

Page 1
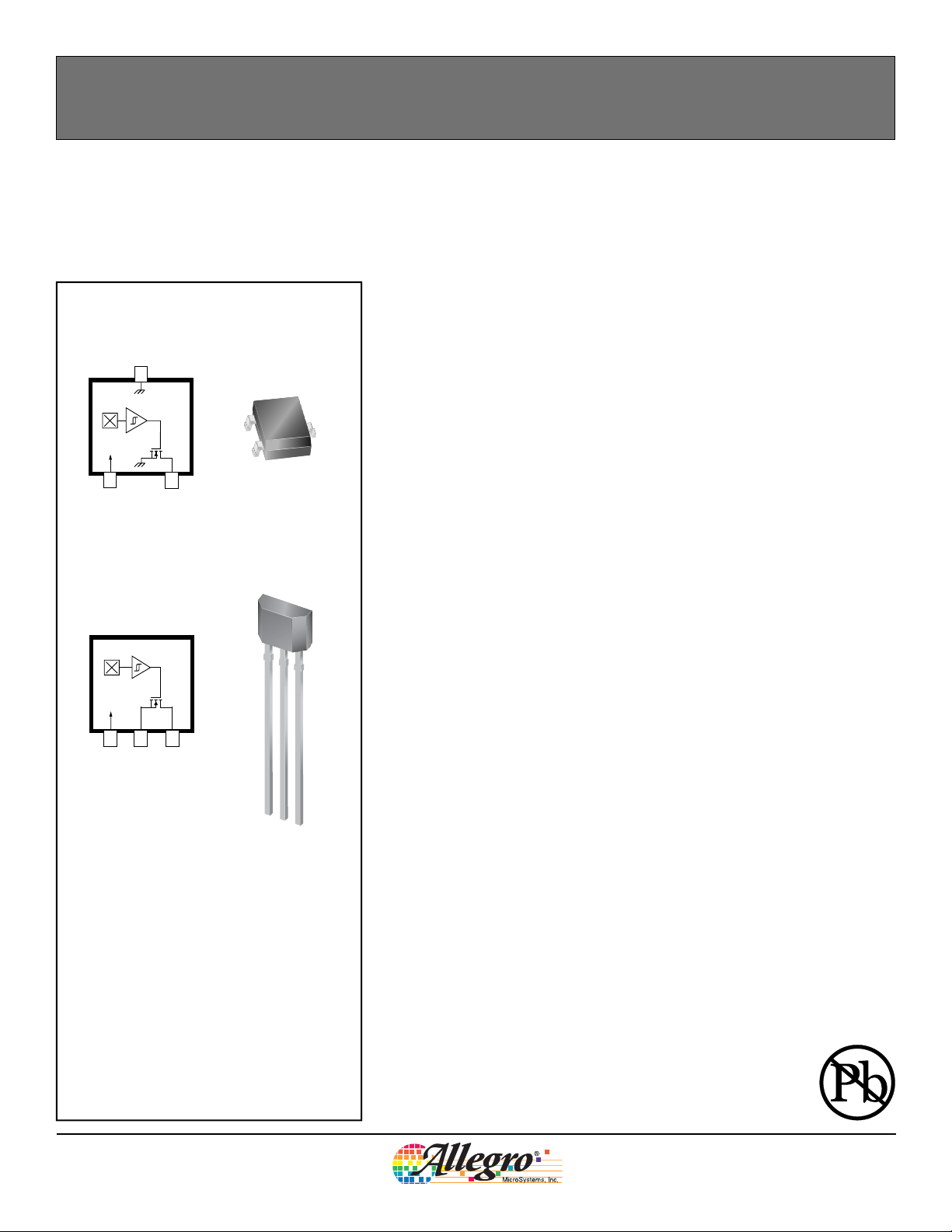
Package LH, 3-pin Surface Mount
GND
3
A3230
Chopper-Stabilized
Hall-Effect Bipolar Switch
The A3230 Hall-effect sensor is a temperature stable, stress-resistant bipolar
switch. This sensor is the most sensitive Hall-effect device in the Allegro® bipolar
switch family and is intended for ring-magnet sensing. Superior high-temperature
performance is made possible through an Allegro patented dynamic offset cancellation that utilizes chopper-stabilization. This method reduces the offset voltage
normally caused by device overmolding, temperature dependencies, and thermal
stress.
VCC
1
2
VOUT
3
Package UA, 3-pin SIP
1 32
VCC
GND
VOUT
1
2
3
AB SO LUTE MAX I MUM RAT INGS
Supply Voltage, VCC..........................................28 V
Reverse-Supply Voltage, V
Output Off Voltage, V
Output Current, I
Reverse-Output Current, I
Magnetic Flux Density, B.........................Unlimited
Operating Temperature
Ambient, T
Ambient, T
Maximum Junction, T
Storage Temperature, T
OUT
OUTSINK
, Range E..................–40ºC to 85ºC
A
, Range L................–40ºC to 150ºC
A
........................–18 V
RCC
............................... 26.5 V
........... Internally Limited
....................–10 mA
ROUT
......................165ºC
J(MAX)
.................. –65ºC to 170ºC
S
The A3230 includes the following on a single silicon chip: a voltage regulator,
Hall-voltage generator, small-signal amplifi er, chopper stabilization, Schmitt
trigger, and a short circuit protected open-drain output. Advanced BiCMOS wafer
fabrication processing takes advantage of low-voltage requirements, component
matching, very low input-offset errors, and small component geometries.
The A3230 Hall-effect bipolar switch turns on in a south polarity magnetic fi eld of
suffi cient strength and switches off in a north polarity magnetic fi eld of suffi cient
strength. Because the output state is not defi ned if the magnetic fi eld is diminished
or removed, to ensure that the device switches, Allegro recommends using magnets of both polarities and of suffi cient strength in the application.
The A3230 is rated for operation between the ambient temperatures –40°C and
85°C for the E temperature range, and –40°C to 150°C for the L temperature
Two A3230 package styles provide magnetically optimized solutions
range.
for most applications. Package LH is a SOT23W, a miniature low-profi le
surface-mount package, while package UA is a three-lead ultramini SIP for
through-hole mounting. Each package is available in a lead (Pb) free version,
with 100% matte tin plated leadframes.
Features and Benefi ts
Chopper stabilization
Superior temperature stability
Extremely low switchpoint drift
Insensitive to physical stress
Reverse battery protection
Output short circuit protection
Solid state reliability
Small size
Robust EMC capability
High ESD ratings (HBM)
A3230-DS
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
Page 2
A3230
Chopper-Stabilized Hall Effect Bipolar Switch
Product Selection Guide
Part Number
A3230ELHLT –
A3230ELHLT-T Yes
A3230EUA –
A3230EUA-T Yes
A3230LLHLT –
A3230LLHLT-T Yes
A3230LUA –
A3230LUA-T Yes
Pb-
free
Packing* Mounting
7-in. reel, 3000 pieces/reel 3-pin SOT23W surface mount
Bulk, 500 pieces/bag 3-pin SIP through hole
7-in. reel, 3000 pieces/reel 3-pin SOT23W surface mount
Bulk, 500 pieces/bag 3-pin SIP through hole
*Contact Allegro for additional packing options.
VCC
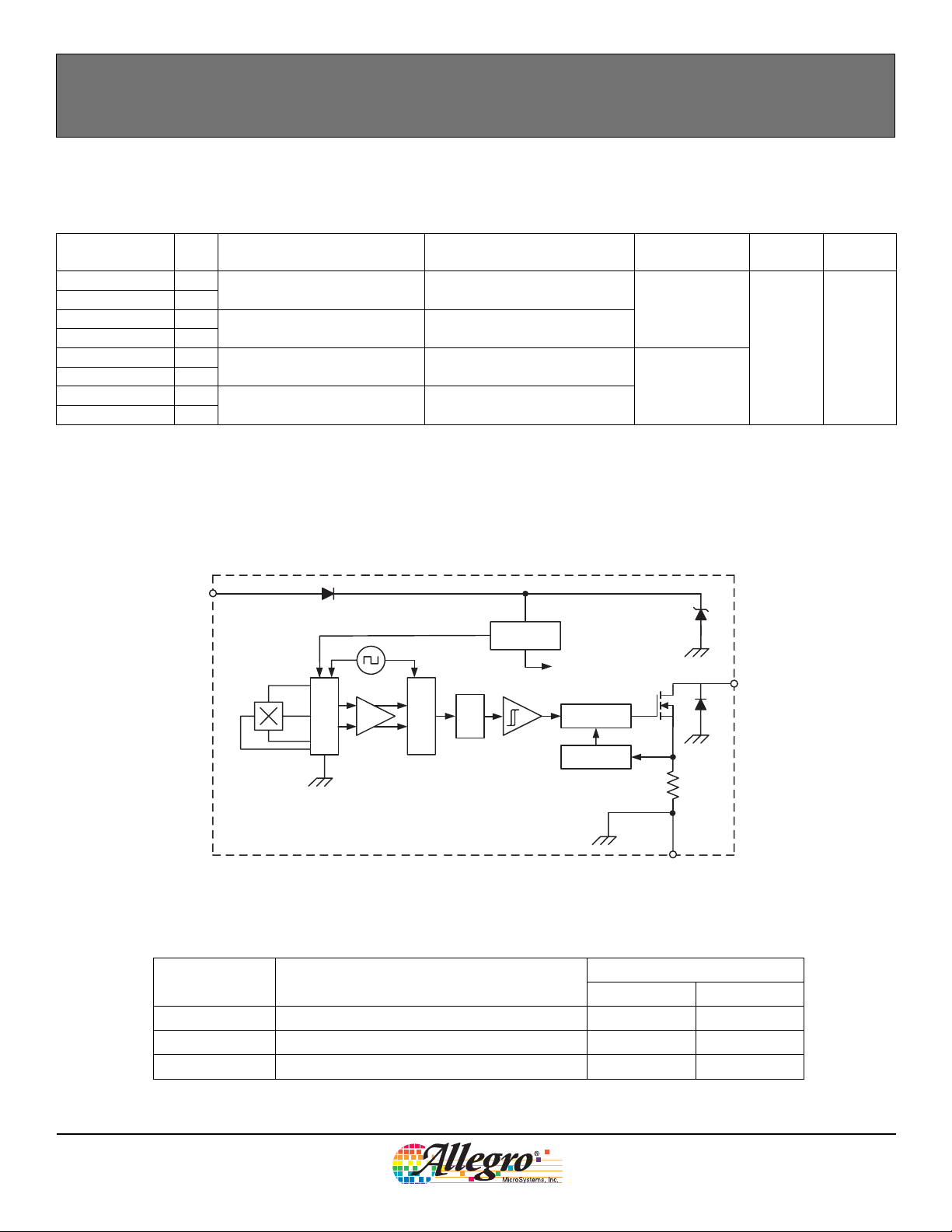
Functional Block Diagram
Regulator
To All Subcircuits
Ambient, T
(°C)
–40 to 85
–40 to 150
B
A
RP(MIN)
(G)
B
OP(MAX)
(G)
–25 25
VOUT
A3230-DS
Amp
Cancellation
Dynamic Offset
Sample and Hold
Filter
Low-Pass
Control
Current Limit
Terminal List
Name Description
VCC Connects power supply to chip 1 1
VOUT Output from circuit 2 3
GND Ground 3 2
Package LH Package UA
<1Ω
GND
Number
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
2
Page 3
A3230
Chopper-Stabilized Hall Effect Bipolar Switch
OPERATING CHARACTERISTICS valid over full operating voltage and ambient temperature ranges, unless otherwise noted
Characteristic Symbol Test Conditions Min. Typ. Max. Units
Electrical Characteristics
Supply Voltage
Output Leakage Current I
Output On Voltage V
Output Current Limit I
Power-On Time t
Chopping Frequency f
Output Rise Time
Output Fall Time
Supply Current
Reverse Battery Current I
Supply Zener Clamp Voltage V
Supply Zener Current
Magnetic Characteristics
Operate Point B
Release Point B
Hysteresis B
1
Maximum voltage must be adjusted for power dissipation and junction temperature, see Power Derating section.
2
CS = oscilloscope probe capacitance.
3
Maximum current limit is equal to the maximum I
4
Magnetic fl ux density, B, is indicated as a negative value for north-polarity magnetic fi elds, and as a positive value for south-polarity magnetic fi elds.
This so-called algebraic convention supports arithmetic comparison of north and south polarity values, where the relative strength of the fi eld is indicated
by the absolute value of B, and the sign indicates the polarity of the fi eld (for example, a –100 G fi eld and a 100 G fi eld have equivalent strength, but
opposite polarity).
1
2
2
3
4
V
CC
OUTOFF
OUT(SAT)IOUT
OM
PO
c
t
r
t
f
I
CCON
I
CCOFF
RCC
Z
I
Z
OP
RP
HYS
Operating, TJ < 165°C 3.6 – 24 V
V
OUT
B > B
VCC > 3.6 V – 8 50 µs
R
LOAD
R
LOAD
B > B
B < B
V
RCC
ICC = 8 mA; TA = 25°C 28 – – V
VS = 28 V – – 8 mA
South pole adjacent to branded face of device –10 7.5 25
North pole adjacent to branded face of device –25 –7.5 10
B
CC(MAX)
= 24 V, B < B
= 20 mA, B > B
OP
RP
OP
– – 10 µA
– 250 500 mV
30 – 60 mA
– 200 – kHz
= 820 Ω, CS = 20 pF – 0.2 1 µs
= 820 Ω, CS = 20 pF – 0.2 1 µs
OP
RP
– 1.6 5 mA
– 1.6 5 mA
= –18 V – – –2 mA
– B
OP
+ 3 mA.
RP
51525
G
G
G
A3230-DS
DEVICE QUALIFICATION PROGRAM
Contact Allegro for information.
EMC (Electromagnetic Compatibility) REQUIREMENTS
Contact Allegro for information.
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
3
Page 4
A3230
Chopper-Stabilized Hall Effect Bipolar Switch
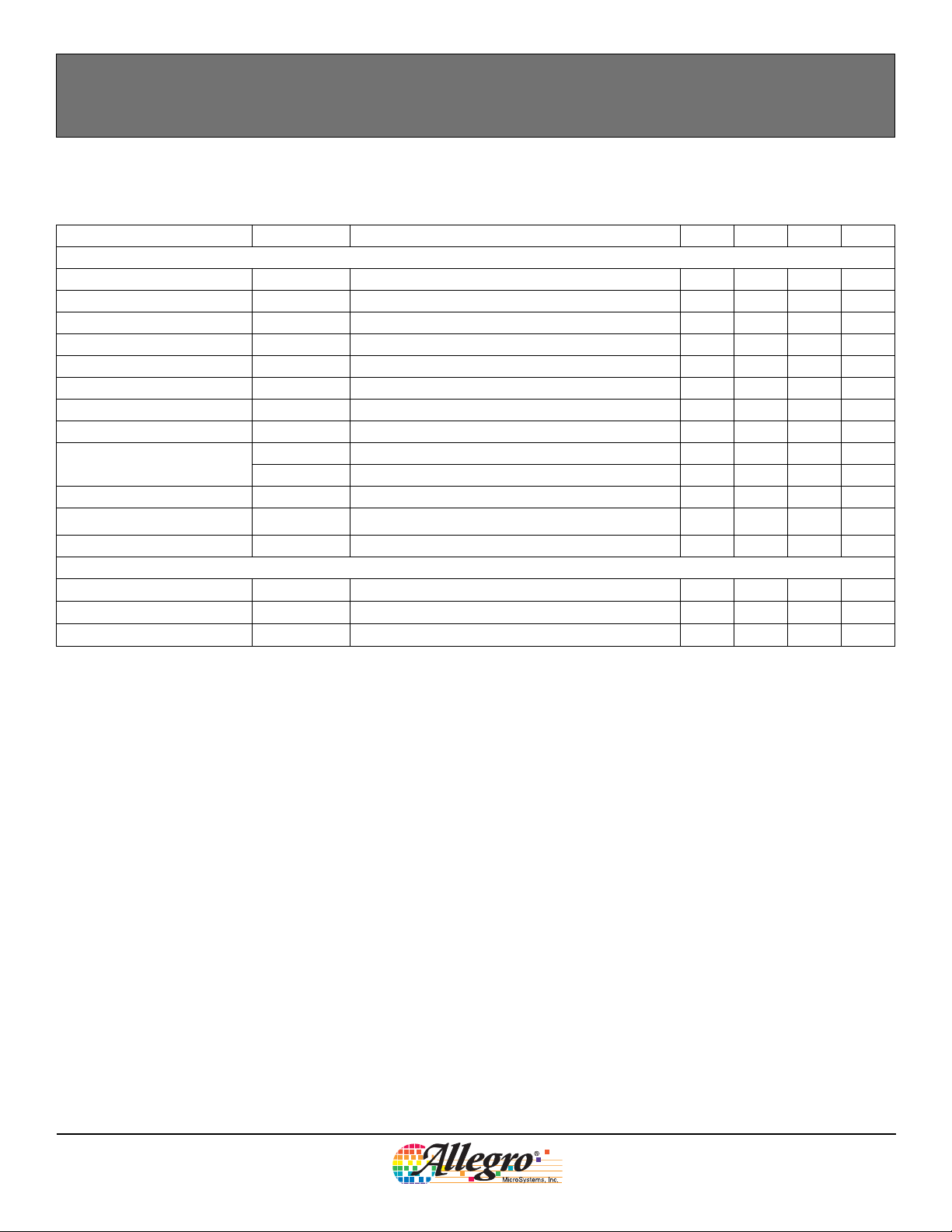
Electrical Characteristic Data
Supply Current (On) versus Ambient Temperature
5.0
4.0
3.0
(mA)
2.0
CCON
I
1.0
0
–50 0 50 100 150
TA (°C)
Supply Current (Off) versus Ambient Temperature
5.0
4.0
3.0
(mA)
2.0
CCOFF
I
VCC (V)
VCC (V)
Supply Current (On) versus Supply Voltage
5.0
4.0
24
3.6
3.0
(mA)
2.0
CCON
I
1.0
0
0 5 10 15 20 25
VCC (V)
Supply Current (Off) versus Supply Voltage
5.0
4.0
3.0
24
3.6
(mA)
2.0
CCOFF
I
TA (°C)
–40
25
150
TA (°C)
–40
25
150
1.0
0
–50 0 50 100 150
TA (°C)
Output Voltage (On) versus Ambient Temperature
500
450
400
350
300
(mV)
250
200
OUT(SAT)
150
V
100
50
0
–50 0 50 100 150
TA (°C)
VCC (V)
24
3.6
1.0
0
0 5 10 15 20 25
VCC (V)
Output Voltage (On) versus Supply Voltage
500
450
400
350
300
(mV)
250
200
OUT(SAT)
150
V
100
50
0
0 5 10 15 20 25
VCC (V)
TA (°C)
–40
25
150
A3230-DS
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
4
Page 5

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
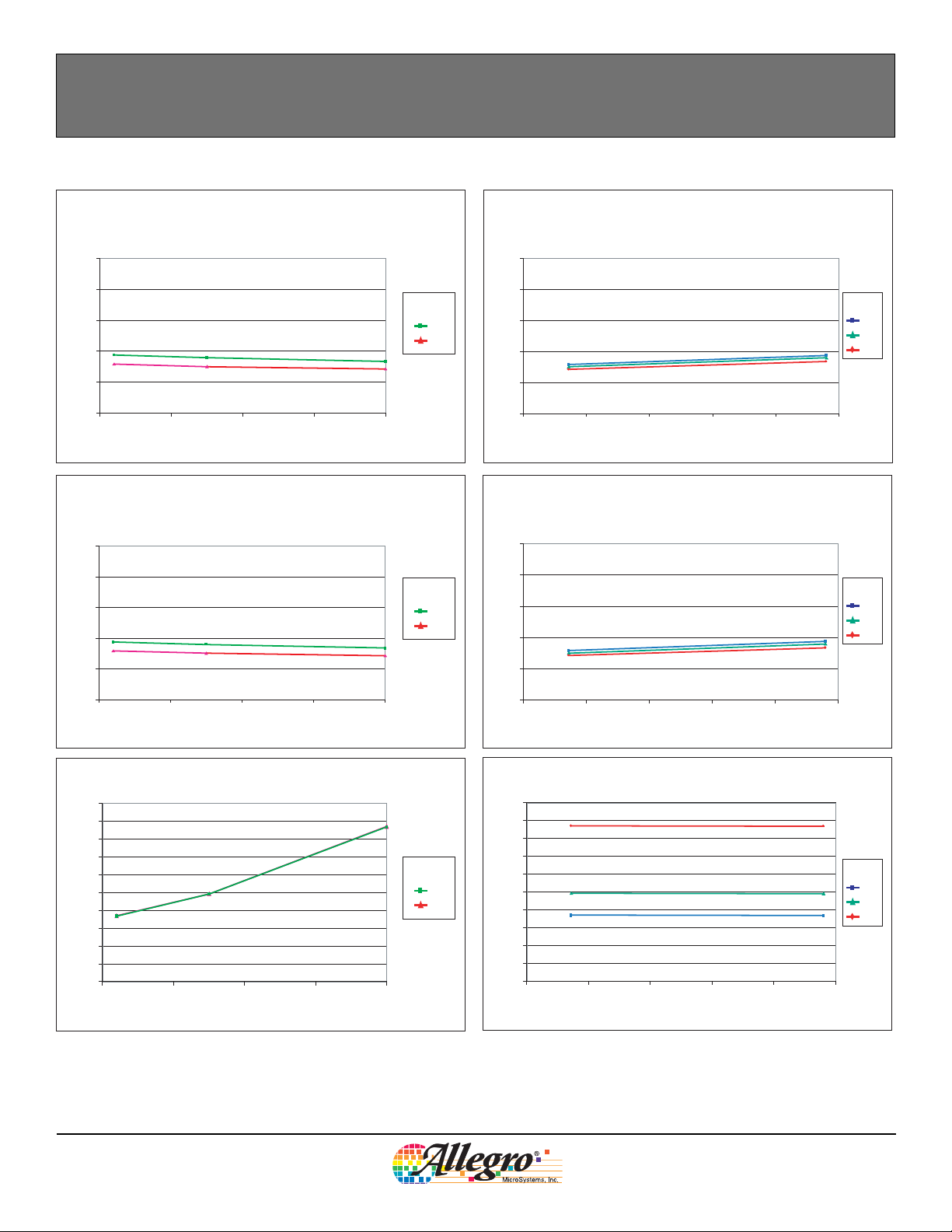
Magnetic Characteristic Data
Operate Point versus Ambient Temperature
25
20
15
10
(G)
5
OP
B
0
-5
-10
–50 0 50 100 150
T
(°C)
A
Release Point versus Ambient Temperature
10
5
0
-5
(G)
-10
RP
B
-15
-20
-25
–50 0 50 100 150
TA (°C)
TA (°C)
VCC (V)
V
(V)
CC
Operate Point versus Supply Voltage
25
20
15
10
24
3.8
(G)B
5
OP
B
0
-5
-10
0 5 10 15 20 25
(V)
V
CC
Release Point versus Supply Voltage
10
5
0
-5
24
3.8
(G)B
-10
RP
-15
-20
-25
0 5 10 15 20 25
VCC (V)
TA (°C)
–40
25
150
TA (°C)
–40
25
150
Hysteresis versus Ambient Temperature
25
20
(G)
15
HYS
B
10
5
–50 0 50 100 150
TA (°C)
A3230-DS
VCC (V)
24
3.8
Hysteresis versus Supply Voltage
25
20
TA (°C)
(G)
15
HYS
10
5
0 5 10 15 20 25
(V)
V
CC
–40
25
150
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
5
Page 6

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
THERMAL CHARACTERISTICS may require derating at maximum conditions, see application information
Characteristic Symbol Test Conditions Value Units
Package Thermal Resistance
Package LH, minimum-K PCB (single-sided with
copper limited to solder pads)
R
θJA
Package LH, low-K PCB (double-sided with
0.926 in
2
copper area)
Package UA, minimum-K PCB (single-sided with
copper limited to solder pads)
Power Derating Curve
= 165°C; ICC = I
T
J(ma x)
25
24
23
22
21
20
(V)
19
CC
18
17
16
15
14
13
12
11
10
Maximum Allowable V
Low-K PCB, Package LH
= 110 °C/W)
(R
θJA
Minimum-K PCB, Package UA
= 165 °C/W)
(R
9
8
7
6
5
4
3
2
θJA
Minimum-K PCB, Package LH
(R
= 228 °C/W)
θJA
20 40 60 80 100 120 140 160 180
Temperature (°C)
CC(max)
V
CC( max )
V
110 ºC/W
228 ºC/W
165 ºC/W
A3230-DS
Power Dissipation versus Ambient Temperature
1900
1800
1700
1600
1500
1400
(mW)
1300
D
1200
1100
1000
900
800
700
600
500
400
Power Dissipation, P
300
200
Min-K PCB, Package LH
100
0
= 228 °C/W)
(R
JA
20 40 60 80 100 120 140 160 180
Low-K PCB, Package LH
(R
= 110 °C/W)
JA
Min-K PCB, Package UA
(R
= 165 °C/W)
JA
Temperature (°C)
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
6
Page 7

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
Functional Description
Operation
The output of these devices switches low (turns on) when a
magnetic fi eld perpendicular to the Hall sensor exceeds the
operate point threshold, BOP. After turn-on, the output voltage
is V
OUT(SAT)
. The output transistor is capable of sinking current
up to the short circuit current limit, IOM, which is a minimum of
30 mA. When the magnetic fi eld is reduced below the release
point, B
, the device output goes high (turns off). The differ-
RP
ence in the magnetic operate and release points is the hysteresis,
B
, of the device. This built-in hysteresis allows clean switch-
HYS
ing of the output even in the presence of external mechanical
vibration and electrical noise.
There are three switching modes for bipolar devices, referred to
as latch, unipolar switch, and negative switch. Mode is determined by the switchpoint characteristics of the individual device.
Note that, as shown in fi gure 1, these switchpoints can lie in
either north or south polarity ranges. The values of the magnetic
parameters for the A3230 are specifi ed in the Magnetic Charac-
teristics table, on page 3.
Bipolar devices typically behave as latches (although these
devices are not guaranteed to do so). In this mode, magnetic
fi elds of opposite polarity and equivalent strengths are needed
to switch the output. When the magnetic fi elds are removed
(B → 0) the device remains in the same state until a magnetic
fi eld of the opposite polarity and of suffi cient strength causes
it to switch. The hysteresis of latch mode behavior is shown in
panel A of fi gure 1.
In contrast to latching, when a device exhibits unipolar switching, it only responds to a south magnetic fi eld. The fi eld must
be of suffi cient strength, > B
, for the device to operate. When
OP
the fi eld is reduced beyond the BRP level, the device switches
back to the high state, as shown in panel B of fi gure 1. Devices
V
S
C
BYP
0.1 µF
A3230
VCC
VOUT
GND
R
LOAD
Sensor Output
(D)
(A) (B) (C)
V+
V
CC
Switch to Low
OUT
V
Switch to High
V
0
B
RP
B
0
HYS
B
OP
OUT(SAT)
B+B– B+B– 0
Figure 1. Bipolar Device Output Switching Modes. These behaviors can be exhibited when using a circuit such as that shown in panel D. Panel A
displays the hysteresis when a device exhibits latch mode (note that the B
B
band is more positive than B = 0), and panel C shows negative switch behavior (the B
HYS
such as the A3230, can operate in any of the three modes.
A3230-DS
V+
OUT
V
0
Switch to High
B
OP(MAX)
RP
B
B
HYS
band incorporates B= 0), panel B shows unipolar switch behavior (the
HYS
V
Switch to Low
V+
CC
Switch to Low
OUT
V
Switch to High
V
OUT(SAT)
0
B
OP
RP(MIN)
B
B
HYS
band is more negative than B = 0). Bipolar devices,
HYS
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
V
CC
V
OUT(SAT)
B+B– 0
7
Page 8

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
exhibiting negative switch behavior operate in a similar but
opposite manner. A north polarity fi eld of suffi cient strength,
> B
, (more north than BRP) is required for operation, although
RP
the result is that V
switches high, as shown in panel C. When
OUT
the fi eld is reduced beyond the BOP level, the device switches
back to the low state.
The A3230 is designed to attain a small hysteresis, and thereby
provide more sensitive switching. Although this means that
true latching behavior cannot be guaranteed in all cases, proper
switching can be ensured by use of both south and north magnetic fi elds, as in a ring magnet.
Bipolar devices adopt an indeterminate output state when
powered-on in the absence of a magnetic fi eld or in a fi eld that
lies within the hysteresis band of the device. The correct state is
attained after the fi rst excursion beyond BOP or BRP.
For more information on Bipolar switches, refer to Application
Note 27705, Understanding Bipolar Hall Effect Sensors.
Applications
It is strongly recommended that an external bypass capacitor be
connected (in close proximity to the Hall sensor) between the
supply and ground of the device to reduce both external noise
and noise generated by the chopper stabilization technique. As is
shown in Panel B of fi gure 1, a 0.1µF capacitor is typical.
Extensive applications information on magnets and Hall-effect
sensors is available in:
• Hall-Effect IC Applications Guide, AN27701,
• Hall-Effect Devices: Gluing, Potting, Encapsulating, Lead
Welding and Lead Forming, AN27703.1
• Soldering Methods for Allegro’s Products – SMT and Through-
Hole, AN26009
All are provided in Allegro Electronic Data Book, AMS-702 and
the Allegro Web site: www.allegromicro.com
A3230-DS
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
8
Page 9

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
Chopper Stabilization Technique
When using Hall-effect technology, a limiting factor for
switchpoint accuracy is the small signal voltage developed
across the Hall element. This voltage is disproportionally small
relative to the offset that can be produced at the output of the
Hall sensor. This makes it diffi cult to process the signal while
maintaining an accurate, reliable output over the specifi ed oper-
ating temperature and voltage ranges.
Chopper stabilization is a unique approach used to minimize
Hall offset on the chip. The patented Allegro technique, namely
Dynamic Quadrature Offset Cancellation, removes key sources
of the output drift induced by thermal and mechanical stresses.
This offset reduction technique is based on a signal modulationdemodulation process. The undesired offset signal is separated
from the magnetic-fi eld-induced signal in the frequency domain,
through modulation. The subsequent demodulation acts as a
modulation process for the offset, causing the magnetic-fi eld-
induced signal to recover its original spectrum at baseband,
while the dc offset becomes a high-frequency signal. The magnetic-fi eld-induced signal then can pass through a low-pass fi lter,
while the modulated dc offset is suppressed. This confi guration
is illustrated in fi gure 2.
The chopper stabilization technique uses a 200 kHz high-frequency clock. For demodulation process, a sample and hold
technique is used, where the sampling is performed at twice the
chopper frequency (400 kHz). This high-frequency operation
allows a greater sampling rate, which results in higher accuracy
and faster signal-processing capability. This approach desensitizes the chip to the effects of thermal and mechanical stresses,
and produces devices that have extremely stable quiescent Hall
output voltages and precise recoverability after temperature
cycling. This technique is made possible through the use of a
BiCMOS process, which allows the use of low-offset, low-noise
amplifi ers in combination with high-density logic integration and
sample-and-hold circuits.
The repeatability of magnetic-fi eld-induced switching is affected
slightly by a chopper technique. However, the Allegro highfrequency chopping approach minimizes the affect of jitter and
makes it imperceptible in most applications. Applications that
are more likely to be sensitive to such degradation are those
requiring precise sensing of alternating magnetic fi elds; for
example, speed sensing of ring-magnet targets. For such applications, Allegro recommends its digital sensor families with lower
sensitivity to jitter. For more information on those devices,
contact your Allegro sales representative.
A3230-DS
Regulator
Clock/Logic
Hall Element
Amp
Figure 2. Chopper Stabilization Circuit (Dynamic Quadrature Offset Cancellation)
Hold
Sample and
Filter
Low-Pass
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
9
Page 10

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
Power Derating
The device must be operated below the maximum junction
temperature of the device, T
. Under certain combinations of
J(max)
peak conditions, reliable operation may require derating supplied power or improving the heat dissipation properties of the
application. This section presents a procedure for correlating
factors affecting operating TJ. (Thermal data is also available on
the Allegro MicroSystems Web site.)
The Package Thermal Resistance, R
, is a fi gure of merit sum-
θJA
marizing the ability of the application and the device to dissipate
heat from the junction (die), through all paths to the ambient air.
Its primary component is the Effective Thermal Conductivity,
K, of the printed circuit board, including adjacent devices and
traces. Radiation from the die through the device case, R
relatively small component of R
. Ambient air temperature,
θJA
θJC
, is
TA, and air motion are signifi cant external factors, damped by
overmolding.
The effect of varying power levels (Power Dissipation, P
), can
D
be estimated. The following formulas represent the fundamental
relationships used to estimate TJ, at PD.
PD = VIN × I
∆T = P
× R
D
IN
(2)
θJA
(1)
Example: Reliability for V
at TA = 150°C, package LH, using a
CC
low-K PCB.
Observe the worst-case ratings for the device, specifi cally:
R
228 °C/W, T
θJA =
I
CC(max) = 5
mA.
Calculate the maximum allowable power level, P
J(max) =
165°C, V
CC(max) =
24 V, and
D(max)
. First,
invert equation 3:
∆T
max
= T
– TA = 165 °C – 150 °C = 15 °C
J(max)
This provides the allowable increase to TJ resulting from internal
power dissipation. Then, invert equation 2:
P
D(max)
= ∆T
max
÷ R
= 15°C ÷ 228 °C/W = 66 mW
θJA
Finally, invert equation 1 with respect to voltage:
V
CC(est)
= P
D(max)
÷ I
= 66 mW ÷ 5 mA = 13 V
CC(max)
The result indicates that, at TA, the application and device can
dissipate adequate amounts of heat at voltages ≤V
Compare V
able operation between V
R
. If V
θJA
V
is reliable under these conditions.
CC(max)
CC(est)
CC(est)
to V
≥ V
. If V
CC(max)
CC(est)
CC(max)
CC(est)
and V
CC(max)
, then operation between V
≤ V
CC(max)
requires enhanced
.
CC(est)
, then reli-
CC(est)
and
TJ = TA + ∆T (3)
For example, given common conditions such as: T
V
= 12 V, I
CC
PD = VCC × I
∆T = PD × R
= 1.5 mA, and R
CC
= 12 V × 1.5 mA = 18 mW
CC
= 18 mW × 165 °C/W = 3°C
θJA
θJA
= 165 °C/W, then:
TJ = TA + ∆T = 25°C + 3°C = 28°C
A worst-case estimate, P
able power level (V
at a selected R
A3230-DS
and TA.
θJA
CC(max)
, represents the maximum allow-
D(max)
, I
), without exceeding T
CC(max)
= 25°C,
A
J(max)
,
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
10
Page 11

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
Package LH, 3-Pin (SOT-23W)
Package UA, 3-Pin
A3230-DS
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
11
Page 12

A3230
Chopper-Stabilized Hall Effect Bipolar Switch
A3230-DS
The products described herein are manufactured under one
or more of the following U.S. patents: 5,045,920; 5,264,783;
5,442,283; 5,389,889; 5,581,179; 5,517,112; 5,619,137; 5,621,319;
5,650,719; 5,686,894; 5,694,038; 5,729,130; 5,917,320; and other
patents pending.
Allegro MicroSystems, Inc. reserves the right to make, from time
to time, such de par tures from the detail spec i fi ca tions as may be
required to permit improvements in the per for mance, reliability,
or manufacturability of its products. Before placing an order, the
user is cautioned to verify that the information being relied upon is
current.
Allegro products are not authorized for use as critical components in life-support devices or sys tems without express written
approval.
The in for ma tion in clud ed herein is believed to be ac cu rate and
reliable. How ev er, Allegro MicroSystems, Inc. assumes no re spon si bil i ty for its use; nor for any in fringe ment of patents or other
rights of third parties which may result from its use.
Copyright © 2005 Allegro MicroSystems, Inc.
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
12
 Loading...
Loading...