

Page 1
2-Phase IMVP-II and IMVP-III
a
FEATURES
Pin Selectable 1- or 2-Phase Operation
Static and Dynamic Current Sharing Characteristics
Backward Compatible to IMVP-II
Superior Load Transient Response with ADOPT
Optimal Positioning Technology
Noise Blanking for Speed and Stability
Synchronous Rectifier Control Extends Battery Life
Smooth Output Transition During VID Code Change
Cycle-by-Cycle Current Limiting
Hiccup or Latched Overload Protection
Transient Glitch-Free Power Good
Soft Start Eliminates Power-On In-Rush Current Surge
2-Level Overvoltage and Reverse Voltage Protection
APPLICATIONS
IMVP-II and IMVP-III Core DC-to-DC Converters
Fixed Voltage Mobile CPU Core DC-to-DC Converters
Notebook/Laptop Power Supplies
Programmable Output Power Supplies
GENERAL DESCRIPTION
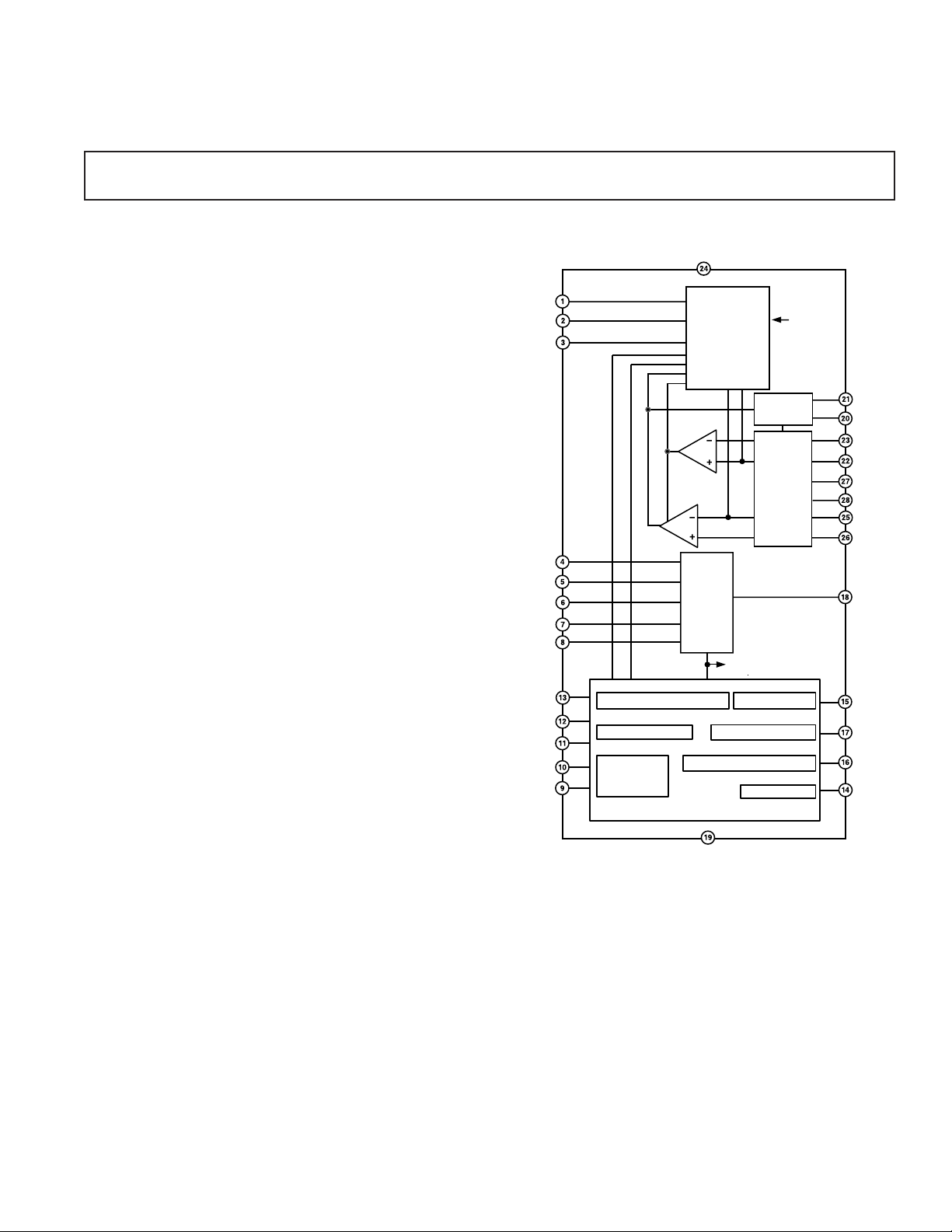
The ADP3203 is a 1- or 2-phase hysteretic peak current dc-to-dc
buck converter controller dedicated to power a mobile
processor’s core. The optimized low voltage design is powered
from the 3.3 V system supply and draws only 10 µA maximum
in shutdown. The nominal output voltage is set by a 5-bit VID
code. To accommodate the transition time required by the
newest processors for on-the-fly VID changes, the ADP3203
features high speed operation to allow a minimized inductor size
that results in the fastest change of current to the output. To
further allow for the minimum number of output capacitors to
be used, the ADP3203 features active voltage positioning with
ADOPT optimal compensation to ensure a superior load transient
response. The output signal interfaces with the ADP3415
MOSFET driver that is optimized for high speed and high efficiency for driving both the top and bottom MOSFETs of the buck
converter. The ADP3203 is capable of controlling the synchronous
rectifier to extend battery lifetime in light load conditions.
TM
Core Controller for Mobile CPUs
ADP3203
FUNCTIONAL BLOCK DIAGRAM
VCC
SD
ADP3203
EN
CORE
DSLP
BOM
ENABLE _UVLO MAIN BIAS
PWRGD BLANKER
VID MUX AND
SHIFT
SELECTOR
HYSTERESIS
SETTING
AND
SHIFT-MUX
PHASE
SPLITTER
CLIM
CURRENT
SENSE
MUX
5-BIT VID
DAC
AND
FIXED
REF
VR
SR CONTROL
COREGD MONITOR
SS-HICCUP TIMER AND OCP
OVP AND RVP
PM MODULE
GND
VR
OUT2
OUT1
CS2
CS1
CS+
CS–
RAMP
REG
DACOUT
DRVLSD
COREFB
SS
CLAMP
HYSSET
DSHIFT
BSHIFT
VID4
VID3
VID2
VID1
VID0
PWRGD
DPRSLP
DSLP
BOM
ADOPT is a trademark of Analog Devices.
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties that
may result from its use. No license is granted by implication or otherwise
under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2002
Page 2
ADP3203–SPECIFICATIONS
100 k⍀, C
OUT1
= C
= 10 pF, CSS =0.047 F, R
OUT2
= 680 ⍀ to 1.2 V, R
PWRGD
(0ⴗC ⱕ TA ⱕ 100ⴗC, High (H) = VCC, Low (L) = 0 V, VCC = 3.3 V, SD = H, V
V
DAC
(0 V
DACOUT
), V
= V
= V
REG
CS–
= 5.1 k⍀ to VCC; HYSSET, BSHIFT, DSHIFT, and
CLAMP
= 1.25 V, R
VID
OUT1
=R
OUT2
COREFB
=
1
DPRSHIFT are open; BOM = H, DSLP = H, DPRSLP = L, unless otherwise noted.) Current sunk by a pin has a positive sign, sourced by a pin has a
negative sign. Negative sign is disregarded for min and max values.
Parameter Symbol Conditions Min Typ Max Unit
SUPPLY-UVLO-SHUTDOWN
Normal Supply Current I
UVLO Supply Current I
Shutdown Supply Current I
CC
CCUVLO
CCSD
VCC = 2.63 V 75 A
SD = L, 3.0 V ≤ VCC ≤ 3.6 V 10 A
79 mA
UVLO Threshold SD = H
UVLO Hysteresis V
V
CCH
V
CCL
CCHYS
VCC Ramping Up, VSS= 0 V 2.95 V
VCC Ramping Down, 2.65 V
V
Floating
SS
50 mV
Shutdown Threshold
(CMOS Input) V
SDTH
VCC/2 V
POWER GOOD
Core Feedback Threshold Voltage V
Power Good Output Voltage V
COREFBH
PWRGD
(Open-Drain Output) V
Masking Time t
PWRGDMSK
3
0.9 V < V
V
V
V
V
V
Ramping Up 1.12 V
COREFB
Ramping Down 1.10 V
COREFB
Ramping Up 0.88 V
COREFB
Ramping Down 0.86 V
COREFB
= V
COREFB
= 0.8 V
COREFB
< 1.675 V
DAC
DACOUT
DACOUT
1.14 V
1.12 V
0.90 V
0.88 V
V
CC
DAC
DAC
DAC
DAC
0.95 V
DAC
DAC
DAC
DAC
CC
0 0.8 V
100 s
V
V
V
V
V
SOFT START/HICCUP TIMER
Charge/Discharge Current I
SS
Soft Start Enable/Hiccup V
Termination Threshold V
V
SSENDWN
SSENUP
SSTERM
4
V
Soft Start Termination/Hiccup V
VSS = 0 V –16 A
V
= 0.5 V 0.5 A
SS
= 1.25 V,
REG
= V
RAMP
V
Ramping Down 80 200 mV
SS
COREFB
= 1.27 V
VSS Ramping Up 150 mV
V
RAMP
= V
COREFB
= 1.27 V
Enable Threshold VSS Ramping Up 1.75 2.00 2.25 V
VID DAC
VID Input Threshold
(CMOS Inputs) V
VID Input Current I
VID0..4
VID0..4
VID0 to VID4 = L 85 A
VCC/2 V
(Internal Active Pull-Up)
Output Voltage V
Accuracy ∆V
Settling Time t
DACS
DAC
DAC/VDAC
5
See VID Code, Table I 0.600 1.750 V
0°C ≤ TA ≤ 85°C
1.75 ≥ V
0.825 ≥ V
∆V
DAC
≥ 0.850 –0.85 +0.85 %
DAC
≥ 0.600 –7.2 +7.2 mV
DAC
= 0.5 V, C
= 10 nF 3.5 s
DAC
REV. 0–2–
Page 3
ADP3203
Parameter Symbol Conditions Min Typ Max Unit
CORE COMPARATOR
Input Offset Voltage (Ramp-Reg) V
Input Bias Current I
Output Voltage V
COREOS
, I
REG
OUT_H
RAMP
(OUT1, OUT2) 3.0
V
Propagation Delay Time t
Rise and Fall Time
2
Noise Blanking Time t
OUT_L
RMPOUT_PD
7
t
OUT_R
7
t
OUT_F
BLNK
CURRENT LIMIT
COMPARATOR
Input Offset Voltage V
Input Bias Current I
Propagation Delay Time t
CLIMOS
, I
CS+
CLiMPD
CS–
6
CURRENT SENSE
MULTIPLEXER
Transresistance R
R
R
Common-Mode Voltage Range4V
,Switch Is ON 150 Ω
CS1–CS+
,Switch Is OFF 50 MΩ
CS2–CS+
CS3–CS+
= V
CS1
CS2
HYSTERESIS SETTING
Hysteresis Current I
–I
Hysteresis Reference Voltage V
,V
RAMP_H
CSP_H
HYSSET
CURRENT LIMIT SETTING
Hysteresis Current I
CS–
V
= 1.25 V ± 1mV
REG
V
REG
= V
= 1.25 V ± 1 A
RAMP
VCC = 3.0 V 2.5 V
VCC = 3.6 V 0 0.4 V
6
TA = 25°C35ns
T
= Full Range 40 ns
A
710 ns
710 ns
OUT L-H Transition 130 ns
OUT H-L Transition 180 ns
V
= 1.25 V ± 1mV
CS–
V
= 1.25 V –3 A
CS+
TA = 25° C60ns
TA = Full Range 100 ns
02V
= 1.25 V
REG
V
= 1.23 V, BOM = H
RAMP
I
= –10 A–8–10 –12 A
HYSSET
= –100 A –85 –100 –115 A
I
HYSSET
V
= 1.27 V, BOM = H
RAMP
I
= –10 A81012 A
HYSSET
= –100 A85100 115 A
I
HYSSET
V
= 1.23 V, BOM = L
RAMP
I
= –10 A –6.4 –8 –9.6 A
HYSSET
= –100 A –68 –80 –92 A
I
HYSSET
V
= 1.27 V, BOM = L
RAMP
I
= –10 A 6.4 8 9.6 A
HYSSET
= –100 A688092A
I
HYSSET
1.65 1.7 1.75 V
V
= 1.23 V
RAMP
V
= V
REG
V
CS+
I
HYSSET
I
HYSSET
V
CS+
I
HYSSET
I
HYSSET
V
CS+
I
HYSSET
I
HYSSET
V
CS+
I
HYSSET
I
HYSSET
= V
CS–
= 1.23 V BOM = H
= –10 A –27 –31.5 –36 A
= –100 A –270 –301.5 –333 A
= 1.27 V, BOM = H
= –10 A –18 –21.5 –25 A
= –100 A –180 –201.5 –223 A
= 1.23 V, BOM = L
= –10 A –21 –25.5 –30 A
= –100 A –226 –241.5 –267 A
= 1.27 V, BOM = L
= –10 A –14 –17.5 –21 A
= –100 A –144 –161.5 –179 A
COREFB
= 1.25 V
REV. 0
–3–
Page 4
ADP3203
Parameter Symbol Conditions Min Typ Max Unit
SHIFT SETTING
Battery Shift Current I
Battery Shift Reference Voltage V
RAMPB
BSHIFT
, I
CS+BVVID
= 1.25 V –92.5 –100 –107.5 mA
= –100 µA, BOM = L
I
BSHIFT
DSLP = H
V
DAC
V
Deep Sleep Shift Current I
Deep Sleep Shift Reference Voltage V
SHIFT CONTROL INPUTS
BOM Threshold V
(CMOS Input)
DSLP Threshold V
(V
-Level CMOS Input)
TT
DPRSLP Mode Threshold
8
(CMOS Input)
LOW SIDE DRIVE CONTROL
Output Voltage (CMOS Output) V
Output Current I
OVER/REVERSE VOLTAGE
PROTECTION-CORE FEEDBACK
Overvoltage Threshold V
Reverse Voltage Threshold V
Output Voltage
(Open-Drain Output) V
Output Current I
, I
RAMPD
CS+DVVID
I
DSHIFT
DSLP = L
DSHIFT
BOM
DSLP
V
DPRSLP
DRVLSD
DPRSLP = H 0 0.4 V
DPRSLP = L 0.7 V
DRVLSD
DPRSLP = H, V
DPRSLP = L, V
COREFB,OVPVCOREFB
COREFB,OVPVCOREFB
CLAMP
CLAMP
V
COREFB
V
COREFB
= 1.25 V –92.5 –100 –107.5 mA
= –100 µA, BOM = H
V
DAC
V
VCC/2 V
0.9 V
VCC/2 V
= 1.5 V 0.4 mA
DRVLSD
= 1.5 V –0.4 mA
DRVLSD
CC
V
CC
V
Rising 2.0 V
Falling –0.3 V
= 2.2 V, V
= V
DAC
, V
0.7 V
= 5 V 10 µA
CLAMP
= 5 V 2 4 mA
CLAMP
CC
V
CC
V
NOTES
1
All limits at temperature extremes are guaranteed via correlation using standard Statistical Quality Control (SQC) methods.
2
Guaranteed by characterization.
3
Two test conditions: 1)PWRGD is OK but forced to fail by applying an out-of-the-Core-Good-window voltage (V
COREFB pin right after the moment that BOM or DPRSLP is asserted/deasserted. PWRGD should not fail immediately, only with the specified blanking delay
time. 2) PWRGD is forced to fail (V
(V
COREFB, GOOD
blanking delay time.
4
Guaranteed by design.
5
Measured from 50% of VID code transition amplitude to the point where V
6
40 mVp-p amplitude impulse with 20 mV overdrive. Measured from the input threshold intercept point to 50% of the output voltage swing.
7
Measured between the 30% and 70% points of the output voltage swing.
8
DPRSLP circuit meets the minimum 30 ns DPRSLPVR signal assertion requirement; guaranteed by design.
= 1.25 V) right after the moment that BOM or DPRSLP is asserted/deasserted. PWRGD should not go high immediately, only with the specified
COREFB, BAD
= 1.0 V at V
= 1.25 V setting) but gets into the Core Good window
VID
settles within ± 1% of its steady state value.
DACOUT
COREFB,BAD
= 1.0 V at V
= 1.25 V setting) to the
VID
REV. 0–4–
Page 5
ADP3203
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS*
Input Supply Voltage (VCC) . . . . . . . . . . . . . . –0.3 V to +7 V
All Other Inputs/Outputs . . . . . . . . . . . –0.3 V to VCC + 0.3 V
Operating Ambient Temperature Range . . . . . . 0°C to 100°C
Junction Temperature Range . . . . . . . . . . . . . . . 0°C to 150°C
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98°C/W
JA
Storage Temperature Range . . . . . . . . . . . . –65°C to +150°C
Lead Temperature (Soldering, 10 sec.) . . . . . . . . . . . . . 300°C
*This is a stress rating only; operation beyond these limits can cause the device to
be permanently damaged.
ORDERING GUIDE
Temperature Package Package
Model Range Description Option
ADP3203JRU-0.85-RL 0.85 V 0ºC to 100ºC TSSOP-28
ADP3203JRU-0.85-R7 0.85 V 0ºC to 100ºC TSSOP-28
ADP3203JRU-1.0-RL 1 V 0ºC to 100ºC TSSOP-28
ADP3203JRU-1.0-RL7 1 V 0ºC to 100ºC TSSOP-28
Table I. VID Code
VID4 VID3 VID2 VID1 VID0 VOUT
000001.750
000011.700
000101.650
000111.600
001001.550
001011.500
001101.450
001111.400
010001.350
010011.300
010101.250
010111.200
011001.150
011011.100
011101.050
011111.000
100000.975
100010.950
100100.925
100110.900
101000.875
101010.850
101100.825
101110.800
110000.775
110010.750
110100.725
110110.700
111000.675
111010.650
111100.625
111110.600
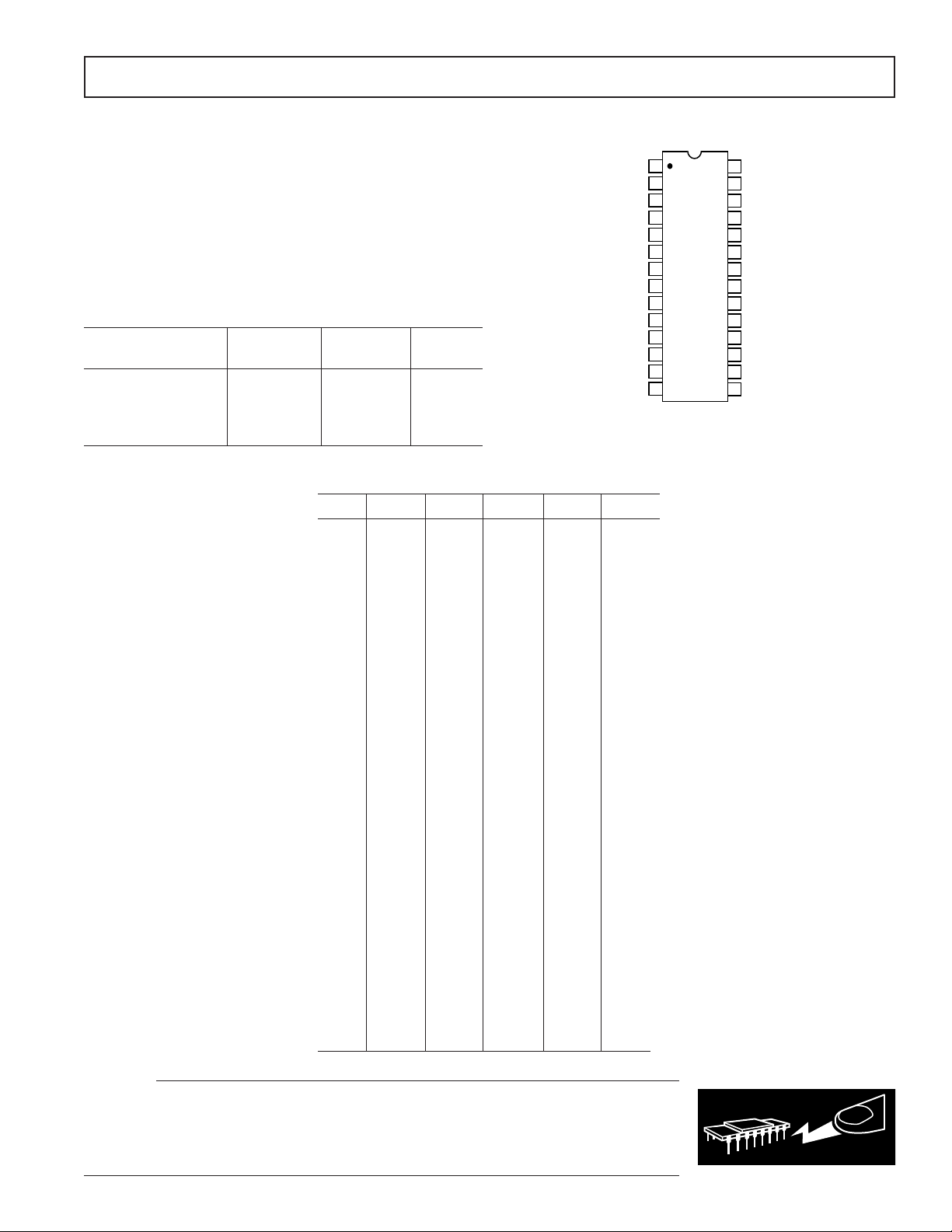
PIN CONFIGURATION
HYSSET
DSHIFT
BSHIFT
VID4
VID3
VID2
VID1
VID0
BOM
DPSLP
DPRSLP
PWRGD
CLAMP
SD
1
2
3
4
5
ADP3203
6
TOP VIEW
(Not to Scale)
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
CS–
CS+
REG
RAMP
VCC
CS2
CS1
OUT2
OUT1
GND
DACOUT
COREFB
SS
DRVLSD
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection. Although the
ADP3203 features proprietary ESD protection circuitry, permanent damage may occur on devices
subjected to high energy electrostatic discharges. Therefore, proper ESD precautions are recommended
to avoid performance degradation or loss of functionality.
REV. 0
–5–
Page 6

ADP3203
PIN FUNCTION DESCRIPTIONS
Pin Mnemonic Function
1HYSSET Hysteresis Set. This is an analog I/O pin whose output is a fixed voltage reference and whose input
is a current that is programmed by an external resistance to ground. The current is used in the IC to
set the hysteretic currents for the core comparator and the current limit comparator. Modification
of the resistance will affect both the hysteresis of the feedback regulation and the current limit setpoint and hysteresis.
2 DSHIFT Deep Sleep Shift. This is an analog I/O pin whose output is the VID reference voltage and whose
input is a current that is programmed by an external resistance to ground. The current is used in the
IC to set a switched bias current out of the RAMP pin, depending on whether it is activated by the
DPSLP signal. When activated, this added bias current creates a downward shift of the regulated
core voltage to a predetermined optimum level for regulation corresponding to Deep Sleep Mode of
CPU operation. The use of the VID code as the reference makes the deep sleep offset a fixed
percentage of the VID setting, as required by specifications.
3 BSHIFT Battery Optimized Mode (BOM) Shift. This is an analog I/O pin whose output is the VID
reference voltage and whose input current is programmed by an external resistance to ground. The
current is used in the IC to set a switched bias current out of the RAMP pin, depending on whether
it is activated by the BOM signal. When activated, this added bias current creates a downward shift
of the regulated core voltage to a predetermined optimum level for regulation corresponding to the
Battery Optimized Mode of the CPU operation. The use of the VID code as the reference makes the
BSHIFT a fixed percentage of the VID setting, as required by specifications.
4–8 VID[4:0] Voltage Identification Inputs. These are the VID inputs for logic control of the programmed
reference voltage that appears at the DACOUT pin, and via external component configuration, is
used for setting the output voltage regulation point. The VID pins have a specified internal pull-up
current that, if left open, will default the pins to a logic high state. The VID code does not set
the DAC output voltage directly but through a transparent latch that is clocked by the BOM pin’s
GMUXSEL signal rising and falling edge.
9 BOM Battery Optimized Mode Control (Active Low). This digital input pin corresponds to the
system’s GMUXSEL signal, which corresponds to Battery Optimized Mode of the CPU operation
in its active low state and Performance Optimized Mode (POM) in its deactivated high state. The
signal also controls the optimal positioning of the core voltage regulation level by offsetting it
downward in Battery Optimized Mode according to the functionality of the BSHIFT and RAMP
pins. It is also used to initiate a masking period for the PWRGD signal whenever a GMUXSEL
signal transition occurs.
10 DPSLP Deep Sleep Mode Control (Active Low). This is a digital input pin corresponding to the system’s
STP CPU signal that, in its active state, corresponds to Deep Sleep Mode of the CPU operation,
which is a subset operating mode of either BOM or POM operation. The signal controls the optimal
positioning of the core voltage regulation level by offsetting it downward according to the functionality of
the DSHIFT and RAMP pins.
11 DPRSLP Deeper Sleep Mode Control (Active High). This is a digital input pin corresponding to the system’s
DPRSLPVR signal corresponding to Deeper Sleep Mode of the CPU operation. When the signal
is activated, it controls the DAC output voltage by disconnecting the VID signals from the DAC
input and setting a specified internal deeper sleep code instead. At deassertion of the DPRSLPVR
signal, the DAC output voltage returns to the voltage level determined by the external VID code.
The DPRSLPVR signal is also used to initiate a blanking period for the PWRGD signal to disable
its response to a pending dynamic core voltage change that corresponds to the VID code transition.
REV. 0–6–
Page 7

ADP3203
PIN FUNCTION DESCRIPTIONS (continued)
Pin Mnemonic Function
12 PWRGD Power Good (Active High). This open-drain output pin, via the assistance of an external pull-up
resistor to the desired voltage, indicates that the core voltage is within the specified tolerance of the
VID programmed value, or else is in a VID transition state as indicated by a recent state transition
of either the BOM or DPRSLP pins. PWRGD is deactivated (pulled low) when the IC is disabled,
in UVLO Mode, or starting up, or the COREFB voltage is out of the core Power Good window.
The open-drain output allows external wired ANDing (logical NORing) with other open-drain/
collector Power Good indicators.
13 SD Shutdown (Active Low). This is a digital input pin coming from a system signal that, in its active
state, shuts down the IC operation, placing the IC in its lowest quiescent current state for maximum
power savings.
14 CLAMP Clamp (Active High). This open-drain output pin, via the assistance of an external pull-up
resistor, indicates that the core voltage should be clamped for its protection. To allow the highest
level of protection, the CLAMP signal is developed using both a redundant reference and a redundant feedback path with respect to those of the main regulation loop. The signal is timed out using
the soft start capacitor, so an external current protection mechanism (e.g., a fuse or ac adapter’s
current limit) should be tripped within ~3 times the programmed soft start time (e.g., 5 ms~10 ms).
In a preferred and more conservative configuration, the core voltage is clamped by an external FET.
The initial protection function is served when it is activated by detection of either an overvoltage or
a reverse voltage condition on the COREFB pin. Due to loss of the latched signal at IC power-off,
backup protection function is served by connecting the pull-up resistor to a system “ALWAYS”
regulator output (e.g., V5_ALWAYS). If the external FET is used, this implementation will keep
the core voltage clamped until the ADP3203 has power reapplied, thus keeping protection for the
CPU even after a hard-failure power-down and restart (e.g., a shorted top or bottom FET).
15 DRVLSD Drive-Low Shutdown (Active Low). In its active state, this digital output pin indicates that the lower
FET of the core VR should be disabled. In the suggested application schematic, this pin is directly
connected to the pin of the same name on the ADP3415 or other driver IC. Drive-low shutdown is
normally activated by the DPRSLP signal corresponding to a light load condition, but a number of
dynamic conditions can override the control of this pin as needed.
16 SS Soft Start. The output of this analog I/O pin is a controlled current source used to charge or
discharge an external grounded capacitor; the input is the detected voltage that is indicative
of elapsed time. The pin controls the soft start time of the IC as well as the hiccup cycle time during
overload, including but not limited to short circuit, overvoltage, and reverse voltage. Hiccup
operation was added to reduce short circuit power dissipation by more than an order of magnitude,
while still allowing an automatic restart when the failure mode ceased.
17 COREFB Core Feedback. This high impedance analog input pin is used to monitor the output voltage for
setting the proper state of the PWRGD and CLAMP pins. It is generally recommended to RC-filter
the ripple and noise from the monitored core voltage, as suggested by the application schematic.
18 DACOUT Digital-to-Analog Converter Output. This output voltage is the VID-controlled reference voltage
whose primary function is to determine the output voltage regulation point.
19 GND Ground
20 OUT1 Output to Driver 1. This digital output pin is used to command the state of the switched node via
the driver and MOSFET switches. It should be connected to the IN pin of the ADP3415 driver that
corresponds to the first of two channels.
REV. 0
–7–
Page 8

ADP3203
PIN FUNCTION DESCRIPTIONS (continued)
Pin Mnemonic Function
21 OUT2 Output to Driver 2. This digital output pin is used to command the state of the switched node via
the driver. It should be connected to the IN pin of the ADP3415 driver that corresponds to the
second of two channels.
22 CS1 Current Sense, Channel 1. This high impedance analog input pin is used to provide negative
feedback of the current information for the first of two channels.
23 CS2 Current Sense, Channel 2. This high impedance analog input pin is used to provide negative
feedback of the current information for the second of two channels. The pin is also used to determine whether the chip is acting as a single- or dual-phase controller. If the pin is tied to VCC but
not a sense resistor, then the dual-phase operation is disabled; the chip works as a single-phase controller.
In this condition, the second phase’s output signal (OUT2) does not switch but stays static low.
24 VCC Power Supply. This should be connected to the system’s 3.3 V power supply output.
25 RAMP Regulation Ramp Feedback Input. The RAMP pin voltage is compared against the REG pin for
cycle-by-cycle switching response. Several switched current sources also appear at this input: the
cycle-by-cycle hysteresis setting switched current programmed by the HYSSET pin, the BOM shift
current programmed by the BSHIFT pin, and the Deep Sleep shift current programmed by the
DSHIFT pin. The external resistive termination at this pin sets the magnitude of the hysteresis
applied to the regulation loop.
26 REG Regulation Voltage Summing Input. This is a high impedance analog input pin into which the
voltage reference of the feedback loop allows the summing of both the DACOUT voltage and the
core voltage for programming the output resistance of the core voltage regulator. This is also the pin
at which an optimized transient response can be tailored using Analog Devices’ patented ADOPT
design technique.
27 CS+ Current Limit Positive Sense. This high impedance analog input pin is multiplexed between either
of the two current-sense inputs during the high state of the OUT pin of the respective channel.
During the common off-time of both channels, the pin’s voltage reflects the average of the two
channels. The multiplexed current sense signal is passed to the core comparator through an external
resistive termination connected from this pin to the RAMP pin. The external (RAMP) resistor sets
the magnitude of the hysteresis applied to the regulation loop.
28 CS– Current Limit Negative Sense. This high impedance analog input pin is normally Kelvin
connected to the negative node of the current sense resistor(s) via a current-limit programming
resistor. A hysteretically controlled current—three times the current programmed at the HYSSET
pin—also flows out of this pin and develops a current-limit setting voltage across that resistor,
which must then be matched by the inductor current flowing in the current sensing resistor in order
to trigger the current limit function. When triggered, the current flowing out of this pin is reduced
to two-thirds of its previous value, producing hysteresis in the current limiting function.
REV. 0–8–
Page 9

10000
SOFT START CAPACITANCE – nF
10
1
0.01
0.1 100
SOFT START TIME – ms
110
0.1
100
TEMPERATURE – ⴗC
90
020
NORMALIZED BLANKING TIME – %
40 60 80 100
92
94
96
98
100
102
104
106
108
110
1000
NORMAL OPERATING MODE
Typical Performance Characteristics–ADP3203
HIGH
100
10
SUPPLY CURRENT – A
1
0.1
0 10020
UVLO MODE
SHUTDOWN MODE
40 60 80
TEMPERATURE – ⴗC
TPC 1. Supply Current vs. Temperature
1.770
1.765
1.760
1.755
1.750
1.745
DAC OUTPUT – V
1.740
1.735
+0.85%
FULL SCALE
–0.85%
PWRGD
LOW
ⴚ0.15 0.15ⴚ0.10
ⴚ0.05 0 0.05 0.10
RELATIVE CORE VOLTAGE – %
TPC 4. Power Good vs. Relative Core Voltage Variation
1.730
0
20 40 60 80 100
TEMPERATURE – ⴗC
TPC 2. DAC Output Voltage vs. Temperature
0.620
0.615
0.610
0.605
0.600
0.595
DAC OUTPUT – V
0.590
REV. 0
0.585
0.580
0 10020
TPC 3. DAC Output Voltage vs. Temperature
ZERO SCALE
40 60 80
AMBIENT TEMPERATURE – ⴗC
+7.2mV
ⴚ7.2mV
–9–
TPC 5. Soft Start Timing vs. Timing Capacitor
TPC 6. PWRGD Blanking Time vs. Temperature
Normalized to 25
°
C
Page 10

ADP3203
6ⴛ
220F
D1
V_5S
BAR43S
C19
C17
V_DC
C20
0.1F
3.3F
1F
2.7⍀
RBST2
6ⴛ
10F
C21 . . . C26
0.1F
10
BST
ADP3415
1
Q10
IR7811W
Q9
IR7811W
7
9
8
SW
GND
DRVH
SDINDRVLSD
DLY
234
D6
D5
6
DRVL
VCC
5
R4
L2
0.32H
MBRS130LT3
MBRS130LT3
Q8
IR7811W
Q7
IR7811W
Q6
IR7811W
0⍀
RCL
432⍀ 1%
R15
Q13
R20
5.1K
V_5 ALWAYS
Q5
IR7811W
Q4
IR7811W
IR7807V
10%
C40 . . . C45
VCORE
RSC1
R14
C25
2m⍀
L1
0.32H
6ⴛ
10F
10⍀
V_DC
C31 . . . C36
0.015F
0.1F
D4
MBRS130LT3
D3
MBRS130LT3
RSC2
2m⍀
10⍀
C24
0.015F
Q2
IR7811W
Q3
D1
V_5S
BAR43S
C12
C10
0.1F
3.3F
C20
1F
RBST1
Q1
IR7811W
987
2.7⍀
10
BST
DRVH
SW
GND
6
DRVL
IR7811W
ADP3415
DLY
R16
VCC
5
0⍀
RC
1.5k⍀1%
COC
4700pF
RD
1.05k 1%
CDAC
0.01F
2.7⍀
RCFB
SDINDRVLSD
234
1
V_3S
C8
0.1F
C4
C3
R4
2.7⍀
1F
C2
10pF
28
CS–
C1
27
CS+
26
REG
10pF
25
RA 243⍀ 1%
RAMP
RB OPEN
23
24
CS2
VCC
22
CS1
21
OUT2VID0
20
OUT1
19
GND
17
18
COREFB
DACOUT
CSS
16
SS
0.047F
15
DRVLSD
0.1F
ADP3203
BOM
DPSLP
DPRSLP
HYSSET
DSHIFT
BSHIFT
3456789
1
2
8.06k⍀ 1%
34.0k⍀ 1%
19.1k⍀ 1%
RDSHIFT
RBSHIFT
RHYSSET
VID4
VID3
VR_VID3
VR_VID4
VID2
VID1
VR_VID2
VR_VID1
RBOM 220k⍀
(IMVP-2 ONLY)
VR_VID0
11
10
STP_CPU
DPRSLPVR
PWRGDSDCLAMP
12
13
14
CORE_ON
GMUXSEL
V_3S
3k⍀
VR_PWRGD
Figure 1. Typical Application
REV. 0–10–
Page 11

ADP3203
THEORY OF OPERATION
Overview
Featuring a new proprietary single- or dual-channel buck
converter hysteretic control architecture developed by Analog
Devices, the ADP3203 is the optimal core voltage control
solution for both IMVP-II and IMVP-III generation microprocessors. The complex, multitiered regulation requirements of
either IMVP specification are easily implemented with the
highly integrated functionality of this controller.
Power Conversion Control Architecture
Driving of the individual channels is accomplished using
external drivers, such as the ADP3415. One PWM interface pin
per channel, OUT1 and OUT2, is provided. A separate pin,
DRVLSD, commands the driver to enable or disable synchronous rectifier operation during the off time of each channel. The
same DRVLSD pin is connected to all three drivers.
The ADP3203 uses hysteretic control. The resistor from the
HYSSET Pin to ground sets up a current that is switched
bidirectionally into a resistor interconnected between the
RAMP and CS+ pins. The switching of this current sets the
hysteresis.
In its dual-channel configuration, the hysteretic control requires
multiplexing information in all channels. The inductor current
of the channel that is driven high is controlled against the upper
hysteresis limit. During the common off time of the channels,
the inductor currents are averaged together and compared
against the lower hysteresis limit. This proprietary off-time
averaging technique serves to eliminate a systematic offset that
otherwise appears in a fully multiplexed hysteretic control system.
Compensation
As with all ADI products for core voltage control, the controller
is compatible with ADOPT compensation, which provides the
optimum output voltage containment within a specified voltage
window or along a specified load line using the fewest possible
output capacitors. The inductor ripple current is kept at a fixed
programmable value, while the output voltage is regulated with
fully programmable voltage positioning parameters, which can
be tuned to optimize the design for any particular CPU regulation specification. By controlling the ripple current rather than
the ripple voltage, the frequency variations associated with
changes in output impedance for standard ripple regulators will
not appear.
Feedback/Current Sensing
Accurate current sensing is needed to accomplish output voltage
positioning accurately, which, in turn, is required to allow the
minimum number of output capacitors to be used to contain
transients. A current sense resistor is used between each
inductor and the output capacitors. To allow the control to
operate without amplifiers, the negative feedback signal is
multiplexed from the inductor or upstream side of the current
sense resistors, and a positive feedback signal, if needed for load
line tuning, is taken from the output or downstream side.
Output Voltage Programming by VID, Offsets, and Load Line
In the IMVP-II and IMVP-III specifications, the output voltage
is a function of both the core current (according to a specified
load line) and the system operating mode (i.e., performance or
battery optimized, normal or deep sleep clocking state, or
deeper sleep). The VID code programs the “nominal” core
voltage. The core voltage decreases as a function of load current
along the load line, which is synonymous with an output
resistance of the power converter. The core voltage is also offset
by a dc value—usually specified as a percentage—depending on
the operating mode. The voltage offset is also called a “shift.”
Two pins, BSHIFT and DSHIFT, are used to program the
magnitude of the voltage shifts. The voltage shifts are accomplished by injecting current at the node of the negative input pin
of the feedback comparator. Resistive termination at the pins
determines the magnitude of the voltage shifts.
Two other pins, BOM and DPSLP, are used to activate the
respective two shifts only in their active low states. In the
ADP3203, the shifts are mutually exclusive, with the deep sleep
shift (controlled by the DPSLP and DSHIFT pins) being the
dominant one. Another pin, DPRSLP, eliminates both shifts
only in its active high state. Its assertion corresponds to the
Deeper Sleep Operating Mode.
Current Limiting
The current programmed at the HYSSET pin and a resistor
from the CS– pin to the common node of the current sense
resistors set the current limit. If the current limit threshold is
triggered, a hysteresis is applied to the threshold so that
hysteretic control is maintained during a current limited
operating mode.
Soft Start and Hiccup
A capacitor from the SS pin to ground determines both the soft
start time and the frequency at which hiccup will occur under a
continuous short circuit or overload.
System Signal Interface
Several pins of the ADP3203 are meant to connect directly to
system signals. The VID pins connect to the system VID
control signals. The DPRSLP pin connects to the system’s
DPRSLPVR signal. The DPSLP pin connects to the system’s
DPSLP or STPCPU signal. The BOM signal connects to the
system’s GMUXSEL signal. In an IMVP-II system, the
GMUXSEL signal precedes any VID code change with a few
nanoseconds, while in an IMVP-III system, it follows it with a
maximum 12 µs delay. To comply with both specifications, the
ADP3203 has a VID register in front of the DAC inputs that is
written by a short pulse generated at the rising or falling edge of
the GMUXSEL signal. In an IMVP-II configuration, if the
external VID multiplex settling time is longer than the internal
VID register’s write pulsewidth, then the insertion of an external
RC delay network in the GMUXSEL signal path (in front of the
BOM pin) is recommended. The Intel specification calls for
maximum 200 ns VID code setup time. This specification can
be met with a simple RC network that consists of only a 220 kΩ
resistor and no external capacitor, just the BOM pin’s capacitance.
Undervoltage Lockout
The ADP3203’s supply pin, VCC, has undervoltage lockout
(UVLO) functionality to ensure that if the supply voltage is too
low to maintain proper operation, the IC will remain off and in
a low current state.
Overvoltage Protection (OVP) and Reverse Voltage Protection (RVP)
The ADP3203 features a comprehensive redundantly monitored
OVP and RVP implementation to protect the CPU core against
an excessive or reverse voltage, e.g., as might be induced by a
component or connection failure in the control or power stage.
REV. 0
–11–
Page 12

ADP3203
Two pins are associated with the OVP/RVP circuitry—a pin for
output voltage feedback, COREFB, which is also used for
Power Good monitoring but not for voltage regulation, and an
output pin, CLAMP.
The CLAMP pin defaults to a low state at startup of the ADP3203
and remains low until an overvoltage or reverse voltage condition
is detected. If either condition is detected, the CLAMP pin is
switched and latched to the VCC pin. The high state of the
CLAMP pin is reset only after several milliseconds as the soft
start pin discharges.
For maximum and fastest protection, the CLAMP pin should
be used to drive the gate of a power MOSFET whose drain
source is connected across the CPU core voltage. Detection of
overvoltage or reverse voltage will clamp the core voltage to
essentially zero, thus quickly removing the fault condition and
preventing further energy from being applied to the CPU core.
For a less comprehensively protective but also less costly
solution, the CLAMP pin may be used to latch the disconnection of input power. The latch should be powered whenever any
input power source is present. Typically, such a latching circuit
is already present in a system design, so it becomes only a
matter of allowing the CLAMP pin to also trigger the latch. In
this configuration, the latched off state of the system would be
indicative of a system failure. The overvoltage/reverse voltage
protective means is via not allowing the continued application of
energy to the CPU core. The design objective should be,
however, to ensure that the CPU core could safely absorb the
remaining energy in the power converter, since this energy is not
clamped as in the preferred configuration.
LAYOUT CONSIDERATIONS
Advantages in PCB Layout
This 2-phase solution separates the controller (ADP3203) and
the MOSFET drivers (ADP3415). Today, most motherboards
only leave small pieces of PCB area for the power management
circuit. Therefore, the separation of the controller and the
MOSFET drivers gives much greater freedom in layout than
any single chip solution.
Meanwhile, the separation also provides the freedom to place the
analog controller in a relatively quiet area in the motherboard.
This can minimize the susceptibility of the controller to injected
noise. Any single-chip solution with a high speed loop design will
suffer larger susceptibility to jitter that appears as modulation of
the output voltage.
The ADP3203 maximizes the integration of IMVP-III features.
Therefore, no additional externally implemented functions are
required to comply with IMVP-III specifications. This saves
PCB area for component placement on the motherboard.
PCB Layout Consideration for ADP3203/ADP3415
The following guidelines are recommended for optimal performance of the ADP3203 and ADP3415 in a power converter.
The circuitry is considered in three parts: the power switching
circuitry, the output filter, and the control circuitry.
Placement Overview
1. For ideal component placement, the output filter capacitors
will divide the power switching circuitry from the control
section. As an approximate guideline considered on a single-
sided PCB, the best layout would have components aligned
in the following order: ADP3415, MOSFETs and input
capacitor, output inductor, current sense resistor, output
capacitors, control components, and ADP3203. Note that
the ADP3203 and ADP3415 are completely separated for an
ideal layout, which is impossible with a single-chip solution.
This keeps the noisy switched power section isolated from
the precision control section and gives more freedom in the
layout of the power switching circuitry.
2. Whenever a power dissipating component (e.g., a power
MOSFET) is soldered to a PCB, the liberal use of vias, both
directly on the mounting pad if possible and immediately
surrounding it, is recommended. Two important reasons for
this are: improvement of the current rating through the vias
(if it is a current path) and improved thermal performance,
especially if there is opportunity to spread the heat with a
plane on the opposite side of the PCB.
Power Switching Circuitry
ADP3415, MOSFETs, and Input Capacitors
3. Locate the ADP3415 near the MOSFETs so that the loop
inductance in the path of the top gate drive returned to the
SW pin is small, and similarly for the bottom gate drive
whose return path is the ground plane. The GND pin should
have at least one very close via into the ground plane.
4. Locate the input bypass MLC capacitors close to the MOSFETs
so that the physical area of the loop enclosed in the electrical
path through the bypass capacitor and around through the
top and bottom MOSFETs (drain source) is small and wide.
This is the switching power path loop.
5. Make provisions for thermal management of all the MOSFETs.
Heavy copper and wide traces to ground and power planes will
help to pull the heat out. Heatsinking by a metal tap soldered in
the power plane near the MOSFETs will help. Even just a small
airflow can help tremendously. Paralleled MOSFETs to achieve
a given resistance will help spread the heat.
6. An external Schottky diode (across the bottom MOSFET)
may increase efficiency by a small amount (< ~1%), depending on its forward voltage drop compared to the MOSFET’s
body diode at a given current; a MOSFET with a built-in
Schottky is more effective. For an external Schottky, it should
be placed next to the bottom MOSFET or it may not be
effective at all.
7. The VCC bypass capacitor should be close to the VCC pin
and connected on either a very short trace to the GND pin
or to the GND plane.
Output Filter
Output Inductor and Capacitors, Current Sense Resistor
8. Locate the current sense resistors very near to the output
voltage plane.
9. The load-side heads of sense resistors should join as closely as
possible for accurate current signal measurement of each phase.
10. PCB trace resistances from the current sense resistors to
the regulation point should be minimized, known (calculated or measured), and compensated for as part of the
design if it is significant. (Remote sensing is not sufficient
REV. 0–12–
Page 13

ADP3203
for relieving this requirement.) A square section of 1-ounce
copper trace has a resistance of ~500 µΩ that adds to the
specified dc output resistance of the power converter. The
output capacitors should similarly be close to the regulation point and well tied into power planes as impedance
here will add to the ac output resistance (i.e., the ESR)
that is implicitly specified as well.
11. Whenever high currents must be routed between PCB layers,
vias should be used liberally to create parallel current paths
so that the resistance and inductance are minimized and the
via current rating is not exceeded.
Control Circuitry
ADP3203, Control Components
12. If the ADP3203 cannot be placed as previously recommended, care should be taken to keep the device and
surrounding components away from radiation sources
(e.g., from power inductors) and capacitive coupling from
noisy power nodes.
13. Noise immunity can be improved by the use of a devoted
signal ground plane for the power controller and its surrounding components. Space for a ground plane might
readily be available on a signal plane of the PCB since it is
often unused in the vicinity of the power controller.
14. If critical signal lines (i.e., signals from the current sense
resistor leading back to the ADP3203) must cross through
power circuitry, it is best if a signal ground plane can be
interposed between those signal lines and the traces of the
power circuitry. This serves as a shield to minimize noise
injection into the signals.
15. Absolutely avoid crossing any signal lines over the switching power path loop, described previously.
16. Accurate voltage positioning depends on accurate current
sensing, so the control signals that monitor the voltage
differentially across the current sense resistor should be
Kelvin-connected. Please refer to the ADI Evaluation
Board of the ADP3203 and its documentation for control
signal connection with sense resistors.
17. The RC filter used for the current sense signal should be
located near the control components as this serves the dual
purpose of filtering out the effect of the current sense
resistors’ parasitic inductance and the noise picked up
along the routing of the signal. The former purpose is
achieved by having the time constant of the RC filters
approximately matched to that of the sense resistors and is
important for maintaining the accuracy of the current signal.
APPLICATION INFORMATION
Theoretical Background
This application section presents the theoretical background for
multiphase dc-to-dc converters using the ADP320x family of
controllers for mobile CPUs. Members of that family control
multiphase ripple regulators (also called hysteretic regulators) in
a configuration that allows employing ADOPT, Analog Devices’
optimal voltage positioning technique, to implement the desired
output voltage and load line both statically and dynamically, as
required by Intel’s IMVP-II and IMVP-III specifications.
Single-Phase Hysteretic Regulator with ADOPT
Figure 2 shows the conventional single-phase hysteretic
regulator and the characteristic waveforms. The operation is as
follows. During the time the upper transistor, Q1, is turned on,
the inductor current, I
increase. When V
reaches the upper threshold of the
OUT
, and also the output voltage, V
L
OUT
,
hysteretic comparator, Q1 is turned off, Q2 is turned on, and
the inductor current and the output voltage decrease. The cycle
repeats after V
reaches the lower threshold of the hysteretic
OUT
comparator.
V
Q1
Q2
V
IN
V
SW
L
V
H
V
REF
V
I
L
+
C
O
LOAD
R
E
OUT
OUT
V
H
V
SW
I
L
t
t
t
Figure 2. Conventional Hysteretic Regulator and
Its Characteristic Waveforms
Since there is no voltage error amplifier in the hysteretic
regulator, its response to any change in the load current or the
input voltage is virtually instantaneous. Therefore, the hysteretic
regulator represents the fastest possible dc-to-dc converter. A
slight disadvantage of the conventional hysteretic regulator is
that its frequency varies with the input and output voltages. In a
typical mobile CPU converter application, the worst-case
frequency variation due to the input voltage variation is in the
order of 30%, which is usually acceptable. In the simplest
implementation of the hysteretic converter, shown in Figure 2,
the frequency also varies proportionally with the ESR, R
, of the
E
output capacitor. Since the initial value is often poorly controlled, and the ESR of electrolytic capacitors also changes with
temperature and age, practical ESR variations can easily lead to
a frequency variation in the order of three to one. However, a
modification of the hysteretic topology eliminates the dependence of the operating frequency on the ESR. In addition, the
modification allows the optimal implementation, ADOPT, of
Intel’s IMVP-II and IMVP-III load line specifications. Figure 3
shows the modified hysteretic regulator.
REV. 0
–13–
Page 14

ADP3203
V
IN
Q1
V
Q2
Figure 3. Modified Hysteretic Regulator with ADOPT
The implementation requires adding a resistive divider (RC and
) between the reference voltage and the output and connect-
R
D
ing the tap of the divider to the noninverting input of the
hysteretic comparator. A capacitor, C
upper member (R
It is easily shown that the output impedance of the converter
can be no less than the ESR of the output capacitor. A straightforward derivation demonstrates that the output impedance of
the converter in Figure 3 can be minimized to equal the ESR,
R
, when the following two equations are valid (neglecting PCB
E
trace resistance for now):
RRRR
DCECS
−
=
R
CS
and
CR
OC
=
RR
O
CS D
C
From Equation 2, the series resistance is:
R
R
CS
E
=
R
+1
R
This is the ADOPT configuration and design procedure that
allows the maximum possible ESR to be used while meeting a
given load line specification.
It can be seen from Equation 3 that unless R
infinite, R
will always be smaller than RE. An advantage of the
CS
circuit of Figure 3 is that if we select the ratio R
unity, the additional dissipation introduced by the series
resistance R
will be negligible. Another interesting feature of
CS
the circuit in Figure 3 is that the ac voltage across the two
inputs of the hysteretic comparator is now equal only to the ac
voltage across R
CS
LI
SW
V
H
) of the divider.
C
R
L
CS
C
OC
R
C
R
D
V
REF
, is placed across the
OC
V
OUT
+
C
O
LOAD
R
E
(1)
2
E
D
C
is zero or RC is
D
well above
D/RC
(2)
(3)
. This is due to the presence of the capacitor
, which effectively couples the ac component of the output
C
OC
voltage to the noninverting input voltage of the comparator.
Since the comparator sees only the ac voltage across R
, in the
CS
circuit of Figure 3 the dependence of the switching frequency
on the ESR of the output capacitor is completely eliminated.
Equation 4 presents the expression for the switching frequency.
R LV(V V )V
CSHIN OUT OUT
f
=
−
V
IN
(4)
Multiphase Hysteretic Regulator with ADOPT
Multiphase converters have very important advantages, including reduced rms current in the input filter capacitor (allowing
the use of a smaller and less expensive device), distributed heat
dissipation (reducing the hot-spot temperature and increasing
reliability), higher total power capability, increased equivalent
frequency without increased switching losses (allowing the use
of a smaller equivalent inductances, and thereby shortening the
load transient time), and reduced ripple current in the output
capacitor (reducing the output ripple voltage and allowing the
use of a smaller and less expensive output capacitor). Also, they
have some disadvantages, which should be considered when
choosing the number of phases. Those disadvantages include
the need for more switches and output inductors than in a
single-phase design (leading to a higher cost than a single-phase
solution, at least below a certain power level), more complex
control, and the possibility of uneven current sharing among the
phases.
The family of ADP320x controllers alleviates two of the above
disadvantages of multiphase converters. It presents a simple and
cost-effective control solution and provides perfect current
sharing among the phases. Figure 4 shows a simplified block
diagram of a 3-phase converter using the control principle
implemented with the ADP3203, the 3-phase member of the
ADP320x family.
As Figure 4 shows, in the multiphase configuration the ripple
current signal is multiplexed from all channels. During the on
time of any given channel, its current is compared to the upper
threshold of the hysteretic comparator. When the current
reaches the upper threshold, the control FET of that channel is
turned off. During the common off time of all channels, their
currents are averaged and compared to the lower threshold.
When the averaged channel current reaches the lower threshold,
the hysteretic comparator changes state again and turns on the
control FET of the next channel, as selected by the phase
REV. 0–14–
Page 15

ADP3203
splitter logic. This control concept ensures that the peak
currents of all channels will be the same, and therefore the
channel currents will be perfectly balanced. The ADOPT
compensation can be used the same way as in the single-phase
version discussed in the preceding text.
V
IN
Q1
Q2
V
SW1
Q3
V
SW2
Q4
PHASE
SPLITTER
Since due to second order effects, the detailed design of a
multiphase converter with the ADP320x family is rather
complex, a design aid using MathSoft’s MathCAD
®
program
has been developed. Please contact ADI for further information.
PHASE 1
PHASE 2L1L2
OUT 2
OUT 1
I
L1
I
L2
HYSTERETIC
CORE
COMPARATOR
CURRENT
SENSE MUX
CS1
V
CS2
H
R
CS1
V
R
CS2
C
OC
R
V
REF
OUT
R
E
LOAD
C
O
R
C
D
Figure 4. 2-Phase Modified Hysteretic Regulator with ADOPT
MathCAD is a registered trademark of MathSoft Engineering & Education, Inc.
REV. 0
–15–
Page 16

OUTLINE DIMENSIONS
28-Lead Thin Shrink Small Outline Package [TSSOP]
(RU-28)
Dimensions shown in millimeters
9.80
9.70
9.60
28
PIN 1
0.15
0.05
COPLANARITY
0.10
15
4.50
4.40
4.30
141
0.65
BSC
0.30
0.19
COMPLIANT TO JEDEC STANDARDS MO-153AE
SEATING
PLANE
1.20
MAX
6.40 BSC
0.20
0.09
C02839–0–7/02(0)
8ⴗ
0ⴗ
0.75
0.60
0.45
–16–
PRINTED IN U.S.A.
REV 0
 Loading...
Loading...