

Page 1
Supervisory, Watchdog and Manual Reset
ADP5042
Rev. A
rights of third parties that may result from its use. Specifications subject to change without notice. No
Trademarks and registered trademarks are the property of their respec tive owners.
Fax: 781.461.3113 ©2010-2011 Analog Devices, Inc. All rights reserved.
FPWM
PSM/PWM
MODE
SW
VOUT1
PGND
C6
10µF
V
OUT1
AT
800mA
L1
1µH
EN_BK
BUCK
EN_LDO1
LDO1
(DIGITAL)
EN_LDO2
LDO2
(ANALOG)
SUPERVISOR
MICROPROCESSOR
VIN1
EN3
AVIN
AVIN
EN1
VIN2
VIN3
EN2
AGND
C2
1µF
VOUT2
VOUT3
WSTAT
WDI1
WDI2
nRSTO
V
OUT2
AT
300mA
C4
1µF
V
OUT3
AT
300mA
C5
4.7µF
ON
OFF
ON
OFF
ON
OFF
VIN1 = 2.3V
TO 5.5V
AVIN
R
FILT
= 30Ω
VIN2 = 1.7V
TO 5.5V
MR
C1
1µF
VIN3 = 1.7V
TO 5.5V
C3
1µF
08811-001
Data Sheet
FEATURES
Input voltage range: 2.3 V to 5.5 V
One 0.8 A buck regulator
Two 300 mA LDOs
20-lead, 4 mm × 4 mm LFCSP package
Initial regulator accuracy: ±1%
Overcurrent and thermal protection
Soft start
Undervoltage lockout
Open drain processor reset with threshold monitoring
±1.5% threshold accuracy over the full temperate range
Guaranteed reset output valid to V
Dual watchdog for secure systems
Watchdog 1 controls reset
Watchdog 2 controls reset and regulators power cycle
Buck key specifications
Current mode topology for excellent transient response
3 MHz operating frequency
Uses tiny multilayer inductors and capacitors
Mode pin selects forced PWM or auto PFM/PSM modes
100% duty cycle low dropout mode
LDOs key specifications
Low V
from 1.7 V to 5.5 V
IN
Stable with1 µF ceramic output capacitors
High PSRR, 60 dB PSRR up to 1 kHz/10 kHz
Low output noise
110 µV rms typical output noise at V
Low dropout voltage: 150 mV at 300 mA load
−40°C to +125°C junction temperature range
= 1 V
CC
= 2.8 V
OUT
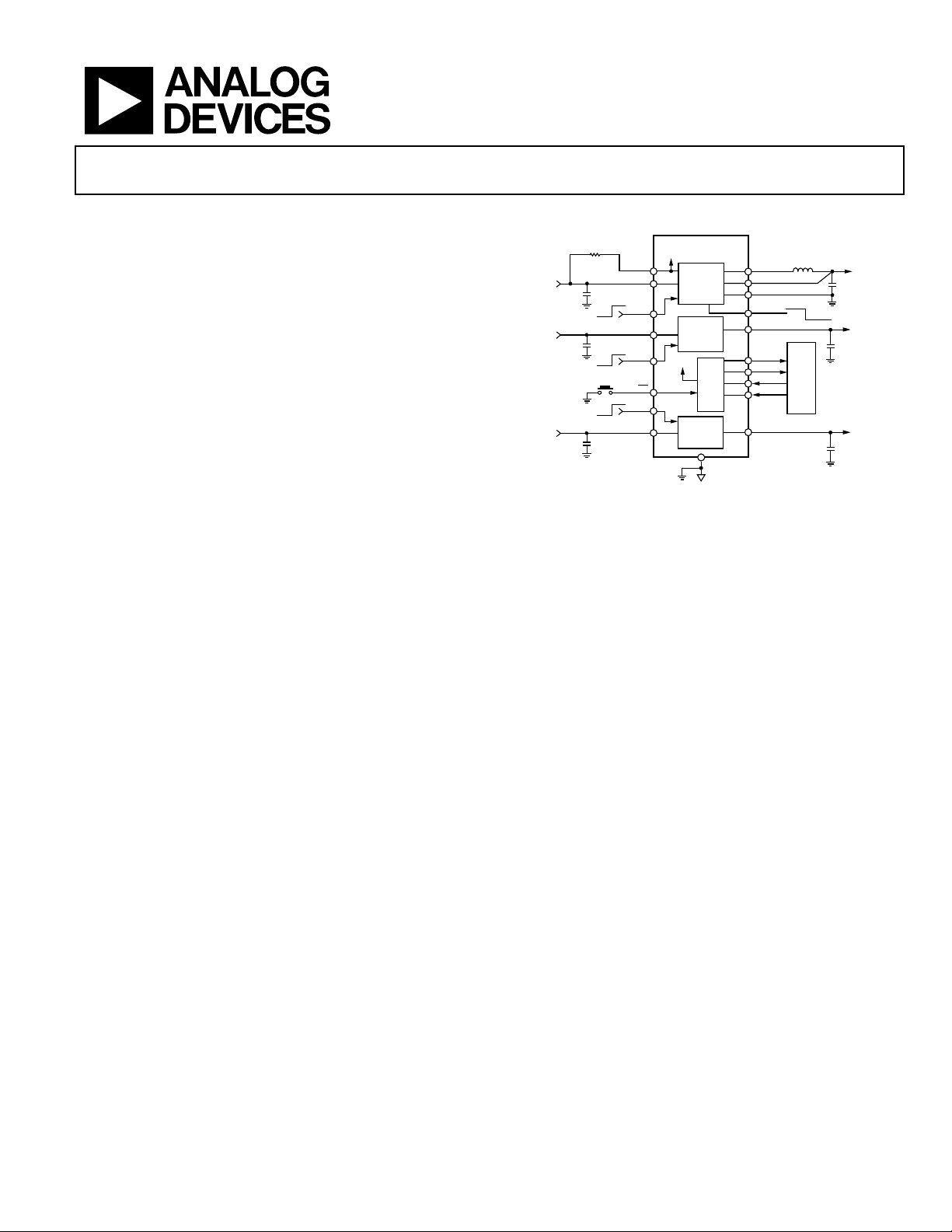
Micro PMU with 0.8 A Buck, Two 300 mA LDOs
HIGH LEVEL BLOCK DIAGRAM
Figure 1.
GENERAL DESCRIPTION
The ADP5042 combines one high performance buck regulator
and two low dropout regulators (LDO) in a small 20-lead
LFCSP to meet demanding performance and board space
requirements.
The high switching frequency of the buck regulator enables
use of tiny multilayer external components and minimizes the
board space.
The MODE pin selects the buck mode of operation. When set
to logic high, the buck regulators operate in forced PWM mode.
When the MODE pin is set to logic low, the buck regulators
operate in PWM mode when the load is around the nominal
value. When the load current falls below a predefined threshold
the regulator operates in power save mode (PSM) improving
the light-load efficiency.
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringement s of patents or other
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
The low quiescent current, low dropout voltage, and wide input
voltage range of the ADP5042 LDOs extend the battery life of
portable devices. The two LDOs maintain power supply
rejection greater than 60 dB for frequencies as high as 10 kHz
while operating with a low headroom voltage.
Each regulator is activated by a high level on the respective
enable pin. The ADP5042 is available with factory programmable
default output voltages and can be set to a wide range of options.
The ADP5042 contains supervisory circuits that monitor
power supply voltage levels and code execution integrity in
microprocessor-based systems. They also provide power-on
reset signals. An on-chip dual watchdog timer can reset the
microprocessor or power cycle the system (Watchdog 2) if it
fails to strobe within a preset timeout period.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Page 2

ADP5042 Data Sheet
TABLE OF CONTENTS
Features .............................................................................................. 1
High Level Block Diagram .............................................................. 1
General Description ......................................................................... 1
Revision History ............................................................................... 2
Specifications ..................................................................................... 3
General Specification ................................................................... 3
Supervisory Specification ............................................................ 3
Buck Specifications ....................................................................... 5
LDO1, LDO2 Specifications ....................................................... 5
Input and Output Capacitor, Recommended Specifications .. 6
Absolute Maximum Ratings ............................................................ 7
Thermal Data ................................................................................ 7
Thermal Resistance ...................................................................... 7
ESD Caution .................................................................................. 7
Pin Configuration and Function Descriptions ............................. 8
Theory of Operation ...................................................................... 18
Power Management Unit ........................................................... 18
Buck Section ................................................................................ 19
LDO Section ............................................................................... 20
Supervisory Section ................................................................... 20
Applications Information .............................................................. 23
Buck External Component Selection ....................................... 23
LDO Capacitor Selection .......................................................... 24
Supervisory Section ................................................................... 25
PCB Layout Guidelines .............................................................. 26
Evaluation Board Schematics and Artwork ............................ 27
Suggested Layout ........................................................................ 27
Bill of Materials ........................................................................... 28
Application Diagram ................................................................. 28
Factory Programmable Options ................................................... 29
Outline Dimensions ....................................................................... 30
Ordering Guide .......................................................................... 30
REVISION HISTORY
10/11—Rev. 0 to Rev. A
Updated Outline Dimensions ....................................................... 30
Changes to Ordering Guide .......................................................... 30
12/10—Revision 0: Initial Version
Rev. A | Page 2 of 32
Page 3
Data Sheet ADP5042
Input Voltage Falling
UVLO
1.95
V
Thermal Shutdown Threshold
TSSD
TJ rising
150 °C
mV
SUPPLY
RESET THRESHOLD ACCURACY
VTH − 0.8%
VTH
VTH + 0.8%
V
TA = 25°C, sensed on VOUTx
RESET TIMEOUT PERIOD WATCHDOG2 (t
)
SPECIFICATIONS
GENERAL SPECIFICATION
AVIN, VIN1 = (V
are enabled.
Table 1.
Parameter Symbol Description Min Typ Max Unit
AVIN UNDERVOLTAGE LOCKOUT UVLO
Input Voltage Rising UVLO
SHUTDOWN CURRENT I
ENx = GND, TJ = −40°C to +125°C 2 µA
+ 0.5 V) or 2.3 V, whichever is greater, AVIN, VIN1 ≥ VIN2, VIN3, TA = 25°C, unless otherwise noted. Regulators
OUT1
TJ = −40°C to +125°C
AVIN
2.25 V
AVINRISE
AVIN FALL
ENx = GND 0.1 µA
GND-SD
Thermal Shutdown Hysteresis TS
ENx, WDIx, MODE, WMOD,
MR
INPUTS
20 °C
SD-HYS
Input Logic High VIH 2.5 V ≤ AVIN ≤ 5.5 V 1.2 V
Input Logic Low VIL 2.5 V ≤ AVIN ≤ 5.5 V 0.4 V
ENx = AVIN or GND 0.05 µA
Input Leakage Current (WMOD
V
I-LEAKAGE
Excluded)
ENx = AVIN or GND, TJ = −40°C to +125°C 1 µA
WMOD Input Leakage Current V
I-LKG-WMOD
VWMOD = 3.6 V, TJ = −40°C to +125°C 50 µA
OPEN-DRAIN OUTPUTS
nRSTO, WSTAT Output Voltage VOL AVIN = 2.3 V to 5.5 V, I
Open-Drain Reset Output Leakage
1 µA
nRSTO/WSTAT
= 3 mA 30
Current
SUPERVISORY SPECIFICATION
AVIN, VIN1 = full operating range, TJ = −40°C to +125°C, unless otherwise noted.
Table 2.
Parameter Min Typ Max Unit Test Conditions/Comments
Supply Current (Supervisory Circuit Only) 45 55 µA AVIN = 5.5 V, EN1 = EN2 = EN3 = VIN
43 52 µA AVIN = 3.6 V, EN1 = EN2 = EN3 = VIN
VTH − 1.5% VTH VTH + 1.5% V
RESET THRESHOLD TO OUTPUT DELAY
GLITCH IMMUNITY (t
UOD
)
RESET TIMEOUT PERIOD WATCHDOG1 (t
RP1
50 125 400 µs V
)
Option A 24 30 36 ms
Option B 160 200 240 ms
RP2
3.5 5 7 ms
VCC TO RESET DELAY (tRD) 150 µs VIN1 falling at 1 mV/µs
REGULATORS SEQUENCING DELAY (tD1, tD2) 2 ms
WATCHDOG INPUTS
Watchdog 1 Timeout Period (t
)
WD1
Option A 81.6 102 122.4 ms
Option B 1.28 1.6 1.92 sec
= −40°C to +125°C, sensed on
T
J
V
OUTx
= V
TH
− 50 mV
UOT
Rev. A | Page 3 of 32
Page 4
ADP5042 Data Sheet
Option D
6.4 8 9.6
min
Option A
210 ms
MANUAL RESET INPUT
Parameter Min Typ Max Unit Test Conditions/Comments
Watchdog 2 Timeout Period (t
Option A 6 7.5 9 sec
Option B Watchdog 2 disabled
Option C 3.2 4 4.8 min
Option E 11.2 16 19.2 min
Option F 25.6 32 38.4 min
Option G 51.2 64 76.8 min
Option H 102.4 128 153.8 min
Watchdog 2 Power Off Period (t
Option B 400 ms
WDI1 Pulse Width 80 ns VIL = 0.4 V, VIH = 1.2 V
WDI2 Pulse Width 8 µs VIL = 0.4 V, VIH = 1.2 V
Watchdog Status Timeout Period (t
WDI1 Input Current (Source) 8 15 20 µA V
WDI1 Input Current (Sink) −30 −25 −14 µA V
WDI2 Internal Pull-Down 45 kΩ
)
WD2
)
POFF
) 11.2 sec
WDCLEAR
= VCC, time average
WDI1
= 0, time average
WDI1
MR Input Pulse Width
MR Glitch Rejection
MR Pull-Up Resistance
MR to Reset Delay
1 µs
220 ns
25 52 80 kΩ
280 ns V
= 5 V
CC
Rev. A | Page 4 of 32
Page 5
Data Sheet ADP5042
NFET, AVIN = VIN1 = 5 V
150
210
mΩ
I
= 1 mA
BUCK SPECIFICATIONS
AVIN, VIN1 = 3.6 V, V
for typical specifications, unless otherwise noted.
Table 3.
Parameter Test Conditions/Comments Min Typ Max Unit
INPUT CHARACTERISTICS
Input Voltage Range (VIN1) 2.3 5.5 V
OUTPUT CHARACTERISTICS
Output Voltage Accuracy PWM mode, TA= 25 °C , I
PWM mode −2 +2 %
PWM TO POWER SAVE MODE CURRENT THRESHOLD 100 mA
INPUT CURRENT CHARACTERISTICS
DC Operating Current I
Shutdown Current ENx = 0 V, TA = TJ = −40°C to +125°C 0.2 1.0 μA
SW CHARACTERISTICS
SW On Resistance PFET 180 240 mΩ
PFET, AVIN = VIN1 = 5 V 140 190 mΩ
NFET 170 235 mΩ
= 1.8 V, TJ= −40°C to +125°C for minimum/maximum specifications, L = 1 µH, C
OUT1
1
VIN1 = 2.3 V to 5.5 V, PWM mode,
= 1 to 800 mA
I
LOAD
= 0 mA, device not switching 21 35 μA
LOAD
= 100 mA −1 +1 %
LOAD
−3 +3 %
= 10 µF, and TA = 25°C
OUT
Current Limit PFET switch peak current limit 1100 1360 1600 mA
ACTIVE PULL-DOWN EN1 = 0 V 75 Ω
OSCILLATOR FREQUENCY 2.5 3.0 3.5 MHz
STA RT-UP TIME 250 μs
1
All limits at temperature extremes are guaranteed via correlation using standard statistical quality control (SQC).
LDO1, LDO2 SPECIFICATIONS
AVIN = 3.6 V, V
T
= 25°C, unless otherwise noted.
A
Table 4.
Parameter Symbol Conditions Min Typ Max Unit
INPUT VOLTAGE RANGE V
OPERATING SUPPLY CURRENT (per
LDO)
I
I
I
I
I
FIXED OUTPUT VOLTAGE ACCURACY V
100 µA < I
V
100 µA < I
V
TJ = −40°C to +125°C
REGULATION
Line Regulation ∆V
TJ = −40°C to +125°C
IN2, VIN3
= (V
+ 0.2 V) or 2.3 V, whichever is greater; AVIN, VIN1 ≥ VIN2, VIN3; I
OUT3
, V
TJ = −40°C to +125°C 1.7
IN2
IN3
I
I
GND
OUT2, VOUT3
/∆V
OUT2
∆V
/∆V
OUT3
I
IN2
IN3
= 0 µA, V
OUT
= 0 µA, V
OUT
= 10 mA 67 µA
OUT
= 10 mA, TJ = −40°C to +125°C 105 µA
OUT
= 200 mA 100 µA
OUT
= 200 mA, TJ = −40°C to +125°C 245 µA
OUT
= 10 mA −1 +1 %
OUT
IN2, VIN3
IN2, VIN3
V
IN2, VIN3
OUT3
= 3.3 V 15 µA
OUT
= 3.3 V, TJ = −40°C to +125°C 50 µA
OUT
< 300 mA −2 +2 %
OUT
= (V
OUT2, VOUT3
< 300 mA −3 +3 %
OUT
= (V
OUT2, VOUT3
= (V
OUT2, VOUT3
+ 0.5 V) to 5.5 V
+ 0.5 V) to 5.5 V
+ 0.5 V) to 5.5 V −0.03 +0.03 %/V
= 10 mA; CIN = C
OUT
= 1 µF;
OUT
5.5 V
Rev. A | Page 5 of 32
Page 6
ADP5042 Data Sheet
I
= 200 mA
60 mV
µV rms
Parameter Symbol Conditions Min Typ Max Unit
Load Regulation1 ∆V
∆V
OUT2
OUT3
/∆I
/∆I
OUT2
OUT3
I
TJ = −40°C to +125°C
DROPOUT VOLTAGE2 V
DROPOUT
V
I
I
I
ACTIVE PULL-DOWN R
STA RT-UP TIME T
CURRENT-LIMIT THRESHOLD3 I
OUTPUT NOISE OUT
EN2/EN3 = 0 V 600 Ω
PDLDO
V
STA RT-UP
TJ = −40°C to +125°C 335 470 mA
LIMIT
LDO2NOISE
10 Hz to 100 kHz, V
10 Hz to 100 kHz, V
OUT
LDO1NOISE
10 Hz to 100 kHz, V
10 Hz to 100 kHz, V
POWER SUPPLY REJECTION RATIO PSRR
1
Based on an end-point calculation using 1 mA and 100 mA loads.
2
Dropout voltage is defined as the input-to-output voltage differential when the input voltage is set to the nominal output voltage. This applies only for output
voltages above 2.3 V.
3
Current-limit threshold is defined as the current at which the output voltage drops to 90% of the specified typical value. For example, the current limit for a 3.0 V
output voltage is defined as the current that causes the output voltage to drop to 90% of 3.0 V, or 2.7 V.
I
OUT2, VOUT3
= 1 mA to 200 mA 0.002 %/mA
OUT2, VOUT3
OUT2, VOUT3
OUT2, IOUT3
OUT2, IOUT3
OUT2, IOUT3
OUT2, IOUT3
OUT2, VOUT3
= 1 mA to 200 mA 0.0075 %/mA
= 3.3 V
= 10 mA 4 mV
= 10 mA, TJ = −40°C to +125°C 5 mV
= 200 mA, TJ = −40°C to +125°C 100 mV
= 3.3 V 85 µs
10 Hz to 100 kHz, V
10 Hz to 100 kHz, V
IN2, VIN3
IN2, VIN3
, V
IN2
= 3.3 V, V
= 3.3 V, V
= 3.3 V, V
IN3
1 kHz, V
= 100 mA
I
OUT
100 kHz, V
= 100 mA
I
OUT
1 MHz, V
= 100 mA
I
OUT
= 5 V, V
IN3
= 5 V, V
IN3
= 5 V, V
IN3
= 5 V, V
IN2
= 5 V, V
IN2
= 5 V, V
IN2
OUT3
OUT3
OUT3
OUT2
OUT2
OUT2
OUT2, OUT3
OUT2, VOUT3
OUT2, VOUT3
= 3.3 V 123 µV rms
= 2.8 V 110 µV rms
= 1.5 V 59 µV rms
= 3.3 V 140 µV rms
= 2.8 V 129 µV rms
= 1.5 V 66
= 2.8 V,
= 2.8 V,
= 2.8 V,
66 dB
57 dB
60 dB
INPUT AND OUTPUT CAPACITOR, RECOMMENDED SPECIFICATIONS
Table 5.
Parameter Symbol Conditions Min Typ Max Unit
MINIMUM OUTPUT CAPACITANCE (BUCK)1 C
MINIMUM INPUT AND OUTPUT CAPACITANCE2 (LDO1, LDO2) C
CAPACITOR ESR R
1
The minimum output capacitance should be greater than 4.7 µF over the full range of operating conditions. The full range of operating conditions in the application
must be considered during device selection to ensure that the minimum capacitance specification is met.
2
The minimum input and output capacitance should be greater than 0.70 µF over the full range of operating conditions. The full range of operating conditions in the
application must be considered during device selection to ensure that the minimum capacitance specification is met. X7R and X5R type capacitors are recommended,
Y5V and Z5U capacitors are not recommended for use with LDOs or the buck.
TJ = −40°C to +125°C 7 40 µF
MIN1
TJ = −40°C to +125°C 0.70 µF
MIN23
TJ = −40°C to +125°C 0.001 1 Ω
ESR
Rev. A | Page 6 of 32
Page 7
Data Sheet ADP5042
ESD Machine Model
100 V
ABSOLUTE MAXIMUM RATINGS
Table 6.
Parameter Rating
AVIN, VINx, VOUTx, ENx, MODE, MR, WDIx,
WMOD, WSTAT, nRSTO to GND
Storage Temperature Range −65°C to +150°C
Operating Junction Temperature Range −40°C to +125°C
Soldering Conditions JEDEC J-STD-020
ESD Human Body Model 3000 V
ESD Charged Device Model 1500 V
−0.3 V to +6 V
Junction-to-ambient thermal resistance (θ
based on modeling and calculation using a 4-layer board. The
junction-to-ambient thermal resistance is highly dependent on
the application and board layout. In applications where high
maximum power dissipation exists, close attention to thermal
board design is required. The value of θ
PCB material, layout, and environmental conditions. The specified
value of θ
is based on a four-layer, 4” × 3”, 2.5 oz copper board,
JA
as per JEDEC standard. For additional information, see the
AN-772 Application Note, A Design and Manufacturing Guide
for the Lead Frame Chip Scale (LFCSP).
) of the package is
JA
may vary, depending on
JA
Stresses above those listed under absolute maximum ratings
may cause permanent damage to the device. This is a stress
rating only and functional operation of the device at these or
any other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
THERMAL DATA
Absolute maximum ratings apply individually only, not in
combination.
The ADP5042 can be damaged when the junction temperature
limits are exceeded. Monitoring ambient temperature does not
guarantee that the junction temperature is within the specified
temperature limits. In applications with high power dissipation
and poor thermal resistance, the maximum ambient
temperature may have to be derated. In applications with
moderate power dissipation and low PCB thermal resistance,
the maximum ambient temperature can exceed the maximum
limit as long as the junction temperature is within specification
limits. The junction temperature of the device is dependent on
the ambient temperature, the power dissipation of the device
(P
), and the junction-to-ambient thermal resistance of the
D
package. Maximum junction temperature is calculated from the
ambient temperature and power dissipation using the formula
T
= TA + (PD × θJA)
J
THERMAL RESISTANCE
θJA is specified for the worst-case conditions, that is, a device
soldered in a circuit board for surface-mount packages.
Table 7. Thermal Resistance
Package Type θJA θJC Unit
20-Lead, 0.5 mm pitch LFCSP 38 4.2 °C/W
ESD CAUTION
Rev. A | Page 7 of 32
Page 8
ADP5042 Data Sheet
D
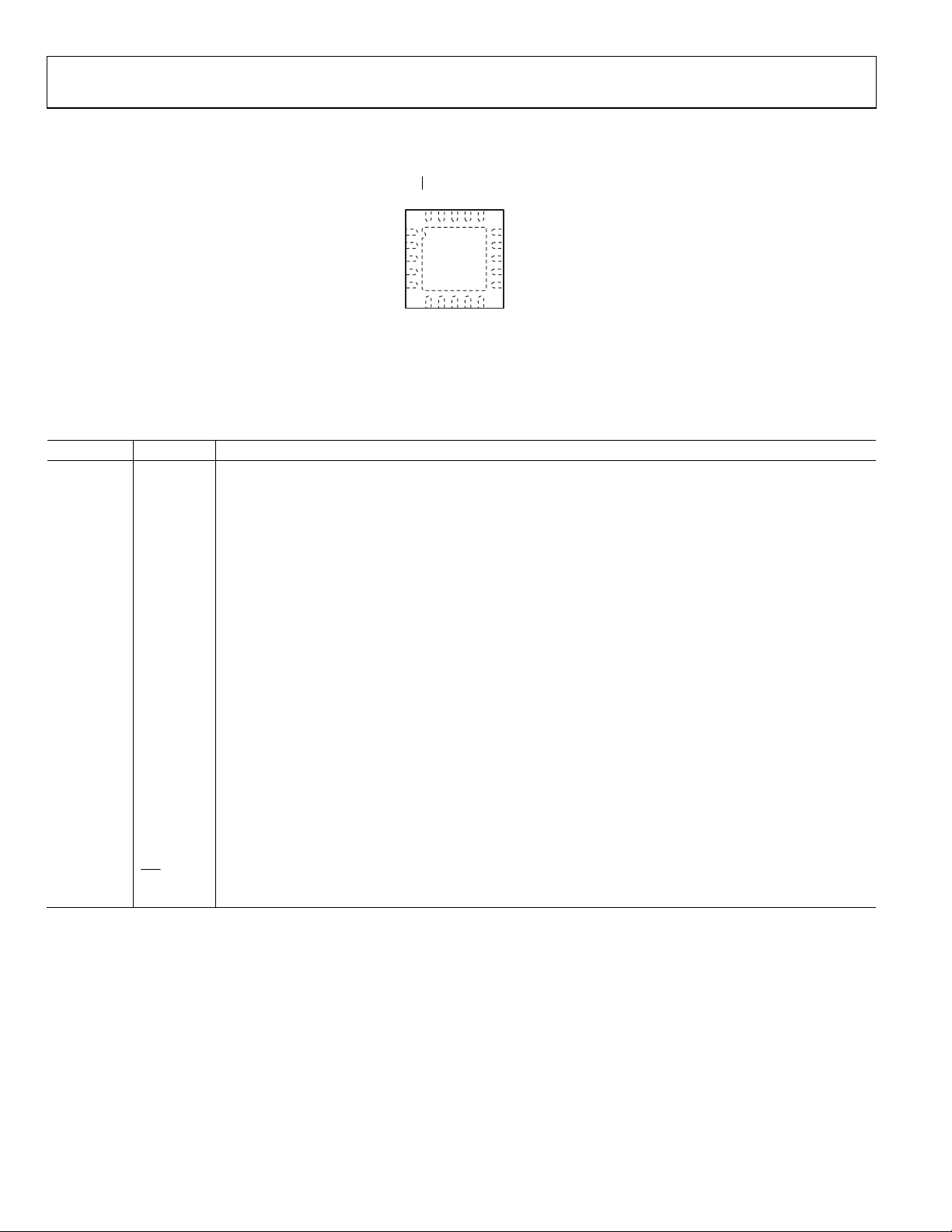
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
DI1
MO
W
MODE
W
MR
20
EN2
19
16
17
18
1
NC
2
VOUT3
VIN3
EN3
nRSTO
NOTES
1. EXPOSED PAD SHOULD BE CONNECTED TO AGND.
2. NC = NO CONNE CT. DO NOT CONNECT TO THIS PIN.
3
4
5
ADP5042
TOP VIEW
(Not to S cale)
8
6
7
SW
VIN1
AVIN
15 WSTAT
VOUT2
14
13
VIN2
12
WDI2
11
VOUT1
9
10
EN1
PGND
08811-002
Figure 2. Pin Configuration—View from Top of the Die
Table 8. Preliminary Pin Function Descriptions
Pin No. Mnemonic Description
1 NC Do not connect to this pin.
2 VOUT3 LDO2 Output Voltage and Sensing Input.
3 VIN3 LDO2 Input Supply (1.7 V to 5.5 V).
4 EN3 Enable LDO2. EN3 = high: turn on LDO2; EN3 = low: turn off LDO2.
5 nRSTO Open-Drain Reset Output, Active Low.
6 AVIN Regulators Housekeeping and Supervisory Input Supply (2.3 V to 5.5 V).
7 VIN1 Buck Input Supply (2.3 V to 5.5 V).
8 SW Buck Switching Node.
9 PGND Dedicated Power Ground for Buck Regulator.
10 EN1 Enable Buck. EN1 = high: turn on buck; EN1 = low: turn off buck.
11 VOUT1 Buck Sensing Node.
12 WDI2 Watchdog 2 (Long Timeout) Refresh Input from Processor. Can be disabled only by factory option.
13 VIN2 LDO1 Input Supply (1.7 V to 5.5 V).
14 VOUT2 LDO1 Output Voltage and Sensing Input.
15 WSTAT
Open-Drain Watchdog Timeout Status. WSTAT = high: Watchdog 1 timeout or power-on reset; WSTAT = low:
Watchdog 2 timeout. Auto cleared after one second.
16 EN2 Enable LDO1. EN2 = high: turn on LDO1. EN2 = low: turn off LDO1.
17 MODE
Buck Mode. MODE = high: buck regulator operates in fixed PWM mode; MODE = low: buck regulator operates
in pulse skipping mode (PSM) at light load and in constant PWM at higher load.
18 WMOD
Watchdog Mode. WMOD = low: Watchdog 1 normal mode; WMOD = high: Watchdog 1 cannot be disabled by
a three-state condition applied on WDI1.
19 WDI1 Watchdog 1 Refresh Input from Processor. If WDI1 is in high-Z and WMOD is low, Watchdog 1 is disabled.
20
MR
Manual Reset Input, Active Low.
TP AGND Analog Ground (TP = Thermal Pad). Exposed pad should be connected to AGND.
Rev. A | Page 8 of 32
Page 9
Data Sheet ADP5042
08811-003
CH1 2.0V/DIV 1MΩ
B
W
20.0M
CH2 2.0V/DIV 1MΩ
B
W
500M
CH3 2.0V/DIV 1MΩ
B
W
20.0M
A CH1 1.76V 200µs/DIV
50.0MS/s
20.0ns/pt
1
2
3
VOUT1
VOUT2
VOUT3
0
0.1
0.2
0.3
0.4
0.5
0.6
1.0
0.9
0.8
0.7
2.3 2.8 3.3 3.8 4.3 4.8 5.3
SYSTEM QUIESCENT CURRE NT (mA)
INPUT VOLTAGE (V)
08811-004
VOUT1 = 1.8V ,
VOUT2 = VO UT = 3.3V
08811-005
CH1 2.0V/DIV 1MΩ
B
W
20.0M
CH2 2.0V/DIV 1MΩ
B
W
500M
CH3 100mA/DIV 1MΩ
B
W
20.0M
CH4 5.0V/DIV 1MΩ
B
W
500M
A CH1 2.92V 50µs/DIV
50.0MS/s
20.0ns/pt
2
4
1
3
SW
VOUT1
EN
IIN
08811-006
CH1 4.0V/DIV 1MΩ
B
W
20.0M
CH2 3.0V/DIV 1MΩ
B
W
500M
CH3 200mA/DIV 1MΩ
B
W
20.0M
CH4 5.0V/DIV 1MΩ
B
W
500M
A CH1 2.24V 50µs/DIV
20.0MS/s
50.0ns/pt
4
2
1
3
SW
VOUT1
LOAD
EN
3.22
3.24
3.26
3.28
3.30
3.32
3.34
OUTPUT VOLTAGE (V)
OUTPUT CURRE NT (A)
0 0.1 0.2 0.3 0.4 0.5 0.6
0.7 0.8 0.9 1.0
08811-007
+25°C
–40°C
+85°C
1.775
1.780
1.785
1.790
1.795
1.800
1.805
1.810
1.815
1.820
1.825
1.830
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
OUTPUT CURRE NT (A)
OUTPUT VOLTAGE (V)
+25°C
–40°C
+85°C
08811-008
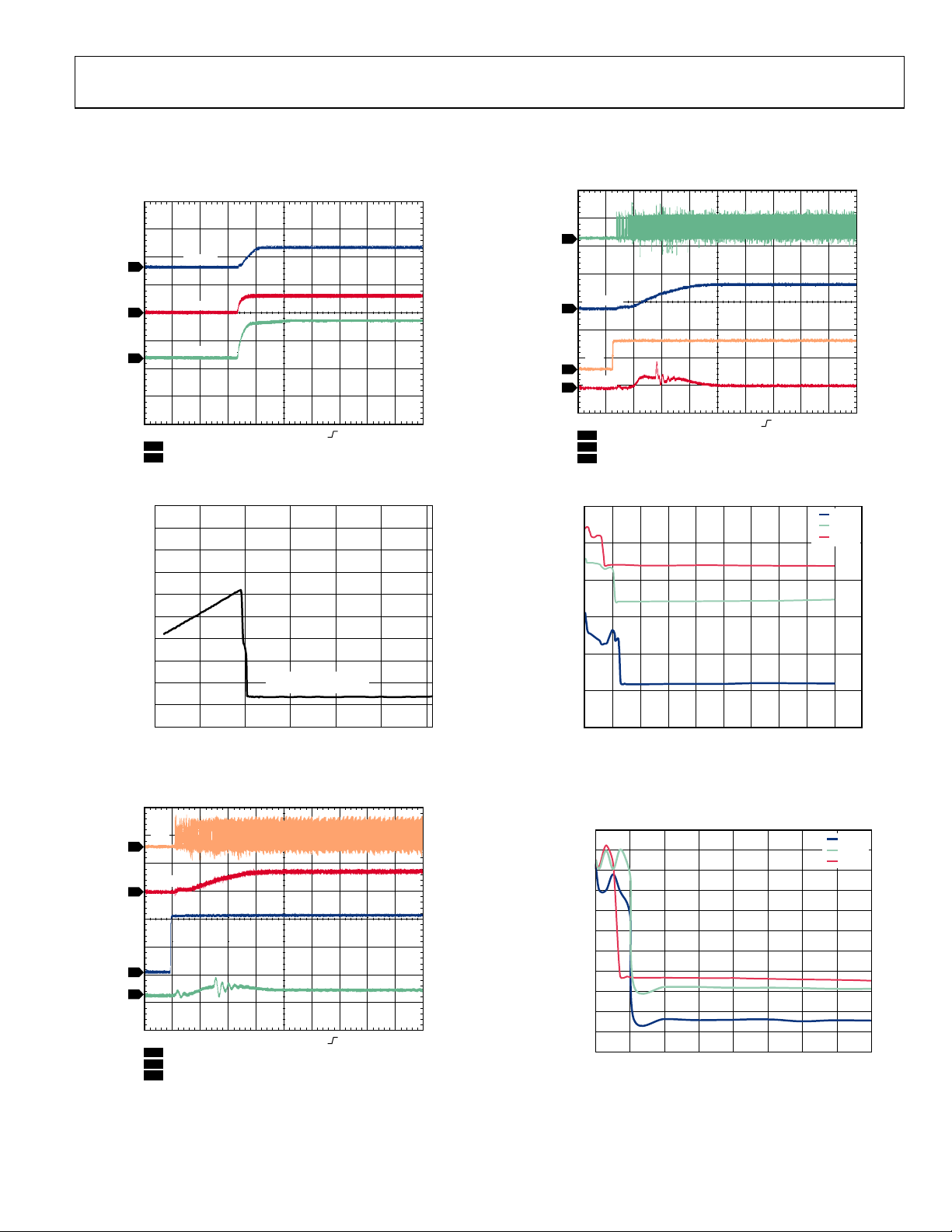
TYPICAL PERFORMANCE CHARACTERISTICS
VIN1 = VIN2 = VIN3 = AVIN = 5.0 V, TA = 25°C, unless otherwise noted.
Figure 3. 3-Channel Start-Up Waveforms
Figure 4. System Quiescent Current (Sum of All the Input Currents) vs. Input Voltage,
VOUT1 = 1.8 V, VOUT2 = VOUT3 = 3.3 V
Figure 6. Buck Startup, VOUT1 = 1.8 V, I
OUT2
= 20 mA
Figure 7. Buck Load Regulation Across Temperature, VOUT1 = 3.3 V, Auto Mode
Figure 5. Buck Startup, VOUT1 = 1.8 V, I
= 20 mA
OUT1
Rev. A | Page 9 of 32
Figure 8. Buck Load Regulation Across Temperature, VOUT1 = 1.8 V, Auto Mode
Page 10
ADP5042 Data Sheet
1.784
1.785
1.786
1.787
1.788
1.789
1.790
1.791
1.792
1.793
1.794
1.795
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
–40°C
+25°C
+85°C
OUTPUT CURRE NT (A)
OUTPUT VOLTAGE (V)
08811-009
1.790
1.791
1.792
1.793
1.794
1.795
1.796
1.797
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
OUTPUT CURRE NT (A)
OUTPUT VOLTAGE (V)
VIN = 5.5V
VIN = 4.5V
VIN = 3.6V
08811-010
0
10
20
30
40
50
60
70
80
90
100
0.0001 0.001 0.01 0.1 1
EFFICIENCY (%)
OUTPUT CURRE NT (A)
3.6V
4.5V
5.5V
08811-011
0
10
20
30
40
50
60
70
80
90
100
0.001 0.01 0.1 1
EFFICIENCY (%)
OUTPUT CURRE NT (A)
3.6V
4.5V
5.5V
08811-012
0
10
20
30
40
50
60
70
80
90
100
0.0001 0.001
0.01 0.1 1
EFFICIENCY (%)
OUTPUT CURRE NT (A)
2.4V
3.6V
4.5V
5.5V
08811-013
0
10
20
30
40
50
60
70
80
90
100
0.001 0.01 0.1 1
EFFICIENCY (%)
I
OUT
(A)
2.4V
3.6V
4.5V
5.5V
08811-014
Figure 9. Buck Load Regulation Across Temperature, VOUT1 = 1.8 V, PWM Mode
Figure 10. Buck Load Regulation Across Input Voltage, VOUT1 = 1.8 V, PWM Mode
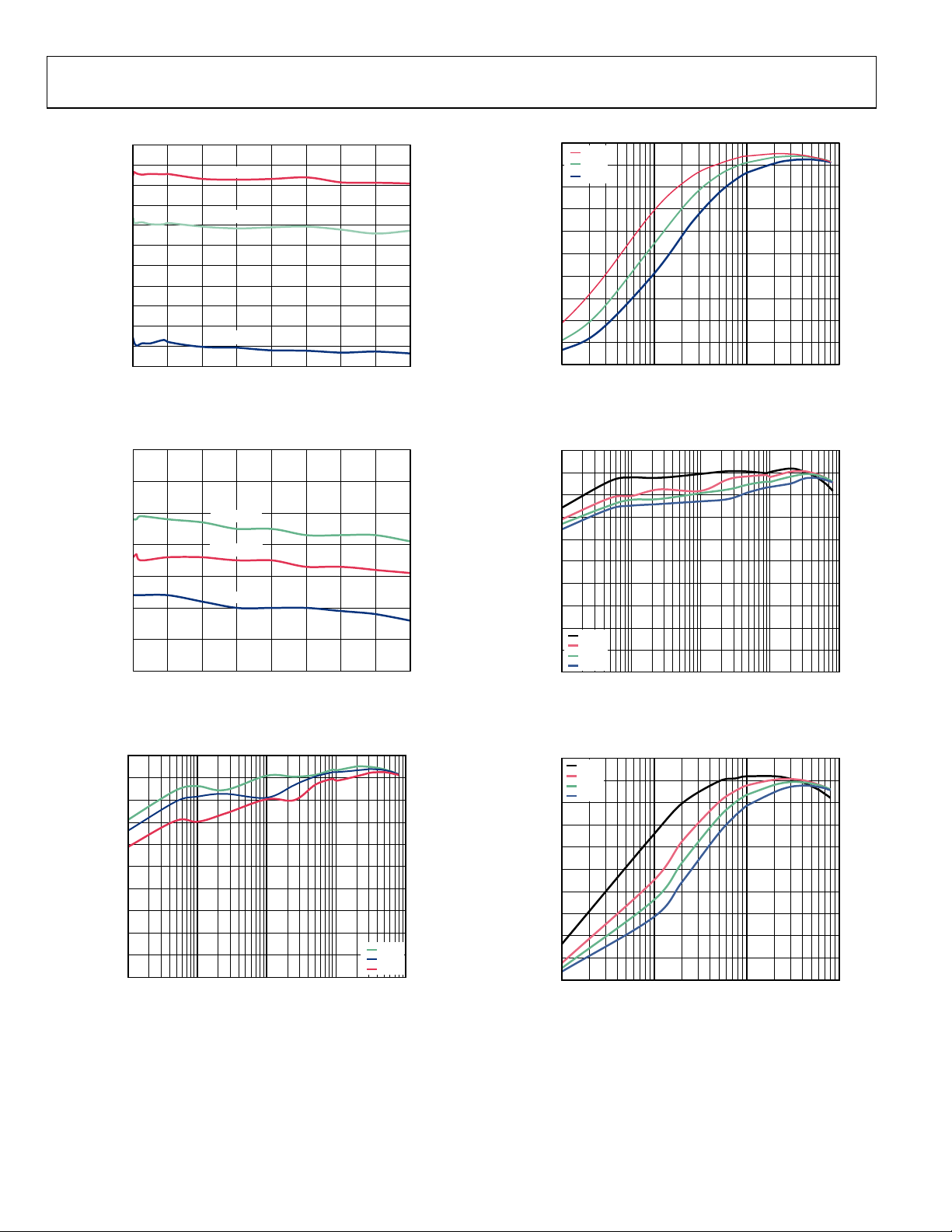
Figure 12. Buck Efficiency vs. Load Current, Across Input Voltage, VOUT1 = 3.3 V,
PWM Mode
Figure 13. Buck Efficiency vs. Load Current, Across Input Voltage, VOUT1 = 1.8 V,
Auto Mode
Figure 11. Buck Efficiency vs. Load Current, Across Input Voltage, VOUT1 = 3.3 V,
Auto Mode
Figure 14. Buck Efficiency vs. Load Current, Across Input Voltage, VOUT2 = 1.8 V,
PWM Mode
Rev. A | Page 10 of 32
Page 11

Data Sheet ADP5042
0
10
20
30
40
50
60
70
80
90
100
0.001 0.01 0.1 1
EFFICIENCY (%)
OUTPUT CURRE NT (A)
+25ºC
–40ºC
+85ºC
08811-015
0
10
20
30
40
50
60
70
80
90
100
0.0001 0.001 0.01 0.1 1
EFFICIENCY (%)
OUTPUT CURRE NT (A)
+25°C
–40°C
+85°C
08811-016
0
10
20
30
40
50
60
70
80
90
100
0.0001 0.001 0.01 0.1 1
EFFICIENCY (%)
OUTPUT CURRE NT (A)
+25°C
–40°C
+85°C
08811-017
1.7
1.6
1.5
1.4
1.3
1.2
1.1
1.0
2.6 3.6 4.6 5.6
INPUT VOLTAGE (V)
OUTPUT CURRE NT (A)
08811-018
2.85
2.90
2.95
3.00
3.05
3.10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
FREQUENCY (MHz)
+25°C
–40°C
+85°C
08811-019
OUTPUT CURRE NT (A)
08811-020
CH1 20.0mV/ DIV
B
W
20.0M
CH2 200mA/DIV 1MΩ
B
W
20.0M
CH3 2.0V/ DIV 1MΩ
B
W
20.0M
A CH1 2.4mV 5.0µs/DIV
20.0MS/s
50.0ns/pt
1
2
3
VOUT
I
SW
SW
Figure 15. Buck Efficiency vs. Load Current, Across Temperature, VOUT1 = 1.8 V,
PWM Mode
Figure 16. Buck Efficiency vs. Load Current, Across Temperature, VOUT1 = 3.3 V,
Auto Mode
Figure 18. Buck DC Current Capability vs. Input Voltage, VOUT1 = 1.8 V
Figure 19. Buck Switching Frequency vs. Output Current, Across Temperature,
VOUT1 = 1.8 V, PWM Mode
Figure 17. Buck Efficiency vs. Load Current, Across Temperature, VOUT1 = 1.8 V,
Auto Mode
Figure 20. Typical Waveforms, VOUT1 = 3.3 V, I
= 30 mA, Auto Mode
OUT1
Rev. A | Page 11 of 32
Page 12

ADP5042 Data Sheet
08811-021
CH1 2.0V/DIV 1MΩ
B
W
20.0M
CH2 50.0mV/ DIV
B
W
20.0M
CH3 500mA/DIV
B
W
20.0M
A CH1 1.56mV 5.0µs/DIV
200MS/s
5.0ns/pt
2
3
1
VOUT
I
SW
SW
08811-022
CH1 2.0V/DIV 1MΩ
B
W
20.0M
CH2 50.0mV/ DIV
B
W
20.0M
CH3 500mA/DIV
B
W
20.0M
A CH1 1.56mV 500ns/DIV
200MS/s
5.0ns/pt
2
3
1
VOUT
I
SW
SW
08811-023
CH1 20.0mV/ DIV
B
W
20.0M
CH2 200mA/DIV 1MΩ
B
W
20.0M
CH3 2.0V/DIV 1MΩ
B
W
20.0M
A CH1 2.4mV 200ns/DIV
500MS/s
2.0ns/pt
1
2
3
VOUT
I
SW
SW
08811-024
CH1 3V/DI V
B
W
20.0M
CH2 50mV/DI V
B
W
20.0M
CH3 900mV/DIV 1MΩ
B
W
20.0M
A CH3 4.79V 100µs/DIV
10.0MS/s
100ns/pt
1
3
VIN
VOUT
SW
2
08811-025
CH2 50mV/DI V
B
W
20.0M
CH3 1V/DI V 1MΩ
B
W
20.0M
CH4 2V/DI V 1MΩ
B
W
20.0M
A CH3 4.96mV 100µs/DIV
20MS/s
100ns/pt
2
3
4
VIN
VOUT
SW
08811-026
CH1 4V/DI V
B
W
20.0M
CH2 50mV/DI V 1MΩ
B
W
20.0M
CH3 50mA/DIV 1M Ω
B
W
20.0M
A CH3 44mA 200µs/DIV
10MS/s
100ns/pt
2
3
1
SW
VOUT
IOUT
Figure 21. Typical Waveforms, VOUT1 = 1.8 V, IOUT2 = 30 mA, Auto Mode
Figure 22. Typical Waveforms, VOUT1 = 1.8 V, IOUT1 = 30 mA, PWM Mode
Figure 24. Buck Response to Line Transient, Input Voltage from 4.5 V to 5.0 V,
VOUT1 = 3.3 V, PWM Mode
Figure 25. Buck Response to Line Transient, VIN = 4.5 V to 5.0 V, VOUT1 = 1.8 V,
PWM Mode
Figure 23. Typical Waveforms, VOUT1 = 3.3 V, IOUT2 = 30 mA, PWM Mode
Figure 26. Buck Response to Load Transient, IOUT1 from 1 mA to 50 mA,
VOUT1 = 3.3 V, Auto Mode
Rev. A | Page 12 of 32
Page 13

Data Sheet ADP5042
08811-027
CH1 4V/DI V
B
W
20.0M
CH2 50mV/DI V
B
W
20.0M
CH3 50mA/DIV 1M Ω
B
W
20.0M
A CH3 28mA 200µs/DIV
5MS/s
200ns/pt
2
3
1
VOUT
SW
V
OUT
LOAD
A CH3 86mA
2
3
1
VOUT
SW
LOAD
08811-028
CH1 4V/DI V
B
W
20.0M
CH2 50mV/DIV
B
W
20.0M
CH3 50mA/DIV 1MΩ
B
W
20.0M
200µs/DIV
10MS/s
100ns/pt
3
4
2
08811-029
VOUT1
LOAD
SW
CH2 4V/DI V 1MΩ
B
W
20.0M
CH3 50mV/DI V 1MΩ
B
W
20.0M
CH4 50mA/DIV 1MΩ
B
W
20.0M
200µs/DIV
50MS/s
20ns/pt
A CH3 145mA
1
2
3
08811-030
VOUT
EN
IIN
A CH2 1.14V
CH1 1V/DI V 1MΩ
B
W
500M
CH2 3V/DIV 1MΩ
B
W
500M
CH3 50mA/DIV 1MΩ
B
W
20.0M
50µs/DIV
2MS/s
500ns/pt
08811-031
1
2
3
VOUT
IIN
EN
A CH2 1.14V
CH1 1V/DI V 1MΩ
B
W
500M
CH2 3V/DIV 1MΩ
B
W
500M
CH3 50mA/DIV 1MΩ
B
W
20.0M
100µs/DIV
1MS/s
1.0µs/pt
1.500
1.502
1.504
1.506
1.508
1.510
0.0001 0.001 0.01 0.1
OUTPUT VOLTAGE (V)
OUTPUT CURRE NT (A)
3.3V
4.5V
5.0V
5.5V
08811-032
Figure 27. Buck Response to Load Transient, IOUT2 from 1 mA to 50 mA,
VOUT2 = 1.8 V, Auto Mode
Figure 28. Buck Response to Load Transient, IOUT1 from 20 mA to 140 mA,
VOUT1 = 3.3 V, Auto Mode
Figure 30. LDO1 Startup, VOUT3=1.5 V, IOUT3 = 5 mA
Figure 31. LDO2 Startup, VOUT3=3.3 V, IOUT3 = 5 mA
Figure 29. Buck Response to Load Transient, IOUT2 from 20 mA to 180 mA,
VOUT1 = 1.8 V, PWM Mode
Figure 32. LDO1 Load Regulation Across Input Voltage, VOUT2 = 1.5 V
Rev. A | Page 13 of 32
Page 14

ADP5042 Data Sheet
0.0001 0.001 0.01 0.1
OUTPUT VOLTAGE (V)
OUTPUT CURRE NT (A)
1.47
1.48
1.49
1.5
1.51
1.52
1.53
+85°C
+25°C
–40°C
08811-033
1.480
1.485
1.490
1.495
1.500
1.505
1.510
1.515
1.520
3.6 4.5 5.0 5.5
OUTPUT VOLTAGE (V)
INPUT VOLTAGE (V)
100µA
1mA
10mA
100mA
150mA
08811-034
3.25
3.26
3.27
3.28
3.29
3.30
3.31
3.32
3.33
3.34
3.35
0.0001 0.001 0.01 0.1
OUTPUT VOLTAGE (V)
OUTPUT CURRE NT (A)
3.6V
4.5V
5.0V
5.5V
08811-035
3.25
3.26
3.27
3.28
3.29
3.30
3.31
3.32
3.33
3.34
3.35
0.0001 0.001 0.01 0.1
OUTPUT VOLTAGE (V)
OUTPUT CURRE NT (A)
+85°C
+25°C
–40°C
08811-036
3.280
3.285
3.290
3.295
3.300
3.305
3.310
3.315
3.320
3.325
3.6 4.5 5.0 5.5
OUTPUT VOLTAGE (V)
INPUT VOLTAGE (V)
100µA
1mA
10mA
100mA
150mA
08811-037
0 0.05 0.10 0.15
LOAD (A)
CURRENT (µA)
08811-038
0
50
100
150
200
250
Figure 33. LDO1 Load Regulation Across Temperature, VIN2 = 3.3 V, VOUT2 = 1.5 V
Figure 34. LDO1 Line Regulation Across Output Load, VOUT2 = 1.5 V
Figure 36. LDO2 Load Regulation Across Temperature, VIN3 = 3.6 V, VOUT3 = 3.3 V
Figure 37. LDO2 Line Regulation Across Output Load, VOUT3 = 3.3 V
Figure 35. LDO2 Load Regulation Across Input Voltage, VOUT3 = 3.3 V
Figure 38. LDO2 Ground Current vs. Output Load, VOUT3 = 2.8 V
Rev. A | Page 14 of 32
Page 15

Data Sheet ADP5042
0
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
2.3 2.8 3.3 3.8 4.3 4.8 5.3 5.8
GROUND CURRENT ( mA)
INPUT VOLTAGE (V)
1µA
100µA
1mA
10mA
100mA
150mA
08811-039
3
1
08811-040
VOUT
IOUT
CH1 50mV/DI V 1MΩ
B
W
500M
CH3 50mA/DIV 1M Ω
B
W
20.0M
200µs/DIV
500kS/s
2.0µs/pt
A CH3 28mA
1
3
08811-041
IOUT
VOUT
CH1 50mV/DI V 1MΩ
B
W
500M
CH3 50mA/DIV 1M Ω
B
W
20.0M
200µs/DIV
500kS/s
2.0µs/pt
A CH3 50mA
08811-042
21
22
CH1 10.0mV/DIV
CH2 800mV/DIV
A CH2 5.33V
1MΩ
B
W
20.0M
VOUT
VIN
B
W
20.0M
08811-043
21
CH1 10.0mV/Div
CH2 800mV/Div
A CH2 5.33V
B
W
20.0M
1MΩ
B
W
20.0M
VOUT
VIN
2
LOAD CURRENT ( A)
OUTPUT VOLTAGE (V)
0 0.1 0.2 0.3
0.5
0
1.0
1.5
2.0
2.5
3.0
0.4 0.5 0.6 0.7
0.8
5.5V
4.5V
3.6V
08811-056
Figure 39. LDO2 Ground Current vs. Input Voltage, Across Output Load,
VOUT3 = 2.8 V
Figure 40. LDO2 Response to Load Transient, IOUT3 from 1 mA to 80 mA,
VOUT3 = 3.3 V
Figure 42. LDO2 Response to Line Transient, Input Voltage from 4.5 V to 5.5 V,
VOUT3 = 3.3 V
Figure 43. LDO1 Line Transient VIN = 4.5 V to 5.5 V, VOUT2 = 1.5 V
Figure 41. LDO1 Response to Load Transient, IOUT3 from 1 mA to 80 mA,
VOUT2 = 1.5 V
Figure 44. LDO1, LDO2 Output Current Capability vs. Input Voltage
Rev. A | Page 15 of 32
Page 16

ADP5042 Data Sheet
LOAD (mA)
RMS NOISE (µV)
08811-044
100
10
CH2; V
OUT
= 3.3V; VIN = 5V
CH2; V
OUT
= 3.3V; VIN = 3.6V
CH2; V
OUT
= 2.8V; VIN = 3.1V
CH2; V
OUT
= 1.5V; VIN = 5V
CH2; V
OUT
= 1.5V; VIN = 1.8V
0.0001 0.001 0.01 0.1 1 10 100 1k
LOAD (mA)
RMS NOISE (µV)
08811-045
100
10
CH3; VOUT = 3. 3V ; V IN = 5V
CH3; VOUT = 3. 3V ; V IN = 3.6V
CH3; VOUT = 2. 8V ; V IN = 3.1V
CH3; VOUT = 1. 5V ; V IN = 5V
CH3; VOUT = 1. 5V ; V IN = 1.8V
0.0001 0.001 0.01 0.1 1 10 100 1k
10 100 1k 10k 100k 1M 10M
FREQUENCY ( Hz )
NOISE (µV/√Hz)
08811-046
VOUT2 = 3.3V, VIN2 = 3.6V, I
LOAD
= 300mA
VOUT2 = 1.5V, VIN2 = 1.8V, I
LOAD
= 300mA
VOUT2 = 2.8V, VIN2 = 3.1V, I
LOAD
= 300mA
100
10
1.0
0.1
0.01
VOUT3 = 3.3V , VIN3 = 3.6V , I
LOAD
= 300mA
VOUT3 = 1.5V , VIN3 = 1.8V , I
LOAD
= 300mA
VOUT3 = 2.8V , VIN3 = 3.1V , I
LOAD
= 300mA
NOISE (µV/√Hz)
100
10
1
0.1
0.01
1 10 100 1k
FREQUENCY ( Hz )
10k 100k 1M
08811-055
100
10
1.0
0.1
0.01
10 100 1k 10k 100k 1M 10M
FREQUENCY ( Hz )
08811-048
NOISE (µV/
√Hz
)
VOUT3 = 1.5V, VIN3 = 1.8V, I
LOAD
= 300mA
VOUT2 = 2.8V, VIN2 = 3.1V, I
LOAD
= 300mA
VOUT3 = 2.8V, VIN3 = 3.1V, I
LOAD
= 300mA
VOUT2 = 3.3V, VIN2 = 3.6V, I
LOAD
= 300mA
VOUT3 = 3.3V, VIN3 = 3.6V, I
LOAD
= 300mA
VOUT2 = 1.5V, VIN2 = 1.8V, I
LOAD
= 300mA
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
10 100 1k
10k 100k 1M 10M
FREQUENCY ( Hz )
PSRR (dB)
08811-049
1mA
10mA
100mA
200mA
300mA
Figure 45. LDO1 Output Noise vs. Load Current, Across Input and Output Voltage
Figure 46. LDO2 Output Noise vs. Load Current, Across Input and Output Voltage
Figure 48. LDO2 Noise Spectrum Across Output Voltage, VIN = VOUT + 0.3 V
Figure 49. LDO1 vs. LDO2 Noise spectrum
Figure 47. LDO1 Noise Spectrum Across Output Voltage, VIN = VOUT + 0.3 V
Figure 50. LDO2 PSRR Across Output Load, VIN3 = 3.3 V, VOUT3 = 2.8 V
Rev. A | Page 16 of 32
Page 17

Data Sheet ADP5042
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
10 100 1k 10k 100k 1M 10M
FREQUENCY ( Hz )
PSRR (dB)
08811-050
1mA
10mA
100mA
200mA
300mA
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
10 100 1k
10k 100k 1M 10M
FREQUENCY ( Hz )
PSRR (dB)
08811-051
1mA
10mA
100mA
200mA
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
10 100 1k
10k 100k 1M 10M
FREQUENCY ( Hz )
PSRR (dB)
08811-052
1mA
10mA
100mA
200mA
300mA
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
10 100 1k 10k 100k 1M 10M
FREQUENCY ( Hz )
PSRR (dB)
08811-053
1mA
10mA
100mA
200mA
300mA
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
10 100 1k
10k 100k 1M 10M
FREQUENCY ( Hz )
PSRR (dB)
08811-054
1mA
10mA
100mA
200mA
300mA
Figure 51. LDO2 PSRR Across Output Load, VIN3 = 3.1 V, VOUT3 = 2.8 V
Figure 52. LDO2 PSRR Across Output Load, VIN3 = 5 V, VOUT3 = 3.3 V
Figure 54. LDO1 PSRR Across Output Load, VIN2 = 5.0 V, VOUT2 = 1.5 V
Figure 55. LDO1 PSRR Across Output Load, VIN2 = 1.8 V, VOUT2 = 1.5 V
Figure 53. LDO2 PSRR Across Output Load, VIN3 = 3.6 V, VOUT3 = 3.3 V
Rev. A | Page 17 of 32
Page 18

ADP5042 Data Sheet
ENABLE
AND MODE
CONTROL
LD
O1
CONTROL
SOFT START
PWM/
PSM
CONTROL
BUCK1
DRIVER
AND
AN
TISHOOT
THROUGH
OSCILLATOR
V
REF
THERMAL
SHUTDOWN
SYSTEM
UNDERVOLTAGE
LOCK OUT
RESET
GENERATOR
DEBOUNCE
PWM
COMP
VDDA
VDDA
VDDA
GM ERROR
AMP
PSM
COMP
LOW
CURRENT
I
LIMIT
R1
R2
ADP5042
VOUT1 WMOD
ENWD1 ENWD2
VIN1
AVIN
SW
PGND
EN1
ENBK
ENLDO1
ENLDO2
MODE
MODE
EN2
EN3
SEL
OPMODE_FUSES
VIN2 AGND VOUT2 VIN3
LDO2
CONTROL
R3
R4
ENLDO1
500Ω
ENBK
60Ω
ENLDO2
500Ω
D
C
B Y
A
VDDA
R0 R1
MR
WDI1
200kΩ
VDDA
52kΩ
40kΩ
WATCHDOG
DETECTOR1
WATCHDOG
STATUS
MONITOR
WDI2
WATCHDOG
DETECTOR2
POFF
POFF
VOUT3
nRSTO
WSTAT
08811-057
THEORY OF OPERATION
POWER MANAGEMENT UNIT
The ADP5042 is a micro power management unit (micro PMU)
combing one step-down (buck) dc-to-dc convertor, two low
Figure 56. Functional Block Diagram
dropout linear regulators (LDOs), and a supervisory circuit, with
dual watchdog, for processor control. The regulators are activated
by a logic level high applied to the respective EN pin. The EN1
controls the buck regulator, the EN2 controls LDO1, and the
EN3 controls LDO2. The ADP5042 has factory programmed
output voltages and reset voltage threshold. Other features
available in this device are the mode pin to control the buck
switching operation, a status pin informing the external processor
which watchdog caused a reset and push-button reset input.
When a regulator is turned on, the output voltage is controlled
through a soft start circuit to avoid a large inrush current due to
the discharged output capacitors.
The buck regulator can operate in forced PWM mode if the
MODE pin is at a logic high level. In forced PWM mode, the
switching frequency of the buck is always constant and does not
change with the load current. If the MODE pin is at logic low
level, the switching regulator operates in auto PWM/PSM mode.
In this mode, the regulator operates at fixed PWM frequency
when the load current is above the power saving current threshold.
When the load current falls below the power saving current
threshold, the regulator enters power saving mode, where the
switching occurs in bursts. The burst repetition is a function of
the current load and the output capacitor value. This operating
mode reduces the switching and quiescent current losses.
Rev. A | Page 18 of 32
Page 19

Data Sheet ADP5042
Thermal Protection
In the event that the junction temperature rises above 150°C,
the thermal shutdown circuit turns off the buck and the LDOs.
Extreme junction temperatures can be the result of high current
operation, poor circuit board design, or high ambient temperature.
A 20°C hysteresis is included so that when thermal shutdown
occurs, the buck and LDOs do not return to operation until the
on-chip temperature drops below 130°C. When coming out of
thermal shutdown, soft start is initiated.
Undervoltage Lockout
To protect against battery discharge, undervoltage lockout
(UVLO) circuitry is integrated in the system. If the input
voltage on AVIN drops below a typical 2.15 V UVLO threshold,
all channels shut down. In the buck channel, both the power
switch and the synchronous rectifier turn off. When the voltage
on AVIN rises above the UVLO threshold, the part is enabled
once more.
Alternatively, the user can select device models with a UVLO
set at a higher level, suitable for 5 V applications. For these
models, the device hits the turn-off threshold when the input
supply drops to 3.65 V typical.
Enable/Shutdown
The ADP5042 has individual control pins for each regulator. A
logic level high applied to the ENx pin activates a regulator, a
logic level low turns off a regulator.
When regulators are turned off after a Watchdog 2 event (see
the Watchdog 2 Input section), the reactivation of the regulator
occurs with a factory programmed order (see Tabl e 9). The
delay between the regulator activation (
Table 9. ADP5042 Regulators Sequencing
REGSEQ[1:0] Regulators Sequence (First to Last)
0 0
0 1
1 0
1 1 No sequence, all regulators start at same time
LDO1 LDO2 Buck
Buck LDO1 LDO2
LDO1 Buck LDO2
t
, tD2) is 2 ms.
D1
BUCK SECTION
The buck uses a fixed frequency and high speed current mode
architecture. The buck operates with an input voltage of 2.3 V
to 5.5 V.
Control Scheme
The buck operates with a fixed frequency, current mode PWM
control architecture at medium to high loads for high efficiency
but shift to a power save mode (PSM) control scheme at light
loads to lower the regulation power losses. When operating in
fixed frequency PWM mode, the duty cycle of the integrated
switches is adjusted and regulates the output voltage. When
operating in PSM at light loads, the output voltage is controlled
in a hysteretic manner, with higher output voltage ripple. During
part of this time, the converter is able to stop switching and
enters an idle mode, which improves conversion efficiency.
PWM Mode
In PWM mode, the buck operates at a fixed frequency of 3 MHz,
set by an internal oscillator. At the start of each oscillator cycle,
the PFET switch is turned on, sending a positive voltage across
the inductor. Current in the inductor increases until the current
sense signal crosses the peak inductor current threshold that
turns off the PFET switch and turns on the NFET synchronous
rectifier. This sends a negative voltage across the inductor,
causing the inductor current to decrease. The synchronous
rectifier stays on for the rest of the cycle. The buck regulates the
output voltage by adjusting the peak inductor current threshold.
Power Save Mode (PSM)
The buck smoothly transitions to PSM operation when the load
current decreases below the PSM current threshold. When the
buck enters power save mode, an offset is induced in the PWM
regulation level, which makes the output voltage rise. When the
output voltage reaches a level that is approximately 1.5% above
the PWM regulation level, PWM operation is turned off. At this
point, both power switches are off, and the buck enters an idle
mode. The output capacitor discharges until the output voltage
falls to the PWM regulation voltage, at which point the device
drives the inductor to make the output voltage rise again to the
upper threshold. This process is repeated while the load current
is below the PSM current threshold.
PSM Current Threshold
The PSM current threshold is set to 100 mA. The buck employs
a scheme that enables this current to remain accurately controlled, independent of input and output voltage levels. This
scheme also ensures that there is very little hysteresis between
the PSM current threshold for entry to and exit from the PSM.
The PSM current threshold is optimized for excellent efficiency
over all load currents.
Short-Circuit Protection
The buck includes frequency foldback to prevent output current
runaway on a hard short. When the voltage at the feedback pin
falls below half the target output voltage, indicating the possibility of a hard short at the output, the switching frequency is
reduced to half the internal oscillator frequency. The reduction
in the switching frequency allows more time for the inductor to
discharge, preventing a runaway of output current.
Soft Start
The buck has an internal soft start function that ramps the
output voltage in a controlled manner upon startup, thereby
limiting the inrush current. This prevents possible input voltage
drops when a battery or a high impedance power source is
connected to the input of the converter.
Current Limit
The buck has protection circuitry to limit the amount of
positive current flowing through the PFET switch and the
amount of negative current flowing through the synchronous
rectifier. The positive current limit on the power switch limits
Rev. A | Page 19 of 32
Page 20

RSTO
nRSTO
t
RD
t
RD
VOUT2
t
RP1
t
RP1
VOUT2
VOUT2
V
TH
V
TH
0V
1V
0V
1V
0V
08811-058
ADP5042 Data Sheet
the amount of current that can flow from the input to the
output. The negative current limit prevents the inductor
current from reversing direction and flowing out of the load.
100% Duty Operation
With a dropping input voltage or with an increase in load
current, the buck may reach a limit where, even with the PFET
switch on 100% of the time, the output voltage drops below the
desired output voltage. At this limit, the buck transitions to a
mode where the PFET switch stays on 100% of the time. When
the input conditions change again and the required duty cycle
falls, the buck immediately restarts PWM regulation without
allowing overshoot on the output voltage.
LDO SECTION
The ADP5042 contains two LDOs with low quiescent current,
low dropout linear regulator, and provides up to 300 mA of
output current. Drawing a low 15 μA quiescent current (typical)
at no load makes the LDO ideal for battery-operated portable
equipment.
The LDO operates with an input voltage range of 1.7 V to 5.5 V.
The wide operating range makes these LDOs suitable for
cascading configurations where the LDO supply voltage is
provided from the buck regulator.
The LDOs also provide high power supply rejection ratio (PSRR),
low output noise, and excellent line and load transient response
with just a small 1 µF ceramic input and output capacitor.
LDO2 is optimized to supply analog circuits because it offers
better noise performance compared to LDO1. LDO1 should be
used in applications where noise performance is not critical.
Internally, one LDO consists of a reference, an error amplifier,
a feedback voltage divider, and a PMOS pass transistor. Output
current is delivered via the PMOS pass device, which is controlled by the error amplifier. The error amplifier compares
the reference voltage with the feedback voltage from the output
and amplifies the difference. If the feedback voltage is lower
than the reference voltage, the gate of the PMOS device is
pulled lower, allowing more current to flow and increasing
the output voltage. If the feedback voltage is higher than the
reference voltage, the gate of the PMOS device is pulled higher,
reducing the current flowing to the output.
SUPERVISORY SECTION
The ADP5042 provides microprocessor supply voltage supervision by controlling the reset input of the microprocessor.
Code execution errors are avoided during power-up, powerdown, and brownout conditions by asserting a reset signal when
the supply voltage is below a preset threshold and by allowing
supply voltage stabilization with a fixed timeout reset pulse
after the supply voltage rises above the threshold. In addition,
problems with microprocessor code execution can be monitored
and corrected with a dual-watchdog timer.
Rev. A | Page 20 of 32
Reset Output
The ADP5042 has an active-low, open-drain reset output. This
output structure requires an external pull-up resistor to connect
the reset output to a voltage rail that is no higher than 6 V. The
resistor should comply with the logic low and logic high voltage
level requirements of the microprocessor while supplying input
current and leakage paths on the nRSTO pin. A 10 kΩ resistor is
adequate in most situations.
The reset output is asserted when the monitored rail is below
the reset threshold (V
within the watchdog timeout period (t
), when WDI1 or WDI2 is not serviced
TH
WD1
and t
). Reset remains
WD12
asserted for the duration of the reset active timeout period (t
after V
rises above the reset threshold or after the watchdog
CC
timer times out. Figure 57 illustrates the behavior of the reset
output, nRSTO, and it assumes that VOUT2 is selected as the
rail to be monitored and supplies the external pull-up connected
to the nRSTO output.
Figure 57. Reset Timing Diagram
The reset threshold voltage and the sensed rail (VOUT1,
VOUT2, VOUT3, or AVIN) are factory programmed. Refer to
Table 16 for a complete list of the reset thresholds available for
the ADP5042.
When monitoring the input supply voltage, AVIN, if the
selected reset threshold is below the UVLO level (factory
programmable to 2.25 V or 3.6 V) the reset output, nRSTO, is
asserted low as soon as the input voltage falls below the UVLO
threshold. Below the UVLO threshold, the reset output is
maintained low down to ~1 V VIN. This it to ensure that the reset
output is not released when there is sufficient voltage on the rail
supplying a processor to restart the processor operations.
Manual Reset Input
The ADP5042 features a manual reset input (MR) which, when
driven low, asserts the reset output. When
MR
transitions from
low to high, reset remains asserted for the duration of the reset
active timeout period before deasserting. The
MR
input has a
52 kΩ, internal pull-up, connected to AVIN, so that the input is
always high when unconnected. An external push-button
switch can be connected between
MR
and ground so that the
user can generate a reset. Debounce circuitry for this purpose is
integrated on chip. Noise immunity is provided on the
MR
input,
and fast, negative-going transients of up to 100 ns (typical) are
ignored. A 0.1 µF capacitor between
MR
and ground provides
additional noise immunity.
)
RP
Page 21

Data Sheet ADP5042
WDI1
n
RSTO
t
RP1
t
RP1
t
WD1
V
SENSED
V
TH
1V
0V
0V
0V
08811-059
AVIN/VINx/ENx
V
OUT1
V
OUT2
V
OUT3
n
RSTO
WDI2
WSTAT
0V
0V
0V
0V
0V
t
POFF
t
RP2
t
WD2
t
RP1
t
RP1
t
WDCLEAR
t
D1
t
D1
t
D2
V
TH
t
D2
08811-060
Watchdog 1 Input
The ADP5042 features a watchdog timer that monitors microprocessor activity. A timer circuit is cleared with every low-tohigh or high-to-low logic transition on the watchdog input pin
(WDI1), which detects pulses as short as 80 ns. If the timer
counts through the preset watchdog timeout period (t
is asserted. The microprocessor is required to toggle the WDI1
pin to avoid being reset. Failure of the microprocessor to toggle
WDI1 within the timeout period, therefore, indicates a code
execution error, and the reset pulse generated restarts the
microprocessor in a known state.
As well as logic transitions on WDI1, the watchdog timer is also
cleared by a reset assertion due to an undervoltage condition on
the monitored rail. When reset is asserted, the watchdog timer
is cleared and does not begin counting again until reset deasserts.
Watchdog 1 timer can be disabled by leaving WDI1 floating or
by three-stating the WDI1 driver. The pin WMOD controls the
Watchdog 1 operating mode. If WMOD is set to logic level low,
Watchdog 1 is enabled as long as WDI1 is not in three-state. If
WMOD is set to logic level high, Watchdog 1 is always active
and cannot be disabled by a three-state condition. WMOD
input has an internal 200 kΩ pull-down resistor.
Watchdog 1 timeout is factory set to two possible values as
indicated in Table 18.
WD1
), reset
Figure 58. Watchdog 1 Timing Diagram
Watchdog 2 Input
The ADP5042 features an additional watchdog timer that
monitors microprocessor activity in parallel to the first watchdog
with a much longer timeout. This provides additional security
and safety in case Watchdog 1 is incorrectly strobed. A timer
circuit is cleared with every low-to-high or high-to-low logic
transition on the watchdog input pin (WDI2), which detects pulses
as short as 8 µs. If the timer counts through the preset watchdog
timeout period (t
), reset is asserted, followed by a power
WD2
cycle of all regulators . The microprocessor is required to toggle
the WDI2 pin to avoid being reset and powered down. Failure
of the microprocessor to toggle WDI2 within the timeout period,
therefore, indicates a code execution error, and the reset output
nRSTO is forced low for
off for the t
time. After the t
POFF
t
. Then, all the regulators are turned
RP2
period, the regulators are re-
POFF
activated according to a predefined sequence (see Tab l e 9). Finally,
the reset line (nRSTO) is asserted for
t
. This guarantees a
RP1
clean power-up of the system and proper reset.
As well as logic transitions on WDI2, the watchdog timer is also
cleared by a reset assertion due to an undervoltage condition on
the VTH monitored rail which can be factory programmable
between VOUT1, VOUT2, VOUT3, an d AV IN (see Tabl e 21).
When reset is asserted, the watchdog timer is cleared and does
not begin counting again until reset deasserts.
Watchdog 2 timeout is factory set to seven possible values as
indicated in Table 19. One additional option allows Watchdog 2
to be factory disabled.
Figure 59. Watchdog 2 Timing Diagram (Assuming That VOUT2 Is the Monitored Rail)
Rev. A | Page 21 of 32
Page 22

ADP5042 Data Sheet
Low
Don't care
Watchdog 2
NO POWER APPLIED TO AVIN.
ALL REGULATORS AND SUPERVISORY
TURNED OFF
NO POWER
POR
STANDBY
WSTAT = HIGH
WSTAT = HIGH
RESET
NORMAL
WSTAT = LOW
AVIN < VUVLO
ALL ENx = LOW
AVIN > VUVLO
TRANSITION
STATE
TRANSITION
STATE
TRANSITION
STATE
END OF POR
WSTAT
TIMEOUT
(t
WDCLEAR
)
WSTAT = 1
TRANSITION
STATE
ALL REGULATORS AND
SUPERVISOR ACTIVATED
WDOG2
TIMEOUT
(t
WD2
)
WSTAT = 0
END OF (t
POFF
)
PULSE
WDOG1 TIMEOUT
(t
WD1
) AND
WSTAT TIMEOUT
WSTAT = 1
WDOG1 TIMEOUT
(t
WD1
)
ALL ENx = HIGH
ACTIVE
POWER OFF
RESET SHORT
AVIN < VUVLO
END OF RESET
PULSE (t
RP2
)
INTERNAL CIRCUIT BIASED
REGULATORS AND
SUPERVISORY NOT ACTIVATED
AVIN < VUVLO
AVIN < VUVLO
VMON < VTH
END OF RESET
PULSE (t
RP1
)
08811-061
Watchdog Status Indicator
In addition to the dual watchdog function, the ADP5042
features a watchdog status monitor available on the WSTAT pin.
This pin can be queried by the external processor to determine
the origin of a reset. WSTAT is an open-drain output.
WSTAT outputs a logic level depending on the condition that
has generated a reset. WSTAT is forced low if the reset was
generated because of a Watchdog 2 timeout. WSTAT is pulled
high, through external pull-up, for any other reset cause (Watchdog
1 timeout, power failure or monitored voltage below threshold).
The status monitor is automatically cleared (set to logic level
high) 10 seconds after the nRSTO low to high transition (t
WDCLEAR
),
processor firmware must be designed being able to read the
WSTAT flag before t
expiration after a Watchdog 2 reset.
WDCLEAR
The WSTAT flag is not updated in the event of a reset due to a
low voltage threshold detection or Watchdog 1 event occurring
within 10 seconds after nRSTO low to high transition. In this
situation, WSTAT maintains the previous state (see state flow in
Figure 60).
The external processor can further distinguish a reset caused by
a Watchdog 1 timeout from a power failure, status monitor
WSTAT indicating a high level, by implementing a RAM check
or signature verification after reset. A RAM check or signature
failure indicates that a power failure has occurred, whereas a
RAM check or signature validation indicates that a Watchdog 1
timeout has occurred.
Tabl e 10 shows the possible watchdog decoded statuses.
Table 10. Watchdog Status Decoding
WSTAT RAM CHECKSUM RESET ORIGIN
High Failed Power failure
High Ok Watchdog 1
Figure 60. ADP5042 State Flow
Rev. A | Page 22 of 32
Page 23

Data Sheet ADP5042
−×
2
I
0
2
4
6
8
10
12
0 1 2 3 4 5 6
DC BIAS VOLTAGE (V)
CAPACITANCE (µ F)
08811-062
APPLICATIONS INFORMATION
BUCK EXTERNAL COMPONENT SELECTION
Trade -offs between performance parameters such as efficiency
and transient response can be made by varying the choice of
external components in the applications circuit, as shown in
Figure 66.
Inductor
The high switching frequency of the ADP5042 buck allows for
the selection of small chip inductors. For best performance, use
inductor values between 0.7 μH and 3 μH. Suggested inductors
are shown in Ta bl e 11.
The peak-to-peak inductor current ripple is calculated using
the following equation:
VVV
OUT
××
LfV
RIPPLE
)(
Dimensions
(mm)
I
SAT
(mA)
DCR
(mΩ)
I
RIPPLE
OUT
=
IN
IN
SW
where:
f
is the switching frequency.
SW
L is the inductor value.
The minimum dc current rating of the inductor must be greater
than the inductor peak current. The inductor peak current is
calculated using the following equation:
II +=
PEAK
)(
MAXLOAD
Inductor conduction losses are caused by the flow of current
through the inductor, which has an associated internal dc
resistance (DCR). Larger sized inductors have smaller DCR,
which may decrease inductor conduction losses. Inductor core
losses are related to the magnetic permeability of the core material.
Because the buck is high switching frequency dc-to-dc converters,
shielded ferrite core material is recommended for its low core
losses and low EMI.
Table 11. Suggested 1.0 μH Inductors
Vendor Model
Murata LQM2MPN1R0NG0B 2.0 × 1.6 × 0.9 1400 85
Murata LQM18FN1R0M00B 1.6 × 0.8 × 0.8 150 26
Taiyo Yuden CBMF1608T1R0M 1.6 × 0.8 × 0.8 290 90
Coilcraft EPL2014-102ML 2.0 × 2.0 × 1.4 900 59
TDK GLFR1608T1R0M-LR 1.6 × 0.8 × 0.8 230 80
Coilcraft 0603LS-102 1.8 × 1.69 × 1.1 400 81
Toko MDT2520-CN 2.5 × 2.0 × 1.2 1350 85
Output Capacitor
Higher output capacitor values reduce the output voltage ripple
and improve load transient response. When choosing this value,
it is also important to account for the loss of capacitance due to
output voltage dc bias.
Ceramic capacitors are manufactured with a variety of dielectrics, each with a different behavior over temperature and
applied voltage. Capacitors must have a dielectric adequate
to ensure the minimum capacitance over the necessary
temperature range and dc bias conditions. X5R or X7R
dielectrics with a voltage rating of 6.3 V or 10 V are recommended for best performance. Y5V and Z5U dielectrics are
not recommended for use with any dc-to-dc converter because
of their poor temperature and dc bias characteristics.
The worst-case capacitance accounting for capacitor variation
over temperature, component tolerance, and voltage is calculated using the following equation:
C
= C
EFF
× (1 − TEMPCO) × (1 − TOL)
OUT
where:
is the effective capacitance at the operating voltage.
C
EFF
TEMPCO is the worst-case capacitor temperature coefficient.
TOL is the worst-case component tolerance.
In this example, the worst-case temperature coefficient (TEMPCO)
over −40°C to +85°C is assumed to be 15% for an X5R dielectric.
The tolerance of the capacitor (TOL) is assumed to be 10%, and
C
is 9.2481 μF at 1.8 V, as shown in Figure 61.
OUT
Substituting these values in the equation yields
= 9.2481 μF × (1 − 0.15) × (1 − 0.1) = 7.0747 μF
C
EFF
To guarantee the performance of the buck, it is imperative
that the effects of dc bias, temperature, and tolerances on the
behavior of the capacitors be evaluated for each application.
Figure 61. Typical Capacitor Performance
Rev. A | Page 23 of 32
Page 24

ADP5042 Data Sheet
V
OUT
SW
RIPPLE
CfI××=8
RIPPLE
V
Taiyo Yuden
X5R
JMK107BJ475
0603
6.3
SW
VIN1
VIN2
VIN3
VOUT1
VOUT2
nRSTO
PGND
VOUT3
L1
1µH
C6
4.7µF
C4
1µF
R1
100kΩ
C5
1µF
C2
4.7µF
C1
1µF
C3
1µF
AVIN
R
FLT
30Ω
V
IN
2.3V TO 5.5V
MICRO PMU
ADP5042
PROCESSOR
ANALOG
SUB-SYSTEM
VCORE
VDDIO
RESET
GPIO1
MODE
WDI
GPIO2
ENx
GPIO[x:y]
VANA
3
08811-063
Murata
X5R
GRM188R60J475ME19D
0603
6.3
The peak-to-peak output voltage ripple for the selected output
capacitor and inductor values is calculated using the following
equation:
V
RIPPLE
=
( )
×
π
SW
IN
×××
CLf
22
OUT
Capacitors with lower equivalent series resistance (ESR) are
preferred to guarantee low output voltage ripple, as shown in
the following equation:
RIPPLE
ESR ≤
COUT
I
The effective capacitance needed for stability, which includes
temperature and dc bias effects, is a minimum of 7 µF and a
maximum of 40 µF.
Input Capacitor
Higher value input capacitors help to reduce the input voltage
ripple and improve transient response. Maximum input
capacitor current is calculated using the following equation:
VVV
)(
−
IN
CIN
II
≥
OUT
MAXLOAD
)(
OUT
V
IN
To m i ni mize supply noise, place the input capacitor as close
to the VIN pin of the buck as possible. As with the output
capacitor, a low ESR capacitor is recommended.
The effective capacitance needed for stability, which includes
temperature and dc bias effects, is a minimum of 3 µF and a
maximum of 10 µF. A list of suggested capacitors is shown in
Tabl e 13.
Table 12. Suggested 10 μF Capacitors
Vendor Typ e Model
Case
Size
Voltage
Rating (V)
Murata X5R GRM188R60J106 0603 6.3
TDK X5R C1608JB0J106K 0603 6.3
Panasonic X5R ECJ1VB0J106M 0603 6.3
The buck regulator requires 10 µF output capacitors to guarantee stability and response to rapid load variations and to transition
in and out the PWM/PSM modes. In certain applications, where
the buck regulator powers a processor, the operating state is
known because it is controlled by software. In this condition,
the processor can drive the MODE pin according to the operating
state; consequently, it is possible to reduce the output capacitor
from 10 µF to 4.7 µF because the regulator does not expect a
large load variation when working in PSM mode (see Figure 62).
Table 13. Suggested 4.7 μF Capacitors
Vendor Type Model
Size
Taiyo Yuden X5R JMK107BJ475 0603 6.3
Panasonic X5R ECJ-0EB0J475M 0402 6.3
Case
Voltage
Rating
(V)
LDO CAPACITOR SELECTION
Output Capacitor
The ADP5042 LDOs are designed for operation with small,
space-saving ceramic capacitors, but they function with most
commonly used capacitors as long as care is taken with the ESR
value. The ESR of the output capacitor affects stability of the
LDO control loop. A minimum of 0.70 µF capacitance with an
ESR of 1 Ω or less is recommended to ensure stability of the
ADP5042. Transient response to changes in load current is also
affected by output capacitance. Using a larger value of output
capacitance improves the transient response of the ADP5042 to
large changes in load current.
Input Bypass Capacitor
Connecting a 1 µF capacitor from VIN2 and VIN3 to GND
reduces the circuit sensitivity to printed circuit board (PCB)
layout, especially when long input traces or high source
impedance is encountered. If greater than 1 µF of output
capacitance is required, increase the input capacitor to match it.
Figure 62. Processor System Power Management with PSM/PWM Control
Table 14. Suggested 1.0 μF Capacitors
Voltage
Case
Rev. A | Page 24 of 32
Vendor Type Model
Murata
X5R GRM155R61A105ME15
TDK X5R C1005JB0J105KT 0402 6.3
Panasonic X5R ECJ0EB0J105K 0402 6.3
Taiyo Yuden X5R LMK105BJ105MV-F 0402 10.0
Rating
Size
(V)
0402 10.0
Page 25

Data Sheet ADP5042
1.2
1.0
0.8
0.6
0.4
0.2
0
0 1 2 3 4 5 6
DC BIAS VOLTAGE (V)
CAPACITANCE (µ F)
08811-064
1000
900
800
700
600
500
400
300
200
100
0
0.1 1 10 100
C
OMPARATOR OVERDRIVE (% OF V
TH
)
TRANSIENT DURATION (µs)
08811-065
Input and Output Capacitor Properties
Use any good quality ceramic capacitors with the ADP5042 as
long as they meet the minimum capacitance and maximum ESR
requirements. Ceramic capacitors are manufactured with a variety
of dielectrics, each with a different behavior over temperature
and applied voltage. Capacitors must have a dielectric adequate
to ensure the minimum capacitance over the necessary temperature range and dc bias conditions. X5R or X7R dielectrics
with a voltage rating of 6.3 V or 10 V are recommended for best
performance. Y5V and Z5U dielectrics are not recommended
for use with any LDO because of their poor temperature and dc
bias characteristics.
Figure 63
depicts the capacitance vs. voltage bias characteristic
of a 0402 1 µF, 10 V, X5R capacitor. The voltage stability of a
capacitor is strongly influenced by the capacitor size and voltage
rating. In general, a capacitor in a larger package or higher voltage
rating exhibits better stability. The temperature variation of the
X5R dielectric is about ±15% over the −40°C to +85°C temperature range and is not a function of package or voltage rating.
To guarantee the performance of the ADP5042, it is imperative
that the effects of dc bias, temperature, and tolerances on the
behavior of the capacitors be evaluated for each application.
SUPERVISORY SECTION
Watchdog 1 Input Current
To minimize watchdog input current (and minimize overall
power consumption), leave WDI1 low for the majority of the
watchdog timeout period. When driven high, WDI1 can draw
as much as 25 µA. Pulsing WDI1 low-to-high-to-low at a low
duty cycle reduces the effect of the large input current. When
WDI1 is unconnected and WMOD is set to logic level low, a
window comparator disconnects the watchdog timer from the
reset output circuitry so that reset is not asserted when the
watchdog timer times out.
Negative-Going VCC Transients
To av o id unnecessary resets caused by fast power supply transients,
the ADP5042 is equipped with glitch rejection circuitry. The typical
performance characteristic in Figure 64 plots the monitored rail
voltage, V
The curve shows combinations of transient magnitude and
duration for which a reset is not generated for a 2.93 V reset
threshold part. For example, with the 2.93 V threshold, a
transient that goes 100 mV below the threshold and lasts 8 µs
typically does not cause a reset, but if the transient is any larger
in magnitude or duration, a reset is generated.
, transient duration vs. the transient magnitude.
TH
Figure 63. Capacitance vs. Voltage Characteristic
Use the following equation to determine the worst-case capacitance accounting for capacitor variation over temperature,
component tolerance, and voltage.
C
= C
EFF
× (1 − TEMPCO) × (1 − TOL)
BIAS
where:
C
is the effective capacitance at the operating voltage.
BIAS
TEMPCO is the worst-case capacitor temperature coefficient.
TOL is the worst-case component tolerance.
In this example, the worst-case temperature coefficient
(TEMPCO) over −40°C to +85°C is assumed to be 15% for an
X5R dielectric. The tolerance of the capacitor (TOL) is assumed
to be 10%, and C
is 0.94 μF at 1.8 V as shown in Figure 63.
BIAS
Substituting these values into the following equation yields:
= 0.94 μF × (1 − 0.15) × (1 − 0.1) = 0.719 μF
C
EFF
Therefore, the capacitor chosen in this example meets the
minimum capacitance requirement of the LDO over
temperature and tolerance at the chosen output voltage.
Figure 64. Maximum V
Threshold Overdrive
Transient Duration vs. Reset
TH
Watchdog Software Considerations
In implementing the watchdog strobe code of the microprocessor, quickly switching WDI1 low to high and then high
to low (minimizing WDI1 high time) is desirable for current
consumption reasons. However, a more effective way of using
the watchdog function can be considered.
A low-to-high-to-low WDI1 pulse within a given subroutine
prevents the watchdog from timing out. However, if the subroutine becomes stuck in an infinite loop, the watchdog cannot
detect this because the subroutine continues to toggle WDI1. A
more effective coding scheme for detecting this error involves
Rev. A | Page 25 of 32
Page 26

ADP5042 Data Sheet
START
SET WDI
HIGH
PROGRAM
CODE
SUBROUTINE
SET WDI
LOW
RETURN
INFINITE LOOP:
WATCHDOG
TIMES OUT
RESET
08811-066
ADP5042
MICROPROCESSOR
V
CC
VOUT1
VOUT2
nRSTO
WDI1
RESET
WDI2
VIN1
I/O
I/O
V
CORE
VDDIO
08811-067
using a slightly longer watchdog timeout. In the program that
calls the subroutine, WDI1 is set high. The subroutine sets
WDI1 low when it is called. If the program executes without error,
WDI1 is toggled high and low with every loop of the program.
If the subroutine enters an infinite loop, WDI1 is kept low, the
watchdog times out, and the microprocessor is reset (see
Figure 65).
Figure 65. Watchdog Flow Diagram
The second watchdog, refreshed through the WDI2 pin, is
useful in applications where safety is a very critical factor and
the system must recover from unwanted operations, for example, a
processor stuck in a continuous loop where Watchdog 1 is kept
refreshed or environmental conditions that may unset or damage
the processor port controlling the WDI1 pin. In the event of a
Watchdog 2 timeout, the ADP5042 power cycles all the supplied
rails to guarantee a clean processor start.
Figure 66. Typical Applications Circuit
PCB LAYOUT GUIDELINES
Poor layout can affect ADP5042 performance, causing electromagnetic interference (EMI) and electromagnetic compatibility
(EMC) problems, ground bounce, and voltage losses. Poor
layout can also affect regulation and stability. A good layout is
implemented using the following guidelines:
• Place the inductor, input capacitor, and output capacitor
close to the IC using short tracks. These components carry
high switching frequencies, and large tracks act as antennas.
• Route the output voltage path away from the inductor and
SW node to minimize noise and magnetic interference.
• Maximize the size of ground metal on the component side
to help with thermal dissipation.
• Use a ground plane with several vias connecting to the
component side ground to further reduce noise interference
on sensitive circuit nodes.
Rev. A | Page 26 of 32
Page 27

Data Sheet ADP5042
SW
VOUT1
PGND
MODE
C6
10µF
L1
1µH
VIN1
TP1
TP2
TP11
TP6
TP5
TP8
EN3
EN1
VIN2
VIN3
EN2
AGND
C2
1µF
VOUT2
VOUT3
WSTAT
WDI1
WDI2
nRSTO
TP12
C4
1µF
C5
4.7µF
VIN1 = 2.3V
TO 5.5V
AVIN
R
FILT
30Ω
AVIN
VIN2 = 1.7V
TO 5.5V
C1
1µF
VIN3 = 1.7V
TO 5.5V
C3
1µF
VOUT1 AT
800mA
VOUT2 AT
300mA
VOUT3 AT
300mA
TP4
TP9
TP10
TP7
TP3
EN_BK
BUCK
EN_LDO1
LDO1
EN_LDO2
LDO2
SUPERVISOR
AVIN
08811-068
0.5
0.5
1.0 1.5 2.0
2.5 3.0
3.5
4.0 4.5
5.0
5.5
1.0
1.5
2.0
2.5
3.0
3.5
VIAs LEGEND
mm
mm
6.0
6.5
NC
MODE
VIN1
SW
PGND
EN1
4.0
4.5
5.0
5.5
6.0
C6- 10
µ
F
6.3V/XR50603
GPL
GP
L
1.5V
3.3V
7.0
TOP LAYER
SECOND LAYER
PPL
L1 – 1µH
0603
C5 – 4.7µF
10V/XR5 0603
C4 – 1µF
6.3V/XR5
0402
C1 – 1µF
10V/XR5
0402
C2 – 1µF
10V/XR5
0402
PPL = POWER PLANE (+4V)
GPL = GROUND PLANE
1.8V
AGND
ADP5042
GPLGPL
GPL
GPL
VOUT3
PIN 1
VIN3
WDI2
VIN2
VOUT2
WSTAT
EN2
NC
WDI1
WMOD
VOUT1
MR
nRSTO
N
C3 – 1µF
6.3V/XR5
0402
EN3
R
FILT
30Ω
0402
GPL
GPL
GPL
GPL
GPL
PPL PPL PPL
EVALUATION BOARD SCHEMATICS AND ARTWORK
SUGGESTED LAYOUT
Figure 67. Evaluation Board Schematic
Figure 68. Layout
Rev. A | Page 27 of 32
Page 28

ADP5042 Data Sheet
C1, C2, C3, C4
1 µF, X5R, 6.3 V
LMK105BJ105MV-F
Taiyo Yuden
0402
V
V
V
BILL OF MATERIALS
Table 15.
Reference Value Part Number Vendor Package
C5 4.7 µF, X5R, 10 V LMK107BJ475MA-T Taiyo Yuden 0603
C6 10 µF, X5R, 6.3 V JMK107BJ106MA-T Taiyo Yuden 0603
R
30 Ω 0201/0402
FI LT
L1 1 µH, 0.09 Ω, 290 mA BRC1608T1R0M Taiyo Yuden 0603
1 µH, 0.08 Ω, 230 mA GLFR1608T1R0M-LR TDK 0603
IC1 3-regulator micro PMU ADP5042 Analog Devices 20-Lead LFCSP
APPLICATION DIAGRAM
R
FILT
30Ω
AVIN
IN1 = 2.3V
TO 5.5V
IN2 = 1.7V
TO 5.5V
PUSH-BUTTON
IN3 = 1.7V
TO 5.5V
4.7µF
OFF
C1
1µF
OFF
RESET
OFF
C3
1µF
C5
ON
ON
ON
VIN3
AVIN
6
VIN1
7
EN1
10
VIN2
13
EN2
16
MR
20
EN3
4
3 2
EN_BK
(DIGITAL)
EN_LDO1
AVIN
POFF
EN_LDO2
(ANALOG)
BUCK
LDO1
SUPERVISOR
LDO2
RESET
WDOG2
WDOG1
AGND
8
11
9
17
14
15
5
12
19
17
16
1
SW
VOUT1
PGND
MODE
VO
UT2
WSTAT
nRST
WDI2
WDI1
WMOD
EN2
NC
VOUT3
L1
1µH
FPWM
R1
O
V
DD
PWM/PSM
V
DD
R2
ON
F
OF
C4
1µF
VOUT1 AT
800mA
C6
10µ
F
VOUT2 AT
300mA
C2
1µF
VOUT3 AT
300mA
MAIN
MICROCONTROLLER
08811-070
Figure 69. Application Diagram
Rev. A | Page 28 of 32
Page 29

Data Sheet ADP5042
Min
Typ
Max
Min
Max
111 (For VIN = 5 V − 6%)
4.630
4.700
V
110 (For VOUT = 3.3 V)
3.034
3.080
3.126
3.003
3.157
V
101 (For VOUT = 3.3 V)
2.886
2.930
2.974
2.857
3.000
V
100 (For VOUT = 2.8 V)
2.591
2.630
2.669
2.564
2.696
V
011 (For VOUT = 2.8 V)
2.463
2.500
2.538
2.438
2.563
V
010 (For VOUT = 2.5 V − 6%)
2.350
2.385
V
001 (For VOUT = 2.2 V − 6%)
2.068
2.099
V
000 (For VOUT = 1.8 V − 6%)
1.692
1.717
V
111
102.4
128
153.6
min
11
AVIN1 pin
FACTORY PROGRAMMABLE OPTIONS
Table 16. Reset Voltage Threshold Options1
T
= +25°C T
A
Selection
Table 17. Reset Timeout Options
Selection Min Ty p Max Unit
0 24 30 36 ms
1 160 200 240 ms
Table 18. Watchdog 1 Timer Options
Selection Min Ty p Max Unit
0 81.6 102 122.4 ms
1 1.12 1.6 1.92 sec
= −40°C to +85°C
A
Unit
Table 19. Watchdog 2 Timer Options
Selection Min Ty p Max Unit
000 6 7.5 9 sec
001 Watchdog 2 disabled
010 3.2 4 4.8 min
011 6.4 8 9.6 min
100 12.8 16 19.2 min
101 25.6 32 38.4 min
110 51.2 64 76.8 min
Table 20. Power-Off Timing Options
Selection Min Ty p Max Unit
0 140 200 280 ms
1 280 400 560 ms
Table 21. Reset Sensing Options
Selection Monitored Rail
00 VOUT1 pin
01 VOUT2 pin
10 VOUT3 pin
1
When monitoring AVIN, the reset threshold selected, by fuse option or by the external resistor divided, must be higher than the UVLO threshold (2.25 V or 3.6 V).
Rev. A | Page 29 of 32
Page 30

ADP5042 Data Sheet
OUTLINE DIMENSIONS
PIN 1
INDICATOR
0.80
0.75
0.70
SEATING
PLANE
4.10
4.00 SQ
3.90
0.50
BSC
0.50
0.40
0.30
0.05 MAX
0.02 NOM
0.20 REF
COPLANARITY
0.08
0.30
0.25
0.20
16
15
EXPOSED
11
10
BOTTOM VIEWTOP VIEW
20
1
PAD
5
6
FOR PROPER CONNECTION OF
THE EXPOSED PAD, REFER TO
THE PIN CONFIGURATION AND
FUNCTION DESCRIPTIONS
SECTION OF THIS DATA SHEET.
P
N
I
I
N
I
D
0.25 MIN
1
O
C
A
T
2.65
2.50 SQ
2.35
R
COMPLIANTTOJEDEC STANDARDS MO-220-WGGD.
061609-B
Figure 70. 20-Lead, Lead Frame Chip Scale Package [LFCSP_WQ]
4 mm × 4 mm Body, Very Very Thin Quad
(CP-20-10)
Dimensions shown in millimeters
ORDERING GUIDE
1, 2
Model
ADP5042ACPZ-1-R7 VOUT1 = 1.8 V WD1 t
Regulator Settings Supervisory Settings Temperature Range Package Description
= 1.6 sec TJ = −40°C to +125°C
OUT
20-Lead, Lead Frame
Scale Package
[LFCSP_WQ]
VOUT2 = 1.5 V WD2 t
VOUT3 = 3.3 V Reset t
= 128 min
OUT
= 200 ms
OUT
UVLO = 2.2 V POFF = 200 ms
Sequencing: LDO1,
LDO2, buck
VTH Sensing =
VOUT3, 2.93 V
ADP5042ACPZ-2-R7 VOUT1 = 1.5 V WD1 t
= 1.6 sec TJ = −40°C to +125°C
OUT
20-Lead, Lead Frame
Scale Package
[LFCSP_WQ]
VOUT2 = 1.8 V WD2 t
VOUT3 = 3.3 V Reset t
= 128 min
OUT
= 200 ms
OUT
UVLO = 2.2 V POFF = 200 ms
Sequencing: LDO1,
LDO2, buck
VTH Sensing =
VOUT3, 2.93 V
ADP5042CP-1-EVALZ Evaluation Board
ADP5042CP-2-EVALZ Evaluation Board
1
Z = RoHS Compliant Part.
2
Monitoring ambient temperature does not guarantee that the junction temperature (TJ) is within the specified temperature limits.
Package
Option
CP-20-10
CP-20-10
Rev. A | Page 30 of 32
Page 31

Data Sheet ADP5042
NOTES
Rev. A | Page 31 of 32
Page 32

ADP5042 Data Sheet
NOTES
©2010-2011 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D08811-0-11/11(A)
Rev. A | Page 32 of 32
 Loading...
Loading...