

Page 1

ENGINEERING TOMORROW
Design Guide
VLT® HVAC Basic Drive FC 101
www.vlt.dk
Page 2

Page 3
Indholdsfortegnelse Design Guide
Indholdsfortegnelse
1 Introduktion
1.1 Formålet med Design Guiden
1.2 Dokument- og softwareversion
1.3 Sikkerhedssymboler
1.4 Forkortelser
1.5 Yderligere ressourcer
1.6 Ordforklaring
1.7 Eektfaktor
1.8 Regulatorisk overensstemmelse
1.8.1 CE-mærke 9
1.8.2 UL-overensstemmelse 10
1.8.3 Overensstemmelse med RCM-mærke 10
1.8.4 EAC 10
1.8.5 UkrSEPRO 11
2 Sikkerhed
2.1 Uddannet personale
2.2 Sikkerhedsforanstaltninger
6
6
6
6
7
7
7
9
9
12
12
12
3 Produktoversigt
3.1 Fordele
3.1.1 Hvorfor anvende en frekvensomformer til styring af ventilatorer og pumper? 14
3.1.2 Den klare fordel – energibesparelser 14
3.1.3 Eksempel på energibesparelser 14
3.1.4 Sammenligning af energibesparelser 15
3.1.5 Eksempel med en varierende gennemstrømning over et år 16
3.1.6 Bedre styring 17
3.1.7 Ikke behov for stjerne-/trekantstarter eller softstarter 17
3.1.8 Brug af en frekvensomformer sparer penge 17
3.1.9 Uden en frekvensomformer 18
3.1.10 Med en frekvensomformer 19
3.1.11 Applikationseksempler 20
3.1.12 Variable Air Volume (variabel luftvolumen) 20
3.1.13 Løsning med VLT
3.1.14 Konstant luftvolumen 21
3.1.15 Løsning med VLT
14
14
®
®
20
21
3.1.16 Køletårnsventilator 22
3.1.17 Løsning med VLT
3.1.18 Kondensatpumper 23
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 1
®
22
Page 4
Indholdsfortegnelse
VLT® HVAC Basic Drive FC 101
3.1.19 Løsning med VLT
®
3.1.20 Primære pumper 24
3.1.21 Løsning med VLT
®
3.1.22 Sekundære pumper 26
3.1.23 Løsning med VLT
®
3.2 Styringsstrukturer
3.2.1 Styringsstruktur, åben sløjfe 27
3.2.2 PM/EC+ motorstyring 27
3.2.3 Styring med lokalbetjening (Hand On) og ernbetjening (Auto On) 27
3.2.4 Styringsstruktur for lukket sløjfe 28
3.2.5 Feedbackkonvertering 28
3.2.6 Referencehåndtering 29
3.2.7 Finjustering af frekvensomformerens styreenhed til lukket sløjfe 30
3.2.8 Manuel justering af PI 30
3.3 Omgivelsesforhold for kørsel
3.4 Generelle forhold vedrørende EMC
3.4.1 Oversigt over EMC-emissioner 36
23
24
26
27
30
36
3.4.2 Emissionskrav 38
3.4.3 Testresultater for EMC-emission 39
3.4.4 Oversigt over harmoniske emissioner 40
3.4.5 Harmoniske emissionskrav 40
3.4.6 Harmoniske testresultater (emission) 40
3.4.7 Immunitetskrav 42
3.5 Galvanisk adskillelse (PELV)
3.6 Lækstrøm til jord
3.7 Ekstreme driftsforhold
3.7.1 Termisk motorbeskyttelse (ETR) 44
3.7.2 Termistorindgange 44
4 Valg og bestilling
4.1 Typekode
4.2 Optioner og tilbehør
4.2.1 LCP-betjeningspanel 47
4.2.2 Montering af LCP i tavlefronten 47
4.2.3 IP21/NEMA Type 1-kapslingssæt 48
42
43
43
46
46
47
4.2.4 Afkoblingsplade 49
4.3 Bestillingsnumre
50
4.3.1 Optioner og tilbehør 50
4.3.2 Harmoniske ltre 51
4.3.3 Eksternt RFI-lter 53
2 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 5
Indholdsfortegnelse Design Guide
5 Installation
5.1 Elektrisk installation
5.1.1 Netforsyning og motortilslutning 56
5.1.2 EMC-korrekt elektrisk installation 61
5.1.3 Styreklemmer 63
6 Programmering
6.1 Indledning
6.2 LCP-betjeningspanel (LCP)
6.3 Menuer
6.3.1 Statusmenu 65
6.3.2 Kvikmenu 65
6.3.3 Hovedmenu 79
6.4 Hurtig overførsel af parameterindstillinger mellem ere frekvensomformere
6.5 Aæsning og programmering af indekserede parametre
6.6 Initialisering til fabriksindstillinger
7 Installation og opsætning af RS485
54
54
64
64
64
65
79
80
80
81
7.1 RS485
7.1.1 Oversigt 81
7.1.2 Netværksforbindelse 81
7.1.3 Opsætning af frekvensomformerhardware 81
7.1.4 Parameterindstillinger for Modbus-kommunikation 82
7.1.5 EMC-retningslinjer 82
7.2 FC-protokol
7.2.1 Oversigt 83
7.2.2 FC med Modbus RTU 83
7.3 Parameterindstillinger til aktivering af protokol
7.4 Rammestruktur for FC-protokolmeddelelser
7.4.1 Indhold af et tegn (byte) 83
7.4.2 Telegramstruktur 83
7.4.3 Telegramlængde (LGE) 84
7.4.4 Frekvensomformeradresse (ADR) 84
7.4.5 Datakontrolbyte (BCC) 84
7.4.6 Datafeltet 84
81
83
83
83
7.4.7 PKE-feltet 84
7.4.8 Parameternummer (PNU) 85
7.4.9 Indeks (IND) 85
7.4.10 Parameterværdi (PWE) 85
7.4.11 Datatyper, der understøttes af frekvensomformeren 85
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 3
Page 6
Indholdsfortegnelse
VLT® HVAC Basic Drive FC 101
7.4.12 Konvertering 86
7.4.13 Procesord (PCD) 86
7.5 Eksempler
7.5.1 Skrivning af en parameterværdi 86
7.5.2 Læsning af en parameterværdi 86
7.6 Oversigt over Modbus RTU
7.6.1 Indledning 87
7.6.2 Oversigt 87
7.6.3 Frekvensomformer med Modbus RTU 87
7.7 Netværkskonguration
7.8 Rammestruktur for Modbus RTU-meddelelse
7.8.1 Indledning 88
7.8.2 Struktur for Modbus RTU-telegram 88
7.8.3 Start/stop-felt 88
7.8.4 Adressefelt 88
7.8.5 Funktionsfelt 89
7.8.6 Datafelt 89
7.8.7 CRC-kontrolfelt 89
7.8.8 Spoleregisteradressering 89
86
87
88
88
7.8.9 Adgang via PCD skriv/læs 91
7.8.10 Sådan styres frekvensomformeren 91
7.8.11 Funktionskoder, som understøttes af Modbus RTU 91
7.8.12 Modbus-undtagelseskoder 92
7.9 Adgang til parametre
7.9.1 Parameterhåndtering 92
7.9.2 Datalagring 92
7.9.3 IND (indeks) 92
7.9.4 Tekstblokke 92
7.9.5 Konverteringsfaktor 92
7.9.6 Parameterværdier 92
7.10 Eksempler
7.10.1 Læs spolestatus (01 hex) 93
7.10.2 Tving/skriv enkelt spole (05 hex) 93
7.10.3 Tving/skriv ere spoler (0F hex) 94
7.10.4 Læs holderegistre (03 hex) 94
7.10.5 Forudindstil enkelt register (06 hex) 94
92
93
7.10.6 Forudindstil ere registre (10 hex) 95
7.10.7 Læs/skriv ere registre (17 hex) 95
7.11 Danfoss FC-styreprol
7.11.1 Styreord i henhold til FC-prol (8–10 Protokol = FC-prol) 96
4 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
96
Page 7
Indholdsfortegnelse Design Guide
7.11.2 Statusord i henhold til FC-prol (STW) 97
7.11.3 Bushastighedsreferenceværdi 99
8 Generelle specikationer
8.1 Mekaniske mål
8.1.1 Montering side-om-side 100
8.1.2 Frekvensomformerens mål 101
8.1.3 Forsendelsens mål 104
8.1.4 Frembygning 105
8.2 Specikationer for netforsyning
8.2.1 3 x 200–240 V AC 105
8.2.2 3 x 380–480 V AC 106
8.2.3 3 x 525–600 V AC 110
8.3 Sikringer og afbrydere
8.4 Generelle tekniske data
8.4.1 Netforsyning (L1, L2, L3) 113
8.4.2 Motorudgang (U, V, W) 113
8.4.3 Kabellængde og tværsnit 113
8.4.4 Digitale indgange 113
8.4.5 Analoge indgange 114
100
100
105
111
113
8.5 dU/Dt
Indeks
8.4.6 Analog udgang 114
8.4.7 Digital udgang 114
8.4.8 Styrekort, seriel kommunikation via RS485 115
8.4.9 Styrekort, 24 V DC-udgang 115
8.4.10 Relæudgang 115
8.4.11 Styrekort 10 V DC-udgang 116
8.4.12 Omgivelsesforhold 116
116
119
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 5
Page 8

Introduktion
VLT® HVAC Basic Drive FC 101
11
1 Introduktion
1.1 Formålet med Design Guiden
Denne Design Guide er tiltænkt projekt- og systemingeniører, rådgivende designingeniører samt applikations- og
produktspecialister. Den indeholder tekniske oplysninger
om frekvensomformerens egenskaber i forbindelse med
integrering i motorstyringen og overvågningssystemer.
Oplysninger om drift, krav og anbefalinger til systemintegration er beskrevet i detaljer. Oplysninger om karakteristik
for indgangseekt, udgang for motorstyring og omgivende
driftsforhold for frekvensomformeren er veldokumenteret.
Følgende er også indeholdt:
Sikkerhedsfunktioner.
•
Overvågning af fejltilstand.
•
Driftsstatusrapportering.
•
Egenskaber for seriel kommunikation.
•
Programmerbare optioner og funktioner
•
Detaljerede oplysninger om design er også omfatter, som
for eksempel:
Krav til sitet.
•
Kabler.
•
Sikringer.
•
Styreledninger.
•
Apparatstørrelser og vægt.
•
Anden vigtig information, der er nødvendig for at
•
kunne planlægge systemintegration.
En gennemgang af de detaljerede produktoplysninger i
designfasen muliggør udviklingen af et godt gennemtænkt
system med optimal funktionalitet og virkningsgrad.
(25 hk) 400 V IP54 og lavere. Denne funktion kræver
software- og hardwareopdateringer og introducerer nogle
begrænsninger, hvad angår bagudkompatibilitet for
kapslingsstørrelser H1–H5 og I2–I4. Se Tabel 1.2 vedrørende
begrænsningerne.
Software
kompatibilitet
Gammel software
(OSS-l version 3.xx
og derunder)
Ny software
(OSS-l version 4.xx
eller højere)
Hardware
kompatibilitet
Gammelt eektkort
(produktionsuge 33
2017 eller tidligere)
Nyt eektkort
(produktionsuge 34
2017 eller senere)
Tabel 1.2 Software- og hardwarekompatibilitet
Sikkerhedssymboler
1.3
Følgende symboler anvendes i denne vejledning:
Gammelt styrekort
(produktionsuge 33
2017 eller tidligere)
Ja Nej
Nej Ja
Gammelt styrekort
(produktionsuge 33
2017 eller tidligere)
Ja (kun software-
version 3.xx eller
derunder)
Ja (software SKAL
opdateres til version
3.xx eller derunder,
ventilatoren kører
kontinuerligt ved
fuld hastighed)
Nyt styrekort
(produktionsuge 34
2017 eller senere)
Nyt styrekort
(produktionsuge 34
2017 eller senere)
Ja (software SKAL
opdateres til version
4.xx eller højere)
Ja (kun software-
version 4.xx eller
højere)
VLT® er et registreret varemærke.
Dokument- og softwareversion
1.2
Denne manual bliver regelmæssigt gennemgået og
opdateret. Alle forslag til forbedringer er velkomne.
Udgave Bemærkninger Software-
version
MG18C8xx Opdatér til nye software- og
hardwareversioner.
Tabel 1.1 Dokument- og softwareversion
Fra softwareversion 4.0x og nyere (fra produktionsuge 33
2017) implementeres kølepladeventilatorfunktionen med
variabel hastighed i frekvensomformeren ved
relser på 22 kW (30 hk) 400 V IP20 og lavere, og 18,5 kW
6 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
4.2x
eektstør-
ADVARSEL
Angiver en potentielt farlig situation, som kan medføre
dødsfald eller alvorlig personskade.
FORSIGTIG
Angiver en potentielt farlig situation, som kan medføre
mindre eller moderat personskade. Kan også bruges til
at advare mod usikre fremgangsmåder.
BEMÆRK!
Angiver vigtige oplysninger, herunder situationer som
kan resultere i skade på udstyr eller ejendom.
Page 9
Introduktion Design Guide
1.4 Forkortelser
°C
°F
A Ampere/AMP
AC Vekselstrøm
AMA Automatisk motortilpasning
AWG American Wire Gauge
DC Jævnstrøm
EMC Elektromagnetisk kompatibilitet
ETR Elektronisk termorelæ
FC Frekvensomformer
f
M,N
kg Kilogram
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAKS
I
VLT,N
kHz Kilohertz
LCP LCP-betjeningspanel
m Meter
mA Milliampere
MCT Motion control-værktøj (Motion control
mH Millihenry-induktans
min Minut
ms Millisekund
nF Nanofarad
Nm Newtonmeter
n
s
P
M,N
PCB Printplade
PELV Beskyttende ekstra lav spænding
Regen Regenerative klemmer
O/MIN Omdrejninger pr. minut
s Sekund
T
LIM
U
M,N
V Volt
Tabel 1.3 Forkortelser
Yderligere ressourcer
1.5
VLT® HVAC Basic Drive FC 101 Quick Guide
•
indeholder grundlæggende oplysninger om
mekaniske mål, montering og programmering.
VLT® HVAC Basic Drive FC 101 Programming Guide
•
indeholder oplysninger om programmering og
omfatter komplette parameterbeskrivelser.
Grader celsius
Grader fahrenheit
Nominel motorfrekvens
Nominel udgangsstrøm for vekselretter
Strømgrænse
Nominel motorstrøm
Maksimal udgangsstrøm
Nominel udgangsstrøm leveret af frekvensomformeren
tool)
Synkron motorhastighed
Nominel motoreekt
Momentgrænse
Nominel motorspænding
Danfoss VLT® Energy Box software. Vælg PC-
•
software download på www.danfoss.com/en/
service-and-support/downloads/dds/vlt-energy-box/.
Med VLT® Energy Box Software kan der foretages
sammenligninger af energiforbruget for HVACventilatorer og -pumper, der drives af Danfossfrekvensomformere og alternative metoder til
owstyring. Anvend dette værktøj til præcist at
beregne omkostningerne og tilbagebetalingen
ved brug af Danfoss-frekvensomformere på HVACventilatorer, -pumper og køletårne.
Den tekniske dokumentation fra Danfoss er tilgængelig i
elektronisk form på dokumentations-CD'en, der medsendes
produktet, eller i trykt form hos den lokale Danfoss-salgsafdeling.
MCT 10-opsætningssoftware support
Download softwaren fra www.danfoss.com/en/service-andsupport/downloads/dds/vlt-motion-control-tool-mct-10/.
Under monteringsprocessen af softwaren angives
adgangskode 81463800 for at aktivere FC 101-funktionaliteten. En licensnøgle er ikke påkrævet for at anvende FC
101-funktionaliteten.
Den seneste software indeholder ikke altid de seneste
frekvensomformeropdateringer. Kontakt den lokale salgsafdeling for at få de seneste frekvensomformeropdateringer
(*.upd-ler), eller download frekvensomformeropdateringerne fra www.danfoss.com/en/service-and-support/
downloads/dds/vlt-motion-control-tool-mct-10/#Overview.
Ordforklaring
1.6
Frekvensomformer
I
VLT, MAKS
Den maksimale udgangsstrøm.
I
VLT,N
Den nominelle udgangsstrøm leveret af frekvensomformeren.
U
VLT, MAKS
Den maksimale udgangsspænding.
Indgang
Den tilsluttede motor kan startes og stoppes via LCP'et og
de digitale indgange. Funktionerne er opdelt i to grupper
som beskrevet i Tabel 1.4. Funktionerne i gruppe 1 har
højere prioritet end funktionerne i gruppe 2.
Gruppe 1
Gruppe 2
Tabel 1.4 Styrekommandoer
Nulstil, friløbsstop, nulstil og friløbsstop, hurtigt
stop, DC-bremse, stop og [O]-tasten.
Start, pulsstart, reversering, reverseret start, jog
og fastfrys udgang.
Motor
f
JOG
Motorfrekvensen, når jog-funktionen er aktiveret (via
digitale klemmer).
1 1
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 7
Page 10
175ZA078.10
Moment
Kipgrænse
o/min
Introduktion
VLT® HVAC Basic Drive FC 101
11
f
M
Motorfrekvensen.
f
MAKS
Den maksimale motorfrekvens.
f
MIN
Den minimale motorfrekvens.
f
M,N
Den nominelle motorfrekvens (typeskiltdata).
I
M
Motorstrømmen.
I
M,N
Den nominelle motorstrøm (typeskiltdata).
n
M,N
Motorens nominelle hastighed (typeskiltdata).
P
M,N
Den nominelle motoreekt (typeskiltdata).
U
M
Den aktuelle motorspænding.
U
M,N
Den nominelle motorspænding (typeskiltdata).
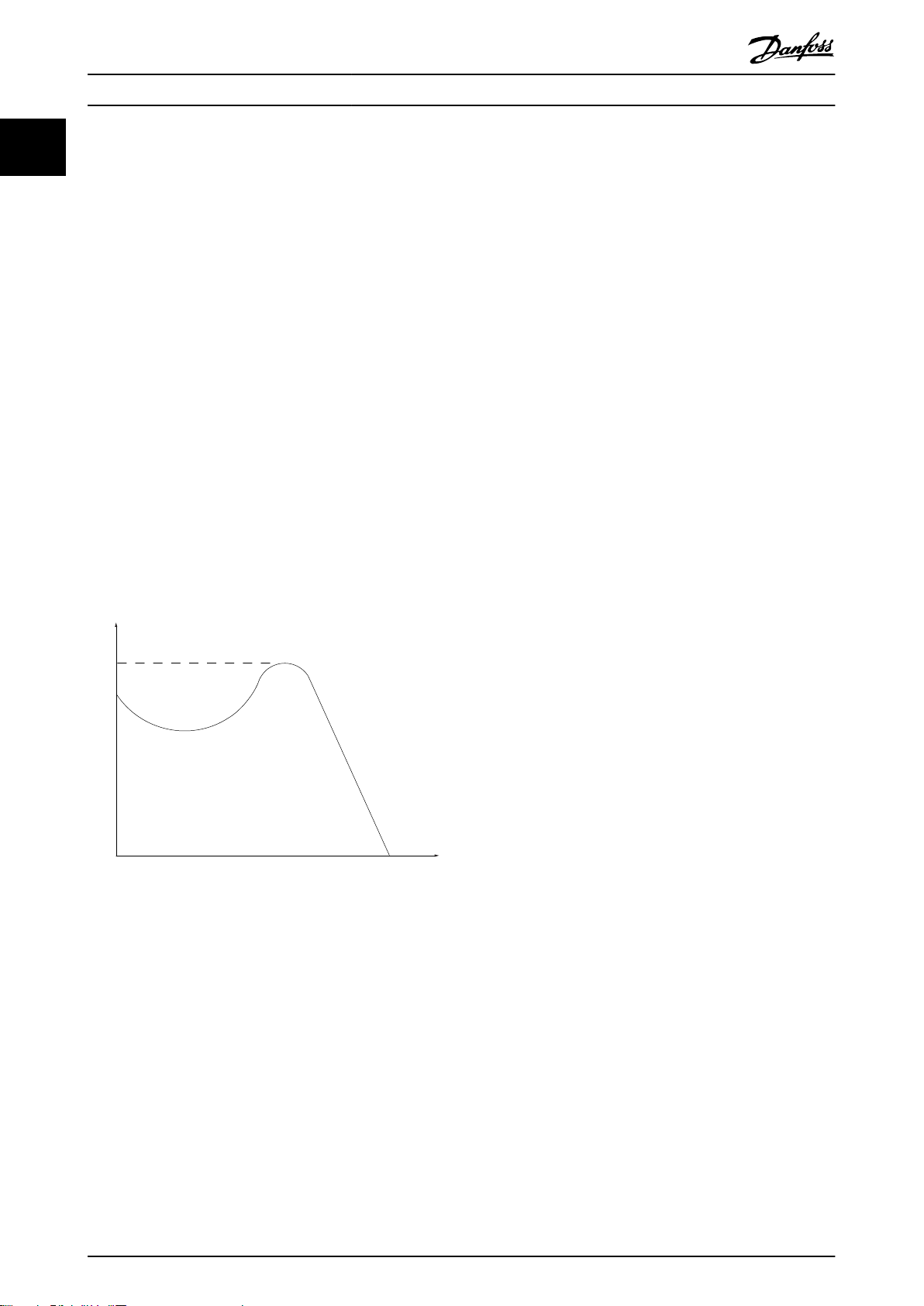
Løsrivelsesmoment
Busreference
Signal, der sendes til den serielle kommunikationsport (FCport).
Preset-reference
En deneret preset-reference, der kan indstilles fra -100 %
til +100 % af referenceområdet. Der kan vælges otte
preset-referencer via de digitale klemmer.
Ref
MAKS
Bestemmer forholdet mellem referenceindgangen ved
100 % af fuld skalaværdi (typisk 10 V, 20 mA) og den
resulterende reference. Maksimumreferenceværdien, der er
indstillet i parameter 3-03 Maksimumreference.
Ref
MIN
Bestemmer forholdet mellem referenceindgangen ved 0 %
af værdien (typisk 0 V, 0 mA, 4 mA) og den resulterende
reference. Minimumreferenceværdien indstilles i
parameter 3-02 Minimumreference.
Analoge indgange
De analoge indgange bruges til at styre forskellige
funktioner i frekvensomformeren.
Der ndes to typer analoge indgange:
Strømindgang: 0–20 mA og 4–20 mA
•
Spændingsindgang: 0–10 V DC
•
Analoge udgange
De analoge udgange kan levere et signal på 0-20 mA,
4-20 mA eller et digitalt signal.
Automatisk motortilpasning, AMA
AMA-algoritmen bestemmer de elektriske parametre for
den tilsluttede motor ved stilstand og kompenserer for
modstanden baseret på motorkablets længde.
Digitale indgange
De digitale indgange kan bruges til styring af forskellige
funktioner i frekvensomformeren.
Digitale udgange
Frekvensomformeren er forsynet med to Solid Stateudgange, der kan levere et 24 V DC-signal (maksimum
Illustration 1.1 Løsrivelsesmoment
40 mA).
Relæudgange
η
VLT
Frekvensomformerens virkningsgrad deneres som
forholdet mellem den afgivne og den modtagne eekt.
Start-deaktiver-kommando
En stopkommando, der tilhører styrekommandoerne i
gruppe 1. Se Tabel 1.4.
Stopkommando
Se Tabel 1.4.
Analog reference
Et signal, der sendes til de analoge indgange 53 eller 54.
Det kan være spænding eller strøm.
Strømindgang: 0–20 mA og 4–20 mA
•
Spændingsindgang: 0–10 V DC
•
Frekvensomformeren har to programmerbare relæudgange.
ETR
Elektronisk termorelæ er en beregning af termisk
belastning baseret på aktuel belastning og tid. Den har til
formål at beregne motortemperaturen og forhindre
overophedning af motoren.
Initialisering
Ved initialisering (parameter 14-22 Driftstilstand) indstilles
frekvensomformerens programmerbare parametre igen til
fabriksindstillingerne.
Parameter 14-22 Driftstilstand initialiserer ikke kommunikationsparametrene, fejlloggen eller re mode-loggen.
8 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 11

Introduktion Design Guide
Periodisk driftscyklus
Periodisk drift betyder en sekvens af driftscyklusser. Hver
cyklus består af en periode med og en periode uden
belastning. Driften kan være enten periodisk drift eller
ikke-periodisk drift.
LCP
Betjeningspanelet udgør en komplet grænseade til styring
og programmering af frekvensomformeren. Betjeningspanelet er aftageligt på IP20-apparater og fastmonteret på
IP54-apparater. Det kan monteres op til 3 m (9,8 fod) fra
frekvensomformeren, f.eks. i et frontpanel ved hjælp af
installationssætoptionen.
Lsb
Mindst betydende bit.
MCM
Forkortelse for Mille Circular Mil, som er en amerikansk
måleenhed for kabeltværsnit. 1 MCM = 0,5067 mm2.
Msb
Mest betydende bit.
Online-/oineparametre
Ændringer af onlineparametre aktiveres, umiddelbart efter
at dataværdien er ændret. Tryk på [OK] for at aktivere
oineparametre.
PI-regulering
PI-reguleringen opretholder den ønskede hastighed og
temperatur og det ønskede tryk osv. ved at tilpasse
udgangsfrekvensen til den varierende belastning.
RCD
Fejlstrømsafbryder.
Opsætning
Der kan gemmes parameterindstillinger i to opsætninger.
Skift mellem de to parameteropsætninger og rediger i en
opsætning, mens en anden er aktiv.
Slipkompensering
Frekvensomformeren kompenserer for motorslippet ved at
give frekvensen et tilskud, der følger den målte motorbelastning, således at motorhastigheden holdes næsten
konstant.
Smart Logic Control (SLC)
SLC er en række brugerdenerede handlinger, som afvikles,
når de tilknyttede brugerdenerede hændelser evalueres
som sande af SLC.
Termistor
Temperaturafhængig modstand, der placeres, hvor
temperaturen ønskes overvåget (frekvensomformer eller
motor).
Trip
Tilstand, der skiftes til i fejlsituationer, for eksempel hvis
frekvensomformeren udsættes for en overtemperatur, eller
når frekvensomformeren beskytter motoren, processen eller
mekanismen. Genstart forhindres, indtil årsagen til fejlen er
ophørt, og trip-tilstanden annulleres ved at aktivere
nulstilling. I nogle tilfælde kan nulstillingen udføres
automatisk via programmering. Trip må ikke benyttes til
personbeskyttelse.
Triplås
En tilstand, der skiftes til i fejlsituationer, hvor en frekvensomformer beskytter sig selv og kræver fysisk indgriben, for
eksempel hvis frekvensomformeren udsættes for
kortslutning på udgangen. En triplås kan kun annulleres
ved at afbryde netforsyningen, erne årsagen til fejlen og
tilslutte frekvensomformeren igen. Genstart forhindres,
indtil trip-tilstanden annulleres ved at aktivere nulstilling. I
nogle tilfælde kan nulstillingen udføres automatisk via
programmering. Triplås må ikke benyttes til personbeskyttelse.
VT-karakteristik
Variabel momentkarakteristik, som anvendes til pumper og
ventilatorer.
+
VVC
Sammenlignet med almindelig spændings-/frekvensforholdsstyring giver Voltage Vector Control (VVC+) forbedret
dynamik og stabilitet både ved ændring af hastighedsreference og i forhold til belastningsmomentet.
1.7 Eektfaktor
Eektfaktoren angiver, i hvilken grad frekvensomformeren
belaster netforsyningen. Eektfaktoren er forholdet mellem
I1 og I
, hvor I1 er den grundlæggende strøm, og I
RMS
RMS
er
den totale RMS-strøm inklusive harmoniske strømme. En
lavere eektfaktor betyder højere I
for den samme kW-
RMS
ydelse.
Effektfaktor =
3 × U × I1× cosϕ
3 × U × I
RMS
Eektfaktoren til trefaset styring:
Effekt faktor =
= I
2
+ I
1
I
RMS
I1 × cosϕ1
I
RMS
2
2
+ I
+ . . + I
5
7
I
1
=
eftersomcosϕ1 = 1
I
RMS
2
n
En høj eektfaktor indikerer, at de forskellige harmoniske
strømme er lave.
Frekvensomformerens indbyggede DC-spoler producerer en
høj eektfaktor, hvilket minimerer belastningen af netforsyningen.
Regulatorisk overensstemmelse
1.8
Frekvensomformere er konstrueret i overensstemmelse
med de direktiver, der er beskrevet i dette afsnit.
1.8.1 CE-mærke
CE-mærket (Communauté européenne) indikerer, at
producenten af produktet overholder alle gældende EUdirektiver. De EU-direktiver, der gælder for design og
fremstilling af af frekvensomformere, er anført i Tabel 1.5.
1 1
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 9
Page 12
Introduktion
VLT® HVAC Basic Drive FC 101
11
BEMÆRK!
CE-mærket regulerer ikke produktets kvalitet. De
tekniske specikationer kan ikke udledes af CE-mærket.
1.8.2 UL-overensstemmelse
UL-registreret
BEMÆRK!
Frekvensomformere med integreret sikkerhedsfunktion
skal overholde maskindirektivet.
EU-direktiv Version
Lavspændingsdirektivet 2014/35/EU
EMC-direktivet 2014/30/EU
ErP-direktivet
Tabel 1.5 EU-direktiver gældende for frekvensomformere
Overensstemmelseserklæringer kan fås ved anmodning.
1.8.1.1 Lavspændingsdirektivet
Lavspændingsdirektivet nder anvendelse for alt elektrisk
udstyr, der anvendes i spændingsområderne 50-1.000 V AC
og 75-1.600 V DC.
Formålet med direktivet er at sikre personbeskyttelse og
undgå beskadigelse af ejendom ved drift af elektrisk
udstyr, der er installeret, og som vedligeholdes korrekt i
den tilsigtede applikation.
1.8.1.2 EMC-direktivet
Formålet med EMC-direktivet (elektromagnetisk kompatibilitet) er at reducere elektromagnetisk forstyrrelse og
højne immunitet af elektrisk udstyr og installationer. Det
grundlæggende beskyttelseskrav beskrevet i EMC-direktivet
2014/30/EU angiver, at apparater, som genererer elektromagnetisk forstyrrelse (EMI), eller hvis drift kan påvirkes af
EMI, skal være designet til at begrænse frembringelsen af
elektromagnetisk forstyrrelse og skal have en passende
grad af immunitet til EMI, når disse er korrekt installeret og
vedligeholdes og anvendes som beregnet.
Apparater med elektrisk udstyr, der anvendes i enkeltstående løsninger, eller som en del af et system, skal være
udstyret med CE-mærket. Systemer kræver ikke CE-mærket,
men de skal overholde de grundlæggende beskyttelseskrav
beskrevet i EMC-direktivet.
1.8.1.3 ErP-direktivet
ErP-direktivet er det Europæiske Ecodesign-direktiv for
energirelaterede produkter. Direktivet beskriver ecodesignkravene til energirelaterede produkter, herunder
frekvensomformere. Formålet med direktivet er at øge
energieektivitet og niveauet for beskyttelse af miljøet,
idet sikkerheden omkring energiforsyningen øges.
Miljømæssig påvirkning af energirelaterede produkter
omfatter energiforbrug gennem hele produktets livscyklus.
Illustration 1.2 UL
BEMÆRK!
IP54-apparater er ikke UL-certicerede.
Frekvensomformeren overholder fastholdelseskravene for
termisk hukommelse i UL 508C. Se afsnittet Termisk
motorbeskyttelse i den produktrelevante Design Guide for
ere oplysninger.
1.8.3 Overensstemmelse med RCM-mærke
Illustration 1.3 RCM-mærke
RCM-mærket angiver overensstemmelse med gældende
tekniske standarder for elektromagnetisk kompatibilitet
(EMC). RCM-mærket er påkrævet, når elektriske og
elektroniske apparater skal etableres på markedet i
Australien og New Zealand. RCM-mærkets regulatoriske
retningslinjer omhandler kabelbåret og udstrålet emission.
Anvend de emissionsgrænser, der er angivet i EN/IEC
61800-3, for frekvensomformere. En overensstemmelseserklæring kan fås ved anmodning.
1.8.4 EAC
Illustration 1.4 EAC-mærke
EAC-mærket for euroasiatisk overensstemmelse angiver, at
produktet overholder alle krav og tekniske bestemmelser,
der gælder for produktet i henhold til Den Euroasiatiske
Toldunion, som består af medlemsstaterne i Den Euroasiatiske Økonomiske Union.
EAC-logoet skal forendes både på produktmærkatet og på
mærkatet på emballagen. Alle produkter, der anvendes i
EAC-området, skal købes hos Danfoss i EAC-området.
10 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 13
089
Introduktion Design Guide
1.8.5 UkrSEPRO
Illustration 1.5 UkrSEPRO
UKrSEPRO-certikatet sikrer kvalitet og sikkerhed for både
produkter og service samt produktionsstabilitet i henhold
til ukrainske regulatoriske standarder. UKrSEPRO-certikatet
er et påkrævet dokument, der skal anvendes ved toldbehandling, for alle produkter, der sendes ind eller ud af
ukrainsk territorium.
1 1
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 11
Page 14
Sikkerhed
VLT® HVAC Basic Drive FC 101
2 Sikkerhed
22
2.1 Uddannet personale
Korrekt og pålidelig transport, lagring, montering, drift og
vedligeholdelse er påkrævet for problemfri og sikker drift
af frekvensomformeren. Det er kun tilladt for uddannet
personale at montere eller betjene dette udstyr.
Uddannet personale
som er autoriseret til at montere, idriftsætte og
vedligeholde udstyr, systemer og kredsløb i overensstemmelse med relevante love og bestemmelser.
Derudover skal personalet være bekendt med de instruktioner og sikkerhedsforanstaltninger, der er beskrevet i
denne vejledning.
deneres som udlærte medarbejdere,
2.2 Sikkerhedsforanstaltninger
ADVARSEL
HØJSPÆNDING
Frekvensomformere indeholder højspænding, når de er
tilsluttet netspændingen, DC-forsyning eller belastningsfordeling. Hvis montering, start og vedligeholdelse
udføres af personale, der ikke er uddannet til det, kan
det resultere i død eller alvorlig personskade.
Montering, start og vedligeholdelse må kun
•
udføres af personale, der er uddannet til det.
Før der foretages service- eller reparations-
•
arbejde, skal der anvendes et egnet
måleapparat til at måle spændingen og for at
sikre, at der ikke er resterende spænding i
frekvensomformeren.
ADVARSEL
UTILSIGTET START
Når frekvensomformeren er tilsluttet netspændingen, DCforsyningen eller belastningsfordeling, kan motoren
starte pludseligt. Utilsigtet start under programmering,
service- eller reparationsarbejde kan resultere i død,
alvorlig personskade eller beskadigelse af udstyr eller
ejendom. Motoren kan startes med en ekstern kontakt,
en eldbuskommando, et indgangsreferencesignal fra
LCP'et eller LOP'et, via ernbetjening ved hjælp af
MCT 10-opsætningssoftware, eller efter en slettet
fejltilstand.
For at undgå utilsigtet motorstart:
Tryk på [O/Reset] på LCP'et, før program-
•
mering af parametre.
Afbryd frekvensomformeren fra netforsyningen.
•
Frekvensomformeren, motoren og det drevne
•
udstyr skal være fuldstændigt tilsluttet og
samlet, før frekvensomformeren tilsluttes
netspændingen, DC-forsyningen eller belastningsfordeling.
ADVARSEL
AFLADNINGSTID
Frekvensomformeren indeholder DC-link-kondensatorer,
der kan forblive opladede, selv når frekvensomformeren
ikke er forsynet med strøm. Der kan være højspænding
til stede, selv når LED-advarselslamperne er slukkede.
Det kan resultere i død eller alvorlig personskade, hvis
der ikke ventes det angivne tidsrum, efter at strømmen
er slået fra, før der udføres service- eller reparationsarbejde.
Stop motoren.
•
Frakobl netspændingen og de eksterne DC-link-
•
strømforsyninger, herunder reservebatterier
(backup), UPS og DC-link-tilslutninger til andre
frekvensomformere.
Afbryd eller lås PM-motor.
•
Vent, indtil kondensatorerne er helt aadede.
•
Minimumventetiden er angivet i Tabel 2.1.
Før der foretages service- eller reparations-
•
arbejde, skal der anvendes et egnet
måleapparat til at måle spændingen og for at
sikre, at kondensatorerne er fuldt aadede.
12 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 15
Sikkerhed Design Guide
Spænding
[V]
3 x 200 0,25–3,7 (0,33–5) 4
3 x 200 5,5–11 (7–15) 15
3 x 400 0,37–7,5 (0,5–10) 4
3 x 400 11–90 (15–125) 15
3 x 600 2,2–7,5 (3–10) 4
3 x 600 11–90 (15–125) 15
Tabel 2.1 Aadningstid
Eektområde [kW (hk)] Minimumventetid
(minutter)
ADVARSEL
FARLIG LÆKSTRØM
Lækstrømmene overstiger 3,5 mA. Hvis frekvensomformeren ikke jordes korrekt, kan det resultere i død
eller alvorlig personskade.
Sørg for, at udstyret jordes korrekt af en
•
autoriseret elektriker.
ADVARSEL
FARER VED UDSTYRET
Kontakt med roterende aksler og elektrisk udstyr kan
resultere i død eller alvorlig personskade.
Sørg for, at montering, start og vedligeholdelse
•
må kun udføres af uddannet og kvaliceret
personale.
Elektrisk arbejde skal overholde nationale og
•
lokale sikkerhedsforskrifter.
Følg procedurerne i denne manual.
•
2 2
FORSIGTIG
FARE PGA. INTERN FEJL
En intern fejl i frekvensomformeren kan resultere i
alvorlig personskade, når frekvensomformeren ikke er
lukket korrekt.
Sørg for, at alle dæksler er på plads og fastgjort
•
sikkert, inden apparatet forsynes med strøm.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 13
Page 16
120
100
80
60
40
20
0
20 40 60 80 100 120 140 160 180
120
100
80
60
40
20
0 20 40 60 80 100 120 140 160 180
Volume %
Volume %
INPUT POWER % PRESSURE %
SYSTEM CURVE
FAN CURVE
A
B
C
130BA781.11
ENERGY
CONSUMED
Produktoversigt
3 Produktoversigt
3.1 Fordele
VLT® HVAC Basic Drive FC 101
33
3.1.1 Hvorfor anvende en
frekvensomformer til styring af
ventilatorer og pumper?
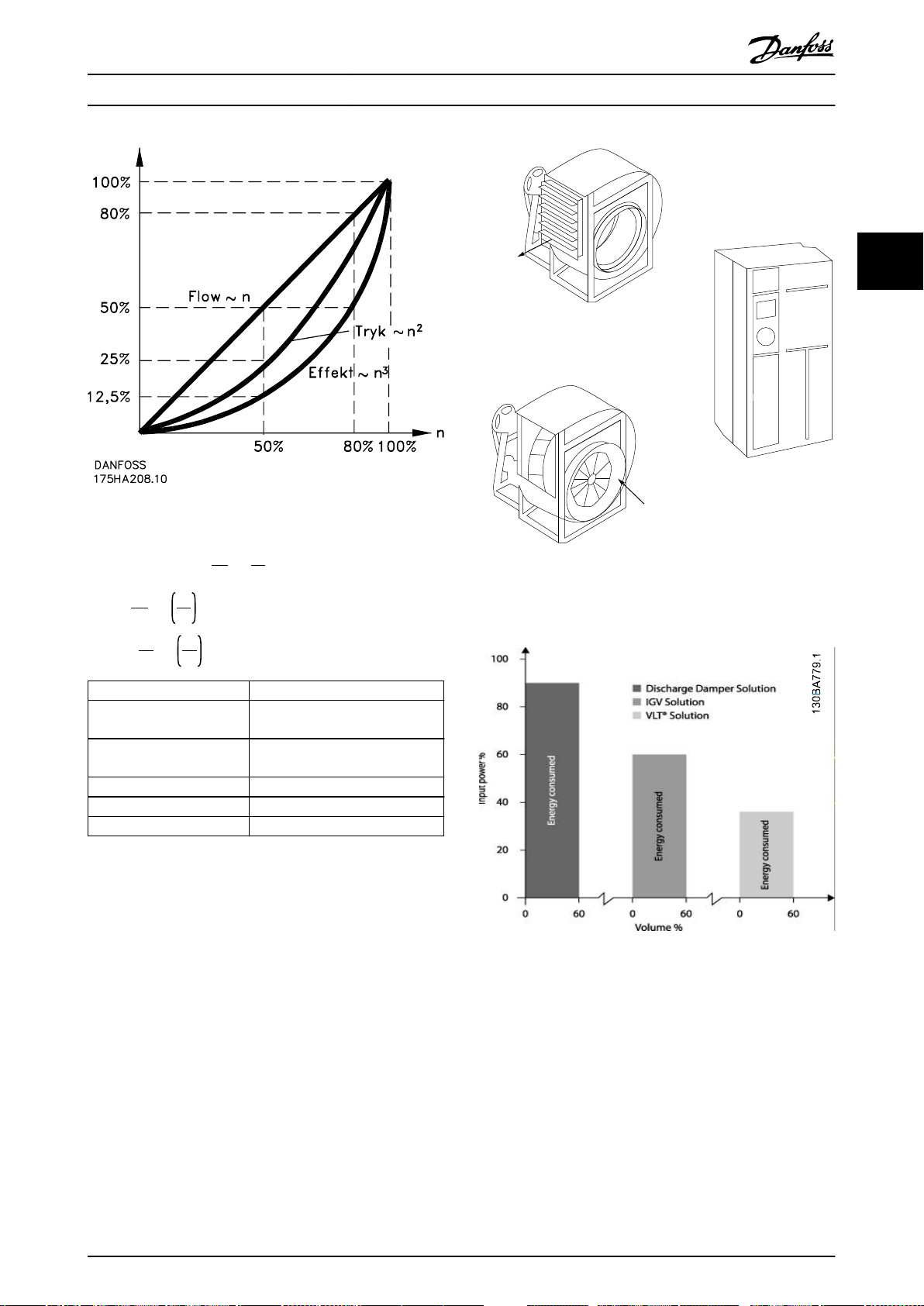
En frekvensomformer udnytter det faktum, at centrifugale
ventilatorer og pumper følger proportionalitetslovene. Se
kapitel 3.1.3 Eksempel på energibesparelser for oplysninger.
3.1.2 Den klare fordel – energibesparelser
Den elektriske energibesparelse er den klare fordel ved at
anvende en frekvensomformer til hastighedsstyring af
ventilatorer eller pumper.
Sammenlignet med alternative styresystemer og
teknologier er en frekvensomformer det mest energioptimale styresystem til styring af ventilator- og
pumpeanlæg.
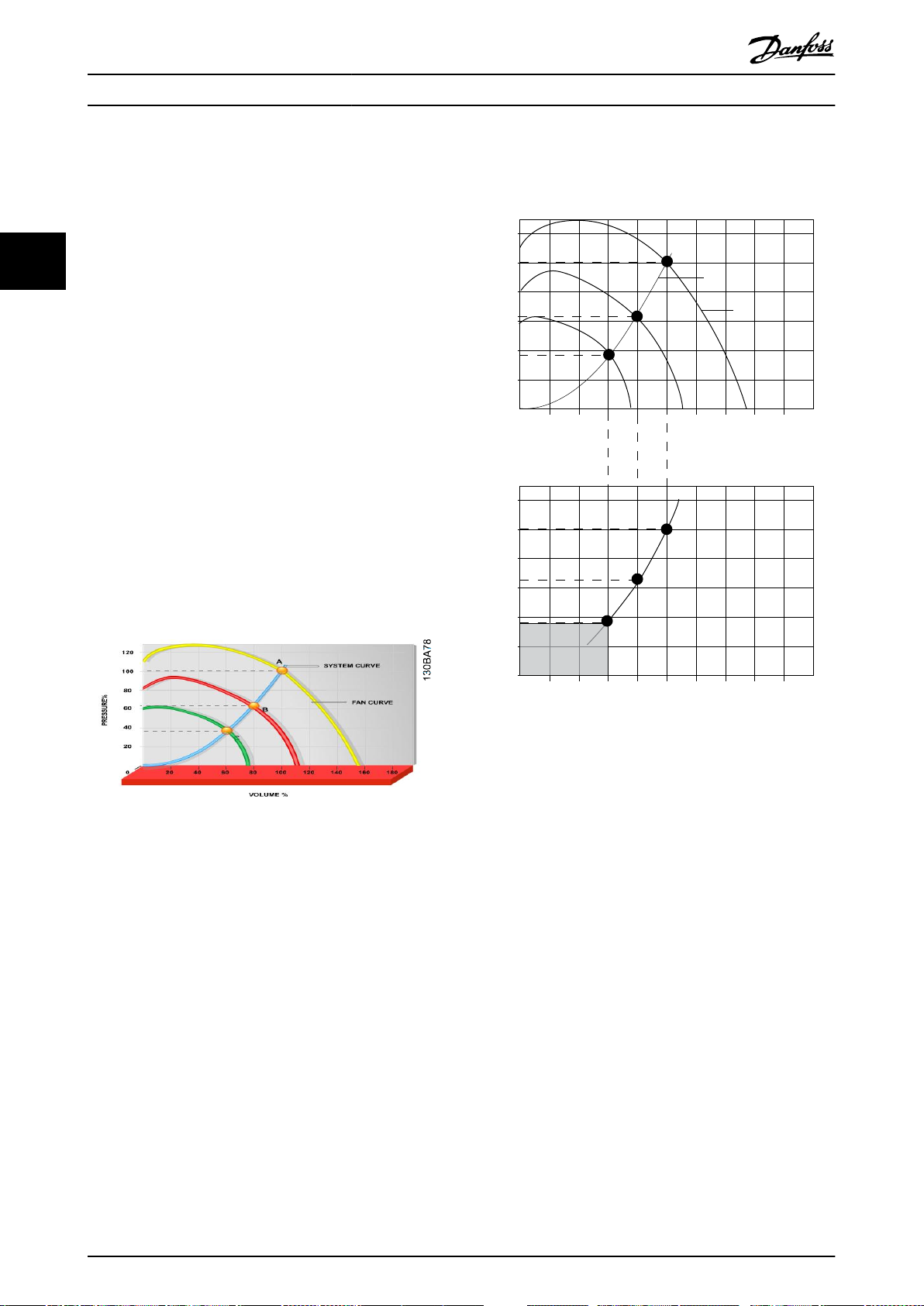
Illustration 3.1 Ventilatorkurver (A, B og C) for reducerede
ventilatorvolumener
Illustration 3.2 Energibesparelser med frekvensomformer-
løsning
Når en frekvensomformer anvendes til at reducere ventilatorkapaciteten til 60 %, kan der opnås energibesparelser på
mere end 50 % i typiske applikationer.
3.1.3 Eksempel på energibesparelser
Som vist i Illustration 3.3 styres gennemstrømningen ved at
ændre O/MIN. Ved at reducere hastigheden med kun 20 %
fra den nominelle hastighed reduceres gennemstrømningen tilsvarende 20 %. Det skyldes, at
gennemstrømningen er direkte proportional med O/MIN.
Elektricitetsforbruget reduceres imidlertid med 50 %.
Hvis det pågældende anlæg skal kunne levere en gennemstrømning på 100 % meget få dage om året og den
resterende del af året i gennemsnit under 80 % af den
nominelle gennemstrømning, opnår man en energibesparelse på mere end 50 %.
Illustration 3.3 beskriver afhængigheden af gennemstrømning, tryk og strømforbrug pr. O/MIN.
14 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 17
130BA782.10
Discharge
damper
Less energy savings
IGV
Costlier installation
Maximum energy savings
Produktoversigt Design Guide
Illustration 3.3 Proportionalitetslovene
3 3
Q
n
1
Gennemstrø mning :
=
2
n
1
n
2
3
n
1
n
2
H
Tryk:
Effekt:
Q = gennemstrømning P = eekt
Q1 = nominel gennemstrømning
Q2 = reduceret gennemstrømning
H = tryk n = hastighedsstyring
H1 = nominelt tryk n1 = nominel hastighed
H2 = reduceret tryk n2 = reduceret hastighed
1
=
H
2
P
1
P
2
Tabel 3.1 Proportionalitetslovene
1
=
Q
n
2
2
P1 = nominel eekt
P2 = reduceret eekt
3.1.4 Sammenligning af energibesparelser
Frekvensomformerløsningen fra Danfoss tilbyder store
besparelser sammenlignet med traditionelle energibesparende løsninger, som for eksempel en løsning med
udløbsspjæld og IGV (ledeapparat). Dette skyldes, at
frekvensomformeren er i stand til at styre ventilatorhastigheden i henhold til termisk belastning på systemet, og
frekvensomformeren har en indbygget funktion, der gør
det muligt for frekvensomformeren at fungere som et
bygningsstyringssystem (BMS).
Illustration 3.3 illustrerer typiske energibesparelser, der kan
opnås med tre almindelige løsninger, når ventilatorvolumen reduceres til 60 %.
Som grafen viser, kan der i typiske applikationer opnås
energibesparelser på mere end 50 % .
Illustration 3.4 De tre almindelige energibesparelsessystemer
Illustration 3.5 Energibesparelser
Udløbsspjæld reducerer strømforbruget. IGV'er tilbyder en
reduktion på 40 %, men de er dyre at installere. Frekvensomformerløsningen fra Danfoss reducerer energiforbruget
med mere end 50 % og er let at installere. Den reducerer
også støj, mekanisk stress og slid, og den forlænger hele
applikationens levetid.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 15
Page 18
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Produktoversigt
VLT® HVAC Basic Drive FC 101
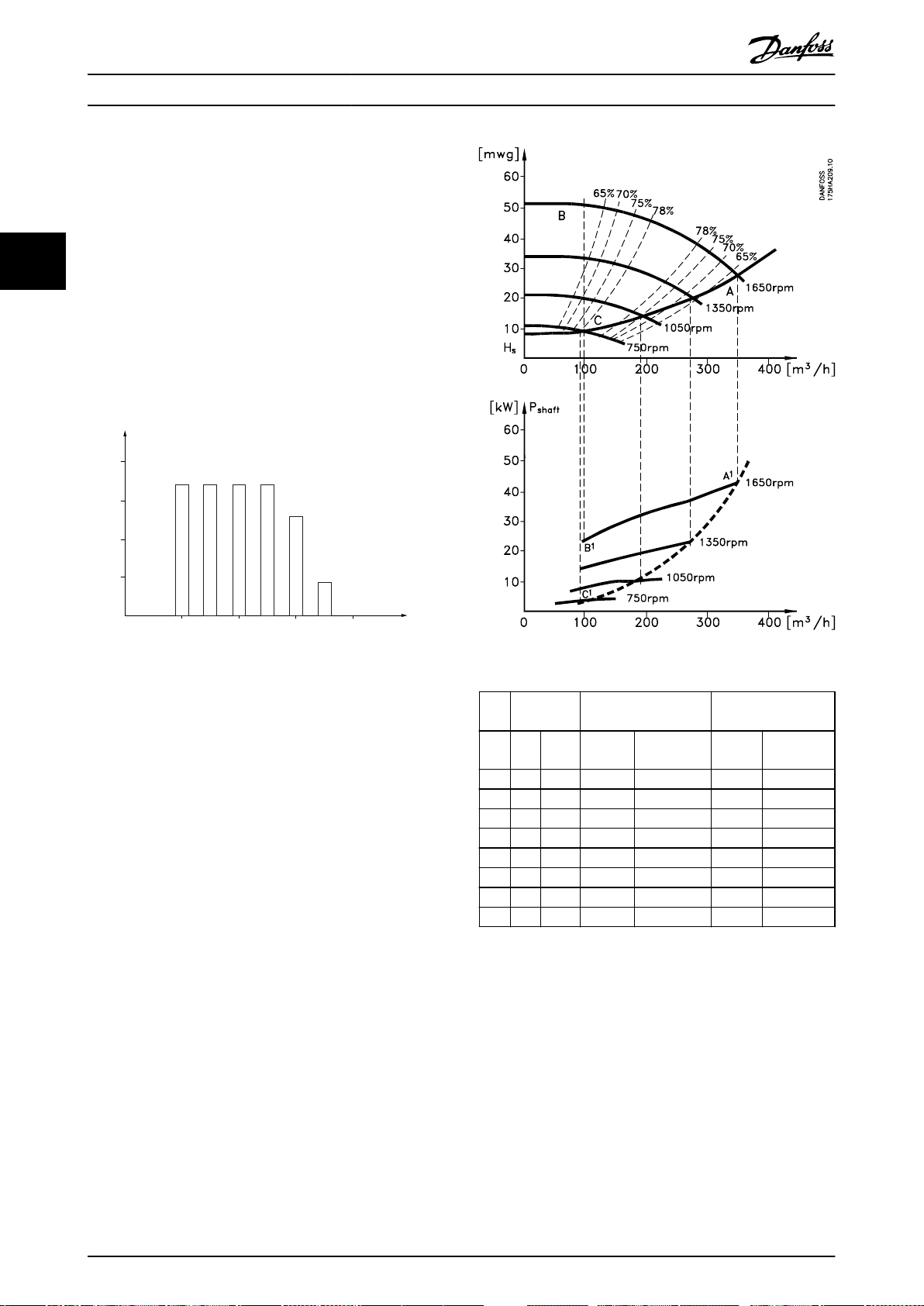
3.1.5 Eksempel med en varierende
gennemstrømning over et år
Dette eksempel er beregnet ud fra pumpekarakteristikker
hentet fra et pumpedatablad.
33
Det opnåede resultat viser energibesparelser på mere end
50 % ved en given distribution af gennemstrømning i
løbet af et år. Tilbagebetalingsperioden afhænger af prisen
pr. kWh og frekvensomformerens pris. I dette eksempel er
det mindre end et år sammenlignet med ventiler og
konstant hastighed.
Energibesparelser
P
= P
aksel
akseleekt
Illustration 3.6 Gennemstrømningsfordeling over et år
Illustration 3.7 Energi
m3/t
Fordeling Ventilregulering
im
1
For-
brug
kWh A1 - C
% Timer Eekt
A1 - B
350 5 438 42,5 18,615 42,5 18,615
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752 23,0 40,296 3,5 6,132
100 8760 – 275,064 – 26,801
Σ
Tabel 3.2 Resultat
Frekvensomformer-
styring
Eekt
For-
brug
kWh
1
16 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 19
Produktoversigt Design Guide
3.1.6 Bedre styring
Hvis en frekvensomformer anvendes til at styre gennemstrømningen eller trykket i et system, opnås en forbedret
styring.
En frekvensomformer kan ændre ventilatorens eller
pumpens hastighed og derved opnå variabel styring af
gennemstrømning og tryk.
En frekvensomformer kan desuden hurtigt variere ventilatorens eller pumpens hastighed, så den tilpasses de nye
gennemstrømnings- eller trykbetingelser i systemet.
Simpel styring af processen (gennemstrømning, niveau
eller tryk) ved brug af den indbyggede PI-styring.
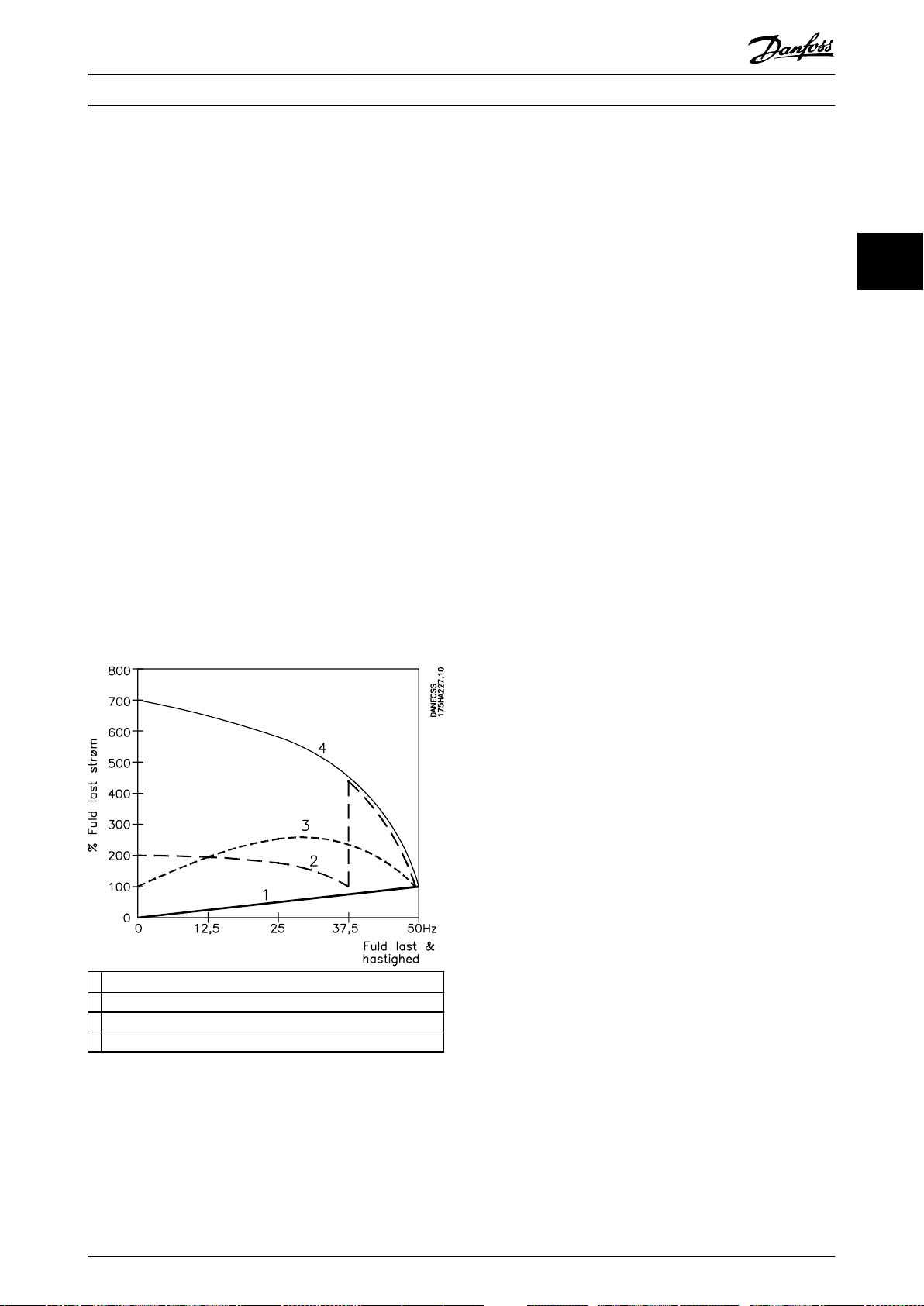
3.1.7 Ikke behov for stjerne-/trekantstarter
eller softstarter
Når relativt store motorer skal startes, er det i mange lande
nødvendigt at anvende udstyr, der begrænser startstrømmen. I mere traditionelle systemer anvendes der ofte
en stjerne-/trekantstarter eller softstarter. Denne form for
motorstartere kan undværes, når man bruger en frekvensomformer.
3.1.8 Brug af en frekvensomformer sparer
penge
Eksempel kapitel 3.1.9 Uden en frekvensomformer viser, at en
frekvensomformer erstatter andet udstyr. Det kan
beregnes, hvor store omkostningerne er i forbindelse med
installation af de to anlæg. I eksemplet kan de to anlæg
realiseres for nogenlunde samme pris.
Anvend VLT® Energy Box-softwaren, som beskrives i
kapitel 1.5 Yderligere ressourcer , til at beregne de omkostningsbesparelser, der kan opnås ved at benytte en
frekvensomformer.
3 3
Som illustreret i Illustration 3.8 forbruger en frekvensomformer ikke mere end den nominelle strøm.
1
VLT® HVAC Basic Drive FC 101
2 Stjerne-/trekantstarter
3 Softstartere
4 Start direkte på netforsyning
Illustration 3.8 Startstrøm
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 17
Page 20
Produktoversigt
VLT® HVAC Basic Drive FC 101
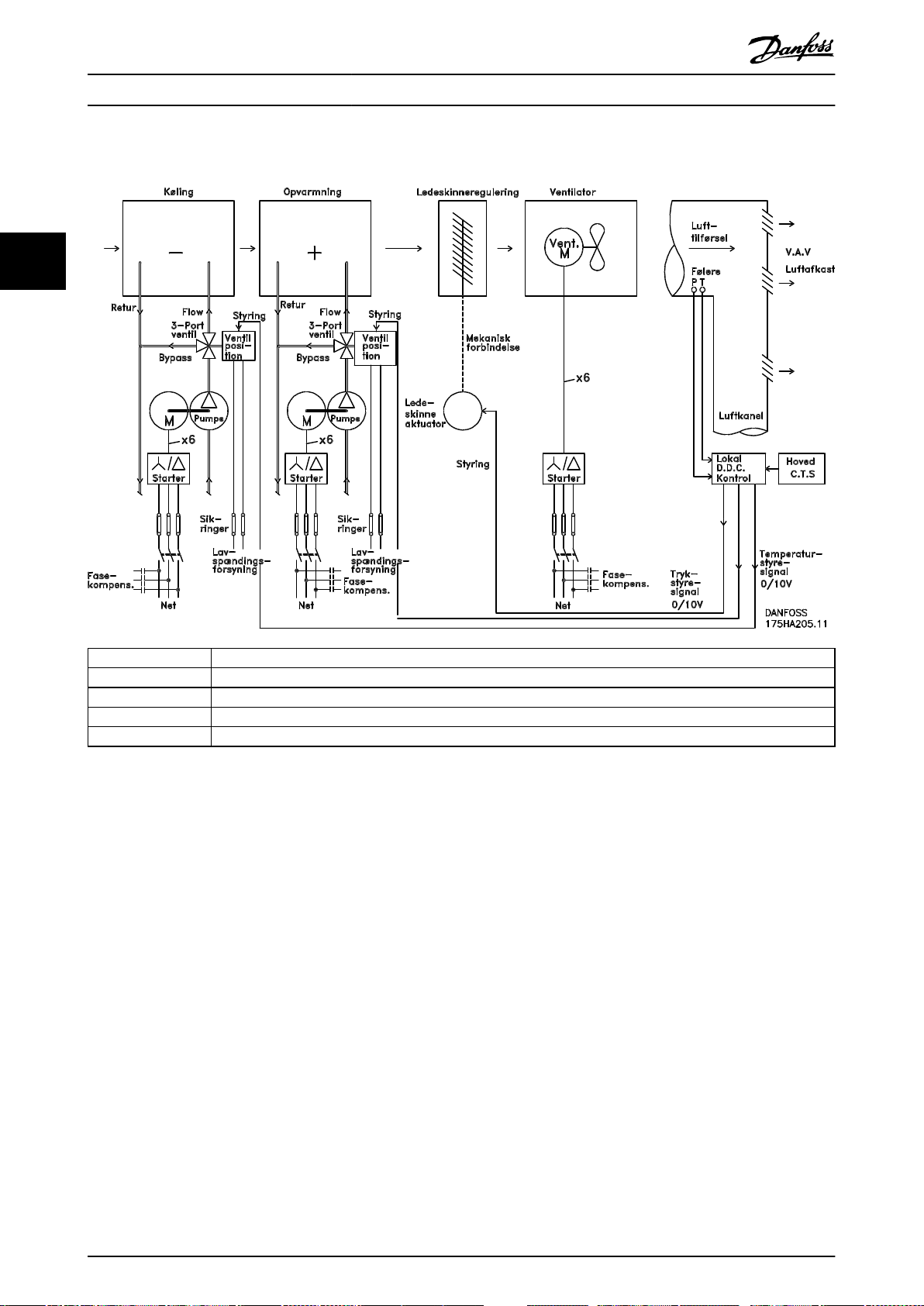
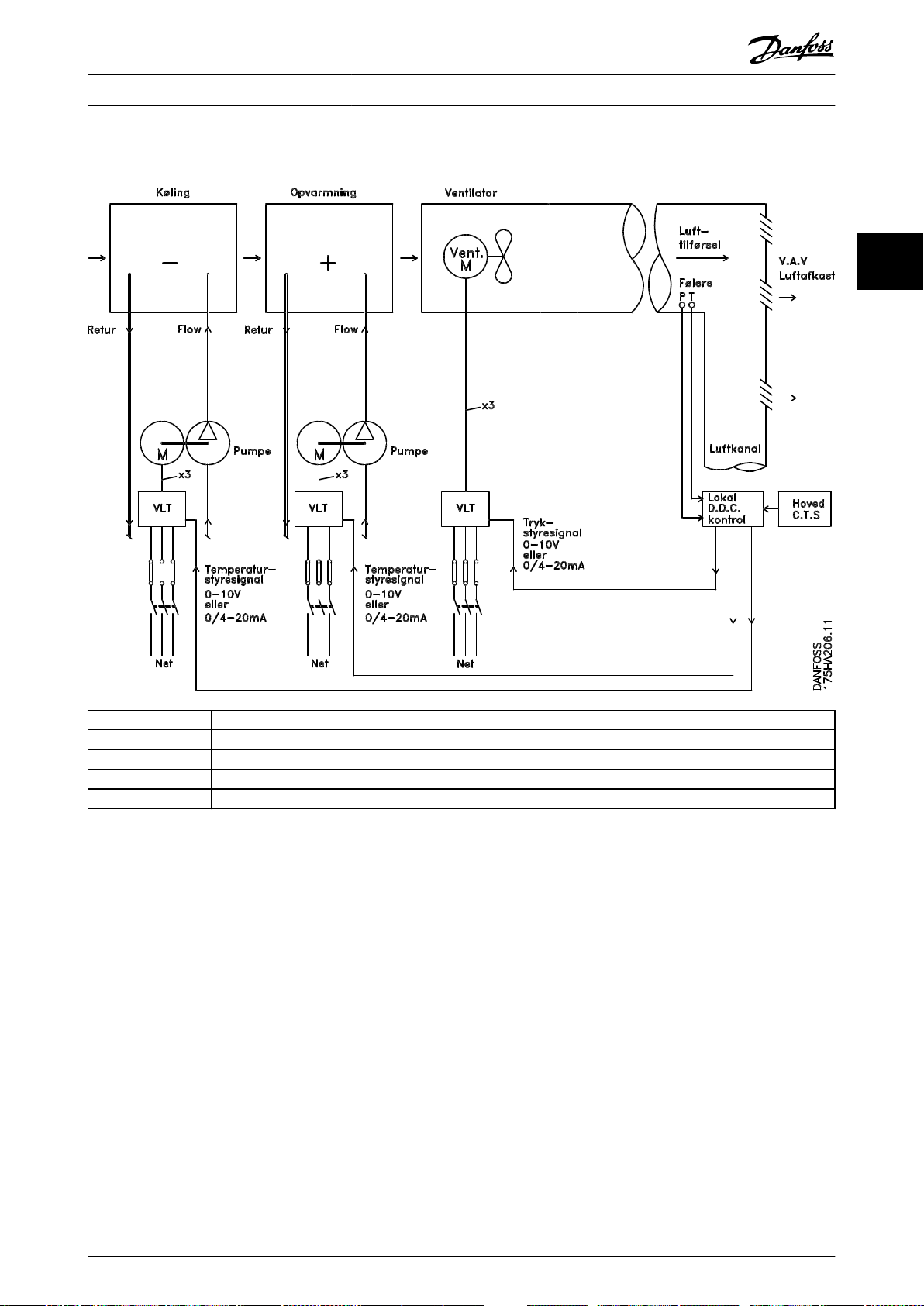
3.1.9 Uden en frekvensomformer
33
D.D.C. Direct digital control (direkte digital styring)
E.M.S. Energy management system (energihåndteringssystem)
V.A.V. Variable Air Volume (variabel luftvolumen)
Føler P Tryk
Føler T Temperatur
Illustration 3.9 Traditionelt ventilatorsystem
18 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 21
Produktoversigt Design Guide
3.1.10 Med en frekvensomformer
3 3
D.D.C. Direct digital control (direkte digital styring)
E.M.S. Energy management system (energihåndteringssystem)
V.A.V. Variable Air Volume (variabel luftvolumen)
Føler P Tryk
Føler T Temperatur
Illustration 3.10 Ventilatorsystem styret af frekvensomformere
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 19
Page 22
Frequency
converter
Frequency
converter
D1
D2
D3
Cooling coil
Heating coil
Filter
Pressure
signal
Supply fan
VAV boxes
Flow
Flow
Pressure
transmitter
Return fan
3
3
T
130BB455.10
Produktoversigt
VLT® HVAC Basic Drive FC 101
3.1.11 Applikationseksempler
I de følgende afsnit vises nogle typiske applikationseksempler inden for HVAC.
3.1.13
Løsning med VLT
Spjæld og IGV'er fungerer ved at opretholde et konstant
tryk i rørsystemer, hvorimod en løsning med en frekvens-
®
omformer sparer meget mere energi og reducerer
33
3.1.12 Variable Air Volume (variabel
luftvolumen)
installationens kompleksitet. I stedet for at oprette et
kunstigt tryktab eller forårsage et fald i ventilatorens
eektivitet sænker frekvensomformeren ventilatorens
VAV- eller variabel luftvolumen-systemer anvendes til
styring af både ventilation og temperatur for at
imødekomme en bygnings behov. Centrale VAV-systemer
anses for at være den mest energibesparende metode at
etablere luftkonditionering i bygninger på. Der opnås en
større virkningsgrad, hvis der konstrueres centrale systemer
i stedet for distribuerede systemer.
Virkningsgraden kommer ved anvendelse af større
ventilatorer og kølere, som besidder meget større
hastighed, så den luftgennemstrømning og det tryk, som
systemet kræver, opnås.
Centrifugaludstyr, som f.eks. ventilatorer, opfører sig i
henhold til centrifugalkraftens love. Det betyder, at ventilatorerne nedbringer det tryk og den luftgennemstrømning,
de frembringer, efterhånden som hastigheden nedsættes.
Derved nedsættes deres strømforbrug markant.
PI-reguleringen i VLT® HVAC Basic Drive FC 101 kan bruges
til at erne behovet for yderligere styreenheder.
eektivitet end små motorer og distribuerede, luftkølede
kølere. Desuden opnås besparelser gennem lavere vedligeholdelseskrav.
Illustration 3.11 Variable Air Volume (variabel luftvolumen)
20 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 23
Frequency
converter
Frequency
converter
Pressure
signal
Cooling coil
Heating coil
D1
D2
D3
Filter
Pressure
transmitter
Supply fan
Return fan
Temperature
signal
Temperature
transmitter
130BB451.10
Produktoversigt Design Guide
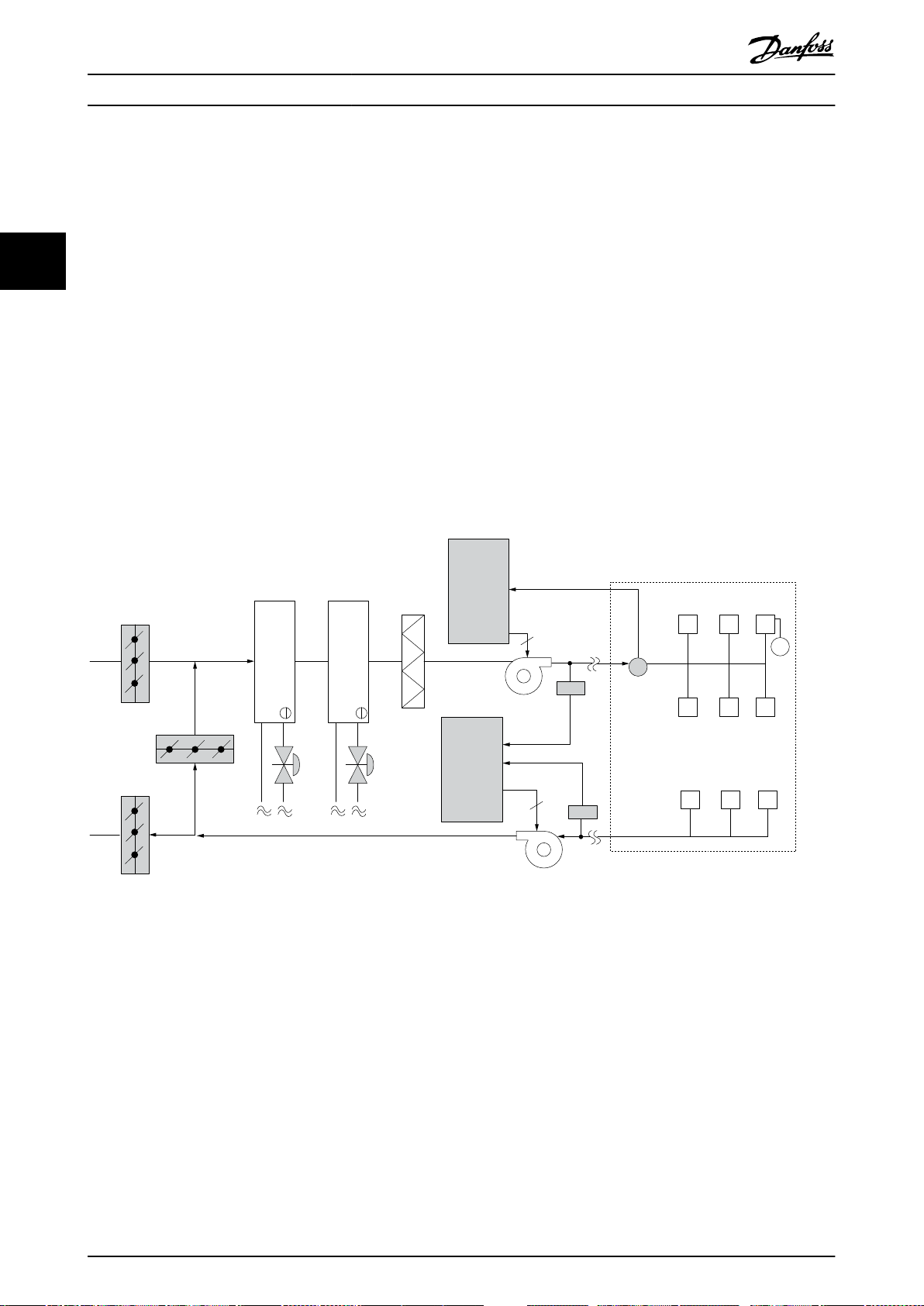
3.1.14 Konstant luftvolumen
CAV-systemer, eller systemer med konstant luftvolumen, er
centrale ventilationssystemer, som almindeligvis anvendes
til at forsyne store fælleszoner med et minimum af frisk,
tempereret luft. De kom før VAV-systemerne og ndes
derfor også i ældre, erzonede erhvervsejendomme. Disse
systemer forvarmer den friske luft ved anvendelse af
lufthåndteringsenheder (AHU'er) med en opvarmningsspole, og mange anvendes også til luftkonditionering
i bygninger og har en kølespole. Ventilatorens
spoleenheder anvendes hyppigt til at hjælpe med
opvarmnings- og afkølingsbehovene i de enkelte zoner.
3.1.15
Løsning med VLT
Med en frekvensomformer kan der opnås betydelige
energibesparelser, samtidig med at der er god styring af
bygningen. Temperaturfølere eller CO2-følere kan anvendes
som feedbacksignaler til frekvensomformerne. Et CAVsystem kan programmeres til at køre på baggrund af
faktiske bygningsforhold, hvad enten der er tale om styring
af temperatur, luftkvalitet eller begge dele. Efterhånden
som antallet af personer i de styrede områder falder, er
behovet for frisk luft også faldende. CO2-føleren registrerer
lavere niveauer og sænker forsyningsventilatorernes
hastighed. Returventilatoren modulerer, så der opretholdes
et statisk tryksætpunkt eller en fast forskel mellem luftens
forsynings- og returgennemstrømning.
®
Ved temperaturstyring, især i luftkonditioneringssystemer,
er der forskellige kølebehov, efterhånden som
temperaturen udenfor skifter, og antallet af personer i de
styrede zoner ændrer sig. Når temperaturen falder under
sætpunktet, nedsættes forsyningsventilatorens hastighed.
Returventilatoren modulerer, så der opretholdes et statisk
tryksætpunkt. Ved at nedsætte luftgennemstrømningen
nedsættes også den energi, der anvendes til at opvarme
eller nedkøle den friske luft, hvilket giver yderligere
besparelser.
Flere af funktionerne i den dedikerede frekvensomformer
fra Danfoss HVAC kan anvendes til at forbedre CAVsystemets ydeevne. Noget, man er optaget af, når et
ventilationssystem skal styres, er at undgå dårlig
luftkvalitet. Den programmerbare minimumfrekvens kan
indstilles til at opretholde et minimum af forsyningsluft
uanset feedbacksignalet eller referencesignalet. Frekvensomformeren omfatter også en PI-regulering med mulighed
for at overvåge både temperatur og luftkvalitet. Selv om
temperaturbehovet er opfyldt, fastholder frekvensomformeren tilstrækkelig luftforsyning for at tilfredsstille
luftkvalitetsføleren. Styreenheden er i stand til at overvåge
og sammenligne to feedbacksignaler, så returventilatoren
styres ved også at opretholde en fast luftgennemstrømningsforskel mellem forsynings- og returkanalerne.
3 3
Illustration 3.12 Konstant luftvolumen
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 21
Page 24
Frequency
converter
Water Inlet
Water Outlet
CHILLER
Temperature
Sensor
BASIN
Conderser
Water pump
Supply
130BB453.10
Produktoversigt
VLT® HVAC Basic Drive FC 101
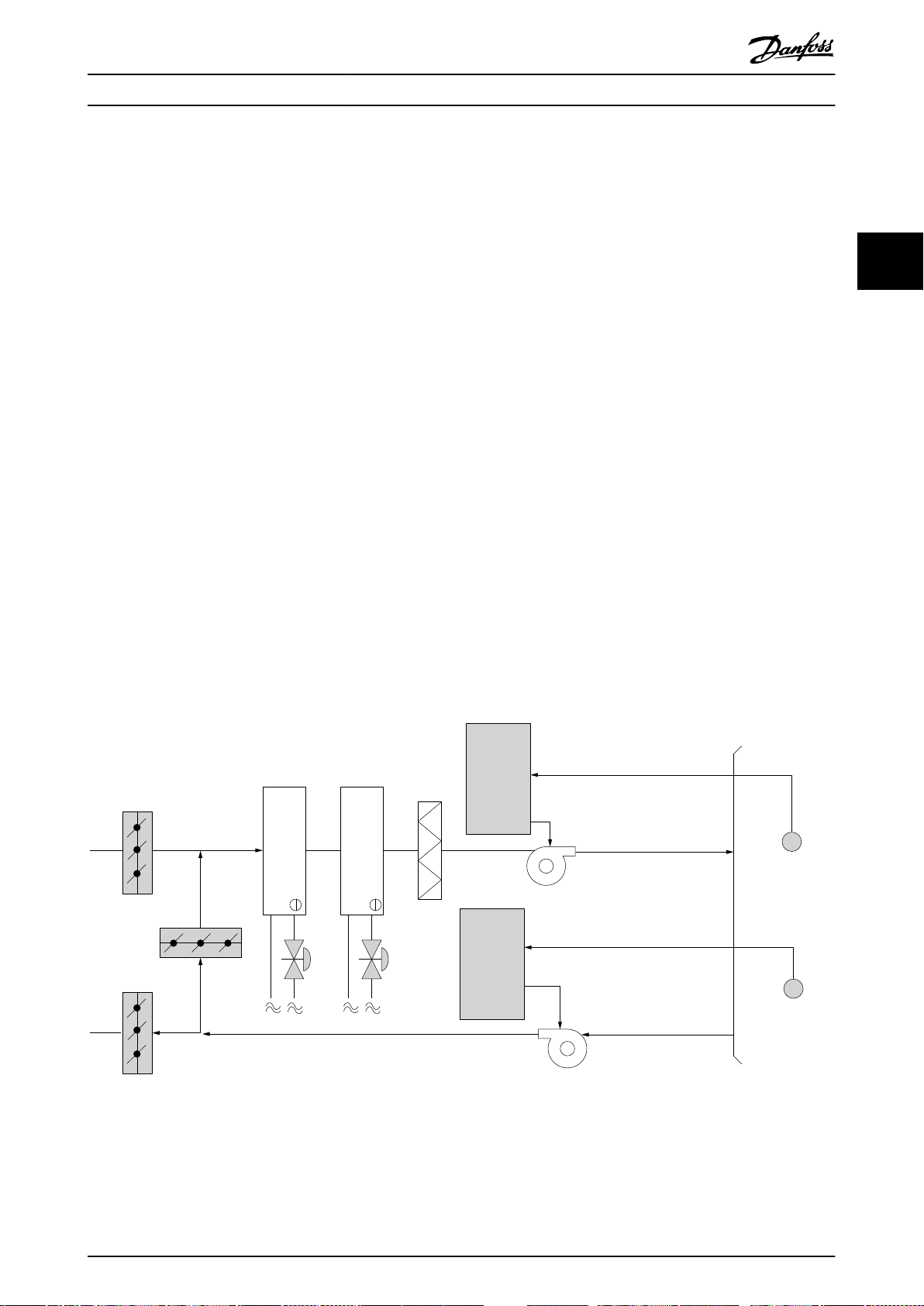
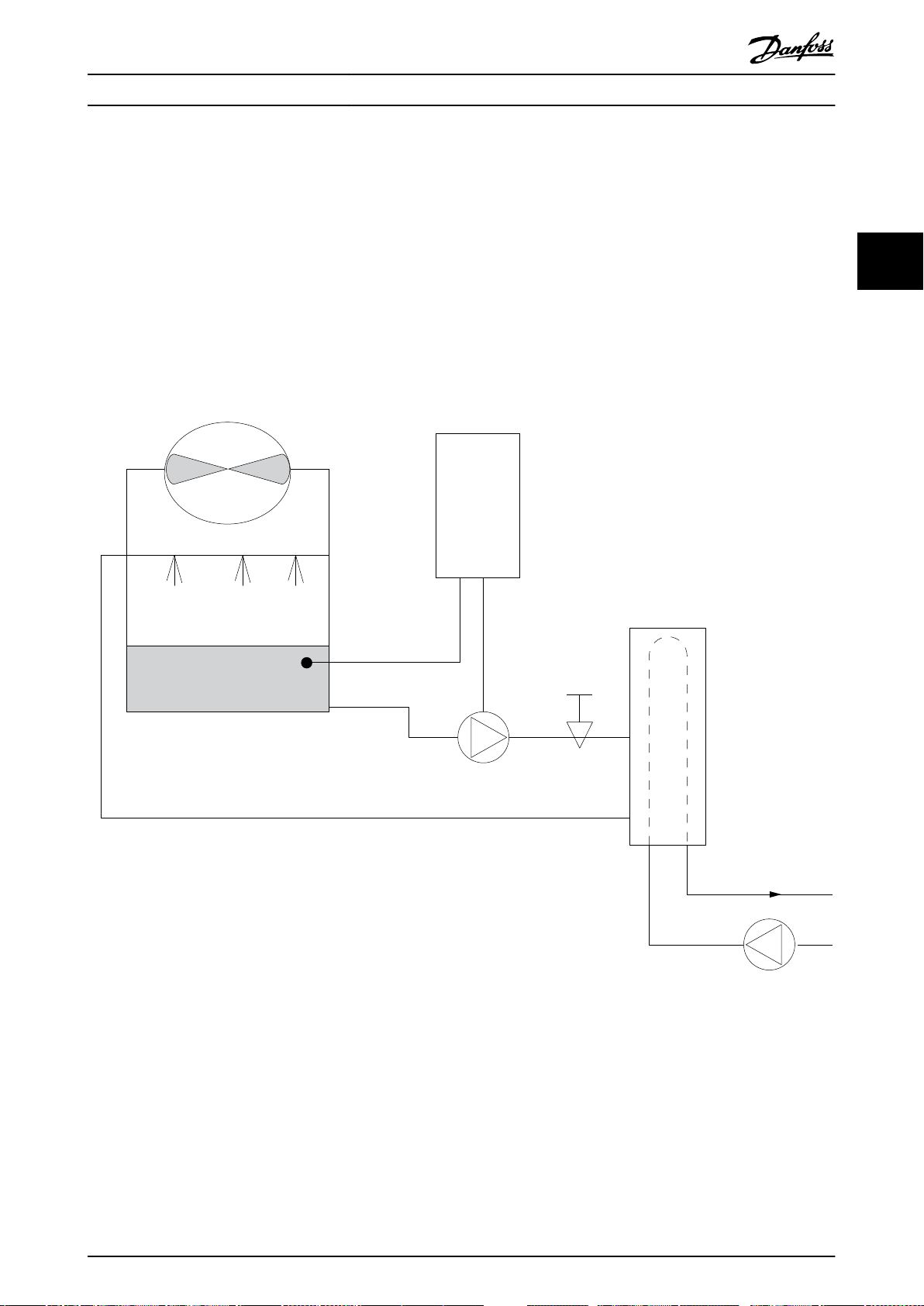
3.1.16 Køletårnsventilator
Flere af funktionerne i den dedikerede frekvensomformer
fra Danfoss HVAC kan anvendes til at forbedre ydeevnen i
Køletårnsventilatorer køler kondensatet i vandkølede
kølesystemer. Vandkølede kølesystemer er den mest
eektive måde at frembringe afkølet vand på. De er op til
20 % mere eektive end luftkølede kølere. Afhængigt af
33
klimaet er køletårne ofte den mest energibesparende måde
at køle kondensatet fra kølerne på.
De afkøler kondensatet ved fordampning.
Kondensatet indsprøjtes i køletårnet på køletårnenes
lameller, så overadearealet øges. Tårnets ventilator blæser
luft gennem lamellerne og det indsprøjtede vand for at
køletårnsventilatorapplikationer. Når køletårnsventilatorerne
falder under en vis hastighed, bliver den virkning,
ventilatoren har i forbindelse med afkøling af vandet, lille.
Hvis der anvendes en gearkasse til frekvensstyring af
tårnventilatoren, kan der desuden kræves en minimumshastighed på 40–50 %.
Den kundeprogrammerbare minimumfrekvensindstilling
kan fastholde denne minimumfrekvens, selv når
feedbacken eller hastighedsreferencen kræver lavere
hastigheder.
forøge fordampningen. Fordampningen erner energi fra
vandet, hvorved dets temperatur falder. Det afkølede vand
opsamles i køletårnsbassinet, hvorfra det pumpes tilbage i
kølekondensatoren, og hele processen starter forfra.
Som standard er det desuden muligt at programmere
frekvensomformeren, så den går i sleep mode og standser
ventilatoren, indtil der er brug for en højere hastighed.
Desuden kan nogle køletårnsventilatorer have uønskede
3.1.17
Løsning med VLT
®
Med en frekvensomformer kan køletårnsventilatorerne
frekvenser, som kan medføre vibrationer. Disse frekvenser
kan let undgås ved at programmere bypass-frekvensområderne i frekvensomformeren.
styres til den ønskede hastighed, så kondensattemperaturen opretholdes. Frekvensomformerne kan også
anvendes til at tænde og slukke ventilatoren.
Illustration 3.13 Køletårnsventilator
22 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 25
Frequency
converter
Water
Inlet
Water
Outlet
BASIN
Flow or pressure sensor
Condenser
Water pump
Throttling
valve
Supply
CHILLER
130BB452.10
Produktoversigt Design Guide
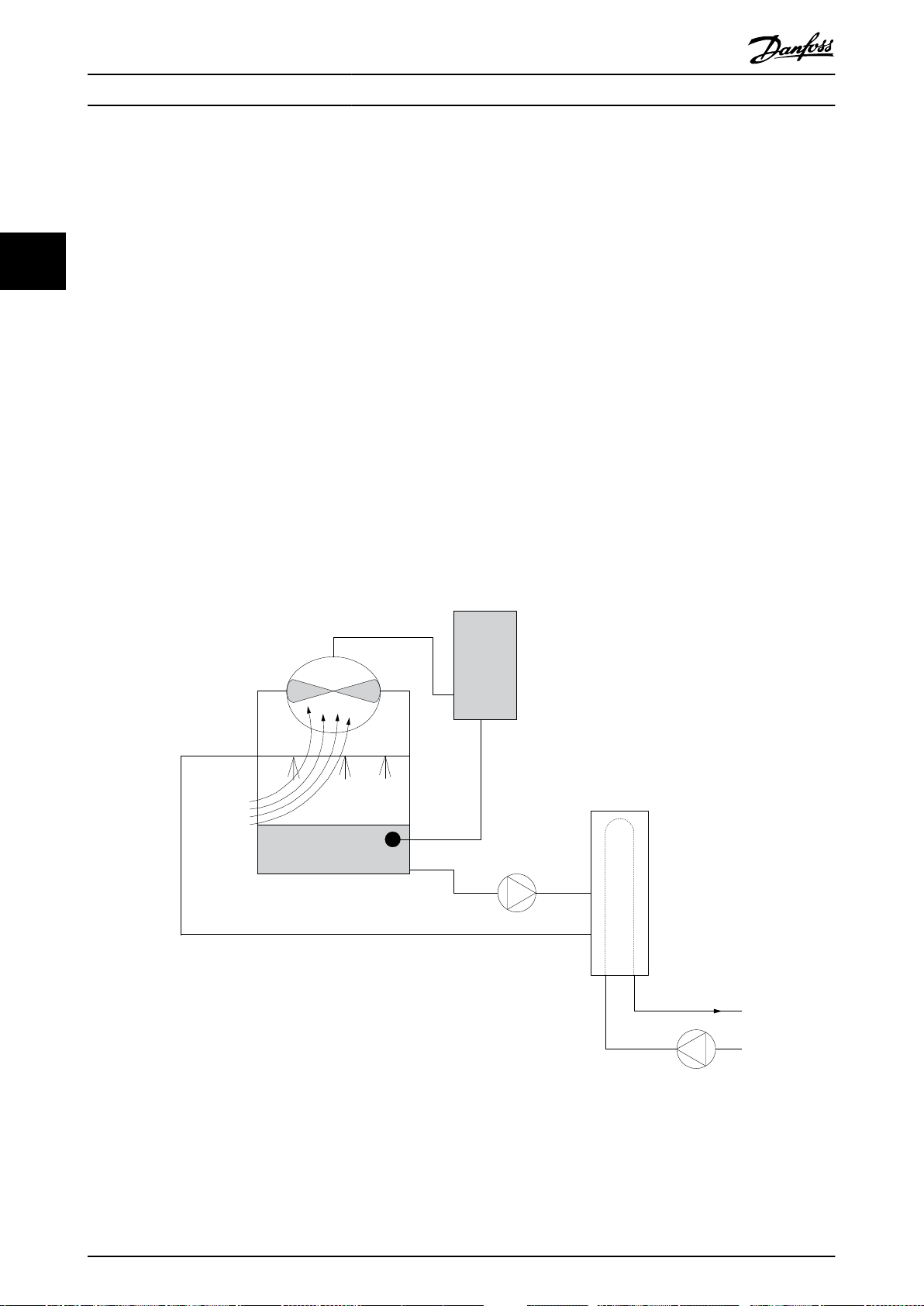
3.1.18 Kondensatpumper
Kondensatpumper anvendes primært til at cirkulere vand
gennem kondenseringsdelen af de vandkølede kølere og
det dertilhørende køletårn. Kondensatet absorberer varmen
fra kølernes kondenseringsdel og frigiver den til
atmosfæren i køletårnet. Disse systemer giver den mest
eektive måde at afkøle vand på, idet de er helt op til
20 % mere eektive end luftkølede kølere.
3.1.19
Løsning med VLT
®
Frekvensomformere kan anvendes sammen med kondensatpumper i stedet for at afbalancere pumperne vha. en
drøvleventil eller ved at trimme pumpehjulet.
Ved at bruge en frekvensomformer i stedet for en drøvleventil spares helt enkelt den energi, som ville være blevet
absorberet af ventilen. Besparelsen kan udgøre 15–20 %
eller mere. Tilpasning af pumpehjulet er irreversibelt,
hvilket betyder, at hjulet skal udskiftes, hvis forholdene
ændres, og der opstår et større behov for gennemstrømning.
3 3
Illustration 3.14 Kondensatpumper
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 23
Page 26
Produktoversigt
VLT® HVAC Basic Drive FC 101
3.1.20 Primære pumper
Primære pumper i et primært/sekundært pumpesystem
kan anvendes til at opretholde en konstant gennemstrømning gennem udstyr, som kommer ud for drifts- eller
33
styringsmæssige vanskeligheder, når de udsættes for en
variabel gennemstrømning. Den primære/sekundære
pumpeteknik kobler den primære produktionssløjfe fra den
sekundære distributionssløjfe. Dette betyder, at apparater
som f.eks. kølere kan opnå en konstant designgennemstrømning og kan fungere korrekt, mens resten af systemet
kan have en varierende gennemstrømning.
Når fordampningsniveauet falder i en køler, bliver det
afkølede vand efterhånden overafkølet. Når dette sker,
forsøger køleren at mindske sin kølekapacitet. Hvis
gennemstrømningshastigheden falder for meget eller for
hurtigt, kan køleren ikke komme af med sin belastning i
tilstrækkelig grad, og kølerens sikkerhedsudløser udløses,
så køleren skal nulstilles manuelt. Denne situation er
almindelig i store installationer, især hvor to eller
kølere installeres parallelt, såfremt et primært/sekundært
pumpesystem ikke anvendes.
3.1.21
Afhængigt af systemets størrelse og størrelsen på den
primære sløjfe kan den primære sløjfes energiforbrug blive
betydeligt.
Der kan føjes en frekvensomformer til det primære system
som erstatning for drøvleventilen og/eller trimning af
hjulene, hvorved driftsomkostningerne nedbringes. Der
ndes to almindelige styringsmetoder:
Løsning med VLT
®
ere
Gennemstrømningsmåler
Da den ønskede gennemstrømningshastighed er kendt og
konstant, kan en gennemstrømningsmåler monteres ved
udgangen på hver køler og anvendes til at styre pumpen
direkte. Ved brug af den indbyggede PI-regulering
opretholder frekvensomformeren til enhver tid en
passende gennemstrømningshastighed, hvor der endda
kompenseres for den skiftende modstand i den primære
rørsløjfe i takt med, at kølerne og deres pumper kobles til
og fra.
Bestemmelse af lokal hastighed
Operatøren mindsker simpelthen udgangsfrekvensen, indtil
designgennemstrømningshastigheden opnås.
Brug af en frekvensomformer til at mindske pumpens
hastighed er meget lig tilpasning af pumpehjulet, bortset
fra at det ikke kræver nogen arbejdsindsats, og at
pumpeeektiviteten forbliver højere. Afbalanceringen
omfatter helt enkelt reduktion af pumpens hastighed, indtil
den korrekte gennemstrømningshastighed opnås, hvorefter
hastigheden forbliver fast. Pumpen kører med denne
hastighed, hver gang køleren tilkobles. Da den primære
sløjfe ikke er udstyret med manøvreventiler og andre
anordninger, som kan få systemkurven til at skifte, og da
variationen ved at koble pumper og kølere til og fra
normalt er lille, forbliver denne faste hastighed passende.
Hvis gennemstrømningshastigheden skal forøges senere i
systemets levetid, øger frekvensomformeren simpelthen
pumpens hastighed, i stedet for at der kræves et nyt
pumpehjul.
24 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 27
Frequency
converter
Frequency
converter
CHILLER
CHILLER
Flowmeter
Flowmeter
F F
130BB456.10
Produktoversigt Design Guide
3 3
Illustration 3.15 Primære pumper
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 25
Page 28

Frequency
converter
Frequency
converter
CHILLER
CHILLER
3
3
P
130BB454.10
Produktoversigt
VLT® HVAC Basic Drive FC 101
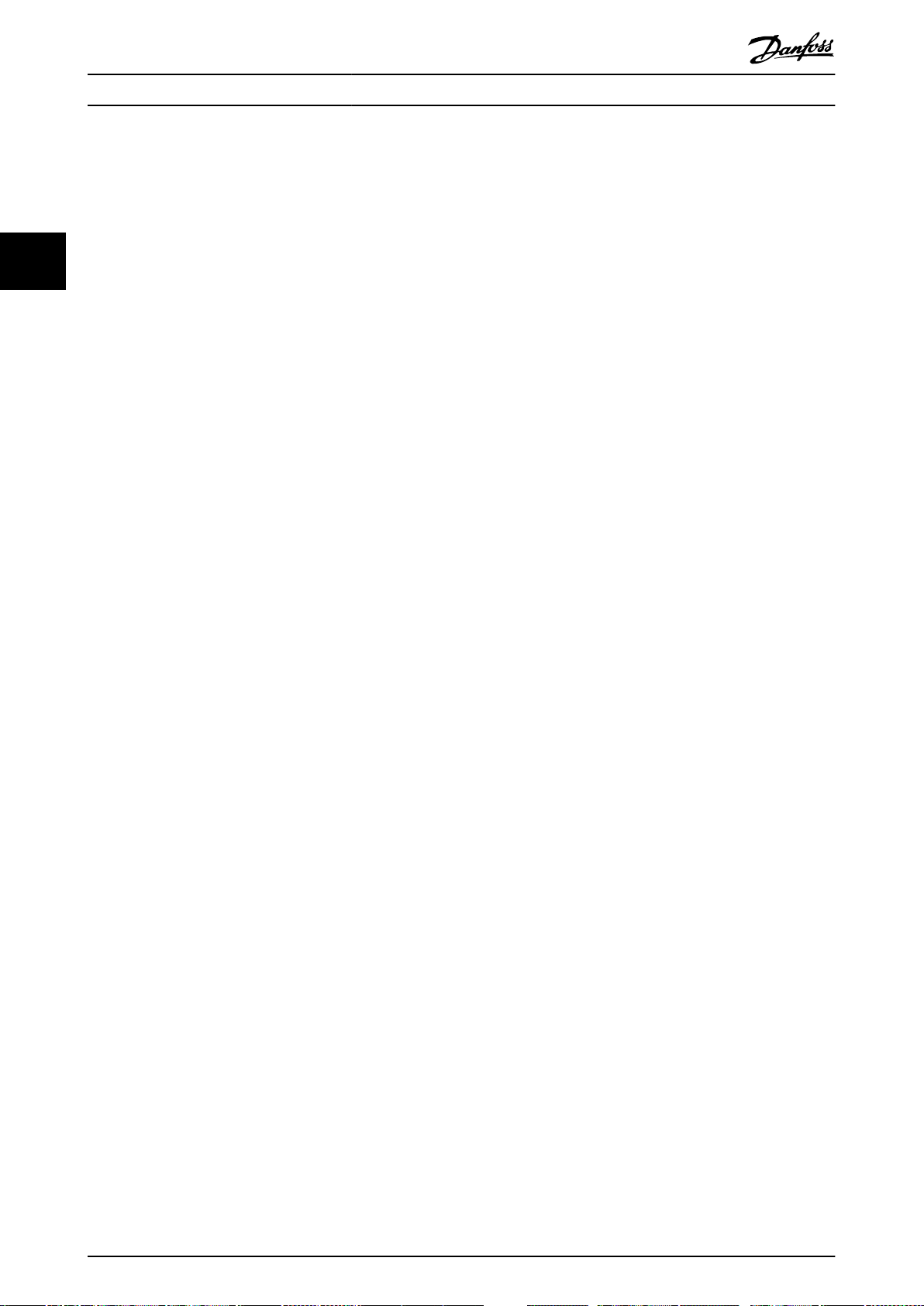
3.1.22 Sekundære pumper
Sekundære pumper i et primært/sekundært afkølet
vandpumpesystem fordeler det afkølede vand til belastningerne fra den primære produktionssløjfe. Det primære/
33
sekundære pumpesystem anvendes til hydronisk afkobling
af en rørsløjfe fra en anden. I dette tilfælde anvendes den
primære pumpe til at opretholde en konstant gennemstrømning gennem kølerne, mens de sekundære pumper
kan variere deres gennemstrømning, forbedre styringen og
spare energi.
Hvis det primære/sekundære koncept ikke anvendes i
designet med et system med variabelt volumen, når
gennemstrømningshastigheden falder for meget eller for
hurtigt, kan køleren ikke komme ordentligt af med sin
belastning. Kølerens sikkerhedsudløser for lav fordampningstemperatur tripper dernæst køleren, hvorefter der
kræves manuel nulstilling. Denne situation er almindelig i
større installationer, især hvis der installeres to eller ere
kølere parallelt.
3.1.23
Selv om det primære/sekundære system med tovejsventiler
forbedrer energibesparelserne og letter problemerne med
systemstyring, realiseres de egentlige energibesparelser og
styringspotentialet ved at tilføje frekvensomformere.
Løsning med VLT
®
Med korrekt placerede følere giver tilføjelsen af frekvensomformere pumperne mulighed for at variere deres
hastighed, så den følger systemkurven i stedet for
pumpekurven.
Dermed ernes energispild og det meste af overtrykket,
som tovejsventiler kan blive udsat for.
Efterhånden som de overvågede belastninger opfyldes,
lukker tovejsventilerne ned. Dermed stiger dierenstrykket,
som måles på tværs af belastningen og tovejsventilen. Når
dette dierenstryk begynder at stige, sænkes pumpens
hastighed, så styringsløftehøjden, der også kaldes
sætpunktværdien, kan opretholdes. Denne sætpunktsværdi
beregnes ved at lægge belastningens og tovejsventilens
tryktab under designbetingelser sammen.
BEMÆRK!
Hvis der køres med ere pumper parallelt, skal de køre
med samme hastighed for at maksimere energibesparelserne, enten via individuelle, dedikerede
frekvensomformere, eller ved at en frekvensomformer
kører ere pumper parallelt.
Illustration 3.16 Sekundære pumper
26 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 29
130BB892.10
100%
0%
-100%
100%
Local
reference
scaled to
Hz
Auto mode
Hand mode
LCP Hand on,
off and auto
on keys
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-14
Motor speed
high limit [Hz]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Produktoversigt Design Guide
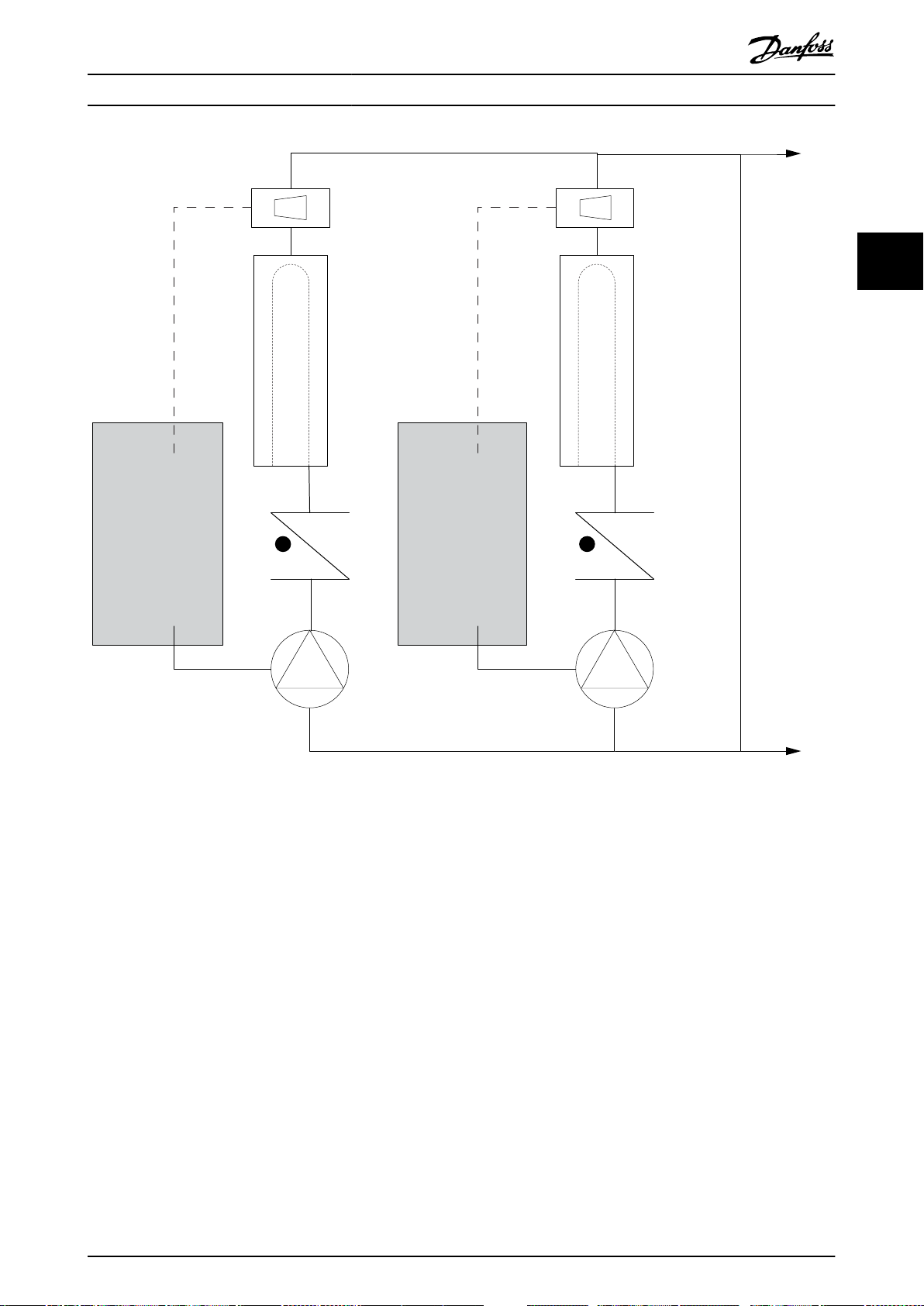
3.2 Styringsstrukturer
Vælg [0] Åben sløjfe eller [1] Lukket sløjfe i parameter 1-00 Kongurationstilstand.
3.2.1 Styringsstruktur, åben sløjfe
Illustration 3.17 Struktur med åben sløjfe
3 3
I den konguration, der er vist i Illustration 3.17, er
parameter 1-00 Kongurationstilstand indstillet til [0] Åben
sløjfe. Den resulterende reference fra referencehåndterings-
systemet eller den lokale reference modtages og føres
igennem rampebegrænsningen og hastighedsgrænsen, før
den sendes til motorstyringen. Motorstyringens udgangssignal begrænses derefter af maksimumfrekvensgrænsen.
Strømgrænser for PM-motorer:
3.2.2 PM/EC+ motorstyring
EC+-konceptet fra Danfoss giver mulighed for at anvende
højeektive PM-motorer (permanente magnetmotorer) i
IEC-standardkapslingsstørrelser styret af frekvensomformere
fra Danfoss.
Idriftsætningsproceduren kan sammenlignes med
eksisterende procedurer for asynkrone motorer (induktion)
ved anvendelse af Danfoss VVC+ PM-styringsstrategi.
Fordele for kunden:
Frit valg af motorteknologi (permanent
•
magnetmotor eller asynkron motor).
Installation og drift som man kender det fra
•
asynkrone motorer.
Producentuafhængigt valg af systemkomponenter
•
(f.eks. motorer).
Overlegen systemeektivitet gennem valg af de
•
bedste komponenter.
Mulighed for eftermontering i eksisterende instal-
•
lationer.
Eektområde: 45 kW (60 hk) (200 V), 0,37–90 kW
•
(0,5–121 hk) (400 V), 90 kW (121 hk) (600 V) for
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 27
3.2.3 Styring med lokalbetjening (Hand On)
Frekvensomformeren kan betjenes manuelt via betjeningspanelet eller med ernstyring via analoge/digitale
indgange eller en seriel bus. Hvis det er tilladt i
parameter 0-40 [Hand on]-tast på LCP, parameter 0-44 [O/
Reset]-tast på LCP og parameter 0-42 [Auto on] tast på LCP,
er det muligt at starte og standse frekvensomformeren via
LCP'et ved at trykke på [Hand On] og [O/Reset]. Alarmer
kan nulstilles med [O/Reset]-tasten.
induktionsmotorer og 0,37–22 kW (0,5–30 hk)
(400 V) for PM-motorer.
Understøttes for øjeblikket kun op til 22 kW (30
•
hk).
LC-ltre understøttes ikke med PM-motorer.
•
Den kinetiske backup-algoritme understøttes ikke
•
i forbindelse med PM-motorer.
Understøtter kun komplet AMA på statormod-
•
standen Rs i systemet.
Ingen stilstandsdetektering (understøttes fra
•
softwareversion 2.80).
og ernbetjening (Auto On)
Page 30

Hand
On
Off
Reset
Auto
On
130BB893.10
7-30 PI
Normal/Inverse
Control
PI
Reference
Feedback
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
130BB894.11
S
100%
0%
-100%
100%
*[-1]
_
+
130BB895.10
+
-
PI
P
P
P
Ref.
signal
Desired
ow
FB conversion
Ref.
FB
Flow
FB
signal
Flow
P 20-01
Produktoversigt
VLT® HVAC Basic Drive FC 101
sammenligner den denne feedback med en sætpunktsreferenceværdi og fastslår en eventuel fejl mellem de to
signaler. Derefter justerer frekvensomformeren motorens
hastighed for at afhjælpe fejlen.
Illustration 3.18 LCP-taster
33
Tænk for eksempel på en pumpeapplikation, hvor
pumpens hastighed skal styres, så det statiske tryk i røret
er konstant. Værdien af det statiske tryk leveres til
Lokal reference tvinger kongurationstilstanden til åben
sløjfe uafhængigt af indstillingen i parameter 1-00 Kongu-
rationstilstand.
frekvensomformeren som en sætpunktreference. En statisk
trykføler måler det faktiske statiske tryk i røret og leverer
disse data til frekvensomformeren som et feedbacksignal.
Hvis feedbacksignalet er højere end sætpunktsreferencen,
Den lokale reference gendannes ved nedlukning.
sænkes frekvensomformerens hastighed for at reducere
trykket. Hvis trykket i røret er lavere end sætpunktsrefe-
3.2.4 Styringsstruktur for lukket sløjfe
rencen, øger frekvensomformeren automatisk
pumpehastigheden på samme måde, så det tryk, der
Med den interne styreenhed kan frekvensomformeren blive
leveres af pumpen, forøges.
en del af det styrede system. Frekvensomformeren
modtager et feedbacksignal fra en føler i systemet. Derefter
Illustration 3.19 Styringsstruktur, lukket sløjfe
Mens standardværdierne for frekvensomformerens
styreenhed til lukket sløjfe ofte giver en tilfredsstillende
ydeevne, kan styringen af systemet ofte optimeres ved at
justere parametrene.
3.2.5 Feedbackkonvertering
I nogle applikationer kan det være nyttigt at konvertere
feedbacksignalet. Dette kan for eksempel ske ved at bruge
et tryksignal til at give gennemstrømningsfeedback.
Eftersom kvadratroden af trykket er proportional med
gennemstrømningen, giver kvadratroden af tryksignalet en
værdi, der er proportional med gennemstrømningen. Se
Illustration 3.20.
28 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Illustration 3.20 Konvertering af feedbacksignal
Page 31

Speed open
loop
mode
Input command:
freeze reference
Process
control
Scale to
Hz
Scale to
process
unit
Remote
reference/
setpoint
±200%
Feedback
handling
Remote
reference in %
maxRefPCT
minRefPct
min-max ref
Freeze
reference &
increase/
decrease
reference
±100%
Input commands:
Speed up/speed down
±200%
Relative
reference
=
X+X*Y/100
±200%
External reference in %
±200%
Parameter choise:
Reference resource 1,2,3
±100%
Preset reference
Input command:
preset ref bit0, bit1, bit2
+
+
Relative scalling reference
Intern resource
Preset relative reference
±100%
Preset reference 0 ±100%
Preset reference 1 ±100%
Preset reference 2 ±100%
Preset reference 3 ±100%
Preset reference 4 ±100%
Preset reference 5 ±100%
Preset reference 6 ±100%
Preset reference 7 ±100%
External resource 1
No function
Analog reference
±200 %
Local bus reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
Pulse input reference
±200 %
External resource 2
No function
Analog reference
±200 %
Local bus reference
±200 %
External resource 3
No function
Analog reference
±200 %
Local bus reference
±200 %
Y
X
130BE842.10
Produktoversigt Design Guide
3.2.6 Referencehåndtering
Oplysninger om drift med åben og lukket sløjfe.
3 3
Illustration 3.21 Blokdiagram over ernreference
Fjernreferencen består af:
•
•
•
•
Der kan programmeres op til otte preset-referencer i
frekvensomformeren. Den aktive preset-reference kan
vælges ved hjælp af digitale indgange eller den serielle
kommunikationsbus. Referencen kan også leveres eksternt,
oftest fra en analog indgang. Denne eksterne kilde vælges
med en af de tre referencekildeparametre
(parameter 3-15 Reference 1-kilde, parameter 3-16 Reference
2-kilde og parameter 3-17 Reference 3-kilde). Alle referenceressourcer og busreferencen tilføjes for at opnå den
samlede eksterne reference. Den eksterne reference, presetreferencen eller summen af de to kan vælges som den
aktive reference. Endelig kan denne reference også skaleres
ved hjælp af parameter 3-14 Preset relativ reference.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 29
Preset-referencer.
Eksterne referencer (analoge indgange og
referencer for seriel kommunikationsbus).
Forudindstillet relativ reference.
Feedbackstyret sætpunkt.
Den skalerede reference beregnes således:
Reference = X + X ×
Hvor X er den eksterne reference, preset-referencen eller
summen af disse, og Y er parameter 3-14 Preset relativ
reference i [%].
Y
100
Hvis Y, parameter 3-14 Preset relativ reference, er indstillet til
0 %, påvirkes referencen ikke af skaleringen.
Page 32

110%
100%
90 %
80
%
70 %
60 %
50 %
40 %
30 %
20 %
10 %
0
I
out
[%]
0
2
5
10
16
40
o
C
50
o
C
45
o
C
fsw[kHz]
130BC217.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC219.10
Produktoversigt
VLT® HVAC Basic Drive FC 101
3.2.7 Finjustering af frekvensomformerens
styreenhed til lukket sløjfe
Når frekvensomformerens styreenhed til lukket sløjfe er
kongureret, skal styreenhedens ydeevne afprøves. I
mange tilfælde kan ydeevnen være acceptabel ved brug af
33
standardværdierne for parameter 20-93 PI-proportionalforst.
og parameter 20-94 PID-integrationstid. Nogle gange kan
det dog være en hjælp at optimere disse parameterværdier
for at opnå hurtigere systemsvar, samtidig med at hastighedsoverstyringen kontrolleres.
3.2.8 Manuel justering af PI
Illustration 3.22 0,25–0,75 kW (0,34–1,0 hk), 200 V, kapslings-
1. Start motoren.
2. Indstil parameter 20-93 PI-proportionalforst. til 0,3,
og forøg den, indtil feedbacksignalet begynder at
svinge. Hvis det er nødvendigt, kan frekvensomformeren startes og stoppes, eller der kan
foretages trinvise ændringer af sætpunktsreferencen for at få signalet til at svinge.
3. Reducér PI-proportionalforstærkningen, indtil
feedbacksignalet stabiliseres.
4. Reducér proportionalforstærkningen med 40–
60 %.
5. Indstil parameter 20-94 PID-integrationstid til
20 sek., og reducér den, indtil feedbacksignalet
begynder at svinge. Hvis det er nødvendigt, kan
frekvensomformeren startes og stoppes, eller der
kan foretages trinvise ændringer af sætpunktsreferencen for at få signalet til at svinge.
6. Forøg PI-integrationstiden, indtil feedbacksignalet
stabiliseres.
7. Forøg integrationstiden med 15–50 %.
størrelse H1, IP20
Illustration 3.23 0,37–1,5 kW (0,5–2,0 hk), 400 V, kapslings-
størrelse H1, IP20
Omgivelsesforhold for kørsel
3.3
Frekvensomformeren er konstrueret til at opfylde
standarden IEC/EN 60068-2-3, EN 50178 9.4.2.2 ved 50 °C
(122 °F).
Den målte omgivelsestemperatur over 24 timer skal være
mindst 5 °C (41 °F) lavere end den maksimale omgivelsestemperatur. Hvis frekvensomformeren kører ved høj
omgivelsestemperatur, skal den kontinuerlige
udgangsstrøm reduceres.
30 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Illustration 3.24 2,2 kW (3,0 hk), 200 V, kapslingsstørrelse H2,
IP20
Page 33

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
5
130BC220.11
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC221.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110 %
I
out
[%]
16
5
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122 oF
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC223.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC224.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
Produktoversigt Design Guide
3 3
Illustration 3.25 2,2–4,0 kW (3,0–5,4 hk), 400 V, kapslings-
størrelse H2, IP20
Illustration 3.26 3,7 kW (5,0 hk), 200 V, kapslingsstørrelse H3,
IP20
Illustration 3.28 5,5–7,5 kW (7,4–10 hk), 200 V, kapslings-
størrelse H4, IP20
Illustration 3.29 11–15 kW (15–20 hk), 400 V, kapslings-
størrelse H4, IP20
Illustration 3.27 5,5–7,5 kW (7,4–10 hk), 400 V, kapslings-
størrelse H3, IP20
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 31
Illustration 3.30 11 kW (15 hk), 200 V, kapslingsstørrelse H5,
IP20
Page 34

fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC226.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[
kHz
]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC229.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
fsw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Produktoversigt
VLT® HVAC Basic Drive FC 101
33
Illustration 3.31 18,5–22 kW (25–30 hk), 400 V, kapslings-
størrelse H5, IP20
Illustration 3.32 15–18,5 kW (20–25 hk), 200 V, kapslings-
størrelse H6, IP20
Illustration 3.34 45 kW (60 hk), 400 V, kapslingsstørrelse H6,
IP20
Illustration 3.35 22–30 kW (30–40 hk), 600 V, kapslings-
størrelse H6, IP20
Illustration 3.33 30–37 kW (40–50 hk), 400 V, kapslings-
størrelse H6, IP20
32 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Illustration 3.36 22–30 kW (30–40 hk), 200 V, kapslings-
størrelse H7, IP20
Page 35

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20 %
2 4 6 8 10 12
40 %
60 %
80 %
40oC
45
o
C
50
o
C
100 %
110 %
130BC235.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC236.10
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC237.10
Produktoversigt Design Guide
3 3
Illustration 3.37 55–75 kW (74–100 hk), 400 V, kapslings-
størrelse H7, IP20
Illustration 3.38 45–55 kW (60–74 hk), 600 V, kapslings-
størrelse H7, IP20
Illustration 3.40 90 kW (120 hk), 400 V, kapslingsstørrelse H8,
IP20
Illustration 3.41 75–90 kW (100–120 hk), 600 V, kapslings-
størrelse H8, IP20
Illustration 3.39 37–45 kW (50–60 hk), 200 V, kapslings-
størrelse H8, IP20
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 33
Illustration 3.42 2,2–3 kW (3,0–4,0 hk), 600 V, kapslings-
størrelse H9, IP20
Page 36

I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
I
out
[%]
f
sw
[kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC255.10
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
130BC256.10
130BD012.10
o
70%
80%
90%
0
I [%]
out
60%
100%
110%
2 84106
50 C
50%
40%
30%
20%
10%
0
o
40 C
12 14 16
fsw[kHz]
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC240.10
Produktoversigt
VLT® HVAC Basic Drive FC 101
33
Illustration 3.43 5,5–7,5 kW (7,4–10 hk), 600 V, kapslings-
størrelse H9, IP20
Illustration 3.44 11–15 kW (15–20 hk), 600 V, kapslings-
størrelse H10, IP20
Illustration 3.46 5,5–7,5 kW (7,4–10 hk), 400 V, kapslings-
størrelse I3, IP54
Illustration 3.47 11–18,5 kW (15–25 hk), 400 V, kapslings-
størrelse I4, IP54
Illustration 3.45 0,75–4,0 kW (1,0–5,4 hk), 400 V, kapslings-
størrelse I2, IP54
34 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Illustration 3.48 22–30 kW (30–40 hk), 400 V, kapslings-
størrelse I6, IP54
Page 37

Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40
o
C
45
o
C
50
o
C
100
%
110
%
130BC241.10
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
Iout [%]
f
sw [kHz]
20
%
2 4 6 8 10 12
40
%
60
%
80
%
40oC
45
o
C
50
o
C
100
%
110
%
130BC243.10
Produktoversigt Design Guide
Illustration 3.49 37 kW (50 hk), 400 V, kapslingsstørrelse I6,
IP54
Hvis motoren eller det udstyr, der er drevet af motoren, for
eksempel en ventilator, støjer eller vibrerer ved visse
frekvenser, kongureres følgende parametre eller parametergrupper for at reducere eller erne støj og vibrationer:
Parametergruppe 4-6* Hastighedsbypass.
•
Indstil parameter 14-03 Overmodulering til [0] O
•
aktiv.
Switchmønster og switchfrekvens i parameter-
•
gruppe 14-0* Vekselretterkobling.
Parameter 1-64 Resonansdæmpning.
•
Den akustiske støj fra frekvensomformeren kommer fra tre
kilder:
DC-link-spoler.
•
Intern ventilator.
•
Drosselspole til RFI-lter.
•
3 3
Illustration 3.50 45–55 kW (60–74 hk), 400 V, kapslings-
størrelse I7, IP54
Kapslingsstørrelse
Niveau [dBA]
1)
H1 43,6
H2 50,2
H3 53,8
H4 64
H5 63,7
H6 71,5
H7 67,5 (75 kW (100 hk) 71,5 dB)
H8 73,5
H9 60
H10 62,9
I2 50,2
I3 54
I4 67,4
I6 70
I7 62
I8 65,6
Tabel 3.3 Typiske værdier målt ved en afstand på 1 m (3,28 fod)
fra apparatet
1) Værdierne er målt ved en støj på 35 dBA i baggrunden og med
ventilatoren kørende med fuld hastighed.
Frekvensomformeren er afprøvet i henhold til en
procedure, der er baseret på de standarder, som er vist i
Tabel 3.4.
Illustration 3.51 75–90 kW (100–120 hk), 400 V, kapslings-
størrelse I8, IP54
Frekvensomformeren overholder de krav, der gælder for
apparater monteret på vægge og gulve i produktionslokaler samt i tavler boltet fast til disse.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 35
IEC/EN 60068-2-6 Vibration (sinusformet) – 1970
IEC/EN 60068-2-64 Tilfældig vibration, bredbånd
Tabel 3.4 Standarder
Page 38

Produktoversigt
VLT® HVAC Basic Drive FC 101
En frekvensomformer indeholder mange mekaniske og
elektroniske komponenter. De er alle i nogen udstrækning
sårbare over for miljømæssige påvirkninger.
FORSIGTIG
33
MONTERINGSMILJØER
Frekvensomformeren må ikke monteres i miljøer, hvor
der er luftbårne væsker, partikler eller gasser, som kan
påvirke eller ødelægge de elektriske komponenter. Hvis
der ikke træes de nødvendige beskyttelsesforanstaltninger, øges risikoen for driftsforstyrrelser, hvilket kan
medføre beskadigelse af udstyr og personskade.
Væsker kan overføres gennem luften og kondensere i
frekvensomformeren, hvilket kan medføre korrosion på
komponenter og metaldele. Damp, olie og saltvand kan
medføre korrosion på komponenter og metaldele. I
sådanne miljøer skal der bruges udstyr med kapslingsgrad
IP54. Som en ekstra beskyttelse kan der bestilles coatede
printplader som option (standard for nogle eektstørrelser).
Luftbårne partikler, såsom støv, kan forårsage mekaniske,
elektriske eller termiske fejl i frekvensomformeren. Et typisk
tegn på for mange luftbårne partikler er støvpartikler rundt
om frekvensomformerens ventilator. I støvede miljøer skal
der bruges udstyr med kapslingsgrad IP54 eller et skab til
IP20-/TYPE 1-udstyr.
I miljøer med høje temperaturer og fugtighed vil ætsende
gasser, f.eks. svovl-, kvælstof- og klorforbindelser, resultere i
kemiske processer på komponenter i frekvensomformeren.
Sådanne kemiske reaktioner påvirker og skader meget
hurtigt de elektroniske komponenter. I sådanne miljøer skal
udstyret monteres i et kabinet med luftventilation, hvilket
holder de aggressive gasser væk fra frekvensomformeren.
Ekstra beskyttelse i disse områder opnås ved coating af
printpladerne, som kan bestilles som en option.
Inden frekvensomformeren monteres, skal det kontrolleres,
om der er væsker, partikler og gasser i den omgivende luft.
Dette gøres ved at observere eksisterende installationer i
dette miljø. Hvis der
eller hvis der er korrosion på metaldelene, er det typiske
tegn på skadelige luftbårne væsker.
Der ndes ofte for høje niveauer af støvpartikler i installationens kabinetter og i de eksisterende elektriske
installationer. Et tegn på aggressive luftbårne gasser er, at
kobberskinnerne og kabelafslutningerne på de
eksisterende installationer bliver sorte.
ndes vand eller olie på metaldelene,
Generelle forhold vedrørende EMC
3.4
3.4.1 Oversigt over EMC-emissioner
Frekvensomformere (og andre elektriske apparater)
genererer elektroniske eller magnetiske felter, som kan give
forstyrrelser i det omgivende miljø. Disse påvirkningers
elektromagnetiske kompatibilitet (EMC) afhænger af
apparaternes karakteristika for
strømme.
Ukontrolleret gensidig påvirkning mellem elektriske
apparater i et system kan forringe kompatibiliteten og
hæmme pålidelig drift. Forstyrrelse kan ske i form af
harmoniske strømme på nettet, elektrostatiske udladninger,
hurtige spændingsudsving eller højfrekvent forstyrrelse.
Elektriske apparater genererer forstyrrelser, samtidig med at
de påvirkes af forstyrrelser fra andre genererede kilder.
Burst-transienter opstår som regel i frekvensområdet
150 kHz til 30 MHz. Luftbårne forstyrrelser fra frekvensomformersystemet i området 30 MHz til 1 GHz genereres af
vekselretteren, motorkablet og motoren.
Kapacitive strømme i motorkablet sammen med høj dU/dt
fra motorspændingen genererer lækstrømme, som vist i
Illustration 3.52.
Brug af et skærmet motorkabel øger lækstrømmen (se
Illustration 3.52), fordi skærmede kabler har højere
kapacitans til jord end uskærmede kabler. Hvis
lækstrømmen ikke
relser på netforsyningen i radiofrekvensområdet under ca.
5 MHz. Eftersom lækstrømmen (I1) føres tilbage til
apparatet gennem skærmen (I3), er der i princippet kun et
lille elektromagnetisk felt (I4) fra det skærmede motorkabel
som vist i Illustration 3.52.
Skærmen reducerer de udstrålede forstyrrelser, men øger
den lavfrekvente forstyrrelse på netforsyningen. Motorkabelskærmen skal monteres på frekvensomformerkapslingen
såvel som motorkapslingen. Dette gøres bedst ved at
bruge indbyggede skærmbøjler for at undgå snoede
skærmender (pigtails). Pigtails øger skærmimpedansen ved
højere frekvenser, hvilket reducerer
lækstrømmen (I4).
Når der anvendes et skærmet kabel til relæ, styrekabel,
signalinterface og bremse, skal skærmen monteres på
kapslingen i begge ender. I visse situationer er det dog
nødvendigt at bryde skærmen for at undgå strømsløjfer.
Hvis skærmen skal sættes på en monteringsplade til
frekvensomformeren, skal monteringspladen være lavet af
metal, fordi skærmstrømmene skal føres tilbage til
apparatet. Der skal desuden sikres god elektrisk kontakt fra
monteringspladen gennem monteringsskruerne til
frekvensomformerens chassis.
ltreres, forårsager det øgede forstyr-
eekt og harmoniske
skærmeekten og øger
36 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 39

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Produktoversigt Design Guide
Hvis der benyttes uskærmede kabler, overholdes enkelte emissionskrav ikke, skønt de este immunitetskrav opfyldes. For at
begrænse forstyrrelsesniveauet fra hele systemet (apparat og installation) skal motor- og bremsekabler gøres så korte som
muligt. Undgå at placere følsomme signalkabler langs med motor- og bremsekablerne. Radioforstyrrelser over 50 MHz
(luftbårne) genereres især af styreelektronikken.
3 3
1 Jordledning 2 Skærm 3 Netspænding
4 Frekvensomformer 5 Skærmet motorkabel 6 Motor
Illustration 3.52 Generering af lækstrømme
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 37
Page 40

Produktoversigt
VLT® HVAC Basic Drive FC 101
3.4.2 Emissionskrav
EMC-produktstandarden for frekvensomformere denerer
re kategorier (C1, C2, C3 og C4) med specikke krav til
emission og immunitet. Tabel 3.5 bestemmer denitionen
33
af de re kategorier og den tilsvarende klassicering i EN
55011.
EN/IEC
61800-3
kategori
C1
C2
C3
C4
Denition
Frekvensomformere monteret i rst
environment (bolig og kontor) med
en forsyningsspænding på mindre
end 1.000 V.
Frekvensomformere monteret i rst
environment (bolig og kontor) med
forsyningsspænding på mindre end
1.000 V, som hverken er ytbare
eller af typen plug-in, og som skal
monteres og idriftsættes af en
professionel.
Frekvensomformere monteret i
second environment (industri) med
en forsyningsspænding på mindre
end 1.000 V.
Frekvensomformere monteret i
second environment med en
forsyningsspænding lig med eller
over 1.000 V eller nominel strøm
lig med eller over 400 A eller med
henblik på brug i komplekse installationer.
Tilsvarende
emissions-
klasse i EN
55011
Klasse B
Klasse A
gruppe 1
Klasse A
gruppe 2
Ingen
grænselinje.
Udarbejd en
EMC-plan.
Tabel 3.5 Korrelation mellem IEC 61800-3 og EN 55011
Når de generiske emissionsstandarder (kabelbårne)
anvendes, skal frekvensomformerne overholde grænserne i
Tabel 3.6.
Miljø
First
environment
(bolig og
kontor)
Second
environment
(industrimiljø)
Tabel 3.6 Korrelation mellem generiske emissionsstandarder
og EN 55011
Generisk emissions-
standard
EN/IEC 61000-6-3 emissionsstandard for beboelses- og
erhvervsmiljøer samt lette
industrimiljøer.
EN/IEC 61000-6-4 emissionsstandard for industrimiljøer.
Tilsvarende
emissionsklasse i
EN 55011
Klasse B
Klasse A gruppe
1
38 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 41

Produktoversigt Design Guide
3.4.3 Testresultater for EMC-emission
Følgende testresultater er opnået i et system med en frekvensomformer, en skærmet styreledning, en styreboks med
potentiometer samt et skærmet motorkabel.
RFI-ltertype Ledningsbåret emission. Maksimumlængde på skærmet kabel [m (fod)] Udstrålet emission
Industrimiljø
EN 55011
EN/IEC 61800-3
H4 RFI-lter (EN55011 A1, EN/IEC61800-3 C2)
0,25–11 kW
(0,34–15 hk)
3 x 200–240 V
IP20
0,37–22 kW
(0,5–30 hk)
3 x 380–480 V
IP20
H2 RFI-lter (EN 55011 A2, EN/IEC 61800-3 C3)
15–45 kW
(20–60 hk)
3 x 200–240 V
IP20
30–90 kW
(40–120 hk)
3 x 380–480 V
IP20
0,75–18,5 kW
(1–25 hk)
3 x 380–480 V
IP54
22–90 kW
(30–120 hk)
3 x 380–480 V
IP54
H3 RFI-lter (EN55011 A1/B, EN/IEC 61800-3 C2/C1)
15–45 kW
(20–60 hk)
3 x 200–240 V
IP20
30–90 kW
(40–120 hk)
3 x 380–480 V
IP20
0,75–18,5 kW
(1–25 hk)
3 x 380–480 V
IP54
Klasse A gruppe 2
Industrimiljø
Kategori C3
Second environment
Industri
Uden
eksternt
lter
– – 25 (82) 50 (164) – 20 (66) Ja Ja – Nej
– – 25 (82) 50 (164) – 20 (66) Ja Ja – Nej
25 (82) – – – – – Nej – Nej –
25 (82) – – – – – Nej – Nej –
25 (82) – – – – – Ja – – –
25 (82) – – – – – Nej – Nej –
– – 50 (164) – 20 (66) – Ja – Nej –
– – 50 (164) – 20 (66) – Ja – Nej –
– – 25 (82) – 10 (33) – Ja – – –
Med
eksternt
lter
Klasse A gruppe 1
Industrimiljø
Kategori C2
First environment
Bolig og kontor
Uden
eksternt
lter
Med
eksternt
lter
Klasse B
Boliger, butikker og let
industri
Kategori C1
First environment
Bolig og kontor
Uden
eksternt
lter
Med
eksternt
lter
Klasse A gruppe 1
Industrimiljø
Kategori C2
First environment
Bolig og kontor
Uden
eksternt
lter
Med
eksternt
lter
Boliger, butikker og let
First environment
Bolig og kontor
Uden
eksternt
lter
3 3
Klasse B
industri
Kategori C1
Med
eksternt
lter
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 39
Page 42

175HA034.10
Produktoversigt
RFI-ltertype Ledningsbåret emission. Maksimumlængde på skærmet kabel [m (fod)] Udstrålet emission
Industrimiljø
22–90 kW
(30–120 hk)
3 x 380–480 V
IP54
– – 25 (82) – 10 (33) – Ja – Nej –
VLT® HVAC Basic Drive FC 101
33
Tabel 3.7 Testresultater for EMC-emission
3.4.4 Oversigt over harmoniske emissioner
En frekvensomformer optager en ikke-sinusformet strøm
fra netforsyningen, hvilket øger indgangsstrømmen I
RMS
. En
ikke-sinusformet strøm transformeres via en Fourier-analyse
og deles i sinusbølgestrømme med forskellige frekvenser,
dvs. forskellige harmoniske strømme In med 50 Hz som
basisfrekvens:
I
Hz 50 250 350
Tabel 3.8 Harmoniske strømme
1
I
5
I
7
De harmoniske strømme påvirker ikke strømforbruget
direkte, men øger varmetabene i installationen
(transformer, kabler). Harmoniske strømme skal derfor
holdes på et lavt niveau for at undgå overbelastning af
transformeren og høje temperaturer i kablerne i installationer med en høj procentdel af ensretterbelastning.
Illustration 3.53 DC-link-spoler
BEMÆRK!
Nogle af de harmoniske strømme kan forstyrre
kommunikationsudstyr, der er sluttet til samme
transformer, eller skabe resonans med eektfaktorkorrek-
tionsbatterier.
Frekvensomformeren er som standard forsynet med DClink-spoler for at sikre lave harmoniske strømme. Dette
reducerer normalt indgangsstrømmen I
med 40 %.
RMS
(UN% af U)
3.4.5 Harmoniske emissionskrav
Udstyr, som er sluttet til det oentlige forsyningsnet
Optioner Denition
IEC/EN 61000-3-2 klasse A til trefaset balanceret
1
udstyr (kun til professionelt udstyr op til 1 kW
(1,3 hk) total eekt).
IEC/EN 61000-3-12 udstyr 16–75 A og professionelt
2
udstyr fra 1 kW (1,3 hk) op til 16 A fasestrøm.
Tabel 3.9 Tilsluttet udstyr
3.4.6 Harmoniske testresultater (emission)
Eektstørrelser op til PK75 i T4 og P3K7 i T2 overholder
IEC/EN 61000-3-2 klasse A. Eektstørrelser fra P1K1 og op
til P18K i T2 og op til P90K i T4 overholder IEC/EN
61000-3-12, tabel 4.
Faktisk 0,25–
11 kW (0,34–
15 hk), IP20,
200 V (typisk)
Grænse for
R
≥120
sce
Faktisk 0,25–
11 kW (0,34–
15 hk), 200 V
(typisk)
Grænse for
R
≥120
sce
Individuel harmonisk strøm In/I1 (%)
I
5
32,6 16,6 8,0 6,0
40 25 15 10
Harmonisk strømforvrængningsfaktor (%)
I
7
THDi PWHD
39 41,4
48 46
I
11
I
13
Spændingsforvrængningen på netforsyningsspændingen
Tabel 3.10 Harmonisk strøm 0,25–11 kW (0,34–15 hk), 200 V
afhænger af størrelsen på de harmoniske strømme ganget
med netforsyningsimpedansen for den pågældende
frekvens. Den samlede spændingsforvrængning THDv
beregnes ud fra de enkelte spændingsharmoniske strømme
efter følgende formel:
2
THD
% = U
40 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
5
+ U
2
+ ... + U
7
2
N
Page 43

Produktoversigt Design Guide
Individuel harmonisk strøm In/I1 (%)
I
5
I
7
I
11
I
13
Faktisk 0,37–22
kW (0,5–30 hk),
IP20, 380–480 V
36,7 20,8 7,6 6,4
(typisk)
Grænse for
R
≥120
sce
40 25 15 10
Harmonisk strømforvrængningsfaktor (%)
THDi PWHD
Faktisk 0,37–
22 kW (0,5–
30 hk), 380–
44,4 40,8
480 V (typisk)
Grænse for
R
≥120
sce
48 46
Tabel 3.11 Harmonisk strøm 0,37–22 kW (0,5–30 hk),
380-480 V
Individuel harmonisk strøm In/I1 (%)
I
5
I
7
I
11
I
13
Faktisk 30–90 kW
(40–120 hk), IP20,
380–480 V
36,7 13,8 6,9 4,2
(typisk)
Grænse for
R
≥120
sce
40 25 15 10
Harmonisk strømforvrængningsfaktor (%)
THDi PWHD
Faktisk 30–90 kW
(40–120 hk), 380–
40,6 28,8
480 V (typisk)
Grænse for
R
≥120
sce
48 46
Tabel 3.12 Harmonisk strøm 30–90 kW (40–120 hk), 380–480 V
Individuel harmonisk strøm In/I1 (%)
I
5
I
7
I
11
I
13
Faktisk 2,2–15 kW
(3,0–20 hk), IP20,
525–600 V
48 25 7 5
(typisk)
Harmonisk strømforvrængningsfaktor (%)
THDi PWHD
Faktisk 2,2–15 kW
(3,0–20 hk), 525–
55 27
600 V (typisk)
Individuel harmonisk strøm In/I1 (%)
I
5
I
7
I
11
Faktisk 18,5–90
kW (25–120 hk),
IP20, 525–600 V
48,8 24,7 6,3 5
(typisk)
Harmonisk strømforvrængningsfaktor (%)
THDi PWHD
Faktisk 18,5–90
kW (25–120 hk),
525–600 V
55,7 25,3
(typisk)
Tabel 3.14 Harmonisk strøm 18,5–90 kW (25–120 hk),
525–600 V
Individuel harmonisk strøm In/I1 (%)
I
5
I
7
I
11
Faktisk 22–90 kW
(30–120 hk), IP54,
36,3 14 7 4,3
400 V (typisk)
Grænse for
R
≥120
sce
40 25 15 10
Harmonisk strømforvrængningsfaktor (%)
THDi PWHD
Faktisk 22–90 kW
(30–120 hk), IP54,
40,1 27,1
400 V (typisk)
Grænse for
R
≥120
sce
48 46
Tabel 3.15 Harmonisk strøm 22–90 kW (30–120 hk), 400 V
Individuel harmonisk strøm In/I1 (%)
I
5
I
7
I
11
Faktisk 0,75–18,5
kW (1,0–25 hk),
IP54, 380-480 V
36,7 20,8 7,6 6,4
(typisk)
Grænse for
R
≥120
sce
40 25 15 10
Harmonisk strømforvrængningsfaktor (%)
THDi PWHD
Faktisk 0,75–18,5
kW (1,0–25 hk),
IP54, 380–480 V
44,4 40,8
(typisk)
Grænse for
R
≥120
sce
48 46
I
13
3 3
I
13
I
13
Tabel 3.13 Harmonisk strøm 2,2–15 kW (3,0–20 hk), 525–600 V
Tabel 3.16 Harmonisk strøm 0,75–18.5 kW (1,0–25 hk),
380–480 V
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 41
Page 44

SMPS
130BB896.10
1
2
3
a
M
Produktoversigt
VLT® HVAC Basic Drive FC 101
Faktisk 15–45 kW
(20–60 hk), IP20,
200 V (typisk)
33
Grænse for
R
≥120
sce
Faktisk 15–45 kW
(20–60 hk), 200 V
(typisk)
Grænse for
R
≥120
sce
Individuel harmonisk strøm In/I1 (%)
I
5
26,7 9,7 7,7 5
40 25 15 10
Harmonisk strømforvrængningsfaktor (%)
I
7
THDi PWHD
30,3 27,6
48 46
I
11
I
13
Galvanisk adskillelse (PELV)
3.5
PELV giver beskyttelse via ekstra lav spænding. Der ydes
beskyttelse mod elektrisk stød, når den elektriske forsyning
er af PELV-typen, og når installationen foretages i henhold
til beskrivelsen i lokale/nationale bestemmelser om PELVforsyninger.
Alle styreklemmer og relæklemmer 01-03/04-06 overholder
PELV (beskyttende ekstra lav spænding) (gælder ikke for
jordet trekantben på mere end 440 V).
Den galvaniske (sikre) adskillelse opnås ved at opfylde
kravene til bedre isolering og ved at sørge for de relevante
krybninger/luftafstande. Disse krav beskrives i standarden
Tabel 3.17 Harmonisk strøm 15–45 kW (20–60 hk), 200 V
Forudsat at kortslutningseekten for forsynings-Ssc er større
end eller lig med:
EN 61800-5-1.
De komponenter, der udgør den elektriske isolering i
henhold til beskrivelsen, stemmer også overens med
kravene til højere isolering og de i EN 61800-5-1 beskrevne
S
= 3 × R
SC
på grænseadepunktet mellem brugerens forsyning og det
oentlige system (R
SCE
× U
netforsyning
).
sce
× I
= 3 × 120 × 400 × I
equ
relevante test.
equ
Den galvaniske adskillelse for PELV kan vises i
Illustration 3.55:
Det er brugeren af udstyret eller montørens ansvar at sikre,
om nødvendigt i samråd med distributionsnetværksoperatøren, at udstyret kun er forbundet til en forsyning med
en kortslutningseekt Ssc større end eller lig det, der er
angivet ovenfor.
Andre eektstørrelser kan forbindes til det oentlige
forsyningsnetværk i samråd med distributionsnetværksoperatøren.
Overensstemmelse med forskellige retningslinjer for
systemniveauer:
De harmoniske strømdata i Tabel 3.10 til Tabel 3.17 gives i
overensstemmelse med IEC/EN 61000-3-12 med henvisning
til produktstandarden for Power Drive-systemerne. De kan
bruges som basis for beregningen af den harmoniske
indydelse på strømforsyningssystemet og til
strøms
dokumentation af overensstemmelse med relevante
regionale retningslinjer: IEEE 519 -1992; G5/4.
3.4.7 Immunitetskrav
Immunitetskravene til frekvensomformere afhænger af det
miljø, de monteres i. Kravene til industrimiljøer er højere
end kravene til bolig- og kontormiljøer. Alle Danfossfrekvensomformere overholder kravene til industrimiljøer
og overholder derfor også de lavere krav til bolig- og
kontormiljøer med en stor sikkerhedsmargin.
For at bevare PELV skal alle tilslutninger til styreklemmerne
være PELV. Eksempelvis skal termistorer forstærkes/dobbeltisoleres.
0,25–22 kW (0,34–30 hk)
1 Forsyning (SMPS)
2 Optokoblere, kommunikation mellem AOC og BOC
3 Tilpassede relæer
a Klemmer på styrekortet
Illustration 3.54 Galvanisk adskillelse
42 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 45

130BB901.10
1324
5
a
M
Produktoversigt Design Guide
30–90 kW (40–120 hk)
1 Forsyning (SMPS) inklusive signalisolering af UDC, der angiver
den mellemliggende strømspænding.
2 Gate drive, som kører IGBT'er (triggertransformere/
optokoblere).
3 Strømtransducere
4 Intern soft charge, RFI og temperaturmålingskredsløb
5 Tilpassede relæer
a Klemmer på styrekortet
Illustration 3.55 Galvanisk adskillelse
Den funktionelle galvaniske adskillelse (se Illustration 3.54)
er til RS485-standardbusgrænseaden.
ADVARSEL
FARLIG LÆKSTRØM
Lækstrømmene overstiger 3,5 mA. Hvis frekvensomformeren ikke jordes korrekt, kan det resultere i død
eller alvorlig personskade.
Sørg for, at udstyret jordes korrekt af en
•
autoriseret elektriker.
ADVARSEL
FEJLSTRØMSAFBRYDERBESKYTTELSE
Dette produkt kan forårsage en DC-strøm i den
beskyttende leder. Når der anvendes en fejlstrømsafbryder (RCD) som beskyttelse i tilfælde af direkte eller
indirekte kontakt, må der kun anvendes en Type Bfejlstrømsafbryder på produktets forsyningsside. Ellers
skal der foretages andre beskyttende foranstaltninger,
f.eks. separation fra miljøet vha. dobbelt eller forstærket
isolering eller isolering fra forsyningssystemet ved hjælp
af en transformer. Se også applikationsanvisningen
Beskyttelse mod elektriske farer.
Beskyttelsesjording af frekvensomformeren og brug af
RCD'er skal altid følge nationale og lokale bestemmelser.
3.7 Ekstreme driftsforhold
3 3
FORSIGTIG
MONTERING VED STOR HØJDE
Kontakt Danfoss vedrørende PELV ved højder over 2.000
m (6.500 fod).
3.6 Lækstrøm til jord
ADVARSEL
AFLADNINGSTID
Det kan være forbundet med livsfare at berøre de
elektriske komponenter, også efter at udstyret er koblet
fra netforsyningen.
Sørg også for, at andre spændingsindgange er afbrudt,
f.eks. belastningsfordeling (sammenkobling af DC-link)
samt motortilslutning til kinetisk backup.
Vent mindst i det tidsrum, der angives i Tabel 2.1, inden
de elektriske dele berøres.
Et kortere tidsrum er kun tilladt, hvis typeskiltet på det
pågældende apparat angiver det.
Kortslutning (motorfase-fase)
Strømmåling i hver af de tre motorfaser eller i DC-linket
beskytter frekvensomformeren mod kortslutninger. En
kortslutning mellem to udgangsfaser medfører overstrøm i
vekselretteren. Vekselretteren slukkes individuelt, når
kortslutningsstrømmen overstiger den tilladte værdi (alarm
16, Triplås).
Se kapitel 8.3.1 Sikringer og afbrydere for oplysninger om
beskyttelse af frekvensomformeren mod en kortslutning
ved belastningsfordelings- og bremseudgangene.
Kobling på udgangen
Kobling på udgangen mellem motor og frekvensomformer
er tilladt. Frekvensomformeren bliver ikke på nogen måde
beskadiget ved kobling på udgangen. Der kan imidlertid
opstå fejlmeddelelser.
Motorgenereret overspænding
Spændingen i DC-linket øges, når motoren fungerer som
en generator. Dette sker i følgende tilfælde:
Belastningen driver motoren (ved konstant
•
udgangsfrekvens fra frekvensomformeren), dvs. at
belastningen genererer energi.
Under en deceleration (rampe ned) er friktionen
•
lav, hvis inertimomentet er højt, og rampe nedtiden er for kort til, at energien kan spredes som
et tab i frekvensomformeren, motoren og installationen.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 43
Page 46

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fUD = 0,2 x f M,N
fUD = 2 x f M,N
fUD = 1 x f M,N
IMN
IM
Produktoversigt
VLT® HVAC Basic Drive FC 101
En forkert indstilling af slipkompenseringen
•
3.7.2 Termistorindgange
(parameter 1-62 Slipkompensering) kan medføre
højere DC-link-spænding.
Termistorens udkoblingsværdi er >3 kΩ.
Styreenheden forsøger måske at korrigere rampen, hvis
parameter 2-17 Overspændingsstyring er aktiveret.
33
Frekvensomformeren slukkes for at beskytte transistorerne
og DC-link-kondensatorerne, når der nås et vist spændingsniveau.
Der kan indbygges en termistor (PTC-føler) i motoren med
henblik på beskyttelse af viklinger.
Motorbeskyttelse kan implementeres ved hjælp af en
række teknikker:
Netudfald
I tilfælde af netudfald fortsætter frekvensomformeren, indtil
DC-link-spændingen kommer ned under mindste
stopniveau, hvilket typisk er 15 % under frekvensomfor-
PTC-føler i motorviklinger.
•
Mekanisk termisk kontakt (Klixon-type).
•
Elektronisk termorelæ (ETR).
•
merens laveste nominelle forsyningsspænding.
Netspændingen før afbrydelsen bestemmer sammen med
motorbelastningen, hvor længe der skal gå, før frekvensomformeren friløber.
3.7.1 Termisk motorbeskyttelse (ETR)
Danfoss bruger ETR til at beskytte motoren mod overophedning. Det er en elektronisk funktion, som simulerer et
bimetalrelæ baseret på indvendige målinger. Karakteristika
er vist i Illustration 3.56.
Illustration 3.57 Trip på grund af høj motortemperatur
Eksempel med digital indgang og en 10 V-strømforsyning
Frekvensomformeren tripper, når motortemperaturen er for
høj.
Parameteropsætning:
Illustration 3.56 Karakteristik for termisk motorbeskyttelse
Indstil parameter 1-90 Termisk motorbeskyttelse til [2]
Termistor-trip.
Indstil parameter 1-93 Termistorkilde til [6] Digital indgang
29.
X-aksen viser forholdet mellem I
aksen viser tidsrummet i sekunder, inden ETR kobler ud og
motor
og I
nominel. Y-
motor
tripper frekvensomformeren. Kurverne viser den karakteristiske nominelle hastighed ved den dobbelte nominelle
hastighed og ved 0,2 x den nominelle hastighed.
Det er tydeligt, at ETR ved lavere hastigheder kobler ud
ved en lavere temperatur på grund af mindre køling af
motoren. Dette forhindrer, at motoren overophedes selv
ved lave hastigheder. Funktionen ETR beregner motortemperaturen på basis af den faktiske strøm og hastighed.
44 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 47

R
OFF
ON
<800 Ω >2,9 kΩ
18
19
12 20 55
27 29 42 45 50 53 54
DIG IND
DIG IND
DIG IND
DIG IND
61 68 69
N
P
KOMM. GND
+24 V
0/4-20 mA A UD/DIG UD 0/4-20 mA A UD/DIG UD
KOM A IND
KOM DIG IND
10 V/20 mA IND
10 V/20 mA IND
10 V UD
BUSKL.
OFF ON
130BB898.10
18
19
12 20 55
27 29 42 45 50 53 54
DIG IND
DIG IND
DIG IND
DIG IND
61 68 69
N
P
KOMM. GND
+24 V
0/4-20 mA A UD/DIG UD
0/4-20 mA A UD/DIG UD
KOM A IND
KOM DIG IND
10 V/20 mA IND
10 V/20 mA IND
10 V UD
BUSKL.
OFF ON
130BB897.10
R
<3,0 k Ω
>2,9 k Ω
OFF
ON
Produktoversigt Design Guide
3 3
Illustration 3.58 Digital indgang/10 V-strømforsyning
Eksempel med analog indgang og en 10 V-strømforsyning
Frekvensomformeren tripper, når motortemperaturen er for
høj.
Parameteropsætning:
Indstil parameter 1-90 Termisk motorbeskyttelse til [2]
Termistor-trip.
Indstil parameter 1-93 Termistorkilde til [1] Analog indgang
53.
BEMÆRK!
Indstil ikke Analog indgang 54 som referencekilde.
Illustration 3.59 Analog indgang/10 V-strømforsyning
Indgang
Forsynings-
spænding [V]
Digital 10
Analog 10
Grænse
-udkoblingsværdier [Ω]
<800⇒2,9 k
<800⇒2,9 k
Tabel 3.18 Forsyningsspænding
BEMÆRK!
Sørg for, at den valgte forsyningsspænding svarer til
specikationen for det anvendte termistorelement.
ETR aktiveres i parameter 1-90 Termisk motorbeskyttelse.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 45
Page 48

F C - P T H
130BB899.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X0 D
1
1
X
X
X
X X X
X X X
Valg og bestilling
VLT® HVAC Basic Drive FC 101
4 Valg og bestilling
4.1 Typekode
En typekode denerer en specik konguration af VLT® HVAC Basic Drive FC 101-frekvensomformeren. Anvend Illustration 4.1
til at oprette en typekodestreng for den ønskede konguration.
44
Illustration 4.1 Typekode
Beskrivelse Position Muligt valg
Produktgruppe og FC-serie 1–6 FC 101
Nominel eekt 7–10 0,25–90 kW (0,34–120 hk) (PK25-P90K)
Antal faser 11 3 faser (T)
T2: 200–240 V AC
Netspænding 11–12
Kapsling 13–15
RFI-lter 16–17
Bremse 18 X: Ingen bremsechopper medfølger
Display 19
Coating af PCB 20
Netforsyningsoption 21 X: Ingen netforsyningsoption
Tilpasning 22 X: Ingen tilpasning
Tilpasning 23 X: Ingen tilpasning
Softwareversioner 24–27 SXXXX: Seneste version – standardsoftware
Softwaresprog 28 X: Standard
A-optioner 29–30 AX: Ingen A-optioner
B-optioner 31–32 BX: Ingen B-optioner
C0-optioner MCO 33–34 CX: Ingen C-optioner
C1-optioner 35 X: Ingen C1-optioner
Software til C-optioner 36–37 XX: Uden optioner
D-optioner 38–39 DX: Ingen D0-optioner
T4: 380–480 V AC
T6: 525–600 V AC
E20: IP20/chassis
P20: IP20/chassis med bagplade
E5A: IP54
P5A: IP54 med bagplade
H1: RFI-lterklasse A1/B
H2: RFI-lterklasse A2
H3: RFI-lterklasse A1/B (reduceret kabellængde)
H4: RFI-lterklasse A1
A: Alfanumerisk LCP-betjeningspanel
X: Uden LCP-betjeningspanel
X: Intet coated PCB
C: Coated PCB
Tabel 4.1 Typekodebeskrivelse
46 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 49

130BB775.12
Status
Main
Menu
Quick
Menu
Menu
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
O
Reset
Auto
On
Alarm
Warn.
On
Com.
Alarm
Warn.
On
B
a
c
k
Hand
OK
O
Reset
Auto
On On
130BB776.11
R1.5 +_ 0.5
62.5 +_ 0.2
86 +_ 0.2
1
2
3
4
Status
Main
Menu
Quick
Menu
Menu
Com.
Alarm
Warn.
On
Hand
On
OK
O
Reset
Auto
On
B
a
c
k
130BB777.10
Valg og bestilling Design Guide
4.2 Optioner og tilbehør
4.2.1 LCP-betjeningspanel
Bestillingsnummer Beskrivelse
132B0200 LCP til alle IP20-apparater
Tabel 4.2 Bestillingsnummer for LCP
Kapsling IP55 front-monteret
Maksimal kabellængde til apparat 3 m (10 fod)
Kommunikationsstandard RS485
Tabel 4.3 Tekniske data for LCP
4.2.2 Montering af LCP i tavlefronten
Trin 1
Monter pakning på LCP.
Illustration 4.2 Monter pakning
4 4
1 Udkobling af tavle. Tavletykkelse på 1–3 mm (0,04–0,12
tommer)
2 Tavle
3 Pakning
4 LCP
Illustration 4.3 Anbring LCP'et på tavlen (front-monteret)
Trin 2
Anbring LCP'et på tavlen. Se målene på hullet på
Illustration 4.3.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 47
Trin 3
Anbring konsollen på bagsiden af LCP'et, og skyd den ned.
Spænd skruerne, og tilslut kablets hunstik til LCP'et.
Illustration 4.4 Anbring konsol på LCP
Page 50

130BB778.10
130BB902.12
A
B
C
OK
Alarm
Warn.
On
B
a
c
k
Hand
On
Reset
Auto
On
Status
Quick
Menu
Main
Menu
130BB903.10
Valg og bestilling
VLT® HVAC Basic Drive FC 101
Trin 4
Slut kablet til frekvensomformeren.
44
Illustration 4.5 Tilslut kabel
BEMÆRK!
Anvend de medfølgende stjerneskruer til at fastgøre
stikket til frekvensomformeren. Tilspændingsmomentet
er 1,3 Nm (11,5 tommer-pund).
Illustration 4.6 H1–H5 (see data i Tabel 4.4)
4.2.3 IP21/NEMA Type 1-kapslingssæt
IP21/NEMA Type 1 er en ekstra kapslingsdel, der leveres til
IP20-apparater.
Ved anvendelse af kapslingssættet opgraderes et IP20apparat, så apparatet overholder kapslingsgraden IP21/
NEMA Type 1.
Illustration 4.7 Mål (see data i Tabel 4.4)
48 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 51

130BB793.10
99 99
Valg og bestilling Design Guide
Kapsling
H1 IP20
H2 IP20 2,2 (3,0)
H3 IP20 3,7 (5,0)
H4 IP20
H5 IP20 11 (15)
H6 IP20
H7 IP20
H8 IP20
H9 IP20 – –
H10 IP20 – –
IP-
klasse
3x200–240 V
[kW (hk)]
0,25–1,5
(0,34–2,0)
5,5-7,5
(7,4–10)
15–18,5
(20–25)
22–30
(30–40)
37–45
(50–60)
Eekt
3x380–480 V
[kW (hk)]
0,37–1,5
(0,5–2,0)
2,2-4,0
(3,0–5,4)
5,5-7,5
(7,4–10)
11–15
(15–20)
18,5–22
(25–30)
30–45
(40–60)
55–75
(74–100)
90 (120)
Højde
[mm (tomm
er)] A
3x525–600 V
[kW (hk)]
– 293 (11,5) 81 (3,2) 173 (6,8) 132B0212 132B0222
– 322 (12,7) 96 (3,8) 195 (7,7) 132B0213 132B0223
– 346 (13,6) 106 (4,2) 210 (8,3) 132B0214 132B0224
– 374 (14,7) 141 (5,6) 245 (9,6) 132B0215 132B0225
– 418 (16,5) 161 (6,3) 260 (10,2) 132B0216 132B0226
18,5–30
(25–40)
37–55
(50–74)
75–90
(100–120)
2,2–7,5
(3,0–10)
11–15
(15–20)
663 (26,1) 260 (10,2) 242 (9,5) 132B0217 132B0217
807 (31,8) 329 (13,0) 335 (13,2) 132B0218 132B0218
943 (37,1) 390 (15,3) 335 (13,2) 132B0219 132B0219
372 (14,6) 130 (5,1) 205 (8,1) 132B0220 132B0220
475 (18,7) 165 (6,5) 249 (9,8) 132B0221 132B0221
Bredde
[mm
(tommer)]
B
Dybde
[mm
(tommer)] C
Bestil-
lingsnr. til
IP21-sæt
Bestil-
lingsnr. til
NEMA Type
1-sæt.
4 4
Tabel 4.4 Specikationer for kapslingssæt
4.2.4 Afkoblingsplade
Brug afkoblingspladen til EMC-korrekt installation.
Illustration 4.8 viser afkoblingspladen på en H3-kapsling.
Illustration 4.8 Afkoblingsplade
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 49
Page 52

Valg og bestilling
Eekt [kW(hk)] Bestillingsnumre
Kapsling IP-klasse 3x200–240 V 3x380–480 V 3x525–600 V
H1 IP20 0,25–1,5 (0,33–2,0) 0,37–1,5 (0,5–2,0) – 132B0202
H2 IP20 2,2 (3,0) 2,2–4 (3,0–5,4) – 132B0202
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) – 132B0204
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) – 132B0205
H5 IP20 11 (15) 18,5–22 (25–30) – 130B0205
44
H6 IP20 15–18,5 (20–25) 30 (40) 18,5–30 (25–40) 132B0207
H6 IP20 – 37–45 (50–60) – 132B0242
H7 IP20 22–30 (30–40) 55 (75) 37–55 (50–75) 132B0208
H7 IP20 – 75 (100) – 132B0243
H8 IP20 37-45 (50–60) 90 (125) 75–90 (100–125) 132B0209
Tabel 4.5 Specikationer for afkoblingsplade
VLT® HVAC Basic Drive FC 101
for afkoblingsplade
BEMÆRK!
Til H9- og H10-kapslingsstørrelser medfølger afkoblingspladerne i tilbehørsposen.
4.3 Bestillingsnumre
4.3.1 Optioner og tilbehør
Kapslings
Beskrivelse
1)
LCP
Monteringss
æt IP55 til
LCP-panel
inklusive
kabel på 3 m
(9,8 fod).
LCP 31 til RJ
45-konverte-
ringssæt
Monteringss
æt IP55 til
LCP-panel
uden kabel
på 3 m
(9,8 fod).
Afkoblingsplade
IP21-option 132B0212 132B0213 132B0214 132B0215 132B0216 132B0217 132B0218 132B0219
størrelse
Netspæn
ding
T2 (200–
240 V AC)
T4 (380–
480 V AC)
T6 (525–
600 V AC)
132B0200
H1
[kW (hk)]H2[kW (hk)]H3[kW (hk)]H4[kW (hk)]H5[kW (hk)]
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
132B0202 132B0202 132B0204 132B0205 132B0205 132B0207 132B0242 132B0208 132B0243 132B0209
2,2 (3,0) 3,7 (5,0)
2,2–4,0
(3,0–5,4)
– – – – –
5,5–7,5
(7,5–10)
5,5–7,5
(7,5–10)
11–15
(15–20)
11 (15)
18,5–22
(25–30)
132B0201
132B0203
132B0206
[kW (hk)]
15–18,5
(20–25)
30 (40)
18,5–30
(25–40)
H6
–
37–45
(50–60)
–
H7
[kW (hk)]
22–30
(30–40)
55 (75) 75 (100) 90 (125)
37–55
(50–75)
–
–
H8
[kW (hk)]
37–45
(50–60)
75–90
(100–125)
50 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 53

Valg og bestilling Design Guide
Kapslings
NEMA Type
1-sæt
Tabel 4.6 Optioner og tilbehør
1) Til IP20-apparater bestilles LCP'et separat. Til IP54-apparater er LCP'et inkluderet i
formeren.
størrelse
Netspæn
ding
H1
[kW (hk)]H2[kW (hk)]H3[kW (hk)]H4[kW (hk)]H5[kW (hk)]
132B0222 132B0223 132B0224 132B0225 132B0226 132B0217 132B0218 132B0219
4.3.2 Harmoniske ltre
H6
[kW (hk)]
standardkongurationen og monteret på frekvensom-
H7
[kW (hk)]
[kW (hk)]
H8
4 4
3x380–480 V 50 Hz
Frekven
somfor-
merens
Eekt
[kW (hk)]
(30)
(40)
(50)
(60)
(74)
(100)
(120)
Tabel 4.7 AHF-ltre (5 % strømforvrængning)
indgan
kontinu
22
30
37
45
55
75
90
Fabriks-
indstille
gsstrø
switch-
m,
frekven
s [kHz]
erlig
[A]
41,5 4 4 130B1397 130B1239
57 4 3 130B1398 130B1240
70 4 3 130B1442 130B1247
84 3 3 130B1442 130B1247
103 3 5 130B1444 130B1249
140 3 4 130B1445 130B1250
176 3 4 130B1445 130B1250
THDi-
t
niveau
[%]
lingsnum
lter IP00
Bestil-
mer for
Varenum
mer for
lter IP20
3x380–480 V 50 Hz
Frekven
somfor-
merens
Eekt
[kW (hk)]
(30)
(40)
(50)
(60)
(74)
(100)
(120)
Tabel 4.8 AHF-ltre (10 % strømforvrængning)
indgan
gsstrø
kontinu
erlig [A]
22
30
37
45
55
75
90
Fabriks-
indstille
switch-
m,
frekven
s [kHz]
41,5 4 6 130B1274 130B1111
57 4 6 130B1275 130B1176
70 4 9 130B1291 130B1201
84 3 9 130B1291 130B1201
103 3 9 130B1292 130B1204
140 3 8 130B1294 130B1213
176 3 8 130B1294 130B1213
THDi-
t
niveau
[%]
Bestillings-
nummer
for lter
IP00
Varenum
mer for
lter IP20
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 51
Page 54

Valg og bestilling
3x440–480 V 60 Hz
Frekvensom-
Eekt
[kW
(hk)]
(30)
44
(40)
(50)
(60)
(74)
(100)
(120)
indgangsstrøm,
kontinuerlig
22
30
37
45
55
75
90
formerens
[A]
34,6 4 3 130B1792 130B1757
49 4 3 130B1793 130B1758
61 4 3 130B1794 130B1759
73 3 4 130B1795 130B1760
89 3 4 130B1796 130B1761
121 3 5 130B1797 130B1762
143 3 5 130B1798 130B1763
Fabriks-
indstillet
switch-
frekvens
[kHz]
THDi-
niveau
[%]
VLT® HVAC Basic Drive FC 101
Bestillings-
nummer for
lter IP00
Varenummer
for lter
IP20
Tabel 4.9 AHF-ltre (5 % strømforvrængning)
3x440–480 V 60 Hz
Frekvensom-
Eekt
[kW
(hk)]
(30)
(40)
(50)
(60)
(74)
(100)
(120)
Tabel 4.10 AHF-ltre (10 % strømforvrængning)
indgangsstrøm,
kontinuerlig
22
30
37
45
55
75
90
formerens
[A]
34,6 4 6 130B1775 130B1487
49 4 8 130B1776 130B1488
61 4 7 130B1777 130B1491
73 3 9 130B1778 130B1492
89 3 8 130B1779 130B1493
121 3 9 130B1780 130B1494
143 3 10 130B1781 130B1495
Fabriks-
indstillet
switch-
frekvens
[kHz]
THDi-
niveau
[%]
Bestillings-
nummer for
lter IP00
Varenummer
for lter
IP20
52 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 55

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Valg og bestilling Design Guide
4.3.3 Eksternt RFI-lter
Med de eksterne ltre, der er angivet i Tabel 4.11, kan der opnås maksimal skærmet kabellængde på 50 m (164 fod) i
henhold til EN/IEC 61800-3 C2 (EN 55011 A1) eller 20 m (65,6 fod) i henhold til EN/IEC 61800-3 C1(EN 55011 B).
Eekt [kW (hk)]
Størrelse 380-480 V
0,37–2,2
(0,5–3,0)
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
Tabel 4.11 RFI-ltre – detaljer
Type A B C D E F G H I J K L1
FN3258-7-45 190 40 70 160 180 20 4,5 1 10,6 M5 20 31
FN3258-16-45 250 45 70 220 235 25 4,5 1 10,6 M5 22,5 31
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Moment
[Nm (tommer-
pund)]
0,7–0,8
(6,2–7,1)
0,7–0,8
(6,2–7,1)
1,9–2,2
(16,8–19,5)
1,9–2,2
(16,8–19,5)
Vægt [kg
(pund)]
0,5
(1,1)
0,8
(1,8)
1,2
(2,6)
1,4
(3,1)
Bestillings-
nummer
132B0244
132B0245
132B0246
132B0247
4 4
Illustration 4.9 RFI-lter – mål
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 53
Page 56

L1
L2
L3
3-phase
power
input
PE
PE
+10 V DC
0-10 V DC-
0-10 V DC-
50 (+10 V OUT)
54 (A IN)
53 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
0/4-20 mA
42 0/4-20 mA A OUT / D OUT
45 0/4-20 mA A OUT / D OUT
18 (D IN)
19 (D IN)
27 (D IN/OUT)
29 (D IN/OUT)
12 (+24 V OUT)
24 V (NPN)
20 (COM D IN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
24 V (NPN)
O V (PNP)
Bus ter.
Bus ter.
RS485
Interface
RS485
(N RS485) 69
(P RS485) 68
(Com RS485 ) 61
(PNP)-Source
(NPN)-Sink
ON=Terminated
OFF=Unterminated
ON
1 2
240 V AC 3 A
Not present on all power sizes
Do not connect shield to 61
01
02
03
relay 1
relay 2
UDC+
UDC-
Motor
U
V
W
130BD467.12
06
05
04
240 V AC 3 A
Installation
VLT® HVAC Basic Drive FC 101
5 Installation
5.1 Elektrisk installation
55
Illustration 5.1 Skematisk tegning over grundlæggende ledningsføring
BEMÆRK!
UDC- og UDC+ er ikke tilgængelige på følgende apparater:
•
•
•
•
Al kabelføring skal overholde nationale og lokale bestemmelser vedrørende kabeltværsnit og omgivelsestemperatur. Kobberledere er påkrævet. 75 °C (167 °F) anbefales.
IP20, 380–480 V, 30–90 kW (40–125 hk)
IP20, 200–240 V, 15–45 kW (20–60 hk)
IP20, 525–600 V, 2,2–90 kW (3,0–125 hk)
IP54, 380–480 V, 22–90 kW (30–125 hk)
54 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 57

Installation Design Guide
Eekt [kW (hk)] Moment [Nm (tommer-pund)]
Kapslings
størrelse
IP-klasse 3 x 200–240 V 3 x 380–480 V
H1 IP20
0,25–1,5
(0,33–2,0)
0,37–1,5
(0,5–2,0)
H2 IP20 2,2 (3,0) 2,2–4,0 (3,0–5,0) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H3 IP20 3,7 (5,0) 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H4 IP20 5,5–7,5 (7,5–10) 11–15 (15–20) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H5 IP20 11 (15) 18,5–22 (25–30) 1,2 (11) 1,2 (11) 1,2 (11) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
H6 IP20 15–18,5 (20–25) 30–45 (40–60) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 22–30 (30–40) 55 (70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 – 75 (100) 14 (124) 14 (124) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 37–45 (50–60) 90 (125)
Tabel 5.1 Tilspændingsmomenter for kapslingsstørrelser H1–H8, 3 x 200–240 V og 3 x 380–480 V
Eekt [kW (hk)] Moment [Nm (tommer-pund)]
Kapslings-
størrelse
IP-klasse 3 x 380–480 V Netforsyning Motor
I2 IP54
0,75–4,0
(1,0–5,0)
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I3 IP54 5,5–7,5 (7,5–10) 0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I4 IP54 11–18,5 (15–25) 1,4 (12) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
I6 IP54 22–37 (30–50) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I7 IP54 45–55 (60–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,6 (5,0)
I8 IP54 75–90 (100–125)
14 (124)/24
(212)
Netfor-
syning
Motor
DC-
forbindelse
Styreklemm
er
Jord Relæ
0,8 (7,0) 0,8 (7,0) 0,8 (7,0) 0,5 (4,0) 0,8 (7,0) 0,5 (4,0)
1)
24 (212)
14 (124)/24
2)
(212)
2)
24 (212)
forbindelse
1)
DC-
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Styreklemmer Jord Relæ
– 0,5 (4,0) 3 (27) 0,6 (5,0)
5 5
Tabel 5.2 Tilspændingsmomenter for kapslingsstørrelser I2–I8
Eekt [kW (hk)] Moment [Nm (tommer-pund)]
Kapslings-
størrelse
IP-klasse 3 x 525–600 V Netforsyning Motor
DC-
forbindelse
Styreklemmer Jord Relæ
H9 IP20 2,2–7,5 (3,0–10) 1,8 (16) 1,8 (16) Anbefales ikke 0,5 (4,0) 3 (27) 0,6 (5,0)
H10 IP20 11–15 (15–20) 1,8 (16) 1,8 (16) Anbefales ikke 0,5 (4,0) 3 (27) 0,6 (5,0)
H6 IP20 18,5–30 (25–40) 4,5 (40) 4,5 (40) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H7 IP20 37–55 (50–70) 10 (89) 10 (89) – 0,5 (4,0) 3 (27) 0,5 (4,0)
H8 IP20 75–90 (100–125)
14 (124)/24
2)
(212)
14 (124)/24
2)
(212)
– 0,5 (4,0) 3 (27) 0,5 (4,0)
Tabel 5.3 Tilspændingsmomenter for kapslingsstørrelser H6–H10, 3 x 525–600 V
≤
95 mm
2
2
1) Kabelmål >95 mm
2) Kabelmål
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 55
Page 58

130BB634.10
1
2
2
3
4
Motor
U
V
W
-DC
+DC
MAINS
Installation
VLT® HVAC Basic Drive FC 101
5.1.1 Netforsyning og motortilslutning
Relæer og klemmer på kapslingsstørrelser H1–H5
Frekvensomformeren er konstrueret til at kunne fungere
med alle trefasede asynkrone standardmotorer. Det
maksimale kabeltværsnit fremgår af kapitel 8.4 Generelle
tekniske data.
Brug et skærmet/armeret motorkabel for at
•
overholde
EMC-emissionsspecikationerne, og
tilslut dette kabel til både afkoblingspladen og
motoren.
Hold motorkablet så kort som muligt for at
55
•
begrænse støjniveauet og minimere lækstrømme.
Se FC 101 Monteringsinstruktion for afkobling-
•
spladen for yderligere oplysninger om montering
af afkoblingspladen.
Se også afsnittet EMC-korrekt installation i
•
kapitel 5.1.2 EMC-korrekt elektrisk installation.
Se kapitlet Tilslutning til netforsyning og motor i
•
VLT® HVAC Basic Drive FC 101 Quick Guide for at få
oplysninger om tilslutning af frekvensomformeren
til netforsyningen og motoren.
1 Netforsyning
2 Jord
3 Motor
4 Relæer
Illustration 5.2 Kapslingsstørrelser H1–H5
IP20, 200–240 V, 0,25–11 kW (0,33–15 hk)
IP20, 380–480 V, 0,37–22 kW (0,5–30 hk)
56 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 59

1
95
99
L1 91 / L2 92 / L3 93
U 96 / V 97 / W 98
03 02 01
06 05 04
2
3
4
130BB762.10
1
2
3
4
130BB763.10
Installation Design Guide
Relæer og klemmer på kapslingsstørrelse H6
1 Netforsyning
2 Motor
3 Jord
4 Relæer
Illustration 5.3 Kapslingsstørrelse H6
IP20, 380–480 V, 30–45 kW (40–60 hk)
IP20, 200–240 V, 15–18,5 kW (20–25 hk)
IP20, 525–600 V, 22–30 kW (30–40 hk)
Relæer og klemmer på kapslingsstørrelse H7
5 5
1 Netforsyning
2 Relæer
3 Jord
4 Motor
Illustration 5.4 Kapslingsstørrelse H7
IP20, 380–480 V, 55–75 kW (70–100 hk)
IP20, 200–240 V, 22–30 kW (30–40 hk)
IP20, 525–600 V, 45–55 kW (60–70 hk)
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 57
Page 60

130BB764.10
1
2
3
4
98
97
96
99
95
93
92
91
L1
L1
L1
U
V
w
MOTOR
MOTOR
U V W
99
130BT302.12
130BA725.10
Installation
VLT® HVAC Basic Drive FC 101
Relæer og klemmer på kapslingsstørrelse H8
Sørg for, at netforsyningskablerne til kapslingsstørrelse H9
er tilsluttet korrekt. Se kapitlet Tilslutning til netforsyning og
motor i VLT® HVAC Basic Drive FC 101 Quick Guide for
yderligere oplysninger. Anvend de tilspændingsmomenter,
der er beskrevet i kapitel 5.1.1 Generelt om elektrisk instal-
lation.
Relæer og klemmer på kapslingsstørrelse H10
55
1 Netforsyning
2 Relæer
3 Jord
4 Motor
Illustration 5.5 Kapslingsstørrelse H8
IP20, 380–480 V, 90 kW (125 hk)
IP20, 200–240 V, 37–45 kW (50–60 hk)
IP20, 525–600 V, 75–90 kW (100–125 hk)
Tilslutning til netforsyning og motor for kapslingsstørrelse H9
Illustration 5.7 Kapslingsstørrelse H10
IP20, 600 V, 11–15 kW (15–20 hk)
Illustration 5.6 Motortilslutning for kapslingsstørrelse H9
IP20, 600 V, 2,2–7,5 kW (3,0–10 hk)
58 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 61

130BC299.10
7
3
2
5
1
8
4
6
130BC201.10
Installation Design Guide
Kapslingsstørrelse I2
Kapslingsstørrelse I3
5 5
1 RS485
2 Netforsyning
3 Jord
4 Kabelbøjler
1 RS485
2 Netforsyning
3 Jord
4 Kabelbøjler
5 Motor
6 UDC
7 Relæer
8 I/O
5 Motor
6 UDC
7 Relæer
Illustration 5.9 Kapslingsstørrelse I3
IP54, 380–480 V, 5,5–7,5 kW (7,5–10 hk)
8 I/O
Illustration 5.8 Kapslingsstørrelse I2
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 hk)
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 59
Page 62

130BD011.10
130BC203.10
130BT326.10
130BT325.10
Installation
VLT® HVAC Basic Drive FC 101
Kapslingsstørrelse I4
Kapslingsstørrelse I6
55
Illustration 5.12 Nettilslutning til kapslingsstørrelse I6
1 RS485
2 Netforsyning
3 Jord
4 Kabelbøjler
5 Motor
6 UDC
7 Relæer
8 I/O
IP54, 380–480 V, 22–37 kW (30–50 hk)
Illustration 5.10 Kapslingsstørrelse I4
IP54, 380–480 V, 0,75–4,0 kW (1,0–5,0 hk)
Illustration 5.11 IP54 kapslingsstørrelser I2, I3, I4
Illustration 5.13 Motortilslutning for kapslingsstørrelse I6
IP54, 380–480 V, 22–37 kW (30–50 hk)
60 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 63

311
130BA215.10
RELAY 1
RELAY 2
9
9
6
03 02 01
90 05 04
91
L1
92
L2
93
L3
96
U
97
V
98
W
88
DC-
89
DC+
81
R-
8
R+
99
95
130BA248.10
Installation Design Guide
5.1.2 EMC-korrekt elektrisk installation
Vær opmærksom på følgende anbefalinger, så EMC-korrekt
elektrisk installation sikres.
Brug kun skærmede/armerede motorkabler og
•
skærmede/armerede styreledninger.
Tilslut skærmen til jord i begge ender.
•
Undgå montering med snoede skærmender
•
(pigtails), da dette kan påvirke skærmens eekt
ved høje frekvenser. Brug i stedet de
medfølgende kabelbøjler.
Det er vigtigt at sørge for god elektrisk kontakt
•
fra installationspladen gennem installationsskruerne til frekvensomformerens metalkabinet.
Brug stjerneskiver og galvanisk ledende installati-
•
onsplader.
Brug ikke uskærmede/uarmerede motorkabler i
•
installationskabinetterne.
5 5
Illustration 5.14 Relæer på kapslingsstørrelse I6
IP54, 380–480 V, 22–37 kW (30–50 hk)
Kapslingsstørrelser I7, I8
Illustration 5.15 Kapslingsstørrelser I7, I8
IP54, 380–480 V, 45–55 kW (60–70 hk)
IP54, 380–480 V, 75–90 kW (100–125 hk)
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 61
Page 64

L1
L2
L3
PE
Min. 16 mm
2
Udligningskabel
Styreledninger
Alle kabelindgange
i en side af panelet
Jordslutningsskinne
Stripped kabelisolering
Udgangskontaktor osv.
Motorkabel
Motor, 3 faser og
PLC osv.
Panel
Netforsyning
Min. 200mm
mellem styrekabel,
forsyningskabel
og mellem netspændinger
motorkabel
PLC
Jording
Forstærket beskyttelsesjord
130BB761.10
Installation
VLT® HVAC Basic Drive FC 101
55
Illustration 5.16 EMC-korrekt elektrisk installation
BEMÆRK!
I Nordamerika skal der anvendes metalrør i stedet for skærmede kabler.
62 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 65

130BF892.10
12 20 55
181927 29 42 54
45 50 53
DIGI IN
61 68 69
N
P
COMM. GND
+24 V
GND
GND
10 V OUT
10 V/20 mA IN
0/4-20 mA A OUT/DIG OUT
BUS TER.
OFF ON
DIGI IN
DIGI IN
DIGI IN
0/4-20 mA A OUT/DIG OUT
10 V/20 mA IN
Installation Design Guide
5.1.3 Styreklemmer
Se VLT® HVAC Basic Drive FC 101 Quick Guide, og sørg for, at
klemmeafdækningen ernes korrekt.
Illustration 5.17 viser alle frekvensomformerens
styreklemmer. Frekvensomformeren kan startes ved at
påføre et startsignal (klemme 18), en forbindelse mellem
klemmer 12-27 og en analog reference (klemme 53 eller
54, og 55).
Tilstanden for digital indgang 18, 19 og 27 indstilles i
parameter 5-00 Digital I/O-tilstand (standardværdien er
PNP). Tilstanden digital indgang 29 indstilles i
parameter 5-03 Dig ind 29 tilstand (standardværdien er
PNP).
Illustration 5.17 Styreklemmer
5 5
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 63
Page 66

B
a
c
k
Com.
1-20 Motor Power
[5] 0.37kW - 0.5HP
Setup 1
AB1
12
131415
11
11
109876
5
432
C
D
Sta
tus
M
ain
M
enu
Q
uick
M
enu
Hand
On
OK
M
enu
Off
Reset
Auto
On
Alarm
Warn.
On
11
Programmering
6 Programmering
VLT® HVAC Basic Drive FC 101
6
6.1 Indledning
Frekvensomformeren kan programmeres fra LCP'et eller fra
en pc via RS485-kommunikationsporten ved at installere
MCT 10-opsætningssoftware. Se kapitel 1.5 Yderligere
ressourcer for ere oplysninger om software.
6.2 LCP-betjeningspanel (LCP)
LCP'et er opdelt i re funktionsgrupper.
A. Display
B. Menutast
C. Navigationstaster og indikatorlys
D. Betjeningstaster og indikatorlys
1 Parameternummer og -navn.
2 Parameterværdi.
Opsætningsnummeret viser aktivt setup og redigeringssetup. Hvis den samme opsætning fungerer som både
aktivt setup og redigeringssetup, vises kun det opsætnings-
3
nummer (fabriksindstilling). Hvis aktivt setup og
redigeringssetup er forskellige, vises begge numre i
displayet (opsætning 12). Nummeret, der blinker, er redigeringsopsætning.
Motorretningen vises nederst til venstre på displayet med
4
en lille pil, der peger med eller mod uret.
Trekanten angiver, om LCP'et viser status, kvikmenuen eller
5
hovedmenuen.
Tabel 6.1 Forklaring til Illustration 6.1, del I
B. Menutast
Tryk på [Menu] for at skifte mellem status, kvikmenu og
hovedmenu.
C. Navigationstaster og indikatorlys
6 LED'en Com: Blinker ved kommunikation via bussen.
7 Grøn LED/On: Styredelen fungerer korrekt.
8 Gul LED/Warn.: Angiver en advarsel.
9 Blinkende rød LED/Alarm: Angiver en alarm.
[Back]: Går tilbage til det foregående trin eller lag i navigati-
10
onsstrukturen.
[▲] [▼] [►]: Bruges til navigation mellem parametergrupper
11
og parametre samt inden for parametre. Kan også bruges til
at indstille den lokale reference.
[OK]: Bruges til at vælge en parameter og acceptere
12
ændringer af parameterindstillinger.
Tabel 6.2 Forklaring til Illustration 6.1, del II
Illustration 6.1 LCP-betjeningspanel
A. Display
LCD-displayet er belyst og har to alfanumeriske linjer. Alle
data vises på LCP'et.
Illustration 6.1 beskriver de oplysninger, der kan aæses på
displayet.
D. Betjeningstaster og indikatorlys
[Hand On]: Starter motoren og aktiverer styring af frekvensomformeren via LCP'et.
BEMÆRK!
[2] Inverteret friløb er standardoption for
13
parameter 5-12 Klemme 27, digital indgang. Hvis der
ikke er en 24 V-forsyning til klemme 27, starter
[Hand On] ikke motoren. Forbind klemme 12 og
klemme 27.
[O/Reset]: Stopper motoren (Ikke aktiv). Hvis apparatet er i
14
alarmtilstand, nulstilles alarmen.
[Auto On]: Frekvensomformeren styres enten via
15
styreklemmerne eller seriel kommunikation.
Tabel 6.3 Forklaring til Illustration 6.1, del III
64 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 67

FC
+24V
DIG IND
DIG IND
DIG IND
DIG IND
COM DIG IND
A UD/D UD
A UD/D UD
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10V
Reference
Start
+10V
A IND
A IND
KOM
130BB674.10
45
+
-
130BB629.10
Tryk på OK for at starte guiden
Tryk på Tilbage for at springe den over
Opsætning 1
Programmering Design Guide
6.3 Menuer
6.3.1 Statusmenu
I Statusmenuen er der følgende valgmuligheder:
Motorfrekvens [Hz], parameter 16-13 Frekvens.
•
Motorstrøm [A], parameter 16-14 Motorstrøm
•
Motorhastighedsreference i procent [%],
•
parameter 16-02 Reference [%].
Feedback, parameter 16-52 Feedback [enhed].
•
Motoreekt, parameter 16-10 Eekt [kW] for kW,
•
parameter 16-11 Eekt [hp] for hk. Hvis
parameter 0-03 Regionale indstillinger er indstillet
til [1] Nordamerika, vises motoreekt i hk i stedet
for kW.
Tilpasset udlæsning, parameter 16-09 Tilpas.
•
udlæs..
Motorhastighed [O/MIN],
•
parameter 16-17 Hastighed [O/MIN].
6.3.2 Kvikmenu
Guiden vises efter opstart, og indtil en parameter er blevet
ændret. Guiden kan altid åbnes igen via kvikmenuen. Tryk
på [OK] for at starte guiden. Tryk på [Back] for at gå tilbage
til statusbilledet.
Illustration 6.3 Start/afslut guiden
6
6
Brug kvikmenuen til at programmere de mest almindelige
funktioner. Kvikmenuen består af:
Guide til applikationer med åben sløjfe. Se
•
Illustration 6.4 for oplysninger.
Guide til applikationer med lukket sløjfe. Se
•
Illustration 6.5 for ere oplysninger.
Motoropsætning. Se Tabel 6.6 for ere
•
oplysninger.
Valgte ændringer.
•
Den indbyggede guidemenu vejleder på en klar og
velstruktureret måde installatøren ved opsætning af
frekvensomformeren til applikationer med åben sløjfe,
lukket sløjfe, samt hurtige motorindstillinger.
Illustration 6.2 Frekvensomformerens ledningsføring
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 65
Page 68

Power kW/50 Hz
OK
Motor Power
Motor Voltage
Motor Frequency
Motor Current
Motor nominal speed
if
Select Regional Settings
... the Wizard starts
200-240V/50Hz/Delta
Grid Type
Asynchronous motor
Asynchronous
Motor Type
Motor current
Motor nominal speed
Motor Cont. Rated Torque
Stator resistance
Motor poles
Back EMF at 1000 rpm
Motor type = IPM
Motor type = SPM
d-axis Inductance Sat. (LdSat)
[0]
[0]
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
Start Mode
Rotor Detection
[0]
Position Detection Gain
%
Off
100
Locked Rotor Detection
[0]
s
Locked Rotor Detection Time[s]
0.10
57
V
5
mH
q-axis Inductance (Lq)
5
mH
1.10
kW
400
V
50
Hz
Max Output Frequency
65
Hz
Motor Cable Length
50
m
4.66
A
1420
RPM
[0]
PM motor
Set Motor Speed low Limit
Hz
Set Motor Speed high Limit
Hz
Set Ramp 1 ramp-up time
s
Set Ramp 1 ramp-down Time
s
Active Flying start?
Disable
Set T53 low Voltage
V
Set T53 high Voltage
V
Set T53 Low Current
A
Set T53 High Current
A
Voltage
AMA Failed
AMA Failed
Automatic Motor Adaption
Auto Motor Adapt OK
Press OK
Select Function of Relay 2
No function
Off
Select Function of Relay 1
[0] No function
Set Max Reference
Hz
Hz
Set Min Reference
AMA running
-----
Do AMA
(Do not AMA)
AMA OK
[0]
[0]
[0]
Select T53 Mode
Current
Current
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0010
0010
[0]
[0]
04.66
13.30
0050
0220
0000
0050
B
a
c
k
Status Screen
The Wizard can always be
reentered via the Quick Menu
At power-up, select the
preferred language.
The next screen is
the Wizard screen.
Wizard Screen
if
OK
Power-up Screen
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Select language
[1] English
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
Press OK to start Wizard
Press Back to skip it
Setup 1
B
a
c
k
Com.
Status
Main
Menu
Quick
Menu
Hand
On
OK
Menu
Reset
Off
Auto
On
Alarm
Warn.
On
0.0 Hz
0.0 kW
Setup 1
B
a
c
k
Com.
130BC244.16
q-axis Inductance Sat. (LqSat)
5
mH
Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
d-axis Inductance (Lq)
5
mH
... the Wizard starts
Programmering
VLT® HVAC Basic Drive FC 101
6
Illustration 6.4 Opsætningsguide til applikationer med åben sløjfe
66 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 69

Programmering Design Guide
Opsætningsguide til applikationer med åben sløjfe
Parameter Option Standard Anvendelse
Parameter 0-03 Regionale
indstillinger
[0] International
[1] Nordamerika
[0] International –
Parameter 0-06 Gridtype [0] 200–240 V/50 Hz/IT-net
[1] 200–240 V/50 Hz/Delta
[2] 200–240 V/50 Hz
[10] 380–440 V/50 Hz/ITnet
[11] 380–440 V/50 Hz/
Delta
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/ITnet
[21] 440–480 V/50 Hz/
Delta
[22] 440–480 V/50 Hz
[30] 525–600 V/50 Hz/ITnet
[31] 525–600 V/50 Hz/
Delta
[32] 525–600 V/50 Hz
[100] 200–240 V/60 Hz/ITnet
[101] 200–240 V/60 Hz/
Delta
[102] 200–240 V/60 Hz
[110] 380–440 V/60 Hz/ITnet
[111] 380–440 V/60 Hz/
Delta
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/ITnet
[121] 440–480 V/60 Hz/
Delta
[122] 440–480 V/60 Hz
[130] 525–600 V/60 Hz/ITnet
[131] 525–600 V/60 Hz/
Delta
[132] 525–600 V/60 Hz
Størrelsesrelateret Vælg driftstilstand for genstart, når frekvensomformeren
igen sluttes til netspændingen efter en nedlukning.
6
6
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 67
Page 70

6
Programmering
Parameter Option Standard Anvendelse
Parameter 1-10 Motorkonstruktion
*[0] Asynchron
[1] PM,ikke-udpræg.SPM
[3] PM, udpræget IPM
VLT® HVAC Basic Drive FC 101
[0] Asynkron Indstilling af parameterværdien kan ændre følgende
parametre:
Parameter 1-01 Motorstyringsprincip.
•
Parameter 1-03 Momentkarakteristikker.
•
Parameter 1-08 Motorstyringsbåndbredde.
•
Parameter 1-14 Dæmpningsforstærkningsfaktor.
•
Parameter 1-15 Lav hastighed, ltertidskonstant
•
Parameter 1-16 Høj hastighed, ltertidskonstant
•
Parameter 1-17 Spændingsltertidskonst.
•
Parameter 1-20 Motoreekt.
•
Parameter 1-22 Motorspænding.
•
Parameter 1-23 Motorfrekvens.
•
Parameter 1-24 Motorstrøm.
•
Parameter 1-25 Nominel motorhastighed.
•
Parameter 1-26 Kont. nominelt motormoment.
•
Parameter 1-30 Statormodstand (Rs).
•
Parameter 1-33 Statorlækreaktans (X1).
•
Parameter 1-35 Hovedreaktans (Xh).
•
Parameter 1-37 d-akseinduktans (Ld).
•
Parameter 1-38 q-akseinduktans (Lq).
•
Parameter 1-39 Motorpoler.
•
Parameter 1-40 Modelektromot.kraft v. 1000 O/MIN.
•
Parameter 1-44 d-akseinduktans Sat. (LdSat).
•
Parameter 1-45 q-akseinduktans Sat. (LdSat).
•
Parameter 1-46 Positionsregistrer.forst..
•
Parameter 1-48 Strøm ved min. induktans for d-akse.
•
Parameter 1-49 Strøm ved min. induktans for q-akse.
•
Parameter 1-66 Min. strøm ved lav hastighed.
•
Parameter 1-70 Starttilstand.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Flying Start.
•
Parameter 1-80 Funktion ved stop.
•
Parameter 1-82 Min.-hastighed for funktion ved stop [Hz].
•
Parameter 1-90 Termisk motorbeskyttelse.
•
Parameter 2-00 DC-holde-/forvarmn.strøm.
•
Parameter 2-01 DC-bremsestrøm.
•
Parameter 2-02 DC-bremseholdetid.
•
Parameter 2-04 DC-bremseindkoblingshast..
•
Parameter 2-10 Bremsefunktion.
•
Parameter 4-14 Motorhastighed, høj grænse [Hz].
•
Parameter 4-19 Maks. udgangsfrekvens.
•
Parameter 4-58 Manglende motorfasefunktion.
•
Parameter 14-65 Derate af hast. f. dødtidskompensering.
•
68 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 71

Programmering Design Guide
Parameter Option Standard Anvendelse
Parameter 1-20 Motoreekt 0,12–110 kW/0,16–150 hk Størrelsesrelateret Angiv motoreekten ud fra typeskiltdata.
Parameter 1-22 Motorspænding 50–1.000 V Størrelsesrelateret Angiv motorspændingen ud fra typeskiltdata.
Parameter 1-23 Motorfrekvens 20–400 Hz Størrelsesrelateret Angiv motorfrekvensen ud fra typeskiltdata.
Parameter 1-24 Motorstrøm 0,01–10.000,00 A Størrelsesrelateret Angiv motorstrømmen ud fra typeskiltdata.
Parameter 1-25 Nominel
motorhastighed
Parameter 1-26 Kont. nominelt
motormoment
50–9.999 O/MIN Størrelsesrelateret Angiv motorens nominelle hastighed ud fra typeskiltdata.
0,1–1.000,0 Nm Størrelsesrelateret Denne parameter er tilgængelig, når
parameter 1-10 Motorkonstruktion er indstillet til valg, der
aktiverer tilstand med permanent magnetmotor.
BEMÆRK!
Ændres denne parameter, påvirkes andre parameterindstillinger.
Parameter 1-29 Automatisk
motortilpasning (AMA)
Parameter 1-30 Statormodstand
(Rs)
Parameter 1-37 d-akseinduktans
(Ld)
Parameter 1-38 q-akseinduktans
(Lq)
Parameter 1-39 Motorpoler 2–100 4 Indtast antallet af motorpoler.
Parameter 1-40 Modelektromot.kraft v. 1000 O/MIN
Parameter 1-42 Motorkabellængde
Parameter 1-44 d-akseinduktans
Sat. (LdSat)
Parameter 1-45 q-akseinduktans
Sat. (LdSat)
Parameter 1-46 Positionsregistrer.forst.
Parameter 1-48 Strøm ved min.
induktans for d-akse
Parameter 1-49 Strøm ved min.
induktans for q-akse
Parameter 1-70 Starttilstand [0] Rotordetektering
Se
parameter 1-29 Automatis
k motortilpasning (AMA).
0,000–99,990 Ω
0,000–1.000,000 mH Størrelsesrelateret Indtast værdien for d-akseinduktansen.
0,000–1.000,000 mH Størrelsesrelateret Indtast værdien for q-akseinduktansen.
10–9.000 V Størrelsesrelateret Fase til fase RMS, modelektromotorisk kraft ved 1.000 O/
0–100 m 50 m Indtast motorkabellængde.
0,000–1.000,000 mH Størrelsesrelateret Denne parameter svarer til induktansmætningen for Ld.
0,000–1.000,000 mH Størrelsesrelateret Denne parameter svarer til induktansmætningen af Lq.
20–200% 100% Justerer testpulsens højde under positionsdetektering ved
20–200% 100% Indtast induktansmætningspunktet.
20–200% 100% Denne parameter angiver d- og q-induktansværdiernes
[1] Parkering
O Udførelse af AMA optimerer motorens ydeevne.
Størrelsesrelateret Indstil statormodstandsværdien.
Værdien fås fra databladet for den permanente
magnetmotor.
MIN.
Ideelt set vil denne parameter have samme værdi som
parameter 1-37 d-akseinduktans (Ld). Hvis motorleverandøren oplyser en induktionskurve, skal
induktionsværdien, der er på 200 % af den nominelle
værdi, dog indtastes.
Ideelt set vil denne parameter have samme værdi som
parameter 1-38 q-akseinduktans (Lq). Hvis motorleverandøren oplyser en induktionskurve, skal
induktionsværdien, der er på 200 % af den nominelle
værdi, dog indtastes.
start.
mætningskurve. Fra 20–100 % af denne parameter vil
induktanserne være lineært approksimerede pga.
parameter 1-37 d-akseinduktans (Ld), parameter 1-38 qakseinduktans (Lq), parameter 1-44 d-akseinduktans Sat.
(LdSat) og parameter 1-45 q-akseinduktans Sat. (LdSat).
[0] Rotordetektering Vælg PM-motorens starttilstand.
6
6
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 69
Page 72

6
Programmering
Parameter Option Standard Anvendelse
Parameter 1-73 Flying Start [0] Deaktiveret
[1] Aktiveret
Parameter 3-02 Minimumreference
Parameter 3-03 Maksimumreference
Parameter 3-41 Rampe 1,
rampe-op-tid
Parameter 3-42 Rampe 1,
rampe-ned-tid
Parameter 4-12 Motorhastighed,
lav grænse [Hz]
Parameter 4-14 Motorhastighed,
høj grænse [Hz]
Parameter 4-19 Maks. udgangsfrekvens
Parameter 5-40 Funktionsrelæ Se parameter 5-40 Funkti-
Parameter 5-40 Funktionsrelæ Se parameter 5-40 Funkti-
Parameter 6-10 Klemme 53, lav
spænding
Parameter 6-11 Klemme 53, høj
spænding
Parameter 6-12 Klemme 53, lav
strøm
Parameter 6-13 Klemme 53, høj
strøm
Parameter 6-19 Terminal 53
mode
Parameter 30-22 Låst rotorbeskyttelse
Parameter 30-23 Registreringstid
for låst rotor [s]
-4.999,000–4.999,000 0 Minimumreferencen er den laveste værdi, der kan opnås
-4.999,000–4.999,000 50 Maksimumreferencen er den højeste værdi, der kan opnås
0,05–3.600,00 sek Størrelsesrelateret Hvis asynkron motor er valgt, er rampe op-tiden fra 0 til
0,05–3.600,00 sek Størrelsesrelateret For asynkrone motorer er rampe ned-tiden fra nominel
0,0–400,0 Hz 0 Hz Angiv minimumgrænsen for lav hastighed.
0,0–400,0 Hz 100 Hz Angiv maksimumgrænsen for høj hastighed.
0,0–400,0 Hz 100 Hz Angiv den maksimale udgangsfrekvensværdi. Hvis
onsrelæ.
onsrelæ.
0,00–10,00 V 0,07 V Indtast den spænding, der svarer til den lave referen-
0,00–10,00 V 10 V Angiv den spænding, der svarer til den høje referen-
0,00–20,00 mA 4 mA Angiv den strøm, der svarer til den lave referenceværdi.
0,00–20,00 mA 20 mA Angiv den strøm, der svarer til den høje referenceværdi.
[0] Strøm
[1] Spænding
[0] Ikke aktiv
[1] Aktiv
0,05–1 sek 0,10 sek
VLT® HVAC Basic Drive FC 101
[0] Deaktiveret Vælg [1] Aktiveret for at gøre frekvensomformeren i stand
til at fange en roterende motor i tilfælde af netudfald.
Vælg [0] Deaktiveret, hvis denne funktion ikke er
nødvendig. Når denne parameter er indstillet til [1]
Aktiveret, har parameter 1-71 Startforsink. og
parameter 1-72 Startfunktion ingen funktion.
Parameter 1-73 Flying Start er kun aktiveret i VVC+-tilstand.
ved at lægge samtlige referencer sammen.
ved at lægge samtlige referencer sammen.
den nominelle parameter 1-23 Motorfrekvens. Hvis der er
valgt PM-motor, er rampe op-tiden fra 0 til
parameter 1-25 Nominel motorhastighed.
parameter 1-23 Motorfrekvens til 0. For PM-motorer er
rampe ned-tiden fra parameter 1-25 Nominel motorhastighed til 0.
parameter 4-19 Maks. udgangsfrekvens er indstillet lavere
end parameter 4-14 Motorhastighed, høj grænse [Hz],
indstilles parameter 4-14 Motorhastighed, høj grænse [Hz] lig
med parameter 4-19 Maks. udgangsfrekvens automatisk.
[9] Alarm Vælg den funktion, der skal styre udgangsrelæ 1.
[5] Frekvensomformer kører
[1] Spænding Vælg, om klemme 53 skal bruges som strøm- eller
[0] O
Vælg den funktion, der skal styre udgangsrelæ 2.
ceværdi.
ceværdi.
spændingsindgang.
–
–
Tabel 6.4 Opsætningsguide til applikationer med åben sløjfe
70 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 73

6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is forced to be set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0010
s
3-42 Ramp1 ramp-down time
0010
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
130BC402.14
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
Off
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Configuration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[0]
200-240V/50Hz/Delta
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM motor
1-39 Motor Poles
8
%
04.66
Hz
Motor type = Asynchronous
Motor type = PM motor
Motor type = IPM
Motor type = SPM
1-44 d-axis Inductance Sat. (LdSat)
(1-70) Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
Off
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
1-42 Motor Cable Length
50
m
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
1-37 d-axis inductance(Lq)
5
mH
... the Wizard starts
... the Wizard starts
Programmering Design Guide
Opsætningsguide til applikationer med lukket sløjfe
6
6
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 71
Illustration 6.5 Opsætningsguide til applikationer med lukket sløjfe
Page 74

6
Programmering
Parameter Indstillingsområde Standard Anvendelse
Parameter 0-03 Regionale
indstillinger
Parameter 0-06 Gridtype [0]–[132] se Tabel 6.4. Valgt størrelse Vælg driftstilstand for genstart, når frekvensomformeren
Parameter 1-00 Kongurations-
tilstand
[0] International
[1] Nordamerika
[0] Åben sløjfe
[3] Lukket sløjfe
VLT® HVAC Basic Drive FC 101
[0] International –
igen sluttes til netspændingen efter en nedlukning.
[0] Åben sløjfe Vælg [3] Lukket sløjfe.
72 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 75

Programmering Design Guide
Parameter Indstillingsområde Standard Anvendelse
Parameter 1-10 Motorkonstruktion
*[0] Asynchron
[1] PM,ikke-udpræg.SPM
[3] PM, udpræget IPM
[0] Asynkron Indstilling af parameterværdien kan ændre følgende
parametre:
Parameter 1-01 Motorstyringsprincip.
•
Parameter 1-03 Momentkarakteristikker.
•
Parameter 1-08 Motorstyringsbåndbredde.
•
Parameter 1-14 Dæmpningsforstærkningsfaktor.
•
Parameter 1-15 Lav hastighed, ltertidskonstant
•
Parameter 1-16 Høj hastighed, ltertidskonstant
•
Parameter 1-17 Spændingsltertidskonst.
•
Parameter 1-20 Motoreekt.
•
Parameter 1-22 Motorspænding.
•
Parameter 1-23 Motorfrekvens.
•
Parameter 1-24 Motorstrøm.
•
Parameter 1-25 Nominel motorhastighed.
•
Parameter 1-26 Kont. nominelt motormoment.
•
Parameter 1-30 Statormodstand (Rs).
•
Parameter 1-33 Statorlækreaktans (X1).
•
Parameter 1-35 Hovedreaktans (Xh).
•
Parameter 1-37 d-akseinduktans (Ld).
•
Parameter 1-38 q-akseinduktans (Lq).
•
Parameter 1-39 Motorpoler.
•
Parameter 1-40 Modelektromot.kraft v. 1000 O/MIN.
•
Parameter 1-44 d-akseinduktans Sat. (LdSat).
•
Parameter 1-45 q-akseinduktans Sat. (LdSat).
•
Parameter 1-46 Positionsregistrer.forst..
•
Parameter 1-48 Strøm ved min. induktans for d-akse.
•
Parameter 1-49 Strøm ved min. induktans for q-akse.
•
Parameter 1-66 Min. strøm ved lav hastighed.
•
Parameter 1-70 Starttilstand.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Flying Start.
•
Parameter 1-80 Funktion ved stop.
•
Parameter 1-82 Min.-hastighed for funktion ved stop [Hz].
•
Parameter 1-90 Termisk motorbeskyttelse.
•
Parameter 2-00 DC-holde-/forvarmn.strøm.
•
Parameter 2-01 DC-bremsestrøm.
•
Parameter 2-02 DC-bremseholdetid.
•
Parameter 2-04 DC-bremseindkoblingshast..
•
Parameter 2-10 Bremsefunktion.
•
Parameter 4-14 Motorhastighed, høj grænse [Hz].
•
Parameter 4-19 Maks. udgangsfrekvens.
•
Parameter 4-58 Manglende motorfasefunktion.
•
Parameter 14-65 Derate af hast. f. dødtidskompensering.
•
6
6
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 73
Page 76

Programmering
Parameter Indstillingsområde Standard Anvendelse
Parameter 1-20 Motoreekt 0,09–110 kW Størrelsesrelateret Angiv motoreekten ud fra typeskiltdata.
Parameter 1-22 Motorspænding 50–1.000 V Størrelsesrelateret Angiv motorspændingen ud fra typeskiltdata.
Parameter 1-23 Motorfrekvens 20–400 Hz Størrelsesrelateret Angiv motorfrekvensen ud fra typeskiltdata.
Parameter 1-24 Motorstrøm 0–10.000 A Størrelsesrelateret Angiv motorstrømmen ud fra typeskiltdata.
Parameter 1-25 Nominel
motorhastighed
Parameter 1-26 Kont. nominelt
motormoment
50–9.999 O/MIN Størrelsesrelateret Angiv motorens nominelle hastighed ud fra typeskiltdata.
0,1–1.000,0 Nm Størrelsesrelateret Denne parameter er tilgængelig, når
VLT® HVAC Basic Drive FC 101
parameter 1-10 Motorkonstruktion er indstillet til valg, der
aktiverer tilstand med permanent magnetmotor.
BEMÆRK!
Ændres denne parameter, påvirkes andre parameterindstillinger.
6
Parameter 1-29 Automatisk
motortilpasning (AMA)
Parameter 1-30 Statormodstand
(Rs)
Parameter 1-37 d-akseinduktans
(Ld)
Parameter 1-38 q-akseinduktans
(Lq)
Parameter 1-39 Motorpoler 2–100 4 Indtast antallet af motorpoler.
Parameter 1-40 Modelektromot.kraft v. 1000 O/MIN
Parameter 1-42 Motorkabellængde
Parameter 1-44 d-akseinduktans
Sat. (LdSat)
Parameter 1-45 q-akseinduktans
Sat. (LdSat)
Parameter 1-46 Positionsregistrer.forst.
Parameter 1-48 Strøm ved min.
induktans for d-akse
Parameter 1-49 Strøm ved min.
induktans for q-akse
Parameter 1-70 Starttilstand [0] Rotordetektering
O Udførelse af AMA optimerer motorens ydeevne.
0–99,990 Ω
0,000–1.000,000 mH Størrelsesrelateret Indtast værdien for d-akseinduktansen.
0,000–1.000,000 mH Størrelsesrelateret Indtast værdien for q-akseinduktansen.
10–9.000 V Størrelsesrelateret Fase til fase RMS, modelektromotorisk kraft ved 1.000 O/
0–100 m 50 m Indtast motorkabellængde.
0,000–1.000,000 mH Størrelsesrelateret Denne parameter svarer til induktansmætningen for Ld.
0,000–1.000,000 mH Størrelsesrelateret Denne parameter svarer til induktansmætningen af Lq.
20–200% 100% Justerer testpulsens højde under positionsdetektering ved
20–200% 100% Indtast induktansmætningspunktet.
20–200% 100% Denne parameter angiver d- og q-induktansværdiernes
[1] Parkering
Størrelsesrelateret Indstil statormodstandsværdien.
Værdien fås fra databladet for den permanente
magnetmotor.
MIN.
Ideelt set vil denne parameter have samme værdi som
parameter 1-37 d-akseinduktans (Ld). Hvis motorleverandøren oplyser en induktionskurve, skal
induktionsværdien, der er på 200 % af den nominelle
værdi, dog indtastes.
Ideelt set vil denne parameter have samme værdi som
parameter 1-38 q-akseinduktans (Lq). Hvis motorleverandøren oplyser en induktionskurve, skal
induktionsværdien, der er på 200 % af den nominelle
værdi, dog indtastes.
start.
mætningskurve. Fra 20–100 % af denne parameter vil
induktanserne være lineært approksimerede pga.
parameter 1-37 d-akseinduktans (Ld), parameter 1-38 qakseinduktans (Lq), parameter 1-44 d-akseinduktans Sat.
(LdSat) og parameter 1-45 q-akseinduktans Sat. (LdSat).
[0] Rotordetektering Vælg PM-motorens starttilstand.
74 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 77

Programmering Design Guide
Parameter Indstillingsområde Standard Anvendelse
Parameter 1-73 Flying Start [0] Deaktiveret
[1] Aktiveret
Parameter 3-02 Minimumreference
Parameter 3-03 Maksimumreference
Parameter 3-10 Preset-reference -100–100% 0 Indtast sætpunktet.
Parameter 3-41 Rampe 1,
rampe-op-tid
Parameter 3-42 Rampe 1,
rampe-ned-tid
Parameter 4-12 Motorhastighed,
lav grænse [Hz]
Parameter 4-14 Motorhastighed,
høj grænse [Hz]
Parameter 4-19 Maks. udgangsfrekvens
Parameter 6-20 Klemme 54, lav
spænding
Parameter 6-21 Klemme 54, høj
spænding
Parameter 6-22 Klemme 54, lav
strøm
Parameter 6-23 Klemme 54, høj
strøm
Parameter 6-24 Klemme 54, lav
ref./feedb.-værdi
Parameter 6-25 Klemme 54, høj
ref./feedb.-værdi
Parameter 6-26 Klemme 54,
ltertidskonstant
Parameter 6-29 Klemme 54, tilst [0] Strøm
Parameter 20-81 PID normal/
inv. styring
Parameter 20-83 PI-starthast.
[Hz]
Parameter 20-93 PI-proportionalforst.
-4.999,000–4.999,000 0 Minimumreferencen er den laveste værdi, der kan opnås
-4.999,000–4.999,000 50 Maksimumreferencen er den højeste værdi, der kan opnås
0,05–3.600,0 sek Størrelsesrelateret Rampe op-tid fra 0 til den nominelle
0,05–3.600,0 sek Størrelsesrelateret Rampe ned-tid fra den nominelle
0,0–400,0 Hz 0,0 Hz Angiv minimumgrænsen for lav hastighed.
0,0–400,0 Hz 100 Hz Angiv maksimumgrænsen for høj hastighed.
0,0–400,0 Hz 100 Hz Angiv den maksimale udgangsfrekvensværdi. Hvis
0,00–10,00 V 0,07 V Indtast den spænding, der svarer til den lave referen-
0,00–10,00 V 10,00 V Angiv den spænding, der svarer til den høje referen-
0,00–20,00 mA 4,00 mA Angiv den strøm, der svarer til den lave referenceværdi.
0,00–20,00 mA 20,00 mA Angiv den strøm, der svarer til den høje referenceværdi.
-4999–4999 0 Indtast den feedbackværdi, der svarer til spændingen eller
-4999–4999 50 Indtast den feedbackværdi, der svarer til spændingen eller
0,00–10,00 sek 0,01 Indtast ltertidskonstanten.
[1] Spænding
[0] Normal
[1] Inverteret
0–200 Hz 0 Hz Indtast den motorhastighed, der skal opnås som
0,00–10,00 0,01 Indtast processtyringsenhedens proportionalforstærkning.
[0] Deaktiveret Vælg [1] Aktiveret for at gøre frekvensomformeren i stand
til at fange en roterende motor i for eksempel ventilatorapplikationer. Når PM er valgt, er denne parameter
aktiveret.
ved at lægge samtlige referencer sammen.
ved at lægge samtlige referencer sammen.
parameter 1-23 Motorfrekvens for asynkrone motorer.
Rampe op-tid fra 0 til parameter 1-25 Nominel motorha-
stighed for PM-motorer.
parameter 1-23 Motorfrekvens til 0 for asynkrone motorer.
Rampe ned-tid fra parameter 1-25 Nominel motorhastighed
til 0 for PM-motorer.
parameter 4-19 Maks. udgangsfrekvens er indstillet lavere
end parameter 4-14 Motorhastighed, høj grænse [Hz],
indstilles parameter 4-14 Motorhastighed, høj grænse [Hz] lig
med parameter 4-19 Maks. udgangsfrekvens automatisk.
ceværdi.
ceværdi.
strømmen, der er indstillet i parameter 6-20 Klemme 54, lav
spænding/parameter 6-22 Klemme 54, lav strøm.
strømmen, der er indstillet i parameter 6-21 Klemme 54, høj
spænding/parameter 6-23 Klemme 54, høj strøm.
[1] Spænding Vælg, om klemme 54 skal bruges som strøm- eller
spændingsindgang.
[0] Normal Vælg [0] Normal for at indstille processtyringen til
forøgelse af udgangshastigheden, når procesfejlen er
positiv. Vælg [1] Inverteret for at mindske udgangshastigheden.
startsignal for igangsættelse af PI-styring.
Der opnås hurtig styring ved kraftig forstærkning. Hvis
forstærkningen er for høj, kan processen imidlertid blive
ustabil.
6
6
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 75
Page 78

Programmering
Parameter Indstillingsområde Standard Anvendelse
Parameter 20-94 PI Integral
Time
Parameter 30-22 Låst rotorbeskyttelse
Parameter 30-23 Registreringstid
for låst rotor [s]
Tabel 6.5 Opsætningsguide til applikationer med lukket sløjfe
0,1–999,0 sek 999,0 sek Angiv integrationstiden for processtyringen. Der opnås
[0] Ikke aktiv
[1] Aktiv
0,05–1,00 sek 0,10 sek
VLT® HVAC Basic Drive FC 101
hurtig styring ved en kort integrationstid, men hvis
integrationstiden er for kort, bliver processen ustabil. En
for lang integrationstid deaktiverer integrationshandlingen.
[0] O
–
–
Motoropsætning
Opsætningsguiden til motoren leder brugeren gennem de nødvendige motorparametre.
6
Parameter Indstillingsområde Standard Anvendelse
Parameter 0-03 Regionale
indstillinger
Parameter 0-06 Gridtype [0]–[132] se Tabel 6.4. Størrelsesrelateret Vælg driftstilstand for genstart, når frekvensomformeren
[0] International
[1] Nordamerika
0 –
igen sluttes til netspændingen efter en nedlukning.
76 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 79

Programmering Design Guide
Parameter Indstillingsområde Standard Anvendelse
Parameter 1-10 Motorkonstruktion
*[0] Asynkron
[1] PM,ikke-udpræg.SPM
[3] PM, udpræget IPM
[0] Asynkron Indstilling af parameterværdien kan ændre følgende
parametre:
Parameter 1-01 Motorstyringsprincip.
•
Parameter 1-03 Momentkarakteristikker.
•
Parameter 1-08 Motorstyringsbåndbredde.
•
Parameter 1-14 Dæmpningsforstærkningsfaktor.
•
Parameter 1-15 Lav hastighed, ltertidskonstant
•
Parameter 1-16 Høj hastighed, ltertidskonstant
•
Parameter 1-17 Spændingsltertidskonst.
•
Parameter 1-20 Motoreekt.
•
Parameter 1-22 Motorspænding.
•
Parameter 1-23 Motorfrekvens.
•
Parameter 1-24 Motorstrøm.
•
Parameter 1-25 Nominel motorhastighed.
•
Parameter 1-26 Kont. nominelt motormoment.
•
Parameter 1-30 Statormodstand (Rs).
•
Parameter 1-33 Statorlækreaktans (X1).
•
Parameter 1-35 Hovedreaktans (Xh).
•
Parameter 1-37 d-akseinduktans (Ld).
•
Parameter 1-38 q-akseinduktans (Lq).
•
Parameter 1-39 Motorpoler.
•
Parameter 1-40 Modelektromot.kraft v. 1000 O/MIN.
•
Parameter 1-44 d-akseinduktans Sat. (LdSat).
•
Parameter 1-45 q-akseinduktans Sat. (LdSat).
•
Parameter 1-46 Positionsregistrer.forst..
•
Parameter 1-48 Strøm ved min. induktans for d-akse.
•
Parameter 1-49 Strøm ved min. induktans for q-akse.
•
Parameter 1-66 Min. strøm ved lav hastighed.
•
Parameter 1-70 Starttilstand.
•
Parameter 1-72 Startfunktion.
•
Parameter 1-73 Flying Start.
•
Parameter 1-80 Funktion ved stop.
•
Parameter 1-82 Min.-hastighed for funktion ved stop [Hz].
•
Parameter 1-90 Termisk motorbeskyttelse.
•
Parameter 2-00 DC-holde-/forvarmn.strøm.
•
Parameter 2-01 DC-bremsestrøm.
•
Parameter 2-02 DC-bremseholdetid.
•
Parameter 2-04 DC-bremseindkoblingshast..
•
Parameter 2-10 Bremsefunktion.
•
Parameter 4-14 Motorhastighed, høj grænse [Hz].
•
Parameter 4-19 Maks. udgangsfrekvens.
•
Parameter 4-58 Manglende motorfasefunktion.
•
Parameter 14-65 Derate af hast. f. dødtidskompensering.
•
6
6
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 77
Page 80

Programmering
Parameter Indstillingsområde Standard Anvendelse
Parameter 1-20 Motoreekt 0,12–110 kW/0,16–150hkStørrelsesrelateret Angiv motoreekten ud fra typeskiltdata.
Parameter 1-22 Motorspænding 50–1.000 V Størrelsesrelateret Angiv motorspændingen ud fra typeskiltdata.
Parameter 1-23 Motorfrekvens 20–400 Hz Størrelsesrelateret Angiv motorfrekvensen ud fra typeskiltdata.
Parameter 1-24 Motorstrøm 0,01–10.000,00 A Størrelsesrelateret Angiv motorstrømmen ud fra typeskiltdata.
Parameter 1-25 Nominel
motorhastighed
Parameter 1-26 Kont. nominelt
motormoment
50–9.999 O/MIN Størrelsesrelateret Angiv motorens nominelle hastighed ud fra typeskiltdata.
0,1–1.000,0 Nm Størrelsesrelateret Denne parameter er tilgængelig, når
VLT® HVAC Basic Drive FC 101
parameter 1-10 Motorkonstruktion er indstillet til valg, der
aktiverer tilstand med permanent magnetmotor.
BEMÆRK!
Ændres denne parameter, påvirkes andre parameterindstillinger.
6
Parameter 1-30 Statormodstand
(Rs)
Parameter 1-37 d-akseinduktans
(Ld)
Parameter 1-38 q-akseinduktans
(Lq)
Parameter 1-39 Motorpoler 2–100 4 Indtast antallet af motorpoler.
Parameter 1-40 Modelektromot.kraft v. 1000 O/MIN
Parameter 1-42 Motorkabellængde
Parameter 1-44 d-akseinduktans
Sat. (LdSat)
Parameter 1-45 q-akseinduktans
Sat. (LdSat)
Parameter 1-46 Positionsregistrer.forst.
Parameter 1-48 Strøm ved min.
induktans for d-akse
Parameter 1-49 Strøm ved min.
induktans for q-akse
Parameter 1-70 Starttilstand [0] Rotordetektering
Parameter 1-73 Flying Start [0] Deaktiveret
Parameter 3-41 Rampe 1,
rampe-op-tid
0–99,990 Ω
0,000–1.000,000 mH Størrelsesrelateret Indtast værdien for d-akseinduktansen. Værdien fås fra
0,000–1.000,000 mH Størrelsesrelateret Indtast værdien for q-akseinduktansen.
10–9.000 V Størrelsesrelateret Fase til fase RMS, modelektromotorisk kraft ved 1.000 O/
0–100 m 50 m Indtast motorkabellængde.
0,000–1.000,000 mH Størrelsesrelateret Denne parameter svarer til induktansmætningen for Ld.
0,000–1.000,000 mH Størrelsesrelateret Denne parameter svarer til induktansmætningen af Lq.
20–200% 100% Justerer testpulsens højde under positionsdetektering ved
20–200% 100% Indtast induktansmætningspunktet.
20–200% 100% Denne parameter angiver d- og q-induktansværdiernes
[1] Parkering
[1] Aktiveret
0,05–3.600,0 sek Størrelsesrelateret Rampe op-tid fra 0 til den nominelle
Størrelsesrelateret Indstil statormodstandsværdien.
databladet for den permanente magnetmotor.
MIN.
Ideelt set vil denne parameter have samme værdi som
parameter 1-37 d-akseinduktans (Ld). Hvis motorleverandøren oplyser en induktionskurve, skal
induktionsværdien, der er på 200 % af den nominelle
værdi, dog indtastes.
Ideelt set vil denne parameter have samme værdi som
parameter 1-38 q-akseinduktans (Lq). Hvis motorleverandøren oplyser en induktionskurve, skal
induktionsværdien, der er på 200 % af den nominelle
værdi, dog indtastes.
start.
mætningskurve. Fra 20–100 % af denne parameter vil
induktanserne være lineært approksimerede pga.
parameter 1-37 d-akseinduktans (Ld), parameter 1-38 qakseinduktans (Lq), parameter 1-44 d-akseinduktans Sat.
(LdSat) og parameter 1-45 q-akseinduktans Sat. (LdSat).
[0] Rotordetektering Vælg PM-motorens starttilstand.
[0] Deaktiveret Vælg [1] Aktiveret for at aktivere frekvensomformeren til at
fange en roterende motor.
parameter 1-23 Motorfrekvens.
78 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 81

Programmering Design Guide
Parameter Indstillingsområde Standard Anvendelse
Parameter 3-42 Rampe 1,
rampe-ned-tid
Parameter 4-12 Motorhastighed,
lav grænse [Hz]
Parameter 4-14 Motorhastighed,
høj grænse [Hz]
Parameter 4-19 Maks. udgangsfrekvens
Parameter 30-22 Låst rotorbeskyttelse
Parameter 30-23 Registreringstid
for låst rotor [s]
Tabel 6.6 Opsætningsguiden til motoren, indstillinger
0,05–3.600,0 sek Størrelsesrelateret Rampe ned-tid fra nominel parameter 1-23 Motorfrekvens
til 0.
0,0–400,0 Hz 0,0 Hz Angiv minimumgrænsen for lav hastighed.
0,0–400,0 Hz 100,0 Hz Angiv maksimumgrænsen for høj hastighed.
0,0–400,0 Hz 100,0 Hz Angiv den maksimale udgangsfrekvensværdi. Hvis
parameter 4-19 Maks. udgangsfrekvens er indstillet lavere
end parameter 4-14 Motorhastighed, høj grænse [Hz],
indstilles parameter 4-14 Motorhastighed, høj grænse [Hz] lig
med parameter 4-19 Maks. udgangsfrekvens automatisk.
[0] Ikke aktiv
[1] Aktiv
0,05–1,00 sek 0,10 sek
[0] O
–
–
6
6
Valgte ændringer
Under Valgte ændringer vises alle de parametre, der er
ændret i forhold til fabriksindstillingen.
Listen viser kun de parametre, der er ændret
•
under redigering af den aktuelle opsætning.
Parametre, der er blevet nulstillet til fabriksindstil-
•
lingerne, vises ikke.
Meddelelsen Tom betyder, at ingen parametre er
•
blevet ændret.
Ændring af parameterindstillinger
1. Tryk på [Menu]-tasten, indtil indikatoren på
displayet er over Quick Menu, for at skifte til
kvikmenuen.
2.
Tryk på [▲] [▼] for at vælge guiden, opsætning i
lukket sløjfe, motoropsætning eller valgte
ændringer.
3. Tryk på [OK].
4.
Tryk på [▲] [▼] for at gennemgå parametrene i
kvikmenuen.
5. Tryk på [OK] for at vælge en parameter.
6.
Tryk på [▲] [▼] for at ændre værdien for parameterindstillingen.
7. Tryk på [OK] for at acceptere ændringen.
8. Tryk på [Back] to gange for at gå til Status, eller
tryk på [Menu] én gang for at gå til
hovedmenuen.
Fra hovedmenuen er der adgang til samtlige parametre
1. Tryk på [Menu]-tasten, indtil indikatoren på
displayet er over hovedmenuen.
2.
Tryk på [▲] [▼] for at gå igennem parametergrupperne.
3. Tryk på [OK] for at vælge en parametergruppe.
4.
Tryk på [▲] [▼] for at gå igennem parametrene i
den valgte gruppe.
5. Tryk på [OK] for at vælge parameteren.
6.
Tryk på [▲] [▼] for at indstille eller ændre parameterværdien.
7. Tryk på [OK] for at acceptere ændringen.
6.3.3 Hovedmenu
Tryk på [Menu] for at få adgang til hovedmenuen, og
programmér alle parametre. Hovedmenuparametrene er
tilgængelige direkte, medmindre der er oprettet en
adgangskode via parameter 0-60 Hovedmenu-adgangskode.
Til de este applikationer er det ikke nødvendigt med
adgang til hovedmenuparametrene. Kvikmenuen giver den
nemmeste og hurtigste adgang til de parametre, der typisk
skal anvendes.
6.4 Hurtig overførsel af
parameterindstillinger mellem ere
frekvensomformere
Når opsætningen af en frekvensomformer er gennemført,
skal dataene gemmes i LCP'et eller på en pc via MCT 10opsætningssoftware.
Dataoverførsel fra frekvensomformer til LCP
1. Gå til parameter 0-50 LCP-kopi.
2. Tryk på [OK].
3. Vælg [1] Alle til LCP.
4. Tryk på [OK].
Slut LCP'et til en anden frekvensomformer, og kopiér
ligeledes parameterindstillingerne til denne frekvensomformer.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 79
Page 82

Programmering
VLT® HVAC Basic Drive FC 101
6
Dataoverførsel fra LCP til frekvensomformer
1. Gå til parameter 0-50 LCP-kopi.
2. Tryk på [OK].
3. Vælg [2] Alle fra LCP.
4. Tryk på [OK].
6.5 Aæsning og programmering af
indekserede parametre
Vælg parameteren, tryk på [OK], og tryk på tasterne [
for at rulle igennem de indekserede værdier. En parameterværdi kan ændres ved at vælge den indekserede værdi
og trykke på [OK]. Rediger værdien ved at trykke på [▲]/
[▼]. Tryk på [OK] for at acceptere den nye indstilling. Tryk
på [Cancel] for at annullere. Tryk på [Back] for at forlade
parameteren.
▲
]/[▼]
6.6 Initialisering til fabriksindstillinger
Der er to måder, hvorpå man kan initialisere frekvensomformeren til fabriksindstilling.
Anbefalet initialisering
1. Vælg parameter 14-22 Driftstilstand.
2. Tryk på [OK].
3. Vælg [2] Initialisering, og tryk på [OK].
4. Sluk for frekvensomformeren, og vent, indtil lyset
i displayet går ud.
5. Tilslut netforsyningen igen. Frekvensomformeren
er nu nulstillet, undtagen følgende parametre:
Parameter 1-06 Højredrejende
•
Parameter 8-30 Protokol
•
Parameter 8-31 Adresse
•
Parameter 8-32 Baud-hast.
•
Parameter 8-33 Paritet/stop-bits
•
Parameter 8-35 Min. svartidsforsinkelse
•
Parameter 8-36 Maks. svarforsinkelse
•
Parameter 8-37 Maksimum forsinkelse
•
mellem tegn
Parameter 8-70 BACnet-enhedsforekomst
•
Parameter 8-72 MS/TP Maks. mastere
•
Parameter 8-73 MS/TP Maks. info.-rammer
•
Parameter 8-74 "I-am" -tjeneste
•
Parameter 8-75 Initialisering adgangskode
•
Parameter 15-00 Driftstimer til
•
parameter 15-05 Antal overspændinger
Parameter 15-03 Antal indkoblinger
•
Parameter 15-04 Antal overtemperaturer
•
Parameter 15-05 Antal overspændinger
•
Parameter 15-30 Alarm-log: Fejlkode
•
Parametergruppe 15-4* Apparatident.
•
Parameter 18-10 Fire mode log: Hændelse
•
Tongerinitialisering
Frekvensomformeren kan også initialiseres til fabriksindstillingerne via tongerinitialisering:
1. Sluk frekvensomformeren.
2. Tryk på [OK] og [Menu].
3. Start frekvensomformeren, mens tasterne stadig
holdes inde i 10 sek.
4. Frekvensomformeren er nu nulstillet, undtagen
følgende parametre:
Parameter 1-06 Højredrejende
•
Parameter 15-00 Driftstimer
•
Parameter 15-03 Antal indkoblinger
•
Parameter 15-04 Antal overtemperaturer
•
Parameter 15-05 Antal overspændinger
•
Parametergruppe 15-4* Apparatident.
•
Parameter 18-10 Fire mode log: Hændelse
•
Initialisering af parametre bekræftes af alarm 80, Apparat
init. i displayet, når strømmen har været afbrudt og tændt
igen.
80 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 83

61 68 69
N
P
COMM. GND
130BB795.10
130BG049.10
Installation og opsætning a... Design Guide
7 Installation og opsætning af RS485
7.1 RS485
7.1.1 Oversigt
RS485 er en busgrænseade med to ledninger, som er
kompatibel med multidrop-netværkstopologi. Noder kan
med andre ord tilsluttes som en bus eller via dropkabler
fra en fælles linje. Der kan tilsluttes i alt 32 noder pr.
netværkssegment.
Forstærkere opdeler netværkssegmenter.
BEMÆRK!
Hver enkelt forstærker fungerer som en node i det
segment, den er installeret i. Hver node, der er tilsluttet i
et givent netværk, skal have en unik nodeadresse på
tværs af alle segmenter.
Terminér hvert segment i begge ender ved hjælp af enten
frekvensomformerens termineringskontakt (S801) eller et
forspændt termineringsmodstandsnetværk. Brug altid
skærmede, snoede kabler (STP) til buskabelføring, og følg
almindelig god installationspraksis.
Det er vigtigt at oprette en lavimpedant jordtilslutning af
skærmen ved hver node. Slut en stor
skærmen til jord, f.eks. med en kabelbøjle eller en ledende
kabelbøsning. Anvend potentialeudlignende kabler for at
bevare det samme jordpotentiale i hele netværket, især i
installationer med lange kabler.
For at forhindre impedansforskydning skal der altid bruges
samme type kabel gennem hele netværket. Hvis der sluttes
en motor til frekvensomformeren, skal der altid anvendes
et skærmet motorkabel.
overade på
7.1.2 Netværksforbindelse
Slut frekvensomformeren til RS485-netværket på følgende
måde (se også Illustration 7.1):
1. Slut signalkablerne til klemme 68 (P+) og 69 (N-)
på frekvensomformerens hovedstyrekort.
2. Tilslut kabelskærmen til kabelbøjlerne.
BEMÆRK!
Anvend skærmede, snoede kabelpar for at reducere
støjen mellem lederne.
7 7
Illustration 7.1 Netværksforbindelse
7.1.3 Opsætning af
frekvensomformerhardware
Anvend DIP switchen til terminering på frekvensomformerens hovedstyrekort til at terminere RS485-bussen.
Kabel Skærmet, snoet (STP)
Impedans [Ω]
Kabellængde
[m (fod)]
Tabel 7.1 Kabelspecikationer
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 81
120
Maksimum 1.200 m (3.937) (inkl. dropkabler).
Maksimum 500 m (1.640) station-til-station
Illustration 7.2 Fabriksindstilling for afbryder
Fabriksindstillingen for DIP switchen er OFF.
Page 84

195NA493.11
1
2
90°
Installation og opsætning a...
VLT® HVAC Basic Drive FC 101
7.1.4 Parameterindstillinger for Modbus-
7.1.5 EMC-retningslinjer
kommunikation
BEMÆRK!
Parameter Funktion
Parameter 8-30 Prot
okol
Parameter 8-31 Adr
esse
Vælg den applikationsprotokol, der skal køre
for RS485-grænseaden.
Angiv nodeadressen.
BEMÆRK!
Adresseområdet afhænger af den
protokol, der er valgt i
parameter 8-30 Protokol.
Parameter 8-32 Bau
d-hast.
Angiv baud-hastighed.
BEMÆRK!
Standard-baud-hastigheden afhænger
af den protokol, der er valgt i
parameter 8-30 Protokol.
Følg altid relevant national og lokal lovgivning
vedrørende beskyttelsesjording. Hvis kablerne ikke
jordes korrekt, kan det resultere i kommunikationsbrist
eller skade på udstyret. Hold RS485-kommunikationskablet på afstand af motorkabler og
bremsemodstandskabler for at undgå kobling af højfrekvensstøj mellem kablerne. Normalt er en afstand på
200 mm (8 tommer) tilstrækkelig. Sørg for den størst
mulige afstand mellem kablerne, især hvor kabler løber
parallelt over lange afstande. Hvis krydsning ikke kan
undgås, skal RS485-kablet krydse motor- og bremsemodstandskabler i en vinkel på 90°.
77
Parameter 8-33 Pari
tet/stop-bits
Angiv pariteten og antallet af stopbit.
BEMÆRK!
Standardindstillingen afhænger af den
protokol, der er valgt i
parameter 8-30 Protokol.
Parameter 8-35 Min
. svartidsforsinkelse
Parameter 8-36 Ma
ks. svarforsinkelse
Parameter 8-37 Ma
ksimum forsinkelse
mellem tegn
Angiv en minimumforsinkelsestid mellem
modtagelse af en forespørgsel og afsendelse
af et svar. Denne funktion er beregnet til at
overvinde forsinkelser i modemsvartider.
Angiv en maksimumforsinkelsestid mellem
afsendelse af en forespørgsel og modtagelse
af et svar.
Angiv en maksimumforsinkelsestid mellem
to modtagne byte for at sikre timeout, hvis
transmissionen afbrydes.
BEMÆRK!
Standardindstillingen afhænger af den
protokol, der er valgt i
parameter 8-30 Protokol.
1 Fieldbuskabel
Tabel 7.2 Parameterindstillinger for Modbus-kommunikation
2 Minimumafstand på 200 mm (8 tommer)
Illustration 7.3 Minimumafstand mellem kommunikation og
strømkabler
82 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 85

STX LGE ADR D ATA BCC
195NA099.10
Installation og opsætning a... Design Guide
7.2 FC-protokol
7.2.1 Oversigt
FC-protokollen, også kendt som FC-bussen eller standardbussen, er Danfoss
adgangsteknik i overensstemmelse med master-slaveprincippet for kommunikation via en seriel bus.
Der kan tilsluttes en master og maksimalt 126 slaver til
bussen. Masteren vælger de enkelte slaver via et
adressetegn i telegrammet. En slave kan ikke selv overføre,
uden at den først bliver anmodet om at gøre det, og
direkte meddelelsesoverførsel mellem de enkelte slaver er
ikke mulig. Kommunikation foregår i halv duplex-tilstand.
Master-funktionen kan ikke overføres til en anden node
(enkelt master-system).
Det fysiske lag er RS485 og anvender derved RS485-porten,
der er indbygget i frekvensomformeren. FC-protokollen
understøtter forskellige telegramformater:
Et kort format på otte byte til procesdata.
•
Et langt format på 16 byte, der også omfatter en
•
parameterkanal.
Et format til tekst.
•
-standardeldbussen. Den denerer en
7.2.2 FC med Modbus RTU
Parameterindstillinger til aktivering af
7.3
protokol
Indstil følgende parametre for at aktivere FC-protokollen
for frekvensomformeren.
Parameter Indstilling
Parameter 8-30 Protokol FC
Parameter 8-31 Adresse 1–126
Parameter 8-32 Baud-hast. 2400–115200
Parameter 8-33 Paritet/stop-bits
Tabel 7.3 Parametre til aktivering af protokol
Lige paritet, 1 stopbit
(standard)
7.4 Rammestruktur for FC-
protokolmeddelelser
7.4.1 Indhold af et tegn (byte)
Hvert tegn, der overføres, begynder med en startbit.
Derefter overføres der otte databits, hvilket svarer til en
byte. Hvert tegn sikres via en paritetsbit. Denne bit
indstilles til 1, når den når paritet. Paritet er, når der er et
lige antal 1'ere i 8-databittene og paritetsbitten i alt. Et
tegn afsluttes af en stopbit og består derfor af 11 bits i alt.
7 7
FC-protokollen giver adgang til frekvensomformerens
styreord og busreference.
Styreordet gør det muligt for Modbus-masteren at styre
ere vigtige funktioner i frekvensomformeren:
Start.
•
Standsning af frekvensomformeren på forskellige
•
måder:
- Friløbsstop.
- Hurtigt stop.
- DC-bremsestop.
- Normalt stop (rampestop).
Nulstilling efter et fejltrip.
•
Drift ved forskellige forudindstillede hastigheder.
•
Baglæns kørsel.
•
Ændring af aktivt setup.
•
Styring af de to relæer, der er indbygget i
•
frekvensomformeren.
Busreferencen anvendes normalt til hastighedsstyring. Det
er også muligt at få adgang til parametrene, læse deres
værdier og eventuelt skrive værdier til dem. Adgangen til
parametrene giver en række styringsoptioner, herunder
styring af frekvensomformerens sætpunkt, når den interne
PI-regulering anvendes.
Illustration 7.4 Indhold af et tegn
7.4.2 Telegramstruktur
Hvert telegram har følgende struktur:
Starttegn (STX) = 02 hex.
•
En byte, der betegner telegramlængden (LGE).
•
En byte, der betegner frekvensomformeradressen
•
(ADR).
Flere databytes (variabelt, afhængigt af telegramtypen)
følger.
Telegrammet afsluttes af en datakontrolbyte (BCC).
Illustration 7.5 Telegramstruktur
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 83
Page 86

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 B CCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Installation og opsætning a...
7.4.3 Telegramlængde (LGE)
VLT® HVAC Basic Drive FC 101
Telegramlængden er antallet af databytes plus
Illustration 7.7 Parameterblok
adressebyten ADR og datakontrolbyten BCC.
4 databytes LGE = 4+1+1 = 6 bytes
12 databytes LGE = 12+1+1 = 14 bytes
Telegrammer, der indeholder tekst
Tabel 7.4 Længde på telegrammer
1) De 10 repræsenterer de faste tegn, mens n er variabel (afhængigt
af tekstlængden).
101)+n bytes
7.4.4 Frekvensomformeradresse (ADR)
Adresseformat 1–126
Bit 7 = 1 (adresseformat 1–126 aktiv).
•
77
Bit 0–6 = frekvensomformeradresse 1–126.
•
Bit 0–6 = 0 broadcast.
•
Tekstblok
Tekstblokken bruges til at læse eller skrive tekst via
datablokken.
Illustration 7.8 Tekstblok
7.4.7 PKE-feltet
PKE-feltet indeholder to underfelter:
Parameterkommando og svar (AK)
•
Parameternummer (PNU)
•
Slaven returnerer adressebyten uændret til masteren i
svartelegrammet.
7.4.5 Datakontrolbyte (BCC)
Kontrolsummen beregnes som en XOR-funktion. Inden den
første byte i telegrammet modtages, er den beregnede
kontrolsum 0.
7.4.6 Datafeltet
Datablokkenes struktur afhænger af telegramtypen. Der
ndes tre telegramtyper, som nder anvendelse for både
styretelegrammer (master⇒slave) og svartelegrammer
(slave⇒master).
De tre telegramtyper er:
Procesblok (PCD)
PCD består af datablokke på
omfatter:
•
•
Illustration 7.6 Procesblok
Parameterblok
Parameterblokken anvendes til at overføre parametre
mellem master og slave. Datablokken består af 12 bytes
(seks ord) og omfatter også procesblokken.
re bytes (to ord) og
Styreord og referenceværdi (fra master til slave).
Statusord og aktuel udgangsfrekvens (fra slave til
master).
Illustration 7.9 PKE-feltet
Bit 12–15 overfører parameterkommandoer fra master til
slave og returnerer behandlede svar fra slave til master.
Parameterkommandoer, master⇒slave
Bitnummer Parameterkommando
15 14 13 12
0 0 0 0 Ingen kommando.
0 0 0 1 Læs parameterværdi.
0 0 1 0 Skriv parameterværdi i RAM (ord).
0 0 1 1 Skriv parameterværdi i RAM (dobbeltord).
1 1 0 1
1 1 1 0
1 1 1 1 Læs tekst.
Tabel 7.5 Parameterkommandoer
Skriv parameterværdi i RAM og EEPROM
(dobbeltord).
Skriv parameterværdi i RAM og EEPROM
(ord).
84 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 87

Installation og opsætning a... Design Guide
Svar slave⇒master
Bitnummer Svar
15 14 13 12
0 0 0 0 Intet svar.
0 0 0 1 Parameterværdi overført (ord).
0 0 1 0 Parameterværdi overført (dobbeltord).
0 1 1 1 Kommandoen kan ikke udføres.
1 1 1 1 Tekst overført.
Tabel 7.6 Svar
Hvis kommandoen ikke kan udføres, sender slaven svaret
0111 Kommando kan ikke udføres og afgiver følgende
fejlrapporter i Tabel 7.7.
Fejlkode FC-specikation
0 Ugyldigt parameternummer.
1 Parameter kan ikke ændres.
2 Øvre eller nedre grænse er overskredet.
3 Underindeks er ødelagt.
4 Ingen array.
5 Forkert datatype.
6 Ikke brugt.
7 Ikke brugt.
9 Beskrivelseselement er ikke tilgængeligt.
11 Ingen skriveadgang til parameter.
15 Ingen tekst tilgængelig.
17 Ikke gældende under kørsel.
18 Andre fejl.
100 –
>100 –
130 Ingen busadgang til denne parameter.
131
132 Ingen LCP-adgang.
252 Ukendt seer.
253 Forespørgsel understøttes ikke.
254 Ukendt attribut.
255 Ingen fejl.
Tabel 7.7 Slaverapport
Det er ikke muligt at skrive til fabriksopsætning.
7.4.8 Parameternummer (PNU)
7.4.9 Indeks (IND)
Indekset anvendes sammen med parameternummeret til at
opnå læse-/skriveadgang til parametre, der har et indeks,
for eksempel parameter 15-30 Alarm-log: Fejlkode. Indekset
består af to bytes: en lav byte og en høj byte.
Kun den lave byte anvendes som indeks.
7.4.10 Parameterværdi (PWE)
Parameterværdiblokken består af to ord (re byte), og
værdien afhænger af den denerede kommando (AK).
Masteren anmoder om en parameterværdi, hvis PWEblokken ikke indeholder en værdi. Hvis en parameterværdi
(skrivekommando) skal ændres, skrives den nye værdi i
PWE-blokken og sendes fra masteren til slaven.
Når en slave svarer på en parameteranmodning
(læsekommando), overføres den aktuelle parameterværdi i
PWE-blokken og returneres til masteren. Hvis en parameter
indeholder
ere dataoptioner, for eksempel
parameter 0-01 Sprog, vælges dataværdien ved at indtaste
værdien i PWE-blokken. Ved hjælp af seriel kommunikation
er det kun muligt at læse parametre, som indeholder
datatype 9 (tekststreng).
Parameter 15-40 FC-type til parameter 15-53 Eektkortserienummer indeholder datatype 9.
Læs for eksempel kapslingsstørrelsen og netspændingsområdet i parameter 15-40 FC-type. Når der overføres
(læses) en tekststreng, er telegramlængden variabel, og
teksterne har forskellig længde. Telegramlængden er
deneret i telegrammets anden byte (LGE). Ved brug af
tekstoverførsel angiver indekstegnet, om der er tale om en
læse- eller skrivekommando.
For at kunne læse en tekst via PWE-blokken skal parameterkommandoen (AK) angives til F hex. Indekstegnets høje
byte skal være 4.
7.4.11 Datatyper, der understøttes af
frekvensomformeren
7 7
Bitnumre 0–11 overfører parameternumre. Den
pågældende parameters funktion fremgår af parameterbe-
Uden fortegn betyder, at der intet fortegn er med i
telegrammet.
skrivelsen i kapitel 6 Programmering.
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 85
Page 88

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Installation og opsætning a...
VLT® HVAC Basic Drive FC 101
Datatyper Beskrivelse
3 16-bit heltal
4 32-bit heltal
5 8-bit uden fortegn
6 16-bit uden fortegn
7 32-bit uden fortegn
9 Tekststreng
Tabel 7.8 Datatyper
Eksempler
7.5
7.5.1 Skrivning af en parameterværdi
Skift parameter 4-14 Motorhastighed, høj grænse [Hz] til
100 Hz.
Skriv data i EEPROM.
PKE = E19E hex – Skriv enkelt ord i
parameter 4-14 Motorhastighed, høj grænse [Hz]:
7.4.12 Konvertering
Programming guide indeholder beskrivelser af parametre i
hver parametergruppe. Parameterværdier overføres kun
som heltal. Konverteringsfaktorer bruges til at overføre
decimaler.
77
Parameter 4-12 Motorhastighed, lav grænse [Hz] har en
konverteringsfaktor på 0,1. Minimumfrekvensen kan
Dataværdi 1.000, svarende til 100 Hz, se
kapitel 7.4.12 Konvertering.
Telegrammet ser ud som Illustration 7.10.
IND = 0000 hex
•
PWEHIGH = 0000 hex.
•
PWELOW = 03E8 hex.
•
indstilles til 10 Hz ved at overføre værdien 100. En konverteringsfaktor på 0,1 betyder, at den overførte værdi ganges
med 0,1. Værdien 100 opfattes derfor som 10,0.
Konverteringsindeks Konverteringsfaktor
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Illustration 7.10 Telegram
BEMÆRK!
Parameter 4-14 Motorhastighed, høj grænse [Hz] er et
enkelt ord, og parameterkommandoen for skriv i
EEPROM er E. Parameter 4-14 Motorhastighed, høj grænse
[Hz] er 19E i hexadecimal.
Svaret fra slaven til masteren er vist i Illustration 7.11.
Tabel 7.9 Konvertering
7.4.13 Procesord (PCD)
Blokken af procesord er delt i to blokke på hver 16 bit, der
altid kommer i den angivne rækkefølge.
PCD 1 PCD 2
Styretelegram (master⇒slave-styreord)
Styretelegram (slave⇒master)-statusord
Tabel 7.10 Procesord (PCD)
Referenceværdi
Aktuel udgangsfrekvens
Illustration 7.11 Svar fra master
7.5.2 Læsning af en parameterværdi
Læs værdien i parameter 3-41 Rampe 1, rampe-op-tid.
PKE = 1155 hex – Læs parameterværdien i
parameter 3-41 Rampe 1, rampe-op-tid:
IND = 0000 hex
•
PWE
•
PWE
•
= 0000 hex.
HIGH
= 0000 hex.
LOW
86 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 89

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Installation og opsætning a... Design Guide
Illustration 7.12 Telegram
Hvis værdien i parameter 3-41 Rampe 1, rampe-op-tid er 10
sek, er svaret fra slaven til masteren vist i Illustration 7.13.
Hvis der kræves et svar, udarbejder og sender
styreenheden svartelegrammet.
Styreenheder kommunikerer ved hjælp af en master/slaveteknik, hvor det kun er masteren, der kan igangsætte
transaktioner (kaldet forespørgsler). Slaver svarer ved at
levere de anmodede data til masteren eller ved at handle
som anmodet i forespørgslen.
Masteren kan adressere individuelle slaver eller igangsætte
et broadcast-telegram til alle slaver. Slaver returnerer et
svar på de forespørgsler, der adresseres til dem individuelt.
Der returneres ingen svar på broadcast-forespørgsler fra
masteren.
Illustration 7.13 Svar
3E8 hex svarer til 1.000 decimalt. Konverteringsindekset for
parameter 3-41 Rampe 1, rampe-op-tid er -2, dvs. 0,01.
Parameter 3-41 Rampe 1, rampe-op-tid er af typen Uden
fortegn 32.
7.6 Oversigt over Modbus RTU
7.6.1 Indledning
Danfoss antager, at den installerede styreenhed
understøtter grænseaderne, som er beskrevet i dette
dokument, og at alle de krav og begrænsninger, der er
fastsat i styreenheden såvel som frekvensomformeren,
overholdes nøje.
Den indbyggede Modbus RTU (remote terminal unit) er
konstrueret til at kommunikere med enhver styreenhed,
der understøtter de grænseader, som er deneret i dette
dokument. Det antages, at brugeren har et indgående
kendskab til styreenhedens muligheder og begrænsninger.
7.6.2 Oversigt
Uanset hvilken type fysisk kommunikationsnetværk, der
anvendes, beskriver dette afsnit den proces, som en
styreenhed anvender til anmodning om adgang til et
andet apparat. Denne proces omfatter, hvordan Modbus
RTU svarer på anmodninger fra andre apparater, og
hvordan fejl registreres og rapporteres. Den opretter også
et fælles format for telegramfelters layout og indhold.
Under kommunikation via et Modbus RTU-netværk gør
protokollen følgende:
Bestemmer, hvordan hver styreenhed lærer sin
•
apparatadresse.
Genkender et telegram, der er adresseret til den.
•
Bestemmer, hvilke handlinger der skal udføres.
•
Udtrækker alle data eller andre oplysninger i
•
telegrammet.
Modbus RTU-protokollen etablerer formatet for masterens
forespørgsel ved at levere følgende information:
Apparatets (eller broadcast) adresse.
•
En funktionskode denerer den anmodede
•
handling.
Alle slags data, der skal sendes.
•
Et fejlkontrolfelt.
•
Slaveenhedens svartelegram udformes også ved hjælp af
Modbus-protokollen. Den indeholder felter, der bekræfter
den udførte handling, data, der skal returneres, og et
fejlkontrolfelt. Hvis der opstår en fejl i forbindelse med
modtagelse af telegrammet, eller hvis slaven ikke kan
udføre den anmodede handling, udformer og sender
slaven en fejlmeddelelse. Alternativt opstår der en timeout.
7.6.3 Frekvensomformer med Modbus RTU
Frekvensomformeren kommunikerer i Modbus RTU-format
via den indbyggede RS485-grænseade. Modbus RTU giver
adgang til frekvensomformerens styreord og busreference.
Styreordet gør det muligt for Modbus-masteren at styre
ere vigtige funktioner i frekvensomformeren:
Start.
•
Forskellige standsninger:
•
- Friløbsstop.
- Hurtigt stop.
- DC-bremsestop.
- Normalt stop (rampestop).
Nulstilling efter et fejltrip.
•
Drift ved forskellige forudindstillede hastigheder.
•
Baglæns kørsel.
•
Ændring af aktivt setup.
•
Styring af frekvensomformerens indbyggede relæ.
•
Busreferencen anvendes normalt til hastighedsstyring. Det
er også muligt at få adgang til parametrene, læse deres
værdier og eventuelt skrive værdier til dem. Adgangen til
parametrene giver en række styringsoptioner, herunder
7 7
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 87
Page 90

Installation og opsætning a...
VLT® HVAC Basic Drive FC 101
styring af frekvensomformerens sætpunkt, når den interne
PI-regulering anvendes.
7.7 Netværkskonguration
Indstil følgende parametre for at aktivere Modbus RTU på
frekvensomformeren:
Parameter Indstilling
Parameter 8-30 Protokol Modbus RTU
Parameter 8-31 Adresse 1–247
Parameter 8-32 Baud-hast. 2400–115200
Parameter 8-33 Paritet/stop-bits
Tabel 7.11 Netværkskonguration
Lige paritet, 1 stopbit
(standard)
7.8 Rammestruktur for Modbus RTU-
77
meddelelse
telegrammet er fuldført. Delvise telegrammer registreres,
og fejl angives som et resultat. Tegn, der skal overføres,
skal angives i det hexadecimale format 00–FF i hvert felt.
Frekvensomformeren overvåger konstant netværksbussen,
også i tavse intervaller. Når det første felt (adressefeltet)
modtages, afkoder hver enkelt frekvensomformer eller
apparat det for at fastslå, hvilket apparat der adresseres.
Modbus RTU-telegrammer, der adresseres til nul, er
broadcast-telegrammer. Svar er ikke tilladt for broadcasttelegrammer. En typisk telegramramme er vist i Tabel 7.14.
Start Adresse Funktion Data
T1-T2-T3-
T4
Tabel 7.14 Struktur for Modbus RTU-telegram
8 bit 8 bit N x 8 bit 16 bit
CRC-
kontrol
Slut
T1-T2-T3-
T4
7.8.3 Start/stop-felt
7.8.1 Indledning
Telegrammer starter med en lydløs periode med intervaller
Styreenhederne er kongureret til at kommunikere med
Modbus-netværk ved brug af RTU-tilstand (remote terminal
unit), hvor hver enkelt byte i et telegram indeholder to 4bit hexadecimale tegn. Formatet for hver byte vises i
Tabel 7.12.
Startb
it
Tabel 7.12 Format for hver byte
Kodesystem 8-bit binær, hexadecimal 0–9, A–F.
Bit pr. byte
Fejlkontrolfelt Cyklisk redundanskontrol (CRC).
Tabel 7.13 Byte-oplysninger
Databyte Stop/
paritet
To hexadecimale tegn i hvert 8-bit-felt i
telegrammet.
En startbit.
•
Otte databit. Den mindst vigtige bit
•
sendes først.
En bit for paritet mellem lige/ulige;
•
ingen bit for ingen paritet
En stopbit, hvis der anvendes paritet; to
•
bit, hvis ingen paritet.
Stop
7.8.2 Struktur for Modbus RTU-telegram
Det apparat, der overfører, placerer et Modbus RTUtelegram i en ramme med et kendt start- og slutpunkt.
Dette gør det muligt for de modtagende enheder at
begynde ved starten af telegrammet, læse adressedelen,
fastslå, hvilken enhed der adresseres (eller alle enheder,
hvis telegrammet broadcastes) og at registrere, når
på mindst 3,5 tegn. Den lydløse periode implementeres
som et multiplum af tegnintervaller ved den valgte
netværks-baud-hastighed (vist som Start T1-T2-T3-T4). Det
første felt, der skal overføres, er apparatadressen. Efter det
sidste overførte tegn følger en lignende periode i
intervaller af mindst 3,5 tegn, som markerer afslutningen af
telegrammet. Et nyt telegram kan begynde efter denne
periode.
Overfør hele telegramrammen i en konstant strøm. Hvis
der forekommer en lydløs periode i intervaller på mere end
1,5 tegn, inden rammen er fuldført, erner det
modtagende apparat det ufuldendte telegram og antager,
at den næste byte er adressefeltet i et nyt telegram. Hvis
et nyt telegram begynder inden 3,5 tegnintervaller efter et
forudgående telegram, opfatter det modtagende apparat
det tilsvarende som en fortsættelse af det foregående
telegram. Denne adfærd medfører timeout (intet svar fra
slaven), eftersom værdien i det sidste CRC-felt ikke er
gyldig for de kombinerede telegrammer.
7.8.4 Adressefelt
En telegramrammes adressefelt indeholder otte bit. Gyldige
adresser på slaveenheder skal være i området 0–247
decimalt. De individuelle slaveenheder er tildelt adresser i
området 1–247. 0 er reserveret til broadcast-tilstand, hvilket
alle slaver genkender. En master adresserer en slave ved at
placere slaveadressen i telegrammets adressefelt. Når
slaven sender sit svar, placeres dens egen adresse i dette
adressefelt, så masteren ved, hvilken slave der svarer.
88 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 91

Installation og opsætning a... Design Guide
7.8.5 Funktionsfelt
En telegramrammes funktionsfelt indeholder otte bit.
Gyldige koder skal være i området 1–FF. Funktionsfelter
bruges til at sende telegrammer mellem master og slave.
Når der sendes et telegram fra en master til en slaveenhed,
fortæller funktionskodefeltet slaven, hvilken handling
denne skal foretage. Når slaven svarer masteren, bruger
den funktionskodefeltet til at angive, at det enten er et
normalt (fejlfrit) svar, eller at der er opstået en fejl (kaldet
et undtagelsessvar).
Ved et normalt svar bruger slaven ganske enkelt den
oprindelige funktionskode. Ved et undtagelsessvar
returnerer slaven en kode, der svarer til den oprindelige
funktionskode med dens mest
logisk 1. Desuden placerer slaven en unik kode i svartelegrammets datafelt. Denne kode fortæller masteren, hvilken
type fejl, der er opstået eller årsagen til undtagelsen. Se
også kapitel 7.8.11 Funktionskoder, som understøttes af
Modbus RTU og kapitel 7.8.12 Modbus-undtagelseskoder.
signikante bit angivet til
7.8.6 Datafelt
Datafeltet består af sæt af to hexadecimale tal i området
00–FF hexadecimalt. Disse cifre består af ét RTU-tegn.
Datafeltet for telegrammer, der sendes fra en master til en
slaveenhed, indeholder yderligere oplysninger, som slaven
skal bruge for at handle derefter.
Oplysninger kan indeholder punkter såsom:
Spole eller registeradresser.
•
Mængden af punkter, der skal håndteres.
•
Antallet af faktiske databytes i feltet.
•
7.8.7 CRC-kontrolfelt
Telegrammer omfatter et fejlkontrolfelt, der fungerer
baseret på en cyklisk redundanskontrolmetode (CRC). CRCfeltet kontrollerer indholdet i hele telegrammet. Den
anvendes uanset den paritetskontrolmetode, der anvendes
for de enkelte tegn i telegrammet. Transmitterenheden
beregner CRC-værdien og vedhæfter CRC'en som det sidste
felt i telegrammet. Modtagerenheden genberegner en CRC
under modtagelse af telegrammet og sammenligner den
beregnede værdi med den faktiske værdi, der modtages i
CRC-feltet. To ulige værdier resulterer i en bus time-out.
Fejlkontrolfeltet indeholder en 16-bit binær værdi, der er
implementeret som to 8-bit bytes. Efter implementeringen
vedhæftes den mindst betydende byte i feltet først og
efterfølges af den mest betydende byte. Den mest
betydende byte i CRC er den sidste byte, der sendes i
telegrammet.
7.8.8 Spoleregisteradressering
I Modbus er alle data organiseret i spoler og holderegistre.
Spoler holder en enkelt bit, mens holderegistre holder et
2-byte ord (det vil sige 16 bits). Alle dataadresser i
Modbus-telegrammer refereres til nul. Den første forekomst
af et dataelement adresseres som element 0. For eksempel:
Spolen med navnet spole 1 i en programmerbar
styreenhed adresseres som spole 0000 i dataadressefeltet i
en Modbus-telegrammet. Spole 127 decimalt adresseres
som spole 007EHEX (126 decimalt).
Holderegister 40001 adresseres som register 0000 i
telegrammets dataadressefelt. I funktionskodefeltet er der
allerede speciceret en holderegister-handling. Derfor er
referencen 4XXXX implicit. Holderegister 40108 adresseres
som register 006BHEX (107 decimalt).
Spolenu
mmer
1–16
17–32
33–48
49–64
66–65536 Reserveret. –
Tabel 7.15 Spoleregister
Frekvensomformerens styreord (se
Tabel 7.16).
Frekvensomformerens hastighed
eller sætpunktsreferenceområde
0x0–0xFFFF (-200 % ... ~200 %).
Frekvensomformerens statusord (se
Tabel 7.17).
Åben sløjfe-tilstand: Frekvensomformerens udgangsfrekvens.
Lukket sløjfe-tilstand: Frekvensomformerens feedbacksignal.
Parameterskrivekontrol (master til
slave).
0 = parameterændringer skrives til
65
RAM'en i frekvensomformeren.
1 = parameterændringer skrives til
RAM'en og EEPROM'en i frekvensomformeren.
Beskrivelse Signalretning
Master til slave
Master til slave
Slave til master
Slave til master
Master til slave
7 7
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 89
Page 92

Installation og opsætning a...
VLT® HVAC Basic Drive FC 101
Spole 0 1
01 Preset-reference lsb
02 Preset-reference msb
03 DC-bremse Ingen DC-bremse
04 Friløbsstop Ingen friløbsstop
05 Hurtigt stop Intet hurtigt stop
06 Fastfrys frekvens Ingen fastfrys frekvens.
07 Rampestop Start
08 Ingen nulstilling Reset
09 Ingen jog Jog
10 Rampe 1 Rampe 2
11 Data ikke gyldige Data gyldige
12 Relæ 1 fra Relæ 1 til
13 Relæ 2 fra Relæ 2 til
14 Opsæt lsb
15 –
16 Ingen reversering Reversering
77
Tabel 7.16 Frekvensomformerens styreord (FC-prol)
PLC-
Busadresse
Busregister
0 1 40001 Reserveret –
1 2 40002 Reserveret –
2 3 40003 Reserveret –
3 4 40004 Fri – –
4 5 40005 Fri – –
5 6 40006 Modbus-konguration Læs/skriv
6 7 40007 Seneste fejlkode
7 8 40008 Seneste fejlregister
8 9 40009 Indeksmarkør Læs/skriv
9 10 40010 Parameter 0-01 Sprog
19 20 40020 Fri – –
29 30 40030
1)
register
Indhold Adgang Beskrivelse
Parameter 0-03 Regionale
indstillinger
Spole 0 1
33 Styring ikke klar Styring klar
Frekvensomformer ikke
34
klar
35 Friløbsstop Sikkerhedslukket
36 Ingen alarmer Alarm
37 Ikke brugt Ikke brugt
38 Ikke brugt Ikke brugt
39 Ikke brugt Ikke brugt
40 Ingen advarsel Advarsel
41 Ikke ved reference Ved reference
42 Hand mode Auto mode
43 Ude af frekvensområde Inden for frekvensområde
44 Standset Kører
45 Ikke brugt Ikke brugt
46 Ingen spændingsadvarsel Spænding overstiger
Ikke inden for
47
strømgrænse
48 Termisk niveau er OK Termisk niveau overstiger
Tabel 7.17 Frekvensomformerens statusord (FC-prol)
Reserveret til de ældre frekvensomformere VLT® 5000
og VLT® 2800.
Reserveret til de ældre frekvensomformere VLT® 5000
og VLT® 2800.
Reserveret til de ældre frekvensomformere VLT® 5000
og VLT® 2800.
Kun TCP. Reserveret til Modbus TCP
(parameter 12-28 Gem dataværdier og
parameter 12-29 Gem altid – gemt i f.eks. EEPROM).
Skrivebe-
skyttet
Skrivebe-
skyttet
Afhænger af
paramete-
radgang
Afhænger af
paramete-
radgang
Fejlkode modtaget fra parameterdatabase. Se WHAT
38295 for oplysninger.
Registeradresse, hvor sidste fejl opstod. Se WHAT 38296
for oplysninger.
Underindeks til den parameter, der skal åbnes. Se
WHAT 38297 for oplysninger.
Parameter 0-01 Sprog (Modbus-register = 10 parameter-
number)
Plads til 20 bytes reserveret til parameter i Modbus-
kort.
Parameter 0-03 Regionale indstillinger
Plads til 20 bytes reserveret til parameter i Modbus-
kort.
Frekvensomformer klar
Strømgrænse
Tabel 7.18 Adresse/registre
1) Værdi skrevet i Modbus RTU-telegrammet skal være 1 eller lavere end registernummeret. Læs for eksempel Modbus-register 1 ved at skrive
værdien 0 i telegrammet.
90 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 93

CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
Installation og opsætning a... Design Guide
7.8.9 Adgang via PCD skriv/læs
Fordelen ved at anvende PCD skriv/læs-konguration er, at
styreenheden kan skrive eller læse ere data i et telegram.
Op til 63 registre kan der læses eller skrives til via funktionskodens læseholderegister, eller skriv ere registre i et
telegram. Strukturen er også eksibel, således at der kun
kan skrives til to registre, og 10 registre kan læses fra
styreenheden.
PCD'ens skriveliste er data sendt fra styreenheden til
frekvensomformeren. Dataene inkluderer styreord,
reference og applikationsafhængige data såsom minimumreference og rampetider osv.
BEMÆRK!
Styreordet og referencen sendes altid i listen fra
styreenheden til frekvensomformeren.
PCD-skrivelisten er indstillet i parameter 8-42 PCD-skrivekon-
guration.
PCD'ens skriveliste er data sendt fra frekvensomformeren til
styreenheden såsom styreord, primær faktisk værdi og
applikationsafhængige data såsom kørte timer, motorstrøm
og alarmord.
BEMÆRK!
Statusordet og primær faktisk værdi sendes altid i listen
fra frekvensomformeren til styreenheden.
BEMÆRK!
Felterne, der er markeret med grå, kan ikke ændres. De
er standardværdier.
BEMÆRK!
32-bit parametrene skal knyttes sammen inden for 32-bit
grænserne (PCD2 & PCD3 eller PCD4 & PCD5 osv.), hvor
parameternummeret knyttes to gange til
parameter 8-42 PCD-skrivekonguration eller
parameter 8-43 PCD-læsekonguration.
7.8.10 Sådan styres frekvensomformeren
I dette afsnit beskrives de koder, som kan bruges i
funktions- og datafelterne i et Modbus RTU-telegram.
7.8.11 Funktionskoder, som understøttes af
Modbus RTU
Modbus RTU understøtter brugen af følgende funktionskoder i funktionsfeltet i et telegram.
Funktion Funktionskode (hex)
Læs spoler 1
Læs holderegistre 3
Skriv enkelt spole 5
Skriv enkelt register 6
Skriv ere spoler F
Skriv ere registre 10
Hent kommunikationshændelsestæller B
Rapportér slave-id 11
Læs skriv ere registre 17
7 7
Illustration 7.14 Adgang via PCD skriv/læs
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 91
Tabel 7.19 Funktionskoder
Funktion
Funkti-
onskode
Diagnostik 8
Tabel 7.20 Funktionskoder
Underfunkti
ons-
Underfunktion
kode
1 Genstart kommunikation.
Returnér fejlndingsre-
2
gister.
Ryd tællere og fejln-
10
dingsregister.
Returnér busmeddelelses-
11
tælling.
Returnér buskommunika-
12
tionsfejloptælling.
Returnér slavefejlop-
13
tælling.
Returnér slavemeddelel-
14
sestælling.
Page 94

Installation og opsætning a...
VLT® HVAC Basic Drive FC 101
7.8.12 Modbus-undtagelseskoder
Læsning parameter 3-14 Preset relativ reference (32 bit):
Holderegistre 3410 og 3411 holder parameterværdierne.
En komplet forklaring af strukturen for et undtagelsessvar
ndes i kapitel 7.8.5 Funktionsfelt.
Kode Navn Betydning
Den funktionskode, der modtages i
forespørgslen, er ikke en tilladt handling
for serveren (eller slaven). Dette kan være,
fordi funktionskoden kun gælder for nyere
Ugyldig
1
funktion
77
Ugyldig
2
dataadresse
Ugyldig
3
dataværdi
Slaveen-
4
hedsfejl
Tabel 7.21 Modbus-undtagelseskoder
apparater og ikke blev implementeret i
det valgte apparat. Det kunne også
indikere, at serveren (eller slaven) ikke er i
den rette tilstand til at behandle en
forespørgsel af denne type, for eksempel
fordi den ikke er kongureret og bliver
bedt om at returnere registerværdier.
Den dataadresse, der modtages i
forespørgslen, er ikke en tilladt adresse for
serveren (eller slaven). Mere specikt er
kombinationen af referencenummeret og
overførselslængden ugyldig. For en
styreenhed med 100 registre lykkes en
forespørgsel med oset 96 og længde 4,
mens en forespørgsel med oset 96 og
længde 5 genererer en undtagelse 02.
En værdi, som er indeholdt i forespørgselsdatafeltet, er ikke en tilladt værdi for
serveren (eller slaven). Dette angiver en
fejl i strukturen af resten af en kompleks
forespørgsel, som for eksempel at den
implicitte længde er korrekt. Det betyder
IKKE, at et datapunkt, der sendes til
opbevaring i et register, har en værdi
uden for applikationsprogrammets
forventning, da Modbus-protokollen ikke
er klar over betydningen af en hvilken
som helst værdi i et hvilket som helst
register.
Der opstod en uoprettelig fejl, mens
serveren (eller slaven) forsøgte at udføre
den forespurgte handling.
Værdien 11300 (decimal) betyder, at parameteren er
indstillet til 1113,00.
Se kapitel 6 Programmering for oplysninger om parametre,
størrelse, og konverteringsindeks.
7.9.2 Datalagring
Spole 65-decimalen bestemmer, om data, der skrives til
frekvensomformeren, gemmes i EEPROM og RAM (spole 65
= 1) eller kun i RAM (spole 65 = 0).
7.9.3 IND (indeks)
Nogle parametre i frekvensomformeren er array-parametre,
for eksempel parameter 3-10 Preset-reference. Eftersom
Modbus ikke understøtter arrays i holderegistrene, har
frekvensomformeren reserveret holderegister 9 som pointer
til array. Før en array-parameter læses eller skrives, skal
holderegister 9 indstilles. Indstilling af holderegister til
værdien 2 gør, at alle følgende læse-/skrivehandlinger til
array-parametre foregår til indeks 2.
7.9.4 Tekstblokke
Der etableres adgang til parametre, som er gemt som
tekststrenge, på samme måde som de andre parametre.
Den maksimale tekstblokstørrelse er 20 tegn. Hvis en
læseanmodning for en parameter omfatter ere tegn, end
parameteren kan gemme, afkortes svaret. Hvis læseanmodningen for en parameter omfatter færre tegn, end
parameteren kan gemme, indsættes der mellemrum i
svaret.
7.9.5 Konverteringsfaktor
En parameterværdi kan kun overføres som heltal. Brug
konverteringsfaktoren til at overføre decimaler.
7.9.6 Parameterværdier
Adgang til parametre
7.9
7.9.1 Parameterhåndtering
Standarddatatyper
Standarddatatyperne er int 16, int 32, uint 8, uint 16 og
uint 32. De lagres som 4x-registre (40001–4FFFF).
Parametrene læses ved hjælp af funktionen 03 hex læs
Parameternummeret (PNU) oversættes fra den registeradresse, der ndes i Modbus-læse- eller skrivemeddelelsen.
Parameternummeret oversættes til Modbus som (10 x
parameternummer) decimal. Eksempel: Læsning
parameter 3-12 Catch up/slow down (16 bit): Holderegister
holderegistre. Parametre skrives ved hjælp af funktionen 6
hex forudindstil enkelt register til et register (16 bit) og
funktionen 10 hex forudindstil ere registre til to registre
(32 bit). Størrelserne, der kan læses, ligger fra et register
(16 bit) til 10 registre (20 tegn).
3120 holder en parameterværdi. Værdien 1352 (decimal)
betyder, at parameteren er indstillet til 12,52 %.
92 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 95

Installation og opsætning a... Design Guide
Ikke-standarddatatyper
Ikke-standarddatatyper er tekststrenge og lagres som 4xregistre (40001–4FFFF). Parametrene læses ved hjælp af
funktionen 03 hex læs holderegistre og skrives ved hjælp
af funktionen 10 hex forudindstil ere registre. Størrelser,
der kan læses, ligger fra et register (2 tegn) op til 10
registre (20 tegn).
7.10 Eksempler
Følgende eksempler viser forskellige Modbus RTUkommandoer.
7.10.1 Læs spolestatus (01 hex)
Beskrivelse
Denne funktion læser ON/OFF-status for de enkelte
udgange (spoler) i frekvensomformeren. Broadcast
understøttes aldrig for læsninger.
Forespørgsel
Forespørgselstelegrammet angiver startspolen og det antal
spoler, der skal læses. Spoleadresser starter ved nul, dvs.
spole 33 adresseres som 32.
Eksempel på en anmodning om at læse spole 33-48
(statusord) fra slaveenhed 01.
Feltnavn Eksempel (hex)
Slaveadresse 01 (frekvensomformeradresse)
Funktion 01 (læs spoler)
Startadresse HI 00
Startadresse LO 20 (32 decimaler) spole 33
Antal punkter HI 00
Antal punkter LO 10 (16 decimaler)
Fejlkontrol (CRC) –
Tabel 7.22 Forespørgsel
Svar
Spolestatus i svartelegrammet er pakket som én spole pr.
bit i datafeltet. Status angives som: 1 = ON; 0 = OFF. Lsb'en
for den første databyte indeholder den spole, der er
adresseret i forespørgslen. De andre spoler følger mod den
mest betydende ende af byten og fra den mindst
betydende til den mest betydende i efterfølgende byte.
Hvis det returnerede spoleantal ikke er et multiplum af
otte, udfyldes de resterende bit i den endelige databyte
med 0-værdier (mod den mest betydende ende af byten).
Feltet med antal byte angiver antallet af komplette
databyte.
Feltnavn Eksempel (hex)
Slaveadresse 01 (frekvensomformeradresse)
Funktion 01 (læs spoler)
Antal byte 02 (2 databyte)
Data (spole 40–33) 07
Data (spole 48–41) 06 (STW = 0607 hex)
Fejlkontrol (CRC) –
Tabel 7.23 Svar
BEMÆRK!
Spoler og registre adresseres eksplicit med en afvigelse
på -1 i Modbus.
For eksempel adresseres spole 33 som spole 32.
7.10.2 Tving/skriv enkelt spole (05 hex)
Beskrivelse
Denne funktion tvinger en spole til enten ON eller OFF. I
forbindelse med broadcast gennemtvinger funktionen de
samme spolereferencer i alle de monterede slaver.
Forespørgsel
Forespørgselstelegrammet angiver den spole 65 (parameterskrivekontrol), der skal tvinges. Spoleadresser starter ved
nul, dvs. spole 65 adresseres som 64. Tving data = 00 00
hex (OFF) eller FF 00 hex (ON).
Feltnavn Eksempel (hex)
Slaveadresse 01 (frekvensomformeradresse)
Funktion 05 (skriv enkelt spole)
Spoleadresse HI 00
Spoleadresse LO 40 (64 decimaler) spole 65
Tving data HI FF
Tving data LO 00 (FF 00 = ON)
Fejlkontrol (CRC) –
Tabel 7.24 Forespørgsel
Svar
Det normale svar er et ekko af forespørgslen, der
returneres, når spoletilstanden er blevet tvunget.
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 05
Tving data HI FF
Tving data LO 00
Antal spoler HI 00
Antal spoler LO 01
Fejlkontrol (CRC) –
7 7
Tabel 7.25 Svar
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 93
Page 96

Installation og opsætning a...
VLT® HVAC Basic Drive FC 101
7.10.3 Tving/skriv ere spoler (0F hex)
Beskrivelse
Denne funktion tvinger hver spole i en spolesekvens til
enten ON eller OFF. I forbindelse med broadcasting
gennemtvinger funktionen de samme spolereferencer i alle
de monterede slaver.
Forespørgsel
Forespørgselstelegrammet angiver, at spole 17–32 (hastighedssætpunkt) skal tvinges.
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 03 (læs holderegistre)
Startadresse HI 0B (registeradresse 3029)
Startadresse LO D5 (registeradresse 3029)
Antal punkter HI 00
Antal punkter LO
Fejlkontrol (CRC) –
Tabel 7.28 Forespørgsel
02 – (parameter 3-03 Maksimumreference
er 32 bit lang, dvs. to registre)
BEMÆRK!
Spoleadresser starter ved nul, dvs. spole 17 adresseres
som 16.
Feltnavn Eksempel (hex)
Slaveadresse 01 (frekvensomformeradresse)
77
Funktion 0F (skriv ere spoler)
Spoleadresse HI 00
Spoleadresse LO 10 (spoleadresse 17)
Antal spoler HI 00
Antal spoler LO 10 (16 spoler)
Antal byte 02
Tving data HI
(spoler 8–1)
Tving data LO
(spoler 16–9)
Fejlkontrol (CRC) –
Tabel 7.26 Forespørgsel
20
00 (reference = 2000 hex)
Svar
Det normale svar returnerer slaveadressen, funktionskoden,
startadressen og antallet af tvungne spoler.
Feltnavn Eksempel (hex)
Slaveadresse 01 (frekvensomformeradresse)
Funktion 0F (skriv ere spoler)
Spoleadresse HI 00
Spoleadresse LO 10 (spoleadresse 17)
Antal spoler HI 00
Antal spoler LO 10 (16 spoler)
Fejlkontrol (CRC) –
Tabel 7.27 Svar
7.10.4 Læs holderegistre (03 hex)
Beskrivelse
Denne funktion læser indholdet af holderegistre i slaven.
Forespørgsel
Forespørgselstelegrammet angiver startregistret og antallet
af registre, der skal læses. Registeradresser starter ved nul,
så register 1–4 adresseres som 0–3.
Eksempel: Læs parameter 3-03 Maksimumreference, register
03030.
Svar
Registerdataene i svartelegrammet pakkes som to byte pr.
register med det binære indhold højrejusteret i hver byte.
For hvert register indeholder den første byte de mest
betydende bit, og den anden indeholder de mindst
betydende bit.
Eksempel: hex 000088B8 = 35,000 = 35 Hz.
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 03
Antal byte 04
Data HI (register 3030) 00
Data LO (register 3030) 16
Data HI (register 3031) E3
Data LO (register 3031) 60
Fejlkontrol (CRC) –
Tabel 7.29 Svar
7.10.5 Forudindstil enkelt register (06 hex)
Beskrivelse
Med denne funktion forudindstilles en værdi i et enkelt
holderegister.
Forespørgsel
Forespørgselstelegrammet angiver den registerreference,
der skal forudindstilles. Registeradresser starter ved nul.
Register 1 adresseres således som 0.
Eksempel: Skriv til parameter 1-00 Kongurationstilstand,
register 1000.
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 06
Registeradresse HI 03 (registeradresse 999)
Registeradresse LO E7 (registeradresse 999)
Forudindstillede data HI 00
Forudindstillede data LO 01
Fejlkontrol (CRC) –
Tabel 7.30 Forespørgsel
94 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Page 97

Installation og opsætning a... Design Guide
Svar
Det normale svar er et ekko af forespørgslen, der er
returneret, efter at registerindholdet er sendt.
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 06
Registeradresse HI 03
Registeradresse LO E7
Forudindstillede data HI 00
Forudindstillede data LO 01
Fejlkontrol (CRC) –
Tabel 7.31 Svar
7.10.6 Forudindstil ere registre (10 hex)
Beskrivelse
Denne funktion forudindstiller værdier i en sekvens af
holderegistre.
Forespørgsel
Forespørgselstelegrammet angiver de registerreferencer,
der skal forudindstilles. Registeradresser starter ved nul.
Register 1 adresseres således som 0. Eksempel på en
anmodning om at forudindstille to registre (angiv
parameter 1-24 Motorstrøm til 738 (7,38 A)):
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 10
Startadresse HI 04
Startadresse LO 07
Antal registre HI 00
Antal registre LO 02
Antal byte 04
Skriv data HI (register 4: 1049) 00
Skriv data LO (register 4: 1049) 00
Skriv data HI (register 4: 1050) 02
Skriv data LO (register 4: 1050) E2
Fejlkontrol (CRC) –
Tabel 7.32 Forespørgsel
7.10.7 Læs/skriv ere registre (17 hex)
Beskrivelse
Denne funktionskode kombinerer en læse-proces og en
skrive-proces i en enkelt Modbus-transaktion. Skriveprocessen udføres før læse-processen.
Forespørgsel
Forespørgselsmeddelelsen angiver startadresse og antallet
af holderegistre, der skal læses, såvel som startadressen,
antal holderegistre og de data, der skal skrives. Holderegistre adresseres og starter ved nul. Eksempel på en
anmodning om at indstille parameter 1-24 Motorstrøm til
738 (7,38 A), og læs parameter 3-03 Maksimumreference,
som har værdi 50.000 (50.000 Hz):
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 17
Læs startadresse HI 0B (registeradresse 3029)
Læs startadresse LO D5 (registeradresse 3029)
Antallet til at læse HI 00
02
Antallet til at læse LO
Skriv startadresse HI 04 (registeradresse 1239)
Skriv startadresse LO D7 (registeradresse 1239)
Antallet til at skrive HI 00
Antallet til at skrive LO 02
Skriv antal byte 04
Skriv registre værdi HI 00
Skriv registre værdi LO 00
Skriv registre værdi HI 02
Skriv registre værdi LO 0E
Fejlkontrol (CRC) –
Tabel 7.34 Forespørgsel
Svar
Det normale svar indeholder dataene fra den gruppe
registre, der blev læst. Feltet med antal byte angiver
mængden af bytes, der skal følge efter i læsedatafeltet.
(Parameter 3-03 Maksimumre-
ference er 32 bit lang, dvs. to
registre)
7 7
Svar
Det normale svar returnerer slaveadressen, funktionskoden,
startadressen og antallet af forudindstillede registre.
Feltnavn Eksempel (hex)
Slaveadresse 01
Funktion 10
Startadresse HI 04
Startadresse LO 19
Antal registre HI 00
Antal registre LO 02
Fejlkontrol (CRC) –
Tabel 7.33 Svar
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 95
Slaveadresse 01
Funktion 17
Antal byte 04
Læs registre værdi HI 00
Læs registre værdi LO 00
Læs registre værdi HI C3
Læs registre værdi LO 50
Fejlkontrol (CRC) –
Tabel 7.35 Svar
Feltnavn Eksempel (hex)
Page 98

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Installation og opsætning a...
VLT® HVAC Basic Drive FC 101
7.11 Danfoss FC-styreprol
7.11.1 Styreord i henhold til FC-prol (8–10
Protokol = FC-prol)
Bit 02 = 1: Medfører rampning.
Bit 03, Friløb
Bit 03 = 0: Frekvensomformeren slipper motoren med det
samme (udgangstransistorerne afbrydes), og motoren
friløber til standsning.
Bit 03 = 1: Hvis de øvrige startbetingelser er opfyldt,
starter frekvensomformeren motoren.
Denér i parameter 8-50 Vælg friløb, hvordan bit 03 opretter
en gate sammen med den tilsvarende funktion på en
digital indgang.
Illustration 7.15 Styreord i henhold til FC-prol
Bit 04, Hurtigt stop
Bit 04 = 0: Får motorhastigheden til at rampe ned til stop
(angivet i parameter 3-81 Kvikstop rampetid).
Bit Bitværdi = 0 Bitværdi = 1
00 Referenceværdi Ekstern udvælgelse, lsb
01 Referenceværdi Ekstern udvælgelse, msb
02 DC-bremse Rampe
77
03 Friløb Ingen friløb
04 Hurtigt stop Rampe
Hold udgangsfre-
05
kvensen
06 Rampestop Start
07 Ingen funktion Reset
08 Ingen funktion Jog
09 Rampe 1 Rampe 2
10 Data ugyldige Data gyldige
11 Relæ 01 åbent Relæ 01 aktivt
12 Relæ 02 åbent Relæ 02 aktivt
13 Parameteropsætning Udvalg lsb
15 Ingen funktion Reversering
Tabel 7.36 Styreord i henhold til FC-prol
Brug rampe
Bit 05, Hold udgangsfrekvens
Bit 05 = 0: Den aktuelle udgangsfrekvens (i Hz) fastfryses.
Ændr kun den fastfrosne udgangsfrekvens ved de digitale
indgange, der er programmeret til [21] Hastighed op og
[22] Hastighed ned (parameter 5-10 Klemme 18, digital
indgang til parameter 5-13 Klemme 29, digital indgang).
BEMÆRK!
Hvis fastfrys udgangen er aktiv, kan frekvensomformeren
kun stoppes på én af følgende måder:
Bit 03 friløbsstop.
•
Bit 02 DC-bremse.
•
Digital indgang, der er programmeret til [5] DC-
•
bremse inv., [2] Friløb inverteret eller [3] Friløb og
reset inv. (parameter 5-10 Klemme 18, digital
indgang til parameter 5-13 Klemme 29, digital
indgang).
Forklaring af styrebit
Bit 00/01
Bit 00 og 01 anvendes til at vælge mellem de re referenceværdier, der er forprogrammeret i parameter 3-10 Preset-
reference i henhold til Tabel 7.37.
Programmeret
referenceværdi
Tabel 7.37 Styrebit
BEMÆRK!
Denér i parameter 8-56 Vælg preset-reference, hvordan
bit 00/01 opretter en gate sammen med den tilsvarende
funktion på de digitale indgange.
Bit 02, DC-bremse
Bit 02 = 0: Medfører DC-bremsning og stop. Indstil
bremsestrøm og varighed i parameter 2-01 DC-bremsestrøm
og parameter 2-02 DC-bremseholdetid.
96 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
Parameter
1 Parameter 3-10 Preset-reference [0] 0 0
2 Parameter 3-10 Preset-reference [1] 0 1
3 Parameter 3-10 Preset-reference [2] 1 0
4 Parameter 3-10 Preset-reference [3] 1 1
Bit01Bit
00
Bit 06, Rampestop/-start
Bit 06 = 0: Medfører et stop og får motorhastigheden til at
rampe ned til stop via den valgte rampe ned-parameter.
Bit 06 = 1: Hvis de øvrige startbetingelser er opfyldt, lader
bit 06 frekvensomformeren starte motoren.
Denér i parameter 8-53 Vælg start, hvordan bit 06
rampestop/-start opretter en gate sammen med den
tilsvarende funktion på en digital indgang.
Bit 07, Nulstil
Bit 07 = 0: Ingen nulstilling.
Bit 07 = 1: Nulstiller trip. Nulstilling aktiveres på signalets
foranke, det vil sige ved skift fra logisk 0 til logisk 1.
Bit 08, Jog
Bit 08 = 1: Parameter 3-11 Jog-hastighed [Hz] bestemmer
udgangsfrekvensen.
Bit 09, Valg af rampe 1/2
Bit 09 = 0: Rampe 1 er aktiv (parameter 3-41 Rampe 1,
rampe-op-tid til parameter 3-42 Rampe 1, rampe-ned-tid).
Bit 09 = 1: Rampe 2 (parameter 3-51 Rampe 2, rampe-op-tid
til parameter 3-52 Rampe 2, rampe-ned-tid) er aktiv.
Page 99

Output frequencySTW
Bit
Slave-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.12
Installation og opsætning a... Design Guide
Bit 10, Dataene er ikke gyldige/Dataene er gyldige
Fortæl frekvensomformeren, om styreordet skal anvendes
eller ignoreres.
Bit 10 = 0: Styreordet ignoreres.
Bit 10 = 1: Styreordet anvendes. Denne funktion er
relevant, fordi telegrammet altid indeholder styreordet
uanset telegramtypen. Deaktivér styreordet, hvis det ikke
skal bruges, når der opdateres eller læses parametre.
Bit 11, Relæ 01
Bit 11 = 0: Relæ er ikke aktiveret.
Bit 11 = 1: Relæ 01 er aktiveret, hvis [36] Styreord bit 11 er
valgt i parameter 5-40 Funktionsrelæ.
Bit 12, Relæ 02
Bit 12 = 0: Relæ 02 er ikke aktiveret.
Bit 12 = 1: Relæ 02 er aktiveret, hvis [37] Styreord bit 12 er
valgt i parameter 5-40 Funktionsrelæ.
Bit 13, Valg af opsætning
Anvend bit 13 til at vælge mellem de to menuopsætninger
iht. Tabel 7.38.
Opsætning Bit 13
1 0
2 1
Tabel 7.38 Menuopsætninger
Funktionen er kun mulig, når der er valgt [9] Multiopsætning i parameter 0-10 Aktiv opsætning.
Brug parameter 8-55 Vælg opsætning til at denere, hvordan
bit 13 opretter en gate sammen med den tilsvarende
funktion på de digitale indgange.
Bit 15, Reversering
Bit 15 = 0: Ingen reversering.
Bit 15 = 1: Reversering. Reversering er indstillet til digital i
parameter 8-54 Vælg reversering i fabriksindstillingen. Bit 15
medfører kun reversering, når der er valgt seriel kommunikation, [2] Logisk ELLER eller [3] Logisk OG.
7.11.2 Statusord i henhold til FC-prol
(STW)
Indstil parameter 8-30 Protokol til [0] FC.
Illustration 7.16 Statusord
Bit Bit = 0 Bit = 1
00 Styring ikke klar Styring klar
01 Frekvensomformer ikke klar Frekvensomformer klar
02 Friløb Aktivér
03 Ingen fejl Trip
04 Ingen fejl Fejl (ingen trip)
05 Reserveret –
06 Ingen fejl Triplås
07 Ingen advarsel Advarsel
08
Hastighed ≠ reference
09 Lokal betjening Busstyring
10 Uden for frekvensgrænse Frekvensgrænse OK
11 Ingen funktion I drift
12 Frekvensomformer OK Standset, auto-start
13 Spænding OK Spænding overskredet
14 Strøm OK Strøm overskredet.
15 Termisk niveau OK Termisk niveau overskredet
Tabel 7.39 Statusord i henhold til FC-prol
Hastighed = reference
Forklaring af statusbits
Bit 00, Styring ikke klar/klar
Bit 00 = 0: Frekvensomformeren tripper.
Bit 00 = 1: Frekvensomformerens styreenheder er klar, men
strømkomponenten modtager ikke nødvendigvis en
forsyning (hvis der bruges 24 V ekstern forsyning til
styreenhederne).
Bit 01, frekvensomformer klar
Bit 01 = 0: Frekvensomformeren er ikke klar.
Bit 01 = 1: Frekvensomformeren er klar til drift, men
friløbskommandoen er aktiv via de digitale indgange eller
via seriel kommunikation.
Bit 02, Friløbsstop
Bit 02 = 0: Frekvensomformeren udløser motoren.
Bit 02 = 1: Frekvensomformeren starter motoren med en
startkommando.
Bit 03, Ingen fejl/trip
Bit 03 = 0: Frekvensomformeren er ikke i fejltilstand.
Bit 03 = 1: Frekvensomformeren tripper. Tryk på [Reset] for
at genoptage driften.
Bit 04, Ingen fejl/fejl (ingen trip)
Bit 04 = 0: Frekvensomformeren er ikke i fejltilstand.
Bit 04 = 1: Frekvensomformeren viser en fejl, men tripper
ikke.
Bit 05, Ikke brugt
Bit 05 anvendes ikke i statusordet.
Bit 06, Ingen fejl/triplås
Bit 06 = 0: Frekvensomformeren er ikke i fejltilstand.
Bit 06 = 1: Frekvensomformeren trippes og låses.
Bit 07, Ingen advarsel/advarsel
Bit 07 = 0: Der er ingen advarsler.
Bit 07 = 1: Der er opstået en advarsel.
7 7
MG18C801 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. 97
Page 100

Installation og opsætning a...
Bit 08, Hastighed ≠ reference/hastighed = reference
Bit 08 = 0: Motoren kører, men den nuværende hastighed
er anderledes end den forhåndsindstillede hastighedsreference. Det kan ske, når hastigheden ramper op/ned
under start/stop.
Bit 08 = 1: Motorhastigheden svarer til den forhåndsindstillede hastighedsreference.
Bit 09, Lokal betjening/busstyring
Bit 09 = 0: [O/Reset] er aktiveret på styreenheden, eller
der er valgt [2] Lokal i parameter 3-13 Referencested. Det er
ikke muligt at styre frekvensomformeren via seriel
kommunikation.
Bit 09 = 1: Det er muligt at styre frekvensomformeren via
eldbus/seriel kommunikation.
Bit 10, Uden for frekvensgrænse
Bit 10 = 0: Udgangsfrekvensen har nået værdien i
parameter 4-12 Motorhastighed, lav grænse [Hz] eller
77
parameter 4-14 Motorhastighed, høj grænse [Hz].
Bit 10 = 1: Udgangsfrekvensen ligger inden for de
denerede grænser.
Bit 11, Ingen drift/i drift
Bit 11 = 0: Motoren kører ikke.
Bit 11 = 1: Frekvensomformeren har et startsignal uden
friløb.
Bit 12, Frekvensomformer OK/standset, auto-start
Bit 12 = 0: Der er ingen midlertidig overtemperatur i
frekvensomformeren.
Bit 12 = 1: Frekvensomformeren stopper på grund af
overtemperatur, men apparatet er ikke trippet og
genoptager driften, når overtemperaturen normaliseres.
Bit 13, Spænding OK/grænse overskredet
Bit 13 = 0: Der er ingen spændingsadvarsler.
Bit 13 = 1: DC-spændingen i frekvensomformerens DC-link
er for lav eller for høj.
Bit 14, Strøm OK/grænse overskredet
Bit 14 = 0: Motorstrømmen er lavere end strømgrænsen,
der er valgt i parameter 4-18 Current Limit.
Bit 14 = 1: Strømgrænsen i parameter 4-18 Current Limit er
overskredet.
Bit 15, Termisk niveau OK/grænse overskredet
Bit 15 = 0: Timerne for termisk motorbeskyttelse og
termisk beskyttelse overskrides ikke 100 %.
Bit 15 = 1: Én af timerne overskrider 100 %.
VLT® HVAC Basic Drive FC 101
98 Danfoss A/S © 04/2018 Alle rettigheder forbeholdes. MG18C801
 Loading...
Loading...