

Page 1
200 kHz, 1 A High-Voltage
a
FEATURES
Wide Input Voltage Range: 3.6 V to 30 V
Adjustable and Fixed (3.3 V, 5 V) Output Options
Integrated 1 A Power Switch
Uses Small Surface-Mount Components
Cycle-By-Cycle Current Limiting
Peak Input Voltage (100 ms): 60 V
Thermally Enhanced 8-Lead SOIC Package
Configurable as a Buck, Buck-Boost and SEPIC
Regulator
APPLICATIONS
Industrial Power Systems
PC Peripheral Power Systems
Preregulator for Linear Regulators
Distributed Power Systems
Automotive Systems
Battery Chargers
Step-Down Switching Regulator
ADP3050
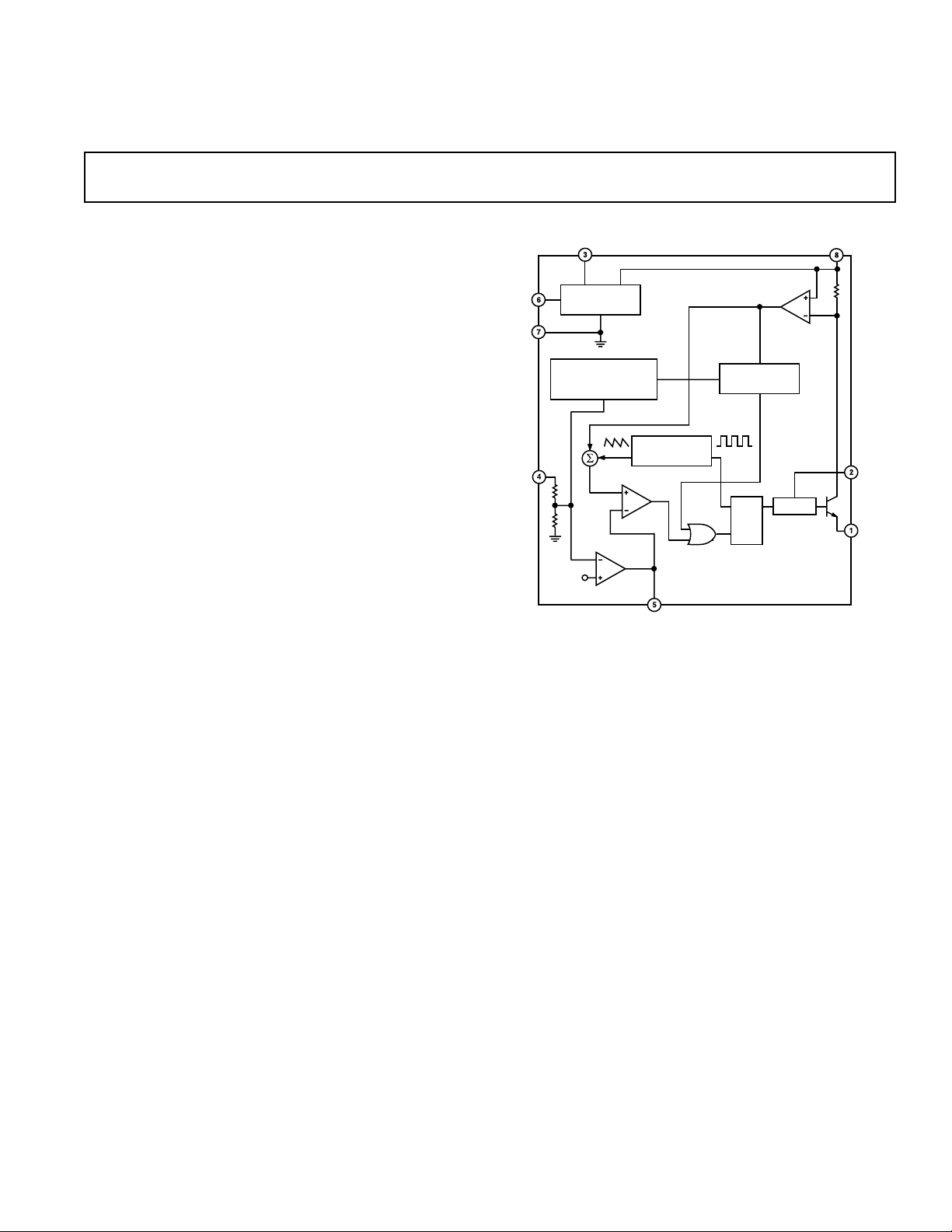
FUNCTIONAL BLOCK DIAGRAM
GND
SD
FB
BIAS
2.5V
REGULATOR
FREQUENCY
AND CURRENT LIMIT
FOLDBACK
+
g
1.2V
m
200kHz
OSCILLATOR
CMP
CURRENT SENSE
AMPLIFIER
CURRENT
LIMIT
SQ DRIVER
R
ADP3050
IN
BOOST
SWITCH
GENERAL DESCRIPTION
The ADP3050 is a current-mode monolithic buck (step-down)
PWM switching regulator that contains a high current 1 A power
switch and all control, logic, and protection functions. It uses a
unique compensation scheme that allows the use of any type of
output capacitor (tantalum, ceramic, electrolytic, OS-CON).
Unlike some buck regulators, the design is not restricted to using
a specific type of output capacitor or ESR value.
A special boosted drive stage is used to saturate the NPN power
switch, providing a system efficiency higher than conventional
bipolar buck switchers. Further efficiency improvements are obtained by using the low voltage regulated output to provide the
device's internal operating current. A high switching frequency
allows the use of small external surface-mount components. A
wide variety of standard off-the-shelf devices can be used, providing a great deal of design flexibility. A complete regulator
design requires only a few external components.
COMP
The ADP3050 includes a shutdown input that places the device
in a low-power mode, reducing the total supply current to under
20 µA. Internal protection features include thermal shutdown
circuitry and a cycle-by-cycle current-limit for the power switch
to provide complete device protection under fault conditions.
The ADP3050 provides excellent line and load regulation,
maintaining typically less than ±3% output voltage accuracy
over temperature and under all input voltage and output current
conditions.
The ADP3050 is specified over the industrial temperature range of
–40°C to +85°C and is available in a thermally enhanced 8-lead
SOIC package.
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2000
Page 2
1
ADP3050–SPECIFICATIONS
Parameter Symbol Conditions Min Typ Max Unit
FEEDBACK
Feedback Voltage V
ADP3050 1.16 1.20 1.24 V
ADP3050-3.3 3.20 3.30 3.40 V
ADP3050-5 4.85 5.00 5.15 V
Line Regulation V
Load Regulation I
Input Bias Current I
ERROR AMPLIFIER
Transconductance
Voltage Gain
2
2
Output Current
ADP3050 COMP = 1.0 V, FB = 1.1 V to 1.3 V ±115 µA
ADP3050-3.3 COMP = 1.0 V, FB = 3.0 V to 3.6 V ±120 µA
ADP3050-5 COMP = 1.0 V, FB = 4.5 V to 5.5 V ±135 µA
OSCILLATOR
Oscillator Frequency
3
Minimum Duty Cycle D
Maximum Duty Cycle D
SWITCH
Average Output Current Limit4I
ADP3050 BOOST = 15 V, FB = 1.1 V 1.0 1.25 1.5 A
ADP3050-3.3 BOOST = 15 V, FB = 3.0 V 1.0 1.25 1.5 A
ADP3050-5 BOOST = 15 V, FB = 4.5 V 1.0 1.25 1.5 A
Peak Switch Current Limit
5
Saturation Voltage BOOST = 15 V, I
Leakage Current 50 nA
SHUTDOWN
Input Voltage Low 0.4 V
Input Voltage High 2.0 V
SUPPLY
Minimum Input Voltage
6
Minimum BIAS Voltage V
Minimum BOOST Voltage V
IN Supply Current I
Normal Mode BIAS = 5.0 V 0.7 1.5 mA
Shutdown Mode SD = 0 V, V
BIAS Supply Current I
BOOST Supply Current I
NOTES
1
All limits at temperature extremes are guaranteed via correlation using standard Statistical Quality Control (SQC).
2
Transconductance and voltage gain measurements refer to the internal amplifier without the voltage divider. To calculate the transconductance and gain of the fixed
voltage parts, divide the values shown by FB/1.20.
3
The switching frequency is reduced when the feedback pin is lower than 0.8 ⫻ FB.
4
See Figure 22 for test circuit.
5
Switch current limit is measured with no diode, no inductor, and no output capacitor.
6
Minimum input voltage is not measured directly, but is guaranteed by other tests. The actual minimum input voltage needed to keep the output in regulation will
depend on output voltage and load current.
Specifications subject to change without notice.
FB
FB
g
m
A
VOL
f
OSC
MIN
MAX
CL(AVG)
I
CL(PEAK)
V
IN
BIAS
BOOST
Q
BIAS
BOOST
(VIN = 10 V, TA = –40ⴗC to +85ⴗC, unless otherwise noted)
Over Line and Temperature
= 10 V to 30 V, no load 0.005 %/V
IN
= 100 mA to 1 A,
LOAD
ADP3050AR Only –1.0 +0.1 +1.0 %/A
ADP3050AR-3.3, ADP3050AR-5 –0.5 +0.1 +0.5 %/A
ADP3050AR Only 0.65 2 µA
1250 µMho
300 V/V
170 200 240 kHz
10 %
90 %
1.5 1.7 2.1 A
= 1 A 0.65 0.95 V
LOAD
3.6 V
3.0 V
3.0 V
≤ 30 V 15 40 µA
IN
BIAS = 5.0 V 4.0 6.0 mA
BOOST = 15 V, ISW = 0.5 A 18 mA
BOOST = 15 V, ISW = 1.0 A 20 40 mA
–2–
REV. 0
Page 3
ADP3050
ABSOLUTE MAXIMUM RATINGS*
IN Voltage
Steady State . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +30 V
Peak (<100 ms) . . . . . . . . . . . . . . . . . . . . . –0.3 V to +60 V
BOOST Voltage
Steady State . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +45 V
Peak (<100 ms) . . . . . . . . . . . . . . . . . . . . . –0.3 V to +65 V
SD, BIAS Voltage . . . . . . . . . . . . . . . . . –0.3 V to IN + 0.3 V
FB Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +8 V
COMP Voltage . . . . . . . . . . . . . . . . . . . –0.3 V to IN + 0.3 V
SWITCH Voltage . . . . . . . . . . . . . . . . . –0.3 V to IN + 0.3 V
Operating Ambient Temperature Range . . . . –40°C to +85°C
Operating Junction Temperature Range . . . –40°C to +125°C
Storage Temperature Range . . . . . . . . . . . . –65°C to +150°C
(2-Layer PCB) . . . . . . . . . . . . . . . . . . . . . . . . . . 108°C/W
θ
JA
(4-Layer PCB) . . . . . . . . . . . . . . . . . . . . . . . . . . . 81°C/W
θ
JA
Lead Temperature Range (Soldering, 60 sec.) . . . . . . . . 300°C
*This is a stress rating only; operation beyond these limits can cause the device to
be permanently damaged. Unless otherwise specified, all voltages are referenced
to GND
ORDERING GUIDE
Output Temperature
Model Voltage Range Package*
°
ADP3050AR ADJ –40
ADP3050AR-3.3 3.3 V –40
C to +85°C SO-8
°
C to +85°C SO-8
ADP3050AR-5 5.0 V –40°C to +85°C SO-8
*SO = Small Outline Package
PIN CONFIGURATION
8-Lead SOIC
(R-Suffix)
SWITCH
BOOST
BIAS
FB
1
ADP3050
2
TOP VIEW
3
(Not to Scale)
4
8
7
6
5
IN
GND
SD
COMP
PIN FUNCTION DESCRIPTION
Pin Name Function
1 SWITCH This is the emitter of the internal NPN
power switch. The voltage at this pin switches
between V
and approximately –0.5 V.
IN
2 BOOST This pin is used to provide a boosted voltage
(higher than V
) for the drive stage of the
IN
NPN power switch. With the higher drive
voltage, the power switch can be saturated,
greatly reducing the switch power losses.
3 BIAS Connect this pin to the regulated output
voltage to maximize system efficiency.
When this pin is above 2.7 V, most of the
ADP3050 operating current will be taken
from the output instead of the input supply.
Leave unconnected if not used.
4 FB This feedback pin senses the regulated output
voltage. Connect this pin directly to the output (fixed output versions).
5 COMP This pin is used to compensate the regulator
with an external resistor and capacitor. This
pin can be used to override the control loop,
but the voltage on this pin should not exceed
about 2 V, as the pin is internally clamped to
ensure a fast transient response. Use a pull-up
resistor if this pin is to be pulled higher than 2 V.
6 SD Use this pin to turn the device on and off. If
this feature is not needed, tie this pin directly
.
to V
IN
7 GND Connect this pin to local ground plane.
8 IN Connect this pin to the input supply voltage.
An input bypass capacitor must be placed
close to this pin to ensure proper regulator
operation.
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although this device features proprietary ESD protection circuitry, permanent damage may occur
on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
REV. 0
–3–
Page 4
ADP3050
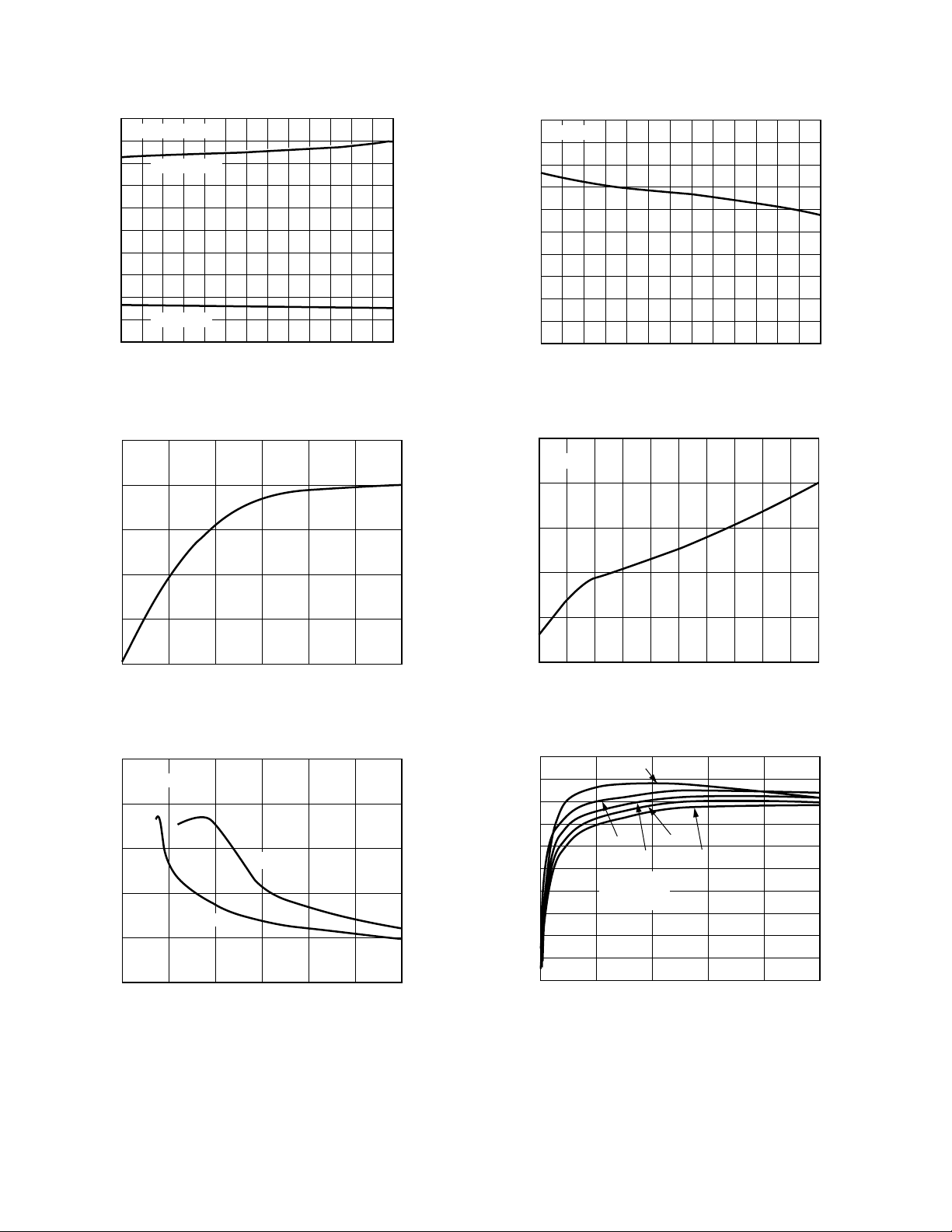
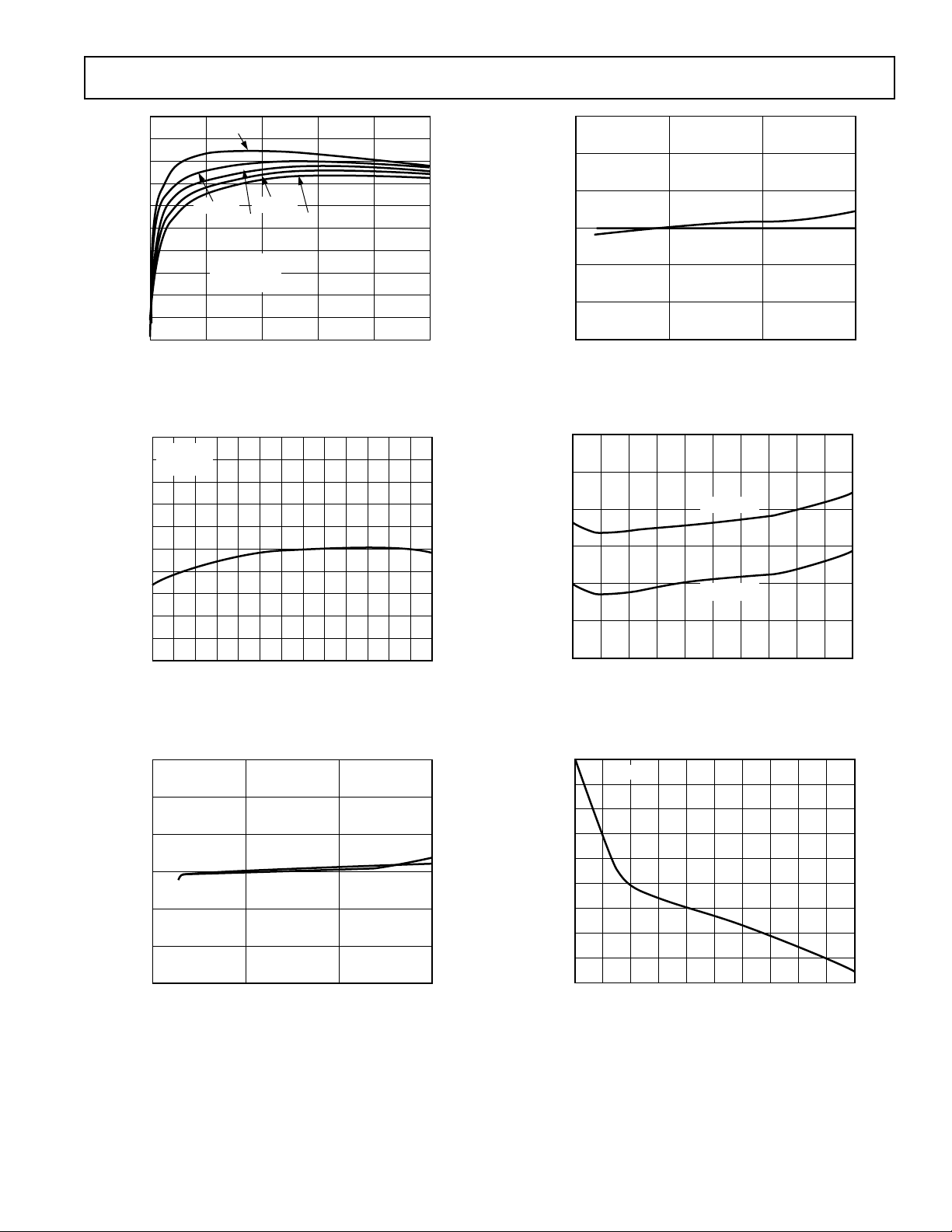
– Typical Characteristics
5.0
VIN = 10V, NO LOAD
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
QUIESCENT OPERATING CURRENT – mA
0.5
0
ⴚ4585ⴚ35
INTO BIAS PIN
INTO VIN PIN
ⴚ25 ⴚ15 ⴚ5
5 152535455565 75
TEMPERATURE – ⴗC
Figure 1. Quiescent Operating Current vs. Temperature
25
20
15
2.0
VIN = 10V
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
AVERAGE OUTPUT CURRENT – A
0.2
0
ⴚ25 ⴚ15 ⴚ5
ⴚ4585ⴚ35
5 152535455565 75
TEMPERATURE – ⴗC
Figure 4. Average Output Current Limit vs. Temperature
25
VIN = 10V
20
15
10
5
SHUTDOWN QUIESCENT CURRENT – A
0
030
10 15 20 25
5
SUPPLY VOLTAGE – V
Figure 2. Shutdown Quiescent Current vs. Supply Voltage
10
BIAS TIED TO V
8
6
4
2
QUIESCENT OPERATING CURRENT – mA
0
030
OUT
V
OUT
V
= 3.3V
OUT
10 15 20 25
5
SUPPLY VOLTAGE – V
= 5V
Figure 3. Quiescent Operating Current vs. Supply Voltage
10
BOOST CURRENT – mA
5
0
0
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
LOAD CURRENT – A
Figure 5. Boost Current vs. Load Current
100
90
80
70
60
50
40
EFFICIENCY – %
30
20
10
0
01k200 400 600 800
VIN = 6V
VIN = 24V
= 12V
V
IN
VIN = 18V
L = 33H
C
IN
C
OUT
VIN = 30V
= 22F
= 100F
OUTPUT CURRENT – mA
Figure 6. 5 V Output Efficiency
1.00.1
–4–
REV. 0
Page 5
ADP3050
INPUT VOLTAGE – V
0
OUTPUT VOLTAGE CHANGE – %
10 20 30
0.6
0.2
0.4
0
ⴚ0.6
ⴚ0.4
ⴚ0.2
V
OUT
= 3.3V
I
LOAD
= 1A
I
LOAD
= 100mA
100
90
80
70
60
50
40
EFFICIENCY – %
30
20
10
0
01k200 400 600 800
= 5V
V
IN
VIN = 12V
VIN = 24V
VIN = 18V
L = 33H
C
= 22F
IN
= 100F
C
OUT
OUTPUT CURRENT – mA
V
IN
= 30V
Figure 7. 3.3 V Output Efficiency
0.5
VIN = 10V
ⴚ0.1
ⴚ0.2
ⴚ0.3
OUTPUT VOLTAGE CHANGE – %
ⴚ0.4
ⴚ0.5
0.4
0.3
0.2
0.1
I
LOAD
0
ⴚ4585ⴚ35
= 1A
ⴚ25 ⴚ15 ⴚ5
5 152535455565 75
TEMPERATURE – ⴗC
Figure 8. Output Voltage Change vs. Temperature
Figure 10. 3.3 V Output Voltage Change vs. Input Voltage
8
7
V
= 5V
6
5
4
MINIMUM INPUT VOLTAGE – V
3
2
0
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
OUT
V
= 3.3V
OUT
LOAD CURRENT – A
1.00.1
Figure 11. Minimum Input Voltage vs. Load Current
ⴚ0.02
ⴚ0.04
ⴚ0.06
ⴚ0.08
ⴚ0.10
ⴚ0.12
ⴚ0.14
OUTPUT VOLTAGE CHANGE – %
ⴚ0.16
ⴚ0.18
0
VIN = 10V
01.00.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
LOAD CURRENT – A
Figure 12. Load Regulation
0.6
V
= 5V
OUT
0.4
0.2
I
= 1A
0.0
ⴚ0.2
OUTPUT VOLTAGE CHANGE – %
ⴚ0.4
ⴚ0.6
0
LOAD
I
= 100mA
LOAD
10
INPUT VOLTAGE – V
20 30
Figure 9. 5 V Output Voltage Change vs. Input Voltage
REV. 0
–5–
Page 6

ADP3050
0.8
0.7
0.6
VIN = 10V
VSW = 5V/DIV
0.5
0.4
0.3
0.2
SWITCH SATURATION VOLTAGE – V
0.1
0.0
0.1 1.00.2
0.3 0.4 0.5 0.6 0.7 0.8 0.9
LOAD CURRENT – A
Figure 13. Switch Saturation Voltage vs. Load Current
210
VIN = 10V
208
206
204
202
200
198
SWITCHING FREQUENCY – kHz
194
192
190
196
= 250A
I
LOAD
ⴚ
ⴚ
ⴚ25ⴚ15ⴚ
45
35
5
5 152535455565 75
AMBIENT TEMPERATURE – ⴗC
85
Figure 14. Switching Frequency vs. Temperature
0V
= 500mA/DIV
I
L
VIN = 10V
= 5V
V
OUT
= 800mA
I
0A
LOAD
L = 33H
C
= 22F
IN
= 100F
C
OUT
TIME – 1s/DIV
Figure 16. Continuous Conduction-Mode Waveforms
VSW = 5V/DIV
0V
= 500mA/DIV
I
L
0A
TIME – 1s/DIV
VIN = 10V
= 5V
V
OUT
= 100mA
I
LOAD
L = 33H
C
= 22F
IN
= 100F
C
OUT
Figure 17. Discontinuous Conduction-Mode Waveforms
250
200
150
100
SWITCHING FREQUENCY – kHz
VIN = 10V
COMP = 0.4V
50
0
0
NORMALIZED FEEDBACK VOLTAGE – V
0.4 0.6 0.8
Figure 15. Frequency Foldback
V
= 20mV/DIV
5V
1A
0A
1.00.2
OUT
I
LOAD
VIN = 10V
= 5V
V
OUT
= 100mA TO 1A SWITCHED
I
LOAD
L = 33H
C
= 22F
IN
= 100F
C
OUT
TIME – 400s/DIV
Figure 18. Transient Response
–6–
REV. 0
Page 7

ADP3050
VIN = 10V
= 5V
V
OUT
= 19⍀
R
LOAD
L = 33H COILTRONICS
UP2B-330
C
= 22F
IN
= 100F
C
OUT
0V
0A
= 500mA/DIV
I
L
V
= 1V/DIV
OUT
TIME – 100s/DIV
Figure 19. Start-Up from Shutdown
1,500
VIN = 10V, NO LOAD
1,450
1,400
1,350
1,300
1,250
1,200
1,150
TRANSCONDUCTANCE – Mho
1,100
1,050
1,000
ⴚ4585ⴚ35
ⴚ25 ⴚ15 ⴚ5
5 152535455565 75
TEMPERATURE – ⴗC
Figure 20. Error Amplifier Transconductance vs. Temperature
THEORY OF OPERATION
The ADP3050 is a fixed-frequency, current-mode buck regulator.
Current mode systems provide excellent transient response, and
are much easier to compensate than voltage-mode systems. (Refer
to the functional block diagram.) At the beginning of each clock
cycle, the oscillator sets the latch, turning on the power switch.
The signal at the noninverting input of the comparator is a replica
of the switch current (summed with the oscillator ramp). When
this signal reaches the appropriate level set by the output of the
error amplifier, the comparator resets the latch and turns off the
power switch. In this manner, the error amplifier sets the correct
current trip level to keep the output in regulation. If the error
amplifier output increases, more current is delivered to the
output; if it decreases, less current is delivered to the output.
The current sense amplifier provides a signal proportional to
switch current to both the comparator and to a cycle-by-cycle
current limit. If the current limit is exceeded, the latch will be
reset, turning the switch off until the beginning of the next clock
cycle. The ADP3050 has a foldback current limit that reduces
the switching frequency under fault conditions to reduce stress
to the IC and to the external components.
Most of the control circuitry is biased from the 2.5 V internal
regulator. When the BIAS pin is left open, or when the voltage
at this pin is less than 2.7 V, all of the operating current for the
57.6
48.0
38.4
28.8
19.2
MAGNITUDE – dB
ⴚ9.6
ⴚ19.2
ⴚ28.8
ⴚ38.4
9.6
NO LOAD
0
0
1k 10k 100k
FREQUENCY – Hz
220
200
180
160
140
120
100
PHASE – Degrees
80
60
40
20
1M100
Figure 21. Error Amplifier Gain
ADP3050 is drawn from the input supply. When the BIAS pin
is above 2.7 V, the majority of the operating current is then
drawn from this pin (usually tied to the regulator's low-voltage
output) instead of from the higher-voltage input supply. This
can provide substantial efficiency improvements at light-load
conditions, especially for systems where the input voltage is
much higher than the output voltage.
The ADP3050 uses a special drive stage that allows the power
switch to saturate. An external diode and capacitor provide a
boosted voltage to the drive stage that is higher than the input
supply voltage. Overall efficiency is dramatically improved by
using this type of saturating drive stage.
Pulling the SD pin below 0.4 V puts the device in a low-power
mode, shutting off all internal circuitry and reducing the supply
current to under 20 µA.
3.3V
V
OUT
+
4k⍀
C4
100F
R1
C2
1nF
1N5818
12V
V
IN
D1
L1
33H
+
1N914
C3
220nF
C1
22F
D2
1
2
3
4
SWITCH
BOOST
BIAS
FB
GND
SD
COMP
8
IN
7
6
5
U1
ADP3050-3.3
Figure 22. Typical Application Circuit
Setting the Output Voltage
The output of the adjustable version (ADP3050AR) can be set
to any voltage between 1.25 V and 12 V by connecting a resistor
divider to the FB pin as shown in Figure 23.
RR
21
V
12
OUT
.
1=× −
(1)
REV. 0
–7–
Page 8

ADP3050
L1
1N5817
GND
D1
V
1N4148
5V
IN
22H
1
2
3
4
C2
0.01F
SWITCH
BOOST
BIAS
FB
U1
ADP3050
C3
0.22F
R2
C
F
21.5k⍀
D2
20k⍀
C1
+
2 ⴛ 10F
CERAMIC
R1
GND
SD
COMP
8
IN
7
6
5
7.5k⍀
R
C
2.5V
C4
+
2 ⴛ 22F
CERAMIC
C
C
4.7nF
V
OUT
Figure 23. Adjustable Output Application Circuit
APPLICATION INFORMATION
The complete process for designing a step-down switching regulator using the ADP3050 is given in the following sections. Each
section includes a list of recommended devices. These lists do
not include every available device, nor every available manufacturer. They contain only surface-mount devices, but equivalent
through-hole devices can be substituted if needed. In choosing
components, keep in mind what is most important to the design
(efficiency, cost, size, etc.) as these things will ultimately determine which components are used. Also, make sure the design
specifications are clearly defined and that they reflect the worstcase conditions. Key specifications include the minimum and
maximum input voltage, the output voltage and ripple, and the
minimum and maximum load current.
INDUCTOR SELECTION
The inductor value will determine the mode of operation for the
regulator: continuous mode, where the inductor current flows
continuously; or discontinuous mode, where the inductor current
reduces to zero during every switch cycle. Continuous mode is
the best choice for many applications. It provides higher output
power, lower peak currents in the switch, inductor, and diode,
and a lower inductor ripple current (which means lower output
ripple voltage). Discontinuous mode does allow the use of smaller
magnetics, but at a price: lower available load current, and higher
peak and ripple currents. Designs with a high input voltage or a
low load current often operate in discontinuous mode to minimize inductor value and size. The ADP3050 is designed to work
well in both modes of operation.
Continuous Mode
The inductor current in a continuous mode system is a triangular
waveform (equal to the ripple current) centered around a dc value
(equal to the load current). The amount of ripple current is determined by the inductor value, and is usually between 20% and 40%
of the maximum load current. To reduce the inductor size, ripple
currents between 40% and 80% are often used in continuous
mode designs with a high input voltage or a low output current.
The inductor value can be calculated using the following equation:
VV
IN OUT
L
=
−
(MAX)
If
RIPPLE SW
××
V
1
OUT
V
IN
(MAX)
(2)
Where V
lated output voltage, and f
is the maximum input voltage, V
IN(MAX)
is the switching frequency (200 kHz).
SW
is the regu-
OUT
The initial choice for the amount of ripple current may seem arbitrary, but it will serve as a good starting point for finding a standard
off-the-shelf inductor value (i.e., 10 µH, 15 µH, 22 µH, 33 µH, and
47 µH). If a specific inductance value is to be used, simply rearrange
the above equation to find the ripple current. For an 800 mA, 12 V
to 5 V system, and a ripple current of 320 mA (40% of 800 mA) is
chosen, the inductance would be:
−
LH=
12 5
032
.
×
200 10
1
×
5
×= µ
3
12
45 5
.
A 47 µH inductor is the closest standard value, which gives a ripple
current of about 310 mA. The peak switch current is equal to the
load current plus one-half the ripple current (this is also the peak
current for the inductor and the catch diode):
1
I
2
(3)
II
0.8 0.155 0.95 A
=+
SW(PK) OUT(MAX) RIPPLE
=+ =
Pick an inductor with a dc (or saturation) current rating about
20% larger than I
to ensure that the inductor is not running
SW(PK)
near the edge of saturation. For this example, 1.20 ⫻ 0.95 A =
1.14 A, so use an inductor with a dc current rating of at least 1.2 A.
The maximum switch current is internally limited to 1.5 A, and
this limit, along with the ripple current, will determine the maximum load current the system can provide.
If the load current decreases to below one-half the ripple current,
the regulator will operate in discontinuous mode.
Discontinuous Mode
For load currents less than around 0.5 A, discontinuous mode
operation can be used. This will allow the use of a smaller inductor, but the ripple current will be much higher (which means a
higher output ripple voltage). If a larger output capacitor must be
used to reduce the output ripple voltage, the overall system may
actually take up more board area than if a larger inductor was
used. The operation and equations for the two modes are quite
different, but the boundary between these two modes occurs
when the ripple current is equal to twice the load current (when
I
RIPPLE
= 2 ⫻ I
). From this we can use Equation 2 to find the
OUT
minimum inductor value needed to keep the system in continuous mode operation (solve for the inductor value with I
2 ⫻ I
OUT
).
VV
DIS
=
IN OUT
L
−
(MAX)
2
If
×
OUT SW
1
××
V
OUT
V
IN
(MAX)
=
RIPPLE
(4)
Using an inductor below this value will cause the system to operate
in discontinuous mode. For a 400 mA, 24 V to 5 V system:
−
L
.
24 5
≤
DIS
×
204
≤µ
24 7
.
×
200 10
H
1
×
5
×
3
24
If the chosen inductor value is too small, the internal current
limit will trip each cycle and the regulator will have trouble
providing the necessary load current.
Inductor Core Types and Materials
Many types of inductors are currently available. Numerous core
styles along with numerous core materials often make the selection process seem even more confusing. A quick overview of the
–8–
REV. 0
Page 9

ADP3050
types of inductors available will make the selection process a
little easier to understand.
Open-core geometries (bobbin core) are usually less expensive than
closed-core geometries (toroidal core) and can be a good choice for
some applications, but care must be taken when they are used. In
open-core inductors, the magnetic flux is not completely contained
inside the core. The radiating magnetic field will generate ElectroMagnetic Interference (EMI), often inducing voltages onto nearby
circuit board traces. These inductors may not be suitable for systems
that contain very high accuracy circuits or sensitive magnetics. A few
manufacturers have “semiclosed” and “shielded” cores, where an
outer magnetic shield surrounds a bobbin core. These devices have
less EMI than the standard open core, and will usually be smaller
than a closed core.
Most core materials used in surface-mount inductors are either
powdered iron or ferrite. For many designs, material choice will
be arbitrary, but the properties of each material should be recognized. Ferrites will have lower core losses than powdered iron,
but the lower loss means a higher price. Powdered iron cores will
saturate softly (the inductance gradually reduces as current rating
is exceeded), while ferrite cores will saturate much more abruptly
(the inductance rapidly reduces). Kool Mµ
®
is one type of ferrite
that is specially designed to minimize core losses and heat generation (especially at switching frequencies above 100 kHz), but
again, these devices will be more expensive.
Do not overlook the dc winding resistance (DCR) of the inductor.
A high DCR can decrease the system efficiency by 2%–5% for
lower output voltages at heavy loads. To obtain a lower DCR
means using a physically larger inductor, so a trade-off in size
and efficiency must be made. The power loss due to this resistance is simply I
system with an inductor DCR of 100 mΩ, the winding resistance will dissipate (0.8
2
⫻ DCR. For an 800 mA, 5 V to 3.3 V
OUT
2
⫻ 0.1 Ω) = 64 mW. This represents a
power loss to the system of 64 mW/(3.3 V ⫻ 800 mA) = 2.4%.
Typical DCR values will be between 10 mΩ and 200 mΩ.
Choosing an Inductor
Several considerations must be made when choosing an inductor:
cost, size, EMI, core and copper losses, and maximum current
rating. Follow the steps below to choose an inductor that is right
for the system (refer to the calculations and descriptions from the
previous sections). Table I shows an extensive list of inductors
that can be used. Contact the manufacturers for their full product
offering, availability and pricing. They offer many more values
and package sizes to suit numerous applications.
1. Choose a mode of operation, then calculate the inductor
value using the appropriate equation. For continuous mode
systems, a ripple current of 40% the maximum load current
is a good starting point. The inductor value can then be
increased or decreased if desired.
2. Calculate the peak switch current (this will be the maximum
current seen by the inductor). Make sure that the dc (or
saturation) current rating of the inductor is high enough
(around 1.2 times the peak switch current). Inductors with
dc current ratings of at least 1 A should be used for all designs.
This will provide a safety margin for start-up and fault conditions where the inductor current will be higher than normal.
If an inductor’s current rating is exceeded, the core will
saturate, causing the inductance value to decrease and the
inductor’s temperature to increase.
Kool Mµ is a registered trademark of Magnetics, Inc.
REV. 0
–9–
3. Estimate the dc winding resistance based on the inductance
value. A good rule of thumb is to allow about 5 mΩ of resistance per µH of inductance.
4. Pick the core material and type. First decide if an open-core
inductor can be used with the design. If you are not sure,
you can always get a few samples of each type (open core,
semi-closed core, shielded core, and closed core) and try
them out. Do not be discouraged from using open core
inductors simply because they require a little extra care; just
be aware of what to look for if you do use them. They are
quite small and inexpensive, and are used successfully in
many different applications.
OUTPUT CAPACITOR SELECTION
The ADP3050 can be used with any type of output capacitor.
The trade-offs between price, component size, and regulator
performance can be evaluated to determine the best choice for
each application. The Effective Series Resistance (ESR) of the
capacitor plays an important role in both the loop compensation
and the system performance. The ESR provides a “zero” in the
feedback loop, therefore the ESR value must be known so that
the loop can be compensated correctly (most manufacturers
specify maximum ESR in their data sheets). The capacitor ESR
also contributes to the output ripple voltage (V
). Solid tantalum or multilayer ceramic capacitors are
I
RIPPLE
RIPPLE
= ESR ⫻
recommended, providing good performance with a small size
and reasonable cost.
Solid tantalum capacitors have a good combination of low ESR
and high capacitance, and are available from several different
manufacturers (AVX TPS series, Sprague 593D series, Kemet
T495 series, NEMCO LSR series). Capacitance values from 22 µF
to more than 500 µF can be used, but values of 47 µF to 220 µF
will be sufficient for most designs. A smaller value can be used, but
ESR is size-dependent, so a smaller device will have a higher ESR.
Ensure that the capacitor’s ripple current rating is larger than the
inductor ripple current (the ripple current will flow into the output
capacitor).
Multilayer ceramic capacitors can be used in applications where
minimum output voltage ripple is a priority. They have a very low
ESR (a 22 µF ceramic can have an ESR one-fifth that of a 22 µF
solid tantalum), but may require more board area for the same
value of output capacitance. A few manufacturers have recently
improved upon their low voltage ceramic capacitors, providing a
smaller package with a lower ESR (Tokin, Murata, Taiyo Yuden
and AVX). Several ceramics can be used in parallel to give an
extremely low ESR and a good value of capacitance. If your design
is very cost-sensitive and not severely space-limited, several aluminum electrolytic capacitors can be used in parallel (their size and
ESR are larger than ceramic and solid tantalum). OS-CON
capacitors can also be used, but they are typically larger and
more expensive than ceramic or solid tantalum capacitors.
Choosing an Output Capacitor
Use the following steps to choose an appropriate capacitor.
Several choices for output capacitors are contained in Table III.
1. Decide the maximum output ripple voltage for the design,
and this will determine your maximum ESR (remember
that V
RIPPLE
≈ ESR ⫻ I
). Typical output ripple voltages
RIPPLE
range between 0.5% and 2% of the output voltage. To lower
the output voltage ripple, there are only two choices: either
increase the inductor value, or use an output capacitor with a
lower ESR.
Page 10

ADP3050
Table I. Inductor Selection Guide
Max Max Package
Vendor/ Value I
DC
DCR Core Core Dimensions (mm)
Model (µH) (A) (Ω) Type Material W L H
Sumida
CD73 10 1.4 0.08 Open Ferrite 7.0 7.8 3.5
CD73 15 1.2 0.10 Open Ferrite 7.0 7.8 3.5
CD73 22 1.1 0.13 Open Ferrite 7.0 7.8 3.5
CR75 22 1.5 0.11 Open Ferrite 7.0 7.8 5.0
CR75 33 1.2 0.13 Open Ferrite 7.0 7.8 5.0
CR75 47 1.1 0.18 Open Ferrite 7.0 7.8 5.0
CDRH73 10 1.7 0.08 S.C. Ferrite 7.3 7.3 3.4
CDRH73 15 1.3 0.13 S.C. Ferrite 7.3 7.3 3.4
CDRH6D38 22 1.3 0.10 S.C. Ferrite 6.7 6.7 4.0
CDRH6D38 33 1.1 0.12 S.C. Ferrite 6.7 6.7 4.0
CDR105B 22 1.4 0.08 S.C. Ferrite 9.0 10.0 5.0
CDR105B 33 1.2 0.11 S.C. Ferrite 9.0 10.0 5.0
CDR105B 47 1.0 0.14 S.C. Ferrite 9.0 10.0 5.0
COILCRAFT
DO1608 10 1.1 0.14 Open Ferrite 4.6 6.6 2.9
DO3316 10 3.8 0.03 Open Ferrite 9.4 13.0 5.1
DO3316 15 3.0 0.04 Open Ferrite 9.4 13.0 5.1
DO3316 22 2.6 0.05 Open Ferrite 9.4 13.0 5.1
DO3316 33 2.0 0.09 Open Ferrite 9.4 13.0 5.1
DO3316 47 1.6 0.14 Open Ferrite 9.4 13.0 5.1
DT3316 10 2.0 0.06 S.C. Ferrite 9.4 13.0 5.1
DT3316 15 1.8 0.06 S.C. Ferrite 9.4 13.0 5.1
COILTRONICS*
CTX10-1 10 1.9 0.04 Toroid Kool Mµ 8.9 8.9 4.2
CTX20-1 20 1.0 0.14 Toroid Kool Mµ 8.9 8.9 4.2
CTX10-2 10 2.5 0.03 Toroid Kool Mµ 8.9 8.9 6.0
CTX20-2 20 1.3 0.11 Toroid Kool Mµ 8.9 8.9 6.0
CTX33-2 33 1.5 0.09 Toroid Kool Mµ 8.9 8.9 6.0
CTX10-2 40 1.3 0.12 Toroid Kool Mµ 8.9 8.9 6.0
CTX10-1P 10 1.6 0.03 Toroid P.I. 8.9 8.9 4.2
CTX15-1P 15 1.2 0.05 Toroid P.I. 8.9 8.9 4.2
CTX20-1P 20 1.0 0.08 Toroid P.I. 8.9 8.9 4.2
CTX20-2P 20 1.3 0.11 Toroid P.I. 8.9 8.9 6.0
UP2-330 33 1.7 0.10 Open Ferrite 8.8 10.6 5.9
UP2-470 47 1.4 0.15 Open Ferrite 8.8 10.6 5.9
TOKIN
SSB64 10 1.2 0.12 Open Ferrite 6.3 6.3 6.0
SSB64 15 1.0 0.15 Open Ferrite 6.3 6.3 6.0
SSB84 10 1.4 0.10 Open Ferrite 8.3 8.3 6.0
SSB84 15 1.2 0.11 Open Ferrite 8.3 8.3 6.0
SSB84 22 1.2 0.16 Open Ferrite 8.3 8.3 6.0
S.C. = semiclosed, P.I. = powdered iron, Toroid is a closed core.
*Coiltronics toroidal inductors consist of two windings on one core that can be connected in parallel (for a higher current rating) or in series (for a higher inductance value);
consult Coiltronics data sheet.
Table II. Inductor Manufacturers
Company Phone Fax Web Site
Sumida (USA) (847) 956-0666 (847) 956-0702 www.sumida.com
Sumida (Japan) 81-3-3607-5111 81-3-3607-5144 www.sumida.com
Coilcraft (847) 639-6400 (847) 639-1469 www.coilcraft.com
Coiltronics (561) 241-7876 (561) 241-9339 www.coiltronics.com
Tokin (USA) (408) 432-8020 (408) 434-0375 www.tokin.com
Tokin (Japan) 81-22-211-1281 81-22-211-0975 www.tokin.com
–10–
REV. 0
Page 11

ADP3050
2. Decide what type of capacitor to use (tantalum, ceramic,
etc.), then look at the table for some possible devices. Many
more values, sizes, and voltage ratings are available, so contact
each manufacturer for a complete product list. If a certain type
of capacitor must be used and space permits, simply use
several devices in parallel to reduce the total ESR.
3. Check the capacitor voltage rating and ripple current rating
to ensure it will work for your application (these ratings are
derated for higher temperatures, so always check the
manufacturer’s data sheet).
4. Make sure the final choice for the output capacitor has been
optimized for cost, size, availability, and performance while
still meeting the required capacitance. The recommended
capacitance is in the 47 µF to 220 µF range.
CATCH DIODE SELECTION
The recommended catch diode is a type 1N5818 Schottky or an
equivalent. The low forward voltage drop (450 mV typical at 1 A)
and fast switching speed of a Schottky rectifier provide the best
performance and efficiency. The 1N5818 is rated at 30 V reverse
Table III. Capacitor Selection Guide
Max Package
Vendor/ Value ESR* Voltage Dimensions (mm)
Series (F) (⍀) (V) Type W L H
AVX
TPS 100 0.150 6.3 Tantalum 3.2 6.0 2.6
TPS 47 0.150 16 Tantalum 4.3 7.3 2.9
TPS 100 0.100 10 Tantalum 4.3 7.3 2.9
TPS 100 0.125 16 Tantalum 4.3 7.3 2.9
Y5V 10 ~0.040 10 MLC 1.6 3.2 1.5
Y5V 10 ~0.040 16 MLC 2.5 3.2 1.7
Y5V 18 ~0.040 10 MLC 2.5 3.2 1.7
Y5V 22 ~0.040 10 MLC 2.5 3.2 1.7
Sprague
593D 47 0.150 16 Tantalum 4.3 7.3 2.8
593D 68 0.150 16 Tantalum 4.3 7.3 2.8
593D 100 0.100 10 Tantalum 4.3 7.3 2.8
593D 100 0.100 16 Tantalum 4.3 7.3 4.0
Tokin
CU 10 ~0.040 10 MLC 1.6 3.2 1.6
CU 10 ~0.040 25 MLC 2.7 5.7 2.5
CU 18 ~0.040 25 MLC 5.0 5.7 2.5
CU 10 ~0.040 50 MLC 5.0 5.7 3.0
CU 22 ~0.030 25 MLC 5.0 5.7 3.0
*Maximum ESR ratings at 100 kHz; MLC = multilayer ceramic.
voltage and 1 A average forward current. For lower input voltages,
use a lower voltage Schottky to reduce the diode forward voltage
drop and increase overall system efficiency (i.e., a 12 V to 5 V
system does not need a 30 V diode). For automotive applications,
a 60 V Schottky may be necessary. The average forward current for
the catch diode can be calculated by:
–
VV
II
DIODE OUT
=×
(AVG)
IN OUT
V
IN
(5)
For the earlier continuous mode example (12 V to 5 V at 800 mA),
the average diode current would be:
–
IA
DIODE(AVG)
12 5
12
. =× =08
047.
For this system, a 1N5817 would be a good choice (rated at 20 V
and 1 A). Do not use catch diodes rated less than 1 A. Even though
the average current can be less than 1 A under normal operating
conditions, since the diode current will be much higher under fault
conditions. The worst case fault condition for the diode occurs when
the regulator becomes slightly overloaded (sometimes called a soft
REV. 0
Table IV. Capacitor Manufacturers
Company Phone Fax Web Address
AVX (803) 448-9411 (803) 448-1943 www.avxcorp.com
Kemet (864) 963-6300 (864) 963-6521 www.kemet.com
Murata (USA) (800) 831-9172 (770) 436-3030 www.murata.com
Nemco (800) 227-4058 (650) 571-0825 www.nemcocaps.com
Sprague (207) 324-4140 (207) 324-7223 www.vishay.com
Tokin (USA) (408) 432-8020 (408) 434-0375 www.tokin.com
Tokin (Japan) 81-22-211-1281 81-22-211-0975 www.tokin.com
Taiyo Yuden (USA) (800) 348-2496 (847) 925-0899 www.t-yuden.com
Taiyo Yuden (Japan) 81-33-833-5441 81-33-835-4754 www.t-yuden.com
–11–
Page 12

ADP3050
short). This is usually only a problem when the input voltage to output voltage ratio is greater than 2.5. Under this condition, the load
current needed is slightly more than the regulator can provide. The
output voltage then droops slightly, and the switch stays on every
cycle until the internal current limit is reached. Under this condition,
the load current can reach around 1.2 A. For example: a system with
an input voltage of 24 V and an output voltage of 5 V, if a gradual
overload causes the output voltage to droop to 4 V, the average
diode current would be:
–
IA
DIODE(AVG)
24 4
24
=× =12
10..
If the system must survive such gradual overloads for a prolonged
period of time, ensure that the diode chosen can survive these
conditions. A larger 2 A or 3 A diode can be used if necessary.
Choosing a Catch Diode
Use the following steps to pick an appropriate catch diode.
Table V shows several Schottky rectifiers with different reverse
voltage and forward current ratings.
1. The average diode current rating must be sufficient to provide
the required load current (see above calculations). Diodes
rated below 1 A should not be used, even if the average diode
current is much lower.
2. The reverse voltage rating of the catch diode should be at
least the maximum input voltage. Often a higher rating is
chosen (1.2 times the maximum input voltage) to provide a
safety margin.
INPUT CAPACITOR SELECTION
The input bypass capacitor plays an important role in proper
regulator operation, minimizing voltage transients at the input
and providing a short local loop for the switching current. Place
this capacitor close to ADP3050 between the V
and GND pins
IN
using short, wide traces. This input capacitor should have an rms
ripple current rating of at least:
II
CI OUT
N(RMS)
V
OUT
IN
V
V
V
OUT
IN
2
≥× −
(6)
This rating is crucial, as the input capacitor must be able to
withstand the large current pulses present at the input of a stepdown regulator. Values of 20 µF to 50 µF are typical, but the
main criteria for capacitor selection should be the ripple current
and voltage ratings.
Ceramics are an excellent choice for input bypassing due to their
low ESR and high ripple current rating. Ceramics are especially
suited for high input voltages, and are available from many different manufacturers. Tantalums are often used for input bypassing,
but precautions must be taken, as they occasionally fail when
subjected to large inrush currents during power-up. These
surges are common when the regulator input is connected to a
battery or high-capacitance supply. Several manufacturers now
offer surface-mount solid tantalum capacitors that are surge
tested (AVS TPS series, Sprague 593D series, Kemet T495 series,
and NEMCO LSR series), but even these devices can fail if the
current surge occurs when the capacitor voltage is near its maximum rating. For this reason, a 2:1 derating is suggested for
tantalum capacitors used in applications where large inrush currents
are present (i.e., a 20 V tantalum should only be used for an input
voltage up to 10 V). Aluminum electrolytics are the cheapest choice,
but it takes several in parallel to get a good rms current rating.
OS-CON capacitors have a good ESR and ripple current rating,
but they are typically larger and more costly. Refer to Table IV
for a list of capacitor manufacturers.
DISCONTINUOUS MODE RINGING
When operating in discontinuous mode, high frequency ringing
will appear at the switch node when the inductor current has
decreased to zero. This ringing is normal, and is not a result of
loop instability. It is caused by the switch and diode capacitance
reacting with the inductor to form a damped sinusoidal ringing.
This ringing is usually in the range of several megahertz, and is
not harmful to normal circuit operation.
SETTING THE OUTPUT VOLTAGE
The fixed voltage versions of the ADP3050 (3.3 V and 5 V) have
the feedback resistor divider included on-chip. For the adjustable
version, the output voltage is set using two external resistors.
Referring to Figure 23, pick a value for R1 between 10 kΩ and
20 kΩ, then calculate the appropriate value for R2 using:
Table V. Schottky Diode Selection Guide
V
1 A Diodes 2 A Diodes 3 A Diodes
R
15 V 10BQ15 30BQ15
20 V 1N5817 B220 SK32
SK12 B320
B120 NSQ03A02
EC10QS02
30 V V1N5818 B230 SK33
SK13 EC21QS03 B330
B130 NSQ03A03
MBRS130
EC10QS03
40 V 1N5819 B240 SK34
SK14 EC21QS04 B340
B140 MBRS340
MBRS140 30BQ040
10BQ040 NSQ03A04
EC10QS04
RR
21
V
OUT
.
120
1=× −
(7)
It is important to note that the accuracy of these resistors directly
affects the accuracy of the output voltage. The FB pin threshold
variation is ±3%, and the tolerances of R1 and R2 will add to this
Table VI. Schottky Diode Manufacturers
Company Phone Fax
Motorola (602) 244-3576 (602) 244-4015 www.mot.com
MBRSxxx
Diodes, Inc. (805) 446-4800 (805) 446-4850 www.diodes.com
1N58xx, Bxxx, SKxxx
International Rectifier (310) 322-3331 (310) 322-3332 www.irf.com
10BQxxx, 30BQxxx
Nihon Inter Electronic (USA) (661) 867-2555 (661) 867-2698
Nihon Inter Electronic (Japan) 81-33-343-3411 81-33-343-7377
ECxxxxxx, NSQxxxx
–12–
REV. 0
Page 13

ADP3050
to determine the total output variation. Use 1% resistors placed
close to the FB pin to prevent noise pick up.
FREQUENCY COMPENSATION
The ADP3050 uses a unique compensation scheme that allows the
use of any type of output capacitor. The designer is not limited to a
specific type of capacitor nor a specific ESR range. External compensation allows the designer to optimize the loop for transient response
and system performance. The values for R
and CC will set the
C
pole and zero locations for the error amplifier to compensate the
regulator loop.
For tantalum output capacitors, the typical compensation values
are R
= 4 kΩ and CC = 1 nF; for ceramics, the typical values
C
= 4 kΩ and CC = 4.7 nF. These values may not be opti-
are R
C
mized for all designs, but they should provide a good starting
point for selecting the final compensation values. Other types of
output capacitors will require different values of C
between
C
0.5 nF and 10 nF. Typically, the lower the ESR of the output
capacitor, the larger the value for C
. Normal variations in
C
capacitor ESR, output capacitance, and inductor value (due
to production tolerances, changes in operating point, changes
in temperature) will affect the loop gain and phase response.
Always check the final design over its complete operating range
to ensure proper regulator operation.
Adjusting the R
and CC values can optimize the compensation for
C
your system. Use the typical values above as a starting point, then
try increasing and decreasing each independently and observing the
transient response. An easy way to check the transient response of
the design is by observing the output while pulsing the load current
at a rate of around 100 Hz to 1 kHz. There should be some slight
ringing at the output when the load pulses, but this should not be
excessive (just a few rings). The frequency of this ringing shows
the approximate unity gain frequency of the loop. Again, always
check the design over its full operating range of input voltage,
output current, and temperature to ensure that the loop is compensated correctly.
In addition to setting the zero location, R
also sets the high
C
frequency gain of the error amplifier. If this gain is too large,
output ripple voltage will appear at the COMP pin (the output
of the error amplifier) with enough amplitude to interfere with
normal regulator operation. If this happens, subharmonic
switching will occur (the pulsewidth of the switch waveform will
change, even though the output voltage stays regulated). The
voltage ripple at the COMP pin should be kept below about 100
mV to prevent this from occurring. The amount of ripple can be
estimated by the following formula, where g
fier transconductance (g
V g R I ESR
COMP, RIPPLE m C RIPPLE
= 1,250 µMho):
m
=×
()
××
()
is the error ampli-
m
V
FB
×
(8)
V
OUT
For example: a 12 V to 5 V, 800 mA regulator with an inductor
of L = 47 µH has I
= 310 mA (example from earlier section);
RIPPLE
if a 100 µF tantalum output capacitor with a maximum ESR of
100 mΩ and compensation values of R
= 4 kΩ and CC = 1 nF
C
are used. The ripple voltage at the COMP pin will be:
−
V
COMP, RIPPLE
.
120
×=
.
50
37 2
=×××
1 250 10 4 10 0 310 0 1
,..
()
. mV
63
××
()
If this ripple voltage were more than 100 mV, RC would need to
be decreased to prevent subharmonic switching. Typical values
for R
will be in the range of 2 kΩ to 10 kΩ.
C
For output voltages greater than 5 V, it may be necessary to add a
small capacitor in parallel with R2, as shown in Figure 23. This
will improve stability and transient response. For tantalum output
capacitors, the typical value for C
capacitors, the typical value for C
CURRENT LIMIT/FREQUENCY FOLDBACK
is 100 pF. For ceramic output
F
is 400 pF.
F
The ADP3050 uses a cycle-by-cycle current limit to protect the
device under fault and high stress conditions. When the current
limit is exceeded, the power switch turns off until the beginning
of the next oscillator cycle. If the voltage on the feedback pin
drops below 80% of its nominal value, the oscillator frequency
starts to decrease (see Figure 15 in the Typical Performance
Characteristics section). The frequency gradually reduces to a
minimum value of around 80 kHz (this minimum occurs when
the feedback voltage falls to 30% of its nominal value). This
reduces the power dissipation in the IC, the external diode, and
the inductor during short circuit conditions. This frequency
foldback method provides complete device fault protection without interfering with the normal device operation.
BIAS PIN CONNECTION
To help improve efficiency, most of the internal operating current
can be drawn from the lower voltage regulated output voltage
instead of from the input supply. For example, if the input voltage
is 24 V and the output voltage is 5 V, a quiescent current of 4 mA
will waste 96 mW if drawn from the input supply, but only 20 mW
is drawn from the regulated 5 V output. This power savings will be
most evident at high input voltages and low load currents. The output voltage must be 3 V or higher to take advantage of this feature.
BOOSTED DRIVE STAGE
An external capacitor and diode are used to provide the boosted
voltage needed for the special drive stage. If the output voltage is
above 4 V, connect the anode of the boost diode to the regulated
output; for output voltages less than or equal to 3 V, connect it to
the input supply. For some low voltage systems (i.e., 5 V to 3.3 V
converters), the anode of the boost diode can be connected to
either the input or output voltage. During switch off-time, the
boost capacitor is charged up to the voltage at the anode of the
boost diode. When the switch turns on, this voltage is added to
the switch voltage (the boost diode is reverse-biased) providing a
voltage higher than the input supply. The peak voltage appearing
on the BOOST pin will be the sum of the input voltage and the
boost voltage (either V
IN
+ V
or 2 ⫻ VIN). Ensure that this peak
OUT
voltage does not exceed the BOOST pin maximum rating of 45 V.
For most applications, a 1N4148 or 1N914 type diode can be
used with a 220 nF capacitor. A 470 nF capacitor may be needed
for output voltages between 3 V and 4 V. The boost capacitor
should have an ESR less than 2 Ω to ensure that it will be adequately
charged up during switch off-time. Most any type of film or ceramic
capacitor can be used.
START-UP/MINIMUM INPUT VOLTAGE
For most designs, the regulated output voltage provides the
boosted voltage for the drive stage. During startup, the output
voltage is zero, so there is no boosted supply for the drive stage.
REV. 0
–13–
Page 14

ADP3050
To deal with this problem, the ADP3050 contains a backup
drive stage to get everything started. As the output voltage
increases, so will the boost voltage. When the boost voltage
reaches around 2.5 V, the switch drive will transition smoothly
from the backup driver to the boosted driver. If the boost
voltage should decrease below around 2.5 V (i.e., short circuit,
overload condition), the backup stage will again take over to
provide switch drive. The minimum input voltage needed for
the ADP3050 to function correctly is about 3.6 V (this will
ensure proper operation of the internal circuitry), but a small
amount of headroom is needed for all step-down regulators.
The following formula gives the approximate minimum input
voltage needed for a given system, where V
is the switch
SAT
saturation voltage (see Figure 13 for the appropriate value of
V
). Figure 11 also shows the typical minimum input voltage
SAT
needed for 3.3 V and 5 V systems.
VV
+
V
IN
(MIN)
OUT SAT
=
.
085
(9)
THERMAL CONSIDERATIONS
Several factors contribute to IC power dissipation: ac and dc
switch losses, boost current, and quiescent current. The following
formulas can be used to calculate these losses to determine the
power dissipation of the IC. These formulas assume continuous
mode operation, but they provide a reasonable estimate for discontinuous mode systems (do not use these formulas to calculate
efficiency at light loads).
Switch loss:
PIV
=××
SW OUT SAT
V
OUT
+× ××
tI Vf
()
OV OUT IN SW
V
IN
(10)
Boost current loss:
2
(11)
V
IN
P
BOOST
IV
OUTSWOUT
=×
β
Quiescent current loss:
where V
is ~0.6 V at I
SAT
=×
()
Q IN Q OUT BIAS
OUT
+×
()
(12)
= 800 mA (taken from Figure 13), f
SW
PV I V I
is the switch frequency (200 kHz), tOV is the switch current/voltage
β
overlap time (~50 ns),
switch (~50), I
and I
BIAS
is the quiescent current drawn from VIN (~1 mA)
Q
is the quiescent current drawn from V
For example: for a 5 V to 3.3 V system with I
P
=××
08 06
SW
50 10 0 8 5 0 200 10 357
()
PmW
PmW
−
× ××× ×
=× =
BOOST
=×
510 33410 18
()
Q
is the current gain of the NPN power
SW
(~4 mA).
OUT
= 800 mA:
OUT
33
.
.
.
93
..
085033
.
50
−−
33
+××
()
+
50
.
2
.
35
.
.
=
mW
=
For a total IC power dissipation of:
PPPP
=+ +
TOTAL SW BOOST Q
mW
= 410
(13)
The ADP3050 uses a thermally enhanced SO-8 package with a
package thermal resistance, θ
, of around 80°C/W for a four-
JA
layer board (poor layout techniques will result in a higher thermal
resistance). This allows the ADP3050 to provide 1 A load currents
in an SO-8 package. The maximum die temperature, T
, can be
J
calculated using the thermal resistance and the maximum ambient
temperature:
TT P
=+ ×θ
A A TOTAL
J
J
(14)
For the previous example (5 V to 3.3 V at 800 mA system, SO-8
thermally enhanced package using good layout techniques) with
a worst-case ambient temperature of 70°C:
T/.
=°+° × = °70 80 0 41 103CCW C
J
The maximum operating junction (die) temperature is 125°C, so
this system will operate within the safe limits of the ADP3050.
Check the die temperature at minimum and maximum supply
voltages to ensure proper operation under all conditions. The PC
board and its copper traces will provide sufficient heat-sinking,
but be sure to follow the layout suggestions in the Board Layout
Guidelines section. For any design that combines high output
current with high duty cycle and/or high input voltage, the junction temperature must be calculated to ensure normal operation.
Always use the equations in this section to estimate the power
dissipation.
BOARD LAYOUT GUIDELINES
A good board layout is essential when designing a switching
regulator. The high switching currents along with parasitic
wiring inductances can generate significant voltage transients and
cause havoc in sensitive circuits. For best results, keep the main
switching path as tight as possible (keep L1, D1, C
, and C
IN
OUT
close together) and minimize the copper area of the SWITCH and
BOOST nodes (without violating current density requirements) to
reduce the amount of noise coupling into other sensitive nodes.
L1
V
GND
IN
C
IN
IN
ADP3050
+
GND
SWITCH
C
D1
OUT
V
OUT
+
GND
Figure 24. Main Switching Path
The external components should be located as close to the
ADP3050 as possible. For best thermal performance, use wide
copper traces for all IC connections, and always connect the
GND pin to a large piece of copper or ground plane. The additional copper will improve heat transfer from the IC, greatly
reducing the package thermal resistance. Further improvements of the thermal performance can be made by using
multilayer boards and using vias to transfer heat to the other
layers. A single layer board layout is shown in Figure 25. The
amount of copper used for the input, output, and ground
traces can be reduced, but were made large to improve the
thermal performance. For the 5 V and 3.3 V versions, leave
out R1 and R2; for the Adjustable version, remove the trace
that shorts out R2. Route all sensitive traces and components,
such as those associated with the feedback and compensation away
from the BOOST and SWITCH traces.
–14–
REV. 0
Page 15

OUTPUT
GROUND
INPUT
ADP3050
ground), but its operation is quite different. For this topology,
the feedback pin is grounded and the GND pin is tied to the
negative output, allowing the feedback network of the IC to
regulate the negative output voltage.
C1
L1
D2
R2 R1 CC RC
C2
C3
D1
ADP3050
Figure 25. Recommended Board Layout
TYPICAL APPLICATIONS
5 V to 3.3 V Buck (Step-Down) Regulator
The circuit in Figure 26 shows the ADP3050 in a buck configuration. It is used to generate 3.3 V regulated output from 5 V
input voltage with the following specifications:
= 4.5 V to 5.5 V
V
IN
= 3.3 V
V
OUT
I
= 0.75 A
OUT
I
= 0.4 A ⫻ 0.75 A = 0.3 A
1N5817
GND
D1
SD
V
IN
RIPPLE
V
OUT RIPPLE
5V
22H
C3
0.22F
+
= 50 mV
L1
D2
1N4148
C1
22F
1
SWITCH
2
BOOST
3
BIAS
4
FB
ADP3050-3.3
C2
0.01F
U1
GND
COMP
SD
3.3V
V
OUT
+
C5
7.5k⍀
100F
R1
C4
1nF
8
IN
7
6
5
100F
C5
+
V
OUT
ⴚ5V @ 0.5A
SD
V
GND
L1
47H
1N5818
12V
IN
D2
1N4148
C3
0.22F
D1
+
C1
22F
NC
1
SWITCH
2
BOOST
3
BIAS
4
FB
ADP3050-5
C2
0.01F
U1
GND
SD
COMP
8
IN
7
6
5
R1
5.1k⍀
C4
3.3nF
Figure 27. Inverting (Buck-Boost) Regulator
The design procedure used for the standard buck converter cannot
be used for a buck-boost converter due to fundamental differences
in how the output voltage is generated. The switch currents in the
buck-boost are much higher than in the standard buck converter,
thus lowering the available load current. To calculate the maximum
output current for a given maximum switch current use the following
equation:
V
IN
+
VV
IN OUT
××× +
fLVV
2
SW IN OUT
×
×
VV
IN OUT
()
(15)
where I
and V
IN
I
OUT
(MAX)
=
I
SW
SW(MAX)
−
(MAX)
is the switch current limit rating of the ADP3050
is the minimum input voltage. The inductor ripple current
can be estimated using the following equation:
V
OUT
VV
IN OUT
(MAX)
+
(16)
I
RIPPLE
V
IN
(MAX)
=××
Lf
1
SW
For the circuit in Figure 27, the maximum ripple current (at the
maximum input voltage) is:
5
IA
RIPPLE
=
47 10
12
−
63
×
×
200 10
1
×
×
12 5
+−
−
0 375
=
.
High ripple currents are present in both the input and output
capacitors, and their ripple current ratings must be large enough
to sustain the large switching currents present in this topology.
The capacitors should have a ripple current rating of at least:
Figure 26. 5 V to 3.3 V Buck Regulator
INVERTING (BUCK-BOOST) REGULATOR
The circuit in Figure 27 shows the ADP3050 in a buck-boost
configuration, which produces a negative output voltage from a
positive input voltage. This topology looks quite similar to the
buck shown in Figure 26 above (except the IC and the output
filter are now referenced to the negative output instead of
REV. 0
–15–
V
II
RMS OUT
(CIN, COUT)
≈×
V
OUT
IN
(17)
The peak current seen by the diode, switch, and inductor can be
found by rearranging the load current equation:
I
PEAK
VV
+
IN OUT
=
V
IN
II
×
OUT RIPPLE
1
+×
2
(18)
Page 16

ADP3050
The largest peak currents occur at the lowest input voltage. For
this design with a load current of 500 mA:
+−
IA
PEAK
12 5
=
12
×
05
1
+×
0 375 0 9...
2
=
The average current diode will be equal to the load current.
An inductor with a current rating 20% greater than 0.9 A should
be used (rating of at least 1.2 A). Inductors and diodes with ratings
greater than 1 A should always be used, even if the calculated peak
and average currents are lower. This will ensure that start-up and
fault conditions will not overstress the components.
For the buck-boost topology, the input voltage can be less than
the output voltage (i.e., V
= 4 V, V
IN
= –5 V), but the avail-
OUT
able load current will be even lower. The equations given in this
section are valid for input voltages less than and greater than the
output voltage. The voltage seen by the ADP3050 is equal to the
sum of the input and output voltages (the BOOST pin sees the
sum of V
+ 2 ⫻ |V
IN
|). Make sure that the maximum voltage
OUT
ratings of these pins are not exceeded.
Dual Output SEPIC Regulator
For many systems, a dual polarity supply is needed. The circuit
in Figure 28 generates both a positive and a negative 5 V output
using a single magnetic component. The two inductors shown
are actually two separate windings on a single core contained in
a small, surface-mount package. The windings can be connected
in parallel or in series to be used as a single inductor for a conventional buck regulator, or they can be used as a 1:1 transformer,
as in this application. One winding is used as the standard buck
inductor for the +5 V output. The second winding is used to
generate the –5 V output along with D2, C6, and C7.
+
D2
GND
SD
COMP
C7
100F
ⴚ5V @ 0.25A
V
OUT
+5V @ 0.5A
V
OUT
+
C5
5.1k⍀
100F
R1
C4
1nF
8
IN
7
6
5
D1
1N5818
C3
0.22F
*INDUCTOR IS A SINGLE CORE
WITH TWO WINDINGS
COILTRONICS CTX25-4
SD
12V
V
IN
GND
L1*
25H
1N4148
+
C1
22F
L1*
25H
+
C6
100F
D3
1
2
3
4
1N5818
SWITCH
BOOST
BIAS
FB
U1
ADP3050-5
C2
0.01F
Figure 28. Dual Output +5 V and –5 V Regulator
These components form a SEPIC (Single Ended Primary Inductance Converter) using the 1:1 coupled inductor to generate the
negative supply. When the switch is off, the voltage across the buck
winding is equal to V
+ VD (VD is the diode drop). This voltage is
O
generated across the second winding, which is connected to produce
the –5 V supply. The –5 V output would be generated even
without C6 in the circuit, but its inclusion greatly improves the
regulation of the negative output and lowers the inductor ripple
current. The total output current available for both supplies is
limited by the ADP3050 (internally limited to around 1.0 A).
Keeping load currents below 500 mA and 250 mA, for the positive and negative supplies, respectively, will ensure that current
limit is not reached under normal operation. These limits are
not interchangeable; 500 mA cannot be drawn from the –5 V
supply while drawing only 250 mA from the +5 V supply. The
maximum current available from the –5 V output is directly related
to the +5 V load current due to the fact that the +5 V output is
used to regulate both supplies. Typically, the –5 V load current
should be around one-half of the +5 V load current to ensure good
regulation of both outputs. Additionally, the –5 V output should
have a preload (the minimum current level) of 1% to 2% of the
+5 V load current. This will help maintain good regulation of the
–5 V output at light loads.
The ripple voltage of the +5 V output is that of a normal buck
regulator (as described in the Applications Information section).
This ripple voltage is determined by the inductor ripple current
and the ESR of the output capacitor. For the system below, the
positive output voltage ripple is a 30 mV peak-to-peak triangular
wave. The ripple voltage of the –5 V output is a rectangular
wave (due to the rectangular shape of the current waveform into
the –5 V output capacitor). The amplitude of this current waveform is approximately equal to twice the –5 V load current. For
a load current of 200 mA and an ESR of 100 mΩ, the negative
output voltage ripple is around 2 ⫻ 200 mA ⫻ 100 mΩ, or
about 40 mV. The edges of this ripple waveform are quite fast,
which, along with the inductance of the output capacitor, generates
narrow spikes on the negative output voltage. These spikes can
easily be filtered out using an additional 5 µF to 10 µF bypass
capacitor close to the load (the inductance of the PC board
trace and the additional capacitor create a low-pass filter to
remove these high frequency spikes).
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
8-Lead SOIC
(R Suffix)
0.1968 (5.00)
0.1890 (4.80)
8
0.0500
(1.27)
BSC
5
0.2440 (6.20)
41
0.2284 (5.80)
0.0688 (1.75)
0.0532 (1.35)
0.0192 (0.49)
0.0138 (0.35)
0.0098 (0.25)
0.0075 (0.19)
0.0196 (0.50)
0.0099 (0.25)
8°
0°
0.0500 (1.27)
0.0160 (0.41)
x 45°
0.1574 (4.00)
0.1497 (3.80)
PIN 1
0.0098 (0.25)
0.0040 (0.10)
SEATING
PLANE
C3451–2.5–3/00 (rev. 0)
PRINTED IN U.S.A.
–16–
REV. 0
 Loading...
Loading...