data or still
image data input/output. Supported formats are 8-/10-/12-bit
Table 23. Maximum Pixel Data Input Rates (144-Ball Package)
Input Rate Limit
Active Resolution
Interface Compression Mode Input Format
HDATA Irreversible 8-bit data 45 130 200
Irreversible 10-bit data 45 130 200
Irreversible 12-bit data 45 130 200
Irreversible 16-bit data 45 130 200
Reversible 8-bit data 40 130 200
Reversible 10-bit data 32 130 200
Reversible 12-bit data 27 130 200
Reversible 14-bit data 23 130 200
VDATA Irreversible 8-bit data 65 130 200
Irreversible 10-bit data 65 130 200
Irreversible 12-bit data 65 130 200
Reversible 8-bit data 40 130 200
Reversible 10-bit data 32 130 200
Reversible 12-bit data 27 130 200
1
Input rate limits for HDATA might be less for certain applications depending on input picture size and content, host interface settings, and DMA transfer settings.
2
Minimum guaranteed sustained output rate or minimum sustainable compression rate [input rate/minimum peak output rate].
3
Maximum peak output rate; an output rate above this value is not possible.
(MSPS)1
YCbCr formats or single component format. See the
ADV212
User’s Guide for details. All formats can support less precision
than provided by specifying the actual data width/precision in
the PMODE register.
The maximum allowable data input rate is limited by using
irreversible or reversible compression modes and the data width
(or precision) of the input samples. Refer to Table 23 and
Table 25 to determine the maximum data input rate.
Approx Min Output Rate,
Compressed Data2
(Mbps)
Approx Max Output Rate,
Compressed Data3
(Mbps)
Table 24. Maximum Pixel Data Input Rates (121-Ball Package)
Input Rate Limit
Active Resolution
1
Interface Compression Mode Input Format
HDATA Irreversible 8-bit data 34 98 150
Irreversible 10-bit data 34 98 150
Irreversible 12-bit data 34 98 150
Irreversible 16-bit data 34 98 150
Reversible 8-bit data 30 98 150
Reversible 10-bit data 24 98 150
Reversible 12-bit data 20 98 150
Reversible 14-bit data 17 98 150
VDATA Irreversible 8-bit data 48 98 150
Irreversible 10-bit data 48 98 150
Irreversible 12-bit data 48 98 150
Reversible 8-bit data 30 98 150
Reversible 10-bit data 24 98 150
Reversible 12-bit data 20 98 150
1
Input rate limits for HDATA might be less for certain applications depending on input picture size and content, host interface settings, and DMA transfer settings.
2
Minimum guaranteed sustained output rate or minimum sustainable compression rate [input rate/minimum peak output rate].
3
Maximum peak output rate; an output rate above this value is not possible.
(MSPS)
Rev. 0 | Page 32 of 44
Approx Min Output Rate,
Compressed Data2
(Mbps)
Approx Max Output Rate,
Compressed Data3
(Mbps)
Page 33

ADV212
www.BDTIC.com/ADI
Table 25. Maximum Supported Tile Width for Data Input on HDATA and VDATA Buses
Compression Mode Input Format Tile/Precinct Maximum Width
9/7i Single-component 2048
9/7i Two-component 1024 each
9/7i Three-component 1024 (Y)
5/3i Single-component 4096
5/3i Two-component 2048 (each)
5/3i Three-component 2048 (Y)
5/3r Single-component 4096
5/3r Two-component 2048
5/3r Three-component 1024
Rev. 0 | Page 33 of 44
Page 34

ADV212
www.BDTIC.com/ADI
APPLICATIONS
This section describes typical video applications for the
ADV212 JPEG 2000 video processor.
ENCODE—MULTICHIP MODE
Due to the data input rate limitation (see Table 23), an 1080i
application requires at least two ADV212s to encode or decode
full-resolution 1080i video. In encode mode, the ADV212
accepts Y and CbCr data on separate buses. An encode example
is shown in Figure 33.
32-BIT HOST CPU
DATA[31:0] HDATA[31:0]
ADDR[3:0] ADDR[3:0]
CS CS
RD RD
ACK ACK
WR WE
IRQ
DREQ DREQ
DACK DACK
G I/O SCOMM[5]
ADV212_1_SLAVE
VDATA[11:2]
IRQ
VCLK
MCLK
FIELD
VSYNC
HSYNC
In decode mode, a master/slave configuration (as shown in
Figure 34) or a slave/slave configuration can be used to
synchronize the outputs of the two ADV212s. See the
A
pplication Note for details on how to configure the ADV212s
AN-796
in a multichip application.
Applications that have two separate VDATA outputs sent to an
FPGA or buffer before they are sent to an encoder do not
require synchronization at the ADV212 outputs.
74.25MHz
OSC
Y
CbCr
ADV7402
10-BIT SD/ HD
VIDEO
DECODER
LLC
Y[9:0]
C[9:0]
1080i
VIDEO IN
ADV212_2_SLAVE
VCLK
MCLK
HSYNC
VSYNC
FIELD
VDATA[11:2]
CbCr
6389-002
CS
RD
WR
ACK
IRQ
DREQ
DACK
HDATA[31:0]
ADDR[3:0]
CS
RD
WE
ACK
IRQ
DREQ
DACK
SCOMM[5]
Figure 33. Encode—Multichip Application
Rev. 0 | Page 34 of 44
Page 35

ADV212
www.BDTIC.com/ADI
DECODE—MULTICHIP MASTER/SLAVE
In a master/slave configuration, it is expected that the master
HVF outputs are connected to the slave HVF inputs and that
each SCOMM[5] pin is connected to the same GPIO on the host.
32-BIT HOST CPU
DATA[31:0] HDATA[31:0]
ADDR[3:0] ADDR[3:0]
CS CS
RD RD
WR WE
ACK ACK
IRQ
DREQ DREQ
DACK DACK
G I/O SCOMM[5]
CS
RD
WR
ACK
IRQ
DREQ
DACK
ADV212_1_MASTER
VDATA[11:2]
IRQ
ADV212_2_SLAVE
HDATA[31:0]
ADDR[3:0]
CS
RD
WE
ACK
IRQ
VDATA[11:2]
DREQ
DACK
SCOMM[5]
Figure 34. Decode—Multichip Master/Slave Application
VCLK
MCLK
FIELD
VSYNC
HSYNC
VCLK
MCLK
HSYNC
VSYNC
FIELD
In a slave/slave configuration, the common HVF for both
ADV212s is generated by an external house sync and each
SCOMM[5] is connected to the same GPIO output on the host.
SWIRQ1, Software Interrupt 1 in the EIRQIE register, must be
unmasked on both devices to enable multichip mode.
74.25MHz
OSC
YY
CbCr
CbCr
ADV7321A
10-BIT SD/ HD
VIDEO
ENCODER
CLKIN
Y[9:0]
C[9:0]
1080i
VIDEO OUT
6389-003
Rev. 0 | Page 35 of 44
Page 36

ADV212
www.BDTIC.com/ADI
DIGITAL STILL CAMERA/CAMCORDER
Figure 35 is a typical configuration for a digital camera or camcorder.
AD9843A
10
D[9:0]
SDATA SERIAL DAT A
SCK SERIAL CLK
SL SERIAL EN
FPGA
DATA INPUTS[9:0]
MCLK
VCLK
VFRM
VRDY
VSTRB
VDATA[15:6]PIXEL OUT[9:0]
ADV212
DATA[15:0]HDATA[15:0]
ADDR[3:0]ADDR[3:0]
CSCS
RDRD
WEWE
ACKACK
IRQIRQ
16-BIT
HOST CPU
Figure 35. Digital Still Camera/Camcorder Encode Application for 10-Bit Pixel Data Using Raw Pixel Mode
06389-004
Rev. 0 | Page 36 of 44
Page 37

ADV212
www.BDTIC.com/ADI
ENCODE/DECODE SDTV VIDEO APPLICATION
Figure 36 shows two ADV212 chips using a 10-bit CCIR 656 in normal host mode.
ENCODE MODE
32-BIT
HOST CPU
DECODE MODE
32-BIT
HOST CPU
HDATA[31:0]DATA[31:0]
IRQINTR
ADDR[3:0]ADDR[3:0]
CSCS
RDRD
WEWE
ACKACK
HDATA[31:0]DATA[31:0]
IRQINTR
ADDR[3:0]ADDR[3:0]
CSCS
RDRD
WEWE
ACKACK
ADV212
ADV212
VCLK
MCLK
MCLK
27MHz
OSC
27MHz
OSC
P[19:10]VDATA[11:2]
LLC1
ADV7301A
P[9:0]VDATA[11:2]
CLKINVCLK
ADV7189
10-BIT
VIDEO
DECODER
10-BIT
VIDEO
ENCODER
Figure 36. Encode/Decode—SDTV Video Application
VIDEO IN
VIDEO OUT
06389-005
Rev. 0 | Page 37 of 44
Page 38

ADV212
www.BDTIC.com/ADI
32-BIT HOST APPLICATION
Figure 37 shows two ADV212 chips using a 10-bit CCIR 656 in normal host mode.
FPGA
32-BIT
HOST CPU
DATA[31:0]
FPGA
31-BIT
HOST CPU
DATA[31:0]
DREQ0DREQ0
DACK0DACK0
HDATA[31:0]DATA[31:0]
IRQIRQ
ADDR[3:0]ADDR[3:0]
CSCS
RDRD
WEWE
ACKACK
DREQ0DREQ0
DACK0DACK0
HDATA[31:0]DATA[31:0]
IRQIRQ
ADDR[3:0]ADDR[3:0]
CSCS
RDRD
WEWE
ACKACK
ADV212
VDATA[11:2]
ADV212
VCLK
MCLK
MCLK
27MHz
OSC
27MHz
OSC
P[19:10]
LLC1
ADV730xA
P[9:0]VDATA[11:2]
CLKINVCLK
ADV7189
10-BIT
VIDEO
DECODER
10-BIT
VIDEO
ENCODER
VIDEO IN
ENCODE MODE
VIDEO OUT
DECODE MODE
06389-006
Figure 37. Encode/Decode 32-Bit Host Application
Rev. 0 | Page 38 of 44
Page 39

ADV212
www.BDTIC.com/ADI
HIPI (HOST INTERFACE—PIXEL INTERFACE)
Figure 38 is a typical configuration using HIPI mode.
ADV212
HDATA<31>Y0/G0<MSB>
HDATA<30>Y0/G0<6>
HDATA<29>Y0/G0<5>
HDATA<28>Y0/G0<4>
HDATA<27>Y0/G0<3>
HDATA<26>Y0/G0<2>
HDATA<25>Y0/G0<1>
HDATA<24>Y0/G0<0>
HDATA<23>Cb0/G1<MSB>
HDATA<22>Cb0/G1<6>
HDATA<21>Cb0/G1<5>
HDATA<20>Cb0/G1<4>
HDATA<19>Cb0/G1<3>
HDATA<18>Cb0/G1<2>
HDATA<17>Cb0/G1<1>
HDATA<16>Cb0/G1<0>
HDATA<15>Y1/G2<MSB>
HDATA<14>Y1/G2<6>
HDATA<13>Y1/G2<5>
HDATA<12>Y1/G2<4>
HDATA<11>Y1/G2<3>
HDATA<10>Y1/G2<2>
HDATA<9>Y1/G2<1>
HDATA<8>Y1/G2<0>
HDATA<7>Cr0/G3<MSB>
HDATA<6>Cr0/G3<6>
HDATA<5>Cr0/G3<5>
HDATA<4>Cr0/G3<4>
HDATA<3>Cr0/G3<3>
HDATA<2>Cr0/G3<2>
HDATA<1>Cr0/G3<1>
32-BIT HOS T
DATA<31:0>
CS
RD RD
WR WE
ACK ACK
IRQ IRQ
DREQ DREQ0
DACK DACK0
DREQ DREQ1
DACK DACK1
74.25MHz
Figure 38. Host Interface—Pixel Interface Mode
HDATA<0>Cr0/G3<0>
CS
MCLK
COMPRESSED
DATA PATH
RAW PIXEL
DATA PATH
06389-007
Rev. 0 | Page 39 of 44
Page 40

ADV212
www.BDTIC.com/ADI
JDATA INTERFACE
Figure 39 shows a typical configuration using JDATA with a dedicated JDATA output, 16-bit host, and 10-bit CCIR 656.
FPGA
16-BIT
HOST CPU
ADV212
JDATA[7:0]
HOLD
VALID
HDATA[15:0]DATA[15:0]
IRQIRQ
ADDR[3:0]ADDR[3:0]
CSCS
RDRD
WEWE
ACKACK
HSYNC
VCLK
MCLK
YCrCb
27MHz
OSC
P[19:10]VDATA[11:2]
FIELDFIELD
VSVSYNC
HS
LLC1
ADV7189
VIDEO IN
06389-008
Figure 39. JDATA Application
Rev. 0 | Page 40 of 44
Page 41

ADV212
A
R
*
A
R
*
www.BDTIC.com/ADI
OUTLINE DIMENSIONS
12.20
12.00 SQ
11.80
BALL A1
CORNER
TOP VIEW
10.00
BSC SQ
1.00
BSC
9
1087
11
BOTTOM VIEW
1 CORNE
INDEX AREA
63
5
21
4
A
B
C
D
E
F
G
H
J
K
L
1.85
1.71
1.40
1.85
MAX
DETAIL A
DETAILA
0.50 NOM
0.30 MIN
0.70
0.60
0.50
BALL DIAMET ER
*COMPLIANT WITH JEDE C STANDARDS MO-192-ABD- 1 WITH
EXCEPTIO N TO PACKAGE HEI GHT AND THICKNES S .
SEATING
PLANE
Figure 40. 121-Ball Chip Scale Package Ball Grid Array [CSP_BGA]
(BC-121-1)
Dimensions shown in millimeters
1 CORNE
13 .00
BSC SQ
BALL A1
INDICATOR
TOP VIEW
DETAIL A
11.00
BCS SQ
1.00 BSC
0.53
0.43
BALL DIAMET ER
12
0.70
0.60
0.50
11
10 876
INDEX AREA
9
5
BOTTOM VIEW
DETAILA
SEATING
PLANE
4
321
*
1.31
1.21
1.11
0.20
COPLANARITY
A
B
C
D
E
F
G
H
J
K
L
M
*
1.32
1.21
1.11
COPLANARITY
0.20 MAX
082406-A
*
COMPLIANT WITH JEDEC STANDARDS MO- 192-AAD- 1 WITH
EXCEPTION TO PACKAGE HEIGHT AND THI CKNE S S.
Figure 41. 144-Ball Chip Scale Package Ball Grid Array [CSP_BGA]
Dimensions shown in millimeters
Rev. 0 | Page 41 of 44
(BC-144-3)
021506-A
Page 42

ADV212
www.BDTIC.com/ADI
ORDERING GUIDE
Temperature
Model
ADV212BBCZ-1151 −40°C to +85°C 115 MHz
ADV212BBCZRL-1151 −40°C to +85°C 115 MHz
ADV212BBCZ-1501 −40°C to +85°C 150 MHz
ADV212BBCZRL-1501 −40°C to +85°C 150 MHz
1
Z = Pb-free part.
Range
Speed
Grade Operating Voltage Package Description
1.5 V Internal,
2.5 V or 3.3 V I/O
1.5 V Internal,
2.5 V or 3.3 V I/O
1.5 V Internal,
2.5 V or 3.3 V I/O
1.5 V Internal,
2.5 V or 3.3 V I/O
121-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-121-1
121-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-121-1
144-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-144-3
144-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-144-3
Package
Option
Rev. 0 | Page 42 of 44
Page 43

ADV212
www.BDTIC.com/ADI
NOTES
Rev. 0 | Page 43 of 44
Page 44

ADV212
www.BDTIC.com/ADI
NOTES
©2006 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D06389-0-10/06(0)
Rev. 0 | Page 44 of 44
 Loading...
Loading...