

Page 1
Continuous Rate 12.3Mb/s to 2.7Gb/s
www.BDTIC.com/ADI
Clock and Data Recovery IC w/Loop Timed SERDES
Preliminary Technical Data
FEATURES
Serial data input: 12.3 Mb/s to 2.7 Gb/s
Exceeds ITU-T Jitter Specifications
Integrated Limiting Amp: 6mV sensitivity
Adjustable slice level: ±100 mV
Patented dual-loop clock recovery architecture
Programmable LOS detect and Slice Level
Integrated PRBS Generator and Detector
No reference clock required
Loss of lock indicator
Rate Selectivity without the use of a reference clock
2
C™ interface to access optional features
I
Single-supply operation: 3.3 V
Low power: 1.0W
8 mm × 8 mm 56-lead LFCSP
APPLICATIONS
Passive Optical Network s
SONET OC-1/3/12/48 and all associated FEC rates
Fibre Channel, 2× Fibre Channel , GbE, HDTV, etc.
WDM transponders
Test equipment
ADN2865
PRODUCT DESCRIPTION
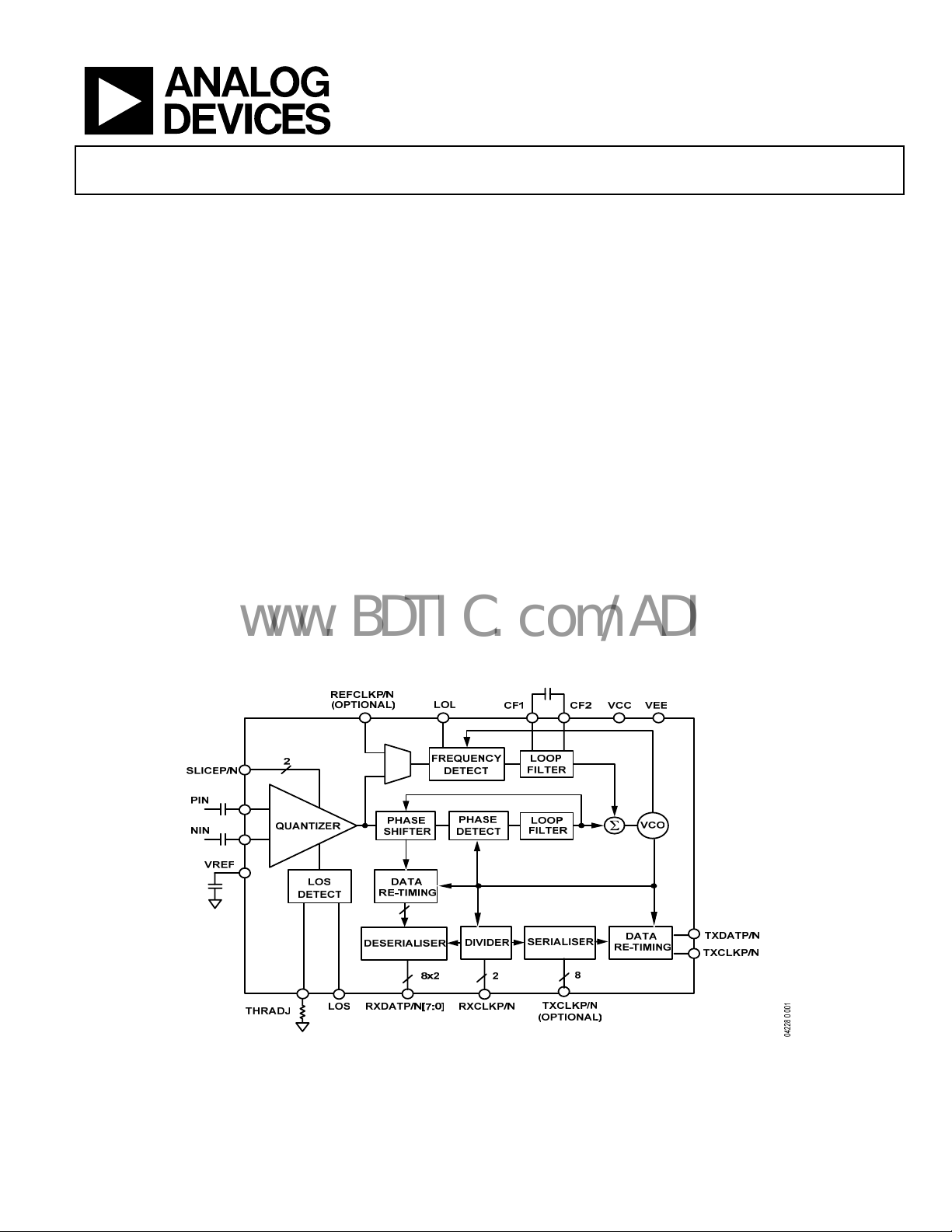
The ADN2865 provides the receiver functions of quantization,
signal level detect, and clock and data recovery for continuous
data rates from 12.3 Mb/s to 2.7 Gb/s. An integrated
deserialiser supports 8 bit parallel transfer to an FPGA or digital
ASIC. The recovered clock can simultaneously serialize data
supplied in an 8 bit parallel format.
The ADN2865 automatically locks to all data rates without the
need for an external reference clock or programming. All
SONET jitter requirements are exceeded, including jitter
transfer, jitter generation, and jitter tolerance. All specifications
are quoted for −40°C to +85°C ambient temperature, unless
otherwise noted.
This device, together with a PIN diode and a TIA preamplifier,
can implement a highly integrated, low cost, low power fiber
optic receiver.
The ADN2865 have many optional features available via an I
interface, e.g. the user can read back the data rate that the
ADN2865 is locked on to, or the user can set the device to only
lock to one particular data rate if provisioning of data rates is
required.
2
C
FUNCTIONAL BLOCK DIAGRAM
Figure 1 ADN2865 Functional Block Diagram
Rev.PrA
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.326.8703 © 2006 Analog Devices, Inc. All rights reserved.
Page 2

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
TABLE OF CONTENTS
Specifications..................................................................................... 3
Jitter Specifications....................................................................... 4
Output and Timing Specifications ............................................. 5
Absolute Maximum Ratings............................................................ 6
Thermal Characteristics .............................................................. 7
ESD Caution.................................................................................. 7
Timing Characteristics..................................................................... 9
Pin Configuration and Function Descriptions........................... 10
Typical Performance Characteristics ............................................. 8
2
I
C Interface Timing and Internal Register Description........... 12
Terminology .................................................................................... 16
Jitter Specifications ......................................................................... 17
Jitter Generation .........................................................................17
Jitter Transfer............................................................................... 17
Jitter Tolerance............................................................................ 17
Functional Description.................................................................. 20
Frequency Acquisition............................................................... 20
Limiting Amplifier ..................................................................... 21
Slice Adjust.................................................................................. 22
Loss of Signal (LOS) Detector .................................................. 22
Lock Detector Operation .......................................................... 20
Harmonic Detector.................................................................... 21
Squelch Mode .......................... Error! Bookmark not defined.
I2C Interface ............................................................................... 22
Reference Clock (Optional) ...................................................... 23
Applications Information.............................................................. 26
PCB Design Guidelines ............................................................. 26
DC-Coupled Application.......................................................... 28
Coarse Data Rate Readback Look-Up Table............................... 30
Outline Dimensions....................................................................... 32
Theory of Operation ...................................................................... 18
REVISION HISTORY
Revision 0: Initial Version
Revision A: Remove Minimum Supply Current Spec
Revision B: Update spec table
Ordering Guide .......................................................................... 32
Rev. PrA | Page 2 of 33
Page 3
Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
SPECIFICATIONS
TA = T
unless otherwise noted.
Table 1.
Parameter Conditions Min Typ Max Unit
QUANTIZER—DC CHARACTERISTICS
QUANTIZER—AC CHARACTERISTICS
QUANTIZER—SLICE ADJUSTMENT
LOSS OF SIGNAL DETECT (LOS)
R
R
R
OC-1
R
R
LOSS OF LOCK DETECT (LOL)
OC-48 1.0 μs
ACQUISITION TIME
OC-12 2.0 ms
OC-3 3.4 ms
OC-1 9.8 ms
12.3 Mb/s 40.0 ms
1
PIN and NIN should be differentially driven and ac-coupled for optimum sensitivity.
2
When ac-coupled, the LOS assert and de-assert time is dominated by the RC time constant of the ac coupling capacitor and the 50 Ω input termination of the
ADN2865 input stage.
MIN
to T
, VCC = V
MAX
MIN
to V
, VEE = 0 V, CF = 0.47 μF, SLICEP = SLICEN = VEE, Input Data Pattern: PRBS 223 − 1,
MAX
Input Voltage Range @ PIN or NIN, dc-coupled 1.8 2.8 V
Peak-to-Peak Differential Input PIN – NIN 2.0 V
Input Common Mode Level
DC-coupled (see Figure , Figure , and
Figure )
Differential Input Sensitivity 223 − 1 PRBS, ac-coupled,1 BER = 1 x 10
2.3 2.5
–10
TBD TBD mV p-p
2.8
V
Input Overdrive (see Figure ) TBD TBD mV p-p
Input Offset TBD μV
Input RMS Noise BER = 1 x 10
–10
TBD μV rms
Data Rate 12.3 2700 Mb/s
S11 @ 2.5 GHz −15 dB
Input Resistance Differential 100
Ω
Input Capacitance 0.65 pF
Gain SLICEP – SLICEN = ±0.5 V TBD 0.1 TBD V/V
Differential Control Voltage Input SLICEP – SLICEN TBD V
Control Voltage Range DC level @ SLICEP or SLICEN VEE 0.95 V
Slice Threshold Offset 1 mV
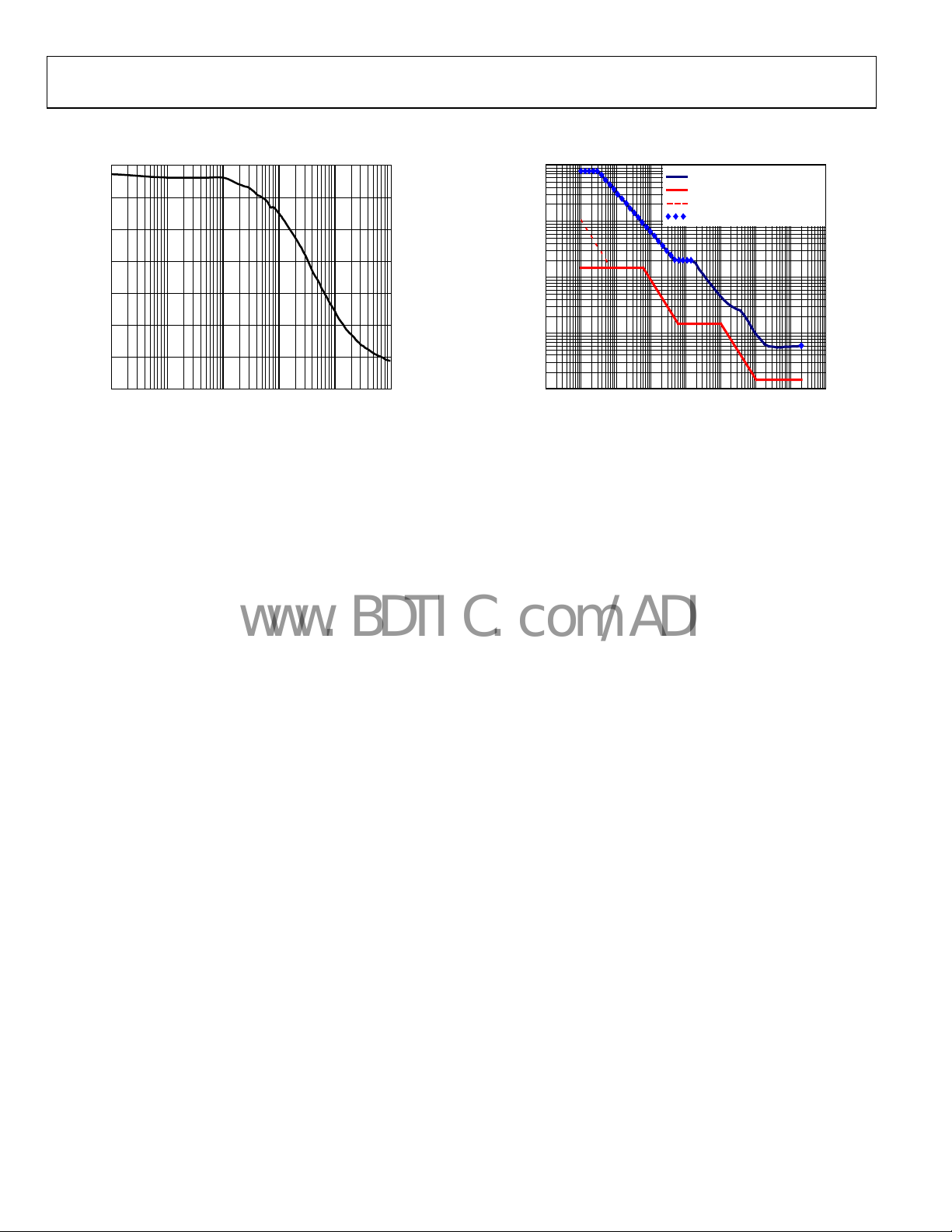
Loss of Signal Detect Range (see Figure 2) R
= 0 Ω TBD TBD mV
Thresh
= 100 kΩ TBD TBD mV
Thresh
Hysteresis (Electrical) OC-48
= 0 Ω TBD TBD dB
Thresh
= 100 kΩ TBD TBD dB
Thresh
= 0 Ω TBD TBD dB
Thresh
= 10 kΩ TBD TBD dB
Thresh
LOS Assert Time DC-coupled2 TBD ns
LOS De-Assert Time DC-coupled2 TBD ns
VCO Frequency Error for LOL Assert With respect to nominal 1000 ppm
VCO Frequency Error for LOL De-Assert With respect to nominal 250 ppm
LOL Response Time 12.3 Mb/s 4 ms
OC-12 1.0 μs
Lock to Data Mode OC-48 1.3 ms
Optional Lock to REFCLK Mode 10.0 ms
Rev. PrA | Page 3 of 33
Page 4
ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
Parameter Conditions Min Typ Max Unit
DATA RATE READBACK ACCURACY
Coarse Readback (See Table ) 10 %
Fine Readback In addition to REFCLK accuracy
Data rate < 20 Mb/s 200 ppm
Data rate > 20 Mb/s 100 ppm
POWER SUPPLY VOLTAGE 3.0 3.3 3.6 V
POWER SUPPLY CURRENT 300 350 mA
OPERATING TEMPERATURE RANGE –40 +85 °C
JITTER SPECIFICATIONS
TA = T
unless otherwise noted.
Table 2.
Parameter Conditions Min Typ Max Unit
PHASE-LOCKED LOOP CHARACTERISTICS
100 kHz 0.75 UI p-p
1 MHz 0.075 UI p-p
20 MHz 0.075 UI p-p
OC-12, 223 − 1 PRBS
25 kHz 0.75 UI p-p
OC-3, 223 − 1 PRBS
6500 Hz 0.75 UI p-p
65 kHz 0.075 UI p-p
Power Supply Rejection See Figure XX. TBD dB
to T
MIN
Jitter Transfer BW OC-48 2000 kHz
OC-12 500 kHz
OC-3 130 kHz
Jitter Peaking OC-48 0 0.1 dB
OC-12 0 0.1 dB
OC-3 0 0.1 dB
Jitter Generation OC-48, 12 kHz to 20 MHz TBD TBD UI rms
TBD 0.33 UI p-p
OC-12, 12 kHz to 5 MHz TBD TBD UI rms
TBD 0.2 UI p-p
OC-3, 12 kHz to 1.3 MHz TBD TBD UI rms
TBD 0.2 UI p-p
Jitter Tolerance OC-48, 223 − 1 PRBS
, VCC = V
MAX
MIN
to V
, VEE = 0 V, CF = 0.47 uF, SLICEP = SLICEN = VEE, Input Data Pattern: PRBS 223 − 1,
MAX
250 kHz
Error! Bookmark not defined.
0.075 UI p-p
Rev. PrA | Page 4 of 33
Page 5
Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
OUTPUT AND TIMING SPECIFICATIONS
Table 3.
Parameter Conditions Min Typ Max Unit
CML OUPUT CHARACTERISTICS
Single-Ended Output Swing VSE (see Figure 75) 300 350 600 mV
Differential Output Swing V
Output High Voltage VOH VCC V
Output Low Voltage VOL VCC − 0.6 VCC − 0.35 VCC − 0.3 V
CML Ouput Timing
Rise Time 20% to 80% TBD ps
Fall Time 80% to 20% TBD ps
LVDS OUPUT CHARACTERISTICS
(RXCLKP/N, RXDATP/N)
Differential Output Swing V
Output High Voltage VOH 1475 mV
Output Low Voltage VOL 925 V
Output Offset Voltage VOS 1125 1200 1275 V
Output Impedance Differential 100 Ω
LVDS Ouputs Timing
Rise Time 20% to 80% 115 220 ps
Fall Time 80% to 20% 115 220 ps
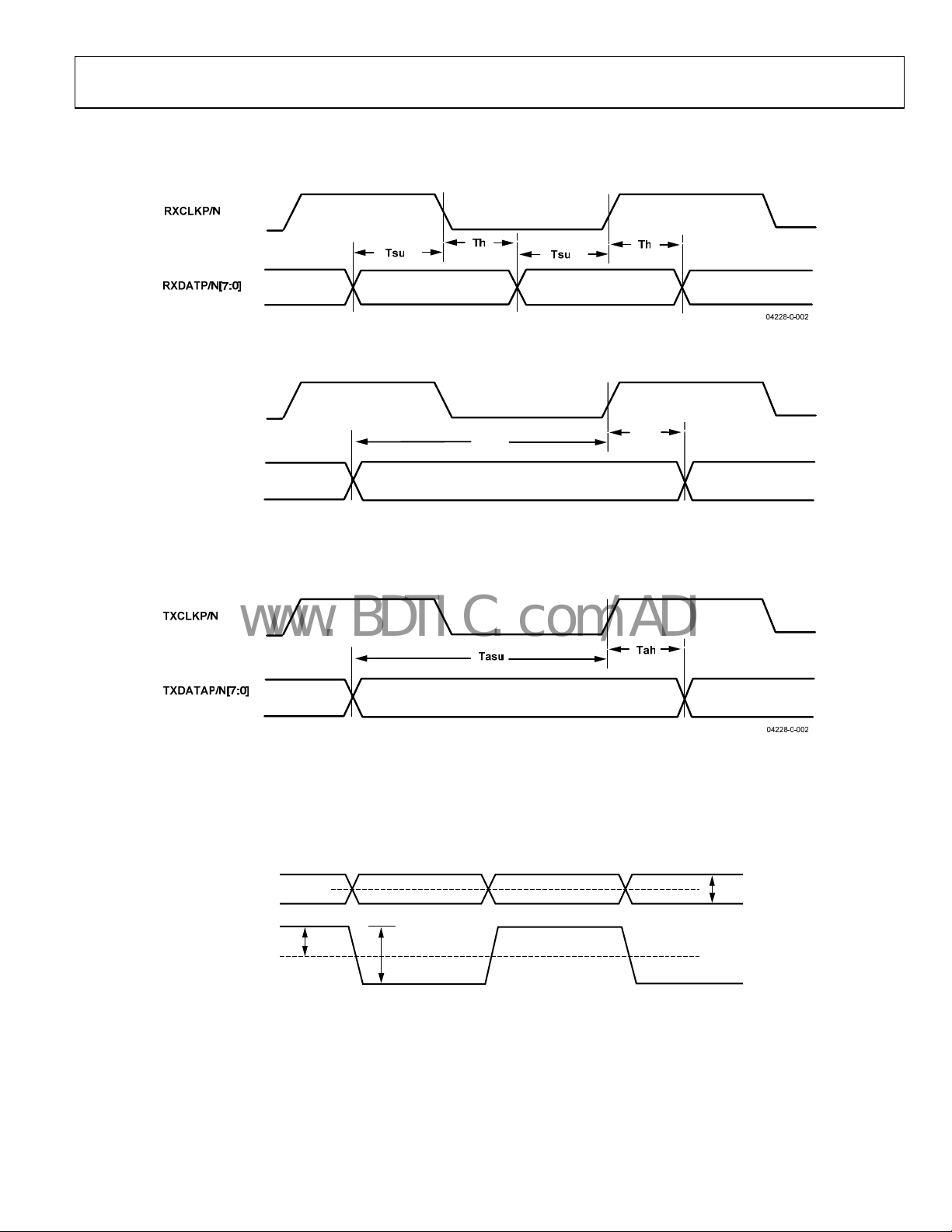
Setup Time TS (see Figure 4), OC-48 2.61 ns
Hold Time TH (see Figure 4), OC-48 -1.70 ns
I2C INTERFACE DC CHARACTERISTICS LVCMOS
Input High Voltage VIH 0.7 VCC V
Input Low Voltage VIL 0.3 VCC V
Input Current VIN = 0.1 VCC or VIN = 0.9 VCC −10.0 +10.0 μA
Output Low Voltage VOL, I
I2C INTERFACE TIMING (See Figure )
SCK Clock Frequency 400 kHz
SCK Pulse Width High t
SCK Pulse Width Low t
Start Condition Hold Time t
Start Condition Setup Time t
Data Setup Time t
Data Hold Time t
SCK/SDA Rise/Fall Time TR/TF 20 + 0.1 Cb
Stop Condition Setup Time t
Bus Free Time between a Stop and a Start t
REFCLK CHARACTERISTICS Optional lock to REFCLK mode
Input Voltage Range @ REFCLKP or REFCLKN
V
V
Minimum Differential Input Drive 100 mV p-p
Reference Frequency 12.3 200 MHz
Required Accuracy 100 ppm
LVTTL DC INPUT CHARACTERISTICS
Input High Voltage VIH 2.0 V
Input Low Voltage VIL 0.8 V
Input High Current IIH, VIN = 2.4 V 5 μA
1
Cb = total capacitance of one bus line in pF. If mixed with Hs-mode devices, faster fall-times are allowed (see Table 6).
(see Figure 75) 600 700 1200 mV
DIFF
(see Figure 4) 250 320 400 mV
DIFF
= 3.0 mA 0.4 V
OL
600 ns
HIGH
1300 ns
LOW
600 ns
HD;STA
600 ns
SU;STA
100 ns
SU;DAT
300 ns
HD;DAT
600 ns
SU;STO
1300 ns
BUF
0 V
IL
VCC V
IH
1
300 ns
Rev. PrA | Page 5 of 33
Page 6
ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
Parameter Conditions Min Typ Max Unit
Input Low Current IIL, VIN = 0.4 V −5 μA
LVTTL INPUT TIMING
Setup Time (Sync Mode) T
Hold Time (Sync Mode) TSH (see Figure 3), 1.25Gb/s 0.70 ns
Setup Time (Align Mode) T
Hold Time (Align Mode) TAH (see Figure 4), 1.25Gb/s TBD ns
LVTTL DC OUTPUT CHARACTERISTICS
Output High Voltage VOH, IOH = −2.0 mA 2.4 V
Output Low Voltage VOL, IOL = 2.0 mA 0.4 V
(see Figure 3), 1.25Gb/s 3.60 ns
SSU
(see Figure 4), 1.25Gb/s TBD ns
ASU
Rev. PrA | Page 6 of 33
Page 7

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
ABSOLUTE MAXIMUM RATINGS
TA = T
μF, SLICEP = SLICEN = VEE, unless otherwise noted.
Table 4.
Parameter Rating
Supply Voltage (VCC) 4.2 V
Minimum Input Voltage (All Inputs) VEE − 0.4 V
Maximum Input Voltage (All Inputs) VCC + 0.4 V
Maximum Junction Temperature 125°C
Storage Temperature −65°C to +150°C
Lead Temperature (Soldering 10 s) 300°C
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on
the human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
MIN
to T
, VCC = V
MAX
MIN
to V
, VEE = 0 V, CF = 0.47
MAX
Stress above those listed under Absolute Maximum Ratings may
cause permanent damage to the device. This is a stress rating
only and functional operation of the device at these or any other
conditions above those indicated in the operational sections of
this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
THERMAL CHARACTERISTICS
Thermal Resistance
56-LFCSP, 4-layer board with exposed paddle soldered to VEE
θ
= 28°C/W
JA
Rev. PrA | Page 7 of 33
Page 8
ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
TYPICAL PERFORMANCE CHARACTERISTICS
16
14
12
10
8
TRIP POINT (mV p-p)
6
4
1000
100
JITTER AMPLITUDE (UI)
ADN2812 TOLERANCE
SONET REQUIREMENT MASK
SONET OBJECTIVE MASK
EQUIPMENT LIMIT
10
1
2
1 10 100
1k 10k 100k
R
(Ω)
TH
Figure 2. LOS Comparator Trip Point Programming
04228-0-003
0.1
1 10 100 1k 10k 100k 1M 10M
JITTER FREQUENCY (Hz)
Figure 3. Typical Measured Jitter Tolerance OC-48
100M
04228-0-030
Rev. PrA | Page 8 of 33
Page 9
Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
TIMING CHARACTERISTICS
Figure 4. Rx Output Timing
/ N
RXCLKP
Tssu
TXDATAP
/ N [ 7 : 0 ]
Figure 5. Tx Input Timing (Sync Mode)
Figure 6. Tx Input Timing Align Mode)
Tsh
04228
-0-
002
OUTP
OUTN
OUTP–OUTN
V
CML
V
0V
SE
V
DIFF
Figure 75. Single-Ended vs. Differential Output Specifications
V
SE
04228-0-004
Rev. PrA | Page 9 of 33
Page 10
ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
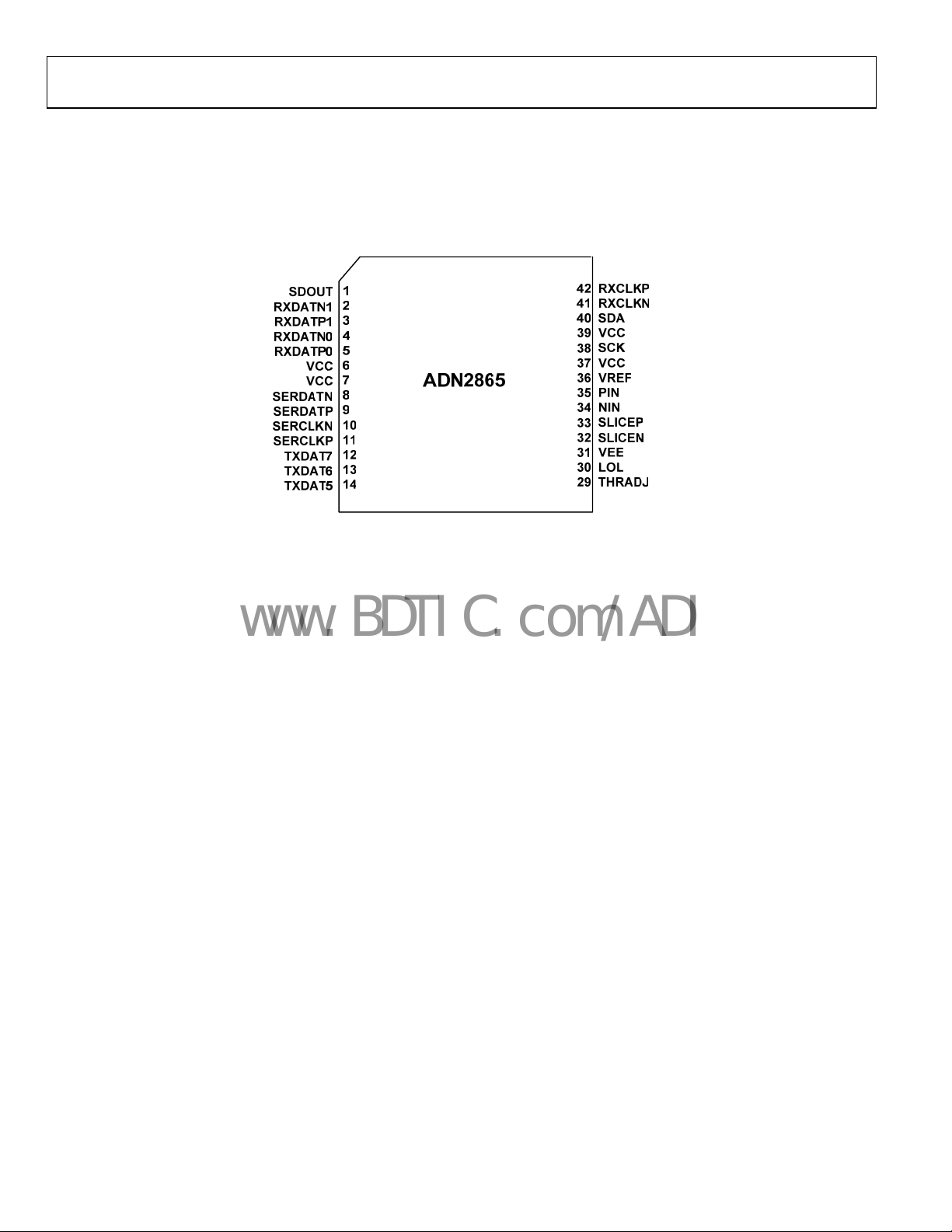
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
RXDATP2
RXDATN2
RXDATP3
RXDATN3
RXDATP4
RXDATN4
VCC
RXDATP5
RXDATN5
RXDATP6
RXDATN6
VCC
RXDATP7
RXDATN7
56555453525150494847464544
43
15161718192021222324252627
CF1
VEE
VEE
VCC
VCC
TXDAT2
TXDAT1
VREG
TXDAT0
TXCLK
TXDAT4
TXDAT3
Figure 86. Pin Configuration
REFN
28
REFP
Rev. PrA | Page 10 of 33
Page 11

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
Table 5. Pin Function Descriptions
Pin # Mnemonic Type Description
1 SDOUT
2 RXDATN1
3 RXDATP1
4 RXDATN0
5 RXDATP0
6 VCC3
7 VCC7
8SERDATN
9SERDATP
10 SERCLKN
11 SERCLKP
12 TXDAT7
13 TXDAT6
14 TXDAT5
15 TXDAT4
16 TXCLK
17 TXDAT3
18 TXDAT2
19 TXDAT1
20 TXDAT0
21 VREG
22 CF1
23 VEE2
24 VCC2
25 VEE4
26 VCC4
27 REFN
28 REFP
29 THRADJ
30 LOL
31 VEE1
32
33 SLICEP
34 NIN
35 PIN
36 VREF
37 VCC1
38 SCK
39 VCC6
40 SDA
41 RXCLKN
42 RXCLKP
43 RXDATN7
44 RXDATP7
45 VCC5
46 RXDATN6
47 RXDATP6
48 RXDATN5
49 RXDATP5
50 VCC5
51 RXDATN4
52 RXDATP4
53 RXDATN3
54 RXDATP3
55 RXDATN2
56 RXDATP2
1
Type: P = power, AI = analog input, AO = analog output, DI = digital input, DO = digital output.
SLICEN
DO
DO
DO
DO
DO
PWR
PWR
DO
DO
DO
DO
DI
DI
DI
DI
DI
DI
DI
DI
DI
AO
AO
PWR
PWR
PWR
PWR
DI
DI
AO
DO
PWR
AI
AI
AI
AI
AO
PWR
DI
PWR
DI
DO
DO
DO
DO
PWR
DO
DO
DO
DO
PWR
DO
DO
DO
DO
DO
DO
Active high, Loss of signal indica tor. (LVTTL)
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Differential receive data output. Last bit received. (LVDS)
Differential receive data output. Last bit received. (LVDS)
Power for CDR & Serialiser
Power for CML drivers
Differential serialized da ta output to LDD. (CML)
Differential serialized da ta output to LDD. (CML)
Differential clock for serialized Tx data. (CML)
Differential clock for serialized Tx data. (CML)
Transmit data input. First bit sent. (LVTTL)
Transmit data input. (LVTTL)
Transmit data input. (LVTTL)
Transmit data input. (LVTTL)
Qualifying clock for transmit data input. (LVTTL)
Transmit data input. (LVTTL)
Transmit data input. (LVTTL)
Transmit data input. (LVTTL)
Transmit data input. Last bit sent. (LVTTL)
Decoupling node for VCO power.
PLL loop filter capacitor.
Ground for VCO / PLL / Gm
Power for VCO / PLL / Gm
Ground for FLL
Power for FLL
Reference clock input. (LVDS/LVTTL)
Reference clock input. (LVDS/LVTTL)
LOS Threshold Setting Resistor.
Active high, Loss-of-Lock Indicator. (LVTTL)
Ground for Limamp / LOS
Differential Slice Level Adjust Input.
Differential Slice Level Adjust Input.
Differential serial input to Limiting Amp. (CML)
Differential serial input to Limiting Amp. (CML)
Decoupling node for internal voltage reference.
Power for Limamp / LOS
I2C Serial Clock Input.
Power for Deserialiser, LVDS pre-drivers
I2C Serial Data Input.
Qualifying clock for Rx Data Outputs. (LVDS)
Qualifying clock for Rx Data Outputs. (LVDS)
Differential receive data output. Last bit received. (LVDS)
Differential receive data output. Last bit received. (LVDS)
Power for LVDS drivers
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Power for LVDS Drivers
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Differential receive data output. (LVDS)
Rev. PrA | Page 11 of 33
Page 12

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
I2C INTERFACE TIMING AND INTERNAL REGISTER DESCRIPTION
SLAVE ADDRESS [6...0]
100010 X
MSB = 1
Figure 9. Slave Address Configuration
R/W
CTRL.
0
0 = WR
1 = RD
S SLAVE ADDR, LSB = 0 (WR) A(S) A(S) A(S)DATASUB ADDR A(S) PDATA
Figure 10. I
2
C Write Data Transfer
04228-0-006
S
S = START BIT P = STOP BIT
A(S) = ACKNOWLEDGE BY SLAVE A(M) = ACKNOWLEDGE BY MASTER
SSLAVE ADDR, LSB = 0 (WR) SLAVE ADDR, LSB = 1 (RD)A(S) A(S)SUB ADDR A(S) DATA A(M) DATA PA(M)
A(M) = LACK OF ACKNOWLEDGE BY MASTER
Figure 11. I
2
C Read Data Transfer
04228-0-007
SDA
SCK
START BIT
S
SLAVE ADDRESS SUB ADDRESS DATA
SLADDR[4...0]
Figure 12. I
SUB ADDR[6...1] DATA[6...1]
2
C Data Transfer Timing
D0D7A0A7A5A6
STOP BIT
ACKACKWR ACK
P
04228-0-008
t
F
SDA
t
SCK
SSPS
LOW
t
HD;STA
t
R
t
HD;DAT
t
SU;DAT
Figure 13. I
t
F
t
HIGH
t
SU;STA
2
C Port Timing Diagram
t
HD;STA
t
SU;STO
t
BUF
t
R
04228-0-009
Rev. PrA | Page 12 of 33
Page 13

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
Table 6. Internal Register Map1
Reg Name R/W ADDRES
S
FREQ0 R 0x0 MSB LSB
FREQ1 R 0x1 MSB LSB
FREQ2 R 0x2 0 MSB LSB
RATE R 0x3 COARSE_RD[8] Coarse Data Readback COARSE_RD[1]
D7 D6 D5 D4 D3 D2 D1 D0
MISC R 0x4 X X Los Status Static LOL LOL Status Datarate
meas
complete
CTRLA W 0x8 Fref Range Data Rate/DIV FREF Ratio Measure
Data Rate
CTRLA_RD R 0x5 Readback CTRLA
CTRLB W 0x9 Config LOL Reset
MISC[4]
CTRLB_RD R 0x6 Readback CTRLB
CTRLC W 0x11 0 0 Set Signal
CTRLD W 0x22 CDR Bypass Power
Down
LVD S
Drivers
CTRLE W 0x27 RXCLK Alignment Align TX Mode Reverse RX
FDDI_MO
DE
W 0x0D FDDI Mode
Enable
System
Reset
Degrade
Threshold
Power
Down CML
Drivers
0 Reset
MISC[2]
Enable
Signal
Degrade
Squelch
Output
Buffers
Subharmonic Ratio 0 0
LOS forces
acquisition
Initiate PBS
Sequence
0 0 0
Config LOS Squelch
Mode
PRBS Mode[2:0]
Reverse TX
Bus
Bus
X COARSE_RD[
0] LSB
Lock to
Reference
Boost Output
0
SEL_MODE W 0x34 0 0 Acq Mode Cont Rate /
HI_CODE W 0x35 HI_CODE[8] HI_CODE[1]
LO_CODE W 0x36 LO_CODE[8] LO_CODE[1]
CODE_LSB W 0x39 0 0 0 0 0 0 HI_CODE[0] LO_CODE[0]
1
All writeable registers default to 0x00.
Table 7. Miscellaneous Register, MISC
LOS Status Static LOL LOL Status
D7 D6 D5 D4 D3 D2 D1 D0
x x 0 = No loss of signal 0 = Waiting for next LOL 0 = Locked 0 = Measuring datarate x COARSE_RD[0]
1 = Loss of signal 1 = Static LOL until reset 1 = Acquiring 1 = Measurement complete
Rev. PrA | Page 13 of 33
Single Rate
Datarate
Range
CLK
Holdover
Mode 2A
Datarate Measurement
Complete
CLK
Holdover
Mode 2B
0
Coarse Rate
Readback LSB
Page 14

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
1
Table 8. Control Register, CTRLA
F
Range Datarate/Div_F
REF
D7 D6 D5 D4 D3 D2 D1 D0
0 0 12.3 MHz to 25 MHz 0 0 0 0 1 Set to 1 to measure datarate 0 = Lock to input data
0 1 25 MHz to 50 MHz 0 0 0 1 2 1 = Lock to reference clock
1 0 50 MHz to 100 MHz 0 0 1 0 4
1 1 100 MHz to 200 MHz n 2n
1 0 0 0 256
1
Where DIV_F
is the divided down reference referred to the 12.3 MHz to 25 MHz band (see the Reference Clock (Optional) section).
REF
Table 9. Control Register, CTRLB
Config LOL Reset MISC[4] System Reset Reset MISC[2]
D7 D6 D5 D4 D3 D2 D1 D0
0 = LOL pin normal operation
1 = LOL pin is static LOL
Table 10. Control Register, CTRLC
Signal Degrade Threshold Signal Degrade Mode Config LOS SERCLK
D7 D6 D5 D4 D3 D2 D1 D0
Set
to 0
0=Set SD Threshold to 9mV
Set
to 0
1=Set SD Threshold to 1.9x
LOS Threshold
Table 11. Control Register, CTRLD
CDR Bypass Buffer Control Initiate PRBS PRBS Mode
D7 D6 D5 D4 D3 D2 D1 D0
0=Normal
1=CDR Disabled
operation
1=Power Down
LVDS drivers
Table 12. Control Register, CTRLE
RXCLK Alignment to RXDATA Tx Mode Bus Reversal
D7 D6 D5 D4 D3 D2 D1 D0
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
+1 UI
0
-3 UI
+4 UI
+2 UI
+4 UI
-2 UI
Write a 1 followed by
0 to reset MISC[4]
0= Disable Signal Degrade
Mode
1= Enable Signal Degrade
Mode
0=Normal
operation
1=Power Down
CML drivers
0=Sync Mode
1=Align
Ratio Measure Datarate Lock to Reference
REF
Write a 1 followed by
0 to reset ADN2865
0
0=Enable align
1=Disable align
Set
to 0
Set
to 0
Write a 1 followed by 0
to initiate PRBS
Generate Sequence
Write a 1 followed by
0 to reset MISC[2]
0 = Active high LOS
1 = Active low LOS
RXDATA[7:0]
0=Bit 0 is last received
1=Bit 7 is last received
0 = Power Down
SERCLK buffer
1 = Enable SERCLK
buffer
0 0 0 Power Down 0=CDR Enabled
0
0
1
0
TXDATA[7:0]
0=Bit 0 is last sent
1=Bit 7 is last sent
Set
to 0
1
0
Set
to 0
Generate Mode
Detect Mode,
compares errors
Set
to 0
Set
to 0
Set
To 0
Rev. PrA | Page 14 of 33
Page 15

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
Table 13. FDDI_MODE
FDDI Enable Subharmonic Ratio [6..2]
D7 D6 D5 D4 D3 D2 D1 D0
0= FDDI Mode Disabled
1= FDDI Mode Enabled
Table 14. SEL_MODE
Mode Control 2 Mode Control 1 Mode Control 0
D7 D6 D5 D4 D3 D2 D1 D0
Set
to 0
Table 15. CTLF
CDR Mode
D7 D6 D5 D4 D3 D2 D1 D0
Set to 0 Set to 0 Set to 0 Set to 0 Set to 0 0 0 0 = NDC -> OB
0=LTD/LTR Mode
Set
to 0
1=LTR Mode Only
0 0 0 0 1 = 1
0 0 0 1 0 = 2
0 0 0 1 1 = 3
--------------------1 1 1 1 1 = 31
0= Continuous Rate
1= Single Rate
0= Full Range (12.3M-
2.7G)
1= Limited Range
Set to 0
Set to 0
Clock Holdover
Mode 2A
Set to 1 for Clock
Holdover Mode 2A
Clock Holdover
Mode 2B
Set to 1 for Clock
Holdover Mode 2B
1 0 1 = NDC -> PRBS
Set
to 0
Rev. PrA | Page 15 of 33
Page 16

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
TERMINOLOGY
VREF
PIN
NIN
10mVp-p
50 50
SCOPE
PROBE
VREF
+
Quantizer
-
2.5V
3k
50Ω
50Ω
VREF
+
QUANTIZER
–
3kΩ
2.5V
04228-0-012
Input Sensitivity and Input Overdrive
Sensitivity and overdrive specifications for the quantizer involve
offset voltage, gain, and noise. The relationship between the
logic output of the quantizer and the analog voltage input is
shown in Figure . For sufficiently large positive input voltage,
the output is always Logic 1 and, similarly for negative inputs,
the output is always Logic 0. However, the transitions between
output Logic Levels 1 and 0 are not at precisely defined input
voltage levels, but occur over a range of input voltages. Within
this range of input voltages, the output might be either 1 or 0, or
it might even fail to attain a valid logic state. The width of this
zone is determined by the input voltage noise of the quantizer.
The center of the zone is the quantizer input offset voltage.
Input overdrive is the magnitude of signal required to guarantee
the correct logic level with 1 × 10
OUTPUT
SENSITIVITY
(2
×
Figure 14. Input Sensitivity and Input Overdrive
−10
1
0
OFFSET
OVERDRIVE
OVERDRIVE)
confidence level.
NOISE
INPUT (V p-p)
04228-0-010
Single-Ended vs. Differential
AC coupling is typically used to drive the inputs to the
quantizer. The inputs are internally dc biased to a commonmode potential of ~2.5 V. Driving the ADN2865 single-ended
and observing the quantizer input with an oscilloscope probe at
the point indicated in Figure shows a binary signal with an
average value equal to the common-mode potential and
instantaneous values both above and below the average value. It
is convenient to measure the peak-to-peak amplitude of this
signal and call the minimum required value the quantizer
sensitivity. Referring to Figure , because both positive and
negative offsets need to be accommodated, the sensitivity is
twice the overdrive. The ADN2865 quantizer typically has
6 mV p-p sensitivity.
scope
probe
PIN
Figure 15. Single-Ended Sensitivity Measurement
Driving the ADN2865 differentially (see Figure ), sensitivity
seems to improve from observing the quantizer input with an
oscilloscope probe. This is an illusion caused by the use of a
single-ended probe. A 5 mV p-p signal appears to drive the
ADN2865 quantizer. However, the single-ended probe
measures only half the signal. The true quantizer input signal is
twice this value, because the other quantizer input is a complementary signal to the signal being observed.
5mV p-p
VREF
VREF
5mV p-p
Figure 16. Differential Sensitivity Measurement
LOS Response Time
LOS response time is the delay between removal of the input
signal and indication of loss of signal (LOS) at the LOS output,
Pin 22. When the inputs are dc-coupled, the LOS assert time of
the AD2817 is 500 ns typically and the de-assert time is 400 ns
typically,. In practice, the time constant produced by the ac
coupling at the quantizer input and the 50 Ω on-chip input
termination determines the LOS response time.
Rev. PrA | Page 16 of 33
Page 17

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
JITTER SPECIFICATIONS
The ADN2865 CDR is designed to achieve the best bit-errorrate (BER) performance and exceeds the jitter transfer, generation, and tolerance specifications proposed for SONET/SDH
equipment defined in the Telcordia Technologies specification.
Jitter is the dynamic displacement of digital signal edges from
their long-term average positions, measured in unit intervals
(UI), where 1 UI = 1 bit period. Jitter on the input data can
cause dynamic phase errors on the recovered clock sampling
edge. Jitter on the recovered clock causes jitter on the
retimed data.
The following sections briefly summarize the specifications of
jitter generation, transfer, and tolerance in accordance with the
Telcordia document (GR-253-CORE, Issue 3, September 2000)
for the optical interface at the equipment level and the
ADN2865 performance with respect to those specifications.
JITTER GENERATION
The jitter generation specification limits the amount of jitter
that can be generated by the device with no jitter and wander
applied at the input. For OC-48 devices, the band-pass filter
has a 12 kHz high-pass cutoff frequency with a roll-off of
20 dB/decade, and a low-pass cutoff frequency of at least
20 MHz. The jitter generated must be less than 0.01 UI rms, and
must be less than 0.1 UI p-p.
0.1
ACCEPTABLE
JITTER GAIN (dB)
RANGE
f
C
JITTER FREQUENCY (kHz)
Figure 17. Jitter Transfer Curve
SLOPE = –20dB/DECADE
04228-0-013
JITTER TOLERANCE
The jitter tolerance is defined as the peak-to-peak amplitude of
the sinusoidal jitter applied on the input signal, which causes a
1 dB power penalty. This is a stress test intended to ensure that
no additional penalty is incurred under the operating
conditions (see Figure ).
15.00
SLOPE = –20dB/DECADE
JITTER TRANSFER
The jitter transfer function is the ratio of the jitter on the output
signal to the jitter applied on the input signal versus the
frequency. This parameter measures the limited amount of the
jitter on an input signal that can be transferred to the output
signal (see Figure ).
1.50
0.15
INPUT JITTER AMPLITUDE (UI p-p)
f
0
Figure 18. SONET Jitter Tolerance Mask
f
1
JITTER FREQUENCY (kHz)
f
f
2
3
f
4
04228-0-014
Rev. PrA | Page 17 of 33
Page 18

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
THEORY OF OPERATION
The ADN2865 is a delay- and phase-locked loop circuit for
clock recovery and data retiming from an NRZ encoded data
stream. The phase of the input data signal is tracked by two
separate feedback loops, which share a common control voltage.
A high speed delay-locked loop path uses a voltage controlled
phase shifter to track the high frequency components of input
jitter. A separate phase control loop, comprised of the VCO,
tracks the low frequency components of input jitter. The initial
frequency of the VCO is set by yet a third loop, which compares
the VCO frequency with the input data frequency and sets the
coarse tuning voltage. The jitter tracking phase-locked loop
controls the VCO by the fine-tuning control.
The delay- and phase-loops together track the phase of the
input data signal. For example, when the clock lags input data,
the phase detector drives the VCO to higher frequency, and also
increases the delay through the phase shifter; both these actions
serve to reduce the phase error between the clock and data. The
faster clock picks up phase, while the delayed data loses phase.
Because the loop filter is an integrator, the static phase error is
driven to zero.
X(s)
INPUT
DATA
RECOVERED
CLOCK
d = PHASE DETECTOR GAIN
o = VCO GAIN
c = LOOP INTEGRATOR
psh = PHASE SHIFTER GAIN
n = DIVIDE RATIO
Figure 19. ADN2865 PLL/DLL Architecture
Z(s)
psh
e(s)
d/sc
JITTER TRANSFER FUNCTION
Z(s)
=
X(s)
2
s
TRACKING ERROR TRANSFER FUNCTION
e(s)
=
X(s)
2
s
o/s
1/n
1
cn
n psh
s+ 1
+
do
o
2
s
d psh
do
s++
c
cn
JITTER PEAKING
IN ORDINARY PLL
04228-0-015
Another view of the circuit is that the phase shifter implements
the zero required for frequency compensation of a second-order
phase-locked loop, and this zero is placed in the feedback path
and, thus, does not appear in the closed-loop transfer function.
Jitter peaking in a conventional second-order phase-locked loop
is caused by the presence of this zero in the closed-loop transfer
function. Because this circuit has no zero in the closed-loop
transfer, jitter peaking is minimized.
The delay- and phase-loops together simultaneously provide
wide-band jitter accommodation and narrow-band jitter
filtering. The linearized block diagram in Figure shows that the
jitter transfer function, Z(s)/X(s), is a second-order low-pass
providing excellent filtering. Note that the jitter transfer has no
zero, unlike an ordinary second-order phase-locked loop. This
means that the main PLL loop has virtually zero jitter peaking
(see Figure ). This makes this circuit ideal for signal regenerator
applications, where jitter peaking in a cascade of regenerators
can contribute to hazardous jitter accumulation.
The error transfer, e(s)/X(s), has the same high-pass form as an
ordinary phase-locked loop. This transfer function is free to be
optimized to give excellent wide-band jitter accommodation,
because the jitter transfer function, Z(s)/X(s), provides the
narrow-band jitter filtering.
ADN2812
JITTER GAIN (dB)
o
n psh
Figure 20. ADN2865 Jitter Response vs. Conventional PLL
d psh
c
FREQUENCY (kHz)
Z(s)
X(s)
04228-0-016
The delay- and phase-loops contribute to overall jitter accommodation. At low frequencies of input jitter on the data signal,
the integrator in the loop filter provides high gain to track large
jitter amplitudes with small phase error. In this case, the VCO is
frequency modulated and jitter is tracked as in an ordinary
phase-locked loop. The amount of low frequency jitter that can
be tracked is a function of the VCO tuning range. A wider
tuning range gives larger accommodation of low frequency
jitter. The internal loop control voltage remains small for small
phase errors, so the phase shifter remains close to the center of
its range and thus contributes little to the low frequency jitter
accommodation.
Rev. PrA | Page 18 of 33
Page 19

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
At medium jitter frequencies, the gain and tuning range of the
VCO are not large enough to track input jitter. In this case, the
VCO control voltage becomes large and saturates, and the VCO
frequency dwells at one extreme of its tuning range or the other.
The size of the VCO tuning range, therefore, has only a small
effect on the jitter accommodation. The delay-locked loop
control voltage is now larger, and so the phase shifter takes on
the burden of tracking the input jitter. The phase shifter range,
in UI, can be seen as a broad plateau on the jitter tolerance
curve. The phase shifter has a minimum range of 2 UI at all
data rates.
The gain of the loop integrator is small for high jitter
frequencies, so that larger phase differences are needed to make
the loop control voltage big enough to tune the range of the
phase shifter. Large phase errors at high jitter frequencies
cannot be tolerated. In this region, the gain of the integrator
determines the jitter accommodation. Because the gain of the
loop integrator declines linearly with frequency, jitter accommodation is lower with higher jitter frequency. At the highest
frequencies, the loop gain is very small, and little tuning of the
phase shifter can be expected. In this case, jitter
accommodation is determined by the eye opening of the input
data, the static phase error, and the residual loop jitter
generation. The jitter accommodation is roughly 0.5 UI in this
region. The corner frequency between the declining slope and
the flat region is the closed loop bandwidth of the delay-locked
loop, which is roughly 3 MHz at OC-48.
Rev. PrA | Page 19 of 33
Page 20

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
FUNCTIONAL DESCRIPTION
SERDES
The ADN2865 has an integrated serializer / deserializer and
clock divider which allows the continuous rate CDR to interface
directly to an FPGA or digital ASIC, such a s a Media Access
Controller (MAC), resulting in power and space savings.
The recovered clock is divided by 16 and is used to transfer 8
bits of receive data to the MAC on both the rising and falling
edge. Both RXCLKP/N and RXDATAP/N[7:0] use LVDS
signaling for noise reasons and have a relative phase which is
adjustable via the I2C interface, per table 12 on page 14.
Half rate (1.25Gb/s) transmit data can also be serialised by the
ADN2865 at the CML output using the recovered clock from
the receive channel. An optional CML clock output is available.
The parallel interface consists of 8 LVCMOS / LVTTL inputs
with an optional TXCLK at the divde by 8 rate. Two timing
modes are available, sync mode and align mode.
Sync Mode
This is the default mode of operation. and does not require a
TXCLK signal. Instead, TXDATA[7:0] is timed from RXCLK
and the round trip delay between these signals must meet the
setup and hold time requirement specified in table 3 to avoid
corrupting the serial bit stream. Sync mode is useful in
applications which require a stable timing relationship between
the input and output serial bit streams.
Align Mode
This mode is controlled using the I2C interface and requires the
use of TXCLK which is used to latch TXDATA internally.
When enabled, align mode centers this latched data with
respect to the internal divide by 8 sampling clock, which can
render the interface less sensitive to variation in the timing of
TXDATA[7:0] relative to RXCLK. In a typical application, the
propagation delay between RXCLK and TXDATA[7:0] will vary
with process, temperature and supply voltage through the
external MAC device. This variation can be calibrated out by
enabling and then disabling align mode. The downside to using
align mode is that the calibration process leads to additional
uncertainty in the serial bit timing relative to the input bit
stream by +/- 1 UI. In align mode, it is necessary to meet the
setup and hold time for TXDATA[7:0] relative to TXCLK.
Bit order reversal is supported for both the receive and transmit
parallel buses using the I2C interface.
TXCLK
EDGE
DETECTOR
ALIGN
MODE
DIVIDE
RESET
BY 8
RECOVERED
CLOCK
COUNTER
FREQUENCY ACQUISITION
The ADN2865 acquires frequency from the data over a range of
data frequencies from 12.3 Mb/s to 2.7 Gb/s. The lock detector
circuit compares the frequency of the VCO and the frequency
of the incoming data. When these frequencies differ by more
than 1000 ppm, LOL is asserted. This initiates a frequency
acquisition cycle. The VCO frequency is reset to the bottom of
its range, which is 12.3 MHz. The frequency detector then
compares this VCO frequency and the incoming data frequency
and increments the VCO frequency, if necessary. Initially, the
VCO frequency is incremented in large steps to aid fast acquisition. As the VCO frequency approaches the data frequency, the
step size is reduced until the VCO frequency is within 250 ppm
of the data frequency, at which point LOL is de-asserted.
Once LOL is de-asserted, the frequency-locked loop is turned
off. The PLL/DLL pulls in the VCO frequency the rest of the
way until the VCO frequency equals the data frequency.
The frequency loop requires a single external capacitor between
CF1 and CF2, Pins 14 and 15. A 0.47 μF ± 20%, X7R ceramic
chip capacitor with < 10 nA leakage current is recommended.
Leakage current of the capacitor can be calculated by dividing
the maximum voltage across the 0.47 μF capacitor, ~3 V, by the
insulation resistance of the capacitor. The insulation resistance
of the 0.47 uF capacitor should be greater than 300 MΩ
LOCK DETECTOR OPERATION
The lock detector on the ADN2865 has three modes of
operation: normal mode, REFCLK mode, and static LOL mode.
Normal Mode
In normal mode, the ADN2865 is a continuous rate CDR that
locks onto any data rate from 12.3 Mb/s to 2.7 Gb/s without the
use of a reference clock as an acquisition aid. In this mode, the
lock detector monitors the frequency difference between the
VCO and the input data frequency, and de-asserts the loss of
lock signal, which appears on LOL Pin 30, when the VCO is
TXDATA[7:0]
REGISTER
REGISTER
SERIALISER
Figure 21. Align Mode Operation
TXCLK
Dn+1[7:0]
DIV BY 8
Dn[7:0]
Rev. PrA | Page 20 of 33
Page 21

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
within 250 ppm of the data frequency. This enables the D/PLL,
which pulls the VCO frequency in the remaining amount and
also acquires phase lock. Once locked, if the input frequency
error exceeds 1000 ppm (0.1%), the loss of lock signal is reasserted and control returns to the frequency loop, which
begins a new frequency acquisition starting at the lowest point
in the VCO operating range, 12.3 MHz. The LOL pin remains
asserted until the VCO locks onto a valid input data stream to
within 250 ppm frequency error. This hysteresis is shown in
Figure 22.
LOL
1
–1000
Figure 22. Transfer Function of LOL
0–250 250 1000 f
VCO
(ppm)
ERROR
04228-0-018
LOL Detector Operation Using a Reference Clock
In this mode, a reference clock is used as an acquisition aid to
lock the ADN2865 VCO. Lock to reference mode is enabled by
setting CTRLA[0] to 1. The user also needs to write to the
CTRLA[7:6] and CTRLA[5:2] bits in order to set the reference
frequency range and the divide ratio of the data rate with
respect to the reference frequency. For more details, see the
Reference Clock (Optional) section. In this mode, the lock
detector monitors the difference in frequency between the
divided down VCO and the divided down reference clock. The
loss of lock signal, which appears on the LOL Pin 30, is deasserted when the VCO is within 250 ppm of the desired
frequency. This enables the D/PLL, which pulls the VCO
frequency in the remaining amount with respect to the input
data and also acquires phase lock. Once locked, if the input
frequency error exceeds 1000 ppm (0.1%), the loss of lock signal
is re-asserted and control returns to the frequency loop, which
re-acquires with respect to the reference clock. The LOL pin
remains asserted until the VCO frequency is within 250 ppm of
the desired frequency. This hysteresis is shown in Figure 22.
Static LOL Mode
The ADN2865 implements a static LOL feature, which indicates
if a loss of lock condition has ever occurred and remains
asserted, even if the ADN2865 regains lock, until the static LOL
bit is manually reset. The I
2
C register bit, MISC[4], is the static
LOL bit. If there is ever an occurrence of a loss of lock
condition, this bit is internally asserted to logic high. The
MISC[4] bit remains high even after the ADN2865 has reacquired lock to a new data rate. This bit can be reset by writing
a 1 followed by 0 to I
2
C Register Bit CTRLB[6]. Once reset, the
MISC[4] bit remains de-asserted until another loss of lock
condition occurs.
Writ i ng a 1 to I
2
C Register Bit CTRLB[7] causes the LOL pin,
Pin 16, to become a static LOL indicator. In this mode, the LOL
pin mirrors the contents of the MISC[4] bit and has the
functionality described in the previous paragraph. The
CTRLB[7] bit defaults to 0. In this mode, the LOL pin operates
in the normal operating mode, that is, it is asserted only when
the ADN2865 is in acquisition mode and de-asserts when the
ADN2865 has re-acquired lock.
HARMONIC DETECTOR
The ADN2865 provides a harmonic detector, which detects
whether or not the input data has changed to a lower harmonic
of the data rate that the VCO is currently locked onto. For
example, if the input data instantaneously changes from OC-48,
2.488 Gb/s, to an OC-12, 622.080 Mb/s bit stream, this could be
perceived as a valid OC-48 bit stream, because the OC-12 data
pattern is exactly 4× slower than the OC-48 pattern. So, if the
change in data rate is instantaneous, a 101 pattern at OC-12
would be perceived by the ADN2865 as a 111100001111 pattern
at OC-48. If the change to a lower harmonic is instantaneous, a
typical CDR could remain locked at the higher data rate.
The ADN2865 implements a harmonic detector that automatically identifies whether or not the input data has switched to a
lower harmonic of the data rate that the VCO is currently
locked onto. When a harmonic is identified, the LOL pin is
asserted and a new frequency acquisition is initiated. The
ADN2865 automatically locks onto the new data rate, and the
LOL pin is de-asserted.
However, the harmonic detector does not detect higher
harmonics of the data rate. If the input data rate switches to a
higher harmonic of the data rate the VCO is currently locked
onto, the VCO loses lock, the LOL pin is asserted, and a new
frequency acquisition is initiated. The ADN2865 automatically
locks onto the new data rate.
The time to detect lock to harmonic is
16,384 × (T
d
/ρ)
where:
1/T
is the new data rate. For example, if the data rate is
d
switched from OC-48 to OC-12, then T
= 1/622 MHz.
d
ρ is the data transition density. Most coding schemes seek to
ensure that ρ = 0.5, for example, PRBS, 8B/10B.
When the ADN2865 is placed in lock to reference mode, the
harmonic detector is disabled.
LIMITING AMPLIFIER
The limiting amplifier on the ADN2865 has differential inputs
(PIN/NIN), which are internally terminated with 50 Ω to an
on-chip voltage reference (VREF = 2.5 V typically). The inputs
are typically ac-coupled externally, although dc coupling is
possible as long as the input common mode voltage remains
above 2.5 V (see Figure , Figure , and Figure in the Applications
Rev. PrA | Page 21 of 33
Page 22

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
Information section). Input offset is factory trimmed to achieve
better than 6 mV typical sensitivity with minimal drift. The
limiting amplifier can be driven differentially or single-ended.
SLICE AND SAMPLE PHASE ADJUST (ADN2817
ONLY)
The quantizer slicing level can be offset by ±100 mV to mitigate
the effect of amplified spontaneous emission (ASE) noise or
duty cycle distortion by applying a differential voltage input of
up to ±0.95 V to SLICEP/N inputs. If no adjustment of the slice
level is needed, SLICEP/N should be tied to VEE. The gain of
the slice adjustment is ~0.1 V/V.
If the user is not using the BER monitoring function, sample
phase adjustment can be utilized to optimize the horizontal
sampling point of the incoming data eye. The ADN2865
automatically centers the sampling point to the best of its ability.
However, sample phase adjustment could be used to
compensate for any static phase offset of the CDR and duty
cycle distortion of the incoming eye. Sample phase adjustment
is applied to the incoming eye via the PHASE register. It is
important to note that sample phase adjustment can not be used
if the user is utilising the BER monitoring capability. This is
because the BER monitoring circuit requires control of the
sample phase adjustment circuitry. Also, using the sample phase
adjustment capability uses an additional 180mW of power.
LOSS OF SIGNAL (LOS) DETECTOR
The receiver front end LOS detector circuit detects when the
input signal level has fallen below a user-adjustable threshold.
The threshold is set with a single external resistor from Pin 9,
THRADJ, to VEE. The LOS comparator trip point-versusresistor value is illustrated in Figure 2. If the input level to the
ADN2865 drops below the programmed LOS threshold, the
output of the LOS detector, LOS Pin 1, is asserted to a Logic 1.
The LOS detector’s response time is ~500 ns by design, but is
dominated by the RC time constant in ac-coupled applications.
The LOS pin defaults to active high. However, by setting Bit
CTRLC[2] to 1, the LOS pin is configured as active low.
There is typically 6 dB of electrical hysteresis designed into the
LOS detector to prevent chatter on the LOS pin. This means
that, if the input level drops below the programmed LOS
threshold causing the LOS pin to assert, the LOS pin is not deasserted until the input level has increased to 6 dB (2×) above
the LOS threshold (see Figure ).
LOS OUTPUT
)
DIFF
INPUT VOLTAGE (V
Figure 23. ADN2817 LOS Detector Hysteresis
The LOS detector and the SLICE level adjust can be used
simultaneously on the ADN2865. This means that any offset
added to the input signal by the SLICE adjust pins does not
affect the LOS detector’s measurement of the absolute input
level.
INPUT LEVEL
HYSTERESIS
LOS THRESHOLD
04228-0-017
t
I2C INTERFACE
The ADN2865 supports a 2-wire, I2C compatible, serial bus
driving multiple peripherals. Two inputs, serial data (SDA) and
serial clock (SCK), carry information between any devices
connected to the bus. Each slave device is recognized by a
unique address. The 7-bit slave address is factory programmed
to binary ‘1100000’. The LSB of the word sets either a read or
write operation (see Figure ). Logic 1 corresponds to a read
operation, while Logic 0 corresponds to a write operation.
To control the device on the bus, the following protocol must be
followed. First, the master initiates a data transfer by establishing a start condition, defined by a high to low transition on
SDA while SCK remains high. This indicates that an
address/data stream follows. All peripherals respond to the start
condition and shift the next eight bits (the 7-bit address and the
R/W bit). The bits are transferred from MSB to LSB. The
peripheral that recognizes the transmitted address responds by
pulling the data line low during the ninth clock pulse. This is
known as an acknowledge bit. All other devices withdraw from
the bus at this point and maintain an idle condition. The idle
condition is where the device monitors the SDA and SCK lines
waiting for the start condition and correct transmitted address.
The R/W bit determines the direction of the data. Logic 0 on
the LSB of the first byte means that the master writes
information to the peripheral. Logic 1 on the LSB of the first
byte means that the master reads information from the
peripheral.
Rev. PrA | Page 22 of 33
The ADN2865 acts as a standard slave device on the bus. The
data on the SDA pin is 8 bits long supporting the 7-bit addresses
plus the R/W bit. The ADN2865 has 8 subaddresses to enable
the user-accessible internal registers (see Table 6 through Table
15). It, therefore, interprets the first byte as the device address
and the second byte as the starting subaddress. Autoincrement
mode is supported, allowing data to be read from or written to
Page 23

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
the starting subaddress and each subsequent address without
manually addressing the subsequent subaddress. A data transfer
is always terminated by a stop condition. The user can also
access any unique subaddress register on a one-by-one basis
without updating all registers.
Stop and start conditions can be detected at any stage of the
data transfer. If these conditions are asserted out of sequence
with normal read and write operations, then they cause an
immediate jump to the idle condition. During a given SCK high
period, the user should issue one start condition, one stop
condition, or a single stop condition followed by a single start
condition. If an invalid subaddress is issued by the user, the
ADN2865 does not issue an acknowledge and returns to the idle
condition. If the user exceeds the highest subaddress while
reading back in autoincrement mode, then the highest subaddress register contents continue to be output until the master
device issues a no-acknowledge. This indicates the end of a
read. In a no-acknowledge condition, the SDATA line is not
pulled low on the ninth pulse. See Figure and Figure for
sample read and write data transfers and Figure 12 for a more
detailed timing diagram.
REFERENCE CLOCK (OPTIONAL)
A reference clock is not required to perform clock and data
recovery with the ADN2865. However, support for an optional
reference clock is provided. The reference clock can be driven
differentially or single-ended. If the reference clock is not being
used, then REFCLKP should be tied to VCC, and REFCLKN
can be left floating or tied to VEE (the inputs are internally
terminated to VCC/2). See Figure through Figure for sample
configurations.
The REFCLK input buffer accepts any differential signal with a
peak-to-peak differential amplitude of greater than 100 mV (for
example, LVPECL or LVDS) or a standard single-ended low
voltage TTL input, providing maximum system flexibility.
Phase noise and duty cycle of the reference clock are not critical
and 100 ppm accuracy is sufficient.
ADN2817/18
REFCLKP
10
11
REFCLKN
Figure 24. Differential REFCLK Configuration
Buffer
100k100k
VCC/2
VCC
CLK
OSC
Figure 25. Single-Ended REFCLK Configuration
REFCLKP
OUT
REFCLKN
VCC
10
REFCLKP
11
NC
REFCLKN
Figure 26. No REFCLK Configuration
ADN2817/18
10
x
11
ADN2817/18
100k100k
100k100k
Buffer
VCC/2
Buffer
VCC/2
The two uses of the reference clock are mutually exclusive. The
reference clock can be used either as an acquisition aid for the
ADN2865 to lock onto data, or to measure the frequency of the
incoming data to within 0.01%. (There is the capability to
measure the data rate to approximately ±10% without the use of
a reference clock.) The modes are mutually exclusive, because,
in the first use, the user knows exactly what the data rate is and
wants to force the part to lock onto only that data rate; in the
second use, the user does not know what the data rate is and
wants to measure it.
Lock to reference mode is enabled by writing a 1 to I
2
C Register
Bit CTRLA[0]. Fine data rate readback mode is enabled by
writing a 1 to I
2
C Register Bit CTRLA[1]. Writing a 1 to both of
these bits at the same time causes an indeterminate state and is
not supported.
Using the Reference Clock to Lock onto Data
In this mode, the ADN2865 locks onto a frequency derived
from the reference clock according to the following equation:
Data Rate/2
CTRLA[5:2]
= REFCLK/2
CTRLA[7:6]
The user must know exactly what the data rate is, and provide a
reference clock that is a function of this rate. The ADN2865 can
still be used as a continuous rate device in this configuration,
provided that the user has the ability to provide a reference
clock that has a variable frequency (see Application Note
AN-632).
Rev. PrA | Page 23 of 33
The reference clock can be anywhere between 12.3 MHz and
200 MHz. By default, the ADN2865 expects a reference clock of
between 12.3 MHz and 25 MHz. If it is between 25 MHz and
Page 24

ADN2865 Preliminary Technical Data
(
(
(
)
www.BDTIC.com/ADI
50 MHz, 50 MHz and 100 MHz, or 100 MHz and 200 MHz, the
user needs to configure the ADN2865 to use the correct
reference frequency range by setting two bits of the CTRLA
register, CTRLA[7:6].
Table 16. CTRLA Settings
CTRLA[7:6] Range (MHz) CTRLA[5:2] Ratio
00 12.3 to 25 0000 1
01 25 to 50 0001 2
10 50 to 100 n 2n
11 100 to 200 1000 256
The user can specify a fixed integer multiple of the reference
clock to lock onto using CTRLA[5:2], where CTRLA should be
set to the data rate/DIV_F
divided-down reference referred to the 12.3 MHz to 25 MHz
band. For example, if the reference clock frequency was
38.88 MHz and the input data rate was 622.08 Mb/s, then
CTRLA[7:6] would be set to [01] to give a divided-down
reference clock of 19.44 MHz. CTRLA[5:2] would be set to
[0101], that is, 5, because
622.08 Mb/s/19.44 MHz = 2
In this mode, if the ADN2865 loses lock for any reason, it
relocks onto the reference clock and continues to output a stable
clock.
While the ADN2865 is operating in lock to reference mode, if
the user ever changes the reference frequency, the F
(CTRLA[7:6]), or the F
followed by writing a 0 to 1 transition into the CTRLA[0] bit to
initiate a new lock to reference command.
, where DIV_F
REF
5
ratio (CTRLA[5:2]), this must be
REF
represents the
REF
REF
range
Using the Reference Clock to Measure Data Frequency
The user can also provide a reference clock to measure the
recovered data frequency. In this case, the user provides a
reference clock, and the ADN2865 compares the frequency of
the incoming data to the incoming reference clock and returns a
ratio of the two frequencies to 0.01% (100 ppm). The accuracy
error of the reference clock is added to the accuracy of the
ADN2865 data rate measurement. For example, if a 100-ppm
accuracy reference clock is used, the total accuracy of the
measurement is within 200 ppm.
The reference clock can range from 12.3 MHz and 200 MHz.
The ADN2865 expects a reference clock between 12.3 MHz and
25 MHz by default. If it is between 25 MHz and 50 MHz,
50 MHz and 100 MHz, or 100 MHz and 200 MHz, the user
needs to configure the ADN2865 to use the correct reference
frequency range by setting two bits of the CTRLA register,
CTRLA[7:6]. Using the reference clock to determine the
frequency of the incoming data does not affect the manner in
which the part locks onto data. In this mode, the reference clock
is used only to determine the frequency of the data. For this
reason, the user does not need to know the data rate to use the
reference clock in this manner.
Prior to reading back the data rate using the reference clock, the
CTRLA[7:6] bits must be set to the appropriate frequency range
with respect to the reference clock being used. A fine data rate
readback is then executed as follows:
Step 1: Write a 1 to CTRLA[1]. This enables the fine data rate
measurement capability of the ADN2865. This bit is level
sensitive and does not need to be reset to perform subsequent
frequency measurements.
Step 2: Reset MISC[2] by writing a 1 followed by a 0 to
CTRLB[3]. This initiates a new data rate measurement.
Step 3: Read back MISC[2]. If it is 0, then the measurement is
not complete. If it is 1, then the measurement is complete and
the data rate can be read back on FREQ[22:0]. The time for a
data rate measurement is typically 80 ms.
Step 4: Read back the data rate from registers FREQ2[6:0],
FREQ1[7:0], and FREQ0[7:0].
Use the following equation to determine the data rate:
)_14(
RATESEL
+
[]
DATARATE
where:
FREQ[22:0] is the reading from FREQ2[6:0] (MSByte),
FREQ1[7:0], and FREQ0[7:0] (LSByte).
Table 17.
D22 D21...D17 D16 D15 D14...D9 D8 D7 D6...D1 D0
FREQ2[6:0] FREQ1[7:0] FREQ0[7:0]
f
is the data rate (Mb/s).
DATA RATE
is the REFCLK frequency (MHz).
f
REFCLK
SEL_RATE is the setting from CTRLA[7:6].
For example, if the reference clock frequency is 32 MHz,
SEL_RATE = 1, since the CTRLA[7:6] setting would be [01],
because the reference frequency would fall into the 25 MHz to
50 MHz range. Assume for this example that the input data rate
is 2.488 Gb/s (OC-48). After following Steps 1 through 4, the
value that is read back on FREQ[22:0] = 0x26E010, which is
equal to 2.5477 × 10
yields
6
. Plugging this value into the equation
)
If subsequent frequency measurements are required, CTRLA[1]
should remain set to 1. It does not need to be reset. The
measurement process is reset by writing a 1 followed by a 0 to
CTRLB[3]. This initiates a new data rate measurement. Follow
Steps 2 through 4 to read back the new data rate.
Note: A data rate readback is valid only if LOL is low. If LOL is
high, the data rate readback is invalid.
×=
)114(=×+
fFREQf
REFCLK
)
2/0..22
Gb/s488.22/6e326e5477.2
Rev. PrA | Page 24 of 33
Page 25

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
Additional Features Available via the I2C Interface
Coarse Data Rate Readback
The data rate can be read back over the I2C interface to
approximately +
clock. A 9-bit register, COARSE_RD[8:0], can be read back
when LOL is de-asserted. The 8 MSBs of this register are the
contents of the RATE[7:0] register. The LSB of the
COARSE_RD register is Bit MISC[0].
Table provides coarse data rate readback to within ±10%.
10% without the need of an external reference
Fi
LOS Configuration
The LOS detector output, LOS Pin 22, can be configured to be
either active high or active low. If CTRLC[2] is set to Logic 0
(default), the LOS pin is active high when a loss of signal
condition is detected. Writing a 1 to CTRLC[2] configures the
LOS pin to be active low when a loss of signal condition is
detected.
System Reset
A frequency acquisition can be initiated by writing a 1 followed
by a 0 to the I
frequency acquisition while keeping the ADN2865 in the
operating mode that it was previously programmed to in
registers CTRL[A], CTRL[B], and CTRL[C].
2
C Register Bit CTRLB[5]. This initiates a new
FDDI Mode
A scheme has been implemented on the ADN2865 that enables
the device to lock to input data streams that appear as subharmonics of the desired datarate, e.g. FDDI during link
synchronization. This works for any code where a subharmonic
down to the 31st is transmitted. FDDI uses the 5th
subharmonic. The implementation requires certain
programming by the user and more importantly certain
assumptions about the incoming data.
The user is required to program the part into FDDI mode by
setting bit FDDI_MODE[7]=1. The user then needs to program
the target datarate, (for FDDI this is 125MHz). This is done by
programming an upper and lower 9-bit code into I2C registers
HI_CODE[8..0], LO_CODE[8..0], and CODE_LSB[1..0]. See
Table XX for a look-up table showing the correct register
settings for each datarate. The user must also program the
subharmonic ratio into I2C register FDDI_MODE[6..2] that the
ADN2865 needs to lock on to, e.g. FDDI_MODE[6..2] = 00101
for FDDI (5
mode before the next datarate is applied.
Here is what is required of the incoming data:
th
subharmonic). The user has to de-program FDDI
1.
The subharmonic must be a clock-type waveform i.e.
transition density equal to 1 at the subharmonic
frequency.
The subharmonic must be continued to be applied
2.
until LOL goes LOW, i.e. until acquisition is
completed. It doesn't matter how long the
subharmonic remains after LOL goes LOW.
In FDDI Mode, the output of the ADN2865 is squelched until
the device has acquired lock of the subharmonic input. This
causes all zeros to be transmitted out of the 2865 until lock has
been achieved. Once locked, the outputs are enabled and begin
transmitting data. For FDDI protocol, this would be when the
'H' symbols are being transmitted during link synchronization.
CLK HOLDOVER MODE
CLK Holdover Mode 2A:
This mode of operation will be available in all LTD modes: The
output clock frequency will remain within +/-5% if the input
data is removed or changed. To operate in this mode, the user
would write to the I2C to put the part into CLK Holdover Mode
2A mode by setting SEL_MODE[2]=1. The user must then
initiate an acquisition via a software reset. The device will then
lock onto the input datarate. At this point the output frequency
remains within +/- 5% of the intial acquired value regardless of
whether or not the input data is taken away or the datarate
changes. Only a sw reset can initiate a new acquistion in this
mode.
CLK Holdover Mode 2B:
This mode is selected by setting SEL_MODE[1]=1. In this
mode, the output clock stays within +/-5% of the initial
acquired frequency, even if the input data is taken away. Unlike
CLK Holdover Mode 2A, in this mode the ADN2865 will
initiate a new frequency acquisition automatically if the input
datarate changes. This mode requires the inputs to be DC
coupled because if the inputs are AC coupled and the input is
taken away, any noise present on the inputs may be large
enough to trigger a new
cause the clock output frequency to change.
frequency acquisition which would
CDR BYPASS MODE
The CDR on the ADN2865 can be bypassed by setting bit
CTRLD[7]=1. In this mode the ADN2865 will feed the input
directly through the input amplifiers to the output buffer,
completely bypassing the CDR.
DISABLE OUTPUT BUFFERS
The ADN2865 provides the option of disabling the output
buffers for power savings. The LVDS output buffers can be
disabled by setting CTRLD[6]=1. For additional power savings,
e.g. in a low power standby mode, the CML output buffers can
also be disabled by setting CTRLD[5]=1.
Rev. PrA | Page 25 of 33
Page 26

ADN2865 Preliminary Technical Data
(
=
www.BDTIC.com/ADI
APPLICATIONS INFORMATION
PCB DESIGN GUIDELINES
Proper RF PCB design techniques must be used for optimal
performance.
Power Supply Connections and Ground Planes
Use of one low impedance ground plane is recommended. The
VEE pins should be soldered directly to the ground plane to
reduce series inductance. If the ground plane is an internal
plane and connections to the ground plane are made through
vias, multiple vias can be used in parallel to reduce the series
inductance. The exposed pad should be connected to the GND
plane using plugged vias
so that solder does not leak through
the vias during reflow.
Use of a 10 μF electrolytic capacitor between VCC and VEE is
recommended at the location where the 3.3 V supply enters the
PCB. When using 0.1 μF and 1 nF ceramic chip capacitors, they
should be placed between the IC power supply VCC and VEE,
as close as possible to the ADN2865 VCC pins.
If connections to the supply and ground are made through vias,
the use of multiple vias in parallel helps to reduce series
inductance, especially on Pins 7,45 & 50, which supplies power
to the high speed LVDS & CML output buffers. Refer to the
schematic in Figure for recommended connections.
By using adjacent power supply and GND planes, excellent high
frequency decoupling can be realized by using close spacing
between the planes. This capacitance is given by
)
pFε88.0 A/dC
plane
r
where:
ε
is the dielectric constant of the PCB material.
r
A is the area of the overlap of power and GND planes (cm
2
).
d is the separation between planes (mm).
ε
For FR-4,
= 4.4 mm and 0.25 mm spacing, C ~15 pF/
r
. .
RXDATP2
RXDATN2
RXDATP3
RXDATN3
RXDATP4
RXDATN4
VCC
RXDATP5
RXDATN5
RXDATP6
RXDATN6
VCC
RXDATP7
RXDATN7
56555453525150494847464544
15161718192021222324252627
CF1
VEE
. . . . . . . .
TXDAT4
TXCLK
TXDAT3
TXDAT2
TXDAT1
TXDAT0
VREG
VCC
VEE
VCC
43
REFP
REFN
NC
28
Figure 27. Typical ADN2865 Applications Circuit
Rev. PrA | Page 26 of 33
Page 27

Preliminary Technical Data ADN2865
T
C
=
(
)
A
A
A
www.BDTIC.com/ADI
Transmission Lines
Use of 50 Ω transmission lines is required for all LVDS and
CML input and output signals to minimize reflections: PIN,
NIN, RXDATAP/N[7:0], RXCLKP/N, SERDATP, SERDATN,
SERCLKP, SERCLKN (also REFCLKP, REFCLKN, if a high
frequency reference clock is used, such as 155 MHz). It is also
necessary for the PIN/NIN input traces to be matched in length,
and the parallel bus / CML output traces to be matched in
length to avoid skew between the differential traces. All high
speed CML outputs, SERDATP,SERDATN,SERCLKP,SERCLKN
also require 100 Ω back termination chip resistors connected
between the output pin and VCC. These resistors should be
placed as close as possible to the output pins. These 100 Ω
resistors are in parallel with on-chip 100 Ω termination resistors
to create a 50 Ω back termination (see Figure ).
The high speed inputs, PIN and NIN, are internally terminated
with 50 Ω to an internal reference voltage (see Figure ). A 0.1 μF
is recommended between VREF, Pin 36, and GND to provide
an ac ground for the inputs.
As with any high speed mixed-signal design, take care to keep
all high speed digital traces away from sensitive analog nodes.
V C C
V C C
1 0 0
1 0 0
D N 2 8 6 5
Figure 28. Typical ADN2865 Applications Circuit
T I
Figure 29. ADN2865 AC-Coupled Input Configuration
5 0
1 0 0
Ω
0 . 1 u F
V C C
1 0 0
C
I
N
C
I N
0 . 1
0 . 1
P I N
N I N
V R E F
μ
5
0
μ
D N 2 8 6 5
5 0
Ω
5 0
V
3k
V
TERM
TERM
50
50
2.5V
Soldering Guidelines for Chip Scale Package
The lands on the 56 LFCSP are rectangular. The printed circuit
board pad for these should be 0.1 mm longer than the package
land length and 0.05 mm wider than the package land width.
The land should be centered on the pad. This ensures that the
solder joint size is maximized. The bottom of the chip scale
package has a central exposed pad. The pad on the printed
circuit board should be at least as large as this exposed pad. The
user must connect the exposed pad to VEE using plugged vias
so that solder does not leak through the vias during reflow. This
ensures a solid connection from the exposed pad to VEE.
Choosing AC Coupling Capacitors
AC coupling capacitors at the input (PIN, NIN) and output
(SERDATP,SERDATN) of the ADN2865 must be chosen such
that the device works properly over the full range of data rates
used in the application. When choosing the capacitors, the time
constant formed with the two 50 Ω resistors in the signal path
must be considered. When a large number of consecutive
identical digits (CIDs) are applied, the capacitor voltage can
droop due to baseline wander (see Figure ), causing patterndependent jitter (PDJ).
The user must determine how much droop is tolerable and
choose an ac coupling capacitor based on that amount of droop.
The amount of PDJ can then be approximated based on the
capacitor selection. The actual capacitor value selection may
require some trade-offs between droop and PDJ.
Example: Assuming that 2% droop can be tolerated, then the
maximum differential droop is 4%. Normalizing to V
Droop = Δ V = 0.04 V = 0.5 V
(1 − e
pp
–t/τ
) ; therefore, τ = 12t
:
pp
where:
τ is the RC time constant (C is the ac coupling capacitor, R =
100 Ω seen by C).
t is the total discharge time, which is equal to n
Τ
.
n is the number of CIDs.
T is the bit period.
The capacitor value can then be calculated by combining the
equations for τ and t:
Rn
/12
Once the capacitor value is selected, the PDJ can be
approximated as
pspp
nT/RC
etPDJ
−=
r
6.0/15.0
()
−
where:
PDJ
is the amount of pattern-dependent jitter allowed;
pspp
< 0.01 UI p-p typical.
is the rise time, which is equal to 0.22/BW,
t
r
where BW ~ 0.7 (bit rate).
Note that this expression for t
is accurate only for the inputs.
r
The output rise time for the ADN2865 is ~100 ps regardless of
data rate.
Rev. PrA | Page 27 of 33
Page 28

ADN2865 Preliminary Technical Data
A
A
www.BDTIC.com/ADI
VCC
TIA
V1
V1b
V2
C
IN
V2b
PIN
NIN
ADN2817
50
V
REF
50
Limamp
CDR
C
DATAOU T P
OUT
DATAOU T N
1
V1
V1b
V2
V2b
Vdiff
Vdiff = V2-V2b
VT H = ADN2817 QuantizerT hreshold
NOT ES:
1.D uringdatapatter nswith hight ransition density, differential DC voltage at V1and V2 iszero.
2. When theoutput oft he TIA goesto C ID, V1 and V1b aredr iven to different D C levels. V2 and V 2b di schargeto t he V ref level which
effectivelyintroduces adifferential DC offset across theAC couplingcapacitors.
3. When the burst of data starts again, the differential D C offset across the AC coupling capacitors is applied to the input levelscausing
aDC shift i n thedifferential input.Thi s shift islarge enough such that oneof the states,either H I or LO depending on thelevelsof
V1 and V1b when theTIA went to CID , iscancel led out.The quantizer will not recognize thisas a vali d state.
4. The DC offset slowly di schargesun til thediff erential input voltage exceedsthe sensiti vity of the A DN2817. T he quantizer wi ll be able
torecognizeboth HI and LO states at thispoint.
2
Figure 30. Example of Baseline Wander
3
4
DC-COUPLED APPLICATION
The inputs to the ADN2865 can also be dc-coupled. This might
be necessary in burst mode applications, where there are long
VCC
D N 2 8 65
P I N
periods of CIDs, and baseline wander cannot be tolerated. If the
inputs to the ADN2865 are dc-coupled, care must be taken not
TI
50
Ω
N I N
to violate the input range and common-mode level requirements of the ADN2865 (see Figure through Figure ). If dc
coupling is required, and the output levels of the TIA do not
adhere to the levels shown in Figure , then level shifting and/or
0.1u F
5 0
V R E F
an attenuator must be between the TIA outputs and the
ADN2865 inputs.
Figure 31. DC-Coupled Application
Vref
VTH
50
2.5V
3k
Rev. PrA | Page 28 of 33
Page 29

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
PIN
PIN
INPUT (V)
NIN
VPP = PIN – NIN = 2×VSE = 10mV AT SENSITIVITY
= 5mV MIN
V
SE
V
= 2.3V MIN
CM
(DC-COUPLED)
INPUT (V)
NIN
VPP = PIN – NIN = 2×VSE = 2.0V MAX
V
SE
V
CM
(DC-COUPLED)
= 1.0V MAX
= 2.3V
Figure 32. Minimum Allowed DC-Coupled Input Levels
04228-0-027
Figure 33. Maximum Allowed DC-Coupled Input Levels
04228-0-028
Rev. PrA | Page 29 of 33
Page 30

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
COARSE DATA RATE READBACK LOOK-UP TABLE
Code is the 9-bit value read back from COARSE_RD[8:0].
Table 18. Look-Up Table
Code F
0 5.1934e+06
1 5.1930e+06
2 5.2930e+06
3 5.3989e+06
4 5.5124e+06
5 5.6325e+06
6 5.7612e+06
7 5.8995e+06
8 6.0473e+06
9 6.2097e+06
10 6.3819e+06
11 6.5675e+06
12 6.7688e+06
13 6.9874e+06
14 7.2262e+06
15 7.4863e+06
16 7.4139e+06
17 7.4135e+06
18 7.5606e+06
19 7.7173e+06
20 7.8852e+06
21 8.0633e+06
22 8.2548e+06
23 8.4586e+06
24 8.6784e+06
25 8.9180e+06
26 9.1736e+06
27 9.4481e+06
28 9.7464e+06
29 1.0068e+07
30 1.0417e+07
31 1.0791e+07
32 1.0387e+07
33 1.0386e+07
34 1.0586e+07
35 1.0798e+07
36 1.1025e+07
37 1.1265e+07
38 1.1522e+07
39 1.1799e+07
40 1.2095e+07
41 1.2419e+07
42 1.2764e+07
43 1.3135e+07
44 1.3538e+07
45 1.3975e+07
46 1.4452e+07
47 1.4973e+07
MID
Code F
48 1.4828e+07
49 1.4827e+07
50 1.5121e+07
51 1.5435e+07
52 1.5770e+07
53 1.6127e+07
54 1.6510e+07
55 1.6917e+07
56 1.7357e+07
57 1.7836e+07
58 1.8347e+07
59 1.8896e+07
60 1.9493e+07
61 2.0136e+07
62 2.0833e+07
63 2.1582e+07
64 2.0774e+07
65 2.0772e+07
66 2.1172e+07
67 2.1596e+07
68 2.2049e+07
69 2.2530e+07
70 2.3045e+07
71 2.3598e+07
72 2.4189e+07
73 2.4839e+07
74 2.5527e+07
75 2.6270e+07
76 2.7075e+07
77 2.7950e+07
78 2.8905e+07
79 2.9945e+07
80 2.9655e+07
81 2.9654e+07
82 3.0242e+07
83 3.0869e+07
84 3.1541e+07
85 3.2253e+07
86 3.3019e+07
87 3.3834e+07
88 3.4714e+07
89 3.5672e+07
90 3.6694e+07
91 3.7792e+07
92 3.8985e+07
93 4.0273e+07
94 4.1666e+07
95 4.3164e+07
MID
Code F
96 4.1547e+07
97 4.1544e+07
98 4.2344e+07
99 4.3191e+07
100 4.4099e+07
101 4.5060e+07
102 4.6090e+07
103 4.7196e+07
104 4.8378e+07
105 4.9678e+07
106 5.1055e+07
107 5.2540e+07
108 5.4150e+07
109 5.5899e+07
110 5.7810e+07
111 5.9890e+07
112 5.9311e+07
113 5.9308e+07
114 6.0485e+07
115 6.1739e+07
116 6.3081e+07
117 6.4506e+07
118 6.6038e+07
119 6.7669e+07
120 6.9427e+07
121 7.1344e+07
122 7.3388e+07
123 7.5585e+07
124 7.7971e+07
125 8.0546e+07
126 8.3333e+07
127 8.6328e+07
128 8.3095e+07
129 8.3087e+07
130 8.4689e+07
131 8.6383e+07
132 8.8198e+07
133 9.0120e+07
134 9.2179e+07
135 9.4392e+07
136 9.6757e+07
137 9.9356e+07
138 1.0211e+08
139 1.0508e+08
140 1.0830e+08
141 1.1180e+08
142 1.1562e+08
143 1.1978e+08
MID
Code F
144 1.1862e+08
145 1.1862e+08
146 1.2097e+08
147 1.2348e+08
148 1.2616e+08
149 1.2901e+08
150 1.3208e+08
151 1.3534e+08
152 1.3885e+08
153 1.4269e+08
154 1.4678e+08
155 1.5117e+08
156 1.5594e+08
157 1.6109e+08
158 1.6667e+08
159 1.7266e+08
160 1.6619e+08
161 1.6617e+08
162 1.6938e+08
163 1.7277e+08
164 1.7640e+08
165 1.8024e+08
166 1.8436e+08
167 1.8878e+08
168 1.9351e+08
169 1.9871e+08
170 2.0422e+08
171 2.1016e+08
172 2.1660e+08
173 2.2360e+08
174 2.3124e+08
175 2.3956e+08
176 2.3724e+08
177 2.3723e+08
178 2.4194e+08
179 2.4695e+08
180 2.5233e+08
181 2.5802e+08
182 2.6415e+08
183 2.7067e+08
184 2.7771e+08
185 2.8538e+08
186 2.9355e+08
187 3.0234e+08
188 3.1188e+08
189 3.2218e+08
190 3.3333e+08
191 3.4531e+08
MID
Rev. PrA | Page 30 of 33
Page 31

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
Code F
192 3.3238e+08
193 3.3235e+08
194 3.3876e+08
195 3.4553e+08
196 3.5279e+08
197 3.6048e+08
198 3.6872e+08
199 3.7757e+08
200 3.8703e+08
201 3.9742e+08
202 4.0844e+08
203 4.2032e+08
204 4.3320e+08
205 4.4719e+08
206 4.6248e+08
207 4.7912e+08
208 4.7449e+08
209 4.7447e+08
210 4.8388e+08
211 4.9391e+08
212 5.0465e+08
213 5.1605e+08
214 5.2831e+08
215 5.4135e+08
MID
Code F
216 5.5542e+08
217 5.7075e+08
218 5.8711e+08
219 6.0468e+08
220 6.2377e+08
221 6.4437e+08
222 6.6666e+08
223 6.9062e+08
224 6.6476e+08
225 6.6470e+08
226 6.7751e+08
227 6.9106e+08
228 7.0558e+08
229 7.2096e+08
230 7.3743e+08
231 7.5514e+08
232 7.7405e+08
233 7.9485e+08
234 8.1688e+08
235 8.4064e+08
236 8.6640e+08
237 8.9438e+08
238 9.2496e+08
239 9.5825e+08
MID
Code F
240 9.4898e+08
241 9.4893e+08
242 9.6776e+08
243 9.8782e+08
244 1.0093e+09
245 1.0321e+09
246 1.0566e+09
247 1.0827e+09
248 1.1108e+09
249 1.1415e+09
250 1.1742e+09
251 1.2094e+09
252 1.2475e+09
253 1.2887e+09
254 1.3333e+09
255 1.3812e+09
256 1.3295e+09
257 1.3294e+09
258 1.3550e+09
259 1.3821e+09
260 1.4112e+09
261 1.4419e+09
262 1.4749e+09
263 1.5103e+09
MID
Code F
264 1.5481e+09
265 1.5897e+09
266 1.6338e+09
267 1.6813e+09
268 1.7328e+09
269 1.7888e+09
270 1.8499e+09
271 1.9165e+09
272 1.8980e+09
273 1.8979e+09
274 1.9355e+09
275 1.9756e+09
276 2.0186e+09
277 2.0642e+09
278 2.1132e+09
279 2.1654e+09
280 2.2217e+09
281 2.2830e+09
282 2.3484e+09
283 2.4187e+09
284 2.4951e+09
285 2.5775e+09
286 2.6666e+09
287 2.7625e+09
MID
Rev. PrA | Page 31 of 33
Page 32

ADN2865 Preliminary Technical Data
www.BDTIC.com/ADI
OUTLINE DIMENSIONS
Figure 34. 56-Lead Frame Chip Scale Package [LFCSP]
(CP-56)
Dimensions shown in millimeters
ORDERING GUIDE
Model Temperature Range Package Description Package Option
ADN2865ACP −40°C to 85°C 56-LFCSP CP-56
ADN2865ACP-RL −40°C to 85°C 56-LFCSP, tape-reel, 2500 pcs CP-56
ADN2865ACP-RL7 −40°C to 85°C 56-LFCSP, tape-reel, 1500 pcs CP-56
Rev. PrA | Page 32 of 33
Page 33

Preliminary Technical Data ADN2865
www.BDTIC.com/ADI
PR06000-0-3/06(PrA)
NOTES
Rev. PrA | Page 33 of 33
 Loading...
Loading...