

Page 1
270 MHz, 400 A
a
FEATURES
Ultralow Power
400 A Power Supply Current (4 mW on ⴞ5 V
Specified for Single Supply Operation
High Speed
270 MHz, –3 dB Bandwidth (G = +1)
170 MHz, –3 dB Bandwidth (G = +2)
280 V/s Slew Rate (G = +2)
28 ns Settling Time to 0.1%, 2 V Step (G = +2)
Low Distortion/Noise
–63 dBc @ 1 MHz, V
–50 dBc @ 10 MHz, V
= 2 V p-p
O
= 2 V p-p
O
4.0 nV/√Hz Input Voltage Noise @ 10 MHz
Good Video Specifications (RL = 1 k⍀, G = +2)
Gain Flatness 0.1 dB to 30 MHz
0.11% Differential Gain Error
0.4ⴗ Differential Phase Error
APPLICATIONS
Signal Conditioning
A/D Buffer
Power-Sensitive, High-Speed Systems
Battery Powered Equipment
Loop/Remote Power Systems
Communication or Video Test Systems
Portable Medical Instruments
PRODUCT DESCRIPTION
The AD8005 is an ultralow power, high-speed amplifier with a
wide signal bandwidth of 170 MHz and slew rate of 280 V/µs.
This performance is achieved while consuming only 400 µA of
quiescent supply current. These features increase the operating
time of high-speed battery-powered systems without reducing
dynamic performance.
)
S
Current Feedback Amplifier
AD8005
FUNCTIONAL BLOCK DIAGRAM
8-Lead Plastic DIP and SOIC
AD8005
NC
1
2
–IN
+IN
3
–V
4
S
NC = NO CONNECT
5-Lead SOT-23
OUT
–V
2
S
+IN
3
AD8005
The current feedback design results in gain flatness of 0.1 dB
to 30 MHz while offering differential gain and phase errors of
0.11% and 0.4°. Harmonic distortion is low over a wide
bandwidth with THDs of –63 dBc at 1 MHz and –50 dBc at
10 MHz. Ideal features for a signal conditioning amplifier or
buffer to a high-speed A-to-D converter in portable video,
medical or communication systems.
The AD8005 is characterized for +5 V and ±5 V supplies and
will operate over the industrial temperature range of –40°C to
+85°C. The amplifier is supplied in 8-lead plastic DIP, 8-lead
SOIC and 5-lead SOT-23 packages.
8
NC
7
+V
S
OUT
6
NC
5
+V
51
S
–IN
4
3
G = +2
2
1
0
–1
–2
–3
NORMALIZED GAIN – dB
–4
–5
–6
0.1 50010 100
V
R
OUT
= 1kV
L
= 200mV p-p
1
FREQUENCY – MHz
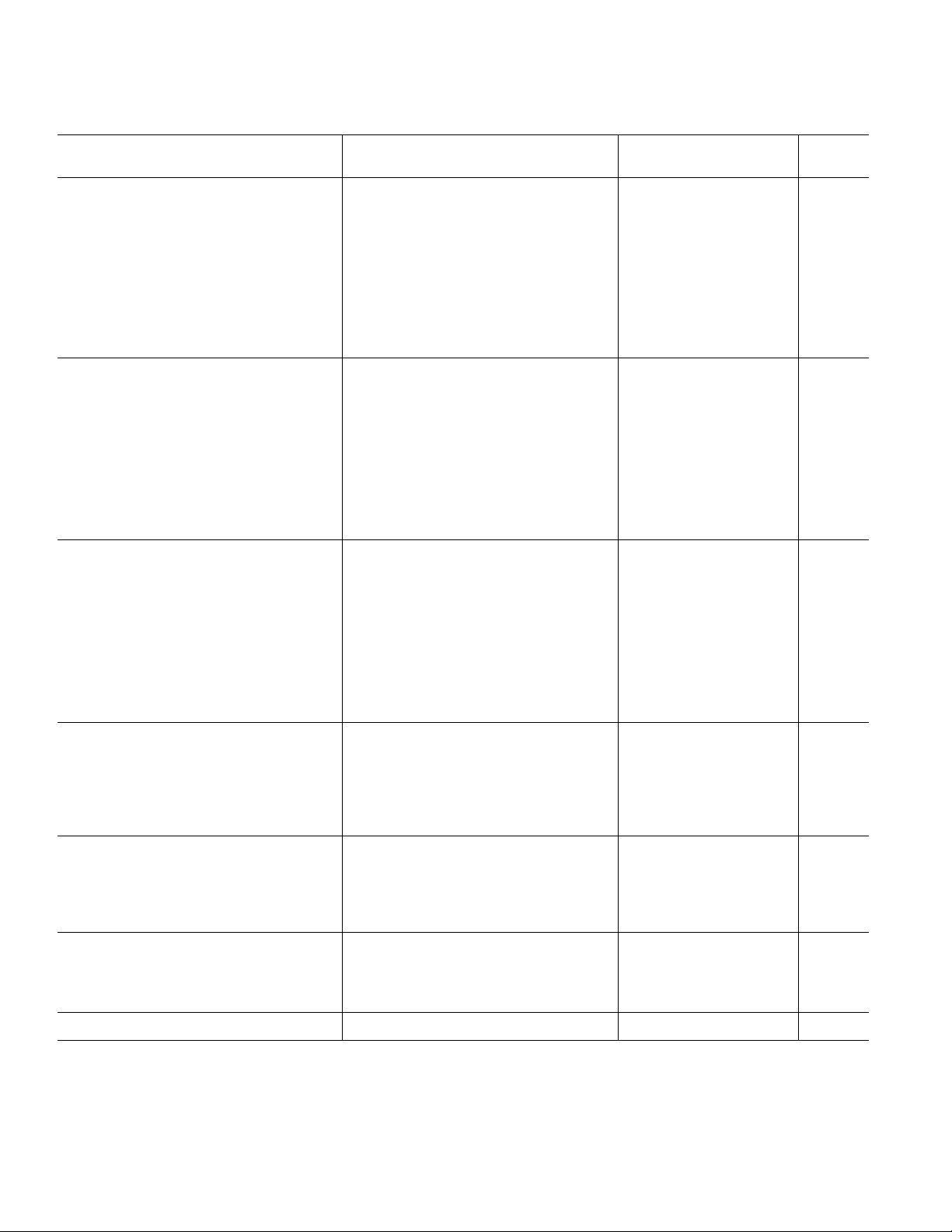
VS = ±5V
VS = +5V
Figure 1. Frequency Response; G = +2, VS = +5 V or ±5V
REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
–40
G = +2
V
= 2V p-p
OUT
–50
RL = 1kV
–60
–70
–80
DISTORTION – dBc
–90
–100
1
3RD
2ND
FREQUENCY – MHz
2ND
3RD
2010
Figure 2. Distortion vs. Frequency; VS = ±5V
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 1999
Page 2
AD8005–SPECIFICATIONS
ⴞ5 V SUPPLIES
(@ TA = +25ⴗC, VS = ⴞ5 V, RL = 1 k⍀ unless otherwise noted)
AD8005A
Parameter Conditions Min Typ Max Units
DYNAMIC PERFORMANCE R
–3 dB Small Signal Bandwidth G = +1, V
Bandwidth for 0.1 dB Flatness G = +2, V
Large Signal Bandwidth G = +10, V
Slew Rate (Rising Edge) G = +2, V
= 3.01 kΩfor “N” Package or
F
R
= 2.49 kΩ for “R” Package or
F
R
= 2.10 kΩ for “RT” Package
F
G = +2, V
G = –1, V
= 0.2 V p-p 225 270 MHz
O
= 0.2 V p-p 140 170 MHz
O
= 0.2 V p-p 10 30 MHz
O
= 4 V p-p, R
O
= 4 V Step 280 V/µs
O
= 4 V Step, R
O
= 499 Ω 40 MHz
F
= 1.5 kΩ 1500 V/µs
F
Settling Time to 0.1% G = +2, VO = 2 V Step 28 ns
DISTORTION/NOISE PERFORMANCE R
Total Harmonic Distortion f
= 3.01 kΩ for “N” Package or
F
= 2.49 kΩ for “R” Package or
R
F
R
= 2.10 kΩ for “RT” Package
F
= 1 MHz, VO = 2 V p-p, G = +2 –63 dBc
C
= 10 MHz, VO = 2 V p-p, G = +2 –50 dBc
f
C
Differential Gain NTSC, G = +2 0.11 %
Differential Phase NTSC, G = +2 0.4 Degrees
Input Voltage Noise f = 10 MHz 4.0 nV/√Hz
Input Current Noise f = 10 MHz, +I
–I
IN
IN
1.1 pA/√Hz
9.1 pA/√Hz
DC PERFORMANCE
Input Offset Voltage 530±mV
to T
T
MIN
MAX
50 ±mV
Offset Drift 40 µV/°C
+Input Bias Current 0.5 1 ±µA
to T
T
MIN
MAX
2 ±µA
–Input Bias Current 510±µA
to T
T
MIN
MAX
12 ±µA
Input Bias Current Drift (±) 6nA/°C
Open-Loop Transimpedance 400 1000 kΩ
INPUT CHARACTERISTICS
Input Resistance +Input 90 MΩ
–Input 260 Ω
Input Capacitance +Input 1.6 pF
Input Common-Mode Voltage Range 3.8 ±V
Common-Mode Rejection Ratio V
= ±2.5 V 46 54 dB
CM
OUTPUT CHARACTERISTICS
Output Voltage Swing Positive +3.7 +3.90 V
Negative –3.90 –3.7 V
Output Current R
= 50 Ω 10 mA
L
Short Circuit Current 60 mA
POWER SUPPLY
Quiescent Current 400 475 µA
Power Supply Rejection Ratio V
to T
T
MIN
S
MAX
= ±4 V to ±6 V 56 66 dB
560 µA
OPERATING TEMPERATURE RANGE –40 +85 °C
Specifications subject to change without notice.
–2–
REV. A
Page 3
AD8005
+5 V SUPPLY
(@ TA = +25ⴗC, VS = +5 V, RL = 1 k⍀ to 2.5 V unless otherwise noted)
AD8005A
Parameter Conditions Min Typ Max Units
DYNAMIC PERFORMANCE R
–3 dB Small Signal Bandwidth G = +1, V
Bandwidth for 0.1 dB Flatness G = +2, V
Large Signal Bandwidth G = +10, V
Slew Rate (Rising Edge) G = +2, V
= 3.01 kΩ for “N” Package or
F
R
= 2.49 kΩ for “R” Package or
F
R
= 2.10 kΩ for “RT” Package
F
G = +2, V
G = –1, V
= 0.2 V p-p 190 225 MHz
O
= 0.2 V p-p 110 130 MHz
O
= 0.2 V p-p 10 30 MHz
O
= 2 V p-p, R
O
= 2 V Step 260 V/µs
O
= 2 V Step, R
O
= 499 Ω 45 MHz
F
= 1.5 kΩ 775 V/µs
F
Settling Time to 0.1% G = +2, VO = 2 V Step 30 ns
DISTORTION/NOISE PERFORMANCE R
Total Harmonic Distortion f
Differential Gain NTSC, G = +2, R
Differential Phase NTSC, G = +2, R
= 3.01 kΩ for “N” Package or
F
= 2.49 kΩ for “R” Package or
R
F
R
= 2.10 kΩ for “RT” Package
F
= 1 MHz, VO = 2 V p-p, G = +2 –60 dBc
C
= 10 MHz, VO = 2 V p-p, G = +2 –50 dBc
f
C
to 1.5 V 0.14 %
L
to 1.5 V 0.70 Degrees
L
Input Voltage Noise f = 10 MHz 4.0 nV/√Hz
Input Current Noise f = 10 MHz, +I
–I
IN
IN
1.1 pA/√Hz
9.1 pA/√Hz
DC PERFORMANCE
Input Offset Voltage 535±mV
to T
T
MIN
MAX
50 ±mV
Offset Drift 40 µV/°C
+Input Bias Current 0.5 1 ±µA
to T
T
MIN
MAX
2 ±µA
–Input Bias Current 510±µA
to T
T
MIN
MAX
11 ±µA
Input Bias Current Drift (±)8nA/°C
Open-Loop Transimpedance 50 500 kΩ
INPUT CHARACTERISTICS
Input Resistance +Input 120 MΩ
–Input 300 Ω
Input Capacitance +Input 1.6 pF
Input Common-Mode Voltage Range 1.5 to 3.5 V
Common-Mode Rejection Ratio VCM = 1.5 V to 3.5 V 48 54 dB
OUTPUT CHARACTERISTICS
Output Voltage Swing 1.1 to 3.9 0.95 to 4.05 V
Output Current R
= 50 Ω 10 mA
L
Short Circuit Current 30 mA
POWER SUPPLY
Quiescent Current 350 425 µA
to T
T
MIN
MAX
475 µA
Power Supply Rejection Ratio VS = +4 V to +6 V 56 66 dB
OPERATING TEMPERATURE RANGE –40 +85 °C
Specifications subject to change without notice.
REV. A
–3–
Page 4
AD8005
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.6 V
Internal Power Dissipation
2
1
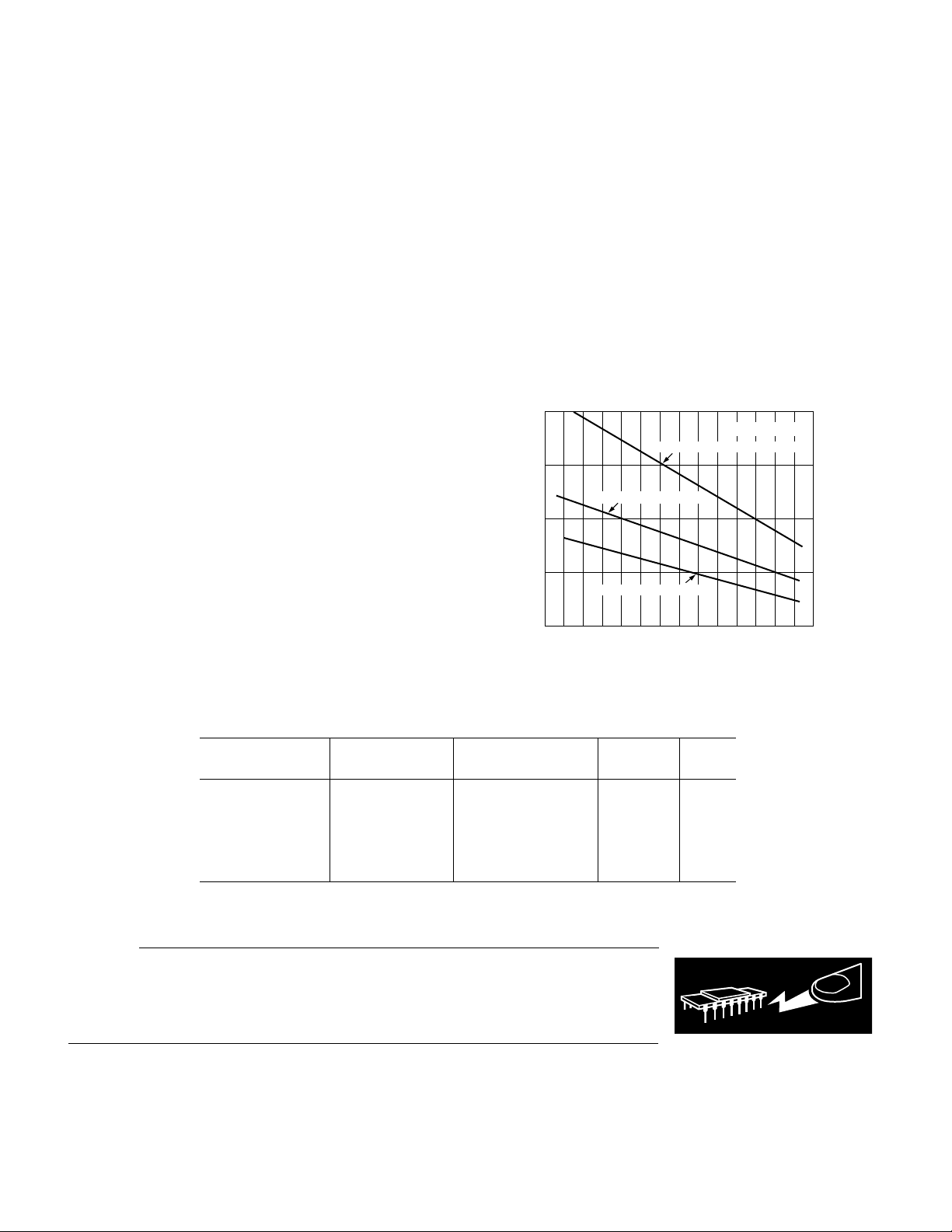
Plastic DIP Package (N) . . . . . . . . . . . . . . . . . . . . 1.3 Watts
Small Outline Package (R) . . . . . . . . . . . . . . . . . . 0.75 Watts
SOT-23-5 Package (RT) . . . . . . . . . . . . . . . . . . . 0.5 Watts
Input Voltage (Common Mode) . . . . . . . . . . . . . . . ±V
± 1V
S
Differential Input Voltage . . . . . . . . . . . . . . . . . . . . . . . ±3.5 V
Output Short Circuit Duration
. . . . . . . . . . . . . . . . . . . . . . . Observe Power Derating Curves
Storage Temperature Range
N, R & RT Package . . . . . . . . . . . . . . . . . –65°C to +125°C
Operating Temperature Range (A Grade) . . . –40°C to +85°C
Lead Temperature Range (Soldering 10 sec) . . . . . . . . +300°C
NOTES
1
Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only; functional operation of the
device at these or any other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
2
Specification is for device in free air:
8-Lead Plastic DIP Package: θJA = 90°C/W
8-Lead SOIC Package: θJA = 155°C/W
5-Lead SOT-23 Package: θJA = 240°C/W
MAXIMUM POWER DISSIPATION
The maximum power that can be safely dissipated by the
AD8005 is limited by the associated rise in junction temperature. The maximum safe junction temperature for plastic
encapsulated devices is determined by the glass transition tem-
perature of the plastic, approximately +150°C. Exceeding this
limit temporarily may cause a shift in parametric performance
due to a change in the stresses exerted on the die by the package.
Exceeding a junction temperature of +175°C for an extended
period can result in device failure.
While the AD8005 is internally short circuit protected, this may
not be sufficient to guarantee that the maximum junction tem-
perature (+150°C) is not exceeded under all conditions. To
ensure proper operation, it is necessary to observe the maximum
power derating curves shown in Figure 3.
2.0
TJ = +150°C
8-LEAD PLASTIC-DIP PACKAGE
1.5
8-LEAD SOIC PACKAGE
1.0
0.5
MAXIMUM POWER DISSIPATION – Watts
0
–50
5-LEAD SOT-23 PACKAGE
AMBIENT TEMPERATURE – °C
Figure 3. Maximum Power Dissipation vs. Temperature
ORDERING GUIDE
Temperature Package Package Brand
Model Range Description Option Code
AD8005AN –40°C to +85°C 8-Lead Plastic DIP N-8
AD8005AR –40°C to +85°C 8-Lead Plastic SOIC SO-8
AD8005AR-REEL –40°C to +85°C 13" Tape and Reel SO-8
AD8005ART-REEL –40°C to +85°C 13" Tape and Reel RT-5 H1A
AD8005AR-REEL7 –40°C to +85°C 7" Tape and Reel SO-8
AD8005ART-REEL7 –40°C to +85°C 7" Tape and Reel RT-5 H1A
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD8005 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high-energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
9080
706050403020100–40 –30 –20 –10
–4–
REV. A
Page 5

Typical Characteristics–AD8005
5
4
VS = 65V
3
V
= 200mV p-p
OUT
R
= 1kV
L
2
1
0
–1
–2
NORMALIZED GAIN – dB
–3
–4
–5
1 50010 100
G = +10
R
= 499V
F
FREQUENCY – MHz
G = +1
G = +2
Figure 4. Frequency Response; G = +1, +2, +10; VS = ±5 V
6.2
6.1
6.0
5.9
5.8
G = +2
5.7
V
= 200mV p-p
OUT
R
= 1kV
GAIN – dB
5.6
5.5
5.4
5.3
5.2
L
0.1
FREQUENCY – MHz
50010 1001
5
VS = 65V
4
V
= 200mV p-p
OUT
R
= 1kV
3
L
2
1
0
–1
–2
NORMALIZED GAIN – dB
–3
–4
–5
1 50010 100
G = –10
R
= 1kV
F
FREQUENCY – MHz
G = –1
R
= 1.5kV
F
Figure 7. Frequency Response; G = –1, –10; VS = ±5 V
140
120
100
80
60
GAIN – dB
40
20
0
1k 100M10k 100k 1M 10M 1G
FREQUENCY – Hz
PHASE
GAIN
0
–40
–80
–120
–160
PHASE – Degrees
–200
–240
–280
Figure 5. Gain Flatness; G = +2; VS = ±5 V or +5 V
7
6
5
4
3
2
GAIN – dB
1
0
–1
–2
1 50010 100
VS = 65V
V
= 4V p-p
OUT
FREQUENCY – MHz
VS = 65V
V
= 2V p-p
OUT
Figure 6. Large Signal Frequency Response;
= 1 k
G = +2, R
Ω
L
Figure 8. Transimpedance Gain and Phase vs. Frequency
10
9
8
7
6
VS = +5V
5
G = +2
V
= 1k
R
L
4
1%THD) – Volts
(
3
2
PEAK-TO-PEAK OUTPUT VOLTAGE
1
0
0.5 100110
FREQUENCY – MHz
Figure 9. Output Swing vs. Frequency; VS = ±5 V
REV. A
–5–
Page 6

AD8005–Typical Characteristics
–40
G = +2
= 2V p-p
V
–50
OUT
= 1kV
R
L
–60
–70
–80
DISTORTION – dBc
–90
–100
1
3RD
2ND
FREQUENCY – MHz
2ND
3RD
2010
Figure 10. Distortion vs. Frequency; VS = ±5 V
0.10
0.05
0.00
–0.05
DIFF GAIN – %
–0.10
0.06
0.04
0.02
0.00
–0.02
–0.04
DIFF PHASE – Degrees
–0.06
MIN = –0.06 MAX = 0.03 p-p/MAX = 0.09
MIN = –0.01 MAX = 0.39 p-p = 0.40
MODULATING RAMP LEVEL – IRE
VS = ±5V
= 1kV
R
L
G = +2
VS = ±5V
R
= 1kV
L
G = +2
11th1st 2nd 3rd 4th 5t h 6th 7th 8th 9th 10th
Figure 11. Differential Gain and Phase, VS = ±5 V
–40
G = +2
= 2V p-p
V
–50
OUT
= 1kV
R
L
–60
–70
–80
DISTORTION – dBc
–90
–100
1
3RD
2ND
FREQUENCY – MHz
2ND
3RD
2010
Figure 13. Distortion vs. Frequency VS = +5 V
0.10
0.05
0.00
–0.05
DIFF GAIN – %
–0.10
1.0
0.5
0.0
–0.5
DIFF PHASE – Degrees
–1.0
MIN = –0.08 MAX = 0.04 p-p/MAX = 0.12
VS = +5V
R
= 1kV TO +1.5V
L
G = +2
MIN = 0.00 MAX = 0.70 p-p = 0.70
VS = +5V
R
= 1kV TO +1.5V
L
G = +2
MODULATING RAMP LEVEL – IRE
11th1st 2nd 3rd 4th 5th 6th 7th 8th 9th 10th
Figure 14. Differential Gain and Phase, VS = +5 V
9
8
7
6
5
4
SWING – V p-p
3
2
1
0
10
VS = 65V
VS = +5V
LOAD RESISTANCE – V
1k 10k100
Figure 12. Output Voltage Swing vs. Load
–6–
9
8
f = 5MHz
G = +2
7
R
= 1kV
L
6
5
4
3
PEAK-TO-PEAK OUTPUT
2
AT 5MHz ( 0.5% THD) – Volts
1
0
31145678910
TOTAL SUPPLY VOLTAGE – Volts
Figure 15. Output Swing vs. Supply
REV. A
Page 7

AD8005
–5
VS = +5V OR 65V
–10
G = +2
–15
R
= 1kV
L
–20
–25
–30
CMRR – dB
–35
–40
–45
–50
–55
0.03
0.1 100
110
FREQUENCY – MHz
Figure 16. CMRR vs. Frequency; VS = +5 V or ±5 V
VS = +5V AND 65V
= 1k
R
V
100
OUTPUT RESISTANCE – V
L
G = +2
10
1
0.03 500
VS = +5V
VS = 65V
0.1 100
110
FREQUENCY – MHz
12.5
10.0
7.5
5.0
2.5
INPUT VOLTAGE NOISE – nV/ Hz
0
10 10M100
1k 10k 100k 1M
FREQUENCY – Hz
Figure 19. Noise vs. Frequency; VS = +5 V or ±5 V
62.5
50.0
37.5
25.0
12.5
INPUT CURRENT NOISE – pA/ Hz
0
10 10M100 1k 10k 100k 1M
INVERTING CURRENT
NONINVERTING CURRENT
FREQUENCY – Hz
Figure 17. Output Resistance vs. Frequency;
= ±5 V and +5 V
V
S
10
VS = +5V OR 65V
0
G = +2
–10
R
= 1kV
L
–20
–30
–40
PSRR – dB
–50
–60
–70
–80
0.03 500
0.1 100
110
FREQUENCY – MHz
–PSRR
+PSRR
Figure 18. PSRR vs. Frequency; VS = +5 V or ±5 V
Figure 20. Noise vs. Frequency; VS = +5 V or ±5 V
100
90
10
0%
V
OUT
V
IN
1V 2V
VS = 65V
G = +6
= 1kV
R
L
150ns
Figure 21.±Overdrive Recovery, VS = ±5 V, VIN = 2 V Step
REV. A
–7–
Page 8

AD8005–Typical Characteristics
R
F
= 10pF NOMINAL
LOAD
C
0.01mF
0.01mF
PROBE
10mF
10mF
R
1kV
V
OUT
L
+V
S
–V
S
V
IN
R
G
50V
PROBE : TEK P6137
C
Figure 22. Test Circuit; G = +2; RF = RG = 3.01 kΩ for
N Package; R
= RG = 2.49 kΩ for R and RT Packages
F
100
90
10
0%
50mV
10ns
V
IN
1.5kV
51.1V
PROBE : TEK P6137
C
1.5kV
= 10pF NOMINAL
LOAD
C
0.01mF
0.01mF
PROBE
R
1kV
10mF
10mF
V
OUT
L
+V
S
–V
S
Figure 25. Test Circuit; G = –1, RF = RG = 1.5 kΩ for
N, R and RT Packages
100
90
10
0%
50mV
10ns
Figure 23. 200 mV Step Response; G = +2, VS = ±2.5 V
±
5 V
or
100
90
10
0%
1V
10ns
Figure 24. Step Response; G = +2, VS = ±5 V
Figure 26. 200 mV Step Response; G = –1, VS = ±2.5 V
±
5 V
or
100
90
10
0%
1V
10ns
Figure 27. Step Response; G = –1, VS = ±5 V
–8–
REV. A
Page 9

AD8005
APPLICATIONS
Driving Capacitive Loads
Capacitive loads interact with an op amp’s output impedance
to create an extra delay in the feedback path. This reduces
circuit stability, and can cause unwanted ringing and oscillation. A given value of capacitance causes much less ringing
when the amplifier is used with a higher noise gain.
The capacitive load drive of the AD8005 can be increased by
adding a low valued resistor in series with the capacitive load.
Introducing a series resistor tends to isolate the capacitive load
from the feedback loop thereby diminishing its influence. Figure 29 shows the effects of a series resistor on capacitive drive
for varying voltage gains. As the closed-loop gain is increased,
the larger phase margin allows for larger capacitive loads with
less overshoot. Adding a series resistor at lower closed-loop
gains accomplishes the same effect. For large capacitive loads,
the frequency response of the amplifier will be dominated by
the roll-off of the series resistor and capacitive load.
R
F
R
R
G
AD8005
S
R
L
V
1k
C
L
Figure 28. Driving Capacitive Loads
80
VS = 65V
2V OUTPUT STEP
70
WITH 30% OVERSHOOT
60
50
40
30
CAPACITIVE LOAD – pF
20
10
0
1 345
RS = 10V
RS = 5V
RS = 0V
2
CLOSED-LOOP GAIN – V/V
Figure 29. Capacitive Load Drive vs. Closed-Loop Gain
Single-Supply Level Shifter
In addition to providing buffering, many systems require that an
op amp provide level shifting. A common example is the level
shifting that is required to move a bipolar signal into the unipolar range of many modern analog-to-digital converters (ADCs). In
general, single supply ADCs have input ranges that are referenced neither to ground nor supply. Instead the reference level
is some point in between, usually halfway between ground and
supply (+2.5 V for a single supply 5 V ADC). Because highspeed ADCs typically have input voltage ranges of 1 V to 2 V,
the op amp driving it must be single supply but not necessarily
rail-to-rail.
R2
1.5kV
+5V
R1
1.5kV
V
IN
V
REF
+5V
R3
30.1kV
AD8005
R4
10kV
0.1mF
0.01mF 10mF
V
OUT
Figure 30. Bipolar to Unipolar Level Shifter
Figure 30 shows a level shifter circuit that can move a bipolar
signal into a unipolar range. A positive reference voltage, derived
from the +5 V supply, sets a bias level of +1.25 V at the noninverting terminal of the op amp. In ac applications, the accuracy of
this voltage level is not important. Noise is however a serious
consideration. A 0.1 µF capacitor provides useful decoupling of
this noise.
The bias level on the noninverting terminal sets the input commonmode voltage to +1.25 V. Because the output will always be
positive, the op amp may therefore be powered with a single
+5 V power supply.
The overall gain function is given by the equation:
= –
R2
R1
V
OUT
V
+
IN
R3 +R 4
R4
R2
1+
V
R1
REF
In the above example, the equation simplifies to
V
= –VIN+2.5 V
OUT
REV. A
–9–
Page 10

AD8005
Single-Ended-to-Differential Conversion
Many single supply ADCs have differential inputs. In such cases,
the ideal common-mode operating point is usually halfway
between supply and ground. Figure 31 shows how to convert a
single-ended bipolar signal into a differential signal with a
common-mode level of 2.5 V.
BIPOLAR
SIGNAL
60.5V
2.49kV
0.1mF
2.49kV
2.49kV
2.49kV
+5V
+5V
R
IN
1kV
0.1mF
AD8005
R
G
619V
AD8005
+5V
+5V
0.1mF
R
2.49kV
R
3.09kV
0.1mF
F1
F2
V
OUT
Figure 31. Single-Ended-to-Differential Converter
Amp 1 has its +input driven with the ac-coupled input signal
while the +input of Amp 2 is connected to a bias level of +2.5 V.
Thus the –input of Amp 2 is driven to virtual +2.5 V by its
output. Therefore, Amp 1 is configured for a noninverting gain
of five, (1 + R
), because RG is connected to the virtual
F1/RG
+2.5 V of Amp 2’s –input.
When the +input of Amp 1 is driven with a signal, the same
signal appears at the –input of Amp 1. This signal serves as an
input to Amp 2 configured for a gain of –5, (–R
F2/RG
). Thus the
two outputs move in opposite directions with the same gain and
create a balanced differential signal.
This circuit can be simplified to create a bipolar in/bipolar out
single-ended to differential converter. Obviously, a single supply
is no longer adequate and the –V
pins must now be powered
S
with –5 V. The +input to Amp 2 is tied to ground. The ac
coupling on the +input of Amp 1 is removed and the signal can
be fed directly into Amp 1.
Layout Considerations
In order to achieve the specified high-speed performance of the
AD8005 you must be attentive to board layout and component
selection. Proper R
design techniques and selection of compo-
F
nents with low parasitics are necessary.
The PCB should have a ground plane that covers all unused
portions of the component side of the board. This will provide a
low impedance path for signals flowing to ground. The ground
plane should be removed from the area under and around the
chip (leave about 2 mm between the pin contacts and the
ground plane). This helps to reduce stray capacitance. If both
signal tracks and the ground plane are on the same side of the
PCB, also leave a 2 mm gap between ground plane and track.
R
V
IN
V
IN
G
R
T
R
G
R
NONINVERTING CONFIGURATION
R
F
INVERTING CONFIGURATION
R
F
T
C1
0.01mF
C2
0.01mF
C1
0.01mF
C2
0.01mF
R
O
C3
10mF
C4
10mF
R
O
C3
10mF
C4
10mF
V
OUT
+V
S
–V
S
V
OUT
+V
S
–V
S
Figure 32. Inverting and Noninverting Configurations
Chip capacitors have low parasitic resistance and inductance
and are suitable for supply bypassing (see Figure 32). Make sure
that one end of the capacitor is within 1/8 inch of each power
pin with the other end connected to the ground plane. An
additional large (0.47 µF–10 µF) tantalum electrolytic capacitor
should also be connected in parallel. This capacitor supplies
current for fast, large signal changes at the output. It must not
necessarily be as close to the power pin as the smaller capacitor.
Locate the feedback resistor close to the inverting input pin in
order to keep the stray capacitance at this node to a minimum.
Capacitance variations of less than 1.5 pF at the inverting input
will significantly affect high-speed performance.
Use stripline design techniques for long signal traces (i.e., greater
than about 1 inch). Striplines should have a characteristic
impedance of either 50 Ω or 75 Ω. For the Stripline to be
effective, correct termination at both ends of the line is necessary.
Table I. Typical Bandwidth vs. Gain Setting Resistors
Small Signal –3 dB
BW (MHz),
Gain R
F
R
G
R
T
VS = ⴞ5 V
–1 1.49 kΩ 1.49 kΩ 52.3 120 MHz
–10 1 kΩ 100 Ω 100 Ω 60 MHz
+1 2.49 kΩ ⴥ 49.9 Ω 270 MHz
+2 2.49 kΩ 2.49 kΩ 49.9 Ω 170 MHz
+10 499 Ω 56.2 Ω 49.9 Ω 40 MHz
–10–
REV. A
Page 11

AD8005
Increasing Feedback Resistors
Unlike conventional voltage feedback op amps, the choice of feedback resistor has a direct impact on the closed-loop bandwidth
and stability of a current feedback op amp circuit. Reducing the
resistance below the recommended value makes the amplifier
more unstable. Increasing the size of the feedback resistor
reduces the closed-loop bandwidth.
360mA (rms)
4.99kV
+5V
AD8005
QUIESCENT CURRENT
475mA (MAX)
–5V
V
OUT
2V (rms)
V
0.2V (rms)
562V
IN
Figure 33. Saving Power by Increasing Feedback Resistor
Network
In power-critical applications where some bandwidth can be
sacrificed, increasing the size of the feedback resistor will yield
significant power savings. A good example of this is the gain of
+10 case. Operating from a bipolar supply (±5 V), the quiescent
current is 475 µA (excluding the feedback network). The recom-
mended feedback and gain resistors are 499 Ω and 56.2 Ω
respectively. In order to drive an rms output voltage of 2 V, the
output must deliver a current of 3.6 mA to the feedback network. Increasing the size of the resistor network by a factor of
10 as shown in Figure 33 will reduce this current to 360 µA.
The closed loop bandwidth will however decrease to 20 MHz.
REV. A
–11–
Page 12

AD8005
0.210 (5.33)
MAX
0.160 (4.06)
0.115 (2.93)
0.022 (0.558)
0.014 (0.356)
0.1574 (4.00)
0.1497 (3.80)
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
8-Lead Plastic DIP
(N-8)
0.430 (10.92)
0.348 (8.84)
8
14
PIN 1
0.100
(2.54)
BSC
5
0.280 (7.11)
0.240 (6.10)
0.060 (1.52)
0.015 (0.38)
0.070 (1.77)
0.045 (1.15)
0.130
(3.30)
MIN
SEATING
PLANE
0.325 (8.25)
0.300 (7.62)
0.015 (0.381)
0.008 (0.204)
8-Lead Plastic SOIC
(SO-8)
0.1968 (5.00)
0.1890 (4.80)
8
5
0.2440 (6.20)
41
0.2284 (5.80)
C2186a–0–8/99
0.195 (4.95)
0.115 (2.93)
0.0098 (0.25)
0.0040 (0.10)
0.0669 (1.70)
0.0590 (1.50)
0.0512 (1.30)
0.0354 (0.90)
PIN 1
SEATING
PLANE
0.0059 (0.15)
0.0019 (0.05)
0.0688 (1.75)
0.0532 (1.35)
0.0500
(1.27)
BSC
0.0192 (0.49)
0.0138 (0.35)
0.0098 (0.25)
0.0075 (0.19)
5-Lead Plastic SOT-23
(RT-5)
0.1181 (3.00)
0.1102 (2.80)
1 2 3
0.1181 (3.00)
4
0.0748 (1.90)
BSC
0.0197 (0.50)
0.0138 (0.35)
0.1024 (2.60)
5
0.0374 (0.95) BSC
0.0571 (1.45)
0.0374 (0.95)
SEATING
PLANE
0.0196 (0.50)
0.0099 (0.25)
8°
0°
0.0500 (1.27)
0.0160 (0.41)
10°
0°
x 45°
0.0079 (0.20)
0.0031 (0.08)
0.0217 (0.55)
0.0138 (0.35)
PRINTED IN U.S.A.
–12–
REV. A
 Loading...
Loading...