

Page 1
dB
Cool™ Remote Thermal
FEATURES
Monitors up to 5 voltages
Controls and monitors up to 4 fans
High and low frequency fan drive signal
1 on-chip and 2 remote temperature sensors
Series resistance cancellation on the remote channel
Extended temperature measurement range, up to 191°C
Dynamic T
intelligently
Automatic fan speed control mode controls system
cooling based on measured temperature
Enhanced acoustic mode dramatically reduces user
perception of changing fan speeds
Thermal protection feature via
Monitors performance impact of Intel® Pentium™ 4
processor
Thermal control circuit via
2-wire, 3-wire, and 4-wire fan speed measurement
Limit comparison of all monitored values
Meets SMBus 2.0 electrical specifications
(fully SMBus 1.1 compliant)
control mode optimizes system acoustics
MIN
output
THERM
input
THERM
Controller and Voltage Monitor
ADT7468
GENERAL DESCRIPTION
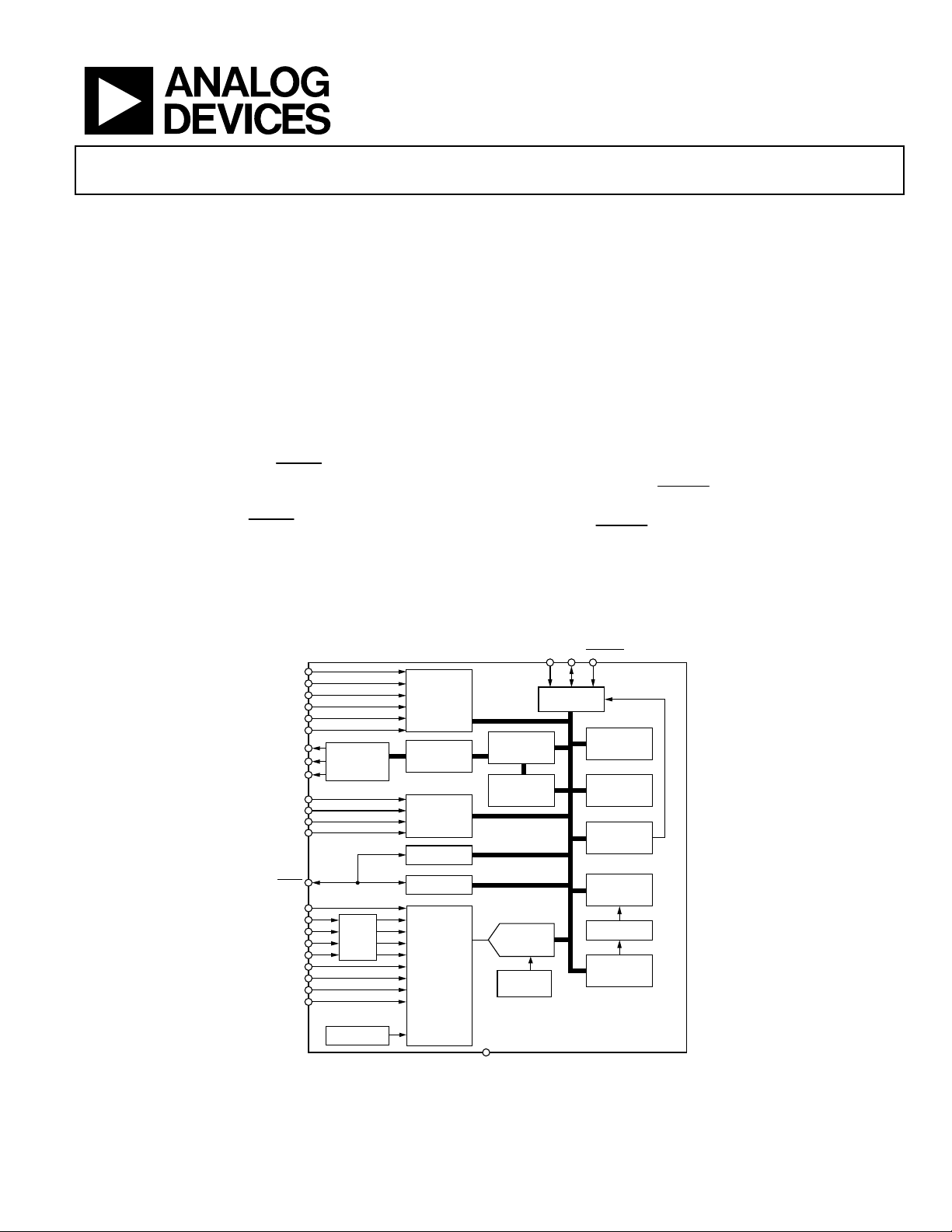
The ADT7468 dBCOOLTM controller is a thermal monitor and
multiple PWM fan controller for noise-sensitive or powersensitive applications requiring active system cooling. The
ADT7468 can drive a fan using either a low or high frequency
drive signal, monitor the temperature of up to two remote
sensor diodes plus its own internal temperature, and measure
and control the speed of up to four fans, so that they operate at
the lowest possible speed for minimum acoustic noise.
The automatic fan speed control loop optimizes fan speed for a
given temperature. A unique dynamic T
enables the system thermals/acoustics to be intelligently
managed. The effectiveness of the system’s thermal solution can
be monitored using the
THERM
input. The ADT7468 also
provides critical thermal protection to the system using the
bidirectional
THERM
pin as an output to prevent system or
component overheating.
control mode
MIN
FUNCTIONAL BLOCK DIAGRAM
VID5
VID4
VID3
VID2
VID1
VID0
PWM1
PWM2
PWM3
TACH1
TACH2
TACH3
TACH4
THERM
+12V
+2.5V
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
+5V
V
V
D1+
D1–
D2+
D2–
CCP
CC
IN
IN
IN
PWM REGISTERS
AND
CONTROLLERS
HF & LF
VCCTO ADT7468
SRC
BAND GAP
TEMP SENSOR
ACOUSTIC
ENHANCEMENT
CONTROL
ACOUSTIC
ENHANCEMENT
CONTROL
FAN SPEED
COUNTER
PERFORMANCE
MONITORING
THERMAL
PROTECTION
INPUT
SIGNAL
CONDITIONING
AND
ANALOG
MULTIPLEXER
GND
Figure 1.
SCL
SDA
SMBALERT
SERIAL BUS
INTERFACE
AUTOMATIC
FAN SPEED
CONTROL
DYNAMIC
T
MIN
CONTROL
ADT7468
10-BIT
ADC
BAND GAP
REFERENCE
ADDRESS
POINTER
REGISTER
PWM
CONFIGURATION
REGISTERS
INTERRUPT
MASKING
INTERRUPT
STATUS
REGISTERS
LIMIT
COMPARATORS
VALUE AND
LIMIT
REGISTERS
04499-0-001
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.326.8703 © 2004 Analog Devices, Inc. All rights reserved.
Page 2
ADT7468
TABLE OF CONTENTS
Specifications..................................................................................... 3
Absolute Maximum Ratings............................................................ 5
Thermal Characteristics .............................................................. 5
ESD Caution.................................................................................. 5
Pin Configuration and Function Descriptions............................. 6
Typical Performance Characteristics ............................................. 8
Product Description....................................................................... 10
Status Registers........................................................................... 23
THERM
Timer ........................................................................... 25
Fan Drive Using PWM Control ............................................... 28
Laying Out 2-Wire and 3-Wire Fans....................................... 30
Operating from 3.3 V Standby.................................................. 34
XNOR Tree Test Mode .............................................................. 35
Comparison between ADT7463 and ADT7468..................... 10
How to Set the Functionality of Pin 14 ...................................11
Recommended Implementation............................................... 11
Serial Bus Interface..................................................................... 12
Write Operations ........................................................................ 13
Read Operations ......................................................................... 14
SMBus Timeout.......................................................................... 14
Voltage Measurement Input...................................................... 14
Analog-to-Digital Converter ....................................................14
Input Circuitry ............................................................................ 15
Voltage Measurement Registers................................................ 15
Voltage Limit Registers.............................................................. 15
VID Code Monitoring............................................................... 15
VID Code Input Threshold Voltage......................................... 15
VID Code Change Detect Function ........................................ 16
Power-On Default ...................................................................... 35
Programming the Automatic Fan Speed Control Loop ............ 36
Automatic Fan Control Overview............................................ 36
Step 1: Hardware Configuration.............................................. 37
Recommended Implementation 1 ........................................... 38
Recommended Implementation 2 ........................................... 39
Step 2: Configuring the MUX................................................... 40
Step 3: T
Step 4: PWM
Step 5: PWM
Step 7: T
Step 8: T
Dynamic T
Settings for Thermal Calibration Channels....... 42
MIN
for Each PWM (Fan) Output....................... 43
MIN
for PWM (Fan) Outputs.............................. 43
MAX
for Temperature Channels ............................... 47
THERM
for Temperature Channels .................................. 48
HYST
Control Mode ................................................... 49
MIN
Step 9: Operating Points for Temperature Channels............. 51
Step 10: High and Low Limits for Temperature Channels ... 52
Additional ADC Functions for Voltage Measurements ........16
Temperature Measurement Method ........................................ 18
Series Resistance Cancellation.................................................. 19
Factors Affecting Diode Accuracy ........................................... 19
Additional ADC Functions for Temperature Measurement. 21
Limits, Status Registers, and Interrupts ....................................... 22
Limit Values................................................................................. 22
REVISION HISTORY
Revision 0: Initial Version
Rev. 0 | Page 2 of 80
Step 11: Monitoring
THERM
................................................... 55
Enhancing System Acoustics .................................................... 56
Step 12: Ramp Rate for Acoustic Enhancement..................... 58
Register Tables ................................................................................ 60
ADT7468 Programming Block Diagram.................................... 79
Outline Dimensions....................................................................... 80
Ordering Guide .......................................................................... 80
Page 3
ADT7468
SPECIFICATIONS
TA = T
All voltages are measured with respect to GND, unless otherwise specified. Typicals are at T
norm. Logic inputs accept input high voltages up to V
logic levels of V
not production tested.
Table 1.
Parameter Min Typ Max Unit Test Conditions/Comments
POWER SUPPLY
20 µA Standby mode
TEMP-TO-DIGITAL CONVERTER
36 µΑ Second current
96 µΑ Third current
ANALOG-TO-DIGITAL CONVERTER (INCLUDING MUX AND ATTENUATORS)
FAN RPM-TO-DIGITAL CONVERTER
MIN
to T
, VCC = V
MAX
= 0.8 V for a falling edge and VIH = 2.0 V for a rising edge. SMBus timing specifications are guaranteed by design and are
IL
MIN
to V
, unless otherwise noted.
MAX
MAX
= 25°C and represent most likely parametric
A
even when device is operating down to V
. Timing specifications are tested at
MIN
Supply Voltage 3.0 3.3 5.5 V
Supply Current, ICC 3 mA Interface inactive, ADC active
Local Sensor Accuracy ±1.5 °C 0°C ≤ TA ≤ 70°C
−3.5 +2 °C −40°C ≤ TA ≤ +100°C
−4 +2 °C −40°C ≤ TA ≤ +120°C
Resolution 0.25 °C
Remote Diode Sensor Accuracy ±1.5 °C 0°C ≤ TA ≤ 70°C; 0°C ≤ TD ≤ 120°C
−3.5 +2 °C −40°C ≤ TA ≤ +100°C; 0°C ≤ TD ≤ +120°C
−4.5 +2 °C −40°C ≤ TA ≤ +120°C; 0°C ≤ TD ≤ +120°C
Resolution 0.25 °C
Remote Sensor Source Current 6 µA First current
Total Unadjusted Error (TUE) ±2 % For 12 V and 5 V channels
±1.5 % For all other channels
Differential Nonlinearity (DNL) ±1 LSB 8 bits
Power Supply Sensitivity ±0.1 %/V
Conversion Time (Voltage Input) 11 ms Averaging enabled
Conversion Time (Local Temperature) 12 ms Averaging enabled
Conversion Time (Remote Temperature) 38 ms Averaging enabled
Total Monitoring Cycle Time 145 ms Averaging enabled
Total Monitoring Cycle Time 19 ms Averaging disabled
Input Resistance 40 70 100 kΩ For V
channel
CC
80 140 200 kΩ For all other channels
Accuracy ±5 % 0°C ≤ TA ≤ 70°C , 3.3 V
±7 % −40°C ≤ TA ≤ +120°C , 3.3 V
±10 % −40°C ≤ TA ≤ +120°C , 5.5 V
Full-Scale Count 65,535
Nominal Input RPM 109 RPM Fan count = 0xBFFF
329 RPM Fan count = 0x3FFF
5000 RPM Fan count = 0x0438
10000 RPM Fan count = 0x021C
Internal Clock Frequency 85.5 90 94.5 kHz 0°C ≤ TA ≤ 70°C, V
83.7 90 96.3 kHz −40°C ≤ TA ≤ +120°C, V
81 90 99 kHz −40°C ≤ TA ≤ +120°C, V
CC
= 3.3 V
CC
CC
= 3.3 V
= 5.5 V
Rev. 0 | Page 3 of 80
Page 4
ADT7468
A
Parameter Min Typ Max Unit Test Conditions/Comments
OPEN-DRAIN DIGITAL OUTPUTS, PWM1 TO PWM3, XTO
Current Sink, IOL 8.0 mA
Output Low Voltage, VOL 0.4 V I
High Level Output Current, IOH 0.1 1.0 µA V
OPEN-DRAIN SERIAL DATA BUS OUTPUT (SDA)
Output Low Voltage, VOL 0.4 V I
High Level Output Current, IOH 0.1 1.0 µA V
SMBUS DIGITAL INPUTS (SCL, SDA)
Input High Voltage, VIH 2.0 V
Input Low Voltage, V
0.4 V
IL
Hysteresis 500 mV
DIGITAL INPUT LOGIC LEVELS (TACH INPUTS)
Input High Voltage, VIH 2.0 V
5.5 V Maximum input voltage
Input Low Voltage, VIL 0.8 V
−0.3 V Minimum input voltage
Hysteresis 0.5 V p-p
DIGITAL INPUT LOGIC LEVELS (THERM) ADTL+
Input High Voltage, V
Input Low Voltage, V
0.75 × V
IH
0.4 V
IL
V
CCP
DIGITAL INPUT CURRENT
Input High Current, IIH −1 µA VIN = VCC
Input Low Current, IIL 1 µA VIN = 0
Input Capacitance, CIN 5 pF
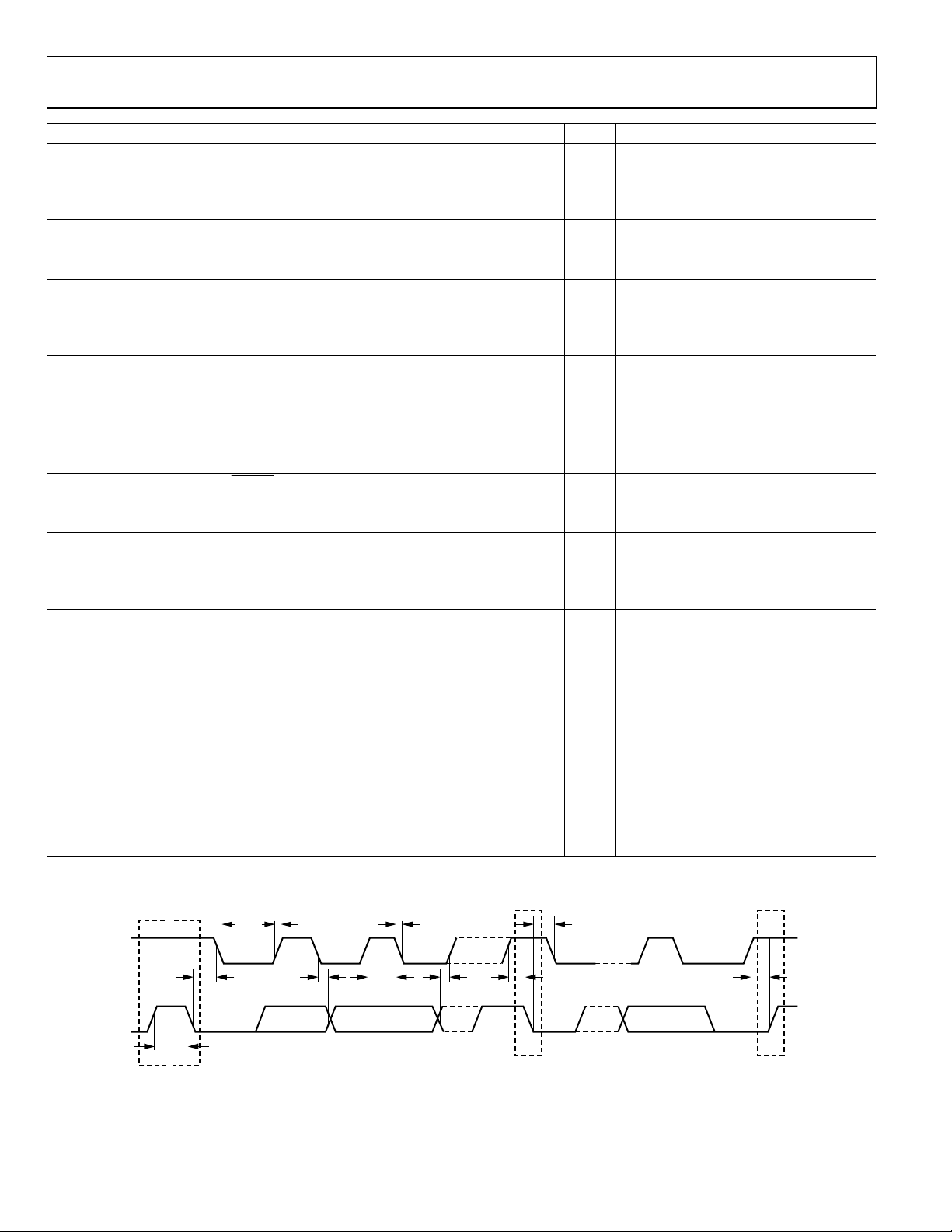
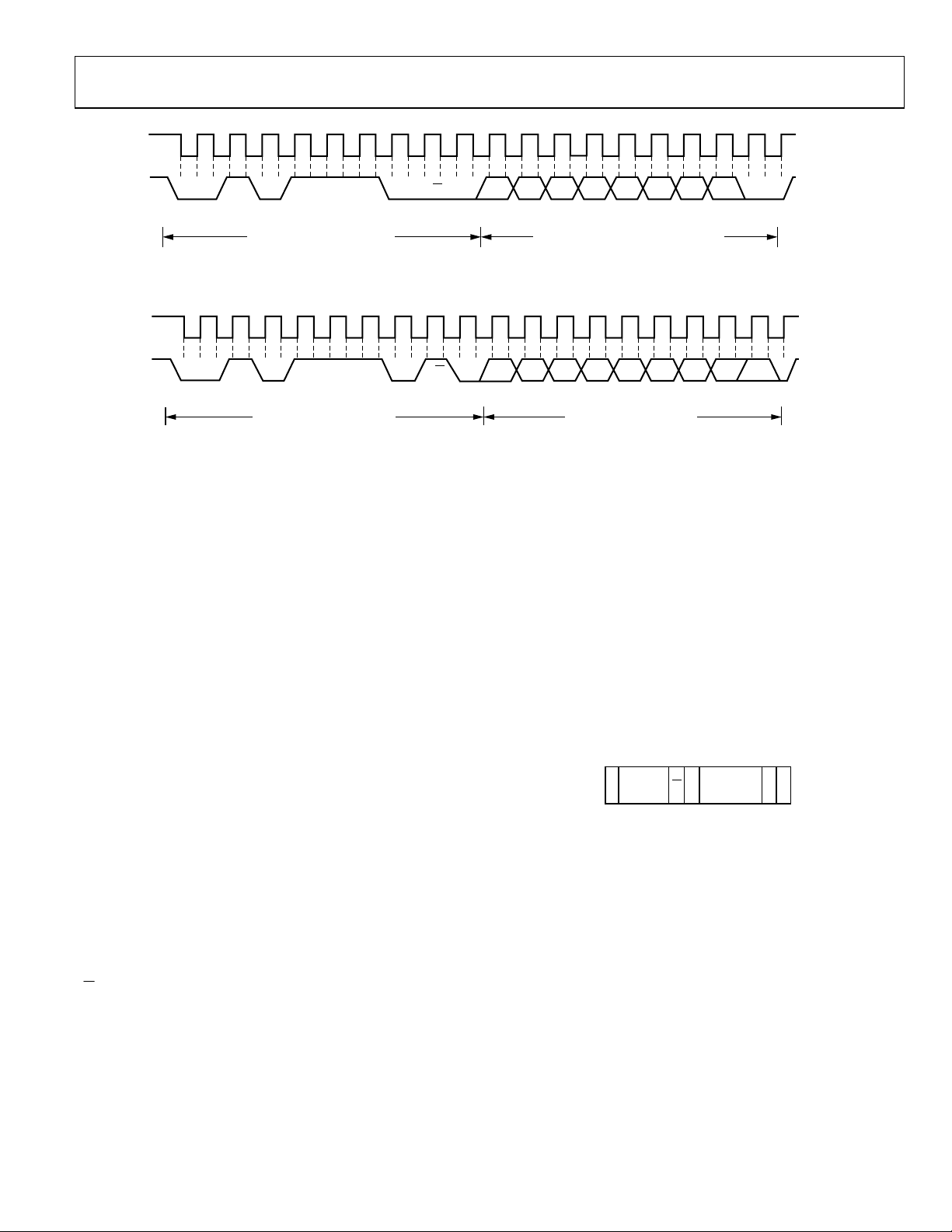
SERIAL BUS TIMING See Figure 2
Clock Frequency, f
10 400 kHz
SCLK
Glitch Immunity, tSW 50 ns
Bus Free Time, t
Start Setup Time, t
Start Hold Time, t
SCL Low Time, t
SCL High Time, t
4.7 µs
BUF
4.7 µs
SU;STA
4.0 µs
HD;STA
4.7 µs
LOW
4.0 50 µs
HIGH
SCL, SDA Rise Time, tR 1000 ns
SCL, SDA Fall Time, t
Data Setup Time, t
Data Hold Time, t
Detect Clock Low Timeout, t
300 µs
F
250 ns
SU;DAT
300 ns
HD;DAT
15 35 ms Can be optionally disabled
TIMEOUT
= −8.0 mA, VCC = +3.3 V
OUT
= VCC
OUT
= −4.0 mA, VCC = +3.3 V
OUT
= VCC
OUT
t
F
t
HIGH
t
SU; DAT
SP
Figure 2. Serial Bus Timing Diagram
t
SU; STA
t
HD; STA
t
SU; STO
04499-0-002
SCL
SD
t
BUF
PS
t
HD; STA
t
LOW
t
R
t
HD; DAT
Rev. 0 | Page 4 of 80
Page 5
ADT7468
ABSOLUTE MAXIMUM RATINGS
Table 2.
Parameter Rating
Positive Supply Voltage (VCC) 5.5 V
Maximum Voltage on 12 VIN Pin 20 V
Voltage on Any Input or Output Pin −0.3 V to +6.5 V
Input Current at Any Pin ±5 mA
Package Input Current ±20 mA
Maximum Junction Temperature (T
Storage Temperature Range −65°C to +150°C
Lead Temperature, Soldering
IR Reflow Peak Temperature 220°C
Lead Temperature (Soldering 10 s) 300°C
ESD Rating 1000 V
) 150°C
JMAX
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on
the human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
THERMAL CHARACTERISTICS
24-lead QSOP package:
= 150°C/W
θ
JA
= 39°C/W
θ
JC
Rev. 0 | Page 5 of 80
Page 6
ADT7468
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
SDA
SCL
GND
V
VID0
VID1
VID2
VID3
TACH3
PWM2/SMBALERT
TACH1
TACH2
1
2
3
4
CC
5
6
7
8
9
10
11
12
ADT7468
TOP VIEW
(NOT TO SCALE)
PWM1/XTO
24
V
23
CCP
+2.5V
22
IN
21
+12VIN/VID5
/THERM
+5V
20
IN
VID4
19
D1+
18
17
D1–
16
D2+
15
D2–
14
TACH4/GPIO/THERM/SMBALERT
13
PWM3
04499-0-003
Figure 3. Pin Configuration
Table 3. Pin Function Descriptions
Pin
No.
Mnemonic Description
1 SDA Digital I/O (Open Drain). SMBus bidirectional serial data. Requires pull-up resistor.
2 SCL Digital Input (Open Drain). SMBus serial clock input. Requires pull-up resistor.
3 GND Ground Pin.
4 VCC
Power Supply. Can be powered by 3.3 V standby, if monitoring in low power states is required. V
is also monitored
CC
through this pin. The ADT7468 can also be powered from a 5 V supply. Setting Bit 7 of Configuration Register 1
(Reg. 0x40) rescales the V
input attenuators to correctly measure a 5 V supply.
CC
5 VID0 Digital Input (Open Drain). Voltage supply readouts from CPU. This value is read into the VID register (Reg. 0x43).
6 VID1 Digital Input (Open Drain). Voltage supply readouts from CPU. This value is read into the VID register (Reg. 0x43).
7 VID2 Digital Input (Open Drain). Voltage supply readouts from CPU. This value is read into the VID register (Reg. 0x43).
8 VID3 Digital Input (Open Drain). Voltage supply readouts from CPU. This value is read into the VID register (Reg. 0x43).
9 TACH3
Digital Input (Open Drain). Fan tachometer input to measure speed of Fan 3. Can be reconfigured as an analog input
(AIN3) to measure the speed of 2-wire fans.
10 PWM2
Digital Output (Open Drain). Requires 10 kΩ typical pull-up. Pulse width modulated output to control Fan 2 speed.
Can be configured as a high or low frequency drive.
SMBALERT
Digital Output (Open Drain). This pin can be reconfigured as an SMBALERT interrupt output to signal out-of-limit
conditions.
11 TACH1
Digital Input (Open Drain). Fan tachometer input to measure speed of Fan 1. Can be reconfigured as an analog input
(AIN1) to measure the speed of 2-wire fans.
12 TACH2
Digital Input (Open Drain). Fan tachometer input to measure speed of Fan 2. Can be reconfigured as an analog input
(AIN2) to measure the speed of 2-wire fans.
13 PWM3
Digital I/O (Open Drain). Pulse width modulated output to control speed of Fan 3 and Fan 4. Requires 10 kΩ typical
pull-up. Can be configured as a high or low frequency drive.
14 TACH4
Digital Input (Open Drain). Fan tachometer input to measure speed of Fan 4. Can be reconfigured as an analog input
(AIN4) to measure the speed of 2-wire fans.
GPIO General Purpose Open Drain Digital I/O.
Alternatively, the pin can be reconfigured as a bidirectional THERM pin. Can be used to time and monitor assertions
THERM
on the THERM
input. For example, this pin can be connected to the PROCHOT output of an Intel Pentium 4 processor
or to the output of a trip point temperature sensor. This pin can also be used as an output to signal overtemperature
conditions.
SMBALERT
Digital Output (Open Drain). This pin can be reconfigured as an SMBALERT interrupt output to signal out-of-limit
conditions.
15 D2– Cathode Connection to Second Thermal Diode.
16 D2+ Anode Connection to Second Thermal Diode.
17 D1– Cathode Connection to First Thermal Diode.
Rev. 0 | Page 6 of 80
Page 7
ADT7468
Pin
No. Mnemonic Description
18 D1+ Anode Connection to First Thermal Diode.
19 VID4 Digital Input (Open Drain). Voltage supply readouts from CPU. This value is read into the VID register (Reg. 0x43).
20 +5VIN Analog Input. Monitors +5 V power supply.
21 +12VIN Analog Input. Monitors +12 V power supply.
VID5
22 +2.5VIN Analog Input. Monitors +2.5 V supply, typically a chipset voltage.
23 V
24 PWM1 Digital Output (Open Drain). Pulse width modulated output to control Fan 1 speed. Requires 10 kΩ typical pull-up.
XTO Also functions as the output from the XOR tree in XOR test mode.
Alternatively, this pin can be reconfigured as a bidirectional THERM pin. Can be used to time and monitor assertions
THERM
on the THERM
the output of a trip point temperature sensor. This pin can also be used as an output to signal overtemperature
conditions.
Digital Input (Open Drain). Voltage supply readouts from CPU. This value is read into the VID register (Reg. 0x43).
Supports VRM10 solutions.
Analog Input. Monitors processor core voltage (0 V to 3 V).
CCP
input. For example, it can be connected to the PROCHOT output of an Intel Pentium 4 processor or to
Rev. 0 | Page 7 of 80
Page 8
ADT7468
TYPICAL PERFORMANCE CHARACTERISTICS
0
20
100mV
–10
–20
–30
–40
TEMPERATURE ERROR (°C)
–50
–60
1 4.73.3 100 2.2
CAPACITANCE (nF)
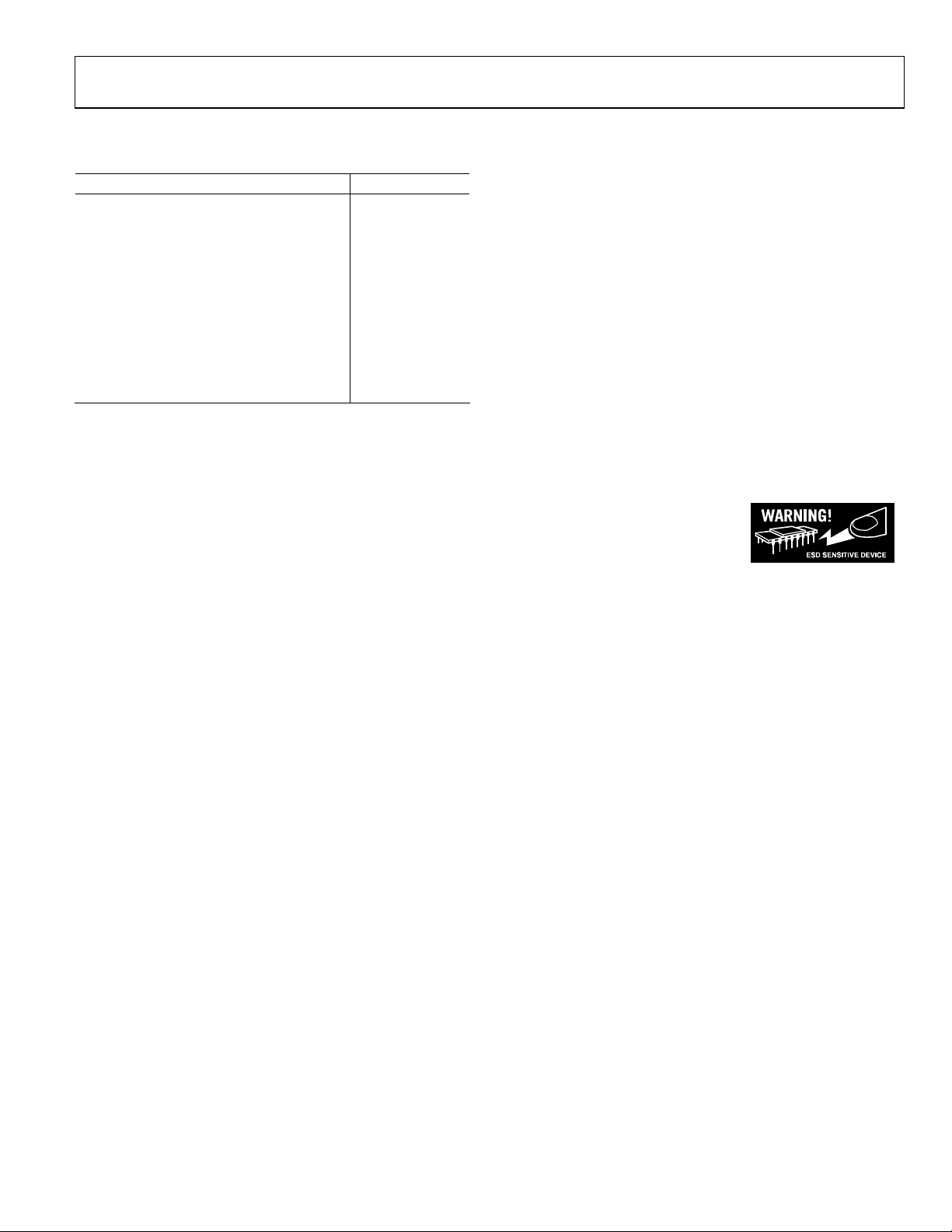
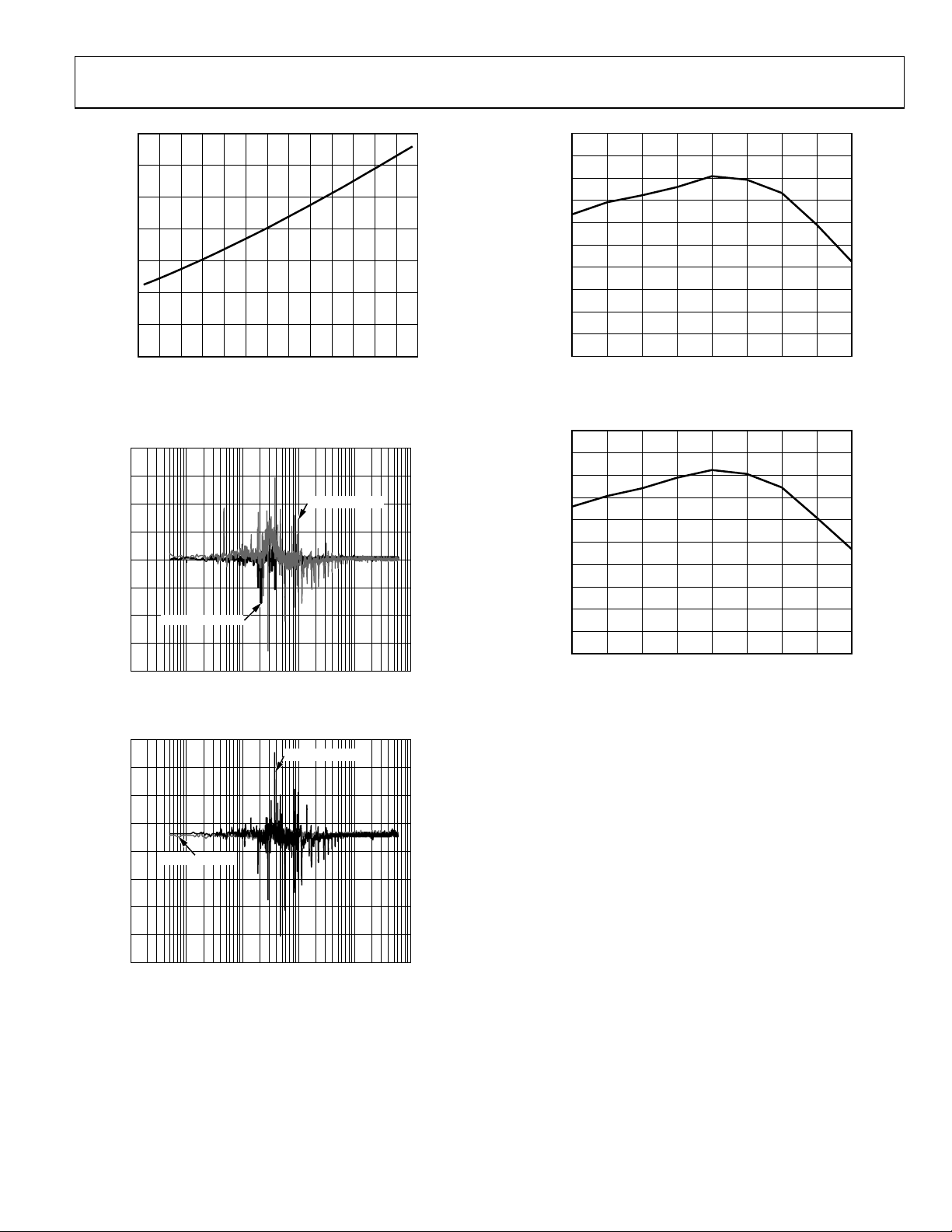
Figure 4. Temperature Error vs. Capacitance between D+ and D−
0
–10
–20
–30
–40
–50
–60
–70
TEMPERATURE ERROR (°C)
–80
–90
–100
CAPACITANCE (nF)
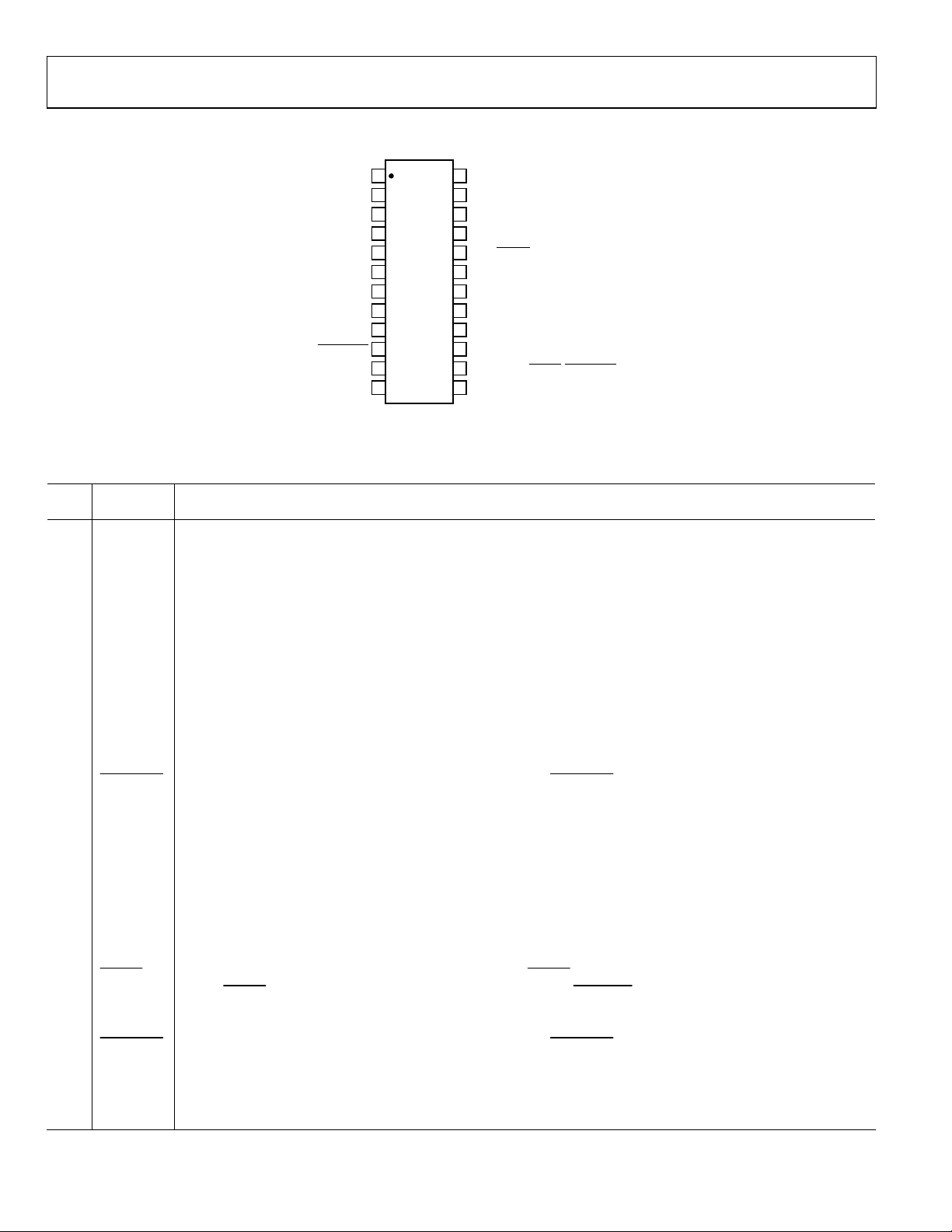
Figure 5. External Temperature Error vs. D+/D− Capacitance
60
40
D+ TO GND
15
04499-0-045
10
5
0
TEMPERATURE ERROR (°C)
–5
–10
60mV
40mV
FREQUENCY (kHz)
1G10 100 1M 10M 100M
04499-0-048
Figure 7. Remote Temperature Error vs. Common Mode Noise Frequency
6
5
4
3
2
1
0
–1
TEMPERATURE ERROR (°C)
–2
–3
2501020515
04499-0-046
–4
10mV
FREQUENCY (kHz)
20mV
1G10 100 1M 10M 100M
04499-0-049
Figure 8. Remote Temperature Error vs. Differential Mode Noise Frequency
1.40
1.35
20
0
D+ TO V
–20
–40
TEMPERATURE ERROR (°C)
–60
–80
RESISTANCE (MΩ)
CC
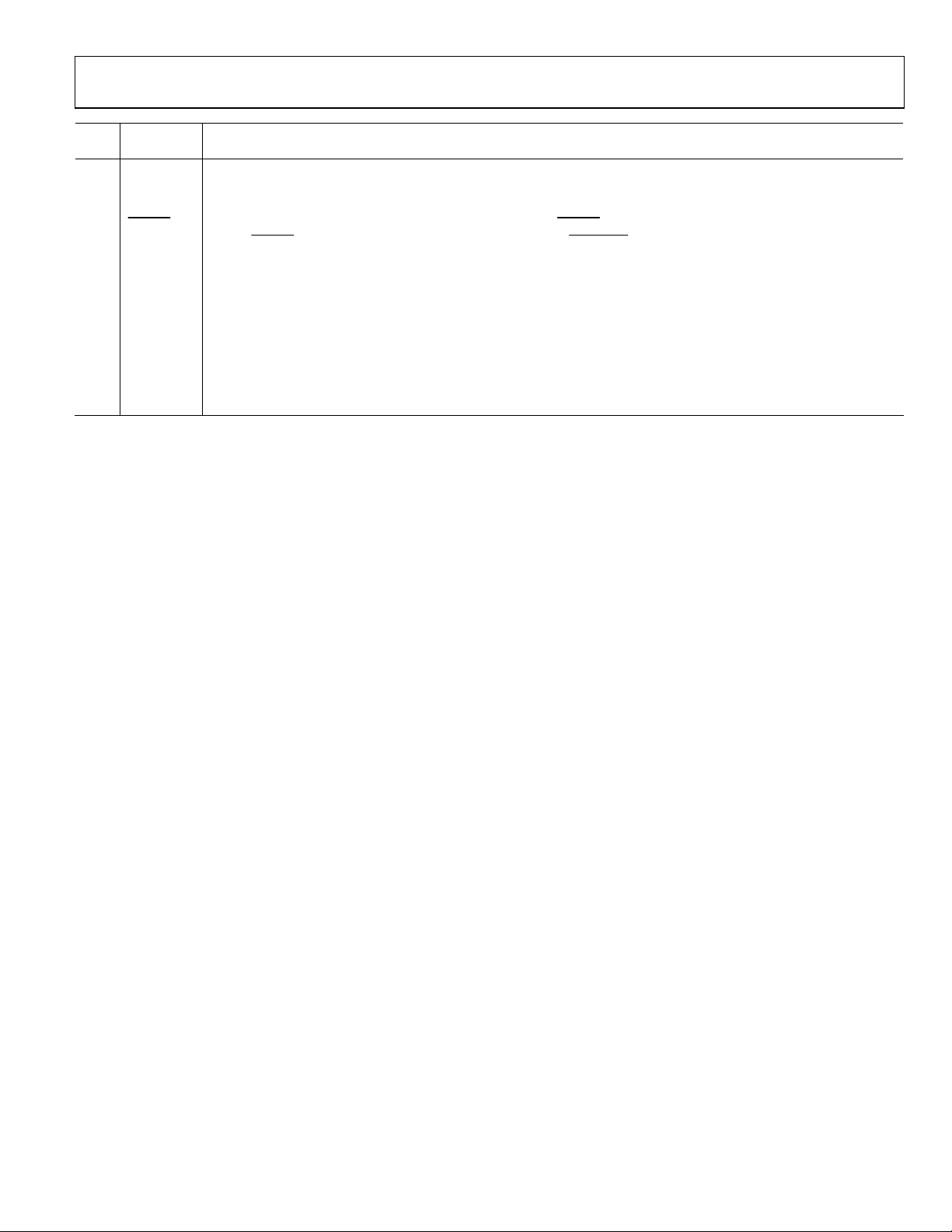
Figure 6. Remote Temperature Error vs. PCB Resistance
1.30
1.25
(mA)
1.20
DD
I
1.15
1.10
1000 3.3 20110
04499-0-047
1.05
3.0 3.8 5.23.4 4.43.6 4.83.2 4.0 5.44.6 5.04.2
POWER SUPPLY VOLTAGE (V)
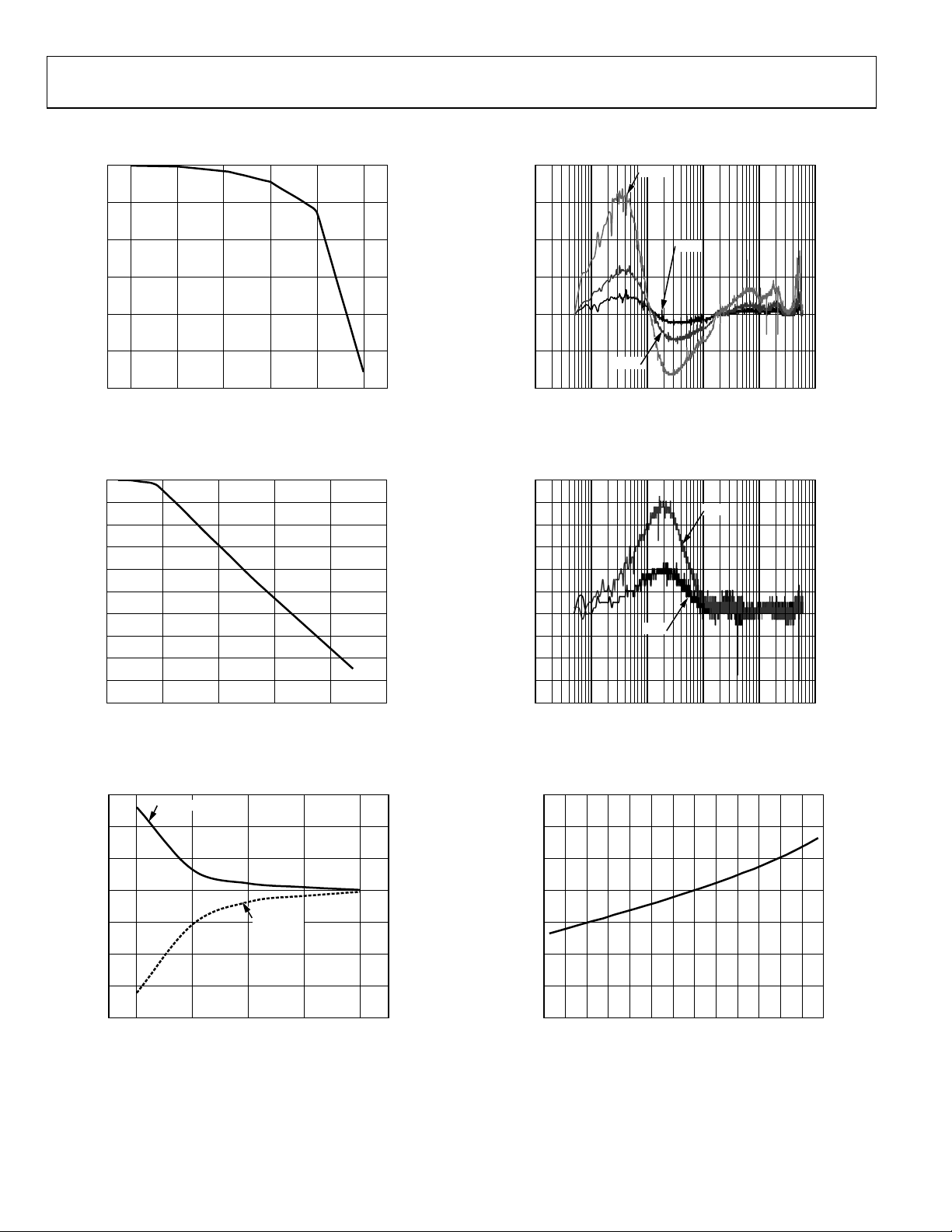
Figure 9. Normal I
vs. Power Supply
DD
04499-0-050
Rev. 0 | Page 8 of 80
Page 9
ADT7468
7
6
5
4
A)
µ
(
3
DD
I
2
1
0
3.0 3.8 5.23.4 4.43.6 4.83.2 4.0 5.44.6 5.04.2
POWER SUPPLY VOLTAGE (V)
Figure 10. Shutdown I
vs. Power Supply
DD
20
15
10
5
0
–5
–10
TEMPERATURE ERROR (°C)
–15
–20
INT ERROR, 100mV
POWER SUPPLY NOISE FREQUENCY (kHz)
INT ERROR, 250mV
Figure 11. Internal Temperature Error vs. Power Supply
20
15
EXT ERROR, 250mV
04499-0-051
1G10 100 1M 10M 100M
04499-0-052
1.0
0.5
0
–0.5
–1.0
–1.5
–2.0
ERROR (°C)
–2.5
–3.0
–3.5
–4.0
TEMPERATURE (°C)
Figure 13. Internal Temperature Error vs. ADT7468 Temperature
1.0
0.5
0
–0.5
–1.0
–1.5
–2.0
ERROR (°C)
–2.5
–3.0
–3.5
–4.0
TEMPERATURE (°C)
Figure 14. Remote Temperature Error vs. ADT7468 Temperature
120–40 –20 0 20 40 60 80 100
04499-0-091
120–40 –20 0 20 40 60 80 100
04499-0-092
10
5
0
EXT ERROR, 100mV
–5
–10
TEMPERATURE ERROR (°C)
–15
–20
POWER SUPPLY NOISE FREQUENCY (kHz)
1G10 100 1M 10M 100M
Figure 12. Remote Temperature Error vs. Power Supply Noise Frequency
04499-0-053
Rev. 0 | Page 9 of 80
Page 10
ADT7468
PRODUCT DESCRIPTION
The ADT7468 is a complete thermal monitor and multiple fan
controller for any system requiring thermal monitoring and
cooling. The device communicates with the system via a serial
system management bus. The serial bus controller has a serial
data line for reading and writing addresses and data (Pin 1), and
an input line for the serial clock (Pin 2). All control and
programming functions for the ADT7468 are performed over
the serial bus. In addition, a pin can be reconfigured as an
SMBALERT
COMPARISON BETWEEN ADT7463 AND ADT7468
The ADT7468 is an upgrade to the ADT7463. The ADT7468
and ADT7463 are almost pin and register map compatible. The
ADT7468 and ADT7463 have the following differences:
1. On the ADT7468, the PWM drive signals can be config-
2. Once the V
3. The fans are switched off by default on power-up on the
4. Series resistance cancellation (SRC) is provided on the
output to signal out-of-limit conditions.
ured as either high frequency or low frequency drives. The
low frequency option is programmable between 10 Hz and
100 Hz. The high frequency option is 22.5 kHz. On the
ADT7463, only the low frequency option is available.
is powered up, monitoring of temperature
CC
and fan speeds is enabled on the ADT7468 when V
powered up, or if V
is never powered up, when the first
CCP
CCP
is
SMBus transaction with the ADT7468 is completed. On the
ADT7463, the STRT bit in Configuration Register 1 must
be set to enable monitoring.
ADT7468. On the ADT7463, the fans run at full speed on
power-up.
Fail-safe cooling is provided on the ADT7468 in that, if the
measured temperature exceeds the
THERM
limit (100°C),
the fans run at full speed.
Fail-safe cooling is also provided 4.6 s after V
is powered
CCP
up. See Figure 48. The fans go to full speed, if the ADT7468
has not been addressed via the SMBus within 4.6 s of when
the V
is powered up. This protects the system in the
CCP
event that the SMBus fails. The ADT7468 can be programmed at any time, either before or after the 4.6 s has
elapsed, and it behaves as programmed. If V
powered up, fail-safe cooling is effectively disabled. If V
is never
CCP
CCP
is disabled, writing to the ADT7468 at any time causes the
ADT7468 to operate normally.
remote temperature channels on the ADT7468, but not on
the ADT7463. SRC automatically cancels linear offset
introduced by a series resistance between the thermal
diode and the sensor.
5. The ADT7468 has an extended temperature measurement
range. The measurement range goes from–64°C to +191°C.
On the ADT7463, the measurement range is from −127°C
to +127°C. This means that the ADT7468 can measure
higher temperatures. The ADT7468 also includes the
ADT7463 temperature range; the temperature measurement range can be switched by setting Bit 0 of
Configuration Register 5.
6. The ADT7468 maximum fan speed (% duty cycle) in the
automatic fan speed control loop can be programmed. The
maximum fan speed is 100% duty cycle on the ADT7463
and is not programmable.
7. The offset register in the ADT7468 is programmable up to
±64°C with 0.50°C resolution. The offset register of the
ADT7463 is programmable up to ±32°C with 0.25°C
resolution.
8. V
is monitored on Pin 23 of the ADT7468 and can be
CCP
used to set the threshold for
). The threshold for
V
CCP
= 1.7 V and VIL = 0.8 V on the ADT7463.
V
IH
THERM
THERM (PROCHOT
PROCHOT
(
) (2/3 of
) is set at
9. On the ADT7463, Pin 22 can be reconfigured as SMBus
ALERT. This is not available on the ADT7468; instead,
SMBALERT
can be enabled on Pin 14.
10. A GPIO can also be made available on Pin 14 on the
ADT7468. This is not available on the ADT7463. Set the
GPIO polarity and direction in Configuration Register 5.
The GPIO status bit is Bit 5 of Status Register 2 (shared
with TACH4 and
THERM
, because only one can be
enabled at a time).
11. The ADT7463 has three possible SMBus addresses, which
are selectable using the address select and address enable
pins. The ADT7468 has one SMBus address available at
Address 0x2E.
Due to the inclusion of extra functionality, the register map has
changed, including an additional configuration register:
Configuration Register 5 at Address 0x7C.
Configuration Register 5
Bit 0: If Bit 0 is set to 1, the ADT7468 is backward compatible
temperature-wise with the ADT7463. Measurements, T
MIN
calibration circuit, fan control, etc., work in the range −127°C to
+127°C. Also, care should be taken in reprogramming the
temperature limits (T
, operating point,
MIN
THERM
limits) to
their desired twos complement value, because the power-on
default for them is at Offset 64. The extended temperature range
is −64°C to 191°C. The default is 1, which is in the −64°C to
+191°C temperature range.
Rev. 0 | Page 10 of 80
Page 11
ADT7468
Bit 1= 0 is the high frequency (22.5 kHz) fan drive signal.
Bit 1 = 1 switches the fan drive to low frequency PWM,
programmable between 10 Hz and 100 Hz, the same as the
ADT7463. The default = 0 = HF PWM.
Bit 2 sets the direction for the GPIO: 0 = input, 1 = output.
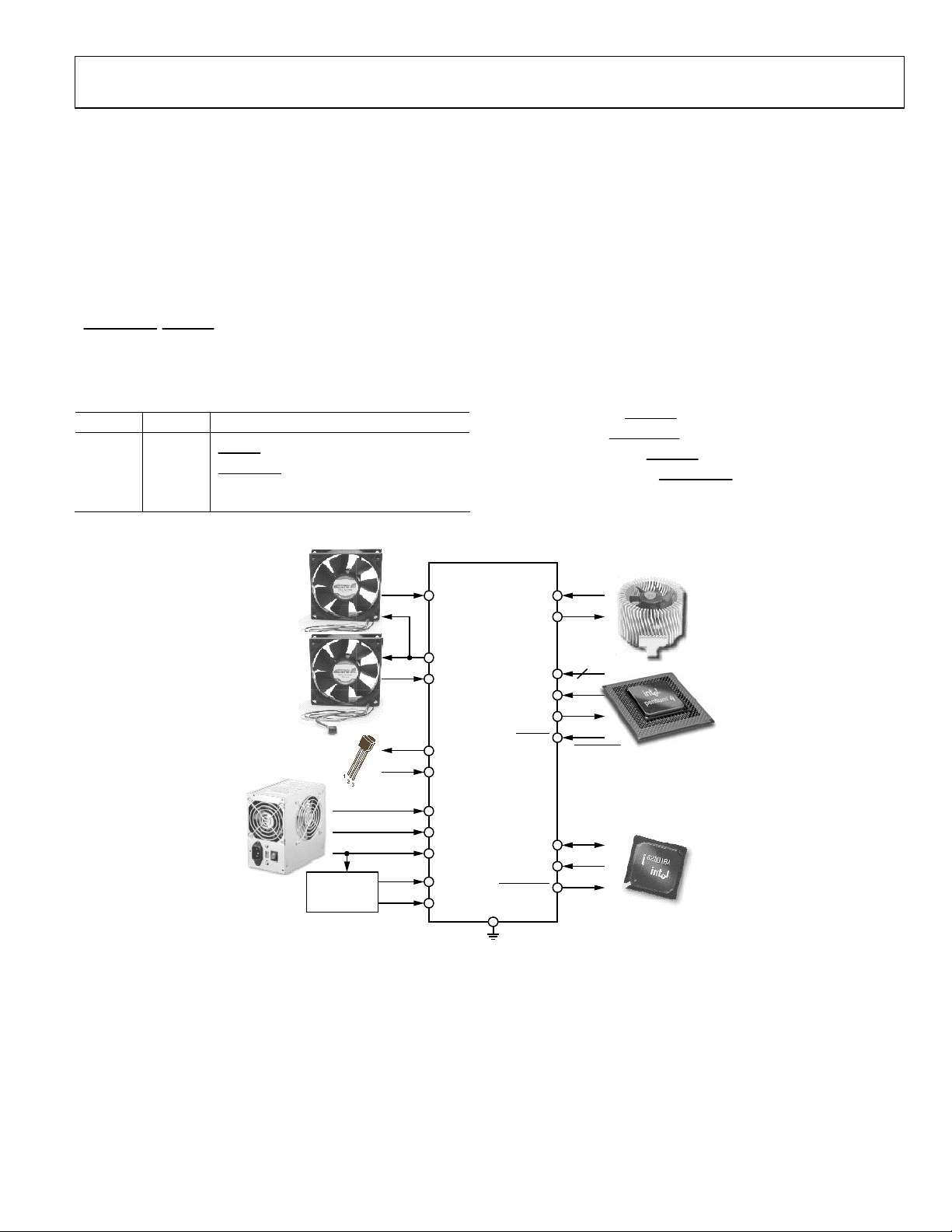
RECOMMENDED IMPLEMENTATION
Configuring the ADT7468 as in Figure 15 allows the system
designer to use the following features:
• Two PWM outputs for fan control of up to three fans (the
front and rear chassis fans are connected in parallel).
Bit 3 sets the GPIO polarity: 0 = active low, 1 = active high.
HOW TO SET THE FUNCTIONALITY OF PIN 14
Pin 14 on the ADT7468 has four possible functions:
SMBALERT
required functionality by setting Bit 0 and Bit 1 of Configuration Register 4 at Address 0x7D.
Table 4. Pin 14 Settings
Bit 0 Bit 1 Function
00 TACH4
01
10
11 GPIO
THERM
,
, GPIO, and TACH4. The user chooses the
THERM
SMBALERT
FRONT
CHASSIS
FAN
REAR
CHASSIS
FAN
AMBIENT
TEMPERATURE
TACH2
PWM3
TACH3
D1+
D1–
• Three TACH fan speed measurement inputs.
• V
• CPU temperature measured using Remote 1 temperature
• Ambient temperature measured through Remote 2
• Bidirectional
ADT7468
VID[0:4]/VID[0:5]
THERM
measured internally through Pin 3.
CC
channel.
temperature channel.
Pentium 4
overtemperature
programmed as an
PWM1
TACH1
5(VRM9)/6(VRM10)
D2+
D2–
PROCHOT
THERM
PROCHOT
THERM
SMBALERT
CPU FAN
CPU
pin. This feature allows Intel
monitoring and can function as an
output. It can alternatively be
system interrupt output.
3.3VSB
ADP316x
VRM
CONTROLLER
V
COMP
5V
12V/VID5
CURRENT
V
CORE
GND
SDA
SCL
SMBALERT
ICH
04499-0-004
Figure 15. ADT7468 Configuration
Rev. 0 | Page 11 of 80
Page 12
ADT7468
SERIAL BUS INTERFACE
On PCs and servers, control of the ADT7468 is carried out
using the serial system management bus (SMBus). The
ADT7468 is connected to this bus as a slave device, under the
control of a master controller, which is usually (but not
necessarily) the ICH.
The ADT7468 has a fixed 7-bit serial bus address of 0101110 or
0x2E. The read/write bit must be added to get the 8-bit address
(01011100 or 0x5C). Data is sent over the serial bus in
sequences of nine clock pulses: eight bits of data followed by an
acknowledge bit from the slave device. Transitions on the data
line must occur during the low period of the clock signal and
remain stable during the high period, because a low-to-high
transition when the clock is high might be interpreted as a stop
signal. The number of data bytes that can be transmitted over
the serial bus in a single read or write operation is limited only
by what the master and slave devices can handle.
When all data bytes have been read or written, stop conditions
are established. In write mode, the master pulls the data line
high during the tenth clock pulse to assert a stop condition. In
read mode, the master device overrides the acknowledge bit by
pulling the data line high during the low period before the
ninth clock pulse. This is known as No Acknowledge. The
master then takes the data line low during the low period before
the tenth clock pulse, and then high during the tenth clock
pulse to assert a stop condition.
Any number of bytes of data can be transferred over the serial
bus in one operation, but it is not possible to mix read and write
in one operation, because the type of operation is determined at
the beginning and cannot subsequently be changed without
starting a new operation.
In the ADT7468, write operations contain either one or two
bytes, and read operations contain one byte and perform the
following functions. To write data to one of the device data
registers or read data from it, the address pointer register must
be set so that the correct data register is addressed, then data
can be written into that register or read from it. The first byte of
a write operation always contains an address that is stored in the
address pointer register. If data is to be written to the device,
then the write operation contains a second data byte that is
written to the register selected by the address pointer register.
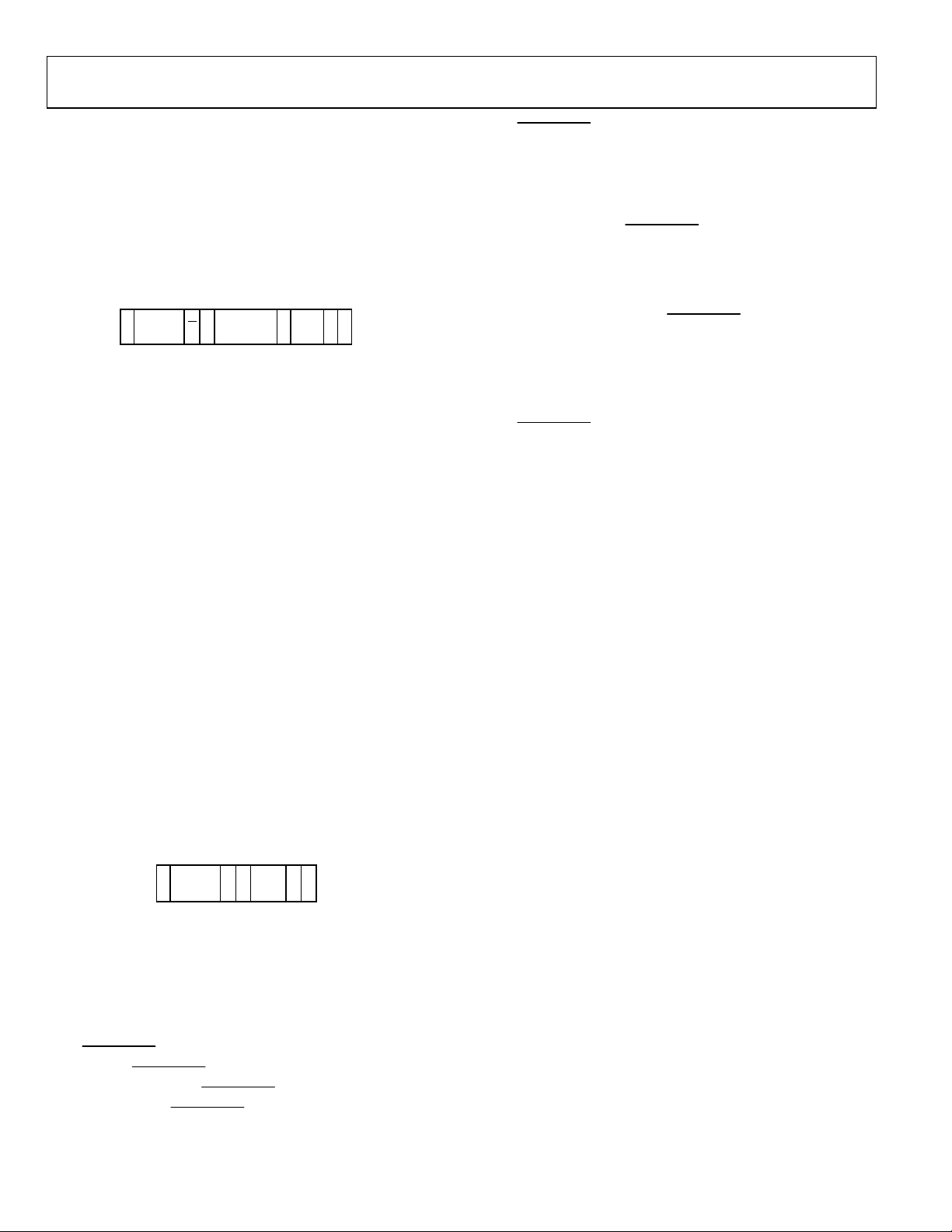
This write operation is illustrated in Figure 16. The device
W
address is sent over the bus, and then R/
is set to 0. This is
followed by two data bytes. The first data byte is the address of
the internal data register to be written to, which is stored in the
address pointer register. The second data byte is the data to be
written to the internal data register.
When reading data from a register, there are two possibilities:
• If the ADT7468’s address pointer register value is unknown
or not the desired value, it must first be set to the correct
value before data can be read from the desired data register.
This is done by performing a write to the ADT7468 as
before, but only the data byte containing the register
address is sent, because no data is written to the register.
This is shown in Figure 17.
A read operation is then performed consisting of the serial
W
bus address, R/
bit set to 1, followed by the data byte read
from the data register. This is shown in Figure 18.
• If the address pointer register is known to be already at the
desired address, data can be read from the corresponding
data register without first writing to the address pointer
register, as shown in Figure 18.
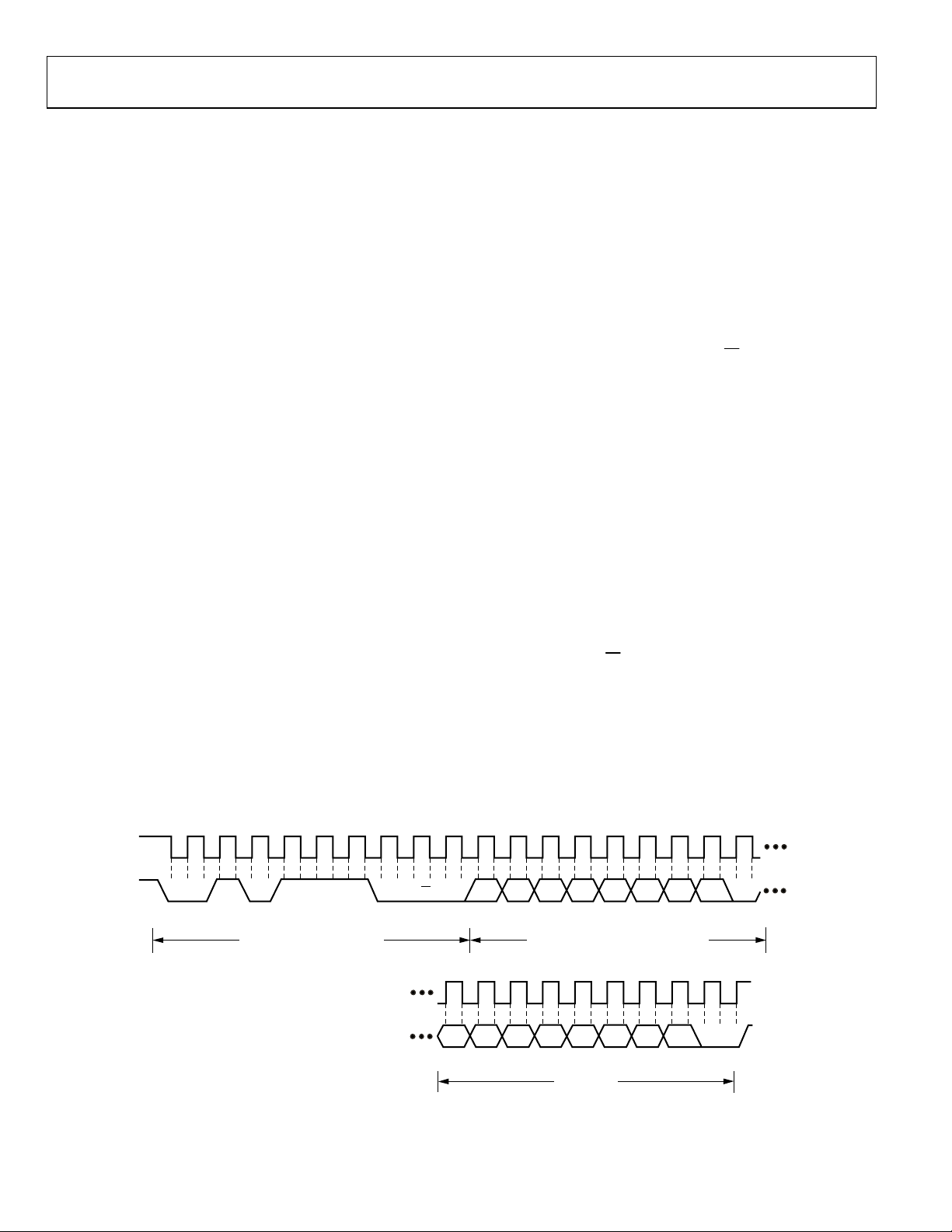
SCL
SDA
START BY
MASTER
19
0
1011
FRAME 1
SERIAL BUS ADDRESS BYTE
SCL (CONTINUED)
SDA (CONTINUED)
Figure 16. Writing a Register Address to the Address Pointer Register, then Writing Data to the Selected Register
0
1
R/W
ACK. BY
ADT7468
Rev. 0 | Page 12 of 80
1
D6
D7
1
D7
D5
D6
D4
D5
ADDRESS POINTER REGISTER BYTE
D4
D3
FRAME 3
DATA BYTE
D3
FRAME 2
D2
D2
D1
D0
9
D1
D0
ACK. BY
ADT7468
9
ACK. BY
ADT7468
STOP BY
MASTER
04499-0-005
Page 13
ADT7468
SDA
SCL
SDA
START BY
MASTER
1
0
1011
SERIAL BUS ADDRESS BYTE
FRAME 1
0
1
R/W
ACK. BY
ADT7468
Figure 17. Writing to the Address Pointer Register Only
1
SCL
0
START BY
MASTER
10
SERIAL BUS ADDRESS BYTE
1
FRAME 1
1
0
1
R/W
ACK. BY
ADT7468
Figure 18. Reading Data from a Previously Selected Register
It is possible to read a data byte from a data register without
first writing to the address pointer register, if the address
pointer register is already at the correct value. However, it is not
possible to write data to a register without writing to the address
pointer register, because the first data byte of a write is always
written to the address pointer register.
In addition to supporting the send byte and receive byte
protocols, the ADT7468 also supports the read byte protocol.
(see System Management Bus Specifications Rev. 2 for more
information. This document is available from Intel.)
If several read or write operations must be performed in
succession, the master can send a repeat start condition instead
of a stop condition to begin a new operation.
WRITE OPERATIONS
The SMBus specification defines several protocols for different
types of read and write operations. The ones used in the
ADT7468 are discussed below. The following abbreviations are
used in the diagrams:
S – START
P – STOP
R – READ
W – WRITE
A – ACKNOWLEDGE
A
– NO ACKNOWLEDGE
D0
9
ACK. BY
ADT7468
STOP BY
MASTER
19
D6
D7
D4
D5
ADDRESS POINTER REGISTER BYTE
D3
FRAME 2
D2
D1
19
D6
D7
D4
D5
DATA BYTE FROM ADT7468
D3
FRAME 2
D2
D1
9
D0
NO ACK. BY
MASTER
STOP BY
MASTER
2. The master sends the 7-bit slave address followed by the
write bit (low).
3. The addressed slave device asserts ACK on SDA.
4. The master sends a command code.
5. The slave asserts ACK on SDA.
6. The master asserts a stop condition on SDA and the
transaction ends.
For the ADT7468, the send byte protocol is used to write a
register address to RAM for a subsequent single byte read from
the same address. This operation is illustrated in Figure 19.
231564
SLAVE
ADDRESS
REGISTER
WASAP
ADDRESS
04499-0-008
Figure 19. Setting a Register Address for Subsequent Read
If the master is required to read data from the register
immediately after setting up the address, it can assert a repeat
start condition immediately after the final ACK and carry out a
single byte read without asserting an intermediate stop
condition.
Write Byte
In this operation, the master device sends a command byte and
one data byte to the slave device, as follows:
04499-0-006
04499-0-007
The ADT7468 uses the following SMBus write protocols.
Send Byte
In this operation, the master device sends a single command
byte to a slave device as follows:
1. The master device asserts a start condition on SDA.
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by the
write bit (low).
3. The addressed slave device asserts ACK on SDA.
4. The master sends a command code.
Rev. 0 | Page 13 of 80
Page 14
ADT7468
5. The slave asserts ACK on SDA.
SMBALERT
1.
is pulled low.
6. The master sends a data byte.
7. The slave asserts ACK on SDA.
8. The master asserts a stop condition on SDA to end the
transaction.
This operation is illustrated in Figure 20.
24653178
SLAVE
ADDRESS
Figure 20. Single Byte Write to a Register
SLAVE
ADDRESS
DATAAAWSAP
04499-0-009
READ OPERATIONS
The ADT7468 uses the following SMBus read protocols.
Receive Byte
This operation is useful when repeatedly reading a single
register. The register address must have been set up previously.
In this operation, the master device receives a single byte from a
slave device as follows:
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by the
read bit (high).
3. The addressed slave device asserts ACK on SDA.
4. The master receives a data byte.
5. The master asserts NO ACK on SDA.
6. The master asserts a stop condition on SDA and the
transaction ends.
In the ADT7468, the receive byte protocol is used to read a
single byte of data from a register whose address has previously
been set by a send byte or write byte operation. This operation
is illustrated in Figure 21.
213564
SLAVE
SRAAPDATA
ADDRESS
Figure 21. Single Byte Read from a Register
Alert Response Address
Alert response address (ARA) is a feature of SMBus devices that
allows an interrupting device to identify itself to the host when
multiple devices exist on the same bus.
SMBALERT
The
output or an
connected to a common
master. If a device’s
output can be used as either an interrupt
SMBALERT
. One or more outputs can be
SMBALERT
SMBALERT
line connected to the
line goes low, the following
procedure occurs:
04499-0-010
2. The master initiates a read operation and sends the alert
response address (ARA = 0001 100). This is a general call
address that must not be used as a specific device address.
3. The device whose
SMBALERT
output is low responds to
the alert response address, and the master reads its device
address. The address of the device is now known and can
be interrogated in the usual way.
4. If more than one device’s
SMBALERT
output is low, the
one with the lowest device address has priority in accordance with normal SMBus arbitration.
5. Once the ADT7468 has responded to the alert response
address, the master must read the status registers and the
SMBALERT
is cleared only if the error condition has gone
away.
SMBUS TIMEOUT
The ADT7468 includes an SMBus timeout feature. If there is no
SMBus activity for 35 ms, the ADT7468 assumes that the bus is
locked and releases the bus. This prevents the device from
locking or holding the SMBus expecting data. Some SMBus
controllers cannot handle the SMBus timeout feature, so it can
be disabled.
Configuration Register 1(Reg. 0x40)
<6> TODIS = 0, SMBus timeout enabled (default).
<6> TODIS = 1, SMBus timeout disabled.
VOLTAGE MEASUREMENT INPUT
The ADT7468 has four external voltage measurement channels.
It can also measure its own supply voltage, V
. Pins 20 to 23
CC
can measure 5 V, 12 V, and 2.5 V supplies, and the processor
core voltage V
measurement is carried out through the V
(0 V to 3 V input). The VCC supply voltage
CCP
pin (Pin 4). Setting
CC
Bit 7 of Configuration Register 1 (Reg. 0x40) allows a 5 V
supply to power the ADT7468 and be measured without
overranging the V
measurement channel. The 2.5 V input can
CC
be used to monitor a chipset supply voltage in computer
systems.
ANALOG-TO-DIGITAL CONVERTER
All analog inputs are multiplexed into the on-chip, successiveapproximation, analog-to-digital converter. This has a resolution of 10 bits. The basic input range is 0 V to 2.25 V, but the
inputs have built-in attenuators to allow measurement of 2.5 V,
3.3 V, 5 V, 12 V, and the processor core voltage V
external components. To allow for the tolerance of these supply
voltages, the ADC produces an output of 3/4 full scale (decimal
768 or 300 hex) for the nominal input voltage and so has
adequate headroom to cope with overvoltages.
without any
CCP
Rev. 0 | Page 14 of 80
Page 15
ADT7468
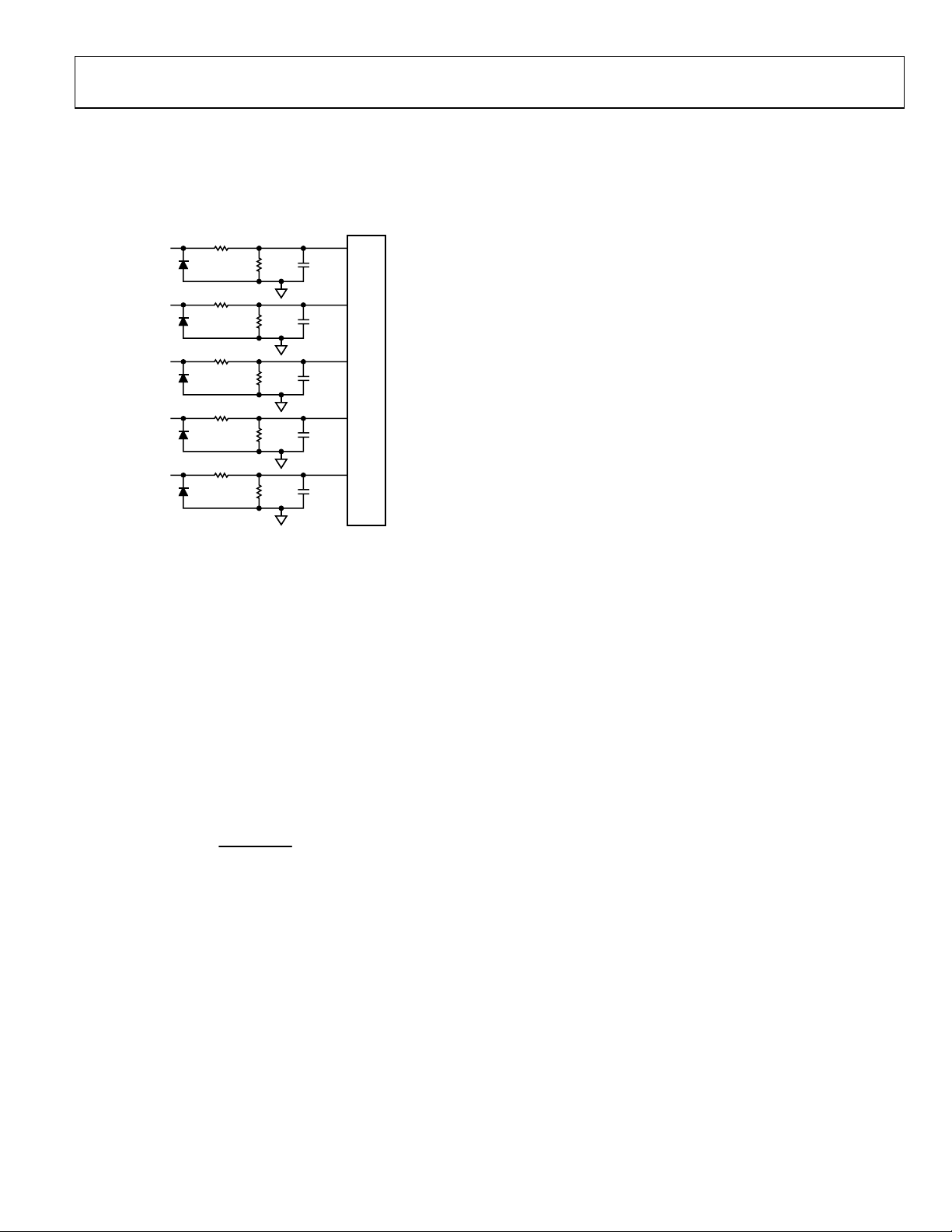
INPUT CIRCUITRY
The internal structure for the analog inputs is shown in
Figure 22. The input circuit consists of an input protection
diode, an attenuator, plus a capacitor to form a first-order lowpass filter that gives input immunity to high frequency noise.
12V
3.3V
2.5V
V
5V
CCP
120kΩ
IN
IN
IN
IN
Figure 22. Structure of Analog Inputs
20kΩ 30pF
93kΩ
47kΩ 30pF
68kΩ
71kΩ 30pF
45kΩ
94kΩ 30pF
17.5kΩ
52.5kΩ 35pF
MUX
04499-0-011
Reg. 0x4C, 12 V Low Limit = 0x00 default
Reg. 0x4D, 12 V High Limit = 0xFF default
Table 5 shows the input ranges of the analog inputs and output
codes of the 10-bit ADC.
When the ADC is running, it samples and converts a voltage
input in 0.7 ms and averages 16 conversions to reduce noise; a
measurement takes nominally 11 ms.
VID CODE MONITORING
The ADT7468 has five dedicated voltage ID (VID code)
inputs. These are digital inputs that can be read back through
the VID register (Reg. 0x43) to determine the processor voltage
required or being used in the system. Five VID code inputs
support VRM9.x solutions. In addition, Pin 21 (12 V input) can
be reconfigured as a sixth VID input to satisfy future VRM
requirements.
VID Code Register (Reg. 0x43)
<0> = VID0, reflects logic state of Pin 5.
<1> = VID1, reflects logic state of Pin 6.
<2> = VID2, reflects logic state of Pin 7.
VOLTAGE MEASUREMENT REGISTERS
Reg. 0x20, 2.5 V Reading = 0x00 default
Reg. 0x21, V
Reg. 0x22, V
Reading = 0x00 default
CCP
Reading = 0x00 default
CC
Reg. 0x23, 5 V Reading = 0x00 default
Reg. 0x24, 12 V Reading = 0x00 default
VOLTAGE LIMIT REGISTERS
Associated with each voltage measurement channel is a high
and low limit register. Exceeding the programmed high or low
limit causes the appropriate status bit to be set. Exceeding either
limit can also generate
SMBALERT
Reg. 0x44, 2.5 V Low Limit = 0x00 default
Reg. 0x45, 2.5 V High Limit = 0xFF default
Reg. 0x46, V
Reg. 0x47, V
Reg. 0x48, V
Reg. 0x49, V
Low Limit = 0x00 default
CCP
High Limit = 0xFF default
CCP
Low Limit = 0x00 default
CC
High Limit = 0xFF default
CC
Reg. 0x4A, 5 V Low Limit = 0x00 default
Reg. 0x4B, 5 V High Limit = 0xFF default
interrupts.
<3> = VID3, reflects logic state of Pin 8.
<4> = VID4, reflects logic state of Pin 19.
<5> = VID5, reconfigurable 12 V input. This bit reads 0 when
Pin 21 is configured as the 12 V input. This bit reflects the logic
state of Pin 21 when the pin is configured as VID5.
VID CODE INPUT THRESHOLD VOLTAGE
The switching threshold for the VID code inputs is approximately 1 V. To enable future compatibility, it is possible to
reduce the VID code input threshold to 0.6 V. Bit 6 (THLD) of
the VID register (Reg. 0x43) controls the VID input threshold
voltage.
VID CODE REGISTER (Reg. 0x43)
<6> THLD = 0, VID switching threshold = 1 V,
< 0.8 V, VIH > 1.7 V, V
V
OL
THLD = 1, VID switching threshold = 0.6 V,
< 0.4 V, VIH > 0.8 V, V
V
OL
Reconfiguring Pin 21 as VID5 Input
Pin 21 can be reconfigured as a sixth VID code input (VID5)
for VRM10 compatible systems. Because the pin is configured
as VID5, it is not possible to monitor a 12 V supply.
Bit 7 of the VID register (Reg. 0x43) determines the function of
Pin 21. System or BIOS software can read the state of Bit 7 to
determine whether the system is designed to monitor 12 V or is
monitoring a sixth VID input.
MAX
MAX
= 3.3 V
= 3.3 V
Rev. 0 | Page 15 of 80
Page 16
ADT7468
VID Code Register (Reg. 0x43)
<7> VIDSEL = 0, Pin 21 functions as a 12 V measurement
input. Software can read this bit to determine that there are five
VID inputs being monitored. Bit 5 of Register 0x43 (VID5)
always reads back 0. Bit 0 of Status Register 2 (Reg. 0x42)
reflects 12 V out-of-limit measurements.
VIDSEL = 1, Pin 21 functions as the sixth VID code input
(VID5). Software can read this bit to determine that there are
six VID inputs being monitored. Bit 5 of Register 0x43 reflects
the logic state of Pin 21. Bit 0 of Status Register 2 (Reg. 0x42)
reflects VID code changes.
VID CODE CHANGE DETECT FUNCTION
The ADT7468 has a VID code change detect function. When
Pin 21 is configured as the VID5 input, VID code changes can
be detected and reported back by the ADT7468. Bit 0 of Status
Register 2 (Reg. 0x42) is the 12 V/VC bit and denotes a VID
change when set. The VID code change bit is set when the logic
states on the VID inputs are different than they were 11 µs
previously. The change of VID code can be used to generate an
SMBALERT
interrupt. If an
required, Bit 0 of Interrupt Mask Register 2 (Reg. 0x75), when
set, prevents
SMBALERT
changes.
Status Register 2 (Reg. 0x42)
<0> 12V/VC = 0, if Pin 21 is configured as VID5, then Logic 0
denotes no change in VID code within the last 11 µs.
<0> 12V/VC = 1, if Pin 21 is configured as VID5, then Logic 1
means that a change has occurred on the VID code inputs
within the last 11 µs. An
function is enabled.
ADDITIONAL ADC FUNCTIONS FOR VOLTAGE MEASUREMENTS
A number of other functions are available on the ADT7468 to
offer the system designer increased flexibility.
Turn-Off Averaging
For each voltage measurement read from a value register,
16 readings have actually been made internally and the results
averaged before being placed into the value register. For
SMBALERT
interrupt is not
s from occurring on VID code
SMBALERT
is generated, if this
instances where faster conversions are needed, setting Bit 4 of
Configuration Register 2 (Reg. 0x73) turns averaging off. This
effectively gives a reading 16 times faster (0.7 ms), but the
reading may be noisier.
Bypass Voltage Input Attenuator
Setting Bit 5 of Configuration Register 2 (Reg. 0x73) removes
the attenuation circuitry from the 2.5 V, V
, VCC, 5 V, and 12 V
CCP
inputs. This allows the user to directly connect external sensors
or rescale the analog voltage measurement inputs for other
applications. The input range of the ADC without the
attenuators is 0 V to 2.25 V.
Single-Channel ADC Conversion
Setting Bit 6 of Configuration Register 2 (Reg. 0x73) places the
ADT7468 into single-channel ADC conversion mode. In this
mode, the ADT7468 can be made to read a single voltage
channel only. If the internal ADT7468 clock is used, the selected
input is read every 0.7 ms. The appropriate ADC channel is
selected by writing to Bits <7:5> of the TACH1 minimum high
byte register (0x55).
Bits <7:5> Reg. 0x55 Channel Selected
000 2.5 V
001 V
010 VCC
011 5 V
100 12 V
101 Remote 1 Temperature
110 Local Temperature
111 Remote 2 Temperature
CCP
Configuration Register 2 (Reg. 0x73)
<4> = 1, averaging off.
<5> = 1, bypass input attenuators.
<6> = 1, single-channel convert mode.
TACH1 Minimum High Byte (Reg. 0x55)
<7:5> Selects ADC channel for single-channel convert mode.
Rev. 0 | Page 16 of 80
Page 17
ADT7468
Table 5. 10-Bit A/D Output Code vs. VIN
Input Voltage A/D Output
12 VIN 5 VIN V
(3.3 VIN)
CC
<0.0156 <0.0065 <0.0042 <0.0032 <0.00293 0 00000000 00
0.0156–0.0312 0.0065–0.0130 0.0042–0.0085 0.0032–0.0065 0.0293–0.0058 1 00000000 01
0.0312–0.0469 0.0130–0.0195 0.0085–0.0128 0.0065–0.0097 0.0058–0.0087 2 00000000 10
0.0469–0.0625 0.0195–0.0260 0.0128–0.0171 0.0097–0.0130 0.0087–0.0117 3 00000000 11
0.0625–0.0781 0.0260–0.0325 0.0171–0.0214 0.0130–0.0162 0.0117–0.0146 4 00000001 00
0.0781–0.0937 0.0325–0.0390 0.0214–0.0257 0.0162–0.0195 0.0146–0.0175 5 00000001 01
0.0937–0.1093 0.0390–0.0455 0.0257–0.0300 0.0195–0.0227 0.0175–0.0205 6 00000001 10
0.1093–0.1250 0.0455–0.0521 0.0300–0.0343 0.0227–0.0260 0.0205–0.0234 7 00000001 11
0.1250–0.1406 0.0521–0.0586 0.0343–0.0386 0.0260–0.0292 0.0234–0.0263 8 00000010 00
•
•
•
4.0000–4.0156 1.6675–1.6740 1.1000–1.1042 0.8325–0.8357 0.7500–0.7529 256 (1/4 scale) 01000000 00
•
•
•
8.0000–8.0156 3.3300–3.3415 2.2000–2.2042 1.6650–1.6682 1.5000–1.5029 512 (1/2 scale) 10000000 00
•
•
•
12.0000–12.0156 5.0025–5.0090 3.3000–3.3042 2.4975–2.5007 2.2500–2.2529 768 (3/4 scale) 11000000 00
•
•
•
15.8281–15.8437 6.5983–6.6048 4.3527–4.3570 3.2942–3.2974 2.9677–2.9707 1013 11111101 01
15.8437–15.8593 6.6048–6.6113 4.3570–4.3613 3.2974–3.3007 2.9707–2.9736 1014 11111101 10
15.8593–15.8750 6.6113–6.6178 4.3613–4.3656 3.3007–3.3039 2.9736–2.9765 1015 11111101 11
15.8750–15.8906 6.6178–6.6244 4.3656–4.3699 3.3039–3.3072 2.9765–2.9794 1016 11111110 00
15.8906–15.9062 6.6244–6.6309 4.3699–4.3742 3.3072–3.3104 2.9794–2.9824 1017 11111110 01
15.9062–15.9218 6.6309–6.6374 4.3742–4.3785 3.3104–3.3137 2.9824–2.9853 1018 11111110 10
15.9218–15.9375 6.6374–6.4390 4.3785–4.3828 3.3137–3.3169 2.9853–2.9882 1019 11111110 11
15.9375–15.9531 6.6439–6.6504 4.3828–4.3871 3.3169–3.3202 2.9882–2.9912 1020 11111111 00
15.9531–15.9687 6.6504–6.6569 4.3871–4.3914 3.3202–3.3234 2.9912–2.9941 1021 11111111 01
15.9687–15.9843 6.6569–6.6634 4.3914–4.3957 3.3234–3.3267 2.9941–2.9970 1022 11111111 10
>15.9843 >6.6634 >4.3957 >3.3267 >2.9970 1023 11111111 11
1
The VCC output codes listed assume that VCC is 3.3 V. If VCC input is reconfigured for 5 V operation (by setting Bit 7 of Configuration Register 1), then the VCC output codes
are the same as for the 5 V
column.
IN
1
2.5 V
V
IN
Decimal Binary (10 Bits)
CCP
Rev. 0 | Page 17 of 80
Page 18
ADT7468
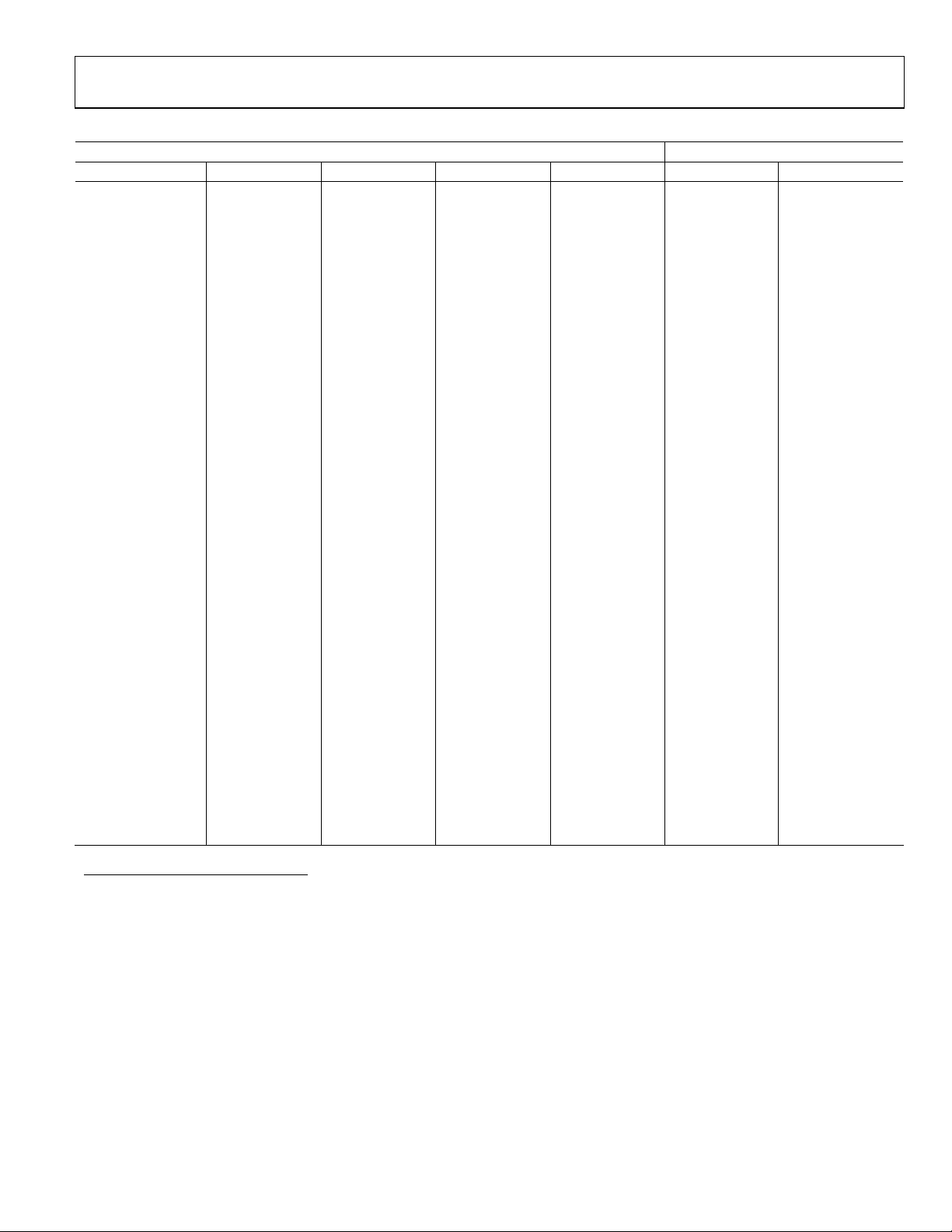
(
×=∆
TEMPERATURE MEASUREMENT METHOD
A simple method of measuring temperature is to exploit the
negative temperature coefficient of a diode, measuring the baseemitter voltage (V
current. Unfortunately, this technique requires calibration to
null out the effect of the absolute value of V
from device to device.
The technique used in the ADT7468 is to measure the change in
when the device is operated at three different currents.
V
BE
Previous devices have used only two operating currents, but the
use of a third current allows automatic cancellation of
resistances in series with the external temperature sensor.
Figure 24 shows the input signal conditioning used to measure
the output of an external temperature sensor. This figure shows
the external sensor as a substrate transistor, but it could equally
be a discrete transistor. If a discrete transistor is used, the
collector is not grounded and should be linked to the base. To
prevent ground noise from interfering with the measurement,
the more negative terminal of the sensor is not referenced to
ground, but is biased above ground by an internal diode at the
D− input. C1 can optionally be added as a noise filter
(recommended maximum value 1000 pF). However, a better
option in noisy environments is to add a filter, as described in
the Noise Filtering section.
Local Temperature Measurement
The ADT7468 contains an on-chip band gap temperature
sensor whose output is digitized by the on-chip 10-bit ADC.
The 8-bit MSB temperature data is stored in the local temperature register (Address 26h). Because both positive and negative
temperatures can be measured, the temperature data is stored in
Offset 64 format or twos complement format, as shown in
Table 6 and Table 7. Theoretically, the temperature sensor and
ADC can measure temperatures from −128°C to +127°C (or
−61°C to +191°C in the extended temperature range) with a
resolution of 0.25°C. However, this exceeds the operating
temperature range of the device, so local temperature
measurements outside the ADT7468 operating temperature
range are not possible.
Remote Temperature Measurement
The ADT7468 can measure the temperature of two remote
diode sensors or diode-connected transistors connected to Pins
17 and 18, or 15 and 16.
) of a transistor, operated at constant
BE
, which varies
BE
This is given by
)
NnqKTV
1/
BE
where:
K is Boltzmann’s constant.
q is the charge on the carrier.
T is the absolute temperature in Kelvin.
N is the ratio of the two currents.
Figure 23 shows the input signal conditioning used to measure
the output of a remote temperature sensor. This figure shows
the external sensor as a substrate transistor, provided for
temperature monitoring on some microprocessors. It could also
be a discrete transistor such as a 2N3904/2N3906.
V
N2 × IIN1× II
REMOTE
SENSING
TRANSISTOR
D+
D–
Figure 23. Signal Conditioning for Remote Diode Temperature Sensors
BIAS
fC = 65kHz
LPF
DD
V
OUT+
TO ADC
V
OUT–
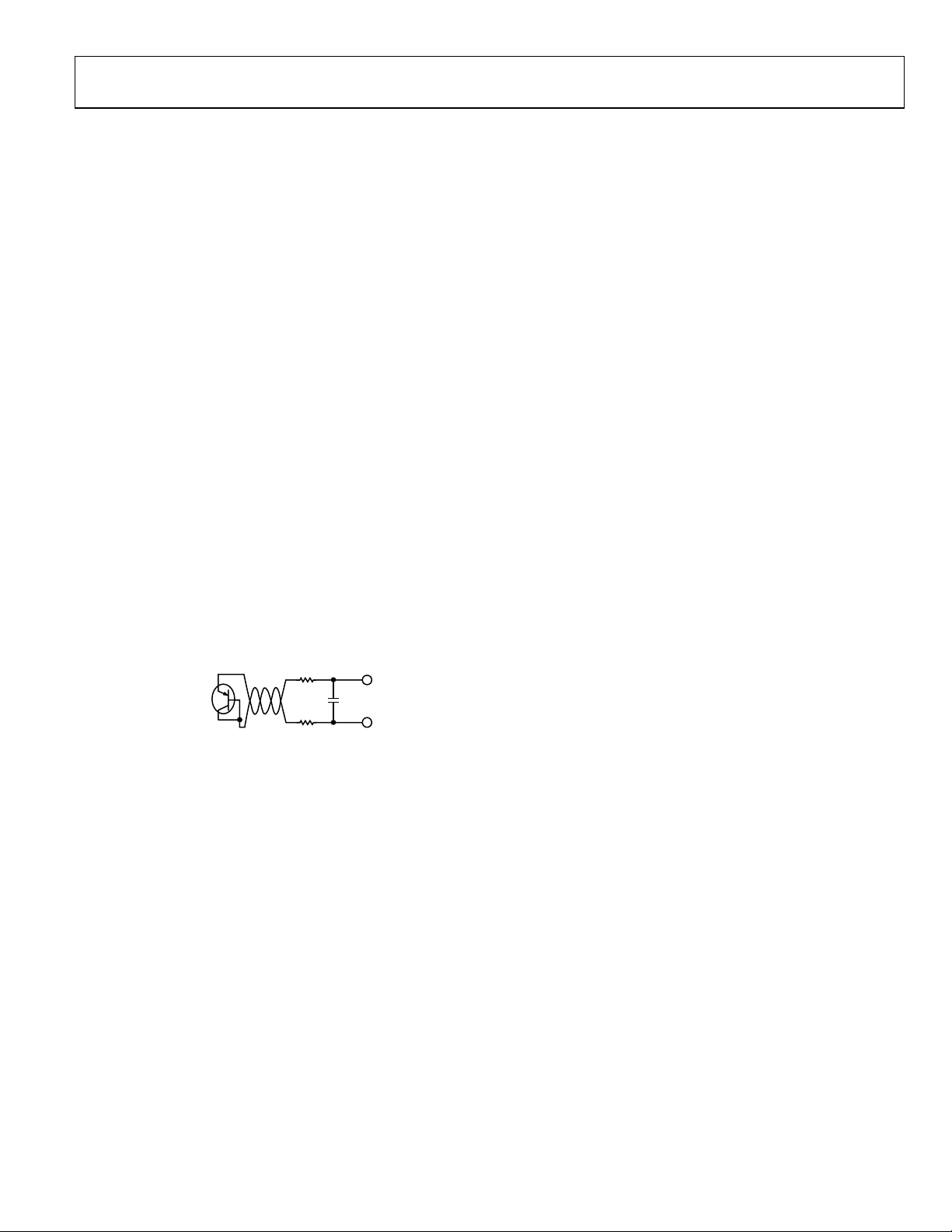
If a discrete transistor is used, the collector is not grounded and
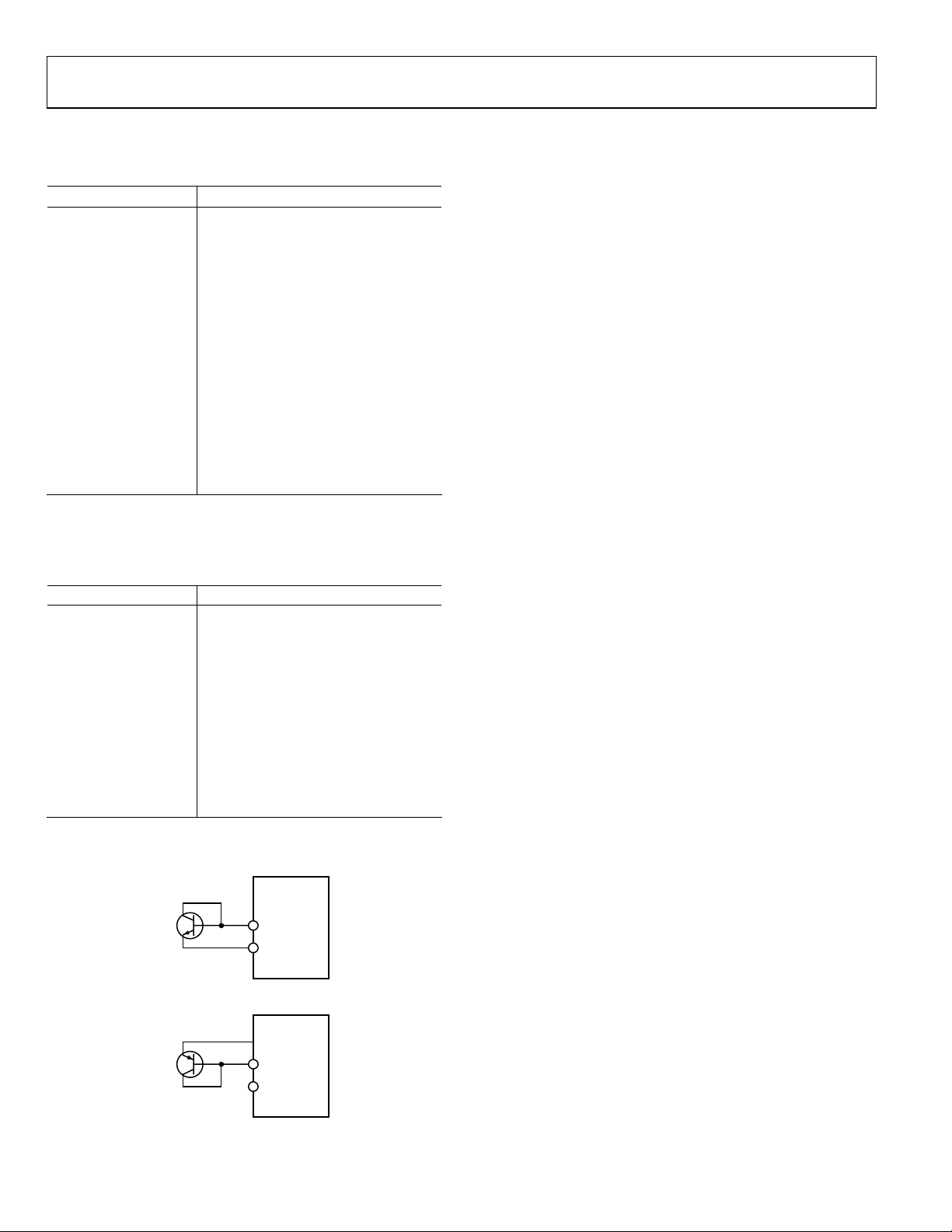
should be linked to the base. If a PNP transistor is used, the base
is connected to the D– input and the emitter to the D+ input. If
an NPN transistor is used, the emitter is connected to the D–
input and the base to the D+ input. Figure 25 and Figure 26
show how to connect the ADT7468 to an NPN or PNP
transistor for temperature measurement. To prevent ground
noise from interfering with the measurement, the more negative
terminal of the sensor is not referenced to ground, but is biased
above ground by an internal diode at the D– input.
To m e as u re ∆ V
, the operating current through the sensor is
BE
switched among three related currents. Shown in Figure 23,
N1 × I and N2 × I are different multiples of the current I. The
currents through the temperature diode are switched between
I and N1 × I, giving ∆V
giving ∆V
the two ∆V
. The temperature can then be calculated using
BE2
measurements. This method can also cancel the
BE
, and then between I and N2 × I,
BE1
effect of any series resistance on the temperature measurement.
04499-0-012
The forward voltage of a diode or diode-connected transistor
operated at a constant current exhibits a negative temperature
coefficient of about –2 mV/°C. Unfortunately, the absolute value
varies from device to device and individual calibration is
of V
BE
required to null this out, so the technique is unsuitable for mass
production. The technique used in the ADT7468 is to measure
the change in V
when the device is operated at three different
BE
The resulting ∆V
low-pass filter to remove noise and then to a chopper-stabilized
amplifier. This amplifies and rectifies the waveform to produce
a dc voltage proportional to ∆V
voltage, and a temperature measurement is produced. To reduce
the effects of noise, digital filtering is performed by averaging
the results of 16 measurement cycles.
waveforms are passed through a 65 kHz
BE
. The ADC digitizes this
BE
currents.
Rev. 0 | Page 18 of 80
Page 19
ADT7468
T
The results of remote temperature measurements are stored in
10-bit, twos complement format, as illustrated in Table 6. The
extra resolution for the temperature measurements is held in
the Extended Resolution Register 2 (Reg. 0x77). This gives
temperature readings with a resolution of 0.25°C.
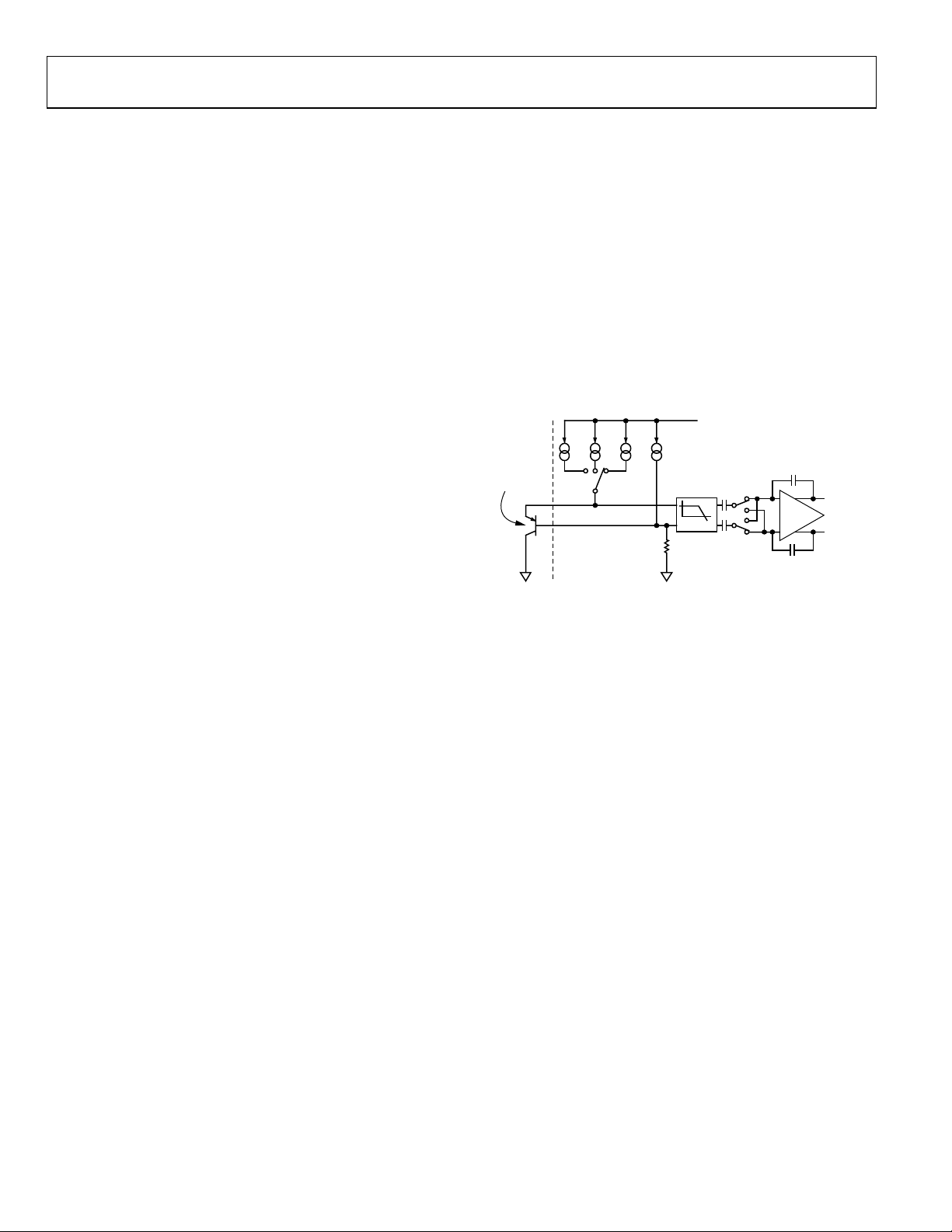
Noise Filtering
For temperature sensors operating in noisy environments,
previous practice was to place a capacitor across the D+ and D−
pins to help combat the effects of noise. However, large capacitances affect the accuracy of the temperature measurement,
leading to a recommended maximum capacitor value of 1000 pF.
This capacitor reduces the noise, but does not eliminate it, making
use the sensor difficult in a very noisy environment.
The ADT7468 has a major advantage over other devices for
eliminating the effects of noise on the external sensor. Using the
series resistance cancellation feature, a filter can be constructed
between the external temperature sensor and the part. The effect
of any filter resistance seen in series with the remote sensor is
automatically canceled from the temperature result.
The construction of a filter allows the ADT7468 and the remote
temperature sensor to operate in noisy environments. Figure 24
shows a low-pass R-C-R filter, with the following values :
R = 100 Ω, C = 1 nF.
This filtering reduces both common-mode noise and
differential noise.
100Ω
REMOTE
EMPERATURE
SENSOR
Figure 24. Filter Between Remote Sensor and ADT7468
100Ω
1nF
D+
D–
04499-0-093
SERIES RESISTANCE CANCELLATION
Parasitic resistance to the ADT7468 D+ and D− inputs (seen in
series with the remote diode) is caused by a variety of factors,
including PCB track resistance and track length. This series
resistance appears as a temperature offset in the remote sensor’s
temperature measurement. This error typically causes a 0.5°C
offset per Ω of parasitic resistance in series with the remote
diode.
The ADT7468 automatically cancels out the effect of this series
resistance on the temperature reading, giving a more accurate
result, without the need for user characterization of this
resistance. The ADT7468 is designed to automatically cancel,
typically, up to 3 kΩ of resistance. By using an advanced
temperature measurement method, this is transparent to the
user. This feature allows resistances to be added to the sensor
path to produce a filter, allowing the part to be used in noisy
environments. See the Noise Filtering section for details.
FACTORS AFFECTING DIODE ACCURACY
Remote Sensing Diode
The ADT7468 is designed to work with either substrate
transistors built into processors or with discrete transistors.
Substrate transistors are generally PNP types with the collector
connected to the substrate. Discrete types can be either PNP or
NPN transistors connected as a diode (base-shorted to the
collector). If an NPN transistor is used, the collector and base
are connected to D+ and the emitter to D−. If a PNP transistor
is used, the collector and base are connected to D− and the
emitter is connected to D+.
To reduce the error due to variations in both substrate and
discrete transistors, a number of factors should be taken into
consideration:
•
The ideality factor, n
deviation of the thermal diode from ideal behavior. The
ADT7468 is trimmed for an n
following equation to calculate the error introduced at a
temperature T (°C), when using a transistor whose n
not equal 1.008. See the processor data sheet for the n
values.
∆T = (n
− 1.008) × (273.15 K + T)
f
To factor this in, the user can write the ∆T value to the
offset register. The ADT7468 then automatically adds it to
or subtracts it from the temperature measurement.
Some CPU manufacturers specify the high and low current
•
levels of the substrate transistors. The high current level of
the ADT7468, I
is 6 µA. If the ADT7468 current levels do not match the
current levels specified by the CPU manufacturer, it might
be necessary to remove an offset. The CPUs data sheet
advises whether this offset needs to be removed and how to
calculate it. This offset can be programmed to the offset
register. It is important to note that, if more than one offset
must be considered, the algebraic sum of these offsets must
be programmed to the offset register.
If a discrete transistor is used with the ADT7468, the best
accuracy is obtained by choosing devices according to the
following criteria:
•
Base-emitter voltage greater than 0.25 V at 6 µA, at the
highest operating temperature.
•
Base-emitter voltage less than 0.95 V at 100 µA, at the
lowest operating temperature.
•
Base resistance less than 100 Ω.
•
Small variation in h
control of V
BE
, of the transistor is a measure of the
f
value of 1.008. Use the
f
, is 96 µA and the low level current, I
HIGH
(say 50 to 150) that indicates tight
FE
characteristics.
does
f
f
LOW
,
Rev. 0 | Page 19 of 80
Page 20
ADT7468
2
2
Transistors, such as 2N3904, 2N3906, or equivalents in SOT-23
packages, are suitable devices to use.
Table 6. Temperature Data Format
Temperature Digital Output (10-Bit)1
–128°C
–125°C
–100°C
–75°C
–50°C
–25°C
–10°C
0°C
10.25°C
25.5°C
50.75°C
75°C
100°C
125°C
127°C
1
Bold numbers denote 2 LSB of measurement in Extended Resolution
Register 2 (Reg. 0x77) with 0.25°C resolution.
Table 7. Extended Range, Temperature Data Format
Temperature Digital Output (10-Bit)1
–64°C
–1°C
0°C
1°C
10°C
25°C
50°C
75°C
100°C
125°C
191°C
1
Bold numbers denote 2 LSB of measurement in Extended Resolution
Register 2 (Reg. 0x77) with 0.25°C resolution.
1000 0000 00
1000 0011 00
1001 1100 00
1011 0101 00
1100 1110 00
1110 0111 00
1111 0110 00
0000 0000 00
0000 1010 01
0001 1001 10
0011 0010 11
0100 1011 00
0110 0100 00
0111 1101 00
0111 1111 00
0000 0000 00
0011 1111 00
0100 0000 00
0100 0001 00
0100 1010 00
0101 1001 00
0111 0010 00
1000 1001 00
1010 0100 00
1011 1101 00
1111 1111 00
ADT7468
Nulling Out Temperature Errors
As CPUs run faster, it is getting more difficult to avoid high
frequency clocks when routing the D+/D– traces around a
system board. Even when recommended layout guidelines are
followed, some temperature errors may still be attributable to
noise coupled onto the D+/D– lines. Constant high frequency
noise usually attenuates or increases temperature measurements
by a linear, constant value.
The ADT7468 has temperature offset registers at Addresses
0x70, 0x72 for the Remote 1 and Remote 2 temperature
channels. By doing a one-time calibration of the system, the
user can determine the offset caused by system board noise and
null it out using the offset registers. The offset registers
automatically add an Offset 64/twos complement 8-bit reading
to every temperature measurement. The LSBs add 0.5°C offset
to the temperature reading so the 8-bit register effectively allows
temperature offsets of up to ±64°C with a resolution of 0.5°C.
This ensures that the readings in the temperature measurement
registers are as accurate as possible.
Temperature Offset Registers
Reg. 0x70, Remote 1 Temperature Offset = 0x00 (0°C default)
Reg. 0x71,
Reg. 0x72,
Local Temperature Offset = 0x00 (0°C default)
Remote 2 Temperature Offset = 0x00 (0°C default)
ADT7463/ADT7468 Backwards Compatible Mode
By setting Bit 1 of Configuration Register 5 (0x7C), all temperature measurements are stored in the Zone Temp value registers
(0x25, 0x26, and 0x27) in twos complement in the range −64°C
to +127°C (the ADT7468 still makes calculations based on the
Offset 64 extended range and clamps the results, if necessary.)
The temperature limits must be reprogrammed in twos
complement. If a twos complement temperature below −63°C is
entered, the temperature is clamped to −63°C. In this mode, the
diode fault condition remains −128°C = 1000 0000, while in the
extended temperature range (−64°C to +191°C), the fault
condition is represented by −64°C = 0000 0000.
Temperature Measurement Registers
Reg. 0x25, Remote 1 Temperature
N3904
NPN
Figure 25. Measuring Temperature Using an NPN Transistor
D+
D–
ADT7468
04499-0-013
Reg. 0x26,
Reg. 0x27,
Reg. 0x77,
<7:6> TDM2, Remote 2 temperature LSBs.
Local Temperature
Remote 2 Temperature
Extended Resolution 2 = 0x00 default
<5:4> LTMP, local temperature LSBs.
N3906
PNP
Figure 26. Measuring Temperature Using a PNP Transistor
D+
D–
04499-0-014
Rev. 0 | Page 20 of 80
<3:2> TDM1, Remote 1 temperature LSBs.
Page 21
ADT7468
Temperature Measurement Limit Registers
Associated with each temperature measurement channel are
high and low limit registers. Exceeding the programmed high or
low limit causes the appropriate status bit to be set. Exceeding
either limit can also generate
Reg. 0x4E,
Reg. 0x4F,
Reg. 0x50,
Remote 1 Temperature Low Limit = 0x01 default
Remote 1 Temperature High Limit = 0x7F default
Local Temperature Low Limit = 0x01 default
SMBALERT
interrupts.
Reg. 0x51, Local Temperature High Limit = 0x7F default
Reg. 0x52,
Reg. 0x53,
Remote 2 Temperature Low Limit = 0x01 default
Remote 2 Temperature High Limit = 0x7F default
Reading Temperature from the ADT7468
It is important to note that temperature can be read from the
ADT7468 as an 8-bit value (with 1°C resolution) or as a 10-bit
value (with 0.25°C resolution). If only 1°C resolution is
required, the temperature readings can be read back at any
time and in no particular order.
Table 9. Conversion Time with Averaging Enabled
Channel Measurement Time
Voltage Channels 11 ms
Remote Temperature 39 ms
Local Temperature 12 ms
Single-Channel ADC Conversions
Setting Bit 6 of Configuration Register 2 (Reg. 0x73) places the
ADT7468 into single-channel ADC conversion mode. In this
mode, the ADT7468 can be made to read a single temperature
channel only. The appropriate ADC channel is selected by
writing to Bits <7:5> of the TACH1 minimum high byte register
(0x55).
Table 10. Channel Selection
Bits <7:5> Reg. 0x55 Channel Selected
101 Remote 1 temperature
110 Local temperature
111 Remote 2 temperature
Configuration Register 2 (Reg. 0x73)
<4> = 1,
averaging off.
If the 10-bit measurement is required, this involves a 2-register
read for each measurement. The extended resolution register
(Reg. 0x77) should be read first. This causes all temperature
reading registers to be frozen until all temperature reading
registers have been read from. This prevents an MSB reading
from being updated while its two LSBs are being read and
vice versa.
ADDITIONAL ADC FUNCTIONS FOR TEMPERATURE MEASUREMENT
A number of other functions are available on the ADT7468 to
offer the system designer increased flexibility.
Turn-Off Averaging
For each temperature measurement read from a value register,
16 readings have actually been made internally and the results
averaged before being placed into the value register. Sometimes
it is necessary to take a very fast measurement. Setting Bit 4 of
Configuration Register 2 (Reg. 0x73) turns averaging off.
<6> = 1, single-channel convert mode.
TACH1 Minimum High Byte (Reg. 0x55)
<7:5>
selects ADC channel for single-channel convert mode.
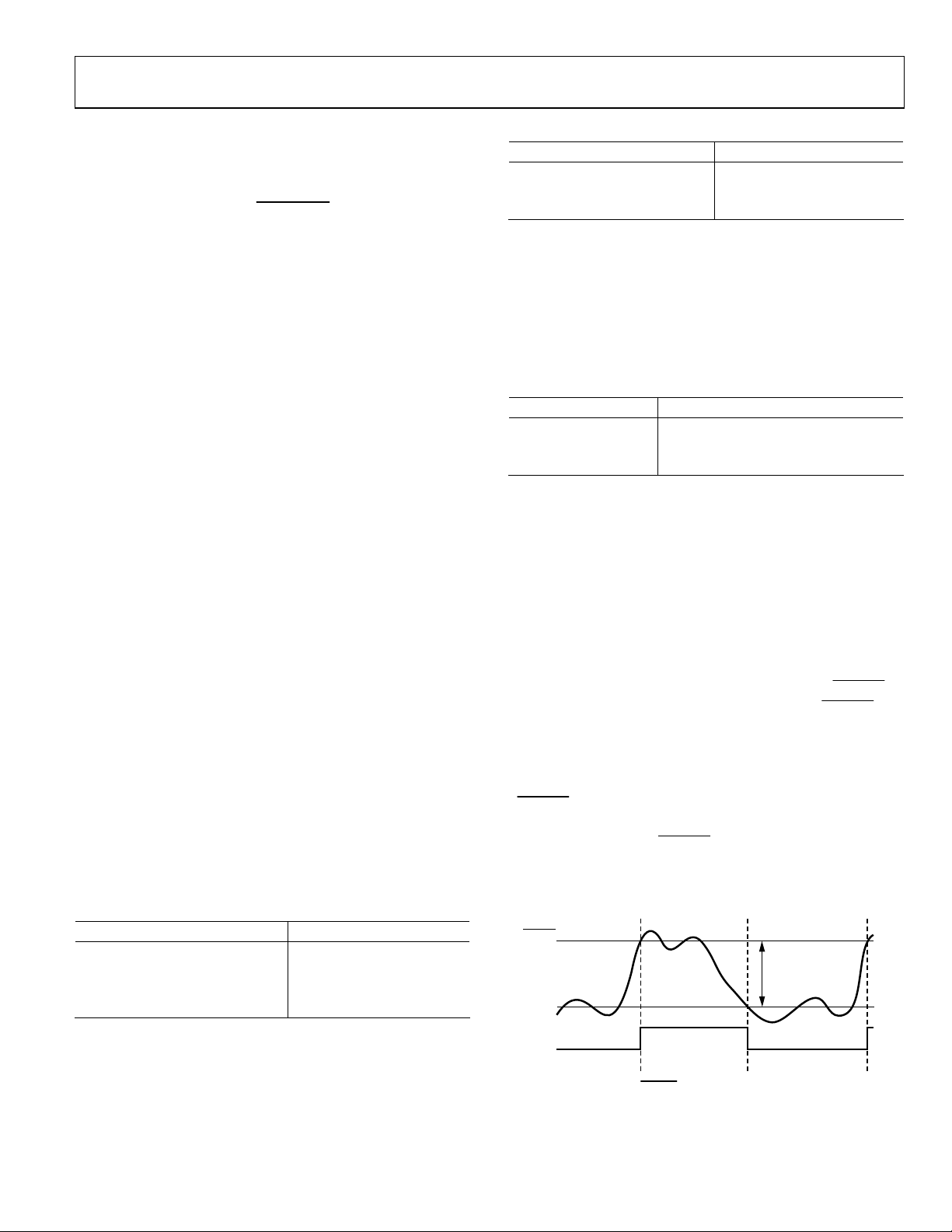
Overtemperature Events
Overtemperature events on any of the temperature channels can
be detected and dealt with automatically in automatic fan speed
control mode. Register 0x6A to Register 0x6C are the
temperature limits. When a temperature exceeds its
temperature limit, all PWM outputs run at the maximum PWM
duty cycle (Reg. 0x38, Reg. 0x39, and Reg. 0x3A). This
effectively runs the fans at the fastest allowed speed. The fans
stay running at this speed until the temperature drops below
THERM
boost bit in Configuration Register 3, Bit 2, Reg. 0x78.) The
hysteresis value for that
programmed into Reg. 0x6D and Reg. 0x6E (hysteresis
registers). The default hysteresis value is 4°C.
Table 8. Conversion Time with Averaging Disabled
Channel Measurement Time
Voltage Channels 0.7 ms
Remote Temperature 1 7 ms
Remote Temperature 2 7 ms
Local Temperature 1.3 ms
THERM LIMIT
TEMPERATURE
FANS
THERM
THERM
minus hysteresis. (This can be disabled by setting the
Figure 27.
THERM
THERM
temperature limit is the value
HYSTERESIS (°C)
100%
Temperature Limit Operation
04499-0-015
Rev. 0 | Page 21 of 80
Page 22
ADT7468
LIMITS, STATUS REGISTERS, AND INTERRUPTS
LIMIT VALUES
Associated with each measurement channel on the ADT7468
are high and low limits. These can form the basis of system
status monitoring; a status bit can be set for any out-of-limit
condition and detected by polling the device. Alternatively,
SMBALERT
microcontroller of out-of-limit conditions.
8-Bit Limits
The following is a list of 8-bit limits on the ADT7468.
Volt ag e Li mi t Re g is ter s
Reg. 0x44, 2.5 V Low Limit = 0x00 default
Reg. 0x45,
Reg. 0x46,
Reg. 0x47,
Reg. 0x48,
Reg. 0x49,
Reg. 0x4A,
Reg. 0x4B,
Reg. 0x4C,
Reg. 0x4D,
Reg. 0x46, V
Reg. 0x47,
Reg. 0x48,
interrupts can be generated to flag a processor or
2.5 V High Limit = 0xFF default
V
Low Limit = 0x00 default
CCP
V
High Limit = 0xFF default
CCP
VCC Low Limit = 0x00 default
VCC High Limit = 0xFF default
5 V Low Limit = 0x00 default
5 V High Limit = 0xFF default
12 V Low Limit = 0x00 default
12 V High Limit = 0xFF default
Low Limit = 0x00 default
CCP
V
High Limit = 0xFF default
CCP
VCC Low Limit = 0x00 default
THERM
Reg. 0x7A,
Limit Register
THERM
Limit = 0x00 default
16-Bit Limits
The fan TACH measurements are 16-bit results. The fan TACH
limits are also 16 bits, consisting of a high byte and low byte.
Because fans running under speed or stalled are normally the
only conditions of interest, only high limits exist for fan TACHs.
Because the fan TACH period is actually being measured,
exceeding the limit indicates a slow or stalled fan.
Fan Limit Registers
Reg. 0x54, TA C H1 M i ni m u m L ow B y te = 0x00 default
Reg. 0x55,
Reg. 0x56,
Reg. 0x57,
Reg. 0x58,
Reg. 0x59,
Reg. 0x5A,
Reg. 0x5B,
TAC H1 M ini m u m Hi g h B y te = 0x00 default
TAC H2 M ini m u m L ow B y te = 0x00 default
TAC H2 M ini m u m Hi g h B y te = 0x00 default
TAC H3 M ini m u m L ow B y te = 0x00 default
TAC H3 M ini m u m Hi g h B y te = 0x00 default
TAC H4 M ini m u m L ow B y te = 0x00 default
TAC H4 M ini m u m Hi g h B y te = 0x00 default
Out-of-Limit Comparisons
Once all limits have been programmed, the ADT7468 can be
enabled for monitoring. The ADT7468 measures all voltage and
temperature measurements in round-robin format and sets the
appropriate status bit for out-of-limit conditions. TACH
measurements are not part of this round-robin cycle. Comparisons are done differently depending on whether the measured
value is being compared to a high or low limit.
Reg. 0x49,
VCC High Limit = 0xFF default
Temperature Limit Registers
Reg. 0x4E, Remote 1 Temperature Low Limit = 0x01 default
Reg. 0x4F,
Reg. 0x6A,
Reg. 0x50,
Reg. 0x51,
Reg. 0x6B, Local
Reg. 0x52,
Reg. 0x53,
Reg. 0x6C,
Remote 1 Temperature High Limit = 0x7F default
Remote 1
THERM
Limit = 0x64 default
Local Temperature Low Limit = 0x01 default
Local Temperature High Limit = 0x7F default
THERM
Limit = 0x64 default
Remote 2 Temperature Low Limit = 0x01 default
Remote 2 Temperature High Limit = 0x7F default
Remote 2
THERM
Limit = 0x64 default
High Limit: > Comparison Performed
Low Limit: ≤ Comparison Performed
Voltage and temperature channels use a window comparator for
error detecting and, therefore, have high and low limits. Fan
speed measurements use only a low limit. This fan limit is
needed only in manual fan control mode.
Analog Monitoring Cycle Time
The analog monitoring cycle begins when a 1 is written to the
start bit (Bit 0) of Configuration Register 1 (Reg. 0x40). By
default, the ADT7463 powers up with this bit set. The ADC
measures each analog input in turn and, as each measurement is
completed, the result is automatically stored in the appropriate
value register. This round-robin monitoring cycle continues
unless disabled by writing a 0 to Bit 0 of Configuration
Register 1.
Rev. 0 | Page 22 of 80
Page 23

ADT7468
As the ADC is normally left to free-run in this manner, the time
taken to monitor all the analog inputs is normally not of
interest, because the most recently measured value of any input
can be read out at any time.
For applications where the monitoring cycle time is important,
it can easily be calculated.
The total number of channels measured is
•
Four dedicated supply voltage inputs
Supply voltage (V
•
•
Local temperature
Two remote temperatures
•
CC
pin)
As mentioned previously, the ADC performs round-robin
conversions and takes 11 ms for each voltage measurement,
12 ms for a local temperature reading, and 39 ms for each
remote temperature reading. The total monitoring cycle time
for averaged voltage and temperature monitoring is, therefore,
nominally
Status Register 1 (Reg. 0x41)
Bit 7 (OOL) = 1
, denotes a bit in Status Register 2 is set and
Status Register 2 should be read.
Bit 6 (R2T) = 1, Remote 2 temperature high or low limit has
been exceeded.
Bit 5 (LT) = 1, local temperature high or low limit has been
exceeded.
Bit 4 (R1T) = 1, Remote 1 temperature high or low limit has
been exceeded.
Bit 3 (5 V) = 1, 5 V high or low limit has been exceeded.
Bit 2 (V
Bit 1 (V
) = 1, V
CC
) = 1, V
CCP
high or low limit has been exceeded.
CC
high or low limit has been exceeded.
CCP
Bit 0 (2.5 V) = 1, 2.5 V high or low limit has been exceeded.
Status Register 2 (Reg. 0x42)
Bit 7 (D2) = 1
, indicates an open or short on D2+/D2– inputs.
Bit 6 (D1) = 1, indicates an open or short on D1+/D1– inputs.
(5 × 11) + 12 + (2 × 39) = 145 ms
Fan TACH measurements are made in parallel and are not
synchronized with the analog measurements in any way.
STATUS REGISTERS
The results of limit comparisons are stored in Status Registers 1
and 2. The status register bit for each channel reflects the status
of the last measurement and limit comparison on that channel.
If a measurement is within limits, the corresponding status
register bit is cleared to 0. If the measurement is out-of-limits,
the corresponding status register bit is set to 1.
The state of the various measurement channels can be polled by
reading the status registers over the serial bus. In Bit 7 (OOL) of
Status Register 1 (Reg. 0x41), 1 means that an out-of-limit event
has been flagged in Status Register 2. This means that the user
also needs to read Status Register 2. Alternatively, Pin 10 or Pin
14 can be configured as an
interrupt automatically notifies the system supervisor of an outof-limit condition. Reading the status registers clears the
appropriate status bit as long as the error condition that caused
the interrupt has cleared. Status register bits are “sticky.”
Whenever a status bit is set, indicating an out-of-limit
condition, it remains set even if the event that caused it has
gone away (until read). The only way to clear the status bit is to
read the status register after the event has gone away. Interrupt
status mask registers (Reg. 0x74, and Reg. 0x75) allow individual
interrupt sources to be masked from causing an
However, if one of these masked interrupt sources goes out-oflimit, its associated status bit is set in the interrupt status
registers.
SMBALERT
output. This hard
SMBALERT
.
Bit 5 (F4P) = 1, indicates Fan 4 has dropped below minimum
speed. Alternatively, indicates that the
exceeded, if the
THERM
function is used.
THERM
limit has been
Bit 4 (FAN3) = 1, indicates Fan 3 has dropped below minimum
speed.
Bit 3 (FAN2) = 1, indicates Fan 2 has dropped below minimum
speed.
Bit 2 (FAN1) = 1, indicates Fan 1 has dropped below minimum
speed.
Bit 1 (OVT) = 1, indicates a
THERM
overtemperature limit has
been exceeded.
Bit 0 (12V/VC) = 1, indicates a 12 V high or low limit has been
exceeded. If the VID code change function is used, this bit
indicates a change in VID code on the VID0 to VID5 inputs.
SMBALERT
The ADT7468 can be polled for status, or an
Interrupt Behavior
SMBALERT
interrupt can be generated for out-of-limit conditions. It is
important to note how the
SMBALERT
output and status bits
behave when writing interrupt handler software.
Rev. 0 | Page 23 of 80
Page 24
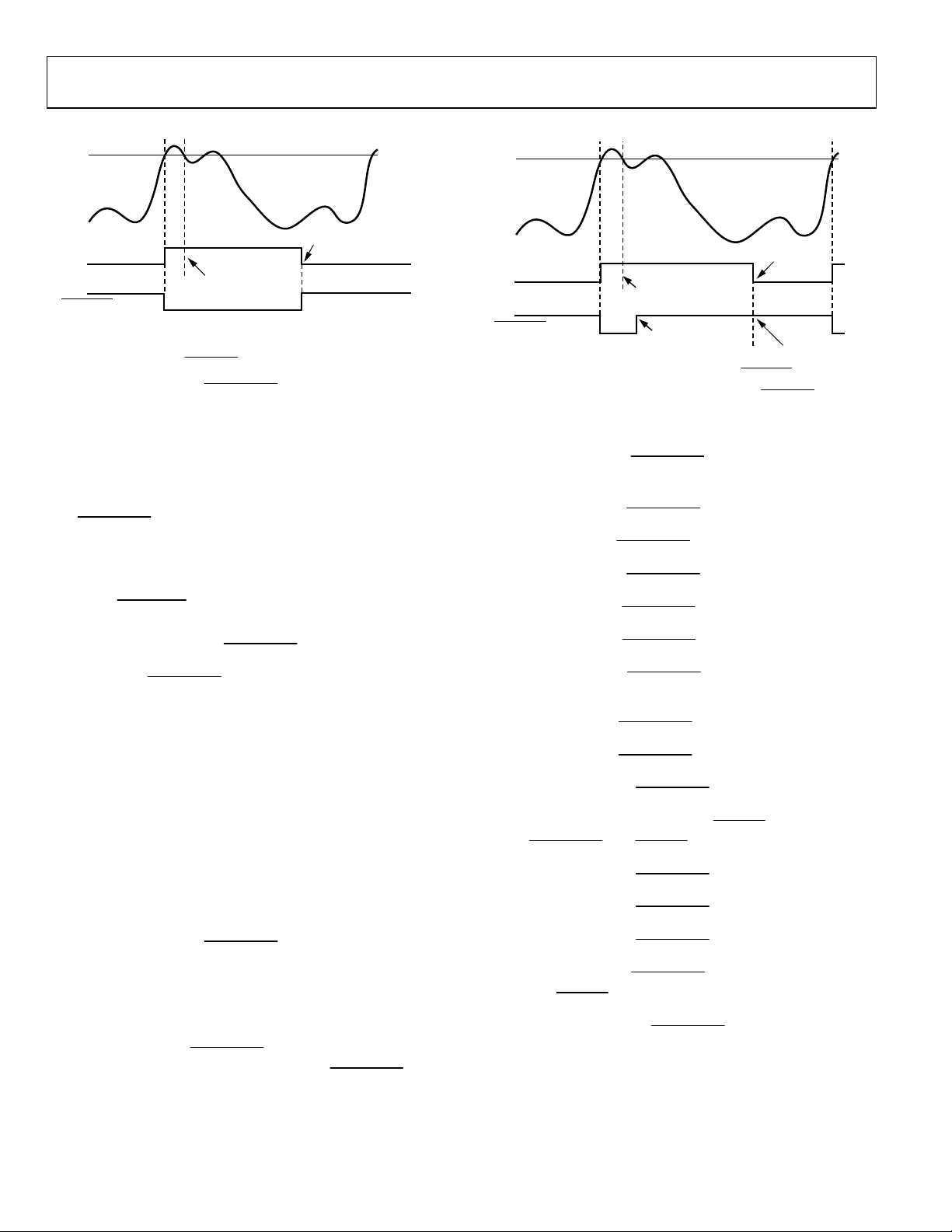
ADT7468
T
HIGH LIMIT
TEMPERATURE
CLEARED ON READ
“STICKY”
STATUS BI
TEMP BACK IN LIMIT
SMBALERT
Figure 28.
(STATUS BIT STAYS SET)
SMBALERT
Figure 28 shows how the
and Status Bit Behavior
SMBALERT
(TEMP BELOW LIMIT)
output and “sticky” status
bits behave. Once a limit is exceeded, the corresponding status
bit is set to 1. The status bit remains set until the error condition
subsides and the status register is read. The status bits are
referred to as “sticky,” because they remain set until read by
software. This ensures that an out-of-limit event cannot be
missed, if software is polling the device periodically. Note that
SMBALERT
the
output remains low for the entire duration that
a reading is out-of-limit and until the status register has been
read. This has implications on how software handles the
interrupt.
Handling
SMBALERT
Interrupts
To prevent the system from being tied up servicing interrupts, it
is recommend to handle the
SMBALERT
interrupt as follows:
04499-0-022
HIGH LIMIT
TEMPERATURE
“STICKY”
STATUS BIT
SMBALERT
Figure 29. How Masking the Interrupt Source Affects
TEMP BACK IN LIMIT
(STATUS BIT STAYS SET)
INTERRUPT
MASK BIT SET
Interrupt Mask Register 1 (Reg. 0x74)
Bit 7 (OOL) = 1
, masks
SMBALERT
for any alert condition
flagged in Status Register 2.
Bit 6 (R2T) = 1, masks
Bit 5 (LT) = 1, masks
Bit 4 (R1T) = 1, masks
Bit 3 (5 V) = 1, masks
Bit 2 (VCC) = 1, masks
SMBALERT
SMBALERT
SMBALERT
SMBALERT
SMBALERT
for Remote 2 temperature.
for local temperature.
for Remote 1 temperature.
for 5 V channel.
for VCC channel.
CLEARED ON READ
(TEMP BELOW LIMIT)
INTERRUPT MASK BIT
CLEARED
(SMBALERT REARMED)
SMBALERT
Output
04499-0-023
Detect the
1.
2.
Enter the interrupt handler.
3.
Read the status registers to identify the interrupt source.
4.
Mask the interrupt source by setting the appropriate mask
SMBALERT
assertion.
bit in the interrupt mask registers (Reg. 0x74 and
Reg. 0x75).
5.
Take the appropriate action for a given interrupt source.
6.
Exit the interrupt handler.
7.
Periodically poll the status registers. If the interrupt status
bit has cleared, reset the corresponding interrupt mask bit
to 0. This causes the
SMBALERT
output and status bits to
behave as shown in Figure 29.
Masking Interrupt Sources
Interrupt Mask Registers 1 and 2 are located at Addresses 0x74
and 0x75. These allow individual interrupt sources to be
masked out to prevent
masking an interrupt source prevents only the
SMBALERT
interrupts. Note that
SMBALERT
output from being asserted; the appropriate status bit is set
normally.
Bit 0 (V
) = 1, masks
CCP
SMBALERT
for V
channel.
CCP
Interrupt Mask Register 2 (Reg. 0x75)
Bit 7 (D2) = 1
Bit 6 (D1) = 1, masks
Bit 5 (FAN4) = 1, masks
If the TACH4 pin is being used as the
SMBALERT
masks
Bit 4 (FAN3) = 1, masks
Bit 3 (FAN2) = 1, masks
Bit 2 (FAN1) = 1, masks
Bit 1 (OVT) = 1, masks
(exceeding
THERM
Bit 0 (12V/VC) = 1, masks
SMBALERT
, masks
SMBALERT
SMBALERT
THERM
for a
SMBALERT
SMBALERT
SMBALERT
SMBALERT
temperature limits).
SMBALERT
for Diode 2 errors.
for Diode 1 errors.
for Fan 4 failure.
THERM
input, this bit
event.
for Fan 3.
for Fan 2.
for Fan 1.
for overtemperature
for 12 V channel or for
a VID code change, depending on the function used.
Rev. 0 | Page 24 of 80
Page 25

ADT7468
Enabling the
SMBALERT
The
Pin 10 or Pin 14 can be reconfigured as an
SMBALERT
Interrupt Output
interrupt function is disabled by default.
SMBALERT
output
to signal out-of-limit conditions.
Table 11. Configuring Pin 10 as
Register Bit Setting
Configuration Register 3
(Reg. 0x78)
SMBALERT
<0> Pin 10 = ALERT
<1> Pin 10 = PWM2
Output
THERM
Assigning
Functionality to a Pin
Pin 14 on the ADT7468 has four possible functions:
SMBALERT
THERM
,
, GPIO, and TACH4. The user chooses the
required functionality by setting Bit 0 and Bit 1 of Configuration Register 4 at Address 0x7D.
THERM
If
is enabled (Bit 1, Configuration Register 3 at
Address 0x78):
•
Pin 20 becomes
•
If Pin 14 is configured as
Configuration Register 4 at Address 0x7D), then
THERM
.
THERM
(Bit 0 and Bit 1 of
THERM
is enabled on this pin.
THERM
If
•
Pin 20 becomes a 5 V measurement input.
•
If Pin 14 is configured as
is not enabled:
THERM
, then
THERM
is
disabled on this Pin.
Table 12. Configuring Pin 14
Bit 0 Bit 1 Function
0 0 TACH4
0 1
1 0
1 1 GPIO
THERM
SMBALERT
THERM
as an Input
THERM
When
assertions on the
ing to the
is configured as an input, the user can time
THERM
PROCHOT
pin. This can be useful for connect-
output of a CPU to gauge system
performance.
below T
then pulling the
Figure 30 for more information.
T
MIN
THERM
THERM ASSERTED TO LOW AS AN INPUT:
FANS DO NOT GO TO 100%, BECAUSE
TEMPERATURE IS BELOW T
THERM TIMER
The ADT7468 has an internal timer to measure
assertion time. For example, the
connected to the
measure system performance. The
connected to the output of a trip point temperature sensor.
The timer is started on the assertion of the ADT7468’s
input and stopped when
counts
counting on the next
continues to accumulate
timer is read (it is cleared on read) or until it reaches full scale.
If the counter reaches full scale, it stops at that reading until
cleared.
The 8-bit
that Bit 0 is set to 1 on the first
cumulative
of the
the timer with a resolution of 22.76 ms (see Figure 31).
or if the duty cycle in manual mode is set to 0x00,
MIN
THERM
Figure 30. Asserting
in Automatic Fan Speed Control Mode
low externally has no effect. See
MIN
THERM ASSERTED TO LOW AS AN INPUT:
FANS DO NOT GO TO 100%, BECAUSE
TEMPERATURE IS ABOVE T
ARE ALREADY RUNNING
THERM
Low as an Input
MIN
THERM
THERM
THERM
THERM
THERM
THERM
PROCHOT
output of a Pentium 4 CPU to
THERM
times cumulatively, that is, the timer resumes
THERM
assertion. The
THERM
timer register (Reg. 0x79) is designed such
THERM
assertion time has exceeded 45.52 ms, Bit 1
timer is set and Bit 0 now becomes the LSB of
input can be
THERM
input can also be
is unasserted. The timer
THERM
assertion times until the
assertion. Once the
AND FANS
THERM
timer
04499-0-024
The user can also set up the ADT7468 so that, when the
THERM
fans run at 100% for the duration of the time that the
pin is driven low externally, the fans run at 100%. The
THERM
pin is pulled low. This is done by setting the BOOST bit (Bit 2)
in Configuration Register 3 (Address = 0x78) to 1. This works
only if the fan is already running, for example, in manual mode
when the current duty cycle is above 0x00, or in automatic
mode when the temperature is above T
. If the temperature is
MIN
Rev. 0 | Page 25 of 80
When using the
THERM
After a
1.
The contents of the timer are cleared on read.
2.
The F4P bit (Bit 5) of Status Register 2 needs to be cleared
(assuming that the
THERM
timer, be aware of the following.
timer read (Reg. 0x79):
THERM
timer limit has been
exceeded).
Page 26

ADT7468
THERM
If the
timer is read during a
the following happens:
1.
The contents of the timer are cleared.
Bit 0 of the
2.
THERM
timer is set to 1 (because a
assertion is occurring).
THERM
The
3.
If the
4.
timer increments from zero.
THERM
timer limit (Reg. 0x7A) = 0x00, then the
F4P bit is set.
Generating
The ADT7468 can generate
THERM
ble
SMBALERT
Interrupts from
SMBALERT
timer limit has been exceeded. This allows the
system designer to ignore brief, infrequent
while capturing longer
the
THERM
timer limit register. This 8-bit register allows a
limit from 0 s (first
before an
SMBALERT
THERM
THERM
assertion) to 5.825 s to be set
is generated. The
compared with the contents of the
If the
THERM
timer value exceeds the
value, then the F4P bit (Bit 5) of Status Register 2 is set and an
SMBALERT
is generated. Note that the F4P bit (Bit 5) of Mask
Register 2 (Reg. 0x75) masks out
to 1; although the F4P bit of Interrupt Status Register 2 still is
set, if the
THERM
timer limit is exceeded.
THERM
assertion, then
THERM
THERM
Timer Events
s when a programma-
THERM
assertions,
timer events. Register 0x7A is
THERM
THERM
THERM
SMBALERT
timer value is
timer limit register.
timer limit
s, if this bit is set
THERM
THERM
TIMER
(REG. 0x79)
THERM
THERM
TIMER
(REG. 0x79)
THERM
THERM
TIMER
(REG. 0x79)
000 00010
765 32104
ACCUMULATE THERM LOW
ASSERTION TIMES
000 00100
765 32104
ACCUMULATE THERM LOW
ASSERTION TIMES
000 01010
765 32104
Figure 31.Understanding the
THERM ASSERTED
≤ 22.76ms
THERM ASSERTED
≥ 45.52ms
THERM ASSERTED ≥ 113.8ms
(91.04ms + 22.76ms)
THERM
Timer
04499-0-025
Figure 32 is a functional block diagram of the
THERM
timer,
limit, and associated circuitry. Writing a value of 0x00 to the
THERM
be generated on the first
timer limit register (Reg. 0x7A) causes
THERM
limit value of 0x01 generates an
THERM
assertions exceed 45.52 ms.
assertion. A
SMBALERT
SMBALERT
THERM
timer
, once cumulative
to
2.914s
1.457s
728.32ms
THERM LIMIT
(REG. 0x7A)
364.16ms
182.08ms
91.04ms
45.52ms
22.76ms
0
7654321
COMPARATOR
7654321
IN
CLEARED
ON READ
Figure 32. Functional Block Diagram of
OUT
LATCH
RESET
1 = MASK
MASK REGISTER 2
THERM
2.914s
1.457s
728.32ms
364.16ms
182.08ms
91.04ms
45.52ms
22.76ms
0
THERM TIMER CLEARED ON READ
F4P BIT (BIT 5)
STATUS REGISTER 2
F4P BIT (BIT 5)
(REG. 0x75)
THERM TIMER
Monitoring Circuitry
(REG. 0x79)
THERM
SMBALERT
04499-0-026
Rev. 0 | Page 26 of 80
Page 27

ADT7468
Configuring the Relevant
1. Configure the desired pin as the
Setting Bit 1 (
THERM
Register 3 (Reg. 0x78) enables the
THERM
Behavior
THERM
timer input.
timer enable) of Configuration
THERM
timer
monitoring functionality. This is disabled on Pins 14 and
20 by default.
Setting Bits 0 and 1 (PIN14FUNC) of Configuration
Register 4 (Reg. 0x7D) enables
THERM
timer output
functionality on Pin 20 (Bit 1 of Configuration Register 3,
THERM
, must also be set). Pin 14 can also be used as
TACH4.
Select the desired fan behavior for
2.
THERM
timer events.
Assuming that the fans are running, setting Bit 2 (BOOST
bit) of Configuration Register 3 (Reg. 0x78) causes all fans
to run at 100% duty cycle whenever
THERM
is asserted.
This allows fail-safe system cooling. If this bit is 0, the fans
run at their current settings and are not affected by
THERM
THERM
Select whether
3.
SMBALERT
events. If the fans are not already running when
is asserted, the fans do not run to full speed.
THERM
timer events should generate
interrupts.
Bit 5 (F4P) of Mask Register 2 (Reg. 0x75), when set, masks
SMBALERT
out
s when the
exceeded. This bit should be cleared, if
THERM
on
Select a suitable
4.
events are required.
THERM
This value determines whether an
on the first
THERM
causes an
THERM
assertion time limit is exceeded. A value of 0x00
SMBALERT
THERM
timer limit value is
SMBALERT
limit value.
SMBALERT
is generated
assertion, or only if a cumulative
to be generated on the first
assertion.
s based
THERM
can be calculated for a fixed
example, if it takes one week for a
2.914 s to be exceeded and the next time it takes only 1
hour, then this is an indication of a serious degradation in
system performance.
Configuring the
THERM
Pin as an Output
In addition to monitoring
can optionally drive
PROCHOT
is bidirectional,
processor by asserting
THERM
PROCHOT
system-critical thermal limits. If the temperature exceeds a
thermal limit by 0.25°C,
THERM
is still above the thermal limit on the next monitoring cycle,
THERM
stays low.
THERM
temperature is equal to or below the thermal limit. Because the
temperature for that channel is measured only once for every
monitoring cycle, after
THERM
remain low for at least one monitoring cycle.
The
THERM
pin can be configured to assert low, if the
Remote 1, local, or Remote 2
exceeded by 0.25°C. The
THERM
are at Registers 0x6A, 0x6B, and 0x6C, respectively. Setting Bit 3
of Registers 0x5F, 0x60, and 0x61 enables the
feature for the Remote 1, local, and Remote 2 temperature
channels, respectively. Figure 33 shows how the
asserts low as an output in the event of a critical
overtemperature.
THERM LIMIT
+0.25°C
THERM LIMIT
TEMP
THERM
THERM
THERM
timer limit time. For
THERM
timer limit of
as an input, the ADT7468
low as an output. In cases where
THERM
can be used to throttle the
. The user can preprogram
asserts low. If the temperature
remains asserted low until the
asserts it is guaranteed to
THERM
temperature limits are
temperature limit registers
THERM
output
THERM
pin
Select a
5.
THERM
monitoring time.
This value specifies how often OS or BIOS level software
checks the
THERM
the
THERM
tive
THERM
assertion time is <22.76 ms in Hour 1, >182.08 ms
THERM
timer. For example, BIOS could read
timer once an hour to determine the cumula-
assertion time. If, for example, the total
in Hour 2, and >5.825 s in Hour 3, this can indicate that
system performance is degrading significantly, because
THERM
is asserting more frequently on an hourly basis.
Alternatively, OS or BIOS level software can timestamp
when the system is powered on. If an SMBALERT is
generated due to the
THERM
timer limit being exceeded,
another timestamp can be taken. The difference in time
Figure 33. Asserting
An alternative method of disabling
THERM
or −128°C or less in twos complement mode; that is, for
THERM
respectively,
Rev. 0 | Page 27 of 80
ADT7468
MONITORING
CYCLE
THERM
as an Output, Based on Tripping
THERM
THERM
Limits
is to program the
temperature limit to –64°C or less in Offset 64 mode,
temperature limit values less than –63°C or –128°C,
THERM
is disabled.
04499-0-027
Page 28

ADT7468
FAN DRIVE USING PWM CONTROL
The ADT7468 uses pulse-width modulation (PWM) to control
fan speed. This relies on varying the duty cycle (or on/off ratio)
of a square wave applied to the fan to vary the fan speed. The
external circuitry required to drive a fan using PWM control is
extremely simple. For 4-wire fans, the PWM drive might need
only a pull-up resistor. In many cases, the 4-wire fan PWM
input has a built-in pull-up resistor.
The ADT7468 PWM frequency can be set to a selection of low
frequencies or a single high PWM frequency. The low frequency
options are usually used for 2-wire and 3-wire fans, while the
high frequency option is usually used with 4-wire fans.
For 2-wire or 3-wire fans, a single N-channel MOSFET is the
only drive device required. The specifications of the MOSFET
depend on the maximum current required by the fan being
driven and the input capacitance of the FET. Because a 10 kΩ
(or greater) resistor must be used as a PWM pull-up, an FET
with large input capacitance can cause the PWM output to
become distorted and adversely affect the fan control range.
This is a requirement only when using high frequency PWM
mode.
Figure 34 uses a 10 kΩ pull-up resistor for the TACH signal.
This assumes that the TACH signal is an open-collector from
the fan. In all cases, the TACH signal from the fan must be kept
below 5 V maximum to prevent damaging the ADT7468. If in
doubt as to whether the fan used has an open-collector or
totem-pole TACH output, use one of the input signal
conditioning circuits shown in the Fan Speed Measurement
section.
Figure 35 shows a fan drive circuit using an NPN transistor
such as a general-purpose MMBT2222. While these devices are
inexpensive, they tend to have much lower current handling
capabilities and higher on resistance than MOSFETs. When
choosing a transistor, care should be taken to ensure that it
meets the fan’s current requirements. Ensure that the base
resistor is chosen such that the transistor is saturated when the
fan is powered on.
Because 4-wire fans are powered continuously, the fan speed is
not switched on or off as with previous PWM driven/powered
fans. This enables it to perform better than 3-wire fans,
especially for high frequency applications.
12V 12V
Typical notebook fans draw a nominal 170 mA, and so SOT
devices can be used where board space is a concern. In desktops,
fans can typically draw 250 mA to 300 mA each. If you drive
several fans in parallel from a single PWM output or drive
larger server fans, the MOSFET must handle the higher current
requirements. The only other stipulation is that the MOSFET
should have a gate voltage drive, V
interfacing to the PWM_OUT pin. V
< 3.3 V, for direct
GS
can be greater than
GS
3.3 V as long as the pull-up on the gate is tied to 5 V. The
MOSFET should also have a low on resistance to ensure that
there is not significant voltage drop across the FET, which
would reduce the voltage applied across the fan and, therefore,
the maximum operating speed of the fan.
Figure 34 shows how to drive a 3-wire fan using PWM control.
12V 12V
10kΩ
TACH/AIN
10kΩ
4.7kΩ
3.3V
ADT7468
10kΩ
PWM
Figure 34. Driving a 3-Wire Fan Using an N-Channel MOSFET
12V
FAN
Q1
NDT3055L
1N4148
04499-0-028
10kΩ
TACH
10kΩ
4.7kΩ
TACH
3.3V
12V
FAN
1N4148
ADT7468
665Ω
PWM
Q1
MMBT2222
Figure 35. Driving a 3-Wire Fan Using an NPN Transistor
Figure 36 shows a typical drive circuit for 4-wire fans.
12V
12V
TACH/AIN
ADT7468
PWM
10kΩ
10kΩ
4.7kΩ
3.3V
2kΩ
Figure 36. Driving a 4-Wire Fan
TACH
12V, 4-WIRE FAN
V
CC
TACH
PWM
04499-0-029
04499-0-041
Rev. 0 | Page 28 of 80
Page 29

ADT7468
Driving Two Fans from PWM3
The ADT7468 has four TACH inputs available for fan speed
measurement, but only three PWM drive outputs. If a fourth fan
is being used in the system, it should be driven from the PWM3
output in parallel with the third fan. Figure 37 shows how to
drive two fans in parallel using low cost NPN transistors.
Figure 38 shows the equivalent circuit using a MOSFET.
Because the MOSFET can handle up to 3.5 A, it is simply a
matter of connecting another fan directly in parallel with the
first. Care should be taken in designing drive circuits with
transistors and FETs to ensure that the PWM pins are not
required to source current and that they sink less than the
5 mA maximum current specified on the data sheet.
Driving up to Three Fans from PWM3
TACH measurements for fans are synchronized to particular
PWM channels; for example, TACH1 is synchronized to
PWM1. TACH3 and TACH4 are both synchronized to PWM3,
so PWM3 can drive two fans. Alternatively, PWM3 can be programmed t o s y nchronize TACH2 , TAC H3, and TACH 4 t o the
PWM3 output. This allows PWM3 to drive two or three fans. In
this case, the drive circuitry looks the same, as shown in
Figure 37 and Figure 38. The SYNC bit in Register 0x62 enables
this function.
Synchronization is not required in high frequency mode when
used with 4-wire fans.
<4> (SYNC) Enhance Acoustics Register 1 (Reg. 0x62)
SYNC = 1
, sy n c h r o n i zes TACH2, TAC H 3 , and TACH4 t o
PWM3.
12V
PWM3
3.3V 3.3V
1kΩ
2.2kΩ
TACH3 TACH4
Q2
MMBT2222
MMBT2222
1N4148
Q3
Q1
MMBT3904
10Ω
10Ω
04499-0-030
ADT7468
Figure 37. Interfacing Two Fans in Parallel to the PWM3 Output Using Low Cost NPN Transistors
3.3V
10kΩ
TYPICAL
TACH4
ADT7468
TACH3
PWM3
3.3V
10kΩ
TYPICAL
3.3V
10kΩ
TYPICAL
+V +V
5V OR
TACH TACH
12V FAN
Q1
NDT3055L
1N4148
5V OR
12V FAN
04499-0-031
Figure 38. Interfacing Two Fans in Parallel to the PWM3 Output Using a Single N-Channel MOSFET
Rev. 0 | Page 29 of 80
Page 30

ADT7468
Driving 2-Wire Fans
The ADT7468 can support 2-wire fans only when low frequency PWM mode is selected in Configuration Register 5,
Bit 2. If this bit is not set to 1, the ADT7468 cannot measure the
speed of 2-wire fans.
Figure 39 shows how a 2-wire fan can be connected to the
ADT7468. This circuit allows the speed of a 2-wire fan to be
measured, even though the fan has no dedicated TACH signal.
A series resistor, R
commutation pulses into a voltage, which is ac-coupled into the
ADT7468 through the 0.01 µF capacitor. On-chip signal
conditioning allows accurate monitoring of fan speed. The
value of R
chosen depends upon the programmed input
SENSE
threshold and the current drawn by the fan. For fans drawing
approximately 200 mA, a 2 Ω R
threshold is programmed as 40 mV.
ADT7468
TACH
Figure 40 shows a typical plot of the sensing waveform at the
TACH/AIN pin.
, in the fan circuit converts the fan
SENSE
value is suitable when the
SENSE
+V
3.3V
PWM
10kΩ
TYPICAL
0.01µF
5V OR
12V FAN
Figure 39. Driving a 2-Wire Fan
Q1
NDT3055L
R
SENSE
2Ω
TYPICAL
1N4148
04499-0-032
For fans that draw more current, such as larger desktop or
server fans, R
can be reduced for the same programmed
SENSE
threshold. The smaller the threshold programmed the better,
because more voltage is developed across the fan and the fan
spins faster. Note that when the voltage spikes (either negative
going or positive going) are more than 40 mV in amplitude, the
fan speed can be reliably determined.
LAYING OUT 2-WIRE AND 3-WIRE FANS
Figure 41 shows how to lay out a common circuit arrangement
for 2-wire and 3-wire fans. Some components are not populated,
depending on whether a 2-wire or 3-wire fan is used.
12V OR 5V
R1
R2
C1
TACH
R3 R4
Figure 41. Planning for 2-Wire or 3-Wire Fans on a PCB
TACH Inputs
Pins 9, 11, 12, and 14 (when configured as TACH inputs) are
open-drain TACH inputs intended for fan speed measurement.
Signal conditioning in the ADT7468 accommodates the slow
rise and fall times typical of fan tachometer outputs. The
maximum input signal range is 0 V to 5 V, even when V
than 5 V. In the event that these inputs are supplied from fan
outputs that exceed 0 V to 5 V, either resistive attenuation of the
fan signal or diode clamping must be included to keep inputs
within an acceptable range.
1N4148
3.3V OR 5V
R5
Q1
MMBT2222
PWM
FOR 3-WIRE FANS:
POPULATE R1, R2, R3
R4 = 0W
C1 = UNPOPULATED
FOR 2-WIRE FANS:
POPULATE R4, C1
R1, R2, R3 UNPOPULATED
04499-0-042
is less
CC
Figure 40. Fan Speed Sensing Waveform at TACH/AIN Pin
Figure 42 to Figure 45 show circuits for most common fan
TAC H ou t p u t s .
If the fan TACH output has a resistive pull-up to V
connected directly to the fan input, as shown in Figure 42.
04499-0-033
Rev. 0 | Page 30 of 80
12V
PULL-UP
4.7kΩ
TYPICAL
TACH
OUTPUT
TACH
Figure 42. Fan with TACH Pull-Up to V
V
CC
FAN SPEED
COUNTER
ADT7468
CC
, it can be
CC
04499-0-034
Page 31

ADT7468
C
K
If the fan output has a resistive pull-up to 12 V (or other voltage
greater than 5 V) then the fan output can be clamped with a
Zener diode, as shown in Figure 43. The Zener diode voltage
should be chosen so that it is greater than V
of the TACH
IH
input but less than 5 V, allowing for the voltage tolerance of the
Zener. A value of between 3 V and 5 V is suitable.
12V
PULL-UP
4.7kΩ
TYPICAL
*CHOOSE ZD1 VOLTAGE APPROXIMATELY 0.8× V
TACH
OUTPUT
TACH
ZD1*
Figure 43. Fan with TACH Pull-Up to Voltage > 5 V, for example, 12 V)
Clamped with Zener Diode
V
CC
FAN SPEED
COUNTER
ADT7468
CC
If the fan has a strong pull-up (less than 1 kΩ) to 12 V or a
totem-pole output, then a series resistor can be added to limit
the Zener current, as shown in Figure 44.
5V OR 12V
FAN
V
CC
04499-0-035
Fan Speed Measurement
The fan counter does not count the fan TACH output pulses
directly, because the fan speed could be less than 1,000 RPM
and it would take several seconds to accumulate a reasonably
large and accurate count. Instead, the period of the fan
revolution is measured by gating an on-chip 90 kHz oscillator
into the input of a 16-bit counter for N periods of the fan TACH
output (Figure 46), so the accumulated count is actually
proportional to the fan tachometer period and inversely
proportional to the fan speed.
N, the number of pulses counted, is determined by the settings
of Register 0x7B (TACH pulses per revolution register). This
register contains two bits for each fan, allowing one, two
(default), three, or four TACH pulses to be counted.
LOC
PWM
TACH
1
PULL-UP TYP
<1kΩ OR
TOTEM POLE
*CHOOSE ZD1 VOLTAGE APPROXIMATELY 0.8× V
Figure 44. Fan with Strong TACH Pull-Up to > V
R1
10kΩ
TACH
OUTPUT
TACH
ZD1
ZENER*
FAN SPEED
COUNTER
ADT7468
CC
or Totem-Pole Output,
CC
Clamped with Zener and Resistor
Alternatively, a resistive attenuator can be used, as shown in
Figure 45. R1 and R2 should be chosen such that
2 V < V
PULL-UP
× R2/(R
+ R1 + R2) < 5 V
PULL-UP
The fan inputs have an input resistance of nominally 160 kΩ to
ground, which should be taken into account when calculating
resistor values.
With a pull-up voltage of 12 V and pull-up resistor less than
1 kΩ, suitable values for R1 and R2 would be 100 kΩ and 47 kΩ,
respectively. This gives a high input voltage of 3.83 V.
12V
<1kΩ
R1*
TACH
OUTPUT
TACH
R2*
*SEE TEXT
Figure 45. Fan with Strong TACH Pull-Up to > V
Attenuated with R1/R2
V
CC
FAN SPEED
COUNTER
ADT7468
or Totem-Pole Output,
CC
04499-0-036
04499-0-037
2
3
4
Figure 46. Fan Speed Measurement
Fan Speed Measurement Registers
The fan tachometer readings are 16-bit values consisting of a
2-byte read from the ADT7468.
Reg. 0x28,
Reg. 0x29,
Reg. 0x2A,
Reg. 0x2B,
Reg. 0x2C,
Reg. 0x2D,
Reg. 0x2E,
Reg. 0x2F,
TAC H1 L ow B yte = 0x00 default
TAC H1 H i gh B yte = 0x00 default
TAC H2 L ow B yte = 0x00 default
TAC H2 H i gh B yte = 0x00 default
TAC H3 L ow B yte = 0x00 default
TAC H3 H i gh B yte = 0x00 default
TAC H4 L ow B yte = 0x00 default
TAC H4 H i gh B y te = 0x00 default
Reading Fan Speed from the ADT7468
The measurement of fan speeds involves a 2-register read for
each measurement. The low byte should be read first. This
causes the high byte to be frozen until both high and low byte
registers have been read, preventing erroneous TACH readings.
The fan tachometer reading registers report back the number of
04499-0-038
Rev. 0 | Page 31 of 80
Page 32

ADT7468
11.11 µs period clocks (90 kHz oscillator) gated to the fan speed
counter, from the rising edge of the first fan TACH pulse to the
rising edge of the third fan TACH pulse (assuming two pulses
per revolution are being counted). Because the device is
essentially measuring the fan TACH period, the higher the
count value, the slower the fan is actually running. A 16-bit fan
tachometer reading of 0xFFFF indicates either that the fan has
stalled or is running very slowly (<100 RPM).
High Limit: > Comparison Performed
Because the actual fan TACH period is being measured, falling
below a fan TACH limit by 1 sets the appropriate status bit and
can be used to generate an
Fan TACH Limit Registers
The fan TACH limit registers are 16-bit values consisting of two
bytes.
Reg. 0x54,
Reg. 0x55,
Reg. 0x56,
Reg. 0x57,
Reg. 0x58,
Reg. 0x59,
Reg. 0x5A,
Reg. 0x5B,
Fan Speed Measurement Rate
The fan TACH readings are normally updated once every
second.
TAC H1 M ini m u m L ow B y te = 0xFF default
TAC H1 M ini m u m Hi g h B y te = 0xFF default
TAC H2 M ini m u m L ow B y te = 0xFF default
TAC H2 M ini m u m Hi g h B y te = 0xFF default
TAC H3 M ini m u m L ow B y te = 0xFF default
TAC H3 M ini m u m Hi g h B y te = 0xFF default
TAC H4 M ini m u m L ow B y te = 0xFF default
TAC H4 M ini m u m Hi g h B y te = 0xFF default
SMBALERT
.
Calculating Fan Speed
Assuming a fan with a two pulses per revolution (and two
pulses per revolution being measured), fan speed is calculated
by
Fan Speed (RPM) = (90,000 × 60)/Fan TACH Reading
where Fan TACH Reading is the 16-bit fan tachometer reading.
Example:
TACH1 High Byte (Reg. 0x29) = 0x17
TACH1 Low Byte (Reg. 0x28) = 0xFF
What is Fan 1 speed in RPM?
Fan 1 TACH Reading = 0x17FF = 6143 (decimal)
RPM = (f × 60)/Fan 1 TACH Reading
RPM = (90000 × 60)/6143
Fan Speed = 879 RPM
Fan Pulses per Revolution
Different fan models can output either 1, 2, 3, or 4 TACH pulses
per revolution. Once the number of fan TACH pulses has been
determined, it can be programmed into the fan pulses per
revolution register (Reg. 0x7B) for each fan. Alternatively, this
register can be used to determine the number or pulses per
revolution output by a given fan. By plotting fan speed measurements at 100% speed with different pulses per revolution
setting, the smoothest graph with the lowest ripple determines
the correct pulses per revolution value.
Fan Pulses per Revolution Register
<1:0>
Fan 1 default = 2 pulses per revolution.
The FAST bit (Bit 3) of Configuration Register 3 (Reg. 0x78),
when set, updates the fan TACH readings every 250 ms.
If any of the fans are not being driven by a PWM channel but
are powered directly from 5 V or 12 V, their associated dc bit in
Configuration Register 3 should be set. This allows TACH
readings to be taken on a continuous basis for fans connected
directly to a dc source. For optimal results, the associated dc bit
should always be set when using 4-wire fans.
Rev. 0 | Page 32 of 80
<3:2> Fan 2 default = 2 pulses per revolution.
<5:4> Fan 3 default = 2 pulses per revolution.
<7:6> Fan 4 default = 2 pulses per revolution.
00 = 1 pulse per revolution.
01 = 2 pulses per revolution.
10 = 3 pulses per revolution.
11 = 4 pulses per revolution.
Page 33

ADT7468
2-Wire Fan Speed Measurements (Low Frequency Mode Only)
The ADT7468 is capable of measuring the speed of 2-wire fans,
that is, fans without TACH outputs. To do this, the fan must be
interfaced as shown in the Driving 2-Wire Fans section. In this
case, the TACH inputs should be reprogrammed as analog
inputs, AIN.
Configuration Register 2 (Reg. 0x73)
Bit 3 (AIN4) = 1,
of a 2-wire fan using an external sensing resistor and coupling
capacitor.
Bit 2 (AIN3) = 1, Pin 9 is reconfigured to measure the speed of
a 2-wire fan using an external sensing resistor and coupling
capacitor.
Bit 1 (AIN2) = 1, Pin 12 is reconfigured to measure the speed
of a 2-wire fan using an external sensing resistor and coupling
capacitor.
Bit 0 (AIN1) = 1, Pin 11 is reconfigured to measure the speed
of a 2-wire fan using an external sensing resistor and coupling
capacitor.
AIN Switching Threshold
Having configured the TACH inputs as AIN inputs for 2-wire
measurements, a user can select the sensing threshold for the
AIN signal.
Configuration Register 4 (Reg. 0x7D)
<3:2> AINL,
measurements.
00 = ±20 mV
01 = ±40 mV
10 = ±80 mV
11 = ±130 mV
Fan Spin-Up
The ADT7468 has a unique fan spin-up function. It spins the
fan at 100% PWM duty cycle until two TACH pulses are
detected on the TACH input. Once two TACH pulses have been
detected, the PWM duty cycle goes to the expected running
value, for example, 33%. The advantage is that fans have
different spin-up characteristics and take different times to
overcome inertia. The ADT7468 runs the fans just fast enough
to overcome inertia and is quieter on spin-up than fans
programmed to spin up for a given spin-up time.
Fan Startup Timeout
To prevent the generation of false interrupts as a fan spins up
(because it is below running speed), the ADT7468 includes a
fan startup timeout function. During this time, the ADT7468
looks for two TACH pulses. If two TACH pulses are not
detected, then an interrupt is generated.
Pin 14 is reconfigured to measure the speed
input threshold for 2-wire fan speed
Using Configuration Register 4 (0x40) Bit 5 (FSPDIS), this
functionality can be changed (see the Disabling Fan Startup
Timeout section).
PWM1 Configuration (Reg. 0x5C)
<2:0> SPIN
PWM2 Configuration (Reg. 0x5D)
<2:0> SPIN
PWM3 Configuration (Reg. 0x5E)
<2:0> SPIN
Disabling Fan Startup Timeout
Although fan startup makes fan spin-ups much quieter than
fixed-time spin-ups, the option exists to use fixed spin-up times.
Setting Bit 5 (FSPDIS) to 1 in Configuration Register 1
(Reg. 0x40) disables the spin-up for two TACH pulses. Instead,
the fan spins up for the fixed time as selected in Reg. 0x5C to
Reg. 0x5E.
, startup timeout for PWM1.
000 = No startup timeout
001 = 100 ms
010 = 250 ms default
011 = 400 ms
100 = 667 ms
101 = 1 s
110 = 2 s
111 = 4 s
, startup timeout for PWM2.
000 = No startup timeout
001 = 100 ms
010 = 250 ms default
011 = 400 ms
100 = 667 ms
101 = 1 s
110 = 2 s
111 = 4 s
, start-up timeout for PWM3.
000 = No startup timeout
001 = 100 ms
010 = 250 ms default
011 = 400 ms
100 = 667 ms
101 = 1 s
110 = 2 s
111 = 4 s
Rev. 0 | Page 33 of 80
Page 34

ADT7468
PWM Logic State
The PWM outputs can be programmed high for 100% duty
cycle (noninverted) or low for 100% duty cycle (inverted).
PWM1 Configuration (Reg. 0x5C)
<4> INV.
0 = Logic high for 100% PWM duty cycle.
1 = Logic low for 100% PWM duty cycle.
PWM2 Configuration (Reg. 0x5D)
<4> INV
0 = Logic high for 100% PWM duty cycle.
1 = Logic low for 100% PWM duty cycle.
PWM3 Configuration (Reg. 0x5E)
<4> INV
0 = Logic high for 100% PWM duty cycle.
1 = Logic low for 100% PWM duty cycle.
Low Frequency Mode PWM Drive Frequency
The PWM drive frequency can be adjusted for the application.
Register 0x5F to Register 0x61 configure the PWM frequency
for PWM1 to PWM3, respectively. In high frequency mode, the
PWM drive frequency is always 22.5 kHz and cannot be
changed.
PWM1 Frequency Registers (Reg. 0x5F to Reg. 0x61)
<2:0> FREQ.
Fan Speed Control
The ADT7468 controls fan speed using two modes: automatic
and manual.
In automatic fan speed control mode, fan speed is automatically
varied with temperature and without CPU intervention, once
initial parameters are set up. The advantage is that, if the system
hangs, the user is guaranteed that the system is protected from
overheating. The automatic fan speed control incorporates a
feature called dynamic T
design effort required to program the automatic fan speed
control loop. See the Programming the Automatic Fan Speed
Control Loop section.
.
.
000 = 11.0 Hz
001 = 14.7 Hz
010 = 22.1 Hz
011 = 29.4 Hz
100 = 35.3 Hz default
101 = 44.1 Hz
110 = 58.8 Hz
111 = 88.2 Hz
MIN
calibration. This feature reduces the
In manual fan speed control mode, the ADT7468 allows the
duty cycle of any PWM output to be manually adjusted. This
can be useful, if the user wants to change fan speed in software
or adjust PWM duty cycle output for test purposes. Bits <7:5>
of Reg. 0x5C to Reg. 0x5E (PWM Configuration) control the
behavior of each PWM output.
PWM Configuration Register (Reg. 0x5C to Reg. 0x5E)
<7:5> BHVR.
111 = manual mode
Once under manual control, each PWM output can be manually
updated by writing to Reg. 0x30 to Reg. 0x32 (PWMx current
duty cycle registers).
Programming the PWM Current Duty Cycle Registers
The PWM current duty cycle registers are 8-bit registers that
allow the PWM duty cycle for each output to be set anywhere
from 0% to 100% in steps of 0.39%. The value to be programmed into the PWM
Va lu e (decimal) = PWM
register is given by
MIN
/0.39
MIN
Example 1: For a PWM duty cycle of 50%,
Va lu e (decimal) = 50/0.39 = 128 (decimal)
Va lu e = 128 (decimal) or 0x80 (hex)
Example 2: For a PWM duty cycle of 33%,
Va lu e (decimal) = 33/0.39 = 85 (decimal)
Va lu e = 85 (decimal) or 0x54 (hex)
PWM Duty Cycle Registers
Reg. 0x30 PWM1 Duty Cycle = 0x00 (0% default)
Reg. 0x31
Reg. 0x32
PWM2 Duty Cycle = 0x00 (0% default)
PWM3 Duty Cycle = 0x00 (0% default)
By reading the PWMx current duty cycle registers, the user can
keep track of the current duty cycle on each PWM output, even
when the fans are running in automatic fan speed control mode
or acoustic enhancement mode. See the Programming the
Automatic Fan Speed Control Loop section for details.
OPERATING FROM 3.3 V STANDBY
The ADT7468 has been specifically designed to operate from a
3.3 V STBY supply. In computers that support S3 and S5 states,
the core voltage of the processor is lowered in these states. If
using the dynamic T
processor changes the CPU temperature and changes the
dynamics of the system under dynamic T
when monitoring
disabled during these states.
mode, lowering the core voltage of the
MIN
control. Likewise,
MIN
THERM
, the
THERM
timer should be
Rev. 0 | Page 34 of 80
Page 35

ADT7468
4
Dynamic T
<1> VCCPLO = 1
When the power is supplied from 3.3 V STBY and the V
voltage drops below the V
1.
Status Bit 1 (V
SMBALERT
2.
THERM
3.
hold its value prior to the S3 or S5 state.
4.
Dynamic T
being adjusted due to an S3 or S5 state.
5.
The ADT7468 is prevented from entering the shutdown
state.
Once the core voltage, V
everything is re-enabled and the system resumes normal
operation.
XNOR TREE TEST MODE
The ADT7468 includes an XNOR tree test mode. This mode is
useful for in-circuit test equipment at board-level testing. By
applying stimulus to the pins included in the XNOR tree, it is
possible to detect opens or shorts on the system board.
The XNOR tree test is invoked by setting Bit 0 (XEN) of the
XNOR tree test enable register (Reg. 0x6F).
Control Register 1 (Reg. 0x36)
MIN
low limit, the following occurs:
CCP
) in Status Register 1 is set.
CCP
is generated, if enabled.
monitoring is disabled. The
control is disabled. This prevents T
MIN
, goes above the V
CCP
THERM
low limit,
CCP
CCP
timer should
from
MIN
POWER-ON DEFAULT
When the ADT7468 is powered up, it polls the V
If V
stays below 0.75 V (the system CPU power rail is not
CCP
powered up), then the ADT7468 assumes the functionality of
the default registers after the ADT7468 is addressed via any
valid SMBus transaction.
If V
goes high (the system processor power rail is powered
CCP
up), then a fail-safe timer begins to count down. If the ADT7468
is not addressed by any valid SMBus transaction before the failsafe timeout (4.6 s) lapses, then the ADT7468 drives the fans to
full speed. If the ADT7468 is addressed by a valid SMBus
transaction after this point, the fans stop, and the ADT7468
assumes its default settings and begins normal operation.
If V
goes high (the system processor power rail is powered
CCP
up), then a fail-safe timer begins to count down. If the ADT7468
has been addressed by a valid SMBus transaction before the failsafe timeout (4.6 s) lapsed, then the ADT7468 operates normally, assuming the functionality of all the default registers. See
the flow chart in Figure 48.
ADT7468 IS POWERED UP
HAS THE ADT7468 BEEN
ACCESSED BY A VALID
Y
SMBUS TRANSACTION?
N
CCP
input.
Figure 47 shows the signals that are exercised in the XNOR tree
test mode.
VID0
VID1
VID2
VID3
VID4
TACH1
TACH2
TACH3
TACH
PWM2
PWM3
Figure 47. XNOR Tree Test
PWM1/XTO
04499-0-040
IS V
ABOVE 0.75V? CHECK V
CCP
Y
START FAIL-SAFE TIMER
HAS THE ADT7468 BEEN
ACCESSED BY A VALID
Y
SMBUS TRANSACTION?
FAIL-SAFE TIMER ELAPSES
AFTER THE FAIL-SAFE TIMEOUT
HAS THE ADT7468 BEEN
ACCESSED BY A VALID
SMBUS TRANSACTION?
ADT7468 NORMALLY
N
Y
START UP THE
Figure 48. Power-On Flow Chart
N
RUN THE FANS TO FULL SPEED
N
HAS THE ADT7468 BEEN
ACCESSED BY A VALID
SMBUS TRANSACTION?
SWITCH OFF FANS
CCP
Y
N
04499-0-043
Rev. 0 | Page 35 of 80
Page 36

ADT7468
PROGRAMMING THE AUTOMATIC FAN SPEED CONTROL LOOP
Note: To more efficiently understand the automatic fan speed
control loop, it is strongly recommended to use the ADT7468
evaluation board and software while reading this section.
This section provides the system designer with an understanding of the automatic fan control loop, and provides step-by-step
guidance on effectively evaluating and selecting critical system
parameters. To optimize the system characteristics, the designer
needs to give some thought to system configuration, including
the number of fans, where they are located, and what temperatures are being measured in the particular system.
The mechanical or thermal engineer who is tasked with the
system thermal characterization should also be involved at the
beginning of the process.
AUTOMATIC FAN CONTROL OVERVIEW
The ADT7468 can automatically control the speed of fans based
upon the measured temperature. This is done independently of
CPU intervention once initial parameters are set up.
The ADT7468 has a local temperature sensor and two remote
temperature channels that can be connected to a CPU on-chip
thermal diode (available on Intel Pentium class and other
CPUs). These three temperature channels can be used as the
basis for automatic fan speed control to drive fans using pulsewidth modulation (PWM).
Automatic fan speed control reduces acoustic noise by
optimizing fan speed according to accurately measured
temperature. Reducing fan speed can also decrease system
current consumption. The automatic fan speed control mode is
very flexible owing to the number of programmable parameters,
including T
MIN
and T
temperature channel and, therefore, for a given fan are critical,
because they define the thermal characteristics of the system.
The thermal validation of the system is one of the most
important steps in the design process, so these values should be
selected carefully.
Figure 49 gives a top-level overview of the automatic fan control
circuitry on the ADT7468. From a systems-level perspective, up
to three system temperatures can be monitored and used to
control three PWM outputs. The three PWM outputs can be
used to control up to four fans. The ADT7468 allows the speed
of four fans to be monitored. Each temperature channel has a
thermal calibration block, allowing the designer to individually
configure the thermal characteristics of each temperature
channel. For example, one can decide to run the CPU fan when
CPU temperature increases above 60°C and a chassis fan when
the local temperature increases above 45°C. At this stage, the
designer has not assigned these thermal calibration settings to a
particular fan drive (PWM) channel. The right side of Figure 49
shows controls that are fan-specific. The designer has individual
control over parameters such as minimum PWM duty cycle, fan
speed failure thresholds, and even ramp control of the PWM
outputs. Automatic fan control, then, ultimately allows graceful
fan speed changes that are less perceptible to the system user.
RANGE
. The T
MIN
and T
values for a
RANGE
REMOTE 1
TEMP
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
RANGE
100%
0%
100%
MUX
LOCAL
TEMP
REMOTE 2
TEMP
T
MIN
THERMAL CALIBRATION
T
MIN
T
RANGE
T
RANGE
0%
100%
0%
Figure 49. Automatic Fan Control Block Diagram
Rev. 0 | Page 36 of 80
PWM
MIN
PWM
MIN
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM1
TACH1
PWM2
TACH2
PWM3
TACH3
04499-0-054
Page 37

ADT7468
STEP 1: HARDWARE CONFIGURATION
During system design, the motherboard sensing and control
capabilities should be addressed early in the design stages.
Decisions about how these capabilities are used should involve
the system thermal/mechanical engineer. Ask the following
questions:
1.
What ADT7468 functionality will be used?
•
PWM2 or
•
TACH4 fan speed measurement or overtemperature
THERM
•
5 V voltage monitoring or overtemperature
function?
12 V voltage monitoring or VID5 input?
•
The ADT7468 offers multifunctional pins that can be
reconfigured to suit different system requirements and
physical layouts. These multifunction pins are software
programmable.
SMBALERT
function?
?
THERM
How many fans will be supported in system, three or four?
2.
This influences the choice of whether to use the TACH4
pin or to reconfigure it for the
3.
Is the CPU fan to be controlled using the ADT7468 or will
THERM
function.
it run at full speed 100% of the time?
If run at 100%, this frees up a PWM output, but the system
is louder.
4.
Where will the ADT7468 be physically located in the
system?
This influences the assignment of the temperature
measurement channels to particular system thermal zones.
For example, locating the ADT7468 close to the VRM
controller circuitry allows the VRM temperature to be
monitored using the local temperature channel.
REMOTE 1 =
AMBIENT TEMP
LOCAL =
VRM TEMP
REMOTE 2 =
CPU TEMP
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
T
RANGE
T
RANGE
T
RANGE
100%
0%
100%
MUX
0%
100%
0%
PWM
MIN
PWM
MIN
PWM
MIN
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
MEASUREMENT
Figure 50. Hardware Configuration Example
RAMP
RAMP
RAMP
AND 4
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM1
TACH1
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
REAR CHASSIS
CPU FAN SINK
04499-0-055
Rev. 0 | Page 37 of 80
Page 38

ADT7468
RECOMMENDED IMPLEMENTATION 1
Configuring the ADT7468 as in Figure 51 provides the system
designer with the following features:
1.
Six VID inputs (VID0 to VID5) for VRM10 support.
2.
Two PWM outputs for fan control of up to three fans. (The
front and rear chassis fans are connected in parallel.)
3.
Three TACH fan speed measurement inputs.
4.
V
measured internally through Pin 4.
CC
5.
CPU core voltage measurement (V
6.
2.5 V measurement input used to monitor CPU current
(connected to V
output of ADP316x VRM controller).
COMP
This is used to determine CPU power consumption.
FRONT
CHASSIS
FAN
CORE
).
TACH2
5 V measurement input.
7.
8.
VRM temperature using local temperature sensor.
9.
CPU temperature measured using the Remote 1
temperature channel.
10.
Ambient temperature measured through the Remote 2
temperature channel.
11.
If not using VID5, this pin can be reconfigured as the 12 V
monitoring input.
Bidirectional
12.
13.
PWM1
TACH1
PROCHOT
or can be used as an overtemperature
SMBALERT
THERM
pin allows the monitoring of
output from an Intel P4 processor, for example,
THERM
system interrupt output.
output.
CPU FAN
REAR
CHASSIS
FAN
AMBIENT
TEMPERATURE
PWM3
VID[0:4]/VID[0.5]
TACH3
D1+
D1–
D2+
D2–
THERM
5(VRM9)/6(VRM10)
PROCHOT
CPU
ADT7468
3.3VSB
5V
12V/VID5
SDA
SCL
SMBALERT
ICH
04499-0-056
ADP316x
VRM
CONTROLLER
V
COMP
CURRENT
V
CORE
GND
Figure 51. Recommended Implementation 1
Rev. 0 | Page 38 of 80
Page 39

ADT7468
5 V measurement input.
RECOMMENDED IMPLEMENTATION 2
Configuring the ADT7468 as in Figure 52 provides the system
designer with the following features:
1.
Six VID inputs (VID0 to VID5) for VRM10 support.
2.
Three PWM outputs for fan control of up to three fans.
(All three fans can be individually controlled.)
3.
Three TACH fan speed measurement inputs.
4.
V
measured internally through Pin 4.
CC
5.
CPU core voltage measurement (V
6.
2.5 V measurement input used to monitor CPU current
(connected to V
output of ADP316x VRM controller).
COMP
This is used to determine CPU power consumption.
FRONT
CHASSIS
FAN
CORE
).
TACH2
7.
8.
VRM temperature using local temperature sensor.
9.
CPU temperature measured using the Remote 1
temperature channel.
10.
Ambient temperature measured through the Remote 2
temperature channel.
11.
If not using VID5, this pin can be reconfigured as the 12 V
monitoring input.
Bidirectional
12.
PROCHOT
or can be used as an overtemperature
PWM1
TACH1
THERM
pin allows the monitoring of
output from an Intel P4 processor, for example,
THERM
output.
CPU FAN
REAR
CHASSIS
FAN
AMBIENT
TEMPERATURE
PWM3
VID[0:4]/VID[0.5]
TACH3
D1+
D1–
D2+
D2–
THERM
5(VRM9)/6(VRM10)
PROCHOT
CPU
ADT7468
3.3VSB
5V
12V/VID5
SDA
SCL
ICH
04499-0-057
ADP316x
VRM
CONTROLLER
V
COMP
CURRENT
V
CORE
GND
Figure 52. Recommended Implementation 2
Rev. 0 | Page 39 of 80
Page 40

ADT7468
STEP 2: CONFIGURING THE MUX
After the system hardware configuration is determined, the fans
can be assigned to particular temperature channels. Not only
can fans be assigned to individual channels, but the behavior of
the fans is also configurable. For example, fans can be run under
automatic fan control, can be run manually (under software
control), or can be run at the fastest speed calculated by
multiple temperature channels. The MUX is the bridge between
temperature measurement channels and the three PWM
outputs.
Bits <7:5> (BHVR) of Registers 0x5C, 0x5D, and 0x5E (PWM
configuration registers) control the behavior of the fans
connected to the PWM1, PWM2, and PWM3 outputs. The
values selected for these bits determine how the MUX connects
a temperature measurement channel to a PWM output.
Automatic Fan Control MUX Options
<7:5> (BHVR),
000 = Remote 1 temperature controls PWMx
001 = local temperature controls PWMx
Registers 0x5C, 0x5D, 0x5E.
101 = Fastest speed calculated by local and Remote 2
temperature controls PWMx
110 = Fastest speed calculated by all three temperature
channels controls PWMx
The Fastest Speed Calculated options pertain to controlling one
PWM output based on multiple temperature channels. The
thermal characteristics of the three temperature zones can be
set to drive a single fan. An example would be the fan turning
on when Remote 1 temperature exceeds 60°C or if the local
temperature exceeds 45°C.
Other MUX Options
<7:5> (BHVR),
Registers 0x5C, 0x5D, 0x5E.
011 = PWMx runs full speed
100 = PWMx disabled (default)
111 = manual mode. PWMx is runner under software
control. In this mode, PWM duty cycle registers
(Registers 0x30 to 0x32) are writable and control the PWM
outputs.
010 = Remote 2 temperature controls PWMx
REMOTE 1 =
AMBIENT TEMP
LOCAL =
VRM TEMP
REMOTE 2 =
CPU TEMP
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
100%
T
RANGE
100%
T
RANGE
100%
T
RANGE
Figure 53. Assigning Temperature Channels to Fan Channels
0%
0%
0%
MUX
MUX
PWM
MIN
PWM
MIN
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM1
TACH1
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
REAR CHASSIS
CPU FAN SINK
04499-0-058
Rev. 0 | Page 40 of 80
Page 41

ADT7468
MUX Configuration Example
This is an example of how to configure the MUX in a system
using the ADT7468 to control three fans. The CPU fan sink is
controlled by PWM1, the front chassis fan is controlled by
PWM2, and the rear chassis fan is controlled by PWM3. The
MUX is configured for the following fan control behavior:
•
PWM1 (CPU fan sink) is controlled by the fastest speed
calculated by the local (VRM temperature) and Remote 2
(processor) temperature. In this case, the CPU fan sink is
also being used to cool the VRM.
PWM2 (front chassis fan) is controlled by the Remote 1
•
temperature (ambient).
•
PWM3 (rear chassis fan) is controlled by the Remote 1
temperature (ambient).
Example MUX Settings
<7:5> (BHVR),
PWM1 Configuration Register 0x5C.
101 = Fastest speed calculated by local and Remote 2
temperature controls PWM1
<7:5> (BHVR), PWM2 Configuration Register 0x5D.
000 = Remote 1 temperature controls PWM2
<7:5> (BHVR), PWM3 Configuration Register 0x5E.
000 = Remote 1 temperature controls PWM3
These settings configure the MUX, as shown in Figure 54.
REMOTE 2 =
CPU TEMP
LOCAL =
VRM TEMP
REMOTE 1 =
AMBIENT TEMP
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
T
RANGE
T
RANGE
T
RANGE
100%
0%
100%
0%
100%
0%
MUX
PWM
MIN
PWM
MIN
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM1
TACH1
CPU FAN SINK
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
REAR CHASSIS
04499-0-059
Figure 54. MUX Configuration Example
Rev. 0 | Page 41 of 80
Page 42

ADT7468
STEP 3: T
CALIBRATION CHANNELS
T
is the temperature at which the fans start to turn on under
MIN
automatic fan control. The speed at which the fan runs at T
programmed later. The T
channel specific, for example, 25°C for ambient channel, 30°C
for VRM temperature, and 40°C for processor temperature.
T
is an 8-bit value, either twos complement or Offset 64, that
MIN
can be programmed in 1°C increments. There is a T
associated with each temperature measurement channel:
Remote 1 Local, and Remote 2 Temp. Once the T
exceeded, the fan turns on and runs at the minimum PWM
duty cycle. The fan turns off once the temperature has dropped
below T
To overcome fan inertia, the fan is spun up until two valid
TACH rising edges are counted. See the Fan Startup Timeout
section for more details. In some cases, primarily for psychoacoustic reasons, it is desirable that the fan never switch off
below T
0x62), when set, keep the fans running at the PWM minimum
duty cycle, if the temperature should fall below T
SETTINGS FOR THERMAL
MIN
values chosen are temperature
MIN
MIN
value is
MIN
– T
MIN
MIN
.
HYST
. Bits <7:5> of Enhanced Acoustics Register 1 (Reg.
.
MIN
MIN
register
is
T
Registers
MIN
Reg. 0x67, Remote 1 Temperature T
Reg. 0x68,
Reg. 0x69,
Local Temperature T
Remote 2 Temperature T
= 0x9A (90°C)
MIN
= 0x9A (90°C)
MIN
= 0x9A (90°C)
MIN
Enhance Acoustics Register 1 (Reg. 0x62)
Bit 7 (MIN3) = 0,
temperature is below T
PWM3 is off (0% PWM duty cycle) when
– T
HYST
.
MIN
Bit 7 (MIN3) = 1, PWM3 runs at PWM3 minimum duty cycle
below T
MIN
– T
HYST
.
Bit 6 (MIN2) = 0, PWM2 is off (0% PWM duty cycle) when
– T
temperature is below T
MIN
HYST
.
Bit 6 (MIN2) = 1, PWM2 runs at PWM2 minimum duty cycle
below T
MIN
– T
HYST
.
Bit 5 (MIN1) = 0, PWM1 is off (0% PWM duty cycle) when
temperature is below T
MIN
– T
HYST
.
Bit 5 (MIN1) = 1, PWM1 runs at PWM1 minimum duty cycle
– T
below T
MIN
HYST
.
100%
E
L
C
Y
C
Y
T
U
D
M
W
P
0%
REMOTE 2 =
CPU TEMP
LOCAL =
VRM TEMP
REMOTE 1 =
AMBIENT TEMP
T
MIN
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
MIN
T
T
T
RANGE
RANGE
RANGE
100%
0%
100%
MUX
0%
100%
0%
PWM
MIN
PWM
MIN
PWM
MIN
Figure 55. Understanding the T
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
Parameter
MIN
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM1
TACH1
CPU FAN SINK
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
REAR CHASSIS
04499-0-060
Rev. 0 | Page 42 of 80
Page 43

ADT7468
STEP 4: PWM
PWM
is the minimum PWM duty cycle at which each fan in
MIN
FOR EACH PWM (FAN) OUTPUT
MIN
the system runs. It is also the start speed for each fan under
automatic fan control once the temperature rises above T
For maximum system acoustic benefit, PWM
should be as
MIN
low as possible. Depending on the fan used, the PWM
setting
MIN
MIN
.
is usually in the 20% to 33% duty cycle range. This value can be
found through fan validation.
100%
Programming the PWM
The PWM
registers are 8-bit registers that allow the
MIN
minimum PWM duty cycle for each output to be configured
anywhere from 0% to 100%. This allows the minimum PWM
duty cycle to be set in steps of 0.39%.
The value to be programmed into the PWM
by
Va lu e (decimal) = PWM
Example 1: For a minimum PWM duty cycle of 50%,
Va lu e (decimal) = 50/0.39 = 128 (decimal)
Va lu e = 128 (decimal) or 80 (hex)
Registers
MIN
MIN
/0.39
register is given
MIN
PWM DUTY CYCLE
PWM
MIN
0%
TEMPERATURE
04499-0-061
Figure 56. PWM
T
MIN
Determines Minimum PWM Duty Cycle
MIN
More than one PWM output can be controlled from a single
temperature measurement channel. For example, Remote 1
temperature can control PWM1 and PWM2 outputs. If two
different fans are used on PWM1 and PWM2, then the fan
characteristics can be set up differently. As a result, Fan 1 driven
by PWM1 can have a different PWM
connected to PWM2. Figure 57 illustrates this as PWM1
value than that of Fan 2
MIN
MIN
(front fan) is turned on at a minimum duty cycle of 20%, while
PWM2
(rear fan) turns on at a minimum of 40% duty cycle.
MIN
Note, however, that both fans turn on at exactly the same
temperature, defined by T
100%
PWM2
MIN
PWM DUTY CYCLE
PWM1
MIN
0%
Figure 57. Operating Two Different Fans from a Single Temperature Channel
.
MIN
2
M
W
P
1
M
W
P
T
MIN
TEMPERATURE
04499-0-062
Example 2: For a minimum PWM duty cycle of 33%,
Va lu e (decimal) = 33/0.39 = 85 (decimal)
Va lu e = 85 (decimal)l or 54 (hex)
PWM
Registers
MIN
Reg. 0x64, PWM1 Minimum Duty Cycle = 0x80 (50% default)
Reg. 0x65
Reg. 0x66,
PWM2 Minimum Duty Cycle = 0x80 (50% default)
PWM3 Minimum Duty Cycle = 0x80 (50% default)
Note on Fan Speed and PWM Duty Cycle
The PWM duty cycle does not directly correlate to fan speed in
RPM. Running a fan at 33% PWM duty cycle does not equate to
running the fan at 33% speed. Driving a fan at 33% PWM duty
cycle actually runs the fan at closer to 50% of its full speed. This
is because fan speed in %RPM generally relates to the square
root of PWM duty cycle. Given a PWM square wave as the
drive signal, fan speed in RPM approximates to
10% ×= cycledutyPWMfanspeed
STEP 5: PWM
PWM
is the maximum duty cycle that each fan in the system
MAX
FOR PWM (FAN) OUTPUTS
MAX
runs at under the automatic fan speed control loop. For
maximum system acoustic benefit, PWM
should be as low as
MAX
possible, but should be capable of maintaining the processor
temperature limit at an acceptable level. If the
THERM
temperature limit is exceeded, the fans are still boosted to 100%
for fail-safe cooling.
There is a PWM
limit for each fan channel. The default value
MAX
of this register is 0xFF and so has no effect unless it is
programmed.
Rev. 0 | Page 43 of 80
Page 44

ADT7468
100%
PWM
MAX
PWM DUTY CYCLE
PWM
MIN
0%
MAX
TEMPERATURE
/0.39
register is given
MAX
04499-0-063
THERM
T
MIN
Figure 58. PWM
Determines Maximum PWM Duty Cycle below the
MAX
Temperature Limit
Programming the PWM
The PWM
registers are 8-bit registers that allow the
MAX
Registers
MAX
maximum PWM duty cycle for each output to be configured
anywhere from 0% to 100%. This allows the maximum PWM
duty cycle to be set in steps of 0.39%.
The value to be programmed into the PWM
by
Va lu e (decimal) = PWM
Example 1: For a maximum PWM duty cycle of 50%,
Va lu e (decimal) – 50/0.39 = 128 (decimal)
Va lu e = 128 (decimal) or 80 (hex)
Example 2: For a minimum PWM duty cycle of 75%,
Va lu e (decimal) = 75/0.39 = 85 (decimal)
Va lu e = 192 (decimal) or C0 (hex)
PWM
Registers
MAX
Reg. 0x38, PWM1 Maximum Duty Cycle = 0xFF
(100% default)
Reg. 0x39,
PWM2 Maximum Duty Cycle = 0xFF
(100% default)
STEP 6: T
T
is the range of temperature over which automatic fan
RANGE
control occurs once the programmed T
been exceeded. T
value, that is, a T
33%. If PWM
FOR TEMPERATURE CHANNELS
RANGE
temperature has
MIN
is a temperature slope, not an arbitrary
RANGE
of 40°C holds true only for PWM
RANGE
is increased or decreased, the effective T
MIN
MIN
=
RANGE
changes.
T
RANGE
100%
PWM DUTY CYCLE
PWM
MIN
0%
The T
T
MIN
Figure 59. T
or fan control slope is determined by the following
RANGE
Parameter Affects Cooling Slope
RANGE
TEMPERATURE
04499-0-064
procedure:
1.
Determine the maximum operating temperature for that
channel (for example, 70°C).
2.
Determine experimentally the fan speed (PWM duty cycle
value) that does not exceed the temperature at the worstcase operating points. (For example, 70°C is reached when
the fans are running at 50% PWM duty cycle.)
Determine the slope of the required control loop to meet
3.
these requirements.
4.
Using the ADT7468 evaluation software, you can
graphically program and visualize this functionality. Ask
your local Analog Devices representative for details.
100%
Reg. 0x3A,
PWM3 Maximum Duty Cycle = 0xFF
(100% default)
See the Note on Fan Speed and PWM Duty Cycle on Page 43.
Rev. 0 | Page 44 of 80
50%
PWM DUTY CYCLE
33%
0%
Figure 60. Adjusting PWM
30°C
T
MIN
40°C
Affects T
MIN
RANGE
04499-0-065
Page 45

ADT7468
T
is implemented as a slope, which means that as PWM
RANGE
is changed, T
same. The higher the PWM
T
, that is, the fan reaches full speed (100%) at a lower
RANGE
changes, but the actual slope remains the
RANGE
value, the smaller the effective
MIN
temperature.
100%
MIN
Example: Calculate T
and PWM
T
T
T
T
= 33% duty cycle = 85 (decimal).
MIN
= T
MAX
MAX
MAX
MAX
+ (Max DC − Min DC) × T
MIN
= 30°C + (100% − 33%) × 40°C/170
= 30°C + (255 − 85) × 40°C/170
= 70°C (effective T
Example: Calculate T
and PWM
= 50% duty cycle = 128 (decimal).
MIN
, given that T
MAX
RANGE
, given that T
MAX
MIN
= 40°C)
MIN
= 30°C, T
/170
RANGE
= 30°C, T
RANGE
RANGE
= 40°C,
= 40°C,
50%
33%
25%
PWM DUTY CYCLE
10%
0%
30°C
40°C
45°C
54°C
T
MIN
Figure 61. Increasing PWM
For a given T
value, the temperature at which the fan runs
RANGE
at full speed for different PWM
Changes Effective T
MIN
values can be easily
MIN
RANGE
04499-0-066
calculated:
T
= T
MAX
+ (Max DC − Min DC) × T
MIN
RANGE
/170
where:
is the temperature at which the fan runs full speed.
T
MAX
T
is the temperature at which the fan turns on.
MIN
Max DC is the maximum duty cycle (100%) = 255 decimal.
Min D C is equal to PWM
T
is the duty PWM duty cycle vs. temperature slope.
RANGE
Example: Calculate T, given that T
and PWM
T
T
T
T
= 10% duty cycle = 26 (decimal).
MIN
= T
MAX
MAX
MAX
MAX
+ (Max DC − Min DC) × T
MIN
= 30°C + (100% − 10%) × 40°C/170
= 30°C + (255 − 26) × 40°C/170
= 84°C (effective T
Example: Calculate T
and PWM
T
T
T
T
= 25% duty cycle = 64 (decimal).
MIN
= T
MAX
MAX
MAX
MAX
+ (Max DC − Min DC) × T
MIN
= 30°C + (100% − 25%) × 40°C/170
= 30°C + (255 − 64) × 40°C/170
= 75°C (effective T
.
MIN
RANGE
, given that T
MAX
RANGE
= 30°C, T
MIN
= 54°C)
MIN
= 45°C)
RANGE
/170
RANGE
= 30°C, T
/170
RANGE
= 40°C,
= 40°C,
RANGE
= T
T
MAX
T
MAX
T
MAX
T
MAX
Selecting a T
The T
RANGE
+ (Max DC − Min DC) × T
MIN
= 30°C + (100% − 50%) × 40°C/170
= 30°C + (255 − 128) × 40°C/170
= 60°C (effective T
Slope
RANGE
RANGE
= 30°C)
value can be selected for each temperature channel:
Remote 1, local, and Remote 2 temperature. Bits <7:4> (T
of Registers 0x5F to 0x61 define the T
RANGE
/170
RANGE
value for each
RANGE
)
temperature channel.
Table 13. Selecting a T
Bits <7:4>1 T
RANGE
RANGE
Val ue
(°C)
0000 2
0001 2.5
0010 3.33
0011 4
0100 5
0101 6.67
0110 8
0111 10
1000 13.33
1001 16
1010 20
1011 26.67
1100 32 (default)
1101 40
1110 53.33
1111 80
1
Register 0x5F configures Remote 1 T
Register 0x60 configures Local T
Register 0x61 configures Remote 2 T
RANGE
RANGE
.
RANGE
.
.
Summary of T
RANGE
Function
When using the automatic fan control function, the temperature
at which the fan reaches full speed can be calculated by
T
= T
MAX
MIN
+ T
(1)
RANGE
Equation 1 holds true only when PWM
PWM duty cycle.
Rev. 0 | Page 45 of 80
is equal to 33%
MIN
Page 46

ADT7468
Increasing or decreasing PWM
changes the effective T
MIN
RANGE
although the fan control still follows the same PWM duty cycle
to temperature slope. The effective T
for different PWM
RANGE
MIN
values can be calculated using Equation 2:
T
= T
MAX
+ (Max DC − Min DC) × T
MIN
/170 (2)
RANGE
where:
(Max DC − Min DC) × T
/170 is the effective T
RANGE
RANGE
value.
See the Note on Fan Speed and PWM Duty Cycle.
Figure 62 shows PWM duty cycle versus temperature for each
T
setting. The lower graph shows how each T
RANGE
RANGE
setting
affects fan speed versus temperature. As can be seen from the
graph, the effect on fan speed is nonlinear.
100
90
80
70
60
50
40
30
PWM DUTY CYCLE (%)
20
10
0
0 20406080100120
100
90
80
70
60
50
40
30
FAN SPEED (% OF MAX)
20
10
0
0 20 40 60 80 100 120
TEMPERATURE ABOVE T
TEMPERATURE ABOVE T
Figure 62. T
RANGE
MIN
MIN
vs. Actual Fan Speed Profile
2°C
2.5°C
3.33°C
4°C
5°C
6.67°C
8°C
10°C
13.3°C
16°C
20°C
26.6°C
32°C
40°C
53.3°C
80°C
2°C
2.5°C
3.33°C
4°C
5°C
6.67°C
8°C
10°C
13.3°C
16°C
20°C
26.6°C
32°C
40°C
53.3°C
80°C
The graphs in Figure 62 assume that the fan starts from 0%
PWM duty cycle. Clearly, the minimum PWM duty cycle,
PWM
performs in the system. Figure 63 shows how T
when the PWM
, needs to be factored in to see how the loop actually
MIN
is affected
RANGE
value is set to 20%. It can be seen that the fan
MIN
actually runs at about 45% fan speed when the temperature
exceeds T
MIN
.
,
04499-0-067
100
90
80
70
60
50
40
30
PWM DUTY CYCLE (%)
20
10
0
0 20 40 60 80 100 120
100
90
80
70
60
50
40
30
FAN SPEED (% OF MAX)
20
10
0
0 20 40 60 80 100 120
Figure 63. T
TEMPERATURE ABOVE T
TEMPERATURE ABOVE T
and % Fan Speed Slopes with PWM
RANGE
MIN
MIN
MIN
2°C
2.5°C
3.33°C
4°C
5°C
6.67°C
8°C
10°C
13.3°C
16°C
20°C
26.6°C
32°C
40°C
53.3°C
80°C
2°C
2.5°C
3.33°C
4°C
5°C
6.67°C
8°C
10°C
13.3°C
16°C
20°C
26.6°C
32°C
40°C
53.3°C
80°C
= 20%
Example: Determining T
The following example shows how the different T
for Each Temperature Channel
RANGE
and T
MIN
RANGE
settings can be applied to three different thermal zones. In this
example, the following T
= 80°C for ambient temperature
T
RANGE
= 53.3°C for CPU temperature
T
RANGE
T
= 40°C for VRM temperature
RANGE
values apply:
RANGE
This example uses the MUX configuration described in Step 2,
with the ADT7468 connected as shown in Figure 54. Both CPU
temperature and VRM temperature drive the CPU fan
connected to PWM1. Ambient temperature drives the front
chassis fan and rear chassis fan connected to PWM2 and
PWM3. The front chassis fan is configured to run at PWM
20%. The rear chassis fan is configured to run at PWM
30%. The CPU fan is configured to run at PWM
= 10%.
MIN
MIN
=
MIN
=
Note on 4-Wire Fans
The control range for 4-wire fans is much wider than that of
2-wire or 3-wire fans. In many cases, 4-wire fans can start with a
PWM drive of as little as 20%.
04499-0-068
Rev. 0 | Page 46 of 80
Page 47

ADT7468
100
90
80
70
60
50
40
30
PWM DUTY CYCLE (%)
20
10
0
0 10203040 10050 60 70 80 90
100
90
80
70
60
50
40
30
FAN SPEED (% MAX RPM)
20
10
0
0 10203040 10050 60 70 80 90
Figure 64. T
STEP 7: T
T
THERM
THERM
is the absolute maximum temperature allowed on a
TEMPERATURE ABOVE T
TEMPERATURE ABOVE T
and % Fan Speed Slopes for VRM, Ambient, and
RANGE
CPU Temperature Channels
MIN
MIN
FOR TEMPERATURE CHANNELS
temperature channel. Above this temperature, a component
such as the CPU or VRM might be operating beyond its safe
operating limit. When the temperature measured exceeds
, all fans are driven at 100% PWM duty cycle (full speed)
T
THERM
to provide critical system cooling.
04499-0-069
The fans remain running at 100% until the temperature drops
below T
minus hysteresis, where hysteresis is the number
THERM
programmed into the Hysteresis Registers 0x6D and 0x6E. The
default hysteresis value is 4°C.
The T
limit should be considered the maximum worst-case
THERM
operating temperature of the system. Because exceeding any
limit runs all fans at 100%, it has very negative acoustic
T
THERM
effects. Ultimately, this limit should be set up as a fail-safe, and
one should ensure that it is not exceeded under normal system
operating conditions.
Note that the T
limits are nonmaskable and affect the fan
THERM
speed no matter how automatic fan control settings are
configured. This allows some flexibility, because a T
RANGE
value
can be selected based on its slope, while a hard limit (such as
70°C), can be programmed as T
the fan reaches full speed) by setting T
(the temperature at which
MAX
to that limit (for
THERM
example, 70°C).
THERM
Registers
Reg. 0x6A, Remote 1
Reg. 0x6B,
Reg. 0x6C,
Local
Remote 2
THERM
THERM
THERM
limit = 0xA4 (100°C default)
limit = 0xA4 (100°C default)
limit = 0xA4 (100°C default)
Hysteresis Registers
Reg. 0x6D, Remote 1, Local Hysteresis Register
Remote 1 temperature hysteresis (4°C default).
<7:4>,
<3:0>, Local temperature hysteresis (4°C default).
Reg. 0x6E
<7:4>,
, Remote 2 Temperature Hysteresis Register
Remote 2 temperature hysteresis (4°C default).
Because each hysteresis setting is four bits, hysteresis values are
programmable from 1°C to 15°C. It is not recommended that
hysteresis values ever be programmed to 0°C, because this
disables hysteresis. In effect, this would cause the fans to cycle
between normal speed and 100% speed, creating unsettling
acoustic noise.
Rev. 0 | Page 47 of 80
Page 48

ADT7468
100%
E
L
C
Y
C
Y
T
U
D
M
W
P
0%
T
THERMAL CALIBRATION
REMOTE 2 =
CPU TEMP
THERMAL CALIBRATION
T
RANGE
T
RANGE
T
100%
100%
THERM
0%
MIN
T
MIN
MUX
T
LOCAL =
VRM TEMP
REMOTE 1 =
AMBIENT TEMP
STEP 8: T
T
is the amount of extra cooling a fan provides after the
HYST
FOR TEMPERATURE CHANNELS
HYST
MIN
THERMAL CALIBRATION
T
MIN
temperature measured has dropped back below T
fan turns off. The premise for temperature hysteresis (T
0%
T
RANGE
100%
0%
T
RANGE
Figure 65. How T
before the
MIN
HYST
THERM
) is
that, without it, the fan would merely chatter or cycle on and off
regularly whenever temperature is hovering at about the T
MIN
setting.
The T
value chosen determines the amount of time needed
HYST
for the system to cool down or heat up as the fan is turning on
and off. Values of hysteresis are programmable in the range 1°C
to 15°C. Larger values of T
on and off. The T
The T
setting applies not only to the temperature hysteresis
HYST
default value is set at 4°C.
HYST
for fan on/off, but the same setting is used for the T
prevent the fans from chattering
HYST
THERM
hysteresis value, described in Step 6. Therefore, programming
Registers 0x6D and 0x6E sets the hysteresis for both fan on/off
and the
THERM
function.
PWM
MIN
RAMP
CONTROL
PWM
MIN
PWM
MIN
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
GENERATOR
GENERATOR
GENERATOR
Relates to Automatic Fan Control
Hysteresis Registers
Reg. 0x6D, Remote 1, Local Hysteresis Register
Remote 1 temperature hysteresis (4°C default).
<7:4>,
<3:0>, local temperature hysteresis (4°C default).
Reg. 0x6E
<7:4>,
, Remote 2 Temp Hysteresis Register
Remote 2 temperature hysteresis (4°C default).
In some applications, it is required that fans not turn off below
, but remain running at PWM
T
MIN
Acoustics Register 1 (Reg. 0x62) allow the fans to be turned off
or to be kept spinning below T
T
value has no effect on the fan when the temperature drops
HYST
below T
MIN
.
PWM
CONFIG
PWM
PWM
CONFIG
PWM
PWM
CONFIG
PWM
PWM1
TACH1
CPU FAN SINK
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
REAR CHASSIS
MIN
. If the fans are always on, the
MIN
04499-0-070
. Bits <7:5> of Enhanced
Rev. 0 | Page 48 of 80
Page 49

ADT7468
100%
E
L
C
Y
C
Y
T
U
D
M
W
P
0%
T
THERMAL CALIBRATION
LOCAL =
THERMAL CALIBRATION
THERMAL CALIBRATION
REMOTE 2 =
CPU TEMP
VRM TEMP
REMOTE 1 =
AMBIENT TEMP
Figure 66. The T
T
RANGE
MIN
T
MIN
T
MIN
T
MIN
T
THERM
100%
0%
T
RANGE
100%
MUX
0%
T
RANGE
100%
0%
T
RANGE
Value Applies to Fan On/Off Hysteresis and
HYST
PWM
MIN
PWM
MIN
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
THERM
Hysteresis
PWM1
TACH1
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
CPU FAN SINK
REAR CHASSIS
04499-0-071
Enhance Acoustics Register 1 (Reg. 0x62)
Bit 7 (MIN3) = 0,
temperature is below T
PWM3 is off (0% PWM duty cycle) when
− T
HYST
.
MIN
Bit 7 (MIN3) = 1, PWM3 runs at PWM3 minimum duty cycle
below T
MIN
− T
HYST
.
Bit 6 (MIN2) = 0, PWM2 is off (0% PWM duty cycle) when
temperature is below T
MIN
− T
HYST
.
Bit 6 (MIN2) = 1, PWM2 runs at PWM2 minimum duty cycle
below T
MIN
− T
HYST
.
Bit 5 (MIN1) = 0, PWM1 is off (0% PWM duty cycle) when
temperature is below T
MIN
− T
HYST
.
Bit 5 (MIN1) = 1, PWM1 runs at PWM1 minimum duty cycle
below T
MIN
− T
HYST
.
DYNAMIC T
CONTROL MODE
MIN
In addition to the automatic fan speed control mode described
in the Automatic Fan Control Overview section, the ADT7468
has a mode that extends the basic automatic fan speed control
loop. Dynamic T
control allows the ADT7468 to intelligently
MIN
adapt the system’s cooling solution for best system performance
or lowest possible system acoustics, depending on user or
design requirements. Use of dynamic T
control alleviates the
MIN
need to design for worst-case conditions and significantly
reduces system design and validation time.
Designing for Worst-Case Conditions
System design must always allow for worst-case conditions. In
PC design, the worst-case conditions include, but are not
limited to the following:
Rev. 0 | Page 49 of 80
Page 50

ADT7468
• Wo rs t- Ca se Al ti tu de
A computer can be operated at different altitudes. The
altitude affects the relative air density, which alters the
effectiveness of the fan cooling solution. For example,
comparing 40°C air temperature at 10,000 ft. to 20°C air
temperature at sea level, relative air density is increased by
40%. This means that the fan can spin 40% slower and
make less noise at sea level than at 10,000 ft. while keeping
the system at the same temperature at both locations.
Wo r st - Ca s e F a n
•
Due to manufacturing tolerances, fan speeds in RPM are
normally quoted with a tolerance of ±20%. The designer
needs to assume that the fan RPM can be 20% below
tolerance. This translates to reduced system airflow and
elevated system temperature. Note that fans 20% out of
tolerance can negatively impact system acoustics, because
they run faster and generate more noise.
•
Worst-Case Chassis Airflow
The same motherboard can be used in a number of
different chassis configurations. The design of the chassis
and the physical location of fans and components
determine the system thermal characteristics. Moreover, for
a given chassis, the addition of add-in cards, cables, or
other system configuration options can alter the system
airflow and reduce the effectiveness of the system cooling
solution. The cooling solution can also be inadvertently
altered by the end user. (For example, placing a computer
against a wall can block the air ducts and reduce system
airflow.)
VENTS
I/O CARDS
GOOD CPU AIRFLOW
FAN
POWER
SUPPLY
CPU
VENTS
I/O CARDS
POOR CPU
AIRFLOW
POWER
SUPPLY
FAN
CPU
Worst-Case Assembly
•
Every system manufactured is unique because of
manufacturing variations. Heat sinks may be loose fitting
or slightly misaligned. Too much or too little thermal
grease might be used, or variations in application pressure
for thermal interface material could affect the efficiency of
the thermal solution. Accounting for manufacturing
variations in every system is difficult; therefore, the system
must be designed for the worst case.
T
A
θ
θ
θ
θ
θ
SA
TIMS
CTIM
TIMC
JTIM
T
S
T
TIM
T
C
T
TIM
T
J
θ
CA
θ
CS
θ
JA
04499-0-073
HEAT
SINK
THERMAL
INTERFACE
MATERIAL
INTEGRATED
HEAT
SPREADER
SUBSTRATE
PROCESSOR
EPOXY
THERMAL INTERFACE MATERIAL
Figure 68. Thermal Model
Although a design usually accounts for worst-case conditions in
all these cases, the actual system is almost never operated at
worst-case conditions. The alternative to designing for the worst
case is to use the dynamic T
Dynamic T
Dynamic T
Control Overview
MIN
control mode builds upon the basic automatic
MIN
fan control loop by adjusting the T
control function.
MIN
value based on system
MIN
performance and measured temperature. This is important,
because, instead of designing for the worst case, the system
thermals can be defined as operating zones. ADT7468 can selfadjust its fan control loop to maintain either an operating zone
temperature or a system target temperature. For example, one
can specify that the ambient temperature in a system should be
maintained at 50°C. If the temperature is below 50°C, the fans
might not need to run or might run very slowly. If the
temperature is higher than 50°C, the fans need to throttle up.
FAN
VENTS
GOOD VENTING =
GOOD AIR EXCHANGE
DRIVE
BAYS
POOR VENTING =
POOR AIR EXCHANGE
Figure 67. Chassis Airflow Issues
• Worst-Case Processor Power Consumption
This data sheet maximum does not necessarily reflect the
true processor power consumption. Designing for worstcase CPU power consumption can result in a processor
becoming overcooled (generating excess system noise).
•
Worst-Case Peripheral Power Consumption
The tendency is to design to data sheet maximums for
peripheral components (again overcooling the system).
DRIVE
BAYS
Rev. 0 | Page 50 of 80
04499-0-072
The challenge presented by any thermal design is finding the
right settings to suit the system’s fan control solution. This can
involve designing for the worst case, followed by weeks of
system thermal characterization, and finally fan acoustic
optimization (for psycho-acoustic reasons). Getting the most
benefit from the automatic fan control mode involves characterizing the system to find the best T
control loop, and the best PWM
speed setting. Using the ADT7468’s dynamic T
and T
MIN
value for the quietest fan
MIN
settings for the
RANGE
control mode,
MIN
however, shortens the characterization time and alleviates
tweaking the control loop settings, because the device can selfadjust during system operation.
Dynamic T
control mode is operated by specifying the
MIN
operating zone temperatures required for the system. Associated
with this control mode are three operating point registers, one
Page 51

ADT7468
for each temperature channel. This allows the system thermal
solution to be broken down into distinct thermal zones. For
example, CPU operating temperature is 70°C, VRM operating
temperature is 80°C, and ambient operating temperature is
50°C. The ADT7468 dynamically alters the control solution to
maintain each zone temperature as closely as possible to its
target operating point.
Operating Point Registers
Reg. 0x33, Remote 1 Operating Point = 0xA4 (100°C default)
Reg. 0x34,
Reg. 0x35,
Local Operating Point = 0xA4 (100°C default)
Remote 2 Operating Point = 0xA4 (100°C default)
Figure 69 shows an overview of the parameters that affect the
operation of the dynamic T
PWM DUTY CYCLE
T
LOWTMIN
OPERATING
POINT
Figure 69. Dynamic T
control loop.
MIN
T
T
HIGH
THERM
Control Loop
MIN
T
RANGE
TEMPERATURE
Table 14 provides a brief description of each parameter.
Table 14. T
Control Loop Parameters
MIN
Parameter Description
T
LOW
If the temperature drops below the T
limit, an
LOW
error flag is set in a status register and an
SMBALERT
T
HIGH
If the temperature exceeds the T
interrupt can be generated.
limit, an
HIGH
error flag is set in a status register and an
SMBALERT
T
MIN
The temperature at which the fan turns on
interrupt can be generated.
under automatic fan speed control.
Operating
point
The target temperature for a particular
temperature zone. The ADT7468 attempts to
maintain system temperature at about the
operating point by adjusting the T
parameter
MIN
of the control loop.
T
THERM
If the temperature exceeds this critical limit, the
fans can be run at 100% for maximum cooling.
T
RANGE
Programs the PWM duty cycle vs. temperature
control slope.
04499-0-074
Dynamic T
Because the dynamic T
the automatic fan control mode, program the automatic fan
control mode parameters first, as described in Step 1 to Step 8,
then proceed with dynamic T
STEP 9: OPERATING POINTS FOR TEMPERATURE CHANNELS
The operating point for each temperature channel is the optimal
temperature for that thermal zone. The hotter each zone is
allowed to be, the quieter the system, because the fans are not
required to run as fast. The ADT7468 increases or decreases fan
speeds as necessary to maintain the operating point
temperature, allowing for system-to-system variation and
removing the need for worst-case design. If a sensible operating
point value is chosen, any T
system characterization. If the T
sooner than required, and the temperature is below the operating point. In response, the ADT7468 increases T
fans off longer and to allow the temperature zone to get closer
to the operating point. Likewise, too high a T
the operating point to be exceeded, and in turn, the ADT7468
reduces T
Programming Operating Point Registers
There are three operating point registers, one for each
temperature channel. These 8-bit registers allow the operating
point temperatures to be programmed with 1°C resolution.
Operating Point Registers
Reg. 0x33, Remote 1 Operating Point = 0xA4 (100°C default)
Reg. 0x34,
Reg. 0x35,
Control Programming
MIN
control mode is a basic extension of
MIN
control mode programming.
MIN
value can be selected in the
MIN
value is too low, the fans run
MIN
to keep the
MIN
value causes
MIN
to turn the fans on sooner to cool the system.
MIN
Local Operating Point = 0xA4 (100°C default)
Remote 2 Operating Point = 0xA4 (100°C default)
Rev. 0 | Page 51 of 80
Page 52

ADT7468
REMOTE 2 =
CPU TEMP
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
RANGE
100%
OPERATING
0%
100%
MUX
0%
T
RANGE
T
RANGE
100%
0%
LOCAL =
VRM TEMP
REMOTE 1 =
AMBIENT TEMP
T
MIN
THERMAL CALIBRATION
T
MIN
Figure 70. Operating Point Value Dynamically Adjusts Automatic Fan Control Settings
STEP 10: HIGH AND LOW LIMITS FOR TEMPERATURE CHANNELS
The low limit defines the temperature at which the T
starts to be increased, if temperature falls below this value. This
has the net effect of reducing the fan speed, allowing the system
to get hotter. An interrupt can be generated when the temperature drops below the low limit.
The high limit defines the temperature at which the T
starts to be reduced, if temperature increases above this value.
This has the net effect of increasing fan speed to cool down the
system. An interrupt can be generated when the temperature
rises above the high limit.
Programming High and Low Limits
There are six limit registers; a high limit and low limit are
associated with each temperature channel. These 8-bit registers
allow the high and low limit temperatures to be programmed
with 1°C resolution.
Temperature Limit Registers
Reg. 0x4E, Remote 1 Temperature Low Limit = 0x01
Reg. 0x4F,
Reg. 0x50,
Reg. 0x51,
Remote 1 Temperature High Limit = 0x7F
Local Temperature Low Limit = 0x01
Local Temperature High Limit = 0x7F
MIN
MIN
value
value
POINT
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
How Dynamic T
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
Control Works
MIN
PWM1
TACH1
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
REAR CHASSIS
CPU FAN SINK
04499-0-075
The basic premise is as follows:
Set the target temperature for the temperature zone, which
1.
could be, for example, the Remote 1 thermal diode. This
value is programmed to the Remote 1 operating
temperature register.
2.
As the temperature in that zone (Remote 1 temperature)
rises toward and exceeds the operating point temperature,
is reduced and the fan speed increases.
T
MIN
As the temperature drops below the operating point
3.
temperature, T
is increased and the fan speed is reduced.
MIN
However, the loop operation is not as simple as described in
these steps. A number of conditions govern the situations in
which T
can increase or decrease.
MIN
Short Cycle and Long Cycle
The ADT7468 implements two loops: a short cycle and a long
cycle. The short cycle takes place every n monitoring cycles. The
long cycle takes place every 2n monitoring cycles. The value of
n is programmable for each temperature channel. The bits are
located at the following register locations:
Remote 1 = CYR1 = Bits <2:0> of Calibration Control
Register 2 (Address = 0x37).
Reg. 0x52,
Reg. 0x53,
Remote 2 Temperature Low Limit = 0x01
Remote 2 Temperature High Limit = 0x7F
Rev. 0 | Page 52 of 80
Page 53

ADT7468
Local = CYL = Bits <5:3> of Calibration Control Register 2
(Address = 0x37).
Remote 2 = CYR2 = Bits <7:6> of Calibration Control Register
2 and Bit 0 of Calibration Control Register 1 (Address = 0x36).
Table 15. Cycle Bit Assignments
Code Short Cycle Long Cycle
000 8 cycles (1 s) 16 cycles (2 s)
001 16 cycles (2 s) 32 cycles (4 s)
010 32 cycles (4 s) 64 cycles (8 s)
011 64 cycles (8 s) 128 cycles (16 s)
100 128 cycles (16 s) 256 cycles (32 s)
101 256 cycles (32 s) 512 cycles (64 s)
110 512 cycles (64 s) 1024 cycles (128 s)
111 1024 cycles (128 s) 2048 cycles (256 s)
Care should be taken when choosing the cycle time. A long
cycle time means that T
has very fast temperature transients, the dynamic T
is updated less often. If your system
MIN
control
MIN
loop will always be lagging. If you choose a cycle time that is too
fast, the full benefit of changing T
might not be realized and
MIN
needs to change again on the next cycle; in effect, it is overshooting. It is necessary to carry out some calibration to identify
the most suitable response time.
Figure 71 shows the steps taken during the short cycle.
WAIT n
MONITORING
CYCLES
CURRENT
TEMPERATURE
MEASUREMENT
T1(n)
OPERATING
POINT
TEMPERATURE
OP1
PREVIOUS
TEMPERATURE
MEASUREMENT
T1 (n – 1)
IS T1(n) >
(OP1 – HYS)
IS T1(n) – T1(n – 1)
≤ 0.25°C
IS T1(n) – T1(n – 1) = 0.5 – 0.75°C
IS T1(n) – T1(n – 1) = 1.0 – 1.75°C
IS T1(n) – T1(n – 1) > 2.0°C
YES
NO
NO
YES
DO NOTHING
DO NOTHING
(SYSTEM IS
COOLING OF
FOR CONSTANT)
DECREASE T
DECREASE T
DECREASE T
MIN
MIN
MIN
BY 1°C
BY 2°C
BY 4°C
Figure 71. Short Cycle Steps
Figure 72 shows the steps taken during the long cycle.
The following examples illustrate some of the circumstances
that might cause T
Example: Normal Operation—No T
to increase, decrease, or stay the same.
MIN
Adjustment
MIN
1. If measured temperature never exceeds the programmed
operating point minus the hysteresis temperature, then
is not adjusted, that is, remains at its current setting.
T
MIN
If measured temperature never drops below the low
2.
temperature limit, then T
is not adjusted.
MIN
04499-0-077
CURRENT
TEMPERATURE
MEASUREMENT
T1(n)
OPERATING
POINT
TEMPERATURE
OP1
THERM LIMIT
HIGH TEMP
LIMIT
OPERATING
POINT
LOW TEMP
LIMIT
T
MIN
Figure 73. Temperature between Operating Point and Low Temperature Limit
Because neither the operating point minus the hysteresis
temperature nor the low temperature limit has been exceeded,
the T
value is not adjusted, and the fan runs at a speed
MIN
determined by the fixed T
automatic fan speed control mode.
Example: Operating Point Exceeded—T
When the measured temperature is below the operating point
temperature minus the hysteresis, T
Once the temperature exceeds the operating temperature minus
the hysteresis (OP − Hyst), T
during the short cycle (see Figure 71). The rate at which T
decreases depends on the programmed value of n. It also
depends on how much the temperature has increased between
this monitoring cycle and the last monitoring cycle, that is, if
the temperature has increased by 1°C, then T
2°C. Decreasing T
thus providing more cooling to the system.
If the temperature is slowly increasing only in the range
(OP − Hyst), that is, ≤0.25°C per short monitoring cycle, then
T
does not decrease. This allows small changes in
MIN
temperature in the desired operating zone without changing
. The long cycle makes no change to T
T
MIN
WAIT 2n
MONITORING
CYCLES
IS T1(n) > OP1
IS T1(n) < LOW TEMP LIMIT
AND
T
< HIGH TEMP LIMIT
MIN
AND
T
< OP1
MIN
AND
T1(n) > T
YES
NO
MIN
NO
YES
DECREASE T
BY 1°C
INCREASE
T
BY 1°C
MIN
DO NOT
CHANGE
Figure 72. Long Cycle Steps
HYSTERESIS
ACTUAL
TEMP
and T
MIN
starts to decrease. This occurs
MIN
has the effect of increasing the fan speed,
MIN
values defined in the
RANGE
Reduced
MIN
remains the same.
MIN
is reduced by
MIN
in the
MIN
MIN
MIN
04499-0-078
04499-0-079
Rev. 0 | Page 53 of 80
Page 54

ADT7468
O
temperature range (OP − Hyst), because the temperature has
not exceeded the operating temperature.
Once the temperature exceeds the operating temperature, the
long cycle causes T
while the temperature remains above the operating temperature.
This takes place in addition to the decrease in T
occur due to the short cycle. In Figure 74, because the temperature is increasing at a rate ≤0.25°C per short cycle, no reduction
takes place during the short cycle.
in T
MIN
Once the temperature has fallen below the operating
temperature, T
starts to increase slowly, T
temperature increases at a rate ≤0.25°C per cycle.
Example: Increase T
When the temperature drops below the low temperature limit,
can increase in the long cycle. Increasing T
T
MIN
effect of running the fan slower and, therefore, quieter. The long
cycle diagram in Figure 74 shows the conditions that need to be
true for T
to increase. Here is a quick summary of those
MIN
to be reduced by 1°C every long cycle
MIN
that would
MIN
stays the same. Even when the temperature
MIN
stays the same, because the
MIN
Cycle
MIN
has the
MIN
THERM
LIMIT
HIGH TEMP
LIMIT
PERATING
POINT
HYSTERESIS
conditions and the reasons they need to be true.
can increase, if
T
MIN
The measured temperature has fallen below the low
•
temperature limit. This means the user must choose the
low limit carefully. It should not be so low that the
temperature never falls below it, because T
increase and the fans would run faster than necessary.
•
T
is below the high temperature limit. T
MIN
allowed to increase above the high temperature limit. As a
result, the high limit should be sensibly chosen, because it
determines how high T
T
•
is below the operating point temperature. T
MIN
can go.
MIN
never be allowed to increase above the operating point
temperature, because the fans would not switch on until
the temperature rose above the operating point.
•
The temperature is above T
is turned off below T
MIN
. The dynamic T
MIN
.
would never
MIN
is never
MIN
MIN
control
MIN
should
T
MIN
LOW TEMP
LIMIT
ACTUAL
TEMP
DECREASE HERE DUE TO
SHORT CYCLE ONLY
T1(n) – T1 (n – 1) = 0.5°C
OR 0.75°C = > T
DECREASES BY 1°C
EVERY SHORT CYCLE
MIN
DECREASE HERE DUE TO
LONG CYCLE ONLY
T1(n) – T1 (n – 1)
AND T1(n) > OP = > T
DECREASES BY 1°C
EVERY LONG CYCLE
NO CHANGE IN T
DUE TO ANY CYCLE, BECAUSE
T1(n) – T1 (n – 1)
AND T1(n) < OP = > T
STAYS THE SAME
≤
0.25°C
MIN
Figure 74. Effect of Exceeding Operating Point Minus Hysteresis Temperature
MIN
≤
0.25°C
HERE
MIN
04499-0-080
Rev. 0 | Page 54 of 80
Page 55

ADT7468
O
Figure 75 shows how T
ture is above T
T
is below the high temperature limit and below the
MIN
and below the low temperature limit, and
MIN
increases when the current tempera-
MIN
operating point. Once the temperature rises above the low
temperature limit, T
THERM
LIMIT
HIGH TEMP
LIMIT
OPERATING
POINT
HYSTERESIS
LOW TEMP
LIMIT
ACTUAL
T
MIN
Figure 75. Increasing T
Example: Preventing T
Because T
is dynamically adjusted, it is undesirable for T
MIN
MIN
TEMP
stays the same.
for Quieter Operation
MIN
from Reaching Full Scale
MIN
04499-0-081
MIN
to reach full scale (127°C), because the fan would never switch
on. As a result, T
is allowed to vary only within a specified
MIN
range:
1.
The lowest possible value for T
is –127°C (twos
MIN
complement mode) or −64°C (Offset 64 mode).
T
2.
3.
cannot exceed the high temperature limit.
MIN
If the temperature is below T
, the fan is switched off or
MIN
is running at minimum speed, and dynamic T
control is
MIN
disabled.
THERM
LIMIT
PERATING
POINT
LOW TEMP
HIGH TEMP
Figure 76. T
LIMIT
LIMIT
T
MIN
HYSTERESIS
ACTUAL
TEMP
T
PREVENTED
MIN
FROM INCREASING
Adjustments Limited by the High Temperature Limit
MIN
04499-0-082
STEP 11: MONITORING THERM
Using the operating point limit ensures that the dynamic T
control mode is operating in the best possible acoustic position
while ensuring that the temperature never exceeds the maximum operating temperature. Using the operating point limit
allows T
to be independent of system-level issues because of
MIN
its self-corrective nature. In PC design, the operating point for
the chassis is usually the worst-case internal chassis
temperature.
MIN
The optimal operating point for the processor is determined by
monitoring the thermal monitor in the Intel Pentium 4 processor. To do this, the
connected to the
PROCHOT
THERM
output of the Pentium 4 is
input of the ADT7468.
The operating point for the processor can be determined by
allowing the current temperature to be copied to the operating
point register when the
PROCHOT
output pulls the
THERM
input low on the ADT7468. This gives the maximum
temperature at which the Pentium 4 can run before clock
modulation occurs.
Enabling the
Bits <4:2> of dynamic T
enable/disable
THERM
Trip Point as the Operating Point
control Register 1 (Reg. 0x36)
MIN
THERM
monitoring to program the operating
point.
Dynamic T
<2> PHTR2 = 1,
the Remote 2 operating point register, if
The operating point contains the temperature at which
Control Register 1 (0x36)
MIN
copies the Remote 2 current temperature to
THERM
is asserted.
THERM
is asserted. This allows the system to run as quietly as possible
without affecting system performance.
PHTR2 = 0, ignores any
THERM
assertions. The Remote 2
operating point register reflects its programmed value.
<3> PHTL = 1, copies the local current temperature to the local
temperature operating point register, if
operating point contains the temperature at which
THERM
is asserted. The
THERM
is
asserted. This allows the system to run as quietly as possible
without affecting system performance.
PHTL = 0, ignores any
THERM
assertions. The local
temperature operating point register reflects its programmed
value.
<4> PHTR1 = 1, copies the Remote 1 current temperature to
the Remote 1 operating point register, if
The operating point contains the temperature at which
THERM
is asserted.
THERM
is asserted. This allows the system to run as quietly as possible
without affecting system performance.
PHTR1 = 0, ignores any
THERM
assertions. The Remote 1
operating point register reflects its programmed value.
Enabling Dynamic T
Bits <7:5>
of dynamic T
enable/disable dynamic T
Control Mode
MIN
control Register 1 (Reg. 0x36)
MIN
control on the temperature
MIN
channels.
Dynamic
<5> R2T = 1,
temperature channel. The chosen T
Control Register 1 (0x36)
TMIN
enables dynamic T
control on the Remote 2
MIN
value is dynamically
MIN
adjusted based on the current temperature, operating point, and
high and low limits for this zone.
Rev. 0 | Page 55 of 80
Page 56

ADT7468
R2T = 0, disables dynamic T
is not adjusted and the channel behaves as described in the
Automatic Fan Control Overview section.
<6> LT = 1, enables dynamic T
temperature channel. The chosen T
adjusted based on the current temperature, operating point, and
high and low limits for this zone.
LT = 0 , disables dynamic T
not adjusted and the channel behaves as described in the
Automatic Fan Control Overview section.
<7> R1T = 1, enables dynamic T
temperature channel. The chosen T
adjusted based on the current temperature, operating point, and
high and low limits for this zone.
R1T = 0, disables dynamic T
is not adjusted and the channel behaves as described in the
Automatic Fan Control Overview section.
control. The T
MIN
control on the local
MIN
value is dynamically
MIN
control. The T
MIN
control on the Remote 1
MIN
value is dynamically
MIN
control. The T
MIN
value chosen
MIN
value chosen is
MIN
value chosen
MIN
ENHANCING SYSTEM ACOUSTICS
Automatic fan speed control mode reacts instantaneously to
changes in temperature, that is, the PWM duty cycle responds
immediately to temperature change. Any impulses in
temperature can cause an impulse in fan noise. For psychoacoustic reasons, the ADT7468 can prevent the PWM output
from reacting instantaneously to temperature changes.
Enhanced acoustic mode controls the maximum change in
PWM duty cycle at a given time. The objective is to prevent the
fan from cycling up and down, annoying the user.
Acoustic Enhancement Mode Overview
Figure 77 gives a top-level overview of the automatic fan control
circuitry on the ADT7468 and shows where acoustic
enhancement fits in. Acoustic enhancement is intended as a
postdesign tweak made by a system or mechanical engineer
evaluating best settings for the system. Having determined the
optimal settings for the thermal solution, the engineer can
adjust the system acoustics. The goal is to implement a system
that is acoustically pleasing without causing user annoyance due
to fan cycling. It is important to realize that although a system
might pass an acoustic noise requirement specification (for
example, 36 dB), if the fan is annoying, it fails the consumer test.
ACOUSTIC
ENHANCEMENT
REMOTE 2 =
CPU TEMP
LOCAL =
VRM TEMP
REMOTE 1 =
AMBIENT TEMP
THERMAL CALIBRATION
T
MIN
THERMAL CALIBRATION
T
RANGE
100%
0%
100%
MUX
0%
T
MIN
THERMAL CALIBRATION
T
MIN
T
RANGE
T
RANGE
100%
0%
Figure 77. Acoustic Enhancement Smoothes Fan Speed Variations under Automatic Fan Speed Control
PWM
MIN
PWM
MIN
PWM
MIN
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 1
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 2
MEASUREMENT
RAMP
CONTROL
(ACOUSTIC
ENHANCEMENT)
TACHOMETER 3
AND 4
MEASUREMENT
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM
CONFIG
PWM
GENERATOR
PWM1
TACH1
CPU FAN SINK
PWM2
TACH2
FRONT CHASSIS
PWM3
TACH3
REAR CHASSIS
04499-0-083
Rev. 0 | Page 56 of 80
Page 57

ADT7468
Approaches to System Acoustic Enhancement
There are two different approaches to implementing system
acoustic enhancement: temperature-centric and fan-centric.
The temperature-centric approach involves smoothing transient
temperatures as they are measured by a temperature source (for
example, Remote 1 temperature). The temperature values used
to calculate the PWM duty cycle values are smoothed, reducing
fan speed variation. However, this approach causes an inherent
delay in updating fan speed and causes the thermal characteristics of the system to change. It also causes the system fans to
stay on longer than necessary, because the fan’s reaction is
merely delayed. The user has no control over noise from
different fans driven by the same temperature source. Consider,
for example, a system in which control of a CPU cooler fan (on
PWM1) and a chassis fan (on PWM2) use Remote 1 temperature. Because the Remote 1 temperature is smoothed, both fans
are updated at exactly the same rate. If the chassis fan is much
louder than the CPU fan, there is no way to improve its
acoustics without changing the thermal solution of the CPU
cooling fan.
The fan-centric approach to system acoustic enhancement
controls the PWM duty cycle, driving the fan at a fixed rate (for
example, 6%). Each time the PWM duty cycle is updated, it is
incremented by a fixed 6%. As a result, the fan ramps smoothly
to its newly calculated speed. If the temperature starts to drop,
the PWM duty cycle immediately decreases by 6% at every
update. Therefore, the fan ramps smoothly up or down without
inherent system delay. Consider, for example, controlling the
same CPU cooler fan (on PWM1) and chassis fan (on PWM2)
using Remote 1 temperature. The T
MIN
and T
settings have
RANGE
already been defined in automatic fan speed control mode, that
is, thermal characterization of the control loop has been
optimized. Now the chassis fan is noisier than the CPU cooling
fan. Using the fan-centric approach, PWM2 can be placed into
acoustic enhancement mode independently of PWM1. The
acoustics of the chassis fan can, therefore, be adjusted without
affecting the acoustic behavior of the CPU cooling fan, even
though both fans are controlled by Remote 1 temperature. The
fan-centric approach is how acoustic enhancement works on
the ADT7468.
Enabling Acoustic Enhancement for Each PWM Output
Enhance Acoustics Register 1 (Reg. 0x62)
<3> = 1,
enables acoustic enhancement on PWM1 output.
Enhance Acoustics Register 2 (Reg. 0x63)
<7> = 1,
enables acoustic enhancement on PWM2 output.
<3> = 1, enables acoustic enhancement on PWM3 output.
Effect of Ramp Rate on Enhanced Acoustics Mode
The PWM signal driving the fan has a period, T, given by the
PWM drive frequency, f, b ecause T = 1/f. For a given PWM
period, T, the PWM period is subdivided into 255 equal time
slots. One time slot corresponds to the smallest possible
increment in the PWM duty cycle. A PWM signal of 33% duty
cycle is, therefore, high for 1/3 × 255 time slots and low for 2/3
× 255 time slots. Therefore, a 33% PWM duty cycle corresponds
to a signal that is high for 85 time slots and low for 170 time
slots.
PWM_OUT
33% DUTY
CYCLE
Figure 78. 33% PWM Duty Cycle Represented in Time Slots
85
TIME SLOTS
PWM OUTPUT
(ONE PERIOD)
= 255 TIME SLOTS
170
TIME SLOTS
The ramp rates in the enhanced acoustics mode are selectable
from the values 1, 2, 3, 5, 8, 12, 24, and 48. The ramp rates are
discrete time slots. For example, if the ramp rate is 8, then eight
time slots are added to the PWM high duty cycle each time the
PWM duty cycle needs to be increased. If the PWM duty cycle
value needs to be decreased, it is decreased by eight time slots.
Figure 79 shows how the enhanced acoustics mode algorithm
operates.
READ
TEMPERATURE
CALCULATE
NEW PWM
DUTY CYCLE
IS NEW PWM
VALUE >
PREVIOUS
VALUE?
YES
INCREMENT
PREVIOUS
PWM VALUE
BY RAMP RATE
Figure 79. Enhanced Acoustics Algorithm
NO
BY RAMP RATE
DECREMENT
PREVIOUS
PWM VALUE
04499-0-085
The enhanced acoustics mode algorithm calculates a new PWM
duty cycle based on the temperature measured. If the new
PWM duty cycle value is greater than the previous PWM value,
then the previous PWM duty cycle value is incremented by
either 1, 2, 3, 5, 8, 12, 24, or 48 time slots, depending on the
settings of the enhance acoustics registers. If the new PWM
duty cycle value is less than the previous PWM value, then the
previous PWM duty cycle is decremented by 1, 2, 3, 5, 8, 12, 24,
or 48 time slots. Each time the PWM duty cycle is incremented
or decremented, its value is stored as the previous PWM duty
cycle for the next comparison.
A ramp rate of 1 corresponds to one time slot, which is 1/255 of
the PWM period. In enhanced acoustics mode, incrementing or
decrementing by 1 changes the PWM output by 1/255 × 100%.
04499-0-084
Rev. 0 | Page 57 of 80
Page 58

ADT7468
STEP 12: RAMP RATE FOR ACOUSTIC ENHANCEMENT
The optimal ramp rate for acoustic enhancement can be found
through system characterization after the thermal optimization
has been finished. The effect of each ramp rate should be
logged, if possible, to determine the best setting for a given
solution.
Enhanced Acoustics Register 1 (Reg. 0x62)
<2:0> ACOU,
000 = 1 time slot = 35 s
001 = 2 time slots = 17.6 s
010 = 3 time slots = 11.8 s
011 = 5 time slots = 7 s
100 = 8 time slots = 4.4 s
101 = 12 time slots =3 s
110 = 24 time slots = 1.6 s
111 = 48 time slots = 0.8 s
Enhance Acoustics Register 2 (Reg. 0x63)
<2:0> ACOU3,
000 = 1 time slot = 35 s
001 = 2 time slots = 17.6 s
010 = 3 time slots = 11.8 s
011 = 5 time slots = 7 s
100 = 8 time slots = 4.4 s
101 = 12 time slots = 3 s
110 = 24 time slots = 1.6 s
111 = 48 time slots = 0.8 s
<6:4> ACOU2, selects the ramp rate for PWM2.
000 = 1 time slot = 35 s
001 = 2 time slots = 17.6 s
010 = 3 time slots = 11.8 s
011 = 5 time slots = 7 s
100 = 8 time slots = 4.4 s
101 = 12 time slots = 3 s
110 = 24 time slots = 1.6 s
111 = 48 time slots = 0.8 s
Another way to view the ramp rates is to measure the time it
takes for the PWM output to ramp up from 0% to 100% duty
cycle for an instantaneous change in temperature. This can be
tested by putting the ADT7468 into manual mode and changing
the PWM output from 0% to 100% PWM duty cycle. The PWM
output takes 35 s to reach 100%, when a ramp rate of 1 time slot
is selected.
Figure 80 shows remote temperature plotted against PWM duty
cycle for enhanced acoustics mode. The ramp rate is set to 48,
which corresponds to the fastest ramp rate. Assume that a new
selects the ramp rate for PWM1.
selects the ramp rate for PWM3.
temperature reading is available every 115 ms. With these
settings, it takes approximately 0.76 s to go from 33% duty cycle
to 100% duty cycle (full speed). Even though the temperature
increases very rapidly, the fan ramps up to full speed gradually.
140
R
(°C)
120
100
80
60
40
20
TEMP
PWM CYCLE (%)
0
0 0.76
TIME (s)
Figure 80. Enhanced Acoustics Mode with Ramp Rate = 48
120
100
80
60
40
20
0
04499-0-086
Figure 81 shows how changing the ramp rate from 48 to 8
affects the control loop. The overall response of the fan is
slower. Because the ramp rate is reduced, it takes longer for the
fan to achieve full running speed. In this case, it takes
approximately 4.4 s for the fan to reach full speed.
120
R
(°C)
100
TEMP
80
60
40
20
0
0
PWM DUTY CYCLE (%)
TIME (s)
Figure 81. Enhanced Acoustics Mode with Ramp Rate = 8
140
120
100
80
60
40
20
0
4.4
04499-0-087
Figure 82 shows the PWM output response for a ramp rate of 2.
In this instance, the fan took about 17.6 s to reach full running
speed.
140
R
(°C)
TEMP
120
100
80
60
40
20
0
0
PWM DUTY CYCLE (%)
TIME (s)
17.6
Figure 82. Enhanced Acoustics Mode with Ramp Rate = 2
120
100
80
60
40
20
0
04499-0-088
Rev. 0 | Page 58 of 80
Page 59

ADT7468
908
7
6
5
4
3
2
Figure 83 shows how the control loop reacts to temperature
with the slowest ramp rate. The ramp rate is set to 1, while all
other control parameters remain the same. With the slowest
ramp rate selected, it takes 35 s for the fan to reach full speed.
120
100
80
60
40
20
R
(°C)
TEMP
PWM DUTY CYCLE (%)
0
0
TIME (s)
Figure 83. Enhanced Acoustics Mode with Ramp Rate = 1
140
120
100
80
60
40
20
0
35
04499-0-089
As Figure 80 to Figure 83 show, the rate at which the fan reacts
to temperature change is dependent on the ramp rate selected in
the enhanced acoustics registers. The higher the ramp rate, the
faster the fan reaches the newly calculated fan speed.
Figure 84 shows the behavior of the PWM output as temperature varies. As the temperature increases, the fan speed ramps
up. Small drops in temperature do not affect the ramp-up
function, because the newly calculated fan speed is still higher
than the previous PWM value. Enhanced acoustics mode allows
the PWM output to be made less sensitive to temperature
variations. This is dependent on the ramp rate selected and
programmed into the enhanced acoustics registers.
0
0
0
0
0
0
0
10
0
PWM DUTY CYCLE (%)
R
(°C)
TEMP
04499-0-090
Figure 84. How Fan Reacts to Temperature Variation
in Enhanced Acoustics Mode
Slower Ramp Rates
The ADT7468 can be programmed for much longer ramp times
by slowing the ramp rates. Each ramp rate can be slowed by a
factor of 4.
PWM1 Configuration Register (Reg. 0x5C)
<3> SLOW,
1 slows the ramp rate for PWM1 by 4.
PWM2 Configuration Register (Reg. 0x5D)
<3> SLOW,
1 slows the ramp rate for PWM2 by 4.
PWM3 Configuration Register (Reg. 0x5E)
<3> SLOW,
1 slows the ramp rate for PWM3 by 4.
The following sections list the ramp-up times when the SLOW
bit is set for each PWM output.
Enhanced Acoustics Register 1 (Reg. 0x62)
<2:0> ACOU,
selects the ramp rate for PWM1.
000 = 140 s
001 = 70.4 s
010 = 47.2 s
011 = 28 s
100 = 17.6 s
101 = 12 s
110 = 6.4 s
111 = 3.2 s
Enhance Acoustics Register 2 (Reg. 0x63)
<2:0> ACOU3,
selects the ramp rate for PWM3.
000 = 140 s
001 = 70.4 s
010 = 47.2 s
011 = 28 s
100 = 17.6 s
101 = 12 s
110 = 6.4 s
111 = 3.2 s
<6:4> ACOU2, selects the ramp rate for PWM2.
000 = 140 s
001 = 70.4 s
010 = 47.2 s
011 = 28 s
100 = 17.6 s
101 = 12 s
110 = 6.4 s
111 = 3.2 s
Rev. 0 | Page 59 of 80
Page 60

ADT7468
REGISTER TABLES
Table 16. ADT7468 Registers
Address R/W Description Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Default Lockable?
0x20 R 2.5 V measurement 9 8 7 6 5 4 3 2 0x00
0x21 R V
0x22 R VCC measurement 9 8 7 6 5 4 3 2 0x00
0x23 R 5 V measurement 9 8 7 6 5 4 3 2 0x00
0x24 R 12 V measurement 9 8 7 6 5 4 3 2 0x00
0x25 R
0x26 R Local Temperature 9 8 7 6 5 4 3 2 0x01
0x27 R
0x28 R TACH1 Low Byte 7 6 5 4 3 2 1 0 0x00
0x29 R TACH1 High Byte 15 14 13 12 11 10 9 8 0x00
0x2A R TACH2 Low Byte 7 6 5 4 3 2 1 0 0x00
0x2B R TACH2 High Byte 15 14 13 12 11 10 9 8 0x00
0x2C R TACH3 Low Byte 7 6 5 4 3 2 1 0 0x00
0x2D R TACH3 High Byte 15 14 13 12 11 10 9 8 0x00
0x2E R TACH4 Low Byte 7 6 5 4 3 2 1 0 0x00
0x2F R TACH4 High Byte 15 14 13 12 11 10 9 8 0x00
0x30 R/W
0x31 R/W
0x32 R/W
0x33 R/W
0x34 R/W
0x35 R/W
0x36 R/W
0x37 R/W
0x38 R/W
0x39 R/W
0x3A R/W
0x3D R Device ID Register 7 6 5 4 3 2 1 0 0x68
0x3E R
0x3F R Revision Number VER VER VER VER STP STP STP STP 0x70
0x40 R/W Configuration 1
0x41 R Interrupt Status 1 OOL R2T LT R1T
0x42 R Interrupt Status 2
0x43 R/W VID Config VIDSEL THLD VID 5 VID 4 VID 3 VID 2 VID 1 VID 0 0x00
0x44 R/W 2.5 V Low Limit 7 6 5 4 3 2 1 0 0x00
0x45 R/W 2.5 V High Limit 7 6 5 4 3 2 1 0 0xFF
0x46 R/W V
0x47 R/W V
0x48 R/W VCC Low Limit 7 6 5 4 3 2 1 0 0x00
0x49 R/W VCC High Limit 7 6 5 4 3 2 1 0 0xFF
0x4A R/W 5 V Low Limit 7 6 5 4 3 2 1 0 0x00
measurement 9 8 7 6 5 4 3 2 0x00
CCP
Remote 1
9 8 7 6 5 4 3 2 0x01
Temperature
Remote 2
9 8 7 6 5 4 3 2 0x01
Temperature
PWM1 Current Duty
7 6 5 4 3 2 1 0 0x00
Cycle
PWM2 Current Duty
7 6 5 4 3 2 1 0 0x00
Cycle
PWM3 Current Duty
7 6 5 4 3 2 1 0 0x00
Cycle
Remote 1
7 6 5 4 3 2 1 0 0xA4 Yes
Operating Point
Local Temp
7 6 5 4 3 2 1 0 0xA4 Yes
Operating Point
Remote 2
7 6 5 4 3 2 1 0 0xA4 Yes
Operating Point
Dynamic T
Control Reg. 1
Dynamic T
Control Reg. 2
MIN
MIN
Max PWM 1 Duty
R2T LT R1T PHTR2 PHTL PHTR1 V
CYR2 CYR2 CYL CYL CYL CYR1 CYR1 CYR1 0x00 Yes
7 6 5 4 3 2 1 0 0xFF Yes
LO CYR2 0x00 Yes
CCP
Cycle
Max PWM 2 Duty
7 6 5 4 3 2 1 0 0xFF Yes
Cycle
Max PWM 3 Duty
7 6 5 4 3 2 1 0 0xFF Yes
Cycle
Company ID
7 6 5 4 3 2 1 0 0x41
Number
V
CC
TODIS FSPDIS VxI FSPD RDY LOCK STRT 0x01 Yes
=
5 V
5 V/
THERM
V
CC
2.5 V 0x00
CCP
V
Timer Limit
D2
FAU LT
D1
FAU LT
FAN 4 /
THERM
FAN 3 FA N 2 FAN1
THERM
Tem p
12 V/VC 0x00
Limit
Low Limit 7 6 5 4 3 2 1 0 0x00
CCP
High Limit 7 6 5 4 3 2 1 0 0xFF
CCP
Rev. 0 | Page 60 of 80
Page 61

ADT7468
Address R/W Description Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Default Lockable?
0x4B R/W 5 V High Limit 7 6 5 4 3 2 1 0 0xFF
0x4C R/W 12 V Low Limit 7 6 5 4 3 2 1 0 0x00
0x4D R/W 12 V High Limit 7 6 5 4 3 2 1 0 0xFF
0x4E R/W
Remote 1 Temp
Low Limit
0x4F R/W
Remote 1 Temp
High Limit
0x50 R/W
Local Temp Low
Limit
0x51 R/W
Local Temp High
Limit
0x52 R/W
Remote 2 Temp
Low Limit
0x53 R/W
Remote 2 Temp
High Limit
0x54 R/W
TACH1 Minimum
Low Byte
0x55 R/W
TACH1 Minimum
High Byte
0x56 R/W
TACH2 Minimum
Low Byte
0x57 R/W
TACH2 Minimum
High Byte
0x58 R/W
TACH3 Minimum
Low Byte
0x59 R/W
TACH3 Minimum
High Byte
0x5A R/W
TACH4 Minimum
Low Byte
0x5B R/W
TACH4 Minimum
High Byte
0x5C R/W
PWM1
Configuration
Register
0x5D R/W
PWM2
Configuration
Register
0x5E R/W
PWM3
Configuration
Register
0x5F R/W
Remote 1
/PWM 1
T
RANGE
Frequency
0x60 R/W
0x61 R/W
Local T
RANGE
Frequency
Remote 2
/PWM3
T
RANGE
/PWM 2
Frequency
0x62 R/W
Enhance Acoustics
Reg. 1
0x63 R/W
Enhance Acoustics
Reg. 2
0x64 R/W
PWM1 Min Duty
Cycle
0x65 R/W
PWM2 Min Duty
Cycle
0x66 R/W
PWM3 Min Duty
Cycle
0x67 R/W Remote 1 Temp T
0x68 R/W Local Temp T
MIN
0x69 R/W Remote 2 Temp T
0x6A R/W
Remote 1
THERM
Temp Limit
0x6B R/W
Local
THERM
Tem p
Limit
7 6 5 4 3 2 1 0 0x01
7 6 5 4 3 2 1 0 0x7F
7 6 5 4 3 2 1 0 0x01
7 6 5 4 3 2 1 0 0x7F
7 6 5 4 3 2 1 0 0x01
7 6 5 4 3 2 1 0 0x7F
7 6 5 4 3 2 1 0 0xFF
15 14 13 12 11 10 9 8 0xFF
7 6 5 4 3 2 1 0 0xFF
15 14 13 12 11 10 9 8 0xFF
7 6 5 4 3 2 1 0 0xFF
15 14 13 12 11 10 9 8 0xFF
7 6 5 4 3 2 1 0 0xFF
15 14 13 12 11 10 9 8 0xFF
BHVR BHVR BHVR INV SLOW SPIN SPIN SPIN 0x82 Yes
BHVR BHVR BHVR INV SLOW SPIN SPIN SPIN 0x82 Yes
BHVR BHVR BHVR INV SLOW SPIN SPIN SPIN 0x82 Yes
RANGE RANGE RANGE RANGE THRM FREQ FREQ FREQ 0XC4 Yes
RANGE RANGE RANGE RANGE THRM FREQ FREQ FREQ 0XC4 Yes
RANGE RANGE RANGE RANGE THRM FREQ FREQ FREQ 0XC4 Yes
MIN3 MIN2 MIN1 SYNC EN1 ACOU ACOU ACOU 0X00 Yes
EN2 ACOU2 ACOU2 ACOU2 EN3 ACOU3 ACOU3 ACOU3 0X00 Yes
7 6 5 4 3 2 1 0 0X80 Yes
7 6 5 4 3 2 1 0 0X80 Yes
7 6 5 4 3 2 1 0 0X80 Yes
7 6 5 4 3 2 1 0 0X9A Yes
MIN
7 6 5 4 3 2 1 0 0X9A Yes
7 6 5 4 3 2 1 0 0X9A Yes
MIN
7 6 5 4 3 2 1 0 0XA4 Yes
7 6 5 4 3 2 1 0 0XA4 Yes
Rev. 0 | Page 61 of 80
Page 62

ADT7468
Address R/W Description Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Default Lockable?
0x6C R/W
Remote 2
THERM
Temp Limit
0x6D R/W
0x6E R/W
0x6F R/W
Remote 1 and Local
Tem p/ T
Hysteresis
MIN
Remote 2
Tem p/ T
Hysteresis
MIN
XNOR Tree Test
Enable
0x70 R/W
Remote 1
Temperature Offset
0x71 R/W
Local Temperature
Offset
0x72 R/W
Remote 2
Temperature Offset
0x73 R/W
Configuration
Register 2
0x74 R/W
Interrupt Mask 1
Register
0x75 R/W
Interrupt Mask 2
Register
0x76 R/W
Extended
Resolution 1
0x77 R/W
Extended
Resolution 2
0x78 R/W
Configuration
Register 3
0x79 R
THERM
Timer Status
Register
0x7A R/W
THERM
Timer Limit
Register
0x7B R/W
TACH Pulses per
Revolution
0x7C R/W
Configuration
Register 5
0x7D R/W
Configuration
Register 4
0x7E R Test Register 1 DO NOT WRITE TO THESE REGISTERS 0X00 Yes
0x7F R Test Register 2 DO NOT WRITE TO THESE REGISTERS 0X00 Yes
Table 17. Voltage Reading Registers (Power-On Default = 0x00)1
Register Address R/W Description
0x20 Read-only Reflects the voltage measurement at the 2.5 V input on Pin 22 (8 MSBs of reading).
0x21 Read-only Reflects the voltage measurement2 at the V
0x22 Read-only Reflects the voltage measurement3 at the VCC input on Pin 4 (8 MSBs of reading).
0x23 Read-only Reflects the voltage measurement at the 5 V input on Pin 20 (8 MSBs of reading.
0x24 Read-only Reflects the voltage measurement at the 12 V input on Pin 21 (8 MSBs of reading).
1
If the extended resolution bits of these readings are also being read, the extended resolution registers (Reg. 0x76, 0x77) must be read first. Once the extended
resolution registers have been read, the associated MSB reading registers are frozen until read. Both the extended resolution registers and the MSB registers are frozen.
2
If V
Low (Bit 1 of the Dynamic T
CCP
3
VCC (Pin 4) is the supply voltage for the ADT7468.
MIN
7 6 5 4 3 2 1 0 0XA4 Yes
HYSR1 HYSR1 HYSR1 HYSR1 HYSL HYSL HYSL HYSL 0X44 Yes
HYSR2 HYSR2 HYSR2 HYRS RES RES RES RES 0X40 Yes
RES RES RES RES RES RES RES XEN 0X00 Yes
7 6 5 4 3 2 1 0 0X00 Yes
7 6 5 4 3 2 1 0 0X00 Yes
7 6 5 4 3 2 1 0 0X00 Yes
SHDN CONV ATTN AVG AIN4 AIN3 AIN2 AIN1 0X00 Yes
OOL R2T LT RIT 5 V V
V
CC
2.5 V 0X00
CCP
D2 D1 F4P FAN3 FAN2 FAN1 OV T 12 V / VC 0X00
5 V 5 V V
V
CC
V
CC
CCP
V
2.5 V 2.5 V 0X00
CCP
TDM2 TDM2 LTMP LTMP TDM1 TDM1 12 V 12 V 0X00
DC4 DC3 DC2 DC1 FAST BOOST
THERM
ALERT
Enable
0X00 Yes
TMR TMR TMR TMR TMR TMR TMR ASRT/TMRO 0X00
LIMT LIMT LIMT LIMT LIMT LIMT LIMT LIMT 0X00
FAN 4 FA N 4 FAN3 FAN3 FA N 2 FAN2 FAN1 FA N 1 0X55
RES RES RES RES GPIOP GPIOD LF/HF
TWOS
0X00 Yes
COMPL
BpAtt
12 V
BpAtt
5 V
Control Register 1, 0x36) is set, V
BpAtt
V
CCP
BpAtt
2.5 V
can control the sleep state of the ADT7468.
CCP
AINL AINL
Pin 14
Func
input on Pin 23 (8 MSBs of reading).
CCP
Pin 14 Func 0X00 Yes
Rev. 0 | Page 62 of 80
Page 63

ADT7468
Table 18. Temperature Reading Registers (Power-On Default = 0x01)
1, 2, 3
Register Address R/W Description
0x25
Read-only
Remote 1 temperature reading
3, 4
(8 MSB of reading).
0x26 Read-only Local temperature reading (8 MSB of reading).
0x27 Read-only Remote 2 temperature reading
1
If the extended resolution bits of these readings are also being read, the extended resolution registers (Reg. 0x76, 0x77) must be read first. Once the extended
resolution registers have been read, all associated MSB reading registers are frozen until read. Both the extended resolution registers and the MSB registers are frozen.
2
These temperature readings can be in twos complement or Offset 64 format; this interpretation is determined by Bit 0 of Configuration Register 5 (0x7C).
3
In twos complement mode, a temperature reading of −128°C (0x80) indicates a diode fault (open or short) on that channel.
4
In Offset 64 mode, a temperature reading of −64°C (0x00) indicates a diode fault (open or short) on that channel.
3, 4
(8 MSB of reading).
Table 19. Fan Tachometer Reading Registers (Power-On Default = 0x00)1
Register Address R/W Description
0x28 Read-only TACH1 low byte.
0x29 Read-only TACH1 high byte.
0x2A Read-only TACH2 low byte.
0x2B Read-only TACH2 high byte.
0x2C Read-only TACH3 low byte.
0x2D Read-only TACH3 high byte.
0x2E Read-only TACH4 low byte.
0x2F Read-only TACH4 high byte.
1
These registers count the number of 11.11 µs periods (based on an internal 90 kHz clock) that occur between a number of consecutive fan TACH pulses (default = 2).
The number of TACH pulses used to count can be changed using the fan pulses per revolution register (Reg. 0x7B). This allows the fan speed to be accurately measured.
Because a valid fan tachometer reading requires that two bytes are read, the low byte must be read first. Both the low and high bytes are then frozen until read. At
power-on, these registers contain 0x0000 until such time as the first valid fan TACH measurement is read into these registers. This prevents false interrupts from
occurring while the fans are spinning up. A count of 0xFFFF indicates that a fan is one of the following:
• Stalled or blocked (object jamming the fan).
• Failed (internal circuitry destroyed).
• Not populated. (The ADT7468 expects to see a fan connected to each TACH. If a fan is not connected to that TACH, its TACH minimum high and low bytes should
be set to 0xFFFF.)
• Alternate function, for example, TACH4 reconfigured as
• 2-wire instead of 3-wire fan.
THERM
pin.
1
Table 20. Current PWM Duty Cycle Registers (Power-On Default = 0x00)
Register Address R/W Description
0x30 Read/write PWM1 current duty cycle (0% to 100% duty cycle = 0x00 to 0xFF).
0x31 Read/write PWM2 current duty cycle (0% to 100% duty cycle = 0x00 to 0xFF).
0x32 Read/write PWM3 current duty cycle (0% to 100% duty cycle = 0x00 to 0xFF).
1
These registers reflect the PWM duty cycle driving each fan at any given time. When in automatic fan speed control mode, the ADT7468 reports the PWM duty cycles
back through these registers. The PWM duty cycle values vary according to temperature in automatic fan speed control mode. During fan startup, these registers report
back 0x00. In software mode, the PWM duty cycle outputs can be set to any duty cycle value by writing to these registers.
Table 21. Operating Point Registers (Power-On Default = 0x64)
1, 2, 3
Register Address R/W3 Description
0x33 Read/write Remote 1 operating point register (default = 100°C).
0x34 Read/write Local temperature operating point register (default = 100°C).
0x35 Read/write Remote 2 operating point register (default = 100°C).
1
These registers set the target operating point for each temperature channel when the dynamic T
2
The fans being controlled are adjusted to maintain temperature about an operating point.
3
These registers become read-only when the Configuration Register 1 lock bit is set to 1. Any subsequent attempts to write to these registers fail.
control feature is enabled.
MIN
Rev. 0 | Page 63 of 80
Page 64

ADT7468
Table 22. Register 0x36—Dynamic T
Bit Name R/W Description
<0> CYR2 Read/write
MSB of 3-bit remote 2 cycle value. The other two bits of the code reside in Dynamic T
(Reg. 0x37). These three bits define the delay time between making subsequent T
control loop, in terms of the number of monitoring cycles. The system has associated thermal time constants
that need to be found to optimize the response of fans and the control loop.
<1> V
LO Read/write
CCP
V
CCP
low limit value (Reg. 0x46), the following occurs:
• Status Bit 1 in Status Register 1 is set.
• SMBALERT
• PROCHOT
• Dynamic T
• The device is prevented from entering shutdown.
• Everything is re-enabled once V
<2> PHTR1 Read/write
PHTR1 = 1 copies the Remote 1 current temperature to the Remote 1 operating point register, if THERM
asserted. The operating point contains the temperature at which THERM
to run as quietly as possible without affecting system performance.
PHTR1 = 0 ignores any THERM
its programmed value.
<3> PHTL Read/write
PHTL = 1 copies the local channel’s current temperature to the local operating point register, if THERM
asserted. The operating point contains the temperature at which THERM
to run as quietly as possible without affecting system performance.
PHTL = 0 ignores any THERM
reflects its programmed value.
<4> PHTR2 Read/write
PHTR2 = 1 copies the Remote 2 current temperature to the Remote 2 operating point register, if THERM
asserted. The operating point contains the temperature at which THERM
run as quietly as possible without affecting system performance.
PHTR2 = 0 ignores any THERM
its programmed value.
<5> R1T Read/write
R1T = 1 enables dynamic T
dynamically adjusted based on the current temperature, operating point, and high and low limits for this
zone.
R1T = 0 disables dynamic T
described in the Fan Speed Control section.
<6> LT Read/write
LT=1 enables dynamic T
adjusted based on the current temperature, operating point, and high and low limits for this zone.
LT = 0 disables dynamic T
described in the Fan Speed Control section.
<7> R2T Read/write
R2T = 1 enables dynamic T
dynamically adjusted based on the current temperature, operating point, and high and low limits for this
zone.
R2T = 0 disables dynamic T
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any subsequent attempts to write to this register fail.
described in the Fan Speed Control section.
Control Register 1 (Power-On Default = 0x00)1
MIN
MIN
LO = 1. When the power is supplied from 3.3 V STANDBY and the core voltage (V
is generated, if enabled.
monitoring is disabled.
control is disabled.
MIN
increases above the V
CCP
low limit.
CCP
is asserted, which allows the system
assertions on the THERM pin. The Remote 1 operating point register reflects
is asserted, which allows the system
assertions on the THERM pin. The local operating temperature point register
is asserted. This allows the system to
assertions on the THERM pin. The Remote 2 operating point register reflects
control on the Remote 1 temperature channel. The chosen T
MIN
control. The T
MIN
control on the local temperature channel. The chosen T
MIN
control. The T
MIN
control on the Remote 2 temperature channel. The chosen T
MIN
control. The T
MIN
value chosen is not adjusted, and the channel behaves as
MIN
value chosen is not adjusted, and the channel behaves as
MIN
value chosen is not adjusted, and the channel behaves as
MIN
MIN
Control Register 2
MIN
adjustments in the
) drops below its V
CCP
value is
MIN
value is dynamically
value is
MIN
CCP
is
is
is
Rev. 0 | Page 64 of 80
Page 65

ADT7468
Table 23. Register 0x37—Dynamic T
Bit Name R/W Description
<2:0> CYR1 Read/write
3-Bit Remote 1 Cycle Value. These three bits define the delay time between making subsequent T
adjustments in the control loop for the Remote 1 channel, in terms of number of monitoring cycles. The
system has associated thermal time constants that need to be found to optimize the response of fans and
the control loop.
Bits Decrease Cycle Increase Cycle
000 8 cycles (1 s) 16 cycles (2 s)
001 16 cycles (2 s) 32 cycles (4 s)
010 32 cycles (4 s) 64 cycles (8 s)
011 64 cycles (8 s) 128 cycles (16 s)
100 128 cycles (16 s) 256 cycles (32 s)
101 256 cycles (32 s) 512 cycles (64 s)
110 512 cycles (64 s) 1024 cycles (128 s)
111 1024 cycles (128 s) 2048 cycles (256 s)
<5:3> CYL Read/write
3-bit local temperature cycle value. These three bits define the delay time between making subsequent T
adjustments in the control loop for the local temperature channel, in terms of number of monitoring cycles.
The system has associated thermal time constants that need to be found to optimize the response of fans
and the control loop.
Bits Decrease Cycle Increase Cycle
000 8 cycles (1 s) 16 cycles (2 s)
001 16 cycles (2 s) 32 cycles (4 s)
010 32 cycles (4 s) 64 cycles (8 s)
011 64 cycles (8 s) 128 cycles (16 s)
100 128 cycles (16 s) 256 cycles (32 s)
101 256 cycles (32 s) 512 cycles (64 s)
110 512 cycles (64 s) 1024 cycles (128 s)
111 1024 cycles (128 s) 2048 cycles (256 s)
<7:6> CYR2 Read/write
2 LSBs of 3-bit Remote 2 cycle value. The MSB of the 3-bit code resides in Dynamic T
(Reg. 0x36). These three bits define the delay time between making subsequent T
control loop for the Remote 2 channel, in terms of number of monitoring cycles. The system has associated
thermal time constants that need to be found to optimize the response of fans and the control loop.
Control Register 2 (Power-On Default = 0x00)1
MIN
Control Register 1
MIN
adjustments in the
MIN
MIN
MIN
Bits Decrease Cycle Increase Cycle
000 8 cycles (1 s) 16 cycles (2 s)
001 16 cycles (2 s) 32 cycles (4 s)
010 32 cycles (4 s) 64 cycles (8 s)
011 64 cycles (8 s) 128 cycles (16 s)
100 128 cycles (16 s) 256 cycles (32 s)
101 256 cycles (32 s s) 512 cycles (64 s)
110 512 cycles (64 s) 1024 cycles (128 s)
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any subsequent attempts to write to this register fail.
111 1024 cycles (128 s) 2048 cycles (256 s)
1, 2
Table 24. Maximim PWM Duty Cycle (Power-On Default = 0xFF)
Register Address R/W2 Description
0x38 Read/write Maximum duty cycle for PWM1 output, default = 100% (0xFF.)
0x39 Read/write Maximum duty cycle for PWM2 output, default = 100% (0xFF).
0x3A Read/write Maximum duty cycle for PWM3 output, default = 100% (0xFF).
1
These registers set the maximum PWM duty cycle of the PWM output .
2
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any subsequent attempts to write to this register fail.
Rev. 0 | Page 65 of 80
Page 66

ADT7468
Table 25. Register 0x40—Configuration Register 1 (Power-On Default = 0x01)
Bit Name R/W Description
<0> STRT Read/write Logic 1 enables monitoring and PWM control outputs based on the limit settings programmed.
Logic 0 disables monitoring and PWM control based on the default power-up limit settings.
Note that the limit values programmed are preserved even if a Logic 0 is written to this bit and the
default settings are enabled. This bit becomes read-only and cannot be changed once Bit 1 (LOCK bit)
has been written. All limit registers should be programmed by BIOS before setting this bit to 1.
(Lockable.)
<1> LOCK Write once
<2> RDY Read-only
<3> FSPD Read/write When set to 1, this bit runs all fans at full speed. Power-on default = 0. This bit never gets locked.
<4> VxI Read/write
<5> FSPDIS Read/write
<6> TODIS Read/write
<7> VCC Read/write
Table 26. Register 0x41—Interrupt Status Register 1 (Power-On Default = 0x00)
Bit Name R/W Description
<0> 2.5 V Read-only
<1> V
Read-only
CCP
<2> VCC Read-only
<3>
5 V/
THERM
Read-only
timer
<4> R1T Read-only
<5> LT Read-only
<6> R2T Read-only
<7> OOL Read-only
Logic 1 locks all limit values to their current settings. Once this bit is set, all lockable registers become
read-only and cannot be modified until the ADT7468 is powered down and powered up again. This
prevents rogue programs such as viruses from modifying critical system limit settings. (Lockable.)
This bit is set to 1 by the ADT7468 to indicate only that the device is fully powered-up and ready to begin
system monitoring.
BIOS should set this bit to a 1 when the ADT7468 is configured to measure current from an ADI ADOPT™
VRM controller and to measure the CPU’s core voltage. This bit allows monitoring software to display
CPU watts usage. (Lockable.)
Logic 1 disables fan spin-up for two TACH pulses. Instead, the PWM outputs go high for the entire fan
spin-up timeout selected.
When this bit is set to 1, the SMBus timeout feature is enabled. This allows the ADT7468 to be used with
SMBus controllers that cannot handle SMBus timeouts. (Lockable.)
When this bit is set to 1, the ADT7468 rescales its V
ADT7468 measures V
as a 3.3 V supply. (Lockable.)
CC
pin to measure 5 V supply. If this bit is 0, the
CC
2.5 V = 1 indicates that the 2.5 V high or low limit has been exceeded. This bit is cleared on a read of the
status register only if the error condition has subsided.
= 1 indicates that the V
V
CCP
high or low limit has been exceeded. This bit is cleared on a read of the
CCP
status register only if the error condition has subsided.
= 1 indicates that the VCC high or low limit has been exceeded. This bit is cleared on a read of the
V
CC
status register only if the error condition has subsided.
A one indicates the 5 V high or low limit has been exceeded. This bit is cleared on a read of the status
register only if the error condition has subsided. If Pin 20 is configured as THERM
, this bit is asserted when
the Timer Limit has been exceeded.
R1T = 1 indicates that the Remote 1 low or high temperature has been exceeded. This bit is cleared on a
read of the status register only if the error condition has subsided.
LT =1 indicates that the local low or high temperature has been exceeded. This bit is cleared on a read of
the status register only if the error condition has subsided.
R2T = 1 indicates that the Remote 2 low or high temperature has been exceeded. This bit is cleared on a
read of the status register only if the error condition has subsided.
OOL = 1 indicates that an out-of-limit event has been latched in Status Register 2. This bit is a logical OR
of all status bits in Status Register 2. Software can test this bit in isolation to determine whether any of
the voltage, temperature, or fan speed readings represented by Status Register 2 are out-of-limit, which
saves the need to read Status Register 2 during every interrupt or polling cycle.
Rev. 0 | Page 66 of 80
Page 67

ADT7468
Table 27. Register 0x42—Interrupt Status Register 2 (Power-On Default = 0x00)
Bit Name R/W Description
<0> 12V/VC Read-only
<1> OVT Read-only
<2> FAN1 Read-only
<3> FAN2 Read-only
<4> FAN3 Read-only
<5> F4P Read-only
Read/write When Pin 14 is programmed as a GPIO output, writing to this bit determines the logic output of the GPIO.
Read-only
<6> D1 Read-only D1 = 1 indicates either an open or short circuit on the Thermal Diode 1 inputs.
<7> D2 Read-only D2 = 1 indicates either an open or short circuit on the Thermal Diode 2 inputs.
Table 28. Register 43H—VID Register (Power-On Default = 0x00 )
Bit Name R/W Description
<4:0> VID[4:0] Read-only
<5> VID5 Read-only
<6> THLD Read/write Selects the input switching threshold for the VID inputs.
<7> VIDSEL Read/write VIDSEL = 0 configures Pin 21 as the 12 V measurement input (default).
Table 29. Voltage Limit Registers
Register Address R/W Description2 Power-On Default
0x44 Read/write 2.5 V. 0x00
0x45 Read/write 2.5 V. 0xFF
0x46 Read/write V
0x47 Read/write V
0x48 Read/write VCC low limit. 0x00
0x49 Read/write VCC high limit. 0xFF
0x4A Read/write 5 V low limit. 0x00
0x4B Read/write 5 V high limit. 0xFF
0x4C Read/write 12 V low limit. 0x00
0x4D Read/write 12 V high limit. 0xFF
1
Setting the Configuration Register 1 lock bit has no effect on these registers.
2
High Limits: An interrupt is generated when a value exceeds its high limit (> comparison). Low Limits: An interrupt is generated when a value is equal to or below its
low limit (≤ comparison).
A one indicates that the 12 V high or low limit has been exceeded. This bit is cleared on a read of the status
register only if the error condition has subsided. If Pin 21 is configured as VID5, this bit is the VID change bit.
This bit is set when the levels on VID0 to VID5 are different than they were 11 µs previously. This pin can be
used to generate an SMBALERT
OVT = 1 indicates that one of the THERM
read of the status register when the temperature drops below THERM − T
whenever the VID code changes.
overtemperature limits has been exceeded. This bit is cleared on a
HYST
.
FAN1 = 1 indicates that Fan 1 has dropped below minimum speed or has stalled. This bit is not set when the
PWM 1 output is off.
FAN2 = 1 indicates that Fan 2 has dropped below minimum speed or has stalled. This bit is not set when the
PWM 2 output is off.
FAN3 = 1 indicates that Fan 3 has dropped below minimum speed or has stalled. This bit is not set when the
PWM 3 output is off.
When Pin 14 is programmed as a TACH4 input, F4P = 1 indicates that Fan 4 has dropped below minimum
speed or has stalled. This bit is not set when the PWM3 output is off.
If Pin 14 is configured as the
THERM
timer input for
assertion time exceeds the limit programmed in the
THERM
monitoring, then this bit is set when the
THERM
limit register (Reg. 0x7A).
THERM
The VID[4:0] inputs from the CPU indicate the expected processor core voltage. On power-up, these bits
reflect the state of the VID pins, even if monitoring is not enabled.
Reads VID5 from the CPU when Bit 7 = 1. If Bit 7 = 0, then the VID5 bit always reads back 0 (power-on
default).
THLD = 0 selects a threshold of 1 V (V
THLD = 1 lowers the switching threshold to 0.6 V (V
1
low limit. 0x00
CCP
high limit. 0xFF
CCP
< 0.8 V, VIH > 1.7 V).
OL
< 0.4 V, VIH > 0.8 V).
OL
Rev. 0 | Page 67 of 80
Page 68

ADT7468
Table 30. Temperature Limit Registers1
Register Address R/W Description2 Power-On Default
0x4E Read/write Remote 1 temperature low limit. 0x81
0x4F Read/write Remote 1 temperature high limit. 0x7F
0x50 Read/write Local temperature low limit. 0x81
0x51 Read/write Local temperature high limit. 0x7F
0x52 Read/write Remote 2 temperature low limit. 0x81
0x53 Read/write Remote 2 temperature high limit. 0x7F
1
Exceeding any of these temperature limits by 1°C causes the appropriate status bit to be set in the interrupt status register. Setting the Configuration Register 1 lock bit
has no effect on these registers.
2
High Limits: An interrupt is generated when a value exceeds its high limit (> comparison). Low Limits: An interrupt is generated when a value is equal to or below its
low limit (≤ comparison).
Table 31. Fan Tachometer Limit Registers
Register Address R/W Description Power-On Default
0x54 Read/write TACH1 minimum low byte. 0xFF
0x55 Read/write
0x56 Read/write TACH2 minimum low byte. 0xFF
0x57 Read/write TACH2 minimum high byte. 0xFF
0x58 Read/write TACH3 minimum low byte. 0xFF
0x59 Read/write TACH3 minimum high byte. 0xFF
0x5A Read/write TACH4 minimum low byte. 0xFF
0x5B Read/write TACH4 minimum high byte. 0xFF
1
Exceeding any of the TACH limit registers by 1 indicates that the fan is running too slowly or has stalled. The appropriate status bit is set in Interrupt Status Register 2 to
indicate the fan failure. Setting the Configuration Register 1 lock bit has no effect on these registers.
Table 32. Register 0x55—TACH 1 Minimum High Byte (Power-On Default = 0xFF)
Bits Name R/W Description
<4:0> Reserved Read-only
These bits are reserved when Bit 6 of Config 2 Register (0x73) is set (single-channel ADC mode).
Otherwise, these bits represent Bits <4:0> of the TACH1 minimum high byte.
<7:5> SCADC Read/write
When Bit 6 of Config 2 Register (0x73) is set (single channel ADC mode), these bits are used to select the
only channel from which the ADC makes measurements. Otherwise, these bits represent Bits <7:5> of
the TACH1 minimum high byte.
1
TACH1 minimum high byte/Single channel ADC
channel select.
0xFF
Rev. 0 | Page 68 of 80
Page 69

ADT7468
Table 33. PWM Configuration Registers
Register Address R/W1 Description Power-On Default
0x5C Read/write PWM1 configuration. 0x82
0x5D Read/write PWM2 configuration. 0x82
0x5E Read/write PWM3 configuration. 0x82
Bit Name R/W Description
<2:0> SPIN Read/write
000 = No startup timeout
001 = 100 ms
010 = 250 ms (default)
011 = 400 ms
100 = 667 ms
101 = 1 s
110 = 2 s
111 = 4 s
<3> SLOW Read/write SLOW = 1 makes the ramp rates for acoustic enhancement four times longer.
<4> INV Read/write
<7:5> BHVR Read/write These bits assign each fan to a particular temperature sensor for localized cooling.
000 = Remote 1 temperature controls PWMx (automatic fan control mode).
001 = local temperature controls PWMx (automatic fan control mode).
010 = Remote 2 temperature controls PWMx (automatic fan control mode).
011 = PWMx runs full speed.
100 = PWMx disabled (default).
101 = fastest speed calculated by local and Remote 2 temperature controls PWMx.
110 = fastest speed calculated by all three temperature channel controls PWMx.
1
These registers become read-only when the Configuration Register 1 lock bit is set to 1. Any subsequent attempts to write to these registers fail.
These bits control the startup timeout for PWMx. The PWM output stays high until
two valid TACH rising edges are seen from the fan. If there is not a valid TACH signal
during the fan TACH measurement directly after the fan startup timeout period, then
the TACH measurement reads 0xFFFF and Status Register 2 reflects the fan fault. If the
TACH minimum high and low bytes contain 0xFFFF or 0x0000, then the Status
Register 2 bit is not set, even if the fan has not started.
This bit inverts the PWM output. The default is 0, which corresponds to a logic high
output for 100% duty cycle. Setting this bit to 1 inverts the PWM output, so 100%
duty cycle corresponds to a logic low output.
111 = manual mode. PWM duty cycle registers (Reg. 0x30 to Reg. 0x32) become
writable.
Rev. 0 | Page 69 of 80
Page 70

ADT7468
Table 34. TEMP T
Register Address R/W1 Description Power-On Default
0x5F Read/write Remote 1 T
0x60 Read/write Local temperature T
0x61 Read/write Remote 2 T
Bit Name R/W Description
<2:0> FREQ Read/write These bits control the PWMx frequency.
000 = 11.0 Hz
001 = 14.7 Hz
010 = 22.1 Hz
011 = 29.4 Hz
100 = 35.3 Hz (default)
101 = 44.1 Hz
110 = 58.8 Hz
111 = 88.2 Hz
<3> THRM Read/write
<7:4> RANGE Read/write
0000 = 2°C
0001 = 2.5°C
0010 = 3.33°C
0011 = 4°C
0100 = 5°C
0101 = 6.67°C
0110 = 8°C
0111 = 10°C
1000 = 13.33°C
1001 = 16°C
1010 = 20°C
1011 = 26.67°C
1100 = 32°C (Default)
1101 = 40°C
1110 = 53.33°C
1111 = 80°C
1
These registers become read-only when the Configuration Register 1 lock bit is set. Any further attempts to write to these registers have no effect.
/PWM Frequency Registers
RANGE
/PWM1 frequency. 0xC4
RANGE
/PWM2 frequency. 0xC4
RANGE
/PWM3 frequency. 0xC4
RANGE
THRM = 1 causes the
temperature channel’s
remains asserted until the temperature is equal to or below the
minimum time that
THERM
pin (Pin 14/20) to assert low as an output when this
THERM
limit has been exceeded by 0.25°C. The
THERM
asserts is one monitoring cycle. This allows clock
THERM
THERM
limit. The
modulation of devices that incorporate this feature.
THRM = 0 makes the
PROCHOT
monitoring, when Pin 14/20 is configured as
THERM
pin act as an input only, for example, for Pentium 4
THERM
.
These bits determine the PWM duty cycle vs. the temperature slope for automatic fan
control.
pin
Rev. 0 | Page 70 of 80
Page 71

ADT7468
Table 35. Register 0x62—Enhanced Acoustics Register 1 (Power-On Default = 0x00)
Bit Name R/W1 Description
<2:0> ACOU Read/write
<3> EN1 Read/write When this bit is 1, acoustic enhancement is enabled on PWM1 output.
<4> SYNC Read/write
<5> MIN1 Read/write
<6> MIN2 Read/write
<7> MIN3 Read/write
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
These bits select the ramp rate applied to the PWM1 output. Instead of PWM1 jumping instantaneously to
its newly calculated speed, PWM1 ramps gracefully at the rate determined by these bits. This feature
enhances the acoustics of the fan being driven by the PWM1 output.
Time Slot Increase Time for 33% to 100%
000 = 1 35 s
001 = 2 17.6 s
010 = 3 11.8 s
011 = 4 7 s
100 = 8 4.4 s
101 = 12 3 s
110 = 24 1.6 s
111 = 48 0.8 s
SYNC = 1 synchronizes fan speed measurements on TACH2, TACH3, and TACH4 to PWM3. This allows up to
three fans to be driven from PWM3 output and their speeds to be measured.
SYNC = 0 synchronizes only TACH3 and TACH4 to PWM3 output.
When the ADT7468 is in automatic fan control mode, this bit defines whether PWM1 is off (0% duty cycle) or
at PWM1 minimum duty cycle when the controlling temperature is below its T
0 = 0% duty cycle below T
1 = PWM1 minimum duty cycle below T
– hysteresis.
MIN
– hysteresis.
MIN
– hysteresis value.
MIN
When the ADT7468 is in automatic fan speed control mode, this bit defines whether PWM2 is off (0% duty
cycle) or at PWM2 minimum duty cycle when the controlling temperature is below its T
0 = 0% duty cycle below T
1 = PWM 2 minimum duty cycle below T
– hysteresis.
MIN
– hysteresis.
MIN
– hysteresis value.
MIN
When the ADT7468 is in automatic fan speed control mode, this bit defines whether PWM3 is off (0% duty
cycle) or at PWM3 minimum duty cycle when the controlling temperature is below its T
0 = 0% duty cycle below T
1 = PWM3 minimum duty cycle below T
– hysteresis.
MIN
– hysteresis.
MIN
– hysteresis value.
MIN
Rev. 0 | Page 71 of 80
Page 72

ADT7468
Table 36. Register 0x63 – Enhanced Acoustics Register 2 (Power-On Default = 0x00)
Bit Name R/W1 Description
<2:0> ACOU3 Read/write
< 3 > EN3 Read/write When this bit is 1, acoustic enhancement is enabled on PWM3 output.
<6:4> ACOU2 Read/write
<7> EN2 Read/write When this bit is 1, acoustic enhancement is enabled on PWM2 output.
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
Table 37. PWM Minimum Duty Cycle Registers
Register Address R/W1 Description Power-On Default
0x64 Read/write PWM1 minimum duty cycle. 0x80 (50% duty cycle)
0x65 Read/write PWM2 minimum duty cycle. 0x80 (50% duty cycle)
0x66 Read/write PWM3 minimum duty cycle. 0x80 (50% duty cycle)
Bit Name R/W1 Description
<7:0> PWM duty cycle Read/write These bits define the PWM
0x00 = 0% duty cycle (fan off).
0x40 = 25% duty cycle.
0x80 = 50% duty cycle.
0xFF = 100% duty cycle (fan full speed).
1
These registers become read-only when the ADT7468 is in automatic fan control mode.
Table 38. T
Registers1
MIN
Register Address R/W2 Description Power-On Default
0x67 Read/write Remote 1 temperature T
0x68 Read/write Local temperatue T
0x69 Read/write Remote 2 temperature T
1
These are the T
with temperature according to T
2
These registers become read-only when the Configuration Register 1 lock bit is set. Any further attempts to write to these registers have no effect.
registers for each temperature channel. When the temperature measured exceeds T
MIN
These bits select the ramp rate applied to the PWM3 output. Instead of PWM3 jumping instantaneously to
its newly calculated speed, PWM3 ramps gracefully at the rate determined by these bits. This effect
enhances the acoustics of the fan being driven by the PWM3 output.
Time Slot Increase Time for 33% to 100%
000 = 1 35 s
001 = 2 17.6 s
010 = 3 11.8 s
011 = 5 7 s
100 = 8 4.4 s
101 = 12 3 s
110 = 24 1.6 s
111 = 48 0.8 s
These bits select the ramp rate applied to the PWM2 output. Instead of PWM2 jumping instantaneously to
its newly calculated speed, PWM2 ramps gracefully at the rate determined by these bits. This effect
enhances the acoustics of the fans being driven by the PWM2 output.
Time Slot Increase Time for 33% to 100%
000 = 1 35 s
001 = 2 17.6 s
010 = 3 11.8 s
011 = 5 7 s
100 = 8 4.4 s
101 = 12 3 s
110 = 24 1.6 s
duty cycle for PWMx.
MIN
. 0x5A (90°C)
MIN
. 0x5A (90°C)
MIN
. 0x5A (90°C)
MIN
, the appropriate fan runs at minimum speed and increases
RANGE
.
MIN
Rev. 0 | Page 72 of 80
Page 73

ADT7468
Table 39.
Register Address R/W2 Description Power-On Default
0x6A Read/write
0x6B Read/write
0x6C Read/write
1
If any temperature measured exceeds its
system in the event of a critical overtemperature. It also ensures some level of cooling in the event that software or hardware locks up. If set to 0x80, this feature is
disabled. The PWM output remains at 100% until the temperature drops below
these limits by 0.25°C can cause the
2
These registers become read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to these registers have no effect.
Table 40. Temperature/T
Register Address R/W2 Description Power-On Default
0x6D Read/write Remote 1 and local temperature hysteresis. 0x44
<3:0> HYSL
<7:4> HYSR1
0x6E Read/write Remote 2 temperature hysteresis. 0x40
<7:4> HYSR2
1
Each 4-bit value controls the amount of temperature hysteresis applied to a particular temperature channel. Once the temperature for that channel falls below its T
value, the fan remains running at PWM
hysteresis value chosen also applies to that temperature channel, if its
exceeded and remains at 100% until the temperature drops below
programmed less than 4°C. Setting the hysteresis value lower than 4°C causes the fan to switch on and off regularly when the temperature is close to T
2
These registers become read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to these registers have no effect.
Table 41. XNOR Tree Test Enable
Register Address R/W1 Description Power-On Default
0x6F Read/write XNOR tree test enable register. 0x00
<0> XEN
<7:1> Reserved Unused. Do not write to these bits.
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
Table 42. Remote 1 Temperature Offset
Register Address R/W1 Description Power-On Default
0x70 Read/write Remote 1 temperature offset. 0x00
<7:0> Read/write
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
THERM
Limit Registers1
THERM
Hysteresis Registers1
MIN
duty cycle until the temperature = T
MIN
Remote 1 THERM
Local THERM
Remote 2 THERM
THERM
limit, all PWM outputs drive their fans at 100% duty cycle. This is a fail-safe mechanism incorporated to cool the
THERM
pin to assert low as an output.
Local temperature hyseresis. 0°C to 15°C of
limit.
limit.
limit.
limit – hysteresis. If the
0x64 (100°C)
0x64 (100°C)
0x64 (100°C)
THERM
pin is programmed as an output, then exceeding
hysteresis can be applied to the local temperature
AFC and dynamic T
Remote 1 temperature hyseresis. 0°C to 15°C of
control loops.
MIN
hysteresis can be applied to the Remote 1
temperature AFC and dynamic T
Local temperature hyseresis. 0°C to 15°C of
control loops.
MIN
hysteresis can be applied to the local temperature
AFC and dynamic T
– hysteresis. Up to 15°C of hysteresis can be assigned to any temperature channel. The
MIN
THERM
THERM
limit is exceeded. The PWM output being controlled goes to 100%, if the
– hysteresis. For acoustic reasons, it is recommended that the hysteresis value not be
If the XEN bit is set to 1, the device enters the XNOR
control loops.
MIN
tree test mode. Clearing the bit removes the device
from the XNOR tree test mode.
Allows a twos complement offset value to be
automatically added to or subtracted from the
Remote 1 temperature reading. This is to
compensate for any inherent system offsets such as
PCB trace resistance. LSB value = 0.5°C.
THERM
.
MIN
limit is
MIN
Rev. 0 | Page 73 of 80
Page 74

ADT7468
Table 43. Local Temperature Offset
Register Address R/W1 Description Power-On Default
0x71 Read/write Local temperature offset. 0x00
<7:0> Read/write
Allows a twos complement offset value to be
automatically added to or subtracted from the local
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
temperature reading. LSB value = 0.5°C.
Table 44. Remote 2 Temperature Offset
Register Address R/W1 Description Power-On Default
0x72 Read/write Remote 2 temperature offset. 0x00
<7:0> Read/write
Allows a twos complement offset value to be
automatically added to or subtracted from the
Remote 2 temperature reading. This is to
compensate for any inherent system offsets such as
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
PCB trace resistance. LSB value = 0.5°C.
Table 45. Register 0x73—Configuration Register 2 (Power-On Default = 0x00)
Bit Name R/W1 Description
0 AIN1 Read/write
AIN1 = 0, speed of 3-wire fans measured using the TACH output from the fan.
AIN1 = 1, Pin 6 is reconfigured to measure the speed of 2-wire fans using an
external sensing resistor and coupling capacitor. AIN voltage threshold is set via
Configuration Register 4 (Reg. 0x7D). Only relevant in low frequency mode.
1 AIN2 Read/write
AIN2 = 0, speed of 3-wire fans measured using the TACH output from the fan.
AIN2 = 1, Pin 7 is reconfigured to measure the speed of 2-wire fans using an
external sensing resistor and coupling capacitor. AIN voltage threshold is set via
Configuration Register 4 (Reg. 0x7D). Only relevant in low frequency mode.
2 AIN3 Read/write
AIN3 = 0, speed of 3-wire fans measured using the TACH output from the fan.
AIN3 = 1, Pin 4 is reconfigured to measure the speed of 2-wire fans using an
external sensing resistor and coupling capacitor. AIN voltage threshold is set via
Configuration Register 4 (Reg. 0x7D). Only relevant in low frequency mode.
3 AIN4 Read/write
AIN4 = 0, speed of 3-wire fans measured using the TACH output from the fan.
AIN4 = 1, Pin 9 is reconfigured to measure the speed of 2-wire fans using an
external sensing resistor and coupling capacitor. AIN voltage threshold is set via
Configuration Register 4 (Reg. 0x7D). Only relevant in low frequency mode.
4 AVG Read/write
AVG = 1, averaging on the temperature and voltage measurements is turned off.
This allows measurements on each channel to be made much faster.
5 ATTN Read/write
ATTN = 1, the ADT7468 removes the attenuators from the 2.5 V, V
inputs. These inputs can be used for other functions such as connecting up
external sensors. It is possible to remove attenuators from individual channels
using Bits <7:4> of Configuration Register 4 (0x7D).
6 CONV Read/write
CONV = 1, the ADT7468 is put into a single-channel ADC conversion mode. In this
mode, the ADT7468 can be made to read continuously from one input only, for
example, Remote 1 temperature. The appropriate ADC channel is selected by
writing to Bits <7:5> of TACH1 minimum high byte register (0x55).
Bits <7:5> Reg. 0x55
000 2.5 V
001 V
CCP
010 VCC (3.3 V)
011 5 V
100 12 V
101 Remote 1 temperature
110 Local temperature
111 Remote 2 temperature
7 SHDN Read/write
SHDN = 1, ADT7468 goes into shutdown mode. All PWM outputs assert low (or
high depending on state of INV bit) to switch off all fans. The PWM current duty
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
cycle registers read 0x00 to indicate that the fans are not being driven.
, 5 V, and 12 V
CCP
Rev. 0 | Page 74 of 80
Page 75

ADT7468
Table 46. Register 0x74—Interrupt Mask Register 1 (Power-On Default <7:0> = 0x00)
Bit Name R/W Description
0 2.5V Read/write
1 V
Read/write
CCP
2 VCC Read/write
3 5V Read/write
4 RIT Read/write
5 LT Read/write
6 R2T Read/write
7 OOL Read/write
2.5 V = 1, masks SMBALERT
= 1, masks SMBALERT for out-of-limit conditions on the V
V
CCP
= 1, masks SMBALERT for out-of-limit conditions on the VCC channel.
V
CC
5 V = 1, masks SMBALERT
RIT = 1, masks SMBALERT
LT = 1, masks SMBALERT
R2T = 1, masks SMBALERT
OOL = 1, masks SMBALERT
Table 47. Register 0x75—Interrupt Mask Register 2 (Power-On Default <7:0> = 0x00)
Bit Name R/W Description
When Pin 21 is configured as a 12 V input, 12V/VC = 1 masks SMBALERT
0 12V/VC Read/write
on the 12 V channel. When Pin 21 is programmed as VID5, this bit masks an SMBALERT
VID code bit changes.
1 OVT Read only
2 FAN1 Read/write
3 FAN2 Read/write
4 FAN3 Read/write
5 F4P Read/write
OVT = 1, masks SMBALERT
FAN1 = 1, masks SMBALERT
FAN2 = 1, masks SMBALERT
FAN3 = 1, masks SMBALERT
If Pin 14 is configured as TACH 4, F4P = 1 masks SMBALERT
If Pin 14 is configured as
If Pin 14 is configured as GPIO, F4P = 1 masks SMBALERT when GPIO is an input and GPIO is
asserted.
6 D1 Read/write
7 D2 Read/write
D1 = 1 masks SMBALERT
D2 = 1 masks SMBALERT
for out-of-limit conditions on the 2.5 V channel.
channel.
CCP
for out-of-limit conditions on the 5 V channel.
for out-of-limit conditions on the Remote 1 temperature channel.
for out-of-limit conditions on the local temperature channel.
for out-of-limit conditions on the Remote 2 temperature channel.
for any out-of-limit condition in Status Register 2.
for out-of-limit conditions
, if the VID5
for overtemperature
THERM
conditions.
for a Fan 1 fault.
for a Fan 2 fault.
for a Fan 3 fault.
for a Fan 4 fault.
THERM
, F4P = 1 masks SMBALERT for an exceeded
THERM
timer limit.
for a diode open or short on a Remote 1 channel.
for a diode open or short on a Remote 2 channel.
Table 48. Register 0x76—Extended Resolution Register 11
Bit Name R/W Description
<1:0> 2.5V Read-only 2.5 V LSBs. Holds the 2 LSBs of the 10-bit 2.5 V measurement.
<3:2> V
Read-only V
CCP
LSBs. Holds the 2 LSBs of the 10-bit V
CCP
measurement.
CCP
<5:4> VCC Read-only VCC LSBs. Holds the 2 LSBs of the 10-bit VCC measurement.
<7:6> 5 V Read-only 5 V LSBs. Holds the 2 LSBs of the 10-bit 5 V measurement.
1
If this register is read, this register and the registers holding the MSB of each reading are frozen until read.
Table 49. Register 0x77—Extended Resolution Register 21
Bit Name R/W Description
<1:0> 12V Read-only 12 V LSBs. Holds the 2 LSBs of the 10-bit 12 V measurement.
<3:2> TDM1 Read-only Remote 1 temperature LSBs. Holds the 2 LSBs of the 10-bit Remote 1 temperature measurement.
<5:4> LTMP Read-only Local temperature LSBs. Holds the 2 LSBs of the 10-bit local temperature measurement.
<7:6> TDM2 Read-only Remote 2 temperature LSBs. Holds the 2 LSBs of the 10-bit Remote 2 temperature measurement.
1
If this register is read, this register and the registers holding the MSB of each reading are frozen until read.
Rev. 0 | Page 75 of 80
Page 76

ADT7468
Table 50. Register 0x78—Configuration Register 3 (Power-On Default = 0x00)
Bit Name R/W1 Description
<0> ALERT Read/write
<1>
<2> BOOST Read/write
<3> FAST Read/write
<4> DC1 Read/write
<5> DC2 Read/write
<6> DC3 Read/write
<7> DC4 Read/write
1
THERM
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
Read/write
ALERT = 1, Pin 10 (PWM2/SMBALERT) is configured as an
out-of-limit error conditions.
ALERT = 0, Pin 10 (PWM2/SMBALERT
THERM Enable = 1 enables THERM functionality on Pin 20 and Pin 14, if Pin 14 is configured as
THERM
, determined by Bits 0 and 1 (PIN14FUNC) of Configuration Register 4. When THERM is
asserted, if the fans are running and the boost bit is set, the fans run at full speed. Alternatively,
can be programmed so that a timer is triggered to time how long THERM has been asserted.
THERM
When THERM
programmed duty cycle for fail-safe cooling.
FAST = 1, enables fast TACH measurements on all channels. This increases the TACH measurement
rate from once per second to once every 250 ms (4 ×).
DC1 = 1, enables TACH measurements to be continuously made on TACH1. Fans must be driven by
dc. Setting this bit prevents pulse stretching, because it is not required for dc-driven motors.
DC2 = 1, enables TACH measurements to be continuously made on TACH2. Fans must be driven by
dc. Setting this bit prevents pulse stretching, because it is not required for dc-driven motors.
DC3 = 1, enables TACH measurements to be continuously made on TACH3. Setting this bit prevents
pulse stretching, because it is not required for dc-driven motors.
DC4 = 1, enables TACH measurements to be continuously made on TACH4. Setting this bit prevents
pulse stretching, because it is not required for dc-driven motors.
is an input and BOOST = 1, assertion of THERM causes all fans to run at the maximum
) is configured as the PWM2 output.
Table 51. Register 0x79—
Bit Name R/W Description
<7:1> TMR Read-only
<0>
ASRT/
TMR0
THERM
Read-only
Timer Status Register (Power-On Default = 0x00)
Times how long THERM
exceeds 45.52 ms.
This bit is set high on the assertion of the THERM
assertion time exceeds 45.52 ms, this bit is set and becomes the LSB of the 8-bit TMR reading. This
allows THERM
22.76 ms.
assertion times from 45.52 ms to 5.82 s to be reported back with a resolution of
input is asserted. These seven bits read zero until the THERM assertion time
Table 52. Register 0x7A—
Bit Name R/W Description
<7:0> LIMT Read/write
THERM
Timer Limit Register (Power-On Default = 0x00)
Sets maximum
limit with a resolution of 22.76 ms allowing
programmed. If the
2 (Reg. 0x42) is set. If the limit value is 0x00, then an interrupt is generated immediately on the
assertion of the
THERM
assertion length allowed before an interrupt is generated. This is an 8-bit
THERM
THERM
assertion time exceeds this limit, Bit 5 (F4P) of Interrupt Status Register
THERM
input.
SMBALERT
input and is cleared on read. If the THERM
assertion limits of 45.52 ms to 5.82 s to be
interrupt output to indicate
Rev. 0 | Page 76 of 80
Page 77

ADT7468
Table 53. Register 0x7B—TACH Pulses per Revolution Register (Power-On Default = 0x55)
Bit Name R/W Description
<1:0> FAN1 Read/write
00 = 1
01 = 2 (default)
10 = 3
11 = 4
<3:2> FAN2 Read/write
00 = 1
01 = 2 (default)
10 = 3
11 = 4
<5:4> FAN3 Read/write
00 = 1
01 = 2 (default)
10 = 3
11 = 4
<7:6> FAN4 Read/write
00 = 1
01 = 2 (default)
10 = 3
11 = 4
Table 54. Register 0x7C—Configuration Register 5 (Power-On Default = 0x00)
Bit Name R/W1 Description
<0> 2sC Read/write 2sC = 1, sets the temperature range to twos complement temperature range.
<1> HF/LF Sets the PWM drive frequency to high frequency mode (0) or low frequency mode (1).
<2> GPIOD
<3> GPIOP
<4:7> RES Unused.
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
Sets number of pulses to be counted when measuring Fan 1 speed. Can be used to determine fan
pulses per revolution for unknown fan type.
Pulses Counted
Sets number of pulses to be counted when measuring Fan 2 speed. Can be used to determine fan
pulses per revolution for unknown fan type.
Pulses Counted
Sets number of pulses to be counted when measuring Fan 3 speed. Can be used to determine fan
pulses per revolution for unknown fan type.
Pulses Counted
Sets number of pulses to be counted when measuring Fan 4 speed. Can be used to determine fan
pulses per revolution for unknown fan type.
Pulses Counted
2sC = 0, changes the temperature range to Offset 64. When this bit is changed, the ADT7468 interprets
all relevant temperature register values as defined by this bit.
GPIO direction. When GPIO function is enabled, this determines whether the GPIO is an input (0) or an
output (1).
GPIO polarity. When the GPIO function is enabled and is programmed as an output, this bit
determines whether the GPIO is active low (0) or high (1).
Rev. 0 | Page 77 of 80
Page 78

ADT7468
Table 55. Register 0x7D—Configuration Register 4 (Power-On Default = 0x00)
Bit Name R/W1 Description
<1:0> PIN14FUNC Read/write These bits set the functionality of Pin 14:
00 = TACH4 (default)
01 = Bidirectional
10 = SMBALERT
11 = GPIO
<3:2> AINL Read/write
These two bits define the input threshold for 2-wire fan speed measurements (low frequency mode
only):
00 = ±20 mV
01 = ±40 mV
10 = ±80 mV
11 = ±130 mV
<4> BpAtt2.5V
Bypass 2.5 V attenuator. When set, the measurement scale for this channel changes from 0 V (0x00) to
2.2965 V (0xFF).
<5> BpAttV
CCP
Bypass V
attenuator. When set, the measurement scale for this channel changes from 0 V (0x00) to
CCP
2.2965 V (0xFF).
<6> BpAtt5V
Bypass 5 V attenuator. When set, the measurement scale for this channel changes from 0 V (0x00) to
2.2965 V (0xFF).
<7> BpAtt12V
1
This register becomes read-only when the Configuration Register 1 lock bit is set to 1. Any further attempts to write to this register have no effect.
Bypass 12 V attenuator. When set, the measurement scale for this channel changes from 0 V (0x00) to
2.2965 V (0xFF).
Table 56. Register 0x7E—Manufacturer’s Test Register 1 (Power-On Default = 0x00)
Bit Name R/W Description
<7:0> Reserved Read-only
Manufacturer’s test register. These bits are reserved for manufacturer’s test purposes and should not
be written to under normal operation.
Table 57. Register 0x7F—Manufacturer’s Test Register 2 (Power-On Default = 0x00)
Bit Name R/W Description
<7:0> Reserved Read-only
Manufacturer’s test register. These bits are reserved for manufacturer’s test purposes and should not
be written to under normal operation.
THERM
Rev. 0 | Page 78 of 80
Page 79

ADT7468
ADT7468 PROGRAMMING BLOCK DIAGRAM
PWM DUTY CYCLE/RELATIVE FAN SPEED
TEMPERATURE
F4P
THERM
T
HYST
T
MIN
T
HYST
T
MIN PWM
0% DUTY CYCLE
AUTOMATIC FAN CONTROL
TEMPERATURE
HEATINGCOOLING
= SLOPE
RANGE
T
MAX PWM
100% DUTY CYCLE
OFFSET 64
(0x41, 0x42)
MASK INTERRUPT?
INTERRUPT STATUS
THERM
FAN FAULT
FOR REMOTE
DIODE FAULT.
MEASURED IS
OUT OF LIMITS
CHANNELS ONLY
HARDWARE INTERRUPTS
TACH 4
THERM
SET PIN 14/20
GPIO
SMBALERT
FUNCTIONALITY
SMBALERT
(0x74,0x75)
TWOS COMPLEMENT
MODE
RANGE
HIGH/LOW
FAN DRIVE
FREQUENCY
TEMPERATURE
(0X7C)
CONFIGURATION 5
GPIO POLARITY
GPIO DIRECTION
±20mV
±40mV
±80mV
±130mV
CONFIGURATION 2
(0X73)
MEASURE
TEMPERATURE
FROM 2- OR 3-
WIRE FANS
OFFSET
AND VOLTAGE
AVERAGE TEMP
MEASUREMENTS
(0x70-0x72)
TEMPERATURE
MEASUREMENT
CCP
RESCALE V
INPUT (5V/3.3V)
LOW LIMIT
HIGH LIMIT
ADC MODE
SINGLE CHANNEL
(0X4E-0X53)
SHUTDOWN
OUTPUTS
HIGH/LOW
DRIVE PWM
ON STATUS
REGISTER 2
INTERRUPTS
EXCEEDED
THERM TIMER
LIMIT HAS BEEN
SOFTWARE INTERRUPTS
MEASUREMENT
(ONLY USED WHEN FANS ARE
CYXX
THERM TIMER
FOR 2-WIRE FANS
INPUT THRESHOLD
POWERED BY DC AND NOT PWM)
CHANGE
CYCLE TIME
ADJUSTMENT
CYCLE TIME
MIN
T
LIMIT (0x7A)
THERM TIMER
(AINL)
LOW
CCP
V
STATUS (0x79)
CCP
ATTENUATOR
BYPASS V
8 CYCLES (1s)
DECREASE
CYCLE TIME
INCREASE
CYCLE TIME
(SLEEP)
16 CYCLES (2s)
32 CYCLES (4s)
LOW LIMIT
CCP
V
64 CYCLES (8s)
16 CYCLES (2s)
(0x46)
(0x47)
MEASUREMENT
CCP
V
128 CYCLES (16s)
32 CYCLES (4s)
(0x47)
HIGH LIMIT
CCP
V
256 CYCLES (32s)
64 CYCLES (8s)
512 CYCLES (64s)
128 CYCLES (16s)
AND VOLTAGE
AVERAGE TEMP
LIMITS
THERM TEMP
1024 CYCLES (128s)
256 CYCLES (32s)
512 CYCLES (64s)
MEASUREMENTS
(SEE CONFIGURATION 2,
(0x6A, 0x6B, 0x6C)
0x73)
XNOR Test
1024 CYCLES (128s)
(0x6F)
2048 CYCLES (256s)
TEMPERATURE
FANS
THERM
GENERAL
VOLTAGES
INTERRUPT
TEMPERATURE
MEASUREMENT
(0X25, 0X26,0X27)
(0x49)
(0x48)
LOW LIMIT
HIGH LIMIT
CC
CC
V
V
(0x22)
MEASUREMENT
CC
V
OUTPUT
INVERT PWM
(0X54-0X5B)
MINIMUM LIMIT
FANTACH 16-BIT
SLOW IMPROVED
PWM CONFIGURATION
(0x25-0x27)
MEASUREMENT MSBs
REMOTE 1 TEMP CONTROLS
SELECTED PWM DRIVE (AFC MODE)
FAN BEHAVIOR
ACOUSTIC RAMP-UP
(0x5C-0x5E)
(0X77)
MEASUREMENT LSBs
PWM DRIVE (AFC MODE)
LOCAL TEMP CONTROLS SELECTED
NO TIMEOUT
UNTIL ALL TEMPERATURE
MSB REGISTERS ARE FROZEN
IF THESE REGISTERS ARE USED,
MEASUREMENT MSB REGISTERS
ALL TEMPERATURE MEASUREMENT
SELECTED PWM DRIVE
REMOTE 2 TEMP CONTROLS
SELECTED PWM DRIVE (AFC MODE)
100ms
400ms
250ms (DEFAULT)
TIMEOUT
FAN SPINUP
ARE READ.
RUNS FULL SPEED
667ms
1 PULSE PER REV
FAN TACH
PULSES PER REV
(0X40)
CONFIGURATION 1
DISABLED (DEFAULT)
SELECTED PWM DRIVE
1s2s4s
2 PULSE PER REV
(0x7B)
LOCK
START
MONITORING
FASTEST SPEED CALCULATED
BY LOCAL AND REMOTE 2 TEMP
CONTROLS SELECTED PWM DRIVE
FASTEST SPEED CALCULATED BY ALL
3 PULSE PER REV
4 PULSE PER REV
MAX FAN SPEED
CC
READY
SETTINGS
(MAX PWM DUTY CYCLE)
(5V/3.3V)
FULLSPEED
RUN FANS AT
RESCALE V
MANUAL MODE. PWM DUTY CYCLE
3 TEMPERATURE CHANNEL CONTROLS
REGISTERS (0x30-0x32) BECOME WRITABLE
(0x30-0x32)
(0x38-0x3A)
PWM DUTY CYCLE
(MANUAL MODE ONLY)
(0x78)
CONFIGURATION 3
DUTY CYCLE
MIN
PWM
(AUTOMATIC MODE ONLY)
(0x7D)
CONFIGURATION 4
ENABLE THERM
(0X64-0X66)
(FAN MUST BE RUNNING)
THERM BOOST
PHTXX
DYNAMIC T
CURRENT TEMPERATURE OF SELECTED
MIN
CONTROL
PWM 2
FAST TACH
CONFIGURE
MEASUREMENTS
POINT REGISTER ON ASSERTION OF THERM
ENABLE DYNAMIC T
CHANNEL IS COPIED TO RELEVANT OPERATING
(0x36, 0x37)
MIN
SMBALERT
PIN 10
CONTROL ON INDIVIDUAL
FAN SPEED
ENABLE CONTINUOUS
CHANNEL
CONTROL
. MIN TEMP THAT CAUSES
SELECTED FANS TO RUN
MIN
T
AUTOMATIC FAN
(0x67-0x69)
TEMPERATURE HYSTERES IS
(THYST)
(0x6D, 0x6E)
OPERATING
POINT
(0x33-0x35)
(0x28-0x2F)
WHEN THE LOW BYTE IS READ,
FAN 16-BIT MEASUREMENT
LOW BYTE MUST BE READ FIRST.
ASSOCIATED HIGH BYTE IS READ.
REGISTERS ARE LOCKED UNTIL THE
CC
CCP
V
V
LOCAL TEMP
REMOTE TEMP1
REMOTE TEMP2
35s (33%-100%)
SELECTED PWM
17.6s (33%-100%)
RAMP-UP SPEED
ENHANCE
ACOUSTICS
7s (33%-100%)
18s (33%-100%)
ENABLE
SELECTED PWM
RAMP-UP SPEED
(0x62,0x63)
3s (33%-100%)
4.4s (33%-100%)
1.6s (33%-100%)
0.8s (33%-100%)
–HYST
MIN
T
MEASUREMENTS
SYNC FAN SPEED
ALLOW SELECTED
PWM TO TURN OFF
WHEN TEMP IS BELOW
THERM IS
INPUT/OUTPUT
,PWM
ENABLE
RANGE
(0x5F, 0x60, 0x61)
TEMP T
FREQ,THERM
THERM AS
(TIMER) INPUT
2°C
4°C
5°C
2.5°C
3.33°C
RANGE
11.0Hz
14.7Hz
22.1Hz
T
OUTPUT
THERM AS
OVERTEMP
8°C
10°C
16°C
20°C
32°C
40°C
6.67°C
13.33°C
26.67°C
29.4Hz
35.3Hz
44.1Hz
58.8Hz
88.2Hz
80°C
53.33°C
ADT7467/ADT7468 PROGRAMMING BLOCK DIAGRAM
PWM
FREQUENCY
04498-0-044
Figure 85.
Rev. 0 | Page 79 of 80
Page 80

ADT7468
OUTLINE DIMENSIONS
0.341
BSC
PIN 1
0.010
0.004
COPLANARITY
0.004
24 13
1
0.065
0.049
0.025
BSC
COMPLIANT TO JEDEC STANDARDS MO-137AE
0.012
0.008
0.069
0.053
12
0.154
BSC
SEATING
PLANE
0.236
BSC
0.010
0.006
8°
0°
0.050
0.016
Figure 86. 24-Lead Shrink Small Outline Package [QSOP]
(RQ-24)
Dimensions shown in inches
ORDERING GUIDE
Model Temperature Range Package Description Package Option
ADT7468ARQ –40°C to +120°C 24-Lead QSOP RQ-24
ADT7468ARQ-REEL –40°C to +120°C 24-Lead QSOP RQ-24
ADT7468ARQ-REEL7 –40°C to +120°C 24-Lead QSOP RQ-24
© 2004 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D04499–0–4/04(0)
Rev. 0 | Page 80 of 80
 Loading...
Loading...