

Page 1

High-Speed Oversampling CMOS
ADC with 16-Bit Resolution
a
FEATURES
Monolithic 16-Bit, Oversampled A/D Converter
8 Oversampling Mode, 20 MSPS Clock
2.5 MHz Output Word Rate
1.01 MHz Signal Passband w/0.004 dB Ripple
Signal-to-Noise Ratio: 88.5 dB
Total Harmonic Distortion: –96 dB
Spurious Free Dynamic Range: 100 dB
Input Referred Noise: 0.6 LSB
Selectable Oversampling Ratio: 1, 2, 4, 8
Selectable Power Dissipation: 150 mW to 585 mW
85 dB Stopband Attenuation
0.004 dB Passband Ripple
Linear Phase
Single +5 V Analog Supply, +5 V/+3 V Digital Supply
Synchronize Capability for Parallel ADC Interface
Twos-Complement Output Data
44-Lead MQFP
at a 2.5 MHz Output Word Rate
AD9260
FUNCTIONAL BLOCK DIAGRAM
VINA
VINB
REF TOP
REF
BOTTOM
COMMON
MODE
VREF
SENSE
REFCOM
AVSS
AVDD
MULTIBIT
SIGMA-DELTA
MODULATOR
AD9260
REFERENCE
BUFFER
BANDGAP
REFERENCE
AVDD
AVSS
RESET/
AVSS
AVDD
12-BIT: 20MHz
16-BIT: 10MHz
16-BIT: 5MHz
16-BIT: 2.5MHz
BIAS
CIRCUIT
SYNC
DVSS DVDD
DIGITAL
DEMODULATOR
STAGE 1:2X
DECIMATION
FILTER
STAGE 2:2X
DECIMATION
FILTER
STAGE 3:2X
DECIMATION
FILTER
CLOCK
BUFFER
MODE
REGISTER
DRVSS
DRVDD
OUTPUT REGISTER
OUTPUT MODE MULTIPLEXER
OTR
BIT1–BIT16
DAV
READ
PRODUCT DESCRIPTION
The AD9260 is a 16-bit, high-speed oversampled analog-todigital converter (ADC) that offers exceptional dynamic range
over a wide bandwidth. The AD9260 is manufactured on an
advanced CMOS process. High dynamic range is achieved with
an oversampling ratio of 8× through the use of a proprietary
technique that combines the advantages of sigma-delta and
pipeline converter technologies.
The AD9260 is a switched-capacitor ADC with a nominal fullscale input range of 4 V. It offers a differential input with 60 dB
of common-mode rejection of common-mode signals. The signal range of each differential input is ±1 V centered on a 2.0 V
common-mode level.
The on-chip decimation filter is configured for maximum performance and flexibility. A series of three half-band FIR filter
stages provide 8× decimation filtering with 85 dB of stopband
attenuation and 0.004 dB of passband ripple. An onboard digital multiplexer allows the user to access data from the various
stages of the decimation filter.
The on-chip programmable reference and reference buffer amplifier are configured for maximum accuracy and flexibility. An
external reference can also be chosen to suit the user’s specific
dc accuracy and drift requirements.
MODECLKBIAS ADJUST
CS
The AD9260 operates on a single +5 V supply, typically consuming 585 mW of power. A power scaling circuit is provided
allowing the AD9260 to operate at power consumption levels as
low as 150 mW at reduced clock and data rates. The AD9260 is
available in a 44-lead MQFP package and is specified to operate
over the industrial temperature range.
PRODUCT HIGHLIGHTS
The AD9260 is fabricated on a very cost effective CMOS
process. High-speed, precision mixed-signal analog circuits are
combined with high-density digital filter circuits.
The AD9260 offers a complete single-chip 16-bit sampling
ADC with a 2.5 MHz output data rate in a 44-lead MQFP.
Selectable Internal Decimation Filtering—The AD9260
provides a high-performance decimation filter with 0.004 dB
passband ripple and 85 dB of stopband attenuation. The filter
is configurable with options for 1×, 2×, 4×, and 8× decimation.
Power Scaling—The AD9260 consumes a low 585 mW of power
at 16-bit resolution and 2.5 MHz output data rate. Its power
can be scaled down to as low as 150 mW at reduced clock rates.
Single Supply— Both of the analog and digital portions of the
AD9260 can operate off of a single +5 V supply simplifying
system power supply design. The digital logic will also accommodate a single +3 V supply for reduced power.
REV. B
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2000
Page 2
AD9260–SPECIFICATIONS
CLOCK INPUT FREQUENCY RANGE
Parameter—Decimation Factor (N) AD9260 (8) AD9260 (4) AD9260 (2) AD9260 (1) Units
CLOCK INPUT (Modulator Sample Rate, f
)1111kHz min
CLOCK
20 20 20 20 MHz max
OUTPUT WORD RATE (FS = f
/N) 0.125 0.250 0.500 1 kHz min
CLOCK
2.5 5 10 20 MHz max
Specifications subject to change without notice
(AVDD = +5 V, DVDD = +3 V, DRVDD = +3 V, f
DC SPECIFICATIONS
P
arameter—Decimation Factor (N) AD9260 (8) AD9260 (4) AD9260 (2) AD9260 (1) Units
unless otherwise noted, R
BIAS
= 2 k)
= 20 MSPS, V
CLOCK
= +2.5 V, Input CML = 2.0 V T
REF
MIN
to T
RESOLUTION 16 16 16 12 Bits min
INPUT REFERRED NOISE (TYP)
1.0 V Reference 1.40 2.4 6.0 1.3 LSB rms typ
2.5 V Reference
1
0.68 (90.6) 1.2 (86) 3.7 (76) 1.0 (63.2) LSB rms typ (dB typ)
ACCURACY
Integral Nonlinearity (INL) ± 0.75 ± 0.75 ± 0.75 ± 0.3 LSB typ
Differential Nonlinearity (DNL) ±0.50 ± 0.50 ± 0.50 ± 0.25 LSB typ
No Missing Codes 16 16 16 12 Bits Guaranteed
Offset Error 0.9 (0.5) (0.5) (0.5) (0.5) % FSR max (typ @ +25°C)
Gain Error
Gain Error
2
3
2.75 (0.66) (0.66) (0.66) (0.66) % FSR max (typ @ +25°C)
1.35 (0.7) (0.7) (0.7) (0.7) % FSR max (typ @ +25°C)
TEMPERATURE DRIFT
Offset Error 2.5 2.5 2.5 2.5 ppm/°C typ
Gain Error
Gain Error
2
3
22 22 22 22 ppm/°C typ
7.0 7.0 7.0 7.0 ppm/°C typ
MAX
POWER SUPPLY REJECTION
AVDD, DVDD, DRVDD (+5 V ± 0.25 V) 0.06 0.06 0.06 0.06 % FSR max
ANALOG INPUT
Input Span
= 1.0 V 1.6 1.6 1.6 1.6 V p-p Diff. max
V
REF
= 2.5 V 4.0 4.0 4.0 4.0 V p-p Diff. max
V
REF
Input (VINA or VINB) Range +0.5 +0.5 +0.5 +0.5 V min
+AVDD – 0.5 +AVDD – 0.5 +AVDD – 0.5 +AVDD – 0.5 V max
Input Capacitance 10.2 10.2 10.2 10.2 pF typ
INTERNAL VOLTAGE REFERENCE
Output Voltage (1 V Mode) 1111 V typ
Output Voltage Error (1 V Mode) ± 14 ±14 ± 14 ±14 mV max
Output Voltage (2.5 V Mode) 2.5 2.5 2.5 2.5 V typ
Output Voltage Error (2.5 V Mode) ± 35 ± 35 ± 35 ± 35 mV max
Load Regulation
4
1 V REF 0.5 0.5 0.5 0.5 mV max
2.5 V REF 2.0 2.0 2.0 2.0 mV max
REFERENCE INPUT RESISTANCE 8888 kΩ
–2–
REV. B
Page 3
P
arameter—Decimation Factor (N) AD9260 (8) AD9260 (4) AD9260 (2) AD9260 (1) Units
POWER SUPPLIES
Supply Voltages
AVDD +5 +5 +5 +5 V (± 5%)
DVDD and DRVDD +5.5 +5.5 +5.5 +5.5 V max
+2.7 +2.7 +2.7 +2.7 V min
Supply Current
IAVDD 115 115 115 115 mA typ
134 mA max
IDVDD 12.5 10.3 6.5 2.4 mA typ
3.5 mA max
IDRVDD 0.450 0.850 1.7 2.6 mA typ
POWER CONSUMPTION 613 608 600 585 mW typ
630 mW max
NOTES
1
VINA and VINB Connect to DUT CML.
2
Including Internal 2.5 V reference.
3
Excluding Internal 2.5 V reference.
4
Load regulation with 1 mA load Current (in addition to that required by AD9260).
Specifications subject to change without notice.
AC SPECIFICATIONS
(AVDD = +5 V, DVDD = +3 V, DRVDD = +3 V, f
unless otherwise noted, R
= 2 k)
BIAS
= 20 MSPS, V
CLOCK
= +2.5 V, Input CML = 2.0 V T
REF
Parameter—Decimation Factor (N) AD9260(8) AD9260(4) AD9260(2) AD9260(1) Units
DYNAMIC PERFORMANCE
INPUT TEST FREQUENCY: 100 kHz (typ)
Signal-to-Noise Ratio (SNR)
Input Amplitude = –0.5 dBFS 88.5 82 74 63 dB typ
Input Amplitude = –6.0 dBFS 82.5 78 68 58 dB typ
SNR and Distortion (SINAD)
Input Amplitude = –0.5 dBFS 87.5 82 74 63 dB typ
Input Amplitude = –6.0 dBFS 82 77.5 69 58 dB typ
Total Harmonic Distortion (THD)
Input Amplitude = –0.5 dBFS –96 –96 –97 –98 dB typ
Input Amplitude = –6.0 dBFS –93 –98 –96 –98 dB typ
Spurious Free Dynamic Range (SFDR)
Input Amplitude = –0.5 dBFS 100 98 98 88 dB typ
Input Amplitude = –6.0 dBFS 94 100 94 84 dB typ
INPUT TEST FREQUENCY: 500 kHz
Signal-to-Noise Ratio (SNR)
Input Amplitude = –0.5 dBFS 86.5 82 74 63 dB typ
80.5 dB min
Input Amplitude = –6.0 dBFS 82.5 77 68 58 dB typ
SNR and Distortion (SINAD)
Input Amplitude = –0.5 dBFS 86.0 81 74 63 dB typ
80.0 dB min
Input Amplitude = –6.0 dBFS 82.0 77 68 58 dB typ
Total Harmonic Distortion (THD)
Input Amplitude = –0.5 dBFS –97.0 –92 –89 –86 dB typ
–90.0 dB max
Input Amplitude = –6.0 dBFS –95.5 –96 –89 –86 dB typ
Spurious Free Dynamic Range (SFDR)
Input Amplitude = –0.5 dBFS 99.0 92 91 88 dB typ
90.0 dB max
Input Amplitude = –6.0 dBFS 98 100 91 82 dB typ
AD9260
to T
MIN
MAX
–3–REV. B
Page 4
AD9260–SPECIFICATIONS
AC SPECIFICATIONS (Continued)
Parameter—Decimation Factor (N) AD9260 (8) AD9260 (4) AD9260 (2) AD9260 (1) Units
DYNAMIC PERFORMANCE (Continued)
INPUT TEST FREQUENCY: 1.0 MHz (typ)
Signal-to-Noise Ratio (SNR)
Input Amplitude = –0.5 dBFS 85 82 74 63 dB typ
Input Amplitude = –6.0 dBFS 80 76 68 58 dB typ
SNR and Distortion (SINAD)
Input Amplitude = –0.5 dBFS 84.5 81 74 63 dB typ
Input Amplitude = –6.0 dBFS 80 76 69 58 dB typ
Total Harmonic Distortion (THD)
Input Amplitude = –0.5 dBFS –102 –96 –82 –79 dB typ
Input Amplitude = –6.0 dBFS –96 –94 –84 –77 dB typ
Spurious Free Dynamic Range (SFDR)
Input Amplitude = –0.5 dBFS 105 98 83 80 dB typ
Input Amplitude = –6.0 dBFS 98 96 87 80 dB typ
INPUT TEST FREQUENCY: 2.0 MHz (typ)
Signal-to-Noise Ratio (SNR)
Input Amplitude = –0.5 dBFS 82 74 63 dB typ
Input Amplitude = –6.0 dBFS 76 68 58 dB typ
SNR and Distortion (SINAD)
Input Amplitude = –0.5 dBFS 81 73 62 dB typ
Input Amplitude = –6.0 dBFS 76 69 58 dB typ
Total Harmonic Distortion (THD)
Input Amplitude = –0.5 dBFS –101 –80 –75 dB typ
Input Amplitude = –6.0 dBFS –95 –80 –76 dB typ
Spurious Free Dynamic Range (SFDR)
Input Amplitude = –0.5 dBFS 104 80 78 dB typ
Input Amplitude = –6.0 dBFS 100 83 79 dB typ
INPUT TEST FREQUENCY: 5.0 MHz (typ)
Signal-to-Noise Ratio (SNR)
Input Amplitude = –0.5 dBFS 59 dB typ
Input Amplitude = –6.0 dBFS 57 dB typ
SNR and Distortion (SINAD)
Input Amplitude = –0.5 dBFS 58 dB typ
Input Amplitude = –6.0 dBFS 57 dB typ
Total Harmonic Distortion (THD)
Input Amplitude = –0.5 dBFS –58 dB typ
Input Amplitude = –6.0 dBFS –67 dB typ
Spurious Free Dynamic Range (SFDR)
Input Amplitude = –0.5 dBFS 59 dB typ
Input Amplitude = –6.0 dBFS 70 dB typ
INTERMODULATION DISTORTION
1 = 475 kHz, fIN2 = 525 kHz –93 –91 –91 –83 dBFS typ
f
IN
fIN1 = 950 kHz, fIN2 = 1.050 MHz –95 –86 –85 –83 dBFS typ
DYNAMIC CHARACTERISTICS
Full Power Bandwidth 75 75 75 75 MHz typ
Small Signal Bandwidth (AIN = –20 dBFS) 75 75 75 75 MHz typ
Aperture Jitter 2222ps rms typ
Specifications subject to change without notice.
–4–
REV. B
Page 5

AD9260
DIGITAL FILTER CHARACTERISTICS
Parameter AD9260 Units
8× DECIMATION (N = 8)
Passband Ripple 0.00125 dB max
Stopband Attenuation 82.5 dB min
Passband 0 MHz min
0.605 × (f
Stopband 1.870 × (f
18.130 × (f
Passband/Transition Band Frequency
(–0.1 dB Point) 0.807 × (f
(–3.0 dB Point) 1.136 × (f
Absolute Group Delay
Group Delay Variation 0 µs max
Settling Time (to ±0.0007%)
1
1
13.55 × (20 MHz/f
24.2 × (20 MHz/f
4× DECIMATION (N = 4)
Passband Ripple 0.001 dB max
Stopband Attenuation 82.5 dB min
Passband 0 MHz min
1.24 × (f
Stopband 3.75 × (f
16.25 × (f
Passband/Transition Band Frequency
(–0.1 dB Point) 1.61 × (f
(–3.0 dB Point) 2.272 × (f
Absolute Group Delay
Group Delay Variation 0 µs max
Settling Time (to ±0.0007%)
1
1
2.90 × (20 MHz/f
5.05 × (20 MHz/f
2× DECIMATION (N = 2)
Passband Ripple 0.0005 dB max
Stopband Attenuation 85.5 dB min
Passband 0 MHz min
2.491 × (f
Stopband 7.519 × (f
12.481 × (f
Passband/Transition Band Frequency
(–0.1 dB Point) 3.231 × (f
(–3.0 dB Point) 4.535 × (f
Absolute Group Delay
Group Delay Variation 0 µs max
Settling Time (to ±0.0007%)
1
1
0.80 × (20 MHz/f
1.40 × (20 MHz/f
1× DECIMATION (N = 1)
Propagation Delay: t
PROP
13 ns max
Absolute Group Delay (225 × (20 MHz/f
NOTES
1
To determine “overall” Absolute Group Delay and/or Settling Time inclusive of delay from the sigma-delta modulator, add Absolute Group Delay and/or Settling
Time pertaining to specific decimation mode to the Absolute Group Delay specified in 1 × decimation.
Specifications subject to change without notice.
/20 MHz) MHz max
CLOCK
/20 MHz) MHz min
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz min
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz min
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
/20 MHz) MHz max
CLOCK
) µs max
CLOCK
) µs max
CLOCK
) µs max
CLOCK
) µs max
CLOCK
) µs max
CLOCK
) µs max
CLOCK
)) + t
CLOCK
PROP
ns max
–5–REV. B
Page 6
)
AD9260
–Digital Filter Characteristics
0
–20
–40
–60
MAGNITUDE – dB
–80
–100
–120
0 1.0
0.2 0.4 0.6 0.8
FREQUENCY (NORMALIZED TO
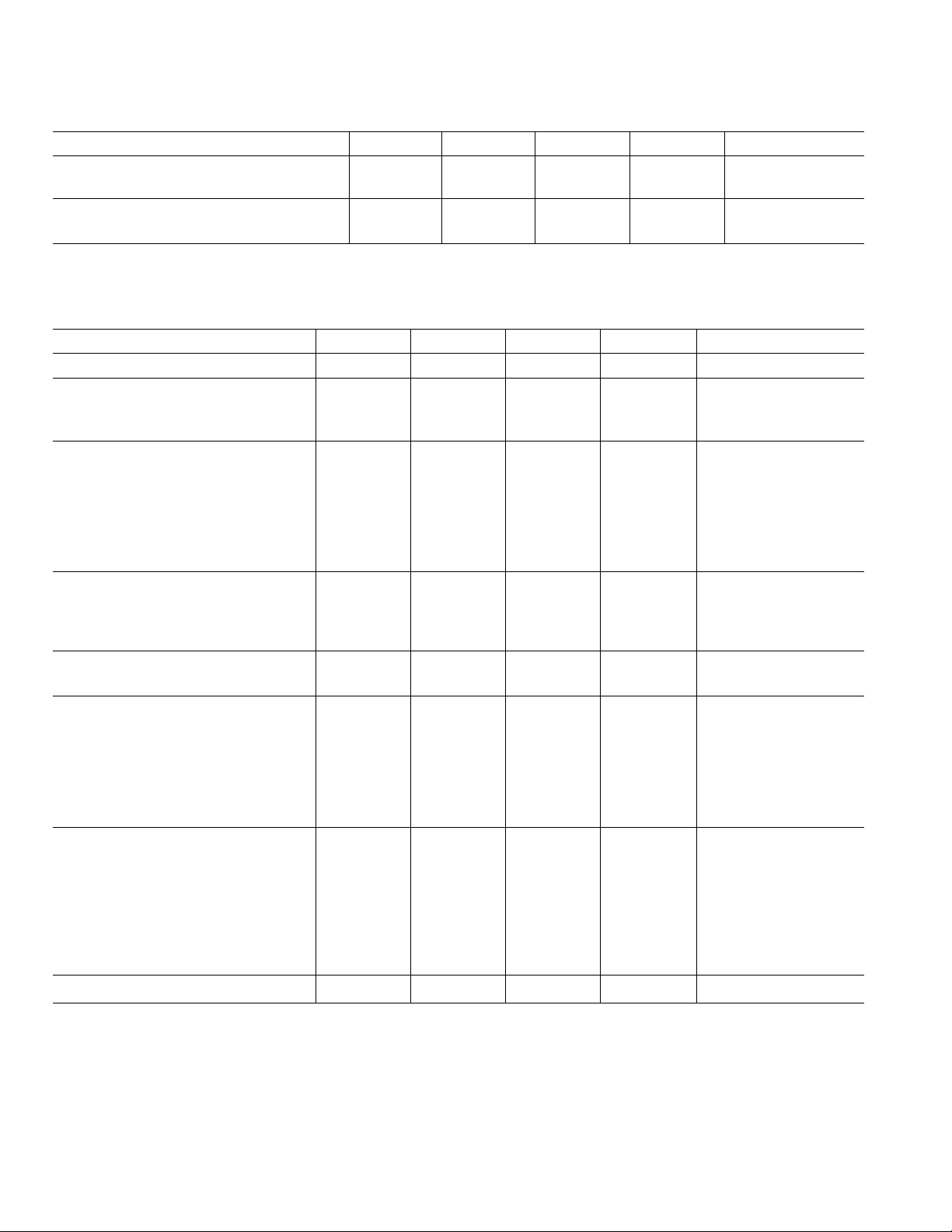
Figure 1a. 8× FIR Filter Frequency Response
0
–20
–40
–60
1.2
1.0
0.8
0.6
0.4
0.2
0
NORMALIZED OUTPUT RESPONSE
–0.2
–0.4
0 300200100
CLOCK PERIODS – RELATIVE TO CLK
400 500
Figure 1b. 8× FIR Filter Impulse Response
1.0
0.8
0.6
0.4
MAGNITUDE – dB
–80
–100
–120
0.2 0.4 0.6 0.8
0 1.0
FREQUENCY (NORMALIZED TO )
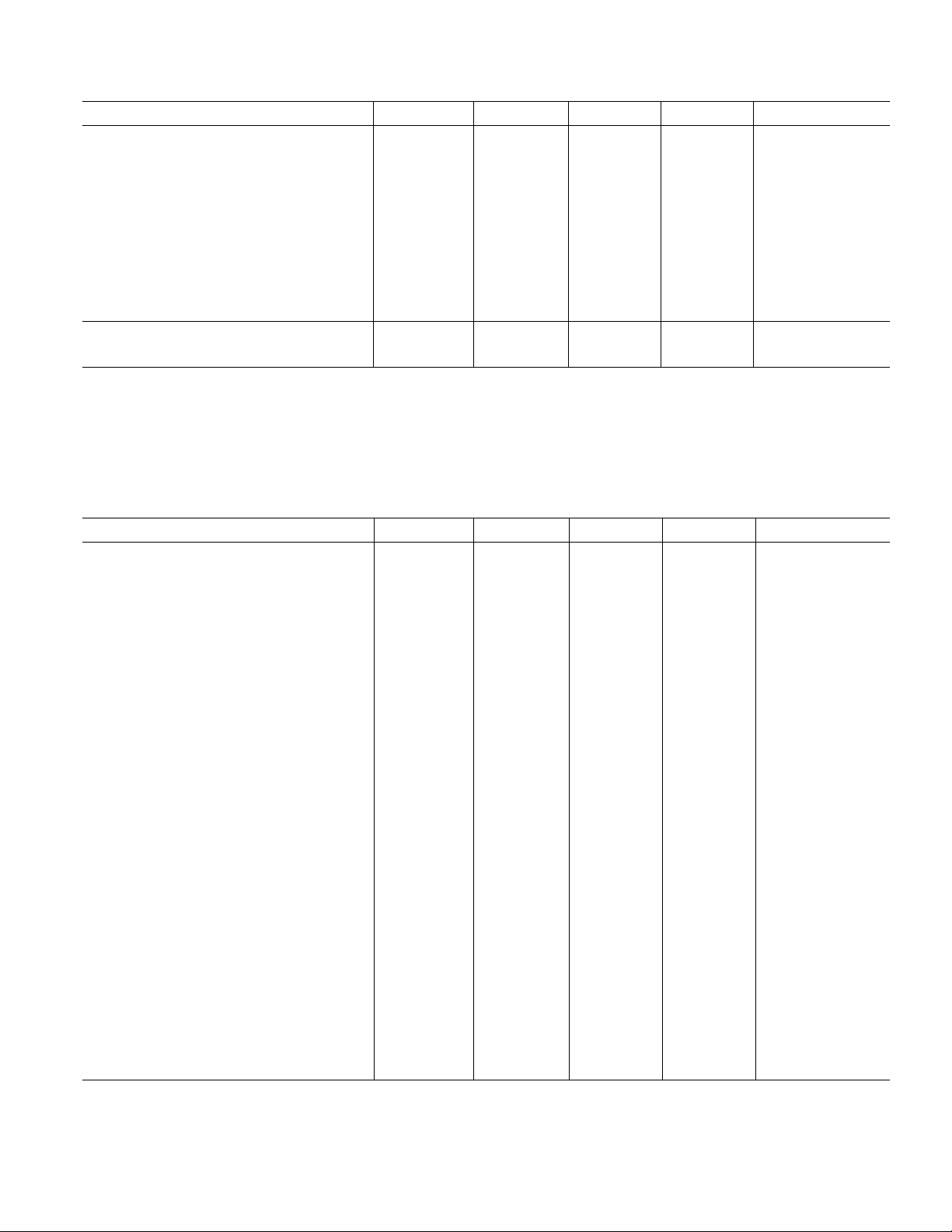
Figure 2a. 4× FIR Filter Frequency Response
0
–20
–40
–60
MAGNITUDE – dB
–80
–100
–120
0.2 0.4 0.6 0.8
0 1.0
FREQUENCY (NORMALIZED TO )
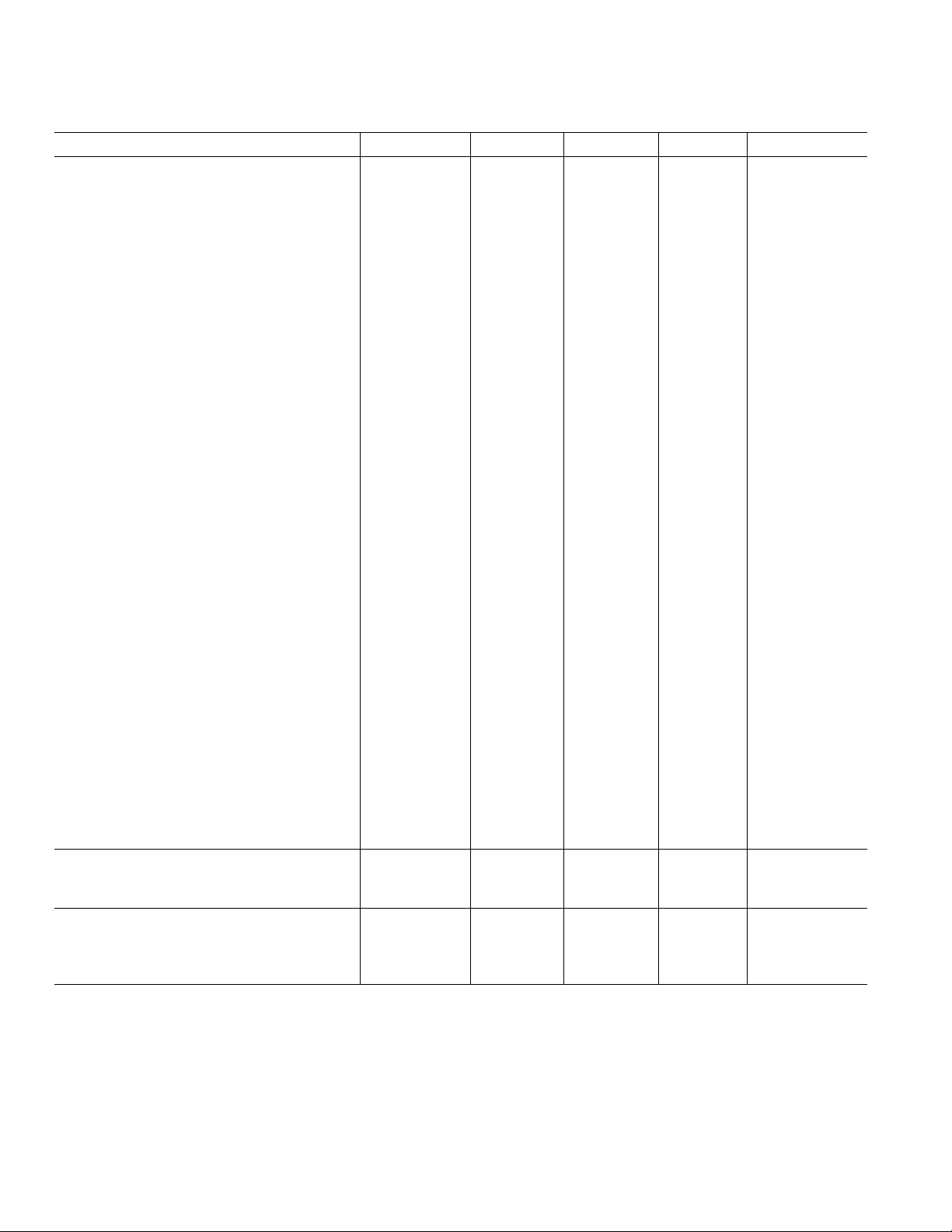
Figure 3a. 2× FIR Filter Frequency Response
1.2
1.2
0.2
0
NORMALIZED OUTPUT RESPONSE
–0.2
10 100 11020 30 40 50 60 70 80 90
0
CLOCK PERIODS – RELATIVE TO CLK
Figure 2b. 4× FIR Filter Impulse Response
1.0
0.8
0.6
0.4
0.2
0
NORMALIZED OUTPUT RESPONSE
–0.2
0
5
CLOCK PERIODS – RELATIVE TO CLK
Figure 3b. 2× FIR Filter Impulse Response
201510
–6–
REV. B
Page 7
AD9260
Table I. Integer Filter Coefficients for First Stage Decimation
Filter (23-Tap Halfband FIR Filter)
Lower Upper Integer
Coefficient Coefficient Value
H(1) H(23) –1
H(2) H(22) 0
H(3) H(21) 13
H(4) H(20) 0
H(5) H(19) –66
H(6) H(18) 0
H(7) H(17) 224
H(8) H(16) 0
H(9) H(15) –642
H(10) H(14) 0
H(11) H(13) 2496
H(12) 4048
Table II. Integer Filter Coefficients for Second Stage Decimation Filter (43-Tap Halfband FIR Filter)
Lower Upper Integer
Coefficient Coefficient Value
H(1) H(43) 3
H(2) H(42) 0
H(3) H(41) –12
H(4) H(40) 0
H(5) H(39) 35
H(6) H(38) 0
H(7) H(37) –83
H(8) H(36) 0
H(9) H(35) 172
H(10) H(34) 0
H(11) H(33) –324
H(12) H(32) 0
H(13) H(31) 572
H(14) H(30) 0
H(15) H(29) –976
H(16) H(28) 0
H(17) H(27) 1680
H(18) H(26) 0
H(19) H(25) –3204
H(20) H(24) 0
H(21) H(23) 10274
H(22) 16274
NOTE: The composite filter undecimated coefficients (i.e.,
impulse response) in the 4× decimation mode can be determined
by convolving the first stage filter taps with a “zero stuffed”
version of the second stage filter taps (i.e., insert one zero between samples). Similarly, the composite filter coefficients in the
8× decimation mode can be determined by convolving the taps
of the composite 4× decimation mode (as previously determined) with a “zero stuffed” version of the third stage filter taps
(i.e., insert three zeros between samples).
Table III. Integer Filter Coefficients for Third Stage Decimation Filter (107-Tap Halfband FIR Filter)
Lower Upper Integer
Coefficient Coefficient Value
H(1) H(107) –1
H(2) H(106) 0
H(3) H(105) 2
H(4) H(104) 0
H(5) H(103) –2
H(6) H(102) 0
H(7) H(101) 3
H(8) H(100) 0
H(9) H(99) –3
H(10) H(98) 0
H(11) H(97) 1
H(12) H(96) 0
H(13) H(95) 3
H(14) H(94) 0
H(15) H(93) –12
H(16) H(92) 0
H(17) H(91) 27
H(18) H(90) 0
H(19) H(89) –50
H(20) H(88) 0
H(21) H(87) 85
H(22) H(86) 0
H(23) H(85) –135
H(24) H(84) 0
H(25) H(83) 204
H(26) H(82) 0
H(27) H(81) –297
H(28) H(80) 0
H(29) H(79) 420
H(30) H(78) 0
H(31) H(77) –579
H(32) H(76) 0
H(33) H(75) 784
H(34) H(74) 0
H(35) H(73) –1044
H(36) H(72) 0
H(37) H(71) 1376
H(38) H(70) 0
H(39) H(69) –1797
H(40) H(68) 0
H(41) H(67) 2344
H(42) H(66) 0
H(43) H(65) –3072
H(44) H(64) 0
H(45) H(63) 4089
H(46) H(62) 0
H(47) H(61) –5624
H(48) H(60) 0
H(49) H(59) 8280
H(50) H(58) 0
H(51) H(57) –14268
H(52) H(56) 0
H(53) H(55) 43520
H(54) 68508
–7–REV. B
Page 8
AD9260–SPECIFICATIONS
DIGITAL SPECIFICATIONS
(AVDD = +5 V, DVDD = +5 V, T
MIN
to T
unless otherwise noted)
MAX
Parameter AD9260 Units
1
CLOCK
AND LOGIC INPUTS
High-Level Input Voltage
(DVDD = +5 V) +3.5 V min
(DVDD = +3 V) +2.1 V max
Low-Level Input Voltage
(DVDD = +5 V) +1.0 V min
(DVDD = +3 V) +0.9 V max
High-Level Input Current (V
Low-Level Input Current (V
= DVDD) ± 10 µA max
IN
= 0 V) ± 10 µA max
IN
Input Capacitance 5 pF typ
LOGIC OUTPUTS (with DRVDD = 5 V)
High-Level Output Voltage (I
High-Level Output Voltage (I
Low-Level Output Voltage
Low-Level Output Voltage (I
= 50 µA) +4.5 V min
OH
= 0.5 mA) +2.4 V min
OH
2
(IOL = 0.3 mA) +0.4 V max
= 50 µA) +0.1 V max
OL
Output Capacitance 5 pF typ
LOGIC OUTPUTS (with DRVDD = 3 V)
High-Level Output Voltage (I
= 50 µA) +2.4 V min
OH
Low-Level Output Voltage (IOL = 50 µA) +0.7 V max
NOTES
1
Since CLK is referenced to AVDD, +5 V logic input levels only apply.
2
The AD9260 is not guaranteed to meet VOL = 0.4 V max for standard TTL load of IOL = 1.6 mA.
Specifications subject to change without notice.
ANALOG INPUT
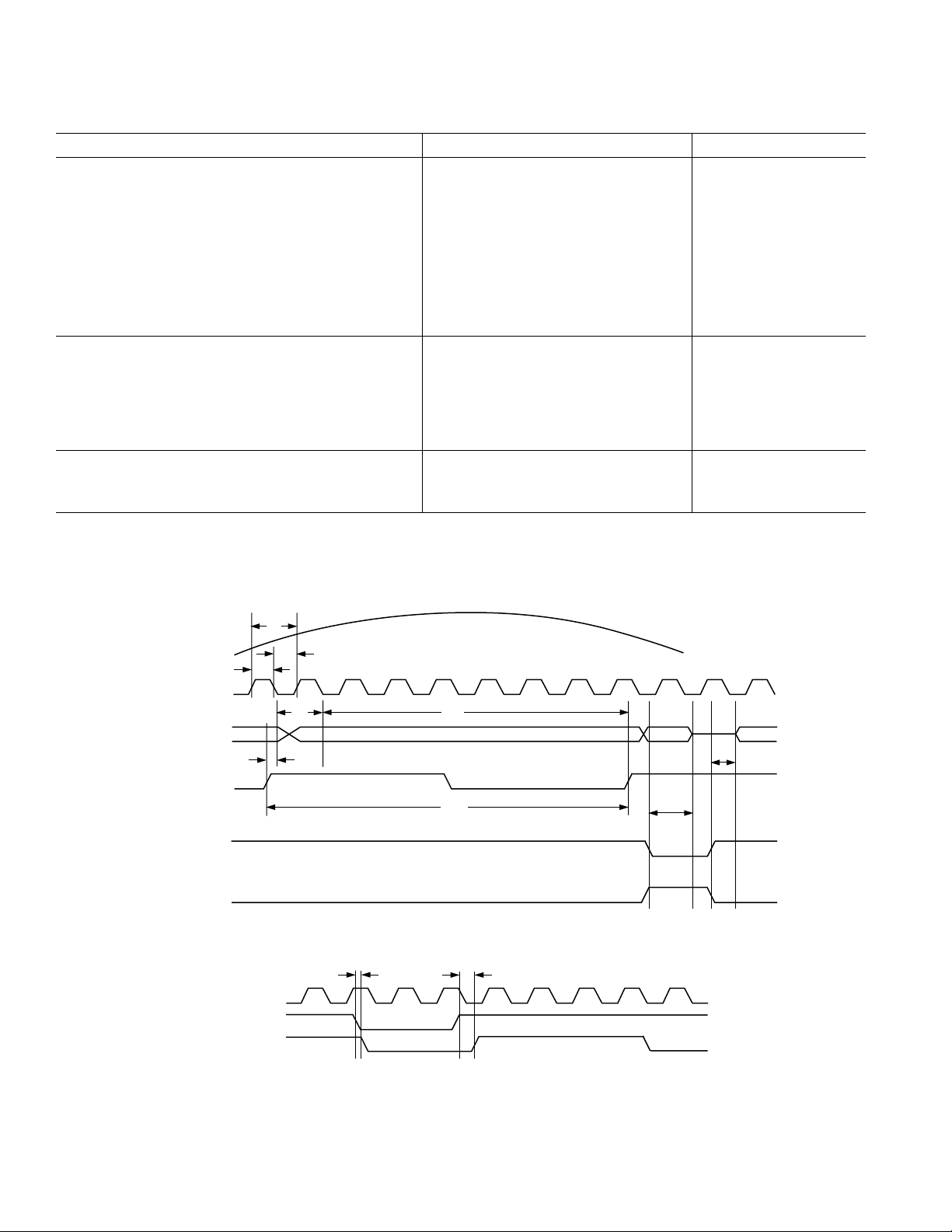
INPUT CLOCK
DATA OUTPUT
DAV
READ
CS
S1
t
CH
t
H
INPUT CLOCK
RESET
DAV
S2
t
C
t
CL
t
t
DAV
DS
t
OE
t
OD
t
DI
Figure 4a. Timing Diagram
t
RES-DAV
t
CLK-DAV
Figure 4b.
RESET
Timing Diagram
–8–
REV. B
Page 9

AD9260
WARNING!
ESD SENSITIVE DEVICE
SWITCHING SPECIFICATIONS
(AVDD = +5 V, DVDD = +5 V, CL = 20 pF, T
MIN
to T
unless otherwise noted)
MAX
Parameters Symbol AD9260 Units
Clock Period t
Data Available (DAV) Period t
Data Invalid t
Data Setup Time t
Clock Pulsewidth High t
Clock Pulsewidth Low t
Data Hold Time t
RESET to DAV Delay t
CLOCK to DAV Delay t
Three-State Output Disable Time t
Three-State Output Enable Time t
Specifications subject to change without notice.
C
DAV
DI
DS
CH
CL
H
RES–DAV
CLK–DAV
OD
OE
ABSOLUTE MAXIMUM RATINGS*
With
Respect
Parameter to Min Max Units
AVDD AVSS –0.3 +6.5 V
DVDD DVSS –0.3 +6.5 V
AVSS DVSS –0.3 +0.3 V
AVDD DVDD –6.5 +6.5 V
DRVDD DRVSS –0.3 +6.5 V
DRVSS AVSS –0.3 +0.3 V
REFCOM AVSS –0.3 +0.3 V
CLK, MODE, READ,
Model Range Description Option*
AD9260AS –40°C to +85°C 44-Lead MQFP S-44
AD9260EB Evaluation Board
*S = Metric Quad Flatpack.
THERMAL CHARACTERISTICS
Thermal Resistance
44-Lead MQFP
θ
= 53.2°C/W
JA
= 19°C/W
θ
JC
50 ns min
tC × Mode ns min
40% t
t
–tH–t
DAV
DAV
DI
ns max
ns min
22.5 ns min
22.5 ns min
3.5 ns min
10 ns typ
15 ns typ
8 ns typ
45 ns typ
ORDERING GUIDE
Temperature Package Package
CS, RESET DVSS –0.3 DVDD + 0.3 V
Digital Outputs DRVSS –0.3 DRVDD
+ 0.3 V
VINA, VINB,
CML, BIAS AVSS –0.3 AVDD
VREF AVSS –0.3 AVDD
SENSE AVSS –0.3 AVDD
+ 0.3 V
+ 0.3 V
+ 0.3 V
CAPB, CAPT AVSS –0.3 AVDD + 0.3 V
Junction Temperature +150 °C
Storage Temperature –65 +150 °C
Lead Temperature
(10 sec) +300 °C
*Stresses above those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; functional operation of the
device at these or any other conditions above those indicated in the operational
sections of this specification is not implied. Exposure to absolute maximum ratings
for extended periods may effect device reliability.
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD9260 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high-energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
–9–REV. B
Page 10

AD9260
DEFINITIONS OF SPECIFICATION
INTEGRAL NONLINEARITY (INL)
INL refers to the deviation of each individual code from a line
drawn from “negative full scale” through “positive full scale.”
The point used as “negative full scale” occurs 1/2 LSB before
the first code transition. “Positive full scale” is defined as a
level 1 1/2 LSB beyond the last code transition. The deviation
is measured from the middle of each particular code to the true
straight line.
DIFFERENTIAL NONLINEARITY (DNL, NO MISSING
CODES)
An ideal ADC exhibits code transitions that are exactly 1 LSB
apart. DNL is the deviation from this ideal value. Guaranteed
no missing codes to 14-bit resolution indicates that all 16384
codes, respectively, must be present over all operating ranges.
NOTE: Conventional INL and DNL measurements don’t really
apply to Σ∆ converters: the DNL looks continually better if
longer data records are taken. For the AD9260, INL and DNL
numbers are given as representative.
ZERO ERROR
The major carry transition should occur for an analog value
1/2 LSB below VINA = VINB. Zero error is defined as the
deviation of the actual transition from that point.
GAIN ERROR
The first code transition should occur at an analog value
1/2 LSB above negative full scale. The last transition should
occur at an analog value 1 1/2 LSB below the nominal full scale.
Gain error is the deviation of the actual difference between first
and last code transitions and the ideal difference between first
and last code transitions.
TEMPERATURE DRIFT
The temperature drift for zero error and gain error specifies the
maximum change from the initial (+25°C) value to the value at
or T
T
MIN
POWER SUPPLY REJECTION
MAX
.
The specification shows the maximum change in full scale from
the value with the supply at the minimum limit to the value with
the supply at its maximum limit.
APERTURE JITTER
Aperture jitter is the variation in aperture delay for successive
samples and is manifested as noise on the input to the A/D.
SIGNAL-TO-NOISE AND DISTORTION (S/N+D, SINAD)
RATIO
S/N+D is the ratio of the rms value of the measured input signal
to the rms sum of all other spectral components below the
Nyquist frequency, including harmonics but excluding dc.
The value for S/N+D is expressed in decibels.
EFFECTIVE NUMBER OF BITS (ENOB)
For a sine wave, SINAD can be expressed in terms of the number of bits. Using the following formula,
N = (SINAD – 1.76)/6.02
it is possible to get a measure of performance expressed as N,
the effective number of bits.
Thus, effective number of bits for a device for sine wave inputs
at a given input frequency can be calculated directly from its
measured SINAD.
TOTAL HARMONIC DISTORTION (THD)
THD is the ratio of the rms sum of the first six harmonic components to the rms value of the measured input signal and
is expressed as a percentage or in decibels.
SIGNAL-TO-NOISE RATIO (SNR)
SNR is the ratio of the rms value of the measured input signal to
the rms sum of all other spectral components below the Nyquist
frequency, excluding the first six harmonics and dc. The value
for SNR is expressed in decibels.
SPURIOUS FREE DYNAMIC RANGE (SFDR)
SFDR is the difference in dB between the rms amplitude of the
input signal and the peak spurious signal.
TWO-TONE SFDR
The ratio of the rms value of either input tone to the rms value
of the peak spurious component. The peak spurious component
may or may not be an IMD product. May be reported in dBc
(i.e., degrades as signal level is lowered), or in dBFS (always
related back to converter full scale).
–10–
REV. B
Page 11
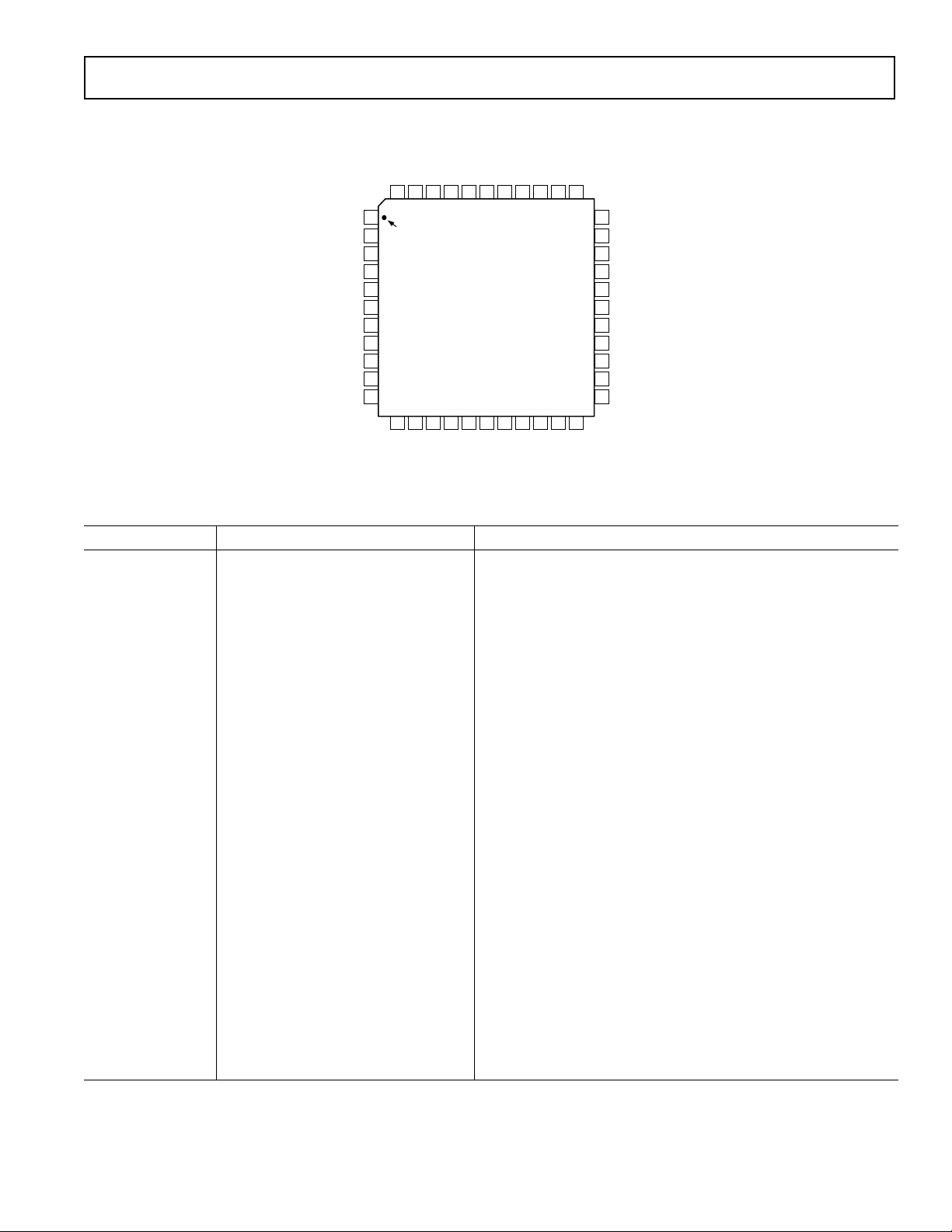
PIN CONFIGURATION
AD9260
VINB
42
BIT11
NC
VINA
CML
40 39 3841
AD9260
TOP VIEW
(Not to Scale)
BIT8
BIT9
BIT10
AVSS
BIT7
CAPT
BIT6
CAPB
BIT5
BIAS
BIT4
MODE
33
32
31
30
29
28
27
26
25
24
23
BIT3
REFCOM
VREF
SENSE
RESET
AVSS
AVDD
CS
DAV
OTR
BIT1 (MSB)
BIT2
DVSS
AVSS
DVDD
AVDD
DRVSS
DRVDD
CLK
READ
(LSB) BIT16
BIT15
BIT14
NC
AVDD
4344 36 35 3437
1
PIN 1
IDENTIFIER
2
3
4
5
6
7
8
9
10
11
12 13 14 15 16 17 18 19 20 21 2 2
BIT12
BIT13
NC = NO CONNECT
PIN FUNCTION DESCRIPTIONS
Pin No. Name Description
1 DVSS Digital Ground.
2, 29, 38 AVSS Analog Ground.
3 DVDD +3 V to +5 V Digital Supply.
4, 28, 44 AVDD +5 V Analog Supply.
5 DRVSS Digital Output Driver Ground.
6 DRVDD +3 V to +5 V Digital Output Driver Supply.
7 CLK Clock Input.
8 READ Part of DSP Interface—Pull Low to Disable Output Bits.
9 BIT16 Least Significant Data Bit (LSB).
10–23 BIT15–BIT2 Data Output Bit.
24 BIT1 Most Significant Data Bit (MSB).
25 OTR Out of Range—Set When Converter or Filter Overflows.
26 DAV Data Available.
27 CS Chip Select (CS): Active LOW.
30 RESET RESET: Active LOW.
31 SENSE Reference Amplifier SENSE: Selects REF Level.
32 VREF Input Span Select Reference I/O.
33 REFCOM Reference Common.
34 MODE Mode Select—Selects Decimation Mode.
35 BIAS Power Bias.
36 CAPB Noise Reduction Pin—Decouples Reference Level.
37 CAPT Noise Reduction Pin—Decouples Reference Level.
39 CML Common-Mode Level (AVDD/2.5).
40, 43 NC No Connect (Ground for Shielding Purposes).
41 VINA Analog Input Pin (+).
42 VINB Analog Input Pin (–).
–11–REV. B
Page 12

AD9260
–Typical Performance Characteristics
(AVDD = DVDD = DRVDD = +5.0 V, 4 V Input Span, Differential DC Coupled Input with CML = 2.0 V, f
= 20 MSPS, Full Bias)
CLOCK
0
100kHz INPUT
–20
–40
–60
–80
dB BELOW FULL SCALE
–100
–120
0
0.4 0.6 0.8
FREQUENCY – MHz
20MHz CLOCK
8 DECIMATION
THD: –96dB
1.0
1.20.2
Figure 5. Spectral Plot of the AD9260 at 100 kHz Input,
20 MHz Clock, 8
0
–20
–40
–60
–80
dB BELOW FULL SCALE
–100
–120
0
×
OSR (2.5 MHz Output Data Rate)
100kHz INPUT
20MHz CLOCK
4 DECIMATION
THD: –98dB
0.5
1 1.5 2 2.5
FREQUENCY – MHz
Figure 6. Spectral Plot of the AD9260 at 100 kHz Input,
×
20 MHz Clock, 4
OSR (5 MHz Output Data Rate)
0
–20
–40
–60
–80
dB BELOW FULL SCALE
–100
–120
1
02
3456 78910
FREQUENCY – MHz
100kHz INPUT
20MHz CLOCK
1 DECIMATION
THD: –98dB
Figure 8. Spectral Plot of the AD9260 at 100 kHz Input,
20 MHz Clock, Undecimated (20 MHz Output Data Rate)
110
106
102
98
WORST CASE SPUR – dBFS
94
90
–12dBFS/TONE
–6.5dBFS/TONE
–26dBFS/TONE
0.20
–46dBFS/TONE
0.4 0.6 1
FREQUENCY – MHz
0.8
Figure 9. Dual Tone SFDR vs. Input Frequency (F1 = F2,
– F2, Span = 10% Center Frequency, Mode = 8×)
(F
1
0
–20
–40
–60
–80
dB BELOW FULL SCALE
–100
–120
0
1 1.5 2 2.5 3 3.5 4 4.5
FREQUENCY – MHz
100kHz INPUT
20MHz CLOCK
2 DECIMATION
THD: –98dB
50.5
Figure 7. Spectral Plot of the AD9260 at 100 kHz Input,
×
20 MHz Clock, 2
OSR (10 MHz Output Data Rate)
–12–
0
DUAL-TONE TEST
f1 = 1.0MHz
–20
f2 = 975kHz
20MHz CLOCK
–40
8 DECIMATION
IM3: –94dB
–60
–80
dB BELOW FULL SCALE
–100
–120
0
0.4 0.6 0.8 1
FREQUENCY – MHz
1.20.2
Figure 10. Two-Tone Spectral Performance of the
AD9260 Given Inputs at 975 kHz and 1.0 MHz, 20 MHz
×
Clock, 8
Decimation
REV. B
Page 13

Typical AC Characterization Curves vs. Decimation Mode
INPUT FREQUENCY – MHz
0.1 10
SINAD – dBFS
1
60
1 MODE
2 MODE
4 MODE
8 MODE
65
70
75
80
85
90
55
50
(AVDD = DVDD = DRVDD = +5 V, 4 V Input Span, Differential DC Coupled Input with CML = 2 V, AIN = 0.5 dBFS Full Bias)
90
AD9260
85
80
75
70
SINAD – dBFS
65
60
55
50
0.1 10
INPUT FREQUENCY – MHz
8 MODE
4 MODE
1
Figure 11. SINAD vs. Input Frequency (f
–50
–60
–70
–80
THD – dBFS
–90
–100
–110
0.1 10
8 MODE
1
INPUT FREQUENCY – MHz
2 MODE
4 MODE
Figure 12. THD vs. Input Frequency (f
2 MODE
1 MODE
= 20 MSPS)
CLOCK
1 MODE
= 20 MSPS)
CLOCK
1
Figure 14. SINAD vs. Input Frequency (f
–70
–75
–80
–85
–90
–95
–100
THD – dBFS
–105
–110
–115
–120
0.1 10
8 MODE
INPUT FREQUENCY – MHz
Figure 15. THD vs. Input Frequency (f
4 MODE
1
CLOCK
1 MODE
2 MODE
CLOCK
= 10 MSPS)
= 10 MSPS)
1
–50
–60
–70
–80
SFDR – dBFS
–90
–100
–110
8 MODE
0.1 10
INPUT FREQUENCY – MHz
Figure 13. SFDR vs. Input Frequency (f
1
8× SINAD performance limited by noise contribution of input differential op
amp driver.
–70
1 MODE
2 MODE
4 MODE
1
= 20 MSPS)
CLOCK
–75
–80
–85
–90
–95
–100
SFDR – dBFS
–105
–110
–115
–120
0.1 10
8 MODE
1
INPUT FREQUENCY – MHz
2 MODE
4 MODE
Figure 16. SFDR vs. Input Frequency (f
1 MODE
CLOCK
= 10 MSPS)
–13–REV. B
Page 14

AD9260
Typical AC Characterization Curves for 8 Mode
(AVDD = DVDD = DRVDD = +5 V, 4 V Input Span, Differential DC Coupled Input with CML = 2 V, Full Bias)
90
90
85
–0.5dBFS
80
75
SINAD – dB
70
65
60
–6.0dBFS
–20dBFS
0.1
INPUT FREQUENCY – MHz
Figure 17. SINAD vs. Input Frequency (f
–70
–75
–80
–85
–90
THD – dB
–95
–100
–105
–110
–20dBFS
–0.5dBFS
–6.0dBFS
0.1
INPUT FREQUENCY – MHz
Figure 18. THD vs. Input Frequency (f
= 20 MSPS)
CLOCK
= 20 MSPS)
CLOCK
85
80
75
SINAD – dB
70
65
60
–70
–75
–80
–85
–90
THD – dB
–95
–100
–105
0.1
INPUT FREQUENCY – MHz
0.1
INPUT FREQUENCY – MHz
1
1
Figure 20. SINAD vs. Input Frequency (f
1
Figure 21. THD vs. Input Frequency (f
–0.5dBFS
–6.0dBFS
–20dBFS
= 10 MSPS)
CLOCK
–20dBFS
–6.0dBFS
–0.5dBFS
= 10 MSPS)
CLOCK
1
1
1
105
100
–0.5dBFS
–6.0dBFS
–20dBFS
INPUT FREQUENCY – MHz
= 20 MSPS)
CLOCK
1
95
SFDR – dBc
90
85
80
0.1
Figure 19. SFDR vs. Input Frequency (f
1
SINAD performance limited by noise contribution of input differential op amp
driver.
–14–
105
100
–6.0dBFS
95
–0.5dBFS
SFDR – dBc
90
85
80
0.1
INPUT FREQUENCY – MHz
–20dBFS
Figure 22. SFDR vs. Input Frequency (f
= 10 MSPS)
CLOCK
1
REV. B
Page 15

Typical AC Characterization Curves for 4 Mode
INPUT FREQUENCY – MHz
0.1
1
SFDR – dBc
–0.5dBFS
–6.0dBFS
–20dBFS
110
105
95
90
80
100
85
(AVDD = DVDD = DRVDD = +5 V, 4 V Input Span, Differential DC Coupled Input with CML = 2 V, Full Bias)
90
90
AD9260
85
80
75
70
SINAD – dB
65
60
55
50
0.1 10
–0.5dBFS
–6.0dBFS
–20dBFS
INPUT FREQUENCY – MHz
1
Figure 23. SINAD vs. Input Frequency (f
–70
–75
–80
–85
–90
THD – dB
–95
–100
–105
–110
0.1 10
Figure 24. THD vs. Input Frequency (f
–20dBFS
–0.5dBFS
–6.0dBFS
INPUT FREQUENCY – MHz
1
CLOCK
= 20 MSPS)
CLOCK
= 20 MSPS)
85
–0.5dBFS
80
–6.0dBFS
75
SINAD – dB
70
65
–20dBFS
60
0.1
INPUT FREQUENCY – MHz
Figure 26. SINAD vs. Input Frequency (f
–70
–75
–80
–85
–90
THD – dB
–95
–6.0dBFS
–100
–105
–110
0.1
INPUT FREQUENCY – MHz
Figure 27. THD vs. Input Frequency (f
–0.5dBFS
CLOCK
= 10 MSPS)
CLOCK
–20dBFS
= 10 MSPS)
1
1
110
105
100
95
SFDR – dBc
90
85
80
0.1 10
Figure 25. SFDR vs. Input Frequency (f
INPUT FREQUENCY – MHz
1
–0.5dBFS
–6.0dBFS
–20dBFS
CLOCK
= 20 MSPS)
Figure 28. SFDR vs. Input Frequency (f
–15–REV. B
= 10 MSPS)
CLOCK
Page 16

AD9260
Typical AC Characterization Curves for 2 Mode
(AVDD = DVDD = DRVDD = +5 V, 4 V Input Span, Differential DC Coupled Input with CML = 2 V, Full Bias)
80
80
75
70
65
SINAD – dB
60
55
50
0.1 10
INPUT FREQUENCY – MHz
1
Figure 29. SINAD vs. Input Frequency (f
–60
–65
–70
–0.5dBFS
THD – dB
–75
–80
–85
–90
–95
–6.0dBFS
–5.0dBFS
–6.0dBFS
–20dBFS
CLOCK
–20dBFS
= 20 MSPS)
75
70
65
SINAD – dB
60
55
50
0.1 10
INPUT FREQUENCY – MHz
1
–0.5dBFS
–6.0dBFS
–20dBFS
Figure 32. SINAD vs. Input Frequency (f
–60
–65
–70
–75
THD – dB
–80
–85
–90
–0.5dBFS
–95
–20dBFS
–6.0dBFS
= 10 MSPS)
CLOCK
–100
0.1 10
INPUT FREQUENCY – MHz
1.0
Figure 30. THD vs. Input Frequency (f
100
95
90
–6.0dBFS
85
SFDR – dBc
80
75
70
0.1 10
–0.5dBFS
1
INPUT FREQUENCY – MHz
Figure 31. SFDR vs. Input Frequency (f
= 20 MSPS)
CLOCK
–20dBFS
= 20 MSPS)
CLOCK
–100
0.1 10
INPUT FREQUENCY – MHz
1
Figure 33. THD vs. Input Frequency (f
100
95
–6.0dBFS
90
–0.5dBFS
85
SFDR – dBc
80
75
70
0.1 10
INPUT FREQUENCY – MHz
1
–20dBFS
Figure 34. SFDR vs. Input Frequency (f
= 10 MSPS)
CLOCK
= 10 MSPS)
CLOCK
–16–
REV. B
Page 17

Typical AC Characterization Curves for 1 Mode
INPUT FREQUENCY – MHz
0.1 10
SINAD – dB
1
–0.5dBFS
–6.0dBFS
–20dBFS
70
65
60
55
50
45
40
INPUT FREQUENCY – MHz
0.1 10
THD – dBc
1
–0.5dBFS
–6.0dBFS
–20dB
–60
–70
–80
–85
–90
–95
–100
–75
–65
–55
INPUT FREQUENCY – MHz
0.1 10
SFDR – dBc
1
–6.0dBFS
–20dBFS
95
85
75
70
65
60
50
80
90
55
–0.5dBFS
100
(AVDD = DVDD = DRVDD = +5 V, 4 V Input Span, Differential DC Coupled Input with CML = 2 V, Full Bias)
70
65
–0.5dBFS
60
AD9260
55
SINAD – dB
50
45
40
0.1 10
–6.0dBFS
–20dBFS
1
INPUT FREQUENCY – MHz
Figure 35. SINAD vs. Input Frequency (f
–55
–60
–65
–70
–75
–80
THD – dB
–85
–90
–95
–100
0.1 10
–20dBFS
1
INPUT FREQUENCY – MHz
–0.5dBFS
Figure 36. THD vs. Input Frequency (f
= 20 MSPS)
CLOCK
–6.0dBFS
= 20 MSPS)
CLOCK
Figure 38. SINAD vs. Input Frequency (f
Figure 39. THD vs. Input Frequency (f
CLOCK
= 10 MSPS)
CLOCK
= 10 MSPS)
100
95
90
85
80
75
70
SDFR – dBc
65
60
55
50
0.1 10
Figure 37. SFDR vs. Input Frequency (f
–0.5dBFS
–6.0dBFS
–20dBFS
INPUT FREQUENCY – MHz
1
= 20 MSPS)
CLOCK
Figure 40. SFDR vs. Input Frequency (f
= 10 MSPS)
CLOCK
–17–REV. B
Page 18

AD9260
Typical AC Characterization Curves
(AVDD = DVDD = DRVDD = +5 V, 4 V Input Span, AIN = –0.5 dBFS, Differential DC Coupled Input with CML = 2 V)
100
95
90
85
80
75
70
SFDR – dBFS
65
60
55
50
QUARTER BIAS
52
CLOCK FREQUENCY – MHz
10 15 20
FULL BIAS
HALF BIAS
Figure 41. SFDR vs. Clock Rate (fIN = 100 kHz in 8× Mode)
100
80
60
FULL BIAS
HALF BIAS
–60
–65
–70
–75
–80
THD – dBc
–85
–90
–95
–100
1.0
1.2
1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0
COMMON MODE INPUT LEVEL – Volts
F
F
IN
Figure 44. THD vs. Common-Mode Input Level (CML)
–40
–50
–60
FS = 10MHz
= 1MHz, 2 MODE
IN
= 100kHz, 8 MODE
FS = 20MHz
SFDR – dBFS
40
20
0
5
10 15 25
CLOCK FREQUENCY – MHz
QUARTER BIAS
20
Figure 42. SFDR vs. Clock Rate (fIN = 500 kHz in 4× Mode)
100
FULL BIAS
80
60
SFDR – dBFS
40
20
0
5
HALF BIAS
QUARTER BIAS
10 15 25
CLOCK FREQUENCY – MHz
20
Figure 43. SFDR vs. Clock Rate (fIN = 1.0 MHz in 2× Mode)
CMR – dB
–70
–80
–90
Figure 45. CMR vs. Input Frequency (V
100k 10M1M10k1k
INPUT FREQUENCY – Hz
CML
Mode)
100
4V SPAN SNR-8 MODE
95
90
85
SFDR – dBFS
80
75
0
0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
FREQUENCY – MHz
4V SPAN SFDR-2 MODE
1.6V SPAN SNR-8 MODE
1.6V SPAN SFDR-2 MODE
Figure 46. 4 V vs. 1.6 V Span SNR/SFDR (f
FS = 5MHz
100M
= 2 V p-p, 1
= 20 MSPS)
CLOCK
×
–18–
REV. B
Page 19

AD9260
20MSPS-dBFS
FULL BIAS
AIN – dBFS
WORST SPUR – dBc and dBFS
–60
50
70
80
90
100
110
120
–50 –40 –30 –20 –10 0
10MSPS-dBc
HALF BIAS
10MSPS-dBFS
HALF BIAS
20MSPS-dBc
FULL BIAS
60
FULL BIAS-dBFS
AIN – dBFS
WORST SPUR – dBc and dBFS
–60
50
70
80
90
100
110
120
–50 –40 –30 –20 –10 0
60
HALF BIAS-dBFS
HALF BIAS-dBc
FULL BIAS-dBc
AIN – dBFS
WORST SPUR – dBc and dBFS
–60
50
70
80
90
100
110
120
–50 –40 –30 –20 –10 0
60
dBc
dBFS
Additional AC Characterization Curves
(AVDD = DVDD = DRVDD = +5 V, 4 V Input Span, AIN = –0.5 dBFS, Differential DC Coupled Input with CML = 2 V, Full Bias, unless otherwise noted)
120
115
110
105
100
SFDR – dBFS
95
90
85
80
–50
–45 –40 –35 –30 –25 –20 –15 –10 –5 0
20 MSPS
FULL BIAS
AIN – dBFS
20 MSPS
HALF BIAS
10 MSPS
HALF BIAS
10 MSPS
FULL BIAS
Figure 47. Single-Tone SFDR vs. Amplitude (fIN =100 kHz,
×
Mode)
8
110
105
100
95
SFDR – dBFS
90
20 MSPS
FULL BIAS
10 MSPS
HALF BIAS
10 MSPS
FULL BIAS
Figure 50. Two-Tone SFDR (F1 = 475 kHz, F2 = 525 MHz,
×
Mode)
8
85
80
–50
–45 –40 –35 –30 –25 –20 –15 –10 –5 0
AIN – dBFS
Figure 48. Single-Tone SFDR vs. Amplitude (fIN =1.0 MHz,
×
Mode)
2
110
10 MSPS
105
100
95
SFDR – dBFS
90
85
80
–50
Figure 49. Single-Tone SFDR vs. Amplitude (fIN = 500 kHz,
2
×
Mode)
HALF BIAS
20 MSPS
FULL BIAS
–45 –40 –35 –30 –25 –20 –15 –10 –5 0
AIN – dBFS
10 MSPS
FULL BIAS
Figure 51. Two-Tone SFDR (F1 = 0.95 kHz, F2 = 1.05 MHz,
×
Mode 20 MSPS)
8
Figure 52. Two-Tone SFDR (F1 = 1.9 MHz, F2 = 2.1 MHz,
4
×
Mode 20 MSPS)
–19–REV. B
Page 20

AD9260
+
–
5B
+
V
IN
–
5B
DAC1
INT1
+
–
5B
DAC2
INT2
SHUFFLE
5B
ADC
DAC
M
CONTROL/TEST
LOGIC
BANDGAP
REFERENCE
REFERENCE
BUFFER
OUT
Figure 53. Simplified Block Diagram
THEORY OF OPERATION
The AD9260 utilizes a new analog-to-digital converter architecture to combine sigma-delta techniques with a high-speed,
pipelined A/D converter. This topology allows the AD9260 to
offer the high dynamic range associated with sigma-delta converters while maintaining very wide input signal bandwidth
(1.25 MHz) at a very modest 8× oversampling ratio. Figure 53
provides a block diagram of the AD9260. The differential
analog input is fed into a second order, multibit sigma-delta
modulator. This modulator features a 5-bit flash quantizer and
5-bit feedback. In addition, a 12-bit pipelined A/D quantizes
the input to the 5-bit flash to greater accuracy. A special digital
modulation loop combines the output of the 12-bit pipelined
A/D with the delayed output of the 5-bit flash to produce the
equivalent response of a second order loop with a 12-bit
quantizer and 12-bit feedback. The combination of a second
order loop and multibit feedback provides inherent stability:
the AD9260 is not prone to idle tones or full-scale idiosyncracies sometimes associated with higher order single bit sigmadelta modulators.
The output of this 12-bit modulator is fed into the digital decimation filter. The voltage level on the MODE pin establishes
the configuration for the digital filter. The user may bring the
data out undecimated (at the clock rate), or at a decimation
factor of 2×, 4×, or a full 8×. The spectra for these four cases
are shown in Figures 5, 6, 7 and 8, all for a 100 kHz full-scale
input and 20 MHz clock. The spectra of the undecimated
output clearly shows the second order shaping characteristic of
the quantization noise as it rises at frequencies above 1.25 MHz.
The on-chip decimation filter provides excellent stopband rejection to suppress any stray input signal between 1.25 MHz and
18.75 MHz, substantially easing the requirements on any antialiasing filter for the analog input path. The decimation filters
are integrated with symmetric FIR filter structures, providing a
linear phase response and excellent passband flatness.
16
3B
ADC3BDAC
–D
Z
HALF-BAND
DECIMATION FILTER STAGE 1
HALF-BAND
DECIMATION FILTER STAGE 2
HALF-BAND
DECIMATION FILTER STAGE 3
OUTPUT BITS
+
4
–
3B
ADC3BDAC
PIPELINE CORRECTION LOGIC
++
DIFFERENTIATOR
C
OUT
LSB
8 LSBs
+
4
–
4B
ADC
The digital output driver register of the AD9260 features both
READ and CHIP SELECT pins to allow easy interfacing. The
digital supply of the AD9260 is designed to operate over a
2.7 V to 5.25 V supply range, though 3 V supplies are recommended to minimize digital noise on the board. A DATA
AVAILABLE pin allows the user to easily synchronize to the
converter’s decimated output data rate. OUT-OF-RANGE
(OTR) indication is given for an overflow in the pipelined A/D
converter or digital filters. A RESETB function is provided to
synchronize the converter’s decimated data and clear any overflow condition in the analog integrators.
An on-chip reference and reference buffer are included on the
AD9260. The reference can be configured in either a 2.5 V
mode (providing a 4 V pk-pk differential input full scale), a 1 V
mode (providing a 1.6 V pk-pk differential input full scale), or
programmed with an external resistor divider to provide any
voltage level between 1 V and 2.5 V. However, optimum noise and
distortion performance for the AD9260 can only be achieved with a
2.5 V reference as shown in Figure 46.
For users wishing to operate the part at reduced clock frequencies, the bias current of the AD9260 is designed to be scalable.
This scaling is accomplished through use of the proper external
resistor tied to the BIAS pin: the power can be reduced roughly
proportionately to clock frequency by as much as 75% (for clock
rates of 5 MHz). Refer to Figures 41–43 and 47–51 for characterization curves showing performance tradeoffs.
ANALOG INPUT AND REFERENCE OVERVIEW
Figure 54, a simplified model of the AD9260, highlights the
relationship between the analog inputs, VINA, VINB and the
reference voltage VREF. Like the voltage applied to the top of
the resistor ladder in a flash A/D converter, the value VREF
defines the maximum input voltage to the A/D converter. An
internal reference buffer in the AD9260 scales the reference
voltage VREF before it is applied internally to the AD9260
–20–
REV. B
Page 21

AD9260
A/D core. The scale factor of this reference buffer is 0.8. Consequently, the maximum input voltage to the A/D core is +0.8 ×
VREF. The minimum input voltage to the A/D core is automatically defined to be –0.8 × VREF. With this scale factor, the
maximum differential input span of 4 V p-p is obtained with a
VREF voltage of 2.5 V. A smaller differential input span may be
obtained by using a VREF voltage of less than 2.5 V at the
expense of ac performance (refer to Figure 46).
+0.8VREF
VINA
16
VINB
+
–
A/D CORE
–0.8VREF
Figure 54. Simplified Input Model
INPUT SPAN
The AD9260 is implemented with a differential input structure.
This structure allows the common-mode level (average voltage
of the two input pins) of the input signal to be varied independently of the input span of the converter over a wide range, as
shown in Figure 44. Specifically, the input to the A/D core is
the difference of the voltages applied at the VINA and VINB
input pins. Therefore, the equation,
VCORE = VINA–VINB (1)
defines the output of the differential input stage and provides
the input to the A/D core.
The voltage, VCORE, must satisfy the condition,
–0.8 × VREF ≤ VCORE ≤ +0.8 × VREF (2)
where VREF is the voltage at the VREF pin.
INPUT COMPLIANCE RANGE
In addition to the limitations on the differential span of the
input signal indicated in Equation 2, an additional limitation is
placed on the inputs by the analog input structure of the AD9260.
The analog input structure bounds the valid operating range for
VINA and VINB. The condition,
AVSS +0.5 V < VINA < AVDD – 0.5 V
AVSS +0.5 V < VINB < AVDD + 0.5 V
(3)
where AVSS is nominally 0 V and AVDD is nominally +5 V,
defines this requirement. Thus the valid inputs for VINA and
VINB are any combination that satisfies both Equations 2 and
3. Note, the clock clamping method used in the differential
driver circuit shown in Figure 57 is sufficient for protecting the
AD9260 in an undervoltage condition.
For additional information showing the relationships between
VINA, VINB, VREF and the digital output of the AD9260, see
Table V.
Refer to Table IV for a summary of the various analog input
and reference configurations.
ANALOG INPUT OPERATION
The analog input structure of the AD9260 is optimized to meet
the performance requirements for some of the most demanding
communication and data acquisition applications. This input
structure is composed of a switched-capacitor network that
samples the input signal applied to pins VINA and VINB on
every rising edge of the CLK pin. The input switched capacitors are charged to the input voltage during each period of
CLK. The resulting charge, q, on these capacitors is equal to
C × V
, where C is the input capacitor. The change in charge
IN
on these capacitors, delta q, as the capacitors are charged from a
previous sample of the input signal to the next sample, is approximated in the following equation,
delta q ~ C × deltaV
where V
V
N–2
represents the present sample of the input signal and
N
represents the sample taken two clock cycles earlier. The
= C × (VN – V
N
) (4)
N–2
average current flow into the input (provided from an external
source) is given in the following equation,
I = delta q/T ~ C × (V
where T represents the period of CLK and f
N
– V
N–2
) × f
CLOCK
represents the
CLOCK
(5)
frequency of CLK. Equations 4 and 5 provide simplifying approximations of the operation of the analog input structure of
the AD9260. A more exact, detailed description and analysis of
the input operation is provided below.
SS3
SS1
VINA
CPA1
SS2
VINB
CPA2
CPB1
CPB2
CS1
CS2
SH3
SH4
SH1
SS4
SH2
ANALOG
MODULATOR
Figure 55. Detailed Analog Input Structure
Figure 55 illustrates the analog input structure of the AD9260.
For the moment, ignore the presence of the parasitic capacitors
CPA and CPB. The effects of these parasitic capacitors will be
discussed near the end of this section. The switched capacitors,
CS1 and CS2, sample the input voltages applied on pins VINA
and VINB. These capacitors are connected to input pins VINA
and VINB when CLK is low. When CLK rises, a sample of the
input signal is taken on capacitors CS1 and CS2. When CLK is
high, capacitors CS1 and CS2 are connected to the Analog
Modulator. The modulator precharges capacitors CS1 and CS2
to minimize the amount of charge required from any circuit
used in combination with the AD9260 to drive input pins VINA
and VINB. This reduces the input drive requirements of the
analog circuitry driving pins VINA and VINB. The Analog
Modulator precharges the voltages across capacitors CS1 and
CS2, approximately equal to a delayed version of the input
signal. When capacitors CS1 and CS2 are connected to input
pins VINA and VINB, the differential charge, Q(n), on these
capacitors is given in the following equation,
Q(n) = q1 – q2 = CS × VCORE (6)
–21–REV. B
Page 22

AD9260
where q1 and q2 are the individual charges stored on capacitors
CS1 and CS2 respectively, and CS is the capacitance value of
CS1 and CS2. When capacitors CS1 and CS2 are connected to
the Analog Modulator during the preceding “precharge” clock
phase, the capacitors are precharged equal to an approximation
of a previous sample of the input signal. Consequently the
differential charge on these capacitors while CLK is high is
given in the following equation,
Q(n–1) = CS × VCORE(delay) + CS × Vdelta (7)
where VCORE(delay) is the value of VCORE sampled during a
previous period of CLK, and Vdelta is the sigma-delta error
voltage left on the capacitors. Vdelta is a natural artifact of the
sigma-delta feedback techniques utilized in the Analog Modulator of the AD9260. It is a small random voltage term that
changes every clock period and varies from 0 to ±0.05 × VREF.
The analog circuitry used to drive the input pins of the AD9260
must respond to the charge glitch that occurs when capacitors
CS1 and CS2 are connected to input pins VINA and VINB. This
circuitry must provide additional charge, qdelta, to capacitors
CS1 and CS2, which is the difference between the precharged
value, Q(n–1), and the new value, Q(n), as given in the following equation,
Qdelta = Q(n) – Q(n–1) (8)
Qdelta = CS × [VCORE–VCORE(delay) + Vdelta] (9)
DRIVING THE INPUT
Transient Response
The charge glitch occurs once at the beginning of every period
of the input CLK (falling edge), and the sample is taken on
capacitors CS1 and CS2 exactly one-half period later (rising
edge). Figure 56 presents a typical input waveform applied to
input Pins VINA and VINB of the AD9260.
TRACK SAMPLE TRACK SAMPLE TRACK SAMPLE TRACK SAMPLE
CLOCK
VINA-VINB
Figure 56. Typical Input Waveform
Figure 56 illustrates the effect of the charge glitch when a source
with nonzero output impedance is used to drive the input pins.
This source must be capable of settling from the charge glitch in
one-half period of the CLK. Unfortunately, the MOS switches
used in any CMOS-switched capacitor circuit (including those
in the AD9260) include nonlinear parasitic junction capacitances connected to their terminals. Figure 55 also illustrates
the parasitic capacitances, Cpa1, Cpb1, Cpa2 and Cpb2, associated with the input switches.
Parasitic capacitor Cpa1 and Cpa2 are always connected to Pins
VINA and VINB and therefore do not contribute to the glitch
energy. Parasitic capacitors Cpb1 and Cpb2, on the other hand,
cause a charge glitch that adds to that of input capacitors CS1
and CS2 when they are connected to input Pins VINA and
VINB. The nonlinear junction capacitance of Cpb1 and Cpb2
cause charge glitch energy that is nonlinearily related to the
input signal. Therefore, linear settling is difficult to achieve
unless the input source completely settles during one-half
period of CLK. A portion of the glitch impulse energy “kicked”
back at the source is not linearly related to the input signal.
Therefore, the best way to ensure that the input signal settles
linearly is to use wide bandwidth circuitry, which settles as
completely as possible from the glitch during one-half period of
the CLK.
The AD9260 utilizes a proprietary clock-boosted boot-strapping
technique to reduce the nonlinear parasitic capacitances of the
internal CMOS switches. This technique improves the linearity
of the input switches and reduces the nonlinear parasitic capacitance. Thus, this technique reduces the nonlinear glitch energy.
The capacitance values for the input capacitors and parasitic
capacitors for the input structure of the AD9260, as illustrated
in Figure 55, are listed as follows.
CS = 3.2 pF, Cpa = 6 pF, Cpb = 1 pF (where CS is the capacitance value of capacitors CS1 and CS2, Cpa is the value of
capacitors Cpa1 and Cpa2, and Cpb is the value of capacitors
Cpb1 and Cpb2). The total capacitance at each input pin is
= CS + Cpa + Cpb = 10.2 pF.
C
IN
Input Driver Considerations
The optimum noise and distortion performance of the AD9260 can
ONLY be achieved when the AD9260 is driven differentially with a
4 V input span . Since not all applications have a signal precon-
ditioned for differential operation, there is often a need to perform a single-ended-to-differential conversion. In the case of the
AD9260, a single-ended-to-differential conversion is best realized
using a differential op amp driver. Although a transformer will
perform a similar function for ac signals, its usefulness is precluded by its inability to directly drive the AD9260 and thus the
additional requirement of an active low noise, low distortion
buffer stage.
Single-Ended-to-Differential Op Amp Driver
There are two single-ended-to-differential op amp driver circuits useful for driving the AD9260. The first circuit, shown in
Figure 57, uses the AD8138 and represents the best choice in
most applications. The AD8138 is a low-distortion differential
ADC driver designed to convert a ground-referenced singleended input signal to a differential output signal with a specified
common-mode level for dc-coupling applications. It is capable
of maintaining the typical THD and SFDR performance of the
AD9260 with only a slight degradation in its noise performance
in the 8× mode (i.e., SNR of 85 dB–86 dB).
In this application, the AD8138 is configured for unity gain and
its common-mode output level is set to 2.5 V (i.e., VREF of the
AD9260) to maximize its output headroom while operating from a
single supply. Note, single-supply operation has the benefit of
not requiring an input protection network for the AD9260 in
dc-coupled applications. A simple R-C network at the output is
used to filter out high-frequency noise from the AD8138. Recall,
the AD9260’s small signal bandwidth is 75 MHz, hence any
noise falling within the baseband bandwidth of the AD9260
defined by its sample and decimation rate, as well as “images”
of its baseband response occurring at multiples of the sample
rate, will degrade its overall noise performance.
–22–
REV. B
Page 23

AD9260
499
499 50
+5V
100pF
AD8138
50
499
100pF
C
S
C
S
VINA
AD9260
VINB
VREF
0.1F10F
VIN
499
Figure 57. AD8138 Single-Ended Differential ADC Driver
The second driver circuit, shown in Figure 58, can provide slightly
enhanced noise performance relative to the AD8138, assuming
low-noise, high-speed op amps are used. This differential op amp
driver circuit is configured to convert and level-shift a 2 V p-p
single-ended, ground-referenced signal to a 4 V p-p differential
signal centered at the common-mode level of the AD9260. The
circuit is based on two op amps that are configured as matched
unity gain difference amplifiers. The single-ended input signal is
applied to opposing inputs of the difference amplifiers, thus
providing differential outputs. The common-mode offset voltage
is applied to the noninverting resistor leg of each difference amplifier providing the required offset voltage. This offset voltage is
derived from the common-mode level (CML) pin of the AD9260
via a low output impedance buffer amplifier capable of driving a
1 µF capacitive load. The common-mode offset can be varied
over a 1.8 V to 2.5 V span without any serious degradation in
distortion performance as shown in Figure 44, thus providing
some flexibility in improving output compression distortion from
some ± 5 op amps with limited positive voltage swing.
To protect the AD9260 from an undervoltage fault condition
from op amps specified for ±5 V operation, two 50 Ω series
resistors and a diode to AGND are inserted between each op
amp output and the AD9260 inputs. The AD9260 will inherently
be protected against any overvoltage condition if the op amps
share the same positive power supply (i.e., AVDD) as the AD9260.
Note, the gain accuracy and common-mode rejection of each difference amplifier in this driver circuit can be enhanced by using
a matched thin-film resistor network (i.e., Ohmtek ORNA5000F)
for the op amps. Resistor values should be 500 Ω or less to maintain the lowest possible noise.
The noise performance of each unity gain differential driver
circuit is limited by its inherent noise gain of two. For unity gain
op amps ONLY, the noise gain can be reduced from two to one
R
V
-VIN
CML
50
R
C
C
R
R
C
C
100pF
F
C
V
-VIN
CML
F
100pF
C
50
C
D
100pF
0.1F
50
50
AD817
1.0F
VINA
AD9260
VINB
CML
VIN
R
R
R
R
Figure 58. DC-Coupled Differential Driver with
Level-Shifting
beyond the input signals passband by adding a shunt capacitor,
C
, across each op amp’s feedback resistor. This will essentially
F
establish a low-pass filter which reduces the noise gain to one
beyond the filter’s f
input signal to f
–3 dB
while simultaneously bandlimiting the
–3 dB
. Note, the pole established by this filter can
also be used as the real pole of an antialiasing filter. Since the
noise contribution of two op amps from the same product family
are typically equal but uncorrelated, the total output-referred
noise of each op amp will add root-sum square leading to a
further 3 dB degradation in the circuit’s noise performance.
Further out-of-band noise reduction can be realized with the
addition of single-ended and differential capacitors, C
and CD.
S
The distortion and noise performance of the two op amps
within the signal path are critical in achieving the AD9260’s
optimum performance. Low noise op amps capable of providing
greater than 85 dB THD at 1 MHz while swinging over a 1 V to
3 V range are a rare commodity, yet should only be considered.
The AD9632 op amp was found to provide superb distortion
performance in this circuit due to its ability to maintain excellent distortion performance over a wide bandwidth while swinging over a 1 V to 3 V range. Since the AD9632 is gain-of-two or
greater stable, the use of the noise reduction shunt capacitors
discussed above was prohibited thus degrading its noise performance slightly (1 dB–2 dB) when compared to the OPA642.
Note, the majority of the AD9260 test and characterization data
presented in this data sheet was taken using the AD9632 op
amp in this dc coupled driver circuit. This driver circuit is also
provided on the AD9260 evaluation board since the AD8138
was unreleased at that time.
Table IV. Reference Configuration Summary
Reference Input Span (VINA–VINB) Required VREF
Operating Mode (V p-p) (V) Connect To
INTERNAL 1.6 1 SENSE VREF
INTERNAL 4.0 2.5 SENSE REFCOM
INTERNAL 1.6 ≤ SPAN ≤ 4.0 and 1 ≤ VREF ≤ 2.5 and R1 VREF and SENSE
SPAN = 1.6 × VREF VREF = (1+R1/R2) R2 SENSE and REFCOM
EXTERNAL 1.6 ≤ SPAN ≤ 4.0 1 ≤ VREF ≤ 2.5 SENSE AVDD
VREF EXT. REF.
–23–REV. B
Page 24

AD9260
The outputs of each op amp are ac coupled via a small series
resistor and capacitor (i.e., 50 Ω and 0.1 µF) to the respective
inputs of the AD9260. Similar to the dc coupled driver, further
out-of-band noise reduction can be realized with the addition of
100 pF single-ended and differential capacitors, CS and CD.
The lower-cutoff frequency of this ac coupled circuit is determined by R
level pin, CML, of the AD9260 for proper biasing of the inputs.
Although the OPA642 was found to provide the lowest overall
noise and distortion performance (i.e., 88.8 dB and 96 dB
THD @ 100 kHz), the AD8055 (or dual AD8056) suffered
only a 0.5 dB to 1.5 dB degradation in overall performance. It
is worth noting that given the high-level of performance attainable
by the AD9260, special consideration must be given to both the
quality of the test equipment and test setup in its evaluation.
Common-Mode Level
The CML pin is an internal analog bias point used internally by
the AD9260. This pin must be decoupled to analog ground
with at least a 0.1 µF capacitor as shown in Figure 59. The dc
level of CML is approximately AVDD/2.5. This voltage should
be buffered if it is to be used for any external biasing.
Note: the common-mode voltage of the input signal applied to
the AD9260 need not be at the exact same level as CML. While
this level is recommended for optimal performance, the AD9260 is
tolerant of a range of input common-mode voltages around
AVDD/2.5.
REFERENCE OPERATION
The AD9260 contains an onboard bandgap reference and internal reference buffer amplifier. The onboard reference provides a
pin-strappable option to generate either a 1 V or 2.5 V output.
With the addition of two external resistors, the user can generate
reference voltages other than 1 V and 2.5 V. Another alternative is to use an external reference for designs requiring enhanced accuracy and/or drift performance. See Table IV for a
summary of the pin-strapping options for the AD9260 reference
configurations. Note, the optimum noise and distortion can only be
achieved with a 2.5 V reference.
Figure 60 shows a simplified model of the internal voltage reference of the AD9260. A pin-strappable reference amplifier
buffers a 1 V fixed reference. The output from the reference
amplifier, A1, appears on the VREF pin and MUST be decoupled with 0.1 µF and 10 µF capacitor to REFCOM. The
voltage on the VREF pin determines the full-scale input span of
the A/D. This input span equals:
The voltage appearing at the VREF pin, as well as the state of
the internal reference amplifier, A1, are determined by the voltage appearing at the SENSE pin. The logic circuitry contains
two comparators that monitor the voltage at the SENSE pin.
The comparator with the lowest set point (approximately 0.3 V)
and CC in which RC is tied to the common-mode
C
0.1F
CML
AD9260
Figure 59. CML Decoupling
Full-Scale Input Span = 1.6 × VREF
TO A/D
6.25k
6.25k
DISABLE
–
1V
AD9260
DISABLE
A1
5k
A2
5k
A2
+
LOGIC
A1
LOGIC
CAPT
CAPB
VREF
7.5k7.5k
SENSE
5k
REFCOM
Figure 60. Simplified Reference
controls the position of the switch within the feedback path of
A1. If the SENSE pin is tied to REFCOM, the switch is connected to the internal resistor network, thus providing a VREF
of 2.5 V. If the SENSE pin is tied to the VREF pin via a short
or resistor, the switch is connected to the SENSE pin. A short
will provide a VREF of 1.0 V while an external resistor network
will provide an alternative VREF SPAN between 1.0 V and
2.5 V. The external resistor network may, for example, be
implemented as a resistor divider circuit. This divider circuit
could consist of a resistor (R1) connected between VREF and
SENSE and another resistor (R2) connected between SENSE
and REFCOM. The other comparator controls internal circuitry that will disable the reference amplifier if the SENSE pin
is tied to AVDD. Disabling the reference amplifier allows the
VREF pin to be driven by an external voltage reference.
The reference buffer circuit, level shifts the reference to an
appropriate common-mode voltage for use by the internal circuitry. The on-chip buffer provides the low impedance necessary for driving the internal switched capacitor circuits and
eliminates the need for an external buffer op amp.
The actual reference voltages used by the internal circuitry of
the AD9260 appear on the CAPT and CAPB pins. If VREF is
configured for 2.5 V, thus providing a 4 V full-scale input span,
the voltages appear at CAPT and CAPB are 3.0 V and 1.0 V
respectively. For proper operation when using the internal or an
external reference, it is necessary to add a capacitor network to
decouple the CAPT and CAPB pins. Figure 61 shows the recommended decoupling network. This capacitive network performs the following three functions: (1) along with the reference
amplifier, A2, it provides a low source impedance over a large
frequency range to drive the A/D internal circuitry, (2) it provides the necessary compensation for A2, and (3) it bandlimits
the noise contribution from the reference. The turn-on time of
the reference voltage appearing between CAPT and CAPB is
approximately 15 ms and should be evaluated in any powerdown mode of operation.
–24–
REV. B
Page 25

AD9260
0.1F
AD9260
V
REF
+
10F
SENSE
REFCOM
CAPT
0.1F
CAPB
0.1F
+
10F
0.1
F
Figure 61. Recommended Reference Decoupling Network
DIGITAL INPUTS AND OUTPUTS
Digital Outputs
The AD9260 output data is presented in a twos complement
format. Table V indicates the output data formats for various
input ranges and decimation modes. A straight binary output
data format can be created by inverting the MSB.
Table V. Output Data Format
Input (V) Condition (V) Digital Output
8 Decimation Mode
VINA–VINB < –0.8 × VREF 1000 0000 0000 0000
VINA–VINB = –0.8 × VREF 1000 0000 0000 0000
VINA–VINB = 0 0000 0000 0000 0000
VINA–VINB = +0.8 × VREF – 1 LSB 0111 1111 1111 1111
VINA–VINB >= + 0.8 × VREF 0111 1111 1111 1111
4 Decimation Mode
VINA–VINB < –0.825 × VREF 1000 0001 0001 1100
VINA–VINB = –0.825 × VREF 1000 0001 0000 1100
VINA–VINB = 0 0000 0000 0000 0000
VINA–VINB = +0.825 × VREF – 1 LSB 0111 1110 1110 0011
VINA–VINB >= + 0.825 × VREF 0111 1110 1110 0011
2 Decimation Mode
VINA–VINB < –0.825 × VREF 1000 0000 0100 0001
VINA–VINB = –0.825 × VREF 1000 0000 0100 0001
VINA–VINB = 0 0000 0000 0000 0000
VINA–VINB = +0.825 × VREF – 1 LSB 0111 1111 1011 1110
VINA–VINB >= + 0.825 × VREF 0111 1111 1011 1110
The slight different ± full-scale input voltage conditions and
their corresponding digital output code for the 4× and 2× decimation modes can be attributed to the different digital scaling
factors applied to each of the AD9260’s FIR decimation stages
for filter optimization purposes. Thus, a + full-scale reading of
0111 1111 1111 1111 and – full-scale reading of 1000 0000
0000 0000 is unachievable in the 2× and 4× decimation mode.
As a result, a digital overrange condition can never exist in the
2× and 4× decimation mode and thus OTR being set high indicates an overrange condition in the analog modulator.
The output data format in 1× decimation differs from that in 2×,
4× and 8× decimation modes. In 1× decimation mode the output data remains in a twos complement format, but the digital
numbers are scaled by a factor of 7/128. This factor of 7/128 is
the product of an internal scale factor of 7/8 in the analog modulator and a 1/16 scale factor caused by LSB justification of the
12-bit modulator data.
CS AND READ PINS
The CS and READ pins control the state of the output data
pins (BIT1–BIT16) on the AD9260. The CS pin is active low
and the READ pin is active high. When CS and READ are
both active the ADC data is driven on the output data pins,
otherwise the output data pins are in a high-impedance (Hi-Z)
–25–REV. B
state. Table VI indicates the relationship between the CS and
READ pins and the state of Pins Bit 1–Bit 16.
Table VI. CS and READ Pin Functionality
CS READ Condition of Data Output Pins
Low Low Data Output Pins in Hi-Z State
Low High ADC Data on Output Pins
High Low Data Output Pins in Hi-Z State
High High Data Output Pins in Hi-Z State
DAV PIN
The DAV pin indicates when the output data of the AD9260 is
valid. Digital output data is updated on the rising edge of DAV.
The data hold time (t
) is dependent on the external loading of
H
DAV and the digital data output pins (BIT1–BIT16) as well as
the particular decimation mode. The internal DAV driver is
sized to be larger than the drivers pertaining to the digital data
outputs to ensure that rising edge of DAV occurs before the
data transitions under similar loading conditions (i.e., fanout)
regardless of mode. Note that minimum data hold (t
) of 3.5 ns
H
is specified in the Figure 4 timing diagram from the 50% point
of DAV’s rising edge to the 50% of data transition using a capacitive load of 20 pF for DAV and BIT1–BIT16. Applications
interfacing to TTL logic and/or having larger capacitive loading
for DAV than BIT1–BIT16 should consider latching data on
the falling edge of DAV since the falling edge of DAV occurs
well after the data has transitioned in the case of the 2×, 4× and
8× modes. The duty cycle of DAV is approximately 50% and it
remains active independent of CS and READ.
RESET PIN
The RESET pin is an asynchronous digital input that is active
low. Upon asserting RESET low, the clocks in the digital decimation filters are disabled, the DAV pin goes low and the data
on the digital output data pins (Bit 1–Bit 16) is invalid. In addition, the analog modulator in the AD9260 and internal clock
dividers used in the decimation filters are reset and will remain
reset as long as RESET is maintained low. In the 2×, 4×, or 8×
mode, the RESET must remain low for at least a clock period to
ensure all the clock dividers and analog modulator are reset.
Upon bringing RESET high, the internal clock dividers will
begin to count again on the next falling edge of CLK and DAV
will go high approximately 15 ns after this falling edge, resuming
normal operation. Refer to Figure 4b for a timing diagram.
The state of the internal decimation filters in the AD9260
remains unchanged when RESET is asserted low. Consequently, when RESET is pulsed low, this resets the analog
modulator but does not clear all the data in the digital filters.
The data in the filters is corrupted by the effect of resetting the
analog modulator (this causes an abrupt change at the input of
the digital filter and this change is unrelated to the signal at the
input of the A/D converter). Similarly, in multiplexed applications in which the input of the A/D converters sees an abrupt
change, the data in the analog modulator and digital filter will
be corrupted.
For this reason, following a pulse on the RESET pin, or change
in channels (i.e., multiplexed applications only), the decimation
filters must be flushed of their data. These filters have a memory
length, hence delay, equal to the number of filter taps times
the clock rate of the converter. This memory length may be
Page 26

AD9260
interpreted in terms of a number of samples stored in the
decimation filter. For example, if the part is in 8× decimation
mode, the delay is 321/f
. This corresponds to 321 samples
CLOCK
stored in the decimation filter. These 321 samples must be
flushed from the AD9260 after RESET is pulsed high prior to
reusing the data from the AD9260. That is, the AD9260 should
be allowed to clock for 321 samples as the corrupted data is
flushed from the filters. If the part is in 4× or 2× decimation
mode, then the relatively smaller group delays of the 4× and 2×
decimation filters result fewer samples that must be flushed
from the filters (108 samples and 23 samples respectively).
In 2×, 4× or 8× mode, RESET may be used to synchronize
multiple AD9260s clocked with the same clock. The decimation
filters in the AD9260 are clocked with an internal clock divider.
The state of this clock divider determines when the output data
becomes available (relative to CLK). In order to synchronize
multiple AD9260s clocked with the same clock, it is necessary
that the clock dividers in each of the individual AD9260s are
all reset to the same state. When RESET is asserted low, these
clock dividers are cleared. On the next falling edge of CLK following the rising edge of RESET, the clock dividers begin counting
and the clock is applied to the digital decimation filters.
OTR PIN
The OTR pin is a synchronous output that is updated each
CLK period. It indicates that an overrange condition has occurred within the AD9260. Ideally, OTR should be latched on
the falling edge of CLK to ensure proper setup-and-hold time.
However, since an overrange condition typically extends well
beyond one clock cycle (i.e., does not toggle at the CLK rate).
OTR typically remains high for more than a clock cycle, allowing it to be successfully detected on the rising edge of CLK or
monitored asynchronously.
An overrange condition must be carefully handled because of
the group delays in the low-pass digital decimation filters in the
output stages of the AD9260. When the input signal exceeds
the full-scale range of the converter, this can have a variety of
effects upon the operation of the AD9260, depending on the
duration and amplitude of this overrange condition. A short
duration overrange condition (<< filter group delay) may cause
the analog modulator to briefly overrange without causing the
data in the low pass digital filters to exceed full scale. The analog modulator is actually capable of processing signals slightly
(3%) beyond the full-scale range of the AD9260 without internally clipping. A long duration overrange condition will cause
the digital filter data to exceed full scale. For this reason, the
OTR signal is generated using two separate internal out-ofrange detectors.
The first of these out-of-range detectors is placed at the output
of the analog modulator and indicates whether the modulator
output signal has extended 3% beyond the full-scale range of
the converter. If the modulator output signal exceeds 3% beyond full scale, the digital data is hard-limited (i.e., clipped) to a
number that is 3% larger than full scale. Due to the delay of the
switched capacitor analog modulator, the OTR signal is delayed
3 1/2 clock cycles relative to the clock edge in which the overranged analog input signal was sampled.
The second out-of-range detector is placed at the output of the
stage three decimation filter and detects whether the low pass
filtered data has exceeded full scale. When this occurs, the filter
output data is hard limited to full scale. The OTR signal is a
logical OR function of the signals from these two internal outof-range detectors. If either of these detectors produces an outof-range signal, the OTR pin goes high and the data may be
seriously corrupted.
If the AD9260 is used in a system that incorporates automatic
gain control (AGC), the OTR signal may be used to indicate
that the signal amplitude should be reduced. This may be particularly effective for use in maximizing the signal dynamic
range if the signal includes high-frequency components that
occasionally exceed full scale by a small amount. If, on the other
hand, the signal includes large amplitude low frequency components that cause the digital filters to overrange, this may cause
the low pass digital filter to overrange. In this case the data may
become seriously corrupted and the digital filters may need to
be flushed. See the RESET pin function description above for
an explanation of the requirements for flushing the digital filters.
OTR should be sampled with the falling edge of CLK. This
signal is invalid while CLK is HIGH.
MODE OPERATION
The Mode Select Pin (MODE) allows the user to select one of
four available digital filter modes using a single pin. Each mode
configures the internal decimation filter to decimate at: 1×, 2×,
4× or 8×. Refer to Table VII for mode pin ranges.
The mode selection is performed by using a set of internal comparators, as illustrated in Figure 62, so that each mode corresponds to a voltage range on the input of the MODE pin. The
output of the comparators are fed into encoding logic where, on
the falling edge of the clock, the encoded data is latched.
Table VII. Recommended Mode Pin Ranges and Configurations
Mode Pin Typical Decimation
Range Mode Pin Mode
0 V–0.5 V GND 8×
0.5 V–1.5 V VREF/2 2×
1.5 V–3.0 V CML 4×
3.0 V–5.0 V AVDD 1×
BIAS PIN OPERATION
The Bias Select Pin (BIAS) gives the user, who is able to operate the AD9260 at a slower clock rate, the added flexibility of
running the device in a lower, power consumption mode when it
is clocked at less than 20 MHz.
This is accomplished by scaling the bias current of the AD9260
as illustrated in Figure 63. The bias amplifier drives a source
follower and forces 1 V across R
, which sets the bias current.
EXT
This effectively adjusts the bias current in the modulator amplifiers and FLASH preamplifiers. When a large value of R
EXT
is
used, a smaller bias current is available to the internal amplifier
circuitry. As a result these amplifiers need more time to settle,
thus dictating the use of a slower clock as the power is reduced.
Refer to the characterization curves shown in Figures 41–48
revealing the performance tradeoffs.
–26–
REV. B
Page 27

The scaling is accomplished by properly attaching an external
SAMPLE RATE – MSPS
I
AVDD
– mA
5
30
70
90
110
130
10 15 20
50
FULL BIAS-2k
HALF BIAS-4k
QUARTER BIAS-8k
8
2
4
1
SAMPLE RATE – MSPS
I
DVDD
/I
DRVDD
– mA
5
6
10
12
14
16
10 15 20
8
4
2
0
resistor to the BIAS pin of the AD9260 as shown in Table IX.
R
is normally 2 kΩ for a clock speed of 20 MHz and scales
EXT
inversely with clock rate. Because BIAS is an external pin, minimization of capacitance to this pin is recommended in order to
prevent instability of the bias pin amplifier.
AVDD
4R
3R
MODE PIN
AD9260
2R
R
AVSS
LATCH
ENCODER
CLOCK
ENCODED MODE
Figure 64. I
Mode 1
×–4×
vs. Sample Rate (AVDD = +5 V,
AVDD
)
Figure 62. Simplified Mode Pin Circuitry
BIAS CURRENT
1V
BIAS PIN
REXT
Figure 63. Simplified Bias Pin Circuitry
POWER DISSIPATION CONSIDERATIONS
The power dissipation of the AD9260 is dependent on its
Figure 65a. I
= 1 MHz)
3 V, f
IN
30
25
DVDD/IDRVDD
vs. Sample Rate (DVDD = DRVDD =
8
4
application-specific configuration and operating conditions.
The analog power dissipation as shown in Figure 64 is primarily
a function of its power bias setting and sample rate. It remains
insensitive to the particular input waveform being digitized or
digital filter MODE setting. The digital power dissipation is
primarily a function of the digital supply setting (i.e., +3 V to
20
– mA
15
DRVDD
/I
DVDD
10
I
1
2
+5 V), the sample rate and, to a lesser extent, the MODE setting
and input waveform. Figures 65a and 65b show the total current
dissipation of the “combined” digital (DVDD) and digital driver
supply (DRVDD) for +3 V and +5 V supplies. Note, DVDD
and DRVDD are typically derived from the same supply bus
since no degradation in performance results. A 1 MHz fullscale sine wave was used to ensure maximum digital activity in
the digital filters and the digital drivers had a fanout of one.
Note also that a twofold decrease in digital supply current results when the digital supply is reduced form +5 V to +3 V.
Figure 65b. I
= 5 V, f
5
0
5
DVDD/IDRVDD
= 1 MHz)
IN
10 15 20
SAMPLE RATE – MSPS
vs. Sample Rate (DVDD = DRVDD
–27–REV. B
Page 28

AD9260
Digital Output Driver Considerations (DRVDD)
The AD9260 output drivers can be configured to interface with
+5 V or 3.3 V logic families by setting DRVDD to +5 V or 3.3 V
respectively. The AD9260 output drivers in each mode are
appropriately sized to provide sufficient output current to drive
a wide variety of logic families. However, large drive currents
tend to cause glitches on the supplies and may affect SINAD
performance. Applications requiring the AD9260 to drive large
capacitive loads or large fanout may require additional decoupling capacitors on DRVDD. The addition of external buffers or
latches helps reduce output loading while providing effective
isolation from the databus.
Clock Input and Considerations
The AD9260 internal timing uses the two edges of the clock
input to generate a variety of internal timing signals. The clock
input must meet or exceed the minimum specified pulse width
high and low (t
and tCL) specifications for the given A/D as
CH
defined in the Switching Specifications at the beginning of the
data sheet to meet the rated performance specifications. For
example, the clock input to the AD9260 operating at 20 MSPS
may have a duty cycle between 45% to 55% to meet this timing
requirement since the minimum specified t
and tCL is 22.5 ns.
CH
For clock rates below 20 MSPS, the duty cycle may deviate from
this range to the extent that both t
and tCL are satisfied.
CH
All high-speed high-resolution A/Ds are sensitive to the quality of
the clock input. The degradation in SNR at a given full-scale
input frequency (f
) due to only aperture jitter (tA) can be calcu-
IN
lated with the following equation:
SNR = 20 log
In the equation, the rms aperture jitter, t
[1/(2 π fIN tA)]
10
, represents the root-
A
sum square of all the jitter sources which include the clock input,
analog input signal, and A/D aperture jitter specification. For
example, if a 500 kHz full-scale sine wave is sampled by an A/D
with a total rms jitter of 15 ps, the SNR performance of the A/D
will be limited to 86.5 dB.
The clock input should be treated as an analog signal in cases
where aperture jitter may affect the dynamic range of the
AD9260. In fact, the CLK input buffer is internally powered
from the AD9260’s analog supply, AVDD. Thus the CLK logic
high and low input voltage levels are +3.5 V and +1.0 V, respectively. Supplies for clock drivers should be separated from the
A/D output driver supplies to avoid modulating the clock signal
with digital noise. Low jitter crystal controlled oscillators make
the best clock sources. If the clock is generated from another type
of source (by gating, dividing, or other method), it should be
retimed by the original clock at the last step.
GROUNDING AND DECOUPLING
Analog and Digital Grounding
Proper grounding is essential in any high-speed, high-resolution
system. Multilayer printed circuit boards (PCBs) are recommended to provide optimal grounding and power schemes. The
use of ground and power planes offers distinct advantages:
1. The minimization of the loop area encompassed by a signal
and its return path.
2. The minimization of the impedance associated with ground
and power paths.
3. The inherent distributed capacitor formed by the power plane,
PCB insulation, and ground plane.
These characteristics result in both a reduction of electromagnetic interference (EMI) and an overall improvement in
performance.
It is important to design a layout that prevents noise from coupling
onto the input signal. Digital signals should not be run in parallel
with input signal traces and should be routed away from the
input circuitry. While the AD9260 features separate analog and
digital ground pins, it should be treated as an analog component.
The AVSS, DVSS and DRVSS pins must be joined together directly
under the AD9260. A solid ground plane under the A/D is ac-
ceptable if the power and ground return currents are managed carefully. Alternatively, the ground plane under the A/D
may contain serrations to steer currents in predictable directions
where cross-coupling between analog and digital would otherwise be unavoidable. The AD9260/EB ground layout, shown in
Figure 76, depicts the serrated type of arrangement. The analog
and digital grounds are connected by a jumper below the A/D.
Analog and Digital Supply Decoupling
The AD9260 features separate analog, digital, and driver supply
and ground pins, helping to minimize digital corruption of sensitive analog signals.
Figure 66 shows the power supply rejection ratio vs. frequency
for a 200 mV p-p ripple applied to AVDD, DVDD, and DAVDD.
90
85
DVDD & DRVDD
80
75
70
65
60
PSRR – dBFS
55
50
45
40
AVDD
101
FREQUENCY – kHz
100
1000
10000
Figure 66. AD9260 PSRR vs. Frequency (8 × Mode)
In general, AVDD, the analog supply, should be decoupled to
AVSS, the analog common, as close to the chip as physically
possible. Figure 67 shows the recommended decoupling for the
analog supplies; 0.1 µF ceramic chip capacitors should provide
adequately low impedance over a wide frequency range. Note
that the AVDD and AVSS pins are co-located on the AD9260
4
0.1F
0.1F
AVDD
AVSS
3
AVDD
28
AVSS
29
AD9260
AVDD
AVSS
44
0.1F
38
Figure 67. Analog Supply Decoupling
–28–
REV. B
Page 29

AD9260
to simplify the layout of the decoupling capacitors and provide
the shortest possible PCB trace lengths. The AD9260/EB power
plane layout, shown in Figure 77 depicts a typical arrangement
using a multilayer PCB.
The digital activity on the AD9260 chip falls into two general
categories: digital logic, and output drivers. The internal digital
logic draws surges of current, mainly during the clock transitions. The output drivers draw large current impulses while the
output bits are changing. The size and duration of these currents are a function of the load on the output bits: large capacitive loads are to be avoided. Note that the digital logic of the
AD9260 is referenced DVDD while the output drivers are referenced to DRVDD. Also note that the SNR performance of the
AD9260 remains independent of the digital or driver supply
setting.
The decoupling shown in Figure 68, a 0.1 µF ceramic chip
capacitor, is appropriate for a reasonable capacitive load on the
digital outputs (typically 20 pF on each pin). Applications
involving greater digital loads should consider increasing the
digital decoupling proportionally, and/or using external buffers/
latches.
0.1F
3
1
AD9260
DVSS
DRVDD
DRVSS
6
0.1F
5
DVDD
Figure 68. Digital Supply Decoupling
A complete decoupling scheme will also include large tantalum
or electrolytic capacitors on the PCB to reduce low-frequency
ripple to negligible levels. Refer to the AD9260/EB schematic
and layouts in Figures 73–77 for more information regarding the
placement of decoupling capacitors.
An alternative layout and decoupling scheme is shown in Figure
69. This layout and decoupling scheme is well suited for applications in which multiple AD9260s are located on the same PC
board and/or the AD9260 is part of a multicard mixed signal
system in which grounds are tied back at the system supplies
(i.e., star ground configuration). In this case, the AD9260 is
treated as an analog component in which its analog (i.e.,
AVDD) and digital (DVDD and DRVDD) supplies are derived
from the systems +5 V analog supply and all of the AD9260’s
ground pins are tied directly to the analog ground plane which
resides directly underneath the IC.
Referring to Figure 69, each supply pin is directly decoupled to
their respective ground pin or analog ground plane via a ceramic
0.1 µF chip capacitor. Surface mount ferrite beads are used to
isolate the analog (AVDD), digital (DVDD), and driver supplies
(DRVDD) of the AD9260 from the +5 V power buss. Properly
selected ferrite beads can provide more than 40 dB of isolation
from high-frequency switching transients originating from AD9260
supply pins. Further noise immunity from noise is provided by
the inherent power-supply rejection of the AD9260 as shown in
Figure 64. If digital operation at 3 V is desirable for power savings and or to provide for a 3 V digital logic interface, a 5 V to
3 V linear regulator can be used to drive DVDD and/or DRVDD.
A more complete discussion on this layout and decoupling scheme
can be found in Chapter 7, pages 7-27 through 7-55 of the High
Speed Design Techniques seminar book, which is available at
www.analog.com/support/frames/lin_frameset.hml.
INSERT 5/3 VOLT LINEAR REGULATOR
FOR 3 OR 3.3V DIGITAL OPERATION
V
A
10F
FERRITE
BEAD CORE*
0.1F
0.1F
0.1F
0.1F
DVDD
DVSS
AVDD
AVSS
AVDD
AVSS
AVDD
AVSS
DRVDD
DRVSS
AD9260
BITS 1–16,
0.1F
DAV
CLK
SAMPLING CLOCK
GENERATOR
BUFFER
LATCH
V
D
Figure 69.
AD9260 EVALUATION BOARD
GENERAL DESCRIPTION
The AD9260 Evaluation Board is designed to provide an easy
and flexible method of exercising the AD9260 and demonstrate
its performance to data sheet specifications. The evaluation
board is fabricated in four layers: the component layer; the
ground layer; the power layer and the solder layer. The board is
clearly labeled to provide easy identification of components.
Ample space is provided near the analog and clock inputs to
provide additional or alternate signal conditioning.
FEATURES AND USER CONTROL
• Jumper Controlled Mode/OSR Selection: The choice of
Mode/OSR can easily be varied by jumping either JP1,
JP2, JP3 or JP4 as illustrated in Figure 71 within the
Mode/OSR Control Block. To obtain the desired mode
refer to Table VIII.
Table VIII. AD9260 Evaluation Board Mode Select
Mode/OSR Connect Jumper
1× JP4
2× JP2
4× JP3
8× JP1
• Selectable Power Bias: The power consumption of the
AD9260 can be scaled down if the user is able to operate the
device at a lower clock frequency. As illustrated in Figure 71,
pin cups are provided for the external resistor (R2) tied to
the BIAS pin of the AD9260. Table IX defines the recommended resistance for a given clock speed to obtain the desired power consumption.
–29–REV. B
Page 30

AD9260
2.5/3V
NC
VOUT
TRIM
1V
U5
AD780R
TEMP
GNDS
R3
15k
R4
10k
NC
+VIN
1
2
3
4
R12
15k
R13
10k
C18
0.1F
AGND
JP10
C19
0.1F
R11
49.9
C17
10F
+
C15
0.1F
1KPOT
8
7
6
5
Figure 70. Evaluation Board External Reference Circuitry
Table IX. Evaluation Board Recommended Resistance Value
for External Bias Resistor
Resistor Clock Speed Power
Value (max) Consumption
2 kΩ 20 MHz 585 mW
4 kΩ 10 MHz 325 mW
8 kΩ 5 MHz 200 mW
16 kΩ 2.5 MHz 150 mW
• Data Interfacing Controls: The data interfacing controls
(RESETB, CSB, READ, DAV) are all accessible via SMA
connectors (J2–J5) as illustrated in Figure 71 within the data
interfacing control block. The RESETB, CSB and READ
connections are each supplied with two sets or resistor pin
cups to allow the user to pull-up or pull-down each signal to
a fixed state. R5, R6 and R30 will terminate to ground, while
R7, R28 and R29 terminate to DRVDD. The DAV and
OTR signals are also directly connected to the data output
connector P1. All interfacing controls are buffered through
the CMOS line driver 74HC541.
• Buffered Output Data: The twos complement output data
is buffered through two CMOS noninverting bus transceivers
(U2 and U3) and made available at pin connector P1 as
illustrated in Figure 71 within the data output block.
• Jumper Controlled Reference Source: The choice of
reference for the AD9260 can easily be varied between 1.0 V,
2.5 V or external, by using Jumpers JP5, JP6, JP7 and JP9 as
illustrated in Figure 71 within the reference configuration
block. To obtain the desired reference see Table X.
Table X. Evaluation Board Reference Pin Configuration
Reference Input Voltage
Voltage Connect Jumper (pk-pk FS)
2.5 V JP7 4.0 V
1.0 V JP6 1.6 V
External JP5, JP9 and JP10 4.0 V
VCC2
R10
1k
C14
AGND
AD817R
VCC2
U6
0.1F
R9
1k
R8
390
AGND
Q1
2N2222
C12
0.1F
VREFEXT
+
C13
10F
The external reference circuitry, is illustrated in Figure 70. By
connecting or disconnecting JP10, the external reference can be
configured for either 1.0 V or 2.5 V. That is, by connecting JP10,
the external reference will be configured to provide a 2.5 V
reference. By leaving JP10 open, the external reference will be
configured to provide a 1.0 V reference.
• Flexible DC or AC Coupled External Clock Inputs: As
illustrated in Figure 71, the AD9260 Evaluation Board is
designed to allow the user the flexibility of selecting how to
connect the external clock source. It is also equipped with a
playpen area for experimenting with optional clock drivers or
crystals.
• Selecting DC or AC Coupled External Clock:
DC Coupled: To directly drive the clock externally via the
CLKIN connector, connect JP11 and disconnect JP12. Note:
50 Ω terminated by R27.
AC Coupled: To ac couple the external clock and level shift it
to midsupply, connect JP12 and disconnect JP11. Note: 50 Ω
terminated by R27.
• Flexible Input Signal Configuration Circuitry: The
AD9260 Evaluation Board’s Input Signal Configuration Block
is illustrated in Figure 72. It is comprised of an input signal
summing amplifier (U7), a variable input signal commonmode generator (U10) and a pair of amplifiers (U8 and U9)
that configure the input into a differential signal and drive it,
through a pair of isolation resistors, into the input pins of
AD9260. The user can either input a signal or dual signal
into the evaluation board via the two SMA connectors (J6 and
J7) labeled IN-1 or IN-2.
The user should refer to the Driving the Input section of the data
sheet for a detailed explanation of how the inputs are to be driven
and what amplifier requirements are recommended.
• Selecting Single or Dual Signal Input: The input ampli-
fier (U7) can either be configured as a dual input signal
inverting summer or a single tone inverting buffer. This
flexibility will allow for slightly better noise performance in
the single tone mode due to the inherent noise gain difference in the two amplifier configurations. An optional feedback capacitor (C9) was added to allow the user additional
out-of band filtering of the input signal if needed.
–30–
REV. B
Page 31

AD9260
For two-tone input signals: The user would leave jumpers (JP8)
connected and use IN-1 and IN-2 (J7 and J6) as the connectors for the input signals.
For signal tone input signal: The user would remove jumper
(JP8) and use only IN-1 as the input signal connector.
• Selectable Input Signal Common-Mode Level Source:
The input signal’s common-mode level (CML) can be set by
U10.
To use the Input CML generated by U10: Disconnect jumper
JP13 and Connect resistors RX3 and RX4. The CML generated by U10 is variable and adjustable using the 1 kΩ
trimpot R35.
SHIPMENT CONFIGURATION AND QUICK SETUP
• The AD9260 Evaluation Board is configured as follows when
shipped:
1. 2.5 V external reference/4.0 V differential full-scale input:
JP5, JP9 and JP10 connected, JP6 and JP7 disconnected.
2. 8× Mode/OSR: JP1 connected, JP2, JP3, and JP4
disconnected.
3. Full Speed Power Bias: R2 = 2 kΩ and connected.
4. CSB pulled low: R6 = 49.9 Ω and connected, R29
disconnected.
5. RESETB pulled high: R7 = 10 kΩ and connected, R30 disconnected.
6. READ pulled high: R28 = 10 kΩ and connected, R5
disconnected.
7. Single Tone Input: JP8 removed, input applied via IN-1 (J7).
8. Input signal common-mode level set by Trimpot R35 to
2.0 V: Jumper JP12 is disconnected and resistors Rx4 and
Rx3 are connected.
9. AC Coupled Clock: JP12 connected and JP11 disconnected.
Note: 50 Ω terminated by R27.
QUICK SETUP
1. Connect the required power supplies to the Evaluation
Board as illustrated in Figure 22:
⇒±5 VA supplies to P5—Analog Power
⇒ +5 VA supply to P4—Analog Power
⇒ +5 VD supply to P3—Digital Power
⇒ +5 VD supply to P2—Driver Power
2. Connect a Clock Source to CLKIN (J1): Note: 50 Ω terminated by R1.
3. Connect an Input Signal Source to the IN-1 (J7).
4. Turn On Power!
5. The AD9260 Evaluation Board is now ready for use.
APPLICATION TIPS
1. The ADC analog input should not be overdriven. Using a
signal amplitude slightly lower than FSR will allow a
small amount of “headroom” so that noise or DC offset
voltage will not overrange the ADC and “hard limit” on
signal peaks.
2. Two-tone tests can produce signal envelopes that exceed
FSR. Set each test signal to slightly less than –6 dB to prevent “hard limiting” on peaks.
3. Bandpass filtering of test signal generators is absolutely
necessary for SNR, THD and IMD tests. Note, a low noise
signal generator along with a high Q bandpass filter is often
necessary to achieve the attainable noise performance of the
AD9260.
4. Test signal generators must have exceptional noise performance to achieve accurate SNR measurements. Good generators, together with fifth-order elliptical bandpass filters,
are recommended for SNR tests. Narrow bandwidth crystal
filters can also be used to filter generator broadband noise,
but they should be carefully tested for operation at highsignal levels.
5. The analog inputs of the AD9260 should be terminated
directly at the input pin sockets with the correct filter terminating impedance (50 Ω or 75 Ω), or it should be driven by
a low output impedance buffer. Short leads are necessary to
prevent digital noise pickup.
6. A low noise (jitter) clock signal generator is required for
good ADC dynamic performance. A poor generator can
seriously impair good SNR performance particularly at
higher input frequencies. A high-frequency generator, based
on a clock source (e.g., crystal source), is recommended.
Frequency-synthesized clock generators should generally be
avoided because they typically provide poor jitter performance. See Note 8 if a crystal-based clock generator is used
during FFT testing.
A low jitter clock may be generated by using a high-frequency
clock source and dividing this frequency down with a low noise
clock divider to obtain the AD9260 input CLK. Maintaining a
large amplitude clock signal may also be very beneficial in minimizing the effects of noise in the digital gates of the clock generation circuitry.
Finally, special care should be taken to avoid coupling noise
into any digital gates preceding the AD9260 CLK pin. Short
leads are necessary to preserve fast rise times and careful decoupling should be used with these digital gates and the supplies
for these digital gates should be connected to the same supplies
as that of the internal AD9260 clock circuitry (Pins 44 and 38).
7. Two-tone testing will require isolation between test signal
generators to prevent IMD generation in the test generator
output circuits.
8. A very low side-lobe window must be used for FFT calculations if generators cannot be phase-locked and set to exact
frequencies.
9. A well designed, clean PC board layout will assure proper
operation and clean spectral response. Proper grounding
and bypassing, short lead lengths, separation of analog and
digital signals, and the use of ground planes are particularly
important for high-frequency circuits. Multilayer PC boards
are recommended for best performance, but if carefully
designed, a two-sided PC board with large heavy (20 oz.
foil) ground planes can give excellent results.
10. Prototype “plug-boards” or wire-wrap boards will not be
satisfactory.
–31–REV. B
Page 32

AD9260
TP7 TP9 TP11 TP12 TP13
P1 17
P1 19
P1 21
P1 23
P1 25
P1 27
P1 29
P1 31
P1 33
P1 38
P1 39
P1 37
P1 35
P1 2
P1 4
P1 6
P1 8
P1 10
P1 12
P1 14
P1 16
P1 18
P1 20
P1 22
P1 24
P1 26
P1 28
P1 30
P1 32
P1 34
P1 38
P1 40
P1 1
P1 3
P1 5
P1 7
P1 9
P1 11
P1 13
P1 15
20
10
18
17
16
15
14
1
19
2
3
4
5
6
7
8
9
20
19
18
17
16
1
2
3
4
5
6
7
8
9
10
15
14
13
12
11
20
19
18
17
16
1
2
3
4
5
6
7
8
9
10
15
14
13
12
11
22
21
20
19
18
34
35
36
37
38
39
40
41
42
17
16
15
14
13
12
12 34567891011
33 32 31 30 29 28 27 26 25 24 23
43
44
13
12
11
RD
TP1:RD
TP8:OTR
DRVDD
VCC
GND
Y1
Y2
Y3
Y4
Y5
Y6
Y7
Y8
U4
74HC541
G1
G2
A1
A2
A3
A4
A5
A6
A7
A8
U2
74HC245
DIR
A1
A2
A3
A4
A5
A6
A7
A8
GND
VCC
OUT_EN
B1
B2
B3
B4
B5
B6
B7
B8
U3
74HC245
DRVDD
DRVDD
DRVDD
DRVDD
TP10
JP15
CT1
CT2
CT3
CT4
CT5
CT6
CT7
CT8
CT9
CT10
CT11
CT12
CT13
CT14
CT15
CT16
CT18
CT17
DATA OUTPUT BLOCK
J2
J3J4J5
RESET CS
READ DAV
DRVDD
R5
49.9
R28
10k
R6
49.9
R29
10k
R30
49.9
R7
10k
DATA OUTPUT CONTROL BLOCK
JP5:EXT REF
JP6:1V REF
JP7:2.5V REF
JP9:EXT REF
MDAVDD
REFERENCE CONFIGURATION
BLOCK
+
C10
10F
C11
0.1F
TP6
MDAVDD
JP4:1
JP3:4
JP2:2
JP1:8
MODE/OSR
CONTROL BLOCK
TP2
TP3
TP4:REFB
TP5:REFT
C5
0.1F
C4
10F
C2
0.1F
R2
2k
C1
0.1F
C3
0.1F
C6
10F
C7
0.1F
W1
W2
INVDD
DVDD
FLAVDD
CT20
C61
10F
C62
0.1F
DVDD
CT19
J1
CLKIN
RD
MODE
REFCOM
BIAS
CAPB
CAPT
AVSS
CML
NC
VINA
VINB
NC
AVDD
VREF
SENSE
RESET
AVSS
AVDD
CS
DAV
OTR
BIT01(MSB)
BIT02
DVSS
AVSS
DVDD
AVDD
DRVSS
DRVDD
CLK
READ
BIT16(LSB)
BIT15
BIT14
BIT13
BIT12
BIT11
BIT10
BIT09
BIT08
BIT07
BIT06
BIT05
BIT04
BIT03
AD9260
CML
VINA
VINB
1V
CML
VREFEXT
R27
49.9k
C8
0.1F
R33
1k
JP13
JP11
R31
1k
RESETB
CSBBUE
TP15
AGND
DC COUPLED
AC COUPLED
SHIELDED_TRACE
NC = NO CONNECT
MDAVDD
DIR
A1
A2
A3
A4
A5
A6
A7
A8
GND
VCC
OUT_EN
B1
B2
B3
B4
B5
B6
B7
B8
Figure 71. Evaluation Board Top Level Schematic
–32–
REV. B
Page 33

IN-2
IN-1
AD9260
R18
390
C20
R32
390
RX4
XXX
0.1F
R19
390
R17
390
R23
390
R24
390
R25
390
+
C23
10F
C9
TBD
AD817R
3
2
3
VCC2
4
5
AD9632
8
VCC2
7
390
VEE
U10
R22
6
4
7
CX4
XXX
U7
6
57.6
R15
57.6
IKPOT
R21
JP8
390
R1
R16
390
R14
50
R34
390
2
RX3
XXX
R35
1k
C25
0.1F
J6
J7
C22
0.1F
3
AD9632
2
3
AD9632
2
VCC2
8
5
VEE
VCC2
8
5
VEE
U8
7
6
4
C16
100pF
R20
390
U9
7
6
4
R26
390
JP16
JP17
R46
50
R48
50
100pF
100pF
JP12
C24
C26
9260CML
R47
50
R49
50
VINA
VINB
Figure 72. Evaluation Board Input Configuration Block
L3
R40
R42
R44
R38
R41
C38
0.1F
L4
R43
C42
0.1F
L5
R45
C46
0.1F
L2
R39
C34
0.1F
1
P4:+5V
+
C36
10F
C37
0.1F
+
C40
10F
C41
0.1F
+
C44
10F
C45
C32
22F
0.1F
C33
0.1F
P3:D5
2
P4
1
+
2
P3
EVALUATION BOARD POWER SUPPLY CONFIGURATION
C39
0.01F
C43
0.01F
C47
0.01F
C35
0.01F
FLAVDD
MDAVDD
INVDD
DVDD
P2:VDD
1
+
C27
47F
C55
C56
47F
C28
47F
0.1F
C57
0.1F
C29
0.1F
2
P5
1
+
2
P5
1
+
2
P2
P5:+5AUX
P5:–5AUX
VEE VEE VEE
C30
C31
0.1F
C64
0.1F
0.1F
U7 U8 U9
VCC2 DRVDD DRVDD DRVDD
C51
C52
0.1F
C53
0.1F
0.1F
L6
R50
L7
R52
L2
R36
VCC2
VCC2 VCC2
C48
0.1F
U7 U8 U9
C54
0.1F
R51
R53
R37
C49
0.1F
VCC2
VEE
DRVDD
C50
0.1F
U10 U2 U3 U4
DEVICE SUPPLY DECOUPLING
Figure 73. Evaluation Board Power Supply Configuration and Coupling
–33–REV. B
Page 34

AD9260
Figure 74. Evaluation Board Component Side Layout (Not to Scale)
Figure 75. Evaluation Board Solder Side Layout (Not to Scale)
–34–
REV. B
Page 35

AD9260
Figure 76. Evaluation Board Ground Plane Layout (Not to Scale)
Figure 77. Evaluation Board Power Plane Layout (Not to Scale)
–35–REV. B
Page 36

AD9260
1.03 (0.041)
0.73 (0.029)
SEATING
PLANE
0.25 (0.01)
MIN
0.23 (0.009)
0.13 (0.005)
OUTLINE DIMENSIONS
Dimensions shown in millimeters and (inches).
44-Lead MQFP
(S-44)
13.45 (0.529)
44
12
0.8 (0.031)
12.95 (0.510)
10.1 (0.398)
9.90 (0.390)
TOP VIEW
(PINS DOWN)
BSC
34
33
23
22
0.45 (0.018)
0.3 (0.012)
2.45 (0.096)
MAX
2.1 (0.083)
1.95 (0.077)
0
MIN
°
1
11
8.45 (0.333)
8.3 (0.327)
C3197a–0–5/00 (rev. B) 00581
–36–
PRINTED IN U.S.A.
REV. B
 Loading...
Loading...