

Page 1
120 mA, Current Sinking,
V
FEATURES
Current sink: 120 mA
Available in 3 × 3 array WLCSP package
2-wire, (I
10-bit resolution
Integrated current sense resistor
Power supply range: 2.7 V to 5.5 V
Guaranteed monotonic over all codes
Power down to 0.5 μA typical
Internal reference
Ultralow noise preamplifier
Power-down function
Power-on reset
APPLICATIONS
Consumer
2
C-compatible) 1.8 V serial interface
Lens autofocus
Image stabilization
Optical zoom
Shutters
Iris/exposure
Neutral density (ND) filters
Lens covers
Camera phones
Digital still cameras
Camera modules
Digital video cameras/camcorders
Camera-enabled devices
Security cameras
Web/PC cameras
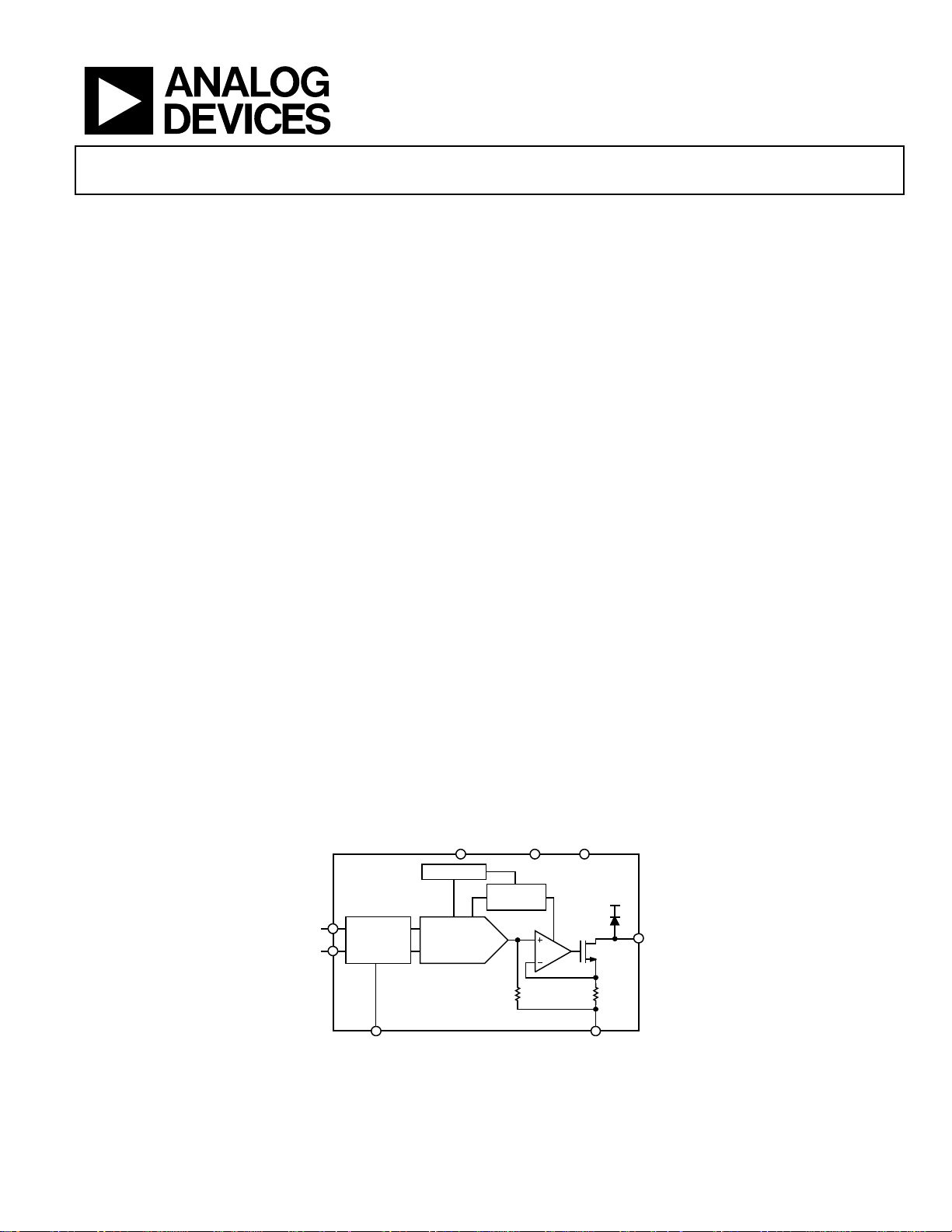
FUNCTIONAL BLOCK DIAGRAM
XSHUTDOWN
10-Bit, I2C DAC
AD5821A
Industrial
Heater controls
Fan controls
Cooler (Peltier) controls
Solenoid controls
Valve controls
Linear actuator controls
Light controls
Current loop controls
GENERAL DESCRIPTION
The AD5821A is a single, 10-bit digital-to-analog converter
(DAC) with output current sinking capability of 120 mA. It
features an internal reference and operates from a single 2.7 V
to 5.5 V supply. The DAC is controlled via a 2-wire, I
compatible serial interface that operates at clock rates up to
400 kHz.
The AD5821A incorporates a power-on reset circuit that
ensures the DAC output powers up to 0 V and remains there until
a valid write takes place. It has a power-down feature that reduces
the current consumption of the device to 1 µA maximum.
The AD5821A is designed for autofocus, image stabilization,
and optical zoom applications in camera phones, digital still
cameras, and camcorders.
The AD5821A is also suitable for many industrial applications,
such as controlling temperature, light, and movement without
derating over temperatures ranging from −30°C to +85°C.
2
The I
C 7-bit address for the AD5821A is 0xC.
DGND
DD
2
C®-
REFERENCE
POWER-ON
RESET
SDA
SCL
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
I2C SERIAL
INTERFACE
DGND
10-BIT
CURRENT
OUTPUT DAC
AD5821A
R
Figure 1.
R
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2008 Analog Devices, Inc. All rights reserved.
SENSE
3.3Ω
D1
AGND
V
DD
I
SINK
07796-001
Page 2

AD5821A
TABLE OF CONTENTS
Features .............................................................................................. 1
Consumer Applications ................................................................... 1
Industrial Applications .................................................................... 1
General Description ......................................................................... 1
Functional Block Diagram .............................................................. 1
Revision History ............................................................................... 2
Specifications ..................................................................................... 3
AC Specifications .......................................................................... 4
Timing Specifications .................................................................. 4
Absolute Maximum Ratings ............................................................ 5
Pin Configuration and Function Descriptions ............................. 6
REVISION HISTORY
10/08—Revision 0: Initial Version
Typical Performance Characteristics ..............................................7
Terminology .................................................................................... 10
Theory of Operation ...................................................................... 11
Serial Interface ............................................................................ 11
I2C Bus Operation ...................................................................... 11
Data Format ................................................................................ 11
Power Supply Bypassing and Grounding ................................ 12
Applications Information .............................................................. 14
Outline Dimensions ....................................................................... 15
Ordering Guide .......................................................................... 15
Rev. 0 | Page 2 of 16
Page 3
AD5821A
SPECIFICATIONS
VDD = 2.7 V to 5.5 V, AGND = DGND = 0 V, load resistance (RL) = 25 Ω connected to VDD. All specifications T
otherwise noted.
MIN
to T
MAX
, unless
Table 1.
B Version
1
Parameter Min Typ Max Unit Test Conditions/Comments
DC PERFORMANCE
= 3.6 V to 4.5 V; device operates over 2.7 V to 5.5 V
V
DD
with reduced performance
Resolution 10 Bits 117 μA/LSB
Relative Accuracy
Differential Nonlinearity
Zero-Code Error
Offset Error @ Code 16
Gain Error
Offset Error Drift
Gain Error Drift
2
2, 3
2, 4
2
±0.6 % of FSR at 25°C
4, 5
2, 5
±0.2 ±0.5 LSB/°C
±1 LSB Guaranteed monotonic over all codes
0 0.5 1 mA All 0s loaded to DAC
2
0.5 mA
10 μA/°C
±1.5 ±4 LSB
OUTPUT CHARACTERISTICS
Minimum Sink Current
4
3 mA
Maximum Sink Current 120 mA
Output Current During XSHUTDOWN
Output Compliance
5
0.6 V
5
80 nA XSHUTDOWN = 0
V
DD
Output voltage range over which maximum 120 mA
sink current is available
Output Compliance
5
0.48 V
V
DD
Output voltage range over which 90 mA sink current
is available
Power-Up Time
LOGIC INPUTS (XSHUTDOWN)
5
20 μs To 10% of FS, coming out of power-down mode; V
5
DD
= 5 V
Input Current ±1 μA
Input Low Voltage, V
Input High Voltage, V
0.54 V VDD = 2.7 V to 5.5 V
INL
1.26 V VDD = 2.7 V to 5.5 V
INH
Pin Capacitance 3 pF
LOGIC INPUTS (SCL, SDA)
Input Low Voltage, V
Input High Voltage, V
Input Low Voltage, V
Input High Voltage, V
5
−0.3 +0.54 V VDD = 2.7 V to 3.6 V
INL
1.26 VDD + 0.3 V VDD = 2.7 V to 3.6 V
INH
−0.3 +0.54 V VDD = 3.6 V to 5.5 V
INL
1.4 VDD + 0.3 V VDD = 3.6 V to 5.5 V
INH
Input Leakage Current, IIN ±1 μA VIN = 0 V to VDD
Input Hysteresis, V
0.05 VDD V
HYST
Digital Input Capacitance, CIN 6 pF
Glitch Rejection
6
50 ns Pulse width of spike suppressed
POWER REQUIREMENTS
VDD 2.7 5.5 V
IDD (Normal Mode) 0.5 1 mA IDD specification is valid for all DAC codes;
V
IDD (Power-Down Mode)
1
Temperature range for the B version is −30°C to +85°C.
2
See the Terminology section.
3
Linearity is tested using a reduced code range: Code 32 to Code 1023.
4
To achieve near zero output current, use the power-down feature.
5
Guaranteed by design and characterization; not production tested. XSHUTDOWN is active low. SDA and SCL pull-up resistors are tied to 1.8 V.
6
Input filtering on both the SCL and the SDA inputs suppress noise spikes that are less than 50 ns.
7
XSHUTDOWN is active low.
7
0.5 μA V
= 1.8 V, V
INH
= 1.8 V, V
INH
= GND, VDD = 2.7 V to 3.6 V
INL
= GND, VDD = 3 V
INL
Rev. 0 | Page 3 of 16
Page 4
AD5821A
S
AC SPECIFICATIONS
VDD = 2.7 V to 5.5 V, AGND = DGND = 0 V, RL = 25 Ω connected to VDD, unless otherwise noted.
Table 2.
1, 2
B Version
Parameter Min Typ Max Unit Test Conditions/Comments
Output Current Settling Time 250 μs VDD = 3.6 V, RL = 25 Ω, LL = 680 μH, ¼ scale to ¾ scale change (0x100 to 0x300)
Slew Rate 0.3 mA/μs
Major Code Change Glitch
0.15 nA-sec 1 LSB change around major carry
Impulse
Digital Feedthrough
1
Temperature range for the B version is −40°C to +85°C.
2
Guaranteed by design and characterization; not production tested.
3
See the Terminology section.
3
0.06 nA-sec
TIMING SPECIFICATIONS
VDD = 2.7 V to 3.6 V. All specifications T
Table 3.
B Version
Parameter
f
400 kHz max SCL clock frequency
SCL
1
Limit at T
MIN
, T
MAX
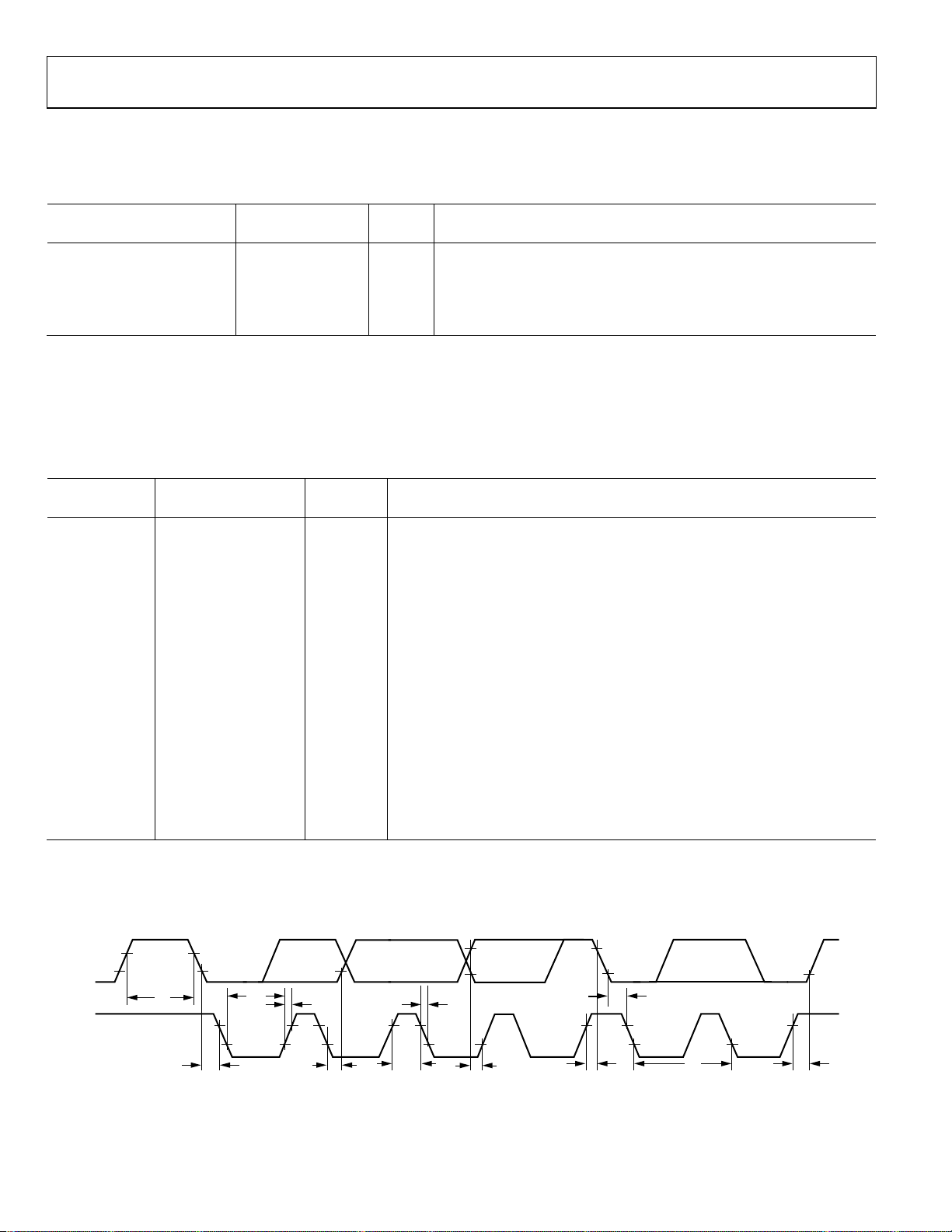
t1 2.5 μs min SCL cycle time
t2 0.6 μs min t
t3 1.3 μs min t
t4 0.6 μs min t
t5 100 ns min t
2
t
6
0.9 μs max t
0 μs min
t7 0.6 μs min t
t8 0.6 μs min t
t9 1.3 μs min t
t10 300 ns max tR, rise time of both SCL and SDA when receiving
0 ns min Can be CMOS driven
t11 250 ns max tF, fall time of SDA when receiving
300 ns max tF, fall time of both SCL and SDA when transmitting
20 + 0.1 C
CB 400 pF max Capacitive load for each bus line
1
Guaranteed by design and characterization; not production tested.
2
A master device must provide a hold time of at least 300 ns for the SDA signal (referred to the VINH MIN of the SCL signal) to bridge the undefined region of the SCL falling edge.
3
C
is the total capacitance of one bus line in pF. t
B
3
B
Timing Diagram
MIN
to T
, unless otherwise noted.
MAX
Unit Description
, SCL high time
HIGH
, SCL low time
LOW
, start/repeated start condition hold time
HD, STA
, data setup time
SU, DAT
, data hold time
HD, DAT
, setup time for repeated start
SU, STA
, stop condition setup time
SU, STO
, bus free time between a stop condition and a start condition
BUF
ns min
and tF are measured between 0.3 VDD and 0.7 VDD.
R
DA
SCL
t
9
t
4
START
CONDITIO N
t
3
t
10
t
6
t
t
11
2
t
5
REPEATED
CONDITION
t
7
START
t
4
t
1
t
8
STOP
CONDITIO N
07796-002
Figure 2. 2-Wire Serial Interface Timing Diagram
Rev. 0 | Page 4 of 16
Page 5
AD5821A
ABSOLUTE MAXIMUM RATINGS
TA = 25°C, unless otherwise noted.
Table 4.
Parameter Rating
VDD to AGND −0.3 V to +5.5 V
VDD to DGND −0.3 V to VDD + 0.3 V
AGND to DGND −0.3 V to +0.3 V
SCL, SDA to DGND −0.3 V to VDD + 0.3 V
XSHUTDOWN to DGND −0.3 V to VDD + 0.3 V
I
to AGND −0.3 V to VDD + 0.3 V
SINK
Operating Temperature Range
Industrial (B Version) −30°C to +85°C
Storage Temperature Range −65°C to +150°C
Junction Temperature (TJ
WLCSP Power Dissipation (TJ
θJA Thermal Impedance
) 150°C
MAX
1
− TA)/θJA
MAX
Mounted on 4-Layer Board 95°C/W
Lead Temperature, Soldering
Maximum Peak Reflow Temperature2260°C (±5°C)
1
To achieve the optimum θJA, it is recommended that the AD5821A be
soldered on a 4-layer board.
2
As per JEDEC J-STD-020C.
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
ESD CAUTION
Rev. 0 | Page 5 of 16
Page 6

AD5821A
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
3
12
A
B
C
VIEW FROM BALL SIDE
07796-021
Figure 3. Pin Configuration
Table 5. Pin Function Descriptions
Pin Number Mnemonic Description
A1 I
Output Current Sink.
SINK
A2 NC No Connection.
A3 XSHUTDOWN Power-Down. Asynchronous power-down signal, active low.
B1 AGND Analog Ground Pin.
B2 DGND Digital Ground Pin.
B3 SDA I2C Interface Signal.
C1 DGND Digital Ground Pin.
C2 VDD Digital Supply Voltage.
C3 SCL I2C Interface Signal.
1515µm
NC
I
XSHUTDOWN
SINK
DGND
1690µm
SDA
SCL
AGND
V
DD
DGND
07796-023
Figure 4. Metallization Photo
Dimensions shown in microns (μm)
Rev. 0 | Page 6 of 16
Page 7

AD5821A
TYPICAL PERFORMANCE CHARACTERISTICS
2.0
1.5
1.0
INL (LSB)
0.5
0
–0.5
0
56
112
168
224
280
336
392
448
CODE
504
560
616
INL V
TEMP = 25°C
728
672
784
DD
840
= 3.8V
896
952
1008
1023
07796-004
Figure 5. Typical INL vs. Code Plot
0.6
0.5
0.4
0.3
0.2
0.1
DNL (LS B)
0
–0.1
–0.2
–0.3
0
56
112
168
224
280
336
392
448
CODE
504
560
616
672
DNL VDD = 3.8V
TEMP = 25°C
896
840
784
728
952
1008
1023
07796-005
Figure 6. Typical DNL vs. Code Plot
92.0
91.5
91.0
90.5
90.0
89.5
OUTPUT CURRENT (mA)
89.0
88.5
VERT = 50µs/DIV
3
CH3 M50.0µs
Figure 8. Settling Time for a 4-LSB Step (V
VERT = 2µA/DIV
1
CH1 M2.0s
Figure 9. 0.1 Hz to 10 Hz Noise Plot (V
0.14
0.12
0.10
0.08
(A)
OUT
0.06
I
0.04
0.02
HORIZ = 468µA/DIV
= 3.6 V)
DD
4.8µA p-p
HORIZ = 2s/DI V
= 3.6 V)
DD
@ +25°C
I
OUT
@ –40°C
I
OUT
I
@ +85°C
OUT
07796-007
07796-008
88.0
53.5
100.0
–6
–6
150.0
–6
Figure 7. ¼ to ¾ Scale Settling Time (V
200.0
TIME
0
–6
250.0
–6
= 3.6 V)
DD
300.0
–6
333.1
–6
07796-006
0
56
112
280
224
168
336
392
448
CODE
504
560
616
672
728
784
840
896
952
Figure 10. Sink Current vs. Code vs. Temperature (VDD = 3.6 V)
1008
1023
07796-009
Rev. 0 | Page 7 of 16
Page 8

AD5821A
2000
1800
1600
1400
1200
1000
800
ACPSRR (µA/V )
600
400
200
0
10 100 1k 100k10k
FREQUENCY (Hz)
Figure 11. AC Power Supply Rejection Ratio (VDD = 3.6 V)
3.5
3.0
2.5
2.0
1.5
1.0
INL (LSB)
0.5
NEGATIVE INL (VDD = 3.6V)
0
–0.5
–1.0
NEGATIVE INL (V
NEGATIVE INL (V
TEMPERATURE (° C)
POSITIVE INL (V
POSITIVE INL (VDD = 3.6V)
= 3.8V)
DD
= 4.5V)
DD
Figure 12. INL vs. Temperature vs. Supply Voltage
1.0
0.8
0.6
0.4
0.2
0
DNL (LS B)
–0.2
–0.4
–0.6
–0.8
–1.0
POSITIVE DNL (V
NEGATIVE DNL (V
NEGATIVE DNL (V
NEGATIVE DNL (V
DD
DD
DD
POSITIVE DNL (VDD = 3.6V)
= 4.5V)
= 3.8V)
= 3.6V)
TEMPERATURE (°C)
POSITIVE DNL (V
= 4.5V)
DD
Figure 13. DNL vs. Temperature vs. Supply Voltage
DD
DD
07796-010
= 4.5V)POSITIVE INL (VDD = 3.8V)
85–40 –30 –20 –10 0 15 25 35 45 55 65 75
07796-011
= 3.8V)
85–40 –30 –20 –10 0 15 25 35 45 55 65 75
07796-012
0.45
0.40
0.35
0.30
V
DD
0.25
0.20
0.15
ZERO-CODE ERROR (mA)
0.10
0.05
0
= 4.5V
VDD = 3.6V
= 3.8V
V
DD
TEMPERATURE (°C)
Figure 14. Zero-Code Error vs. Temperature vs. Supply Voltage
1.5
= 4.5V
V
1.0
0.5
= 3.8V
V
DD
0
–0.5
–1.0
FULL-SCAL E ERROR (mA)
–1.5
–2.0
DD
VDD = 3.6V
TEMPERATURE (° C)
Figure 15. Full-Scale Error vs. Temperature vs. Supply Voltage
1.4
VDD = 5.5V
1.3
= 4.5V
V
DD
1.2
VDD = 3.6V
1.1
VDD = 2.7V
1.0
0.9
0.8
VO LTAG E (V )
0.7
0.6
0.5
0.4
–50 –30 9070503010–10
Figure 16. SCL and SDA Logic High Level (V
TEMPERATURE (° C)
INH
) vs.
Temperature and Supply Voltage
85–40 –30 –20 –10 0 15 25 35 45 55 65 75
07796-013
85–40 –30 –20 –10 0 15 25 35 45 55 65 75
07796-014
07796-024
Rev. 0 | Page 8 of 16
Page 9

AD5821A
1.4
1.3
1.2
1.1
1.0
0.9
0.8
VO LTAG E (V )
0.7
0.6
0.5
0.4
–50 –30 9070503010–10
Figure 17. SCL and SDA Logic Low Level (V
VDD = 3.6V
VDD = 5.5V
VDD = 2.7V
TEMPERATURE (°C)
V
= 4.5V
DD
07796-026
) vs.
INL
Temperature and Supply Voltage
1.4
VDD = 5.5V
1.3
= 4.5V
V
DD
1.2
VDD = 3.6V
1.1
VDD = 2.7V
1.0
0.9
0.8
VO LTAG E (V )
0.7
0.6
0.5
0.4
–50 –3 0 9070503010–10
Figure 18. XSHUTDOWN Logic High Level (V
TEMPERATURE (°C)
07796-025
) vs.
INH
Temperature and Supply Voltage
1.4
1.3
1.2
1.1
1.0
0.9
0.8
VO LTAG E (V )
0.7
0.6
0.5
0.4
–50 –30 9070503010–10
Figure 19. DNL vs. XSHUTDOWN Logic Low Level (V
VDD = 5.5V
VDD = 3.6V
TEMPERATURE (° C)
= 4.5V
V
DD
VDD = 2.7V
07796-027
) vs.
INL
Temperature and Supply Voltage
Rev. 0 | Page 9 of 16
Page 10

AD5821A
TERMINOLOGY
Relative Accuracy
For the DAC, relative accuracy or integral nonlinearity (INL)
is a measurement of the maximum deviation, in LSB, from a
straight line passing through the endpoints of the DAC transfer function. A typical INL vs. code plot is shown in Figure 5.
Differential Nonlinearity (DNL)
Differential nonlinearity is the difference between the measured
change and the ideal 1 LSB change between any two adjacent
codes. A specified differential nonlinearity of ±1 LSB maximum
ensures monotonicity. This DAC is guaranteed monotonic by
design. A typical DNL vs. code plot is shown in Figure 6.
Zero-Code Error
Zero-code error is a measurement of the output error when zero
code (0x0000) is loaded to the DAC register. Ideally, the output
is 0 mA. The zero-code error is always positive in the AD5821A
because the output of the DAC cannot go below 0 mA. This is
due to a combination of the offset errors in the DAC and output
amplifier. Zero-code error is expressed in milliamperes (mA).
Gain Error
Gain error is a measurement of the span error of the DAC. It is
the deviation in slope of the DAC transfer characteristic from
the ideal, expressed as a percent of the full-scale range.
Gain Error Drift
Gain error drift is a measurement of the change in gain error
with changes in temperature. It is expressed in LSB/°C.
Digital-to-Analog Glitch Impulse
This is the impulse injected into the analog output when the
input code in the DAC register changes state. It is normally
specified as the area of the glitch in nanoampere seconds
(nA-sec) and is measured when the digital input code is
changed by 1 LSB at the major carry transition.
Digital Feedthrough
Digital feedthrough is a measurement of the impulse injected
into the analog output of the DAC from the digital inputs of
the DAC, but it is measured when the DAC output is not
updated. It is specified in nanoampere seconds (nA-sec) and
measured with a full-scale code change on the data bus, that is,
from all 0s to all 1s and vice versa.
Offset Error
Offset error is a measurement of the difference between I
(actual) and I
function, expressed in milliamperes (mA). Offset error is
measured on the AD5821A with Code 16 loaded into the DAC
register.
Offset Error Drift
Offset error drift is a measurement of the change in offset error
with a change in temperature. It is expressed in microvolts per
degree Celsius (µV/°C).
(ideal) in the linear region of the transfer
OUT
SINK
Rev. 0 | Page 10 of 16
Page 11

AD5821A
V
V
THEORY OF OPERATION
The AD5821A is a fully integrated, 10-bit DAC with 120 mA
output current sink capability. It is intended for driving voice
coil actuators in applications such as lens autofocus, image
stabilization, and optical zoom. The circuit diagram is shown in
Figure 20. A 10-bit current output DAC coupled with Resistor R
generates the voltage that drives the noninverting input of the
operational amplifier. This voltage also appears across the R
SENSE
resistor and generates the sink current required to drive the
voice coil.
Resistor R and Resistor R
are interleaved and matched.
SENSE
Therefore, the temperature coefficient and any nonlinearities
over temperature are matched, and the output drift over temperature is minimized. Diode D1 is an output protection diode.
XSHUTDOWN
REFERENCE
POWER-ON
RESET
SDA
I2C SERIAL
SCL
INTERFACE
DGND
Figure 20. Block Diagram Showing Connection to Voice Coil
10-BIT
CURRENT
OUTPUT DAC
AD5821A
R
DGND
DD
V
DD
D1
I
SINK
R
SENSE
3.3Ω
AGND
SERIAL INTERFACE
The AD5821A is controlled using the industry-standard I2C
2-wire serial protocol. Data can be written to or read from the
DAC at data rates of up to 400 kHz. After a read operation, the
contents of the input register are reset to all 0s.
I2C BUS OPERATION
An I2C bus operates with one or more master devices that
generate the serial clock (SCL) and read and write data on
the serial data line (SDA) to and from slave devices such as
the AD5821A. On all devices on an I
connected to the SDA line and the SCL pin connected to the
SCL line of the master device. I
lines low; pulling high is achieved by pull-up resistors, R
value of R
depends on the data rate, bus capacitance, and the
P
maximum load current that the I
standard device).
1.8
R
R
P
P
SDA
SCL
2
C bus, the SDA pin is
2
C devices can only pull the bus
. The
P
2
C device can sink (3 mA for a
07796-020
When the bus is idle, SCL and SDA are both high. The master
device initiates a serial bus operation by generating a start
condition, which is defined as a high-to-low transition on the
SDA low while SCL is high. The slave device connected to the
bus responds to the start condition and shifts in the next eight
data bits under control of the serial clock.
These eight data bits consist of a 7-bit address, plus a read/write
W
(R/
) bit that is 0 if data is to be written to a device, and 1 if
data is to be read from a device. Each slave device on an I
2
C bus
must have a unique address. The address of the AD5821A is
0001100; however, 0001101, 0001110, and 0001111 address the
part because the last two bits are unused/don’t cares (see
and ). Because the address plus the R/
Figure 23
W
bit always
Figure 22
equals eight bits of data, the write address of the AD5821A is
00011000 (0x18) and the read address is 00011001 (0x19) (see
and ). Figure 22 Figure 23
At the end of the address data, after the R/
W
bit, the slave
device that recognizes its own address responds by generating
an acknowledge (ACK) condition. This is defined as the slave
device pulling SDA low while SCL is low before the ninth clock
pulse and keeping it low during the ninth clock pulse. Upon
receiving the ACK, the master device can clock data into the
AD5821A in a write operation, or it can clock it out in a read
operation. Data must change either during the low period of the
clock (because SDA transitions during the high period define a
start condition), or during a stop condition, as described in the
section. Data Format
2
I
C data is divided into blocks of eight bits, and the slave generates
an ACK at the end of each block. Because the AD5821A requires
10 bits of data, two data-words must be written to it when a
write operation occurs, or read from it when a read operation
occurs. At the end of a read or write operation, the AD5821A
acknowledges the second data byte. The master generates a stop
condition, defined as a low-to-high transition on SDA while SCL
is high, to end the transaction.
DATA FORMAT
Data is written to the AD5821A high byte first, MSB first, and is
shifted into the 16-bit input register. After all data is shifted in,
data from the input register is transferred to the DAC register.
Because the DAC requires only 10 bits of data, not all bits of the
input register data are used. The MSB is reserved for an activehigh, software-controlled, power-down function.
The data format is shown in Tab l e 6. When referring to this table,
note that Bit 14 is unused; Bit 13 to Bit 4 correspond to the DAC
data bits, D9 to D0; and Bit 3 to Bit 0 are unused.
During a read operation, data is read in the same bit order.
I2C MASTER
DEVICE
I2C SLAVE
DEVICE
Figure 21. Typical I
AD5821A
2
C Bus
I2C SLAVE
DEVICE
07796-016
Rev. 0 | Page 11 of 16
Page 12

AD5821A
V
X
SCL
1191
9
SDA
START BY
MASTER
00
01 1XXR/W
ACK BY
FRAME 1
SERIAL BUS
ADDRESS BYTE
AD5821A
PD X D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 X X X X
ACK BY
FRAME 2
MOST SI GNIFICANT
DATA BYTE
AD5821A
FRAME 3
LEAST SI GNIFICANT
DATA BYTE
ACK BY
AD5821A
STOP BY
MASTER
Figure 22. Write Operation
9
ACK BY
AD5821A
STOP BY
MASTER
SCL
SDA
START BY
MASTER
1191
00
01 1XXR/W
FRAME 1
SERIAL BUS
ADDRESS BYTE
AD5821A
PD X D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 X X X X
ACK BY
FRAME 2
MOST SIGNIFICANT
DATA BYTE
ACK BY
AD5821A
FRAME 3
LEAST SIGNIFICANT
DATA BYTE
Figure 23. Read Operation
Table 6. Data Format
High Byte Low Byte
Serial DataWord s
Serial Data
Bit
15
Bit
14
Bit
13
Bit
12
Bit
11
Bit
Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit
10
0
SD7 SD6 SD5 SD4 SD3 SD2 SD1 SD0 SD7 SD6 SD5 SD4 SD3 SD2 SD1 SD0
Bits
Input
R15 R14 R13 R12 R11 R10 R9 R8 R7 R6 R5 R4 R3 R2 R1 R0
Register
Function XSHUTDOWN1 X D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 X X X X
1
XSHUTDOWN = soft power-down; X = unused/don’t care; and D9 to D0 = AC data.
VOICE
COIL
AGND
R
R
I
GROUND
RETURN
BATTERY
L
C
C
T
SINK
V
DROP
V
COIL
TRACE
RESISTANCE
07796-019
POWER SUPPLY BYPASSING AND GROUNDING
When accuracy is important in an application, it is beneficial
to consider power supply and ground return layout on the PCB.
The PCB for the AD5821A should have separate analog and digital
power supply sections. Where shared AGND and DGND is
necessary, the connection of grounds should be made at only
one point, as close as possible to the AD5821A.
Pay special attention to the layout of the AGND return path and,
and trace it between the voice coil motor and I
any series resistance. Figure 24 shows the output current sink
of the AD5821A and illustrates the importance of reducing the
effective series impedance of AGND and the trace resistance
between the motor and I
Inductor L
and Resistor RC. The current through the voice coil
C
. The voice coil is modeled using
SINK
is effectively a dc current that results in a voltage drop, V
when the AD5821A is sinking current. The effect of any series
inductance is minimal.
to minimize
SINK
COIL
,
V
DD
DGND
SDA
SCL
SHUTDOWN
DGND
AD5821A
R
R
SENSE
Q1
R
G
L
G
Figure 24. Effect of PCB Trace Resistance and Inductance
07796-017
07796-018
Rev. 0 | Page 12 of 16
Page 13

AD5821A
×+×+
−
+
−
When sinking the maximum current of 120 mA, the maximum
voltage drop allowed across R
is 400 mV, and the minimum
SENSE
drain to source voltage of Q1 is 200 mV. This means that the
AD5821A output has a compliance voltage of 600 mV. If V
DROP
falls below 600 mV, the output transistor, Q1, can no longer
operate properly and I
may not be maintained as a constant.
SINK
When sinking 90 mA, the maximum voltage drop allowed across
R
is 300 mV, and the minimum drain to source voltage of
SENSE
Q1 is 180 mV. This means that the AD5821A output has a
compliance voltage of 480 mV. If V
output transistor, Q1, can no longer operate properly and I
may not be maintained as a constant. As I
falls below 480 mV, the
DROP
decreases, the
SINK
SINK
voltage required across the transistor, Q1, also decreases and,
therefore, lower supplies can be used with the voice coil motor.
As the current increases to 120 mA through the voice coil,
V
increases. V
COIL
decreases and eventually approaches the
DROP
minimum specified compliance voltage of 600 mV (or 480 mV,
if I
= 90 mA). The ground return path is modeled by the
SINK
components R
coil and the AD5821A is modeled as R
L
influence R
G
and LG. The trace resistance between the voice
G
. The inductive effects of
T
and RC equally, and because the current is
SENSE
maintained as a constant, it is not as critical as the purely resistive
component of the ground return path. When the maximum sink
current is flowing through the motor, the resistive elements, R
, may have an impact on the voltage headroom of Q1 and
R
G
could, in turn, limit the maximum value of R
because of
C
and
T
voltage compliance.
For example, if
V
= 3.6 V
BAT
R
= 0.5 Ω
G
R
= 0.5 Ω
T
I
= 120 mA
SINK
V
= 600 mV (compliance voltage)
DROP
Then the largest value of resistance of the voice coil, R
SINKDROP
I
T
SINK
BAT
=
R
C
××+−
mA120
×+×+−
)]0.5mA(1202mV[600V3.6
=
, is
C
RIRIVV
)]()([
GSINK
=
24
Using another example, if
= 3.6 V
V
BAT
R
= 0.5 Ω
G
= 0.5 Ω
R
T
I
= 90 mA
SINK
V
= 480 mV (compliance voltage specification at 90 mA)
DROP
Then the largest value of resistance of the voice coil, R
SINKDROP
I
SINK
T
)]0.5mA(902mV[480V3.6
××
=
BAT
=
R
C
mA90
, is
C
)]()([
RIRIVV
GSINK
=
33.66
For this reason, it is important to minimize any series impedance
on both the ground return path and interconnect between the
AD5821A and the motor. It is also important to note that for
lower values of I
the compliance voltage of the output stage
SINK
also decreases. This decrease allows the user to either use voice
coil motors with high resistance values or decrease the power
supply voltage on the voice coil motor. The compliance voltage
decreases as the I
current decreases.
SINK
The power supply of the AD5821A, or the regulator used to supply
the AD5821A, should be decoupled. Best practice power supply
decoupling recommends that the power supply be decoupled
with a 10 µF capacitor. Ideally, this 10 µF capacitor should be of
a tantalum bead type. However, if the power supply or regulator
supply is well regulated and clean, such decoupling may not be
required. The AD5821A should be decoupled locally with a
0.1 µF ceramic capacitor, and this 0.1 F capacitor should be
located as close as possible to the V
pin. The 0.1 µF capacitor
DD
should be ceramic with a low effective series resistance and
effective series inductance. The 0.1 µF capacitor provides a low
impedance path to ground for high transient currents.
The power supply line should have as large a trace as possible to
provide a low impedance path and reduce glitch effects on the
supply line. Clocks and other fast switching digital signals should
be shielded from other parts of the board by digital ground.
Avoid crossover of digital and analog signals, if possible. When
traces cross on opposite sides of the board, they should run at
right angles to each other to reduce feedthrough effects through
the board. The best technique is to use a multilayer board with
ground and power planes, where the component side of the
board is dedicated to the ground plane only and the signal
traces are placed on the solder side. However, this is not always
possible with a 2-layer board.
Rev. 0 | Page 13 of 16
Page 14

AD5821A
V
V
APPLICATIONS INFORMATION
The AD5821A is designed to drive both spring-preloaded and
nonspring linear motors used in applications such as lens autofocus, image stabilization, or optical zoom. The operation principle
of the spring-preloaded motor is that the lens position is controlled
by the balancing of a voice coil and spring. Figure 25 shows the
transfer curve of a typical spring-preloaded linear motor for
autofocus. The key points of this transfer function are displacement or stroke, which is the actual distance the lens moves in
millimeters (mm) and the current through the motor, measured
in milliamps (mA).
A start current is associated with spring-preloaded linear
motors, which is a threshold current that must be exceeded for
any displacement in the lens to occur. The start current is usually
20 mA or greater; the rated stroke or displacement is usually
0.25 mm to 0.4 mm; and the slope of the transfer curve is
approximately 10 µm/mA or less.
The AD5821A is designed to sink up to 120 mA, which is more
than adequate for available commercial linear motors or voice
coils. Another factor that makes the AD5821A the ideal solution for these applications is the monotonicity of the device,
ensuring that lens positioning is repeatable for the application
of a given digital word.
DD
R
PRP
SDA
SCL
XSHUTDOWN
1
3
4
I2C SERIAL
INTERFACE
Figure 26 shows a typical application circuit for the AD5821A.
0.5
0.4
0.3
0.2
STROKE (mm)
START
CURRENT
0.1
10 50 60 8070 90 100403020 110 120
SINK CURRENT (mA)
Figure 25. Spring-Preloaded Voice Coil Stroke vs. Sink Current
REFERENCE
10-BIT
CURRENT
OUTPUT DAC
0.1µF
DD
6
POWER-ON
RESET
2
D1
V
CC
VOICE
COIL
I
8
SINK
07796-029
I2C MASTER
DEVICE
I2C SLAVE
DEVICE
5
AD5821A
R
10µF
V
DD
+
R
SENSE
7
V
CC
0.1µF 10µF
+
07796-028
Figure 26. Typical Application Circuit
Rev. 0 | Page 14 of 16
Page 15

AD5821A
OUTLINE DIMENSIONS
0.65
0.59
0.53
SEATING
PLANE
0.35
0.32
0.29
123
A
B
BALL 1
IDENTIFIER
1.575
1.515
1.455
1.750
1.690
1.630
C
091306-B
TOP VIEW
(BALL SI DE DOWN)
0.28
0.24
0.20
0.50 BSC
BALL PITCH
BOTTOM VIEW
(BALL SI DE UP)
Figure 27. 9-Ball Wafer Level Chip Scale Package [WLCSP]
(CB-9-1)
Dimensions shown in millimeters
ORDERING GUIDE
Model Temperature Range Package Description Package Option Branding
AD5821ABCBZ-REEL7
AD5821ABCBZ-REEL
AD5821A-WAFER −40°C to +85°C Bare Die Wafer
AD5821AD-WAFER −40°C to +85°C Bare Die Wafer on Film
EVAL-AD5821AEBZ
1
Z = RoHS Compliant Part.
1
−30°C to +85°C 9-Ball Wafer Level Chip Scale Package (WLCSP) CB-9-1 1X
1
−30°C to +85°C 9-Ball Wafer Level Chip Scale Package (WLCSP) CB-9-1 1X
1
Evaluation Board
Rev. 0 | Page 15 of 16
Page 16

AD5821A
NOTES
Purchase of licensed I2C components of Analog Devices or one of its sublicensed Associated Companies conveys a license for the purchaser under the Philips I2C Patent
Rights to use these components in an I
2
C system, provided that the system conforms to the I2C Standard Specification as defined by Philips.
©2008 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D07796-0-10/08(0)
Rev. 0 | Page 16 of 16
 Loading...
Loading...