

Page 1
a
S
DSP Microcomputer
ADSP-21161N
SUMMARY
High Performance 32-Bit DSP—Applications in Audio,
Medical, Military, Wireless Communications,
Graphics, Imaging, Motor-Control, and Telephony
Super Harvard Architecture—Four Independent Buses
for Dual Data Fetch, Instruction Fetch, and
Nonintrusive, Zero-Overhead I/O
Code Compatible with All Other SHARC Family DSPs
Single-Instruction-Multiple-Data (SIMD) Computational
Architecture—Two 32-Bit IEEE Floating-Point
Computation Units, Each with a Multiplier, ALU,
Shifter, and Register File
Serial Ports Offer I
2
S Support Via 8 Programmable and
Simultaneous Receive or Transmit Pins, which
Support up to 16 Transmit or 16 Receive Channels of
Audio
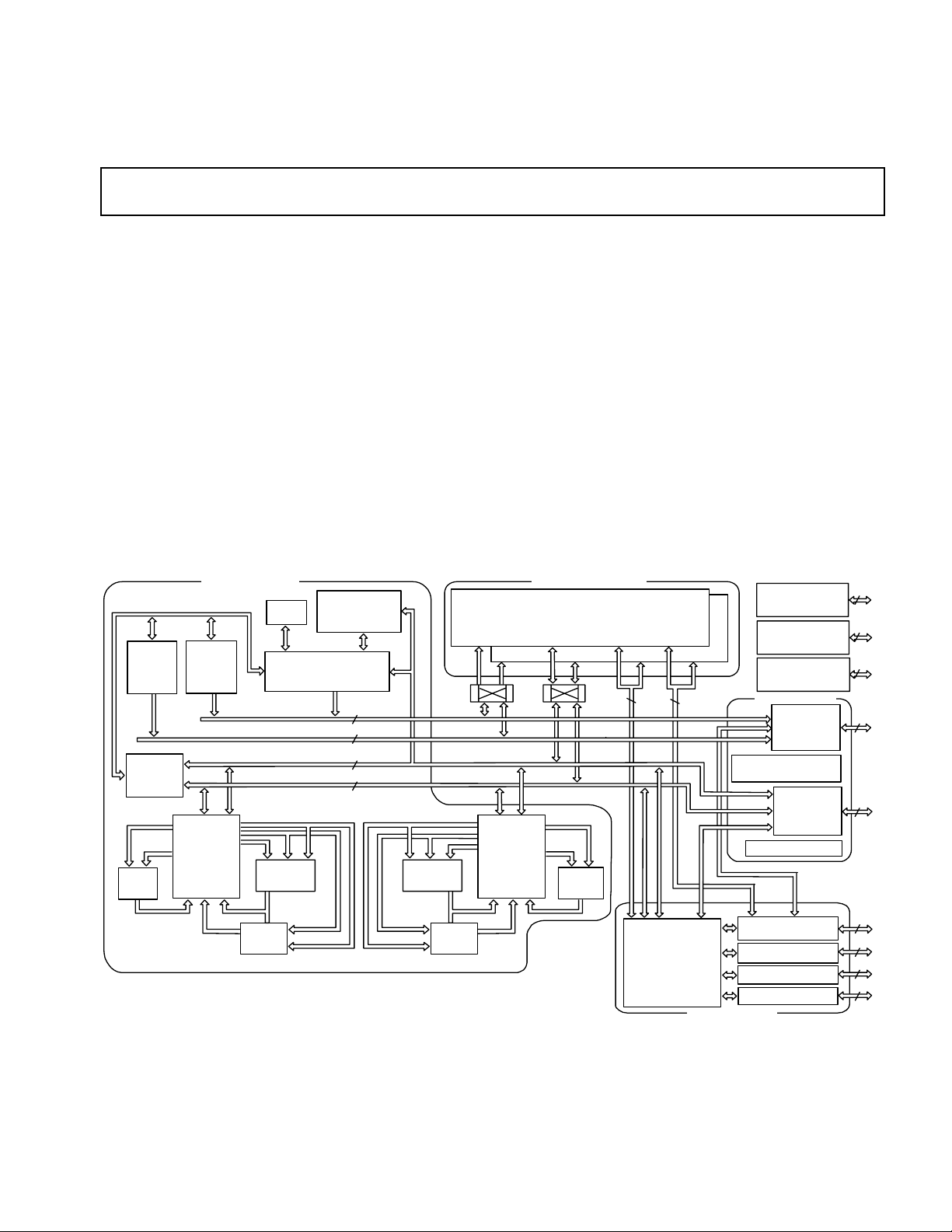
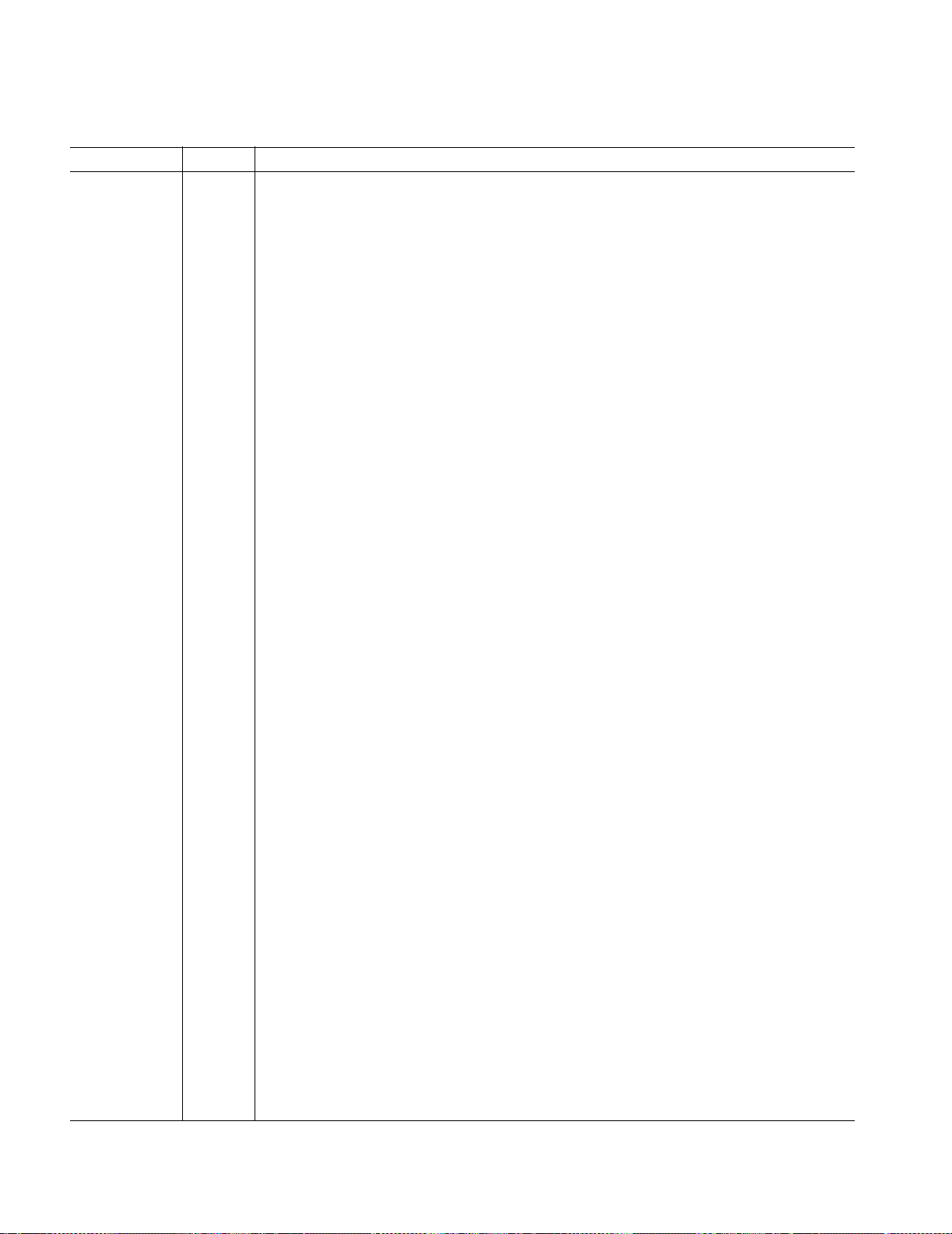
FUNCTIONAL BLOCK DIAGRAM
CORE PROCESSOR
INSTRUCTION
CACHE
32 ⴛ 48-BIT
PROGRAM
SEQUENCER
32
32
64
64
BARREL
SHIFTER
DAG1
8 ⴛ 4 ⴛ 32
BUS
CONNECT
(PX)
MULT
DAG2
8 ⴛ 4 ⴛ 32
DATA
REGISTER
FILE
(PEX)
16 ⴛ 40-BIT
TIMER
PM ADDRESS BUS
DM ADDRESS BUS
PM DATA BUS
DM DATA BUS
BARREL
SHIFTER
Integrated Peripherals—Integrated I/O Processor,
1M Bit On-Chip Dual-Ported SRAM, SDRAM
Controller, Glueless Multiprocessing Features, and
I/O Ports (Serial, Link, External Bus, SPI, and JTAG)
ADSP-21161N Supports 32-Bit Fixed, 32-Bit Float, and
40-Bit Floating-Point Formats
KEY FEATURES
100 MHz (10 ns) Core Instruction Rate
Single-Cycle Instruction Execution, Including SIMD
Operations in Both Computational Units
600 MFLOPs Peak and 400 MFLOPs Sustained
Performance
225-Ball 17 mm
DUAL-PORTED SRAM
TWO INDEPENDENT
DUAL-PORTED BLOCKS
PROCESSOR PORT
ADDR DATA ADDR
ADDR DATA DATA
DATA
REGISTER
FILE
(PEY)
16 ⴛ 40-BIT
× 17 mm MBGA Package
I/O PORT
DATA
IOD
64
MULT
ADDR
IOA
18
0
K
1
C
K
O
L
C
B
O
L
B
AND EMULATION
EXTERNAL PORT
MULTIPROCESSOR
INTERFACE
HOST PORT
JTAG TEST
GPIO
FLAGS
SDRAM
CONTROLLER
ADDR BUS
MUX
DATA BUS
MUX
6
12
8
24
32
ALU
ALU
SHARC and the SHARC logo are registered trademarks of Analog Devices, Inc.
REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties that
may result from its use. No license is granted by implication or otherwise
under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective companies.
IOP
REGISTERS
(MEMO RY MAPPED)
CONTROL,
STATUS,&
DATA BUFFERS
I/O PROCESSOR
DMA
CONTROLLER
SERIAL PORTS (4)
LINK PORTS (2)
SPI PORTS (1)
5
16
20
4
One Technology Way, P.O.Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel:781/329-4700 www.analog.com
Fax:781/326-8703 © 2003 Analog Devices, Inc. All rights reserved.
Page 2

ADSP-21161N
KEY FEATURES (continued)
1 M Bit On-Chip Dual-Ported SRAM (0.5 M Bit Block 0,
0.5 M Bit Block 1) for Independent Access by Core
Processor and DMA
200 Million Fixed-Point MACs Sustained Performance
Dual Data Address Generators (DAGs) with Modulo and
Bit-Reverse Addressing
Zero-Overhead Looping with Single-Cycle Loop Setup,
Providing Efficient Program Sequencing
IEEE 1149.1 JTAG Standard Test Access Port and On-Chip
Emulation
Single Instruction Multiple Data (SIMD) Architecture
Provides:
Two Computational Processing Elements
Concurrent Execution—Each Processing Element
Executes the Same Instruction, but Operates on
Different Data
Code Compatibility—At Assembly Level, Uses the
Same Instruction Set as Other SHARC DSPs
Parallelism in Buses and Computational Units Enables:
Single-Cycle Execution (with or without SIMD) of: a
Multiply Operation, an ALU Operation, a Dual
Memory Read or Write, and an Instruction Fetch
Transfers Between Memory and Core at Up to Four
32-Bit Floating- or Fixed-Point Words Per Cycle,
Sustained 1.6 Gbytes/s Bandwidth
Accelerated FFT Butterfly Computation through a
Multiply with Add and Subtract
DMA Controller Supports:
14 Zero-Overhead DMA Channels for Transfers between
ADSP-21161N Internal Memory and External Memory,
External Peripherals, Host Processor, Serial Ports,
Link Ports, or Serial Peripheral Interface (SPICompatible)
64-Bit Background DMA Transfers at Core Clock Speed,
in Parallel with Full-Speed Processor Execution
800 M Bytes/s Transfer Rate over IOP Bus
Host Processor Interface to 8-, 16-, and 32-Bit
Microprocessors; the Host Can Directly Read/Write
ADSP-21161N IOP Registers
32-Bit (or up to 48-Bit) Wide Synchronous External Port
Provides:
Glueless Connection to Asynchronous, SBSRAM and
SDRAM External Memories
Memory Interface Supports Programmable Wait State
Generation and Wait Mode for Off-Chip Memory
Up to 50 MHz Operation for Non-SDRAM Accesses
1:2, 1:3, 1:4, 1:6, 1:8 Clock into Core Clock Frequency
Multiply Ratios
24-Bit Address, 32-Bit Data Bus. 16 Additional Data
Lines via Multiplexed Link Port Data Pins Allow
Complete 48-Bit Wide Data Bus for Single-Cycle
External Instruction Execution
Direct Reads and Writes of IOP Registers from Host or
Other 21161N DSPs
62.7 Mega-Word Address Range for Off-Chip SRAM and
SBSRAM Memories
32-48, 16-48, 8-48 Execution Packing for Executing
Instruction Directly from 32-Bit, 16-Bit, or 8-Bit Wide
External Memories
32-48, 16-48, 8-48, 32-32/64, 16-32/64, 8-32/64, Data
Packing for DMA Transfers Directly from 32-Bit,
16-Bit, or 8-Bit Wide External Memories to and from
Internal 32-, 48-, or 64-Bit Internal Memory
Can be Configured to have 48-Bit Wide External Data
Bus, if Link Ports are not Used. The Link Port Data
Lines are Multiplexed with the Data Lines D0 to D15
and are Enabled through Control Bits in SYSCON
SDRAM Controller for Glueless Interface to Low Cost
External Memory
Zero Wait State, 100 MHz Operation for Most Accesses
Extended External Memory Banks (64 M Words) for
SDRAM Accesses
Page Sizes up to 2048 Words
An SDRAM Controller Supports SDRAM in Any and All
Memory Banks
Support for Interface to Run at Core Clock and Half the
Core Clock Frequency
Support for 16 M Bits, 64 M Bits, 128 M Bits, and
256 M Bits with SDRAM Data Bus Configurations of
4, 8, 16, and 32
254 Mega-Word Address Range for Off-Chip SDRAM
Memory
Multiprocessing Support Provides:
Glueless Connection for Scalable DSP Multiprocessing
Architecture
Distributed On-Chip Bus Arbitration for Parallel Bus
Connect of Up to Six ADSP-21161Ns, Global Memory,
and a Host
Two 8-Bit Wide Link Ports for Point-to-Point
Connectivity Between ADSP-21161Ns
400 M Bytes/s Transfer Rate over Parallel Bus
200 M Bytes/s Transfer Rate Over Link Ports
Serial Ports Provide:
Four 50 M Bit/s Synchronous Serial Ports with
Companding Hardware
8 Bidirectional Serial Data Pins, Configurable as Either a
Transmitter or Receiver
2
S Support, Programmable Direction for 8
I
Simultaneous Receive and Transmit Channels, or Up
to Either 16 Transmit Channels or 16 Receive
Channels
128 Channel TDM Support for T1 and E1 Interfaces
Companding Selection on a Per Channel Basis in TDM
Mode
Serial Peripheral Interface (SPI)
Slave Serial Boot through SPI from a Master SPI Device
Full-Duplex Operation
Master-Slave Mode Multimaster Support
Open-Drain Outputs
Programmable Baud Rates, Clock Polarities and Phases
12 Programmable I/O Pins
1 Programmable Timer
–2– REV. A
Page 3
ADSP-21161N
TABLE OF CONTENTS
GENERAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . 3
ADSP-21161N Family Core Architecture . . . . . . . . . 5
SIMD Computational Engine . . . . . . . . . . . . . . . . 5
Independent, Parallel Computation Units . . . . . . . 5
Data Register File . . . . . . . . . . . . . . . . . . . . . . . . . 5
Single-Cycle Fetch of Instruction and
Four Operands . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Instruction Cache . . . . . . . . . . . . . . . . . . . . . . . . . 5
Data Address Generators With Hardware Circular
Buffers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Flexible Instruction Set . . . . . . . . . . . . . . . . . . . . . 5
ADSP-21161N Memory and I/O Interface Features . 5
Dual-Ported On-Chip Memory . . . . . . . . . . . . . . . 5
Off-Chip Memory and Peripherals Interface . . . . . 6
SDRAM Interface . . . . . . . . . . . . . . . . . . . . . . . . . 6
Target Board JTAG Emulator Connector . . . . . . . 7
DMA Controller . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Multiprocessing . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Link Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Serial Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Serial Peripheral (Compatible) Interface . . . . . . . . 9
Host Processor Interface . . . . . . . . . . . . . . . . . . . . 9
General-Purpose I/O Ports . . . . . . . . . . . . . . . . . . . 9
Program Booting . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Phase-Locked Loop and Crystal Double Enable . . 9
Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Development Tools . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Designing an Emulator-Compatible
DSP Board (Target) . . . . . . . . . . . . . . . . . . . . . 10
Additional Information . . . . . . . . . . . . . . . . . . . . . . 11
PIN FUNCTION DESCRIPTIONS . . . . . . . . . . . . . 12
BOOT MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . 18
ABSOLUTE MAXIMUM RATINGS . . . . . . . . . . 19
ESD SENSITIVITY . . . . . . . . . . . . . . . . . . . . . . . . 19
TIMING SPECIFICATIONS . . . . . . . . . . . . . . . . 20
Power Dissipation . . . . . . . . . . . . . . . . . . . . . . . . 21
Power-up Sequencing – Silicon
Revision 0.3, 1.0, 1.1 . . . . . . . . . . . . . . . . . . . . 22
Clock Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Clock Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Flags . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Memory Read – Bus Master . . . . . . . . . . . . . . . . 27
Memory Write – Bus Master . . . . . . . . . . . . . . . . 28
Synchronous Read/Write – Bus Master . . . . . . . . 29
Synchronous Read/Write – Bus Slave . . . . . . . . . . 30
Host Bus Request . . . . . . . . . . . . . . . . . . . . . . . . 31
Asynchronous Read/Write –
Host to ADSP-21161N . . . . . . . . . . . . . . . . . . 33
Three-State Timing – Bus Master, Bus Slave . . . . 35
DMA Handshake . . . . . . . . . . . . . . . . . . . . . . . . 37
SDRAM Interface – Bus Master . . . . . . . . . . . . . 39
Link Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Serial Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
SPI Interface Specifications . . . . . . . . . . . . . . . . . 47
JTAG Test Access Port and Emulation . . . . . . . . 50
Output Drive Currents . . . . . . . . . . . . . . . . . . . . . . 51
Test Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Output Enable Time . . . . . . . . . . . . . . . . . . . . . . 51
Output Disable Time . . . . . . . . . . . . . . . . . . . . . 51
Example System Hold Time Calculation . . . . . . . 51
Capacitive Loading . . . . . . . . . . . . . . . . . . . . . . . 52
Environmental Conditions . . . . . . . . . . . . . . . . . . . 52
Thermal Characteristics . . . . . . . . . . . . . . . . . . . 52
225-BALL METRIC MBGA
PIN CONFIGURATIONS . . . . . . . . . . . . . . . . . . 53
OUTLINE DIMENSIONS . . . . . . . . . . . . . . . . . . . . 55
ORDERING GUIDE . . . . . . . . . . . . . . . . . . . . . . . . 55
Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
GENERAL DESCRIPTION
The ADSP-21161N SHARC DSP is the first low cost derivative
of the ADSP-21160 featuring Analog Devices Super Harvard
Architecture. Easing portability, the ADSP-21161N is source
code compatible with the ADSP-21160 and with first generation
ADSP-2106x SHARCs in SISD (Single Instruction, Single
Data) mode. Like other SHARC DSPs, the ADSP-21161N is a
32-bit processor that is optimized for high performance DSP
applications. The ADSP-21161N includes a 100 MHz core, a
dual-ported on-chip SRAM, an integrated I/O processor with
multiprocessing support, and multiple internal buses to eliminate
I/O bottlenecks.
As was first offered in the ADSP-21160, the ADSP-21161N
offers a Single-Instruction-Multiple-Data (SIMD) architecture.
Using two computational units (ADSP-2106x SHARCs have
one), the ADSP-21161N can double cycle performance versus
the ADSP-2106x on a range of DSP algorithms.
Fabricated in a state of the art, high speed, low power CMOS
process, the ADSP-21161N has a 10 ns instruction cycle time.
With its SIMD computational hardware running at 100 MHz,
the ADSP-21161N can perform 600 million math operations per
second. Table 1 shows performance benchmarks for the
ADSP-21161N.
Table 1. Benchmarks (at 100 MHz)
Speed
Benchmark Algorithm
1024 Point Complex FFT
(at 100 MHz)
171 µs
(Radix 4, with reversal)
FIR Filter (per tap)
1
IIR Filter (per biquad)
1
5 ns
40 ns
1
Matrix Multiply (pipelined)
[3 × 3] × [3 × 1] 30 ns
[4 × 4] × [4 × 1] 37 ns
Divide (y/x) 60 ns
Inverse Square Root 40 ns
1
1
DMA Transfers 800 M bytes/s
1
Specified in SISD mode. Using SIMD, the same benchmark applies for
two sets of computations. For example, two sets of biquad operations can
be performed in the same amount of time as the SISD mode benchmark.
–3–REV. A
Page 4
ADSP-21161N
The ADSP-21161N continues SHARC’s industry-leading
standards of integration for DSPs, combining a high performance
32-bit DSP core with integrated, on-chip system features. These
features include a 1 M bit dual ported SRAM memory, host
processor interface, I/O processor that supports 14 DMA
channels, four serial ports, two link ports, SDRAM controller,
SPI interface, external parallel bus, and glueless multiprocessing.
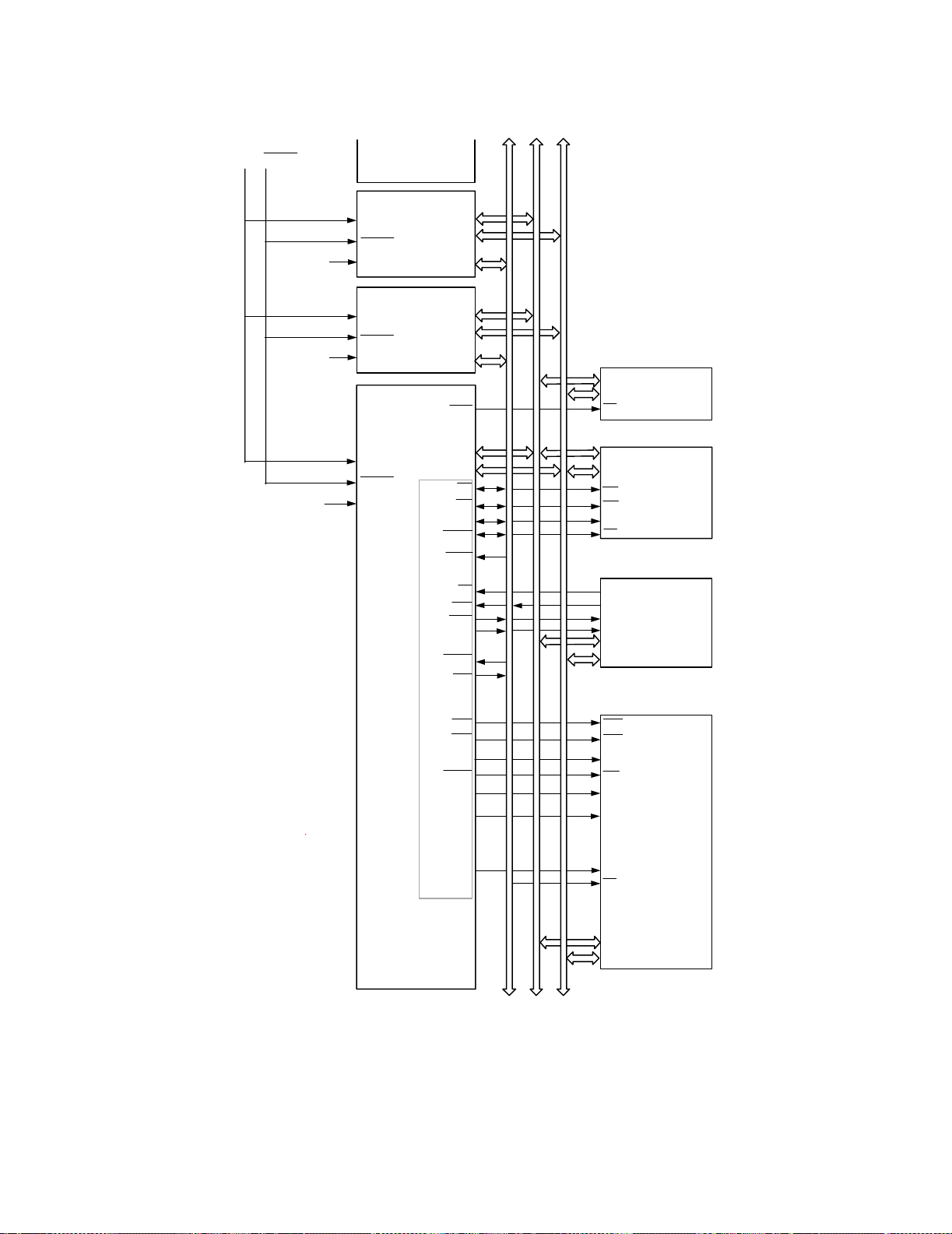
The block diagram of the ADSP-21161N on Page 1 illustrates
the following architectural features:
• Two processing elements, each ma de u p of an AL U, M ul-
tiplier, Shifter, and Data Register File
• Data Address Generators (DAG1, DAG2)
• Program sequencer with instruction cache
• PM and DM buses capable of supporting four 32-bit data
transfers between memory and the core every core
processor cycle
• Interval timer
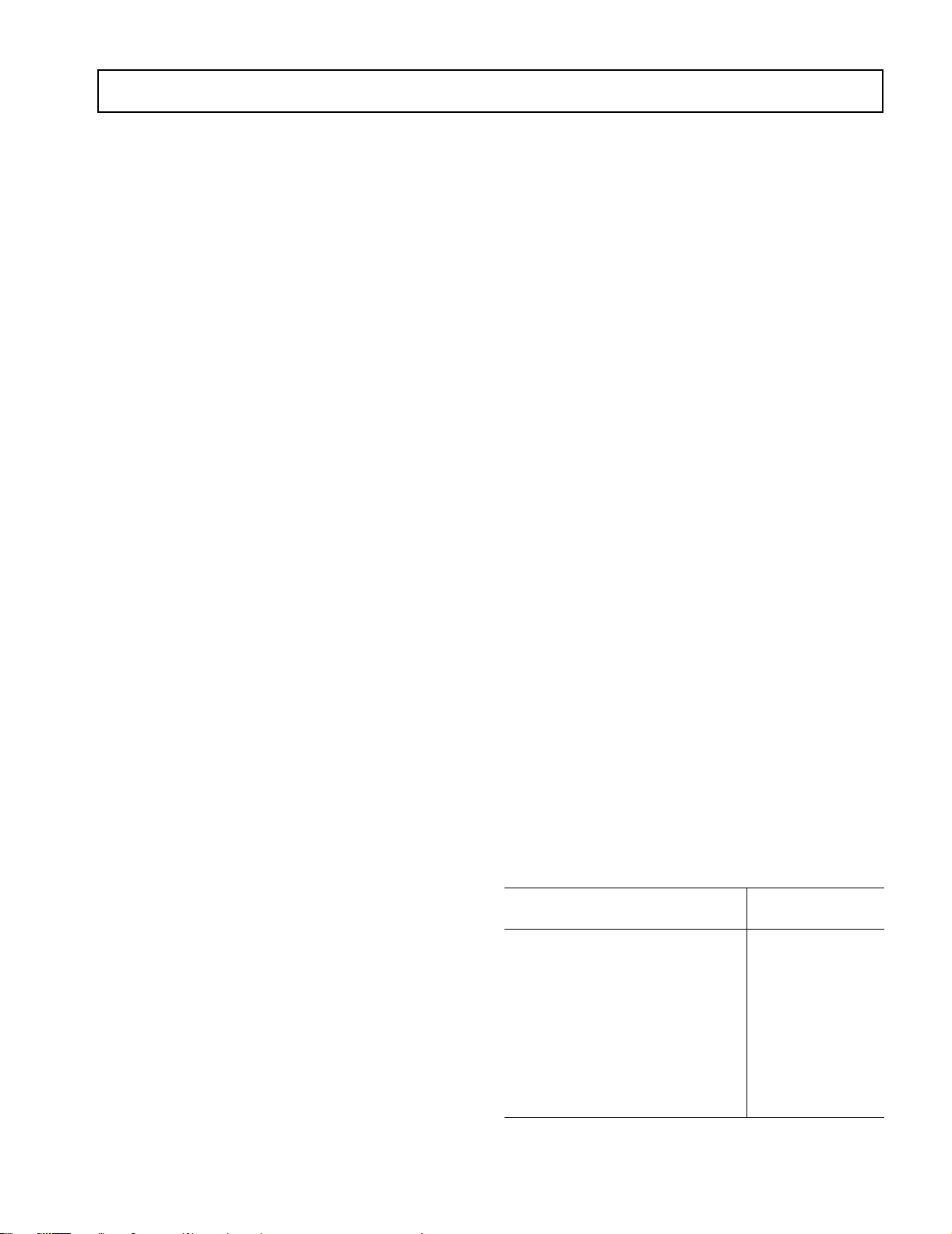
ADSP-21161N
CLOCK
LINK
DEVICES
(2 MAX)
(OPTIONAL)
SERIAL
DEVICE
(OPTIONAL)
SERIAL
DEVICE
(OPTIONAL)
SERIAL
DEVICE
(OPTIONAL)
SERIAL
DEVICE
(OPTIONAL)
SPI
COMPATIBLE
DEVICE
(HOST OR SLAVE)
(OPTIONAL)
CLKIN
XTAL
2
CLK_CFG1-0
CLKDBL
EBOOT
LBOOT
3
IRQ2-0
12
FLAG11-0
TIMEXP
RPBA
ID2-0
LXCLK
LXACK
LXDAT7-0
SCLK0
FS0
D0A
D0B
SCLK1
FS1
D1A
D1B
SCLK2
FS2
D2A
D2B
SCLK3
FS3
D3A
D3B
SPICLK
SPIDS
MOSI
MISO
RESET JTAG
ADDR23-0
DATA47-16
SDCL K1-0
DMAR2-1
DMAG2-1
RSTOUT
BMS
BRST
RD
WR
ACK
MS3-0
RAS
CAS
DQM
SDWE
SDCKE
SDA10
CLKOUT
CS
HBR
HBG
REDY
BR6-1
PA
SBTS
7
• On-Chip SRAM (1 M bit)
• SDRAM Controller for glueless interface to SDRAMs
• External port that supports:
• Interfacing to off-chip memory peripherals
• Glueless multiprocessing support for six ADSP-
21161N SHARCs
• Host port read/write of IOP registers
• DMA controller
• Four serial ports
• Two lin k p or ts
• SPI compatible interface
• JTAG test access port
• 12 General-Purpose I/O Pins
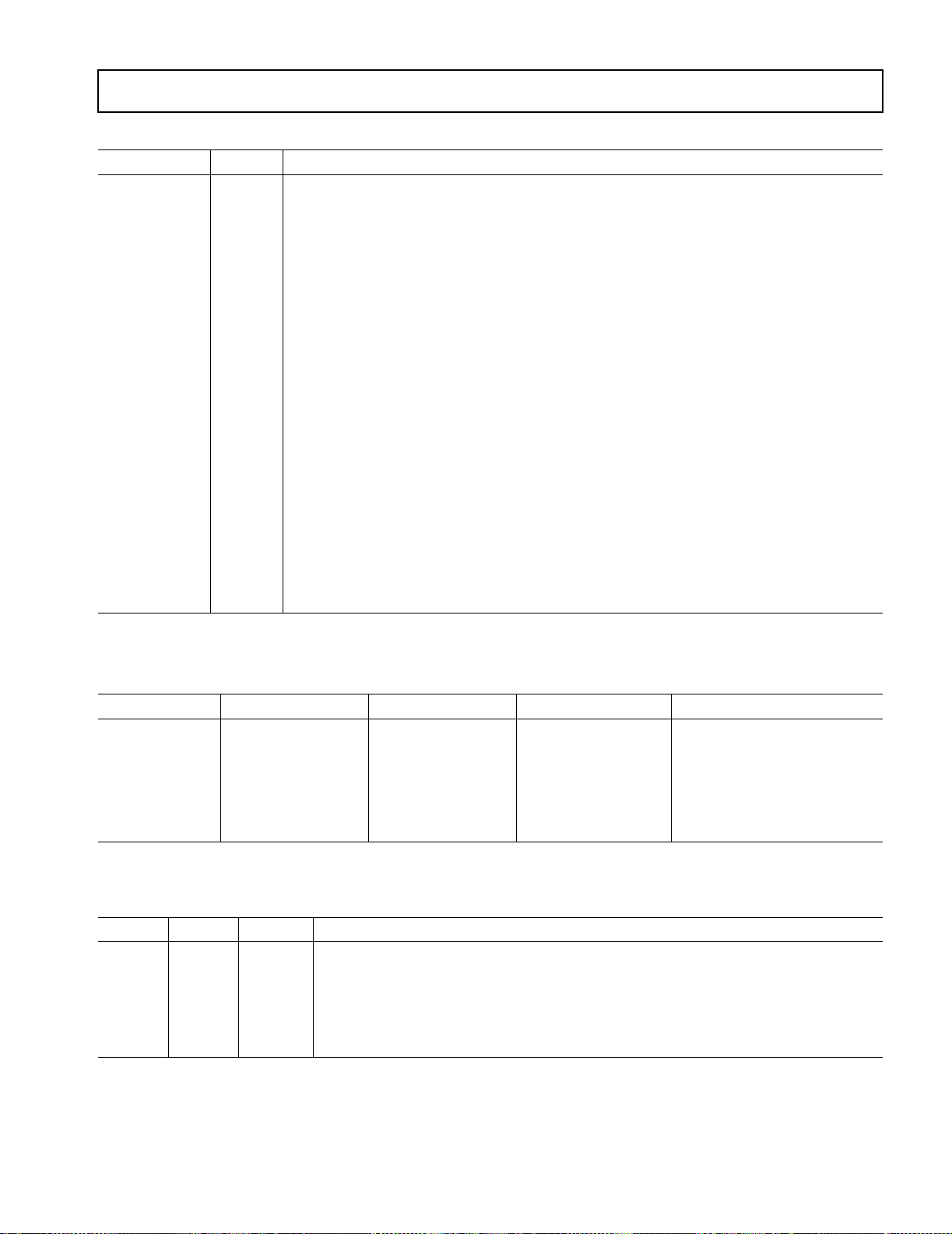
Figure 1 shows a typical single-processor system. A multiprocess-
ing system appears in Figure 4 on Page 8.
L
S
S
O
E
R
T
R
N
O
C
A
D
T
D
A
A
D
CS
ADDR
DATA
ADDR
DATA
OE
WE
ACK
CS
DATA
ADDR
DATA
BOOT
EPROM
(OPTIONAL)
MEMORY
AND
PERIPHERALS
(OPTIONAL)
DMA DEVICE
(OPTIONAL)
HOST
PROCESSOR
INTERFACE
(OPTIONAL)
RAS
CAS
DQM
WE
CLK
CKE
A10
CS
ADDR
DATA
SDRAM
(OPTIONAL)
Figure 1. System Diagram
–4– REV. A
Page 5

ADSP-21161N
ADSP-21161N Family Core Architecture
The ADSP-21161N includes the following architectural features
of the ADSP-2116x family core. The ADSP-21161N is code
compatible at the assembly level with the ADSP-21160, ADSP21060, ADSP-21061, ADSP-21062, and ADSP-21065L.
SIMD Computational Engine
The ADSP-21161N contains two computational processing
elements that operate as a Single Instruction Multiple Data
(SIMD) engine. The processing elements are referred to as PEX
and PEY, and each contains an ALU, multiplier, shifter, and
register file. PEX is always active, and PEY may be enabled by
setting the PEYEN mode bit in the MODE1 register. When this
mode is enabled, the same instruction is executed in both processing elements, but each processing element operates on
different data. This architecture is efficient at executing math
intensive DSP algorithms.
Entering SIMD mode also has an effect on the way data is transferred between memory and the processing elements. When in
SIMD mode, twice the data bandwidth is required to sustain
computational operation in the processing elements. Because of
this requirement, entering SIMD mode also doubles the
bandwidth between memory and the processing elements. When
using the DAGs to transfer data in SIMD mode, two data values
are transferred with each access of memory or the register file.
SIMD is supported only for internal memory accesses and is not
supported for off-chip accesses.
Independent, Parallel Computation Units
Within each processing element is a set of computational units.
The computational units consist of an arithmetic/logic unit
(ALU), multiplier, and shifter. These units perform single-cycle
instructions. The three units within each processing element are
arranged in parallel, maximizing computational throughput.
Single multifunction instructions execute parallel ALU and multiplier operations. In SIMD mode, the parallel ALU and
multiplier operations occur in both processing elements. These
computation units support IEEE 32-bit single-precision floatingpoint, 40-bit extended precision floating-point, and 32-bit
fixed-point data formats.
Data Register File
A general-purpose data register file is contained in each processing element. The register files transfer data between the
computation units and the data buses, and store intermediate
results. These 10-port, 32-register (16 primary, 16 secondary)
register files, combined with the ADSP-2116x enhanced Harvard
architecture, allow unconstrained data flow between computation units and internal memory. The registers in PEX are referred
–
to as R0
Single-Cycle Fetch of Instruction and Four Operands
The ADSP-21161N features an enhanced Harvard architecture
in which the data memory (DM) bus transfers data and the
program memory (PM) bus transfers both instructions and data
(see Figure 1 on Page 4). With the ADSP-21161N’s separate
program and data memory buses and on-chip instruction cache,
R15 and in PEY as S0–S15.
the processor can simultaneously fetch four operands (two over
each data bus) and an instruction (from the cache), all in a
single cycle.
Instruction Cache
The ADSP-21161N includes an on-chip instruction cache that
enables three-bus operation for fetching an instruction and four
data values. The cache is selective—only the instructions whose
fetches conflict with PM bus data accesses are cached. This cache
enables full-speed execution of core, looped operations such as
digital filter multiply-accumulates, and FFT butterfly processing.
Data Address Generators With Hardware Circular Buffers
The ADSP-21161N’s two data address generators (DAGs) are
used for indirect addressing and implementing circular data
buffers in hardware. Circular buffers allow efficient programming
of delay lines and other data structures required in digital signal
processing, and are commonly used in digital filters and Fourier
transforms. The two DAGs of the ADSP-21161N contain sufficient registers to allow the creation of up to 32 circular buffers
(16 primary register sets, 16 secondary). The DAGs automatically handle address pointer wrap-around, reduce overhead,
increase performance, and simplify implementation. Circular
buffers can start and end at any memory location.
Flexible Instruction Set
The 48-bit instruction word accommodates a variety of parallel
operations, for concise programming. For example, the ADSP21161N can conditionally execute a multiply, an add, and a
subtract in both processing elements, while branching, all in a
single instruction.
ADSP-21161N Memory and I/O Interface Features
The ADSP-21161N adds the following architectural features to
the ADSP-2116x family core:
Dual-Ported On-Chip Memory
The ADSP-21161N contains one megabit of on-chip SRAM,
organized as two blocks of 0.5 M bits. Each block can be configured for different combinations of code and data storage. Each
memory block is dual-ported for single-cycle, independent
accesses by the core processor and I/O processor. The dualported memory in combination with three separate on-chip buses
allow two data transfers from the core and one from the I/O
processor, in a single cycle. On the ADSP-21161N, the memory
can be configured as a maximum of 32K words of 32-bit data,
64K words of 16-bit data, 21K words of 48-bit instructions (or
40-bit data), or combinations of different word sizes up to one
megabit. All of the memory can be accessed as 16-bit, 32-bit,
48-bit, or 64-bit words. A 16-bit floating-point storage format is
supported that effectively doubles the amount of data that may
be stored on-chip. Conversion between the 32-bit floating-point
and 16-bit floating-point formats is done in a single instruction.
While each memory block can store combinations of code and
data, accesses are most efficient when one block stores data using
the DM bus for transfers, and the other block stores instructions
and data using the PM bus for transfers. Using the DM bus and
–5–REV. A
Page 6
ADSP-21161N
PM bus, with one dedicated to each memory block, assures
single-cycle execution with two data transfers. In this case, the
instruction must be available in the cache.
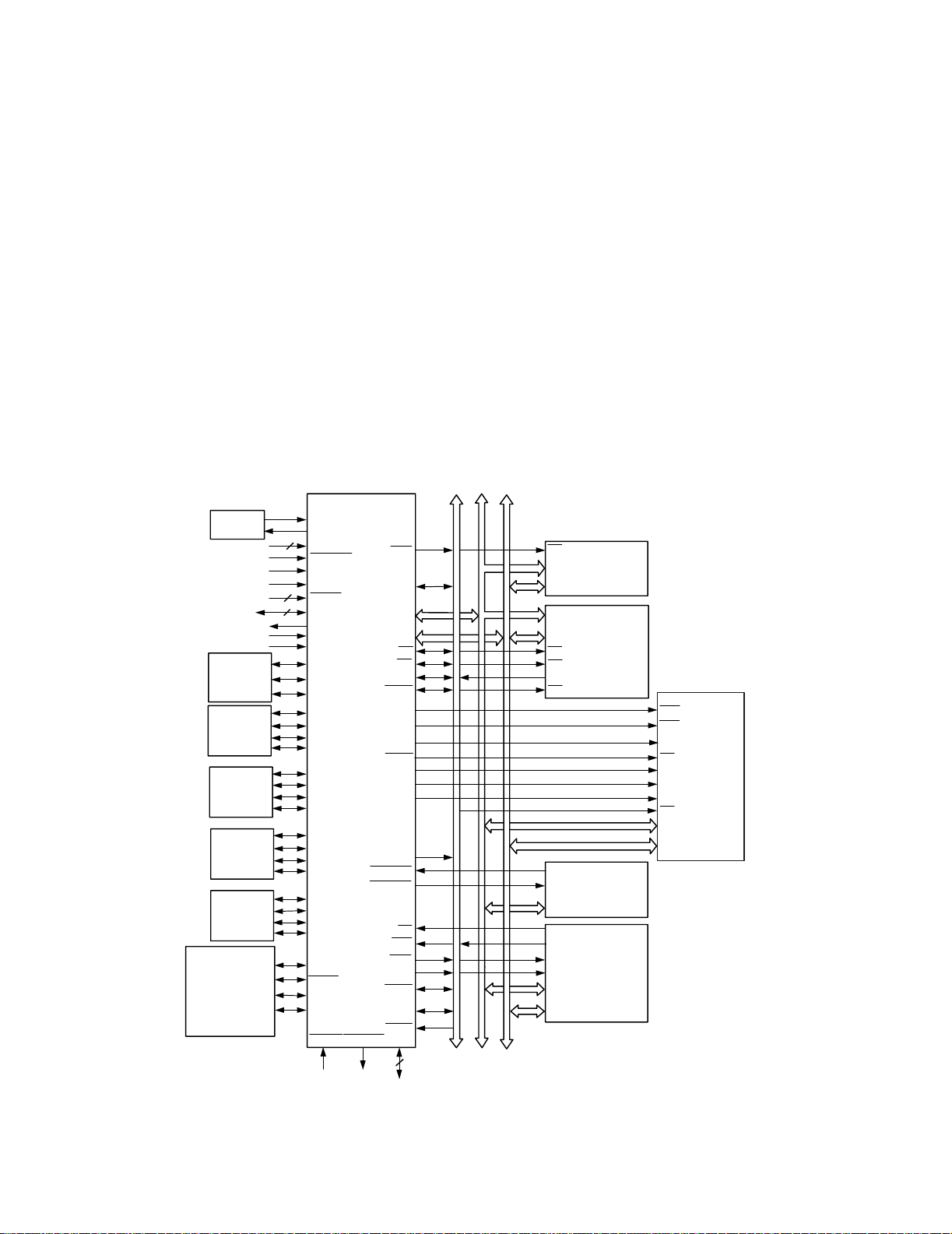
INTERNAL
MEMORY
SPACE
MULTIPROCESSOR
MEMORY
SPACE
IOP REGISTERS
LONG WORD ADDRESSING
NORMAL WORD ADDRESSING
SHORT WORD ADDRESSING
IOP REGISTERS OF ADSP-21161N
WITH ID = 001
IOP REGISTERS OF ADSP-21161N
WITH ID = 010
IOP REGISTERS OF ADSP-21161N
WITH ID = 011
IOP REGISTERS OF ADSP-21161N
WITH ID = 100
IOP REGISTERS OF ADSP-21161N
WITH ID = 101
IOP REGISTERS OF ADSP-21161N
WITH ID = 110
RESERVED
ADDRESS
0x0000 0000 - 0x0001 FFFF
0x0002 0000 - 0x0002 1FFF (BLK 0)
0x0002 8000 - 0x0002 9FFF (BLK 1)
0x0004 0000 - 0x0004 3FFF (BLK 0)
0x0005 0000 - 0x0005 3FFF (BLK 1)
0x0008 0000 - 0x0008 7FFF (BLK 0)
0x000A 0000 - 0x000A 7FFF (BLK 1)
0x0010 0000 - 0x0011 FFFF
0x0012 0000 - 0x0013 FFFF
0x0014 0000 - 0x0015 FFFF
0x0016 0000 - 0x0017 FFFF
0x0018 0000 - 0x0019 FFFF
0x001A 0000 - 0x001B FFFF
0x001C 0000
0x001F FFFF
ADDRESS
0x0020 0000
MS0
BANK 0
0x00FF FFFF (NON-SDRAM)
0x03FF FFFF (SDRAM)
0x0400 0000
MS1
BANK 1
0x04FF FFFF (NON-SDRAM)
0x07FF FFFF (SDRAM)
0x0800 0000
MS2
BANK 2
0x08FF FFFF (NON-SDRAM)
0x0BFF FFFF (SDRAM)
0x0C00 0000
EXTERNAL MEMORY SPACE
Figure 2. Memory Map
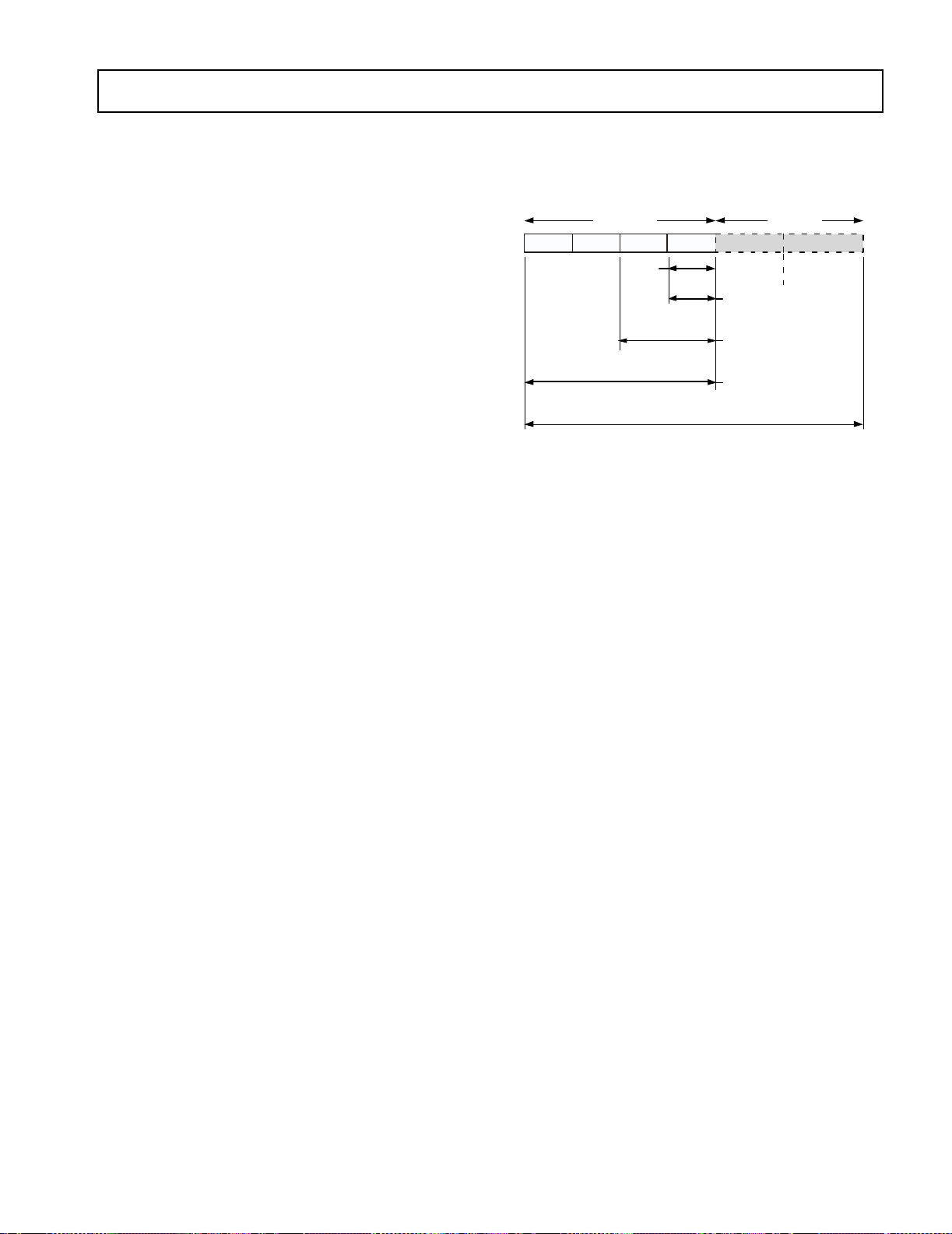
Off-Chip Memory and Peripherals Interface
The ADSP-21161N’s external port provides the processor’s
interface to off-chip memory and peripherals. The 62.7-M word
off-chip address space (254.7-M word if all SDRAM) is included
in the ADSP-21161N’s unified address space. The separate onchip buses—for PM addresses, PM data, DM addresses, DM
data, I/O addresses, and I/O data—are multiplexed at the external
port to create an external system bus with a single 24-bit address
bus and a single 32-bit data bus. Every access to external memory
is based on an address that fetches a 32-bit word. When fetching
an instruction from external memory, two 32-bit data locations
are being accessed for packed instructions. Unused link port lines
–
can also be used as additional data lines DATA15
DATA0,
allowing single-cycle execution of instructions from external
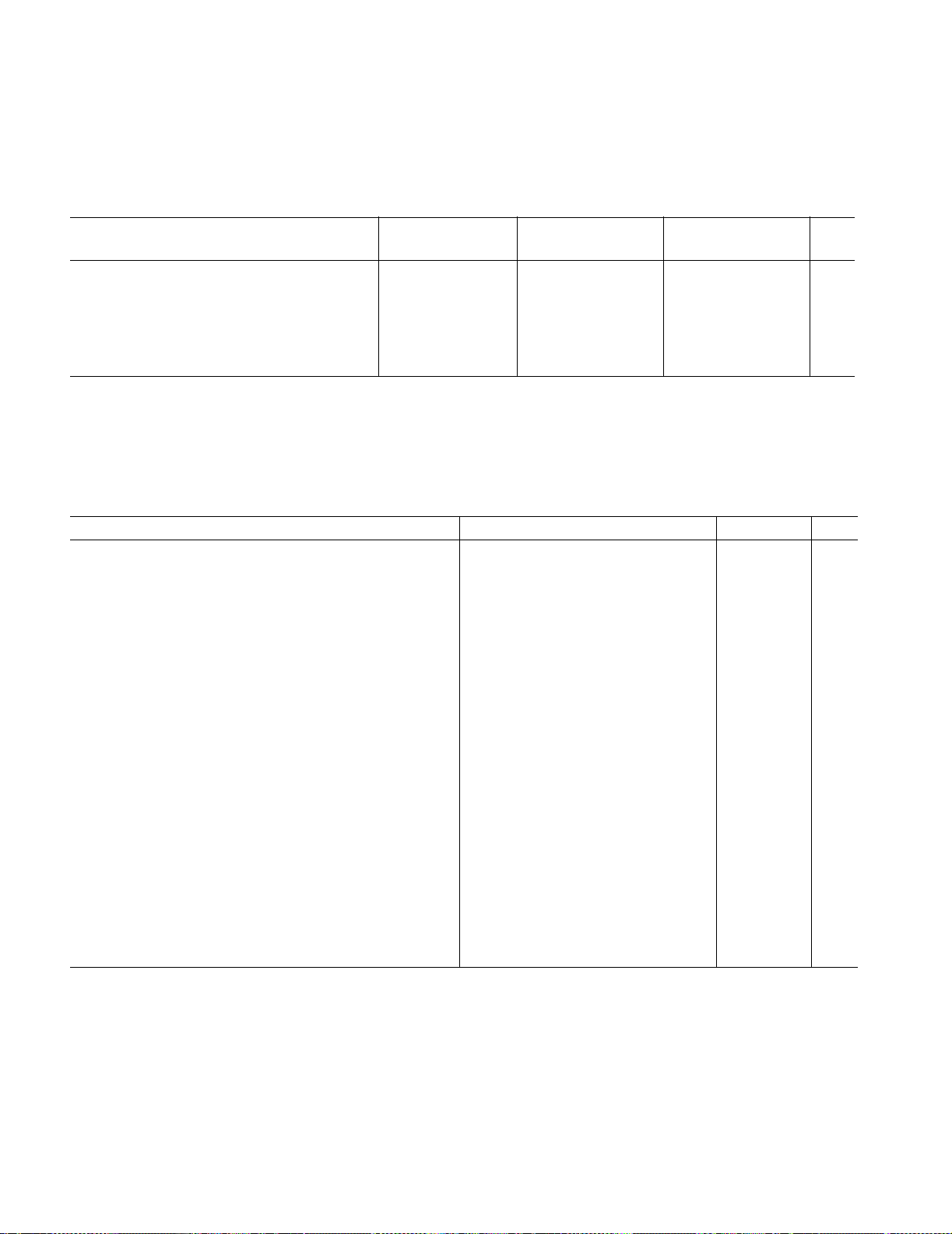
memory, at up to 100 MHz. Figure 3 on Page 7 shows the
alignment of various accesses to external memory.
BANK 3
0x0CFF FFFF (NON-SDRAM)
0x0FFF FFFF (SDRAM)
NOTE: BANK SIZES ARE FIXED
MS3
The external port supports asynchronous, synchronous, and synchronous burst accesses. Synchronous burst SRAM can be
interfaced gluelessly. The ADSP-21161N also can interface gluelessly to SDRAM. Addressing of external memory devices is
facilitated by on-chip decoding of high-order address lines to
generate memory bank select signals. The ADSP-21161N
provides programmable memory wait states and external
memory acknowledge controls to allow interfacing to memory
and peripherals with variable access, hold, and disable time
requirements.
SDRAM Interface
The SDRAM interface enables the ADSP-21161N to transfer
data to and from synchronous DRAM (SDRAM) at the core
clock frequency or at one-half the core clock frequency. The
–6– REV. A
Page 7
ADSP-21161N
K1–
0=0
synchronous approach, coupled with the core clock frequency,
supports data transfer at a high throughput—up to 400 M bytes/s
for 32-bit transfers and 600 M bytes/s for 48-bit transfers.
The SDRAM interface provides a glueless interface with
standard SDRAMs—16 Mb, 64 Mb, 128 Mb, and 256 Mb—
and includes options to support additional buffers between the
ADSP-21161N and SDRAM. The SDRAM interface is
extremely flexible and provides capability for connecting
SDRAMs to any one of the ADSP-21161N’s four external
memory banks, with up to all four banks mapped to SDRAM.
Systems with several SDRAM devices connected in parallel may
require buffering to meet overall system timing requirements.
The ADSP-21161N supports pipelining of the address and
control signals to enable such buffering between itself and
multiple SDRAM devices.
Target Board JTAG Emulator Connector
Analog Devices DSP Tools product line of JTAG emulators uses
the IEEE 1149.1 JTAG test access port of the ADSP-21161N
processor to monitor and control the target board processor
during emulation. Analog Devices DSP Tools product line of
JTAG emulators provides emulation at full processor speed,
allowing inspection and modification of memory, registers, and
processor stacks. The processor’s JTAG interface ensures that the
emulator will not affect target system loading or timing.
For complete information on SHARC Analog Devices DSP
Tools product line of JTAG emulator operation, see the appropriate Emulator Hardware User’s Guide. For detailed information on the interfacing of Analog Devices JTAG emulators
with Analog Devices DSP products with JTAG emulation ports,
please refer to Engineer to Engineer Note
JTAG Emulation Technical Reference
EE-68: Analog Devices
. Both of these documents can
be found on the Analog Devices website:
http://www.analog.com/dsp/tech_docs.html
DMA Controller
The ADSP-21161N’s on-chip DMA controller enables zerooverhead data transfers without processor intervention. The
DMA controller operates independently and invisibly to the
processor core, allowing DMA operations to occur while the core
is simultaneously executing its program instructions. DMA
transfers can occur between the ADSP-21161N’s internal
memory and external memory, external peripherals, or a host
processor. DMA transfers can also occur between the ADSP21161N’s internal memory and its serial ports, link ports, or the
SPI-compatible (Serial Peripheral Interface) port. External bus
packing and unpacking of 32-, 48-, or 64-bit words in internal
memory is performed during DMA transfers from either 8-,
16-, or 32-bit wide external memory. Fourteen channels of DMA
are available on the ADSP-21161N—two are shared between the
SPI interface and the link ports, eight via the serial ports, and
four via the processor’s external port (for host processor, other
ADSP-21161Ns, memory, or I/O transfers). Programs can be
downloaded to the ADSP-21161N using DMA transfers. Asynchronous off-chip peripherals can control two DMA channels
using DMA Request/Grant lines (
DMAR2–1, DMAG2–1
).
Other DMA features include interrupt generation upon completion of DMA transfers, and DMA chaining for automatic linked
DMA transfers.
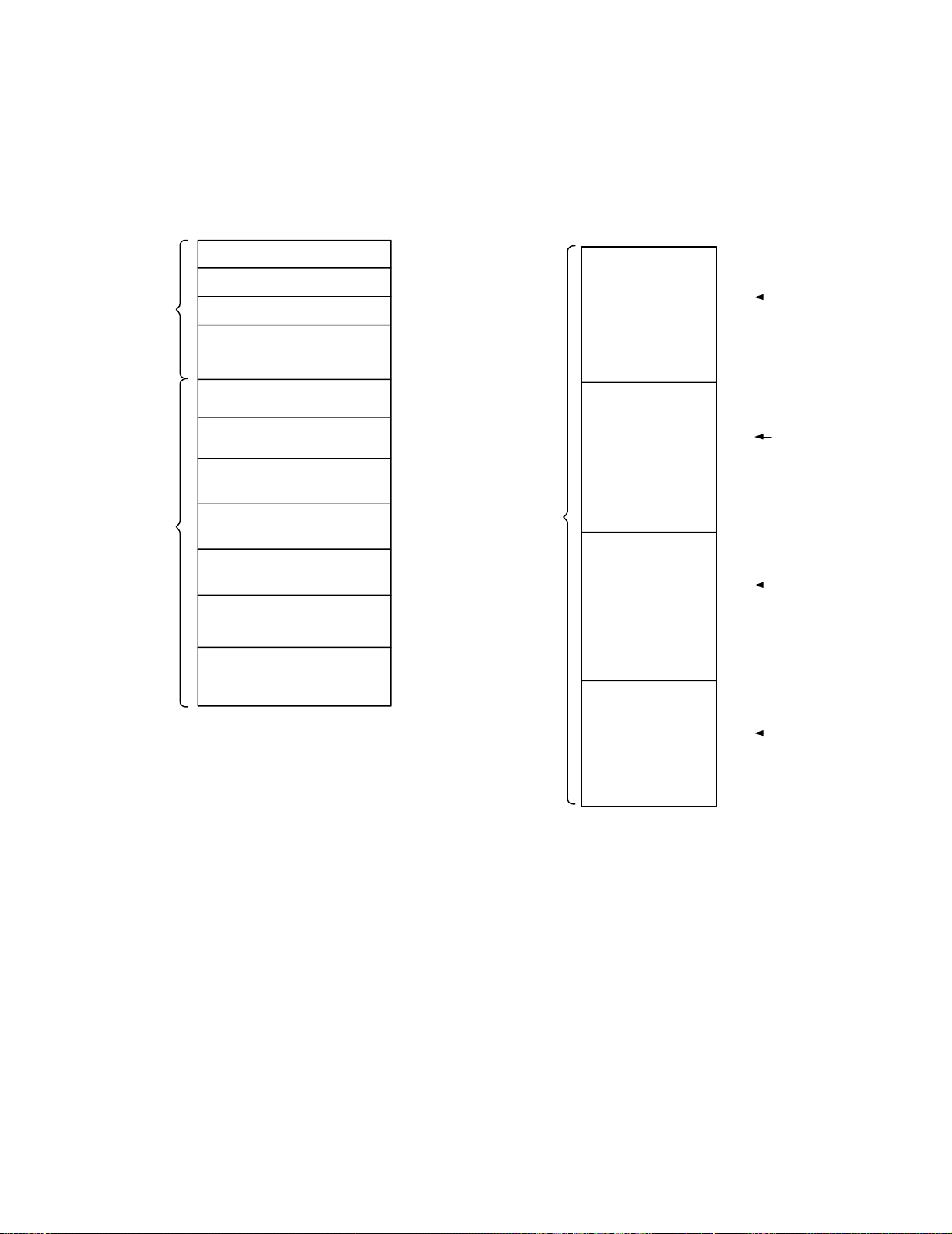
DATA 47–1 6
47 4 0 39 32 3 1 24 2 3 16
PROM
BO O T
NOTE:
EXTRA DATA LINE S DATA15–0 ARE ONLY ACCESSIBLE IF LINK PORTS
ARE DISABLED. ENABLE THESE ADDITIONAL DATA L INKS BY SELECTING IPAC
1INSYS CON.
15 8 7 0
DATA15-8
DA TA 1 5–0
L1DATA7–0
8-BIT PACKED DMA DATA
8-BIT PACKED INSTRUCTION
EXECUTION
16-BIT PACKED DMA DATA
16-BIT PACKED INSTRUCTION EXE CUTION
FLOAT OR FIXED, D31–D0,
32-BIT PACKED
32-BIT PACKED INSTRUCTION
48-BIT INSTRUCT ION FETCH
(NO PACKING)
L0DATA7–0
DATA7–0
Figure 3. External Data Alignment Options
Multiprocessing
The ADSP-21161N offers powerful features tailored to
multiprocessing DSP systems. The external port and link ports
provide integrated glueless multiprocessing support.
The external port supports a unified address space (see Figure 2
on Page 6) that enables direct interprocessor accesses of each
ADSP-21161N’s internal memory-mapped (I/O processor) registers. All other internal memory can be indirectly accessed via
DMA transfers initiated via the programming of the IOP DMA
parameter and control registers. Distributed bus arbitration logic
is included on-chip for simple, glueless connection of systems
containing up to six ADSP-21161Ns and a host processor.
Master processor change over incurs only one cycle of overhead.
Bus arbitration is selectable as either fixed or rotating priority.
Bus lock enables indivisible read-modify-write sequences for
semaphores. A vector interrupt is provided for interprocessor
commands. Maximum throughput for interprocessor data
transfer is 400 M bytes/s over the external port.
Two link ports provide a second method of multiprocessing communications. Each link port can support communications to
another ADSP-21161N. The ADSP-21161N, running at
100 MHz, has a maximum throughput for interprocessor communications over the links of 200 M bytes/s. The link ports and
cluster multiprocessing can be used concurrently or
independently.
Link Ports
The ADSP-21161N features two 8-bit link ports that provide
additional I/O capabilities. With the capability of running at
100 MHz, each link port can support 100 M bytes/s. Link port
I/O is especially useful for point-to-point interprocessor communication in multiprocessing systems. The link ports can operate
independently and simultaneously, with a maximum data
throughput of 200 M bytes/s. Link port data is packed into
48- or 32-bit words and can be directly read by the core processor
–7–REV. A
Page 8
ADSP-21161N
CLOCK
RESET
ADSP-21161N #4
ADSP-21161N #3
CLKIN
RESET
3
ID2-0
ADDR23-0
DATA47-16
CONTROL
L
S
S
O
E
R
T
R
N
O
C
A
D
T
D
A
A
D
ADSP-21161N #2
CLKIN
RESET
2
ID2-0
ADSP-21161N #1
CLKIN
RESET
1
ID2-0
ADDR23-0
DATA47-16
CONTROL
ADDR23-0
DATA47-16
L
O
R
T
N
O
C
SDCLK1-0
SDCKE
BMS
RD
WR
ACK
MS3-0
SBTS
CS
HBR
HBG
REDY
BR6-2
BR1
RAS
CAS
DQM
SDWE
ADDR
DATA
CS
ADDR
DATA
OE
WE
ACK
CS
ADDR
L
S
S
O
E
R
T
R
N
D
O
D
A
C
DATA
A
T
A
D
RAS
CAS
DQM
WE
CLK
CKE
BOOT
EPROM
(OPTIONAL)
GLOBAL
MEMORY
AND
PERIPHERALS
(OPTIONAL)
HOST
PROCESSOR
INTERFACE
(OPTIONAL)
SDRAM
(OPTIONAL)
Figure 4. Shared Memory Multiprocessing System
or DMA-transferred to on-chip memory. Each link port has its
own double-buffered input and output registers. Clock/acknowledge handshaking controls link port transfers. Transfers are
programmable as either transmit or receive.
SDA10
A10
CS
ADDR
DATA
Serial Ports
The ADSP-21161N features four synchronous serial ports that
provide an inexpensive interface to a wide variety of digital and
mixed-signal peripheral devices. Each serial port is made up of
two data lines, a clock and frame sync. The data lines can be
programmed to either transmit or receive.
–8– REV. A
Page 9

ADSP-21161N
The serial ports operate at up to half the clock rate of the core,
providing each with a maximum data rate of 50 M bit/s. The serial
data pins are programmable as either a transmitter or receiver,
providing greater flexibility for serial communications. Serial port
data can be automatically transferred to and from on-chip
memory via a dedicated DMA. Each of the serial ports features
a Time Division Multiplex (TDM) multichannel mode, where
two serial ports are TDM transmitters and two serial ports are
TDM receivers (SPORT0 Rx paired with SPORT2 Tx,
SPORT1 Rx paired with SPORT3 Tx). Each of the serial ports
also support the I
commonly used by audio codecs, ADCs and DACs), with two
data pins, allowing four I
devices) per serial port, with a maximum of up to 16 I
2
S protocol (an industry standard interface
2
S channels (using two I2S stereo
2
S channels.
The serial ports permit little-endian or big-endian transmission
formats and word lengths selectable from 3 bits to 32 bits. For
2
S mode, data-word lengths are selectable between 8 bits and 32
I
bits. Serial ports offer selectable synchronization and transmit
modes as well as optional µ-law or A-law companding. Serial port
clocks and frame syncs can be internally or externally generated.
Serial Peripheral (Compatible) Interface
Serial Peripheral Interface (SPI) is an industry standard synchronous serial link, enabling the ADSP-21161N SPI-compatible
port to communicate with other SPI-compatible devices. SPI is
a 4-wire interface consisting of two data pins, one device select
pin, and one clock pin. It is a full-duplex synchronous serial
interface, supporting both master and slave modes. The SPI port
can operate in a multimaster environment by interfacing with up
to four other SPI-compatible devices, either acting as a master or
slave device. The ADSP-21161N SPI-compatible peripheral
implementation also features programmable baud rate and clock
phase/polarities. The ADSP-21161N SPI-compatible port uses
open drain drivers to support a multimaster configuration and to
avoid data contention.
Host Processor Interface
The ADSP-21161N host interface enables easy connection to
standard 8-bit, 16-bit, or 32-bit microprocessor buses with little
additional hardware required. The host interface is accessed
through the ADSP-21161N’s external port. Four channels of
DMA are available for the host interface; code and data transfers
are accomplished with low software overhead. The host processor
requests the ADSP-21161N’s external bus with the host bus
request (
), host bus grant (
HBG
), and chip select (CS)
HBR
signals. The host can directly read and write the internal IOP
registers of the ADSP-21161N, and can access the DMA channel
setup and message registers. DMA setup via a host would allow
it to access any internal memory address via DMA transfers.
Vector interrupt support provides efficient execution of host
commands.
General-Purpose I/O Ports
The ADSP-21161N also contains 12 programmable, general
purpose I/O pins that can function as either input or output. As
output, these pins can signal peripheral devices; as input, these
pins can provide the test for conditional branching.
Program Booting
The internal memory of the ADSP-21161N can be booted at
system power-up from either an 8-bit EPROM, a host processor,
the SPI interface, or through one of the link ports. Selection of
BMS
the boot source is controlled by the Boot Memory Select (
),
EBOOT (EPROM Boot), and Link/Host Boot (LBOOT) pins.
8-, 16-, or 32-bit host processors can also be used for booting.
Phase-Locked Loop and Crystal Double Enable
The ADSP-21161N uses an on-chip Phase-Locked Loop (PLL)
–
to generate the internal clock for the core. The CLK_CFG1
0
pins are used to select ratios of 2:1, 3:1, and 4:1. In addition to
the PLL ratios, the
ratio options. The (1
CLKDBL
×/2×
pin can be used for more clock
CLKIN) rate set by the
CLKDBL
pin determines the rate of the PLL input clock and the rate at
which the external port operates. With the combination of
CLK_CFG1
CLKDBL
, ratios of 2:1, 3:1, 4:1, 6:1, and
–
0 and
8:1 between the core and CLKIN are supported. See also
Figure 10 on Page 20.
Power Supplies
The ADSP-21161N has separate power supply connections for
the analog (AV
) power supplies. The internal and analog supplies must
(V
DDEXT
/AGND), internal (V
DD
), and external
DDINT
meet the 1.8 V requirement. The external supply must meet the
3.3 V requirement. All external supply pins must be connected
to the same supply.
Note that the analog supply (AV
) powers the ADSP-21161N’s
DD
clock generator PLL. To produce a stable clock, provide an
external circuit to filter the power input to the AV
pin. Place
DD
the filter as close as possible to the pin. For an example circuit,
see Figure 5. To prevent noise coupling, use a wide trace for the
analog ground (AGND) signal and install a decoupling capacitor
as close as possible to the pin.
V
DDINT
Figure 5. Analog Power (AVDD) Filter Circuit
Development Tools
10
0.1F
AGND
0.01F
AV
DD
The ADSP-21161N is supported with a complete set of software
and hardware development tools, including Analog Devices
emulators and VisualDSP++
1
development environment. The
same emulator hardware that supports other ADSP-21xxx DSPs,
also fully emulates the ADSP-21161N.
The VisualDSP++ project management environment lets programmers develop and debug an application. This environment
includes an easy-to-use assembler that is based on an algebraic
syntax; an archiver (librarian/library builder), a linker, a loader,
1
VisualDSP++ is a registered trademark of Analog Devices, Inc.
–9–REV. A
Page 10
ADSP-21161N
a cycle-accurate instruction-level simulator, a C/C++ compiler,
and a C/C++ run-time library that includes DSP and mathematical functions. Two key points for these tools are:
• Compiled ADSP-21161N C/C++ code efficiency—The
compiler has been developed for efficient translation of
C/C++ code to ADSP-21161N assembly. The DSP has
architectural features that improve the efficiency of
compiled C/C++ code.
• ADSP-2106x family code compatibility—The assembler
has legacy features to ease the conversion of existing
ADSP-2106x applications to the ADSP-21161N.
Debugging both C/C++ and assembly programs with the
VisualDSP++ debugger, programmers can:
• View mixed C/C++ and assembly code (interleaved
source and object information)
• Insert break points
• Set conditional breakpoints on registers, memory, and
stacks
• Trace instruction execution
• Perform linear or statistical profiling of program
execution
• Fill, dump, and graphically plot the contents of memory
• Source level debugging
• Create custom debugger windows
The VisualDSP++ IDE lets programmers define and manage
DSP software development. Its dialog boxes and property pages
let programmers configure and manage all of the ADSP-21xxx
development tools, including the syntax highlighting in the
VisualDSP++ editor. This capability permits:
• Controlling how the development tools process inputs
and generate outputs.
• Maintaining a one-to-one correspondence with the tool’s
command line switches.
Analog Devices DSP emulators use the IEEE 1149.1 JTAG test
access port of the ADSP-21161N processor to monitor and
control the target board processor during emulation. The
emulator provides full-speed emulation, allowing inspection and
modification of memory, registers, and processor stacks. Nonintrusive in-circuit emulation is assured by the use of the processor’s
JTAG interface—the emulator does not affect target system
loading or timing.
In addition to the software and hardware development tools
available from Analog Devices, third parties provide a wide range
of tools supporting the ADSP-21xxx processor family. Hardware
tools include ADSP-21xxx PC plug-in cards. Third Party
software tools include DSP libraries, real-time operating systems,
and block diagram design tools.
Designing an Emulator-Compatible DSP Board (Target)
The Analog Devices DSP Tools family of emulators are tools that
every DSP developer needs to test and debug hardware and
software systems. Analog Devices has supplied an IEEE 1149.1
JTAG Test Access Port (TAP) on each JTAG DSP. The emulator
uses the TAP to access the internal features of the DSP, allowing
the developer to load code, set breakpoints, observe variables,
observe memory, and examine registers. The DSP must be halted
to send data and commands, but once an operation has been
completed by the emulator, the DSP system is set running at full
speed with no impact on system timing.
To use these emulators, the target’s design must include the
interface between an Analog Devices JTAG DSP and the
emulation header on a custom DSP target board.
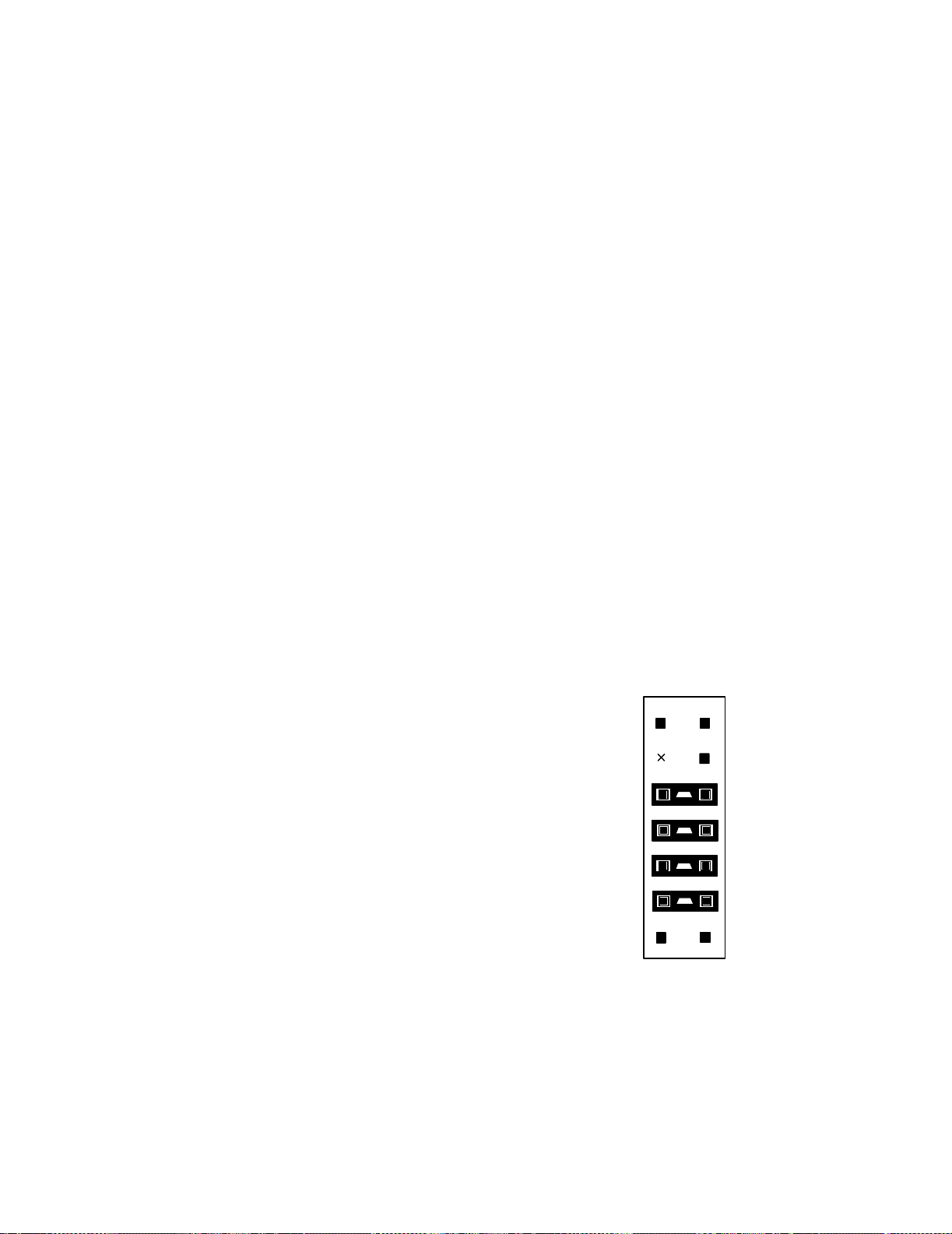
Target Board Header
The emulator interface to an Analog Devices JTAG DSP is a
14-pin header, as shown in Figure 6. The customer must supply
this header on the target board in order to communicate with the
emulator. The interface consists of a standard dual row 0.025"
×
square post header, set on 0.1"
0.1" spacing, with a minimum
post length of 0.235". Pin 3 is the key position used to prevent
the pod from being inserted backwards. This pin must be clipped
on the target board.
Also, the clearance (length, width, and height) around the header
must be considered. Leave a clearance of at least 0.15" and 0.10"
around the length and width of the header, and reserve a height
clearance to attach and detach the pod connector.
As can be seen in Figure 6, there are two sets of signals on the
header. There are the standard JTAG signals TMS, TCK, TDI,
TRST
, and
EMU
TDO,
used for emulation purposes (via an
emulator). There are also secondary JTAG signals BTMS,
BTCK, BTDI, and
BTRST
that are optionally used for board-
level (boundary scan) testing.
12
GND
KEY (NO PIN)
BTMS
BTCK
BTRST TRST
34
56
78
910
11 12
BTDI
13 14
GND
TOP VIEW
EMU
GND
TMS
TCK
TDI
TDO
Figure 6. JTAG Target Board Connector for JTAG Equipped Analog Devices DSP (Jumpers in Place)
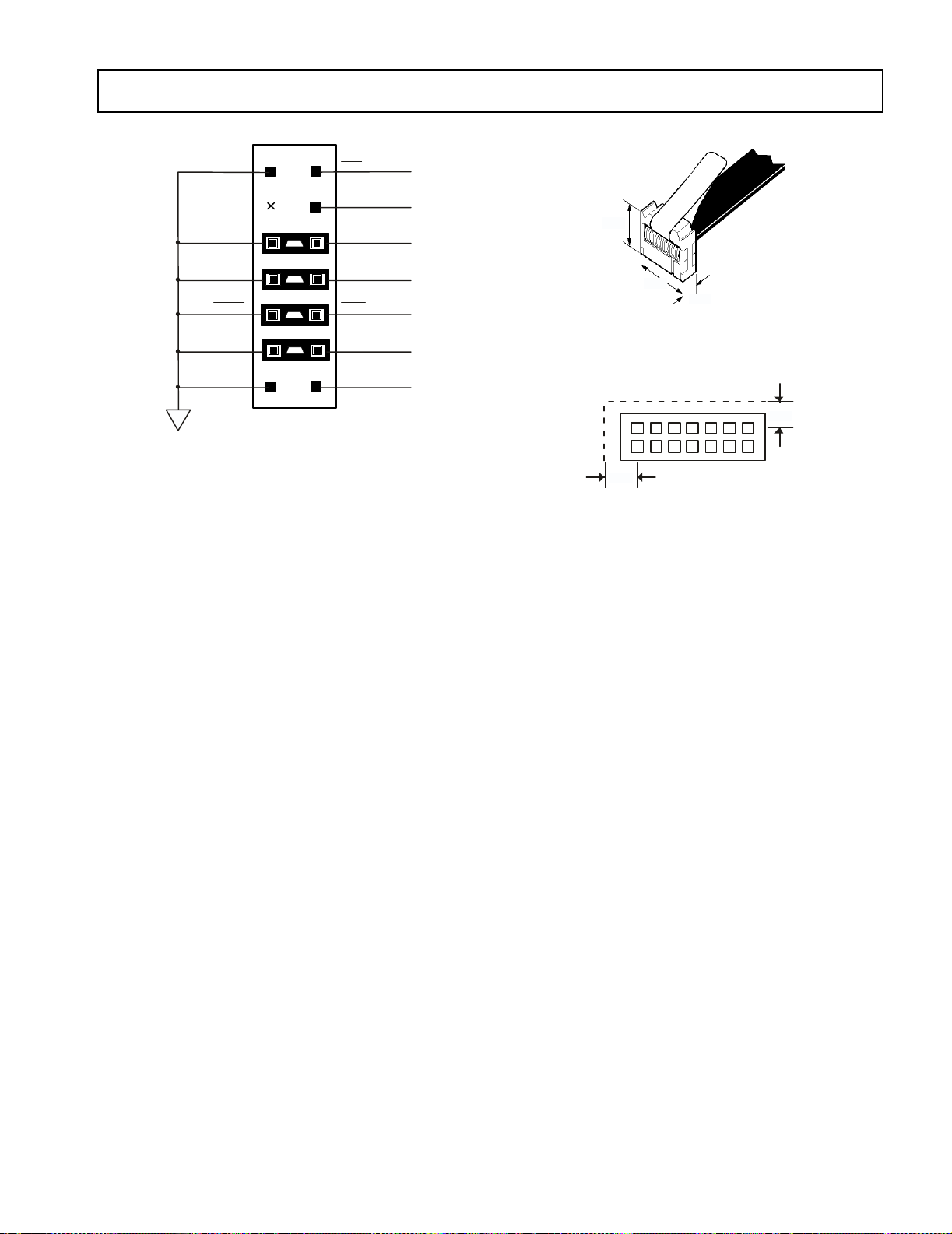
When the emulator is not connected to this header, place jumpers
across BTMS, BTCK,
BTRST
, and BTDI as shown in Figure 7.
This holds the JTAG signals in the correct state to allow the DSP
to run free. Remove all the jumpers when connecting the
emulator to the JTAG header.
–10– REV. A
Page 11
ADSP-21161N
GND
KEY (NO PIN)
BTMS
BTCK
BTRST
BTDI
GND
12
34
56
78
910
9
11 12
13 14
TOP VIEW
EMU
GND
TMS
TCK
TRST
TDI
TDO
Figure 7. JTAG Target Board Connector with No Local Boundary Scan
JTAG Emulator Pod Connector
Figure 8 details the dimensions of the JTAG pod connector at the
14-pin target end. Figure 9 displays the keep-out area for a target
board header. The keep-out area enables the pod connector to
properly seat onto the target board header. This board area
should contain no components (chips, resistors, capacitors, etc.).
The dimensions are referenced to the center of the 0.025" square
post pin.
Design-for-Emulation Circuit Information
For details on target board design issues including mechanical
layout, single processor connections, multiprocessor scan chains,
signal buffering, signal termination, and emulator pod logic, see
0.64 "
0.88"
0.24"
Figure 8. JTAG Pod Connector Dimensions
0.10"
0.1 5"
Figure 9. JTAG Pod Connector Keep-Out Area
EE-68: Analog Devices JTAG Emulation Technical Reference
the
on
the Analog Devices website (www.analog.com)—use site search
on “EE-68”. This document is updated regularly to keep pace
with improvements to emulator support.
Additional Information
This data sheet provides a general overview of the ADSP-21161N
architecture and functionality. For detailed information on the
ADSP-2116x Family core architecture and instruction set, refer
ADSP-21161 SHARC DSP Hardware Reference
to the
ADSP-21160 SHARC DSP Instruction Set Reference
and the
.
–11–REV. A
Page 12
ADSP-21161N
PIN FUNCTION DESCRIPTIONS
ADSP-21161N pin definitions are listed below. Inputs identified
as synchronous (S) must meet timing requirements with respect
to CLKIN (or with respect to TCK for TMS, TDI). Inputs
identified as asynchronous (A) can be asserted asynchronously
TRST
to CLKIN (or to TCK for
or GND, except for the following:
V
DDEXT
• ADDR23–0, DATA47–0, BRST, CLKOUT (Note:
These pins have a logic-level hold circuit enabled on the
ADSP-21161N DSP with ID2–0 = 00x.)
• PA, ACK, RD, WR, DMARx, DMAGx, (ID2–0 = 00x)
(Note: These pins have a pull-up enabled on the ADSP21161N DSP with ID2–0 = 00x.)
• LxCLK, LxACK, LxDAT7–0 (LxPDRDE = 0) (Note:
See Link Port Buffer Control Register Bit definitions in
the ADSP-21161N SHARC DSP Hardware Reference.)
• DxA, DxB, SCLKx, SPICLK, MISO, MOSI, EMU,
TMS,TRST, TDI (Note: These pins have a pull-up.)
Table 2. Pin Function Descriptions
Pin Type Function
ADDR23–0 I/O/T External Bus Address. The ADSP-21161N outputs addresses for external memory and
DATA47
MS3–0 I/O/T Memory Select Lines. These outputs are asserted (low) as chip selects for the corre-
RD I/O/T Memor y Read Strobe. RD is asser ted whenever ADSP-21161N reads a word from external
–16 I/O/T External Bus Data. The ADSP-21161N inputs and outputs data and instructions on these
).Tie or pull unused inputs to
peripherals on these pins. In a multiprocessor system the bus master outputs addresses for
read/writes of the IOP registers of other ADSP-21161Ns while all other internal memory
resources can be accessed indirectly via DMA control (that is, accessing IOP DMA parameter
registers). The ADSP-21161N inputs addresses when a host processor or multiprocessing
bus master is reading or writing its IOP registers. A keeper latch on the DSP’s ADDR23-0
pins maintains the input at the level it was last driven. This latch is only enabled on the
ADSP-21161N with ID2
pins. Pull-up resistors on unused data pins are not necessary. A keeper latch on the DSP’s
DATA47
on the ADSP-21161N with ID2
Note: DATA15
the link ports are disabled and will not be used. In addition, DATA7
L0DAT7
execution of 48-bit instructions from external SBSRAM (system clock speed-exter nal port), SRAM
(system clock speed-external port) and SDRAM (core clock or one-half the core clock speed). The
IPACKx Instruction Packing Mode Bits in SYSCON should be set correctly (IPACK1
to enable this full instruction Width/No-packing Mode of operation.
sponding banks of external memory. Memory bank sizes are fixed to 16 M words for nonSDRAM and 64 M words for SDRAM. The MS3–0 outputs are decoded memory address
lines. In asynchronous access mode, the MS3–0 outputs transition with the other address
outputs. In synchronous access modes, the MS3–0 outputs assert with the other address
lines; however, they deassert after the first CLKIN cycle in which ACK is sampled asserted.
In a multiprocessor system, the MSx signals are tracked by slave SHARCs. The internal
addresses 24 and 25 are zeros and 26 and 27 are decoded into MS3–0.
memory or from the IOP registers of other ADSP-21161Ns. External devices, including
other ADSP-21161Ns, must assert RD for reading from a word of the ADSP-21161N IOP
register memory. In a multiprocessing system, RD is driven by the bus master. RD has a
20 kΩ internal pull-up resistor that is enabled for DSPs with ID2
–16 pins maintains the input at the level it was last driven. This latch is only enabled
–8 pins (multiplexed with L1DAT7–0) can also be used to extend the data bus if
–0) can also be used to extend the data bus if the link ports are not used. This enables
–0=00x.
The following symbols appear in the Type column of Table 2:
A = Asynchronous, G = Ground, I = Input, O = Output,
P = Power Supply, S = Synchronous, (A/D) = Active Drive,
SBTS
Ω
on all
is
(O/D) = Open Drain, and T = Three-State (when
asserted or when the ADSP-21161N is a bus slave).
Unlike previous SHARC processors, the ADSP-21161N
contains internal series resistance equivalent to 50
input/output drivers except the CLKIN and XTAL pins.
Therefore, for traces longer than six inches, external series
resistors on control, data, clock, or frame sync pins are not
required to dampen reflections from transmission line effects for
point-to-point connections. However, for more complex
networks such as a star configuration, series termination is still
recommended.
–0=00x.
–0 pins (multiplexed with
–0=0x1)
–0=00x.
–12– REV. A
Page 13
ADSP-21161N
Table 2. Pin Function Descriptions (continued)
Pin Type Function
WR I/O/T Memor y Write Low Strobe. WR is asser ted when ADSP-21161N writes a word to external
memory or IOP registers of other ADSP-21161Ns. External devices must assert WR for
writing to ADSP-21161N IOP registers. In a multiprocessing system, the bus master drives
WR. WR has a 20 kΩ internal pull-up resistor that is enabled for DSPs with ID2
BRST I/O/T Sequential Burst Access. BRST is asserted by ADSP-21161N to indicate that data
associated with consecutive addresses is being read or written. A slave device samples the
initial address and increments an internal address counter after each transfer. The incremented address is not pipelined on the bus. A master ADSP-21161N in a multiprocessor
environment can read slave external port buffers (EPBx) using the burst protocol. BRST is
asserted after the initial access of a burst transfer. It is asserted for every cycle after that,
except for the last data request cycle (denoted by RD or WR asserted and BRST negated).
A keeper latch on the DSP’s BRST pin maintains the input at the level it was last driven.
This latch is only enabled on the ADSP-21161N with ID2
ACK I/O/S Memory Acknowledge. External devices can de-assert ACK (low) to add wait states to an
external memory access. ACK is used by I/O devices, memory controllers, or other peripherals to hold off completion of an external memory access. The ADSP-21161N deasserts
ACK as an output to add wait states to a synchronous access of its IOP registers. ACK has
a 20 kΩ internal pull-up resistor that is enabled during reset or on DSPs with ID2
SBTS I/S Suspend Bus and Three-State. External devices can assert SBTS (low) to place the
external bus address, data, selects, and strobes in a high impedance state for the following
cycle. If the ADSP-21161N attempts to access external memory while SBTS is asserted, the
processor will halt and the memory access will not be completed until SBTS is deasserted.
SBTS should only be used to recover from host processor/ADSP-21161N deadlock.
CAS I/O/T SDRAM Column Access Strobe. In conjunction with RAS, MSx, SDWE, SDCLKx,
and sometimes SDA10, defines the operation for the SDRAM to perform.
RAS I/O/T SDRAM Row Access Strobe. In conjunction with CAS, MSx, SDWE, SDCLKx, and
sometimes SDA10, defines the operation for the SDRAM to perform.
SDWE I/O/T SDRAM Write Enable. In conjunction with CAS, RAS, MSx, SDCLKx, and sometimes
SDA10, defines the operation for the SDRAM to perform.
DQM O/T SDRAM Data Mask. In write mode, DQM has a latency of zero and is used during a
precharge command and during SDRAM power-up initialization.
SDCLK0 I/O/S/T SDRAM Clock Output 0. Clock for SDRAM devices.
SDCLK1 O/S/T SDRAM Clock Output 1. Additional clock for SDRAM devices. For systems with multiple
SDRAM devices, handles the increased clock load requirements, eliminating need of offchip clock buffers. Either SDCLK1 or both SDCLKx pins can be three-stated.
SDCKE I/O/T SDRAM Clock Enable. Enables and disables the CLK signal. For details, see the data
sheet supplied with the SDRAM device.
SDA10 O/T SDRAM A10 Pin. Enables applications to refresh an SDRAM in parallel with a non-
SDRAM accesses or host accesses. This pin replaces the DSP’s A10 pin only during SDRAM
accesses.
IRQ2–0 I/A Interrupt Request Lines. These are sampled on the rising edge of CLKIN and may be
either edge-triggered or level-sensitive.
FLAG11
TIMEXP O Timer Expired. Asserted for four core clock cycles when the timer is enabled and
HBR I/A Host Bus Request. Must be asserted by a host processor to request control of the ADSP-
–0 I/O/A Flag Pins. Each is configured via control bits as either an input or output. As an input, it
can be tested as a condition. As an output, it can be used to signal external peripherals.
TCOUNT decrements to zero.
21161N’s external bus. When HBR is asserted in a multiprocessing system, the ADSP21161N that is bus master will relinquish the bus and assert HBG. To relinquish the bus,
the ADSP-21161N places the address, data, select, and strobe lines in a high impedance
state. HBR has priority over all ADSP-21161N bus requests (BR6–1) in a multiprocessing
system.
–0=00x.
–0=00x.
–0=00x.
–13–REV. A
Page 14
ADSP-21161N
Table 2. Pin Function Descriptions (continued)
Pin Type Function
HBG I/O Host Bus Grant. Acknowledges an HBR bus request, indicating that the host processor
may take control of the external bus. HBG is asserted (held low) by the ADSP-21161N until
HBR is released. In a multiprocessing system, HBG is output by the ADSP-21161N bus
master and is monitored by all others.
After HBR is asserted, and before HBG is given, HBG will float for 1 t
To avoid erroneous grants, HBG should be pulled up with a 20kΩ to 50kΩ external resistor.
CS I/A Chip Select. Asserted by host processor to select the ADSP-21161N.
REDY O (O/D) Host Bus Acknowledge. The ADSP-21161N deasserts REDY (low) to add wait states to
a host access of its IOP registers when CS and HBR inputs are asserted.
DMAR1 I/A DMA Request 1 (DMA Channel 11). Asserted by external port devices to request DMA
services. DMAR1 has a 20 kΩ internal pull-up resistor that is enabled for DSPs with
–0=00x.
ID2
DMAR2 I/A DMA Request 2 (DMA Channel 12). Asserted by external port devices to request DMA
services. DMAR2 has a 20 kΩ internal pull-up resistor that is enabled for DSPs with
–0=00x.
ID2
DMAG1 O/T DMA Grant 1 (DMA Channel 11). Asserted by ADSP-21161N to indicate that the
requested DMA starts on the next cycle. Driven by bus master only. DMAG1 has a 20 kΩ
internal pull-up resistor that is enabled for DSPs with ID2
DMAG2 O/T DMA Grant 2 (DMA Channel 12). Asserted by ADSP-21161N to indicate that the
requested DMA starts on the next cycle. Driven by bus master only. DMAG2 has a 20 kΩ
internal pull-up resistor that is enabled for DSPs with ID2
BR6–1 I/O/S Multiprocessing Bus Requests. Used by multiprocessing ADSP-21161Ns to arbitrate for
bus mastership. An ADSP-21161N only drives its own BRx line (corresponding to the value
of its ID2
ADSP-21161Ns, the unused BRx pins should be pulled high; the processor's own BRx line
must not be pulled high or low because it is an output.
BMSTR O Bus Master Output. In a multiprocessor system, indicates whether the ADSP-21161N is
current bus master of the shared external bus. The ADSP-21161N drives BMSTR high only
while it is the bus master. In a single-processor system (ID=000), the processor drives this
pin high. This pin is used for debugging purposes.
–0IMultiprocessing ID. Determines which multiprocessing bus request (BR6–BR1) is used
ID2
by ADSP-21161N. ID=001 corresponds to BR1, ID=010 corresponds to BR2, and so on.
Use ID=000 or ID =001 in single-processor systems. These lines are a system configuration
selection that should be hardwired or only changed at reset.
RPBA I/S Rotating Priority Bus Arbitration Select. When RPBA is high, rotating priority for
multiprocessor bus arbitration is selected. When RPBA is low, fixed priority is selected. This
signal is a system configuration selection that must be set to the same value on every ADSP21161N. If the value of RPBA is changed during system operation, it must be changed in
the same CLKIN cycle on every ADSP-21161N.
PA I/O/T Priority Access. Asserting its PA pin enables an ADSP-21161N bus slave to interrupt
background DMA transfers and gain access to the external bus. PA is connected to all ADSP21161Ns in the system. If access priority is not required in a system, the PA pin should be
left unconnected. PA has a 20 kΩ internal pull-up resistor that is enabled for DSPs with
ID2
DxA I/O Data Transmit or Receive Channel A (Serial Ports 0, 1, 2, 3). Each DxA pin has an
internal pull-up resistor. Bidirectional data pin. This signal can be configured as an output
to transmit serial data, or as an input to receive serial data.
DxB I/O Data Transmit or Receive Channel B (Serial Ports 0, 1, 2, 3). Each DxB pin has an
internal pull-up resistor. Bidirectional data pin. This signal can be configured as an output
to transmit serial data, or as an input to receive serial data.
SCLKx I/O Transmit/Receive Serial Clock (Serial Ports 0, 1, 2, 3). Each SCLK pin has an internal
pull-up resistor. This signal can be either internally or externally generated.
–0 inputs) and monitors all others. In a multiprocessor system with less than six
–0=00x.
–0=00x.
–0=00x.
(1 CLKIN cycle).
CK
–14– REV. A
Page 15
ADSP-21161N
Table 2. Pin Function Descriptions (continued)
Pin Type Function
FSx I/O Transmit or Receive Frame Sync (Serial Ports 0, 1, 2, 3). The frame sync pulse initiates
shifting of serial data. This signal is either generated internally or externally. It can be active
high or low or an early or a late frame sync, in reference to the shifting of serial data.
SPICLK I/O Serial Peripheral Interface Clock Signal. Driven by the master, this signal controls the
rate at which data is transferred. The master may transmit data at a variety of baud rates.
SPICLK cycles once for each bit transmitted. SPICLK is a gated clock that is active during
data transfers, only for the length of the transferred word. Slave devices ignore the serial
clock if the slave select input is driven inactive (HIGH). SPICLK is used to shift out and
shift in the data driven on the MISO and MOSI lines. The data is always shifted out on one
clock edge of the clock and sampled on the opposite edge of the clock. Clock polarity and
clock phase relative to data are programmable into the SPICTL control register and define
the transfer format. SPICLK has a 50 kΩ internal pull-up resistor.
SPIDS I Serial Peripheral Interface Slave Device Select. An active low signal used to enable
slave devices. This input signal behaves like a chip select, and is provided by the master device
for the slave devices. In multimaster mode SPIDS signal can be asserted to a master device
to signal that an error has occurred, as some other device is also trying to be the master
device. If asserted low when the device is in master mode, it is considered a multimaster
error. For a single-master, multiple-slave configuration where FLAG3
must be tied or pulled high to V
21161N SPI interaction, any of the master ADSP-21161N’s FLAG3
drive the SPIDS signal on the ADSP-21161N SPI slave device.
MOSI I/O (o/d) SPI Master Out Slave. If the ADSP-21161N is configured as a master, the MOSI pin
becomes a data transmit (output) pin, transmitting output data. If the ADSP-21161N is
configured as a slave, the MOSI pin becomes a data receive (input) pin, receiving input data.
In an ADSP-21161N SPI interconnection, the data is shifted out from the MOSI output pin
of the master and shifted into the MOSI input(s) of the slave(s). MOSI has an internal pullup resistor.
MISO I/O (o/d) SPI Master In Slave Out. If the ADSP-21161N is configured as a master, the MISO pin
becomes a data receive (input) pin, receiving input data. If the ADSP-21161N is configured
as a slave, the MISO pin becomes a data transmit (output) pin, transmitting output data. In
an ADSP-21161N SPI interconnection, the data is shifted out from the MISO output pin
of the slave and shifted into the MISO input pin of the master. MISO has an internal pullup resistor. MISO can be configured as o/d by setting the OPD bit in the SPICTL register.
Note: Only one slave is allowed to transmit data at any given time.
LxDAT7
[DATA15
LxCLK I/O Link Port Clock (Link Ports 0
LxACK I/O Link Port Acknowledge (Link Ports 0
EBOOT I EPROM Boot Select. For a description of how this pin operates, see the table in the BMS
LBOOT I Link Boot. For a description of how this pin operates, see the table in the BMS pin
–0
–0]
I/O
[I/O/T]
Link Port Data (Link Ports 0
For silicon revisions 1.2 and higher, each LxDAT pin has a keeper latch that is enabled when
used as a data pin; or a 20 kΩ internal pull-down resistor that is enabled or disabled by the
LxPDRDE bit of the LCTL register.
For silicon revisions 0.3, 1.0, and 1.1 each LxDAT pin has a 50 kΩ internal pull-down resistor
that is enabled or disabled by the LxPDRDE bit of the LCTL register.
Note: L1DAT7
DATA7
data lines for executing instructions at up to the full clock rate from external memory. See
DATA47
resistor that is enabled or disabled by the LxPDRDE bit of the LCTL register.
50 kΩ resistor that is enabled or disabled by the LxPDRDE bit of the LCTL register.
pin description. This signal is a system configuration selection that should be hardwired.
description. This signal is a system configuration selection that should be hardwired.
–0 pins. If link ports are disabled and are not used, these pins can be used as additional
–0 are multiplexed with the DATA15–8 pins L0DAT7–0 are multiplexed with the
–16 for more information.
–1).
on the master device. For ADSP-21161N to ADSP-
DDEXT
–1). Each LxCLK pin has an internal pull-down 50 kΩ
–1). Each LxACK pin has an internal pull-down
–0 are used, this pin
–0 pins can be used to
–15–REV. A
Page 16
ADSP-21161N
Table 2. Pin Function Descriptions (continued)
Pin Type Function
BMS I/O/T Boot Memory Select. Serves as an output or input as selected with the EBOOT and
LBOOT pins (see Table 4). This input is a system configuration selection that should be
hardwired. For Host and PROM boot, DMA channel 10 (EPB0) is used. For Link boot and
SPI boot, DMA channel 8 is used.
Three-state only in EPROM boot mode (when BMS is an output).
CLKIN I Local Clock In. Used in conjunction with XTAL. CLKIN is the ADSP-21161N clock input.
It configures the ADSP-21161N to use either its internal clock generator or an external clock
source. Connecting the necessary components to CLKIN and XTAL enables the internal
clock generator. Connecting the external clock to CLKIN while leaving XTAL unconnected
configures the ADSP-21161N to use the external clock source such as an external clock
oscillator.The ADSP-21161N external port cycles at the frequency of CLKIN. The
instruction cycle rate is a multiple of the CLKIN frequency; it is programmable at powerup via the CLK_CFG1
specified frequency.
XTAL O Crystal Oscillator Terminal 2. Used in conjunction with CLKIN to enable the ADSP-
21161N’s internal clock oscillator or to disable it to use an external clock source. See CLKIN.
CLK_CFG1-0 I Core/CLKIN Ratio Control. ADSP-21161N core clock (instruction cycle) rate is equal
to n × PLLICLK where n is user selectable to 2, 3, or 4, using the CLK_CFG1
These pins can also be used in combination with the CLKDBL pin to generate additional
core clock rates of 6 × CLKIN and 8 × CLKIN (see the Clock Rate Ratios table in the
CLKDBL description).
CLKDBL I Crystal Double Mode Enable. This pin is used to enable the 2× clock double circuitry,
where CLKOUT can be configured as either 1× or 2× the rate of CLKIN. This CLKIN
double circuit is primarily intended to be used for an external crystal in conjunction with
the internal clock generator and the XTAL pin. The internal clock generator when used in
conjunction with the XTAL pin and an external crystal is designed to support up to a
maximum of 25 MHz external crystal frequency. CLKDBL can be used in XTAL mode to
generate a 50 MHz input into the PLL. The 2× clock mode is enabled (during RESET low)
by tying CLKDBL to GND, otherwise it is connected to V
example, this enables the use of a 25 MHz crystal to enable 100 MHz core clock rates and
a 50 MHz CLKOUT operation when CLK_CFG0=0, CLK_CFG1 =0 and CLKDBL=0.
This pin can also be used to generate different clock rate ratios for external clock oscillators
as well. The possible clock rate ratio options (up to 100 MHz) for either CLKIN (external
clock oscillator) or XTAL (crystal input) are shown in Table 3 on Page 17. An 8:1 ratio
enables the use of a 12.5 MHz crystal to generate a 100 MHz core (instruction clock) rate
and a 25 MHz CLKOUT (external port) clock rate. See also Figure 10 on Page 20.
Note: When using an external crystal, the maximum crystal frequency cannot exceed 25 MHz.
For all other external clock sources, the maximum CLKIN frequency is 50 MHz.
CLKOUT O/T Local Clock Out. CLKOUT is 1× or 2× and is driven at either 1× or 2× the frequency of
CLKIN frequency by the current bus master. The frequency is determined by the CLKDBL
pin. This output is three-stated when the ADSP-21161N is not the bus master or when the
host controls the bus (HBG asserted). A keeper latch on the DSP’s CLKOUT pin maintains
the output at the level it was last driven. This latch is only enabled on the ADSP-21161N
with ID2
If CLKDBL enabled, CLKOUT=2 × CLKIN
If CLKDBL disabled, CLKOUT= 1 × CLKIN
Note: CLKOUT is only controlled by the CLKDBL pin and operates at either 1 × CLKIN or
2 × CLKIN.
Do not use CLKOUT in multiprocessing systems. Use CLKIN instead.
RESET I/A Processor Reset. Resets the ADSP-21161N to a known state and begins execution at the
program memory location specified by the hardware reset vector address. The RESET input
must be asserted (low) at power-up.
–0=00x.
–0 pins. CLKIN may not be halted, changed, or operated below the
–0 inputs.
for 1× clock mode. For
DDEXT
–16– REV. A
Page 17
ADSP-21161N
Table 2. Pin Function Descriptions (continued)
Pin Type Function
RSTOUT
TCK I Tes t Cl o ck ( J TA G). Provides a clock for JTAG boundary scan.
TMS I/S Test Mode Select (JTAG). Used to control the test state machine. TMS has a 20 kΩ internal
TDI I/S Test Data Input (JTAG). Provides serial data for the boundary scan logic. TDI has a 20 kΩ
TDO O Test Data Output (JTAG). Serial scan output of the boundary scan path.
TRST I/A Test Reset (JTAG). Resets the test state machine. TRST must be asserted (pulsed low)
EMU O (O/D) Emulation Status. Must be connected to the ADSP-21161N Analog Devices DSP Tools
V
DDINT
V
DDEXT
AVD D P Analog Power Supply. Nominally +1.8 V dc and supplies the DSP’s internal PLL (clock
AGND G Analog Power Supply Return.
GND G Power Supply Return. (26 pins).
NC Do Not Connect. Reserved pins that must be left open and unconnected. (5 pins
1
RSTOUT exists only for silicon revision 1.2.
2
Four NC pins for silicon revision 1.2, because RSTOUT has been added.
1
O Reset Out. When RSTOUT is asserted (low), this pin indicates that the core blocks are in
reset. It is deasserted 4080 cycles after RESET is deasserted indicating that the PLL is stable
and locked.
pull-up resistor.
internal pull-up resistor.
after power-up or held low for proper operation of the ADSP-21161N. TRST has a 20 kΩ
internal pull-up resistor.
product line of JTAG emulators target board connector only. EMU has a 50 kΩ internal
pull-up resistor.
P Core Power Supply. Nominally +1.8 V dc and supplies the DSP’s core processor (14 pins).
P I/O Power Supply. Nominally +3.3 V dc. (13 pins).
generator). This pin has the same specifications as V
, except that added filtering
DDINT
circuitry is required. See Power Supplies on Page 9.
2
).
Table 3. Clock Rate Ratios
CLKDBL CLK_CFG1 CLK_CFG0 Core:CLKIN CLKIN:CLKOUT
10 0 2:1 1:1
10 1 3:1 1:1
11 0 4:1 1:1
00 0 4:1 1:2
00 1 6:1 1:2
01 0 8:1 1:2
BOOT MODES
Table 4. Boot Mode Selection
EBOOT LBOOT BMS Booting Mode
1 0 Output EPROM (Connect BMS to EPROM chip select.)
0 0 1 (Input) Host Processor
0 1 0 (Input) Serial Boot via SPI
0 1 1 (Input) Link Port
0 0 0 (Input) No Booting. Processor executes from external memory.
1 1 x (Input) Reserved
–17–REV. A
Page 18
ADSP-21161N
SPECIFICATIONS
RECOMMENDED OPERATING CONDITIONS
C Grade K Grade
Parameter
V
DDINT
AV
DD
V
DDEXT
V
IH
V
IL
T
CASE
Specifications subject to change without notice.
1
Applies to input and bidirectional pins: DATA47–16, ADDR23–0, MS3–0, RD, WR, ACK, SBTS, IRQ2–0, FLAG11–0, HBG, HBR, CS, DMAR1,
DMAR2, BR6–1, ID2–0, RPBA, PA, BRST, FSx, DxA, DxB, SCLKx, RAS, CAS, SDWE, SDCLK0, LxDAT7–0, LxCLK, LxACK, SPICLK, MOSI,
MISO, SPIDS, EBOOT, LBOOT, BMS, SDCKE, CLK_CFGx, CLKDBL, CLKIN, RESET, TRST, TCK, TMS, TDI.
2
See Thermal Characteristics on Page 52 for information on thermal specifications.
Internal (Core) Supply Voltage 1.71 1.89 1.71 1.89 V
Analog (PLL) Supply Voltage 1.71 1.89 1.71 1.89 V
External (I/O) Supply Voltage 3.13 3.47 3.13 3.47 V
High Level Input Voltage1
Low Level Input Voltage1 @ V
Case Operating Temperature
ELECTRICAL CHARACTERISTICS
Parameter Test Conditions Min Max Unit
V
OH
V
OL
I
IH
I
IL
I
IHC
I
ILC
I
IKH
I
IKL
I
IKH-OD
I
IKL-OD
I
ILPU
I
OZH
I
OZL
I
OZLPU1
I
OZLPU2
I
OZHPD1
I
OZHPD2
I
DD-INPEAK
I
DD-INHIGH
I
DD-INLOW
I
DD-IDLE
AI
DD
C
IN
Specifications subject to change without notice.
1
Applies to output and bidirectional pins: DATA47–16, ADDR23–0, MS3–0, RD, WR, ACK, DQM, FLAG11–0, HBG, REDY, DMAG1, DMAG2,
BR6–1, BMSTR, PA, BRST, FSx, DxA, DxB, SCLKx, RAS, CAS, SDWE, SDA10, LxDAT7–0, LxCLK, LxACK, SPICLK, MOSI, MISO, BMS,
SDCLKx, SDCKE, EMU, XTAL, TDO, CLKOUT, TIMEXP, RSTOUT.
2
See Output Drive Currents on Page 51 for typical drive current capabilities.
3
Applies to input pins: DATA47–16, ADDR23–0, MS3–0, SBTS, IRQ2–0, FLAG11–0, HBG, HBR, CS, BR6–1, ID2–0, RPBA, BRST, FSx, DxA, DxB,
SCLKx, RAS, CAS, SDWE, SDCLK0, LxDAT7–0, LxCLK, LxACK, SPICLK, MOSI, MISO, SPIDS, EBOOT, LBOOT, BMS, SDCKE, CLK_CFGx,
CLKDBL, TCK, RESET, CLKIN.
4
Applies to input pins with 20 kΩ internal pull-ups: RD, WR, ACK, DMAR1, DMAR2, PA, TRST, TMS, TDI.
5
Applies to CLKIN only.
6
Applies to all pins with keeper latches: ADDR23–0, DATA47–0, MS3–0, BRST, CLKOUT.
7
Current required to switch from kept high to low or from kept low to high.
8
Characterized, but not tested.
High Level Output Voltage
Low Level Output Voltage
High Level Input Current3,
Low Level Input Current
CLKIN High Level Input Current
CLKIN Low Level Input Current
Keeper High Load Current
Keeper Low Load Current
Keeper High Overdrive Current6, 7,
Keeper Low Overdrive Current6, 7,
Low Level Input Current Pull-Up
Three-State Leakage Current9,
Three-State Leakage Current
Three-State Leakage Current Pull-Up1
Three-State Leakage Current Pull-Up2
Three-State Leakage Current Pull-Down1
Three-State Leakage Current Pull-Down2
Supply Current (Internal)
Supply Current (Internal)
Supply Current (Internal)
Supply Current (Idle)
Supply Current (Analog)
Input Capacitance
20, 21
1
1
4
3
6
6
14, 15
15, 16
15, 17
15, 18
19
Test Conditions Min Max Min Max Unit
@ V
2
5
5
8
8
4
10, 11
9, 12, 13
= max 2.0 V
DDEXT
= min –0.5 +0.8 –0.5 +0.8 V
DDEXT
+0.5 2.0 V
DDEXT
DDEXT
–40 +105 0 +85 °C
@ V
@ V
@ V
@ V
@ V
@ V
@ V
@ V
@ V
@ V
@ V
@ V
@ V
10
11
@ V
@ V
12
@ V
13
@ V
t
CCLK
t
CCLK
t
CCLK
t
CCLK
= min, IOH = –2.0 mA
DDEXT
= min, IOL = 4.0 mA
DDEXT
= max, VIN = V
DDEXT
= max, VIN = 0 V 10 µA
DDEXT
= max, VIN = V
DDEXT
= max, VIN = 0 V 35 µA
DDEXT
= max, VIN = 2.0 V –250 –100 µA
DDEXT
= max, VIN = 0.8 V 50 200 µA
DDEXT
= max –300 µA
DDEXT
= max 300 µA
DDEXT
= max, VIN = 0 V 350 µA
DDEXT
= max, VIN = V
DDEXT
= max, VIN = 0 V 10 µA
DDEXT
= max, VIN = 0 V 500 µA
DDEXT
= max, VIN = 0 V 350 µA
DDEXT
= max, VIN = V
DDEXT
= max, VIN = V
DDEXT
= 10.0 ns, V
= 10.0 ns, V
= 10.0 ns, V
= 10.0 ns, V
= max 900 mA
DDINT
= max 650 mA
DDINT
= max 500 mA
DDINT
= max 400 mA
DDINT
2
2
max 10 µA
DDEXT
max 35 µA
DDEXT
max 10 µA
DDEXT
max 350 µA
DDEXT
max 500 µA
DDEXT
2.4 V
+0.5 V
@ AVDD = max 10 mA
fIN = 1 MHz, T
= 25°C, VIN = 1.8 V 4.7 pF
CASE
0.4 V
–18– REV. A
Page 19

ADSP-21161N
9
Applies to three-statable pins: DATA47–16, ADDR23–0, MS3–0, CLKOUT, FLAG11–0, REDY, HBG, BMS, BR6–1, RAS, CAS, SDWE, DQM,
SDCLKx, SDCKE, SDA10, BRST.
10
Applies to three-statable pins with 20 kΩ pull-ups: RD, WR, DMAG1, DMAG2, PA.
11
Applies to three-statable pins with 50 kΩ internal pull-ups: DxA, DxB, SCLKx, SPICLK., EMU, MISO, MOSI
12
Applies to three-statable pins with 50 kΩ internal pull-downs: LxDAT7–0 (below Revision1.2), LxCLK, LxACK. Use I
13
Applies to three-statable pins with 20 kΩ internal pull-downs: LxDAT7-0 (Revision 1.2 and higher).
14
The test program used to measure I
internal power measurements made using typical applications are less than specified. For more information, see “Power Dissipation” on Page 21.
15
Current numbers are for V
16
I
DDINHIGH
17
I
DDINLOW
18
Idle denotes ADSP-21161N state during execution of IDLE instruction. See Power Dissipation on Page 21.
19
Characterized, but not tested.
20
Applies to all signal pins.
21
Guaranteed, but not tested.
is a composite average based on a range of high activity code. See Power Dissipation on Page 21.
is a composite average based on a range of low activity code. See Power Dissipation on Page 21.
DDINPEAK
and AVDD supplies combined.
DDINT
represents worst-case processor operation and is not sustainable under normal application conditions. Actual
ABSOLUTE MAXIMUM RATINGS
Internal (Core) Supply Voltage (V
)1. . –0.3 V to +2.2 V
DDINT
Analog (PLL) Supply Voltage (AVDD)1. . . . –0.3 V to +2.2 V
External (I/O) Supply Voltage (V
1
Input Voltage
Output Voltage Swing
Load Capacitance
Storage Temperature Range
1
Stresses greater than those listed above may cause permanent damage to the
device. These are stress ratings only; functional operation of the device at these
or any other conditions greater than those indicated in the operational sections
of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
. . . . . . . . . . . . . . . . –0.5 V to V
1
. . . . . . . . . –0.5 V to V
1
. . . . . . . . . . . . . . . . . . . . . . . . . .200 pF
1
. . . . . . . . . . .–65°C to +150°C
)1 . . –0.3 V to +4.6 V
DDEXT
DDEXT
DDEXT
+ 0.5 V
+ 0.5 V
for Rev. 1.2 and higher.
OZHPD2
ESD SENSITIVITY
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V
readily accumulate on the human body and test equipment and can discharge without
detection. Although the ADSP-21161N features proprietary ESD protection circuitry,
permanent damage may occur on devices subjected to high energy electrostatic
discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
–19–REV. A
Page 20

ADSP-21161N
TIMING SPECIFICATIONS
The ADSP-21161N’s internal clock switches at higher frequencies than the system input clock (CLKIN). To generate the
internal clock, the DSP uses an internal phase-locked loop
(PLL). This PLL-based clocking minimizes the skew between
the system clock (CLKIN) signal and the DSP’s internal clock
(the clock source for the external port logic and I/O pads).
The ADSP-21161N’s internal clock (a multiple of CLKIN)
provides the clock signal for timing internal memory, processor
core, link ports, serial ports, and external port (as required for
read/write strobes in asynchronous access mode). During reset,
program the ratio between the DSP’s internal clock frequency
and external (CLKIN) clock frequency with the CLK_CFG1–0
and
CLKDBL
pins. Even though the internal clock is the clock
source for the external port, it behaves as described in the Clock
Rate Ratio chart in Table 3 on Page 17. To determine switching
frequencies for the serial and link ports, divide down the internal
clock, using the programmable divider control of each port
(DIVx for the serial ports and LxCLKD for the link ports).
Note the following definitions of various clock periods that are a
function of CLKIN and the appropriate ratio control.
Figure 10 enables Core-to-CLKIN ratios of 2:1, 3:1, 4:1, 6:1,
and 8:1 with external oscillator or crystal. It also shows support
for CLKOUT-to-CLKIN ratios of 1:1 and 2:1.
Table 5. CLKOUT and CCLK Clock Generation Operation
Timing Requirements Description
1
Calculation
CLKIN Input Clock 1/tCK
CLKOUT External Port System Clock 1/t
PLLICLK PLL Input Clock 1/t
CCLK Core Clock 1/t
t
CK
t
CCLK
t
LCLK
t
SCLK
t
SDK
t
SPICLK
1
where:
LR = link port-to-core clock ratio (1, 2, 3, or 1:4, determined by LxCLKD)
SR = serial port-to-core clock ratio (wide range, determined by CLKDIV)
SDCKR = SDRAM-to-Core Clock Ratio (1:1 or 1:2, determined by SDCTL register)
SPIR = SPI-to-Core Clock Ratio (wide range, determined by SPICTL register)
LCLK = Link Port Clock
SCLK = Serial Port Clock
SDK = SDRAM Clock
SPICLK = SPI Clock
CLKIN Clock Period 1/CLKIN
(Processor) Core Clock Period 1/CCLK
Link Port Clock Period (t
Serial Port Clock Period (t
SDRAM Clock Period (t
SPI Clock Period (t
CCLK
CCLK
CCLK
CCLK
CKOP
PLLIN
CCLK
) × LR
) × SR
) × SDCKR
) × SPIR
(CRYSTAL OSCILLATOR
(QUARTZ CRYSTAL
CLKIN
4.2–50MHz)
XTAL
25MHz MAX)
SYNCHRONOUS EP
MULTIPROCESSING
SBSRAM
CLOCK DOUBLER
CLKDBL
1, 2
ASYNCHRONOUS EP
HOST
SRAM
)
z
K
H
L
M
C
0
I
5
L
–
L
2
.
P
4
(
CLKOUT CLK_CFG1–0
RATIOS
2, 3, 4
HARDWARE
INTERRUPT
I/O FLAG
TIMER
PLL
)
z
H
M
K
0
L
0
1
C
–
C
3
.
3
3
(
Figure 10. Core Clock and System Clock Relationship to CLKIN
–20– REV. A
CORE
I/O PROCESSOR
LINK PORTS
1, 1/2, 1/3, 1/4
SDRAM
1, 1/2
SERIAL PORTS
1/2 MAX
SPI
1/8 MAX
Page 21

ADSP-21161N
Use the exact timing information given. Do not attempt to derive
parameters from the addition or subtraction of others. While
addition or subtraction would yield meaningful results for an
individual device, the values given in this data sheet reflect statistical variations and worst cases. Consequently, it is not
meaningful to add parameters to derive longer times.
See Figure 40 on Page 51 under Test Conditions for voltage
reference levels.
Switching characteristics specify how the processor changes its
signals. Circuitry external to the processor must be designed for
compatibility with these signal characteristics. Switching characteristics describe what the processor will do in a given circumstance. Use switching characteristics to ensure that any timing
requirement of a device connected to the processor (such as
memory) is satisfied.
Timing requirements apply to signals that are controlled by
circuitry external to the processor, such as the data input for a
read operation. Timing requirements guarantee that the
Power Dissipation
Total power dissipation has two components: one due to internal
circuitry and one due to the switching of external output drivers.
Internal power dissipation depends on the instruction execution
sequence and the data operands involved. Using the current specifications (I
DDINPEAK
, I
DDINHIGH
, I
DDINLOW
, I
DDIDLE
) from the
Electrical Characteristics on Page 18 and the current-versusoperation information in Table 6, the programmer can estimate
the ADSP-21161N’s internal power supply (V
DDINT
) input
current for a specific application, according to the following
formula:
% Peak I
% High I
×
DDINPEAK
×
DDINHIGH
×
% Low I
+ % Idle I
--------------------------------------------------
DDINLOW
×
I
DDINT
DDIDLE
processor operates correctly with other devices.
Table 6. Operation Types Versus Input Current
Operation
Peak Activity
(I
DDINPEAK
)
1
High Activity
(I
DDINHIGH
1
)
Low Activity
(I
DDINLOW
1
)
Instruction Type Multifunction Multifunction Single Function
Instruction Fetch Cache Internal Memory Internal Memory
Core Memory Access
Internal Memory DMA 1 per 2 t
2
2 per tCK cycle (DM×64 and PM×64) 1 per tCK cycle (DM×64) None
cycles 1 per 2 t
CCLK
cycles N/A
CCLK
External Memory DMA 1 per external port cycle (×32) 1 per external port cycle (×32) N/A
Data bit pattern for core
Wor st ca se Ra nd om N/ A
memory access and DMA
1
The state of the PEYEN bit (SIMD versus SISD mode) does not influence these calculations.
2
These assume a 2:1 core clock ratio. For more information on ratios and clocks (tCK and t
), see the timing ratio definitions on Page 20.
CCLK
The external component of total power dissipation is caused by
the switching of output pins. Its magnitude depends on:
• The number of output pins that switch during each cycle
(O)
• The maximum frequency at which they can switch (f)
• Their load capacitance (C)
• Their voltage swing (V
DD
)
and is calculated by:
P
EXT
OC× V
2
× f×=
DD
The load capacitance should include the processor package
capacitance (C
load high and then back low. At a maximum rate of 1/t
). The switching frequency includes driving the
IN
,
CK
address and data pins can drive high and low, while writing to a
SDRAM memory.
P
Example: Estimate
with the following assumptions:
EXT
• A system with one bank of external memory (32 bit)
• Two 1M 16 SDRAM chips are used, each with a load
of 10 pF (ignoring trace capacitance)
• External Data Memory writes can occur every cycle at a
rate of 1/t
with 50% of the pins switching
CK
• The bus cycle time is 50 MHz
• The external SDRAM clock rate is 100 MHz
• Ignoring SDRAM refresh cycles
• Addresses are incremental and on the same page
The
P
equation is calculated for each class of pins that can
EXT
drive, as shown in Table 7.
A typical power consumption can now be calculated for these
conditions by adding a typical internal power dissipation:
P
TOTALPEXTPINTPPLL
++=
Where:
P
is from Table 7.
EXT
P
INT
is I
× 1.8 V, using the calculation I
DDINT
listed in Power
DDINT
Dissipation on Page 21.
P
is AIDD × 1.8 V, using the value for AIDD listed in the Electrical
PLL
Characteristics on Page 18.
–21–REV. A
Page 22

ADSP-21161N
Table 7. External Power Calculations (3.3 V Device)
Pin Type Number of Pins % Switching C f V
Address 11 20 24.7 pF 50 MHz 10.9 V = 0.030 W
MSx 4 0 24.7 pF N/A 10.9 V = 0.000 W
SDWE 1 0 24.7 pF N/A 10.9 V = 0.000 W
Data 32 50 14.7 pF 50 MHz 10.9 V = 0.128 W
SDCLK0 1 100 24.7 pF 100 MHz 10.9 V = 0.027 W
P
DD
2
= P
EXT
= 0.185 W
EXT
Note that the conditions causing a worst-case
P
from those causing a worst-case
. Maximum
INT
P
are different
EXT
P
cannot
INT
occur while 100% of the output pins are switching from all ones
Power-Up Sequencing – Silicon Revision 0.3, 1.0, 1.1
The timing requirements for DSP startup for silicon revision 0.3,
1.0, or 1.1 are given in Table 8.
to all zeros. Note also that it is not common for an application to
have 100% or even 50% of the outputs switching simultaneously.
Table 8. Power-Up Sequencing for Revisions 0.3, 1.0, and 1.1 (DSP Startup)
Parameter Min Max Unit
Timing Requirements
t
RSTVDD
t
VDDRAMP
t
IVDDEVDD
t
CLKVDD
t
VDDRST
t
CLKRST
t
PLLRST
1
The minimum 0.9 V/ms is based on the slowest allowable ramp-up time (2 ms) for V
ramp from 0 volts to 3.3 volts.
2
The minimum time of 0 ns assumes that V
1.8 and 3.3 volt rails before RESET can be deasserted.
3
The 100 µs minimum assumes a stable CLKIN signal after meeting worst-case start-up timing of crystal oscillator circuits. Refer to the crystal oscillator
manufacturer's data sheet for start-up time. A 25 ms maximum oscillator start-up time can be assumed if using the XTAL pin and internal oscillator
circuit in conjunction with an external crystal. 100 µs is the minimum time required for the PLL to reliably lock to a valid (stable) CLKIN frequency.
RESET Low Before V
V
DDINT/VDDEXT
V
on Before V
DDINT
Voltage Ramp Rate
CLKIN Valid After V
V
DDINT/VDDEXT
Valid Bef ore RESET Deasserted
DDINT/VDDEXT
DDEXT
DDINT/VDDEXT
CLKIN Valid Before RESET Deasserted
PLL Control Setup Before RESET Deasserted 20 µs
and V
DDINT
DDEXT
on 0 ns
1
0.0009 9 V/µs
–50 +200 ms
Valid 0 200 ms
2
3
to ramp from 0 volts to 1.8 volts and (3.6 ms) for V
DDINT
power supplies are valid. The V
DDINT
and V
100 µs
100 µs
supplies must be fully ramped to their
DDEXT
DDEXT
to
RESET
t
VDDRST
t
CLKRST
t
PLLRST
VDDINT
VDDEXT
CLKIN
CLKDBL
CLK_CFG1-0
t
RSTVDD
t
VDDRAMP
t
VDDRAMP
t
IVDDEVDD
t
CLKVDD
Figure 11. Power-Up Sequencing for Revisions 0.3, 1.0, and 1.1 (DSP Startup)
–22– REV. A
Page 23

ADSP-21161N
Power-Up Sequencing – Silicon Revision 1.2
The timing requirements for DSP startup for silicon with revision
1.2 are given in Table 9.
Table 9. Power-Up Sequencing for Revision 1.2 (DSP Startup)
Parameter Min Max Unit
Timing Requirements
t
RSTVDD
t
IVDDEVDD
t
CLKVDD
t
CLKRST
t
PLLRST
t
WRST
RESET Low Before V
V
on Before V
DDINT
CLKIN Valid After V
DDINT/VDDEXT
DDEXT
DDINT/VDDEXT
CLKIN Valid Before RESET Deasserted
on 0 ns
1
Valid
2
PLL Control Setup Before RESET Deasserted
Subsequent RESET Low Pulsewidth
4
–50 +200 ms
0 200 ms
10 µs
3
20 µs
4t
CK
ns
Switching Requirements
t
CORERST
1
Valid V
DDINT/VDDEXT
of milliseconds depending on the design of the power supply subsystem.
2
Assumes a stable CLKIN signal, after meeting worst-case start-up timing of crystal oscillators. Refer to the crystal oscillator manufacturer's data sheet for
start-up time. Assume a 25 ms maximum oscillator start-up time if using the XTAL pin and internal oscillator circuit in conjunction with an e xternal crystal.
3
Based on CLKIN cycles
4
Applies after the power-up sequence is complete. Subsequent resets require a minimum of 4 CLKIN cycles for RESET to be held low in order to properly
initialize and propagate default states at all I/O pins.
5
The 4080 cycle count depends on t
time, resulting in 4081 cycles maximum.
RSTOUT
DSP core reset deasserted after RESET deasserted 4080t
assumes that the supplies are fully ramped to their 1.8 and 3.3 volt rails. Voltage ramp rates can vary from microseconds to hundreds
specification in Table 11. If setup time is not met, one additional CLKIN cycle may be added to the core reset
SRST
does not currently exist for ADSP-21161N revisions
CK
3, 5
0.3, 1.0, and 1.1. This new signal will be placed on one of the
current no-connect pins: ball B15.
RESET
t
RSTVDD
VDDINT
t
IVDDEVDD
VDDEXT
CLKIN
t
CLKVDD
t
CLKRST
CLKDBL
CLK_CFG1-0
RSTOUT
Figure 12. Power-Up Sequencing for Revision 1.2 (DSP Startup)
During the power-up sequence of the DSP, differences in the
ramp-up rates and activation time between the two supplies can
cause current to flow in the I/O ESD protection circuitry. To
prevent damage to the ESD diode protection circuitry, Analog
Devices recommends including a bootstrap Schottky diode.
t
PLLR ST
t
CORERST
The bootstrap Schottky diode is connected between the 1.8 V
and 3.3 V power supplies as shown in Figure 13. It protects the
ADSP-21161N from partially powering the 3.3 V supply.
Including a Schottky diode will shorten the delay between
the supply ramps and thus prevent damage to the ESD diode
–23–REV. A
Page 24

ADSP-21161N
protection circuitry. With this technique, if the 1.8 V rail rises
ahead of the 3.3 V rail, the Schottky diode pulls the 3.3 V rail
along with the 1.8 V rail.
DC INPUT
SOURCE
Clock Input
In systems that use multiprocessing or SBSRAM,
CLKDBL
cannot be enabled nor can the systems use an external crystal as
the CLKIN source.
Do not use CLKOUT as the clock source for the SBSRAM
device. Using an external crystal in conjunction with
CLKDBL
Figure 13. Dual Voltage Schottky Diode
to generate a CLKOUT frequency is not supported. Negative
hold times can result from the potential skew between CLKIN
and CLKOUT.
Table 10. Clock Input
100 MHz
Parameter
Timing Requirements
t
CK
t
CKL
t
CKH
t
CKRF
t
CCLK
CLKIN Period
CLKIN Width Low
CLKIN Width High
CLKIN Rise/Fall (0.4 V–2.0 V) 3 ns
CCLK Period 10 30 ns
1
1
1
20 238 ns
7.5 119 ns
7.5 119 ns
Switching Characteristics
t
DCKOO
t
CKOP
t
CKWH
t
CKWL
1
CLKIN is dependent on the configuration of the CLKCFGx and CLKDBL pins to achieve desired t
CLKOUT Delay After CLKIN 0 2 ns
CLKOUT Period t
CLKOUT Width High t
CLKOUT Width Low t
–1 t
CKOP
/2–2 t
CKOP
/2–2 t
CKOP
3.3V I/O
VOLTAGE
REGULATOR
1.8V CORE
VOLTAGE
REGULATOR
CCLK
CKOP
CKOP
CKOP
.
V
DDEXT
ADSP-21161N
V
DDINT
UnitMin Max
+1 ns
/2+2 ns
/2+2 ns
t
CK
CLKIN
t
CKH
1
t
DCKOO
CLKOUT
2
t
DCKOO
2
t
CKWH
CLKOUT
NOTES:
1. WH EN CLKDBL IS DISABLED, ANYSPECIFICATION TOCLKIN
APPLIES TO THE RISING EDGE, ONLY.
2. WH EN CLKDBL IS ENABLED, ANY SPECIFICATION TO CLKIN
APPLIES TO THE RISING OR FALLING EDGE.
t
CKWH
t
t
CKOP
DCKOO
1
2
t
CKL
1
t
CKOP
2
t
CKWL
t
CKWL
2
1
Figure 14. Clock Input
Clock Signals
The ADSP-21161N can use an external clock or a crystal. See
CLKIN pin description. The programmer can configure the
ADSP-21161N to use its internal clock generator by connecting
the necessary components to CLKIN and XTAL. Figure 15
shows the component connections used for a crystal operating in
fundamental mode.
CLKIN XTAL
C1
27pF
SUGGESTED COMPONENTS FOR 100MHz OPERATION:
ECLIPTEK EC2SM-25.000M (SURFACE MOUNT PACKAGE)
ECLIPTEK EC-25.000M(THROUGH-HOLE PACKAGE)
C1 = 27pF
C2 = 27pF
NOTE: C1 AND C2 ARE SPECIFIC TO CRYSTAL SPECIFIED FOR X1.
CONTACT CRYSTAL MANUFACTURER FOR DETAILS. THIS 25MHz
CRYSTAL GENERATES A 100MHz CCLK AND A 50MHz EP CLOCK
WITH CLKDBL ENABLED AND A 2:1 PLL MULTIPLY RATIO.
X1
C2
27pF
Figure 15. 100 MHz Operation (Fundamental Mode Crystal)
–24– REV. A
Page 25

ADSP-21161N
Reset
Table 11. Reset
Parameter Min Max Unit
Timing Requirements
t
WRST
t
SRST
1
Applies after the power-up sequence is complete.
2
Only required if multiple ADSP-21161Ns must come out of reset synchronous to CLKIN with program counters (PC) equal. Not required for multiple
ADSP-21161Ns communicating over the shared bus (through the external port), because the bus arbitration logic synchronizes itself automatically
after reset.
RESET Pulsewidth Low
RESET Setup Before CLKIN High
CLKIN
RESET
Interrupts
1
4t
2
CK
8.5 ns
t
WRST
t
SRST
ns
Figure 16. Reset
Table 12. Interrupts
Parameter Min Max Unit
Timing Requirements
t
SIR
t
HIR
t
IPW
1
Only required for IRQx recognition in the following cycle.
2
Applies only if t
IRQ2–0 Setup Before CLKIN
IRQ2–0 Hold After CLKIN
IRQ2–0 Pulsewidth
SIR
and t
requirements are not met.
HIR
2
CLKIN
IRQ2–0
1
1
t
SIR
t
IPW
6ns
0ns
2 + t
t
HIR
CKOP
ns
Figure 17. Interrupts
–25–REV. A
Page 26

ADSP-21161N
Timer
Table 13. Timer
Parameter Min Max Unit
Switching Characteristic
t
DTEX
Flags
Table 14. Flags
Parameter Min Max Unit
Timing Requirement
t
SFI
t
HFI
t
DWRF I
t
HFIWR
CLKIN to TIMEXP 1 7 ns
CLKIN
t
DTEX
TIMEXP
Figure 18. Timer
FLAG11–0IN Setup Before CLKIN
FLAG11–0IN Hold After CLKIN
FLAG11–0IN Delay After RD/WR Low
FLAG11–0IN Hold After RD/WR Deasserted
1
1
1
1
4ns
1ns
12 ns
0ns
t
DTEX
Switching Characteristics
t
DFO
t
HFO
t
DFOE
t
DFOD
1
Flag inputs meeting these setup and hold times for instruction cycle N will affect conditional instructions in instruction cycle N+2.
CLKIN
FLAG11–0
CLKIN
FLAG11–0
RDWR,
FLAG11–0
FLAG11–0
Delay After CLKIN 9 ns
OUT
Hold After CLKIN 1 ns
OUT
CLKIN to FLAG11–0
CLKIN to FLAG11–0
t
DFOE
OUT
IN
t
DWRFI
Enable 1 ns
OUT
Disable 5 ns
OUT
t
FLAG INPUT
t
DFO
SFI
t
HFI
t
HFIWR
t
HFO
FLAG OUTPUT
t
DFO
t
DFOD
Figure 19. Flags
–26– REV. A
Page 27

ADSP-21161N
Memory Read – Bus Master
Use these specifications for asynchronous interfacing to
memories (and memory-mapped peripherals) without reference
to CLKIN. These specifications apply when the ADSP-21161N
is the bus master accessing external memory space in asynchronous access mode.
Table 15. Memory Read – Bus Master
Parameter Min Max Unit
Timing Requirements
t
DAD
t
DRLD
t
HDA
t
SDS
t
HDRH
t
DAAK
t
DSAK
t
SAKC
t
HAKC
Address, Selects Delay to Data Valid
RD Low to Data Valid
1
Data Hold from Address, Selects
Data Setup to RD High 8 ns
Data Hold from RD High
3
ACK Delay from Address, Selects
ACK Delay from RD Low
ACK Setup to CLKIN
4
4
ACK Hold After CLKIN 1 ns
1, 2
3
0ns
t
CKOP
0.75t
–0.25t
CKOP
–11+W ns
CCLK
–11+W ns
1ns
2, 4
0.5t
+3 ns
CCLK
t
CKOP
t
CKOP
–0.5t
–0.75t
–12+W ns
CCLK
–11+W ns
CCLK
Switching Characteristics
t
DRHA
t
DARL
t
RW
t
RWR
W = (number of wait states specified in WAIT register) × t
HI = t
CKOP
H = t
CKOP
1
Data Delay/Setup: User must meet t
2
The falling edge of MSx, BMS is referenced.
3
Data Hold: User must meet t
hold times given capacitive and dc loads.
4
ACK Delay/Setup: User must meet t
Address Selects Hold After RD High 0.25t
Address Selects to RD Low
RD Pulsewidth t
2
0.25t
CKOP
RD High to WR, RD, DMAGx Low 0.5t
CKOP
–1+H ns
CCLK
–3 ns
CCLK
–0.5t
CCLK
–1+W ns
CCLK
–1+HI ns
.
(if an address hold cycle or bus idle cycle occurs, as specified in WAIT register; otherwise HI = 0).
(if an address hold cycle occurs as specified in WAIT register; otherwise H = 0).
, t
, or t
DRLD
in asynchronous access mode. See Example System Hold Time Calculation on Page 51 for the calculation of
, t
DSAK
, or t
SDS.
for deassertion of ACK (Low); all three specifications must be met for assertion of ACK (High).
SAKC
HDA
or t
DAD
HDRH
DAAK
ADDRESS
MSx, BMS
RD
DATA
ACK
CLKIN
WR, DMAG
t
DARL
t
DAAK
t
RW
t
t
DSAK
DAD
t
DRLD
t
SAKC
t
SDS
Figure 20. Memory Read – Bus Master
–27–REV. A
t
HAKC
t
HDRH
t
HDA
t
DRHA
t
RWR
Page 28

ADSP-21161N
Memory Write – Bus Master
Use these specifications for asynchronous interfacing to
memories (and memory-mapped peripherals) without reference
to CLKIN. These specifications apply when the ADSP-21161N
is the bus master accessing external memory space in asynchronous access mode.
Table 16. Memory Write – Bus Master
Parameter Min Max Unit
Timing Requirements
t
DAAK
t
DSAK
t
SAKC
t
HAKC
ACK Delay from Address, Selects
ACK Delay from WR Low
ACK Setup to CLKIN
ACK Hold After CLKIN
1
1
1
Switching Characteristics
t
DAWH
t
DAWL
t
WW
t
DDWH
t
DWHA
t
DWHD
t
DATRWH
t
WWR
t
DDWR
t
WDE
Address, Selects to WR Deasserted2t
Address, Selects to WR Low
WR Pulsewidth t
Data Setup Before WR High t
Address Hold After WR Deasserted 0.25t
Data Hold After WR Deasserted 0.25t
Data Disable After WR Deasserted
WR High to WR, RD, DMAGx Low 0.5t
Data Disable Before WR or RD Low 0.25t
WR Low to Data Enabled –0.25t
W = (number of wait states specified in WAIT register) × t
H = t
HI = t
I = t
1
ACK Delay/Setup: User must meet t
2
The falling edge of MSx, BMS is referenced.
3
See Example System Hold Time Calculation on Page 51 for calculation of hold times given capacitive and dc loads.
(if an address hold cycle occurs, as specified in WAIT register; otherwise H = 0).
CKOP
(if an address hold cycle or bus idle cycle occurs, as specified in WAIT register; otherwise HI = 0).
CKOP
(if a bus idle cycle occurs, as specified in WAIT register; otherwise I = 0).
CKOP
or t
DSAK
or t
DAAK
1, 2
0.5t
+3 ns
CCLK
t
CKOP
t
CKOP
–0.5t
–0.75t
–12+W ns
CCLK
–11+W ns
CCLK
1ns
– 0.25t
2
for deassertion of ACK (Low); all three specifications must be met for assertion of ACK (High).
SAKC
CKOP
0.25t
CCLK
–0.5t
CKOP
–0.25t
CKOP
CCLK
0.25t
CCLK
CCLK
–1.25+HI ns
CCLK
CCLK
CCLK
.
CKOP
3
–3+W ns
CCLK
–3 ns
–1+W ns
CCLK
– 13.5+W ns
CCLK
–1+H ns
–1+H ns
– 2+H 0.25t
+2.5+H ns
CCLK
–3+I ns
–1 ns
ADDRESS
MSx, BMS
WR
DATA
ACK
CLKIN
RD, DMAG
t
DAWL
t
DAAK
t
DAWH
t
WW
t
WDE
t
DDWH
t
DSAK
t
SAKC
Figure 21. Memory Write – Bus Master
–28– REV. A
t
HAKC
t
DWHD
t
DWHA
t
WWR
t
DATRWH
t
DDWR
Page 29

ADSP-21161N
Synchronous Read/Write – Bus Master
Use these specifications for interfacing to external memory
systems that require CLKIN, relative to timing or for accessing
a slave ADSP-21161N (in multiprocessor memory space). When
accessing a slave ADSP-21161N, these switching characteristics
must meet the slave's timing requirements for synchronous
read/writes (see Synchronous Read/Write – Bus Slave on
Page 30). The slave ADSP-21161N must also meet these (bus
master) timing requirements for data and acknowledge setup and
hold times.
Table 17. Synchronous Read/Write – Bus Master
Parameter Min Max Unit
Timing Requirements
t
SSDATI
t
HSDATI
t
SACKC
t
HACKC
Data Setup Before CLKIN 5.5 ns
Data Hold After CLKIN 1 ns
ACK Setup Before CLKIN 0.5t
+3 ns
CCLK
ACK Hold After CLKIN 1 ns
Switching Characteristics
t
DADD O
t
HADDO
t
DRDO
t
DWRO
t
DRWL
t
DDATO
t
HDATO
Address, MSx, BMS, BRST, Delay After CLKIN 10 ns
Address, MSx, BMS, BRST, Hold After CLKIN 1.5 ns
RD High Delay After CLKIN 0.25t
WR High Delay After CLKIN 0.25t
RD/WR Low Delay After CLKIN 0.25t
–1 0.25t
CCLK
–1 0.25t
CCLK
–1 0.25t
CCLK
+9 ns
CCLK
+9 ns
CCLK
+9 ns
CCLK
Data Delay After CLKIN 12.5 ns
Data Hold After CLKIN 1.5 ns
CLKIN
ADDRESS
MSx, BRST
ACK
(IN)
READ CYCLE
RD
DATA
(IN)
WRITE CYCLE
WR
DATA(OUT)
t
t
DDATO
DADDO
t
DRWL
t
DRWL
t
SACKC
t
HADDO
t
SSDATI
t
DRDO
t
DWRO
t
HACKC
t
HSDATI
t
HDATO
Figure 22. Synchronous Read/Write – Bus Master
–29–REV. A
Page 30

ADSP-21161N
Synchronous Read/Write – Bus Slave
Use these specifications for ADSP-21161N bus master accesses
of a slave’s IOP registers in multiprocessor memory space. The
bus master must meet these (bus slave) timing requirements.
Table 18. Synchronous Read/Write – Bus Slave
Parameter Min Max Unit
Timing Requirements
t
SADDI
t
HADDI
t
SRWI
t
HRWI
t
SSDATI
t
HSDATI
Switching Characteristics
t
DDATO
t
HDATO
t
DACKC
t
HACKO
Address, BRST Setup Before CLKIN 5 ns
Address, BRST Hold After CLKIN 1 ns
RD/WR Setup Before CLKIN 5 ns
RD/WR Hold After CLKIN 1 ns
Data Setup Before CLKIN 5.5 ns
Data Hold After CLKIN 1 ns
Data Delay After CLKIN 12.5 ns
Data Hold After CLKIN 1.5 ns
ACK Delay After CLKIN 10 ns
ACK Hold After CLKIN 1.5 ns
CLKIN
ADDRESS
ACK
READ ACCESS
RD
DATA
(OUT)
WRITE ACCESS
WR
DATA
(IN)
t
DACKC
t
SAD DI
t
SRWI
t
DDATO
t
SRWI
t
SSDATI
Figure 23. Synchronous Read/Write – Bus Slave
t
HADDI
t
t
t
HSDATI
HRWI
HRWI
t
HACKO
t
HDATO
–30– REV. A
Page 31

ADSP-21161N
Host Bus Request
Use these specifications for asynchronous host bus requests of an
ADSP-21161N (
HBR, HBG
Table 19. Host Bus Request
Parameter Min Max Unit
Timing Requirements
t
HBGRCSV
t
SHBRI
t
HHBRI
t
SHBGI
t
HHBGI
HBG Low to RD/WR/CS Valid 19 ns
HBR Setup Before CLKIN
HBR Hold After CLKIN
HBG Setup Before CLKIN 6 ns
HBG Hold After CLKIN 1 ns
Switching Characteristics
t
DHBGO
t
HHBGO
t
DRDYCS
t
TRDYHG
t
ARDYTR
1
Only required for recognition in the current cycle.
2
(O/D) = open drain, (A/D) = active drive.
HBG Delay After CLKIN 7 ns
HBG Hold After CLKIN 1.5 ns
REDY (O/D) or (A/D) Low from CS and HBR Low
REDY (O/D) Disable or REDY (A/D) High from HBG2t
REDY (A/D) Disable from CS or HBR High
).
1
1
2
6ns
1ns
2
+14 ns
CKOP
10 ns
11 ns
CLKIN
HB R
HB G
HB R
CS
RE D Y
(O/D)
RE D Y
(A/D)
(OU T)HB G
(IN )
(OU T)HB G
t
DRDYCS
t
SHB RI
t
HHBGO
t
HHBRI
t
DHBGO
t
HBGRCSV
t
TRDYHG
t
SHB GI
t
HHBGI
t
ARDYTR
RD
WR
CS
O/D = OPEN DRAIN, A/D = ACTIVE DRIVE
Figure 24. Host Bus Request
–31–REV. A
Page 32

ADSP-21161N
Multiprocessor Bus Request
Use these specifications for passing of bus mastership between
BRx
multiprocessing ADSP-21161Ns (
Table 20. Multiprocessor Bus Request
Parameter Min Max Unit
Timing Requirements
t
SBRI
t
HBRI
t
SPAI
t
HPAI
t
RPBA Setup Before CLKIN High 6 ns
SRPBAI
t
HRPBAI
BRx, Setup Before CLKIN High 9 ns
BRx, Hold After CLKIN High 0.5 ns
PA Setup Before CLKIN High 9 ns
PA Hold After CLKIN High 1 ns
RPBA Hold After CLKIN High 2 ns
Switching Characteristics
t
DBRO
t
HBRO
t
DPASO
t
TRPAS
t
DPAMO
t
PATR
BRx Delay After CLKIN High 8 ns
BRx Hold After CLKIN High 1.0 ns
PA Delay After CLKIN High, Slave 8 ns
PA Disable After CLKIN High, Slave 1.5 ns
PA Delay After CLKIN High, Master 0.25t
PA Disable Before CLKIN High, Master 0.25t
).
+9 ns
CCLK
–5 ns
CCLK
CLKIN
BRx (OUT)
PA (OUT)
(S LAV E)
PA (OUT)
(MASTER)
BR x (IN)
PA (IN)
(O/D)
RP BA
O/D = OP EN DRAIN
t
DBRO
t
HBRO
t
DP A SO
t
DPAMO
t
SRPBAI
t
HR P BAI
Figure 25. Multiprocessor Bus Request
t
SBRI
t
SPAI
t
t
HBRI
HPAI
t
PATR
t
TRPAS
–32– REV. A
Page 33

ADSP-21161N
Asynchronous Read/Write – Host to ADSP-21161N
Use these specifications for asynchronous host processor accesses
CS
and
of an ADSP-21161N, after the host has asserted
HBG
(low). After
drive the
RD
registers.
is returned by the ADSP-21161N, the host can
and WR pins to access the ADSP-21161N’s IOP
HBR
and
HBG
are assumed low for this timing.
HBR
Although the DSP will recognize
HBG
will not be returned by the DSP until after reset is deas-
serted and the DSP completes bus synchronization.
Note: Host internal memory access is not supported.
HBR
asserted before reset, a
Table 21. Read Cycle
Parameter Min Max Unit
Timing Requirements
t
SADRDL
t
HADRDH
t
WRWH
t
DRDHRDY
t
DRDHRDY
Address Setup and CS Low Before RD Low 0 ns
Address Hold and CS Hold Low After RD 2ns
RD/WR High Width 3.5 ns
RD High Delay After REDY (O/D) Disable 0 ns
RD High Delay After REDY (A/D) Disable 0 ns
Switching Characteristics
t
SDATRDY
t
DRDYRDL
t
RDYPRD
t
HDARWH
Data Valid Before REDY Disable from Low 2 ns
REDY (O/D) or (A/D) Low Delay After RD Low 10 ns
REDY (O/D) or (A/D) Low Pulsewidth for Read 1.5t
CCLK
ns
Data Disable After RD High 26ns
Table 22. Write Cycle
Parameter Min Max Unit
Timing Requirements
t
SCSWRL
t
HCSWRH
t
SADWRH
t
HADWRH
t
WWRL
t
WRWH
t
DWRHRDY
t
SDATWH
t
HDATWH
CS Low Setup Before WR Low 0 ns
CS Low Hold After WR High 0 ns
Address Setup Before WR High 6 ns
Address Hold After WR High 2 ns
WR Low Width t
+1 ns
CCLK
RD/WR High Width 3.5 ns
WR High Delay After REDY (O/D) or (A/D) Disable 0 ns
Data Setup Before WR High 5 ns
Data Hold After WR High 4 ns
Switching Characteristics
t
DRDYWRL
t
RDYPWR
1
Only when slave write FIFO is full.
REDY (O/D) or (A/D) Low Delay After WR/CS Low
REDY (O/D) or (A/D) Low Pulsewidth for Write
1
1
12 ns
11 ns
–33–REV. A
Page 34

ADSP-21161N
READ CYCLE
ADDRESS/CS
RD
DATA (OUT)
t
SADRDL
t
HADRDH
t
WRWH
t
HDARWH
REDY (O/D)
RED Y (A /D )
WRI TE C Y CLE
ADDRESS
CS
WR
DA TA ( IN )
t
t
DRDYRDL
t
SCS WRL
t
DRDYWRL
SDAT RDY
t
WWRL
t
RD YPRD
t
SADWRH
t
SDA TWH
t
RDYPWR
t
HCSWRH
t
DRDHRDY
t
DWRHRDY
t
HADWRH
t
t
HDATWH
WRWH
REDY(O/D)
REDY (A/D)
O/D= OPEN DRAIN, A/D = ACTIVE DRIVE
Figure 26. Asynchronous Read/Write – Host to ADSP-21161N
–34– REV. A
Page 35

ADSP-21161N
Three-State Timing – Bus Master, Bus Slave
These specifications show how the memory interface is disabled
(stops driving) or enabled (resumes driving) relative to CLKIN
SBTS
and the
pin. This timing is applicable to bus master tran-
During reset, the DSP will not respond to
MMS accesses. Although the DSP will recognize
HBG
before reset, a
will not be returned by the DSP until after
reset is deasserted and the DSP completes bus synchronization.
SBTS, HBR
HBR
, and
asserted
sition cycles (BTC) and host transition cycles (HTC) as well as
SBTS
the
pin.
Table 23. Three-State Timing – Bus Master, Bus Slave
Parameter Min Max Unit
Timing Requirements
t
STSCK
t
HTSCK
SBTS Setup Before CLKIN 6 ns
SBTS Hold After CLKIN 2 ns
Switching Characteristics
t
MIENA
t
MIENS
t
MIENHG
t
MITRA
t
MITRS
t
MITRHG
t
DATEN
t
DATTR
t
ACKEN
t
ACKTR
t
CDCEN
t
CDCTR
t
ATR HB G
t
STRHBG
t
BTRHBG
t
MENHBG
1
Strobes = RD, WR, DMAGx.
2
Where N = 0.5, 1.0, 1.5 for 1:2, 1:3, and 1:4, respectively.
3
In addition to bus master transition cycles, these specs also apply to bus master and bus slave synchronous read/write.
4
Memory Interface = Address, RD, WR, MSx, DMAGx, and BMS (in EPROM boot mode). BMS is only an output in EPROM boot mode.
Address/Select Enable After CLKIN High 1.5 9 ns
Strobes Enable After CLKIN High
1
−1.5 +9 ns
HBG Enable After CLKIN 1.5 9 ns
Address/Select Disable After CLKIN High –0.5t
Strobes Disable After CLKIN High t
HBG Disable After CLKIN
Data Enable After CLKIN
Data Disable After CLKIN
2
3
3
CKOP
0.5t
1.5 10 ns
1.5 6 ns
–20 –0.5t
CKOP
– 0.25t
+N×t
CKOP
CCLK
CCLK
−17 t
CKOP
–20 0.5t
–15 ns
CKOP
– 0.25t
CKOP
+N×t
−12.5 ns
CCLK
CCLK
–15 ns
ACK Enable After CLKIN High 1.5 9 ns
ACK Disable After CLKIN High 0.2 5 ns
CLKOUT Enable After CLKIN
CLKOUT Disable After CLKIN t
Address/Select Disable Before HBG Low
RD/WR/DMAGx Disable Before HBG Low4t
BMS Disable Before HBG Low
Memory Interface Enable After HBG High
2
4
0.5t
4
1.5t
0.5t
4
t
+N×t
CKOP
−5 t
CKOP
CKOP
+ 0.25t
CKOP
CKOP
–5 t
CKOP
CCLK
–6 1.5t
CCLK
–4 0.5t
0.5t
CKOP
CKOP
CKOP
−4t
CKOP
CKOP
CKOP
+N×t
CCLK
+5 ns
ns
+2 ns
+ 0.25t
+3 ns
CCLK
+2 ns
+5 ns
–35–REV. A
Page 36

ADSP-21161N
CLKIN
SBTS
t
STSCK
t
HTSCK
MEMORY
INTERFACE
DATA
ACK
CLKIN
CLKOUT
HBG
MEMORY
INTERFACE
t
MIENA,tMIENS,tMIENHG
t
DATEN
t
ACKEN
t
CDCEN
t
MENHBG
MEMORY INTERFACE = ADDRESS, RD, WR, MSx, DMAGx, BMS (IN EPROM MODE)
t
MITRA,tMITRS,tMITRHG
t
DATTR
t
ACKTR
t
CDCTR
Figure 27. Three-State Timing – Bus Master, Bus Slave
t
ATRHBG,tSTRHBG,tBTRHBG
–36– REV. A
Page 37

ADSP-21161N
DMA Handshake
These specifications describe the three DMA handshake modes.
In all three modes
handshake mode,
DMAR
DMAG
is used to initiate transfers. For
controls the latching or enabling of
data externally. For external handshake mode, the data transfer
is controlled by the ADDR23–0,
RD, WR, MS3–0
, ACK, and
DMAG
signals. For Paced Master mode, the data transfer is
controlled by ADDR23–0,
DMAG
). For Paced Master mode, the Memory Read-Bus
RD, WR, MS3–0
, and ACK (not
Master, Memory Write-Bus Master, and Synchronous
Read/Write-Bus Master timing specifications for ADDR23
RD, WR, MS3–0
, DATA47–16, and ACK also apply.
Table 24. DMA Handshake
Parameter Min Max Unit
Timing Requirements
t
SDRC
t
WDR
t
SDATDGL
t
HDATIDG
t
DATDRH
t
DMARLL
t
DMARH
DMARx Setup Before CLKIN
DMARx Width Low (Nonsynchronous)
Data Setup After DMAGx Low
Data Hold After DMAGx High 2 ns
Data Valid After DMARx High
DMARx Low Edge to Low Edge
DMARx Width High
2
1
2
3
3
4
3.5 ns
t
+4.5 ns
CCLK
t
–0.5t
CKOP
t
+3 ns
CKOP
t
CKOP
t
+4.5 ns
CCLK
CCLK
–7 ns
ns
Switching Characteristics
t
DDGL
t
WDGH
t
WDGL
t
HDGC
t
VDATDGH
t
DATRDG H
t
DGWRL
t
DGWRH
t
DGWRR
t
DGRDL
t
DRDGH
t
DGRDR
t
DGWR
t
DADG H
t
DDGHA
W = (number of wait states specified in WAIT register) × t
HI = t
CKOP
1
Only required for recognition in the current cycle.
2
Maximum throughput using DMARx/DMAGx handshaking equals t
limit applies to non-synchronous access mode only.
3
t
SDATDGL
the write, the data can be driven t
4
Use t
DMARLL
5
t
VDATDGH
t
VDATDGH=tCKOP
6
See Example System Hold Time Calculation on Page 51 for calculation of hold times given capacitive and dc loads.
7
This parameter applies for synchronous access mode only.
DMAGx Low Delay After CLKIN 0.25t
DMAGx High Width 0.5t
DMAGx Low Width t
DMAGx High Delay After CLKIN t
Data Valid Before DMAGx High
Data Disable After DMAGx High
5
6
CKOP
CKOP
t
CKOP
0.25t
+1 0.25t
CCLK
–1+HI ns
CCLK
–0.5t
– 0.25t
– 0.25t
CCLK
–1 ns
CCLK
+1.0 t
CCLK
–8 t
CCLK
CKOP
CKOP
– 3 0.25t
+9 ns
CCLK
– 0.25t
CCLK
– 0.25t
CCLK
+4 ns
CCLK
+9 ns
+5 ns
WRx Low Before DMAGx Low –1.5 +2 ns
DMAGx Low Before WRx High t
WRx High Before DMAGx High
7
CKOP
–0.5t
–2+W ns
CCLK
–1.5 +2 ns
RDx Low Before DMAGx Low –1.5 +2 ns
RDx Low Before DMAGx High t
RDx High Before DMAGx High
7
DMAGx High to WRx, RDx Low 0.5t
CKOP
–0.5t
–2+W ns
CCLK
–1.5 +2 ns
–2+HI ns
CCLK
Address/Select Valid to DMAGx High 15 ns
Address/Select Hold After DMAGx High 1 ns
.
CKOP
(if data bus idle cycle occurs, as specified in WAIT register; otherwise HI = 0).
+ t
WDR
is the data setup requirement if DMARx is not being used to hold off completion of a write. Otherwise, if DMARx low holds off completion of
if DMARx transitions synchronous with CLKIN. Otherwise, use t
is valid if DMARx is not being used to hold off completion of a read. If DMARx is used to prolong the read, then
–0.25t
CCLK
after DMARx is brought high.
DATDRH
–8+(n×t
) where n equals the number of extra cycles that the access is prolonged.
CKOP
DMARH
WDR
= (t
and t
CCLK
DMARH
+4.5) + (t
.
+4.5)=29 ns (34.5 MHz). This throughput
CCLK
–
0,
–37–REV. A
Page 38

ADSP-21161N
CLKIN
DMARx
t
SDRC
t
WDR
t
DMARLL
t
SDRC
t
DMARH
t
HDGC
DMAGx
TRANSFERS BETWEEN ADSP-21161N
INTERNAL MEMORY AND EXTERNAL DEVICE
DATA
DATA
TRANSFERS BETWEEN EXTERNAL DEVICE AND
EXTERNAL MEMORY
WR
RD
ADDRESS
(FROM ADSP-2116x TO EXTERNAL DRIVE)
(FROM EXTERNAL DRIVE TO ADSP-21161N)
1
(EXTERNAL HANDSHAKE MODE)
(EXTERNAL DEVICE TO EXTERNAL MEMORY)
(EXTERNAL MEMORY TO EXTERNAL DEVICE)
MSx
1
MEMORY READ BUS MASTER, MEMORY WRITE BUS MASTER, OR SYNCHRONOUS READ/WRITE BUS MASTER
TIMING SPECIFICATIONS FOR ADDR23–0, RD, WR, MS3-0 AND ACK ALSO APPLY HERE.
t
DGWRL
t
DDGL
t
DGRDL
t
DADGH
t
SDATDGL
t
DGWRH
t
DRDGH
t
WDGL
t
DATDRH
t
VDATDGH
t
DGWRR
t
DGRDR
t
WDGH
t
DGWR
t
DDGHA
t
DATRDGH
t
HDATIDG
Figure 28. DMA Handshake
–38– REV. A
Page 39

ADSP-21161N
SDRAM Interface – Bus Master
Use these specifications for ADSP-21161N bus master accesses
of SDRAM:
Table 25. SDRAM Interface – Bus Master
Parameter Min Max Unit
Timing Requirements
t
SDSDK
t
HDSDK
Switching Characteristics
t
DSDK1
t
SDK
t
SDKH
t
SDKL
t
DCADSDK
t
HCADSDK
t
SDTRSDK
t
SDENSDK
t
SDCTR
t
SDCEN
t
SDSDKTR
t
SDSDKEN
t
SDATR
t
SDAEN
1
For the second, third, and fourth rising edges of SDCLK delay from CLKIN, add appropriate number of SDCLK period to the t
depending upon the SDCKR value and the core clock to CLKIN ratio.
2
Subtract t
3
Command = SDCKE, MSx, DQM, RAS, CAS, SDA10, and SDWE
4
SDRAM Controller adds one SDRAM CLK three-stated cycle delay on a read, followed by a write.
5
Valid when DSP transitions to SDRAM master from SDRAM slave.
CCLK
Data Setup Before SDCLK 2.0 ns
Data Hold After SDCLK 2.3 ns
First SDCLK Rise Delay After CLKIN1, 20.75t
SDCLK Period t
CCLK
+ 1.5 0.75t
CCLK
2 × t
+ 8.0 ns
CCLK
CCLK
SDCLK Width High 4 ns
SDCLK Width Low 4 ns
Command, Address, Data, Delay After
SDCLK
Command, Address, Data, Hold After
SDCLK
Data Three-State After SDCLK
Data Enable After SDCLK
3
3
4
5
2.0 ns
0.75t
Command Three-State After CLKIN 0.5t
CCLK
–1.5 0.5t
CCLK
0.25t
0.5t
+2.5 ns
CCLK
+ 2.0 ns
CCLK
+ 6.0 ns
CCLK
Command Enable After CLKIN 2 5 ns
SDCLK Three-State After CLKIN 0 3 ns
SDCLK Enable After CLKIN 1 4 ns
Address Three-State After CLKIN −0.25 t
−5 −0.25t
CCLK
ns
CCLK
Address Enable After CLKIN −0.4 +7.2 ns
DSDK1
from result if value is greater than or equal to t
CCLK
.
and t
ns
ns
SSDKC1
values,
SDRAM Interface – Bus Slave
These timing requirements allow a bus slave to sample the bus
master’s SDRAM command and detect when a refresh occurs:
Table 26. SDRAM Interface – Bus Slave
Parameter Min Max Unit
Timing Requirements
t
SSDKC1
t
SCSDK
t
HCSDK
1
For the second, third, and fourth rising edges of SDCLK delay from CLKOUT, add appropriate number of SDCLK period to the t
values, depending upon the SDCKR value and the Core clock to CLKOUT ratio.
2
SDCKR = 1 for SDCLK equal to core clock frequency and SDCKR = 2 for SDCLK equal to half core clock frequency.
3
Subtract t
4
Command = SDCKE, RAS, CAS, and SDWE.
CCLK
First SDCLK Rise
after CLKOUT
Command Setup
before SDCLK
Command Hold
after SDCLK
from result if value is greater than or equal to t
1, 2, 3
4
4
SDCK t
CCLK
−0.5t
− 0.5 SDCKR t
CCLK
CCLK
−0.25t
+ 2.0 ns
CCLK
2 ns
1 ns
and t
CCLK
DSDK1
.
SSDKC1
–39–REV. A
Page 40

ADSP-21161N
CLKIN
t
DSDK1
t
SDK
t
SDKH
SDCLK
DATA(IN)
DATA(OUT)
CMND1ADDR
(OUT)
CMND1(OUT)
ADDR
(OUT)
CLKIN
SDCLK
t
SDSDK
t
SDCEN
t
SDAEN
t
SDSDKEN
t
DCADSDK
t
SDENSDK
t
DCADSDK
t
HDSDK
t
HCADSDK
t
SDKL
t
HCADSDK
t
SDTRSDK
t
SDATR
t
SDSDKTR
t
SDCTR
CLKOUT
t
SSDKC1
SDCLK (IN)
t
SCSDK
CMND2(IN)
1
COMMAND = SDCKE, MSx, RAS, CAS, SDWE, DQM, AND SDA10.
2
COMMAND = SDCKE, RAS, CAS, AND SD WE.
Figure 29. SDRAM Interface
t
HCSDK
–40– REV. A
Page 41

ADSP-21161N
Link Ports
Calculation of link receiver data setup and hold relative to link
clock is required to determine the maximum allowable skew that
can be introduced in the transmission path between LDATA and
LCLK. Setup skew is the maximum delay that can be introduced
in LDATA relative to LCLK, (setup skew = t
). Hold skew is the maximum delay that can be introduced
– t
SLDCL
in LCLK relative to LDATA, (hold skew = t
). Calculations made directly from speed specifications
– t
HLDCL
LCLKTWL
LCLKTWH
min– t
min – t
DLDCH
HLDCH
will result in unrealistically small skew times because they include
multiple tester guardbands. The setup and hold skew times
shown below are calculated to include only one tester guardband.
ADSP-21161N Setup Skew = 1.5 ns max
ADSP-21161N Hold Skew = 1.5 ns max
Note that there is a two-cycle effect latency between the link port
enable instruction and the DSP enabling the link port.
Table 27. Link Ports – Receive
Parameter Min Max Unit
Timing Requirements
t
SLDCL
t
HLDCL
t
LCLKIW
t
LCLKRWL
t
LCLKRWH
Data Setup Before LCLK Low 1 ns
Data Hold After LCLK Low 3.5 ns
LCLK Period t
LCLK
ns
LCLK Width Low 4.0 ns
LCLK Width High 4.0 ns
Switching Characteristics
t
DLALC
1
LACK goes low with t
LACK Low Delay After LCLK High
relative to rise of LCLK after first nibble, but does not go low if the receiver's link buffer is not about to fill.
DLALC
RECEIVE
t
LCLK RWH
LCLK
1
t
LCLKIW
812ns
t
LCLKRWL
LDAT7-0
LACK (OUT)
t
SLDCL
IN
t
HLDCL
Figure 30. Link Ports—Receive
t
DLALC
–41–REV. A
Page 42

ADSP-21161N
Table 28. Link Ports – Transmit
Parameter Min Max Unit
Timing Requirements
t
SLACH
t
HLACH
Switching Characteristics
t
DLDCH
t
HLDCH
t
LCLKTWL
t
LCLKTWH
t
DLACLK
LACK Setup Before LCLK High 8 ns
LACK Hold After LCLK High –2 ns
Data Delay After LCLK High 3 ns
Data Hold After LCLK High 0 ns
LCLK Width Low 0.5t
LCLK Width High 0.5t
LCLK Low Delay After LACK High 0.5t
–1.0 0.5t
LCLK
–1.0 0.5t
LCLK
+3 3t
LCLK
+1.0 ns
LCLK
+1.0 ns
LCLK
+11 ns
LCLK
TRANSMIT
LCLK
LDAT7-0
LACK (IN)
t
HLDCH
t
LCLKTWHtLCLKTWL
t
DLDCH
OUT
THE
t
REQUIREMENT APPLIES TO THE RISING EDGE OF LCLK ONLY FOR THE FIRST NIBBLE TRANSMITTED.
SLACH
LAST NIBBLE/BYTE
TRANSMITTED
FIRST NIBBLE/BYTE
t
SLACH
TRANSMITTED
t
HLACH
Figure 31. Link Ports—Transmit
LCLK INACTIVE
(HIGH)
t
DLACLK
–42– REV. A
Page 43

ADSP-21161N
Serial Ports
To determine whether communication is possible between two
devices at clock speed n, the following specifications must be
confirmed: 1) frame sync delay and frame sync setup and hold,
2) data delay and data setup and hold, and 3) SCLK width.
Table 29. Serial Ports – External Clock
Parameter Min Max Unit
Timing Requirements
t
SFSE
t
HFSE
t
SDRE
t
HDRE
t
SCLKW
t
SCLK
1
Referenced to sample edge.
Table 30. Serial Ports – Internal Clock
Parameter Min Max Unit
Timing Requirements
t
SFSI
t
HFSI
t
SDRI
t
HDRI
1
Referenced to sample edge.
Transmit/Receive FS Setup Before Transmit/Receive
1
SCLK
Transmit/Receive FS Hold After Transmit/Receive
1
SCLK
Receive Data Setup Before Receive SCLK
Receive Data Hold After Receive SCLK
1
1
3.5 ns
4ns
1.5 ns
4ns
SCLKx Width 7 ns
SCLKx Period 2t
CCLK
ns
FS Setup Time Before SCLK (Transmit/Receive Mode)18ns
FS Hold After SCLK (Transmit/Receive Mode)
Receive Data Setup Before SCLK
Receive Data Hold After SCLK
1
1
1
0.5t
+1 ns
CCLK
4ns
3ns
Table 31. Serial Ports – External Clock
Parameter Min Max Unit
Switching Characteristics
t
DFSE
t
HOFSE
t
DDTE
t
HDTE
1
Referenced to drive edge.
2
SCLK/FS Configured as a transmit clock/frame sync with the DDIR bit = 1 in SPCTLx register.
3
SCLK/FS Configured as a receive clock/frame sync with the DDIR bit = 0 in SPCTLx register.
FS Delay After SCLK (Internally Generated FS)
FS Hold After SCLK (Internally Generated FS)
Transmit Data Delay After SCLK
Transmit Data Hold After SCLK
1, 2
16 ns
1, 2
0ns
1, 2, 3
1, 2 , 3
13 ns
3ns
Table 32. Serial Ports – Internal Clock
Parameter Min Max Unit
Switching Characteristics
t
DFSI
t
HOFSI
t
DDTI
t
HDTI
t
SCLKIW
1
Referenced to drive edge.
2
SCLK/FS Configured as a transmit clock/frame sync with the DDIR bit = 1 in SPCTLx register.
3
SCLK/FS Configured as a receive clock/frame sync with the DDIR bit = 0 in SPCTLx register.
FS Delay After SCLK (Internally Generated FS)
FS Hold After SCLK (Internally Generated FS)
Transmit Data Delay After SCLK
Transmit Data Hold After SCLK
SCLK Width
2
1, 2
1, 2
1, 2, 3
1, 2, 3
4.5 ns
–1.5 ns
7.5 ns
0ns
0.5t
–2.5 0.5t
SCLK
+2 ns
SCLK
–43–REV. A
Page 44

ADSP-21161N
Table 33. Serial Ports – Enable and Three-State
Parameter Min Max Unit
Switching Characteristics
t
DDTEN
t
DDTTE
t
DDTIN
t
DDTTI
1
Referenced to drive edge.
2
SCLK/FS Configured as a transmit clock/frame sync with the DDIR bit = 1 in SPCTLx register.
Data Enable from External Transmit SCLK
Data Disable from External Transmit SCLK
Data Enable from Internal Transmit SCLK
Data Disable from Internal Transmit SCLK
Table 34. Serial Ports – External Late Frame Sync
Parameter Min Max Unit
Switching Characteristics
t
DDTLFSE
Data Delay from Late External Transmit FS or External
Receive FS with MCE = 1, MFD = 0
t
DDTENFS
1
MCE = 1, Transmit FS enable and Transmit FS valid follow t
Data Enable from Late FS or MCE = 1, MFD = 0
DDTLFSE
1, 2
1
1
1
1
1
and t
DDTENFS
4ns
10 ns
0ns
3ns
13 ns
0.5 ns
.
–44– REV. A
Page 45

ADSP-21161N
DATA RECEIVE— INTERNAL CLOCK DATA RECEIVE— EXTERNAL CLOCK
DRIVE EDGE SAMPLE EDGE
t
SCLKIW
DRIVE EDGE SAMPLE EDGE
t
SCLKW
SCLK
FS
DXA/DXB
SCLK
FS
DXA/DXB
SCLK
t
t
DFSI
DFSI
t
HOFSI
NOTE: EITHER THE RISING EDGE OR FALLING EDGE OF SCLK (EXTERNAL), SCLK (INTERNAL) CAN BE USED AS THE ACTIVE SAMPLING EDGE.
DATA TRANSMIT — INTERNAL CLOCK
DRIVE EDGE SAMPLE EDGE
t
HOFSI
t
HDTI
NOTE: EITHER THE RISING EDGE OR FALLING EDGE OF SCLK (EXTERNAL), SCLK (INTERNAL) CAN BE USED AS THE ACTIVE SAMPLING EDGE.
t
SCLKIW
t
DDTI
t
t
t
SFSI
SDRI
SFSI
t
t
HFSI
t
HDRI
HFSI
FS
D
A/DXB
X
SCLK
FS
DXA/DXB
t
HOFSE
DATA TRANSMIT — EXTERNAL CLOCK
DRIVE EDGE SAMPLE EDGE
t
HOFSE
t
HDTE
t
DFSE
t
DFSE
t
SCLKW
t
DDTE
t
SFSE
t
t
SDRE
SFSE
t
HFSE
t
HDRE
t
HFSE
SCLK (EXT)
DXA/DXB
SCLK (INT)
D
A/DXB
X
DRIVE EDGE DRIVE EDGE
SCLK
t
DDTEN
DRIVE EDGE
t
DDTIN
SCLK
t
DDTTE
DRIVE EDGE
Figure 32. Serial Ports
t
DDTTI
–45–REV. A
Page 46

ADSP-21161N
X
SCLK
TERNAL RECEIVE FSWITH MCE = 1, MFD = 0
E
DRIVE SAMPLE DRIVE
t
SFSE/I
FS
t
t
DDTE/I
DDTE/I
DXA/DXB
SCLK
FS
D
A/DXB
X
t
DDTENFS
t
DDTLFSE
LATE EXTERNAL TRANSMIT FS
DRIVE SAMPLE DRIVE
t
SFSE/I
t
DDTENFS
t
DDTLFSE
t
HDTE/I
1ST BIT 2ND BIT
t
HDTE/I
1ST BIT 2ND BIT
Figure 33. Serial Ports – External Late Frame Sync
t
t
HOFSE/I
HOFSE/I
–46– REV. A
Page 47

SPI Interface Specifications
ADSP-21161N
Table 35. SPI Interface Protocol
– Master Switching and Timing
Parameter Min Max Unit
Timing Requirements
t
SSPIDM
Data Input Valid to SPICLK Edge (Data Input Set-up
0.5t
+10 ns
CCLK
Time)
t
HSPIDM
t
SPITDM
SPICLK Last Sampling Edge to Data Input Not Valid 0.5t
Sequential Transfer Delay 2t
+1 ns
CCLK
CCLK
ns
Switching Characteristics
t
SPICLKM
t
SPICHM
t
SPICLM
t
DDSPIDM
t
HDSPIDM
t
SDSCIM_0
Serial Clock Cycle 8 t
Serial Clock High Period 4t
Serial Clock Low Period 4t
CCLK
–4 ns
CCLK
–4 ns
CCLK
SPICLK Edge to Data Out Valid (Data Out Delay Time) 3 ns
SPICLK Edge to Data Out Not Valid (Data Out Hold Time) 0 ns
FLAG3–0 (SPI Device Select) Low to First SPICLK Edge
5t
CCLK
ns
ns
for CPHASE = 0
t
SDSCIM_1
FLAG3–0 (SPI Device Select) Low to First SPICLK Edge
3t
CCLK
ns
for CPHASE = 1
t
HDSM
Last SPICLK Edge to FLAG3–0 High t
–3 ns
CCLK
Table 36. SPI Interface Protocol – Slave Switching and Timing
Parameter Min Max Unit
Timing Requirements
t
SPICLKS
t
SPICHS
t
SPICLS
t
SDSCO
t
HDS
Serial Clock Cycle 8t
Serial Clock High Period 4t
Serial Clock Low Period 4t
CCLK
CCLK
CCLK
SPIDS Assertion to First SPICLK Edge
CPHASE = 0 3.5t
CPHASE = 1 1.5t
Last SPICLK Edge to SPIDS Not Asserted
–4 ns
–4 ns
+8 ns
CCLK
+8 ns
CCLK
ns
CPHASE = 0 0 ns
t
SSPIDS
t
HSPIDS
t
SDPPW
Data Input Valid to SPICLK Edge (Data Input Set-up Time) 0 ns
SPICLK Last Sampling Edge to Data Input Not Valid t
SPIDS Deassertion Pulsewidth (CPHASE = 0) t
+1 ns
CCLK
CCLK
ns
Switching Characteristics
t
DSOE
t
DSDHI
t
DDSPIDS
t
HDSPIDS
t
HDLSBS
SPIDS Assertion to Data Out Active 2 0.5t
SPIDS Deassertion to Data High Impedance 1.5 0.5t
SPICLK Edge to Data Out Valid (Data Out Delay Time) 0.75t
1
SPICLK Edge to Data Out Not Valid (Data Out Hold Time) 0.25t
1
SPICLK Edge to Last Bit Out Not Valid
(Data Out Hold Time) for LSB
2
t
DSOV
1
When CPHASE = 0 and baud rate is greater than 1, t
2
Applies to the first deassertion of SPIDS only.
SPIDS Assertion to Data Out Valid (CPHASE = 0) 1.5t
affects the length of the last bit transmitted.
HDLSBS
–47–REV. A
0.5t
CCLK
CCLK
CCLK
+3 ns
CCLK
+4.5t
SPICLK
CCLK
CCLK
+5.5 ns
+5.5 ns
+3 ns
ns
+7 ns
Page 48

ADSP-21161N
FLAG3-0
(OUTPUT)
SPICLK
(CP = 0)
(OUTPUT)
SPICLK
(CP = 1)
(OUTPUT)
t
SDSCIM
t
SPICHMtSPICLM
t
SPICLM
t
SPICHM
t
DDSPIDM
t
HDSPIDM
t
SPICLKM
t
HDSM
t
SPITDM
MOSI
(OUTPUT)
CPHASE = 1
MISO
(INPUT)
MOSI
(OUTPUT)
CPHASE = 0
MISO
(INPUT)
t
SSPIDM
LSB
VALID
t
HDSPIDM
LSBMSB
LSB
VALID
t
SSPIDM
t
SSPIDM
MSB
VALID
MSB
VALID
t
HSPIDM
t
HSSPIDM
t
DDSPIDM
Figure 34. SPI Interface Protocol – Master Switching and Timing
LSBMSB
t
HSPIDM
–48– REV. A
Page 49

SPIDS
(INPUT)
SPICLK
(CP = 0)
(INPUT)
SPICLK
(CP = 1)
(INPUT)
MISO
(OUTPUT)
CPHASE = 1
MOSI
(INPUT)
MISO
(OUTPUT)
CPHASE = 0
MOSI
(INPUT)
t
DSOE
t
DSOV
t
DSOE
t
SDSCO
t
SSPIDS
t
SPICHStSPICLS
t
SPICLS
t
DDSPIDS
VALID
MSB
MSB VALID
MSB
t
SPICHS
t
HDSPIDS
t
HSPIDS
t
DDSPIDS
t
SSPIDS
t
DDSPIDS
t
HDLSBS
VALID
t
SPICLKS
t
SSPIDS
LSB
LSB
LSB
VALID
t
t
t
HSPIDS
HDS
DSDHI
LSBMSB
ADSP-21161N
t
SDPPW
t
HSPIDS
t
DSDHI
Figure 35. SPI Interface Protocol – Slave Switching and Timing
–49–REV. A
Page 50

ADSP-21161N
JTAG Test Access Port and Emulation
Table 37. JTAG Test Access Port and Emulation
Parameter Min Max Unit
Timing Requirements
t
TCK
t
STAP
t
HTAP
t
SSYS
t
HSYS
t
TRSTW
Switching Characteristics
t
DTDO
t
DSYS
1
System Inputs = DATA47–16, ADDR23–0, RD, WR, ACK, RPBA, SPIDS, EBOOT, LBOOT, DMAR2–1, CLK_CFG1–0, CLKDBL, CS, HBR,
SBTS, ID2–0, IRQ2–0, RESET, BMS, MISO, MOSI, SPICLK, DxA, DxB, SCLKx, FSx, LxDAT7–0, LxCLK, LxACK, SDWE, HBG, RAS, CAS,
SDCLK0, SDCKE, BRST, BR6–1, PA, MS3–0, FLAG11–0.
2
System Outputs = BMS, MISO, MOSI, SPICLK, DxA, DxB, SCLKx, FSx, LxDAT7–0, LxCLK, LxACK, DATA47–16, SDWE, ACK, HBG, RAS,
CAS, SDCLK1–0, SDCKE, BRST, RD, WR, BR6–1, PA, MS3–0, ADDR23–0, FLAG11–0, DMAG2–1, DQM, REDY, CLKOUT, SDA10,
TIMEXP, EMU, BMSTR, RSTOUT.
TCK Period t
CK
ns
TDI, TMS Setup Before TCK High 5 ns
TDI, TMS Hold After TCK High 6 ns
System Inputs Setup Before TCK Low
1
2ns
System Inputs Hold After TCK Low1 15 ns
TRST Pulsewidth 4t
CK
ns
TDO Delay from TCK Low 13 ns
t
TCK
t
STAP
t
DSYS
2
t
HTAP
t
SSYS
30 ns
t
HSYS
System Outputs Delay After TCK Low
TCK
TMS
TDI
t
DTDO
TDO
SYSTEM
INPUTS
SYSTEM
OUTPUTS
Figure 36. JTAG Test Access Port and Emulation
–50– REV. A
Page 51

Output Drive Currents
Figure 37 shows typical I-V characteristics for the output drivers
of the ADSP-21161N. The curves represent the current drive
capability of the output drivers as a function of output voltage.
80
60
50
40
30
20
A
m
–
10
T
N
0
E
R
R
–10
U
C
)
–20
T
X
E
D
–30
D
V
(
–40
D
A
–50
O
L
–60
–80
03.50.5 1.0 1.5 2.0 2.5 3.0
V
DDEXT
V
= 3.47V, –40°C
DDEXT
= 3.47V, –40°C
V
=3.3V,+25°C
DDEXT
SWEEP (V
V
DDEXT
DDEXT
V
=3.3V,+25°C
DDEXT
= 3.13V, +105°C
) VOLTAGE– V
V
DDEXT
= 3.13V, +105°C
ADSP-21161N
REFERENCE
SIGNAL
t
t
DIS
V
OH
(MEASURED)
V
OL
(MEASURED)
OUTPUT STOPS DRIVING
Figure 38. Output Enable/Disable
and the input threshold for the device requiring the hold time. A
∆
typical
line), and I
V will be 0.4 V. CL is the total bus capacitance (per data
is the total leakage or three-state current (per data
L
line). The hold time will be t
(i.e., t
for the write cycle).
DATRWH
MEASURED
V
(MEASURED) – V
OH
VOL(MEASURED) + V
t
DECAY
HIGH IMPEDANCE STATE.
TEST CONDITIONS CAUSE THIS
VOLTAGE TO BE APPROXIMATELY 1.5V.
plus the minimum disable time
DECAY
t
ENA
2.0V
1.0V
OUTPUT STARTS DRIVING
V
OH
(MEASURED)
V
OL
(MEASURED)
Figure 37. Typical Drive Currents
Test Conditions
The DSP is tested for output enable, disable, and hold time.
Output Enable Time
Output pins are considered to be enabled when they have made
a transition from a high impedance state to the point when they
start driving. The output enable time t
is the interval from the
ENA
point when a reference signal reaches a high or low voltage level
to the point when the output has reached a specified high or low
trip point, as shown in the Output Enable/Disable diagram
(Figure 38). If multiple pins (such as the data bus) are enabled,
the measurement value is that of the first pin to start driving.
Output Disable Time
Output pins are considered to be disabled when they stop driving,
go into a high impedance state, and start to decay from their
output high or low voltage. The time for the voltage on the bus
∆
to decay by
load current, I
V is dependent on the capacitive load, CL and the
. This decay time can be approximated by the
L
following equation:
CL∆V()
-------------------- -
t
DECAY
The output disable time t
and t
as shown in Figure 38. The time t
DECAY
=
I
L
is the difference between t
DIS
MEASURED
MEASURED
is the
interval from when the reference signal switches to when the
∆
output voltage decays
output low voltage. t
and with
∆
V equal to 0.5 V.
V from the measured output high or
is calculated with test loads CL and IL,
DECAY
TO
OUTPUT
PIN
30pF
50
1.5V
Figure 39. 31Equivalent Device Loading for AC Measurements (Includes All Fixtures)
INPUT
1.5V 1.5V
OR
OUTPUT
Figure 40. Voltage Reference Levels for AC Measurements (Except Output Enable/Disable)
Example System Hold Time Calculation
To determine the data output hold time in a particular system,
first calculate t
using the equation given above. Choose ∆V
DECAY
to be the difference between the ADSP-21161N’s output voltage
–51–REV. A
Page 52

ADSP-21161N
5
2
s
n
–
20
D
L
O
H
R
15
O
Y
A
L
E
10
D
T
U
P
T
U
O
NOMINAL
5
–5
021030 60 90 120 150 180
Y = 0.0835X - 2.42
LOAD CAPACITANCE – pF
Figure 41. Typical Output Delay or Hold vs. Load Capacitance (at Max Case Temperature)
16.0
14.0
)
%
s
12.0
0
n
8
–
O
S
T
E
10.0
%
M
I
0
T
2
,
L
V
8.0
L
7
A
7
.
F
2
D
6.0
O
N
T
A
V
E
4
S
9
I
4.0
6
.
R
0
(
2.0
0
0 20020 40 60 80 100 120 140 160 180
Y = 0.0743X + 1.5613
RISE TIME
FALL TIME
Y = 0.0414X + 2.0128
LOAD CAPACITANCE – pF
Figure 42. Typical Output Rise/Fall Time (20% – 80%,
= Max)
V
DDEXT
Capacitive Loading
Output delays and holds are based on standard capacitive loads:
30 pF on all pins (see Figure 39 on Page 51). Figure 41 shows
graphically how output delays and holds vary with load capacitance. (Note that this graph or derating does not apply to output
disable delays; see Output Disable Time on Page 51.) The graphs
of Figure 41, Figure 42, and Figure 43 may not be linear outside
the ranges shown for Typical Output Delay vs. Load Capacitance
and Typical Output Rise Time (20% – 80%, V = Min) vs. Load
Capacitance.
Environmental Conditions
The thermal characteristics in which the DSP is operating
influence performance.
Thermal Characteristics
The ADSP-21161N is packaged in a 225-ball Mini Ball Grid
Array (MBGA). The ADSP-21161N is specified for a case temperature (
) . To en su re th at th e
CASE
T
data sheet specification
CASE
T
is not exceeded, a heatsink and/or an air flow source may be used.
Use the center block of ground pins (MBGA balls: F6-10,
G6-10, H6-10, J6-10, K6-10) to provide thermal pathways to the
printed circuit board’s ground plane. A heatsink should be
attached to the ground plane (as close as possible to the thermal
pathways) with a thermal adhesive.
T
CASETAMB
PD θCA×()+=
where:
• T
= Case temperature (measured on top surface
CASE
of package)
• PD = Power dissipation in W (this value depends upon
the specific application; a method for calculating PD is
shown under Power Dissipation).
•θ
= Value from Table 38.
CA
•θ
= 8.0°C/W
JB
16.0
Airflow (Linear Ft./Min.) 0 200 400
Table 38. Airflow Over Package Versus θCA
14.0
12.0
)
%
s
0
n
8
–
10.0
O
S
T
E
%
M
I
0
8.0
T
2
,
L
V
L
7
A
7
.
F
6.0
2
D
O
N
T
A
V
4.0
E
4
S
9
I
6
.
R
0
(
2.0
0
020020 40 60 80 100 120 14 0 160 180
Y = 0.0773X + 1.4399
RISE TIME
FALL TIME
Y = 0.0417X + 1.8674
LOAD CAPACITANCE – pF
θ
(°C/W)
CA
1
θ
= 6.8°C/W.
JC
1
17.9 15.2 13.7
Figure 43. Typical Output Rise/Fall Time (20% – 80%,
V
= Min)
DDEXT
–52– REV. A
Page 53

225-BALL METRIC MBGA PIN CONFIGURATIONS
Table 39. 225-Ball Metric MBGA Pin Assignments
ADSP-21161N
Pin Name
PBGA
Pin Number Pin Name
PBGA
Pin Number Pin Name
PBGA
Pin Number Pin Name
PBGA
Pin Number
NC A01 TRST B01 TMS C01 TDO D01
BMSTR A02 TDI B02 EMU C02 TCK D02
BMS A03 RPBA B03 GND C03 FLAG11 D03
SPIDS A04 MOSI B04 SPICLK C04 MISO D04
EBOOT A05 FS0 B05 D0B C05 SCLK0 D05
LBOOT A06 SCLK1 B06 D1A C06 D1B D06
SCLK2 A07 D2B B07 D2A C07 FS1 D07
D3B A08 D3A B08 FS2 C08 V
DDINT
D08
L0DAT4 A09 L0DAT7 B09 FS3 C09 SCLK3 D09
L0ACK A10 L0CLK B10 L0DAT6 C10 L0DAT5 D10
L0DAT2 A11 L0DAT1 B11 L1DAT7 C11 L0DAT3 D11
L1DAT6 A12 L1DAT4 B12 L1DAT3 C12 L1DAT5 D12
L1CLK A13 L1ACK B13 L1DAT1 C13 DATA42 D13
L1DAT2 A14 L1DAT0 B14 DATA45 C14 DATA46 D14
NC A15 RSTOUT
1
B15 DATA47 C15 DATA44 D15
FLAG10 E01 FLAG5 F01 FLAG1 G01 FLAG0 H01
RESET E02 FLAG7 F02 FLAG2 G02 IRQ0 H02
FLAG8 E03 FLAG9 F03 FLAG4 G03 V
DDINT
H03
D0A E04 FLAG6 F04 FLAG3 G04 IRQ1 H04
V
DDEXT
V
DDINT
V
DDEXT
V
DDINT
V
DDEXT
V
DDINT
V
DDEXT
E05 V
DDINT
F05 V
DDEXT
G05 V
DDINT
H05
E06 GND F06 GND G06 GND H06
E07 GND F07 GND G07 GND H07
E08 GND F08 GND G08 GND H08
E09 GND F09 GND G09 GND H09
E10 GND F10 GND G10 GND H10
E11 V
DDINT
F11 V
DDEXT
G11 V
DDINT
H11
L0DAT0 E12 DATA37 F12 DATA34 G12 DATA29 H12
DATA39 E13 DATA40 F13 DATA35 G13 DATA28 H13
DATA43 E14 DATA38 F14 DATA33 G14 DATA30 H14
DATA41 E15 DATA36 F15 DATA32 G15 DATA31 H15
IRQ2 J01 TIMEXP K01 ADDR19 L01 ADDR16 M01
ID1 J02 ADDR22 K02 ADDR17 L02 ADDR12 M02
ID2 J03 ADDR20 K03 ADDR21 L03 ADDR18 M03
ID0 J04 ADDR23 K04 ADDR2 L04 ADDR6 M04
V
DDEXT
GND J06 GND K06 V
GND J07 GND K07 V
GND J08 GND K08 V
GND J09 GND K09 V
GND J10 GND K10 V
V
DDEXT
J05 V
J11 V
DDINT
DDINT
K05 V
K11 V
DDEXT
DDINT
DDEXT
DDINT
DDEXT
DDINT
DDEXT
L05 ADDR0 M05
L06 MS1 M06
L07 BR6 M07
L08 V
DDEXT
M08
L09 WR M09
L10 SDA10 M10
L11
RAS M11
DATA26 J12 DATA22 K12 CAS L12 ACK M12
DATA24 J13 DATA19 K13 DATA20 L13 DATA17 M13
DATA25 J14 DATA21 K14
DATA16 L14
DMAG2 M14
DATA27 J15 DATA23 K15 DATA18 L15 DMAG1 M15
–53–REV. A
Page 54

ADSP-21161N
Table 39. 225-Ball Metric MBGA Pin Assignments (continued)
Pin Name
PBGA
Pin Number Pin Name
PBGA
Pin Number Pin Name
PBGA
Pin Number Pin Name
ADDR14 N01 ADDR13 P01 NC R01
ADDR15 N02
ADDR9 P02
ADDR11 R02
ADDR10 N03 ADDR8 P03 ADDR7 R03
ADDR5 N04 ADDR4 P04 ADDR3 R04
ADDR1 N05
MS2 P05 MS3 R05
MS0 N06 SBTS P06 PA R06
BR5 N07 BR4 P07 BR3 R07
BR2 N08 BR1 P08 RD R08
BRST N09 SDCLK1 P09 CLKOUT R09
SDCKE N10 SDCLK0 P10 HBR R10
CS N11 REDY P11 HBG R11
CLK_CFG1 N12 CLKIN P12 CLKDBL R12
CLK_CFG0 N13 DQM P13 XTAL R13
AVD D N1 4 AG ND P1 4 SDWE R14
DMAR1 N15 DMAR2 P15 NC R15
1
RSTOUT exists only for silicon revisions 1.2 and greater. Leave this pin unconnected for silicon revisions 0.3, 1.0, and 1.1.
2
4
6
8
10
1214
1
3
5
7
9
15 13
11
PBGA
Pin Number
KEY:
VDDINT
VDDEXT
*
USE THE CENTER BLOCK OF GROUND PINS TO PROVIDE THERMAL
PATHWAYS TO YOUR PRINTED CIRCUIT BOARD GROUND PLANE
GND
AGND
*
AVDD
SIGNAL
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
Figure 44. 225-Ball Metric MBGA Pin Assignments (Bottom View, Summary)
–54– REV. A
Page 55

ADSP-21161N
0
0
OUTLINE DIMENSIONS
The ADSP-21161N comes in a 17 mm × 17 mm, 225-ball MBGA package with 15 rows of balls.
225-Ball Mini-BGA (CA-225)
17.
BSC
A1 BALL
INDICATOR
17.00
BSC
14.00
BSC
SQ
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
1.00
BSC
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
1.85 MAX
(SEE NOTE 1)
NOTES:
1. DIMENSIONS ARE IN MILLIMETERS AND COMPLY WITH JEDEC STANDARD MO-192-AAF2, EXCEPT FOR HEIGHT
2. ACTUAL POSITION OF THE BALL GRID IS WITHIN 0.25 OF ITS IDEAL POSITION RELATIVE TO THE PACKAGE EDGES.
3. ACTUAL POSITION OF EACH BALL IS WITHIN 0.10 OF ITS IDEAL POSITION RELATIVE TO THE BALL GRID.
TOP VIEW
DETAIL A
AND THICKNESS DIMENSIONS NOTED.
1.00 BSC (BALL PITCH)
SEATING
PLANE
BOTTOM VIEW
0.70
0.60
0.50
(BALL DIAMETER)
DETAIL A
0.30 MIN
0.20 MAX
1.31 MAX
(SEE NOTE 1)
ORDERING GUIDE
Part Number
1
Case Temperature
Range Instruction Rate
On-Chip
SRAM Operating Voltage
ADSP-21161NKCA-100 0°C to +85°C 100 MHz 1 M bit 1.8 int/3.3 ext V
ADSP-21161NCCA-100 –40°C to +105°C 100 MHz 1 M bit 1.8 int/3.3 ext V
1
These parts are packaged in a 225-ball Mini-Ball Grid Array (MBGA).
–55–REV. A
Page 56

ADSP-21161N
Revision History
Location Page
5/03—Changed from Rev. 0 to Rev. A
Changes to:
KEY FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2
Table 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3
SIMD Computational Engine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
Figure 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
Off-Chip Memory and Peripherals Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
DMA Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
Host Processor Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Phase-Locked Loop and Crystal Double Enable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Design-for-Emulation Circuit Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
Table 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
Table 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
TIMING SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
Table 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
Figure 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
Power Dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
Table 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
Figure 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
Table 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
Figure 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
Clock Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
Table 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
Figure 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
Table 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
Figure 17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
Table 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Figure 18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Table 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Figure 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Memory Read
Table 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Figure 20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Memory Write
Table 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Figure 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Synchronous Read/Write
Table 17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Figure 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Host BusRequest . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Table 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Figure 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Table 20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
Figure 25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
Asynchronous Read/Write
Table 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Table 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Three-State Timing
Figure 27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
Table 23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
Table 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Figure 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
– Bus Master . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
– Bus Master . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
– Bus Master . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
– Host to ADSP-21161N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
– Bus Master, Bus Slave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
–56– REV. A
Page 57

ADSP-21161N
Location Page
Changes to:
Table 25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Table 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Table 29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Figure 35 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Figure 37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Figure 39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
OUTLINE DIMENSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Changes to formatting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Global
–57–REV. A
Page 58

–58–
Page 59

–59–
Page 60

C02935–0–5/03(A)
–60–
 Loading...
Loading...