

Page 1
MAKING MODERN LIVING POSSIBLE
Design Guide
VLT® Brake Resistor MCE 101
VLT® Frequency Converters • FC 51 • FC 102 • FC 202 • FC 301
FC 302 • FC 360 • FCD 302 • VLT® 2800
www.danfoss.com/drives
Page 2

Page 3
Contents Design Guide
Contents
1 Introduction
1.1 How to Read this Design Guide
1.2 Conformity
1.3 Safety Precautions
1.4 Disposal
2 Product Overview
2.1 Description of the Brake System
2.2 Horizontal or Vertical Load
2.3 Aluminium-housed Brake Resistors
2.3.1 Aluminium-housed Flat-pack Brake Resistors 6
2.3.2 Aluminium-housed Compact Brake Resistor 6
2.4 Steel Grid Brake Resistors
3 Installation
3.1 Mechanical Installation
3.1.1 Aluminium-housed Compact Brake Resistors and Flat-pack Brake Resistors 7
3.1.2 Steel Grid Brake Resistors 10
4
4
4
4
4
5
5
5
6
6
7
7
3.1.3 Accessories 11
3.2 Electrical Installation
3.2.1 EMC Precautions 12
3.2.2 Cable Connection 12
3.2.3 Brake Cable 13
3.3 Protective Functions
3.3.1 Overtemperature Protection 13
3.3.2 Brake Resistor and Brake IGBT 14
4 System Integration
4.1 Brake Resistor Calculation
4.1.1 Brake Set-up 15
4.1.2 Calculation of Brake Resistor Resistance 15
4.1.3 Calculation of Braking Power 16
4.1.4 Calculation of the Brake Resistor Peak Power 17
4.1.5 Calculation of the Brake Resistor Average Power 17
4.1.6 Braking of Inertia 17
12
13
15
15
5 Programming
5.1 Parameters for VLT® Micro Drive FC 51
5.2 Parameters for VLT® HVAC Drive FC 102 and VLT® AQUA Drive FC 202
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 1
18
18
18
Page 4
Contents Design Guide
5.3 Parameters for VLT® AutomationDrive FC 301/FC 302 and ® Decentral Drive FCD
302
21
5.4 Parameters for VLT® AutomationDrive FC 360
5.5 Parameters for VLT® 2800
6 Application Examples
6.1 Conveyor Belt
6.2 Centrifuge
6.3 Continuous Braking
7 Special Conditions
7.1 Alternative Braking Methods
7.1.1 DC Injection Braking 30
7.1.2 AC-braking 30
7.1.3 Mechanical Holding Brake 30
7.1.4 DC Braking 31
8 Selection Guide
8.1 Selection Flow Chart
8.2 Selection Tables for Recommended Brake Resistors
24
25
27
27
29
29
30
30
32
32
33
8.2.1 Abbreviations used in the Brake Resistor Tables 33
8.2.2 VLT® Micro Drive FC 51 33
8.2.3 VLT® HVAC Drive FC 102 35
8.2.4 VLT® AQUA Drive FC 202 41
8.2.5 VLT® AutomationDrive FC 301 48
8.2.6 VLT® AutomationDrive FC 302 51
8.2.7 VLT® AutomationDrive FC 360 57
8.2.8 VLT® Decentral Drive FCD 302 59
8.2.9 VLT® 2800 60
8.3 Selection Tables for Alternative Brake Resistors
8.3.1 Abbreviations used in the Brake Resistor Tables 62
8.3.2 VLT® HVAC Drive FC 102, T2 62
8.3.3 VLT® HVAC Drive FC 102, T4 62
8.3.4 VLT® AQUA Drive FC 202, T2 63
8.3.5 VLT® AQUA Drive FC 202, T4 63
8.3.6 VLT® AutomationDrive FC 301, T2 64
62
8.3.7 VLT® AutomationDrive FC 302, T2 64
8.3.8 VLT® AutomationDrive FC 301, T4 65
8.3.9 VLT® AutomationDrive FC 302, T5 65
9 Specifications
2 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
66
Page 5
Contents Design Guide
9.1 Ambient Conditions
9.2 General Electrical Specifications
9.3 Electrical Data: MCE 101 Product Types 9xx
9.4 Mechanical Data: MCE 101 Product Types 9xx
9.5 Electrical Data: Product Types BWD and BWG
9.6 Mechanical Data: Product Types BWD and BWG
9.7 Mechanical Drawings
9.7.1 Figure 1 - 914CBT-HxxxDHT 83
9.7.2 Figure 2 - 914CBT-HxxxCHT 87
9.7.3 Figure 3 - 914CBT-HxxxBHT 90
9.7.4 Figure 4 - 914CBR-VxxxDT 93
9.7.5 Figure 5 - 914CBR-VxxxCT 96
9.7.6 Figure 6 - 914CBR-VxxxBT 98
9.7.7 Figure 7 - 914CCHxxxCT 101
9.7.8 Figure 8 - 917CM13 103
9.7.9 Figure 9 - 917CM15 105
9.7.10 Figure 10 - 917CM17 107
66
66
67
74
81
82
83
9.7.11 Figure 11 - 917CM25 109
9.7.12 Figure 12 - 917CM27 111
9.7.13 Figure 13 - 917CM37 113
9.7.14 Figure 14 - 917CMD27 115
9.7.15 Figure 15 - 917CMD37 117
9.7.16 Figure 16 - 929CBT-VxxxGHT 119
9.7.17 Figure 17 - 929CBT-VxxxBGHT 122
9.7.18 Figure 18 - 930CBT-VxxxGHT 125
9.7.19 Figure 19 - 930CBT- VxxxBGHT 128
9.7.20 Figure 20 - BWD250xxx 131
9.7.21 Figure 21 - BWD500xxx 132
9.7.22 Figure 22 - BWD600xxx 133
9.7.23 Figure 23 - BWG250xxx 135
9.7.24 Figure 24 - BWG500xxx 136
9.8 Mechanical Drawings: Accessories
9.8.1 Mounting Brackets: L Profile 137
9.8.2 Mounting Brackets: Footprint 139
137
Index
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 3
142
Page 6
Introduction Design Guide
1
1 Introduction
1.1 How to Read this Design Guide
Danfoss VLT® Brake Resistors MCE 101 are optimised for:
VLT® Micro Drive FC 51
•
VLT® HVAC Drive FC 102
•
VLT® AQUA Drive FC 202
•
VLT® AutomationDrive FC 300
•
VLT® AutomationDrive FC 360
•
VLT® Decentral Drive FCD 302
•
VLT® 2800
•
General versions for horizontal and vertical applications are
available.
The Design Guide provides the information required to
select and plan installation of the right brake resistor for
an application:
Selection of the correct brake resistor
•
Pre-installation considerations
•
Programming.
•
As an alternative to using a brake resistor, other braking
methods can be applied depending on the braking profile
of the application, see chapter 7 Special Conditions.
1.2
Conformity
Table 1.1 Approval
1) See Table 9.2 and Table 9.4 for UL conformity.
What is CE Conformity and Labelling
The purpose of CE labelling is to avoid technical trade
obstacles within EFTA and the EU. The EU has introduced
the CE label as a simple way of showing whether a
product complies with the relevant EU directives. The CE
label says nothing about the specifications or quality of
the product. Brake resistors are regulated by the following
EU directive:
The low-voltage directive (2006/95/EC)
Brake resistors must be CE labelled in accordance with the
low-voltage directive of December 12, 2006. The directive
applies to all electrical equipment and appliances used in
the 50-1000 V AC and the 75-1500 V DC voltage ranges.
Danfoss CE-labels in accordance with the directive and
issues a declaration of conformity upon request.
1.3
Safety Precautions
1)
Additional technical literature is also available online at
www.danfoss.com/BusinessAreas/DrivesSolutions/Documentations/Technical+Documentation.
WARNING
When in use, the brake resistor surface temperature
rises. DO NOT touch the brake resistor during operation.
WARNING
Never work on a brake resistor in operation.
NOTICE
Never attempt to repair a defective brake resistor.
1.4 Disposal
Equipment containing electrical components
may not be disposed of together with
domestic waste.
It must be separately collected with electrical
and electronic waste according to local and
currently valid legislation.
4 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 7
150/160%
175UA067.10
100%
150/160%
175UA068.10
Product Overview Design Guide
2 Product Overview
2.1 Description of the Brake System
2.2
Horizontal or Vertical Load
2 2
When the speed reference of a frequency converter is
reduced, the motor acts as a generator and the frequency
converter brakes. When a motor acts as a generator, it
supplies energy to the frequency converter which is
collected in the DC link. The function of the brake resistor
is to provide a load on the DC link during braking, thereby
ensuring that the braking power is absorbed by the brake
resistor.
If a brake resistor is not used, the DC-link voltage of the
frequency converter continues to increase, until disconnecting for protection. The advantage of using a brake
resistor is that it enables braking of a heavy load quickly,
e.g. on a conveyor belt.
The brake resistors in this series are all external
components. Therefore, the brake resistor does not form
an integral part of the frequency converter.
The external brake resistor provides the following
advantages:
The resistor time cycle can be selected as
•
required.
The heat developed during braking can be
•
conveyed beyond the panel cabinet to allow the
energy to be used.
The electronic components do not overheat, even
•
when the brake resistor is overloaded.
The brake resistor series is suitable for Danfoss frequency
converters
VLT® Micro Drive FC 51
•
VLT® HVAC Drive FC 102
•
VLT® AQUA Drive FC 202
•
VLT® AutomationDrive FC 300
•
VLT® AutomationDrive FC 360
•
VLT® Decentral Drive FCD 302
•
VLT® 2800
•
.
2.2.1 How to Select
The Danfoss brake resistor range consists of 2 groups:
Brake resistors for horizontal loads (conveyors,
•
trolleys, gantry cranes, etc.), see Illustration 2.1;
Brake resistors for vertical loads (cranes, hoists,
•
elevators), see Illustration 2.2.
Illustration 2.1 Horizontal Loads
Illustration 2.2 Vertical Loads
The brake resistor range is intended to cover the general
braking requirements for horizontal and vertical brake
applications.
To select the best brake resistor for an application, refer to
chapter 8.1 Selection Flow Chart. The flow chart links to
further information, either selection tables or calculations
of inertia or duty cycle.
To cater for both the horizontal and vertical ranges, 3
types of brake resistors are available:
Aluminium-housed flat-pack brake resistors
•
Aluminium-housed compact brake resistors
•
Steel grid brake resistors
•
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 5
Page 8
130BD245.12
1
130BD646.10
130BD228.10
130BD217.10
130BD586.10
Product Overview Design Guide
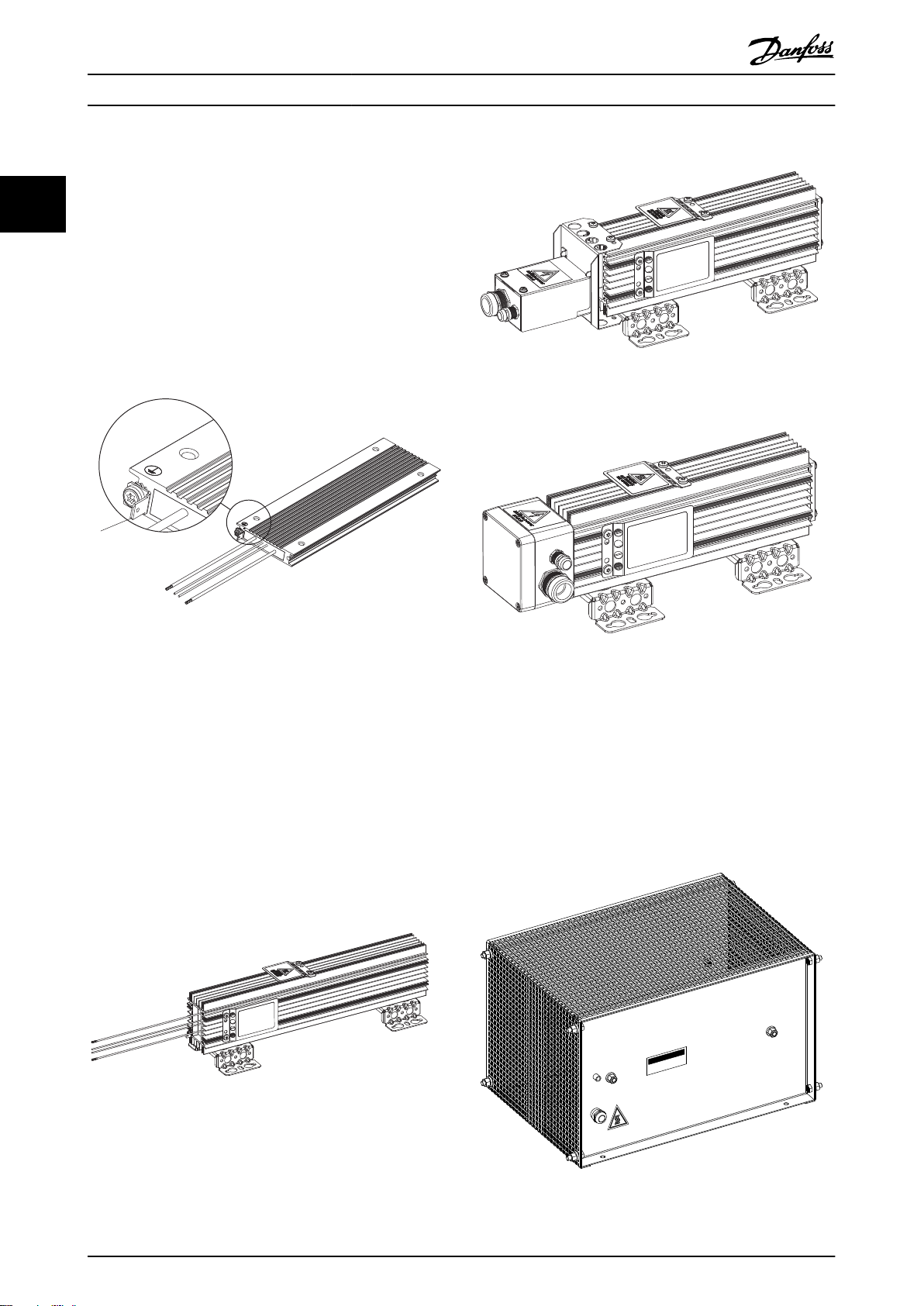
2.3 Aluminium-housed Brake Resistors
2.3.1 Aluminium-housed Flat-pack Brake
22
Resistors
The flat-pack brake resistor is an anodized aluminiumhoused resistor suitable for wall mounting or on a
footprint or an L-profile bracket. The L-profile bracket is
used for rear mounting. The brake resistor is designed for
high pulse loads of up to 40 times the nominal load and is
therefore suitable for both vertical and horizontal
applications. The enclosure protection is IP54 or IP65.
Illustration 2.5 CBR-V-DT IP21
Illustration 2.3 Flat-pack IP54
Aluminium-housed Compact Brake
2.3.2
Resistor
The compact brake resistor is housed in aluminium profiles
with pre-mounted brackets for wall mounting. It is
designed for high pulse loads of up to 60 times the
nominal load and is therefore used for both horizontal and
vertical loads. The enclosure protection class is either IP21,
IP54 or IP65. The brake resistor IP classes IP21 and IP65 are
equipped with a connection box containing cable glands
and cable connection to the resistor and the temperature
switch. IP54 versions have fixed unscreened cables.
Illustration 2.6 CBR-V-BT IP65
2.4 Steel Grid Brake Resistors
The steel grid brake resistor is steel grid housed and
consists of multiple elements. This brake resistor is suitable
for pulse loads between 10 and 20 times the nominal load,
suitable for frequent braking applications such as cranes,
hoists and elevators. It is supplied in an IP20 enclosure
with cable glands and has a built-in temperature switch.
Illustration 2.4 CBR-V-CT IP54
6 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Illustration 2.7 Steel Grid House IP20
Page 9
130BD900.10
200 mm
Installation Design Guide
3 Installation
3.1 Mechanical Installation
The brake resistors are cooled by natural convection, and
the specified minimum clearances must be observed to
ensure efficient ventilation. The ventilation must be
efficient enough to dispatch the regenerative power in the
brake resistor.
NOTICE
When installing the brake resistor, ensure all precautions
are in place to avoid the risk of overloading. Overloading
can lead to a fire hazard due to the heat generated in
the brake resistor.
The brake resistor is very hot during or after braking.
The brake resistor must be located in a secure
environment to avoid fire risk.
Mount the brake resistor free of any combustible
•
materials at a well ventilated location.
The MCE 101 brake resistors product type 9xx
•
contain a built-in temperature switch (for
overtemperature protection purposes. See
chapter 3.3 Protective Functions).
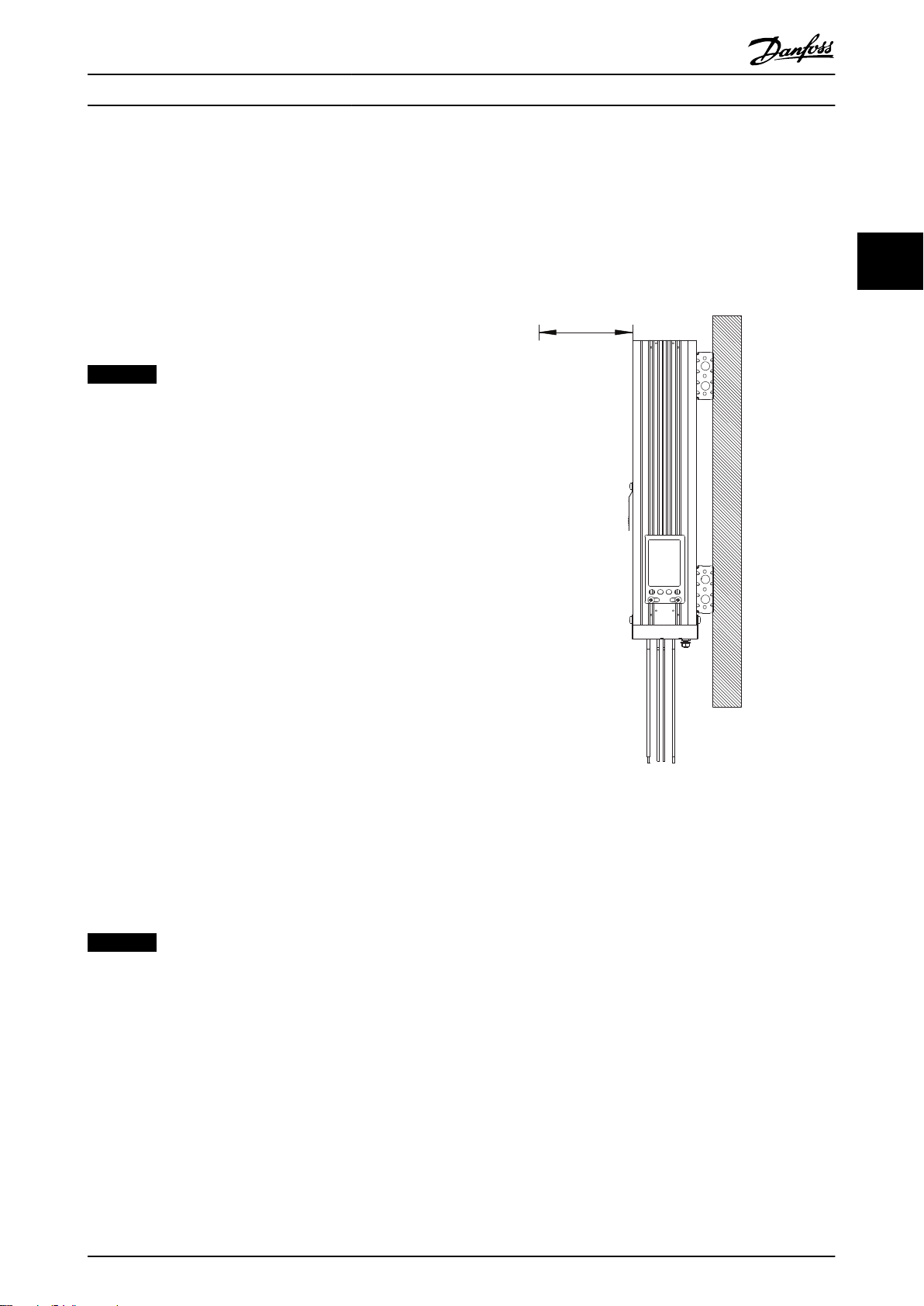
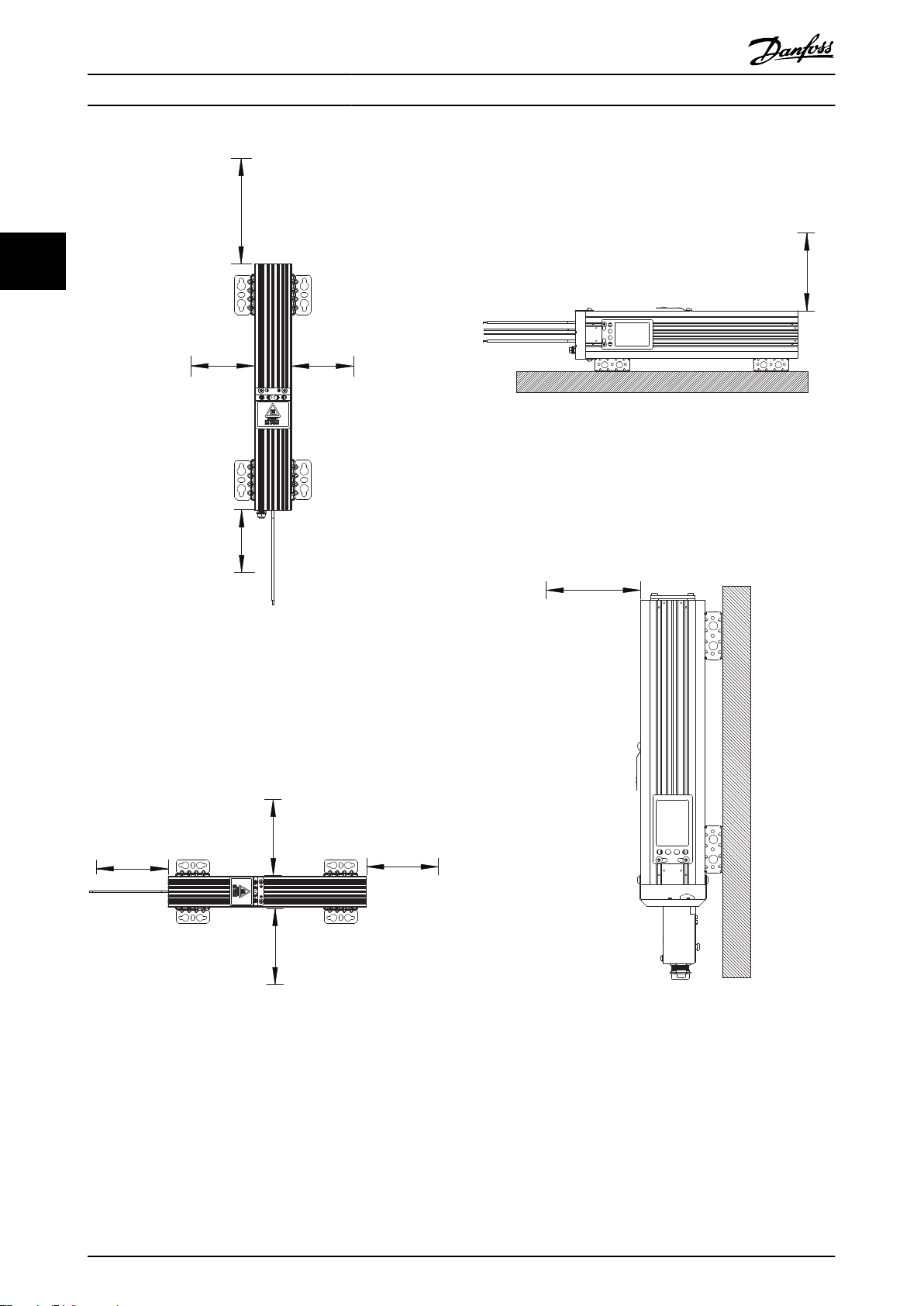
Vertical Mounting, IP54
For minimum clearances for vertical mounting for all
aluminium-housed compact and flat-pack brake resistors,
see Illustration 3.1 and Illustration 3.2.
3 3
Aluminium-housed Compact Brake
3.1.1
Resistors and Flat-pack Brake
Resistors
The aluminium-housed compact and flat-pack brake
resistors are designed for vertical mounting for optimum
cooling performance. However, horizontal mounting is
possible for both flat-pack and compact brake resistors.
Derating with 20% is required when mounting the
compact brake resistors horizontally. No derating for flatpacks are required. The enclosure protection of the IP21
types is reduced to IP20 when mounted horizontally.
NOTICE
All resistors are cooled by natural convection. To ensure
sufficient airflow and cooling, follow minimum clearance
in Illustration 3.1 to Illustration 3.8.
Illustration 3.1 Vertical Mounting, IP54
Versions with Fixed Cables
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 7
Page 10
130BD901.10
200 mm
500 mm
200 mm
200 mm
200 mm
200 mm
200 mm200 mm
130BD902.10
130BD903.10
500 mm
130BD904.10
200 mm
Installation Design Guide
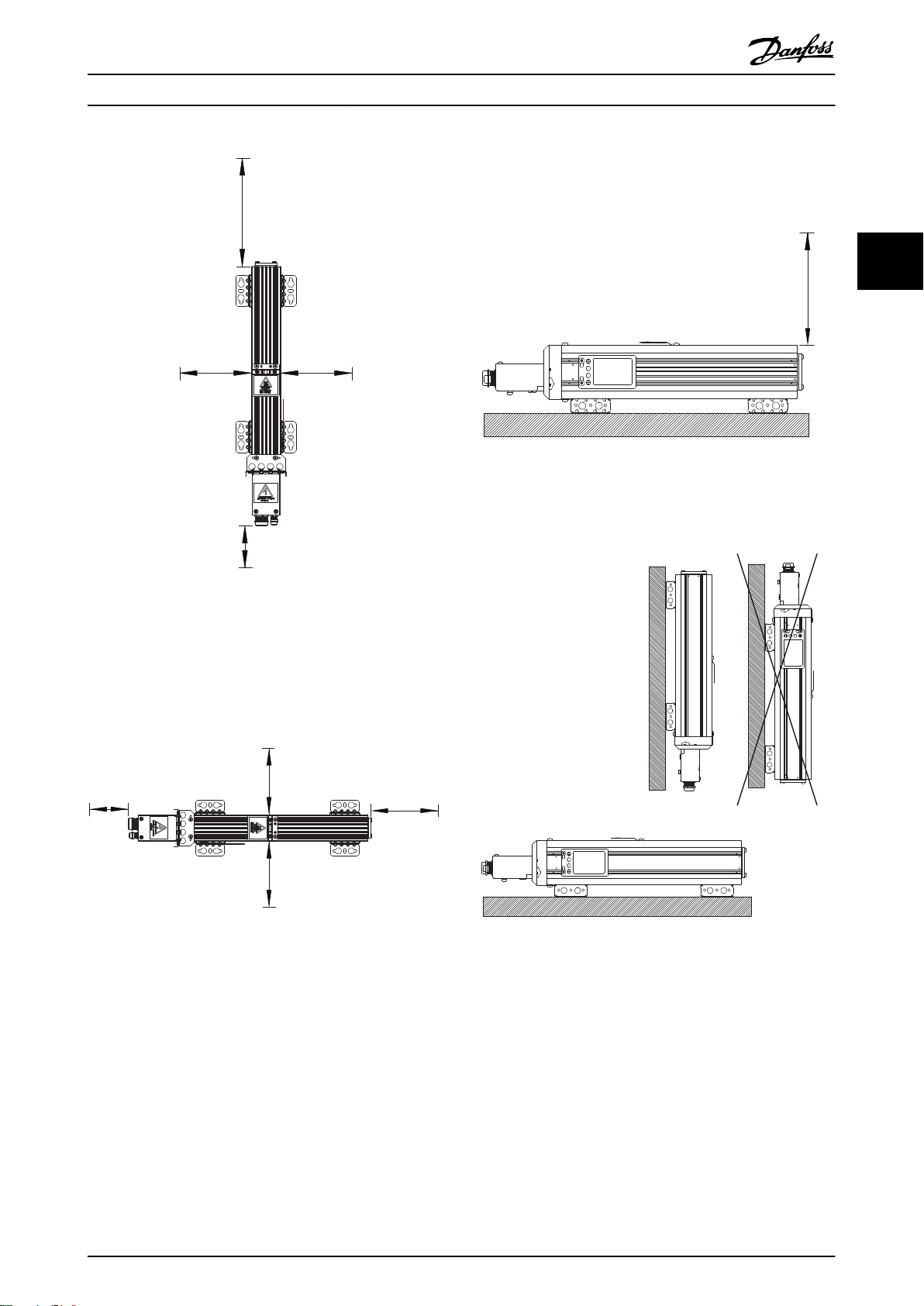
For minimum clearances for horizontal mounting for all
aluminium-housed compact and flat-pack brake resistors,
IP54 versions (versions with fixed cables), see Illustration 3.4
(side view).
33
Illustration 3.4 Horizontal mounting, IP54
Versions with Fixed Cables
Vertical mounting, IP21 and IP65
For minimum clearances for vertical mounting for all
aluminium-housed compact brake resistors, see
Illustration 3.5 and Illustration 3.6.
Illustration 3.2 Vertical Mounting, IP54
Versions with Fixed Cables
Horizontal mounting, IP54
For minimum clearances for horizontal mounting for all
aluminium-housed compact and flat-pack brake resistors,
see Illustration 3.3 (top view).
Illustration 3.3 Horizontal mounting, IP54
Versions with Fixed Cables
Illustration 3.5 Vertical Mounting, IP21 and IP65
Versions with Connection Box
8 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 11
200 mm
200 mm
500 mm
100 mm
130BD905.10
200 mm
100 mm
200 mm
200 mm
130BD906.10
130BD907.10
500 mm
130BD227.11
Installation
Design Guide
Horizontal mounting, IP21 and IP65
For minimum clearances for horizontal mounting for all
aluminium housed compact brake resistors, see
Illustration 3.8 (side view).
3 3
Illustration 3.8 Horizontal Mounting, IP21 and IP65
Versions with Connection Box
Orientation, compact and flat-pack brake resistors
Illustration 3.6 Vertical Mounting, IP21 and IP65
Versions with Connection Box
Horizontal mounting, IP21 and IP65
For minimum clearances for horizontal mounting for all
aluminium-housed compact brake resistors, see
Illustration 3.7 (top view).
Illustration 3.7 Horizontal Mounting, IP21 and IP65
Versions with Connection Box
Illustration 3.9 Orientation of Compact and Flat-pack Brake
Resistors
Derating with 20% is required when mounting the
compact brake resistors horizontally. The enclosure
protection of the IP21 types is reduced to IP20 when
mounted horizontally.
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 9
Page 12
130BD708.12
150 mm
150 mm
150 mm
150 mm
500 mm
175Uxxxx
130BD884.10
175Uxxxx
130BD709.11
Installation Design Guide
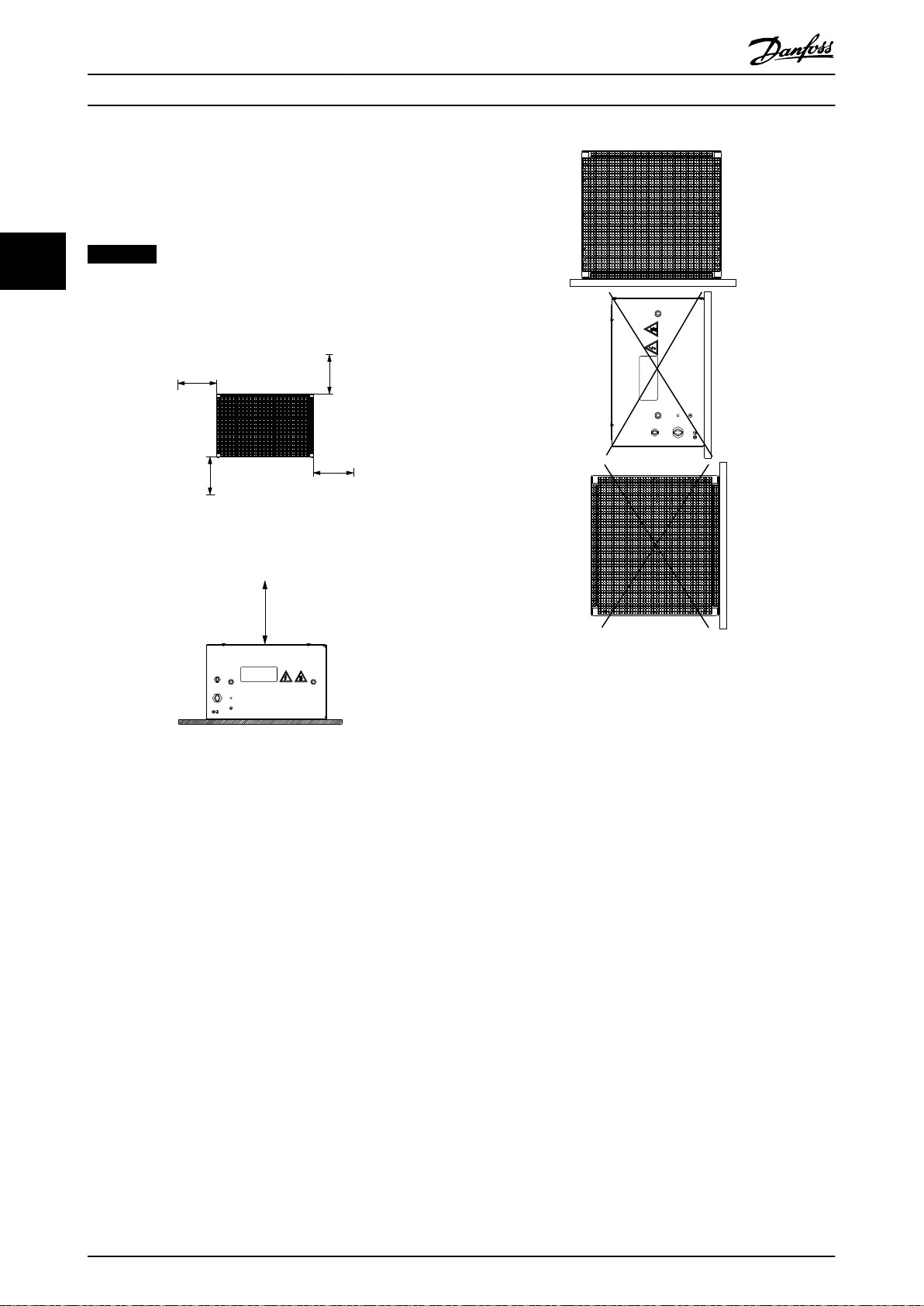
3.1.2 Steel Grid Brake Resistors
The steel grid brake resistors are designed for horizontal
mounting only.
33
NOTICE
All resistors are cooled by natural convection. To ensure
sufficient airflow and cooling, follow minimum
clearances in Illustration 3.10 and Table 3.3.
Illustration 3.10 Minimum Clearances of all Steel Grid Brake
Resistors - Top View
Illustration 3.12 Orientation of Steel Grid Brake Resistors
Illustration 3.11 Minimum Clearances of all Steel Grid Brake
Resistors - Side View
10 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 13
1
2
3
130BD595.10
130BD838.10
Installation
Design Guide
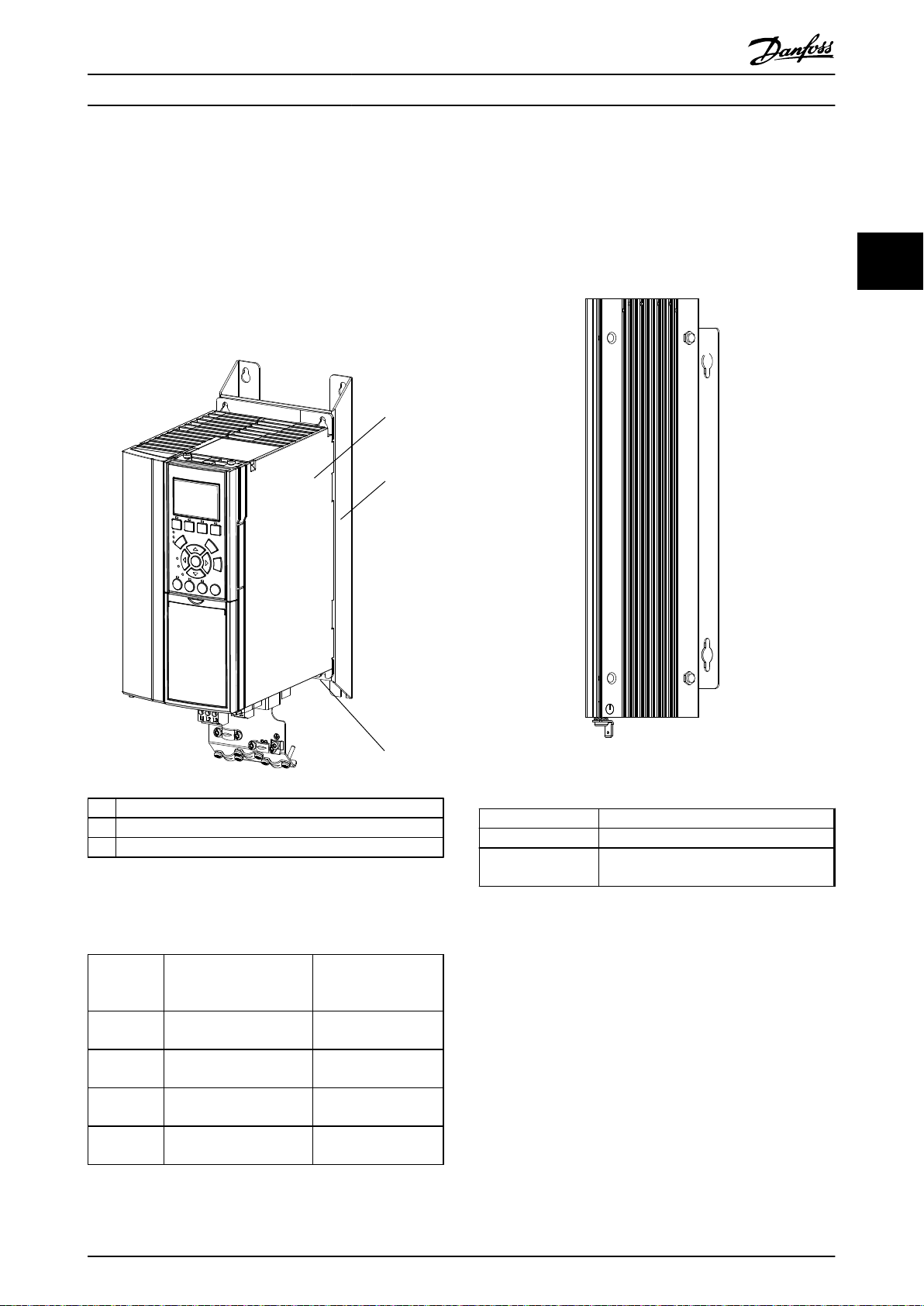
3.1.3 Accessories
Footprint brackets
The footprint bracket is an accessory used for mounting
flat-pack brake resistors.
Use the footprint bracket to mount the brake resistor at
the rear of the frequency converter. Once mounted, the
combined brake resistor and frequency converter occupy
the same space in the cabinet as the frequency converter
alone.
For mechanical dimensions for footprint brackets, see
chapter 9.8.2 Mounting Brackets: Footprint.
L profile brackets
The L profile bracket is an accessory used for mounting
flat-pack brake resistors. The L profile brackets support
both horizontally and vertically mounting on a fixed
surface optimising the required footprint.
3 3
1 Frequency converter
2 Footprint mounting bracket
3 Flat-pack brake resistor
Illustration 3.13 Flat-pack Brake Resistor mounted at Rear of
Frequency Converter
Part number Compatible brake resistor Compatible frequency
175U0085
175U0087
175U0086
175U0088
Table 3.1 Selection Table
1x100 W flat-pack
1x200 W flat-pack
2x100 W flat-pack
2x200 W flat-pack
2x100 W flat-pack
2x200 W flat-pack
1x100 W flat-pack
1x200 W flat-pack
converter enclosure
size
A2
A2
A3
A3
Illustration 3.14 L Profile Bracket
Part number Compatible brake resistor
175U0009 1x200 W flat-pack
175U0011
Table 3.2
1) Order 2x175U0011 for 300 W flat-pack brake resistors.
1)
1x100 W flat-pack
1x300 W flat-pack
For mechanical dimensions for L profile brackets, see
chapter 9.8.1 Mounting Brackets: L Profile
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 11
Page 14
Fieldbus cable
Min. 200 mm
90° crossing
Brake resistor
130BD507.11
130BB154.12
Installation Design Guide
3.2 Electrical Installation
Cable Connection
3.2.2
3.2.1 EMC Precautions
The following EMC precautions are recommended to
achieve interference-free operation of fieldbus cable(s) and
33
digital and analog inputs and outputs.
NOTICE
To comply with EMC emission specifications, screened/
armoured cables are recommended.
NOTICE
Observe relevant national and local regulations, for
example regarding protective earth connection. Keep the
fieldbus cable(s) away from motor and brake resistor
cables to avoid coupling of high frequency noise from one
cable to another. Normally, a distance of 200 mm (8
inches) is sufficient, but keeping the greatest possible
distance between the cables is recommended, especially
where cables run in parallel over long distances. When
crossing is unavoidable, the fieldbus cable(s) must cross
motor and brake resistor cables at an angle of 90°, see
Illustration 3.15.
Cables General: All cabling must comply with national
and local regulations on cable cross-sections and
ambient temperature.
See Table 3.3 for recommended temperature ratings for all
cables and conductors connected to the brake resistor as
ground connection, thermal switch and brake power.
IP class Recommended cables
IP20
IP21
IP54
IP65
Table 3.3 Cable Temperature Ratings
1) For ground connection
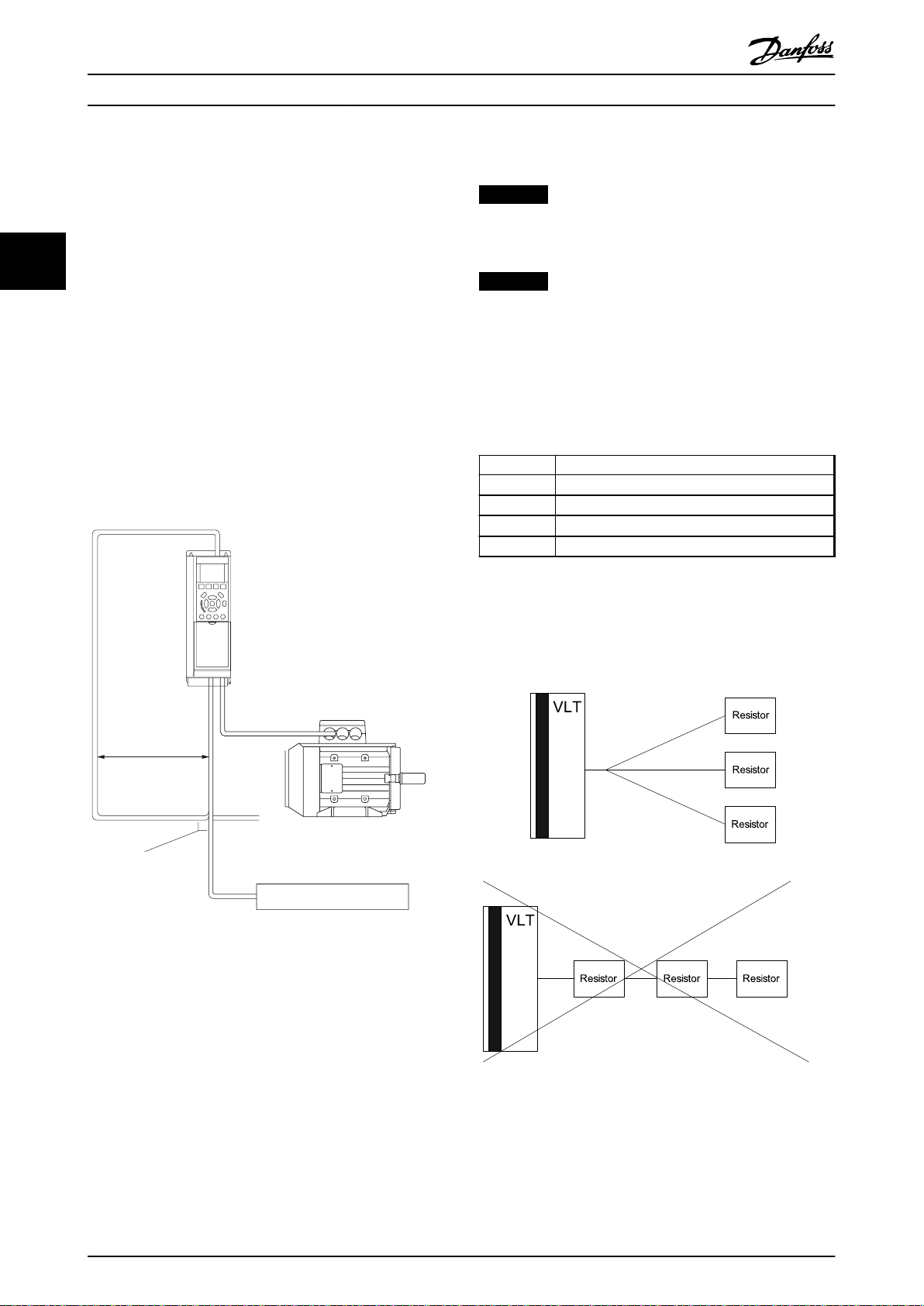
How to connect more than one resistor
Star parallel connection to ensure load is shared evenly
between 2 or more resistors.
≥80 °C
≥80 °C
≥90 °C
≥90 °C
1)
Illustration 3.15 Cable Routing
Illustration 3.16 Connection of Several Brake Resistors
12 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 15
81
82
99
91 92 93 95
96 97 98 99
12
18
L1 L2 L3 PE
U V W PE
VLT
MCE 101
Brake resistor
T1
T2
RB1
RB2
L1
L2
L3
PE
F1
PE
R-
R+
PE
+24V
D-in
M
3~
130BD553.11
Installation
Design Guide
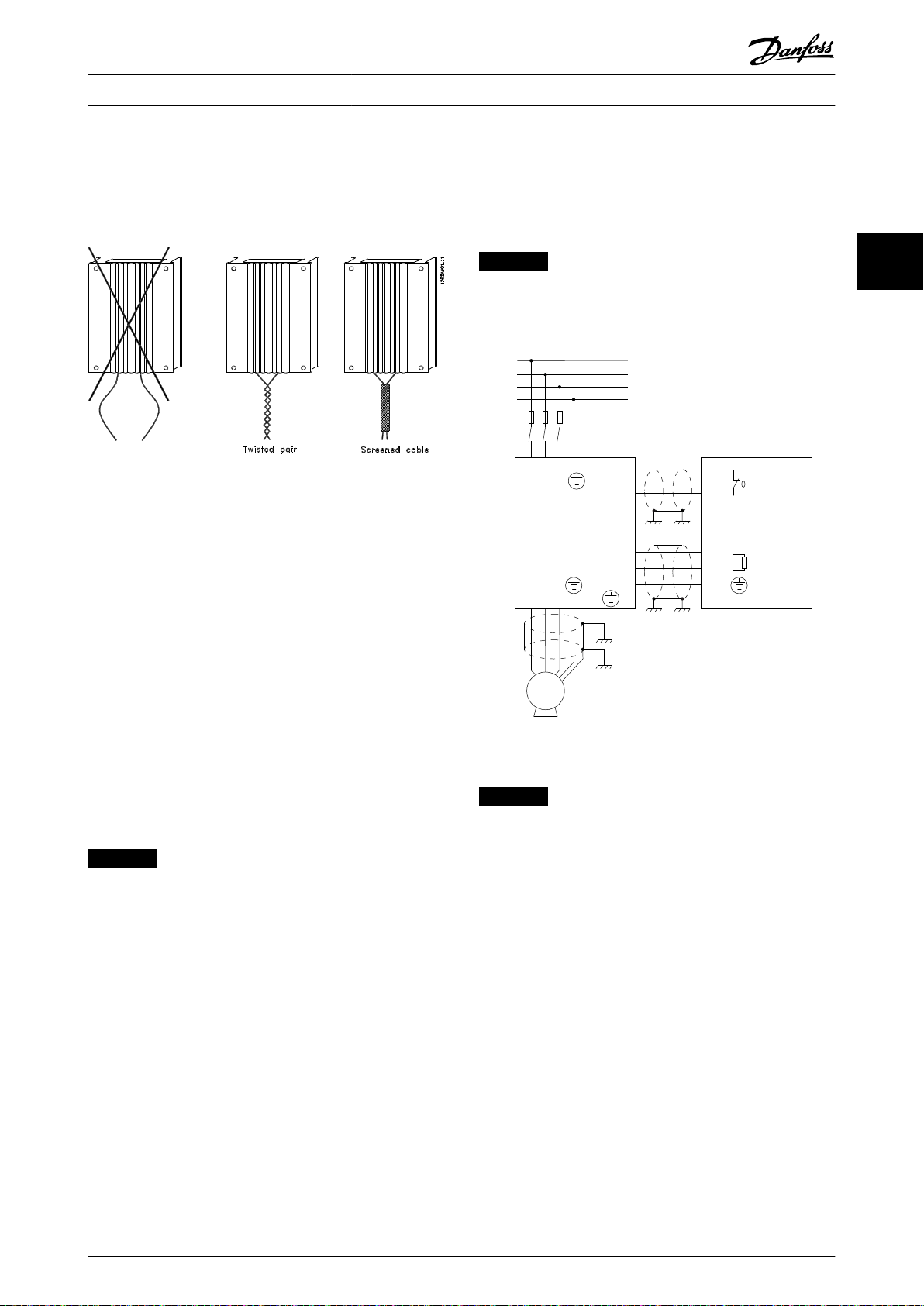
Brake resistors with fixed cables
To reduce the electrical noise from the wires between the
brake resistor and the frequency converter, twist the wires.
For enhanced EMC performance a metal screen can be
used.
Illustration 3.17 Twisted Cables
Brake Cable
3.2.3
Max. length: 20 m shielded cable.
Automatic restart after enabling of the temperature
switch:
Select coast inverse for the selected digital input.
Prevent automatic restart:
Select latched start for the selected digital input.
NOTICE
Coast does not terminate the brake function.
Example 1
3 3
Ensure the connection cable to the brake resistor is
shielded. Connect the shielding to the conductive back
plate of the frequency converter and to the brake resistor
metal cabinet, using cable clamps.
3.3
Protective Functions
3.3.1 Overtemperature Protection
The Danfoss brake resistor MCE 101 is equipped with a
galvanic isolated temperature switch (PELV) that is closed
under normal operating conditions and open if the brake
resistor is overheated.
NOTICE
Use the temperature switch as overtemperature
protection feature to prevent damage of the brake
resistor caused by overtemperature. To prevent damage
to the brake resistor, perform an immediate stop or a
ramp down.
There are several ways the temperature switch can be
used:
The temperature switch as digital input to frequency
converter
Example 1
1. Connect terminal T1 of the brake resistor to the
frequency converter terminal 12 or 13.
2. Connect terminal T2 of the brake resistor to a
digital input e.g. terminal 18.
Illustration 3.18 Temperature Switch in Brake Resistor
NOTICE
The temperature switch as input to the frequency
converter cannot be considered a primary safety
function.
In case of a malfunction in the brake IGBT, the frequency
converter and brake resistor are only protected by
disconnecting the mains supply to the frequency
converter. The temperature switch must be connected
disabling the mains supply to the frequency converter by
a contactor preventing dangerous overtemperatures.
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 13
Page 16
91 92 93 95
96 97 98 99
M
3~
12
27
L1 L2 L3 PE
VLT
MCE 101
Brake resistor
T1
T2
RB1
RB2
99
PE
81
R -
82R+
PE
L1
L2
L3
N
PE
F1
S1 K1
F2
S2
K1
K1
U V W PE
130BD554.11
Installation Design Guide
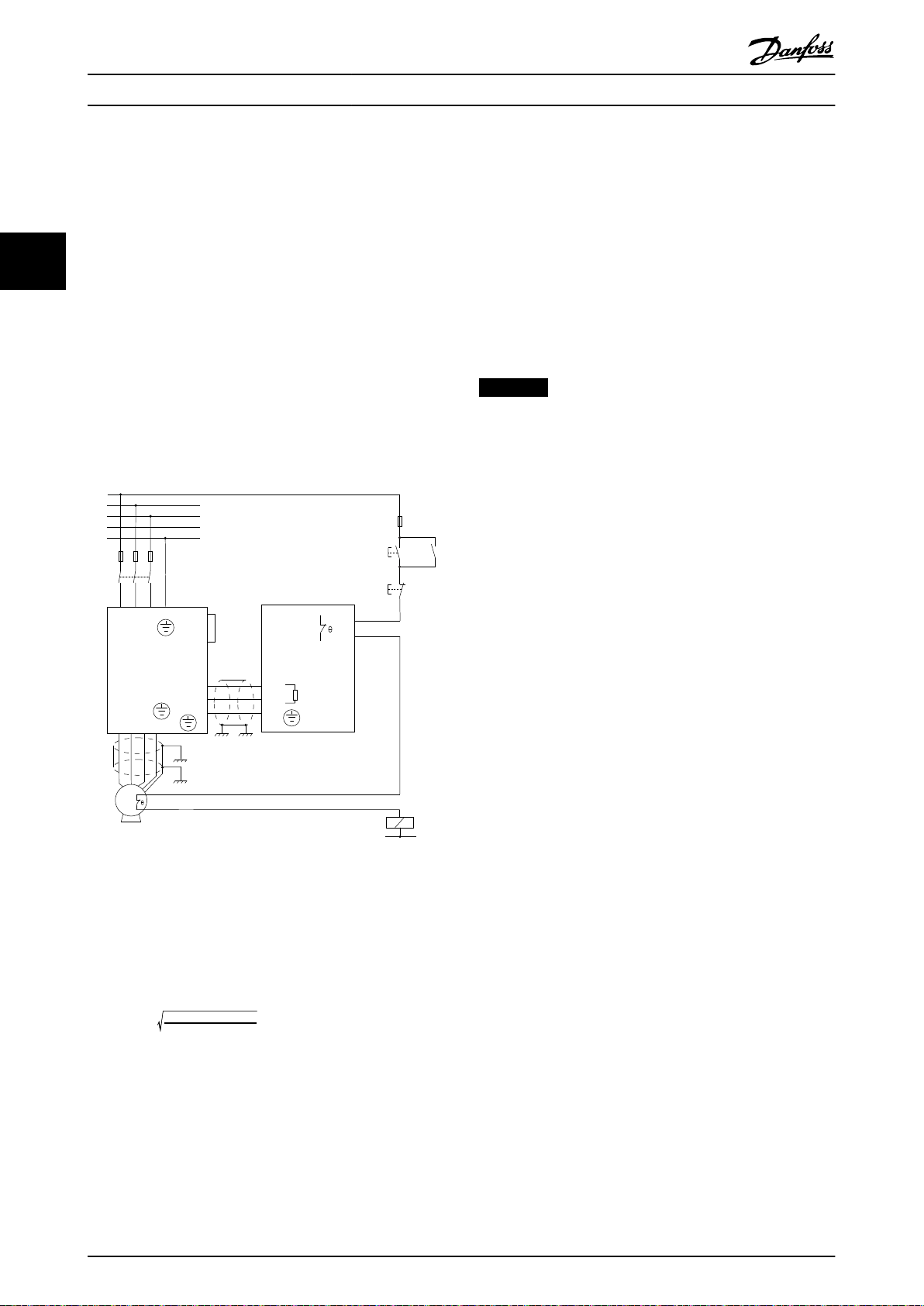
The temperature switch disabling the mains supply to
3.3.2
Brake Resistor and Brake IGBT
VLT by a contactor
Example 2
1. Connect the brake resistor built-in thermal switch
as controlling an input contactor. In this example,
the thermal switch within the brake resistor is
33
connected in series with the thermal switch
within the motor.
2. Connect start and stop push buttons in series
with the thermal switches.
3. Connect to a contactor in the mains supply in
front of the frequency converter.
Thermal overheating in brake resistor or motor disables
the mains supply to the frequency converter.
Example 2
Brake resistor power monitor
In addition, the brake power monitor function makes it
possible to read out the momentary power and the mean
power for a selected time period. The brake can also
monitor the power energising and make sure it does not
exceed a limit selected in parameter 2-12 Brake Power Limit
(kW). In 2-13 Brake Power Monitoring, select the function to
carry out when the power transmitted to the brake resistor
exceeds the limit set in parameter 2-12 Brake Power Limit
(kW).
NOTICE
Monitoring the brake power does not fulfil a safety
function. The brake resistor circuit is not ground leakage
protected.
The brake is protected against short-circuiting of the brake
resistor, and the brake transistor is monitored to ensure
that short-circuiting of the transistor is detected. Use a
relay or digital output to protect the brake resistor against
overloading in the event of a fault in the frequency
converter, see chapter 3.3.1 Overtemperature Protection.
Illustration 3.19 Temperature Switch in both Motor and Brake
Resistor disabling Mains Supply by an Input Contactor
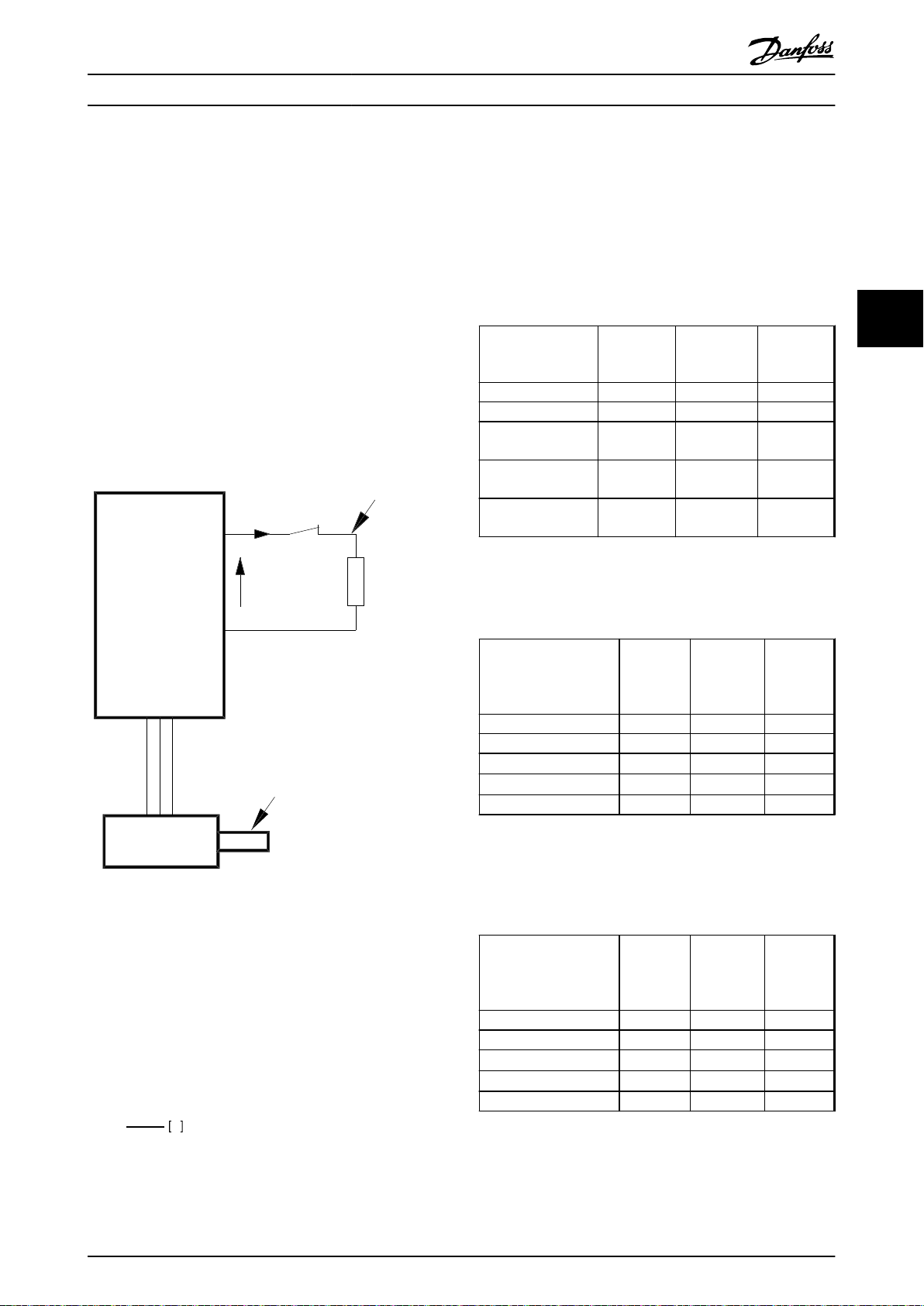
Thermo relay disabling the brake resistor
Example 3
Calculate the brake current (I
thermo relay
) setting of the
temperature switch as follows:
P
I
thermo relay
brake resistor max
=
R
br
Rbr is the current brake resistor value calculated in
chapter 4.1.2 Calculation of Brake Resistor Resistance.
Look up the brake current setting of the thermo relay for
Danfoss brake resistors in chapter 8 Selection Guide.
Overvoltage control (OVC) can be selected as an alternative
brake function in parameter 2-17 Over-voltage Control. If the
DC-link voltage increases, this function is active for all
units. The function ensures that a trip can be avoided. This
is done by increasing the output frequency to limit the
voltage from the DC link. It is a useful function, e.g. if the
ramp-down time is too short since tripping of the
frequency converter is avoided. In this situation the rampdown time is extended.
14 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 17
P
peak,mec.
175ZA096.14
VLT
U
DC
I
termo
P
peak
P
avg
R
br
P
b, max
P
motor
η
INV
= 0.98
η
motor
= 0.9
System Integration
4 System Integration
Design Guide
4.1 Brake Resistor Calculation
To ensure the optimal selection of brake resistor for a
given application, its inertia and braking profile
calculations are required.
This chapter explains the calculations required to obtain
values for optimal selection of brake resistor for a given
application.
4.1.1 Brake Set-up
The following sections use expressions and abbreviations
related to the brake set-up in Illustration 4.1.
Udc is the voltage, where the brake is activated. The FCseries brake function is settled depending on the mains
supply.
DC-link Voltage (Udc), FC 51
Size [V] Brake active
[V]
FC 51 1x200-240 390 410 410
FC 51 3x200-240 390 410 410
FC 51 3x380-480,
1.5-4.0 kW
FC 51 3x380-480,
5.5-15 kW
FC 51 3x380-480,
18.5-22 kW
Table 4.1 DC-link Voltage (Udc), FC 51
1) Adjustable with 2-14 Brake Voltage Reduce
770 800 800
705-770
770 800 800
1)
Warning
before cut
out [V]
800 800
Cut out
(trip) [V]
DC-link Voltage (Udc), FC 102
Brake
Size [V]
FC 102 3x200-240 390 405 410
FC 102 3x380-480 778 810 820
FC 102 3x525-600
FC 102 3x525-600
FC 102 3x525-690 1099 1109 1130
1)
2)
active
[V DC]
943 965 975
1099 1109 1130
High
voltage
warning
[V DC]
Over
voltage
alarm
[V DC]
4 4
Table 4.2 DC-link Voltage (Udc), FC 102
1) Enclosure types A, B, C
2) Enclosure types D, E, F
Illustration 4.1 Brake Set-up
Calculation of Brake Resistor
4.1.2
Resistance
To prevent the frequency converter from cutting out for
protection when the motor brakes, select resistor values on
the basis of the peak braking power and the intermediate
circuit voltage:
2
Udc
R
=
br
P
peak
Ω
The brake resistor performance depends on the DC-link
voltage (Udc).
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 15
DC-link Voltage (Udc), FC 202
Brake
Size [V]
FC 202 3x200-240 390 405 410
FC 202 3x380-480 778 810 820
FC 202 3x525-600
FC 202 3x525-600
FC 202 3x525-690 1099 1109 1130
Table 4.3 DC-link Voltage (Udc), FC 202
1) Enclosure types A, B, C
2) Enclosure types D, E, F
1)
2)
active
[V DC]
943 965 975
1099 1109 1130
High
voltage
warning
[V DC]
Over
voltage
alarm
[V DC]
Page 18
P
[W]
P
peak
P
avg
T
p
T
b
t [s]
175ZA094.13
System Integration Design Guide
DC-link Voltage (Udc), FC 301/FC 302
Use the brake resistance R
, to ensure that the frequency
rec
converter is able to brake at the highest braking torque
High
voltage
warning
[V DC]
Size [V]
FC 301 3x200-240
FC 301 3x200-240
Brake
active
[V DC]
1)
2)
365 405 410
390 405 410
FC 302 3x200-240 390 405 410
44
FC 301 3x380-480
FC 301 3x380-480
FC 302 3x380-500
FC 302 3x380-500
FC 302 3x525-600
FC 302 3x525-600
1)
2)
3)
4)
3)
4)
728 810 820
778 810 820
810 840 855
810 828 855
943 965 975
1099 1109 1130
FC 302 3x525-690 1099 1109 1130
Table 4.4 DC-link Voltage (Udc), FC 301/FC 302
1) Enclosure type A
2) Enclosure types B, C
3) Enclosure types A, B, C
4) Enclosure types D, E, F
DC-link Voltage (Udc), FC 360
1)
High
voltage
warning
[V DC]
800 800
800 800
Size [V]
FC 360 3x380-480,
0.37-22 kW
FC 360 3x380-480, 30-75
kW
Brake
active
[V DC]
700-770
N/A
2)
Over
voltage
alarm
[V DC]
Over
voltage
alarm
[V DC]
(M
) (e.g. 160%). The formula is written as:
br(%)
2
U
x 100
R
Ω =
η
η
rec
motor
VLT
P
motor
is typically at 0.90
is typically at 0.98
x
dc
M
x η
br
%
VLT
x η
motor
When a higher brake resistor resistance is selected, 160%/
150%/110% braking torque cannot be obtained, and there
is a risk that the frequency converter cuts out of DC-Link
overvoltage for protection.
For braking at lower torque, for example 80% torque, it is
possible to install a brake resistor with lower power rating.
Calculate size using the formula for calculating R
Calculation of Braking Power
4.1.3
rec
.
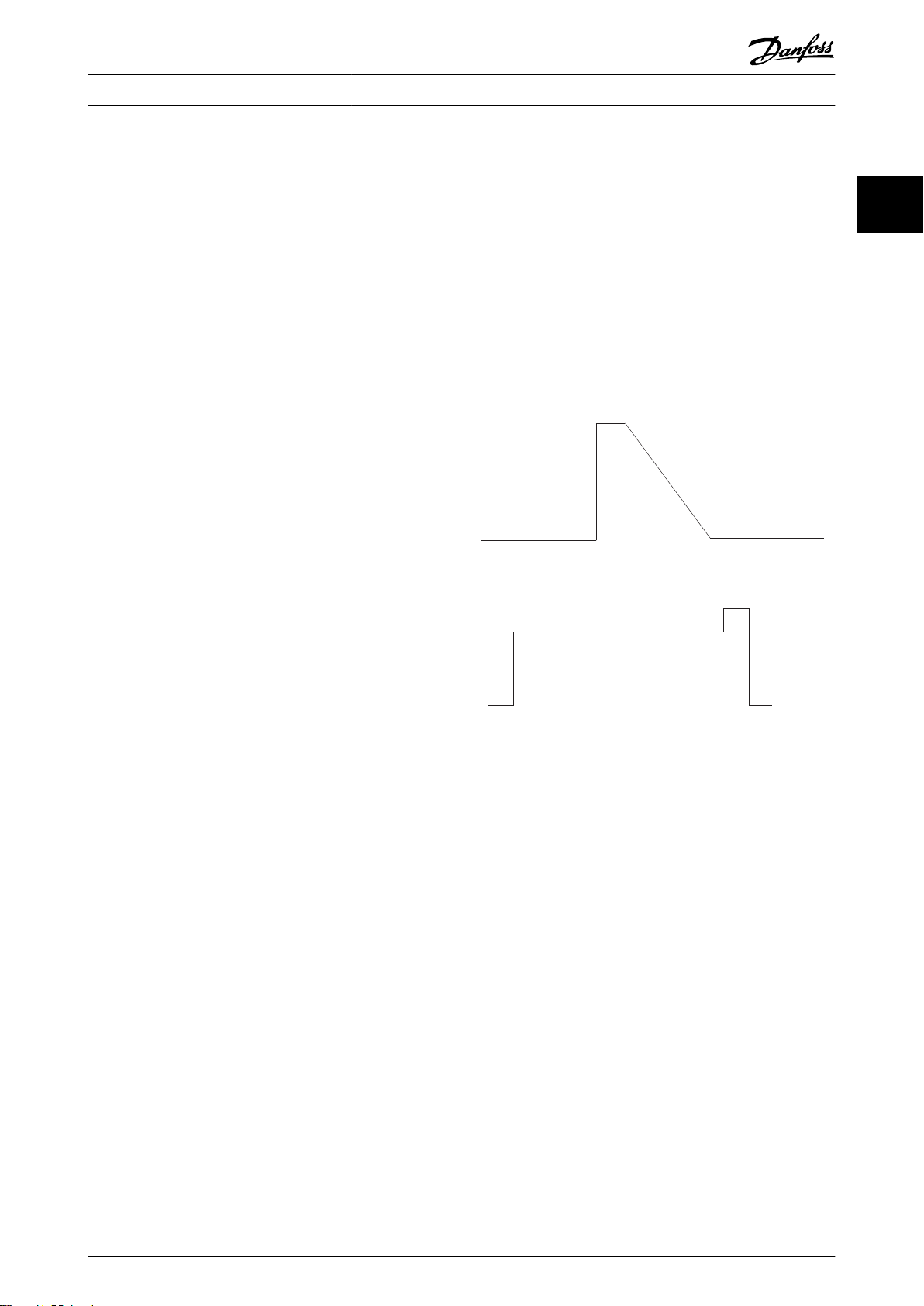
When calculating the braking power, ensure that the brake
resistor is scaled for the average power as well as the peak
power.
The average power is determined by the process
•
period time, i.e. the length of the braking time in
relation to the process period time.
The peak power is determined by the braking
•
torque, which means that as braking progresses,
the brake resistor must be able to dissipate the
energy input.
Illustration 4.2 shows the relation between the average
Table 4.5 DC-link Voltage (Udc), FC 360
1) Adjustable with 2-14 Brake voltage reduce
2) No built-in brake option
power and the peak power.
DC-link Voltage (Udc), FCD 302
High
voltage
warning
[V DC]
Size [V]
Brake
active
[V DC]
FCD 302 3x380-480 778 810 820
Table 4.6 DC-link Voltage (Udc), FCD 302
DC-link Voltage (Udc), VLT 2800
Brake
Size [V]
active
[V DC]
VLT 2800 3x200-240 385 400 410
VLT 2800 3x380-480 770 800 820
Table 4.7 DC-link Voltage (Udc), VLT 2800
16 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
High
voltage
warning
[V DC]
Over
voltage
alarm
[V DC]
Over
voltage
alarm
[V DC]
T
p
T
b
Process period time in s
Braking time in s
Illustration 4.2 Relation between Average Power and Peak
Power
Page 19
ω Start
ω Stop
∆t
∆ω/∆t
175ZA863.11
System Integration
Design Guide
4.1.4 Calculation of the Brake Resistor Peak
Power
P
the motor shaft. Calculate P
P
P
when the motor brakes.
P
the efficiencies of the motor and the frequency converter.
Calculate P
P
When the brake resistor recommended by Danfoss is
selected (R
chapter 8 Selection Guide, the brake resistor is certain to
provide a braking torque of 160%/150%/110% on the
motor shaft.
is the peak power by which the motor brakes on
peak, mec
as follows:
peak, mec
=
P
×
M
peak, mec
is the braking power dissipated to the brake resistor
peak
is lower than P
peak
=
peak
motor
peak,mec
as follows:
peak
P
×
M
motor
) on the basis of the tables in
rec
BR %
×
W
BR %
since the power is reduced by
η
×
η
W
VLT
motor
Danfoss offers brake resistors with a duty-cycle of max.
10% and 40%. If a 10% duty-cycle is applied, the brake
resistors are able to absorb P
for 10% of the period
peak
time. The remaining 90% of the period time is used on
deflecting excess heat.
Calculate the average power with 10% duty-cycle as
follows:
P
=
P
avg
peak
× 10 %
W
Calculate the average power with 40% duty-cycle as
follows:
P
=
P
avg
peak
× 40 %
W
The calculations apply to intermittent braking using a
period time of 30 s.
NOTICE
Exceeding the specified intermittent braking period time
may result in overheating the resistor.
4 4
Calculation of the Brake Resistor
4.1.5
Average Power
The average power is determined by the length of the
braking time in relation to the process period time.
When the kinetic energy (Eb) transferred to the resistor in
each braking sequence is known (see chapter 6.1 Conveyor
Belt and chapter 6.2 Centrifuge), calculate the average
power of the brake resistor as follows:
E
avg
b
=
W
T
p
T
× 100
b
%
T
p
Tp = process period time in s
Tb = braking time in s
P
Tp = period time in s, see Illustration 4.2.
When the kinetic energy transferred to the resistor in each
braking sequence is not known, calculate the average
power on the basis of the process period time and the
braking time.
Calculate the duty-cycle for the braking sequence as
follows:
Duty cycle =
where
4.1.6 Braking of Inertia
When braking high inertia values on the motor shaft, base
the brake resistor values on the inertia, Δω, Δt, see
Illustration 4.3.
Illustration 4.3 Braking of High Inertia
Δt is determined by the ramp-down time.
NOTICE
The ramp-down time goes from the rated motor
frequency to 0 Hz.
P
can be calculated as:
peak
P
=
η
×
η
×
ω
VLT
η
×
n
start
VLT
P
peak
peak
=
motor
η
motor
×
j is the motor shaft inertia.
start
×
× j ×
j
×
2 ×
Δω
60
Δt
Δn
π
2
×
Δt
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 17
Page 20
Programming Design Guide
5 Programming
For descriptions of all available parameters, see the
product specific Programming Guide, www.danfoss.com/
BusinessAreas/DrivesSolutions/Documentations/VLT+Technical
+Documentation.htm.
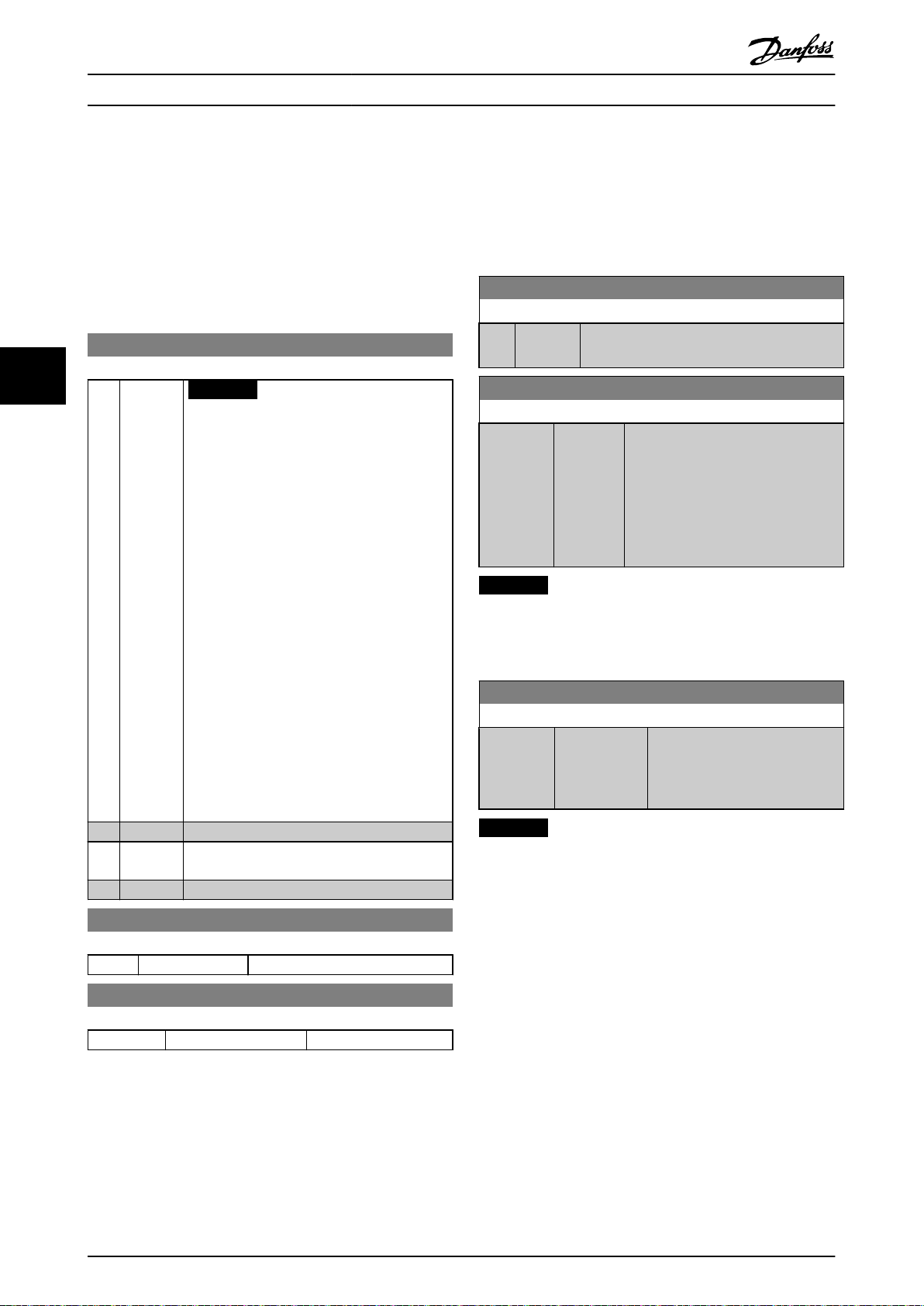
5.1
Parameters for VLT® Micro Drive FC 51
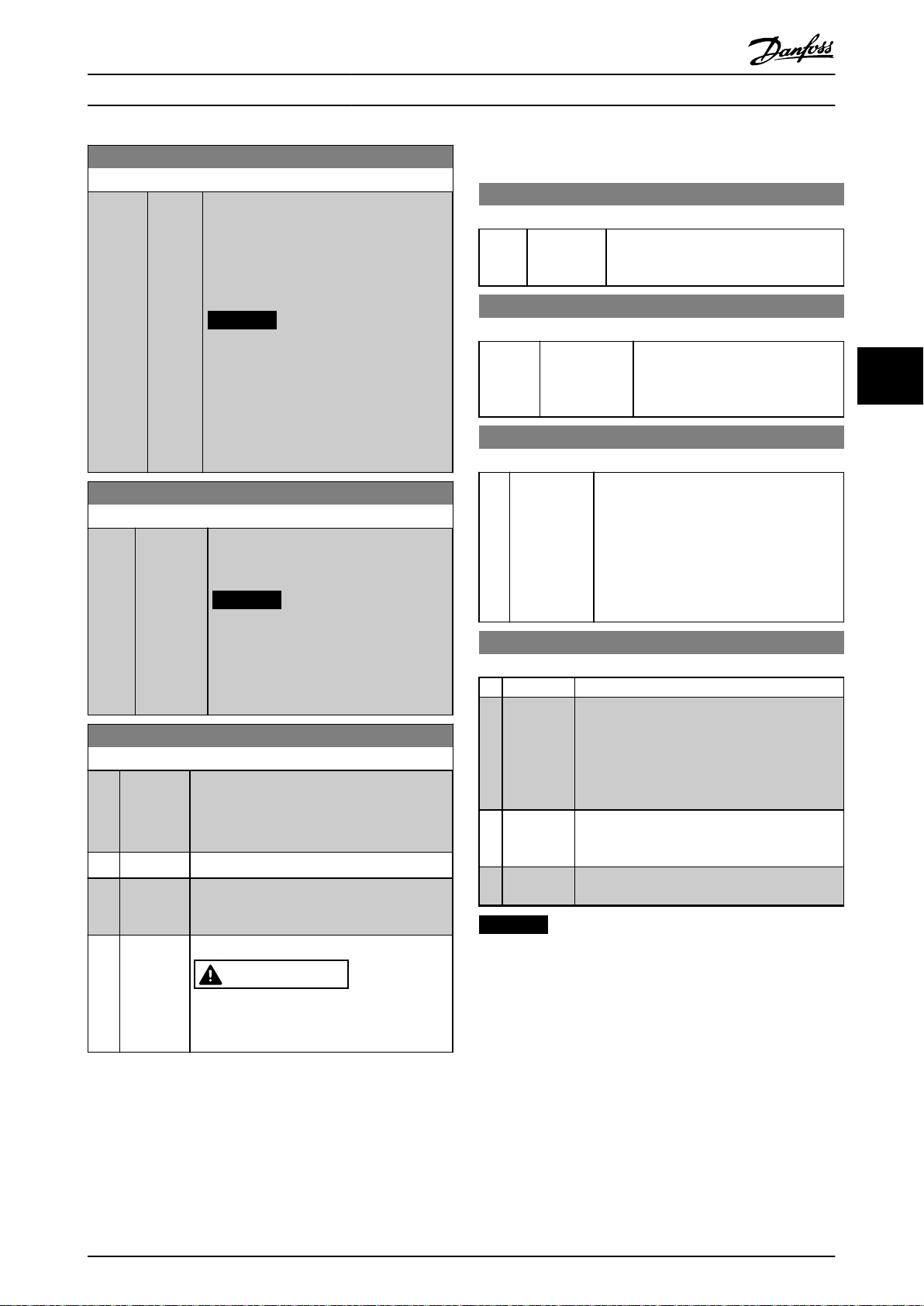
2-10 Brake Function
55
Option: Function:
NOTICE
Resistor brake is only functional in
frequency converters with integrated
dynamic brake. An external resistor must
be connected.
Resistor Brake
The resistor brake limits voltage in the
intermediate circuit when the motor acts as
generator. Without brake resistor, the frequency
converter eventually trips.
The resistor brake consumes surplus energy
resulting from motor braking. A frequency
converter with brake, stops a motor faster than
without a brake, which is used in many
applications. Requires connection of external
brake resistor.
An alternative to the resistor brake is the AC
brake.
AC Brake
The AC brake consumes surplus energy by
creating power loss in the motor.
It is important to keep in mind that an increase
in power loss causes motor temperature to rise.
* Off No brake function.
[0]
[1] Resistor
Brake
[2] AC Brake AC brake is active.
Resistor brake is active.
5.2
Parameters for VLT® HVAC Drive FC 102
and VLT® AQUA Drive FC 202
2-02 DC Braking Time
Range: Function:
10 s* [0 - 60 s] Set the duration of the DC braking current set
in 2-01 DC Brake Current, once activated.
2-03 DC Brake Cut In Speed [RPM]
Range: Function:
Size
related*
[ 0 - 0
RPM]
Set the DC brake cut-in speed to
activate the DC braking current set in
2-01 DC Brake Current, upon a stop
command.
When 1-10 Motor Construction is set to
[1] PM non-salient SPM this value is
limited to 0 RPM (OFF)
NOTICE
Parameter 2-03 DC Brake Cut In Speed [RPM] does not
have effect when 1-10 Motor Construction=[1] PM, nonsalient SPM.
2-04 DC Brake Cut In Speed [Hz]
Range: Function:
Size related* [ 0 - 1000.0
Hz]
Set the DC brake cut-in speed for
activation of the DC braking
current set in 2-01 DC Brake
Current, upon a stop command.
NOTICE
Parameter 2-04 DC Brake Cut In Speed [Hz] has no effect
when 1-10 Motor Construction[1] PM, non-salient SPM.
2-11 Brake Resistor (Ohm)
Range: Function:
5 Ω* [5-5000 Ω] Set brake resistor value.
2-14 Brake Voltage Reduce
Range: Function:
0 V* [ 0 - 0 V]
18 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 21
Programming Design Guide
2-10 Brake Function
Option: Function:
Available selections depend on 1-10 Motor
Construction:
[0] Asynchron:
[0] Off
•
[1] Resistor brake
•
[2] AC brake
•
[1] PM non-salient:
[0] Off
•
[1] Resistor brake
•
[0] Off No brake resistor installed.
[1] Resistor
brake
[2] AC brake AC Brake only works in Compressor Torque mode
Brake resistor incorporated in the system, for
dissipation of surplus brake energy as heat.
Connecting a brake resistor allows a higher DClink voltage during braking (generating
operation). The resistor brake function is only
active in frequency converters with an integral
dynamic brake.
in 1-03 Torque Characteristics.
2-11 Brake Resistor (ohm)
Range: Function:
Size
related*
[ 5.00 -
65535.00
Ohm]
Set the brake resistor value in Ω. This
value is used for monitoring the power
to the brake resistor in 2-13 Brake Power
Monitoring. This parameter is only active
in frequency converters with an integral
dynamic brake.
Use this parameter for values without
decimals. For a selection with 2 decimals,
use parameter 30-81 Brake Resistor (ohm).
2-12 Brake Power Limit (kW)
Range: Function:
Size
related*
[ 0.001 -
2000.000
kW]
Parameter 2-12 Brake Power Limit (kW) is
the expected average power dissipated in
the brake resistor over the time period
selected within 2-13 Brake Power
Monitoring. It is used as the monitoring
limit for 16-33 Brake Energy /2 min and
thereby specifies when a warning/alarm is
to be given.
To calculate parameter 2-12 Brake Power
Limit (kW), the following formula can be
used.
2
U
V×tbrs
P
br,avg
P
br,avg
the brake resistor, Rbr is the resistance of
the brake resistor. tbr is the active
breaking time within the 120 s period, Tbr.
br
W
=
RbrΩ×Tbrs
is the average power dissipated in
2-12 Brake Power Limit (kW)
Range: Function:
Ubr is the DC voltage where the brake
resistor is active.
NOTICE
If values are unknown, or if Tbr is
different from 120 s, the practical
approach is to run the brake
application, readout 16-33 Brake
Energy /2 min and then enter this
+20% in 2-12 Brake Power Limit
(kW).
2-13 Brake Power Monitoring
Option: Function:
This parameter is only active in frequency
converters with an integral dynamic brake.
This parameter enables monitoring of the
power to the brake resistor. The power is
calculated on the basis of the resistance
(parameter 2-11 Brake Resistor (ohm)), the
DC-link voltage, and the resistor duty time.
The time periode can be selected in this
parameter.
The functions are as follows:
Off:
•
Brake power monitoring disabled.
Default setting.
Warning (time period):
•
Activates a warning on the display
when the power transmitted over
the selected time period exceeds
100% of the monitoring limit
(parameter 2-12 Brake Power Limit
(kW)). The warning disappears
when the transmitted power falls
below 80% of the monitoring limit.
Trip (time period);
•
Trips frequency converter and
displays an alarm when the
calculated power exceeds 100% of
the monitoring limit.
Warning & trip (time period):
•
Activates both of the above,
including warning, trip and alarm.
* Disabled Brake power monitoring disabled.
[0]
[1] Warning 120s Warning based on 120 s time periode.
[2] Trip 120s Trip based on 120 s time periode.
[3] Warning &
trip 120s
[4] Warning 30s Warning based on 30 s time periode.
[5] Trip 30s Trip based on 30s time periode
Warning and trip based on 120 s time
periode.
5 5
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 19
Page 22
Programming Design Guide
2-13 Brake Power Monitoring
Option: Function:
[6] Warning &
trip 30s
[7] Warning 60s Warning based on 60 s time periode.
[8] Trip 60s Trip based on 60 s time periode.
[9] Warning &
trip 60s
[10] Warning 300s Warning based on 300 s time periode.
[11] Trip 300s Trip based on 300 s time periode.
[12] Warning &
55
trip 300s
[13] Warning 600s Warning based on 600s time periode.
[14] Trip 600s Trip based on 600 s time periode.
[15] Warning &
trip 600s
Warning and trip based on 30 s time
periode.
Warning and trip based on 60 s time
periode.
Warning and trip based on 300 s time
periode.
Warning and trip based on 600 s time
periode.
If power monitoring is disabled or Warning is selected, the
brake function remains active, even if the monitoring limit
is exceeded. This may lead to thermal overload of the
resistor. It is also possible to generate a warning via a
relay/digital outputs. The measuring accuracy of the power
monitoring depends on the accuracy of the resistance of
2-15 Brake Check
Option: Function:
[2] Trip Monitors for a short-circuit or disconnection of
the brake resistor, or a short-circuit of the brake
IGBT. If a fault occurs, the frequency converter
cuts out while displaying an alarm (trip locked).
[3] Stop and
trip
[4] AC brake Monitors for a short-circuit or disconnection of
Monitors for a short-circuit or disconnection of
the brake resistor, or a short-circuit of the brake
IGBT. If a fault occurs, the frequency converter
ramps down to coast and then trips. A trip lock
alarm is displayed.
the brake resistor, or a short-circuit of the brake
IGBT. If a fault occurs, the frequency converter
performs a controlled ramp-down.
NOTICE
Remove a warning arising in connection with [0] Off or
[1] Warning by cycling the mains supply. The fault must
be corrected first. For [0] Off or [1] Warning, the
frequency converter keeps running even if a fault is
located.
the resistor (better than ±20%).
2-15 Brake Check
Option: Function:
Select type of test and monitoring function to
check the connection to the brake resistor, or
whether a brake resistor is present, and then
display a warning or an alarm in the event of a
fault. The brake resistor disconnection function is
tested during power-up. However, the brake
IGBT test is performed when there is no braking.
A warning or trip disconnects the brake function.
The testing sequence is as follows:
1. The DC-link ripple amplitude is
measured for 300 ms without braking.
2. The DC-link ripple amplitude is
measured for 300 ms with the brake
turned on.
3. If the DC-link ripple amplitude while
braking is lower than the DC-link ripple
amplitude before braking +1%. Brake
check failed, return a warning or alarm.
4. If the DC-link ripple amplitude while
braking is higher than the DC-link
ripple amplitude before braking +1%.
Brake check OK.
Off Monitors brake resistor and brake IGBT for a
[0]
*
[1] Warning Monitors brake resistor and brake IGBT for a
short-circuit during operation. If a short-circuit
occurs, a warning appears.
short-circuit, and runs a test for brake resistor
disconnection during power-up.
2-16 AC brake Max. Current
Range: Function:
100 %* [ 0 - 1000.0%]Enter the maximum permissible current
when using AC brake to avoid
overheating of motor windings. The AC
brake function is available in Flux mode
only.
NOTICE
Parameter 2-16 AC brake Max. Current has no effect when
1-10 Motor Construction=[1] PM, non-salient SPM.
2-17 Over-voltage Control
Option: Function:
[0] Disabled No OVC required.
[2] * Enabled Activates OVC.
NOTICE
Parameter 2-17 Over-voltage Control has no effect when
1-10 Motor Construction[1] PM, non-salient SPM.
NOTICE
The ramp time is automatically adjusted to avoid
tripping of the frequency converter.
20 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 23
Programming Design Guide
16-32 Brake Energy /s
Range: Function:
0 kW* [0 - 10000 kW] View the brake power transmitted to an
external brake resistor, stated as an
instantaneous value.
16-33 Brake Energy /2 min
Range: Function:
0 kW* [0 - 10000
kW]
View the brake power transmitted to an
external brake resistor. The mean power is
calculated on an average level based on
the selected time period within 2-13 Brake
Power Monitoring.
30-81 Brake Resistor (ohm)
Range: Function:
Size
related*
[ 0.01 -
65535.00 Ohm]
Set the brake resistor value in Ω
with 2 decimals. This value is used
for monitoring the power to the
brake resistor in 2-13 Brake Power
Monitoring.
5.3
Parameters for VLT® AutomationDrive
FC 301/FC 302 and ® Decentral Drive
FCD 302
2-02 DC Braking Time
Range: Function:
10 s* [0 - 60 s] Set the duration of the DC braking current set
in 2-01 DC Brake Current, once activated.
2-03 DC Brake Cut In Speed [RPM]
Range: Function:
Size related* [ 0 - 60000
RPM]
2-04 DC Brake Cut In Speed [Hz]
Range: Function:
Size related* [ 0 - 1000.0
Hz]
Set the DC brake cut-in speed for
activation of the DC braking
current set in 2-01 DC Brake
Current, upon a stop command.
Set the DC brake cut-in speed for
activation of the DC braking
current set in 2-01 DC Brake
Current, upon a stop command.
5 5
NOTICE
Parameter 2-04 DC Brake Cut In Speed [Hz] has no effect
when 1-10 Motor Construction[1] PM, non-salient SPM.
2-10 Brake Function
Option: Function:
[0] Off No brake resistor is installed.
[1] Resistor
brake
[2] AC brake Is selected to improve braking without using a
A brake resistor is incorporated in the system, for
dissipation of surplus brake energy as heat.
Connecting a brake resistor allows a higher DClink voltage during braking (generating operation).
The resistor brake function is only active in
frequency converters with an integral dynamic
brake.
brake resistor. This parameter controls an
overmagnetisation of the motor when running
with a generatoric load. This function can improve
the OVC-function. Increasing the electrical losses
in the motor allows the OVC function to increase
the braking torque without exceeding the over
voltage limit.
NOTICE
The AC brake is not as efficient as dynamic
braking with resistor.
AC brake is for VVC+ mode in both open
and closed loop.
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 21
Page 24
Programming
Design Guide
2-11 Brake Resistor (ohm)
Range: Function:
Size
related*
55
2-12 Brake Power Limit (kW)
[ 5.00 -
65535.00
Ohm]
Set the brake resistor value in Ω. This
value is used for monitoring the power
to the brake resistor in 2-13 Brake Power
Monitoring. This parameter is only active
in frequency converters with an integral
dynamic brake.
Use this parameter for values without
decimals. For a selection with 2 decimals,
use parameter 30-81 Brake Resistor (ohm).
Range: Function:
Size
related*
[ 0.001 -
2000.000
kW]
Parameter 2-12 Brake Power Limit (kW) is
the expected average power dissipated in
the brake resistor over the time period
selected within 2-13 Brake Power
Monitoring. It is used as the monitoring
limit for 16-33 Brake Energy /2 min and
thereby specifies when a warning/alarm is
to be given.
To calculate parameter 2-12 Brake Power
Limit (kW), the following formula can be
used.
2
U
V×tbrs
P
br,avg
P
br,avg
the brake resistor, Rbr is the resistance of
the brake resistor. tbr is the active
breaking time within the 120 s period, Tbr.
Ubr is the DC voltage where the brake
resistor is active.
br
W
=
RbrΩ×Tbrs
is the average power dissipated in
NOTICE
If values are unknown, or if Tbr is
different from 120 s, the practical
approach is to run the brake
application, readout 16-33 Brake
Energy /2 min and then enter this
+20% in 2-12 Brake Power Limit
(kW).
2-13 Brake Power Monitoring
Option: Function:
This parameter is only active in frequency
converters with an integral dynamic brake.
This parameter enables monitoring of the
power to the brake resistor. The power is
calculated on the basis of the resistance
(parameter 2-11 Brake Resistor (ohm)), the
DC-link voltage, and the resistor duty time.
The time periode can be selected in this
parameter.
The functions are as follows:
2-13 Brake Power Monitoring
Option: Function:
Off:
•
Brake power monitoring disabled.
Default setting.
Warning (time period):
•
Activates a warning on the display
when the power transmitted over
the selected time period exceeds
100% of the monitoring limit
(parameter 2-12 Brake Power Limit
(kW)). The warning disappears
when the transmitted power falls
below 80% of the monitoring limit.
Trip (time period);
•
Trips frequency converter and
displays an alarm when the
calculated power exceeds 100% of
the monitoring limit.
Warning & trip (time period):
•
Activates both of the above,
including warning, trip and alarm.
[0] * Disabled Brake power monitoring disabled.
[1] Warning 120s Warning based on 120 s time periode.
[2] Trip 120s Trip based on 120 s time periode.
[3] Warning &
trip 120s
[4] Warning 30s Warning based on 30 s time periode.
[5] Trip 30s Trip based on 30s time periode
[6] Warning &
trip 30s
[7] Warning 60s Warning based on 60 s time periode.
[8] Trip 60s Trip based on 60 s time periode.
[9] Warning &
trip 60s
[10] Warning 300s Warning based on 300 s time periode.
[11] Trip 300s Trip based on 300 s time periode.
[12] Warning &
trip 300s
[13] Warning 600s Warning based on 600s time periode.
[14] Trip 600s Trip based on 600 s time periode.
[15] Warning &
trip 600s
Warning and trip based on 120 s time
periode.
Warning and trip based on 30 s time
periode.
Warning and trip based on 60 s time
periode.
Warning and trip based on 300 s time
periode.
Warning and trip based on 600 s time
periode.
If power monitoring is disabled or Warning is selected, the
brake function remains active, even if the monitoring limit
is exceeded. This may lead to thermal overload of the
resistor. It is also possible to generate a warning via a
relay/digital outputs. The measuring accuracy of the power
monitoring depends on the accuracy of the resistance of
the resistor (better than ±20%).
22 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 25
Programming Design Guide
2-15 Brake Check
Option: Function:
Parameter 2-15 Brake Check is only active in
frequency converters with an integral dynamic
brake.
Select type of test and monitoring function to
check the connection to the brake resistor, or
whether a brake resistor is present, and then
display a warning or an alarm in the event of a
fault.
NOTICE
The brake resistor disconnection function
is tested during power-up. However, the
brake IGBT test is performed when there is
no braking. A warning or trip disconnects
the brake function.
The testing sequence is as follows:
1. The DC-link ripple amplitude is
measured for 300 ms without braking.
2. The DC-link ripple amplitude is
measured for 300 ms with the brake
turned on.
3. If the DC-link ripple amplitude while
braking is lower than the DC-link ripple
amplitude before braking + 1%: Brake
check has failed by returning a warning
or alarm.
4. If the DC-link ripple amplitude while
braking is higher than the DC-link ripple
amplitude before braking + 1%: Brake
check is OK.
Off Monitors brake resistor and brake IGBT for a
[0]
*
[1] Warning Monitors brake resistor and brake IGBT for a
[2] Trip Monitors for a short-circuit or disconnection of
[3] Stop and
trip
[4] AC brake Monitors for a short-circuit or disconnection of
short-circuit during operation. If a short-circuit
occurs, warning 25 appears.
short-circuit, and runs a test for brake resistor
disconnection during power-up.
the brake resistor, or a short-circuit of the brake
IGBT. If a fault occurs, the frequency converter
cuts out while displaying an alarm (trip locked).
Monitors for a short-circuit or disconnection of
the brake resistor, or a short-circuit of the brake
IGBT. If a fault occurs, the frequency converter
ramps down to coast and then trips. A trip lock
alarm is displayed (e.g. warning 25, 27 or 28).
the brake resistor, or a short-circuit of the brake
IGBT. If a fault occurs, the frequency converter
performs a controlled ramp-down. This option is
available for FC 302 only.
2-15 Brake Check
Option: Function:
[5] Trip Lock
NOTICE
Remove a warning arising in connection with [0] Off or
[1] Warning by cycling the mains supply. The fault must
be corrected first. For [0] Off or [1] Warning, the
frequency converter keeps running even if a fault is
located.
2-16 AC brake Max. Current
Range: Function:
100 %* [ 0 - 1000.0 %] Enter the maximum permissible current
when using AC brake to avoid
overheating of motor windings.
NOTICE
Parameter 2-16 AC brake Max. Current has no effect when
1-10 Motor Construction[1] PM, non salient SPM.
2-17 Over-voltage Control
Option: Function:
Overvoltage control (OVC) reduces the risk
of the frequency converter tripping due to
an overvoltage on the DC-link caused by
generative power from the load.
[0] * Disabled No OVC required.
[1] Enabled (not
at stop)
[2] Enabled Activates OVC.
Activates OVC except when using a stop
signal to stop the frequency converter.
NOTICE
Do not enable OVC in hoisting applications.
2-18 Brake Check Condition
Range: Function:
[0] * At Power Up Brake check is performed at power
up.
[1] After Coast Situations Brake check is performed after coast
situations.
16-32 Brake Energy /s
Range: Function:
0 kW* [0 - 10000 kW] View the brake power transmitted to an
external brake resistor, stated as an
instantaneous value.
5 5
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 23
Page 26

Programming Design Guide
16-33 Brake Energy /2 min
Range: Function:
0 kW* [0 - 10000
kW]
View the brake power transmitted to an
external brake resistor. The mean power is
calculated on an average level based on
the selected time period within 2-13 Brake
Power Monitoring.
30-81 Brake Resistor (ohm)
Range: Function:
Size
55
related*
[ 0.01 -
65535.00
Ohm]
Set the brake resistor value in Ω. This
value is used for monitoring the
power to the brake resistor in
2-13 Brake Power Monitoring. This
parameter is only active in frequency
converters with an integral dynamic
brake.
5.4
Parameters for VLT® AutomationDrive
FC 360
2-10 Brake Function
Option: Function:
[0]*Off No brake resistor is installed.
[1] Resistor
brake
[2] AC brake Improves braking without using a brake resistor.
A brake resistor is incorporated in the system for
dissipation of surplus brake energy as heat.
Connecting a brake resistor allows a higher DClink voltage during braking (generating
operation). The brake resistor function is only
active in frequency converters with an integral
dynamic brake.
This parameter controls an overmagnetisation of
the motor when running with a generatoric load.
This function can improve the OVC-function.
Increasing the electrical losses in the motor
allows the OVC-function to increase braking
torque without exceeding the voltage limit.
NOTICE
The AC brake is not as efficient as
dynamic braking with resistor.
AC brake is for VVC+ mode in both open
and closed loop.
2-11 Brake Resistor (ohm)
Range: Function:
Size
related*
[ 0 65535
Ohm]
Set the brake resistor value in Ω. This
value is used for monitoring the power to
the brake resistor. Parameter 2-11 Brake
Resistor (ohm) is only active in frequency
converters with an integral dynamic brake.
Use this parameter for values without
decimals.
2-12 Brake Power Limit (kW)
Range: Function:
Size
related*
[0.001
- 2000
kW]
Parameter 2-12 Brake Power Limit (kW) is the
expected average power dissipated in the
brake resistor over a period of 120 s. It is
used as the monitoring limit for 16-33 Brake
Energy /2 min and thereby specifies when a
warning/alarm is to be given.
To calculate parameter 2-12 Brake Power
Limit (kW), the following formula can be
used.
P
W
=
br,avg
P
is the average power dissipated in the
br,avg
brake resistor, Rbr is the resistance of the
2
U
V×tbrs
br
RbrΩ×Tbrs
24 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 27
Programming Design Guide
2-12 Brake Power Limit (kW)
Range: Function:
brake resistor. tbr is the active breaking time
within the 120 s period, Tbr.
Ubr is the DC voltage where the brake
resistor is active. This depends on the unit
as follows:
T4 units: 778 V
NOTICE
If Rbr is not known or if Tbr is different
from 120 s, the practical approach is
to run the brake application, readout
16-33 Brake Energy /2 min and then
enter this + 20% in 2-12 Brake Power
Limit (kW).
2-16 AC Brake, Max current
Range: Function:
100 %* [0 - 160%]Enter the maximum permissible current
when using AC brake to avoid overheating
of motor windings.
NOTICE
Parameter 2-16 AC Brake, Max current
has no effect when 1-10 Motor
Construction is set to [1] PM, nonsalient SPM.
2-17 Over-voltage Control
Option: Function:
Overvoltage control (OVC) reduces the risk of
the frequency converter tripping due to an
overvoltage on the DC-link caused by
generative power from the load.
[0] * Disabled No OVC required.
[1] Enabled
(not at
stop)
[2] Enabled Activates OVC
Activates OVC except when using a stop signal
to stop the frequency converter.
WARNING
Do NOT enable OVC in hoisting
applications.
5.5
Parameters for VLT® 2800
126 DC brake time
Range: Function:
10 sec* [0 - 60 sec.] The DC brake time is set at which
parameter 132 DC brake voltage is to be
active.
127 DC brake cut-in frequency
Range: Function:
0.00 OFF* [0.0 (OFF) par. 202]
Set the DC brake cut-in frequency at
which the DC brake is to be
activated in connection with a stop
command.
132 DC brake voltage
Range: Function:
0%* [0 - 100% of
max. DC
brake
voltage]
Set the DC brake voltage to be activated at
stop when the DC brake frequency set in
parameter 127 DC brake cut-in frequency is
reached, or if DC braking inverse is active via
a digital input or via serial communication.
Subsequently, the DC brake voltage is active
for the time set in parameter 126 DC brake
time.
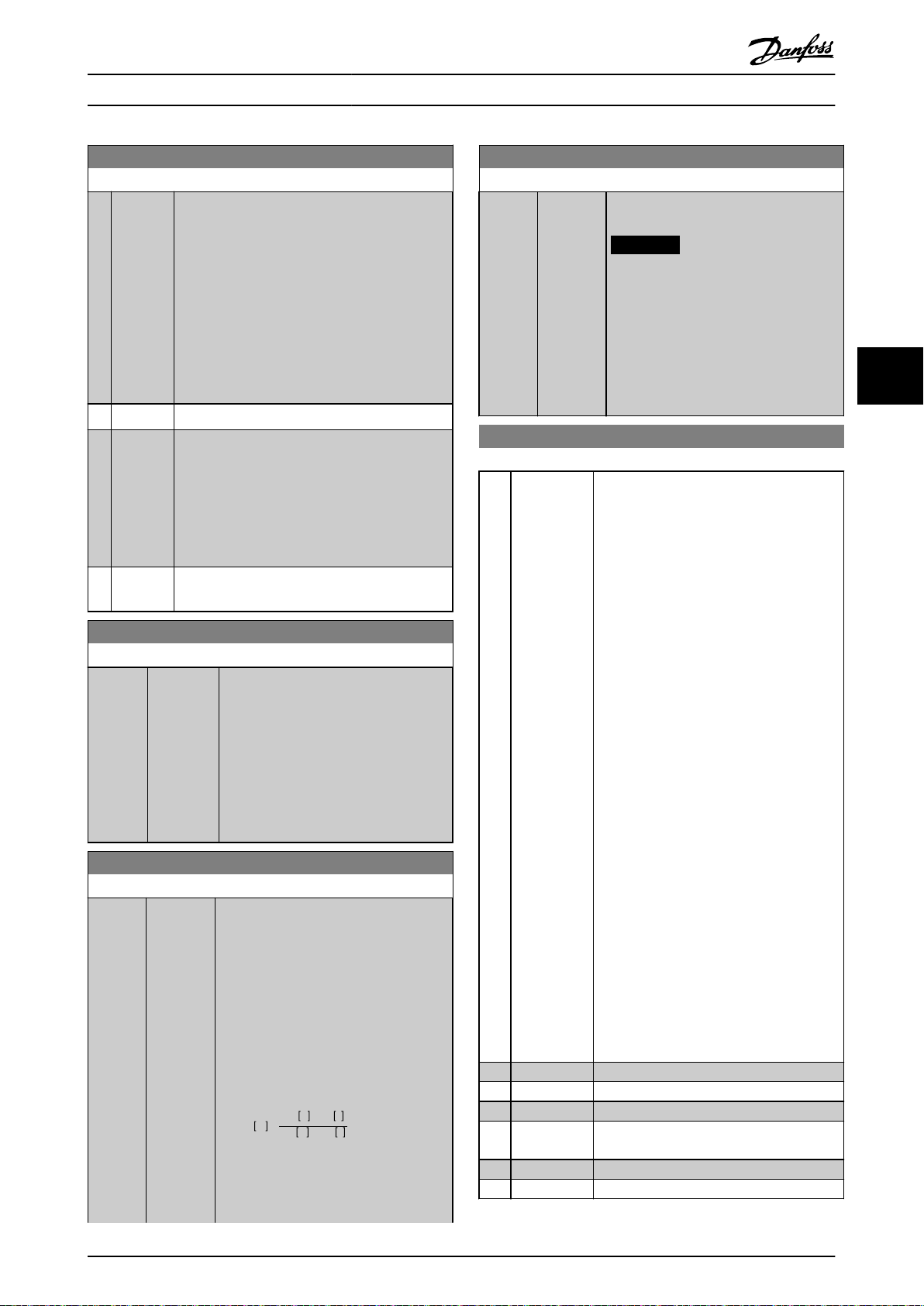
400 Brake function
Option: Function:
[0] Off
[1] Resistor
brake
[4] AC brake
[5] Load
sharing
Select [1] Resistor brake if the frequency
converter has an integral brake transistor, and a
brake resistor is connected to terminals 81, 82.
A higher DC-link voltage is permitted during
braking (generated operation) when a brake
resistor is connected.
Select [4] AC brake to improve braking without
using brake resistors. Note that [4] AC brake is
not as effective as [1] Resistor brake.
NOTICE
Disconnected and reconnect mains voltage to activate a
change of selection.
5 5
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 25
Page 28
Programming Design Guide
456 Brake Voltage Reduce
Range: Function:
0*0* [0-25 V if 200 V
device]
[0-50 V if 400 V
device]
Set the voltage by which the level for
resistor braking is reduced. It is only
active when [1] Resistor is selected in
parameter 400 Brake function.
NOTICE
The greater the reduction value, the faster the reaction
to a generator overload. Should only be used if there are
problems with overvoltage in the DC-link voltage.
55
26 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 29
Application Examples Design Guide
6 Application Examples
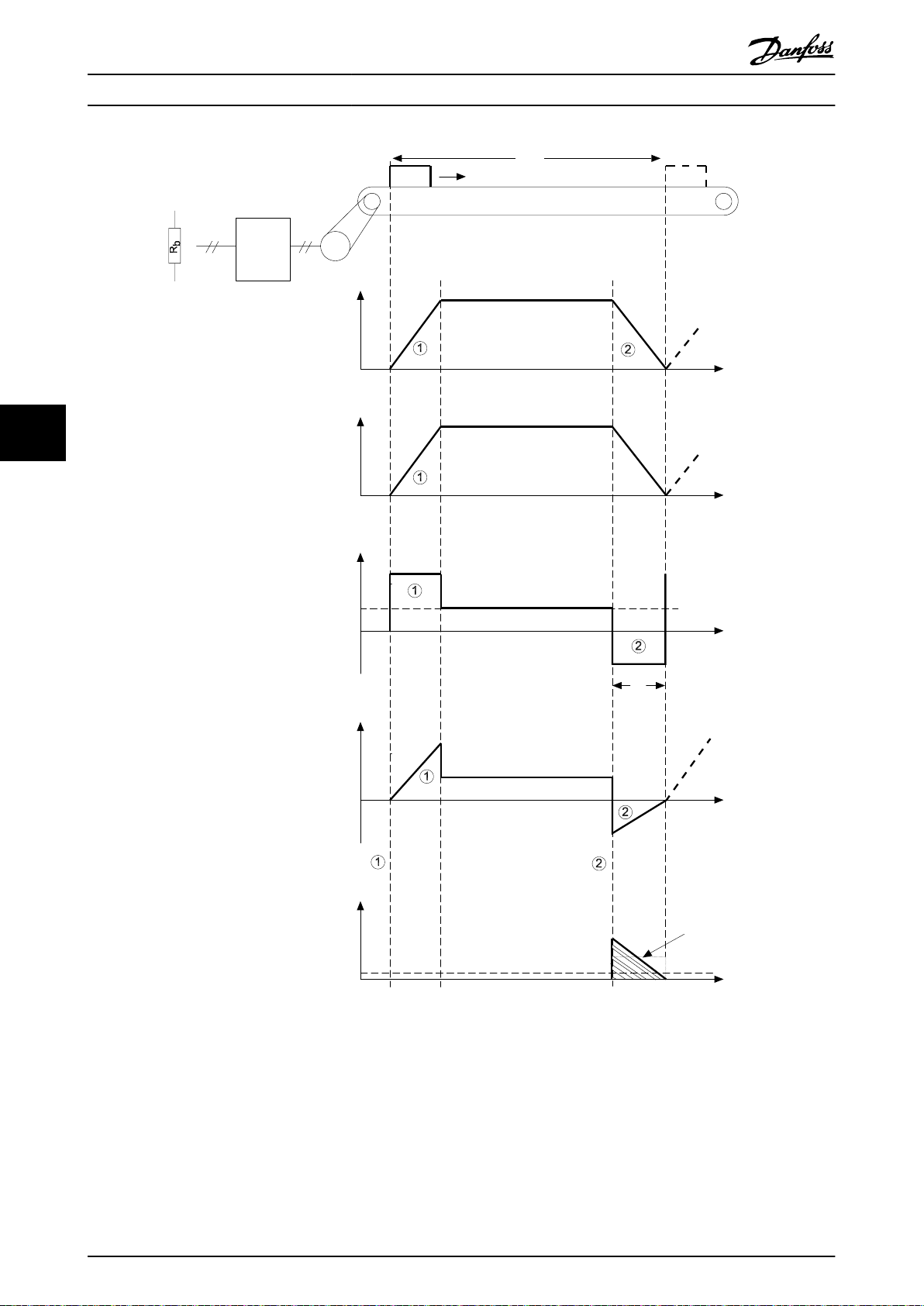
6.1 Conveyor Belt
Illustration 6.1 shows the relation between the braking
power and the acceleration/braking of a conveyor belt.
Note:
The motor power during braking is negative,
•
since the torque on the motor shaft is negative.
The motor power is time-dependent.
•
The braking power (the power to be dissipated to the
brake resistor) corresponds almost exactly to the negative
motor power plus losses in the motor and the frequency
converter.
Kinetic energy (E) in conveyor belt + motor:
E
= 0. 5 × m ×
where
m = mass with linear movement [kg]
v = speed of mass with linear movement [m/s]
j = inertia of motor and gear box [kgm2]
ω = motor speed [rad/s]
2
v
+ 0 .5 × j × ω
2
Ws
Insert:
n
× 2π
ω
=
60
The result is:
E
= 0 .5×
b
2
m v
+ 0 .0055 ×
2
j
×
n
− 0 .052 × n ×
M
×
η
Ws
f
M
6 6
n
ω
= motor speed =
× 2π
60
rad /
s
This formula is also expressed as follows:
E
= 0. 50 × m ×
2
v
+ 0 .0055 × j ×
n2Ws
However, not all of the energy is dissipated in the brake
resistor. The friction of the conveyor belt and the power
loss of the motor also contribute to the braking function.
So, the formula for energy dissipation (Eb) to the brake
resistor is as follows:
E
= 0 .5×
b
m v
2
+ 0 .5
jω
2
− 0 .5 ×
Mfω
×
η
M
Ws
where
Mf = Friction torque [Nm]
ŋM = Motor efficiency
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 27
Page 30
P
average
Time [s]
Time [s]
Time [s]
Time [s]
Length [m]
175ZA397.14
Acceleration
Braking
P
braking, avg.
P
[W]
Motor power
P
[W]
Brake power
M
[Nm]
Torque
V
[m/s]
Speed
VLT®
M
V
[m/s]
Speed
m v
T
p
m
ϖ
[m/s]
T
p
Application Examples
Design Guide
66
Illustration 6.1 Conveyor Belt: Relation between Braking Power and Acceleration/Deceleration
28 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 31

Application Examples Design Guide
6.2 Centrifuge
Illustration 6.2 Centrifuge with Brake Resistor
Braking of a centrifuge is a typical application of brake
resistors, shown in Illustration 6.2.
The formula for energy dissipation (Eb) to the brake resistor
is:
6 6
E
= 0. 0055 ×
b
j
× n22 + 0. 0055 ×
c
j
× n12 × ηM
M
Ws
where
m = weight of the centrifuge content [kg]
jC = centrifuge inertia [kgm2] = 0.5 x m (r
2
+ r
1
jM = gear motor inertia [kgm2]
ηM = gear motor efficiency
n1 = max. motor speed [rpm]
n2 = max. centrifuge speed [rpm]
Rb = brake resistor
6.3
Continuous Braking
To achieve continuous braking, select a brake resistor in
which the constant braking power does not exceed the
average power P
of the brake resistor.
avg
NOTICE
Contact the Danfoss distributor for further information.
2
)
2
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 29
Page 32

Special Conditions Design Guide
7 Special Conditions
7.1 Alternative Braking Methods
7.1.1 DC Injection Braking
If the 3-phase winding of the stator is fed with direct
current, a stationary magnetic field Φ is set up in the
stator bore causing a voltage to be induced in the bars of
the cage rotor as long as the rotor is in motion. Since the
electrical resistance of the rotor cage is very low, even
small induced voltages can create a high rotor current.
This current produces a strong braking effect on the bars
and hence on the rotor. As the speed decreases, the
frequency of the induced voltage decreases and with it the
inductive impedance. The ohmic resistance of the rotor
77
gradually becomes dominant and so increases the braking
effect as the speed comes down. The braking torque
generated decreases steeply just before standstill and
finally ceases when there is no further movement. Direct
current injection braking is therefore not suitable for
holding a load at rest.
FC 102, 202, 301 and 302-Series
An over-modulated DC current added to the AC current
works as an eddy current brake (parameter 2-02 DC Braking
Time ≠ 0 s).
AC-braking
7.1.2
When the motor acts as a brake, the DC-link voltage
increases because energy is fed back to the DC-link. The
principle in AC-brake is to increase the magnetisation
during the braking and thereby increase the thermal losses
of the motor.
VLT 2800
By using parameter 144 in VLT 2800, it is possible to adjust
the size of the generator torque that can be applied to the
motor without the intermediate circuit voltage exceeding
the warning level.
The braking torque depends on the speed. With the ACbrake function enabled and parameter 144=1.3 (factory
setting) it is possible to brake with about 50% of rated
torque below 2/3 of rated speed and with about 25 % at
rated speed. The function is not working at low speed
(below 1/3 of nominal motor speed). It is only possible to
run for about 30 s with parameter 144 greater than 1.2.
NOTICE
If the value in parameter 144 is increased, the motor
current simultaneously increases significantly when
generator loads are applied. The parameter should
therefore only be changed if it is guaranteed during
measurement that the motor current in all operating
situations never exceeds the maximum permitted current
in the motor. Note: The current cannot be read out from
the display.
7.1.3 Mechanical Holding Brake
A mechanical holding brake mounted directly on the
motor shaft normally performs static braking. In some
applications, the static holding torque is working as static
holding of the motor shaft (usually synchronous
permanent motors). A holding brake is either controlled by
a PLC or directly by a digital output from the frequency
converter (relay or solid state).
NOTICE
FC 102, 202, 301 and 302-Series
The brake energy is distributed in the motor by changing
the loss conditions in the motor. The AC brake function
cannot be used in applications with high cycling frequency
since this overheats the motor (parameter 2-10 Brake
Function=[2] AC Brake). By using factory settings it is
possible to brake with about 50% of rated torque below
2/3 of rated speed and with about 25% at rated speed.
The function is not working at low speed (below 1/3 of
nominal motor speed).
When the holding brake is included in a safety chain:
A frequency converter cannot provide a safe control of a
mechanical brake. A redundancy circuitry for the brake
control must be included in the total installation.
30 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 33

Special Conditions Design Guide
7.1.4 DC Braking
Resistor brake is useful from max. speed down to a certain
frequency. Below this frequency DC braking is to be
applied as required. The most efficient way of doing this is
to use a combination of dynamic and DC braking. See
Illustration 7.1. The parameters can be found in
chapter 5 Programming.
7 7
Illustration 7.1 Optimum Braking
How to calculate optimum DC-brake cut in frequency:
n
−
n
0
Slip
s
=
Synchronous speed
n
0
n
× 100 %
f
× 60
n
=
0
p
[1/min]
f = frequency supplied to motor
p = no. of pole pairs
nn = speed of the rotor
s
×
DC-brake cut in frequency = 2 ×
100
f
Hz
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 31
Page 34

Select a 10%
duty cycle brake
resistor from the
selection tables
Select a 10%
duty cycle brake
resistor from the
selection tables
Select a 40%
duty cycle brake
resistor from the
selection tables
Please contact
Danfoss
1)
Please contact
Danfoss
1)
130BB148.13
Low intertia
ramp down>15 s
Low or high
intertia?
Horizontal
Vertical
Horizontal or
vertical movement?
Determine braking
time of the
application
Braking time<
brake resistor period
Braking time>
brake resistor period
Calculate duty
cycle
duty cycle <10% duty cycle >40%
duty cycle ranging
from 10-40%
High inertia
ramp down<15 s
or don’t know
Compare the braking
time with the resistors
braking period
Selection Guide
Design Guide
8 Selection Guide
8.1 Selection Flow Chart
To select the correct size of brake resistor for an application, refer to the flow chart in Illustration 8.1.
1. Select an answer to each question from the top down.
2. Follow the answer to reach the next question, or to obtain guidance in calculating inertia or duty cycle.
3. The final box indicates the correct selection table, or whether to call hotline for additional guidance.
88
Illustration 8.1 Brake Resistor Selection Flow Chart
1) When contacting Danfoss, provide the following data:
Nominal power 100%
•
Maximum power during brake cycle
•
Braking time/duty cycle
•
Supply voltage (max. DC)
•
Resistance (Ω)
•
With or without temperature switch
•
IP enclosure rating
•
Type of reference drive
•
32 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 35

Selection Guide Design Guide
8.2 Selection Tables for Recommended Brake Resistors
8.2.1 Abbreviations used in the Brake Resistor Tables
Mains Voltage class
P
m
R
min
R
rec
Thermo relay Brake current setting of external thermo relay
Danfoss part number Danfoss brake resistor order numbers
Cable cross-section
P
br,cont.
R
br,nom
8.2.2
VLT® Micro Drive FC 51
10% duty cycle, horizontal braking, S2, T2, T4
Frequency converter data
Mains
type
P
m
[kW]
S2 1.5 60.0 70.9 70 0.200 175u3026 - - - 1.5 1.6
S2 2.2 40.0 47.6 48 0.200 175u3031 - - - 1.5 1.9
T2 1.5 60.0 70.9 70 0.200 175u3026 - - - 1.5 1.6
T2 2.2 40.0 47.6 48 0.200 175u3031 - - - 1.5 1.9
T2 3.7 23.0 27.7 27 0.360 175u3326 175u3477 175u3478 - 1.5 3.5
T4 1.5 234 274.8 270 0.200 175u3007 - - - 1.5 0.8
T4 2.2 157 184.4 200 0.200 175u3008 - - - 1.5 0.9
T4 3 113 133.7 145 0.300 175u3300 - - - 1.5 1.3
T4 4 83.0 98.9 110 0.450 175u3335 175u3450 175u3449 - 1.5 1.9
T4 5.5 60.0 71.2 80 0.570 175u3336 175u3452 175u3451 - 1.5 2.5
T4 7.5 44.0 51.8 56 0.680 175u3337 175u3027 175u3028 - 1.5 3.3
T4 11 29.0 34.8 38 1.130 175u3338 175u3034 175u3035 - 1.5 5.2
T4 15 21.0 25.3 28 1.400 175u3339 175u3039 175u3040 - 1.5 6.7
T4 18.5 17.0 20.4 22 1.700 175u3340 175u3047 175u3048 - 1.5 8.3
T4 22 14.0 17.1 19 2.200 175u3357 175u3049 175u3050 - 1.5 10.1
Rated motor size for frequency converter
Minimum permissible brake resistor - by frequency converter
Recommended brake resistor resistance of Danfoss brake resistors
Recommended minimum value based upon PVC insulated copper cable. 30 °C ambient temperature with normal
heat dissipation
Brake resistor average rated power. The temperature switch enables at approximate 90% of continuous rated
power at brake resistors with IP54, IP21 and IP65 enclosure protection
The nominal (calculated) resistor value to ensure a brake power on motor shaft of 150/160/110% for 1 minute
FC 51 Horizontal braking 10% duty cycle
Brake resistor data Installation
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
Danfoss part number
Screw
P
rec
br,cont.
[kW]
Wire IP54
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
8 8
Thermo
relay
[A]
Table 8.1 S2, T2, T4, Horizontal Braking 10% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 33
Page 36

Selection Guide Design Guide
40% duty cycle, vertical braking, S2, T2, T4
FC 51 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
S2 1.5 60.0 70.9 70 0.570 175u3302 175u3404 175u3403 - 1.5 2.7
S2 2.2 40.0 47.6 48 0.960 175u3303 175u3406 175u3405 - 1.5 4.2
T2 1.5 60.0 70.9 70 0.570 175u3302 175u3404 175u3403 - 1.5 2.7
T2 2.2 40.0 47.6 48 0.960 175u3303 175u3406 175u3405 - 1.5 4.2
T2 3.7 23.0 27.7 27 1.400 175u3305 175u3410 175u3409 - 1.5 6.8
T4 1.5 234 274.8 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
T4 2.2 157 184.4 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
T4 3 113 133.7 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
T4 4 83.0 98.9 110 1.700 175u3314 175u3424 175u3423 - 1.5 3.7
T4 5.5 60.0 71.2 80 2.200 175u3315 175u3138 175u3139 - 1.5 5
T4 7.5 44.0 51.8 56 3.200 175u3316 175u3428 175u3427 - 1.5 7.1
T4 11 29.0 34.8 38 5.000 - - - 175u3236 1.5 11.5
T4 15 21.0 25.3 28 6.000 - - - 175u3237 2.5 14.7
T4 18.5 17.0 20.4 22 8.000 - - - 175u3238 4 19
T4 22 14.0 17.1 19 10.000 - - - 175u3203 4 23
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.2 S2, T2, T4, Vertical Braking 40% Duty Cycle
34 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 37

Selection Guide Design Guide
8.2.3
VLT® HVAC Drive FC 102
10% duty cycle, horizontal braking, T2
FC 102 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
T2 1.1 130 152.9 145 0.100 175u3016 - - - 1.5 0.8
T2 1.5 81.0 110.5 100 0.100 175u3021 - - - 1.5 0.9
T2 2.2 58.5 74.1 70 0.200 175u3026 - - - 1.5 1.6
T2 3 45.0 53.7 48 0.200 175u3031 - - - 1.5 1.9
T2 3.7 31.5 39.9 35 0.300 175u3325 - - - 1.5 2.7
T2 5.5 22.5 28.7 27 0.360 175u3326 175u3477 175u3478 - 1.5 3.5
T2 7.5 17.7 20.8 18 0.570 175u3327 175u3442 175u3441 - 1.5 5.3
T2 11 12.6 14.0 13 0.680 175u3328 175u3059 175u3060 - 1.5 6.8
T2 15 8.7 10.2 9.0 1.130 175u3329 175u3068 175u3069 - 2.5 10.5
T2 18.5 5.3 8.2 5.7 1.400 175u3330 175u3073 175u3074 - 4 14.7
T2 22 5.1 6.9 5.7 1.700 175u3331 175u3483 175u3484 - 4 16
T2 30 3.2 5.0 3.5 2.200 175u3332 175u3080 175u3081 - 6 24
T2 37 3.0 4.1 3.5 2.800 175u3333 175u3448 175u3447 - 10 27
T2 45 2.4 3.3 2.8 3.200 175u3334 175u3086 175u3087 - 16 32
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.3 T2, Horizontal Braking 10% Duty Cycle
40% duty cycle, vertical braking, T2
FC 102 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
T2 1.1 130 152.9 145 0.300 175u3300 - - - 1.5 1.3
T2 1.5 81.0 110.5 100 0.450 175u3301 175u3402 175u3401 - 1.5 2
T2 2.2 58.5 74.1 70 0.570 175u3302 175u3404 175u3403 - 1.5 2.7
T2 3 45.0 53.7 48 0.960 175u3303 175u3406 175u3405 - 1.5 4.2
T2 3.7 31.5 39.9 35 1.130 175u3304 175u3408 175u3407 - 1.5 5.4
T2 5.5 22.5 28.7 27 1.400 175u3305 175u3410 175u3409 - 1.5 6.8
T2 7.5 17.7 20.8 18 2.200 175u3306 175u3412 175u3411 - 1.5 10.4
T2 11 12.6 14.0 13 3.200 175u3307 175u3414 175u3413 - 2.5 14.7
T2 15 8.7 10.2 9.0 5.500 - 175u3176 175u3177 - 4 23
T2 18.5 5.3 8.2 5.7 6.000 - - - 175u3233 10 33
T2 22 5.1 6.9 5.7 8.000 - - - 175u3234 10 38
T2 30 3.2 5.0 3.5 9.000 - - - 175u3235 16 51
T2 37 3.0 4.1 3.5 14.000 - - - 175u3224 25 63
T2 45 2.4 3.3 2.8 17.000 - - - 175u3227 35 78
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.4 T2, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 35
Page 38

Selection Guide Design Guide
10% duty cycle, horizontal braking, T4
FC 102 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
T4 1.1 546 607.3 630 0.100 175u3002 - - - 1.5 0.4
T4 1.5 382 437.3 410 0.100 175u3004 - - - 1.5 0.5
T4 2.2 260 293.3 270 0.200 175u3007 - - - 1.5 0.8
T4 3 189 212.7 200 0.200 175u3008 - - - 1.5 0.9
T4 4 135 157.3 145 0.300 175u3300 - - - 1.5 1.3
T4 5.5 99.0 113.3 110 0.450 175u3335 175u3450 175u3449 - 1.5 1.9
T4 7.5 72.0 82.4 80 0.570 175u3336 175u3452 175u3451 - 1.5 2.5
T4 11 50.0 55.3 56 0.680 175u3337 175u3027 175u3028 - 1.5 3.3
T4 15 36.0 40.3 38 1.130 175u3338 175u3034 175u3035 - 1.5 5.2
T4 18.5 27.0 32.5 28 1.400 175u3339 175u3039 175u3040 - 1.5 6.7
T4 22 20.3 27.2 22 1.700 175u3340 175u3047 175u3048 - 1.5 8.3
T4 30 18.0 19.8 19 2.200 175u3357 175u3049 175u3050 - 1.5 10.1
T4 37 13.4 16.0 14 2.800 175u3341 175u3055 175u3056 - 2.5 13.3
T4 45 10.8 13.1 12 3.200 175u3359 175u3061 175u3062 - 2.5 15.3
T4 55 8.8 10.7 9.5 4.200 - 175u3065 175u3066 - 4 20
T4 75 6.5 7.8 7.0 5.500 - 175u3070 175u3071 - 6 26
T4 90 4.2 6.5 5.5 7.000 - - - 175u3231 10 36
T4 110 3.6 5.3 4.7 9.000 - - - 175u3079 16 44
T4 132 3.0 4.4 3.7 11.000 - - - 175u3083 25 55
T4 160 2.5 3.6 3.3 13.000 - - - 175u3084 35 63
T4 200 2.0 2.9 2.7 16.000 - - - 175u3088 50 77
T4 250 1.6 2.3 2.1 20.000 - - - 175u3091 70 98
T4 315 1.2 1.8 1.7 26.000 - - - 175u3093 2x35 124
T4 355 1.2 1.6 1.3 32.000 - - - 175u3097 2x35 157
T4 400 1.2 1.4 1.2 36.000 - - - 175u3098 2x50 173
T4 450 1.1 1.3 1.1 42.000 - - - 175u3099 2x50 196
T4 500 0.9 1.1 2x1.9 - - - - - - T4 560 0.9 1.0 2x1.7 - - - - - - T4 630 0.8 0.9 2x1.5 - - - - - - T4 710 0.7 0.8 2x1.3 - - - - - - T4 800 0.6 0.7 3x1.8 - - - - - - T4 1000 0.5 0.6 3x1.6 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.5 T4, Horizontal Braking 10% Duty Cycle
36 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 39

Selection Guide Design Guide
40% duty cycle, vertical braking, T4
FC 102 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
T4 1.1 546 607.3 630 0.300 175u3309 - - - 1.5 0.7
T4 1.5 382 437.3 410 0.450 175u3310 175u3416 175u3415 - 1.5 1
T4 2.2 260 293.3 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
T4 3 189 212.7 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
T4 4 135 157.3 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
T4 5.5 99.0 113.3 110 1.700 175u3314 175u3424 175u3423 - 1.5 3.7
T4 7.5 72.0 82.4 80 2.200 175u3315 175u3138 175u3139 - 1.5 5
T4 11 50.0 55.3 56 3.200 175u3316 175u3428 175u3427 - 1.5 7.1
T4 15 36.0 40.3 38 5.000 - - - 175u3236 1.5 11.5
T4 18.5 27.0 32.5 28 6.000 - - - 175u3237 2.5 14.7
T4 22 20.3 27.2 22 8.000 - - - 175u3238 4 19
T4 30 18.0 19.8 19 10.000 - - - 175u3203 4 23
T4 37 13.4 16.0 14 14.000 - - - 175u3206 10 32
T4 45 10.8 13.1 12 17.000 - - - 175u3210 10 38
T4 55 8.8 10.7 9.5 21.000 - - - 175u3213 16 47
T4 75 6.5 7.8 7.0 26.000 - - - 175u3216 25 61
T4 90 4.2 6.5 5.5 36.000 - - - 175u3219 35 81
T4 110 3.6 5.3 4.7 42.000 - - - 175u3221 50 95
T4 132 3.0 4.4 3.7 52.000 - - - 175u3223 70 119
T4 160 2.5 3.6 3.3 60.000 - - - 175u3225 2x35 135
T4 200 2.0 2.9 2.7 78.000 - - - 175u3228 2x50 170
T4 250 1.6 2.3 2.1 90.000 - - - 175u3230 2x70 207
T4 315 1.2 1.8 1.7 - - - - - - T4 355 1.2 1.6 1.3 - - - - - - T4 400 1.2 1.4 1.2 - - - - - - T4 450 1.1 1.3 1.1 - - - - - - T4 500 0.9 1.1 2x1.9 - - - - - - T4 560 0.9 1.0 2x1.7 - - - - - - T4 630 0.8 0.9 2x1.5 - - - - - - T4 710 0.7 0.8 2x1.3 - - - - - - T4 800 0.6 0.7 3x1.8 - - - - - - T4 1000 0.5 0.6 3x1.6 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.6 T4, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 37
Page 40

Selection Guide Design Guide
10% duty cycle, horizontal braking, T6
FC 102 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
T6 1.1 620 889.1 850 0.100 175u3001 - - - 1.5 0.4
T6 1.5 550 642.7 570 0.100 175u3003 - - - 1.5 0.4
T6 2.2 380 431.1 415 0.200 175u3005 - - - 1.5 0.7
T6 3 260 312.5 270 0.200 175u3007 - - - 1.5 0.8
T6 4 189 231.6 200 0.300 175u3342 - - - 1.5 1.1
T6 5.5 135 166.6 145 0.450 175u3343 175u3012 175u3013 - 1.5 1.7
T6 7.5 99.0 121.1 100 0.570 175u3344 175u3136 175u3137 - 1.5 2.3
T6 11 69.0 81.6 72 0.680 175u3345 175u3456 175u3455 - 1.5 2.9
T6 15 48.6 59.4 52 1.130 175u3346 175u3458 175u3457 - 1.5 4.4
T6 18.5 35.1 47.9 38 1.400 175u3347 175u3460 175u3459 - 1.5 5.7
T6 22 27.0 40.1 31 1.700 175u3348 175u3037 175u3038 - 1.5 7
T6 30 22.5 29.2 27 2.200 175u3349 175u3043 175u3044 - 1.5 8.5
T6 37 17.1 23.6 19 2.800 175u3350 175u3462 175u3461 - 2.5 11.4
88
T6 45 13.5 19.4 14 3.200 175u3358 175u3464 175u3463 - 2.5 14.2
T6 55 11.7 15.8 13.5 4.200 - 175u3057 175u3058 - 4 17
T6 75 9.9 11.5 11 5.500 - 175u3063 175u3064 - 6 21
T6 90 8.6 9.6 7.0 7.000 - - - 175u3245 10 32
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.7 T6, Horizontal Braking 10% Duty Cycle
40% duty cycle, vertical braking, T6
FC 102 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
T6 1.1 620 889.1 850 0.280 175u3317 175u3104 175u3105 - 1.5 0.6
T6 1.5 550 642.7 570 0.450 175u3318 175u3430 175u3429 - 1.5 0.9
T6 2.2 380 431.1 415 0.570 175u3319 175u3432 175u3431 - 1.5 1.1
T6 3 260 312.5 270 0.960 175u3320 175u3434 175u3433 - 1.5 1.8
T6 4 189 231.6 200 1.130 175u3321 175u3436 175u3435 - 1.5 2.3
T6 5.5 135 166.6 145 1.700 175u3322 175u3126 175u3127 - 1.5 3.3
T6 7.5 99.0 121.1 100 2.200 175u3323 175u3438 175u3437 - 1.5 4.4
T6 11 69.0 81.6 72 3.200 175u3324 175u3440 175u3439 - 1.5 6.3
T6 15 48.6 59.4 52 5.500 - 175u3148 175u3149 - 1.5 9.7
T6 18.5 35.1 47.9 38 6.000 - - - 175u3239 2.5 12.6
T6 22 27.0 40.1 31 8.000 - - - 175u3240 4 16
T6 30 22.5 29.2 27 10.000 - - - 175u3200 4 19
T6 37 17.1 23.6 19 14.000 - - - 175u3204 10 27
T6 45 13.5 19.4 14 17.000 - - - 175u3207 10 35
T6 55 11.7 15.8 13.5 21.000 - - - 175u3208 16 40
T6 75 9.9 11.5 11 26.000 - - - 175u3211 25 49
T6 90 8.6 9.6 7.0 30.000 - - - 175u3241 35 66
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.8 T6, Vertical Braking 40% Duty Cycle
38 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 41

Selection Guide
Design Guide
10% duty cycle, horizontal braking, T7
FC 102 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
T7 1.1 620 830 630 0.100 175u3002 - - - 1.5 0.4
T7 1.5 513 600 570 0.100 175u3003 - - - 1.5 0.4
T7 2.2 340 403 415 0.200 175u3005 - - - 1.5 0.7
T7 3 243 292 270 0.300 175u3361 - - - 1.5 1
T7 4 180 216 200 0.360 - 175u3009 175u3010 - 1.5 1.3
T7 5.5 130 156 145 0.450 - 175u3012 175u3013 - 1.5 1.7
T7 7.5 94 113 105 0.790 - 175u3481 175u3482 - 1.5 2.6
T7 11 94.5 110.9 105 0.790 175u3360 175u3481 175u3482 - 1.5 2.7
T7 15 69.7 80.7 72 1.130 175u3351 175u3466 175u3465 - 1.5 3.8
T7 18.5 46.8 65.1 52 1.400 175u3352 175u3468 175u3467 - 1.5 4.9
T7 22 36.0 54.5 42 1.700 175u3353 175u3032 175u3033 - 1.5 6
T7 30 29.0 39.7 31 2.200 175u3354 175u3470 175u3469 - 1.5 7.9
T7 37 22.5 32.1 27 2.800 175u3355 175u3472 175u3471 - 2.5 9.6
T7 45 18.0 26.3 22 3.200 175u3356 175u3479 175u3480 - 2.5 11.3
T7 55 13.5 21.4 15.5 4.200 - 175u3474 175u3473 - 4 15.4
T7 75 13.5 15.6 13.5 5.500 - 175u3476 175u3475 - 6 19
T7 90 8.8 13.0 11 7.000 - - - 175u3232 10 25
T7 110 8.8 10.6 9.1 9.000 - - - 175u3067 16 32
T7 132 6.6 8.8 7.4 11.000 - - - 175u3072 16 39
T7 160 4.2 7.2 6.1 13.000 - - - 175u3075 16 46
T7 200 4.2 5.8 5.0 16.000 - - - 175u3078 25 57
T7 250 3.4 4.6 4.0 20.000 - - - 175u3082 35 71
T7 315 2.3 3.7 3.2 26.000 - - - 175u3085 50 90
T7 400 2.3 2.9 2.5 32.000 - - - 175u3089 70 113
T7 450 2.0 2.6 2.3 36.000 - - - 175u3090 2x35 125
T7 500 1.9 2.3 2.0 42.000 - - - 175u3092 2x35 145
T7 560 1.5 2.1 1.6 52.000 - - - 175u3094 2x50 180
T7 630 1.4 1.8 1.4 60.000 - - - 175u3095 2x50 207
T7 710 1.2 1.6 2x2.6 - - - - - - T7 800 1.1 1.4 2x2.2 - - - - - - T7 900 1.0 1.3 2x2.0 - - - - - - T7 1000 0.9 1.1 3x2.6 - - - - - - T7 1200 0.8 1.0 3x2.4 - - - - - - T7 1400 0.6 0.8 3x2.0 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.9 T7, Horizontal Braking 10% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 39
Page 42

Selection Guide
Design Guide
40% duty cycle, vertical braking, T7
FC 102 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
T7 1.1 620 830 630 0.360 - 175u3108 175u3109 - 1.5 0.8
T7 1.5 513 600 570 0.570 - 175u3110 175u3111 - 1.5 1
T7 2.2 340 403 415 0.790 - 175u3112 175u3113 - 1.5 1.3
T7 3 243 292 270 1.130 - 175u3118 175u3119 - 1.5 2
T7 4 180 216 200 1.700 - 175u3122 175u3123 - 1.5 2.8
T7 5.5 130 156 145 2.200 - 175u3106 175u3107 - 1.5 3.7
T7 7.5 94 113 105 3.200 - 175u3132 175u3133 - 1.5 5.2
T7 11 94.5 110.9 105 4.200 - 175u3134 175u3135 - 1.5 6
T7 15 69.7 80.7 72 4.200 - 175u3142 175u3143 - 1.5 7.2
T7 18.5 46.8 65.1 52 6.000 - - - 175u3242 2.5 10.8
T7 22 36.0 54.5 42 8.000 - - - 175u3243 2.5 13.9
T7 30 29.0 39.7 31 10.000 - - - 175u3244 4 18
T7 37 22.5 32.1 27 14.000 - - - 175u3201 10 23
T7 45 18.0 26.3 22 17.000 - - - 175u3202 10 28
T7 55 13.5 21.4 15.5 21.000 - - - 175u3205 16 37
T7 75 13.5 15.6 13.5 26.000 - - - 175u3209 16 44
T7 90 8.8 13.0 11 36.000 - - - 175u3212 25 57
T7 110 8.8 10.6 9.1 42.000 - - - 175u3214 35 68
T7 132 6.6 8.8 7.4 52.000 - - - 175u3215 50 84
T7 160 4.2 7.2 6.1 60.000 - - - 175u3218 70 99
T7 200 4.2 5.8 5.0 78.000 - - - 175u3220 2x35 125
T7 250 3.4 4.6 4.0 90.000 - - - 175u3222 2x35 150
T7 315 2.3 3.7 3.2 - - - - - - T7 400 2.3 2.9 2.5 - - - - - - T7 450 2.0 2.6 2.3 - - - - - - T7 500 1.9 2.3 2.0 - - - - - - T7 560 1.5 2.1 1.6 - - - - - - T7 630 1.4 1.8 1.4 - - - - - - T7 710 1.2 1.6 2x2.6 - - - - - - T7 800 1.1 1.4 2x2.2 - - - - - - T7 900 1.0 1.3 2x2.0 - - - - - - T7 1000 0.9 1.1 3x2.6 - - - - - - T7 1200 0.8 1.0 3x2.4 - - - - - - T7 1400 0.6 0.8 3x2.0 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.10 T7, Vertical Braking 40% Duty Cycle
40 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 43

Selection Guide Design Guide
8.2.4
VLT® AQUA Drive FC 202
10% duty cycle, horizontal braking, T2
FC 202 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
T2 0.25 380 691.3 630 0.100 175u3002 - - - 1.5 0.4
T2 0.37 380 466.7 410 0.100 175u3004 - - - 1.5 0.5
T2 0.55 275 313.7 300 0.100 175u3006 - - - 1.5 0.6
T2 0.75 188 230.0 200 0.100 175u3011 - - - 1.5 0.7
T2 1.1 130 152.9 145 0.100 175u3016 - - - 1.5 0.8
T2 1.5 81.0 110.5 100 0.100 175u3021 - - - 1.5 0.9
T2 2.2 58.5 74.1 70 0.200 175u3026 - - - 1.5 1.6
T2 3 45.0 53.7 48 0.200 175u3031 - - - 1.5 1.9
T2 3.7 31.5 39.9 35 0.300 175u3325 - - - 1.5 2.7
T2 5.5 22.5 28.7 27 0.360 175u3326 175u3477 175u3478 - 1.5 3.5
T2 7.5 17.7 20.8 18 0.570 175u3327 175u3442 175u3441 - 1.5 5.3
T2 11 12.6 14.0 13 0.680 175u3328 175u3059 175u3060 - 1.5 6.8
T2 15 8.7 10.2 9.0 1.130 175u3329 175u3068 175u3069 - 2.5 10.5
T2 18.5 5.3 8.2 5.7 1.400 175u3330 175u3073 175u3074 - 4 15
T2 22 5.1 6.9 5.7 1.700 175u3331 175u3483 175u3484 - 4 16
T2 30 3.2 5.0 3.5 2.200 175u3332 175u3080 175u3081 - 6 24
T2 37 3.0 4.1 3.5 2.800 175u3333 175u3448 175u3447 - 10 27
T2 45 2.4 3.3 2.8 3.200 175u3334 175u3086 175u3087 - 16 32
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.11 T2, Horizontal Braking 10% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 41
Page 44

Selection Guide Design Guide
40% duty cycle, vertical braking, T2
FC 202 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
T2 0.25 380 691.3 630 0.100 175u3002 - - - 1.5 0.4
T2 0.37 380 466.7 410 0.100 175u3004 - - - 1.5 0.5
T2 0.55 275 313.7 300 0.200 175u3096 - - - 1.5 0.8
T2 0.75 188 230.0 200 0.200 175u3008 - - - 1.5 0.9
T2 1.1 130 152.9 145 0.300 175u3300 - - - 1.5 1.3
T2 1.5 81.0 110.5 100 0.450 175u3301 175u3402 175u3401 - 1.5 2
T2 2.2 58.5 74.1 70 0.570 175u3302 175u3404 175u3403 - 1.5 2.7
T2 3 45.0 53.7 48 0.960 175u3303 175u3406 175u3405 - 1.5 4.2
T2 3.7 31.5 39.9 35 1.130 175u3304 175u3408 175u3407 - 1.5 5.4
T2 5.5 22.5 28.7 27 1.400 175u3305 175u3410 175u3409 - 1.5 6.8
T2 7.5 17.7 20.8 18 2.200 175u3306 175u3412 175u3411 - 1.5 10.4
T2 11 12.6 14.0 13 3.200 175u3307 175u3414 175u3413 - 2.5 14.7
T2 15 8.7 10.2 9.0 5.500 - 175u3176 175u3177 - 4 23
T2 18.5 5.3 8.2 5.7 6.000 - - - 175u3233 10 33
T2 22 5.1 6.9 5.7 8.000 - - - 175u3234 10 38
T2 30 3.2 5.0 3.5 9.000 - - - 175u3235 16 51
T2 37 3.0 4.1 3.5 14.000 - - - 175u3224 25 63
T2 45 2.4 3.3 2.8 17.000 - - - 175u3227 35 78
R
[Ω]
min
R
[Ω]
br,nom
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.12 T2, Vertical Braking 40% Duty Cycle
42 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 45

Selection Guide
Design Guide
10% duty cycle, horizontal braking, T4
FC 202 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
T4 0.37 1000 1864.2 1200 0.100 175u3000 - - - 1.5 0.3
T4 0.55 1000 1246.3 1200 0.100 175u3000 - - - 1.5 0.3
T4 0.75 620 910.2 850 0.100 175u3001 - - - 1.5 0.4
T4 1.1 546 607.3 630 0.100 175u3002 - - - 1.5 0.4
T4 1.5 382 437.3 410 0.100 175u3004 - - - 1.5 0.5
T4 2.2 260 293.3 270 0.200 175u3007 - - - 1.5 0.8
T4 3 189 212.7 200 0.200 175u3008 - - - 1.5 0.9
T4 4 135 157.3 145 0.300 175u3300 - - - 1.5 1.3
T4 5.5 99.0 113.3 110 0.450 175u3335 175u3450 175u3449 - 1.5 1.9
T4 7.5 72.0 82.4 80 0.570 175u3336 175u3452 175u3451 - 1.5 2.5
T4 11 50.0 55.3 56 0.680 175u3337 175u3027 175u3028 - 1.5 3.3
T4 15 36.0 40.3 38 1.130 175u3338 175u3034 175u3035 - 1.5 5.2
T4 18.5 27.0 32.5 28 1.400 175u3339 175u3039 175u3040 - 1.5 6.7
T4 22 20.3 27.2 22 1.700 175u3340 175u3047 175u3048 - 1.5 8.3
T4 30 18.0 19.8 19 2.200 175u3357 175u3049 175u3050 - 1.5 10.1
T4 37 13.4 16.0 14 2.800 175u3341 175u3055 175u3056 - 2.5 13.3
T4 45 10.8 13.1 12 3.200 175u3359 175u3061 175u3062 - 2.5 15.3
T4 55 8.8 10.7 9.5 4.200 - 175u3065 175u3066 - 4 20
T4 75 6.5 7.8 7.0 5.500 - 175u3070 175u3071 - 6 26
T4 90 4.2 6.5 5.5 7.000 - - - 175u3231 10 36
T4 110 3.6 5.3 4.7 9.000 - - - 175u3079 16 44
T4 132 3.0 4.4 3.7 11.000 - - - 175u3083 25 55
T4 160 2.5 3.6 3.3 13.000 - - - 175u3084 35 63
T4 200 2.0 2.9 2.7 16.000 - - - 175u3088 50 77
T4 250 1.6 2.3 2.1 20.000 - - - 175u3091 70 98
T4 315 1.2 1.8 1.7 26.000 - - - 175u3093 2x35 124
T4 355 1.2 1.6 1.3 32.000 - - - 175u3097 2x35 157
T4 400 1.2 1.4 1.2 36.000 - - - 175u3098 2x50 173
T4 450 1.1 1.3 1.1 42.000 - - - 175u3099 2x50 196
T4 500 0.9 1.1 2x1.9 - - - - - - T4 560 0.9 1.0 2x1.7 - - - - - - T4 630 0.8 0.9 2x1.5 - - - - - - T4 710 0.7 0.8 2x1.3 - - - - - - T4 800 0.6 0.7 3x1.8 - - - - - - T4 1000 0.5 0.6 3x1.6 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.13 T4, Horizontal Braking 10% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 43
Page 46

Selection Guide
Design Guide
40% duty cycle, vertical braking, T4
FC 202 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
T4 0.37 1000 1864.2 1200 0.200 175u3101 - - - 1.5 0.4
T4 0.55 1000 1246.3 1200 0.200 175u3101 - - - 1.5 0.4
T4 0.75 620 910.2 850 0.200 175u3308 - - - 1.5 0.5
T4 1.1 546 607.3 630 0.300 175u3309 - - - 1.5 0.7
T4 1.5 382 437.3 410 0.450 175u3310 175u3416 175u3415 - 1.5 1
T4 2.2 260 293.3 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
T4 3 189 212.7 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
T4 4 135 157.3 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
T4 5.5 99.0 113.3 110 1.700 175u3314 175u3424 175u3423 - 1.5 3.7
T4 7.5 72.0 82.4 80 2.200 175u3315 175u3138 175u3139 - 1.5 5
T4 11 50.0 55.3 56 3.200 175u3316 175u3428 175u3427 - 1.5 7.1
T4 15 36.0 40.3 38 5.000 - - - 175u3236 1.5 11.5
T4 18.5 27.0 32.5 28 6.000 - - - 175u3237 2.5 14.7
T4 22 20.3 27.2 22 8.000 - - - 175u3238 4 19
T4 30 18.0 19.8 19 10.000 - - - 175u3203 4 23
T4 37 13.4 16.0 14 14.000 - - - 175u3206 10 32
T4 45 10.8 13.1 12 17.000 - - - 175u3210 10 38
T4 55 8.8 10.7 9.5 21.000 - - - 175u3213 16 47
T4 75 6.5 7.8 7.0 26.000 - - - 175u3216 25 61
T4 90 4.2 6.5 5.5 36.000 - - - 175u3219 35 81
T4 110 3.6 5.3 4.7 42.000 - - - 175u3221 50 95
T4 132 3.0 4.4 3.7 52.000 - - - 175u3223 70 119
T4 160 2.5 3.6 3.3 60.000 - - - 175u3225 2x35 135
T4 200 2.0 2.9 2.7 78.000 - - - 175u3228 2x50 170
T4 250 1.6 2.3 2.1 90.000 - - - 175u3230 2x70 207
T4 315 1.2 1.8 1.7 - - - - - - T4 355 1.2 1.6 1.3 - - - - - - T4 400 1.2 1.4 1.2 - - - - - - T4 450 1.1 1.3 1.1 - - - - - - T4 500 0.9 1.1 2x1.9 - - - - - - T4 560 0.9 1.0 2x1.7 - - - - - - T4 630 0.8 0.9 2x1.5 - - - - - - T4 710 0.7 0.8 2x1.3 - - - - - - T4 800 0.6 0.7 3x1.8 - - - - - - T4 1000 0.5 0.6 3x1.6 - - - - - - -
R
[Ω]
min
R
[Ω]
br,nom
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.14 T4, Vertical Braking 40% Duty Cycle
44 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 47

Selection Guide Design Guide
10% duty cycle, horizontal braking, T6
FC 202 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
T6 0.75 620 1329.7 1200 0.100 175u3000 - - - 1.5 0.3
T6 1.1 620 889.1 850 0.100 175u3001 - - - 1.5 0.4
T6 1.5 550 642.7 570 0.100 175u3003 - - - 1.5 0.4
T6 2.2 380 431.1 415 0.200 175u3005 - - - 1.5 0.7
T6 3 260 312.5 270 0.200 175u3007 - - - 1.5 0.8
T6 4 189 231.6 200 0.300 175u3342 - - - 1.5 1.1
T6 5.5 135 166.6 145 0.450 175u3343 175u3012 175u3013 - 1.5 1.7
T6 7.5 99.0 121.1 100 0.570 175u3344 175u3136 175u3137 - 1.5 2.3
T6 11 69.0 81.6 72 0.680 175u3345 175u3456 175u3455 - 1.5 2.9
T6 15 48.6 59.4 52 1.130 175u3346 175u3458 175u3457 - 1.5 4.4
T6 18.5 35.1 47.9 38 1.400 175u3347 175u3460 175u3459 - 1.5 5.7
T6 22 27.0 40.1 31 1.700 175u3348 175u3037 175u3038 - 1.5 7
T6 30 22.5 29.2 27 2.200 175u3349 175u3043 175u3044 - 1.5 8.5
T6 37 17.1 23.6 19 2.800 175u3350 175u3462 175u3461 - 2.5 11.4
T6 45 13.5 19.4 14 3.200 175u3358 175u3464 175u3463 - 2.5 14.2
T6 55 11.7 15.8 13.5 4.200 - 175u3057 175u3058 - 4 17
T6 75 9.9 11.5 11 5.500 - 175u3063 175u3064 - 6 21
T6 90 8.6 9.6 7.0 7.000 - - - 175u3245 10 32
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.15 T6, Horizontal Braking 10% Duty Cycle
40% duty cycle, vertical braking, T6
FC 202 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
[Ω]
br,nom
R
[Ω]
P
rec
br,cont.
[kW]
T6 0.75 620 1329.7 1200 0.360 - 175u3102 175u3103 - 1.5 0.6
T6 1.1 620 889.1 850 0.280 175u3317 175u3104 175u3105 - 1.5 0.6
T6 1.5 550 642.7 570 0.450 175u3318 175u3430 175u3429 - 1.5 0.9
T6 2.2 380 431.1 415 0.570 175u3319 175u3432 175u3431 - 1.5 1.1
T6 3 260 312.5 270 0.960 175u3320 175u3434 175u3433 - 1.5 1.8
T6 4 189 231.6 200 1.130 175u3321 175u3436 175u3435 - 1.5 2.3
T6 5.5 135 166.6 145 1.700 175u3322 175u3126 175u3127 - 1.5 3.3
T6 7.5 99.0 121.1 100 2.200 175u3323 175u3438 175u3437 - 1.5 4.4
T6 11 69.0 81.6 72 3.200 175u3324 175u3440 175u3439 - 1.5 6.3
T6 15 48.6 59.4 52 5.500 - 175u3148 175u3149 - 1.5 9.7
T6 18.5 35.1 47.9 38 6.000 - - - 175u3239 2.5 12.6
T6 22 27.0 40.1 31 8.000 - - - 175u3240 4 16
T6 30 22.5 29.2 27 10.000 - - - 175u3200 4 19
T6 37 17.1 23.6 19 14.000 - - - 175u3204 10 27
T6 45 13.5 19.4 14 17.000 - - - 175u3207 10 35
T6 55 11.7 15.8 13.5 21.000 - - - 175u3208 16 40
T6 75 9.9 11.5 11 26.000 - - - 175u3211 25 49
T6 90 8.6 9.6 7.0 30.000 - - - 175u3241 35 66
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.16 T6, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 45
Page 48

Selection Guide
Design Guide
10% duty cycle, horizontal braking, T7
FC 202 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
T7 1.1 620 830 630 0.100 175u3002 - - - 1.5 0.4
T7 1.5 513 600 570 0.100 175u3003 - - - 1.5 0.4
T7 2.2 340 403 415 0.200 175u3005 - - - 1.5 0.7
T7 3 243 292 270 0.300 175u3361 - - - 1.5 1
T7 4 180 216 200 0.360 - 175u3009 175u3010 - 1.5 1.3
T7 5.5 130 156 145 0.450 - 175u3012 175u3013 - 1.5 1.7
T7 7.5 94 113 105 0.790 - 175u3481 175u3482 - 1.5 2.6
T7 11 94.5 110.9 105 0.790 175u3360 175u3481 175u3482 - 1.5 2.7
T7 15 69.7 80.7 72 1.130 175u3351 175u3466 175u3465 - 1.5 3.8
T7 18.5 46.8 65.1 52 1.400 175u3352 175u3468 175u3467 - 1.5 4.9
T7 22 36.0 54.5 42 1.700 175u3353 175u3032 175u3033 - 1.5 6
T7 30 29.0 39.7 31 2.200 175u3354 175u3470 175u3469 - 1.5 7.9
T7 37 22.5 32.1 27 2.800 175u3355 175u3472 175u3471 - 2.5 9.6
T7 45 18.0 26.3 22 3.200 175u3356 175u3479 175u3480 - 2.5 11.3
T7 55 13.5 21.4 15.5 4.200 - 175u3474 175u3473 - 4 15
T7 75 13.5 15.6 13.5 5.500 - 175u3476 175u3475 - 6 19
T7 90 8.8 13.0 11 7.000 - - - 175u3232 10 25
T7 110 8.8 10.6 9.1 9.000 - - - 175u3067 16 32
T7 132 6.6 8.8 7.4 11.000 - - - 175u3072 16 39
T7 160 4.2 7.2 6.1 13.000 - - - 175u3075 16 46
T7 200 4.2 5.8 5.0 16.000 - - - 175u3078 25 57
T7 250 3.4 4.6 4.0 20.000 - - - 175u3082 35 71
T7 315 2.3 3.7 3.2 26.000 - - - 175u3085 50 90
T7 400 2.3 2.9 2.5 32.000 - - - 175u3089 70 113
T7 450 2.0 2.6 2.3 36.000 - - - 175u3090 2x35 125
T7 500 1.9 2.3 2.0 42.000 - - - 175u3092 2x35 145
T7 560 1.5 2.1 1.6 52.000 - - - 175u3094 2x50 180
T7 630 1.4 1.8 1.4 60.000 - - - 175u3095 2x50 207
T7 710 1.2 1.6 2x2.6 - - - - - - T7 800 1.1 1.4 2x2.2 - - - - - - T7 900 1.0 1.3 2x2.0 - - - - - - T7 1000 0.9 1.1 3x2.6 - - - - - - T7 1200 0.8 1.0 3x2.4 - - - - - - T7 1400 0.6 0.8 3x2.0 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.17 T7, Horizontal Braking 10% Duty Cycle
46 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 49

Selection Guide
Design Guide
40% duty cycle, vertical braking, T7
FC 202 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
T7 1.1 620 830 630 0.360 - 175u3108 175u3109 - 1.5 0.8
T7 1.5 513 600 570 0.570 - 175u3110 175u3111 - 1.5 1
T7 2.2 340 403 415 0.790 - 175u3112 175u3113 - 1.5 1.3
T7 3 243 292 270 1.130 - 175u3118 175u3119 - 1.5 2
T7 4 180 216 200 1.700 - 175u3122 175u3123 - 1.5 2.8
T7 5.5 130 156 145 2.200 - 175u3106 175u3107 - 1.5 3.7
T7 7.5 94 113 105 3.200 - 175u3132 175u3133 - 1.5 5.2
T7 11 94.5 110.9 105 4.200 - 175u3134 175u3135 - 1.5 6
T7 15 69.7 80.7 72 4.200 - 175u3142 175u3143 - 1.5 7.2
T7 18.5 46.8 65.1 52 6.000 - - - 175u3242 2.5 10.8
T7 22 36.0 54.5 42 8.000 - - - 175u3243 2.5 13.9
T7 30 29.0 39.7 31 10.000 - - - 175u3244 4 18
T7 37 22.5 32.1 27 14.000 - - - 175u3201 10 23
T7 45 18.0 26.3 22 17.000 - - - 175u3202 10 28
T7 55 13.5 21.4 15.5 21.000 - - - 175u3205 16 37
T7 75 13.5 15.6 13.5 26.000 - - - 175u3209 16 44
T7 90 8.8 13.0 11 36.000 - - - 175u3212 25 57
T7 110 8.8 10.6 9.1 42.000 - - - 175u3214 35 68
T7 132 6.6 8.8 7.4 52.000 - - - 175u3215 50 84
T7 160 4.2 7.2 6.1 60.000 - - - 175u3218 70 99
T7 200 4.2 5.8 5.0 78.000 - - - 175u3220 2x35 125
T7 250 3.4 4.6 4.0 90.000 - - - 175u3222 2x35 150
T7 315 2.3 3.7 3.2 - - - - - - T7 400 2.3 2.9 2.5 - - - - - - T7 450 2.0 2.6 2.3 - - - - - - T7 500 1.9 2.3 2.0 - - - - - - T7 560 1.5 2.1 1.6 - - - - - - T7 630 1.4 1.8 1.4 - - - - - - T7 710 1.2 1.6 2x2.6 - - - - - - T7 800 1.1 1.4 2x2.2 - - - - - - T7 900 1.0 1.3 2x2.0 - - - - - - T7 1000 0.9 1.1 3x2.6 - - - - - - T7 1200 0.8 1.0 3x2.4 - - - - - - T7 1400 0.6 0.8 3x2.0 - - - - - - -
R
[Ω]
min
R
[Ω]
br,nom
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.18 T7, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 47
Page 50

Selection Guide Design Guide
8.2.5
VLT® AutomationDrive FC 301
10% duty cycle, horizontal braking, T2
FC 301 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
T2 0.25 368 415.9 410 0.100 175u3004 - - - 1.5 0.5
T2 0.37 248 280.7 300 0.100 175u3006 - - - 1.5 0.6
T2 0.55 166 188.7 200 0.100 175u3011 - - - 1.5 0.7
T2 0.75 121 138.4 145 0.100 175u3016 - - - 1.5 0.8
T2 1.1 81.0 92.0 100 0.100 175u3021 - - - 1.5 0.9
T2 1.5 58.5 66.5 70 0.200 175u3026 - - - 1.5 1.6
T2 2.2 40.2 44.6 48 0.200 175u3031 - - - 1.5 1.9
T2 3 29.1 32.3 35 0.300 175u3325 - - - 1.5 2.7
T2 3.7 22.5 25.9 27 0.360 175u3326 175u3477 175u3478 - 1.5 3.5
T2 5.5 17.7 19.7 18 0.570 175u3327 175u3442 175u3441 - 1.5 5.3
T2 7.5 12.6 14.3 13 0.680 175u3328 175u3059 175u3060 - 1.5 6.8
88
T2 11 8.7 9.7 9 1.130 175u3329 175u3068 175u3069 - 2.5 10.5
T2 15 5.3 7.5 5.7 1.400 175u3330 175u3073 175u3074 - 4 15
T2 18.5 5.1 6.0 5.7 1.700 175u3331 175u3483 175u3484 - 4 16
T2 22 3.2 5.0 3.5 2.200 175u3332 175u3080 175u3081 - 6 24
T2 30 3.0 3.7 3.5 2.800 175u3333 175u3448 175u3447 - 10 27
T2 37 2.4 3.0 2.8 3.200 175u3334 175u3086 175u3087 - 16 32
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.19 T2, Horizontal Braking 10% Duty Cycle
40% duty cycle, vertical braking, T2
FC 301 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
[Ω]
br,nom
R
[Ω]
P
rec
br,cont.
[kW]
T2 0.25 368 415.9 410 0.100 175u3004 - - - 1.5 0.5
T2 0.37 248 280.7 300 0.200 175u3096 - - - 1.5 0.8
T2 0.55 166 188.7 200 0.200 175u3008 - - - 1.5 0.9
T2 0.75 121 138.4 145 0.300 175u3300 - - - 1.5 1.3
T2 1.1 81.0 92.0 100 0.450 175u3301 175u3402 175u3401 - 1.5 2
T2 1.5 58.5 66.5 70 0.570 175u3302 175u3404 175u3403 - 1.5 2.7
T2 2.2 40.2 44.6 48 0.960 175u3303 175u3406 175u3405 - 1.5 4.2
T2 3 29.1 32.3 35 1.130 175u3304 175u3408 175u3407 - 1.5 5.4
T2 3.7 22.5 25.9 27 1.400 175u3305 175u3410 175u3409 - 1.5 6.8
T2 5.5 17.7 19.7 18 2.200 175u3306 175u3412 175u3411 - 1.5 10.4
T2 7.5 12.6 14.3 13 3.200 175u3307 175u3414 175u3413 - 2.5 14.7
T2 11 8.7 9.7 9 5.500 - 175u3176 175u3177 - 4 23
T2 15 5.3 7.5 5.7 6.000 - - - 175u3233 10 33
T2 18.5 5.1 6.0 5.7 8.000 - - - 175u3234 10 38
T2 22 3.2 5.0 3.5 9.000 - - - 175u3235 16 51
T2 30 3.0 3.7 3.5 14.000 - - - 175u3224 25 63
T2 37 2.4 3.0 2.8 17.000 - - - 175u3227 35 78
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.20 T2, Vertical Braking 40% Duty Cycle
48 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 51

Selection Guide Design Guide
10% duty cycle, horizontal braking, T4
FC 301 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
T4 0.37 1000 1121.4 1200 0.100 175u3000 - - - 1.5 0.3
T4 0.55 620 749.8 850 0.100 175u3001 - - - 1.5 0.4
T4 0.75 485 547.6 630 0.100 175u3002 - - - 1.5 0.4
T4 1.1 329 365.3 410 0.100 175u3004 - - - 1.5 0.5
T4 1.5 240 263.0 270 0.200 175u3007 - - - 1.5 0.8
T4 2.2 161 176.5 200 0.200 175u3008 - - - 1.5 0.9
T4 3 117 127.9 145 0.300 175u3300 - - - 1.5 1.3
T4 4 86.9 94.6 110 0.450 175u3335 175u3450 175u3449 - 1.5 1.9
T4 5.5 62.5 68.2 80 0.570 175u3336 175u3452 175u3451 - 1.5 2.5
T4 7.5 45.3 49.6 56 0.680 175u3337 175u3027 175u3028 - 1.5 3.3
T4 11 34.9 38.0 38 1.130 175u3338 175u3034 175u3035 - 1.5 5.2
T4 15 25.3 27.7 28 1.400 175u3339 175u3039 175u3040 - 1.5 6.7
T4 18.5 20.3 22.3 22 1.700 175u3340 175u3047 175u3048 - 1.5 8.3
T4 22 16.9 18.7 19 2.200 175u3357 175u3049 175u3050 - 1.5 10.1
T4 30 13.2 14.5 14 2.800 175u3341 175u3055 175u3056 - 2.5 13.3
T4 37 10.6 11.7 12 3.200 175u3359 175u3061 175u3062 - 2.5 15.3
T4 45 8.7 9.6 9.5 4.200 - 175u3065 175u3066 - 4 20
T4 55 6.6 7.8 7.0 5.500 - 175u3070 175u3071 - 6 26
T4 75 4.2 5.7 5.5 7.000 - - - 175u3231 10 36
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.21 T4, Horizontal Braking 10% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 49
Page 52

Selection Guide Design Guide
40% duty cycle, vertical braking, T4
FC 301 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
T4 0.37 1000 1121.4 1200 0.200 175u3101 - - - 1.5 0.4
T4 0.55 620 749.8 850 0.200 175u3308 - - - 1.5 0.5
T4 0.75 485 547.6 630 0.300 175u3309 - - - 1.5 0.7
T4 1.1 329 365.3 410 0.450 175u3310 175u3416 175u3415 - 1.5 1
T4 1.5 240 263.0 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
T4 2.2 161 176.5 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
T4 3 117 127.9 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
T4 4 86.9 94.6 110 1.700 175u3314 175u3424 175u3423 - 1.5 3.7
T4 5.5 62.5 68.2 80 2.200 175u3315 175u3138 175u3139 - 1.5 5
T4 7.5 45.3 49.6 56 3.200 175u3316 175u3428 175u3427 - 1.5 7.1
T4 11 34.9 38.0 38 5.000 - - - 175u3236 1.5 11.5
T4 15 25.3 27.7 28 6.000 - - - 175u3237 2.5 14.7
T4 18.5 20.3 22.3 22 8.000 - - - 175u3238 4 19
T4 22 16.9 18.7 19 10.000 - - - 175u3203 4 23
T4 30 13.2 14.5 14 14.000 - - - 175u3206 10 32
T4 37 10.6 11.7 12 17.000 - - - 175u3210 10 38
T4 45 8.7 9.6 9.5 21.000 - - - 175u3213 16 47
T4 55 6.6 7.8 7.0 26.000 - - - 175u3216 25 61
T4 75 4.2 5.7 5.5 36.000 - - - 175u3219 35 81
R
[Ω]
min
R
[Ω]
br,nom
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.22 T4, Vertical Braking 40% Duty Cycle
50 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 53

Selection Guide Design Guide
8.2.6
VLT® AutomationDrive FC 302
10% duty cycle, horizontal braking, T2
FC 302 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
T2 0.25 380 475.3 410 0.100 175u3004 - - - 1.5 0.5
T2 0.37 275 320.8 300 0.100 175u3006 - - - 1.5 0.6
T2 0.55 188 215.7 200 0.100 175u3011 - - - 1.5 0.7
T2 0.75 130 158.1 145 0.100 175u3016 - - - 1.5 0.8
T2 1.1 81.0 105.1 100 0.100 175u3021 - - - 1.5 0.9
T2 1.5 58.5 76.0 70 0.200 175u3026 - - - 1.5 1.6
T2 2.2 45.0 51.0 48 0.200 175u3031 - - - 1.5 1.9
T2 3 31.5 37.0 35 0.300 175u3325 - - - 1.5 2.7
T2 3.7 22.5 29.7 27 0.360 175u3326 175u3477 175u3478 - 1.5 3.5
T2 5.5 17.7 19.7 18 0.570 175u3327 175u3442 175u3441 - 1.5 5.3
T2 7.5 12.6 14.3 13.0 0.680 175u3328 175u3059 175u3060 - 1.5 6.8
T2 11 8.7 9.7 9.0 1.130 175u3329 175u3068 175u3069 - 2.5 10.5
T2 15 5.3 7.5 5.7 1.400 175u3330 175u3073 175u3074 - 4 14.7
T2 18.5 5.1 6.0 5.7 1.700 175u3331 175u3483 175u3484 - 4 16
T2 22 3.2 5.0 3.5 2.200 175u3332 175u3080 175u3081 - 6 24
T2 30 3.0 3.7 3.5 2.800 175u3333 175u3448 175u3447 - 10 27
T2 37 2.4 3.0 2.8 3.200 175u3334 175u3086 175u3087 - 16 32
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.23 T2, Horizontal Braking 10% Duty Cycle
40% duty cycle, vertical braking, T2
FC 302 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
T2 0.25 380 475.3 410 0.100 175u3004 - - - 1.5 0.5
T2 0.37 275 320.8 300 0.200 175u3096 - - - 1.5 0.8
T2 0.55 188 215.7 200 0.200 175u3008 - - - 1.5 0.9
T2 0.75 130 158.1 145 0.300 175u3300 - - - 1.5 1.3
T2 1.1 81.0 105.1 100 0.450 175u3301 175u3402 175u3401 - 1.5 2
T2 1.5 58.5 76.0 70 0.570 175u3302 175u3404 175u3403 - 1.5 2.7
T2 2.2 45.0 51.0 48 0.960 175u3303 175u3406 175u3405 - 1.5 4.2
T2 3 31.5 37.0 35 1.130 175u3304 175u3408 175u3407 - 1.5 5.4
T2 3.7 22.5 29.7 27 1.400 175u3305 175u3410 175u3409 - 1.5 6.8
T2 5.5 17.7 19.7 18 2.200 175u3306 175u3412 175u3411 - 1.5 10.4
T2 7.5 12.6 14.3 13.0 3.200 175u3307 175u3414 175u3413 - 2.5 14.7
T2 11 8.7 9.7 9.0 5.500 - 175u3176 175u3177 - 4 23
T2 15 5.3 7.5 5.7 6.000 - - - 175u3233 10 33
T2 18.5 5.1 6.0 5.7 8.000 - - - 175u3234 10 38
T2 22 3.2 5.0 3.5 9.000 - - - 175u3235 16 51
T2 30 3.0 3.7 3.5 14.000 - - - 175u3224 25 63
T2 37 2.4 3.0 2.8 17.000 - - - 175u3227 35 78
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.24 T2, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 51
Page 54

Selection Guide
Design Guide
10% duty cycle, horizontal braking, T5
FC 302 Horizontal braking 10% duty cycle
Frequency converter data
R
rec
Mains
type
88
P
m
[kW]
T5 0.37 1000 1389.2 1200 0.100 175u3000 - - - 1.5 0.3
T5 0.55 620 928.8 850 0.100 175u3001 - - - 1.5 0.4
T5 0.75 558 678.3 630 0.100 175u3002 - - - 1.5 0.4
T5 1.1 382 452.5 410 0.100 175u3004 - - - 1.5 0.5
T5 1.5 260 325.9 270 0.200 175u3007 - - - 1.5 0.8
T5 2.2 189 218.6 200 0.200 175u3008 - - - 1.5 0.9
T5 3 135 158.5 145 0.300 175u3300 - - - 1.5 1.3
T5 4 99.0 117.2 110 0.450 175u3335 175u3450 175u3449 - 1.5 1.9
T5 5.5 72.0 84.4 80 0.570 175u3336 175u3452 175u3451 - 1.5 2.5
T5 7.5 50.0 61.4 56 0.680 175u3337 175u3027 175u3028 - 1.5 3.3
T5 11 36.0 41.2 38 1.130 175u3338 175u3034 175u3035 - 1.5 5.2
T5 15 27.0 30.0 28 1.400 175u3339 175u3039 175u3040 - 1.5 6.7
T5 18.5 20.3 24.2 22 1.700 175u3340 175u3047 175u3048 - 1.5 8.3
T5 22 18.0 20.3 19 2.200 175u3357 175u3049 175u3050 - 1.5 10.1
T5 30 13.4 15.8 14 2.800 175u3341 175u3055 175u3056 - 2.5 13.3
T5 37 10.8 12.7 12 3.200 175u3359 175u3061 175u3062 - 2.5 15.3
T5 45 8.8 10.4 9.5 4.200 - 175u3065 175u3066 - 4 20
T5 55 6.5 8.5 7.0 5.500 - 175u3070 175u3071 - 6 26
T5 75 4.2 6.2 5.5 7.000 - - - 175u3231 10 36
T5 90 3.6 5.1 4.7 9.000 - - - 175u3079 16 44
T5 110 3.0 4.2 3.7 11.000 - - - 175u3083 25 55
T5 132 2.5 3.5 3.3 13.000 - - - 175u3084 35 63
T5 160 2.0 2.9 2.7 16.000 - - - 175u3088 50 77
T5 200 1.6 2.3 2.1 20.000 - - - 175u3091 70 98
T5 250 1.2 1.8 1.7 26.000 - - - 175u3093 2x35 124
T5 315 1.2 1.5 1.3 32.000 - - - 175u3097 2x35 157
T5 355 1.2 1.3 1.2 36.000 - - - 175u3098 2x50 173
T5 400 1.1 1.1 1.1 42.000 - - - 175u3099 2x50 196
T5 450 0.9 1.0 2x1.9 - - - - - - T5 500 0.9 0.9 2x1.7 - - - - - - T5 560 0.8 0.8 2x1.5 - - - - - - T5 630 0.7 0.7 2x1.3 - - - - - - T5 710 0.6 0.6 3x1.8 - - - - - - T5 800 0.5 0.6 3x1.6 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
[Ω]
P
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.25 T5, Horizontal Braking 10% Duty Cycle
52 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 55

Selection Guide
Design Guide
40% duty cycle, vertical braking, T5
FC 302 Vertical braking 40% duty cycle
Frequency converter data
R
rec
Mains
type
P
m
[kW]
T5 0.37 1000 1389.2 1200 0.200 175u3101 - - - 1.5 0.4
T5 0.55 620 928.8 850 0.200 175u3308 - - - 1.5 0.5
T5 0.75 558 678.3 630 0.300 175u3309 - - - 1.5 0.7
T5 1.1 382 452.5 410 0.450 175u3310 175u3416 175u3415 - 1.5 1
T5 1.5 260 325.9 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
T5 2.2 189 218.6 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
T5 3 135 158.5 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
T5 4 99.0 117.2 110 1.700 175u3314 175u3424 175u3423 - 1.5 3.7
T5 5.5 72.0 84.4 80 2.200 175u3315 175u3138 175u3139 - 1.5 5
T5 7.5 50.0 61.4 56 3.200 175u3316 175u3428 175u3427 - 1.5 7.1
T5 11 36.0 41.2 38 5.000 - - - 175u3236 1.5 11.5
T5 15 27.0 30.0 28 6.000 - - - 175u3237 2.5 14.7
T5 18.5 20.3 24.2 22 8.000 - - - 175u3238 4 19
T5 22 18.0 20.3 19 10.000 - - - 175u3203 4 23
T5 30 13.4 15.8 14 14.000 - - - 175u3206 10 32
T5 37 10.8 12.7 12 17.000 - - - 175u3210 10 38
T5 45 8.8 10.4 9.5 21.000 - - - 175u3213 16 47
T5 55 6.5 8.5 7.0 26.000 - - - 175u3216 25 61
T5 75 4.2 6.2 5.5 36.000 - - - 175u3219 35 81
T5 90 3.6 5.1 4.7 42.000 - - - 175u3221 50 95
T5 110 3.0 4.2 3.7 52.000 - - - 175u3223 70 119
T5 132 2.5 3.5 3.3 60.000 - - - 175u3225 2x35 135
T5 160 2.0 2.9 2.7 78.000 - - - 175u3228 2x50 170
T5 200 1.6 2.3 2.1 90.000 - - - 175u3230 2x70 207
T5 250 1.2 1.8 1.7 - - - - - - T5 315 1.2 1.5 1.3 - - - - - - T5 355 1.2 1.3 1.2 - - - - - - T5 400 1.1 1.1 1.1 - - - - - - T5 450 0.9 1.0 2x1.9 - - - - - - T5 500 0.9 0.9 2x1.7 - - - - - - T5 560 0.8 0.8 2x1.5 - - - - - - T5 630 0.7 0.7 2x1.3 - - - - - - T5 710 0.6 0.6 3x1.8 - - - - - - T5 800 0.5 0.6 3x1.6 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
[Ω]
P
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.26 T5, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 53
Page 56

Selection Guide Design Guide
10% duty cycle, horizontal braking, T6
FC 302 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
T6 0.75 620 914.2 850 0.100 175u3001 - - - 1.5 0.4
T6 1.1 550 611.3 570 0.100 175u3003 - - - 1.5 0.4
T6 1.5 380 441.9 415 0.200 175u3005 - - - 1.5 0.7
T6 2.2 260 296.4 270 0.200 175u3007 - - - 1.5 0.8
T6 3 189 214.8 200 0.300 175u3342 - - - 1.5 1.1
T6 4 135 159.2 145 0.450 175u3343 175u3012 175u3013 - 1.5 1.7
T6 5.5 99.0 114.5 100 0.570 175u3344 175u3136 175u3137 - 1.5 2.3
T6 7.5 69.0 83.2 72 0.680 175u3345 175u3456 175u3455 - 1.5 2.9
T6 11 48.6 56.1 52 1.130 175u3346 175u3458 175u3457 - 1.5 4.4
T6 15 35.1 40.8 38 1.400 175u3347 175u3460 175u3459 - 1.5 5.7
T6 18.5 27.0 32.9 31 1.700 175u3348 175u3037 175u3038 - 1.5 7
T6 22 22.5 27.6 27 2.200 175u3349 175u3043 175u3044 - 1.5 8.5
T6 30 17.1 21.4 19 2.800 175u3350 175u3462 175u3461 - 2.5 11.4
88
T6 37 13.5 17.3 14 3.200 175u3358 175u3464 175u3463 - 2.5 14.2
T6 45 10.8 14.2 13.5 4.200 - 175u3057 175u3058 - 4 17
T6 55 8.8 11.6 11 5.500 - 175u3063 175u3064 - 6 21
T6 75 6.6 8.4 7.0 7.000 - - - 175u3245 10 32
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.27 T6, Horizontal Braking 10% Duty Cycle
40% duty cycle, vertical braking, T6
FC 302 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
T6 0.75 620 914.2 850 0.280 175u3317 175u3104 175u3105 - 1.5 0.6
T6 1.1 550 611.3 570 0.450 175u3318 175u3430 175u3429 - 1.5 0.9
T6 1.5 380 441.9 415 0.570 175u3319 175u3432 175u3431 - 1.5 1.1
T6 2.2 260 296.4 270 0.960 175u3320 175u3434 175u3433 - 1.5 1.8
T6 3 189 214.8 200 1.130 175u3321 175u3436 175u3435 - 1.5 2.3
T6 4 135 159.2 145 1.700 175u3322 175u3126 175u3127 - 1.5 3.3
T6 5.5 99.0 114.5 100 2.200 175u3323 175u3438 175u3437 - 1.5 4.4
T6 7.5 69.0 83.2 72 3.200 175u3324 175u3440 175u3439 - 1.5 6.3
T6 11 48.6 56.1 52 5.500 - 175u3148 175u3149 - 1.5 9.7
T6 15 35.1 40.8 38 6.000 - - - 175u3239 2.5 12.6
T6 18.5 27.0 32.9 31 8.000 - - - 175u3240 4 16
T6 22 22.5 27.6 27 10.000 - - - 175u3200 4 19
T6 30 17.1 21.4 19 14.000 - - - 175u3204 10 27
T6 37 13.5 17.3 14 17.000 - - - 175u3207 10 35
T6 45 10.8 14.2 13.5 21.000 - - - 175u3208 16 40
T6 55 8.8 11.6 11 26.000 - - - 175u3211 25 49
T6 75 6.6 8.4 7.0 30.000 - - - 175u3241 35 66
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.28 T6, Vertical Braking 40% Duty Cycle
54 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 57

Selection Guide Design Guide
10% duty cycle, horizontal braking, T7
FC 302 Horizontal braking 10% duty cycle
Frequency converter data
R
rec
Mains
type
P
m
[kW]
T7 1.1 620 830 630 0.100 175u3002 - - - 1.5 0.4
T7 1.5 513 600 570 0.100 175u3003 - - - 1.5 0.4
T7 2.2 340 403 415 0.200 175u3005 - - - 1.5 0.7
T7 3 243 292 270 0.300 175u3361 - - - 1.5 1
T7 4 180 216 200 0.360 - 175u3009 175u3010 - 1.5 1.3
T7 5.5 130 156 145 0.450 - 175u3012 175u3013 - 1.5 1.7
T7 7.5 94 113 105 0.790 - 175u3481 175u3482 - 1.5 2.6
T7 11 69.7 76.2 72 1.130 175u3351 175u3466 175u3465 - 1.5 3.8
T7 15 46.8 55.5 52 1.400 175u3352 175u3468 175u3467 - 1.5 4.9
T7 18.5 36.0 44.7 42 1.700 175u3353 175u3032 175u3033 - 1.5 6
T7 22 29.0 37.5 31 2.200 175u3354 175u3470 175u3469 - 1.5 7.9
T7 30 22.5 29.1 27 2.800 175u3355 175u3472 175u3471 2.5 9.6
T7 37 18.0 23.5 22 3.200 175u3356 175u3479 175u3480 - 2.5 11.3
T7 45 13.5 19.3 15.5 4.200 - 175u3474 175u3473 - 4 15.4
T7 55 13.5 15.7 13.5 5.500 - 175u3476 175u3475 - 6 19
T7 75 8.8 11.5 11 7.000 - - - 175u3232 10 25
T7 90 8.8 9.5 9.1 9.000 - - - 175u3067 16 32
T7 110 6.6 7.8 7.4 11.000 - - - 175u3072 16 39
T7 132 4.2 6.4 6.1 13.000 - - - 175u3075 16 46
T7 160 4.2 5.3 5.0 16.000 - - - 175u3078 25 57
T7 200 3.4 4.2 4.0 20.000 - - - 175u3082 35 71
T7 250 2.3 3.4 3.2 26.000 - - - 175u3085 50 90
T7 315 2.3 2.7 2.5 32.000 - - - 175u3089 70 113
T7 355 2.0 2.4 2.3 36.000 - - - 175u3090 2x35 125
T7 400 1.9 2.1 2.0 42.000 - - - 175u3092 2x35 145
T7 500 1.5 1.7 1.6 52.000 - - - 175u3094 2x50 180
T7 560 1.4 1.5 1.4 60.000 - - - 175u3095 2x50 207
T7 630 1.2 1.3 2x2.6 - - - - - - T7 710 1.1 1.2 2x2.2 - - - - - - T7 800 1.0 1.1 2x2.0 - - - - - - T7 900 0.9 0.9 3x2.6 - - - - - - T7 1000 0.8 0.8 3x2.4 - - - - - - T7 1200 0.7 0.7 3x2.0 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
[Ω]
P
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.29 T7, Horizontal Braking 10% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 55
Page 58

Selection Guide Design Guide
40% duty cycle, vertical braking, T7
FC 302 Vertical braking 40% duty cycle
Frequency converter data
R
rec
Mains
type
88
P
m
[kW]
T7 1.1 620 830 630 0.360 - 175u3108 175u3109 - 1.5 0.8
T7 1.5 513 600 570 0.570 - 175u3110 175u3111 - 1.5 1
T7 2.2 340 403 415 0.790 - 175u3112 175u3113 - 1.5 1.3
T7 3 243 292 270 1.130 - 175u3118 175u3119 - 1.5 2
T7 4 180 216 200 1.700 - 175u3122 175u3123 - 1.5 2.8
T7 5.5 130 156 145 2.200 - 175u3106 175u3107 - 1.5 3.7
T7 7.5 94 113 105 3.200 - 175u3132 175u3133 - 1.5 5.2
T7 11 69.7 76.2 72 4.200 - 175u3142 175u3143 - 1.5 7.2
T7 15 46.8 55.5 52 6.000 - - - 175u3242 2.5 10.8
T7 18.5 36.0 44.7 42 8.000 - - - 175u3243 2.5 13.9
T7 22 29.0 37.5 31 10.000 - - - 175u3244 4 18
T7 30 22.5 29.1 27 14.000 - - - 175u3201 10 23
T7 37 18.0 23.5 22 17.000 - - - 175u3202 10 28
T7 45 13.5 19.3 15.5 21.000 - - - 175u3205 16 37
T7 55 13.5 15.7 13.5 26.000 - - - 175u3209 16 44
T7 75 8.8 11.5 11 36.000 - - - 175u3212 25 57
T7 90 8.8 9.5 9.1 42.000 - - - 175u3214 35 68
T7 110 6.6 7.8 7.4 52.000 - - - 175u3215 50 84
T7 132 4.2 6.4 6.1 60.000 - - - 175u3218 70 99
T7 160 4.2 5.3 5.0 78.000 - - - 175u3220 2x35 125
T7 200 3.4 4.2 4.0 90.000 - - - 175u3222 2x35 150
T7 250 2.3 3.4 3.2 - - - - - - T7 315 2.3 2.7 2.5 - - - - - - T7 355 2.0 2.4 2.3 - - - - - - T7 400 1.9 2.1 2.0 - - - - - - T7 500 1.5 1.7 1.6 - - - - - - T7 560 1.4 1.5 1.4 - - - - - - T7 630 1.2 1.3 2x2.6 - - - - - - T7 710 1.1 1.2 2x2.2 - - - - - - T7 800 1.0 1.1 2x2.0 - - - - - - T7 900 0.9 0.9 3x2.6 - - - - - - T7 1000 0.8 0.8 3x2.4 - - - - - - T7 1200 0.7 0.7 3x2.0 - - - - - - -
R
[Ω]
min
R
br,nom
[Ω]
[Ω]
P
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.30 T7, Vertical Braking 40% Duty Cycle
56 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 59

Selection Guide Design Guide
8.2.7
VLT® AutomationDrive FC 360
10% duty cycle, horizontal braking, T4
FC 360 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
T4 0.37 890 1042 1200 0.100 175u3000 - - - 1.5 0.3
T4 0.55 593 694 850 0.100 175u3001 - - - 1.5 0.4
T4 0.75 434 509 630 0.100 175u3002 - - - 1.5 0.4
T4 1.1 288 338 410 0.100 175u3004 - - - 1.5 0.5
T4 1.5 208 244 270 0.200 175u3007 - - - 1.5 0.8
T4 2.2 139 164 200 0.200 175u3008 - - - 1.5 0.9
T4 3 100 119 145 0.300 175u3300 - - - 1.5 1.3
T4 4 74.0 87.9 110 0.450 175u3335 175u3450 175u3449 - 1.5 1.9
T4 5.5 54.0 63.3 80 0.570 175u3336 175u3452 175u3451 - 1.5 2.5
T4 7.5 38.0 46.1 56 0.680 175u3337 175u3027 175u3028 - 1.5 3.3
T4 11 27.0 33.0 38 1.130 175u3338 175u3034 175u3035 - 1.5 5.2
T4 15 19.0 24.0 28 1.400 175u3339 175u3039 175u3040 - 1.5 6.7
T4 18.5 16.0 19.4 22 1.700 175u3340 175u3047 175u3048 - 1.5 8.3
T4 22 16.0 18.0 19 2.200 175u3357 175u3049 175u3050 - 1.5 10.1
T4 30 11.0 13.8 14 2.800 175u3341 175u3055 175u3056 - 2.5 13.3
T4 37 9.0 11.1 12 3.200 175u3359 175u3061 175u3062 - 2.5 15.3
T4 45 8.0 9.1 9.5 4.200 - 175u3065 175u3066 - 4 20
T4 55 6.0 7.4 7.0 5.500 - 175u3070 175u3071 - 6 26
T4 75 4.0 5.4 5.5 7.000 - - - 175u3231 10 36
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.31 T4, Horizontal Braking 10% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 57
Page 60

Selection Guide Design Guide
40% duty cycle, vertical braking, T4
FC 360 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
88
P
m
[kW]
T4 0.37 890 1042 1200 0.200 175u3101 - - - 1.5 0.4
T4 0.55 593 694 850 0.200 175u3308 - - - 1.5 0.5
T4 0.75 434 509 630 0.300 175u3309 - - - 1.5 0.7
T4 1.1 288 338 410 0.450 175u3310 175u3416 175u3415 - 1.5 1
T4 1.5 208 244 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
T4 2.2 139 164 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
T4 3 100 119 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
T4 4 74.0 87.9 110 1.700 175u3314 175u3424 175u3423 - 1.5 3.7
T4 5.5 54.0 63.3 80 2.200 175u3315 175u3138 175u3139 - 1.5 5
T4 7.5 38.0 46.1 56 3.200 175u3316 175u3428 175u3427 - 1.5 7.1
T4 11 27.0 33.0 38 5.000 - - - 175u3236 1.5 11.5
T4 15 19.0 24.0 28 6.000 - - - 175u3237 2.5 14.7
T4 18.5 16.0 19.4 22 8.000 - - - 175u3238 4 19
T4 22 16.0 18.0 19 10.000 - - - 175u3203 4 23
T4 30 11.0 13.8 14 14.000 - - - 175u3206 10 32
T4 37 9.0 11.1 12 17.000 - - - 175u3210 10 38
T4 45 8.0 9.1 9.5 21.000 - - - 175u3213 16 47
T4 55 6.0 7.4 7.0 26.000 - - - 175u3216 25 61
T4 75 4.0 5.4 5.5 36.000 - - - 175u3219 35 81
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
rec
P
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.32 T4, Vertical Braking 40% Duty Cycle
58 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 61

Selection Guide Design Guide
8.2.8
VLT® Decentral Drive FCD 302
10% duty cycle, horizontal braking, T4
FCD 302 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
T4 0.37 1000 1281.6 1200 0.100 175u3000 - - - 1.5 0.3
T4 0.55 620 856.9 850 0.100 175u3001 - - - 1.5 0.4
T4 0.75 558 625.8 630 0.100 175u3002 - - - 1.5 0.4
T4 1.1 382 417.5 410 0.100 175u3004 - - - 1.5 0.5
T4 1.5 260 300.6 270 0.200 175u3007 - - - 1.5 0.8
T4 2.2 189 201.7 200 0.200 175u3008 - - - 1.5 0.9
T4 3 135 146.2 145 0.300 175u3300 - - - 1.5 1.3
Table 8.33 T4, Horizontal Braking 10% Duty Cycle
40% duty cycle, vertical braking, T4
FCD 302 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
T4 0.37 1000 1281.6 1200 0.200 175u3101 - - - 1.5 0.4
T4 0.55 620 856.9 850 0.200 175u3308 - - - 1.5 0.5
T4 0.75 558 625.8 630 0.300 175u3309 - - - 1.5 0.7
T4 1.1 382 417.5 410 0.450 175u3310 175u3416 175u3415 - 1.5 1
T4 1.5 260 300.6 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
T4 2.2 189 201.7 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
T4 3 135 146.2 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Thermo
relay
[A]
Table 8.34 T4, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 59
Page 62

Selection Guide Design Guide
8.2.9
VLT® 2800
10% duty cycle, horizontal braking, 200-400 V
VLT 2800 Horizontal braking 10% duty cycle
Frequency converter data
Mains
type
2803 (200V) 0.37 275 313 300 0.100 175u3006 - - - 1.5 0.6
2805 (200V) 0.55 185 210 200 0.100 175u3011 - - - 1.5 0.7
2807 (200V) 0.75 135 154 145 0.100 175u3016 - - - 1.5 0.8
2811 (200V) 1.1 91 102 100 0.100 175u3021 - - - 1.5 0.9
2815 (200V) 1.5 66 74 70 0.200 175u3026 - - - 1.5 1.6
2822 (200V) 2.2 44 50 48 0.200 175u3031 - - - 1.5 1.9
2840 (200V) 3.7 22 29 27 0.360 175u3326 175u3477 175u3478 - 1.5 3.5
2805 (400V) 0.55 747 839 850 0.100 175u3001 - - - 1.5 0.4
2807 (400V) 0.75 558 613 630 0.100 175u3002 - - - 1.5 0.4
2811 (400V) 1.1 370 409 410 0.100 175u3004 - - - 1.5 0.5
88
2815 (400V) 1.5 260 294 270 0.200 175u3007 - - - 1.5 0.8
2822 (400V) 2.2 185 198 200 0.200 175u3008 - - - 1.5 0.9
2830 (400V) 3 135 143 145 0.300 175u3300 - - - 1.5 1.3
2840 (400V) 4 99 106 110 0.450 175u3335 175u3450 175u3449 - 1.5 1.9
2855 (400V) 5.5 74 76 80 0.570 175u3336 175u3452 175u3451 - 1.5 2.5
2875 (400V) 7.5 52 55 56 0.680 175u3337 175u3027 175u3028 - 1.5 3.3
2880 (400V) 11 35 37 38 1.130 175u3338 175u3034 175u3035 - 1.5 5.2
2881 (400V) 15 26 27 28 1.400 175u3339 175u3039 175u3040 - 1.5 6.7
2882 (400V) 18.5 21 22 22 1.700 175u3340 175u3047 175u3048 - 1.5 8.3
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
Table 8.35 200-400 V, Horizontal Braking 10% Duty Cycle
60 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 63

Selection Guide Design Guide
40% duty cycle, vertical braking, 200-400 V
VLT 2800 Vertical braking 40% duty cycle
Frequency converter data
Mains
type
2803 (200V) 0.37 275 313 300 0.200 175u3096 - - - 1.5 0.8
2805 (200V) 0.55 185 210 200 0.200 175u3008 - - - 1.5 0.9
2807 (200V) 0.75 135 154 145 0.300 175u3300 - - - 1.5 1.3
2811 (200V) 1.1 91 102 100 0.450 175u3301 175u3402 175u3401 - 1.5 2
2815 (200V) 1.5 66 74 70 0.570 175u3302 175u3404 175u3403 - 1.5 2.7
2822 (200V) 2.2 44 50 48 0.960 175u3303 175u3406 175u3405 - 1.5 4.2
2840 (200V) 3.7 22 29 27 1.400 175u3305 175u3410 175u3409 - 1.5 6.8
2805 (400V) 0.55 747 839 850 0.200 175u3308 - - - 1.5 0.5
2807 (400V) 0.75 558 613 630 0.300 175u3309 - - - 1.5 0.7
2811 (400V) 1.1 370 409 410 0.450 175u3310 175u3416 175u3415 - 1.5 1
2815 (400V) 1.5 260 294 270 0.570 175u3311 175u3418 175u3417 - 1.5 1.4
2822 (400V) 2.2 185 198 200 0.960 175u3312 175u3420 175u3419 - 1.5 2.1
2830 (400V) 3 135 143 145 1.130 175u3313 175u3422 175u3421 - 1.5 2.7
2840 (400V) 4 99 106 110 1.700 175u3314 175u3424 175u3423 - 1.5 3.7
2855 (400V) 5.5 74 76 80 2.200 175u3315 175u3138 175u3139 - 1.5 5
2875 (400V) 7.5 52 55 56 3.200 175u3316 175u3428 175u3427 - 1.5 7.1
2880 (400V) 11 35 37 38 5.000 - - - 175u3236 1.5 11.5
2881 (400V) 15 26 27 28 6.000 - - - 175u3237 2.5 14.7
2882 (400V) 18.5 21 22 22 8.000 - - - 175u3238 4 19
P
m
[kW]
R
[Ω]
min
R
br,nom
[Ω]
R
[Ω]
P
rec
br,cont.
[kW]
Brake resistor data Installation
Wire IP54
Danfoss part number
Screw
terminal
IP21
Screw
terminal
IP65
Bolt
connection
IP20
Cable
cross-
section
[mm2]
Thermo
relay
[A]
8 8
Table 8.36 200-400 V, Vertical Braking 40% Duty Cycle
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 61
Page 64

Selection Guide Design Guide
8.3 Selection Tables for Alternative Brake Resistors
8.3.1 Abbreviations used in the Brake Resistor Tables
Mains Voltage class
P
m
R
min
R
rec
Duty cycle P
Danfoss part number Danfoss brake resistor order numbers
P
br,cont.
R
br,nom
8.3.2
VLT® HVAC Drive FC 102, T2
Mains: 200-240 V, T2
FC 102
T2 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
P1K1 1.1 130 152.9 150/100 9 1005
88
P1K1 1.1 130 152.9 150/200 18 0989
P1K5 1.5 81.0 110.5 100/100 7 1006
P1K5 1.5 81.0 110.5 100/200 14 0991
P2K2 2.2 58.5 74.1 72/200 9 0992
P3K0 3 45.0 53.7 50/200 7 0993
P3K7 3.7 31.5 39.9 35/200 6 0994
P3K7 3.7 31.5 39.9 72/200 11 2x0992
Rated motor size for frequency converter
Minimum permissible brake resistor - by frequency converter
Recommended brake resistor resistance of Danfoss brake resistors
x100/Pm
br,cont.
Brake resistor average rated power
The nominal (calculated) resistor value to ensure a brake power on motor shaft of 150/160/110% for 1 minute
Flat-pack IP65
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle
Danfoss part number
Table 8.37 Mains: 200-240 V (T2)
8.3.3
VLT® HVAC Drive FC 102, T4
Mains: 380-480 V, T4
Flat-pack IP65
FC 102
T4 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
P1K1 1.1 546 607.3 620/100 9 1001
P1K1 1.1 546 607.3 620/200 18 0982
P1K5 1.5 382 437.3 430/100 7 1002
P1K5 1.5 382 437.3 430/200 14 0983
P2K2 2.2 260 293.3 310/200 9 0984
P3K0 3 189 212.7 210/200 7 0987
P4K0 4 135 157.3 150/200 5 0989
P4K0 4 135 157.3 300/200 20 2x0985
P5K5 5.5 99.0 113.3 130/200 7 2x0990
Table 8.38 Mains: 380-480 V (T4)
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle Danfoss part number
62 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 65

Selection Guide Design Guide
8.3.4
VLT® AQUA Drive FC 202, T2
Mains: 200-240 V, T2
Flat-pack IP65
FC 202
T2 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
PK25 0.25 380 691.3 430/100 40 1002
PK37 0.37 380 466.7 430/100 27 1002
PK55 0.55 275 313.7 330/100 18 1003
PK55 0.55 275 313.7 310/200 36 0984
PK75 0.75 188 230.0 220/100 13 1004
PK75 0.75 188 230.0 210/200 26 0987
P1K1 1.1 130 152.9 150/100 9 1005
P1K1 1.1 130 152.9 150/200 18 0989
P1K5 1.5 81.0 110.5 100/100 7 1006
P1K5 1.5 81.0 110.5 100/200 14 0991
P2K2 2.2 58.5 74.1 72/200 9 0992
P3K0 3 45.0 53.7 50/200 7 0993
P3K7 3.7 31.5 39.9 35/200 6 0994
P3K7 3.7 31.5 39.9 72/200 11 2x0992
P5K5 5.5 22.5 28.7 40/200 7 2x0996
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle Danfoss part number
8 8
Table 8.39 Mains: 200-240 V (T2)
8.3.5
VLT® AQUA Drive FC 202, T4
Mains: 380-480 V, T4
Flat-pack IP65
FC 202
T4 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
PK75 0.75 620 910.2 830/100 13 1000
P1K1 1.1 546 607.3 620/100 9 1001
P1K1 1.1 546 607.3 620/200 18 0982
P1K5 1.5 382 437.3 430/100 7 1002
P1K5 1.5 382 437.3 430/200 14 0983
P2K2 2.2 260 293.3 310/200 9 0984
P3K0 3 189 212.7 210/200 7 0987
P4K0 4 135 157.3 150/200 5 0989
P4K0 4 135 157.3 300/200 10 2x0985
P5K5 5.5 99.0 113.3 130/200 7 2x0990
P7K5 7.5 72.0 82.4 80/240 6 2x0090
Table 8.40 Mains: 380-480 V (T4)
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle
Danfoss part number
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 63
Page 66

Selection Guide Design Guide
8.3.6
VLT® AutomationDrive FC 301, T2
Mains: 200-240 V, T2
Flat-pack IP65
FC 301
T2 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
PK25 0.25 368 415.9 430/100 40 1002
PK37 0.37 248 280.7 330/100 27 1003
PK37 0.37 248 280.7 310/200 55 0984
PK55 0.55 166 188.7 220/100 20 1004
PK55 0.55 166 188.7 210/200 37 0987
PK75 0.75 121 138.4 150/100 14 1005
PK75 0.75 121 138.4 150/200 27 0989
P1K1 1.1 81.0 92.0 100/100 10 1006
P1K1 1.1 81.0 92.0 100/200 19 0991
P1K5 1.5 58.5 66.5 72/200 14 0992
P2K2 2.2 40.2 44.6 50/200 10 0993
P3K0 3 29.1 32.3 35/200 7 0994
P3K0 3 29.1 32.3 72/200 14 2x0992
P3K7 3.7 22.5 25.9 40/200 11 2x0996
88
Table 8.41 Mains: 200-240 V (T2)
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle Danfoss part number
8.3.7
VLT® AutomationDrive FC 302, T2
Mains: 200-240 V, T2
Flat-pack IP65
FC 302
T2 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
PK25 0.25 380 475.3 430/100 40 1002
PK37 0.37 275 320.8 330/100 27 1003
PK37 0.37 275 320.8 310/200 54 0984
PK55 0.55 188 215.7 220/100 18 1004
PK55 0.55 188 215.7 210/200 36 0987
PK75 0.75 130 158.1 150/100 13 1005
PK75 0.75 130 158.1 150/200 27 0989
P1K1 1.1 81.0 105.1 100/100 9 1006
P1K1 1.1 81.0 105.1 100/200 18 0991
P1K5 1.5 58.5 76.0 72/200 13 0992
P2K2 2.2 45.0 51.0 50/200 9 0993
P3K0 3 31.5 37.0 35/200 7 0994
P3K0 3 31.5 37.0 72/200 14 2x0992
P3K7 3.7 22.5 29.7 40/200 10 2x0996
Table 8.42 Mains: 200-240 V (T2)
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle Danfoss part number
64 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 67

Selection Guide Design Guide
8.3.8
VLT® AutomationDrive FC 301, T4
Mains: 380-480 V, T4
Flat-pack IP65
FC 301
T4 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
PK37 0.37 620 1121.4 830/100 27 1000
PK55 0.55 620 749.8 830/100 18 1000
PK75 0.75 485 547.6 620/100 13 1001
PK75 0.75 485 547.6 620/200 27 0982
P1K1 1.1 329 365.3 430/100 9 1002
P1K1 1.1 329 365.3 430/200 18 0983
P1K5 1.5 240 263.0 310/200 13 0984
P2K2 2.2 161 176.5 210/200 9 0987
P3K0 3 117.0 127.9 150/200 7 0989
P3K0 3 117.0 127.9 300/200 14 2x0985
P4K0 4 87 94.6 240/200 10 2x0986
P5K5 5.5 63 68.2 160/200 7 2x0988
P7K5 7.5 45 49.6 130/200 5 2x0990
P11K 11 34.9 38.0 80/240 4 2x0090
P15K 15 25.3 27.7 72/240 3 2x0091
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle Danfoss part number
8 8
Table 8.43 Mains: 380-480 V (T4)
8.3.9
VLT® AutomationDrive FC 302, T5
Mains: 380-500 V, T5
Flat-pack IP65
FC 302
T5 [kW] [Ω] [Ω] [Ω/W] % 175Uxxxx
PK37 0.37 620 1389.2 830/100 27 1000
PK55 0.55 620 928.8 830/100 18 1000
PK75 0.75 558 678.3 620/100 13 1001
PK75 0.75 558 678.3 620/200 27 0982
P1K1 1.1 382 452.5 430/100 9 1002
P1K1 1.1 382 452.5 430/200 18 0983
P1K5 1.5 260 325.9 310/200 13 0984
P2K2 2.2 189 218.6 210/200 9 0987
P3K0 3 135 158.5 150/200 7 0989
P3K0 3 135 158.5 300/200 14 2x0985
P4K0 4 99 117.2 240/200 10 2x0986
P5K5 5.5 72 84.4 160/200 7 2x0988
P7K5 7.5 50 61.4 130/200 5 2x0990
P11K 11 36.0 41.2 80/240 4 2x0090
P15K 15 27.0 30.0 72/240 3 2x0091
P
m
R
min
R
br,nom
R
per item/P
rec
br,cont.
Duty cycle Danfoss part number
Table 8.44 Mains: 380-500 V (T5)
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 65
Page 68

Specifications Design Guide
9 Specifications
9.1 Ambient Conditions
Environment
Ambient temperature range -40 to 70 °C
Temperature range during storage/transport -40 to 70 °C
Maximum temperature at housing 300 °C
Maximum relative humidity 5-85%, non-condensation during operation
Power derating as a function of ambient temperature. (100% power rating and pulse-load):
- Steel grid brake resistors, IP20 Continuous power 100% @ 40 °C to 70% @ 70 °C, linear
- Aluminum-housed compact brake resistors, IP21 Continuous power 100% @ 40 °C to 75% @ 70 °C, linear
- Aluminum-housed brake resistors - compact and flat-pack, IP54 Continuous power 100% @ 40 °C to 75% @ 70 °C, linear
- Aluminum compact brake resistors, IP65 Continuous power 100% @ 40 °C to 50% @ 70 °C, linear
Power derating at vertical mounted resistor (wall-mounted) when mounted horizontal (100% power rating and pulseload):
- Aluminum-housed flat-pack brake resistors, IP54 No derating
- Aluminum-housed compact brake resistors, IP21, IP54, IP65 -20%
Cooling requirements:
The brake resistors are cooled by free natural convection. The power ratings of the resistors refers to cooling conditions
with free natural cooling. The requirements for minimum clearances must be observed during installation.
Derating at high altitudes 100% @ 1000 m above sea level
99
Derating at high altitudes 94% @ 1500 m above sea level
Derating at high altitudes 82% @ 3000 m above sea level
9.2 General Electrical Specifications
Electrical specifications
Resistance tolerances ±10%
Insulation > 20 MΩ @ 1000 V
Dielectric strength 2500 V AC for 1 min.
Operating voltage:
- Aluminum-housed compact brake resistors, IP54 UL: 600 V AC/600 V DC
- Aluminum-housed compact brake resistors, IP54 IEC: 690 V AC/1100 V DC
- Aluminum-housed flat-pack brake resistors, IP54 UL: 1000 V AC/1400 V DC
- Aluminum-housed flat-pack brake resistors, IP54 IEC: 1000 V AC/1400 V DC
- Aluminum-housed compact brake resistors, IP21, IP65 UL: 600 V AC/600 V DC
- Aluminum-housed compact brake resistors, IP21, IP65 IEC: 690 V AC/1100 V DC
- Steel grid brake resistors, IP20 IEC: 690 V AC/1100 V DC
Power rating (continuous load 100%) with and without temperature switch
- Without temperature switch 100% of continuous power rating @ 40 °C
- With temperature switch, steel grid brake resistors, IP20 100% of continuous power rating @ 40 °C
- With temperature switch, aluminum-housed brake resistors,
IP21, IP54, IP65 Minimum 80% of continuous power rating @ 40 °C
- With temperature switch, aluminum-housed brake
resistors, IP21, IP54, IP65
Electrical data temperature switch:
- Steel grid brake resistors, IP20 10 A, 250 V AC, normally closed (NC). Enables at 260 °C
- Aluminum-housed brake resistors, IP21, IP54, IP65 2 A, 250 V AC, normally closed (NC). Enables at 180 °C
Temperature switch enables at ≥80% of the continuous power
rating @ 40 °C
66 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 69

Specifications Design Guide
9.3 Electrical Data: MCE 101 Product Types 9xx
Pulse
load
power
10%
duty
cycle
52.5 14.8
[Ω]
Continuous
power 100%
load
[W] [kW] [kW] Type
P/N
175U3000 1200 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3001 850 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3002 630 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3003 570 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3004 410 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3005 415 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3006 300 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3007 270 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3008 200 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3009 200 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3010 200 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3011 200 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3012 145 450 5 1.25 1 4.0 12 16 6 - - - 175U3013 145 450 5 1.25 1 4.0 12 16 6 - - - 175U3014 145 280 2.8 0.7 1 4.0 12 16 6 - - - 175U3015 145 280 2.8 0.7 1 4.0 12 16 6 - - - 175U3016 145 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3017 110 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3018 110 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3019 105 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3020 105 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3021 100 100 1.65 0.405 1 - - - - 0.5 20 1.5 16
175U3022 80 450 5 1.25 1 4.0 12 16 6 - - - 175U3023 80 450 5 1.25 1 4.0 12 16 6 - - - 175U3024 72 960 10.8 2.6 1 4.0 12 16 6 - - - 175U3025 72 960 13 3.3 1 4.0 12 16 6 - - - 175U3026 70 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3027 56 680 9.4 2.2 1 4.0 12 16 6 - - - 175U3028 56 680 9.4 2.2 1 4.0 12 16 6 - - - 175U3029 52 1290 17.8 3.8 1 4.0 12 16 6 - - - 175U3030 52 1290 17.8 3.8 1 4.0 12 16 6 - - - 175U3031 48 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3032 42 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3033 42 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3034 38 1130 15.6 3.3 1 4.0 12 16 6 - - - 175U3035 38 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3036 35 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3037 31 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3038 31 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3039 28 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3040 28 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3041 27 280 2.8 0.7 1 4.0 12 16 6 - - - 175U3042 27 280 2.8 0.7 1 4.0 12 16 6 - - - 175U3043 27 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3044 27 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3047 22 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3048 22 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3049 19 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3050 19 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3051 15.5 3500 43.4 10.8 1 4.0 12 55 1/0 - - - 175U3052 15.5 3500 43.4 10.8 1 4.0 12 55 1/0 - - - 175U3053 18 450 6.2 1.45 1 4.0 12 16 6 - - - 175U3054 18 450 6.2 1.45 1 4.0 12 16 6 - - - 175U3055 14 2800 35 8.7 1 4.0 12 16 6 - - - 175U3056 14 2800 35 8.7 1 4.0 12 16 6 - - - 175U3057 13.5 4200
Resi-
stance
Temp. switch Power cables Temp. switch Power cables
Pulse
load
power
40%
duty
1)
cycle
Temp.
switch
2) 3)
1)
1 4.0 12 55 1/0 - - - -
Terminal max wire
[mm2]
[AWG]
cross-section
[mm2]
[AWG]
Wire cross-section
[AWG]
[mm2]
[mm2]
4)
[AWG]
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 67
Page 70

Specifications Design Guide
Pulse
load
power
10%
duty
cycle
9.5 2.37
[Ω]
Continuous
power 100%
load
[W] [kW] [kW] Type
P/N
175U3058 13.5 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3059 13 680 9.4 2.2 1 4.0 12 16 6 - - - 175U3060 13 680 9.4 2.2 1 4.0 12 16 6 - - - 175U3061 12 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3062 12 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3063 11 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3064 11 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3065 9.5 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3066 9.5 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3067 9.1 9000 121 29 2 2.5 14 2xM8 - - - 175U3068 9.0 1130 14.5 3.1 1 4.0 12 16 6 - - - 175U3069 9.0 1130 14.5 3.1 1 4.0 12 16 6 - - - 175U3070 7.0 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3071 7.0 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3072 7.4 11000 148 36 2 2.5 14 2xM8 - - - 175U3073 5.7 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3074 5.7 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3075 6.1 13000 174 42 2 2.5 14 2xM8 - - - 175U3076 5.5 6300 87.0 20.5 1 6.0 10 55 1/0 - - - 175U3077 5.5 6300 87.0 20.5 1 6.0 10 55 1/0 - - - -
99
175U3078 5.0 16000 215 52 2 2.5 14 2xM8 - - - 175U3079 4.7 9000 121 29 2 2.5 14 2xM8 - - - 175U3080 3.5 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3081 3.5 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3082 4.0 20000 268 65 2 2.5 14 2xM8 - - - 175U3083 3.7 11000 148 36 2 2.5 14 2xM8 - - - 175U3084 3.3 13000 174 42 2 2.5 14 2xM8 - - - 175U3085 3.3 26000 349 85 2 2.5 14 2xM8 - - - 175U3086 2.8 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3087 2.8 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3088 2.7 16000 215 52 2 2.5 14 2xM8 - - - 175U3089 2.5 32000 429 104 2 2.5 14 2xM8 - - - 175U3090 2.3 36000 483 117 2 2.5 14 2xM8 - - - 175U3091 2.1 20000 268 65 2 2.5 14 2xM8 - - - 175U3092 2.0 42000 563 137 2 2.5 14 2xM8 - - - 175U3093 1.7 26000 349 85 2 2.5 14 2xM8 - - - 175U3094 1.6 52000 697 169 2 2.5 14 2xM8 - - - 175U3095 1.4 60000 805 195 2 2.5 14 2xM8 - - - 175U3096 300 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3097 1.3 32000 429 104 2 2.5 14 2xM8 - - - 175U3098 1.2 36000 483 117 2 2.5 14 2xM8 - - - 175U3099 1.1 42000 563 137 2 2.5 14 2xM8 - - - 175U3101 1200 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3102 1200 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3103 1200 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3104 850 280 2.8 0.7 1 4.0 12 16 6 - - - 175U3105 850 280 2.8 0.7 1 4.0 12 16 6 - - - 175U3106 145 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3107 145 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3108 630 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3109 630 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3110 570 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3111 570 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3112 415 790 9.5 2.37 1 4.0 12 16 6 - - - 175U3113 415 790 9.5 2.37 1 4.0 12 16 6 - - - 175U3114 410 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3115 410 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3116 270 790 9.5 2.37 1 4.0 12 16 6 - - - 175U3117 270 790
Resi-
stance
Temp. switch Power cables Temp. switch Power cables
Pulse
load
power
40%
duty
1)
cycle
Temp.
switch
2) 3)
1)
1 4.0 12 16 6 - - - -
Terminal max wire
[mm2]
[AWG]
cross-section
[mm2]
[AWG]
Wire cross-section
[AWG]
[mm2]
[mm2]
4)
[AWG]
68 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 71

Specifications Design Guide
Pulse
load
power
10%
duty
cycle
134 33
[Ω]
Continuous
power 100%
load
[W] [kW] [kW] Type
P/N
175U3118 270 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3119 270 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3120 200 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3121 200 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3122 200 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3123 200 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3124 145 450 5.0 1.25 1 4.0 12 16 6 - - - 175U3125 145 450 5.0 1.25 1 4.0 12 16 6 - - - 175U3126 145 1700 21.1 5.7 1 4.0 12 16 6 - - - 175U3127 145 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3130 110 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3131 110 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3132 105 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3133 105 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3134 105 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3135 105 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3136 100 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3137 100 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3138 80 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3139 80 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3140 72 2800 35.0 8.7 1 4.0 12 16 6 - - - 175U3141 72 2800 35.0 8.7 1 4.0 12 16 6 - - - 175U3142 72 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3143 72 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3144 70 790 9.5 2.37 1 4.0 12 16 6 - - - 175U3145 70 790 9.5 2.37 1 4.0 12 16 6 - - - 175U3146 56 2800 35 8.7 1 4.0 12 16 6 - - - 175U3147 56 2800 35 8.7 1 4.0 12 16 6 - - - 175U3148 52 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3149 52 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3152 48 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3153 48 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3154 42 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3155 42 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3156 38 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3157 38 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3160 35 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3161 35 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3162 31 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3163 31 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3166 28 6300 78.7 19.5 1 6.0 10 55 1/0 - - - 175U3167 28 6300 78.7 19.5 1 6.0 10 55 1/0 - - - 175U3168 27 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3169 27 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3170 22 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3171 22 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3172 18 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3173 18 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3174 13 3500 43.4 10.8 1 4.0 12 55 1/0 - - - 175U3175 13 3500 43.4 10.8 1 4.0 12 55 1/0 - - - 175U3176 9.0 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3177 9.0 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3178 5.7 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3179 5.7 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3180 5.7 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3181 5.7 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3182 3.5 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3183 3.5 8200 102.2 25.3 1 6.0 10 55 1/0 - - - 175U3200 27.0 10000
Resi-
stance
Temp. switch Power cables Temp. switch Power cables
Pulse
load
power
40%
duty
1)
cycle
Temp.
switch
2) 3)
1)
2 2.5 14 2xM8 - - - -
Terminal max wire
[mm2]
[AWG]
cross-section
[mm2]
[AWG]
Wire cross-section
[AWG]
[mm2]
[mm2]
4)
[AWG]
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 69
Page 72

Specifications Design Guide
Pulse
load
power
10%
duty
cycle
27.3 6.8
[Ω]
Continuous
power 100%
load
[W] [kW] [kW] Type
P/N
175U3201 27.0 14000 188 46 2 2.5 14 2xM8 - - - 175U3202 22.0 17000 228 55 2 2.5 14 2xM8 - - - 175U3203 19.0 10000 134 33 2 2.5 14 2xM8 - - - 175U3204 19 14000 188 46 2 2.5 14 2xM8 - - - 175U3205 15.5 21000 282 68 2 2.5 14 2xM8 - - - 175U3206 14.0 14000 188 46 2 2.5 14 2xM8 - - - 175U3207 14.0 17000 228 55 2 2.5 14 2xM8 - - - 175U3208 13.5 21000 282 68 2 2.5 14 2xM8 - - - 175U3209 13.5 26000 349 85 2 2.5 14 2xM8 - - - 175U3210 12.0 17000 228 55 2 2.5 14 2xM8 - - - 175U3211 11.0 26000 349 85 2 2.5 14 2xM8 - - - 175U3212 11.0 36000 483 117 2 2.5 14 2xM8 - - - 175U3213 9.5 21000 282 68 2 2.5 14 2xM8 - - - 175U3214 9.1 42000 563 137 2 2.5 14 2xM8 - - - 175U3215 7.4 52000 697 169 2 2.5 14 2xM8 - - - 175U3216 7.0 26000 349 85 2 2.5 14 2xM8 - - - 175U3217 7.0 36000 483 117 2 2.5 14 2xM8 - - - 175U3218 6.1 60000 805 195 2 2.5 14 2xM8 - - - 175U3219 5.5 36000 483 117 2 2.5 14 2xM8 - - - 175U3220 5.0 78000 105 254 2 2.5 14 2xM8 - - - -
99
175U3221 4.7 42000 563 137 2 2.5 14 2xM8 - - - 175U3222 4.0 90000 121 293 2 2.5 14 2xM8 - - - 175U3223 3.7 52000 69 169 2 2.5 14 2xM8 - - - 175U3224 3.5 14000 188 46 2 2.5 14 2xM8 - - - 175U3225 3.3 60000 805 195 2 2.5 14 2xM8 - - - 175U3227 2.8 17000 228 55 2 2.5 14 2xM8 - - - 175U3228 2.7 78000 105 254 2 2.5 14 2xM8 - - - 175U3230 2.1 90000 121 293 2 2.5 14 2xM8 - - - 175U3231 5.5 7000 94 23 2 2.5 14 2xM8 - - - 175U3232 11 7000 94 23 2 2.5 14 2xM8 - - - 175U3233 5.7 6000 80 20 2 2.5 14 2xM8 - - - 175U3234 5.7 8000 107 26 2 2.5 14 2xM8 - - - 175U3235 3.5 9000 121 29 2 2.5 14 2xM8 - - - 175U3236 38 5000 67 16 2 2.5 14 2xM8 - - - 175U3237 28 6000 80 20 2 2.5 14 2xM8 - - - 175U3238 22 8000 107 26 2 2.5 14 2xM8 - - - 175U3239 38 6000 80 20 2 2.5 14 2xM8 - - - 175U3240 31 8000 107 26 2 2.5 14 2xM8 - - - 175U3241 7.0 30000 402 98 2 2.5 14 2xM8 - - - 175U3242 52 6000 80 20 2 2.5 14 2xM8 - - - 175U3243 42 8000 107 26 2 2.5 14 2xM8 - - - 175U3244 31 10000 134 33 2 2.5 14 2xM8 - - - 175U3245 7 7000 94 23 2 2.5 14 2xM8 - - - 175U3300 145 300 5 1 1 - - - - 0.5 20 1.5 16
175U3301 100 450 5 1.25 1 - - - - 0.5 20 1.5 16
175U3302 70 570 6.6 1.65 1 - - - - 0.5 20 1.5 16
175U3303 48 960 11.5 2.88 1 - - - - 0.5 20 1.5 16
175U3304 35 1130 14.5 3.6 1 - - - - 0.5 20 1.5 16
175U3305 27 1400 17.5 4.38 1 - - - - 0.5 20 6.0 10
175U3306 18 2200 27.3 6.8 1 - - - - 0.5 20 6.0 10
175U3307 13 3200 39.9 9.9 1 - - - - 0.5 20 6.0 10
175U3308 850 200 3.05 0.75 1 - - - - 0.5 20 1.5 16
175U3309 630 300 5 1 1 - - - - 0.5 20 1.5 16
175U3310 410 450 5 1.25 1 - - - - 0.5 20 1.5 16
175U3311 270 570 6.6 1.65 1 - - - - 0.5 20 1.5 16
175U3312 200 960 10.8 2.6 1 - - - - 0.5 20 1.5 16
175U3313 145 1130 14.5 3.6 1 - - - - 0.5 20 1.5 16
175U3314 110 1700 21.1 5.27 1 - - - - 0.5 20 6.0 10
175U3315 80 2200
Resi-
stance
Temp. switch Power cables Temp. switch Power cables
Pulse
load
power
40%
duty
1)
cycle
Temp.
switch
2) 3)
1)
1 - - - - 0.5 20 6.0 10
Terminal max wire
[mm2]
[AWG]
cross-section
[mm2]
[AWG]
Wire cross-section
[AWG]
[mm2]
[mm2]
4)
[AWG]
70 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 73

Specifications Design Guide
Pulse
load
power
10%
duty
cycle
39.9 9.9
[Ω]
Continuous
power 100%
load
[W] [kW] [kW] Type
P/N
175U3316 56 3200 39.9 9.9 1 - - - - 0.5 20 6.0 10
175U3317 850 280 2.8 0.7 1 - - - - 0.5 20 1.5 16
175U3318 570 450 5 1.25 1 - - - - 0.5 20 1.5 16
175U3319 415 570 6.6 1.65 1 - - - - 0.5 20 1.5 16
175U3320 270 960 10.8 2.6 1 - - - - 0.5 20 1.5 16
175U3321 200 1130 14.5 3.6 1 - - - - 0.5 20 1.5 16
175U3322 145 1700 21.1 5.27 1 - - - - 0.5 20 6.0 14
175U3323 100 2200 27.3 6.8 1 - - - - 0.5 20 6.0 10
175U3324 72 3200 39.9 9.9 1 - - - - 0.5 20 6.0 10
175U3325 35 300 5 1 1 - - - - 0.5 20 1.5 16
175U3326 27 360 4.2 1.05 1 - - - - 0.5 20 1.5 16
175U3327 18 570 6.6 1.65 1 - - - - 0.5 20 1.5 16
175U3328 13 680 9.4 2.2 1 - - - - 0.5 20 1.5 16
175U3329 9.0 1130 14.5 3.6 1 - - - - 0.5 20 1.5 16
175U3330 5.7 1400 17.5 4.38 1 - - - - 0.5 20 6.0 10
175U3331 5.7 1700 21.1 5.27 1 - - - - 0.5 20 6.0 10
175U3332 3.5 2200 27.3 6.8 1 - - - - 0.5 20 6.0 10
175U3333 3.5 2800 35.0 8.7 1 - - - - 0.5 20 6.0 10
175U3334 2.8 3200 39.9 9.9 1 - - - - 0.5 20 6.0 10
175U3335 110 450 6.6 1.65 1 - - - - 0.5 20 1.5 16
175U3336 80 570 5.0 1.25 1 - - - - 0.5 20 1.5 16
175U3337 56 680 9.4 2.2 1 - - - - 0.5 20 1.5 16
175U3338 38 1130 14.5 3.6 1 - - - - 0.5 20 1.5 16
175U3339 28 1400 17.5 4.38 1 - - - - 0.5 20 6.0 10
175U3340 22 1700 21.1 5.27 1 - - - - 0.5 20 6.0 10
175U3341 14 2800 35 8.7 1 - - - - 0.5 20 6.0 10
175U3342 200 300 5 1 1 - - - - 0.5 20 1.5 16
175U3343 145 450 5 1.25 1 - - - - 0.5 20 1.5 16
175U3344 100 570 6.6 1.65 1 - - - - 0.5 20 1.5 16
175U3345 72 680 9.4 2.2 1 - - - - 0.5 20 1.5 16
175U3346 52 1130 14.5 3.6 1 - - - - 0.5 20 1.5 16
175U3347 38 1400 17.5 4.38 1 - - - - 0.5 20 6.0 10
175U3348 31 1700 21.1 5.27 1 - - - - 0.5 20 6.0 10
175U3349 27 2200 27.3 6 1 - - - - 0.5 20 6.0 10
175U3350 19 2800 35 8.7 1 - - - - 0.5 20 6.0 10
175U3351 72 1130 14.5 3.6 1 - - - - 0.5 20 1.5 16
175U3352 52 1400 17.5 4.38 1 - - - - 0.5 20 6.0 10
175U3353 42 1700 21.1 5.27 1 - - - - 0.5 20 6.0 10
175U3354 31 2200 27.3 6.8 1 - - - - 0.5 20 6.0 10
175U3355 27 2800 35 8.7 1 - - - - 0.5 20 6.0 10
175U3356 22 3200 39.9 9.9 1 - - - - 0.5 20 6.0 10
175U3357 19 2200 27.3 6.8 1 - - - - 0.5 20 6.0 10
175U3358 14 3200 39.9 9.9 1 - - - - 0.5 20 6.0 10
175U3359 12 3200 39.9 9.9 1 - - - - 0.5 20 6.0 10
175U3360 105 790 9.5 2.37 1 - - - - 0.5 20 1.5 16
175U3361 270 300 5 1 1 - - - - 0.5 20 1.5 16
175U3401 100 450 5 1.2 1 4.0 12 16 6 - - - 175U3402 100 450 5 1.25 1 4.0 12 16 6 - - - 175U3403 70 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3404 70 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3405 48 960 11.5 2.88 1 4.0 12 16 6 - - - 175U3406 48 960 11.5 2.88 1 4.0 12 16 6 - - - 175U3407 35 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3408 35 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3409 27 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3410 27 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3411 18 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3412 18 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3413 13 3200
Resi-
stance
Temp. switch Power cables Temp. switch Power cables
Pulse
load
power
40%
duty
1)
cycle
Temp.
switch
2) 3)
1)
1 4.0 12 16 6 - - - -
Terminal max wire
[mm2]
[AWG]
cross-section
[mm2]
[AWG]
Wire cross-section
[AWG]
[mm2]
[mm2]
4)
[AWG]
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 71
Page 74

Specifications Design Guide
Pulse
load
power
10%
duty
cycle
[Ω]
Continuous
power 100%
load
[W] [kW] [kW] Type
360 4.2 1.05
P/N
175U3414 13 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3415 410 450 5 1.25 1 4.0 12 16 6 - - - 175U3416 410 450 5 1.25 1 4.0 12 16 6 - - - 175U3417 270 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3418 270 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3419 200 960 10.8 2.6 1 4.0 12 16 6 - - - 175U3420 200 960 10.8 2.6 1 4.0 12 16 6 - - - 175U3421 145 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3422 145 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3423 110 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3424 110 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3427 56 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3428 56 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3429 570 450 5 1.25 1 4.0 12 16 6 - - - 175U3430 570 450 5 1.25 1 4.0 12 16 6 - - - 175U3431 415 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3432 415 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3433 270 960 10.8 2.6 1 4.0 12 16 6 - - - 175U3434 270 960 10.8 2.6 1 4.0 12 16 6 - - - 175U3435 200 1130 14.5 3.6 1 4.0 12 16 6 - - - -
99
175U3436 200 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3437 100 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3438 100 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3439 72 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3440 72 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3441 18 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3442 18 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3445 5.7 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3446 5.7 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3447 3.5 2800 35 8.7 1 4.0 12 16 6 - - - 175U3448 3.5 2800 35 8.7 1 4.0 12 16 6 - - - 175U3449 110 450 5 1.25 1 4.0 12 16 6 - - - 175U3450 110 450 5 1.25 1 4.0 12 16 6 - - - 175U3451 80 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3452 80 570 6.6 1.65 1 4.0 12 16 6 - - - 175U3455 72 680 9.4 2.2 1 4.0 12 16 6 - - - 175U3456 72 680 9.4 2.2 1 4.0 12 16 6 - - - 175U3457 52 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3458 52 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3459 38 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3460 38 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3461 19 2800 35 8.7 1 4.0 12 16 6 - - - 175U3462 19 2800 35 8.7 1 4.0 12 16 6 - - - 175U3463 14 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3464 14 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3465 72 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3466 72 1130 14.5 3.6 1 4.0 12 16 6 - - - 175U3467 52 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3468 52 1400 17.5 4.38 1 4.0 12 16 6 - - - 175U3469 31 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3470 31 2200 27.3 6.8 1 4.0 12 16 6 - - - 175U3471 27 2800 35 8.7 1 4.0 12 16 6 - - - 175U3472 27 2800 35 8.7 1 4.0 12 16 6 - - - 175U3473 15.5 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3474 15.5 4200 52.5 14.8 1 4.0 12 55 1/0 - - - 175U3475 13.5 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3476 13.5 5500 68.6 17 1 4.0 12 55 1/0 - - - 175U3477 27 360 4.2 1.05 1 4.0 12 16 6 - - - 175U3478 27
Resi-
stance
Temp. switch Power cables Temp. switch Power cables
Pulse
load
power
40%
duty
1)
cycle
Temp.
switch
2) 3)
1)
1 4.0 12 16 6 - - - -
Terminal max wire
[mm2]
[AWG]
cross-section
[mm2]
[AWG]
Wire cross-section
[AWG]
[mm2]
[mm2]
4)
[AWG]
72 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 75

Specifications Design Guide
Pulse
load
power
10%
duty
cycle
[Ω]
Continuous
power 100%
load
[W] [kW] [kW] Type
P/N
175U3479 22 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3480 22 3200 39.9 9.9 1 4.0 12 16 6 - - - 175U3481 105 790 9.5 2.37 1 4.0 12 16 6 - - - 175U3482 105 790 9.5 2.37 1 4.0 12 16 6 - - - 175U3483 5.7 1700 21.1 5.27 1 4.0 12 16 6 - - - 175U3484 5.7 1700 21.1 5.27 1 4.0 12 16 6 - - - -
Table 9.1 Electrical Data: Product Types 9xx
1) Based on reference profiles with 30 s repetition rates
2) Temperature switch type 1: 2 A. 250 V AC. Normally closed (NC). Enables at 180 °C
3) Temperature switch type 2: 10 A. 250 V AC. Normally closed (NC). Enables at 260 °C
4) Only for versions with fixed cables. All cables are 1000 mm unscreened cables.
Resi-
stance
Temp. switch Power cables Temp. switch Power cables
Pulse
load
power
40%
duty
1)
cycle
Temp.
switch
2) 3)
1)
Terminal max wire
[mm2]
[AWG]
cross-section
[mm2]
[AWG]
Wire cross-section
[AWG]
[mm2]
4)
[mm2]
[AWG]
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 73
Page 76

Specifications Design Guide
9.4 Mechanical Data: MCE 101 Product Types 9xx
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
Weight
P/N
175U3000 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3001 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3002 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3003 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3004 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3005 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3006 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3007 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3008 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3009 1.8 21 Y 914CBR-V210DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3010 1.8 65 Y 914CBR-V210BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3011 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3012 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3013 2.4 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3014 1.3 21 Y 914CBR-V160DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3015 1.3 65 Y 914CBR-V160BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3016 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3017 1.8 21 Y 914CBR-V210DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
99
175U3018 1.8 65 Y 914CBR-V210BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3019 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3020 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3021 0.27 54 Y 914CCH145CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3022 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3023 2.4 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3024 4.6 21 Y 914CBR-V560DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3025 4.6 65 Y 914CBR-V560BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3026 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3027 3.5 21 Y 914CBR-V400DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3028 3.5 65 Y 914CBR-V400BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3029 6.1 21 Y 914CBR-V760DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3030 6.1 65 Y 914CBR-V760BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3031 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3032 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3033 9.2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3034 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3035 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3036 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3037 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3038 9.2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3039 8.2 21 N 914CBT-H400DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3040 8.2 65 N 914CBT-H400BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3041 1.3 21 Y 914CBR-V160DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3042 1.3 65 Y 914CBR-V160BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3043 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3044 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3047 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3048 9,2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3049 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3050 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
74 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 77

Specifications Design Guide
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
Weight
P/N
175U3051 25.5 21 N 929CBT-V560GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3052 26.5 65 N 929CBT-V560BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3053 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3054 1.3 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3055 12.8 21 N 914CBT-H660DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3056 12.8 65 N 914CBT-H660BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3057 29 21 N 929CBT-V660GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3058 30 65 N 929CBT-V660BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3059 3.5 21 Y 914CBR-V400DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3060 3.5 65 Y 914CBR-V400BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3061 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3062 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3063 32.5 21 N 929CBT-V760GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3064 33.5 65 N 929CBT-V760BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3065 29 21 N 929CBT-V660GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3066 30 65 N 929CBT-V660BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3067 21 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3068 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3069 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3070 32.5 21 N 929CBT-V760GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3071 33.5 65 N 929CBT-V760BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3072 24 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3073 8.2 21 N 914CBT-H400DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3074 8.2 65 N 914CBT-H400BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3075 25 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3076 39 21 N 930CBT-V660GHT 930CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3077 39 65 N 930CBT-V660BGHT 930CBT-VxxxBGHT chapter 9.7.19 Figure 19 - 930CBT- VxxxBGHT
175U3078 35 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3079 21 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3080 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3081 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3082 37 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3083 24 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3084 25 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3085 45 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3086 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3087 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3088 35 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3089 48 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3090 74 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3091 37 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3092 78 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3093 45 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3094 90 20 N 917CMD27 917CMD27 chapter 9.7.14 Figure 14 - 917CMD27
175U3095 90 20 N 917CMD27 917CMD27 chapter 9.7.14 Figure 14 - 917CMD27
175U3096 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3097 48 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3098 74 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3099 78 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3101 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3102 1.8 21 Y 914CBR-V210DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 75
Page 78

Specifications Design Guide
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
Weight
P/N
175U3103 1.8 65 Y 914CBR-V210BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3104 1.3 21 Y 914CBR-V160DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3105 1.3 65 Y 914CBR-V160BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3106 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3107 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3108 1.8 21 Y 914CBR-V210DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3109 1.8 65 Y 914CBR-V210BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3110 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3111 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3112 3.9 21 Y 914CBR-V460DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3113 3.9 65 Y 914CBR-V460BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3114 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3115 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3116 3.9 21 Y 914CBR-V460DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3117 3.9 65 Y 914CBR-V460BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3118 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3119 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3120 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3121 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3122 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
99
175U3123 9.2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3124 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3125 2.4 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3126 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3127 9.2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3130 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3131 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3132 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3133 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3134 29 21 N 929CBT-V660GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3135 30 65 N 929CBT-V660BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3136 3.0 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3137 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3138 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3139 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3140 12.8 21 N 914CBT-H660DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3141 12.8 65 N 914CBT-H660BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3142 29 21 N 929CBT-V660GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3143 30 65 N 929CBT-V660BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3144 3.9 21 Y 914CBR-V460DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3145 3.9 65 Y 914CBR-V460BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3146 12.8 21 N 914CBT-H660DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3147 12.8 65 N 914CBT-H660BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3148 32.5 21 N 929CBT-V760GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3149 33.5 65 N 929CBT-V760BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3152 8.2 21 N 914CBT-H400DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3153 8.2 65 N 914CBT-H400BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3154 44.5 21 N 930CBT-V760GHT 930CBT-VxxxGHT chapter 9.7.18 Figure 18 - 930CBT-VxxxGHT
175U3155 44.5 65 N 930CBT-V760BGHT 930CBT-VxxxBGHT chapter 9.7.19 Figure 19 - 930CBT- VxxxBGHT
175U3156 32.5 21 N 929CBT-V760GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3157 33.5 65 N 929CBT-V760BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
76 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 79

Specifications Design Guide
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
Weight
P/N
175U3160 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3161 9.2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3162 44.5 21 N 930CBT-V760GHT 930CBT-VxxxGHT chapter 9.7.18 Figure 18 - 930CBT-VxxxGHT
175U3163 44.5 65 N 930CBT-V760BGHT 930CBT-VxxxBGHT chapter 9.7.19 Figure 19 - 930CBT- VxxxBGHT
175U3166 39 21 N 930CBT-V660GHT 930CBT-VxxxGHT chapter 9.7.18 Figure 18 - 930CBT-VxxxGHT
175U3167 39 65 N 930CBT-V660BGHT 930CBT-VxxxBGHT chapter 9.7.19 Figure 19 - 930CBT- VxxxBGHT
175U3168 11.0 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3169 11.0 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3170 44.5 21 N 930CBT-V760GHT 930CBT-VxxxGHT chapter 9.7.18 Figure 18 - 930CBT-VxxxGHT
175U3171 44.5 65 N 930CBT-V760BGHT 930CBT-VxxxBGHT chapter 9.7.19 Figure 19 - 930CBT- VxxxBGHT
175U3172 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3173 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3174 25.5 21 N 929CBT-V560GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3175 26.5 65 N 929CBT-V560BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3176 32.5 21 N 929CBT-V760GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3177 33.5 65 N 929CBT-V760BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3178 32.5 21 N 929CBT-V760GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3179 33.5 65 N 929CBT-V760BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3180 44.5 21 N 930CBT-V760GHT 930CBT-VxxxGHT chapter 9.7.18 Figure 18 - 930CBT-VxxxGHT
175U3181 44.5 65 N 930CBT-V760BGHT 930CBT-VxxxBGHT chapter 9.7.19 Figure 19 - 930CBT- VxxxBGHT
175U3182 44.5 21 N 930CBT-V760GHT 930CBT-VxxxGHT chapter 9.7.18 Figure 18 - 930CBT-VxxxGHT
175U3183 44.5 65 N 930CBT-V760BGHT 930CBT-VxxxBGHT chapter 9.7.19 Figure 19 - 930CBT- VxxxBGHT
175U3200 22 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3201 25 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3202 35 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3203 20 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3204 25 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3205 41 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3206 25 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3207 35 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3208 41 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3209 45 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3210 35 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3211 45 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3212 74 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3213 41 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3214 78 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3215 90 20 N 917CMD27 917CMD27 chapter 9.7.14 Figure 14 - 917CMD27
175U3216 45 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3217 74 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3218 90 20 N 917CMD27 917CMD27 chapter 9.7.14 Figure 14 - 917CMD27
175U3219 74 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3220 182 20 N 917CMD37 917CMD37 chapter 9.7.15 Figure 15 - 917CMD37
175U3221 78 20 N 917CM37 917CM37 chapter 9.7.13 Figure 13 - 917CM37
175U3222 190 20 N 917CMD37 917CMD37 chapter 9.7.15 Figure 15 - 917CMD37
175U3223 90 20 N 917CMD27 917CMD27 chapter 9.7.14 Figure 14 - 917CMD27
175U3224 25 20 N 917CM17 917CM17 chapter 9.7.10 Figure 10 - 917CM17
175U3225 90 20 N 917CMD27 917CMD27 chapter 9.7.14 Figure 14 - 917CMD27
175U3227 35 20 N 917CM25 917CM25 chapter 9.7.11 Figure 11 - 917CM25
175U3228 182 20 N 917CMD37 917CMD37 chapter 9.7.15 Figure 15 - 917CMD37
175U3230 190 20 N 917CMD37 917CMD37 chapter 9.7.15 Figure 15 - 917CMD37
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 77
Page 80

Specifications Design Guide
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
Weight
P/N
175U3231 19 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3232 19 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3233 19 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3234 20 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3235 21 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3236 15 20 N 917CM13 917CM13 chapter 9.7.8 Figure 8 - 917CM13
175U3237 19 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3238 20 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3239 19 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3240 20 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3241 52 20 N 917CM27 917CM27 chapter 9.7.12 Figure 12 - 917CM27
175U3242 19 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3243 20 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3244 22 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3245 20 20 N 917CM15 917CM15 chapter 9.7.9 Figure 9 - 917CM15
175U3300 1.58 54 Y 914CCH355CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3301 2.4 54 Y 914CBR-V260CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3302 3 54 Y 914CBR-V330CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3303 4.6 54 Y 914CBR-V560CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3304 5.4 54 Y 914CBR-V660CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
99
175U3305 8.2 54 Y 914CBT-H400CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3306 11 54 Y 914CBT-H560CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3307 14.6 54 Y 914CBT-H760CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3308 0.54 54 Y 914CCH251CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3309 1.58 54 Y 914CCH355CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3310 2.4 54 Y 914CBR-V260CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3311 3 54 Y 914CBR-V330CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3312 4.6 54 Y 914CBR-V560CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3313 5.4 54 Y 914CBR-V660CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3314 9.2 54 Y 914CBT-H460CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3315 11 54 Y 914CBT-H560CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3316 14.6 54 Y 914CBT-H760CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3317 1.3 54 Y 914CBR-V160CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3318 2.4 54 Y 914CBR-V260CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3319 3 54 Y 914CBR-V330CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3320 4.6 54 Y 914CBR-V560CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3321 5.4 54 Y 914CBR-V660CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3322 9.2 54 N 914CBT-H460CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3323 11 54 Y 914CBT-H560CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3324 14.6 54 Y 914CBT-H760CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3325 1.58 54 Y 914CCH355CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3326 1.8 54 Y 914CBR-V210CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3327 3 54 Y 914CBR-V330CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3328 3.5 54 Y 914CBR-V400CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3329 5.4 54 Y 914CBR-V660CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3330 8.2 54 Y 914CBT-H400CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3331 9.2 54 Y 914CBT-H460CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3332 11 54 Y 914CBT-H560CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3333 12.8 54 Y 914CBT-H660CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3334 14.6 54 Y 914CBT-H760CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3335 2.4 54 Y 914CBR-V260CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
78 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 81

Specifications Design Guide
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
Weight
P/N
175U3336 3 54 Y 914CBR-V330CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3337 3.5 54 Y 914CBR-V400CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3338 5.4 54 Y 914CBR-V660CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3339 8.2 54 Y 914CBT-H400CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3340 9.2 54 Y 914CBT-H460CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3341 12.8 54 Y 914CBT-H660CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3342 1.58 54 Y 914CCH355CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3343 2.4 54 Y 914CBR-V260CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3344 3 54 Y 914CBR-V330CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3345 3.5 54 Y 914CBR-V400CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3346 5.4 54 Y 914CBR-V660CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3347 8.2 54 Y 914CBT-H400CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3348 9.2 54 Y 914CBT-H460CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3349 11 54 Y 914CBT-H560CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3350 12.8 54 Y 914CBT-H660CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3351 5.4 54 Y 914CBR-V660CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3352 8.2 54 Y 914CBT-H400CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3353 9.2 54 Y 914CBT-H460CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3354 11 54 Y 914CBT-H560CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3355 12.8 54 Y 914CBT-H660CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3356 14.6 54 Y 914CBT-H760CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3357 11 54 Y 914CBT-H560CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3358 14.6 54 Y 914CBT-H760CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3359 14.6 54 Y 914CBT-H760CHT 914CBT-HxxxCHT chapter 9.7.2 Figure 2 - 914CBT-HxxxCHT
175U3360 3.9 54 Y 914CBR-V460CT 914CBR-VxxxCT chapter 9.7.5 Figure 5 - 914CBR-VxxxCT
175U3361 1.58 54 Y 914CCH355CT 914CCHxxxCT chapter 9.7.7 Figure 7 - 914CCHxxxCT
175U3401 2.4 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3402 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3403 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3404 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3405 4.6 65 Y 914CBR-V560BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3406 4.6 21 Y 914CBR-V560DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3407 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3408 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3409 8.2 65 N 914CBT-H400BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3410 8.2 21 N 914CBT-H400DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3411 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3412 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3413 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3414 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3415 2.4 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3416 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3417 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3418 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3419 4.6 65 Y 914CBR-V560BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3420 4.6 21 Y 914CBR-V560DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3421 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3422 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3423 9.2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3424 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3427 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 79
Page 82

Specifications Design Guide
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
Weight
P/N
175U3428 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3429 2.4 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3430 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3431 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3432 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3433 4.6 65 Y 914CBR-V560BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3434 4.6 21 Y 914CBR-V560DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3435 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3436 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3437 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3438 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3439 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3440 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3441 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3442 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3445 8.2 65 N 914CBT-H400BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3446 8.2 21 N 914CBT-H400DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3447 12.8 65 N 914CBT-H660BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3448 12.8 21 N 914CBT-H660DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3449 2.4 65 Y 914CBR-V260BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
99
175U3450 2.4 21 Y 914CBR-V260DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3451 3 65 Y 914CBR-V330BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3452 3 21 Y 914CBR-V330DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3455 3.5 65 Y 914CBR-V400BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3456 3.9 21 Y 914CBR-V400DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3457 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3458 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3459 8.2 65 N 914CBT-H400BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3460 8.2 21 N 914CBT-H400DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3461 12.8 65 N 914CBT-H660BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3462 12.6 21 N 914CBT-H660DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3463 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3464 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3465 5.4 65 Y 914CBR-V660BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3466 5.4 21 Y 914CBR-V660DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3467 8.2 65 N 914CBT-H400BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3468 8.2 21 N 914CBT-H400DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3469 11 65 N 914CBT-H560BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3470 11 21 N 914CBT-H560DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3471 12.8 65 N 914CBT-H660BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3472 12.8 21 N 914CBT-H660DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3473 30 65 N 929CBT-V660BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3474 29 21 N 929CBT-V660GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3475 33.5 65 N 929CBT-V760BGHT 929CBT-VxxxBGHT chapter 9.7.17 Figure 17 - 929CBT-VxxxBGHT
175U3476 32.5 21 N 929CBT-V760GHT 929CBT-VxxxGHT chapter 9.7.16 Figure 16 - 929CBT-VxxxGHT
175U3477 1.8 21 Y 914CBR-V210DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3478 1.8 65 Y 914CBR-V210BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
175U3479 14.6 21 N 914CBT-H760DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3480 14.6 65 N 914CBT-H760BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
175U3481 3.9 21 Y 914CBR-V460DT 914CBR-VxxxDT chapter 9.7.4 Figure 4 - 914CBR-VxxxDT
175U3482 3.9 65 Y 914CBR-V460BT 914CBR-VxxxBT chapter 9.7.6 Figure 6 - 914CBR-VxxxBT
80 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 83

Specifications Design Guide
P/N
Weight
[kg]
Enclosure
rating
[IP class]
UL Product type Drawing type Drawing reference
175U3483 9.2 21 N 914CBT-H460DHT 914CBT-HxxxDHT chapter 9.7.1 Figure 1 - 914CBT-HxxxDHT
175U3484 9.2 65 N 914CBT-H460BHT 914CBT-HxxxBHT chapter 9.7.3 Figure 3 - 914CBT-HxxxBHT
Table 9.2 Mechanical Data: Product Types 9xx
9.5 Electrical Data: Product Types BWD and BWG
P/N Resistance Continuous power
Temperature
switch
Wire cross-section
100% load Power cables
[W]
[mm2]
[AWG]
175U0089 60 200 No 1.5 16
175U0090 80 240 No 2.5 14
175U0091 72 240 No 2.5 14
175U0982 620 200 No 1.5 16
175U0983 430 200 No 1.5 16
175U0984 310 200 No 1.5 16
175U0985 300 200 No 1.5 16
175U0986 240 200 No 1.5 16
175U0987 210 200 No 1.5 16
175U0988 160 200 No 1.5 16
175U0989 150 200 No 1.5 16
175U0990 130 200 No 1.5 16
175U0991 100 200 No 1.5 16
175U0992 72 200 No 1.5 16
175U0993 50 200 No 1.5 16
175U0994 35 200 No 1.5 16
175U0995 27 200 No 1.5 16
175U0996 40 200 No 1.5 16
175U1000 830 100 No 1.5 16
175U1001 620 100 No 1.5 16
175U1002 430 100 No 1.5 16
175U1003 330 100 No 1.5 16
175U1004 220 100 No 1.5 16
175U1005 150 100 No 1.5 16
175U1006 100 100 No 1.5 16
175N2395 430 100 No 1.5 16
175N2396 620 100 No 1.5 16
175N2397 830 100 No 1.5 16
175N2398 150 200 No 1.5 16
175N2399 210 200 No 1.5 16
175N2400 310 200 No 1.5 16
Fixed cable
see footnotes
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
2)
2)
2)
2)
2)
2)
9 9
Table 9.3 Electrical Data: Product Types BWD and BWG
1) 510 mm unscreened cables
2) 800 mm Ø8 screened cable
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 81
Page 84

Specifications Design Guide
9.6 Mechanical Data: Product Types BWD and BWG
P/N Weight Enclosure rating
[kg] [IP class]
175U0089 0.55 65 Y BWD500060 BWD500xxx
175U0090 1.05 65 Y BWD600080 BWD600xxx
175U0091 1.05 65 Y BWD600072 BWD600xxx
175U0982 0.55 65 Y BWD500620 BWD500xxx
175U0983 0.55 65 Y BWD500430 BWD500xxx
175U0984 0.55 65 Y BWD500310 BWD500xxx
175U0985 0.55 65 Y BWD500300 BWD500xxx
175U0986 0.55 65 Y BWD500240 BWD500xxx
175U0987 0.55 65 Y BWD500210 BWD500xxx
175U0988 0.55 65 Y BWD500160 BWD500xxx
175U0989 0.55 65 Y BWD500150 BWD500xxx
175U0990 0.55 65 Y BWD500130 BWD500xxx
175U0991 0.55 65 Y BWD500100 BWD500xxx
175U0992 0.55 65 Y BWD500072 BWD500xxx
175U0993 0.55 65 Y BWD500050 BWD500xxx
175U0994 0.55 65 Y BWD500035 BWD500xxx
175U0995 0.55 65 Y BWD500027 BWD500xxx
175U0996 0.55 65 Y BWD500040 BWD500xxx
99
175U1000 0.28 65 Y BWD250830 BWD250xxx
175U1001 0.28 65 Y BWD250620 BWD250xxx
175U1002 0.28 65 Y BWD250430 BWD250xxx
175U1003 0.28 65 Y BWD250330 BWD250xxx
175U1004 0.28 65 Y BWD250220 BWD250xxx
175U1005 0.28 65 Y BWD250150 BWD250xxx
175U1006 0.28 65 Y BWD250100 BWD250xxx
175N2395 0.41 65 Y BWG250430 BWG250xxx
175N2396 0.41 65 Y BWG250620 BWG250xxx
175N2397 0.41 65 Y BWG250830 BWG250xxx
175N2398 0.68 65 Y BWG500150 BWG500xxx
175N2399 0.68 65 Y BWG500210 BWG500xxx
175N2400 0.68 65 Y BWG500310 BWG500xxx
UL
1)
Product type Drawing type Drawing reference
chapter 9.7.21 Figure 21 -
BWD500xxx
chapter 9.7.22 Figure 22 -
BWD600xxx
chapter 9.7.21 Figure 21 -
BWD500xxx
chapter 9.7.20 Figure 20 -
BWD250xxx
chapter 9.7.23 Figure 23 -
BWG250xxx
chapter 9.7.24 Figure 24 -
BWG500xxx
Table 9.4 Mechanical Data: Product Types BWD and BWG
1) Y=yes, N=no
82 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 85

2
1
[0.71]
18
[L+5.59]
L+142
L1
L
[3.74]
95
[3.96]
100
[9.37]
238
[10.24]
260
130BD236.10
Specifications Design Guide
9.7 Mechanical Drawings
9.7.1 Figure 1 - 914CBT-HxxxDHT
1 Hot surface warning x3
2 Name plate
Illustration 9.1 IP21, Side View and Top View
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 83
Page 86

Specifications
Design Guide
Danfoss P/N Typecode
175U3032 MCE101A42R0P1K70E21TAW 42 460 18.11 360 14.17 9.2
175U3037 MCE101A31R0P1K70E21TAW 31 460 18.11 360 14.17 9.2
175U3039 MCE101A28R0P1K40E21TAW 28 400 15.75 300 11.81 8.2
175U3043 MCE101A27R0P2K20E21TAW 27 560 22.05 460 18.11 11
175U3047 MCE101A22R0P1K70E21TAW 22 460 18.11 360 14.17 9.2
175U3049 MCE101A19R0P2K20E21TAW 19 560 22.05 460 11.81 11
175U3055 MCE101A14R0P2K80E21TAW 14 660 25.98 560 22.05 12.8
175U3061 MCE101A12R0P3K20E21TAW 12 760 29.92 660 25.98 14.6
175U3073 MCE101A5R70P1K40E21TAW 5.7 400 15.75 300 11.81 8.2
175U3080 MCE101A3R50P2K20E21TAW 3.5 560 22.05 460 11.81 11
175U3086 MCE101A2R80P3K20E21TAW 2.8 760 29.92 660 25.98 14.6
175U3106 MCE101A145RP2K20E21TAW 145 560 22.05 460 11.81 11
175U3122 MCE101A200RP1K70E21TAW 200 460 18.11 360 14.17 9.2
175U3126 MCE101A145RP1K70E21TAW 145 460 18.11 360 14.17 9.2
175U3130 MCE101A110RP2K20E21TAW 110 560 22.05 460 18.11 11
175U3132 MCE101A105RP3K20E21TAW 105 760 29.92 660 25.98 14.6
175U3138 MCE101A80R0P2K20E21TAW 80 560 22.05 460 18.11 11
175U3140 MCE101A72R0P2K80E21TAW 72 660 25.98 560 22.05 12.8
175U3146 MCE101A56R0P2K80E21TAW 56 660 25.98 560 22.05 12.8
175U3152 MCE101A48R0P1K40E21TAW 48 400 15.75 300 11.81 8.2
175U3160 MCE101A35R0P1K70E21TAW 35 460 18.11 360 14.17 9.2
99
175U3168 MCE101A27R0P2K20E21TAW 27 560 22.05 460 18.11 11
175U3172 MCE101A18R0P3K20E21TAW 18 760 29.92 660 25.98 14.6
175U3410 MCE101A27R0P1K40E21TAW 27 400 15.75 300 11.81 8.2
175U3412 MCE101A18R0P2K20E21TAW 18 560 22.05 460 18.11 11
175U3414 MCE101A13R0P3K20E21TAW 13 760 29.92 660 25.98 14.6
175U3424 MCE101A110RP1K70E21TAW 110 460 18.11 360 14.17 9.2
175U3428 MCE101A56R0P3K20E21TAW 56 760 29.92 660 25.98 14.6
175U3438 MCE101A100RP2K20E21TAW 100 560 22.05 460 18.11 11
175U3440 MCE101A72R0P3K20E21TAW 72 760 29.92 660 25.98 14.6
175U3446 MCE101A5R70P1K40E21TAW 5.7 400 15.75 300 11.81 8.2
175U3448 MCE101A3R50P2K80E21TAW 3.5 660 25.98 560 22.05 12.8
175U3460 MCE101A38R0P1K40E21TAW 38 400 15.75 300 11.81 8.2
175U3462 MCE101A19R0P2K80E21TAW 19 660 25.98 560 22.05 12.8
175U3464 MCE101A14R0P3K20E21TAW 14 760 29.92 660 25.98 14.6
175U3468 MCE101A52R0P1K40E21TAW 52 400 15.75 300 11.81 8.2
175U3470 MCE101A31R0P2K20E21TAW 31 560 22.05 460 18.11 11
175U3472 MCE101A27R0P2K80E21TAW 27 660 25.98 560 22.05 12.8
175U3479 MCE101A22R0P3K20E21TAW 22 760 29.92 660 25.98 14.6
175U3483 MCE101A5R70P1K70E21TAW 5.7 460 18.11 360 14.17 9.2
[Ω]
L ±2 mm L ±0.08 in L1 ±2 mm L1 ±0.04 in
Weight
[kg]
Table 9.5 Mechanical Dimensions
84 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 87

130BD237.10
1
[2.41]
61
130BD241.10
[0.47]
12
[0.94]
24
[0.55]
14
[0.26]
6.5
[1.89]
48
[2.52]
64
1
2
3
4
5
130BD238.10
Specifications
1 Torque: 1-1.4 Nm (8.86-12.34 lb-in)
Illustration 9.2 IP21, End View, Connection Box
Design Guide
1 Resistor connection:
Marked RB1/RB2
9 9
Type: Phoenix G10/2
Illustration 9.3 Mounting Hole
IEC: 0.5-10 mm2/800 V
UL: AWG 20–6/600 V
Wire Stripping: 12 mm (0.47 in)
Torque: 1.5-1.8 Nm (13.28-15.94 lb-in)
2 Temperature switch connection
Marked: T1/T2
Type: Phoenix G5/2 with screw connection
IEC: 0.2–4 mm2/500 V
UL: AWG 24-12 /300 V
Wire Stripping: 8 mm (0.31 in)
Torque: 0.7 Nm (6.2 lb-in)
3 PE: M5
Torque 2–2.7 Nm (17.71-23.91 lb-in)
4 For temperature switch cable:
Clamping Range: 3.5-7.0 mm (0.14-0.28 lb-in)
5 For resistor cable:
Cable gland with internal connection for braid
Clamping Range: 9.0-16.5 mm (0.35-0.65 lb-in)
Illustration 9.4 Connection Box
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 85
Page 88

130BD240.10
130BD239.10
Specifications Design Guide
Illustration 9.5 IP21, 3D View
Mechanical mounting (see Illustration 9.6):
Vertical with connection box down (IP21), or
•
Horizontal (IP20)
•
99
Illustration 9.6 Mechanical Mounting
86 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 89

[9.37]
238
L
L1
[0.98]
25
[1.97]
50
39.37
+1.97
0.00
1000
+50
0
1
2
3
130BD523.10
Specifications
9.7.2 Figure 2 - 914CBT-HxxxCHT
Design Guide
1 Hot surface warning x3
2 Name plate
Illustration 9.7 IP54, Side View and Top View
Resistor cable
Temperature switch
Table 9.6 Cable Details
AWG, see Table 9.7, UL, 1000 V
180° C NC, AWG 20, orange
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 87
Page 90

130BD524.10
[10.24]
260
[2.76]
70
[9.06]
230
[3.74]
95
1
[2.52]
64
[0.26]
6.5
[0.94]
24
[0.28]
R7
130BD526.10
Specifications Design Guide
Danfoss code Typecode
[Ω] L ±2 mm L ±0.08inL1 ±2mmL1 ±0.04
Weight [kg] [AWG]
in
175U3305 MCE101A27R0P1k40E54CAW 27 400 15.75 300 11.81 8.2 10
175U3306 MCE101A18R0P2K20E54CAW 18 560 22.05 460 18.11 11 10
175U3307 MCE101A13R0P3K20E54CAW 13 760 29.92 660 25.98 14.6 10
175U3314 MCE101A110RP1k70E54CAW 110 460 18.11 360 14.17 9.2 10
175U3315 MCE101A80R0P2K20E54CAW 80 560 22.05 460 18.11 11 10
175U3316 MCE101A56R0P3K20E54CAW 56 760 29.92 660 25.98 14.6 10
175U3322 MCE101A145RP1K70E54CAW 145 460 18.11 360 14.17 9.2 14
175U3323 MCE101A100RP2K20E54CAW 100 560 22.05 460 18.11 11 10
175U3324 MCE101A72R0P3K20E54CAW 72 760 29.92 660 25.98 14.6 10
175U3330 MCE101A5R70P1K40E54CAW 5.7 400 15.75 300 11.81 8.2 10
175U3331 MCE101A5R70P1K70E54CAW 5.7 460 18.11 360 14.17 9.2 10
175U3332 MCE101A3R50P2K20E54CAW 3.5 560 22.05 460 18.11 11 10
175U3333 MCE101A3R50P2K80E54CAW 3.5 660 25.98 560 22.05 12.8 10
175U3334 MCE101A2R80P3K20E54CAW 2.8 760 29.92 660 25.98 14.6 10
175U3339 MCE101A28R0P1K40E54CAW 28 400 15.75 300 11.81 8.2 10
175U3340 MCE101A22R0P1K70E54CAW 22 460 18.11 360 14.17 9.2 10
175U3341 MCE101A14R0P2K80E54CAW 14 660 25.98 560 22.05 12.8 10
175U3347 MCE101A38R0P1K40E54CAW 38 400 15.75 300 11.81 8.2 10
175U3348 MCE101A31R0P1K70E54CAW 31 460 18.11 360 14.17 9.2 10
175U3349 MCE101A27R0P2K20E54CAW 27 560 22.05 460 18.11 11 10
175U3350 MCE101A19R0P2K80E54CAW 19 660 25.98 560 22.05 12.8 10
99
175U3352 MCE101A52R0P1K40E54CAW 52 400 15.75 300 11.81 8.2 10
175U3353 MCE101A42R0P1K70E54CAW 42 460 18.11 360 14.17 9.2 10
175U3354 MCE101A31R0P2K20E54CAW 31 560 22.05 460 18.11 11 10
175U3355 MCE101A27R0P2K80E54CAW 27 660 25.98 560 22.05 12.8 10
175U3356 MCE101A22R0P3K20E54CAW 22 760 29.92 660 25.98 14.6 10
175U3357 MCE101A19R0P2k20E54CAW 19 560 22.05 460 18.11 11 10
175U3358 MCE101A14R0P3k20E54CAW 14 760 29.92 660 25.98 14.6 10
175U3359 MCE101A12R0P3K20E54CAW 12 760 29.92 660 25.98 14.6 10
Table 9.7 Mechanical Dimensions
PE: M6
1
Torque 4.2-4.8 Nm (37.17–42.48 lb-in)
Illustration 9.8 IP54, End View, Cable End
Illustration 9.9 Mounting Hole
88 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 91

130BD525.10
130BD885.10
Specifications Design Guide
Illustration 9.10 IP54, 3D View
Mechanical mounting (see Illustration 9.11):
Vertical with cables down, or
•
Horizontal
•
Illustration 9.11 Mechanical Mounting
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 89
Page 92

L
L1
[0.71]
18
[L+3.11]
L+79
[3.74]
95
[3.96]
100
[9.37]
238
[10.24]
260
1
2
130BD230.10
Specifications Design Guide
9.7.3 Figure 3 - 914CBT-HxxxBHT
99
1 Hot surface warning x3
2 Name plate
Illustration 9.12 IP65, Side View and Top View
Danfoss P/N Typecode
175U3033 MCE101A42R0P1K70E65TAW 42 460 18.11 360 14.17 9.2
175U3038 MCE101A31R0P1K70E65TAW 31 460 18.11 360 14.17 9.2
175U3040 MCE101A28R0P1K40E65TAW 28 400 15.75 300 11.81 8.2
175U3044 MCE101A27R0P2K20E65TAW 27 560 22.05 460 18.11 11
175U3048 MCE101A22R0P1K70E65TAW 22 460 18.11 360 14.17 9.2
175U3050 MCE101A19R0P2K20E65TAW 19 560 22.05 460 18.11 11
175U3056 MCE101A14R0P2K80E65TAW 14 660 25.98 560 22.05 12.8
175U3062 MCE101A12R0P3K20E65TAW 12 760 29.92 660 25.98 14.6
175U3074 MCE101A5R70P1K40E65TAW 5,7 400 15.75 300 11.81 8.2
175U3081 MCE101A3R50P2K20E65TAW 3,5 560 22.05 460 18.11 11
175U3087 MCE101A2R80P3K20E65TAW 2,8 760 29.92 660 25.98 14.6
[Ω]
L ±2
mm
L ±0.08 in
L1 ±2
mm
L1 ±0.04 in
Weight [kg]
90 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 93

130BD231.10
[1.95]
49
1
[0.55]
14
[0.26]
6.5
[1.89]
48
[2.52]
64
[0.47]
12
[0.94]
24
130BD235.10
Specifications Design Guide
Danfoss P/N Typecode
[Ω]
L ±2
mm
L ±0.08 in
L1 ±2
mm
L1 ±0.04 in
Weight [kg]
175U3107 MCE101A145RP2K20E65TAW 145 560 22.05 460 18.11 11
175U3123 MCE101A200RP1K70E65TAW 200 460 18.11 360 14.17 9.2
175U3127 MCE101A145RP1K70E65TAW 145 460 18.11 360 14.17 9.2
175U3131 MCE101A110RP2K20E65TAW 110 560 22.05 460 18.11 11
175U3133 MCE101A105RP3K20E65TAW 105 760 29.92 660 25.98 14.6
175U3139 MCE101A80R0P2K20E65TAW 80 560 22.05 460 18.11 11
175U3141 MCE101A72R0P2K80E65TAW 72 660 25.98 560 22.05 12.8
175U3147 MCE101A56R0P2K80E65TAW 56 660 25.98 560 22.05 12.8
175U3153 MCE101A48R0P1K40E65TAW 48 400 15.75 300 11.81 8.2
175U3161 MCE101A35R0P1K70E65TAW 35 460 18.11 360 14.17 9.2
175U3169 MCE101A27R0P2K20E65TAW 27 560 22.05 460 18.11 11
175U3173 MCE101A18R0P3K20E65TAW 18 760 29.92 660 25.98 14.6
175U3409 MCE101A27R0P1K40E65TAW 27 400 15.75 300 11.81 8.2
175U3411 MCE101A18R0P2K20E65TAW 18 560 22.05 460 18.11 11
175U3413 MCE101A13R0P3K20E65TAW 13 760 29.92 660 25.98 14.6
175U3423 MCE101A110RP1K70E65TAW 110 460 18.11 360 14.17 9.2
175U3427 MCE101A56R0P3K20E65TAW 56 760 29.92 660 25.98 14.6
175U3437 MCE101A100RP2K20E65TAW 100 560 22.05 460 18.11 11
175U3439 MCE101A72R0P3K20E65TAW 72 760 29.92 660 25.98 14.6
175U3445 MCE101A5R70P1K40E65TAW 5,7 400 15.75 300 11.81 8.2
175U3447 MCE101A3R50P2K80E65TAW 3,5 660 25.98 560 22.05 12.8
175U3459 MCE101A38R0P1K40E65TAW 38 400 15.75 300 11.81 8.2
175U3461 MCE101A19R0P2K80E65TAW 19 660 25.98 560 22.05 12.8
175U3463 MCE101A14R0P3K20E54TAW 14 760 29.92 660 25.98 14.6
175U3467 MCE101A52R0P1K40E65TAW 52 400 15.75 300 11.81 8.2
175U3469 MCE101A31R0P2K20E65TAW 31 560 22.05 460 18.11 11
175U3471 MCE101A27R0P2K80E65TAW 27 660 25.98 560 22.05 12.8
175U3480 MCE101A22R0P3K20E65TAW 22 760 29.92 660 25.98 14.6
175U3484 MCE101A5R70P1K70E65TAW 5,7 460 18.11 360 14.17 9.2
9 9
Table 9.8 Mechanical Dimensions
Torque 2–3 Nm (17.71–26.57 lb-in)
1
Illustration 9.13 IP65, End View, Connection Box
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 91
Illustration 9.14 Mounting Hole
Page 94

1
2
3
4
5
130BD232.10
130BD234.10
130BD233.10
Specifications Design Guide
Illustration 9.16 IP65, 3D View
Mechanical mounting (see Illustration 9.11):
Vertical with connection box down, or
•
1 PE: M4
Torque 2–3 Nm (17.71-26.57 lb-in)
2 Temperature switch connection:
Marked: T1/T2.
Type: PHOENIX G5/2 with Screw Connection
IEC: 0.2-4 mm2/500 V
UL: AWG 24-12/300 V
99
Wire Stripping: 8 mm (0.31 in)
Torque: 0.7 Nm (6.2 lb-in)
3 For temperature Switch Cable:
Clamping Range: 3.5-7.0 mm (0.14–0.28 in)
4 For resistor cable:
Cable gland with internal connection for braid
Clamping Range: 9.0-16.5 mm (0.35–0.65 in)
5 Resistor connection:
Marked RB1/RB2
Type: PHOENIX G10/2
IEC: 0.5-10 mm2/800 V
UL: AWG 20-6 /600 V
Wire Stripping: 12 mm (0.47 in)
Torque: 1.5-1.8 Nm (13.28-15.94 lb-in)
Illustration 9.17 Mechanical Mounting
•
Horizontal
Illustration 9.15 Connection Box
92 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 95

[ 4,53 ]
115
[ 4,74 ]
120
L
L1
[0,71]
18
[ 4,02 ]
102
[ 4,88 ]
124
[L+5,63]
L+143
1
2
130BD224.10
Specifications Design Guide
9.7.4 Figure 4 - 914CBR-VxxxDT
1 Name plate
2 Hot surface warning x2
Illustration 9.18 IP21, Side View and Top View
Danfoss P/N Typecode
175U3009 MCE101A200RP360RE21TAW 200 210 8.27 110 4.33 1.8
175U3012 MCE101A145RP450RE21TAW 145 260 10.24 160 6.30 2.4
175U3014 MCE101A145RP280RE21TAW 145 160 6.30 70 2.76 1.3
175U3017 MCE101A110RP360RE21TAW 110 210 8.27 110 4.33 1.8
175U3019 MCE101A105RP570RE21TAW 105 330 12.99 230 9.06 3
175U3022 MCE101A80R0P450RE21TAW 80 260 10.24 160 6.30 2.4
175U3024 MCE101A72R0P960RE21TAW 72 560 22.05 460 18.11 4.6
175U3027 MCE101A56R0P680RE21TAW 56 400 15.75 300 11.81 3.5
175U3029 MCE101A52R0P1K29E21TAW 52 760 29.92 660 25.98 6.1
175U3034 MCE101A38R0P1K13E21TAW 38 660 25.98 560 22.05 5.4
175U3041 MCE101A27R0P280RE21TAW 27 160 6.30 70 2.76 1.3
175U3053 MCE101A18R0P450RE21TAW 18 260 10.24 160 6.30 2.4
175U3059 MCE101A13R0P680RE21TAW 13 400 15.75 300 11.81 3.5
175U3068 MCE101A9R00P1K13E21TAW 9 660 25.98 560 22.05 5.4
175U3102 MCE101A1K20P360RE21TAW 1200 210 8.27 110 4.33 1.8
175U3104 MCE101A850RP280RE21TAW 850 160 6.30 70 2.76 1.3
175U3108 MCE101A630RP360RE21TAW 630 210 8.27 110 4.33 1.8
175U3110 MCE101A570RP570RE21TAW 570 330 12.99 230 9.06 3
175U3112 MCE101A415RP790RE21TAW 415 460 18.11 360 14.17 3.9
175U3114 MCE101A410RP570RE21TAW 410 330 12.99 230 9.06 3
175U3116 MCE101A270RP790RE21TAW 270 460 18.11 360 14.17 3.9
[Ω]
L ±2 mm L ±0.08 in L1 ±2 mm L1 ±0.04 in
Weight [kg]
9 9
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 93
Page 96

[2,13]
54
1
130BD225.10
[0,47]
12
[2,52]
64
[0,55]
14
[0,94]
24
[0,26]
6,5
[1,89]
48
130BD229.10
Specifications Design Guide
Danfoss P/N Typecode
[Ω]
L ±2 mm L ±0.08 in L1 ±2 mm L1 ±0.04 in
Weight [kg]
175U3118 MCE101A270RP1k13E21TAW 270 660 25.98 560 22.05 5.4
175U3120 MCE101A200RP1k13E21TAW 200 660 25.98 560 22.05 5.4
175U3124 MCE101A145RP450RE21TAW 145 260 10.24 160 6.30 2.4
175U3136 MCE101A100RP570RE21TAW 100 330 12.99 230 9.06 3
175U3144 MCE101A70R0P790RE21TAW 70 460 18.11 360 14.17 3.9
175U3402 MCE101A100RP450RE21TAW 100 260 10.24 160 6.30 2.4
175U3404 MCE101A70R0P570RE21TAW 70 330 12.99 230 9.06 3
175U3406 MCE101A48R0P960RE21TAW 48 560 22.05 460 18.11 4.6
175U3408 MCE101A35R0P1K13E21TAW 35 660 25.98 560 22.05 5.4
175U3416 MCE101A410RP450RE21TAW 410 260 10.24 160 6.30 2.4
175U3418 MCE101A270RP570RE21TAW 270 330 12.99 230 9.06 3
175U3420 MCE101A200RP960RE21TAW 200 560 22.05 460 18.11 4.6
175U3422 MCE101A145RP1K13E21TAW 145 660 25.98 560 22.05 5.4
175U3430 MCE101A570RP450RE21TAW 570 260 10.24 160 6.30 2.4
175U3432 MCE101A470RP570RE21TAW 415 330 12.99 230 9.06 3
175U3434 MCE101A270RP960RE21TAW 270 560 22.05 460 18.11 4.6
175U3436 MCE101A200RP1K13E21TAW 200 660 25.98 560 22.05 5.4
175U3442 MCE101A18R0P570RE21TAW 18 330 12.99 230 9.06 3
175U3450 MCE101A110RP450RE21TAW 110 260 10.24 160 6.30 2.4
175U3452 MCE101A80R0P570RE21TAW 80 330 12.99 230 9.06 3
175U3456 MCE101A72R0P680RE21TAW 72 400 15.75 300 11.81 3.5
175U3458 MCE101A52R0P1K13E21TAW 52 660 25.98 560 22.05 5.4
99
175U3466 MCE101A72R0P1K13E21TAW 72 660 25.98 560 22.05 5.4
175U3477 MCE101A27R0P360RE21TAW 27 210 8.27 110 4.33 1.8
175U3481 MCE101A105RP790RE21TAW 105 460 18.11 360 14.17 3.9
Table 9.9 Mechanical Dimensions
Torque 1–1.4 Nm (8.86-12.34 lb-in)
1
Illustration 9.20 Mounting Hole
Illustration 9.19 IP21, End View, Connection Box
94 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 97

1
2
3
4
5
130BD226.10
130BD228.10
130BD227.11
Specifications Design Guide
Illustration 9.22 IP21, 3D View
Mechanical mounting (see Illustration 9.23):
Vertical with connection box down (IP21), or
•
Horizontal (IP20)
•
1 Resistor connection:
Marked RB1/RB2
Type: Phoenix G10/2
IEC: 0.5-10 mm2/800 V
UL: AWG 20–6/600 V
Wire Stripping: 12 mm (0.47 in)
Torque: 1.5-1.8 Nm (13.28-15.94 lb-in)
2 Temperature switch connection
Marked: T1/T2
Type: Phoenix G5/2 with screw connection
IEC: 0.2–4 mm2/500 V
UL: AWG 24-12/300 V
Wire Stripping: 8 mm (0.31 in)
Torque: 0.7 Nm (6.2 lb-in)
3 PE: M5
Torque 2–2.7 Nm (17.71-23.91 lb-in)
4 For temperature Switch Cable: Clamping Range: 3.5-7.0
mm (0.14-0.28 lb-in)
5 For resistor cable:
Cable gland with internal connection for braid
Clamping Range: 9.0-16.5 mm (0.35-0.65 lb-in)
Illustration 9.21 Connection Box
9 9
Illustration 9.23 Mechanical Mounting
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 95
Page 98

+1,97
0,00
+50
0
[39,37]
1000
1
[ 4,74 ]
120
[ 4,53 ]
115
2
[0,71]
18
L
L1
[ 4,02 ]
102
[ 4,88 ]
124
130BD219.10
Specifications Design Guide
9.7.5 Figure 5 - 914CBR-VxxxCT
99
1 Name plate
2 Hot surface warning x2
Illustration 9.24 IP54, Side View and Top View
Resistor cable
Temperature switch
AWG 16, UL Style 1659, 600 V, 250 °C
180 °C NC, AWG 20, orange
Table 9.10 Cable Details
Danfoss P/N
Typecode
L ±2 mm L ±0.08 in L1 ±2 mm L1 ±0.08 in
[Ω]
Weight [kg]
175U3301 MCE101A100RP450RE54CAW 100 260 10.24 160 6.3 2.4
175U3302 MCE101A70R0P570RE54CAW 70 330 12.99 230 9.06 3
175U3303 MCE101A48R0P960RE54CAW 48 560 22.05 460 18.11 4.6
175U3304 MCE101A35R0P1K13E54CAW 35 660 25.98 560 22.05 5.4
175U3310 MCE101A410RP450RE54CAW 410 260 10.24 160 6.30 2.4
175U3311 MCE101A270RP570RE54CAW 270 330 12.99 230 9.06 3
175U3312 MCE101A200RP960RE54CAW 200 560 22.05 460 18.11 4.6
175U3313 MCE101A145RP1K13E54CAW 145 660 25.98 560 22.05 5.4
175U3317 MCE101A850RP280RE54CAW 850 160 6.30 70 2.76 1.3
175U3318 MCE101A570RP450RE54CAW 570 260 10.24 160 6.30 2.4
175U3319 MCE101A415RP570RE54CAW 415 330 12.99 230 9.06 3
175U3320 MCE101A270RP960RE54CAW 270 560 22.05 460 18.11 4.6
175U3321 MCE101A200RP1K13E54CAW 200 660 25.98 560 22.05 5.4
175U3326 MCE101A27R0P360RE54CAW 27 210 8.27 110 4.33 1.8
175U3327 MCE101A18R0P570RE54CAW 18 330 12.99 230 9.06 3
175U3328 MCE101A13R0P680RE54CAW 13 400 15.75 300 11.81 3.5
175U3329 MCE101A9R00P1K13E54CAW 9 660 25.98 560 22.05 5.4
175U3335
MCE101A110RP450RE54CAW 110 260 10.24 160 6.30 2.4
96 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
Page 99

130BD220.10
[0,94]
24
[0,26]
6,5
[1,89]
48
[2,52]
64
[0,47]
12
[0,55]
14
130BD223.10
1
130BD222.10
130BD221.10
Specifications Design Guide
Danfoss P/N Typecode
175U3336 MCE101A80R0P570RE54CAW 80 330 12.99 230 9.06 3
175U3337 MCE101A56R0P680RE54CAW 56 400 15.75 300 11.81 3.5
175U3338 MCE101A38R0P1K13E54CAW 38 660 25.98 560 22.05 5.4
175U3343 MCE101A145RP450RE54CAW 145 260 10.24 160 6.30 2.4
175U3344 MCE101A100RP570RE54CAW 100 330 12.99 230 9.06 3
175U3345 MCE101A72R0P680RE54CAW 72 400 15.75 300 11.81 3.5
175U3346 MCE101A52R0P1K13E54CAW 52 660 25.98 560 22.05 5.4
175U3351 MCE101A72R0P1K13E54CAW 72 660 25.98 560 22.05 5.4
175U3360 MCE101A105RP790RE54CAW 105 460 18.11 360 14.17 3.9
Table 9.11 Mechanical Dimensions
L ±2 mm L ±0.08 in L1 ±2 mm L1 ±0.08 in
[Ω]
Mechanical mounting (see Illustration 9.28):
Vertical with connection box down, or
•
Horizontal
•
Illustration 9.25 IP54, End View, Connection Box
Weight [kg]
9 9
Illustration 9.28 Mechanical Mounting
Illustration 9.26 Mounting Hole
1 PE Male Fast-On tab 6.3x0.8
Illustration 9.27 IP54, 3D View
MG90O202 Danfoss A/S © Rev. 05/2014 All rights reserved. 97
Page 100

130BD213.10
1
2
[ L+2,83 ]
L+72
[0,71]
18
L
L1
[ 4,74 ]
120
[ 4,53 ]
115
[ 4,02 ]
102
[ 4,88 ]
124
Specifications Design Guide
9.7.6 Figure 6 - 914CBR-VxxxBT
99
1 Name plate
2 Hot surface warning x2
Illustration 9.29 IP65, Side View and Top View
Danfoss P/N Typecode
175U3010 MCE101A200RP360RE65TAW 200 210 8.27 110 4.33 1.8
175U3013 MCE101A145RP450RE65TAW 145 260 10.24 160 6.3 2.4
175U3015 MCE101A145RP280RE65TAW 145 160 6.3 70 2.76 1.3
175U3018 MCE101A110RP360RE65TAW 110 210 8.27 110 4.33 1.8
175U3020 MCE101A105RP570RE65TAW 105 330 12.99 230 9.06 3
175U3023 MCE101A80R0P450RE65TAW 80 260 10.4 160 6.3 2.4
175U3025 MCE101A72R0P960RE65TAW 72 560 22.05 460 18.11 4.6
175U3028 MCE101A56R0P680RE65TAW 56 400 15.75 300 11.81 3.5
175U3030 MCE101A52R0P1K29E65TAW 52 760 29.92 660 25.98 6.1
175U3035 MCE101A38R0P1K13E65TAW 38 660 25.98 560 22.05 5.4
175U3042 MCE101A27R0P280RE65TAW 27 160 6.3 70 2.76 1.3
175U3054 MCE101A18R0P450RE65TAW 18 260 10.24 160 6.3 2.4
175U3060 MCE101A13R0P680RE65TAW 13 400 15.75 300 11.81 3.5
175U3069 MCE101A9R00P1K13E65TAW 9 660 25.98 560 22.05 5.4
175U3103 MCE101A1K20P360RE65TAW 1200 210 8.27 110 4.3 1.8
175U3105 MCE101A850RP280RE65TAW 850 160 6.3 70 2.76 1.3
175U3109 MCE101A630RP360RE65TAW 630 210 8.27 110 4.33 1.8
175U3111 MCE101A570RP570RE65TAW 570 330 12.99 230 9.06 3
175U3113 MCE101A415RP790RE65TAW 415 460 18.11 360 14.17 3.9
L ±2 mm L ±0.08 in L1 ±2 mm L ±0.08 in
[Ω]
Weight [kg]
98 Danfoss A/S © Rev. 05/2014 All rights reserved. MG90O202
 Loading...
Loading...