

Page 1
Low Cost 225 MHz
a
FEATURES
16 16 High-Speed Nonblocking Switch Arrays
AD8114; G = +1
AD8115; G = +2
Serial or Parallel Programming of Switch Array
Serial Data Out Allows “Daisy Chaining” of Multiple
16 16s to Create Larger Switch Arrays
High Impedance Output Disable Allows Connection of
Multiple Devices Without Loading the Output Bus
For Smaller Arrays See Our AD8108/AD8109 (8 8) or
AD8110/AD8111 (16 8) Switch Arrays
Complete Solution
Buffered Inputs
Programmable High Impedance Outputs
16 Output Amplifiers, AD8114 (G = +1), AD8115 (G = +2)
Drives 150 Loads
Excellent Video Performance
25 MHz, 0.1 dB Gain Flatness
0.05%/0.05 Differential Gain/Differential Phase Error
= 150 )
(R
L
Excellent AC Performance
–3 dB Bandwidth: 225 MHz
Slew Rate: 375 V/s
Low Power of 700 mW (2.75 mW per Point)
Low All Hostile Crosstalk of –70 dB @ 5 MHz
Reset Pin Allows Disabling of All Outputs (Connected
Through a Capacitor to Ground Provides “Power-On”
Reset Capability)
100-Lead LQFP Package (14 mm 14 mm)
APPLICATIONS
Routing of High-Speed Signals Including:
Video (NTSC, PAL, S, SECAM, YUV, RGB)
Compressed Video (MPEG, Wavelet)
3-Level Digital Video (HDB3)
Datacomms
Telecomms
PRODUCT DESCRIPTION
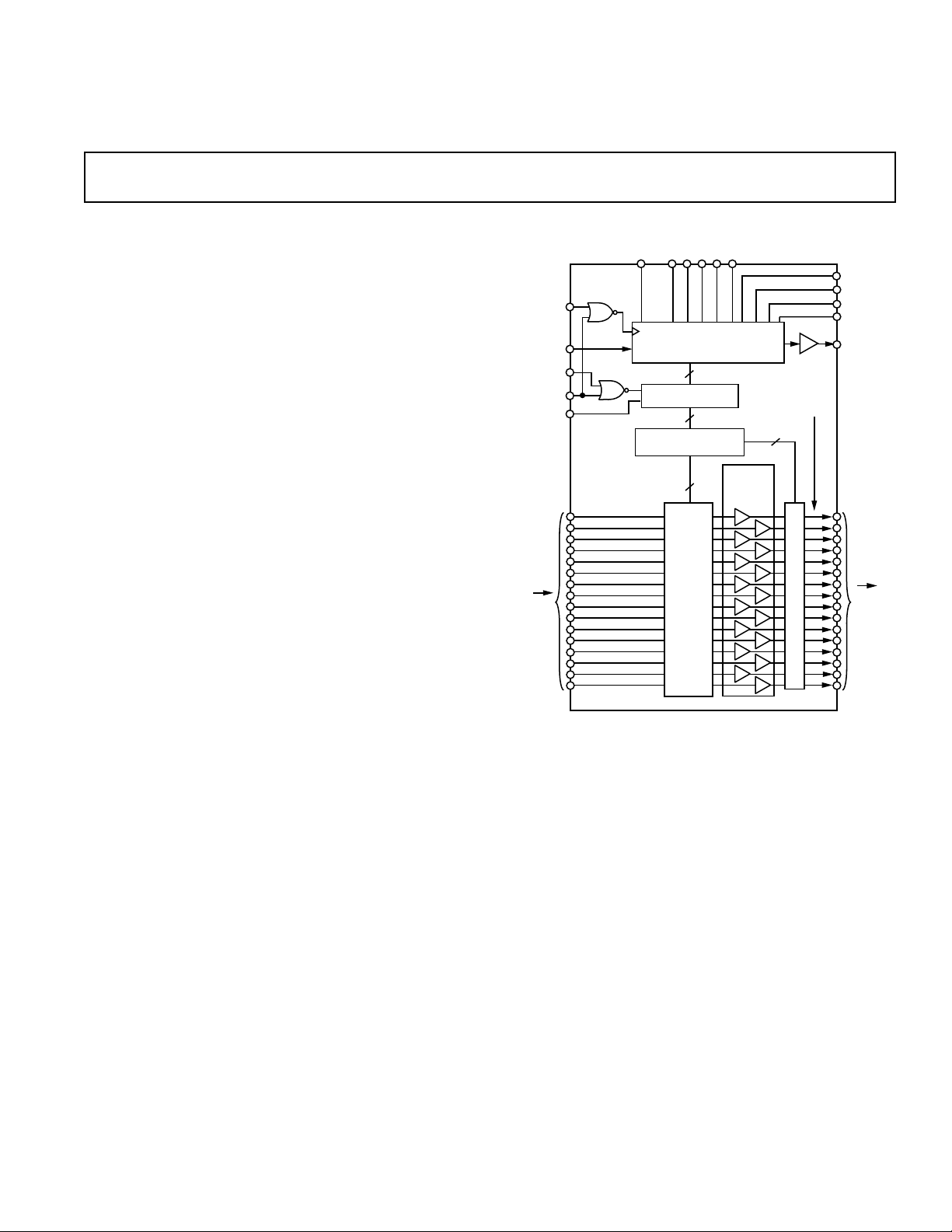
The AD8114/AD8115 are high-speed 16 × 16 video crosspoint
switch matrices. They offer a –3 dB signal bandwidth greater than
200 MHz and channel switch times of less than 50 ns with 1%
settling. With –70 dB of crosstalk and –90 dB isolation (@ 5 MHz),
the AD8114/AD8115 are useful in many high-speed applications.
The differential gain and differential phase of better than 0.05%
and 0.05° respectively, along with 0.1 dB flatness out to 25 MHz
while driving a 75 Ω back-terminated load, make the AD8114/
AD8115 ideal for all types of signal switching.
16
16 Crosspoint Switches
AD8114/AD8115
*
FUNCTIONAL BLOCK DIAGRAM
SER/PAR
CLK
DATA IN
UPDATE
CE
RESET
AD8114/AD8115
16 INPUTS
D0 D1 D2 D3
80-BIT SHIFT REGISTER
PARALLEL LOADING
PARALLEL LATCH
DECODE
16 5:16 DECODERS
SWITCH
MATRIX
D4
WITH 5-BIT
80
80
256
OUTPUT
BUFFER
G = +1,
G = +2
SET
INDIVIDUAL
OR RESET
ALL OUTPUTS
TO "OFF"
16
ENABLE/DISABLE
A0
A1
A2
A3
DATA
OUT
16
OUTPUTS
The AD8114/AD8115 include 16 independent output buffers
that can be placed into a high impedance state for paralleling
crosspoint outputs so that off channels do not load the output
bus. The AD8114 has a gain of +1, while the AD8115 offers
a gain of +2. They operate on voltage supplies of ±5 V while
consuming only 70 mA of idle current. The channel switching
is performed via a serial digital control (which can accommodate “daisy chaining” of several devices) or via a parallel control
allowing updating of an individual output without reprogramming the entire array.
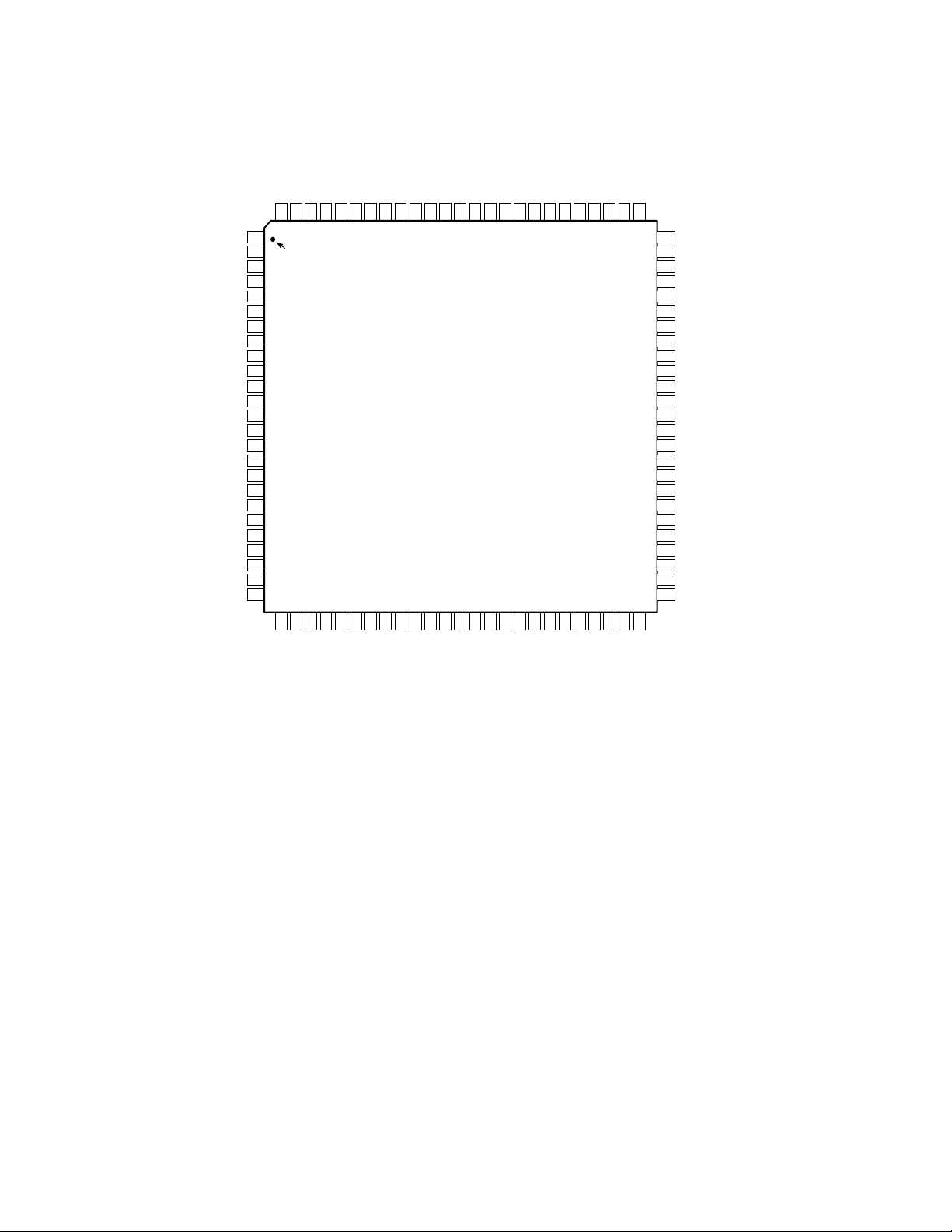
The AD8114/AD8115 is packaged in 100-lead LQFP package
and is available over the extended industrial temperature range
of –40°C to +85°C.
*Patent Pending.
REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties that
may result from its use. No license is granted by implication or otherwise
under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2001
Page 2
AD8114/AD8115–SPECIFICATIONS
(VS = 5 V, TA = +25C, RL = 1 k unless otherwise noted)
AD8114 /AD8115
Parameter Conditions Min Typ Max Unit
DYNAMIC PERFORMANCE
–3 dB Bandwidth 200 mV p-p, R
2 V p-p, R
= 150 Ω 150/125 225/200 MHz
L
= 150 Ω 100/125 MHz
L
Gain Flatness 0.1 dB, 200 mV p-p, RL = 150 Ω 25/40 MHz
0.1 dB, 2 V p-p, R
Propagation Delay 2 V p-p, R
= 150 Ω 5ns
L
Settling Time 0.1%, 2 V Step, R
= 150 Ω 20/40 MHz
L
= 150 Ω 40 ns
L
Slew Rate 2 V Step, RL = 150 Ω 375/450 V/µs
NOISE/DISTORTION PERFORMANCE
Differential Gain Error NTSC or PAL, R
= 1 kΩ 0.05 %
L
NTSC or PAL, RL = 150 Ω 0.05 %
Differential Phase Error NTSC or PAL, R
= 1 kΩ 0.05 Degrees
L
NTSC or PAL, RL = 150 Ω 0.05 Degrees
Crosstalk, All Hostile f = 5 MHz –70/–64 dB
f = 10 MHz –60/–52 dB
Off Isolation, Input-Output f = 10 MHz, R
= 150 Ω, One Channel –90 dB
L
Input Voltage Noise 0.01 MHz to 50 MHz 16/18 nV/√Hz
DC PERFORMANCE
Gain Error No Load 0.05/0.2 0.08/0.6 %
RL = 1 kΩ 0.05/0.2 %
RL = 150 Ω 0.2/0.35 %
Gain Matching No Load, Channel-Channel 0.01/0.5 0.04/1 %
R
= 1 kΩ, Channel-Channel 0.01/0.5 %
L
Gain Temperature Coefficient 0.75/1.5 ppm/°C
OUTPUT CHARACTERISTICS
Output Impedance DC, Enabled 0.2 Ω
Disabled 10 MΩ
Output Disable Capacitance Disabled 5 pF
Output Leakage Current Disabled 1 µA
Output Voltage Range No Load ±3.0 ± 3.3 V
Voltage Range I
= 20 mA ±2.5 ± 3V
OUT
Short Circuit Current 65 mA
INPUT CHARACTERISTICS
Input Offset Voltage Worst Case (All Configurations) 3 15 mV
Temperature Coefficient 10 µV/°C
Input Voltage Range No Load ± 3/±1.5 ± 3.5 V
Input Capacitance Any Switch Configuration 5 pF
Input Resistance 110 MΩ
Input Bias Current Per Output Selected 2 5 µA
SWITCHING CHARACTERISTICS
Enable On Time 60 ns
Switching Time, 2 V Step 50% UPDATE to 1% Settling 50 ns
Switching Transient (Glitch) 20/30 mV p-p
POWER SUPPLIES
Supply Current AVCC, Outputs Enabled, No Load 70/80 mA
AVCC, Outputs Disabled 27/30 mA
AVEE, Outputs Enabled, No Load 70/80 mA
AVEE, Outputs Disabled 27/30 mA
DVCC, Outputs Enabled, No Load 16 mA
Supply Voltage Range ±4.5 to ±5.5 V
PSRR DC 64 80 dB
f = 100 kHz 66 dB
f = 1 MHz 46 dB
OPERATING TEMPERATURE RANGE
Temperature Range Operating (Still Air) –40 to +85 °C
θ
JA
Specifications subject to change without notice.
Operating (Still Air) 40 °C/W
–2–
REV. A
Page 3
AD8114/AD8115
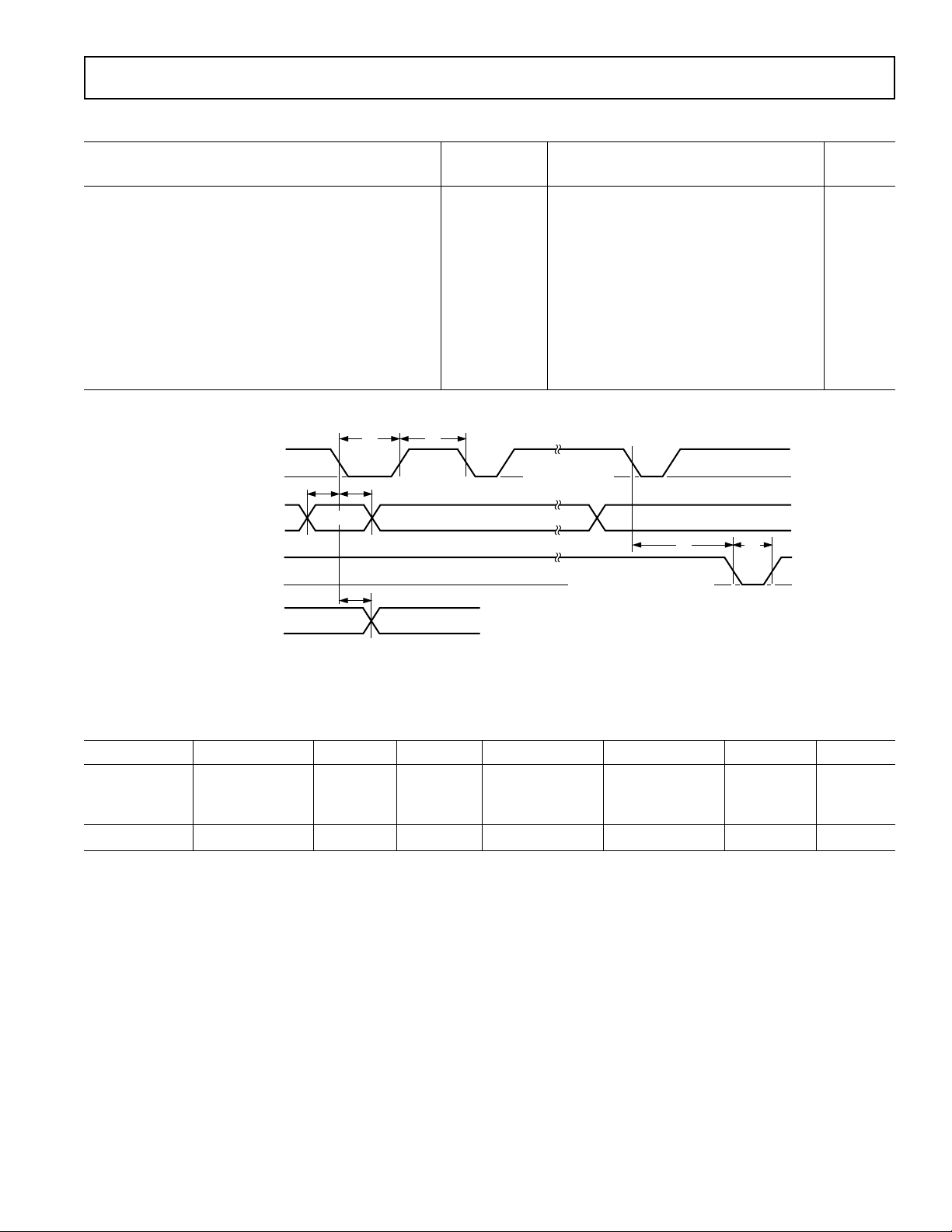
TIMING CHARACTERISTICS (Serial)
Limit
Parameter Symbol Min Typ Max Unit
Serial Data Setup Time t
CLK Pulsewidth t
Serial Data Hold Time t
CLK Pulse Separation, Serial Mode t
CLK to UPDATE Delay t
UPDATE Pulsewidth t
CLK to DATA OUT Valid, Serial Mode t
1
2
3
4
5
6
7
20 ns
100 ns
20 ns
100 ns
0ns
50 ns
200 ns
Propagation Delay, UPDATE to Switch On or Off – 50 ns
Data Load Time, CLK = 5 MHz, Serial Mode – 16 µs
CLK, UPDATE Rise and Fall Times – 100 ns
RESET Time – 200 ns
CLK
DATA IN
1 = LATCHED
UPDATE
0 = TRANSPARENT
DATA OUT
t
1
0
t1t
1
OUT7 (D4) OUT7 (D3) OUT00 (D0)
0
2
3
t
7
t
4
LOAD DATA INTO
SERIAL REGISTER
ON FALLING EDGE
t
5
TRANSFER DATA FROM SERIAL
REGISTER TO PARALLEL
LATCHES DURING LOW LEVEL
t
6
Figure 1. Timing Diagram, Serial Mode
Table I. Logic Levels
V
IH
RESET, SER/PAR RESET, SER/PAR RESET, SER/PAR RESET, SER/PAR
CLK, DATA IN, CLK, DATA IN, CLK, DATA IN, CLK, DATA IN,
CE, UPDATE CE, UPDATE DATA OUT DATA OUT CE, UPDATE CE, UPDATE DATA OUT DATA OUT
2.0 V min 0.8 V max 2.7 V min 0.5 V max 20 µA max –400 µA min –400 µA max 3.0 mA min
V
IL
V
OH
V
OL
I
IH
I
IL
I
OH
I
OL
REV. A
–3–
Page 4
AD8114/AD8115
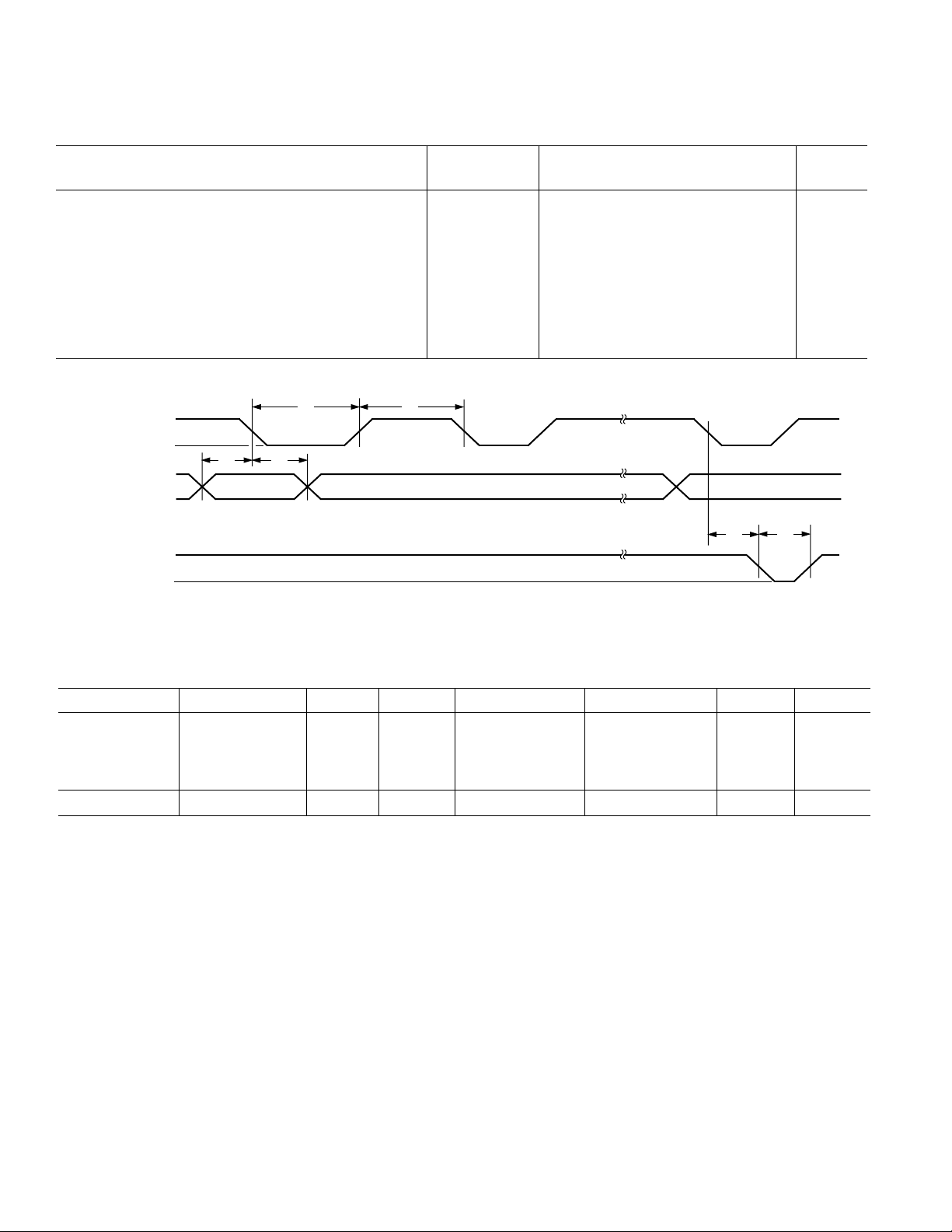
TIMING CHARACTERISTICS (Parallel)
Limit
Parameter Symbol Min Max Unit
Data Setup Time t
CLK Pulsewidth t
Data Hold Time t
CLK Pulse Separation t
CLK to UPDATE Delay t
UPDATE Pulsewidth t
1
2
3
4
5
6
20 ns
100 ns
20 ns
100 ns
0ns
50 ns
Propagation Delay, UPDATE to Switch On or Off – 50 ns
CLK, UPDATE Rise and Fall Times – 100 ns
RESET Time – 200 ns
t
4
t
5
t
6
CLK
D0–D4
A0–A2
1 = LATCHED
UPDATE
0 = TRANSPARENT
t
1
0
1
0
t
1
2
t
3
Figure 2. Timing Diagram, Parallel Mode
Table II. Logic Levels
V
IH
RESET, SER/PAR RESET, SER/PAR RESET, SER/PAR RESET, SER/PAR
CLK, D0, D1, D2, D3, CLK, D0, D1, D2, D3, CLK, D0, D1, D2, D3, CLK, D0, D1, D2, D3,
D4, A0, A1, A2, A3 D4, A0, A1, A2, A3 D4, A0, A1, A2, A3 D4, A0, A1, A2, A3
CE, UPDATE CE, UPDATE DATA OUT DATA OUT CE, UPDATE CE, UPDATE DATA OUT DATA OUT
2.0 V min 0.8 V max 2.7 V min 0.5 V max 20 µA max –400 µA min –400 µA max 3.0 mA min
V
IL
V
OH
V
OL
I
IH
I
IL
I
OH
I
OL
–4–
REV. A
Page 5
AD8114/AD8115
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12.0 V
Internal Power Dissipation
2
AD8114/AD8115 100-Lead Plastic LQFP (ST) . . . . 2.6 W
Input Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ±V
Output Short Circuit Duration
1
ORDERING GUIDE
Temperature Package Package
Model Range Description Option
S
AD8114AST –40°C to +85°C 100-Lead Plastic ST-100
. . . . . . . . . . . . . . . . . . . . . . Observe Power Derating Curves
Storage Temperature Range . . . . . . . . . . . . –65°C to +125°C
Lead Temperature Range (Soldering 10 sec) . . . . . . . . . 300°C
NOTES
1
Stresses above those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; functional operation of the
device at these or any other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
2
Specification is for device in free air (TA = 25°C):
100-lead plastic LQFP (ST): θJA = 40°C/W.
AD8114-EVAL Evaluation Board
AD8115AST –40°C to +85°C 100-Lead Plastic ST-100
AD8115-EVAL Evaluation Board
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD8114/AD8115 features proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high-energy electrostatic discharges. Therefore, proper
ESD precautions are recommended to avoid performance degradation or loss of functionality.
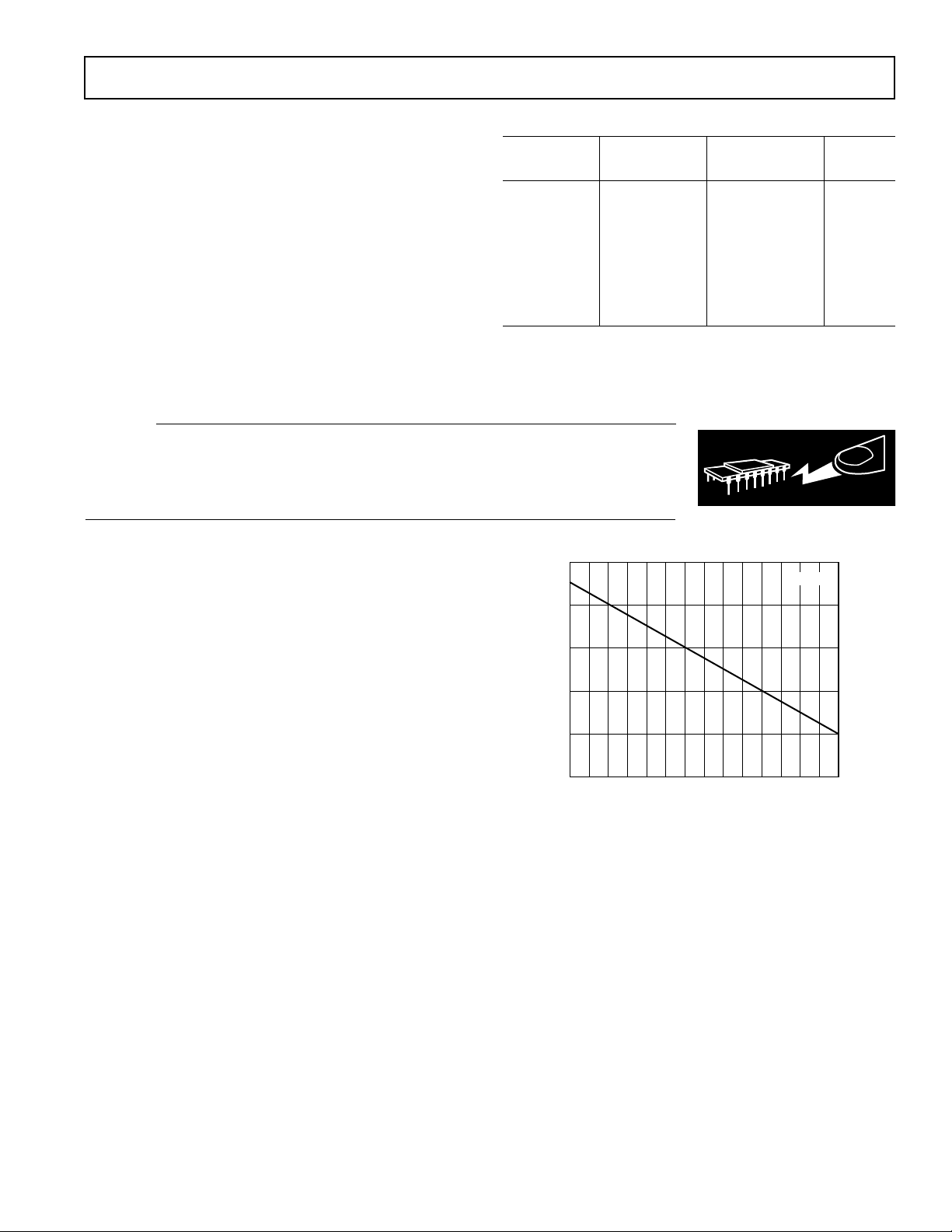
MAXIMUM POWER DISSIPATION
5
The maximum power that can be safely dissipated by the
AD8114/AD8115 is limited by the associated rise in junction
temperature. The maximum safe junction temperature for
4
plastic encapsulated devices is determined by the glass transition
temperature of the plastic, approximately 150°C. Temporarily
3
exceeding this limit may cause a shift in parametric performance
due to a change in the stresses exerted on the die by the package. Exceeding a junction temperature of 175°C for an extended
2
period can result in device failure.
While the AD8114/AD8115 is internally short circuit protected,
this may not be sufficient to guarantee that the maximum junction temperature (150°C) is not exceeded under all conditions.
To ensure proper operation, it is necessary to observe the maxi-
1
MAXIMUM POWER DISSIPATION – W
0
–50 80–40 –30 –20 –100 10203040506070
AMBIENT TEMPERATURE – C
mum power derating curves shown in Figure 3.
Figure 3. Maximum Power Dissipation vs. Temperature
LQFP
(14 mm × 14 mm)
LQFP
(14 mm × 14 mm)
TJ = 150C
90
REV. A
–5–
Page 6
AD8114/AD8115
AVEE14/15
DVCC
DGND
AGND
IN08
AGND
IN09
AGND
IN10
AGND
IN11
AGND
IN12
AGND
IN13
AGND
IN14
AGND
IN15
AGND
AVEE
AVCC
AVCC15
OUT15
OUT14
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
RESETCEDATA OUT
CLK
DATA IN
9998979695
100
PIN 1
IDENTIFIER
PIN CONFIGURATION
UPDATE
SER/PARNCNCNCNCNCNCNCNCNCA0A1A2
9493929190
8988878685
AD8114/AD8115
TOP VIEW
(Not to Scale)
A3
8483828180
D0D1D2D3D4
797877
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
DVCC
DGND
AGND
IN07
AGND
IN06
AGND
IN05
AGND
IN04
AGND
IN03
AGND
IN02
AGND
IN01
AGND
IN00
AGND
AVEE
AVCC
AVCC00
OUT00
AVEE00/01
OUT01
2728293031
26
OUT13
OUT12
AVEE12/13
AVCC13/14
NC = NO CONNECT
3233343536
OUT11
AVEE10/11
AVCC11/12
OUT10
AVCC09/10
OUT09
AVEE08/09
3738394041
OUT08
OUT07
AVEE06/07
AVCC07/08
4243444546
OUT06
OUT05
AVCC05/06
OUT04
AVEE04/05
AVCC03/04
474849
OUT03
AVEE02/03
50
OUT02
AVCC01/02
–6–
REV. A
Page 7
AD8114/AD8115
PIN FUNCTION DESCRIPTIONS
Pin Name Pin Numbers Pin Description
INxx 58, 60, 62, 64, 66, 68, 70, 72, Analog Inputs; xx = Channel Numbers 00 Through 15.
4, 6, 8, 10, 12, 14, 16, 18
DATA IN 96 Serial Data Input, TTL Compatible.
CLK 97 Clock, TTL Compatible. Falling Edge Triggered.
DATA OUT 98 Serial Data Out, TTL Compatible.
UPDATE 95 Enable (Transparent) “Low.” Allows serial register to connect directly to switch matrix.
Data latched when “High.”
RESET 100 Disable Outputs, Active “Low.”
CE 99 Chip Enable, Enable “Low.” Must be “low” to clock in and latch data.
SER/PAR 94 Selects Serial Data Mode, “Low” or Parallel Data Mode, “High.” Must be connected.
OUTyy 53, 51, 49, 47, 45, 43, 41, 39, Analog Outputs yy = Channel Numbers 00 Through 15.
37, 35, 33, 31, 29, 27, 25, 23
AGND 3, 5, 7, 9, 11, 13, 15, 17, 19, 57, Analog Ground for Inputs and Switch Matrix. Must be connected.
59, 61, 63, 65, 67, 69, 71, 73
DVCC 1, 75 +5 V for Digital Circuitry.
DGND 2, 74 Ground for Digital Circuitry.
AVEE 20, 56 –5 V for Inputs and Switch Matrix.
AVCC 21, 55 +5 V for Inputs and Switch Matrix.
AVCCxx/yy 54, 50, 46, 42, 38, 34, 30, 26, 22 +5 V for Output Amplifier that is shared by Channel Numbers xx and yy. Must be connected.
AVEExx/yy 52, 48, 44, 40, 36, 32, 28, 24 –5 V for Output Amplifier that is shared by Channel Numbers xx and yy. Must be connected.
A0 84 Parallel Data Input, TTL Compatible (Output Select LSB).
A1 83 Parallel Data Input, TTL Compatible (Output Select).
A2 82 Parallel Data Input, TTL Compatible (Output Select).
A3 81 Parallel Data Input, TTL Compatible (Output Select MSB).
D0 80 Parallel Data Input, TTL Compatible (Input Select LSB).
D1 79 Parallel Data Input, TTL Compatible (Input Select).
D2 78 Parallel Data Input, TTL Compatible (Input Select).
D3 77 Parallel Data Input, TTL Compatible (Input Select MSB).
D4 76 Parallel Data Input, TTL Compatible (Output Enable).
NC 85–93 No Connect.
REV. A
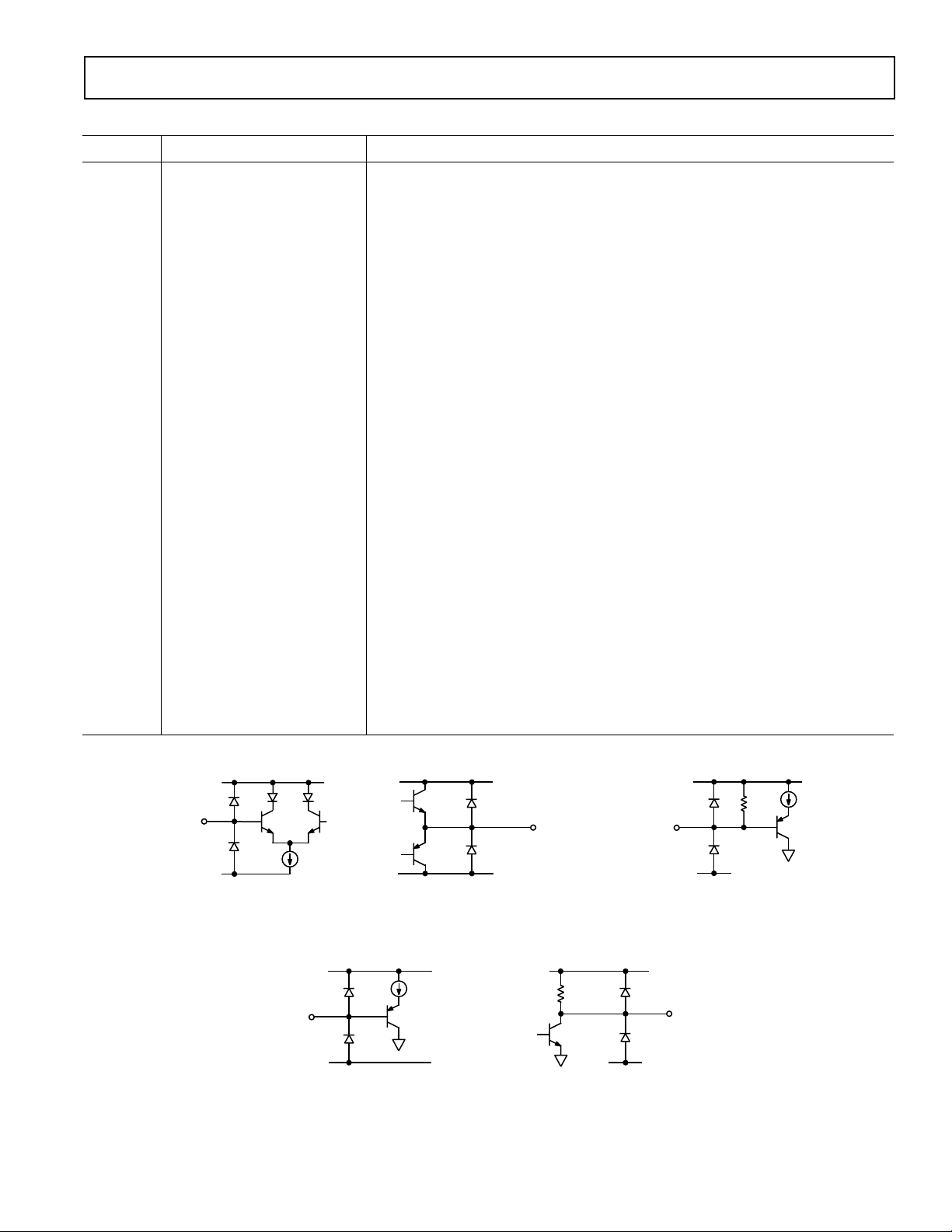
V
CC
ESD
INPUT
ESD
AV
EE
a. Analog Input c. Reset Input
V
CC
ESD
INPUT
ESD
DGND
V
CC
ESD
ESD
AV
EE
b. Analog Output
OUTPUT
2k⍀
V
CC
DGND
RESET
ESD
ESD
V
CC
d. Logic Input e. Logic Output
Figure 5. I/O Schematics
–7–
ESD
ESD
DGND
OUTPUT
20k⍀
Page 8
AD8114/AD8115
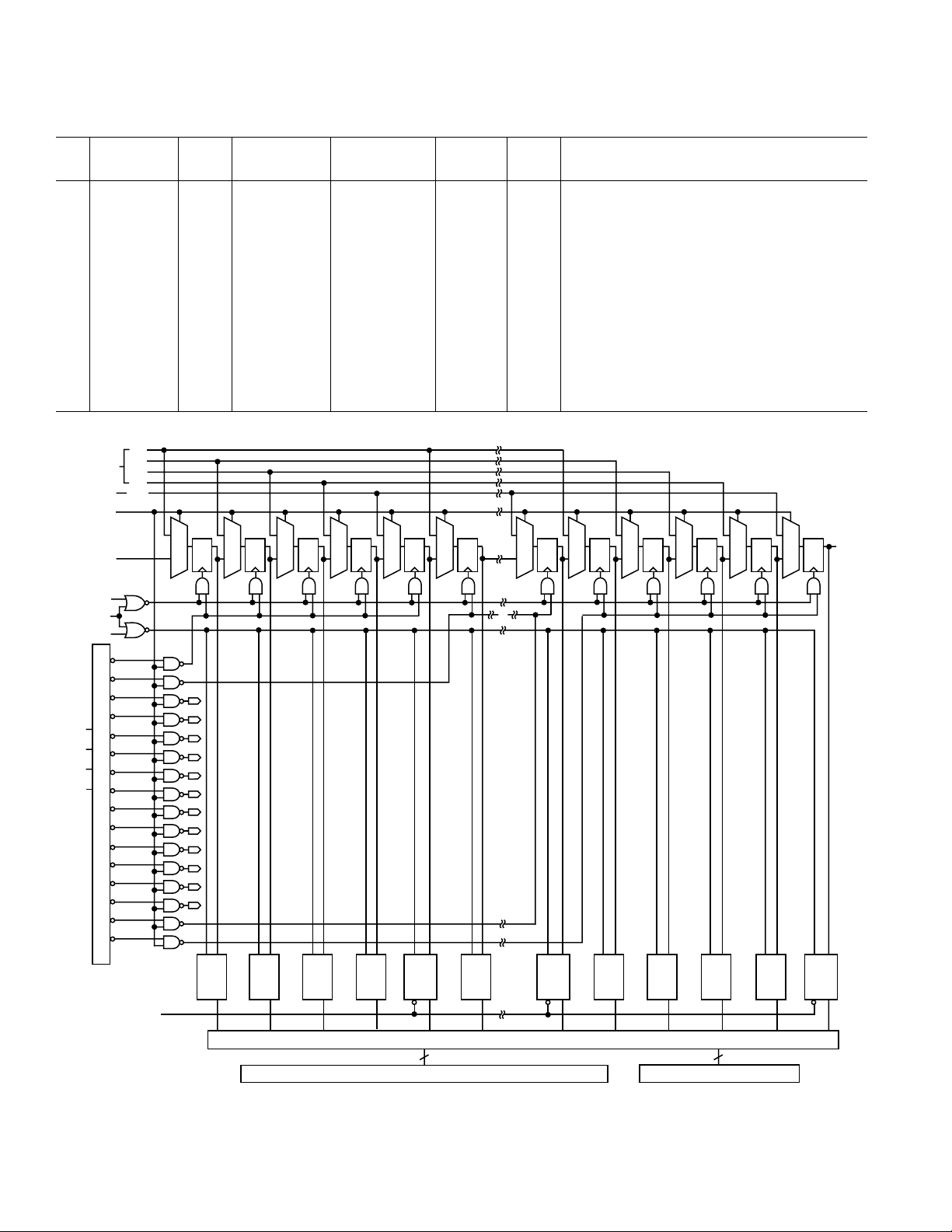
Table III. Operation Truth Table
SER/
CE UPDATE CLK DATA IN DATA OUT RESET PAR Operation/Comment
1 X X X X X X No change in logic.
01 f Data
i
01 f D0 . . . D4, NA in Parallel 1 1 The data on the parallel data lines, D0–D4, are
A0...A3 Mode loaded into the 80-bit serial shift register loca-
0 0 X X X 1 X Data in the 80-bit shift register transfers into the
X X X X X 0 X Asynchronous operation. All outputs are disabled.
D0
DATA
D1
D2
D3
D4
D
CLK
S
D1
Q
Q
D0
S
D1
Q
D0
D
CLK
S
D1
Q
Q
D0
PARALLEL
(OUTPUT
ENABLE)
SER/PAR
DATA IN
(SERIAL)
D
CLK
Data
i-80
1 0 The data on the serial DATA IN line is loaded
into serial register. The first bit clocked into
the serial register appears at DATA OUT 80
clocks later.
tion addressed by A0–A3.
parallel latches that control the switch array.
Latches are transparent.
Remainder of logic is unchanged.
S
D1
Q
Q
D0
D
CLK
S
D1
Q
Q
D0
D
CLK
S
D1
Q
D
Q
Q
D0
CLK
S
D1
Q
D0
D
CLK
S
D1
Q
Q
D0
D
CLK
S
D1
Q
Q
D0
D
CLK
S
D1
Q
Q
D0
D
CLK
S
D1
Q
Q
D0
D
CLK
S
D1
Q
D0
DATA
Q
D
Q
OUT
CLK
CLK
CE
UPDATE
OUT0 EN
OUT1 EN
OUT2 EN
OUTPUT
ADDRESS
OUT3 EN
OUT4 EN
A0
OUT5 EN
A1
OUT6 EN
A2
OUT7 EN
A3
OUT8 EN
OUT9 EN
OUT10 EN
4 TO 16 DECODER
OUT11 EN
OUT12 EN
OUT13 EN
OUT14 EN
OUT15 EN
(OUTPUT ENABLE)
RESET
LE
OUT0
D
B0
Q
LE
OUT0
B1
D
Q
LE
OUT0
B2
D
Q
LE
OUT0
B3
D
Q
LE
OUT0
EN
D
QCLR
LE
OUT1
D
B0
Q
LE
OUT14
EN
D
QCLR
LE
OUT15
B0
D
Q
LE
OUT15
B1
D
Q
LE
OUT15
B2
D
Q
LE
OUT15
B3
D
Q
LE
OUT15
EN
D
QCLR
DECODE
256
SWITCH MATRIX
OUTPUT ENABLE
16
Figure 4. Logic Diagram
–8–
REV. A
Page 9

FREQUENCY – MHz
GAIN – dB
–7
–3
1
0
–1
–2
–4
–5
–6
–0.2
0.2
0.1
0
–0.1
–0.3
–0.4
–0.5
FLATNESS – dB
2
0.1 1 10 100 1000
0.3
0.4
GAIN
FLATNESS
VO AS SHOWN
R
L
= 150⍀
2V p-p
200mV p-p
0.5
–8
200mV p-p
2V p-p
FREQUENCY – MHz
GAIN – dB
–7
–3
1
0
–1
–2
–4
–5
–6
–0.2
0.2
0.1
0
–0.1
–0.3
–0.4
–0.5
FLATNESS – dB
2
0.1 1 10 100 1000
0.3
0.4
GAIN
FLATNESS
2V p-p
200mV p-p
0.5
3
VO AS SHOWN
R
L
= 1k⍀
200mV p-p
2V p-p
FREQUENCY – MHz
GAIN – dB
–4
0
–2
–6
–8
–10
2
0.1 1 10 100 1000
4
VO = 200mV p-p
R
L
AS SHOWN
C
L
= 18pF
RL = 1k⍀
RL = 150⍀
6
8
10
Typical Performance Characteristics–
AD8114/AD8115
1
GAIN
0
FLATNESS
–1
–2
–3
GAIN – dB
–4
–5
–6
–7
0.1
VO AS SHOWN
RL = 150⍀
1 10 100 1000
2V p-p
FREQUENCY – MHz
TPC 1. AD8114 Frequency Response; RL = 150
3
2
1
0
–1
–2
GAIN – dB
–3
–4
–5
–6
–7
0.1 1 10 100 1000
GAIN
FLATNESS
VO AS SHOWN
R
= 1k⍀
L
2V p-p
FREQUENCY – MHz
TPC 2. AD8114 Frequency Response; RL = 1 k
200mV p-p
200mV p-p
0.2
0.1
0
–0.1
–0.2
–0.3
–0.4
–0.5
–0.6
Ω
0.4
0.3
0.2
0.1
0
–0.1
–0.2
–0.3
–0.4
–0.5
–0.6
Ω
FLATNESS – dB
FLATNESS – dB
TPC 4. AD8115 Frequency Response; RL = 150
TPC 5. AD8115 Frequency Response; RL = 1 k
Ω
Ω
4
VO = 200mV p-p
3
AS SHOWN
R
L
2
C
= 18pF
L
1
0
–1
GAIN – dB
–2
–3
–4
REV. A
–5
–6
0.1 1 10 100 1000
TPC 3. AD8114 Frequency Response vs. Load
FREQUENCY – MHz
Impedance
RL = 1k⍀
RL = 150⍀
TPC 6. AD8115 Frequency Response vs. Load
Impedance
–9–
Page 10

AD8114/AD8115
0
RL = 1k
–10
= 37.5
R
T
–20
–30
–40
–50
–60
CROSSTALK – dB
–70
–80
–90
–100
0.1 1 10 100 1000
ALL HOSTILE
ADJACENT
FREQUENCY – MHz
TPC 7. AD8114 Crosstalk vs. Frequency
0
VO = 2V p-p
–10
R
= 150
L
–20
–30
–40
–50
–60
DISTORTION – dBc
–70
–80
–90
–100
110
2ND HARMONIC
3RD HARMONIC
FUNDAMENTAL FREQUENCY – MHz
TPC 8. AD8114 Distortion vs. Frequency
0
RL = 1k
–10
R
= 37.5
T
–20
–30
–40
–50
–60
CROSSTALK – dB
–70
–80
–90
–100
0.1 1 10 100 1000
ALL HOSTILE
ADJACENT
FREQUENCY – MHz
TPC 10. AD8115 Crosstalk vs. Frequency
0
VO = 2V p-p
–10
R
= 150
L
–20
–30
–40
–50
–60
DISTORTION – dBc
–70
–80
–90
50
–100
110
FUNDAMENTAL FREQUENCY – MHz
2ND HARMONIC
3RD HARMONIC
50
TPC 11. AD8115 Distortion vs. Frequency
VO = 2V STEP
= 150
R
L
0.1%/DIV
0 5 10 15 20 25 30 35 40 45
5ns/DIV
TPC 9. AD8114 Settling Time
–10–
VO = 2V STEP
= 150
R
L
0.1%/DIV
0 5 10 15 20 25 30 35 40 45
5ns/DIV
TPC 12. AD8115 Settling Time
REV. A
Page 11

AD8114/AD8115
1M
100k
10k
INPUT IMPEDANCE –
1k
100
1
FREQUENCY – MHz
10 5000.1
100
TPC 13. AD8114 Input Impedance vs. Frequency
1000
100
10
1M
100k
10k
INPUT IMPEDANCE –
1k
100
0.1
1 10 100 500
FREQUENCY – MHz
TPC 16. AD8115 Input Impedance vs. Frequency
1000
100
10
OUTPUT IMPEDANCE –
1
0.1
0.1
1 10 100 1000
FREQUENCY – MHz
TPC 14. AD8114 Output Impedance, Enabled
vs. Frequency
1M
100k
10k
1k
OUTPUT IMPEDANCE –
100
10
0.1
1 10 100 1000
FREQUENCY – MHz
TPC 15. AD8114 Output Impedance, Disabled
vs. Frequency
OUTPUT IMPEDANCE –
1
0.1
0.1
1 10 100 1000
FREQUENCY – MHz
TPC 17. AD8115 Output Impedance, Enabled
vs. Frequency
1M
100k
10k
1k
OUTPUT IMPEDANCE –
100
10
0.1
1 10 100 1000
FREQUENCY – MHz
TPC 18. AD8115 Output Impedance, Disabled
vs. Frequency
REV. A
–11–
Page 12

AD8114/AD8115
–40
–50
–60
–70
–80
–90
–100
–110
OFF ISOLATION – dB
–120
–130
–140
0.1 1 10
FREQUENCY – MHz
100 500
TPC 19. AD8114 Off Isolation, Input-Output
–20
–30
–40
PSRR – dB
–50
–60
–70
–80
–PSRR
+PSRR
–40
–50
–60
–70
–80
–90
–100
–110
OFF ISOLATION – dB
–120
–130
–140
0.1 1 10
FREQUENCY – MHz
100 500
TPC 22. AD8115 Off Isolation, Input-Output
–20
–30
PSRR – dB
–40
–50
–60
–70
–80
+PSRR
–PSRR
–90
–100
0.03 100.1
FREQUENCY – MHz
1
TPC 20. AD8114 PSRR vs. Frequency
170
150
130
110
90
70
VOLTAGE NOISE – nV/ Hz
50
30
10
10 100
1k 10k 100k 1M 10M
16nV/ Hz
FREQUENCY – Hz
TPC 21. AD8114 Voltage Noise vs. Frequency
–90
–100
0.03 100.1
FREQUENCY – MHz
1
TPC 23. AD8115 PSRR vs. Frequency
170
150
130
110
90
70
50
VOLTAGE NOISE – nV/ Hz
30
10
10 100
1k 10k 100k 1M 10M
FREQUENCY – Hz
18nV/ Hz
TPC 24. AD8115 Voltage Noise vs. Frequency
–12–
REV. A
Page 13

AD8114/AD8115
VO = 200mV STEP
= 150
R
L
0.15V
0.10V
0.05V
–0.05V
–0.10V
–0.15V
0V
50mV 25ns
TPC 25. AD8114 Pulse Response, Small Signal
VO = 2V STEP
= 150
R
L
1.5V
1.0V
0.5V
–0.5V
–1.0V
–1.5V
0V
500mV 25ns
VO = 200mV STEP
= 150
R
L
25ns
0.15V
0.10V
0.05V
–0.05V
–0.10V
–0.15V
0V
50mV
TPC 28. AD8115 Pulse Response, Small Signal
VO = 2V STEP
= 150
R
L
1.5V
1.0V
0.5V
–0.5V
–1.0V
–1.5V
0V
500mV 20ns
TPC 26. AD8114 Pulse Response, Large Signal
+5V
INPUT 0
AT –1V
UPDATE
V
OUT
INPUT 1
AT +1V
10ns
0V
+1V
–0V
–1V
TPC 27. AD8114 Switching Time
TPC 29. AD8115 Pulse Response, Large Signal
+5V
INPUT 0
AT –1V
UPDATE
V
OUT
INPUT 1
AT +1V
10ns
0V
+2V
–0V
–2V
TPC 30. AD8115 Switching Time
REV. A
–13–
Page 14

AD8114/AD8115
TPC 31. AD8114 Switching Transient (Glitch)
260
240
220
200
180
160
140
120
FREQUENCY
100
80
60
40
20
TPC 32. AD8114 Offset Voltage Distribution
0
–12
5V
0V
0.05V
0V
–0.05V
–10
–8
–4
–6
OFFSET VOLTAGE – mV
5V
UPDATE
50ns
0V
0.05V
0V
–0.05V
UPDATE
50ns
TPC 34. AD8115 Switching Transient (Glitch)
240
220
200
180
160
140
120
100
FREQUENCY
80
60
40
20
0
–2
4
2
8
6
10
0
–14
–10 –6 –22 6 10 18
–12
–8 –4 8 12 16
04
OFFSET VOLTAGE – mV
14
TPC 35. AD8115 Offset Voltage Distribution
44
40
36
32
28
24
20
FREQUENCY
16
12
8
4
0
–16 –12 –8 –4 0 4 8 12 16 20
–20
OFFSET VOLTAGE DRIFT – V/C
TPC 33. AD8114 Offset Voltage Drift Distribution
⬚
C to +85⬚C)
(–40
44
40
36
32
28
24
20
FREQUENCY
16
12
8
4
0
–8 –4 0 4 8 12 16 20
–12
OFFSET VOLTAGE DRIFT – V/C
TPC 36. AD8115 Offset Voltage Drift Distribution
(–40
⬚
C to +85⬚C)
–14–
REV. A
Page 15

AD8114/AD8115
THEORY OF OPERATION
The AD8114 (G = +1) and AD8115 (G = +2) are crosspoint
arrays with 16 outputs, each of which can be connected to
any one of 16 inputs. Organized by output row, 16 switchable
transconductance stages are connected to each output buffer,
in the form of a 16-to-1 multiplexer. Each of the 16 rows of
transconductance stages are wired in parallel to the 16 input
pins, for a total array of 256 transconductance stages. Decoding
logic for each output selects one (or none) of the transconductance stages to drive the output stage. The transconductance
stages are NPN-input differential pairs, sourcing current into
the folded cascode output stage. The compensation network
and emitter follower output buffer are in the output stage. Voltage feedback sets the gain, with the AD8114 being configured as
a unity gain follower, and the AD8115 as a gain-of-two amplifier with a feedback network.
This architecture provides drive for a reverse-terminated video
load (150 Ω), with low differential gain and phase error for
relatively low power consumption. Power consumption is further reduced by disabling outputs and transconductance stages
that are not in use. The user will notice a small increase in input
bias current as each transconductance stage is enabled.
Features of the AD8114 and AD8115 simplify the construction
of larger switch matrices. The unused outputs of both devices
can be disabled to a high impedance state, allowing the outputs
of multiple ICs to be bused together. In the case of the AD8115, a
feedback isolation scheme is used so that the impedance of the
gain-of-two feedback network does not load the output. Because
no additional input buffering is necessary, high input resistance
and low input capacitance are easily achieved without additional
signal degradation. To control enable glitches, it is recommended
that the disabled output voltage be maintained within its normal
enabled voltage range (±3.3 V). If necessary, the disabled output can be kept from drifting out of range by applying an output
load resistor to ground.
A flexible TTL-compatible logic interface simplifies the programming of the matrix. Both parallel and serial loading into a
first rank of latches programs each output. A global latch simultaneously updates all outputs. A power-on reset pin is available
to avoid bus conflicts by disabling all outputs.
APPLICATIONS
The AD8114/AD8115 have two options for changing the programming of the crosspoint matrix. In the first option a serial
word of 80 bits can be provided that will update the entire matrix
each time. The second option allows for changing a single output’s
programming via a parallel interface. The serial option requires
fewer signals, but more time (clock cycles) for changing the programming, while the parallel programming technique requires more
signals, but can change a single output at a time and requires
fewer clock cycles to complete programming.
Serial Programming
The serial programming mode uses the device pins CE, CLK,
DATA IN, UPDATE and SER/PAR. The first step is to assert a
LOW on SER/PAR in order to enable the serial programming
mode. CE for the chip must be LOW to allow data to be clocked
into the device. The CE signal can be used to address an individual device when devices are connected in parallel.
The UPDATE signal should be HIGH during the time that data
is shifted into the device’s serial port. Although the data will still
shift in when UPDATE is LOW, the transparent, asynchronous
latches will allow the shifting data to reach the matrix. This will
cause the matrix to try to update to every intermediate state as
defined by the shifting data.
The data at DATA IN is clocked in at every down edge of CLK.
A total of 80 bits must be shifted in to complete the programming. For each of the 16 outputs, there are four bits (D0–D3)
that determine the source of its input followed by one bit (D4)
that determines the enabled state of the output. If D4 is LOW
(output disabled), the four associated bits (D0–D3) do not
matter, because no input will be switched to that output.
The most-significant-output-address data is shifted in first, then
following in sequence until the least-significant-output-address
data is shifted in. At this point UPDATE can be taken LOW,
which will cause the programming of the device according to the
data that was just shifted in. The UPDATE registers are asynchronous and when UPDATE is LOW (and CE is LOW), they
are transparent.
If more than one AD8114/AD8115 device is to be serially programmed in a system, the DATA OUT signal from one device
can be connected to the DATA IN of the next device to form a
serial chain. All of the CLK, CE, UPDATE and SER/PAR pins
should be connected in parallel and operated as described above.
The serial data is input to the DATA IN pin of the first device
of the chain, and it will ripple on through to the last. Therefore, the
data for the last device in the chain should come at the beginning
of the programming sequence. The length of the programming
sequence will be 80 bits times the number of devices in the chain.
Parallel Programming
When using the parallel programming mode, it is not necessary
to reprogram the entire device when making changes to the
matrix. In fact, parallel programming allows the modification
of a single output at a time. Since this takes only one CLK/
UPDATE cycle, significant time savings can be realized by
using parallel programming.
One important consideration in using parallel programming is
that the RESET signal DOES NOT RESET ALL REGISTERS
in the AD8114/AD8115. When taken low, the RESET signal
will only set each output to the disabled state. This is helpful
during power-up to ensure that two parallel outputs will not be
active at the same time.
After initial power-up, the internal registers in the device will
generally have random data, even though the RESET signal has
been asserted. If parallel programming is used to program one
output, then that output will be properly programmed, but the
rest of the device will have a random program state depending
on the internal register content at power-up. Therefore, when
using parallel programming, it is essential that ALL OUTPUTS
BE PROGRAMMED TO A DESIRED STATE AFTER
POWER-UP. This will ensure that the programming matrix is
always in a known state. From then on, parallel programming
can be used to modify a single output or more at a time.
In similar fashion, if both CE and UPDATE are taken LOW
after initial power-up, the random power-up data in the shift
register will be programmed into the matrix. Therefore, in order
to prevent the crosspoint from being programmed into an unknown
state DO NOT APPLY LOW LOGIC LEVELS TO BOTH CE
AND UPDATE AFTER POWER IS INITIALLY APPLIED.
Programming the full shift register one time to a desired state,
REV. A
–15–
Page 16

AD8114/AD8115
either by serial or parallel programming after initial power-up,
will eliminate the possibility of programming the matrix to an
unknown state.
To change an output’s programming via parallel programming,
SER/PAR and UPDATE should be taken HIGH and CE should
be taken LOW. The CLK signal should be in the HIGH state.
The 4-bit address of the output to be programmed should be put
on A0–A3. The first four data bits (D0–D3) should contain the
information that identifies the input that gets programmed to the
output that is addressed. The fourth data bit (D4) will determine the enabled state of the output. If D4 is LOW (output
disabled) then the data on D0–D3 does not matter.
After the desired address and data signals have been established,
they can be latched into the shift register by a HIGH to LOW
transition of the CLK signal. The matrix will not be programmed,
however, until the UPDATE signal is taken low. It is thus possible to latch in new data for several or all of the outputs first via
successive negative transitions of CLK while UPDATE is held
high, and then have all the new data take effect when UPDATE
goes LOW. This is the technique that should be used when
programming the device for the first time after power-up when
using parallel programming.
POWER-ON RESET
When powering up the AD8114/AD8115 it is usually desirable
to have the outputs come up in the disabled state. The RESET
pin, when taken LOW will cause all outputs to be in the disabled state. However, the RESET signal DOES NOT RESET
ALL REGISTERS in the AD8114/AD8115 This is important
when operating in the parallel programming mode. Please refer
to that section for information about programming internal
registers after power-up. Serial programming will program the
entire matrix each time, so no special considerations apply.
Since the data in the shift register is random after power-up, they
should not be used to program the matrix or else the matrix can
enter unknown states. To prevent this, DO NOT APPLY LOGIC
LOW SIGNALS TO BOTH CE AND UPDATE INITIALLY
AFTER POWER-UP. The shift register should first be loaded with
the desired data, and then UPDATE can be taken LOW to
program the device.
The RESET pin has a 20 kΩ pull-up resistor to DVDD that can
be used to create a simple power-up reset circuit. A capacitor from
RESET to ground will hold RESET LOW for some time while
the rest of the device stabilizes. The LOW condition will cause
all the outputs to be disabled. The capacitor will then charge
through the pull-up resistor to the HIGH state, thus allowing
full programming capability of the device.
GAIN SELECTION
The 16 × 16 crosspoints come in two versions, depending on the
gain of the analog circuit paths that is desired. The AD8114 device
is unity gain and can be used for analog logic switching and other
applications where unity gain is desired. The AD8114 can also
be used for the input and interior sections of larger crosspoint
arrays where termination of output signals is not usually used.
The AD8114 outputs have a very high impedance when their
outputs are disabled.
The AD8115 can be used for devices that will be used to drive
a terminated cable with its outputs. This device has a built-in
gain-of-two that eliminates the need for a gain-of-two buffer to
drive a video line. Its high output disabled impedance minimizes
signal degradation when paralleling additional outputs.
CREATING LARGER CROSSPOINT ARRAYS
The AD8114/AD8115 are high density building blocks for
creating crosspoint arrays of dimensions larger than 16 × 16.
Various features, such as output disable, chip enable, and gainof-one and gain-of-two options, are useful for creating larger
arrays. When required for customizing a crosspoint array size,
they can be used with the AD8108 and AD8109, a pair (unity
gain and gain-of-two) of 8 × 8 video crosspoint switches, or the
AD8110 and AD8111, a pair (unity gain and gain-of-two)
16 × 8 video crosspoint switches.
The first consideration in constructing a larger crosspoint is to
determine the minimum number of devices are required. The
16 × 16 architecture of the AD8114/AD8115 contains 256
“points,” which is a factor of 64 greater than a 4 × 1 crosspoint
(or multiplexer). The PC board area, power consumption and
design effort savings are readily apparent when compared to
using these smaller devices.
For a nonblocking crosspoint, the number of points required is
the product of the number of inputs multiplied by the number
of outputs. Nonblocking requires that the programming of a
given input to one or more outputs does not restrict the availability of that input to be a source for any other outputs.
Some nonblocking crosspoint architectures will require more than
this minimum as calculated above. Also, there are blocking architectures that can be constructed with fewer devices than this
minimum. These systems have connectivity available on a statistical basis that is determined when designing the overall system.
The basic concept in constructing larger crosspoint arrays is
to connect inputs in parallel in a horizontal direction and to
“wire-OR” the outputs together in the vertical direction. The
meaning of horizontal and vertical can best be understood by
looking at a diagram. Figure 6 illustrates this concept for a
32 × 32 crosspoint array that uses four AD8114s or AD8115s.
IN 00–15
IN 16–31
R
R
16
TERM
16
TERM
AD8114
OR
16
AD8115
16
AD8114
OR
16
AD8115
16
AD8114
16
OR
AD8115
16
AD8114
16
OR
AD8115
16
Figure 6. 32 × 32 Crosspoint Array Using Four AD8114s or
Four AD8115s
The inputs are each uniquely assigned to each of the 32 inputs
of the two devices and terminated appropriately. The outputs
are wired-ORed together in pairs. The output from only one of
a wire-ORed pair should be enabled at any given time. The
device programming software must be properly written to cause
this to happen.
–16–
REV. A
Page 17

IN 00–15
IN 16–31
IN 32–47
IN 48–63
IN 64–79
IN 80–95
IN 96–111
IN 112–127
AD8114/AD8115
RANK 1
(8 AD8114)
128:32
16
R
TERM
16
R
TERM
16
R
TERM
16
R
TERM
16
R
TERM
16
R
TERM
16
R
TERM
16
R
AD8114
AD8114
AD8114
AD8114
AD8114
AD8114
AD8114
AD8114
TERM
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
1k
8
1k
8
1k
8
1k
RANK 2
32:16 NONBLOCKING
(32:32 BLOCKING)
AD8115
AD8115
8
8
8
8
OUT 00–15
NONBLOCKING
ADDITIONAL
16 OUTPUTS
(SUBJECT
TO BLOCKING)
Figure 7. Nonblocking 128 × 16 Array (128 × 32 Blocking)
Using additional crosspoint devices in the design can lower the
number of outputs that have to be wire-ORed together. Figure 7
shows a block diagram of a system using eight AD8114s and
two AD8115s to create a nonblocking, gain-of-two, 128 × 16
crosspoint that restricts the wire-ORing at the output to only
four outputs.
Additionally, by using the lower eight outputs from each of the
two Rank 2 AD8115s, a blocking 128 × 32 crosspoint array can
be realized. There are, however, some drawbacks to this technique. The offset voltages of the various cascaded devices will
accumulate and the bandwidth limitations of the devices will
compound. In addition, the extra devices will consume more
current and take up more board space. Once again, the overall
system design specifications will determine how to make the
various tradeoffs.
Multichannel Video
The excellent video specifications of the AD8114/AD8115 make
them ideal candidates for creating composite video crosspoint
switches. These can be made quite dense by taking advantage of
the AD8114/AD8115’s high level of integration and the fact that
composite video requires only one crosspoint channel per system
video channel. There are, however, other video formats that can
be routed with the AD8114/AD8115 requiring more than one
crosspoint channel per video channel.
Some systems use twisted-pair wiring to carry video signals.
These systems utilize differential signals and can lower costs
because they use lower cost cables, connectors and termination
methods. They also have the ability to lower crosstalk and reject
common-mode signals, which can be important for equipment
that operates in noisy environments or where common-mode
voltages are present between transmitting and receiving equipment.
In such systems, the video signals are differential; there is a
positive and negative (or inverted) version of the signals. These
complementary signals are transmitted onto each of the two
wires of the twisted pair, yielding a first order zero commonmode voltage. At the receive end, the signals are differentially
received and converted back into a single-ended signal.
When switching these differential signals, two channels are
required in the switching element to handle the two differential
signals that make up the video channel. Thus, one differential
video channel is assigned to a pair of crosspoint channels, both
input and output. For a single AD8114/AD8115, eight differential
video channels can be assigned to the 16 inputs and 16 outputs.
This will effectively form an 8 × 8 differential crosspoint switch.
Programming such a device will require that inputs and outputs
be programmed in pairs. This information can be deduced by
inspection of the programming format of the AD8114/AD8115
and the requirements of the system.
There are other analog video formats requiring more than one
analog circuit per video channel. One two-circuit format that is
commonly being used in systems such as satellite TV, digital
cable boxes and higher quality VCRs, is called S-video or Y/C
REV. A
–17–
Page 18

AD8114/AD8115
video. This format carries the brightness (luminance or Y)
portion of the video signal on one channel and the color (chrominance, chroma or C) on a second channel.
Since S-video also uses two separate circuits for one video channel, creating a crosspoint system requires assigning one video
channel to two crosspoint channels as in the case of a differential video system. Aside from the nature of the video format,
other aspects of these two systems will be the same.
There are yet other video formats using three channels to carry
the video information. Video cameras produce RGB (red, green,
blue) directly from the image sensors. RGB is also the usual
format used by computers internally for graphics. RGB can also
be converted to Y, R-Y, B-Y format, sometimes called YUV
format. These three-circuit, video standards are referred to as
component analog video.
The component video standards require three crosspoint channels per video channel to handle the switching function. In a
fashion similar to the two-circuit video formats, the inputs and
outputs are assigned in groups of three and the appropriate logic
programming is performed to route the video signals.
CROSSTALK
Many systems, such as broadcast video, that handle numerous
analog signal channels have strict requirements for keeping the
various signals from influencing any of the others in the system.
Crosstalk is the term used to describe the coupling of the signals
of other nearby channels to a given channel.
When there are many signals in close proximity in a system, as
will undoubtedly be the case in a system that uses the AD8114/
AD8115, the crosstalk issues can be quite complex. A good
understanding of the nature of crosstalk and some definition of
terms is required in order to specify a system that uses one or
more AD8114/AD8115s.
Types of Crosstalk
Crosstalk can be propagated by means of any of three methods. These fall into the categories of electric field, magnetic
field and sharing of common impedances. This section will
explain these effects.
Every conductor can be both a radiator of electric fields and a
receiver of electric fields. The electric field crosstalk mechanism occurs when the electric field created by the transmitter
propagates across a stray capacitance (e.g., free space) and
couples with the receiver and induces a voltage. This voltage
is an unwanted crosstalk signal in any channel that receives it.
Currents flowing in conductors create magnetic fields that circulate
around the currents. These magnetic fields will then generate
voltages in any other conductors whose paths they link. The
undesired induced voltages in these other channels are crosstalk
signals. The channels that crosstalk can be said to have a mutual
inductance that couples signals from one channel to another.
The power supplies, grounds and other signal return paths of a
multichannel system are generally shared by the various channels.
When a current from one channel flows in one of these paths, a
voltage that is developed across the impedance becomes an
input crosstalk signal for other channels that share the common
impedance.
All these sources of crosstalk are vector quantities, so the
magnitudes cannot simply be added together to obtain the total
crosstalk. In fact, there are conditions where driving additional
circuits in parallel in a given configuration can actually reduce
the crosstalk.
Areas of Crosstalk
For a practical AD8114/AD8115 circuit, it is required that it be
mounted to some sort of circuit board in order to connect it to
power supplies and measurement equipment. Great care has
been taken to create a characterization board (also available as
an evaluation board) that adds minimum crosstalk to the intrinsic
device. This, however, raises the issue that a system’s crosstalk is a
combination of the intrinsic crosstalk of the devices in addition
to the circuit board to which they are mounted. It is important
to try to separate these two areas of crosstalk when attempting to
minimize its effect.
In addition, crosstalk can occur among the inputs to a crosspoint
and among the output. It can also occur from input to output.
Techniques will be discussed for diagnosing which part of a system
is contributing to crosstalk.
Measuring Crosstalk
Crosstalk is measured by applying a signal to one or more channels
and measuring the relative strength of that signal on a desired
selected channel. The measurement is usually expressed as dB
down from the magnitude of the test signal. The crosstalk is
expressed by:
|XT| = 20 log
where s = jw is the Laplace transform variable, Asel(s) is the
amplitude of the crosstalk-induced signal in the selected channel
and Atest(s) is the amplitude of the test signal. It can be seen
that crosstalk is a function of frequency, but not a function of
the magnitude of the test signal (to first order). In addition, the
crosstalk signal will have a phase relative to the test signal
associated with it.
A network analyzer is most commonly used to measure crosstalk
over a frequency range of interest. It can provide both magnitude and phase information about the crosstalk signal.
As a crosspoint system or device grows larger, the number of
theoretical crosstalk combinations and permutations can become
extremely large. For example, in the case of the 16 × 16 matrix of
the AD8114/AD8115, we can examine the number of crosstalk
terms that can be considered for a single channel, say IN00 input.
IN00 is programmed to connect to one of the AD8114/AD8115
outputs where the measurement can be made.
First, we can measure the crosstalk terms associated with driving a test signal into each of the other 15 inputs one at a time,
while applying no signal to IN00. We can then measure the
crosstalk terms associated with driving a parallel test signal into
all 15 other inputs taken two at a time in all possible combinations; and then three at a time, etc., until, finally, there is only
one way to drive a test signal into all 15 other inputs in parallel.
Each of these cases is legitimately different from the others and
might yield a unique value depending on the resolution of the
measurement system, but it is hardly practical to measure all
these terms and then to specify them. In addition, this describes
the crosstalk matrix for just one input channel. A similar crosstalk matrix can be proposed for every other input. In addition, if
the possible combinations and permutations for connecting
inputs to the other (not used for measurement) outputs are
taken into consideration, the numbers rather quickly grow to
(Asel(s)/Atest(s))
10
–18–
REV. A
Page 19

AD8114/AD8115
astronomical proportions. If a larger crosspoint array of multiple
AD8114/AD8115s is constructed, the numbers grow larger still.
Obviously, some subset of all these cases must be selected to
be used as a guide for a practical measure of crosstalk. One
common method is to measure “all hostile” crosstalk. This term
means that the crosstalk to the selected channel is measured
while all other system channels are driven in parallel. In general,
this will yield the worst crosstalk number, but this is not always
the case due to the vector nature of the crosstalk signal.
Other useful crosstalk measurements are those created by one
nearest neighbor or by the two nearest neighbors on either side.
These crosstalk measurements will generally be higher than
those of more distant channels, so they can serve as a worst-case
measure for any other one-channel or two-channel crosstalk
measurements.
Input and Output Crosstalk
The flexible programming capability of the AD8114/AD8115
can be used to diagnose whether crosstalk is occurring more on
the input side or the output side. Some examples are illustrative.
A given input channel (IN07 in the middle for this example) can
be programmed to drive OUT07 (also in the middle). The input
to IN07 is just terminated to ground (via 50 Ω or 75 Ω) and no
signal is applied.
All the other inputs are driven in parallel with the same test
signal (practically provided by a distribution amplifier), with all
other outputs except OUT07 disabled. Since grounded IN07 is
programmed to drive OUT07, no signal should be present. Any
signal that is present can be attributed to the other 15 hostile
input signals, because no other outputs are driven. (They are
all disabled.) Thus, this method measures the all-hostile input
contribution to crosstalk into IN07. Of course, the method can be
used for other input channels and combinations of hostile inputs.
For output crosstalk measurement, a single input channel is
driven (IN00 for example) and all outputs other than a given
output (IN07 in the middle) are programmed to connect to
IN00. OUT07 is programmed to connect to IN15 (far away
from IN00), which is terminated to ground. Thus OUT07
should not have a signal present since it is listening to a quiet
input. Any signal measured at the OUT07 can be attributed to
the output crosstalk of the other 16 hostile outputs. Again, this
method can be modified to measure other channels and other
crosspoint matrix combinations.
Effect of Impedances on Crosstalk
The input side crosstalk can be influenced by the output impedance of the sources that drive the inputs. The lower the impedance
of the drive source, the lower the magnitude of the crosstalk. The
dominant crosstalk mechanism on the input side is capacitive
coupling. The high impedance inputs do not have significant
current flow to create magnetically induced crosstalk. However, significant current can flow through the input termination
resistors and the loops that drive them. Thus, the PC board on
the input side can contribute to magnetically coupled crosstalk.
From a circuit standpoint, the input crosstalk mechanism looks
like a capacitor coupling to a resistive load. For low frequencies
the magnitude of the crosstalk will be given by:
where R
|XT| = 20 log
is the source resistance, CM is the mutual capacitance
S
[(RS CM) × s]
10
between the test signal circuit and the selected circuit, and s is
the Laplace transform variable.
REV. A
–19–
From the equation it can be observed that this crosstalk mechanism has a high-pass nature; it can be also minimized by
reducing the coupling capacitance of the input circuits and
lowering the output impedance of the drivers. If the input is driven
from a 75 Ω terminated cable, the input crosstalk can be reduced
by buffering this signal with a low output impedance buffer.
On the output side, the crosstalk can be reduced by driving a
lighter load. Although the AD8114/AD8115 is specified with
excellent differential gain and phase when driving a standard
150 Ω video load, the crosstalk will be higher than the minimum
obtainable due to the high output currents. These currents will
induce crosstalk via the mutual inductance of the output pins
and bond wires of the AD8114/AD8115.
From a circuit standpoint, this output crosstalk mechanism
looks like a transformer with a mutual inductance between the
windings that drives a load resistor. For low frequencies, the
magnitude of the crosstalk is given by:
|XT| = 20 log
(Mxy × s/RL)
10
where Mxy is the mutual inductance of output X to output Y
is the load resistance on the measured output. This
and R
L
crosstalk mechanism can be minimized by keeping the mutual
inductance low and increasing R
. The mutual inductance can
L
be kept low by increasing the spacing of the conductors and
minimizing their parallel length.
PCB Layout
Extreme care must be exercised to minimize additional crosstalk
generated by the system circuit board(s). The areas that must be
carefully detailed are grounding, shielding, signal routing, and
supply bypassing.
The packaging of the AD8114/AD8115 is designed to help keep
the crosstalk to a minimum. Each input is separated from each
other input by an analog ground pin. All of these AGNDs should
be directly connected to the ground plane of the circuit board.
These ground pins provide shielding, low impedance return
paths and physical separation for the inputs. All of these help to
reduce crosstalk.
Each output is separated from its two neighboring outputs by an
analog supply pin of one polarity or the other. Each of these
analog supply pins provides power to the output stages of only
the two nearest outputs. These supply pins provide shielding,
physical separation and a low impedance supply for the outputs.
Individual bypassing of each of these supply pins with a 0.01 µF
chip capacitor directly to the ground plane minimizes high frequency output crosstalk via the mechanism of sharing common
impedances.
Each output also has an on-chip compensation capacitor that
is individually tied to the nearby analog ground pins AGND00
through AGND07. This technique reduces crosstalk by preventing the currents that flow in these paths from sharing a common
impedance on the IC and in the package pins. These AGNDxx
signals should all be connected directly to the ground plane.
The input and output signals will have minimum crosstalk if
they are located between ground planes on layers above and
below, and separated by ground in between. Vias should be
located as close to the IC as possible to carry the inputs and
outputs to the inner layer. The only place the input and output
signals surface is at the input termination resistors and the output series back-termination resistors. To the extent possible,
these signals should also be separated as soon as they emerge
from the IC package.
Page 20

AD8114/AD8115
DVCC DGND NCAVEE AGND AVCCNC
P1-1
P1-2 P1-3 P1-4 P1-5 P1-6
+
JUMPER
0.1F10F
INPUT 00 INPUT 00
INPUT 01 INPUT 01
INPUT 02 INPUT 02
INPUT 03 INPUT 03
INPUT 04 INPUT 04
INPUT 05 INPUT 05
INPUT 06 INPUT 06
INPUT 07 INPUT 07
INPUT 08 INPUT 08
INPUT 09 INPUT 09
INPUT 10 INPUT 10
INPUT 11 INPUT 11
INPUT 12 INPUT 12
INPUT 13 INPUT 13
INPUT 14 INPUT 14
INPUT 15 INPUT 15
0.1F10F
R
P2-5
P2-4
P2-2
P2-3
P2-1
P2-6
+
75
75
75
75
75
75
75
75
75
75
75
75
75
75
75
75
0.1F10F
57,59
3,73
R
P1-7
58
60
61
62
63
64
65
66
67
68
69
70
71
72
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
98
96
+
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
DATA OUT
DATA IN
DVCC
0.01F
1, 75
DVCC
RESET
DGND
2,74 100 99 97 95 84 83 82 81 80 79 78 77 76
R
R
AVCC
0.01F
21, 55
AVCC
AD8114/AD8115
CE
CLK
UPDATE
R
RC
AVEE
0.01F
20, 56
AVEE
A0
A1
A2
RA3R R R R R R R R R
NO CONNECT:
85–93
OUTPUT 00
OUTPUT 01
OUTPUT 02
OUTPUT 03
OUTPUT 04
OUTPUT 05
OUTPUT 06
OUTPUT 07
OUTPUT 08
OUTPUT 09
OUTPUT 10
OUTPUT 11
OUTPUT 12
OUTPUT 13
OUTPUT 14
OUTPUT 15
D0D1D2D3D4
AVCC
AVEE
AVCC
AVEE
AVCC
AVEE
AVCC
AVEE
AVCC
AVEE
AVCC
AVEE
AVCC
AVEE
AVCC
AVEE
AVCC
SER
/PAR
94
20k
SERIAL MODE
JUMP
R33
54
53
52
51
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
0.01F
AVCC
AV
AVCC
AV
AVCC
AV
AVCC
AV
AVCC
AV
AVCC
AV
AVCC
AV
AVCC
AV
DVCC
75
EE
75
75
EE
75
75
EE
75
75
EE
75
75
EE
75
75
EE
75
75
EE
75
75
EE
75
OUTPUT 00
OUTPUT 01
OUTPUT 02
OUTPUT 03
OUTPUT 04
OUTPUT 05
OUTPUT 06
OUTPUT 07
OUTPUT 08
OUTPUT 09
OUTPUT 10
OUTPUT 11
OUTPUT 12
OUTPUT 13
OUTPUT 14
OUTPUT 15
P3-1
P3-2
P3-3
NOTE
R = OPTIONAL 50 TERMINATOR RESISTORS
C = OPTIONAL SMOOTHING CAPACITOR
P3-4
Figure 8. Evaluation Board Schematic
P3-5
–20–
P3-6
P3-7
P3-8
P3-9
P3-10
P3-11
P3-12
P3-13
P3-14
REV. A
Page 21

AD8114/AD8115
Figure 9. Component Side Silkscreen
REV. A
Figure 10. Board Layout (Component Side)
–21–
Page 22

AD8114/AD8115
Figure 11. Board Layout (Signal Layer)
Figure 12. Board Layout (Ground Plane)
–22–
REV. A
Page 23

AD8114/AD8115
Figure 13. Board Layout (Circuit Side)
REV. A
Figure 14. Circuit Side Silkscreen
–23–
Page 24

AD8114/AD8115
Optimized for video applications, all signal inputs and outputs
are terminated with 75 Ω resistors. Stripline techniques are used
to achieve a characteristic impedance on the signal input and
output lines, also of 75 Ω. Figure 15 shows a cross-section of one
of the input or output tracks along with the arrangement of the
PCB layers. It should be noted that unused regions of the four
layers are filled up with ground planes. As a result, the input
and output traces, in addition to having controlled impedances,
are well shielded.
w = 0.008"
(0.2mm)
b = 0.0514"
(1.3mm)
a = 0.008"
(0.2mm)
t = 0.00135" (0.0343mm)
h = 0.025"
(0.63mm)
TOP LAYER
SIGNAL LAYER
POWER LAYER
BOTTOM LAYER
Figure 15. Cross Section of Input and Output Traces
The board has 32 BNC type connectors: 16 inputs and 16 outputs.
The connectors are arranged in a crescent around the device. As
can be seen from Figure 11, this results in all 16 input signal
traces and all 16 signal output traces having the same length.
This is useful in tests such as All-Hostile Crosstalk where the phase
relationship and delay between signals needs to be maintained
from input to output.
The three power supply pins AVCC, DVCC and AVEE should
be connected to good quality, low noise, ±5 V supplies. Where
the same ±5 V power supplies are used for analog and digital, separate cables should be run for the power supply to the evaluation
board’s analog and digital power supply pins.
As a general rule, each power supply pin (or group of adjacent
power supply pins) should be locally decoupled with a 0.01 µF
capacitor. If there is a space constraint, it is more important to
decouple analog power supply pins before digital power supply
pins. A 0.1 µF capacitor, located reasonably close to the pins, can
be used to decouple a number of power supply pins. Finally a
10 µF capacitor should be used to decouple power supplies as
they come onto the board.
MOLEX 0.100" CENTER
CRIMP TERMINAL HOUSING
RESET
CLK
CE
UPDATE
DATA IN
DGND
D-SUB-25
2
3
4
5
6
25
EVALUATION BOARD PC
1
6
MOLEX
TERMINAL HOUSING
3
1
4
5
2
6
SIGNAL
CE
RESET
UPDATE
DATA IN
CLK
DGND
D-SUB 25 PIN (MALE)
1
14
25
13
Figure 16. Evaluation Board-PC Connection Cable
Controlling the Evaluation Board from a PC
The evaluation board includes Windows®-based control software
and a custom cable that connects the board’s digital interface
to the printer port of the PC. The wiring of this cable is shown
in Figure 16. The software requires Windows 3.1 or later to
operate. To install the software, insert the disk labeled “Disk
#1 of 2” in the PC and run the file called SETUP.EXE.
Additional installation instructions will be given on-screen.
Before beginning installation, it is important to terminate any
other Windows applications that are running.
–24–
REV. A
Page 25

AD8114/AD8115
When you launch the crosspoint control software, you will be
asked to select the printer port you are using. Most modern PCs
have only one printer port, usually called LPT1. However some
laptop computers use the PRN port.
Figure 17 shows the main screen of the control software in its
initial reset state (all outputs off). Using the mouse, any input
can be connected with one or more outputs by simply clicking
on the appropriate radio buttons in the 16 × 16 on-screen array.
Each time a button is clicked on, the software automatically sends
and latches the required 80-bit data stream to the evaluation
board. An output can be turned off by clicking the appropriate
button in the Off column. To turn off all outputs, click on RESET.
While the computer software only supports serial programming
via a PC’s parallel port and the provided cable, the evaluation
board has a connector that can be used for parallel programming.
The SER/PAR signal should be at a logic high to use parallel
programming. There is no cable nor software provided with the
evaluation board for parallel programming. These are left to the
user to provide.
AD8114/AD8115
Parallel Port Selection
The software offers volatile and nonvolatile storage of configurations. For volatile storage, up to two configurations can be stored
and recalled using the Memory 1 and Memory 2 Buffers. These
function in a fashion identical to the memory on a pocket calculator. For nonvolatile storage of a configuration, the Save Setup
and Load Setup functions can be used. This stores the configuration as a data file on disk.
Overshoot on PC Printer Ports’ Data Lines
The data lines on some printer ports have excessive overshoot.
Overshoot on the pin that is used as the serial clock (Pin 6 on
the D-Sub-25 connector) can cause communication problems.
This overshoot can be eliminated by connecting a capacitor
from the CLK line on the evaluation board to ground. A pad
has been provided on the circuit-side (C33) of the evaluation
board to allow this capacitor to be soldered into place. Depending upon the overshoot from the printer port, this capacitor may
need to be as large as 0.01 µF.
Figure 17. Screen Display and Control Software
Windows is a registered trademark of Microsoft Corporation.
REV. A
–25–
Page 26

AD8114/AD8115
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
100-Lead Plastic Thin Quad Flatpack (LQFP)
(ST-100)
0.030 (0.75)
0.024 (0.60)
0.018 (0.45)
SEATING
PLANE
STANDOFF
0.003 (0.08)
MAX
0.063 (1.60)
MAX
100 76
1
25
26
0.006 (0.15)
0.002 (0.05)
0.008 (0.20)
0.004 (0.09)
CENTER FIGURES ARE TYPICAL UNLESS OTHERWISE NOTED.
CONTROLLING DIMENSIONS ARE IN MILLIMETERS.
0.630 (16.00) SQ
0.551 (14.00) SQ
0.020 (0.50)
BSC
TOP VIEW
(PINS DOWN)
0.011 (0.27)
0.009 (0.22)
0.007 (0.17)
0.057 (1.45)
0.055 (1.40)
0.053 (1.35)
75
51
50
7
3.5
0
–26–
REV. A
Page 27

AD8114/AD8115
Revision History
Location Page
Data Sheet changed from REV. 0 to REV. A.
Edits to ORDERING GUIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Comments added to Outline Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
REV. A
–27–
Page 28

C01070–0–11/01(A)
–28–
PRINTED IN U.S.A.
 Loading...
Loading...