

Page 1
15 V, I2C Compatible
a
256-Position Digital Potentiometers
FEATURES
256 Position
AD5280: 1-Channel
AD5282: 2-Channel (Independently Programmable)
Potentiometer Replacement
20 k, 50 k, 200 k
Low Temperature Coefficient 30 ppm/°C
Internal Power-On Midscale Preset
5 V to 15 V Single-Supply; 5.5 V Dual-Supply Operation
2
C Compatible Interface
I
APPLICATIONS
Multimedia, Video, and Audio
Communications
Mechanical Potentiometer Replacement
Instrumentation: Gain, Offset Adjustment
Programmable Voltage Source
Programmable Current Source
Line Impedance Matching
GENERAL DESCRIPTION
The AD5280/AD5282 provides a single-/dual-channel, 256-position
digitally controlled variable resistor (VR) device.
1
These devices
perform the same electronic adjustment function as a potentiometer, trimmer, or variable resistor. Each VR offers a completely
programmable value of resistance between the A terminal and
the wiper or the B terminal and the wiper. The fixed A-to-B
terminal resistance of 20 kΩ, 50 kΩ, or 200 kΩ has a 1% channel-to-channel matching tolerance. Nominal temperature
coefficient of both parts is 30 ppm/°C. Another key feature of
these parts is that they can operate up to +15 V or ±5 V.
Wiper position programming defaults to midscale at system
power-on. Once powered, the VR wiper position is programmed
2
by an I
C compatible 2-wire serial data interface. Both parts
have additional programmable logic outputs that enable users to
drive digital loads, logic gates, LED drivers, and analog switches
in their system.
The AD5280/AD5282 are available in thin surface-mount
14-lead and 16-lead TSSOP packages. All parts are guaranteed
to operate over the extended industrial temperature range
of –40°C to +85°C. For 3-wire SPI compatible interface appli-
cations, see AD5260/AD5262 products.
SHDN
V
V
SCL
SDA
GND
AD5280/AD5282
*
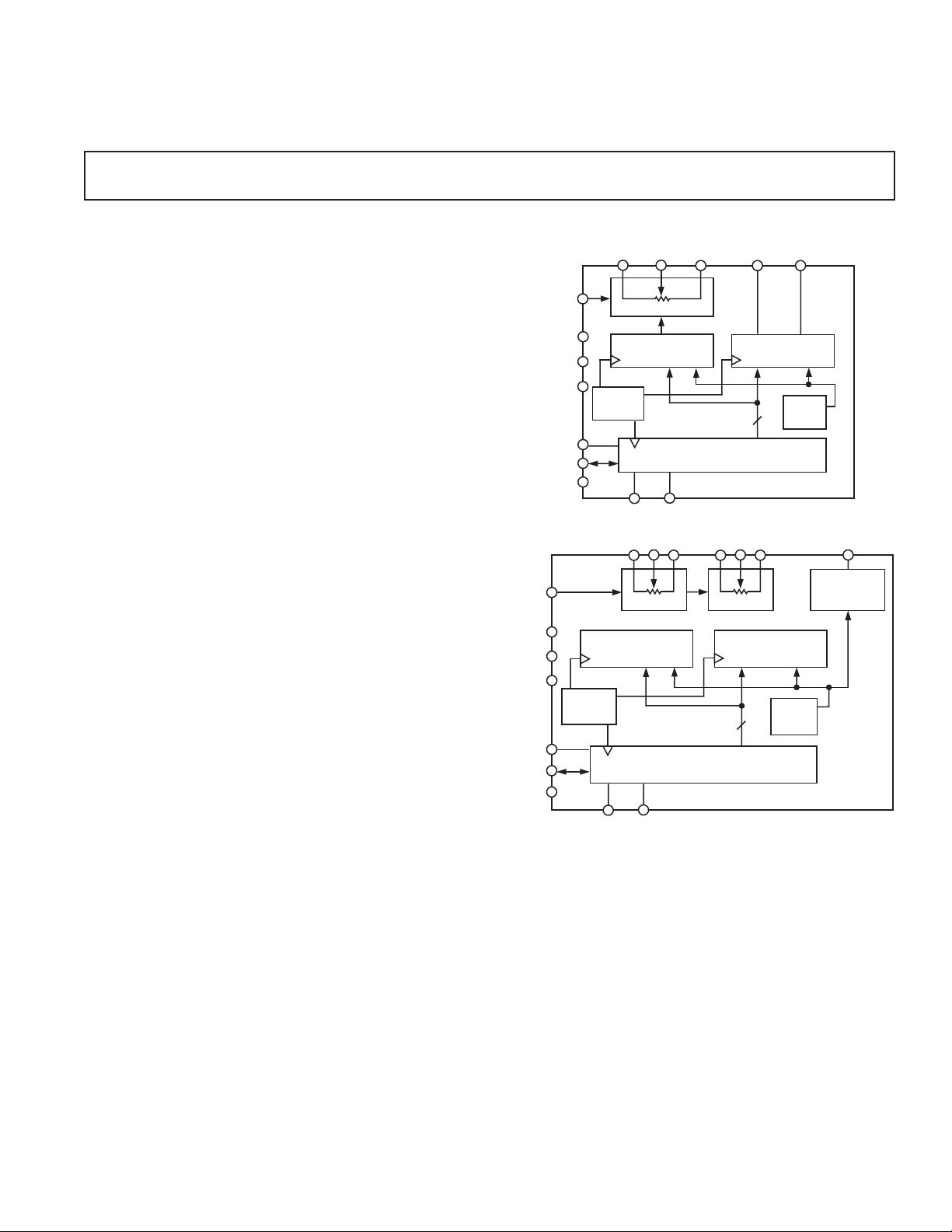
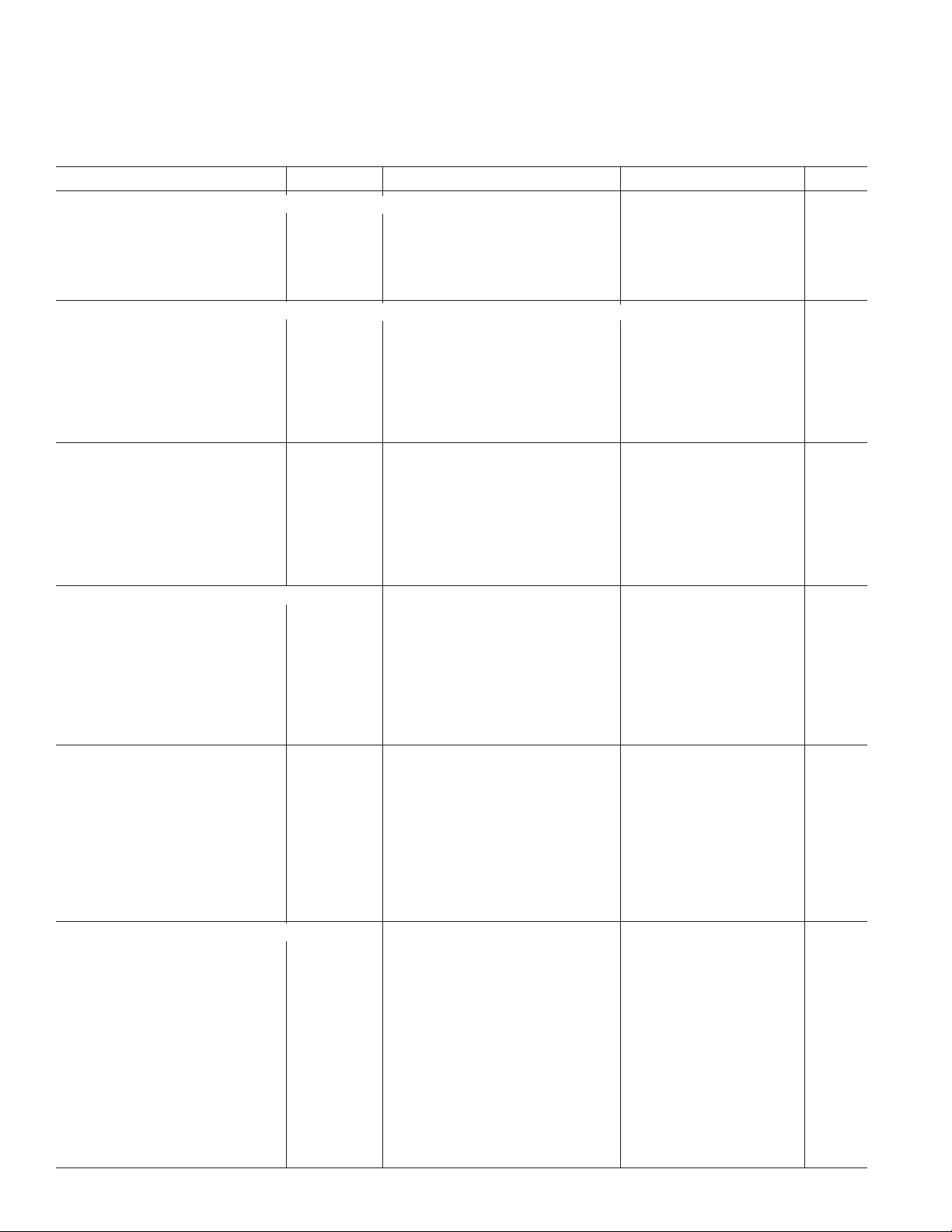
FUNCTIONAL BLOCK DIAGRAMS
AW B O
SHDN
V
DD
V
SS
V
L
SCL
SDA
GND
DD
SS
V
L
ADDRESS
DECODE
RDAC REGISTER
ADDRESS
DECODE
SERIAL INPUT REGISTER
AD0
AD1
A1W1B
RDAC1 REGISTER
SERIAL INPUT REGISTER
AD0
AD1
OUTPUT REGISTER
A2W2B
1
RDAC2 REGISTER
8
1
8
2
O
PWR ON
RESET
AD5280
PWR ON
RESET
2
O
1
OUTPUT
REGISTER
AD5282
*
Patent Pending.
NOTE
1
The terms digital potentiometer, VR, and RDAC are used interchangeably.
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties that
may result from its use. No license is granted by implication or otherwise
under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2002
Page 2
AD5280/AD5282–SPECIFICATIONS
ELECTRICAL CHARACTERISTICS 20 k, 50 k, 200 k VERSION
(VDD = +15 V, VSS = 0 V or VDD = +5 V, VSS = –5 V; V
Parameter Symbol Conditions Min Typ
DC CHARACTERISTICS–RHEOSTAT MODE Specifications apply to all VRs
Resistor Differential NL
Resistor Nonlinearity
Nominal Resistor Tolerance
Resistance Temperature Coefficient R
Wiper Resistance R
2
2
3
R-DNL RWB, VA = NC –1 ± 1/4 +1 LSB
R-INL RWB, VA = NC –1 ± 1/4 +1 LSB
⌬R
AB
/⌬TV
AB
W
DC CHARACTERISTICS–POTENTIOMETER DIVIDER MODE Specifications apply to all VRs
Resolution N 8 Bits
Integral Nonlinearity
Differential Nonlinearity
Voltage Divider Temperature ⌬V
4
4
INL –1 ± 1/4 +1 LSB
DNL –1 ± 1/4 +1 LSB
W
Coefficient
Full-Scale Error V
Zero-Scale Error V
RESISTOR TERMINALS
Voltage Range
Capacitance
5
6
A, B C
Capacitance6 WC
Common-Mode Leakage I
Shutdown Current I
WFSE
WZSE
V
A,B,W
A,B
W
CM
SHDN
DIGITAL INPUTS AND OUTPUTS
Input Logic High V
Input Logic Low V
Input Logic High V
Input Logic Low V
Output Logic High (SDO) V
Output Logic Low (SDO) V
Input Current I
Input Capacitance
6
IH
IL
IH
IL
IH
IL
IL
C
IL
POWER SUPPLIES
Logic Supply V
Power Single-Supply Range V
Power Dual-Supply Range V
Logic Supply Current I
Positive Supply Current I
Negative Supply Current I
Power Dissipation
7
LOGIC
DD RANGE
DD/SS RANGE
LOGIC
DD
SS
P
DISS
Power Supply Sensitivity PSS 0.002 0.01 %/%
DYNAMIC CHARACTERISTICS
6, 8, 9
Bandwidth –3 dB BW_20K RAB = 20 kΩ, Code = 80
BW_50K R
BW_200K R
Total Harmonic Distortion THD
Settling Time t
V
W
S
Crosstalk CT V
Analog Crosstalk CTA Measure V
Resistor Noise Voltage e
N_WB
= 5 V, VA = +VDD, VB = 0 V; –40C < TA < +85C, unless otherwise noted.)
LOGIC
TA = 25°C –30 +30 %
= VDD, Wiper = No Connect 30 ppm/°C
AB
IW = VDD /R, VDD = 3 V or 5 V 60 150 Ω
/⌬TCode = 80
Code = FF
Code = 00
H
H
H
–2 –1 0 LSB
0+1+2LSB
V
SS
5 ppm/°C
f = 5 MHz, measured to 25 pF
GND, Code = 80
H
f = 1 MHz, measured to 55 pF
GND, Code = 80
VA = VB = V
H
W
1nA
2.4 V
V
= 3 V, VSS = 0 2.1 V
LOGIC
V
= 3 V, VSS = 0 0.6 V
LOGIC
4.9 V
VIN = 0 V or 5 V ±1 µA
5pF
2.7 5.5 V
VSS = 0 V 5 15 V
±4.5 ±5.5 V
V
= 5 V 60 µA
LOGIC
VIH = 5 V or VIL = 0 V 0.1 1 µA
0.1 1 µA
VIH = 5 V or VIL = 0 V, VDD = +5 V, 0.2 0.3 mW
V
= –5 V
SS
= 50 kΩ, Code = 80
AB
= 200 kΩ, Code = 80
AB
W
VA = 1 V rms, RAB = 20 kΩ 0.014 %
V
= 0 V DC, f = 1 kHz
B
H
H
H
310 kHz
150 kHz
35 kHz
VA = 5 V, VB = 5 V, 5 µs
±1 LSB error band
= VDD, VB = 0 V, Measure 15 nV-s
A
VW1 with Adjacent RDAC
Making Full-Scale Code Change
with VW2 = 5 V p-p –62 dB
W1
@ f = 10 kHz
RWB = 20 kΩ, f = 1 kHz 18 nV/√Hz
1
Max Unit
V
5 µA
0.8 V
0.4 V
DD
V
REV. 0–2–
Page 3
AD5280/AD5282
Parameter Symbol Conditions Min Typ
INTERFACE TIMING CHARACTERISTICS Applies to all parts
SCL Clock Frequency f
Bus Free Time between STOP and START t
t
BUF
Hold Time (Repeated START) t
t
HD:STA
SCL
1
2
6, 10
1.3 µs
After this period, the first 0.6 µs
1
Max Unit
400 kHz
clock pulse is generated
Low Period of SCL Clock t
t
LOW
High Period of SCL Clock t
t
HIGH
t
Setup Time for START Condition t
SU:STA
Data Hold Time t
t
HD:DAT
Data Setup Time t
t
SU:DAT
tF Fall Time of Both SDA and SCL Signals t
Rise Time of Both SDA and SCL Signals t
t
R
t
Setup Time for STOP Condition t
SU:STO
NOTES
1
Typicals represent average readings at 25°C, VDD = +5 V, VSS = –5 V.
2
Resistor position nonlinearity error R-INL is the deviation from an ideal value measured between the maximum resistance and the minimum resistance wiper
positions. R-DNL measures the relative step change from ideal between successive tap positions. Parts are guaranteed monotonic.
3
VAB = VDD, Wiper (VW) = No connect.
4
INL and DNL are measured at VW with the RDAC configured as a potentiometer divider similar to a voltage output D/A converter. VA = VDD and VB = 0 V.
DNL specification limits of ± 1 LSB maximum are guaranteed monotonic operating conditions.
5
Resistor terminals A, B, W have no limitations on polarity with respect to each other.
6
Guaranteed by design and not subject to production test.
7
P
is calculated from (IDD ⫻ VDD). CMOS logic level inputs result in minimum power dissipation.
DISS
8
Bandwidth, noise, and settling time are dependent on the terminal resistance value chosen. The lowest R value results in the fastest settling time and highest
bandwidth. The highest R value results in the minimum overall power consumption.
9
All dynamic characteristics use VDD = 5 V.
10
See timing diagram for location of measured values.
Specifications subject to change without notice.
3
4
5
6
7
8
9
10
1.3 µs
0.6 50 µs
0.6 µs
0.9 µs
100 ns
300 ns
300 ns
0.6 µs
REV. 0
–3–
Page 4
AD5280/AD5282
ABSOLUTE MAXIMUM RATINGS
(TA = 25°C, unless otherwise noted.)
VDD to GND . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3 V, +15 V
V
to GND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0 V, –7 V
SS
to VSS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 V
V
DD
, VB, VW to GND . . . . . . . . . . . . . . . . . . . . . . . . . . VSS, V
V
A
AX – BX, AX – WX, BX – W
X
Intermittent2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ±20 mA
Continuous . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ±5 mA
to GND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0 V, 7 V
V
LOGIC
Output Voltage to GND . . . . . . . . . . . . . . . . . . . . . . 0 V, 7 V
Operating Temperature Range . . . . . . . . . . . –40°C to +85°C
Thermal Resistance
3
JA,
TSSOP-14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206°C/W
TSSOP-16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150°C/W
1
Maximum Junction Temperature (TJ MAX) . . . . . . . . . 150°C
Storage Temperature . . . . . . . . . . . . . . . . . . –65°C to +150°C
Lead Temperature
RU-14, RU-16 (Vapor Phase, 60 sec) . . . . . . . . . . . . 215°C
RU-14, RU-16 (Infrared, 15 sec) . . . . . . . . . . . . . . . . 220°C
DD
NOTES
1
Stresses above those listed under Absolute Maximum Ratings may cause
permanent damage to the device. This is a stress rating; functional operation of
the device at these or any other conditions above those listed in the operational
sections of this specification is not implied. Exposure to absolute maximum
rating conditions for extended periods may affect device reliability.
2
Maximum terminal current is bound by the maximum current handling of the
switches, maximum power dissipation of the package, and maximum applied
voltage across any two of the A, B, and W terminals at a given resistance.
3
Package Power Dissipation (TJ MAX – TA)/
JA
ORDERING GUIDE
Number of R
AB
Package Package Parts Per Branding
Model Channels (k) Temp Description Option Container Information*
AD5280BRU20 1 20 –40°C to +85°CTSSOP-14 RU-14 96 AD5280B20
AD5280BRU20-REEL7 1 20 –40°C to +85°CTSSOP-14 RU-14 1000 AD5280B20
AD5280BRU50 1 50 –40°C to +85°CTSSOP-14 RU-14 96 AD5280B50
AD5280BRU50-REEL7 1 50 –40°C to +85°CTSSOP-14 RU-14 1000 AD5280B50
AD5280BRU200 1 200 –40°C to +85°CTSSOP-14 RU-14 96 AD5280B200
AD5280BRU200-REEL7 1 200 –40°C to +85°CTSSOP-14 RU-14 1000 AD5280B200
AD5282BRU20 2 20 –40°C to +85°CTSSOP-16 RU-16 96 AD5282B20
AD5282BRU20-REEL7 2 20 –40°C to +85°CTSSOP-16 RU-16 1000 AD5282B20
AD5282BRU50 2 50 –40°C to +85°CTSSOP-16 RU-16 96 AD5282B50
AD5282BRU50-REEL7 2 50 –40°C to +85°CTSSOP-16 RU-16 1000 AD5282B50
AD5282BRU200 2 200 –40°C to +85°CTSSOP-16 RU-16 96 AD5282B200
AD5282BRU200-REEL7 2 200 –40°C to +85°CTSSOP-16 RU-16 1000 AD5282B200
The AD5280/AD5282 die size is 75 mm ⫻ 120 mm, 9,000 sq. mm. Contains 3077 transistors.
*Line 1 contains model number, Line 2 contains ADI logo followed by the end-to-end resistance value, and line 3 contains date code YYWW.
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection. Although the
AD5280/AD5282 features proprietary ESD protection circuitry, permanent damage may occur on
devices subjected to high energy electrostatic discharges. Therefore, proper ESD precautions are
recommended to avoid performance degradation or loss of functionality.
WARNING!
ESD SENSITIVE DEVICE
REV. 0–4–
Page 5
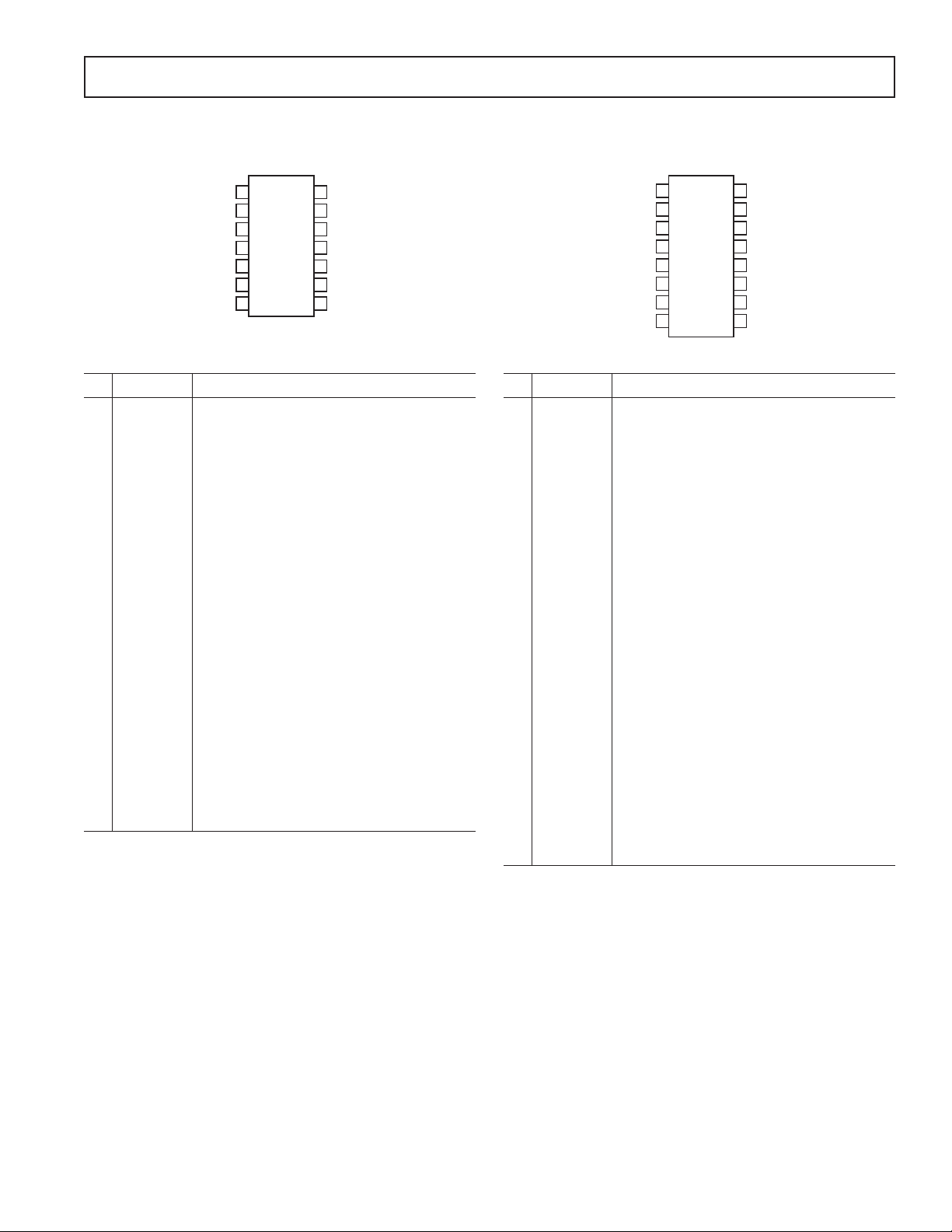
PIN CONFIGURATION
S
S
AD5280/AD5282
AD5280 PIN CONFIGURATION
A
V
HDN
SCL
SDA
DD
1
2
W
3
B
4
5
6
7
AD5280
TOP VIEW
(Not to Scale)
14
O
1
13
V
L
12
O
2
11
V
SS
10
GND
9
AD1
8
AD0
AD5280 PIN FUNCTION DESCRIPTION
Pin Mnemonic Description
1A Resistor Terminal A
2W Wiper Terminal W
3B Resistor Terminal B
4V
DD
Positive Power Supply. Specified for operation
from 5 V to 15 V (Sum of |V
| + |VSS| ≤ 15 V).
DD
5 SHDN Active Low, Asynchronous Connection of the
Wiper W to Terminal B and Open Circuit
of Terminal A. RDAC Register contents
unchanged. SHDN should tie to V
if not used.
L
6 SCL Serial Clock Input
7 SDA Serial Data Input/Output
8AD0 Programmable Address Bit 0 for Multiple
Package Decoding. Bits AD0 and AD1 provide
four possible addresses.
9AD1 Programmable Address Bit 1 for Multiple
Package Decoding. Bits AD0 and AD1 provide
four possible addresses.
10 GND Common Ground
11 V
12 O
13 V
SS
2
L
Negative Power Supply. Specified for operation
from 0 V to –5 V (Sum of |V
Logic Output Terminal O
| + |VSS| ≤ 15 V).
DD
2
Logic Supply Voltage. Needs to be the same
voltage as the digital logic controlling the
AD5280.
14 O
1
Logic Output Terminal O
1
AD5282 PIN CONFIGURATION
W
V
HDN
SCL
SDA
O
A
B
DD
1
1
2
1
3
1
4
1
5
(Not to Scale)
6
7
8
AD5282
TOP VIEW
16
A
2
15
W
2
14
B
2
V
13
L
V
12
SS
11
GND
10
AD1
9
AD0
AD5282 PIN FUNCTION DESCRIPTION
Pin Mnemonic Description
1O
1
2A
1
3W
1
4B
1
5V
DD
Logic Output Terminal O
Resistor Terminal A
Wiper Terminal W
Resistor Terminal B
1
1
1
1
Positive Power Supply. Specified for operation
from 5 V to 15 V (Sum of |V
| + |VSS|≤ 15 V).
DD
6 SHDN Active Low, Asynchronous Connection of the
Wiper W to Terminal B and Open Circuit of
Terminal A. RDAC Register contents
unchanged. SHDN should tie to V
if not used.
L
7 SCL Serial Clock Input
8 SDA Serial Data Input/Output
9 AD0 Programmable Address Bit 0 for Multiple
Package Decoding. Bits AD0 and AD1 provide
four possible addresses.
10 AD1 Programmable Address Bit 1 for Multiple
Package Decoding. Bits AD0 and AD1 provide
four possible addresses.
11 GND Common Ground
12 V
13 V
SS
L
Negative Power Supply. Specified for operation
from 0 V to –5 V (Sum of |V
| + |VSS| ≤ 15 V).
DD
Logic Supply Voltage. Needs to be the same
voltage as the digital logic controlling the
AD5282.
14 B
15 W
16 A
2
2
2
Resistor Terminal B
Wiper Terminal W
2
Resistor Terminal A
2
2
REV. 0
–5–
Page 6
AD5280/AD5282
–Typical Performance Characteristics
1
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
RHEOSTAT MODE INL – LSB
–0.8
–1
0 32 160 256
+5V
ⴞ5V
64 96 128 192 224
CODE – Decimal
+15V
RAB = 20k⍀
= 25ⴗC
T
A
TPC 1. R-INL vs. Code vs.
Supply Voltages
0.5
0.4
0.3
0.2
TA = –40ⴗC
0.1
0
–0.1
–0.2
–0.3
POTENTIOMETER MODE DNL – LSB
–0.4
–0.5
0 32 160 256
TA = +125ⴗC
64 96 128 192 224
CODE – Decimal
RAB = 20k⍀
TA = +85ⴗC
TA = +25ⴗC
TPC 4. DNL vs. Code, VDD/VSS = ±5 V
0.5
0.4
0.3
0.2
ⴞ5V
0.1
0
–0.1
–0.2
–0.3
RHEOSTAT MODE DNL – LSB
–0.8
–0.5
0 32 160 256
+15V
64 96 128 192 224
CODE – Decimal
+5V
RAB = 20k⍀
= 25ⴗC
T
A
TPC 2. R-DNL vs. Code vs.
Supply Voltages
1
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
POTENTIOMETER MODE INL – LSB
–0.8
–1
0 32 160 256
ⴞ5V
64 96 128 192 224
CODE – Decimal
+5V
RAB = 20k⍀
TA = 25ⴗC
+15V
TPC 5. INL vs. Code vs. Supply
Voltages
1
0.8
0.6
TA = +85ⴗC
0.4
0.2
0
–0.2
TA = –40ⴗC
–0.4
–0.6
POTENTIOMETER MODE INL – LSB
–0.8
–1
0 32 160 256
TA = +125ⴗC
TA = +25ⴗC
64 96 128 192 224
CODE – Decimal
RAB = 20k⍀
TPC 3. INL vs. Code, VDD/VSS = ±5 V
0.5
0.4
0.3
0.2
ⴞ5V
0.1
0
–0.1
–0.2
–0.3
POTENTIOMETER MODE DNL – LSB
–0.4
–0.5
0 32 160 256
+5V
64 96 128 192 224
CODE – Decimal
RAB = 20k⍀
= 25ⴗC
T
A
+15V
TPC 6. DNL vs. Code vs.
Supply Voltages
1.0
Avg + 3
0.5
0
INL – LSB
–0.5
–1.0
0 20
Avg
Avg – 3
51015
|VDD – VSS| – V
RAB = 20k⍀
= 25ⴗC
T
A
TPC 7. INL Over Supply Voltage
2.0
1.5
1.0
0.5
0
RINL – LSB
–0.5
–1.0
–1.5
–2.0
0 20
Avg + 3
Avg
Avg – 3
51015
|VDD – VSS| – V
RAB = 20k⍀
T
= 25ⴗC
A
TPC 8. RINL Over Supply Voltage
0
–0.2
–0.4
–0.6
–0.8
–1.0
–1.2
–1.4
–1.6
FULL-SCALE ERROR – LSB
–1.8
–2.0
–40 100
VDD/VSS = 15V/0V
VDD/VSS = ⴞ5V
200–20
TEMPERATURE – ⴗC
RAB = 20k⍀
VDD/VSS = 5V/0V
40 60 80
TPC 9. Full-Scale Error
REV. 0–6–
Page 7

AD5280/AD5282
CODE – Decimal
POTENTIOMETER MODE TEMPCO – ppm/ⴗC
256
–40
966432
–20
0
TA = 25ⴗC
128 192 224
50k⍀
0
20
40
120
100
80
60
200k⍀
20k⍀
2.0
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
ZERO-SCALE ERROR – LSB
0.2
0
–40 100
VDD/VSS = 5V/0V
VDD/VSS = ⴞ5V
200–20
TEMPERATURE – ⴗC
RAB = 20k⍀
VDD/VSS = 15V/0V
40 60 80
TPC 10. Zero-Scale Error
1000
– A
100
LOGIC
I
VDD/VSS = 5V/0V
10
0 534
TPC 13. V
V
21
Supply Current
LOGIC
LOGIC
VIH – V
RAB = 20k⍀
= 25ⴗC
T
A
VDD/VSS = 5V/0V
= 5V
V
LOGIC
= 3V
vs. Digital Input Voltage
1000
@ VDD/VSS = 15V/0V
I
SS
100
ISS @ VDD/VSS = ⴞ5V
IDD @ VDD/VSS = ⴞ5V
10
SUPPLY CURRENT – nA
SS
/I
DD
I
1
–40 125
RAB = 20k
26–7
TEMPERATURE – ⴗC
V
LOGIC
= 5V
V
IH
= 0V
V
IL
59 92
= 5V
TPC 11. Supply Current vs.
Temperature
–100
RHEOSTAT MODE TEMPCO – ppm/ C
–200
700
600
500
400
300
200
100
20k⍀
50k⍀
200k⍀
0
0
966432
CODE – Decimal
TA = 25ⴗC
128 192 224
TPC 14. Rheostat Mode Tempco
⌬
RWB/⌬T vs. Code, VDD/VSS = ±5 V
256
26.0
25.5
VDD/VSS = 15V/0V
25.0
– A
24.5
LOGIC
I
24.0
23.5
23.0
–40 125
TPC 12. V
26–7
TEMPERATURE – ⴗC
LOGIC
V
DD/VSS
59 92
Supply
RAB = 20k⍀
= ⴞ5V
Current vs. Temperature
TPC 15. Potentiometer Mode Tempco
⌬
VWB/⌬T vs. Code, VDD/VSS = ±5 V
0
–6
–12
–18
–24
–30
–36
GAIN – dB
–42
–48
–54
–60
1k
80H
40H
20H
10H
08H
04H
02H
01H
FREQUENCY – Hz
TA = 25ⴗC
V
V
100k10k
= 50mV rms
A
= ⴞ5V
DD/VSS
1M
TPC 16. Gain vs. Frequency
= 20 k
vs. Code, R
REV. 0
AB
Ω
0
–6
–12
–18
–24
–30
GAIN – dB
–36
–42
–48
–54
–60
1k
80H
40H
20H
10H
08H
04H
02H
01H
TA = 25ⴗC
V
V
100k10k
FREQUENCY – Hz
TPC 17. Gain vs. Frequency
vs. Code, RAB = 50 k
–7–
= 50mV rms
A
= ⴞ5V
DD/VSS
Ω
1M
0
–6
–12
–18
–24
–30
–36
GAIN – dB
–42
–48
–54
–60
1k
80H
40H
20H
10H
08H
04H
02H
01H
FREQUENCY – Hz
TPC 18. Gain vs. Frequency
vs. Code, RAB = 200 k
TA = 25ⴗC
= 50mV rms
V
A
VDD/VSS = ⴞ5V
Ω
100k10k
Page 8

AD5280/AD5282
0
–6
–12
–18
–24
–30
–36
GAIN – dB
–42
–48
–54
–60
1k
R = 50k⍀
150kHz
R = 200k⍀
35kHz
TA = 25ⴗC
VDD/VSS = ⴞ5V
V
FREQUENCY – Hz
100k10k
TPC 19. –3 dB Bandwidth
80
60
40
PSRR – –dB
+PSRR @ VDD/VSS = ⴞ5V
20
DC ⴞ 10% p-p AC
0
100
CODE = 80H, VA = VDD, VB = 0V
–PSRR @ VDD/VSS = ⴞ5V
DC ⴞ 10% p-p AC
100000100001000
FREQUENCY – MHz
TPC 22. PSRR vs. Frequency
R = 20k⍀
310kHz
= 50mV rms
A
1M
1000000
–6dB
R = 200k⍀
NOMALIZED GAIN FLATNESS – 0.1dB/DIV
FREQUENCY – Hz
TA = 25ⴗC
V
DD/VSS
R = 20k⍀
R =
50k⍀
10k1k100
= ⴞ5V
TPC 20. Normalized Gain
Flatness vs. Frequency
852.0s1.2VA2
2.04s
TPC 23. Midscale Glitch Energy
Code 80H to 7F
H
100k
– A
LOGIC
I
500
400
300
200
100
0
FREQUENCY – Hz
TPC 21. V
LOGIC
VDD/VSS = ⴞ5V
= 25ⴗC
T
A
CODE = 55
100000010000010000
Supply
H
CODE = FF
H
10000000
Current vs. Frequency
TPC 24. Large Signal Settling Time
33.41s1.0VA2
1.50s
TPC 25. Digital Feedthrough vs.
Time
100
10
– mA
WB_MAX
1
0.1
THEORETICAL I
0.01
0
TPC 26. I
VA = VB = OPEN
T
A
RAB = 200k⍀
966432
128 192 224
CODE – Decimal
vs. Code
MAX
= 25ⴗC
RAB = 20k⍀
RAB = 50k⍀
256
40
CODES SET TO
MIDSCALE
3 LOTS
SAMPLE SIZE = 135
30
20
FREQUENCY – MHz
10
0
–0.5
–0.4
–0.45
LONG TERM CHANNEL-TO-CHANNEL RAB
–0.35
–0.3
–0.2
–0.25
–0.15
MATCH – %
–0.1
–0.05
0
0.1
0.05
TPC 27. Channel-to-Channel
Resistance Matching (AD5282)
0.15
0.2
REV. 0–8–
Page 9

TEST CIRCUITS
Test Circuits 1 to 11 define the test conditions used in the
product specification table.
AD5280/AD5282
V+ = V
DD
1LSB = V+/2
V
MS
N
V
DUT
A
B
W
Test Circuit 1. Potentiometer Divider Nonlinearity
Error (INL, DNL)
NO CONNECT
DUT
A
B
W
I
W
V
MS
Test Circuit 2. Resistor Position Nonlinearity
Error (Rheostat Operation; R-INL, R-DNL)
DUT
A
V
MS2
W
B
I
= VDD/R
NOMINAL
W
V
W
V
MS1
RW = [V
MS1
– V
MS2
]/I
W
OFFSET
GND
A
V
DUT
IN
2.5V
B
+15V
W
AD8610
–15V
V
OUT
Test Circuit 7. Gain vs. Frequency
0.1V
R
=
SW
I
DUT
B
W
I
SW
CODE =
SW
H
0.1V
V
TO V
SS
DD
Test Circuit 8. Incremental On Resistance
NC
V
DD
DUT
V
SS
GND
NC
A
W
B
I
CM
NC = NO CONNECT
V
CM
Test Circuit 3. Wiper Resistance
V
A
V
DD
A
V+
W
B
V+ = V
10%
DD
PSRR (dB) = 20 LOG
PSS (%/ %) =
V
MS
VMS%
V
DD
( )
%
V
V
MS
DD
Test Circuit 4. Power Supply Sensitivity (PSS, PSSR)
OFFSET
GND
A
V
IN
DUT
OFFSET
BIAS
B
5V
W
OP279
V
OUT
Test Circuit 5. Inverting Gain
5V
OFFSET
GND
V
IN
A
DUT
OFFSET
BIAS
OP279
W
B
V
OUT
Test Circuit 9. Common-Mode Leakage Current
DIGITAL INPUT
VOLTAGE
1
1
1
B
1
I
LOGIC
V
DD
A
2
RDAC
2
W
2
V
OUT
B
OUT
VIN]
/
2
V
SS
Test Circuit 10. V
V
IN
V
LOGIC
SCL
SDA
Current vs. Digital Input Voltage
LOGIC
A
RDAC
W
N/C
C
= 20 log [V
TA
Test Circuit 11. Analog Crosstalk (AD5282 Only)
REV. 0
Test Circuit 6. Noninverting Gain
–9–
Page 10

AD5280/AD5282
t
8
SDA
t
1
t
8
t
9
t
6
SCL
t
2
SP
t
3
t
4
t
7
t
5
S P
t
10
Figure 1. Detailed Timing Diagram
Data of AD5280/AD5282 is accepted from the I2C bus in the following serial format:
S 01011AD1AD0R/W A A/B RS SD O1 O2 X X X A D7 D6 D5 D4 D3 D2 D1 D0 A P
Slave Address Byte Instruction Byte Data Byte
Where:
S = Start Condition
P = Stop Condition
A = Acknowledge
A = No Acknowledge
X = Don’t Care
AD1, AD0 = Package Pin Programmable Address Bits
R/W = Read Enable at High and Write Enable at Low
A/B = RDAC Subaddress Select. “Zero” for RDAC1 and “One” for RDAC2
RS = Midscale Reset, Active High (only affects selected channel)
SD = Shutdown. Same as SHDN pin operation except inverse logic (only affects
selected channel)
O2, O1 = Output Logic Pin Latched Values, Default Logic 0
D7, D6, D5, D4, D3, D2, D1, D0 = Data Bits
SCL
SDA
START BY
MASTER
1
0
0
1
SLAVE ADDRESS BYTE
1AD1AD0R/W
1
FRAME 1
91 199
RS SD O1 O2 X X X D7 D6 D5 D4D3D2D1D0
A/B
ACK. BY
AD5280/AD5282
FRAME 2
INSTRUCTION BYTE
ACK. BY
AD5280/AD5282
Figure 2. Writing to the RDAC Register
SCL
SDA
START BY
MASTER
1
0
0
1
SLAVE ADDRESS BYTE
1
FRAME 1
1AD1AD0
91 9
R/W
AD5280/AD5282
D7 D6 D5 D4 D3 D2 D1 D0
ACK. BY
DATA BYTE FROM PREVIOUSLY SELECTED
RDAC REGISTER IN WRITE MODE
FRAME 2
NO ACK. BY
MASTER
Figure 3. Reading Data from a Previously Selected RDAC Register in Write Mode
FRAME 3
DATA BYTE
A
STOP BY
MASTER
ACK. BY
AD5280/AD5282
STOP BY
MASTER
REV. 0–10–
Page 11

AD5280/AD5282
S
OPERATION
The AD5280/AD5282 provides a single-/dual-channel, 256position, digitally controlled variable resistor (VR) device.
To program the VR settings, refer to the Digital Interface section.
Both parts have an internal power-on preset that places the wiper
at midscale during power-on, which simplifies the fault condition
recovery at power-up. Operation of the power-on preset function
also depends on the state of the V
pin. In addition, the shutdown
L
SHDN pin of the AD5280/AD5282 places the RDAC in an
almost zero power consumption state where terminal A is open
circuited and the wiper W is connected to terminal B, resulting
in only leakage currents being consumed in the VR structure.
During shutdown, the VR latch settings are maintained or new
settings can be programmed. When the part is returned from
shutdown, the corresponding VR setting will be applied to the
RDAC.
Ax
HDN
string will not be accessed; therefore, there is 1 LSB less of the
nominal resistance at full scale in addition to the wiper resistance.
The general equation determining the digitally programmed
output resistance between W and B is:
RD
WB AB W
D
256
RR
=×+
()
(1)
where:
D is the decimal equivalent of the binary code loaded in the
8-bit RDAC Register.
R
is the nominal end-to-end resistance.
AB
R
is the wiper resistance contributed by the on resistance of
W
the internal switch.
Again, if R
following output resistance values, R
= 20 kΩ and the A terminal is open circuited, the
AB
, will be set for the fol-
WB
lowing RDAC latch codes.
Table I. Codes and Corresponding Resistances
R
D7
D6
D5
D4
D3
D2
D1
D0
RDAC
LATCH
AND
DECODER
S
R
S
R
S
R
S
Wx
Bx
D (DEC) R
(⍀)Output State
WB
255 19982 Full Scale (RAB – 1 LSB + RW)
128 10060 Midscale
1 138 1 LSB
060Zero-Scale (Wiper Contact Resistance)
Note that in the zero-scale condition, a finite wiper resistance of 60 Ω is
present. Care should be taken to limit the current flow between W and B in this
state to a maximum pulse current of no more than 20 mA. Otherwise, degradation or possible destruction of the internal switch contact can occur.
Similar to the mechanical potentiometer, the resistance of the
RDAC between the wiper W and terminal A also produces a
digitally controlled complementary resistance, R
. When these
WA
terminals are used, the B terminal can be opened. Setting the
Figure 4. AD5280/AD5282 Equivalent RDAC Circuit
PROGRAMMING THE VARIABLE RESISTOR
Rheostat Operation
The nominal resistance of the RDAC between terminals A and
B is available in 20 kΩ, 50 kΩ, and 200 kΩ. The final two or
three digits of the part number determine the nominal resistance
value, e.g., 20 kΩ = 20; 50 kΩ = 50; 200 kΩ = 200. The nominal
resistance (R
) of the VR has 256 contact points accessed by
AB
the wiper terminal, plus the B terminal contact. The 8-bit data
in the RDAC latch is decoded to select one of the 256 possible
settings. Assuming a 20 kΩ part is used, the wiper’s first connection starts at the B terminal for data 00
. Since there is a 60 Ω
H
wiper contact resistance, such a connection yields a minimum
of 60 Ω resistance between terminals W and B. The second
connection is the first tap point that corresponds to 138 Ω
= RAB/256 + RW = 78 Ω + 60 Ω) for data 01H. The third
(R
WB
connection is the next tap point representing 216 Ω (78 ⫻ 2 + 60)
for data 02
, and so on. Each LSB data value increase moves
H
the wiper up the resistor ladder until the last tap point is reached
at 19982 Ω [R
– 1 LSB + RW]. Figure 4 shows a simplified
AB
diagram of the equivalent RDAC circuit where the last resistor
resistance value for R
and decreases as the data loaded in the latch increases in value.
The general equation for this operation is:
RD
WA AB W
For R
= 20 kΩ and B terminal open circuited, the following
AB
256
=×+
()
output resistance, R
latch codes.
Table II. Codes and Corresponding Resistances
D (DEC) R
255 138 Full Scale
128 10060 Midscale
1 19982 1 LSB
0 20060 Zero Scale
The typical distribution of the nominal resistance, R
channel-to-channel matches within ±1%. Device-to-device
matching is process lot dependent and is possible to have ±30%
variation. Since the resistance element is processed in thin film
technology, the change in R
starts at a maximum value of resistance
WA
D
–
256
RR
, will be set for the following RDAC
WA
(⍀)Output State
WA
AB
with temperature has a very low
AB
(2)
, from
30 ppm/°C temperature coefficient.
REV. 0
–11–
Page 12

AD5280/AD5282
PROGRAMMING THE POTENTIOMETER DIVIDER
Voltage Output Operation
The digital potentiometer easily generates a voltage divider at
wiper-to-B and wiper-to-A to be proportional to the input voltage
at A-to-B. Unlike the polarity of V
, which must be positive,
DD–VSS
voltage across A–B, W–A, and W–B can be at either polarity
provided that V
is powered by a negative supply.
SS
If ignoring the effect of the wiper resistance for approximation,
connecting A terminal to 5 V and B terminal to ground produces
an output voltage at the wiper-to-B starting at 0 V up to 1 LSB
less than 5 V. Each LSB of voltage is equal to the voltage
applied across A–B divided by the 256 positions of the potentiometer divider. Since AD5280/AD5282 can be supplied by dual
supplies, the general equation defining the output voltage at V
W
with respect to ground for any valid input voltage applied to
terminals A and B is:
D
256
VDDV
=+
()
WA B
256
256
–
V
(3)
For a more accurate calculation, which includes the effect
of wiper resistance, V
RD
VD
()
W
WB
=
R
AB
can be found as:
W
()
+
V
A
RD
()
WA
V
R
AB
B
(4)
Operation of the digital potentiometer in the Divider Mode
results in a more accurate operation overtemperature. Unlike
the Rheostat Mode, the output voltage is dependent mainly on
the ratio of the internal resistors R
and RWB and not on the absolute
WA
values; therefore, the temperature drift reduces to 5 ppm/°C.
DIGITAL INTERFACE
2-Wire Serial Bus
The AD5280/AD5282 are controlled via an I2C compatible
serial bus. The RDACs are connected to this bus as slave devices.
Referring to Figures 2 and 3, the first byte of AD5280/AD5282 is
a Slave Address Byte. It has a 7-bit slave address and an R/W bit.
The 5 MSBs are 01011 and the following two bits are determined
by the state of the AD0 and AD1 pins of the device. AD0 and
AD1 allow the user to place up to four of the I
2
C compatible
devices on one bus.
The 2-wire I
2
C serial bus protocol operates as follows:
1. The master initiates data transfer by establishing a START
condition, which is when a high-to-low transition on the
SDA line occurs while SCL is high (see Figure 2). The
following byte is the Slave Address Byte which consists of
the 7-bit slave address followed by an R/W bit (this bit
determines whether data will be read from or written to the
slave device).
The slave whose address corresponds to the transmitted
address responds by pulling the SDA line low during the
ninth clock pulse (this is termed the Acknowledge bit). At
this stage, all other devices on the bus remain idle while the
selected device waits for data to be written to or read from
its serial register. If the R/W bit is high, the master will read
from the slave device. On the other hand, if the R/W bit is
low, the master will write to the slave device.
2. A write operation contains an extra Instruction Byte more than
a read operation. Such an Instruction Byte in Write Mode
follows the Slave Address Byte. The MSB of the Instruction
Byte labeled A/B is the RDAC subaddress select. A “low”
selects RDAC1 and a “high” selects RDAC2 for the dualchannel AD5282. Set A/B to low for the AD5280.
The second MSB, RS, is the midscale reset. A logic high on
this bit moves the wiper of a selected channel to the center
tap where R
= RWB. This feature effectively writes over
WA
the contents of the register, and thus when taken out of reset
mode, the RDAC will remain at midscale.
The third MSB SD is a shutdown bit. A logic high causes
the selected channel to open circuit at terminal A while
shorting the wiper to terminal B. This operation yields almost
0 Ω in Rheostat Mode or 0 V in Potentiometer Mode. This
SD bit serves the same function as the SHDN pin except
that the SHDN pin reacts to active low. Also, the SHDN
pin affects both channels (AD5282) as opposed to the SD
bit, which only affects the channel that is being written to. It
is important to note that the shutdown operation does not
disturb the contents of the register. When brought out of
shutdown, the previous setting will be applied to the RDAC.
The following two bits are O1 and O2. They are extra programmable logic outputs that can be used to drive other
digital loads, logic gates, LED drivers, analog switches, and
so on. The three LSBs are Don’t Care (see Figure 2).
3. After acknowledging the Instruction Byte, the last byte in
Write Mode is the Data Byte. Data is transmitted over the
serial bus in sequences of nine clock pulses (eight data bits
followed by an Acknowledge bit). The transitions on the
SDA line must occur during the low period of SCL and
remain stable during the high period of SCL (see Figure 2).
4. In the Read Mode, the Data Byte follows immediately after
the acknowledgment of the Slave Address Byte. Data is
transmitted over the serial bus in sequences of nine clock
pulses (a slight difference with the Write Mode, where there
are eight data bits followed by an Acknowledge bit). Similarly,
the transitions on the SDA line must occur during the low
period of SCL and remain stable during the high period of
SCL (see Figure 3).
5. When all data bits have been read or written, a Stop condition
is established by the master. A Stop condition is defined as a
low-to-high transition on the SDA line while SCL is high. In
Write Mode, the master will pull the SDA line high during
the tenth clock pulse to establish a Stop condition, (see
Figure 2). In Read Mode, the master will issue a No Acknowledge for the ninth clock pulse (i.e., the SDA line remains
high). The master will then bring the SDA line low before
the tenth clock pulse, which goes high to establish a Stop
condition (see Figure 3).
A repeated write function gives the user flexibility to update the
RDAC output a number of times after addressing and instructing
the part only once. During the write cycle, each data byte will
update the RDAC output. For example, after the RDAC has
acknowledged its slave address and instruction bytes, the RDAC
output will update after these two bytes. If another byte is written to the RDAC while it is still addressed to a specific slave
device with the same instruction, this byte will update the output of the selected slave device. If different instructions are
needed, the Write Mode has to start with a new Slave Address,
Instruction, and Data Byte again. Similarly, a repeated read
function of the RDAC is also allowed.
REV. 0–12–
Page 13

AD5280/AD5282
RPR
P
SD
G
M1
SD
G
M2
3.3V
E
2
PROM
RPR
P
5V
AD5282
SCL2
SDA2
V
DD2
= 5V
SCL1
SDA1
V
DD1
= 3.3V
READBACK RDAC VALUE
AD5280/AD5282 allows the user to read back the RDAC values
in the Read Mode. However, for the AD5282 dual-channel
device, the channel of interest is the one that is previously selected
in the Write Mode. In the case where users need to read the
RDAC values of both channels in AD5282, they can program
the first subaddress in Write Mode and then change to Read
Mode to read the first channel value. After that, they can change
back to Write Mode with the second subaddress and finally read
the second channel value in Read Mode again. Note that it is
not necessary for users to issue the Frame 3 data byte in Write
Mode for subsequent readback operation. Users should refer to
Figures 2 and 3 for the programming format.
ADDITIONAL PROGRAMMABLE LOGIC OUTPUT
AD5280/AD5282 features additional programmable logic outputs,
O1 and O2, which can be used to drive a digital load, analog
switches, and logic gates. O
logic states of O
and O2 can be programmed in Frame 2 under
1
and O2 default to Logic 0. The
1
the Write Mode (see Figure 2). These logic outputs have adequate
current driving capability to sink/source milliamperes of load.
Users can also activate O
and O2 in three different ways without
1
affecting the wiper settings. They may do the following:
1. Start, Slave Address Byte, Acknowledge, Instruction Byte
with O
and O2 specified, Acknowledge, Stop.
1
2. Complete the write cycle with Stop, then Start, Slave Address
Byte, Acknowledge, Instruction Byte with O
and O2 specified,
1
Acknowledge, Stop.
3. Do not complete the write cycle by not issuing the Stop, then
Start, Slave Address Byte, Acknowledge, Instruction Byte
with O
and O2 specified, Acknowledge, Stop.
1
MULTIPLE DEVICES ON ONE BUS
Figure 6 shows four AD5282 devices on the same serial bus.
Each has a different slave address since the states of their AD0
and AD1 pins are different. This allows each RDAC within each
device to be written to or read from independently. The master
device output bus line drivers are open-drain pull-downs in a
2
C compatible interface.
fully I
5V
RPR
P
MASTER
SDA SCL
AD1
AD0
AD5282
5V
SDA SCL
AD1
AD0
AD5282
5V
SDA SCL
AD1
AD0
AD5282
5V
SDA SCL
AD1
AD0
SDA
SCL
AD5282
Figure 6. Multiple AD5282 Devices on One Bus
LEVEL SHIFT FOR BIDIRECTIONAL INTERFACE
While most old systems may be operated at one voltage, a new
component may be optimized at another. When two systems
operate the same signal at two different voltages, proper level
shifting is needed. For instance, one can use a 3.3 V E
2
PROM
to interface with a 5 V digital potentiometer. A level shift scheme is
needed to enable a bidirectional communication so that the setting
of the digital potentiometer can be stored to and retrieved from
2
PROM. Figure 7 shows one of the implementations.
the E
M1 and M2 can be any N-Ch signal FETs or low threshold
FDV301N if V
falls below 2.5 V.
DD
SELF-CONTAINED SHUTDOWN FUNCTION
Shutdown can be activated by strobing the SHDN pin or pro-
gramming the SD bit in the Write Mode Instruction Byte. In
addition, shutdown can even be implemented with the device
digital output as shown in Figure 5. In this configuration, the
device will be shut down during power-up, but users are allowed
to program the device. Thus when O
is programmed high, the
1
device will exit from Shutdown Mode and respond to the new
setting. This self-contained shutdown function allows absolute
shutdown during power-up, which is crucial in hazardous
environments, without adding extra components.
O
1
SHDN
R
PD
SDA
SCL
Figure 5. Shutdown by Internal Logic Output
REV. 0
Figure 7. Level Shift for Different Potential Operation
LEVEL SHIFT FOR NEGATIVE VOLTAGE OPERATION
The digital potentiometer is popular in laser diode driver and
certain telecommunications equipment level-setting applications.
These applications are sometimes operated between ground
and some negative supply voltage such that the systems can be
biased at ground to avoid large bypass capacitors that may
significantly impede the ac performance. Like most digital
potentiometers, AD5280/AD5282 can be configured with a
negative supply (see Figure 8).
V
DD
V
SS
–5V
LEVEL SHIFTED
LEVEL SHIFTED
GND
SDA
SCL
Figure 8. Biased at Negative Voltage
–13–
Page 14

AD5280/AD5282
However, the digital inputs must also be level shifted to allow
proper operation since the ground is now referenced to the
negative potential. As a result, Figure 9 shows one implementation
with a few transistors and a few resistors. When V
is below
IN
Q3’s threshold value, Q3 is off, Q1 is off, and Q2 is on. In this
state, V
Q1 is on, and Q2 is turned off. In this state, V
approaches 0 V. When VIN is above 2 V, Q3 is on,
OUT
OUT
is pulled
down to VSS. Beware that proper time shifting is also needed for
successful communication with the device.
V
DD
+5V
V
0
IN
0
VSS = –5V
Q3
Q1
R2
10k⍀
Q2
R3
10k⍀
0
V
OUT
0
–5V
Figure 9. Level Shift for Bipolar Potential Operation
ESD PROTECTION
All digital inputs are protected with a series input resistor and
parallel Zener ESD structures shown in Figure 10; applies to
digital input pins, SDA, SCL, and SHDN.
340⍀
LOGIC
V
SS
Figure 10a. ESD Protection of Digital Pins
POWER-UP SEQUENCE
Since there are ESD protection diodes that limit the voltage
compliance at terminals A, B, and W (see Figure 11), it is important to power V
before applying any voltage to
DD/VSS
terminals A, B, and W. Otherwise, the diode will be forward
biased such that V
will be powered unintentionally and
DD/VSS
may affect the rest of the user’s circuit. The ideal power-up
sequence is in the following order: GND, V
inputs, and V
. The order of powering VA, VB, VW, and
A/B/W
, VSS, digital
DD
digital inputs is not important as long as they are powered
DD/VSS
.
after V
LAYOUT AND POWER SUPPLY BYPASSING
It is a good practice to employ compact, minimum lead length
layout design. The leads to the input should be as direct as
possible with a minimum conductor length. Ground paths should
have low resistance and low inductance.
Similarly, it is also a good practice to bypass the power supplies
with quality capacitors for optimum stability. Supply leads to
the device should be bypassed with 0.01 µF to 0.1 µF disc or
chip ceramics capacitors. Low ESR 1 µF to 10 µF tantalum or
electrolytic capacitors should also be applied at the supplies to
minimize any transient disturbance and filter low frequency
ripple (see Figure 12). Notice the digital ground should also be
joined remotely to the analog ground at one point to minimize
the digital ground bounce.
AD5280/AD5282
V
V
DD
10F
10F
SS
+
C3
C4
C1
0.1F
+
C2
0.1F
V
DD
VSSGND
A, B, W
V
SS
Figure 10b. ESD Protection of Resistor Terminals
TERMINAL VOLTAGE OPERATING RANGE
The AD5280/AD5282 positive VDD and negative VSS power
supply defines the boundary conditions for proper 3-terminal
digital potentiometer operation. Supply signals present on terminals A, B, and W that exceed V
or VSS will be clamped by
DD
the internal forward biased diodes (see Figure 11).
V
DD
A
W
B
V
SS
Figure 11. Maximum Terminal Voltages Set by
and V
V
DD
SS
Figure 12. Power Supply Bypassing
APPLICATIONS
Bipolar DC or AC Operation from Dual Supplies
The AD5280/AD5282 can be operated from dual supplies
enabling control of ground referenced ac signals or bipolar
operation. The ac signal, as high as V
, can be applied
DD/VSS
directly across terminals A–B with the output taken from terminal
W. See Figure 13 for a typical circuit connection.
+5.0V
V
DD
C
SCLK
MOSI
GND
SCL
SDA
GND
V
DD
AD5282
V
SS
A
1
W
B
1
A
2
W
B
2
1
ⴞ2.5V p-p
D = 80
2
ⴞ5V p-p
H
–5.0V
Figure 13. Bipolar Operation from Dual Supplies
REV. 0–14–
Page 15

AD5280/AD5282
Gain Control Compensation
The digital potentiometer is commonly used in gain control
such as the noninverting gain amplifier shown in Figure 14.
200k
C2
4.7pF
U1
A
W
V
O
47k
R1
B
25pF
C
1
V
i
Figure 14. Typical Noninverting Gain Amplifier
Notice the RDAC B terminal parasitic capacitance is connected to
the op amp noninverting node. It introduces a zero for the 1/
term with 20 dB/dec, whereas a typical op amp GBP has –20 dB/dec
characteristics. A large R2 and finite C1 can cause this zero’s
frequency to fall well below the crossover frequency. Thus the
rate of closure becomes 40 dB/dec and the system has 0° phase
margin at the crossover frequency. The output may ring or
oscillate if the input is a rectangular pulse or step function.
Similarly, it is also likely to ring when switching between two gain
values because this is equivalent to a step change at the input.
Depending on the op amp GBP, reducing the feedback resistor
may extend the zero’s frequency far enough to overcome the
problem. A better approach is to include a compensation
capacitor C2 to cancel the effect caused by C1. Optimum compensation occurs when R1 × C1 = R2 × C2. This is not an
option because of the variation of R2. As a result, one may use
the relationship above and scale C2 as if R2 is at its maximum
value. Doing so may overcompensate and compromise the performance slightly when R2 is set at low values. However, it will
avoid the gain peaking, ringing, or oscillation at the worst case.
For critical applications, C2 should be found empirically to suit
the need. In general, C2 in the range of a few pF to no more
than a few tenths of pF is usually adequate for the compensation.
Similarly, there are W and A terminal capacitances connected to
the output (not shown); fortunately their effect at this node is
less significant and the compensation can be avoided in most cases.
Programmable Voltage Reference
For Voltage Divider Mode operation, Figure 15, it is common
to buffer the output of the digital potentiometer unless the load
is much larger than R
. Not only does the buffer serve the
WB
purpose of impedance conversion, it also allows a heavier load
to be driven.
5V
U
1
1
V
GND
2
IN
V
OUT
AD1582
AD5280
3
A
B
5V
AD8601
A
1
V+
V
O
V–
W
Figure 15. Programmable Voltage Reference
8-Bit Bipolar DAC
Figure 16 shows a low cost, 8-bit, bipolar DAC. It offers the same
number of adjustable steps but not the precision as compared to
the conventional DACs. The linearity and temperature coefficients, especially at low value codes, are skewed by the effects of the
digital potentiometer wiper resistance. The output of this circuit is:
D
2
V
=
O REF
256
V
i
V
IN
V
TRIM
GND
U
1
OUT
ADR425
1–
+5V
REF
V
×
U
2
W
BA
R R
+15V
OP2177
A
1
–15V
+15V
OP2177
–15V
5V
REF
U2 = AD5280
(5)
V
A
2
O
Figure 16. 8-Bit Bipolar DAC
Bipolar Programmable Gain Amplifier
For applications that require bipolar gain, Figure 17 shows one
implementation similar to the previous circuit. The digital potentiometer, U
can therefore be programmed between Vi and –KVi at a
W
2
given U
2
, sets the adjustment range. The wiper voltage at
1
setting. Configuring A2 in the Noninverting Mode
allows linear gain and attentuation. The transfer function is:
V
O
V
i
where K is the ratio of R
=+
1
U
2
AD5282
V
i
AD5282
R
R
D
2
××+
12256
WB1/RWA1
W
2
B
A2
2
B
A
1
1
W
1
U
1
V+
OP2177
A
1
KK
1()–
set by U1.
V
DD
V–
V
SS
–kVi
OP2177
A
2
(6)
V
DD
V+
V–
C1
V
SS
V
O
R2
R1
Figure 17. Bipolar Programmable Gain Amplifier
Similar to the previous example, in the simpler (and much more
usual) case, where K = 1, a single digital potentiometer AD5280
is used and U
apply V
is replaced by a matched pair of resistors to
1
and –Vi at the ends of the digital potentiometer. The
i
relationship becomes:
R
D
2122
V
=+
Oi
R
256
V
×1
1–
(7)
If R2 is large, a few pF compensation capacitor may be needed
to avoid any gain peaking.
REV. 0
–15–
Page 16

AD5280/AD5282
Table III shows the result of adjusting D, with A2 configured as
a unity gain, a gain of 2, and a gain of 10. The result is a bipolar
amplifier with linearly programmable gain and 256-step resolution.
Table III. Result of Bipolar Gain Amplifier
DR1 = , R2 = 0 R1 = R2 R2 = 9R1
0–1 –2 –10
64 –0.5 –1 –5
128 0 0 0
192 0.5 1 5
255 0.968 1.937 9.680
Programmable Voltage Source with Boosted Output
For applications that require high current adjustments such as a
laser diode driver or tunable laser, a boosted voltage source can
be considered (see Figure 18).
V
i
5V
A
W
U
1
B
V+
A
1
V–
N
1
SIGNAL
U1 = AD5280
= AD8601, AD8605, AD8541
A
1
= FDV301N, 2N7002
N
V
O
R
BIAS
I
C
C
LD
L
Figure 18. Programmable Booster Voltage Source
In this circuit, the inverting input of the op amp forces the V
BIAS
to be equal to the wiper voltage set by the digital potentiometer.
The load current is then delivered by the supply via the N-Ch
FET N1. N1’s power handling must be adequate to dissipate
) × IL power. This circuit can source a maximum of
(V
i–VO
100 mA with a 5 V supply. A1 needs to be a rail-to-rail input
type. Fore precision applications, a voltage reference such as
ADR423, ADR292, or AD1584 can be applied at the input of
the digital potentiometer.
Programmable 4 to 20 mA Current Source
A programmable 4 to 20 mA current source can be implemented
with the circuit shown in Figure 19. REF191 is a unique, low
supply headroom and high current handling precision reference
that can deliver 20 mA at 2.048 V. The load current is simply
the voltage across terminals B to W of the digital potentiometer
divided by R
I
L
:
S
VD
×
REF
=
N
R
× 2
S
(8)
+5V
U
2
1
V
IN
3
SLEEP
REF191
GND
4
–2.048V TO V
V
OUT
AD5280
L
0 TO (2.048 + VL)
6
C1
1F
+5V
V+
OP8510
V–
–5V
B
W
A
–
U2
+
100
R
S
102
V
L
R
L
I
L
Figure 19. Programmable 4 to 20 mA Current Source
The circuit is simple, but beware of two things. First, dual supply op amps are ideal because the ground potential of REF191
can swing from –2.048 V at zero scale to V
at full scale of the
L
potentiometer setting. Although the circuit works under single
supply, the programmable resolution of the system will be reduced.
For applications that demand higher current capabilities, a few
changes to the circuit in Figure 19 will produce an adjustable
current in the range of hundreds of mA. First, the voltage reference
needs to be replaced with a high current, low dropout regulator,
such as the ADP3333, and the op amp needs to be swapped
with a high current dual-supply model, such as the AD8532.
Depending on the desired range of current, an appropriate value
for RS must be calculated. Because of the high current flowing
to the load, the user must pay attention to the load impedance
so as not to drive the op amp beyond the positive rail.
Programmable Bidirectional Current Source
For applications that require bidirectional current control or
higher voltage compliance, a Howland current pump can be a
solution (see Figure 20). If the resistors are matched, the load
current is:
RR
+
()22
AB
R
I
=
L
AD5280
+5V
A
–5V
1
R
2
B
W
+15V
+
V+
OP2177
V–
–
A
1
–15V
V
×
W
R2
15k
+15V
–
V+
OP2177
V–
+
–15V
14.95k
C1
10pF
A
2
R2
A
R1
150k
150k
R1
R2
50
R
500
(9)
B
V
L
L
I
L
Figure 20. Programmable Bidirectional Current Source
REV. 0–16–
Page 17

AD5280/AD5282
ω
π
OO
RC
or f
RC
==
11
2
R2B in theory can be made as small as needed to achieve the
current needed within A
’s output current driving capability. In
2
this circuit, OP2177 can deliver ±5 mA in either direction, and
the voltage compliance approaches 15 V. It can be shown that
the output impedance is:
RRRR
×+
Z
O
1212
=
RR RR R
×
12 12 2
()
′
BA
–( )
′′
+
AB
(10)
This output impedance can be infinite if resistors R1' and R2'
match precisely with R1 and R2A + R2B, respectively. On the
other hand, it can be negative if the resistors are not matched.
As a result, C1 in the range of 1 pF to 10 pF, is needed to prevent the oscillation.
Programmable Low-Pass Filter
In A/D conversion applications, it is common to include an
antialiasing filter to band-limit the sampling signal. Dual-channel digital potentiometers can be used to construct a second
order Sallen Key low-pass filter (see Figure 21). The design
equations are:
V
O
=
V
i
S
=
ω
O
1
Q
=+
RC R C
11122
2
ω
o
ω
o
2
S
++
ω
Q
1
RRCC
1212
2
o
(11)
(12)
(13)
Users can first select some convenient values for the capacitors.
To achieve maximally flat bandwidth where Q = 0.707, let C1
be twice the size of C2 and let R1 = R2. As a result, the user can
adjust R1 and R2 to the same settings to achieve the desirable
bandwidth.
C1
C
+2.5V
R2R1
V
i
B
A
W
R
ADJUSTED TO
SAME SETTING
B
A
W
R
C
C2
V+
AD8601
V–
–2.5V
V
O
U
1
Figure 21. Sallen Key Low-Pass Filter
PROGRAMMABLE OSCILLATOR
In a classic Wien-bridge oscillator (Figure 22), the Wien network (R, R', C, C') provides positive feedback, while R1 and R2
provide negative feedback. At the resonant frequency, fo, the
overall phase shift is zero, and the positive feedback causes the
circuit to oscillate. With R = R', C = C', and R2 = R2
), the oscillation frequency is:
R
diode
//(R2B +
A
(14)
where R is equal R
D
256
R
–
=
256
WA
R
AB
such that:
(15)
At resonance, setting:
RR2
2=
1
(16)
balances the bridge. In practice, R2/R1 should be set slightly
larger than 2 to ensure the oscillation can start. On the other
hand, the alternate turn-on of the diodes D1 and D2 ensures
that R2/R1 are smaller than 2 momentarily, and therefore stabilizes the oscillation.
Once the frequency is set, the oscillation amplitude can be
tuned by R2
2
3
, ID, and VD are interdependent variables. With proper
V
0
selection of R2
since:
B
=+
ODBD
2VIR V
, an equilibrium will be reached such that V
B
(17)
O
converges. R2B can be in series with a discrete resistor to increase
the amplitude, but the total resistance cannot be too large to
prevent saturation of the output.
FREQUENCY
ADJUSTMENT
10k
B
R
A
C
2.2nF
R1 = R1' = R2B = AD5282
D1 = D2 = 1N4148
W
1k
VN
R1
VP
2.2nF
+2.5V
OP1177
–2.5V
R2
B
10k
W
C
10k
AB
V+
U
V–
R2
2.1k
AB
AMPLITUDE
ADJUSTMENT
R
W
1
A
D1
D2
V
O
Figure 22. Programmable Oscillator with
Amplitude Control
REV. 0
–17–
Page 18

AD5280/AD5282
Resistance Scaling
AD5280/AD5282 offers 20 kΩ, 50 kΩ, and 200 kΩ nominal
resistance. Users who need a lower resistance and the same
number of step adjustments can place multiple devices in parallel. For example, Figure 23 shows a simple scheme of paralleling
both channels of the AD5282. To adjust half of the resistance
linearly per step, users need to program both channels to the
same settings.
V
DD
A
1
B
1
LD
A
2
W
1
W
2
B
2
Figure 23. Reduce Resistance by Half with Linear
Adjustment Characteristics
Applicable only to the Voltage Divider Mode, by paralleling a
discrete resistor as shown in Figure 24, a proportionately lower
voltage appears at terminal A. This translates into a finer degree
of precision because the step size at terminal W will be smaller.
The voltage can be found as:
V
W
D
D
=×
()
256 3 //
V
DD
RR
+
R2 R1
AB
VDD
R3
RR2
×
(//)
R2
A
B
AB
W
(18)
RDAC CIRCUIT SIMULATION MODEL
RDAC
A
25pF
20k
C
A
C
W
55pF
W
C
B
25pF
B
Figure 26. RDAC Circuit Simulation Model for
RDAC = 20 k
Ω
The internal parasitic capacitances and the external capacitive
loads dominate the ac characteristics of the RDACs. Configured
as a potentiometer divider, the –3 dB bandwidth of the AD5280
(20 kΩ resistor) measures 310 kHz at half scale. TPC 19 provides the large signal BODE plot characteristics of the three
available resistor versions—20 kΩ, 50 kΩ, and 200 kΩ. A parasitic simulation model is shown in Figure 26. A macro model
net list for the 20 kΩ RDAC is provided.
Macro Model Net List for RDAC
.PARAM D=256, RDAC=20E3
*
.SUBCKT DPOT (A,W,B)
*
CA A 0 25E-12
RWA A W {(1-D/256)*RDAC+60}
CW W 0 55E-12
RWB W B {D/256*RDAC+60}
CB B 0 25E-12
*
.ENDS DPOT
0
Figure 24. Lowering the Nominal Resistance
Figures 23 and 24 show that the digital potentiometers change
steps linearly. On the other hand, log taper adjustment is usually preferred in applications like volume control. Figure 25
shows another way of resistance scaling. In this circuit, the
smaller the R2 with respect to R
, the more the pseudo log
AB
taper characteristic behaves.
V
i
A
W
R1
B
V
O
R2
Figure 25. Resistor Scaling with Log Adjustment
Characteristics
REV. 0–18–
Page 19

AD5280/AD5282
AD8601
V
i
R
C1
V
O
U
1
BA
W
Resistance Tolerance, Drift, and Temperature Coefficient Mismatch Considerations
In a Rheostat Mode operation such as gain control, Figure 27,
the tolerance mismatch between the digital potentiometer and
the discrete resistor can cause repeatability issues among various
systems. Because of the inherent matching of the silicon process, it is practical to apply the dual-channel device in this type
of application. As such, R1 should be replaced by one of the
channels of the digital potentiometer. R1 should be programmed
to a specific value while R2 can be used for the adjustable gain.
Although it adds cost, this approach minimizes the tolerance
and temperature coefficient mismatch between R1 and R2. In
addition, this approach also tracks the resistance drift over time.
As a result, these nonideal parameters become less sensitive to
the system variations.
R2
AB
W
R1*
V
*REPLACED WITH ANOTHER CHANNEL OF RDAC
C1
AD8601
i
U
1
V
O
Figure 27. Linear Gain Control with Tracking
Resistance Tolerance and Drift
Notice the circuit in Figure 28 can also be used to track the
tolerance, temperature coefficient, and drift in this particular
application. However, the characteristics of the transfer function
change from a linear to pseudo-logarithmic gain function.
Figure 28. Nonlinear Gain Control with Tracking
Resistance Tolerance and Drift
REV. 0
–19–
Page 20

AD5280/AD5282
OUTLINE DIMENSIONS
14-Lead Thin Shrink Small Outline Package (TSSOP)
(RU-14)
Dimensions shown in millimeters
5.10
5.00
4.90
1.05
1.00
0.80
4.50
4.40
4.30
PIN 1
14
0.65
BSC
0.15
0.05
COMPLIANT TO JEDEC STANDARDS MO-153AB-1
0.30
0.19
8
6.40
BSC
71
1.20
MAX
SEATING
PLANE
0.20
0.09
COPLANARITY
0.10
8
0
16-Lead Thin Shrink Small Outline Package (TSSOP)
(RU-16)
Dimensions shown in millimeters
5.10
5.00
4.90
0.15
0.05
4.50
4.40
4.30
PIN 1
16
0.65
BSC
COPLANARITY
COMPLIANT TO JEDEC STANDARDS MO-153AB
0.10
0.30
0.19
9
81
1.20
MAX
6.40
BSC
SEATING
PLANE
0.20
0.09
0.75
8
0
0.60
0.45
C02929–0–10/02(0)
0.75
0.60
0.45
–20–
PRINTED IN U.S.A.
REV. 0
 Loading...
Loading...