

Page 1
a
SERIAL PORTS
SPORT 1SPORT 0
MEMORY
TIMER
SHIFTERMACALU
ARITHMETIC UNITS
DAG 2
DAG 1
DATA ADDRESS
GENERATORS
EXTERNAL
DATA
BUS
EXTERNAL
ADDRESS
BUS
PROGRAM
MEMORY
DATA
MEMORY
DATA MEMORY DATA
DATA MEMORY ADDRESS
PROGRAM MEMORY ADDRESS
PROGRAM MEMORY DATA
PROGRAM
SEQUENCER
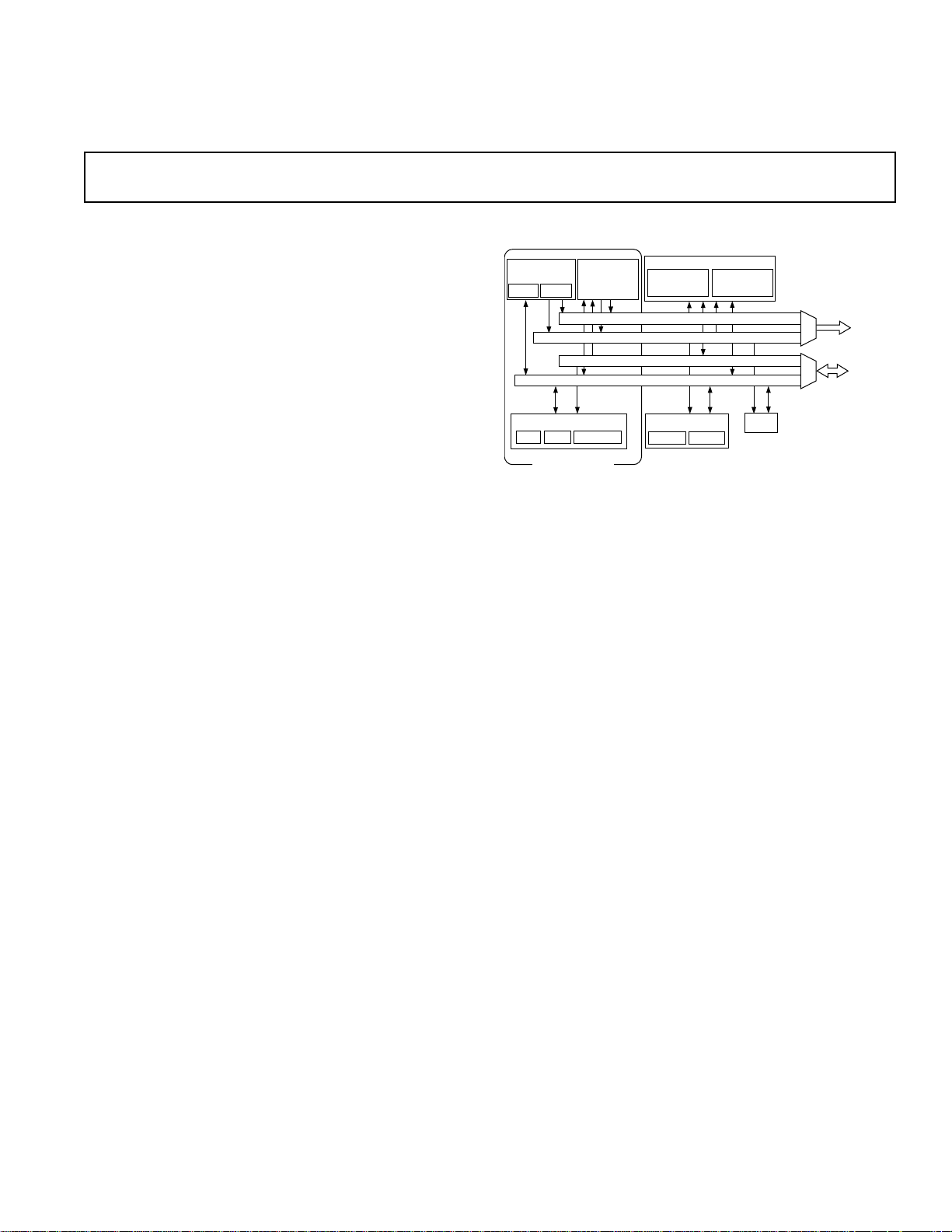
ADSP-2100 CORE
DSP Microcomputers with ROM
ADSP-216x
SUMMARY
16-Bit Fixed-Point DSP Microprocessors with
On-Chip Memory
Enhanced Harvard Architecture for Three-Bus
Performance: Instruction Bus and Dual Data Buses
Independent Computation Units: ALU, Multiplier/
Accumulator and Shifter
Single-Cycle Instruction Execution and Multifunction
Instructions
On-Chip Program Memory ROM and Data Memory RAM
Integrated I/O Peripherals: Serial Ports, Timer
FEATURES
25 MIPS, 40 ns Maximum Instruction Rate (5 V)
Separate On-Chip Buses for Program and Data Memory
Program Memory Stores Both Instructions and Data
(Three-Bus Performance)
Dual Data Address Generators with Modulo and
Bit-Reverse Addressing
Efficient Program Sequencing with Zero-Overhead
Looping: Single-Cycle Loop Setup
Double-Buffered Serial Ports with Companding Hardware,
Automatic Data Buffering and Multichannel Operation
Three Edge- or Level-Sensitive Interrupts
Low Power IDLE Instruction
PLCC and MQFP Packages
GENERAL DESCRIPTION
The ADSP-216x Family processors are single-chip microcomputers␣ optimized␣ for␣ digital␣ signal␣ processing␣ (DSP)
and other high speed numeric processing applications. The
ADSP-216x processors are all built upon a common core with
ADSP-2100. Each processor combines the core DSP architecture—computation units, data address generators and program
sequencer—with features such as␣ on-chip program ROM and
data memory RAM, a programmable timer and two serial ports.
The ADSP-2165/ADSP-2166 also adds program memory and
power-down mode.
This data sheet describes the following ADSP-216x Family
processors:
ADSP-2161/ADSP-2162/
ADSP-2163/ADSP-2164 Custom ROM-programmed DSPs:
ADSP-2165/ADSP-2166 ROM-programmed ADSP-216x
processors with power-down and
larger on-chip memories (12K Pro-
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
gram Memory ROM, 1K Program
Memory RAM, 4K Data Memory
RAM)
FUNCTIONAL BLOCK DIAGRAM
Fabricated in a high speed, submicron, double-layer metal
CMOS process, the highest-performance ADSP-216x processors operate at 25 MHz with a 40 ns instruction cycle time.
Every instruction can execute in a single cycle. Fabrication in
CMOS results in low power dissipation.
The ADSP-2100 Family’s flexible architecture and comprehensive instruction set support a high degree of parallelism.
In one cycle the ADSP-216x can␣ perform␣ all of␣ the␣ following
operations:
•
␣ Generate the next program address
•
␣ Fetch the next instruction
•
␣ Perform one or two data moves
•
␣ Update one or two data address pointers
•
␣ Perform a computation
•
␣ Receive and transmit data via one or two serial ports
Table I shows the features of each ADSP-216x processor.
The ADSP-216x series are memory-variant versions of the
ADSP-2101 and ADSP-2103 that contain factory-programmed
on-chip ROM program memory. These devices offer different
amounts of on-chip memory for program and data storage.
Table I shows the features available in the ADSP-216x series of
custom ROM-coded processors.
The ADSP-216x products eliminate the need for an external
boot EPROM in your system, and can also eliminate the need
for any external program memory by fitting the entire application program in on-chip ROM. These devices thus provide an
excellent option for volume applications where board space and
system cost constraints are of critical concern.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 1999
Page 2

ADSP-216x
TABLE OF CONTENTS
SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
GENERAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . 1
Development Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Additional Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
ARCHITECTURE OVERVIEW . . . . . . . . . . . . . . . . . . . . 3
Serial Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
SYSTEM INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Clock Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
PIN FUNCTION DESCRIPTIONS . . . . . . . . . . . . . . . . . . 6
Program Memory Interface . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Program Memory Maps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Data Memory Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Data Memory Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Bus Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
POWER-DOWN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Power-Down Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Entering Power-Down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Exiting Power-Down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Low Power IDLE Instruction . . . . . . . . . . . . . . . . . . . . . . . 10
ADSP-216x Prototyping . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Ordering Procedure for ADSP-216x ROM Processors . . . . 10
Instruction Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
SPECIFICATIONS–RECOMMENDED OPERATING
CONDITIONS
(ADSP-2161/ADSP-2163/ADSP-2165) . . . . . . . . . . . . . . 13
ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . . 13
ABSOLUTE MAXIMUM RATINGS . . . . . . . . . . . . . . . . 13
SPECIFICATIONS–SUPPLY CURRENT AND POWER
(ADSP-2161/ADSP-2163/ADSP-2165) . . . . . . . . . . . . . . 14
POWER DISSIPATION EXAMPLE . . . . . . . . . . . . . . . . . 15
ENVIRONMENTAL CONDITIONS . . . . . . . . . . . . . . . . 15
CAPACITIVE LOADING . . . . . . . . . . . . . . . . . . . . . . . . . 15
SPECIFICATIONS–
␣ ␣ (ADSP-2161/ADSP-2163/ADSP-2165) . . . . . . . . . . . . . . 16
TEST CONDITIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Output Disable Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Output Enable Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
SPECIFICATIONS–RECOMMENDED OPERATING
CONDITIONS
(ADSP-2162/ADSP-2164/ADSP-2166) . . . . . . . . . . . . . . 17
ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . . 17
ABSOLUTE MAXIMUM RATINGS . . . . . . . . . . . . . . . . 17
SPECIFICATIONS–SUPPLY CURRENT AND POWER
(ADSP-2162/ADSP-2164/ADSP-2166) . . . . . . . . . . . . . . 18
POWER DISSIPATION EXAMPLE . . . . . . . . . . . . . . . . . 19
ENVIRONMENTAL CONDITIONS . . . . . . . . . . . . . . . . 19
CAPACITIVE LOADING . . . . . . . . . . . . . . . . . . . . . . . . . 19
TEST CONDITIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Output Disable Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Output Enable Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
TIMING PARAMETERS
(ADSP-2161/ADSP-2163/ADSP-2165) . . . . . . . . . . . . . . 21
GENERAL NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
TIMING NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
MEMORY REQUIREMENTS . . . . . . . . . . . . . . . . . . . . . . 21
CLOCK SIGNALS AND RESET . . . . . . . . . . . . . . . . . . . 22
INTERRUPTS AND FLAGS . . . . . . . . . . . . . . . . . . . . . . 23
BUS REQUEST/BUS GRANT . . . . . . . . . . . . . . . . . . . . . 24
MEMORY READ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
MEMORY WRITE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
SERIAL PORTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
TIMING PARAMETERS
(ADSP-2162/ADSP-2164/ADSP-2166) . . . . . . . . . . . . . . 28
GENERAL NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
TIMING NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
MEMORY REQUIREMENTS . . . . . . . . . . . . . . . . . . . . . . 28
CLOCK SIGNALS AND RESET . . . . . . . . . . . . . . . . . . . 29
INTERRUPTS AND FLAGS . . . . . . . . . . . . . . . . . . . . . . . 30
BUS REQUEST/BUS GRANT . . . . . . . . . . . . . . . . . . . . . 31
MEMORY READ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
MEMORY WRITE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
SERIAL PORTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
PIN CONFIGURATIONS
68-Lead PLCC (ADSP-216x) . . . . . . . . . . . . . . . . . . . . . 35
80-Lead MQFP (ADSP-216x) . . . . . . . . . . . . . . . . . . . . . 36
PACKAGE OUTLINE DIMENSIONS
68-Lead PLCC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
80-Lead MQFP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
ORDERING GUIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
–2–
REV. 0
Page 3

ADSP-216x
Table I. ADSP-216x ROM-Programmed Processor Features
Feature 2161 2162 2163 2164 2165 2166
Data Memory (RAM) 1/2K 1/2K 1/2K 1/2K 4K 4K
Program Memory (ROM) 8K 8K 4K 4K 12K 12K
Program Memory (RAM) 1K 1K
Timer
Serial Port 0 (Multichannel)
Serial Port 1
Supply Voltage 5 V 3.3 V 5 V 3.3 V 5 V 3.3 V
Speed Grades (Instruction Cycle Time)
10.24 MHz (97.6 ns)
13.00 MHz (76.9 ns)
16.67 MHz (60 ns)
20.00 MHz (50 ns)
25 MHz (40 ns)
Packages
68-Lead PLCC
80-Lead MQFP
Temperature Grades
K Commercial, 0°C to +70°C
B Industrial, –40°C to +85°C
••••••
••••••
••••••
••
•
•• •
•
••
••••
••••••
••••••
••••••
Development Tools
The ADSP-216x processors are supported by a complete set of
tools for system development. The ADSP-2100 Family Development Software includes C and assembly language tools that
allow programmers to write code for any of the ADSP-216x
processors. The ANSI C compiler generates ADSP-216x assembly source code, while the runtime C library provides ANSIstandard and custom DSP library routines. The ADSP-216x
assembler produces object code modules that the linker combines into an executable file. The processor simulators provide
an interactive instruction-level simulation with a reconfigurable,
windowed user interface. A PROM splitter utility generates
PROM programmer compatible files.
®
EZ-ICE
systems by providing a full range of emulation functions such
as modification of memory and register values and execution
breakpoints. EZ-LAB
systems that execute EPROM-based programs.
The EZ-Kit Lite is a very low-cost evaluation/development
platform that contains both the hardware and software needed
to evaluate the ADSP-21xx architecture.
Additional details and ordering information are available in the
ADSP-2100 Family Software & Hardware Development Tools data
sheet (ADDS-21xx-TOOLS). This data sheet can be requested
from any Analog Devices sales office or distributor.
Additional Information
This data sheet provides a general overview of ADSP-216x
processor functionality. For detailed design information on the
architecture and instruction set, refer to the ADSP-2100 Family
User’s Manual, Third Edition, available from Analog Devices.
in-circuit emulators allow debugging of ADSP-21xx
®
demonstration boards are complete DSP
ARCHITECTURE OVERVIEW
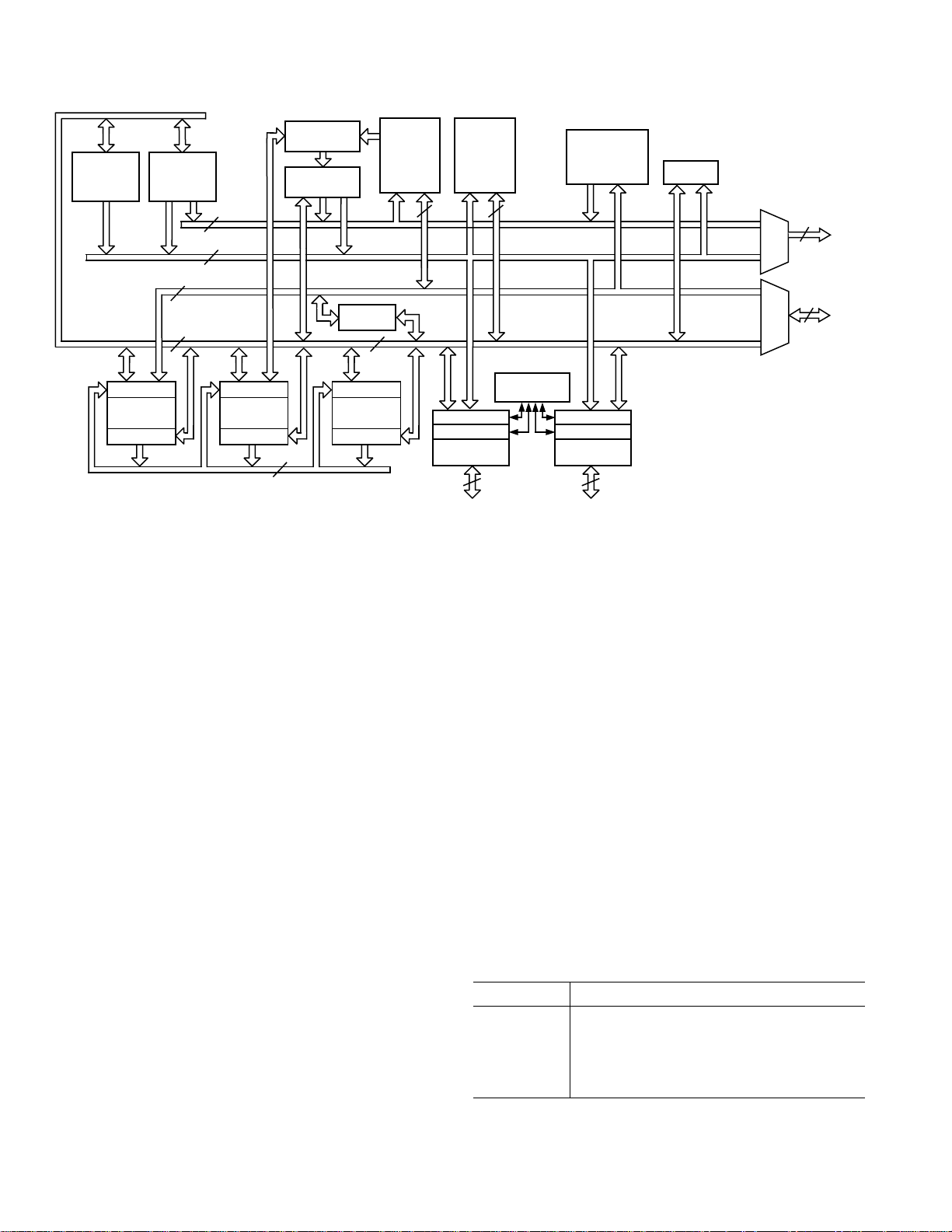
Figure 1 shows a block diagram of the ADSP-216x architecture.
The processors contain three independent computational units:
the ALU, the multiplier/accumulator (MAC), and the shifter.
The computational units process 16-bit data directly and have
provisions to support multiprecision computations. The ALU
performs a standard set of arithmetic and logic operations;
division primitives are also supported. The MAC performs
single-cycle multiply, multiply/add, and multiply/subtract operations. The shifter performs logical and arithmetic shifts, normalization, denormalization, and derive exponent operations. The
shifter can be used to efficiently implement numeric format control
including multiword floating-point representations.
The internal result (R) bus directly connects the computational
units so that the output of any unit may be used as the input of
any unit on the next cycle.
A powerful program sequencer and two dedicated data address
generators ensure efficient use of these computational units.
The sequencer supports conditional jumps, subroutine calls,
and returns in a single cycle. With internal loop counters and
loop stacks, the ADSP-216x executes looped code with zero
overhead—no explicit jump instructions are required to maintain the loop.
Two data address generators (DAGs) provide addresses for
simultaneous dual operand fetches (from data memory and
program memory). Each DAG maintains and updates four
address pointers. Whenever the pointer is used to access data
(indirect addressing), it is post-modified by the value of one of
four modify registers. A length value may be associated with
each pointer to implement automatic modulo addressing for
circular buffers. The circular buffering feature is also used by
the serial ports for automatic data transfers to (and from) onchip memory.
EZ-ICE and EZ-LAB are registered trademarks of Analog Devices, Inc.
REV. 0
–3–
Page 4
ADSP-216x
DATA
ADDRESS
GENERATOR
#1
INPUT REGS
OUTPUT REGS
INSTRUCTION
REGISTER
DATA
ADDRESS
GENERATOR
#2
PMA BUS
14
PMA BUS
14
PMA BUS
24
PMA BUS
16
INPUT REGS
ALU MAC SHIFTER
OUTPUT REGS
PROGRAM
SEQUENCER
16
R BUS
INPUT REGS
OUTPUT REGS
BUS
EXCHANGE
16
PROGRAM
MEMORY
SRAM
& ROM
24
TRANSMIT REG
RECEIVE REG
SERIAL
PORT 0
Figure 1. ADSP-216x Block Diagram
Efficient data transfer is achieved with the use of five internal
buses:
• Program Memory Address (PMA) Bus
• Program Memory Data (PMD) Bus
• Data Memory Address (DMA) Bus
• Data Memory Data (DMD) Bus
• Result (R) Bus
The two address buses (PMA, DMA) share a single external
address bus, allowing memory to be expanded off-chip, and the
two data buses (PMD, DMD) share a single external data bus.
The BMS, DMS and PMS signals indicate which memory space
is using the external buses.
Program memory can store both instructions and data, permitting the ADSP-216x to fetch two operands in a single cycle,
one from program memory and one from data memory. The
processor can fetch an operand from on-chip program memory
and the next instruction in the same cycle.
The memory interface supports slow memories and memorymapped peripherals with programmable wait state generation.
External devices can gain control of the processor’s buses with
the use of the bus request/grant signals (BR, BG).
One bus grant execution mode (GO Mode) allows the ADSP216x to continue running from internal memory. A second
execution mode requires the processor to halt while buses are
granted.
Each ADSP-216x processor can respond to several different
interrupts. There can be up to three external interrupts,
configured as edge- or level-sensitive. Internal interrupts can be
generated by the timer and serial ports. There is also a master
RESET signal.
Booting circuitry provides for loading on-chip program memory
automatically from byte-wide external memory. After reset,
three wait states are automatically generated. This allows, for
example, a 60 ns ADSP-2161 to use a 200 ns EPROM as
DATA
MEMORY
SRAM
16
PMA BUS
DMA BUS
PMD BUS
DMD BUS
COMPANDING
CIRCUITRY
BOOT
ADDRESS
GENERATOR
TRANSMIT REG
RECEIVE REG
SERIAL
PORT 1
55
TIMER
MUX
MUX
14
EXTERNAL
ADDRESS
BUS
24
EXTERNAL
DATA
BUS
external boot memory. Multiple programs can be selected and
loaded from the EPROM with no additional hardware.
The data receive and transmit pins on SPORT1 (Serial Port 1)
can be alternatively configured as a general-purpose input flag
and output flag. You can use these pins for event signalling to
and from an external device.
A programmable interval timer can generate periodic interrupts.
A 16-bit count register (TCOUNT) is decremented every n
cycles, where n–1 is a scaling value stored in an 8-bit register
(TSCALE). When the value of the count register reaches zero,
an interrupt is generated and the count register is reloaded from
a 16-bit period register (TPERIOD).
Serial Ports
The ADSP-216x processors include two synchronous serial
ports (SPORTs) for serial communications and multiprocessor
communication. All of the ADSP-216x processors have two
serial ports (SPORT0, SPORT1).
The serial ports provide a complete synchronous serial interface
with optional companding in hardware. A wide variety of
framed or frameless data transmit and receive modes of operation are available. Each SPORT can generate an internal programmable serial clock or accept an external serial clock.
Each serial port has a 5-pin interface consisting of the following
signals:
Signal Name Function
SCLK Serial Clock (I/O)
RFS Receive Frame Synchronization (I/O)
TFS Transmit Frame Synchronization (I/O)
DR Serial Data Receive
DT Serial Data Transmit
–4–
REV. 0
Page 5

ADSP-216x
The ADSP-216x serial ports offer the following capabilities:
Bidirectional—Each SPORT has a separate, double-buffered
transmit and receive function.
Flexible Clocking—Each SPORT can use an external serial
clock or generate its own clock internally.
Flexible Framing—The SPORTs have independent framing
for the transmit and receive functions; each function can run in
a frameless mode or with frame synchronization signals internally generated or externally generated; frame sync signals may
be active high or inverted, with either of two pulsewidths and
timings.
Different Word Lengths—Each SPORT supports serial data
word lengths from 3 to 16 bits.
Companding in Hardware—Each SPORT provides optional
A-law and µ-law companding according to CCITT recommen-
dation G.711.
Flexible Interrupt Scheme—Receive and transmit functions
can generate a unique interrupt upon completion of a data word
transfer.
Autobuffering with Single-Cycle Overhead—Each SPORT
can automatically receive or transmit the contents of an entire
circular data buffer with only one overhead cycle per data word;
an interrupt is generated after the transfer of the entire buffer is
completed.
Multichannel Capability (SPORT0 Only)—SPORT0 provides a multichannel interface to selectively receive or transmit a
24-word or 32-word, time-division multiplexed serial bit stream;
this feature is especially useful for T1 or CEPT interfaces, or as
a network communication scheme for multiple processors.
Alternate Configuration—SPORT1 can be alternatively
configured as two external interrupt inputs (IRQ0, IRQ1) and
the Flag In and Flag Out signals (FI, FO).
Interrupts
The ADSP-216x’s interrupt controller lets the processor respond to interrupts with a minimum of overhead. Up to three
external interrupt input pins, IRQ0, IRQ1 and IRQ2, are provided. IRQ2 is always available as a dedicated pin; IRQ1 and
IRQ0 may be alternately configured as part of Serial Port 1. The
ADSP-216x also supports internal interrupts from the timer and
the serial ports. The interrupts are internally prioritized and
individually maskable (except for RESET which is nonmaskable).
The IRQx input pins can be programmed for either level- or
edge-sensitivity. The interrupt priorities for each ADSP-216x
processor are shown in Table II.
Table II.␣ Interrupt Vector Addresses and Priority
Interrupt
ADSP-216x Interrupt Source Vector Address
RESET Startup 0x0000
IRQ2 or Power-Down 0x0004 (High Priority)
SPORT0 Transmit 0x0008
SPORT0 Receive 0x000C
SPORT1 Transmit or IRQ1 0x0010
SPORT1 Receive or IRQ0 0x0014
Timer 0x0018 (Low Priority)
The ADSP-216x uses a vectored interrupt scheme: when an
interrupt is acknowledged, the processor shifts program control
to the interrupt vector address corresponding to the interrupt
received. Interrupts can be optionally nested so that a higher
priority interrupt can preempt the currently executing interrupt
service routine. Each interrupt vector location is four instructions in length so that simple service routines can be coded
entirely in this space. Longer service routines require an additional JUMP or CALL instruction.
Individual interrupt requests are logically ANDed with the bits
in the IMASK register; the highest-priority unmasked interrupt
is then selected.
The interrupt control register, ICNTL, allows the external
interrupts to be set as either edge- or level-sensitive. Depending
on Bit 4 in ICNTL, interrupt service routines can either be
nested (with higher priority interrupts taking precedence) or be
processed sequentially (with only one interrupt service active at
a time).
The interrupt force and clear register, IFC, is a write-only register that contains a force bit and a clear bit for each interrupt.
When responding to an interrupt, the ASTAT, MSTAT and
IMASK status registers are pushed onto the status stack and
the PC counter is loaded with the appropriate vector address.
The status stack is seven levels deep to allow interrupt nesting.
The stack is automatically popped when a return from the interrupt instruction is executed.
Pin Definitions
Pin Function Descriptions show pin definitions for the ADSP216x processors. Any inputs not used must be tied to V
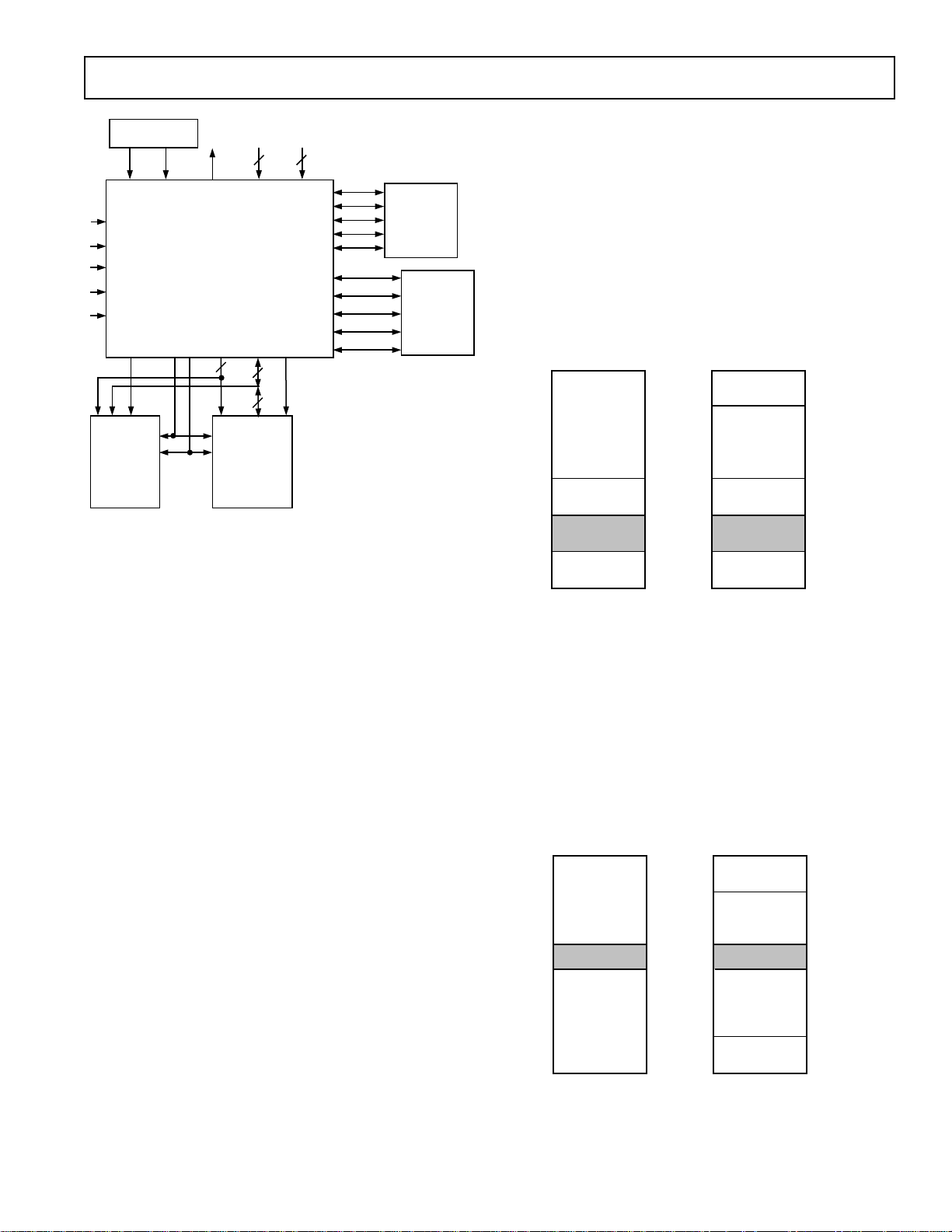
SYSTEM INTERFACE
Figure 3 shows a typical system for the ADSP-216x with two
serial I/O devices, an optional external program and data
memory. A total of 12K words of data memory and 15K words
of program memory is addressable.
Programmable wait-state generation allows the processors to
easily interface to slow external memories.
The ADSP-216x processors also provide either: one external
interrupt (IRQ2) and two serial ports (SPORT0, SPORT1), or
three external interrupts (IRQ2, IRQ1, IRQ0) and one serial
port (SPORT0).
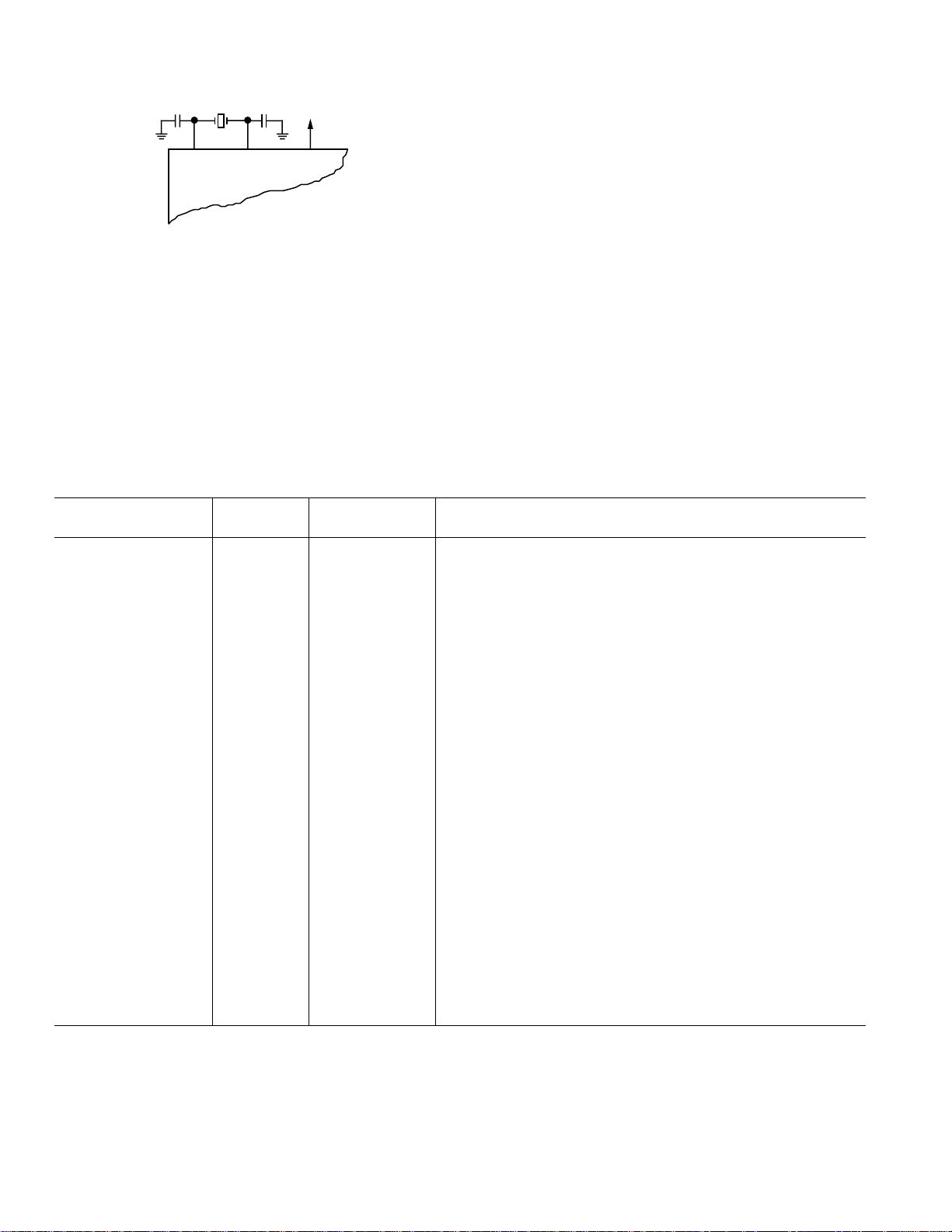
Clock Signals
The ADSP-216x processors’ CLKIN input may be driven by a
crystal or by a TTL-compatible external clock signal. The
CLKIN input may not be halted or changed in frequency during
operation, nor operated below the specified low frequency limit.
If an external clock is used, it should be a TTL-compatible
signal running at the instruction rate. The signal should be
connected to the processor’s CLKIN input; in this case, the
XTAL input must be left unconnected.
Because the ADSP-216x processors include an on-chip oscillator circuit, an external crystal may also be used. The crystal
should be connected across the CLKIN and XTAL pins, with
two capacitors connected as shown in Figure 2. A parallelresonant, fundamental frequency, microprocessor-grade crystal
should be used.
DD
.
REV. 0
–5–
Page 6
ADSP-216x
The power-up sequence is defined as the total time required for
the crystal oscillator circuit to stabilize after a valid V
CLKIN CLKOUT
ADSP-216x
XTAL
applied to the processor and for the internal phase-locked loop
(PLL) to lock onto the specific crystal frequency. A minimum of
2000 t
cycles will ensure that the PLL has locked (this does
CK
not, however, include the crystal oscillator start-up time).
During this power-up sequence the RESET signal should be
Figure 2. External Crystal Connections
A clock output signal (CLKOUT) is generated by the processor,
synchronized to the processor’s internal cycles.
Reset
The RESET signal initiates a complete reset of the ADSP-216x.
The RESET signal must be asserted when the chip is powered
up to assure proper initialization. If the RESET signal is applied
during initial power-up, it must be held long enough to allow
the processor’s internal clock to stabilize. If RESET is activated
at any time after power-up and the input clock frequency does
not change, the processor’s internal clock continues and does
held low. On any subsequent resets, the RESET signal must
meet the minimum pulsewidth specification, t
To generate the RESET signal, use either an RC circuit with an
external Schmidt trigger or a commercially available reset IC.
(Do not use only an RC circuit.)
The RESET input resets all internal stack pointers to the empty
stack condition, masks all interrupts, and clears the MSTAT
register. When RESET is released, the boot loading sequence is
performed (provided there is no pending bus request and the chip
is configured for booting, with MMAP = 0). The first instruction is
then fetched from internal program memory location 0x0000.
not require this stabilization time.
PIN FUNCTION DESCRIPTIONS
Pin # of Input/
Name(s) Pins Output Function
Address 14 O Address outputs for program, data and boot memory.
Data
1
24 I/O Data I/O pins for program and data memories. Input only for
boot memory, with two MSBs used for boot memory addresses.
Unused data lines may be left floating.
RESET 1 I Processor Reset Input
IRQ2 1 I External Interrupt Request #2
BR
2
1 I External Bus Request Input
BG 1 O External Bus Grant Output
PMS 1 O External Program Memory Select
DMS 1 O External Data Memory Select
BMS 1 O Boot Memory Select
RD 1 O External Memory Read Enable
WR 1 O External Memory Write Enable
MMAP 1 I Memory Map Select Input
CLKIN, XTAL 2 I External Clock or Quartz Crystal Input
CLKOUT 1 O Processor Clock Output
V
DD
Power Supply Pins
GND Ground Pins
SPORT0 5 I/O Serial Port 0 Pins (TFS0, RFS0, DT0, DR0, SCLK0)
SPORT1 5 I/O Serial Port 1 Pins (TFS1, RFS1, DT1, DR1, SCLK1)
or Interrupts and Flags:
IRQ0 (RFS1) 1 I External Interrupt Request #0
IRQ1 (TFS1) 1 I External Interrupt Request #1
FI (DR1) 1 I Flag Input Pin
FO (DT1) 1 O Flag Output Pin
PWDACK
PWDFLAG
3
3
1 O Indicates when the processor has entered power-down.
1 I Low-to-High Transition of the Power-Down Flag. Input pin can
be used to terminate power-down.
NOTES
1
Unused data bus lines may be left floating.
2
BR must be tied high (to VDD) if not used.
3
Only on ADSP-2165/ADSP-2166.
RSP
DD
.
is
–6–
REV. 0
Page 7
ADSP-216x
0x0000
2K
EXTERNAL
MMAP = 0
12K 3 24
INTERNAL
ROM
10K 3 24
INTERNAL
ROM
1K 3 24 RAM
RESERVED
2K 3 24
EXTERNAL
2K 3 24
INTERNAL
ROM
1K 3 24 RAM
RESERVED
MMAP = 1
0x2FFF
0x3000
0x33FF
0x3400
0x37FF
0x3800
0x3FFF
0x0000
0x2FFF
0x3000
0x33FF
0x3400
0x37FF
0x3800
0x3FFF
0x07FF
0x0800
MMAP = 0
8K
INTERNAL
ROM
RESERVED
MMAP = 1
0x0000
0x1FF0
0x1FFF
0x2000
0x3FFF
2K
EXTERNAL
RESERVED
0x0000
0x1FF0
0x1FFF
0x2000
0x3FFF
6K
INTERNAL
ROM
6K
EXTERNAL
2K
INTERNAL
ROM
0x7FFF
0x0800
0x37FF
0x3800
8K
EXTERNAL
CLOCK OR
CRYSTAL
34
CLKIN XTAL CLKOUT V
RESET
IRQ2
OE
WE
ADSP-216x
ADDRESS DATA
RW
BR
BG
MMAP
PMS RD DMS BMS
AD
CS
PROGRAM
MEMORY
(OPTIONAL)
DD
14
AD
OE
WE
DATA
MEMORY
&
PERIPHERALS
GND
SERIAL
PORT 0
SERIAL
PORT 1
24
D23-8
16
CS
SCLK
RFS
TFS
DT
DR
SCLK
RFS OR IRQ0
TFS OR IRQ1
DT OR FO
DR OR FI
SERIAL
DEVICE
(OPTIONAL)
SERIAL
DEVICE
(OPTIONAL)
Figure 3. Basic System Configuration
Program Memory Interface
The on-chip program memory address bus (PMA) and on-chip
program memory data bus (PMD) are multiplexed with the onchip data memory buses (DMA, DMD), creating a single external data bus and a single external address bus. The external
data bus is bidirectional and is 24 bits wide to allow instruction
fetches from external program memory. Program memory may
contain code and data.
The external address bus is 14 bits wide. For the ADSP-216x,
these lines can directly address up to 16K words, of which 2K
are on-chip.
The data lines are bidirectional. The program memory select
(PMS) signal indicates accesses to program memory and can be
used as a chip select signal. The write (WR) signal indicates a
write operation and is used as a write strobe. The read (RD)
signal indicates a read operation and is used as a read strobe or
output enable signal.
The ADSP-216x processors write data from their 16-bit registers to 24-bit program memory using the PX register to provide
the lower eight bits. When the processor reads 16-bit data from
24-bit program memory to a 16-bit data register, the lower eight
bits are placed in the PX register.
The program memory interface can generate 0 to 7 wait states for
external memory devices; default is to 7 wait states after RESET.
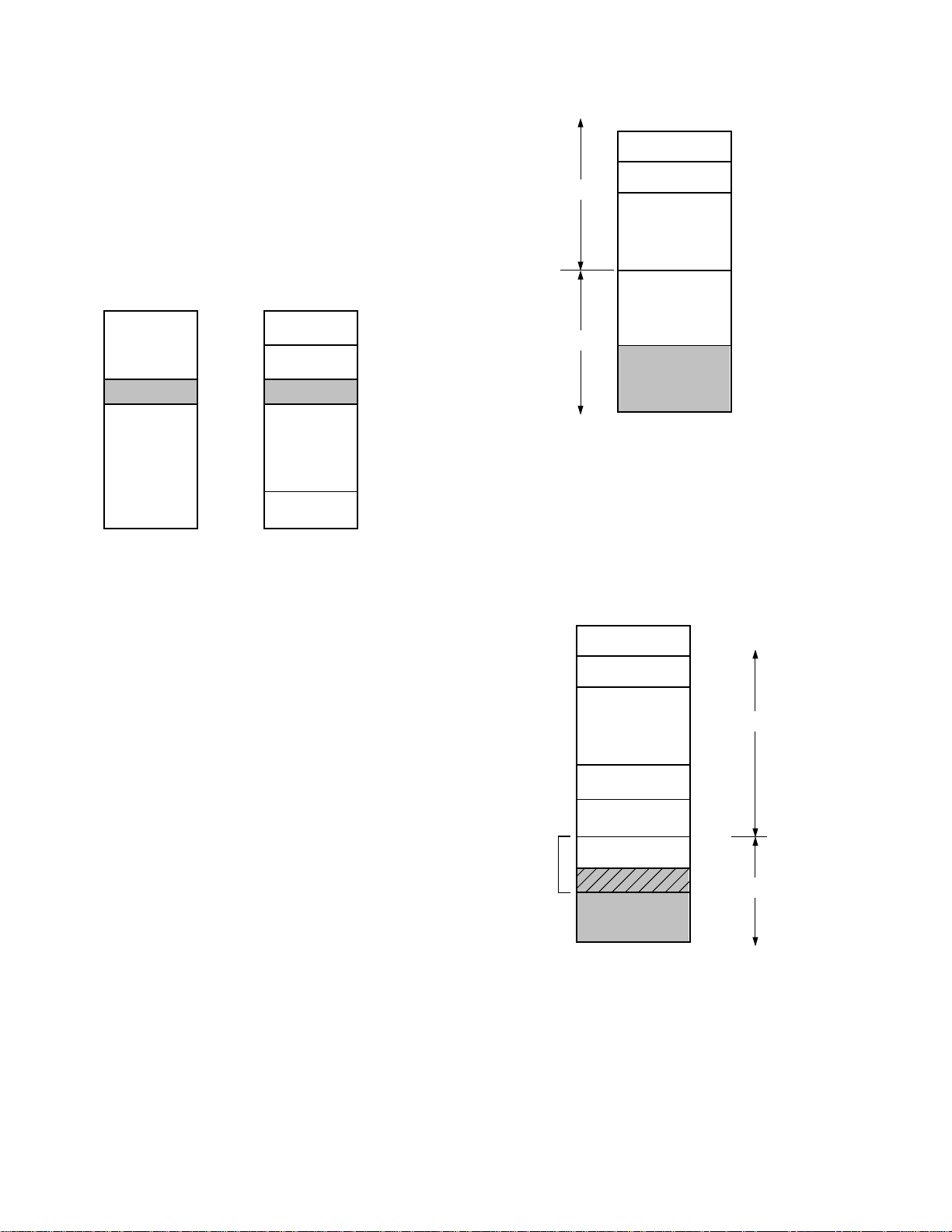
Program Memory Maps
Program memory can be mapped in two ways, depending on the
state of the MMAP pin. Figure 4 shows the program memory
map for the ADSP-2165/ADSP-2166. Figures 5 and 6 show the
program memory maps for the ADSP-2161/ADSP-2162 and
ADSP-2163/ADSP-2164, respectively.
REV. 0
–7–
ADSP-2165/ADSP-2166
When MMAP = 0, on-chip program memory ROM occupies
12K words beginning at address 0x0000. Internal program
memory RAM occupies 1K words beginning at address 0x3000.
Off-chip program memory uses the 2K words beginning at
address 0x3800. The ADSP-2165/ADSP-2166 does not support
boot memory.
When MMAP = 1, 2K words of off-chip program memory begin
at address 0x0000. 10K words of on-chip program memory
ROM at 0x800 to 0x2FFF, and the remainder 2K words of
program memory ROM is at 0x3800 to 0x3FFF. Internal program memory RAM occupies 1K words at address 0x300 to
0x33FF.
Figure 4. ADSP-2165/ADSP-2166 Program Memory Maps
ADSP-2161/ADSP-2162
When MMAP = 0, on-chip program memory ROM occupies
8K words beginning at address 0x0000. Off-chip program
memory uses the remaining 8K words beginning at address
0x2000.
When MMAP = 1, 2K words of off-chip program memory begin
at address 0x0000. 6K words of on-chip program memory ROM
are at 0x0800 to 0x1FF0, and the remainder 2K words of program memory ROM is at 0x3800 to 0x3FFF. An additional 6K
of off-chip program memory is at 0x2000 to 0x37FF.
Figure 5. ADSP-2161/ADSP-2162 Program Memory Maps
Page 8
ADSP-216x
0x0000
4K 3 16
MEMORY-MAPPED
REGISTERS
& RESERVED
0x0800
ADDRESS (HEX)
4K 3 16 INTERNAL
6K EXTERNAL
DWAIT2
1K EXTERNAL
DWAIT0
1K EXTERNAL
DWAIT1
0x0400
0x2000
0x3000
0x3FFF
EXTERNAL
RAM
INTERNAL
RAM
0x0000
512
ADSP-2161/62/63/64
0x0800
ADDRESS (HEX)
10K EXTERNAL
DWAIT2
1K EXTERNAL
DWAIT0
1K EXTERNAL
DWAIT1
0x0400
0x3000
0x3C00
0x3FFF
EXTERNAL
RAM
INTERNAL
RAM
1K EXTERNAL
DWAIT3
1K EXTERNAL
DWAIT4
MEMORY-MAPPED
CONTROL REGISTERS
& RESERVED
0x3A00
0x3800
0x3400
ADSP-2163/ADSP-2164
When MMAP = 0, on-chip program memory ROM occupies
4K words beginning at address 0x0000. Off-chip program
memory uses the remaining 12K words beginning at address
0x1000.
When MMAP = 1, 2K words of off-chip program memory begin
at address 0x0000. 2K words of on-chip program memory ROM
is at 0x0800 to 0x0FF0, and the remainder 2K words of program memory ROM is at 0x3800 to 0x3FFF. An additional
10K of off-chip program memory is at 0x1000 to 0x37FF.
Figure 6. ADSP-2163/ADSP-2164 Program Memory Maps
Data Memory Interface
The data memory address bus (DMA) is 14 bits wide. The
bidirectional external data bus is 24 bits wide, with the upper 16
bits used for data memory data (DMD) transfers.
The data memory select (DMS) signal indicates access to data
memory and can be used as a chip select signal. The write (WR)
signal indicates a write operation and can be used as a write
strobe. The read (RD) signal indicates a read operation and can
be used as a read strobe or output enable signal.
The ADSP-216x processors support memory-mapped I/O, with
the peripherals memory-mapped into the data memory address
space and accessed by the processor in the same manner as data
memory.
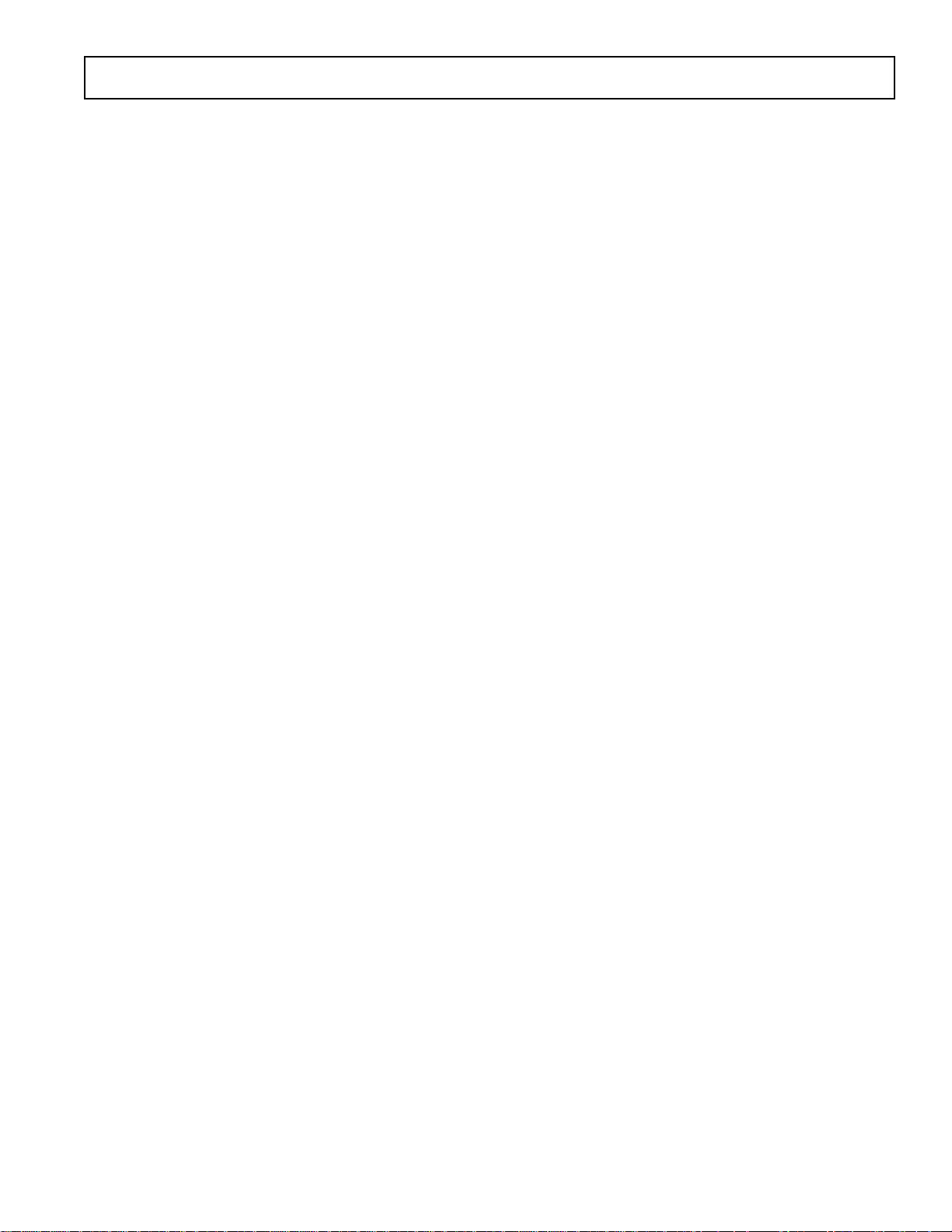
Data Memory Map
For the ADSP-2165/ADSP-2166, on-chip data memory RAM
resides in the 4K words beginning at address 0x2000, as shown
in Figure 7. Data memory locations from 0x3000 to the end of
data memory at 0x3FFF are reserved. Control and status registers for the system, timer, wait-state configuration, and serial port
operations are located in this region of memory.
The remaining 8K of data memory is located off-chip. This
external data memory is divided into three zones, each associated with its own wait-state generator. This allows slower peripherals to be memory-mapped into data memory for which
wait states are specified. By mapping peripherals into different
zones, you can accommodate peripherals with different waitstate requirements. All zones default to 7 wait states after
RESET.
INTERNAL
RESERVED
EXTERNAL
MMAP = 0
4K
ROM
12K
0x0000
0x0FF0
0x0FFF
0x1000
0x3FFF
2K
EXTERNAL
2K
INTERNAL
ROM
RESERVED
10K
EXTERNAL
2K
INTERNAL
ROM
MMAP = 1
0x0000
0x07FF
0x0800
0x0FF0
0x0FFF
0x1000
0x37FF
0x3800
0x3FFF
Figure 7. ADSP-2165/ADSP-2166 Data Memory Map
ADSP-2161/ADSP-2162/ADSP-2163/ADSP-2164
For the ADSP-2161/ADSP-2162/ADSP-2163/ADSP-2164, onchip data memory RAM resides in the 512 words beginning at
address 0x3800, also shown in Figure 8. Data memory locations
from 0x3A00 to the end of data memory at 0x3FFF are reserved.
Control and status registers for the system, timer, wait-state
configuration, and serial port operations are located in this
region of memory.
Figure 8. ADSP-2161/ADSP-2162/ADSP-2163/ADSP-2164
Data Memory Map
The remaining 14K of data memory is located off-chip. This
external data memory is divided into five zones, each associated
with its own wait-state generator. This allows slower peripherals
to be memory-mapped into data memory for which wait states
are specified. By mapping peripherals into different zones, you
can accommodate peripherals with different wait-state requirements. All zones default to seven wait states after RESET.
–8–
REV. 0
Page 9

ADSP-216x
Bus Interface
The ADSP-216x processors can relinquish control of their data
and address buses to an external device. When the external
device requires control of the buses, it asserts the bus request
signal (BR). If the ADSP-216x is not performing an external
memory access, it responds to the active BR input in the next
cycle by:
• Three-stating the data and address buses and the PMS,
DMS, BMS, RD, WR output drivers,
• Asserting the bus grant (BG) signal, and halting program
execution.
If the Go mode is set, however, the ADSP-216x will not halt
program execution until it encounters an instruction that
requires an external memory access.
If the ADSP-216x is performing an external memory access
when the external device asserts the BR signal, it will not threestate the memory interfaces or assert the BG signal until the
cycle after the access completes (up to eight cycles later depending on the number of wait states). The instruction does not need
to be completed when the bus is granted; the ADSP-21xx will
grant the bus between two memory accesses if an instruction
requires more than one external memory access.
When the BR signal is released, the processor releases the BG
signal, re-enables the output drivers and continues program
execution from the point at which it stopped.
The bus request feature operates at all times, including when the
processor is booting and when RESET is active. If this feature is
not used, the BR input should be tied high (to V
POWER-DOWN
The ADSP-2165/ADSP-2166 processors have a low power
feature that lets the processor enter a very low power dormant
state through hardware or software control. A list of powerdown features follows:
• Processor registers and on-chip memory contents are maintained during power-down.
• Power-down mode holds the processor in CMOS standby
with a maximum current of less than 100 µA in some modes.
• Support for an externally generated TTL or CMOS processor clock. The external clock can continue running during
power-down without affecting the lowest power rating.
• Support for crystal operation includes disabling the oscillator
to save power. (The processor automatically waits 4096
CLKIN cycles for the crystal oscillator to start and stabilize).
• When power-down mode is enabled, powering down of the
processor can be initiated either by externally generated
IRQ2 interrupt or by using the IRQ2 force bit in the IFC
register.
• Power-Down Acknowledge Pin (PWDACK) indicates when
the processor has entered power-down.
• Interrupt support allows an unlimited number of instructions
to be executed before optionally powering down.
• Context clear/save control allows the processor to continue
where it left off or start with a clean context when leaving the
power-down state.
DD
).
• Low-to-high transition of the power-down flag input pin
(PWDFLAG) can be used to terminate power-down.
• The RESET pin also can also be used to terminate
power-down.
Power-Down Control
Several parameters of power-down operation can be controlled
through control bits of the “power-down/sportl autobuffer control register.” This control register is memory-mapped at location 0x3FEF and the power-down control bits are as follows:
bit[15] xtal: xtal pin disable during power-down
1 = disabled, 0 = enable (default)
bit[14] pwdflag: (read only )
when pwdena = 1, the value of bit [14] pwdflag is equal to the
status of the pwdflag input pin.
when pwdena = 0, the value of bit [14] pwdflag is equal to 0.
bit[13] pwdena: power-down enable
1 = enable, 0 = disable (default)
if pwdena is set to 0, then the output pin PWDACK is driven
low and the input pin PWDFLAG is disabled
Note: It is not recommended that power-down enable be set or
cleared during an IRQ2 interrupt.
bit[12] pucr: power-up context reset
1 = soft reset, 0 = resume execution (default)
Entering Power-Down
The power-down sequence is defined as follows:
• Enable power-down logic by setting the pwdena bit in the
power-down/sportl autobuffer control register.
Note: In order to power-down, the PWDENA bit must be set
before the IRQ2 interrupt is initiated.
• Initiate the power-down sequence by generating an IRQ2
interrupt either externally or by software use of the IFC
register.
• The processor vectors to the IRQ2 interrupt vector located at
0x0004.
• Any number of housekeeping instructions, starting at location 0x0004 can be executed prior to the processor entering
the power-down mode.
• The processor enters the power-down mode when the processor executes an IDLE instruction while executing the
IRQ2 interrupt routine.
Notes:
• If an RTI instruction is executed before the processor encounter an IDLE instruction, then the processor returns
from the IRQ2 interrupt and the power-down sequence is
aborted.
• The user can differentiate between a “normal” IRQ2 interrupt and a “power-down” IRQ2 interrupt by resetting the
PWDFLAG pin and checking the status of this pin by testing
the PWDFLAG bit in the power-down/SPORT1 autobuffer
control register located at DM[0x3FEF].
REV. 0
–9–
Page 10

ADSP-216x
Exiting Power-Down
The power-down mode can be exited with the use of the
PWDFLAG or RESET pin. Applying a low-to-high transition to
the PWDFLAG pin takes the processor out of power-down
mode. In this case, a delay of 4096 cycles is automatically induced by the processor. Also, depending on the status of the
power-up context reset bit (pucr), the processor either
1) continues to execute instructions following the IDLE instruction that caused the power-down. A RTI instruction is required to pass control back to the main routine (pucr = 0)
or
2) resumes operation from power-down by clearing the PC,
STATUS, LOOP and CNTR stack. The IMASK and
ASTAT registers are set to 0 and the SSTAT goes to 0x55.
The processor then starts executing instructions from the
address zero (pucr = 1).
In the case where the power-down mode is exited by asserting
the RESET pin, the processor state is reset and instruction are
executed from address 0x0000. The RESET pin in this case
must be held low long enough for the external crystal (if any)
and the on-chip PLL to stabilize and lock.
Low Power IDLE Instruction
The IDLE instruction places the ADSP-216x processor in low
power state in which it waits for an interrupt. When an interrupt
occurs, it is serviced and execution continues with instruction
following IDLE. Typically this next instruction will be a JUMP
back to the IDLE instruction. This implements a low power
standby loop.
The IDLE n instruction is a special version of IDLE that slows
the processor’s internal clock signal to further reduce power
consumption. The reduced clock frequency, a programmable
fraction of the normal clock rate, is specified by a selectable
divisor, n, given in the IDLE instruction. The syntax of the
instruction is:
IDLE n;
where n = 16, 32, 64 or 128.
The instruction leaves the chip in an idle state, operating at the
slower rate. While it is in this state, the processor’s other internal clock signals, such as SCLK, CLKOUT, and the timer
clock, are reduced by the same ratio. Upon receipt of an enabled interrupt, the processor will stay in the IDLE state for up
to a maximum of n CLKIN cycles, where n is the divisor specified in the instruction, before resuming normal operation.
When the IDLE n instruction is used, it slows the processor’s
internal clock and thus its response time to incoming interrupts–
the 1-cycle response time of the standard IDLE state is increased
by n, the clock divisor. When an enabled interrupt is received,
the ADSP-216x will remain in the IDLE state for up to a maximum of n CLKIN cycles (where n = 16, 32, 64 or 128) before
resuming normal operation.
When the IDLE n instruction is used in systems that have an
externally generated serial clock (SCLK), the serial clock rate
may be faster than the processor’s reduced internal clock rate.
Under these conditions, interrupts must not be generated at a
faster rate than can be serviced, due to the additional time the
processor takes to come out of the IDLE state (a maximum of n
CLKIN cycles).
ADSP-216x Prototyping
You can prototype your ADSP-216x system with either ADSP2101 or ADSP-2103 RAM-based processors. When code is fully
developed and debugged, it can be submitted to Analog Devices
for conversion into an ADSP-216x ROM product.
The ADSP-2101 EZ-ICE emulator can be used for development
of ADSP-216x systems. For the 3.3 V ADSP-2162/ADSP-2164
and ADSP-2166, a voltage converter interface board provides
3.3 V emulation.
Additional overlay memory is used for emulation of ADSP2161/ADSP-2162 systems. It should be noted that due to the
use of off-chip overlay memory to emulate the ADSP-2161/
ADSP-2162, a performance loss may be experienced when both
executing instructions and fetching program memory data from
the off-chip overlay memory in the same cycle. This can be
overcome by locating program memory data in on-chip memory.
Ordering Procedure for ADSP-216x ROM Processors
To place an order for a custom ROM-coded ADSP-2161,
ADSP-2162, ADSP-2163, ADSP-2164 , ADSP-2165 or ADSP2166 processor, you must:
1. Complete the following forms contained in the ADSP ROM
Ordering Package, available from your Analog Devices sales
representative:
ADSP-216x ROM Specification Form
ROM Release Agreement
ROM NRE Agreement & Minimum Quantity Order (MQO)
Acceptance Agreement for Preproduction ROM Products
2. Return the forms to Analog Devices along with two copies of the
Memory Image File (.EXE file) of your ROM code. The files must
be supplied on two 3.5" or 5.25" floppy disks for the IBM PC
(DOS 2.01 or higher).
3. Place a purchase order with Analog Devices for nonrecurring
engineering changes (NRE) associated with ROM product
development.
After this information is received, it is entered into Analog
Devices’ ROM Manager System which assigns a custom ROM
model number to the product. This model number will be
branded on all prototype and production units manufactured to
these specifications.
To minimize the risk of code being altered during this process,
Analog Devices verifies that the .EXE files on both floppy disks
are identical, and recalculates the checksums for the .EXE file
entered into the ROM Manager System. The checksum data, in
the form of a ROM Memory Map, a hard copy of the .EXE file,
and a ROM Data Verification form are returned to you for
inspection.
A signed ROM Verification Form and a purchase order for
production units are required prior to any product being manufactured. Prototype units may be applied toward the minimum
order quantity.
Upon completion of prototype manufacture, Analog Devices
will ship prototype units and a delivery schedule update for
production units. An invoice against your purchase order for the
NRE charges is issued at this time.
There is a charge for each ROM mask generated and a minimum order quantity. Consult your sales representative for details. A separate order must be placed for parts of a specific
package type, temperature range, and speed grade.
–10–
REV. 0
Page 11
ADSP-216x
Instruction Set
The ADSP-216x assembly language uses an algebraic syntax for
ease of coding and readability. The sources and destinations of
computations and data movements are written explicitly in each
assembly statement, eliminating cryptic assembler mnemonics.
Every instruction assembles into a single 24-bit word and executes
in a single cycle. The instructions encompass a wide variety of
instruction types along with a high degree of operational
ALU Instructions
parallelism. There are five basic categories of instructions: data
move instructions, computational instructions, multifunction
instructions, program flow control instructions and miscellaneous instructions. Multifunction instructions perform one or
two data moves and a computation.
The instruction set is summarized below. The ADSP-2100
Family Users Manual contains a complete reference to the
instruction set.
[IF cond] AR|AF = xop + yop [+ C] ; Add/Add with Carry
= xop – yop [+ C– 1] ; Subtract X – Y/Subtract X – Y with Borrow
= yop – xop [+ C– 1] ; Subtract Y – X/Subtract Y – X with Borrow
= xop AND yop ; AND
= xop OR yop ; OR
= xop XOR yop ; XOR
= PASS xop ; Pass, Clear
= – xop ; Negate
= NOT xop ; NOT
= ABS xop ; Absolute Value
= yop + 1 ; Increment
= yop – 1 ; Decrement
= DIVS yop, xop ; Divide
= DIVQ xop ;
MAC Instructions
[IF cond] MR|MF = xop * yop ; Multiply
= MR + xop
= MR – xop
yop ; Multiply/Accumulate
*
yop ; Multiply/Subtract
*
= MR ; Transfer MR
=0 ; Clear
IF MV SAT MR ; Conditional MR Saturation
Shifter Instructions
[IF cond] SR = [SR OR] ASHIFT xop ; Arithmetic Shift
[IF cond] SR = [SR OR] LSHIFT xop ; Logical Shift
SR = [SR OR] ASHIFT xop BY <exp>; Arithmetic Shift Immediate
SR = [SR OR] LSHIFT xop BY <exp>; Logical Shift Immediate
[IF cond] SE = EXP xop ; Derive Exponent
[IF cond] SB = EXPADJ xop ; Block Exponent Adjust
[IF cond] SR = [SR OR] NORM xop ; Normalize
Data Move Instructions
reg = reg ; Register-to-Register Move
reg = <data> ; Load Register Immediate
reg = DM (<addr>) ; Data Memory Read (Direct Address)
dreg = DM (Ix , My) ; Data Memory Read (Indirect Address)
dreg = PM (Ix , My) ; Program Memory Read (Indirect Address)
DM (<addr>) = reg ; Data Memory Write (Direct Address)
DM (Ix , My) = dreg ; Data Memory Write (Indirect Address)
PM (Ix , My) = dreg ; Program Memory Write (Indirect Address)
Multifunction Instructions
<ALU>|<MAC>|<SHIFT> , dreg = dreg ; Computation with Register-to-Register Move
<ALU>|<MAC>|<SHIFT> , dreg = DM (Ix , My) ; Computation with Memory Read
<ALU>|<MAC>|<SHIFT> , dreg = PM (Ix , My) ; Computation with Memory Read
DM (Ix , My) = dreg , <ALU>|<MAC>|<SHIFT> ; Computation with Memory Write
PM (Ix , My) = dreg , <ALU>|<MAC>|<SHIFT> ; Computation with Memory Write
dreg = DM (Ix , My) , dreg = PM (Ix , My) ; Data & Program Memory Read
<ALU>|<MAC> , dreg = DM (Ix , My) , dreg = PM (Ix , My) ; ALU/MAC with Data & Program Memory Read
REV. 0
–11–
Page 12

ADSP-216x
Program Flow Instructions
DO <addr> [UNTIL term] ; Do Until Loop
[IF cond] JUMP (Ix) ; Jump
[IF cond] JUMP <addr>;
[IF cond] CALL (Ix) ; Call Subroutine
[IF cond] CALL <addr>;
IF [NOT ] FLAG_IN JUMP <addr>; Jump/Call on Flag In Pin
IF [NOT ] FLAG_IN CALL <addr>;
[IF cond] SET|RESET|TOGGLE FLAG_OUT [, ...] ; Modify Flag Out Pin
[IF cond] RTS ; Return from Subroutine
[IF cond] RTI ; Return from Interrupt Service Routine
IDLE [(n)] ; Idle
Miscellaneous Instructions
NOP ; No Operation
MODIFY (Ix , My); Modify Address Register
[PUSH STS] [, POP CNTR] [, POP PC] [, POP LOOP] ; Stack Control
ENA|DIS SEC_REG [, ...] ; Mode Control
BIT_REV
AV_LATCH
AR_SAT
M_MODE
TIMER
G_MODE
Notation Conventions
Ix Index registers for indirect addressing
My Modify registers for indirect addressing
<data> Immediate data value
<addr> Immediate address value
<exp> Exponent (shift value) in shift immediate instructions (8-bit signed number)
<ALU> Any ALU instruction (except divide)
<MAC> Any multiply-accumulate instruction
<SHIFT> Any shift instruction (except shift immediate)
cond Condition code for conditional instruction
term Termination code for DO UNTIL loop
dreg Data register (of ALU, MAC, or Shifter)
reg Any register (including dregs)
; A semicolon terminates the instruction
, Commas separate multiple operations of a single instruction
[ ] Optional part of instruction
[, ...] Optional, multiple operations of an instruction
option1 | option2 List of options; choose one.
Assembly Code Example
The following example is a code fragment that performs the filter tap update for an adaptive filter based on a least-mean-squared
algorithm. Notice that the computations in the instructions are written like algebraic equations.
MF=MX0*MY1(RND), MX0=DM(I2,M1); {MF=error*beta}
MR=MX0*MF(RND), AY0=PM(I6,M5);
DO adapt UNTIL CE;
AR=MR1+AY0, MX0=DM(I2,M1), AY0=PM(I6,M7);
adapt: PM(I6,M6)=AR, MR=MX0*MF(RND);
MODIFY(I2,M3); {Point to oldest data}
MODIFY(I6,M7); {Point to start of data}
–12–
REV. 0
Page 13

ADSP-216x
WARNING!
ESD SENSITIVE DEVICE
SPECIFICATIONS
ADSP-2161/ADSP-2163/ADSP-2165–RECOMMENDED OPERATING CONDITIONS
K Grade B Grade
Parameter Min Max Min Max Unit
V
DD
T
AMB
See “Environmental Conditions” for information on thermal specifications.
ELECTRICAL CHARACTERISTICS
Parameter Test Conditions Min Max Unit
V
IH
V
IH
V
IL
V
OH
V
OL
I
IH
I
IL
I
OZH
I
OZL
C
I
C
O
NOTES
1
Bidirectional pins: D0–D23, SCLK1, RFS1, TFS1, SCLK0, RFS0, TFS0.
2
Input-only pins: RESET, IRQ2, BR, MMAP, DR1, DR0.
3
Input-only pins: CLKIN, RESET, IRQ2, BR, MMAP, DR1, DR0.
4
Output pins: BG, PMS, DMS, BMS, RD, WR, A0–A13, CLKOUT, DT1, DT0.
5
Although specified for TTL outputs, all ADSP-21xx outputs are CMOS-compatible and will drive to VDD and GND, assuming no dc loads.
6
Guaranteed but not tested.
␣7
Three-stateable pins: A0–A13, D0–D23, PMS, DMS, BMS, RD, WR, DT1, SCLK1, RFS1, TFS1, DT0, SCLK0, RFS0, TFS0.
8
0 V on BR, CLKIN Active (to force three-state condition).
9
Applies to PLCC, MQFP package types.
10
Output pin capacitance is the capacitive load for any three-stated output pin.
Specifications subject to change without notice.
Supply Voltage 4.50 5.50 4.50 5.50 V
Ambient Operating Temperature 0 +70 –40 +85 °C
Hi-Level Input Voltage
Hi-Level CLKIN and Reset Voltage @ V
Lo-Level Input Voltage
Hi-Level Output Voltage
Lo-Level Output Voltage
Hi-Level Input Current
Lo-Level Input Current
Three-State Leakage Current
Three-State Leakage Current
Input Pin Capacitance
Output Pin Capacitance
1, 2
1, 3
1, 4, 5
1, 4, 5
3
3
3, 6, 9
6, 7, 9, 10
@ V
= max 2.0 V
DD
= max 2.2 V
DD
@ VDD = min 0.8 V
@ VDD = min, IOH = –0.5 mA 2.4 V
@ V
= min, I
DD
= –100 µA
OH
6
VDD – 0.3 V
@ VDD = min, IOL = 2 mA 0.4 V
@ VDD = max, VIN = V
7
7
@ VDD = max, VIN = VDD max
@ VDD = max, VIN = 0 V
@ VDD = max, V
IN
@ VIN = 2.5 V, fIN = 1.0 MHz, T
@ VIN = 2.5 V, fIN = 1.0 MHz, T
max 10 µA
DD
= 0 V 10 µA
8
8
= 25°C8pF
AMB
= 25°C8pF
AMB
10 µA
10 µA
ABSOLUTE MAXIMUM RATINGS*
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7 V
Input Voltage . . . . . . . . . . . . . . . . . . . . –0.3 V to V
Output Voltage Swing . . . . . . . . . . . . . –0.3 V to V
+ 0.3 V
DD
+ 0.3 V
DD
Operating Temperature Range (Ambient) . . . –40°C to +85°C
(No Extended Temperature Range)
Storage Temperature Range . . . . . . . . . . . . –65ºC to +150ºC
Lead Temperature (10 sec) PGA . . . . . . . . . . . . . . . . .+300ºC
Lead Temperature (5 sec) PLCC, MQFP, TQFP . . . .+280ºC
*Stresses greater than those listed above may cause permanent damage to the
device. These are stress ratings only; functional operation of the device at these or
any other conditions greater than those indicated in the operational sections of this
specification is not implied. Exposure to absolute maximum rating conditions for
extended periods may affect device reliability.
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection. Although
the ADSP-216x features proprietary ESD protection circuitry, permanent damage may occur on
devices subjected to high energy electrostatic discharges. Therefore, proper ESD precautions are
recommended to avoid performance degradation or loss of functionality.
REV. 0 –13–
Page 14

ADSP-216x
SPECIFICATIONS
ADSP-2161/ADSP-2163/ADSP-2165–SUPPLY CURRENT AND POWER
Parameter Test Conditions Min Max Unit
1, 3
1
@ VDD = max, tCK = 40 ns
= max, tCK = 50 ns
@ V
DD
= max, tCK = 60 ns
@ V
DD
@ VDD = max, tCK = 40 ns 12 mA
= max, tCK = 50 ns 11 mA
@ V
DD
I
I
Supply Current (Dynamic)
DD
Supply Current (Idle)
DD
@ VDD = max, tCK = 60 ns 10 mA
NOTES
1
Current reflects device operating with no output loads.
2
VIN = 0.4 V and 2.4 V.
3
Idle refers to ADSP-21xx state of operation during execution of IDLE instruction. Deasserted pins are driven to either V
For typical supply current (internal power dissipation) figures, see Figure 9.
Specifications subject to change without notice.
2
2
2
or GND.
DD
38 mA
31 mA
27 mA
220
200
180
160
140
129mW
120
POWER – mW
100
100mW
80
60
10.00
70
60
51mW
50
40
38mW
30
28mW
POWER – mW
20
10
0
10.00 13.83 20.00 25.00 30.00
VALID FOR ALL TEMPERATURE GRADES.
1
POWER REFLECTS DEVICE OPERATING WITH NO OUTPUT LOADS.
2
IDLE REFERS TO ADSP-216x OPERATION DURING EXECUTION OF IDLE INSTRUCTION.
DEASSERTED PINS ARE DRIVEN TO EITHER VDD OR GND.
3
MAXIMUM POWER DISSIPATION AT VDD = 5.5V DURING EXECUTION OF
IDD IDLE
FREQUENCY – MHz
1,2
VDD = 5.5V
VDD = 5.0
VDD = 4.5V
IDD DYNAMIC
74mW
13.83 20.00 25.00 30.00
FREQUENCY – MHz
64mW
49mW
35mW
1
205mW
VDD = 5.5V
157mW
VDD = 5.0V
118mW
VDD = 4.5V
65
60
55
50
45
POWER – mW
40
35
30
10.00 13.83 20.00 25.00 30.00
IDD IDLE n MODES
51mW
41mW
40mW
IDLE 16
IDLE 128
FREQUENCY – MHz
IDLE n
3
64mW
IDD IDLE
43mW
42mW
INSTRUCTION.
Figure 9. ADSP-2161/ADSP-2163/ADSP-2165 (Typical) vs. Frequency
–14–
REV. 0
Page 15

CL – pF
RISE TIME (0.4V – 2.0V) – ns
0
0
17525 50 150
1
VDD = 4.5V
8
6
4
100 12575
7
5
3
2
CL – pF
–3
0
17525 50 150
VDD = 4.5V
5
3
1
100 12575
4
2
–2
–1
0
VALID OUTPUT DELAY OR HOLD – ns
ADSP-2161/ADSP-2163/ADSP-2165
POWER DISSIPATION EXAMPLE
To determine total power dissipation in a specific application,
the following equation should be applied for each output:
C × V
C = load capacitance,␣ f␣ = output switching frequency.
Example:
In an ADSP-2161 application where external data memory is
used and no other outputs are active, power dissipation is calculated as follows:
Assumptions:
• External data memory is accessed every cycle with 50% of
the address pins switching.
• External data memory writes occur every other cycle with
50% of the data pins switching.
• Each address and data pin has a 10 pF total load at the pin.
• The application operates at V
2
×␣ f
DD
= 5.0 V and tCK = 50 ns.
DD
ADSP-216x
CAPACITIVE LOADING
Figures 10 and 11 show capacitive loading characteristics for the
ADSP-2161/ADSP-2163/ADSP-2165.
Total Power Dissipation = P
P
= internal power dissipation (from Figure 9).
INT
(C × V
2
× f ) is calculated for each output:
DD
# of
Output Pins ⴛ C ⴛ V
Address, DMS 8 × 10 pF × 5
Data, WR 9 × 10 pF × 5
RD 1 × 10 pF × 5
+ (C × V
INT
2
ⴛ f
DD
2
V × 20 MHz = 40.0 mW
2
V × 10 MHz = 22.5 mW
2
V × 10 MHz = 2.5 mW
DD
2
×␣f)
CLKOUT 1 × 10 pF × 52 V × 20 MHz = 5.0 mW
70.0 mW
Total power dissipation for this example = P
+ 70.0 mW.
INT
ENVIRONMENTAL CONDITIONS
Ambient Temperature Rating:
␣␣T
= T
AMB
= Case Temperature in °C
␣␣T
CASE
– (PD × θ
CASE
CA
)
␣ ␣ PD = Power Dissipation in W
= Thermal Resistance (Case-to-Ambient)
␣␣θ
CA
= Thermal Resistance (Junction-to-Ambient)
␣␣θ
JA
= Thermal Resistance (Junction-to-Case)
␣␣θ
JC
Package
JA
JC
CA
PLCC 27°C/W 16°C/W 11°C/W
MQFP 60°C/W 18°C/W 42°C/W
Figure 10. Typical Output Rise Time vs. Load Capacitance, C
(at Maximum Ambient Operating Temperature)
Figure 11. Typical Output Valid Delay or Hold vs. Load
Capacitance, C
(at Maximum Ambient Operating
L
Temperature)
L
REV. 0
–15–
Page 16

ADSP-216x
SPECIFICATIONS
ADSP-2161/ADSP-2163/ADSP-2165
TEST CONDITIONS
Figure 12 shows voltage reference levels for ac measurements.
INPUT
OUTPUT
Figure 12.␣ Voltage␣ Reference␣ Levels for AC Measurements
(Except Output Enable/Disable)
Output Disable Time
Output pins are considered to be disabled when they have
stopped driving and started a transition from the measured output high or low voltage to a high impedance state. The output
disable time (t
shown in Figure 13. The time t
) is the difference of t
DIS
MEASURED
when a reference signal reaches a high or low voltage level to
when the output voltages have changed by 0.5 V from the measured output high or low voltage.
The decay time, t
, and the current load, iL, on the output pin. It can be ap-
C
L
, is dependent on the capacitative load,
DECAY
proximated by the following equation:
3.0V
1.5V
0.0V
2.0V
1.5V
0.8V
MEASURED
and t
DECAY
is the interval from
, as
Output Enable Time
Output pins are considered to be enabled when they have made
a transition from a high-impedance state to when they start
driving. The output enable time (t
) is the interval from when
ENA
a reference signal reaches a high or low voltage level to when the
output has reached a specified high or low trip point, as shown
in Figure 13. If multiple pins (such as the data bus) are enabled,
the measurement value is that of the first pin to start driving.
REFERENCE
SIGNAL
t
(MEASURED)
OUTPUT
(MEASURED)
MEASURED
t
V
DIS
OH
V
OL
OUTPUT STOPS
DRIVING
(MEASURED) – 0.5V
V
OH
(MEASURED) +0.5V
V
OL
t
DECAY
HIGH-IMPEDANCE STATE. TEST CONDITIONS CAUSE
THIS VOLTAGE LEVEL TO BE APPROXIMATELY 1.5V.
t
ENA
V
(MEASURED)
2.0V
1.0V
OUTPUT STARTS
DRIVING
V
(MEASURED)
OH
OL
Figure 13. Output Enable/Disable
I
OL
CV
×05.
t
DECAY
L
=
i
L
from which
t
DIS
= t
MEASURED
– t
DECAY
is calculated. If multiple pins (such as the data bus) are disabled,
the measurement value is that of the last pin to stop driving.
TO
OUTPUT
PIN
50pF
I
OH
+1.5V
Figure 14. Equivalent Device Loading for AC
Measurements (Except Output Enable/Disable)
–16–
REV. 0
Page 17

ADSP-216x
ADSP-2162/ADSP-2164/ADSP-2166–RECOMMENDED OPERATING CONDITIONS
K Grade B Grade
Parameter Min Max Min Max Unit
V
DD
T
AMB
See “Environmental Conditions” for information on thermal specifications.
Supply Voltage 3.00 3.60 3.00 3.60 V
Ambient Operating Temperature 0 +70 –40 +85 °C
ELECTRICAL CHARACTERISTICS
Parameter Test Conditions Min Max Unit
V
V
V
V
V
I
IH
I
IL
I
OZH
I
OZL
C
C
NOTES
1
Input-only pins: CLKIN, RESET, IRQ2, BR, MMAP, DR1, DR0.
2
Bidirectional pins: D0–D23, SCLK1, RFS1, TFS1, SCLK0, RFS0, TFS0.
3
Output pins: BG, PMS, DMS, BMS, RD, WR, A0–A13, CLKOUT, DT1, DT0.
4
All ADSP-2162, ADSP-2164 and ADSP-2166 outputs are CMOS and will drive to VDD and GND with no dc loads.
5
Three-stateable pins: A0–A13, D0–D23, PMS, DMS, BMS, RD, WR, DT1, SCLK1, RFS1, TFS1, DT0, SCLK0, RFS0, TFS0.
6
0 V on BR, CLKIN Active (to force three-state condition).
7
Guaranteed but not tested.
8
Applies to PLCC and MQFP package types.
9
Output pin capacitance is the capacitive load for any three-stated output pin.
Specifications subject to change without notice.
Hi-Level Input Voltage
IH
Hi-Level CLKIN and Reset Voltage @ VDD = max 2.2 V
IH
Lo-Level Input Voltage
IL
Hi-Level Output Voltage
OH
Lo-Level Output Voltage
OL
Hi-Level Input Current
Lo-Level Input Current
Three-State Leakage Current
Three-State Leakage Current
Input Pin Capacitance
I
Output Pin Capacitance
O
1, 2
1, 3
2, 3, 4
3
3
1, 7, 8
2, 7, 8, 9
2, 3, 4
@ VDD = max 2.0 V
@ VDD = min 0.4 V
@ VDD = min, IOH = –0.5 mA
@ VDD = min, IOL = 2 mA
@ VDD = max, VIN = V
5
5
@ VDD = max, V
@ VDD = max, VIN = VDD max
@ VDD = max, VIN = 0 V
= 0 V 10 µA
IN
@ VIN = 2.5 V, fIN = 1.0 MHz, T
@ VIN = 2.5 V, fIN = 1.0 MHz, T
4
4
max 10 µA
DD
6
6
= 25°C8pF
AMB
= 25°C8pF
AMB
2.4 V
0.4 V
10 µA
10 µA
ABSOLUTE MAXIMUM RATINGS*
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +4.5 V
Input Voltage . . . . . . . . . . . . . . . . . . . . –0.3 V to V
Output Voltage Swing . . . . . . . . . . . . . –0.3 V to V
+ 0.3 V
DD
+ 0.3 V
DD
Operating Temperature Range (Ambient) . . . –40ºC to +85ºC
Storage Temperature Range . . . . . . . . . . . . –65ºC to +150ºC
Lead Temperature (5 sec) PLCC, MQFP . . . . . . . . . . +280ºC
*Stresses greater than those listed above may cause permanent damage to the
device. These are stress ratings only, and functional operation of the device at
these or any other conditions greater than those indicated in the operational
sections of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
REV. 0
–17–
Page 18

ADSP-216x
SPECIFICATIONS
ADSP-2162/ADSP-2164/ADSP-2166–SUPPLY CURRENT AND POWER
Parameter Test Conditions Min Max Unit
1, 3
1
@ VDD = max, tCK = 60 ns
= max, tCK = 76.9 ns 15 mA
@ V
DD
= max, tCK = 97.6 ns 14 mA
@ V
DD
@ VDD = max, tCK = 60 ns 5 mA
= max, tCK = 76.9 ns 4 mA
@ V
DD
I
DD
I
DD
Supply Current (Dynamic)
Supply Current (Idle)
@ VDD = max, tCK = 97.6 ns 4 mA
NOTES
1
Current reflects device operating with no output loads.
2
VIN = 0.4 V and 2.4 V.
3
Idle refers to ADSP-216x state of operation during execution of IDLE instruction. Deasserted pins are driven to either VDD or GND.
For typical supply current (internal power dissipation) figures, see Figure 15.
Specifications subject to change without notice.
2
16 mA
50
45
40
35
30
25
20
POWER – mW
15
10
5
0
5.00
14
12
10
9mW
8
6mW
6
POWER – mW
5mW
4
2
0
5.00 7.00 10.00 15.0013.83
VALID FOR ALL TEMPERATURE GRADES.
1
POWER REFLECTS DEVICE OPERATING WITH NO OUTPUT LOADS.
2
IDLE REFERS TO ADSP-216x OPERATION DURING EXECUTION OF IDLE INSTRUCTION.
DEASSERTED PINS ARE DRIVEN TO EITHER VDD OR GND.
3
MAXIMUM POWER DISSIPATION AT VDD = 3.6V DURING EXECUTION OF
IDD IDLE
VDD = 3.6V
FREQUENCY – MHz
1
VDD = 3.30V
VDD = 3.0V
IDD DYNAMIC
VDD = 3.6V
24mW
19mW
15mW
7.00 10.00 13.83 15.00
FREQUENCY – MHz
13mW
10mW
8mW
1,2
48mW
VDD = 3.30V
37mW
29mW
VDD = 3.0V
14
12
10
8
6
POWER – mW
4
2
0
5.00 7.00 10.00 15.0013.83
IDD IDLE n MODES
IDD IDLE
9mW
5mW
4mW
FREQUENCY – MHz
Figure 15. ADSP-2162 Power (Typical) vs. Frequency)
IDLE 16
IDLE 128
IDLE n
INSTRUCTION.
3
13mW
7mW
6mW
–18–
REV. 0
Page 19

ADSP-2162/ADSP-2164/ADSP-2166
CL – pF
RISE TIME (0.4V – 2.0V) – ns
0
0
17525 50 150
5
VDD = 3.0V
30
20
100 12575
35
25
15
10
CL – pF
RISE TIME (0.4V – 2.0V) – ns
–4
0
17525 50 150
VDD = 3.0V
100 12575
–2
NOMINAL
2
4
6
8
10
POWER DISSIPATION EXAMPLE
To determine total power dissipation in a specific application,
the following equation should be applied for each output:
C × V
C = load capacitance,␣ f␣ = output switching frequency.
Example:
In an ADSP-2162 application where external data memory is
used and no other outputs are active, power dissipation is calculated as follows:
Assumptions:
•␣ External data memory is accessed every cycle with 50% of the
␣ ␣ address pins switching.
•␣ External data memory writes occur every other cycle with
␣ ␣ 50% of the data pins switching.
•␣ Each address and data pin has a 10 pF total load at the pin.
•␣ The application operates at V
Total Power Dissipation = P
P
= internal power dissipation (from Figure 15).
INT
(C × V
2
× f) is calculated for each output:
DD
2
×␣ f
DD
= 3.3 V and tCK = 100 ns.
DD
+ (C × V
INT
DD
2
×␣f)
ADSP-216x
CAPACITIVE LOADING
Figures 16 and 17 show capacitive loading characteristics for
the ADSP-2162 and ADSP-2164.
Figure 16. Typical Output Rise Time vs. Load Capacitance, C
(at Maximum Ambient Operating Temperature)
L
# of
Output Pins ⴛ C ⴛ V
Address, DMS 8 × 10 pF × 3.3
Data, WR 9 × 10 pF × 3.3
RD 1 × 10 pF × 3.3
2
ⴛ f
DD
2
V × 10 MHz = 8.71 mW
2
V × 5 MHz = 4.90 mW
2
V × 5 MHz = 0.55 mW
CLKOUT 1 × 10 pF × 3.32 V × 10 MHz = 1.09 mW
15.25 mW
Total power dissipation for this example = P
+ 15.25 mW.
INT
ENVIRONMENTAL CONDITIONS
Ambient Temperature Rating:
␣␣T
= T
AMB
= Case Temperature in °C
␣␣T
CASE
– (PD × θ
CASE
CA
)
␣ ␣ PD = Power Dissipation in W
= Thermal Resistance (Case-to-Ambient)
␣␣θ
CA
= Thermal Resistance (Junction-to-Ambient)
␣␣θ
JA
= Thermal Resistance (Junction-to-Case)
␣␣θ
JC
Package
JA
JC
CA
Figure 17. Typical Output Valid Delay or Hold vs. Load
Capacitance, C
(at Maximum Ambient Operating
L
Temperature)
MQFP 60°C/W 18°C/W 42°C/W
REV. 0
–19–
Page 20

ADSP-216x
SPECIFICATIONS
ADSP-2162/ADSP-2164/ADSP-2166
TEST CONDITIONS
Figure 18 shows voltage reference levels for ac measurements.
V
INPUT
OUTPUT
Figure 18.␣ Voltage Reference Levels␣ for␣ AC Measurements
(Except Output Enable/Disable)
Output Disable Time
Output pins are considered to be disabled when they have
stopped driving and started a transition from the measured
output high or low voltage to a high impedance state. The output disable time (t
as shown in Figure 19. The time t
) is the difference of t
DIS
MEASURED
when a reference signal reaches a high or low voltage level to
when the output voltages have changed by 0.5 V from the measured output high or low voltage.
The decay time, t
, and the current load, iL, on the output pin. It can be ap-
C
L
, is dependent on the capacitative load,
DECAY
proximated by the following equation:
CV
×05.
t
DECAY
L
=
i
L
from which
t
DIS
= t
MEASURED
– t
is calculated. If multiple pins (such as the data bus) are disabled,
the measurement value is that of the last pin to stop driving.
DD
2
V
DD
2
MEASURED
and t
is the interval from
DECAY
DECAY
,
Output Enable Time
Output pins are considered to be enabled when they have made
a transition from a high-impedance state to when they start
driving. The output enable time (t
) is the interval from when
ENA
a reference signal reaches a high or low voltage level to when the
output has reached a specified high or low trip point, as shown
in Figure 19. If multiple pins (such as the data bus) are enabled,
the measurement value is that of the first pin to start driving.
REFERENCE
SIGNAL
t
(MEASURED)
OUTPUT
(MEASURED)
MEASURED
t
V
DIS
OH
V
OL
OUTPUT STOPS
DRIVING
(MEASURED) – 0.5V
V
OH
(MEASURED) +0.5V
V
OL
t
DECAY
HIGH-IMPEDANCE STATE. TEST CONDITIONS CAUSE
THIS VOLTAGE LEVEL TO BE APPROXIMATELY 1.5V.
t
ENA
V
(MEASURED)
2.0V
1.0V
OUTPUT STARTS
DRIVING
V
(MEASURED)
OH
OL
Figure 19. Output Enable/Disable
I
OL
OUTPUT
PIN
TO
50pF
V
DD
2
I
OH
Figure 20. Equivalent Device Loading for AC
Measurements (Except Output Enable/Disable)
–20–
REV. 0
Page 21

TIMING PARAMETERS (ADSP-2161/ADSP-2163/ADSP-2165)
GENERAL NOTES
Use the exact timing information given. Do not attempt to derive parameters from the addition or subtraction of others. While
addition or subtraction would yield meaningful results for an
individual device, the values given in this data sheet reflect statistical variations and worst cases. Consequently, you cannot
meaningfully add parameters to derive longer times.
switching characteristics to ensure that any timing requirement
of a device connected to the processor (such as memory) is
satisfied.
Timing Requirements apply to signals that are controlled by circuitry external to the processor, such as the data input for a read
operation. Timing requirements guarantee that the processor
operates correctly with other devices.
ADSP-216x
TIMING NOTES
Switching Characteristics specify how the processor changes its
signals. You have no control over this timing—circuitry external
to the processor must be designed for compatibility with these
MEMORY REQUIREMENTS
The table below shows common memory device specifications
and the corresponding ADSP-216x timing parameters, for your
convenience.
signal characteristics. Switching characteristics tell you what the
processor will do in a given circumstance. You can also use
ADSP-216x
Memory Device Specification Timing Parameter Timing Parameter Definition
Address Setup to Write Start t
Address Setup to Write End t
Address Hold Time t
Data Setup Time t
Data Hold Time t
OE to Data Valid t
Address Access Time t
ASW
AW
WRA
DW
DH
RDD
AA
A0–A13, DMS, PMS Setup Before WR Low
A0–A13, DMS, PMS Setup Before WR Deasserted
A0–A13, DMS, PMS Hold After WR Deasserted
Data Setup Before WR High
Data Hold After WR High
RD Low to Data Valid
A0–A13, DMS, PMS, BMS to Data Valid
REV. 0
–21–
Page 22

ADSP-216x
TIMING PARAMETERS (ADSP-2161/ADSP-2163/ADSP-2165)
CLOCK SIGNALS AND RESET
16.67 MHz 20 MHz 25 MHz Frequency Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
CLKIN Period 60 150 50 150 40 150 t
CK
CLKIN Width Low 20 20 15 20 ns
t
CKL
CLKIN Width High 20 20 15 20 ns
t
CKH
RESET Width Low 300 250 200 5t
t
RSP
CK
CK
1
Switching Characteristics:
CLKOUT Width Low 20 15 10 0.5tCK – 10 ns
t
CPL
CLKOUT Width High 20 15 10 0.5tCK – 10 ns
t
CPH
t
CLKIN High to CLKOUT High 0 20 0 20 0 15
CKOH
NOTES
1
Applies after power-up sequence is complete. Internal phase lock loop requires no more than 2000 CLKIN cycles, assuming stable CLKIN (not including crystal
oscillator startup time).
2
For 25 MHz only, the maximum frequency dependency for t
CKOH
= 15 ns.
t
CK
t
CKH
2
0202ns
150 ns
ns
CLKIN
CLKOUT
t
CKL
t
CPL
t
t
CHOK
CPH
Figure 21. Clock Signals
–22–
REV. 0
Page 23

ADSP-216x
t
FOH
CLKOUT
FLAG
OUTPUT(S)
IRQx
FI
t
IFS
t
IFH
t
FOD
TIMING PARAMETERS (ADSP-2161/ADSP-2163/ADSP-2165)
INTERRUPTS AND FLAGS
16.67 MHz 20 MHz 25 MHz Frequency Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
t
t
Switching Characteristics:
t
t
NOTES
1
2
3
4
IRQx1 or FI Setup Before 30 27.5 25 0.25tCK + 15 ns
IFS
CLKOUT Low
IRQx1 or FI Setup Before 33 30.5 28 0.25tCK + 18 ns
IFS
CLKOUT Low
IRQx1 or FI Hold After CLKOUT 15 12.5 10 0.25t
IFH
FOH
FOD
IRQx = IRQ0, IRQ1, and IRQ2.
If IRQx and FI inputs meet t
following cycle. (Refer to the “Interrupt Controller” section in Chapter 3, Program Control, of the ADSP-2100 Family User’s Manual, Third Edition for further
information on interrupt servicing.)
Edge-sensitive interrupts require pulsewidths greater than 10 ns. Level-sensitive interrupts must be held low until serviced.
For 25 MHz only, the maximum frequency dependency for t
2, 3
High
FO Hold After CLKOUT High 0 0 0 0 ns
FO Delay from CLKOUT High 15 15 12
2, 3
2, 3
IFS
CK
4
and t
setup/hold requirements, they will be recognized during the current clock cycle; otherwise they will be recognized during the
IFH
= 12 ns.
FOD
15
4
ns
ns
Figure 22. Interrupts and Flags
REV. 0
–23–
Page 24

ADSP-216x
TIMING PARAMETERS (ADSP-2161/ADSP-2163/ADSP-2165)
BUS REQUEST/BUS GRANT
16.67 MHz 20 MHz 25 MHz Frequency Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
BH
t
BS
Switching Characteristics:
t
SD
t
SDB
t
SE
t
SEC
NOTES
1
If BR meets the tBS and tBH setup/hold requirements, it will be recognized in the current processor cycle; otherwise it is recognized in the following cycle. BR requires
a pulsewidth greater than 10 ns.
2
For 25 MHz only, the minimum frequency dependency formula for t
Section 10.2.4, “Bus Request/Grant,” on page 212 of the ADSP-2100 Family User’s Manual, Third Edition, states that “When BR is recognized, the processor responds
immediately by asserting BG during the same cycle.” This is incorrect for the current versions of all ADSP-21xx processors: BG is asserted in the cycle after BR is
recognized. No external synchronization circuit is needed when BR is generated as an asynchronous signal.
BR Hold After CLKOUT High120 17.5 15 0.25tCK + 5 ns
BR Setup Before CLKOUT Low135 32.5 30 0.25tCK + 20 ns
CLKOUT High to DMS, 35 32.5 30 0.25tCK + 20 ns
PMS, BMS, RD, WR Disable
DMS, PMS, BMS, RD, WR 0000 ns
Disable to BG Low
BG High to DMS, PMS,0000 ns
BMS, RD, WR Enable
DMS, PMS, BMS, RD, WR 5 2.5 1.5
2
0.25tCK – 10
2
ns
Enable to CLKOUT High
= (0.25tCK – 8.5).
SEC
CLKOUT
BR
CLKOUT
PMS, DMS
BMS, RD
WR
BG
t
BH
t
BS
t
SD
t
SDB
Figure 23. Bus Request/Bus Grant
t
SEC
t
SE
–24–
REV. 0
Page 25

ADSP-216x
TIMING PARAMETERS (ADSP-2161/ADSP-2163/ADSP-2165)
MEMORY READ
16.67 MHz 20 MHz 25 MHz
Parameter Min Max Min Max Min Max Unit
Timing Requirements:
t
RDD
t
AA
t
RDH
Switching Characteristics:
t
RP
t
CRD
t
ASR
t
RDA
t
RWR
Parameter Min Max Unit
Timing Requirements:
t
RDD
t
AA
t
RDH
Switching Characteristics:
t
RP
t
CRD
t
ASR
t
RDA
t
RWR
NOTES
1
For 25 MHz only, minimum frequency dependency formula for t
w = wait states × t
RD Low to Data Valid 17 12 7 ns
A0–A13, PMS, DMS, BMS to Data Valid 27 19.5 12 ns
Data Hold from RD High 0 0 0 ns
RD Pulsewidth 22 17 12 ns
CLKOUT High to RD Low 10 25 7.5 22.5 5 20 ns
A0–A13, PMS, DMS, BMS Setup Before RD Low 5 2.5 1.5
1
ns
A0–A13, PMS, DMS, BMS Hold After RD Deasserted 6 3.5 1 ns
RD High to RD or WR Low 25 20 15 ns
Frequency Dependency
≤
(CLKIN
25 MHz)
RD Low to Data Valid 0.5tCK – 13 + w ns
A0–A13, PMS, DMS, BMS to Data Valid 0.75tCK – 18 + w ns
Data Hold from RD High 0
RD Pulsewidth 0.5tCK – 8 + w ns
CLKOUT High to RD Low 0.25tCK – 5 0.25tCK + 10 ns
A0–A13, PMS, DMS, BMS Setup Before RD Low 0.25tCK – 10
1
ns
A0–A13, PMS, DMS, BMS Hold After RD Deasserted 0.25tCK – 9 ns
RD High to RD or WR Low 0.5tCK – 5 ns
= (0.25tCK – 8.5).
CK.
ASR
REV. 0
CLKOUT
A0–A13
DMS, PMS,
BMS
RD
WR
t
RDA
t
ASR
t
CRD
D
t
AA
t
RDD
t
RP
t
RDH
t
RWR
Figure 24. Memory Read
–25–
Page 26

ADSP-216x
TIMING PARAMETERS (ADSP-2161/ADSP-2163/ADSP-2165)
MEMORY WRITE
16.67 MHz 20 MHz 25 MHz
Parameter Min Max Min Max Min Max Unit
Switching Characteristics:
t
DW
t
DH
t
WP
t
WDE
t
ASW
t
DDR
t
CWR
t
AW
t
WRA
t
WWR
Parameter Min Max Unit
Switching Characteristics:
t
DW
t
DH
t
WP
t
WDE
t
ASW
t
DDR
t
CWR
t
AW
t
WRA
t
WWR
NOTES
1
For 25 MHz only, the minimum frequency dependency formula for t
w = wait states × t
Data Setup Before WR High 17 12 7 ns
Data Hold After WR High 5 2.5 0 ns
WR Pulsewidth 22 17 12 ns
WR Low to Data Enabled 0 0 0 ns
A0–A13, DMS, PMS Setup Before WR Low 5 2.5 1.5
Data Disable Before WR or RD Low 5 2.5 1.5
1
1
ns
ns
CLKOUT High to WR Low 10 25 7.5 22.5 5 20 ns
A0–A13, DMS, PMS, Setup Before WR Deasserted 23 15.5 8 ns
A0–A13, DMS, PMS Hold After WR Deasserted 6 3.5 1 ns
WR High to RD or WR Low 25 20 15 ns
Frequency Dependency
≤
(CLKIN
25 MHz)
Data Setup Before WR High 0.5tCK – 13 + w ns
Data Hold After WR High 0.25tCK – 10 ns
WR Pulsewidth 0.5tCK – 8 + w ns
WR Low to Data Enabled 0
A0–A13, DMS, PMS Setup Before WR Low 0.25tCK – 10
Data Disable Before WR or RD Low 0.25tCK – 10
1
1
ns
ns
CLKOUT High to WR Low 0.25tCK – 5 0.25tCK + 10 ns
A0–A13, DMS, PMS, Setup Before WR Deasserted 0.75tCK – 22 + w ns
A0–A13, DMS, PMS Hold After WR Deasserted 0.25tCK – 9 ns
WR High to RD or WR Low 0.5tCK – 5 ns
and t
= (0.25tCK – 8.5).
DDR
CK
.
ASW
CLKOUT
A0–A13
DMS, PMS,
BMS
WR
RD
t
WRA
t
ASW
t
CWR
D
t
WDE
t
WP
t
AW
t
DW
t
WWR
t
DH
t
DDR
Figure 25. Memory Write
–26–
REV. 0
Page 27

ADSP-216x
TIMING PARAMETERS (ADSP-2161/ADSP-2163/ADSP-2165)
SERIAL PORTS
13.824 MHz* Frequency Dependency
Parameter Min Max Min Max Unit
Timing Requirements:
t
SCK
t
SCS
t
SCH
t
SCP
Switching Characteristics:
t
CC
t
SCDE
t
SCDV
t
RH
t
RD
t
SCDH
t
TDE
t
TDV
t
SCDD
t
RDV
*Maximum serial port operating frequency is 13.824 MHz for all processor speed grades.
SCLK Period 72.3 72.3 ns
DR/TFS/RFS Setup Before SCLK Low 8 8 ns
DR/TFS/RFS Hold After SCLK Low 10 10 ns
SCLKIN Width 28 28 ns
CLKOUT High to SCLK
OUT
18.1 33.1 0.25t
CK
0.25tCK + 15 ns
SCLK High to DT Enable 0 0 ns
SCLK High to DT Valid 20 20 ns
TFS/RFS
TFS/RFS
Hold After SCLK High 0 0 ns
OUT
Delay from SCLK High 20 20 ns
OUT
DT Hold After SCLK High 0 0 ns
TFS (Alt) to DT Enable 0 0 ns
TFS (Alt) to DT Valid 18 18 ns
SCLK High to DT Disable 25 25 ns
RFS (Multichannel, Frame Delay Zero) 20 20 ns
to DT Valid
CLKOUT
SCLK
DR
TFS
RFS
RFS
OUT
TFS
OUT
DT
TFS
(ALTERNATE
FRAME MODE)
(MULTICHANNEL MODE,
FRAME DELAY 0 {MFD = 0})
RFS
t
CC
IN
IN
t
SCDE
t
t
RH
t
t
TDE
RD
SCDV
t
TDV
t
RDV
t
CC
t
t
SCS
SCH
t
t
SCDH
SCDD
t
SCP
t
SCK
t
SCP
Figure 26. Serial Ports
REV. 0
–27–
Page 28

ADSP-216x
TIMING PARAMETERS (ADSP-2162/ADSP-2164/ADSP-2166)
GENERAL NOTES
Use the exact timing information given. Do not attempt to derive parameters from the addition or subtraction of others. While
addition or subtraction would yield meaningful results for an
individual device, the values given in this data sheet reflect statistical variations and worst cases. Consequently, you cannot
meaningfully add parameters to derive longer times.
switching characteristics to ensure that any timing requirement
of a device connected to the processor (such as memory) is
satisfied.
Timing Requirements apply to signals that are controlled by circuitry external to the processor, such as the data input for a read
operation. Timing requirements guarantee that the processor
operates correctly with other devices.
TIMING NOTES
Switching Characteristics specify how the processor changes its
signals. You have no control over this timing—circuitry external
to the processor must be designed for compatibility with these
MEMORY REQUIREMENTS
The table below shows common memory device specifications
and the corresponding ADSP-216x timing parameters, for your
convenience.
signal characteristics. Switching characteristics tell you what the
processor will do in a given circumstance. You can also use
ADSP-216x
Memory Device Specification Timing Parameter Timing Parameter Definition
Address Setup to Write Start t
Address Setup to Write End t
Address Hold Time t
Data Setup Time t
Data Hold Time t
OE to Data Valid t
Address Access Time t
ASW
AW
WRA
DW
DH
RDD
AA
A0–A13, DMS, PMS Setup Before WR Low
A0–A13, DMS, PMS Setup Before WR Deasserted
A0–A13, DMS, PMS Hold After WR Deasserted
Data Setup Before WR High
Data Hold After WR High
RD Low to Data Valid
A0–A13, DMS, PMS, BMS to Data Valid
–28–
REV. 0
Page 29

ADSP-216x
CLKOUT
CLKIN
t
CPL
t
CHOK
t
CKL
t
CKH
t
CK
t
CPH
TIMING PARAMETERS (ADSP-2162/ADSP-2164/ADSP-2166)
CLOCK SIGNALS AND RESET
Frequency
10.24 MHz 13.0 MHz 16.67 MHz Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
t
t
t
Switching Characteristics:
t
t
t
NOTE
1
CLKIN Period 97.6 150 76.9 150 60.0 150 t
CK
CLKIN Width Low 20 20 20 20 ns
CKL
CLKIN Width High 20 20 20 20 ns
CKH
RESET Width Low 488 384.5 300 5t
RSP
CLKOUT Width Low 38.8 28.5 20 0.5tCK – 10 ns
CPL
CLKOUT Width High 38.8 28.5 20 0.5tCK – 10 ns
CPH
CLKIN High to CLKOUT High 0 20 0 20 0 20 0 20 ns
CKOH
Applies after power-up sequence is complete. Internal phase lock loop requires no more than 2000 CLKIN cycles assuming stable CLKIN (not including crystal
oscillator startup time).
CK
CK
1
150 ns
ns
Figure 27. Clock Signals
REV. 0
–29–
Page 30

ADSP-216x
TIMING PARAMETERS (ADSP-2162/ADSP-2164/ADSP-2166)
INTERRUPTS AND FLAGS
Frequency
10.24 MHz 13.0 MHz 16.67 MHz Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
IRQx1 or FI Setup Before
IFS
CLKOUT Low
IRQx1 or FI Hold After
t
IFH
CLKOUT High
Switching Characteristics:
FO Hold After CLKOUT High 0 0 0 0 ns
t
FOH
t
FO Delay from CLKOUT High 15 15 15 15 ns
FOD
NOTES
1
IRQx = IRQ0, IRQ1, and IRQ2.
2
If IRQx and FI inputs meet t
following cycle. (Refer to the “Interrupt Controller” section in Chapter 3, Program Control, of the ADSP-2100 Family User’s Manual, Third Edition, for further
information on interrupt servicing.)
3
Edge-sensitive interrupts require pulse widths greater than 10 ns. Level-sensitive interrupts must be held low until serviced.
2, 3
2, 3
IFS
44.4 39.2 35.0 0.25tCK + 20 ns
24.4 19.2 15.0 0.25t
and t
setup/hold requirements, they will be recognized during the current clock cycle; otherwise they will be recognized during the
IFH
CK
ns
CLKOUT
FLAG
OUTPUT(S)
IRQx
t
FOD
t
FOH
t
IFH
FI
t
IFS
Figure 28. Interrupts and Flags
–30–
REV. 0
Page 31

ADSP-216x
TIMING PARAMETERS (ADSP-2162/ADSP-2164/ADSP-2166)
BUS REQUEST/BUS GRANT
10.24 MHz 13.0 MHz 16.67 MHz Frequency Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
t
Switching Characteristics:
t
t
t
t
NOTES
1
Section 10.2.4, “Bus Request/Grant,” of the ADSP-2100 Family User’s Manual , Third Edition, states that, “When BR is recognized, the processor responds immediately by asserting BG during the same cycle.” This is incorrect for the current versions of all ADSP-21xx processors: BG is asserted in the cycle after BR is recognized.
No external synchronization circuit is needed when BR is generated as an asynchronous signal.
BR Hold After CLKOUT High129.4 24.2 20.0 0.25tCK + 5 ns
BH
BR Setup Before CLKOUT Low144.4 39.2 35.0 0.25tCK + 20 ns
BS
CLKOUT High to DMS, PMS,
SD
BMS, RD, WR Disable 44.4 39.2 35.0 0.25t
DMS, PMS, BMS, RD, WR
SDB
+ 20 ns
CK
Disable to BG Low 0000 ns
BG High to DMS, PMS, BMS,
SE
RD, WR Enable 0 0 0 0 ns
DMS, PMS, BMS, RD, WR
SEC
Enable to CLKOUT High 14.4 9.2 5.0 0.25tCK – 10 ns
If BR meets the tBS and tBH setup/hold requirements, it will be recognized in the current processor cycle; otherwise it is recognized in the following cycle. BR
requires a pulsewidth greater than 10 ns.
t
BH
CLKOUT
BR
CLKOUT
PMS, DMS
BMS, RD
WR
BG
t
BS
t
SD
t
SDB
Figure 29. Bus Request/Grant
t
SEC
t
SE
REV. 0
–31–
Page 32

ADSP-216x
TIMING PARAMETERS (ADSP-2162/ADSP-2164/ADSP-2166)
MEMORY READ
10.24 MHz 13.0 MHz 16.67 MHz Frequency Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
RD Low to Data Valid 33.8 23.5 15 0.5tCK – 15 + w ns
RDD
A0–A13, PMS, DMS, BMS to
t
AA
Data Valid 49.2 33.7 21 0.75t
Data Hold from RD High 0 0 0 0 ns
t
RDH
Switching Characteristics:
RD Pulsewidth 43.8 33.25 25 0.5tCK – 5 + w ns
t
RP
CLKOUT High to RD Low 19.4 34.4 14.2 29.2 10.0 25.0 0.25tCK – 5 0.25tCK + 10 ns
t
CRD
A0–A13, PMS, DMS, BMS
t
ASR
Setup Before RD Low 12.4 7.2 3.0 0.25t
A0–A13, PMS, DMS, BMS
t
RDA
Hold After RD Deasserted 14.4 9.2 5.0 0.25t
t
RD High to RD or WR Low 38.8 28.5 20.0 0.5tCK – 10 ns
RWR
w = wait states × t
CK.
CLKOUT
A0–A13
– 12 ns
CK
– 10 ns
CK
– 24 + w ns
CK
DMS, PMS,
BMS
RD
WR
t
RDA
t
ASR
t
CRD
D
t
AA
t
RDD
t
RP
t
RDH
t
RWR
Figure 30. Memory Read
–32–
REV. 0
Page 33

ADSP-216x
TIMING PARAMETERS (ADSP-2162/ADSP-2164/ADSP-2166)
MEMORY WRITE
Frequency
10.24 MHz 13.0 MHz 16.67 MHz Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Switching Characteristics:
t
t
t
t
t
t
t
t
t
t
w = wait states × t
Data Setup Before WR High 38.8 28.25 20 0.5tCK – 10 + w ns
DW
Data Hold After WR High 14.4 9.2 5.0 0.25tCK – 10 ns
DH
WR Pulsewidth 43.8 33.25 25 0.5tCK – 5 + w ns
WP
WR Low to Data Enabled 0 0 0 0
WDE
A0–A13, DMS, DMS Setup
ASW
Before WR Low 12.4 7.2 3.0 0.25t
Data Disable Before WR
DDR
or RD Low 14.4 9.2 5.0 0.25t
CLKOUT High to WR Low 19.4 34.4 14.2 29.2 10.0 25.0 0.25tCK – 5 0.25tCK + 10 ns
CWR
A0–A13, DMS, PMS, Setup
AW
Before WR Deasserted 58.2 42.7 30 0.75t
A0–A13, DMS, PMS Hold
WRA
After WR Deasserted 14.4 9.2 5.0 0.25t
WR High to RD or WR Low 38.8 28.25 20 0.5tCK – 10 ns
WWR
CK.
CLKOUT
– 12 ns
CK
– 10 ns
CK
– 15 + w ns
CK
– 10 ns
CK
A0–A13
DMS, PMS,
BMS
WR
RD
t
WRA
t
ASW
t
CWR
D
t
WDE
t
WP
t
AW
t
DW
t
WWR
t
DH
t
DDR
Figure 31. Memory Write
REV. 0
–33–
Page 34

ADSP-216x
TIMING PARAMETERS (ADSP-2162/ADSP-2164/ADSP-2166)
SERIAL PORTS
10.24 MHz 13.0 MHz 13.824 MHz1 Frequency Dependency
Parameter Min Max Min Max Min Max Min Max Unit
Timing Requirements:
t
SCLK Period 97.6 76.9 72.3
SCK
DR/TFS/RFS Setup
t
SCS
Before SCLK Low 8 8 8 8 ns
DR/TFS/RFS Hold After
t
SCH
SCLK Low 10 10 10 10 ns
SCLKIN Width 28 28 28 28 ns
t
SCP
Switching Characteristics:
t
CC
t
SCDE
t
SCDV
t
RH
CLKOUT High to SCLK
SCLK High to DT Enable 0 0 0 0 ns
SCLK High to DT Valid 28
TFS/RFS
Hold After
OUT
24.4 39.4 19.2 34.2 18.1 33.1 0.25tCK0.25tCK + 15 ns
OUT
2
20 20 20
SCLK High 0 0 0 0 ns
t
RD
t
SCDH
t
TDE
t
TDV
t
SCDD
t
RDV
TFS/RFS
SCLK High 28
DT Hold After SCLK High 0 0 0 0 ns
TFS (Alt) to DT Enable 0 0 0 0 ns
TFS (Alt) to DT Valid 18 18 18 18 ns
SCLK High to DT Disable 30
RFS (Multichannel, Frame 20
Delay from
OUT
2
2
20 20 20
25 25 25
Delay Zero) to DT Valid 20 20 20 20 ns
NOTES
1
Maximum serial port operating frequency is 13.824 MHz for all processor speed grades faster then 13.824 MHz.
2
For 10.24 MHz only, the maximum frequency dependency for t
= 28 ns, tRD = 28 ns, t
SCDV
SCDD
1
= 30 ns.
1
t
CK
2
2
2
ns
ns
ns
ns
CLKOUT
SCLK
DR
TFS
RFS
RFS
OUT
TFS
OUT
DT
TFS
(ALTERNATE
FRAME MODE)
(MULTICHANNEL MODE,
FRAME DELAY 0 {MFD = 0})
RFS
t
CC
IN
IN
t
SCDE
t
t
RH
t
t
TDE
RD
SCDV
t
TDV
t
RDV
t
CC
t
t
SCS
SCH
t
t
SCDH
SCDD
t
SCK
t
SCP
t
SCP
Figure 32. Serial Ports
–34–
REV. 0
Page 35

PIN CONFIGURATIONS
68-Lead PLCC
ADSP-216x
GND
D19
D20
D21
D22
D23
V
MMAP
BR
IRQ2
RESET
V
D16
D18
D17
9618 7 6 5 68 67 66 65 64 63 624321
10
11
12
13
14
15
16
DD
17
18
19
20
21
A0
A1
22
23
A2
24
A3
A4
25
26
DD
27 4328 29 30 31 32 33 34 35 36 37 38 39 40 41 42
A5
A6
D13
D15
D12
D14
ADSP-216x
(Not to Scale)
A7
A8
A9
GND
A10
D11
GND
TOP VIEW
A11
A12
D9
D10
PIN 1
IDENTIFIER
A13
PMS
D8
DMS
D7
BMS
D4
D6
D3
D5
XTAL
CLKIN
CLKOUT
BG
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
44
D2
D1
D0
V
DD
SCLK1
FI
IRQ0
IRQ1
FO
SCLK0
DR0
GND
RFS0
TFS0
DT0
RD
WR
PLCC Pin
Number Name
1 D11
2 GND
3 D12
4 D13
5 D14
6 D15
7 D16
8 D17
9 D18
10 GND
11 D19
12 D20
13 D21
14 D22
15 D23
16 V
DD
17 MMAP
PLCC Pin
Number Name
18 BR
19 IRQ2
20 RESET
21 A0
22 A1
23 A2
24 A3
25 A4
26 V
DD
27 A5
28 A6
29 GND
30 A7
31 A8
32 A9
33 A10
34 A11
PLCC Pin
Number Name
35 A12
36 A13
37 PMS
38 DMS
39 BMS
40 BG
41 XTAL
42 CLKIN
43 CLKOUT
44 WR
45 RD
46 DT0
47 TFS0
48 RFS0
49 GND
50 DR0
51 SCLK0
PLCC Pin
Number Name
52 FO (DT1)
53 IRQ1 (TFS1)
54 IRQ0 (RFS1)
55 FI (DR1)
56 SCLK1
57 V
DD
58 D0
59 D1
60 D2
61 D3
62 D4
63 D5
64 D6
65 D7
66 D8
67 D9
68 D10
REV. 0
–35–
Page 36

ADSP-216x
A5
A6
GND
GND
A7
A8
A9
A10
A11
A12
A13
PMS
DMS
BMS
BG
XTAL
CLKIN
*PWDACK
*PWDFLAG
NC
PIN CONFIGURATIONS
80-Lead MQFP
DD
DD
V
80
1
PIN 1
2
IDENTIFIER
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
CLKOUT
A2
A3
A4
V
7978777675
25
22
23
24
RD
WR
DT0
TFS0
A0
A1
RESET
74
73
ADSP-216x
27
28
26
GND
GND
RFS0
727170
TOP VIEW
(Not to Scale)
29
DR0
IRQ2
BR
30
SCLK0
MMAP
31
FO
DD
DD
V
V
D22
D20
D21
D23
69686766656463
32
35
33
34
36
37
FI
DD
D0
V
IRQ0
IRQ1
SCLK1
NC = NO CONNECT
GND
GND
D19
61
62
D18
60
59
D17
58
D16
D15
57
56
D14
55
D13
54
D12
53
GND
52
GND
51
D11
50
D10
D9
49
48
D8
47
D7
46
D6
45
D5
D4
44
43
NC
42
NC
NC
41
40
38
39
D1
D3
D2
MQFP Pin
Number Name
1A5
2A6
3GND
4GND
5A7
6A8
7A9
8 A10
9 A11
10 A12
11 A13
12 PMS
13 DMS
14 BMS
15 BG
16 XTAL
17 CLKIN
18 PWDACK*
19 PWDFLAG*
20 NC
*ADSP-2165/ADSP-2166 only.
Others “NC”.
MQFP Pin
Number Name
21 CLKOUT
22 WR
23 RD
24 DT0
25 TFS0
26 RFS0
27 GND
28 GND
29 DR0
30 SCLK0
31 FO (DT1)
32 IRQ1 (TFS1)
33 IRQ0 (RFS1)
34 FI (DR1)
35 SCLK1
36 V
DD
37 D0
38 D1
39 D2
40 D3
MQFP Pin
Number Name
41 NC
42 NC
43 NC
44 D4
45 D5
46 D6
47 D7
48 D8
49 D9
50 D10
51 D11
52 GND
53 GND
54 D12
55 D13
56 D14
57 D15
58 D16
59 D17
60 D18
MQFP Pin
Number Name
61 GND
62 GND
63 D19
64 D20
65 D21
66 D22
67 D23
68 V
69 V
DD
DD
70 MMAP
71 BR
72 IRQ2
73 RESET
74 A0
75 A1
76 A2
77 A3
78 A4
79 V
80 V
DD
DD
–36–
REV. 0
Page 37

OUTLINE DIMENSIONS
ADSP-216x
68-Lead Plastic Leaded Chip Carrier (PLCC)
ADSP-216x
61
60
44
43
0.175 (4.45)
0.169 (4.29)
0.104 (2.64) TYP
0.050
(1.27)
TYP
0.925 (23.50)
0.895 (22.73)
0.019 (0.48)
0.017 (0.43)
0.029 (0.74)
0.027 (0.69)
PIN 1
IDENTIFIER
BOTTOM VIEW
(PINS UP)
0.995 (25.27)
0.985 (25.02)
9
10
(PINS DOWN)
26
27
0.954 (24.23)
0.950 (24.13)
PIN 1
IDENTIFIER
TOP VIEW
SQ
SQ
REV. 0
–37–
Page 38

ADSP-216x
0.041 (1.03)
0.031 (0.78)
SEATING
PLANE
0.004 (0.10)
MAX
0.010 (0.25)
MIN
OUTLINE DIMENSIONS
ADSP-216x
80-Lead Plastic Quad Flatpack (MQFP)
0.690 (17.45)
0.486 (12.35) BSC
80
21
0.026 (0.65)
BSC
0.667 (16.95)
0.555 (14.10)
0.547 (13.90)
TOP VIEW
(PINS DOWN)
0.014 (0.35)
0.010 (0.25)
61
60
41
40
0.555 (14.10)
0.486 (12.35) BSC
0.134 (3.40)
MAX
0.120 (3.05)
0.100 (2.55)
1
20
THE ACTUAL POSITION OF EACH LEAD
IS WITHIN 0.0047 (0.12) FROM ITS IDEAL
POSITION WHEN MEASURED IN THE
LATERAL DIRECTION.
0.547 (13.90)
0.690 (17.45
0.667 (16.95)
–38–
REV. 0
Page 39

ADSP-216x
ORDERING GUIDE
Ambient
Part Number
ADSP-2161KP-66
ADSP-2161BP-66
ADSP-2161KS-66
ADSP-2161BS-66
ADSP-2162KP-40 (3.3 V)
ADSP-2162BP-40 (3.3 V)
ADSP-2162KS-40 (3.3 V)
ADSP-2163KP-66
ADSP-2163BP-66
ADSP-2163KS-66
ADSP-2163BS-66
ADSP-2163KP-100
ADSP-2163BP-100
ADSP-2163KS-100
ADSP-2163BS-100
ADSP-2164KP-40 (3.3 V)
ADSP-2164BP-40 (3.3 V)
ADSP-2164KS-40 (3.3 V)
ADSP-2164BS-40 (3.3 V)
1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
ADSP-2165KS-80 0°C to +70°C 20.00 80-Lead MQFP S-80
ADSP-2165KS-100 0°C to +70°C 25.00 80-Lead MQFP S-80
ADSP-2165BS-80 –40°C to +85°C 20.00 80-Lead MQFP S-80
ADSP-2165BS-100 –40°C to +85°C 25.00 80-Lead MQFP S-80
ADSP-2166KS-52 (3.3 V) 0°C to +70°C 13.00 80-Lead MQFP S-80
ADSP-2166KS-66 (3.3 V) 0°C to +70°C 16.67 80-Lead MQFP S-80
ADSP-2166BS-52 (3.3 V) –40°C to +85°C 13.00 80-Lead MQFP S-80
ADSP-2166BS-66 (3.3 V) –40°C to +85°C 16.67 80-Lead MQFP S-80
NOTES
1
K = Commercial Temperature Range (0°C to +70°C).
B = Industrial Temperature Range (–40°C to +85°C).
P = PLCC (Plastic Leaded Chip Carrier).
S = MQFP (Plastic Quad Flatpack).
2
Minimum order quantities required. Contact factory for further information.
3
Refer to the section titled “Ordering Procedure for ROM-Coded ADSP-216x Processors” for information about ROM coded parts.
Temperature Instruction Package Package
Range Rate (MHz) Description Option
0°C to +70°C 16.67 68-Lead PLCC P-68A
–40°C to +85°C 16.67 68-Lead PLCC P-68A
0°C to +70°C 16.67 80-Lead MQFP S-80
–40°C to +85°C 16.67 80-Lead MQFP S-80
0°C to +70°C 10.24 68-Lead PLCC P-68A
–40°C to +85°C 10.24 68-Lead PLCC P-68A
0°C to +70°C 10.24 80-Lead MQFP S-80
0°C to +70°C 16.67 68-Lead PLCC P-68A
–40°C to +85°C 16.67 68-Lead PLCC P-68A
0°C to +70°C 16.67 80-Lead MQFP S-80
–40°C to +85°C 16.67 80-Lead MQFP S-80
0°C to +70°C 25 68-Lead PLCC P-68A
–40°C to +85°C 25 68-Lead PLCC P-68A
0°C to +70°C 25 80-Lead MQFP S-80
–40°C to +85°C 25 80-Lead MQFP S-80
0°C to +70°C 10.24 68-Lead PLCC P-68A
–40°C to +85°C 10.24 68-Lead PLCC P-68A
0°C to +70°C 10.24 80-Lead MQFP S-80
–40°C to +85°C 10.24 80-Lead MQFP S-80
C3511–3–10/99
REV. 0
PRINTED IN U.S.A.
–39–
 Loading...
Loading...