

Page 1
LC2MOS
a
FEATURES
22-Bit Sigma-Delta ADC
Dynamic Range of 105 dB (146 Hz Input)
60.003% Integral Nonlinearity
On-Chip Low-Pass Digital Filter
Cutoff Programmable from 584 Hz to 36.5 Hz
Linear Phase Response
Five Line Serial I/O
Twos Complement Coding
Easy Interface to DSPs and Microcomputers
Software Control of Filter Cutoff
65 V Supply
Low Power Operation: 50 mW
APPLICATIONS
Biomedical Data Acquisition
ECG Machines
EEG Machines
Process Control
High Accuracy Instrumentation
Seismic Systems
22-Bit Data Acquisition System
AD7716
FUNCTIONAL BLOCK DIAGRAM
AIN1
AIN2
AIN3
AIN4
AV
DD
MODULATOR
MODULATOR
MODULATOR
MODULATOR
V
DV
DD
AD7716
ANALOG
ANALOG
ANALOG
ANALOG
REF
AV
RESET
SS
LOW PASS
DIGITAL
FILTER
LOW PASS
DIGITAL
FILTER
LOW PASS
DIGITAL
FILTER
LOW PASS
DIGITAL
FILTER
AGND DGND
A0 A1 A2
DIN1
GENERATION
CONTROL
LOGIC
OUTPUT
SHIFT
REGISTER
CONTROL
REGISTER
D
1
OUT
CLOCK
D
OUT
CLKOUTCLKIN
MODE
CASCIN
CASCOUT
RFS
SDATA
SCLK
DRDY
TFS
2
GENERAL DESCRIPTION
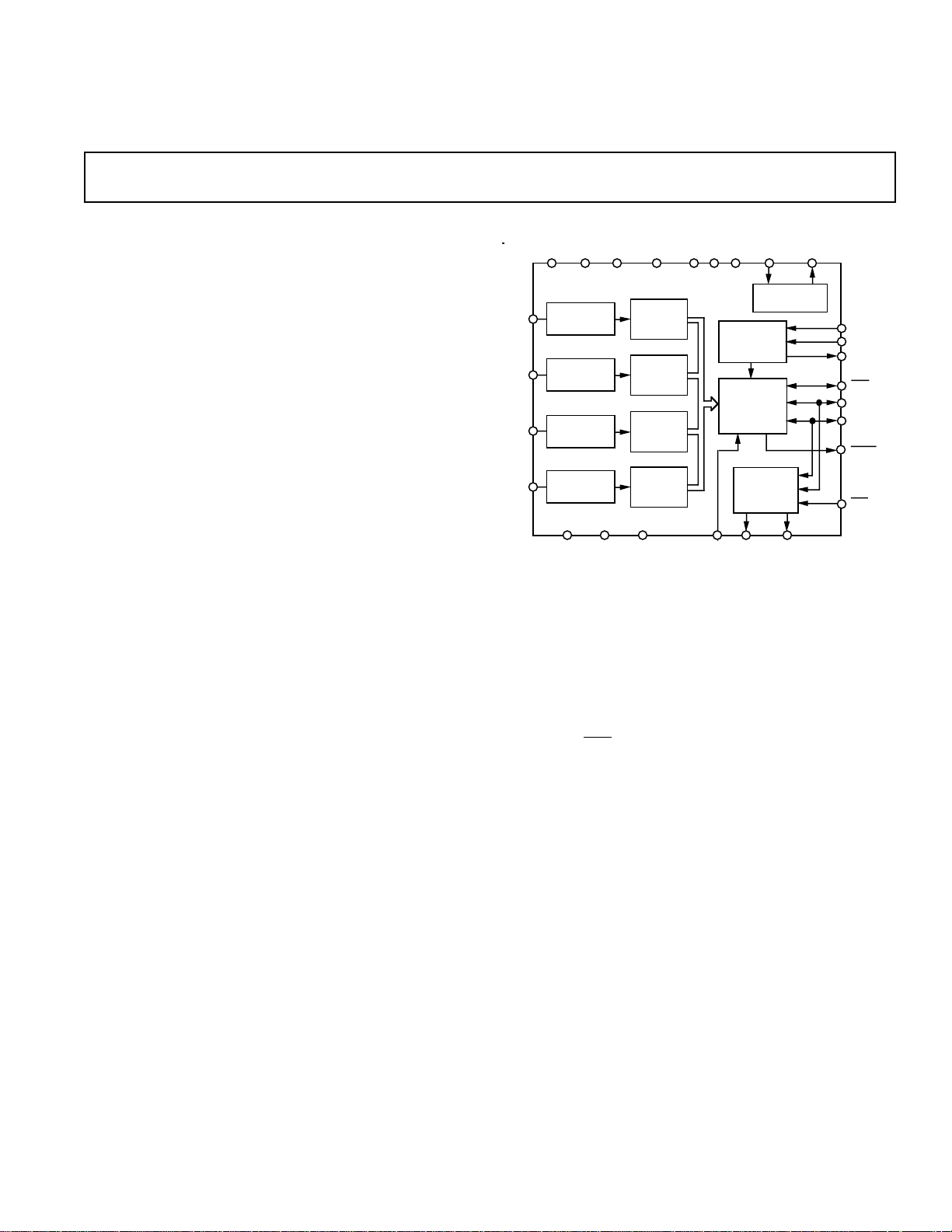
The AD7716 is a signal processing block for data acquisition
systems. It is capable of processing four channels with bandwidths of up to 584 Hz. Resolution is 22 bits and the usable
dynamic range varies from 111 dB with an input bandwidth of
36.5 Hz to 99 dB with an input bandwidth of 584 Hz.
The device consists of four separate A/D converter channels that
are implemented using sigma-delta technology. Sigma-delta
ADCs include on-chip digital filtering and, thus, the system
filtering requirements are eased.
Three address pins program the device address. This allows a
data acquisition system with up to 32 channels to be set up in a
simple fashion. The output word from the device contains 32
bits of data. One bit is determined by the state of the D
IN
1 input and may be used, for example, in an ECG system with an
external pacemaker detect circuit to indicate that the output
word is invalid because of the presence of a pacemaker pulse.
There are 22 bits of data corresponding to the analog input.
Two bits contain the channel address and 3 bits are the device
address. Thus, each channel in a 32-channel system would have
a discrete 5-bit address. The device also has a CASCOUT pin
and a CASCIN pin that allow simple networking of multiple
devices.
The on-chip control register is programmed using the SCLK,
SDATA and
TFS pins. Three bits of the Control Register set
the digital filter cutoff frequency for the device. Selectable frequencies are 584 Hz, 292 Hz, 146 Hz, 73 Hz and 36.5 Hz. A
further 2 bits appear as outputs D
OUT
1 and D
2 and can be
OUT
used for controlling calibration at the front end. The device is
available in a 44-pin PQFP (Plastic Quad Flatpack) and 44-pin
PLCC.
REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 617/329-4700 Fax: 617/326-8703
Page 2
AD7716–SPECIFICATIONS
6 5%; AVSS = –5 V 6 5%; AGND = DGND = 0 V; V
Resistance = 750 V2 with 1 nF to AGND at each AIN. TA = T
= 2.5 V; Filter Cutoff = 146 Hz; Noise Measurement Bandwidth = 146 Hz; AIN Source
REF
MIN
= 8 MHz; MODE Pin Is High (Slave Mode Operation); AVDD = DV
CLKIN
to T
, unless otherwise noted.)
MAX
= +5 V
DD
1, 2
(f
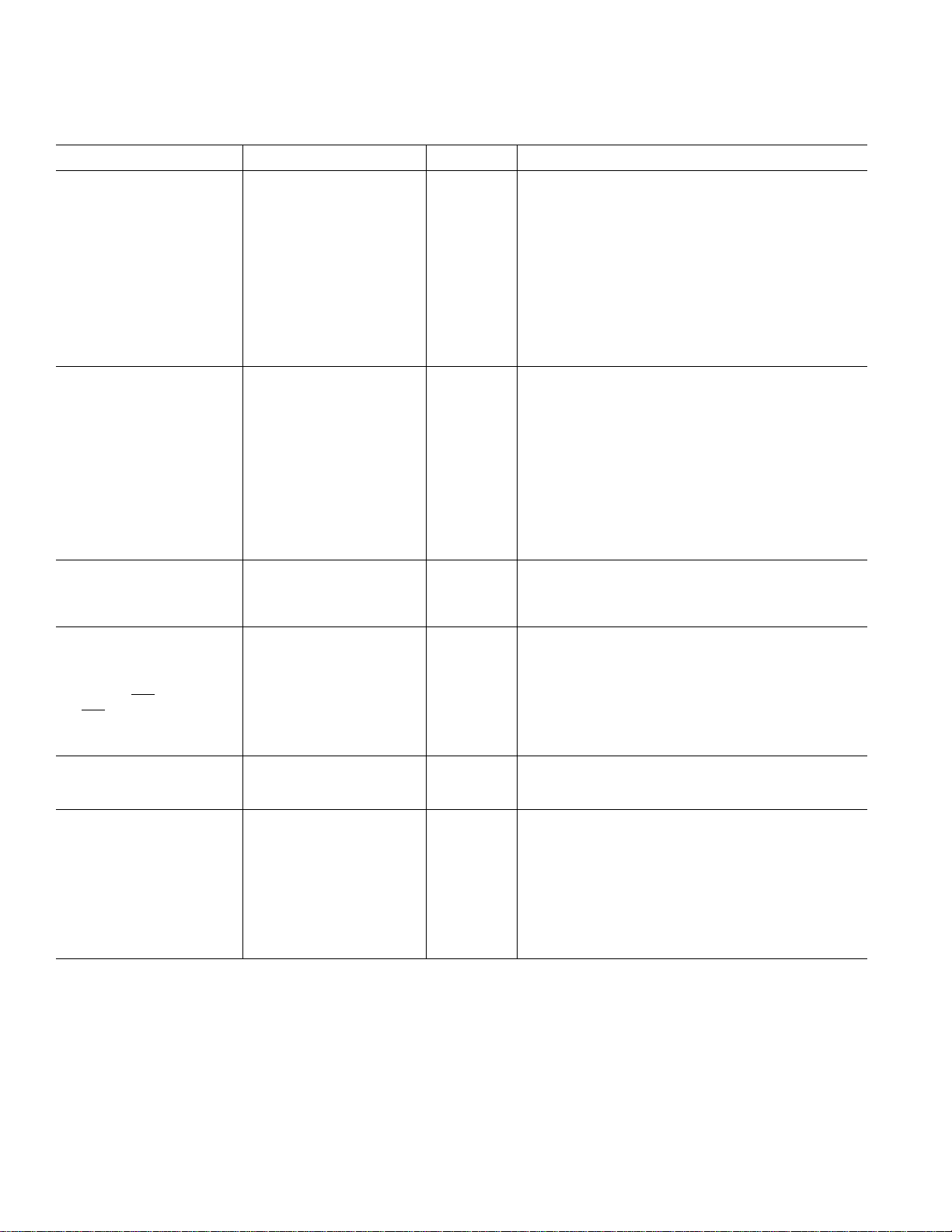
Parameter B Version Units Test Conditions/Comments
STATIC PERFORMANCE
Resolution 22 Bits
Integral Linearity Error 0.003 % FSR typ Guaranteed No Missed Codes to 21 Bits
3
0.006 % FSR max
Gain Error 1 % FSR max
Gain Match Between Channels 0.5 % FSR max
Gain TC 30 µV/°C typ
Offset Error 0.2 % FSR max
Offset Match Between Channels 0.1 % FSR max
Offset TC 4 µV/°C typ
Noise 11 µV rms max See Table I for Typical Noise Performance vs. Programmed
Cutoff Frequency
DYNAMIC PERFORMANCE
Sampling Rate f
Output Update Rate f
Filter Cutoff Frequency f
Settling Time (3 3 14 3 256 3 2N/f
Usable Dynamic Range
4
/14 570 kHz for f
CLKIN
/(14 3 256 3 2N) N Is Decimal Equivalent of FC2, FC1, FC0 in Control Register
CLKIN
/(3.81 3 14 3 256 3 2N)
CLKIN
CLKIN
)
CLKIN
= 8 MHz
See Table I
Total Harmonic Distortion –90 dB typ Input Frequency = 35 Hz
Absolute Group Delay
3
Differential Group Delay
3
–100 dB typ AIN = ±10 mV p-p
(3 3 14 3 256 3 2N)/2f
CLKIN
10 ns typ
Channel-to-Channel Isolation –85 dB typ Feedthrough from Any One Channel to the Other Three, with
35 Hz Full-Scale Sine Wave Applied to that Channel
ANALOG INPUT
Input Range ± 2.5 Volts
Input Capacitance 10 pF typ
Input Bias Current 1 nA typ
LOGIC INPUTS
V
, Input High Voltage 2.4 V min
INH
V
, Input Low Voltage 0.8 V max
INL
IIN, Input Current
SDATA, RFS +10/-130 µA max Internal 50 kΩ Pull-Up Resistors
TFS +10/-650 µA max Internal 10 kΩ Pull-Up Resistor
All Other Inputs ±10 µA max
CIN, Input Capacitance
3
10 pF max
LOGIC OUTPUTS
VOH, Output High Voltage 2.4 V min |I
VOL, Output Low Voltage 0.4 V max |I
| ≤ 40 µA
OUT
| ≤ 1.6 mA
OUT
POWER SUPPLIES
Reference Input 2.4/2.6 V min/V max
AV
DD
DV
DD
AV
SS
I
DD
I
SS
Power Consumption 50 mW max 35 mW typ
Power Supply Rejection
NOTES
1
Operating temperature ranges as follows : B Version; –40°C to +85°C.
2
The AIN pins present a very high impedance dynamic load which varies with clock frequency.
3
Guaranteed by design and characterization. Digital filter has linear phase.
4
Usable dynamic range is guaranteed by measuring noise and relating this to the full-scale input range.
5
100 mV p-p, 120 Hz sine wave applied to each supply.
Specifications subject to change without notice.
5
4.75/5.25 V min/V max
4.75/5.25 V min/V max
–4.75/–5.25 V min/V max
7.5 mA max 4.8 mA typ
2.5 mA max 1.8 mA typ
–70 dB typ
REV. A–2–
Page 3
AD7716
Table I. Typical Usable Dynamic Range, RMS Noise and Filter Settling Time vs. Filter Cutoff Frequency
Programmed Cutoff Output Update Usable Dynamic RMS Noise Filter Settling Time to Absolute Group
N Frequency (Hz) Rate (Hz) Range (dB) (mV) 60.0007% FS (ms) Delay (ms)
0 584 2232 99 21 1.35 0.675
1 292 1116 102 14 2.7 1.35
2 146 558 105 10 5.4 2.7
3 73 279 108 7 10.8 5.4
4 36.5 140 111 5 21.6 10.8
NOTE
Usable Dynamic Range is defined as the ratio of the rms full-scale reading (sine wave input) to the rms noise of the converter.
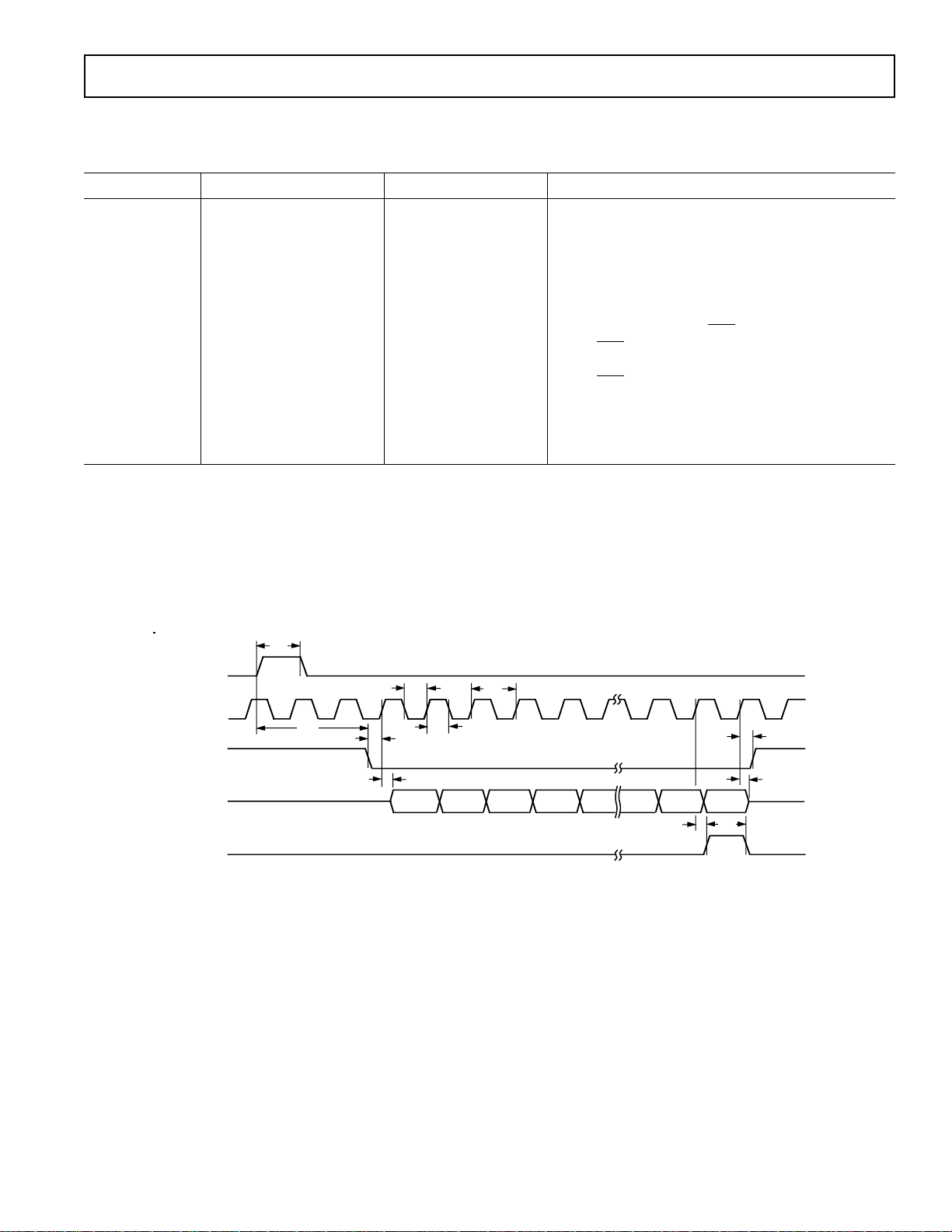
CONTROL REGISTER TIMING CHARACTERISTICS
DGND = 0 V; f
= 8 MHz; Input Levels: Logic 0 = 0 V, Logic 1 = DVDD; unless otherwise noted)
CLKIN
Limit at T
MIN
, T
MAX
1, 2
(AV
DD
= DV
= +5 V 6 5%; AVSS= –5 V 6 5%; AGND =
DD
Parameter (B Version) Units Conditions/Comments
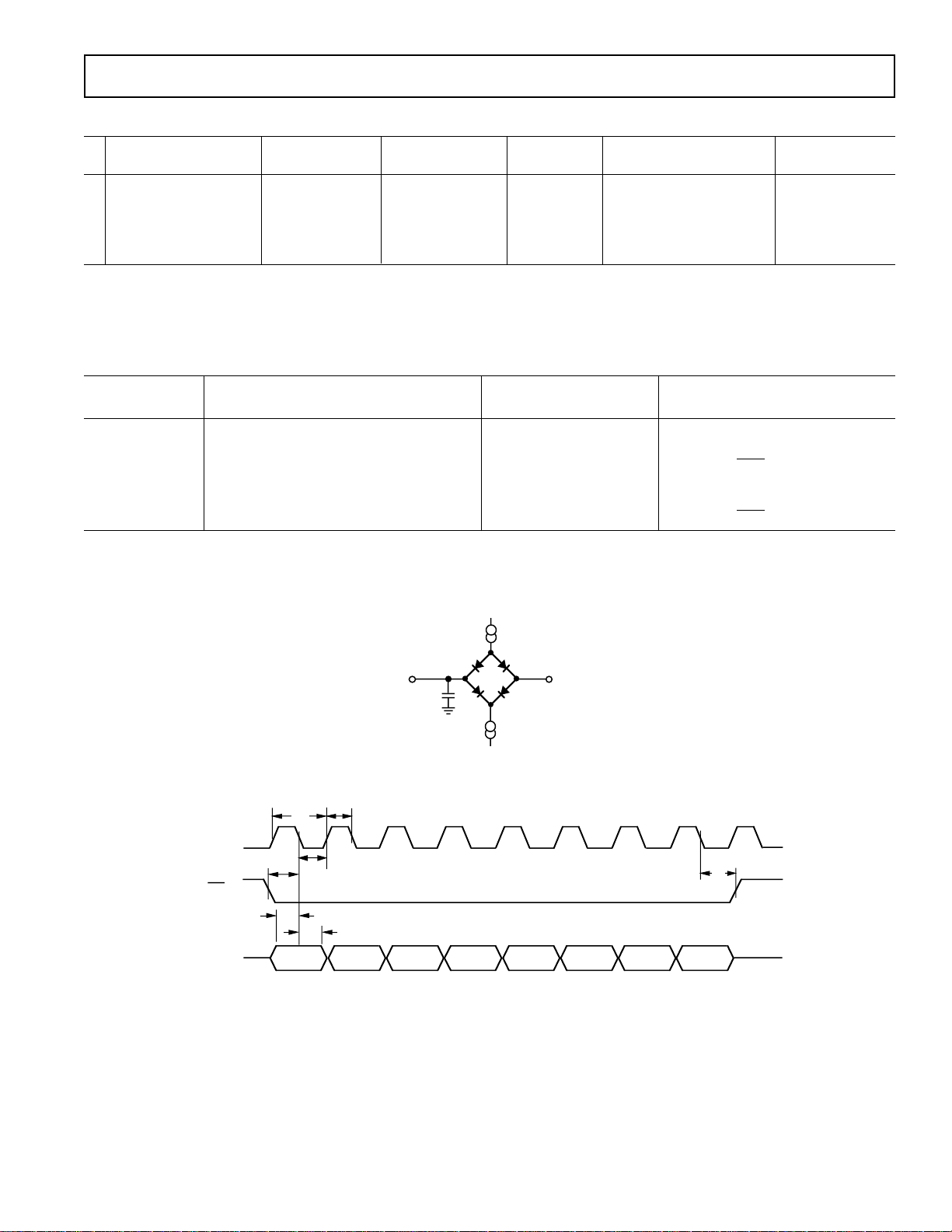
t
1
t
2
t
3
t
4
t
5
t
6
NOTES
1
Sample tested at +25°C to ensure compliance. All input signals are specified with tr = tf = 5 ns (10% to 90% of 5 V) and timed from a voltage level of 1.6 V.
2
See Figure 2.
3
CLKIN Duty Cycle range is 40% to 60%.
1/f
CLKIN
77 ns min SCLK Width
30 ns min TFS Setup Time
20 ns min SDATA Setup Time
10 ns min SDATA Hold Time
20 ns min TFS Hold Time
1.6mA
TO
OUTPUT
PIN
C
L
50pF
200µA
ns min SCLK Period
I
OL
+2.1V
I
OH
Figure 1. Load Circuit for Access Time and Bus Relinquish Time
REV. A
SCLK (I)
TFS (I)
SDATA (I)
t
3
t
4
(DB8)
t
DB0
t
2
1
t
2
t
5
DB1
(DB9)
DB2
(DB10)
DB3
(DB11)
DB4
(DB12)
DB5
(DB13)
DB6
(DB14)
DB7
(DB15)
t
6
Figure 2. Control Register Timing Diagram
–3–
Page 4
AD7716
1, 2
MASTER MODE TIMING CHARACTERISTICS
f
= 8 MHz; Input Levels: Logic 0 = 0 V, Logic 1 = DVDD; unless otherwise noted)
CLKIN
Limit at T
MIN
, T
MAX
(AVDD = DV
Parameter (B Version) Units Conditions/Comments
f
CLKIN
5
t
r
5
t
f
t
7
t
8
t
9
t
10
t
11
t
12
t
13
t
14
t
15
6
t
16
7
t
17
t
18
t
19
3, 4
400 kHz min CLKIN Frequency
8 MHz max
40 ns max Digital Output Rise Time. Typically 20 ns
40 ns max Digital Output Fall Time. Typically 20 ns
1/f
1/f
1/2f
CLKIN
CLKIN
+ 30 ns max DRDY Low to SCLK Low Delay
CLKIN
ns min CASCIN Pulse Width
ns min CASCIN to DRDY Setup Time
50 ns max CLKIN High to DRDY Low, SCLK Active, RFS Active
40 ns max CLKIN High to SCLK High Delay
50 ns min SCLK Width
1/f
CLKIN
ns SCLK Period
40 ns max SCLK High to RFS High Delay
1/f
CLKIN
ns RFS Pulse Width
45 ns max SCLK High to SDATA Valid Delay
1/2f
1/2f
1/2f
+ 50 ns max SCLK Low to SDATA High Impedance Delay
CLKIN
+ 10 ns min
CLKIN
+ 60 ns max CLKIN High to DRDY High Delay
CLKIN
50 ns max CLKIN High to RFS High Impedance, SCLK High Impedance
20 ns min
t
20
t
21
NOTES
1
Sample tested at +25°C to ensure compliance. All input signals are specified with tr = tf = 5 ns (10% to 90% of 5 V) and timed from a voltage level of 1.6 V.
2
See Figures 1 and 3.
3
CLKIN duty cycle range is 40% to 60%.
4
The AD7716 is production tested with f
5
Specified using 10% and 90% points on waveform of interest.
6
t
is measured with the load circuit of Figure 1 and defined as the time required for an output to cross 0.8 V or 2.4 V.
16
7
t
is derived from the measured time taken by the data outputs to change 0.5 V when loaded with the circuit of Figure 1. The measured number is then extrapolated
17
back to remove the effects of charging or discharging the 100 pF capacitor. This means that the time quoted in the timing characteristics is the true bus relinquish
1/2f
2/f
time of the part and as such is independent of external bus loading capacitances.
+ 50 ns max SCLK Low to CASCOUT High Delay
CLKIN
CLKIN
at 8 MHz in the slave mode. It is guaranteed by characterization to operate at 400 kHz and 8 MHz in master mode.
CLKIN
ns CASCOUT Pulse Width
= +5 V 6 5%; AVSS= –5 V 6 5%; AGND = DGND = 0 V;
DD
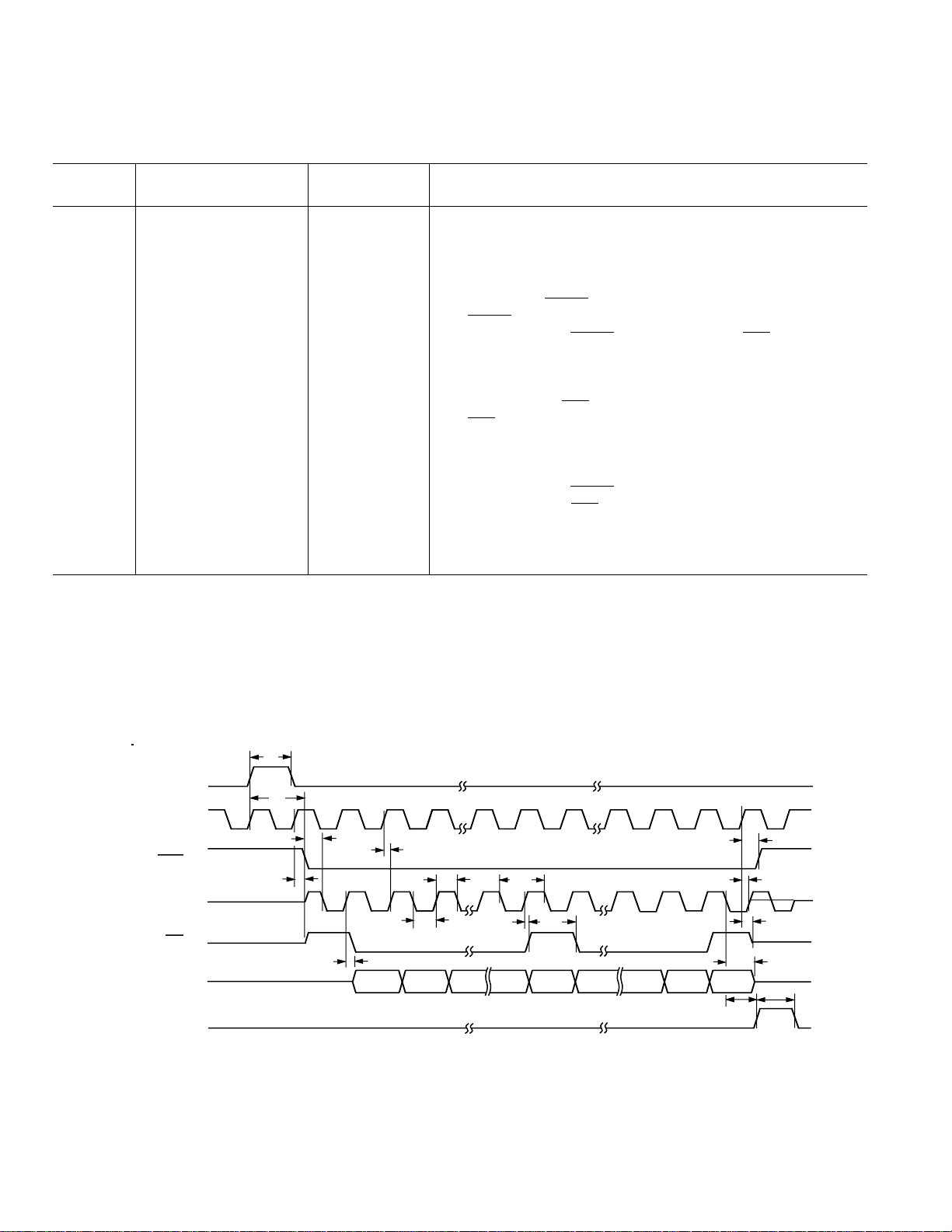
CASCIN (I)
CLKIN (I)
DRDY (O)
SCLK (O)
RFS (O)
SDATA (O)
CASCOUT (O)
t
7
t
8
t
9
t
10
t
16
DB31
CH1
t
11
t
DB30
CH1
t
12
12
DB29
CH1
t
14
DB25
CH1
t
13
t
15
DB24
DB23
CH1
CH1
DB2
CH4
DB1
CH4
DB0
CH4
t
18
t
19
t
19
t
17
t
21
t
20
Figure 3. Master Mode Timing Diagram
–4–
REV. A
Page 5
AD7716
1, 2
(AV
= DV
SLAVE MODE TIMING CHARACTERISTICS
f
= 8 MHz; Input Levels: Logic 0 = 0 V, Logic 1 = DVDD; unless otherwise noted)
CLKIN
DD
Parameter (B Version) Units Conditions/Comments
f
CLKIN
5
t
r
5
t
f
t
23
t
24
t
25
t
26
t
27
6
t
28
t
29
7
t
30
3, 4
400 kHz min CLKIN Frequency
8 MHz max
40 ns max Digital Output Rise Time. Typically 20 ns
40 ns max Digital Output Fall Time. Typically 20 ns
1/f
CLKIN
ns min CASCIN Pulse Width
50 ns min SCLK Width
125 ns min SCLK Period
1/f
+30 ns min CASCIN High to RFS Setup Time
CLKIN
30 ns min RFS Low to SCLK High Setup Time
50 ns max SCLK High to SDATA Valid Delay
50 ns min RFS Hold Time After SCLK High
50 ns max SCLK High to SDATA High Impedance Delay
0 ns min
t
31
t
32
NOTES
1
Sample tested at +25°C to ensure compliance. All input signals are specified with tr = tf = 5 ns (10% to 90% of 5 V) and timed from a voltage level of 1.6 V.
2
See Figures 1 and 4.
3
CLKIN duty cycle range is 40% to 60%.
4
The AD7716 is production tested with f
5
Specified using 10% and 90% points on waveform of interest.
6
t28 is measured with the load circuit of Figure 1 and defined as the time required for an output to cross 0.8 V or 2.4 V.
7
t30 is derived from the measured time taken by the data outputs to change 0.5 V when loaded with the circuit of Figure 1. The measured number is then extrapolated
back to remove the effects of charging or discharging the 100 pF capacitor. This means that the time quoted in the timing characteristics is the true bus relinquish
time of the part and as such is independent of external bus loading capacitances.
60 ns max SCLK High to CASCOUT High Delay.
2/f
CLKIN
at 8 MHz in the slave mode. It is guaranteed by characterization to operate at 400 kHz.
CLKIN
ns max CASCOUT Pulse Width
= +5 V 6 5%; AVSS= –5 V 6 5%; AGND = DGND = 0 V;
DD
CASCIN (I)
SCLK (I)
RFS (I)
SDATA (O)
CASCOUT (O)
t
23
t
24
t
26
t
28
t
27
DB31
CH1
t
24
DB30
CH1
t
25
DB29
CH1
DB28
CH1
DB27
CH1
DB2
CH4
t
DB1
CH4
31
DB0
CH4
t
t
29
t
30
32
Figure 4. Slave Mode Timing Diagram
REV. A
–5–
Page 6

AD7716
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS
(TA = +25°C unless otherwise noted)
AVDD to AGND . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7 V
to AGND . . . . . . . . . . . . . . . . . . . . . . . +0.3 V to –7 V
AV
SS
AGND to DGND . . . . . . . . . . . . . . . . . . . . . –0.3 V to +0.3 V
to DVDD . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +0.3 V
AV
DD
Analog Inputs to AGND . . . . . . AV
to AGND . . . . . . . . . . . .AV
V
REF
Digital Inputs to DGND
2
. . . . . . . . . .–0.3 V to DV
Digital Outputs to DGND . . . . . . . . . . –0.3 V to DV
Operating Temperature Range
Commercial Plastic (B Versions) . . . . . . . . . . .–40°C to +85°C
Storage Temperature Range . . . . . . . . . . . . .–65°C to +150°C
1
– 0.3 V to AV
SS
– 0.3 V to AV
SS
+ 0.3 V
DD
+ 0.3 V
DD
+ 0.3 V
DD
+ 0.3 V
DD
PQFP Package, Power Dissipation . . . . . . . . . . . . . . . 450 mW
Thermal Impedance . . . . . . . . . . . . . . . . . . . . . . 95°C/W
θ
JA
Lead Temperature, Soldering
Vapor Phase (60 sec) . . . . . . . . . . . . . . . . . . . . . . +215°C
Infrared (15 sec) . . . . . . . . . . . . . . . . . . . . . . . . . . +220°C
PLCC Package, Power Dissipation . . . . . . . . . . . . . . . 500 mW
Thermal Impedance . . . . . . . . . . . . . . . . . . . . . . 55°C/W
θ
JA
Lead Temperature, Soldering
Vapor Phase (60 sec) . . . . . . . . . . . . . . . . . . . . . . +215°C
Infrared (15 sec) . . . . . . . . . . . . . . . . . . . . . . . . . . +220°C
NOTES
1
Stresses above those listed under “Absolute Maximum Ratings” may cause
permanent damage to the device. This is a stress rating only and functional
operation of the device at these or any other conditions above those listed in the
operational sections of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability.
2
Transient currents of up to 100 mA will not cause SCR latch-up.
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although these devices feature proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
PQFP PINOUT
2
OUT
44 NC
41 CLKOUT
43 CLKIN
42 NC
40 D
39 TFS
38 DGND
37 NC
35 SDATA
36 DRDY
34 NC
PLCC PINOUT
CLKIN
CLKOUT
NC
NC
3
2
D
OUT
TFS
4412645
DGND
43
NC
DRDY
NC
SDATA
404142
NC 1
NC 2
D
1 3
OUT
DGND 4
NC 5
RFS 6
SCLK 7
RESET 8
AGND 9
AVDD 10
AIN1 11
NC = NO CONNECT
A2 13
AGND 14
AGND 12
NC
7
NC
8
D
1
9
OUT
DGND
10
NC
11
RFS
12
SCLK
13
RESET
14
AGND
15
AV
16
DD
AIN1
17
NC = NO CONNECT
AGND
A2
A2
AGND
21 24
2
IN
A
AD7716
TOP VIEW
(Not to Scale)
3 17
2 15
IN
IN
A
A
AGND 16
A1 19
AGND 18
4 21
IN
A
AGND 20
A0 22
33 MODE
32 NC
31 NC
30 DV
DD
29 DIN1
28 NC
27 CASCIN
26 CASCOUT
25 V
REF
24 AV
SS
23 AGND
ORDERING GUIDE
Temperature Output Noise Package
Model Range (Filter: 146 Hz) Option
AD7716BP –40°C to +85°C 11 µV rms P-44A
AD7716BS –40°C to +85°C 11 µV rms S-44
*P = PLCC (Plastic Leaded Chip Carrier); S = PQFP (Plastic Quad Flatpack).
AD7716
TOP VIEW
(Not to Scale)
22182019
23
3
IN
A
AGND
*
25 28
26
A1
AGND
AGND
MODE
39
NC
38
NC
37
DV
36
DD
DIN1
35
NC
34
CASCIN
33
CASCOUT
32
V
31
REF
AV
30
SS
AGND
29
27
4
A0
IN
A
–6–
REV. A
Page 7

Pin Description
AD7716
PIN DESCRIPTION
AV
DD
Analog Positive Supply, +5 V Nominal. This supplies +ve power to the analog modulators. AVDD & DV
DD
must be tied together externally.
DV
AV
DD
SS
Digital Positive Supply, +5 V Nominal. This supplies +ve power to the digital filter and input/output registers.
Analog Negative Supply, –5 V nominal. This supplies –ve power to the analog modulators.
RESET A high pulse on this input pin synchronizes the sampling point on the four input channels. It can be used in a
multichannel system to ensure simultaneous sampling. This also resets the digital interface to a known state.
A0–A2 The three address input pins, A0, A1 and A2 give the device a unique address. This information is contained in
the output data stream from the device.
CLKIN Clock Input for External Clock.
CLKOUT Clock Output which is used to generate an internal master clock by connecting a crystal between CLKOUT and
CLKIN. If an external clock is used then CLKOUT is not connected.
MODE This digital input determines the device interface mode. If it is hardwired low, then the Master Mode interface is
enabled whereas if it is high, the Slave Mode interface is enabled.
CASCIN This is an active-high, level-triggered digital input which is used to enable the output data stream. This input
may be used to cascade several devices in a multichannel system.
CASCOUT Digital output which goes high at the end of a complete 4-channel data transfer. This can be connected to the
CASCIN of the next device in a multichannel system to ensure proper control of the data transfer.
RFS Receive Frame Synchronization signal for the serial output data stream. This can be an input or output depending
on the interface mode.
SDATA Serial Data Input/Output Pin.
SCLK Serial Clock Input/Output. The SCLK pin is configured as an input or output, depending on the state of the
Mode pin.
DRDY Data Ready Output. A falling edge indicates that a new word is available for transmission. It will return high
when 4, 32-bit words have been transmitted. It also goes high for one clock cycle, when a new word is being
loaded into the output register. Data should not be read during this period.
TFS Transmit Frame Sync input for programming the on-chip Control Register.
D
1 Digital Data Input. This is contained in the digital data stream sent from the device.
IN
D
OUT
1, D
2 Digital Outputs. These two digital outputs can be programmed from the on-chip Control Register. They can
OUT
be used to control calibration signals at the front end.
V
REF
Reference Input, Nominally 2.5 V.
AGND Analog Ground. Ground reference for analog circuitry.
DGND Digital Ground. Ground return for digital circuitry.
AIN1–A
4 Analog Input Pins. The analog input range is ±2.5 V.
IN
REV. A
–7–
Page 8

AD7716
TERMINOLOGY
LINEARITY ERROR
This is the maximum deviation of any code from a straight line
passing through the endpoints of the transfer function. The
endpoints of the transfer function are zero scale (not to be confused with Bipolar Zero), a point 0.5 LSB below the first code
transition (000 . . . 000 to 000 . . . 001) and full scale, a point
0.5 LSB above the last code transition (111 . . . 110 to
111 . . . 111). The error is expressed as a percentage of full
scale.
DIFFERENTIAL LINEARITY ERROR/NO MISSED CODES
This is the difference between any code’s actual width and the
ideal (1 LSB) width. Differential Linearity Error is expressed in
LSBs. A differential linearity specification of ±1 LSB or less
guarantees no missed codes to the full resolution of the device.
The AD7716 has no missed codes guaranteed to 21 bits with a
cutoff frequency of 146 Hz.
GAIN ERROR
Gain Error is the deviation of the last code transition
(111 . . . 110 to 111 . . . 1) from the ideal (V
–3/2 LSBs). It
REF
is expressed as a percentage of full scale.
GAIN TC
This is the variation of gain error with temperature and is expressed in µV/°C.
OFFSET ERROR
Offset Error is the deviation of the first code transition from the
ideal (–V
+ 0.5 LSB). It is expressed as a percentage of full
REF
scale.
OFFSET TC
This is the variation of offset error with temperature and is expressed in µV/°C.
NOISE
This is the converter rms noise expressed in µV. Because of the
digital filtering in the sigma delta converter, the noise performance is a function of the programmed filter cutoff.
SAMPLING RATE
This is the modulator sampling rate. For the AD7716, it is
/14.
f
CLKIN
OUTPUT UPDATE RATE
This is the rate at which the digital filter updates the output shift
register. It is a function of the master clock frequency and the
programmed filter cutoff frequency.
FILTER CUTOFF FREQUENCY
The digital filter of the AD7716 can be programmed, in binary
steps, to 5 discrete cutoff frequencies, ranging from 584 Hz to
36.5 Hz (for a CLKIN frequency of 8 MHz).
SETTLING TIME
This is the settling time of the on-chip digital filter, to 0.0007%
of FSR, in response to a full-scale step at the input of the ADC.
It is proportional to the master clock frequency and the filter
cutoff frequency.
USABLE DYNAMIC RANGE
The usable dynamic range is the ratio of the rms full-scale
reading (sine wave input) to the rms noise of the converter,
expressed in dBs. It determines the level to which it is possible
to resolve the input signal. For example, at a bandwidth of
146 Hz, the rms noise of the converter is 11 µV. The full-scale
rms is 1.77 volts. So, the usable dynamic range is 104 dB. Any
signal below this level will be indistinguishable from noise unless
extra post-filtering techniques are employed.
TOTAL HARMONIC DISTORTION
Total harmonic distortion (THD) is the ratio of the rms sum
of the harmonics to the fundamental. For the AD7716, it is
defined as:
2
2
2
2
2
+V
5
6
THD (dB) =20 log
V
+V
+V
2
3
+V
4
V
1
where V1 is the rms amplitude of the fundamental and V2, V3,
, V5 and V6 are the rms amplitudes of the second through
V
4
sixth harmonics.
ABSOLUTE GROUP DELAY
Absolute group delay is the rate of change of phase versus frequency, dφ/df and is expressed in seconds. For the AD7716,
it is dependent on master clock frequency and filter cutoff
frequency.
DIFFERENTIAL GROUP DELAY
Differential group delay is the total variation in absolute group
delay in the specified bandwidth. Since the digital filter in the
AD7716 has perfectly linear phase, the differential group delay
is almost zero. This is important in many signal processing applications where excessive differential group delay can cause
phase distortion.
–8–
REV. A
Page 9

AD7716
GENERAL DESCRIPTION
The AD7716 is a 4-channel 22-bit A/D converter with on-chip
digital filtering, intended for the measurement of wide dynamic
range, low frequency signals such as those representing ECG,
EEG, chemical, physical or biological processes. It contains
four sigma delta ADCs, a clock oscillator and a serial communications port.
Each of the analog input signals to the AD7716 is continuously
sampled at a rate determined by the frequency of the master
clock, CLKIN. Four sigma-delta modulators convert the
sampled signals into digital pulse trains whose duty cycles contain the digital information. These are followed by low-pass filters to process the output of the modulators and update the
output register at a maximum rate of 2.2 kHz. The output data
can be read from the serial port at any rate up to this.
THEORY OF OPERATION
The general block diagram of a delta-sigma ADC is shown in
Figure 5. It contains the following elements:
1. Continuously Sampling Integrator
2. A Differential Amplifier or Subtracter
3. A 1-Bit A/D Converter (Comparator)
4. A 1-Bit DAC
5. A Digital Low-Pass Filter
In operation, the sampled analog signal is fed to the subtracter,
along with the output of the 1-bit DAC. The filtered difference
signal is fed to the comparator, whose output samples the difference signal at a frequency many times that of the analog signal
frequency (oversampling).
Oversampling is fundamental to the operation of delta-sigma
ADCs. Using the quantization noise formula for an ADC:
SNR = (6.02 3
number of bits + 1.76) dB,
a 1-bit ADC or comparator yields an SNR of 7.78 dB.
When operating with a master clock of 8 MHz, the AD7716
samples the input signal at 570 kHz, which spreads the quantization noise from 0 kHz to 285 kHz. Since the specified analog
input bandwidth of the AD7716 is only 584 Hz maximum (it
can be programmed to be lower), the noise energy in this bandwidth would be only 1/488 of the total quantization noise, assuming that the noise energy was spread evenly throughout the
spectrum. This very high sampling with respect to the input
bandwidth is known as oversampling, and the ratio of 488:1 is
called the oversampling ratio. The noise is reduced still further
by analog filtering in the modulator loop, which shapes the
quantization noise spectrum to move most of the noise energy to
frequencies above 584 Hz. The SNR performance in the 0 Hz
to 584 Hz range is conditioned to the 99 dB level in this fashion
(see Table I). As the programmed bandwidth is reduced, the
oversampling ratio increases and the usable dynamic range also
increases. Thus, for example, with a programmed bandwidth
of 73 Hz, the oversampling ratio is 3904:1, and the usable dynamic range is 108 dB which corresponds to greater than 17-bit
resolution.
The output of the comparator provides the digital input for the
1-bit DAC, so the system functions as a negative feedback loop
which minimizes the difference signal. The digital data that represents the analog input voltage is in the duty cycle of the pulse
train appearing at the output of the comparator. It can be retrieved as a parallel binary data word using a digital filter.
C
R
A
IN
INTEGRATOR
R
+V
REF
–V
REF
1-BIT DAC
CLOCK
EN
STROBED
COMPARATOR
TO
DIGITAL
FILTER
Figure 5. First Order Modulator
Sigma-delta ADCs are generally described by the order of the
analog low-pass filter. A simple example of a first order sigmadelta ADC is shown in Figure 5. This contains only a firstorder low-pass filter or integrator.
The AD7716 uses a second-order sigma-delta modulator and a
digital filter that provides a rolling average of the sampled output. After power-up or if there is a step change in the input
voltage, there is a settling time before valid data is obtained.
DIGITAL FILTERING
The AD7716’s digital filter behaves like an analog filter, with a
few minor differences.
First, since digital filtering occurs after the A-to-D conversion
process, it can remove noise injected during the conversion process. Analog filtering cannot do this.
On the other hand, analog filtering can remove noise superimposed on the analog signal before it reaches the ADC. Digital
filtering cannot do this and noise peaks riding on signals near
full scale have the potential to saturate the analog modulator
and digital filter, even though the average value of the signal is
within limits. If noise signals cause the input signal to exceed
the specified range, consideration should be given to analog input filtering, or to reducing the gain in the input channel to
bring the combination of signal and noise spike within the specified input range.
Filter Characteristics
The cutoff frequency of the digital filter is determined by bits
FC2, FC1 and FC0 in the control register (See Table IV). The
cutoff frequency of the filter is f
/(3.81 3 14 3 256 3 2N),
CLKIN
where N is the decimal equivalent of FC2, FC1, FC0. At the
maximum clock frequency of 8 MHz, with all 0s loaded to FC2,
FC1, FC0, the cutoff frequency of the filter is 584 Hz and the
data update rate is 2232 Hz.
Since the AD7716 contains low-pass filtering, there is a settling
time associated with step function inputs, and data will be invalid after a step change until the settling time has elapsed. The
REV. A
–9–
Page 10

AD7716
relationship between input bandwidth and settling is given in
Table I. Because of this settling time, most sigma delta ADCs
are unsuitable for high speed multiplexing, where channels are
switched and converted sequentially at high rates, as switching
between channels can cause a step change in the input. However, the AD7716 is a sigma-delta solution to multichannel applications, since it can process four channels simultaneously. In
addition, it is easy to cascade several devices in order to increase
the number of channels being processed.
0
–20
–40
–60
–80
–100
–120
–140
GAIN – dB
–160
–180
–200
–220
–240
FREQUENCY – Hz
1668730
13901112834556278
Figure 6. Frequency Response of AD7716 Filter
Figure 6 shows the filter frequency response for a cutoff frequency of 73 Hz. This is a (sinx/x)
3
response (also called sinc3)
that provides greater than 100 dB rejection at the notch frequencies. The relationship between the programmed cutoff
frequency and the first notch is constant (f
). The first notch frequency is also the output data rate.
f
CUTOFF
NOTCH
= 3.81 3
The settling time to a full-scale step input is four times the output data period. Programming a different cutoff frequency via
FC0–FC2 does not alter the profile of the filter response, it simply changes the frequency of the notches.
In Figure 6, the first notch is at 278 Hz. This is also the output
data rate. Settling time to a full-scale step input is 10.8 ms.
The digital filter can be defined by the following equations.
Post Filtering
In the AD7716, the on-chip modulator provides the digital filter
with samples at a rate of 570 kHz. The filter decimates these
samples to provide data at an output rate which corresponds to
the programmed first notch frequency of the filter.
If the user wants to reduce the output noise from the device for
bandwidths less than 36.5 Hz, then it is possible to employ extra
filtering after the AD7716. This extra digital filtering is called
post filtering. If a straight averaging filter is used, for example, a
reduction in bandwidth by a factor of 2 results in √
2 reduction
in the rms noise. This additional filtering will also result in a
longer settling time.
Antialias Considerations
The digital filter does not provide any rejection at integer multiples of the modulator sampling frequency (n 3 570 kHz,
where n = 1, 2, 3, . . .). This means that there are frequency
bands, ±f
wide (f
3dB
is the cutoff frequency selected by FC0
3dB
to FC2) where noise passes unattenuated to the output. However, due to the AD7716’s high oversampling ratio, these bands
occupy only a small fraction of the spectrum and most broadband noise is filtered.
In spectral analysis applications, it is important to note that attenuation at half the output update rate is 16 dB. Extra frontend filtering or post filtering may be required to keep aliases in
this frequency band at an acceptable level.
USING THE AD7716
SYSTEM DESIGN CONSIDERATIONS
The AD7716 operates differently from successive approximation ADCs or other integrating ADCs. Since it samples the signal continuously, like a tracking ADC, there is no need for a
start convert command. The output register is updated at a rate
dependent on the programmed cutoff frequency, and the output
can be read at any time.
Input Signal Conditioning
The input range for the AD7716 is ± V
, where V
REF
= 2.5 V
REF
± 10%. Other input ranges can be accommodated by input signal conditioning. This may take the form of gain to increase a
smaller signal range, or passive attenuation to reduce a larger input voltage range.
3
–N
H (z) =
H ( f ) =
1
N
1– Z
×
1– Z
sinπf/ f
πf/ f
–1
3
)
S
)
S
where N = Ratio of Modulator Sampling Frequency to Output
Rate
and f
= Output Rate.
S
–10–
REV. A
Page 11

AD7716
Source Resistance
If passive attenuators are used in front of the AD7716, care
must be taken to ensure that the source impedance is sufficiently low. The dc input resistance for the AD7716 is greater
than 1 GΩ. In parallel with this there is a small sampling capacitor. The dynamic load presented by this varies with the
clock frequency. The modulator sampling rate determines the
amount of time available for the sampling capacitor to be
charged. Any extra external impedances result in a longer overall charge time resulting in extra gain errors on the analog input.
The AD7716 has a quite large gain error (1% FSR) due to the
fact that there is no on-chip calibration. Thus, even an extra
10 kΩ source resistance and 50 pF source capacitance will have
no significant effect on this.
Active signal conditioning circuits such as op amps generally do
not suffer from problems of high source impedance. Their
open-loop output resistance is normally only tens of ohms and,
in any case, most modern general purpose op amps have
sufficiently fast closed-loop settling time for this not to be a
problem.
Accuracy
Sigma-delta ADCs, like VFCs and other integrating ADCs, do
not contain any source of nonmonotonicity and inherently offer
no missing codes performance.
The AD7716 achieves excellent linearity by the use of high
quality, on-chip silicon dioxide capacitors, which have a very
low capacitance/voltage coefficient.
Drift Considerations
The AD7716 uses autozeroing techniques to minimize input
offset drift. Charge injection in the analog switches and leakage
currents at the sampling node are the primary sources of offset
voltage drift in the converter. Figure 7 indicates the typical offset due to temperature changes. Drift is relatively flat up to
85°C. Above this temperature, leakage current becomes the
main source of offset drift. Since leakage current doubles approximately every 10°C, the offset drifts accordingly. The value
of the voltage on the sample capacitor is updated at a rate determined by the master clock, therefore the amount of offset drift
which occurs will be proportional to the elapsed time between
samples.
Gain drift within the converter depends mainly upon the temperature tracking of the internal capacitors. It is not affected by
leakage currents.
–0.125
–0.25
–0.375
OFFSET VOLTAGE – mV
–0.500
–0.625
20 90
30
TEMPERATURE – °C
70 80605040
Figure 7. Typical Offset Drift
Voltage Reference
The voltage applied to the V
pin defines the analog input
REF
range. The specified reference voltage is 2.5 V ± 10%.
The reference input presents exactly the same dynamic load as
the analog input, but in the case of the reference input, source
resistance and long settling time introduce gain errors rather
than offset errors. Most precision references however have sufficiently low output impedance and wide enough bandwidth to
settle to the required accuracy in the time allowed by the
AD7716.
The reference should be chosen to have minimal noise in the
programmed passband. Recommended references are the
AD780 or the REF43 from Analog Devices. These low noise
references have typical noise spectral densities of 100 nV/√
Hz at
600 Hz. This corresponds to an rms noise of 2.5 µV in this
band and is more than adequate for the AD7716.
Clock Generation
The device operates from a master clock which must be provided either from a crystal source or an external clock source. If
a crystal is used, it must be connected across the CLKIN and
CLKOUT pins. Typical loading capacitors of 15 pF are required on CLKIN, CLKOUT. The crystal manufacturers data
should be consulted for more information. An external clock
can also be used to drive the CLKIN input directly with a
CMOS compatible clock. In this case, CLKOUT is left unconnected. The nominal clock frequency for the device is 8 MHz.
REV. A
–11–
Page 12

AD7716
CONTROL REGISTER DESCRIPTION
The 16-bit control register is programmed in two 8-bit bytes;
the low byte is programmed first and the high byte second. The
loading format is LSB first (DB0 for the Least Significant Byte;
DB8 for the Most Significant Byte). Three control lines are
TFS, SCLK and SDATA. On initial application of
used:
power to the AD7716, the control register will come up in an
undetermined state. Programming the control register requires
an SCLK input, a
MODE pin on the device determines whether it is in the master
interface mode or the slave interface mode. In either mode, a
falling edge on
SDATA and SCLK lines. When
SDATA line is clocked into the control register on each succeeding falling edge of SCLK. When 8 bits have been clocked
in, the transfer automatically stops. Only when another negative
going edge is detected on
into the control register. The control register programming
model is shown in Table II. Bits DB8 and DB0 allow the control register to identify whether the MS Byte or the LS Byte has
been programmed. Only when DB8 is a 1 and DB0 is a 0 will
the register recognize that a complete valid word has been
programmed.
TFS input and an SDATA input. The
TFS causes the part to relinquish control of the
TFS goes low, data on the
TFS will new information be written
Table II. Control Register Programming Model
Control register bit, DB15 (A3), acts as an extra address bit
which must always be set to 1 to enable programming of the
AD7716. If it is set to 0, then the programmed word is ignored.
This allows the user to bypass the AD7716 control register and
use the serial stream from the DSP or microcomputer to program other serial peripheral devices.
When a valid word has been received, the device interrogates
the M0 bit. If this is 0, then the digital filter cutoff frequencies
are programmed to the appropriate value if the device address
pins correspond to the A2, A1, A0 bits in the control register. If
the device address pins do not correspond to the A2, A1, A0
bits then the FC2, FC1, FC0 bits are ignored. If M0 is 1, then
the digital filter cutoff frequencies are programmed to the FC2,
FC1, FC0 value irrespective of the address bits. In a multichannel system this allows the user to either program all
AD7716s to have the same cutoff frequency or else to give each
device a separate cutoff frequency.
Control register bits FC2, FC1, FC0 program the digital filter
cutoff frequency, see Table VI.
Control register bits D2, D1 control the digital output pins D2
and D1. These are programmed in the same way as FC2, FC1,
FC0.
Most Significant Byte Least Significant Byte
DB15 DB14 DB13 DB12 DB11 DB10 DB9 DB8 DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
A3 A2 A1 A0 M0 FC2 FC1 1 FC0 DOUT2 DOUT1 X X X X 0
Table III. M0 Truth Table
M0 Programming Mode
0 A2, A1, A0 determine which device is addressed and
programmed with cutoff frequency and digital output.
1 A2, A1, A0 ignored. All devices are addressed and
programmed with common cutoff frequency and digital
output.
FC2 FC1 FC0 Cutoff Frequency (Hz)
000584
001292
010146
01173
1 0 0 36.6
Table IV. Cutoff Frequency Truth Table
–12–
REV. A
Page 13

AD7716
RESET
The AD7716 has a hardware reset which can be used to synchronize many devices. When the RESET pin goes low after being
high for at least four CLKIN cycles, the modulator sampling
points and digital filter starting points are all synchronized. This
synchronizes all devices which receive the RESET pulse and
gives simultaneous sampling of all channels. It does not affect
the control register but restarts the interface. Also, it is necessary
to wait the requisite settling time after applying Reset to get valid
data from the device.
CASCADING DEVICES
The AD7716 provides a facility for connecting multiple devices
in series. The CASCIN and CASCOUT pins allow this. Connecting CASCOUT to CASCIN of the succeeding device means
that the SDATA output of the second device will be disabled until the output register of the first device is empty.
In the case of the first device in the system, it is possible to drive
CASCIN from CASCOUT of the last device or, alternatively,
DRDY to drive it. If CASCIN is driven by CASCOUT,
invert
then a reset must be applied after every write to the control
register. This also applies in single device systems that use
CASCOUT to drive CASCIN
DATA OUTPUT INTERFACE MODES
When the control register has been programmed, the device begins conversion. There is an initial delay to allow the digital filters to settle. As already stated, these filters are Sinc
3,
and so the
filter output update rate is directly related to the programmed
cutoff frequency. The ratio between these is 3.81. So, for a filter
cutoff frequency of 584 Hz, the output update is 2.22 kHz. The
falling edge of the
DRDY output indicates that the output shift
register has been updated. There are two interface modes. One
is the master mode, where the AD7716 is the master in the system and the processor to which it is communicating is the slave.
The other mode is the slave mode, where the AD7716 is the
slave and the processor is the system master. In both of these
modes the data output stream contains 4 3 32 bits, corresponding to the four input channels. The output data format is given
in Table V. The conversion result DB21–DB0 occupies location
DB31–DB10 of the output register. DB21 is the MSB and is
transmitted first as shown in the timing diagrams. The channel
address is given by CA0 and CA1 which occupy DB9 and DB8
of the output register. The channel address format is given in
Table VI.
Master Mode Interface
The device may be placed in the Master Mode by tying the
MODE pin low. In this mode, data is clocked out of the
AD7716 by an internally generated serial clock and frame synchronization pulse. Two signals initiate the transfer. These are
the input CASCIN and the internally generated
DRDY signal.
When a high level is detected on CASCIN, the device checks
the state of
DRDY. Note, that on initial power-up or after a reset has been applied, the CASCIN input is not necessary on device 000 for the first data transfer but is required thereafter. If
DRDY is low, then the 3-state output, RFS goes high on the
next rising edge of CLKIN and stays high for one CLKIN cycle
before going low again. The 3-state SCLK output is also activated on the same rising edge. As
RFS goes low, DB31 is
clocked out on the rising edge of SCLK and is valid on the falling edge of SCLK. Data is transmitted in 8-bit bytes. For each
, there are 4, 8-bit bytes and 4 RFS pulses. When DB0 of
A
IN
4 has been clocked out, SCLK goes back into 3-state and
A
IN
the CASCOUT output goes high for one master clock cycle.
DRDY also goes high at this point. Successive devices can be
networked together by tying the CASCOUT of one device to
the CASCIN on the next one.
Note that on device 0 (A2, A1, A0 tied low), the CASCIN input
should be driven by the inverse of the
DRDY output. This is
shown in the interface diagram of Figure 8.
The Master Mode interface is very suitable for loading data into
a serial-to-parallel shift register or for DSPs which can accept a
continuous stream of 8-bit bytes.
Slave Mode Interface
The device may be placed in the slave interface mode by tying
the MODE pin high. In this mode, the master processor controls the transfer of data from the signal processing block. It
starts the transfer by sending a frame synchronizations pulse and
serial clock to the AD7716. This could be in response to an interrupt generated by the
DRDY output on the AD7716. If the
device has detected a high level on CASCIN or is device 000 on
its first transfer, it starts to send out data on the next rising edge
of SCLK. This data is then valid on the falling edge of SCLK.
When all the data bits have been clocked out, the CASCOUT
pin goes high for one CLKIN cycle and
DRDY also goes high.
The slave mode interface is suited to both microcomputers like
the 8051 and 68HC11 and also DSPs like the TMS320C25,
ADSP-2101 family and the DSP56000 family.
Table V. Output Data Word Format
DB31 . . . DB10 DB9 DB8 DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
DB21 . . . DB0 CA0 CA1 A0 A1 A2 D
1 OVFL X X X
IN
Conversion Result Channel Address Device Address Pace Detect Overflow Indeterminate
Table VI. Channel Address Format
Channel CA1 (DB8) CA0 (DB9)
10 0
A
IN
20 1
A
IN
31 0
A
IN
41 1
A
IN
REV. A
–13–
Page 14

AD7716
MICROPROCESSOR INTERFACING
Interfacing the AD7716 to the ADSP-2100 Family
The ADSP-2100 family of microcomputers from Analog Devices are high speed, high performance digital signal processors.
Many members of the family have serial ports (known as
SPORTs) which are compatible with the AD7716. These include the ADSP-2101, ADSP-2105, ADSP-2111 and ADSP-
2115. Full details of these are available in the ADSP-2100
Family User’s Manual available from Analog Devices.
Figure 8 shows the hardware interface between two AD7716s
and SPORT 0 of the ADSP-2101 DSP. This yields a very efficient 8-channel data acquisition system. The AD7716 is set up
for slave interface mode by tying the MODE pin high. This
means that the ADSP-2101 is the master in the system and supplies the necessary frame synchronization and SCLK Signals to
the AD7716s when writing to and reading from the device.
On power up, the user should write to the AD7716 control register in order to set the filter cutoff frequencies. The appropriate SPORT 0 Control Register (0 3 3FF6) setting is “7EC7.”
This sets the transmit section for alternate inverted framing with
a word length of 8 bits. Two 8-bit words should then be written
to each AD7716 to program the filter cutoff frequencies. The
control register programming model is given in Table II. Note
that the LSB (DB0) must be loaded first as in the timing diagram of Figure 2.
When the write operation is complete, a reset pulse should be
applied to both devices. This ensures that the sampling and interface timing of the device are synchronized. The reset can be
under DSP control, in which case a flag output could be used.
After reset, the processor should jump to the read routine. For
this read routine, there are several registers that need to be set.
The SPORT0 Control Register setting is “7FCF.” This sets the
receive section for internal SCLK, continuous receive with alternate inverted framing.
The SPORT0 SCLKDIV Register (0 3 3FF5) determines the
SCLK frequency from the ADSP-2101. With “0000” loaded,
the SCLK output is at its maximum (1/2 the master clock of
12.5 MHz).
In normal operation, a SPORT generates an interrupt when it
has received a data word. Autobuffering provides a mechanism
for receiving or transmitting an entire block of serial data before
an interrupt is generated. Service routines can operate on the
entire block of data, rather than on a single word, reducing overhead significantly. This is ideal for use with a device like the
AD7716 where there is a requirement to read many bits of data
(256 in this case) for each sampling instant. The SPORT0
Autobuffer Control Register (0 3 3FF3) is loaded with “0001”
to enable the Receive Autobuffering.
The SPORT0 RFSDIV Register (0 3 3FF4) should be set to
the minimum value of “000F.” Finally the IRQ2 interrupt
should be enabled.
The DSP will now wait for an interrupt from the AD7716. This
interrupt is generated by the AD7716
DRDY line going low. If
the interrupt service routine is set for autobuffered mode with a
length of 16 (16-bit) words, then the DSP will read in the 256
bits from the two AD7716s in one continuous stream and then
stop. The data from the two devices will be contained in the
designated data memory area and the DSP can now go and operate on this as is necessary. Note that, because of the ADSP2101 framing, a one-bit shift left will be necessary on the data in
memory. For 16 data words, this will require 22 instruction
cycles.
+5V
RESET
CONTROL
A0 A1 A2
CASCIN
+5V
A0 A1
DRDY
SCLK
SDATA
+5V
SCLK
SDATA
DRDY
MODE
+5V
AD7716 #1
RESET
CASCOUT MODE
CASCIN
AD7716 #2
RESET
CASCOUT
RFS
TFS
A2
TFS
RFS
4.7kΩ 4.7kΩ
ADSP-2101
IRQ2 (–VE EDGE TRIGGERED)
RFS
SCLK
TFS
DT
DR
Figure 8. 8-Channel Data Acquisition System Using the ADSP-2101 Digital Signal Processor
–14–
REV. A
Page 15

AD7716
When the AD7716 is programmed for the maximum cutoff frequency of 584 Hz, the output data rate is 2.25 kHz. This
means that there is 440 µs available to read the data and do the
necessary number crunching before the next sample must be
read. Assuming that the ADSP-2101 is running from a master
clock of 12.5 MHz means that the maximum SCLK available is
6.25 MHz (1/2 the master clock frequency). It will then take 40
µs to transfer the 256 bits of data from the ADC to the DSP.
This leaves 400 µs for number crunching in the DSP. If the
programmed cutoff frequency is lower then this allows even
more time to the DSP.
MC68HC11 Interface
The MC68HC11 microcomputer can be interfaced to the
AD7716 using the slave mode interface. Figure 9 shows a typical setup. The MODE pin on the AD7716 is tied high for slave
mode operation. The SPI port of the MC68HC11 is used. The
microcomputer is in its single chip mode.
AD7716 is connected to the
IRQ input of the MC68HC11.
DRDY from the
MISO and MOSI on the MC68HC11 should be configured for
wired-or operation. Depending on the interface configuration,
it may be necessary to provide bidirectional buffers between
these lines.
+5V +5V
+5V +5V
CASCIN
CASCIN
MODE
MODE
RFS
RFS
TFS
TFS
DRDY
DRDY
RESET
RESET
SCLK
SCLK
SDATA
SDATA
AD7716
AD7716
CASCOUT
CASCOUT
MC68HC11
MC68HC11
PC0
PC0
PC1
PC1
PC2
IRQ
PC3
PC2
SCK
SCK
MISO
MISO
MOSI
MOSI
SS
SS
Figure 9. MC68HC11 to AD7716 Interface
The MC68HC11 is configured in the master mode with its
CPOL bit set to a logic zero and its CPHA bit set to a logic one.
With an 8 MHz CLKIN input on the AD7716, the device will
operate with all four serial clock rates of the MC68HC11.
Sixteen, 8-bit read operations are necessary to read the 128 bits
from the AD7716 output register. An extra read is necessary to
reset the output register. This means a total of 17 read operations are needed from the MC68HC11.
DSP56001 Interface
Figure 10 shows an interface to the DSP56001 digital signal
processor. The AD7716 is set up for the slave interface mode.
The DSP56001 is set up for asynchronous operation with gated
clock and normal framing. Data must be written to the
AD7716 control register in two 8-bit bytes. The first byte is
written to the DSP56001 SSI transmit data register (TX) and
this is automatically transferred to the transmit shift register
when the frame sync occurs. Data is shifted out to the STD pin
by the internal bit clock (SCK) when the associated frame sync
output is asserted.
The optimum setup for reading all four channels of the AD7716
into the DSP56001 is six 24-bit reads. This will provide 144 clock
edges to shift out the 128 bits of data in the AD7716 output shift
register. The first clock applied to the AD7716 will clock out
DB21 of A
1. DRDY from the AD7716 can be used as an
IN
interrupt input to the DSP56001 to control the data transfer.
Either
IRQA or IRQB of the DSP56001 can be used to detect the
interrupt.
RESET
DSP56001
CONTROL
SC2
SC1
SCK
SC0
STD
SRD
IRQ
+5V
MODE
TFS
RFS
SCLK
SDATA
DRDY
RESET
AD7716
CASCIN
CASCOUT
Figure 10. DSP56001 Interface
TMS320C25 Interface
Figure 11 shows the AD7716 interfaced to the TMS320C25
DSP using the master mode interface. For initial programming
of the AD7716 control register, the external gated clock is required. FSX going low enables this. When the two 8-bit bytes
have been sent to the AD7716, the FSX should go permanently
high. The external gated clock will now be disabled and the
AD7716 will take control of the SDATA line. It will begin
transmitting data as soon as it becomes available. It also provides the clock and frame synchronization signals required by
the DSP.
Reset for the AD7716 is provided by one of the DSP flag
outputs.
RESET CONTROL
FLAG
OUTPUT
TMS320C25
CLKR
CLKX
FSR
DR
DT
FSX
EN
GATED
CLOCK
MODE
RFS
SDATA
TFS
SCLK
RESET CASCIN
AD7716
CASCOUT
Figure 11. TMS320C25 to AD7716 Interface
REV. A
–15–
Page 16

AD7716
0.032 (0.81)
0.026 (0.66)
0.021 (0.53)
0.013 (0.33)
0.056 (1.42)
0.042 (1.07)
0.025 (0.63)
0.015 (0.38)
0.180 (4.57)
0.165 (4.19)
0.63 (16.00)
0.59 (14.99)
0.110 (2.79)
0.085 (2.16)
0.040 (1.01)
0.025 (0.64)
0.050
(1.27)
BSC
0.656 (16.66)
0.650 (16.51)
SQ
0.695 (17.65)
SQ
0.048 (1.21)
0.042 (1.07)
0.048 (1.21)
0.042 (1.07)
40
6
TOP VIEW
39
29
18
17
PIN 1
IDENTIFIER
7
28
0.020
(0.50)
R
Multibandwidth System
Some applications may require multiple AD7716’s with different bandwidths programmed to each device. The best way to
accomplish this is shown in Figure 12. The master mode interface is used for this example but the slave mode may also be
used. The example shows an 8-channel system with Device #0
in the system programmed for a 292 Hz cutoff frequency and
Device #1 programmed for a 146 Hz cutoff frequency.
CASCIN
TFS
RFS
SCLK
SDATA
RESET
#0
(292 Hz)
DRDY
RESET
CASCOUT MODE
CASCIN
#1
(146 Hz)
DRDY
RESET
MODE
Figure 12. Multibandwidth System
The resultant output signals are also shown. Since Device #0
has a higher bandwidth it will also have a higher update rate.
The receiving processor will be getting samples from this device
at twice the rate of Device #1.
0.037 (0.94)
0.025 (0.64)
0.398 (10.11)
0.390 (9.91)
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
44-Lead PLCC
(P-44A)
44-Lead Plastic Quad Flatpack
(S-44)
0.557 (14.148)
0.096 (2.44)
MAX
°
8
0.8
°
34
0.537 (13.640)
0.398 (10.11)
0.390 (9.91)
33
TOP VIEW
C1920a–2–11/95
23
22
RESET
DRDY #0
DRDY #1
SDATA
#0
#0 #1 #0 #0 #1#0#0 #1
Figure 13. Output Signals for Figure 12
–16–
0.040 (1.02)
0.032 (0.81)
0.083 (2.11)
0.077 (1.96)
0.040 (1.02)
0.032 (0.81)
44
1
0.016 (0.41)
0.012 (0.30)
PIN 1
0.033 (0.84)
0.029 (0.74)
12
11
REV. A
PRINTED IN U.S.A.
 Loading...
Loading...