

Page 1
12-Bit, 200 MSPS/500 MSPS TxDAC+® with
Preliminary Technical Data
FEATURES
12-bit resolution, 200 MSPS input data rate
Selectable 2×/4×/8× interpolation filters
/2, f
/4, f
Selectable f
DAC
DAC
Single or dual-channel signal processing
Selectable image rejection Hilbert transform
Flexible calibration engine
Direct IF transmission features
Serial control interface
Versatile clock and data interface
SFDR 90 dBc @10 MHz
WCDMA ACLR = 80 dBc @ 40 MHz IF
DNL = ±0.75 LSB
INL = ±1.5 LSB
3.3 V compatible digital Interface
On-chip 1.2 V reference
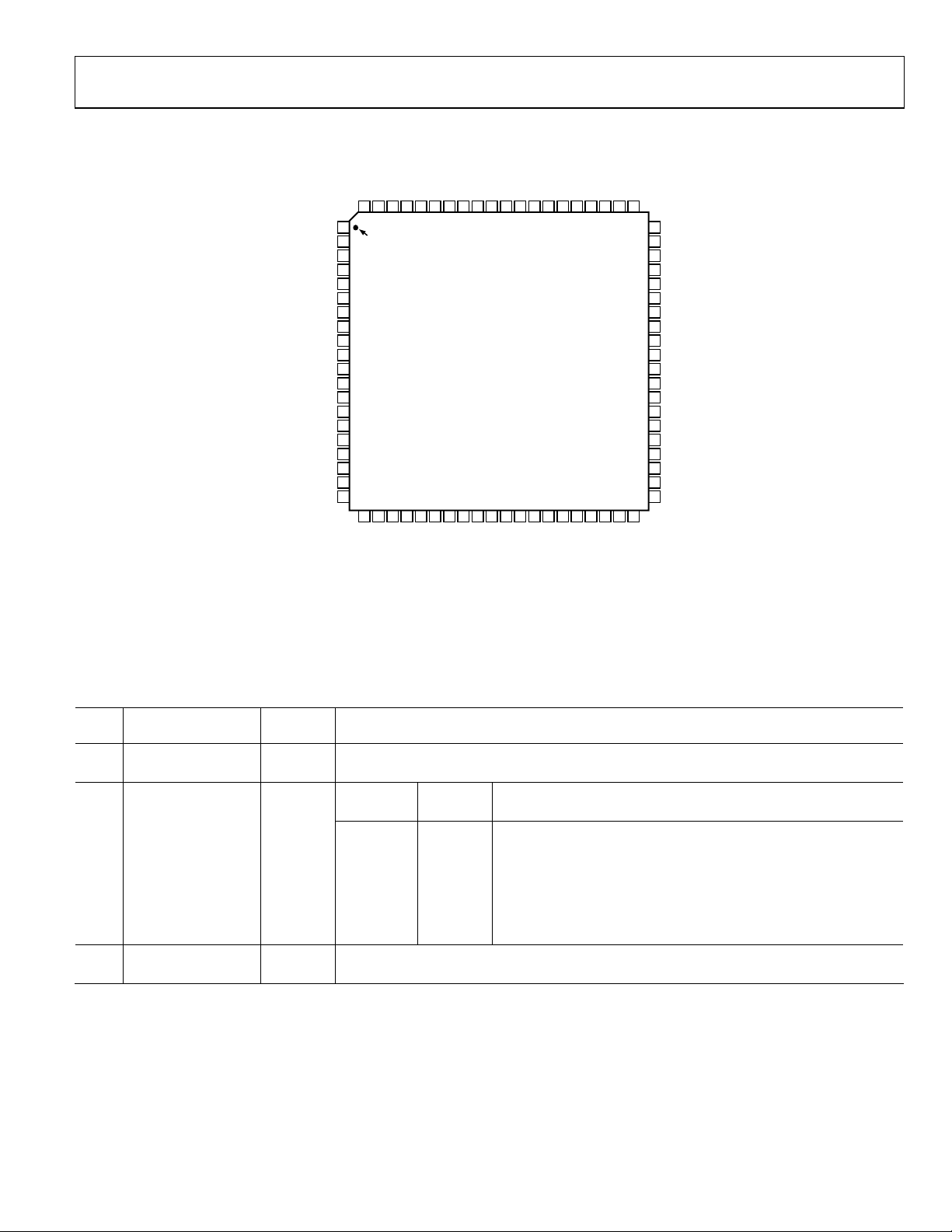
80-lead thermally enhanced TQFP package
APPLICATIONS
Digital quadrature modulation architectures
Multicarrier WCDMA, GSM, TDMA, DCS,
PCS, CDMA Systems
/8 modulation modes
DAC
2×/4×/8× Interpolation and Signal Processing
AD9782
PRODUCT DESCRIPTION
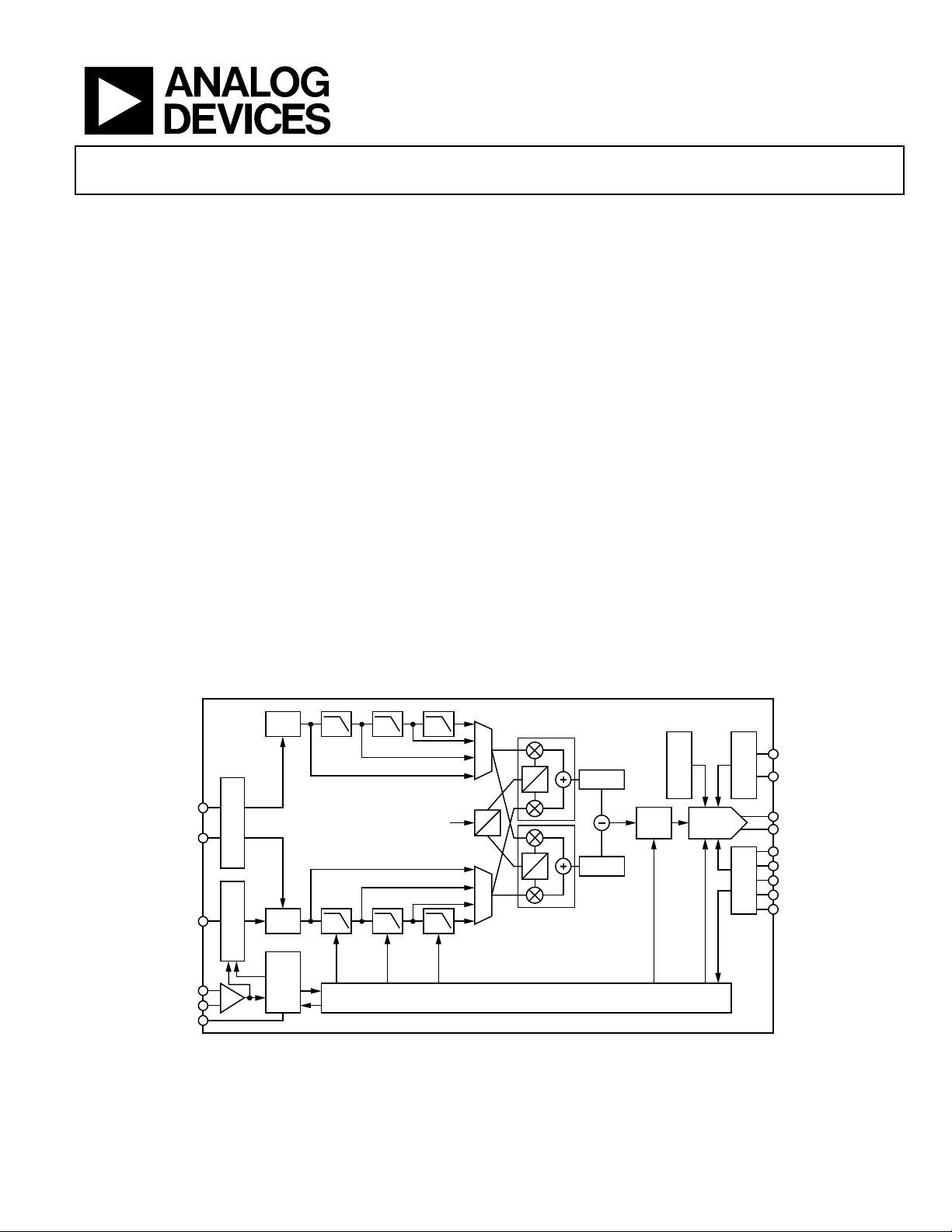
The AD9782 is a 12-bit, high speed, CMOS DAC with 2×/4×/8×
interpolation and signal processing features tuned for
communications applications. It offers state of the art distortion
and noise performance. The AD9782 was developed to meet the
demanding performance requirements of multicarrier and third
generation base stations. The selectable interpolation filters
simplify interfacing to a variety of input data rates while also
taking advantage of oversampling performance gains. The
modulation modes allow convenient bandwidth placement and
selectable sideband suppression.
The flexible clock interface accepts a variety of input types such
as 1 V p-p sine wave, CMOS, and LVPECL in single ended or
differential mode. Internal dividers generate the required data
rate interface clocks.
The AD9782 provides a differential current output, supporting
single-ended or differential applications; it provides a nominal
full-scale current from 10 mA to 20 mA. The AD9782 is
manufactured on an advanced low cost 0.25 µm CMOS process.
FUNCTIONAL BLOCK DIAGRAM
LATCH
P1B[15:0]
P2B[15:0]
DATA ASSEMBLER
×1
DATACLK/
PLL_LOCK
CLK+
CLK–
LPF
Rev. PrC
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
LATCH
DATA PORT
SYNCHRONIZER
CLOCK
MULTIPLIER
×2 ×4 ×8
2×2×2×
f
/2
DAC
/4
f
DAC
/8
f
DAC
2×2×2×
CLOCK DISTRIBUTION AND CONTROL
I
0
90
Q
Figure 1.
FSADJ
0
90
0
90
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.326.8703 © 2004 Analog Devices, Inc. All rights reserved.
∆t
HILBERT
Re()/Im()
ZERO
STUFF
×2/×4/×8/×16
CALIBRATION
16-BIT DAC
×1/×2/×4/×8/×16
CIRCUITS
REFERENCE
SPI
REFIO
I
OUTA
I
OUTB
SDIO
SDO
CSB
SCLK
RESET
03152-PrD-001
Page 2

AD9782 Preliminary Technical Data
TABLE OF CONTENTS
Product Highlights ........................................................................... 3
Digital Filter Specifications........................................................... 23
AD9782–Specifications.................................................................... 4
DC Specifications ......................................................................... 4
Dynamic Specifications ............................................................... 5
Digital Specifications ................................................................... 6
Pin Configuration and Function Descriptions............................. 7
Clock .............................................................................................. 7
Analog............................................................................................ 8
Data ................................................................................................ 8
Serial Interface ..............................................................................9
Definitions of Specifications ......................................................... 10
Typical Performance Charatceristics ...........................................12
Serial Control Interface.................................................................. 17
General Operation of the Serial Interface ............................... 17
Instruction Byte .......................................................................... 17
Serial Interface Port Pin Descriptions ..................................... 17
Digital Interpolation Filter Coefficients.................................. 23
AD9782 Clock/Data Timing..................................................... 24
Interpolation Modes .................................................................. 27
Real and Complex Signals......................................................... 28
Modulation Modes..................................................................... 29
Power Dissipation ...................................................................... 34
Dual Channel Complex Modulation with Hilbert ................ 35
Hilbert Transform Implementation......................................... 36
Operating the AD9782 Rev E Evaluation Board ........................ 40
Power Supplies............................................................................ 40
PECL Clock Driver .................................................................... 40
Data Inputs.................................................................................. 41
SPI Port........................................................................................ 41
Operating with PLL Disabled ................................................... 41
Operating with PLL Enabled .................................................... 42
MSB/LSB Transfers..................................................................... 18
Notes on Serial Port Operation ................................................ 18
Mode Control (via SPI Port) .........................................................19
REVISION HISTORY
Revision PrC: Preliminary Version
Analog Output............................................................................ 42
Outline Dimensions....................................................................... 52
ESD Caution................................................................................ 52
Rev. PrC | Page 2 of 52
Page 3

Preliminary Technical Data AD9782
PRODUCT HIGHLIGHTS
1. The AD9782 is a member of a high speed interpolating
TxDAC+ family with 16-/14-/12-bit resolutions.
6. Flexible clock with single-ended or differential input:
CMOS, 1 V p-p sine wave and LVPECL capability.
2. 2×/4×/8× user selectable interpolating filter eases data rate
and output signal reconstruction filter requirements.
3. 200 MSPS input data rate.
4. Ultrahigh speed 500 MSPS DAC conversion rate.
5. Internal PLL/clock divider provides data rate clock for easy
interfacing.
7. Complete CMOS DAC function operates from a 2.7 V to
3.6 V single analog (AVDD) supply and a 2.5 V (DVDD)
digital supply. The DAC full-scale current can be reduced
for lower power operation, and a sleep mode is provided
for low-power idle periods.
8. On-chip voltage reference: The AD9782 includes a 1.20 V
temperature-compensated band gap voltage reference.
Rev. PrC | Page 3 of 52
Page 4
AD9782 Preliminary Technical Data
AD9782–SPECIFICATIONS
DC SPECIFICATIONS
Table 1. T
otherwise noted
Parameter Min Typ Max Unit
RESOLUTION 12 Bits
DC Accuracy1
Integral Nonlinearity 1.5 LSB
Differential Nonlinearity 0.75 LSB
ANALOG OUTPUT
Offset Error % of FSR
Gain Error (Without Internal Reference) % of FSR
Gain Error (With Internal Reference) % of FSR
Full-Scale Output Current2 10 20 mA
Output Compliance Range –1.0 +1.0 V
Output Resistance TBD kΩ
Output Capacitance 3 pF
REFERENCE OUTPUT
Reference Voltage 1.14 1.20 1.26 V
Reference Output Current3 1 µA
REFERENCE INPUT
Input Compliance Range 0.1 1.25 V
Reference Input Resistance (Ext Reference Mode) 10 MΩ
Small Signal Bandwith 0.5 MHz
TEMPERATURE COEFFICIENTS
Unipolar Offset Drift ppm of FSR/°C
Gain Drift (Without Internal Reference) ppm of FSR/°C
Gain Drift (With Internal Reference) ppm of FSR/°C
Reference Voltage Drift ppm /°C
POWER SUPPLY
AVDD1, AVDD2
Voltage Range 3.1 3.3 3.5 V
Analog Supply Current (I
Analog Supply Current (I
I
AVDD1
ACVDD, ADVDD
Voltage Range 2.35 2.5 2.65 V
Analog Supply Current (I
Analog Supply Current (I
CLKVDD
Voltage Range 2.35 2.5 2.65 V
Clock Supply Current (I
DVDD
Voltage Range 2.35 2.5 2.65 V
Digital Supply Current (I
DRVDD
Voltage Range 2.35 2.5/3.3 3.5 V
Digital Supply Current (I
Nominal Power Dissipation4 1.25 W
OPERATING RANGE –40 +85 °C
MIN
to T
, AVDD1, AVDD2 = 3.3 V, ACVDD, ADVDD, CLKVDD, DVDD, DRVDD = 2.5 V, I
MAX
) mA
AVDD1
) mA
AVDD2
= 20 mA, unless
OUTFS
in SLEEP Mode mA
) mA
ACVDD
) mA
ADVDD
) mA
CLKVDD
) mA
DVDD
) mA
DRVDD
1
Measured at IOUTA driving a virtual ground.
2
Nominal full-scale current, I
3
Use an external amplifier to drive any external load.
4
Measured under the following conditions: f
, is 32× the I
OUTFS
current.
REF
= 125 MSPS, f
DATA
= 500 MSPS, 4× Interpolation, f
DAC
Rev. PrC | Page 4 of 52
/4 Modulation, Hilbert Off.
DAC
Page 5
Preliminary Technical Data AD9782
DYNAMIC SPECIFICATIONS
Table 2. T
Differential Transformer Coupled Output, 50 Ω Doubly Terminated, unless otherwise noted
Parameter Min Typ Max Unit
DYNAMIC PERFORMANCE
Maximum DAC Output Update Rate (f
Output Settling Time (tST) (to 0.025%) ns
Output Propogation Delay5 (tPD) ns
Output Rise Time (10%–90%)6 ns
Output Fall Time (90%–10%)6 ns
Output Noise (I
AC LINEARITY—BASEBAND MODE
Spurious-Free Dynamic Range (SFDR) to Nyquist (f
f
f
f
f
f
f
Two-Tone Intermodulation (IMD) to Nyquist (f
f
f
f
f
f
f
Total Harmonic Distortion (THD)
f
f
Signal-to-Noise Ratio (SNR)
f
f
Adjacent Channel Power Ratio (ACPR)
WCDMA with MHz BW, MHz Channel Spacing
IF = 16 MHz, f
IF = 32 MHz, f
Four-Tone Intermodulation
MHz, MHz, MHz and MHz at –12 dBFS (f
AC LINEARITY—IF MODE
Four-Tone Intermodulation at IF = MHz
MHz, MHz, MHz and MHz at dBFS dBFS
f
5
Propagation delay is delay from CLK input to DAC update.
6
Measured single-ended into 50 Ω load.
to T
MIN
= 160 MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= 160 MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS; f
DATA
= MSPS, f
DATA
, AVDD1, AVDD2 = 3.3 V, ACVDD, ADVDD, CLKVDD, DVDD, DRVDD = 2.5 V, I
MAX
) 500 MSPS
DAC
= 20 mA) pA√Hz
OUTFS
= 0 dBFS)
OUT
= 1 MHz 95 dBc
OUT
= MHz dBc
OUT
= MHz dBc
OUT
= MHz dBc
OUT
= MHz dBc
OUT
= MHz
OUT
= f
OUT1
=25 MHz; f
OUT1
= MHz; f
OUT1
= MHz; f
OUT1
= MHz; f
OUT1
= MHz; f
OUT1
= MHz; f
OUT1
= MHz; 0 dBFS dB
OUT
= MHz; 0 dBFS dB
OUT
= MHz; 0 dBFS dBFS
OUT
= MHz; 0 dBFS dBFS
OUT
= 65.536 MSPS dBc
DATA
= 131.072 MSPS dBc
DATA
= MHz
DAC
OUT2
OUT2
OUT2
OUT2
OUT2
= 31 MHz 80 dBc
OUT2
= MHz dBc
= MHz dBc
= MHz dBc
= MHz dBc
= MHz dBc
= MSPS, Missing Center) dBFS
DATA
= –6 dBFS)
OUT2
OUTFS
= 20 mA,
Rev. PrC | Page 5 of 52
Page 6
AD9782 Preliminary Technical Data
DIGITAL SPECIFICATIONS
Table 3. T
otherwise noted
Parameter Min Typ Max Unit
DIGITAL INPUTS
Logic 1 Voltage DRVDD – 0.9 DRVDD V
Logic 0 Voltage 0 0.9 V
Logic 1 Current –10 +10 µA
Logic 0 Current –10 +10 µA
Input Capacitance 5 pF
LOCK INPUTS
Input Voltage Range 0 2.65 V
Common-Mode Voltage 0.75 1.5 2.25 V
Differential Voltage 0.5 1.5 V
PLL CLOCK ENABLED
Input Setup Time (ts) ns
Input Hold Time (tH) ns
Latch Pulse Width (t
PLL CLOCK DISABLED
Input Setup Time (ts) ns
Input Hold Time (tH) ns
Latch Pulse Width (t
CLK to PLLLOCK Delay (tOD) ns
MIN
to T
, AVDD1, AVDD2 = 3.3 V, ACVDD, ADVDD, CLKVDD, DVDD = 2.5 V, I
MAX
) ns
LPW
) ns
LPW
= 20 mA, unless
OUTFS
Rev. PrC | Page 6 of 52
Page 7
Preliminary Technical Data AD9782
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
NC
ADVDD
ADGND
ACVDD
ACGND
AVDD2
AGND2
AVDD1
AGND1
IOUTA
IOUTB
AGND1
AVDD1
AGND2
AVDD2
ACGND
ACVDD
ADGND
ADVDD
DNC
FSADJ
60
REFIO
59
RESET
58
CSB
57
SCLK
56
SDIO
55
SDO
54
DGND
53
DVDD
52
P2B0
51
P2B1
50
P2B2
49
P2B3
48
P2B4
47
P2B5
46
DGND
45
DVDD
44
P2B6
43
P2B7
42
P2B8
41
P2B9
P2B11
P2B12
P2B10
CLKVDD
LPF
CLKVDD
CLKGND
CLK+
CLK–
CLKGND
DGND
DVDD
P1B15
P1B14
P1B13
P1B12
P1B11
P1B10
DGND
DVDD
P1B9
P1B8
P1B7
NC = NO CONNECT
80 79 78 77 76 71 70 69 68 67 66 6575 74 73 72 64 63 62 61
1
PIN 1
2
IDENTIFIER
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
P1B6
P1B5
P1B4
P1B3
DGND
DVDD
P1B2
AD9782
TOP VIEW
(Not to Scale)
P1B1
P1B0
DRVDD
DGND
P2B13
IQSEL/P2B15
DVDD
Figure 2. Pin Configuration
CLOCK
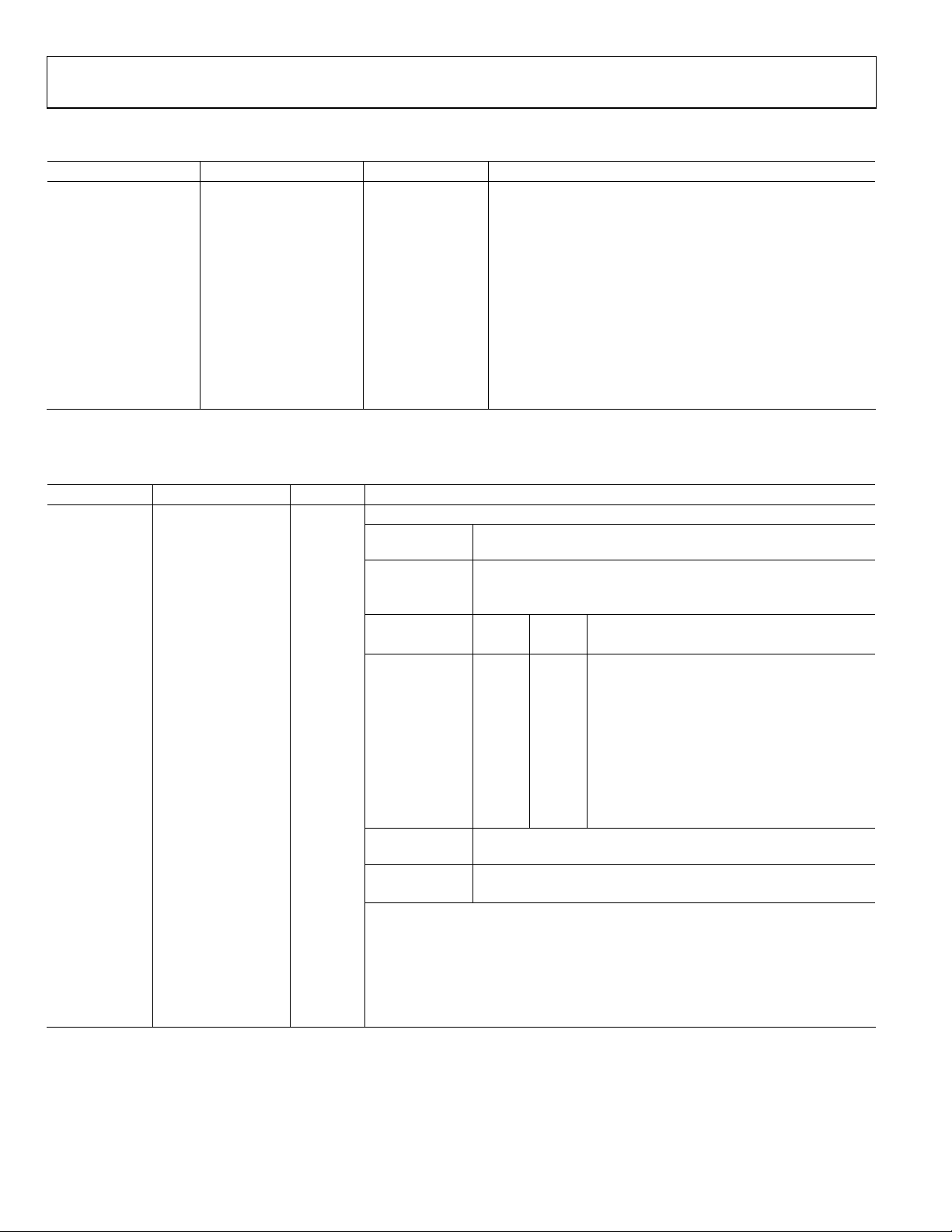
Table 4. Clock Pin Function Descriptions
Pin
No.
5, 6 CLK+, CLK– I Differential Clock Input.
2 LPF I/O PLL Loop Filter.
31 DATACLK/PLL_LOCK I/O
1, 3 CLKVDD Clock Domain 2.5 V.
4, 7 CLKGND Clock Domain 0 V.
Mnemonic Direction Description
PLOCKEXT
04h[0]
DCLKEXT
02h[3]
0 0
0 1 Pin configured for output of channel data rate or synchronizer clock
1 X Internal Clock PLL Status Output:
DATACLK/PLL_LOCK
ONEPORTCLOCK/P2B14
03150-PrD-001
Mode
Pin configured for input of channel data rate or synchronizer clock.
Internal clock synchronizer may be turned on or off with DCLKCRC
(02h[2]).
0: Internal clock PLL is not locked.
1: Internal clock PLL is locked.
Rev. PrC | Page 7 of 52
Page 8
AD9782 Preliminary Technical Data
ANALOG
Table 5. Analog Pin Function Descriptions
Pin No. Mnemonic Direction Description
59 REFIO A Reference.
60 FSADJ A Full-Scale Adjust.
70, 71 IOUTB, IOUTA A Differential DAC Output Currents.
61 DNC Do not connect.
62, 79 ADVDD Analog Domain Digital Content 2.5 V.
63, 78 ADGND Analog Domain Digital Content 0 V.
64, 77 ACVDD Analog Domain Clock Content 2.5 V.
65, 76 ACGND Analog Domain Clock Content 0 V.
66, 75 AVDD2 Analog Domain Clock Switching 3.3 V.
67, 74 AGND2 Analog Domain Switching 0 V.
68, 73 AVDD1 Analog Domain Quiet 3.3 V.
69, 72 AGND1 Analog Domain Quiet 0 V.
DATA
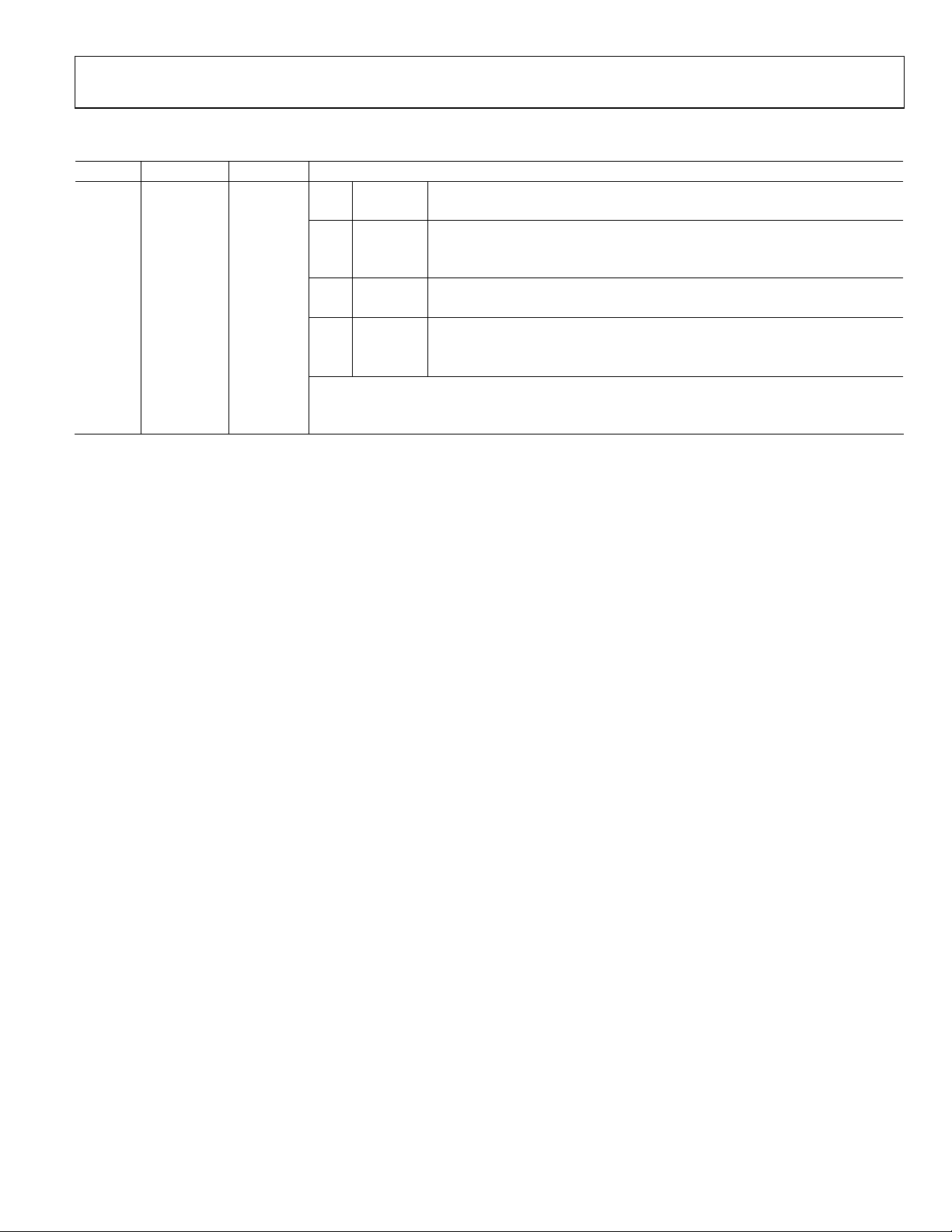
Table 6. Data Pin Function Descriptions
Pin No. Mnemonic Direction Description
10–15, 18–24,
27–29
32 IQSEL/P2B15 I
33 ONEPORTCLK/P2B14 I/O
34, 37–43,
46–51
30 DRVDD Digital Output Pin Supply, 2.5 V or 3.3 V.
9, 17, 26,
36, 44, 52
8, 16, 25,
35, 45, 53
P1B15–P1B0 I
P2B13–P2B0 I Input Data Port Two Bits 13–0.
DVDD Digital Domain 2.5 V.
DGND Digital Domain 0 V.
Input Data Port One.
ONEPORT
02h[6] Mode
0 Latched Data Routed for 1 Channel Processing.
1
ONEPORT
02h[6]
0 X X
1 0 0
1 0 1
1 1 0
1 1 1
ONEPORT
02h[6]
0 Latched data routed for Q channel Bit 14 processing.
1 Pin configured for output of clock at twice the channel data route.
Latched Data Demultiplexed by IQSEL and Routed for Interleaved
I/Q Processing.
IQPOL
02h[1]
IQSEL/
P2B15 Mode (IQPOL == 0)
Latched data routed to Q channel bit 15(MSB)
processing.
Latched data on data port one routed to Q
channel processing.
Latched data on data port one routed to I
channel processing.
Latched data on data port one routed to I
channel processing.
Latched data on data port one routed to Q
channel processing.
Rev. PrC | Page 8 of 52
Page 9
Preliminary Technical Data AD9782
SERIAL INTERFACE
Table 7. Serial Interface Pin Function Descriptions
Pin No. Mnemonic Direction Description
54 SDO O
55 SDIO I/O
56 SCLK I Serial interface clock.
57 CSB I Serial interface chip select.
58 RESET I Resets entire chip to default state.
SDIODIR
00h[7]
CSB
1 X High Impedance.
0 0 Serial Data Output.
0 1 High Impedance.
SDIODIR
CSB
00h[7] Mode
1 X High Impedance.
0 0 Serial Data Output.
0 1 Serial Data Input/Output Depending on Bit 7 of the Serial Instruction Byte.
Mode
Rev. PrC | Page 9 of 52
Page 10

AD9782 Preliminary Technical Data
DEFINITIONS OF SPECIFICATIONS
Linearity Error (Integral Nonlinearity or INL)
Linearity error is defined as the maximum deviation of the
actual analog output from the ideal output, determined by a
straight line drawn from zero to full scale.
Differential Nonlinearity (or DNL)
DNL is the measure of the variation in analog value, normalized
to full scale, associated with a 1 LSB change in digital input
code.
Monotonicity
A D/A converter is monotonic if the output either increases or
remains constant as the digital input increases.
Offset Error
The deviation of the output current from the ideal of zero is
called offset error. For I
inputs are all 0s. For I
, 0 mA output is expected when the
OUTA
, 0 mA output is expected when all
OUTB
inputs are set to 1s.
Gain Error
The difference between the actual and ideal output span. The
actual span is determined by the output when all inputs are set
to 1s, minus the output when all inputs are set to 0s.
Output Compliance Range
The range of allowable voltage at the output of a current-output
DAC. Operation beyond the maximum compliance limits may
cause either output stage saturation or breakdown, resulting in
nonlinear performance.
Temperature Drift
Temperature drift is specified as the maximum change from the
ambient (+25°C) value to the value at either T
MIN
or T
MAX
. For
offset and gain drift, the drift is reported in ppm of full-scale
range (FSR) per degree C. For reference drift, the drift is
reported in ppm per degree C.
Power Supply Rejection
The maximum change in the full-scale output as the supplies
are varied from minimum to maximum specified voltages.
Glitch Impulse
Asymmetrical switching times in a DAC give rise to undesired
output transients that are quantified by a glitch impulse. It is
specified as the net area of the glitch in pV-s.
Spurious-Free Dynamic Range
The difference, in dB, between the rms amplitude of the output
signal and the peak spurious signal over the specified
bandwidth.
Total Harmonic Distortion
THD is the ratio of the rms sum of the first six harmonic
components to the rms value of the measured fundamental. It is
expressed as a percentage or in decibels (dB).
Signal-to-Noise Ratio (SNR)
S/N is the ratio of the rms value of the measured output signal
to the rms sum of all other spectral components below the
Nyquist frequency, excluding the first six harmonics and dc. The
value for SNR is expressed in decibels.
Interpolation Filter
If the digital inputs to the DAC are sampled at a multiple rate of
(interpolation rate), a digital filter can be constructed
f
DATA
which has a sharp transition band near f
would typically appear around f
(output data rate) can be
DAC
/2. Images which
DATA
greatly suppressed.
Pass-Band
Frequency band in which any input applied therein passes
unattenuated to the DAC output.
Stop-Band Rejection
The amount of attenuation of a frequency outside the passband applied to the DAC, relative to a full-scale signal applied at
the DAC input within the pass-band.
Group Delay
Number of input clocks between an impulse applied at the
device input and peak DAC output current. A half-band FIR
filter has constant group delay over its entire frequency range
Settling Time
The time required for the output to reach and remain within a
specified error band about its final value, measured from the
start of the output transition.
Rev. PrC | Page 10 of 52
Impulse Response
Response of the device to an impulse applied to the input.
Page 11

Preliminary Technical Data AD9782
Adjacent Channel Power Ratio (or ACPR)
A ratio in dBc between the measured power within a channel
relative to its adjacent channel.
Complex Modulation
The process of passing the real and imaginary components of a
signal through a complex modulator (transfer function = e
coswt + jsinwt) and realizing real and imaginary components
on the modulator output.
jwt
=
Complex Image Rejection
In a traditional two part upconversion, two images are created
around the second IF frequency. These images are redundant
and have the effect of wasting transmitter power and system
bandwidth. By placing the real part of a second complex
modulator in series with the first complex modulator, either the
upper or lower frequency image near the second IF can be
rejected.
Rev. PrC | Page 11 of 52
Page 12
AD9782 Preliminary Technical Data
TYPICAL PERFORMANCE CHARATCERISTICS
(T
to T
MIN
Coupled Output, 50 Ω Doubly Terminated, unless otherwise noted)
, AVDD1, AVDD2 = 3.3 V, ACVDD, ADVDD, CLKVDD, DVDD, DRVDD = 2.5 V, I
MAX
= 20 mA, Differential Transformer
OUTFS
–000
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 3 Single-Tone Spectrum@ F
–000
–000
–000
ALL CAPS (Initial caps)
= 65 MSPS With F
DATA
TBD
OUT
= F
DATA
/3
–000
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 6. Single-Tone Spectrum @ F
–000
–000
–000
ALL CAPS (Initial caps)
= 78 MSPS with F
DATA
OUT
= F
DATA
/3
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 4. In-Band SFDR vs. F
–000
–000
–000
ALL CAPS (Initial caps)
@ F
OUT
DATA
= 65 MSPS
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 5. Out-of-Band SFDR vs. F
ALL CAPS (Initial caps)
@ F
OUT
= 65 MSPS
DATA
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 7. In-Band SFDR Vs. F
–000
–000
–000
ALL CAPS (Initial caps)
@ F
OUT
DATA
= 78 MSPS
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 8. Out-of-Band SFDR vs. F
ALL CAPS (Initial caps)
@ F
OUT
= 78 MSPS
DATA
Rev. PrC | Page 12 of 52
Page 13
Preliminary Technical Data AD9782
–000
–000
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 9. Single-Tone Spectrum @ F
–000
–000
–000
ALL CAPS (Initial caps)
= 160 MSPS with F
DATA
TBD
ALL CAPS (Initial caps)
–000
OUT
= F
DATA
/3
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 12. Third Order IMD Products vs. F
–000
–000
–000
ALL CAPS (Initial caps)
OUT
@ F
= 65 MSPS
DATA
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 10. In-Band SFDR vs. F
–000
–000
–000
ALL CAPS (Initial caps)
@ F
OUT
DATA
= 160 MSPS
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 11. Out-of-Band SFDR vs. F
ALL CAPS (Initial caps)
@ F
OUT
= 160 MSPS
DATA
–000
–000 –000 –000 –000 –000
Figure 13. Third Order IMD Products vs. F
–000
–000
–000
ALL CAPS (Initial caps)
OUT
@ F
= 78 MSPS
DATA
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 14. Third Order IMD Products vs. F
ALL CAPS (Initial caps)
OUT
@ F
= 160 MSPS
DATA
Rev. PrC | Page 13 of 52
Page 14
AD9782 Preliminary Technical Data
–000
–000
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 15. TPC 13. Third Order IMD Products vs. F
–000
–000
–000
ALL CAPS (Initial caps)
4× – F
8× – F
= 160 MSPS
DATA
= 160 MSPS
DATA
= 80 MSPS
DATA
= 50 MSPS
DATA
1× – F
2× – F
TBD
ALL CAPS (Initial caps)
–000
and Interpolation Rate
OUT
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 18. 3
–000
–000
–000
rd
Order IMD Products vs. AVDD @ F
F
ALL CAPS (Initial caps)
= 320 MSPS, F
DAC
= 160 MSPS
DATA
= 10 MHz,
OUT
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 16. Third Order IMD Products vs. AOUT and Interpolation Rate F
–000
–000
–000
ALL CAPS (Initial caps)
50 MSPS for All Cases
1× – F
= 50 MSPS
DAC
= 100 MSPS
2× – F
DAC
= 200 MSPS
4× – F
DAC
= 400 MSPS
8× – F
DAC
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 17. SFDR vs. AVDD @ F
ALL CAPS (Initial caps)
= 10 MHz; F
OUT
= 320 MSPS F
DAC
= 160 MSPS
DATA
–000
DATA
–000 –000 –000 –000 –000
=
Figure 19. SNR vs. Data Rate for f
–000
–000
–000
ALL CAPS (Initial caps)
= 5 MHz
OUT
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 20. SFDR vs. Temperature @ f
ALL CAPS (Initial caps)
OUT
= f
DATA
/11
Rev. PrC | Page 14 of 52
Page 15
Preliminary Technical Data AD9782
–000
–000
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 21. Single Tone Spurious Performance, f
F
–000
–000
–000
ALL CAPS (Initial caps)
= 150 MSPS, No Interpolation
DATA
= 10 MHz,
OUT
TBD
ALL CAPS (Initial caps)
–000
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 24. Two Tone IMD Performance, F
–000
–000
–000
ALL CAPS (Initial caps)
= 90 MSPS, Interpolation = 4×
DATA
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 22. Two Tone IMD Performance, F
–000
–000
–000
ALL CAPS (Initial caps)
= 150 MSPS, No Interpolation
DATA
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 23. Single Tone Spurious Performance, F
F
ALL CAPS (Initial caps)
= 150 MSPS, Interpolation = 2×
DATA
= 10 MHz,
OUT
–000
–000 –000 –000 –000 –000
Figure 25. Single Tone Spurious Performance, F
F
–000
–000
–000
ALL CAPS (Initial caps)
= 80 MSPS, Interpolation = 4×
DATA
= 10 MHz,
OUT
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 26. Two Tone IMD Performance, F
ALL CAPS (Initial caps)
= 10 MHz, F
Interpolation = 8×
OUT
= 50 MSPS,
DATA
Rev. PrC | Page 15 of 52
Page 16
AD9782 Preliminary Technical Data
–000
–000
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 27. Single Tone Spurious Performance, F
ALL CAPS (Initial caps)
Interpolation = 8×
= 10 MHz, F
OUT
= 50 MSPS,
DATA
–000
–000
TBD
ALL CAPS (Initial caps)
–000
–000
–000 –000 –000 –000 –000
Figure 28. Eight Tone IMD Performance, F
ALL CAPS (Initial caps)
= 160 MSPS, Interpolation = 8×
DATA
Rev. PrC | Page 16 of 52
Page 17

Preliminary Technical Data AD9782
S
SERIAL CONTROL INTERFACE
SDO (PIN 54)
SDIO (PIN 55)
CLK (PIN 56)
CSB (PIN 57)
Figure 29. AD9782 SPI Port Interface
AD9782 SPI
PORT INTERFACE
03150-PrD-002
The AD9782 serial port is a flexible, synchronous serial
communications port allowing easy interface to many industrystandard microcontrollers and microprocessors. The serial I/O
is compatible with most synchronous transfer formats,
including both the Motorola SPI® and Intel® SSR protocols. The
interface allows read/write access to all registers that configure
the AD9782. Single or multiple byte transfers are supported as
well as MSB first or LSB first transfer formats. The AD9782’s
serial interface port can be configured as a single pin I/O
(SDIO) or two unidirectional pins for in/out (SDIO/SDO).
GENERAL OPERATION OF THE SERIAL INTERFACE
There are two phases to a communication cycle with the
AD9782. Phase 1 is the instruction cycle, which is the writing of
an instruction byte into the AD9782, coincident with the first
eight SCLK rising edges. The instruction byte provides the
AD9782 serial port controller with information regarding the
data transfer cycle, which is Phase 2 of the communication
cycle. The Phase 1 instruction byte defines whether the
upcoming data transfer is read or write, the number of bytes in
the data transfer, and the starting register address for the first
byte of the data transfer. The first eight SCLK rising edges of
each communication cycle are used to write the instruction byte
into the AD9782.
A logic high on the CS pin, followed by a logic low, will reset the
SPI port timing to the initial state of the instruction cycle. This
is true regardless of the present state of the internal registers or
the other signal levels present at the inputs to the SPI port. If the
SPI port is in the midst of an instruction cycle or a data transfer
cycle, none of the present data will be written.
The remaining SCLK edges are for Phase 2 of the
communication cycle. Phase 2 is the actual data transfer
between the AD9782 and the system controller. Phase 2 of the
communication cycle is a transfer of 1, 2, 3, or 4 data bytes as
determined by the instruction byte. Normally, using one
multibyte transfer is the preferred method. However, single byte
data transfers are useful to reduce CPU overhead when register
access requires one byte only. Registers change immediately
upon writing to the last bit of each transfer byte.
INSTRUCTION BYTE
The instruction byte contains the following information:
Table 8.
N1 N2 Description
0 0 Transfer 1 Byte
0 1 Transfer 2 Bytes
1 0 Transfer 3 Bytes
1 1 Transfer 4 Bytes
R/W, Bit 7 of the instruction byte, determines whether a read or
a write data transfer will occur after the instruction byte write.
Logic high indicates read operation. Logic 0 indicates a write
operation. N1, N0, Bits 6 and 5 of the instruction byte,
determine the number of bytes to be transferred during the data
transfer cycle. The bit decodes are shown in the following table:
Table 9.
MSB LSB
17 16 15 14 13 12 11 10
R/W N1 N0 A4 A3 A2 A1 A0
A4, A3, A2, A1, A0, Bits 4, 3, 2, 1, 0 of the instruction byte,
determine which register is accessed during the data transfer
portion of the communications cycle. For multibyte transfers,
this address is the starting byte address. The remaining register
addresses are generated by the AD9782.
SERIAL INTERFACE PORT PIN DESCRIPTIONS
SCLK—Serial Clock. The seri al clock pin is used to
synchronize data to and from the AD9782 and to run the
internal state machines. SCLK’s maximum frequency is 15 MHz.
All data input to the AD9782 is registered on the rising edge of
SCLK. All data is driven out of the AD9782 on the falling edge
of SCLK.
CSB—Chip Select. Active low input starts and gates a
communication cycle. It allows more than one device to be used
on the same serial communications lines. The SDO and SDIO
pins will go to a high impedance state when this input is high.
Chip select should stay low during the entire communication
cycle.
SDIO—Serial Data I/O. Data is always written into the
AD9782 on this pin. However, this pin can be used as a
bidirectional data line. The configuration of this pin is
controlled by Bit 7 of register address 00h. The default is
Logic 0, which configures the SDIO pin as unidirectional.
SDO—Serial Data Out. Data is read from this pin for protocols
that use separate lines for transmitting and receiving data. In the
case where the AD9782 operates in a single bidirectional I/O
mode, this pin does not output data and is set to a high
impedance state.
Rev. PrC | Page 17 of 52
Page 18

AD9782 Preliminary Technical Data
MSB/LSB TRANSFERS
The AD9782 serial port can support both most significant bit
(MSB) first or least significant bit (LSB) first data formats. This
functionality is controlled by register address DATADIR
(00h[6]). The default is MSB first. When this bit is set active
high, the AD9782 serial port is in LSB first format. That is, if the
AD9782 is in LSB first mode, the instruction byte must be
written from least significant bit to most significant bit.
Multibyte data transfers in MSB format can be completed by
writing an instruction byte that includes the register address of
the most significant byte. In MSB first mode, the serial port
internal byte address generator decrements for each byte
required of the multibyte communication cycle. Multibyte data
transfers in LSB first format can be completed by writing an
instruction byte that includes the register address of the least
significant byte. In LSB first mode, the serial port internal byte
address generator increments for each byte required of the
multibyte communication cycle.
The AD9782 serial port controller address will increment from
1Fh to 00h for multibyte I/O operations if the MSB first mode is
active. The serial port controller address will decrement from
00h to 1Fh for multibyte I/O operations if the LSB first mode is
active.
NOTES ON SERIAL PORT OPERATION
The AD9782 serial port configuration bits reside in Bits 6 and 7
of register address 00h. It is important to note that the
configuration changes immediately upon writing to the last bit
of the register. For multibyte transfers, writing to this register
may occur during the middle of communication cycle. Care
must be taken to compensate for this new configuration for the
remaining bytes of the current communication cycle.
CSB
SCLK
SDIO
SDO
CSB
SCLK
SDIO
SDO
CSB
SCLK
SDIO
CSB
INSTRUCTION CYCLE DATA TRANSFER CYCLE
R/W N1 N0 A4A 3A 2A 1A 0 D7 D6ND5
D7 D6ND5
N
0
N
0
Figure 30. Serial Register Interface Timing MSB First
INSTRUCTION CYCLE DATA TRANSFER CYCLE
A0 A1 A2 A3 A4 N0 N1 R/W D00D10D2
D00D10D2
0
N
0
N
Figure 31. Serial Register Interface Timing LSB First
t
DS
t
DS
t
PWH
t
t
SCLK
t
PWL
DH
INSTRUCTION BIT 6INSTRUCTION BIT 7
Figure 32. Timing Diagram for Register Write
D00D10D20D3
D00D10D20D3
03152-PrD-004
D7ND6ND5ND4
D7ND6ND5ND4
03152-PrD-005
03152-PrD-006
The same considerations apply to setting the software reset,
SWRST (00h[5]) bit. All other registers are set to their default
values but the software reset doesn’t affect the bits in register
address 00h and 04h.
It is recommended to use only single byte transfers when
changing serial port configurations or initiating a software
reset.
Rev. PrC | Page 18 of 52
SCLK
SDIO
SDO
t
DV
DATA BIT n–1DATA BIT n
Figure 33. Timing Diagram for Register Read
03152-PrD-007
Page 19

Preliminary Technical Data AD9782
MODE CONTROL (VIA SPI PORT)
Table 10.
Address Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
COMMS 00 SDIODIR DATADIR SWRST SLEEP PDN PLLLOCK EXREF
FILTER 01 INTERP[1] INTERP[0] ZSTUFF HPFX8 HPFX4 HPFX2
DATA 02 DATAFMT ONEPORT DCLKSTR DCLKPOL DCLKEXT DCLKCRC IQPOL CRAYDIN
MODULATE 03 CHANNEL HILBERT MODDUAL SIDEBAND MOD[1] MOD[0]
PLL 04 PLLON PLLMULT[1] PLLMULT[0] PLLDIV[1] PLLDIV[0] PLLAZ[1] PLLAZ[0] PLOCKEXT
DCLKCRC 05 DATADJ[3] DATADJ[2] DATADJ[1] DATADJ[0] MODSYNC MODADJ[2] MODADJ[1] MODADJ[0]
06 Reserved
07 Reserved
08 Reserved
09 Reserved
0A Reserved
0B Reserved
0C Reserved
VERSION 0D VERSION[3] VERSION[3] VERSION[3] VERSION[3]
CALMEMCK 0E RESERVED RESERVED CALMEM[1] CALMEN[0] CALCKDIV[2] CALCKDIV[2] CALCKDIV[2]
MEMRDWR 0F CALSTAT CALEN XFERSTAT XFEREN SMEMWR SMEMRD FMEMRD UNCAL
MEMADDR 10 MEMADDR[7] MEMADDR[6] MEMADDR[5] MEMADDR[4] MEMADDR[3] MEMADDR[2] MEMADDR[1] MEMADDR[0]
MEMDATA 11 MEMDATA[5] MEMDATA[4] MEMDATA[3] MEMDATA[2] MEMDATA[1] MEMDATA[0]
DCRSTAT 12 DCRSTAT[2] DCRSTAT[1] DCRSTAT[0]
Table 11.
COMMS(00) Bit Direction Default Description
SDIODIR 7 I 0 0: SDIO pin configured for input only during data transfer
1: SDIO configured for input or output during data transfer
DATADIR 6 I 0 0: Serial data uses MSB first format
1: Serial data uses LSB first format
SWRST 5 I 0 1: Default all serial register bits, except addresses 00h and 04h
SLEEP 4 I 0 1: DAC output current off
PDN 3 I 0 1: All analog and digital circuitry, except serial interface, off
PLLOCK 1 O 0 0: With PLL on, indicates that PLL is not locked
1: With PLL on, indicates that PLL is locked
EXREF 0 I 0 0: Internal band gap reference
1: External reference
Table 12.
FILTER(01) Bit Direction Default Description
INTERP[1:0] [7:6] I 00 00: No interpolation
01: Interpolation 2×
10: Interpolation 4×
11: Interpolation 8×
ZSTUFF 3 I 0 1: Zero Stuffing on
HPFX8 2 I 0 0: ×8 interpolation filter configured for low pass
1: ×8 interpolation filter configured for high pass
HPFX4 1 I 0 0: ×4 interpolation filter configured for low pass
1: ×4 interpolation filter configured for high pass
HPFX2 0 I 0 0: ×2 interpolation filter configured for low pass
1: ×2 interpolation filter configured for high pass
Rev. PrC | Page 19 of 52
Page 20

AD9782 Preliminary Technical Data
Table 13.
DATA(02) Bit Direction Default Description
DATAFMT 7 I 0 0: Twos complement data format
1: Unsigned binary input data format
ONEPORT 6 I 0 0: I and Q input data onto ports one and two respectively
1: I and Q input data interleaved onto port one
DCLKSTR 5 I 0 0: DATACLK pin 12 mA drive strength
1: DATACLK pin 24 mA drive strength
DCLKPOL 4 I 0 0: Input data latched on DATACLK rising edge
1: Input data latched on DATACLK falling edge
DCLKEXT 3 I 0 0: With PLOCKEXT off, DATACLK pin inputs channel data rate or modulator synchronizer clock
1: With PLOCKEXT off, DATACLK pin outputs channel data rate or modulator synchronizer clock
DCLKCRC 2 I 0 0: With PLOCKEXT off, and DATACLK pin as input, DATACLK clock recovery off
1: With PLOCKEXT off, and DATACLK pin as input, DATACLK clock recovery on
IQPOL 1 I 0 0: In one port mode, IQSEL = 1 latches data into I channel, IQSEL = 0 latches data into Q channel
1: In one port mode, IQSEL = 0 latches data into I channel, IQSEL = 1 latches data into Q channel
GRAYDIN 0 I 0 0: Gray decoder off
1: Gray decoder on
Table 14.
MODULATE(03) Bit Direction Default Description
CHANNEL 7 I 0
HILBERT 6 I 0 1: With MODDUAL on, Hilbert transform on
MODDUAL 5 I 0 0: Modulator uses a single channel
SIDEBAND 4 I 0 0: With MODDUAL on, lower sideband rejected
MOD[1:0] [3:2] I 00 00: No modulation
MODDUAL
03h [5]
0 0 I channel processing routed to DAC
0 1 Q channel processing routed to DAC
1 0 Modulator real output routed to DAC
1 1 Modulator imaginary output routed to DAC
1: Modulator uses both I and Q channels
1: With MODDUAL on, upper sideband rejected
01: f
/2 modulation
S
10: f
/4 modulation
S
11: f
/8 modulation
S
CHANNEL
03h[7]
Rev. PrC | Page 20 of 52
Page 21

Preliminary Technical Data AD9782
Table 15.
PLL(04) Bit Direction Default Description
PLLON 7 I 0 0: PLL off
1: PLL on
PLLMULTI[1:0] [6:5] I 00 PLL MULTIPLY FACTOR
00: ×2
00: ×4
00: ×8
00: ×16
PLLDIV[1:0] [4:3] I 00 PLLMULT rate divide factor
00:/1
00:/2
00:/4
00:/8
PLLAZBW[1:0] [2:1] I 00 PLL Autozero settling bandwidth as fraction of CLK ±rate
00: /8 (lowest)
01: /4
10: /2 (highest)
PLOCKEXT 0 I 0 0: With PLL on, DATACLK/PLL_LOCK pin configured for DATACLK input/output
1: With PLL on, DATACLK/PLL_LOCK pin configured for output of PLLLOCK
Table 16.
DCLKCRC(05) Bit Direction Default Description
DATADJ[3:0] [7:4] I 0000 DATACLK offset. Twos complement respresentation
0111: +7
:
0000: 0
:
1000: -8
MODSYNC 3 I 00 0: With PLOCKEXT off, channel data rate clock synchronizer mode
1: With PLOCKEXT off, state machine clock synchronizer mode
MODADJ[2:0] [2:0] I 000
Table 17.
VERSION(0D) Bit Direction Default Description
VERSION[3:0] [3:0] O – Hardware version identifier
000 1 1 1
001 1/√2 0 –1
010 0 –1 1
011 –1/√2 0 –1
100 –1 1 1
101 –1/√2 0 –1
110 0 –1 1
111 1/√2 0 –1
fS/8 fS/4 fS/2
Modulator coefficient offset
Rev. PrC | Page 21 of 52
Page 22

AD9782 Preliminary Technical Data
Table 18.
CALMEMCK(OE) Bit Direction Default Description
CALMEM [5:4] O 00 Calibration memory
00: Uncalibrated
01: Self Calibration
10: Factory calibration
11: User input
CALCKDIV[2:0] [2:0] I 00 Calibration clock divide ratio from channel data rate
000: /32
001: /64
:
110: /2048
111: /4096
Table 19.
MEMRDWR(OF) Bit Direction Default Description
CALSTAT 7 O 0 0: Self Calibration cycle not complete
1: Self Calibration cycle complete
CALEN 6 I 0 1: Self Calibration in progress
XFERSTAT 5 O 0 0: Factory memory transfer not complete
1: Factory memory transfer complete
XFEREN 4 I 0 1: Factory memory transfer in progress
SMEMWR 3 I 0 1: Write static memory data from external port
SMEMRD 2 I 0 1: Read static memory to external port
FMEMRD 1 I 0 1: Read factory memory data to external port
UNCAL 0 I 0 1: Use uncalibrated
Table 20.
MEMADDR(10) Bit Direction Default Description
MEMADDR [7:0] [7:0] I/O 00000000 Address of factory or static memory to be accessed
Table 21.
MEMDATA(11) Bit Direction Default Description
MEMDATA [5:0] [5:0] I/O 000000 Data or factory or static memory access
Table 22.
DCRCSTAT(12) Bit Direction Default Description
DCRCSTAT (2) 2 O 0 0: With DATACLK CRC on, lock has never been achieved
1: With DATACLK CRC on, lock has been achieved at least once
DCRCSTAT(1) 1 O 0 0: With DATACLK CRC on, system is currently not locked
1: With DATACLK CRC on, system is currently locked
DCRCSTAT(0) 0 O 0 0: With DATACLK CRC on, system is currently locked
1: With DATACLK CRC on, system lost lock due to jitter
Rev. PrC | Page 22 of 52
Page 23

Preliminary Technical Data AD9782
–
–
–
–
–
–
–
–
–
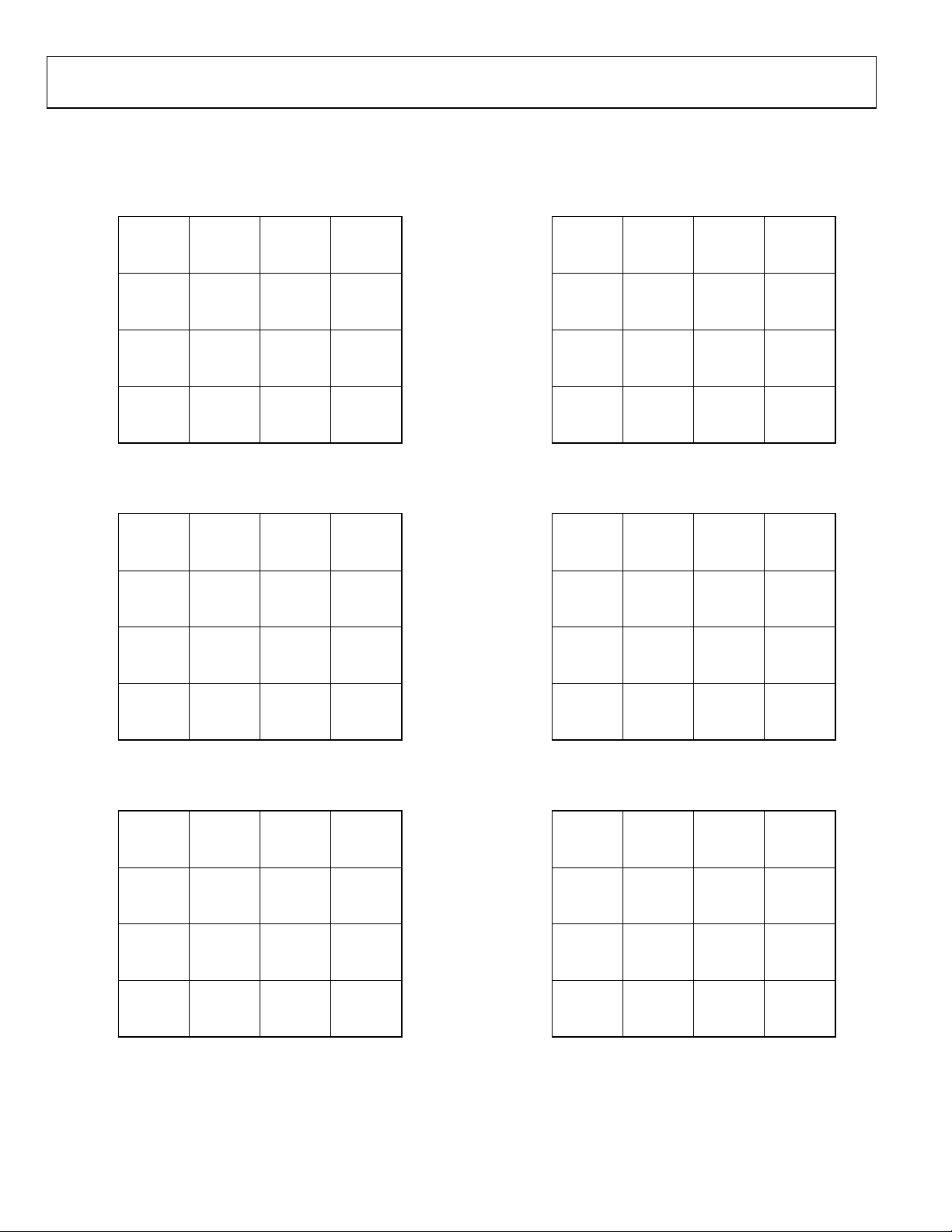
DIGITAL FILTER SPECIFICATIONS
–20
–40
–60
–80
100
120
140
–20
–40
–60
–80
100
120
140
–20
–40
–60
–80
100
120
140
0
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
03152-PrD-008
Figure 34. ×2 Interpolation Filter Response
0
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
03152-PrD-009
Figure 35. ×4 Interpolation Filter Response
0
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
03152-PrD-010
Figure 36. ×8 Interpolation Filter Response
DIGITAL INTERPOLATION FILTER COEFFICIENTS
Table 23. Stage 1 Interpolation Filter Coefficients
Lower Coefficient Upper Coefficient Integer Value
H(1) H(43) 9
H(2) H(42) 0
H(3) H(41) –27
H(4) H(40) 0
H(5) H(39) 65
H(6) H(38) 0
H(7) H(37) –131
H(8) H(36) 0
H(9) H(35) 239
H(10) H(34) 0
H(11) H(33) –407
H(12) H(32) 0
H(13) H(31) 665
H(14) H(30) 0
H(15) H(29) –1070
H(16) H(28) 0
H(17) H(27) 1764
H(18) H(26) 0
H(19) H(25) –3273
H(20) H(24) 0
H(21) H(23) 10358
H(22) 16384
Table 24. Stage 2 Interpolation Filter Coefficients
Lower Coefficient Upper Coefficient Integer Value
H(1) H(19) 19
H(2) H(18) 0
H(3) H(17) –120
H(4) H(16) 0
H(5) H(15) 436
H(6) H(14) 0
H(7) H(13) –1284
H(8) H(12) 0
H(9) H(11) 5045
H(10) 8192
Table 25. Stage 3 Interpolation Filter Coefficients
Lower Coefficient Upper Coefficient Integer Value
H(1) H(11) 7
H(2) H(10) 0
H(3) H(9) –53
H(4) H(8) 0
H(5) H(7) 302
H(6) 512
Rev. PrC | Page 23 of 52
Page 24

AD9782 Preliminary Technical Data
AD9782 CLOCK/DATA TIMING
DLL Disabled, Two-Port Data Mode, DATACLK as Output
With the interpolation set to 1×, the DATACLK output is a
delayed and inverted version of DACCLK at the same
frequency. Note that DACCLK refers to the differential clock
inputs applied at Pins 5 and 6. As Figure 37 shows, there is a
constant delay between the rising edge of DACCLK and the
falling edge of DATACLK.
t
= 5ns TYP
D
Figure 37. Data Timing, DLL Off, 1× Interpolation, DCLKPOL = 1
The DCLKPOL bit (Reg 02 Bit 4) allows the data to be latched
into the AD9782 on either the rising or falling edge of
DACCLK. With DCLKPOL = 1, the data is latched in on the
rising edge of Diff Clk, as shown in Figure 37. With DCLKPOL
= 0, as shown in Figure 38, data is latched in on the falling edge
of DACCLK. The setup and hold times are always with respect
to the latched edge of DACCLK.
DACCLK
IN
DATACLK
OUT
t
12
tH = 2.9ns TYPtS = –0.5ns TYP
DATA
03152-PrD-066
DACCLK
DATACLK
t
= 6ns TYP
D
tH = 2.9ns TYPtS = –0.5ns TYP
DATA
Figure 38. Data Timing, DLL Off, 1× Interpolation, DCLKPOL = 0
OUT
IN
03152-PrD-067
Rev. PrC | Page 24 of 52
Page 25

Preliminary Technical Data AD9782
With the interpolation set to 2×, the DACCLK input runs at
twice the speed of the DATACLK. Data is latched into the
AD9782’s inputs on every other rising edge of DACCLK, as
shown in Figure 40 and Figure 41. With DCLKPOL = 1, as
shown in Figure 40, the latching edge of DACCLK is the rising
edge that occurs just before the falling edge of DATACLK. With
DCLKPOL = 0, as in Figure 41, the latching edge of DACCLK is
the rising edge of DACCLK that occurs just before the rising
edge of DATACLK. The setup and hold time values are identical
to those in Figure 37 and Figure 38.
Note that there is a slight difference in the delay from the rising
edge of DACCLK to the falling edge of DATACLK, and the
delay from the rising edge of DACCLK to the rising edge of
DATACL K . As F i g u r e 39 sh o w s , the DATACLK duty c yc l e i s
slightly less than 50%. This is true in all modes.
With the interpolation set to 4× or 8×, the DACCLK input runs
at 4× or 8× the speed of the DATACLK output. The data is
latched in on a rising edge of DACCLK, similar to the 2×
interpolation mode. However, the latching edge is every fourth
edge in 4× interpolation mode and every eighth edge in the 8×
interpolation mode. Again, similar to operation in the 2×
interpolation mode, with DCLKPOL = 1, the latching edge of
DACCLK is the rising edge that occurs just before the falling
edge of DATACLK. With DCLKPOL = 0, the latching edge of
DACCLK is the rising edge that occurs just before the rising
edge of DATACLK. The setup and hold time values are identical
to those in 1× and 2× interpolation
03152-PrD-068
Figure 39.
DACCLK
DATACLK
t
= 5ns TYP
D
Figure 40. Data Timing, DLL Off, 2× Interpolation, DCLKPOL = 1
t
= 6ns TYP
D
Figure 41. Data Timing, DLL Off, 2× Interpolation, DCLKPOL = 0
tH = 2.9ns TYPtS = –0.5ns TYP
DATA
DACCLK
DATACLK
tH = 2.9ns TYPtS = –0.5ns TYP
DATA
OUT
OUT
IN
03152-PrD-069
IN
03152-PrD-070
Rev. PrC | Page 25 of 52
Page 26

AD9782 Preliminary Technical Data
DATAADJUST Synchronization
When designing the digital interface for high speed DACs, care
must be taken to ensure that the DAC input data meets setupand-hold requirements. Often, compensation must be used in
the clock delay path to the digital engine driving the DAC. The
AD9782 has the on chip capability to vary the DACCLK’s
latching edge. With the interpolation function enabled, this
allows the user the choice of multiple edges upon which to latch
the data. For instance, if the AD9782 is using 8× interpolation,
the user may latch from one of eight edges before the rising
edge of DATACLK, or seven edges after this rising edge. The
specific edge upon which data is latched is controlled by SPI
Register 05h, Bits 7:4. Table 26 shows the relationship of the
latching edge of DACCLK and DATACLK with the various
settings of the DATAADJ bits.
Table 26.
SPI Reg 05h
Bit 7 Bit 6 Bit 5 Bit 4
Latching Edge wrt DATACLK
0 0 0 0 0
0 0 0 1 +1
0 0 1 0 +2
0 0 1 1 +3
0 1 0 0 +4
0 1 0 1 +5
0 1 1 0 +6
0 1 1 1 +7
1 0 0 0 –8
1 0 0 1 –7
1 0 1 0 –6
1 0 1 1 –5
1 1 0 0 –4
1 1 0 1 –3
1 1 1 0 –2
1 1 1 1 –1
Figure 42, Figure 43, and Figure 44 show the alignment for the
latching edge of DACCLK with 4× interpolation and different
settings for DATAADJ. In Figure 42, DATAADJ is set to 0000,
with DCLKPOL set to 0 so that the latching edge of DACCLK is
immediately before the rising edge of DATACLK. The data
transitions shown in Figure 42 are synchronous with the
DACCLK, so that DACCLK and data are constant with respect
to each other. The only visible change when DATAADJ is
altered is that DATACLK moves, indicating the latching edge
has moved as well. Note that when DATAADJ is altered, the
latching edge with respect to DATACLK remains the same, but
the latching edge of DACCLK follows the edge of DATACLK.
RISING EDGE OF DATACLK
CONCURRENT WITH
LATCHING EDGE OF DACCLK
DACCLK
LATCHING EDGE
DATA TRANSITION
03152-PrD-071
Figure 42. DATAADJ = 0000
Figure 43 shows the same conditions, but now DATAADJ is set
to 1111. This moves DATACLK to the left in the plot, indicating
that it occurs one DACCLK cycle before it did in Figure 42. As
explained previously, the latching edge of DACCLK also moves
one cycle back in time.
RISING EDGE OF DATACLK
CONCURRENT WITH
LATCHING EDGE OF DACCLK
Note that the data in Figure 40 and Figure 41 was taken with the
DATAADJ default of 0000. With DCLKPOL = 0, the latching
edge of DACCLK is just previous to the rising edge of
DATACLK; with DCLKPOL = 1, the latching edge of DACCLK
is just previous to the falling edge of DATACLK.
With 8× interpolation, the user has the capability of using one
of 16 edges to latch the data. This is due to the fact that there are
eight DAC clock edges before and after the DATACLK until the
next DATACLK latching edge. With 4× interpolation, there are
only four latching edges of DACCLK available before and after
each DATACLK edge. Therefore, in 4× interpolation, only the
even numbered values for DATAADJ are available, and the
options are changed from +3 cycles to –4 cycles. With 2×
interpolation, there are only two edges available before and after
DATACLK, so the choices for DATAADJ are diminished to +1
cycle to –2 cycles.
Rev. PrC | Page 26 of 52
DACCLK
LATCHING EDGE
DATA TRANSITION
03152-PrD-072
Figure 43. DATAADJ = 1111
Page 27

Preliminary Technical Data AD9782
Figure 44 shows the same conditions, with DATAADJ now set
to 0001, thus moving DATACLK to the right in the plot. This
indicates that it occurs one DACCLK cycle after it did in
Figure 42. Now the latching edge of DACCLK moves forward in
time one cycle.
RISING EDGE OF DATACLK
CONCURRENT WITH
LATCHING EDGE OF DACCLK
DACCLK
LATCHING EDGE
DATA TRANSITION
03152-PrD-073
Figure 44. DATAADJ = 0001
INTERPOLATION MODES
Table 27.
INTERP[1] INTERP[0] Mode
0 0 No Interpolation
0 1 ×2 Interpolation
1 0 ×4 Interpolation
1 1 ×8 Interpolation
Interpolation is the process of increasing the number of points
in a time domain waveform by approximating points between
the input data points; on a uniform time grid, this produces a
higher output data rate. Applied to an interpolation DAC, a
digital interpolation filter is used to approximate the interpolated points, having an output data rate increased by the
interpolation factor. Interpolation filter responses are achieved
by cascading individual digital filter banks, whose filter
coefficients are given in Table 1; filter responses are shown in
Figure 34.
The digital filter’s frequency domain response exhibits
symmetry about half the output data rate and dc. It will cause
images of the input data to be shaped by the interpolation
filter’s frequency response. This has the advantage of causing
input data images, which fall in the stop band of the digital filter
to be rejected by the stop-band attenuation of the interpolation
filter; input data images falling in the interpolation filter’s passband will be passed. In band-limited applications, the images at
the output of the DAC must be limited by an analog reconstruction filter. The complexity of the analog reconstruction filter is
determined by the proximity of the closest image to the
required signal band. Higher interpolation rates yield larger
stop-band regions, suppressing more input images and resulting
in a much relaxed analog reconstruction filter.
A DAC shapes its output with a sinc function, having a null at
the sampling frequency of the DAC. The higher the DAC sampling rate compared to the input signal bandwidth, the less the
DAC sinc function will shape the output. Figure 45 shows the
interpolation filters of the AD9782 under different interpolation
rates, normalized to the input data rate, f
. The higher the
SIN
interpolation rate the more input data images fall in the
interpolation filter stop band and are rejected; the band-width
between passed images is larger with higher interpolation
factors. The sinc function shaping is also reduced with a higher
interpolation factor.
Table 28.
Sinc Shaping
Mode
No Interpolation –2.8241 f
×2 Interpolation –0.6708 2f
×4 Interpolation –0.1657 4f
×8 Interpolation –0.0413 8f
at 0.43f
(dB) Bandwidth to First Image
SIN
SIN
SIN
SIN
SIN
Rev. PrC | Page 27 of 52
Page 28

AD9782 Preliminary Technical Data
–
–
–
–
–
–
–
–
0
–50
100
150
–8 –6 –4 –2 –0 2 4 6 8
0
–50
100
150
–8 –6 –4 –2 0 2 4 6 8
0
–50
100
150
–8 –6 –4 –2 0 2
0
–50
100
150
–8 –6 –4 –2 0 2 4 68
SINCRESPONSE
4 68
NO INTERPOLATION
×2INTERPOLATION
×4INTERPOLATION
×8INTERPOLATION
INTERP[1] = 0
INTERP[0] = 0
f
SIN
INTERP[1] = 0
INTERP[0] = 1
f
SIN
INTERP[1] = 1
INTERP[0] = 0
f
SIN
INTERP[1] = 1
INTERP[0] = 1
f
SIN
03152-PrD-011
Figure 45. Interpolation Modes
REAL AND COMPLEX SIGNALS
A complex signal contains both magnitude and phase
information. Given two signals at the same frequency, if a point
in time can be taken such that the signal leading in phase is
cosinusoidal and the lagging signal is sinusoidal, then
information pertaining to the magnitude and phase of a
combination of the two signals can be derived; the combination
of the two signals can be considered a complex signal. The
cosine and sine can be represented as a series of exponentials;
recalling that a multiplication by j is a counter clockwise
rotation about the Re/Im plane, the phasor representation of a
complex signal, with frequency f, can be shown Figure 46.
Im
C
2πft
Acos(2πft) = A =
Asin(2πft) = A =[je
A
C = Ae
Re
Figure 46. Complex Phasor Representation
Im
A/2
–f
2πft
= Acos(2πft) + jAsin(2πft)
+j2πft
–j2πft
e
e
+j2πft
+ e
2
+ e
2j
–j2πft
A
2
A
2
Re
A/2
A/2
0
+f
FREQUENCY
A/2
+j2πft
–j2πft
[
e
+ e
]
+j2πft
–j2πft
+ e
]
03152-PrD-012
The cosine term represents a signal on the real plane with
mirror symmetry about dc; this is referred to as the real, inphase or I component of a complex signal. The sine term
represents a signal on the imaginary plane with mirror
asymmetry about dc; this term is referred to as the imaginary,
quadrature or Q complex signal component.
The AD9782 has two channels of interpolation filters, allowing
both I and Q components to be shaped by the same filter
transfer function. The interpolation filters’ frequency response
is a real transfer function. Two DACs are required to represent a
complex signal. A single DAC can only synthesize a real signal.
When a DAC synthesizes a real signal, negative frequency
components fold onto the positive frequency axis. If the input to
the DAC is mirror symmetrical about dc, the folded negative
frequency components fold directly onto the positive frequency
components in phase producing constructive signal summation.
If the input to the DAC is not mirror symmetric about dc,
negative frequency components may not be in phase with
positive frequency components and will cause destructive signal
summation. Different applications may or may not benefit from
either type of signal summation.
Rev. PrC | Page 28 of 52
Page 29

Preliminary Technical Data AD9782
MODULATION MODES
Table 29. Single Channel Modulation
MODDUAL CHANNEL MOD[1] MOD[0] Mode
0 0 0 0 I Channel, no modulation
0 0 0 1 I Channel, modulation by f
0 0 1 0 I Channel, modulation by f
0 0 1 1 I Channel, modulation by f
0 1 0 0 Q Channel, no modulation
0 1 0 1 Q Channel, modulation by f
0 1 1 0 Q Channel, modulation by f
0 1 1 1 Q Channel, modulation by f
Either channel of the AD9782’s interpolation filter channels can
be routed to the DAC and modulated. In single channel
operation the input data may be modulated by a real sinusoid;
the input data and the modulating sinusoid will contain both
positive and negative frequency components. A double
sideband output results when modulating two real signals. At
the DAC output the positive and negative frequency
components will add in phase resulting in constructive signal
summation.
Table 30.
Interpolation
Modulation None ×2 ×4 ×8
none f
f
/2 f
DAC
f
/4 Overlap Touching 2 f
DAC
f
/8 Overlap Overlap Touching 6 f
DAC
2 f
SIN
2 f
SIN
4 f
SIN
4 f
SIN
8 f
SIN
8 f
SIN
4 f
SIN
Table 31.
Interpolation
As the modulating sinusoidal frequency becomes a larger
fraction of the DAC update rate, f
the more the sinc function
DAC,
of the DAC shapes the modulated signal bandwidth, and the
closer the first image moves. As the AD9782 interpolation
filter’s pass band represents a large portion of the input data’s
Nyquist band, under certain modulation and interpolation
modes it is possible for modulated signal bands to touch or
overlap images if sufficient interpolation is not used.
Figure 48 shows the effect of real modulation under all
interpolation modes. The sinc shaping at the corners of the
modulated signal band and the bandwidth to the first image for
Modulation None ×2 ×4 ×8
None 0 0 0 0
–2.8241 –0.6708 –0.1657 –0.0413
f
/2 –0.0701 –1.1932 –2.3248 –3.0590
DAC
–22.5378 –9.1824 –6.1190 –4.9337
f
/4 Overlap Touching –0.2921 –0.5974
DAC
–1.9096 –1.3607
f
/8 Overlap Overlap Touching –0.0727
DAC
–0.4614
Modulated pass band edges sinc shaping(lower/upper).
those cases whose pass bands do not touch or overlap are
tabulated.
DAC
DAC
DAC
DAC
DAC
DAC
/2
/4
/8
/2
/4
/8
SIN
SIN
SIN
SIN
Rev. PrC | Page 29 of 52
Page 30

AD9782 Preliminary Technical Data
–
–
–
–
–
–
–
–
FILTERED INTERPOLATION IMAGES
0
DAC/8
f
–
f
/8 MODULATION
S
DAC/8
f
–
DAC/8fDAC/43fDAC/8fDAC/25fDAC/83fDAC/47fDAC/8
f
DAC/8fDAC/43fDAC/8fDAC/25fDAC/83fDAC/47fDAC/8
f
f
f
DAC
DAC
03152-PrD-013
f
–
–f
DAC
DAC
/8
–7f
/8
–7f
DAC
DAC
/4
f
–3
/4
f
–3
DAC
DAC
/8
f
–5
/8
f
–5
DAC
DAC
/2
f
–
/2
f
–
DAC
DAC
/8
DAC
f
–3
/8
DAC
f
–3
/4
DAC
f
–
/4
DAC
f
–
Figure 47. Double Sideband Modulation
0
–50
100
150
–8 –6 –4 –2 0 2 4 68
0
–50
100
150
–8–6–4–202468
0
–50
100
150
–8–6–4–202468
0
–50
100
150
–8 –6 –4
–202468
Figure 48. Real Modulation by f
/2 under all Interpolation Modes
DAC
NO INTERPOLATION
×2INTERPOLATION
×4 INTERPOLATION
×8 INTERPOLATION
INTERP[1] = 0
INTERP[0] = 0
MOD[1] = 0
MOD[0] = 1
f
SIN
INTERP[1] = 0
INTERP[0] = 1
MOD[1] = 0
MOD[0] = 1
f
SIN
INTERP[1] = 1
INTERP[0] = 0
MOD[1] = 0
MOD[0] = 1
f
SIN
INTERP[1] = 1
INTERP[0] = 1
MOD[1] = 0
MOD[0] = 1
f
SIN
03152-PrD-014
Rev. PrC | Page 30 of 52
Page 31

Preliminary Technical Data AD9782
0
–50
–100
–150
–8 –6 –4 –2 0 2 4 68
0
–50
–100
–150
–8 –6 –4 –2 0 2
0
–50
–100
–150
–8 –6 –4 –2 0 2 4 6 8
0
–50
–100
–150
–8 –6 –4 –2 0 2 4 6 8
Figure 49. Real Modulation by f
/4 under all Interpolation Modes
DAC
468
NO INTERPOLATION
×2 INTERPOLATION
×4 INTERPOLATION
×8 INTERPOLATION
INTERP[1] = 0
INTERP[0] = 0
MOD[1] = 1
MOD[0] = 0
f
SIN
INTERP[1] = 0
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 0
f
SIN
INTERP[1] = 1
INTERP[0] = 0
MOD[1] = 1
MOD[0] = 0
f
SIN
INTERP[1] = 1
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 0
f
SIN
03215-PrD-015
0
–50
–100
–150
–8
0
–50
–100
–150
–8 –6
0
–50
–100
–150
–8 –6
0
–50
–100
–150
8– –6
–6 –4 –2
–4 –2 0
–4 –2 0
–4 –2
Figure 50. Real Modulation by f
0 2
246
246
024
/8 under all Interpolation Modes
DAC
4 6 8
NO INTERPOLATION
×2 INTERPOLATION
×4 INTERPOLATION
×8 INTERPOLATION
68
INTERP[1] = 0
INTERP[0] = 0
MOD[1] = 1
MOD[0] = 0
f
SIN
INTERP[1] = 0
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 0
8
f
SIN
INTERP[1] = 1
INTERP[0] = 0
MOD[1] = 1
MOD[0] = 0
8
f
SIN
INTERP[1] = 1
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 0
f
SIN
03152-PrD-017
Rev. PrC | Page 31 of 52
Page 32

AD9782 Preliminary Technical Data
Table 32. Dual Channel Complex Modulation
MODSING REALIMAG MOD[1] MOD[0] Mode
0 0 0 0 Real output, no modulation
0 0 0 1 Real output, modulation by f
0 0 1 0 Real output, modulation f
0 0 1 1 Real output, modulation f
0 1 0 0 Image output, no modulation
0 1 0 1 Imag output, modulation by f
0 1 1 0 Imag output, modulation by f
0 1 1 1 Imag output, modulation by f
In dual channel mode, the two channels may be modulated by a
complex signal, with either the real or imaginary modulation
result directed to the DAC. Assume initially that the complex
modulating signal is defined for a positive frequency only; this
causes the output spectrum to be translated in frequency by the
modulation factor only. No additional sidebands are created as a
result of the modulation process, and therefore the bandwidth
to the first image from the baseband bandwidth is the same as
the output of the interpolation filters. Furthermore, pass bands
will not overlap or touch. The sinc shaping at the corners of the
modulated signal band are tabulated. Figure 52 shows the
complex modulations.
Table 33.
Interpolation
Modulation None ×2 ×4 ×8
None 0 0 0 0
–2.8241 –0.6708 –0.1657 –0.0413
f
/2 –0.0701 –1.1932 –2.3248 –3.0590
DAC
–22.5378 –9.1824 –6.1190 –4.9337
f
/4 –0.4680 –0.0175 –0.2921 –0.5974
DAC
–6.0630 –3.3447 –1.9096 –1.3607
f
/8 –1.3723 –0.1160 –0.0044 –0.0727
DAC
–4.9592 –1.7195 –0.7866 –0.4614
Modulated passband edges sinc shaping(lower/upper).
DAC
DAC
/4
/8
DAC
DAC
DAC
DAC
/2
/2
/4
/8
FILTERED INTERPOLATION IMAGES
f
–
f
–
DAC
DAC
/8
f
–7
/8
f
–7
DAC
DAC
/4
f
–3
/4
f
–3
DAC
DAC
/8
f
–5
/8
f
–5
DAC
DAC
/2
DAC
f
–
/2
DAC
f
–
/8
DAC
f
–3
/8
DAC
f
–3
/4
DAC
f
–
/4
DAC
f
–
Figure 51. Complex Modulation
0
/8
DAC
f
–
f
/8 MODULATION
S
0
/8
DAC
f
–
/8
DAC
f
NO NEGATIVE
SIDEBAND
/8
DAC
f
/4
DAC
f
/4
DAC
f
/8
3f
/8
3f
DAC
DAC
/2
DAC
f
/2
DAC
f
/8
DAC
5f
/8
DAC
5f
/4
3f
/4
3f
DAC
DAC
/8
7f
/8
7f
DAC
DAC
f
f
DAC
DAC
03152-PrD-018
Rev. PrC | Page 32 of 52
Page 33

Preliminary Technical Data AD9782
–
–
–
–
–
–
–
–
–
–
–
–
0
–50
100
150
–8 –6 –4 –2 0 2 4 68
0
–50
100
150
–8 –6 –4 –2 0 2 4 6 8
0
–50
100
150
–8 –6 –4 –2 0 2 4 6 8
Figure 52. Complex Modulation by f
0
–50
100
150
–8
0
–50
100
150
–8
0
–50
100
150
–8 –6 –4 –2 0 2 4
–6 –4 –2 0 2 4 68
–6 –4 –2 0 2 4 6 8
Figure 53. Complex Modulation by f
0
–50
–100
–150
–8 –6 –4 –2 0 2
0
–50
–100
–150
–8
0
–50
–100
–150
–8 –6 –4 –2 0 2 4 68
–6 –4 –2 0 2 4 68
Figure 54. Complex Modulation by f
/2 under all Interpolation Modes
DAC
/4 under all Interpolation Modes
DAC
4 68
/8 under all Interpolation Modes
DAC
×2I NTERPOLATION
×4I NTERPOLATION
×8I NTERPOLATION
×2INTERPOLATION
×4INTERPOLATION
×8INTERPOLATION
68
×2INTERPOLATION
×4INTERPOLATION
×8INTERPOLATION
INTERP[1] = 0
INTERP[0] = 1
MOD[1] = 0
MOD[0] = 1
f
SIN
INTERP[1] = 1
INTERP[0] = 0
MOD[1] = 0
MOD[0] = 1
f
SIN
INTERP[1] = 1
INTERP[0] = 1
MOD[1] = 0
MOD[0] = 1
f
SIN
INTERP[1] = 0
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 0
f
SIN
INTERP[1] = 1
INTERP[0] = 0
MOD[1] = 1
MOD[0] = 0
f
SIN
INTERP[1] = 1
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 0
f
SIN
INTERP[1] = 0
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 1
f
SIN
INTERP[1] = 1
INTERP[0] = 0
MOD[1] = 1
MOD[0] = 1
f
SIN
INTERP[1] = 1
INTERP[0] = 1
MOD[1] = 1
MOD[0] = 1
f
SIN
03152-PrD-019
03152-PrD-020
03152-PrD-021
Rev. PrC | Page 33 of 52
Page 34

AD9782 Preliminary Technical Data
POWER DISSIPATION
The AD9782 has seven power supply domains: two 3.3 V analog
domains (AVDD1 and AVDD2), two 2.5 V analog domains
(ADVDD and ACVDD), one 2.5 V clock domain (CLKVDD),
and two digital domains (DVDD, which runs from 2.5 V, and
DRVDD, which can run from 2.5 V or 3.3 V).
60
50
40
4×8×
2×
The current needed for the 3.3 V analog supplies, AVDD1 and
AVDD2, is consistent across speed and varying modes of the
AD9782. Nominally, the current for AVDD1 is 29 mA across all
speeds and modes, while the current for AVDD2 is 20 mA.
The current for the 2.5 V analog supplies and the digital
supplies varies depending on speed and mode of operation.
Figure 55, Figure 56, and Figure 57 show this variation. Note
that CLKVDD, ADVDD, and ACVDD vary with clock speed
and interpolation rate, but not with modulation rate.
425
400
375
350
325
300
275
250
225
200
175
IDVDD (mA)
150
125
100
75
50
25
0
8× fs/8
8× fs/4
8×
F
DATA
4× fs/8
4× fs/4
4×
(MSPS)
Figure 55. DVDD Supply Current vs. Clock Speed, Interpolation, and
Modulation Rates
2× fs/8
2× fs/4
2×
1×
2500 25 50 75 100 125 150 175 200 225
03152-PrD-077
30
IDVDD (mA)
20
10
0
F
DATA
(MSPS)
1×
2500 25 50 75 100 125 150 175 200 225
03152-PrD-078
Figure 56. CLKVDD Supply Current vs. Clock Speed and Interpolation Rates
30
25
20
15
IDVDD (mA)
10
5
0
8×
F
DATA
4×
(MSPS)
2×
1×
2500 25 50 75 100 125 150 175 200 225
03152-PrD-079
Figure 57. ADVDD and ACVDD Supply Current vs. Clock Speed and
Interpolation Rates
Rev. PrC | Page 34 of 52
Page 35

Preliminary Technical Data AD9782
FILTERED INTERPOLATION IMAGES
/8
/4
/8
/2
DAC
f
–
DAC
f
–
DAC
f
–
f
–7
/8
f
–7
/8
f
–7
DAC
DAC
DAC
DAC
f
–3
/4
DAC
f
–3
/4
DAC
f
–3
f
–5
/8
f
–5
/8
f
–5
DAC
DAC
DAC
f
–
/2
f
–
/2
f
–
DAC
DAC
DAC
/8
f
–3
/8
f
–3
/8
f
–3
DAC
DAC
DAC
/4
f
–
/4
f
–
/4
f
–
DAC
DAC
DAC
/8
DAC
f
–
f
/8 MODULATION
S
/8
DAC
f
–
f
/4 MODULATION
S
/8
DAC
f
–
Figure 58. Complex Modulation with Negative Frequency Aliasing
DUAL CHANNEL COMPLEX MODULATION WITH HILBERT
Table 34.
HILBERT Mode
0 Hilbert transform off
1 Hilbert transform on
When complex modulation is performed, the entire spectrum is
translated by the modulation factor. If the resulting modulated
spectrum is not mirror symmetric about dc, when the DAC
synthesizes the modulated signal, negative frequency components will fall on the positive frequency axis and can cause
destructive summation of the signals. For some applications,
this can be seen as distorting the modulated output signal.
X = Ae
Im
j2π(f + fm)t
Re
Y = Ae
Im
j2π(f + fm)t – π/2
Re
Z = HILBERT(Y) C = X – Z
Im
Re
Im
Re
000
/8
/4
/8
/2
/8
/4
/8
DAC
f
/8
DAC
f
/8
DAC
f
DAC
f
/4
DAC
f
/4
DAC
f
3f
/8
3f
DAC
/8
DAC
3f
DAC
DAC
f
/2
DAC
f
/2
DAC
f
DAC
5f
/8
DAC
5f
/8
DAC
5f
DAC
3f
/4
DAC
3f
/4
DAC
3f
DAC
7f
/8
DAC
7f
/8
DAC
7f
f
f
f
By performing a second complex modulation with a modulating signal having a fixed π/2 phase difference, Figure 59 (Y),
relative to the original complex modulation signal, Figure 59
(X), taking the Hilbert transform of the new resulting complex
modulation, and subtracting it from the original complex modulation output all negative frequency components can be folded
in phase to the positive frequency axis before being synthesized
by the DAC. When the DAC synthesizes the modulated output
there are no negative frequency components to fold onto the
positive frequency axis out of phase; consequently no distortion
is produced as a result of the modulation process.
0
ALIASED NEGATIVE FREQUENCY INTERPOLATION IMAGES
–50
DAC
DAC
DAC
03152-PrD-022
A/2
A/2
f
A/2 A/2
A/2 A/2
A/2
A/2
A/2A/2
A/2
f
A/2
f
A
0000
f
A
03152-PrD-023
Figure 59. Negative Freque ncy Imag e Rejecti on
dBFS
–100
–150
Figure 60. Negative Freque ncy Aliasing Distort ion
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
03152-PrD-024
Rev. PrC | Page 35 of 52
Page 36

AD9782 Preliminary Technical Data
Figure 60 shows this effect at the DAC output for a mirror
asymmetic signal about dc produced by complex modulation
without a Hilbert transform. The signal bandwidth was narrowed to show the aliased negative frequency interpolation
images.
The transfer function of an ideal Hilbert transform has a +90°
phase shift for negative frequencies, and a –90° phase shift for
positive frequencies. Because of the discontinuities that occur at
0 Hz and at 0.5 × Sample Rate, any real implementation of the
Hilbert Transform trades off bandwidth versus ripple.
In contrast, Figure 61 shows the same waveform with the
Hilbert transform applied. Clearly, the aliased interpolation
images are not present.
0
–50
dBFS
–100
–150
Figure 61. Effects of Hilbert Transform
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
03152-PrD-025
If the output of the AD9782 is to be used with a quadrature
modulator, negative frequency images are cancelled without the
need of a Hilbert transform.
HILBERT TRANSFORM IMPLEMENTATION
The Hilbert transform on the AD9782 is implemented as a 19coefficient FIR. The coefficients are given in Table 35
Table 35.
Coefficient Integer Value
H(1) –6
H(2) 0
H(3) –17
H(4) 0
H(5) –40
H(6) 0
H(7) –91
H(8) 0
H(9) –318
H(10) 0
H(11) 318
H(12) 0
H(13) 91
H(14) 0
H(15) 40
H(16) 0
H(17) 17
H(18) 0
H(19) 6
Figure 62 and Figure 63 show the gain of the Hilbert transform
versus frequency. Gain is essentially flat, with a pass-band ripple
of 0.1dB over the frequency range 0.07 × Sample Rate to
0.43 × Sample Rate.
Figure 64 shows the phase response of the Hilbert transform
implemented in the AD9782. The phase response for positive
frequencies begins at –90° at 0 Hz, followed by a linear phase
response (pure time delay) equal to nine filter taps (nine clock
cycles). For negative frequencies, the phase response at 0 Hz is
+90°, again followed by a linear phase delay of nine filter taps.
To compensate for the unwanted 9-cycle delay, an equal delay of
nine taps is used in the AD9782 digital signal path opposite to
the Hilbert transform. This delay block is noted as t on the data
sheet.
10
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
Figure 62. Hilbert Transform Gain
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8
–1.0
Figure 63. Hilbert Transform Ripple
1000100 200 300 400 500 600 700 800 900
03152-PrD-074
1000100 200 300 400 500 600 700 800 900
03152-PrD-075
Rev. PrC | Page 36 of 52
Page 37

Preliminary Technical Data AD9782
4
3
The AD9782 has the ability to place the baseband single sideband complex signal either above the IF frequency or below it.
Figure 66 illustrates the baseband selection.
2
1
0
–1
–2
–3
–4
1200100 200 400 600 800 1000
Figure 64. Phase Response of Hilbert Transform
Table 36. Dual Channel Complex Modulation Sideband
Selection
Sideband Mode
0 Lower IF sideband rejected
1 Upper IF sideband rejected
LO
Re()
Im()
0
90
03150-PrD-003
I
AD9782
Q
AD9782
Figure 65. AD9782 Driving Quadrature Modulator
03152-PrD-076
0
–50
dBFS
–100
–150
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
03152-PrD-027
Figure 66. Upper IF Sideband Rejected
0
–50
dBFS
–100
The AD9782 can be configured to drive a quadrature modulator, representatively as in Figure 65. Where two AD9782s are
used with one AD9782 producing the real output, the second
AD9782 produces the imaginary output. By configuring the
AD9782 as a complex modulator coupled to a quadrature
modulator, IF image rejection is possible. The quadrature
modulator acts as the real part of a complex modulation producing a double sideband spectrum at the local oscillator (LO)
frequency, with mirror symmetry about dc.
A baseband double sideband signal modulated to IF increases
IF filter complexity and reduces power efficiency. If the baseband signal is complex, a single sideband IF modulation can be
used, relaxing IF filter complexity and increasing power
efficiency.
Rev. PrC | Page 37 of 52
–150
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
03152-PrD-028
Figure 67. Lower IF Sideband Rejected
Page 38

AD9782 Preliminary Technical Data
IF
–f
IF
f
–
IF
f
–
Figure 68. IF Quadrature Modulation of Real and Complex Baseband Signals
BASEBAND IF
00
0
IF
f
SIDEBAND = 0
IF
f
SIDEBAND = 1
IF
f
03152-PrD-029
Table 37. Data Port Synchronization
PLOCKEXT DCLKEXT MODSYNC DCLKCRC Mode Function
1 X X X PLL output PLL locked flag output, synchronizer disabled
0 0 0 X Dataclk Master Channel data rate clock output
0 0 1 X Modulator Master Modulator synchronization clock output
0 1 0 0 Dataclk Slave Input channel data rate clock, DLL off
0 1 0 1 Dataclk Slave Input channel data rate clock, DLL on
0 1 1 0 Modulator Slave Input modulator synchronizer clock, DLL off
0 1 1 1 Modulator Slave Input modulator synchronizer clock, DLL on
In applications where two or more AD9782s are used to synthesize several digital data paths, it may be necessary to ensure that
the digital inputs to each device are latched synchronously. In
complex data processing applications, digital modulator phase
alignment may be required between two AD9782s. In order to
allow data synchronization and phase alignment, only one
AD9782 should be configured as a master device, providing a
reference clock for another slave-configured AD9782.
With synchronization enabled, a reference clock signal is
generated on the DATACLK/PLL_LOCK pin of the master. The
DATACLK/PLL_LOCK pins on the slave devices act as inputs
The second master mode, DATACLK master mode, generates a
reference clock that is at the channel data rate. In this mode, the
slave devices align their internal channel data rate clock to the
master. If modulator phase alignment is needed, a concurrent
serial write to all slave devices is necessary. To achieve this, the
CSB pin on all slaves must be connected together and a group
serial write to the MODADJ register bits must be performed;
the modulator coefficient alignment is updated on the next
rising edge of the internal state machine following a successful
serial write, Figure 69. Modulator master mode does not need a
concurrent serial write as slaves lock to the master phase
automatically.
for the reference clock generated by the master. The DATACLK/
PLL_LOCK pin on the master and all slaves must be directly
connected. All master and slave devices must have the same
clock source connected to their respective CLK+/CLK– pins.
When configured as a master, the reference clock generated may
take one of two forms. In modulator master mode, the reference
clock will be a square wave with a period equal to 16 cycles of
the DAC update clock. Internal to the AD9782 is a 16-state
finite state machine, running at the DAC update rate. This state
machine generates all internal and external synchronization
clocks and modulator phasings. The rising edge of the master
In a slave device, the local channel data rate clock and the digital
modulator clock are created from the internal state machine.
The local channel data rate clock is used by the slave to latch
digital input data. At high data rates, the delay inherent in the
signal path from master to slave may cause the slave to lag the
master when acquiring synchronization. To account for this, an
integer number of the DAC update clock cycles may be
programmed into the slave device as an offset. The value in
DATADJ allows the local channel data rate clock in the slave
device to advance by up to eight cycles of the DAC clock or
delayed by up to seven cycles, Figure 70.
reference clock is time aligned to the internal state machine’s
state zero. Slave devices use the master’s reference clock to
synchronize their data latching and align their modulator’s
phase by aligning their local state machine state zero to the
master.
The digital modulator coefficients are updated at the DAC clock
rate and decoded in sequential order from the state machine
according to Figure 71. The MODADJ bits can be used to align
a different coefficient to the finite state machine’s zero state as
shown in Figure 72.
Rev. PrC | Page 38 of 52
Page 39

Preliminary Technical Data AD9782
STATE MACHINE
CYCLE CLOCK
CHANNEL DATA
RECEIVED CHANNEL
DATA RATE CLOCK
DATA RATE CLOCK
DAC
CLOCK
STATE
MACHINE
MODULATOR
COEFFICIENT
MODADJ
RATE CLOCK
01234567891011121314150123456789101112131415
10–1010–1010–1010–10–1010–1010–1010–1010
000 000
Figure 69. Synchronous Serial Modulator Phase Alignment
DATADJ[3:0]
DAC CLOCK
LOCAL CHANNEL
0000 00011111
–1 +1
Figure 70. Local Channel Data Rate Clock Synchronized with Offset
STATE 2 3 4 5 6 7 8 9 10 11 12 13 4 1510
DECODE 0 0 0 0 0 –1 0 0 0 0 01 1/ 2 –1/ 2 –1/ 2 –1/ 2
fs/8 12345670
fs/4 1 2 30
fs/2
0 1
Figure 71. Digital Modulator State Machine Decode
03152-PrD-030
03152-PrD-031
1
03152-PrD-032
MODADJ[2:0]
DAC CLOCK
STATE
MACHINE
MODULATOR
COEFFICIENT
STATE MACHINE
CYCLE CLOCK
000 101010
14150123 1501 15012
–1 0 1 0 –1 0 0 –1 0 1 0 –1 0
Figure 72. Local Modulator Coefficient Synchronized with Offset
Rev. PrC | Page 39 of 52
03152-PrD-033
Page 40

AD9782 Preliminary Technical Data
A
X
OPERATING THE AD9782 REV E EVALUATION BOARD
This section helps the user get started with the AD9782
evaluation board. Because it is intended to provide starter
information to power up the board and verify correct operation,
a description of some of the more advanced modes of operation
has been omitted. For a description of the various SPI registers
and the effect they have on the operating modes of the AD9782,
see the Mode Control (via SPI Port) section.
POWER SUPPLIES
The AD9782 Rev E Evaluation Board has five power supply
connectors, labeled VDDIN, CVDIN, VDD2IN, VDD3IN, and
AVDIN. The AD9782 itself actually has seven power supply
domains. To reconcile the power supply domains on the chip
with the power supply connectors on the evaluation board, use
Table 38.
Additionally, the DRVDD power supply on the AD9782 is used
to supply power for the digital input bus. DRVDD can be run
from 2.5 V or 3.3 V. On the evaluation board, DRVDD is jumper
selectable by JP1, just to the left of the chip on the evaluation
board. With the jumper set to the 3.3 V position, DRVDD chip
receives its power from VDD3IN. With the jumper set to the
2.5 V position, DRVDD receives its power from AVDIN.
PECL CLOCK DRIVER
The AD9782 system clock is driven from an external source via
connector S1. The AD9782 Evaluation Board includes an
OnSemiconductor MC100EPT22 PECL clock driver. In the
factory, the evaluation board is set to use this PECL driver as a
single-ended-to-differential clock receiver. The PECL driver can
be set to run from 2.5 V from the CVDIN power connector, or
3.3 V from the VDD3IN power connector. This setting is done
via jumper, JP2, situated next to the CVDIN power connector,
and by setting input bias resistors R23 and R4 on the evaluation
board. The factory default is for the PECL driver to be powered
from CVDIN at 2.5 V (R23 = 90.9 Ω, R4 = 115 Ω). To operate
the PECL driver with a 3.3 V supply, R23 must be replaced with
a 115 Ω resistor and R4 must be replaced with a 115 Ω resistor,
as well as changing the position of JP2. The schematic of the
PECL driver section of the evaluation board is shown below in
Figure 73. A low jitter sine wave can be used as the clock source.
Care must be taken to make sure the clock amplitude does not
exceed the power supply rails for the PECL driver.
CLKVDDS
R23
MC100EPT22
115Ω
C32
0.1µF
CLK
Figure 73. PECL Driver on AD9782 Rev E Evaluation Board
R4
90.9Ω
1
7
U2
COND;5
CLKVDDS;8
2
CLKVDDS
R5
50Ω
R7
50Ω
R6
50Ω
CLK+
CLK–
03152-PrD-080
Table 38.
Nominal Power
Evaluation Board Label PS Domain on Chip
Supply Voltage (V) Description
VDDIN DVDD 2.5 SPI port
CVDIN CLKVDD 2.5 Clock circuitry
VDD2IN ACVDD and ADVDD 2.5 Analog circuitry containing clock and digital interface circuitry
VDD3IN AVDD2 3.3 Switching analog circuitry
AVDIN AVDD1 3.3 Analog output circuitry
Rev. PrC | Page 40 of 52
Page 41

Preliminary Technical Data AD9782
DATA INPUTS
Digital data inputs to the AD9782 are accessed on the
evaluation board through connectors J1 and J2. These are 40 pin
right angle connectors that are intended to be used with
standard ribbon cable connectors. The input levels should be
either 3.3 V or 2.5 V CMOS, depending on the setting of the
DRVDD jumper JP1. The data format is selectable through
Register 02h, Bit 7 (DATAFMT). With this bit set to a default 0,
the AD9782 assumes that the input data is in twos complement
format. With this bit set to 1, data should be input in offset
binary format.
When the evaluation board is first powered up and the clock
and data are running, it is recommended that the proper
operating current is verified. Depress reset switch SW1 to
ensure that the AD9782 is in the default mode. The default
mode for the AD9782 is for the internal PLL to be disabled, and
the interpolation set to 1×. The modulator is turned off in the
default mode. The nominal operating currents for the
evaluation board in the power-up default mode are shown in
Table 39.
Additionally, the DRVDD power supply on the AD9782 is used
to supply power for the digital input bus. DRVDD can be run
from 2.5 V or 3.3 V. On the evaluation board, DRVDD is jumper
selectable by JP1, just to the left of the chip on the evaluation
board. With the jumper set to the 3.3 V position, DRVDD chip
receives its power from VDD3IN. With the jumper set to the
2.5 V position, DRVDD receives its power from AVDIN.
Table 39. Nominal Operating Currents in Power-Up Default Mode
Evaluation Board Power Supply
VDDIN 24 49 74 99
CVDIN 79 83 87 92
VDD2IN 1 4 6 8
VDD3IN 30 30 30 30
AVDIN 27 27 27 27
Table 40. SPI Registers
Register Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 0
01h INTERP[1] INTERP[0]
04h PLLON PLLMULT[1] PLLMULT[0] PLLDIV[1] PLLDIV[0] PLOCKEXT
Interpolation Rate PLL Multiplier PLL Divider
Bit 7 Bit 6 Rate Bit 6 Bit 5 Mult Bit 4 Bit 3 Div
0 0 1× 0 0 2× 0 0 ÷1
0 1 2× 0 1 4× 0 1 ÷2
1 0 4× 1 0 8× 1 0 ÷4
1 1 8× 1 1 16× 1 1 ÷8
50 MSPS 100 MSPS 150 MSPS 200 MSPS
SPI PORT
SW1 is a hard reset switch that sets the AD9782 to its default
state. It should be used every time the AD9782 power supply is
cycled or the clock is interrupted, or if new data is to be written
via the SPI port. For a description of the various SPI registers
and the effect they have on the operating modes of the AD9782,
see the Mode Control (via SPI Port) section. Set the SPI
software to read back data from the AD9782 and verify that
when the software is run, the expected values are read back.
OPERATING WITH PLL DISABLED
The SPI registers referenced in this section are shown in
Table 40.
With the PLL disabled, the evaluation board clock input must
be run at the intended DAC sample rate, up to the specified
limit of 500 MSPS. At the same time, the interpolation rate
should be set so the input data rate does not exceed the 200
MSPS limit. In the default mode with the PLL disabled, the
DATACLK signal from the AD9782 is available at connector S2.
The rate of this clock is the system clock applied at S1, divided
by the interpolation rate. DATACLK can be used to synchronize
the external data into the AD9782.
Nominal Current @ Speed (mA)
Rev. PrC | Page 41 of 52
Page 42

AD9782 Preliminary Technical Data
OPERATING WITH PLL ENABLED
Note that a specific revision of the AD9782 on the Rev E
Evaluation Board has a nonfunctioning PLL. This revision can
be identified by the xxx.
With the AD9782 PLL enabled, the evaluation board clock input
must be run at the data input rate, up to the specified 200 MSPS
limit. The PLL controls the internal clock multiplication and
drives the interpolation filters and digital modulator. The
internal PLL has a VCO in the control loop that is designed to
operate optimally over the 200 MHz to 500 MHz range. The
VCO speed can be calculated as follows:
VCO Speed = Input Data Rate × PLLMULT[1,0]
The interpolation rate is set by Bits 6 and 7. With the PLL
enabled, the settings for the interpolation rate, the PLL
multiplier, and the PLL divide are interrelated. The interpolation
rate must meet the following criteria:
Interpolation Rate = [Settings of Bits 6, 7] = [PLLMULT ÷
PLLDIVIDER]
Therefore, assuming the input data rate is constant and the
VCO is at optimal speed, if the interpolation rate is increased by
a factor of M, the PLLMULT setting must be decreased by the
same factor M.
With the PLL enabled, DATACLK connector S2 indicates the
lock state of the PLL. A Logic 1 from S2 indicates lock; a Logic 0
indicates the PLL is not currently locked.
ANALOG OUTPUT
The analog output of the AD9782 is accessed via connector S3.
Once all settings are selected and current levels, PLL lock state,
and SPI port functionality are verified, the analog signal at S3
can be viewed. For most of the AD9782’s applications, a
spectrum analyzer is the instrument of choice to verify proper
performance. A typical spectral plot is shown in Figure 74, with
the AD9782 synthesizing a two-tone signal in the default mode
with a 200 MSPS sample rate. A single tone CW signal should
provide output power of approximately +0.5 dBm to the
spectrum analyzer.
If the spectrum does not look correct at this point, the data
input may be violating setup and hold times with respect to the
input clock. To correct this, the user should vary the input data
timing. If this is not possible, SPI Register 02h, Bit 4 can be
inverted. This bit controls the clock edge upon which the data is
latched. If these methods do not correct the spectrum, it is
unlikely that the issue is timing related. This note should then
be reread to verify that all instructions have been followed.
10
0
–10
–20
–30
–40
–50
–60
–60
–70
–80
–90
–100
START 100 kHz STOP 200 MHz19.9 MHz/
Figure 74. Typical Spectral Plot
03152-PrD-081
Rev. PrC | Page 42 of 52
Page 43

Preliminary Technical Data AD9782
CGND; 5
4
CLK+
CLK–
3
MC100EPT22
CLKVDDS; 8
U2
6
JP30
ADVDD
JP33
ACVDD
R7
50Ω
R5
50Ω
R6
50Ω
CGND; 5
CLKVDDS; 8
2
1
MC100EPT22
U2
7
R4
ACLKX
AVDD2
3
2
1
90.9Ω
DRVDD
AB
JP36
R23
115Ω
CLKVDDS
C32
0.1µF
C76
0.1µF
JP1
C75
0.1µF
CLKVDDS
C28
4.7µF
+
C35
0.1µF
L6
B
3
6.3V
CLKVDDS
2
JP1
C34
0.1µF
FERRITE
C29
22µF
A
1
AUX CLOCK
16V
JP7
JP8
L14
VAL
JP6
L13
TP35
BLK BLKBLKBLKBLKBLKBLK
TP36
L7
L10
VAL
VAL
VAL
TP30 TP31 TP32 TP33 TP34
DVDD
DVDD
C48
C46
+
2.5VN
DVDDS
TP16
BLK
0.1µF
TP18
BLK
TP17
BLK
22µF
16V
L11
L12
FERRITE
FERRITE
AVD3
TP1
RED
L8
SMAEDGE
ADVDD2_IN
FERRITE
AGND2; 3,4,5
S7
C45
C47
+
2.5V
TP12
BLK
0.1µF
22µF
16V
DVDD_IN
JP34
TP13
L9
SMAEDGE
VDD
RED
FERRITE
DGND; 3,4,5
S5
AVDD2
JP9
AVD2
TP3
BLK
C67
0.1µF
TP2
RED
L3
FERRITE
C65
22µF
16V
+
3.3V
AGND2; 3,4,5
S9
SMAEDGE
ADVDD3_IN
AVDD
TP5
2
C68
C64
+
3.3VQ
BLK
0.1µF
22µF
16V
JP10
AVD1
TP4
RED
L2
FERRITE
1
AGND; 3,4,5
SMAEDGE
S10
AVDD_IN
CLKVDD
JP5
TP7
C69
C63
+
2.5VQ
BLK
0.1µF
22µF
POWER INPUT FILTERS
16V
03152-PrD-082
CVD
TP6
RED
L1
FERRITE
CGND;3,4,5
SMAEDGE
S11
CLKVDD_IN
Figure 75. Power Supply Distribution
Rev. PrC | Page 43 of 52
Page 44

AD9782 Preliminary Technical Data
AVDD2
AVDD
S3
R42
49.9Ω
OUT1
P
IOUTB
T3
C66
+
ACOM1P21
AGND; 3,4,5
T2A
S
ADTL1-12
46
10µF
6.3V
ACVDD
AVDD1P1
ACOM2P2
4
NC = 5
3
C17
AVDD2P2
6
PS
TC1-1T
1
2
6.3V
C3
10µF
+
C15
0.1µF
0.1µF
ACVDDP2
ADCOMP2
ACCOM2P2
3
1
PS
T2B
NC = 5
TP8
WHT
TP11
WHT
DNC1
FSADJ
ADVDDP2
4
TP10
5
WHT
REFIO
R8
+
RESET
RESET
TTWB-1-B
6
2.000kΩ
0.01%
C16
0.1µF
C30
10V
SPCSB
SPI_CSB
C61
0.001µF
C18
0.001µF
C4
0.1µF
C62
0.1µF
C55
0.001µF
C20
0.001µF
C49
0.1µF
807978777675747372717069686766656463626160595857565554535251504948474645444342
DNC2
R10
49.9ΩR949.9Ω
ADVDD
C2
10µF
6.3V
+
C14
0.1µF
C19
0.1µF
AVDD2P1
ACVDDP1
ADVDDP1
ACOM2P1
ACCOMP1
31
IOUTA
AVDD1P2
ACOM1P11
ACOM2P12
BLK
TP29
AGND; 3,4,5
S3
DVDD
C5
10µF
6.3V
+
C21
0.001µF
C38
0.1µF
10µF
SPCLK
SPSDI
SPSDO
SP-SDI
DVDD6
SP-SDO
DCOM6
SP-CLK
BD00
P2B0LSB
BD03
BD02
BD01
P2B1
P2B2
P2B3
DRVDD
2
1
SW1
4
3
FLOAT; 5
RESET
DVDD
C6
10µF
6.3V
+
C22
0.001µF
C37
0.1µF
BD04
BD05
P2B4
P2B5
DVDD5
DCOM5
BD08
BD07
BD06
41
P2B6
P2B7
P2B8
U1
AD9786BTSP
CLK+
CLK–
CLKCOM1
T1
JP23
T1-1T
CLKCOM2
S1
ACLKX
DCOM1
DVDD1
P1B15MSB
10111213141516171819202122232425262728293031323334353637383940
AD15
CLK– CLK+
DVDD
CGND; 3,4,5
P1B12
P1B13
P1B14
AD13
AD14
C40
0.1µF
C26
0.001µF
C10
10µF
6.3V
+
DCOM2
DVDD2
P1B10
P1B11
AD11
AD10
AD12
DVDD
DRVDD
P1B6
P1B7
P1B8
P1B9
AD06
AD07
AD08
AD09
C41
0.1µF
C25
0.001µF
C9
10µF
6.3V
+
C33
0.1µF
C54
0.001µF
C31
10µF
6.3V
+
DCOM3
DVDD3
P1B1
DVDD
TP14
WHT
P1B2
AD01
AD02
C39
0.1µF
C24
C8
10µF
+
S2
P1B3
P1B4
P1B5
AD03
AD04
AD05
DCLK-PLLL
DRVDD1
P1B0LSB
AD00
0.001µF
6.3V
DATACLK
DGND; 3,4,5
P2B14-OPCLK
P2B15MSB-IQSEL
BD14
3
BD15
A
2
JP28
P2B13
BD13
B
DCOM4
1
DVDD
OPCLK_3
DVDD4
JP27
S6
P2B10
P2B11
P2B12
BD12
P2B9
BD11
BD09
BD10
C36
0.1µF
C23
0.001µF
C7
10µF
6.3V
+
S4
OPCLK
OPCLK
IQ
DGND; 3,4,5
03152-PrD-083
CLKVDD1
CLKVDD2
LPF
123456789
C49
1pF
C42
0.1µF
C11
0.1µF
C12
0.1µF
C1
10µF
CLKVDD
R3
10kΩ
R2
10kΩ
6.3V
+
JP22
WHT
123
5
6
R1
50Ω
4
CLKVDD
T2A
C13
0.1µF
TP15
Figure 76. Local Circuitry
Rev. PrC | Page 44 of 52
Page 45

Preliminary Technical Data AD9782
AX15
AX14
AX13
AX12
DATA-A
AX15
RIBBON
J1
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
AX07
AX06
AX05
AX04
AX14
AX13
AX12
AX11
AX10
AX09
AX08
AX07
AX06
AX05
AX04
AX03
AX02
AX01
AX00
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
R26
100
R27
100
R28
100
R29
100
R38
100
R39
100
R40
100
R34
100
R30
Ω
Ω
100
R31
100
Ω
R32
100
Ω
R33
100
Ω
AX08
Ω
AX09
Ω
AX10
Ω
AX11
RCOM
21 345678910
R1 R2 R3 R4 R5 R6 R7 R8 R9
RCOM
R44
100
Ω
R43
100
Ω
R41
100
Ω
R46
100
AX00
Ω
AX01
Ω
AX02
Ω
AX03
Ω
Ω
JP3
JP12
R1 R2 R3 R4 R5 R6 R7 R8 R9R1 R2 R3 R4 R5 R6 R7 R8 R9
RP5
RCOM
DNP
RP1 22
116
RP1 22
215
RP1 22
314
RP1 22
413
RP1 22
512
RP1 22
611
RP1 22
710
RP1 22
89
RP2 22
116
RP2 22
215
RP2 22
314
RP2 22
413
RP2 22
512
RP2 22
611
RP2 22
710
RP2 22
89
RP6
DNP
21 34567891021 345678910
21 345678910
R1 R2 R3 R4 R5 R6 R7 R8 R9
RCOM
JP21
JP19
RP7
DNP
AD15
AD14
AD13
AD12
AD11
AD10
AD09
AD08
AD07
AD06
AD05
AD04
AD03
AD02
AD01
AD00
RP8
DNP
03152-PrD-084
Figure 77. Digital Data Port A Input Terminations
Rev. PrC | Page 45 of 52
Page 46

AD9782 Preliminary Technical Data
BX15
BX14
BX13
BX12
DATA-B
BX15
RIBBON
J2
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
BX07
BX06
BX05
BX04
BX14
BX13
BX12
BX11
BX10
BX09
BX08
BX07
BX06
BX05
BX04
BX03
BX02
BX01
BX00
SDO
CLK
SDI
CSB
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
100
100
100
100
100
100
100
100
R57
R62
100
Ω
R61
R60
R64
Ω
R58
100
Ω
R59
100
Ω
R63
100
Ω
BX08
Ω
BX09
Ω
BX10
Ω
BX11
RCOM
21 345678910
R1 R2 R3 R4 R5 R6 R7 R8 R9
RCOM
BX00
Ω
BX01
Ω
BX02
Ω
BX03
Ω
R55
R54
R53
R56
R51
100
Ω
R49
100
Ω
R47
100
Ω
R52
100
Ω
JP26
JP31
R1 R2 R3 R4 R5 R6 R7 R8 R9R1 R2 R3 R4 R5 R6 R7 R8 R9
RP12
RCOM
DNP
RP3 22
116
RP3 22
215
RP3 22
314
RP3 22
413
RP3 22
512
RP3 22
611
RP3 22
710
RP3 22
89
RP4 22
116
RP4 22
215
RP4 22
314
RP4 22
413
RP4 22
512
RP4 22
611
RP4 22
710
RP4 22
89
RP11
DNP
21 34567891021 345678910
21 345678910
R1 R2 R3 R4 R5 R6 R7 R8 R9
RCOM
JP25
JP24
RP9
DNP
BD15
BD14
BD13
BD12
BD11
BD10
BD09
BD08
BD07
BD06
BD05
BD04
BD03
BD02
BD01
BD00
RP10
DNP
03152-PrD-085
Figure 78. Digital Data Port B Input Terminations
Rev. PrC | Page 46 of 52
Page 47

Preliminary Technical Data AD9782
DVDDS
C52
OPCLK
3
J
1
CLK
2
K
74LCX112
U7
11
J
13
CLK
12
K
74LCX112
U7
15
10
14
4
PRE
CLR
PRE
CLR
5
Q
6
Q_
DGND;8
DVDDS;16
9
Q
7
Q_
DGND;8
DVDDS;16
SPCSB
SPCLK
SPSDI
SPSDO
OPCLK_3
R21
10kΩ
+
R20
10kΩ
4.7µF
6.3V
C53
0.1µF
SDO
SDI
CLK
CSB
U5
21
74AC14
U5
4
74AC14
U5
6
74AC14
U6
12
U6
3
U6
5
3
5
74AC14
4
74AC14
6
74AC14
12 13
74AC14
10
74AC14
8
74AC14
13 12
11
9
U5
U5
U5
U6
74AC14
U6
74AC14
U6
74AC14
R50
9kΩ
R48
9kΩ
11
R45
9kΩ
9
DVDDS
10
8
Figure 79. SPI and One-Port Clock Circuitry
SW2
A
2
B
++
C43
4.7µF
6.3V
SW3
A
3
2
1
B
C50
0.1µF
SW4
A
3
2
1
B
C44
4.7µF
6.3V
SW5
A
3
2
B
1
C51
0.1µF
3
1
SPI PORT
P1
1
2
3
4
5
6
03152-PrD-086
Rev. PrC | Page 47 of 52
Page 48

AD9782 Preliminary Technical Data
Figure 80. PCB Assembly, Primary Side
03152-PrD-087
Figure 81. PCB Assembly, Secondary Side
Rev. PrC | Page 48 of 52
03152-PrD-088
Page 49

Preliminary Technical Data AD9782
Figure 82. PCB Assembly, Layer 1 Metal
03152-PrD-089
Figure 83. PCB Assembly, Layer 6 Metal
Rev. PrC | Page 49 of 52
03152-PrD-090
Page 50

AD9782 Preliminary Technical Data
Figure 84. PCB Assembly, Layer 2 Metal (Ground Plane)
03152-PrD-091
Figure 85. PCB Assembly, Layer 3 Metal (Power Plane)
Rev. PrC | Page 50 of 52
03152-PrD-092
Page 51

Preliminary Technical Data AD9782
Figure 86. PCB Assembly, Layer 4 Metal (Power Plane)
03152-PrD-093
03152-PrD-094
Figure 87. PCB Assembly, Layer 5 Metal (Ground Plane)
Rev. PrC | Page 51 of 52
Page 52

AD9782 Preliminary Technical Data
OUTLINE DIMENSIONS
PIN 1
14.00 SQ
12.00 SQ
TOP VIEW
(PINS DOWN)
61
60
61
60
BOTTOM
VIEW
80
1
6.00
SQ
0.75
0.60
0.45
SEATING
PLANE
1.20
MAX
80
1
0.15
0.05
COPLANARITY
0.20
0.09
0.08
20
21
1.05
1.00
0.95
0.50 BSC
0.27
0.22
0.17
COMPLIANT TO JEDEC STANDARDS MS-026-ADD-HD
41
40
GAGE PLANE
0.25
3.5°
41
40
7°
0°
21
Figure 88. 80-Lead Thermally Enhanced TQFP
(SV-80)
Dimensions shown in millimeters)
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on the
human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
20
© 2004 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
PR03150–0–3/04(PrC)
Rev. PrC | Page 52 of 52
 Loading...
Loading...