

Page 1
a
Motion Coprocessor
ADMC200
FEATURES
Analog Input Block
11-Bit Resolution Analog-to-Digital (A/D) Converter
4 Single-Ended Simultaneously Sampled Analog Inputs
3.2 s Conversion Time/Channel
0 V–5 V Analog Input Range
Internal 2.5 V Reference
PWM Synchronized Sampling Capability
12-Bit PWM Timer Block
Three-Phase Center-Based PWM
1.5 kHz–25 kHz PWM Switching Frequency Range
Programmable Deadtime
Programmable Pulse Deletion
PWM Synchronized Output
External PWM Shutdown
Vector Transformation Block
12-Bit Vector Transformations
Forward and Reverse Clarke Transformations
Forward and Reverse Park Rotations
2.9 s Transformation Time
DSP & Microcontroller Interface
12-Bit Memory Mapped Registers
Twos Complement Data Format
6.25 MHz to 25 MHz Operating Clock Range
68-Lead PLCC Package
Single 5 V DC Power Supply
Industrial Temperature Range
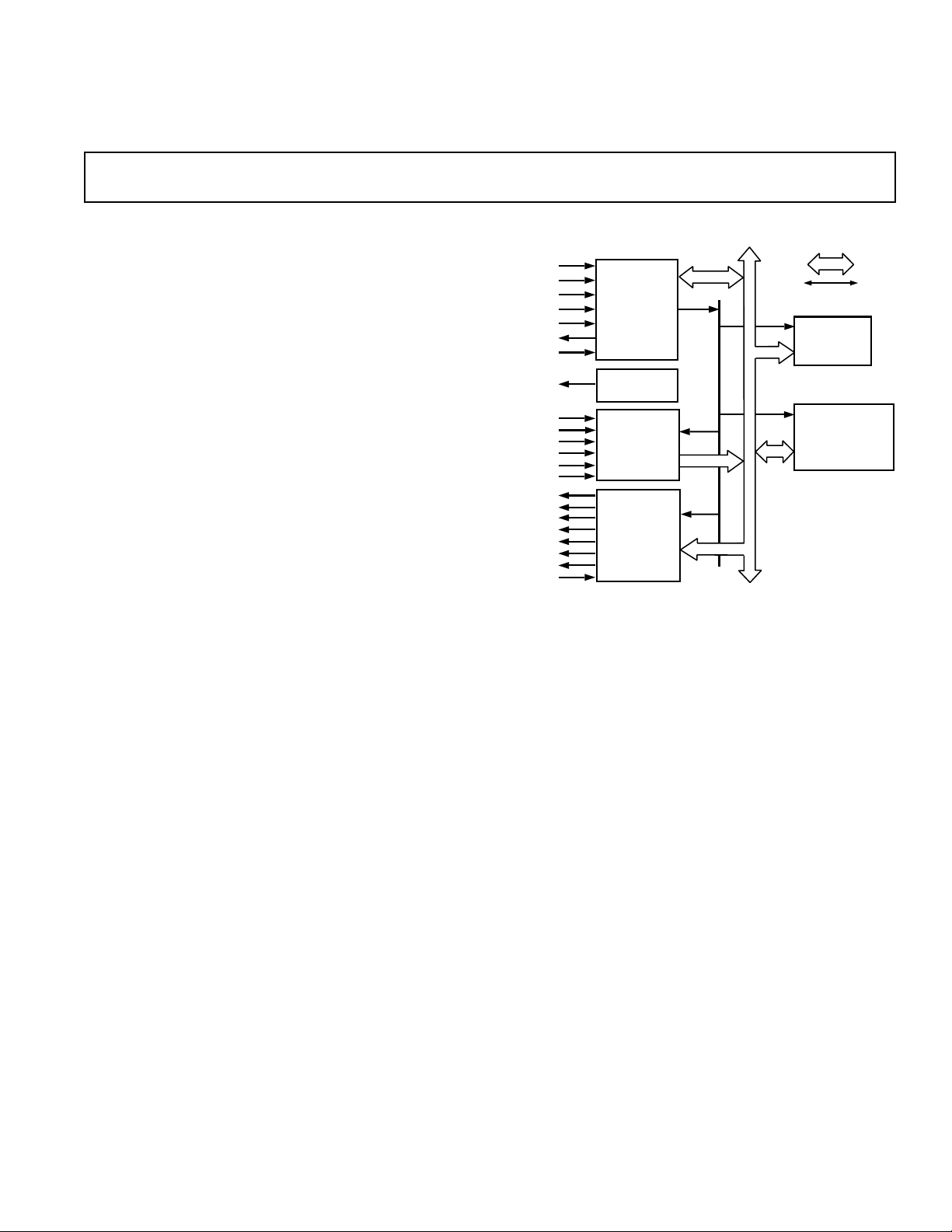
GENERAL DESCRIPTION
The ADMC200 is a motion coprocessor that can be used with
either microcontrollers or digital signal processors (DSP). It
provides the functionality that is required to implement a digital
control system. In a typical application, the DSP or microcontroller performs the control algorithms (position, speed,
torque and flux loops) and the ADMC200 provides the necessary motor control functions: analog current data acquisition,
vector transformation, and PWM drive signals.
PRODUCT HIGHLIGHTS
Simultaneous Sampling of Four Inputs
A four channel sample and hold amplifier allows three-phase
motor currents to be sampled simultaneously, reducing errors
from phase coherency. Sample and hold acquisition time is
1.6 µs and conversion time per channel is 3.2 µs (using a 12.5 MHz
system clock).
FUNCTIONAL BLOCK DIAGRAM
DATABUS
RESET
WR
A0–3
RD
CS
IRQ
CLK
REFOUT
REFIN
CONVST
AUX
PWMSYNC
AP
BP
CP
STOP
EMBEDDED
CONTROL
SEQUENCER
INTERNAL
REFERENCE
U
V
W
A
B
C
11-BIT
A/D
CONVERTER
12-BIT
PWM TIMER
BLOCK
D0 – D11
CONTROL BUS
CONTROL
REGISTERS
VECTOR
TRANSFORMATION
BLOCK
Flexible Analog Channel Sequencing
The ADMC200 support acquisition of 2, 3, or 4 channels per
group. Converted channel results are stored in registers and the
data can be read in any order. The sampling and conversion
time for two channels is 8 µs, three channels is 11.2 µs, and four
channels is 14.4 µs (using a 12.5 MHz system clock).
Embedded Control Sequencer
The embedded control sequencer off-loads the DSP or microprocessor, reducing the instructions required to read analog input channels, control PWM timers and perform vector transformations. This frees the host processor for performing control
algorithms.
Fast DSP/Microprocessor Interface
The high speed digital interface allows direct connection to
16-bit digital signal processors and microprocessors. The
ADMC200 has 12 bit memory mapped registers with twos
complement data format and can be mapped directly into the
data memory map of a DSP. This allows for a single instruction
read and write interface.
Integration
The ADMC200 integrates a four channel simultaneous sampling analog-to-digital converter, analog reference, vector transformation, and three-phase PWM timers into a 68-lead PLCC.
Integration reduces cost, board space, power consumption, and
design and test time.
REV. B
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2000
Page 2
(VDD = +5 V 5%; AGND = DGND = 0 V; REFIN = 2.5 V; External Clock =
ADMC200–SPECIFICATIONS
Parameter ADMC200AP Units Conditions/Comments
ANALOG-TO-DIGITAL CONVERTER
Resolution 11 Bits Twos Complement Data Format
Relative Accuracy ± 2 LSB max Integral Nonlinearity
Differential Nonlinearity ±2 LSB max
Bias Offset Error ± 5 LSB max Any Channel
Bias Offset Match 4 LSB max Between Channels
Full-Scale Error ± 6 LSB max Any Channel
Full-Scale Error Match 4 LSB max Between Channels
Conversion Time/Channel 40 System CLK Cycles
Signal-to-Noise Ratio (SNR)
2
Channel-to-Channel Isolation Sine Wave Applied to Unselected Channels
Two-/Three-Phase Mode –58 dB max
Three-/Three-Phase Mode –55 dB max
ANALOG INPUTS
Input Voltage Level 0–5 Volts
Analog Input Current 100 µA max
Input Capacitance 10 pF typ
TRACK AND HOLD
Aperture Delay 200 ns max Any Channel
Aperture Time Delay Match 20 ns max Between Channels
SHA Acquisition Time 20 System CLK Cycles
Droop Rate 5 mV/ms max
REFERENCE INPUT
Voltage Level 2.5 V dc
Reference Input Current 50 µA max
REFERENCE OUTPUT
Voltage Level 2.5 Volts
Voltage Level Tolerance ± 5 % max Full Load
Drive Capability ± 200 µA max
LOGIC
V
IL
V
IH
V
OL
V
OH
Input Leakage Current 1 µA max
Three-State Leakage Current 1 µA max
Input Capacitance 20 pF typ
PWM TIMERS
Resolution 12 Bits
Programmable Deadtime Range 0–10.08 µs
Programmable Deadtime Increments 2 System CLK Cycles 160 ns
Programmable Pulse Deletion Range 0–10.16 µs
Programmable Deletion Increments 1 System CLK Cycle 80 ns
Minimum PWM Frequency 1.5 kHz Resolution Varies with PWM Switching Frequency
VECTOR TRANSFORMATION Park & Clarke Transformation
Radius Error 0.7 % max
Angular Error 30 arc min max
Reverse Transformation Time 37 System CLK Cycles
Forward Transformation Time 40 System CLK Cycles
EXTERNAL CLOCK INPUT
Range 6.25–25 MHz If > 12.5 MHz, Then It Is Necessary to Divide Down
INTERNAL SYSTEM CLOCK
Range 6.25–12.5 MHz
POWER SUPPLY CURRENT
I
DD
NOTES
1
Measurements made with external reference.
2
Tested with PWM Switching Frequency of 25 kHz.
Specifications subject to change without notice.
1
60 dB min fIN = 600 Hz Sine Wave, f
0.8 V max
2.0 V min
0.4 V max I
4.5 V min I
20 mA max
12.5 MHz; TA = –40C to +85C unless otherwise noted)
SAMPLE
= 400 µA, VDD = 5 V
SINK
= 20 µA, VDD = 5 V
SOURCE
(10 MHz Clock: 20 kHz = 9 Bits, 10 kHz = 10 Bits,
5 kHz = 11 Bits, 2.5 kHz = 12 Bits). Higher Frequencies are Available with Lower Resolution
via SYSCTRL Register
= 55 kHz, 600 Hz
–2–
REV. B
Page 3
ADMC200
Table I. Timing Specifications (VDD = 5 V 5%; TA = –4
0C to +85C)
Number Symbol Timing Requirements Min Max Units
1t
2t
3t
4t
5t
6t
7t
8t
9t
10 t
11 t
12 t
13 t
14 t
15 t
9
16 t
17 t
18 t
19 t
20 t
21 t
22 t
23 t
24 t
NOTE
1
All WRITES to the ADMC200 must occur within 1 system clock cycle (0 wait states).
clk CLK Period 40 160 ns
per
clk CLK Pulsewidth, High 20 ns
pwh
clk CLK Pulsewidth, Low 20 ns
pwl
csb_wrb CS Low before Falling Edge of WR 0ns
su
addr_wrb ADDR Valid before Falling Edge of WR 0ns
su
data_wrb DATA Valid before Rising Edge of WR 13 ns
su
wrb_data DATA Hold after Rising Edge of WR 4.5 ns
hd
wrb_addr ADDR Hold after Rising Edge of WR 4.5 ns
hd
wrb_csb CS Hold after Rising Edge of WR 4.5 ns
hd
1
wrb
pwl
1
wrb
pwh
wrb_clk_h
hd
wrb_clk_h
su
wrb_clk_l
su
clk_wrb_l
hd
csb_rdb CS Low before Falling Edge of RD 0ns
su
addr_rdb ADDR Valid before Falling Edge of RD 0ns
su
rdb_addr ADDR Hold after Rising Edge of RD 0ns
hd
rdb_csb CS Hold after Rising Edge of RD 0ns
hd
rdb RD Pulsewidth, Low 20 ns
pwl
rdb RD Pulsewidth, High 20 ns
pwh
rdb_clk_h RD Low before Rising Edge of CLK 7.5 ns
su
rdb_clk_h RD Low after Rising Edge of CLK 7.5 ns
hd
resetb RESET Pulsewidth, Low 2 × t
pwl
1
1
1
1
WR Pulsewidth, Low 20 ns
WR Pulsewidth, High 20 ns
WR Low after Rising Edge of CLK 7 ns
WR High before Rising Edge of CLK 7 ns
WR High before Falling Edge of CLK 10 ns
WR High after Falling Edge of CLK 10 ns
clk ns
per
Number Symbol Switching Characteristics Min Max Units
25 t
rdb_data DATA Valid after Falling Edge of RD 23 ns
dly
26 thdrdb_data DATA Hold after Rising Edge of RD 0ns
CLK
CLK
RESET
1
2
3
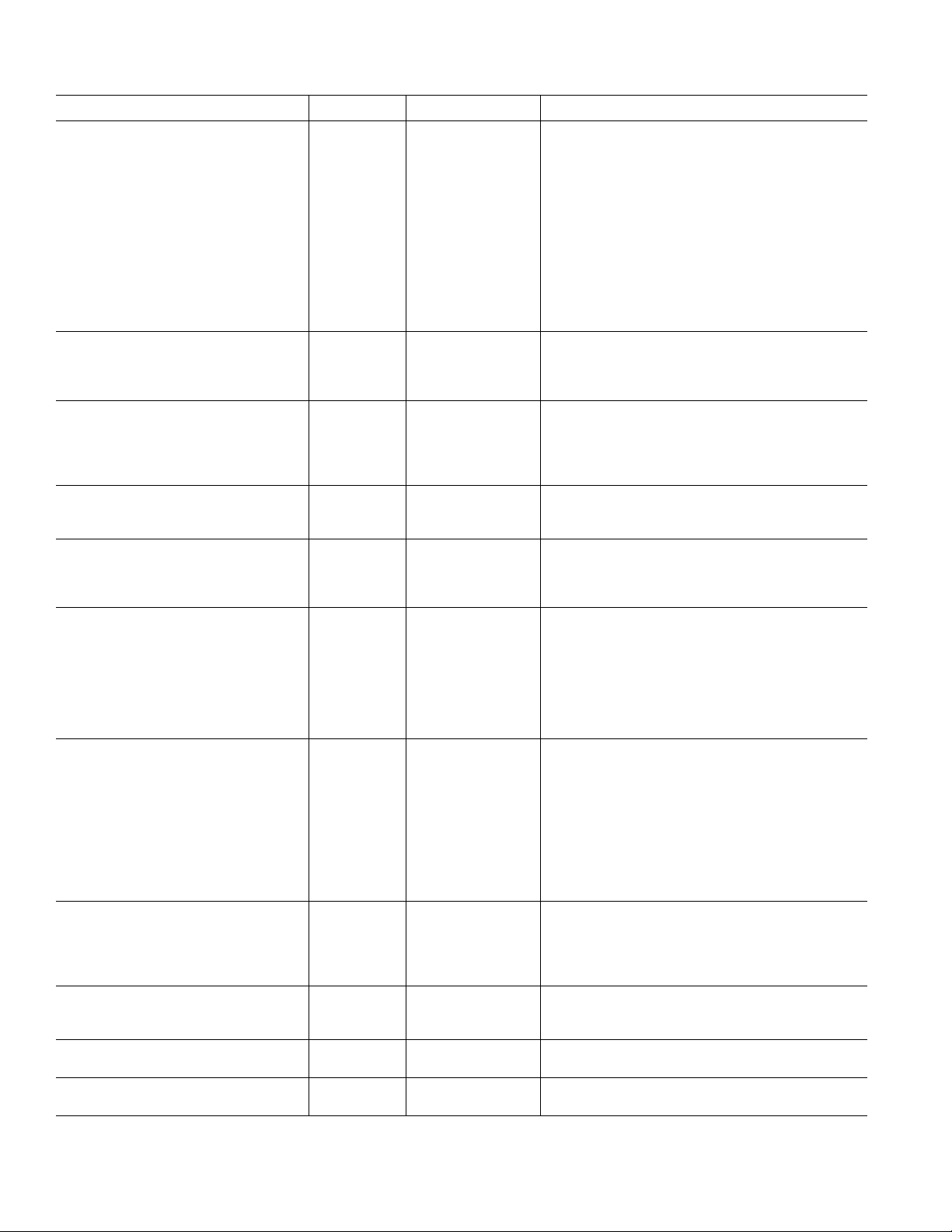
Figure 1. Clock Input Timing
24
Figure 2. Reset Input Timing
CLK
12
CS
A0–A3
WR
DATA
4
NOTE:
ALL WRITES TO THE ADMC200 MUST OCCUR WITHIN
ONE SYSTEM CLOCK CYCLE (i.e. 0 WAIT STATES)
5
13
15
9
8
11
10
6
7
14
Figure 3. Write Cycle Timing Diagram
REV. B
–3–
Page 4
ADMC200
CLK
CS
A0–A3
23
22
20
RD
DATA
16
17
25
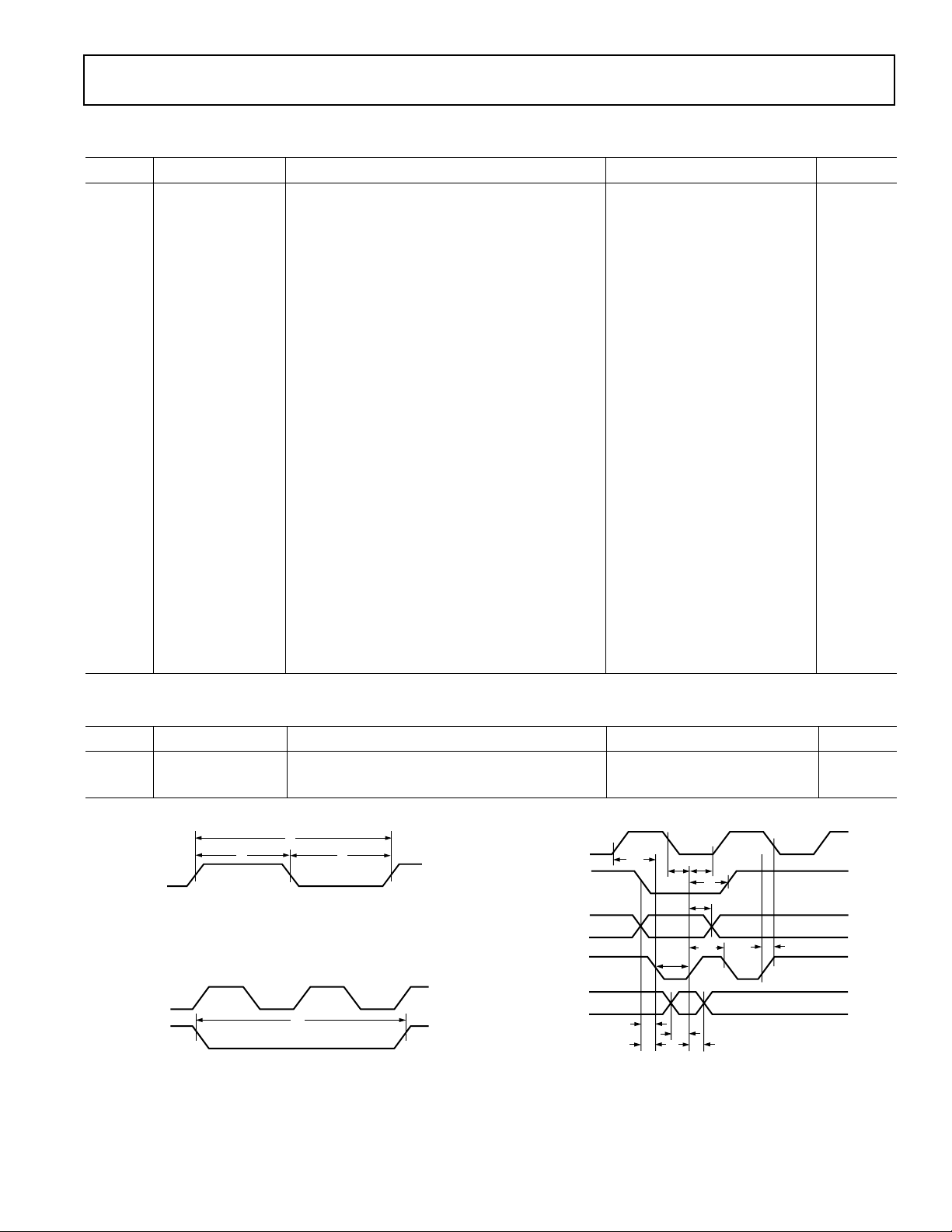
Figure 4. Read Cycle Timing Diagram
ABSOLUTE MAXIMUM RATINGS*
Supply Voltage (VDD) . . . . . . . . . . . . . . . . . . –0.3 V to +7.0 V
Digital Input Voltage . . . . . . . . . . . . . . . . . . . . . –0.3 V to V
Analog Input Voltage . . . . . . . . . . . . . . . . . . . . . –0.3 V to V
Analog Reference Input Voltage . . . . . . . . . . . . –0.3 V to V
Digital Output Voltage Swing . . . . . . . . . . . . . . –0.3 V to V
Analog Reference Output Swing . . . . . . . . . . . . –0.3 V to V
DD
DD
DD
DD
DD
Operating Temperature . . . . . . . . . . . . . . . . . –40°C to +85°C
Lead Temperature (Soldering, 10 sec) . . . . . . . . . . . . +280°C
*Stresses greater than those listed above may cause permanent damage to the
device. These are stress ratings only; functional operation of the device at these or
any other conditions greater than those indicated in the operational sections of this
specification is not implied. Exposure to absolute maximum rating conditions for
extended periods may affect device reliability.
21
26
18
19
ORDERING GUIDE
Part Temperature Package Package
Number Range Description Option
ADMC200AP –40°C to +85°C 68-Lead PLCC P-68A
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the ADMC200 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
WARNING!
ESD SENSITIVE DEVICE
–4–
REV. B
Page 5

PIN DESIGNATIONS
ADMC200
Pin Mnemonic Type Description
1 D9 BIDIR Data Bit 9
2 D10 BIDIR Data Bit 10
3 D11 BIDIR Data Bit 11, MSB
4–9 NC No Connect
10 V
DD
11 A3 I/P Address Bit 3, MSB
12 A2 I/P Address Bit 2
13 A1 I/P Address Bit 1
14 A0 I/P Address Bit 0, LSB
15 NC No Connect
16 RESET I/P Chip Reset
17 CONVST I/P A/D Conversion Start
18 IRQ O/P Interrupt Request (Pull-Up Required)
19 V
DD
20 DGND GND Digital Ground
21 CLK I/P External Clock Input
22 WR I/P Write Select
23 RD I/P Output Enable/Read
24 CS I/P Chip Select
25 NC No Connect
26 V
DD
27 AGND GND Analog Ground
28 AGND GND Analog Ground
29 U I/P Analog Input U
30 V I/P Analog Input V
31 W I/P Analog Input W
32 SGND GND Analog Signal Ground
33 REFIN I/P Analog Reference Input
34–36 NC No Connect
37 AUX I/P Auxiliary Analog Input
38 REFOUT O/P Internal 2.5 V Analog Reference
39 V
DD
40 DGND GND Digital Ground
SUP +5 V Digital Power Supply
SUP +5 V Digital Power Supply
SUP +5 V Analog Power Supply
SUP +5 V Digital Power Supply
Pin Mnemonic Type Description
41 DGND GND Digital Ground
42 DGND GND Digital Ground
43 DGND GND Digital Ground
44 V
DD
SUP +5 V Digital Power Supply
45 NC No Connect
46 DGND GND Digital Ground
47 STOP I/P PWM Timer Output Disable
48 PWMSYNC O/P PWM Synchronization Output
49 CP O/P PWM Timer Output C
Prime
50 C O/P PWM Timer Output C
51 BP O/P PWM Timer Output B
Prime
52 NC No Connect
53 B O/P PWM Timer Output B
54 AP O/P PWM Timer Output A
Prime
55 A O/P PWM Timer Output A
56 DGND GND Digital Ground
57 DGND GND Digital Ground
58 DGND GND Digital Ground
59 V
DD
SUP +5 V Digital Power Supply
60 D0 BIDIR Data Bit 0, LSB
61 D1 BIDIR Data Bit 1
62 D2 BIDIR Data Bit 2
63 D3 BIDIR Data Bit 3
64 D4 BIDIR Data Bit 4
65 D5 BIDIR Data Bit 5
66 D6 BIDIR Data Bit 6
67 D7 BIDIR Data Bit 7
68 D8 BIDIR Data Bit 8
Pin Types Pin Types
10
V
DD
11
A3
12
A2
13
A1
14
A0
15
NC
16
RESET
17
CONVST
18
IRQ
19
V
DD
20
DGND
21
CLK
22
WR
23
RD
24
CS
25
NC
26
V
DD
NC = NO CONNECT
PIN CONFIGURATION
NC
NC
NC
NC
9618765 686766656463624321
NC
NC
D11
D10
D9
ADMC200
TOP VIEW
(Not to Scale)
27 4328 29 30 31 32 33 34 35 36 37 38 39 40 41 42
U
V
AGND
W
AGND
SGND
NC
REFIN
NC
D7
D8
PIN 1
IDENTIFIER
NC
AUX
D5
D6
DD
V
REFOUT
D4
DGND
D3
DGND
D2
D1
DGND
DGND
60
D0
59
V
58
DGND
57
DGND
56
DGND
55
A
54
AP
53
B
52
NC
51
BP
50
C
49
CP
48
PWMSYNC
47
STOP
46
DGND
45
NC
44
V
I/P = Input Pin BIDIR = Bidirectional Pin
O/P = Output Pin SUP = Supply Pin
GND = Ground Pin
DD
DD
REV. B
–5–
Page 6

ADMC200
ANALOG INPUT BLOCK
The ADMC200 contains an 11-bit resolution, successive approximation analog-to-digital (A/D) converter with twos complement
output data format. The analog input range is ±2.5 V (0 V–5 V)
with a 2.5 V offset as defined by REFIN. The on-chip 2.5 V ±
5% reference is utilized by connecting the REFOUT pin to the
REFIN pin.
The A/D conversion time is determined by the system clock frequency, which can range from 6.25 MHz to 12.5 MHz. The
Sample and Hold (SHA) acquisition time is 20 system clock
cycles and is independent of the number of channels sampled
and/or digitized. The input stage to the A/D converter is a four
channel SHA which allows the four channels to be held simultaneously and then sequentially digitized. Forty system clock
cycles are required to complete each A/D conversion. The analog channel sampling is flexible and is programmable through
the SYSCTRL register. The minimum number of channels per
conversion is two. The throughput time of the analog acquisition block can be calculated as follows:
tAA= t
SHA
+ (n × t
CONV
)
where
= analog acquisition time,
t
AA
n = # channels,
t
= SHA acquisition time (20 × system clock period),
SHA
= conversion time (40 × system clock period) per channel.
t
CONV
A/D Conversions are initiated via the CONVST pin. A synchronizing pulse (PWMSYNC) is provided at the beginning of
each PWM cycle. This pulse can be used to synchronize the
A/D conversion process to the PWM switching frequency.
Operating the A/D Converter
The A/D converter can be set up to convert a sequence of channels as defined in the SYSCTRL register (see Table V). Always
write 0 to both Bits 0 and 1 of the SYSCTRL register. The default channel select mode after RESET is to convert channels V
and W only. This is two-/three-phase mode. Three-/three-phase
mode converts channels U, V, W and/or AUX. Three-/threephase mode is achieved by writing a 1 to Bit 3 of the SYSCTRL
register. After the conversion process is complete, the channels
can be read in any order.
There are two methods that can be used to indicate when the
A/D conversions are completed and the data is ready: interrupt
driven and software timing.
Interrupt Driven Method
Interrupts can be used to indicate the end of conversion for a
group of channels. Before beginning any A/D conversions, Bit 7
of the SYSCTRL register must be set to 1 to enable A/D conversion interrupts. Then, when an A/D conversion is complete,
an interrupt will be generated. After an interrupt is detected
Bit 0 of the SYSSTAT register must be checked to determine if
the A/D converter was the source. Reading the SYSSTAT register automatically clears the interrupt flag bits.
Software Timing Method
An alternative method is to use the DSP or microcontroller to
keep track of the amount of time elapsed between CONVST
and the expected completion time (n × t
CONV
).
Reading Results
The 11-bit A/D conversion results for channels U, V, W and
AUX are stored in the ADCU, ADCV, ADCW and ADCAUX
registers respectively. The twos complement data is left justified
and the LSB is set to zero. The relationship between input voltage and output coding is shown in Figure 5.
011111111110
000000000000
100000000000
OUTPUT
CODE
0V
FULL-SCALE
TRANSITION
FS = 5V
LSB =
2.5
INPUT VOLTAGE
5V
2048
5V–1LSB
Figure 5. Transfer Function
Sample and Hold
After powering up the ADMC200, bring the RESET pin low for
a minimum of two clock cycles in order to enable A/D conversions. Before initiating the first conversion (CONVST) after a
reset, the SHA time of 20 system clock cycles must occur. A
conversion is initiated by bringing CONVST high for a minimum of one system clock cycle. The SHA goes into hold mode
at the falling edge of clock.
Following completion of the A/D conversion process, a minimum of 20 system clock cycles are required before initiating another conversion in order to allow the sample and hold circuitry
to reacquire the input signals.
If a CONVST is initiated before the 20 clock cycles have
elapsed, the embedded control sequencer will delay conversion
until this requirement is met.
PWM TIMER BLOCK OVERVIEW
The PWM timers have 12-bit resolution and support programmable pulse deletion and deadtime. The ADMC200 generates
three center-based signals A, B, and C based upon user-supplied
duty cycles values. The three signals are then complemented
and adjusted for programmable deadtime to produce the six
outputs. The ADMC200 PWM master switching frequency can
range from 2.5 kHz to 20 kHz, when using a 10 MHz system
clock. The master frequency selection is set as a fraction of the
PWMTM register. If the system clock is 10 MHz, then the
minimum edge resolution available is 100 ns.
The output format of the PWM block is active LO. There is an
external input to the PWM timers (STOP) that will disable all
six outputs within one system clock when the input is HIGH.
The ADMC200 has a PWM Synchronization output
(PWMSYNC) which brings out the master switching frequency
from the PWM timers. The width of the PWMSYNC pulse is
equal to one system clock cycle. For example, if the system clock
is 10 MHz, the PWMSYNC width would be equal to 100 ns.
PWM Master Switching Period Selection
The switching time is set by the PWMTM register which should
be loaded with a value equal to the system clock frequency
divided by the desired master switching frequency. For example, if the desired switching frequency is 8 kHz and the system clock frequency is 10 MHz, then the PWMTM register
should be loaded with 1250 (10 MHz/8 kHz). The PWMCHA,
PWMCHB, and PWMCHC registers are loaded with the
–6–
REV. B
Page 7

ADMC200
I
y
I
x
ρ
I
q
I
d
ROTOR
REFERENCE
FRAME AXIS
90°
desired on-time and their values would be calculated as a ratio
of the PWMTM register value. Note: Desired Pulse Density =
(PWMCHx register)/( PWMTM register).
The beginning of each PWM cycle is marked by the PWMSYNC
signal. New values of PWMCHA, PWMCHB and PWMCHC
must all be loaded into their respective registers at least four system clock cycles before the beginning of a new PWM cycle. All
three registers must be updated for any of them to take effect.
New PWM on/off times are calculated during these four clock
cycles and therefore the PWMCHA, PWMCHB and PWMCHC
registers must be loaded before this time. If this timing requirement is not met, then the PWM outputs may be invalid during
the next PWM cycle.
PWM Example
The following example uses a system clock speed of 10 MHz.
The desired PWM master switching frequency is 8 kHz and the
desired on-time for the timers A, B and C are 25%, 50% and
10% respectively. The values for the PWMCHA, PWMCHB,
and PWMCHC registers must be calculated as ratios of the
PWMTM register (1250 in this example). To achieve these
duty cycles, load the PWMCHA register with 313 (1250 ×
0.25), PWMCHB with 625 (1250 × 0.5) and PWMCHC with
125 (1250 × 0.1).
Programmable Deadtime
With perfectly complemented PWM drive signals and nonideal
switching characteristics of the power devices, both transistors
in a particular leg might be switched on at the same time, resulting in either a power supply trip, inverter trip or device destruction. In order to prevent this, a delay must be introduced
between the complemented signal edges. For example, the rising edge of AP occurs before the falling edge of A, and the falling edge of the complemented A occurs after the rising edge of
A. This capability is known as programmable deadtime.
The ADMC200 programmable deadtime value is loaded into
the 7-bit PWMDT register, in which the LSB is set to zero internally, which means the deadtime value is always divisible by
two. With a 10 MHz system clock, the 0–126 range of values in
PWMDT yield a range of deadtime values from 0 µs to 12.6 µs
in 200 ns steps. Figure 6 shows PWM timer A with a programmable deadtime of PWMDT.
PWMTM
full off (0%) and its prime to full on (100%). This is valid for
A, AP, B, BP, C and CP. This feature would be used in an environment where the inverter’s power transistors have a minimum switching time. If the user-specified duty cycle would
result in a pulse duration shorter than the minimum switching
time of the transistors, then pulse deletion should be used to
prevent this occurrence. With a 10 MHz system clock, the 0–
127 range of values in PWMPD yield a range of deadtime values
from 0 µs to 12.7 µs in 100 ns steps.
External PWM Shutdown
There is an external input pin (STOP) to the PWM timers that
will disable all six outputs when it goes HIGH. When the STOP
pin goes HIGH, the PWM timer outputs will all go HIGH
within one system clock cycle. When the STOP pin goes
LOW, the PWM timer outputs are re-enabled within one system
clock cycle. If external PWM shutdown isn’t required, tie the
STOP pin LOW.
VECTOR TRANSFORMATION BLOCK OVERVIEW
The Vector Transformation Block performs both Park and
Clarke coordinate transformations to control a three-phase
motor (Permanent Magnet Synchronous Motor or Induction
Motor) via independent control of the decoupled rotor torque
and flux currents. The Park and Clarke transformations combine
to convert three-phase stator current signals into two orthogonal
rotor referenced current signals I
and Iq. Id represents the flux
d
or magnetic field current and Iq represents the torque generating current. The I
and Iq current signals are used by the
d
processor’s motor torque control algorithm to calculate the
required direct V
and quadrature Vq voltage components for the
d
motor. The forward Park and Clarke transformations are used
to convert the V
and Vq voltage signals in the rotor reference
d
frame to three phase voltage signals (U, V, W) in the stator
reference frame. These are then scaled by the processor and
written to the ADMC200’s PWM registers in order to drive the
inverter. The figures below illustrate the Clarke and Park Transformations respectively.
I
y
I
x
120°
I
w
I
120°
I
u
120°
v
A
PWMCHA - PWMDT
Three-Phase Equivalent
Stator Currents Two-Phase Currents
Figure 7. Reverse Clarke Transformation
AP
PWMCHA + PWMDT
Figure 6. Programmable Deadtime Example
Pulse Deletion
The pulse deletion feature prevents a pulse from being generated when the user-specified duty cycle results in a pulse duration shorter than the user-specified deletion value. The pulse
deletion value is loaded into the 7-bit register PWMPD. When
the user-specified on-time for a channel would result in a calculated pulsewidth less than the value specified in the PWMPD
register, then the PWM outputs for that channel would be set to
REV. B
–7–
Rotating Stationary
Reference Frame Reference Frame
Figure 8. Reverse Park Transformation
Page 8

ADMC200
3
V
q
V
d
ρ
90°
V
y
V
x
Stationary Rotating
Reference Frame Reference Frame
Figure 9. Forward Park Transformation
V
y
V
x
120°
W
120°
U
V
120°
Equivalent Three-Phase Stator
Two-Phase Voltage Voltage
Figure 10. Forward Clarke Transformation
Operating/Using the Vector Transformation Block
After powering up the ADMC200, RESET must be driven
low for a minimum of two clock cycles to enable vector
transformations.
The vector transformation block can perform either a forward or
reverse transformation.
Reverse Transformation is defined by the following operations:
(a) Clarke: 3-phase current signals to 2-phase current signals
followed by (b) Park: 2-phase current signals cross multiplied by
sin ρ, cos ρ which effectively measures the current components
with respect to the rotor (stationary) where ρ is the electrical
angle of the rotor field with respect to the stator windings.
Forward transformation is defined by the following operations:
(a) Park: 2-phase voltage signals cross multiplied by sin ρ, cos ρ
followed by (b) Clarke: 2-phase to 3-phase voltage signal
conversion.
In order to provide maximum flexibility in the target system, the
ADMC200 operates in an asynchronous manner. This means
that the functional blocks (analog input, reverse transformation,
forward transformation and PWM timers) operate independently of each other. The reverse and forward vector transformation operations cannot occur simultaneously. All vector
transformation registers, except for RHO/RHOP, are twos
complement. RHO/RHOP are unsigned ratios of 360°. For example, 45° would be 45/360 × 2
12
.
Performing a Reverse Transformation
A reverse transformation is initiated by writing to the reverse
rotation angle register RHO and operates on the values in the
PHIP1, PHIP2 and PHIP3 registers. When the reverse transformation is in 2/3 mode, PHIP1 is calculated from PHIP2 and
PHIP3. This is used in systems where only two phase currents
are measured. The reverse transformation 2/3 mode is set by
clearing Bit 10 in the SYSCTRL register and is the default
mode after RESET.
In order to perform a reverse transformation, first write to the
PHIP2 and PHIP3 registers, and to the PHIP1 register if not in
2/3 mode. Then initiate the transformation by writing the reverse rotation angle to the RHO register.
The reverse rotation will be completed in 37 system clock cycles
after the rotation is initiated. If Bit 6 of the system control register is set, then an interrupt will be generated on completion.
When an interrupt occurs, the user must check Bit 1 of the
SYSSTAT register to determine if the vector transformation
block was the source of the interrupt.
During the vector transformation, the vector transformation
registers must not be written to or the vector rotation results
will be invalid.
Reverse Clarke Transformation
The first operation is the Clarke transformation in which the
three phase motor current signals (I
sine and cosine orthogonal signals (I
, Iv, Iw) are converted to
u
and Iy). These signals
x
represent the equivalent currents in a two-phase ac machine and
is the signal format required for the Park rotation. The threephase input signals are of the form:
PHIP1 I
PHIP2 I
PHIP3 I
and the Park rotation requires inputs in the form I
I
sin θ, therefore we need to generate Is sin θ.
s
= Is cosθ
u
= Is cos (θ + 120)
v
= Is cos (θ + 240)
w
cos θ and
s
This is calculated from:
IY I
sin θ =
s
After the reverse transform, registers I
1
(Is cos (θ + 240) – Is cos (θ +120))
and I
contain the 2-
x
y
phase input current information.
In the case where 2 of 3-phase information (PHIP2/3 only) is
provided, then PHIP1 will be derived from the simple fact that
all sum to zero. This value is then placed in the IX register.
IX = I
= Is cos θ = – Is cos (θ + 120) – Is cos (θ + 240)
x
Reverse Park Rotation
IX/IY are then processed together with the digital angle ρ
(RHO) by a Park rotation. If the input signals are I
and Iy,
x
then the rotation can be described by:
ID I
IQ I
= Ix × cos ρ + Iy × sin ρ
d
= –Iy × sin ρ + Iy × cos ρ
q
where ID and IQ are the outputs of the Park rotation.
Cos ρ and sin ρ are required for the Park rotation, and are calculated internally.
Substituting for I
ID I
IQ I
d
q
and Iy in the above yields:
x
= Is cos θ × cos ρ + Is sin θ × sin ρ = Is cos (θ – ρ)
= Is sin θ × cos ρ – Is cos θ × sin ρ = Is sin (θ – ρ)
Performing a Forward Transformation
In order to perform a forward rotation, write values to the VD
and VQ registers and then initiate the transformation by writing
the rotation angle to the register RHOP. The forward transformation will only operate correctly when Bit 10 in the
SYSCTRL register is set (i.e., in 3/3 mode).
The forward rotation will be completed in 40 system clock
cycles after the rotation is initiated. If Bit 6 of the system control register is set, then an interrupt will be generated on
–8–
REV. B
Page 9

ADMC200
completion. When an interrupt occurs, the user must check Bit
1 of the system status register, SYSSTAT, to determine if the
vector transformation block was the source of the interrupt.
During the vector transformation, the transformation registers
must not be written to or the vector rotation results will be invalid.
Forward Park Rotation
If the input signals are represented by Vd and Vq, then the transformation can be described by:
VX V
VY V
where V
= Vd × cos ρ – V
x
= Vd × sin ρ + Vq × cos ρ
y
and Vy are the outputs of the Park Rotation, and are
x
×
sin ρ
q
the inputs to the reverse Clarke transformation.
Forward Clarke Transformation (2 to 3 Phase)
The second operation to be applied to the above results, is the
Forward Clarke Transformation where 2 phase (stator) voltage
signals are converted to 3 phase (stator) voltage signals.
For the inverse Clarke transform we require three phase outputs of the form below:
PHV1 V cos α
PHV2 V cos (α + 120)
PHV3 V cos (α + 240)
We have two quadrature voltages (V cosα and V sinα) available.
PHV2 V cos (α + 120) =
PHV3 V cos (α + 240) =
INTERRUPT GENERATION
1
–
× V cosα –
2
1
–
× V cosα+
2
3
× V sin α
2
3
× V sin α
2
There are two interrupt sources on the ADMC200 that may be
independently enabled to generate interrupts. The first
interrupt source is the Analog Input Block, which, if enabled,
generates an interrupt at the end of conversion. The second interrupt source is the Vector Transformation Block, which,
if enabled, generates an interrupt at the end of a Vector
Transformation.
When a 1 is stored in Bit 7 of the SYSCTRL register, ADC
interrupts are enabled. When a 1 is stored in Bit 6 of the
SYSCTRL register, Vector Transformation interrupts are enabled. Upon a reset of the chip, both bits are set to the default
condition, 0, thus disabling all interrupts.
When an enabled interrupt occurs, Bit 11 of the SYSSTAT
register becomes a 1. If that interrupt had been an ADC interrupt, Bit 0 of SYSSTAT register would also be set to 1. If that
interrupt had been a Vector Transformation interrupt, Bit 1 of
SYSSTAT would be set to 1. Whenever the SYSSTAT register
is read, these three bits go back to their default state, 0, immediately after their values are loaded onto the data bus. Upon a reset, these three bits also go to their default state, 0.
The IRQ pin has an open-drain driver, which will drive it low at
the appropriate times, but the user must supply an external
pull-up resistor to bring the node back high when it is not being
pulled low.
The IRQ pin operates in one of two modes, edge mode or level
mode. In edge mode, when an enabled interrupt occurs, the
IRQ pin will be driven low for one system clock period. In level
mode, when an enable interrupt occurs, the IRQ pin will be
driven low, and will remain low until the SYSSTAT register is
read. The combination of level mode and the open-drain driver
allows multiple interrupt sources in an application to drive a
single interrupt input line on the host DSP or microprocessor.
Edge mode or level mode is determined with Bit 8 of the
SYSCTRL register. Edge mode (0) is the default; a 1 in this bit
will put the IRQ pin into level mode.
The recommended method of using the interrupt generation
capability is to set edge or level mode, enable the appropriate
interrupts, and then monitor the IRQ line. After the IRQ pin
goes low, the SYSSTAT register of the ADMC200 should be
read, (1) to determine if it was this chip that caused the interrupt, if other lines are wired together with this IRQ pin, and (2)
if it was this chip, to determine if it was generated by the Analog
Input Block or the Vector Transformation Block. Once this
is done, the appropriate interrupt handling routine may be
executed.
APPLICATION NOTE LIST
1. AN-407 AC Motor Control Experiments Using the ADMC200
Evaluation Board
2. AN-408 AC Motor Control Using the ADMC200 Motion
Coprocessor
3. AN-409 Advanced Motor Control Techniques Using the
ADMC200 Motion Coprocessor
POWER SUPPLY CONNECTIONS AND SETUP
The nominal positive power supply level (VDD) is +5 V ± 5%.
The positive power supply V
ADMC200 V
pins (10, 19, 26, 39, 44, 59). The SGND pin
DD
should be connected to all
DD
(32) and both AGND pins (27, 28) should be star point connected at a point close to the AGND pins of the ADMC200.
The DGND pins (20, 40, 41, 42, 43, 46, 56, 57, 58) should
also be connected to AGND pins close to the ADMC200.
Power supplies should be decoupled at the power pins using a
0.1 µF capacitor. A 220 nF capacitor must also be connected as
close as possible between REFIN (Pin 33) and SGND (Pin 32).
In addition, the IRQ requires a 15 K pull-up to the V
DSP/CONTROLLER INTERFACE
supply.
DD
The ADMC200 has a 12 bit bidirectional parallel port for interfacing with Analog Devices’ ADSP-2100 DSP family or microcontrollers/microprocessors.
The ADMC200 coprocessor is designed to be conveniently interfaced to ADI’s family of fixed-point DSPs. Figures 11 and 12
show the interfacing between the ADMC200 and the ADSP2101/2105/2115, ADSP-2171, ADSP-2181, TMS320C2x
DSPs. In the case of the TMS320C2x, some glue logic is required to decode the RD/WR lines and invert the CLKOUT1
signal.
The ADSP-2101/2105/2115 CLKOUT frequency equals the
crystal/clock frequency of its CLKIN. This signal (CLKOUT)
can be used to directly drive the CLK line (Pin 21) on the
ADMC200. The ADMC200 coprocessor can be operated with
a clock frequency between the range of 6.25 MHz and 25 MHz.
If the clock frequencies are greater than 12.5 MHz, then it is
necessary to internally divide down the external clock to derive
the ADMC200’s system clock (via SYSCTRL register).
REV. B
–9–
Page 10

ADMC200
ADDRESS BUS
V
DD
CS
IRQ
RD
WR
CLK
A0–A3
ADMC200
D0–D11*
A0–A13
ADSP-2101/
ADSP-2105/
ADSP-2115–20MHz
ADSP-2171–10MHz
ADSP-2181–10MHz
D0–D23
*NOTE:
BY MAPPING THE ADMC200 DATA BUS TO THE TWELVE HIGHEST BITS
OF THE ADSP DATA BUS, FULL-SCALE OUTPUTS FROM THE ADC
CAN BE REPRESENTED BY ± 1.0 IN FIXED POINT ARITHMETIC.
DMS
IRQ2
CLKOUT
RD
WR
ADDRESS
DECODE
EN
DATA BUS
Figure 11. ADI Digital Signal Processor/Microcomputer
ADDRESS BUS
V
DD
CS
IRQ
RD
WR
CLK
A0–A3
ADMC200
D0–D11
A0–A15
TMS320C20
TMS320C25
TMS320C25-50
D0–D15
INTn
STRB
R/W
CLKOUT1
IS
ADDRESS
DECODE
EN
DATA BUS
Figure 12. TI Second-Generation Devices TMS320C20/
C25/C25–50
In the case of the ADSP-2171/2181, the system clock is internally
scaled; a 10 MHz system clock will derive a 20 MHz CLKOUT.
In the case of the TMS320C2x, the CLKOUT1 signal is derived
from the system clock divided by a factor of 4; consequently a
50 MHz TMS320C25-50 will derive a 12.5 MHz CLKOUT1 for
use by the ADMC200.
Note: A pull-up resistor is required on the IRQ (Pin 18) output
from the ADMC200. The STOP (Pin 47) must be tied low if
not in use.
SYSTEM CLOCK FREQUENCY
The nominal range of the input clock for the ADMC200 is
6.25 MHz to 25 MHz. The external CLK frequency can be internally divided down by 2 by writing to Bit 5 of the SYSCTRL
register. If the external CLK is faster than 12.5 MHz then it is
necessary to internally divide it down.
REGISTER ADDRESSING
Four address lines (A0 through A3) are used in conjunction
with the control lines (CS, WR, RD,) to select registers 0
through 15. The CS and RD control lines are active low. The
registers are given symbolic names.
Table II.
Pin Function
CS Enables the ADMC200 register interface
(connect via chip select logic-active low)
RD Places data from the internal register onto the
data bus
WR Loads the internal register with data on the
data bus on its positive edge
Table III. Write Registers
Name A3A2A1A
Register Function
0
RHO 0000 Load RHO (ρ) and Start Reverse Transform
PHIP1/VD 0001 Reverse Rotation Direct Input/Forward Direct Input
PHIP2/VQ 0010 Reverse Rotation Direct Input/Forward Direct Input
PHIP3 0011 Reverse Rotation Direct Input
RHOP 0100 Load RHOP(ρ) and Start Forward Transform
PWMTM 0101 PWM Master Switching Period
PWMCHA 0110 PWM Channel A On-Time
PWMCHB 0111 PWM Channel B On-Time
PWMCHC 1000 PWM Channel C On-Time
PWMDT 1001 PWM Programmable Deadtime (7-Bit Register)
PWMPD 1010 PWM Pulse Deletion Value (7-Bit Register)
1011 Reserved
1100 Reserved
SYSCTRL 1101 System Control
1110 Reserved
1111 Reserved
–10–
REV. B
Page 11

Table IV. Read Registers
ADMC200
Name A3A2A1A
Register Function
0
ID/PHV1/VX 0000 Reverse Rotation Result (IDS)/Forward Result Cos +0°
IQ/PHV2 0001 Reverse Rotation Result (I
)/Forward Cos +120°
QS
IX/PHV3 0010 Reverse Clarke Cos + 0°/Forward Result Cos +240°
IY/VY 0011 Reverse Clarke Cos +90°/Forward Cos +90°
0100 Reserved
ADCV 0101 A/D Conversion Result Channel V
ADCW 0110 A/D Conversion Result Channel W
ADCAUX 0111 A/D Conversion Result Auxiliary Channel
ADCU 1000 A/D Conversion Result Channel U
1001 Reserved
1010 Reserved
1011 Reserved
1100 Reserved
SYSCTRL 1101 System Control
SYSSTAT 1110 System Status
1111 Reserved
DESCRIPTION OF THE REGISTERS
Table V. System Control (SYSCTRL) Registers
All unspecified register locations are reserved.
SYSCTRL System Control Register (See Table V and VI)
SYSSTAT System Status Register (See Table VII)
ADCU These registers contain the results from the first
ADCV three analog input channels U, V, and W. The
ADCW output data format is twos complement and
therefore Bit 0 is always zero as the A/D
converter has 11-bit resolution.
ADCAUX This register contains the conversion result
of the auxiliary channel.
PWMTM PWM Master Switching Period
PWMCHA PWM Channel A on-time
PWMCHB PWM Channel B on-time
PWMCHC PWM Channel C on-time
PWMDT PWM Programmable Deadtime Value
PWMPD PWM Programmable Pulse Deletion Value
ID/IQ These are the results of the reverse rotation
(torque and flux components).
PHV1/2/3 These are the results from the forward
Clarke Transformation.
PHIP1/2/3 The inputs for reverse vector transformation
(Clarke and Park).
IX/IY These registers contain the results of the Clarke
transformation that are the inputs to the reverse
Park rotation.
VX, VY VX , VY contain the results of the forward
Park rotation.
RHOP RHOP is the angle used during the forward vec-
tor transformation. Writing to the RHOP register causes the forward rotation to start based on
values in RHOP, VD and VQ registers.
RHO RHO is the angle used during the reverse vector
transformation. Writing to this register starts
the reverse rotation using the values in the
RHO, PHIP1/2/3 registers.
RHO and RHOP are unsigned ratios of 360°.
For example, 45 degrees would be 45/360 × 2
12
Bit Function Default
0 Reserved, Must Be 0 0
1 Reserved, Must Be 0 0
3 Enables U Channel Conversion
(1 = Enable) Three/Three-Phase Mode 0
4 Enables AUX Channel Conversion
(0 = Disable, 1 = Enable) 0
5 Divide External Clock by 2
(0 = No, 1 = Yes) 0
6 Park Interrupt Enable 0
7 ADC Interrupt Enable
(0 = Disable, 1 = Enable) 0
8 IRQ Pin Format (Edge or Level Based
Interrupt Requests) (0 = Edge) 0
10 Reverse Rotation (0 = 2/3, 1 = 3/3)
Forward Rotation (1 = Enable) 0
Bit 0, 1 Reserved for future use. Always write 0 to these bits.
Bit 3 Channel U Conversion Enable. If Bit 3 is set to 1, then
Channel U will be converted along with V, W and/or
AUX. This bit selects three-/three-phase mode.
Bit 4 Aux Channel Conversion Enable. If Bit 4 is set to
1, then the AUX input will be converted along with
the channels V, W and/or U.
Bit 5 If Bit 5 = 1, then the external clock will be divided by
two to derive the system clock. If the external clock
frequency is greater than 12.5 MHz, then this bit must
be set.
Bit 6 Park Interrupt Enable. This bit allows interrupts to
be generated when the Park rotation is completed.
Bit 7 ADC Interrupt Enable. This bit allows interrupts to
be generated via the IRQ pin when the analog-todigital conversion process is complete.
.
RESET
REV. B
–11–
Page 12

ADMC200
Bit 8 IRQ Pin Format—Edge or Level Interrupt Selection.
If Bit 8 is set to 0, then an interrupt will cause a pulse
of one system clock to be generated on the IRQ pin.
If Bit 8 is set to 1, then an interrupt causes the IRQ
output to go LOW (logic 0). The IRQ output pin
will remain LOW until the SYSSTAT register is read.
Bit 10 If Bit 10 is set to 1, then the reverse Park transforma-
tion will be formed in 3/3 mode. For Forward
transformations, this bit must be set to 1.
Table VI. SYSCTRL Analog Input Channel Selection
Bit 3 Bit 4 Channels Converted Mode
0 0 V, W (Default) Two/Three Phase
0 1 V, W, AUX Two/Three Phase
1 0 U, V, W Three/Three Phase
1 1 U, V, W, AUX Three/Three Phase
Table VII. System Status Register (SYSSTAT)
1
RESET
Bit Function Default
0 A/D Conversion
Completion Interrupt
(1 = True) 0
1 Vector Transformation
Completion Interrupt
(1 = True) 0
4 Rotation Results are Valid
(1 = Valid) X
2
11 IRQ Generated from This 0
Device (1 = True)
NOTES
1
Reading this register clears the interrupt status flags Bits 0, 1 and 11.
2
Undefined until the first Vector Transformation has started
Bit 0 A/D Conversion Completion Interrupt. This register
is set to 1 when the A/D conversion process has completed and ADC interrupts have been enabled in the
SYSCTRL register.
Bit 1 Interrupt Status. This register is set to 1 when the
Vector Transformation is completed and the Vector
Transformation completion interrupts have been
enabled.
Bit 4 This bit is set to 1 when the rotation results are valid.
Bit 11 If any interrupt source on the ADMC200 occurs, then
this bit is set to 1.
C2071a–1.5–4/00 (rev. B)
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
68-Lead Plastic Leaded Chip Carrier (PLCC)
(P-68A)
61
60
44
43
0.175 (4.45)
0.169 (4.29)
0.104 (2.64) TYP
0.050
(1.27)
TYP
0.925 (23.50)
0.895 (22.73)
0.019 (0.48)
0.017 (0.43)
0.029 (0.74)
0.027 (0.69)
PIN 1
IDENTIFIER
BOTTOM VIEW
(PINS UP)
PRINTED IN U.S.A.
0.995 (25.27)
0.985 (25.02)
9
10
(PINS DOWN)
26
27
0.954 (24.23)
0.950 (24.13)
PIN 1
IDENTIFIER
TOP VIEW
SQ
SQ
–12–
REV. B
 Loading...
Loading...