


MAKING MODERN LIVING POSSIBLE
Projektierungshandbuch
VLT® AutomationDrive FC 301/302
0,25-75 kW
www.danfoss.com/drives

Inhaltsverzeichnis Projektierungshandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Zweck des Projektierungshandbuchs
1.2 Zusätzliche Materialien
1.3 Abkürzungen, Symbole und Konventionen
1.4 Definitionen
1.5 Dokument- und Softwareversion
1.6 Übereinstimmung mit Vorschriften
1.6.1 CE-Zeichen 10
1.6.1.1 Niederspannungsrichtlinie 10
1.6.1.2 EMV-Richtlinie 11
1.6.1.3 Maschinenrichtlinie 11
1.6.2 UL-Konformität 11
1.6.3 Konformität mit Richtlinien in der Schifffahrt 11
1.7 Entsorgungshinweise
1.8 Sicherheit
2 Sicherheit
2.1 Sicherheitssymbole
8
8
8
8
9
10
10
11
11
13
13
2.2 Qualifiziertes Personal
2.3 Sicherheitsmaßnahmen
3 Grundlegende Betriebsprinzipien
3.1 Allgemeines
3.2 Beschreibung des Betriebs
3.3 Funktionsbeschreibung
3.3.1 Gleichrichterteil 15
3.3.2 Zwischenkreisabschnitt 15
3.3.3 Wechselrichterabschnitt 15
3.3.4 Bremsoption 15
3.3.5 Zwischenkreiskopplung 16
3.4 Bedienschnittstellen zur Steuerung
3.5 Anschlussplan
3.6 PI-Regler
3.6.1 Steuerverfahren 19
3.6.2 FC 301 vs. FC 302 Steuerverfahren 20
3.6.3 Regelungsstruktur in VVC
+
13
13
15
15
15
15
16
17
19
21
3.6.4 Regelungsstruktur im Fluxvektor ohne Geber (nur FC 302) 22
3.6.5 Regelungsstruktur bei Fluxvektor mit Geber (nur FC 302) 23
3.6.6 PID 24
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 1
Inhaltsverzeichnis Projektierungshandbuch
3.6.6.1 PID-Drehzahlregelung 24
3.6.6.2 Optimieren des PID-Drehzahlreglers 26
3.6.6.3 PID-Prozessregler 27
3.6.6.4 Erweiterte PID-Regelung 28
3.6.7 Interner Stromgrenzenregler in Betriebsart VVC
3.6.8 Handsteuerung (Hand On) und Fernsteuerung (Auto On) 28
+
28
3.7 Sollwertverarbeitung
3.7.1 Sollwerteinstellung 30
3.7.2 Sollwertgrenzen 32
3.7.3 Skalierung von Festsollwerten und Bussollwerten 32
3.7.4 Skalierung von Analog- und Pulssollwerten und Istwert 33
3.7.5 Totzone um Null 33
4 Produktfunktionen
4.1 Automatisierte Betriebsfunktionen
4.1.1 Kurzschluss-Schutz 38
4.1.2 Überspannungsschutz 38
4.1.3 Erkennung fehlender Motorphasen 39
4.1.4 Erkennung der Netzphasen-Asymmetrie 39
4.1.5 Schalten am Ausgang 39
4.1.6 Überlastschutz 39
4.1.7 Blockierter Rotorschutz 39
4.1.8 Automatische Leistungsreduzierung 39
4.1.9 Automatische Energieoptimierung 40
30
38
38
4.1.10 Automatische Taktfrequenzmodulation 40
4.1.11 Automatische Leistungsreduzierung bei hoher Trägerfrequenz 40
4.1.12 Spannungsschwankungen 40
4.1.13 Resonanzdämpfung 40
4.1.14 Temperaturgeregelte Lüfter 40
4.1.15 EMV-Konformität 40
4.1.16 Galvanische Trennung der Steuerklemmen 40
4.2 Kundenspezifische Anwendungsfunktionen
4.2.1 Automatische Motoranpassung 41
4.2.2 Thermischer Motorschutz 41
4.2.3 Netzausfall 42
4.2.4 Integrierter PID-Regler 42
4.2.5 Automatischer Wiederanlauf 42
4.2.6 Motorfangschaltung 42
4.2.7 Volles Drehmoment bei gesenkter Drehzahl 42
4.2.8 Frequenzausblendung 42
4.2.9 Motor-Vorheizung 43
41
2 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Inhaltsverzeichnis Projektierungshandbuch
4.2.10 4 programmierbare Parametersätze 43
4.2.11 Dynamische Bremse 43
4.2.12 Mechanische Bremssteuerung ohne Rückführung 43
4.2.13 Mechanische Bremssteuerung mit Rückführung/Mechanische Bremse bei Hubanwendungen 44
4.2.14 Smart Logic Control (SLC) 45
4.2.15 Safe Torque Off 46
4.3 Danfoss VLT® FlexConcept
®
46
5 Systemintegration
5.1 Betriebsbedingungen
5.1.1 Luftfeuchtigkeit 48
5.1.2 Temperatur 48
5.1.3 Temperatur und Kühlung 48
5.1.4 Manuelle Leistungsreduzierung 49
5.1.4.1 Leistungsreduzierung beim Betrieb mit niedriger Drehzahl 49
5.1.4.2 Leistungsreduzierung wegen niedrigem Luftdruck 49
5.1.5 Störgeräusche 50
5.1.6 Vibrationen und Erschütterungen 50
5.1.7 Aggressive Umgebungen 50
5.1.7.1 Gase 50
5.1.7.2 Staubbelastung 50
5.1.7.3 Explosionsgefährdete Bereiche 51
5.1.8 Instandhaltung 51
5.1.9 Lagerung 51
5.2 Allgemeine EMV-Aspekte
48
48
52
5.2.1 EMV-Prüfergebnisse 53
5.2.2 Emissionsanforderungen 54
5.2.3 Störfestigkeitsanforderungen 54
5.2.4 Motorisolation 55
5.2.5 Motorlagerströme 55
5.3 Netzversorgungsstörung/-rückwirkung
5.3.1 Einfluss von Oberschwingungen in einer Energieverteilungsanlage 56
5.3.2 Normen und Anforderungen zur Oberschwingungsbegrenzung 57
5.3.3 Reduzierung, Vermeidung oder Kompensation von Oberschwingungen 58
5.3.4 Oberschwingungsberechnung 58
5.4 Galvanische Trennung (PELV)
5.4.1 PELV (Schutzkleinspannung) – Protective Extra Low Voltage 58
5.5 Bremsfunktionen
5.5.1 Auswahl des Bremswiderstands 59
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 3
56
58
59
Inhaltsverzeichnis Projektierungshandbuch
6 Produktspezifikationen
6.1 Elektrische Daten
6.1.1 Netzversorgung 200-240 V 62
6.1.2 Netzversorgung 380-500 V 64
6.1.3 Netzversorgung 525-600 V (nur FC 302) 67
6.1.4 Netzversorgung 525-690 V (nur FC 302) 70
6.2 Allgemeine technische Daten
6.2.1 Netzversorgung 72
6.2.2 Motorausgang und Motordaten 72
6.2.3 Umgebungsbedingungen 72
6.2.4 Kabelspezifikationen 73
6.2.5 Steuereingang/-ausgang und Steuerdaten 73
6.2.6 Leistungsreduzierung wegen erhöhter Umgebungstemperatur 77
6.2.6.1 Leistungsreduzierung wegen erhöhter Umgebungstemperatur, Bauform A 77
6.2.6.2 Leistungsreduzierung wegen erhöhter Umgebungstemperatur, Bauform B 77
6.2.6.3 Leistungsreduzierung wegen erhöhter Umgebungstemperatur, Bauform C 80
6.2.7 Gemessene Werte für dU/dt-Prüfung 82
62
62
72
6.2.8 Wirkungsgrad 85
6.2.9 Störgeräusche 85
7 Bestellen des Frequenzumrichters
7.1 Antriebskonfigurator
7.1.1 Typencode 86
7.1.2 Sprache 88
7.2 Bestellnummern
7.2.1 Optionen und Zubehör 89
7.2.2 Ersatzteile 91
7.2.3 Montagezubehör 91
7.2.4 VLT® AutomationDrive FC 301 92
7.2.5 Bremswiderstände für FC 302 96
7.2.6 Andere Flatpack-Bremswiderstände 103
7.2.7 Oberschwingungsfilter 105
7.2.8 Sinusfilter 107
7.2.9 du/dt-Filter 109
86
86
89
8 Mechanische Installation
8.1 Sicherheit
8.2 Abmessungen
8.2.1 Aufstellung 114
8.2.1.1 Abstand 114
4 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
111
111
112
Inhaltsverzeichnis Projektierungshandbuch
8.2.1.2 Wandmontage 114
9 Elektrische Installation
9.1 Sicherheit
9.2 Kabel
9.2.1 Anzugsmoment 117
9.2.2 Einführungsöffnungen 118
9.2.3 Festziehen der Abdeckung, nachdem alle Anschlüsse vorgenommen wurden 122
9.3 Netzanschluss
9.3.1 Sicherungen und Trennschalter 126
9.3.1.1 Sicherungen 126
9.3.1.2 Empfehlungen 127
9.3.1.3 CE-Konformität 127
9.3.1.4 UL-Konformität 130
9.4 Motoranschluss
9.5 Schutz vor Erdableitstrom
9.6 Zusätzliche Anschlüsse
9.6.1 Relais 140
9.6.2 Trennschalter und Schütze 141
116
116
117
122
136
138
140
9.6.3 Zwischenkreiskopplung 142
9.6.4 Bremswiderstand 142
9.6.5 PC-Software 142
9.6.5.1 MCT 10 143
9.6.5.2 MCT 31 143
9.6.5.3 Harmonic Calculation Software (HCS) 143
9.7 Zusätzliche Motorinformationen
9.7.1 Motorkabel 143
9.7.2 Anschluss von mehreren Motoren 144
9.8 Sicherheit
9.8.1 Hochspannungsprüfung 146
9.8.2 EMV-Erdung 146
10 Anwendungsbeispiele
10.1 Häufig verwendete Anwendungen
10.1.1 Frequenzumrichtersystem mit Rückführung 153
10.1.2 Programmierung von Momentengrenze und Stopp 153
10.1.3 Programmieren der Drehzahlregelung 154
143
146
148
148
11 Optionen und Zubehör
11.1 Kommunikationsoptionen
11.2 I/O, Rückführungs- und Sicherheitsoptionen
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 5
156
156
156
Inhaltsverzeichnis Projektierungshandbuch
11.2.1 VLT® Universal-E/A-Optionsmodul MCB 101 156
11.2.2 VLT® Drehgeber-Option MCB 102 157
11.2.3 VLT® Resolver-Option MCB 103 159
11.2.4 VLT® Relaiskarte MCB 105 161
11.2.5 VLT® Sichere SPS-Schnittstellenoption MCB 108 163
11.2.6 VLT® PTC-Thermistorkarte MCB 112 164
11.2.7 VLT® Erweiterte Relaiskarte MCB 113 166
11.2.8 VLT® Sensoreingangsoption MCB 114 167
11.2.9 VLT® Safe Option MCB 15x 168
11.2.10 VLT® Adapter der C-Option MCF 106 171
11.3 Motion Control-Optionen
11.4 Zubehör
11.4.1 Bremswiderstände 173
11.4.2 Sinusfilter 173
11.4.3 du/dt-Filter 174
11.4.4 Common Mode Filter 174
11.4.5 Oberschwingungsfilter 174
11.4.6 IP21/Typ 1-Gehäusesatz 174
11.4.7 Fern-Einbausatz für LCP 176
11.4.8 Befestigungskonsole für die Bauformen A5, B1, B2, C1 und C2 177
12 RS-485 Installation und Konfiguration
12.1 Installieren und einrichten
12.1.1 Übersicht 179
12.2 Netzwerkanschluss
12.3 -Busabschluss
12.4 RS-485 Installation und Konfiguration
12.5 Übersicht zum FC-Protokoll
171
173
179
179
180
180
180
181
12.6 Netzwerkkonfiguration
12.7 Aufbau der Telegrammblöcke für FC-Protokoll
12.7.1 Inhalt eines Zeichens (Byte) 181
12.7.2 Telegrammaufbau 181
12.7.3 Telegrammlänge (LGE) 181
12.7.4 Frequenzumrichteradresse (ADR) 181
12.7.5 Datensteuerbyte (BCC) 182
12.7.6 Das Datenfeld 182
12.7.7 Das PKE-Feld 183
12.7.8 Parameternummer (PNU) 183
12.7.9 Index (IND) 183
12.7.10 Parameterwert (PWE) 183
6 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
181
181
Inhaltsverzeichnis Projektierungshandbuch
12.7.11 Unterstützte Datentypen 184
12.7.12 Umwandlung 184
12.7.13 Prozesswörter (PCD) 184
12.8 Beispiele
12.8.1 Schreiben eines Parameterwerts 185
12.8.2 Lesen eines Parameterwertes 185
12.9 Übersicht zu Modbus RTU
12.9.1 Voraussetzungen 185
12.9.2 Was der Benutzer bereits wissen sollte 185
12.9.3 Übersicht zu Modbus RTU 185
12.9.4 Frequenzumrichter mit Modbus-RTU 186
12.10 Netzwerkkonfiguration
12.11 Aufbau der Modbus RTU-Telegrammblöcke
12.11.1 Frequenzumrichter mit Modbus-RTU 186
12.11.2 Modbus RTU-Meldungsaufbau 186
12.11.3 Start-/Stoppfeld 187
12.11.4 Adressfeld 187
12.11.5 Funktionsfeld 187
12.11.6 Datenfeld 187
12.11.7 CRC-Prüffeld 187
185
185
186
186
12.11.8 Adressieren von Einzelregistern 188
12.11.9 Steuern des Frequenzumrichters 189
12.11.10 Von Modbus RTU unterstützte Funktionscodes 189
12.11.11 Modbus-Ausnahmecodes 189
12.12 Zugriff auf Parameter
12.12.1 Parameterverarbeitung 190
12.12.2 Datenspeicherung 190
12.12.3 IND (Index) 190
12.12.4 Textblöcke 190
12.12.5 Umrechnungsfaktor 190
12.12.6 Parameterwerte 190
12.13 Danfoss FC-Steuerprofil
12.13.1 Steuerwort gemäß FC-Profil (8-10 Steuerprofil = FC-Profil) 191
12.13.2 Zustandswort gemäß FC-Profil (STW) (8-10 Steuerprofil = FC-Profil) 192
12.13.3 Bus (Drehzahl) Sollwert 193
12.13.4 Steuerwort gemäß PROFIdrive-Profil (CTW) 194
12.13.5 Zustandswort gemäß PROFIdrive-Profil (STW) 195
190
191
Index
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 7
197
Einführung Projektierungshandbuch
1
1 Einführung
1.1 Zweck des Projektierungshandbuchs
Das Projektierungshandbuch enthält die notwendigen
Informationen für die Integration des Frequenzumrichters
in einer Vielzahl von Anwendungen.
VLT® ist eine eingetragene Marke.
1.2 Zusätzliche Materialien
Es stehen weitere Ressourcen zur Verfügung, die Ihnen
helfen, erweiterten Betrieb sowie erweiterte Programmierungen und Konformität mit allen einschlägigen Normen
für Frequenzumrichter zu verstehen.
Das Produkthandbuch stellt Ihnen detaillierte
•
Informationen zur Installation und
Inbetriebnahme des Frequenzumrichters zur
Verfügung.
Das Programmierhandbuch enthält umfassende
•
Informationen für die Arbeit mit Parametern
sowie viele Anwendungsbeispiele.
®
Das VLT
•
Moment (Safe Torque Off) enthält eine
Beschreibung zur Verwendung von Danfoss
Frequenzumrichtern in funktionalen Sicherheitsanwendungen.
Zusätzliche Veröffentlichungen und Handbücher
•
sind von Danfoss erhältlich. Siehe danfoss.com/
Product/Literature/Technical+Documentation.htm
für Auflistungen.
Für die Frequenzumrichter stehen Optionsmodule
•
zur Verfügung, die einige der in diesen
Dokumenten enthaltenen Informationen ändern
können. Bitte prüfen Sie die Anleitungen dieser
Optionsmodule auf besondere Anforderungen.
Wenden Sie sich für weitere Informationen an einen
Danfoss-Händler oder besuchen Sie www.danfoss.com.
1.3
Abkürzungen, Symbole und
Konventionen
Konventionen
Nummerierte Listen enthalten Verfahren.
Aufzählungslisten enthalten andere Informationen und
Beschreibungen von Abbildungen.
Kursiver Text enthält:
Querverweise
•
Links
•
Fußnoten
•
Produkthandbuch Sicher abgeschaltetes
Parameternamen, Parametergruppennamen,
•
Parameteroptionen
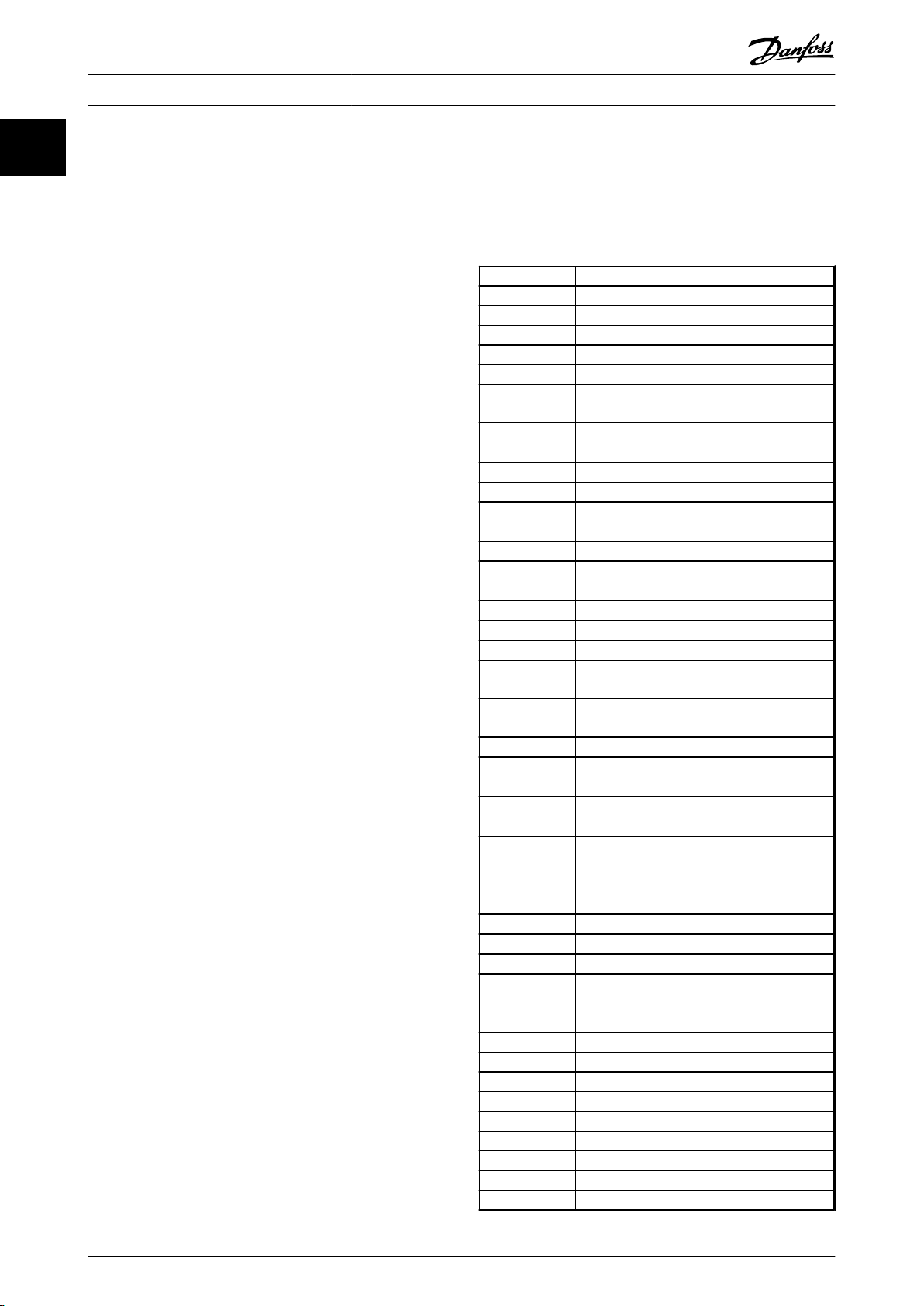
60° AVM 60° Asynchrone Vektormodulation
A Ampere
AC Wechselstrom
AD Luftentladung
AI Analogeingang
AMA Automatische Motoranpassung
AWG American Wire Gauge = Amerikanisches
Drahtmaß
°C
CD Konstante Entladung (Constant Discharge)
CM Gleichtakt (Common Mode)
CT Konstantes Drehmoment (Constant Torque)
DC Gleichstrom
DI Digitaleingänge
DM Gegentakt (Differential Mode)
D-TYPE Abhängig vom Frequenzumrichter
EMV Elektromagnetische Verträglichkeit
ETR Elektronisches Thermorelais
f
JOG
f
M
f
MAX
f
MIN
f
M,N
FC Frequenzumrichter
g Gramm
Hiperface
HP Horsepower
HTL HTL-Drehgeber (10-30 V) Pulse -
Hz Hertz
I
I
I
I
I
kHz Kilohertz
LCP LCP Bedieneinheit
lsb Least Significant Bit (geringstwertiges Bit)
m Meter
mA Milliampere
MCM Mille Circular Mil
MCT Motion Control Tool
mH Millihenry (Induktivität)
min Minute
®
INV
LIM
M,N
VLT,MAX
VLT,N
Grad Celsius
Motorfrequenz bei aktivierter JOG-Funktion
Motorfrequenz
Die maximale Ausgangsfrequenz des Frequen-
zumrichters gilt an seinem Ausgang.
Die minimale Motorfrequenz vom Frequen-
zumrichter.
Motornennfrequenz
Hiperface® ist eine eingetragene Marke von
Stegmann.
Hochspannungs-Transistorlogik
Wechselrichter-Nennausgangsstrom
Stromgrenze
Motornennstrom
Der maximale Ausgangsstrom
Der vom Frequenzumrichter gelieferte
Nennausgangsstrom
8 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Einführung
ms Millisekunden
msb Most Significant Bit (höchstwertiges Bit)
η
VLT
nF Nanofarad
NLCP Numerische LCP-Bedieneinheit
Nm Newtonmeter
n
s
Online-/OfflineParameter
P
br,cont.
PCB Leiterplatte
PCD Prozessdaten
PELV Schutzkleinspannung – Protective extra low
P
m
P
M,N
PM Motor Permanentmagnet-Motor
PID-Prozess Der PID-Regler sorgt dafür, dass Drehzahl,
R
br,nom
RCD Fehlerstromschutzschalter
rückspeisefähig Generatorische Klemmen
R
min
EFF Effektivwert
U/min [UPM] Umdrehungen pro Minute
R
rec
s Sekunde
SFAVM Statorfluss-orientierte asynchrone Vektormodu-
STW (ZSW) Zustandswort
SMPS Schaltnetzteil
THD Gesamtoberschwingungsgehalt – Total
T
LIM
TTL Pulse des TTL-Drehgebers (5 V) - Transistor-
U
M,N
V Volt
VT Variables Drehmoment
VVC+ Spannungsvektorsteuerung – Voltage Vector
Der Wirkungsgrad des Frequenzumrichters
wird als das Verhältnis zwischen Leistungsabgabe und Leistungsaufnahme definiert.
Synchrone Motordrehzahl
Änderungen der Online-Parameter werden
sofort nach Änderung des Datenwertes
aktiviert.
Nennleistung des Bremswiderstands
(Durchschnittsleistung beim kontinuierlichen
Bremsen)
voltage
Nenn-Ausgangsleistung des Frequenzumrichters als HO
Motornennleistung
Druck, Temperatur usw. konstant gehalten
werden.
Der Nenn-Widerstandswert, mit dem an der
Motorwelle für eine Dauer von 1 Minute eine
Bremsleistung von 150/160 % gewährleistet
wird.
Zulässiger Mindestwert des Frequenzumrichters für den Bremswiderstand
Widerstandswert und Widerstand des
Bremswiderstands
lation
Harmonic Distortion
Drehmomentgrenze
Transistor-Logik
Motornennspannung
Control
Projektierungshandbuch
Folgende Symbole kommen in diesem Dokument zum
Einsatz:
WARNUNG
Kennzeichnet eine potenziell gefährliche Situation, die
den Tod oder schwere Verletzungen zur Folge haben
kann.
VORSICHT
Kennzeichnet eine potenziell gefährliche Situation, die
leichte Verletzungen zur Folge haben kann. Die
Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Kennzeichnet wichtige Informationen, einschließlich
Situationen, die zu Geräte- oder sonstigen Sachschäden
führen können.
1.4 Definitionen
Motorfreilauf
Die Motorwelle dreht im Leerlauf. Kein Drehmoment am
Motor.
Bremswiderstand
Der Bremswiderstand kann die bei generatorischer
Bremsung erzeugte Bremsleistung aufnehmen. Während
generatorischer Bremsung erhöht sich die Zwischenkreisspannung. Ein Bremschopper stellt sicher, dass die
generatorische Energie an den Bremswiderstand
übertragen wird.
CT-Kennlinie
Konstante Drehmomentkennlinie; wird für Anwendungen
wie Förderbänder, Verdrängungspumpen und Krane
eingesetzt.
Initialisieren
Bei der Initialisierung (14-22 Betriebsart) werden die
Werkseinstellungen des Frequenzumrichters wiederhergestellt.
Aussetzbetrieb (Arbeitszyklus)
Der Aussetzbetrieb bezieht sich auf eine Abfolge von
Arbeitszyklen. Jeder Zyklus besteht aus einem Belastungsund einem Entlastungszeitraum. Der Betrieb kann
periodisch oder aperiodisch sein.
Parametersatz
Sie können die Parametereinstellungen in vier Parametersätzen speichern. Sie können zwischen den vier
Parametersätzen wechseln oder einen Satz bearbeiten,
während ein anderer Satz gerade aktiv ist.
1
1
Tabelle 1.1 Abkürzungen
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 9
Einführung
Projektierungshandbuch
1
Schlupfausgleich
Der Frequenzumrichter gleicht den belastungsabhängigen
Motorschlupf aus, indem er unter Berücksichtigung des
Motorersatzschaltbildes und der gemessenen Motorlast die
Ausgangsfrequenz anpasst (nahezu konstante Drehzahl).
Smart Logic Control (SLC)
Die SLC ist eine Folge benutzerdefinierter Aktionen, die
ausgeführt werden, wenn die zugeordneten benutzerdefinierten Ereignisse durch den Smart Logic Controller als
„wahr“ ermittelt werden. (Parametergruppe 13-** Smart
Logic.
FC-Standardbus
Schließt RS485-Bus mit FC-Protokoll oder MC-Protokoll ein.
Siehe 8-30 FC-Protokoll.
Thermistor
Ein temperaturabhängiger Widerstand, mit dem die
Temperatur des Frequenzumrichters oder des Motors
überwacht wird.
Abschaltung
Ein Zustand, der in Fehlersituationen eintritt, z. B. bei einer
Übertemperatur des Frequenzumrichters oder wenn der
Frequenzumrichter den Motor, Prozess oder Mechanismus
schützt. Der Neustart wird verzögert, bis die Fehlerursache
behoben wurde und der Alarmzustand über die [Reset]Taste am LCP quittiert wird. In einigen Fällen erfolgt die
Aufhebung automatisch (durch vorherige Programmierung). Sie dürfen Abschaltung nicht zu Zwecken der
Personensicherheit verwenden.
Abschaltblockierung
Ein Zustand, der in Fehlersituationen eintritt, in denen der
Frequenzumrichter aus Sicherheitsgründen abschaltet und
ein manueller Eingriff erforderlich ist, z. B. bei einem
Kurzschluss am Ausgang des Frequenzumrichters. Sie
können eine Abschaltblockierung nur durch Unterbrechen
der Netzversorgung, Beheben der Fehlerursache und
erneuten Anschluss des Frequenzumrichters aufheben. Der
Neustart wird verzögert, bis der Fehlerzustand über die
[Reset]-Taste am LCP quittiert wird. Sie dürfen Abschaltung
nicht zu Zwecken der Personensicherheit verwenden.
VT-Kennlinie
Variable Drehmomentkennlinie; typisch bei Anwendungen
mit quadratischem Lastmomentverlauf über den Drehzahlbereich, z. B. Kreiselpumpen und Lüfter.
Leistungsfaktor
Der Wirkleistungsfaktor (Lambda) berücksichtigt alle
Oberschwingungen und ist immer kleiner als der
Leistungsfaktor (cosphi), der nur die 1. Oberschwingung
von Strom und Spannung berücksichtigt.
P
kW
Uλ x Iλ x
cos
cosϕ=
P
kVA
=
Uλ x Iλ
ϕ
Cosphi wird auch als Verschiebungsleistungsfaktor
bezeichnet.
Lambda und Cosphi sind für Danfoss VLT® Frequenzumrichter in Kapitel 6.2.1 Netzversorgung aufgeführt.
Der Leistungsfaktor gibt an, wie stark ein Frequenzumrichter die Netzversorgung belastet.
Je niedriger der Leistungsfaktor, desto höher der I
bei
eff
gleicher kW-Leistung.
Darüber hinaus weist ein hoher Leistungsfaktor darauf hin,
dass der Oberschwingungsstrom sehr niedrig ist.
Alle Danfoss Frequenzumrichter verfügen über eingebaute
Zwischenkreisdrosseln, durch die ein hoher Leistungsfaktor
erzielt und die gesamte Spannungsverzerrung THD der
Netzversorgung deutlich reduziert wird.
1.5 Dokument- und Softwareversion
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.2
zeigt die Dokumentenversion und die entsprechende
Softwareversion an.
Ausgabe Anmerkungen Softwareversion
MG33BFxx Ersetzt MG33BExx 6,72
Tabelle 1.2 Dokument- und Softwareversion
1.6 Übereinstimmung mit Vorschriften
Frequenzumrichter werden in Übereinstimmung mit den in
diesem Abschnitt beschriebenen Richtlinien konstruiert.
CE-Zeichen
1.6.1
Das CE-Zeichen (Communauté Européenne) zeigt an, dass
der Hersteller des Produkts alle relevanten EU-Richtlinien
einhält. Die 3 EU-Richtlinien, die für Auslegung und
Konstruktion von Frequenzumrichtern sind die Niederspannungsrichtlinie, die EMV-Richtlinie und die
Maschinenrichtlinie (für Geräte mit integrierter Sicherheitsfunktion).
Die CE-Kennzeichnung soll für einen freien Handel
zwischen der EG und Mitgliedsstaaten der EFTA
(Europäische Freihandelsassoziation) innerhalb der EWE
technische Barrieren beseitigen. Über die Qualität eines
Produkts sagt die CE-Kennzeichnung nichts aus. Auch gibt
sie keinen Aufschluss zu technischen Spezifikationen.
1.6.1.1
Frequenzumrichter werden als elektronische Komponenten
klassifiziert und müssen in Übereinstimmung mit der
Niederspannungsrichtlinie die CE-Kennzeichnung tragen.
Die Richtlinie gilt für alle elektrischen Geräte im
Spannungsbereich von 50–1000 V AC und 75–1600 V DC.
Die Richtlinie schreibt vor, dass aufgrund der Konstruktion
der Betriebsmittel gewährleistet ist, dass diese bei einer
ordnungsmäßigen Installation und Wartung sowie einer
bestimmungsmäßigen Verwendung die Sicherheit von
Menschen und Nutztieren sowie die Erhaltung von
Niederspannungsrichtlinie
10 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Einführung
Sachwerten nicht gefährden. Danfoss CE-Kennzeichnungen
sind mit der Niederspannungsrichtlinie konform und liefern
auf Wunsch eine Konformitätserklärung.
Projektierungshandbuch
1.6.1.2 EMV-Richtlinie
1.6.2
UL-Konformität
UL-gelistet
1
1
Elektromagnetische Verträglichkeit (EMV) bedeutet, dass
elektromagnetische Störungen zwischen Geräten deren
Leistung nicht beeinträchtigt. Die grundlegende Schutzanforderung der EMV-Richtlinie 2004/108/EG gibt vor, dass
Betriebsmittel, die elektromagnetische Störungen
verursachen oder deren Betrieb durch diese Störungen
beeinträchtigt werden kann, bei einer ordnungsmäßigen
Installation und Wartung sowie einer bestimmungsmäßigen Verwendung so ausgelegt sein müssen, dass ihre
erreichten elektromagnetischen Störungen begrenzt sind
und die Betriebsmittel eine bestimmte Störfestigkeit
aufweisen.
Ein Frequenzumrichter kann als Stand-alone-Gerät oder als
Teil einer komplexeren Anlage eingesetzt werden. Als
Stand-alone-Einheiten oder als Teil einer Anlage
verwendete Geräte müssen CE-Kennzeichnungen
verwenden. Anlagen müssen nicht über eine CEKennzeichnung verfügen, jedoch den grundlegenden
Schutzanforderungen der EMV-Richtlinie entsprechen.
1.6.1.3
Frequenzumrichter werden gemäß der Niederspannungsrichtlinie als elektronische Komponenten eingestuft, jedoch
müssen Frequenzumrichter mit integrierter Sicherheitsfunktion mit der Maschinenrichtlinie 2006/42/EG konform
sein. Frequenzumrichter ohne Sicherheitsfunktion fallen
nicht unter die Maschinenrichtlinie. Wird ein Frequenzumrichter jedoch in ein Maschinensystem integriert, so stellt
Danfoss Informationen zu Sicherheitsaspekten des Motors
zur Verfügung.
Die Maschinenrichtlinie 2006/42/EG bezieht sich auf
Maschinen, die aus einem Aggregat mehrerer zusammenwirkender Komponenten oder Betriebsmittel bestehen, von
denen mindestens eine(s) mechanisch beweglich ist. Die
Richtlinie schreibt vor, dass aufgrund der Konstruktion der
Betriebsmittel gewährleistet ist, dass diese bei einer
ordnungsmäßigen Installation und Wartung sowie einer
bestimmungsmäßigen Verwendung die Sicherheit von
Menschen und Nutztieren sowie die Erhaltung von
Sachwerten nicht gefährden.
Wenn Frequenzumrichter in Maschinen mit mindestens
einem beweglichen Teil eingesetzt werden, muss der
Maschinenhersteller eine Erklärung zur Verfügung stellen,
in der die Übereinstimmung mit allen relevanten gesetzlichen Bestimmungen und Sicherheitsrichtlinien bestätigt
wird. Danfoss Die CE-Kennzeichnungen sind mit der
Maschinenrichtlinie für Frequenzumrichter mit integrierter
Sicherheitsfunktion konform und liefern auf Wunsch eine
Konformitätserklärung.
Maschinenrichtlinie
Abbildung 1.1 UL
HINWEIS
Frequenzumrichter der Bauform T7 (525-690 V) sind
nicht nach UL-Anforderungen zertifiziert.
Der Frequenzumrichter erfüllt die Anforderungen der
UL508C bezüglich des thermischen Gedächtnisses. Weitere
Informationen können Sie dem Abschnitt Thermischer
Motorschutz im Projektierungshandbuch entnehmen.
Konformität mit Richtlinien in der
1.6.3
Schifffahrt
Für eine Übereinstimmung mit dem Europäischen Übereinkommen über die internationale Beförderung gefährlicher
Güter auf Binnenwasserstraßen (ADN) siehe
Kapitel 9.8.3 ADN-konforme Installation .
1.7
Entsorgungshinweise
Sie dürfen elektrische Geräte und Geräte
mit elektrischen Komponenten nicht
zusammen mit normalem Hausmüll
entsorgen.
Sammeln Sie diese separat gemäß den
lokalen Bestimmungen und den aktuell
gültigen Gesetzen und führen Sie sie dem
Recycling zu.
Tabelle 1.3 Entsorgungshinweise
1.8
Sicherheit
Frequenzumrichter enthalten Hochspannungskomponenten
und können bei unsachgemäßer Handhabung tödliche
Verletzungen verursachen. Die Geräte sollten nur von
ausgebildeten Technikern installiert und betrieben werden.
Reparaturarbeiten dürfen erst begonnen werden, wenn der
Frequenzumrichter vom Netz getrennt und der festgelegte
Zeitraum für die Entladung gespeicherter elektrischer
Energie verstrichen ist.
Weitere Informationen entnehmen Sie dem Produk-
thandbuch, das dem Gerät bei Lieferung beiliegt und
online verfügbar ist unter:
Entladungszeit und
•
detaillierte Sicherheitshinweise und Warnungen.
•
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 11
Einführung Projektierungshandbuch
1
Für einen sicheren Betrieb des Frequenzumrichters ist die
strikte Befolgung von Sicherheitsmaßnahmen und hinweisen unbedingt erforderlich.
12 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Sicherheit Projektierungshandbuch
2 Sicherheit
2.1 Sicherheitssymbole
Folgende Symbole kommen in diesem Dokument zum
Einsatz:
WARNUNG
Kennzeichnet eine potenziell gefährliche Situation, die
den Tod oder schwere Verletzungen zur Folge haben
kann.
UNERWARTETER ANLAUF
Wenn der Frequenzumrichter an das Versorgungsnetz
angeschlossen ist, kann der Motor jederzeit anlaufen,
wodurch die Gefahr von schweren oder tödlichen Verletzungen sowie von Geräte- oder Sachschäden besteht.
Der Motor kann über einen externen Schalter, einen
seriellen Bus-Befehl, ein Eingangssollwertsignal vom LCP
oder nach einem quittierten Fehlerzustand anlaufen.
VORSICHT
Kennzeichnet eine potenziell gefährliche Situation, die
leichte Verletzungen zur Folge haben kann. Die
Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Kennzeichnet wichtige Informationen, einschließlich
Situationen, die zu Geräte- oder sonstigen Sachschäden
führen können.
2 2
WARNUNG
1. Ist ein unerwarteter Anlauf des Motors gemäß
den Bestimmungen zur Personensicherheit
unzulässig, trennen Sie den Frequenzumrichter
vom Netz.
2. Drücken Sie vor der Programmierung von
Parametern die Taste [Off] am LCP.
3. Frequenzumrichter, Motor und alle
angetriebenen Geräte müssen bei Anschluss des
Frequenzumrichters an das Versorgungsnetz
betriebsbereit sein.
2.2 Qualifiziertes Personal
Der einwandfreie und sichere Betrieb des Frequenzumrichters setzt voraus, dass Transport, Lagerung, Montage,
Bedienung sowie Instandhaltung sachgemäß und
zuverlässig erfolgen. Nur qualifiziertes Fachpersonal darf
diese Geräte installieren oder bedienen.
Als qualifiziertes Personal werden geschulte Mitarbeiter
bezeichnet, die autorisiert sind, Geräte, Systeme und
Schaltkreise gemäß geltenden Gesetzen und Bestimmungen zu installieren, instand zu halten und zu warten.
Ferner muss das Personal mit den Anweisungen und
Sicherheitsmaßnahmen in diesem Dokument vertraut sein.
2.3
Sicherheitsmaßnahmen
WARNUNG
HOCHSPANNUNG!
Bei Anschluss an die Netzspannung führen Frequenzumrichter Hochspannung. Erfolgen Installation,
Inbetriebnahme und Wartung nicht durch qualifiziertes
Personal, kann dies Tod oder schwere Verletzungen zur
Folge haben.
Nur qualifiziertes Personal darf Installation,
•
Inbetriebnahme und Wartung vornehmen.
WARNUNG
ENTLADUNGSZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Das Nichteinhalten der
vorgesehenen Entladungszeit nach dem Trennen der
Stromversorgung vor Wartungs- oder Reparaturarbeiten
kann zu schweren oder tödlichen Verletzungen führen!
1. Stoppen Sie den Motor.
2. Trennen Sie die Netzversorgung, die
Permanentmagnet-Motoren und die externen
DC-Zwischenkreisversorgungen, einschließlich
externer Batterie, USV- und DC-Zwischenkreisverbindungen zu anderen Frequenzumrichtern.
3. Führen Sie Wartungs- oder Reparaturarbeiten
erst nach vollständiger Entladung der Kondensatoren durch. Die entsprechende Wartezeit
finden Sie in Tabelle 2.1.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 13

Sicherheit
Projektierungshandbuch
Spannung
[V]
22
200-240 0,25-3,7 kW 5,5-37 kW
380-500 0,25-7,5 kW 11-75 kW
525-600 0,75-7,5 kW 11-75 kW
525-690 1,5-7,5 kW 11-75 kW
Auch wenn die Warn-LED nicht leuchten, kann Hochspannung
vorliegen.
Tabelle 2.1 Entladungszeit
Mindestwartezeit (Minuten)
4 7 15
VORSICHT
POTENZIELLE GEFAHR IM FALLE EINES INTERNEN
FEHLERS
Es besteht Verletzungsgefahr, wenn der Frequenzumrichter nicht ordnungsgemäß geschlossen wird.
Vor dem Einschalten des Stroms müssen Sie
•
sicherstellen, dass alle Sicherheitsabdeckungen
eingesetzt und sicher befestigt sind.
WARNUNG
GEFAHR VON ABLEITSTROM
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsmäßige Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen.
Stellen Sie die korrekte Erdung der Geräte
•
durch einen zertifizierten Elektroinstallateur
sicher.
WARNUNG
GEFAHR DURCH ANLAGENKOMPONENTEN!
Ein Kontakt mit drehenden Wellen und elektrischen
Betriebsmitteln kann zu schweren Personenschäden oder
sogar tödlichen Verletzungen führen.
Stellen Sie sicher, dass Installations-,
•
Inbetriebnahme- und Wartungsarbeiten
ausschließlich von geschultem und qualifiziertem Personal durchgeführt wird.
Alle Elektroarbeiten müssen den VDE-
•
Vorschriften und anderen lokal geltenden
Elektroinstallationsvorschriften entsprechen.
Befolgen Sie die Verfahren in diesem Handbuch.
•
VORSICHT
WINDMÜHLEN-EFFEKT
Bei einem unerwarteten Drehen von PermanentmagnetMotoren besteht die Gefahr von Personen- und
Sachschäden.
Stellen Sie sicher, dass die Permanentmagnet-
•
Motoren blockiert sind, so dass sie unter keinen
Umständen drehen können.
14 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Grundlegende Betriebsprinzi...
Projektierungshandbuch
3 Grundlegende Betriebsprinzipien
3.1 Allgemeines
Dieses Kapitel enthält eine Übersicht über die primären
Baugruppen und Schaltkreise des Frequenzumrichters. Es
dient zur Beschreibung der internen elektrischen und
Signalverarbeitungsfunktionen. Eine Beschreibung der
internen Regelungsstruktur ist ebenfalls enthalten.
Darüber hinaus enthält es Beschreibungen der verfügbaren
automatisierten und optionalen Frequenzumrichterfunktionen zur Auslegung robuster Betriebssysteme mit einer
hohen Leistung bei Steuerungs- und Statusprotokollierung.
3.2 Beschreibung des Betriebs
Der Frequenzumrichter liefert zur Regelung der
Motordrehzahl eine geregelte Menge von Netzstrom an
einen dreiphasigen Standard-Induktionsmotor. Der
Frequenzumrichter liefert variable Frequenz und Spannung
an den Motor.
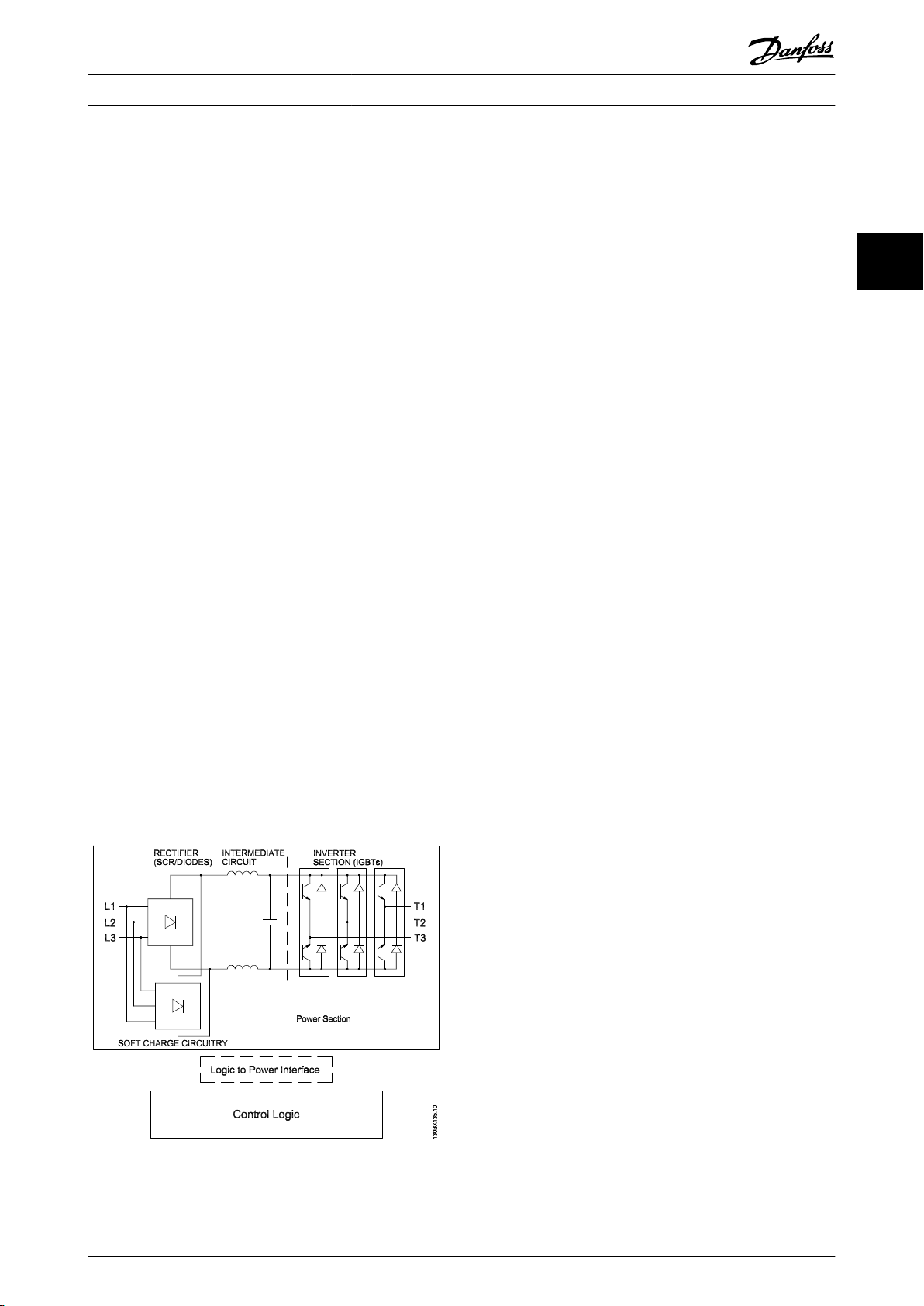
Der Frequenzumrichter ist in vier Hauptmodule unterteilt.
Gleichrichter
•
Zwischenkreis
•
Wechselrichter
•
Steuerung und Regelung
•
In Kapitel 3.3 Funktionsbeschreibung werden diese Module
detaillierter beschrieben. Darüber hinaus wird erklärt, wie
Leistungs- und Steuersignale innerhalb des Frequenzumrichters übertragen werden.
3.3 Funktionsbeschreibung
3.3.1 Gleichrichterteil
Wenn der Strom zunächst am Frequenzumrichter angelegt
wird, fließt er durch die Eingangsklemmen (L1, L2 und L3)
und weiter zu der Schalter- bzw. EMV-Filteroption, je nach
Gerätekonfiguration.
3.3.2 Zwischenkreisabschnitt
Hinter dem Gleichrichterabschnitt gelangt die Spannung
zum Zwischenkreisabschnitt. Eine Sinusfilterschaltung,
bestehend aus der DC-Busdrossel und der DC-Bus-Kondensatorbatterie, glättet diese gleichgerichtete Spannung.
Die DC-Busdrossel liefert eine Reihenimpedanz zur
Änderung des Stroms. Hierdurch wird der Filterungsprozess bei gleichzeitiger Reduzierung der
Oberschwingungsverzerrung, die in der Eingangswechselstromwellenform in Gleichrichterkreisen in der Regel
vorhanden ist, unterstützt.
Wechselrichterabschnitt
3.3.3
Sobald Startbefehl und Drehzahlsollwert vorhanden sind,
leiten die IGBTs im Wechselrichterabschnitt den Schaltvorgang zur Erzeugung des Ausgangssignals ein. Die
Signalform, die vom Danfoss VVC+ PWM-Verfahren an der
Steuerkarte erzeugt wird, ermöglicht optimale Leistung
und minimale Verluste im Motor.
3 3
Bremsoption
3.3.4
Bei Frequenzumrichtern mit der dynamischen Bremsoption
ist ein Brems-IGBT zusammen mit den Klemmen 81(R-) und
82(R+) zum Anschluss eines externen Bremswiderstands
vorgesehen.
Die Funktion des Brems-IGBT ist die Begrenzung der
Spannung im Zwischenkreis, wenn die maximal erlaubte
Spannungsgrenze überschritten wird. Dazu schaltet er den
externen Widerstand in den Zwischenkreis, um die
übermäßige DC-Spannung der Zwischenkreiskondensatoren zu reduzieren. Übermäßige Zwischenkreisspannung
entsteht in der Regel durch eine durchziehende Last, durch
die generatorische Energie in den Zwischenkreis zurückgespeist wird. Dies ist zum Beispiel der Fall, wenn die Last
Abbildung 3.1 Interne Steuerlogik
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 15
den Motor antreibt, wodurch die Spannung an den DCBuskreis zurückgeführt wird.
Grundlegende Betriebsprinzi... Projektierungshandbuch
Eine externe Anbringung des Bremswiderstand bietet die
Vorteile, dass der Widerstand basierend auf Anwendungsanforderungen ausgewählt wird, die Energie aus dem
Schaltschrank heraus leitet und den Umrichter vor
Überhitzung schützt, falls der Bremswiderstand überlastet.
33
Das IGBT-Gate-Signal des Brems-IGBTs wird von der
Steuerkarte generiert und über Leistungskarte und IGBTAnsteuerkarte an das Brems-IGBT übermittelt. Zusätzlich
überwachen Leistungs- und Steuerkarte das Brems-IGBT
und die Bremswiderstandsverbindung bzgl. Kurzschluss
und Überlast.
Zwischenkreiskopplung
3.3.5
gungen erforderlich. Zur detaillierten Planung sollte vorab
die Abteilung Anwendungskonstruktion von Danfoss
kontaktiert werden.
Im zweiten Verfahren wird der Frequenzumrichter
ausschließlich von einer DC-Quelle gespeist. Daher
gestaltet sich die Konfiguration hier etwas komplizierter.
Zunächst wird eine externe DC-Quelle benötigt. Zudem ist
eine Vorrichtung zum Vorladen des DC-Bus bei der NetzEinschaltung erforderlich. Schließlich ist eine
Spannungsquelle erforderlich, die die Lüfter im Gerät
versorgt. Auch für diese Konfiguration sollte zunächst
vorab die Abteilung Anwendungskonstruktion von Danfoss
kontaktiert werden.
3.4 Bedienschnittstellen zur Steuerung
Geräte mit eingebauter Zwischenkreiskopplung enthalten
die Klemmen (+) 89 DC und (-) 88 DC. Innerhalb des
Frequenzumrichters werden diese Klemmen mit dem DCBus an der Eingangsseite der DC-Zwischenkreisdrossel und
der Buskondensatoren verbunden.
Für die Verwendung der Zwischenkreiskopplungsklemmen
stehen 2 Konfigurationen zur Verfügung.
Im ersten Verfahren werden die Klemmen verwendet, um
die DC-Buskreise mehrerer Frequenzumrichter miteinander
zu verbinden. Auf diese Weise kann ein im generatorischen
Betrieb befindliches Gerät überschüssige Busspannung an
ein anderes Gerät weitergeben, das den Motor antreibt.
Durch diese Zwischenkreiskopplung wird der Bedarf an
externen dynamischen Bremswiderständen reduziert und
Energie gespart. Theoretisch ist die Anzahl der Geräte, die
auf diese Weise miteinander verbunden werden können,
unendlich. Jedoch müssen alle Geräte die gleiche
Nennspannung aufweisen. Darüber hinaus kann es je nach
Größe und Anzahl der Geräte erforderlich sein, DCZwischenkreisdrosseln und DC-Sicherungen am
Zwischenkreis sowie AC-Drosseln am Netz zu installieren.
Für eine solche Konfiguration sind spezifische Überle-
3.4.1 Steuerverfahren
Der Frequenzumrichter empfängt Steuersignale von
mehreren Quellen.
LCP Bedieneinheit (Hand-Betrieb)
•
Programmierbare Analog-, Digital- und Analog/
•
Digital-Steuerklemmen (Betriebsart Auto)
RS-485-, USB- oder serielle Kommunikations-
•
schnittstellen (Betriebsart Auto)
Bei ordnungsgemäßer Verdrahtung und Programmierung
liefern die Steuerklemmen Istwert, Sollwert und weitere
Eingangssignale an den Frequenzumrichter; Ausgangsstatus und Fehlerbedingungen vom Frequenzumrichter,
Relais zum Betrieb der Zusatzeinrichtungen und serielle
Schnittstelle. Ein Bezugspotential von 24 V steht ebenfalls
zur Verfügung. Die Steuerklemmen sind für verschiedene
Funktionen programmierbar, indem Sie die Parameteroptionen bis zur Bedieneinheit (LCP) an der Vorderseite des
Geräts oder an externen Quellen auswählen. Die meisten
Steuerkabel stellt der Kunde bereit, alternativ können Sie
sie aber auch ab Werk bestellen.
16 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
130BD599.11
3-phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0 V
5V
S801
0/4-20 mA
RS-485
RS-485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC-
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
**
240 V AC, 2 A
400 V AC, 2 A
*
*
*
: Ground
: Ground 1
: Ground 2
: PE
Grundlegende Betriebsprinzi...
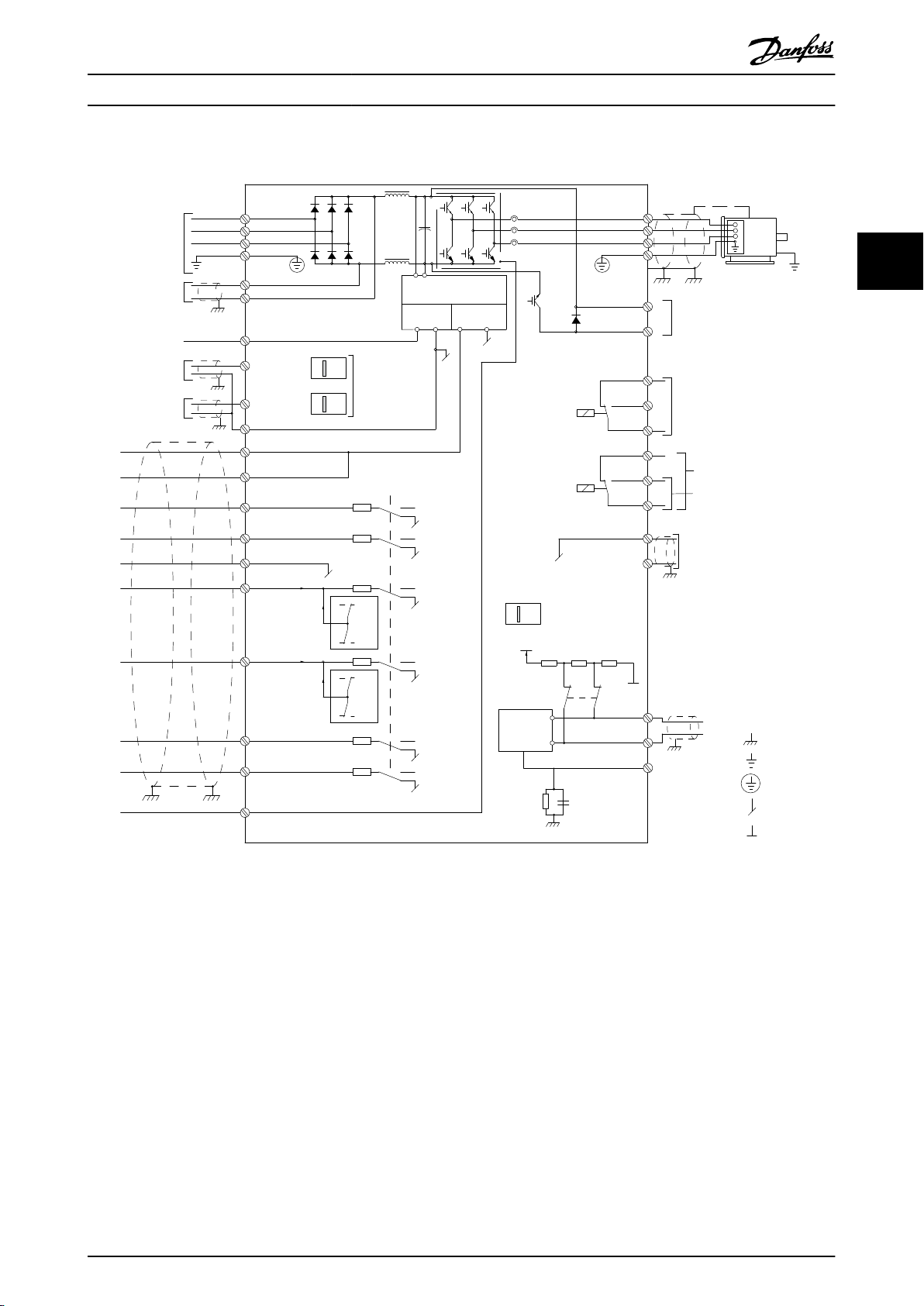
3.5 Anschlussplan
Projektierungshandbuch
3 3
Abbildung 3.2 Anschlussplan des Grundgeräts
A=Analog, D=Digital
*Klemme 37 (optional) wird für Safe Torque Off (sicher abgeschaltetes Moment) verwendet. Installationsanweisungen für das
sicher abgeschaltete Moment (Safe Torque Off) finden Sie im Produkthandbuch Sicher abgeschaltetes Moment (Safe Torque
Off) für Danfoss VLT® Frequenzumrichter. Klemme 37 ist nicht Teil von FC 301 (außer Bauform A1). Relais 2 und Klemme 29
haben im FC 301 keine Funktion.
**Schließen Sie die Abschirmung nicht an.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 17
130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Grundlegende Betriebsprinzi...
Projektierungshandbuch
33
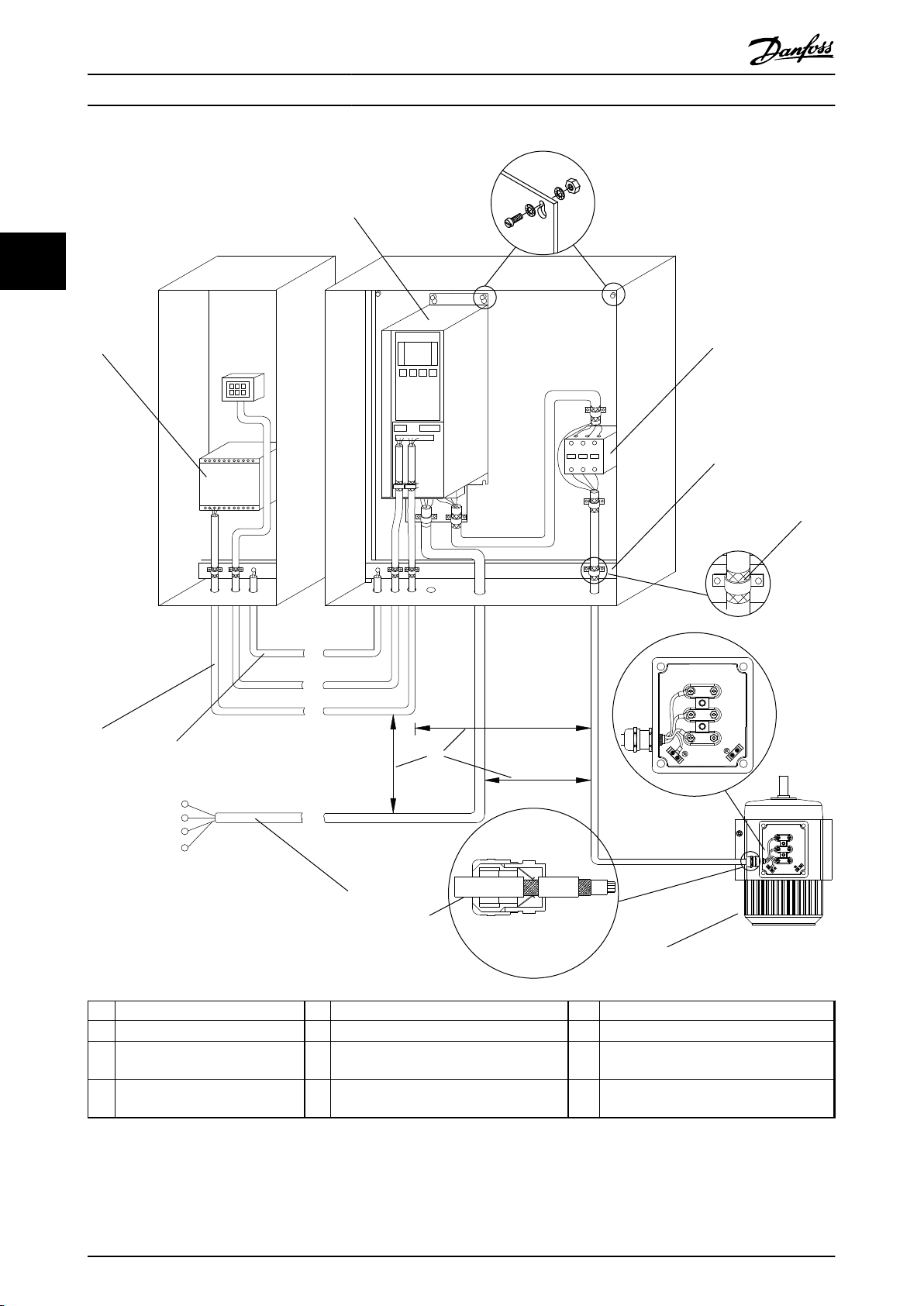
1 Übergeordnete Steuerung (SPS) 5 Kabelisolierung (abisoliert) 9 Steuerkabel (abgeschirmt)
2 Frequenzumrichter 6 Kabelverschraubung 10
3 Ausgangsschütz 7 Motor, 3-Phasen und PE-Leiter
(abgeschirmt)
4 Kabelschelle 8 Netz, 3-Phasen und verstärkter PE-Leiter
11
Potentialausgleich min. 16 mm
Abstand zwischen Steuerkabel,
Motorkabel und Netzkabel (min. 200 mm)
2
(nicht abgeschirmt)
Abbildung 3.3 EMV-konformer elektrischer Anschluss
18 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Grundlegende Betriebsprinzi... Projektierungshandbuch
Weitere Informationen zu EMV finden Sie unter Kapitel 4.1.15 EMV-Konformität.
HINWEIS
EMV-STÖRUNGEN
Verwenden Sie für Motor- und Steuerleitungen
abgeschirmte Kabel und verlegen Sie die Kabel für
Netzversorgung, Motor- und Steuerleitungen getrennt.
Die Nichtbeachtung dieser Vorgabe kann zu nicht
vorgesehenem Verhalten oder reduzierter Leistung der
Anlage führen. Ein Mindestabstand von 200 mm
zwischen Leistungs- und Motorkabeln sowie Steuerleitungen ist erforderlich.
3.6 PI-Regler
3.6.1 Steuerverfahren
Ein Frequenzumrichter richtet Wechselspannung vom Netz
in Gleichspannung um, aus der er anschließend eine
Wechselspannung mit variabler Amplitude und Frequenz
erzeugt.
Spannung/Strom und Frequenz am Motorausgang sind
somit variabel, was eine stufenlose Drehzahlregelung von
herkömmlichen Dreiphasen-Asynchronmotoren und
Permanentmagnet-Motoren ermöglicht.
Sie können den Frequenzumrichter für die Regelung der
Drehzahl oder des Drehmoments an der Motorwelle
konfigurieren. Einstellung von 1-00 Regelverfahren
bestimmt die Art der Regelung.
empfehlen wir, eine komplette AMA auszuführen, da die
richtigen Motordaten von großer Bedeutung für optimale
Leistung sind.
Regelung mit Rückführung im Fluxvektorbetrieb
•
mit Geberrückführung bietet überlegene Leistung
in allen vier Quadranten und bei allen Motordrehzahlen.
VVC+-Betrieb ohne Rückführung. Die Funktion
•
wird in mechanisch robusten Anwendungen
verwendet, dabei ist jedoch die Genauigkeit
begrenzt. Die Drehmomentfunktion ohne
Rückführung funktioniert grundsätzlich nur in
einer Drehrichtung. Das Drehmoment wird
anhand der internen Strommessung des Frequenzumrichters berechnet.
Drehzahl-/Drehmomentsollwert
Der Sollwert für dieses Regelverhalten kann entweder ein
einzelner Sollwert oder die Summe verschiedener Sollwerte
einschließlich relativ skalierter Sollwerte sein. Die Sollwertverarbeitung wird ausführlich in
Kapitel 3.7 Sollwertverarbeitung erklärt.
3 3
Drehzahlregelung
Es gibt zwei Arten der Drehzahlregelung:
Drehzahlregelung ohne Istwertrückführung vom
•
Motor (ohne Geber).
Drehzahlregelung mit Istwertrückführung mit PID-
•
Regelcharakteristik. Eine korrekt optimierte
Drehzahlregelung mit Istwertrückführung arbeitet
mit einer wesentlich höheren Genauigkeit als eine
ohne Istwertrückführung.
Wählt, welcher Eingang zur Rückführung des PID-Drehzahlistwerts in 7-00 Drehgeberrückführung verwendet werden
soll.
Drehmomentregelung
Die Drehmomentregelung ist Teil der Motorregelung in
Anwendungen, in denen das Drehmoment an der
Motorwelle die Anwendung zur Spannungsregelung regelt.
Drehmomentregelung kann in 1-00 Regelverfahren gewählt
werden, entweder als VVC+ [4] Drehmoment ohne
Rückführung oder [2] Fluxvektor-Steuerprinzip mit Drehgeber.
Die Drehmomenteinstellung erfolgt durch Festlegung eines
analogen, digitalen oder busgesteuerten Sollwerts. Die
maximale Drehzahlgrenze wird in 4-21 Variable Drehzahl-
grenze festgelegt. Bei Betrieb mit Drehmomentregelung
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 19
Grundlegende Betriebsprinzi... Projektierungshandbuch
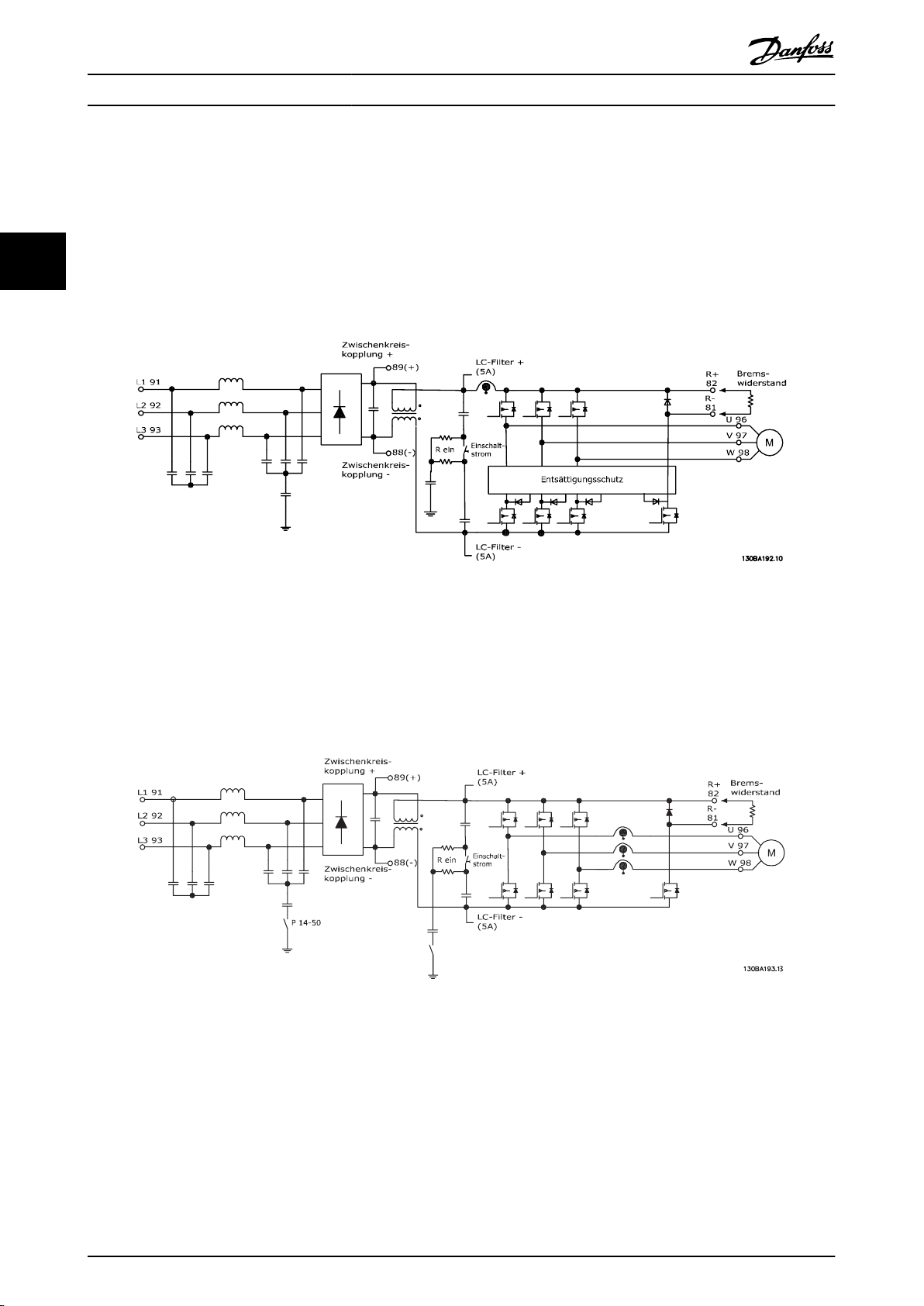
3.6.2 FC 301 vs. FC 302 Steuerverfahren
Der FC 301 ist ein Frequenzumrichter für Anwendungen mit einfachen bis mittleren Anforderungen an Dynamik und
Genauigkeit. Das Steuerverfahren basiert auf VVC+ (Voltage Vector Control).
Der FC 301 kann zur Steuerung von Asynchron- sowie PM-Motoren verwendet werden.
Das Strommessprinzip im FC 301 wird mit einer Summenstrommessung im DC-Zwischenkreis oder in der Motorphase
33
realisiert. Der Erdschlussschutz auf Motorseite wird durch eine Schutzbeschaltung an den IGBT gewährleistet.
Das Kurzschlussschutzverhalten beim FC 301 hängt von der Strommessung im positiven DC-Zwischenkreis und dem Entsättigungsschutz mit Rückführung von den 3 unteren IGBT und der Bremse ab.
Abbildung 3.4 Steuerverfahren FC 301
Der FC 302 ist ein Hochleistungsfrequenzumrichter mit Servoeigenschaften für anspruchsvolle Anwendungen. Er verfügt
über verschiedene Arten von Motorsteuerprinzipien, wie U/f-Sondermotor-Modus, VVC+ oder Fluxvektor-Motorregelung.
Der FC 302 ist in der Lage, permanent erregte Synchronmotoren (bürstenlose Servomotoren) sowie normale KäfigläuferAsynchronmotoren zu steuern.
Der Kurzschlussschutz beim FC 302 wird von Stromwandlern in allen 3 Motorphasen und einem Entsättigungsschutz mit
Rückführung von der Bremse sicher realisiert.
Abbildung 3.5 Steuerverfahren FC 302
20 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Grundlegende Betriebsprinzi... Projektierungshandbuch
3.6.3
Regelungsstruktur in VVC
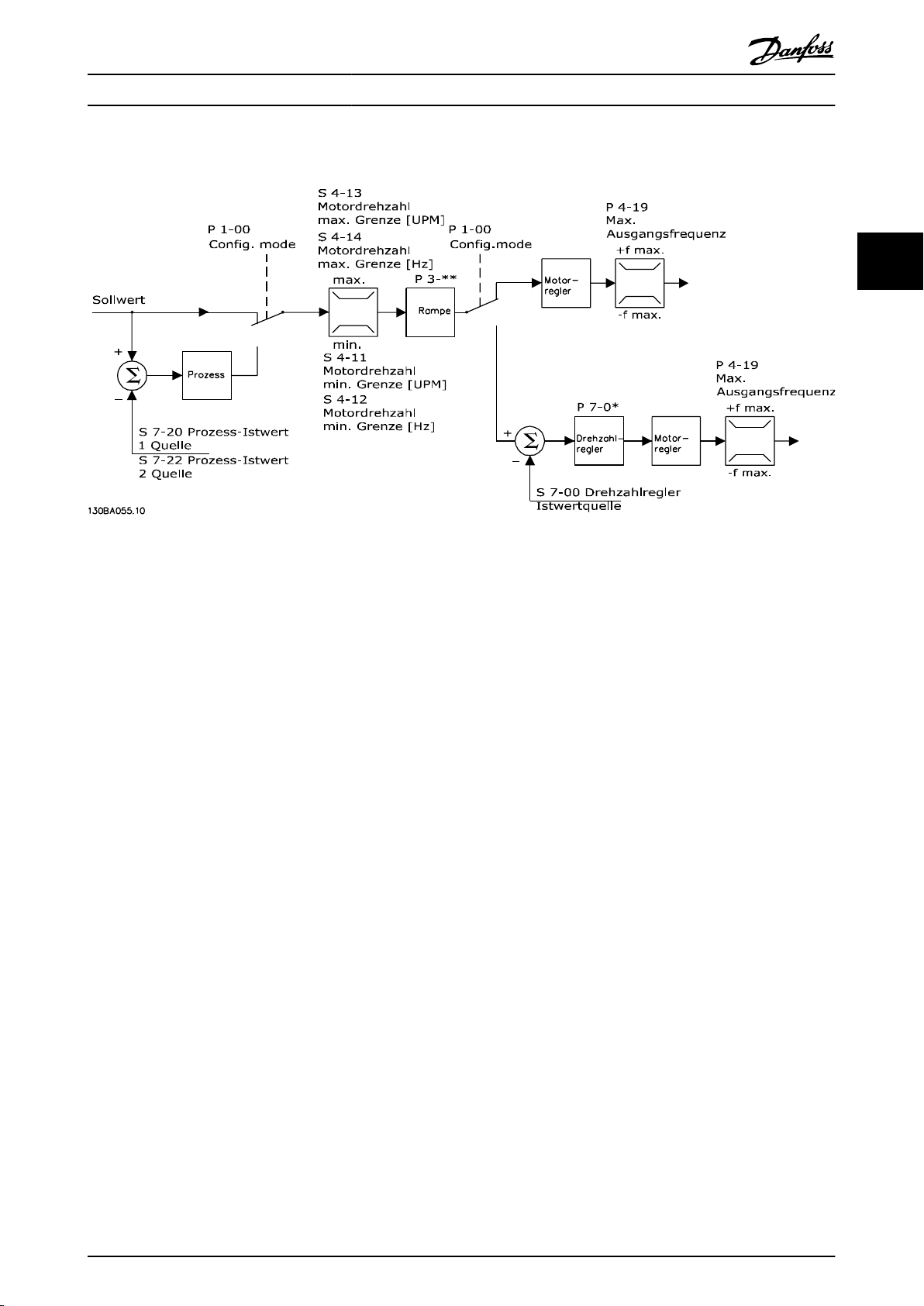
Abbildung 3.6 Regelungsstruktur bei VVC+-Konfigurationen mit und ohne Rückführung
Siehe Aktive/Inaktive Parameter in verschiedenen Antriebssteuerungsmodi im Programmierhandbuch für eine Übersicht der
verfügbaren Steuerungskonfigurationen, je nach Verwendung eines AC-Motors oder Vollpol-PM-Motors. In der in
Abbildung 3.6 gezeigten Konfiguration ist 1-01 Steuerprinzip auf [1] VVC+ eingestellt und 1-00 Regelverfahren auf [0] Ohne
Rückführung. Der resultierende Sollwert aus dem Sollwertsystem wird in der Rampenbegrenzung und Drehzahlbegrenzung
empfangen und durch sie geführt, bevor er an die Motorregelung übergeben wird. Der Ausgang der Motorregelung ist
dann zusätzlich durch die maximale Frequenzgrenze beschränkt.
+
3 3
Wenn 1-00 Regelverfahren auf [1] Mit Drehgeber eingestellt ist, wird der resultierende Sollwert von der Rampenbegrenzung
und Drehzahlgrenze an einen PID-Drehzahlregler übergeben. Die Parameter für den PID-Drehzahlregler befinden sich in
Parametergruppe 7-0* PID Drehzahlregler. Der resultierende Sollwert vom PID-Drehzahlregler wird beschränkt durch die
Frequenzgrenze an die Motorsteuerung geschickt.
Wählen Sie [3] PID-Prozess in 1-00 Regelverfahren, um die Prozess-PID-Regelung zur Regelung mit Rückführung z. B. bei einer
Druck- oder Durchflussregelung zu verwenden. Die PID-Prozess-Parameter befinden sich in Parametergruppe 7-2* PID-Prozess
Istw. und 7-3* PID-Prozessregler.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 21
Grundlegende Betriebsprinzi... Projektierungshandbuch
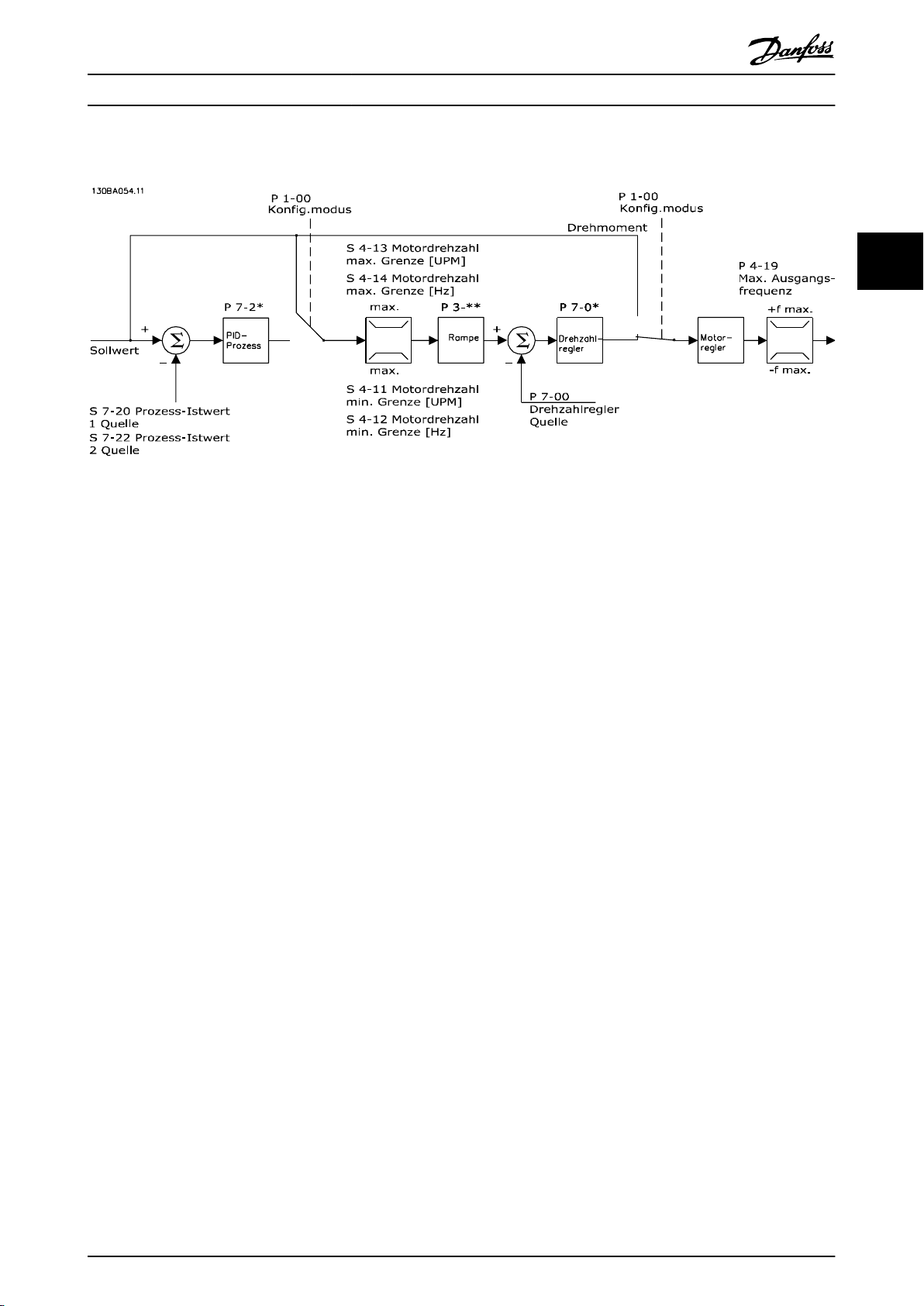
3.6.4 Regelungsstruktur im Fluxvektor ohne Geber (nur FC 302)
33
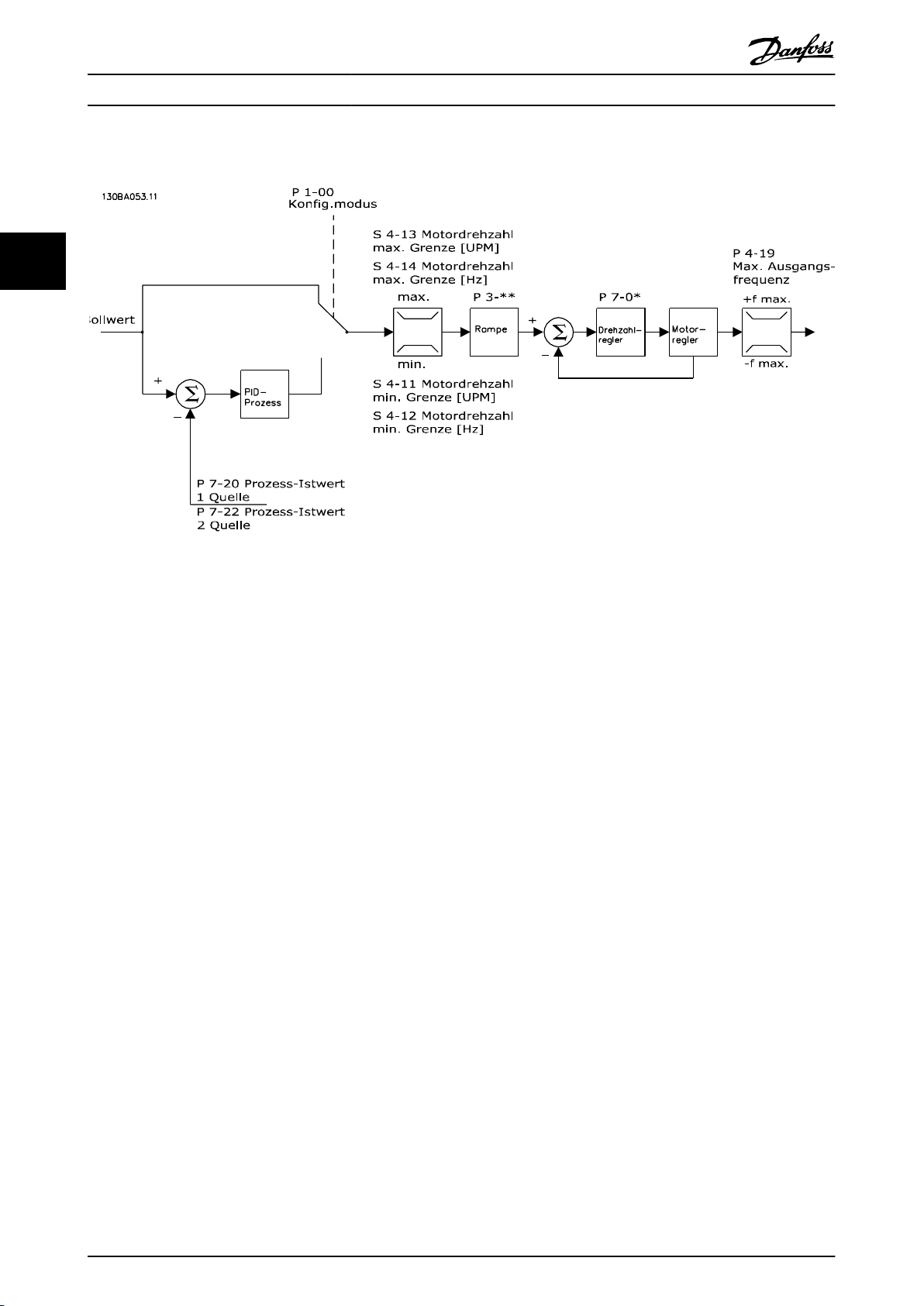
Abbildung 3.7 Regelungsstruktur bei Konfigurationen mit Fluxvektor mit und ohne Geber
Siehe Aktive/Inaktive Parameter in verschiedenen Antriebssteuerungsmodi im Programmierhandbuch für eine Übersicht der
verfügbaren Steuerungskonfigurationen, je nach Verwendung eines AC-Motors oder Vollpol-PM-Motors. In der gezeigten
Konfiguration ist 1-01 Steuerprinzip auf [2] Fluxvektor ohne Geber eingestellt und 1-00 Regelverfahren auf [0] Ohne
Rückführung. Der resultierende Sollwert aus dem Sollwertsystem wird entsprechend der angegebenen Parametereinstellungen durch die Rampen- und Drehzahlbegrenzungen geführt.
Ein errechneter Drehzahlistwert wird zur Steuerung der Ausgangsfrequenz am PID-Drehzahlregler erzeugt.
Der PID-Drehzahlregler muss mit seinen Parametern P, I und D (Parametergruppe 7-0* PID-Drehzahlregler) eingestellt werden.
Wählen Sie [3] PID-Prozess in 1-00 Regelverfahren, um die Prozess-PID-Regelung zur Regelung mit Rückführung z. B. bei einer
Druck- oder Durchflussregelung zu verwenden. Die Parameter für Prozess-PID-Regelung befinden sich in Parametergruppe
7-2* PID-Prozess Istw. und 7-3* PID-Prozessregler.
22 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Grundlegende Betriebsprinzi... Projektierungshandbuch
3.6.5 Regelungsstruktur bei Fluxvektor mit Geber (nur FC 302)
Abbildung 3.8 Regelungsstruktur bei Konfiguration mit Fluxvektor mit Geber (nur bei FC 302 verfügbar)
Siehe Aktive/Inaktive Parameter in verschiedenen Antriebssteuerungsmodi im Programmierhandbuch für eine Übersicht der
verfügbaren Steuerungskonfigurationen, je nach Verwendung eines AC-Motors oder Vollpol-PM-Motors. In der gezeigten
Konfiguration ist 1-01 Steuerprinzip auf [3] Fluxvektor mit Geber und 1-00 Regelverfahren auf [1] Mit Drehgeber eingestellt.
3 3
In dieser Konfiguration wird der Motorregelung ein Istwertsignal von einem direkt am Motor montierten Drehgeber
zugeführt (eingestellt in 1-02 Drehgeber Anschluss).
Wählen Sie [1] Mit Drehgeber in 1-00 Regelverfahren, um den resultierenden Sollwert als Eingang für die PID-Drehzahlregelung zu benutzen. Parameter für den PID-Drehzahlregler befinden sich in Parametergruppe 7-0* PID-Drehzahlregler.
Wählen Sie [2] Drehmomentregler in 1-00 Regelverfahren, um den resultierenden Sollwert direkt als Drehmomentsollwert zu
benutzen. Drehmomentregelung kann nur in der Konfiguration Fluxvektor mit Geber (1-01 Steuerprinzip) gewählt werden.
Wenn dieser Modus gewählt wurde, erhält der Sollwert die Einheit Nm. Er benötigt keinen Drehmomentistwert, da das
Drehmoment anhand der Strommessung des Frequenzumrichters berechnet wird.
Wählen Sie [3] PID-Prozess in 1-00 Regelverfahren, um die PID-Prozessregelung zur Regelung mit Rückführung z. B. bei einer
Druck- oder Durchflussregelung zu verwenden.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 23
Grundlegende Betriebsprinzi... Projektierungshandbuch
3.6.6 PID
3.6.6.1 PID-Drehzahlregelung
Die PID-Drehzahlregelung erhält ungeachtet der sich ändernden Motorlast eine konstante Motordrehzahl aufrecht.
33
1-00 Regelverfahren
[0] Ohne Rückführung AKTIV AKTIV AKTIV N.v.
[1] Mit Drehgeber N.v. Nicht aktiv N.v. AKTIV
[2] Drehmomentregler N.v. N.v. N.v. Nicht aktiv
[3] PID-Prozess Nicht aktiv Nicht aktiv Nicht aktiv N.v.
[4] Drehmom. o. Rück. N.v. Nicht aktiv N.v. N.v.
[5] Wobbel Nicht aktiv Nicht aktiv Nicht aktiv Nicht aktiv
[6] Flächenwickler Nicht aktiv Nicht aktiv Nicht aktiv N.v.
[7] Erw.PID-Drehz.m.Rück. Nicht aktiv Nicht aktiv Nicht aktiv N.v.
[8] Erw.PID-Drehz.o.Rück. N.v. Nicht aktiv N.v. Nicht aktiv
Tabelle 3.1 Steuerkonfigurationen mit aktiver Drehzahlregelung
„N.v.“ bedeutet, dass der Modus nicht verfügbar ist. „Nicht aktiv“ bedeutet, dass der Modus verfügbar ist, aber die Drehzahlregelung in diesem
Modus nicht aktiv ist.
1-01 Steuerprinzip
U/f
VVC
+
Fluxvektor ohne Geber Fluxvektor mit Geber
HINWEIS
Die PID-Drehzahlregelung funktioniert mit der Standard-Parametereinstellung (Werkseinstellungen), Sie sollten sie
jedoch zur Optimierung der Motorsteuerung anpassen. Insbesondere das Potential der beiden Verfahren zur FluxMotorsteuerung hängt stark von der richtigen Einstellung ab.
Tabelle 3.2 fasst alle Eigenschaften zusammen, die für die Drehzahlregelung konfiguriert werden können. Siehe VLT
AutomationDrive FC 301/FC 302 Programmierhandbuch für detaillierte Informationen zur Programmierung.
®
24 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Grundlegende Betriebsprinzi... Projektierungshandbuch
Parameter Funktionsbeschreibung
7-00 Drehgeberrückführung Legt den Eingang fest, von der der PID-Drehzahlregler den Istwert erhalten soll.
7-02 Drehzahlregler PVerstärkung
7-03 Drehzahlregler I-Zeit
7-04 Drehzahlregler D-Zeit Liefert Zuwachs proportional zur Veränderungsrate des Istwerts. Die Einstellung Null deaktiviert den
7-05 Drehzahlregler D-Verstärk./
Grenze
7-06 Drehzahlregler Tiefpassfilterzeit
7-07 Drehzahlregler Getriebefaktor
7-08 Drehzahlregler Vorsteuerung Das Sollwertsignal umgeht den Drehzahlregler mit dem angegebenen Wert. Diese Funktion erhöht die
7-09 Speed PID Error Correction
w/ Ramp
Je höher der Wert, desto schneller die Regelung. Ein zu hoher Wert kann jedoch zu Schwingungen
führen.
Eliminiert eine Abweichung von der stationären Drehzahl. Je niedriger der Wert, desto schneller die
Reaktion. Ein zu niedriger Wert kann jedoch zu Schwingungen führen.
Differentiator.
Kommt es in einer Anwendung zu sehr schnellen Änderungen des Soll- oder Istwertes, so kann der
Differentiator rasch zum Überschwingen neigen. Er reagiert auf Änderungen der Regelabweichung. Je
schneller sich die Regelabweichung ändert, desto höher fällt auch die Differentiationsverstärkung aus.
Sie können die Differentiationszeit daher begrenzen, so dass sowohl eine angemessene Differentiationszeit bei langsamen Änderungen als auch eine angemessene Verstärkung bei schnellen Änderungen
eingestellt werden kann.
Ein Tiefpassfilter, das Schwingungen auf dem Istwertsignal dämpft und die stationäre Leistung
verbessert. Bei einer zu langen Filterzeit nimmt jedoch die dynamische Leistung der PID-Drehzahlregelung ab.
Einstellungen von Parameter 7-06 aus der Praxis anhand der Anzahl von Pulsen pro Umdrehung am
Drehgeber (PPR):
Drehgeber-PPR 7-06 Drehzahlregler Tiefpassfilterzeit
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
Der Frequenzumrichter multipliziert den Drehzahlistwert mit diesem Verhältnis.
dynamische Leistung der Drehzahlregelschleife.
Der Drehzahlfehler zwischen Rampe und aktueller Geschwindigkeit wird mit der Einstellung in diesem
Parameter verglichen. Wenn der Drehzahlfehler diesen Parametereintrag übersteigt, wird er über einen
Beschleunigungs- bzw. Verzögerungsvorgang auf kontrollierte Weise korrigiert.
3 3
Tabelle 3.2 Relevante Parameter für die Drehzahlregelung
Nehmen Sie die Programmierung in der genannten Reihenfolge vor (siehe Erläuterung der Einstellungen im Program-
mierhandbuch)
In Tabelle 3.3 wird davon ausgegangen, dass für alle anderen Parameter und Schalter die Werkseinstellung verwendet wird.
Funktion Parameter Einstellung
1) Stellen Sie sicher, dass der Motor einwandfrei läuft. Gehen Sie wie folgt vor:
Stellen Sie die Motorparameter mit Hilfe der Daten vom
Typenschild ein
Führen Sie eine Automatische Motoranpassung durch 1-29 Autom.
2) Prüfen Sie, ob der Motor läuft und der Drehgeber ordnungsgemäß angeschlossen ist. Gehen Sie wie folgt vor:
Drücken Sie die Taste [Hand On] am LCP. Prüfen Sie, ob
der Motor läuft und in welche Richtung er sich dreht
(nachfolgend „positive Richtung“ genannt).
Gehen Sie zu 16-20 Rotor-Winkel. Drehen Sie den Motor
langsam in die positive Richtung. Das Drehen muss so
langsam erfolgen (nur wenige U/min), dass Sie feststellen
können, ob der Wert in 16-20 Rotor-Winkel zu- oder
abnimmt.
Wenn 16-20 Rotor-Winkel abnimmt, ändern Sie die
Drehgeberrichtung in 5-71 Kl. 32/33 Drehgeber Richtung.
1-2* Siehe Motor-Typenschild
[1] Aktivieren Sie die komplette AMA
Motoranpassung
Stellen Sie einen positiven Sollwert ein.
16-20 Rotor-Winkel N.v. (Anzeigeparameter) Anmerkung: Ein ansteigender
Wert läuft bei 65535 über und startet erneut bei 0.
5-71 Kl. 32/33
Drehgeber
Richtung
[1] Linkslauf (wenn 16-20 Rotor-Winkel ansteigt)
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 25
Grundlegende Betriebsprinzi... Projektierungshandbuch
Funktion Parameter Einstellung
3) Stellen Sie sicher, dass die Grenzwerte des Frequenzumrichters auf sichere Werte eingestellt sind
Stellen Sie zulässige Grenzwerte für die Sollwerte ein. 3-02 Minimaler
Sollwert
3-03 Maximaler
Sollwert
33
Stellen Sie sicher, dass die Rampeneinstellungen
innerhalb des Leistungsbereichs des Frequenzumrichters
liegen und zulässigen Spezifikationen für den
Anwendungsbetrieb entsprechen.
Stellen Sie zulässige Grenzwerte für die Motordrehzahl
und -frequenz ein.
4) Konfigurieren Sie die Drehzahlregelung und wählen Sie das Verfahren für die Motorsteuerung.
Aktivierung der Drehzahlregelung
Auswahl des Steuerprinzips 1-01 Steuerprinzip [3] Fluxvektor mit Geber
5) Konfigurieren und skalieren Sie den Sollwert für den Drehzahlregler
Stellen Sie Analogeingang 53 als variablen Sollwert ein 3-15 Variabler
Skalieren Sie den Analogeingang 53 0 UPM (0 V) auf
1500 UPM (10 V)
6) Konfigurieren Sie das Signal des 24V/HTL-Drehgebers als Istwert für die Motorsteuerung und die Drehzahlregelung
Stellen Sie Digitaleingang 32 und 33 als HTL-Drehgebereingänge ein
Wählen Sie Klemme 32/33 als Motor-Istwert 1-02 Drehgeber
Wählen Sie Klemme 32/33 als Drehgeberrückführung 7-00 Drehgeber-
7) Stellen Sie die Parameter für die PID-Drehzahlregelung ein
Verwenden Sie ggf. die Einstellungsanweisungen oder
stellen Sie manuell ein
8) Speichern Sie abschließend
Speichern Sie die Parametereinstellung im LCP 0-50 LCP-Kopie [1] Speichern in LCP
3-41 Rampenzeit
Auf 1
3-42 Rampenzeit
Ab 1
4-11 Min. Drehzahl
[UPM]
4-13 Max. Drehzahl
[UPM]
4-19 Max.
Ausgangsfrequenz
1-00 Regelverfahren
Sollwert 1
6-1* Nicht notwendig (Werkseinstellung)
5-14 Klemme 32
Digitaleingang
5-15 Klemme 33
Digitaleingang
Anschluss
rückführung
7-0* Siehe Anweisungen
0 U/min (Werkseinstellung)
1500 U/min (Werkseinstellung)
Werkseinstellung
Werkseinstellung
0 U/min (Werkseinstellung)
1500 U/min (Werkseinstellung)
60 Hz (Werkseinstellung 132 Hz)
[1] Mit Drehgeber
Nicht notwendig (Werkseinstellung)
[0] Ohne Funktion (Werkseinstellung)
Nicht notwendig (Werkseinstellung)
Nicht notwendig (Werkseinstellung)
Tabelle 3.3 Programmierreihenfolge
3.6.6.2
Optimieren des PID-Drehzahlreglers
HINWEIS
1-20 Motornennleistung [kW] ist die Motorleistung in [kW]
Die folgenden Einstellungsanweisungen sind empfehlenswert, wenn in Anwendungen mit überwiegend träger
(d. h. für die Berechnung „4“ kW anstatt „4000“ W
verwenden).
Last (mit geringer Reibung) eines der Flux-Vektorregelverfahren angewendet wird.
Der Wert von 30-83 Drehzahlregler P-Verstärkung hängt von
der Gesamtträgheit von Motor und Last ab. Die
ausgewählte Bandbreite kann anhand der folgenden
Formel berechnet werden:
2
x
. 1 − 20 x 9550
Par.
. 1 − 25
x
Bandbreite rad/s
Par
. 7 − 02 =
Gesamt- Trägheit kgm
Par
Ein praktischer Wert für die Bandbreite ist 20 rad/s. Prüfen
Sie das Ergebnis der Berechnung von 7-02 Drehzahlregler P-
Verstärkung mit der folgenden Formel (nicht erforderlich
bei einem hochauflösenden Istwert wie z. B. einem SinCosIstwert):
Par
. 7 − 02
Max. Drehmoment Rippel
MAX
0. 01 x 4 x
=
Drehgeber- Auflösung x Par
2 x π
%
. 7 − 06
x
Ein empfohlener Ausgangswert für 7-06 Drehzahlregler
Tiefpassfilterzeit ist 5 ms (eine niedrigere Drehgeberauf-
26 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Grundlegende Betriebsprinzi... Projektierungshandbuch
lösung erfordert einen höheren Filterwert). Normalerweise
ist ein max. Drehmomentrippel von 3 % zulässig. Für
Inkrementalgeber finden Sie die Drehgeberauflösung in
5-70 Kl. 32/33 Drehgeber Aufl. [Pulse/U] (24V HTL bei
Standard-Frequenzumrichter) oder 17-11 Inkremental
Auflösung [Pulse/U] (5 V TTL für Drehgeber-Option MCB
102).
Generell wird die passende Obergrenze von 7-02 Drehzahl-
regler P-Verstärkung anhand der Drehgeberauflösung und
der Istwert-Filterzeit ermittelt. Andere Faktoren in der
Anwendung können den 7-02 Drehzahlregler P-Verstärkung
jedoch auf einen niedrigeren Wert begrenzen.
Zum Minimieren der Übersteuerung können Sie
7-03 Drehzahlregler I-Zeit (je nach Anwendung) auf ca.
2,5 Sek. einstellen.
Stellen Sie 7-04 Drehzahlregler D-Zeit auf 0 ein, bis alle
anderen Einstellungen vorgenommen wurden. Sie können
ggf. experimentieren und diese Einstellung in kleinen
Schritten ändern.
3.6.6.3
PID-Prozessregler
Mit dem PID-Prozessregler können Sie Anwendungsparameter steuern, die mit einem Sensor messbar sind (d. h.
Druck, Temperatur, Fluss) und vom angeschlossenen Motor
über eine Pumpe, einen Lüfter oder ein anderes Gerät
beeinflusst werden können.
Tabelle 3.4
zeigt die Konfigurationen, bei denen die
Prozessregelung möglich ist. Wenn ein Verfahren der FluxVektorsteuerung verwendet wird, ist zu beachten, dass Sie
auch die Parameter für den PID-Drehzahlregler einstellen
müssen. Lesen Sie Kapitel 3.6 PI-Regler, um zu sehen, wo
die Drehzahlregelung aktiviert ist.
1-00 Regelverfahren
[3] PID-Prozess Nicht
Tabelle 3.4 Steuerungskonfigurationen mit Prozessregelung
1-01 Steuerprinzip
U/f
aktiv
+
VVC
PID-Prozess Prozess
Fluxvektor
ohne
Geber
und
Drehzahl
Fluxvektor
mit Geber
Prozess
und
Drehzahl
HINWEIS
Die PID-Prozessregelung funktioniert mit der StandardParametereinstellung, sollte jedoch zur Optimierung der
Anwendungssteuerung angepasst werden. Insbesondere
das Potential der beiden Verfahren zur FluxMotorsteuerung hängt stark von der richtigen
Einstellung der PID-Drehzahlregelung (vor dem Einstellen
der PID-Prozessregelung) ab.
3 3
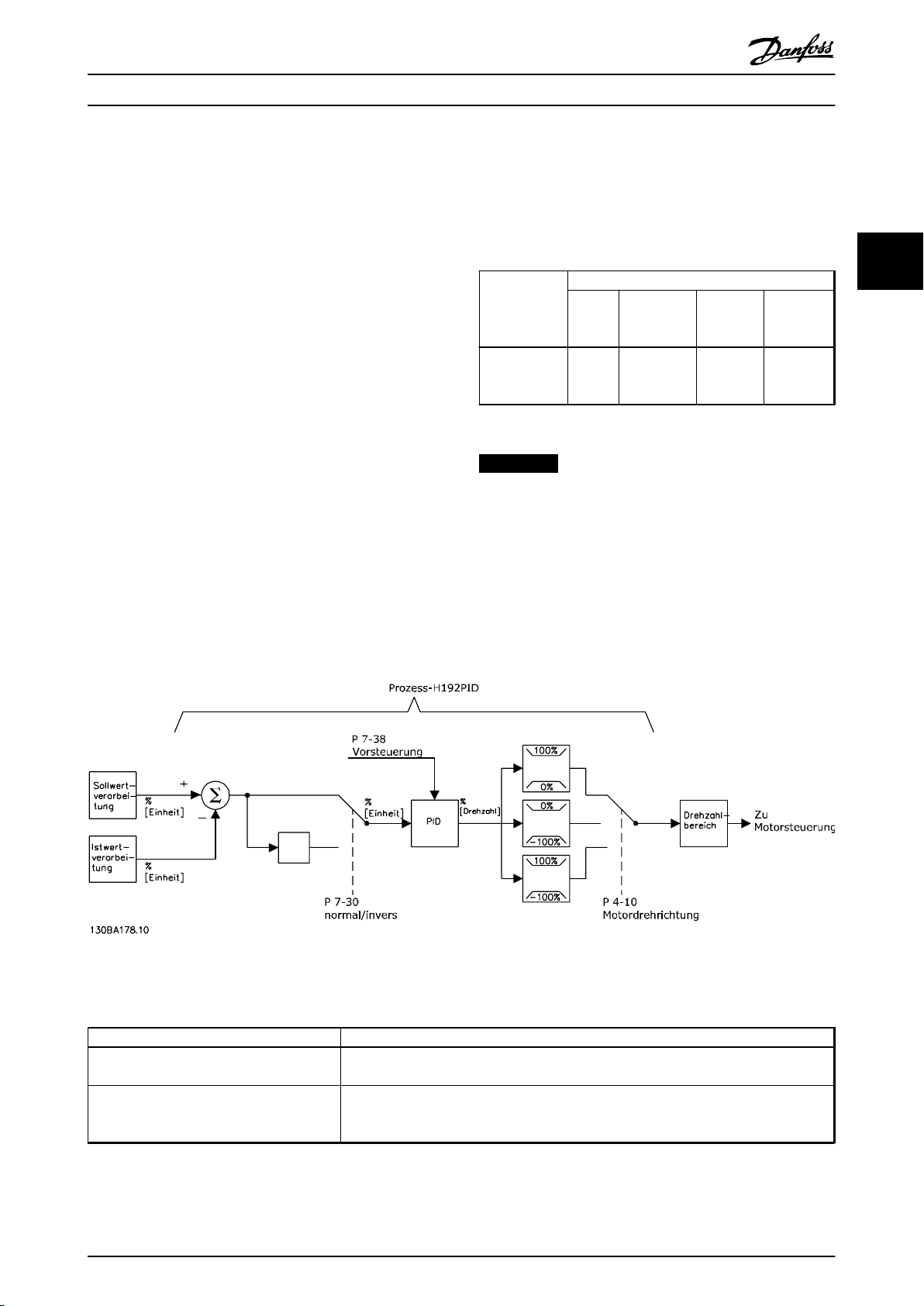
Abbildung 3.9 Diagramm für PID-Prozessregler
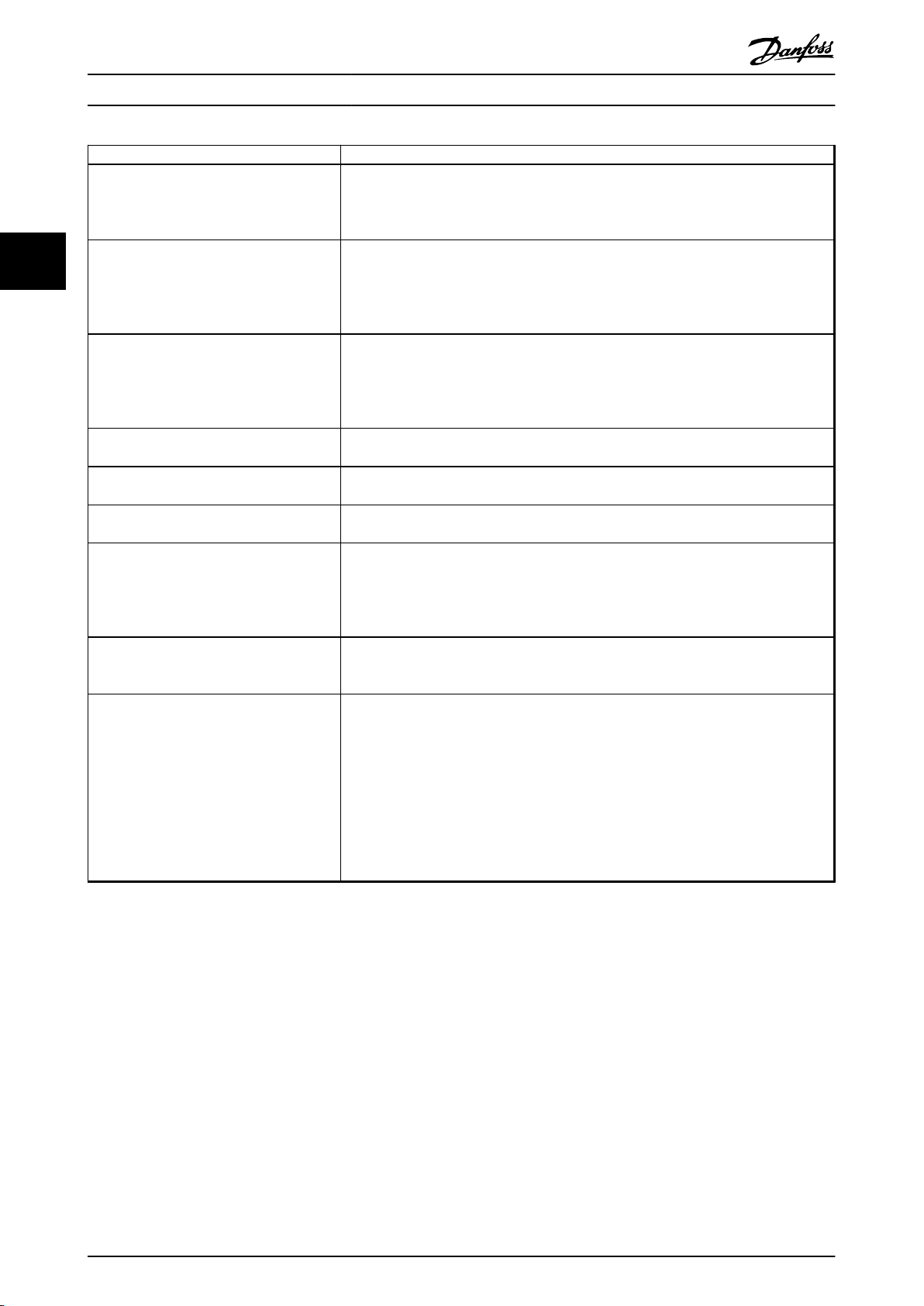
Tabelle 3.5 fasst alle Eigenschaften zusammen, die für die Prozessregelung konfiguriert werden können.
Parameter Funktionsbeschreibung
7-20 PID-Prozess Istwert 1 Legt den Eingang (Analog oder Puls) fest, von dem die PID-Prozessregelung den Istwert
erhalten soll.
7-22 PID-Prozess Istwert 2 Gegebenenfalls: Legt fest, ob (und von woher) die PID-Prozessregelung ein zusätzliches
Istwertsignal erhält. Wenn ein weiterer Istwertanschluss ausgewählt wurde, werden die
beiden Istwertsignale vor der Verwendung im PID-Prozessregler addiert.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 27
Grundlegende Betriebsprinzi... Projektierungshandbuch
Parameter Funktionsbeschreibung
7-30 Auswahl Normal-/Invers-Regelung
7-31 PID-Prozess Anti-Windup Die Anti-Windup-Funktion bewirkt, dass im Falle des Erreichens einer Frequenz- oder
33
7-32 PID-Prozess Reglerstart bei In einigen Anwendungen kann das Erreichen der gewünschten Drehzahl bzw. des
7-33 PID-Prozess P-Verstärkung Je höher der Wert, desto schneller die Regelung. Ein zu hoher Wert kann jedoch zu
7-34 PID-Prozess I-Zeit Eliminiert eine Abweichung von der stationären Drehzahl. Je niedriger der Wert, desto
7-35 PID-Prozess D-Zeit Liefert Zuwachs proportional zur Veränderungsrate des Istwerts. Die Einstellung Null
7-36 PID-Prozess D-Verstärkung/Grenze Kommt es in einer Anwendung zu sehr schnellen Änderungen des Soll- oder Istwertes, so
7-38 PID-Prozess Vorsteuerung In Anwendungen mit einer ausgeglichenen (und in etwa linearen) Beziehung zwischen
5-54 Pulseingang 29 Filterzeit (Pulseingang
29),
5-59 Pulseingang 33 Filterzeit (Pulseingang
33),
6-16 Klemme 53 Filterzeit (Analogeingang
53),
6-26 Klemme 54 Filterzeit (Analogeingang 54)
6-36 Klemme X30/11 Filterzeit
6-46 Klemme X30/12 Filterzeit
35-46 Term. X48/2 Filter Time Constant
Im Betriebsmodus [0] Normal reagiert die Prozessregelung mit einer Erhöhung der
Motordrehzahl, wenn der Istwert den Sollwert unterschreitet. In der gleichen Situation,
jedoch im Betriebsmodus [1] Invers, reagiert die Prozessregelung stattdessen mit einer
abnehmenden Motordrehzahl.
Drehmomentgrenze der Integrator auf eine Verstärkung eingestellt wird, die der aktuellen
Frequenz entspricht. So vermeiden Sie, dass bei einer Abweichung, die mit einer Drehzahländerung ohnehin nicht auszugleichen wäre, weiter integriert wird. Sie können die
Funktion durch Auswahl von [0] Aus deaktivieren.
Sollwerts sehr lange dauern. Bei solchen Anwendungen kann es von Vorteil sein, eine
Motorfrequenz festzulegen, auf die der Frequenzumrichter den Motor ungeregelt
hochfahren soll, bevor die Prozessregelung aktiviert wird. Dies erfolgt durch Festlegen
eines Werts für PID-Prozess Reglerstart in 7-32 PID-Prozess Reglerstart bei.
Schwingungen führen.
schneller die Reaktion. Ein zu niedriger Wert kann jedoch zu Schwingungen führen.
deaktiviert den Differentiator.
kann der Differentiator rasch zum Überschwingen neigen. Er reagiert auf Änderungen der
Regelabweichung. Je schneller sich die Regelabweichung ändert, desto höher fällt auch
die Differentiationsverstärkung aus. Sie können die D-Verstärkung daher begrenzen, um
eine angemessene Differentiationszeit für langsame Änderungen einzustellen.
dem Sollwert und der dafür erforderlichen Motordrehzahl können Sie die Dynamik der
Regelung gegebenenfalls mit Hilfe der Vorsteuerung steigern.
Sofern beim Istwertsignal Rippelströme bzw. -spannungen auftreten, können diese mit
Hilfe eines Tiefpassfilters gedämpft werden. Diese Zeitkonstante ist ein Ausdruck für eine
Drehzahlgrenze der Rippel, die beim Istwertsignal auftreten.
Beispiel: Ist das Tiefpassfilter auf 0,1 s eingestellt, so ist die Eckfrequenz 10 RAD/s,
(Kehrwert von 0,1 s), was (10/(2 x π)) = 1,6 Hz entspricht. Dies führt dazu, dass alle
Ströme/Spannungen, die um mehr als 1,6 Schwingungen pro Sekunde schwanken, herausgefiltert werden. Es wird also nur ein Istwertsignal geregelt, das mit einer Frequenz
(Drehzahl) von unter 1,6 Hz schwankt.
Das Tiefpassfilter verbessert die stationäre Leistung, bei einer zu langen Filterzeit nimmt
jedoch die dynamische Leistung des PID-Prozessreglers ab.
Tabelle 3.5 Relevante Parameter für die Prozessregelung
3.6.6.4
Erweiterte PID-Regelung
Wenn der Frequenzumrichter während des Motorbetriebs
oder im generatorischen Betrieb die aktuellen Grenzwerte
Informationen zu erweiterten PID-Regelparametern finden
Sie im VLT® AutomationDrive FC 301/FC 302 Programmier-
handbuch
erreicht, versucht das Gerät schnellstmöglich, die
eingestellten Drehmomentgrenzen wieder zu
unterschreiten, ohne die Kontrolle über den Motor zu
verlieren.
3.6.7 Interner Stromgrenzenregler in
Betriebsart VVC
+
Wenn der Motorstrom bzw. das Motordrehmoment die in
4-16 Momentengrenze motorisch, 4-17 Momentengrenze
generatorisch und 4-18 Stromgrenze festgelegten Drehmo-
mentgrenzen überschreitet, wird die integrierte
Stromgrenzenregler aktiviert.
28 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
3.6.8 Handsteuerung (Hand On) und
Fernsteuerung (Auto On)
Der Frequenzumrichter kann vor Ort manuell über das LCP
oder im Fernbetrieb über Analog- und Digitaleingänge
oder die serielle Bus-Schnittstelle gesteuert werden. Falls in
0-40 [Hand On]-LCP Taste, 0-41 [Off]-LCP Taste, 0-42 [Auto

130BP046.10
Hand
on
O
Auto
on
Reset
Grundlegende Betriebsprinzi... Projektierungshandbuch
On]-LCP Taste und 0-43 [Reset]-LCP Taste gestattet, können
Sie den Frequenzumrichter mit den LCP-Tasten [Hand On]
und [Off] steuern. Sie können Alarme über die [Reset]-Taste
quittieren. Nach Drücken der [Hand On]-Taste schaltet der
Frequenzumrichter in den Hand-Betrieb und verwendet
standardmäßig den Ortsollwert, den Sie mithilfe der
Navigationstasten am LCP einstellen können.
Nach dem Drücken der [Auto On]-Taste schaltet der
Frequenzumrichter in die Betriebsart Auto und verwendet
standardmäßig den Fernsollwert. In diesem Modus lässt
sich der Frequenzumrichter über die Digitaleingänge bzw.
verschiedene serielle Schnittstellen (RS-485, USB oder einen
optionalen Feldbus) steuern. Mehr Informationen zum
Starten, Stoppen, Ändern von Rampen und Parametersätzen finden Sie in den Parametergruppen 5-1*
Digitaleingänge oder 8-5* Betr. Bus/Klemme.
Abbildung 3.11 Aktiver Sollwert
3 3
Abbildung 3.10 Bedientasten
Aktiver Sollwert und Regelverfahren
Der aktive Sollwert kann der Ortsollwert oder Fernsollwert
sein.
In 3-13 Sollwertvorgabe können Sie den Ortsollwert durch
Auswahl von [2] Ort permanent auswählen.
Dies ist unabhängig davon, ob sich der Frequenzumrichter
im Auto-Betrieb oder im Hand-Betrieb befindet. Durch
Auswahl von [0] Umschalt. Hand/Auto (Werkseinstellung)
hängt die Sollwertvorgabe von der aktiven Betriebsart ab
(Hand-Betrieb oder Auto-Betrieb).
Abbildung 3.12 Regelverfahren
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 29

Grundlegende Betriebsprinzi... Projektierungshandbuch
[Hand On] [Auto on]Tasten
Hand Umschalt. Hand/
Hand ⇒ Off
33
Auto Umschalt. Hand/
Auto ⇒ Off
Alle Tasten Ort Ort
Alle Tasten Fern Fern
Tabelle 3.6 Bedingungen für die Aktivierung von
Ort-/Fernsollwerten
3-13 Sollwertvorgabe
Auto
Umschalt. Hand/
Auto
Auto
Umschalt. Hand/
Auto
Aktiver Sollwert
Ort
Ort
Fern
Fern
Binärsollwert
Ein über die serielle Schnittstelle (RS-485 Klemme 68-69)
angelegtes Sollwertsignal.
Festsollwert
Ein definierter Festsollwert, einstellbar zwischen -100 %
und +100 % des Sollwertbereichs. Sie können bis zu 8
Festsollwerte über die Digitaleingänge auswählen.
Pulssollwert
Ein an Klemme 29 oder 33 angelegter Pulssollwert,
ausgewählt durch 5-13 Klemme 29 Digitaleingang oder
5-15 Klemme 33 Digitaleingang [32] Pulseingang. Die
Skalierung erfolgt in Parametergruppe 5-5* Pulseingänge.
Ref
MAX
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
100 % des Gesamtskalenwerts (in der Regel 10 V, 20 mA)
1-00 Regelverfahren definiert, welches Regelverfahren (d. h.,
Drehzahl, Drehmoment oder PID-Prozess) bei Fern-Betrieb
angewendet werden soll. 1-05 Hand/Ort-Betrieb Konfigu-
ration definiert, welches Regelverfahren bei Hand (Ort)Betrieb angewendet werden soll. Einer von beiden ist
immer aktiv, es können jedoch nicht beide gleichzeitig
aktiv sein.
3.7
Sollwertverarbeitung
3.7.1 Sollwerteinstellung
Analogsollwert
Ein an Eingang 53 oder 54 angelegtes Analogsignal. Das
Signal kann entweder Spannung 0-10 V (FC 301 und FC
302) oder -10 to +10 V (FC 302), Stromsignal 0-20 mA oder
4-20 mA sein.
und dem resultierenden Sollwert. Der in 3-03 Maximaler
Sollwert eingestellte maximale Sollwert.
Ref
MIN
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
0 % (normalerweise 0 V, 0 mA, 4 mA) und dem
resultierenden Sollwert. Der in 3-02 Minimaler Sollwert
eingestellte minimale Sollwert.
Ortsollwert
Der Ortsollwert ist aktiv, wenn der Frequenzumrichter mit
aktiver [Hand on]-Taste betrieben wird. Den Sollwert
können Sie über die Navigationstasten [▲]/[▼] und [◄]/[►]
einstellen.
Fernsollwert
Abbildung 3.13 zeigt das Sollwertsystem zur Berechnung
des Fernsollwerts.
30 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Grundlegende Betriebsprinzi... Projektierungshandbuch
3 3
Abbildung 3.13 Fernsollwert
Der Fernsollwert wird bei jedem Abtastintervall
berechnet und besteht anfänglich aus 2 Arten von
Sollwerteingängen:
1. X (der aktuelle Sollwert): Eine Summe (siehe
3-04 Sollwertfunktion) von bis zu vier extern
ausgewählten Sollwerten, bestehend aus einer
beliebigen Kombination (bestimmt durch die
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 31
Einstellung von 3-15 Variabler Sollwert 1,
3-16 Variabler Sollwert 2 und 3-17 Variabler
Sollwert 3) eines Festsollwerts (3-10 Festsollwert),
variabler Analogsollwerte, variabler Digitalsollwerte und verschiedener serieller Bussollwerte
in einer beliebigen Einheit, in welcher der

Grundlegende Betriebsprinzi...
Frequenzumrichter gesteuert wird ([Hz], [UPM],
[Nm] usw.).
2. Y (der relative Sollwert): Eine Summe eines
Festsollwerts (3-14 Relativer Festsollwert) und eines
variablen Analogsollwerts (3-18 Relativ. Skalie-
33
Die 2 Arten von Sollwerteingängen werden in folgender
Formel kombiniert: Fernsollwert = X + X * Y/100 %. Wenn
der relative Sollwert nicht verwendet wird, müssen Sie
3-18 Relativ. Skalierungssollw. Ressource auf [0] Deaktiviert
und 3-14 Relativer Festsollwert auf 0 % einstellen. Die
Funktion Frequenzkorrektur Auf/Ab und die Funktion
Sollwert speichern kann durch Digitaleingänge am Frequenzumrichter aktiviert werden. Die Funktionen und Parameter
werden im Programmierhandbuch beschrieben.
Die Skalierung von Analogsollwerten wird in Parametergruppen 6-1* Analogeingang 1 und 6-2* Analogeingang 2
und die Skalierung digitaler Pulssollwerte in Parametergruppe 5-5* Pulseingänge beschrieben.
Sollwertgrenzen und -bereiche werden in Parametergruppe
3-0* Sollwertgrenzen eingestellt.
3.7.2
rungssollw. Ressource) in [%].
Sollwertgrenzen
Projektierungshandbuch
Abbildung 3.15 Resultierender Sollwert
Der Wert von 3-02 Minimaler Sollwert kann nicht unter 0
eingestellt werden, sofern 1-00 Regelverfahren nicht auf [3]
PID-Regler eingestellt ist. In diesem Fall ergibt sich das
Verhältnis zwischen dem resultierenden Sollwert (nach der
Befestigung) und der Summe aller Sollwerte wie in
Abbildung 3.16 gezeigt.
3-00 Sollwertbereich, 3-02 Minimaler Sollwert und
3-03 Maximaler Sollwert definieren zusammen den
zulässigen Bereich der Summe aller Sollwerte. Die Summe
aller Sollwerte wird bei Bedarf begrenzt. Die Beziehung
zwischen dem resultierenden Sollwert (nach der
Befestigung) und der Summe aller Sollwerte wird in
Abbildung 3.14 gezeigt.
Abbildung 3.14 Beziehung zwischen resultierendem Sollwert
und der Summe aller Sollwerte
Abbildung 3.16 Summe aller Sollwerte bei Einstellung von
1-00 Regelverfahren auf [3] PID-Regler
Skalierung von Festsollwerten und
3.7.3
Bussollwerten
Festsollwerte werden gemäß den folgenden Regeln
skaliert:
Wenn 3-00 Sollwertbereich: [0] Min. bis Max. ist,
•
entspricht ein Sollwert von 0 % dem Wert 0
[Einheit], wobei eine beliebige Einheit (UPM, m/s,
bar usw.) zulässig ist, und ein Sollwert von 100 %
entspricht dem Maximum (abs. 3-03 Maximaler
Sollwert), abs (3-02 Minimaler Sollwert)).
Wenn 3-00 Sollwertbereich: [1] -Max. bis +Max. ist,
•
entspricht der Sollwert 0 % dem Wert 0 [Einheit],
der Sollwert -100 % entspricht dem Sollwert -
32 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Grundlegende Betriebsprinzi... Projektierungshandbuch
Max. und der Sollwert 100 % entspricht dem
Sollwert Max.
Bussollwerte werden gemäß den folgenden Regeln
skaliert:
Wenn 3-00 Sollwertbereich: [0] Min bis Max.
•
eingestellt ist, gilt für eine maximale Auflösung
des Bussollwerts folgende Busskalierung: der
Sollwert 0 % entspricht dem min. Sollwert und
der Sollwert 100 % entspricht dem max. Sollwert.
Wenn 3-00 Sollwertbereich: [1] -Max. bis +Max.,
•
entspricht der Sollwert -100 % dem Sollwert Max. und der Sollwert 100 % entspricht dem
Sollwert Max.
Skalierung von Analog- und
3.7.4
Pulssollwerten und Istwert
Soll- und Istwerte werden auf gleiche Weise von Analogund Pulseingängen skaliert. Einziger Unterschied ist, dass
Sollwerte, die über oder unter den angegebenen
„Endpunkten“ liegen (P1 und P2 in Abbildung 3.17),
eingegrenzt werden, während dies bei Istwerten nicht der
Fall ist.
Abbildung 3.18 Skalierung des Sollwertausgangs
3.7.5
3 3
Totzone um Null
Abbildung 3.17 Skalierung von Analog- und Pulssollwerten
und Istwert
In einigen Fällen sollte der Sollwert (gelegentlich auch der
Istwert) eine Totzone um Null haben. (Dies stellt sicher,
dass die Maschine gestoppt wird, wenn der Sollwert „nahe
Null“ liegt.)
Nehmen Sie die folgenden Einstellungen vor, um die
Totzone zu aktivieren und ihren Umfang zu definieren:
Der minimale oder maximale Sollwert muss Null
•
sein. Anders ausgedrückt: Entweder P1 oder P2
müssen an der X-Achse in Abbildung 3.19
angetragen sein.
Außerdem müssen sich beide Punkte im selben
•
Quadranten befinden.
Die Größe der Totzone wird von P1 oder P2 definiert, wie
dies in Abbildung 3.19 gezeigt wird.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 33

Grundlegende Betriebsprinzi... Projektierungshandbuch
33
Abbildung 3.19 Totzone
Somit ergibt sich bei einem Sollwertendpunkt von P1 = (0 V, 0 UPM) keine Totzone. Ein Sollwertendpunkt von
beispielsweise P1 = (1 V, 0 UPM) führt jedoch zu einer Totzone von -1 V bis +1 V, sofern Endpunkt P2 in Quadrant 1 oder
Quadrant 4 gelegt wird.
Abbildung 3.20 Reversierte Totzone
34 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Grundlegende Betriebsprinzi... Projektierungshandbuch
Abbildung 3.21 zeigt die Wirkung der Min.-Max.-Begrenzungen an einem Sollwerteingang.
3 3
Abbildung 3.21 Positiver Sollwert mit Totzone, Digitaleingang zum Triggern der Reversierung
Abbildung 3.22 zeigt, wie der Sollwerteingang mit Werten, die außerhalb der Grenzen für -Max und +Max liegen, die Unterund Obergrenzen der Eingänge begrenzt, bevor der externe Sollwert addiert wird. Abbildung 3.22 zeigt auch, wie der
externe Sollwert durch den Sollwertalgorithmus an -Max bis +Max begrenzt wird.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 35

130BA188.12
Grundlegende Betriebsprinzi... Projektierungshandbuch
33
Abbildung 3.22 Positiver Sollwert mit Totzone, Digitaleingang zum Triggern der Reversierung. Begrenzungsregeln
36 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

130BA189.12
Grundlegende Betriebsprinzi... Projektierungshandbuch
3 3
Abbildung 3.23 Bipolarer Sollwert mit Totzone. Vorzeichen bestimmt die Richtung, -Max. bis +Max
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 37

Produktfunktionen
Projektierungshandbuch
4 Produktfunktionen
Die Last treibt den Motor an (bei konstanter
4.1 Automatisierte Betriebsfunktionen
Diese Funktionen sind aktiv, sobald der Frequenzumrichter
in Betrieb ist. Hierfür ist keine Programmierung oder
Inbetriebnahme erforderlich. Durch ein Bewusstsein für die
44
Existenz dieser Funktionen kann die Systemauslegung
optimiert und ggf. die Integration redundanter
Komponenten oder Funktionen vermieden werden.
Der Frequenzumrichter verfügt über eine Reihe von
integrierten Schutzfunktionen zum Selbstschutz und zum
Schutz des angetriebenen Motors.
4.1.1 Kurzschluss-Schutz
Motor (Phase-Phase)
Der Frequenzumrichter ist durch seine Strommessung in
jeder der drei Motorphasen oder im DC-Zwischenkreis
gegen Kurzschlüsse geschützt. Ein Kurzschluss zwischen
zwei Ausgangsphasen bewirkt einen Überstrom im
Wechselrichter. Jedoch wird der Wechselrichter
abgeschaltet, sobald sein Kurzschlussstrom den zulässigen
Wert (Alarm 16 Abschaltblockierung) überschreitet.
Netzseite
Ein ordnungsgemäß arbeitender Frequenzumrichter
begrenzt die Stromaufnahme vom Netz. Wir empfehlen,
versorgungsseitig Sicherungen und/oder Trennschalter als
Schutz für den Fall einer Bauteilstörung im Inneren des
Frequenzumrichters zu verwenden (erster Fehler). Siehe
Kapitel 9.3 Netzanschluss für weitere Informationen.
HINWEIS
Dies ist obligatorisch, um Übereinstimmung mit IEC
60364 für CE oder NEC 2009 für UL sicherzustellen.
Bremswiderstand
Der Frequenzumrichter ist vor Kurzschlüssen im Bremswiderstand geschützt.
Zwischenkreiskopplung
Installieren Sie zum Schutz des DC-Busses gegen
Kurzschlüsse sowie des Frequenzumrichters gegen Überlast
DC-Sicherungen in Reihe an den Zwischenkreiskopplungen
aller angeschlossenen Geräte. Siehe Kapitel 9.6.3 Zwischen-
kreiskopplung für weitere Informationen.
4.1.2
Überspannungsschutz
•
Ausgangsfrequenz des Frequenzumrichters), d. h.,
die Last „erzeugt“ Energie.
Während der Verzögerung („Rampe ab“), bei
•
hohem Trägheitsmoment, niedriger Reibung und
zu kurzer Rampenzeit, um die Energie als Verlust
an Frequenzumrichter, Motor und der Installation
weitergeben zu können.
Eine falsche Einstellung beim Schlupfausgleich
•
kann eine höhere DC-Zwischenkreisspannung
hervorrufen.
Gegen-EMK durch PM-Motorbetrieb. Bei Freilauf
•
mit hoher Drehzahl kann die Gegen-EMK des PMMotors möglicherweise die maximale
Spannungstoleranz des Frequenzumrichters
überschreiten und Schäden verursachen. Der Wert
von 4-19 Max. Ausgangsfrequenz wird automatisch
basierend auf einer internen Berechnung anhand
des Werts von 1-40 Gegen-EMK bei 1000 UPM,
1-25 Motornenndrehzahl und 1-39 Motorpolzahl
berechnet.
HINWEIS
Statten Sie den Frequenzumrichter zur Vermeidung einer
Überdrehzahl des Motors (z. B. aufgrund eines
übermäßigen Windmühleneffekts) mit einem Bremswiderstand aus.
Sie können die Überspannung mithilfe einer Bremsfunktion
(2-10 Bremsfunktion) und/oder einer Überspannungssteuerung (2-17 Überspannungssteuerung) beseitigen.
Bremsfunktionen
Schließen Sie einen Bremswiderstand ist zur Ableitung der
überschüssigen Bremsenergie an. Bei angeschlossenem
Bremswiderstand ist beim Bremsen ein höheres
Bremsmoment verfügbar.
Die AC-Bremse ist eine Alternative für ein verbessertes
Bremsen ohne Verwendung eines Bremswiderstands. Diese
Funktion regelt eine Übermagnetisierung des Motors im
Generatorbetrieb. Diese Funktion kann die Überspannungssteuerung verbessern. Durch eine Erhöhung der
elektronischen Verluste im Motor kann die OVC-Funktion
das Bremsmoment erhöhen, ohne die Überspannungsgrenze zu überschreiten.
Vom Motor erzeugte Überspannung
Die Spannung im Zwischenkreis erhöht sich beim generatorischen Betrieb des Motors. Dies geschieht in folgenden
Fällen:
38 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktfunktionen
Projektierungshandbuch
HINWEIS
Die AC-Bremse ist nicht so effektiv wie das dynamische
Bremsen mit einem Widerstand.
Überspannungssteuerung (OVC)
Die Überspannungssteuerung reduziert die Gefahr einer
Abschaltung des Frequenzumrichters aufgrund einer
Überspannung im Zwischenkreis. Dies wird gewährleistet,
indem die Rampe-Ab-Zeit automatisch verlängert wird.
HINWEIS
OVC kann für den PM-Motor mit allen Steuerungskernen,
PM VVC+, Flux OL und Flux CL für PM-Motoren aktiviert
werden.
HINWEIS
Aktivieren Sie die Überspannungssteuerung nicht bei
Hubanwendungen.
4.1.3 Erkennung fehlender Motorphasen
Die Funktion Fehlende Motorphase (4-58 Motorphasen
Überwachung) ist werkseitig aktiviert, um Beschädigungen
des Motors im Falle einer fehlenden Motorphase zu
verhindern. Die Werkseinstellung ist 1.000 ms, für eine
schnellere Erkennung kann diese jedoch geändert werden.
Erkennung der Netzphasen-
4.1.4
Asymmetrie
Ein Betrieb bei starker Netzphasen-Asymmetrie kann die
Lebensdauer des Motors reduzieren. Die Bedingungen
gelten als schwer, wenn der Motor bei nahezu nomineller
Last kontinuierlich betrieben wird. Bei der Werkseinstellung
wird der Frequenzumrichter bei einem Netzphasenfehler
(14-12 Netzphasen-Unsymmetrie) abgeschaltet.
Schalten am Ausgang
4.1.5
Das Hinzufügen eines Schalters am Ausgang, zwischen
Motor und Frequenzumrichter, ist zulässig. Es können
Fehlermeldungen auftreten. Aktivieren Sie die Motorfangschaltung zum Abfangen eines drehenden Motors.
4.1.6
Überlastschutz
Drehmomentgrenze
Die Drehmomentgrenze schützt den Motor unabhängig
von der Drehzahl vor Überlast. Die Drehmomentgrenze
wird in 4-16 Momentengrenze motorisch bzw.
4-17 Momentengrenze generatorisch eingestellt, und die
Verzögerungszeit zwischen Drehmomentgrenzen-Warnung
und Abschaltung wird in 14-25 Drehmom.grenze Verzöge-
rungszeit definiert.
Stromgrenze
Die Stromgrenze bestimmen Sie in 4-18 Stromgrenze, die
Verzögerung zwischen Stromgrenzenwarnung und
Abschaltung wird in 14-24 Stromgrenze Verzögerungszeit
festgelegt.
Drehzahlgrenze
Min. Drehzahlgrenze: 4-11 Min. Drehzahl [UPM] oder
4-12 Min. Frequenz [Hz] begrenzt den Betriebsdrehzahl-
bereich, beispielsweise zwischen 30 und 50/60 Hz.
Max. Drehzahlgrenze: (4-13 Max. Drehzahl [UPM] oder
4-19 Max. Ausgangsfrequenz begrenzt die max. Ausgangsdrehzahl, die der Frequenzumrichter liefern kann.
ETR
Bei ETR handelt es sich um eine elektronische Funktion, die
anhand interner Messungen ein Bimetallrelais simuliert. Die
Kennlinie wird in Abbildung 4.1 gezeigt.
Motorspannung Grenze
Der Wechselrichter wird nach Erreichen eines bestimmten
fest programmierten Spannungsniveaus abgeschaltet, um
die Transistoren und die Zwischenkreiskondensatoren zu
schützen.
Übertemperatur
Der Frequenzumrichter verfügt über integrierte Temperatursensoren und reagiert aufgrund von fest
programmierten Grenzen sofort auf kritische Werte.
Blockierter Rotorschutz
4.1.7
Es kann zu Situationen kommen, wenn der Rotor aufgrund
von übermäßiger Last oder aufgrund anderer Faktoren
blockiert ist (Lager oder Anwendung führt zu einer
Situation mit blockiertem Rotor). Dies führt zu einem
Überhitzen der Motorwicklung (die ungehinderte
Bewegung des Rotors ist für eine ordnungsgemäß Kühlung
erforderlich). Der Frequenzumrichter kann den blockierten
Rotor per PM Flux-Regelung ohne Rückführung und PM
VVC+-Regelung (30-22 Locked Rotor Protection) erkennen.
Automatische Leistungsreduzierung
4.1.8
Der Frequenzumrichter prüft beständig, ob die folgenden
Parameter ein kritisches Niveau aufweisen:
Kritisch hohe Temperatur an Steuerkarte oder
•
Kühlkörper
Hohe Motorbelastung
•
Hohe DC-Zwischenkreisspannung
•
Niedrige Motordrehzahl
•
Als Reaktion auf einen kritischen Wert passt der Frequenzumrichter die Taktfrequenz an. Bei kritisch hohen internen
Temperaturen und niedriger Motordrehzahl kann der
Frequenzumrichter ebenfalls den PWM-Schaltmodus auf
SFAVM setzen.
4 4
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 39

Produktfunktionen
Projektierungshandbuch
HINWEIS
Die automatische Leistungsreduzierung erfolgt anders,
wenn 14-55 Ausgangsfilter auf [2] Sinusfilter
programmiert ist.
4.1.9 Automatische Energieoptimierung
Die Automatische Energieoptimierung (AEO) gibt dem
44
Frequenzumrichter vor, die Motorlast kontinuierlich zu
überwachen und die Ausgangsspannung für eine maximale
Effizienz anzupassen. Bei geringer Last wird die Spannung
reduziert, und der Motorstrom wird minimiert. Dies bietet
die Vorteile einer erhöhten Effizienz, einer geringeren
Erwärmung und eines ruhigeren Betriebs des Motors. Sie
müssen keine V/Hz-Kurve wählen, da der Frequenzumrichter die Motorspannung automatisch anpasst.
4.1.10
Automatische
Taktfrequenzmodulation
Der Frequenzumrichter erzeugt kurze elektrische Impulse
zur Bildung einer AC-Sinuskurve. Die Trägerfrequenz ist die
Rate dieser Impulse. Eine niedrige Trägerfrequenz
(langsame Pulsrate) führt zu Störgeräuschen im Motor,
weshalb vorzugsweise eine höhere Trägerfrequenz
verwendet werden sollte. Eine hohe Trägerfrequenz
erzeugt jedoch wiederum Wärme im Frequenzumrichter
wodurch die verfügbare Strommenge zum Motor begrenzt
werden kann. Durch die Verwendung von Bipolartransistoren mit isolierter Gate-Elektrode (Insulated Gate Bipolar Transistors, IGBT) wird ein sehr schnelles Schalten
ermöglicht.
4.1.12
Der Frequenzumrichter hält Netzschwankungen wie
Transienten, vorübergehenden Ausfällen, Spannungsabfällen und Stoßspannungen stand. Der Frequenzumrichter
kompensiert Schwankungen in der Eingangsspannung von
±10 % der Nennspannung automatisch, um die volle
Motornennspannung und den vollen Drehmoment bereitstellen zu können. Wenn Sie den automatischen
Wiederanlauf ausgewählt haben, läuft der Frequenzumrichter nach einer Überspannungsabschaltung automatisch
wieder an. Und bei aktivierter Motorfangschaltung
synchronisiert der Frequenzumrichter vor dem Start die
Motordrehung.
4.1.13
Hochfrequente Motorresonanzgeräusche können durch die
Nutzung der Resonanzdämpfung unterbunden werden.
Hierbei steht Ihnen die automatische oder manuelle
Frequenzdämpfung zur Auswahl.
4.1.14
Die internen Kühllüfter werden durch Sensoren im
Frequenzumrichter temperaturgeregelt. Der Kühllüfter läuft
im Betrieb bei niedriger Last, im Energiesparmodus oder
Standby häufig nicht. Dadurch wird der Geräuschpegel
gesenkt, die Effizienz erhöht und die Nutzungsdauer des
Lüfters verlängert.
4.1.15
Spannungsschwankungen
Resonanzdämpfung
Temperaturgeregelte Lüfter
EMV-Konformität
Die automatische Schaltfrequenzmodulation regelt diese
Zustände automatisch, damit ohne Überhitzen des
Frequenzumrichters die höchste Trägerfrequenz zur
Verfügung steht. Durch die Lieferung einer geregelten
hohen Trägerfrequenz werden die Betriebsgeräusche des
Motors bei niedrigen Drehzahlen leiser, wenn eine
Geräuschregelung wichtig ist, und eine volle Ausgangsleistung des Motors ist bei Bedarf möglich.
4.1.11
Automatische Leistungsreduzierung
bei hoher Trägerfrequenz
Der Frequenzumrichter ist für den Dauerbetrieb bei Volllast
bei Trägerfrequenzen zwischen 3,0 und 4,5 kHz ausgelegt.
Durch eine Trägerfrequenz, die höher als 4,5 kHz liegt, wird
eine erhöhte Wärmestrahlung im Frequenzumrichter
erzeugt, sodass der Ausgangsstrom reduziert werden muss.
Der Frequenzumrichter umfasst eine automatische
Funktion zur lastabhängigen Trägerfrequenzregelung. Mit
dieser Funktion kann der Motor von einer der zulässigen
Last entsprechend hohen Trägerfrequenz profitieren.
Elektromagnetische Störungen (EMI) oder Funkfrequenzstörungen (EMV, bei Funkfrequenzen) sind Interferenzen, die
einen Stromkreis durch elektromagnetische Induktion oder
Strahlung von einer externen Quelle beeinträchtigen. Der
Frequenzumrichter ist so konzipiert, dass er die Anforderungen der EMV-Produktnorm für Frequenzumrichter, IEC
61800-3, sowie die Europäische Norm EN 55011, erfüllt.
Damit der Frequenzumrichter die Emissionswerte der Norm
EN 55011 einhält, müssen Sie das Motorkabel abschirmen
und ordnungsgemäß abschließen. Weitere Informationen
zur EMV-Leistung finden Sie unter Kapitel 5.2.1 EMV-Prüfer-
gebnisse.
4.1.16
Galvanische Trennung der
Steuerklemmen
Alle Steuerklemmen und Ausgangsrelaisklemmen sind
galvanisch von der Netzversorgung getrennt. So ist der
Reglerkreis vollständig vor dem Eingangsstrom geschützt.
Die Ausgangsrelaisklemmen müssen separat geerdet
werden. Diese Isolierung entspricht den strengen Anforderungen der PELV (Protective Extra Low Voltage)-Richtlinie.
40 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2.000
500
200
400
300
1.000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Produktfunktionen
Projektierungshandbuch
Die Komponenten, aus denen die galvanische Trennung
besteht, umfassen
Stromversorgung, einschließlich Signaltrennung
•
Gatedriver zur Ansteuerung der IGBTs, Triggert-
•
ransformatoren und Optokoppler
Die Ausgangsstrom-Halleffektwandler
•
4.2 Kundenspezifische
Anwendungsfunktionen
Hierbei handelt es sich um die gängigsten Funktionen, die
Sie zur Verbesserung der Systemleistung in den Frequenzumrichter einprogrammieren können. Sie erfordern einen
Die ETR-Funktion berechnet die Motortemperatur, indem
es den Strom, die Frequenz und die Betriebszeit misst. Der
Frequenzumrichter zeigt die thermische Belastung am
Motor in Prozent an und kann bei einem programmierbaren Überlast-Sollwert eine Warnung ausgeben.
Durch die programmierbaren Optionen bei einer Überlast
kann der Frequenzumrichter den Motor stoppen, die
Ausgangsleistung reduzieren oder den Zustand ignorieren.
Sogar bei niedrigen Drehzahlen erfüllt der Frequenzumrichter die Normen der I2t Klasse 20 für elektronische
Motorüberlastung.
mittels des integrierten elektronischen Thermo-
•
relais (ETR).
minimalen Programmierungs- oder Einrichtungsaufwand.
Durch ein Verständnis der Verfügbarkeit dieser Funktionen
kann die Systemauslegung optimiert und möglicherweise
die Integration von redundanten Bauteilen oder
Funktionen vermieden werden. Anweisungen zur
Aktivierung dieser Funktionen finden Sie im produktspezifischen Programmierhandbuch.
Automatische Motoranpassung
4.2.1
Die automatische Motoranpassung (AMA) ist ein automatisierter Testalgorithmus zur Messung der elektrischen
Motorparameter. Die AMA stellt ein genaues elektronisches
Modell des Motors bereit. Mit dieser Funktion kann der
Frequenzumrichter die Abstimmung mit dem Motor für
optimale Leistung und Effizienz berechnen. Indem Sie das
AMA-Verfahren durchführen, wird außerdem die Energieoptimierungsfunktion des Frequenzumrichters verbessert.
Abbildung 4.1 ETR-Eigenschaften
Die AMA wird bei Motorstillstand und ohne die Last vom
Motor abzukoppeln durchgeführt.
Thermischer Motorschutz
4.2.2
Die X-Achse zeigt das Verhältnis zwischen Motorstrom
(I
) und Motornennstrom (I
motor
motor, nom
). Die Y-Achse zeigt
die Zeit in Sekunden, bevor ETR eingreift und den
Frequenzumrichter abschaltet. Die Kurven zeigen das
Für die Bereitstellung des thermischen Motorschutzes gibt
es drei Möglichkeiten:
Verhalten der Nenndrehzahl bei Nenndrehzahl x 2 und
Nenndrehzahl x 0,2.
Bei geringerer Drehzahl schaltet das ETR aufgrund einer
Über die Temperaturerfassung in folgenden
•
Bauteilen
mittels PTC- oder KTY-Sensor in den mit
-
einem der Analog- oder Digitaleingänge
verbundenen Motorwicklungen
mittels PT100 oder PT1000 in den mit
-
der Sensoreingangskarte MCB 114
verbundenen Motorwicklungen und
Motorlagern
mittels PTC-Thermistoreingang an der
-
PTC-Thermistorkarte MCB 112 (mit ATEX-
geringeren Kühlung des Motors schon bei geringerer
Wärmeentwicklung ab. So wird der Motor auch in
niedrigen Drehzahlbereichen vor Überhitzung geschützt.
Die Funktion ETR berechnet die aktuelle Motortemperatur
laufend auf Basis des aktuellen Motorstroms und der
aktuellen Motordrehzahl. Die berechnete Motortemperatur
kann in 16-18 Therm. Motorschutz abgelesen werden.
Für Ex-e-Motoren in ATEX-Bereichen ist auch eine spezielle
Ausführung des ETR verfügbar. Mit dieser Funktion können
Sie eine spezifische Kurve zum Schutz des Ex-e-Motors
eingeben. Im Programmierhandbuch wird der Anwender
durch die Einrichtung geführt.
Zulassung)
mittels des mechanischen Thermoschalters
•
(Klixon-Schalter) an einem Digitaleingang
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 41
4 4

Produktfunktionen
Projektierungshandbuch
4.2.3 Netzausfall
Während eines Netzausfalls läuft der Frequenzumrichter
weiter, bis die Spannung des Zwischenkreises unter den
minimalen Stopppegel abfällt – normalerweise 15 % unter
der niedrigsten Versorgungsnennspannung des Frequenzumrichters. Die Höhe der Netzspannung vor dem Ausfall
und die aktuelle Motorbelastung bestimmen, wie lange der
Frequenzumrichter im Freilauf ausläuft.
44
In (14-10 Netzausfall-Funktion) können Sie für den Frequenzumrichter unterschiedliche Verhaltensweisen für
Netzausfälle konfigurieren, dazu gehören:
Abschaltblockierung, sobald die Leistung des DC-
•
Zwischenkreises verbraucht ist
Motorfreilauf mit Motorfanschaltung, sobald die
•
Netzversorgung zurückkehrt (1-73 Motorfangschaltung)
Kinetisches Back-Up
•
Ger. Ram.-Ab
•
Motorfangschaltung
Mit dieser Funktion kann der Frequenzumrichter einen
Motor, der aufgrund eines Netzausfalls unkontrolliert läuft,
„fangen“. Diese Option ist vor allem für Zentrifugen und
Lüfter relevant.
Kinetisches Back-Up
Mit dieser Funktion wird sichergestellt, dass der Frequenzumrichter so lange weiterläuft, wie Energie im System
vorhanden ist. Bei kurzen Netzausfällen wird der Betrieb
wiederhergestellt, sobald das Netz zurückkehrt, ohne dabei
die Anwendung anzuhalten oder die Kontrolle zu verlieren.
Sie können mehrere Varianten des kinetischen Speichers
auswählen.
Das Verhalten des Frequenzumrichters bei einem
Netzausfall können Sie in 14-10 Netzausfall-Funktion und
1-73 Motorfangschaltung konfigurieren.
Integrierter PID-Regler
4.2.4
Ihnen steht der integrierte, proportionale, differentiale PIDRegler zur Verfügung, sodass die Notwendigkeit
zusätzlicher Steuergeräte entfällt. Der PID-Regler sorgt für
eine konstante Steuerung von Systemen mit Rückführung,
bei denen eine Regelung von Druck, Durchfluss,
Temperatur oder einer anderen Systemanforderung
aufrecht erhalten werden muss. Der Frequenzumrichter
stellt eine eigenständige Steuerung der Motordrehzahl als
Reaktion auf die Istwertsignale von Fernsensoren bereit.
Steuerungsmaßnahmen, indem er die beiden Signale zur
Optimierung der Systemleistung vergleicht.
4.2.5 Automatischer Wiederanlauf
Sie können den Frequenzumrichter so programmieren,
dass er den Motor nach einer nicht schwerwiegenden
Abschaltung, wie einem vorübergehenden Leistungsverlust
oder einer Schwankung, neu startet. Durch diese Funktion
entfällt die Notwendigkeit eines manuellen Resets und der
automatisierte Betrieb für ferngesteuerte Systeme wird
verbessert. Die Anzahl der Neustartversuche und die Dauer
zwischen den Versuchen kann begrenzt sein.
Motorfangschaltung
4.2.6
Die Motorfangschaltung ermöglicht dem Frequenzumrichter die Synchronisierung mit einem drehenden Motor
bis zur vollen Drehzahl. Die Synchronisierung ist
unabhängig von der Laufrichtung des Motors möglich.
Hierdurch können Sie Abschaltungen aufgrund einer
Überstromaufnahme verhindern. Mechanische Belastungen
der Anlage werden minimiert, da beim Start des Frequenzumrichters keine abrupte Änderung der Motordrehzahl
erfolgt.
Volles Drehmoment bei gesenkter
4.2.7
Drehzahl
Der Frequenzumrichter folgt einer variablen V/Hz-Kurve,
damit das volle Motordrehmoment sogar bei gesenkten
Drehzahlen vorhanden ist. Das volle Ausgangsmoment
kann mit der maximalen ausgelegten Betriebsdrehzahl des
Motors übereinstimmen. Dies ist bei Umrichtern mit
variablem Drehmoment nicht der Fall, die bei niedriger
Drehzahl ein reduziertes Motordrehmoment liefern. Auch
unterscheidet sich dies von Umrichtern mit konstantem
Drehmoment, die unterhalb der vollen Drehzahl
übermäßige Spannung, Wärme und Motorgeräusche
verursachen.
Frequenzausblendung
4.2.8
In bestimmten Anwendungen kann die Anlage Betriebsdrehzahlen aufweisen, die eine mechanische Resonanz
erzeugen. Dies kann zu übermäßiger Geräuschentwicklung
führen und mechanische Komponenten in der Anlage
beschädigen. Der Frequenzumrichter verfügt über 4
programmierbare Ausblendfrequenzbandbreiten. Anhand
dieser kann der Motor Drehzahlen überspringen, die
Resonanzen in der Anlage verursachen.
Der Frequenzumrichter kann zwei Istwertsignale von zwei
verschiedenen Geräten verarbeiten. Mit dieser Funktion
können Sie ein System mit unterschiedlichen IstwertAnforderungen steuern. Der Frequenzumrichter ergreift
42 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Produktfunktionen Projektierungshandbuch
4.2.9 Motor-Vorheizung
Zum Vorheizen eines Motors in kalten oder feuchten
Umgebungen kann ein kleiner, kontinuierlicher Gleichstrom
am Motor angelegt werden, um diesen vor Kondensation
und einem Kaltstart zu schützen. Diese Methode macht
den Einsatz eines Heizgeräts überflüssig.
4.2.10 4 programmierbare Parametersätze
Der Frequenzumrichter verfügt über 4 voneinander
unabhängig programmierbare Parametersätze. Über
Externe Anwahl können Sie über Digitaleingänge oder die
serielle Kommunikation zwischen mehreren unabhängig
programmierten Funktionen umschalten. Es werden
unabhängige Konfigurationen verwendet, zum Beispiel zur
Änderung von Sollwerten, für einen Tages-/Nachtbetrieb
bzw. einen Sommer-/Winterbetrieb oder zur Steuerung
mehrerer Motoren. Der aktive Parametersatz wird am LCP
angezeigt.
Sie können Konfigurationsdaten zwischen Frequenzumrichtern kopieren, indem Sie die Informationen vom
abnehmbaren LCP herunterladen.
4.2.11
Dynamische Bremse durch:
Dynamische Bremse
Bremswiderstand
•
Ein Brems-IGBT leitet die Bremsenergie vom
Motor an den angeschlossenen Bremswiderstand
(2-10 Bremsfunktion = [1]) und verhindert so, dass
die Überspannung einen bestimmten Grenzwert
überschreitet.
AC-Bremse
•
Durch Ändern der Verlustbedingungen im Motor
wird die Bremsenergie im Motor verteilt. Sie
dürfen die AC-Bremsfunktion nicht in
Anwendungen mit einer hohen Ein-/Ausschaltfrequenz verwenden, da dies zu einer
Überhitzung des Motors führen würde
(2-10 Bremsfunktion = [2]).
DC-Bremse
•
Ein übermodulierter Gleichstrom verstärkt den
Wechselstrom und funktioniert als Wirbelstrombremse (2-02 DC-Bremszeit ≠ 0 s).
4.2.12 Mechanische Bremssteuerung ohne
Rückführung
Parameter zum Steuern des Betriebs eines elektromagnetischen (mechanischen) Bremse, wie sie in der Regel für
Hubanwendungen benötigt wird.
Zum Steuern einer mechanische Bremse ist ein Relaisausgang (Relais 01 oder Relais 02) oder ein programmierter
Digitalausgang (Klemme 27 oder 29) erforderlich. In
Situationen, in denen der Frequenzumrichter nicht in der
Lage ist, den Motor „anzuhalten“ (z. B. aufgrund einer
übermäßigen Last), muss dieser Ausgang in der Regel
geschlossen sein. Wählen Sie für Anwendungen mit einer
elektromagnetischen Bremse unter 5-40 Relaisfunktion,
5-30 Klemme 27 Digitalausgang oder 5-31 Klemme 29
Digitalausgang die Option [32] Mechanische Bremse aus. Bei
Auswahl von [32] Mechanische Bremse ist die mechanische
Bremse beim Anlaufen geschlossen, bis der Ausgangsstrom
über dem unter 2-20 Bremse öffnen bei Motorstrom
ausgewählten Niveau liegt. Beim Stoppen wird die
mechanische Bremse aktiviert, wenn die Drehzahl unter
das unter 2-21 Bremse schliessen bei Motordrehzahl
festgelegte Niveau fällt. Tritt am Frequenzumrichter ein
Alarmzustand, ein Überstrom oder eine Überspannung auf,
so wird die mechanische Bremse sofort geschlossen. Dies
gilt auch bei der Funktion Safe Torque Off (Sicher
abgeschaltetes Moment).
HINWEIS
Die Schutzmodus- und Abschaltverzögerungsfunktionen
(14-25 Drehmom.grenze Verzögerungszeit und 14-26 WR-
Fehler Abschaltverzögerung) können die Aktivierung der
mechanischen Bremse in einem Alarmzustand
möglicherweise verzögern. Bei Hubanwendungen
müssen diese Funktionen daher deaktiviert werden.
4 4
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 43

Produktfunktionen Projektierungshandbuch
44
Abbildung 4.2 Mechanische Bremse
4.2.13
Mechanische Bremssteuerung mit
Rückführung/Mechanische Bremse
bei Hubanwendungen
Die Regelung der mechanischen Bremse in Hub- und
Vertikalförderanwendungen unterstützt die folgenden
Funktionen:
2 Kanäle für den Istwert der mechanischen
•
Bremse für einen zusätzlichen Schutz gegen
unerwartetes Verhalten aufgrund eines
Kabelbruchs.
Überwachung der Rückführung der mechanischen
•
Bremse über den gesamten Zyklus. Hiermit kann
die mechanische Bremse geschützt werden insbesondere, wenn mehrere Frequenzumrichter
mit derselben Welle verbunden sind.
Keine Rampe Auf, bis die Rückführung bestätigt,
•
dass die mechanische Bremse geöffnet ist.
Verbesserte Lastregelung beim Stopp. Wenn
•
2-23 Mech. Bremse Verzögerungszeit zu kurz
eingestellt ist, wird W22 aktiviert, und eine
Rampe Ab des Drehmoments ist nicht zulässig.
Sie können den Übergang bei der Übertragung
•
der Last von der Bremse an den Motor konfigurieren. Zur Minimierung der Bewegung können
Sie 2-28 Verstärkungsfaktor erhöhen. Ändern Sie
für einen reibungslosen Übergang während des
Vorgangs die Einstellung von Drehzahlregelung
zu Positionsregelung.
Stellen Sie 2-28 Verstärkungsfaktor auf 0
•
ein, um die Positionssteuerung während
2-25 Bremse lüften Zeit zu aktivieren.
Hierdurch aktivieren Sie die PIDParameter 2-30 Position P Start
Proportional Gain bis 2-33 Speed PID Start
Lowpass Filter Time für die Positions-
steuerung.
44 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Mech.Bremse
Relais
Drehmoment-Sollw.
Motor-drehzahl
Vormagnetis. Drehmomen-
trampenzeit
P. 2-27
Drehmomentsollw. 2-26
Verstärkungsfaktor
P. 2-28
Bremsfreigabezeit
P. 2-25
Rampe 1 Auf
P. 3-41
Rampe 1 Ab
P. 3-42
Stoppverzögerung
P. 2-24
Bremsverzögerung
aktivieren
P. 2-23
1 2 3
130BA642.12
II
B
. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Produktfunktionen Projektierungshandbuch
4 4
Abbildung 4.3 Lüften der Bremse für mechanische Bremssteuerung für Hubanwendungen Diese Bremsansteuerung ist nur bei FLUX
mit Motor-Istwert für Asynchron- und Vollpol-PM-Motoren verfügbar.
2-26 Drehmomentsollw.
bis 2-33 Speed PID Start Lowpass
Filter Time sind nur für die mechanische Bremssteuerung
bei Hubanwendungen (FLUX mit Motor-Istwert) verfügbar.
Sie können 2-30 Position P Start Proportional Gain bis
Die Bedingung für ein Ereignis kann ein bestimmter Status
sein oder wenn der Ausgang einer Logikregel oder eines
Vergleicher-Funktion WAHR wird. Dies führt zu einer
zugehörigen Aktion, wie in Abbildung 4.4 gezeigt.
2-33 Speed PID Start Lowpass Filter Time für einen sehr
sanften Übergang von der Drehzahlregelung zur Positionssteuerung während 2-25 Bremse lüften Zeit - der Zeitraum,
in der die Last von der mechanischen Bremse an den
Frequenzumrichter übertragen wird.
2-30 Position P Start Proportional Gain bis 2-33 Speed PID
Start Lowpass Filter Time sind aktiviert, wenn 2-28 Verstärkungsfaktor auf 0 eingestellt ist. Siehe Abbildung 4.3 für
weitere Informationen.
HINWEIS
Ein Beispiel der erweiterten mechanischen
Bremssteuerung für Hub- und Vertikalförderanwendungen finden Sie unter Kapitel 10 Anwendungsbeispiele.
4.2.14 Smart Logic Control (SLC)
Smart Logic Control (SLC) ist eine Folge benutzerdefinierter
Aktionen (siehe 13-52 SL-Controller Aktion [x]), die
ausgeführt werden, wenn das zugehörige benutzerdefinierte Ereignis (siehe 13-51 SL-Controller Ereignis [x]) durch
den SLC als WAHR ermittelt wird.
Abbildung 4.4 SCL-Ereignis und Aktion
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 45

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
130BB890.14
P1 P2 P3
Produktfunktionen
Projektierungshandbuch
Ereignisse und Aktionen sind jeweils nummeriert und
paarweise verknüpft (Zustände). Wenn also Ereignis [0]
verknüpfen. Das Ergebnis (WAHR/FALSCH) kann z. B. von
einem Digitalausgang verwendet werden.
erfüllt ist (d. h. WAHR ist), wird die Aktion [0] ausgeführt.
Danach werden die Bedingungen von Ereignis [1]
ausgewertet, und wenn WAHR, wird Aktion [1] ausgeführt
usw. Es wird jeweils nur ein Ereignis ausgewertet. Ist das
Ereignis FALSCH, wird während des aktuellen Abtastintervalls keine Aktion (im SLC) ausgeführt und es werden
keine anderen Ereignisse ausgewertet. Dies bedeutet, dass
44
der SLC, wenn er startet, Ereignis [0] (und nur Ereignis [0])
in jedem Abtastintervall auswertet. Nur wenn Ereignis [0]
Abbildung 4.7 Logikregeln
als WAHR bewertet wird, führt der SLC Aktion [0] aus und
beginnt, Ereignis [1] auszuwerten. Sie können 1 bis 20
Ereignisse und Aktionen programmieren.
Wenn das letzte Ereignis/die letzte Aktion durchgeführt
wurde, startet die Sequenz ausgehend von Ereignis [0]/
Aktion [0] erneut. Abbildung 4.5 zeigt ein Beispiel mit 4
Ereignissen/Aktionen:
4.2.15 Safe Torque Off
Informationen zur Funktion „Sicher abgeschaltetes
Moment“ (Safe Torque Off, STO) finden Sie im Produk-
thandbuch VLT® Frequenzumrichter – Sicher abgeschaltetes
Moment.
4.3
Danfoss VLT® FlexConcept
®
Danfoss VLT® FlexConcept® ist eine flexible, energie- und
kosteneffiziente Frequenzumrichterlösung, die
hauptsächlich für Förderbänder entwickelt wurde. Das
Konzept umfasst den VLT® OneGearDrive®, angetrieben
vom VLT® AutomationDrive FC 302 oder VLT® Dezentralen
Antrieb FCD 302.
OneGearDrive ist im Wesentlichen ein PermanentmagnetMotor mit Kegelradgetriebe. Das Kegelradgetriebe ist mit
verschiedenen Getriebeübersetzungen erhältlich.
Abbildung 4.5 Ausführungsreihenfolge bei einer Programmierung von 4 Ereignissen/Aktionen
Vergleicher
Vergleicher dienen zum Vergleichen von stetigen Variablen
(z. B. Ausgangsfrequenz, Ausgangsstrom, Analogeingang
usw.) mit voreingestellten Festwerten.
Abbildung 4.8 OneGearDrive
Der OneGearDrive kann je nach den Anforderungen der
jeweiligen Anwendung von einem VLT® AutomationDrive
FC 302 und VLT® Dezentralen Antrieb FCD 302 in den
Abbildung 4.6 Vergleicher
Logikregeln
Parameter zur freien Definition von binären Verknüpfungen
(bool´sch). Es ist möglich, 3 bool'sche Zustände in einer
Logikregel über UND, ODER, NICHT miteinander zu
46 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
folgenden Leistungsgrößen angetrieben werden:
0,75 kW
•
1,1 kW
•
1,5 kW
•
2,2 kW
•
3,0 kW
•

Produktfunktionen
Wenn Sie [1] PM (Oberfl. mon.) in für FC 302 oder FCD 302
ausgewählt haben, können Sie den OneGearDrive in
1-11 Motorhersteller auswählen, und die empfohlenen
Parameter werden automatisch festgelegt.
Projektierungshandbuch
Weitere Informationen finden Sie im VLT
FC 301/FC 302 Programmierhandbuch, in der VLT
OneGearDrive Auswahlanleitung und www.danfoss.com/
BusinessAreas/DrivesSolutions/VLTFlexConcept/
®
AutomationDrive
®
4 4
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 47

Systemintegration
5 Systemintegration
5.1 Betriebsbedingungen
Projektierungshandbuch
5.1.3
Temperatur und Kühlung
5.1.1 Luftfeuchtigkeit
Obwohl der Frequenzumrichter bei hoher Feuchtigkeit (bis
95 % relativer Feuchte) ordnungsgemäß betrieben werden
kann, müssen Sie Kondensation möglichst vermeiden.
Insbesondere besteht die Gefahr von Kondensation, wenn
55
der Frequenzumrichter kälter als feuchte Umgebungsluft
ist. Luftfeuchtigkeit kann auch an den elektronischen
Komponenten kondensieren und Kurzschlüsse verursachen.
Kondensation tritt an stromlosen Geräten auf. Wenn
aufgrund der Umgebungsbedingungen Kondensation
möglich ist, wird die Installation einer Schaltschrankheizung empfohlen. Vermeiden Sie eine Installation in
Bereichen, in denen Frost auftritt.
Alternativ kann die Gefahr von Kondensation durch den
Standby-Betrieb des Frequenzumrichters (Gerät am Netz
angeschlossen) reduziert werden. Stellen Sie jedoch sicher,
dass der Leistungsverlust ausreichend ist, damit die
Frequenzumrichterschaltung frei von Feuchtigkeit bleibt.
Temperatur
5.1.2
Für alle Frequenzumrichter sind Ober- und Untergrenzen
für die Umgebungstemperatur festgelegt. Durch die
Vermeidung extremer Umgebungstemperaturen wird die
Lebensdauer der Betriebsmittel verlängert und die
allgemeine Anlagenzuverlässigkeit optimiert. Befolgen Sie
die Empfehlungen für die maximale Leistung und die
Langlebigkeit der Geräte.
Obwohl Umrichter bei Temperaturen bis -10 °C
•
betrieben werden können, ist ein ordnungsgemäßer Betrieb bei Nennlast erst bei
Temperaturen ab 0 ° oder höher garantiert.
Überschreiten Sie nicht die Temperatur-Höchst-
•
grenze.
Die Lebensdauer der elektronischen
•
Komponenten reduziert sich je 10 °C im Betrieb
über der Auslegungstemperatur um 50 %.
Auch Geräte der Schutzarten IP54, IP55 oder IP66
•
müssen den festgelegten Umgebungstemperaturbereichen entsprechen.
Eine zusätzliche Klimatisierung des Schaltschranks
•
oder des Installationsorts ist ggf. notwendig.
Die Frequenzumrichter verfügen über integrierte Lüfter für
eine optimale Kühlung. Der Hauptlüfter führt den
Luftstrom an den Kühlrippen des Kühlkörpers entlang und
gewährleistet so eine Kühlung der Innenluft. Bei einigen
Leistungsgrößen befindet sich ein kleiner Sekundärlüfter in
der Nähe der Steuerkarte, damit die Innenluft zur
Vermeidung lokaler Überhitzung zirkuliert wird. Der
Hauptlüfter wird durch die Innentemperatur des Frequenzumrichters geregelt, und die Drehzahl erhöht sich
zusammen mit der Temperatur schrittweise, wodurch die
Geräusche und der Energieverbrauch bei geringem Bedarf
reduziert werden können. Zudem wird hierdurch bei
Bedarf eine maximale Kühlung gewährleistet. Sie können
die Lüftersteuerung über 14-52 Lüftersteuerung an jede
beliebige Anwendung anpassen, auch zum Schutz vor
negativen Effekten der Kühlung bei sehr kaltem Klima. Bei
einer Übertemperatur im Frequenzumrichter werden
Schaltfrequenz und Schaltmuster reduziert, siehe
Kapitel 5.1.4 Manuelle Leistungsreduzierung für weitere
Informationen.
Für alle Frequenzumrichter sind Ober- und Untergrenzen
für die Umgebungstemperatur festgelegt. Durch die
Vermeidung extremer Umgebungstemperaturen kann die
Lebensdauer der Geräte verlängert und die GesamtSystemzuverlässigkeit maximiert werden. Befolgen Sie die
Empfehlungen für die maximale Leistung und die Langlebigkeit der Geräte.
Frequenzumrichter können zwar bei
•
Temperaturen bis -10 °C eingesetzt werden,
jedoch ist ein einwandfreier Betrieb bei Nennlast
nur bei Temperaturen von 0 °C und höher
gewährleistet.
Überschreiten Sie nicht die Temperatur-Höchst-
•
grenze.
Überschreiten Sie nicht die maximale Tages-
•
Durchschnittstemperatur.
(Die Tages-Durchschnittstemperatur ist die max.
Umgebungstemperatur minus 5 °C.
Beispiel: die max. Temperatur beträgt 50 °C, die
maximale Tages-Durchschnittstemperatur beträgt
45 °C).
Beachten Sie die erforderlichen Mindestabstände
•
ober- und unterhalb des Geräts
(Kapitel 8.2.1.1 Abstand).
Grundsätzlich gilt, dass sich die Lebensdauer der
•
elektronischen Komponenten je 10 °C
48 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Max.I
out
(%)
at T
AMB, MAX
D, E and F enclosures
Altitude (km)
HO
NO
T
at 100% I
out
100%
96%
92%
0 K
-3 K
-6 K
1 km 2 km 3 km
-5 K
-8 K
-11 K
130BC015.10
AMB, MAX
Systemintegration Projektierungshandbuch
Überschreitung der Auslegungstemperatur im
Betrieb um 50 % reduziert.
Selbst bei Geräten mit hohen Schutzklassen
•
müssen Sie die angegebenen Umgebungstemperaturbereiche einhalten.
Eine zusätzliche Klimatisierung des Schaltschranks
•
oder des Installationsorts ist ggf. notwendig.
5.1.4 Manuelle Leistungsreduzierung
Ziehen Sie eine Leistungsreduzierung in Betracht, wenn
eine der folgenden Bedingungen vorhanden ist.
Betrieb über 1000 m (niedriger Luftdruck)
•
Betrieb mit niedriger Drehzahl
•
Lange Motorkabel
•
Kabel mit großem Querschnitt
•
Hohe Umgebungstemperatur
•
Weitere Informationen finden Sie unter
Kapitel 6.2.6 Leistungsreduzierung wegen erhöhter
Umgebungstemperatur.
5.1.4.1
Leistungsreduzierung beim Betrieb
mit niedriger Drehzahl
5.1.4.2
Leistungsreduzierung wegen
niedrigem Luftdruck
Bei niedrigerem Luftdruck nimmt die Kühlfähigkeit der Luft
ab.
Unterhalb einer Höhe von 1000 m über NN ist keine
Leistungsreduzierung erforderlich. Oberhalb einer Höhe
von 1000 m muss die Umgebungstemperatur (T
der max. Ausgangsstrom (I
) entsprechend Abbildung 5.1
out
reduziert werden.
Abbildung 5.1 Höhenabhängige Ausgangsstromreduzierung
bei T
2 km ziehen Sie bitte Danfoss zu PELV (Schutzkleinspannung)
zurate.
bei den Baugrößen A, B und C. Bei Höhen über
AMB, MAX
AMB
) oder
5 5
Wenn ein Motor an den Frequenzumrichter angeschlossen
ist, muss für eine ausreichende Motorkühlung gesorgt sein.
Der Grad der Erwärmung hängt von der Last am Motor
sowie von der Betriebsdrehzahl und -dauer ab.
Anwendungen mit konstantem Drehmoment (CT-Modus)
In Anwendungen mit konstantem Drehmoment kann im
niedrigen Drehzahlbereich ein Problem auftreten. Bei
Anwendungen mit konstantem Drehmoment kann es bei
niedriger Drehzahl aufgrund einer geringeren Kühlleistung
des Motorlüfters zu einer Überhitzung des Motors
kommen.
Soll der Motor kontinuierlich mit weniger als der Hälfte der
Nenndrehzahl laufen, so müssen Sie dem Motor zusätzliche
Kühlluft zuführen (oder es ist ein für diese Betriebsart
geeigneter Motor zu verwenden).
Alternativ können Sie auch die relative Belastung des
Motors verringern, indem Sie einen größeren Motor
einsetzen. was jedoch durch die Leistungsgröße des
Frequenzumrichters eingeschränkt ist.
Anwendungen mit variablem (quadratischem)
Drehmoment (VT)
Bei Anwendungen mit variablem Drehmoment (z. B. Zentrifugalpumpen und Lüfter). bei denen das Drehmoment in
quadratischer und die Leistung in kubischer Beziehung zur
Drehzahl steht, ist keine zusätzliche Kühlung oder
Leistungsreduzierung des Motors erforderlich.
Eine Alternative ist die Reduzierung der Umgebungstemperatur bei großen Höhen und damit die Sicherstellung
von 100 % Ausgangsstrom bei großen Höhen. Zur
Veranschaulichung, wie sich die Grafik lesen lässt, wird die
Situation bei 2.000 m Höhe für die Bauform B mit T
= 50° C dargestellt. Bei einer Temperatur von 45 °C (T
- 3,3 K) sind 91 % des Nennausgangsstroms verfügbar.
MAX
AMB, MAX
AMB,
Bei einer Temperatur von 41,7 °C sind 100 % des Nennausgangsstroms verfügbar.
Abbildung 5.2 Höhenabhängige Ausgangsstromreduzierung
bei T
bei der Bauform D3h.
AMB, MAX
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 49

Systemintegration Projektierungshandbuch
5.1.6 Vibrationen und Erschütterungen
5.1.5 Störgeräusche
Der Frequenzumrichter wurde gemäß den Normen IEC
Störgeräusche von Frequenzumrichtern haben 3 Ursachen
68-2-6/34/35 und 36 geprüft. Im Rahmen dieser Prüfverfahren wird das Gerät im Bereich von 18 bis 1.000 Hz in 3
Zwischenkreisdrosseln
•
EMV-Filterdrossel
•
Interne Lüfter
•
Siehe Kapitel 6.2.9 Störgeräusche für Spezifikationen zu den
Störgeräuschen.
55
Aggressive Umgebungen
5.1.7
Richtungen für eine Dauer von 2 Stunden g-Kräften von
0,7 unterzogen. Alle Danfoss Frequenzumrichter erfüllen
die bei diesen Bedingungen gegebenen Anforderungen,
wenn das Gerät an der Wand oder auf dem Boden
montiert ist und der Schaltschrank, in dem das Gerät
montiert ist, an der Wand oder mit dem Boden
verschraubt ist.
5.1.7.1 Gase
Aggressive Gase wie Schwefelwasserstoff, Chlor oder Ammoniak können die elektrischen und mechanischen Komponenten
des Frequenzumrichters beschädigen. Eine Kontamination der Kühlluft kann zudem zu einer allmählichen Zersetzung von
Leiterbahnen auf Platinen sowie Türdichtungen führen. Aggressive Stoffe finden sich häufig in Kläranlagen oder Schwimmbecken. Ein eindeutiges Anzeichen für eine aggressive Atmosphäre ist korrodiertes Kupfer.
In aggressiven Atmosphären werden nur bestimmte Schutzarten sowie schutzbeschichtete Platinen empfohlen. Siehe
Tabelle 5.1 für Werte der Schutzbeschichtung.
HINWEIS
Der Frequenzumrichter ist standardmäßig mit Schutzbeschichtungen der Klasse 3C2 ausgestattet. Auf Anfrage sind auch
Beschichtungen der Klasse 3C3 erhältlich.
Klasse
Gasart Einheit
Meersalz k. A. Keine Salznebel Salznebel
Schwefeloxide
Schwefelwasserstoff
Chlor
Chlorwasserstoff
Fluorwasserstoff
Ammoniak
Ozon
Stickstoff
Tabelle 5.1 Spezifikationen der Schutzbeschichtungsklassen
Die Höchstwerte sind transiente Spitzenwerte, die maximal 30 Minuten pro Tag erreicht werden dürfen.
5.1.7.2
Staubbelastung
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
Häufig kann die Installation von Frequenzumrichtern in
Umgebungen mit hoher Staubbelastung nicht vermieden
werden. Staub beeinträchtigt wand- oder rahmenmontierte
Geräte mit der Schutzart IP55 oder IP66 sowie schrankmontierte Geräte der Schutzart IP21 oder IP20.
Berücksichtigen Sie die 3 nachstehend beschrieben
Aspekte, wenn Sie Frequenzumrichter in solchen
Umgebungen installieren.
3C1 3C2 3C3
Durchschnittswert Max. Wert Durchschnittswert Max. Wert
3
0,1 0,3 1,0 5,0 10
3
0,01 0,1 0,5 3,0 10
3
0,01 0,1 0,03 0,3 1,0
3
0,01 0,1 0,5 1,0 5,0
3
0,003 0,01 0,03 0,1 3,0
3
0,3 1,0 3,0 10 35
3
0,01 0,05 0,1 0,1 0,3
3
0,1 0,5 1,0 3,0 9,0
Reduzierte Kühlung
Staub führt zu Ablagerungen auf der Geräteoberfläche und
im Inneren des Geräts auf den Leiterkarten und den
elektronischen Komponenten. Diese Ablagerungen wirken
wie isolierende Schichten und hindern die Wärmeableitung
in die Umgebungsluft, wodurch die Kühlkapazität reduziert
wird. Die Komponenten erwärmen sich. Dies führt zu
einem schnelleren Verschleiß der elektronischen
Komponenten und die Lebensdauer des Geräts wird
reduziert. Staubablagerungen auf dem Kühlkörper an der
Rückseite des Geräts reduzieren ebenfalls die Lebensdauer
des Geräts.
50 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Systemintegration
Projektierungshandbuch
Kühllüfter
Die Luftzirkulation zur Kühlung des Geräts wird durch
Kühllüfter generiert, die sich in der Regel an der Rückseite
des Geräts befinden. Die Lüfterrotoren verfügen über
kleine Lager, in die Staub eindringen und abrasiv wirken
kann. Dies führt zu Beschädigungen der Lager und zu
einem Ausfall der Lüfter.
Filter
Frequenzumrichter mit hoher Leistung verfügen über
Kühllüfter, die heiße Luft aus dem Geräteinneren
ausstoßen. Ab einer bestimmten Größe verfügen diese
Lüfter über Filtermatten. Diese Filter können in stark
staubbelasteten Umgebungen schnell verstopfen. Unter
diesen Bedingungen sind vorbeugende Maßnahmen
erforderlich.
Regelmäßige Wartung
Unter den oben beschriebenen Bedingungen wird
empfohlen, dass Sie den Frequenzumrichter im Rahmen
der regelmäßigen Wartung reinigen. Beseitigen Sie
jeglichen Staub vom Kühlkörper und von den Lüftern und
reinigen Sie die Filtermatten.
5.1.7.3
Explosionsgefährdete Bereiche
kabelung und die Anschlussumgebung in
Übereinstimmung mit der Klassifizierung e ist. Die
nach dieser Klassifizierung bestehende
Beschränkung in der Anschlussumgebung bezieht
sich auf die zulässige Höchstspannung in diesem
Bereich. Die Ausgangsspannung eines Frequenzumrichters ist in der Regel auf die Netzspannung
begrenzt. Die Modulation der Ausgangsspannung
kann zu einer Erzeugung von laut Klassifizierung
e unzulässig hoher Spitzenspannungen führen. In
der Praxis hat sich die Verwendung eines
Sinusfilters am Frequenzumrichterausgang als
effektive Methode zur Dämpfung der hohen
Spitzenspannungen bewährt.
HINWEIS
Installieren Sie keine Frequenzumrichter in explosionsgefährdeten Bereichen. Installieren Sie den
Frequenzumrichter in einem Schaltschrank außerhalb
dieses Bereichs. Die Verwendung eines Sinusfilters am
Frequenzumrichterausgang zur Dämpfung des dU/dtSpannungsanstiegs und der Spitzenspannungen wird
ebenfalls empfohlen. Halten Sie die Motorleitungen so
kurz wie möglich.
5 5
In explosionsgefährdeten Bereichen betriebene Anlagen
müssen bestimmte Bedingungen erfüllen. Die EU-Richtlinie
94/9/EG beschreibt den Betrieb elektronischer Gerät in
explosionsgefährdeten Bereichen.
Die Temperatur von durch Frequenzumrichter geregelte
Motoren muss in explosionsgefährdeten Bereichen mithilfe
eines PTC-Temperatursensors überwacht werden. Motoren
der Zündschutzart d oder e sind für solche Umgebungen
zugelassen.
Die Zündschutzart e sieht die Vermeidung
•
jeglicher Funkenbildung vor. Der FC 302 mit der
Firmware-Version V6.3x oder höher ist mit einer
„ATEX ETR Temperaturüberwachung"-Funktion
zum Betrieb speziell zugelassener Ex-e-Motoren
ausgestattet. In Kombination mit einer ATEXzugelassenen PTC-Überwachungsvorrichtung wie
der PTC-Thermistorkarte MCB 112 ist für die
Installation keine separate Zulassung einer
approbierten Organisation erforderlich, d. h. es
müssen keine aufeinander abgestimmten Vorrichtungen verwendet werden.
Die Zündschutzart e sieht vor, dass eine etwaige
•
Funkenbildung ausschließlich in einem
geschützten Bereich stattfindet. Hier ist keine
Zulassung erforderlich, jedoch eine spezielle
Verdrahtung und Eindämmung.
Die Kombination d/e ist in explosionsgefährdeten
•
Bereichen am häufigsten zu finden. Der Motor ist
von der Zündschutzart e, während die Motorver-
HINWEIS
VLT® AutomationDrive-Geräte mit der Option MCB 112
verfügen über eine PTB-zertifizierte Überwachungsfunktion des Motorthermistorsensors in
explosionsgefährdeten Bereichen. Abgeschirmte
Motorkabel sind nicht erforderlich, wenn die Frequenzumrichter mit Sinusfiltern am Ausgang betrieben
werden.
5.1.8 Instandhaltung
Danfoss Frequenzumrichtermodelle bis 90 kW sind
wartungsfrei. Frequenzumrichter mit hoher Leistung (mit
Nennleistungen von 110 kW oder höher) verfügen über
integrierte Filtermatten, die je nach Staub- und Verschmutzungsbelastung vom Betreiber regelmäßig gereinigt
werden müssen. Die Wartungsintervalle für die Kühllüfter
(ca. 3 Jahre) und die Kondensatoren (ca. 5 Jahre) werden
für die meisten Umgebungen empfohlen.
5.1.9
Lagerung
Wie alle elektronischen Betriebsmittel müssen Frequenzumrichter an einem trockenen Ort gelagert werden.
Während der Lagerung ist ein regelmäßiges Formieren
(Laden der Kondensatoren) nicht erforderlich.
Es wird empfohlen, das Gerät bis zur Installation
verschlossen in der Verpackung zu belassen.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 51

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Systemintegration
Projektierungshandbuch
5.2 Allgemeine EMV-Aspekte
Elektromagnetische Störungen sind leitungsgeführt im Frequenzbereich von 150 kHz bis 30 MHz und als Luftstrahlung im
Frequenzbereich von 30 MHz bis 1 GHz zu betrachten. Feldgebundene Störungen des Frequenzumrichtersystems im
Frequenzbereich von 30 MHz bis 1 GHz werden durch den Wechselrichter, das Motorkabel und den Motor erzeugt.
Wie in Abbildung 5.3 gezeigt, werden durch die Kapazität des Motorkabels, in Verbindung mit hohem dU/dt der
Motorspannung, Ableitströme erzeugt.
Die Verwendung eines abgeschirmten Motorkabels erhöht den Ableitstrom (siehe Abbildung 5.3), da abgeschirmte Kabel
eine höhere Kapazität zu Erde haben als nicht abgeschirmte Kabel. Wird der Ableitstrom nicht gefiltert, verursacht dies in
der Netzzuleitung größere Störungen im Funkfrequenzbereich unterhalb von etwa 5 MHz. Der Ableitstrom (I1) kann über die
Abschirmung (I3) direkt zurück zum Gerät fließen. Es verbleibt dann gemäß Abbildung 5.3 im Prinzip nur ein Ableitstrom (I4),
der vom abgeschirmten Motorkabel über die Erde zurückfließen muss.
55
Die Abschirmung verringert zwar die abgestrahlte Störung, erhöht jedoch die Niederfrequenzstörungen am Netz. Schließen
Sie den Motorkabelschirm an die Gehäuse von Frequenzumrichter und Motor an. Dies geschieht am besten durch die
Verwendung von integrierten Schirmbügeln, um verdrillte Abschirmungsenden (Pigtails) zu vermeiden. Die verdrillten
Abschirmungsenden erhöhen die Abschirmungsimpedanz bei höheren Frequenzen, wodurch der Abschirmungseffekt
reduziert und der Ableitstrom (I4) erhöht wird.
Verbinden Sie die Abschirmung an beiden Enden mit dem Gehäuse, wenn abgeschirmte Kabel für Relais, Steuerkabel,
Signalschnittstelle und Bremse verwendet werden. In einigen Situationen ist zum Vermeiden von Stromschleifen jedoch eine
Unterbrechung der Abschirmung notwendig.
1 Massekabel 4 Frequenzumrichter
2 Abschirmung 5 Abgeschirmtes Motorkabel
3 Netzversorgung 6 Motor
Abbildung 5.3 Situationen, in denen Ableitströme erzeugt werden
In den Fällen, in denen die Montage der Abschirmung über eine Montageplatte für den Frequenzumrichter vorgesehen ist,
muss diese Montageplatte aus Metall gefertigt sein, da die Ableitströme zum Gerät zurückgeführt werden müssen.
Außerdem muss durch die Montageschrauben stets ein guter elektrischer Kontakt von der Montageplatte zur Gehäusemasse
des Frequenzumrichters gewährleistet sein.
Beim Einsatz ungeschirmter Leitungen werden einige Emissionsanforderungen nicht erfüllt. Die immunitätsbezogenen
Anforderungen werden jedoch erfüllt.
Um das Störungsniveau des gesamten Systems (Frequenzwandler und Installation) so weit wie möglich zu reduzieren, ist es
wichtig, dass Sie die Motor- und Bremskabel so kurz wie möglich halten. Steuer- und Buskabel dürfen nicht gemeinsam mit
Motor- und Bremskabeln verlegt werden. Interferenzen von mehr als 50 MHz (in der Luft) werden insbesondere von der
Regelelektronik erzeugt.
52 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Systemintegration
Projektierungshandbuch
5.2.1 EMV-Prüfergebnisse
Die folgenden Ergebnisse wurden unter Verwendung einer Anlage mit einem Frequenzumrichter, einem abgeschirmten
Steuerkabel, einem Steuerkasten mit Potentiometer, einem einzelnen Motor sowie einem geschirmten Motorkabel (Ölflex
Classic 100 CY) bei Nenn-Schaltfrequenz erzielt. In Tabelle 5.2 sind die zulässigen maximalen Motorkabellängen aufgeführt.
HINWEIS
Die Bedingungen können sich bei anderen Parametersätzen wesentlich verändern.
HINWEIS
Siehe Tabelle 9.19 für parallele Motorkabel.
EMV-Filtertyp Leitungsgeführte Störaussendung Feldgebundene Störaussendung
Kabellänge [m]
Normen und
Anforderungen
H1
FC 301 0-37 kW 200-240 V 10 50 50 Nein Ja Ja
FC 302 0-37 kW 200-240 V 50 150 150 Nein Ja Ja
H2/H5
FC 301 0-3,7 kW 200-240 V Nein Nein 5 Nein Nein Ja
FC 302
0-7,5 kW 380-500 V Nein Nein 5 Nein Nein Ja
H3
FC 301 0-1,5 kW 200-240V 2,5 25 25 Nein Ja Ja
0-1,5 kW 380-480V 2,5 25 25 Nein Ja Ja
H4
FC 302 1,1-7,5 kW 525-690 V Nein 100 100 Nein Ja Ja
11-22 kW 525-690 V Nein 100 100 Nein Ja Ja
30-75 kW 525-690 V Nein 150 150 Nein Ja Ja
1)
Hx
FC 302 0,75-75 kW 525-600 V Nein Nein Nein Nein Nein Nein
EN 55011/CISPR 11 Klasse B Klasse A
Gruppe 1
EN/IEC 61800-3 Kategorie C1 Kategorie C2 Kategorie C3 Kategorie C1 Kategorie C2 Kategorie C3
0-75 kW 380-480 V 10 50 50 Nein Ja Ja
0-75 kW 380-480 V 50 150 150 Nein Ja Ja
5,5-37 kW 200-240 V
11-75 kW 380-500 V
11-22 kW 525-690 V
30-75 kW 525-690 V
11-37 kW 525-690 V
2)
2)
2)
2)
3
Nein Nein 25 Nein Nein Ja
Nein Nein 25 Nein Nein Ja
Nein Nein 25 Nein Nein Ja
Nein Nein 25 Nein Nein Ja
Nein 150 150 Nein Ja Ja
Klasse A
Gruppe 2
Klasse B Klasse A
Gruppe 1
Klasse A
Gruppe 2
5 5
Tabelle 5.2 EMV-Prüfergebnisse (Störaussendung) Maximale Motorkabellänge
1) Hx-Ausführungen können gemäß EN/IEC 61800-3 Kategorie C4 verwendet werden
2) T5, 22-45 kW und T7, 22-75 kW erfüllen Klasse A, Gruppe 1 mit 25 m langem Motorkabel. Bei der Installation sind einige Beschränkungen
gegeben (kontaktieren Sie Danfoss für detaillierte Informationen).
Hx, H1, H2, H3, H4 oder H5 ist an Pos. 16-17 des Typencodes für EMV-Filter definiert, siehe Tabelle 7.1.
3) IP20
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 53

Systemintegration
Projektierungshandbuch
5.2.2 Emissionsanforderungen
Die EMV-Produktnorm für Frequenzumrichter definiert 4
Umgebung
Kategorien (C1, C2, C3 und C4) mit festgelegten Anforderungen für Störaussendung und Störfestigkeit. Tabelle 5.3
enthält die Definitionen der 4 Kategorien und die entsprechende Klassifizierung aus EN 55011.
Entsprechende
Kategorie Definition
55
C1 In der ersten Umgebung (Wohn-,
Geschäfts- und Gewerbebereich
sowie Kleinbetriebe) installierte
Frequenzumrichter mit einer
Versorgungsspannung unter 1000
V.
C2 In der ersten Umgebung (Wohn-,
Geschäfts- und Gewerbebereich
sowie Kleinbetriebe) installierte
Frequenzumrichter mit einer
Versorgungsspannung unter 1000
V, die weder steckerfertig noch
beweglich sind und von
Fachkräften installiert und in
Betrieb genommen werden
müssen.
C3 In der zweiten Umgebung (Indust-
riebereich) installierte
Frequenzumrichter mit einer
Versorgungsspannung unter 1000
V.
C4 In der zweiten Umgebung (Indust-
riebereich) installierte
Frequenzumrichter mit einer
Versorgungsspannung gleich oder
über 1000 V oder einem
Nennstrom gleich oder über 400 A
oder vorgesehen für den Einsatz in
komplexen Systemen.
Tabelle 5.3 Zusammenhang zwischen IEC 61800-3 und EN 55011
Störaussendungsklasse in
EN 55011
Klasse B
Klasse A
Gruppe 1
Klasse A
Gruppe 2
Keine
Grenzlinie.
Es sollte ein
EMV-Plan
erstellt werden.
Zweite
Umgebung
(Industriebereich)
Tabelle 5.4 Zusammenhang zwischen der Fachgrundnorm
Störungsaussendung und EN 55011
5.2.3 Störfestigkeitsanforderungen
Die Störfestigkeitsanforderungen für Frequenzumrichter
sind abhängig von der Installationsumgebung. In Industriebereichen sind die Anforderungen höher als in Wohn- oder
Bürobereichen. Alle Danfoss-Frequenzumrichter erfüllen die
Störfestigkeitsanforderungen in Industriebereichen und
dementsprechend auch die niedrigeren Anforderungen in
Wohn- und Bürobereichen.
Zur Dokumentation der Störfestigkeit gegenüber
elektrischen Störungen wurde der nachfolgende Störfestigkeitstest entsprechend den folgenden grundlegenden
Normen durchgeführt:
•
•
•
•
Wenn die Fachgrundnorm (leitungsgeführte) Störungsaussendung zugrunde gelegt wird, müssen die
•
Frequenzumrichter die Grenzwerte in Tabelle 5.4 einhalten.
Fachgrundnorm
Störungsaussendung
Fachgrundnorm EN/IEC
61000-6-4 für Industriebereiche.
EN 61000-4-2 (IEC 61000-4-2): Elektrostatische
Entladung (ESD): Simulation elektrostatischer
Entladungen von Personen.
EN 61000-4-3 (IEC 61000-4-3): Elektromagnetisches Einstrahlfeld, amplitudenmodulierte
Simulation der Auswirkungen von Radar- und
Funkgeräten sowie von mobilen Kommunikationsgeräten.
EN 61000-4-4 (IEC 61000-4-4): Schalttransienten:
Simulation von Störungen, herbeigeführt durch
Schalten mit einem Schütz, Relais oder ähnlichen
Geräten.
EN 61000-4-5 (IEC 61000-4-5): Stoßspannungstransienten: Simulation von Transienten, z. B.
durch Blitzschlag in nahe gelegenen Installationen.
EN 61000-4-6 (IEC 61000-4-6): HF-Gleichtakt:
Simulation der Auswirkung von Funksende-
Entsprechende
Störaussendungsklasse in
EN 55011
Klasse A Gruppe
1
geräten, die an Verbindungskabel angeschlossen
sind.
Umgebung
Erste
Umgebung
(Wohnung und
Büro)
Fachgrundnorm
Störungsaussendung
Fachgrundnorm EN/IEC
61000-6-3 für Wohnbereich,
Geschäfts- und Gewerbebereiche sowie Kleinbetriebe.
Entsprechende
Störaussendungsklasse in
EN 55011
Klasse B
Siehe Tabelle 5.5.
54 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Systemintegration Projektierungshandbuch
Fachgrundnorm Impulskette
IEC 61000-4-4
Abnahmekriterium B B B A A
Spannungsbereich: 200-240 V, 380-500 V, 525-600 V, 525-690 V
Leitung
Motor 4 kV CM (Common
Bremse 4 kV CM (Common
Zwischenkreiskopplung 4 kV CM (Common
Steuerkabel 2 kV CM (Common
Standardbus 2 kV CM (Common
Relaisleitungen 2 kV CM (Common
Anwendungs- und FeldbusOptionen
LCP-Kabel 2 kV CM (Common
Externe 24 V DC
Gehäuse
4 kV CM (Common
Mode)
Mode)
Mode)
Mode)
Mode)
Mode)
Mode)
2 kV CM (Common
Mode)
Mode)
2 V CM (Common
Mode)
— —
Stoßspannungst-
ransienten
IEC 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
(Common Mode)
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
(Common Mode)
1)
1)
1)
1)
1)
1)
1)
1)
ESD
IEC
61000-4-2
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
8 kV AD
6 kV CD
Abgestrahlte elektromagne-
tische Felder
IEC 61000-4-3
10 V/m —
HF-Gleichtakt-
IEC 61000-4-6
spannung
5 5
Tabelle 5.5 EMV-Immunitätstabelle
1)
Einspritzung an Kabelschirm
Motorisolation
5.2.4
Motoren mit moderner Konstruktion, die für die
Verwendung mit Frequenzumrichtern bestimmt sind,
haben einen höheren Isolationsgrad, durch den sich die
neue Generation der hocheffizienten IGBTs mit hohem
dU/dt auszeichnet. Zur Nachrüstung in alten Motoren muss
die Motorisolation überprüft oder eine Dämpfung mit
einem dU/dt-Filter bzw. falls erforderlich mit einem
Sinusfilter durchgeführt werden. dU/dt
Bei Motorkabellängen ≤ der in Kapitel 6.2 Allgemeine
technische Daten aufgeführten maximalen Kabellänge
werden die in Tabelle 5.6 aufgeführten Motorisolationsnennwerte empfohlen. Bei einem geringeren Isolationswert
eines Motors wird die Verwendung eines dU/dt- oder
Sinusfilters empfohlen.
Netznennspannung [V] Motorisolation [V]
UN ≤ 420
420 V < UN ≤ 500 Verstärkte ULL = 1600
500 V < UN ≤ 600 Verstärkte ULL = 1800
600 V < UN ≤ 690 Verstärkte ULL = 2000
Tabelle 5.6 Motorisolation
Standard ULL = 1300
5.2.5 Motorlagerströme
Erden Sie zur Minimierung der Lager- und Wellenströme
die folgenden Komponenten mit der angetriebenen
Maschine:
Frequenzumrichter
•
Motor
•
angetriebene Maschine
•
Motor
•
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 55

175HA034.10
Systemintegration
Projektierungshandbuch
Vorbeugende Standardmaßnahmen
1. Verwenden Sie ein isoliertes Lager.
2. Wenden Sie strenge Installationsverfahren an.
2a Stellen Sie sicher, dass Motor und
Lastmotor aufeinander abgestimmt sind.
2b Befolgen Sie die EMV-Installations-
richtlinie streng.
Die Oberschwingungen tragen nicht direkt zur Leistungsaufnahme bei; sie erhöhen jedoch die Wärmeverluste bei
der Installation (Transformator, Leitungen). Bei Anlagen mit
einem relativ hohen Anteil an Gleichrichterlasten ist es
deshalb wichtig, die Oberschwingungen auf einem
niedrigen Pegel zu halten, um eine Überlastung des
Transformators und zu hohe Temperaturen in den
Leitungen zu vermeiden.
2c Verstärken Sie den Schutzleiter (PE),
sodass die hochfrequent wirksame
Impedanz im PE niedriger als bei den
Eingangsstromleitungen ist.
55
2d Stellen Sie eine gute hochfrequent
wirksame Verbindung zwischen dem
Abbildung 5.4 Zwischenkreisdrosseln
Motor und dem Frequenzumrichter her,
zum Beispiel über ein abgeschirmtes
Kabel mit einer 360°-Verbindung im
Motor und im Frequenzumrichter.
2e Stellen Sie sicher, dass die Impedanz
vom Frequenzumrichter zur Gebäudeerdung niedriger als die
HINWEIS
Oberschwingungsströme können eventuell Kommunikationsgeräte stören, die an denselben Transformator
angeschlossen sind, oder Resonanzen in Verbindung mit
Blindstromkompensationsanlagen verursachen.
Erdungsimpedanz der Maschine ist. Dies
kann bei Pumpen schwierig sein.
2f Stellen Sie eine direkte Erdverbindung
zwischen Motor und Last her.
3. Senken Sie die IGBT-Taktfrequenz.
4. Ändern Sie die Wechselrichtersignalform, 60° AVM
oder SFAVM.
5. Installieren Sie ein Wellenerdungssystem oder
verwenden Sie eine Trennkupplung.
6. Tragen Sie leitfähiges Schmierfett auf.
7. Verwenden Sie, sofern möglich, minimale
Drehzahleinstellungen.
8. Versuchen Sie sicherzustellen, dass die
Netzspannung zur Erde symmetrisch ist. Dies
kann bei IT-, TT-, TN-CS-Netzen oder Systemen
I
eff
I
1
I
5
I
7
I
11-49
Tabelle 5.8 Oberschwingungsströme verglichen mit dem
effektiven Eingangsstrom
Eingangsstrom
1,0
0,9
0,4
0,2
< 0,1
Um Oberschwingungsströme gering zu halten, sind
Frequenzumrichter bereits serienmäßig mit Drosseln im
Zwischenkreis ausgestattet. Zwischenkreisdrosseln
verringern die gesamte Spannungsverzerrung THD um
40 %.
mit geerdetem Zweig schwierig sein.
Einfluss von Oberschwingungen in
9. Verwenden Sie ein dU/dt-Filter.
5.3.1
einer Energieverteilungsanlage
5.3
Netzversorgungsstörung/-rückwirkung
Ein Frequenzumrichter nimmt vom Netz einen nicht
sinusförmigen Strom auf, der den Eingangsstrom I
eff
erhöht. Nicht sinusförmige Ströme können mithilfe einer
Fourier-Analyse in Sinusströme verschiedener Frequenz, d.
h. in verschiedene Oberschwingungsströme In mit einer
Grundfrequenz von 50 Hz, zerlegt werden:
In Abbildung 5.5 ist ein Transformator auf der Primärseite
mit einem Verknüpfungspunkt PCC1 an der Mittelspannungsversorgung verbunden. Der Transformator hat eine
Impedanz Z
und speist eine Reihe von Verbrauchern. Der
xfr
Verknüpfungspunkt, an dem alle Verbraucher angeschaltet
sind, ist PCC2. Jeder Verbraucher wird durch Kabel mit
einer Impedanz Z1, Z2, Z3 angeschlossen.
Oberschwingungsströme
Hz 50 250 350
Tabelle 5.7 Umgewandelter nicht sinusförmiger Strom
56 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
I
1
I
5
I
7

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Systemintegration
Projektierungshandbuch
Abbildung 5.6 Störende Wirkungen von Oberschwingungen
5 5
5.3.2 Normen und Anforderungen zur
Oberschwingungsbegrenzung
Abbildung 5.5 Kleine Verteilanlage
Von nicht linearen Lasten aufgenommene Oberschwingungsströme führen durch den Spannungsabfall an den
Impedanzen des Verteilungssystems zu einer Spannungsverzerrung. Höhere Impedanzen ergeben höhere Grade an
Spannungsverzerrung.
Die Stromverzerrung steht mit der Geräteleistung und der
individuellen Last in Verbindung. Spannungsverzerrung
steht mit der Systemleistung in Verbindung. Die
Spannungsverzerrung im PCC kann nicht ermittelt werden,
wenn nur die Oberschwingungsleistung der Last bekannt
ist. Um die Verzerrung im PCC vorhersagen zu können,
müssen die Konfiguration des Verteilungssystems und die
entsprechenden Impedanzen bekannt sein.
Ein häufig verwendeter Begriff, um die Impedanz eines
Stromnetzes zu beschreiben, ist das Kurzschlussverhältnis
R
, definiert als das Verhältnis zwischen Kurzschluss-
sce
Scheinleistung der Versorgung am PCC (Ssc) und der
Nennscheinleistung der Last (S
S
ce
R
=
sce
S
wobei
equ
S
sc
=
Z
Versorgung
2
U
und
S
equ
equ
=U×
Die störende Wirkung von Oberschwingungen hat zwei
Faktoren:
Oberschwingungsströme tragen zu Systemver-
•
lusten bei (in Verkabelung, Transformator)
Spannungsverzerrung durch Oberschwingungen
•
führt zu Störungen anderer Lasten und erhöht
Verluste in anderen Lasten
Die Anforderungen an die Oberschwingungsbegrenzungen
können:
anwendungsspezifische Anforderungen
•
einzuhaltende Normen sein
•
Die anwendungsspezifischen Anforderungen beziehen sich
auf eine konkrete Anlage, in der technische Gründe für die
Begrenzung der Oberschwingungen vorliegen.
Beispiel
Ein 250-kVA-Transformator mit zwei angeschlossenen 110kW-Motoren reicht aus, wenn einer der Motoren direkt an
das Netz geschaltet und der andere über einen Frequenzumrichter gespeist wird. Der Transformator ist jedoch
unterdimensioniert, wenn beide Motoren über Frequenzumrichter gespeist werden. Durch Verwendung
zusätzlicher Maßnahmen zur Oberschwingungsreduzierung
in der Anlage oder Wahl von Low Harmonic Drives
ermöglichen den Betrieb beider Motoren mit Frequenzumrichtern.
Es gibt verschiedene Normen, Vorschriften und Empfehlungen zur Reduzierung von Oberschwingungen. Normen
).
I
equ
unterscheiden sich je nach Land und Industrie. Die
folgenden Normen sind am häufigsten anwendbar:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Genaue Angaben zu jeder Norm enthält das AHF-Projektierungshandbuch 005/010.
In Europa beträgt die maximale THvD 8 %, wenn die
Anlage über das öffentliche Netz versorgt wird. Wenn die
Anlage über einen eigenen Transformator verfügt, ist die
Grenze für die THvD 10 %. Der VLT® AutomationDrive kann
einer THvD von 10 % standhalten.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 57

130BC968.10
1325 4
6
b
a
M
7
Systemintegration Projektierungshandbuch
5.3.3 Reduzierung, Vermeidung oder
Kompensation von
Diese Anforderungen sind in der Norm EN 61800-5-1
beschrieben.
Oberschwingungen
Die Bauteile, die die elektrische Trennung gemäß nachstIn Fällen, in denen zusätzliche Oberschwingungsunterdrückung gefordert ist, bietet Danfoss eine Vielzahl von
Geräten zur Reduzierung, Vermeidung oder Kompensation
von Netzrückwirkungen. Diese sind:
12-pulsige Frequenzumrichter
•
AHF-Filter
•
55
Die Wahl der richtigen Lösung hängt von verschiedenen
Faktoren ab:
Ziehen Sie immer eine Reduzierung der Oberschwingungen in Betracht, wenn die Transformatorlast einen
nicht linearen Anteil von 40 % oder mehr hat.
Low Harmonic Drives
•
Aktive Filter
•
Das Stromnetz (Hintergrundverzerrung, Netzun-
•
symmetrie, Resonanz und Art der Versorgung
(Transformator/Generator)
Anwendung (Lastprofil, Anzahl Lasten und
•
Lastgröße)
Örtliche/nationale Anforderungen/Vorschriften
•
(IEEE519, IEC, G5/4 usw.)
Total Cost of Ownership (Anschaffungskosten,
•
Wirkungsgrad, Wartung usw.)
ehender Beschreibung bilden, erfüllen ebenfalls die
Anforderungen für höhere Isolierung und der
entsprechenden Tests gemäß Beschreibung in EN
61800-5-1.
Die galvanische PELV-Trennung ist an 6 Punkten
vorhanden (siehe Abbildung 5.7):
Um den PELV-Schutzgrad beizubehalten, müssen alle
steuerklemmenseitig angeschlossenen Geräte den PELV-
Anforderungen entsprechen, d. h., Thermistoren müssen
beispielsweise verstärkt/zweifach isoliert sein.
1. Stromversorgung (SMPS) einschl. Signalisolation
des Zwischenkreises.
2. Gate-Treiber zur Ansteuerung der IGBTs (Triggertransformatoren/Optokoppler).
3. Stromwandler.
4. Bremselektronik (Optokoppler).
5. Einschaltstrombegrenzung, Funkfrequenzstörung
und Temperaturmesskreise.
6. Ausgangsrelais.
7. Mechanische Bremse.
Oberschwingungsberechnung
5.3.4
Danfoss bietet Werkzeuge zur Berechnung der
Oberschwingungen an, siehe Kapitel 9.6.5 PC-Software.
5.4
Galvanische Trennung (PELV)
5.4.1 PELV (Schutzkleinspannung) –
Protective Extra Low Voltage
PELV bietet Schutz durch Kleinspannung gemäß EN 50178.
Ein Schutz gegen elektrischen Schlag gilt als gewährleistet,
wenn die Stromversorgung vom Typ PELV (Schutzkleinspannung – Protective Extra Low Voltage) ist und die
Installation gemäß den örtlichen bzw. nationalen
Vorschriften für PELV-Versorgungen ausgeführt wurde.
Alle Steuerklemmen und die Relaisklemmen 01-03/04-06
entsprechen PELV (Protective Extra Low Voltage) (gilt nicht
bei geerdetem Dreieck-Netz größer 400 V).
Die galvanische (sichere) Trennung wird erreicht, indem die
Anforderungen für höhere Isolierung erfüllt und die
entsprechenden Kriech-/Luftstrecken beachtet werden.
Abbildung 5.7 Galvanische Trennung
Eine funktionale galvanische Trennung (a und b auf der
Zeichnung) ist für die optionale externe 24 V-Versorgung
und für die RS485-Standardbusschnittstelle vorgesehen.
WARNUNG
Installation in großer Höhenlage:
Bei Höhen über 2 km kontaktieren Sie bitte Danfoss zu
PELV (Schutzkleinspannung - Protective extra low
voltage) zurate.
58 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Systemintegration
Projektierungshandbuch
WARNUNG
Das Berühren spannungsführender Teile – auch nach der
Trennung vom Netz – ist lebensgefährlich.
Stellen Sie ebenfalls sicher, dass andere Spannungseingänge, wie DC-Zwischenkreiskopplung, sowie der
Motoranschluss für kinetischen Speicher getrennt
worden sind.
Lassen Sie vor dem Berühren elektrischer Bauteile
mindestens die in Tabelle 2.1 angegebene Zeit
verstreichen.
Eine kürzere Wartezeit ist nur zulässig, wenn auf dem
Typenschild für das jeweilige Gerät angegeben.
5.5 Bremsfunktionen
Abbildung 5.8 Typischer Bremszyklus
5 5
Die Bremsfunktion wird zum Bremsen der Last an der
Motorwelle angewendet, entweder als dynamische oder
mechanische Bremsung.
Auswahl des Bremswiderstands
5.5.1
Der Bremswiderstand gewährleistet, dass die Energie im
Bremswiderstand und nicht im Frequenzumrichter
absorbiert wird. Weitere Informationen finden Sie im
Bremswiderstand-Projektierungshandbuch.
Ist der Betrag der kinetischen Energie, die in jedem
Bremszeitraum zum Widerstand übertragen wird,
unbekannt, kann die durchschnittliche Leistung auf Basis
der Zykluszeit und Bremszeit berechnet werden, was als
Aussetzbetrieb bezeichnet wird. Der Arbeitszyklus für
Aussetzbetrieb des Widerstandes gibt den Arbeitszyklus an,
für den der Widerstand ausgelegt ist. Abbildung 5.8 zeigt
einen typischen Bremszyklus.
HINWEIS
Der von den Motorlieferanten bei der Angabe der
zulässigen Belastung häufig benutzte Betrieb S5 des
Widerstands gibt den Aussetzbetrieb an.
Sie können den Arbeitszyklus für Aussetzbetrieb des
Widerstands wie folgt berechnen:
Arbeitszyklus = tb/T
T = Zykluszeit in s
tb ist die Bremszeit in s (als Teil der gesamten Zykluszeit)
Bremsar-
200-240 V
PK25-P11K 120 Dauerlast 40%
P15K-P37K 300 10% 10%
380-500 V
PK37-P75K 120 Dauerlast 40%
P90K-P160 600 Dauerlast 10%
P200-P800 600 40% 10%
525-600 V
PK75-P75K 120 Dauerlast 40%
525-690 V
P37K-P400 600 40% 10%
P500-P560 600
P630-P1M0 600 40% 10%
Tabelle 5.9 Bremsung bei hohem Überlastmoment
1) 500 kW bei 86 % Bremsmoment/560 kW bei 76 % Bremsmoment
2) 500 kW bei 130 % Bremsmoment/560 kW bei 115 %
Bremsmoment
Zykluszeit [s]
beitszyklus
bei 100 %
Drehmoment
40%
1)
Bremsarbeits-
zyklus bei
Übermoment
(150/160 %)
2)
10%
Danfoss bietet Bremswiderstände mit Arbeitszyklen von
5 %, 10 % und 40 % an. Bei Anwendung eines Arbeitszyklus von 10 % können die Bremswiderstände die
Bremsleistung über 10 % der Zykluszeit aufnehmen. Die
übrigen 90 % der Zykluszeit werden zum Abführen
überschüssiger Wärme genutzt.
HINWEIS
Stellen Sie sicher, dass der Bremswiderstand für die
erforderliche Bremszeit ausgelegt ist.
Die maximal zulässige Last am Bremswiderstand wird als
Spitzenleistung bei einem gegebenen Arbeitszyklus im
Aussetzbetrieb ausgedrückt und wird berechnet als:
ED Arbeitszyklus
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 59
=
tb
T Zyklus

Systemintegration
Projektierungshandbuch
wobei tb die Bremszeit in Sekunden und der Zyklus T die
gesamte Zykluszeit ist.
Der Bremswiderstand wird wie gezeigt berechnet:
500V :
600V :
690V :
464923
R
=
rec
R
=
rec
R
=
rec
P
Motor
630137
P
Motor
832664
P
Motor
Ω
Ω
Ω
1) Bei Frequenzumrichtern ≤ 7,5 kW Wellenleistung
R
Ω =
br
wobei
P
Spitze
= P
U
P
Spitze
Motor
2
dc
x Mbr [%] x η
Motor
x η
VLT
[W]
2) Bei Frequenzumrichtern 11-75 kW Wellenleistung
HINWEIS
Der ohmsche Widerstand des gewählten Bremswiderstands darf nicht unter dem von Danfoss
empfohlenen Wert liegen, da sonst der Frequenzum-
55
Der Bremswiderstand hängt von der Zwischenkreisspannung (UDC) ab.
Die Bremsfunktion von FC 301 und FC 302 ist in 4 Netzbereiche unterteilt.
richter beschädigt wird. Bei einem Bremswiderstand mit
höherem Ohmwert wird hingegen nicht mehr das
maximale Bremsmoment von 160 % erzielt, und der
Frequenzumrichter schaltet während der Bremsung
möglicherweise mit DC-Überspannung ab.
Größe Bremse aktiv Warnung vor
Abschaltung
FC 301/FC 302
390 V 405 V 410 V
200-240 V
FC 301 380-480V778 V 810 V 820 V
FC 302 380-500V810 V 840 V 850 V
FC 302 525-600V943 V 965 V 975 V
Abschaltung
HINWEIS
Bei einem Kurzschluss im Bremstransistor des Frequenzumrichters kann ein eventueller Dauerstrom zum
Bremswiderstand nur durch Unterbrechung der Netzversorgung zum Frequenzumrichter (Netzschalter, Schütz)
verhindert werden. (Das Schütz kann vom Frequenzumrichter gesteuert werden).
FC 302 525-690V1084 V 1109 V 1130 V
Tabelle 5.10 Grenzwerte für Bremse [UDC]
HINWEIS
Prüfen Sie, ob Ihr Bremswiderstand für eine Spitzenspannung von 410 V, 820 V, 850 V, 975 V bzw. 1130 V
zugelassen ist, wenn Sie keine Danfoss Bremswiderstände verwenden.
Danfoss empfiehlt folgende Bremswiderstände R
gewährleisten, dass der Frequenzumrichter mit dem
maximal verfügbaren Bremsmoment (M
br(%)
bremst. Die Formel kann wie folgt geschrieben werden:
2
U
x 100
R
Ω =
rec
P
Motor
η
beträgt normalerweise 0,90
Motor
η
beträgt normalerweise 0,98
VLT
x
dc
M
xη
br
%
VLT
x η
Motor
Bei Frequenzumrichtern mit 200 V, 480 V, 500 V und 600 V
wird R
bei einem Bremsmoment von 160 % wie folgt
rec
ausgedrückt:
200V :
480V :
480V :
107780
R
=
rec
R
=
rec
R
=
rec
P
Motor
375300
P
Motor
428914
P
Motor
Ω
Ω
Ω
1
2
: Diese
rec
) von 160 %
VORSICHT
Der Bremswiderstand erwärmt sich während und nach
dem Bremsen.
Berühren Sie den Bremswiderstand nicht, um
•
Verletzungen zu vermeiden.
Zur Vermeidung jeglicher Brandgefahr müssen
•
Sie den Bremswiderstand in einer sicheren
Umgebung platzieren.
VORSICHT
Frequenzumrichter der Bauformen D-F enthalten mehr
als einen Bremschopper. Daher müssen Sie bei diesen
Bauformen einen Bremswiderstand pro Bremschopper
verwenden.
5.5.2 Verdrahtung des Bremswiderstands
EMV (Twisted-Pair-Kabel/Abschirmung)
Verwenden Sie zur Erfüllung der angegebenen EMVLeistung des Frequenzumrichters abgeschirmte Kabel/
Adern. Bei der Verwendung ungeschirmter Kabel wird
empfohlen, die Kabeladern zu verdrillen, um elektrische
Störgeräusche zwischen Bremswiderstand und Frequenzumrichter zu verringern.
Verwenden Sie eine Metallabschirmung für verbesserte
EMV-Leistung.
60 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Systemintegration Projektierungshandbuch
5.5.3 Steuerung mit Bremsfunktion
Die Bremse ist gegen einen Kurzschluss des Bremswiderstands geschützt. Der Bremstransistor wird auf eine
Kurzschlussbedingung hin überwacht. Eine eventuell
vorhandene thermische Überwachung (Klixon) des
Bremswiderstands kann vom Frequenzumrichter
ausgewertet werden.
Außerdem ermöglicht die Bremse ein Auslesen der
aktuellen Leistung und der mittleren Leistung der letzten
120 s. Die Bremse kann ebenfalls die Bremsleistung
überwachen und sicherstellen, dass sie die in 2-12 Bremswi-
derstand Leistung (kW) gewählte Grenze nicht überschreitet.
In 2-13 Bremswiderst. Leistungsüberwachung legen Sie fest,
welche Funktion ausgeführt wird, wenn die an den
Bremswiderstand übertragene Leistung den in
2-12 Bremswiderstand Leistung (kW) eingestellten Grenzwert
überschreitet.
HINWEIS
Überwachen der Bremsleistung ist keine Sicherheitsfunktion; Hierfür ist ein Thermoschalter erforderlich. Der
Bremswiderstandskreis ist nicht gegen Erdableitstrom
geschützt.
5 5
Sie können Überspannungssteuerung (OVC) (ohne
Bremswiderstand) als alternative Bremsfunktion in
2-17 Überspannungssteuerung wählen. Diese Funktion ist für
alle Geräte aktiv. Sie stellt sicher, dass bei Anstieg der
Zwischenkreisspannung eine Abschaltung verhindert
werden kann. Dies geschieht durch Anheben der
Ausgangsfrequenz zur Begrenzung der Zwischenkreisspannung. Dies ist eine sehr nützliche Funktion, wenn z. B.
die Rampenzeit Ab zu kurz eingestellt wurde, da hierdurch
ein Abschalten des Frequenzumrichters vermieden wird. In
dieser Situation wird jedoch die Rampenzeit Ab
automatisch verlängert.
HINWEIS
OVC kann nicht aktiviert werden, wenn ein PM-Motor
betrieben wird (wenn 1-10 Motorart auf [1] PM, Vollpol
eingestellt ist).
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 61

Produktspezifikationen Projektierungshandbuch
6 Produktspezifikationen
6.1 Elektrische Daten
6.1.1 Netzversorgung 200-240 V
Typenbezeichnung PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Typische Wellenleistung [kW] 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3,0 3,7
Schutzart IP20 (nur FC 301) A1 A1 A1 A1 A1 A1 - - Schutzart IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
Schutzart IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Ausgangsstrom
Dauerbetrieb (200-240 V) [A] 1,8 2,4 3,5 4,6 6,6 7,5 10,6 12,5 16,7
66
Aussetzbetrieb (200-240 V) [A] 2,9 3,8 5,6 7,4 10,6 12,0 17,0 20,0 26,7
Dauerbetrieb kVA (208 V) [kVA] 0,65 0,86 1,26 1,66 2,38 2,70 3,82 4,50 6,00
Max. Eingangsstrom
Dauerbetrieb (200-240 V) [A] 1,6 2,2 3,2 4,1 5,9 6,8 9,5 11,3 15,0
Aussetzbetrieb (200-240 V) [A] 2,6 3,5 5,1 6,6 9,4 10,9 15,2 18,1 24,0
Zusätzliche technische Daten
Max. Kabelquerschnitt
Bremse und Zwischenkreiskopplung [mm2]
([AWG])
Max. Kabelquerschnitt
[mm2] ([AWG])
Typische Verlustleistung bei max. Nennlast (W)
3)
Wirkungsgrad
4)
für Netz, Motor,
4)
mit Trennschalter
21 29 42 54 63 82 116 155 185
2)
0,94 0,94 0,95 0,95 0,96 0,96 0,96 0,96 0,96
4,4,4 (12,12,12)
(min. 0,2 (24))
6,4,4 (10,12,12)
Tabelle 6.1 Netzversorgung 200-240 V, PK25-P3K7
62 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktspezifikationen
Projektierungshandbuch
Typenbezeichnung P5K5 P7K5 P11K
Hohe/Normale Überlast
1)
HO NO HO NO HO NO
Typische Wellenleistung [kW] 5,5 7,5 7,5 11 11 15
Schutzart IP20 B3 B3 B4
Schutzart IP21, IP55, IP66 B1 B1 B2
Ausgangsstrom
Dauerbetrieb (200-240 V) [A] 24,2 30,8 30,8 46,2 46,2 59,4
Aussetzbetrieb (60 s Überlast) (200-240 V) [A] 38,7 33,9 49,3 50,8 73,9 65,3
Dauerbetrieb kVA (208 V) [kVA] 8,7 11,1 11,1 16,6 16,6 21,4
Max. Eingangsstrom
Dauerbetrieb (200-240 V) [A] 22,0 28,0 28,0 42,0 42,0 54,0
Aussetzbetrieb (60 s Überlast) (200-240 V) [A] 35,2 30,8 44,8 46,2 67,2 59,4
Zusätzliche technische Daten
IP20 max. Kabelquerschnitt
Zwischenkreiskopplung) [mm2] ([AWG])
IP21 max. Kabelquerschnitt 4) für Netz, Bremse und Zwischenkreiskopplung [mm2] ([AWG])
IP21 max. Kabelquerschnitt 4) für Motor [mm2] ([AWG])
Max. Kabelquerschnitt
Typische Verlustleistung bei max. Nennlast (W)
Wirkungsgrad
2)
4)
für Netz, Bremse, Motor und
4)
mit Trennschalter [mm2]([AWG])
3)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,-,- (2,-,-)
16,10,16 (6,8,6) 16,10,16 (6,8,6) 35,-,- (2,-,-)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,25,25 (2,4,4)
16,10,10 (6,8,8)
239 310 371 514 463 602
0,96 0,96 0,96
6 6
Tabelle 6.2 Netzversorgung 200-240 V, P5K5-P11K
Typenbezeichnung P15K P18K P22K P30K P37K
Hohe/Normale Überlast
1)
HO NO HO NO HO NO HO NO HO NO
Typische Wellenleistung [kW] 15 18,5 18,5 22 22 30 30 37 37 45
Schutzart IP20 B4 C3 C3 C4 C4
Schutzart IP21, IP55, IP66 C1 C1 C1 C2 C2
Ausgangsstrom
Dauerbetrieb (200-240 V) [A] 59,4 74,8 74,8 88,0 88,0 115 115 143 143 170
Aussetzbetrieb (60 s Überlast) (200-240 V) [A] 89,1 82,3 112 96,8 132 127 173 157 215 187
Dauerbetrieb kVA (208 V) [kVA] 21,4 26,9 26,9 31,7 31,7 41,4 41,4 51,5 51,5 61,2
Max. Eingangsstrom
Dauerbetrieb (200-240 V) [A] 54,0 68,0 68,0 80,0 80,0 104 104 130 130 154
Aussetzbetrieb (60 s Überlast) (200-240 V) [A] 81,0 74,8 102 88,0 120 114 156 143 195 169
Zusätzliche technische Daten
IP20 max. Kabelquerschnitt für Netz, Bremse,
Motor und Zwischenkreiskopplung [mm2]
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt für Netz
und Motor [mm2] ([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt für Bremse
und Zwischenkreiskopplung [mm2] ([AWG])
Max. Kabelquerschnitt
4)
mit Trennschalter [mm2]
([AWG])
Typische Verlustleistung bei max. Nennlast (W)
Wirkungsgrad
2)
3)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
185, 150, 120
(350 MCM, 300
MCM, 4/0)
50, 35, 35 (1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
624 737 740 845 874 1140 1143 1353 1400 1636
0,96 0,97 0,97 0,97 0,97
Tabelle 6.3 Netzversorgung 200-240 V, P15K-P37K
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 63

Produktspezifikationen Projektierungshandbuch
6.1.2 Netzversorgung 380-500 V
Typenbezeichnung PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Typische Wellenleistung [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Schutzart IP20 (nur FC 301) A1 A1 A1 A1 A1 - - - - Schutzart IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
Schutzart IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Ausgangsstrom Hohe Überlast 160 % für 1 Min.
Wellenleistung [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Dauerbetrieb (380-440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,6 7,2 10 13 16
Aussetzbetrieb (380-440 V) [A] 2,1 2,9 3,8 4,8 6,6 9,0 11,5 16 20,8 25,6
Dauerbetrieb (441-500 V) [A] 1,2 1,6 2,1 2,7 3,4 4,8 6,3 8,2 11 14,5
Aussetzbetrieb (441-500 V) [A] 1,9 2,6 3,4 4,3 5,4 7,7 10,1 13,1 17,6 23,2
Dauerbetrieb kVA (400 V) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0 6,9 9,0 11
66
Dauerbetrieb kVA (460 V) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0 6,5 8,8 11,6
Max. Eingangsstrom
Dauerbetrieb (380-440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5 9,0 11,7 14,4
Aussetzbetrieb (380-440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4 14,4 18,7 23
Dauerbetrieb (441-500 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7 7,4 9,9 13
Aussetzbetrieb (441-500 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1 11,8 15,8 20,8
Zusätzliche technische Daten
IP20, IP21 max. Kabelquerschnitt 4) (Netz,
Motor, Bremse und Zwischenkreiskopplung)
[mm2]/([AWG])
IP55, IP66 max. Kabelquerschnitt 4) (Netz,
Motor, Bremse und Zwischenkreiskopplung)
[mm2]/([AWG])
Max. Kabelquerschnitt 4) mit Trennschalter
[mm2]([AWG])
Typische Verlustleistung bei max. Nennlast (W)
3)
Wirkungsgrad
2)
35 42 46 58 62 88 116 124 187 255
0,93 0,95 0,96 0,96 0,97 0,97 0,97 0,97 0,97 0,97
4,4,4 (12,12,12)
(min. 0,2(24))
4,4,4 (12,12,12)
6,4,4 (10,12,12)
Tabelle 6.4 Netzversorgung 380-500 V (FC 302), 380-480 V (FC 301), PK37-P7K5
64 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktspezifikationen Projektierungshandbuch
Typenbezeichnung P11K P15K P18K P22K
Hohe/Normale Überlast
Typische Wellenleistung [kW] 11 15 15 18,5 18,5 22,0 22,0 30,0
Schutzart IP20 B3 B3 B4 B4
Schutzart IP21 B1 B1 B2 B2
Schutzart IP55, IP66 B1 B1 B2 B2
Ausgangsstrom
Dauerbetrieb (380-440 V) [A] 24 32 32 37,5 37,5 44 44 61
Aussetzbetrieb (60 s Überlast) (380-440 V) [A] 38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
Dauerbetrieb (441-500 V) [A] 21 27 27 34 34 40 40 52
Aussetzbetrieb (60 s Überlast)
(441-500 V) [A]
Dauerbetrieb kVA (400 V) [kVA] 16,6 22,2 22,2 26 26 30,5 30,5 42,3
Dauerbetrieb kVA (460 V) [kVA] 21,5 27,1 31,9 41,4
Max. Eingangsstrom
Dauerbetrieb (380-440 V) [A] 22 29 29 34 34 40 40 55
Aussetzbetrieb (60 s Überlast)
(380-440 V) [A]
Dauerbetrieb (441-500 V) [A] 19 25 25 31 31 36 36 47
Aussetzbetrieb (60 s Überlast)
(441-500 V) [A]
Zusätzliche technische Daten
IP21, IP55, IP66 max. Kabelquerschnitt 4) für
Netz, Bremse und Zwischenkreiskopplung
[mm2] ([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt 4) für
Motor [mm2] ([AWG])
IP20 max. Kabelquerschnitt
Bremse, Motor und Zwischenkreiskopplung)
[mm2] ([AWG])
Max. Kabelquerschnitt
[mm2]([AWG])
Typische Verlustleistung bei max. Nennlast
3)
(W)
Wirkungsgrad
2)
1)
4)
für Netz,
4)
mit Trennschalter
HO NO HO NO HO NO HO NO
33,6 29,7 43,2 37,4 54,4 44 64 57,2
35,2 31,9 46,4 37,4 54,4 44 64 60,5
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8)
291 392 379 465 444 525 547 739
0,98 0,98 0,98 0,98
6 6
Tabelle 6.5 Netzversorgung 380-500 V (FC 302), 380-480 V (FC 301), P11K-P22K
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 65

Produktspezifikationen
Typenbezeichnung P30K P37K P45K P55K P75K
Hohe/Normale Überlast
Typische Wellenleistung [kW] 30 37 37 45 45 55 55 75 75 90
Schutzart IP21 C1 C1 C1 C2 C2
Schutzart IP20 B4 C3 C3 C4 C4
Schutzart IP55, IP66 C1 C1 C1 C2 C2
Ausgangsstrom
Dauerbetrieb (380-440 V) [A] 61 73 73 90 90 106 106 147 147 177
Aussetzbetrieb (60 s Überlast)
(380-440 V) [A]
Dauerbetrieb (441-500 V) [A] 52 65 65 80 80 105 105 130 130 160
Aussetzbetrieb (60 s Überlast)
(441-500 V) [A]
Dauerbetrieb kVA (400 V) [kVA] 42,3 50,6 50,6 62,4 62,4 73,4 73,4 102 102 123
66
Dauerbetrieb kVA (460 V) [kVA] 51,8 63,7 83,7 104 128
Max. Eingangsstrom
Dauerbetrieb (380-440 V) [A] 55 66 66 82 82 96 96 133 133 161
Aussetzbetrieb (60 s Überlast)
(380-440 V) [A]
Dauerbetrieb (441-500 V) [A] 47 59 59 73 73 95 95 118 118 145
Aussetzbetrieb (60 s Überlast)
(441-500 V) [A]
Zusätzliche technische Daten
IP20 max. Kabelquerschnitt für
Netz und Motor [mm2] ([AWG])
IP20 max. Kabelquerschnitt
(Bremse und Zwischenkreiskopplung) [mm2] ([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt für Netz und Motor [mm2]
([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt für Bremse und
Zwischenkreiskopplung [mm2]
([AWG])
Max. Kabelquerschnitt 4) mit
Trennschalter [mm2] ([AWG])
Geschätzte Verlustleistung
bei max. Nennlast [W]
Wirkungsgrad
2)
1)
3)
HO NO HO NO HO NO HO NO HO NO
91,5 80,3 110 99 135 117 159 162 221 195
82,5 72,6 99 90,2 123 106 144 146 200 177
70,5 64,9 88,5 80,3 110 105 143 130 177 160
570 698 697 843 891 1083 1022 1384 1232 1474
Projektierungshandbuch
78 71,5 97,5 88 120 116 158 143 195 176
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35
(1, 2, 2)
0,98 0,98 0,98 0,98 0,99
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM, 300
MCM, 4/0)
Tabelle 6.6 Netzversorgung 380-500 V (FC 302), 380-480 V (FC 301), P30K-P75K
66 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktspezifikationen Projektierungshandbuch
6.1.3 Netzversorgung 525-600 V (nur FC 302)
Typenbezeichnung PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Typische Wellenleistung [kW] 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Schutzart IP20, IP21 A3 A3 A3 A3 A3 A3 A3 A3
Schutzart IP55 A5 A5 A5 A5 A5 A5 A5 A5
Ausgangsstrom
Dauerbetrieb (525-550 V) [A] 1,8 2,6 2,9 4,1 5,2 6,4 9,5 11,5
Aussetzbetrieb (525-550 V) [A] 2,9 4,2 4,6 6,6 8,3 10,2 15,2 18,4
Dauerbetrieb (551-600 V) [A] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Aussetzbetrieb (551-600 V) [A] 2,7 3,8 4,3 6,2 7,8 9,8 14,4 17,6
Dauerbetrieb kVA (525 V) [kVA] 1,7 2,5 2,8 3,9 5,0 6,1 9,0 11,0
Dauerbetrieb kVA (575 V) [kVA] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Max. Eingangsstrom
Dauerbetrieb (525-600 V) [A] 1,7 2,4 2,7 4,1 5,2 5,8 8,6 10,4
Aussetzbetrieb (525-600 V) [A] 2,7 3,8 4,3 6,6 8,3 9,3 13,8 16,6
Zusätzliche technische Daten
Max. Kabelquerschnitt 4) (Netz, Motor, Bremse
und Zwischenkreiskopplung) [mm2] ([AWG])
Max. Kabelquerschnitt 4) mit Trennschalter
[mm2]([AWG])
Typische Verlustleistung bei max. Nennlast (W)
Wirkungsgrad
2)
3)
35 50 65 92 122 145 195 261
0,97 0,97 0,97 0,97 0,97 0,97 0,97 0,97
4,4,4 (12,12,12)
(min. 0,2 (24))
6,4,4 (10,12,12)
6 6
Tabelle 6.7 Netzversorgung 525-600 V (nur FC 302), PK75-P7K5
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 67

Produktspezifikationen Projektierungshandbuch
Typenbezeichnung P11K P15K P18K P22K P30K
Hohe/Normale Überlast
Typische Wellenleistung [kW] 11 15 15 18,5 18,5 22 22 30 30 37
Schutzart IP20 B3 B3 B4 B4 B4
Schutzart IP21, IP55, IP66 B1 B1 B2 B2 C1
Ausgangsstrom
Dauerbetrieb (525-550 V) [A] 19 23 23 28 28 36 36 43 43 54
Aussetzbetrieb (525-550 V) [A] 30 25 37 31 45 40 58 47 65 59
Dauerbetrieb (551-600 V) [A] 18 22 22 27 27 34 34 41 41 52
Aussetzbetrieb (551-600 V) [A] 29 24 35 30 43 37 54 45 62 57
Dauerbetrieb kVA (550 V) [kVA] 18,1 21,9 21,9 26,7 26,7 34,3 34,3 41,0 41,0 51,4
Dauerbetrieb kVA (575 V) [kVA] 17,9 21,9 21,9 26,9 26,9 33,9 33,9 40,8 40,8 51,8
Max. Eingangsstrom
Dauerbetrieb bei 550 V [A] 17,2 20,9 20,9 25,4 25,4 32,7 32,7 39 39 49
66
Überlast (60 s) bei 550 V [A] 28 23 33 28 41 36 52 43 59 54
Dauerbetrieb bei 575 V [A] 16 20 20 24 24 31 31 37 37 47
Überlast (60 s) bei 575 V [A] 26 22 32 27 39 34 50 41 56 52
Zusätzliche technische Daten
IP20 max. Kabelquerschnitt
Netz, Bremse, Motor und Zwischenkreiskopplung) [mm2] ([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt 4) (Netz, Bremse und
Zwischenkreiskopplung) [mm2]
([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt 4) für Motor [mm2] ([AWG])
Max. Kabelquerschnitt
Trennschalter [mm2]([AWG])
Geschätzte Verlustleistung
bei max. Nennlast [W]
Wirkungsgrad
2)
1)
4)
für
4)
mit
3)
HO NO HO NO HO NO HO NO HO NO
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
16, 10, 10
(6, 8, 8)
220 300 300 370 370 440 440 600 600 740
0,98 0,98 0,98 0,98 0,98
50, 35, 35
(1, 2, 2)
Tabelle 6.8 Netzversorgung 525-600 V (nur FC 302), P11K-P30K
68 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktspezifikationen Projektierungshandbuch
Typenbezeichnung P37K P45K P55K P75K
Hohe/Normale Überlast
Typische Wellenleistung [kW] 37 45 45 55 55 75 75 90
Schutzart IP20 C3 C3 C3 C4 C4
Schutzart IP21, IP55, IP66 C1 C1 C1 C2 C2
Ausgangsstrom
Dauerbetrieb (525-550 V) [A] 54 65 65 87 87 105 105 137
Aussetzbetrieb (525-550 V) [A] 81 72 98 96 131 116 158 151
Dauerbetrieb (551-600 V) [A] 52 62 62 83 83 100 100 131
Aussetzbetrieb (551-600 V) [A] 78 68 93 91 125 110 150 144
Dauerbetrieb kVA (550 V) [kVA] 51,4 61,9 61,9 82,9 82,9 100,0 100,0 130,5
Dauerbetrieb kVA (575 V) [kVA] 51,8 61,7 61,7 82,7 82,7 99,6 99,6 130,5
Max. Eingangsstrom
Dauerbetrieb bei 550 V [A] 49 59 59 78,9 78,9 95,3 95,3 124,3
Überlast (60 s) bei 550 V [A] 74 65 89 87 118 105 143 137
Dauerbetrieb bei 575 V [A] 47 56 56 75 75 91 91 119
Überlast (60 s) bei 575 V [A] 70 62 85 83 113 100 137 131
Zusätzliche technische Daten
IP20 max. Kabelquerschnitt für Netz und Motor [mm2]
([AWG])
IP20 max. Kabelquerschnitt (Bremse und Zwischenkreiskopplung) [mm2] ([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt für Netz und
Motor [mm2] ([AWG])
IP21, IP55, IP66 max. Kabelquerschnitt für Bremse und
Zwischenkreiskopplung [mm2] ([AWG])
Max. Kabelquerschnitt 4) mit Trennschalter [mm2]
([AWG])
Typische Verlustleistung bei max. Nennlast (W)
Wirkungsgrad
2)
1)
3)
HO NO HO NO HO NO HO NO
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50, 35, 35
(1, 2, 2)
740 900 900 1100 1100 1500 1500 1800
0,98 0,98 0,98 0,98
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM, 300
MCM, 4/0)
6 6
Tabelle 6.9 Netzversorgung 525-600 V (nur FC 302), P37K-P75K
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 69

Produktspezifikationen
Projektierungshandbuch
6.1.4 Netzversorgung 525-690 V (nur FC 302)
Typenbezeichnung P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Hohe/Normale Überlast
Typische Wellenleistung (kW) 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Schutzart IP20 A3 A3 A3 A3 A3 A3 A3
Ausgangsstrom
Dauerbetrieb (525-550 V) [A] 2,1 2,7 3,9 4,9 6,1 9,0 11,0
Aussetzbetrieb (525-550V) [A] 3,4 4,3 6,2 7,8 9,8 14,4 17,6
Dauerbetrieb (551-690 V) [A] 1,6 2,2 3,2 4,5 5,5 7,5 10,0
Aussetzbetrieb (551-690V) [A] 2,6 3,5 5,1 7,2 8,8 12,0 16,0
Dauerbetrieb KVA 525 V 1,9 2,5 3,5 4,5 5,5 8,2 10,0
Dauerbetrieb KVA 690 V 1,9 2,6 3,8 5,4 6,6 9,0 12,0
Max. Eingangsstrom
66
Dauerbetrieb (525-550 V) [A] 1,9 2,4 3,5 4,4 5,5 8,1 9,9
Aussetzbetrieb (525-550V) [A] 3,0 3,9 5,6 7,0 8,8 12,9 15,8
Dauerbetrieb (551-690 V) [A] 1,4 2,0 2,9 4,0 4,9 6,7 9,0
Aussetzbetrieb (551-690V) [A] 2,3 3,2 4,6 6,5 7,9 10,8 14,4
Zusätzliche technische Daten
Max. Kabelquerschnitt 4) (Netz, Motor, Bremse und
Zwischenkreiskopplung) [mm2] ([AWG])
Max. Kabelquerschnitt 4) mit Trennschalter [mm2]
([AWG])
Typische Verlustleistung bei max. Nennlast (W)
Wirkungsgrad
2)
1)
3)
HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO
4, 4, 4 (12, 12, 12) (min. 0,2 (24)
6, 4, 4 (10, 12, 12)
44 60 88 120 160 220 300
0,96 0,96 0,96 0,96 0,96 0,96 0,96
Tabelle 6.10 Baugröße A3, Netzversorgung 525-690 V IP20, P1K1-P7K5
Typenbezeichnung P11K P15K P18K P22K
Hohe/Normale Überlast
Typische Wellenleistung 550 V [kW] 7,5 11 11 15 15 18,5 18,5 22
Typische Wellenleistung bei 690 V [kW] 11 15 15 18,5 18,5 22 22 30
Schutzart IP20 B4 B4 B4 B4
Schutzart IP21, IP55 B2 B2 B2 B2
Ausgangsstrom
Dauerbetrieb (525-550 V) [A] 14,0 19,0 19,0 23,0 23,0 28,0 28,0 36,0
Aussetzbetrieb (60 s Überlast)(525-550 V) [A] 22,4 20,9 30,4 25,3 36,8 30,8 44,8 39,6
Dauerbetrieb (551-690 V) [A] 13,0 18,0 18,0 22,0 22,0 27,0 27,0 34,0
Aussetzbetrieb (60 s Überlast)(551-690 V) [A] 20,8 19,8 28,8 24,2 35,2 29,7 43,2 37,4
Dauerbetrieb kVA (bei 550 V) [kVA] 13,3 18,1 18,1 21,9 21,9 26,7 26,7 34,3
Dauerbetrieb kVA (bei 690 V) [kVA] 15,5 21,5 21,5 26,3 26,3 32,3 32,3 40,6
Max. Eingangsstrom
Dauerbetrieb (bei 550 V) (A) 15,0 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Aussetzbetrieb (60 s Überlast) (bei 550 V) (A) 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Dauerbetrieb (bei 690 V) (A) 14,5 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Aussetzbetrieb (60 s Überlast) (bei 690 V) (A) 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Zusätzliche technische Daten
Max. Kabelquerschnitt 4) für Netz/Motor, Zwischenkreiskopplung und Bremse [mm2] ([AWG])
Max. Kabelquerschnitt 4) mit Trennschalter [mm2]
([AWG])
Typische Verlustleistung bei max. Nennlast (W)
Wirkungsgrad
2)
1)
3)
HO NO HO NO HO NO HO NO
35, 25, 25 (2, 4, 4)
16,10,10 (6, 8, 8)
150 220 220 300 300 370 370 440
0,98 0,98 0,98 0,98
Tabelle 6.11 Bauform B2/B4, Netzversorgung 525-690 V IP20/IP21/IP55 (nur FC 302), P11K-P22K
70 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktspezifikationen Projektierungshandbuch
Typenbezeichnung P30K P37K P45K P55K P75K
Hohe/Normale Überlast
Typische Wellenleistung bei 550 V (kW) 22 30 30 37 37 45 45 55 50 75
Typische Wellenleistung bei 690 V [kW] 30 37 37 45 45 55 55 75 75 90
Schutzart IP20 B4 C3 C3 D3h D3h
Schutzart IP21, IP55 C2 C2 C2 C2 C2
Ausgangsstrom
Dauerbetrieb (525-550 V) [A] 36,0 43,0 43,0 54,0 54,0 65,0 65,0 87,0 87,0 105
Aussetzbetrieb (60 s Überlast)(525-550 V)
[A] 54,0 47,3 64,5 59,4 81,0 71,5 97,5 95,7 130,5 115,5
Dauerbetrieb (551-690 V) [A] 34,0 41,0 41,0 52,0 52,0 62,0 62,0 83,0 83,0 100
Aussetzbetrieb (60 s Überlast)(551-690 V)
[A] 51,0 45,1 61,5 57,2 78,0 68,2 93,0 91,3 124,5 110
Dauerbetrieb kVA (bei 550 V) [kVA] 34,3 41,0 41,0 51,4 51,4 61,9 61,9 82,9 82,9 100
Dauerbetrieb kVA (bei 690 V) [kVA] 40,6 49,0 49,0 62,1 62,1 74,1 74,1 99,2 99,2 119,5
Max. Eingangsstrom
Dauerbetrieb (bei 550 V) [A] 36,0 49,0 49,0 59,0 59,0 71,0 71,0 87,0 87,0 99,0
Aussetzbetrieb (60 s Überlast) (bei 550 V)
[A] 54,0 53,9 72,0 64,9 87,0 78,1 105,0 95,7 129 108,9
Dauerbetrieb (bei 690 V) [A] 36,0 48,0 48,0 58,0 58,0 70,0 70,0 86,0 - Aussetzbetrieb (60 s Überlast) (bei 690 V)
[A] 54,0 52,8 72,0 63,8 87,0 77,0 105 94,6 - -
Zusätzliche technische Daten
Max. Kabelquerschnitt für Netz und Motor
[mm2] ([AWG])
Max. Kabelquerschnitt für Zwischenkreiskopplung und Bremse [mm2] ([AWG])
Max. Kabelquerschnitt 4) mit Trennschalter
[mm2] ([AWG])
Geschätzte Verlustleistung
bei max. Nennlast [W]
Wirkungsgrad
2)
1)
HO NO HO NO HO NO HO NO HO NO
150 (300 MCM)
95 (3/0)
95, 70, 70
(3/0, 2/0, 2/0)
3)
600 740 740 900 900 1100 1100 1500 1500 1800
0,98
0,98 0,98 0,98 0,98
185, 150, 120
(350 MCM, 300
MCM, 4/0)
-
6 6
Tabelle 6.12 Bauformen B4, C2, C3, Netzversorgung 525-690 V IP20/IP21/IP55 (nur FC 302), P30K-P75K
Nennwerte der Sicherungen siehe Kapitel 9.3.1 Sicherungen und
Trennschalter.
1)
Hohe Überlast = 150 % oder 160 % Drehmoment für 60 s. Normale Überlast=110 % Drehmoment für 60 s.
2)
Gemessen mit 5 m abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz.
3)
Die typische Verlustleistung gilt für Nennlastbedingungen und sollte innerhalb von ±15 % liegen (Toleranz bezieht sich auf variierende
Spannungs- und Kabelbedingungen).
Werte basieren auf einem typischen Motorwirkungsgrad (Grenzlinie Wirkgrad2/Wirkgrad3). Motoren mit niedrigerem Wirkungsgrad
tragen ebenfalls zum Leistungsverlust im Frequenzumrichter bei und umgekehrt.
Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann die Verlustleistung bedeutend steigen.
Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Weitere Optionen und Anschlusslasten können die
Verluste um bis zu 30 W erhöhen. (Obwohl dies typischerweise nur zusätzliche 4 W bei einer vollbelasteten Steuerkarte oder bei
Optionen für Steckplatz A bzw. Steckplatz B sind.)
Obwohl Messungen mit Geräten nach dem neuesten Stand der Technik erfolgen, müssen geringe Messungenauigkeiten (± 5%) berücksichtigt werden.
4)
Die 3 Werte für den max. Kabelquerschnitt gelten für einadrige Kabel, flexible Kabel und flexible Kabel mit Aderendhülse.
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 71

Produktspezifikationen Projektierungshandbuch
6.2 Allgemeine technische Daten
6.2.1 Netzversorgung
Netzversorgung
Versorgungsklemmen (6 Pulse) L1, L2, L3
Versorgungsspannung 200-240 V ±10 %
Versorgungsspannung FC 301: 380-480 V/FC 302: 380-500 V ±10 %
Versorgungsspannung FC 302: 525-600 V ±10 %
Versorgungsspannung FC 302: 525-690 V ±10 %
Niedrige Netzspannung/Netzausfall:
Bei einer niedrigen Netzspannung oder einem Netzausfall arbeitet der Frequenzumrichter weiter, bis die Zwischenkreisspannung
unter den minimalen Stopppegel abfällt, der normalerweise 15 % unter der niedrigsten Versorgungsnennspannung des Frequenzumrichters liegt. Bei einer Netzspannung von weniger als 10 % unterhalb der niedrigsten Versorgungsnennspannung des
66
Frequenzumrichters erfolgt kein Netz-Ein und es wird kein volles Drehmoment erreicht.
Netzfrequenz 50/60 Hz ±5 %
Max. kurzzeitiges Ungleichgewicht zwischen Netzphasen 3,0 % der Versorgungsnennspannung
Wirkleistungsfaktor (λ) ≥ 0,9 bei Nennlast
Verschiebungs-Leistungsfaktor (cos ϕ) nahe 1 (> 0,98)
Schalten am Netzeingang L1, L2, L3 (Netz-Ein) ≤ 7,5 kW max. 2x/Min.
Schalten am Netzeingang L1, L2, L3 (Netz-Ein) 11-75 kW max. 1x/Min.
Schalten am Netzeingang L1, L2, L3 (Anzahl der Einschaltungen) ≥ 90 kW max. 1 x /2 Min.
Umgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2
Das Gerät eignet sich für Netzversorgungen, die maximal 100.000 A
können.
(symmetrisch) bei maximal je 240/500/600/690 V liefern
eff
Motorausgang und Motordaten
6.2.2
Motorausgang (U, V, W)
Ausgangsspannung 0-100 % der Versorgungsspannung
Ausgangsfrequenz 0-590 Hz
Ausgangsfrequenz bei Fluxvektorbetrieb 0-300 Hz
Schalten am Ausgang Unbegrenzt
Rampenzeiten 0,01-3600 s
Drehmomentkennlinie
Startmoment (konstantes Drehmoment) max. 160 % für 60 s1) einmal in 10 min.
Start-/Überlastmoment (variables Drehmoment) max. 110 % bis zu 0,5 s1) einmal in 10 min.
Drehmomentanstiegzeit in FLUX (für 5 kHz fsw) 1 ms
Drehmomentanstiegzeit in VVC+ (unabhängig von fsw) 10 ms
1) Prozentwert bezieht sich auf das Nenndrehmoment.
2) Die Drehmomentantwortzeit hängt von der Anwendung und der Last ab, aber als allgemeine Regel gilt, dass der Drehmomentschritt von 0 bis zum Sollwert das Vier- bis Fünffache der Drehmomentanstiegzeit beträgt.
3) Spezielle Kundenausführungen mit Ausgangsfrequenzen von 0-1000 Hz sind erhältlich.
Umgebungsbedingungen
6.2.3
Umgebung
Schutzart IP20, IP21, IP55, IP66
Vibrationstest 1,0 g
Max. THvD 10%
Max. relative Feuchtigkeit 5 % - 93 % (IEC 721-3-3; Klasse 3K3 (nicht kondensierend) bei Betrieb
Aggressive Umgebungsbedingungen (IEC 60068-2-43) H2S-Test
Prüfung kD
3)
72 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktspezifikationen Projektierungshandbuch
Umgebungstemperatur Max. 50 °C (durchschnittliches Maximum 24 Stunden 45 °C)
Min. Umgebungstemperatur bei Volllast 0 °C
Min. Umgebungstemperatur bei reduzierter Leistung - 10 °C
Temperatur bei Lagerung/Transport -25 bis +65/70 °C
Max. Höhe über dem Meeresspiegel ohne Leistungsreduzierung 1000 m
EMV-Normen, Störaussendung EN 61800-3, EN 55011
EMV-Normen, Störfestigkeit EN61800-3, EN 61000-6-1/2
1) Siehe Kapitel 5.2.1 EMV-Prüfergebnisse
6.2.4 Kabelspezifikationen
1)
Kabellängen und Querschnitte für Steuerleitungen
1)
Max. Motorkabellänge, abgeschirmt 150 m
Max. Motorkabellänge, abgeschirmt 300 m
Maximaler Querschnitt zu Steuerklemmen, flexibler/starrer Draht ohne Aderendhülsen 1,5 mm
Maximaler Querschnitt für Steuerklemmen, flexibles Kabel mit Aderendhülsen 1 mm
Maximaler Querschnitt für Steuerklemmen, flexibles Kabel mit Aderendhülsen mit Bund 0,5 mm
Mindestquerschnitt für Steuerklemmen 0,25 mm
1) Für Leistungskabel siehe die elektrischen Tabellen in Kapitel 6.1 Elektrische Daten.
6.2.5 Steuereingang/-ausgang und Steuerdaten
6.2.5.1 Digitaleingänge
Digitaleingänge
Programmierbare Digitaleingänge FC 301: 4 (5)1)/FC 302: 4 (6)
Klemme Nr. 18, 19, 271), 291), 32, 33
Logik PNP oder NPN
Spannungsniveau 0-24 V DC
Spannungsniveau, logisch „0“ PNP < 5 V DC
Spannungsniveau, logisch „1“ PNP > 10 V DC
Spannungsniveau, logisch „0“ NPN
Spannungsniveau, logisch „1“ NPN
Maximale Spannung am Eingang 28 V DC
Pulsfrequenzbereich 0-110 kHz
(Arbeitszyklus) Min. Pulsbreite 4,5 ms
Eingangswiderstand, R
i
2)
2)
> 19 V DC
< 14 V DC
ca. 4 kΩ
1)
2
2
2
2
6 6
Sichererer Stopp Klemme 37
3, 4)
(Klemme 37 hat festgelegte PNP-Logik)
Spannungsniveau 0-24 V DC
Spannungsniveau, logisch „0“ PNP < 4 V DC
Spannungsniveau, logisch „1“ PNP > 20 V DC
Maximale Spannung am Eingang 28 V DC
Typischer Eingangsstrom bei 24 V 50 mA eff.
Typischer Eingangsstrom bei 20 V 60 mA eff.
Eingangskapazität 400 nF
Alle Digitaleingänge sind von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
1) Sie können die Klemmen 27 und 29 auch als Ausgang programmieren.
2) Mit Ausnahme des Eingangs für den Sicheren Stopp, Klemme 37.
®
3) Siehe VLT
Frequenzumrichter - Sicher abgeschaltetes Moment Produkthandbuch für weitere Informationen zu Klemme 37 und
dem Sicheren Stopp.
4) Bei Verwendung eines Schützes mit integrierter DC-Spule in Kombination mit der Funktion „Sicherer Stopp“ ist es wichtig, dass
Sie eine Rückleitung für den Abschaltstrom von der Spule anlegen. Dies können Sie durch eine Freilaufdiode (oder alternativ eine
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 73

Produktspezifikationen Projektierungshandbuch
30- oder 50-V-MOV für schnellere Antwortzeiten) an der Drossel umsetzen. Sie können typische Schütze zusammen mit dieser
Diode erwerben.
Analogeingänge
Anzahl Analogeingänge 2
Klemme Nr. 53, 54
Betriebsarten Spannung oder Strom
Betriebsartwahl Schalter S201 und Schalter S202
Einstellung Spannung Schalter S201/Schalter S202 = AUS (U)
Spannungsniveau -10 bis +10 V (skalierbar)
Eingangswiderstand, R
i
ca. 10 kΩ
Max. Spannung ± 20 V
Strom Schalter S201/Schalter S202 = EIN (I)
Strombereich 0/4 bis 20 mA (skalierbar)
Eingangswiderstand, R
66
Max. Strom 30 mA
i
ca. 200 Ω
Auflösung der Analogeingänge 10 Bit (+ Vorzeichen)
Genauigkeit der Analogeingänge Max. Abweichung 0,5 % der Gesamtskala
Bandbreite 100 Hz
Die Analogeingänge sind galvanisch von der Versorgungsspannung (PELV = Protective extra low voltage/Schutzkleinspannung)
und anderen Hochspannungsklemmen getrennt.
Abbildung 6.1 PELV-Isolierung
Puls-/Drehgeber-Eingänge
Programmierbare Puls-/Drehgeber-Eingänge 2/1
Klemmennummer Puls-/Drehgeber 291), 332) / 323), 33
Max. Frequenz an Klemme 29, 32, 33 110 kHz (Gegentakt)
Max. Frequenz an Klemme 29, 32, 33 5 kHz (offener Kollektor)
Min. Frequenz an Klemme 29, 32, 33 4 Hz
Spannungsniveau siehe Abschnitt zu Digitaleingängen
Maximale Spannung am Eingang 28 V DC
Eingangswiderstand, R
i
ca. 4 kΩ
Pulseingangsgenauigkeit (0,1-1 kHz) Max. Abweichung: 0,1 % der Gesamtskala
Genauigkeit des Drehgebereingangs (1-11 kHz) Max. Abweichung: 0,05 % der Gesamtskala
Die Puls- und Drehgebereingänge (Klemmen 29, 32, 33) sind galvanisch von der Versorgungsspannung PELV (Schutzkleinspannung – Protective extra low voltage) und anderen Hochspannungsklemmen getrennt.
1) FC 302 nur
2) Pulseingänge sind 29 und 33
3) Drehgebereingänge: 32 = A, und 33 = B
Digitalausgang
Programmierbare Digital-/Pulsausgänge 2
Klemme Nr. 27, 29
Spannungsniveau am Digital-/Pulsausgang 0-24 V
Max. Ausgangsstrom (Körper oder Quelle) 40 mA
3)
1)
74 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Produktspezifikationen Projektierungshandbuch
Max. Last am Pulsausgang 1 kΩ
Max. kapazitive Last am Pulsausgang 10 nF
Min. Ausgangsfrequenz am Pulsausgang 0 Hz
Max. Ausgangsfrequenz am Pulsausgang 32 kHz
Genauigkeit am Pulsausgang Max. Abweichung: 0,1 % der Gesamtskala
Auflösung der Pulsausgänge 12 Bit
1) Die Klemmen 27 und 29 können auch als Eingang programmiert werden.
Der Digitalausgang ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Analogausgang
Anzahl programmierbarer Analogausgänge 1
Klemme Nr. 42
Strombereich am Analogausgang 0/4 bis 20 mA
Max. Last GND – Analogausgang < 500 Ω
Genauigkeit am Analogausgang Max. Abweichung: 0,5 % der Gesamtskala
Auflösung am Analogausgang 12 Bit
Der Analogausgang ist galvanisch von der Versorgungsspannung (PELV – Schutzkleinspannung, Protective extra low voltage)
und anderen Hochspannungsklemmen getrennt.
Steuerkarte, 24 V DC-Ausgang
Klemme Nr. 12, 13
Ausgangsspannung 24 V +1, -3 V
Max. Last 200 mA
Die 24 V DC-Versorgung ist galvanisch von der Versorgungsspannung (PELV) getrennt, hat jedoch das gleiche Potential wie die
analogen und digitalen Ein- und Ausgänge.
6 6
Steuerkarte, 10 V DC-Ausgang
Klemme Nr. ±50
Ausgangsspannung 10,5 V ±0,5 V
Max. Last 15 mA
Die 10-V-DC-Versorgung ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Steuerkarte, RS485 serielle Schnittstelle
Klemme Nr. 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Klemme Nr. 61 Masse für Klemmen 68 und 69
Die serielle RS-485-Kommunikationsschnittstelle ist von anderen zentralen Stromkreisen funktional und von der Versorgungsspannung (PELV) galvanisch getrennt.
Steuerkarte, serielle USB-Schnittstelle
USB-Standard 1.1 (Full Speed)
USB-Buchse USB-Buchse Typ B (Gerät)
Der Anschluss an einen PC erfolgt über ein standardmäßiges USB-Kabel.
Die USB-Verbindung ist galvanisch von der Versorgungsspannung (PELV, Schutzkleinspannung) und anderen Hochspannungsklemmen getrennt.
Der USB-Erdanschluss ist nicht galvanisch von der Schutzerde getrennt. Benutzen Sie nur einen isolierten Laptop als PCVerbindung zum USB-Anschluss am Frequenzumrichter.
Relaisausgänge
Programmierbare Relaisausgänge FC 301 alle kW: 1/FC 302 alle kW: 2
Klemmennummer Relais 01 1-3 (öffnen), 1-2 (schließen)
Max. Klemmenleistung (AC-1)1) an 1-3 (öffnen), 1-2 (schließen) (ohmsche Last) 240 V AC, 2 A
Max. Klemmenleistung (AC-15)1) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
Max. Klemmenleistung (DC-1)1) an 1-2 (schließen), 1-3 (öffnen) (ohmsche Last) 60 V DC, 1 A
Max. Klemmenleistung (DC-13)1) (induktive Last) 24 V DC, 0,1 A
Relais 02 (nur FC 302) Klemmennummer 4-6 (öffnen), 4-5 (schließen)
Max. Klemmenleistung (AC-1)1) an 4-5 (schließen) (ohmsche Last)
2)3)
Überspannungs-Kat. II 400 V AC, 2 A
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 75

Produktspezifikationen Projektierungshandbuch
Max. Klemmenleistung (AC-15)1) an 4-5 (schließen) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
Max. Klemmenleistung (DC-1)1) an 4-5 (schließen) (ohmsche Last) 80 V DC, 2 A
Max. Klemmenleistung (DC-13)1) an 4-5 (schließen) (induktive Last) 24 V DC, 0,1 A
Max. Klemmenleistung (AC-1)1) an 4-6 (öffnen) (ohmsche Last) 240 V AC, 2 A
Max. Klemmenleistung (AC-15)1) an 4-6 (öffnen) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
Max. Klemmenleistung (DC-1)1) an 4-6 (öffnen) (ohmsche Last) 50 V DC, 2 A
Max. Klemmenleistung (DC-13)1) an 4-6 (öffnen) (induktive Last) 24 V DC, 0,1 A
Min. Klemmenleistung an 1-3 (öffnen), 1-2 (schließen), 4-6 (öffnen), 4-5 (schließen) 24 V DC 10 mA, 24 V AC 20 mA
Umgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2
1) IEC 60947 Teile 4 und 5
Die Relaiskontakte sind durch verstärkte Isolierung (PELV – Protective extra low voltage/Schutzkleinspannung) vom Rest der
Schaltung galvanisch getrennt.
2) Überspannungskategorie II
3) UL-Anwendungen 300 V AC 2 A
66
Steuerkartenleistung
Abtastintervall 1 ms
Steuerungseigenschaften
Auflösung der Ausgangsfrequenz bei 0-590 Hz ±0,003 Hz
Wiederholgenauigkeit für Präz. Start/Stopp (Klemmen 18, 19) ≤±0,1 ms
System-Reaktionszeit (Klemmen 18, 19, 27, 29, 32, 33) ≤ 2 ms
Drehzahlregelbereich (ohne Rückführung) 1:100 der Synchrondrehzahl
Drehzahlregelbereich (mit Rückführung) 1:1000 der Synchrondrehzahl
Drehzahlgenauigkeit (ohne Rückführung) 30-4000 UPM: Abweichung ±8 UPM
Drehzahlgenauigkeit (mit Rückführung), je nach Auflösung des Istwertgebers 0-6000 UPM: Abweichung ±0,15 UPM
Drehmomentregelgenauigkeit (Drehzahlrückführung) max. Abweichung ±5 % der Gesamtskala
Alle Angaben zu Steuerungseigenschaften basieren auf einem 4-poligen Asynchronmotor
76 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

2
20%
4 6 8
10
12 14 16
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
130BA393.10
0
0
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD639.10
I
out
(%)
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BA394.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD640.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA402.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA401.11
B1
B2
Produktspezifikationen Projektierungshandbuch
SFAVM
6.2.6 Leistungsreduzierung wegen erhöhter
Umgebungstemperatur
6.2.6.1 Leistungsreduzierung wegen
erhöhter Umgebungstemperatur,
Bauform A
60° AVM - Pulsbreitenmodulation
Abbildung 6.5 Leistungsreduzierung von I
T
Motorkabel
für Bauform A, mittels SFAVM und max. 10-m-
AMB, MAX
für abweichende
out
Abbildung 6.2 Leistungsreduzierung von I
T
für Bauform A, bei 60° AVM
AMB, MAX
für abweichende
out
SFAVM - Asynchrone Vektormodulation der Statorfrequenz (Stator Frequency Asyncron Vector Modulation)
Abbildung 6.3 Leistungsreduzierung von I
T
für Bauform A, mit SFAVM
AMB, MAX
für abweichende
out
Wenn Sie bei der Bauform A ausschließlich Motorkabel mit
einer Länge von 10 m oder weniger verwenden, ist eine
geringere Leistungsreduzierung erforderlich. Dies liegt
daran, dass die Länge der Motorkabel einen relativ hohen
Einfluss auf die empfohlene Leistungsreduzierung hat.
60° AVM
6.2.6.2
Leistungsreduzierung wegen
erhöhter Umgebungstemperatur,
Bauform B
Bauformen B, T2, T4 und T5
Bei den Bauformen B und C ist die Leistungsreduzierung
auch vom in 1-04 Überlastmodus ausgewählten
Überlastmodus abhängig. ausgewählten Überlastmodus
abhängig.
60° AVM - Pulsbreitenmodulation
Abbildung 6.6 Leistungsreduzierung von I
T
für Bauformen B1 und B2, mittels 60° AVM im
AMB, MAX
Modus „Hohe Überlast“ (160 % Übermoment)
für abweichende
out
6 6
Abbildung 6.4 Leistungsreduzierung von I
T
Motorkabel
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 77
für Bauform A, mittels 60° AVM und max. 10-m-
AMB, MAX
für abweichende
out
Abbildung 6.7 Leistungsreduzierung von I
T
für Bauformen B1 und B2, mittels 60° AVM im
AMB, MAX
für abweichende
out
Modus „Normale Überlast“ (110 % Übermoment)

130BB830.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
o
50 C
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B3 & B4
HO
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
B3
B4
NO
130BB828.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA404.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
0
0
I
out
(%)
NO
130BA403.11
B1
B2
130BB834.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
B3
(%)
l
out
HO
B4
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
B3
B4
f
sw
(kHz)
0
0
(%)
l
out
NO
130BB832.10
Produktspezifikationen Projektierungshandbuch
Abbildung 6.11 Leistungsreduzierung von I
T
Abbildung 6.8 Leistungsreduzierung von I
T
66
Modus „Hohe Überlast“ (160 % Übermoment)
für Bauformen B3 und B4, mittels 60° AVM im
AMB, MAX
für abweichende
out
Modus „Normale Überlast“ (110 % Übermoment)
für die Bauformen B1 und B2, mittels SFAVM im
AMB, MAX
Abbildung 6.12 Leistungsreduzierung von I
Abbildung 6.9 Leistungsreduzierung von I
T
für die Bauformen B3 und B4, mittels 60° AVM im
AMB, MAX
für abweichende
out
T
Modus „Hohe Überlast“ (160 % Übermoment)
für die Bauformen B3 und B4, mittels SFAVM im
AMB, MAX
für abweichende
out
für abweichende
out
Modus „Normale Überlast“ (110 % Übermoment)
SFAVM - Asynchrone Vektormodulation der Statorfrequenz (Stator Frequency Asyncron Vector Modulation)
Abbildung 6.13 Leistungsreduzierung von I
T
Modus „Normale Überlast“ (110 % Übermoment)
out
für abweichende
Abbildung 6.10 Leistungsreduzierung von I
T
Modus „Hohe Überlast“ (160 % Übermoment)
für die Bauformen B1 und B2, mittels SFAVM im
AMB, MAX
78 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
für die Bauformen B3 und B4, mittels SFAVM im
AMB, MAX
out
für abweichende

1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
3
(%)
l
out
f
sw
(kHz)
0
0
B1 & B2
NO
130BB820.10
1 2 4
6 8
20%
10
40%
o
50 C
f
sw
(kHz)
0
0
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B1 & B2
HO
130BB822.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
NO
130BB826.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
HO
130BB824.10
fsw (kHz)
130BB211.10
13.6
20.4
27.2
34
I
out
(A)
30.6
1 2 64
55°C
50°C
45°C
8 10
B2 all options
Produktspezifikationen Projektierungshandbuch
Bauformen B, T6
60° AVM - Pulsbreitenmodulation
Abbildung 6.17 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für 600-V-
Abbildung 6.14 Leistungsreduzierung des Ausgangsstroms mit
Frequenzumrichter, Baugröße B; SFAVM, Hohe Überlast
einer Schaltfrequenz und Umgebungstemperatur für 600-VFrequenzumrichter, Baugröße B, 60 AVM, normale Überlast
Bauformen B, T7
Bauformen B2 und B4, 525-690 V
60° AVM - Pulsbreitenmodulation
6 6
Abbildung 6.15 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für 600-VFrequenzumrichter, Baugröße B, 60 AVM, hohe Überlast
Abbildung 6.18 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für Baugröße
B2 und B4, 60° AVM. Bemerkung: Die Kurve wird mit dem
Strom als Absolutwert gezeichnet und gilt sowohl für hohe als
auch normale Überlast.
SFAVM - Asynchrone Vektormodulation der Statorfrequenz (Stator Frequency Asyncron Vector Modulation)
Abbildung 6.16 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für 600-VFrequenzumrichter, Baugröße B; SFAVM, Normale Überlast
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 79

fsw (kHz)
130BB212.10
40
60
80
100
I
out
(A)
90
1 2 64
55°C
50°C
45°C
8 10
B2 all options
70
20
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA398.10
0
0
I
out
(%)
HO
C1 & C2
130BA397.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
C1 & C2
130BB831.10
80%
90%
100%
110%
(%)
l
out
C3 & C4
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB829.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
HO
f
sw
(kHz)
45°C
50°C
55°C
130BA400.10
0
0
I
out
(%)
C1 & C2
Produktspezifikationen Projektierungshandbuch
SFAVM - Asynchrone Vektormodulation der Statorfrequenz (Stator Frequency Asyncron Vector Modulation)
Abbildung 6.19 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für die
66
Baugrößen B2 und B4, SFAVM. Bemerkung: Die Kurve wird mit
Abbildung 6.22 Leistungsreduzierung von I
T
für die Bauformen C3 und C4, mittels 60° AVM im
AMB, MAX
Modus „Hohe Überlast“ (160 % Übermoment)
für abweichende
out
dem Strom als Absolutwert gezeichnet und gilt sowohl für
hohe als auch normale Überlast.
6.2.6.3
Leistungsreduzierung wegen
erhöhter Umgebungstemperatur,
Bauform C
Bauformen C, T2, T4 und T5
60° AVM - Pulsbreitenmodulation
Abbildung 6.20 Leistungsreduzierung von I
T
für die Bauformen C1 und C2, mittels 60° AVM im
AMB, MAX
Modus „Hohe Überlast“ (160 % Übermoment)
für abweichende
out
Abbildung 6.23 Leistungsreduzierung von I
T
für die Bauformen C3 und C4, mittels 60° AVM im
AMB, MAX
Modus „Normale Überlast“ (110 % Übermoment)
SFAVM - Asynchrone Vektormodulation der Statorfrequenz (Stator Frequency Asyncron Vector Modulation)
für abweichende
out
Abbildung 6.24 Leistungsreduzierung von I
T
Abbildung 6.21 Leistungsreduzierung von I
T
für die Bauformen C1 und C2, mittels 60° AVM im
AMB, MAX
Modus „Normale Überlast“ (110 % Übermoment)
80 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
für abweichende
out
Modus „Hohe Überlast“ (160 % Übermoment)
für die Bauformen C1 und C2, mittels SFAVM im
AMB, MAX
out
für abweichende

2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
fsw (kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA399.10
C1 & C2
130BB835.10
80%
90%
100%
110%
C3 & C4
(%)
l
out
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
0
0
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB833.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB821.10
80%
90%
100%
o
45 C
110%
(%)
l
out
C1 & C2
HO
1 2 4
6 8
20%
10
40%
60%
o
50 C
f
sw
(kHz)
0
0
130BB823.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB827.10
Produktspezifikationen Projektierungshandbuch
Bauformen C, T6
60° AVM - Pulsbreitenmodulation
Abbildung 6.25 Leistungsreduzierung von I
T
für die Bauformen C1 und C2, mittels SFAVM im
AMB, MAX
für abweichende
out
Modus „Normale Überlast“ (110 % Übermoment)
Abbildung 6.26 Leistungsreduzierung von I
T
für die Bauformen C3 und C4, mittels SFAVM im
AMB, MAX
für abweichende
out
Modus „Hohe Überlast“ (160 % Übermoment)
Abbildung 6.28 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für 600-V-
Frequenzumrichter, Baugröße C, 60 AVM, normale Überlast
Abbildung 6.29 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für 600-V-
Frequenzumrichter, Baugröße C, 60 AVM, hohe Überlast
6 6
SFAVM - Asynchrone Vektormodulation der Statorfrequenz (Stator Frequency Asyncron Vector Modulation)
Abbildung 6.27 Leistungsreduzierung von I
T
für die Bauformen C3 und C4, mittels SFAVM im
AMB, MAX
Modus „Normale Überlast“ (110 % Übermoment)
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 81
für abweichende
out
Abbildung 6.30 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für 600-V-
Frequenzumrichter, Baugröße C; SFAVM, Normale Überlast

130BB825.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
HO
fsw (kHz)
130BB213.11
20.4
34
I
out
(A)
28.9
1 2 64
55°C
50°C
45°C
8 10
C2 all options
13.6
27.2
fsw (kHz)
130BB214.10
40
60
80
100
I
out
(A)
86.6
1 2 64
55°C
50°C
45°C
8 10
C2 all options
66.6
20
2
20%
4 6 8 10
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
I
LOAD
at T
AMB
max
130BD597.10
0
0
I
LOAD
at T
AMB
max +5 °C
I
LOAD
at T
AMB
max +5 °C
Produktspezifikationen
Projektierungshandbuch
SFAVM - Asynchrone Vektormodulation der Statorfrequenz (Stator Frequency Asyncron Vector Modulation)
Abbildung 6.31 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für 600-V-
66
Frequenzumrichter, Baugröße C; SFAVM, Hohe Überlast
Abbildung 6.33 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für Baugröße
C2, SFAVM. Bemerkung: Die Kurve wird mit dem Strom als
Absolutwert gezeichnet und gilt sowohl für hohe als auch
normale Überlast.
Baugröße C, T7
60° AVM - Pulsbreitenmodulation
Abbildung 6.34 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für Baugröße
Abbildung 6.32 Leistungsreduzierung des Ausgangsstroms mit
einer Schaltfrequenz und Umgebungstemperatur für Baugröße
C2, 60° AVM. Bemerkung: Die Kurve wird mit dem Strom als
Absolutwert gezeichnet und gilt sowohl für hohe als auch
normale Überlast.
C3
Gemessene Werte für dU/dt-Prüfung
6.2.7
Zur Vermeidung von Beschädigungen von Motoren ohne
Phasentrennpapier oder einer anderen Isolationsverstärkung für den Betrieb des Frequenzumrichters wird
unbedingt empfohlen, dass Sie ein dU/dt-Filter oder LCFilter am Ausgang des Frequenzumrichters installieren.
Wenn ein Transistor in der Wechselrichterbrücke schaltet,
steigt die Spannung im Motor im Verhältnis dU/dt,
abhängig von:
Motorinduktivität
•
Motorkabel (Typ, Querschnitt, Länge, mit/ohne
•
Abschirmung)
Die Selbstinduktivität verursacht ein Übersteuern der
82 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
Spannungsspitze in der Motorspannung, bevor sie sich
stabilisiert. Der Pegel wird durch die Spannung im
Zwischenkreis bestimmt.
Spitzenspannung an den Motorklemmen wird durch das
Schalten der IGBT-Transistoren verursacht. Die Lebensdauer
des Motors wird sowohl durch die Anstiegzeit als auch die

Produktspezifikationen
Projektierungshandbuch
Spitzenspannung beeinflusst. Eine zu hohe Spitzenspannung schädigt vor allem Motoren ohne
Phasentrennungspapier in den Wicklungen.
Bei kurzen Motorkabeln (wenige Meter) sind Anstiegzeit
und Spitzenspannung niedriger. Die Motorkabellänge
(100 m) führt zu einer längeren Anstiegzeit und einer
höheren Spitzenspannung.
Der Frequenzumrichter erfüllt hinsichtlich der Motorkonstruktion IEC 60034-25 und IEC 60034-17.
200-240 V (T2)
NetzKabellänge [m]
5 240 0,13 0,510 3,090
50 240 0,23 2,034
100 240 0,54 0,580 0,865
150 240 0,66 0,560 0,674
Tabelle 6.13 P5K5T2
Kabellänge [m]
36 240 0,264 0,624 1,890
136 240 0,536 0,596 0,889
150 240 0,568 0,568 0,800
spannu
ng [V]
Netz-
spannu
ng [V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt [kV/μs]
NetzKabellänge [m]
15 240 0,194 0,626 2,581
50 240 0,252 0,574 1,822
150 240 0,488 0,538 0,882
Tabelle 6.18 P22KT2
Kabellänge [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Tabelle 6.19 P30KT2
Kabellänge [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Tabelle 6.20 P37KT2
spannu
ng [V]
Netz-
spannu
ng [V]
Netz-
spannu
ng [V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
380-500 V (T4)
6 6
Tabelle 6.14 P7K5T2
NetzKabellänge [m]
30 240 0,556 0,650 0,935
100 240 0,592 0,594 0,802
150 240 0,708 0,587 0,663
Tabelle 6.15 P11KT2
Kabellänge [m]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tabelle 6.16 P15KT2
Kabellänge [m]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
spannu
ng [V]
Netz-
spannu
ng [V]
Netz-
spannu
ng [V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
NetzKabellänge [m]
5 480 0,640 0,690 0,862
50 480 0,470 0,985 0,985
150 480 0,760 1,045 0,947
Tabelle 6.21 P1K5T4
Kabellänge [m]
5 480 0,172 0,890 4,156
50 480 0,310 2,564
150 480 0,370 1,190 1,770
Tabelle 6.22 P4K0T4
Kabellänge [m]
5 480 0,04755 0,739 8,035
50 480 0,207 4,548
150 480 0,6742 1,030 2,828
Tabelle 6.23 P7K5T4
spannu
ng [V]
Netz-
spannu
ng [V]
Netz-
spannu
ng [V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tabelle 6.17 P18KT2
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 83

Produktspezifikationen
Projektierungshandbuch
NetzKabellänge [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tabelle 6.24 P11KT4
Kabellänge [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
66
Tabelle 6.25 P15KT4
Kabellänge [m]
36 480 0,312 2,846
100 480 0,556 1,250 1,798
150 480 0,608 1,230 1,618
Tabelle 6.26 P18KT4
Kabellänge [m]
15 480 0,288 3,083
100 480 0,492 1,230 2,000
150 480 0,468 1,190 2,034
Tabelle 6.27 P22KT4
spannu
ng [V]
Netz-
spannu
ng [V]
Netz-
spannu
ng [V]
Netz-
spannu
ng [V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Kabellänge [m]
15 480 0,256 1,230 3,847
50 480 0,328 1,200 2,957
100 480 0,456 1,200 2,127
150 480 0,960 1,150 1,052
Tabelle 6.30 P45KT4
380-500 V (T5)
Kabellänge [m]
5 480 0,371 1,170 2,523
Tabelle 6.31 P55KT5
Kabellänge [m]
5 480 0,371 1,170 2,523
Tabelle 6.32 P75KT5
600 V (T6)
Kabellänge [m]
36 600 0,304 1,560 4,105
50 600 0,300 1,550 4,133
100 600 0,536 1,640 2,448
150 600 0,576 1,640 2,278
Netzspannu
ng [V]
Netzspannun
g [V]
Netzspannun
g [V]
Netzspannun
g [V]
Anstiegzeit
[μs]
Anstiegzei
t
[μs]
Anstiegzei
t
[μs]
Anstiegzei
t
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
NetzKabellänge [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tabelle 6.28 P30KT4
Kabellänge [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tabelle 6.29 P37KT4
spannu
ng [V]
Netz-
spannu
ng [V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tabelle 6.33 P15KT6
NetzKabellänge [m]
36 600 0,084 1,560 7,962
50 600 0,120 1,540 5,467
100 600 0,165 1,472 3,976
150 600 0,190 1,530 3,432
Tabelle 6.34 P30KT6
Kabellänge [m]
15 600 0,276 1,184 4,290
Tabelle 6.35 P75KT6
spannun
g [V]
Netz-
spannun
g [V]
Anstiegzeit
[μs]
Anstiegzeit
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
84 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Produktspezifikationen
Projektierungshandbuch
525-690 V (T7)
NetzKabellänge [m]
80 690 0,58 1,728 2369
130 690 0,93 1,824 1569
180 690 0,925 1,818 1570
Tabelle 6.36 P7K5T7
Kabellänge [m]
6 690 0,238 1416 4739
50 690 0,358 1764 3922
150 690 0,465 1872 3252
Tabelle 6.37 P45KT7
6.2.8
spannun
g [V]
Netz-
spannun
g [V]
Wirkungsgrad
Anstiegzei
t
[μs]
Anstiegzei
t
[μs]
Wirkungsgrad des Frequenzumrichters
Die Last am Frequenzumrichter hat kaum Auswirkung auf
seinen Wirkungsgrad.
Das heißt, dass sich der Wirkungsgrad des Frequenzumrichters nicht ändert; wenn Sie eine andere U/f-Kennlinie
wählen. Dennoch haben die U/f-Kennlinien einen Einfluss
auf den Wirkungsgrad des Motors.
Der Wirkungsgrad nimmt leicht ab, wenn die Taktfrequenz
auf einen Wert von über 5 kHz eingestellt ist. Der
Wirkungsgrad nimmt auch leicht ab, wenn das Motorkabel
länger als 30 m ist.
Berechnung des Wirkungsgrads
Berechnen Sie den Wirkungsgrad des Frequenzumrichters
bei unterschiedlichen Lasten auf Grundlage von
Abbildung 6.35. Multiplizieren Sie den Faktor in dieser
Abbildung mit dem spezifischen Wirkungsgradfaktor, der in
Kapitel 6.2 Allgemeine technische Daten zu finden ist.
Abbildung 6.35 Typische Wirkungsgradkurven
Beispiel: Nehmen wir als Beispiel einen Frequenzumrichter
mit 55 kW und 380–480 V AC bei 25 % Last bei 50 %
Drehzahl. Das Diagramm zeigt 0,97 an. Die Nenn-Effizienz
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 85
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
für einen 55-kW-Frequenzumrichter beträgt 0,98. Der
tatsächliche Wirkungsgrad ist gleich: 0,97 x 0,98=0,95.
Motorwirkungsgrade
Der Wirkungsgrad eines an den Frequenzumrichter
angeschlossenen Motors hängt von der Magnetisierungsstufe ab. Der Motorwirkungsgrad ist außerdem vom
Motortyp abhängig.
Im Nenndrehmomentbereich von 75–100 % ist
•
der Motorwirkungsgrad praktisch konstant,
sowohl wenn dieser vom Frequenzumrichter
geregelt als auch wenn er direkt am Netz
betrieben wird.
Die U/f-Kennlinien haben nur einen minimalen
•
Einfluss auf den Wirkungsgrad. Allerdings
ergeben sich beachtliche Effizienzvorteile bei
Motoren mit mindestens 11 kW.
Die Taktfrequenz hat keinen Einfluss auf den
•
Wirkungsgrad von kleinen Motoren. Die Effizienz
von Motoren ab 11 kW wird um 1 bis 2 %
verbessert. Dies liegt daran, dass die Form der
Sinuskurve des Motorstroms bei hoher
Taktfrequenz fast perfekt ist.
Systemwirkungsgrad
Zur Berechnung des Systemwirkungsgrads wird der
Wirkungsgrad des Frequenzumrichters mit dem Motorwirkungsgrad multipliziert.
Störgeräusche
6.2.9
Störgeräusche von Frequenzumrichtern haben 3 Ursachen
Zwischenkreisdrosseln
•
EMV-Filterdrossel
•
Interne Lüfter
•
Siehe Tabelle 6.38 für Spezifikationen zu den Störgeräuschen.
Gehäusetyp
A1 51 60
A2 51 60
A3 51 60
A4 51 60
A5 54 63
B1 61 67
B2 58 70
B4 52 62
C1 52 62
C2 55 65
C4 56 71
D3h 58 71
Tabelle 6.38 Nennwerte der Störgeräusche
Alle Werte werden im Abstand von 1 m zum Gerät gemessen.
50 % Lüfterdrehzahl [dBA]
Volle Lüfterdrehzahl [dBA]
6 6

F C - P T
130BB836.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X D
Bestellen des Frequenzumric... Projektierungshandbuch
7 Bestellen des Frequenzumrichters
7.1 Antriebskonfigurator
Abbildung 7.1 Beispiel für Typencode
Sie können mit dem Antriebskonfigurator den geeigneten
Frequenzumrichter für Ihre Anwendung zusammenstellen
und den entsprechenden Typencode erzeugen. Der
Antriebskonfigurator erzeugt automatisch eine 8-stellige
Bestellnummer, mit der Sie den Frequenzumrichter über
eine Vertriebsniederlassung vor Ort bestellen können.
77
Außerdem können Sie eine Projektliste mit mehreren
Produkten aufstellen und an Ihren Danfoss-Verkaufsingenieuer senden.
Der Antriebskonfigurator ist auf der globalen Internetseite
zu finden: www.danfoss.com/drives.
Typencode
7.1.1
Ein Beispiel für den Typencode:
FC-302PK75T5E20H1BGCXXXSXXXXA0BXCXXXXD0
Die Bedeutung der Zeichen in dieser Zeichenfolge sind in
Tabelle 7.1 und Tabelle 7.2 definiert. Im obigen Typencode
sind z. B. die Optionen Profibus DP V1 und die externe 24
V-Versorgung enthalten.
Beschreibung Pos. Mögliche Optionen
Produktgruppe
Frequenzumrichter-Serie
Nennleistung 8-10 0,25-75 kW
Phasen 11 Drei Phasen (T)
Netzspannung 11-12T2: 200-240 V
Baugröße 13-15E20: IP20
1-3 FC 30x
4-6 301: FC 301
302: FC 302
T4: 380-480 V
T5: 380-500 V
T6: 525-600 V
T7: 525-690 V
E55: IP 55
P20: IP20 (mit Rückwand)
P21: IP21 (mit Rückwand)
P55: IP55 (mit Rückwand)
Z20: IP20
E66: IP66
1)
Beschreibung Pos. Mögliche Optionen
EMV-Filter 16-17Hx: Keine EMV-Filter im Frequenzum-
richter integriert (nur 600-V-Geräte)
H1: Integriertes EMV-Filter. Erfüllt EN
55011 Klasse A1/B und EN/IEC 61800-3
Kategorie 1/2
H2: Kein zusätzliches EMV-Filter. Erfüllt
EN 55011 Klasse A2 und EN/IEC 61800-3
Kategorie 3
H3:
H3 – Integriertes EMV-Filter. Erfüllt EN
55011 Klasse A1/B und EN/IEC 61800-3
Kategorie 1/2 (baugröße A1)1)nur
H4: Integriertes EMV-Filter. Erfüllt EN
55011 Klasse A1 und EN/IEC 61800-3
Kategorie 2
H5: Ausführungen für Schiffsanwendungen. Entspricht denselben
Emissionswerten wie H2-Versionen
Bremse 18 B: Bremschopper integriert
X: Kein Bremschopper integriert
T: Sicherer Stopp Keine Bremse
U: Sicherer Stopp Bremschopper
Display 19 G: Grafisches LCP-Bedienteil
N: Numerisches LCP-Bedienteil
X: Ohne LCP-Bedienteil
Beschichtung
der Platine
Netzoption 21 X: Keine Netzoption
20 C: Beschichtete Platine
R: Widerstandsfähiger
X: Keine beschichtete Platine
1: Netztrennschalter
3: Netztrennschalter und Sicherung
5: Netztrennschalter, Sicherung und
Zwischenkreiskopplung
7: Sicherung
8: Netztrennschalter und Zwischenkreis-
kopplung
A: Sicherung und Zwischenkreis-
kopplung
D: Zwischenkreiskopplung
2)
3)
2, 3)
1)
1)
2, 3)
3)
2)
86 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Bestellen des Frequenzumric... Projektierungshandbuch
Beschreibung Pos. Mögliche Optionen
Anpassung 22 X: Standard-Kabeleinführungen
O: Europäisches metrisches Gewinde in
Kabeleinführungen (nur A4, A5, B1, B2,
C1, C2)
S: Kabeleinführungen nach dem
britischen Maßsystem (nur A5, B1, B2,
C1 und C2)
Anpassung 23 X: Keine Anpassung
Softwareversion
SoftwareSprache
1): FC 301/nur Baugröße A1
2) Nur US-Markt
3): Die Baugrößen A und B3 verfügen werkseitig über eine
integrierte Zwischenkreiskopplung
Tabelle 7.1 Bestell-Typencode Baugrößen A, B
und C
Beschreibung Pos. Mögliche Optionen
A-Optionen 29-30AX: Keine A-Option
B-Optionen 31-32BX: Keine Option
C0 Optionen 33-34CX: Keine Option
C1 Optionen 35 X: Keine Option
Software für
die COption/E1Optionen
2427
28 X: Unbenutzt
SXXX: Aktuelle Version - Standard-
Software
A0: MCA 101 Profibus DP V1 (Standard)
A4: MCA 104 DeviceNet (Standard)
A6: MCA 105 CANOpen (Standard)
AN: MCA 121 EtherNet/IP
AL: MCA 120 ProfiNet
AQ: MCA 122 Modbus TCP
AT: MCA 113 Profibus-Umrichter VLT
3000
AU: MCA 114 Profibus-Umrichter VLT
5000
AY: MCA 123 Powerlink
A8: MCA 124 EtherCAT
BK: MCB 101 Allgemeine I/O-Option
BR: MCB 102 Drehgeber-Option
BU: MCB 103 Resolver-Option
BP: MCB 105 Relaisoption
BZ: MCB 108 Sicherheits-SPS-Schnittstelle
B2: MCB 112 PTC-Thermistorkarte
B4: MCB 114 VLT Sensoreingang
B6: MCB 150 Safe Option TTL
B7: MCB 151 Safe Option HTL
C4: MCO 305, programmierbarer
Bewegungsregler
R: MCB 113 Ext. Relaiskarte
Z: MCA 140 Modbus RTU OEM-Option
36-37XX: Standardregler
10: MCO 350 Synchronisierungsregler
11: MCO 351 Positioning Control
Beschreibung Pos. Mögliche Optionen
D-Optionen 38-39DX: Keine Option
D0: MCB 107 Externe Spannungsversorgung mit 24 V DC
Tabelle 7.2 Bestell-Typencode, Optionen
HINWEIS
Für Leistungsgrößen über 75 kW siehe das VLT
AutomationDrive FC 300 90-1400 kW Projektierungshandbuch.
®
7 7
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 87

Bestellen des Frequenzumric... Projektierungshandbuch
7.1.2 Sprache
Frequenzumrichter werden automatisch mit einem Sprachpaket geliefert, das für die Region, in der sie bestellt werden,
relevant ist. 4 regionale Sprachpakete decken die folgenden Sprachen ab:
Sprachpaket 1 Sprachpaket 2 Sprachpaket 3 Sprachpaket 4
English English English English
Deutsch Deutsch Deutsch Deutsch
Französisch Chinesisch Slowenisch Spanisch
Dänisch Koreanisch Bulgarisch English US
Niederländisch Japanisch Serbisch Griechisch
Spanisch Thai Rumänisch Brasilianisches Portugiesisch
Schwedisch Traditionelles Chinesisch Ungarisch Türkisch
Italienisch Bahasa (Indonesisch) Tschechisch Polnisch
Finnisch Russisch
Tabelle 7.3 Sprachpakete
77
Wenn Sie Frequenzumrichter mit einem anderen Sprachpaket bestellen möchten, wenden Sie sich an Ihren lokalen Händler.
88 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Bestellen des Frequenzumric... Projektierungshandbuch
7.2 Bestellnummern
7.2.1 Optionen und Zubehör
Beschreibung Bestellnummer
Unbeschichtet Beschichtet
Diverse Ausrüstung
VLT® Bedienteilsatz Baugröße A5
VLT® Bedienteilsatz Baugröße B1
VLT® Bedienteilsatz Baugröße B2
VLT® Bedienteilsatz Baugröße C1
VLT® Bedienteilsatz Baugröße C2
VLT® Befestigungskonsolen für Baugröße A5
VLT® Befestigungskonsolen für Baugröße B1
VLT® Befestigungskonsolen für Baugröße B2
VLT® Befestigungskonsolen für Baugröße C1
VLT® Befestigungskonsolen für Baugröße C2
VLT® IP21-Satz, Baugröße A1
VLT® IP21-Satz, Baugröße A2
VLT® IP21-Satz, Baugröße A3
VLT® Oberer IP21-Satz, Baugröße A2
VLT® Oberer IP21-Satz, Baugröße A3
VLT® Rückwand IP55, Baugröße A5
VLT® Rückwand IP21, IP55, Baugröße B1
VLT® Rückwand IP21, IP55, Baugröße B2
VLT® Rückwand IP20, Baugröße B4
VLT® Rückwand IP21, IP55, Baugröße C1
VLT® Rückwand IP21, IP55, Baugröße C2
VLT® Rückwand IP20, Baugröße C3
VLT® Rückwand IP20, Baugröße C4
VLT® Rückwand IP66, Baugröße A5
VLT® Edelstahl-Rückwand IP66, Baugröße B1
VLT® Edelstahl-Rückwand IP66, Baugröße B2
VLT® Edelstahl-Rückwand IP66, Baugröße C1
VLT® Edelstahl-Rückwand IP66, Baugröße C2
VLT® Profibus-Adapter Sub-D9-Stecker
Profibus-Abschirmungsplattensatz für IP20, Baugrößen A1, A2 und A3 130B0524
Klemmenblock für DC-Zwischenkreisverbindung bei Baugröße A2/A3 130B1064
VLT® Schraubanschlussklemmen 130B1116
VLT® USB-Verlängerung, 350-mm-Kabel 130B1155
VLT® USB-Verlängerung, 650-mm-Kabel 130B1156
VLT® Halterahmen A2 für 1 Bremswiderstand 175U0085
VLT® Halterahmen A3 für 1 Bremswiderstand 175U0088
VLT® Halterahmen A2 für 2 Bremswiderstände 175U0087
VLT® Halterahmen A3 für 2 Bremswiderstände 175U0086
LCP Bedieneinheit
VLT® LCP 101 Numerische Bedieneinheit
VLT® LCP 102 Grafisches LCP-Bedienteil
VLT® Kabel für LCP 2, 3 m
VLT® Einbausatz für alle LCP-Bedienteile
VLT® Einbausatz, grafisches LCP
130B1028
130B1046
130B1047
130B1048
130B1049
130B1080
130B1081
130B1082
130B1083
130B1084
130B1121
130B1122
130B1123
130B1132
130B1133
130B1098
130B3383
130B3397
130B4172
130B3910
130B3911
130B4170
130B4171
130B3242
130B3434
130B3465
130B3468
130B3491
130B1112
130B1124
130B1107
175Z0929
130B1170
130B1113
7 7
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 89

Bestellen des Frequenzumric... Projektierungshandbuch
Beschreibung Bestellnummer
Unbeschichtet Beschichtet
VLT® Einbausatz, numerisches LCP
VLT® LCP-Einbausatz, ohne LCP
VLT® LCP-Einbausatz Blindabdeckung IP55/66, 8 m
VLT® Bedieneinheit LCP 102, grafisch
VLT® Blindabdeckung, mit Danfoss-Logo, IP55/66
Optionen für Steckplatz A
VLT® Profibus DP V1 MCA 101
VLT® DeviceNet MCA 104
VLT® CAN Open MCA 105
VLT® PROFIBUS-Umrichter MCA 113
VLT® PROFIBUS-Umrichter MCA 114
VLT® PROFINET MCA 120
VLT® EtherNet/IP MCA 121
VLT® Modbus TCP MCA 122
77
POWERLINK 130B1489 130B1490
EtherCAT 130B5546 130B5646
VLT® DeviceNet MCA 104
Optionen für Steckplatz B
VLT® Universal I/O MCB 101
VLT® Drehgebereingang MCB 102
VLT® Resolver-Eingang MCB 103
VLT® Relaisoption MCB 105
VLT® Safe PLC I/O MCB 108
VLT® PTC-Thermistorkarte MCB 112
VLT® Safe Option MCB 140
VLT® Safe Option MCB 141
VLT® Safe Option MCB 150
VLT® Safe Option MCB 151
Einbausätze für C-Optionen
VLT® Einbausatz für C-Option, 40 mm, Baugrößen A2/A3
VLT® Einbausatz für C-Option, 60 mm, Baugrößen A2/A3
VLT® Einbausatz für C-Option, Baugröße A5
VLT® Einbausatz für C-Option, Baugrößen B/C/D/E/F (außer B3)
VLT® Einbausatz für C-Option, 40 mm, Baugrößen B3
VLT® Einbausatz für C-Option, 60 mm, Baugröße B3
Optionen für Steckplatz C
VLT® Motion Control MCO 305
VLT® Synchronregler MCO 350
VLT® Positionsregler MCO 351
Regler des Zentrumswicklers 130B1165 130B1166
VLT® Erweiterte Relaiskarte MCB 113
VLT® Adapter der C-Option MCF 106
Option für Steckplatz D
VLT® 24 V DC-Versorgung MCB 107
VLT® EtherNet/IP MCA 121
VLT® Ableitstrom-Überwachungssatz, Baugrößen A2/A3
VLT® Ableitstrom-Überwachungssatz, Baugröße B3
VLT® Ableitstrom-Überwachungssatz, Baugröße B4
VLT® Ableitstrom-Überwachungssatz, Baugröße C3
130B1114
130B1117
130B1129
130B1078
130B1077
130B1100 130B1200
130B1102 130B1202
130B1103 130B1205
130B1245
130B1246
130B1135 130B1235
130B1119 130B1219
130B1196 130B1296
130B1102 130B1202
130B1125 130B1212
130B1115 130B1203
130B1127 130B1227
130B1110 130B1210
130B1120 130B1220
130B1137
130B6443
130B6447
130B3280
130B3290
130B7530
130B7531
130B7532
130B7533
130B1413
130B1414
130B1134 130B1234
130B1152 130B1252
130B1153 120B1253
130B1164 130B1264
130B1230
130B1108 130B1208
175N2584
130B5645
130B5764
130B5765
130B6226
90 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Bestellen des Frequenzumric... Projektierungshandbuch
Beschreibung Bestellnummer
Unbeschichtet Beschichtet
VLT® Ableitstrom-Überwachungssatz, Baugröße C4
PC-Software
VLT® Motion Control Tool MCT 10, 1 Lizenz
VLT® Motion Control Tool MCT 10, 5 Lizenzen
VLT® Motion Control Tool MCT 10, 10 Lizenzen
VLT® Motion Control Tool MCT 10, 25 Lizenzen
VLT® Motion Control Tool MCT 10, 50 Lizenzen
VLT® Motion Control Tool MCT 10, 100 Lizenzen
VLT® Motion Control Tool MCT 10, >100 Lizenzen
Sie können die Optionen bereits als werkseitig montiert bestellen, siehe Bestellinformationen, Kapitel 7.1 Antriebskonfigurator.
Tabelle 7.4 Bestellnummern für Optionen und Zubehör
Ersatzteile
7.2.2
130B5647
130B1000
130B1001
130B1002
130B1003
130B1004
130B1005
130B1006
Die verfügbaren Ersatzteile für Ihre Spezifikation finden Sie im VLT Shop oder mithilfe des Konfigurators.
VLTShop.danfoss.com.
7.2.3 Montagezubehör
Typ Beschreibung Bestellnummer
Montagezubehör
Montagezubehör A1 Montagezubehör, Baugröße A1 130B1021
Montagezubehör A2/A3 Montagezubehör, Baugröße A2/A3 130B1022
Montagezubehör A5 Montagezubehör, Baugröße A5 130B1023
Montagezubehör A1-A5 Montagezubehör, Baugröße A1-A5 Stecker für Bremse und Zwischenkreis-
kopplung
Montagezubehör B1 Montagezubehör, Baugröße B1 130B2060
Montagezubehör B2 Montagezubehör, Baugröße B2 130B2061
Montagezubehör B3 Montagezubehör, Baugröße B3 130B0980
Montagezubehör B4 Montagezubehör, Baugröße B4, 18,5-22 kW 130B1300
Montagezubehör B4 Montagezubehör, Baugröße B4, 30 kW 130B1301
Montagezubehör C1 Montagezubehör, Baugröße C1 130B0046
Montagezubehör C2 Montagezubehör, Baugröße C2 130B0047
Montagezubehör C3 Montagezubehör, Baugröße C3 130B0981
Montagezubehör C4 Montagezubehör, Baugröße C4, 55 kW 130B0982
Montagezubehör C4 Montagezubehör, Baugröße C4, 75 kW 130B0983
Tabelle 7.5 Bestellnummern für Montagezubehör
130B0633
7 7
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 91

Bestellen des Frequenzumric... Projektierungshandbuch
7.2.4 VLT® AutomationDrive FC 301
T2, Horizontales Bremsen 10 % Arbeitszyklus
FC 301 Horizontales Bremsen 10 % Arbeitszyklus
Frequenzumrichterdaten
Netztyp
77
P
m
[kW]
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 166 188,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 121 138,4 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 92,0 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 66,5 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 40,2 44,6 48 0,200 175u3031 - - - 1,5 1,9
T2 3 29,1 32,3 35 0,300 175u3325 - - - 1,5 2,7
T2 3,7 22,5 25,9 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 15
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
rec
P
br.cont.
[kW]
Bremswiderstandsdaten Installation
Danfoss Teilenummer
Kabel IP54
Schrau-
banschlus
sklemme
IP21
Schrau-
banschlus
sklemme
IP65
Bolt
connection
IP20
Kabelquerschnitt
[mm2]
Thermo-
relais
[A]
Tabelle 7.6 T2, Horizontales Bremsen 10 % Arbeitszyklus
92 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Bestellen des Frequenzumric... Projektierungshandbuch
FC 301 Vertikales Bremsen 40 % Arbeitszyklus
Frequenzumrichterdaten
Netztyp
P
m
[kW]
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 166 188,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 121 138,4 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 92,0 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 66,5 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 40,2 44,6 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 29,1 32,3 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 25,9 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
rec
P
br.cont.
[kW]
Bremswiderstandsdaten Installation
Kabel
IP54
Danfoss Teilenummer
Schrauban-
schlusskle
mme IP21
Schrauban-
schlusskle
mme IP65
Bolt
connection
IP20
Kabelquerschnitt
[mm2]
Thermo-
relais
[A]
7 7
Tabelle 7.7 T2, Vertikales Bremsen 40 % Arbeitszyklus
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 93

Bestellen des Frequenzumric... Projektierungshandbuch
FC 301 Horizontales Bremsen 10 % Arbeitszyklus
Frequenzumrichterdaten
Netztyp
77
P
m
[kW]
T4 0,37 1000 1121,4 1200 0,100 175u3000 - - - 1,5 0,3
T4 0,55 620 749,8 850 0,100 175u3001 - - - 1,5 0,4
T4 0,75 485 547,6 630 0,100 175u3002 - - - 1,5 0,4
T4 1,1 329 365,3 410 0,100 175u3004 - - - 1,5 0,5
T4 1,5 240 263,0 270 0,200 175u3007 - - - 1,5 0,8
T4 2,2 161 176,5 200 0,200 175u3008 - - - 1,5 0,9
T4 3 117 127,9 145 0,300 175u3300 - - - 1,5 1,3
T4 4 86,9 94,6 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T4 5,5 62,5 68,2 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T4 7,5 45,3 49,6 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T4 11 34,9 38,0 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
T4 15 25,3 27,7 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T4 18,5 20,3 22,3 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T4 22 16,9 18,7 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T4 30 13,2 14,5 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T4 37 10,6 11,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T4 45 8,7 9,6 9,5 4,200 - 175u3065 175u3066 - 4 20
T4 55 6,6 7,8 7,0 5,500 - 175u3070 175u3071 - 6 26
T4 75 4,2 5,7 5,5 7,000 - - - 175u3231 10 36
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
rec
P
br.cont.
[kW]
Bremswiderstandsdaten Installation
Danfoss Teilenummer
Kabel IP54
Schrau-
banschlus
sklemme
IP21
Schrau-
banschlus
sklemme
IP65
Bolt
connection
IP20
Kabelquerschnitt
[mm2]
Thermo-
relais
[A]
Tabelle 7.8 T4, Horizontales Bremsen 10 % Arbeitszyklus
94 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Bestellen des Frequenzumric... Projektierungshandbuch
FC 301 Vertikales Bremsen 40 % Arbeitszyklus
Frequenzumrichterdaten
Netztyp
P
m
[kW]
T4 0,37 1000 1121,4 1200 0,200 175u3101 - - - 1,5 0,4
T4 0,55 620 749,8 850 0,200 175u3308 - - - 1,5 0,5
T4 0,75 485 547,6 630 0,300 175u3309 - - - 1,5 0,7
T4 1,1 329 365,3 410 0,450 175u3310 175u3416 175u3415 - 1,5 1
T4 1,5 240 263,0 270 0,570 175u3311 175u3418 175u3417 - 1,5 1,4
T4 2,2 161 176,5 200 0,960 175u3312 175u3420 175u3419 - 1,5 2,1
T4 3 117 127,9 145 1,130 175u3313 175u3422 175u3421 - 1,5 2,7
T4 4 86,9 94,6 110 1,700 175u3314 175u3424 175u3423 - 1,5 3,7
T4 5,5 62,5 68,2 80 2,200 175u3315 175u3138 175u3139 - 1,5 5
T4 7,5 45,3 49,6 56 3,200 175u3316 175u3428 175u3427 - 1,5 7,1
T4 11 34,9 38,0 38 5,000 - - - 175u3236 1,5 11,5
T4 15 25,3 27,7 28 6,000 - - - 175u3237 2,5 14,7
T4 18,5 20,3 22,3 22 8,000 - - - 175u3238 4 19
T4 22 16,9 18,7 19 10,000 - - - 175u3203 4 23
T4 30 13,2 14,5 14 14,000 - - - 175u3206 10 32
T4 37 10,6 11,7 12 17,000 - - - 175u3210 10 38
T4 45 8,7 9,6 9,5 21,000 - - - 175u3213 16 47
T4 55 6,6 7,8 7,0 26,000 - - - 175u3216 25 61
T4 75 4,2 5,7 5,5 36,000 - - - 175u3219 35 81
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
rec
P
br.cont.
[kW]
Bremswiderstandsdaten Installation
Kabel
IP54
Danfoss Teilenummer
Schrauban-
schlusskle
mme IP21
Schrauban-
schlusskle
mme IP65
Bolt
connection
IP20
Kabelquerschnitt
[mm2]
Thermo-
relais
[A]
7 7
Tabelle 7.9 T4, Vertikales Bremsen 40 % Arbeitszyklus
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 95

Bestellen des Frequenzumric... Projektierungshandbuch
7.2.5 Bremswiderstände für FC 302
FC 302 Horizontales Bremsen 10 % Arbeitszyklus
Frequenzumrichterdaten
Netztyp
77
P
m
[kW]
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 188 215,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 130 158,1 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 105,1 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 76,0 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 45,0 51,0 48 0,200 175u3031 - - - 1,5 1,9
T2 3 31,5 37,0 35 0,300 175u3325 - - - 1,5 2,7
T2 3,7 22,5 29,7 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13,0 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9,0 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 14,7
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
rec
P
br.cont.
[kW]
Bremswiderstandsdaten Installation
Kabel IP54
Danfoss Teilenummer
Schrau-
banschlus
sklemme
IP21
Schrau-
banschlus
sklemme
IP65
Bolt
connection
IP20
Kabelque
r-
schnitt
[mm2]
Thermo-
relais
[A]
Tabelle 7.10 T2, Horizontales Bremsen 10 % Arbeitszyklus
96 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03

Bestellen des Frequenzumric... Projektierungshandbuch
FC 302 Vertikales Bremsen 40 % Arbeitszyklus
Frequenzumrichterdaten
Netztyp
P
m
[kW]
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 188 215,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 130 158,1 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 105,1 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 76,0 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 45,0 51,0 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 31,5 37,0 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 29,7 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13,0 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9,0 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
rec
P
br.cont.
[kW]
Bremswiderstandsdaten Installation
Danfoss Teilenummer
Kabelquerschnitt
[mm2]
Kabel IP54
Schrau-
banschlus
sklemme
IP21
Schrau-
banschlus
sklemme
IP65
Bolt
connection
IP20
Thermo-
relais
[A]
7 7
Tabelle 7.11 T2, Vertikales Bremsen 40 % Arbeitszyklus
MG33BF03 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. 97

Bestellen des Frequenzumric... Projektierungshandbuch
FC 302 Horizontales Bremsen 10 % Arbeitszyklus
Frequenzumrichterdaten
Netztyp
77
P
m
[kW]
T5 0,37 1000 1389,2 1200 0,100 175u3000 - - - 1,5 0,3
T5 0,55 620 928,8 850 0,100 175u3001 - - - 1,5 0,4
T5 0,75 558 678,3 630 0,100 175u3002 - - - 1,5 0,4
T5 1,1 382 452,5 410 0,100 175u3004 - - - 1,5 0,5
T5 1,5 260 325,9 270 0,200 175u3007 - - - 1,5 0,8
T5 2,2 189 218,6 200 0,200 175u3008 - - - 1,5 0,9
T5 3 135 158,5 145 0,300 175u3300 - - - 1,5 1,3
T5 4 99,0 117,2 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T5 5,5 72,0 84,4 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T5 7,5 50,0 61,4 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T5 11 36,0 41,2 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
T5 15 27,0 30,0 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T5 18,5 20,3 24,2 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T5 22 18,0 20,3 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T5 30 13,4 15,8 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T5 37 10,8 12,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T5 45 8,8 10,4 9,5 4,200 - 175u3065 175u3066 - 4 20
T5 55 6,5 8,5 7,0 5,500 - 175u3070 175u3071 - 6 26
T5 75 4,2 6,2 5,5 7,000 - - - 175u3231 10 36
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
rec
P
br.cont.
[kW]
Bremswiderstandsdaten Installation
Danfoss Teilenummer
Kabel IP54
Schrau-
banschlus
sklemme
IP21
Schrau-
banschlus
sklemme
IP65
Bolt
connection
IP20
Kabelquerschnitt
[mm2]
Thermo-
relais
[A]
Tabelle 7.12 T5, Horizontales Bremsen 10 % Arbeitszyklus
98 Danfoss A/S © 09/2014 Alle Rechte vorbehalten. MG33BF03
 Loading...
Loading...