

Page 1
a
DSP Microcomputers
ADSP-21msp58/59
FEATURES
38 ns Instruction Cycle Time (26 MIPS) from 13.00 MHz
Crystal
ADSP-2100 Family Code and Function Compatible with
New Instruction Set Enhanced for Bit Manipulation
Instructions, Multiplication Instructions, Biased
Rounding, and Global Interrupt Masking
2K 3 24 Words of On-Chip Program Memory RAM
2K 3 16 Words of On-Chip Data Memory RAM
4K 3 24 Words of On-Chip Program Memory ROM
(ADSP-21msp59 Only)
8-Bit Parallel Host Interface Port
Analog Interface Provides:
16-Bit Sigma-Delta ADC and DAC
Programmable Gain Stages
On-Chip Anti-Aliasing & Anti-Imaging Filters
8 kHz Sampling Frequency
65 dB ADC, SNR and THD
72 dB DAC, SNR and THD
425 mW Typical Power Dissipation @ 5.0 V @ 38 ns
<1 mW Powerdown Mode with 100 Cycle Recovery
Dual Purpose Program Memory for Both Instruction
and Data Storage
Independent ALU, Multiplier/Accumulator, and Barrel
Shifter Computational Units
Two Independent Data Address Generators
Powerful Program Sequencer Provides:
Zero Overhead Looping
Conditional Instruction Execution
Two Double-Buffered Serial Ports with Companding
Hardware, One Serial Port (SPORT0) has Automatic
Data Buffering
Programmable 16-Bit Interval Timer with Prescaler
Programmable Wait State Generation
Automatic Booting of Internal Program Memory from
Byte-Wide External Memory, e.g., EPROM, or
Through Host Interface Port
Stand-Alone ROM Execution (ADSP-21msp59 Only)
Single-Cycle Instruction Execution
Single-Cycle Context Switch
Multifunction Instructions
Three Edge- or Level-Sensitive External Interrupts
Low Power Dissipation in Standby Mode
100-Lead TQFP
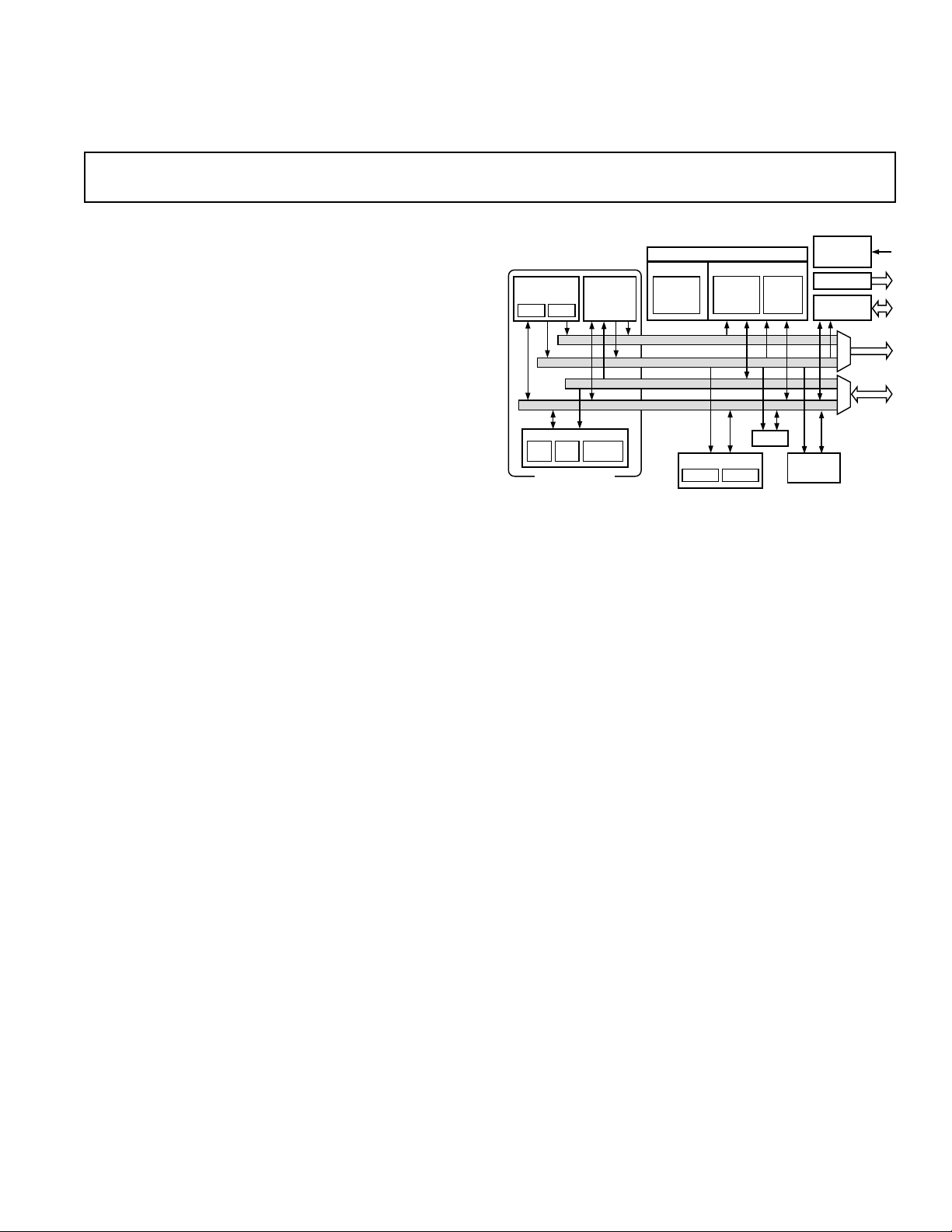
FUNCTIONAL BLOCK DIAGRAM
POWERDOWN
INTERFACE
HOST
INTERFACE
PORT
CONTROL
LOGIC
FLAG
ANALOG
EXTERNAL
ADDRESS
BUS
EXTERNAL
DATA
BUS
DATA
ADDRESS
GENERATORS
DAG 1 DAG 2
ARITHMETIC UNITS
ALU
MAC
ADSP-2100 BASE
ARCHITECTURE
ADSP-21msp59
PROGRAM
SEQUENCER
PROGRAM MEMORY ADDRESS
DATA MEMORY ADDRESS
PROGRAM MEMORY DATA
DATA MEMORY DATA
SHIFTER
PROGRAM
MEMORY
4K x 24
(ROM)
MEMORY
PROGRAM
SERIAL PORTS
SPORT 0
ADSP-21msp58/59
MEMORY
2K x 24
TIMER
SPORT 1
DATA
MEMORY
2K x 16
GENERAL DESCRIPTION
The ADSP-21msp58 and ADSP-21msp59 Mixed-Signal Processors (MSProcessor
®
DSPs) are fully integrated, single-chip
DSPs complete with a high performance analog front end. The
ADSP-21msp58/59 Family is optimized for voice band applications such as Speech Compression, Speech Processing, Speech
Recognition, Text-to Speech, and Speech-to-Text conversion.
The ADSP-21msp58/59 combines the ADSP-2100 base architecture (three computation units, data address generators, and
program sequencer) with two serial ports, a host interface port,
an analog front end, a programmable timer, extensive interrupt
capability, and on-chip program and data memory.
The ADSP-21msp58 provides 2K words (24-bit) of program
RAM and 2K words (16-bit) of data memory. The ADSP21msp59 provides an additional 4K words (24-bit) of program
ROM. The ADSP-21msp58/59 integrates a high performance
analog codec based on a single chip, voice band codec, the
AD28msp02. Powerdown circuitry is also provided to meet the
low power needs of battery operated portable equipment. The
ADSP-21msp58/59 is available in a 100-pin TQFP package
(thin quad flat package).
In addition, the ADSP-21msp58/59 supports new instructions,
which include bit manipulations–bit set, bit clear, bit toggle,
bit test–new ALU constants, new multiplication instruction
(x squared), biased rounding, and global interrupt masking.
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
MSProcessor is a registered trademark of Analog Devices, Inc.
© Analog Devices, Inc., 1995
One Technology Way, P.O. Box 9106, Norwood. MA 02062-9106, U.S.A.
Tel: 617/329-4700 Fax: 617/326-8703
Page 2
ADSP-21msp58/59
DIGITAL ARCHITECTURE OVERVIEW
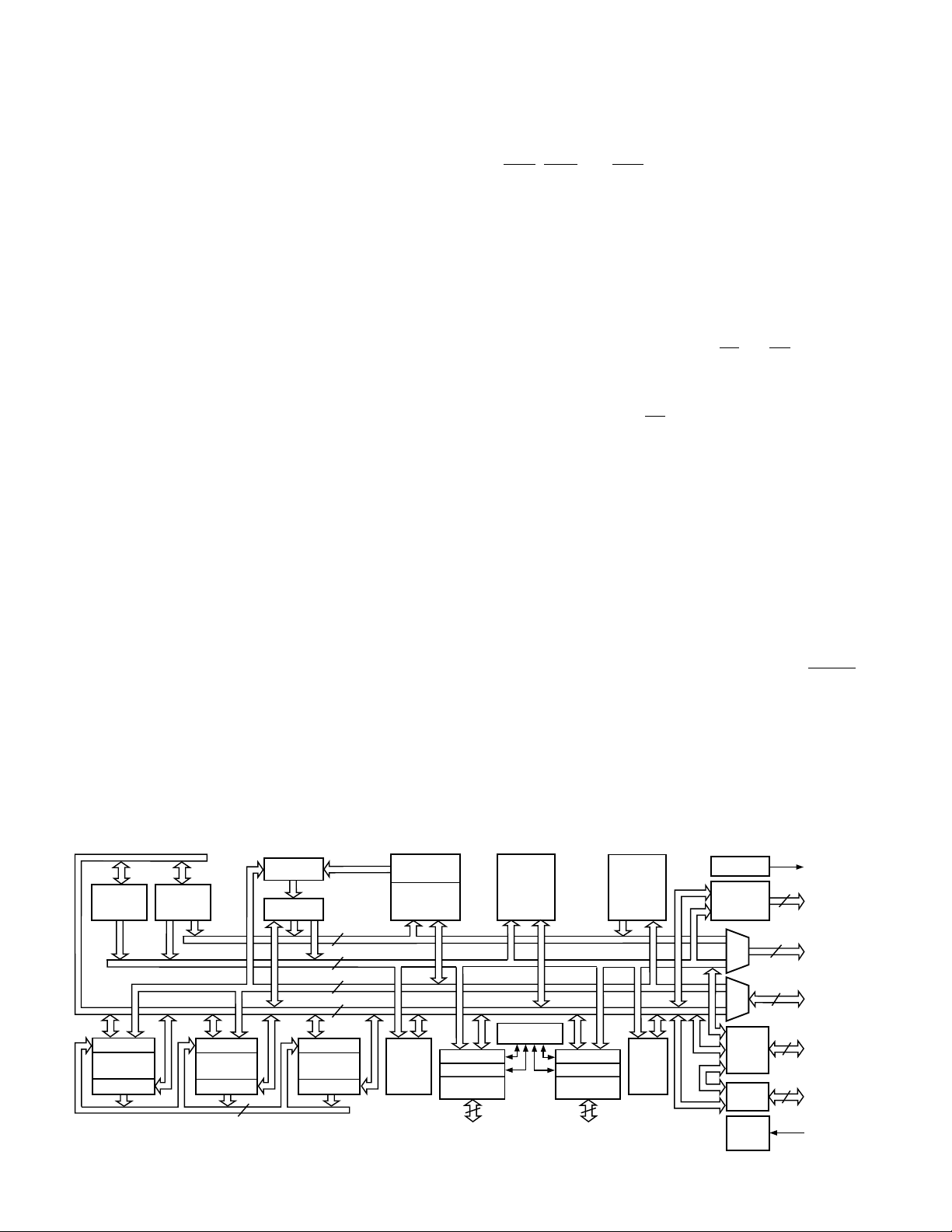
Figure 1 is an overall block diagram of the ADSP-21msp58/59.
The processors contain three independent computational units:
the ALU, the multiplier/accumulator (MAC), and the shifter.
The computational units process 16-bit data directly and have
provisions to support multiprecision computations. The ALU
performs a standard set of arithmetic and logic operations; division primitives are also supported. The MAC performs singlecycle multiply, multiply/add, and multiply/subtract operations.
The shifter performs logical and arithmetic shifts, normalization,
denormalization, and derive exponent operations. The shifter
can be used to efficiently implement numeric format control including multiword floating-point representations.
The internal result (R) bus directly connects the computational
units so that the output of any unit may be the input of any unit
on the next cycle.
A powerful program sequencer and two dedicated data address
generators ensure efficient use of these computational units.
The sequencer supports conditional jumps, subroutine calls,
and returns in a single cycle. With internal loop counters and
loop stacks, the ADSP-21msp58/59 executes looped code with
zero overhead—no explicit jump instructions are required to
maintain the loop.
Two data address generators (DAGs) provide addresses for simultaneous dual operand fetches (from data memory and program memory). Each DAG maintains and updates four address
pointers. Whenever the pointer is used to access data (indirect
addressing), it is post-modified by the value of one of four
modify registers. A length value may be associated with each
pointer to implement automatic modulo addressing for circular
buffers. The circular buffering feature is also used by the serial
ports for automatic data transfers to (and from) on-chip
memory.
Efficient data transfer is achieved with the use of five internal
buses:
• Program Memory Address (PMA) Bus
• Program Memory Data (PMD) Bus
• Data Memory Address (DMA) Bus
• Data Memory Data (DMD) Bus
• Result (R) Bus
The two address buses (PMA, DMA) share a single external address bus, allowing memory to be expanded off chip, and the
two data buses (PMD, DMD) share a single external data bus.
The
BMS, DMS, and PMS signals indicate which memory
space the external buses are being used for.
Program memory can store both instructions and data, permit-
ting the ADSP-21msp58/59 to fetch two operands in a single
cycle, one from program memory and one from data memory.
The ADSP-21msp58/59 can fetch an operand from on-chip
program memory and the next instruction in the same cycle.
The memory interface supports slow memories and memorymapped peripherals with programmable wait state generation.
External devices can gain control of the processors’ buses with
the use of the bus request/grant signals (
BR and BG). Bus grant
has two modes of operation. If GoMode is enabled in the MSTAT
register, instruction execution continues from internal memory.
If GoMode is disabled, the processor stops instruction execution
and waits for deassertion of
BR.
In addition to the address and data bus for external memory
connection, the ADSP-21msp58/59 has a host interface port
(HIP) for easy connection to a host processor. The HIP is made
up of 8 data/address pins and 10 control pins. The HIP is extremely flexible and provides a simple interface to a variety of
host processors. For example, the Motorola 68000 series, the
Intel 80C51 series, and the Analog Devices ADSP-2101 can be
easily connected to the HIP. The host processor can boot the
ADSP-21msp58/59 on-chip memory through the HIP.
The ADSP-21msp58/59 can respond to eleven interrupts. There
can be up to three external interrupts, configured as edge- or
level-sensitive, and seven internal interrupts generated by the
Timer, the Serial Ports (SPORTs), the HIP, the powerdown circuitry, and the analog interface. There is also a master
RESET
signal.
The two serial ports provide a complete synchronous serial in-
terface with optional companding in hardware and a wide variety of framed or frameless data transmit and receive modes of
operation. Each port can generate an internal programmable serial clock or accept an external serial clock.
Booting circuitry provides for loading on-chip program memory
automatically from byte-wide external memory. After reset,
DATA
ADDRESS
GENERATOR
#1
INPUT REGS
ALU
OUTPUT REGS
DATA
ADDRESS
GENERATOR
#2
INPUT REGS
MAC
OUTPUT REGS
16
INSTRUCTION
REGISTER
PROGRAM
SEQUENCER
R BUS
PROGRAM
SRAM
14
14
24
16
INPUT REGS
SHIFTER
OUTPUT REGS
PMA BUS
DMA BUS
PMD BUS
DMD BUS
2K x 24
PROGRAM
ROM
4K x 24
(ADSP-21msp59)
CONTROL
LOGIC
TRANSMIT REG
RECEIVE REG
SERIAL
PORT 0
5
DATA
SRAM
2K x 16
COMPANDING
CIRCUITRY
TRANSMIT REG
RECEIVE REG
Figure 1. ADSP-21msp58/59 Block Diagram
–2–
SERIAL
PORT 1
ADDRESS
GENERATOR
5
BOOT
TIMER
FLAG
ADC, DAC
AND
FILTERS
MUX
MUX
HIP
CONTROL
HIP
REGISTER
POWER
DOWN
CONTROL
LOGIC
1
7
14
EXTERNAL
ADDRESS
BUS
EXTERNAL
24
DATA
BUS
10
8
HIP
DATA
BUS
1
REV. 0
Page 3
ADSP-21msp58/59
seven wait states are automatically generated. This allows, for
example, a 38 ns ADSP-21msp58/59 to use a 250 ns EPROM
as external boot memory. Multiple programs can be selected
and loaded from the EPROM with no additional hardware. The
on-chip program memory can also be initialized through the
HIP.
The ADSP-21msp58/59 features a general purpose flag output
whose state is controlled through software. You can use this
output to signal an event to an external device. In addition, the
data input and output pins on SPORT1 can be alternatively
configured as an input and an output flag.
A programmable interval timer can generate periodic interrupts.
A 16-bit count register (TCOUNT) is decremented every n
cycles, where n–1 is a scaling value stored in an 8-bit register
(TSCALE). When the value of the count register reaches zero,
an interrupt is generated and the count register is reloaded from
a 16-bit period register (TPERIOD).
The ADSP-21msp58/59 instruction set provides flexible data
moves and multifunction (one or two data moves with a computation) instructions. Every instruction can be executed in a
single processor cycle. The ADSP-21msp58/59 uses an algebraic syntax for ease of coding and readability. A comprehensive
set of development tools supports program development.
Serial Ports
The ADSP-21msp58/59 processors include two synchronous serial ports (SPORT0 and SPORT1) for serial communications
and multiprocessor communication.
Here is a brief list of the capabilities of the ADSP-21msp58/59
SPORTs. Refer to the ADSP-2100 Family User’s Manual for further details.
• SPORTs are bidirectional with a separate, double-buffered
transmit and receive section.
• SPORTs can use an external serial clock or generate their own
clock internally.
• SPORTs have independent framing for the transmit and
receive sections. Sections run in a frameless mode or with
frame synchronization signals internally or externally generated. Frame sync signals are programmed to be active high or
low, with either of two pulse widths and timings.
• SPORTs support serial data word lengths from 3 to 16 bits
and provide optional A-law and µ-law companding according
to CCITT recommendation G.711.
• SPORTs receive and transmit sections generate separate
interrupts when the SPORTs are ready to read or write new
data.
• SPORTs can receive and transmit an entire circular buffer of
data with only one overhead cycle per data word (Autobuffering
Mode). An interrupt is generated after a complete data buffer
transfer.
• SPORT0 has a multichannel interface to selectively receive
and transmit a 24- or 32-word, time-division multiplexed
serial bit stream.
• SPORT1 can be reconfigured as two external interrupt inputs
(
IRQ0 and IRQ1) and the Flag In and Flag Out signals (FI,
FO). The internally generated serial clock may still be used in
this configuration.
Pin Descriptions
The ADSP-21msp58 and ADSP-21msp59 are available in a
100-lead TQFP package. Table I contains the pin descriptions.
Table I. ADSP-21msp58/59 Pin List
Pin #
Group of Input/
Name Pins Output Function
Digital Pins
Address 14 O Address output for program,
data and boot memory spaces
Data 24 I/O Data I/O pins for program
and data memories. Input
only for boot memory space,
with two MSBs used as boot
space addresses.
RESET 1 I Processor reset input
IRQ2 1 I External interrupt request #2
BR 1 I External bus request input
BG 1 O External bus grant output
PMS 1 O External program memory select
DMS 1 O External data memory select
BMS 1 O Boot memory select
RD 1 O External memory read enable
WR 1 O External memory write enable
MMAP 1 I Memory map select
CLKIN,
XTAL 2 I External clock or quartz crystal
input
CLKOUT 1 O Processor clock output
HACK 1 O HIP acknowledge output
HSEL 1 I HIP select input
BMODE 1 I Boot mode select (0 = Standard
EPROM Booting, 1 = HIP
Booting)
HMD0 1 I Bus strobe select (0 =
1 = RW/
HMD1 1 I HIP address/data mode select
(0 = Separate, 1 = Multiplexed)
HRD/HRW 1 I HIP read strobe or read/write
select
HWR/HDS 1 I HIP write strobe or host data
strobe select
HD7–0/
HAD7–0 8 I/O HIP data or HIP data and
address
HA2/ALE 1 I Host address 2 or address latch
enable
HA1–0/
(unused) 2 I Host address 1 and 0 inputs
SPORT0 5 I/O Serial port 0 pins (TFS0, RFS0,
DT0, DR0, SCLK0)
SPORT1 5 I/O Serial port 1 pins (TFS1, RFS1,
DT1, DR1, SCLK1)
or
DS)
RD/WR,
REV. 0
–3–
Page 4
ADSP-21msp58/59
Pin #
Group of Input/
Name Pins Output Function
IRQ0 (RFS1) 1 I External interrupt request #0
IRQ1 (TFS1) 1 I External interrupt request #1
SCLK1 1 O Programmable clock output
FI (DR1) 1 I Flag input pin
FO (DT1) 1 O Flag output pin
FL0 1 O General purpose flag output pin
V
DD
4 Digital power supply pins
GND 5 Ground pins
PWD 1 I Powerdown pin
Analog Pins
VIN
NORM
1 I Input terminal of the NORM
amplifier for the encoder section
(ADC)
VIN
AUX
1 I Input terminal of the AUX
amplifier for the encoder section
(ADC)
Decouple 1 I Ground reference of the NORM
and AUX amplifiers for the
encoder section (ADC)
VOUT
P
1 O Noninverting output terminal of
the differential amplifier from
the decoder section (DAC)
VOUT
N
1 O Inverting output terminal of the
differential amplifier from the
decoder section (DAC)
V
REF
1 O Output voltage reference
REF_
FILTER 1 O Voltage reference external by-
pass filter node
V
CC
GND
A
Host Interface Port
1 Analog power supply
2 Analog ground
The ADSP-21msp58/59 host interface port (HIP) is a parallel
I/O port that allows for an easy connection to a host processor.
Through the HIP, the ADSP-21msp58/59 can be used as a
memory-mapped peripheral to a host computer. The HIP can
be thought of as an area of dual-ported memory, or mailbox registers, that allows communication between the computational
core of the ADSP-21msp58/59 and the host computer.
The host interface port is completely asynchronous. The host
processor can write data into the HIP while the ADSP21msp58/59 is operating at full speed.
The HIP can be configured with the following pins:
• BMODE (when MMAP = 0) determines whether the ADSP-
21msp58/59 boots from the host processor (through the HIP)
or external EPROM (through the data bus).
• HMD0 configures the bus strobes as separate read and write
strobes, or a single read/write select and a host data strobe.
• HMD1 selects separate address (3-bit) and data (8-bit) buses,
or a multiplexed 8-bit address/data bus with address latch
enable.
Tying these pins to appropriate values configures the ADSP21msp58/59 for straight-wire interface to a variety of industrystandard microprocessors and microcomputers.
When the host processor writes an 8-bit value to the HIP, the
upper eight bits of the HIP registers are all zeros. For additional
information, refer to the ADSP-2100 Family User’s Manual,
Chapter 7, for information about 8-bit configuration.
HIP Operation
The HIP contains six data registers (HDR5-0) and two status
registers (HSR7-6) with an associated HMASK register for
masking interrupts from individual HIP data registers. The HIP
data registers are memory-mapped in the internal data memory
of the ADSP-21msp58/59. HIP transfers can be managed using
either interrupts or polling. These registers are shown in the section “ADSP-21msp58/59 Registers.” The two status registers
provide status information to both the ADSP-21msp58/59 and
the host processor. HSR7 contains a software reset bit that can
be set by the ADSP-21msp58/59 and the host.
The HIP allows a software reset to be performed by the host
processor. The internal software reset signal is asserted for five
ADSP-21msp58/59 cycles.
The HIP generates an interrupt whenever an HDR register receives data from a host processor write. It also generates an interrupt when the host processor has performed a successful read
of any HDR. The read/write status of the HDRs is also stored in
the HSR registers.
The HMASK register bits can be used to mask the generation of
read or write interrupts from individual HDR registers. Bits in
the IMASK register enable and disable all HIP read interrupts
or all HIP write interrupts. So, for example, a write to HDR4
will cause an interrupt only if both the HDR4 Write bit in
HMASK and the HIP Write interrupt enable bit in IMASK are
set.
The HIP provides a second method of booting the ADSP21msp58/59 in which the host processor loads instructions into
the HIP. The ADSP-21msp58/59 automatically transfers the
data, in this case opcodes, to internal program memory. The
BMODE pin determines whether the ADSP-21msp58/59 boots
from the host processor through the HIP or from external
EPROM over the data bus.
Interrupts
The interrupt controller lets the processor respond to interrupts
and reset with a minimum of overhead. The ADSP-21msp58/59
provides up to three external interrupt input pins,
and
IRQ2. IRQ2 is always available as a dedicated pin;
SPORT1 may be reconfigured for
IRQ1 and IRQ0 and the flag.
IRQ0, IRQ1,
The ADSP-21msp58/59 also supports internal interrupts from
the timer, the host interface port, the serial ports, the analog interface, and the powerdown control circuit. The interrupts are
internally prioritized and individually maskable (except for
powerdown and
RESET). The input pins can be programmed
for either level- or edge-sensitivity. The priorities and vector addresses for the interrupts are shown in Table II; the interrupt
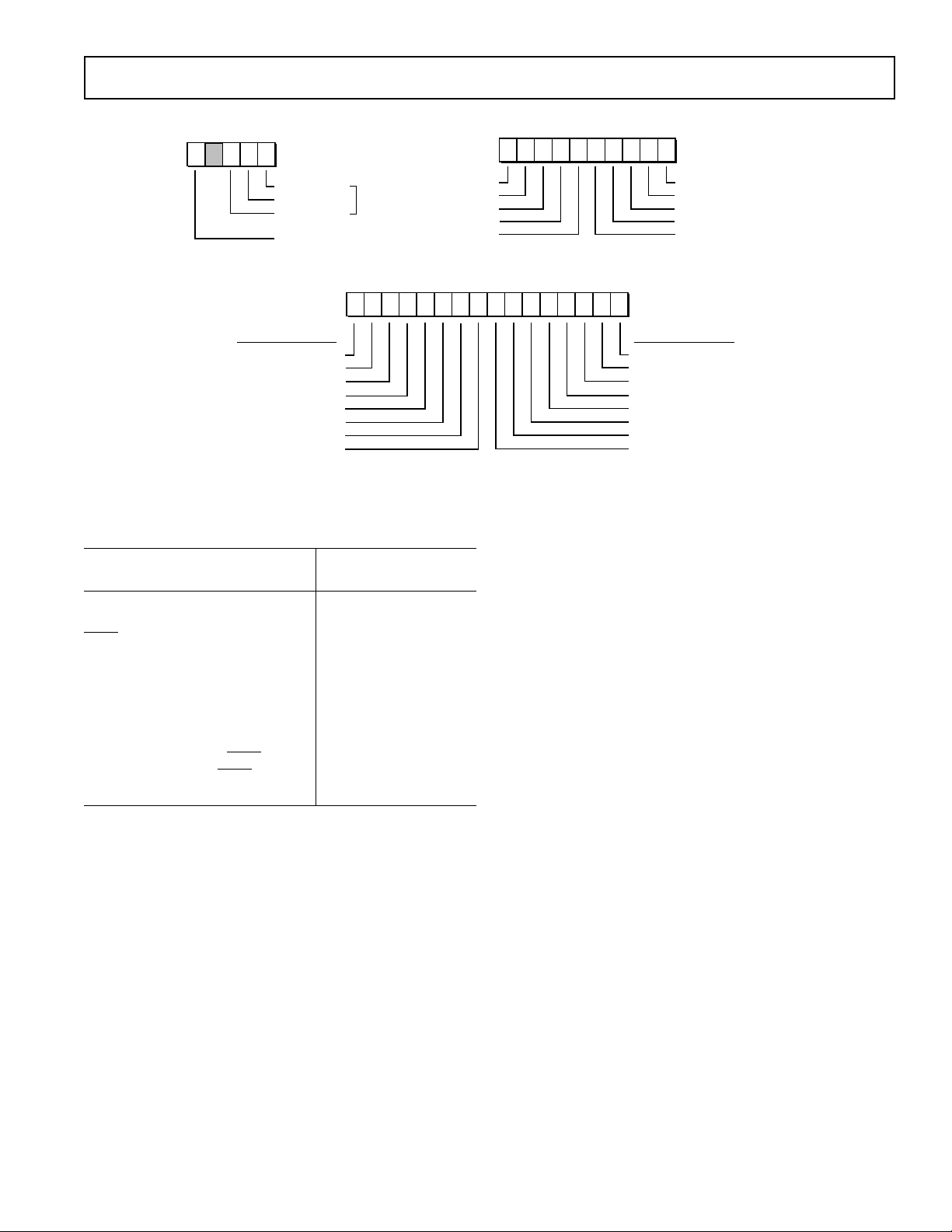
registers are shown in Figure 2.
–4–
REV. 0
Page 5
ADSP-21msp58/59
ICNTL
43210
0
IRQ0 Sensitivity
IRQ1 Sensitivity
IRQ2 Sensitivity
Interrupt Nesting
1 = enable, 0 = disable
INTERRUPT FORCE
SPORT0 Transmit
SPORT0 Receive
Analog Transmit
SPORT1 Transmit or IRQ1
SPORT1 Receive or IRQ0
IRQ2
Analog Receive
Timer
1 = edge
0 = level
SPORT0 Transmit
SPORT0 Receive
1514131211109876543210
0000000000000000
IRQ2
HIP Write
HIP Read
IFC
Figure 2. Interrupt Registers
Table II. Interrupt Priority & Interrupt Vector Addresses
Interrupt Vector
Source of Interrupt Address (Hex)
Reset (or Power-Up with PUCR = 1) 0000 (Highest Priority)
Powerdown (Nonmaskable) 002C
IRQ2 0004
HIP Write 0008
HIP Read 000C
SPORT0 Transmit 0010
SPORT0 Receive 0014
Analog Interface Transmit 0018
Analog Interface Receive 001C
SPORT1 Transmit or (
SPORT1 Receive or (
IRQ1) 0020
IRQ0) 0024
Timer 0028 (Lowest Priority)
Interrupts can be masked or unmasked with the IMASK regis-
ter. Individual interrupt requests are logically ANDed with the
bits in IMASK; the highest priority unmasked interrupt is then
selected. The powerdown interrupt is non-maskable.
The interrupt control register, ICNTL, allows the external interrupts to be set as either edge- or level-sensitive. Interrupt service routines can either be nested (with higher priority interrupts
taking precedence) or be processed sequentially (with only one
interrupt service active at a time).
The interrupt force and clear register, IFC, is a write-only register used to force an interrupt or clear a pending edge-sensitive
interrupt.
On-chip stacks preserve the processor status and are automatically maintained during interrupt handling. The stack is twelve
levels deep to allow interrupt nesting.
Register bit values shown in Figure 2 are the default bit values
after reset. If no values are shown, the bits are indeterminate at
reset. Reserved bits are shown in gray; these bits should always
be written with zeros.
9876543210
0000000000
IMASK
Timer
IRQ0 or SPORT1 Receive
IRQ1 or SPORT1 Transmit
Analog Receive
Analog Transmit
1 = enable, 0 = disable
INTERRUPT CLEAR
Timer
SPORT1 Receive or IRQ0
SPORT1 Transmit or IRQ1
Analog Receive
Analog Transmit
SPORT0 Receive
SPORT0 Transmit
IRQ2
1 = enable, 0 = disable
The following instructions allow global enable or disable servicing of the interrupts (including powerdown), regardless of the
state of IMASK. Disabling the interrupts does not affect
autobuffering.
ENA INTS;
DIS INTS;
Interrupt servicing is enabled on processor reset.
System Interface
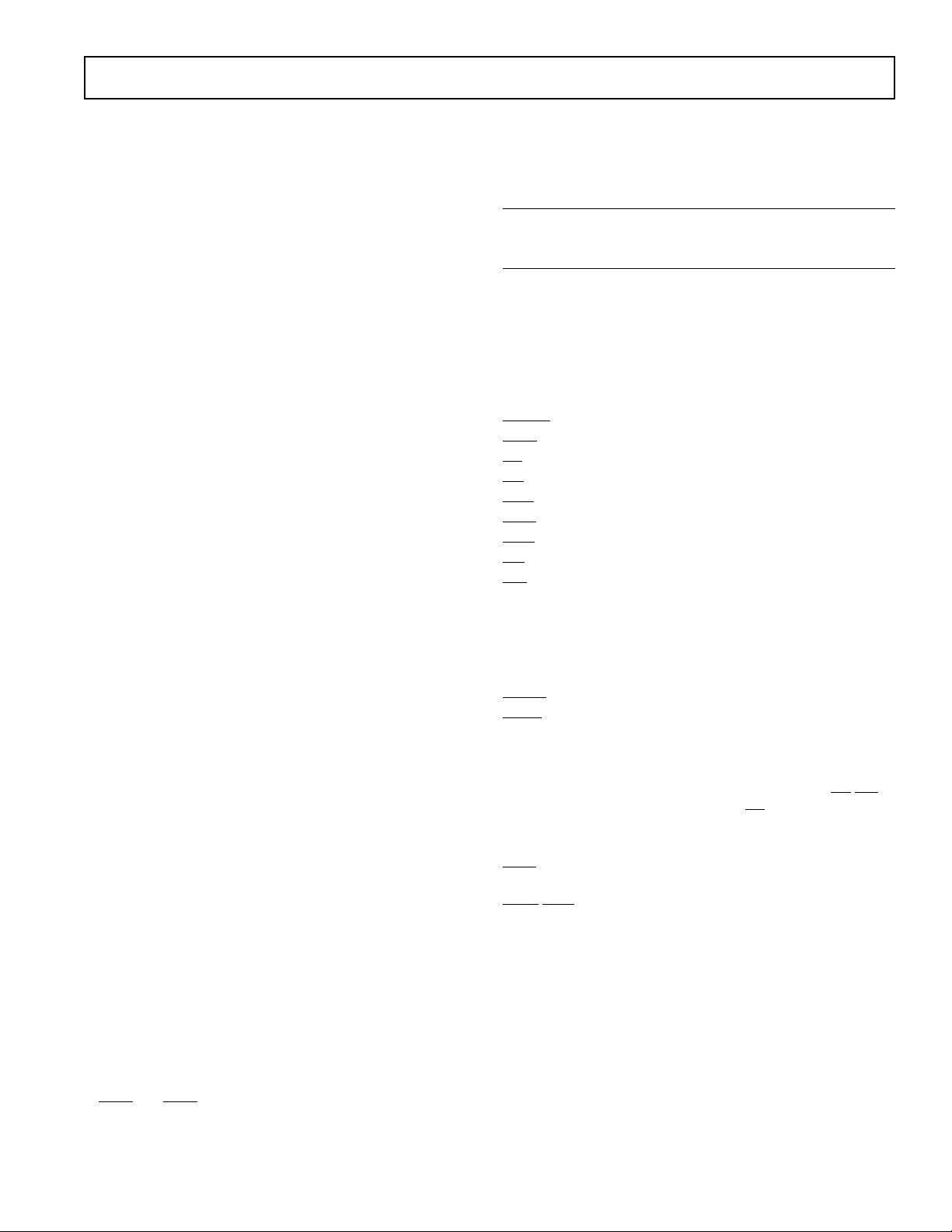
Figure 3 shows a basic system configuration with the ADSP21msp58/59, two serial devices, a host processor, a boot
EPROM, optional external program and data memories, and an
analog interface. Up to 15K words of data memory and 16K
words of program memory can be supported. Programmable
wait state generation allows the processor to interface easily to
slow memories. The ADSP-21msp58/59 also provides one external interrupt and two serial ports or three external interrupts
and one serial port.
Clock Signals
The ADSP-21msp58/59 CLKIN input may be driven by a crystal or by a TTL-compatible external clock signal.
The CLKIN input may not be halted, changed in frequency
during operation, or operated at any frequency other the one
specified. Operating the ADSP-21msp58/59 at any other frequency changes the analog performance, which is not tested or
supported.
If an external clock is used, it should be a TTL-compatible signal running at half the instruction rate. The signal should be
connected to the processor’s CLKIN input; in this case, the
XTAL input must be left unconnected.
The ADSP-21msp58/59 uses an input clock with a frequency
equal to half the instruction rate; a 13 MHz input clock yields a
38.46 ns processor cycle (which is equivalent to 26 MHz). Normally, instructions are executed in a single processor cycle.
All device timing is relative to the internal instruction clock rate,
which is indicated by the CLKOUT signal when enabled. The
REV. 0
–5–
Page 6
ADSP-21msp58/59
ANALOG
CLOCK OR
CRYSTAL
CLKIN
XTAL V
CLKOUT
RESET
IRQ2
BR
BG
MMAP
FL0
PMS RD WR ADDRESS DATA DMS BMS
24
ADCS
PROGRAM
MEMORY
(OPTIONAL)
NOTE: The two MSBs of the Boot EPROM Address are also the two MSBs of the Data Bus.
This is only for the 27C256 and 27C512.
INPUT
GND
CC
A
ADSP-21msp58/59
OE
WE
ANALOG
OUTPUT
4321
VDDGND
14
AD
OE
WE
MEMORY &
PERIPHERALS
(OPTIONAL)
D
DATA
54
23-8
HOST
MODE
24
16
3
CS
7
HIP
SERIAL
PORT 0
SERIAL
PORT 1
HIP CONTROL
HIP DATA/ADDR
8
SCLK
RFS
TFS
DT
DR
SCLK
RFS OR IRQ0
TFS OR IRQ1
DT OR FO
DR OR FI
14 2
OE
HOST
PROCESSOR
(OPTIONAL)
SERIAL DEVICE
(OPTIONAL)
SERIAL DEVICE
(OPTIONAL)
D
23-22
D
15-8
8
ADCS
BOOT
MEMORY
e.g., EPROM
27C64
27C128
27C256
27C512
Figure 3. ADSP-21msp58/59 Basic System Configuration
CLKOUT signal is enabled and disabled by the CLKODIS bit
in the SPORT0 Autobuffer Control Register, DM[0x3FF3].
Because the ADSP-21msp58/59 includes an on-chip oscillator
circuit, an external crystal may also be used. The crystal should
be connected across the CLKIN and XTAL pins, with two capacitors connected as shown in Figure 4. A parallel-resonant,
fundamental frequency, microprocessor-grade crystal should be
used.
CLKIN XTAL
ADSP-21msp58/59
CLKOUT
Figure 4. External Crystal Connections
Reset
The RESET signal initiates a master reset of the ADSP21msp58/59. The
power-up sequence to assure proper initialization.
RESET signal must be asserted during the
RESET dur-
ing initial power-up must be held long enough to allow the
processor’s internal clock to stabilize. If
RESET is asserted at
any time after power-up, the clock continues to run and does
not require stabilization time.
The power-up sequence is defined as the total time required for
the crystal oscillator circuit to stabilize after a valid V
DD
is applied to the processor and for the internal phase-locked loop
(PLL) to lock onto the specific crystal frequency. A minimum of
2000 CLKIN cycles will ensure that the PLL has locked (this
does not, however, include the crystal oscillator start-up time).
During this power-up sequence, the
held low. On any subsequent resets, the
meet the minimum pulse width specification, t
RESET input contains some hysteresis; however, if you use
The
an RC circuit to generate your
RESET signal should be
RESET signal must
.
RSP
RESET signal, the use of an ex-
ternal Schmidt trigger is recommended.
The master
RESET sets all internal stack pointers to the empty
stack condition, masks all interrupts, and clears the MSTAT
register. When
RESET is released, if there is no pending bus request and the chip is configured for booting (MMAP = 0), the
boot loading sequence is performed. Then the first instruction is
fetched from internal program memory location 0x0000 and execution begins.
Program Memory Interface
The on-chip program memory address bus (PMA) and on-chip
program memory data bus (PMD) are multiplexed with the onchip data memory buses (DMA, DMD), creating a single external data bus and a single external address bus. The data and
address busses are three-stated when the DSP runs from internal memory. Refer to the ADSP-2100 Family User’s Manual,
Chapter 10, “Memory Interface” for a detailed explanation. The
14-bit address bus directly addresses up to 16K words. See
“Program Memory Maps” for details on program memory
addressing.
The program memory data lines are bidirectional. The program
memory select (
memory and can be used as a chip select signal. The write (
PMS) signal indicates access to program
WR)
signal indicates a write operation and is used as a write strobe.
–6–
REV. 0
Page 7
ADSP-21msp58/59
The read (RD) signal indicates a read operation and is used as a
read strobe or output enable signal. An external program
memory access should always be qualified with the
PMS signal.
The ADSP-21msp58/59 writes data from its 16-bit registers to
24-bit program memory using the PX register to provide the
lower eight bits. When the processor reads data (not instructions) from 24-bit program memory to a 16-bit data register, the
lower eight bits are placed in the PX register. The program
memory interface can generate zero to seven wait states for external memory devices; the default is seven wait states after
RESET.
Program Memory Maps
ADSP-21msp58
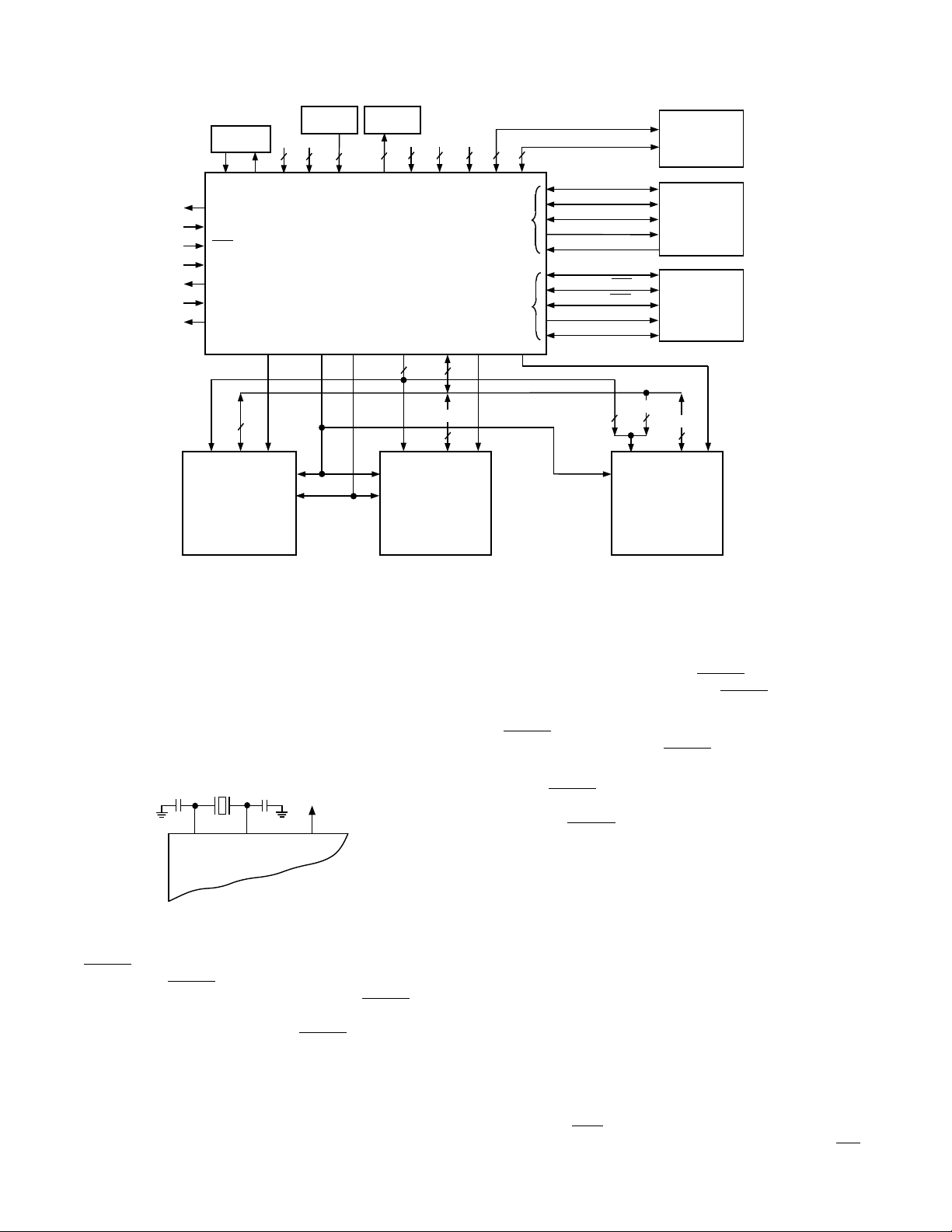
ADSP-21msp58 Program memory can be mapped in two ways,
depending on the state of the MMAP pin. Figure 5 shows the
two configurations. When MMAP = 0, internal RAM occupies
2K words beginning at address 0x0000; external program
memory uses the remaining 14K words beginning at address
0x0800. In this configuration, the boot loading sequence (described in “Boot Memory Interface”) is automatically initiated
when
RESET is released.
INTERNAL
RAM
LOADED FROM
EXTERNAL
BOOT
MEMORY
EXTERNAL
MMAP=0
0000
07FF
0800
3FFF
EXTERNAL
INTERNAL
RAM
NOT LOADED
MMAP=1
0000
37FF
3800
3FFF
Figure 5. ADSP-21msp58 Program Memory Maps
When MMAP = 1, 14K words of external program memory begin at address 0x0000 and internal RAM is located in the upper
2K words, beginning at address 0x3800. In this configuration,
the boot loading sequence does not take place; execution begins
immediately after
RESET.
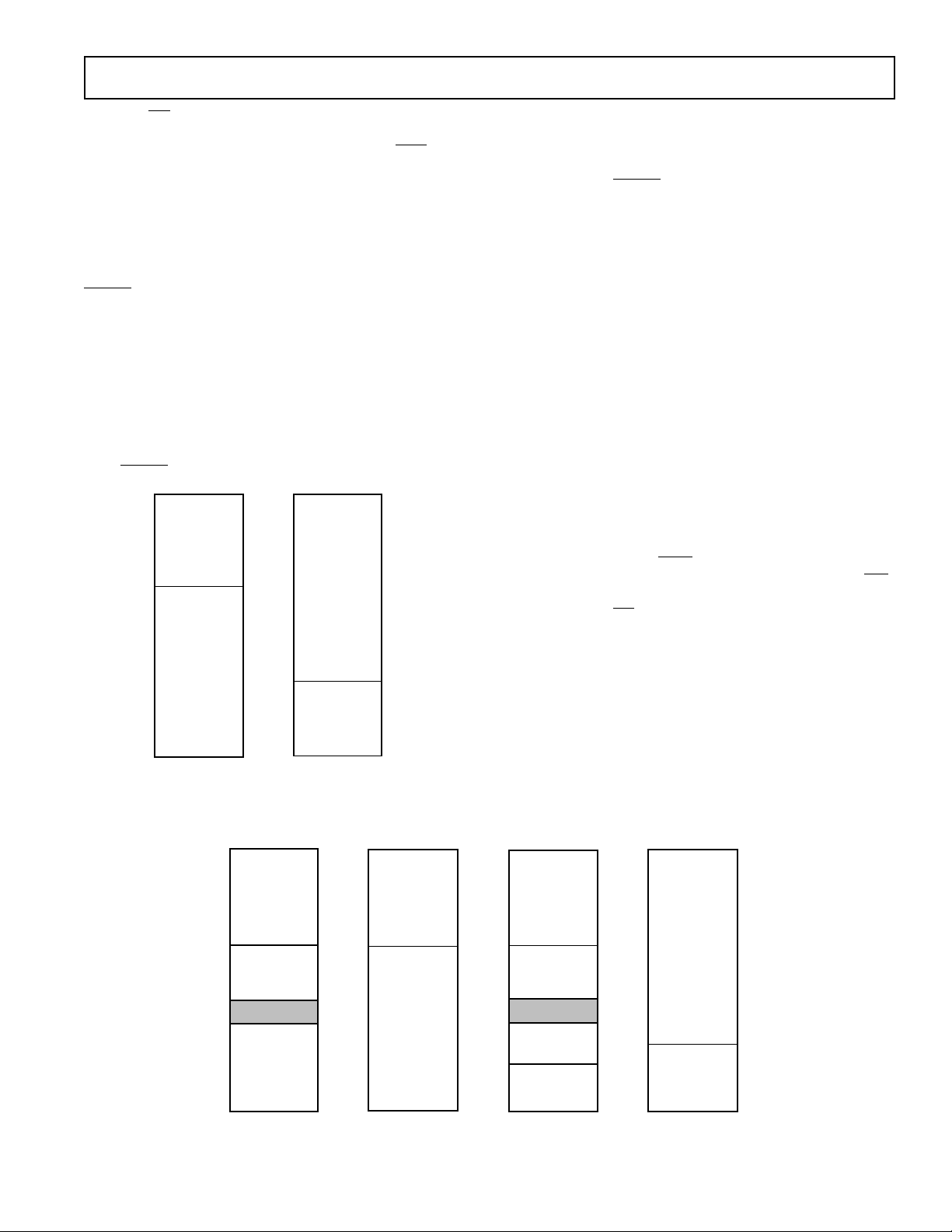
ADSP-21msp59
The ADSP-21msp59 is functionally identical to the ADSP21msp58. The ADSP-21msp59 includes an additional 4K by
24-bit mask programmable ROM (see Figure 6). The ROM
can be used to hold program instructions or data and can be
accessed twice in one instruction cycle if necessary. The ROM
always resides at locations PM[0x0800] through PM[0x17FF]
regardless of the state of the MMAP pin. Sixteen addresses at
the end of ROM (0x17F0–0x17FF) are reserved for Analog
Devices’ use. The ROM is enabled by setting the ROMENABLE
bit in the Data Memory Wait State control register, DM[0x3FFE].
When the ROMENABLE bit is set to 1, addressing program
memory in this range will access the on-chip ROM. When set
to 0, addressing program memory in this range will access external program memory. The ROMENABLE bit is set to 0 on
chip reset.
Data Memory Interface
The data memory address bus (DMA) is 14 bits wide. The bidirectional external data bus is 24 bits wide, with the upper 16
bits used for data memory data (DMD) transfers.
The data memory select (
memory and can be used as a chip select signal. The write (
DMS) signal indicates access to data
WR)
signal indicates a write operation and can be used as a write
strobe. The read (
RD) signal indicates a read operation and can
be used as a read strobe or output enable signal.
The ADSP-21msp58/59 supports memory-mapped I/O, with
the peripherals memory mapped into the data or program
memory address spaces and accessed by the processor in the
same manner.
Data Memory Map
The on-chip data memory RAM resides in the 2K words beginning at address 0x3000, as shown in Figure 7. In addition, data
memory locations from 0x3800 to the end of data memory at
0x3FFF are reserved. Control registers for the system, timer,
REV. 0
INTERNAL
RAM
LOADED FROM
EXTERNAL
BOOT
MEMORY
INTERNAL
MASK
PROGRAMMED
ROM
17F0 – 17FF
RESERVED
EXTERNAL
ROM ENABLE = 1
MMAP = 0
0000
07FF
0800
17FF
1800
3FFF
INTERNAL
RAM
LOADED FROM
EXTERNAL
BOOT
MEMORY
EXTERNAL
ROM ENABLE = 0
MMAP = 0
0000
07FF
0800
3FFF
EXTERNAL
INTERNAL
MASK
PROGRAMMED
ROM
17F0 – 17FF
RESERVED
EXTERNAL
INTERNAL
RAM
NOT LOADED
ROM ENABLE = 1
MMAP = 1
0000
07FF
0800
17FF
1800
37FF
3800
3FFF
Figure 6. ADSP-21msp59 Program Memory Maps
–7–
EXTERNAL
INTERNAL
RAM
NOT LOADED
ROM ENABLE = 0
MMAP = 1
0000
37FF
3800
3FFF
Page 8
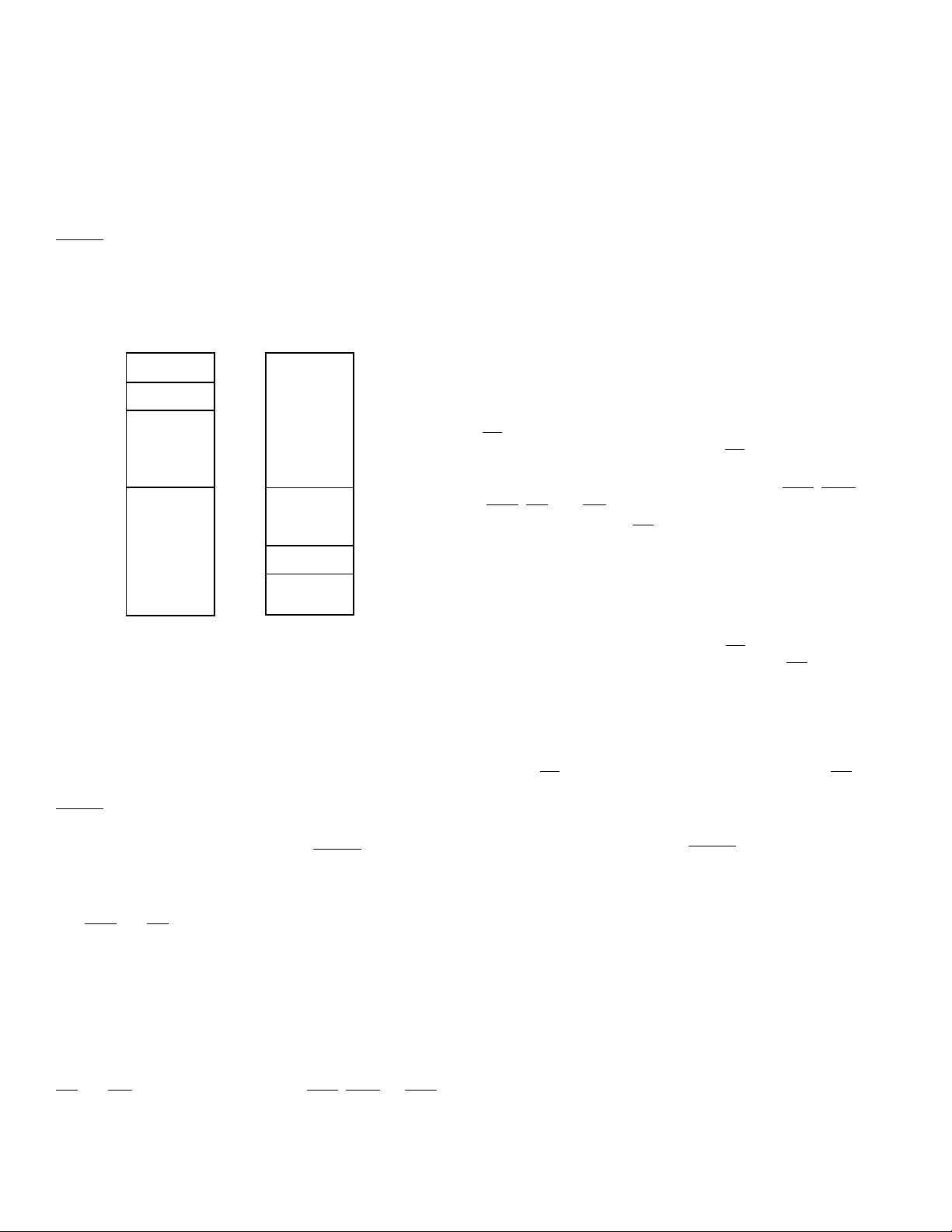
ADSP-21msp58/59
wait-state configuration, host interface port, codec, and serial
port operations are located in this region of memory.
The remaining 12K of data memory is external. External data
memory is divided into three zones, each associated with its own
wait-state generator. By mapping peripherals into different
zones, you can accommodate peripherals with different waitstate requirements. All zones default to seven wait states after
RESET.
For compatibility with other ADSP-2100 Family processors, bit
definitions for DWAIT3 and DWAIT4 are shown in the Data
Memory Wait State Control register, but they are not used by
the ADSP-21msp58/59.
DWAIT0
(1K EXTERNAL)
DWAIT1
(1K EXTERNAL)
DWAIT2
(10K EXTERNAL)
NO WAIT STATES
WAIT STATES
0000
03FF
0400
07FF
0800
2FFF
3000
3FFF
12K
EXTERNAL
2K
INTERNAL
1K
RESERVED
MEMORY MAPPED
REGISTERS
AND RESERVED
DATA MEMORY
0000
2FFF
3000
37FF
3800
3BFF
3C00
3FFF
Figure 7. ADSP-21msp58/59 Data Memory Maps
Boot Memory Interface
The ADSP-21msp58/59 can load on-chip memory from external boot memory space. The boot memory space consists of
64K by 8-bit space, divided into eight separate 8K by 8-bit
pages. Three bits in the System Control Register select which
page is loaded by the boot memory interface. Another bit in the
System Control Register allows the user to force a boot loading
sequence under software control. Boot loading from Page 0 after
RESET is initiated automatically if MMAP = 0.
The boot memory interface can generate zero to seven wait
states; it defaults to seven wait states after
RESET. This allows
the ADSP-21msp58/59 to boot from a single low cost EPROM
such as a 27C256. Program memory is booted one byte at a
time and converted to 24-bit program memory words.
The
BMS and RD signals are used to select and to strobe the
boot memory interface. Only 8-bit data is read over the data
bus, on pins D8–D15. To accommodate addressing up to eight
pages of boot memory, the two MSBs of the data bus are used
in the boot memory interface as the two MSBs of the boot
memory address.
The ADSP-2100 Family Assembler and Linker support the creation of programs and data structures requiring multiple boot
pages during execution.
RD and WR must always be qualified by PMS, DMS, or BMS
to ensure the correct program, data, or boot memory accessing.
HIP Booting
The ADSP-21msp58/59 can also boot programs through the
Host Interface Port. If BMODE = 1 and MMAP = 0, the
ADSP-21msp58/59 boots from the HIP. If BMODE = 0, the
ADSP-21msp58/59 boots through the data bus (in the same
way as the ADSP-2101), as described above in “Boot Memory
Interface.” For additional information about HIP booting, refer
to the ADSP-2100 Family User’s Manual, Chapter 7, “Host Interface Port.”
The ADSP-2100 Family Development Software includes a
utility program called the HIP Splitter. This utility allows the
creation of programs that can be booted through the ADSP21msp58/59 HIP, in a similar fashion as EPROM-bootable
programs generated by the PROM Splitter utility.
Bus Request and Bus Grant
The ADSP-21msp58/59 can relinquish control of the data and
address buses to an external device. When the external device
requires access to memory, it asserts the bus request signal
(
BR). If the ADSP-21msp58/59 is not performing an external
memory access, it responds to the active
BR input in the follow-
ing processor cycle by
• three-stating the data and address buses and the
PMS, DMS,
BMS, RD, and WR output drivers,
• asserting the bus grant (
BG) signal, and
• halting program execution.
If GoMode is enabled, the ADSP-21msp58/59 will not halt pro-
gram execution until it encounters an instruction that requires
an external memory access.
If the ADSP-21msp58/59 is performing an external memory access when the external device asserts the
not three-state the memory interfaces or assert the
BR signal, then it will
BG signal
until the cycle after the access is completed, which can be up to
eight cycles later depending on the number of wait states. The
instruction does not need to be completed when the bus is
granted. If a single instruction requires two external memory
accesses, the bus will be granted between the two accesses.
When the
BR signal is released, the processor releases the BG
signal, which reenables the output drivers, and continues program execution from the point where it stopped.
The bus request feature operates at all times, including when
the processor is booting and when
RESET is active.
LOW POWER OPERATION
The ADSP-21msp58/59 has three low power modes that significantly reduce the power dissipation when the device operates
under standby conditions. These modes are:
• Powerdown
• Idle
• Slow Idle
The CLKOUT pin may also be disabled to reduce external
power dissipation. The CLKOUT pin is controlled by Bit 14 of
SPORT0 Autobuffer Control Register, DM[0x3FF3].
Powerdown
The ADSP-21msp58/59 has a low power feature that lets the
processors enter a very low power dormant state through hardware or software control. Here is a brief list of powerdown features. Refer to the ADSP-2100 Family User’s Manual, Chapter 9,
–8–
REV. 0
Page 9
ADSP-21msp58/59
“System Interface” for detailed information about the powerdown feature.
• Powerdown mode holds the processor in CMOS standby with
a maximum current of less than 100 µA in some modes.
• Quick recovery from powerdown. In some modes, the processor can begin executing instructions in less than 100 CLKIN
cycles.
• Support for an externally generated TTL or CMOS processor
clock. The external clock can continue running during
powerdown without affecting the lowest power rating and 100
CLKIN cycle recovery.
• Support for crystal operation includes disabling the oscillator
to save power (the processor automatically waits 4096 CLKIN
cycles for the crystal oscillator to start and stabilize), and
letting the oscillator run to allow 100 CLKIN cycle start-up.
• Powerdown is initiated by either the powerdown pin (
or the software powerdown force bit.
• Interrupt support allows an unlimited number of instructions
to be executed before optionally powering down. The powerdown interrupt also can be used as a non-maskable, edgesensitive interrupt.
• Context clear/save control lets the processor continue where it
left off or start with a clean context when leaving the powerdown state.
• The
RESET pin also can be used to terminate powerdown,
and the host software reset feature can be used to terminate
powerdown under certain conditions.
• Setting the CLKODIS bit (Bit 14 of the SPORT0 Autobuffer
Control Register [0x3FF3]) disables the CLKOUT pin during
powerdown.
Idle
When the ADSP-21msp58/59 is in the Idle Mode, the processor
waits indefinitely in a low power state until an interrupt occurs.
When an unmasked interrupt occurs, it is serviced; execution
then continues with the instruction following the IDLE instruction.
Slow Idle
The IDLE instruction is enhanced on the ADSP-21msp58/59 to
let the processor’s internal clock signal be slowed, further reducing power consumption. The reduced clock frequency, a programmable fraction of the normal clock rate, is specified by a
selectable divisor given in the IDLE instruction. The format of
the instruction is
IDLE (n);
where n = 16, 32, 64, or 128. This instruction keeps the processor fully functional, but operating at the slower clock rate. While
it is in this state, the processor’s other internal clock signals,
such as SCLK, and timer clock, are reduced by the same ratio.
CLKOUT remains at the normal rate; it is not reduced. The default form of the instruction, when no clock divisor is given, is
the standard IDLE instruction.
When the IDLE (n) instruction is used, it effectively slows down
the processor’s internal clock and thus its response time to incoming interrupts––the 1-cycle response time of the standard
idle state is increased by n, the clock divisor. When an enabled
interrupt is received, the ADSP-21msp58/59 remains in the idle
state for up to a maximum of n processor cycles (n = 16, 32, 64,
or 128) before resuming normal operation.
PWD)
When the IDLE (n) instruction is used in systems that have an
externally generated serial clock (SCLK), the serial clock rate
may be faster than the processor’s reduced internal clock rate.
Under these conditions, interrupts must not be generated at a
faster rate than can be serviced, due to the additional time the
processor takes to come out of the idle state (a maximum of n
processor cycles).
Standalone ROM Execution (ADSP-21msp59 Only)
When the MMAP and BMODE pins both are set to 1, the
ROM is automatically enabled and execution commences from
program memory location 0x0800 at the start of ROM. This
feature lets an embedded design operate without external
memory components. To operate in this mode, the ROM coded
program must copy an interrupt vector table to the appropriate
locations in program memory RAM. In this mode, the ROM
enable bit defaults to 1 during reset.
Table III. Boot Summary Table
BMODE = 0 BMODE = 1
MMAP = 0 Boot from EPROM, Boot from HIP, then
then execution starts execution starts at
at internal RAM internal RAM location
location 0x0000 0x0000
MMAP = 1 No booting, execution Stand Alone Mode,
starts at external memory execution starts at
location 0x0000 internal ROM location
0x0800
Ordering Procedure For ADSP-21msp59 ROM Processors
To place an order for a custom ROM-coded ADSP-21msp59
processor, you must:
1. Complete the following forms contained in the ADSP ROM
Ordering Package, available from your Analog Devices sales
representative:
ADSP-21msp59 ROM Specification Form
ROM Release Agreement
ROM NRE Agreement & Minimum Quantity Order (MQO)
Acceptance Agreement for Preproduction ROM Products
2. Return the forms to Analog Devices along with two copies of
the Memory Image File (.EXE file) of your ROM code. The
files must be supplied on two 3.5" or 5.25" floppy disks for
the IBM PC (DOS 2.01 or higher).
3. Place a purchase order with Analog Devices for nonrecurring
engineering changes (NRE) associated with ROM product
development.
After this information is received, it is entered into Analog
Devices’ ROM Manager System that assigns a custom ROM
model number to the product. This model number will be
branded on all prototype and production units manufactured to
these specifications.
To minimize the risk of code being altered during this process,
Analog Devices verifies that the .EXE files on both floppy disks
are identical, and recalculates the checksums for the .EXE file
entered into the ROM Manager System. The checksum data, in
the form of a ROM Memory Map, a hard copy of the .EXE file,
and a ROM Data Verification form are returned to you for
inspection.
REV. 0
–9–
Page 10
ADSP-21msp58/59
A signed ROM Verification Form and a purchase order for production units are required prior to any product being manufactured. Prototype units may be applied toward the minimum
order quantity.
Upon completion of prototype manufacture, Analog Devices
will ship prototype units and a delivery schedule update for production units. An invoice against your purchase order for the
NRE charges is issued at this time.
There is a charge for each ROM mask generated and a minimum order quantity. Consult your sales representative for details. A separate order must be placed for parts of a specific
package type, temperature range, and speed grade.
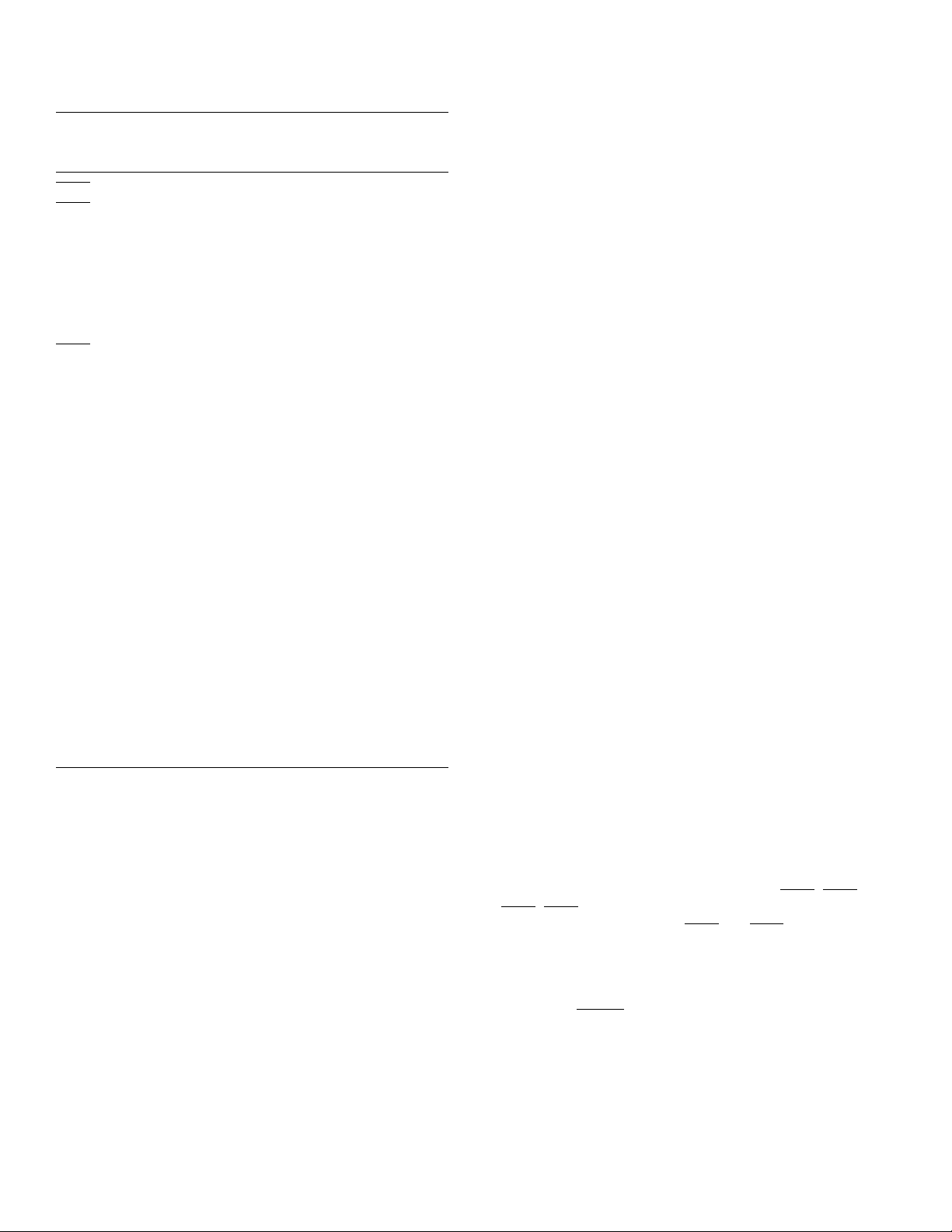
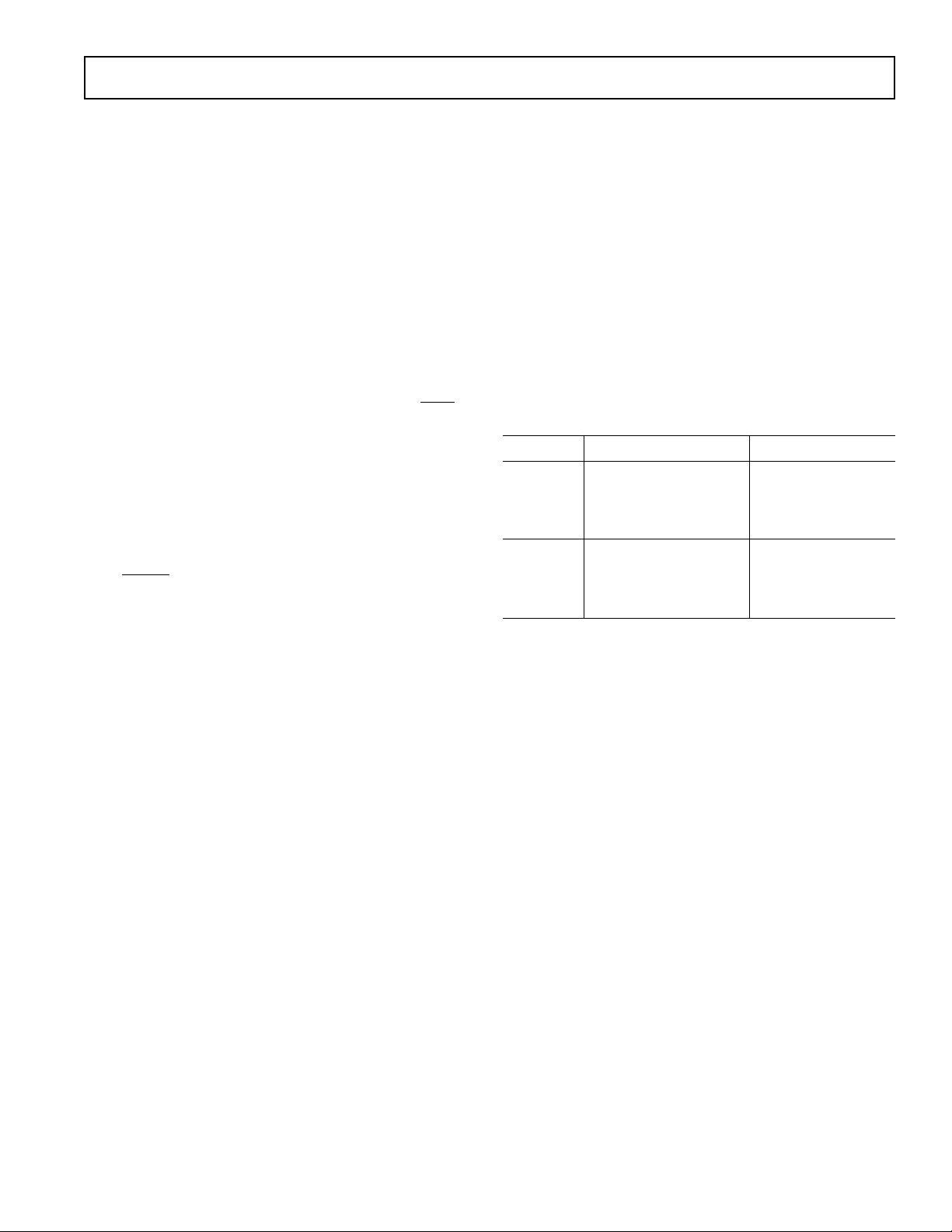
ANALOG INTERFACE
The analog interface contains encoding circuitry (ADC), decoding circuitry (DAC), and processor interface logic. A block diagram of the ADSP-21msp58/59 analog section is shown in
Figure 8.
The analog interface is configured through the Analog Control
Register and the Analog Autobuffer/Powerdown Register (refer
to “ADSP-21msp58/59 Registers”). The Analog Control Register DM[0x3FEE] configures the programmable gain stages, the
analog input multiplexer, and the analog interface powerdown
state. Note that the unused bits must be cleared to zero.
VIN
NORM
VIN
AUX
DECOUPLE
REF_FILTER
V
REF
VOUT
VOUT
MUX
BUF
P
N
DIFFERENTIAL AMP
OUTPUT
DAC
PGA
ADC
PGA
VOLTAGE
REFERENCE
ANALOG
SMOOTHING
FILTER
16-BIT
SIGMADELTA
ADC
16-BIT
SIGMADELTA
DAC
PROCESSOR
INTERFACE
16
Figure 8. Analog Interface Block Diagram
A/D Conversion
The A/D conversion circuitry of the analog interface consists of
an analog multiplexer, a programmable gain amplifier (ADC
PGA), and a 16-bit sigma-delta analog-to-digital converter
(ADC).
Analog Input Multiplexer and Amplifiers
The analog multiplexer selects either the NORM or AUX input
to the ADC’s sigma-delta modulator. The inputs should be ac
coupled.
The ADC PGA may be used to additionally increase the signal
level by +6 dB, +20 dB, or +26 dB. This gain is selected by bit
9 and bit 0 (IG0, IG1) of the analog control register. Input signal level to the sigma-delta ADC should not exceed the V
INMAX
specification.
Analog-To-Digital Converter
The analog interface’s analog-to-digital converter consists of a
4th-order analog sigma-delta modulator, an anti-aliasing decimation filter, and an optional digital high-pass filter. For a detailed
description of the ADC components, refer to the ADSP-2100
Family User’s Manual, Chapter 8, “Analog Interface.”
Bit 10 of the Analog Control Register (0x3FEE) may be set to
add an offset to the input of the ADC sigma-delta converter.
This offset moves ADC sigma-delta idle tones out of the 4.0
kHz speech band range. This added offset must be removed by
the ADC high-pass filter. Therefore, the high-pass filter must be
inserted when you use the offset feature.
D/A Conversion
The D/A conversion circuitry of the analog interface consists of
a sigma-delta digital-to-analog converter (DAC), an analog
smoothing filter, a programmable gain amplifier (DAC PGA),
and a differential output amplifier.
Digital-to-Analog Converter
The digital-to-analog converter consists of an optional digital
high-pass filter, an anti-imaging interpolation filter, and a
sigma-delta modulator. The digital filters and the sigma-delta
modulator have the same characteristics as the filters and
modulator of the ADC. For detailed description of the DAC
components, refer to the ADSP-2100 Family User’s Manual,
Chapter 8, “Analog Interface.”
Analog Smoothing Filter and Programmable Gain Amplifier
The analog smoothing filter consists of a 3rd-order switched capacitor filter with a 3 dB point at approximately 25 kHz.
The DAC’s programmable gain amplifier (DAC PGA) can be
used to adjust the output signal level by –15 dB to +6 dB in
3 dB increments. This gain is selected by bits 2–4 (OG0, OG1,
OG2) of the analog control register.
Differential Output Amplifier
The analog output signal (VOUTP, VOUTN) is produced by a
differential amplifier. The differential amplifier meets specifications for loads greater than 2 kΩ and has a maximum differential output swing of ±3.156 V peak-to-peak (3.17 dBm0). The
DAC will drive loads smaller than 2 kΩ, but with degraded
performance.
The output signal is dc-biased to the on-chip voltage reference
(V
) and can be ac-coupled directly to a load or dc-coupled to
REF
an external amplifier.
The VOUT
, VOUTN output must be used as a differential sig-
P
nal otherwise performance will be severely compromised. Do
not use either pin as a single-ended output.
OPERATING THE ANALOG INTERFACE
The analog interface is operated with several memory-mapped
control and data registers. The ADC and DAC I/O data is received and transmitted through two memory-mapped data registers. The data can also be autobuffered directly into (or from)
on-chip memory. In both cases, the I/O processing is interrupt
driven; two interrupts are dedicated to the analog interface, one
for the ADC receive data and one for the DAC transmit data.
The ADSP-21msp58/59 must have an input clock frequency of
13 MHz. At this frequency, analog-to-digital and digital-to-analog converted data is transmitted at an 8 kHz rate with a single
16-bit word transmitted every 125 µs.
For detailed information about the analog interface, refer to the
ADSP-2100 Family User’s Manual, Chapter 8, “Analog Interface.”
–10–
REV. 0
Page 11
ADSP-21msp58/59
Autobuffering
In some applications, it is advantageous to perform block data
transfers between the analog converters and processor memory.
Analog interface autobuffering enables the automatic transfer of
data blocks directly from the ADC to on-chip processor data
memory or from on-chip processor data memory directly to the
DAC.
ADC and DAC Interrupts
The analog interface generates two interrupts that signal either:
(1) a 16-bit, 8 kHz analog-to-digital or digital-to-analog conversion has been completed, or (2) an autobuffer block transfer
has been completed (i.e., the data buffer contents have been
received or transferred).
When an analog interrupt occurs, the processor vectors to the
addresses listed in Table II, Interrupt Priority & Interrupt Vector
Addresses.
The ADC receive and DAC transmit interrupts occur at an
8 kHz rate, indicating when the data registers should be accessed. On the receive side, the ADC interrupt is generated each
time an A/D conversion cycle is completed and the 16-bit data
word is available in the ADC receive register. On the transmit
side, the DAC interrupt is generated each time an D/A conversion cycle is completed and the DAC transmit register is ready
for the next 16-bit data word.
Both interrupts are generated simultaneously at an 8 kHz rate,
occurring every 3250 instruction cycles with a 13 MHz internal
processor clock. The interrupts are generated continuously,
starting when the analog interface is powered up by setting the
APWD bits (Bits 5 and 6) to one in the analog control register.
Because both interrupts occur simultaneously, only one should
be enabled (in IMASK) to vector to a single service routine that
handles transmit and receive data. However, when using
autobuffer transfers, both interrupts should be enabled.
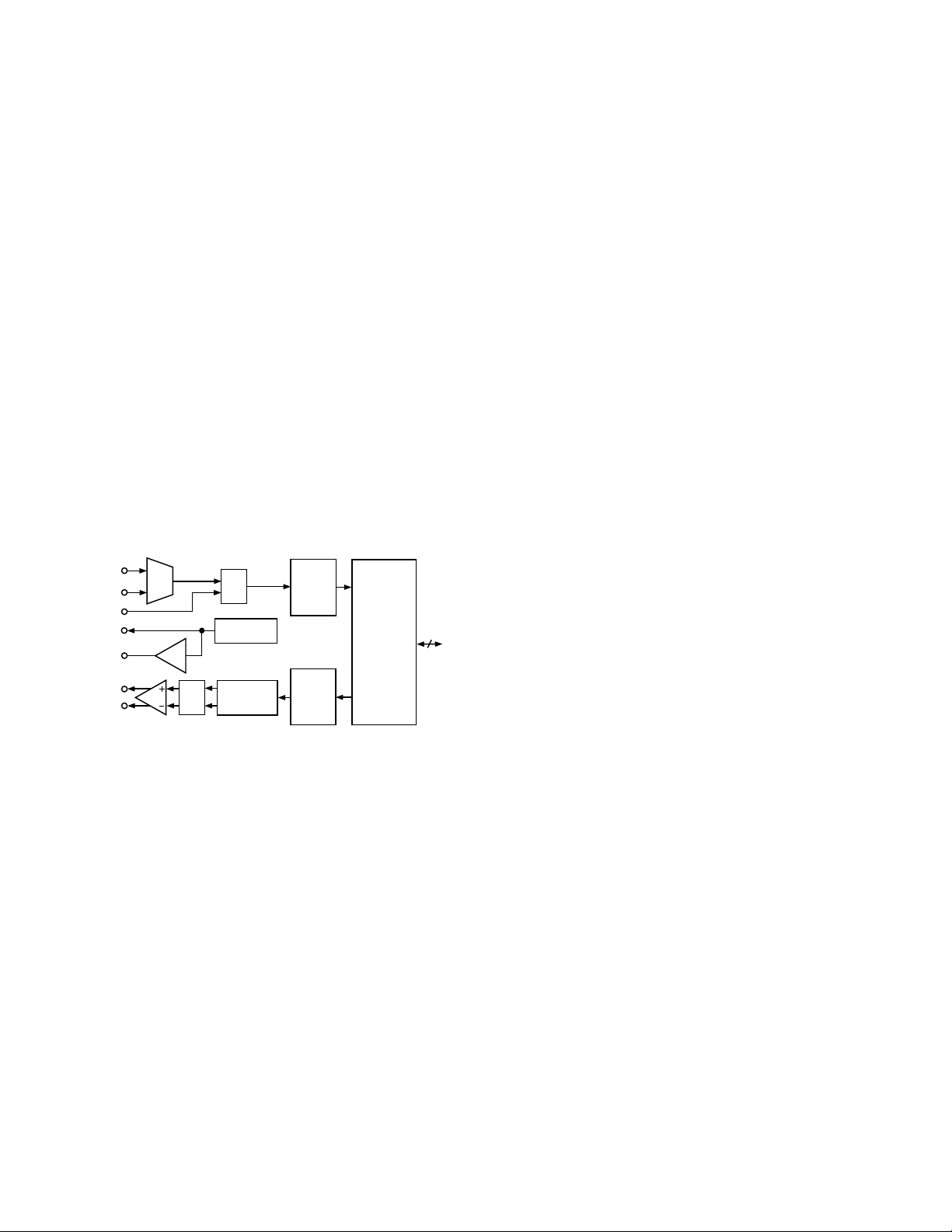
ADSP-21msp58/59 REGISTERS
Figure 9 summarizes the ADSP-21msp58/59 registers. Some
registers store values. For example, AX0 stores an ALU operand; I4 stores a DAG2 pointer. Other registers consist of control
bits and fields, or status flags. For example ASTAT contains
status flags from arithmetic operations, and fields in DWAIT
control the number of wait states for different zones of data
memory.
A secondary set of registers in all computational units allows a
single-cycle context switch.
The bit and field definitions for control and status registers are
given in the rest of this section, except IMASK, ICNTL, and
IFC, which are defined earlier in this data sheet. The system
control register, DWAIT register, timer registers, HIP control
registers, HIP data registers, and SPORT control registers are
all mapped into data memory locations; that is, you access these
registers by reading and writing data memory locations rather
than register names. The particular data memory address is
shown with each memory-mapped register.
Register bit values shown on the following pages are the default
bit values after reset. If no values are shown, the bits are indeterminate at reset. Reserved bits are shown in gray; these bits
should always be written with zeros.
DAG 1
I0
M0
L0
I1
M1
L1
I2
M2
L2
I3
M3
L3
AX0 AX1 AY0 AY1
ALU
AFAR
DAG 2
I4
M4
L4
I5
M5
L5
I6
M6
L6
I7
M7
L7
MX0 MX1 MY0 MY1
MAC
MR0 MR1 MR2 MF
PROGRAM SEQUENCER
SSTAT
CNTR
OWRCNTR
COUNT
STACK
4 x 14
STATUS
SI SE SB
ICNTL
IFC
SR1SR0
LOOP
STACK
4 x 18
PC
STACK
16 x 14
14
14
24
16
0x3FFF
0x3FFE
PMA BUS
DMA BUS
PMD BUS
DMD BUS
0x3FEC 0x3FED
DAC
0x3FEE-0x3FEF
CONTROL REGISTERS
ANALOG INTERFACE
SYSTEM CONTROL
DM WAIT CONTROL
ADC
0x3FFA-0x3FF3
CONTROL REGISTERS
SPORT 0
IMASK
MSTAT
ASTAT
STACK
12 x 25
SHIFTER
Figure 9. ADSP-21msp58/59 Registers
TX0RX0
PROGRAM
SRAM
2K x 24
PX
CONTROL REGISTERS
PROGRAM
ROM
4K x 24
ADSP-21msp59
ONLY
TX1RX1
0x3FF2-0x3FEF
SPORT 1
DATA
SRAM
2K x 16
0x3FFD
0x3FFC
0x3FFB
TIMER
TPERIOD
TCOUNT
TSCALE
HOST
INTERFACE
PORT
0x3FE0-0x3FE5
0x3FE6-0x3FE7
0x3FE8
POWERDOWN
DATA
STATUS
HMASK
FLAG
CONTROL
LOGIC
REV. 0
–11–
Page 12
ADSP-21msp58/59
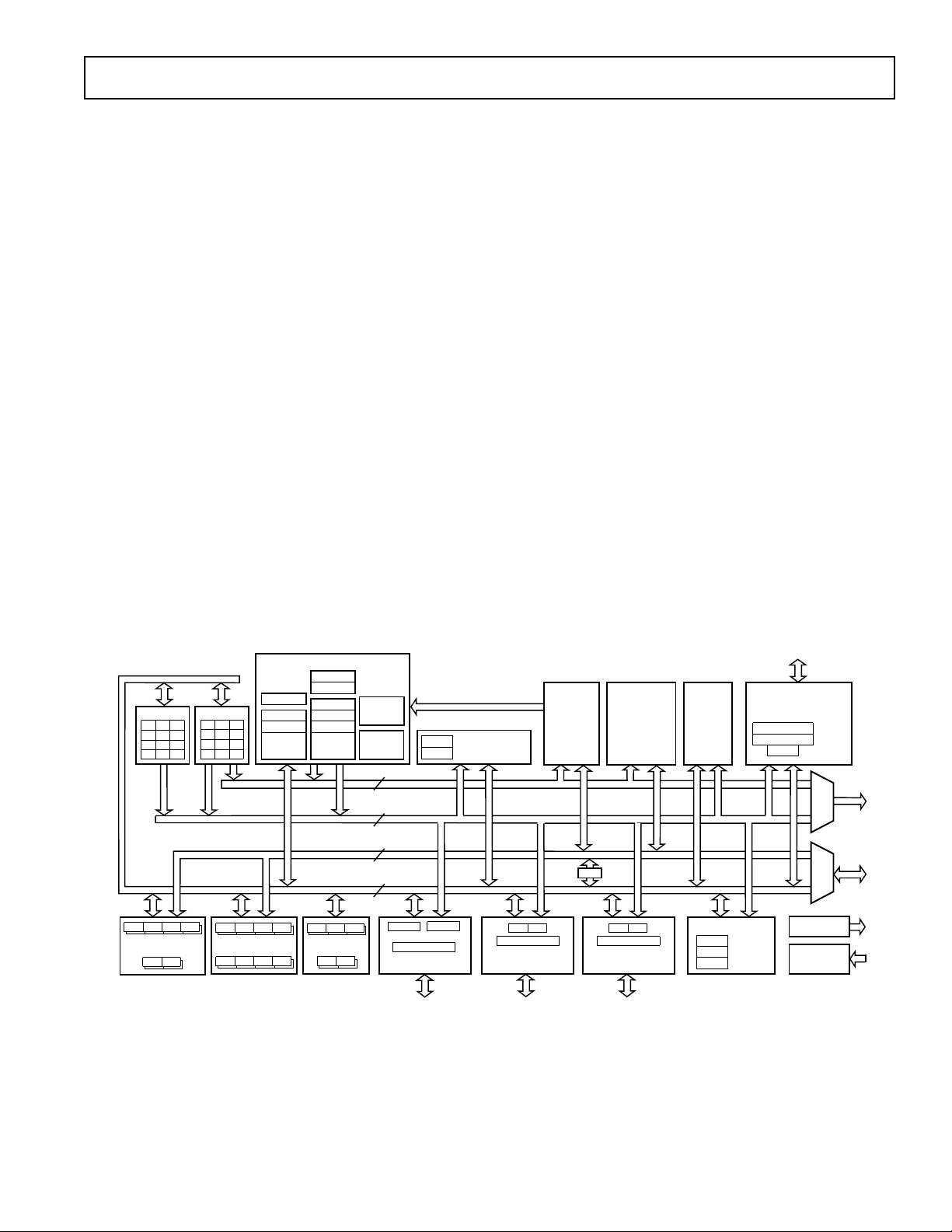
ASTAT
76543210
00000000
1514131211109876543210
00000100001 11 111
AZ ALU Result Zero
AN ALU Result Negative
AV ALU Overflow
AC ALU Carry
AS ALU X Input Sign
AQ ALU Quotient
MV MAC Overflow
SS Shifter Input Sign
MSTAT
6543210
0000000
System Control Register
SSTAT (Read -Only)
76543210
01010101
PC Stack Empty
PC Stack Overflow
Count Stack Empty
Count Stack Overflow
Status Stack Empty
Status Stack Overflow
Loop Stack Empty
Loop Stack Overflow
Data Register Bank Select
0 = primary, 1 = secondary
Bit Reverse Mode Enable (DAG1)
ALU Overflow Latch Mode Enable
AR Saturation Mode Enable
MAC Result Placement
0 = fractional, 1 = integer
Timer Enable
Go Mode Enable
0x3FFF
SPORT0 Enable
1 = enabled, 0 = disabled
SPORT1 Enable
1 = enabled, 0 = disabled
SPORT1 Configure
0 = FI, FO, IRQ0
1 = serial port
, IRQ1, SCLK
PWAIT
Program Memory
Wait States
BFORCE
Boot Force Bit
BPAGE
Boot Page Select
BWAIT
Boot Wait States
Timer Registers
1514131211109876543210
TPERIOD Period Register
TCOUNT Counter Register
00000000
TCOUNT Scaling Register
Control Registers
0x3FFD
0x3FFC
0x3FFB
–12–
REV. 0
Page 13

ADSP-21msp58/59
ROM Enable/Data Memory Wait State
Control Register
0x3FFE
1514131211109876543210
00000001111 11 111
DWAIT4
DWAIT3
ROM enable (ADSP-21msp59)
1 = enable
0 = disable
SPORT0 Multichannel Receive Word Enable Registers
1 = Channel Enabled
0 = Channel Ignored
0x3FFA
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
0x3FF9
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
SPORT0 Control Register
1514131211109876543210
00000000000 00 000
DWAIT2 DWAIT1 DWAIT0
SPORT0 Multichannel Transmit Word Enable Registers
1 = Channel Enabled
0 = Channel Ignored
0x3FF8
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
0x3FF7
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0x3FF6
Multichannel Enable MCE
Internal Serial Clock Generation ISCLK
Receive Frame Sync Required RFSR
Receive Frame Sync Width RFSW
Multichannel Frame Delay MFD
Only If Multichannel Mode Enabled
Transmit Frame Sync Required TFSR
Transmit Frame Sync Width TFSW
(or MCL Multichannel Length; 1 = 32 words, 0 = 24 words
ITFS Internal Transmit Frame Sync Enable
Only If Multichannel Mode Enabled
)
Control Registers
SLEN Serial Word Length
DTYPE Data Format
00 = right justify, zero-fill unused MSBs
01 = right justify, sign extend into unused MSBs
10 = compand using µ-law
11 = compand using A-law
INVRFS Invert Receive Frame Sync
INVTFS Invert Transmit Frame Sync
(or INVTDV Invert Transmit Data Valid
Only If Multichannel Mode Enabled
IRFS Internal Receive Frame Sync Enable
)
REV. 0
–13–
Page 14

ADSP-21msp58/59
SPORT0 SCLKDIV
Serial Clock Divide Modulus
0x3FF5
1514131211109876543210
SPORT0 RFSDIV
Receive Frame Sync Divide Modulus
0x3FF4
1514131211109876543210
CLKOUT Disable Control Bit
MAC Biased Rounding Control Bit
Transmit Autobuffer I Register
Flag Out (Read Only)
Internal Serial Clock Generation ISCLK
Receive Frame Sync Required RFSR
Receive Frame Sync Width RFSW
Transmit Frame Sync Required TFSR
Transmit Frame Sync Width TFSW
ITFS Internal Transmit Frame Sync Enable
CLKODIS
BIASRND
TIREG
SPORT0 Autobuffer Control Register
0x3FF3
1514131211109876543210
0000 00
SPORT1 Control Register
0x3FF2
1514131211109876543210
0000000000 00 000
SLEN Serial Word Length
DTYPE Data Format
00 = right justify, zero-fill unused MSBs
01 = right justify, sign extend into unused MSBs
10 = compand using µ-law
11 = compand using A-law
INVRFS Invert Receive Frame Sync
INVTFS Invert Transmit Frame Sync
IRFS Internal Receive Frame Sync Enable
RBUF
Receive Autobuffering Enable
TBUF
Transmit Autobuffering Enable
RMREG
Receive Autobuffer M Register
RIREG
Receive Autobuffer I Register
TMREG
Transmit Autobuffer M Register
Control Registers
–14–
REV. 0
Page 15

00000000000 00 000
1514131211109876543210
HMASK Register
0x3FE8
Host HDR5 Read
Host HDR4 Read
Host HDR3 Read
Host HDR2 Read
Host HDR1 Read
Host HDR0 Read
Host HDR0 Write
Host HDR1 Write
Host HDR2 Write
Host HDR3 Write
Host HDR4 Write
Host HDR5 Write
Interrupt Enables
1 = Enable
0 = Disable
0000 00
1514131211109876543210
Analog Autobuffer/Powerdown Control Register
0x3FEF
XTALDIS
XTAL Pin Disable During Powerdown
1 = disabled, 0 = enabled
(XTAL pin should be disabled when
no external crystal is connected)
XTALDELAY
Delay Startup From Powerdown 4096 Cycles
1 = delay, 0 = no delay
(use delay to let internal phase locked
loop or external oscillator stabilize)
PDFORCE
Powerdown Force
1 = force processor to vector to
powerdown interrupt
PUCR
Powerup Context Reset
1 = soft reset, 0 = resume execution
ARBUF
ADC Receive Autobuffer Enable
ATBUF
DAC Transmit Autobuffer Enable
ARMREG
Receive M Register
ARIREG
Receive I Register
ATMREG
Transmit M Register
ATIREG
Transmit I Register
1514131211109876543210
SPORT1 SCLKDIV
Serial Clock Divide Modulus
0x3FF1
1514131211109876543210
SPORT1 RFSDIV
Receive Frame Sync Divide Modulus
0x3FF0
ADSP-21msp58/59
REV. 0
Control Registers
–15–
Page 16

ADSP-21msp58/59
ADC Offset
ADC Input Gain
DAC High Pass Filter Bypass
1 = bypass, 0 = insert
ADC High Pass Filter Bypass
1 = bypass, 0 = insert
Analog Interface Powerdown
0 = powerdown, 1 = enable
(set both bits to 1
to enable analog interface)
Analog Control Register
0x3FEE
1514131211109876543210
00000000000 00 000
OG2 OG1 OG0
IG0
DABY
ADBY
APWD
All bits are set to 0 at processor reset.
(Reserved bits 11–15 must always be set to 0)
ADC Receive
1514131211109876543210
IG0, IG1
ADC Input Gain (for PGA)
Gain
IG1
IG0
0
IG2
0
0
1
1
0
1
1
IG1
IG1
0
0
0
0
0
0
1
1
1
1
1
0
0
1
1
1
0
0
1
0
0
1
1
1
0dB
+6dB
+20dB
+26dB
IG1
ADC Input Gain
IMS
ADC Input Multiplexer Select
1 = AUX input, 0 = NORM input
OG2, OG1, OG0
DAC Output Gain (for PGA)
Gain
+6dB
+3dB
0dB
–3dB
–6dB
–9dB
–12dB
–15dB
DM(0x3FED)
DAC Transmit
1514131211109876543210
HIP Data Registers
HDR5
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0x3FE5
HDR4
0x3FE4
HDR3
0x3FE3
HDR2
0x3FE2
HDR1
0x3FE1
HDR0
0x3FE0
DM(0x3FEC)
Control Registers
–16–
REV. 0
Page 17

HSR6
0x3FE6
1514131211109876543210
00000000000 00 000
ADSP-21msp58/59
ADSP-21msp58/59 HDR5 Write
ADSP-21msp58/59 HDR4 Write
ADSP-21msp58/59 HDR3 Write
ADSP-21msp58/59 HDR2 Write
ADSP-21msp58/59 HDR1 Write
ADSP-21msp58/59 HDR0 Write
Host HDR0 Write
Host HDR1 Write
Host HDR2 Write
Host HDR3 Write
Host HDR4 Write
Host HDR5 Write
HSR7
0x3FE7
1514131211109876543210
00000000100 00 000
ADSP-21msp58/59 HDR0 Write
ADSP-21msp58/59 HDR1 Write
ADSP-21msp58/59 HDR2 Write
ADSP-21msp58/59 HDR3 Write
ADSP-21msp58/59 HDR4 Write
ADSP-21msp58/59 HDR5 Write
Overwrite Mode
Software Reset
Control Registers
INSTRUCTION SET DESCRIPTION
The ADSP-21msp58/59 assembly language instruction set has
an algebraic syntax that was designed for ease of coding and
readability. The assembly language, which takes full advantage
of the processor’s unique architecture, offers the following
benefits:
• The algebraic syntax eliminates the need to remember cryptic
assembler mnemonics. For example, a typical arithmetic add
instruction, such as AR = AX0 + AY0, resembles a simple
equation.
• Every instruction assembles into a single 24-bit word and
executes in a single cycle.
•The syntax is a superset of the ADSP-2100 Family assembly
language and is completely source and object code compatible
with other family members. Programs may, however, need to
be relocated to utilize internal memory and conform to the
ADSP-21msp58/59 interrupt vector and reset vector map.
• Sixteen condition codes are available. For conditional jump,
call, return, or arithmetic instructions, the condition can be
checked and the operation executed in the same instruction
cycle.
• Multifunction instructions allow parallel execution of an
arithmetic instruction with up to two fetches and one write to
processor memory space during a single instruction cycle.
Consult the ADSP-2100 Family User’s Manual for a complete
description of the syntax and an instruction set reference.
ADSP-21msp58/59 EXTENDED INSTRUCTION SET
The ADSP-21msp58/59 has a number of additional instructions beyond the standard ADSP-2100 Family instruction set.
These additional instructions and mathematical operations are
described below.
Slow IDLE
Slow IDLE allows slowing the processor’s internal clock by a
factor of 16, 32, 64, or 128 during IDLE. The instruction
source code is specified as follows:
Syntax: IDLE (n);
Permissible Values for n
16, 32, 64, 128
Examples: IDLE;
IDLE (16);
Description: The IDLE instruction causes the processor to
wait indefinitely in a low power state until an interrupt occurs. When an unmasked interrupt occurs, it is serviced; execution then continues with
the instruction following the IDLE instruction.
The optional value provides a “slow idle” feature; slowing the clock down by the factor set
with the value.
Interrupt Enable and Disable Instructions
The ADSP-21msp58/59 supports an interrupt enable instruction and interrupt disable instruction. Interrupts are enabled by
default at reset. The interrupt enable instruction source code is
specified as follows:
REV. 0
–17–
Page 18

ADSP-21msp58/59
Syntax: ENA INTS;
Description: Executing the ENA INTS instruction allows all
unmasked interrupts to be serviced again.
The interrupt disable instruction source code is specified as
follows:
Syntax: DIS INTS;
Description: Reset enables interrupt servicing. Executing the
DIS INTS instruction causes all interrupts to be
masked without changing the contents of the
IMASK register. Disabling interrupts does not
affect the autobuffer circuitry, which will operate
normally whether or not interrupts are enabled.
The disable interrupt instruction masks all user
interrupts including the powerdown interrupt.
Extended ALU and Multiplier Operations
The following extended computation operations are available
only on the ADSP-21msp58/59 processor. The term “base instruction set” refers to the computations and instructions available on all ADSP-21xx processors.
Additional Constants for ALU Operations
A new set of numerical constants may be used in all nonmultifunction ALU operations (except DIVS and DIVQ) using both
X and Y operands. The instruction source code is specified as
follows:
Syntax: [IF condition] AR = xop function yop
AF constant
Permissible xops
AX0, AX1, AR, MR0, MR1, MR2, SR0, SR1
Permissible functions
ADD/ADD with CARRY, SUBTRACT X–Y/SUBTRACT X–
Y with BORROW, SUBTRACT Y–X/SUBTRACT Y–X with
BORROW, AND, OR, XOR
Permissible yops (base instruction set)
AY0, AY1, AF
Permissible yops and constants (extended instruction set)
AY0, AY1, AF, 0, 1, 2, 4, 8, 16, 32, 64, 128, 256, 512, 1024,
2048, 4096, 8192, 16384, 32767, –2, –3, –5, –9, –17, –33, –65,
–129, –257, –513, –1025, –2049, –4097, –8193, –16385, –32768
Examples: AR = AR+1;
AR = MR1 - 33;
IF GT AF = AX1 OR 16;
Description: Test the optional condition and, if true, perform
the specified function. If false then perform a nooperation. Omitting the condition performs the
function unconditionally. The operands are contained in the data registers specified in the instruction or optionally a constant may be used.
Additional Constants for ALU PASS Operation
A new set of numerical constants may be used in the PASS instruction. The instruction source code is specified as follows:
Syntax: [IF condition] AR = pass yop
AF constant
Permissible yops (base instruction set)
AY0, AY1, AF
Permissible yops and constants (extended instruction set)
AY0, AY1, AF, 0, 1, 2, 3, 4, 5, 7, 8, 9, 15, 16, 17, 31, 32, 33,
63, 64, 65, 127, 128, 129, 255, 256, 257, 511, 512, 513, 1023,
1024, 1025, 2047, 2048, 2049, 4095, 4096, 4097, 8191, 8192,
8193, 16383, 16384, 16385, 32766, 32767, –1, –2, –3, –4, –5,
–6, –8, –9, –10, –16, –17, –18, –32, –33, –34, –64, –65, –66, –128,
–129, –130, –256, –257, –258, –512, –513, –514, –1024, –1025,
–1026, –2048, –2049, –2050, –4096, –4097, –4098, –8192, –8193,
–8194, –16384, –16385, –16386, –32767, –32768
Examples: IF GE AR = PASS AY0;
IF EQ AF = PASS –1025;
Description: Test the optional condition and, if true, pass the
source operand unmodified through the ALU
block and store in the destination location. If the
condition is not true, perform a no-operation.
Omitting the condition performs the pass unconditionally. The source operand is contained in
the data registers specified in the instruction or
optional constant.
The PASS instruction performs the transfer to the
AR register and affect the status flag; this instruction is different from a register move operation
which does not affect any status flags. PASS 0 is
one method of clearing AR. PASS 0 can also be
combined in a multifunction instruction in conjunction with memory reads and writes to clear AR.
Note: The ALU status flags (in the ASTAT register)
are not defined for the execution of this instruction when using the constant values other than 0,
1, and –1.
ALU Bit Operations
The additional constants for ALU operations allow you to code
bit test, set, clear, and toggle operations through careful choice
of the constant and ALU function. For streamlined programming,
the source code for these operations can also be specified as:
Syntax: [IF condition] AR = TSTBIT n of xop;
AF SETBIT n of xop;
CLBIT n of xop;
TGBIT n of xop;
Permissible xops
AX0, AX1, AR, MR0, MR1, MR2, SR0, SR1
Permissible n Values (0 = LSB)
0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15
Examples: AF=TSTBIT 5 of AR;
IF NE JUMP SET;
/* JUMP TO SET IF BIT IS SET */
Definitions of Operations
TSTBIT is an AND operation with a 1 in the selected bit
SETBIT is an OR operation with a 1 in the selected bit
CLBIT is an AND operation with a 0 in the selected bit
TGBIT is an XOR operation with a 1 in the selected bit
Result-Free ALU Operations
The result-free ALU operations allow the generation of condition flags based on an ALU operation but discard the result.
The source code for the instruction is specified as follows:
Syntax: NONE = <ALU>;
where <ALU> is any unconditional ALU operation of the 21xx
base instruction set (except DIVS or DIVQ). (Note that the additional constant ALU operations of the ADSP-2171/2181 extended instruction set are not allowed.)
–18–
REV. 0
Page 19

ADSP-21msp58/59
VIN
NORM
VIN
AUX
DECOUPLE
PGA
C3
C2
C1
R1
INPUT
SOURCE
STAR
GROUND
ADSP-21msp58/59
MUX
Examples: NONE = AX0 – AY0;
NONE = PASS SR0;
Description: Perform the designated ALU operation, set the
condition flags, then discard the result value.
This allows the testing of register values without
disturbing the AR or AF register values.
MAC Operations
A modified MAC operation allows additional type 9 instructions. The conditional ALU/MAC instruction has been modified to allow the X operand to be used as the Y operand as well.
This allows a single cycle X
2
, and also ∑X2 operations.
The new MAC instructions allow the use of any xop as both the
X and Y operands. The instructions source code is specified as
follows:
Syntax: [IF condition] MR = [MR +] xop * yop (UU);
MF [MR –] xop (SS) ;
(RND);
Permissible xops
AR, MR0, MR1, MR2, MX0, MX1, SR0, SR1
Example: IF LT MR=MR+ SR0 * SR0 (SS);
Note: Both X operators must be the same register.
Biased Rounding
A new mode has been added to allow biased rounding in addition to the normal unbiased rounding. When the BIASRND bit
is set to 0 the normal unbiased rounding operations occur.
When the BIASRND bit is set to 1, biased rounding occurs instead of the normal unbiased rounding. When operating in biased rounding mode all rounding operations with MR0 set to
0x8000 will round up, rather than only rounding odd MR1
values up. For example:
MR value before RND biased RND result unbiased RND result
00-0000-8000 00-0001-8000 00-0000-8000
00-0001-8000 00-0002-8000 00-0002-8000
00-0000-8001 00-0001-8001 00-0001-8001
00-0001-8001 00-0002-8001 00-0002-8001
00-0000-7FFF 00-0000-7FFF 00-0000-7FFF
00-0001-7FFF 00-0001-7FFF 00-0001-7FFF
This mode only has an effect when the MR0 register contains
0x8000, all other rounding operation work normally. This mode
was added to allow more efficient implementation of bit specified algorithms which specify biased rounding such as the GSM
speech compression routines. Unbiased rounding is preferred
for most algorithms.
Note: BIASRND bit is bit twelve of the SPORT0
Autobuffer Control register.
Interrupt Enable
The ADSP-21msp58/59 supports an interrupt enable instruction. Interrupts are enabled by default at reset. The instruction
source code is specified as follows:
Syntax: ENA INTS;
Description: Executing the ENA INTS instruction allows
all unmasked interrupts to be serviced again.
Interrupt Disable
The ADSP-21msp58/59 supports an interrupt disable instruction. The instruction source code is specified as follows:
Syntax: DIS INTS;
Description: Reset enables interrupt servicing. Executing the
DIS INTS instruction causes all interrupts to
be masked without changing the contents of the
IMASK register. Disabling interrupts does not affect the autobuffer circuitry, which will operate
normally whether or not interrupts are enabled.
The disable interrupt instruction masks all user
interrupts including the powerdown interrupt.
CIRCUIT DESIGN CONSIDERATIONS
The following sections discuss interfacing analog signals to the
ADSP-21msp58/59.
Analog Signal Input
Figure 10 shows the recommended input circuit for the analog input pin (either VIN
NORM
or VIN
). The circuit of Figure 10
AUX
implements a first-order low-pass filter (R1C1) with a 3 dB point
less than 40 kHz. This is the only filter required external to the
processor to prevent aliasing of the sampled signal. Since the
ADSP-21msp58/59’s sigma-delta ADC uses a highly oversampled
approach that transfers the bulk of the anti-aliasing filtering into the
digital domain, the off-chip anti-aliasing need only be of low order.
Figure 10. Recommend Analog Input Circuit
The on-chip ADC PGA can be used when there is not enough
gain in the input circuit. The PGA gain is set by bits 9 and 0
(IG1, IG0) of the processor’s analog control register. The gain
must be chosen to ensure that a full-scale input signal (at R1 in
Figure 10) produces a signal level at the input to the sigma-delta
modulator of the ADC that does not exceed VIN
MAX
(refer to
the “Analog Interface Electrical Characteristics” specifications).
VIN
NORM
and VIN
are biased at the Internal Reference Volt-
AUX
age (nominal of 2.5 V) of the ADSP-21msp58/59, which lets the
analog section of the processor operate from a single supply.
The input signal should be ac-coupled with an external capacitor (C2). The value of C2 is determined by the input resistance
of the analog input (VIN
NORM
, VIN
) (200 kΩ) and the de-
AUX
sired cutoff frequency. The cutoff frequency should be ≤30 Hz.
The following equation should be used to determine the values
of R1, C1, and C2; R1 should be ≤2.2 kΩ. C2 should be ≥0.027
µF; C3 should be equal to C2.
2 π f
1
1RIN
C2 =
RIN = ADSP-21msp58/59 input resistance (200 kΩ)
f
= cutoff frequency <30 Hz
1
2 π f
1
C1
2
R1 =
R1 ≤ 2.2 kΩ
> 20 kHz < 40 kHz*
f
2
2 π f
1
R1
2
C1 =
For optimum ADC performance, C1 should be an NPO type
capacitor.
*If minimum (<0.1 dB) rolloff at 4 kHz is desired, f2 should be set to 40 kHz.
REV. 0
–19–
Page 20

ADSP-21msp58/59
Analog Signal Output
The differential analog output (VOUTP, VOUTN) is produced
by an on-chip differential amplifier which is part of the processor’s
analog interface. The differential amplifier will meet dynamic
specifications for loads greater than 2 kΩ (R
≥ 2 kΩ) and has a
L
maximum differential output voltage swing of ±3.156 V peak-topeak (3.17 dBm0). The DAC will drive loads smaller than 2 kΩ,
but with degraded dynamic performance. The differential output can be ac-coupled directly to a load or dc-coupled to an external amplifier.
Figure 11 shows a simple circuit providing a differential output
with ac coupling. The capacitor of this circuit (C
OUT
) is op-
tional; if used, its value can be chosen as follows:
C
OUT
C
OUT
R
L
C
OUT
VOUT
VOUT
1
=
(60π ) R
P
ADSP-21msp58/59
N
L
Figure 11. Example Circuit for Differential Output with
AC Coupling
The VOUTP and VOUTN outputs must be used as differential
outputs (do not use either as a single-ended output). Figure 12
shows an example circuit which can be used to convert the differential output to a single-ended output. The circuit uses a differential-to-single-ended amplifier, the Analog Devices SSM2141.
+12V
0.1µF
7
4
GND
SSM2141
0.1µF
GND
V
OUT
5
1
GND
A
–12V
A
VOUT
VOUT
A
ADSP-21msp58/59
P
N
Figure 12. Example Circuit for Single-Ended Output
Voltage Reference Filter Capacitance
Figure 13 shows the recommended reference filter capacitor
connections. The capacitor grounds should be connected to the
same star ground point shown in Figure 10.
BUF
VOLTAGE
REFERENCE
ADSP-21msp58/59
10µF
STAR
GROUND
0.1µF
V
REF
REF_FILTER
Figure 13. Voltage Reference Filter Capacitor
APPLICATION EXAMPLES
The ADSP-21msp58/59 is ideal for speech processing applications where high performance for analog and digital circuitry is
required, but board space is severely limited. The cellular radio
handset is one application. Here the ADSP-21msp58/59 can
digitize the speech, then perform compression algorithms that
sufficiently reduce the bit rate for transmission in a limited radio
bandwidth.
DEFINITION OF SPECIFICATIONS
Absolute Gain
Absolute gain is a measure of converter gain for a known signal.
Absolute gain is measured with a 1.0 kHz sine wave at 0 dBm0.
The absolute gain specification is used as a reference for the
gain tracking error specification.
Gain Tracking Error
Gain tracking error measures changes in converter output for
different signal levels relative to an absolute signal level. The
absolute signal level is 1.0 kHz at 0 dBm0. Gain tracking error
at 0 dBm0 is 0 dB by definition.
SNR + THD
Signal-to-noise ratio plus total harmonic distortion is defined to
be the ratio of the rms value of the measured input signal to the
rms sum of all other spectral components in the frequency range
300 Hz–3400 Hz, including harmonics but excluding dc.
Intermodulation Distortion
With inputs consisting of sine waves at two frequencies, fa and
fb, any active device with nonlinearities will create distortion
products at sum and difference frequencies of mfa ± nfb where
m, n = 0, 1, 2, 3, etc. Intermodulation terms are those which
neither m nor n are equal to zero. The second order terms include (fa + fb) and (fa – fb), while the third order terms include
(2fa + fb), (2fa – fb), (fa + 2fb), and (fa – 2fb).
Idle Channel Noise
Idle channel noise is defined as the total signal energy measured
at the output of the device when the input is grounded (measured in the frequency range 300 Hz–3400 Hz).
Crosstalk
Crosstalk is defined as the ratio of the rms value of a full-scale
signal appearing on one channel to the rms value of the same
signal that couples onto the adjacent channel. Crosstalk is expressed in dB.
Power Supply Rejection
Power supply rejection measures the susceptibility of a device to
a signal on the power supply. Power supply rejection is measured by modulating a signal on the power supply and measuring the signal at the output (relative to 0 dB). Power supply
rejection is defined as the ratio of the rms value of the modulation signal to the rms value of the same signal in the ADC/DAC
channel.
Group Delay
Group delay is defined as the derivative of radian phase with respect to radian frequency, ∂φ(ω)/∂ω. Group delay is a measure
of the average delay of a system as a function of frequency. A
linear system with a constant group delay has a linear phase response. The deviation of group delay away from a constant indicates the degree of nonlinear phase response of the system.
–20–
REV. 0
Page 21

ADSP-21msp58/59–SPECIFICA TIONS
ADSP-21msp58/59
RECOMMENDED OPERATING CONDITIONS
B Grade
Parameter Min Max Unit
V
DD
T
AMB
See “Environmental Conditions” for information on thermal specifications.
Supply Voltage 4.50 5.50 V
Ambient Operating Temperature –40 +85 °C
ELECTRICAL CHARACTERISTICS
Parameter Test Conditions Min Max Unit
V
IH
V
IH
V
IL
V
OH
V
OL
I
IH
I
IL
I
OZH
I
OZL
I
DD
I
DD
I
DD
I
CC
C
I
C
O
NOTES
1
Bidirectional pins: D0-D23, RFS0, RFS1, SCLK0, SCLK1, TFS0, TFS1, HD0-HD7/HAD0-HAD7.
2
Input only pins: RESET, IRQ2, BR, MMAP, DR0, DR1, HSEL, HSIZE, BMODE, HMD0, HMD1, HRD/HWR, HWR/HDS, PWD, HA2/ALE, HA1-0.
3
Input only pins: CLKIN, RESET, IRQ2, BR, MMAP, DR0, DR1, HSEL, HSIZE, BMODE, HMD0, HMD1, HRD/HWR, HWR/HDS, PWD, HA2/ALE, HA1-0.
4
Output pins: BG, PMS, DMS, BMS, RD, WR, A0-A13, DT0, DT1, CLKOUT, HACK, FL0.
5
Although specified for TTL outputs, all ADSP-21msp58/59 outputs are CMOS-compatible and will drive to VDD and GND, assuming no dc loads.
6
Idle refers to ADSP-21msp58/59 state of operation during IDLE instruction. Deasserted pins are driven to either V
IDLE currents.
7
Three-statable pins: A0-A13, D0-D23, PMS, DMS, BMS, RD, WR, DT0, DT1, SCLK0, SCLK1, TFS0, TFS1, RFS0, RSF1, HD0-HD7/HAD0-HAD7.
8
0 V on BR, CLKIN Active (to force three-state condition).
9
Current reflects the digital portion of device operating with no output loads and a 2 kΩ load on the analog output (VOUTP, VOUTN).
10
tCK = 76.92 ns, CODEC active, 80% execution type 1 instructions, with random data. For typical figures for digital and analog supply currents, refer to “Power
Dissipation” section.
11
Guaranteed but not tested.
12
Output pin capacitance is the capacitive load for any three-stated output pin.
Specifications subject to change without notice.
Hi-Level Input Voltage
Hi-Level CLKIN Voltage @ V
Lo-Level Input Voltage
Hi-Level Output Voltage
Lo-Level Output Voltage
Hi-Level Input Current
Lo-Level Input Current
Tristate Leakage Current
Tristate Leakage Current
Digital Supply Current (Idle)
Digital Supply Current (Dynamic)
Digital Supply Current (Powerdown)9@ VDD = max, See
Analog Supply Current (Dynamic)
Input Pin Capacitance
Output Pin Capacitance
1, 2
1, 3
1, 4, 5
1, 4, 5
3
3
7
7
3, 11, 12
7, 11, 12
6, 9
9, 10
9
@ V
= max 2.0 V
DD
= max 2.2 V
DD
@ VDD = min 0.8 V
@ VDD = min,
I
= –0.5 mA 2.4 V
OH
@ V
= min,
DD
I
= –100 µA
OH
6
VDD – 0.3 V
@ VDD = min,
I
= 2 mA 0.4 V
OL
@ VDD = max,
V
= V
IN
max 10 µA
DD
@ VDD = max,
V
= 0 V 10 µA
IN
@ VDD = max,
V
= V
IN
@ VDD = max,
V
= 0 V
IN
DD
max
8
8
10 µA
10 µA
@ VDD = max,
Codec Inactive 18 mA
@ VDD = max,
V
= max 92 mA
CC
ADSP-2100 Family User’s
Manual, Chapter 9 100 µA
Codec Active 18 mA
@ VIN = 2.5 V,
f
= 1.0 MHz,
IN
T
= 25°C8pF
AMB
@ VIN = 2.5 V,
f
= 1.0 MHz,
IN
T
= 25°C8pF
AMB
or GND. Refer to chart in back for lower
DD
REV. 0
–21–
Page 22

ADSP-21msp58/59
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS
*
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7 V
Input Voltage . . . . . . . . . . . . . . . . . . . . . –0.3 V to V
Output Voltage Swing . . . . . . . . . . . . . . –0.3 V to V
+ 0.3 V
DD
+ 0.3 V
DD
Operating Temperature Range (Ambient) . . . .–40°C to +85°C
Storage Temperature Range . . . . . . . . . . . . .–65°C to +150°C
Lead Temperature (5 sec) . . . . . . . . . . . . . . . . . . . . . . +280°C
*
Stresses above those listed under “Absolute Maximum Ratings” may cause
permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions above those indicated in the
operational sections of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability.
ESD SENSITIVITY
The ADSP-21msp58/59 is an ESD (electrostatic discharge) sensitive device. Electrostatic charges
readily accumulate on the human body and equipment and can discharge without detection.
Permanent damage may occur to devices subjected to high energy electrostatic discharges.
The ADSP-21msp58/59 features proprietary ESD protection circuitry to dissipate high energy
discharges (Human Body Model).
Proper ESD precautions are recommended to avoid performance degradation or loss of functionality. Unused devices must be stored in conductive foam or shunts, and the foam should be
discharged to the destination before devices are removed.
TIMING PARAMETERS
GENERAL NOTES
Use the exact timing information given. Do not attempt to derive parameters from the addition or subtraction of others. While
addition or subtraction would yield meaningful results for an individual device, the values given in this data sheet reflect statistical variations and worst cases. Consequently, you cannot
meaningfully add up parameters to derive longer times.
TIMING NOTES
Switching characteristics specify how the processor changes its
signals. You have no control over this timing; it is dependent on
the internal design. Timing requirements apply to signals that
are controlled outside the processor, such as the data input for a
read operation.
Timing requirements guarantee that the processor operates correctly with another device. Switching characteristics tell you
what the device will do under a given circumstance. Also, use the
switching characteristics to ensure any timing requirement of a
device connected to the processor (such as memory) is satisfied.
MEMORY REQUIREMENTS
This chart links common memory device specification
names and ADSP-21msp58/59 timing parameters for your
convenience.
Common
Parameter Memory Device
Name Function Specification Name
t
ASW
t
AW
t
WRA
t
DW
t
DH
t
RDD
t
AA
A0-A13, DMS, PMS Address Setup to
Setup before
WR Low Write Start
A0-A13, DMS, PMS Setup Address Setup
before
WR Deasserted to Write End
A0-A13, DMS, PMS Address Hold Time
Hold after
WR Deasserted
Data Setup before WR High Data Setup Time
Data Hold after WR High Data Hold Time
RD Low to Data Valid OE to Data Valid
A0-A13, DMS, PMS, Address Access Time
BMS to Data Valid
–22–
REV. 0
Page 23

ADSP-21msp58/59
FREQUENCY RESPONSE
ADC ADC DAC DAC
Frequency Max Min Max Min
(Hz) (dB) (dB) (dB) (dB)
0+ –60.00 N/A –60.00 N/A
75 –25.00 N/A –25.00 N/A
150 +0.266 –0.134 +0.015 –0.185
300 +0.272 –0.128 +0.030 –0.170
1000 +0.000 +0.000 +0.000 +0.000
2000 +0.050 –0.350 +0.050 –0.200
3000 –0.200 –0.600 –0.050 –0.300
3400 –0.300 –0.700 –0.090 –0.340
3700 –0.375 –0.775 –0.120 –0.370
3850 –25.00 N/A –25.00 N/A
4000 –60.00 N/A –60.00 N/A
NOTES
All specifications relative to absolute gain @ 1.0 kHz.
ADC and DAC high-pass filters inserted.
ADC specifications do not include RC filter attenuation and assumes an ac coupled input (see “Analog Test Conditions”
for RC filter details).
NOISE & DISTORTION
Parameter Min Max Unit Test Condition
ADC Intermodulation Distortion –60 dB m, n = 1 and 2; f
DAC Intermodulation Distortion –70 dB m, n = 1 and 2; f
ADC Idle Channel Noise 65 dBm0
DAC Idle Channel Noise 72 dBm0
ADC Crosstalk
DAC Crosstalk
ADC Power Supply Rejection
DAC Power Supply Rejection
ADC Group Delay
DAC Group Delay
1
1
1
1
1
1
–65 dB ADC input signal level: 1.0 kHz, 0 dBm0
DAC input at idle.
–65 dB ADC input signal level: analog ground
DAC output signal level: 1.0 kHz, 0 dBm0
–55 dB Input signal level at VCC and VDD pins:
1.0 kHz, 100 mV p-p sine wave
–55 dB Input signal level at VCC and VDD pins:
1.0 kHz, 100 mV p-p sine wave
1 ms 300 Hz–3000 Hz
1 ms 300 Hz–3000 Hz
ADC SNR and THD 65 dB 1.0 kHz, 0 dBm0
DAC SNR and THD 72 dB 1.0 kHz, 0 dBm0
NOTE
1
Guaranteed but not tested.
100
80
60
ADC SNR + THD
PEAK @
65dB
100
DAC SNR + THD
80
60
= 984; fb = 1047
a
= 984; fb = 1047
a
PEAK @
72dB
REV. 0
40
SNR + THD – dB
20
0
–60 10–50 –40 –30 –20 –10 0
VIN – dBm0
SLOPE =
20dB
20dBm0
40
SNR + THD – dB
20
0
3.17
–60 10–50 –40 –30 –20 –10 0
Figure 14. SNR + THD vs. V
–23–
SLOPE =
VIN – dBm0
IN
20dB
20dBm0
3.17
Page 24

ADSP-21msp58/59
ANALOG INTERFACE ELECTRICAL CHARACTERISTICS
Symbol Parameter Min Typ Max Unit
ADC
R
I
VIN
DAC:
R
O
V
OOFF
V
O
R
L
MAX
Input Resistance
Maximum Input Range
Output Resistance
Output DC Offset
Maximum Voltage Output Swing (p-p) Across R
Single-Ended
Differential
Load Resistance
1
1, 2
1, 4
5
1
1, 4
at VIN
1, 3
NORM
, VIN
AUX
200 kΩ
3.156 V p-p
2.5 Ω
–400 400 mV
L
3.156 V
6.312 V
2kΩ
Reference Buffer:
Voltage Reference (V
Output Impedence
Capacitive Load
1
PSRR
NOTES
Test conditions for all analog interface tests: ADC PGA bypassed, DAC PGA set to 0 dB gain, with 2 kΩ load on analog output (VOUTP, VOUTN), VCC = 5.0 V.
1
Guaranteed but not tested.
2
Varies with PGA setting.
3
At input to sigma-delta modulator of ADC.
4
At VOUTP, VOUTN.
5
Between VOUTP and VOUTN.
1
) 2.25 2.75 V
REF
1
250 Ω
10 nf
55 dB
GAIN
Parameter Min Typ Max Unit Test Conditions
ADC Absolute Gain –0.7 0 0.7 dBm0 1.0 kHz, 0 dBm0
ADC Gain Tracking Error –0.1 0 0.1 dBm0 1.0 kHz, +3 to –50 dBm0
ADC PGA Relative Gain –0.6 0 0.6 dBm0 1.0 kHz
DAC Absolute Gain –0.75 0 0.75 dBm0 1.0 kHz, 0 dBm0
DAC Gain Tracking Error –0.1 0 0.1 dBm0 1.0 kHz, +3 to –50 dBm0
DAC PGA Relative Gain –0.6 0 0.6 dBm0 1.0 kHz
–24–
REV. 0
Page 25

ADSP-21msp58/59
Parameter Min Max Unit
Clock Signals
t
is defined as 0.5 t
CK
an input clock with a quency equal to half the instruction
rate; a 13 MHz input clock (which is equivalent to 76.92 ns)
yields a 38.46 ns processor cycle (equivalent to 26 MHz).
t
values within the range of 0.5 t
CK
substituted for all relevant timing parameters to obtain
specification value. Example: t
= 0.5 (38.46 ns) – 7 ns = 12.23 ns.
Timing Requirement:
t
CKI
t
CKIL
t
CKIH
Switching Characteristic:
t
CKL
t
CKH
t
CKOH
Control Signals
Timing Requirement:
t
RSP
NOTES
1
Applies after power-up sequence is complete. Internal phase lock loop requires no more than 2000 CLKIN cycles assuming stable CLKIN (not including
crystal oscillator start-up time).
The ADSP-21msp58/59 uses
CKI.
period should be
CKI
= 0.5tCK – 7 ns
CKH
CLKIN Period 76.92 125 ns
CLKIN Width Low 20 ns
CLKIN Width High 20 ns
CLKOUT Width Low 0.5t
CLKOUT Width High 0.5t
– 7 ns
CK
– 7 ns
CK
CLKIN High to CLKOUT High 0 20 ns
RESET Width Low 5t
CK
1
ns
CLKIN
CLKOUT
t
CKI
t
CKIL
t
CKOH
t
CKL
t
CKH
Figure 15. Clock Signals
t
CKIH
REV. 0
–25–
Page 26

ADSP-21msp58/59
Parameter Min Max Unit
Interrupts and Flags
Timing Requirement:
t
t
IFS
IFH
IRQx or FI Setup before CLKOUT Low
IRQx or FI Hold after CLKOUT High
Switching Characteristics:
t
FOH
t
FOD
NOTES
1
If IRQx and FI inputs meet t
the following cycle. (Refer to “Interrupt Controller Operation” in the Program Control chapter of the User’s Manual for further information on interrupt servicing.)
2
Edge-sensitive interrupts require pulse widths greater than 10 ns; level-sensitive interrupts must be held low until serviced.
3
IRQx = IRQ0, IRQ1, and IRQ2.
4
Flag Output = FL0 and FO.
Flag Output Hold after CLKOUT Low
Flag Output Delay from CLKOUT Low
and t
IFS
setup/hold requirements, they will be recognized during the current clock cycle; otherwise the signals will be recognized on
IFH
CLKOUT
FLAG
OUTPUTS
1, 2, 3
1, 2, 3
4
4
t
FOD
t
FOH
t
IFH
0.25tCK + 15 ns
0.25t
CK
ns
0.5tCK – 7 ns
0.5tCK + 5 ns
IRQ
x
FI
t
IFS
Figure 16. Interrupts and Flags
–26–
REV. 0
Page 27

ADSP-21msp58/59
Parameter Min Max Unit
Bus Request/Grant
Timing Requirement:
t
BH
t
BS
BR Hold after CLKOUT High
BR Setup before CLKOUT Low
Switching Characteristic:
t
SD
CLKOUT High to DMS, PMS, BMS, 0.25tCK + 10 ns
RD, WR Disable
t
SDB
t
SE
DMS, PMS, BMS, RD, WR
Disable to
BG Low 0 ns
BG High to DMS, PMS, BMS,
RD, WR Enable 0 ns
t
SEC
DMS, PMS, BMS, RD, WR
Enable to CLKOUT High 0.25tCK – 7 ns
NOTES
1
BR is an asynchronous signal. If BR meets the setup/hold requirements, it will be recognized during the current clock cycle; otherwise the signal will be recognized
on the following cycle. Refer to the ADSP-2100 Family User’s Manual for BR/BG cycle relationships.
CLKOUT
1
1
t
BH
0.25tCK + 2 ns
0.25tCK + 17 ns
BR
CLKOUT
PMS, DMS,
BMS,RD,
WR
BG
t
BS
t
SD
t
SDB
Figure 17. Bus Request–Bus Grant
t
SEC
t
SE
REV. 0
–27–
Page 28

ADSP-21msp58/59
Parameter Min Max Unit
Memory Read
Timing Requirement:
t
RDD
t
AA
t
RDH
Switching Characteristic:
t
RP
t
CRD
t
ASR
t
RDA
t
RWR
NOTE
w = wait states × tCK.
RD Low to Data Valid 0.5tCK – 11 + w ns
A0-A13, PMS, DMS, BMS to Data Valid 0.75tCK – 12 + w ns
Data Hold from RD High 0 ns
RD Pulse Width 0.5tCK – 5 + w ns
CLKOUT High to RD Low 0.25tCK – 5 0.25tCK + 7 ns
A0-A13, PMS, DMS, BMS Setup before RD Low 0.25tCK – 6 ns
A0-A13, PMS, DMS, BMS Hold after RD Deasserted 0.25tCK – 3 ns
RD High to RD or WR Low 0.5t
CLKOUT
A0 – A13
DMS, PMS,
BMS
– 5
CK
t
RDA
WR
RD
t
ASR
t
CRD
D
t
AA
t
RP
t
ROD
t
RWR
t
RDH
Figure 18. Memory Read
–28–
REV. 0
Page 29

ADSP-21msp58/59
Parameter Min Max Unit
Memory Write
Switching Characteristic:
t
DW
t
DH
t
WP
t
WDE
t
ASW
t
DDR
t
CWR
t
AW
t
WRA
t
WWR
NOTE
w = wait states × t
Data Setup before WR High 0.5t
Data Hold after WR High 0.25t
– 7 + w ns
CK
– 2 ns
CK
WR Pulse Width 0.5tCK – 5 + w ns
WR Low to Data Enabled 0 ns
A0-A13, DMS, PMS Setup before WR Low 0.25t
– 6 ns
CK
Data Disable before WR or RD Low 0.25tCK – 6 ns
CLKOUT High to WR Low 0.25t
A0-A13, DMS, PMS, Setup before WR Deasserted 0.75t
A0-A13, DMS, PMS Hold after WR Deasserted 0.25t
– 5 0.25tCK + 7 ns
CK
– 9 + w ns
CK
– 3 ns
CK
WR High to RD or WR Low 0.5tCK – 5 ns
CK.
CLKOUT
A0 – A13
DMS, PMS
WR
RD
t
WRA
t
t
ASW
t
D
CWR
t
WP
t
AW
t
WDE
t
DW
WWR
t
DH
t
DDR
Figure 19. Memory Write
REV. 0
–29–
Page 30

ADSP-21msp58/59
Parameter Min Max Unit
Serial Ports
Timing Requirement:
t
SCK
t
SCS
t
SCH
t
SCP
Switching Characteristic:
t
CC
t
SCDE
t
SCDV
t
RH
t
RD
t
SCDH
t
TDE
t
TDV
t
SCDD
t
RDV
SCLK Period 50 ns
DR/TFS/RFS Setup before SCLK Low 4 ns
DR/TFS/RFS Hold after SCLK Low 7 n s
SCLK
CLKOUT High to SCLK
Width 20 ns
in
out
0.25t
CK
0.25t
+ 10 ns
CK
SCLK High to DT Enable 0 ns
SCLK High to DT Valid 15 ns
TFS/RFS
TFS/RFS
Hold after SCLK High 0 ns
out
Delay from SCLK High 15 ns
out
DT Hold after SCLK High 0 ns
TFS(Alt) to DT Enable 0 ns
TFS(Alt) to DT Valid 14 ns
SCLK High to DT Disable 15 ns
RFS (Multichannel, Frame Delay Zero) to DT Valid 15 ns
CLKOUT
SCLK
DR
RFS
TFS
RFS
OUT
TFS
OUT
DT
TFS
alternate
frame mode
RFS
multichannel
mode, frame
delay 0 (MFD = 0)
t
CC
IN
IN
t
RH
t
t
t
t
RD
SCDV
SCDE
TDE
t
TDV
t
RDV
t
CC
t
t
t
SCS
SCH
t
SCDD
t
SCDH
SCP
t
SCK
t
SCP
Figure 20. Serial Ports
–30–
REV. 0
Page 31

ADSP-21msp58/59
Parameter Min Max Unit
Host Interface Port
Separate Data and Address (HMD1 = 0)
Read Strobe and Write Strobe (HMD0 = 0)
Timing Requirement:
t
HSU
t
HDSU
t
HWDH
t
HH
t
HRWP
HA2-0 Setup before Start of Write or Read
Data Setup before End of Write
Data Hold after End of Write
HA2-0 Hold after End of Write or Read
Read or Write Pulse Width
3
3
5
Switching Characteristic:
t
HSHK
t
HKH
t
HDE
t
HDD
t
HRDH
t
HRDD
NOTES
1
Start of Write = HWR Low and HSEL Low.
2
Start of Read = HRD Low and HSEL Low.
3
End of Write = HWR High or HSEL High.
4
End of Read = HRD High or HSEL High.
5
Read Pulse Width = HRD Low and HSEL Low, Write Pulse Width = HWR Low and HSEL Low.
HACK Low after Start of Write or Read
HACK Hold after End of Write or Read
Data Enabled after Start of Read
Data Valid after Start of Read
Data Hold after End of Read
Data Disabled after End of Read
HOST WRITE CYCLE
2
2
4
4
HA2–0
HSEL
HWR
t
3, 4
1, 2
3, 4
HSU
1, 2
ADDRESS
t
HRWP
5ns
5ns
3ns
3ns
20 ns
015ns
015ns
0ns
18 ns
0ns
7ns
t
HH
HOST READ CYCLE
HACK
t
t
HKH
t
HRDH
t
HH
t
HKH
HRDD
t
HWDH
HD7–0
HA2–0
HSEL
HRD
HACK
HD7–0
t
HSHK
DATA
t
HDSU
ADDRESS
t
HRWP
t
HSU
t
HSHK
DATA
t
HDE
t
HDD
Figure 21. Host Interface Port (HMD1 = 0, HMD0 = 0)
REV. 0
–31–
Page 32

ADSP-21msp58/59
Parameter Min Max Unit
Host Interface Port
Separate Data and Address (HMD1 = 0)
Read Strobe and Write Strobe (HMD0 = 1)
Timing Requirement:
t
HSU
t
HDSU
t
HWDH
t
HH
t
HRWP
HA2-0, HRW Setup before Start of Write or Read
Data Setup before End of Write
Data Hold after End of Write
HA2-0, HRW Hold after End of Write or Read
Read or Write Pulse Width
3
Switching Characteristic:
t
HSHK
t
HKH
t
HDE
t
HDD
t
HRDH
t
HRDD
NOTES
1
Start of Write or Read = HDS Low and HSEL Low.
2
End of Write or Read = HDS High and HSEL High.
3
Read or Write Pulse Width = HDS Low and HSEL Low.
HACK Low after Start of Write or Read
HACK Hold after End of Write or Read
Data Enabled after Start of Read
Data Valid after Start of Read
Data Hold after End of Read
Data Disabled after End of Read
HA2–0
HSEL
HOST WRITE CYCLE
2
HRW
HDS
1
2
2
2
5ns
5ns
3ns
3ns
20 ns
1
2
1
1
2
ADDRESS
t
HRWP
t
HSU
015ns
015ns
0ns
18 ns
0ns
7ns
t
HH
HOST READ CYCLE
HACK
HD7–0
HA2–0
HSEL
HRW
HDS
HACK
HD7–0
t
HSHK
DATA
t
HDSU
ADDRESS
t
HRWP
t
HSU
t
HSHK
DATA
t
HDE
t
HDD
t
HH
t
HRDH
t
HRDD
t
t
HWDH
t
HKH
HKH
Figure 22. Host Interface Port (HMD1 = 0, HMD0 =1)
–32–
REV. 0
Page 33

ADSP-21msp58/59
Parameter Min Max Unit
Host Interface Port
Multiplexed Data and Address (HMD1 = 1)
Read Strobe and Write Strobe (HMD0 = 0)
Timing Requirement:
t
HALP
t
HASU
t
HAH
t
HALS
t
HDSU
t
HWDH
t
HRWP
Switching Characteristic:
t
HSHK
t
HKH
t
HDE
t
HDD
t
HRDH
t
HRDD
NOTES
1
Start of Write = HWR Low and HSEL Low.
2
Start of Read = HRD Low and HSEL Low.
3
End of Write = HWR High or HSEL High.
4
End of Read = HRD High or HSEL High.
5
Read Pulse Width = HRD Low and HSEL Low, Write Pulse Width = HWR Low and HSEL Low.
ALE Pulse Width 10 ns
HAD15-0 Address Setup, before ALE Low 5 ns
HAD15-0 Address Hold after ALE Low 2 ns
Start of Write or Read after ALE Low
HAD15-0 Data Setup before End of Write
HAD15-0 Data Hold after End of Write
Read or Write Pulse Width
5
HACK Low after Start of Write or Read
HACK Hold after End of Write or Read
HAD15-0 Data Enabled after Start of Read
HAD15-0 Data Valid after Start of Read
HAD15-0 Data Hold after End of Read 0 n s
HAD15-0 Data Disabled after End of Read
1, 2
3
1, 2
3, 4
2
3
10 ns
5ns
3ns
20 ns
015ns
2
015ns
0ns
18 ns
4
7ns
HOST WRITE CYCLE
HOST READ CYCLE
ALE
t
HSEL
HWR
HACK
HAD7–0
ALE
HSEL
HRD
HACK
HAD7–0
t
HASU tHAH
ADDRESS
t
HASU tHAH
ADDRESS
t
t
HALP
HALS
HALP
t
HALS
t
t
t
t
t
HRWP
HSHK
HSHK
HDE
HDD
t
t
DATA
HDSU
HRWP
DATA
t
HKH
t
HWDH
t
HKH
t
t
Figure 23. Host Interface Port (HMD1 = 1, HMD0 = 0)
HRDH
HRDD
REV. 0
–33–
Page 34

ADSP-21msp58/59
Parameter Min Max Unit
Host Interface Port
Multiplexed Data and Address (HMD1 = 1)
Read Strobe and Write Strobe (HMD0 = 1)
Timing Requirement:
t
HALP
t
HASU
t
HAH
t
HALS
t
HSU
t
HDSU
t
HWDH
t
HH
t
HRWP
Switching Characteristic:
t
HSHK
t
HKH
t
HDE
t
HDD
t
HRDH
t
HRDD
NOTES
1
Start of Write or Read = HDS Low and HSEL Low.
2
End of Write or Read = HDS High and HSEL High.
3
Read or Write Pulse Width = HDS Low and HSEL Low.
ALE Pulse Width 10 ns
HAD15-0 Address Setup before ALE Low 5 ns
HAD15-0 Address Hold after ALE Low 2 ns
Start of Write or Read after ALE Low
HRW Setup before Start of Write or Read
HAD15-0 Data Setup before End of Write
HAD15-0 Data Hold after End of Write
HRW Hold after End of Write or Read
Read or Write Pulse Width
3
HACK Low after Start of Write or Read
HACK Hold after End of Write or Read
HAD15-0 Data Enabled after Start of Read
HAD15-0 Data Valid after Start of Read
HAD15-0 Data Hold after End of Read
HAD15-0 Data Disabled after End of Read
1
1
2
2
2
10 ns
5ns
5ns
3ns
3ns
20 ns
1
2
1
1
2
2
015ns
015ns
0ns
18 ns
0ns
7ns
HOST WRITE CYCLE
HOST READ CYCLE
ALE
HSEL
HRW
HDS
HACK
HAD7–0
ALE
HSEL
HRW
HDS
HACK
HAD7–0
t
HASU
ADDRESS
t
HASU tHAH
ADDRESS
t
HALP
t
HALS
t
HAH
t
HALP
t
HALS
t
HRWP
t
HH
t
HSU
DATA
t
t
t
t
HKH
HWDH
HH
HKH
t
HRDH
t
HRDD
t
HSHK
t
HDSU
t
HRWP
t
HSU
t
HSHK
t
HDE
DATA
t
HDD
Figure 24. Host Interface Port (HMD1 = 1, HMD0 = 1)
–34–
REV. 0
Page 35

ADSP-21msp58/59
65mW
37mW
35mW
29mW
21mW
20mW
70
60
50
40
30
20
10
POWER,
IDLE n
MODES
3
2 6 10 14 18 22 26 30
IDLEs @ 5.0V
CODEC INACTIVE
TYPICAL VALUES
IDLE (16)
IDLE (32)
IDLE (64)
IDLE (128)
1/t
CK
– MHz
POWER (P
IDLE
N) – mW
POWER, IDLE
2
110
100
90
80
70
60
50
40
30
2 6 10 14 18 22 26 30
1/t
CK
– MHz
100mW
83mW
69mW
57mW
49mW
42mW
VDD = 5.5V
VDD = 4.5V
POWER (P
IDLE
) – mW
IDLE 0
CODEC INACTIVE
MAX VALUES
V
DD
= 5.0V
POWER, INTERNAL
1
480mW
391mW
310mW
191mW
154mW
118mW
550
500
450
400
350
300
250
200
150
100
50
2 6 10 14 18 22 26 30
POWER (P
INT
) – mW
VDD = 5.5V
VDD = 4.5V
1/t
CK
– MHz
INTERNAL
(80% NOMINAL LOADING)
CODEC INACTIVE
MAX VALUES
550
500
450
400
350
300
250
200
150
100
50
V
DD
= 5.0V
1
2
3
VALID FOR ALL TEMPERATURE GRADES.
POWER REFLECTS DEVICE OPERATING WITH NO OUTPUT LOADS.
IDLE REFERS TO ADSP-21msp58/59 STATE OF OPERATION DURING EXECUTION OF
IDLE INSTRUCTION. DEASSERTED PINS ARE DRIVEN TO EITHER V
DD
OR GND.
POWER REFLECTS DEVICE OPERATING WITH CLKOUT DISABLED.
TYPICAL POWER DISSIPATION AT 5.0V V
DD
DURING EXECUTION OF
IDLE n
INSTRUCTION (CLOCK FREQUENCY REDUCTION). POWER REFLECTS DEVICE
OPERATING WITH CLKOUT DISABLED.
ENVIRONMENTAL CONDITIONS
Ambient Temperature Rating:
T
= T
AMB
T
= Case Temperature in °C
CASE
– (PD × θCA)
CASE
PD = Power Dissipation in W
θ
= Thermal Resistance (Case-to-Ambient)
CA
θ
= Thermal Resistance (Junction-to-Ambient)
JA
θ
= Thermal Resistance (Junction-to-Case)
JC
Package θ
TQFP 50°C/W 2°C/W 48°C/W
POWER DISSIPATION
To determine total power dissipation in a specific application,
the following equation should be applied for each output:
C = load capacitance, f = output switching frequency.
Example:
In an application where external data memory is used and no
other outputs are active, power dissipation is calculated as
follows:
Assumptions:
•
External data memory is accessed every cycle with 50% of the
address pins switching.
•
External data memory writes occur every other cycle with
50% of the data pins switching.
•
Each address and data pin has a 10 pF total load at the pin.
•
The application operates at V
Total Power Dissipation = P
P
INT
= internal power dissipation from Power vs. Frequency
graph (Figure 25).
(C × V
Address, DMS 8 × 10 pF × 52 V × 26 MHz = 52 mW
2
× f ) is calculated for each output:
DD
JA
# of
Pins × C × V
C × V
2
× f
DD
= 5.0 V and t
DD
INT
DD
θ
JC
+ (C × V
2
× f
Data Output, WR 9 × 10 pF × 52 V × 13 MHz = 30 mW
RD 1 × 10 pF × 52 V × 13 MHz = 4 mW
CLKOUT 1 × 10 pF × 52 V × 26 MHz = 6 mW
Total power dissipation for this example is P
Typical Power Consumption
INT
The typical power consumption can be calculated from the following data, taken at 5.0 V and +25°C. Dynamic V
taken while executing 80% type 1 multifunction instructions, on
random data.
Parameter Typ
Digital Supply Current (Idle, Codec Powered Up) 19 mA
I
DD
I
Digital Supply Current (Idle) 13 mA
DD
Digital Supply Current (Dynamic, Codec Powered Up) 83 mA
I
DD
Digital Supply Current (Dynamic) 78 mA
I
DD
I
Digital Supply Current (Powerdown) 10 µA
DD
ICCAnalog Supply Current (Dynamic) 15 mA
Analog Devices recommends that the ADSP-21msp58/59
is used with a 13 MHz input clock. Below this input clock
REV. 0
θ
CA
= 76.92 ns.
CK
2
× f )
DD
92 mW
+ 92 mW.
data was
DD
frequency, the codec performance changes and the performance
specifications cannot be guaranteed. The codec filter characteristics, however, scale approximately linearly with frequency.
If the codec is disabled, then the processor can be used at any
allowed input frequency. The power consumption of the ADSP21msp58/59 at these frequencies is shown in Figure 25.
Figure 25. Power vs. Internal Processor Frequency
–35–
Page 36

ADSP-21msp58/59
CAPACITIVE LOADING
Figures 26 and 27 show the capacitive loading characteristics of
the ADSP-21msp58/59.
28
24
20
16
12
8
RISE TIME (0.4V – 2.4V) – ns
4
0
VDD = 4.5V
25 17550 75 100 125 150
CL – pF
Figure 26. Typical Output Rise Time vs. Load Capacitance,
(at Maximum Ambient Operating Temperature)
C
L
+14
+12
+10
+8
+6
+4
+2
NOMINAL
VALID OUTPUT DELAY OR HOLD – ns
–2
–4
25 17550 75 100 125 150
CL – pF
Figure 27. Typical Output Valid Delay or Hold vs. Load
Capacitance, C
(at Maximum Ambient Operating
L
Temperature)
TEST CONDITIONS
Digital
Figure 28 shows the voltage reference levels and Figure 29
shows the equivalent device loading for the ac measurements.
INPUT
OUTPUT
0.0V
0.8V
1.5V
1.5V
3.0V
2.0V
Figure 28. Voltage Reference Levels for AC Measurements (Except Output Enable/Disable)
I
OL
TO
OUTPUT
PIN
50pF
I
OH
+1.5V
Figure 29. Equivalent Device Loading for AC Measurements (Including All Fixtures)
Analog
Figure 30 shows the analog test conditions.
2200pF
NPO
2200pF
NPO
1.0µF
1.0µF
VIN
VIN
NORM
AUX
10µF
DECOUPLE
1.0µF
REF_CAP
0.1µF
2.2kΩ
2.2kΩ
Figure 30. Analog Test Conditions
–36–
REV. 0
Page 37

ADSP-21msp58/59
t
MEASURED
t
DIS
t
ENA
V
OH
(MEASURED)
REFERENCE
SIGNAL
VOH (MEASURED) –0.5V
V
OL
(MEASURED) +0.5V
t
DECAY
OUTPUT STOPS
DRIVING
V
OH
(MEASURED)
V
OL
(MEASURED)
OUTPUT
OUTPUT STARTS
HERE
HIGH-IMPEDANCE STATE. TEST CONDITIONS CAUSE
THIS VOLTAGE LEVEL TO BE APPROXIMATELY 1.5V.
V
OL
(MEASURED)
2.0V
1.0V
Output Disable Time
Output pins are considered to be disabled when they have
stopped driving and started a transition from the measured output high or low voltage to a high impedance state. The output
disable time (t
) is the difference of t
DIS
MEASURED
and t
DECAY
, as
shown in the Output Enable/Disable diagram. The time is the
interval from when a reference signal reaches a high or low voltage level to when the output voltages have changed by 0.5 V
from the measured output high or low voltage. The decay time,
t
, is dependent on the capacitative load, CL, and the cur-
DECAY
rent load, i
, on the output pin. It can be approximated by the
L
following equation:
•0.5V
C
t
DECAY
L
=
i
L
from which
t
= t
DIS
MEASURED–tDECAY
is calculated. If multiple pins (such as the data bus) are disabled, the measurement value is that of the last pin to stop
driving.
Output Enable Time
Output pins are considered to be enabled when that have made
a transition from a high-impedance state to when they start driving. The output enable time (t
) is the interval from when a
ENA
reference signal reaches a high or low voltage level to when the
output has reached a specified high or low trip point, as shown
in the Output Enable/Disable diagram. If multiple pins (such as
the data bus) are enabled, the measurement value is that of the
first pin to start driving.
Figure 31. Output Enable/Disable
REV. 0
–37–
Page 38

ADSP-21msp58/59
PIN CONFIGURATION
100-Lead Thin Plastic Quad Flatpack (TQFP)
D15
D16
D17
D18
D19
D20
D21
D22
D23
VDD
GND
PMS
DMS
BMS
RD
WR
HD7
HD6
HD5
HD4
HD3
HD2
HD1
HD0
HA2/ALE
D10
GND
D9
D8
D7D6D5
(PINS DOWN)
D4D3D2D1D0
TOP VIEW
D12
D13
D11
D14
100
1
25
26
BG
BR
PWD
GNDA
BMODE
VOUTP
VOUTN
VREF
VCC
76
50
75
51
VINNORM
DECOUPLE
VINAUX
REF_FILTER
GNDA
MMAP
RESET
IRQ2
HMD0
HMD1
HACK
FL0
SCLK1
DR1/FI
RFS1/IRW0
TFS1/IRQ1
DT1/FO
GND
SCLK0
DR0
FRS0
TFS0
DT0
VDD
A13
HA1
HA0
HSEL
HWR/HDS
CLKOUT
HRD/HRW
VDD
GND
XTAL
GND
CLKIN
VDD
A1
A4
A5
A6
A2
A3
A0
A9
A8
A7
A10
A11
A12
–38–
REV. 0
Page 39

ADSP-21msp58/59
100-Lead Thin Plastic Quad Flatpack (TQFP) Pinout
TQFP Pin TQFP Pin TQFP Pin TQFP Pin
Number Name Number Name Number Name Number Name
1 D15 26 HA1 51 A13 76 VCC
2 D16 27 HA0 52 VDD 77 VREF
3 D17 28
4 D18 29
5 D19 30
6 D20 31 CLKOUT 56 DR0 81 BMODE
7 D21 32 VDD 57 SCLK0 82
8 D22 33 GND 58 GND 83
9 D23 34 XTAL 59 DT1/FO 84
10 VDD 35 CLKIN 60 TFS1/
11 GND 36 GND 61 RFS1/
12
13
14
15
16
17 HD7 42 A4 67 HMD0 92 D7
18 HD6 43 A5 68
19 HD5 44 A6 69
20 HD4 45 A7 70 MMAP 95 D9
21 HD3 46 A8 71 GNDA 96 D10
22 HD2 47 A9 72 REF_FILTER 97 D11
23 HD1 48 A10 73 VINAUX 98 D12
24 HD0 49 A11 74 DECOUPLE 99 D13
25 HA2/ALE 50 A12 75 VINNORM 100 D14
PMS 37 VDD 62 DR1/FI 87 D2
DMS 38 A0 63 SCLK1 88 D3
BMS 39 A1 64 FL0 89 D4
RD 40 A2 65 HACK 90 D5
WR 41 A3 66 HMD1 91 D6
HSEL 53 DT0 78 VOUTP
HWR/HDS 54 TFS0 79 VOUTN
HRD/HRW 55 RFS0 80 GND
PWD
BR
BG
IRQ1 85 D0
IRQ0 86 D1
IRQ2 93 GND
RESET 94 D8
REV. 0
–39–
Page 40

ADSP-21msp58/59
OUTLINE DIMENSIONS
Dimensions shown in millimeters and (inches)
100-Lead Metric Thin Plastic Quad Flat Pack (TQFP)
0.75 (0.030)
0.50 (0.019)
SEATING
PLANE
1.60 (0.063)
MAX
16.25 (0.640)
15.75 (0.620)
14.05 (0.553)
13.95 (0.549)
100 76
1
TOP VIEW
(PINS DOWN)
SQ
SQ
75
C2030–4–4/95
0.1 (0.004)
0.15 (0.006)
0.05 (0.002)
0.057 (1.45)
0.053 (1.35)
25
26
0.56 (0.022)
0.44 (0.018)
0.27 (0.011)
0.17 (0.007)
12.06 (0.475) SQ
51
50
ORDERING GUIDE*
Ambient Instruction
Temperate Rate Package Package
Part Number Range (MIPS) Description Option
ADSP-21msp58BST-104 –40°C to +85°C 26 100-Lead TQFP ST-100
*Refer to the section titled “Ordering Procedure for ADSP-21msp59 ROM Processors” for information about ordering ROM coded parts.
–40–
PRINTED IN U.S.A.
REV. 0
 Loading...
Loading...