

Page 1

MAKING MODERN LIVING POSSIBLE
Programming Guide
VLT® HVAC Basic Drive
Page 2

Page 3
Contents
Contents
VLT® HVAC Basic Drive Programming Guide
1 Introduction
1.1.1 Copyright, Limitation of Liability and Revision Rights 1-1
1.1.2 Symbols 1-1
1.1.3 Abbreviations 1-2
1.1.5 Definitions 1-2
1.1.8 Electrical Overview 1-7
2 How to Program
2.1 Programming with MCT-10 Setup Software
2.2 Local Control Panel (LCP)
2.3 Menus
2.3.1 Status 2-2
2.3.2 Quick Menu 2-2
2.3.3 The FC101 Start-up Wizard for Open-loop Applications 2-2
2.3.4 Main Menu 2-11
2.4 Quick Transfer of Parameter Settings between Multiple Adjustable Frequency
Drives
2.5 Read-out and Programming of Indexed Parameters
1-1
2-1
2-1
2-1
2-2
2-12
2-12
2.6 Initialize the Adjustable Frequency Drive to Default Settings in Two Ways
3 Parameters
3.1 Main Menu - Operation and Display - Group 0
3.1.1 0-0* Basic Settings 3-1
3.1.2 0-1* Define and set-up Operations 3-2
3.1.3 0-3* LCP Custom Readout 3-3
3.1.4 0-4* LCP 3-4
3.1.5 0-5* Copy/Save 3-4
3.1.6 0-6* Password 3-5
3.2 Main Menu - Load and Motor - Group 1
3.2.1 1-0* General Settings 3-6
3.2.2 1-10 - 1-13 Motor Selection 3-6
3.2.5 1-2* Motor Data 3-8
3.3 Main Menu - Brakes - Group 2
3.3.1 2-1* Overvoltage Control 3-13
3.4 Main Menu - Reference/Ramps - Group 3
3.4.1 3-0* Reference Limits 3-14
2-12
3-1
3-1
3-6
3-13
3-14
3.4.2 3-1* References 3-14
3.4.3 3-4* Ramp 1 3-15
MG18B222 - VLT® is a registered Danfoss trademark
Page 4
Contents
VLT® HVAC Basic Drive Programming Guide
3.4.4 3-5* Ramp 2 3-15
3.4.5 3-8* Other Ramps 3-16
3.5 Main Menu - Limits/Warnings - Group 4
3.5.1 4-1* Motor Limits 3-17
3.5.3 4-5* Adj. Warnings 3-17
3.5.4 4-6* Speed Bypass 3-18
3.6 Main Menu - Digital In/Out - Group 5
3.6.1 5-0* Digital I/O Mode 3-20
3.6.2 5-1* Digital Inputs 3-20
3.6.4 5-4* Relays 3-26
3.6.6 5-9* Bus Controlled 3-30
3.7 Main Menu - Analog In/Out - Group 6
3.7.1 6-0* Analog I/O Mode 3-31
3.7.2 6-1* Analog Input 53 3-31
3.7.3 6-2* Analog Input 54 3-32
3.7.4 6-7* Analog/Digital Output 45 3-32
3.7.5 6-9* Analog/Digital Output 42 3-34
3.8 Main Menu - Communications and Options - Group 8
3.8.1 8-0* General Settings 3-36
3-17
3-20
3-31
3-36
3.8.2 8-3* FC Port Settings 3-36
3.8.3 8-5* Digital/Bus 3-37
3.8.4 8-7* BACnet 3-38
3.8.5 8-8* FC Port Diagnostics 3-39
3.8.6 8-9* Bus Feedback 3-39
3.9 Main Menu - Smart Logic - Group 13
3.9.1 13-** Prog. Features 3-40
3.9.2 13-0* SLC Settings 3-40
3.9.3 13-1* Comparators 3-42
3.9.4 13-2*Timers 3-43
3.9.5 13-4* Logic Rules 3-43
3.9.6 13-5* States 3-46
3.10 Main Menu - Special Functions - Group 14
3.10.1 14-0* Inverter Switching 3-49
3.10.2 14-1* >Mains Power On/Off 3-49
3.10.3 14-2* Trip Reset 3-49
3.10.4 14-4*Energy Optimizing 3-50
3-40
3-49
3.10.5 14-5* Environment 3-50
3.11 Main Menu - Drive Information - Group 15
MG18B222 - VLT® is a registered Danfoss trademark
3-52
Page 5
Contents
VLT® HVAC Basic Drive Programming Guide
3.11.1 15-0* Operating Data 3-52
3.11.2 15-3* Alarm Log 3-52
3.11.3 15-4* Drive Identification 3-52
3.12 Main Menu - Data Readouts - Group 16
3.12.1 16-0* General Status 3-54
3.12.2 16-1* Motor Status 3-54
3.12.3 16-3* Drive Status 3-55
3.12.4 16-5* Ref. & Feedb. 3-55
3.12.5 16-6* Inputs and Outputs 3-55
3.12.6 16-8* Fieldbus & FC Port 3-57
3.12.7 16-9* Diagnosis Readouts 3-57
3.13 Main Menu - Data Readouts 2 - Group 18
3.13.1 18-1* Fire Mode Log 3-58
3.14 Main Menu - Adjustable Frequency Drive Closed-loop - Group 20
3.14.1 20-0* Feedback 3-59
3.14.2 20-8* PI Basic Settings 3-59
3.14.3 20-9* PI Controller 3-59
3.15 Main Menu - Application Functions - Group 22
3.15.1 22-4* Sleep Mode 3-60
3.15.2 22-6* Broken Belt Detection 3-61
3-54
3-58
3-59
3-60
3.16 Main Menu - Application Functions 2 - Group 24
3.16.1 24-0* Fire Mode 3-62
3.16.2 24-1* Drive Bypass 3-63
4 Troubleshooting
4.1.2 Alarm Words 4-3
4.1.3 Warning Words 4-3
4.1.4 Extended Status Words 4-4
4.1.5 Fault Messages 4-4
5 Parameter Lists
5.1 Parameter Options
5.1.1 Default settings 5-1
5.1.2 0-** Operation / Display 5-2
5.1.3 1-** Load and Motor 5-3
5.1.4 2-** Brakes 5-4
5.1.5 3-** Reference/Ramps 5-5
5.1.6 4-** Limits/Warnings 5-6
3-62
4-1
5-1
5-1
5.1.7 5-** Digital In/Out 5-7
MG18B222 - VLT® is a registered Danfoss trademark
Page 6
Contents
VLT® HVAC Basic Drive Programming Guide
5.1.8 6-** Analog In/Out 5-8
5.1.9 8-** Comm. and Options 5-9
5.1.10 13-** Smart Logic 5-10
5.1.11 14-** Special Functions 5-11
5.1.12 15-** Drive Information 5-12
5.1.13 16-** Data Readouts 5-13
5.1.14 18-** Info & Readouts 5-14
5.1.15 20-** Drive Closed Loop 5-14
5.1.16 22-** Appl. Functions 5-15
5.1.17 24-** Appl. Functions 2 5-15
6 Index
6-1
MG18B222 - VLT® is a registered Danfoss trademark
Page 7
Introduction
1 Introduction
VLT® HVAC Basic Drive Programming Guide
1 1
VLT HVAC Basic Drive
FC 100 Series
Table 1.1
This guide can be used with all VLT
HVAC Basic Drive adjustable
frequency drives with software
version 2.0X.
The actual software version
number can be read from
15-43 Software Version.
Table 1.2
Copyright, Limitation of Liability and
1.1.1
Revision Rights
the use, or the inability to use information contained in
this manual, even if advised of the possibility of such
damages. In particular, Danfoss is not responsible for any
costs, including but not limited to those incurred as a
result of lost profits or revenue, loss or damage of
equipment, loss of computer programs, loss of data, the
costs to substitute these, or any claims by third parties.
Danfoss reserves the right to revise this publication at any
time and to make changes to its contents without prior
notice or any obligation to notify former or present users
of such revisions or changes.
Symbols
1.1.2
Symbols used in this guide.
NOTE!
Indicates something to be noted by the reader.
CAUTION
Indicates a potentially hazardous situation which, if not
avoided, may result in minor or moderate injury or
equipment damage.
This publication contains information proprietary to
Danfoss. By accepting and using this manual, the user
agrees that the information contained herein will be used
solely for operating equipment from Danfoss or equipment
from other vendors provided that such equipment is
intended for communication with Danfoss equipment over
a serial communication link. This publication is protected
under the copyright laws of Denmark and most other
countries.
Danfoss does not warrant that a software program
produced according to the guidelines provided in this
manual will function properly in every physical, hardware
or software environment.
Although Danfoss has tested and reviewed the documentation within this manual, Danfoss makes no warranty or
representation, neither expressed nor implied, with respect
to this documentation, including its quality, performance,
or fitness for a particular purpose.
In no event shall Danfoss be liable for direct, indirect,
special, incidental, or consequential damages arising out of
WARNING
Indicates a potentially hazardous situation which, if not
avoided, could result in death or serious injury.
Indicates default setting
*
Table 1.3
MG18B222 - VLT® is a registered Danfoss trademark 1-1
Page 8
Introduction
VLT® HVAC Basic Drive Programming Guide
11
1.1.3 Abbreviations
Alternating current AC
American wire gauge AWG
Ampere/AMP A
Automatic Motor Adaptation AMA
Current limit I
Degrees Celsius
Direct current DC
Drive Dependent D-TYPE
Electro Magnetic Compatibility EMC
Electronic Thermal Relay ETR
Adjustable frequency drive FC
Gram g
Hertz Hz
Horsepower hp
Kilohertz kHz
Local Control Panel LCP
Meter m
Millihenry Inductance mH
Milliampere mA
Millisecond ms
Minute min
Motion Control Tool MCT
Nanofarad nF
Newton Meters Nm
Nominal motor current I
Nominal motor frequency f
Nominal motor power P
Nominal motor voltage U
Permanent Magnet motor PM motor
Protective Extra Low Voltage PELV
Printed Circuit Board PCB
Rated Inverter Output Current I
Revolutions Per Minute RPM
Regenerative terminals Regen
Second s
Synchronous Motor Speed n
Torque limit T
Volts V
The maximum output current I
The rated output current supplied by the
adjustable frequency drive
Table 1.4
LIM
°C
M,N
M,N
M,N
M,N
INV
s
LIM
VLT,MAX
I
VLT,N
1.1.4
Available Literature for VLT HVAC
Basic Drive
- Quick Guide MG18AXYY
- Programming Guide MG18BXYY provides
information on how to program and includes
complete parameter descriptions.
- Design Guide MG18CXYY provides all the
technical information about the adjustable
frequency drive and customer design and
applications.
- PC-based Configuration Tool MCT 10, MG10AXYY
enables the user to configure the adjustable
frequency drive from a Windows™-based PC
environment.
-
Danfoss VLT® Energy Box software at
www.danfoss.com/BusinessAreas/DrivesSolutions
then choose PC Software Download
VLT® Energy Box Software allows energy
consumption comparisons of HVAC fans and
pumps driven by Danfoss drives and alternative
methods of flow control. This tool may be used
to project, as accurately as possible, the costs,
savings, and payback of using Danfoss adjustable
frequency drives on HVAC fans and pumps.
X = Revision number
YY = Language code
Danfoss technical literature is available in print from your
local Danfoss Sales Office or online at:
www.danfoss.com/BusinessAreas/DrivesSolutions/Documentations/Technical+Documentation.htm
Definitions
1.1.5
Adjustable Frequency Drive:
I
VLT,MAX
Maximum output current.
I
VLT,N
Rated output current supplied by the Adjustable frequency
drive.
U
VLT, MAX
Maximum output voltage.
Input:
Control command
Start and stop the connected motor by means of LCP and
digital inputs.
Functions are divided into two groups.
Functions in group 1 have higher priority than functions in
group 2.
1-2 MG18B222 - VLT® is a registered Danfoss trademark
Page 9
175ZA078.10
Pull-out
rpm
Torque
Introduction
VLT® HVAC Basic Drive Programming Guide
1 1
Group 1 Reset, Coasting stop, Reset and Coasting stop,
Quick stop, DC braking, Stop and the [OFF] key.
Group 2 Start, Latched start, Reversing, Start reversing, Jog
and Freeze output
Table 1.5
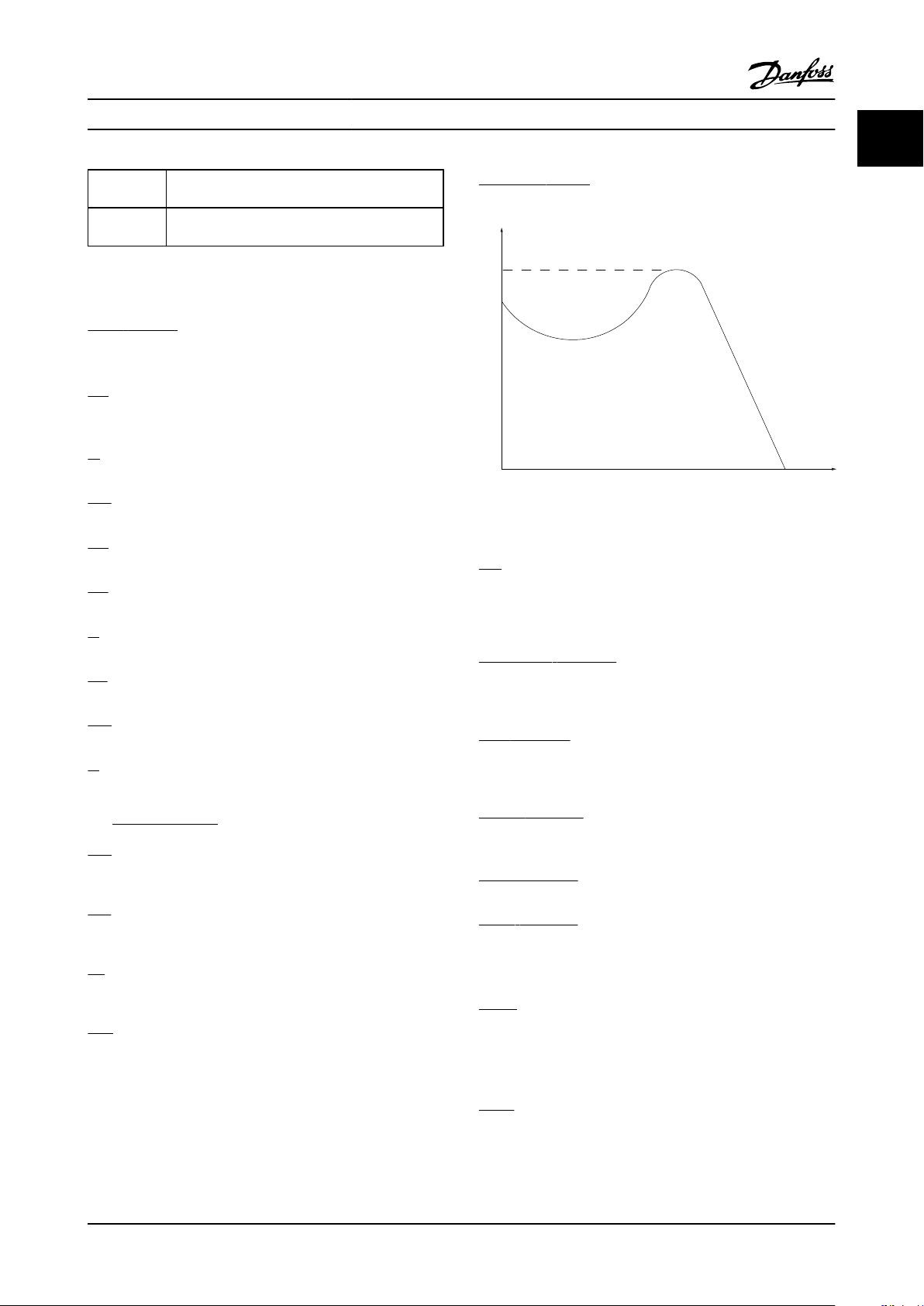
Motor:
Motor Running
Torque generated on output shaft and speed from zero
rpm to max. speed on motor.
f
JOG
Motor frequency when the jog function is activated (via
digital terminals).
f
M
Motor frequency.
f
MAX
Maximum motor frequency.
f
MIN
Minimum motor frequency.
f
M,N
Rated motor frequency (nameplate data).
I
M
Motor current (actual).
I
M,N
Rated motor current (nameplate data).
n
M,N
Rated motor speed (nameplate data).
n
s
Synchronous motor speed
2 ×
par
=
. 1 − 23 × 60
par
. 1 − 39
n
s
P
M,N
s
Rated motor power (nameplate data in kW or hp).
T
M,N
Rated torque (motor).
U
M
Instantaneous motor voltage.
U
M,N
Rated motor voltage (nameplate data).
Break-away torque
Figure 1.1
η
VLT
The efficiency of the adjustable frequency drive is defined
as the ratio between the power output and the power
input.
Start-disable command
A stop command belonging to the group 1 control
commands - see this group.
Stop command
See Control commands.
References:
Analog Reference
A signal transmitted to the analog inputs 53 or 54, can be
voltage or current.
Binary Reference
A signal transmitted to the serial communication port.
Preset Reference
A defined preset reference to be set from -100% to +100%
of the reference range. Selection of eight preset references
via the digital terminals.
Ref
MAX
Determines the relationship between the reference input
at 100% full scale value (typically 10 V, 20 mA) and the
resulting reference. The maximum reference value set in
3-03 Maximum Reference.
Ref
MIN
Determines the relationship between the reference input
at 0% value (typically 0 V, 0 mA, 4 mA) and the resulting
reference. The minimum reference value set in
3-02 Minimum Reference.
MG18B222 - VLT® is a registered Danfoss trademark 1-3
Page 10
Introduction
VLT® HVAC Basic Drive Programming Guide
11
Miscellaneous:
Analog Inputs
The analog inputs are used for controlling various
functions of the Adjustable frequency drive.
There are two types of analog inputs:
Current input, 0-20 mA and 4-20 mA
Voltage input, 0-10 V
Analog Outputs
The analog outputs can supply a signal of 0–20 mA, 4–20
mA.
Automatic Motor Adaptation, AMA
AMA algorithm determines the electrical parameters for
the connected motor at standstill.
CTW
Control Word
Digital Inputs
The digital inputs can be used for controlling various
functions of the Adjustable frequency drive.
ETR
Electronic Thermal Relay is a thermal load calculation
based on present load and time. Its purpose is to estimate
the motor or Adjustable frequency drive temperature.
Initializing
If initialization is carried out (14-22 Operation Mode), the
Adjustable frequency drive returns to the default setting.
Intermittent Duty Cycle
An intermittent duty rating refers to a sequence of duty
cycles. Each cycle consists of an on-load and an off-load
period. The operation can be either periodic duty or nonperiodic duty.
LCP
The Local Control Panel makes up a complete interface for
control and programming of the adjustable frequency
drive. The control panel is detachable and can be installed
up to 10 ft [3 m] from the adjustable frequency drive, i.e.,
in a front panel by means of the installation kit option.
lsb
Least significant bit.
msb
Most significant bit.
MCM
Short for Mille Circular Mil, an American measuring unit for
cable cross-sections. 1 MCM = 0.5067 mm2.
Process PI
The PI control maintains the desired speed, pressure,
temperature, etc. by adjusting the output frequency to
match the varying load.
Power Cycle
Switch off line power until the display (LCP) is dark – then
turn power on again.
RCD
Residual Current Device.
Set-up
You can save parameter settings in two set-ups. Change
between the two parameter set-ups and edit one set-up,
while another set-up is active.
Slip Compensation
The adjustable frequency drive compensates for the motor
slip by giving the frequency a supplement that follows the
measured motor load, keeping the motor speed almost
constant.
Slip compensation is default set to off.
Smart Logic Control (SLC)
The SLC is a sequence of user-defined actions executed
when the associated user-defined events are evaluated as
true by the Smart Logic Controller. (Parameter group 13-**
Smart Logic Control (SLC).)
STW
Status Word
Adjustable Frequency Drive Standard Bus
Includes RS-485 bus with FC protocol. See 8-30 Protocol.
Thermistor
A temperature-dependent resistor placed where the
temperature is to be monitored (adjustable frequency drive
or motor).
Trip
A state entered in fault situations, e.g., if the adjustable
frequency drive is subject to an over-temperature or when
the adjustable frequency drive is protecting the motor,
process or mechanism. Restart is prevented until the cause
of the fault has disappeared and the trip state is canceled
by activating reset or, in some cases, by being
programmed to reset automatically. Trip may not be used
for personal safety.
Trip Lock
A state entered in fault situations when the adjustable
frequency drive is protecting itself and requiring physical
intervention, e.g., if the adjustable frequency drive is
subject to a short circuit on the output. A locked trip can
only be canceled by cutting off line power, removing the
cause of the fault, and reconnecting the adjustable
frequency drive. Restart is prevented until the trip state is
canceled by activating reset or, in some cases, by being
programmed to reset automatically. Trip may not be used
for personal safety.
VT Characteristics
Variable torque characteristics used for pumps and fans.
1-4 MG18B222 - VLT® is a registered Danfoss trademark
Page 11
Introduction
VLT® HVAC Basic Drive Programming Guide
1 1
plus
VVC
If compared with standard voltage/frequency ratio control,
Voltage Vector Control (VVC
plus
) improves the dynamics
and the stability, both when the speed reference is
changed and in relation to the load torque.
Power Factor
The power factor is the relation between I1 and I
3 x U x
I
cos
ϕ
Power factor
=
3 x U x
1
I
RMS
RMS
.
The power factor for 3-phase control:
=
I1 x cos
I
RMS
ϕ1
=
I
RMS
I
1
since cos
ϕ1 = 1
The power factor indicates to what extent the adjustable
frequency drive imposes a load on the line power supply.
The lower the power factor, the higher the I
RMS
for the
same kW [hp] performance.
2
2
I
=
I
RMS
+
1
2
I
+
I
+ .. +
5
7
2
I
n
In addition, a high power factor indicates that the different
harmonic currents are low.
The built-in DC coils in the adjustable frequency drive
produce a high power factor, which minimizes the
imposed load on the line power supply.
Safety Precautions
1.1.6
WARNING
The voltage of the adjustable frequency drive is dangerous
whenever connected to line power. Incorrect installation of
the motor, adjustable frequency drive or serial communication bus may cause death, serious personal injury or
damage to the equipment. Consequently, the instructions
in this manual, as well as national and local rules and
safety regulations, must be complied with.
Safety Regulations
1. The line power supply to the adjustable
frequency drive must be disconnected whenever
repair work is to be carried out. Make sure that
the line power supply has been disconnected and
that the necessary time has elapsed before
removing motor and line power supply plugs.
2. The [OFF] key on the control panel of the
adjustable frequency drive does not disconnect
the line power supply and consequently it must
not be used as a safety switch.
3. The equipment must be properly grounded, the
user must be protected against supply voltage
and the motor must be protected against
overload in accordance with applicable national
and local regulations.
4. The ground leakage current exceeds 3.5 mA.
5. Protection against motor overload is not included
in the factory setting. If this function is desired,
set 1-90 Motor Thermal Protection to data value [4]
ETR trip 1 or data value [3] ETR warning 1.
6. Do not remove the plugs for the motor and line
power supply while the adjustable frequency
drive is connected to line power. Make sure that
the line power supply has been disconnected and
that the necessary time has elapsed before
removing motor and line power plugs.
7. Please note that the adjustable frequency drive
has more voltage sources than L1, L2 and L3,
when load sharing (linking of DC intermediate
circuit) or external 24 V DC are installed. Make
sure that all voltage sources have been disconnected and that the necessary time has elapsed
before commencing repair work.
Safety Precautions - Continued
1.1.7
Warning against unintended start
1. The motor can be brought to a stop by means of
digital commands, bus commands, references or
a local stop, while the adjustable frequency drive
is connected to line power. If personal safety
considerations (e.g., risk of personal injury caused
by contact with moving machine parts following
an unintentional start) make it necessary to
ensure that no unintended start occurs, these
stop functions are not sufficient. In such cases,
the line power supply must be disconnected.
2. The motor may start while setting the
parameters. If this means that personal safety
may be compromised (e.g., personal injury caused
by contact with moving machine parts), motor
starting must be prevented, for instance by
secure disconnection of the motor connection.
3. A motor that has been stopped with the line
power supply connected, may start if faults occur
in the electronics of the adjustable frequency
drive, through temporary overload or if a fault in
the power supply grid or motor connection is
remedied. If unintended start must be prevented
for personal safety reasons (e.g., risk of injury
caused by contact with moving machine parts),
the normal stop functions of the adjustable
frequency drive are not sufficient.
MG18B222 - VLT® is a registered Danfoss trademark 1-5
Page 12
Introduction
VLT® HVAC Basic Drive Programming Guide
11
4. Control signals from, or internally within, the
adjustable frequency drive may in rare cases be
activated in error, be delayed or fail to occur
entirely. When used in situations where safety is
critical, these control signals must not be relied
on exclusively.
WARNING
High Voltage
Touching the electrical parts may be fatal - even after the
equipment has been disconnected from line power.
Also make sure that other voltage inputs have been
disconnected, such as load sharing (linkage of DC
intermediate circuit)
Systems where adjustable frequency drives are installed
must, if necessary, be equipped with additional monitoring
and protective devices according to the valid safety
regulations, e.g., law on mechanical tools, regulations for
the prevention of accidents, etc. Modifications on the
adjustable frequency drives by means of the operating
software are allowed.
NOTE!
Hazardous situations shall be identified by the machine
builder/integrator who is responsible for taking necessary
preventive means into consideration. Additional
monitoring and protective devices may be included, always
according to valid national safety regulations, e.g., law on
mechanical tools, regulations for the prevention of
accidents.
Protection Mode
Once a hardware limit on motor current or DC link voltage
is exceeded, the adjustable frequency drive will enter
Protection mode. Protection mode means a change of the
PWM modulation strategy and a low switching frequency
to minimize losses. This continues 10 sec after the last fault
and increases the reliability and the robustness of the
adjustable frequency drive while re-establishing full control
of the motor. Parameter 0-07 Auto DC Braking may cause
PWM when coasted.
1-6 MG18B222 - VLT® is a registered Danfoss trademark
Page 13
L1
L2
L3
3 Phase
power
input
PE
PE
+10Vdc
0-10Vdc-
0-10Vdc-
50 (+10V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20mA A OUT / DIG OUT
45 0/4-20mA A OUT / DIG OUT
18 (DIGI IN)
19 (DIGI IN)
27 (DIGI IN)
29 (DIGI IN)
12 (+24V OUT)
24V (NPN)
20 (COM D IN)
OV (PNP)
24V (NPN)
OV (PNP)
24V (NPN)
OV (PNP)
24V (NPN)
OV (PNP)
Bus ter.
Bus ter.
RS-485
Interface
RS-485
(N PS-485) 69
(P RS-485) 68
(Com RS-485) 61
(PNP) Source
(NPN) Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240Vac 2A
Not present on all power sizes
Do not connect shield to
61 on 116, 117 and 118 units
01
02
03
relay1
relay2
UDC+
UDC-
Motor
U
V
W
130BB626.10
06
05
04
240Vac 2A
Introduction
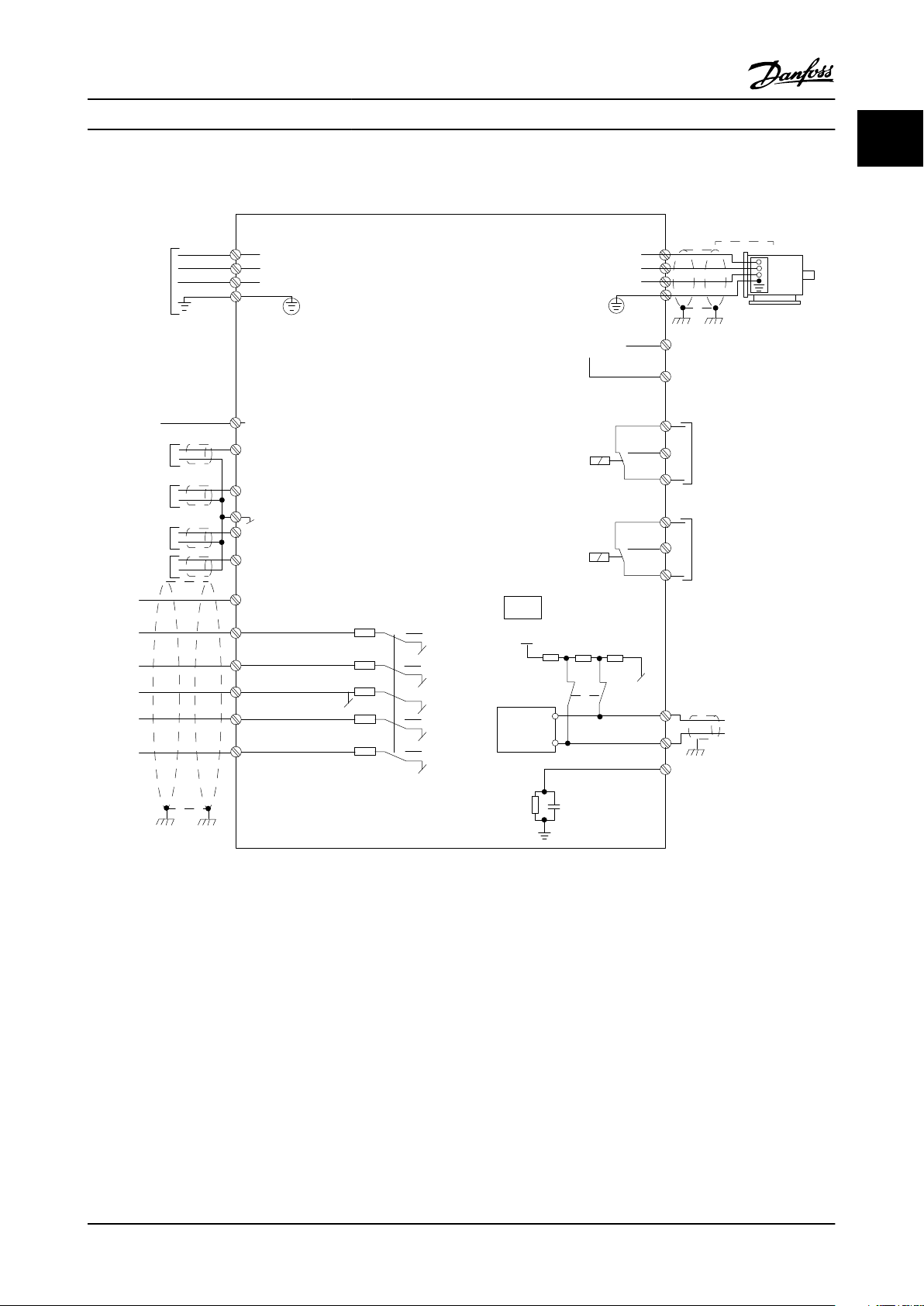
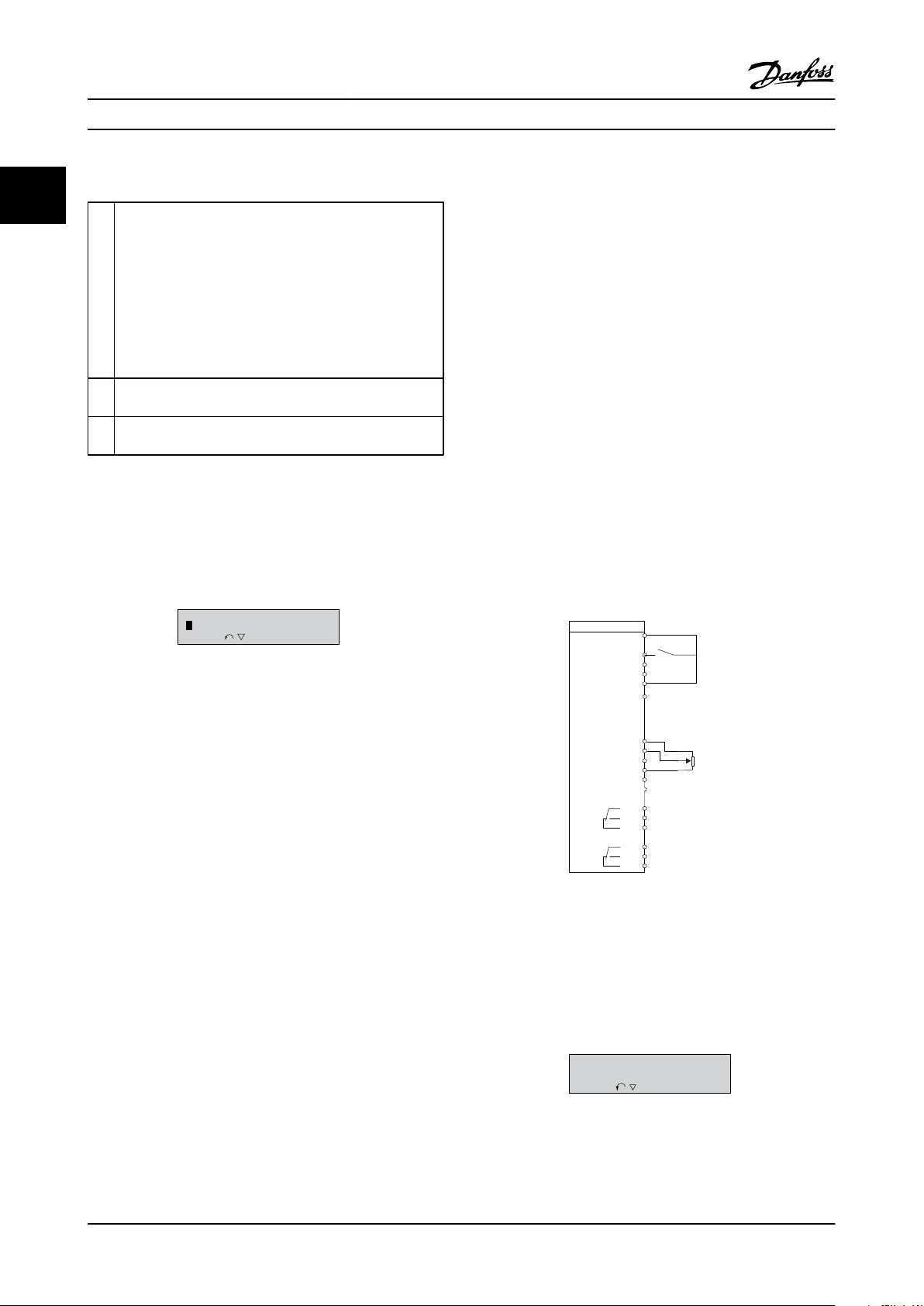
1.1.8 Electrical Overview
VLT® HVAC Basic Drive Programming Guide
1 1
Figure 1.2
NOTE!
Please note there is no access to UDC- and UDC+ on the following units:
IP20 380–480 V 40–125 hp [30–90 kW]
IP20 200–240 V 20–60 hp [15–45 kW]
IP20 525–600 V 3–125 hp [2.2–90 kW]
IP54 380–480 V 30–125 hp [22–90 kW]
MG18B222 - VLT® is a registered Danfoss trademark 1-7
Page 14

Introduction
VLT® HVAC Basic Drive Programming Guide
11
1-8 MG18B222 - VLT® is a registered Danfoss trademark
Page 15
130BB765.11
B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
A
B
1
12
13 14 15
11
11
10
9
8
7
6
5
4
3
2
C
D
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn.
On
11
How to Program
VLT® HVAC Basic Drive Programming Guide
2 How to Program
2.1 Programming with MCT-10 Setup
Software
The adjustable frequency drive can be programmed from a
PC via RS-485 COM port by installing the MCT-10 Setup
Software. This software can either be ordered using code
number 130B1000 or downloaded from the Danfoss
Website: http://www.danfoss.com/BusinessAreas/DrivesSolutions/Softwaredownload/ Please refer to manual
MG10RXYY.
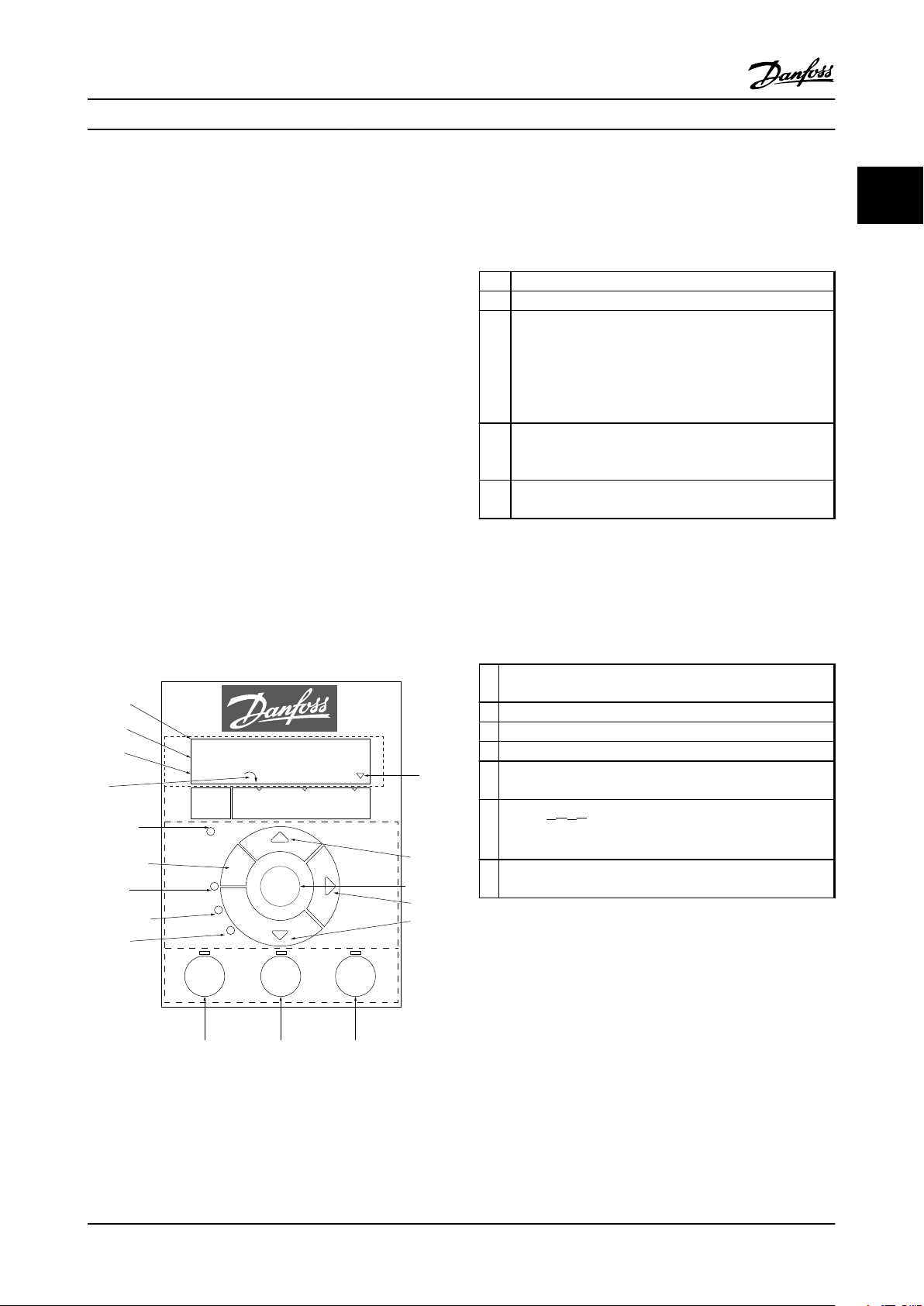
2.2 Local Control Panel (LCP)
The following instructions are valid for the FC 101 LCP. The
LCP is divided into four functional sections.
A. Alphanumeric display
B. Menu key
C. Navigation keys and LEDs
D. Operation keys and LEDs
Information can be read from the display.
1 Parameter number and name.
2 Parameter value.
3 Set-up number shows the active set-up and the edit set-
up. If the same set-up acts as both the active and edit setup, only that set-up number is shown (factory setting).
When the active and edit set-up differ, both numbers are
shown in the display (Set-up 12). The flashing number
indicates the edit set-up.
4 Motor direction is shown to the bottom left of the display
– indicated by a small arrow pointing either clockwise or
counter-clockwise.
5 The triangle indicates if the LCP is in status, quick menu or
main menu.
Table 2.1
B. Menu Key
Use the menu key to select between status, quick menu or
main menu.
C. Navigation keys and LEDs
6 Com led: Flashes when bus communication is communi-
cating.
7 Green LED/On: Control section is working.
8 Yellow LED/Warn.: Indicates a warning.
9 Flashing Red LED/Alarm: Indicates an alarm.
10 [Back]: For moving to the previous step or layer in the
navigation structure
11
Arrows [▲] [▼]: For navigating between parameter groups,
parameters and within parameters. Can also be used for
setting local reference.
12 [OK]: For selecting a parameter and for accepting changes to
parameter settings
2 2
Table 2.2
Figure 2.1
A. Alpha Numeric Display
The LCD display is backlit with two alpha-numeric lines. All
data is displayed on the LCP.
MG18B222 - VLT® is a registered Danfoss trademark 2-1
Page 16
130BB628.10
Select Language
[ 0 ] English
Set-up 1
FC
+24V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A OUT / D OUT
A OUT / D OUT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 V
Reference
Start
+10V
A IN
A IN
COM
130BB674.10
45
+
-
130BB629.10
Press OK to start Wizard
Push Back to skip it
Set-up 1
How to Program
VLT® HVAC Basic Drive Programming Guide
D. Operation keys and LEDs
22
13 [Hand On]: Starts the motor and enables control of the
adjustable frequency drive via the LCP.
NOTE!
2.3.2
Quick Menu
Use the quick setup of the adjustable frequency drive to
program the most common VLT HVAC Basic Drive
functions. The [Quick Menu] consists of:
Terminal 27 Digital Input (5-12 Terminal 27 Digital
Input) has coast inverse as default setting. This
means that [Hand On] will not start the motor if
there is no 24 V to terminal 27. Connect terminal 12
to terminal 27.
14 [Off/Reset]: Stops the motor (off). If in alarm mode the
alarm will be reset.
15 [Auto On]: The adjustable frequency drive is controlled
either via control terminals or serial communication.
Table 2.3
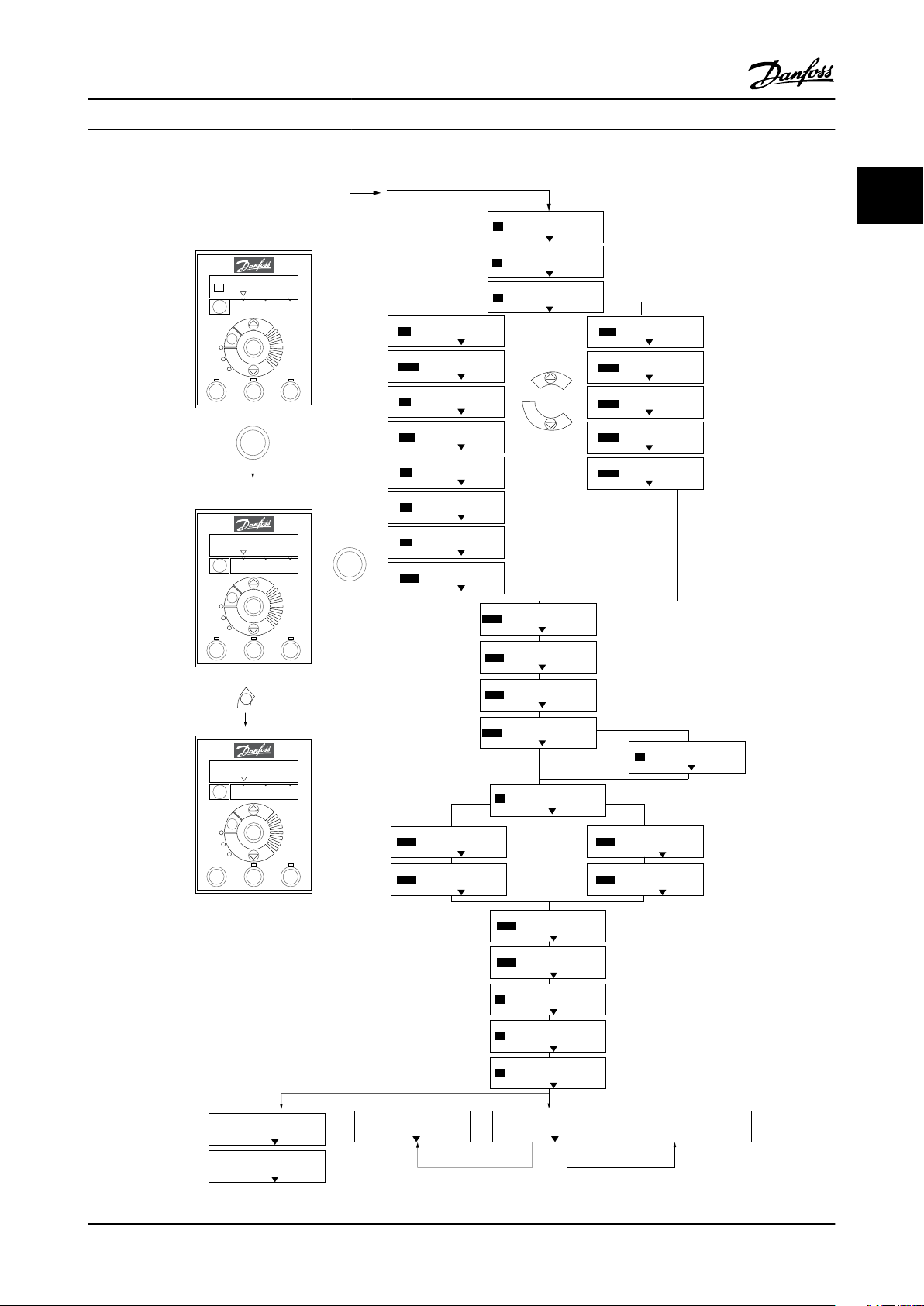
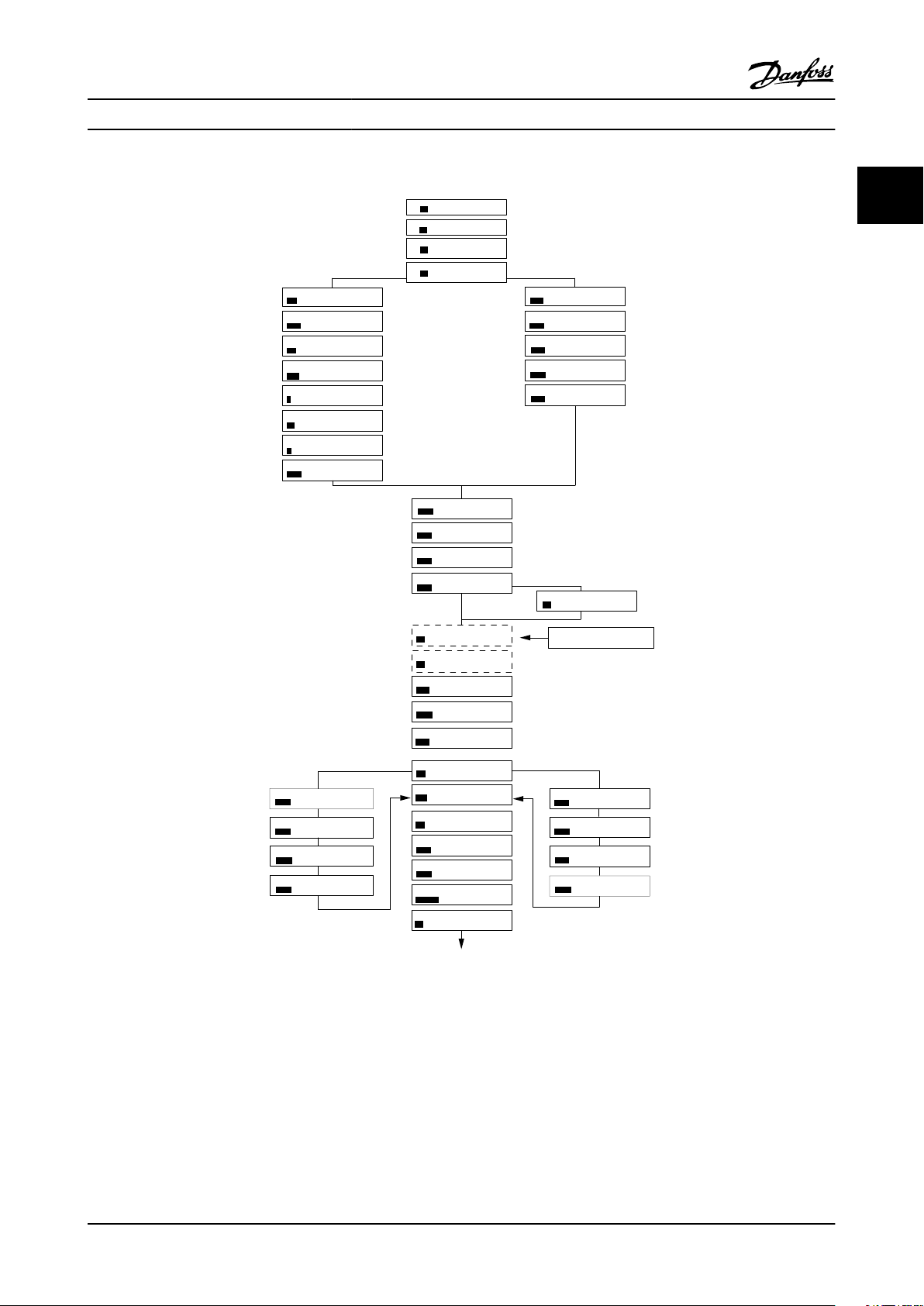
2.3.3 The FC101 Start-up Wizard for Open-
The built-in wizard menu guides the installer through the
Wizard for open-loop applications
•
Closed-loop set-up wizard
•
Motor set-up
•
Changes made
•
loop Applications
set up of the adjustable frequency drive in a clear and
At power-up
At the first power-up, the user is asked to choose the
preferred language. Once selected, this screen will never
be shown again in the following power-ups, but the
language can still be changed in 0-01 Language.
structured manner in order to set up an open-loop
application. An open-loop application is here an
application with a start signal, analog reference (voltage or
current) and optionally also relay signals (but no feedback
signal from the process applied).
Figure 2.2
2.3 Menus
2.3.1 Status
When choosing the [Status] menu it is possible to choose
between the following:
Motor Frequency (Hz), 16-13 Frequency;
•
Motor Current (A), 16-14 Motor Current;
•
Motor Speed Reference in Percentage (%),
•
16-02 Reference %;
Feedback, 16-52 Feedback [Unit];
•
Motor Power (kW) (if 0-03 Regional Settings is set
•
to [1] North America, Motor Power will be shown
in the unit of hp instead of kW), 16-10 Power [kW]
for kW, 16-11 Power [hp] for hp;
Custom Readout 16-09 Custom Readout;
•
Figure 2.3
The wizard will initially be shown after power-up until any
parameter has been changed. The wizard can always be
accessed again through the Quick Menu. Press [OK] to start
the wizard. If [Back] is pressed, the FC 101 will return to
the status screen.
Figure 2.4
2-2 MG18B222 - VLT® is a registered Danfoss trademark
Page 17
130BC401.10
Value
Setup 1
Power kW/50 Hz
Setup 1
Set Motor Speed low Limit
Hz
Setup 1
Set Motor Speed high Limit
Hz
Setup 1
Set Ramp 1 ramp-up time
s
Setup 1
Set Ramp 1 ramp-down Time
s
Setup 1
Active Flying start?
Disable
OK
OK
B
a
c
k
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn
On
Status Screen
The Wizard can always be
reentered via the Quick Menu!
Power Up Screen
At power up the user is
asked to choose the
prefered language.
Select language
[1] English
0.0 Hz
0.0 kW
Setup 1
Setup 1
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn
On
Press OK to start Wizard
Press Back to skip it
Setup 1
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn
On
The next screen will be
the Wizard screen.
Wizard Screen
5
Setup 1
Set Motor Power
7
Setup 1
Set Motor Voltage
8
Setup 1
Set Motor frequency
9
Setup 1
Set Motor current
10
Setup 1
Set Motor nominal speed
11
1
2
if
if
3
17
20
21
22
B
a
c
k
B
a
c
k
B
a
c
k
Select Regional Settings
... the HVAC FC 101 Wizard starts
Setup 1
200-240V/50Hz/Delta
Grid Type
4
Asynchronous Motor
Setup 1
Asynchronous
Select Motor Type
6
Setup 1
Set Motor current
12
Setup 1
Select Motor nominal speed
13
Setup 1
Set Motor Cont. Rated Torque
14
Setup 1
Stator resistance
15
Setup 1
Motor poles
16
Setup 1
Back EMF at 1000 rpm
18
Setup 1
d-axis inductance
19
Setup 1
Set Max Output Frequency
23
24
Setup 1
Setup 1Setup 1
Setup 1
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Current
Voltage
28
29
26
27
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
AMA Failed
0.0 Hz
0.0 kW
Wizard completed
Press OK to accept
Automatic Motor Adaption
O
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Set Min Reference
Hz
AMA running
-----
AMA failed
Do AMA
(Do not AMA)
AMA OK
30
31
32
33
34
37
38
39
35 36
[0]
[0]
[0]
Setup 1
Select T53 Mode
Current
25
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
57
V
5
mH
0065
Hz
1.50
kW
0050
V
0050
Hz
04.66
A
1420
RPM
[0]
PM motor
Motor Type = Asynchronous
Motor Type = PM Motor
0000
0050
0003
0003
[0]
[0]
04.66
13.30
0050
0220
0000
0050
How to Program
VLT® HVAC Basic Drive Programming Guide
2 2
Figure 2.5
MG18B222 - VLT® is a registered Danfoss trademark 2-3
Page 18
How to Program
VLT® HVAC Basic Drive Programming Guide
The FC 101 Start-up Wizard for Open-loop Applications
22
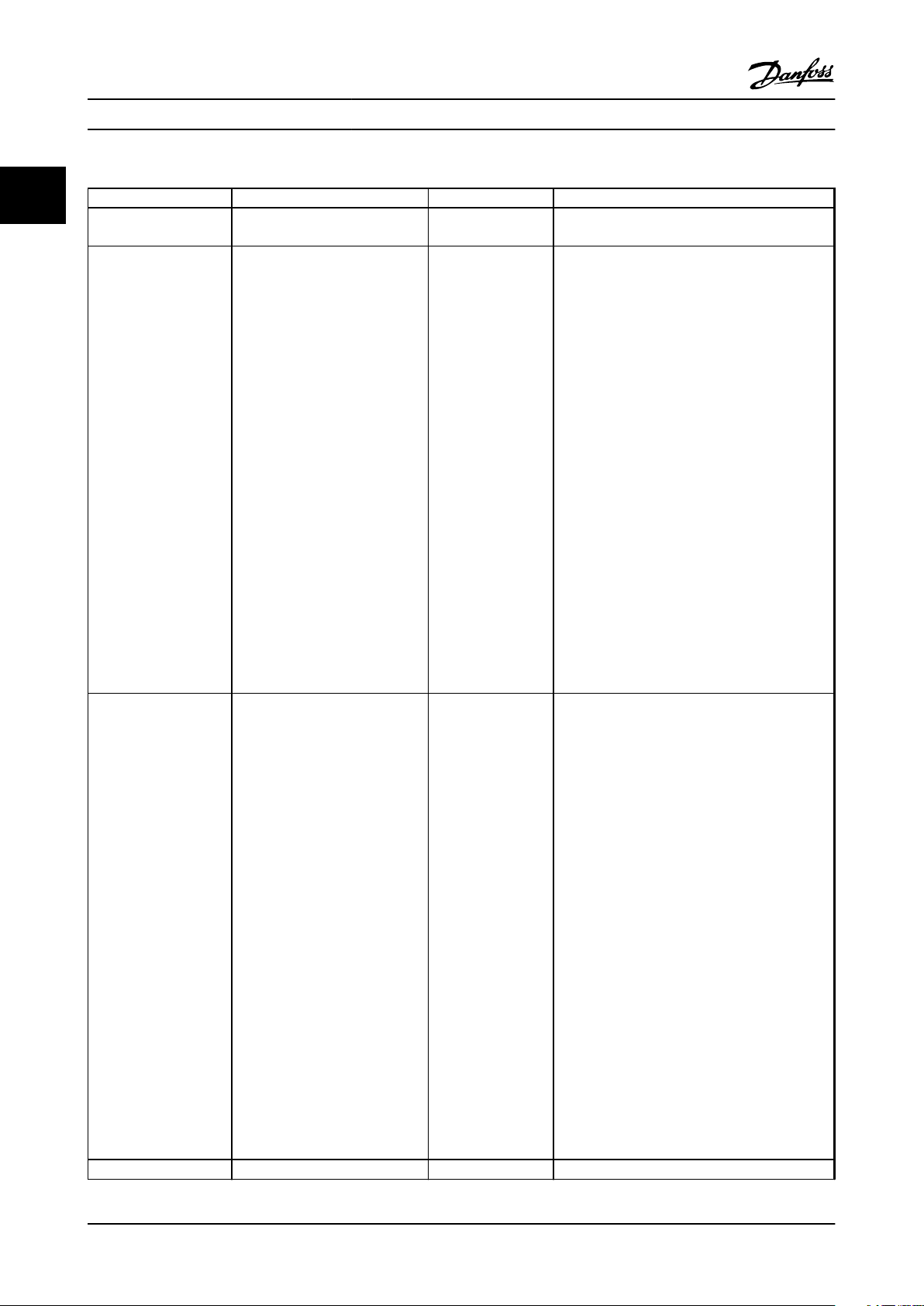
No & Name Range Default Function
0-03 Regional Settings [0] International
[1] US
0-06 GridType [0] 200–240 V/50 Hz/IT grid
[1] 200–240 V/50 Hz/Delta
[2] 200–240 V/50 Hz
[10] 380–440 V/50 Hz/IT grid
[11] 380–440 V/50 Hz/Delta
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/IT grid
[21] 440–480 V/50 Hz/Delta
[22] 440–480 V/50 Hz
[30] 525–600 V/50 Hz/IT grid
[31] 525–600 V/50 Hz/Delta
[32] 525–600 V/50 Hz
[100] 200–240 V/60 Hz/IT grid
[101] 200–240 V/60 Hz/Delta
[102] 200–240 V/60 Hz
[110] 380–440 V/60 Hz/IT grid
[111] 380–440 V/60 Hz/Delta
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/IT grid
[121] 440–480 V/60 Hz/Delta
[122] 440–480 V/60 Hz
[130] 525–600 V/60 Hz/IT grid
[131] 525–600 V/60 Hz/Delta
[132] 525–600 V/60 Hz
1-10 Motor Construction *[0] Asynchron
[1] PM, non-salient SPM
1-20 Motor Power
0.12–110 kW/0.16–150 hp Size related Enter motor power from nameplate data
0
Size related
[0] Asynchron Setting the parameter value might change these
Select operating mode for restart upon
reconnection of the drive to AC line voltage after
power-down
parameters:
1-01 Motor Control Principle
1-03 Torque Characteristics
1-14 Damping Gain
1-15 Low Speed Filter Time Const.
1-16 High Speed Filter Time Const.
1-17 Voltage filter time const.
1-20 Motor Power [kW]
1-22 Motor Voltage
1-23 Motor Frequency
1-24 Motor Current
1-25 Motor Nominal Speed
1-26 Motor Cont. Rated Torque
1-30 Stator Resistance (Rs)
1-33 Stator Leakage Reactance (X1)
1-35 Main Reactance (Xh)
1-37 d-axis Inductance (Ld)
1-39 Motor Poles
1-40 Back EMF at 1000 RPM
1-66 Min. Current at Low Speed
1-72 Start Function
1-73 Flying Start
4-19 Max Output Frequency
4-58 Missing Motor Phase Function
2-4 MG18B222 - VLT® is a registered Danfoss trademark
Page 19

How to Program
VLT® HVAC Basic Drive Programming Guide
No & Name Range Default Function
1-22 Motor Voltage 50.0–1,000.0 V Size related Enter motor voltage from nameplate data
1-23 Motor Frequency 20.0–400.0 Hz Size related Enter motor frequency from nameplate data
1-24 Motor Current 0.01–10,000.00 A Size related Enter motor current from nameplate data
1-25 Motor Nominal
Speed
1-26 Motor Cont. Rated
Torque
100.0–9,999.0 RPM Size related Enter motor nominal speed from nameplate data
0.1–1,000.0 Size related This parameter is available only when 1-10 Motor
Construction Design is set to [1] PM, non-salient
SPM.
NOTE!
Changing this parameter will affect settings
of other parameters
2 2
1-29 Automatic Motor
Adaption (AMA)
1-30 Stator Resistance
(Rs)
1-37 d-axis Inductance
(Ld)
1-39 Motor Poles 2-100 4 Enter the number of motor poles
1-40 Back EMF at 1000
RPM
1-73 Flying Start When PM is selected, Flying Start is enabled and
1-73 Flying Start [0] Disabled
3-02 Minimum Reference -4,999-4,999 0 The minimum reference is the lowest value
3-03 Maximum Reference -4,999–4,999 50 The maximum reference is the lowest obtainable
3-41 Ramp 1 Ramp Up
Time
3-42 Ramp 1 Ramp
Down Time
4-12 Motor Speed Low
Limit [Hz]
4-14 Motor Speed High
Limit [Hz]
4-19 Max Output
Frequency
5-40 Function Relay [0]
Function relay
5-40 Function Relay [1]
Function relay
See 1-29 Automatic Motor Adaption
(AMA)
0.000–99.990 Size related Set the stator resistance value
0–1000 Size related Enter the value of the d-axis inductance.
10–9,000 Size related Line-Line RMS back EMF voltage at 1000 RPM
[1] Enabled
0.05–3,600.0 s Size related Ramp-up time from 0 to rated 1-23 Motor
0.05–3,600.0 s Size related Ramp-down time from rated 1-23 Motor
0.0–400 Hz 0 Hz Enter the minimum limit for low speed
0.0–400 Hz 65 Hz Enter the maximum limit for high speed
0–400 Size related Enter the maximum output frequency value
See 5-40 Function Relay Alarm Select the function to control output relay 1.
See 5-40 Function Relay Drive running Select the function to control output relay 2.
Off Performing an AMA optimizes motor performance.
Obtain the value from the permanent magnet
motor data sheet. The de-axis inductance cannot
be found by performing an AMA.
cannot disable
0
Select [1] Enable to enable the drive to catch a
motor spinning due to line drop-out. Select [0]
Disable if this function is not required. When is
enabled 1-71 Start Delay and 1-72 Start Function
have no function. is active in VVC+ mode only.
obtainable by summing all references.
by summing all references.
Frequency if Asynchron motor is selected; ramp-up
time from 0 to 1-25 Motor Nominal Speed if PM
motor is selected
Frequency to 0 if Asynchron motor is selected;
ramp-down time from 1-25 Motor Nominal Speed
to 0 if PM motor is selected
MG18B222 - VLT® is a registered Danfoss trademark 2-5
Page 20
How to Program
VLT® HVAC Basic Drive Programming Guide
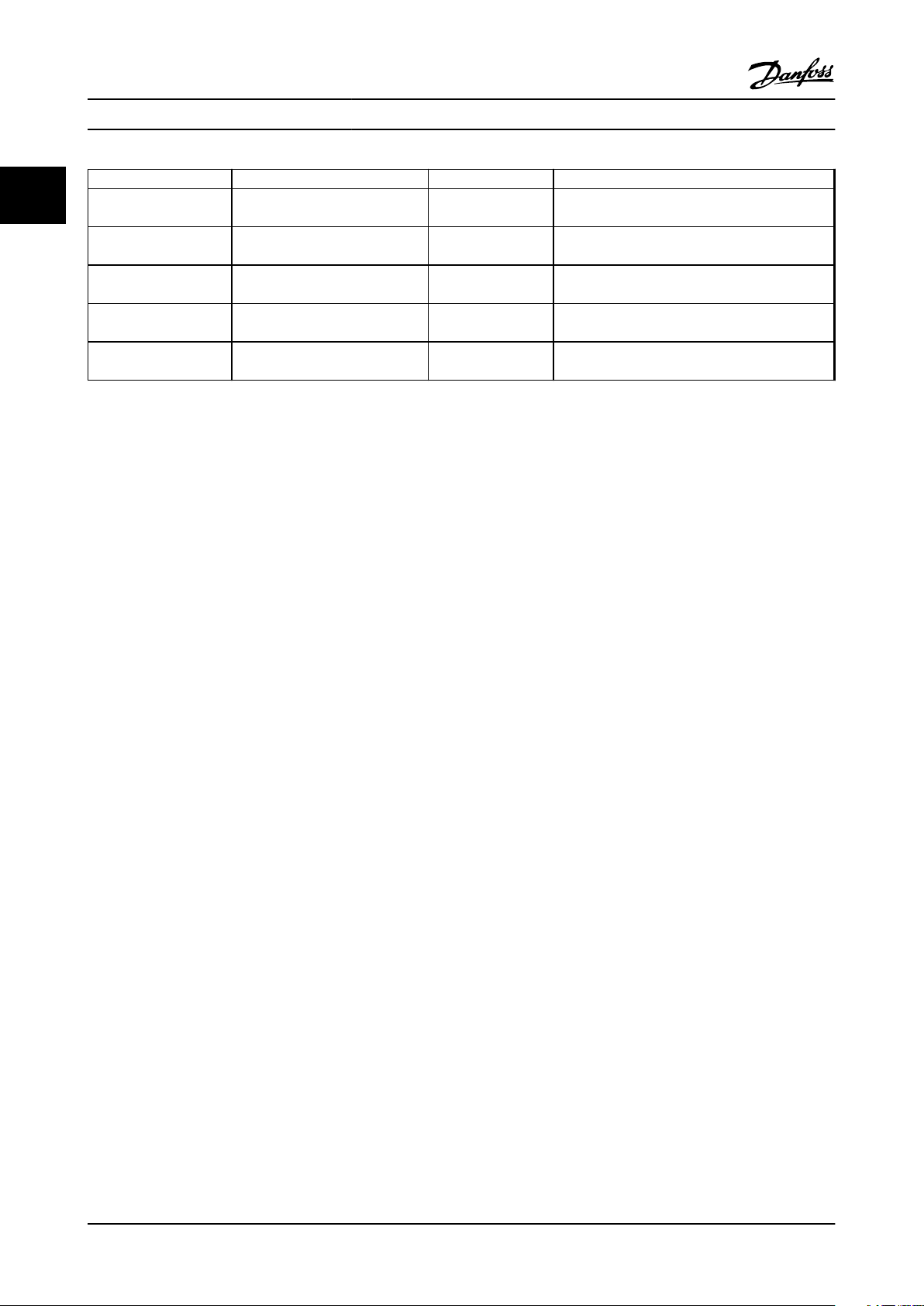
No & Name Range Default Function
22
6-10 Terminal 53 Low
Voltage
6-11 Terminal 53 High
Voltage
6-12 Terminal 53 Low
Current
6-13 Terminal 53 High
Current
6-19 Terminal 53 mode [0] Current
Table 2.4
0–10 V 0.07 V Enter the voltage that corresponds to the low
reference value.
0–10 V 10 V Enter the voltage that corresponds to the high
reference value.
0-20 mA 4 Enter the current that corresponds to the low
reference value.
0-20 mA 20 Enter the current that corresponds to the high
reference value.
1 Select if terminal 53 is used for current or voltage
[1] Voltage
input.
2-6 MG18B222 - VLT® is a registered Danfoss trademark
Page 21
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
27
28
29
30
31
32
33
34
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous Motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
0050
V
1-24 Motor current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0003
s
3-42 Ramp1 ramp-down time
0003
s
5
6
7
8
9
18
19
20
21
22
22a
23
24
25
26
35
36
37
38
39
40
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.10
1-20 Motor Power
1.10
kW
1-23 Motor frequency
0050
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
O
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Conguration Mode
[3]
Closed Loop
3
0-03 Regional Settings
[0]
Power kW/50 Hz
1
3-16 Reference Source 2
[0]
No Operation
22b
1-10 Motor Type
[0]
Asynchronous
4
2
[0]
200-240V/50Hz/Delta
1-30 Stator resistance
0.65
Ohms
1-25 Motor nominal speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-37 d-axis inductance(Ld)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 rpm
57
V
10
11
12
13
14
15
16
17
PM motor
1-39 Motor poles
8
%
04.66
Hz
MotorType = Asynchronous
MotorType = PM Motor
How to Program
Closed-loop Set-up Wizard
VLT® HVAC Basic Drive Programming Guide
2 2
Figure 2.6
MG18B222 - VLT® is a registered Danfoss trademark 2-7
Page 22
How to Program
VLT® HVAC Basic Drive Programming Guide
Closed-loop Set-up Wizard
22
No & Name Range Default Function
0-03 Regional Settings [0] International
[1] US
0-06 GridType [0] -[[132] please see start-up
wizard for open-loop
application
1-00 Configuration Mode [0] Open-loop
[3] Closed-loop
1-10 Motor Construction *[0] Motor construction
[1] PM, non-salient SPM
1-20 Motor Power
1-22 Motor Voltage 50.0–1,000.0 V Size related Enter motor voltage from nameplate data
1-23 Motor Frequency 20.0–400.0 Hz Size related Enter motor frequency from nameplate data
1-24 Motor Current 0.0–10,000.00 A Size related Enter motor current from nameplate data
1-25 Motor Nominal Speed 100.0–9,999.0 RPM Size related Enter motor nominal speed from nameplate
1-26 Motor Cont. Rated Torque 0.1–1,000.0 Size related This parameter is available only when
0.125–150 hp [0.09–110 kW] Size related Enter motor power from nameplate data
0
Size selected Select operating mode for restart upon
reconnection of the adjustable frequency
drive to AC line voltage after power-down.
0 Change this parameter to Closed-loop
[0] Asynchron Setting the parameter value might change
these parameters:
1-01 Motor Control Principle
1-03 Torque Characteristics
1-14 Damping Gain
1-15 Low Speed Filter Time Const.
1-16 High Speed Filter Time Const.
1-17 Voltage filter time const.
1-20 Motor Power [kW]
1-22 Motor Voltage
1-23 Motor Frequency
1-25 Motor Nominal Speed
1-26 Motor Cont. Rated Torque
1-30 Stator Resistance (Rs)
1-33 Stator Leakage Reactance (X1)
1-35 Main Reactance (Xh)
1-37 d-axis Inductance (Ld)
1-39 Motor Poles
1-40 Back EMF at 1000 RPM
1-66 Min. Current at Low Speed
1-72 Start Function
1-73 Flying Start
4-19 Max Output Frequency
4-58 Missing Motor Phase Function
data
1-10 Motor Construction Design is set to [1]
PM, non-salient SPM.
NOTE!
Changing this parameter will affect
settings of other parameters
1-29 Automatic Motor Adaption
(AMA)
1-30 Stator Resistance (Rs) 0.000–99.990 Size related Set the stator resistance value
1-37 d-axis Inductance (Ld) 0–1000 Size related Enter the value of the d-axis inductance.
2-8 MG18B222 - VLT® is a registered Danfoss trademark
Off Performing an AMA optimizes motor
performance.
Obtain the value from the permanent magnet
motor data sheet. The de-axis inductance
cannot be found by performing an AMA.
Page 23
How to Program
VLT® HVAC Basic Drive Programming Guide
No & Name Range Default Function
1-39 Motor Poles 2-100 4 Enter the number of motor poles
1-40 Back EMF at 1000 RPM 10–9,000 Size related Line-Line RMS back EMF voltage at 1000 RPM
1-73 Flying Start [0] Disabled
[1] Enabled
3-02 Minimum Reference -4,999-4,999 0 The minimum reference is the lowest value
3-03 Maximum Reference -4,999-4,999 50 The maximum reference is the highest value
3-10 Preset Reference -100–100% 0 Enter the setpoint.
3-41 Ramp 1 Ramp Up Time 0.05–3,600.0 s Size related Ramp-up time from 0 to rated 1-23 Motor
3-42 Ramp 1 Ramp Down Time 0.05–3,600.0 s Size related Ramp-down time from rated 1-23 Motor
4-12 Motor Speed Low Limit [Hz] 0.0–400 Hz 0.0 Hz Enter the minimum limit for low speed
4-14 Motor Speed High Limit [Hz] 0–400 Hz 65 Hz Enter the minimum limit for high speed
4-19 Max Output Frequency 0–400 Size related Enter the maximum output frequency value
6-29 Terminal 54 mode [0] Current
[1] Voltage
6-20 Terminal 54 Low Voltage 0–10 V 0.07 V Enter the voltage that corresponds to the low
6-21 Terminal 54 High Voltage 0–10 V 10 V Enter the voltage that corresponds to the low
6-22 Terminal 54 Low Current 0-20 mA 4 Enter the current that corresponds to the high
6-23 Terminal 54 High Current 0-20 mA 20 Enter the current that corresponds to the high
6-24 Terminal 54 Low Ref./Feedb.
Value
6-25 Terminal 54 High Ref./Feedb.
Value
6-26 Terminal 54 Filter Time
Constant
20-81 PI Normal/ Inverse Control [0] Normal
20-83 PI Start Speed [Hz] 0–200 Hz 0 Enter the motor speed to be attained as a
20-93 PI Proportional Gain 0–10 0.01 Enter the process controller proportional gain.
-4,999-4,999 0 Enter the feedback value that corresponds to
-4,999–4,999 50 Enter the feedback value that corresponds to
0–10 s 0.01 Enter the filter time constant.
[1] Inverse
0
1 Select if terminal 54 is used for current or
0
Select [1] Enable to enable the adjustable
frequency drive to catch a spinning motor,
e.g., in fan applications. When PM is selected,
Flying Start is enabled.
obtainable by summing all references.
obtainable by summing all references.
Frequency if Asynchron motor is selected;
ramp-up time from 0 to 1-25 Motor Nominal
Speed if PM motor is selected.
Frequency to 0 if Asynchron motor is selected;
ramp-down time from 1-25 Motor Nominal
Speed to 0 if PM motor is selected.
voltage input
reference value.
high reference value.
reference value.
reference value.
the voltage or current set in 6-20 Terminal 54
Low Voltage/6-22 Terminal 54 Low Current
the voltage or current set in 6-21 Terminal 54
High Voltage/6-23 Terminal 54 High Current
Select [0] Normal to set the process control to
increase the output speed when the process
error is positive. Select [1] Inverse to reduce
the output speed.
start signal for commencement of PI control.
Quick control is obtained at high amplification. However, if amplification is too great,
the process may become unstable
2 2
MG18B222 - VLT® is a registered Danfoss trademark 2-9
Page 24

How to Program
VLT® HVAC Basic Drive Programming Guide
No & Name Range Default Function
22
20-94 PI Integral Time 0.1–999.0 s 999.0 s Enter the process controller integral time.
Obtain quick control through a short integral
time, though if the integral time is too short,
the process becomes unstable. An excessively
long integral time disables the integral action.
Table 2.5
Motor Set-up
The Quick Menu Motor Set-up guides you through the
needed motor parameters.
No & Name Range Default Function
0-03 Regional
Settings
0-06 GridType [0] -[132]
1-10 Motor
Construction
1-20 Motor
Power
1-22 Motor
Voltage
1-23 Motor
Frequency
1-24 Motor
Current
1-25 Motor
Nominal
Speed
[0] International
[1] US
please see
start-up wizard
for open-loop
application
*[0] Motor
construction
[1] PM, nonsalient SPM
0.12–110 kW/
0.16–150 hp
50.0–1,000.0 V Size related Enter motor
20.0–400.0 Hz Size related Enter motor
0.01–10,000.00ASize related Enter motor
100.0–9,999.0
RPM
0
Size selected Select operating
mode for restart
upon
reconnection of
the drive to AC
line voltage after
power-down
[0]
Asynchron
Size related Enter motor
Size related Enter motor
power from
nameplate data
voltage from
nameplate data
frequency from
nameplate data
current from
nameplate data
nominal speed
from nameplate
data
No & Name Range Default Function
1-26 Motor
Cont. Rated
Torque
0.1–1,000.0 Size related This parameter is
available only
when 1-10 Motor
Construction
Design is set to
[1] PM, nonsalient SPM.
NOTE!
Changing this
parameter will
affect settings
of other
parameters
1-30 Stator
Resistance (Rs)
1-37 d-axis
Inductance
(Ld)
1-39 Motor
Poles
1-40 Back EMF
at 1000 RPM
1-73 Flying
Start
0.000–99.990 Size related Set the stator
resistance value
0–1000 Size related Enter the value
of the d-axis
inductance.
Obtain the value
from the
permanent
magnet motor
data sheet. The
de-axis
inductance
cannot be found
by performing an
AMA.
2-100 4 Enter the number
of motor poles
10–9,000 Size related Line-Line RMS
back EMF voltage
at 1000 RPM
[0] Disabled
[1] Enabled
0 Select Enable to
enable the
Adjustable
frequency drive
to catch a
spinning motor
2-10 MG18B222 - VLT® is a registered Danfoss trademark
Page 25
How to Program
VLT® HVAC Basic Drive Programming Guide
No & Name Range Default Function
3-41 Ramp 1
Ramp Up
Time
3-42 Ramp 1
Ramp Down
Time
4-12 Motor
Speed Low
Limit [Hz]
4-14 Motor
Speed High
Limit [Hz]
4-19 Max
Output
Frequency
Table 2.6
0.05–3,600.0 s Size related Ramp-up time
from 0 to rated
1-23 Motor
Frequency
0.05–3,600.0 s Size related Ramp-down time
from rated
1-23 Motor
Frequency to 0
0.0–400 Hz 0.0 Hz Enter the
minimum limit
for low speed
0.0–400 Hz 65 Enter the
maximum limit
for high speed
0–400 Size related Enter the
maximum output
frequency value
Changes Made
Changes Made lists all parameters changed since factory
setting. Only the changed parameters in current edit-setup
are listed in changes made.
If the parameter's value is changed back to the factory
settings from another different value, the parameter will
NOT be listed in Changes Made.
1. Press [Menu] key to enter the Quick Menu until
indicator in display is placed above Quick Menu.
2.
Press [▲] [▼] to select either FC 101 wizard,
closed-loop setup, motor setup or changes made,
then press [OK].
3.
Press [▲] [▼] to browse through the parameters
in the Quick Menu.
4. Press [OK] to select a parameter.
5.
Press [▲] [▼] to change the value of a parameter
setting.
6. Press [OK] to accept the change.
7. Press either [Back] twice to enter “Status”, or
press [Menu] once to enter “Main Menu”.
simplest and quickest access to the typical required
parameters.
The Main Menu accesses all parameters.
1. Press [Menu] key until indicator in display is
placed above “Main Menu”.
2.
Use [▲] [▼] to browse through the parameter
groups.
3. Press [OK] to select a parameter group.
4.
Use [▲] [▼] to browse through the parameters in
the specific group.
5. Press [OK] to select the parameter.
6.
Use [▲] [▼] to set/change the parameter value.
[Back] is used to go one level back.
2 2
2.3.4
Main Menu
[Main Menu] is used for programming all parameters. The
Main Menu parameters can be accessed immediately
unless a password has been created via 0-60 Main Menu
Password. For the majority of VLT HVAC Basic Drive
applications, it is not necessary to access the Main Menu
parameters but instead the Quick Menu provides the
MG18B222 - VLT® is a registered Danfoss trademark 2-11
Page 26
How to Program
VLT® HVAC Basic Drive Programming Guide
22
2.4 Quick Transfer of Parameter Settings
between Multiple Adjustable Frequency
Drives
Once the set-up of an adjustable frequency drive is
complete, Danfoss recommends that you store the data in
the LCP or on a PC via MCT-10 Setup Software tool.
Data storage in LCP.
WARNING
Stop the motor before performing this operation.
1.
Go to 0-50 LCP Copy
2. Press the [OK] key
3. Select “All to LCP”
4. Press the [OK] key
Connect the LCP to another adjustable frequency drive
and copy the parameter settings to this adjustable
frequency drive as well.
Data transfer from LCP to adjustable frequency drive:
NOTE!
Stop the motor before performing this operation.
1.
Go to 0-50 LCP Copy
2. Press the [OK] key
3. Select “All from LCP”.
4. Press the [OK] key
2.5
Read-out and Programming of Indexed
Parameters
Use as an example.
Choose the parameter, press [OK], and use [▲/▼] to scroll
through the indexed values. To change the parameter
value, select the indexed value and press [OK]. Change the
value by using the up/down keys. Press [OK] to accept the
new setting. Press [Cancel] to abort. Press [Back] to leave
the parameter.
2.6
Initialize the Adjustable Frequency
Drive to Default Settings in Two Ways
Recommended initialization (via 14-22 Operation Mode)
1.
Select 14-22 Operation Mode.
2. Press [OK].
3.
Select Initialization and Press [OK].
4. Cut off the line power supply and wait until the
display turns off.
5. Reconnect the line power supply - the adjustable
frequency drive is now reset. Except the following
parameters.
8-30 Protocol
8-31 Address
8-32 Baud Rate
8-33 Parity / Stop Bits
8-35 Minimum Response Delay
8-36 Maximum Response Delay
8-37 Maximum Inter-char delay
8-70 BACnet Device Instance
8-72 MS/TP Max Masters
8-73 MS/TP Max Info Frames
8-74 "I am" Service
8-75 Intialisation Password
15-00 Operating hours to 15-05 Over Volt's
15-03 Power Up's
15-04 Over Temp's
15-05 Over Volt's
15-30 Alarm Log: Error Code
15-4* Drive identification parameters
1-06 Clockwise Direction
Two-finger initialization:
1. Power off the adjustable frequency drive.
2. Press [OK] and [Menu].
3. Power up the adjustable frequency drive while
still pressing the keys above for 10 s.
4. The adjustable frequency drive is now reset,
except the following parameters:
2-12 MG18B222 - VLT® is a registered Danfoss trademark
Page 27

How to Program
15-00 Operating hours
15-03 Power Up's
15-04 Over Temp's
15-05 Over Volt's
15-4* Drive identification parameters
Initialization of parameters is confirmed by AL80 in the
display after the power cycle.
VLT® HVAC Basic Drive Programming Guide
2 2
MG18B222 - VLT® is a registered Danfoss trademark 2-13
Page 28

How to Program
VLT® HVAC Basic Drive Programming Guide
22
2-14 MG18B222 - VLT® is a registered Danfoss trademark
Page 29
Parameters
3 Parameters
VLT® HVAC Basic Drive Programming Guide
3.1 Main Menu - Operation and Display Group 0
Parameters related to the fundamental functions of the
adjustable frequency drive, function of the LCP buttons
and configuration of the LCP display.
3.1.1 0-0* Basic Settings
0-01 Language
Option: Function:
Defines the language to be used in the display.
[0] English
[1] Deutsch
[2] Francais
[3] Dansk
[4] Spanish
[5] Italiano
[28] Bras.port
[255] No Text
0-03 Regional Settings
Option: Function:
This parameter cannot be adjusted while the
motor is running. In order to meet the needs
for different default settings in different parts of
the world, 0-03 Regional Settings is implemented
in the adjustable frequency drive. The selected
setting influences the default setting of the
motor nominal frequency.
[0] Interna-
tional
[1] North
America
0-04 Operating State at Power-up
Option: Function:
[0] Resume Resumes operation of the adjustable frequency
Sets default value of 1-23 Motor Frequency [50
Hz].
Sets the default value of 1-23 Motor Frequency
to 60 Hz.
Select the operating mode upon reconnection of
the adjustable frequency drive to AC line voltage
after power-down when operating in Hand (local)
mode.
drive maintaining the same local reference and
the same start/stop condition (applied by [Hand
On]/[Off] on the LCP or Hand Start via a digital
0-04 Operating State at Power-up
Option: Function:
input as before the adjustable frequency drive
was powered down).
[1] Forced
stop,
ref=old
Uses saved reference [1] to stop the adjustable
frequency drive but at the same time retains the
local speed reference in memory prior to powerdown. After AC line voltage is reconnected and
after receiving a start command (using the LCP
[Hand On] button or Hand Start command via a
digital input) the adjustable frequency drive
restarts and operates at the retained speed
reference.
0-06 GridType
Option: Function:
Select the grid type of the supply
voltage/frequency.
NOTE!
Not all choices are supported in
all power sizes.
The IT grid is a line power source
where there are no connections to
ground.
Delta is a line power source where
the secondary part of the
transformer is delta connected and
one phase is connected to ground.
[0] 200-240V/50Hz/IT-grid
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
[10] 380-440V/50Hz/IT-grid
[11] 380-440V/50Hz/Delta
[12] 380-440V/50Hz
[20] 440-480V/50Hz/IT-grid
[21] 440-480V/50Hz/Delta
[22] 440-480V/50Hz
[30] 525-600V/50Hz/IT-grid
[31] 525-600V/50Hz/Delta
[32] 525-600V/50Hz
[100] 200-240V/60Hz/IT-grid
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[110] 380-440V/60Hz/IT-grid
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-1
Page 30

Parameters
VLT® HVAC Basic Drive Programming Guide
3
0-06 GridType
Option: Function:
[120] 440-480V/60Hz/IT-grid
[121] 440-480V/60Hz/Delta
[122] 440-480V/60Hz
[130] 525-600V/60Hz/IT-grid
[131] 525-600V/60Hz/Delta
[132] 525-600V/60Hz
0-07 Auto DC Braking
Option: Function:
Protective function against overvoltage at coast.
WARNING
Can cause PWM when coasted.
[0] Off Function is not active.
[1] On Function is active.
3.1.2 0-1* Define and set-up Operations
Define and control the individual parameter set-ups. Userdefined parameters and miscellaneous external inputs (e.g.,
bus, LCP, analog/digital inputs, feedback, etc.) control the
functionality of the adjustable frequency drive.
A complete set of all parameters controlling the adjustable
frequency drive is called a set-up. The adjustable frequency
drive contains 2 set-ups, Set-up 1 and Set-up 2.
Furthermore, a fixed set of factory settings can be copied
into one or more set-ups.
Some of the advantages of having more than one set-up
in the adjustable frequency drive are:
Run motor in one set-up (Active Set-up) while
•
updating parameters in another set-up (Edit Setup)
Connect various motors (one at a time) to the
•
adjustable frequency drive. Motor data for various
motors can be placed in different set-ups.
Rapidly change settings of adjustable frequency
•
drive and/or motor, for example, while the motor
is running. Ramp time or preset references) via
bus or digital inputs.
The Active Set-up can be set as Multi Set-up where the
active set-up is selected via input on a digital input
terminal and/or via the bus control word.
0-10 Active Set-up
Option: Function:
Select the set-up in which the adjustable
frequency drive is to operate.
Use 0-51 Set-up Copy to copy a set-up to one or all
other set-ups. To avoid conflicting settings of the
same parameter within two different set-ups, link
the set-ups together using 0-12 Link Setups. Stop
the adjustable frequency drive before switching
between set-ups, where parameters marked ‘not
changeable during operation’ have different
values.
Parameters which are ‘not changeable during
operation’ are marked FALSE in the parameter lists
in 5 Parameter Lists.
[1] Set-up 1 Set-up 1 is active.
[2] Set-up 2 Set-up 2 is active.
[9] Multi
Set-up
Is used for remote selection of set-ups using
digital inputs and the serial communication port.
This set-up uses the settings from 0-12 Link Setups.
0-11 Programming Set-up
Option: Function:
Select the set-up to be edited (i.e.,
programmed) during operation: either the
active set-up or the inactive set-up. The set-up
number being edited is displayed in the LCP
flashing.
[1] Set-up 1
[2] Set-up 2
[9] Active Set-up(i.e., the set-up in which the adjustable
Set-up 1 [1] to Set-up 2 [2] can be edited freely
during operation, independently of the active
set-up.
frequency drive is operating) can also be edited
during operation.
0-12 Link Setups
Option: Function:
The link ensures synchronizing of the “not
changeable during operation” parameter values
enabling shift from one set-up to another during
operation.
If the set-ups are not linked, a change between
them is not possible while the motor is running.
Thus the set-up change does not occur until the
motor is coasted.
[0] Not
linked
Leaves parameters unchanged in both set-ups
and cannot be changed while the motor is
running.
3-2 MG18B222 - VLT® is a registered Danfoss trademark
Page 31

0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Parameters
VLT® HVAC Basic Drive Programming Guide
0-12 Link Setups
Option: Function:
[20] Linked Copies “not changeable during operation”
3.1.3 0-3* LCP Custom Readout
It is possible to customize the display elements for various
purposes: *Custom Readout. Value proportional to speed
(linear, squared or cubed depending on unit selected in
0-30 Custom Readout Unit) *Display Text. Text string stored
in a parameter.
Custom Readout
The calculated value to be displayed is based on settings
in 0-30 Custom Readout Unit, 0-31 Custom Readout Min
Value (linear only), 0-32 Custom Readout Max Value,
4-14 Motor Speed High Limit [Hz] and actual speed.
Figure 3.1
The relation will depend on the type of unit selected in
0-30 Custom Readout Unit:
parameters from one set-up to the other, so they
are identical in both set-ups.
MG18B222 - VLT® is a registered Danfoss trademark 3-3
Unit Type
Dimensionless Linear
Speed
Flow, volume
Flow, mass
Velocity
Length
Temperature
Pressure Quadratic
Power Cubic
Table 3.1
Speed Relation
0-30 Custom Readout Unit
Option: Function:
Program a value to be shown in the
display of the LCP. The value has a linear,
squared or cubed relation to speed. This
relation depends on the unit selected (see
table above). The actual calculated value
can be read in 16-09 Custom Readout.
[0] None
[1] %
[5] PPM
[10] l/Min
[11] RPM
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m3/s
[24] m3/min
[25] m3/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] Degree Celsius
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m Wg
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
3
3
Page 32

Parameters
VLT® HVAC Basic Drive Programming Guide
3
0-30 Custom Readout Unit
Option: Function:
[124] CFM
[127] ft3/h
[140] ft/s
[141] ft/min
[160] Degree Fahr
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] hp
0-31 Custom Readout Min Value
Range: Function:
0 CustomReadoutUnit*
[ 0 - 999999.99
CustomReadoutUnit]
This parameter allows the
choice of the min. value of
the custom defined readout
(occurs at zero speed). It is
only possible to select a value
different to 0 when selecting
a linear unit in 0-30 Custom
Readout Unit. For quadratic
and cubic units, the minimum
value will be 0.
3.1.4 0-4* LCP
Enable, disable and password protect individual keys on
the LCP.
0-40 [Hand on] Key on LCP
Option: Function:
[0] Disabled
[1] Enabled [Hand on] key is enabled.
Select [0] Disabled to avoid accidental start of the
adjustable frequency drive in Hand mode.
0-42 [Auto on] Key on LCP
Option: Function:
[0] Disabled
[1] Enabled [Auto on] key is enabled.
Select [0] Disabled to avoid accidental start of the
adjustable frequency drive from LCP.
0-44 [Off/Reset] Key on LCP
Option: Function:
[0] Disabled
[1] Enabled
[7] Enable Reset Only
3.1.5 0-5* Copy/Save
0-32 Custom Readout Max Value
Range: Function:
100 CustomReadoutUnit*
[ 0.0 - 999999.99
CustomReadoutUnit]
This parameter sets the
max value to be shown
when the speed of the
motor has reached the set
value for 4-14 Motor Speed
High Limit [Hz].
0-37 Display Text 1
Range: Function:
[0 - 0 ] In this parameter it is possible to write an individual
text string to be read via serial communication.
Only used when running BACnet.
0-38 Display Text 2
Range: Function:
[0 - 0 ] In this parameter it is possible to write an individual
text string to be read via serial communication.
Only used when running BACnet.
0-39 Display Text 3
Range: Function:
[0 - 0 ] In this parameter it is possible to write an individual
text string to be read via serial communication.
Only used when running BACnet.
Copy parameter settings between set-ups and to/from the
LCP.
0-50 LCP Copy
Option: Function:
[0] No copy
[1] All to LCP Copies all parameters in all set-ups from the
adjustable frequency drive memory to the LCP
memory. For service purposes, it is
recommended to copy all parameters to the
LCP after commissioning.
[2] All from
LCP
[3] Size indep.
from LCP
Copies all parameters in all set-ups from the
LCP memory to the adjustable frequency drive
memory.
Copies only the parameters that are
independent of the motor size. The latter
selection can be used to program several
adjustable frequency drives with the same
function without disturbing motor data that are
already set.
3-4 MG18B222 - VLT® is a registered Danfoss trademark
Page 33

Parameters
0-51 Set-up Copy
Option: Function:
[0] No copy No function
[1] Copy from setup1Copy from set-up 1 to set-up 2.
[2] Copy from setup2Copy from set-up 2 to set-up 1.
VLT® HVAC Basic Drive Programming Guide
3
3
[9] Copy from
Factory setup
Copy factory setting to programming setup (chosen in 0-11 Programming Set-up).
3.1.6 0-6* Password
0-60 Main Menu Password
Range: Function:
0 * [0 - 999 ] Define the password for access to the main
menu via the [Main Menu] key. Setting value to
0 disables the password function.
MG18B222 - VLT® is a registered Danfoss trademark 3-5
Page 34
Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.2 Main Menu - Load and Motor - Group 1
Parameters related to the motor nameplate load compensations and application load type.
3.2.1 1-0* General Settings
1-00 Configuration Mode
Option: Function:
[0] Open
Loop
[3] Closed
Loop
Motor speed is determined by applying a speed
reference or by setting desired speed when in
Hand mode.
Open-loop is also used if the adjustable frequency
drive is part of a closed-loop control system
based on an external PI controller providing a
speed reference signal as output.
Motor Speed will be determined by a reference
from the built-in PI controller varying the motor
speed as of a closed-loop control process (e.g.,
constant pressure or flow). The PI controller must
be configured in parameter group20-**.
NOTE!
This parameter cannot be changed when the motor is
running.
NOTE!
When set for Closed-Loop, the commands Reversing and
Start Reversing will not reverse the direction of the motor.
1-03 Torque Characteristics
Option: Function:
(e.g., multiple condenser fans or cooling tower
fans). Provides a voltage which is optimized for a
squared torque load characteristic of the motor.
[3] Auto
Energy
Optim.
For optimum energy efficient speed control of
centrifugal pumps and fans. Provides a voltage
which is optimized for a squared torque load
characteristic of the motor but in addition the
AEO feature will adapt the voltage exactly to the
current load situation, thereby reducing energy
consumption and audible noise from the motor.
1-06 Clockwise Direction
This parameter defines the term “Clockwise” corresponding to
the LCP direction arrow. Used for easy change of direction of
shaft rotation without swapping motor wires.
Option: Function:
[0] Normal Motor shaft will turn in clockwise
direction when adjustable frequency
drive is connected U -> U; V -> V, and
W -> W to motor.
[1] Inverse Motor shaft will turn in counter-
clockwise direction when adjustable
frequency drive is connected U -> U; V
-> V, and W -> W to motor.
This parameter cannot be changed while the motor is
running.
1-01 Motor Control Principle
Option: Function:
[0] U/f Is used for parallel connected motors and/or special
motor applications. The U/f settings are set in 1-55 U/f
Characteristic - U and 1-56 U/f Characteristic - F.
NOTE!
When running U/f control slip and load compensations are not included.
[1] VVC+ Normal running mode, including slip and load
compensations.
NOTE!
If 1-10 = [1] PM, only VVC+ option is available.
1-03 Torque Characteristics
Option: Function:
[1] Variable
Torque
For speed control of centrifugal pumps and fans.
Also to be used when controlling more than one
motor from the same adjustable frequency drive
1-10 - 1-13 Motor Selection
3.2.2
NOTE!
This parameter group cannot be adjusted while the motor
is running.
The following parameters are active ('x') depending on the
setting of 1-10 Motor Construction
1-10 Motor Construction [0] Asynchron [1] PM
Motor non-
salient
1-00 Configuration Mode x x
1-03 Torque Characteristics x
1-06 Clockwise Direction x x
1-14 Damping Gain x
1-15 Low Speed Filter Time
Const.
1-16 High Speed Filter Time
Const.
1-17 Voltage filter time const. x
x
x
3-6 MG18B222 - VLT® is a registered Danfoss trademark
Page 35

Parameters
VLT® HVAC Basic Drive Programming Guide
1-10 Motor Construction [0] Asynchron [1] PM
Motor non-
salient
1-20 Motor Power [kW] x
1-22 Motor Voltage x
1-23 Motor Frequency x
1-24 Motor Current x x
1-25 Motor Nominal Speed x x
1-26 Motor Cont. Rated Torque x x
1-29 Automatic Motor Adaption
(AMA)
1-30 Stator Resistance (Rs) x x
1-33 Stator Leakage Reactance
(X1)
1-35 Main Reactance (Xh) x
1-37 d-axis Inductance (Ld) x
1-39 Motor Poles x x
1-40 Back EMF at 1000 RPM x
1-52 Min Speed Normal
Magnetizing [Hz]
1-60 Low Speed Load Compensation
1-61 High Speed Load Compensation
1-62 Slip Compensation x
1-63 Slip Compensation Time
Constant
1-64 Resonance Dampening x
1-65 Resonance Dampening Time
Constant
1-66 Min. Current at Low Speed x
1-71 Start Delay x x
1-72 Start Function x x
1-73 Flying Start x x
1-80 Function at Stop x x
1-82 Min Speed for Function at
Stop [Hz]
1-90 Motor Thermal Protection x x
1-93 Thermistor Source x x
2-00 DC Hold Current x
2-01 DC Brake Current x
2-02 DC Braking Time x
2-04 DC Brake Cut-in Speed [Hz] x
2-06 DC Brake Current x
2-07 DC Braking Time x
2-10 Brake Function x x
2-16 AC brake Max. Current x
2-17 Over-voltage Control x
4-10 Motor Speed Direction x x
4-12 Motor Speed Low Limit [Hz] x x
4-14 Motor Speed High Limit [Hz] x x
4-18 Current Limit x x
x x
x
x
x
x
x
x
x x
1-10 Motor Construction [0] Asynchron [1] PM
Motor non-
salient
4-19 Max Output Frequency x x
4-58 Missing Motor Phase
Function
14-40 VT Level x
14-41 AEO Minimum Magnetization
Table 3.2
x
x
3.2.3 1-10 Motor Construction
1-10 Motor Construction
Select the motor construction type.
Option: Function:
[0] Asynchron For asynchronous motors.
[1] PM, non salient
SPM
For permanent magnet (PM) motors.
Note that PM motors are divided into
two groups, with either surface mounted
(non-salient) or interior (salient) magnets.
NOTE!
Only available up to 30 hp [22 kW]
motor power.
NOTE!
Motor construction can either be asynchronous or
permanent magnet (PM) motor.
3.2.4
1-14 - 1-17 VVC
The default control parameters for VVC
core are optimized for HVAC applications and inertia load
in range of 50>Jl/Jm>5, were Jl is load inertia from the
application and Jm is machine inertia.
For low inertia applications Jl/Jm,<5 it is recommended
that 1-17 Voltage filter time const. be increased with a
factor of 5‒10 and in some cases 1-14 Damping Gain
should also be reduced to improve performance and
stability.
For High inertia applications Jl/Jm>>50, it is recommended
that 1-15 Low Speed Filter Time Const., 1-16 High Speed Filter
Time Const. and1-14 Damping Gain be increased to improve
performance and stability.
For high load at low speed [<30% of rated speed] it is
recommended that 1-17 Voltage filter time const. is
increased due to non-linearity in the inverter at low speed.
1-14 Damping Gain
Range: Function:
120 %* [ 0 - 250 %]
plus
PM
plus
PMSM control
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-7
Page 36

Parameters
VLT® HVAC Basic Drive Programming Guide
3
1-15 Low Speed Filter Time Const
Range: Function:
Size
related*
[ 0.01 - 20s]High pass-filter damping time
constant determines the response
time to load steps. Obtain quick
control through a short damping time
constant. However, if this value is too
short, the control becomes unstable.
This time constant is used below 10%
rated speed.
1-16 High Speed Filter Time Const
Range: Function:
Size
related*
[ 0.01 - 20s]High pass-filter damping time
constant determines the response
time to load steps. Obtain quick
control through a short damping time
constant. However, if this value is too
short, the control becomes unstable.
This time constant is used above 10%
rated speed.
1-17 Voltage filter time const
Range: Function:
Size
related*
[ 0.01 - 1s]Machine Supply Voltage Filter Time
constant is used for reducing the
influence of high frequency ripples and
system resonances in the calculation of
machine supply voltage. Without this
filter, the ripples in the currents can
distort the calculated voltage and
affects the stability of the system.
1-20 Motor Power
Range: Function:
[9] 1.5 kW - 2 hp
[10] 2.2 kW - 3 hp
[11] 3 kW - 4 hp
[12] 3.7 kW - 5 hp
[13] 4 kW - 5.4 hp
[14] 5.5 kW - 7.5 hp
[15] 7.5 kW - 10 hp
[16] 11 kW - 15 hp
[17] 15 kW - 20 hp
[18] 18.5 kW - 25 hp
[19] 22 kW - 30 hp
[20] 30 kW - 40 hp
[21] 37 kW - 50 hp
[22] 45 kW - 60 hp
[23] 55 kW - 75 hp
[24] 75 kW - 100 hp
[25] 90 kW - 120 hp
[26] 110 kW - 150 hp
1-22 Motor Voltage
Range: Function:
Size
related*
[ 50.0 -
1000.0 V]
Enter the nominal motor voltage
according to the motor nameplate
data. The default value corresponds to
the nominal rated output of the unit.
This parameter cannot be adjusted
while the motor is running.
3.2.5 1-2* Motor Data
Parameter group 1-2* comprises input data from the
nameplate on the connected motor.
NOTE!
Changing the value of these parameters affects the setting
of other parameters.
1-20 Motor Power
Range: Function:
[2] 0.12 kW - 0.16 hp
[3] 0.18 kW - 0.25 hp
[4] 0.25 kW - 0.33 hp
[5] 0.37 kW - 0.5 hp
[6] 0.55 kW - 0.75 hp
[7] 0.75 kW - 1 hp
[8] 1.1 kW - 1 hp
3-8 MG18B222 - VLT® is a registered Danfoss trademark
Page 37

Parameters
VLT® HVAC Basic Drive Programming Guide
1-23 Motor Frequency
Range: Function:
Size
related*
[ 20 400 Hz]
Select the motor frequency value from the
motor nameplate data. For 87 Hz
operation with 230/400 V motors, set the
nameplate data for 230 V/50 Hz. Adapt
4-14 Motor Speed High Limit [Hz] and
3-03 Maximum Reference to the 87 Hz
application.
NOTE!
This parameter cannot be adjusted while the motor is
running.
1-24 Motor Current
Range: Function:
Size related* [ 0.01 - 26.0A]Enter the nominal motor current
value from the motor nameplate
data. This data is used for calculating
motor torque, motor thermal
protection, etc.
NOTE!
This parameter cannot be adjusted while the motor is
running.
1-25 Motor Nominal Speed
Range: Function:
Size related* [100 - 60000
RPM]
Enter the nominal motor speed
value from the motor nameplate
data. This data is used for
calculating automatic motor
compensations.
1-29 Automatic Motor Adaption (AMA)
Option: Function:
The AMA function optimizes dynamic motor
performance by automatically optimizing the
advanced motor 1-30 Stator Resistance (Rs) to
1-35 Main Reactance (Xh) while the motor is
stationary.
[0] Off No function
[1] Enable
Complete
AMA
Performs AMA of the stator resistance RS, the
stator leakage reactance X1 and the main
reactance Xh.
NOTE!
Please note that terminal 27 Digital Input
(5-12 Terminal 27 Digital Input) has coast
inverse as default setting. This means
that AMA cannot be performed if there is
no 24 V to terminal 27; therefore,
connect terminal 12 to terminal 27.
[2] Enable
Reduced
AMA
Performs a reduced AMA of the stator
resistance Rs in the system only. Select this
option if an LC filter is used between the
adjustable frequency drive and the motor.
NOTE!
When 1-10 Motor Construction is set to [1] PM, non-salient
SPM, the only option available is [2] Enable Reduced AMA.
Activate the AMA function by pressing [Hand on] after
selecting [1] or [2]. After a normal sequence, the display
will read: “Press [OK] to finish AMA”. After pressing the
[OK] key, the adjustable frequency drive is ready for
operation.
3
3
NOTE!
This parameter cannot be adjusted while the motor is
running.
1-26 Motor Cont. Rated Torque
Range: Function:
Size related* [0.1 - 10000.0
Nm]
This parameter is available only
when 1-10 Motor Construction is
set to [1] PM, non-salient SPM.
NOTE!
Changing this parameter will affect settings of other
parameters.
MG18B222 - VLT® is a registered Danfoss trademark 3-9
NOTE!
For the best adaptation of the adjustable
•
frequency drive, run AMA on a cold motor.
AMA cannot be performed while the motor is
•
running
AMA can not be performed on a motor with a
•
bigger power rating than the adjustable
frequency drive, e.g., when a 7.5 hp [5.5 kW]
motor is connected to a 5 hp [4 kW] adjustable
frequency drive.
NOTE!
Avoid generating external torque during AMA.
Page 38

Parameters
VLT® HVAC Basic Drive Programming Guide
3
NOTE!
If one of the settings in parameter group 1-2* Motor Data
is changed, the advanced motor parameters,1-30 Stator
Resistance (Rs) to 1-39 Motor Poles, will return to default
setting.
This parameter cannot be adjusted while the motor is
running.
NOTE!
Full AMA should be run without filter only while reduced
AMA should be run with filter.
1-30 Stator Resistance (Rs)
Range: Function:
Size related* [ 0.0 -
99.99 Ohm]
Set the stator resistance value. Enter
the value from a motor data sheet or
perform an AMA on a cold motor.
This parameter cannot be adjusted
while the motor is running.
1-33 Stator Leakage Reactance (X1)
Range: Function:
Size related* [ 0.0 - 999.9 Ohm] Set stator leakage reactance of
motor.
Size related* [0.0–999.9 Ohm]
1-35 Main Reactance (Xh)
Range: Function:
Size
related*
[ 0.0 -
999.9
Ohm]
Set the main reactance of the motor using
one of these methods:
1. Run an AMA on a cold motor. The
adjustable frequency drive will
measure the value from the
motor.
2. Enter the Xh value manually.
Obtain the value from the motor
supplier.
3. Use the Xh default setting. The
adjustable frequency drive
establishes the setting on the
basis of the motor nameplate
data.
NOTE!
This parameter cannot be adjusted while running.
1-37 d-axis Inductance (Ld)
Range: Function:
Size related* [ 0 - 1000 ] Obtain the value from the permanent
magnet motor data sheet. The d-axis
inductance cannot be found by
performing an AMA.
1-39 Motor Poles
Range: Function:
4 * [2 -
100 ]
Enter the number of motor poles.
Poles ~nn@ 50 Hz ~nn@ 60 Hz
2 2,700–3,000 3,250–3,600
4 1,350–1,500 1,625–1,800
6 700–1,000 840–1,200
Table 3.3
The table shows the number of poles for normal
speed ranges of various motor types. Define
motors designed for other frequencies separately.
The motor pole value is always an even number,
because it refers to the total number of poles, not
pairs of poles.
This parameter cannot be adjusted while the
motor is running.
1-40 Back EMF at 1000 RPM
Range: Function:
Size related* [ 10 - 9000 V] Line-Line RMS back EMF voltage at
1000 RPM
1-50 Motor Magnetisation at Zero Speed
Range: Function:
100 %* [ 0 - 300.0 %]
1-52 Min Speed Normal Magnetising [Hz]
Range: Function:
0 Hz* [ 0 - 10.0
Hz]
Set the required frequency for normal
magnetizing current.
Use this parameter along with 1-50 Motor
Magnetisation at Zero Speed. See drawing
for 1-50 Motor Magnetisation at Zero Speed.
1-55 U/f Characteristic - U
Range: Function:
Size related* [0 - 999 V] Enter voltage at each frequency point
to manually form a U/f characteristic
matching motor. Frequency points are
defined in 1-56 U/f Characteristic - F.
3-10 MG18B222 - VLT® is a registered Danfoss trademark
Page 39

Parameters
VLT® HVAC Basic Drive Programming Guide
1-56 U/f Characteristic - F
Range: Function:
Size
related*
[ 0 -
400.0
Hz]
Enter frequency points to manually form a U/f
characteristic matching motor. Voltage at
each point is defined in 1-55 U/f Characteristic
- U.
Make a U/f characteristic based on 6 definable
voltages and frequencies, see figure below.
Simplify U/f characteristics by merging 2 or
more points (voltages and frequencies),
respectively, are set equal.
Figure 3.3
1-60 Low Speed Load Compensation
Range: Function:
100 %* [0 - 199 %]
1-61 High Speed Load Compensation
Range: Function:
100 %* [0 - 199 %]
1-62 Slip Compensation
Range: Function:
0 %* [ -400 - 399.0 %]
1-63 Slip Compensation Time Constant
Range: Function:
0.1 s* [ 0.05 - 5.00s]Enter the slip compensation reaction
speed. A high value results in slow
reaction, and a low value results in quick
reaction. If low-frequency resonance
problems arise, use a longer time setting.
1-66 Min. Current at Low Speed
Range: Function:
50 %* [ 0 - 120 %]
1-71 Start Delay
Range: Function:
Function. Set the start delay time until
acceleration is to begin.
1-72 Start Function
Option: Function:
[0] DC Hold/delay
time
[2] Coast/delay time Inverter is coasted during start delay time
Motor is energized with 2-00 DC Hold/
Motor Preheat Current during start delay
time.
(inverter off).
1-73 Flying Start
Option: Function:
This function makes it possible to catch a motor
that is spinning freely due to a line drop-out.
Flying start will search in clockwise direction only.
If not successful, a DC brake will be activated. If PM
motor is selected, Parking will be carried out if the
speed is below 2.5%–5% of the time set in 2-07 DC
Braking Time.
[0] Disabled
[1] Enabled
Select [0] Disable if this function is not required
Select [1] Enable to enable the adjustable
frequency drive to “catch” and control a spinning
motor.
The parameter is always set to [1] Enable when
1-10 Motor Construction = [1] PM non-salient.
Important related parameters:
2-01 DC Brake Current
•
2-06 DC Brake Current
•
2-07 DC Braking Time
•
The Flystart function used for PM motors is based on an
initial speed estimation. The speed will always be
estimated as the first thing after an active start signal is
given.
If the speed estimate comes out below 2.5%–5% of
nominal speed, then the Parking function will be engaged
(see 2-06 DC Brake Current and 2-07 DC Braking Time).
Otherwise, the adjustable frequency drive will catch the
motor at that speed and resume normal operation.
3
3
1-71 Start Delay
Range: Function:
0 s* [0 - 10 s] This parameter enables a delay of the starting
time. The adjustable frequency drive begins
with the start function selected in 1-72 Start
MG18B222 - VLT® is a registered Danfoss trademark 3-11
Current limitations of the Flystart Principle used for PM
motors:
The speed range is up to 100% Nominal Speed or
•
the field weakening speed (which ever is lowest).
Limited to power size up to 30 hp [22 kW].
•
Page 40

Parameters
VLT® HVAC Basic Drive Programming Guide
3
For high inertia applications (i.e., where the load
•
inertia is more than 30 times larger than the
motor inertia).
1-80 Function at Stop
Option: Function:
Select the drive function after a stop command
or after the speed is ramped down to the
settings in 1-82 Min Speed for Function at Stop
[Hz]. Function at Stop.
Available selections depend on 1-10 Motor
Construction:
[0] Asynchron:
[0] coast
[1] DC hold
[1] PM non-salient:
[0] coast
[0] Coast Leaves motor in free mode.
[1] DC hold /
Motor
Preheat
Energizes motor with a DC holding current (see
2-00 DC Hold/Motor Preheat Current).
1-82 Min Speed for Function at Stop [Hz]
Range: Function:
0 Hz* [0 - 20 Hz] Set the output frequency at which to
activate 1-80 Function at Stop.
1-90 Motor Thermal Protection
Option: Function:
[3] ETR warning1If the calculated upper limit of the motor
temperature range is exceeded, a warning is
issued.
[4] ETR trip 1 If 90% of the calculated upper limit of the
motor temperature range is exceeded, an
alarm is issued and the adjustable frequency
drive trips.
1-93 Thermistor Source
Option: Function:
Select the input to which the thermistor
(PTC sensor) should be connected. When
using an analog input, the same analog can
not be used as a reference in 3-15 Reference
Resource 1 to 3-17 Reference Resource 3.
[0] None
[1] Analog input
AI53
[6] Digital input
DI29
NOTE!
This parameter cannot be adjusted while the motor is
running.
1-90 Motor Thermal Protection
Option: Function:
Using ETR (Electronic Thermal Relay) the
motor temperature is calculated based on
frequency, speed and time. Danfoss
recommends using the ETR function, if a
thermistor is not present.
NOTE!
ETR calculation is based on motor data
from group 1-2*.
[0] No protection Disables temperature monitoring.
[1] Thermistor
warning
[2] Thermistor
trip
A thermistor connected to either digital or
analog input gives a warning if upper limit of
motor temperature range is exceeded, (see
1-93 Thermistor Source).
A thermistor connected to either digital or
analog input gives an alarm and makes the
adjustable frequency drive trip if upper limit
of motor temperature range is exceeded, (see
1-93 Thermistor Source).
NOTE!
Digital input should be set to [0] PNP - Active at 24 V in
5-03 Digital Input 29 Mode.
3-12 MG18B222 - VLT® is a registered Danfoss trademark
Page 41

Parameters
VLT® HVAC Basic Drive Programming Guide
3.3 Main Menu - Brakes - Group 2
2-00 DC Hold/Motor Preheat Current
Range: Function:
50 %* [0 - 160 %]
NOTE!
The maximum value depends on the rated motor current.
Avoid 100% current for too long. It may damage the
motor.
2-01 DC Brake Current
Range: Function:
50 %* [0 - 150 %]
NOTE!
The maximum value depends on the rated motor current.
Avoid 100% current for too long. It may damage the
motor.
2-02 DC Braking Time
Range: Function:
10 s* [0 - 60 s] Set the duration of the DC braking current set
in 2-01 DC Brake Current, once activated.
2-06 Parking Current
Range: Function:
100 %* [0 - 150 %]
NOTE!
2-06 DC Brake Current and 2-07 DC Braking Time: Only
active if PM motor construction is selected in 1-10 Motor
Construction
2-07 DC Braking Time
Range: Function:
3.0 s* [0.1 - 60.0 s] Set the duration of the parking current
time set in 2-06 DC Brake Current. Active in
connection with 1-73 Flying Start.
3.3.1 2-1* Overvoltage Control
Parameter group for selecting dynamic braking parameters.
2-10 Brake Function
Option: Function:
[0] Off No brake resistor installed.
[2] AC brake AC brake is active.
3
3
2-04 DC Brake Cut In Speed
Range: Function:
0 Hz* [ 0 - 400
Hz]
This parameter is for setting the DC brake
cut-in speed at which the DC braking
current 2-01 DC Brake Current is to be
active, in connection with a stop command.
NOTE!
2-01, 2-02 and 2-04 will not have effect when 1-10 Motor
Construction = [1] PM, non-salient SPM.
2-17 Over-voltage Control
Option: Function:
Select whether to enable OVC, which reduces the
risk of drive trip due to overvoltage on the DC link
caused by generative power from load.
[0] Disabled No OVC required.
[2] Enabled Activates OVC.
NOTE!
The ramp time is automatically adjusted to avoid tripping
of the Adjustable frequency drive.
NOTE!
2-17 Over-voltage Control cannot be enabled when
1-10 Motor Construction = [1] PM, non-salient SPM.
MG18B222 - VLT® is a registered Danfoss trademark 3-13
Page 42

P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Parameters
VLT® HVAC Basic Drive Programming Guide
3.4 Main Menu - Reference/Ramps - Group
3
3
3.4.1 3-0* Reference Limits
Parameters for setting the reference unit, limits and ranges.
Please also see parameter group 20-0* for information on
settings in closed-loop.
3-02 Minimum Reference
Range: Function:
0 ReferenceFeedbackUnit*
[ -4999.0 - 4999
ReferenceFeedbackUnit]
The Minimum
Reference is the
lowest value
obtainable by
summing all
references.
3-03 Maximum Reference
Range: Function:
Size related* [ -4999.0 - 4999 ReferenceFeed-
backUnit]
3.4.2 3-1* References
3-10 Preset Reference
Range: Function:
0 %* [-100 - 100 %]
Figure 3.4
3-11 Jog Speed [Hz]
Range: Function:
5 Hz* [ 0 - 400.0
Hz]
The jog speed is a fixed output speed at
which the adjustable frequency drive is
running when the jog function is
activated.
See also 3-80 Jog Ramp Time.
3-14 Preset Relative Reference
Range: Function:
0 %* [-100 - 100 %]
3-14 MG18B222 - VLT® is a registered Danfoss trademark
3-15 Reference 1 Source
Option: Function:
Select the input to be used for the first
reference signal. 3-15 Reference 1 Source,
3-16 Reference 2 Source and
3-17 Reference 3 Source define up to
three different reference signals. The
sum of these reference signals defines
the actual reference. See also
1-93 Thermistor Source.
[0] No function
[1] Analog in 53
[2] Analog in 54
[7] Pulse input 29
[11] Local bus
reference
Page 43

t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Parameters
3-16 Reference 2 Source
Option: Function:
Select the input to be used for the
second reference signal. 3-15 Reference
1 Source, 3-16 Reference 2 Source and
3-17 Reference 3 Source define up to
three different reference signals. The
sum of these reference signals defines
the actual reference. See also
1-93 Thermistor Source.
[0] No function
[1] Analog in 53
[2] Analog in 54
[7] Pulse input 29
[11] Local bus
reference
3-17 Reference 3 Source
Option: Function:
Select the reference input to be used for
the third reference signal. 3-15 Reference 1
Source, 3-16 Reference 2 Source and
3-17 Reference 3 Source define up to three
different reference signals. The sum of
these reference signals defines the actual
reference.
This parameter cannot be adjusted while
the motor is running. The option [1] PM is
not accessible, if 3-17 Reference 3 Source =
[1] PM.
[0] No function
[1] Analog in 53
[2] Analog in 54
[7] Pulse input 29
[11] Local bus
reference
3.4.3 3-4* Ramp 1
VLT® HVAC Basic Drive Programming Guide
Figure 3.6
3-41 Ramp 1 Ramp Up Time
Range: Function:
Size
related*
[0.05 3600 s]
3-42 Ramp 1 Ramp Down Time
Range: Function:
Size
related*
[0.05 3600 s]
Enter acceleration time from 0 Hz to
1-23 Motor Frequency if Asynchronous
motor is selected. Enter acceleration time
from 0 RPM to 1-25 Motor Nominal
Speed if PM motor is selected. Choose a
ramp-up time such that the output
current does not exceed the current limit
in 4-18 Current Limit during ramping. See
ramp-down time in 3-42 Ramp 1 Ramp-
down Time.
Enter deceleration time from 1-23 Motor
Frequency to 0 Hz if Asynchronous motor
is selected. Enter deceleration time from
1-25 Motor Nominal Speed to 0 RPM if
PM motor is selected. Choose a ramp-up
time such that the output current does
not exceed the current limit in
4-18 Current Limit Current Limit during
ramping. See ramp-up time in 3-41 Ramp
1 Ramp-up Time.
3
3
Configure the ramp parameter, ramping times, for each of
the two ramps (parameter group 3-4* and parameter
group 3-5*).
MG18B222 - VLT® is a registered Danfoss trademark 3-15
3.4.4 3-5* Ramp 2
Choosing ramp parameters, see parameter group 3-4*.
3-51 Ramp 2 Ramp Up Time
Range: Function:
Size
related*
[0.05 3600 s]
Enter acceleration time from 0 Hz to
1-23 Motor Frequency if Asynchronous
motor is selected. Enter acceleration time
from 0 RPM to 1-25 Motor Nominal
Speed if PM motor is selected. Choose a
ramp-down time such that the output
Page 44

3
Parameters
3-51 Ramp 2 Ramp Up Time
Range: Function:
current does not exceed the current limit
in 4-18 Current Limit during ramping. See
ramp-down time in 3-52 Ramp 2 Ramp
Down Time.
3-52 Ramp 2 Ramp Down Time
Range: Function:
Size
related*
[0.05 3600 s]
Enter deceleration time from 1-23 Motor
Frequency to 0 Hz if Asynchronous motor
is selected. Enter deceleration time from
1-25 Motor Nominal Speed to 0 RPM if
PM motor is selected. Choose a rampdown time such that the output current
does not exceed the current limit in
4-18 Current Limit during ramping. See
ramp-up time in 3-51 Ramp 2 Ramp Up
Time.
VLT® HVAC Basic Drive Programming Guide
3.4.5 3-8* Other Ramps
3-80 Jog Ramp Time
Range: Function:
Size
related*
3-81 Quick Stop Ramp Time
Range: Function:
Size
related*
[0.05 3600 s]
[0.05 3600 s]
Enter the jog ramp time, i.e., the
acceleration/deceleration time between 0
Hz to 1-23 Motor Frequency. Ensure that
the resultant output current required for
the given jog ramp time does not exceed
the current limit in 4-18 Current Limit. The
jog ramp time starts upon activation of a
jog signal via the control panel, a selected
digital input, or the serial communication
port.
Enter the quick stop ramp time from the
1-23 Motor Frequency to 0 Hz. During
ramping, no overvoltage may arise in the
inverter, nor may the generated current
exceed the limit in 4-18 Current Limit is
activated by means of a signal on a
selected digital input or via the serial
communication port.
3-16 MG18B222 - VLT® is a registered Danfoss trademark
Page 45

Parameters
VLT® HVAC Basic Drive Programming Guide
3.5 Main Menu - Limits/Warnings - Group 4
3.5.1 4-1* Motor Limits
Define current and speed limits for the motor, and the
reaction of the adjustable frequency drive when the limits
are exceeded.
4-10 Motor Speed Direction
Option: Function:
[0] Clockwise Only operation in a clockwise direction will
be allowed.
[2] Both directions Operation in both a clockwise and counter-
clockwise direction will be allowed.
NOTE!
The setting in 4-10 Motor Speed Direction has impact on
1-73 Flying Start.
4-12 Motor Speed Low Limit [Hz]
Range: Function:
0 Hz* [ 0 - 400.0
Hz]
Enter the minimum limit for motor speed.
The Motor Speed Low Limit can be set to
correspond to the minimum output
frequency of the motor shaft. The Speed
Low Limit must not exceed the setting in
4-14 Motor Speed High Limit [Hz].
4-14 Motor Speed High Limit [Hz]
Range: Function:
65 Hz* [ 0.1 -
400.0 Hz]
Enter the maximum limit for motor speed.
4-14 Motor Speed High Limit [Hz] can be set
to match the manufacturer's recommended
max. motor speed. The Motor Speed High
Limit must exceed the value in 4-12 Motor
Speed Low Limit [Hz].
NOTE!
Max. output frequency cannot exceed 10% of the inverter
switching frequency (14-01 Switching Frequency).
NOTE!
Motor Speed High Limit cannot be set higher than
4-19 Max Output Frequency.
4-18 Current Limit
Range: Function:
110 %* [0 - 300 %]
3.5.2 4-4* Adjustable Warnings 2
4-40 Warning Frequency Low
Range: Function:
0.00
Hz*
[0.0 HzDepends on the
value of 4-41
Warning
Frequency High]
Use this parameter to set a lower limit
for the frequency range.
When the motor speed falls below this
limit, the display reads SPEED LOW.
Warning bit 10 is set in 16-94 Ext.
Status Word. Output Relay can be
configured to indicate this warning.
LCP warning light does not light when
this parameter set limit is reached.
4-41 Warning Frequency High
Range: Function:
400.0
Hz*
[Depends on
the value of 4-40
Warning
Frequency Low -
400.0 Hz]
Use this parameter to set a higher
limit for the frequency range.
When the motor speed exceeds this
limit, the display reads SPEED HIGH.
Warning bit 9 is set in 16-94 Ext.
Status Word. Output Relay can be
configured to indicate this warning.
LCP warning light does not light
when this parameter set limit is
reached.
3.5.3 4-5* Adj. Warnings
Define adjustable warning limits for current. Warnings are
shown on the display, programmed output or serial bus.
4-50 Warning Current Low
Range: Function:
0 A* [ 0 - 194.0A]Enter the I
falls below this limit, a bit in the drive's status
word will be set. This value can also be
programmed to produce a signal on the
digital output or the relay output.
4-51 Warning Current High
Range: Function:
Size
related*
[ 0.0 -
194.0 A]
value. When the motor current
LOW
Enter the I
current exceeds this limit, a bit in the
drive's status word will be set. This
value can also be programmed to
produce a signal on the digital output
or the relay output.
value. When the motor
HIGH
3
3
4-19 Max Output Frequency
Range: Function:
Size related* [ 0.0 - 400 Hz]
MG18B222 - VLT® is a registered Danfoss trademark 3-17
Page 46

Parameters
VLT® HVAC Basic Drive Programming Guide
3
4-54 Warning Reference Low
Range: Function:
-999999.999 * [ -999999.999 par. 4-55 ]
Enter the lower reference limit.
When the actual reference falls
below this limit, the display
indicates Ref
outputs can be programmed to
produce a status signal on
terminal 27 or 29 ( only) and on
relay output 01 or 02 ( only).
4-55 Warning Reference High
Range: Function:
4999.000* [Depend on
the value of
4-54 Warning
Reference Low-
4999.000]
Use this parameter to set a higher
limit for the reference range.
When the actual reference exceeds
this limit, the display reads
Reference High. Warning bit 19 is
set in 16-94 Ext. Status Word. Output
Relay can be configured to indicate
this warning. LCP warning light does
not light when this parameter set
limit is reached.
4-56 Warning Feedback Low
Range: Function:
-4,999.000* [-4,999.000 -
Depends on the
value of 4-57
Warning
Feedback High]
Use this parameter to set a lower
limit for the feedback range.
When the feedback falls below
this limit, the display reads
Feedback Low. Warning bit 6 is
set in 16-94 Ext. Status Word.
Output Relay can be configured
to indicate this warning. LCP
warning light does not light when
this parameter set limit is reached.
4-57 Warning Feedback High
Range: Function:
4,999.000* [Depends on
the value of 4-56
Warning
Feedback Low
-4,999.000]
Use this parameter to set a higher
limit for the feedback range.
When the feedback exceeds this
limit, the display reads Feedback
High. Warning bit 5 is set in 16-94
Ext. Status Word. Output Relay can
be configured to indicate this
warning. LCP warning light does
not light when this parameter set
limit is reached.
. The signal
LOW
4-58 Missing Motor Phase Function
Option: Function:
Select On, to display an alarm in the event of a missing
motor phase. Select Off, for no missing motor phase
alarm. However the On setting is strongly
recommended to avoid motor damage.
[0] Off No alarm is displayed if a missing motor phase occurs.
[1] On An alarm is displayed if a missing motor phase occurs.
NOTE!
This parameter cannot be adjusted while the motor is
running. Missing Motor phase Function is always disabled
with PM.
3.5.4 4-6* Speed Bypass
Define the speed bypass areas for the ramps. Some
systems call for avoiding certain output frequencies or
speeds due to resonance problems in the system. Three
frequency ranges can be avoided.
4-61 Bypass Speed From [Hz]
Array [3]
Range: Function:
0 Hz* [0 - 400 Hz] Some systems call for avoiding certain
output speeds due to resonance problems
in the system. Enter the lower limits of the
speeds to be avoided.
4-63 Bypass Speed To [Hz]
Array [3]
Range: Function:
0 Hz* [0 - 400 Hz] Some systems call for avoiding certain
output speeds due to resonance problems
in the system. Enter the upper limits of the
speeds to be avoided.
3-18 MG18B222 - VLT® is a registered Danfoss trademark
Page 47

Parameters
VLT® HVAC Basic Drive Programming Guide
3.5.5 Semi-Automatic Bypass Speed Set-up
The Semi-Automatic Bypass Speed Set-up can be used to
facilitate the programming of the frequencies to be
skipped due to resonances in the system.
The following process is to be carried out:
1. Stop the motor.
NOTE!
Smaller adjustable frequency drives have a ramp time of
three seconds which can make it difficult to set the bypass
speeds. Adjust the ramp times in 3-41 Ramp 1 Ramp Up
Time and 3-42 Ramp 1 Ramp Down Time.
2.
Select [1] Enabled in 4-64 Semi-Auto Bypass Set-up.
3. Press [Hand On] to start the search for frequency
bands causing resonances. The motor will ramp
up according to the ramp set.
NOTE!
Terminal 27 Digital Input 5-12 Terminal 27 Digital Input has
coast inverse as default setting. This means that [Hand On]
will not start the motor if there is no 24 V to terminal 27,
so connect terminal 12 to terminal 27.
4. When sweeping through a resonance band, press
[OK] on the LCP when leaving the band. The
actual frequency will be stored as the first
element in 4-63 Bypass Speed To [Hz] (array).
Repeat this for each resonance band identified at
the ramp-up (maximum three can be adjusted).
5. When maximum speed has been reached, the
motor will automatically begin to ramp down.
Repeat the above procedure when speed is
leaving the resonance bands during the
deceleration. The actual frequencies registered
when pressing [OK] will be stored in 4-61 Bypass
Speed From [Hz].
6. When the motor has ramped down to stop, press
[OK]. The 4-64 Semi-Auto Bypass Set-up will
automatically reset to Off. The adjustable
frequency drive will stay in Hand On mode until
[Off] or [Auto On] is pressed.
If the frequencies for a certain resonance band are not
registered in the right order (frequency values stored in By
Pass Speed To are higher than those in By Pass Speed From)
or if they do not have the same numbers of registrations
for the By Pass From and By Pass To, all registrations will be
canceled and the following message is displayed: Collected
speed areas overlapping or not completely determined. Press
[Cancel] to abort.
4-64 Semi-Auto Bypass Set-up
Option: Function:
[0] Off
[1] Enable
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-19
Page 48

Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.6 Main Menu - Digital In/Out - Group 5
3.6.1 5-0* Digital I/O Mode
Parameters for configuring the input and output using
NPN and PNP.
These parameters cannot be adjusted while the motor is
running.
5-00 Digital Input Mode
Option: Function:
Set NPN or PNP mode for digital inputs 18, 19 and 27.
Digital Input Mode
[0] PNP Action on positive directional pulses (0). PNP systems
are pulled down to GND.
[1] NPN Action on negative directional pulses (1). NPN systems
are pulled up to +24 V, internally in the adjustable
frequency drive.
5-03 Digital Input 29 Mode
Option: Function:
[0] PNP
[1] NPN
3.6.2 5-1* Digital Inputs
Parameters for configuring the input functions for the
input terminals.
The digital inputs are used for selecting various functions
in the adjustable frequency drive. All digital inputs can be
set to the following functions:
Digital input
function
[0] No operation No reaction to signals transmitted to
[1] Reset Resets Adjustable frequency drive after a
[2] Coast inverse Leaves motor in free mode. Logic ‘0’ =>
[3] Coast and reset
inverse
Description
terminal.
TRIP/ALARM. Not all alarms can be reset.
coasting stop.
(Default Digital input 27): Coasting stop,
inverted input (NC).
Reset and coasting stop inverted input
(NC). Leaves motor in free mode and
resets the Adjustable frequency drive.
Logic ‘0’ ⇒ coasting stop and reset.
Digital input
Description
function
[4] Quick Stop
inverse
[5] DC brake inverse Inverted input for DC braking (NC). Stops
[6] Stop inverse Stop inverted function. Generates stop
[7] External Interlock Same function as Coasting stop, inverse,
*[8] Start Select start for a start/stop command.
[9] Latched start Motor starts, if a pulse is applied for min.
[10] Reversing Change the direction of the motor shaft
[11] Start reversing Use for start/stop and for reversing at the
[14] Jog
[16] Preset ref bit 0 Enables a choice between one of the
Inverted input (NC). Generates a stop in
accordance with the quick stop ramp time
set in 3-81 Quick Stop Ramp Time. When
the motor stops, the shaft is in free mode.
motor by energizing it with DC current for
a certain time period, see 2-01 DC Brake
Current. Function is only active when
value in 2-02 DC Braking Time is different
from 0. This selection is not possible
when 1-10 Motor Construction is set to [1]
PM non-salient SPM.
function when selected terminal goes
from logical level “1” to “0” (not latched).
The stop is performed according to the
selected ramp time.
but External Interlock generates the alarm
message ’external fault’ on the display
when the terminal which is programmed
for Coast Inverse is logic ‘0’. The alarm
message will also be active via digital
outputs and relay outputs, if programmed
for External Interlock. The alarm can be
reset using a digital input or the [Reset]
key if the cause for the External Interlock
has been removed.
Logic ‘1’ = start, logic ‘0’ = stop. (Default
Digital input 18)
2 ms. Motor stops when Stop inverse is
activated.
rotation. Reversing signal only changes
the direction of rotation; it does not
activate the start function. Select [2] Both
directions in 4-10 Motor Speed Direction. 0
= normal, 1 = reversing.
same time. Signals on [8] start are not
allowed at the same time. 0 = stop, 1 =
start reversing.
Used for activating jog speed. See
3-11 Jog Speed [Hz]. (Default Digital input
29)
eight preset references according to
Table 3.5.
3-20 MG18B222 - VLT® is a registered Danfoss trademark
Page 49

Parameters
VLT® HVAC Basic Drive Programming Guide
Digital input
Description
function
[17] Preset ref bit 1 Enables a choice between one of the
eight preset references according to
Table 3.5.
[18] Preset ref bit 2 Enables a choice between one of the
eight preset references according to
Table 3.5.
[19] Freeze reference Freeze actual reference. The frozen
reference is now the point of enable/
condition for Speed up and Slow to be
used. If Speed up/down is used, speed
change always follows ramp 2 (3-51 Ramp
2 Ramp Up Time and 3-52 Ramp 2 Ramp
Down Time) in the range 3-02 Minimum
Reference - 3-03 Maximum Reference.
[20] Freeze output Freezes actual reference. The frozen
reference is now the point of enable/
condition for Speed up and Slow to be
used. If Speed up/down is used, the
speed change always follows ramp 2.
[21] Speed up For digital control of the up/down speed
is desired (motor potentiometer). Activate
this function by selecting either Freeze
reference or Freeze output. When Speed
up is activated for less than 400 msec. the
resulting reference will be increased by
0.1%. If Speed up is activated for more
than 400 msec., the resulting reference
will ramp according to Ramp 1 in
3-41 Ramp 1 Ramp Up Time.
[22] Slow
[23] Set-up select bit
0
[34] Ramp bit 0 Select which ramp to use. Logic “0” will
[37] Fire mode A signal applied will put the adjustable
Same as [21] Speed up, but reference
decreases.
Selects one of the two set-ups. Set
0-10 Active Set-up to Multi Set-up.
select ramp 1 while logic “1” will select
ramp 2.
frequency drive into Fire Mode and all
other commands will be disregarded. See
24-0* Fire Mode.
Digital input
Description
function
[52] Run permissive The input terminal, for which the Run
permissive has been programmed must
be logic “1” before a start command can
be accepted. Run permissive has a logic
‘AND’ function related to the terminal
which is programmed for [8] Start, [14] Jog
or [20] Freeze Output, which means that in
order to start running the motor, both
conditions must be fulfilled. If Run
permissive is programmed on multiple
terminals, Run permissive needs only be
logic ‘1’ on one of the terminals for the
function to be carried out. The digital
output signal for Run Request ([8] Start,
[14] Jog or [20] Freeze Output)
programmed in par. 5-3*, or par. 5-4*, will
not be affected by Run Permissive.
NOTE!
If no Run permissive signal is applied
but either Run, Jog or Freeze
commands is activated, the status
line in the display will show either
Run Requested, Jog Requested or
Freeze Requested.
[53] Hand Start A signal applied will put the adjustable
frequency drive into Hand mode as if
[Hand On] has been pressed and a normal
stop command will be overridden. If
disconnecting the signal, the motor will
stop. To make any other start commands
valid, another digital input must be
assigned to Auto-Start and a signal
applied to this. The [Hand On] and [Auto
On] keys have no impact. The [Off] key
will override Hand Start and Auto Start.
Press either the [Hand On] or [Auto On]
key to make Hand Start and Auto Start
active again. If no signal on either Hand
Start or Auto-Start, the motor will stop
regardless of any normal Start command
applied. If signal applied to both Hand
Start and Auto-Start, the function will be
Auto-Start.
[54] Auto start A signal applied will put the adjustable
frequency drive into Auto mode as if
[Auto On] has been pressed. See also [53]
Hand Start.
[60] Counter A (up) Input for increment counting in the SLC
counter.
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-21
Page 50

Parameters
VLT® HVAC Basic Drive Programming Guide
3
Digital input
Description
function
[61] Counter A
(down)
[62] Reset Counter A Input for reset of counter A.
[63] Counter B (up) Input for increment counting in the SLC
[64] Counter B
(down)
[65] Reset Counter B Input for reset of counter B
Table 3.4
Selected preset
ref.:
Preset
reference 1
Preset
reference 2
Preset
reference 3
Preset
reference 4
Preset
reference 5
Preset
reference 6
Preset
reference 7
Preset
reference 8
Table 3.5 Selected preset reference
Input for decrement counting in the SLC
counter.
counter.
Input for decrement counting in the SLC
counter.
Preset ref. bit 2 Preset ref. bit1Preset ref. bit
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
5-10 Terminal 18 Digital Input
Parameter for configuring the input function on input terminal
18.
Option: Function:
[0] No operation
[1] Reset
[2] Coast inverse
[3] Coast and reset inverse
[4] Quick stop inverse
[5] DC-brake inverse
[6] Stop inverse
[7] External Interlock
[8] Start
[9] Latched start
[10] Reversing
[11] Start reversing
[14] Jog
5-10 Terminal 18 Digital Input
Parameter for configuring the input function on input terminal
18.
Option: Function:
[16] Preset ref bit 0
[17] Preset ref bit 1
[18] Preset ref bit 2
[19] Freeze reference
[20] Freeze output
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[34] Ramp bit 0
[37] Fire Mode
[52] Run permissive
[53] Hand start
[54] Auto start
[60] Counter A (up)
[61] Counter A (down)
[62] Reset Counter A
[63] Counter B (up)
[64] Counter B (down)
[65] Reset Counter B
5-11 Terminal 19 Digital Input
Parameter for configuring the input function on input terminal
19.
Option: Function:
[0] No operation
[1] Reset
[2] Coast inverse
[3] Coast and reset inverse
[4] Quick stop inverse
[5] DC-brake inverse
[6] Stop inverse
[7] External Interlock
[8] Start
[9] Latched start
[10] Reversing
[11] Start reversing
[14] Jog
[16] Preset ref bit 0
[17] Preset ref bit 1
[18] Preset ref bit 2
[19] Freeze reference
[20] Freeze output
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[34] Ramp bit 0
[37] Fire Mode
3-22 MG18B222 - VLT® is a registered Danfoss trademark
Page 51

Parameters
VLT® HVAC Basic Drive Programming Guide
5-11 Terminal 19 Digital Input
Parameter for configuring the input function on input terminal
19.
Option: Function:
[52] Run permissive
[53] Hand start
[54] Auto start
[60] Counter A (up)
[61] Counter A (down)
[62] Reset Counter A
[63] Counter B (up)
[64] Counter B (down)
[65] Reset Counter B
5-12 Terminal 27 Digital Input
Parameter for configuring the input function on input terminal
27.
Option: Function:
[0] No operation
[1] Reset
[2] Coast inverse
[3] Coast and reset inverse
[4] Quick stop inverse
[5] DC-brake inverse
[6] Stop inverse
[7] External Interlock
[8] Start
[9] Latched start
[10] Reversing
[11] Start reversing
[14] Jog
[16] Preset ref bit 0
[17] Preset ref bit 1
[18] Preset ref bit 2
[19] Freeze reference
[20] Freeze output
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[34] Ramp bit 0
[37] Fire Mode
[52] Run permissive
[53] Hand start
[54] Auto start
[60] Counter A (up)
[61] Counter A (down)
[62] Reset Counter A
[63] Counter B (up)
[64] Counter B (down)
[65] Reset Counter B
5-13 Terminal 29 Digital Input
Parameter for configuring the input function on input terminal
29.
Option: Function:
[0] No operation
[1] Reset
[2] Coast inverse
[3] Coast and reset inverse
[4] Quick stop inverse
[5] DC-brake inverse
[6] Stop inverse
[7] External Interlock
[8] Start
[9] Latched start
[10] Reversing
[11] Start reversing
[14] Jog
[16] Preset ref bit 0
[17] Preset ref bit 1
[18] Preset ref bit 2
[19] Freeze reference
[20] Freeze output
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[32] Pulse input
[34] Ramp bit 0
[37] Fire Mode
[52] Run permissive
[53] Hand start
[54] Auto start
[60] Counter A (up)
[61] Counter A (down)
[62] Reset Counter A
[63] Counter B (up)
[64] Counter B (down)
[65] Reset Counter B
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-23
Page 52

Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.6.3 5-3* Digital Outputs
Parameters for configuring the output functions for the
output terminals. The 2 solid-state digital outputs are
common for terminals 27 and 29. Set the I/O function for
terminal 27 in 5-01 Terminal 27 Mode and set the I/O
function for terminal 29 in 5-02 Terminal 29 Mode. These
parameters cannot be adjusted while the motor is running.
The digital outputs can be programmed
with these functions:
[0] No operation
[1] Control ready The control board receives supply voltage.
[2] Drive ready The adjustable frequency drive is ready
[3] Drive ready /
remote control
[4] Stand-by / no
warning
[5] Running The motor is running.
[6] Running / no
warning
[8] Run on
reference / no
warning
[9] Alarm An alarm activates the output. There are
[10] Alarm or
warning
[11] At torque limit
[12] Out of current
range
[13] Below current,
low
[14] Above current,
high
[16] Below speed,
low
[17] Above speed,
high
[18] Out of
feedback
range
[19] Below
feedback low
Default for all digital outputs and relay
outputs
for operation and applies a supply signal
on the control board.
The adjustable frequency drive is ready
for operation and is in Auto On mode.
The adjustable frequency drive is ready
for operation. No start or stop command
is been given (start/disable). There are no
warnings.
The output speed is higher than the
speed set in 1-81 Min Speed for Function at
Stop [RPM]. The motor is running and
there are no warnings.
The motor runs at reference speed.
no warnings.
An alarm or a warning activates the
output.
The torque limit set in 4-16 Torque Limit
Motor Mode or 4-13 Motor Speed High
Limit [RPM] has been exceeded.
The motor current is outside the range set
in 4-18 Current Limit.
The motor current is lower than set in
4-50 Warning Current Low.
The motor current is higher than set in
4-51 Warning Current High.
The output speed is lower than the
setting in 4-52 Warning Speed Low.
The output speed is higher than the
setting in 4-53 Warning Speed High.
The feedback is outside the range set in
4-56 Warning Feedback Low and
4-57 Warning Feedback High.
The feedback is below the limit set in
4-56 Warning Feedback Low.
[20] Above
feedback high
[21] Thermal
warning
[25] Reverse
[26] Bus OK Active communication (no timeout) via
[27] Torque limit
and stop
[28] Brake, no
warning
[29] Brake ready,
no fault
[30] Brake fault
(IGBT)
[35] External
Interlock
[40] Out of ref
range
[41] Below
reference low
[42] Above
reference high
[45] Bus Ctrl
[46] Bus Ctrl 1 if
timeout
[47] Bus Ctrl 0 if
timeout
[60] Comparator 0 See parameter group 13-1*. If Comparator
[61] Comparator 1 See parameter group 13-1*. If Comparator
[62] Comparator 2 See parameter group 13-1*. If Comparator
[63] Comparator 3 See parameter group 13-1*. If Comparator
The feedback is above the limit set in
4-57 Warning Feedback High.
The thermal warning turns on when the
temperature exceeds the limit in the
motor, the adjustable frequency drive, the
brake resistor, or the thermistor.
Reversing. Logic ‘1’ = relay activated, 24V
DC when CW rotation of the motor. Logic
‘0’ = relay not activated, no signal, when
CCW rotation of the motor.
the serial communication port.
Use in performing a coasting stop and in
torque limit condition. If the adjustable
frequency drive has received a stop signal
and is at the torque limit, the signal is
Logic ‘0’.
The brake is active and there are no
warnings.
The brake is ready for operation and there
are no faults.
The output is Logic ‘1’ when the brake
IGBT is short-circuited. Use this function to
protect the adjustable frequency drive if
there is a fault on the brake modules. Use
the output/relay to cut out the main
voltage from the adjustable frequency
drive.
External Interlock function has been
activated via one of the digital inputs.
0 is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
2 is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
2 is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
3 is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
3-24 MG18B222 - VLT® is a registered Danfoss trademark
Page 53

Parameters
VLT® HVAC Basic Drive Programming Guide
[64] Comparator 4 See parameter group 13-1*. If Comparator
4 is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[65] Comparator 5 See parameter group 13-1*. If Comparator
5 is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[70] Logic Rule 0 See parameter group 13-4*. If Logic Rule 0
is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[71] Logic Rule 1 See parameter group 13-4*. If Logic Rule 1
is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[72] Logic Rule 2 See parameter group 13-4*. If Logic Rule 2
is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[73] Logic Rule 3 See parameter group 13-4*. If Logic Rule 3
is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[74] Logic Rule 4 See parameter group 13-4*. If Logic Rule 4
is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[75] Logic Rule 5 See parameter group 13-4*. If Logic Rule 5
is evaluated as TRUE, the output will go
high. Otherwise, it will be low.
[80] SL Digital
Output A
[81] SL Digital
Output B
[82] SL Digital
Output C
[83] SL Digital
Output D
[84] SL Digital
Output E
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [38] Set dig. out. A high is
executed. The input will go low whenever
the Smart Logic Action [32] Set dig. out. A
low is executed.
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [39] Set dig. out. Bhigh is executed.
The input will go low whenever the Smart
Logic Action [33] Set dig. out. B low is
executed.
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [40] Set dig. out. C high is executed.
The input will go low whenever the Smart
Logic Action [34] Set dig. out. C low is
executed.
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [41] Set dig. out. D high is
executed. The input will go low whenever
the Smart Logic Action [35] Set dig. out. D
low is executed.
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [42] Set dig. out. E high is executed.
The input will go low whenever the Smart
Logic Action [36] Set dig. out. E low is
executed.
[85] SL Digital
Output F
[160] No alarm The output is high when no alarm is
[161] Running
reverse
[165] Local reference
active
[166] Remote
reference
active
[167] Start
command
active
[168] Drive in hand
mode
[169] Drive in auto
mode
[180] Clock Fault The clock function has been reset to
[181] Preventive
Maintenance
[193] Sleep Mode The adjustable frequency drive/system has
[194] Broken Belt A Broken Belt condition has been
[196] Fire Mode The adjustable frequency drive is
[198] Drive Bypass To be used as signal for activating an
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [43] Set dig. out. F high is executed.
The input will go low whenever the Smart
Logic Action [37] Set dig. out. F low is
executed.
present.
The output is high when the adjustable
frequency drive is running counterclockwise (the logical product of the
status bits ‘running’ AND ‘reverse’).
The output is high when 3-13 Reference
Site = [2] Local or when 3-13 Reference Site
= [0] Linked to hand auto at the same time
as the LCP is in [Hand On] mode.
The output is high when 3-13 Reference
Site [1] or Linked to hand/auto [0] while
the LCP is in [Auto on] mode.
The output is high when there is an
active Start command (i.e. via digital input
bus connection or [Hand on] or [Auto on],
and no Stop command is active).
The output is high when the adjustable
frequency drive is in Hand on mode (as
indicated by the LED light above [Hand
on]).
The output is high when the adjustable
frequency drive is in Hand on mode (as
indicated by the LED light above [Auto
on]).
default (2000-01-01) because of a power
failure.
One or more of the preventive
maintenance events programmed in
23-10 Maintenance Item has passed the
time for the specified action in
23-11 Maintenance Action.
set to sleep mode. See parameter group
22-4*.
detected. This function must be enabled
in 22-60 Broken Belt Function.
operating in Fire Mode. See parameter
group 24-0* Fire Mode.
external electromechanical bypass
switching the motor direct on line. See
24-1* Drive Bypass.
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-25
Page 54

Parameters
VLT® HVAC Basic Drive Programming Guide
3
CAUTION
If the Drive Bypass Function is
enabled, the adjustable frequency
drives are no longer Safety Certified
(for using the Safe Stop in versions
where included).
The setting options below are all related to the Cascade
Controller.
Wiring diagrams and settings for parameter, see parameter
group 25-** for more details.
[200] Full
Capacity
[201] Pump1
Running
[202] Pump2
Running
[203] Pump3
Running
Setting in parameter
group 5-3*
[200] Pump 1
Running
[201] Pump 2
Running
[203] Pump 3
Running
Table 3.6
5-30 Terminal 27 Digital Output
Option: Function:
[0] * No operation Same options and functions as parameter
5-31 Terminal 29 Digital Output
Option: Function:
[0] * No operation Same options and functions as parameter
All pumps running and at full speed
One or more of the pumps controlled by the
Cascade Controller are running. The function
will also depend on the setting of in
25-06 Number Of Pumps. If set to [0] No, Pump
1 refers to the pump controlled by relay
RELAY1, etc. If set to [1] Yes, Pump 1 refers to
the pump controlled by the adjustable
frequency drive only (without any of the builtin relays involved) and Pump 2 to the pump
controlled by the relay RELAY1. See Table 3.6:
See [201]
See [201]
Setting in 25-06 Number Of Pumps
[0] No [1] Yes
Controlled by
RELAY1
Controlled by
RELAY2
Controlled by
RELAY3
group 5-3*.
group 5-3*.
Adjustable
Frequency Drive
controlled
Controlled by
RELAY1
Controlled by
RELAY2
5-33 Term X30/7 Digi Out (MCB 101)
Option: Function:
[0] * No operation This parameter is active when option module
MCB 101 is mounted in the adjustable
frequency drive. Same options and functions
as parameter group 5-3*.
5-34 On delay, Terminal 42 Digital Output
Range: Function:
0.01s* [0.00–600.00s]
5-35 Off delay, Terminal 42 Digital Output
Range: Function:
0.01 s* [0.00–600.00 s]
3.6.4 5-4* Relays
Parameters for configuring the timing and the output
functions for the relays.
5-40 Function Relay
Array (Relay 1 [0], Relay 2 [1])
Select options to define the function of the relays.
The selection of each mechanical relay is realized in an array
parameter.
Option: Function:
[0] No operation Default for both relays
[1] Control Ready The control board receives supply
voltage.
[2] Drive ready The adjustable frequency drive is ready
for operation and applies supply the
signal on the control board.
[3] Drive ready/
remote control
[4] Standby / no
warning
[5] Drive running Motor is running.
[6] Running / no
warning
[7] Run in range/no
warning
[8] Run on ref/no
warning
[9] Alarm An alarm activates output.
[10] Alarm or
warning
The adjustable frequency drive is ready
for operation in Auto On mode.
The adjustable frequency drive is ready
for operation. No start or stop
command is given. No warnings are
present.
Motor runs, and no warning are present.
Motor runs within programmed current
ranges, see 4-50 Warning Current Low
and 4-51 Warning Current High. No
warnings are present.
Motor runs at reference speed and with
no warnings.
An alarm or warning activates output.
3-26 MG18B222 - VLT® is a registered Danfoss trademark
Page 55

Parameters
VLT® HVAC Basic Drive Programming Guide
5-40 Function Relay
Array (Relay 1 [0], Relay 2 [1])
Select options to define the function of the relays.
The selection of each mechanical relay is realized in an array
parameter.
Option: Function:
[12] Out of current
range
[13] Below current,
low
[14] Above current,
high
[16] Below speed,
low
[17] Above speed,
high
[19] Below feedback,
low
[20] Above feedback,
high
[21] Thermal warning The thermal warning turns on when the
[22] Ready, no
thermal warning
[23] Remote, ready,
no thermal
warning
[24] Ready, VoltageOKThe adjustable frequency drive is ready
[25] Reverse Motor runs/is ready to run clockwise
[26] Bus OK Active communication (no timeout) via
[35] External Interlock See digital input.
[36] Control word bit11Bit 11 in the control word controls the
[37] Control word bit12Bit 12 in control word controls relay.
[41] Below reference,
low
[42] Above ref, high
[45] Bus Control
Motor current is outside range set in
4-50 Warning Current Low and
4-51 Warning Current High.
Motor current is lower than set in
4-50 Warning Current Low.
Motor current is higher than set in
4-51 Warning Current High.
temperature exceeds the limit in motor,
adjustable frequency drive or thermistor.
The adjustable frequency drive is ready
for operation and no over-temperature
warning is present.
The adjustable frequency drive is ready
for operation in auto mode, and no
over-temperature warning is present.
for operation and AC line voltage is
within the specified voltage range.
when logic = 0 and counter clockwise
when logic = 1. Output changes as soon
as reversing signal is applied.
serial communication port.
relay.
5-40 Function Relay
Array (Relay 1 [0], Relay 2 [1])
Select options to define the function of the relays.
The selection of each mechanical relay is realized in an array
parameter.
Option: Function:
[60] Comparator 0 See parameter group 13-1*. If
Comparator 0 is evaluated as TRUE, the
output will go high. Otherwise, it will be
low.
[61] Comparator 1 See parameter group 13-1*. If
Comparator 2 is evaluated as TRUE, the
output will go high. Otherwise, it will be
low.
[62] Comparator 2 See parameter group 13-1*. If
Comparator 2 is evaluated as TRUE, the
output will go high. Otherwise, it will be
low.
[63] Comparator 3 See parameter group 13-1*. If
Comparator 3 is evaluated as TRUE, the
output will go high. Otherwise, it will be
low.
[64] Comparator 4 See parameter group 13-1*. If
Comparator 4 is evaluated as TRUE, the
output will go high. Otherwise, it will be
low.
[65] Comparator 5 See parameter group 13-1*. If
Comparator 5 is evaluated as TRUE, the
output will go high. Otherwise, it will be
low.
[70] Logic rule 0 See parameter group 13-4*. If Logic
Rule 0 is evaluated as TRUE, the output
will go high. Otherwise, it will be low.
[71] Logic rule 1 See parameter group 13-4*. If Logic
Rule 1 is evaluated as TRUE, the output
will go high. Otherwise, it will be low.
[72] Logic rule 2 See parameter group 13-4*. If Logic
Rule 2 is evaluated as TRUE, the output
will go high. Otherwise, it will be low.
[73] Logic rule 3 See parameter group 13-4*. If Logic
Rule 3 is evaluated as TRUE, the output
will go high. Otherwise, it will be low.
[74] Logic rule 4 See parameter group 13-4*. If Logic
Rule 4 is evaluated as TRUE, the output
will go high. Otherwise, it will be low.
[75] Logic rule 5 See parameter group 13-4*. If Logic
Rule 5 is evaluated as TRUE, the output
will go high. Otherwise, it will be low.
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-27
Page 56
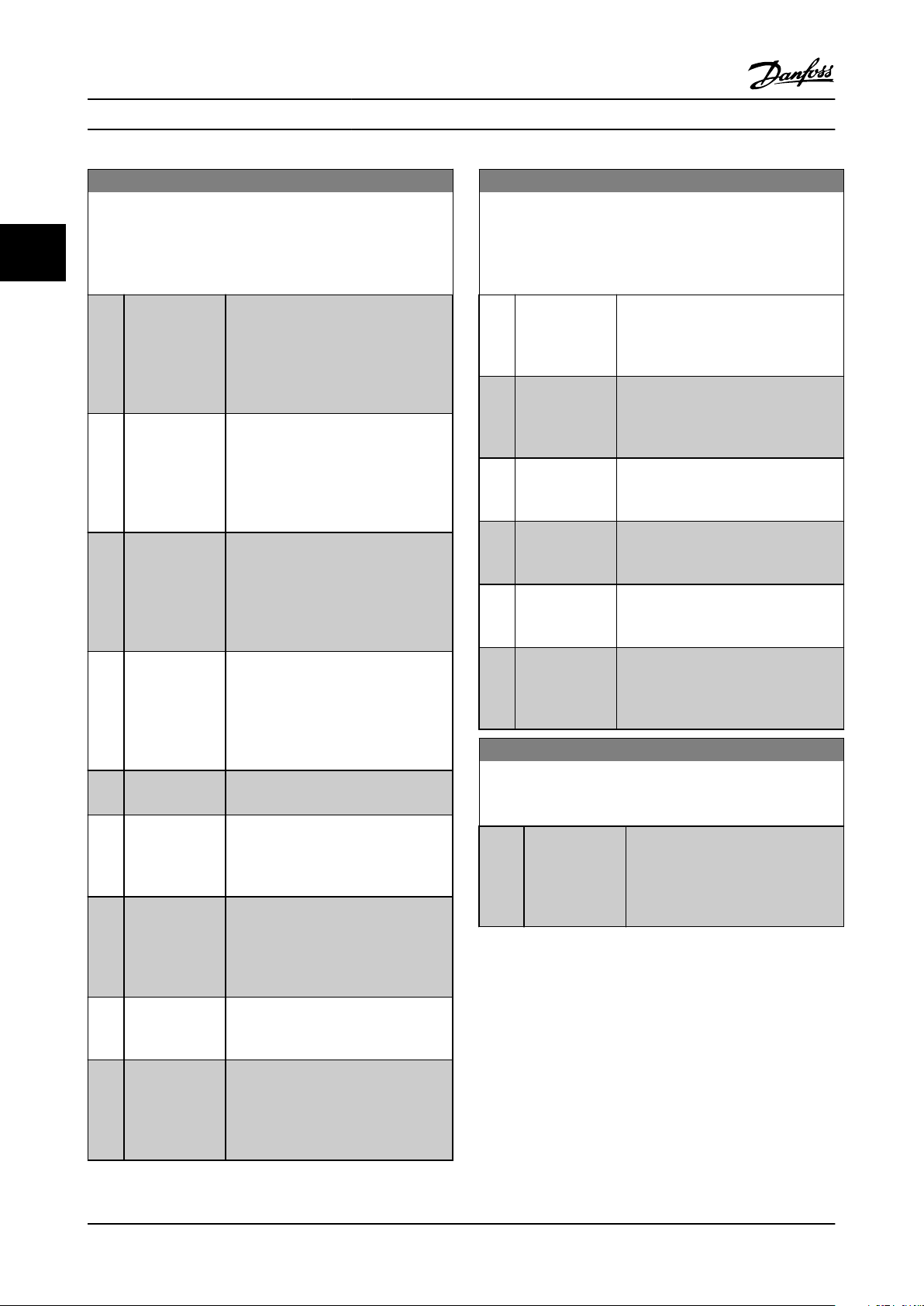
Parameters
VLT® HVAC Basic Drive Programming Guide
3
5-40 Function Relay
Array (Relay 1 [0], Relay 2 [1])
Select options to define the function of the relays.
The selection of each mechanical relay is realized in an array
parameter.
Option: Function:
[80] SL digital output
A
[81] SL digital output
B
[82] SL digital output
C
[83] SL digital output
D
[160] No alarm The output is high when no alarm is
[161] Running reverse The output is high when the adjustable
[165] Local ref. active
[166] Remote ref.
active
[167] Start command
activ
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [38] Set dig. out. A high is
executed. The input will go low
whenever the Smart Logic [32] Action
Set dig. out. A low is executed.
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [39] Set dig. out. Bhigh is
executed. The input will go low
whenever the Smart Logic [33] Action
Set dig. out. B low is executed.
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
Action [40] Set dig. out. C high is
executed. The input will go low
whenever the Smart Logic [34] Action
Set dig. out. C low is executed.
See 13-52 SL Controller Action. The input
will go high whenever the Smart Logic
[41] Action Set dig. out. D high is
executed. The input will go low
whenever the Smart Logic [35] Action
Set dig. out. D low is executed.
present.
frequency drive is running counterclockwise (the logical product of the
status bits ‘running’ AND ‘reverse’).
The output is high when 3-13 Reference
Site = [2] Local or when 3-13 Reference
Site = [0] Linked to hand auto at the
same time as the LCP is in [Hand on]
mode.
The output is high when 3-13 Reference
Site [1] or Linked to hand/auto [0] while
the LCP is in [Auto on] mode.
The output is high when there is an
active Start command (i.e. via digital
input bus connection or [Hand on] or
[Auto on], and no Stop command is
active).
5-40 Function Relay
Array (Relay 1 [0], Relay 2 [1])
Select options to define the function of the relays.
The selection of each mechanical relay is realized in an array
parameter.
Option: Function:
[168] Drive in hand
mode
[169] Drive in auto
mode
[193] Sleep Mode The adjustable frequency drive/system
[194] Broken Belt
Function
[196] Fire Mode The adjustable frequency drive is
[198] Drive Bypass To be used as signal for activating an
The output is high when the adjustable
frequency drive is in Hand on mode (as
indicated by the LED light above [Hand
on]).
The output is high when the adjustable
frequency drive is in Hand on mode (as
indicated by the LED light above [Auto
on]).
has set to sleep mode. See parameter
group22-4*.
A Broken Belt condition has been
detected. This function must be enabled
in 22-60 Broken Belt Function.
operating in Fire Mode. See parameter
group 24-0* Fire Mode.
external electromechanical bypass
switching the motor direct on line.
See 24-1* Drive Bypass.
5-41 On Delay, Relay
Array [9], (Relay 1 [0], Relay 2 [1], Relay 3 [2], Relay 4 [3], Relay 5
[4], Relay 6 [5], Relay 7 [6], Relay 8 [7], Relay 9 [8])
Range: Function:
0.01 s* [0.01 - 600.00 s] Enter the delay of the relay cut-in
time. Select one of available
mechanical relays and MCB 105 in an
array function. See 5-40 Function Relay.
Relay 3-6 are included in MCB 113.
3-28 MG18B222 - VLT® is a registered Danfoss trademark
Page 57

Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
130BA076.10
(RPM)
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
Parameters
VLT® HVAC Basic Drive Programming Guide
Figure 3.9
3
3
Figure 3.7
5-42 Off Delay, Relay
Array[2]: Relay1[0], Relay2[1]
Range: Function:
0.01 s* [0.01 - 600.00s]Enter the delay of the relay cut-out
time. Select one of available
mechanical relays and MCB 105 in an
array function. See 5-40 Function Relay.
Figure 3.8
If the selected event condition changes before the on or
off delay timer expires, the relay output is unaffected.
5-5* Pulse Input
3.6.5
The pulse input parameters are used to define an
appropriate window for the impulse reference area by
configuring the scaling and filter settings for the pulse
inputs. Input terminals 29 or 33 act as frequency reference
inputs. Set terminal 29 (5-13 Terminal 29 Digital Input) or
terminal 33 (5-15 Terminal 33 Digital Input) to [32] Pulse
input. If terminal 29 is used as an input, then set
5-01 Terminal 27 Mode to [0] Input.
5-50 Term. 29 Low Frequency
Range: Function:
100 Hz* [0 - 110000
Hz]
Enter the low frequency limit
corresponding to the low motor shaft
speed (i.e. low reference value) in
5-52 Term. 29 Low Ref./Feedb. Value. Refer
to the diagram in this section.
This parameter is available for only.
5-51 Term. 29 High Frequency
Range: Function:
100 Hz* [0 - 110000
Hz]
Enter the high frequency limit
corresponding to the high motor shaft
speed (i.e. high reference value) in
5-53 Term. 29 High Ref./Feedb. Value.
This parameter is available for only.
5-52 Term. 29 Low Ref./Feedb. Value
Range: Function:
0.000 ReferenceFeedbackUnit*
[-999999.999 -
999999.999
ReferenceFeedbackUnit]
Enter the low reference
value limit for the motor
shaft speed [RPM]. This is
also the lowest feedback
value, see also 5-57 Term.
33 Low Ref./Feedb. Value.
Set terminal 29 to digital
input (5-02 Terminal 29
Mode =input [0] (default)
and 5-13 Terminal 29
Digital Input = applicable
value).
This parameter is
available for only.
MG18B222 - VLT® is a registered Danfoss trademark 3-29
Page 58

3
Parameters
VLT® HVAC Basic Drive Programming Guide
5-53 Term. 29 High Ref./Feedb. Value
Range: Function:
Size
related*
3.6.6
[-999999.999 -
999999.999
ReferenceFeedbackUnit]
5-9* Bus Controlled
Enter the high reference value
[RPM] for the motor shaft
speed and the high feedback
value, see also 5-58 Term. 33
High Ref./Feedb. Value. Select
terminal 29 as a digital input
(5-02 Terminal 29 Mode = [0]
input (default) and
5-13 Terminal 29 Digital Input =
applicable value).
This parameter is available for
only.
This parameter group selects digital and relay outputs via
a serial communication bus setting.
5-90 Digital & Relay Bus Control
Range: Function:
0 * [0 - 0xFFFFFFFF ] This parameter holds the state of the
digital outputs and relays that is
controlled by bus.
A logical '1' indicates that the output is
high or active.
A logical '0' indicates that the output is
low or inactive.
Bit 0 - 3 Reserved
Bit 4 Relay 1 output terminal
Bit 5 Relay 2 output terminal
Bit 6 - 23 Reserved
Bit 24 Terminal 42 Digital Output
Bit 25 Terminal 45 Digital Output
Bit 26 - 31 Reserved
Table 3.7
3-30 MG18B222 - VLT® is a registered Danfoss trademark
Page 59

Ref./Feedback
[RPM]
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage' or
'Low Current'
'High Voltage' or
'High Current'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Parameters
VLT® HVAC Basic Drive Programming Guide
3.7 Main Menu - Analog In/Out - Group 6
6-1* Analog Input 53
3.7.2
Parameter group for setting up the analog I/O configuration and the digital output. The adjustable frequency
drive is equipped with 2 analog inputs: Terminal 53 and
54. The analog inputs can freely be allocated to either
voltage (0–10 V) or current input (0/4–20 mA)
3.7.1 6-0* Analog I/O Mode
6-00 Live Zero Timeout Time
Range: Function:
10 s* [1 - 99 s] Enter the timeout time.
6-01 Live Zero Timeout Function
Option: Function:
Select the timeout function. The function set
in 6-01 Live Zero Timeout Function will be
activated if the input signal on terminal 53 or
54 is below 50% of the value in 6-10 Terminal
53 Low Voltage, 6-12 Terminal 53 Low Current,
6-20 Terminal 54 Low Voltage or 6-22 Terminal
54 Low Current for a time period defined in
6-00 Live Zero Timeout Time.
[0] Off
[1] Freeze output
[2] Stop
[3] Jogging
[4] Max. speed
[5] Stop and trip
Parameters for configuring the scaling and limits for
analog input 53 (terminal 53).
6-10 Terminal 53 Low Voltage
Range: Function:
0.07 V* [0 - 10 V]
Enter the voltage (V) that corresponds to
6-14 Terminal 53 Low Ref./Feedb. Value. The
value must be set at >1 V in order to
activate 6-01 Live Zero Timeout Function.
6-11 Terminal 53 High Voltage
Range: Function:
10 V* [0 - 10 V] Enter the voltage (V) that corresponds to the
high reference value (set in 6-15 Terminal 53
High Ref./Feedb. Value).
6-12 Terminal 53 Low Current
Range: Function:
4 mA* [0 - 20
mA]
Enter the low current value. This reference
signal should correspond to the low
reference/feedback value, set in 6-14 Terminal
53 Low Ref./Feedb. Value. The value must be
set at >2 mA in order to activate the Live
Zero Timeout Function in 6-01 Live Zero
Timeout Function.
6-13 Terminal 53 High Current
Range: Function:
20 mA* [0 - 20 mA] Enter the high current value
corresponding to the high reference/
feedback set in 6-15 Terminal 53 High Ref./
Feedb. Value.
3
3
Figure 3.10
6-14 Terminal 53 Low Ref./Feedb. Value
Range: Function:
0 * [-4999 - 4999 ] Enter the reference or feedback value that
corresponds to the voltage or current set in
parameters 6-10 through 6-12.
6-15 Terminal 53 High Ref./Feedb. Value
Range: Function:
Size related* [-4999 -
MG18B222 - VLT® is a registered Danfoss trademark 3-31
4999 ]
Enter the reference or feedback
value that corresponds to the
voltage or current set in
parameters 6-11 through 6-13.
Page 60

Parameters
VLT® HVAC Basic Drive Programming Guide
3
6-16 Terminal 53 Filter Time Constant
Range: Function:
0.01 s* [0.01 - 10s]Enter the time constant. This is a first-order
digital low pass filter time constant for
suppressing electrical noise in terminal 53. A
high time constant value improves
dampening but also increases the time
delay through the filter.
This parameter cannot be adjusted while
the motor is running.
6-19 Terminal 53 mode
Option: Function:
Select if terminal 54 is used for current or
voltage input.
[0] Current mode
[1] Voltage mode
3.7.3 6-2* Analog Input 54
Parameters for configuring the scaling and limits for
analog input 54 (terminal 54).
6-20 Terminal 54 Low Voltage
Range: Function:
0.07 V* [0 - 10V]Enter the voltage (V) that corresponds to the
low reference value (set in 6-24 Terminal 54
Low Ref./Feedb. Value). The value must be set
at >1 V in order to activate 6-01 Live Zero
Timeout Function.
6-21 Terminal 54 High Voltage
Range: Function:
10 V* [0 - 10 V] Enter the voltage (V) that corresponds to the
high reference value (set in 6-25 Terminal 54
High Ref./Feedb. Value).
6-23 Terminal 54 High Current
Range: Function:
reference/feedback value set in
6-25 Terminal 54 High Ref./Feedb.
Value.
6-24 Terminal 54 Low Ref./Feedb. Value
Range: Function:
0 * [-4999 - 4999 ] Enter the reference or feedback value that
corresponds to the voltage or current set in
6-21 Terminal 54 High Voltage/6-22 Terminal
54 Low Current.
6-25 Terminal 54 High Ref./Feedb. Value
Range: Function:
Size related* [-4999 - 4999 ]
6-26 Terminal 54 Filter Time Constant
Range: Function:
0.01 s* [0.01 - 10s]Enter the time constant. This is a first-order
digital low pass filter time constant for
suppressing electrical noise in terminal 54. A
high time constant value improves
dampening but also increases the time
delay through the filter.
This parameter cannot be adjusted while
the motor is running.
6-29 Terminal 54 mode
Option: Function:
Select if terminal 54 is used for current or
voltage input.
[0] Current mode
[1] Voltage mode
3.7.4 6-7* Analog/Digital Output 45
6-22 Terminal 54 Low Current
Range: Function:
4 mA* [0 - 20
mA]
Enter the low current value. This reference
signal should correspond to the low
reference/feedback value, set in 6-24 Terminal
54 Low Ref./Feedb. Value. The value must be
set at >2 mA in order to activate the Live
Zero Timeout Function in 6-01 Live Zero
Timeout Function.
6-23 Terminal 54 High Current
Range: Function:
20 mA*
20.00 mA*
3-32 MG18B222 - VLT® is a registered Danfoss trademark
[0 - 20 mA]
[par. 6-22-20.00
mA]
Enter the high current value
corresponding to the high
Parameters for configuring the scaling and limits for
analog/digital output Terminal 45. Analog outputs are
current outputs: 0/4-20 mA. Resolution on analog output is
12 bit. Analog output terminals can also be set up for
digital output.
6-70 Terminal 45 Mode
Option: Function:
Set terminal 45 to act as analog output or as
digital output.
[0] 0-20 mA
[1] 4-20 mA
[2] Digital Output
Page 61

Parameters
VLT® HVAC Basic Drive Programming Guide
6-71 Terminal 45 Analog Output
Option: Function:
Select the function of Terminal 45 as an
analog current output. See also
6-70 Terminal 45 Mode.
[0] No operation
[100] Output frequency 0–100 Hz
[101] Reference MinRef. - MaxRef.
[102] Feedback MinFB - MaxFB
[103] Motor Current 0-I
[106] Power 0-P
[139] Bus Control 0–100%
max
nom
6-72 Terminal 45 Digital Output
Option: Function:
Select the function of
Terminal 45 as a
digital current output.
See also 6-70 Terminal
45 Mode. See
5-40 Function Relay for
description of the
choices.
[0] No operation
[1] Control Ready
[2] Drive ready
[3] Drive ready/remote control
[4] Standby / no warning
[5] Drive running
[6] Running / no warning
[7] Run in range/no warning
[8] Run on ref/no warning
[9] Alarm
[10] Alarm or warning
[12] Out of current range
[13] Below current, low
[14] Above current, high
[16] Below speed, low
[17] Above speed, high
[19] Below feedback, low
[20] Above feedback, high
[21] Thermal warning
[22] Ready, no thermal warning
[23] Remote, ready, no thermal warning
[24] Ready, Voltage OK
[25] Reverse
[26] Bus OK
[35] External Interlock
[36] Control word bit 11
[37] Control word bit 12
6-72 Terminal 45 Digital Output
Option: Function:
[41] Below reference, low
[42] Above ref, high
[45] Bus Control
[60] Comparator 0
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Logic rule 0
[71] Logic rule 1
[72] Logic rule 2
[73] Logic rule 3
[74] Logic rule 4
[75] Logic rule 5
[80] SL digital output A
[81] SL digital output B
[82] SL digital output C
[83] SL digital output D
[160] No alarm
[161] Running reverse
[165] Local ref. active
[166] Remote ref. active
[167] Start command activ
[168] Drive in hand mode
[169] Drive in auto mode
[193] Sleep Mode
[194] Broken Belt Function
[196] Fire Mode
[198] Drive Bypass
6-73 Terminal 45 Output Min Scale
Range: Function:
0 %* [0 - 200 %]
6-74 Terminal 45 Output Max Scale
Range: Function:
100 %* [0 - 200 %]
6-76 Terminal 45 Output Bus Control
Range: Function:
0 * [0 - 16384 ]
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-33
Page 62

Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.7.5 6-9* Analog/Digital Output 42
Parameters for configuring the limits for analog/digital
output Terminal 42. Analog outputs are current outputs:
0/4-20 mA. Resolution on analog outputs is 12 bit. Analog
output terminals can also be set up for digital output.
6-90 Terminal 42 Mode
Option: Function:
Set Terminal 42 to act as analog output or
as digital output.
[0] * 0-20 mA
[1] 4-20 mA
[2] Digital Output
6-91 Terminal 42 Analog Output
Option: Function:
Select the function of Terminal 42 as an
analog current output. See also
6-90 Terminal 42 Mode.
[0] No operation
[100] Output frequency 0–100 Hz
[101] Reference MinRef. - MaxRef.
[102] Feedback MinFB - MaxFB
[103] Motor Current 0-I
[106] Power 0-P
[139] Bus Control 0–100%
6-92 Terminal 42 Digital Output
Option: Function:
[0] No operation
[1] Control Ready
[2] Drive ready
[3] Drive ready/remote control
[4] Standby / no warning
[5] Drive running
[6] Running / no warning
[7] Run in range/no warning
[8] Run on ref/no warning
[9] Alarm
[10] Alarm or warning
[12] Out of current range
max
nom
Select the function of
Terminal 42 as an
analog current output.
See also 6-90 Terminal
42 Mode. See
5-40 Function Relay for
description of the
choices.
6-92 Terminal 42 Digital Output
Option: Function:
[13] Below current, low
[14] Above current, high
[16] Below speed, low
[17] Above speed, high
[19] Below feedback, low
[20] Above feedback, high
[21] Thermal warning
[22] Ready, no thermal warning
[23] Remote, ready, no thermal warning
[24] Ready, Voltage OK
[25] Reverse
[26] Bus OK
[35] External Interlock
[36] Control word bit 11
[37] Control word bit 12
[41] Below reference, low
[42] Above ref, high
[45] Bus Control
[60] Comparator 0
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Logic rule 0
[71] Logic rule 1
[72] Logic rule 2
[73] Logic rule 3
[74] Logic rule 4
[75] Logic rule 5
[80] SL digital output A
[81] SL digital output B
[82] SL digital output C
[83] SL digital output D
[160] No alarm
[161] Running reverse
[165] Local ref. active
[166] Remote ref. active
[167] Start command activ
[168] Drive in hand mode
[169] Drive in auto mode
[193] Sleep Mode
[194] Broken Belt Function
[196] Fire Mode
[198] Drive Bypass
6-93 Terminal 42 Output Min Scale
Range: Function:
0 %* [0 - 200 %]
3-34 MG18B222 - VLT® is a registered Danfoss trademark
Page 63
Parameters
6-94 Terminal 42 Output Max Scale
Range: Function:
100 %* [0 - 200 %]
VLT® HVAC Basic Drive Programming Guide
6-96 Terminal 42 Output Bus Control
Range: Function:
0 * [0 - 16384 ]
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-35
Page 64
Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.8 Main Menu - Communications and
Options - Group 8
3.8.1 8-0* General Settings
8-01 Control Site
Option: Function:
Select [0] Digital and ctrl.word for using
digital input and control word. Select [1]
Digital only to use digital inputs only.
Select [2] Control word only to use control
word only. This parameter overrules
settings in 8-50 Coasting Select to
8-56 Preset Reference Select.
[0] Digital and
ctrl.word
[1] Digital only Control by using digital inputs only.
[2] Controlword
only
Control by using both digital input and
control word.
Control by using control word only.
8-02 Control Source
Option: Function:
Select the source of the control word.
[0] None
[1] FC Port
NOTE!
This parameter cannot be adjusted while the motor is
running.
8-06 Reset Control Word Timeout
Option: Function:
[0] * No function
[1] Do reset Reset control word timeout.
3.8.2 8-3* FC Port Settings
8-30 Protocol
Option: Function:
Select the protocol for the integrated RS-485
port.
[0] FC Communication according to the FC Protocol.
[2] Modbus RTU Communication according to the Modbus RTU
protocol.
[3] Metasys N2 Communication protocol. The N2 software
protocol is designed to be general in nature in
order to accommodate the unique properties
each device may have.
[4] FLN
[5] BACNet
NOTE!
Further details can be found in the Metasys manual.
8-31 Address
Range: Function:
1 * [ 0.0 - 247 ] Enter the address for the RS-485 port. Valid
range: 1-126 for FC-bus OR 1-247 for Modbus.
8-03 Control Timeout Time
Range: Function:
1 s* [0.1 -
6500 s]
Enter the maximum time expected to pass
between the reception of two consecutive
messages. If this time is exceeded, it indicates
that the serial communication has stopped.
The function selected in 8-04 Control Timeout
Function Control Timeout Function will then be
carried out.
8-04 Control Timeout Function
Option: Function:
Select the timeout function. The timeout function is
activated when the control word fails to be updated
within the time period specified in 8-03 Control Timeout
Time.
[0] Off
3-36 MG18B222 - VLT® is a registered Danfoss trademark
8-32 Baud Rate
Option: Function:
[0] 2400 Baud
[1] 4800 Baud
[2] 9600 Baud
[3] 19200 Baud
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
Default refers to the FC protocol.
Select the baud rate for the RS-485 port
Page 65

Parameters
VLT® HVAC Basic Drive Programming Guide
8-33 Parity / Stop Bits
Option: Function:
Parity and Stop Bits for the protocol
using the FC Port. For some of the
protocols, not all options are
available.
[0] Even Parity, 1 Stop Bit
[1] Odd Parity, 1 Stop Bit
[2] No Parity, 1 Stop Bit
[3] No Parity, 2 Stop Bits
8-35 Minimum Response Delay
Range: Function:
0.01 s* [ 0.0010 - 0.5 s] Specify the minimum delay time
between receiving a request and
transmitting a response. This is used
for overcoming modem turnaround
delays.
8-36 Maximum Response Delay
Range: Function:
Size related* [ 0.1 - 10.0s]Specify the maximum permissible
delay time between receiving a
request and transmitting the
response. If this time is exceeded, no
response will be returned.
8-37 Maximum Inter-char delay
Range: Function:
0.025 s* [0.025 - 0.025s]Specify the maximum delay time
between 2 characters in a message.
Exceeding this delay time will cause
the message to be discarded.
3.8.3 8-5* Digital/Bus
Parameters for configuring the control word Digital/Bus
merging.
8-50 Coasting Select
Option: Function:
Select control of the coasting function via the
terminals (digital input) and/or via the bus.
NOTE!
This parameter is active only when
8-01 Control Site is set to [0] Digital and
control word.
[0] Digital
input
Activates coast via a digital input.
8-50 Coasting Select
Option: Function:
[1] Bus Activates coast via the serial communication
port.
[2] Logic AND Activates coast via the serial communication bus/
serial communication port, AND additionally via
one of the digital inputs.
[3] Logic OR Activates coast via the serial communication port
OR via one of the digital inputs.
8-51 Quick Stop Select
Option: Function:
Select control of the quick stop function via the
terminals (digital input) and/or via the bus.
NOTE!
This parameter is active only when
8-01 Control Site is set to [0] Digital and
control word.
[0] Digital
input
[1] Bus Activates Quick stop via the serial communi-
cation port.
[2] Logic AND Activates Quick stop via the serial communi-
cation port, AND additionally via one of the
digital inputs.
[3] Logic OR Activates Quick stop via the serial communi-
cation port OR via one of the digital inputs.
8-52 DC Brake Select
Option: Function:
Select control of the DC brake via the terminals
(digital input).
NOTE!
This parameter is active only when
8-01 Control Site is set to [0] Digital and
control word.
[0] Digital
input
[1] Bus Activates DC brake via the serial communication
[2] Logic AND Activates DC brake via the serial communication
[3] Logic OR Activates DC brake via the serial communication
Activates DC brake via a digital input.
port.
port, AND additionally via one of the digital
inputs.
port OR via one of the digital inputs.
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-37
Page 66

Parameters
VLT® HVAC Basic Drive Programming Guide
3
8-53 Start Select
Option: Function:
Select control of the adjustable frequency drive
start function via the terminals (digital input).
NOTE!
This parameter is active only when
8-01 Control Site is set to [0] Digital and
control word.
[0] Digital
input
[1] Bus Activates Start command via the serial communi-
[2] Logic AND Activates Start command via the serial communi-
[3] Logic OR Activates Start command via the serial communi-
Activates Start command via a digital input.
cation port.
cation port, AND additionally via one of the
digital inputs.
cation port OR via one of the digital inputs.
8-54 Reversing Select
Option: Function:
Select control of the adjustable frequency drive
reverse function via the terminals (digital input)
and/or via the serial communication port.
NOTE!
This parameter is active only when
8-01 Control Site is set to [0] Digital and
control word.
[0] Digital
input
[1] Bus Activates Reverse command via the serial
[2] Logic
AND
[3] Logic OR Activates Reverse command via the serial
8-55 Set-up Select
Option: Function:
Activates Reverse command via a digital input.
communication port.
Activates Reverse command via the serial
communication port, AND additionally via one of
the digital inputs.
communication port OR via one of the digital
inputs.
Select control of the adjustable frequency drive
set-up selection via the terminals (digital input)
and/or via the serial communication port.
8-55 Set-up Select
Option: Function:
NOTE!
This parameter is active only
when8-01 Control Site is set to [0] Digital
and control word.
[0] Digital
input
[1] Bus Activates the set-up selection via the serial
[2] Logic
AND
[3] Logic OR Activate the set-up selection via the serial
8-56 Preset Reference Select
Option: Function:
[0] Digital
input
[1] Bus Activates Preset Reference selection via the
[2] Logic AND Activates Preset Reference selection via the
[3] Logic OR Activates the Preset Reference selection via the
3.8.4 8-7* BACnet
8-70 BACnet Device Instance
Range: Function:
1 * [0 - 4194303 ] Enter a unique ID number for the BACnet
8-72 MS/TP Max Masters
Range: Function:
127 * [0 - 127 ] Define the address of the master which holds
Activates the set-up selection via a digital input.
communication port.
Activates the set-up selection via the serial
communication port, AND additionally via one of
the digital inputs.
communication port OR via one of the digital
inputs.
Select control of the adjustable frequency drive
Preset Reference selection via the terminals
(digital input) and/or via the serial communication port.
Activates Preset Reference selection via a digital
input.
serial communication port.
serial communication port, AND additionally via
one of the digital inputs.
serial communication port OR via one of the
digital inputs.
device.
the highest address in this network.
Decreasing this value optimizes polling for the
token.
3-38 MG18B222 - VLT® is a registered Danfoss trademark
Page 67

Parameters
VLT® HVAC Basic Drive Programming Guide
8-73 MS/TP Max Info Frames
Range: Function:
1 * [1 - 65534 ] Define how many info/data frames the device
is allowed to send while holding the token.
8-74 "I am" Service
Option: Function:
[0] Send at power-up
[1] Continuously Choose whether the device should send
the "I-Am" service message only at
power-up or continuously with an interval
of approx. 1 min.
8-75 Intialisation Password
Range: Function:
admin * [1 - 1 ] Enter the password needed for execution of
Drive Re-initialization.
3.8.5 8-8* FC Port Diagnostics
These parameters are used for monitoring the bus
communication via the Adjustable Frequency Drive Port.
8-85 Slave Timeout Errors
Range: Function:
0 * [0 - 65536 ] This parameter shows the number of slave
timeout errors.
8-88 Reset FC port Diagnostics
Option: Function:
[0] Do not reset
[1] Reset counter
3.8.6 8-9* Bus Feedback
8-94 Bus Feedback 1
Range: Function:
0 * [-32768 -
32767 ]
Write a feedback to this parameter via the
serial communication port. This parameter
must be selected in 20-00 Feedback 1 Source
as a feedback source. (Hex value 4000 h
corresponds to 100% feedback / range is
+/-200%)
3
3
8-80 Bus Message Count
Range: Function:
0 * [0 - 65536 ] This parameter shows the number of valid
messages detected on the bus.
8-81 Bus Error Count
Range: Function:
0 * [0 - 65536 ] This parameter shows the number of
messages with faults (e.g., CRC fault), detected
on the bus.
8-82 Slave Messages Rcvd
Range: Function:
0 * [0 - 65536 ] This parameter shows the number of valid
messages addressed to the slave, sent by the
adjustable frequency drive.
8-83 Slave Error Count
Range: Function:
0 * [0 - 65536 ] This parameter shows the number of error
messages, which could not be executed by
the adjustable frequency drive.
8-84 Slave Messages Sent
Range: Function:
0 * [0 - 65536 ] This parameter shows the number of
messages sent from the slave.
MG18B222 - VLT® is a registered Danfoss trademark 3-39
Page 68

Parameters
VLT® HVAC Basic Drive Programming Guide
3.9 Main Menu - Smart Logic - Group 13
3.9.2
13-0* SLC Settings
3
3.9.1 13-** Prog. Features
Smart Logic Control (SLC) is essentially a sequence of userdefined actions (see 13-52 SL Controller Action [x]) executed
by the SLC when the associated user-defined event (see
13-51 SL Controller Event [x]) is evaluated as TRUE by the
SLC. Events and actions are each numbered and linked
together in pairs. This means that when [0] event is fulfilled
(attains the value TRUE), [0] action is executed. After this,
the conditions of [1] event will be evaluated and if
evaluated TRUE, [1] action will be executed and so on. Only
one event will be evaluated at any time. If an event is
evaluated as FALSE, nothing happens (in the SLC) during
the current scan interval and no other events will be
evaluated. This means that when the SLC starts, it
evaluates [0] event (and only [0] event) each scan interval.
Only when [0] event is evaluated TRUE, will the SLC
execute [0] action and start evaluating [1] event. It is
possible to program from 1 to 20 events and actions. When
the last event/action have been executed, the sequence
starts over again from [0] event /[0] action.
Figure 3.13 Example with three event/actions
Starting and stopping the SLC:
Starting and stopping the SLC can be done by selecting [1]
On or [0] Off in 13-00 SL Controller Mode. The SLC always
starts in state 0 (where it evaluates [0] event). The SLC
starts when the Start Event (defined in 13-01 Start Event) is
evaluated as TRUE (provided that [1] On is selected in
13-00 SL Controller Mode). The SLC stops when the Stop
Event (13-02 Stop Event) is TRUE. 13-03 Reset SLC resets all
SLC parameters and starts programming from scratch.
Use the SLC settings to activate, deactivate and reset the
Smart Logic Control sequence. The logic functions and
comparators are always running in the background, which
opens for separate control of digital inputs and outputs.
13-00 SL Controller Mode
Option: Function:
Select [1] On to enable the Smart Logic Control to start
when a start command is present, e.g., via a digital
input. Select [0] Off to disable the Smart Logic Control.
[0] Off Disables the Smart Logic Controller.
[1] On Enables the Smart Logic Controller.
13-01 Start Event
Option: Function:
Select the Boolean (TRUE or FALSE) input
to activate smart logic control.
[0] False Enters the fixed value of FALSE in the
logic rule.
[1] True Enters the fixed value TRUE in the logic
rule.
[2] Running The motor is running.
[3] In range Motor runs within programmed current
ranges (4-50 Warning Current Low and
4-51 Warning Current High)
[4] On reference The motor runs at reference speed.
[7] Out of current
range
[8] Below I low
[9] Above I high
[16] Thermal warning The thermal warning turns on when the
[17] Mains out of
range
[18] Reversing The adjustable frequency drive is
[19] Warning A warning is present.
[20] Alarm (trip) An alarm is present.
[21] Alarm (trip lock) A trip lock alarm is present.
[22] Comparator 0 Use the result of comparator 0 in the
The motor current is outside the range
set in 4-18 Current Limit.
The motor current is lower than set in
4-50 Warning Current Low.
The motor current is higher than set in
4-51 Warning Current High.
temperature exceeds the limit in the
motor, the adjustable frequency drive or
the thermistor.
reversing.
logic rule.
3-40 MG18B222 - VLT® is a registered Danfoss trademark
Page 69

Parameters
VLT® HVAC Basic Drive Programming Guide
13-01 Start Event
Option: Function:
[23] Comparator 1 Use the result of comparator 1 in the
logic rule.
[24] Comparator 2 Use the result of comparator 2 in the
logic rule.
[25] Comparator 3 Use the result of comparator 3 in the
logic rule.
[26] Logic rule 0 Use the result of logic rule 0 in the logic
rule.
[27] Logic rule 1 Use the result of logic rule 1 in the logic
rule.
[28] Logic rule 2 Use the result of logic rule 2 in the logic
rule.
[29] Logic rule 3 Use the result of logic rule 3 in the logic
rule.
[33] Digital input
DI18
[34] Digital input
DI19
[35] Digital input
DI27
[36] Digital input
DI29
[39] Start command This event is TRUE if the adjustable
[40] Drive stopped This event is TRUE if the adjustable
[42] Auto Reset Trip This event is TRUE if the adjustable
[50] Comparator 4 Use the result of comparator 4 in the
[51] Comparator 5 Use the result of comparator 5 in the
[60] Logic rule 4 Use the result of logic rule 4 in the logic
[61] Logic rule 5 Use the result of logic rule 5 in the logic
[83] Broken Belt A broken belt condition has been
Use the value of DI18 in the logic rule
(High = TRUE).
Use the value of DI19 in the logic rule
(High = TRUE).
Use the value of DI27 in the logic rule
(High = TRUE).
Use the value of DI29 in the logic rule
(High = TRUE).
frequency drive is started by any means
(either via digital input, serial communication bus or other).
frequency drive is stopped or coasted by
any means (either via digital input, serial
communication bus or other).
frequency drive is tripped (but not triplocked) and an automatic reset is issued.
logic rule.
logic rule.
rule.
rule.
detected. This function must be enabled
in 22-60 Broken Belt Function.
13-02 Stop Event
Option: Function:
Select the condition (TRUE or FALSE)
which will deactivate the Smart Logic
Controller.
[0] False Enters the fixed value of FALSE in the
logic rule.
[1] True Enters the fixed value TRUE in the logic
rule.
[2] Running
[3] In range
[4] On reference
[7] Out of current
range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of
range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0 Use the result of comparator 0 in the
[23] Comparator 1 Use the result of comparator 1 in the
[24] Comparator 2 Use the result of comparator 2 in the
[25] Comparator 3 Use the result of comparator 3 in the
[26] Logic rule 0 Use the result of logic rule 0 in the
[27] Logic rule 1 Use the result of logic rule 1 in the
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
logic rule.
logic rule.
logic rule.
logic rule.
logic rule.
logic rule.
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-41
Page 70

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Parameters
VLT® HVAC Basic Drive Programming Guide
[28] Logic rule 2 Use the result of logic rule 2 in the
3
[29] Logic rule 3 Use the result of logic rule 3 in the
[30] SL Time-out 0 Use the result of timer 0 in the logic
[31] SL Time-out 1 Use the result of timer 1 in the logic
[32] SL Time-out 2 Use the result of timer 2 in the logic
[33] Digital input DI18 Use the value of DI18 in the logic rule
[34] Digital input DI19
[35] Digital input DI27 Use the value of DI27 in the logic rule
[36] Digital input DI29 Use the value of DI29 in the logic rule
[39] Start command This event is TRUE if the adjustable
[40] Drive stopped This event is TRUE if the adjustable
[42] Auto Reset Trip This event is TRUE if the adjustable
[50] Comparator 4 Use the result of comparator 4 in the
[51] Comparator 5 Use the result of comparator 5 in the
[60] Logic rule 4 Use the result of logic rule 4 in the
[61] Logic rule 5 Use the result of logic rule 5 in the
[70] SL Time-out 3 Use the result of timer 3 in the logic
[71] SL Time-out 4 Use the result of timer 4 in the logic
[72] SL Time-out 5 Use the result of timer 5 in the logic
[73] SL Time-out 6 Use the result of timer 6 in the logic
3-42 MG18B222 - VLT® is a registered Danfoss trademark
13-02 Stop Event
Option: Function:
logic rule.
logic rule.
rule.
rule.
rule.
(High = TRUE).
(High = TRUE).
(High = TRUE).
frequency drive is started by any means
(either via digital input, serial communication bus or other).
frequency drive is stopped or coasted
by any means (either via digital input,
serial communication bus or other).
frequency drive is tripped (but not triplocked) and an automatic reset is
issued.
logic rule.
logic rule.
logic rule.
logic rule.
rule.
rule.
rule.
rule.
13-02 Stop Event
Option: Function:
[74] SL Time-out 7 Use the result of timer 7 in the logic
rule.
[83] Broken Belt A broken belt condition has been
detected. This function must be
enabled in 22-60 Broken Belt Function.
13-03 Reset SLC
Option: Function:
[0] Do not reset
SLC
[1] Reset SLC Resets all group 13 parameters (13-*) to
Retains programmed settings in all group
13 parameters (13-*).
default settings.
3.9.3 13-1* Comparators
Comparators are used for comparing continuous variables
(i.e., output frequency, output current, analog input, etc.)
to fixed preset values.
Figure 3.14
In addition, there are digital values that will be compared
to fixed time values. See explanation in 13-10 Comparator
Operand. Comparators are evaluated once in each scan
interval. Use the result (TRUE or FALSE) directly. All
parameters in this parameter group are array parameters
with index 0 to 5. Select index 0 to program Comparator 0,
select index 1 to program Comparator 1, etc.
13-10 Comparator Operand
Array [6]
Option: Function:
Select the variable to be monitored by
the comparator.
[0] Disabled
[1] Reference
[2] Feedback
[3] Motor speed
[4] Motor Current
[6] Motor power
Page 71

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Parameters
VLT® HVAC Basic Drive Programming Guide
13-10 Comparator Operand
Array [6]
Option: Function:
[7] Motor voltage
[12] Analog input AI53
[13] Analog input AI54
[20] Alarm number
[30] Counter A
[31] Counter B
13-11 Comparator Operator
Array [6]
Option: Function:
[0] Less Than (<)
[1] Approx.Equal (~)
[2] Greater Than (>)
Select [0] < for the result of the evaluation
to be TRUE, when the variable selected in
13-10 Comparator Operand is smaller than
the fixed value in 13-12 Comparator Value.
The result will be FALSE, if the variable
selected in 13-10 Comparator Operand is
greater than the fixed value in
13-12 Comparator Value.
Select [1] ≈ for the result of the evaluation
to be TRUE, when the variable selected in
13-10 Comparator Operand is approximately
equal to the fixed value in
13-12 Comparator Value.
Select [2] > for the inverse logic of option
[0] <.
13-20 SL Controller Timer
Array [8]
Range: Function:
0 s* [0 - 3600s]Enter the value to define the duration of the
FALSE output from the programmed timer. A
timer is only FALSE if it is started by an action
(see 13-52 SL Controller Action [29-31] and
13-52 SL Controller Action [70-74] Start timer X)
and until the timer value has elapsed. Array
par. containing timers 0 to 7.
3.9.5 13-4* Logic Rules
Combine up to three Boolean inputs (TRUE / FALSE inputs)
from timers, comparators, digital inputs, status bits and
events using the logical operators AND, OR, and NOT.
Select Boolean inputs for the calculation in 13-40 Logic Rule
Boolean 1, 13-42 Logic Rule Boolean 2 and 13-44 Logic Rule
Boolean 3. Define the operators used to logically combine
the selected inputs in 13-41 Logic Rule Operator 1 and
13-43 Logic Rule Operator 2.
3
3
13-12 Comparator Value
Array [6]
Range: Function:
0 * [-9999 -
9999 ]
Enter the ‘trigger level’ for the variable that
is monitored by this comparator. This is an
array parameter containing comparator
values 0 to 5.
3.9.4 13-2*Timers
Use the result (TRUE or FALSE) from timers directly to
define an event (see 13-51 SL Controller Event), or as
Boolean input in a logic rule (see 13-40 Logic Rule Boolean
1, 13-42 Logic Rule Boolean 2 or 13-44 Logic Rule Boolean 3).
A timer is only FALSE when started by an action (i.e., [29]
Start timer 1) until the timer value entered in this
parameter is elapsed. Then it becomes TRUE again.
All parameters in this parameter group are array
parameters with index 0 to 2. Select index 0 to program
Timer 0, select index 1 to program Timer 1, and so on.
MG18B222 - VLT® is a registered Danfoss trademark 3-43
Figure 3.15
Priority of calculation
The results of 13-40 Logic Rule Boolean 1, 13-41 Logic Rule
Operator 1 and 13-42 Logic Rule Boolean 2 are calculated
first. The outcome (TRUE / FALSE) of this calculation is
combined with the settings of 13-43 Logic Rule Operator 2
and 13-44 Logic Rule Boolean 3, yielding the final result
(TRUE / FALSE) of the logic rule.
13-40 Logic Rule Boolean 1
Array [6]
Option: Function:
[0] False Enters the fixed value of FALSE in the
logic rule.
[1] True Enters the fixed value TRUE in the logic
rule.
[2] Running
[3] In range
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
Page 72

Parameters
VLT® HVAC Basic Drive Programming Guide
3
13-40 Logic Rule Boolean 1
Array [6]
Option: Function:
[4] On reference
[7] Out of current
range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0 Use the result of comparator 0 in the
[23] Comparator 1 Use the result of comparator 1 in the
[24] Comparator 2 Use the result of comparator 2 in the
[25] Comparator 3 Use the result of comparator 3 in the
[26] Logic rule 0 Use the result of logic rule 0 in the
[27] Logic rule 1 Use the result of logic rule 1 in the
[28] Logic rule 2 Use the result of logic rule 2 in the
[29] Logic rule 3 Use the result of logic rule 3 in the
[30] SL Time-out 0 Use the result of timer 0 in the logic
[31] SL Time-out 1 Use the result of timer 1 in the logic
[32] SL Time-out 2 Use the result of timer 2 in the logic
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
See 13-01 Start Event for further
description.
logic rule.
logic rule.
logic rule.
logic rule.
logic rule.
logic rule.
logic rule.
logic rule.
rule.
rule.
rule.
13-40 Logic Rule Boolean 1
Array [6]
Option: Function:
[33] Digital input DI18 Use the value of DI18 in the logic rule
(High = TRUE).
[34] Digital input DI19 Use the value of DI19 in the logic rule
(High = TRUE).
[35] Digital input DI27 Use the value of DI27 in the logic rule
(High = TRUE).
[36] Digital input DI29 Use the value of DI29 in the logic rule
(High = TRUE).
[39] Start command This logic rule is TRUE if the adjustable
frequency drive is started by any means
(either via digital input, or other).
[40] Drive stopped This logic rule is TRUE if the adjustable
frequency drive is stopped or coasted
by any means (either via digital input,
or other).
[42] Auto Reset Trip This logic rule is TRUE if the adjustable
frequency drive is tripped (but not triplocked) and an automatic reset is
issued.
[50] Comparator 4 Use the result of comparator 4 in the
logic rule.
[51] Comparator 5 Use the result of comparator 5 in the
logic rule.
[60] Logic rule 4 Use the result of logic rule 4 in the
logic rule.
[61] Logic rule 5 Use the result of logic rule 5 in the
logic rule.
[70] SL Time-out 3 Use the result of timer 3 in the logic
rule.
[71] SL Time-out 4 Use the result of timer 4 in the logic
rule.
[72] SL Time-out 5 Use the result of timer 5 in the logic
rule.
[73] SL Time-out 6 Use the result of timer 6 in the logic
rule.
[74] SL Time-out 7 Use the result of timer 7 in the logic
rule.
[83] Broken Belt A broken belt condition has been
detected. This function must be
enabled in 22-60 Broken Belt Function.
3-44 MG18B222 - VLT® is a registered Danfoss trademark
Page 73

Parameters
VLT® HVAC Basic Drive Programming Guide
13-41 Logic Rule Operator 1
Option: Function:
[0] Disabled
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND NOT
[8] NOT OR NOT
13-42 Logic Rule Boolean 2
Array [6]
Option: Function:
Select the second Boolean (TRUE or
FALSE) input for the selected logic
rule.
See 13-40 Logic Rule Boolean 1 for
further descriptions of choices and
their functions.
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
13-42 Logic Rule Boolean 2
Array [6]
Option: Function:
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt A broken belt condition has been
detected. This function must be
enabled in 22-60 Broken Belt Function.
13-43 Logic Rule Operator 2
Array [6]
Option: Function:
Select the second logical operator to be used
on the Boolean input calculated in
13-40 Logic Rule Boolean 1, 13-41 Logic Rule
Operator 1, and 13-42 Logic Rule Boolean 2,
and the Boolean input coming from
13-42 Logic Rule Boolean 2.
[13-44] signifies the Boolean input of
13-44 Logic Rule Boolean 3.
[13-40/13-42] signifies the Boolean input
calculated in 13-40 Logic Rule Boolean 1,
13-41 Logic Rule Operator 1, and 13-42 Logic
Rule Boolean 2. [0] DISABLED (factory setting).
select this option to ignore 13-44 Logic Rule
Boolean 3.
[0] Disabled
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND NOT
[8] NOT OR NOT
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-45
Page 74

Parameters
VLT® HVAC Basic Drive Programming Guide
3
13-44 Logic Rule Boolean 3
Array [6]
Option: Function:
Select the third boolean (TRUE or
FALSE) input for the selected logic
rule.
See 13-40 Logic Rule Boolean 1 for
further descriptions of choices and
their functions.
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
3.9.6 13-5* States
13-51 SL Controller Event
Array [20]
Option: Function:
Select the Boolean input (TRUE or
FALSE) to define the Smart Logic
Controller event.
See 13-02 Stop Event for further
descriptions of choices and their
functions.
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
3-46 MG18B222 - VLT® is a registered Danfoss trademark
Page 75

Parameters
VLT® HVAC Basic Drive Programming Guide
13-51 SL Controller Event
Array [20]
Option: Function:
[74] SL Time-out 7
[83] Broken Belt
13-52 SL Controller Action
Array [20]
Option: Function:
Select the action corresponding to the
SLC event. Actions are executed when
the corresponding event (defined in
13-51 SL Controller Event) is evaluated as
true. The following actions are available
for selection:
[0] Disabled
[1] No action
[2] Select set-up 1
[3] Select set-up 2
[10] Select preset ref0Selects preset reference 0.
[11] Select preset ref1Selects preset reference 1.
[12] Select preset ref2Selects preset reference 2.
[13] Select preset ref3Selects preset reference 3.
[14] Select preset ref4Selects preset reference 4.
[15] Select preset ref5Selects preset reference 5.
[16] Select preset ref6Selects preset reference 6.
[17] Select preset ref7Selects preset reference 7. If the active
[18] Select ramp 1 Selects ramp 1
[19] Select ramp 2 Selects ramp 2
[22] Run Issues a start command to the
[23] Run reverse Issues a start reverse command to the
[24] Stop Issues a stop command to the
Changes the active set-up (0-10 Active
Set-up) to ‘1’.
Changes the active set-up (0-10 Active
Set-up) to ‘2’.
preset reference is changed, it will
merge with other preset reference
commands coming from either the
digital inputs or via a serial communication bus.
adjustable frequency drive.
adjustable frequency drive.
adjustable frequency drive.
13-52 SL Controller Action
Array [20]
Option: Function:
[25] Qstop Issues a quick stop command to the
adjustable frequency drive.
[26] DC Brake Issues a DC stop command to the
adjustable frequency drive.
[27] Coast The adjustable frequency drive coasts
immediately. All stop commands
including the coast command stop the
SLC.
[28] Freeze output Freezes the output frequency of the
adjustable frequency drive.
[29] Start timer 0
[30] Start timer 1
[31] Start timer 2
[32] Set digital out A
low
[33] Set digital out B
low
[34] Set digital out C
low
[35] Set digital out D
low
[38] Set digital out A
high
[39] Set digital out B
high
[40] Set digital out C
high
[41] Set digital out D
high
[60] Reset Counter A Resets Counter A to zero.
[61] Reset Counter B Resets Counter B to zero.
[70] Start Timer 3
[71] Start Timer 4
[72] Start Timer 5
[73] Start Timer 6
Starts timer 0, see 13-20 SL Controller
Timer for further description.
Starts timer 1, see 13-20 SL Controller
Timer for further description.
Starts timer 2, see 13-20 SL Controller
Timer for further description.
Any output with ‘digital output 1’
selected is low (off).
Any output with ‘digital output 2’
selected is low (off).
Any output with ‘digital output 3’
selected is low (off).
Any output with ‘digital output 4’
selected is low (off).
Any output with ‘digital output 1’
selected is high (closed).
Any output with ‘digital output 2’
selected is high (closed).
Any output with ‘digital output 3’
selected is high (closed).
Any output with ‘digital output 4’
selected is high (closed).
Starts timer 3, see 13-20 SL Controller
Timer for further description.
Starts timer 4, see 13-20 SL Controller
Timer for further description.
Starts timer 5, see 13-20 SL Controller
Timer for further description.
Starts timer 6, see 13-20 SL Controller
Timer for further description.
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-47
Page 76

3
Parameters
13-52 SL Controller Action
Array [20]
Option: Function:
[74] Start Timer 7
Starts timer 7, see 13-20 SL Controller
Timer for further description.
VLT® HVAC Basic Drive Programming Guide
3-48 MG18B222 - VLT® is a registered Danfoss trademark
Page 77

Parameters
VLT® HVAC Basic Drive Programming Guide
3.10 Main Menu - Special Functions - Group
14
3.10.1 14-0* Inverter Switching
14-01 Switching Frequency
Option: Function:
Select the inverter switching frequency. Changing
the switching frequency can help to reduce
acoustic noise from the motor.
NOTE!
The output frequency value of the
adjustable frequency drive must never
exceed 1/10 of the switching frequency.
When the motor is running, adjust the
switching frequency in 14-01 Switching
Frequency until the motor is as noiseless as
possible.
NOTE!
Not all choices are available in all power
sizes.
3.10.2 14-1* >Mains Power On/Off
Parameters for configuring line failure monitoring and
handling.
14-12 Function at Mains Imbalance
Option: Function:
Operating under severe line imbalance conditions
reduces the lifetime of the motor. Conditions are
considered severe if the motor operates continuously near nominal load (such as when a pump or
fan runs near full speed).
When a severe line imbalance is detected:
[0] Trip Trips the adjustable frequency drive.
[1] Warning Issues a warning.
[2] Disabled No action.
CAUTION
May cause reduced lifetime.
3.10.3 14-2* Trip Reset
3
3
[0] Ran3 3kHz true random PWM (white noise modulation)
[1] Ran5 5kHz true random PWM (white noise modulation)
[2] 2.0 kHz
[3] 3.0 kHz
[4] 4.0 kHz
[5] 5.0 kHz
[6] 6.0 kHz
[7] 8.0 kHz
[8] 10.0 kHz
[9] 12.0kHz
[10] 16.0kHz
14-03 Overmodulation
Option: Function:
[0] Off Selects no overmodulation of the output voltage in
order to avoid torque ripple on the motor shaft.
[1] On The overmodulation function generates an extra voltage
of up to 8% of U
lation, which results in an extra torque of 10–12% in the
middle of the oversyncronous range (from 0% at
nominal speed rising to approximately 12% at double
nominal speed).
output voltage without overmodu-
max
14-08 Damping Gain Factor
Range: Function:
96 %* [0 - 100 %]
14-20 Reset Mode
Option: Function:
Select the reset function after
tripping. Once reset, the adjustable
frequency drive can be restarted.
[0] Manual reset
[1] Automatic reset x 1
[2] Automatic reset x 2
[3] Automatic reset x 3
[4] Automatic reset x 4
[5] Automatic reset x 5
[6] Automatic reset x 6
[7] Automatic reset x 7
[8] Automatic reset x 8
[9] Automatic reset x 9
[10] Automatic reset x 10
[11] Automatic reset x 15
[12] Automatic reset x 20
[13] Infinite auto reset
Select [0] Manual reset, to perform a
reset via [Reset] or via the digital
inputs.
Select [1]-[12] Automatic reset x 1…x20
to perform between one and twenty
automatic resets after tripping.
Select [13] Infinite Automatic Reset for
continuous resetting after tripping.
MG18B222 - VLT® is a registered Danfoss trademark 3-49
Page 78
Parameters
VLT® HVAC Basic Drive Programming Guide
3
NOTE!
Automatic reset will also be active for resetting safe stop
function.
14-21 Automatic Restart Time
Range: Function:
10 s* [0 - 600 s] Enter the time interval from trip to start of
the automatic reset function. This parameter
is active when 14-20 Reset Mode is set to [1] -
[13] Automatic reset.
14-22 Operation Mode
Option: Function:
Select [2] Initialization to reset all parameter
values to default.
[0] Normal
operation
[2] Initialisation
14-27 Action At Inverter Fault
Option: Function:
[0] Trip
[1] Warning
3.10.4 14-4*Energy Optimizing
Parameters for adjusting the energy optimization level in
both Variable Torque (VT) and Automatic Energy Optimization (AEO) mode.
Automatic Energy Optimization is only active if 1-03 Torque
Characteristics, is set for Auto Energy Optim. [3].
14-40 VT Level
Range: Function:
90 %* [40 - 90 %]
Select [0] Normal operation for normal
operation of the adjustable frequency drive
with the motor in the selected application.
Select [2] Initialization to reset all parameter
values to default settings, except for
15-03 Power Up's, 15-04 Over Temp's and
15-05 Over Volt's. The adjustable frequency
drive will reset during the next power-up.
14-22 Operation Mode will also revert to the
default setting [0] Normal operation.
Select how the adjustable frequency drive should
react at inverter fault. Action At Inverter Fault
3.10.5 14-5* Environment
These parameters help the adjustable frequency drive to
operate under special environmental conditions.
14-50 RFI Filter
Option: Function:
[0] Off
[1] On
14-51 DC-Link Voltage Compensation
Option: Function:
[0] Off Disables DC Link Compensation.
[1] On Enables DC Link Compensation.
14-52 Fan Control
Option: Function:
[0] Auto
[4] Auto Low Temp
14-53 Fan Monitor
Option: Function:
[0] Disabled
[1] Warning
[2] Trip
14-55 Output Filter
Option: Function:
[0] No Filter
[1] Sine-Wave Filter
[3] Sine-Wave Filter with Feedback
Select [0] Off only if the adjustable frequency drive is
fed by an isolated line power source (IT line power).
In this mode, the internal RFI filter capacitors between
chassis and the line power RFI filter circuit are cut-out
to reduce the ground capacity currents.
Select [1] On to ensure that the adjustable frequency
drive complies with EMC standards.
Only valid for the following adjustable
frequency drives: 380–480 V, 40–125 hp
[30–90 kW].
Env.
Select which action the adjustable frequency drive
should take in case a fan fault is detected. (Only
valid for some drive sizes.)
Select whether an output
filter is present.
14-41 AEO Minimum Magnetisation
Range: Function:
66 %* [40 - 75 %]
3-50 MG18B222 - VLT® is a registered Danfoss trademark
14-63 Min Switch Frequency
Set the minimum switch frequency allowed by the output filter.
Option: Function:
[2] 2.0 kHz
[3] 3.0 kHz
Page 79

Parameters
14-63 Min Switch Frequency
Set the minimum switch frequency allowed by the output filter.
Option: Function:
[4] 4.0 kHz
[5] 5.0 kHz
[6] 6.0 kHz
[7] 8.0 kHz
[8] 10.0 kHz
[9] 12.0kHz
[10] 16.0kHz
VLT® HVAC Basic Drive Programming Guide
3
3
MG18B222 - VLT® is a registered Danfoss trademark 3-51
Page 80

Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.11 Main Menu - Drive Information - Group
15
Parameter group containing adjustable frequency drive
information such as operating data, hardware configuration and software versions.
3.11.1 15-0* Operating Data
15-00 Operating hours
Range: Function:
0 h* [0 - 0x7fffffff. h] View how many hours the adjustable
frequency drive has run. The value is
saved when the adjustable frequency
drive is turned off.
15-01 Running Hours
Range: Function:
0 h* [0 - 0x7fffffff.h]View how many hours the motor has run.
Reset the counter in 15-07 Reset Running
Hours Counter. The value is saved when
the adjustable frequency drive is turned
off.
15-02 kWh Counter
Range: Function:
0 kWh* [0 - 65535
kWh]
View the output power of the adjustable
frequency drive in kWh as a mean value
over one hour. Reset the counter in
15-06 Reset kWh Counter.
NOTE!
The reset is carried out by pressing [OK].
15-07 Reset Running Hours Counter
Option: Function:
[0] Do not reset
[1] Reset counter
3.11.2 15-3* Alarm Log
Parameters in this group are array parameters, where up to
10 fault logs can be viewed. [0] is the most recent logged
data, and [9] the oldest. Error codes, values and time
stamp can be viewed for all logged data.
15-30 Alarm Log: Error Code
Range: Function:
0 * [0 - 255 ] View the error code and look up its meaning in
Range: Function:
0 * [-32,767–
32,767]
3.11.3 15-4* Drive Identification
Select [1] Reset counter and press [OK] to reset
Running Hours counter (15-01 Running Hours)
and to zero (see also 15-01 Running Hours).
the Troubleshooting chapter.
View a description of the error. This
parameter is used in combination with
alarm 38 Internal Fault.
15-03 Power Up's
Range: Function:
0 * [0 - 2147483647 ] View the number of times the adjustable
frequency drive has been powered up.
15-04 Over Temp's
Range: Function:
0 * [0 - 65535 ] View the number of adjustable frequency
drive temperature faults which have occurred.
Parameters containing read-only information about the
hardware and software configuration of the Adjustable
frequency drive.
15-40 FC Type
Range: Function:
0 * [0 - 0 ] View the FC type. The readout is identical to the
adjustable frequency drive series power field of the
type code definition, characters 1-6.
15-41 Power Section
15-05 Over Volt's
Range: Function:
0 * [0 - 65535 ] View the number of adjustable frequency
drive overvoltages which have occurred.
15-06 Reset kWh Counter
Option: Function:
[0] Do not reset
[1] Reset counter
3-52 MG18B222 - VLT® is a registered Danfoss trademark
Select [1] Reset and press [OK] to reset the
kWh counter to zero (see 15-02 kWh Counter).
Range: Function:
0 * [0 - 0 ] View the FC type. The readout is identical to the
adjustable frequency drive series power field of the
type code definition, characters 7-10.
15-42 Voltage
Range: Function:
0 * [0 - 0 ] View the FC type. The readout is identical to the
adjustable frequency drive series power field of the
type code definition, characters 11-12.
Page 81

Parameters
VLT® HVAC Basic Drive Programming Guide
15-43 Software Version
Range: Function:
0 * [0 - 0 ] View the software version of the adjustable
frequency drive.
15-44 Ordered TypeCode
Range: Function:
0 * [0 - 0 ] View the type code string used for re-ordering the
adjustable frequency drive in its original configuration.
15-46 Drive Ordering No
Range: Function:
0 * [0 - 0 ] View the 8-digit ordering number used for re-
ordering the adjustable frequency drive in its
original configuration.
15-47 Power Card Ordering No
Range: Function:
0 * [0 - 0 ] View the power card ordering number.
15-48 LCP Id No
Range: Function:
0 * [0 - 0 ] View the LCP ID number.
15-98 Drive Identification
Range: Function:
0 * [0 - 0 ]
3
3
15-49 SW ID Control Card
Range: Function:
0 * [0 - 0 ] View the control card software version number.
15-50 SW ID Power Card
Range: Function:
0 * [0 - 0 ] View the power card software version number.
15-51 Drive Serial Number
Range: Function:
0 * [0 - 0 ] View the adjustable frequency drive serial number.
15-53 Power Card Serial Number
Range: Function:
0 * [0 - 0 ] View the power card serial number.
15-92 Defined Parameters
Range: Function:
0 * [0 - 2000 ]
15-97 Application Type
Range: Function:
0 * [0 - 0xFFFFFFFF ]
MG18B222 - VLT® is a registered Danfoss trademark 3-53
Page 82

Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.12 Main Menu - Data Readouts - Group 16
3.12.1 16-0* General Status
16-00 Control Word
Range: Function:
0 * [0 - 65535 ] View the control word sent from the
adjustable frequency drive via the serial
communication port in hex code.
Bit number
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit Bit = 0 Bit = 1
00 Preset reference choice lsb
01 Preset reference choice second bit of
preset references
02 DC brake Ramp
03 Coasting Enable
04 Quick stop Ramp
05 Freeze output Ramp
06 Ramp stop Start
07 No function Reset
08 No function Jog
09 Ramp 1 Ramp 2
10 Data not valid Valid
11 Relay_A not active Relay_A activated
12 Relay_B not active Relay_B activated
13 Choice of Set-up lsb
14 No function No function
15 No function Reversing
Table 3.8 Control Word
16-01 Reference [Unit]
Range: Function:
0 ReferenceFeedbackUnit*
[-4999 - 4999
ReferenceFeedbackUnit]
16-02 Reference [%]
Range: Function:
0 %* [-200 - 200 %]
View the present
reference value applied
on impulse or analog
basis in the unit
resulting from the
configuration selected
in 1-00 Configuration
Mode (Hz).
16-03 Status Word
Range: Function:
0 * [0 - 65535 ] View the status word sent from the adjustable
frequency drive via the serial communication
port in hex code.
Bit number
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit Bit = 0 Bit = 1
00 Control not ready Ready
01 VLT not ready Ready
02 Coasting Enable
03 No fault Trip
04 No warning Warning
05 Reserved
06 No trip lock Trip lock
07 No warning Warning
08
Speed ≠ ref.
09 Local control Bus control
10 Out of speed range Frequency OK
11 Not running Running
12 No function No function
13 Voltage OK Above limit
14 Current OK Above limit
15 Temperature OK Above limit
Table 3.9 Status Word
Speed = ref.
16-05 Main Actual Value [%]
Range: Function:
0 %* [-200 - 200 %]
16-09 Custom Readout
Range: Function:
0 CustomReadoutUnit*
[0 - 9999
CustomReadoutUnit]
View the user-defined
readouts as defined in
0-30 Custom Readout Unit,
0-31 Custom Readout Min
Value and 0-32 Custom
Readout Max Value. Custom
Readout
3.12.2 16-1* Motor Status
16-10 Power [kW]
Range: Function:
0 kW* [0 - 1000 kW] Displays DC link power in kW. The value
shown is calculated on the basis of the
actual motor voltage and motor current.
3-54 MG18B222 - VLT® is a registered Danfoss trademark
Page 83

Parameters
VLT® HVAC Basic Drive Programming Guide
16-11 Power [hp]
Range: Function:
0 hp* [0 - 1000 hp] View the DC link power in hp. The value
shown is calculated on the basis of the
actual motor voltage and motor current.
16-12 Motor Voltage
Range: Function:
0 V* [0 - 65535 V] View the motor voltage, a calculated value
used for controlling the motor.
16-13 Frequency
Range: Function:
0 Hz* [0 - 6553.5 Hz] View the motor frequency, without
resonance dampening.
16-14 Motor current
Range: Function:
0 A* [0 - 655.35 A] View the motor current measured as a
mean value, IRMS.
16-15 Frequency [%]
Range: Function:
0 %* [0 - 6553.5 %]
16-18 Motor Thermal
Range: Function:
0 %* [0 - 100 %]
16-37 Inv. Max. Current
Range: Function:
0 A* [0 - 655.35 A] View the inverter maximum current. The
data are used for calculation of adjustable
frequency drive protection, etc.
16-38 SL Controller State
Range: Function:
0 * [0 - 20 ] View the actual state of the Smart Logic
Controller (SLC).
3.12.4 16-5* Ref. & Feedb.
16-50 External Reference
Range: Function:
0 %* [-200 - 200 %]
16-52 Feedback[Unit]
Range: Function:
0 ProcessCtrlUnit* [-4999 - 4999
ProcessCtrlUnit]
View the feedback
resulting from the
selection of scaling in
3-02 Minimum Reference
and 3-03 Maximum
Reference.
3.12.5 16-6* Inputs and Outputs
3
3
3.12.3 16-3* Drive Status
16-30 DC Link Voltage
Range: Function:
0 V* [0 - 65535 V] View a measured value.
16-34 Heatsink Temp.
Range: Function:
0 °C* [0 - 255 °C]
16-35 Inverter Thermal
Range: Function:
0 %* [0 - 255 %]
16-36 Inv. Nom. Current
Range: Function:
0 A* [0 - 655.35 A] View the inverter nominal current, which
should match the nameplate data on the
connected motor. The data are used for
motor protection, etc.
16-60 Digital Input
Range: Function:
0 * [0 - 65535 ] View actual state of the digital inputs 18, 19,
27 and 29.
Bits definition
Bit 0 Unused
Bit 1 Unused
Bit 2 Digital input term. 29
Bit 3 Digital input term. 27
Bit 4 Digital input term. 19
Bit 5 Digital input term. 18
Bit 6~15 Unused
Table 3.10
16-61 Terminal 53 Setting
Option: Function:
View the setting of input terminal 53. Current
= 0; Voltage = 1.
[0] Current mode
[1] Voltage mode
MG18B222 - VLT® is a registered Danfoss trademark 3-55
Page 84

Parameters
VLT® HVAC Basic Drive Programming Guide
3
16-62 Analog Input AI53
Range: Function:
1 * [0 - 20 ] View the actual value at input 53.
16-63 Terminal 54 Setting
Option: Function:
View the setting of input terminal 54. Current
= 0; Voltage = 1.
[0] Current mode
[1] Voltage mode
16-64 Analog Input AI54
Range: Function:
1 * [0 - 20 ] View the actual value at input 54.
16-65 Analog Output AO42 [mA]
Range: Function:
0 mA* [0 - 20 mA] View the actual value at output 42 in mA.
The value shown reflects the selection in
6-90 Terminal 42 Mode and 6-91 Terminal 42
Analog Output.
16-66 Digital Output
Range: Function:
0 * [0 -
15 ]
View the binary value of all digital outputs.
Definition:
X: Not used
0: Low
1: High
16-71 Relay Output [bin]
Range: Function:
0 * [0 - 65535 ] View the setting of the relay.
Bits definition:
Bit 0~2 Unused
Bit 3 Relay 02
Bit 4 Relay 01
Bit 5~15 Unused
Table 3.12
16-72 Counter A
Range: Function:
0 * [-32768 -
32767 ]
View the present value of Counter A. Counters
are useful as comparator operands, see
13-10 Comparator Operand.
The value can be reset or changed either via
digital inputs (parameter group 5-1*) or by
using an SLC action (13-52 SL Controller Action).
XX None used
X0 Terminal 42 not used, Terminal 45
low
X1 Terminal 42 not used, Terminal 45
High
0X Terminal 42 low, Terminal 45 not
used
0 Terminal 42 low, Terminal 45 low
1 Terminal 42 low, Terminal 45 high
1X Terminal 42 high, Terminal 45 not
used
10 Terminal 42 high, Terminal 45 low
11 Terminal 42 high, Terminal 45 high
Table 3.11
16-67 Pulse Input #29 [Hz]
Range: Function:
0 * [0 - 130000 ] View the actual frequency rate on terminal
29.
3-56 MG18B222 - VLT® is a registered Danfoss trademark
Page 85

Parameters
VLT® HVAC Basic Drive Programming Guide
16-73 Counter B
Range: Function:
0 * [-32768 -
32767 ]
View the present value of Counter B. Counters
are useful as comparator operands
(13-10 Comparator Operand).
The value can be reset or changed either via
digital inputs (parameter group 5-1*) or by
using an SLC action (13-52 SL Controller Action).
16-79 Analog Output AO45
Range: Function:
0 mA* [0 - 20 mA]
3.12.6 16-8* Fieldbus & FC Port
Parameters for reporting the BUS references and control
words.
16-86 FC Port REF 1
Range: Function:
0 * [-32768 - 32767 ] View the last received reference from the
FC Port.
16-94 Ext. Status Word
Range: Function:
0 * [0 - 0xFFFFFFFFUL ] Returns the extended status word sent
via the serial communication port in
hex code.
16-95 Ext. Status Word 2
Range: Function:
0 * [0 - 0xFFFFFFFFUL ] Returns the extended status word 2
sent via the serial communication port
in hex code.
3
3
3.12.7 16-9* Diagnosis Readouts
16-90 Alarm Word
Range: Function:
0 * [0 - 0xFFFFFFFFUL ] View the alarm word sent via the
serial communication port in hex
code.
16-91 Alarm Word 2
Range: Function:
0 * [0 - 0xFFFFFFFFUL ] View the alarm word 2 sent via the
serial communication port in hex
code.
16-92 Warning Word
Range: Function:
0 * [0 - 0xFFFFFFFFUL ] View the warning word sent via the
serial communication port in hex
code.
16-93 Warning Word 2
Range: Function:
0 * [0 - 0xFFFFFFFFUL ] View the warning word 2 sent via the
serial communication port in hex
code.
MG18B222 - VLT® is a registered Danfoss trademark 3-57
Page 86

3
Parameters
VLT® HVAC Basic Drive Programming Guide
3.13 Main Menu - Data Readouts 2 - Group
18
Parameters in this group are array parameters, where up to
10 fault logs can be viewed. [0] is the most recent logged
data, and [9] the oldest. Error codes, values, and time
stamp can be viewed for all logged data
3.13.1 18-1* Fire Mode Log
18-10 FireMode Log:Event
Range: Function:
0 * [0 - 255 ] View Fire Mode event.
3-58 MG18B222 - VLT® is a registered Danfoss trademark
Page 87

Parameters
VLT® HVAC Basic Drive Programming Guide
3.14 Main Menu - Adjustable Frequency
Drive Closed-loop - Group 20
This parameter group is used for configuring the closedloop PI controller that controls the output frequency of the
adjustable frequency drive.
3.14.1 20-0* Feedback
This parameter group is used to configure the feedback
signal for the adjustable frequency drive’s closed-loop PI
controller.
20-00 Feedback 1 Source
Option: Function:
This parameter defines which input will
be used as the source of the feedback
signal.
[0] No function
[1] Analog Input 53
[2] Analog Input 54
[3] Pulse input 29
[100] Bus Feedback 1
20-83 PI Start Speed [Hz]
Range: Function:
0 Hz* [ 0 -
200.0 Hz]
Enter the motor speed to be attained as a
start signal for commencement of PI control.
Upon power-up, the adjustable frequency
drive operates using speed open-loop control.
When the Process PI start speed is reached,
the adjustable frequency drive will change to
PI control.
20-84 On Reference Bandwidth
Range: Function:
5 %* [0 - 200 %]
3.14.3 20-9* PI Controller
20-91 PI Anti Windup
Option: Function:
[0] Off Continue regulation of an error even when the output
frequency cannot be increased or decreased.
[1] On Cease regulation of an error when the output frequency
can no longer be adjusted.
3
3
20-01 Feedback 1 Conversion
Option: Function:
This parameter allows a conversion function to
be applied to Feedback 1.
[0] Linear
[1] Square
root
[0] Linear has no effect on the feedback.
[1] Square root is commonly used when a
pressure sensor is used to provide flow feedback
((
flow ∝pressure
)).
3.14.2 20-8* PI Basic Settings
Parameters for configuring the Process PI control.
20-81 PI Normal/ Inverse Control
Option: Function:
[0] Normal Causes the adjustable frequency drive’s output
frequency to decrease when the feedback is greater
than the setpoint reference. This is common for
pressure-controlled supply fan and pump
applications.
[1] Inverse Causes the adjustable frequency drive’s output
frequency to increase when the feedback is greater
than the setpoint reference. This is common for
temperature-controlled cooling applications, such as
cooling towers.
20-93 PI Proportional Gain
Range: Function:
0.50 * [0 - 10 ] Enter the process controller proportional gain.
Quick control is obtained at high amplification.
However, if amplification is too great, the
process may become unstable.
20-94 PI Integral Time
Range: Function:
20 s* [0.10 -
9999 s]
Enter the process controller integral time.
Obtain quick control through a short integral
time, though if the integral time is too short,
the process becomes unstable. An
excessively long integral time disables the
integral action.
20-97 PI Feed Forward Factor
Range: Function:
0 %* [0 - 400 %]
MG18B222 - VLT® is a registered Danfoss trademark 3-59
Page 88

3
Parameters
VLT® HVAC Basic Drive Programming Guide
3.15 Main Menu - Application Functions Group 22
3.15.1 22-4* Sleep Mode
The purpose of sleep mode is to allow FC 101 to stop itself
in situations where the system is satisfied. This will save
energy, and keeps system from being over-satisfied (too
high pressure, water cooled too much in cooling towers,
building pressurisation problems). This is also important for
a reason that some applications cannot allow the FC 101
to adjust motor down to low speed. This might damage
pumps, cause insufficient lubrication in gearboxes, and
make fans unstable.
The sleep controller has two important functions - ability
to go to sleep at the right time, and ability to come out of
a sleep mode at the right time. The goal is to keep FC 101
in sleep mode as long as possible to avoid cycling the
motor on and off frequently, and at the same time keep
the controlled system variable in acceptable range.
The sequence when running sleep mode in Open-loop:
1.
The motor speed is less than 22-47 Sleep Speed
[Hz] and the motor has been running longer than
22-40 Minimum Run Time.
2.
FC101 ramps the motor speed down to1-82 Min
Speed for Function at Stop [Hz].
3.
FC101 activates 1-80 Function at Stop. The
adjustable frequency drive is now in sleep mode.
4.
FC101 compares the speed setpoint with
22-43 Wake-Up Speed [Hz] to detect a wake-up
situation.
5.
The speed setpoint is greater than 22-43 Wake-Up
Speed [Hz] and the sleep condition has last for
more than 22-41 Minimum Sleep Time. The
adjustable frequency drive is now out of sleep
mode.
6. Go back to speed open-loop control (ramp motor
speed up to the speed setpoint).
The sequence when running sleep mode in Closed-loop:
1.
If 20-81 PI Normal/ Inverse Control = [0] Normal.
When an error between Reference and Feedback
is greater than 22-44 Wake-Up Ref./FB Diff, the
adjustable frequency drive will go to Boost status.
If 22-45 Setpoint Boost is not set, the adjustable
frequency drive will go into sleep mode.
2.
After 22-46 Maximum Boost Time, drive ramps the
motor speed down to 1-82 Min Speed for Function
at Stop [Hz].
3.
The adjustable frequency drive activates
1-80 Function at Stop. The adjustable frequency
drive is now in Sleep mode.
4. When an error between Reference and Feedback
is greater than 22-44 Wake-Up Ref./FB Diff, and the
condition last more than 22-41 Minimum Sleep
Time, the adjustable frequency drive is out of
sleep mode.
5. The adjustable frequency drive goes back to
Close-loop control.
NOTE!
Sleep mode will not be active when Local Reference is
active (set speed manually by means of navigation keys on
the LCP).
Does not work in Hand-mode. Auto set-up in open-loop
must be carried out before setting input/output in closedloop.
22-40 Minimum Run Time
Range: Function:
10 s* [0 - 600 s] Set the desired minimum running time for
the motor after a start command (digital
input or bus) before entering sleep mode.
22-41 Minimum Sleep Time
Range: Function:
10 s* [0 - 600 s] Set the desired minimum time for staying in
sleep mode. This will override any wake-up
conditions.
22-43 Wake-Up Speed [Hz]
Range: Function:
10 * [ 0 - 400.0 ]
22-44 Wake-Up Ref./FB Diff
Range: Function:
10 %* [0 - 100 %]
22-45 Setpoint Boost
Range: Function:
0 %* [-100 - 100 %]
22-46 Maximum Boost Time
Range: Function:
60 s* [0 -
600 s]
Only to be used if 1-00 Configuration Mode is set
for closed-loop and the integrated PI controller
is used for controlling the pressure.
Set the maximum time for which boost mode
will be allowed. If the set time is exceeded,
sleep mode will be entered and will not wait for
the set boost pressure to be reached.
3-60 MG18B222 - VLT® is a registered Danfoss trademark
Page 89

Parameters
VLT® HVAC Basic Drive Programming Guide
22-47 Sleep Speed [Hz]
Range: Function:
0 * [ 0 - 400.0 ] Set the speed below which the adjustable
frequency drive will go into Sleep mode.
3.15.2 22-6* Broken Belt Detection
The broken belt detection can be used in both closed-loop
and open-loop systems for pumps and fans. If the
estimated motor torque (current) is below the broken belt
torque (current) value (22-61 Broken Belt Torque) and the
adjustable frequency drive output frequency is above or
equal to 15 Hz, 22-60 Broken Belt Function is performed
22-60 Broken Belt Function
Selects the action to be performed if the broken belt condition is
detected.
Option: Function:
[0] Off
[1] Warning The adjustable frequency drive will continue to run,
but will activate a Broken Belt Warning [W95]. A
drive digital output or a serial communication bus
can communicate a warning to other equipment.
[2] Trip The adjustable frequency drive will stop running
and activate a Broken Belt alarm [A 95]. A drive
digital output or a serial communication bus can
communicate an alarm to other equipment.
22-62 Broken Belt Delay
Range: Function:
the action selected in 22-60 Broken Belt
Function.
3
3
NOTE!
Do not set 14-20 Reset Mode, to [13] Infinite auto reset
when 22-60 Broken Belt Function is set to [2] Trip. Doing so
will cause the adjustable frequency drive to continuously
cycle between running and stopping when a broken belt
condition is detected.
NOTE!
If the adjustable frequency drive is equipped with a
constant speed bypass with an automatic bypass function
that starts the bypass if the adjustable frequency drive
experiences a persistent alarm condition, be sure to disable
the bypass’s automatic bypass function, if [2] Trip is
selected as the Broken Belt Function.
22-61 Broken Belt Torque
Range: Function:
10 %* [5 - 100 %]
22-62 Broken Belt Delay
Range: Function:
10 s* [0 - 600 s] Sets the time for which the broken belt
conditions must be active before carrying out
MG18B222 - VLT® is a registered Danfoss trademark 3-61
Page 90

Parameters
VLT® HVAC Basic Drive Programming Guide
3
3.16 Main Menu - Application Functions 2 Group 24
3.16.1 24-0* Fire Mode
CAUTION
Please note the adjustable frequency drive is only one
component of the VLT HVAC Basic Drive system. Correct
function of Fire Mode depends on the correct design and
selection of system components. Ventilation systems
working in life safety applications have to be approved by
the local fire authorities. Non-interruption of the adjustable
frequency drive due to Fire Mode operation could cause over
pressure and result in damage to VLT HVAC Basic Drive
system and components, including dampers and air ducts.
The adjustable frequency drive itself could be damaged and it
may cause damage or fire. Danfoss accepts no responsibility
for errors, malfunctions personal injury or any damage to the
adjustable frequency drive itself or components herein, VLT
HVAC Basic Drive systems and components herein or other
property when the adjustable frequency drive has been
programmed for Fire Mode. In no event shall Danfoss be
liable to the end user or any other party for any direct or
indirect, special or consequential damage or loss suffered by
such party, which has occurred due to the adjustable
frequency drive being programmed and operated in Fire
Mode.
Background
Fire Mode is for use in critical situations, where it is
imperative for the motor to keep running, regardless of
the adjustable frequency drive's normal protective
Message
Fire Mode Status + + + (bit 25)
Fire Mode Warning +
Type LCP Messages in display Warning Word 2 Ext. Status Word 2
functions. These could be ventilation fans in tunnels or
stairwells for instance, where continued operation of the
fan facilitates safe evacuation of personnel in the event of
a fire. Some selections of Fire Mode Function cause alarms
and trip conditions to be disregarded, enabling the motor
to run without interruption.
Activation
Fire Mode is activated only via digital input terminals. See
parameter group 5-1* Digital Inputs.
Messages in display
When Fire Mode is activated, the display will show a status
message “Fire Mode” and a warning “Fire Mode”.
Once Fire Mode is again deactivated, the status messages
will disappear and the warning will be replaced by the
warning “Fire M Was Active”. This message can only be
reset by power-cycling the adjustable frequency drive
supply. If, while the adjustable frequency drive is active in
Fire Mode, a warranty-affecting alarm (see 24-09 FM Alarm
Handling) should occur, the display will show the warning
“Fire M Limits Exceeded”.
Digital and relay outputs can be configured for the status
messages “Fire Mode Active” and the warning “Fire M Was
Active”. See parameter group5-3* and parameter group
5-4*.
“Fire M was Active” messages can also be accessed in the
warning word via serial communication. (See relevant
documentation).
The status messages “Fire Mode” can be accessed via the
extended status word.
Table 3.13
Log
An overview of events related to Fire Mode can be viewed
in the Fire Mode log, parameter group 18-1*.
The log will include up to 10 of the latest events.
Warranty-affecting alarms will have a higher priority.
The log cannot be reset.
Following events are logged:
*Warranty affecting alarms (see 24-09 FM Alarm Handling,
Fire Mode Alarm Handling)
*Fire Mode activated
All other alarms occurring while Fire Mode activated will
be logged as usual.
3-62 MG18B222 - VLT® is a registered Danfoss trademark
NOTE!
During Fire Mode operation all stop commands to the
adjustable frequency drive will be ignored, including
Coast/Coast inverse and External Interlock.
NOTE!
If setting the command [11] Start Reversing on a digital
input terminal in 5-10 Terminal 18 Digital Input, the
adjustable frequency drive will understand this as a
reversing command.
Page 91

Parameters
VLT® HVAC Basic Drive Programming Guide
24-00 FM Function
Option: Function:
[0] Disabled Fire Mode Function is not active.
[1] Enabled-Run
Forward
[2] Enabled-Run
Reverse
[3] Enabled-Coast When this mode is enabled, the output is
[4] Enabled-Run
Fwd/Rev
In this mode, the motor will continue to
operate in a clockwise direction.
In this mode, the motor will continue to
operate in a counter-clockwise direction.
disabled and the motor is allowed to
coast to stop.
NOTE!
In the above, alarms are produced or ignored in
accordance with the selection in 24-09 FM Alarm Handling.
24-05 FM Preset Reference
Range: Function:
0 %* [-100 - 100 %] Enter the required preset reference/
setpoint as a percentage of the Fire Mode
Max Reference set in Hz.
NOTE!
The setting in 14-20 Reset Mode is disregarded if Fire Mode
is active (see parameter group 24-0*, Fire Mode).
No: Description
4 Mains ph. Loss x
7 DC over volt x
8 DC under volt x
9 Inverter overloaded x
13 Over current x
14 Earth fault x
16 Short circuit x
29 Power card temp x
33 Inrush fault x
38 Internal fault x
65 Ctrl. card temp x
68 SafeStop x
Table 3.14
3.16.2
24-1* Drive Bypass
Critical
Alarms
Warranty
Affecting
Alarms
3
3
24-09 Fire Mode Alarm Handling
Option: Function:
[0] Trip+Reset,
Crit Alar
[1] Trip, Critical
Alarms
[2] Trip, All
Alarms/Test
If this mode is selected, the adjustable
frequency drive will continue to run, ignoring
most alarms, even if doing so it may result in
damage of the adjustable frequency drive.
Critical alarms are alarms which cannot be
suppressed, but a restart attempt is possible
(Infinity Automatic Reset).
In case of a critical alarm, the adjustable
frequency drive will trip and not auto-restart
(Manual Reset).
It is possible to test the operation of Fire
Mode, but all alarm states are activated
normally (Manual Reset).
NOTE!
Warranty-affecting alarms. Certain alarms can affect the
lifetime of the adjustable frequency drive. If one of these
disregarded alarms occurs while in Fire Mode, a log of the
event is stored in the Fire Mode Log.
This is where the 10 latest events caused by warrantyaffecting alarms, fire mode activation and fire mode
deactivation are stored.
The adjustable frequency drive includes a feature which
can be used to automatically activate an external electromechanical bypass in case of the event of a Fire Mode
Coast (see 24-00 FM Function).
The bypass will switch the motor to operation direct on
line. The external bypass is activated by means of one of
the digital outputs or relays in the adjustable frequency
drive, when programmed in parameter group 5-3* or
parameter group 5-4*.
NOTE!
The drive bypass cannot be deactivated if in Fire Mode. It
can be deactivated only by either removing the Fire Mode
command signal or the power supply to the adjustable
frequency drive!
When the Drive Bypass function is activated, the display on
the LCP will show the status message Drive Bypass. This
message has a higher priority than the Fire Mode status
messages. When the automatic Drive Bypass function is
enabled, it will cut in the external bypass according to the
below sequence:
MG18B222 - VLT® is a registered Danfoss trademark 3-63
Page 92

3
Parameters
Figure 3.16
VLT® HVAC Basic Drive Programming Guide
Status can be read in the Extended Status Word 2, bit
number 24.
24-10 Drive Bypass Function
Option: Function:
This parameter determines, what circumstances will activate the drive bypass
function:
[0] Disabled
[2] Enabled (Fire
Mode only)
The bypass function will operate at trip at
critical alarms, coast or bypass delay timer if
the timer expires before reset attempts
have completed.
24-11 Drive Bypass Delay Time
Range: Function:
0s* [0 -
Programmable in 1 s increments. Once the Bypass
600 s]
Function is activated in accordance with the setting
in 24-10 Drive Bypass Function, the Bypass Delay
Timer begins to operate. If the adjustable frequency
drive has been set for a number of restart attempts,
the timer will continue to run while the adjustable
frequency drive tries to restart. If the motor restarts
within the time period of the Bypass Delay Timer,
then the timer is reset.
Should the motor fail to restart at the end of the
Bypass Delay Time, the Drive Bypass relay will be
activated, which will have been programmed for
Bypass in 5-40 Function Relay.
Where no restart attempts are programmed, the
timer will run for the delay period set in this
parameter and will then activate the Drive Bypass
relay, which will have been programmed for Bypass
in 5-40 Function Relay, Function Relay.
3-64 MG18B222 - VLT® is a registered Danfoss trademark
Page 93

Troubleshooting
4 Troubleshooting
VLT® HVAC Basic Drive Programming Guide
4.1.1 Alarms and Warnings
A warning or an alarm is signaled by the relevant LED on
the front of the adjustable frequency drive and indicated
by a code on the display.
A warning remains active until its cause is no longer
present. Under certain circumstances operation of the
motor may still be continued. Warning messages may be
critical, but are not necessarily so.
In the event of an alarm, the adjustable frequency drive
will have tripped. Alarms must be reset to restart operation
once their cause has been rectified.
This may be done in four ways:
1. By pressing [Reset].
2. Via a digital input with the “Reset” function.
3. Via serial communication.
4. By resetting automatically using the [Auto Reset]
function, which is a default setting for VLT HVAC
Basic Drive, see 14-20 Reset Mode.
NOTE!
After a manual reset pressing [Reset], the [Auto On] or
[Hand On] must be pressed to restart the motor.
If an alarm cannot be reset, the reason may be that its
cause has not been rectified, or the alarm is trip-locked
(see also table on following page).
4 4
CAUTION
Alarms that are trip-locked offer additional protection,
means that the line power supply must be switched off
before the alarm can be reset. After being switched back
on, the adjustable frequency drive is no longer blocked
and may be reset as described above, once the cause has
been rectified.
Alarms that are not trip-locked can also be reset using the
automatic reset function in 14-20 Reset Mode (Warning:
automatic wake-up is possible!)
If a warning and alarm is marked against a code in the
table on the following page, this means that either a
warning occurs before an alarm, or it can be specified
whether it is a warning or an alarm that is to be displayed
for a given fault.
This is possible, for instance, in 1-90 Motor Thermal
Protection. After an alarm or trip, the motor carries on
coasting, and the alarm and warning flash on the
adjustable frequency drive. Once the problem has been
rectified, only the alarm continues flashing.
No. Description Warning Alarm Trip Lock Parameter Reference
2 Live zero error (X) (X) 6-01
3 No motor (X) 1-80
4 Mains ph. loss (X) (X) (X) 14-12
7 DC over voltage X X
8 DC under voltage X X
9 Inverter overloaded X X
10 Motor ETR over-temperature (X) (X) 1-90
11 Motor thermistor over-temperature (X) (X) 1-90
13 Over Current X X X
14 Earth fault X X X
16 Short.-circuit X X
17 Control word timeout (X) (X) 8-04
24 Fan Fault (only on 400V 40–125 hp [30–90kW]) X X 14-53
30 Motor phase U missing (X) (X) 4-58
31 Motor phase V missing (X) (X) 4-58
32 Motor phase W missing (X) (X) 4-58
38 Internal fault X X
44 Earth fault 2 X X
47 Control Voltage Fault X X
48 VDD1 Supply Low X X
MG18B222 - VLT® is a registered Danfoss trademark 4-1
Page 94

Troubleshooting
VLT® HVAC Basic Drive Programming Guide
No. Description Warning Alarm Trip Lock Parameter Reference
50 AMA Calibration Failed X
51 AMA check Unom and Inom X
52 AMA low I
53 AMA motor too big X
54 AMA motor too small X
55 AMA Parameter out of range X
44
56 AMA interrupted by user X
57 AMA timeout X
58 AMA internal fault X X
59 Current limit X
60 External Interlock X
66 Heatsink Temperature Low X
69 Pwr Card Temperature X X X
79 Illegal PS config X X
80 Drive Initialized to Default Value X
87 Auto DC Braking X
95 Broken Belt X X 22-6*
201 Fire Mode X
202 Fire M Limits Exceeded X
250 New spare parts X X
251 New Type Code X X
nom
X
Table 4.1 Alarm/Warning code list
(X) Dependent on parameter
A trip is the action when an alarm has appeared. The trip
will coast the motor and can be reset by pressing the reset
button or make a reset by a digital input (parameter group
5-1* [1]). The original event that caused an alarm cannot
damage the adjustable frequency drive or cause dangerous
conditions. A trip lock is an action that occurs in
conjunction with an alarm, which may cause damage to
the adjustable frequency drive or connected parts. A trip
lock situation can only be reset by power cycling.
LED indication
Warning yellow
Alarm flashing red
Table 4.2
The alarm words, warning words and extended status
words can be read out via serial bus or optional serial
communication bus for diagnosis. See also 16-90 Alarm
Word, 16-92 Warning Word and 16-94 Ext. Status Word.
4-2 MG18B222 - VLT® is a registered Danfoss trademark
Page 95

Troubleshooting
VLT® HVAC Basic Drive Programming Guide
4.1.2 Alarm Words
16-90 Alarm
Bit Hex Dec
0 1 1 0 0
1 2 2 Pwr.Card Temp 0
2 4 4 Ground Fault
3 8 8 0 Spare part
4 10 16 Ctrl. Word TO 0
5 20 32 Overcurrent 0
6 40 64 0 0
7 80 128 Motor Th. Over 0
8 100 256 Motor ETR Over Broken Belt
9 200 512 Inverter Overld. 0
10 400 1024 DC undervolt 0
11 800 2048 DC overvolt. 0
12 1000 4096 Short Circuit
13 2000 8192 0 0
14 4000 16384 Mains ph. loss 0
15 8000 32768 AMA Not OK 0
16 10000 65536 Live Zero Error 0
17 20000 131072 Internal Fault 0
18 40000 262144 0 Fans error
19 80000 524288 U phase Loss 0
20 100000 1048576 V phase Loss 0
21 200000 2097152 W phase Loss 0
22 400000 4194304 0 0
23 800000 8388608
24 1000000 16777216 0 0
25 2000000 33554432
26 4000000 67108864 0 0
27 8000000 134217728 0 0
28 10000000 268435456 Ground fault 0
29 20000000 536870912 Drive Initialized 0
30 40000000 1073741824 0 0
31 80000000 2147483648 0 0
Word
Control Voltage
Fault 0
VDD1 Supply
Low 0
16-91 Alarm
Word 2
ServiceTrip,
Typecode
External
Interlock
4.1.3
Warning Words
16-92 Warning
Bit Hex Dec
0 1 1 0 0
1 2 2 Pwr.Card Temp 0
2 4 4 Ground Fault 0
3 8 8 0 0
4 10 16 Ctrl. Word TO 0
5 20 32 Overcurrent 0
6 40 64 0 0
7 80 128 Motor Th. Over 0
8 100 256
9 200 512
10 400 1024 DC undervolt 0
11 800 2048 DC overvolt. 0
12 1000 4096 0 0
13 2000 8192 0 0
14 4000 16384 Mains ph. loss 0
15 8000 32768 No motor Auto DC Braking
16 10000 65536 Live Zero Error 0
17 20000 131072 0 0
18 40000 262144 0 Fans warning
19 80000 524288 0 0
20 100000 1048576 0 0
21 200000 2097152 0 0
22 400000 4194304 0 0
23 800000 8388608 0 0
24 1000000 16777216 0 0
25 2000000 33554432 Current Limit 0
26 4000000 67108864 Low temp. 0
27 8000000 134217728 0 0
28 10000000 268435456 0 0
29 20000000 536870912 0 0
30 40000000 1073741824 0 0
31 80000000 2147483648 0 0
Table 4.4
Word
Motor ETR
Over Broken Belt
Inverter
Overld. 0
16-93 Warning
Word 2
4 4
Table 4.3
MG18B222 - VLT® is a registered Danfoss trademark 4-3
Page 96

Troubleshooting
4.1.4 Extended Status Words
VLT® HVAC Basic Drive Programming Guide
16-94 Ext.
Bit Hex Dec
0 1 1 Ramping Off
1 2 2 AMA running Hand/Auto
2 4 4 Start CW/CCW 0
44
3 8 8 0 0
4 10 16 0 0
5 20 32 0 Relay 12 active
6 40 64 0 0
7 80 128
8 100 256
9 200 512 0 Quick Stop
10 400 1024 0 DC Brake
11 800 2048 0 Stop
12 1000 4096 0 0
13 2000 8192 Braking
14 4000 16384 0 Freeze Output
15 8000 32768 OVC active Jog Request
16 10000 65536 AC brake Jog
17 20000 131072 0 Start request
18 40000 262144 0 Start
19 80000 524288 0 0
20 100000 1048576 0 Start Delay
21 200000 2097152
22 400000 4194304 0 Sleep boost
23 800000 8388608 0 Running
24 1000000 16777216 0 Bypass
25 2000000 33554432 0 Fire Mode
26 4000000 67108864 0 External Interlock
27 8000000 134217728 0
28 10000000 268435456 0 FlyStart Active
29 20000000 536870912 0 0
30 40000000 1073741824 0 0
31 80000000 2147483648
Table 4.5
Status Word
Output
current high Control Ready
Output
current low Drive Ready
Local Ref./
Remote Ref. Sleep
Database
busy 0
16-95 Ext. Status
Word 2
Freeze Output
Request
Firemodelimi-
texceed
Fault Messages
4.1.5
WARNING/ALARM 2, Live zero error
This warning or alarm will only appear if programmed by
the user in 6-01 Live Zero Timeout Function. The signal on
one of the analog inputs is less than 50% of the minimum
value programmed for that input. This condition can be
caused by broken wiring or faulty device sending the
signal.
Troubleshooting:
Check connections on all the analog input
terminals. Control card terminals 53 and 54 for
signals, terminal 55 common.
Check that the drive programming matches the
analog signal type.
WARNING/ALARM 4, Mains phase loss A phase is missing
on the supply side, or the line voltage imbalance is too
high. This message also appears for a fault in the input
rectifier on the adjustable frequency drive. Options are
programmed at 14-12 Function at Mains Imbalance.
Troubleshooting: Check the supply voltage and supply
currents to the adjustable frequency drive.
WARNING/ALARM 7, DC over voltage
If the intermediate circuit voltage exceeds the limit, the
adjustable frequency drive trips after a time.
Troubleshooting:
Extend the ramp time
Activate functions in 2-10 Brake Function
WARNING/ALARM 8, DC under voltage
If the intermediate circuit voltage (DC) drops below the
undervoltage limit, the adjustable frequency drive trips
after a fixed time delay. The time delay varies with unit
size.
Troubleshooting:
Make sure that the supply voltage matches the
adjustable frequency drive voltage.
Perform Input voltage test
WARNING/ALARM 9, Inverter overloaded
The adjustable frequency drive is about to cut out because
of an overload (current too high for too long). The counter
for electronic, thermal inverter protection gives a warning
at 90% and trips at 100%, while giving an alarm. The
adjustable frequency drive cannot be reset until the
counter is below 90%.
The fault is that the adjustable frequency drive is
overloaded by more than 100% for too long.
4-4 MG18B222 - VLT® is a registered Danfoss trademark
Page 97

Troubleshooting
VLT® HVAC Basic Drive Programming Guide
Troubleshooting:
Compare the output current shown on the LCP
with the drive rated current.
Compare the output current shown on the LCP
with measured motor current.
Display the Thermal Drive Load on the LCP and
monitor the value. When running above the drive
continuous current rating, the counter should
increase. When running below the drive
continuous current rating, the counter should
decrease.
NOTE!
See the derating section in the Design Guide for more
details if a high switching frequency is required.
WARNING/ALARM 10, Motor overload temperature
According to the electronic thermal protection (ETR), the
motor is too hot. Select whether the adjustable frequency
drive gives a warning or an alarm when the counter
reaches 100% in 1-90 Motor Thermal Protection. The fault is
that the motor is overloaded by more than 100% for too
long.
Troubleshooting:
Check if the motor is overheating.
If the motor is mechanically overloaded
That the motor 1-24 Motor Current is set correctly.
Motor data in parameters 1-20 through 1-25 are
set correctly.
Run AMA in 1-29 Automatic Motor Adaption (AMA).
WARNING/ALARM 11, Motor thermistor overtemp
The thermistor or the thermistor connection is disconnected. Select whether the adjustable frequency drive
gives a warning or an alarm in 1-90 Motor Thermal
Protection.
Troubleshooting:
Check if the motor is overheating.
Check if the motor is mechanically overloaded.
Check that the thermistor is connected correctly.
If using a thermal switch or thermistor, check the
programming of 1-93 Thermistor Source matches
sensor wiring.
WARNING/ALARM 13, Over current
The inverter peak current limit is exceeded. The warning
lasts about 1.5 s, then the adjustable frequency drive trips
and issues an alarm.
Troubleshooting:
This fault may be caused by shock loading or fast
acceleration with high inertia loads.
Turn off the adjustable frequency drive. Check if
the motor shaft can be turned.
Make sure that the motor size matches the
adjustable frequency drive.
Incorrect motor data in parameters 1-20 through
1-25.
ALARM 14, Earth (ground) fault
There is a discharge from the output phases to ground,
either in the cable between the adjustable frequency drive
and the motor or in the motor itself.
Troubleshooting:
Turn off the adjustable frequency drive and
remove the ground fault.
Measure the resistance to ground of the motor
leads and the motor with a megohmmeter to
check for ground faults in the motor.
ALARM 16, Short-circuit
There is short-circuiting in the motor or on the motor
terminals.
Turn off the adjustable frequency drive and remove the
short-circuit.
WARNING/ALARM 17, Control word timeout
There is no communication to the adjustable frequency
drive.
The warning will only be active when 8-04 Control Timeout
Function is NOT set to OFF.
If 8-04 Control Timeout Function is set to Stop and Trip, a
warning appears and the Adjustable frequency drive ramps
down until it trips, while giving an alarm.
Troubleshooting:
Check connections on the serial communication
cable.
Increase 8-03 Control Timeout Time
Check the operation of the communication
equipment.
Verify proper installation based on EMC
requirements.
WARNING 24, Fan fault
The fan warning function is an extra protection function
that checks if the fan is running / mounted. The fan
warning can be disabled in 14-53 Fan Monitor ([0]
Disabled).
4 4
MG18B222 - VLT® is a registered Danfoss trademark 4-5
Page 98

Troubleshooting
VLT® HVAC Basic Drive Programming Guide
Troubleshooting:
Check fan resistance.
ALARM 30, Motor phase U missing
Motor phase U between the adjustable frequency drive
and the motor is missing.
44
Turn off the adjustable frequency drive and check motor
phase U.
ALARM 31, Motor phase V missing
Motor phase V between the adjustable frequency drive
and the motor is missing.
Turn off the adjustable frequency drive and check motor
phase V.
ALARM 32, Motor phase W missing
Motor phase W between the adjustable frequency drive
and the motor is missing.
Turn off the adjustable frequency drive and check motor
phase W.
ALARM 38, Internal fault
It may be necessary to contact your Danfoss supplier.
ALARM 44, Earth fault II
There is a discharge from the output phases to ground,
either in the cable between the adjustable frequency drive
and the motor or in the motor itself.
Troubleshooting
Turn off the adjustable frequency drive and
remove the ground fault.
Measure the resistance to ground of the motor
leads and the motor with a megohmmeter to
check for ground fault in the motor.
WARNING 47, Control Voltage Fault
The 24 V DC is measured on the control card. The external
24 V DC backup power supply may be overloaded,
otherwise contact your Danfoss supplier.
WARNING 48, VDD1 Supply Low
The VDD1 supply on the control card is outside of
allowable limits.
ALARM 51, AMA check Unom and Inom
The setting of motor voltage, motor current, and motor
power is presumably wrong. Check the settings.
ALARM 52, AMA low Inom
The motor current is too low. Check the settings.
ALARM 53, AMA motor too big
The motor is too big for the AMA to be carried out.
ALARM 54, AMA motor too small
The motor is too small for the AMA to be carried out.
ALARM 55, AMA Parameter out of range
The parameter values found from the motor are outside
acceptable range.
ALARM 56, AMA interrupted by user
The AMA has been interrupted by the user.
ALARM 57, AMA timeout
Try to start the AMA again a number of times, until the
AMA is carried out. Please note that repeated runs may
heat the motor to a level where the resistances Rs and Rr
are increased. In most cases, however, this is not critical.
ALARM 58, AMA internal fault
Contact your Danfoss supplier.
WARNING 59, Current limit
The current is higher than the value in 4-18 Current Limit.
ALARM 60, Ext. Interlock
External interlock has been activated. To resume normal
operation, apply 24 V DC to the terminal programmed for
external interlock and reset the adjustable frequency drive
(via serial communication, digital I/O, or by pressing
[Reset]).
WARNING 66, Heatsink temperature low
This warning is based on the temperature sensor in the
IGBT module.
Troubleshooting:
The heatsink temperature measured as 32° F [0°C] could
indicate that the temperature sensor is defective causing
the fan speed to increase to the maximum. If the sensor
wire between the IGBT and the gate drive card is disconnected, this warning would result. Also, check the IGBT
thermal sensor.
ALARM 70, Illegal power section configuration
The control card and power card are incompatible. Contact
your supplier with the type code of the unit from the
nameplate and the part numbers of the cards to check
compatibility.
ALARM 80, Drive initialized to default value
Parameter settings are initialized to default settings after a
manual reset.
ALARM 95, Broken belt
Torque is below the torque level set for no load, indicating
a broken belt. See parameter group 22-6*.
ALARM 126, Motor Rotating
High back emf voltage. Please stop the rotor of the PM
motor.
WARNING 200, Fire Mode
Fire Mode has been activated.
4-6 MG18B222 - VLT® is a registered Danfoss trademark
Page 99

Troubleshooting
WARNING 202, Fire Mode Limits Exceeded
Fire Mode has suppressed one or more warranty voiding
alarms.
ALARM 250, New Spare Part
The power or switch mode power supply has been
exchanged.
ALARM 251, New Type Code
The adjustable frequency drive has a new type code.
VLT® HVAC Basic Drive Programming Guide
4 4
MG18B222 - VLT® is a registered Danfoss trademark 4-7
Page 100

Troubleshooting
VLT® HVAC Basic Drive Programming Guide
44
4-8 MG18B222 - VLT® is a registered Danfoss trademark
 Loading...
Loading...