

Page 1
FEATURES
Pin-compatible family
Excellent dynamic performance
AD9736: SFDR = 82 dBc at f
AD9736: SFDR = 69 dBc at f
AD9736: IMD = 87 dBc at f
AD9736: IMD = 82 dBc at f
LVDS data interface with on-chip 100 Ω terminations
Built-in self test
LVDS sampling integrity
LVDS-to-DAC data transfer integrity
Low power: 380 mW (I
= 20 mA; f
FS
1.8/3.3 V dual-supply operation
Adjustable analog output
8.66 mA to 31.66 mA (RL = 25 Ω to 50 Ω)
On-chip 1.2 V reference
160-lead chip scale ball grid array (CSP_BGA) package
APPLICATIONS
Broadband communications systems
Cellular infrastructure (digital predistortion)
Point-to-point wireless
CMTS/VOD
Instrumentation, automatic test equipment
Radar, avionics
PRODUCT DESCRIPTION
= 30 MHz
OUT
= 130 MHz
OUT
= 30 MHz
OUT
= 130 MHz
OUT
OUT
= 330 MHz)
10-, 12-, 14-Bit, 1200 MSPS DACS
AD9734/AD9735/AD9736
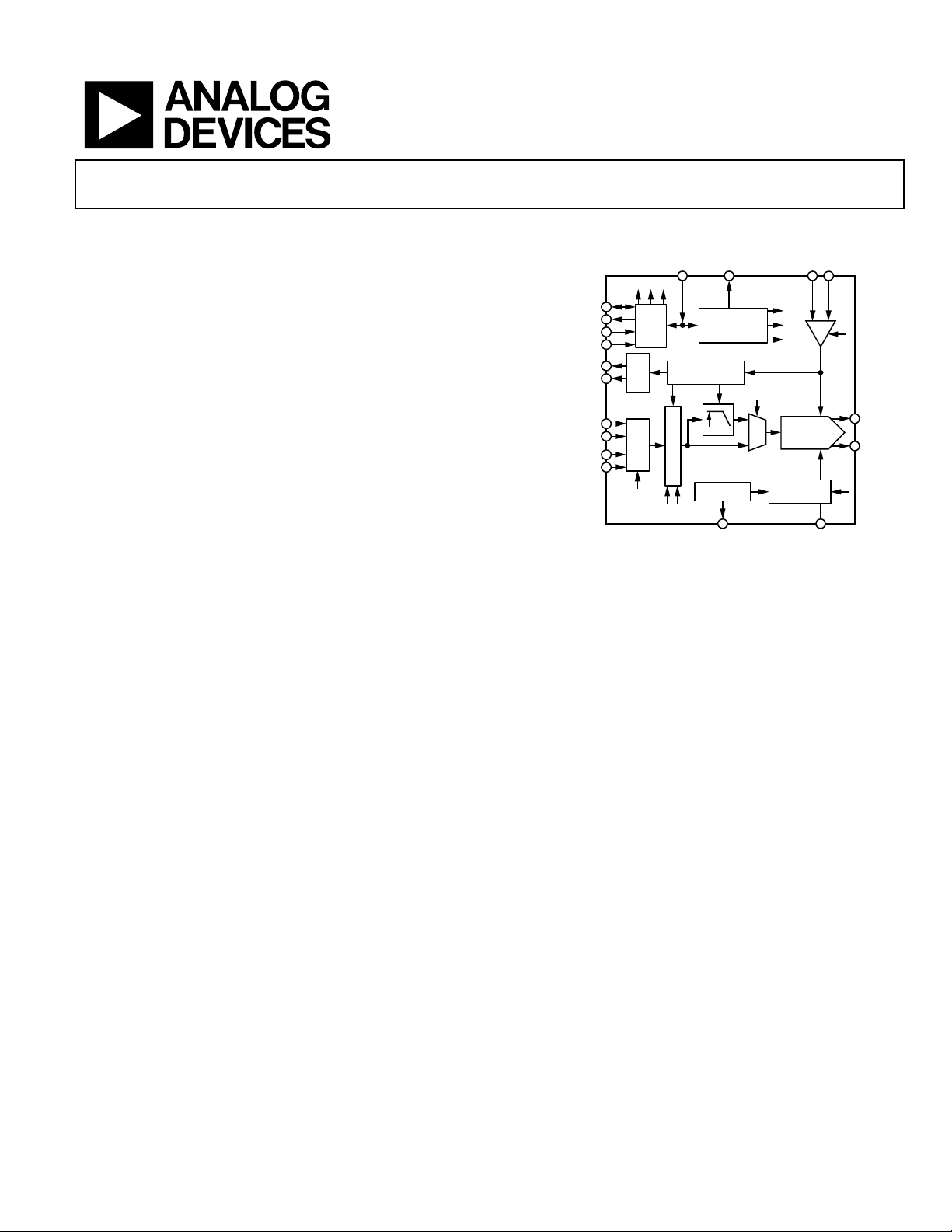
FUNCTIONAL BLOCK DIAGRAM
DACCLK–
S3
REFERENCE
CURRENT
SDI
SDO
CSB
SCLK
DATACLK_OUT+
DATACLK_OUT–
DATACLK_IN+
DATACLK_IN–
DB[13:0]+
DB[13:0]–
S1S2S3
SPI
LVDS
DRIVER
LVDS
RECEIVER
C2
RESET
CONTROLLER
CLOCK
DISTRIBUTION
SYNCHRONIZER
BAND GAP
C1S1
Figure 1.
IRQ
2×
PRODUCT HIGHLIGHTS
1. Low noise and intermodulation distortion (IMD) features
enable high quality synthesis of wideband signals at
intermediate frequencies up to 600 MHz.
2. Double data rate (DDR) LVDS data receivers support the
maximum conversion rate of 1200 MSPS.
3. Direct pin programmability of basic functions or SPI port
access for complete control of all AD973x family functions.
C1
C2
C3
14-, 12-,
10-BIT DAC
CORE
I120VREF
DACCLK+
C3
S2
IOUTA
IOUTB
04862-001
The AD9736, AD9735, and AD9734 are high performance, high
frequency DACs that provide sample rates of up to 1200 MSPS,
permitting multicarrier generation up to their Nyquist
frequency. The AD9736 is the 14-bit member of the family,
while the AD9735 and the AD9734 are the 12-bit and 10-bit
members, respectively. They include a serial peripheral interface
(SPI) port that provides for programming of many internal
parameters and also enables readback of status registers. A
reduced-specification LVDS interface is utilized to achieve the
high sample rate. The output current can be programmed
over a range of 8.66 mA to 31.66 mA. The AD973x family is
manufactured on a 0.18 µm CMOS process and operates from
1.8 V and 3.3 V supplies for a total power consumption of
380 mW in bypass mode. It is supplied in a 160-lead chip scale
ball grid array for reduced package parasitics.
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
4. Manufactured on a CMOS process, the AD973x family
uses a proprietary switching technique that enhances
dynamic performance.
5. The current output(s) of the AD9736 family are easily con-
figured for single-ended or differential circuit topologies.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700
Fax: 781.461.3113 © 2005 Analog Devices, Inc. All rights reserved.
www.analog.com
Page 2

AD9734/AD9735/AD9736
TABLE OF CONTENTS
DC Specifications ............................................................................. 4
Digital Specifications........................................................................ 6
AC Specifications.............................................................................. 8
Absolute Maximum Ratings............................................................ 9
ESD Caution.................................................................................. 9
Pin Configuration and Function Descriptions........................... 10
Te r mi n ol o g y .................................................................................... 13
Typical Performance Characteristics........................................... 14
AD9736 Static Linearity, 10 mA Full Scale............................. 14
AD9736 Static Linearity, 20 mA Full Scale............................. 15
AD9736 Static Linearity, 30 mA Full Scale............................. 16
AD9735 Static Linearity, 10 mA, 20 mA, 30 mA Full Scale .17
AD9734 Static Linearity, 10 mA, 20 mA, 30 mA Full Scale .18
AD9736 Power Consumption, 20 mA Full Scale................... 19
AD9736 Dynamic Performance, 20 mA Full Scale................ 19
Theory of Operation ...................................................................... 31
Serial Peripheral Interface............................................................. 32
General Operation of the Serial Interface............................... 32
Short Instruction Mode (8-Bit Instruction) ........................... 32
Long Instruction Mode (16-Bit Instruction).......................... 32
Serial Interface Port Pin Descriptions..................................... 32
MSB/LSB Transfers .................................................................... 33
Notes on Serial Port Operation ................................................ 33
Pin Mode Operation .................................................................. 34
Reset Operation.......................................................................... 34
Programming Sequence ............................................................ 34
Interpolation Filter ..................................................................... 35
Data Interface Controllers......................................................... 35
LVDS Samp l e Logic .................................................................... 36
LVDS Samp l e Logic C a l ibr ation ............................................... 36
AD9736 Dynamic Performance, 20 mA Full Scale................ 21
AD9736, AD9735, AD9734 WCDMA ACLR, 20 mA Full
.............................................................................................. 22
Scale
AD9735, AD9734 Dynamic Performance, 20 mA Full Scale24
SPI Register Map............................................................................. 25
SPI Register Descriptions.............................................................. 26
MODE Register (REG 00)......................................................... 26
Interrupt Request Register (IRQ) (Reg 01)............................. 26
Full Scale Current (FSC) Register (Regs 02, 03)..................... 27
LVDS Controller (LVDS_CNT) Register (Regs 04, 05, 06).. 27
SYNC Controller (SYNC_CNT) Register (Regs 07, 08) .......28
Cross Controller (CROS_CNT) Register (Regs 10, 11)........ 28
Analog Control (ANA_CNT) Register (Regs 14, 15)............ 29
Built-in Self Test Control (BIST_CNT) Registers (Regs 17, 18,
19, 20, 21)
Controller Clock Predivider (CCLK_DIV) Reading Register
(Reg 22)
.................................................................................... 29
........................................................................................ 30
Operating the LVDS Controller In Manual Mode via the SPI
............................................................................................... 37
Port
Operating the LVDS Controller in Surveillance and Auto
............................................................................................ 37
Mode
SYNC Logic and Controller.......................................................... 38
SYNC Logic and Controller Operation................................... 38
Operating in Manual Mode ...................................................... 38
Operation in Surveillance and Auto Modes ........................... 38
FIFO Bypass................................................................................ 38
Digital Built-In Self Test (BIST) ................................................... 40
Overview ..................................................................................... 40
AD973x BIST Procedure........................................................... 41
AD973x Expected BIST Signatures.......................................... 41
Generating Expected Signatures .............................................. 42
Cross Controller Registers............................................................. 43
Rev. 0 | Page 2 of 68
Page 3

AD9734/AD9735/AD9736
Analog Control Registers...............................................................44
DAC Data Sources ..........................................................................49
Band Gap Temperature Characteristic Trim Bits ...................44
Mirror Roll-Off Frequency Control .........................................44
Headroom Bits.............................................................................44
Volt a ge R e fere n ce ........................................................................45
Applications Information...............................................................46
Driving the DACCLK Input......................................................46
DAC Output Distortion Sources ...................................................47
DC-Coupled DAC Outputs ...........................................................48
REVISION HISTORY
4/05—Revision 0: Initial Version
Input Data Timing ..........................................................................50
Synchronization Timing.................................................................51
Power Supply Sequencing ..............................................................52
AD973X Evaluation Board Schematics ........................................53
AD973X Evaluation Board PCB Layout .......................................58
Outline Dimensions........................................................................65
Ordering Guide...........................................................................65
Rev. 0 | Page 3 of 68
Page 4
AD9734/AD9735/AD9736
DC SPECIFICATIONS
AVDD33 = DVDD33 = 3.3 V, CVDD18 = DVDD18 = 1.8 V, maximum sample rate, IFS = 20 mA, 1× mode, 25 Ω 1% balanced load,
unless otherwise noted.
Table 1.
AD9736 AD9735 AD9734
Parameter Min Typ Max Min Typ Max Min Typ Max Unit
RESOLUTION 14 12 10 Bits
ACCURACY
Integral Nonlinearity (INL) −5.6 ±1.0 +5.6 −1.5 ±0.50 +1.5 −0.5 ±0.12 +0.5 LSB
Differential Nonlinearity (DNL) −2.1 ±0.6 +2.1 −0.5 ±0.25 +0.5 −0.1 ±0.06 +0.1 LSB
ANALOG OUTPUTS
Offset Error −0.01 ±0.005 +0.01 −0.01 ±0.005 +0.01 −0.01 ±0.005 +0.01 % FSR
Gain Error (With Internal
Reference)
Gain Error (Without Internal
Reference)
Full-Scale Output Current 8.66 20.2 31.66 8.66 20.2 31.66 8.66 20.2 31.66 mA
Output Compliance Range −1.0 +1.0 −1.0 1.0 −1.0 +1.0 V
Output Resistance 10 10 10 MΩ
Output Capacitance 1 1 1 pF
TEMPERATURE DRIFT
Offset 0 0 0 ppm/°C
Gain 80 80 80 ppm/°C
Reference Voltage
1
REFERENCE
Internal Reference Voltage1 1.14 1.2 1.26 1.14 1.2 1.26 1.14 1.2 1.26 V
Output Resistance
2
ANALOG SUPPLY VOLTAGES
AVDD33 3.13 3.3 3.47 3.13 3.3 3.47 3.13 3.3 3.47 V
CVDD18 1.70 1.8 1.90 1.70 1.8 1.90 1.70 1.8 1.90 V
DIGITAL SUPPLY VOLTAGES
DVDD33 3.13 3.3 3.47 3.13 3.3 3.47 3.13 3.3 3.47 V
DVDD18 1.70 1.8 1.90 1.70 1.8 1.90 1.70 1.8 1.90 V
SUPPLY CURRENTS
1× Mode, 1.2 GSPS
I
AVDD33
I
CVDD18
I
DVDD33
I
DVDD18
FIR Bypass (1×) Mode 380 380 380 mW
2× Mode, 1.2 GSPS
I
AVDD33
I
CVDD18
I
DVDD33
I
DVDD18
FIR 2× Interpolation Filter
Enabled
±1.0 ±1.0 ±1.0 % FSR
±1.0 ±1.0 ±1.0 % FSR
40 40 40 ppm/°C
5 5 5 kΩ
25 25 25 mA
47 47 47 mA
10 10 10 mA
122 122 122 mA
25 25 25 mA
47 47 47 mA
10 10 10 mA
234 234 234 mA
550 550 550 mW
Rev. 0 | Page 4 of 68
Page 5
AD9734/AD9735/AD9736
AD9736 AD9735 AD9734
Parameter Min Typ Max Min Typ Max Min Typ Max Unit
Static, No Clock
I
AVDD33
I
CVDD18
I
DVDD33
I
DVDD18
FIR Bypass (1×) Mode 133 133 133 mW
Sleep Mode, No Clock
I
AVDD33
FIR Bypass (1×) Mode 59 65 59 65 59 65 mW
Power-Down Mode
I
AVDD33
I
CVDD18
I
DVDD33
I
DVDD18
FIR Bypass (1×) Mode 0.12 1.24 0.12 1.24 0.12 1.24 mW
1
Default band gap adjustment (Reg0E<2:0> = 0h).
2
Use an external amplifier to drive any external load.
25 25 25 mA
8 8 8 mA
10 10 10 mA
2 2 2 mA
2.5 3.15 2.5 3.15 2.5 3.15 mA
0.01 0.13 0.01 0.13 0.01 0.13 mA
0.02 0.12 0.02 0.12 0.02 0.12 mA
0.01 0.12 0.01 0.12 0.01 0.12 mA
0.01 0.11 0.01 0.11 0.01 0.11 mA
Rev. 0 | Page 5 of 68
Page 6
AD9734/AD9735/AD9736
DIGITAL SPECIFICATIONS
AVDD33 = DVDD33 = 3.3 V, CVDD18 = DVDD18 = 1.8 V, maximum sample rate, IFS = 20 mA, 1× mode, 25 Ω 1% balanced load,
unless otherwise noted.
LVDS drivers and receivers are compliant to the IEEE-1596 reduced range link, unless otherwise noted.
Table 2.
Parameter Min Typ Max Unit
LVDS DATA INPUTS
(DB[13:0]+, DB[13:0]−) DB+ = V
Input Voltage Range, Via or Vib 825 1575 mV
Input Differential Threshold, V
Input Differential Hysteresis, V
Receiver Differential Input Impedance, R
LVDS Input Rate 1200 MSPS
LVDS Minimum Data Valid Period (t
LVDS CLOCK INPUT
(DATACLK_IN+, DATACLK_IN−) DATACLK_IN+ = V
Input Voltage Range, Via or V
Input Differential Threshold1, V
Input Differential Hysteresis, V
Receiver Differential Input Impedance, R
Maximum Clock Rate 600 MHz
LVDS CLOCK OUTPUT
(DATACLK_OUT+, DATACLK_ OUT−) DATACLK_OUT+ = V
Termination
Output Voltage High, Voa or V
Output Voltage Low, Voa or V
Output Differential Voltage, |Vod| 150 200 250 mV
Output Offset Voltage, V
Output Impedance, Single-Ended, R
Ro Mismatch Between A and B, ∆R
Change in |Vod| Between 0 and 1, |∆Vod|
Change in Vos Between 0 and 1, ∆V
Output Current—Driver Shorted to Ground, Isa, I
Output Current—Drivers Shorted Together, I
Power-Off Output Leakage, |Ixa|, |Ixb| 10 mA
Maximum Clock Rate 600 MHz
DAC CLOCK INPUT (CLK+, CLK−)
Input Voltage Range, CLK– or CLK+ 0 800
Differential Peak-to-Peak Voltage 400 800 1600 mV
Common-Mode Voltage 300 400 500 mV
Maximum Clock Rate 1200 MHz
SERIAL PERIPHERAL INTERFACE
Maximum Clock Rate (f
Minimum Pulse Width High, t
Minimum Pulse Width Low, t
Minimum SDIO and CSB to SCLK Setup, t
Minimum SCLK to SDIO Hold, t
Maximum SCLK to Valid SDIO and SDO, t
Minimum SCLK to Invalid SDIO and SDO, t
, DB- = Vib
ia
idth
– V
idthh
idthl
in
) 344 ps
MDE
, DATACLK_IN− = V
ia
ib
idth
- V
idthh
idthl
in
, DATACLK_OUT− = Vob 100 Ω
oa
ib
−100 +100 mV
20 mV
80 120 Ω
825 1575 mV
−100 +100 mV
20 mV
80 120 Ω
ob
ob
os
o
o
1375 mV
1025 mV
1150 1250 mV
80 100 120 Ω
10 %
25 mV
SCLK
os
sb
sab
, 1/t
) 20 MHz
SCLK
PWH
PWL
DS
DH
DV
DNV
25 mV
20 mA
4 mA
20 ns
20 ns
10 ns
5 ns
20 ns
5 ns
Rev. 0 | Page 6 of 68
Page 7
AD9734/AD9735/AD9736
Parameter Min Typ Max Unit
INPUTS (SDI, SDIO, SCLK, CSB)
Voltage in High, V
Voltage in Low, V
Current in High, I
Current in Low, I
ih
il
ih
il
Input Capacitance pF
SDIO OUTPUT
Voltage out High, V
Voltage out Low, V
Current out High, I
Current out Low, I
1
Refer to the section for recommended LVDS differential drive levels. Input Data Timing
oh
ol
oh
ol
2.0 3.3 V
0 0.8 V
−10 +10 µA
−10 +10 µA
2.4 3.6 V
0 0.4 V
4 mA
4 mA
Rev. 0 | Page 7 of 68
Page 8
AD9734/AD9735/AD9736
AC SPECIFICATIONS
AVDD33 = DVDD33 = 3.3 V, CVDD18 = DVDD18 = 1.8 V, maximum sample rate, IFS = 20 mA, 1× mode, 25 Ω 1% balanced load,
unless otherwise noted.
Table 3.
AD9736 AD9735 AD9734
Parameter Min Typ Max Min Typ Max Min Typ Max Unit
DYNAMIC PERFORMANCE
Maximum Update Rate 1200 1200 1200 MSPS
SPURIOUS-FREE DYNAMIC RANGE (SFDR)
f
= 800 MSPS
DAC
f
= 20 MHz 75 75 75 dBc
OUT
f
= 1200 MSPS
DAC
f
= 50 MHz 80 76 76 dBc
OUT
f
= 100 MHz 77 74 71 dBc
OUT
f
= 316 MHz 63 63 60 dBc
OUT
f
= 550 MHz 55 54 53 dBc
OUT
TWO-TONE INTERMODULATION
DISTORTION (IMD)
f
= 1200 MSPS
DAC
f
= f
OUT2
+ 1.25 MHz
OUT
f
= 40 MHz 88 84 83 dBc
OUT
f
= 50 MHz 85 84 83 dBc
OUT
f
= 100 MHz 84 81 79 dBc
OUT
f
= 315 MHz 70.5 67 66 dBc
OUT
f
= 550 MHz 65 60 60 dBc
OUT
NOISE SPECTRAL DENSITY (NSD)
Single Tone
f
= 1200 MSPS
DAC
f
= 50 MHz −165
OUT
f
= 100 MHz −164 −161 −154 dBm/Hz
OUT
f
= 241MHz −158.5 −160.5 −159.5 −155 dBm/Hz
OUT
f
= 316 MHz −158 −157 −152 dBm/Hz
OUT
f
= 550 MHz −155 −155 −149 dBm/Hz
OUT
Eight-Tone
f
= 1200 MSPS, 500 kHz Tone
DAC
Spacing
f
= 50 MHz −166.5 −163 −154 dBm/Hz
OUT
f
= 100 MHz −166 −163 −152 dBm/Hz
OUT
f
= 241MHz −163.3 −165 −161.5 −150.5 dBm/Hz
OUT
f
= 316 MHz −164 −162 −151 dBm/Hz
OUT
f
= 550 MHz −162 −160 −150 dBm/Hz
OUT
−162
−154 dBm/Hz
Rev. 0 | Page 8 of 68
Page 9
AD9734/AD9735/AD9736
ABSOLUTE MAXIMUM RATINGS
Table 4.
With
Parameter
AVDD33 AVSS −0.3 V +3.6 V
DVDD33 DVSS −0.3 V +3.6 V
DVDD18 DVSS −0.3 V +1.98 V
CVDD18 CVSS −0.3 V +1.98 V
AVSS DVSS −0.3 V +0.3 V
AVSS CVSS −0.3 V +0.3 V
DVSS CVSS −0.3 V +0.3 V
CLK+, CLK− CVSS −0.3 V CVDD18 + 0.18 V
PIN_MODE DVSS −0.3 V DVDD33 + 0.3 V
DATACLK_IN,
DATACLK_OUT
LVDS Data Inputs DVSS −0.3 V DVDD33 + 0.3 V
IOUTA, IOUTB AVSS −1.0 V AVDD33 + 0.3 V
I120, VREF, IPTAT AVSS −0.3 V AVDD33 + 0.3 V
IRQ, CSB, SCLK,
SDO, SDIO, RESET DVSS −0.3 V DVDD33 + 0.3 V
Junction Temp. 150°C
Storage Temp. −65°C +150°C
Respect to
DVSS −0.3 V DVDD33 + 0.3 V
Min Max
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
sections of this specification is not implied. Exposure to
absolute maximum ratings for extended periods may effect
device reliability.
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on
the human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
Note that this device in its current form does not meet Analog Devices’ standard requirements for ESD as measured against the charged
device model (CDM). As such, special care should be used when handling this product, especially in a manufacturing environment. Analog
Devices will provide a more ESD-hardy product in the near future at which time this warning will be removed from this datasheet.
Rev. 0 | Page 9 of 68
Page 10
AD9734/AD9735/AD9736
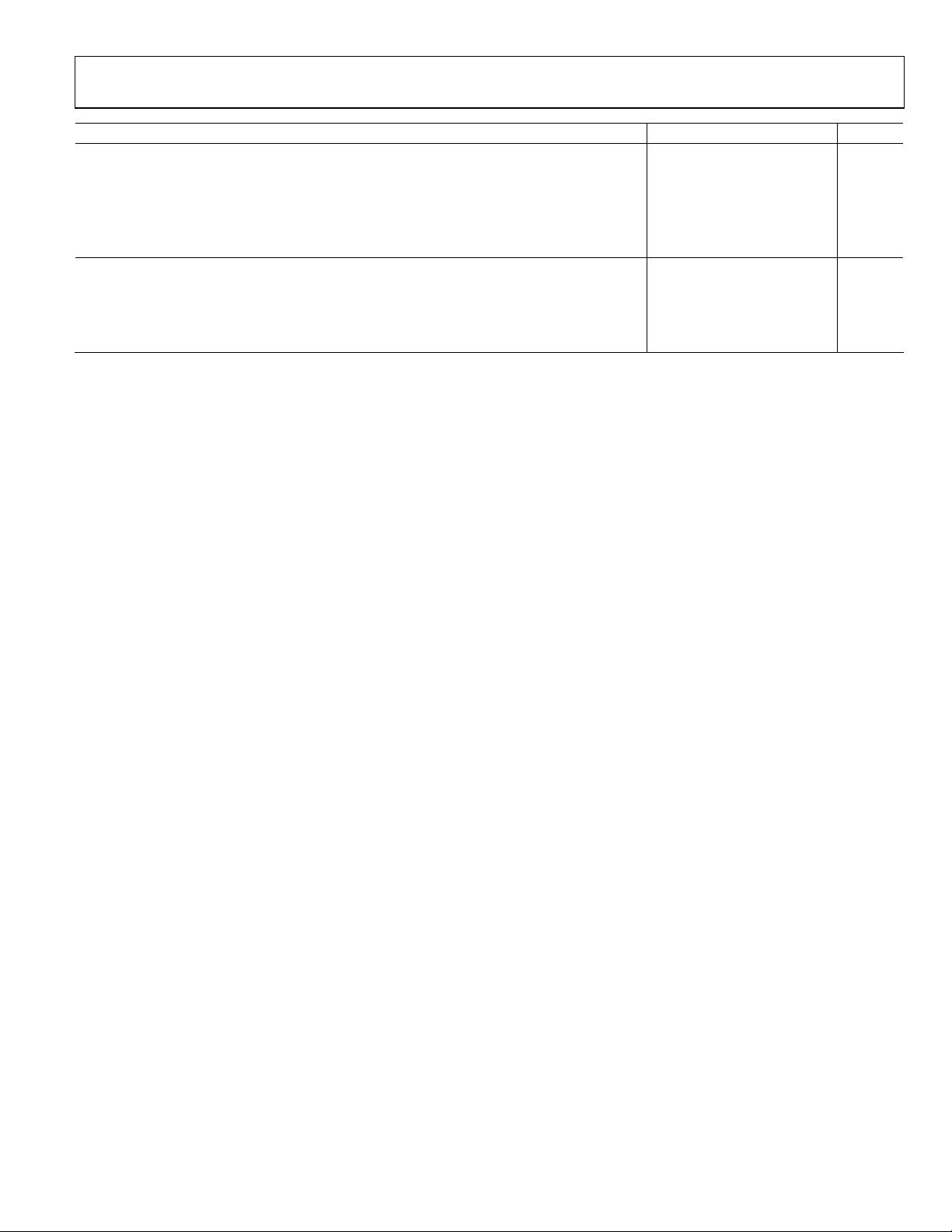
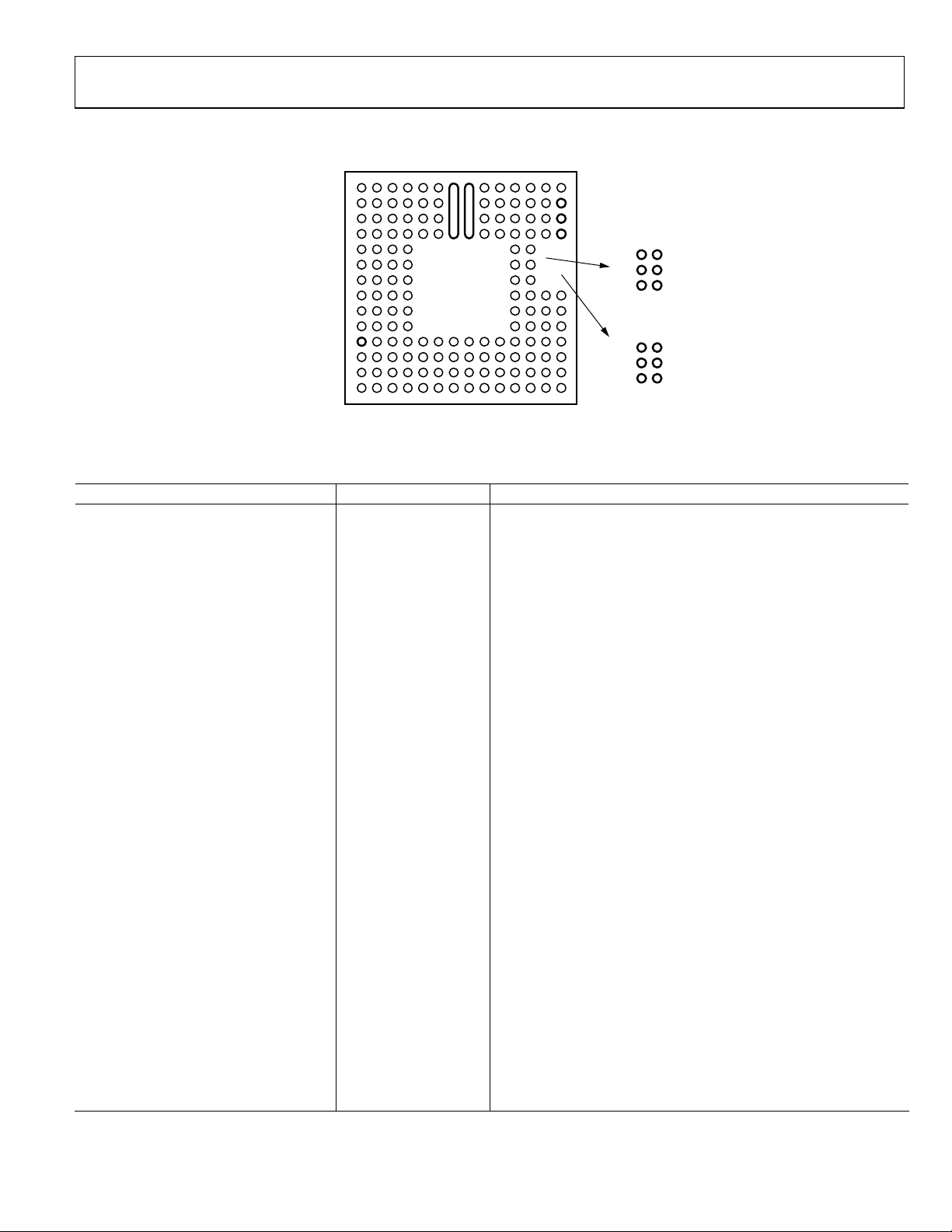
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
1413121110876321954
1413121110876321954
A
B
C
D
E
F
G
H
J
K
L
M
N
P
AVDD33, 3.3V, ANALOG SUPPLY
AVSS, ANALOG SUPPLY GROUND
AVSS, ANALOG SUPPLY GROUND SHIELD
Figure 2. AD9736 Analog Supply Pins ( Top View)
A
B
C
D
E
F
G
H
J
K
L
M
N
P
A
B
C
D
E
F
G
H
J
K
L
M
N
P
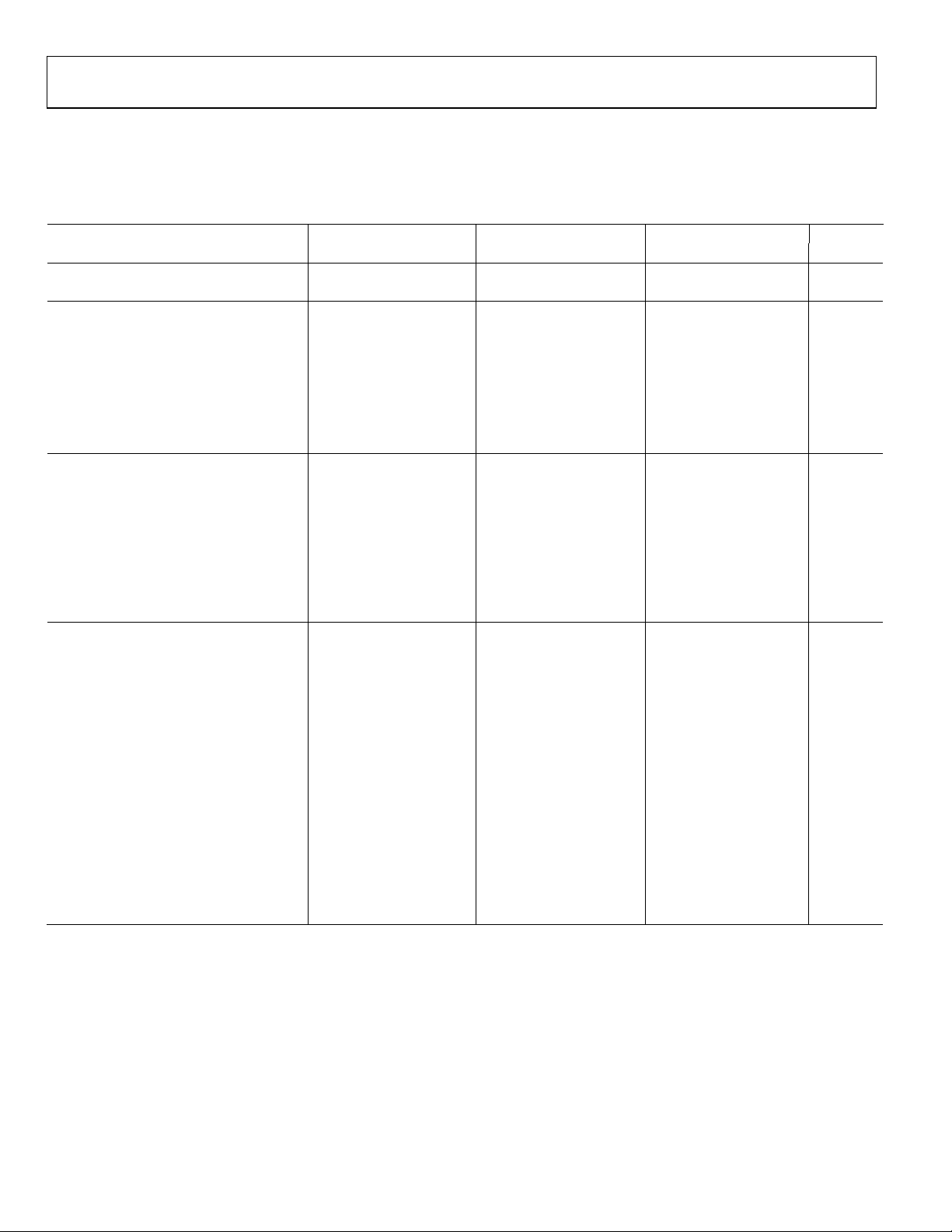
DVDD18, 1.8V DIGITAL SUPPLY
DVDD33, 3.3V DIGITAL SUPPLY
04862-002
DVSS DIGITAL SUPPLY GROUND
04862-004
Figure 4. AD9736 Digital Supply Pins ( Top View)
1413121110876321954
A
B
C
D
E
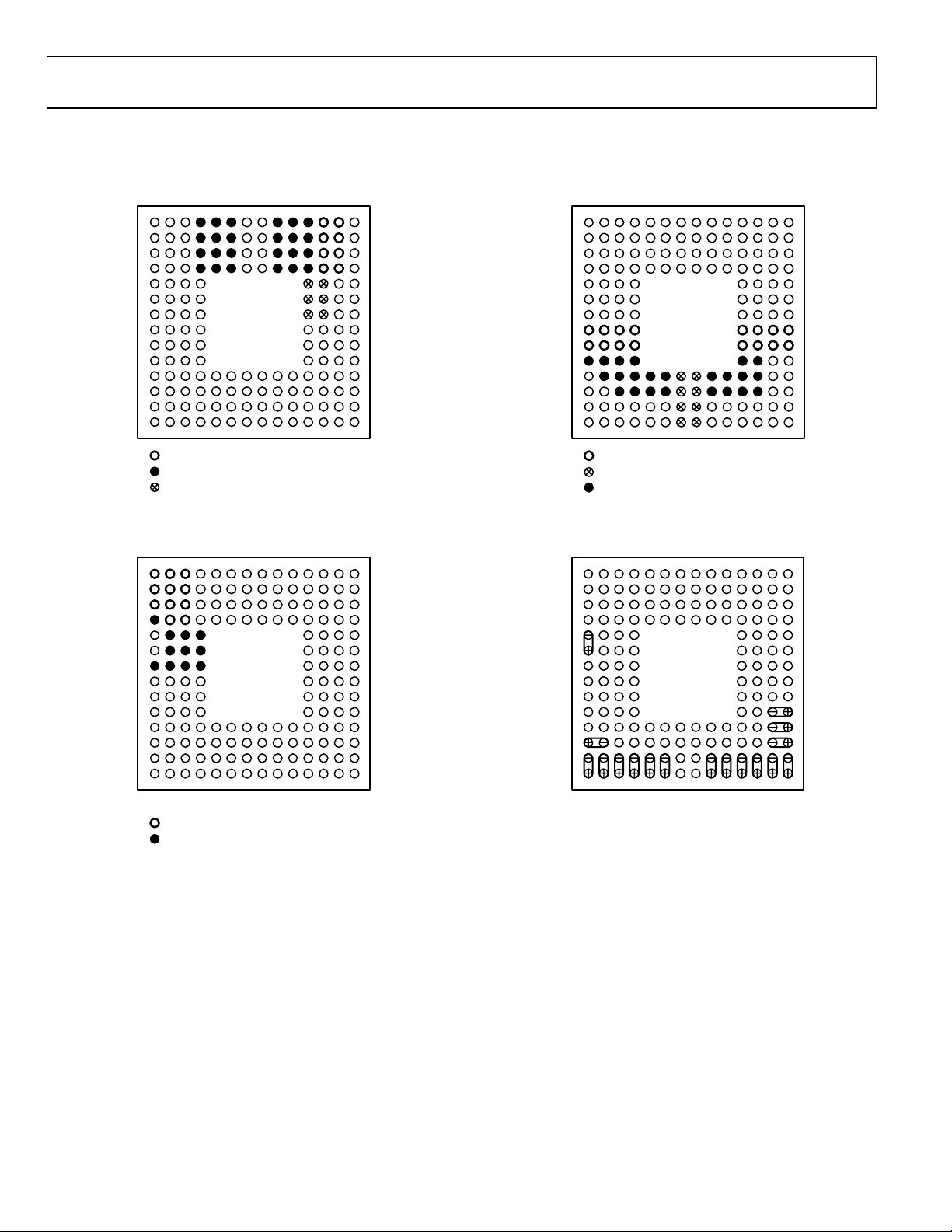
CLK–
F
CLK+
G
H
J
K
L
MDB0 (LSB)
N
P
1413121110876321954
DB13 (MSB)
DB12
DB11
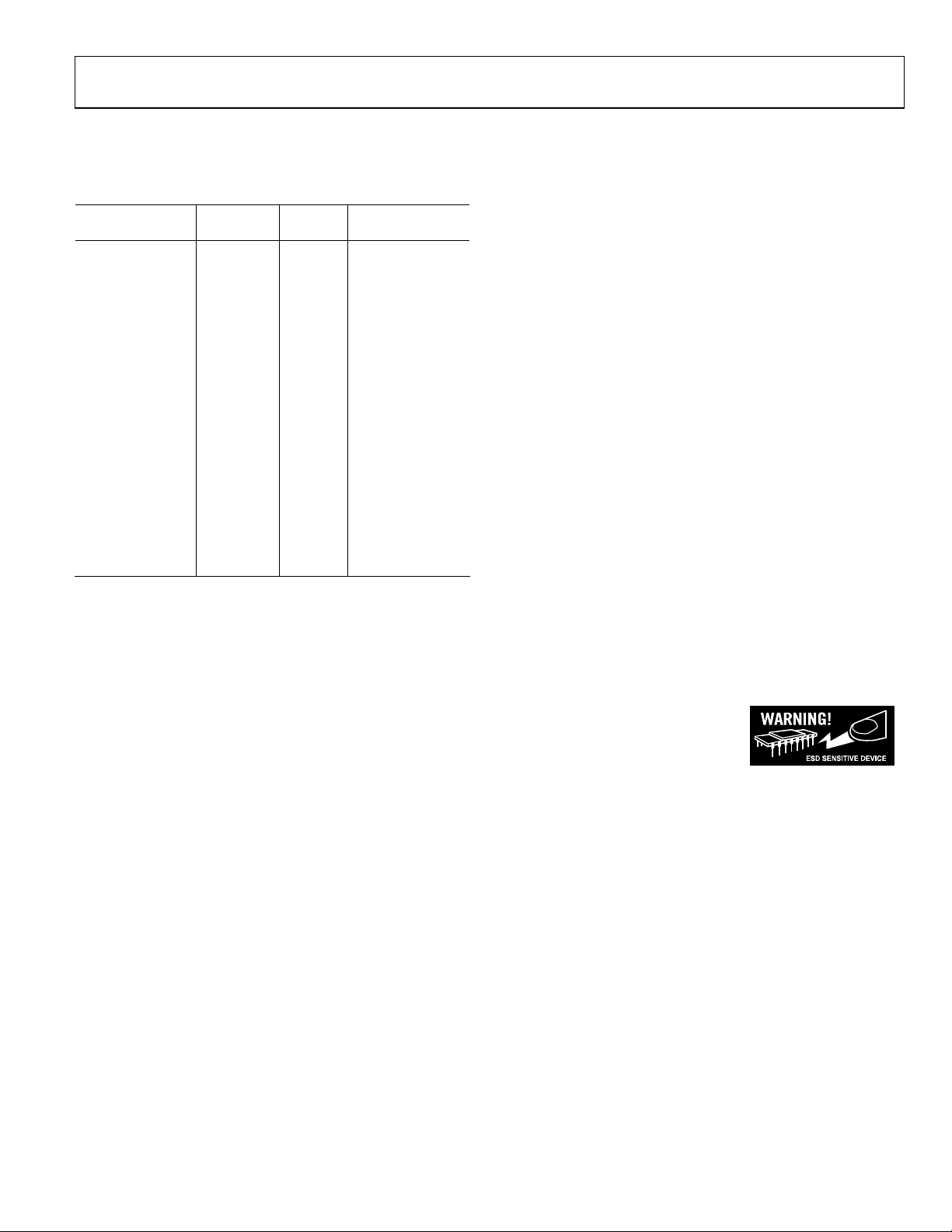
CVDD18, 1.8V CLOCK SUPPLY
CVSS, CLOCK SUPPLY GROUND
Figure 3. AD9736 Clock Supply Pins ( Top View)
04862-003
DB1
DATACLK_OUT
DB6
DATACLK_IN
Figure 5. AD9736 Digital LVDS Inputs, Clock I/O (Top View)
DB7
DB8
DB9
DB10
04862-005
DB5
DB4
DB3
DB2
Rev. 0 | Page 10 of 68
Page 11
AD9734/AD9735/AD9736
IOUTB
IOUTA
1413121110876321954
PIN_MODE
A
B
C
D
E
F
G
H
J
K
L
M
N
P
I120
VREF
IPTAT
CSB
SCLK
UNSIGNED
FSC0
PIN_MODE = 0,
SPI ENABLED
IRQ
PIN_MODE = 1,
SPI DISABLED
2×
RESET
SDIO
SDO
PD
FIFO
FSC1
04862-006
Figure 6. AD9736 Analog I/O and SPI Control Pins ( Top View)
Table 5. Pin Function Descriptions
Pin No. Mnemonic Description
A1, A2, A3, B1, B2, B3, C1, C2, C3, D2, D3 CVDD18 1.8 V Clock Supply.
A4, A5, A6, A9, A10, A11, B4, B5, B6, B9,
AVSS Analog Supply Ground.
B10, B11, C4, C5, C6, C9, C10, C11, D4, D5,
D6, D9, D10, D11
A7, B7, C7, D7 IOUTB DAC Negative Output; 10 mA to 30 mA full-scale output current.
A8, B8, C8, D8 IOUTA DAC Positive Output; 10 mA to 30 mA full-scale output current.
A12, A13, B12, B13, C12, C13, D12, D13 AVDD33 3.3 V Analog Supply.
A14 DNC Do Not Connect.
B14 I120
Nominal 1.2 V Reference; tie to analog ground via 10 kΩ resistor to
generate a 120 µA reference current.
C14 VREF
Band Gap Voltage Reference I/O; tie to analog ground via 1 nF
capacitor, output impedance approximately 5 kΩ.
D1, E2, E3, E4, F2, F3, F4, G1, G2, G3, G4 CVSS Clock Supply Ground.
D14 IPTAT
Factory Test Pin; output current proportional to absolute
temperature, approximately 10 µA at 25°C with approximately
20 nA/°C slope.
E1, F1 DACCLK−/DACCLK+ Negative/Positive DAC Clock Input (DACCLK).
E11, E12, F11, F12, G11, G12 AVSS Analog Supply Ground Shield; tie to AVSS at the DAC.
E13 IRQ/UNSIGNED
If PIN_MODE = 0, IRQ: Active low open-drain interrupt request
output, pull up to DVDD33 with 10 kΩ resistor.
If PIN_MODE = 1, UNSIGNED: Digital input pin where 0 = twos
complement input data format, 1 = unsigned.
E14 RESET/PD If PIN_MODE = 0, RESET: 1 resets the AD9736.
If PIN_MODE = 1, PD: 1 puts the AD9736 in the power-down state.
F13 CSB/2×
See Serial Peripheral Interface and Pin Mode Operation sections for
pin description.
F14 SDIO/FIFO See the Pin Mode Operation section for pin description.
G13 SCLK/FSC0 See the Pin Mode Operation section for pin description.
G14 SDO/FSC1 See the Pin Mode Operation section for pin description.
H1, H2, H3, H4, H11, H12, H13, H14, J1, J2,
DVDD18 1.8 V Digital Supply.
J3, J4, J11, J12, J13, J14
K1, K2, K3, K4, K11, K12, L2, L3, L4, L5, L6,
DVSS Digital Supply Ground.
L9, L10, L11, L12, M3, M4, M5, M6, M9,
M10, M11, M12
Rev. 0 | Page 11 of 68
Page 12
AD9734/AD9735/AD9736
Pin No. Mnemonic Description
K13, K14 DB<13>−/DB<13>+ Negative/Positive Data Input Bit 13 (MSB); reduced swing LVDS.
L1 PIN_MODE 0 = SPI Mode; SPI enabled.
1 = PIN Mode; SPI disabled, direct pin control.
L7, L8, M7, M8, N7, N8, P7, P8 DVDD33 3.3 V Digital Supply.
L13, L14 DB<12>−/DB<12>+ Negative/Positive Data Input Bit 12; reduced swing LVDS.
M2, M1 DB<0>−/DB<0>+ Negative/Positive Data Input Bit 0 (LSB); reduced swing LVDS.
M13, M14 DB<11>−/DB<11>+ Negative/Positive Data Input Bit 11; reduced swing LVDS.
N1, P1 DB<1>−/DB<1>+ Negative/Positive Data Input Bit 1; reduced swing LVDS.
N2, P2 DB<2>−/DB<2>+ Negative/Positive Data Input Bit 2; reduced swing LVDS.
N3, P3 DB<3>−/DB<3>+ Negative/Positive Data Input Bit 3; reduced swing LVDS.
N4, P4 DB<4>−/DB<4>+ Negative/Positive Data Input Bit 4; reduced swing LVDS..
N5, P5 DB<5>−/DB<5>+ Negative/Positive Data Input Bit 5; reduced swing LVDS.
N6, P6 DATACLK_OUT−/
DATACLK_OUT+
N9, P9 DATACLK_IN−/
DATACLK_IN+
N10, P10 DB<6>−/DB<6>+ Negative/Positive Data Input Bit 6; reduced swing LVDS.
N11, P11 DB<7>−/DB<7>+ Negative/Positive Data Input Bit 7; reduced swing LVDS.
N12, P12 DB<8>−/DB<8>+ Negative/Positive Data Input Bit 8; reduced swing LVDS.
N13, P13 DB<9>−/DB<9>+ Negative/Positive Data Input Bit 9; reduced swing LVDS.
N14, P14 DB<10>−/DB<10>+ Negative/Positive Data Input Bit 10; reduced swing LVDS.
Negative/Positive Data Output Clock; reduced swing LVDS.
Negative/Positive Data Input Clock; reduced swing LVDS
Rev. 0 | Page 12 of 68
Page 13

AD9734/AD9735/AD9736
TERMINOLOGY
Linearity Error (Integral Nonlinearity or INL)
The maximum deviation of the actual analog output from the
ideal output, determined by a straight line drawn from zero to
full scale.
Power Supply Rejection
The maximum change in the full-scale output as the supplies
are varied from nominal to minimum and maximum specified
voltages.
Differential Nonlinearity (DNL)
The measure of the variation in analog value, normalized to full
scale, associated with a 1 LSB change in digital input code.
Monotonicity
A DAC is monotonic if the output either increases or remains
constant as the digital input increases.
Offset Error
The deviation of the output current from the ideal of zero is
called the offset error. For IOUTA, 0 mA output is expected
when the inputs are all 0s. For IOUTB, 0 mA output is expected
when all inputs are set to 1s.
Gain Error
The difference between the actual and ideal output span. The
actual span is determined by the output when all inputs are set
to 1s minus the output when all inputs are set to 0s.
Output Compliance Range
The range of allowable voltage at the output of a current output
DAC. Operation beyond the maximum compliance limits may
cause either output stage saturation or breakdown, resulting in
nonlinear performance.
Temp er at u re D ri ft
Specified as the maximum change from the ambient (25°C)
value to the value at either T
drift, the drift is reported in ppm of full-scale range (FSR)
per °C. For reference drift, the drift is reported in ppm per °C.
MIN
or T
. For offset and gain
MAX
Settling Time
The time required for the output to reach and remain within a
specified error band about its final value, measured from the
start of the output transition.
Glitch Impulse
Asymmetrical switching times in a DAC give rise to undesired
output transients that are quantified by a glitch impulse. It is
specified as the net area of the glitch in pV-s.
Spurious-Free Dynamic Range
The difference, in dB, between the rms amplitude of the output
signal and the peak spurious signal over the specified bandwidth.
Total Harmonic Distortion (THD)
THD is the ratio of the rms sum of the first six harmonic
components to the rms value of the measured input signal. It is
expressed as a percentage or in decibels (dB).
Multitone Power Ratio
The spurious-free dynamic range containing multiple carrier
tones of equal amplitude. It is measured as the difference
between the rms amplitude of a carrier tone to the peak
spurious signal in the region of a removed tone.
Rev. 0 | Page 13 of 68
Page 14
AD9734/AD9735/AD9736
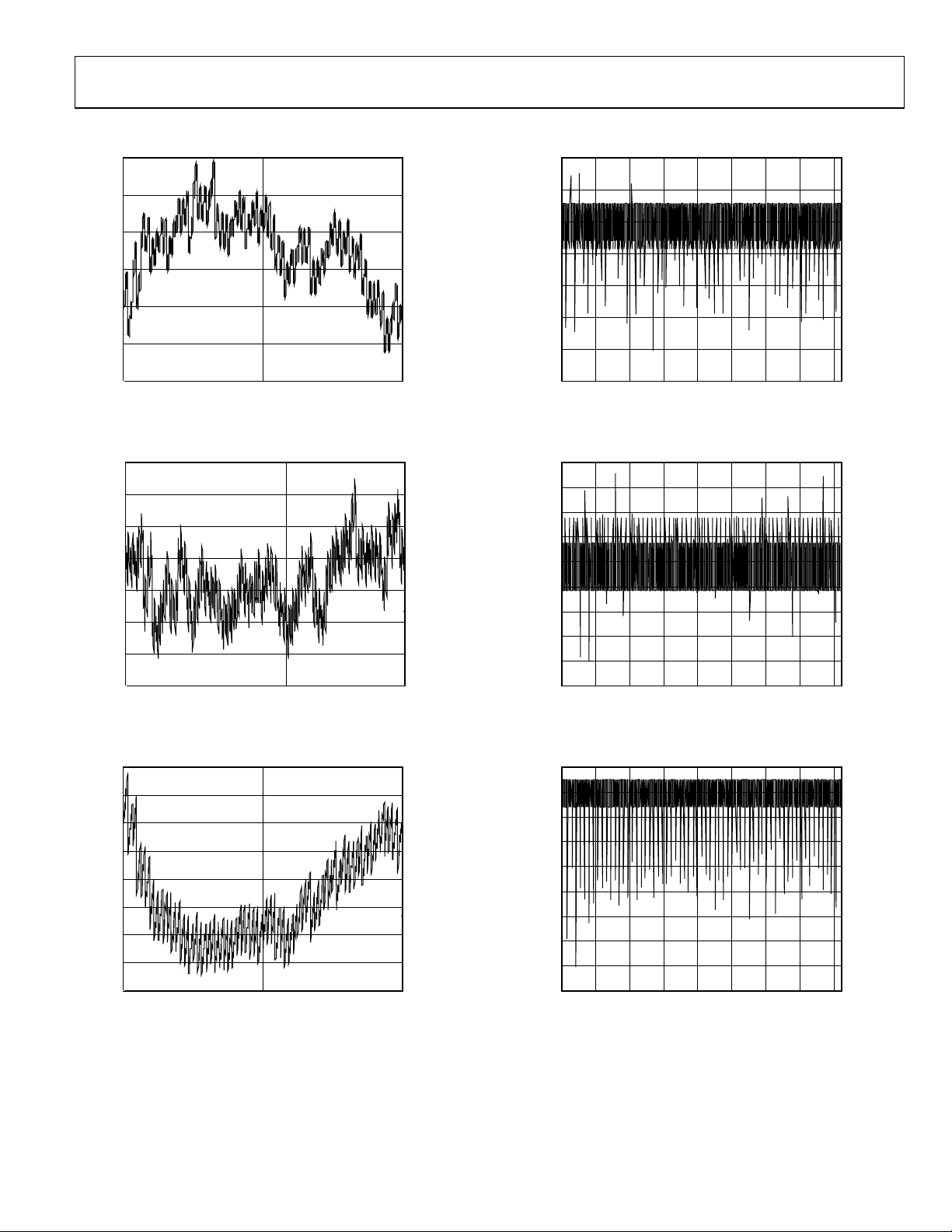
TYPICAL PERFORMANCE CHARACTERISTICS
AD9736 STATIC LINEARITY, 10 mA FULL SCALE
1.00
0.75
0.50
0.25
0
–0.25
–0.50
–0.75
ERROR (LSB)
–1.00
–1.25
–1.50
–1.75
–2.00
–0.25
–0.50
–0.75
ERROR (LSB)
–1.00
–1.25
–1.50
–1.75
–2.00
–0.25
–0.50
–0.75
ERROR (LSB)
–1.00
–1.25
–1.50
–1.75
–2.00
CODE
Figure 7. AD9736 INL, −40°C, 10 mA FS
1.00
0.75
0.50
0.25
0
CODE
Figure 8. AD9736 INL, 25°C, 10 mA FS
1.00
0.75
0.50
0.25
0
CODE
Figure 9. AD9736 INL, 85°C, 10 mA FS
163840 2048 4096 6144 8192 10240 12288 14336
04862-008
163840 2048 4096 6144 8192 10240 12288 14336
04862-008
163840 2048 4096 6144 8192 10240 12288 14336
04862-009
1.0
0.8
0.6
0.4
0.2
0
–0.2
ERROR (LSB)
–0.4
–0.6
–0.8
–1.0
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-010
Figure 10. AD9736 DNL, −40°C, 10 mA FS
1.0
0.8
0.6
0.4
0.2
0
–0.2
ERROR (LSB)
–0.4
–0.6
–0.8
–1.0
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-011
Figure 11. AD976 DNL, 25°C, 10 mA FS
1.0
0.8
0.6
0.4
0.2
0
–0.2
ERROR (LSB)
–0.4
–0.6
–0.8
–1.0
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-012
Figure 12. AD9736 DNL, 85°C, 10 mA FS
Rev. 0 | Page 14 of 68
Page 15

AD9734/AD9735/AD9736
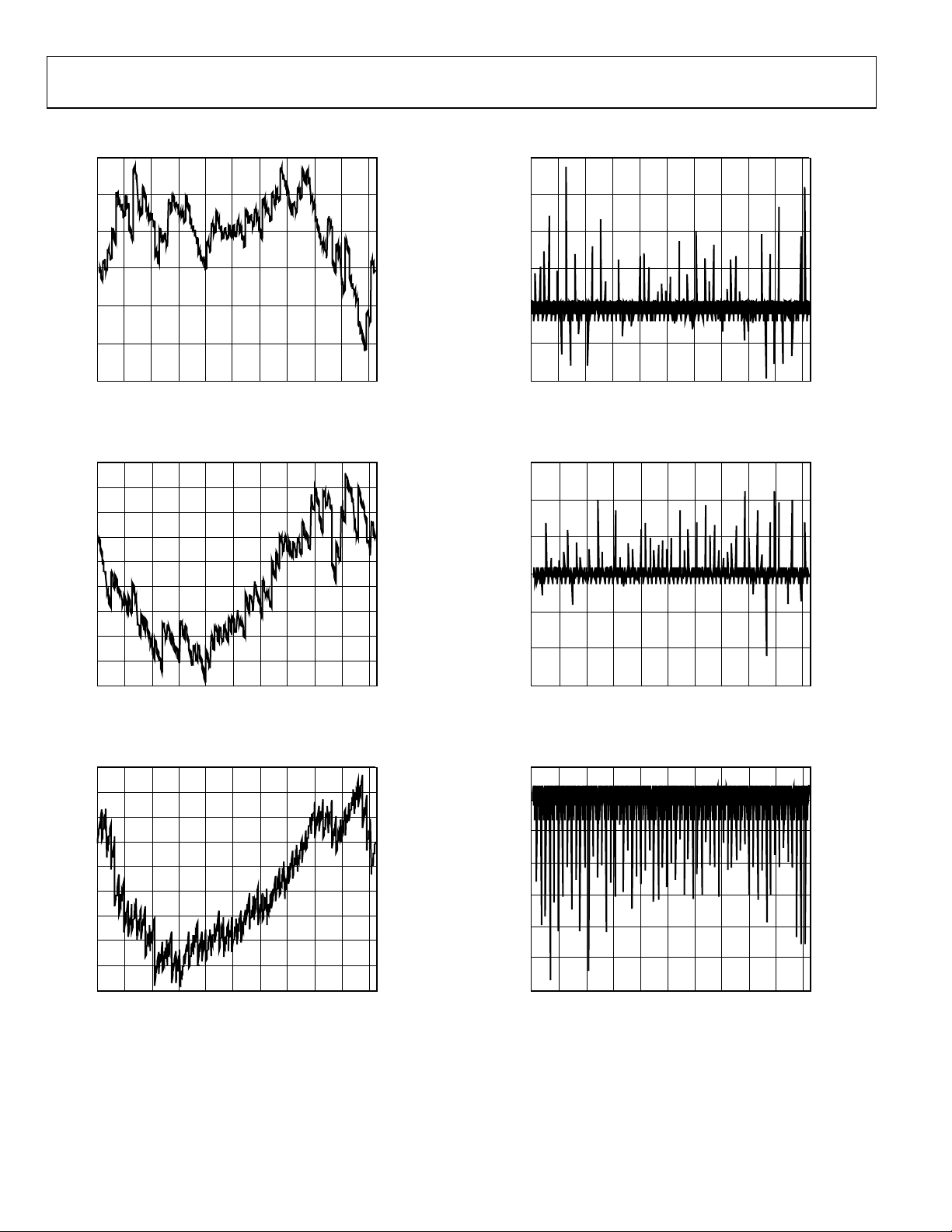
AD9736 STATIC LINEARITY, 20 mA FULL SCALE
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
ERROR (LSB)
–0.6
–0.8
–1.0
–1.2
–1.4
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-013
Figure 13. AD9736 INL, −40°C, 20 mA FS
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
ERROR (LSB)
–0.6
–0.8
–1.0
–1.2
–1.4
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-014
Figure 14. AD9736 INL, 25°C, 20 mA FS
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
ERROR (LSB)
–0.6
–0.8
–1.0
–1.2
–1.4
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-015
Figure 15. AD9736 INL, 85°C, 20 mA FS
0.6
0.5
0.4
0.3
0.2
0.1
0
–0.1
ERROR (LSB)
–0.2
–0.3
–0.4
–0.5
–0.6
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-016
Figure 16. AD9736 DNL, −40°C, 20 mA FS
0.6
0.5
0.4
0.3
0.2
0.1
0
–0.1
ERROR (LSB)
–0.2
–0.3
–0.4
–0.5
–0.6
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-017
Figure 17. AD9736 DNL, 25°C, 20 mA FS
0.6
0.5
0.4
0.3
0.2
0.1
0
–0.1
ERROR (LSB)
–0.2
–0.3
–0.4
–0.5
–0.6
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-018
Figure 18. AD9736 DNL, 85°C, 20 mA FS
Rev. 0 | Page 15 of 68
Page 16
AD9734/AD9735/AD9736
AD9736 STATIC LINEARITY, 30 mA FULL SCALE
2.0
1.5
1.0
0.5
0
–0.5
ERROR (LSB)
–1.0
–1.5
–2.0
CODE
Figure 19. AD9736 INL, −40°C, 30 mA FS
2.0
1.5
1.0
0.5
0
–0.5
ERROR (LSB)
–1.0
–1.5
–2.0
CODE
Figure 20. AD9736 INL, 25°C, 30 mA FS
2.0
1.5
1.0
0.5
0
0
0
0
–0.5
–0.5
ERROR (LSB)
–1.0
–1.0
–1.5
–1.5
–2.0
CODE
Figure 21. AD9736 INL, 85°C, 30 mA FS
163840 2048 4096 6144 8192 10240 12288 14336
163840 2048 4096 6144 8192 10240 12288 14336
163840 2048 4096 6144 8192 10240 12288 14336
04862-019
04862-020
04862-021
0.6
0.5
0.4
0.3
0.2
0.1
0
–0.1
ERROR (LSB)
–0.2
–0.3
–0.4
–0.5
–0.6
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-022
Figure 22. AD9736 DNL, −40°C, 30 mA FS
0.6
0.5
0.4
0.3
0.2
0.1
0
–0.1
ERROR (LSB)
–0.2
–0.3
–0.4
–0.5
–0.6
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-023
Figure 23. AD9736 DNL, 25°C, 30 mA FS
1.0
0.5
0
–0.5
–1.0
–1.5
ERROR (LSB)
–2.0
–2.5
–3.0
CODE
163840 2048 4096 6144 8192 10240 12288 14336
04862-024
Figure 24. AD9736 DNL, 85°C, 30 mA FS
Rev. 0 | Page 16 of 68
Page 17
AD9734/AD9735/AD9736
–
–
–
–
AD9735 STATIC LINEARITY, 10 mA, 20 mA, 30 mA FULL SCALE
0.4
0.100
0.3
0.2
0.1
–0.1
–0.2
0.15
0.10
0.05
0.05
0.10
0.15
0.20
0.2
0.1
–0.1
–0.2
–0.3
–0.4
–0.5
–0.6
0.050
0
–0.050
–0.100
0
40950 2341
04862-025
Figure 25. AD9735 INL, 25°C, 10 mA FS
0
40950 2341
04862-026
Figure 26. AD9735 INL, 25°C, 20 mA FS
0
40950 2341
04862-027
Figure 27. AD9735 INL, 25°C, 30 mA FS
–0.150
–0.200
–0.250
0.100
0.075
0.050
0.025
–0.025
–0.050
–0.075
–0.100
–0.125
0.050
–0.050
–1.000
–1.150
–0.200
–0.250
–0.300
–0.350
–0.400
40950 500 1000 1500 2000 2500 3000 3500
04862-028
Figure 28. AD9735 DNL, 25°C, 10 mA FS
0
40950 500 1000 1500 2000 2500 3000 3500
04862-029
Figure 29. AD9735 DNL, 25°C, 20 mA FS
0
40950 500 1000 1500 2000 2500 3000 3500
04862-030
Figure 30. AD9735 DNL, 25°C, 30 mA FS
Rev. 0 | Page 17 of 68
Page 18
AD9734/AD9735/AD9736
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
AD9734 STATIC LINEARITY, 10 mA, 20 mA, 30 mA FULL SCALE
0.06
0.04
0.04
0.02
0.02
0.04
0.06
0.03
0.02
0.01
0.01
0.02
0.03
0.04
0.05
0.06
0.06
0.04
0.02
0.02
0.04
0.06
0.08
0.10
0.12
0.03
0.02
0
10230 100 200 300 400 500 600 800 900700
04862-031
Figure 31. AD9734 INL, 25°C, 10 mA FS
0
10230 100 200 300 400 500 600 800 900700
04862-032
Figure 32. AD9734 INL, 25°C, 20 mA FS
0
10230 100 200 300 400 500 600 800 900700
04862-033
Figure 33. AD9734 INL, 25°C, 30 mA FS
0.01
0.01
0.02
0.03
0.02
0.01
0.01
0.02
0.03
0.01
0.01
0.02
0.03
0.04
0.05
0.06
0
10230 100 200 300 400 500 600 800 900700
04862-034
Figure 34. AD9734 DNL, 25°C, 10 mA FS
0
10230 100 200 300 400 500 600 800 900700
04862-035
Figure 35. AD9734 DNL, 25°C, 20 mA FS
0
10230 100 200 300 400 500 600 800 900700
04862-036
Figure 36. AD9734 DNL, 25°C, 30 mA FS
Rev. 0 | Page 18 of 68
Page 19
AD9734/AD9735/AD9736
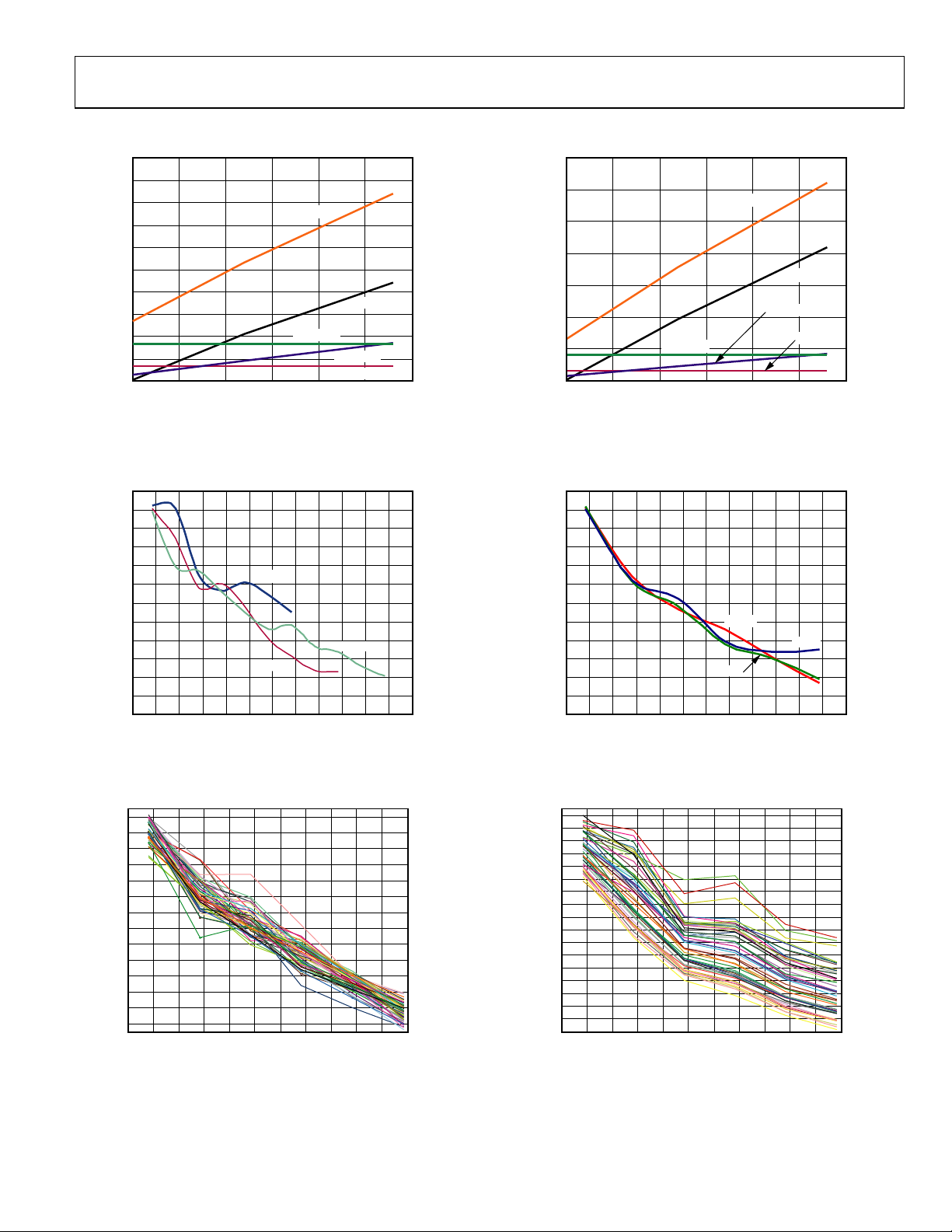
AD9736 POWER CONSUMPTION, 20 mA FULL SCALE
0.50
0.45
0.40
0.35
0.30
0.25
0.20
POWER (W)
0.15
0.10
0.05
0
f
DAC
Figure 37. AD9736 1× Mode Power vs. f
(MHz)
TOTAL
AVDD33
DVDD18
CVDD18
DVDD33
at 25°C
DAC
15000 250 500 750 1000 1250
04862-037
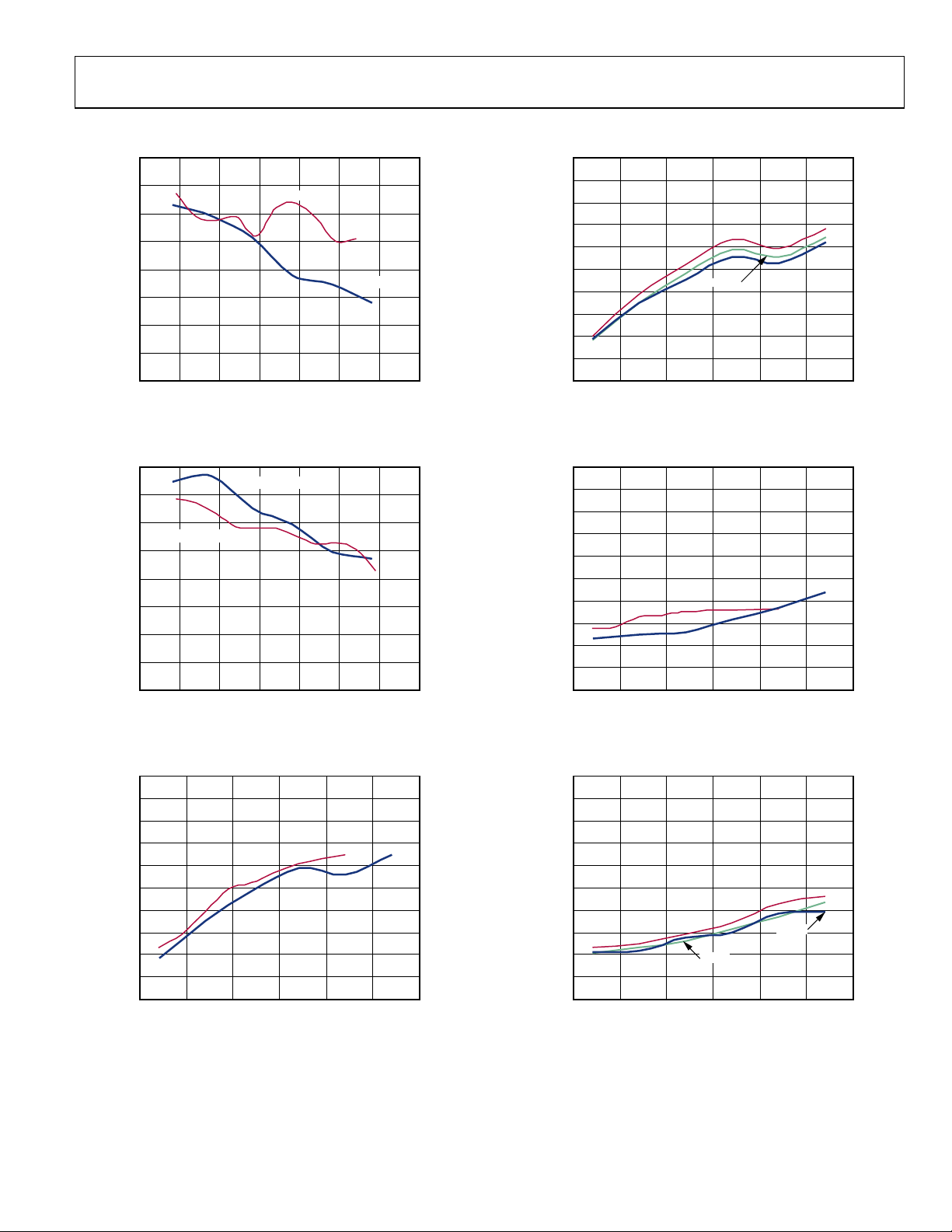
AD9736 DYNAMIC PERFORMANCE, 20 mA FULL SCALE
80
0.7
0.6
0.5
0.4
0.3
POWER (W)
0.2
0.1
0
AVDD33
f
DAC
(MHz)
TOTAL
Figure 38. AD9736, 2× Interpolation Mode Power vs. f
80
DVDD18
VCDD18
DVDD33
DAC
15000 250 500 750 1000 1250
04862-038
at 25°C
75
70
65
SFDR (dBc)
60
55
50
Figure 39. AD9736 SFDR vs. f
78
76
74
72
70
68
66
64
SFDR (dBc)
62
60
58
56
54
52
Figure 41. AD9736 SFDR vs. f
800MSPS
1.2GSPS
1GSPS
f
(MHz)
OUT
over f
OUT
DAC
f
(MHz)
OUT
over 50 parts, 25°C, 1.2 GSPS
OUT
at 25°C
75
70
65
SFDR (dBc)
60
55
6000 50 100 150 200 250 300 350 400 450 500 550
04862-039
50
Figure 40. AD9736 SFDR vs. f
92
90
88
86
84
82
80
78
76
74
IMD (dBc)
72
70
68
66
64
62
60
5500 50 100 150 200 250 300 350 400 450 500
04862-041
58
f
Figure 42. AD9736 IMD vs. f
+85°C
+25°C
f
(MHz)
OUT
over Temperature
OUT
(MHz)
OUT
over 50 parts, 25°C,1.2 GSPS
OUT
–40°C
6000 50 100 150 200 250 300 350 400 450 500 550
04862-040
5500 50 100 150 200 250 300 350 400 450 500
04862-042
Rev. 0 | Page 19 of 68
Page 20
AD9734/AD9735/AD9736
90
85
80
1GSPS
90
85
80
THIRD-ORDER IMD
SFDR
75
70
IMD (dBc)
65
60
55
50
Figure 43. AD9736 IMD vs. f
90
85
80
75
70
IMD (dBc)
65
60
55
50
Figure 44. AD9736 IMD vs. f
95
90
85
80
75
70
IMD AND SFDR (dBc)
65
60
55
800MSPS
+85°C
f
(MHz)
OUT
over f
OUT
DAC
–40°C
+25°C
f
(MHz)
OUT
over Temperature, 1.2 GSPS
OUT
IMD
f
(MHz)
OUT
Figure 45. AD9736 Low Frequency IMD and SFDR vs. f
1.2GSPS
at 25°C
SFDR
, 25°C, 1.2 GSPS
OUT
75
70
65
SFDR, IMID (dBc)
60
55
6000 100 200 300 400 500
04862-043
6000 100 200 300 400 500
04862-044
100010
04862-045
50
f
OUT
Figure 46. AD9736 IMD and SFDR vs. f
80
75
70
65
60
55
SFDR (dBc)
50
45
40
0dBFS
–12dBFS
f
OUT
Figure 47. AD9736 SFDR vs. f
90
85
80
75
70
IMD (dBc)
65
60
55
50
0dBFS
–6dBFS
f
OUT
Figure 48. AD9736 IMD vs. f
(MHz)
, 25°C, 1.2 GSPS, 2× Interpolation
OUT
–6dBFS
(MHz)
OUT
(MHz)
OUT
over A
over A
–12dBFS
, 25°C, 1.2 GSPS
OUT
, 25°C, 1.2 GSPS
OUT
3500 50 100 150 200 250 300
04862-046
6000 100 200 300 400 500
04862-047
6000 100 200 300 400 500
04862-048
Rev. 0 | Page 20 of 68
Page 21
AD9734/AD9735/AD9736
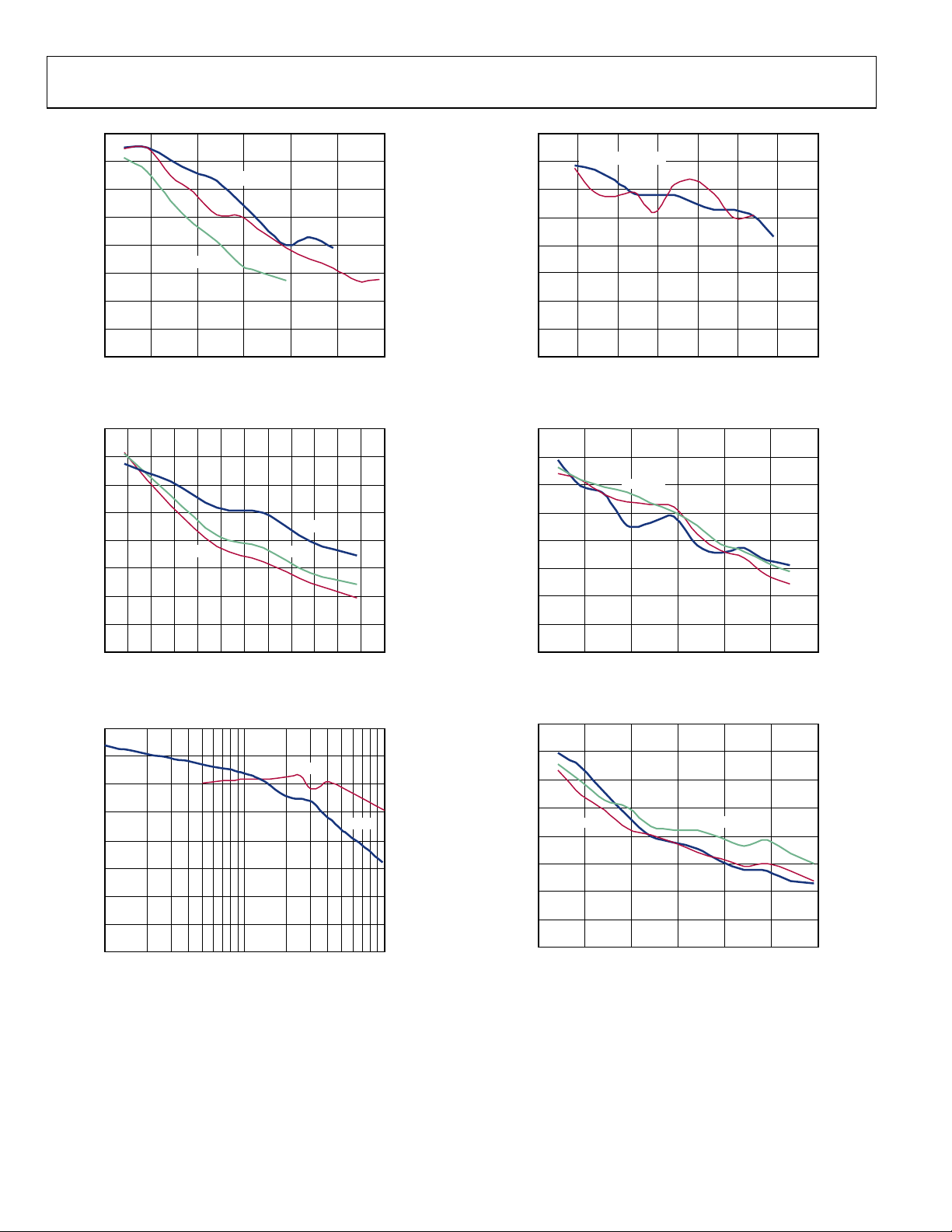
AD9736 DYNAMIC PERFORMANCE, 20 mA FULL SCALE
90
85
80
75
70
65
SFDR, IMD (dBc)
60
55
50
Figure 49. AD9736 SFDR vs. f
90
85
80
THIRD-ORDER IMD_2×
75
70
65
SFDR, IMD (dBc)
60
55
50
Figure 50. AD9736 IMD vs. f
–150
–152
–154
–156
–158
–160
–162
NSD (dBm/Hz)
–164
–166
–168
–170
Figure 51. AD9736 1-Tone NSD vs. f
SFDR_2×
SFDR_1×
f
(MHz)
OUT
, 25°C, 1.2 GSPS, 1× and 2× Interpolation
OUT
THIRD-ORDER IMD_1×
f
(MHz)
OUT
, 25°C, 1.2 GSPS, 1× and 2× Interpolation
OUT
1GSPS
1.2GSPS
f
(MHz)
OUT
over f
DAC
, 25°C
OUT
3500 50 100 150 200 250 300
04862-049
3500 50 100 150 200 250 300
04862-050
6000 100 200 300 400 500
04862-051
–150
–152
–154
–156
–158
–160
–162
NSD (dBm/Hz)
–164
–166
–168
–170
Figure 52. AD9736 1-Tone NSD vs. f
–150
–152
–154
–156
–158
–160
–162
NSD (dBm/Hz)
–164
–166
–168
–170
1GSPS
Figure 53. AD9736 8-Tone NSD vs. f
–150
–152
–154
–156
–158
–160
–162
NSD (dBm/Hz)
–164
–166
–168
–170
Figure 54. AD9736 8-Tone NSD vs. f
f
f
f
+85°C
+25°C
(MHz)
OUT
over Temperature, 1.2 GSPS
OUT
1.2GSPS
(MHz)
OUT
over f
OUT
+85°C
+25°C
(MHz)
OUT
over Temperature, 1.2 GSPS
OUT
–40°C
DAC
–40°C
6000 100 200 300 400 500
04862-052
6000 100 200 300 400 500
04862-053
, 25°C
6000 100 200 300 400 500
04862-054
Rev. 0 | Page 21 of 68
Page 22

AD9734/AD9735/AD9736
–157
–158
–159
–160
–161
–162
NSD (dBm/Hz)
–163
–164
–165
–166
f
OUT
Figure 55. AD9736 1-Tone NSD vs. f
(MHz)
over 50 Parts, 1.2 GSPS, 25°C
OUT
5500 50 100 150 200 250 300 350 400 450 500
04862-055
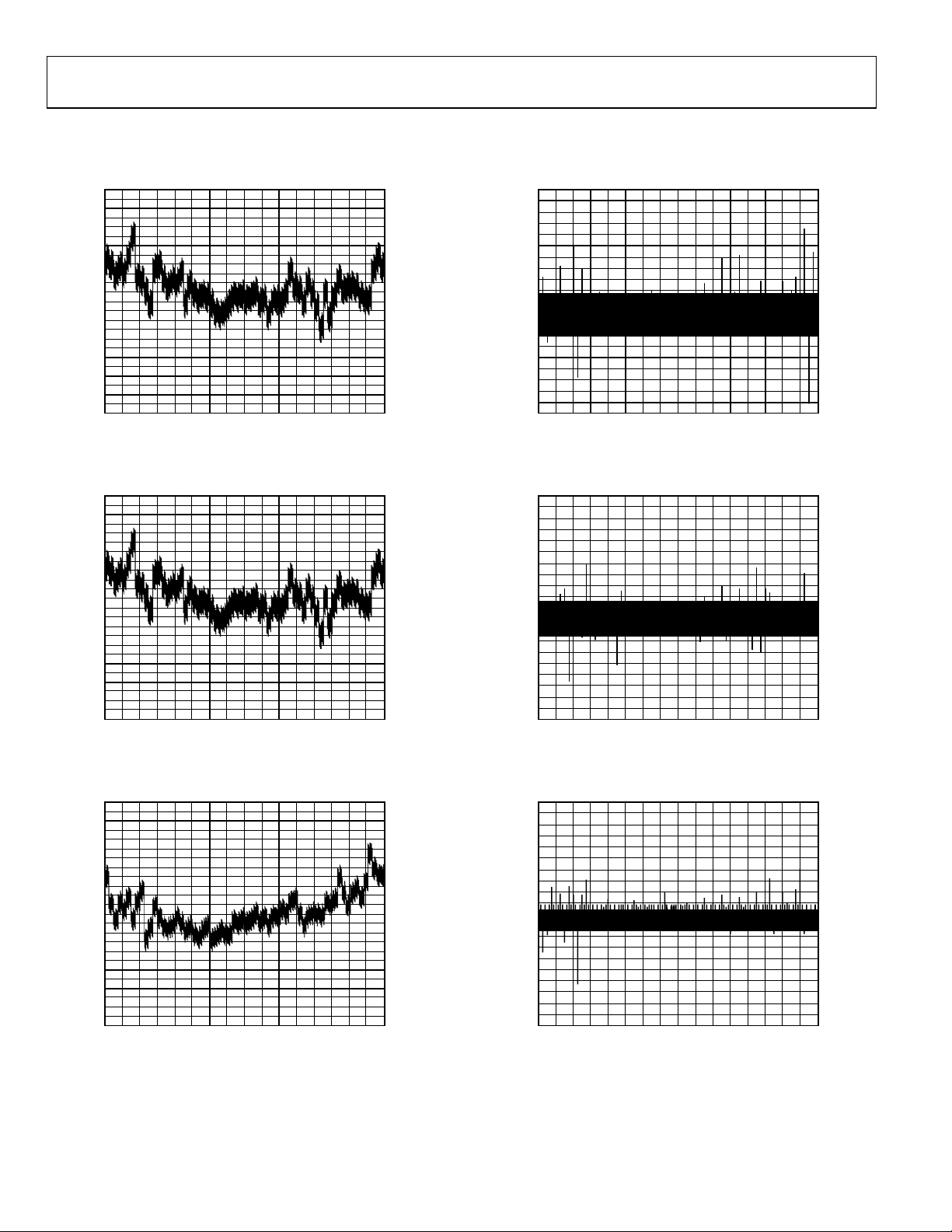
AD9736, AD9735, AD9734 WCDMA ACLR, 20 mA FULL SCALE
REF –22.75dBm
#AVG
LOG 10dB/
#ATTEN 6dB
–161
–162
–163
–164
NSD (dBm/Hz)
–165
–166
–167
Figure 56. AD9736 1-Tone NSD vs. f
f
(MHz)
OUT
over 50 Parts, 1.2 GSPS, 25°C
OUT
5500 50 100 150 200 250 300 350 400 450 500
04862-056
PAVG
10
W1 S2
CENTER 134.83MHz
#RES BW 30kHz
RMS RESULTS OFFSET FREQ REF BW dBc dBm dBc dBm
CARRIER POWER 5.00MHz 3.840MHz –81.65 –92.37 –81.39 –92.11
–10.72dBm/ 10.0MHz 3.840MHz –82.06 –92.78 –82.43 –93.16
3.84000MHz 15.0MHz 3.884MHz –82.11 –92.83 –82.39 –93.11
Figure 57. AD9736 WCDMA Carrier at 134.83 MHz, f
VBW 300kHz SPAN 33.88MHz
LOWER UPPER
= 491.52 MSPS
DAC
SWEEP 109.9ms (601pts)
04862-057
Rev. 0 | Page 22 of 68
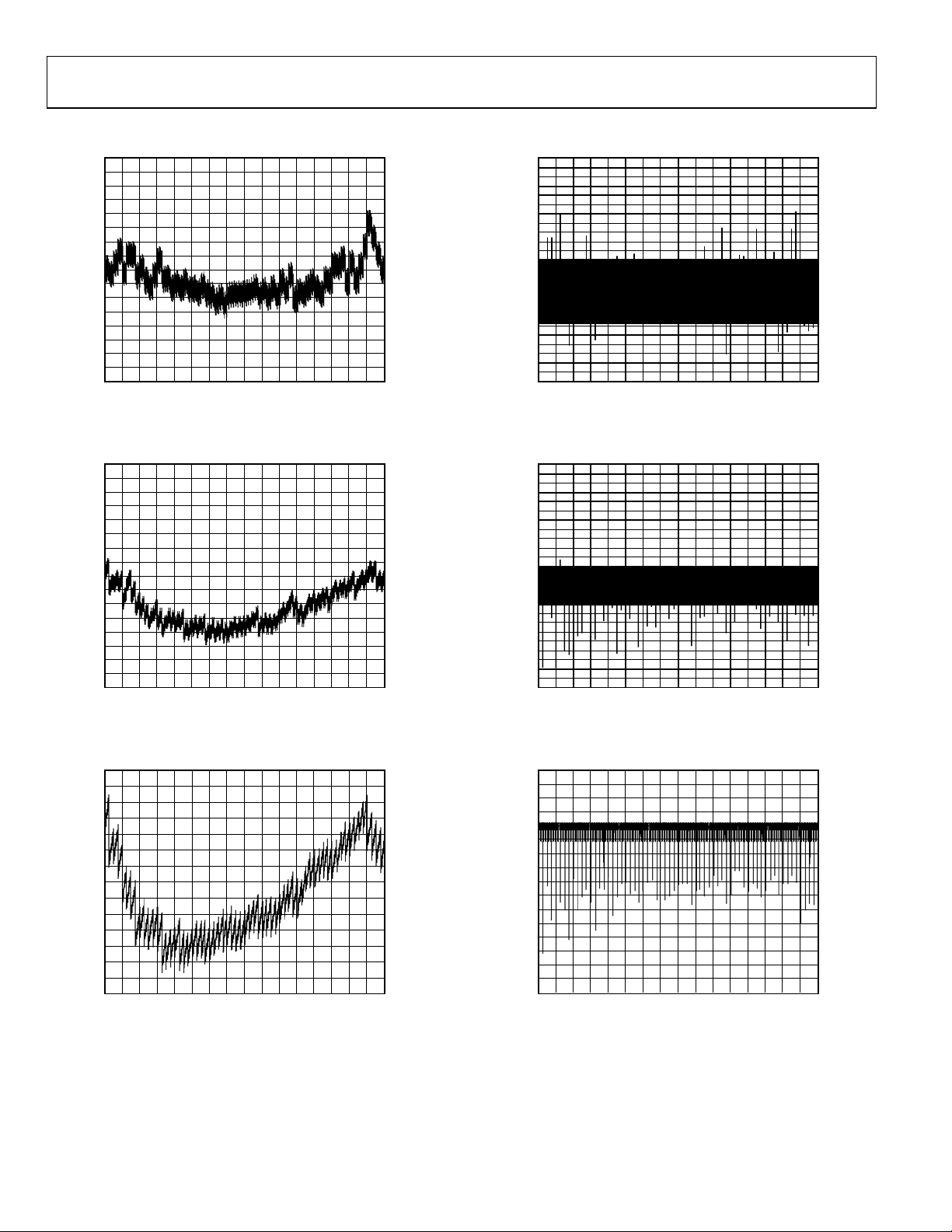
Page 23

AD9734/AD9735/AD9736
REF –22.75dBm
#AVG
LOG 10dB/
#ATTEN 6dB
PAVG
10 S2
CENTER 134.83MHz
#RES BW 30kHz
RMS RESULTS OFFSET FREQ REF BW dBc dBm dBc dBm
CARRIER POWER 5.00MHz 3.840MHz –80.32 –91.10 –80.60 –91.38
–10.72dBm/ 10.0MHz 3.840MHz –81.13 –91.91 –80.75 –91.53
3.84000MHz 15.0MHz 3.884MHz –80.43 –91.21 –81.36 –92.13
Figure 58. AD9735 WCDMA Carrier at 134.83 MHz, f
VBW 300kHz
SWEEP 109.9ms (601pts)
LOWER UPPER
= 491.52 MSPS
DAC
REF –22.75dBm
#AVG
LOG 10dB/
PAVG
10 S2
CENTER 134.83MHz
#RES BW 30kHz
RMS RESULTS OFFSET FREQ REF BW dBc dBm dBc dBm
CARRIER POWER 5.00MHz 3.840MHz –71.07 –81.83 –71.23 –81.99
–10.76dBm/ 10.0MHz 3.840MHz –70.55 –81.31 –71.42 –82.19
3.84000MHz 15.0MHz 3.884MHz –70.79 –81.56 –71.25 –82.01
#ATTEN 6dB
VBW 300kHz
LOWER UPPER
Figure 59. AD9734 WCDMA Carrier at 134.83 MHz, f
= 491.52 MSPS
DAC
SWEEP 109.9ms (601pts)
SPAN 33.88MHz
04862-058
04862-059
SPAN 33.88MHz
Rev. 0 | Page 23 of 68
Page 24

AD9734/AD9735/AD9736
AD9735, AD9734 DYNAMIC PERFORMANCE, 20 mA FULL SCALE
80
90
IMD (dBc)
NSD (dBc/Hz)
NSD (dBc/Hz)
–150
–152
–154
–156
–158
–160
–162
–164
–166
–168
–170
–145
–147
–149
–151
–153
–155
–157
–159
–161
–163
–165
85
80
75
70
65
60
55
50
Figure 63. AD9734 IMD vs. f
Figure 64. AD9735 NSD vs. f
Figure 65. AD9734 NSD vs. f
1GSPS
8 TONES
f
OUT
8 TONES
f
OUT
f
OUT
(MHz)
(MHz)
(MHz)
OUT
1 TONE
over f
800MSPS
DAC
, 1.2 GSPS
OUT
, 1.2 GSPS
OUT
1.2GSPS
, 1.2 GSPS
1 TONE
6000 50 100 150 200 250 300 350 400 450 500 550
04862-063
6000 50 100 150 200 250 300 350 400 450 500 550
04862-064
6000 50 100 150 200 250 300 350 400 450 500 550
04862-065
75
70
65
SFDR (dBc)
60
55
50
Figure 60. AD9735 SFDR vs. f
800MSPS
1GSPS
f
OUT
(MHz)
OUT
over f
, 1.2 GSPS
DAC
1.2GSPS
6000 50 100 150 200 250 300 350 400 450 500 550
04862-060
80
75
70
65
SFDR (dBc)
60
55
50
Figure 61. AD9734 SFDR vs. f
800MSPS
1GSPS
f
OUT
(MHz)
OUT
over f
, 1.2 GSPS
DAC
1.2GSPS
6000 50 100 150 200 250 300 350 400 450 500 550
04862-061
90
85
80
800MSPS
75
70
IMD (dBc)
65
60
55
50
Figure 62. AD9735 IMD vs. f
1GSPS
f
OUT
(MHz)
1.2GSPS
OUT
over f
, 1.2 GSPS
DAC
6000 50 100 150 200 250 300 350 400 450 500 550
04862-062
Rev. 0 | Page 24 of 68
Page 25

AD9734/AD9735/AD9736
SPI REGISTER MAP
Write 0 to unspecified or reserved bit locations. Reading these bits returns unknown values.
Table 6. SPI Register Map
ADR
ADR
Hex
Register
Name
Dec
0 00 MODE SDIO_DIR LSBFIRST RESET LONG_INS 2X MODE FIFO MODE DATAFRMT PD 00 00
1 01 IRQ LVDS SYNC CROSS RESV’D IE_LVDS IE_SYNC IE_CROSS RESV’D 00 00
2 02 FSC_1 SLEEP FSC<9> FSC<8> 02 02
3 03 FSC_2 FSC<7> FSC<6> FSC<5> FSC<4> FSC<3> FSC<2> FSC<1> FSC<0> 00 00
4 04 LVDS_CNT1 MSD<3> MSD<2> MSD<1> MSD<0> MHD<3> MHD<2> MHD<1> MHD<0> 00 00
5 05 LVDS_CNT2 SD<3> SD<2> SD<1> SD<0> LCHANGE ERR_HI ERR_LO CHECK 00 00
6 06 LVDS_CNT3 LSURV LAUTO LFLT<3> LFLT<2> LFLT<1> LFLT<0> LTRH<1> LTRH<0> 00 00
7 07 SYNC_CNT1 FIFOSTAT3 FIFOSTAT2 FIFOSTAT1 FIFOSTAT0 VALID SCHANGE PHOF<1> PHOF<0> 00 00
8 08 SYNC_CNT2 SSURV SAUTO SFLT<3> SFLT<2> SFLT<1> SFLT<0> RESV’D STRH<0> 00 00
9 09 RESERVED
10 0A CROS_CNT1 UPDEL<5> UPDEL<4> UPDEL<3> UPDEL<2> UPDEL<1> UPDEL<0> 00 00
11 0B CROS_CNT2 DNDEL<5> DNDEL<4> DNDEL<3> DNDEL<2> DNDEL<1> DNDEL<0> 00 00
12 0C RESERVED
13 0D RESERVED
14 0E ANA_CNT1 MSEL<1> MSEL<0> TRMBG<2> TRMBG<1> TRMBG<0> C0 C0
15 0F ANA_CNT2 HDRM<7> HDRM<6> HDRM<5> HDRM<4> HDRM<3> HDRM<2> HDRM<1> HDRM<0> CA CA
16 10 RESERVED
17 11 BIST_CNT SEL<1> SEL<0> SIG_READ LVDS_EN SYNC_EN CLEAR 00 00
18 12 BIST<7:0>
19 13 BIST<15:8>
20 14 BIST<23:16>
21 15 BIST<31:24>
22 16 CCLK_DIV RESV’D RESV’D RESV’D RESV’D CCD<3> CCD<2> CCD<1> CCD<0> 00 00
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Default
Hex
Pin Mode
Hex
Rev. 0 | Page 25 of 68
Page 26

AD9734/AD9735/AD9736
SPI REGISTER DESCRIPTIONS
Reading these registers returns previously written values for all defined register bits, unless otherwise noted. Reset value for write registers
in bold text.
MODE REGISTER (REG 00)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x00 MODE SDIO_DIR LSB/MSB RESET LONG_INS 2× MODE FIFO MODE DATAFRMT PD
Table 7. MODE Register Bit Descriptions
Bit Name Read/Write Description
SDIO_DIR : WRITE ->
LSBFIRST : WRITE ->
RESET : WRITE->
LONG_INS : WRITE ->
2×_MODE : WRITE ->
FIFO_MODE : WRITE ->
DATAFRMT : WRITE ->
PD : WRITE ->
0, Input only per SPI standard
1, Bidirectional per SPI standard
0, MSB first per SPI standard
1, LSB first per SPI standard
NOTE: Only change LSB/MSB order in single-byte instructions to avoid erratic behavior due to bit order
errors.
0, Execute software reset of SPI and controllers, reload default register values except registers 0x00 and
0x04
1, Set software reset, write 0 on the next (or any following) cycle to release the reset
0, Short (single-byte) instruction word
1, Long (two-byte) instruction word, not necessary since the maximum internal address is REG31 (0x1F)
0, Disable 2× interpolation filter
1, Enable 2× interpolation filter
0, Disable FIFO synchronization
1, Enable FIFO synchronization
0, Signed input DATA with midscale = 0x0000
1, Unsigned input DATA with midscale = 0x2000
0, Enable LVDS Receiver, DAC, and clock circuitry
1, Power down LVDS Receiver, DAC, and clock circuitry
INTERRUPT REQUEST REGISTER (IRQ) (REG 01)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x01 IRQ LVDS SYNC CROSS RESV’D IE_LVDS IE_SYNC IE_CROSS RESV’D
Table 8. Interrupt Register Bit Descriptions
Bit Name Read/Write Description
LVDS : WRITE -> Don’t Care
: READ ->
SYNC : WRITE -> Don’t Care
: READ ->
CROSS : WRITE -> Don’t Care
: READ ->
IE_LVDS : WRITE ->
IE_SYNC : WRITE ->
IE_CROSS : WRITE ->
0, No active LVDS receiver interrupt
1, Interrupt in LVDS receiver occurred
0, No active SYNC logic interrupt
1, Interrupt in SYNC logic occurred
0, No active CROSS logic interrupt
1, Interrupt in CROSS logic occurred
0, Reset LVDS receiver interrupt and disable future LVDS receiver interrupts
1, Enable LVDS receiver interrupt to activate IRQ pin
0, Reset SYNC logic interrupt and disable future SYNC logic interrupts
1, Enable SYNC logic interrupt to activate IRQ pin
0, Reset CROSS logic interrupt and disable future CROSS logic interrupts
1, Enable CROSS logic interrupt to activate IRQ pin
Rev. 0 | Page 26 of 68
Page 27

AD9734/AD9735/AD9736
FULL SCALE CURRENT (FSC) REGISTER (REGS 02, 03)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x02 FSC_1 SLEEP FSC<9> FSC<8>
0x03 FSC_2 FSC<7> FSC<6> FSC<5> FSC<4> FSC<3> FSC<2> FSC<1> FSC<0>
Table 9. Full Scale Output Register Bit Descriptions
Bit Name Read/Write Description
SLEEP : WRITE ->
FSC<9:0> : WRITE ->
LVDS CONTROLLER (LVDS_CNT) REGISTER (REGS 04, 05, 06)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x04 LVDS_CNT1 MSD<3> MSD<2> MSD<1> MSD<0> MHD<3> MHD<2> MHD<1> MHD<0>
0x05 LVDS_CNT2 SD<3> SD<2> SD<1> SD<0> LCHANGE ERR_HI ERR_LO CHECK
0x06 LVDS_CNT3 LSURV LAUTO LFLT<3> LFLT<2> LFLT<1> LFLT<0> LTRH<1> LTRH<0>
Table 10. LVDS Controller Register Bit Descriptions
Bit Name Read/Write Description
MSD<3:0> : WRITE ->
: READ ->
MHD<3:0> : WRITE ->
: READ ->
SD<3:0> : WRITE->
: READ ->
LCHANGE : READ ->
ERR_HI : READ -> One of the 15 LVDS inputs is above the input voltage limits of the IEEE reduce link specification.
ERR_LO : READ -> One of the 15 LVDS inputs is below the input voltage limits of the IEEE reduced link specification.
CHECK : READ ->
LSURV : WRITE ->
LAUTO : WRITE ->
LFLT<3:0> : WRITE ->
LTRH<2:0> : : WRITE ->
0x0, Set setup delay for the measurement system
If ( LAUTO = 1) the latest measured value for the setup delay
If ( LAUTO = 0) read back of the last SPI write to this bit
0x0, Set hold delay for the measurement system
If ( LAUTO = 1) the latest measured value for the hold delay
If ( LAUTO = 0) read back of the last SPI write to this bit
0x0, Set sample delay
If ( LAUTO = 1) the result of a measurement cycle is stored in this register
If ( LAUTO = 0) read back of the last SPI write to this bit
0, No change from previous measurement
1, Change in value from the previous measurement
NOTE: The average filter and the threshold detection are not applied to this bit
0, Phase measurement—sampling in the previous or following DATA cycle
1, Phase measurement—sampling in the correct DATA cycle
0, The controller stops after completion of the current measurement cycle
1, Continuous measurements are taken and an interrupt is issued if the clock alignment drifts beyond the
threshold value
0, Sample delay is not automatically updated
1, Continuously starts measurement cycles and updates the sample delay according to the measurement
NOTE: LSURV (Reg 06, Bit 7) must be set to 1 and the LVDS IRQ (Reg 01 Bit 3) must be set to 0 for AUTO mode
0x0, Average filter length, Delay = Delay + Delta Delay / 2^ LFLT<3:0>, values greater than 12 (0x0C) are
clipped to 12
000, Set auto update threshold values
0, Enable DAC output
1, Set DAC output current to 0 mA
0x000, 10 mA full-scale output current
0x200, 20 mA full-scale output current
0x3FF, 30 mA full-scale output current
Rev. 0 | Page 27 of 68
Page 28

AD9734/AD9735/AD9736
SYNC CONTROLLER (SYNC_CNT) REGISTER (REGS 07, 08)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x07 SYNC_CNT1 FIFOSTAT3 FIFOSTAT2 FIFOSTAT1 FIFOSTAT0 VALID SCHANGE PHOF<1> PHOF<0>
0x08 SYNC_CNT2 SSURV SAUTO SFLT<3> SFLT<2> SFLT<1> SFLT<0> RESV’D STRH<0>
Table 11. SYNC Controller Register Bit Descriptions
Bit Name Read/Write Description
FIFOSTAT<2:0> : READ -> Position of FIFO read counter, range from 0 to 7
FIFOSTAT<3> : READ ->
VALID : READ ->
SCHANGE : READ ->
PHOF<1:0> : WRITE ->
: READ ->
SSURV : WRITE ->
SAUTO : WRITE ->
SFLT<3:0> : WRITE ->
STRH<0> : WRITE ->
0, SYNC logic OK
1, Error in SYNC logic
0, FIFOSTAT<3:0> is not valid yet
1, FIFOSTAT<3:0> is valid after a reset
0, No change in FIFOSTAT<3:0>
1, FIFOSTAT<3:0> has changed since the previous measurement cycle when SSURV =
1 (surveillance mode active)
00, Change the readout counter
Current setting of the readout counter (PHOF<1:0>) in surveillance mode (SSURV = 1)
after an interrupt
Current calculated optimal readout counter value in AUTO mode (SAUTO = 1)
0, The controller stops after completion of the current measurement cycle
1, Continuous measurements are taken and an interrupt is issued if the readout
counter drifts beyond the threshold value
0, Readout counter (PHOF<3:0>) is not automatically updated
1, Continuously starts measurement cycles and updates the readout counter
according to the measurement
NOTE: SSURV (Reg 08 Bit 7) must be set to 1 and the SYNC IRQ (Reg 01 Bit 2) must be
set to 0 for AUTO mode
0x0, Average filter length, FIFOSTAT = FIFOSTAT + Delta FIFOSTAT/2 ^ SFLT<3:0>,
values greater than 12 (0x0C) are clipped to 12
0, If FIFOSTAT<2:0> = 0 | 7, generate a SYNC interrupt
1, If FIFOSTAT<2:0> = 0 | 1 | 6 | 7, generate a SYNC interrupt
CROSS CONTROLLER (CROS_CNT) REGISTER (REGS 10, 11)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x0A CROS_CNT1 – – UPDEL<5> UPDEL<4> UPDEL<3> UPDEL<2> UPDEL<1> UPDEL<0>
0x0B CROS_CNT2 – – DNDEL<5> DNDEL<4> DNDEL<3> DNDEL<2> DNDEL<1> DNDEL<0>
Table 12. Cross Controller Register Description
Bit Name Read/Write Description
UPDEL<5:0> : WRITE ->
DNDEL<5:0> : WRITE ->
0x00, Move the differential output stage switching point up, set to 0 if DNDEL is non-zero
0x00, Move the differential output stage switching point down, set to 0 if UPDEL is non-zero
Rev. 0 | Page 28 of 68
Page 29

AD9734/AD9735/AD9736
ANALOG CONTROL (ANA_CNT) REGISTER (REGS 14, 15)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x0E ANA_CNT1 MSEL<1> MSEL<0> – – – TRMBG<2> TRMBG<1> TRMBG<0>
0x0F ANA_CNT2 HDRM<7> HDRM<6> HDRM<5> HDRM<4> HDRM<3> HDRM<2> HDRM<1> HDRM<0>
Table 13. Analog Control Register Bit Descriptions
Bit Name Read/Write Description
MSEL<1:0> : WRITE ->
TRMBG<2:0> : WRITE ->
HDRM<7:0> : WRITE ->
BUILT-IN SELF TEST CONTROL (BIST_CNT) REGISTERS (REGS 17, 18, 19, 20, 21)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x11 BIST_CNT SEL<1> SEL<0> SIG_READ LVDS_EN SYNC_EN CLEAR
0x12 BIST<7:0> BIST<7> BIST<6> BIST<5> BIST<4> BIST<3> BIST<2> BIST<1> BIST<0>
0x13 BIST<15:8> BIST<15> BIST<14> BIST<13> BIST<12> BIST<11> BIST<10> BIST<9> BIST<8>
0x14 BIST<23:16> BIST<23> BIST<22> BIST<21> BIST<20> BIST<19> BIST<18> BIST<17> BIST<16>
0x15 BIST<31:24> BIST<31> BIST<30> BIST<29> BIST<28> BIST<27> BIST<26> BIST<25> BIST<24>
Table 14. BIST Register Bit Descriptions
Bit Name Read/Write Description
SEL<1:0> : WRITE ->
SIG_READ : WRITE ->
LVDS_EN WRITE->
SYNC_EN : WRITE ->
CLEAR : WRITE ->
BIST<31:0> : READ -> Results of the built-in self test
00, Write result of the LVDS Phase 1 BIST to BIST<31:0>
01, Write result of the LVDS Phase 2 BIST to BIST<31:0>
10, Write result of the SYNC Phase 1 BIST to BIST<31:0>
11, Write result of the SYNC Phase 2 BIST to BIST<31:0>
0, No action
1, Enable BIST signature readback
0, No action
1, Enable LVDS BIST
0, No action
1, Enable SYNC BIST
0, No action
1, Clear all BIST registers
00, Mirror roll off frequency control = bypass
01, Mirror roll off frequency control = narrowest bandwidth
10, Mirror roll off frequency control = medium bandwidth
11, Mirror roll off frequency control = widest bandwidth
NOTE: See plot in the Analog Control Registers section.
000, Band gap temperature characteristic trim
NOTE: See the plot in the Analog Control Registers section.
0xCA, Output stack headroom control
HDRM<7:4> set reference offset from AVDD33 (VCAS centering)
HDRM<3:0> set overdrive (current density) trim (temperature tracking)
Note: Set to 0xCA for optimum performance
Rev. 0 | Page 29 of 68
Page 30

AD9734/AD9735/AD9736
CONTROLLER CLOCK PREDIVIDER (CCLK_DIV) READING REGISTER (REG 22)
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x16 CCLK_DIV RESV’D RESV’D RESV’D RESV’D CCD<3> CCD<2> CCD<1> CCD<0>
Table 15. Clock Predivider Register Bit Descriptions
Bit Name Read/Write Description
CCD<3:0> : WRITE ->
0x0, Controller clock = DACCLK/16
0x1, Controller clock = DACCLK/32
0x2, Controller clock = DACCLK/64 …
0xF, Controller clock = DACCLK/524288
NOTE: The 100 MHz to 1.2 GHz DACCLK must be divided to less than 10 MHz for correct operation.
CCD<3:0> must be programmed to divide the DACCLK so that this relationship is not violated.
Controller Clock = DACCLK/(2 ^ ( CCD<3:0> + 4 ))
Rev. 0 | Page 30 of 68
Page 31

AD9734/AD9735/AD9736
THEORY OF OPERATION
The AD9736, AD9735, and AD9734 are 14-, 12-, and 10-bit
DACs that run at an update rate up to 1.2 GSPS. Input data can
be accepted up to the full 1.2 GSPS rate, or a 2× interpolation
filter may be enabled (2× mode) allowing full speed operation
with a 600 MSPS input data rate. DATA and DATACLK_IN
inputs are parallel LVDS, meeting the IEEE reduced swing
LVDS specifications with the exception of input hysteresis. The
DATACLK_IN input runs at one-half the input DATA rate in a
double data rate (DDR) format. Each edge of DATACLK_IN is
used to transfer DATA into the AD9736, as shown in Figure 77.
The DACCLK−/DACCLK+ inputs (Pins E1, F1) directly
drive the DAC core to minimize clock jitter. The DACCLK
signal is also divided by 2 (1× and 2× mode), then output as the
DATACLK_OUT. The DATACLK_OUT signal is used to clock
the data source. The DAC expects DDR LVDS data (DB<13:0>)
aligned with the DDR input clock (DATACLK_IN) from a
circuit similar to the one shown in Figure 94. Table 16 shows
the clock relationships.
Table 16. AD973x Clock Relationship
MODE DACCLK DATACLK_OUT DATACLK_IN DATA
1× 1.2 GHz 600 MHz 600 MHz 1.2 GSPS
2× 1.2 GHz 600 MHz 300 MHz 600 MSPS
Maintaining correct alignment of data and clock is a common
challenge with high speed DACs, complicated by changes in
temperature and other operating conditions. Use of the
DATACLK_OUT signal to generate the data allows most of the
internal process, temperature, and voltage delay variation to be
cancelled. The AD973x further simplifies this high speed data
capture problem with two adaptive closed-loop timing
controllers.
One timing controller manages the LVDS data and data clock
alignment (LVDS controller), and the other manages the LVDS
data and DACCLK alignment (SYNC controller). The LVDS
controller locates the data transitions and delays the
DATACLK_IN so that its transition is in the center of the valid
data window. The SYNC controller manages the FIFO that
moves data from the LVDS DATACLK_IN domain to the
DACCLK domain. Both controllers can be operated in manual
mode under external processor control, surveillance mode
where error conditions generate external interrupts, or
automatic mode where errors are automatically corrected.
The LVDS and SYNC controllers include moving average
filtering for noise immunity and variable thresholds to control
their activity. Normally the controllers can be set to run in
automatic mode, and they make any necessary adjustments
without dropping or duplicating samples sent to the DAC. Both
controllers require initial calibration prior to entering automatic
update mode.
The AD973x analog output changes 35 DACCLK cycles after
the input data changes in 1× mode with the FIFO disabled. The
FIFO can add up to eight additional cycles of delay. This delay
can be read from the SPI port. Internal clock delay variation is
less than a single DACCLK cycle at 1.2 GHz (833 ps).
Stopping the AD973x DATACLK_IN while the DACCLK is still
running can lead to unpredictable output signals. This occurs
because the internal digital signal path is interleaved. The last
two samples clocked into the DAC continue to be clocked out
by DACCLK even after DATACLK_IN has been stopped. The
resulting output signal is at a frequency of one-half f
the amplitude depends on the difference between the last two
samples.
Control of the AD973x functions is via the serially programmed
registers listed in Table 6. Optionally, a limited number of
functions may be directly set by external pins in pin mode.
DAC,
and
Rev. 0 | Page 31 of 68
Page 32

AD9734/AD9735/AD9736
S
SERIAL PERIPHERAL INTERFACE
The AD973x serial port is a flexible, synchronous serial
communications port, allowing easy interface to many
industry-standard microcontrollers and microprocessors. The
serial I/O is compatible with most synchronous transfer
formats, including both the Motorola SPI® and Intel® SSR
protocols. The interface allows read/write access to all registers
that configure the AD973x. Single- or multiple-byte transfers
are supported, as well as most significant bit first (MSB-first) or
least significant bit first (LSB-first) transfer formats. The
AD973x serial interface port can be configured as a single pin
I/O (SDIO) or two unidirectional pins for in/out (SDIO/SDO).
SDO (PIN G14)
SDIO (PIN F14)
CLK (PIN G13)
CSB (PIN F13)
Figure 66. AD973x SPI Port
The AD973x can optionally be configured via external pins
rather than the serial interface. When the PIN_MODE input
(Pin L1) is high, the serial interface is disabled and its pins are
reassigned for direct control of the DAC. Specific functionality
is described in the Pin Mode Operation section.
GENERAL OPERATION OF THE SERIAL INTERFACE
There are two phases to a communication cycle with the
AD973x. Phase 1 is the instruction cycle, which is the writing of
an instruction byte into the AD973x, coincident with the first
eight SCLK rising edges. The instruction byte provides the
AD973x serial port controller with information regarding the
data transfer cycle, which is Phase 2 of the communication
cycle. The Phase 1 instruction byte defines whether the
upcoming data transfer is read or write, the number of bytes in
the data transfer, and the starting register address for the first
byte of the data transfer. The first eight SCLK rising edges of
each communication cycle are used to write the instruction byte
into the AD973x.
The remaining SCLK edges are for Phase 2 of the communication cycle. Phase 2 is the actual data transfer between the
AD973x and the system controller. Phase 2 of the communication cycle is a transfer of 1, 2, 3, or 4 data bytes as determined
by the instruction byte. Using one multibyte transfer is the
preferred method. Single-byte data transfers are useful to
reduce CPU overhead when register access requires one byte
only. Registers change immediately upon writing to the last bit
of each transfer byte.
CSB (Chip Select) can be raised after each sequence of 8 bits
(except the last byte) to stall the bus. The serial transfer resumes
when CSB is lowered. Stalling on nonbyte boundaries resets the
SPI.
AD9736
SPI PORT
04862-066
SHORT INSTRUCTION MODE (8-BIT INSTRUCTION)
The short instruction byte is shown in Table 17.
Table 17. SPI Instruction Byte
MSB LSB
I7 I6 I5 I4 I3 I2 I1 I0
R/W N1 N0 A4 A3 A2 A1 A0
R/W, Bit 7 of the instruction byte, determines whether a read or
a write data transfer occurs after the instruction byte write.
Logic high indicates read operation. Logic 0 indicates a write
operation. N1, N0, Bits 6 and 5 of the instruction byte,
determine the number of bytes to be transferred during the data
transfer cycle. The bit decodes are shown in Table 18.
A4, A3, A2, A1, A0, Bits 4, 3, 2, 1, 0 of the instruction byte,
determine which register is accessed during the data transfer
portion of the communications cycle. For multibyte transfers,
this address is the starting byte address. The remaining register
addresses are generated by the AD973x, based on the LSBFIRST
bit (Reg 00, Bit 6).
Table 18. Byte Transfer Count
N1 N2 Description
0 0 Transfer 1 byte
0 1 Transfer 2 bytes
1 0 Transfer 3 bytes
1 1 Transfer 4 bytes
LONG INSTRUCTION MODE (16-BIT INSTRUCTION)
The long instruction bytes are shown in Table 19.
Table 19. SPI Instruction Byte
MSB LSB
I15 I14 I13 I12 I11 I10 I9 I8
R/W N1 N0 A12 A11 A10 A9 A8
I7 I6 I5 I4 I3 I2 I1 I0
A7 A6 A5 A4 A3 A2 A1 A0
If LONG_INS = 1 (Reg 00, Bit 4), the instruction byte is
extended to 2 bytes where the second byte provides an
additional 8 bits of address information. Addresses 0x00 to 0x1F
are equivalent in short and long instruction modes. The
AD973x does not use any addresses greater than 31 (0x1F), so
always set LONG_INS = 0.
SERIAL INTERFACE PORT PIN DESCRIPTIONS
SCLK—Serial Clock. The serial clock pin is used to
synchronize data to and from the AD973x and to run the
internal state machines. The maximum frequency of SCLK is
20 MHz. All data input to the AD973x is registered on the rising
edge of SCLK. All data is driven out of the AD973x on the
rising edge of SCLK.
Rev. 0 | Page 32 of 68
Page 33

AD9734/AD9735/AD9736
CSB—Chip Select. Active low input starts and gates a
communication cycle. It allows more than one device to be used
on the same serial communications lines. The SDO and SDIO
pins goes to a high impedance state when this input is high.
Chip select should stay low during the entire communication
cycle.
SDIO—Serial Data I/O. Data is always written into the
AD973x on this pin. However, this pin can be used as a bidirectional data line. The configuration of this pin is controlled by
SDIO_DIR at Reg 00, Bit 7. The default is Logic 0, which
configures the SDIO pin as unidirectional.
SDO—Serial Data Out. Data is read from this pin for protocols
that use separate lines for transmitting and receiving data. In
the case where the AD973x operates in a single bidirectional
I/O mode, this pin does not output data and is set to a high
impedance state.
MSB/LSB TRANSFERS
The AD973x serial port can support both MSB-first or LSB-first
data formats. This functionality is controlled by LSBFIRST at
Reg 00, Bit 6. The default is MSB first (LSBFIRST = 0).
When LSBFIRST = 0 (MSB first), the instruction and data bytes
must be written from the most significant bit to the least
significant bit. Multibyte data transfers in MSB-first format start
with an instruction byte that includes the register address of the
most significant data byte. Subsequent data bytes should follow
in order from high address to low address. In MSB-first mode,
the serial port internal byte address generator decrements for
each data byte of the multibyte communication cycle.
When LSBFIRST = 1 (LSB first), the instruction and data bytes
must be written from least significant bit to most significant bit.
Multibyte data transfers in LSB-first format start with an
instruction byte that includes the register address of the least
significant data byte followed by multiple data bytes. The serial
port internal byte address generator increments for each byte of
the multibyte communication cycle.
The AD973x serial port controller data address decrements
from the data address written toward 0x00 for multibyte I/O
operations if the MSB-first mode is active. The serial port
controller address increments from the data address written
toward 0x1F for multibyte I/O operations if the LSB-first mode
is active.
NOTES ON SERIAL PORT OPERATION
The AD973x serial port configuration is controlled by Reg 00,
Bits 4, 5, 6, and 7. Note that the configuration changes
immediately upon writing to the last bit of the register. For
multibyte transfers, writing to this register may occur during
the middle of communication cycle. Care must be taken to
compensate for this new configuration for the remaining bytes
of the current communication cycle. The same considerations
apply to setting the software reset, RESET (Reg 00, Bit 5). All
registers are set to their default values except Reg 00 and Reg 04
which remain unchanged.
Use of only single-byte transfers when changing serial port
configurations or initiating a software reset is highly
recommended. In the event of unexpected programming
sequences, the AD973x SPI may become inaccessible. For
example, if user code inadvertently changes the LONG_INS bit
or the LSBFIRST bit, the following bits may have unexpected
results. The SPI can be returned to a known state by writing an
incomplete byte (1 to 7 bits) of all 0s followed by 3 bytes of
0x00. This returns to MSB-first short instructions (Reg 00 =
0x00) so the device may be reinitialized.
INSTRUCTION CYCLE DATA TRANSFER CYCLE
CSB
SCLK
SDIO
R/W N1 N0 A4 A3 A2 A1 A0 D7ND6ND5
Figure 67. Serial Register Interface Timing, MSB-First Write
INSTRUCTION CYCLE DATA TRANSFER CYCLE
CSB
SCLK
SDIO
SDO
R/W N1 N0 A4 A3 A2 A1 A0D7D6ND5
D6ND5
D7
Figure 68. Serial Register Interface Timing, MSB-First Read
INSTRUCTION CYCLE DATA TRANSFER CYCLE
CSB
SCLK
SDIO
A0 A1 A2 A3 A4 N0 N1 R/W D00D10D2
Figure 69. Serial Register Interface Timing, LSB-First Write
INSTRUCTION CYCLE DATA TRANSFER CYCLE
CSB
SCLK
SDIO
SDO
A0 A1 A2 A3 A4 N0 N1 R/W D10D2
D0
D10D2
D0
Figure 70. Serial Register Interface Timing, LSB-First Read
N
N
0
N
0
0
N
0
N
0
N
D00D10D20D3
0
D00D10D20D3
D00D10D20D3
D7ND6ND5ND4
D7ND6ND5ND4
D7ND6ND5ND4
04862-069
04862-067
04862-068
04862-070
Rev. 0 | Page 33 of 68
Page 34

AD9734/AD9735/AD9736
S
S
CSB
SCLK
SDIO
CSB
CLK
DIO
t
DS
t
DS
Figure 71. Timing Diagram for SPI Register Write
I1 I0 D7 D6 D5
Figure 72. Timing Diagram for SPI Register Read
t
PWH
t
t
SCLK
t
PWL
DH
INSTRUCTION BIT 6INSTRUCTION BIT 7
t
DNV
t
DV
After the last instruction bit is written to the SDIO pin, the
driving signal must be set to a high impedance in time for the
bus to turn around. The serial output data from the AD973x is
enabled by the falling edge of SCLK. This causes the first output
data bit to be shorter than the remaining data bits, as shown in
Figure 72.
To assure proper reading of data, read the SDIO or SDO pin
prior to changing the SCLK from low to high.
Due to the more complex multibyte protocol, multiple AD973x
devices cannot be daisy-chained on the SPI bus. Multiple DACs
should be controlled by independent CSB signals.
PIN MODE OPERATION
When the PIN_MODE input (Pin L1) is set high, the SPI port is
disabled. The SPI port pins are remapped, as shown in Table 20.
The function of these pins is described in Table 21. The
remaining PIN_MODE register settings are shown in Table 6.
Table 20. SPI_MODE vs. PIN_MODE Inputs
Pin No. PIN_MODE = 0 PIN_MODE = 1
E13 IRQ UNSIGNED
F13 CSB 2×
G13 SCLK FSC0
E14 RESET PD
F14 SDIO FIFO
G14 SDO FSC1
04862-071
04862-072
Table 21. PIN_MODE Input Functions
Pin Function
UNSIGNED 0, Twos complement input data format
1, Unsigned input data format
2× 0, Interpolation disabled
1, Interpolation = 2× enabled
FSC1, FSC0 00, Sleep mode
01, 10 mA full-scale output current
10, 20 mA full-scale output current
11, 30 mA full-scale output current
PD 0, Chip enabled
1, Chip in power-down state
FIFO 0, Input FIFO disabled
1, Input FIFO enabled
Care must be taken when using PIN_MODE, because only
the control bits shown in Table 21 can be changed. If the
remaining register default values are not suitable for the desired
operation, PIN_MODE cannot be used. If the FIFO is enabled,
the controller clock must be less than 10 MHz. This limits the
DAC clock to 160 MHz.
RESET OPERATION
The RESET pin forces all SPI register contents to their default
values (see Table 6), which places the DAC in a known state.
The software reset bit forces all SPI register contents, except
Reg 00 and Reg 04, to their default values.
The internal reset signal is derived from a logical OR operation
on the RESET pin state and from the software reset state. This
internal reset signal drives all SPI registers to their default
values, except Reg 00 and Reg 04, which are unaffected. The
data registers are not affected by either reset.
The software reset is asserted by writing 1 to Reg 00, Bit 5. It
may be cleared on the next SPI write cycle or a later write cycle.
PROGRAMMING SEQUENCE
The AD973x registers should be programmed in this order:
1. Hardware reset
2. SPI port configuration changes, if necessary
3. Input format, if unsigned
4. Interpolation, if in 2× mode
5. Calibrate and set the LVDS Controller
6. Enable the FIFO
7. Calibrate and set the sync controller
Steps 1 through 4 are required, while 5 through 7 are optional.
The LVDS controller can help assure proper data reception in
the DAC with changes in temperature and voltage. The SYNC
controller manages the FIFO to assure proper transfer of the
received data to the DAC core with changes in temperature and
voltage. The DAC is intended to operate with both controllers
active unless data and clock alignment is managed externally.
Rev. 0 | Page 34 of 68
Page 35

AD9734/AD9735/AD9736
INTERPOLATION FILTER
In 2× mode, the input data is interpolated by a factor of 2 so it
aligns with the DAC update rate. The interpolation filter is a
hard-coded, 55-tap, symmetric FIR with a 0.001 dB pass-band
flatness and a stop-band attenuation of about 90 dB. The transition band runs from 20% of f
to 30% of f
DAC
response is shown in Figure 73 where the frequency axis is
normalized to f
Figure 74 shows the pass-band flatness and
DAC
Table 22 shows the 16-bit filter coefficients.
Table 22. FIR Interpolation Filter Coefficients
Coefficient No. Coefficient No. Tap Weight
h1 h55 −7
h2 h54 0
h3 h53 24
h4 h52 0
h5 h51 −62
h6 h50 0
h7 h49 135
h8 h48 0
h9 h47 −263
h10 h46 0
h11 h45 471
h12 h44 0
h13 h43 −793
h14 h42 0
h15 h41 1273
h16 h40 0
h17 h39 −1976
h18 h38 0
h19 h37 3012
h20 h36 0
h21 h35 −4603
h22 h34 0
h23 h33 7321
h24 h32 0
h25 h31 −13270
h26 h30 0
h27 h29 41505
h28 65536
0
–10
–20
–30
–40
–50
–60
MAGNITUDE (dB)
–70
–80
–90
–100
FREQUENCY NORMALIZED TO
Figure 73. AD973x Interpolation Filter Response
f
DAC
. The FIR
DAC
0.500 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45
04862-073
0.10
0.08
0.06
0.04
0.02
0
–0.02
MAGNITUDE (dB)
–0.04
–0.06
–0.08
–0.10
FREQUENCY NORMALIZED TO
f
DAC
0.250 0.100.05 0.15 0.20
04862-074
Figure 74. AD973x Interpolation Filter Pass-Band Flatness
DATA INTERFACE CONTROLLERS
There are two internal controllers that can be utilized in the
operation of the AD973x. The first controller helps maintain
optimum LVDS data sampling and the second controller helps
maintain optimum synchronization between the DACCLK and
the incoming data. The LVDS controller is responsible for
optimizing the sampling of the data from the LVDS bus
(DB13:0), while the SYNC controller resolves timing problems
between the DAC_CLK (CLK+, CLK−) and the DATACLK. A
block diagram of these controllers is shown in Figure 75.
DATACLK
DATACLK_OUT
DATACLK_IN
DATA
SOURCE
i.e., FPGA
DB<13:0>
LVDS
CONTROLLER
LVDS
SAMPLE
LOGIC
SYNC
CONTROLLER
SYNC
LOGIC
FIFO
Figure 75. AD973x Data Controllers
The controllers are clocked with a divided-down version of the
DAC_CLK. The divide ratio is set utilizing the controller clock
predivider bits (CCD<3:0>) located at REG 22, Bits 3:0 to
generate the controller clock as follows:
Controller Clock = DAC_CLK/(2(CCD<3:0> + 4))
Note that the controller clock may not exceed 10 MHz for
correct operation. Until CCD<3:0> has been properly
programmed to meet this requirement, the DAC output may
not be stable. This means the FIFO cannot be enabled in
PIN_MODE unless the DACCLK is less than 160 MHz.
CLK
CONTROL
DAC
04862-075
Rev. 0 | Page 35 of 68
Page 36

AD9734/AD9735/AD9736
The LVDS and SYNC controllers can be independently
operated in three modes via SPI port Reg 06 and Reg 08:
• Manual mode
• Surveillance mode
• Auto mode
In manual mode, all of the timing measurements and updates
are externally controlled via the SPI.
In surveillance mode, each controller takes measurements and
calculates a new optimal value continuously. The result of the
measurement can be passed through an averaging filter before
evaluating the results for increased noise immunity. The filtered
result is compared to a threshold value set via Reg 06 and
Reg 08 of the SPI port. If the error is greater than the threshold,
an interrupt is triggered and the controller stops. Reg 01 of the
SPI port controls the interrupts with Bits 3 and 2 enabling the
respective interrupts and Bits 7 and 6 indicating the respective
controller’s interrupt. If an interrupt is enabled, it also activates
the AD973x IRQ pin. In order to clear an interrupt, the
interrupt enable bit of the respective controller must be set to 0
for at least 1 controller clock cycle (controller clock <10 MHz).
Auto mode is almost identical to surveillance mode. Instead
of triggering an interrupt and stopping the controller, the
controller automatically updates its settings to the newly
calculated optimal value and continues to run.
DB<13:0>
DATA SAMPLING
DATACLK_IN
Figure 76. AD973x Internal LVDS Data Sampling Logic
SAMPLE
DELAY
PROP DELAY
TO LATCH
Figure 77. AD973x Internal LVDS Data Sampling Logic Timing
LVDS
RX
SIGNAL
LVDS
RX
PROP DELAY
TO LATCH
SD<3:0>
SAMPLE DELAY
MSD<3:0>
DELAY
MSD<3:0>
DELAY
CLK TO DB SKEW
FF
FF
DELAYED
CLOCK
SIGNAL
FF
CLOCK
SAMPLING
SIGNAL
D1
D2
CHECK
04862-076
DB13:0
DATACLK_IN
DATA SAMPLING
SIGNAL (DSS)
D1
D2
04862-077
LVDS SAMPLE LOGIC
A simplified diagram of the AD973x LVDS data sampling
engine is shown in Figure 76 and the timing diagram is shown
in Figure 77.
The incoming LVDS data is latched by the data sampling signal
(DSS), which is derived from DATACLK_IN. The LVDS
controller delays DATACLK_IN to create the data sampling
signal (DSS), which is adjusted to sample the LVDS data in the
center of the valid data window. The skew between the
DATACLK_IN and the LVDS data bits (DB<13:0>) must be
minimal for proper operation. Therefore, it is recommended
that the DATACLK_IN be generated in the same manner as the
LVDS data bits (DB<13:0>) with the same driver and data lines
(that is, it should just be another LVDS data bit running a
constant 01010101… sequence, as shown in Figure 94).
If the DATACLK_IN signal is stopped, the DACCLK continues
to generate an output signal based on the last two values
clocked into the registers that drive D1 and D2, as shown in
Figure 76. If these two registers are not equal, a large output at a
frequency of one-half f
may be generated at the DAC output.
DAC
LVDS SAMPLE LOGIC CALIBRATION
The internal DSS delay must be calibrated to optimize the data
sample timing. Once calibrated, the AD973x can generate an
IRQ or automatically correct its timing if temperature or voltage
variations change the timing too much. This calibration is done
by using the delayed clock sampling signal (CSS) to sample the
delayed clock signal (DCS). The LVDS sampling logic can find
the edges of the DATACLK_IN signal and from this measurement the center of the valid data window can be located.
The internal delay line that derives the delayed DSS from
DATACLK_IN is controlled by SD3:0 (Reg 05, Bits 7:4), while
the DCS is controlled by MSD3:0 (Reg 04, Bits 7:4), and the CSS
is controlled by MHD3:0 (Reg 04, Bits 3:0).
DATACLK_IN transitions must be time aligned with the LVDS
data (DB<13:0>) transitions. This allows the CSS, derived from
the DATACLK_IN, to find the valid data window of DB<13:0>
by locating the DATACLK_IN edges. The latching (rising) edge
of CSS is initially placed using Bits SD<3:0> and can then be
shifted to the left using MSD<3:0> and to the right using
MHD<3:0>. When CSS samples the DCS and the result is 1,
(which can be read back via the check bit at Reg 05, Bit 0) the
sampling is occurring in the correct data cycle. To find the
leading edge of the data cycle, increment the measured setup
delay until the check bit goes low. In order to find the trailing
Rev. 0 | Page 36 of 68
Page 37

AD9734/AD9735/AD9736
edge, increment the measured hold delay (MHD) until check
goes low. Always set MHD = 0 when incrementing MSD and
vice versa.
The incremental units of SD, MSD, and MHD are in units of real
time, not fractions of a clock cycle. The nominal step size is 80 ps.
OPERATING THE LVDS CONTROLLER IN
MANUAL MODE VIA THE SPI PORT
The manual operation of the LVDS controller allows the user to
step through both the setup and hold delays to calculate the
optimal sampling delay (that is, the center of the data eye).
With SD<3:0> and MHD<3:0> set to 0, increment the setup time
delay (MSD<3:0>, Reg 04, Bits 7:4) until the check bit (Reg 05,
Bit 0) goes low and record this value. This locates the leading
DATACLK_IN (and data) transition, as shown in Figure 78.
With SD<3:0> and MSD<3:0> set to 0, increment the hold time
delay (MHD<3:0>, Reg 04, Bits 3:0) until the check bit (Reg 05,
Bit 0) goes low and record this value. This locates the trailing
DATACLK_IN (and DB<13:0>) transition, as shown in Figure 79.
Once both DATACLK_IN edges are located, the sample delay
(SD<3:0>, Reg 05, Bits 7:4) must be updated according to the
following equation:
Sample Delay = (MHD − MSD)/2
After updating SD<3:0>, verify that the sampling signal is in the
middle of the valid data window by adjusting both MHD and
then MSD with the new sample delay until the check bit goes
low. The new MHD and MSD values should be equal to or
within one unit delay if SD<3:0> was set correctly.
MHD and MSD may not be equal to or within one unit delay if
the external clock jitter and noise exceeds the internal delay
resolution. Differences of 2, 3, or more are possible and may
require more filtering to provide stable operation.
The sample delay calibration should be performed prior to
enabling surveillance mode or auto mode.
SETUP TIME (
t
) HOLD TIME (
S
MSD<3:0> = 0 1 2 3 4 5
SAMPLE DELAY
CHECK = 1 1 1 1 1 0 CHECK = 1
Figure 79. Hold Delay Measurement
SD<3:0>
t
)
H
CSS SAMPLE DCS
DB<13:0>
DATACLK_IN
CSS WITH
MHD<3:0> = 0
DSC DELAYED
BY MSD<3:0>
OPERATING THE LVDS CONTROLLER IN SURVEILLANCE AND AUTO MODE
In surveillance mode, the controller searches for the edges of
the data eye in the same manner as in the manual mode of
operation and triggers an interrupt if the clock sampling signal
(CSS) has moved more than the threshold value set by
LTHR<1:0> (Reg 06, Bits 1:0).
There is an internal filter that averages the setup and hold time
measurements to filter out noise and glitches on the clock lines.
Average Value = ( MHD – MSD)/2
New Average = Average Value + ( Δ Av er ag e/2 ^ LFLT<3:0> )
If an accumulating error in the average value causes it to exceed
the threshold value (LTHR<1:0>), an interrupt is issued.
The maximum allowable value for LFLT<3:0> is 12. If
LFLT<3:0> is too small, clock jitter and noise can cause erratic
behavior. In most cases, LFLT can be set to the maximum value.
In surveillance mode, the ideal sampling point should first be
found using manual mode and applied to the sample delay
registers. The user should then set the threshold and filter
values depending on how far the CSS signal is allowed to drift
before an interrupt occurs. Then set the surveillance bit high
(Reg 06, Bit 7) and monitor the interrupt signal either via the
SPI port read back (Reg 01, Bit 7) or the IRQ pin.
= 0
4862-079
SETUP TIME (
MSD<3:0> = 0 1 2 3 4 5
t
S
)
SAMPLE DELAY
Figure 78. Setup Delay Measurement
SD<3:0>
CHECK = 1
CSS SAMPLE DCS
DB<13:0>
DATACLK_IN
CSS WITH
MHD<3:0> = 0
DSC DELAYED
BY MSD<3:0>
Rev. 0 | Page 37 of 68
In auto mode, the same steps should be taken to set up the
sample delay, threshold, and filter length. To run the controller
in auto mode, both the LAUTO (Reg 06, Bit 6) and LSURV
(Reg 06, Bit 7) bits need to be set to 1. In auto mode, the LVDS
interrupt should be set low (Reg 01, Bit 3) to allow the sample
delay to be automatically updated if the threshold value is
exceeded.
04862-078
Page 38

AD9734/AD9735/AD9736
SYNC LOGIC AND CONTROLLER
A FIFO structure is utilized to synchronize the data transfer
between the DACCLK and the DATACLK_IN clock domains.
The sync controller writes data from DB<13:0> into an 8-word
memory register based on a cyclic write counter clocked by the
DSS, which is a delayed version of DACCLK_IN. The data is
read out of the memory based on a second cyclic read counter
clocked by DACCLK. The 8-word FIFO shown in Figure 80
provides sufficient margin to maintain proper timing under
most conditions. The sync logic is designed to prevent the read
and write pointers from crossing. If the timing drifts far enough
to require an update of the phase offset (PHOF<1:0>), two
samples are duplicated or dropped. Figure 81 shows the timing
diagram for the sync logic.
8 WORD
MEMORY
DAC<13:0>
DSS
WRITE
COUNTER
SYNC LOGIC AND CONTROLLER OPERATION
The relationship between the readout pointer and the write
pointer initially is unknown because the startup relationship
between DACCLK and DATACLK_IN is unknown. The sync
logic measures the relative phase between the two counters with
the zero detect block and the flip-flop in Figure 80. The relative
phase is returned in FIFOSTAT<2:0> (Reg 07, Bits 6:4), and
sync logic errors are indicated by FIFOSTAT<3> (Reg 07, Bit 7).
If FIFOSTAT<2:0> returns a value of 0 or 7, it signifies that the
memory is sampling in a critical state (read and write pointers
are close to crossing). If the FIFOSTAT<2:0> returns a value of
3 or 4, it signifies the memory is sampling at the optimal state
(read and write pointers are farthest apart). If FIFOSTAT<2:0>
returns a critical value, the pointer can be adjusted with the
phase offset PHOF<1:0> (Reg 07, Bits 1:0). Due to the
architecture of the FIFO, the phase offset can only adjust the
read pointer in steps of 2.
M0
DAC<13:0>
M7
COUNTER
Figure 80. Sync Logic Block Diagram
ADDER
READ
ZD
FF
PHOF<1:0>
DACCLK
FIFOSTAT<2:0>
04862-080
OPERATING IN MANUAL MODE
To start operating the DAC in manual mode, allow DACCLK
and DATACLK_IN to stabilize, then enable FIFO mode (Reg
00, Bit 2). Read FIFOSTAT<2:0> (Reg 07, Bits 6:4) to determine
if adjustment is needed. For example, if FIFOSTAT<2:0> = 6,
the timing is not yet critical but it is not optimal. To return to
an optimal state (FIFOSTAT<2:0> = 4), the PHOF<1:0>
(Reg 07, Bits 1:0) needs to be set to 1. Setting PHOF<1:0> = 1
effectively increments the read pointer by 2. This causes the
write pointer value to be captured two clocks later, decreasing
FIFOSTAT<2:0> from 6 to 4.
OPERATION IN SURVEILLANCE AND AUTO MODES
Once FIFOSTAT<2:0> has been manually placed in an optimal
state, the AD973x sync logic can be run in surveillance or auto
mode. To start, turn on surveillance mode by setting SSURV = 1
(Reg 08, Bit 7) then enable the sync interrupt (Reg 01, Bit 2). If
STRH<0> = 0 (Reg 08, Bit 0), an interrupt occurs if
FIFOSTAT<2:0> = 0 or 7. If STRH<0> = 1 (Reg 08, Bit 0), an
interrupt occurs if FIFOSTAT<2:0> = 0, 1, 6, or 7. The interrupt
can be read at Reg 01, Bit 6 at the AD973x IRQ pin.
To enter auto mode, complete the preceding steps then set
SAUTO = 1 (Reg 08, Bit 6). Next, set the SYNC interrupt = 0
(Reg 01, Bit 2), to allow the phase offset (PHOF<1:0>) to be
automatically updated if FIFOSTAT<2:0> violates the threshold
value. The FIFOSTAT signal is filtered to improve noise
immunity and reduce unnecessary phase offset updates. The
filter operates with the following algorithm:
FIFOSTAT = FIFOSTAT + ΔFIFOSTAT/2 ^ SFLT<3:0>
where 0 ≤ SFLT<3:0> ≤ 12. Values greater than 12 are set to 12.
If SFLT<3:0> is too small, clock jitter and noise can cause
erratic behavior. Normally SFLT can be set to the maximum
value.
FIFO BYPASS
When the FIFO_MODE bit (Reg 01, Bit 2) is set to 0, the FIFO
is bypassed with a mux. When the FIFO is enabled, the pipeline
delay through the AD973x increases by the delta between the
FIFO read pointer and write pointer plus 4 more clock periods.
Rev. 0 | Page 38 of 68
Page 39

AD9734/AD9735/AD9736
T
DACCLK
INTERNAL DELAY
DATACLK_OU
EXTERNAL DELAY
DATACLK_IN
DATA_IN
DSS1
DSS2
WRITE_PTR1
A
D1
D2
01
M0
M1 B
M2
M3
M4
M5
M6
DATA 'A' CAN BE
SAFELY READ FROM
THE FIFO IN THE
SAFE ZONE. IN THE
ERROR ZONE, THE
POINTERS MAY
BRIEFLY OVERLAP
DUE TO CLOCK JITTER
OR NOISE.
CCDDEEFFGGHHIIJJKKLLM
B
A
B
23456701 234
SAFE ZONE
A
SAMPLE_HOLD
SAMPLE_SETUP
SAMPLE_DELAY
ERROR ZONE
C
D
N
O
PPQR
M
5
I
J
E
F
G
O
N
670
FIFOSTAT IS SET
EQUAL TO THE
WHITE POINTER
EACH TIME THE
READ POINTER
CHANGES FROM
7 TO 0.
Q
M7
READ_PTR1
FIFOSTAT
DAC_DATA
4567012 34 1 2345670
4
B
A
C D E F G H IJKLM
H
44
04862-081
Figure 81. SYNC Logic Timing Diagram
Rev. 0 | Page 39 of 68
Page 40

AD9734/AD9735/AD9736
DIGITAL BUILT-IN SELF TEST (BIST)
OVERVIEW
The AD973x includes an internal signature generator that
processes incoming data to create unique signatures. These
signatures can be read back from the SPI port, allowing
verification of correct data transfer into the AD973x. BIST
vectors provided on the AD973x-EB evaluation board CD can
be used to check the full width data input or individual bits for
PCB debug, utilizing the procedure in the AD973x BIST
Procedure section. Alternatively, any vector may be used
provided the expected signature is calculated in advance. The
MATLAB® routine in the Generating Expected Signatures
section may be used to calculate the expected signature. BIST
should be used to verify correct data transfer because not all
errors may be evident on a spectrum analyzer. There are four
BIST signature generators that can be read back using
Register 18 to Register 21, based on the setting of the BIST
selection bits (Reg 17, Bits 7:6), as shown in Table 23. The BIST
signature returned from the AD973x depends on the digital
input during the test. Because the filters in the DAC have
memory, it is important to put the correct idle value on the
DATA inputs to flush the memory prior to reading the BIST
signature.
Placing the idle value on the data inputs also allows the BIST to
be set up while the DAC clock is running. The idle value should
be all 0s in unsigned mode (0x0000) and all 0s except for the
MSB in twos complement mode (0x2000).
The BIST consists of two stages; the first stage is after the LVDS
receiver and the second stage is after the FIFO. The first BIST
stage verifies correct sampling of the data from the LVDS bus
while the second BIST stage verifies correct synchronization
between the DAC_CLK domain and the DATACLK_IN
domain. The BIST vector is generated using 32-bit LFSR
signature logic. Because the internal architecture is a 2-bus
parallel system, there are two 32-bit LFSR signature logic blocks
on the both the LVDS and sync blocks. Figure 82 shows where
the LVDS and sync phases are located.
Table 23. BIST Selection Bits
Bit SEL<1> SEL<0>
LVDS Phase 1 0 0
LVDS Phase 2 0 1
SYNC Phase 1 1 0
SYNC Phase 2 1 1
D1
DB<13:0>
DATACLK_IN
LVDS
RX
D
Figure 82. Block Diagram Showing LVDS and Sync Phase 1 and Phase 2
LVDS
BIST
PH1
(RISE)
2
LVDS
BIST
PH2
(FALL)
FIFO 2x
SYNC LOGIC
SPI PORT
SYNC
BIST
PH1
(RISE)
SYNC
BIST
PH2
(FALL)
DAC
04862-082
Rev. 0 | Page 40 of 68
Page 41

AD9734/AD9735/AD9736
AD973x BIST PROCEDURE
1. Set RESET pin = 1.
2. Set input DATA = 0x0000 for signed (0x2000 for
unsigned).
3. Enable DATACLK_IN if it is not already running.
4. Run for at least 16 DATACLK_IN cycles.
5. Set RESET pin = 0.
6. Run for at least 16 DATACLK_IN cycles.
7. Set RESET pin = 1.
8. Run for at least 16 DATACLK_IN cycles.
9. Set RESET pin = 0.
10. Set desired operating mode (1× mode and signed data are
default values and expected for the supplied BIST vectors).
11. Set CLEAR (Reg 17, Bit 0), SYNC_EN (Reg 17, Bit 1) and
LVDS_EN (Reg 17, Bit 2) high.
12. Wait 50 DATACLK_IN cycles to allow 0s to propagate
through and clear sync signatures.
13. Set CLEAR low.
14. Read all signature registers (REG 21, 20, 19, and 18) for
each of the four SEL (Reg 17, Bits 7:6) values and verify
they are all 0x00.
LVDS Phase 1
a. Reg 17 set to 0x26 (SEL1 = 0, SEL0 = 0,
SIG_READ = 1, LVDS_EN = 1, SYNC_EN = 1).
b. Read Registers 20, 19, 18, and 17.
LVDS Phase 2
a. Reg 17 set to 0x66 (SEL1= 0, SEL0 = 1,
SIG_READ = 1, LVDS_EN = 1, SYNC_EN = 1).
b. Read Registers 20, 19, 18, and 17.
SYNC Phase 1
a. Reg 17 set to 0xA6 (SEL1= 1, SEL0 = 0,
SIG_READ = 1, LVDS_EN = 1, SYNC_EN = 1).
b. Read Registers 20, 19, 18, and 17.
SYNC Phase 2
a. Reg 17 set to 0xE6 (SEL1= 1, SEL0 = 1,
SIG_READ = 1, LVDS_EN = 1, SYNC_EN = 1).
b. Read Registers 20, 19, 18, and 17.
15. Clock the BIST vector into the AD973x.
16. After the BIST vector has been clocked into the part, hold
DATA = 0x0000 for signed (0x2000 for unsigned);
otherwise, the additional nonzero data changes the
signature.
17. Read all signature registers (Reg 21, 20, 19, and 18 as
described in Step 14 ) for each of the four SEL (Reg 17,
Bits 7:6) values, and verify that they match the expected
signatures shown in Table 24.
18. In some cases, the BIST circuitry may not be completely
cleared, and an incorrect signature may be read. If this
occurs, loop back to Step 11 and rerun the test to obtain
the correct result. In an automated test, it may be best to
always run the vector twice to assure a correct result.
AD973x EXPECTED BIST SIGNATURES
The BIST vectors provided on the AD973x-EB CD are in signed
mode, so no programming needs to be done to the part to pass
the BIST. The BIST vector is for 1×, no FIFO, and signed data.
For testing all 14 input bits, use the vector all_bits_unsnew.txt
and verify against the signatures in Table 24.
Table 24. Expected BIST Data Readback for All Bits
LVDS Phase 1 LVDS Phase 2 SYNC Phase 1 SYNC Phase 2
CF71487C 66DF5250 CF71487C 66DF5250
For individual bit tests, use the vectors named bitn.txt (where n
is the desired bit number being tested) and compare them
against the values in Table 25.
Table 25. Expected BIST Data Readback for Individual Bits
Vector
bit0.txt 0 AABF0A00 2A400500
bit1.txt 1 2BBF0A00 6B400500
bit2.txt 2 29BE0A00 E9400500
bit3.txt 3 2DBC0A00 ED410500
bit4.txt 4 25B80A00 E5430500
bit5.txt 5 35B00A00 F5470500
bit6.txt 6 15A00A00 D54F0500
bit7.txt 7 55800A00 955F0500
bit8.txt 8 D5C00A00 157F0500
bit9.txt 9 D5410A00 153E0500
bit10.txt 10 D5430B00 15BC0500
bit11.txt 11 D5470900 15B80400
bit12.txt 12 D54F0D00 15B00600
bit13.txt 13 D55F0500 15A00200
Note the following for Table 25:
• The term rise refers to Phase 1 and fall refers to Phase 2.
• Byte order is Decimal Register Address 21, 20, 19, then 18.
• Sync phase should always equal LVDS phase in 1× mode.
Bit No.
LVDS Rise
Expected
LVDS Fall
Expected
Rev. 0 | Page 41 of 68
Page 42

AD9734/AD9735/AD9736
GENERATING EXPECTED SIGNATURES
The following MATLAB code duplicates the internal logic of
the AD973x. To use it, save this code in a file called bist.m.
--- begin bist.m ---
function [ ret1 , ret2] = bist(vec)
ret1 = bist1(vec(1:2:length(vec)-1));
ret2 = bist1(vec(2:2:length(vec)));
function ret = bist1(v)
sum = zeros(1,32);
for i = 1 :length(v)
if v(i) ~= 0
su(1) = ~xor(sum(32) ,bitget(v(i),1));
su(2) = ~xor(sum(1) ,bitget(v(i),2));
su(3) = ~xor(sum(2) ,bitget(v(i),3));
su(4) = ~xor(sum(3) ,bitget(v(i),4));
su(5) = ~xor(sum(4) ,bitget(v(i),5));
su(6) = ~xor(sum(5) ,bitget(v(i),6));
su(7) = ~xor(sum(6) ,bitget(v(i),7));
su(8) = ~xor(sum(7) ,bitget(v(i),8));
su(9) = ~xor(sum(8) ,bitget(v(i),9));
su(10) = ~xor(sum(9) ,bitget(v(i),10));
su(11) = ~xor(sum(10) ,bitget(v(i),11));
su(12) = ~xor(sum(11) ,bitget(v(i),12));
su(13) = ~xor(sum(12) ,bitget(v(i),13));
su(14) = ~xor(sum(13) ,bitget(v(i),14));
su(15) = sum(14); su(16) = sum(15);
su(17) = sum(16); su(18) = sum(17);
su(19) = sum(18); su(20) = sum(19);
su(21) = sum(20); su(22) = sum(21);
su(23) = sum(22); su(24) = sum(23);
su(25) = sum(24); su(26) = sum(25);
su(27) = sum(26); su(28) = sum(27);
su(29) = sum(28); su(30) = sum(29);
su(31) = sum(30); su(32) = sum(31);
sum = su;
end
end % for ret = dec2hex( 2.^[0:31]× sum',8);
--- end bist.m ---
To generate the expected BIST signatures, follow this procedure:
1. Start MATLAB and type the following at the command
prompt:
13
t = round(randn(1,100) × 2
/8+213) ;
[ b1 b2 ] = bist(t)
The first statement creates a random vector of 14-bit
words, with a length of 100.
2. Set t equal to any desired vector, otherwise take this
random vector and input it to the AD973x.
3. Alter the command randn(1,100) to change the vector
length as desired.
4. Ty pe b1 at the command line to see the calculated
signature for the LVDS BIST, Phase 1.
5. Ty pe b2 to see the value for LVDS BIST, Phase 2.
The values returned for b1 and b2 each are 32-bit hex values.
They correspond to Reg 18, Reg 19, Reg 20, and Reg 21, where
b1 is the value read for SEL<1:0> = 0,0 (see Table 11) and b2 is
the value read for SEL<1:0> = 0,1.
When the DAC is in 1× mode, the signature at SYNC BIST,
Phase 1 should equal the signature at LVDS BIST, Phase 1. The
same is true for Phase 2.
Rev. 0 | Page 42 of 68
Page 43

AD9734/AD9735/AD9736
CROSS CONTROLLER REGISTERS
The AD973x differential output stage can be adjusted in order
to equalize the charge injection into the positive and negative
outputs. This adjustment can impact certain performance
characteristics, such as harmonic distortion or IMD. System
performance can be enhanced by adjusting the cross controller
as described next.
If the system is calibrated after manufacture, the cross controller
offsets may be adjusted to provide optimum performance. Start
by incrementing DNDEL<5:0> (Reg 11, Bits 5:0) while
observing HD2 (second harmonic distortion) and/or IMD to
find the desired optimum. If DNDEL does not influence the
performance, set it to 0 and increment UPDEL<5:0> (Reg 10,
Bits 5:0). Based on system characterization, it may be found that
setting one or the other of these controls to the maximum value
yields the best performance.
Figure 83 shows the effect of UPDEL and DNDEL.
INCREMENT DNDEL TO MOVE
THE CROSSING TOWARD THE
IDEAL VALUE
IDEAL DIFFERENTIAL OUTPUT
CROSSING ALIGNMENT
INCREMENT UPDEL TO MOVE
THE CROSSING TOWARD THE
IDEAL VALUE
Figure 83. Effect of UPDEL and DNDEL
04862-083
Rev. 0 | Page 43 of 68
Page 44

AD9734/AD9735/AD9736
–
ANALOG CONTROL REGISTERS
The AD973x includes some registers for optimizing its analog
performance. These registers include temperature trim for the
band gap, noise reduction in the output current mirror, and
output current mirror headroom adjustments.
BAND GAP TEMPERATURE CHARACTERISTIC TRIM BITS
Using TRMBG<2:0> (Reg 14, Bits 2:0) the temperature
characteristic of the internal band gap can be trimmed to
minimize the drift over temperature, as shown in Figure 84.
1.23
1.22
1.21
VREF (V)
1.2
1.19
1.18
–50 –40 –30 –20
Figure 84. Band Gap Temperature Characteristic for Various TRMBG Values
The temperature changes are sensitive to process variations,
and Figure 84 may not be representative of all fabrication lots.
Optimum adjustment requires measurement of the device
operation at two temperatures and development of a trim
algorithm to program the correct TRMBG<2:0> values in
external nonvolatile memory.
000
001
010
011
100
101
0
1
010203040506070 8090
–
TEMPERATURE (°C)
110
111
04862-084
MIRROR ROLL-OFF FREQUENCY CONTROL
With MSEL<1:0> (Reg 14, Bits 7:6) the user can adjust the noise
contribution of the internal current mirror to optimize the 1/f
noise. Figure 85 shows MSEL vs. the 1/f noise with 20 mA fullscale current into a 50 Ω resistor.
110
–115
–120
–125
NOISE (IdBm/Hz)
–130
–135
–140
1 10 100
F (kHz)
Figure 85. 1/f Noise with Respect to MSEL Bits
M
S
EL
3
M
S
E
L
1
M
S
E
L
0
M
S
E
L
2
04862-0-085
HEADROOM BITS
HDRM<7:0> (Reg 15, Bits 7:0) are for internal evaluation. It is
not recommended to change the default reset values.
Rev. 0 | Page 44 of 68
Page 45

AD9734/AD9735/AD9736
VOLTAGE REFERENCE
The AD973x output current is set by a combination of digital
control bits and the I120 reference current, as shown in
Figure 86.
AD9736
V
BG
1.2V
V
REF
–
+
I120
1nF
I120
10kΩ
AVSS
Figure 86. Voltage Reference Circuit
The reference current is obtained by forcing the band gap
voltage across an external 10 kΩ resistor from I120 (Pin B14) to
ground. The 1.2 V nominal band gap voltage (V
120 µA reference current in the 10 kΩ resistor. This current is
adjusted digitally by FSC<9:0> (Reg 02, Reg 03) to set the
output full-scale current I
V
⎛
REF
I
FS
72 FSC
⎜
R
⎝
The full-scale output current range is approximately 10 mA to
30 mA for register values from 0x000 to 0x3FF. The default
value of 0x200 generates 20 mA full scale. The typical range is
shown in Figure 87.
FSC<9:0>
CURRENT
SCALING
:
FS
192
⎛
⎜
1024
⎝
DAC
IFULL-SCALE
) generates a
REF
⎞
⎞
><×+×= 0.9
⎟
⎟
⎠
⎠
04862-086
35
30
25
20
(mA)
FS
15
I
10
5
0
0 200 400 600 800
Figure 87. I
DAC GAIN CODE
vs. DAC Gain Code
FS
1000
04862-087
Always connect a 10 kΩ resistor from the I120 pin to ground
and use the digital controls to vary the full-scale current. The
AD973x is not a multiplying DAC. Applying an analog signal to
I120 is not supported.
VREF (Pin C14) must be bypassed to ground with a 1 nF
capacitor. The band gap voltage is present on this pin and may
be buffered for use in external circuitry. The typical output
impedance is near 5 kΩ. If desired, an external reference may be
used to overdrive the internal reference by connecting it to the
VREF pin.
IPTAT (Pin D14) is used for factory testing. It should be left
floating.
Rev. 0 | Page 45 of 68
Page 46

AD9734/AD9735/AD9736
APPLICATIONS INFORMATION
DRIVING THE DACCLK INPUT
The DACCLK input requires a low jitter differential drive
signal. It is a PMOS input differential pair powered from the
1.8 V supply, so it is important to maintain the specified 400
mV input common-mode voltage. Each input pin can safely
swing from 200 mV p-p to 800 mV p-p about the 400 mV
common-mode voltage. While these input levels are not directly
LVDS compatible, DACCLK may be driven by an offset accoupled LVDS signal, as shown in Figure 88.
LVDS_P_IN CLK+
LVDS_N_IN CLK–
Figure 88. LVDS DACCLK Drive Circuit
If a clean sine clock is available, it may be transformer-coupled
to DACCLK, as shown in Figure 105. Use of a CMOS or TTL
clock may also be acceptable for lower sample rates. It can be
routed through a CMOS to LVDS translator, then ac-coupled, as
described previously. Alternatively, it may be transformercoupled and clamped, as shown in Figure 89.
0.1µF
0.1µF
50Ω
50Ω
V
CM
= 400mV
04862-088
TTL OR CMOS
CLK INPUT
0.1µF
50Ω
50Ω
BAV99ZXCT
HIGH SPEED
DUAL DIODE
V
= 400mV
CM
CLK+
CLK–
04862-089
Figure 89. TTL or CMOS DACCLK Drive Circuit
A simple bias network for generating VCM is shown in
Figure 90. It is important to use CVDD18 and CVSS for the
clock bias circuit. Any noise or other signal that is coupled onto
the clock is multiplied by the DAC digital input signal and may
degrade the DAC’s performance.
= 400mV
V
CM
VDDC
1kΩ
287Ω
Figure 90. DACCLK V
0.1µF 1nF
1nF
Generator Circuit
CM
1.8V
VSSC
04862-090
Rev. 0 | Page 46 of 68
Page 47

AD9734/AD9735/AD9736
DAC OUTPUT DISTORTION SOURCES
The second harmonic is mostly due to an imbalance in the
output load. The dc transfer characteristic of the DAC is capable
of second-harmonic distortion of at least −75 dBc. Output load
imbalance or digital data noise coupling onto DACCLK causes
additional second-harmonic distortion.
The DAC architecture inherently generates third harmonics, the
levels of which depend on the output frequency and amplitude
being generated. If any output signal is rectified and coupled
back onto the DAC clock, it can generate additional thirdharmonic energy.
The distortion components should be identical in amplitude
and phase at both AD973x outputs. Even though each singleended output includes a large amount of second-harmonic
energy, a careful differential-to-single-ended conversion can
remove most of it. Optimum performance at high intermediate
frequency (IF) outputs is obtained with the output circuit
shown in Figure 91. This is the configuration implemented on
the evaluation board (Figure 105). The 20 Ω series resistors
allow the DAC to drive a less reactive load, which improves
distortion. Further improvement can be made by adding the
balun T3 to help provide an equal load to both DAC outputs.
R19
IOUTA
IOUTB
50Ω
50Ω
20Ω
R8
R6
R17
20Ω
Figure 91. IF Signal Output Circuit
T3
15651
3443
J2, 50Ω OUTPUT
T1AVSS
AVSS
04862-091
Because T1 has a differential input but a single-ended output,
Pin 4 of T1 has a higher capacitance to ground due to parasitics
to Pin 3. T1 Pin 6 has lower parasitic capacitance to ground
because it drives 50 Ω at Pin 1. This presents an unbalanced
load to the DAC output, so T3 is added to improve the load
balancing. Refer to Figure 105 for the transformer part
numbers.
Rev. 0 | Page 47 of 68
Page 48

AD9734/AD9735/AD9736
DC-COUPLED DAC OUTPUTS
In some cases, it may be desirable to dc-couple the AD973x
outputs. The best method for doing this is shown in Figure 92.
This circuit can be used with voltage or current feedback
amplifiers. Because the DAC output current is driving a virtual
ground, this circuit may offer enhanced settling times. The
settling time is limited by the op amp rather than the DAC. This
circuit is intended for use where the amplifiers can be powered
by a bipolar supply.
100Ω
100Ω
100Ω
500Ω
AVSS
500Ω
IOUTA
DAC
OUTPUT
20mA
FULL SCALE
IOUTB
Figure 92. Op Amp I to V Conversion Output Circuit
100Ω
2V p-p
0V TO –2V
500Ω
AVSS
500Ω
2V p-p
+1V TO –1V
OUTPUT
04862-092
An alternate circuit is shown in Figure 93. It suffers from dc
offset at the output unless the DAC load resistors are small,
relative to the amplifier gain and feedback resistors.
0.5V p-p
0V TO –0.5V
IOUTA
DAC OUTPUT
20mA
FULL SCALE
IOUTB
25Ω
25Ω
AVSS
1kΩ
2kΩ1kΩ
2kΩ
2V p-p
0V TO –2V
OUTPUT
AVSS
04862-093
Figure 93. Differential Op Amp Output Circuit
Rev. 0 | Page 48 of 68
Page 49

AD9734/AD9735/AD9736
DAC DATA SOURCES
The circuit shown in Figure 94 allows optimum data alignment
when running the AD973x at full speed. This circuit can be
easily implemented in the FPGA or ASIC used to drive the
digital inputs. It is important to use the DATACLK_OUT signal
because it helps to cancel some of the timing errors. In this
configuration, DATACLK_OUT generates the DDR LVDS
DATACLK_IN to drive the AD973x. The circuit aligns the
DATACLK_IN and the digital input data (DB<13:0>) as
required by the AD973x. The LVDS controller in the AD973x
uses DATACLK_IN to generate the internal DSS to capture the
incoming data in the center of the valid data window.
To operate in 2× mode, the circuit in Figure 94 must be
modified to include a divide-by-2 block in the path of
DATACLK_OUT. Without this additional divider, the data and
DATACLK_IN runs 2× too fast. DATACLK_OUT is always
DACCLK/2.
Contact FPGA vendors directly regarding the maximum output
data rates supported by their products.
DATA SOURCE
DATACLK_OUT
FROM AD9736 (DDR)
LOGIC 0
LOGIC 1
D1
MUX
D2
MUX
DB(13:0) TO AD9736
DATACLK_IN
TO AD9736 (DDR)
DATA1
DATA2
Figure 94. Recommended FPGA/ASIC Configuration for Driving AD973x
Digital Inputs, 1× Mode
DATACLK_OUT+
DATA1
DATA2
D1
D2
DB
DATACLK_IN+
AC
B
AC
B
ABC
E
D
D
Figure 95. FPGA/ASIC Timing for Driving AD973x Digital Inputs, 1× Mode
04862-094
04862-095
DATA SOURCE
DATACLK_OUT
FROM AD9736 (DDR)
DB(13:0) TO AD9736
DATACLK_IN
TO AD9736 (DDR)
DATA1
DATA2
LOGIC 1
LOGIC 0
÷2
D1
MUX
D2
MUX
Figure 96. Recommended FPGA/ASIC Configuration for Driving AD973x
Digital Inputs, 2× Mode
DATACLK_OUT+
CLK_OUT+/2
DATA1
DATA2
D1
D2
DB
DATACLK_IN+
AC
B
AC
B
ABC
E
D
D
Figure 97. FPGA/ASIC Timing for Driving AD973x Digital Inputs, 2× Mode
04862-096
04862-097
Rev. 0 | Page 49 of 68
Page 50

AD9734/AD9735/AD9736
INPUT DATA TIMING
The AD973x is intended to operate with the LVDS and sync
controllers running to compensate for timing drift due to
voltage and temperature variations. In this mode, the key to
correct data capture is to present valid data for a minimum
amount of time. The AD973x minimum valid data time was
measured by increasing the input data rate to the point of
failure. The nominal supply voltages were used and the
temperature was set to the worst case of 85°C. The input
data was verified via the BIST signature registers, because the
DAC output does not run as fast as the input data logic. The
following example explains how the minimum data valid
period is calculated for the typical performance case.
These factors must be considered in determining the minimum
valid data window at the receiver input:
• Data rise and fall times: 100 ps (rise + fall)
• Internal clock jitter: 10 ps (DATACLK_OUT +
DATACLK_IN)
• Bit-to-bit skew: 50 ps
• Bit-to-DATACLK_IN skew: 50 ps
• Internal data sampling signal resolution: 80 ps
For nominal silicon, the BIST typically indicates failure at
2.15 GSPS or a DACCLK period of 465 ps. The valid data
window is calculated by subtracting all the other variables
from the total data period:
Minimum Data Valid Time = DACCLK Period − Data Rise −
Data Fall − Jitter − Bit-to-Bit Skew − Bit-to-DATACLK_IN Skew
− Data Sampling Signal Resolution
For the 400 mV p-p LVDS signal case:
Minimum Data Valid = 465 ps − 100 ps − 10 ps − 50 ps − 80 ps
= 465 ps − 240 ps = 225 ps
For correct data capture, the input data must be valid for 225 ps.
Slower edges, more jitter, or more skew require an increase in
the clock period to maintain the minimum data valid period.
Table 26 shows the typical minimum data valid period (t
400 mV p-p differential and 250 mV p-p differential LVDS
swings.
MDE
) for
The ability of the AD973x to capture incoming data is
dependent on the speed of the silicon, which varies from lot to
lot. The typical (or average) silicon speed operates with data
that is valid for 225 ps at 85°C. Statistically, the worst extreme
for slow silicon may require up to a 344 ps valid data period, as
specified in Table 2.
Table 26. Typical Minimum Data Valid Times
Differential
Input Voltage
400 mV 2.15 GHz 465 ps 225 ps
250 mV 2.00 GHz 500 ps 260 ps
BIST
Min Clock Period
Max f
CLK
Typ Min Data
Valid at Receiver
At 1.2 GHz, the typical 400 mV p-p minimum data valid period
of 225 ps leaves 608 ps for external factors. Under the same
conditions, the worst expected minimum data valid period of
344 ps leaves 489 ps for external data uncertainty.
The 100 mV LVDS V
threshold test is a dc test to verify that
od
the input logic state changes. It does not indicate the operating
speed. The receiver's ability to recover the data depends on
the input signal overdrive. With a 250 mV input, there is a
150 mV overdrive, and with a 400 mV signal, there is a 300 mV
overdrive. The relationship between overdrive level and timing
is very nonlinear. Higher levels of overdrive result in smaller
minimum valid data windows.
For typical silicon, decreasing the LVDS swing from 400 mV p-p
to 250 mV p-p requires the minimum data valid period to
increase by 15%. This is illustrated in Figure 98.
225ps
400mV
260ps
250mV
04862-098
Figure 98. Typical Minimum Valid Data Time (t
) vs. LVDS Swing
MDE
The minimum valid data window changes with temperature,
voltage, and process. The maximum value presented in the
specification table was determined from a 6σ distribution in the
worst-case conditions.
Rev. 0 | Page 50 of 68
Page 51

AD9734/AD9735/AD9736
SYNCHRONIZATION TIMING
When more than one AD973x must be synchronized or when
a constant group delay must be maintained, the internal
controllers cannot be used. If the FIFO is enabled, the delay
between multiple AD973x devices is unknown. If the
DATACLK_OUT from multiple devices is used, there is an
uncertainty of two DACCLK periods because the initial phase
of DATACLK_OUT with respect to DACCLK cannot be
controlled. This means one DAC must be used to provide
DATACLK_OUT for all synchronized DACs and all timing
must be externally managed. The following timing information
allows system timing to be calculated so that multiple AD973xs
can be synchronized.
DATACLK_OUT changes relative to the rising edge of
DACCLK+ and is delayed, as shown in Figure 99. Because
DACCLK is divided by 2 to create DATACLK_OUT, the phase
of DATACLK_OUT can be 0° or 180°. There is no way to
predict or control this relationship. It may be different after each
power cycle and is not affected by hardware or software resets.
DACCLK
t
DATACLK_OUT
Figure 99. DACCLK to DATACLK_OUT Delay
DDCO
04862-099
The incoming data is de-interleaved internally as shown in
Figure 76. Each edge of DATACLK_IN latches an incoming
sample in two alternating registers. The DATACLK_IN to data
setup and hold definitions are illustrated in Figure 100. All the
data inputs must be valid during the setup-and-hold period.
External skew effectively increases the setup and hold times that
the data source must meet.
DATACLK_IN
OR DATACLK_OUT
DATA_IN
t
DSU
t
DH
Wh i le correc t DATA _ I N vs. DATAC LK_IN ti m i n g is cr it ical,
the transition of the incoming data to the DACCLK domain is
equally critical. By referencing the incoming DATA and
DATACL K _ IN timing to t h e DATAC L K _ OU T signal, s o m e
timing uncertainty can be removed. The DATACLK_OUT
timing very closely tracks the timing of the DACCLKcontrolled registers. Any variation in the path delay affects both
paths in almost the same way. If DATACLK_OUT is not used,
the full DACCLK to DATACLK_OUT path variation reduces
the external timing margin. Figure 101 shows a simplified view
of the internal clocking scheme with the relevant delay paths.
The internal architecture is interleaved such that each phase has
twice as long to make the transition across the clock domains.
This results in an extremely narrow window where the
incoming data must be held stable.
Table 27 shows the timing parameters for Figure 99 and
Figure 100. These parameters were measured for a sample of
five devices from five silicon lots. Worst-case fast and slow skew
lots were included in addition to the nominal (or average) lot.
The typical −40°C to typical +85°C spread illustrates the
variability with temperature for a single lot. Adding in lot-to-lot
variation with the fast and slow lots indicates the worst-case
spread in timing.
The timing varies such that all of the parameters move in the
same direction. For example, if the DATACLK_IN to data setup
time is fast, the hold time is similarly fast. The DACCLK to
DATACLK_OUT delay and the DATACLK_OUT to data setup
and hold is also at the fast end of the range.
Note that the polarities of setup-and-hold values in Table 27
conform to the standard convention of setup time occurring
prior to the latching edge and hold time occurring after the
latching edge, as shown in Figure 100.
04862-100
Figure 100. Standard Definitions for DATACLK_IN or DATACLK_OUT to
Data Setup and Hold, SD = 0
Table 27. AD973x Clock and Data Timing Parameters
Symbol and Definition Fast −40°C Typ −40°C All +25°C Typ +85°C Slow +85°C Unit
t
− DACCLK to DATACLK_OUT Delay 1650 1800 1890 2050 2350 ps
DDCO
t
− DATACLK_IN to DATA Setup −100 −120 −150 −170 −220 ps
DCISU
t
− DATACLK_IN to DATA Hold 210 220 240 280 360 ps
DCIH
t
− DATACLK_OUT to DATA Setup 1310 1440 1611 1710 1970 ps
DISU
t
− DATACLK_OUT to DATA Hold −1250 −1360 −1548 −1640 −1890 ps
DIH
Rev. 0 | Page 51 of 68
Page 52

AD9734/AD9735/AD9736
POWER SUPPLY SEQUENCING
The 1.8 V supplies should be enabled simultaneously with or prior to the 3.3 V supplies. Do not enable the 3.3 V supplies when the
1.8 V supplies are off.
DATACLK_IN DOMAIN DACCLK DOMAIN
D1A
FF
D2A
FF
DAC_DATA
÷
2
DAC
CORE
DAC_OUTPUT
CLK
DACCLK
RX
04862-101
DB<13:0>
DATA SAMPLING
DATACLK_IN
DATACLK_OUT
LVDS
RX
SIGNAL
SD<3:0>
SD<3:0>
SAMPLE DELAY
SAMPLE DELAY
LVDS
RX
LVDS
TX
D1
FF
D2
FF
DAC SAMPLING
PATH A
PATH B
SIGNAL
COMMON SYSTEM CLOCK
DELAYS THROUGH PATH A AND B WILL TRACK,
THUS REDUCING TIMING UNCERTAINTY IN THE SYSTEM
Figure 101. Simplified Internal Clock Routing
Rev. 0 | Page 52 of 68
Page 53

AD9734/AD9735/AD9736
AD973X EVALUATION BOARD SCHEMATICS
TP4
+
TP6
RED
+
C14
10µF
6.3V
TP7
RED
C22
10µF
6.3V
TP5
BLK
C18
10µF
6.3V
C1
10µF
6.3V
TP3
BLK
RED
TP13
BLK
TP14
BLK
TP1
RED
DVDD33
DVSS
VDD18B
DVSS
VDD18A
DVSS
VDDA33
AVSS
L1, L3, L4, L5, L6, AND L7
FERRITE BEAD CORE:
PANASONIC EXC–CL3225U1
DIGIKEY PN: P9811CT–ND
JP1
AVSSVSS
UNDER DUT
POWER INPUT FILTERS
33DIG
TB1 1
VSS
TB1 2
18DIG
TB1 3
VSS
TB1 4
33ANA
TB2 1
AVSS
TB2 2
L6 FERRITE
LC1210
L7 FERRITE
LC1210
L5 FERRITE
LC1210
L1 FERRITE
LC1210
ACASE
+
ACASE
+
ACASE
ACASE
18ANA
TB2 3
AVSS
TB2 4
TP9
L3 FERRITE
LC1210
ACASE
L4 FERRITE
LC1210
RED
+
C10
10µF
6.3V
TP11
BLK
VDDC
AVSS
Figure 102. Power Supply Inputs for AD973x Evaluation Board, Rev. F
04862–102
Rev. 0 | Page 53 of 68
Page 54

AD9734/AD9735/AD9736
VDD18B
NI
CC0603
H14
H13
H12
H11
J14
J13
J12
J11
K11
K12L9L10
L11
L12M9M10
VSS20
VSS19
VSS18
VSS17
VSS16
VSS15
VDD16
VDD15
VDD14
VDD12
VDD13
VDD11
VDD10
VDD9
VSS14
U1
AD9736
HYDROGEN
VDD1
VDD2
VDD3
VDD5
VDD4
VDD6
VDD7
VDD8
VSS1
VSS2
VSS3
VSS4
VSS5
VSS6
VSS7
H2H3H4J1J2J3J4K3K4L3L4L5L6M3M4M5M6K2K1L2L1
H1
C21
1nF
1nF
0.1µF
6.3V
VSS
A8B8C8D8A9
IP2
IP1
TOP
C7
VSSA
IP3
IP4
CC0603
6.3V
C3
C4
A10
VSSA3313
DNP
4.7µF
ACASE
CC060
CC0603
A11B9B10
VSSA3314
VDD18A
VSSA3315
C2
1NF 0.1µF
VSSA3316
C20
C19
B11C9C10
VSSA3317
0.1µF
CC0603 CC0603
4.7µF
ACASE
33ADDV
VSSA3318
6.3V
VSSA3319
VSSA3320
VSS
IRQ
C11D9D10
VSSA3321
VSSA3322
TP2
VSSA3333
C25
CC0603
C24
CC0603
C23
4.7µF
ACASE
PI
AD9736
IN1
IN2
IN3
IN4
VSSA331
VSSA332
VSSA333
VSSA334
VSSA335
VSSA336
VSSA337
VSSA338
VSSA339
VSSA3310
VSSA3311
A7B7C7
D7
B4
A6
B5
B6
A5
A4
D5
D4
C6
C5
C4
M11
M12K2K1L2L1
VSS13
VSS12
VSS8
VSS9
3
B
A
VDD33
R16
WHT
C6
CC0603
D11
A12
VDDA331
VSSA3324
VSSA3312
VDDC1
D6
A1
DB0N
1
1
S
S
V
LVDS13N
VSS10
VSS21
2
33DDV
10kΩ
A13
B12
VDDA332
VDDC2
A3
A2
DB0P
DB1N
DB1P
DB2N
DB2P
DB3N
DB3P
DB4N
DB4P
M2M1N1P1N2N3P2P3N4P4N5P5N6
LVDS9P
LVDS11P
LVDS11N
LVDS10N
LVDS0N
LVDS0P
LVDS1N
LVDS9N
LVDS10P
LVDS1P
LVDS2N
LVDS2P
LVDS13P
LVDS12N
NCK1
VSS22
LVDS12P
SPI_MODE
M2M1N1P1N2N3P2P3N4P4N5P5N6
DB13P
DB12P
0.1%
10kΩ
INF
WHT
WHT
D13
VDDA337
VDDC7
C2
DB12N
IRQ
A14
VDDA338
VDDC8
C3
B14
SPARE
VDDC9
D2
DB11N
C14
0
2
1
I
V
D3
0
1
C
D
D
DB11P
WHT
WHT
D14
VREF
VDDC11
D1
3
B
A
RC0603
B13
VDDA333
VDDA334
VDDC3
VDDC4
B1
2
SPARE
C12
B2
R1
C9
VSSA VSSA
IPTAT
JP4
C13
VDDA335
VDDA336
VDDC5
VDDC6
B3
DB13N
CC0603
TP16
TP12
D12
C1
DB5N
DB5P
DB6N
DB6P
DB7N
DB7P
LVDS8P
LVDS7P
LVDS7N
LVDS3P
LVDS4N
LVDS4P
DB9P
DB9N
DB10P
LVDS6P
LVDS6N
LVDS5N
LVDS5P
DB8P
DB8N
LVDS8N
LVDS3N
DB10N
TP10
TP8
VREF I120
RESET_A
JP3
SPCSB
SPSDI
SPCLK
E14
F13
F14
E13
G13
G14
2X_CSB
FIFO_DSIO
PD_RESET
FSC1_SDO
FSCO_SCLK
SIGNED_IRQ
VSSC1
CLKN
CLKP
VSSC2
VSSC3
E1F1E2E3E4F2F3
DCSKNIN
DCLKPIN
6
P
L7M7N7
LVDS13N
LVDCLKOUTN_VDSCLKINN
LVDCLKOUTN_VDSCLKINP
VDD331
6
P
L7M7N7
DCLKPOUT
DCLKNOUT
VDD33
2
SW1
RESET
4
SPSDO
E11
E12
F11
SHIELD1
SHIELD2
SHIELD3
VSSC4
VSSC5
VSSC6
F4
G1G2G3
C34
LVDS13N
F12
VDD332
VDD3
SHIELD4
VSSC7
LVDS13N
VDD333
1
3
G11
CC0603
P7
LVDS13N
VDD334
P7
CC0603 CC0603
ACASE
G12
SHIELD5
VSSC8
G4
BOTTOM
VSS;5
RC1206
R5
VSSA
SHIELD6
U1
HYDROGEN
VSSC11
VSS
NOTE: AD9736 MSB–LSB BIT ORDER IS REVERSED
SSV
10kΩ
FROM THE CONNECTOR BIT ORDER.
VSS
CC0603
C13
VDDC
1nF
C12
0.1µF
ACASE CC0603
C11
VSS
4.7µF
04862-103
C5
CC063
DNP
CLKN
CLKP
Figure 103. Circuitry Local to AD973x, Evaluation Board, Rev. F
Rev. 0 | Page 54 of 68
Page 55

AD9734/AD9735/AD9736
DCLKNIN
DCLKNOUT
DB8N
DB9N
DB10N
DB13N
DB12N
DB11N
DB7N
DB6N
DB5N
DB0N
DB1N
DB2N
DB3N
DB4N
DB0P
DB1P
VSS
J3
FCN–268 F024–G/0 D
JACK
G49 G50
S47 S48
G47 G48
S45 S46
G45 G46
S43 S44
G43 G44
S41 S42
G41 G42
S39 S40
G39 G40
S37 S38
G37 G38
S35 S36
G35 G36
S33 S34
G33 G34
S31 S32
G31 G32
S29 S30
G29 G30
S27 S28
G27 G28
S25 S26
G25 G26
S23 S24
G23 G24
S21 S22
G21 G22
S19 S20
G19 G20
S17 S18
G17 G18
S15 S16
G15 G16
S13 S14
G13 G14
S11 S12
G11 G12
S9 S10
G9 G10
S7 S8
G7 G8
S5 S6
G5 G6
S3 S4
G3 G4
JACK
S1
G1
S2
G2
TP15
DB2P
WHT
DB6P
DCLKPIN
DCLKPOUT
DB9P
DB13P
DB12P
DB11P
DB10P
DB8P
DB7P
DB3P
DB4P
DB5P
AD9736
DB0
DB13
EXTCLK
TESTOUTN
TESTOUTP
NOTE: AD9736 MSB-LSB BIT ORDER IS REVERSED
FROM THE CONNECTOR BIT ORDER.
CONNECTOR
Figure 104. High Speed Digital I/O Connector, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 55 of 68
DB13
DB0
04862–104
Page 56

AD9734/AD9735/AD9736
CLKP
RC0603
RC0603
25Ω
25Ω
R20
R21
0.1µF
CC0603CC0603
C35
43
T3A
ADTL1–12XX
T3A IS NOT POPULATED
J1
VSSA;3,4,5
SP
CLKN
0.1µF
C36
SMA200UP
VDDC
C27
C26
R3
CC0603 CC0603
RC0603
C38
DNP
DNP
1kΩ
1µF
CC0603
C29
C28
R4
CC0603CC0603
RC0603
VSSA
).
OUT
1µF
0.1µF
300Ω
AN LVDS SIGNAL MAY BE USED
TO DRIVE C35 AND C36 IF R20 AND R21
ARE INCREASED TO 50Ω EACH.
VSSA
VSSA;3,4,5
SMA200UP
J2
580mV p-p
400mV p–p
3
T3B
15
SP
NC=2
ETC1–1–13
4
6
1
415mV COMMON
MODE VOLTAGE
T1:MINI-CIRCUITS
–3dB: 8-600MHz
–1dB: 13-300MHz
VSSA
SP
6
5
5
PS
NC=2
3421
T1
ADT2–1T–1P
R17 AND R19 CAN BE REMOVED AND T1
REPLACED WITH A 1:1 TRANSFORMER FOR
HIGHER OUTPUT AMPLITUDE IF MORE H2
IS ACCEPTABLE (TYPICALLY AT LOWER F
4
T4B
VSSA
5
VSSA
550mV p-p
3421
T2
6
5
ADT2–1T–1P
SP
3
PS
NC=2
41
T3
ETC1–1–13 ETC1–1–13
T3:M/A-COM
–1dB: 4.5-1000MHz
T2 AND T4B ARE NOT POPULATED
550mV p-p
R161
0Ω
THIS CONFIGURATION PROVIDES OPTIMUM AC
PERFORMANCE FOR IF SIGNAL GENERATION.
TYPICAL SIGNAL LEVELS SHOWN FOR 50Ω LOAD.
R17
20Ω
750mV p-p
R6
50Ω
RC0603
VSSA
NOTE:
T1, T3, AND T3B ARE INSTALLED,
R6 AND R8 = 50Ω,
R7 = DNP
R17 AND R19 = 20Ω,
R161 AND R162 = 0Ω,
JUMPER ADDED FROM T1 PIN 3 TO
T1 PIN 2 ON THE REV C EVAL BOARD.
IN
RC0603
RC0603
R18
RC0603
RC0603
DNP
R7
R162
R19
0Ω
20Ω
DNP
RC0603
RC0603
IP
R8
RC0603
R17 AND R19 PRESENT A
MORE 'REAL' LOAD TO THE
50Ω
DAC WHICH IMPROVES
VSSA
H2 PERFORMANCE.
04862–105
Figure 105. Clock Input and Analog Output, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 56 of 68
Page 57

AD9734/AD9735/AD9736
P1
U5
U5
JP9
6
2
RC0805
9kΩR11
31
RC0805
9kΩR12
1110
98
VSS;7
VDD33;14
VSS;7
VDD33;14
12
74AC14
VSS;7
VDD33;14
74AC14
31
JP10
VSS
B
A
VDD33
U6
U6
13
21
JP2
2
SPSDO
74AC14
VSS;7
VDD33;14
74AC14
VSS;7
VDD33;14
R14
RC0603
R13
RC0603
U5
74AC14
34
56
VSS;7
VDD33;14
U5
74AC14
VSS
JP7
B
2
A
SPSDI
VDD33
12453
RC0805
9kΩR10
1312
VSS;7
VDD33;14
U5
SPI PORT
74AC14
12
VSS;7
VDD33;14
U5
74AC14
JP5
SPCSB
31
JP14
VSS
B
A
VDD33
JP6
2
SPCLK
USE THESE JUMPERS TO SET PIN_MODE
CONTROL SIGNALS OR CONNECT SPI PORT
VSS
SIGNALS IN SPI_MODE.
31
B
2
A
JP13
VDD33
F
µ
C33
0.1
F
µ
C32
4.7
6.3V
+
ACASE CC0805
F
µ
C31
0.1
F
µ
6.3V
C30
4.7
+
33DDV
ACASE CC0805
1011
89
74AC14
VSS;7
VDD33;14
74AC14
VSS;7
VDD33;14
74AC14
U6
VSS;7
VDD33;14
65
74AC14
U6
VSS;7
VDD33;14
VSS
U6
43
U6
10kΩ
10kΩ
VSS
RESET_A
31
B
2
A
JP12
31
VDD33
VSS
B
A
VDD33
FERRITE
L8
VSS
VSS
2
2
LC1210
FERRITE
LC1210
L9
FERRITE BEAD CORE:
PANASONIC EXC-CL3225U1
DIGIKEY PN: P9811CT-ND
04862–106
Figure 106. SPI Port Interface, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 57 of 68
Page 58

AD9734/AD9735/AD9736
AD973X EVALUATION BOARD PCB LAYOUT
Note:
The AD9736 is
soldereddirectly
Silkscreen Error:
SPI & PIN are reversed.
Figure 107. CB Layout Top Placement, AD973x Evaluation Board, Rev. F
to the PCB. The
installed.
socket is not
04862-107
Rev. 0 | Page 58 of 68
Page 59

AD9734/AD9735/AD9736
Figure 108. PCB Layout Layer 1, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 59 of 68
04860-108
Page 60

AD9734/AD9735/AD9736
04861-109
Figure 109. PCB Layout Layer 2, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 60 of 68
Page 61

AD9734/AD9735/AD9736
Figure 110. PCB Layout Layer 3, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 61 of 68
04862-110
Page 62

AD9734/AD9735/AD9736
Figure 111. PCB Layout Layer 4, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 62 of 68
014862-111
Page 63

AD9734/AD9735/AD9736
Figure 112. PCB Layout Bottom Placement, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 63 of 68
04862-112
Page 64

AD9734/AD9735/AD9736
E
PLATED TO 1 OUNCE
.062 +/- .007 THICK
1/4 OZ. COPPER CLAD – EXTERNAL LAYERS
2 OZ. COPPER CLAD – INTERNAL LAYERS
NOTES
1. MATERIAL: FOUR LAYER, FR4 GLASS–EPOXY LAMINATE
+/– .002 INCH TOTAL
OF APERTURE SIZE.
ELECTROPLATED WITH .001 INCH MIN. THICK COPPER.
TERMINAL AREAS AND EXPOSED PLATED THRU HOLES TO B
COATED WITH SOLDER AND HOT AIR LEVELED.
2. PLATED THRU HOLES AND THE CONDUCTIVE PATTERN
A. CONDUCTIVE PATTERN FRON TO BACK REGISTRATION
B. MINIMUM ANNULAR RING SURROUNDING HOLES .002 INCH.
C. FINISHED CONDUCTIVE PATTERN +/– .0005 INCH
4. PROCESSING TOLERANCES:
COLOR GREEN, BOTH
SIDES USING THE PATTERN(S) PROVIDED. NO MASK
IS PERMITTED ON THE EXPOSED AREAS. SOLDER
MASK TO ETCH REGISTRATION +/– .002 INCH TOTAL
5. WARP AND TWIST +/– .005 INCH PER INCH.
6. DIMENTIONS: ARE FOR THE FINISHED PART
7. SOLDER MASK: LIQUID PHOTO IMAGABLE SOLDER MASK
8. SCREENING: SCREEN COMPONENT OUTLINES AND
NOMENCLATURE USING OPAQUE WHITE INK ON THE
PRIMARY AND SECONDARY SIDES (AS REQUIRED).
NOMENCLATURE SHALL BE LEGIBLE. SCREEN TO ETCH
REGISTRATION +/– .005 INCH TOTAL.
9. SURFACES: PUNCHED OR MACHINED SURFACES 125 MICRO
INCHES RMS MAX.
IN THIS AREA ON THE SECONDARY SIDE
10. BREAK ALL SHARP EDGES .015 R MAX.
11. FABRICATION VENDOR TO ADD UL VENDOR ID NUMBER
12. DO NOT DRILL. FOR GOLD PLATED SOCKETED VERSION ONLY.
NOTE:
Special layer stack to
set LVDS traceimpedance.
04862-113
Figure 113. PCB Fabrication Detail, AD973x Evaluation Board, Rev. F
Rev. 0 | Page 64 of 68
Page 65

AD9734/AD9735/AD9736
A
R
OUTLINE DIMENSIONS
INDEX AREA
BOTTOM
VIEW
0.80 BSC
SEATING
PLANE
1 CORNE
5
3219
4
A
B
C
D
E
F
G
H
J
K
L
M
N
P
1.00 MAX
0.85 MIN
0.12 MAX
COPLANARITY
1.40 MAX
12.10
12.00 SQ
11.90
BALL A1
INDICATOR
TOP VIEW
DETAIL A
0.43 MAX
0.25 MIN
COMPLIANT TO JEDEC STANDARDS MO-205-AE.
10.40
BSC SQ
0.80
REF
BALL DIAMETER
0.55
0.50
0.45
13
121110 876
14
DETAIL A
Figure 114. 160-Lead Chip Scale Package Ball Grid Array [CSP_BGA]
(BC-160-1)
Dimensions shown in millimeters
ORDERING GUIDE
Model Temperature Range Description Package Option
AD9734BBC −40°C to +85°C 160-Lead Chip Scale Package Ball Grid Array (CSP_BGA) BC-160-1
AD9734BBCRL −40°C to +85°C 160-Lead Chip Scale Package Ball Grid Array (CSP_BGA) BC-160-1
AD9734-EB Evaluation Board
AD9735BBC −40°C to +85°C 160-Lead Chip Scale Package Ball Grid Array (CSP_BGA) BC-160-1
AD9735BBCRL −40°C to +85°C 160-Lead Chip Scale Package Ball Grid Array (CSP_BGA) BC-160-1
AD9735-EB Evaluation Board
AD9736BBC −40°C to +85°C 160-Lead Chip Scale Package Ball Grid Array (CSP_BGA) BC-160-1
AD9736BBCRL −40°C to +85°C 160-Lead Chip Scale Package Ball Grid Array (CSP_BGA) BC-160-1
AD9736-EB Evaluation Board
Rev. 0 | Page 65 of 68
Page 66

AD9734/AD9735/AD9736
NOTES
Rev. 0 | Page 66 of 68
Page 67

AD9734/AD9735/AD9736
NOTES
Rev. 0 | Page 67 of 68
Page 68

AD9734/AD9735/AD9736
NOTES
© 2005 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D04862–0–4/05(0)
Rev. 0 | Page 68 of 68
 Loading...
Loading...