

Datasheet AD8009JRT-REEL7, AD8009JRT-REEL, AD8009AR-REEL7, AD8009AR-REEL, AD8009AR Datasheet (Analog Devices)
...Page 1
1 GHz, 5,500 V/s
a
FEATURES
Ultrahigh Speed
5,500 V/s Slew Rate, 4 V Step, G = +2
545 ps Rise Time, 2 V Step, G = +2
Large Signal Bandwidth
440 MHz, G = +2
320 MHz, G = +10
Small Signal Bandwidth (–3 dB)
1 GHz, G = +1
700 MHz, G = +2
Settling Time 10 ns to 0.1%, 2 V Step, G = +2
Low Distortion Over Wide Bandwidth
SFDR
–44 dBc @ 150 MHz, G = +2, V
–41 dBc @ 150 MHz, G = +10, V
3rd Order Intercept (3IP)
26 dBm @ 70 MHz, G = +10
18 dBm @ 150 MHz, G = +10
Good Video Specifications
Gain Flatness 0.1 dB to 75 MHz
0.01% Differential Gain Error, R
0.01ⴗ Differential Phase Error, R
High Output Drive
175 mA Output Load Drive
10 dBm with –38 dBc SFDR @ 70 MHz, G = +10
Supply Operation
ⴞ5 V Voltage Supply
14 mA (Typ) Supply Current
APPLICATIONS
Pulse Amplifier
IF/RF Gain Stage/Amplifiers
High Resolution Video Graphics
High Speed Instrumentations
CCD Imaging Amplifier
2
1
0
–1
VO = 2Vp–p
–2
–3
–4
–5
NORMALIZED GAIN – dB
–6
–7
–8
1
FREQUENCY RESPONSE – MHz
Figure 1. Large Signal Frequency Response; G = +2 & +10
REV. C
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
= 2 V p-p
O
= 2 V p-p
O
= 150 ⍀
L
= 150 ⍀
L
G = +10
= 200⍀
R
F
RL = 100⍀
100
G = +2
= 301⍀
R
F
RL = 150⍀
100010
Low Distortion Amplifier
AD8009
FUNCTIONAL BLOCK DIAGRAMS
8-Lead Plastic SOIC (SO-8) 5-Lead SOT-23 (RT-5)
AD8009
1
NC
2
–IN
3
+IN
4
–V
S
NC = NO CONNECT
8
NC
7
+V
6
OUT
NC
5
V
S
PRODUCT DESCRIPTION
The AD8009 is an ultrahigh speed current feedback amplifier
with a phenomenal 5,500 V/µs slew rate that results in a rise
time of 545 ps, making it ideal as a pulse amplifier.
The high slew rate reduces the effect of slew rate limiting and
results in the large signal bandwidth of 440 MHz required for
high resolution video graphic systems. Signal quality is maintained over a wide bandwidth with worst case distortion of
–40 dBc @ 250 MHz (G = +10, 1 V p-p). For applications
with multitone signals such as IF signal chains, the third order
Intercept (3IP) of 12 dBm is achieved at the same frequency.
This distortion performance coupled with the current feedback
architecture make the AD8009 a flexible component for a gain
stage amplifier in IF/RF signal chains.
The AD8009 is capable of delivering over 175 mA of load
current and will drive four back terminated video loads while
maintaining low differential gain and phase error of 0.02% and
0.04° respectively. The high drive capability is also reflected in
the ability to deliver 10 dBm of output power @ 70 MHz with
–38 dBc SFDR.
The AD8009 is available in a small SOIC package and will
operate over the industrial temperature range –40°C to +85°C.
The AD8009 is also available in an SOT-23-5 and will operate
over the commercial temperature range 0°C to +70°C.
–30
G = 2
–40
R
= 301⍀
F
= 2V p-p
V
O
–50
–60
–70
DISTORTION – dBc
–80
–90
–100
1 20010 100
2ND,
150⍀ LOAD
FREQUENCY RESPONSE – MHz
2ND,
100⍀ LOAD
3RD,
150⍀ LOAD
Figure 2. Distortion vs. Frequency; G = +2
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2000
AD8009
1
OUT
2
–V
S
+IN
34
3RD,
100⍀ LOAD
5
+V
–IN
S
Page 2
AD8009–SPECIFICATIONS
(@ TA = 25ⴗC, VS = ⴞ5 V, RL = 100 ⍀, for R Package: RF = 301 ⍀ for G = +1, +2,
RF = 200 ⍀ for G = +10, for RT Package: RF = 332 ⍀ for G = +1, RF = 226 ⍀ for G = +2 and RF = 191 for G = +10, unless otherwise noted.)
AD8009AR/JRT
Model Conditions Min Typ Max Units
DYNAMIC PERFORMANCE
–3 dB Small Signal Bandwidth, V
R Package G = +1, R
RT Package G = +1, R
= 0.2 V p-p
O
= 301 Ω 1000 MHz
F
= 332 Ω 845 MHz
F
G = +2 480 700 MHz
G = +10 300 350 MHz
Large Signal Bandwidth, V
= 2 V p-p G = +2 390 440 MHz
O
G = +10 235 320 MHz
Gain Flatness 0.1 dB, V
Slew Rate G = +2, R
Settling Time to 0.1% G = +2, R
= 0.2 V p-p G = +2, RL = 150 Ω 45 75 MHz
O
= 150 Ω, 4 V Step 4500 5500 V/µs
L
= 150 Ω, 2 V Step 10 ns
L
G = +10, 2 V Step 25 ns
Rise and Fall Time G = +2, RL = 150 Ω, 4 V Step 0.725 ns
HARMONIC/NOISE PERFORMANCE
SFDR G = +2, V
= 2 V p-p 5 MHz –74 dBc
O
70 MHz –53 dBc
150 MHz –44 dBc
SFDR G = +10, V
= 2 V p-p 5 MHz –58 dBc
O
70 MHz –41 dBc
150 MHz –41 dBc
Third Order Intercept (3IP) 70 MHz 26 dBm
W.R.T. Output, G = +10 150 MHz 18 dBm
250 MHz 12 dBm
Input Voltage Noise f = 10 MHz 1.9 nV/√Hz
Input Current Noise f = 10 MHz, +In 46 pA/√Hz
f = 10 MHz, –In 41 pA/√Hz
Differential Gain Error NTSC, G = +2, R
NTSC, G = +2, R
Differential Phase Error NTSC, G = +2, R
= 150 Ω 0.01 0.03 %
L
= 37.5 Ω 0.02 0.05 %
L
= 150 Ω 0.01 0.03 Degrees
L
NTSC, G = +2, RL = 37.5 Ω 0.04 0.08 Degrees
DC PERFORMANCE
Input Offset Voltage 25 mV
T
MIN–TMAX
7mV
Offset Voltage Drift 4 µV/°C
–Input Bias Current 50 150 ±µA
T
MIN–TMAX
75 ±µA
+Input Bias Voltage 50 150 ±µ A
T
MIN–TMAX
75 ±µA
Open Loop Transresistance 90 250 kΩ
T
MIN–TMAX
170 kΩ
INPUT CHARACTERISTICS
Input Resistance +Input 110 kΩ
–Input 8 Ω
Input Capacitance +Input 2.6 pF
Input Common-Mode Voltage Range 3.8 ±V
Common-Mode Rejection Ratio VCM = ±2.5 50 52 dB
OUTPUT CHARACTERISTICS
Output Voltage Swing ±3.7 ±3.8 V
Output Current R
= 10 Ω, PD Package = 0.7 W 150 175 mA
L
Short Circuit Current 330 mA
POWER SUPPLY
Operating Range ±4 ±6V
Quiescent Current 14 16 mA
T
MIN–TMAX
18 mA
Power Supply Rejection Ratio VS = ±4 V to ±6 V 64 70 dB
Specifications subject to change without notice.
–2–
REV. C
Page 3

AD8009
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.6 V
Internal Power Dissipation
2
1
Small Outline Package (R) . . . . . . . . . . . . . . . . . . . . 0.75 Watts
Input Voltage (Common Mode) . . . . . . . . . . . . . . . . . . . . ±V
S
Differential Input Voltage . . . . . . . . . . . . . . . . . . . . . . . ± 3.5 V
Output Short Circuit Duration
. . . . . . . . . . . . . . . . . . . . . . Observe Power Derating Curves
Storage Temperature Range R Package . . . . –65°C to +125°C
Operating Temperature Range (A Grade) . . . –40°C to +85°C
Operating Temperature Range (J Grade) . . . . . . 0°C to +70°C
Lead Temperature Range (Soldering 10 sec) . . . . . . . . . 300°C
NOTES
1
Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only; functional operation of the
device at these or any other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
2
Specification is for device in free air:
8-Lead SOIC Package: θJA = 155°C/W.
5-Lead SOT-23 Package: θJA = 240°C/W.
MAXIMUM POWER DISSIPATION
The maximum power that can be safely dissipated by the
AD8009 is limited by the associated rise in junction temperature. The maximum safe junction temperature for plastic
encapsulated devices is determined by the glass transition
temperature of the plastic, approximately 150°C. Exceeding
this limit temporarily may cause a shift in parametric performance due to a change in the stresses exerted on the die by the
package. Exceeding a junction temperature of 175°C for an
extended period can result in device failure.
While the AD8009 is internally short circuit protected, this
may not be sufficient to guarantee that the maximum junction
temperature (150°C) is not exceeded under all conditions. To
ensure proper operation, it is necessary to observe the maximum power derating curves.
2.0
TJ = +150°C
1.5
8-LEAD SOIC PACKAGE
1.0
0.5
MAXIMUM POWER DISSIPATION – Watts
0
–50
5-LEAD SOT-23 PACKAGE
AMBIENT TEMPERATURE – °C
9080
706050403020100–40 –30 –20 –10
Figure 3. Plot of Maximum Power Dissipation vs.
Temperature
ORDERING GUIDE
Temperature Package Package Branding
Model Range Description Option Information
AD8009ACHIPS –40°C to +85°C Die
AD8009AR –40°C to +85°C 8-Lead SOIC SO-8
AD8009AR-REEL –40°C to +85°C 8-Lead SOIC 13" Tape and Reel
AD8009AR-REEL7 –40°C to +85°C 8-Lead SOIC 7" Tape and Reel
AD8009JRT-REEL 0°C to +70°C 5-Lead SOT-23 13" Tape and Reel HKJ
AD8009JRT-REEL7 0°C to +70°C 5-Lead SOT-23 7" Tape and Reel HKJ
AD8009-EB Evaluation Board SO-8
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD8009 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high-energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
REV. C
–3–
Page 4
AD8009
–Typical Performance Characteristics
3
NORMALIZED GAIN – dB
2
1
0
–1
–2
–3
–4
–5
–6
–7
1
R PACKAGE
R
L
V
O
G = +1, +2: R
G = +10: R
RT PACKAGE
G = +1: RF = 332⍀
G = +2: RF = 226⍀
G = +10: R
:
= 100⍀
= 200mV p–p
F
= 200⍀
F
= 191⍀
F
= 301⍀
:
10 100
FREQUENCY – MHz
G = +1, RT
G = +2, R & RT
G = +10, R & RT
G = +1, R
1000
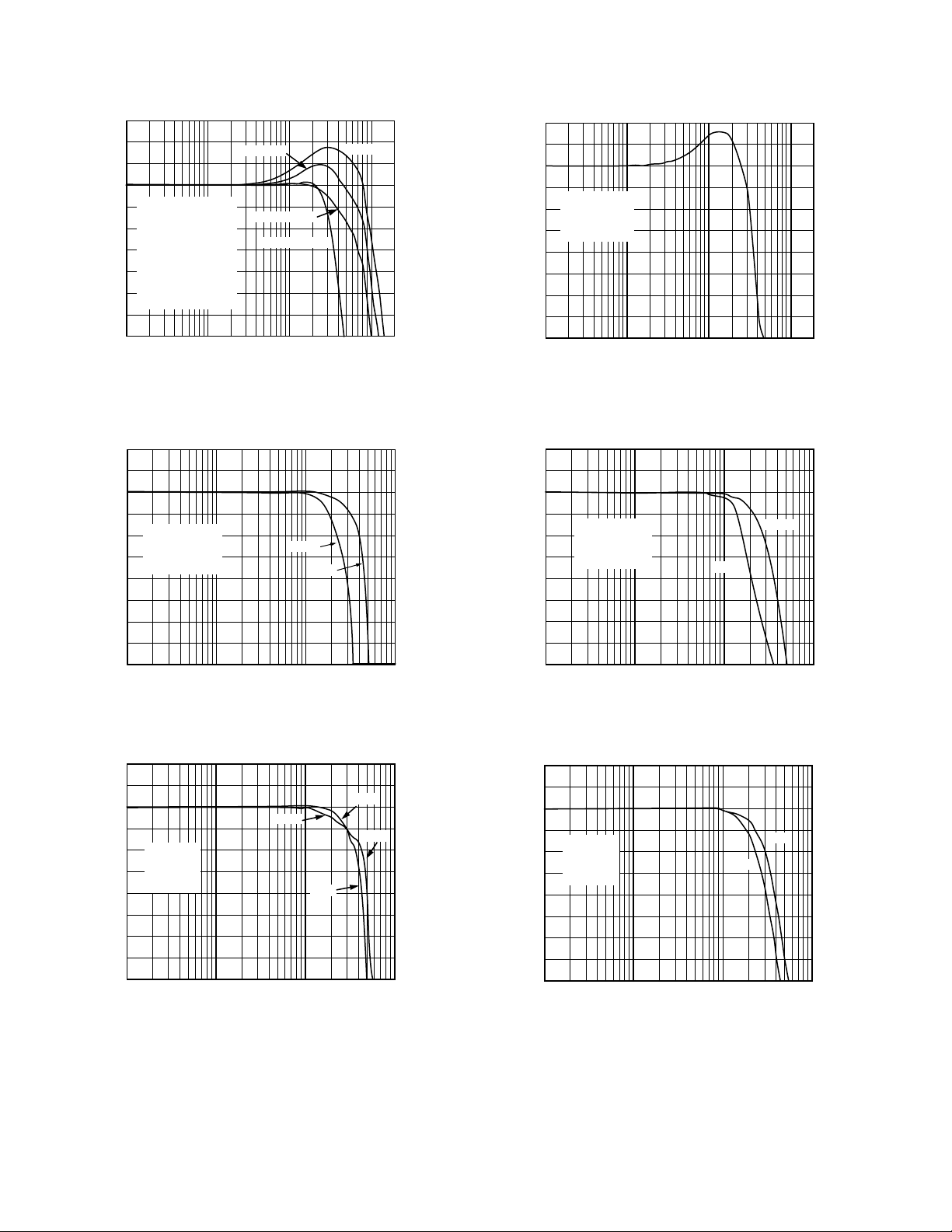
Figure 4. Frequency Response; G = +1, +2, +10, R and RT
Packages
8
7
6
5
G = +2
4
R
= 301⍀
GAIN – dB
3
2
1
0
–1
–2
F
RL = 150⍀
VO AS SHOWN
FREQUENCY – MHz
4V p–p
2V p–p
1001 100010
Figure 5. Large Signal Frequency Response; G = +2
6.2
6.1
6.0
5.9
G = +2
R
= 301⍀
5.8
F
= 150⍀
R
L
5.7
VO = 200mV p–p
5.6
5.5
GAIN FLATNESS – dB
5.4
5.3
5.2
10 1001
FREQUENCY – MHz
1000
Figure 7. Gain Flatness; G = +2
22
21
20
19
GAIN – dB
G = +10
18
17
16
15
14
13
12
= 200⍀
R
F
RL = 100⍀
AS SHOWN
V
O
4V p–p
1001 100010
FREQUENCY – MHz
2V p–p
Figure 8. Large Signal Frequency Response; G = +10
8
GAIN – dB
7
6
5
4
3
2
1
0
–1
–2
G = +2
RF = 301⍀
= 150⍀
R
L
VO = 2V p–p
–40ⴗC
1001 100010
FREQUENCY – MHz
+85ⴗC
–40ⴗC
+85ⴗC
Figure 6. Large Signal Frequency Response vs.
Temperature; G = +2
–4–
22
21
20
GAIN – dB
19
G = +10
18
= 200⍀
R
F
RL = 100⍀
17
= 2V p–p
V
O
16
15
14
13
12
FREQUENCY – MHz
1001 100010
–40ⴗC
+85ⴗC
Figure 9. Large Signal Frequency Response vs.
Temperature; G = +10
REV. C
Page 5

–30
–30
–35
–80
–40
–45
–50
–55
–60
–65
–70
–75
DISTORTION – dBc
100105 200
FREQUENCY – MHz
G = +10
R
F
= 200⍀
RL = 100⍀
VO = 2V p–p
2ND
3RD
–40
–50
G = 2
= 301⍀
R
F
V
= 2V p-p
O
2ND,
100⍀ LOAD
AD8009
–60
–70
DISTORTION – dBc
–80
–90
–100
1 20010 100
2ND,
150⍀ LOAD
3RD,
150⍀ LOAD
FREQUENCY RESPONSE – MHz
3RD,
100⍀ LOAD
Figure 10. Distortion vs. Frequency; G = +2
–35
250MHz
–40
–45
–50
–55
–60
–65
–70
DISTORTION – dBc
–75
–80
–85
–10 12–6 –4 –2 0 2 4 6 8 10 14–8
70MHz
P
OUT
– dBm
22.1⍀
50⍀
5MHz
200⍀
Figure 11. 2nd Harmonic Distortion vs. P
50⍀
P
OUT
50⍀
; (G = +10)
OUT
Figure 13. Distortion vs. Frequency; G = +10
–35
–40
–45
–50
–55
–60
–65
–70
–75
DISTORTION – dBc
–80
–85
–90
–95
–10 –812–6 –4 –20 24 6810
250MHz
70MHz
5MHz
200⍀
22.1⍀
50⍀
P
– dBm
OUT
Figure 14. 3rd Harmonic Distortion vs. P
50⍀
P
OUT
50⍀
; (G = +10)
OUT
14
REV. C
0.02
G = +2
= 301⍀
R
0.01
0.00
–0.01
DIFF GAIN – %
–0.02
0.10
0.05
–0.00
–0.05
–0.10
DIFF PHASE – Degrees
F
RL = 37.5⍀
0
G = +2
= 301⍀
R
F
RL = 150⍀
0
Figure 12. Differential Gain and Phase
IRE
RL = 37.5⍀
IRE
RL = 150⍀
100
100
–5–
50
45
40
35
30
25
INTERCEPT POINT – dBm
20
15
10
10 250100
FREQUENCY – MHz
22.1⍀
50⍀
200⍀
50⍀
50⍀
P
OUT
Figure 15. Two Tone, 3rd Order IMD Intercept vs.
Frequency; G = +10
Page 6

AD8009
1M
100k
RL = 100⍀
10k
TRANSRESISTANCE– ⍀
1k
100
0.01 0.1 1001
GAIN
PHASE
FREQUENCY – MHz
0
–40
–80
–120
–160
100010
Figure 16. Transresistance and Phase vs. Frequency
10
G = +2
PSRR – dB
–10
–20
–30
–40
–50
–60
–70
0
0.03
= 301⍀
R
F
RL = 100⍀
100mV p–p ON TOP OF V
0.1 10010
1 500
S
–PSRR
FREQUENCY – MHz
+PSRR
Figure 17. PSRR vs. Frequency
PHASE – Degrees
CMRR– dB
–10
–15
–20
–25
–30
–35
–40
–45
–50
–55
–60
VIN =
200mVp–p
301⍀
301⍀
154⍀
154⍀
FREQUENCY – MHz
100⍀
V
O
1001 100010
Figure 19. CMRR vs. Frequency
100
G = +2
R
= 301⍀
F
10
1
0.1
OUTPUT RESISTANCE – ⍀
0.01
0.1 100101 500
0.03
FREQUENCY – MHz
Figure 20. Output Resistance vs. Frequency
300
250
Hz
200
150
100
INPUT CURRENT – pA
50
0
10 100 250M1k 10k 100k 1M 10M 100M
NONINVERTING CURRENT
INVERTING CURRENT
FREQUENCY – Hz
Figure 18. Current Noise vs. Frequency
–6–
10
Hz
8
6
4
2
INPUT VOLTAGE NOISE – nV
0
10 100 250M1k 10k 100k 1M 10M 100M
FREQUENCY – Hz
Figure 21. Voltage Noise vs. Frequency
REV. C
Page 7

AD8009
NOISE FIGURE – dB
2.0
1.8
1.6
1.4
VSWR
1.2
– dB
S
–20
–30
G = +10
R
= 200⍀
F
–40
–50
–60
12
–70
–80
25
20
15
G = +10
= 301⍀
R
F
RL = 100⍀
10
5
–90
0
SOURCE RESISTANCE – ⍀
Figure 22. Noise Figure
1
100101 500
FREQUENCY – MHz
1001 100010
Figure 25. Reverse Isolation (S
2.2
C
200⍀
COMP
49.9⍀
C
COMP
C
COMP
2.0
1.8
1.6
VSWR
1.4
1.2
49.9⍀
22.1⍀
1
); G = +10
12
= 0pF
= 3pF
0
0.1 1 10010
FREQUENCY – MHz
500
Figure 23. Input VSWR; G = +10
20
18
16
14
12
10
MAX – dBm
OUT
P
8
6
4
2
0
R
G
50⍀
5 10010
R
F
50⍀
50⍀
FREQUENCY – MHz
G = +10
R
P
OUT
= 200⍀
F
G = +2
= 301⍀
R
F
250
Figure 24. Maximum Output Power vs. Frequency
0
0.1 1 10010
FREQUENCY – MHz
Figure 26. Output VSWR; G = +10
G = +10
= 200⍀
100
90
10
0%
V
OUT
V
= 2V
IN
STEP
2V
2V
R
R
250ns
F
= 100⍀
L
Figure 27. Overdrive Recovery; G = +10
500
REV. C
–7–
Page 8

AD8009
G = +2
= 301⍀
R
F
= 150⍀
R
L
V
= 200mV p–p
O
50mV
1ns
Figure 28. Small Signal Transient Response; G = +2
G = +2
= 301⍀
R
F
= 150⍀
R
L
V
= 2V p–p
O
G = +10
= 200⍀
R
F
R
= 100⍀
L
VO = 200mV p–p
50mV
2ns
Figure 31. Small Signal Transient Response; G = +10
G = +10
= 200⍀
R
F
RL = 100⍀
= 2V p–p
V
O
500mV
1ns
Figure 29. 2 V Transient Response; G = +2
G = +2
= 301⍀
R
F
RL = 150⍀
= 4V p–p
V
O
1.5ns1V
Figure 30. 4 V Transient Response; G = +2
500mV
2ns
Figure 32. 2 V Transient Response; G = +10
G = +10
R
= 200⍀
F
RL = 100⍀
VO = 4V p–p
1V
3ns
Figure 33. 4 V Transient Response; G = +10
–8–
REV. C
Page 9

AD8009
CENTER 50.000 MHz SPAN 80.000 MHz
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
REJECTION – dB
AD8009
G = 2
R
F
= RG= 301⍀
DRIVING
WAVETEK 5201
TUNABLE BPF
f
C
= 50MHz
GAIN – dB
8
7
6
C
5
4
3
2
V
IN
1
0
–1
50⍀
499⍀
C
499⍀
A
1
A
1 dB/div
V
= 200mV p–p
OUT
V
100⍀
10
FREQUENCY – MHz
= 1pF
C
A
1 dB/div
OUT
= 0pF
100
CA = 2pF
3 dB/div
1000
12
9
6
3
0
–3
–6
–9
–12
–15
GAIN – dB
Figure 34. Small Signal Frequency Response vs. Parasitic
Capacitance
CA = 1pF
CA = 2pF
CA = 0pF
V
50⍀
C
IN
A
V
= 200mV p–p
OUT
= ⴞ5V
V
S
499⍀
499⍀
V
OUT
100⍀
HP8753D
0.1F
49.9⍀
0.1F
ZIN = 50⍀
+
10F
10F
+
WAVETEK 5201
BPF
49.9⍀
2
3
301⍀
+5V
7
–5V
AD8009
6
4
301⍀
Z
= 50⍀
OUT
0.001F
0.001F
Figure 36. AD8009 Driving a Bandpass RF Filter
40mV
Figure 35. Small Signal Pulse Response vs. Parasitic
1.5ns
Figure 37. Frequency Response of Bandpass Filter Circuit
Capacitance
APPLICATIONS
All current feedback op amps are affected by stray capacitance
on their –INPUT. Figures 34 and 35 illustrate the AD8009’s
response to such capacitance.
Figure 34 shows the bandwidth can be extended by placing a
capacitor in parallel with the gain resistor. The small signal pulse
response corresponding to such an increase in capacitance/
bandwidth is shown in Figure 35.
As a practical consideration, the higher the capacitance on the
–INPUT to GND, the higher R
needs to be to minimize
F
peaking/ringing.
RF Filter Driver
The output drive capability, wide bandwidth and low distortion
of the AD8009 are well suited for creating gain blocks that can
drive RF filters. Many of these filters require that the input be
driven by a 50 Ω source, while the output must be terminated in
50 Ω for the filters to exhibit their specified frequency response.
REV. C
Figure 36 shows a circuit for driving and measuring the
frequency response of a filter, a Wavetek 5201 Tunable Band
Pass Filter that is tuned to a 50 MHz center frequency. The
HP8753D network provides a stimulus signal for the measurement. The analyzer has a 50 Ω source impedance that drives a
cable that is terminated in 50 Ω at the high impedance noninverting input of the AD8009.
The AD8009 is set at a gain of two. The series 50 Ω resistor at
the output, along with the 50 Ω termination provided by the
filter and its termination, yield an overall unity gain for the
measured path. The frequency response plot of Figure 37
shows the circuit to have an insertion loss of 1.3 dB in the pass
band and about 75 dB rejection in the stop band.
–9–
Page 10

AD8009
75⍀ COAX PRIMARY MONITOR
R
I
OUT
75⍀
RED
75⍀
ADV7160
ADV7162
I
G
OUT
75⍀
I
B
OUT
75⍀
5V
0.1F
7
3
AD8009
2
301⍀
3
AD8009
2
301⍀
3
AD8009
2
6
4
301⍀
–5V
6
301⍀
6
75⍀
75⍀
75⍀
+
10F
75⍀ COAX
+
GREEN
BLUE
RED
10F0.1F
GREEN
BLUE
75⍀
75⍀
ADDITIONAL MONITOR
75⍀
75⍀
75⍀
301⍀
301⍀
Figure 38. Driving an Additional High Resolution Monitor Using Three AD8009s
RGB Monitor Driver
High resolution computer monitors require very high full power
bandwidth signals to maximize their display resolution. The
RGB signals that drive these monitors are generally provided by
a current-out RAMDAC that can directly drive a 75 Ω doubly
terminated line.
There are times when the same output wants to be delivered to
additional monitors. The termination provided internally by
each monitor prohibits the ability to simply connect a second
monitor in parallel with the first. Additional buffering must be
provided.
Figure 38 shows a connection diagram for two high resolution
monitors being driven by an ADV7160 or ADV7162, a 220 MHz
(Mega-pixel per second) triple RAMDAC. This pixel rate
requires a driver whose full power bandwidth is at least half the
pixel rate or 110 MHz. This is to provide good resolution for a
worst case signal that swings between zero scale and full scale
on adjacent pixels.
The primary monitor is connected in the conventional fashion
with a 75 Ω termination to ground at each end of the 75 Ω
cable. Sometimes this configuration is called “doubly terminated” and is used when the driver is a high output impedance
current source.
For the additional monitor, each of the RGB signals close to the
RAMDAC output is applied to a high input impedance, noninverting input of an AD8009 that is configured for a gain of +2. The
outputs each drive a series 75 Ω resistor, cable and termination
resistor in the monitor that divides the output signal by two, thus
providing an overall unity gain. This scheme is referred to as
“back termination” and is used when the driver is a low output
impedance voltage source. Back termination requires that the
voltage of the signal be double the value that the monitor sees.
Double termination requires that the output current be double the
value that flows in the monitor termination.
–10–
REV. C
Page 11

AD8009
Driving a Capacitive Load
A capacitive load, like that presented by some A/D converters,
can sometimes be a challenge for an op amp to drive depending
on the architecture of the op amp. Most of the problem is
caused by the pole created by the output impedance of the op
amp and the capacitor that is driven. This creates extra phase
shift that can eventually cause the op amp to become unstable.
One way to prevent instability and improve settling time when
driving a capacitor is to insert a resistor in series between the op
amp output and the capacitor. The feedback resistor is still
connected directly to the output of the op amp, while the series
resistor provides some isolation of the capacitive load from the
op amp output.
G = + 2: RF = 301⍀ = R
G = + 10: RF = 200⍀, RG = 22.1⍀
R
49.9⍀
T
+5V
G
0.001F
3
7
2V
STEP
AD8009
2
R
R
G
6
4
F
–5V
0.1F
R
S
0.1F0.001F
+
10F
C
50pF
L
10F
+
Figure 39. Capacitive Load Drive Circuit
Figure 39 shows such a circuit with an AD8009 driving a 50 pF
load. With R
gain of +2 and +10, it was found experimentally that setting R
= 0, the AD8009 circuit will be unstable. For a
S
S
to 42.2 Ω will minimize the 0.1% settling time with a 2 V step at
the output. The 0.1% settling time was measured to be 40 ns with
this circuit.
For smaller capacitive loads, a smaller R
settling time, while a larger R
will be required for larger
S
will yield optimal
S
capacitive loads. Of course, a larger capacitance will always
require more time for settling to a given accuracy than a smaller
one, and this will be lengthened by the increase in R
required.
S
At best, a given RC combination will require about 7 time
constants by itself to settle to 0.1%, so a limit will be reached
where too large a capacitance cannot be driven by a given
op amp and still meet the system’s required settling time
specification.
REV. C
–11–
Page 12

AD8009
0.1574 (4.00)
0.1497 (3.80)
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
8-Lead SOIC
(SO-8)
0.1968 (5.00)
0.1890 (4.80)
8
5
0.2440 (6.20)
41
0.2284 (5.80)
0.0098 (0.25)
0.0040 (0.10)
0.0669 (1.70)
0.0590 (1.50)
0.0512 (1.30)
0.0354 (0.90)
0.0059 (0.15)
0.0019 (0.05)
SEATING
PLANE
PIN 1
0.0500
(1.27)
BSC
0.0688 (1.75)
0.0532 (1.35)
0.0192 (0.49)
0.0138 (0.35)
0.0098 (0.25)
0.0075 (0.19)
0.0196 (0.50)
0.0099 (0.25)
8°
0°
0.0500 (1.27)
0.0160 (0.41)
5-Lead Plastic Surface Mount (SOT-23)
(RT-5)
0.1181 (3.00)
0.1102 (2.80)
4 5
0.1181 (3.00)
0.1024 (2.60)
0.0374 (0.95) BSC
0.0571 (1.45)
0.0374 (0.95)
SEATING
PLANE
10ⴗ
0ⴗ
PIN 1
1 3
2
0.0748 (1.90)
BSC
0.0197 (0.50)
0.0138 (0.35)
x 45°
C01011–0–9/00 (rev. C)
0.0079 (0.20)
0.0031 (0.08)
0.0217 (0.55)
0.0138 (0.35)
–12–
PRINTED IN U.S.A.
REV. C
 Loading...
Loading...