

Page 1
256-Position I2C Compatible
SDA
FEATURES
256-position
End-to-end resistance 5 kΩ, 10 kΩ, 50 kΩ, 100 kΩ
Compact SOT-23-8 (2.9 mm × 3 mm) package
Fast settling time: t
Full read/write of wiper register
Power-on preset to midscale
Extra package address decode pin AD0
Computer software replaces µC in factory programming
applications
Single supply: 2.7 V to 5.5 V
Low temperature coefficient 45 ppm/°C
Low power, I
Wide operating temperature –40°C
Evaluation board available
APPLICATIONS
Mechanical potentiometer replacement in new designs
LCD panel V
COM
LCD panel brightness and contrast control
Transducer adjustment of pressure, temperature, position
chemical, and optical sensors
RF amplifier biasing
Automotive electronics adjustment
Gain control and offset adjustment
GENERAL OVERVIEW
= 5 µs typ on power-up
S
= 8 µA
DD
adjustment
to +125°C
Digital Potentiometer
AD5245
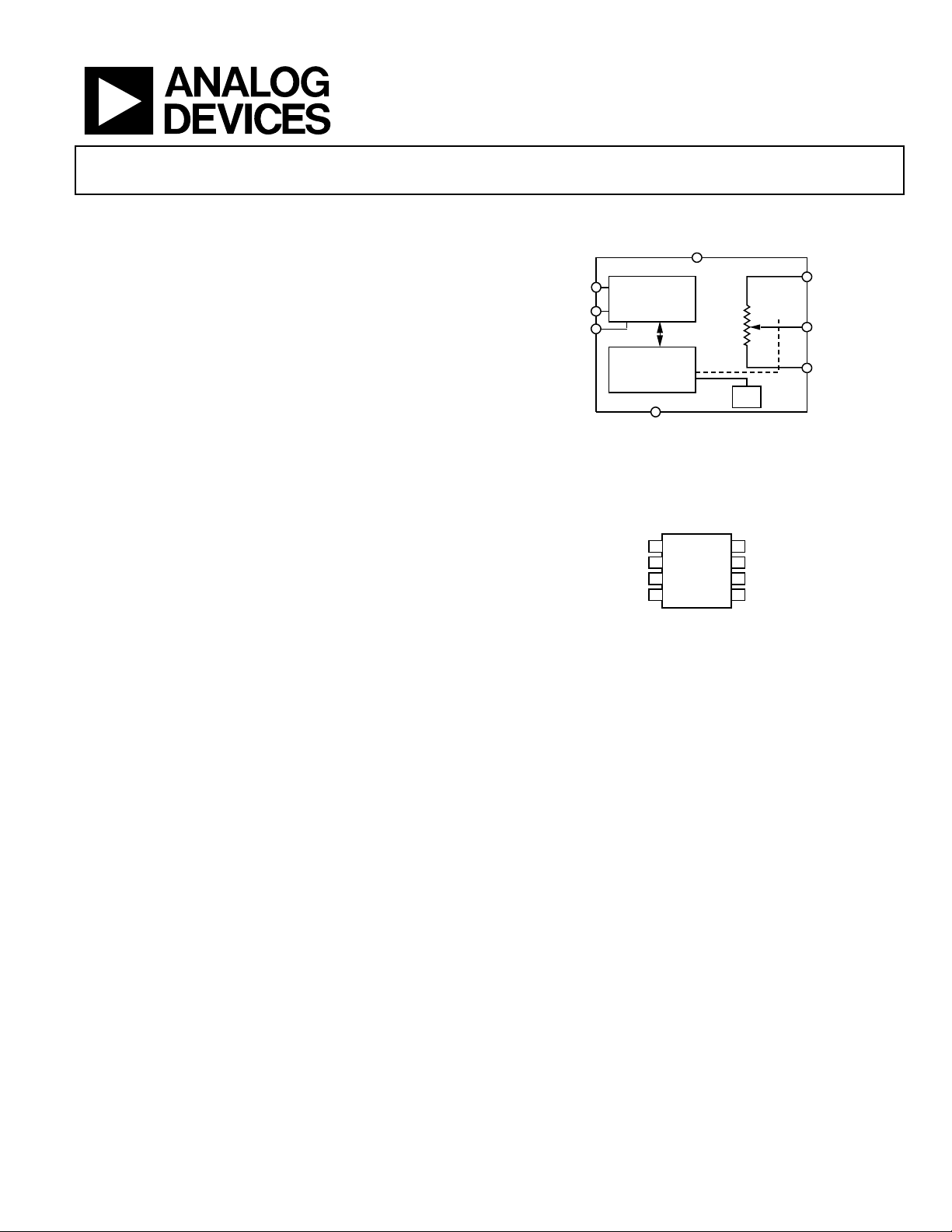
FUNCTIONAL BLOCK DIAGRAM
V
DD
SCL
AD0
I2C
INTERFACE
WIPER
REGISTER
POR
GND
Figure 1.
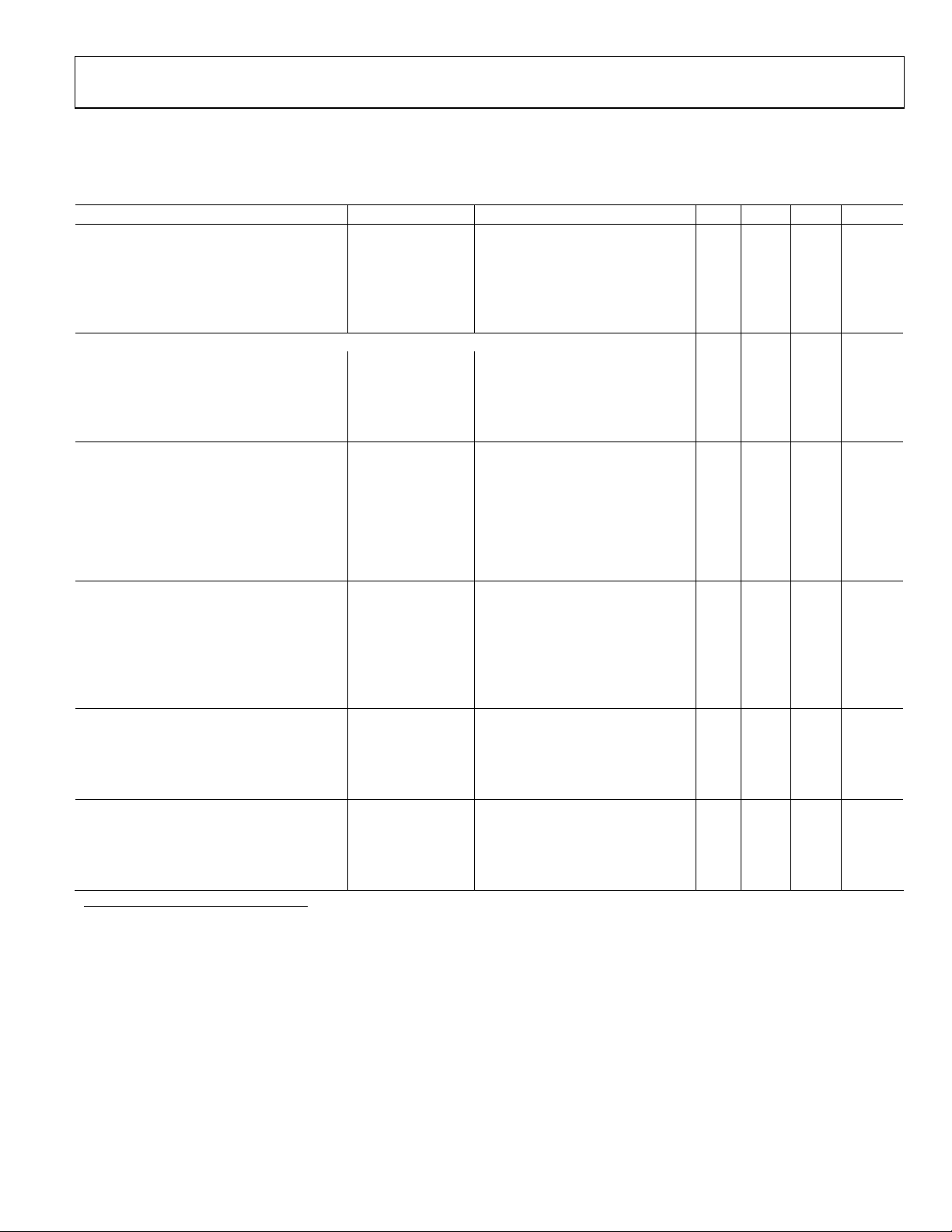
PIN CONFIGURATION
V
GND
SCL
W
DD
1
2
AD5245
3
TOP VIEW
(Not to Scale)
4
Figure 2.
8
A
7
B
6
AD0
5
SDA
A
W
B
03436-A-001
03436-A-002
The AD5245 provides a compact 2.9 mm × 3 mm packaged
solution for 256-position adjustment applications. These devices
perform the same electronic adjustment function as mechanical
potentiometers or variable resistors, with enhanced resolution,
solid-state reliability, and superior low temperature coefficient
performance.
2
The wiper settings are controllable through an I
C compatible
digital interface, which can also be used to read back the wiper
register content. AD0 can be used to place up to two devices on
the same bus. Command bits are available to reset the wiper
position to midscale or to shut down the device into a state of
zero power consumption.
Rev. A
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
Operating from a 2.7 V to 5.5 V power supply and consuming
less than 8 µA allows for usage in portable battery-operated
applications.
Note that the terms digital potentiometer, VR, and RDAC are
used interchangeably.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.326.8703 © 2004 Analog Devices, Inc. All rights reserved.
Page 2

AD5245
TABLE OF CONTENTS
Electrical Characteristics—5 kΩ Version...................................... 3
Electrical Characteristics—10 kΩ, 50 kΩ, 100 kΩ Versions....... 4
Timing Characteristics—5 kΩ, 10 kΩ, 50 kΩ, 100 kΩ Vers ion s 5
Absolute Maximum Ratings............................................................ 6
ESD Caution.................................................................................. 6
Pin Configuration and Function Descriptions............................. 7
Typical Performance Characteristics ............................................. 8
Test Circuits..................................................................................... 12
Theory of Operation ...................................................................... 13
Programming the Variable Resistor......................................... 13
Programming the Potentiometer Divider............................... 14
ESD Protection ........................................................................... 14
Terminal Voltage Operating Range.......................................... 14
Power-Up Sequence ...................................................................14
Layout and Power Supply Bypassing .......................................15
Constant Bias to Retain Resistance Setting............................. 15
Evaluation Board........................................................................ 15
2
I
C Interface..................................................................................... 16
2
I
C Compatible 2-Wire Serial Bus............................................ 16
Outline Dimensions....................................................................... 19
Ordering Guide........................................................................... 19
REVISION HISTORY
3/04—Changed Data Sheet from Rev. 0 to Rev. A
Updated Format.................................................................Universal
Changes to Features ........................................................................ 1
Changes to Applications................................................................. 1
Changes to Figure 1......................................................................... 1
Changes to Electrical Characteristics—5 kΩ Version ................ 3
Changes to Electrical Characteristics—10 kΩ, 50 kΩ,
and 100 kΩ Versions ....................................................................... 4
Changes to Timing Characteristics.............................................. 5
Changes to Absolute Maximum Ratings ...................................... 6
Moved ESD Caution to Page.......................................................... 6
Changes to and Moved Pin Configuration and Function
Descriptions to Page........................................................................ 7
Changes to Figures 22 and 23...................................................... 11
Moved Figure 25 to Figure 26...................................................... 11
Moved Figure 26 to Figure 27...................................................... 11
Moved Figure 27 to Figure 25...................................................... 11
Deleted Figures 31 and 32 ............................................................ 12
Changes to Figure 32, Figure 33 and Figure 34 .........................12
Changes to Rheostat Operation Section .................................... 13
Added Figure 35 ............................................................................13
Changes to Equation 1 and Equation 2 ......................................13
Changes to Table 6 and Table 7 ...................................................13
Added Figure 37 ............................................................................14
Changes to Equation 4.................................................................. 14
Deleted Readback RDAC Value Section..................................... 14
Deleted Level Shifting for Bidirectional Interface Section ...... 14
Moved ESD Protection Section to Page .....................................14
Changes to Figure 38 and Figure 39............................................ 14
Moved Terminal Voltage Operating Range Section to Page.... 14
Changes to Figure 40.....................................................................14
Moved Power-Up Sequence Section to Page ............................. 14
Moved Layout and Power Supply Bypassing Section to Page . 15
Added Constant Bias to Retain Resistance Setting Section..... 15
Added Figure 42 ............................................................................15
Added Evaluation Board Section ................................................15
Added Figure 43 ............................................................................15
2
Moved I
C Interface Section to Page...........................................16
Changes to and Moved I2C Compatible 2-Wire Serial Bus
Section to Page............................................................................... 16
Moved Table 5 and Table 6 to Page ............................................. 17
(Renumbered as Table 8 and Table 9)
Moved Figure 36, Figure 37, and Figure 38 to Page .................. 17
(Renumbered as Figure 44, Figure 45, and Figure 46)
Moved Multiply Devices on One Bus Section to Page .............18
Updated Ordering Guide.............................................................. 19
Updated Outline Dimensions...................................................... 19
2
Moved I
C Disclaimer to Page..................................................... 20
5/03—Revision 0: Initial Version
Rev. A | Page 2 of 20
Page 3
AD5245
ELECTRICAL CHARACTERISTICS—5 kΩ VERSION
VDD = 5 V ± 10%, or 3 V ± 10%; VA = +VDD; VB = 0 V; –40°C < TA < +125°C; unless otherwise noted.
Table 1.
Parameter Symbol Conditions Min Typ1 Max Unit
DC CHARACTERISTICS—RHEOSTAT MODE
Resistor Differential Nonlinearity2 R-DNL RWB, V
Resistor Integral Nonlinearity2 R-INL RWB, V
Nominal Resistor Tolerance3 ∆RAB T
Resistance Temperature Coefficient (∆RAB/RAB)/∆T × 106 VAB = VDD, Wiper = no connect 45 ppm/°C
Wiper Resistance RW 50 120 Ω
DC CHARACTERISTICS—POTENTIOMETER DIVIDER MODE (Specifications apply to all VRs)
Differential Nonlinearity4 DNL –1.5 ±0.1 +1.5 LSB
Integral Nonlinearity4 INL –1.5 ±0.6 +1.5 LSB
Voltage Divider Temperature Coefficient (∆VW/VW)/∆T × 106 Code = 0x80 15 ppm/°C
Full-Scale Error V
Zero-Scale Error V
Code = 0xFF –6 –2.5 0 LSB
WFSE
Code = 0x00 0 +2 +6 LSB
WZSE
RESISTOR TERMINALS
Voltage Range5 V
, VB, VW GND VDD V
A
Capacitance6 A, B CA, CB f = 1 MHz, measured to GND,
Capacitance6 W CW f = 1 MHz, measured to GND,
Shutdown Supply Current7 I
A_SD
Common-Mode Leakage ICM V
DIGITAL INPUTS AND OUTPUTS
Input Logic High VIH V
Input Logic Low VIL V
Input Logic High VIH V
Input Logic Low VIL V
Input Current IIL V
Input Capacitance6 C
5 pF
IL
POWER SUPPLIES
Power Supply Range V
2.7 5.5 V
DD RANGE
Supply Current IDD V
Power Dissipation8 P
V
DISS
Power Supply Sensitivity PSS VDD = +5 V ± 10%, Code = Midscale ±0.02 ±0.05 %/%
DYNAMIC CHARACTERISTICS
6, 9
Bandwidth –3 dB BW_5K RAB = 5 kΩ, Code = 0x80 1.2 MHz
Total Harmonic Distortion THDW V
VW Settling Time tS V
Resistor Noise Voltage Density e
R
N_WB
1
Typical specifications represent average readings at +25°C and VDD = 5 V.
2
Resistor position nonlinearity error R-INL is the deviation from an ideal value measured between the maximum resistance and the minimum resistance wiper
positions. R-DNL measures the relative step change from ideal between successive tap positions. Parts are guaranteed monotonic.
3
VAB = VDD, Wiper (VW) = no connect.
4
INL and DNL are measured at VW with the RDAC configured as a potentiometer divider similar to a voltage output D/A converter. VA = VDD and VB = 0 V.
DNL specification limits of ±1 LSB maximum are guaranteed monotonic operating conditions.
5
Resistor terminals A, B, W have no limitations on polarity with respect to each other.
6
Guaranteed by design and not subject to production test.
7
Measured at the A terminal. The A terminal is open circuited in shutdown mode.
8
P
is calculated from (IDD × VDD). CMOS logic level inputs result in minimum power dissipation.
DISS
9
All dynamic characteristics use VDD = 5 V.
= no connect –1.5 ±0.1 +1.5 LSB
A
= no connect –4 ±0.75 +4 LSB
A
= 25°C –30 +30 %
A
90 pF
Code = 0x80
95 pF
Code = 0x80
VDD = 5.5 V 0.01 1 µA
= VB = VDD/2 1 nA
A
= 5 V 2.4 V
DD
= 5 V 0.8 V
DD
= 3 V 2.1 V
DD
= 3 V 0.6 V
DD
= 0 V or 5 V ±1 µA
IN
= 5 V or VIL = 0 V 3 8 µA
IH
= 5 V or VIL = 0 V, VDD = 5 V 44 µW
IH
= 1 V rms, VB = 0 V, f = 1 kHz 0.1 %
A
= 5 V, VB = 0 V, ±1 LSB error band 1 µs
A
= 2.5 kΩ, RS = 0 6 nV/√Hz
WB
Rev. A | Page 3 of 20
Page 4
AD5245
ELECTRICAL CHARACTERISTICS—10 kΩ, 50 kΩ, 100 kΩ VERSIONS
VDD = 5 V ± 10%, or 3 V ± 10%; VA = VDD; VB = 0 V; –40°C < TA < +125°C; unless otherwise noted.
Table 2.
Parameter Symbol Conditions Min Typ1 Max Unit
DC CHARACTERISTICS—RHEOSTAT MODE
Resistor Differential Nonlinearity2 R-DNL RWB, V
Resistor Integral Nonlinearity2 R-INL RWB, V
Nominal Resistor Tolerance3 ∆RAB T
Resistance Temperature Coefficient (∆RAB/RAB)/∆T × 106 V
Wiper Resistance RW V
DC CHARACTERISTICS—POTENTIOMETER DIVIDER MODE (Specifications apply to all VRs)
Differential Nonlinearity4 DNL –1 ±0.1 +1 LSB
Integral Nonlinearity4 INL –1 ±0.3 +1 LSB
Voltage Divider Temperature Coefficient (∆VW/VW)/∆T × 106 Code = 0x80 15 ppm/°C
Full-Scale Error V
Zero-Scale Error V
Code = 0xFF –3 –1 0 LSB
WFSE
Code = 0x00 0 1 3 LSB
WZSE
RESISTOR TERMINALS
Voltage Range5 V
, VB, VW GND VDD V
A
Capacitance6 A, B CA, CB f = 1 MHz, measured to GND,
Capacitance6 W CW f = 1 MHz, measured to GND,
Shutdown Supply Current I
A_SD
Common-Mode Leakage ICM V
DIGITAL INPUTS AND OUTPUTS
Input Logic High VIH V
Input Logic Low VIL V
Input Logic High VIH V
Input Logic Low VIL V
Input Current IIL V
Input Capacitance6 C
5 pF
IL
POWER SUPPLIES
Power Supply Range V
2.7 5.5 V
DD RANGE
Supply Current IDD V
Power Dissipation7 P
V
DISS
Power Supply Sensitivity PSS VDD = 5 V ± 10%, Code = Midscale ±0.02 ±0.05 %/%
DYNAMIC CHARACTERISTICS
6, 8
Bandwidth –3 dB BW RAB = 10 kΩ/50 kΩ/100 kΩ,
Total Harmonic Distortion THDW V
VW Settling Time (10 kΩ/50 kΩ/100 kΩ) tS V
Resistor Noise Voltage Density e
R
N_WB
1
Typical specifications represent average readings at +25°C and VDD = 5 V.
2
Resistor position nonlinearity error R-INL is the deviation from an ideal value measured between the maximum resistance and the minimum resistance wiper
positions. R-DNL measures the relative step change from ideal between successive tap positions. Parts are guaranteed monotonic.
3
VAB = VDD, Wiper (VW) = no connect.
4
INL and DNL are measured at VW with the RDAC configured as a potentiometer divider similar to a voltage output D/A converter. VA = VDD and VB = 0 V. DNL
specification limits of ±1 LSB maximum are guaranteed monotonic operating conditions.
5
Resistor terminals A, B, W have no limitations on polarity with respect to each other.
6
Guaranteed by design and not subject to production test.
7
P
is calculated from (IDD × VDD). CMOS logic level inputs result in minimum power dissipation.
DISS
8
All dynamic characteristics use VDD = 5 V.
= no connect –1 ±0.1 +1 LSB
A
= no connect –2 ±0.25 +2 LSB
A
= 25°C –30 +30 %
A
= V
, Wiper = no connect 45 ppm/°C
AB
DD
= 5 V 50 120 Ω
DD
90 pF
Code = 0x80
95 pF
Code = 0x80
VDD = 5.5 V 0.01 1 µA
= VB = VDD/2 1 nA
A
= 5 V 2.4 V
DD
= 5 V 0.8 V
DD
= 3 V 2.1 V
DD
= 3 V 0.6 V
DD
= 0 V or 5 V ±1 µA
IN
= 5 V or VIL = 0 V 3 8 µA
IH
= 5 V or VIL = 0 V, VDD = 5 V 44 µW
IH
600/100/40 kHz
Code = 0x80
=1 V rms, VB = 0 V, f = 1 kHz,
A
= 10 kΩ
R
AB
= 5 V, VB = 0 V,
A
0.1 %
2 µs
±1 LSB error band
= 5 kΩ, RS = 0 9 nV/√Hz
WB
Rev. A | Page 4 of 20
Page 5

AD5245
TIMING CHARACTERISTICS—5 kΩ, 10 kΩ, 50 kΩ, 100 kΩ VERSIONS
VDD = 5V ± 10%, or 3V ± 10%; VA = VDD; VB = 0 V; –40°C < TA < +125°C; unless otherwise noted.
Table 3.
Parameter Symbol Conditions Min Typ1 Max Unit
I2C INTERFACE TIMING CHARACTERISTICS
SCL Clock Frequency f
t
Bus Free Time between STOP and START t1 1.3 µs
BUF
t
Hold Time (Repeated START) t2
HD;STA
t
Low Period of SCL Clock t3 1.3 µs
LOW
t
High Period of SCL Clock t4 0.6 µs
HIGH
t
Setup Time for Repeated START Condition t5 0.6 µs
SU;STA
t
Data Hold Time t6 0.9 µs
HD;DAT
t
Data Setup Time t7 100 ns
SU;DAT
tF Fall Time of Both SDA and SCL Signals t8 300 ns
tR Rise Time of Both SDA and SCL Signals t9 300 ns
t
Setup Time for STOP Condition t10 0.6 µs
SU;STO
1
Typical specifications represent average readings at +25°C and VDD = 5 V.
2
Guaranteed by design and not subject to production test.
3
See timing diagrams for locations of measured values.
2, 3
(Specifications Apply to All Parts)
400 kHz
SCL
After this period, the first clock
0.6 µs
pulse is generated.
Rev. A | Page 5 of 20
Page 6
AD5245
ABSOLUTE MAXIMUM RATINGS
TA = 25°C, unless otherwise noted.
Table 4.
Parameter Value
VDD to GND –0.3 V to +7 V
VA, VB, VW to GND VDD
Terminal Current, A to B, A to W, B to W1
Pulsed ±20 mA
Continuous ±5 mA
Digital Inputs and Output Voltage to GND 0 V to +7 V
Operating Temperature Range –40°C to +125°C
Maximum Junction Temperature (T
) 150°C
JMAX
Storage Temperature –65°C to +150°C
Lead Temperature (Soldering, 10 sec) 245°C
Thermal Resistance2 θJA: SOT-23-8 230°C/W
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only and functional operation of the device at these or
any other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
1
Maximum terminal current is bounded by the maximum current handling of
the switches, maximum power dissipation of the package, and maximum
applied voltage across any two of the A, B, and W terminals at a given
resistance.
2
Package power dissipation = (T
– TA)/θJA.
JMAX
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on the
human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
Rev. A | Page 6 of 20
Page 7

AD5245
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
V
GND
SCL
W
DD
1
2
AD5245
3
TOP VIEW
(Not to Scale)
4
8
A
7
B
6
AD0
5
SDA
03436-A-002
Figure 3. Pin Configuration
Table 5. Pin Function Descriptions
Pin Name Description
1 W W Terminal. GND ≤ VW ≤ V
DD.
2 VDD Positive Power Supply.
3 GND Digital Ground.
4 SCL Serial Clock Input. Positive edge triggered. Pull-up resistor rquired.
5 SDA Serial Data Input/Output. Pull-up resistor required.
6 AD0 Programmable address bit 0 for two-device decoding.
7 B B Terminal. GND ≤ VB ≤ V
8 A A Terminal. GND ≤ VA ≤ V
DD.
DD.
Rev. A | Page 7 of 20
Page 8

AD5245
TYPICAL PERFORMANCE CHARACTERISTICS
1.0
DD
= 5 V
5V
3V
5V
3V
_
40°C
+25°C
+85°C
+125°C
03436-A-003
03436-A-004
03436-A-005
0.8
0.6
0.4
0.2
0
–0.2
–0.4
RHEOSTAT MODE INL (LSB)
–0.6
–0.8
–1.0
64
32096
CODE (Decimal)
Figure 4. R-INL vs. Code vs. Supply Voltages
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
RHEOSTAT MODE DNL (LSB)
–0.6
–0.8
–1.0
3209664 128 160 192 224 256
CODE (Decimal)
Figure 5. R-DNL vs. Code vs. Supply Voltages
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
POTENTIOMETER MODE INL (LSB)
–0.8
–1.0
3209664 128 160 192 224 256
CODE (Decimal)
Figure 6. INL vs. Code vs. Temperature , V
128 160 192 224 256
POTENTIOMETER MODE DNL (LSB)
POTENTIOMETER MODE INL (LSB)
POTENTIOMETER MODE DNL(LSB)
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8
–1.0
64
32096
CODE (Decimal)
Figure 7. DNL vs. Code vs. Temperature, V
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8
–1.0
3209664 128 160 192 224 256
CODE (Decimal)
Figure 8. INL vs. Code vs. Supply Voltages
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8
–1.0
3209664 128 160 192 224 256
CODE (Decimal)
Figure 9. DNL vs. Code vs. Supply Voltages
–40°C
+25°C
+85°C
+125°C
128 160 192 224 256
= 5 V
DD
5V
3V
5V
3V
03436-A-006
03436-A-007
03436-A-008
Rev. A | Page 8 of 20
Page 9

AD5245
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
RHEOSTAT MODE INL (LSB)
–0.6
–0.8
–1.0
3209664 128 160 192 224 256
CODE (Decimal)
Figure 10. R-INL vs. Code vs. Temperature, V
1.0
0.8
0.6
0.4
0.2
0
–0.2
–0.4
RHEOSTAT MODE DNL (LSB)
–0.6
–0.8
–1.0
3209664 128 160 192 224 256
CODE (Decimal)
Figure 11. R-DNL vs. Code vs. Temperature, V
2.5
DD
DD
+125°C
= 5 V
_
+125°C
= 5 V
–40
+25°C
+85°C
40°C
+25°C
+85°C
°C
03436-A-009
03436-A-010
2.5
2.0
V
= 5.5V
1.5
1.0
ZSE, ZERO-SCALE ERROR (µA)
0.5
0
0 40 80 120–40
0 40 80 120–40
DD
= 2.7V
V
DD
TEMPERATURE (°C)
03436-A-012
Figure 13. Zero-Scale Error vs. Temperature
10
VDD = 5.5V
1
SUPPLY CURRENT (µA)
DD
I
0.1
V
= 2.7V
DD
0 40 80 120–40
TEMPERATURE (°C)
03436-A-013
Figure 14. Supply Current vs. Temperature
70
2.0
1.5
1.0
0.5
FSE, FULL-SCALE ERROR (LSB)
0
0 40 80 120–40
0 40 80 120–40
TEMPERATURE (°C)
= 2.7V
V
DD
V
= 5.5V
DD
03436-A-011
Figure 12. Full-Scale Error vs. Temperature
60
50
40
30
20
SHUTDOWN CURRENT (nA)
A
I
10
0
VDD = 5V
0
40 80 120–40
TEMPERATURE (°C)
Figure 15. Shutdown Current vs. Temperature
03436-A-014
Rev. A | Page 9 of 20
Page 10

AD5245
200
150
100
50
0
RHEOSTAT MODE TEMPCO (ppm/°C)
–50
160
140
120
100
80
60
40
20
POTENTIOMETER MODE TEMPCO (ppm/°C)
–20
REF LEVEL
0.000dB
0
–6
–12
–18
–24
–30
–36
–42
–48
–54
–60
START 1 000.000Hz STOP 1 000 000.000Hz
3209664 128 160 192 224 256
Figure 16. Rheostat Mode Tempco ∆R
0
32096
64
CODE (Decimal)
WB
128 160 192 224 256
CODE (Decimal)
Figure 17. Potentiometer Mode Tempco ∆V
/DIV
6.000dB
0x80
0x40
0x20
0x10
0x08
0x04
0x02
0x01
1k 10k 100k 1M
MARKER 1 000 000.000Hz
MAG (A/R) –8.918dB
Figure 18. Gain vs. Frequency vs. Code, R
/∆T vs. Code
/∆T vs. Code
WB
= 5 kΩ
AB
REF LEVEL
0.000dB
0
–6
–12
–18
–24
–30
–36
–42
–48
–54
–60
03436-A-015
1k
START 1 000.000Hz STOP 1 000 000.000Hz
REF LEVEL
0.000dB
0
–6
–12
–18
–24
–30
–36
–42
–48
/DIV
6.000dB
0x80
0x40
0x20
0x10
0x08
0x04
0x02
0x01
10k 100k 1M
MARKER 510 634.725Hz
MAG (A/R) –9.049dB
Figure 19. Gain vs. Frequency vs. Code, R
/DIV
6.000dB
0x80
0x40
0x20
0x10
0x08
0x04
0x02
0x01
MARKER 100 885.289Hz
MAG (A/R) –9.014dB
= 10 kΩ
AB
03436-A-018
–54
–60
03436-A-016
1k
START 1 000.000Hz STOP 1 000 000.000Hz
Figure 20. Gain vs. Frequency vs. Code, R
REF LEVEL
0.000dB
0
–6
–12
–18
–24
–30
–36
–42
–48
10k 100k 1M
= 50 kΩ
AB
/DIV
6.000dB
0x80
0x40
0x20
0x10
0x08
0x04
0x02
0x01
MARKER 54 089.173Hz
MAG (A/R) –9.052dB
03436-A-019
–54
–60
03436-A-017
1k 10k 100k 1M
START 1 000.000Hz STOP 1 000 000.000Hz
Figure 21. Gain vs. Frequency vs. Code, R
= 100 kΩ
AB
03436-A-020
Rev. A | Page 10 of 20
Page 11

AD5245
–
–
REF LEVEL
–5.000dB
–5.5
–6.0
–6.5
–7.0
–7.5
–8.0
–8.5
–9.0
R = 100kΩ
–9.5
10.0
10.5
10k
START 1 000.000Hz STOP 1 000 000.000Hz
60
/DIV
0.500dB
5kΩ – 1.026MHz
10kΩ – 511kHz
50kΩ – 101kHz
100kΩ – 54kHz
R = 50kΩ
R = 10kΩ
100k 1M 10M
R = 5kΩ
Figure 22. –3 dB Bandwidth @ Code = 0x80
CODE = 0x80, VA= VDD, VB = 0V
VA = 5V
= 0V
V
B
1
2
Ch 1 5.00V
03436-A-021
B
Ch 2 5.00 V
W
B
M 200ns A CH1 3.00 V
W
VW
SCL
03436-A-026
Figure 25. Large Signal Settling Time, Code 0xFF–>0x00
40
PSRR (–dB)
20
PSRR @ VDD = 5V DC ± 10% p-p AC
0
Figure 23. PSRR v s. Frequency
900
800
700
600
500
(µA)
400
DD
I
300
200
100
0
10k
Figure 24. I
PSRR @ VDD = 3V DC ± 10% p-p AC
10k100 100k 1M1k
FREQUENCY (Hz)
VDD= 5V
CODE = 0x55
CODE = 0xFF
100k 1M 10M
FREQUENCY (Hz)
vs. Frequency
DD
1
2
B
Ch 1 200mV
03436-A-022
Ch 2 5.00 V
W
B
M 100ns A CH2 3.00 V
W
VW
SCL
03436-A-024
Figure 26. Digital Feedthrough
VA = 5V
V
= 0V
B
1
2
B
Ch 1 100mV
03436-A-023
Ch 2 5.00 V
W
B
M 200ns A CH1 152mV
W
VW
SCL
03436-A-025
Figure 27. Midscale Glitch, Code 0x80–>0x7F
Rev. A | Page 11 of 20
Page 12

AD5245
TEST CIRCUITS
Figure 28 to Figure 34 illustrate the test circuits that define the test conditions used in the product specification tables.
V+ = V
DUT
A
V+
W
B
DD
1LSB = V+/2
V
MS
N
03436-A-027
Figure 28. Test Circuit for Potentiometer Divider Nonlinearity Error (INL, DNL)
NO CONNECT
DUT
A
W
B
I
W
V
MS
03436-A-028
Figure 29. Test Circuit for Resistor Position Nonlinearity Error
(Rheostat Operation; R-INL, R-DNL)
DUT
A
V
MS2
W
B
V
W
V
IW = VDD/R
MS1
RW = [V
NOMINAL
MS1
– V
MS2
]/I
W
03436-A-029
Figure 30. Test Circuit for Wiper Resistance
OFFSET
GND
DUT
A
V
IN
2.5V
W
B
+15V
AD8610
–15V
V
OUT
Figure 32. Test Circuit for Gain vs. Frequency
0.1V
RSW=
I
DUT
B
W
I
SW
GND TO V
SW
CODE = 0x00
DD
0.1V
03436-A-032
Figure 33. Test Circuit for Incremental ON Resistance
NC
DUT
GND
A
B
NC
V
DD
I
W
CM
NC = NO CONNECT
V
CM
03436-A-033
Figure 34. Test Circuit for Common-Mode Leakage Current
03436-A-031
V
A
V
DD
A
V+
W
B
V+ = V
10%
DD
PSRR (dB) = 20 LOG
PSS (%/%) =
V
MS
Figure 31. Test Circuit for Power Supply Sensitivity (PSS, PSSR)
∆
V
MS
( )
∆
V
DD
%
∆V
MS
%
∆
V
DD
03436-A-030
Rev. A | Page 12 of 20
Page 13

AD5245
−
THEORY OF OPERATION
The AD5245 is a 256-position digitally controlled variable
resistor (VR) device.
The general equation determining the digitally programmed
output resistance between W and B is
An internal power-on preset places the wiper at midscale
during power-on, which simplifies the fault condition recovery
at power-up.
PROGRAMMING THE VARIABLE RESISTOR
Rheostat Operation
The nominal resistance of the RDAC between Terminals A and
B is available in 5 kΩ, 10 kΩ, 50 kΩ, and 100 kΩ. The nominal
resistance (R
the wiper terminal, plus the B terminal contact. The 8-bit data
in the RDAC latch is decoded to select one of the 256 possible
settings.
Assuming that a 10 kΩ part is used, the wiper’s first connection
starts at the B terminal for data 0x00. Because there is a 50 Ω
wiper contact resistance, such a connection yields a minimum
of 100 Ω (2 × 50 Ω) resistance between Terminals W and B. The
second connection is the first tap point, which corresponds to
139 Ω (R
0x01. The third connection is the next tap point, representing
178 Ω (2 × 39 Ω + 2 × 50 Ω) for data 0x02, and so on. Each LSB
data value increase moves the wiper up the resistor ladder until
the last tap point is reached at 10,100 Ω (R
) of the VR has 256 contact points accessed by
AB
A
W
B
Figure 35. Rheostat Mode Configuration
= RAB/256 + 2 × RW = 39 Ω + 2 × 50 Ω) for data
WB
D7
D6
D5
D4
D3
D2
D1
D0
LATCH
DECODER
Figure 36. AD5245 Equivalent RDAC Circuit
RDAC
AND
A
W
B
R
S
R
S
R
S
R
S
A
W
B
+ 2 × RW).
AB
A
W
B
03436-A-035
03436-A-034
WB
256
D
DR ×+×= 2
)(
AB
(1)
RR
W
where:
D is the decimal equivalent of the binary code loaded in the
8-bit RDAC register.
R
is the end-to-end resistance.
AB
R
is the wiper resistance contributed by the on resistance of
W
the internal switch.
In summary, if R
circuited, the following output resistance R
= 10 kΩ and the A terminal is open
AB
is set for the
WB
indicated RDAC latch codes.
Table 6. Codes and Corresponding R
Resistance
WB
D (Dec.) RWB (Ω) Output State
255 9,961 Full Scale (RAB – 1 LSB + RW)
128 5,060 Midscale
1 139 1 LSB
0 100 Zero Scale (Wiper Contact Resistance)
Note that, in the zero-scale condition, a finite wiper resistance
of 100 Ω is present. Care should be taken to limit the current
flow between W and B in this state to a maximum pulse current
of no more than 20 mA. Otherwise, degradation or possible
destruction of the internal switch contact can occur.
Similar to the mechanical potentiometer, the resistance of the
RDAC between the Wiper W and Terminal A also produces a
digitally controlled complementar y resistance, R
. When these
WA
terminals are used, the B terminal can be opened. Setting the
resistance value for R
starts at a maximum value of resistance
WA
and decreases as the data loaded in the latch increases in value.
The general equation for this operation is
D
256
DR ×+×
= 2
)( (2)
256
For R
= 10 kΩ and the B terminal open circuited, the
AB
following output resistance R
RR
ABWA
W
is set for the indicated RDAC
WA
latch codes.
Table 7. Codes and Corresponding RWA Resistance
D (Dec.) RWA (Ω) Output State
255 139 Full Scale
128 5,060 Midscale
1 9,961 1 LSB
0 10,060 Zero Scale
Rev. A | Page 13 of 20
Page 14

AD5245
Typical device-to-device matching is process lot dependent and
may vary by up to ±30%. Since the resistance element is
processed in thin film technology, the change in R
temperature has a very low 45 ppm/°C temperature coefficient.
PROGRAMMING THE POTENTIOMETER DIVIDER
Voltage Output Operation
The digital potentiometer easily generates a voltage divider at
wiper-to-B and wiper-to-A proportional to the input voltage at
A to B. Unlike the polarity of V
positive, voltage across A to B, W to A, and W to B can be at
either polarity.
V
I
Figure 37. Potentiometer Mode Configuration
If ignoring the effect of the wiper resistance for approximation,
connecting the A terminal to 5 V and the B terminal to ground
produces an output voltage at the wiper-to-B starting at 0 V up
to 1 LSB less than 5 V. Each LSB of voltage is equal to the voltage applied across terminal AB divided by the 256 positions of
the potentiometer divider. The general equation defining the
output voltage at V
with respect to ground for any valid input
W
voltage applied to terminals A and B is
W
256
D
DV
)(
256
V
+= (3)
A
A more accurate calculation, which includes the effect of wiper
resistance, V
, is
W
)(
DR
WB
)( += (4)
DV
W
V
A
R
AB
Operation of the digital potentiometer in the divider mode
results in a more accurate operation over temperature. Unlike
the rheostat mode, the output voltage is dependent mainly on
the ratio of the internal resistors R
absolute values. Therefore, the temperature drift reduces to
15 ppm/°C.
to GND, which must be
DD
A
W
V
O
B
D
−
V
B
256
)(
DR
WA
V
B
R
AB
and RWB and not the
WA
03436-A-036
with
AB
ESD PROTECTION
All digital inputs are protected with a series of input resistors
and parallel Zener ESD structures, shown in Figure 38 and
Figure 39. This applies to the digital input pins SDA, SCL, and
AD0.
340Ω
LOGIC
GND
Figure 38. ESD Protection of Digital Pins
A, B, W
GND
Figure 39. ESD Protection of Resistor Terminals
03436-A-037
03436-A-038
TERMINAL VOLTAGE OPERATING RANGE
The AD5245 VDD and GND power supply defines the boundary
conditions for proper 3-terminal digital potentiometer
operation. Supply signals present on Terminals A, B, and W that
exceed V
or GND are clamped by the internal forward-biased
DD
diodes (see Figure 40).
V
DD
A
W
B
GND
03436-A-039
Figure 40. Maximum Terminal Voltages Set by V
and GND
DD
POWER-UP SEQUENCE
Because the ESD protection diodes limit the voltage compliance
at Terminals A, B, and W (see Figure 40), it is important to
power V
and W; otherwise, the diode is forward biased such that V
powered unintentionally and may affect the rest of the user’s
circuit. The ideal power-up sequence is in the following order:
GND, V
order of powering V
important as long as they are powered after V
/GND before applying any voltage to Terminals A, B,
DD
, digital inputs, and then VA, VB, and VW. The relative
DD
, VB, VW, and the digital inputs is not
A
/GND.
DD
DD
is
Rev. A | Page 14 of 20
Page 15

AD5245
V
LAYOUT AND POWER SUPPLY BYPASSING
It is good practice to employ compact, minimum lead length
layout design. The leads to the inputs should be as direct as
possible with a minimum conductor length. Ground paths
should have low resistance and low inductance.
Similarly, it is also good practice to bypass the power supplies
with quality capacitors for optimum stability. Supply leads to the
device should be bypassed with disk or chip ceramic capacitors
of 0.01 µF to 0.1 µF. Low ESR 1 µF to 10 µF tantalum or
electrolytic capacitors should also be applied at the supplies to
minimize any transient disturbance and low frequency ripple
(see Figure 41). Note that the digital ground should also be
joined remotely to the analog ground at one point to minimize
the ground bounce.
V
DD
+
C3
10µFC10.1µF
Figure 41. Power Supply Bypassing
DD
AD5245
GND
03436-A-040
CONSTANT BIAS TO RETAIN RESISTANCE SETTING
For users who desire nonvolatility but cannot justify the
additional cost for the EEMEM, the AD5245 may be considered
as a low cost alternative by maintaining a constant bias to retain
the wiper setting. The AD5245 is designed specifically with low
power in mind, which allows low power consumption even in
battery-operated systems. The graph in Figure 42 demonstrates
the power consumption from a 3.4 V 450 mA-hr Li-Ion cell
phone battery, which is connected to the AD5245. The
measurement over time shows that the device draws
approximately 1.3 µA and consumes negligible power. Over a
course of 30 days, the battery is depleted by less than 2%, the
majority of which is due to the intrinsic leakage current of the
battery itself.
110%
108%
106%
104%
102%
100%
98%
96%
BATTERY LIFE DEPLETED
94%
92%
90%
0
51015
Figure 42. Battery Operating Life Depletion
DAYS
TA= 25
°C
20 25 30
This demonstrates that constantly biasing the potentiometer
is not an impractical approach. Most portable devices do not
require the removal of batteries for the purpose of charging.
Although the resistance setting of the AD5245 is lost when
the battery needs replacement, such events occur rather
infrequently such that this inconvenience is justified by the
lower cost and smaller size offered by the AD5245. If and
when total power is lost, the user should be provided with a
means to adjust the setting accordingly.
EVALUATION BOARD
An evaluation board, along with all necessary software, is
available to program the AD5245 from any PC running
Windows® 98/2000/XP. The graphical user interface, as shown
in Figure 43, is straightforward and easy to use. More detailed
information is available in the user manual, which comes with
the board.
03436-A-041
03436-A-042
Figure 43. AD5245 Evaluation Board Software
The AD5245 starts at midscale upon power-up. To increment or
decrement the resistance, the user may simply move the scrollbars on the left. To write any specific value, the user should use
the bit pattern in the upper screen and click on the Run button.
The format of writing data to the device is shown in Table 8. To
read the data out from the device, the user can simply click on
the Read button. The format of the read bits is shown in Table 9.
Rev. A | Page 15 of 20
Page 16

AD5245
I2C INTERFACE
I2C COMPATIBLE 2-WIRE SERIAL BUS
The 2-wire I2C serial bus protocol operates as follows:
1.
The master initiates data transfer by establishing a START
condition, which is when a high-to-low transition on the
SDA line occurs while SCL is high (see Figure 45). The
following byte is the slave address byte, which consists of the
W
7-bit slave address followed by an R/
determines whether data is read from or written to the slave
device). The AD5245 has one configurable address bit, AD0
(see Table 8).
The slave whose address corresponds to the transmitted
address responds by pulling the SDA line low during the
ninth clock pulse (this is termed the acknowledge bit). At
this stage, all other devices on the bus remain idle while the
selected device waits for data to be written to or read from
its serial register. If the R/
from the slave device. On the other hand, if the R/
low, the master writes to the slave device.
In write mode, the second byte is the instruction byte. The
2.
first bit (MSB) of the instruction byte is a don’t care.
The second MSB, RS, is the midscale reset. A logic high on
this bit moves the wiper to the center tap where R
This feature effectively writes over the contents of the
register, and thus, when taken out of reset mode, the RDAC
remains at midscale.
The third MSB, SD, is a shutdown bit. A logic high causes an
open circuit at Terminal A while shorting the wiper to
Terminal B. This operation yields almost 0 Ω in rheostat
mode or 0 V in potentiometer mode. It is important to note
that the shutdown operation does not disturb the contents
of the register. When brought out of shutdown, the previous
setting is applied to t he RDAC. Also, during shutdown, new
settings can be programmed. When the part is returned
from shutdown, the corresponding VR setting is applied to
the RDAC.
The remainder of the bits in the instruction byte are don’t
cares (see Table 8).
bit is high, the master reads
W
bit (this bit
W
= RWB.
WA
bit is
After acknowledging the instruction byte, the last byte in
3.
write mode is the data byte. Data is transmitted over the
serial bus in sequences of nine clock pulses (eight data bits
followed by an acknowledge bit). The transitions on the
SDA line must occur during the low period of SCL and
remain stable during the high period of SCL (see Figure 45).
In read mode, the data byte follows immediately after the
4.
acknowledgment of the slave address byte. Data is
transmitted over the serial bus in sequences of nine clock
pulses (a slight difference with write mode, eight data bits
are followed by an acknowledge bit). Similarly, the
transitions on the SDA line must occur during the low
period of SCL and remain stable during the high period of
SCL (see Figure 46).
After all data bits have been read or written, a STOP condi-
5.
tion is established by the master. A STOP condition is
defined as a low-to-high transition on the SDA line while
SCL is high. In write mode, the master pulls the SDA line
high during the tenth clock pulse to establish a STOP
condition (see Figure 45). In read mode, the master issues a
no acknowledge for the ninth clock pulse (that is, the SDA
line remains high). The master then brings the SDA line low
before the tenth clock pulse, which goes high to establish a
STOP condition (see Figure 46).
A repeated write function gives the user flexibility to update
the RDAC output a number of times after addressing and
instructing the part only once. For example, after the RDAC
has acknowledged its slave address and instruction bytes in
the write mode, the RDAC output updates on each
successive byte. If different instructions are needed, the
write/read mode has to start again with a new slave address,
instruction, and data byte. Similarly, a repeated read
function of the RDAC is also allowed.
Rev. A | Page 16 of 20
Page 17

AD5245
A
Y
Table 8. Write Mode
S 0 1 0 1 1 0 AD0
Slave Address Byte Instruction Byte Data Byte
Table 9. Read Mode
S 0 1 0 1 1 0 AD0 R A D7 D6 D5 D4 D3 D2 D1 D0 A P
Slave Address Byte Data Byte
A X RS SD X X X X X A D7 D6 D5 D4 D3 D2 D1 D0 A P
W
S = Start Condition
P = Stop Condition
A = Acknowledge
X = Don’t Care
W
= Write
SCL
SD
t
1
PS
SCL
SDA
START B
MASTER
START BY
MASTER
t
8
t
2
0 1 0 1 1 0 AD0 R/W
SLAVE ADDRESS BYTE
SCL
SDA
t
3
t
t
8
FRAME 1 FRAME 2
1 919
0 1 0 1 1 0 AD0 R/W
FRAME 1
SLAVE ADDRESS BYTE
Figure 46. Reading Data from a Previously Selected RDAC Register in Write Mode
t
9
t
6
t
4
9
2
Figure 44. I
ACK BY
AD5245
C Interface Detailed Timing Diagram
1 919
XRS X X X X X
SD
INSTRUCTION BYTE
Figure 45
. Writing to the RDAC Register
ACK BY
AD5245
R = Read
RS = Reset wiper to Midscale 0x80
SD = Shutdown connects wiper to B terminal and open circuits A
terminal. It does not change contents of wiper register.
D7, D6, D5, D4, D3, D2, D1, D0 = Data Bits
t
2
t
7
D7
D6 D5 D4 D3 D2 D1 D0
t
5
19
D7 D6 D5 D4 D3 D2 D1 D0
ACK BY
AD5245
FRAME 2
RDAC REGISTER
FRAME 3
DATA BYTE
NO ACK
BY MASTER
STOP BY
MASTER
ACK BY
AD5245
STOP BY
MASTER
03436-A-045
t
10
PS
03436-A-044
03436-A-043
Rev. A | Page 17 of 20
Page 18

AD5245
Multiple Devices on One Bus
Figure 47 shows two AD5245 devices on the same serial bus.
Each has a different slave address because the states of their
AD0 pins are different. This allows each RDAC within each
device to be written to or read from independently. The master
device output bus line drivers are open-drain pull-downs in a
2
C compatible interface.
fully I
MASTER
+5V
R
Figure 47. Multiple AD5245 Devices on One I
R
P
P
+5V
SDA SCL
AD0 AD0
AD5245
SDA SCL
AD5245
2
C Bus
SDA
SCL
03436-A-046
Rev. A | Page 18 of 20
Page 19

AD5245
OUTLINE DIMENSIONS
2.90 BSC
847
1.60 BSC
PIN 1
1.30
1.15
0.90
0.15 MAX
1 3562
1.95
BSC
0.38
0.22
COMPLIANT TO JEDEC STANDARDS MO-178BA
Figure 48.
8-Lead Small Outline Transistor Package [SOT-23]
Dimensions shown in millimeters
2.80 BSC
0.65 BSC
1.45 MAX
SEATING
PLANE
(RJ-8)
0.22
0.08
8°
4°
0°
0.60
0.45
0.30
ORDERING GUIDE
Model
Temperature
Package
Description
Package
Option
Branding
Code
(Ω)
R
AB
AD5245BRJ5-R2 –40°C to +125°C SOT-23 RJ-8 D0G 5 k 250
AD5245BRJ5-RL7 –40°C to +125°C SOT-23 RJ-8 D0G 5 k 3,000
AD5245BRJZ5-R21 –40°C to +125°C SOT-23 RJ-8 D0G 5 k 250
AD5245BRJZ5-RL71 –40°C to +125°C SOT-23 RJ-8 D0G 5 k 3,000
AD5245BRJ10-R2 –40°C to +125°C SOT-23 RJ-8 D0H 10 k 250
AD5245BRJ10-RL7 –40°C to +125°C SOT-23 RJ-8 D0H 10 k 3,000
AD5245BRJZ10-R21 –40°C to +125°C SOT-23 RJ-8 D0H 10 k 250
AD5245BRJZ10-RL71 –40°C to +125°C SOT-23 RJ-8 D0H 10 k 3,000
AD5245BRJ50-R2 –40°C to +125°C SOT-23 RJ-8 D0J 50 k 250
AD5245BRJ50-RL7 –40°C to +125°C SOT-23 RJ-8 D0J 50 k 3,000
AD5245BRJZ50-R21 –40°C to +125°C SOT-23 RJ-8 D0J 50 k 250
AD5245BRJZ50-RL71 –40°C to +125°C SOT-23 RJ-8 D0J 50 k 3,000
AD5245BRJ100-R2 –40°C to +125°C SOT-23 RJ-8 D0K 100 k 250
AD5245BRJ100-RL7 –40°C to +125°C SOT-23 RJ-8 D0K 100 k 3,000
AD5245BRJZ100-R21 –40°C to +125°C SOT-23 RJ-8 D0K 100 k 250
AD5245BRJZ100-RL71 –40°C to +125°C SOT-23 RJ-8 D0K 100 k 3,000
AD5245EVAL2 Evaluation Board
1
Z = Pb-free part.
2
The evaluation board is shipped with the 10 kΩ RAB resistor option; however, the board is compatible with all available resistor value options.
Full Container
Quantity
Rev. A | Page 19 of 20
Page 20

AD5245
NOTES
Purchase of licensed I
purchaser under the Philips I
2
C components of Analog Devices or one of its sublicensed Associated Companies conveys a license for the
2
C Patent Rights to use these components in an I2C system, provided that the system conforms to the I2C
Standard Specification as defined by Philips.
© 2004 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
C03436–0–3/04(A)
Rev. A | Page 20 of 20
 Loading...
Loading...