


vacon® nxp
conversores de frequência
aplicação de elevador nxp apfiff33
manual de aplicação


VACON • 1
MANUAL DE APLICAÇÃO DE ELEVADOR VACON® NXP
ÍNDICE
1.
Aplicação de Elevador NXP - Introdução ............................................................................ 4
2.
Problemas de compatibilidade dos parâmetros de versão ................................................ 6
3.
Controle de E/S .................................................................................................................... 8
4.
Princípio de programação dos sinais de entrada ............................................................... 9
5.
Valores de monitoramento (Painel de controle: menu M1) .............................................. 11
6.
Aplicação de Elevador NXP – Listas de parâmetros ......................................................... 18
7.
Descrição dos parâmetros ................................................................................................. 39
Código do documento: DPD02124B
Código do software: APFIFF33
V2.23 ou versões mais recentes
Data: 09/11/2018
1.1 Interface de E/S ...................................................................................................................... 4
1.2 Motor e encoder ..................................................................................................................... 4
1.3 Controle do contator do motor e controle do freio ................................................................ 4
4.1 Definição de uma entrada para uma determinada função no teclado .................................. 9
4.2 Definição de uma entrada analógica como digital ................................................................. 9
4.3 Definição de um terminal para uma determinada função com a ferramenta
®
de programação VACON
NCDrive ...................................................................................... 10
4.4 Definição de entradas/saídas não usadas ........................................................................... 10
5.1 Valores de monitoramento .................................................................................................. 13
5.2 Valores de monitoramento 2 ................................................................................................ 15
6.1 Parâmetros básicos (Painel de controle: Menu M2 G2.1) ............................................... 19
6.2 Parâmetros de perfil de velocidade (Painel de controle: Menu M2 G2.2) ....................... 20
6.3 Parâmetros de controle do freio mecânico (Painel de controle: Menu M2 G2.3) ........... 22
6.4 Parâmetros de controle de conversor (Painel de controle: Menu M2 G2.4) ................... 24
6.5 Parâmetros de controle do motor (Painel de controle: Menu M2 G2.5) ......................... 25
6.6 Estabilizadores (Painel de controle: Menu M2
G2.5.11) ................................................. 28
6.7 Parâmetros identificados (Painel de controle: Menu M2 G2.5.12.x) ............................... 29
6.8 Sinais de entrada (Painel de controle: Menu M2 G2.6) ................................................... 30
6.9 Sinais de saída (Painel de controle: Menu M2 G2.7) ....................................................... 32
6.10 Parâmetros de reinício automático (Painel de controle: Menu M2 G2.9) ....................... 36
6.11 Parâmetros de evacuação (Painel de controle: Menu M2 G2.10) ................................... 37
6.12 Controle de teclado (Painel de controle: Menu M3) ............................................................ 38
6.13 Menu do sistema (Painel de controle: Menu M6) ................................................................ 38
6.14 Placas de expansão (Painel de controle: Menu M7) ............................................................ 38
7.1 Parâmetros básicos ............................................................................................................. 39
7.2 Perfil de velocidade .............................................................................................................. 43
7.3 Parâmetros de referência de velocidade [m/s] (M2 -> G2.2.9) ............................................ 47
7.4 Parâmetros de referência de velocidade [Hz] (M2 -> G2.2.10) ............................................ 48
7.5 Parâmetros da curva de velocidade 1 (M2 -> G2.2.11) ........................................................ 49
7.6 Parâmetros da curva de velocidade 2 (M2 -> G2.2.12) ........................................................ 50
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

2 • VACON
Sinais de saída
8.
Comissionamento da aplicação de elevador .................................................................... 109
9.
Configuração geral dos parâmetros ................................................................................ 110
Ajuste da aplicação
10.
Procedimento de teste para verificar a função de monitoramento dos freios ............... 114
7.7 Controle do freio mecânico .................................................................................................. 51
7.7.1 Lógica de controle do freio mecânico .......................................................................... 53
7.7.2 Parâmetros de malha aberta (M2 -> G2.3.1) ............................................................... 54
7.7.3 Parâmetros de malha fechada (M2 -> G2.3.2) ............................................................. 58
7.7.4 Freio externo (M2 -> G2.3.3) ........................................................................................ 60
7.7.5 Supervisão de freio (M2 -> G2.3.4) ............................................................................... 60
7.7.6 Ajustar a abertura do freio em malha fechada: ........................................................... 61
7.8 Controle do conversor de frequência .................................................................................. 63
7.9 Parâmetros de controle do contator do motor (M2 -> G2.4.7) ............................................ 65
7.10 Parâmetros avançados ........................................................................................................ 65
7.11 Controle do motor ................................................................................................................ 67
7.11.1 Configuração U/f ...................................................................................................... 69
7.11.2 Configurações de malha fechada ............................................................................ 72
7.11.2.1 Reversão .............................................................................................................. 76
7.11.3 Configurações de motor síncrono de ímã permanente ........................................... 77
7.11.3.1 Quedas de tensão do eixo D e Q ........................................................................... 79
7.11.3.2 Controlador de corrente de fluxo ........................................................................ 79
7.11.4 Configurações de estabilização ............................................................................... 81
7.11.4.1 Estabilizador de torque ........................................................................................ 81
7.11.4.2 Estabilizador do círculo de fluxo .......................................................................... 82
7.11.4.3 Estabilizador de fluxo .......................................................................................... 82
7.11.4.4 Estabilizador de tensão ........................................................................................ 83
7.11.5 Configurações de identificação ................................................................................ 84
7.12 Sinais de entrada ................................................................................................................. 85
7.12.1 Entradas digitais (M2 -> G2.6.7) ............................................................................... 86
7.12.2 Entradas analógicas 1 e 2 ........................................................................................ 87
7.13
.................................................................................................................... 89
7.13.1.1 Saída analógica .................................................................................................... 89
7.13.1.2 Saídas digitais ...................................................................................................... 91
7.13.1.3 Limites de supervisão .......................................................................................... 93
7.13.1.4 Relés de expansão ............................................................................................... 94
7.14 Proteções ............................................................................................................................. 95
7.15 Parâmetros de supervisão de elevador (M2 -> G2.8.4) .......................................................101
7.16 Parâmetros de reinício automático ....................................................................................103
7.17 Parâmetros de evacuação ..................................................................................................106
7.18 Parâmetros de controle do teclado ....................................................................................108
8.1 Instalação do VACON
®
NX Drive ..........................................................................................109
9.1 Dados do motor ...................................................................................................................110
9.2 Parâmetros de velocidade ..................................................................................................110
9.2.1 Sinais de entrada e saída ........................................................................................... 110
9.3
...........................................................................................................110
9.3.1 Operação de ajuste em malha aberta ........................................................................ 111
9.3.2 Operações de ajuste em malha fechada .................................................................... 112
9.3.3 Ajuste fino em malha fechada.................................................................................... 112
10.1 Tipo de conexões .................................................................................................................114
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 3
1
11.
Solução de problemas ...................................................................................................... 121
12.
Códigos de falha ............................................................................................................... 122
10.1.1 Conexões com 10 Vcc ............................................................................................. 114
10.1.2 Conexões com 24 Vcc ............................................................................................. 115
10.2 Ativação do monitoramento de freio para atender às normas EN-81-1+A3 ......................117
10.3 Redefinição da falha de monitoramento do freio e códigos de falha .................................117
10.4 Certificado ...........................................................................................................................117
10.5 Procedimento de teste ........................................................................................................118
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

4 • VACON APFIFF33 NXP LIFT
APLICAÇÃO DE ELEVADOR NXP - INTRODUÇÃO
Nota:
Interface de E/S
Motor e encoder
Controle do contator do motor e controle do freio
1.
Selecione a Aplicação de Elevador NXP no menu M6 na página
S6.2
.
®
A Aplicação de Elevador VACON
NXP pode ser utilizada com sistemas modernos de Elevadores.
Esta aplicação contém as funções necessárias para obter um percurso suave para o elevador.
A tabela da interface de E/S contém os sinais mais necessários em aplicações de elevador.
Na aplicação, velocidades constantes são mostradas em [m/s] e também em [Hz], aceleração
2
e desaceleração são mostradas em [m/s
] e as Rampas S em [s].
e superiores (consulte o capítulo
A placa de controle de NXP3 é exigida na Aplicação de Elevador NXP versões 2.00
10.4).
1.1
Todas as saídas são livremente programáveis. Os relés de expansão R03 e R04 podem
ser designados para qualquer saída digital pelo método TTF (Terminal To Function,
terminal para função).
As funções de entrada digital podem ser livremente programadas por qualquer entrada
digital pelo método TTF. Os sinais de partida horário ou reverso são fixos em relação às
entradas DIN1 e DIN2 (confira a próxima página).
As entradas analógicas podem ser usadas para referência de torque e velocidade
(compensação do peso do carro), ou podem ser usadas também como entradas digitais
adicionais.
1.2
O hardware usado pode ser qualquer conversor de frequência VACON® NXP. No modo
de controle do motor de malha fechada, é necessário um encoder e uma placa opcional
(NXOPTA4, NXOPTA5, NXOPTBE, NXOPTBB ou NXOPTAK).
A aplicação também suporta motores de ímã permanente. Há um grupo de menu separado
para parâmetros de motores de ímã permanente (PMM).
Recomendamos o encoder absoluto do tipo ENDAT junto com a placa opcional OPTBB ou
OPTBE para obter o melhor desempenho para um motor de ímã permanente.
Programe o parâmetro P7.3.1.3 ou P7.3.1.5 para Interpolation (Interpolação) = [Yes] (Sim)
se o encoder Sin-Cos for usado. Também é possível usar um resolver, nesse caso, a placa
opcional OPTBC é usada.
1.3
O controle do contator do motor é incluído para permitir que o conversor de frequência
controle um contator entre o conversor de frequência e o motor.
A lógica de controle do contator do motor é usada somente quando uma saída é atribuída
ao controle do contator do motor.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 5
1
O contator fecha com o comando de partida. O conversor de frequência começa a funcionar
após um atraso dado por um parâmetro ou quando a entrada digital programada para a
confirmação do contator do motor fica alta.
Recomenda-se sempre monitorar o contator controlado internamente e externamente para
evitar o controle do motor através de um contator aberto, por ex., quando aberto por um
circuito de segurança (possibilidade de danificar o contator). O monitoramento está ativo
quando a entrada digital está atribuída à realimentação do contator do motor. Dessa forma,
não há necessidade de ajustar o tempo de atraso, e haverá um alarme se o sinal de
confirmação não for recebido.
A lógica de controle do freio mecânico é projetada para obter partidas e paradas suaves
no nível do andar. O freio pode ser ajustado de várias maneiras para atender aos diferentes
requisitos dos motores de elevação e de lógica de controle de elevação.
A versão 211 ou mais recente da aplicação também cumpre a certificação para movimentos
não controlados da cabine (EN 81-1:1998+A3:2009). No caso dos elevadores de tração
elétrica, uma solução possível para atender a norma EN 81-1+A3 é usar a supervisão dos
freios do motor no conversor de frequência. Estes freios também devem ser certificados
sob a norma EN 81-1+A3. Os freios devem ser monitorados independentemente, um por um.
Se o monitoramento da sequência de freios não estiver correto ao abrir e fechar, o elevador
deve ser parado para uma verificação mais detalhada. Consulte o capítulo 9 para obter mais
informações.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

6 • VACON APFIFF33 NXP LIFT
PROBLEMAS DE COMPATIBILIDADE DOS PARÂMETROS DE VERSÃO
2.
APFIFF33V215 x APFIFF33V216
- Manuseio do comando de partida / parada de painel fixo
APFIFF33V213 x APFIFF33V215
- Tempo de fechamento do contator do motor fixo (P2.4.7.1)
- Novo parâmetro P2.8.2.8 OutPhFaultDelay
- Novo parâmetro P2.8.2.9 OutPhFaultCurLim
APFIFF33V211 x APFIFF33V213
- Após o resgate, o modo de controle do motor de resgate é alterado de volta para normal,
após o conversor de frequência ter parado a modulação
APFIFF33V206 x APFIFF33V211
- Cumpre a certificação para movimentos não controlados da cabine (EN 81-
1:1998+A3:2009)
- Mudança do local de controle removida pressionando os botões por 3 s
- Erro de velocidade do eixo apenas com o motor em funcionamento
- Nenhuma falha do painel se o local de controle for NCDrive
- O freio pode ser aberto durante corrente CC em malha aberta
- Fechamento do freio e atrasos na parada de emergência separados
- As falhas de evacuação F60 e F62 são reiniciadas quando a tensão CC ultrapassa 500 V
Alterações de parâmetro:
- Parâmetro P 2.5.10.14 ExtIdRef para ajuste fino de PMSM
- P 2.5.9.18.4 Rollback control wake up limit (Limite de ativação do controle de reversão)
inicializado com o valor 3,00 (três pulsos de encoder)
- P 2.7.10 RO1 Function (Função RO1) inicializada com o valor 0 (Nenhum) (era 2 = Executar)
por motivo de segurançao valor típico é 1 (Pronto) e, em seguida, o circuito de segurança
pode ser conectado através de contatos NA
- P 2.5.17.7 SpdCtrl Ti Start removido
- P 2.5.17.8 SpdCtrlStartDel removido
- Parâmetros próprios AI1 e AI2 separados
- Adicionados os parâmetros Custom min (Mín personalizado) e Custom max (Máx
personalizado) aos grupos AI1 e AI2
- Adicionados os parâmetros Ton delay DIN1 e Ton delay DIN2
- Movido os parâmetros de reversão das configurações de PMSM para o grupo de malha
fechada
- Adicionado cálculo da frequência de escorregamento. O freio de frequência máxima
fechado (OL) usa este valor.
- P2.3.1.3 Valor inicial de FreqLimitOpen_OL 100 -> 0
- P2.3.1.4 Valor inicial de BrakeOpenDelay_OL 10 -> 0
- P2.3.1.7 Valor inicial de MaxFreqBrakeClose_OL 400 -> 200 (2 Hz)
- P2.3.1-2.8 Valor inicial de BrakeReact Time 5 -> 30 (300 ms)
- P2.3.2.3 Valor inicial de FreqLimitOpen_CL 1 -> 0
- P2.3.2.9 Valor inicial em OHz de TimeAtStart_CL 400 -> 800
- P2.3.2.12 Valor inicial de SmoothStartFreq _CL 2 -> 0
- P2.3.3.2 Valor inicial de ExtBrake SuperV1 1 -> 0
- P2.3.3.3 Valor inicial de ExtBrake SuperV2 1 -> 0
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 7
1
Nota:
- P2.3.4.2 ID Adicionada de ExtBrakeSupVInv
- P2.5.9.18 Valor inicial de RollBack Ctrl 0 -> 1 (a reversão também pode ser usada em
motores assíncronos)
- P2.5.9.20 Valor inicial de RollBack Ctrl PreTorq 200 -> 1
- P2.6.2.12 Valor inicial de Speed Sel Input3 16 -> 15
- P2.6.2.13 Valor máximo de AngleIDRepeat 1 -> 89 (correção de erros)
o PMSM selecionado - ganhos de controle de velocidade 15 -> 10
- corrente de abertura do freio em CL 5% na corrente nominal
do motor -> 0
- atraso de abertura do freio em CL 0 -> 30 (300 ms)
Parâmetros de controle do freio:
- Alterado o texto de F55
- Adicionado F91
- Adicionado P2.3.3.3 "ExtBrake Superv2"
- Adicionado P2.3.4.3 "F55 Spv at Start"
- Adicionados os parâmetros reservados de P3.5 a P3.9, para poder ter o botão para
habilitar a Reinicialização da Falha do Freio em B3.10,
- Adicionado B3.10 "Reset Brake Spv F"
- Aumentado o valor padrão de P2.3.4.1 para completar +A3. Padrão 2,00 s.
- Alterado o valor padrão de P2.3.4.2 "ExtBrkSupInversion", para funcionar invertido.
Quando o sistema está parado, os interruptores do freio estão fechados e 24 V
alimentam as entradas digitais que supervisionam o estado
- Alterado o valor padrão de P2.3.4.3 "F55 at Start", = 0/Desativar. Com esse valor,
a Falha de Supervisão do Freio só aparece ao parar no andar, não durante o trajeto
Ao atualizar o aplicativo, não é recomendado usar a função de download de parâmetros
®
do VACON
o antigo arquivo de parâmetros. O aplicativo está em constante desenvolvimento, isso inclui
a alteração de valores padrão de parâmetros; se os parámetros forem transferidos
diretamente para o conversor de frequência, os valores padrão aprimorados serão perdidos.
NCDrive. Em vez disso, carregue os parâmetros da unidade e compare com
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
8 • VACON APFIFF33 NXP LIFT
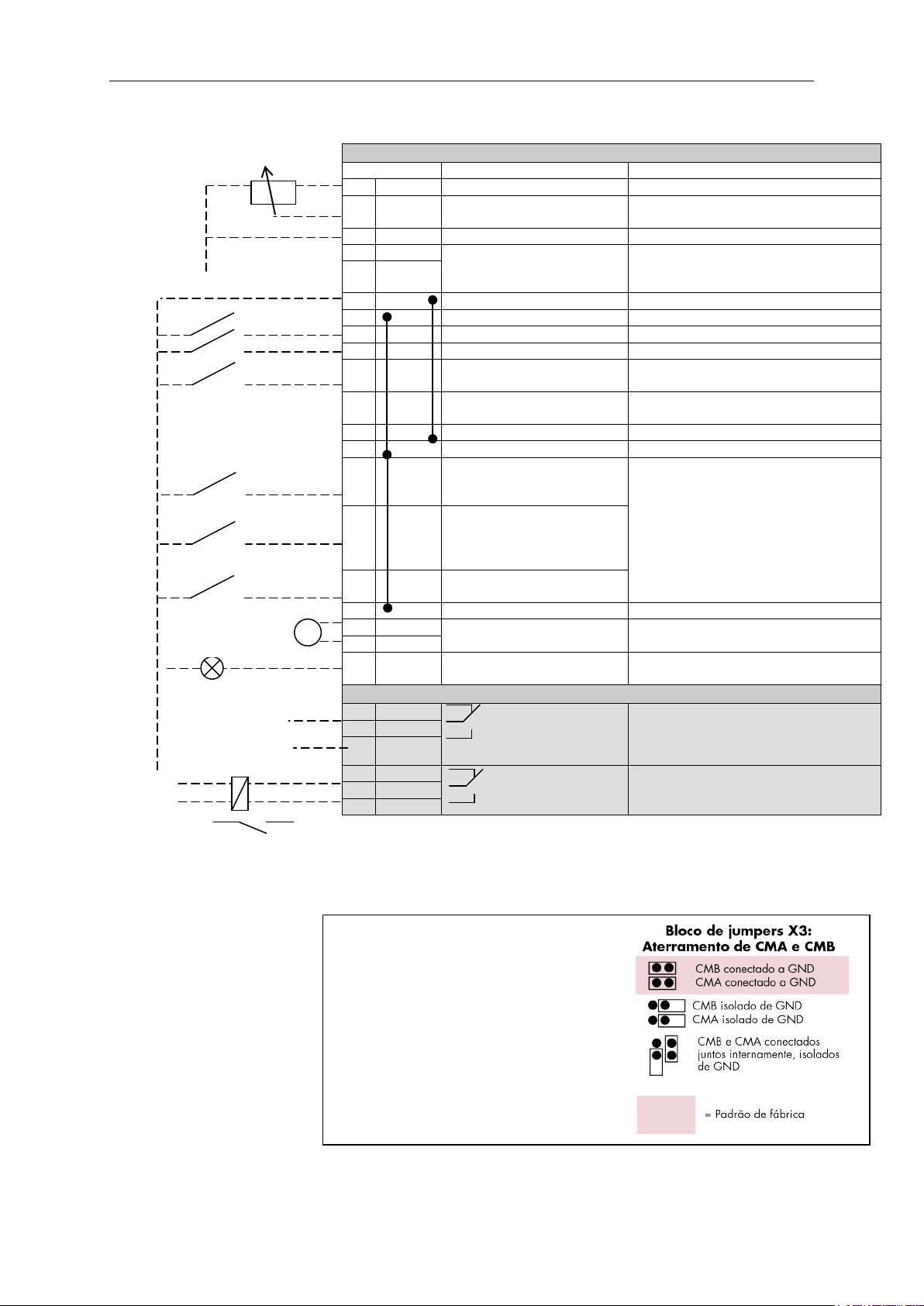
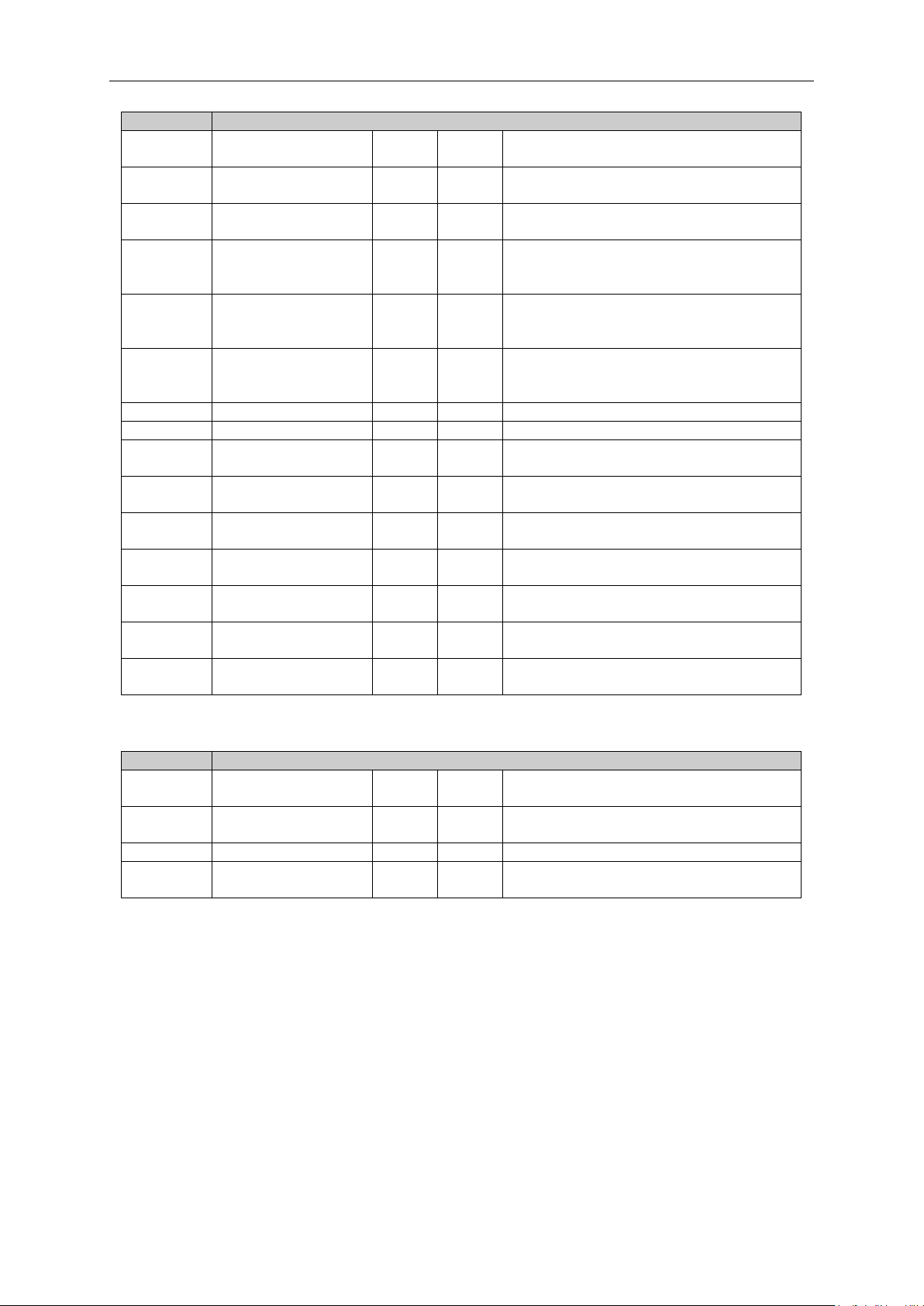
NXOPTA1
Terminal
Sinal
Descrição
1
+10 V
ref
Saída de referência
Tensão para potenciômetro, etc.
2
AI1+
Entrada analógica, faixa
de tensão 0—10 VCC
Referência de frequência de entrada
de tensão
3
AI1-
Terra de E/S
Terra para referência e controles
4
AI2+
Entrada analógica, faixa
Referência de frequência de entrada
5
AI2-
6
+24 V
Saída de tensão de controle
Tensão para chaves, etc. máx 0,1 A
7
GND
Terra de E/S
Terra para referência e controles
8
DIN1
Partida horário (programável)
Contato fechado = partida horário
9
DIN2
Partida reversa (programável)
Contato fechado = partida reversa
10
DIN3
Reset de falha
(programável)
Contato fechado = reset de falha
11
CMA
Comum para DIN 1—DIN 3
Conecte a GND ou +24 V
12
+24 V
Saída de tensão de controle
Tensão para chaves (consulte #6)
13
GND
Terra de E/S
Terra para referência e controles
14
DIN4
Seleção de referência de
Referência de velocidade
DIN5 e DIN6:
15
DIN5
Seleção de referência de
Referência ativa
16
DIN6
Seleção de referência de
velocidade
17
CMB
Comum para DIN4—DIN6
Conecte a GND ou +24 V
18
AO1+
Freqüência de saída
Saída analógica
Programável
Faixa 0—20 mA/RL, máx. 500 Ω
19
AO1-
20
DO1
Saída digital
FALHA
Programável
Coletor aberto, I≤50 mA, U≤48 VCC
NXOPTA2
21
RO1
Saída de relé 1
Programável
22
RO1
23
RO1
24
RO2
Saída de relé 2
Programável
25
RO2
26
RO2
FALHA
CIRCUITO DE
SEGURANÇA
mA
3. CONTROLE DE E/S
de corrente 0—20 mA
velocidade
velocidade
de corrente
programável para entradas DIN4,
Referência ativa com direção
Referência binária
Padrão: “Não usado”
Freio mecânico
(a maneira típica é usar READY (PRONTO))
Tabela 3-3-1. Configuração de E/S padrão da aplicação de elevador NXP
Nota: Consulte as seleções de jumpers abaixo.
Mais informações no Manual do Usuário do VACON® NXS/P
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
VACON • 9
1
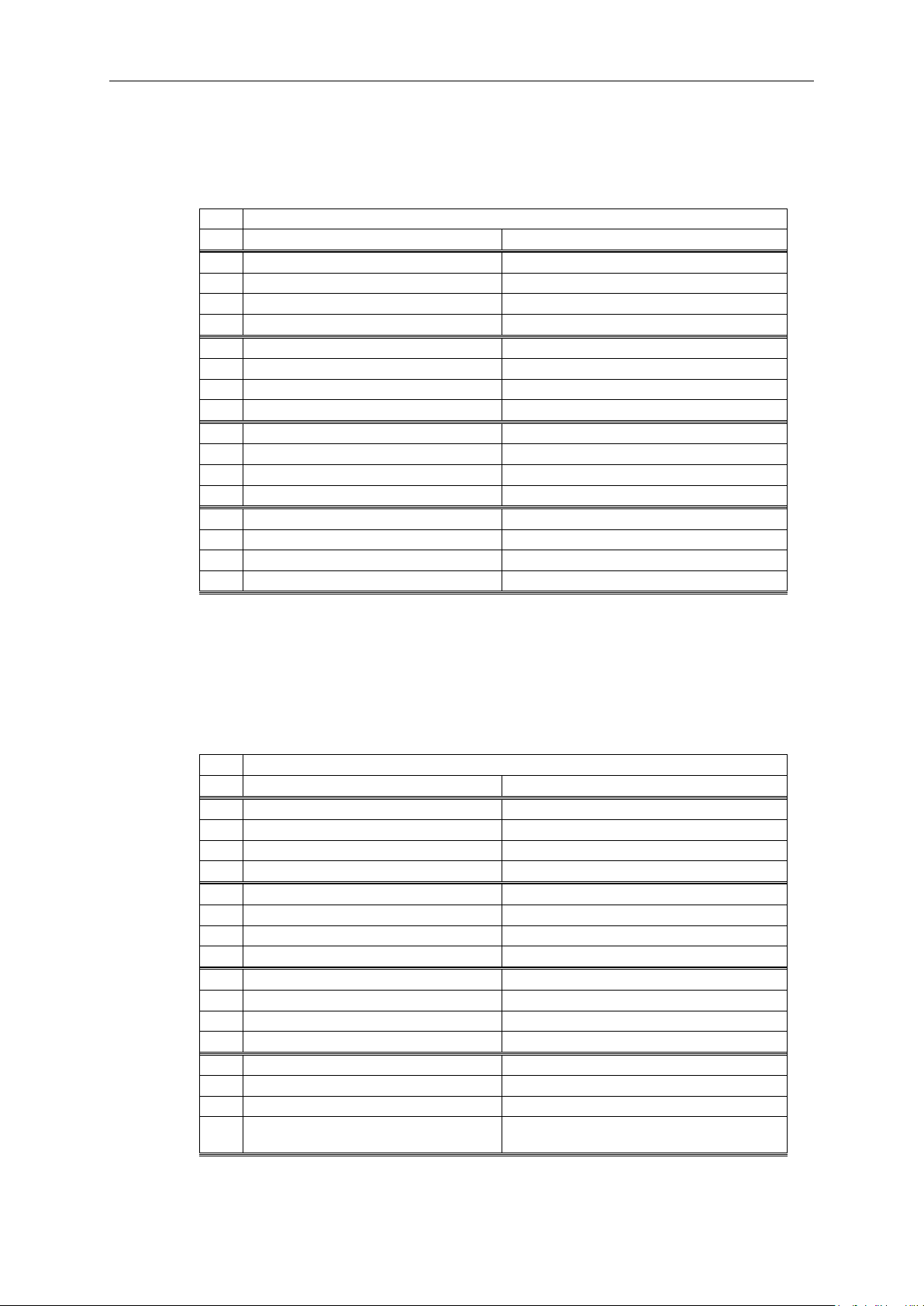
PRINCÍPIO DE PROGRAMAÇÃO DOS SINAIS DE ENTRADA
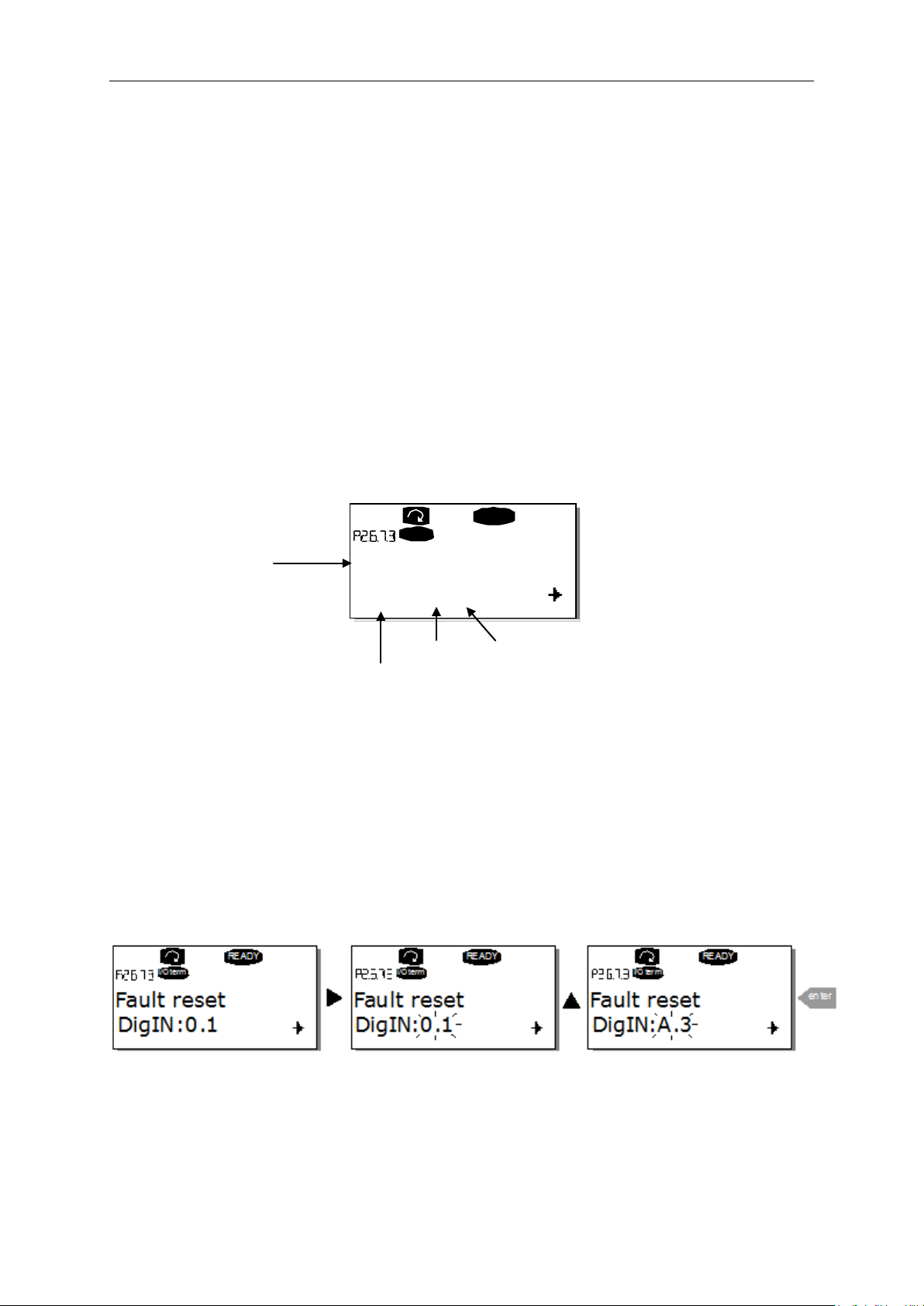
Definição de uma entrada para uma determinada função no teclado
Exemplo:
Definição de uma entrada analógica como digital
READY
I/Oterm
D
igIN:0.1
Fault reset
4.
O princípio de programação do sinal de entrada na Aplicação de Elevador VACON® NXP, bem
®
como na Aplicação de Controle Multiuso VACON
diferente do método convencional usado em outras aplicações de VACON
NXP (e em parte nas outras aplicações) é
®
NX.
No método de programação convencional, método Function to Terminal Programming (FTT),
você deve possuir uma entrada fixa para a qual uma determinada função é definida. Os
aplicativos mencionados acima, no entanto, usam o método Terminal to Function
Programming (TTF) no qual o processo de programação é executado inversamente: Funções
são exibidas como parâmetros para as quais o operador define uma determinada entrada.
4.1
A conexão de uma determinada função (sinal de entrada) a uma determinada entrada digital
é feita ao atribuir ao parâmetro um valor apropriado. O valor é formado pelo slot de placa da
®
placa de controle do VACON
NX (consulte o Manual do Usuário do VACON® NXS/P) e
respectivo número de sinal; consulte abaixo.
Nome da função
Slot Número do terminal
Tipo de terminal
Você deseja conectar a função de entrada digital Fault Reset (Reinicialização de Falha)
(parâmetro 2.6.7.3) a uma entrada digital A.3 na placa básica NXOPTA1, localizada no slot A.
Primeiro, encontre o parâmetro 2.6.7.3 no teclado. Pressione o botão Menu uma vez para
entrar no modo de edição. Na linha de valor, você verá o tipo de terminal à esquerda (DigIN)
e a entrada digital onde a função está conectada à direita.
Quando o valor estiver piscando, segure o botão para cima ou para baixo para encontrar
o slot de placa desejado e o número de sinal. O programa percorrerá os slots da placa,
começando em 0 e prosseguindo de A a E e os números de E/S de 1 a 10.
Após definir o valor desejado, pressione o botão Enter uma vez para confirmar a alteração.
4.2
Na aplicação de elevador, é possível utilizar entradas analógicas como digitais no método
TTF. Para isso, defina SlotF.1 para AI1 e SlotF.2 para AI2. O estado lógico '0' é quando o nível
do sinal está abaixo de 50% e '1' acima dele. Caso queira usar os parâmetros do slotF do
VACON
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
®
NCDrive, você precisará do VACON® NCDrive versão 2.0.18 ou mais recente.
10 • VACON APFIFF33 NXP LIFT
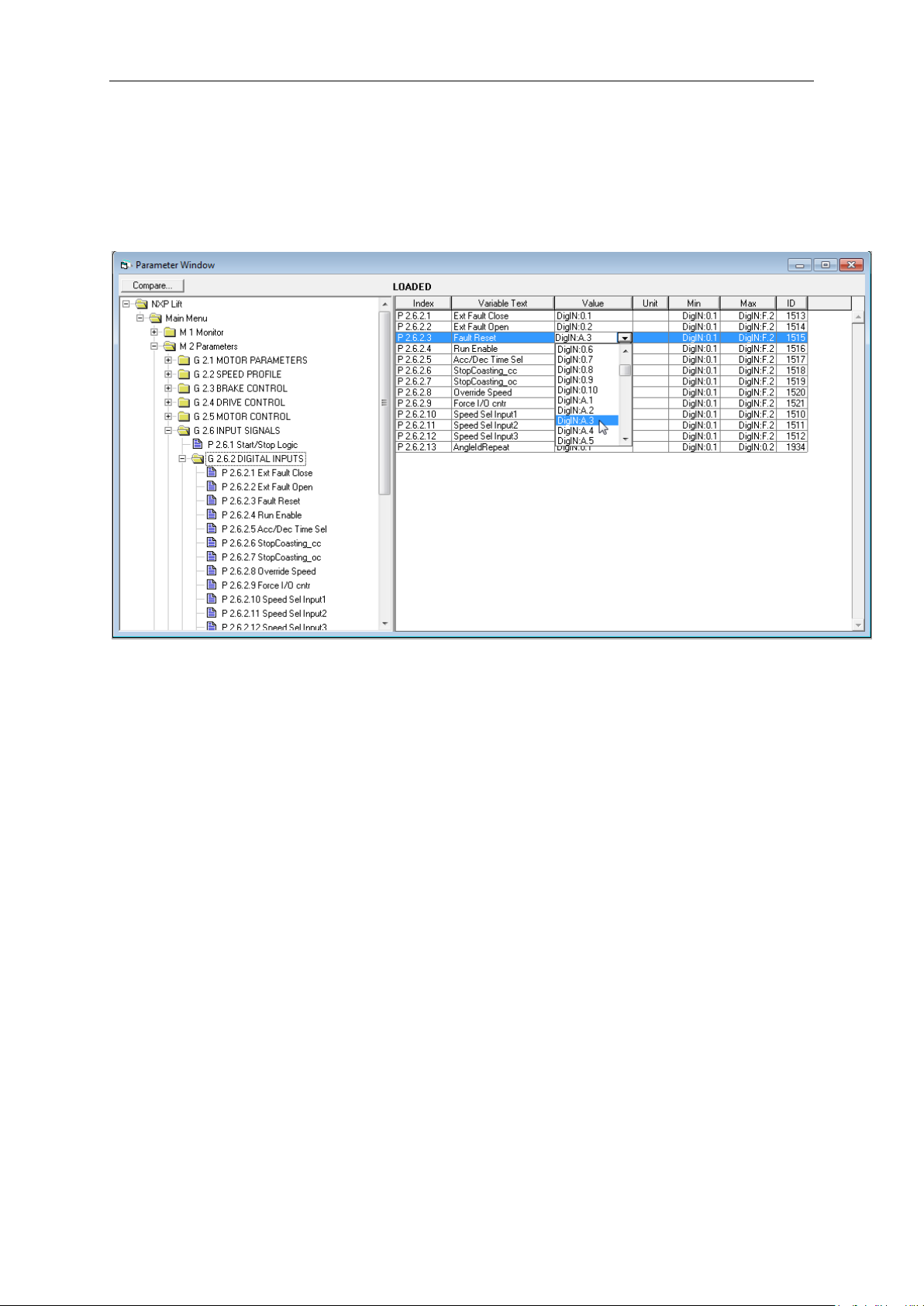
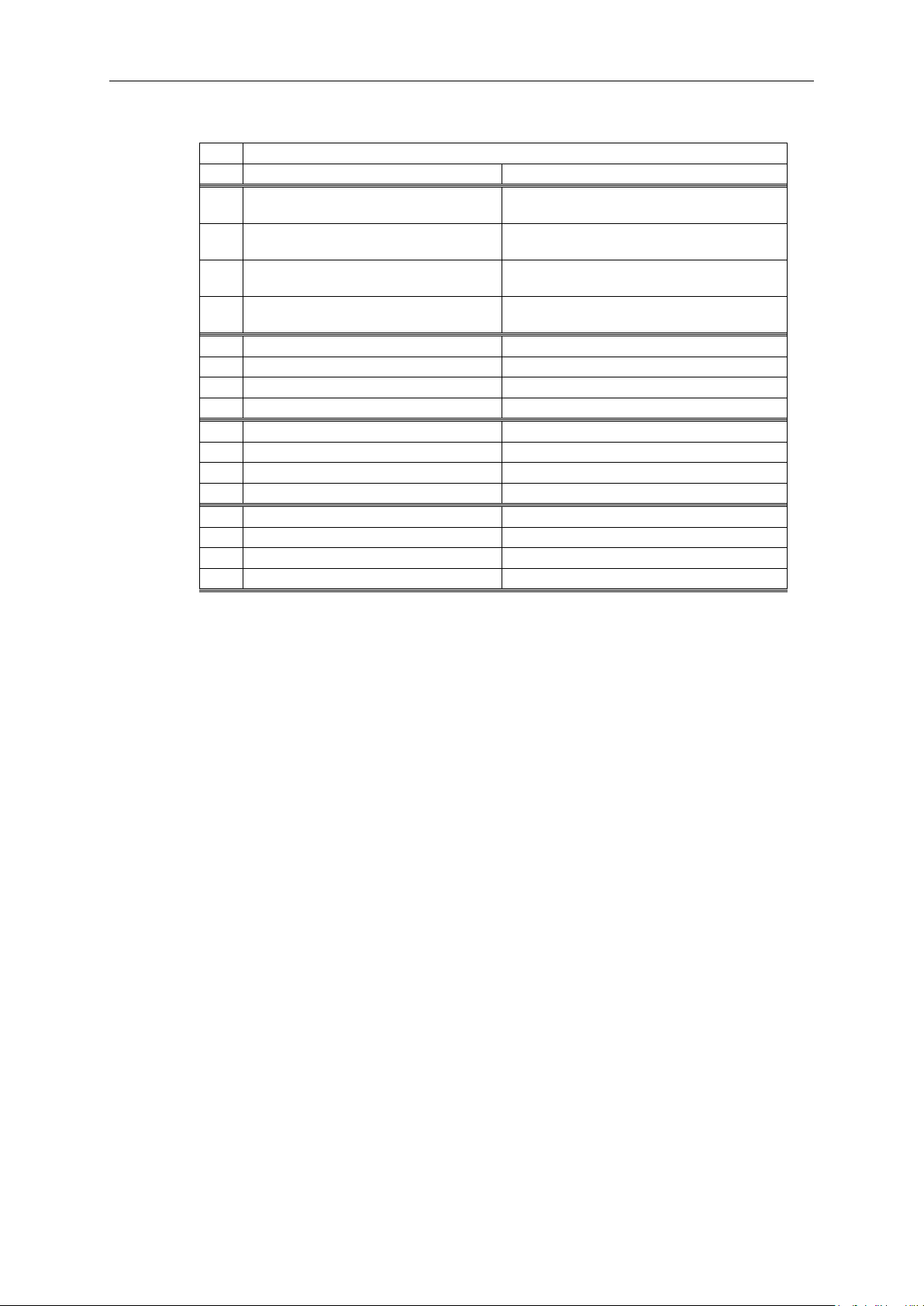
Definição de um terminal para uma determinada função com a ferramenta de programação VACON® NCDrive
Definição de entradas/saídas não usadas
4.3
Se você usar a ferramenta de programação VACON® NCDrive para parametrizar, será
necessário estabelecer a conexão entre a função e entrada/saída da mesma forma que com
o painel de controle. Apenas utilize o código de endereço do menu suspenso na coluna Value
(Valor) (veja a Figura abaixo).
Figura 1. Print de tela da ferramenta de programação NCDrive; Introduzir o código de endereço
4.4
Todas as entradas e saídas não usadas devem receber o valor de slot da placa 0 e o valor
do terminal 1 (0,1). O valor 0,1 também é o valor padrão para a maioria das funções. No
entanto, se você desejar usar os valores de um sinal de entrada digital para, por exemplo,
apenas fins de teste, será possível definir o valor do slot da placa como 0 e o número do
terminal como qualquer outro número entre 2 e 10 para atribuir um estado VERDADEIRO à
entrada. Em outras palavras, o valor 1 corresponde ao 'contato aberto' e os valores 2 a 10
ao “contato fechado”.
No caso de entradas analógicas, atribuir o valor 0,1 ao número de terminal corresponde
ao 0% do nível de sinal, o valor 2 corresponde a 20%, o valor 3 a 30% e assim por diante.
Atribuir um valor 10 ao número de terminal corresponde a 100% do nível de sinal.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
VACON • 11
1
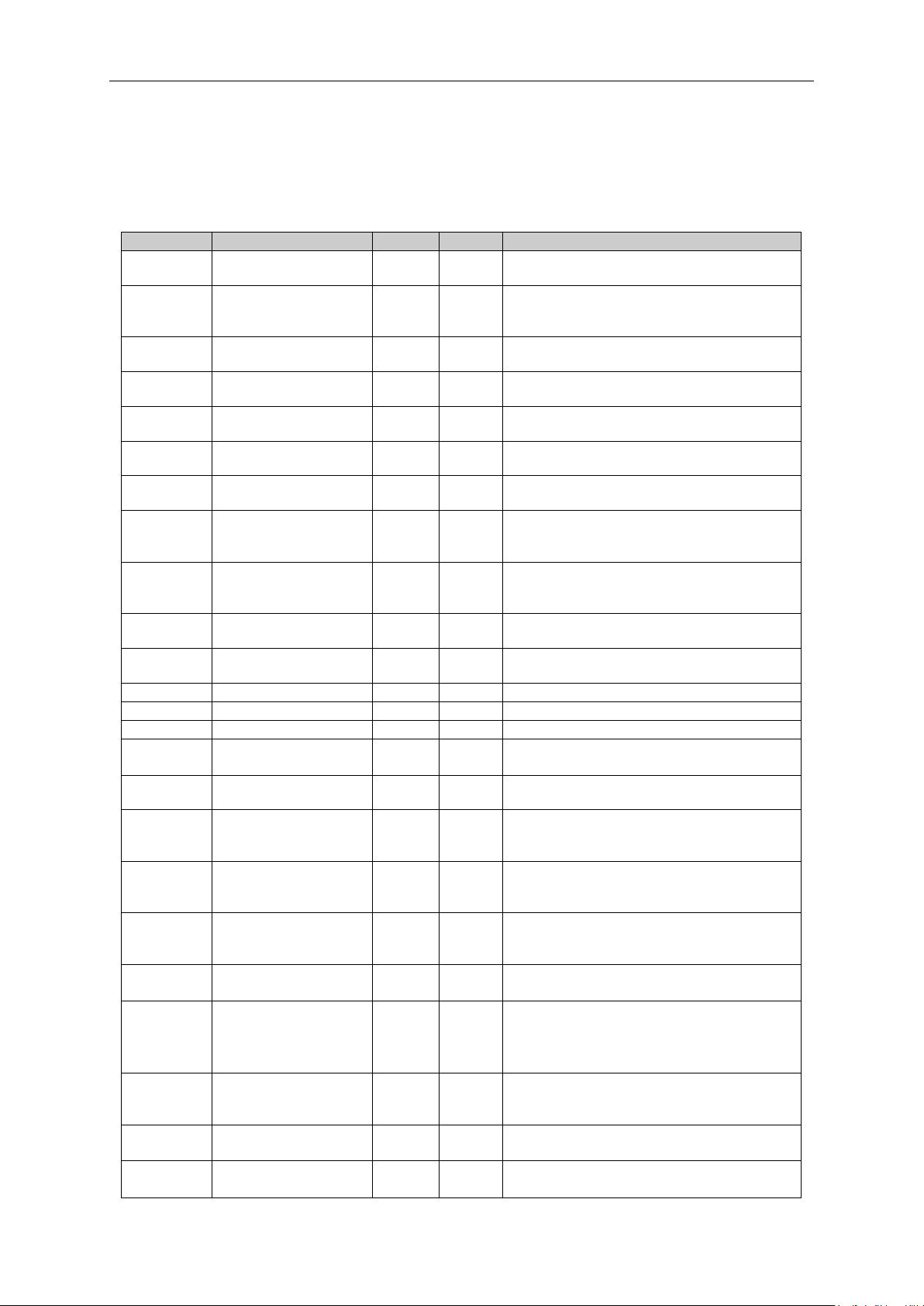
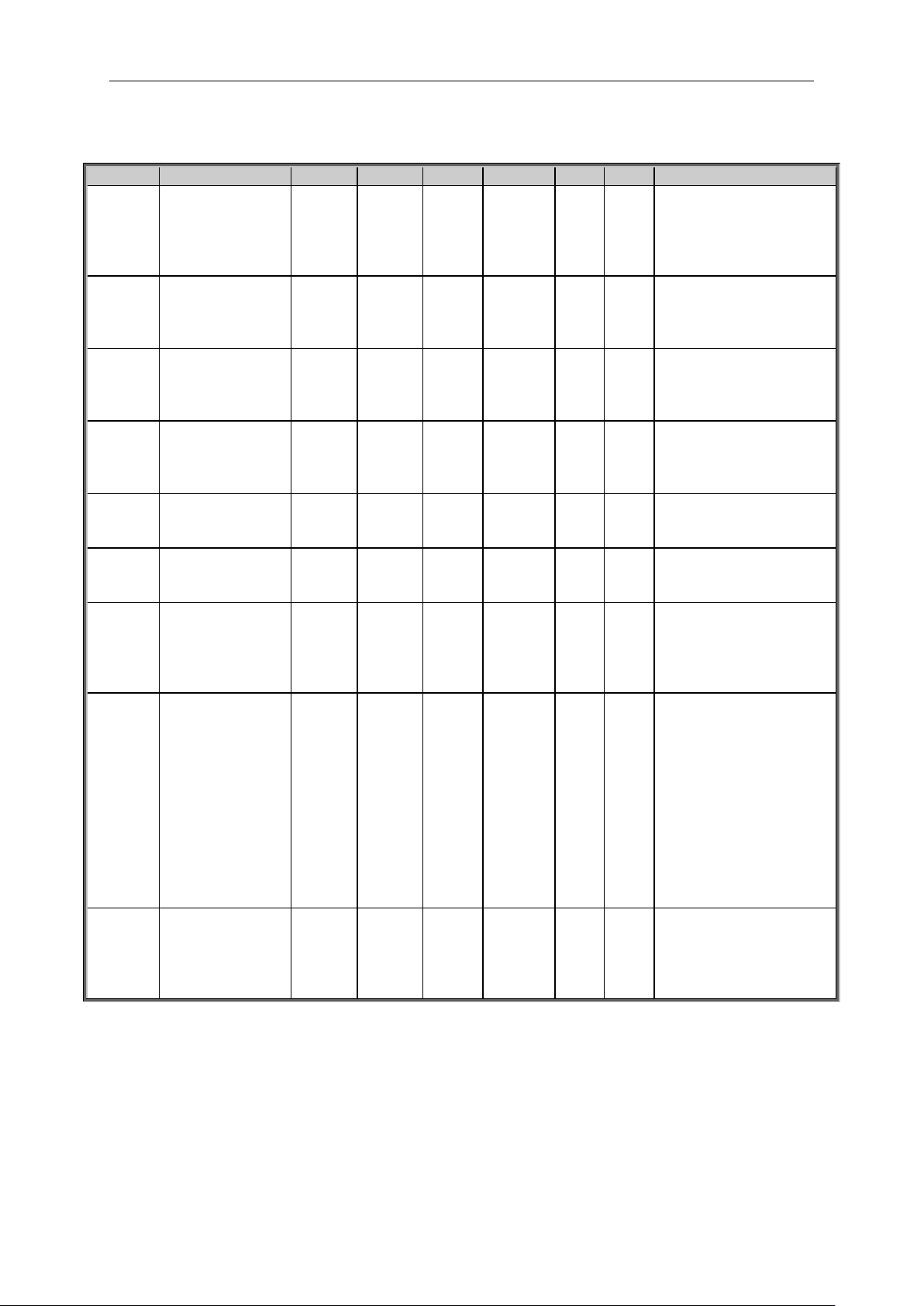
VALORES DE MONITORAMENTO (PAINEL DE CONTROLE: MENU M1)
Código
Parâmetro
Unidade
ID
Descrição
Output frequency
(Freqüência de saída)
Frequency reference
frequência)
Motor speed
(Velocidade do motor)
Motor current
(Corrente do motor)
Motor torque
(Torque do motor)
Motor Power
(Potência do motor)
Motor voltage
(Tensão do motor)
DC link voltage
barramento CC)
Unit temperature
unidade)
Voltage input
(Entrada de tensão)
Current input
(Entrada de corrente)
V1.12
DIN1, DIN2, DIN3
15
Status das entradas digitais
V1.13
DIN4, DIN5, DIN6
16
Status das entradas digitais
V1.14
DO1, RO1, RO2
17
Status de saída digital e relé
Status do relé de expansão (R0E3 reservado
para uso futuro)
Analogue l
(Saída AO(I))
Lift Speed
elevador)
Encoder Speed
encoder)
UnFiltered Motor Torq
filtrado)
Speed ctrl out
Referência de torque da saída do controlador
de velocidade
Distância quando desacelerado de qualquer
diferentes parâmetros na distância de parada.
Pole pair number
polos)
Motor Temperature
(Temperatura do motor)
Temperatura calculada do motor em
porcentagem da temperatura nominal do motor
Três valores diferentes podem ser
monitorados ao mesmo tempo
5.
Os valores de monitoramento são os valores reais dos parâmetros e sinais, bem como
os status e as medições. Os valores de monitoramento não podem ser editados.
®
Consulte o Manual do Usuário do VACON
NXS/P para obter mais informações.
V1.1
V1.2
V1.3
V1.4
V1.5
V1.6
V1.7
V1.8
V1.9
V1.10
V1.11
(Referência de
(Tensão do
(Temperatura da
Hz 1 Frequência de saída para o motor
Hz 25
rpm 2 Velocidade do motor em rpm
A 3
% 4 Em % do torque nominal do motor
% 5 Potência no eixo do motor
V 6
V 7
°C
V
mA 14 AI2
13 AI1
Referência de frequência para o controle
do motor
8 Temperatura da saída de ar
V1.15
V1.16
V1.17
V1.18
V1.19
V1.20
V1.21
V1.22
V1.23
G1.24
ROE1, ROE2, ROE3
out
(Velocidade do
(Velocidade do
(Torque do motor não
(Saída de cont. veloc.)
Ramp Down Distance
(Distância de
desaceleração)
(Número de par de
Multimonitor
35
mA 26 AO1
m/s 1630 Velocidade do elevador em m/s.
rpm 1631
% 1632
% 1633
m 1634
1651
% 9
velocidade para velocidade de nivelamento
(ou velocidade zero). O valor indica o efeito de
Número de par de polos calculado. A ser
verificado.
Tabela 5-1. Valores de monitoramento
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
12 • VACON APFIFF33 NXP LIFT
V1.25
Monitor 2
AbsEnc Position
(Posição AbsEnc)
Posição absoluta do encoder absoluto no
slot C
AbsEnc Revolution
Revoluções da posição absoluta do encoder
Step response
(Resposta do passo)
AI Torque reference
AI)
Referência de torque para o controle do
de execução.
DistDecelerated
desacelerada)
V1.25.7
Current (Corrente)
A
1113
Corrente do motor não filtrada
V1.25.8
Torque
%
1125
Torque do motor não filtrado
DC Voltage
Shaft angle
(Ângulo do eixo)
Shaft rounds
MC Status
(Status de MC)
Status Word
RegulatorStatus
(Status do regulador)
Ident. Fail
V1.26
DTF (oculto quando DTFMode (ModoDTF) = 0)
Speed m/s Actual
Position mm
(Posição mm)
V1.26.3
Enc Abs Puls Raw
p
1974
CarAtFloorArea
(CabineNaÁreaTérrea)
V1.25.1
V1.25.2
V1.25.3
V1.25.4
V1.25.5
V1.25.6
V1.25.9
V1.25.10
V1.25.11
V1.25.12
(Revolução AbsEnc)
(Referência de torque
Torque reference
(Referência de torque)
(Distância
(Tensão CC)
(Rotações do eixo)
p 54
r 55
Hz 1132 Resposta do passo de freq de rampa
% 1779
% 1780
m 1888
V 44 Tensão CC não filtrada
graus 1169 Ângulo do eixo do encoder
r 1170 Rotações do eixo do encoder
64 Palavra de status de controle do motor
absoluto no slot C
Referência de torque escalada da entrada
analógica.
motor. O valor é aumentado após o pedido
Distância percorrida após a desaceleração
iniciada durante a viagem anterior.
V1.25.13
V1.25.13
V1.25.13
(Palavra de status)
(Falha de identificação)
Tabela 5-2. Valores de monitoramento 2
V1.26.1
V1.26.2
V1.26.4
(Velocidade real m/s)
Tabela 5-3. DTF
43 Palavra do status da aplicação
77 Palavra de status do regulador
98 Código de falha de identificação
m/s 1993 Velocidade real em m/s
mm 1994 Posição do elevador em mm
Floo 1769
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 13
1
Valores de monitoramento
V1.1 Ouput frequency (Freqüência de saída) [#,## Hz] ID1
V1.2 Frequency reference (Referência de frequência) [#,## Hz] ID 25
V1.3 Motor speed (Velocidade do motor) [# rpm] ID 2
V1.4 Motor current (Corrente do motor) [#.## A] ID 3
Malha aberta:
Malha fechada:
V1.5 Motor torque (Torque do motor) [%] ID 4
Malha aberta
Malha fechada
V1.6 Motor Power (Potência do motor) [#,# %] ID 5
V1.7 Motor voltage (Tensão do motor) [#,# V] ID 6
V1.8 DC link voltage (Tensão do barramento CC) [# V] ID 7
V1.9 Unit temperature (Temperatura da unidade) °C ID 8
V1.10 Voltage input (Entrada de tensão) [#,## V] ID 13
V1.11 Current Input (Entrada de corrente) [#,## mA] ID 14
5.1
Frequência de saída para motor, atualizada no nível de tempo de 10 ms.
Referência de frequência para controle do motor, após função de
compartilhamento de velocidade. atualizações no nível de tempo de 1 ms.
Velocidade do motor em rpm.
Filtragem linear de 1 s.
Filtragem de 32 ms.
Em % do torque nominal do motor.
Filtragem linear de 1 s.
Filtragem de 32 ms.
Potência calculada do motor.
Tensão calculada do motor.
Tensão CC medida, filtrada.
Temperatura da saída de ar.
Níveis filtrados da entrada analógica.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

14 • VACON APFIFF33 NXP LIFT
V1.12 DIN1, DIN2, DIN3 ID 15
V1.13 DIN4, DIN5, DIN6 ID 16
Status de DIN1/DIN2/DIN3
Status de DIN4/DIN5/DIN6
b0
DIN3
DIN6
b1
DIN2
DIN5
b2
DIN1
DIN4
V1.14 DO1, RO1, RO2 ID 17
V1.15 ROE1, ROE2, ROE3 ID 35
Status de DO1, RO1,
RO2
Status de ROE1, ROE2,
ROE3
b0
DO1
ROE1
b1
RO1
ROE2
b2
RO2
ROE3
V1.16 Analogue lout (Saída AO(I)) [#,## mA] ID 26
V1.17 Lift speed (Velocidade do elevador) [m/s] ID 1630
V1.18 Encoder speed (Velocidade do encoder) [Hz] ID 1631
V1.19 Motor Torque Unf. (Torque do Motor Unf.) [#,# %] ID 1632
V1.20 Speed Ctrl Out (Saída de Cont. Veloc.) [#,# %] ID 1633
V1.21 RampDownDistance (Distância de desaceleração) [#,## m] ID 1634
V1.21 PolePairNumber (Número de par de polos) [-] ID 1651
V1.23 Motor temperature (Temperatura do motor) [#,# %] ID 9
Valor de saída analógica 0% = 0 mA / 0 V, 100% = 20 mA / 10 V
Velocidade linear do elevador.
Frequência do eixo filtrada com Encoder1FiltTime (Tempo de filtragem do
encoder 1).
Torque real em % do torque nominal do motor.
Referência de torque da saída do controlador de velocidade.
Distância de desaceleração da velocidade máxima até a velocidade de
nivelamento.
Número de par de polos calculado pelo controle do motor. Se o valor for
diferente do valor indicado na placa de identificação do motor, verifique a
frequência nominal do motor e a velocidade nominal.
A temperatura calculada do motor 105% é o limite de disparo se a resposta for
falha.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 15
1
Valores de monitoramento 2
V1.25.1 ABS Encoder Position (Posição do Encoder ABS) ID 54
V1.25.2 ABS Encoder Revolutions (Revoluções do Encoder ABS) ID 55
V1.25.3 Step response (Resposta do passo) Hz ID 1132
V1.25.4 AI Torque reference (Referência de torque AI) [#,#%] ID 1779
V1.25.5 Torque reference (Referência de torque) [#,#%] ID 1780
V1.25.6 Distance decelerated (Distância desacelerada) [#,### m] ID 1888
V1.25.7 Current A (Corrente A) A ID 1113
V1.25.8 Torque % ID 1125
V1.25.9 DC Volatge (Tensão CC) V ID 44
V1.25.10 Shaft Angle (Ângulo do eixo) [###,# graus] ID 1169
V1.25.11 Shaft Rounds (Rotações do eixo) ID 1170
5.2
Posição absoluta do encoder dentro de uma rotação. Consulte o manual do
encoder para dimensionamento.
Informação da revolução absoluta do encoder.
Erro de frequência. Compara a saída de rampa com a frequência real do encoder
com precisão de 0,001 Hz. Pode ser usado para ajuste de controle de velocidade
no controle de malha fechada.
Referência de torque escalada da entrada analógica.
Referência de torque para o controle do motor. O valor é aumentado após
o pedido de execução.
Distância desacelerada durante a viagem anterior. A aplicação está contando o valor
depois que a frequência aumentada desce pela primeira vez em uma viagem.
Corrente do motor não filtrada, sinal recomendado para monitoramento do
NCDrive.
Torque do motor não filtrado.
Tensão do barramento CC não filtrada.
Informações de ângulo do encoder incremental. O valor é redefinido quando
24 Vcc é removido do conversor de frequência.
Informações de rotações do encoder incremental. O valor é redefinido quando
24 Vcc é removido do conversor de frequência.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
16 • VACON APFIFF33 NXP LIFT
V1.25.12 MC Status (Status de MC) ID 64
Palavra de status de controle do motor ID64
FALSO
VERDADEIRO
b0
Não no estado Pronto
Pronto
b1
Não em funcionamento
Em funcionamento
b2
Sentido horário
Sentido anti-horário
b3
Sem falha
Falha
b4
Sem Aviso
Aviso
b5
Na velocidade de referência
b6
Na velocidade zero
b7
Fluxo pronto
b8
Limitador de velocidade TC ativo
b9
Direção do encoder
Sentido anti-horário
b10
Parada rápida de subtensão
b11
Sem freio CC
Freio CC ativo
b12
b13
Atraso de reinício ativo
b14
b15
V1.25.13 Application Status Word (Palavra do status da aplicação) ID 43
Palavra de status da aplicação ID43
FALSO
VERDADEIRO
b0
Fluxo não pronto
Fluxo pronto (>90%)
b1
Não no estado Pronto
Pronto
b2
Não em funcionamento
Em funcionamento
b3
Sem falha
Falha
b4
Sentido Horário
Sentido Anti-horário
b5 Na velocidade zero
b6
Não permitir funcionamento
Permitir funcionamento
b7
Sem Aviso
Aviso
b8
b9
b10
Comando de parada por inércia inativo
Comando de parada por inércia ativo
b11
Sem freio CC
Freio CC ativo
b12
Sem solicitação de funcionamento
Solicitação de funcionamento
b13
Controles de limite inativos
Controle de limite ativo
b14
Freio mecânico fechado
Freio mecânico aberto
Sinal de supervisão de freio externo
desligado
A palavra de status MC combina diferentes status de controle do motor em uma
única palavra de dados.
A Palavra de status da aplicação combina diferentes status do conversor
de frequência em uma única palavra de dados.
Sinal recomendado para monitoramento do NCDrive.
b15
Sinal de supervisão de freio externo ligado
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
VACON • 17
1
V1.25.14 Regulator Status (Status do regulador) ID 77
Status do regulador ID77
Status do regulador de corrente
Status do regulador de corrente
no modo gerador
Status do regulador de torque no modo
motor
Status do regulador de torque no modo
gerador
b4
Status do regulador de sobretensão
Tensão CC
b5
Status do regulador de subtensão
Tensão CC
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
V1.25.15 Ident. fail (Falha de identificação) ID 98
b0
b1
b2
b3
no modo motor
Para monitor CL B0
Para monitor CL B1
Código de falha para identificação da falha:
1 = ID_FAIL_OFFSET
2 = ID_FAIL_CURRENT_LEVEL
3 = ID_FAIL_ACCEL_TIME
4 = ID_FAIL_AT_LIMIT
5 = ID_FAIL_MAGN_CURR_LEVEL
6 = ID_FAIL_FLUX_CURVE_LEVEL
7 = ID_FAIL_PMSM_ENCODER_ZERO_POS
8 = ID_FAIL_FREQ_LIM_ERROR
9 = ID_FAIL_PMSM_ENCODER_ZERO_PULSE
10 = ID_FAIL_LS_IDENT_TIMEOUT
11 = ID_FAIL_LS_IDENT_CURRENT
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

18 • VACON APFIFF33 NXP LIFT
APLICAÇÃO DE ELEVADOR NXP – LISTAS DE PARÂMETROS
Explicações da coluna:
6.
Nas próximas páginas, você encontrará as listas de parâmetros nos respectivos grupos
de parâmetros. Cada parâmetro inclui um link para a descrição do respectivo parâmetro.
As descrições dos parâmetros são dadas nas páginas 39 a 108.
Código = Indicação de localização no teclado; mostra ao operador o número
do parâmetro atual
Parâmetro = Nome do parâmetro
Mín. = Valor mínimo do parâmetro
Máx. = Valor máximo do parâmetro
Unidade = Unidade do valor do parâmetro; fornecido caso disponível
Padrão = Valor predefinido em fábrica
Cust = A própria configuração do cliente
ID = Número de ID do parâmetro (usado com ferramentas de PC)
= Aplique o método Terminal to Function (TTF) a esses parâmetros.
Consulte o Capítulo 4.
= No código do parâmetro: o valor do parâmetro somente poderá ser
alterado após a parada do conversor de frequência.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
VACON • 19
1
Parâmetros básicos (Painel de controle: Menu M2 G2.1)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
Verifique a placa de
usada Delta/Estrela.
Motor nominal
nominal do motor)
Verifique a placa de
O padrão se aplica a um
Motor nominal
do motor)
Verifique a placa de
Verifique a placa de
do motor.
Corrente do motor
conversor de frequência.
Magnetizing current
0,00 A = O conversor de
identificação do motor.
0 = Sem ação
1
2
3
OBSERVAÇÃO:
da identificação.
0 = Motor de indução
1
parâmetros.
6.1
P2.1.1
P2.1.2
P2.1.3
P2.1.4
P2.1.5
P2.1.6
P2.1.7
Motor nominal
voltage
(Tensão nominal
do motor)
frequency
(Frequência
Motor nominal
speed (Velocidade
nominal do motor)
current
(Corrente nominal
Motor cosϕ
(Cosϕ do motor)
Current limit
(Limite de corrente)
(Corrente de
magnetização)
NX2: 230 V
20 690 V
4.00 320.00 Hz 50.00 111
5 20 000 rpm 1440 112
0,1 x IH 2 x IH A IH
0.30 1.00 0.85 120
0,1 x IH 2 x IH A IL
0.00 100.00 A 0.00
NX5: 400 V
NX6: 690 V
110
classificação nominal
do motor. Observe
também a conexão
classificação nominal
do motor.
motor de 4 polos e a um
conversor de frequência
de tamanho nominal.
classificação nominal
113
do motor.
classificação nominal
107
máxima na saída do
frequência usa um valor
612
estimado proveniente dos
valores da placa de
P2.1.8
P2.1.9
Identification
(Identificação)
Motor type
(Tipo de motor)
Tabela 6-1. Parâmetros básicos G2.1
0 4 0
0 1 0
631
1650
= Identificação sem
funcionamento
= Identificação com
funcionamento
= Funcionamento de
ID do encoder
Defina
o modo de controle
do motor para Controle
de frequência antes
= Motor de PMS
A configuração do tipo
de motor altera outros
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
20 • VACON APFIFF33 NXP LIFT
Parâmetros de perfil de velocidade (Painel de controle: Menu M2 G2.2)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
Nominal Linear
Linear Nominal)
Velocidade do elevador
nominal do motor.
Seleção de
0 = Referência ativa
1
2
3
4
5
6
0
1
Reference hold time
Estado de
0 = Operação normal
1
estiver OFF (desligado)
Distância da velocidade
máxima até a velocidade
desaceleração.
Distância da velocidade de
DecDecJerk 2.
P2.2.9.x
REFERÊNCIA DE VELOCIDADE [m/s]
Levelling Speed
Nivelamento)
Full Speed
(Velocidade Plena)
Limited Speed
(Velocidade Limitada)
Inspection Speed
Inspeção)
Speed Reference 4
Velocidade 4)
Speed Reference
Velocidade5)
Speed Reference 6
Velocidade 6
6.2
P2.2.1
P2.2.2
P2.2.3
P2.2.4
P2.2.5
P2.2.6
Speed (Velocidade
Speed Reference
Selection (
Referência de
Velocidade)
Enable jerks
(Habilitararrancadas)
(Tempo de espera
de referência)
Stop State (
parada) (DIN456)
StopDistance 1
(Distância de
Parada 1)
0.20 5.00 m/s 1.00
0 6 s
0 1 1
0.00 5.00 s
0 1
0 5.000 m
1500
117
1549
1509
1614
1777
em m/s com frequência
= Ativar ref. com
direção
= Referência binária
= AI1 (entrada de tensão)
= AI2 (entrada de
corrente)
= Fieldbus
= Teclado
= Desativado
= Ativado
Função de meio andar
= Parar se DIN456
de nivelamento.
Ajustar este parâmetro
afeta automaticamente
o tempo de
StopDistance 2
P2.2.7
P2.2.8
P2.2.9.1
P2.2.9.2
P2.2.9.3
P2.2.9.4
P2.2.9.5
P2.2.9.6
P2.2.9.7
(Distância de
Parada 2)
Internal Ramp
Switch (Chave de
rampa interna)
(Velocidade de
(Velocidade de
(Referência de
5(Referência de
(Referência de
0 5.000 m
0 P2.1.2 Hz 0
0.00 P2.2.1 m/s 0.10
0.00 P2.2.1 m/s 1.00
0.00 P2.2.1 m/s 0.25
0.00
0.00 P2.2.1 m/s 0.10
0.00 P2.2.1 m/s 1.00
0.00 P2.2.1 m/s 0.25
1.5x
P2.2.1
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
m/s 0.50
1776
1544
1501
1502
1503
1504
1505
1506
1507
nivelamento até zero.
Ajustar este parâmetro
afeta automaticamente
DecIncJerk 2 e
0 = Não está em uso
Este parâmetro define
o nível de frequência
durante a parada, após
o uso da dinâmica da
curva de velocidade2.
Os parâmetros
correspondem aos
parâmetros do grupo
2.2.10. Eles serão
atualizados
automaticamente se os
parâmetros forem
alterados.
Esses parâmetros
também são atualizados
quando o P2.2.1 é
alterado.
VACON • 21
1
Speed Reference 7
Velocidade 7)
Override speed
substitução)
P2.2.10.x
REFERÊNCIA DE VELOCIDADE [Hz]
Levelling Speed
Nivelamento)
Full Speed
Limited Speed
(VelocidadeLimitada)
Inspection Speed
Inspeção)
Speed Reference 4
Velocidade 4)
Speed Reference 5
Velocidade 5)
Speed Reference 6
Velocidade 6)
Speed Reference 7
Velocidade 7)
Override speed
P2.2.11.x
CURVA DE VELOCIDADE 1
Acceleration
(Aceleração)
Deceleration
(Desaceleração)
Acceleration increase
aceleração 1)
Acceleration
da aceleração 1)
Deceleration increase
desaceleração 1)
Deceleration
desaceleração 1)
P2.2.12.x
CURVA DE VELOCIDADE 2
Acceleration 2
(Aceleração 2)
Deceleration 2
(Desaceleração 2)
Acceleration increase
P2.2.9.8
P2.2.9.9
P2.2.10.1
P2.2.10.2
P2.2.10.3
P2.2.10.4
P2.2.10.5
P2.2.10.6
P2.2.10.7
(Referência de
(Velocidade de
(Velocidade de
(VelocidadePlena)
(Velocidade de
(Referência de
(Referência de
(Referência de
0.00 P2.2.1 m/s 0.50
0.00
0.00 par2.1.2 Hz 5.00
0.00 par2.1.2 Hz 50.00
0.00 par2.1.2 Hz 12.50
0.00
0.00 par2.1.2 Hz 5.00
0.00 par2.1.2 Hz 50.00
0.00 par2.1.2 Hz 12.50
1.5x
P2.2.1
1.5x
P2.1.2
m/s 0.50
Hz 25.00
1508
1613
1604
1605
1606
1607
1608
1609
1610
Os parâmetros
correspondem aos
parâmetros do grupo
2.2.9. Eles serão
atualizados
automaticamente se
os parâmetros forem
alterados.
P2.2.10.8
P2.2.10.9
P2.2.11.1
P2.2.11.2
P2.2.11.3
P2.2.11.4
P2.2.11.5
P2.2.11.6
(Referência de
(Velocidade de
substituição)
jerk 1
(Jerk (S) doinícioda
Decrease jerk 1
(Jerk (S) dofinal
jerk 1
(Jerk (S) do início da
decrease jerk 1
(Jerk (S) do final da
0.00 par2.1.2 Hz 25.00
0.00
0.20 2.00 m/s2 0.70
0.20 2.00 m/s2 0.70
0.01 3.00 s 0.50
0.01 3.00 s 0.25
0.01 3.00 s 0.25
0.01 3.00 s 0.50
1.5x
P2.1.2
Hz 5.00
1611
1612
103
104
1540
1541
1542
1543
P2.2.12.1
P2.2.12.2
P2.2.12.3
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
jerk2
(Jerk (S) do início da
aceleração 2)
0.20 2.00 m/s2 0.20
0.20 2.00 m/s2 0.20
0.01 3.00 s 0.50
502
503
1545
22 • VACON APFIFF33 NXP LIFT
Acceleration
aceleração 2)
Deceleration increase
Deceleration
desaceleração 2)
Parâmetros de controle do freio mecânico (Painel de controle: Menu M2 G2.3)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
P2.3.1.x
MALHA ABERTA
O valor é alterado quando o
parâmetro 2.1.4 Motor Nom
do motor) é ajustado.
Torque limit
(Limite de Torque)
Freq. limit open
Abertura)
Brake open delay
do freio)
Freq. limit close
Fechamento)
Brake close delay
Fechamento)
Max. frequency
Máxima Frequência
Freio fechado)
Mechanical brake
reaction time (Tempo
mecânico)
DC braking current
frenagem CC)
DC braking time at
partida)
0
DC braking time at
parada)
0
Frequency to start
iniciar frenagem CC
por rampa)
P2.2.12.4
P2.2.12.5
P2.2.12.6
6.3
P2.3.1.1
P2.3.1.2
P2.3.1.3
descrease jerk2
(Jerk (S) dofinal da
jerk2
(Jerk (S) do início
da desaceleração 2)
decrease jerk2
(Jerk (S) do final da
0.01 3.00 s 0.50
0.01 3.00 s 0.50
0.01 3.00 s 0.50
1546
1547
1548
Tabela 6-2. Parâmetros de perfil de velocidade G2.2
Current limit
(Limite de corrente)
(Limite de
Frequência para
0 P2.1.4 A 0.2 x In
0.0 100.0 % 0.0
0.00 P2.1.2 Hz 0.00
1551
1552
1553
Current (Corrente nominal
P2.3.1.4
P2.3.1.5
P2.3.1.6
P2.3.1.7
P2.3.1.8
P2.3.1.9
P2.3.1.10
P2.3.1.11
(Atraso abertura
(Limite de
Frequência para
(Atraso para
brake closed
(
de reação do freio
(Corrente de
start (Tempo de
frenagem CC na
stop (Tempo de
frenagem CC na
0.00 10.00 s 0.00
0.01 P2.1.2 Hz 1.00
0.00 10.00 s 0.00
0.00
0.00 10.00 s 0.30
0,1 x In 1,5 x In A Varia
0.000 60.000 s 0.500
0.000 60.000 s 1.000
1.5 x
P2.1.2
Hz 2.00
1554
1555
1556
1557
1558
507
1559
1560
Atraso de freio aberto
em malha aberta
Atraso abertura de
freio em malha aberta
= Freio CC é desativado
na partida
= Freio CC desativado
na parada
P2.3.1.12
DC braking during
ramp stop
Frequência para
(
duranteparada
0.10 10.00 Hz 0.50
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
515
O freio CC é permitido
abaixo deste limite de
frequência
VACON • 23
1
Close delay Estop
Estop)
Run request closing
de fechamento)
0
1
P2.3.2.x
MALHA FECHADA
O valor é alterado quando
motor) é ajustado.
Torque limit
(Limite de torque)
Frequency limit
frequência)
Brake open delay
aberto)
Atraso de abertura de
100 = 1,00 s
Frequency limit close
frequênciafechado)
Brake close delay
Fechamento)
Atraso de fechamento de
100 = 1,00 s
Max. frequency
para freio fechado)
Mechanical brake
reaction time (Tempo
mecânico)
0Hz time at start
napartida)
0Hz time at stop
na parada)
Smooth start time
suave)
Smooth start freq.
suave.)
Close delay Estop
Estop)
Run request closing
de fechamento)
0
1
Start magnetizing
napartida)
Start magnetizing
napartida)
P2.3.1.13
P2.3.1.14
P2.3.2.1
P2.3.2.2
P2.3.2.3
P2.3.2.4
P2.3.2.5
P2.3.2.6
(Atraso fechado
(Solicitação
defuncionamento
Current limit
(Limite de corrente)
(Limite de
(Atraso de freio
(Limite de
(Atraso para
0.00 30.00 s 0.00
0 1 1
0 P2.1.4 A 0.2 x In
0 100.0 % 0
0 P2.1.2 Hz 0.00
0 10.00 s 0.00
0 P2.1.2 Hz 0.01
0 10.00 s 0.00
1640
1641
1561
1562
1563
1564
1565
1566
= Inativo
= Ativo
o parâmetro 2.1.4 Motor
Nom Current (Corrente
nominal do motor) ou
2.1.9 Motor Type (Tipo de
freio em malha fechada
freio em malha fechada
P2.3.2.7
P2.3.2.8
P2.3.2.9
P2.3.210
P2.3.2.11
P2.3.2.12
P2.3.2.13
P2.3.2.14
brake closed
(
Máxima frequência
de reação do freio
(Tempo de 0 Hz
(Tempo de 0 Hz
(Tempo de partida
(Freq. de partida
(Atraso fechado
(Solicitação de
funcionamento
0 75.00 Hz 0.10
0 10.00 s 0.30
0 2.000 s 0.800
0 2.000 s 0.600
0 10.00 s 0.10
0 10.00 Hz 0.00
0.00 30.00 s 0.00
0 1 1
1577
1558
615
616
1568
1569
1640
1641
Os mesmos parâmetros
de Malha aberta
= Inativo
= Ativo
P2.3.2.15
P2.3.2.16
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
time (Tempo de
magnetização
curent (Corrente
demagnetização
0.000 32.000 s 0.150
0.00 IL s 0.00
628
627
Tempo de magnetização
na partida, controle de
malha fechada
Corrente de magnetização
na partida, controle de
malha fechada
24 • VACON APFIFF33 NXP LIFT
P2.3.3.x
ENTRADAS DIGITAIS
External brake
Controle de
freio externo)
External brake
freioexterno)
External brake
freioexterno2)
P2.3.4.x
SUPERVISÃO DE FREIO
External brake
externo)
0 / Não invertido =
normalmente fechados.
Supervision fault F55
partida)
0
1
Parâmetros de controle de conversor (Painel de controle: Menu M2 G2.4)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
0 = Não usado
1
2
3
4
teste
0 = Parada por inércia
1
2
defreq.
Frequency limit
frequência)
Stop distance
deparada)
S-curve time
v.)
Tempo de curva de S. ativo
por distância estiver ativo
Scaling factor
(Fator deescala)
Fator de escala para o
tempo de rampa
P2.4.7.x
CONTROLE DO CONTATOR DO MOTOR
Closing time
fechamento)
Motor Contactor
contator do motor)
P2.3.3.1
P2.3.3.2
P2.3.3.3
P2.3.4.1
P2.3.4.2
P2.3.4.3
control (
supervision
(Supervisão de
supervision2
(Supervisão de
supervision time
Tempo de
(
supervisão de freio
Inverted external
brake supervision
(Supervisão de freio
externo invertido)
at start (Falha de
supervisão F55 na
0.1 F.2 0.2
0.1 F.2 0.1
0.1 F.2 0.1
0.00 5.00 s 2.00
0 1 1
0 1 0
Tabela 6-3. Parâmetros de controle do freio mecânico, G2.3
1601
1602
1838
1603
1856
1857
Consulte o capítulo
Programação de E/S.
Interruptores de freio
normalmente abertos.
1 / Invertido =
Interruptores do freio
= Desativado
= Ativado
6.4
P2.4.1
P2.4.2
P2.4.3
P2.4.4
P2.4.5
P2.4.6
= Usado em
funcionamento
= Chopper de frenagem
Brake chopper
(Cortador do freio)
Stop function
(Função de parada)
(Limite de
(Distância
(Tempo da curva de
0 4 0
0 2 2
0
0 1.5 m 0.0
0 1.00 s 0.15
0 200 % 70
1.5 x
P2.1.2
Hz 5.00
504
506
1624
1539 0 = Não usado
1626
1625
externo
= Usado quando
parado/em
funcionamento
= Funcionamento, sem
= Rampa
= Parada por limite
Usado somente se função
de parada = 2
somente quando Parada
P2.4.7.1
P2.4.7.2
(Tempo de
Acknowledgement
Ativação do
(
0.00 2,00 s 0.10
0.1 F.2 0.1
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1660
1661
Atrasode fechamentopara
contator do motor
Sinal de feedback digital
do contator do motor
VACON • 25
1
P2.4.8.x
AVANÇADO (Oculto com ocultação avançada)
Parâmetro para alteração
3 = Software 3
Advanced Options 1
(Opções Avançadas 1)
Advanced Options 2
(Opções Avançadas 2)
Advanced Options 4
(Opções Avançadas 4)
Advanced Options 5
(Opções Avançadas 5)
Advanced Options 6
(Opções Avançadas 6)
Parâmetros de controle do motor (Painel de controle: Menu M2 G2.5)
Código
Parâmetro
Mín.
Máx.
Unida
de
Padrão
Cust
ID
Observação
0 = Controle de
1
2 = Malha fechada
Switching frequency
de comutação)
Overvoltage controller
de sobretensão)
0
1
Undervoltage
controller (Controlador
0
1
Measured Rs Volt Drop
medida em Rs)
OL SpeedCont ki1 (OL
SpeedCont ki1)
Controlador de
velocidade ki1
OL SpeedCont kp1 (OL
SpeedCont kp1)
Controlador de
velocidade kp1
P2.5.8.x
CONFIGURAÇÕES U/F
0 = Não usado
1
automático
0 = Linear
1
2
3
De fluxo
Field weakening point
decampo)
Voltage at field
decampo)
P2.4.8.1
P2.4.8.2
P2.4.8.3
P2.4.8.4
P2.4.8.5
P2.4.8.6
Modilator Type
(Tipo de modulador)
0 3 0
0 65535 0
0 65535 0
0 65535 0
0 65535 0
0 65535 0
Tabela 6-4. Parâmetros de controle do conversor de frequência, G2.4
6.5
Motor control mode
P2.5.1
(Modo de controle
do motor)
0 2 1
1775
1770
1771
1772
1773
1774
1572
do tipo de modulador
0 = ASIC
1 = Software 1
2 = Software 2
frequência
= Controle de
velocidade, (OL)
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
P2.5.8.1
P2.5.8.2
P2.5.8.3
(Frequência
(Controlador
de subtensão)
(Queda de tensão
U/f optimisation
(Optimização V/f)
U/f ratio selection
(Seleção de razão U/f)
(Ponto de
enfraquecimento
1.0 16.0 kHz Varia
0 1
0 1 1
0 10000
0 10000 300
0 10000 ms 3000
0 1 1
0 3 0
5.00 320.00 Hz 50.00
601 Depende de kW
607
608
662
667
667
1573
1574
602
= Off (desligado)
= On (ligado)
= Off (desligado)
= On (ligado)
= Impulso de torq.
= Quadrática
= Programável
= Linear com otim.
Este parâmetro é
alterado se P2.1.2
for reinicializado.
weakening point
P2.5.8.4
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
(Tensão no ponto de
enfraquecimento
10.00 200.00 % 100.00
603
n% x U
nmot
26 • VACON APFIFF33 NXP LIFT
U/f curve midpoint
Frequência
U/f corve midpoint
de U/f)
Output voltage at zero
zero)
P2.5.9.x
MALHA FECHADA
Speed control limit
velocidade 1)
Speed control limit
velocidade 2)
Speed control Kp1
velocidade Kp 1)
Speed control Kp2
velocidade Kp 2)
Speed control Ti 1
Constante de tempo do
Speed control Ti 2
Constante de tempo do
de velocidade
Current control Kp
corrente Kp)
Current control Ki
Constante de tempo
Encoder 1 filter time
encoder 1)
Slip adjust (Ajuste
de escorregamento)
Tempo de rampa
de torque for usada.
Torque reference
0 = Não usado
de AI1 ou AI2
AI torque reference
torque AI)
Torque reference
scaling minimum value
escala dereferência de
torque)
P2.5.8.5
P2.5.8.6
P2.5.8.7
P2.5.9.1
P2.5.9.2
P2.5.9.3
P2.5.9.4
frequency (
do ponto médio da
curva de U/f)
voltage (Tensão do
ponto médio da curva
frequency (Tensão de
saída em frequência
1 (Limite de
controle de
2 (Limite de
controle de
(Controle de
(Controle de
0.00 P2.5.8.3 Hz 5.00
0.00 100.00 % 10.00
0.00 40.00 % 1.30
0
Par.
2.5.9.1
Par.
2.5.9.2
5.00
0,01 Hz 10.00
0 1000 30
0 1000 30
1575
1576 n% x U
1577 n% x U
1618
1619
1620
1621
Ganho p do controlador
de velocidade
Ganho p do controlador
de velocidade
nmot
nmot
P2.5.9.5
P2.5.9.6
P2.5.9.7
P2.5.9.8
P2.5.9.9
P2.5.9.10
P2.5.9.11
P2.5.9.12
(Tempo de controle
de velocidade 1)
(Tempo de controle
de velocidade 2)
(Controle de
(Tempo de controle
de corrente)
(Tempo do filtro do
Torque ramp time
(Tempo de rampa
de torque)
selection (Seleção
de referência de
torque)
0 500 ms 30.0
0 500 ms 30.0
0 100 40.00
0 1000 ms 1.5
0 100.0 ms 3.0
0 500 % 70
0 1.0 s 0.2
0 2 0
1622
1623
617
1627
618
619
1760
621
integrador do controlador
de velocidade
integrador do controlador
Ganho p do controlador
de corrente
do integrador do
controlador de corrente
Tempo do filtro para
a velocidade atual
de torque na partida
e na parada. Usado na
partida se a referência
1 = Memória de torque
2 = Referência de torque
P2.5.9.13
P2.5.9.14
(Referência de
(Valor mínimo da
0 1 1
-300.00 300.0 % 0.00
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
641
643
Seleção da referência
de torque de AI1 ou AI2
Seleciona o torque que
corresponde ao sinal de
referência mín.
VACON • 27
1
Torque reference
da escala de referência
de torque)
Torque reference
Atraso de solicitação
ShowAdvancedPar
avançados)
P2.5.9.18.x
REVERSÃO
Rollback Controller
reversão)
0
1 =
Rollback Gain
(Ganho de reversão)
Ganho de controle
de reversão
Rollback control
reversão)
Número de pulsos do
P2.5.10.x
MOTOR DE ÍMÃ PERMANENTE
P2.5.10.1
PMSM ShaftPosi
PMSM)
0 = Automático
3 = Definido por digin
Nível de corrente da
motor
Polarity Pulse Current
de polaridade)
Encoder
do encoder)
0
1
EnableRsIdentifi
(Habilitar Identificação
Rs)
0
1
ModIndexLimit
modulação)
Curr 5th amplit
(Amplit da corr 5ª)
Curr 5th phase
(Fase da corr 5ª)
P2.5.9.15
P2.5.9.16
P2.5.9.17
P2.5.9.18.1
P2.5.9.18.2
P2.5.9.18.3
P2.5.9.18.4
scaling maximum
value (Valor máximo
add delay
(Atraso adicional de
referência de torque)
(Mostrar parâm.
(Controlador de
pretorque
(Pré-torque de
controle de
Rollback control
wakeup level
(Nível de ativação
do controle de
reversão)
-300.00 300.0 % 0.00
0.0 10.0 s 0.2
0 1 0
0 1 1
0 32767 2500
0.0 100.0 % 0.1
0.01 10.0 3.0
Seleciona o torque que
642
1778
1969 Para fins de ajuste fino
1687
1689
1691
1690
corresponde ao sinal de
referência máx.
de funcionamento para
adição de referência
de torque.
= desativado
ativado
O nível de torque inicial do
controlador de prevenção
de reversão após a
ativação 1000 = 100,0%
encoder para ativar o
controle de reversão.
A interpolação do
encoder é necessária
para ativação se valores
<1 forem usados.
P2.5.10.2
P2.5.10.3
P2.5.10.4
P2.5.10.5
P2.5.10.6
P2.5.10.7
P2.5.10.8
(Posição do eixo
StartAngleIDmode
(Modo ID do angulo
de partida)
StartAngleIDCurr
(Corrente ID do
ângulo de partida)
(Corrente de pulso
indentification mode
(Modo de
identificação
(Limite do índice de
0 65565 0
0 3 0 1933
0 100 % 0.0 1938
-10.0 200.0 % 0.0
0 1 1
0 1 1
0 200 % 100
0.0 100.0 % 1868
1670
1800
1686
654
655
1 = Forçar sempre
2 = Após a partida
identificação do ângulo
de partida 1000 = 100,0%
do valor nominal do
= Identificação com CC
= Identificação
automática de pulso
= Não
= Sim
P2.5.10.9
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
0.0 360.0 ° 1867
28 • VACON APFIFF33 NXP LIFT
Lsd Voltage Drop
Queda de tensão da
D 2560 = 100%.
Lsq Voltage Drop
Queda de tensão da
Q 2560 = 100%.
Flux Current Kp
(Corrente de fluxo Kp)
Flux Current Ti (Tempo
de corrente de fluxo)
P2.5.10.14
External Id Reference
externa)
P2.5.10.15
IdRefAtZeroSpeed
0
150.0 % 0.0
1805
P2.5.10.16
IdRefMaxFreq
0
P2.1.2
%
0.00
1806
Estabilizadores (Painel de controle: Menu M2 G2.5.11)
Código
Parâmetro
Mín.
Máx.
Unida
de
Padrão
Cust
ID
Observação
Torque Stabilator
torque)
P2.5.11.2
Torque Stabilator Gain
(Ganho do estabilizador
de torque)
P2.5.11.3
Torque Stabilator
torque em FWP)
P2.5.11.4
Torque Stabilator Limit
(Limite do estabilizador
de torque)
P2.5.11.5
Flux Circle Stabilator
círculo de fluxo)
P2.5.11.6
Flux Stabilator Gain
fluxo)
P2.5.11.7
Flux Circle Stabilator
círculo de fluxo)
P2.5.11.8
Voltage Stabilator TC
de tensão)
P2.5.11.9
Voltage Stabilator Gain
P2.5.11.10
Voltage Stabilator
tensão)
P2.5.10.10
P2.5.10.11
P2.5.10.12
P2.5.10.13
(Queda de tensão
em Lsd
)
(Queda de tensão
em Lsq
)
(Referência de Id
-32000 32000 0
-32000 32000 0
0 32000 500
0.0 100.0 ms 5.0
-150.0 150.0 % 0.0
Tabela 6-5. Parâmetros de controle do motor, G2.5
6.6
Damping
P2.5.11.1
(Amortecimento do
estabilizador de
0 1000 800
1413
1757
1758
651
652
1730
reatância do eixo
reatância do eixo
Razão de amortecimento
do estabilizador de torque.
Inicializado em 980 se
o motor PM for selecionado.
Gain in FWP (Ganho
do estabilizador de
Gain (Ganho do
estabilizador do
(Ganho do
estabilizador de
TC (TC do
estabilizador do
(TC do estabilizador
0 1000 100
0 1000 50
0 1500 150
0 32767 10000
0 32000 500
0 32700 900
0 1000 900 1698
1412
1414
1600
1550
1797
1699
Ganho do estabilizador de
torque.
Ganho do estabilizador de
torque no ponto de
enfraquecimento de campo.
Limite da saída do
estabilizador de torque.
Ganho para o estabilizador
do círculo de fluxo.
Ganho do estabilizador de
fluxo.
Coeficiente do filtro do
estabilizador de corrente de ID.
Razão de amortecimento do
estabilizador de tensão.
Tabela 6-6. Estabilizadores, G2.5.11
(Ganho do
estabilizador
de tensão)
Limit (Limite do
estabilizador de
0 100.0 % 10.0 1697
0 320.00 Hz 1.50 1696
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Ganho do estabilizador
de tensão.
Limite da saída do
estabilizador de tensão.

VACON • 29
1
Parâmetros identificados (Painel de controle: Menu M2 G2.5.12.x)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
Flux 10 %
(10% de fluxo)
P2.5.12.2
Flux 20 %
(20% de fluxo)
P2.5.12.3
Flux 30 %
(30% de fluxo)
P2.5.12.4
Flux 40 %
(40% de fluxo)
P2.5.12.5
Flux 50 %
(50% de fluxo)
P2.5.12.6
Flux 60 %
(60% de fluxo)
P2.5.12.7
Flux 70 %
(70% de fluxo)
P2.5.12.8
Flux 80 %
(80% de fluxo)
P2.5.12.9
Flux 90 %
(90% de fluxo)
P2.5.12.10
Flux 100 %
(100% de fluxo)
P2.5.12.11
Flux 100 %
(110% de fluxo)
P2.5.12.12
Flux 120 %
(120% de fluxo)
P2.5.12.13
Flux 130 %
(130% de fluxo)
P2.5.12.14
Flux 140 %
(140% de fluxo)
P2.5.12.15
Flux 150 %
(150% de fluxo)
P2.5.12.16
Rs voltage drop
tensão em Rs)
P2.5.12.17
Ir add zero point
de RI)
P2.5.12.18
Ir add generator
de RI)
P2.5.12.19
Ir add motoring
de RI)
P2.5.12.20
Ls Voltage
tensão em Ls)
P2.5.12.21
Motor BEM
do motor BEM)
6.7
Os parâmetros são atualizados quando a identificação automática do motor estiver
completa. A identificação é ativada ao programar o parâmetro P2.1.8 e dar o comando
de partida dentro de 20 segundos após a programação do parâmetro. Também é possível
alterar esses parâmetros manualmente; no entanto, é necessário ter um conhecimento
muito bom sobre como ajustar o motor.
Como esses valores são parâmetros, é possível salvá-los e copiá-los para outro conversor
de frequência.
P2.5.12.1
0 2500 % 10
0 2500 % 20
0 2500 % 30
0 2500 % 40
0 2500 % 50
0 2500 % 60
0 2500 % 70
0 2500 % 80
0 2500 % 90
0 2500 % 100
0 2500 % 110
0 2500 % 120
0 2500 % 130
0 2500 % 140
1355
1356
1357
1358
1359
1360
1361
1362
1363
1364
1365
1366
1367
1368
0 2500 % 150
(Queda de
voltage (Tensão de
scale (Escala do
gerador de adição
scale (Escala de
motor de adição
Dropp (Queda de
Voltage (Tensão
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
0 30000 Varia
0 30000 Varia
0 30000 Varia
0 30000 Varia
0 3000 0
0,00 320.00 % 0
1369
662
664
665
667
673
674
Usado para cálculo de
torque em malha aberta

30 • VACON APFIFF33 NXP LIFT
P2.5.12.22
Iu Offset
de lu)
P2.5.12.23
Iv Offset
de Iv)
P2.5.12.24
Iw Offset
de Iw)
Sinais de entrada (Painel de controle: Menu M2 G2.6)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
DIN1
DIN2
0
1
2
Partida
Partida
Reverso
P2.6.2.x
ENTRADAS DIGITAIS
External Fault,
fechamento)
External fault,
contato de abertura)
Fault reset
(Reset de falha)
Run enable (Ativar
funcionamento)
Acceleration/Decel
desaceleração)
Stop by coast,
fechamento)
Stop by coast,
contato de abertura)
Override speed
substituição)
Forced I/O control
forçado)
Speed selection
Speed selection
Speed selection
(Compensação
(Compensação
(Compensação
-32000 32000 0
-32000 32000 0
-32000 32000 0
Tabela 6-7. Parâmetros identificados, G2.5.12
6.8
Start/Stop logic
P2.6.1
P2.6.2.1
(Lógica de
Partida/Parada)
closing contact
(Falha Externa,
contato de
0 2 0
0.1 F.2 SlotX.Y 0.1
668
669
670
Horário
300
Partida/
Parada
Partida
Horário
1513
Reversa
Para
trás/Para
frente
Partida
P2.6.2.2
P2.6.2.3
P2.6.2.4
P2.6.2.5
P2.6.2.6
P2.6.2.7
P2.6.2.8
P2.6.2.9
opening contact
(Falha externa,
time selectin
(Seleção do tempo
de aceleração/
closing contact
(Parada por inércia,
contato de
opening contact
(Parada por inércia,
(Velocidade de
(Controle de E/S
0.1 F.2 SlotX.Y 0.2
0.1 F.2 SlotX.Y A.3
0.1 F.2 SlotX.Y 0.2
0.1 F.2 SlotX.Y 0.1
0.1 F.2 SlotX.Y 0.1
0.1 F.2 SlotX.Y 0.2
0.1 F.2 SlotX.Y 0.1
0.1 F.2 SlotX.Y 0.1
1514
1515
1516
1517
1518
1519
1520
1521
Consulte o capítulo
Programação de E/S
na página 9.
P2.6.2.10
P2.6.2.11
P2.6.2.12
input 1 (Seleção de
input 2 (Seleção de
input 3 (Seleção de
0.1 F.2 SlotX.Y A.4
0.1 F.2 SlotX.Y A.5
0.1 F.2 SlotX.Y A.6
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1521
1522
1523

VACON • 31
1
AngleIdRepeat
do ângulo)
DIN1 Ton delay
(Atraso de Ton DIN1)
1,0
s
DIN2 Ton delay
(Atraso de Ton DIN2)
1,0
s
P2.6.3.x
ENTRADAS ANALÓGICAS
P2.6.3.1.x
ENTRADA ANALÓGICA 1
Conecte o sinal AI à
parâmetro.
AI1 Current
corrente AI1)
0
1
2
AI1 Reference
nimo
referência AI1)
AI1 Reference
Valor máximo
referência AI1)
AI1 Reference
de referência de AI1)
0
1
AI1 Reference filter
time (Tempo do filtro
de referência AI1)
AI Customer min
de AI)
AI Customer max
Máx. personalizado
de AI)
P2.6.3.2.x
ENTRADA ANALÓGICA 2
Conecte o sinal AI à
parâmetro.
AI2 Current
de corrente AI2)
0
1
2
AI2 Reference
Valor máximo
referência AI2)
AI2 Reference
Valor máximo
referência AI2)
AI2 Reference
de referência de AI2)
0
1
AI2 Reference filter
time (Tempo do filtro
de referência AI2)
P2.6.2.13
P2.6.2.14
P2.6.2.15
P2.6.3.1.1
P2.6.3.1.2
P2.6.3.1.3
P2.6.3.1.4
(Repetição da Id
AI1 Signal selection
(Seleção do sinal
de AI1)
reference offset
(Compensação de
referência de
scaling minimum
value (Valor mí
da escala de
scaling maximum
value (
de escala de
0.1 F.2 SlotX.Y 0.1
0,0
0,0
0.1 F.2 SlotX.Y A.1
0 2 1
0.00 320.00 Hz 0.00
0.00 320.00 Hz 0.00
0.0
0.0
1934
1833
1834
377
302
303
304
entrada analógica da sua
escolha com este
= Sem compensação
= 4—20 mA
= Faixa personalizada
Seleciona a frequência
que corresponde ao sinal
de referência mín.
0,00 = Sem escala
Seleciona a frequência
que corresponde ao sinal
de referência máx.
0,00 = Sem escala
P2.6.3.1.5
P2.6.3.1.6
P2.6.3.1.7
P2.6.3.1.8
P2.6.3.2.1
P2.6.3.2.2
P2.6.3.2.3
P2.6.3.2.4
inversion (Inversão
(Mín. personalizado
(
AI2 Signal selection
(Seleção do sinal
AI2)
reference offset
(Compensação
de referência
scaling minimum
value (
de escala de
scaling maximum
value (
de escala de
0 1 0
0.00 10.00 s 0.10
-160.00 160.00 % 0.00
-160.00 160.00 % 0.00
0.1 F.2 SlotX.Y A.2
0 2 1
0.00 320.00 Hz 0.00
0.00 320.00 Hz 0.00
305
306 0 = Sem filtragem
380
381
388
390
393
394
= Não invertido
= Ref. invertida
Faixa personalizada:
Entrada mínima
Faixa personalizada:
Entrada máxima
entrada analógica da
sua escolha com este
= Sem compensação
= 4—20 mA
= Faixa personalizada
Seleciona a frequência
que corresponde ao sinal
de referência mín.
0,00 = Sem escala
Seleciona a frequência
que corresponde ao sinal
de referência máx.
0,00 = Sem escala
P2.6.3.2.5
P2.6.3.2.6
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
inversion (Inversão
0 1 0
0.00 10.00 s 0.10
398
389 0 = Sem filtragem
= Não invertido
= Ref. invertida

32 • VACON APFIFF33 NXP LIFT
A2 Custom min (Mín.
personalizado de AI2)
Faixa personalizada:
Entrada mínima
A2 Custom max (Máx.
personalizado de AI2)
Faixa personalizada:
Entrada máxima
Sinais de saída (Painel de controle: Menu M2 G2.7)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
P2.7.1.x
SAÍDAS ANALÓGICAS
0 = Não usado
1
2
3
4
5
6
7
8
CC (0—1000 V)
Analogue output
analógica)
Analogue output
de saída analógica)
0
1
Analogue output
analógica mínima)
0
1
Anal. output scale
analógica)
P2.7.2.x
SAÍDAS DIGITAIS
0 = Não usado
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
mecânico
P2.6.3.2.7
P2.6.3.2.8
Tabela 6-8. Sinais de entrada, G2.6
6.9
Analogue output
P2.7.1.1
function (Função de
saída analógica)
-160.00 160.00 % 0.00
-160.00 160.00 % 0.00
0 8 1
391
392
307
= Freq. saída (0—f
máx
)
= Referência de freq.
(0—f
)
máx
= Velocidade do motor
(0 - velocidade nominal
do motor)
= Corrente de saída
(0—I
nMotor
)
= Torque do motor
(0—T
nMotor
)
= Potência do motor
(0—P
nMotor
)
= Tensão do motor
(0-U
nMotor
)
= Tensão do barramento
P2.7.1.2
P2.7.1.3
P2.7.1.4
P2.7.1.5
P2.7.2.1
filter time (Tempo
do filtro de saída
inversion (Inversão
minimum (Saída
(Escala de saída
Digital output 1
function (Função da
saída digital 1)
0.00 10.00 s 1.00
0 1 0
0 1 0
10 1000 % 100
0 22 3
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
308
309
310
= Não invertido
= Invertido
= 0 mA
= 4 mA
311
= Pronto
=Rodando
=Falha
= Falha inversa
=Superaquecimento de FC
= Falha ou aviso ext.
=Falha ou aviso ref.
=Aviso
=Revertido
= Velocidade predef.
= Na velocidade
312
=Regulador do motor
ativado
=Supervisão do limite
de frequência de saída
=Local de controle: E/S
= ThermalFlt
= FB DigInput1
= Limite inferior
de velocidade
= Limite superior
de torque
= Controle do freio

VACON • 33
1
20 = Controle inv.
21
22 = DTF inFloor
Digital output
digital 1 invertida)
0
1
Digital output 1 ON
digital 1)
0,00
Digital output 1 OFF
saída digital 1)
0,00
Relay output 1
saída de relé 1)
Relay output 1
relé 1 invertida)
0
1
Relay output 1 ON
relé 1)
0,00
Relay output 1 OFF
saída a relé 1)
0,00
Relay output 2
saída de relé 2)
Relay output 2
relé 2 invertida)
P2.7.3.x
LIMITES DE SUPERVISÃO
Speed supervision
torque)
Motoring torque
torque motorização)
Se ajustado em 0, a
e gerador
Output frequency
de saída 1)
0 = Sem limite
superior
Output frequency
imite da frequência
Valor supervisionado)
P2.7.4.x
RELÉS DE EXPANSÃO (não incluído na entrega padrão)
ROE1 Selection
(Seleção de ROE1)
Do freio mecânico
= Controlador
do contator do motor
P2.7.2.2
P2.7.2.3
P2.7.2.4
P2.7.2.5
P2.7.2.6
P2.7.2.7
P2.7.2.8
P2.7.2.9
function 1 inverted
(Função da saída
delay (Atraso de
ligação da saída
Delay (Atraso de
desligamento da
function (Função da
function inverted
(Função da saída de
delay (Atraso de
ligação dasaída a
Delay (Atraso de
desligamento da
function (Função da
0 1 0
0 10.00 s 0.00
0 10.00 s 0.00
0 22 0
0 1 0
0 10.00 s 0.00
0 10.00 s 0.00
0 22 19
1530
1531
1657
313
1532
1533
1658
314
= Sem inversão
= Invertido
Conteúdo de atraso de DO1.
= Atraso não usado
Conteúdo de atraso de DO1.
= Atraso não usado
Como função da saída
digital
= Sem inversão
= Invertido
Conteúdo de atraso de RO1
= Atraso não usado
Conteúdo de atraso de RO1
= Atraso não usado
Como função da saída
digital
P2.7.2.10
P2.7.3.1
P2.7.3.2
P2.7.3.3
P2.7.3.4
P2.7.3.5
function inverted
(Função da saída de
limit (Limite de
supervisão de
supervision
(Supervisão de
Generating torque
supervision
(Supervisão de
torque de geração)
limit 1 supervision
(Supervisão do
limite de frequência
limit 1;
Supervised value
(L
da saída 1;
0 1 0
0.00 5.00 m/s 0.15
0 200.0 % 150.0
-200 0 % 0.0
0 2 0
0.00
1.5 x
P2.1.2
Hz 0.00
1534
1535
1536
1537
315
316
0 = Sem inversão
1 = Invertido
supervisão de torque
do motor define os limites
para os modos de motor
1 = Supervisão do limite
inferior
2 = Supervisão do limite
P2.7.4.1
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
0 F.2 0.1
1680 Consulte a página 4.

34 • VACON APFIFF33 NXP LIFT
ROE1 Function
(Função de ROE1)
Como função da saída
digital
ROE1 Inversion
(Inversão de ROE1)
0 = Sem inversão
1 = Invertido
ROE2 Selection
(Seleção de ROE2)
ROE2 Function
(Função de ROE2)
Como função da saída
digital
ROE2 Inversion
(Inversão de ROE2)
0 = Sem inversão
1 = Invertido
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
P2.8.1.x
FALHAS DE E/S
Response to reference
Resposta à falha
0 = Sem resposta
1
2
3
4
5=Falha, parada por inércia
Reference fault
Frequência
de falha de referência)
Response to ext. fault
(Resposta à falha ext.)
0
1
2
3
P2.8.2.x
FALHAS GERAIS
Input phase
de entrada)
Response to
de subtensão)
Output phase
de saída)
Earth fault protection
falha de terra)
Response to fieldbus
falha de fieldbus)
de slot)
SystemOverloadLi
(Limite de sobrecarga
do sistema)
OutPhFaultDelay
fase de saída)
(Limite de corrente de
A supervisão da fase de
excede este nível x I
P2.8.3.x
FALHAS DO MOTOR
0 = Sem resposta
1
2
3 = Falha, parada por inércia
P2.8.3.2
Motor ambiente
–100.0
100.0 % 0.0 705
Fator de temperatura
P2.7.4.2
P2.7.4.3
P2.7.4.4
P2.7.4.5
P2.7.4.6
0 21 0
0 1 0
0 F.2 0.1
0 21 0
0 1 0
Tabela 6-9. Sinais de saída, G2.7
Proteções (Painel de controle: Menu M2 G2.8)
P2.8.1.1
P2.8.1.2
P2.8.1.3
fault (
de referência)
frequency (
0 5 0
0.00
0 3 2
1.5 x
P2.1.2
Hz 0.00
1681
1682
1683 Consulte a página 4.
1684
1685
=Aviso
=Aviso + Frequência anterior
700
728
701
=Aviso+FreqPredef 2.8.1.2
=Falha, acel. de parada
Para 2.4.2
P2.8.2.1
P2.8.2.2
P2.8.2.3
P2.8.2.4
P2.8.2.5
P2.8.2.6
P2.8.2.7
P2.8.2.8
P2.8.2.9
supervision
(Supervisão de fases
undervoltage fault
Resposta a falha
(
supervision
Supervisão de fase
(
(Proteção contra
fault (Resposta a
(Resposta a falha
(Atraso da falha da
OutPhFaultCurLim
falha da fase de saída)
0 3 0
1 3 2
0 3 2
0 3 2
0 3 2
0 3 2
0 100 % 98
0.10 2.00 s 2.00
1.0 50.0 % 2.5
730
727
702
703
733
734
1850
1821
1822
= Sem resposta
= Aviso
= Falha, acel. de parada
Para 2.4.2
= Falha, parada por
inércia
Tempo de atraso da falha
da fase de saída
saída está ativa quando
a corrente do motor
P2.8.3.1
the motor (Proteção
térmica do motor)
0 3 2
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
704
= Aviso
= Falha, acel. de parada
Para 2.4.2

VACON • 35
1
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
temperature fator
ambiente do motor)
ambiente
Motor cooling fator at
zero)
Motor termal time
motor)
Motor duty cycle (Ciclo
de trabalhodo motor)
0 = Sem resposta
1
2
3
inércia
Stall current (Corrente
Quando a entrada for
serão redefinidos
Stall time limit (Limite
bloqueado)
Stall frequency limit
de estolagem)
0 = Sem resposta
1
2
3 = Falha, parada por inércia
P2.8.4.x
SUPERVISÃO DO
ELEVADOR
External brake
externo)
0
1
2
Shaft speed fault
velocidade do eixo)
0 = Sem ação
1
2 = Falha
Shaft speed
velocidade do eixo)
Shaft speed superv.
do eixo [m/s])
Shaft speed superv.
eixo [Hz])
Overtorque
de sobretorque)
0 = Sem ação
1
2 = Falha
Torque superv. time
de torque)
Response to control
conflito de controle)
0 = Sem ação
1
2 = Falha
(Fator de
temperatura
P2.8.3.3
P2.8.3.4
P2.8.3.5
P2.8.3.6
P2.8.3.7
P2.8.3.8
P2.8.3.9
P2.8.3.10
zero speed (Fator de
arrefecimento do
motor em velocidade
tempo térmica do
Stall protection
(Proteção de parada)
de estolagem)
de tempo de rotor
(Limite de frequência
Response to
thermistor fault
(Resposta àfalha do
termistor)
0.0 150.0 % 40.0
1 200 mín. 45
0 100 % 100
0 3 0
0.01
1.00 120.00 s 15.00
1.0
0 3 0
2 x
P2.1.4
1.5 x
P2.1.2
A
Hz 25.0
1,3 x
P2.1.4
706
707
708
709
710
711
712
732
Habilidade de
arrefecimento do motor em
unidade de velocidade zero
Constante de tempo térmica
do motor, em minutos
= Aviso
= Falha, acel. de parada
Para 2.4.2
= Falha, parada por
alterada, esses valores
Tempo máx. para
estolagem
Frequência máx. para
proteção de estolagem
= Aviso
= Falha, acel. de parada
Para 2.4.2
P2.8.4.1
P2.8.4.2
P2.8.4.3
P2.8.4.4
P2.8.4.5
P2.8.4.6
P2.8.4.7
control fault (Falha
de controle do freio
(Falha de
supervision time
(Limite de
supervisão da
limit [m/s] (Limite
de superv. da veloc.
limit [Hz] (Limite de
superv. da veloc. Do
protection (Proteção
(Tempo de superv.
0 2 0
0 2
0.00 5.00 Hz 0.40
0 P2.2.1 m/s 0.30
0.00
0 2 0
0 5.00 s 0.00
1.5 x
P2.1.2
Hz 15.00
0/AM
2/PMSM
1580
1581
1582
1583
1584
1585
1586
= Sem ação
= Aviso
= Falha
= Aviso
Limite de supervisão da
velocidade do eixo
Mesmos parâmetros com
unidades diferentes
= Aviso
P2.8.4.8
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
conflict (Resposta ao
0 2 2
1587
= Aviso

36 • VACON APFIFF33 NXP LIFT
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
Min. current limit
Decorrente)
0 = Não usado
1
2
3 = Falha
Parâmetros de reinício automático (Painel de controle: Menu M2 G2.9)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
Wait time
(Tempo de espera)
Trial time (Tempo
para tentativas)
0 = Rampa
1
2 = Def. do sistema
Number of tries after
subtensão)
Number of tries after
sobretensão)
Number of tries after
subtensão)
Number of tries after
de referência)
Number of tries after
do motor)
Number of tries after
falha externa)
Number of tries after
supervisão da fase de
entrada)
P2.8.4.9
P2.8.4.10
(Limite mín.
0 Hz speed
response (Resposta
de velocidade 0 Hz)
Tabela 6-10. Proteções, G2.8
6.10
P2.9.1
P2.9.2
P2.9.3
P2.9.4
P2.9.5
Start function
(Função departida)
undervoltage trip
(Número de
tentativas após
acionamento por
overvoltage trip
(Número de
tentativas após
acionamento por
0 P2.1.4 A 0.00
0 3 0
0.10 10.00 s 0.50
0.00 60.00 s 30.00
0 2 0
0 10 x 0
0 10 x 0
1588 0 = Sem ação
1589
717
718
719
720
721
= Aviso
= Aviso + Parada
= Partida dinâmica
P2.9.6
P2.9.7
P2.9.8
P2.9.9
P2.9.10
overcurrent trip
(Número de
tentativas após
acionamento por
reference trip
(
Número de
tentativas após
acionamento
motor temperature
fault trip (
acionamento por
falhade temperatura
external fault trip
acionamento por
acionamento por
Número de
tentativas após
(
Número de
tentativas após
input phase
supervision trip
(
Número de
tentativas após
0 3 x 0
0 10 x 0
0 10 x 0
0 10 x 0
0 10 x 0
722
723
726
725
1659
Tabela 6-11. Parâmetros de partida automática, G2.9
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 37
1
Parâmetros de evacuação (Painel de controle: Menu M2 G2.10)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
Evacuation mode
evacuação)
0 = Não usado
1
2 = Automático
Evacuation input
evacuação)
Consulte o capítulo
página 9.
Voltage select
tensão)
0
1
Motor control
controle do motor)
0 = Controle de frequência
1
2 = Malha fechada
Direction change
mudança de sentido)
Test time fw/bw
fw/bw)
Current read delay
de corrente)
Valor do tempo de teste
evacuação estiver ligado
0 = Não usado
1
automático
U/f-curve middle
da curva U/f)
U/f-curve middle
médio da curva U/f)
Output voltage at
em frequência zero)
P2.10.12
DC-brake current
freio CC)
Corrente de freio CC no
5,6 A)
P2.10.13
Start DC-brake
Tempo de freio CC na
P2.10.14.x
VELOCIDADE MÁXIMA NA EVACUAÇÃO
Max speed in
evacuação [m/s])
Max speed
evacuação [Hz])
6.11
P2.10.1
P2.10.2
P2.10.3
P2.10.4
P2.10.5
P2.10.6
P2.10.7
P2.10.8
P2.10.9
(Modo de
(Entrada de
(Seleção de
mode (Modo de
delay (Atraso de
(Tempo de teste
(Atraso de leitura
U/f optimization
(Otimização V/f)
point frequency
(Frequência do
ponto médio
0 2 2 0
0.1 F.2 0.1
0 1 0
0 2 0
0 20.00 s 5.00
0 20.00 s 3.00
0 P2.10.5 s 1.50
0 1 0
0.00 P2.1.2 Hz 5.00
1590
1591
1920
1592
1593
1594 Valor de tempo de teste
1595
1596
1597
= Manual
Programação de E/S na
= 500 V
= 230 V
= Cont. velocidade
Atraso de alteração de
função de teste
quando o modo de
= Impulso de torque
Ponto médio da curva U/F
programável
P2.10.10
P2.10.11
P2.10.14.1
P2.10.14.2
point voltage
(Tensão do ponto
zero frequency
(Tensão de saída
(Corrente de
time (Tempo de
partida de freio CC)
evacuation [m/s]
(Velocidade
máxima na
evacuation [Hz]
(Velocidade
máxima na
0.00 100.00 % 10.00
0.00 40.00 % 1.30
0.00 6.00 A P2.1.4
0.000 60.000 s 0.500
0 P2.2.1 m/s 0.1
0 P2.1.2 Hz 5.00
1598
1599
1663
1664
1616
1617
Tensão do motor no
ponto médio da curva U/F
programável
Tensão do motor no ponto
zero da curva U/F
programável
modo de evacuação (máx
partida no modo de
evacuação
Mesmos parâmetros com
diferentes unidades. O
valor máximo é 40% do
valor nominal.
Tabela 6-12. Parâmetros de evacuação, G2.10
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

38 • VACON APFIFF33 NXP LIFT
Controle de teclado (Painel de controle: Menu M3)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Cust
ID
Observação
0 = Controle de PC
1
2
3 = Fieldbus
Keypad reference
teclado)
Direction (Direção)
(no teclado)
0 = Para frente
1 = Para trás
0 = Função limitada do
1
sempre ativado
P3.5
Reservado
0 1 0 0
P3.6
Reservado)
0 1 0 0
P3.7
Reservado
0 1 0 0
P3.8
Reservado)
0 1 0 0
P3.9
Reservado
0 1 0 0
Reset brake
supervisão de freio)
0
1
Menu do sistema (Painel de controle: Menu M6)
Placas de expansão (Painel de controle: Menu M7)
6.12
Os parâmetros para a seleção do local de controle e direção no teclado estão listados
abaixo. Consulte o menu de controle do teclado no Manual do Usuário do VACON
®
P3.1
R3.2
P3.3
P3.4
P3.10
Control place
(Local de controle)
(Referência do
Stop button
(Botão de parada)
supervision fault
(Redefinir falha de
1 3 2 125
P2.1.1 P2.1.2 Hz 0.00
0 1 0 123
0 1 1 114
0 1 0 0
= Terminal de E/S
= Teclado
botão de parada
= Botão de parada
= Pressione enter
= Pressione reset
NXS/P.
Tabela 6-13. Parâmetros de controle do teclado, M3
6.13
Para obter informações sobre parâmetros e funções relacionados ao uso geral do conversor
de frequência, como seleção de aplicação e idioma, conjuntos de parâmetros personalizados
®
ou informações sobre hardware e software, consulte o Manual do Usuário do VACON
NXS/P.
6.14
O menu M7 mostra as placas de expansão e opcionais conectadas à placa de controle
e informações relacionadas às placas. Para obter mais informações, consulte o Manual
®
do Usuário do VACON
NXS/P.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 39
1
DESCRIÇÃO DOS PARÂMETROS
Parâmetros básicos
P2.1.1 Motor Nominal Voltage (Tensão nominal do motor) ID110 “Motor Nom Voltg”
P2.1.2 Motor Nominal Frequency
(Frequência nominal do motor) ID111 “Motor Nom Freq”
P2.1.3 Motor nominal speed (Velocidade nominal do motor) ID112 “Motor Nom Speed”
P2.1.4 Motor nominal current (Corrente nominal do motor) ID113 “Motor Nom Currnt”
P2.1.5 Motor cos phi (Cos phi do motor) ID120 “Motor Cos Phi”
P2.1.6 Current limit (Limite de corrente) ID107 “Current Limit”
P2.1.7 Magnetizing current (Corrente de magnetização) ID612 “MagnCurrent”
7.
7.1
Encontre este valor Un na placa de classificação nominal do motor.
Este parâmetro define a tensão nominal no ponto de enfraquecimento de campo.
Encontre este valor fn na placa de classificação nominal do motor. Este parâmetro define
o ponto de enfraquecimento de campo com o mesmo valor em "G: Controle do motor".
A frequência nominal do motor corresponde à velocidade nominal do elevador
(parâmetro 2.2.1).
Encontre este valor nn na placa de classificação nominal do motor. Observe também
a frequência nominal.
Em alguns casos, a velocidade nominal do motor é mostrada com um decimal. Neste caso,
a prática é fornecer o número inteiro mais próximo e ajustar a frequência nominal do motor
para que o conversor de frequência calcule o número de pares de polos correto (V 1.22).
Encontre este valor In na placa de classificação nominal do motor. Se a corrente de
magnetização for fornecida, defina também a corrente de magnetização P2.1.7 antes
da identificação do motor.
Encontre este valor “cos phi” na placa de classificação nominal do motor.
Esse parâmetro determina a corrente do motor máxima na saída do conversor de frequência.
Para evitar sobrecarga do motor, ajuste este parâmetro de acordo com a corrente nominal
do motor. O limite de corrente é 1,5 vezes a corrente nominal (I
), como padrão.
L
Após uma quebra de energia, a aplicação define a corrente máxima nominal
do conversor de frequência para este parâmetro.
Defina aqui a corrente de magnetização do motor (corrente sem carga) a 2/3
da velocidade nominal do motor.
Quando o valor for zero, a corrente de magnetização é calculada a partir dos parâmetros
nominais do motor:
5 1
çã =
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5

40 • VACON APFIFF33 NXP LIFT
P2.1.8 Identification (Identificação) ID631 “Indentification”
OBSERVAÇÃO:
OBSERVAÇÃO:
OBSERVAÇÃO:
OBSERVAÇÃO:
OBSERVAÇÃO:
OBSERVAÇÃO:
0 = "No Action" Sem ação
1 = “ID No Run” - Identificação sem girar o motor
()> (
,
[]
=
(
)
(
Se dado antes da identificação do motor, será usado como referência para a sintonização
U/f ao fazer a identificação sem girar o motor.
A identificação do motor é uma parte do ajuste do motor e dos parâmetros específicos
do conversor. Ela é uma ferramenta para o comissionamento e serviço do conversor,
com o objetivo de encontrar os melhores valores de parâmetro possíveis para a maioria
dos motores. A identificação automática do motor calcula ou mede os parâmetros do
motor necessários para controle ótimo do motor e da velocidade.
Defina o modo de controle do motor para o controle de frequência antes
da identificação.
Durante a identificação, o conversor de frequência não abrirá o freio
mecânico por razões de segurança. Se a rotação do motor exigir que o freio seja aberto,
isso precisa ser feito externamente.
Durante a identificação do motor, os limites de torque e potência devem
estar acima de 100%. O limite de corrente também deve estar acima da corrente
nominal do motor.
)
Durante a identificação do motor, o tempo de aceleração deve ser
inferior a 20 segundos.
Se a frequência de comutação for alterada após a identificação,
recomenda-se que a identificação do motor seja executada novamente.
Um motor pequeno com cabos do motor longos pode exigir redução
da frequência de comutação, se a identificação não for bem-sucedida.
Nenhuma identificação solicitada.
A corrente é aplicada ao motor, mas o eixo não será girado. As configurações U/f são
identificadas. Esta identificação é um requisito mínimo se o motor for usado apenas em
controle de malha aberta. No entanto, recomenda-se sempre fazer a identificação com
o motor em rotação se a necessidade de controle em malha fechada ocorrer depois que
a mecânica for conectada ao eixo.
Exemplo de comportamento
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 41
1
2 = "ID With Run" - Identificação com rotação do motor
3 = “Enc. ID Run” - Identificação do motor do encoder
IM
PMSM:
Nota:
5 = “ID Run Fails” - Identificação falhou
O eixo é girado durante a identificação.
Esta identificação deve ser executada sem carga no eixo do motor. As configurações U/f
e a corrente de magnetização são identificadas. Essa identificação deve ser executada
independentemente do modo de operação final (malha fechada ou malha aberta) para
obter o melhor desempenho do motor.
Exemplo de comportamento
: Se executado para um motor de indução, o número e a direção do pulso do encoder
são identificados. Pode ser usado se não houver informações do encoder disponíveis.
O resultado correto só pode ser alcançado com o motor descarregado.
não for adequada para o motor usado (o ângulo é identificado automaticamente em cada
partida se o parâmetro PMSM Shaft Position (Posição do eixo PMSM) for zero).
Esta identificação do motor atualizará o parâmetro PMSM Shaft Position (Posição do eixo
do PMSM) com base na posição absoluta do encoder ou na posição do pulso Z do
encoder do tipo incremental.
Com parâmetros padrão, a posição do eixo PMSM é pesquisada com o método de
corrente pulsada. Se o motor não é adequado para isso e/ou o eixo pode girar livremente
durante a identificação, o posicionamento da corrente CC pode ser usado. Para obter
mais informações, consulte o parâmetro "Encoder identification mode" (Modo de
identificação do encoder) em G: Configurações de controle do motor / PMSM.
for alterada, por exemplo, devido a uma manutenção.
Esta seleção é usada para o motor PMS se a identificação automática do ângulo
A identificação precisa ser refeita se a posição do encoder relacionada ao motor
A identificação falhou na última tentativa.
Os dados básicos da placa de identificação do motor devem ser configurados
corretamente antes de executar a identificação do motor:
- P2.1.1 – P2.1.7 Dados básicos do motor.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

42 • VACON APFIFF33 NXP LIFT
Nota:
P2.1.9 Motor Type (Tipo de motor) ID1650 “Motor Type”
0 “Induction” - Motor de indução
-
1 “PMSM” - Motor síncrono de ímã permanente
- P2.1.7 A corrente de magnetização também pode ser fornecida, se disponível, se
fornecida antes da identificação sem rotação do motor; a curva U/f será ajustada
de acordo com a corrente de magnetização fornecida.
- P2.1.9 Tipo de motor.
Quando em malha fechada e com um encoder instalado, o parâmetro para pulsos /
rotações (no Menu M7) também deve ser ajustado.
A identificação automática é ativada ao configurar este parâmetro para o valor
apropriado seguido por um comando de partida na direção solicitada. O comando
de partida para o conversor de frequência deve ser dado dentro de 20 s. Se nenhum
comando de partida for dado dentro de 20 s, a identificação do motor será cancelada
e o parâmetro será redefinido para sua configuração padrão. A identificação do motor
pode ser interrompida a qualquer momento com o comando de parada normal e o
parâmetro é redefinido para sua configuração padrão. Caso a identificação do motor
detecte falhas ou outros problemas, a identificação é concluída, se possível. Após a
conclusão da identificação, será dado um aviso se nem todos os tipos de identificação
solicitados tiverem sido concluídos com êxito. Durante a Identificação do motor, o
controle do freio é desabilitado.
Após ser feita a identificação, o conversor de frequência exige borda de subida
do comando de partida.
Selecione o tipo de motor usado com este parâmetro.
Motor assíncrono
- Entre em contato com a fábrica antes de usar com um motor magnetizado
externamente.
Veja o parâmetro relacionado em “G2.5.10: Configurações de controle do motor /
PMSM”.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 43
1
Perfil de velocidade
P2.2.1 Nominal Linear Speed (Velocidade Linear Nominal) ID 1500 "NominalLinSpeed"
P2.2.2 Speed reference selection
(Seleção de referência de velocidade) ID 117 "Speed Ref Select"
0
1
2
3
4
5
6
0 = Codificação de atividade
DIN
[4,5,6]
Parâmetros
Ref. de velocidade
Prioridade
Direção
[0;0;0]
2.2.9.1/2.2.10.1
(velocidade de
nivelamento)
0 baixa
irrelevante
[1;0;0]
2.2.9.2/2.2.10.2
(velocidade plena)
1 média
irrelevante
[0;1;0]
2.2.9.3/2.2.10.3
(velocidade limitada)
2 alta
irrelevante
[0;0;1]
2.2.9.4/2.2.10.4
(velocidade de
inspeção)
3 mais alta
irrelevante
7.2
A velocidade linear nominal corresponde à velocidade de elevação na frequência nominal
do motor (parâmetro 2.1.2).
Os parâmetros de velocidade no grupo 2.2.9 são introduzidos em magnitudes lineares
e os parâmetros no grupo 2.2.10 são introduzidos em Hz. Há uma escala interna entre
velocidades lineares e frequências. Os parâmetros em ambos os grupos correspondem
um ao outro. Se o valor da velocidade linear nominal for alterado, os parâmetros
do grupo 2.2.10 serão recalculados de acordo.
Define a fonte de referência da frequência selecionada quando controlada do local
de controle de E/S. O valor padrão é 0.
= Codificação de atividade
= Codificação de atividade com direção
= Codificação binária
= Entrada de tensão (AI1)
= Entrada de corrente (AI2)
= Fieldbus
= Teclado
A referência de velocidade pode ser determinada de três maneiras diferentes com
entradas digitais. As entradas digitais são programáveis (consulte a página 10).
A primeira coluna contém o estado das entradas digitais (marcadas como valores padrão
DIN4, DIN5 e DIN6). O sinal de entrada correto pode ser programado com os parâmetros
2.6.2.10, 2.6.2.11 e 2.6.2.12.
A segunda coluna contém o parâmetro e a próxima coluna a referência de velocidade
correspondente. A coluna de prioridade define qual velocidade é ativada se mais de uma
entrada digital estiver ativada. Se a referência de velocidade for diferente quando estiver
em direção diferente, a direção é definida na coluna de direção.
Quatro velocidades constantes diferentes podem ser selecionadas.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Tabela 7-1. Referência ativa

44 • VACON APFIFF33 NXP LIFT
1 = Codificação de atividade com direção
DIN
[4,5,6]
Parâmetros
Ref. de velocidade
Prioridade
Direção
[0;0;0]
2.2.9.1/2.2.10.1
(velocidade de nivelamento)
0 baixa
para a frente
[1;0;0]
2.2.9.2/2.2.10.2
(velocidade plena)
1 média
para a frente
[0;1;0]
2.2.9.3/2.2.10.3
(velocidade limitada)
2 alta
para a frente
[0;0;1]
2.2.9.4/2.2.10.4
(velocidade de inspeção)
3 mais alta
para a frente
[0;0;0]
2.2.9.5/2.2.10.5
(velocidade predefinida 4)
0 baixa
para trás
[1;0;0]
2.2.9.6/2.2.10.6
(velocidade predefinida 5)
1 média
para trás
[0;1;0]
2.2.9.7/2.2.10.7
(velocidade predefinida 6)
2 alta
para trás
[0;0;1]
2.2.9.8/2.2.10.8
(velocidade predefinida 7)
3 mais alta
para trás
2 = Codificação binária
DIN
[4,5,6]
Parâmetros
Ref. de velocidade
Prioridade
Direção
[0;0;0]
2.2.9.1/2.2.10.1
(velocidade de nivelamento)
-
irrelevante
[1;0;0]
2.2.9.2/2.2.10.2
(velocidade plena)
-
irrelevante
[0;1;0]
2.2.9.3/2.2.10.3
(velocidade limitada)
-
irrelevante
[1;1;0]
2.2.9.4/2.2.10.4
(velocidade de inspeção)
-
irrelevante
[0;0;1]
2.2.9.5/2.2.10.5
(velocidade predefinida 4)
-
irrelevante
[1;0;1]
2.2.9.6/2.2.10.6
(velocidade predefinida 5)
-
irrelevante
[0;1;1]
2.2.9.7/2.2.10.7
(velocidade predefinida 6)
-
irrelevante
[1;1;1]
2.2.9.8/2.2.10.8
(velocidade predefinida 7)
-
irrelevante
P2.2.3 Enable Jerks (Habilitar arrancadas) ID 1549 “Enable Jerks”
0
1
0
P2.2.4 Reference Hold Time (Tempo de espera de referência) ID 1509 “Reference hold”
As velocidades constantes são selecionadas de acordo com o estado das entradas digitais
e a direção do motor. Quatro velocidades diferentes por direção estão disponíveis.
Tabela 7-2. Referência ativa com direção
Oito diferentes velocidades constantes são selecionadas de acordo com a palavra
binária formada através das entradas digitais.
Tabela 7-3. Referência binária
= Desativado
= Ativado
O arredondamento de aceleração e desaceleração com arrancadas pode ser desativado
definindo este parâmetro como
. Se definido como 0 (Desativado), os valores de
arrancada não terão efeito.
O parâmetro define por quanto tempo a referência de frequência é mantida após o sinal
de partida. Durante esse tempo, a referência de velocidade não é alterada.
Esta função também é chamada de 'viagem de meio andar'. As entradas de partida e
parada não são afetadas por esta função.
O tempo de espera de referência começa quando a frequência é liberada para o valor
nominal após a partida. Isso ocorre quando o freio mecânico é aberto e o atraso da
reação do freio e o tempo de partida suave expiraram.
Quando o temporizador de retenção de referência tiver expirado, a aceleração diminuirá
o tempo de arrancada (parâmetro 2.2.11.4) e a desaceleração aumentará o tempo de
arrancada (parâmetro 2.2.11.5) afetando a curva de velocidade (veja a figura abaixo).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 45
1
P2.2.5 Stop State (Estado de parada) (DIN456) ID 1641 “Stop State”
0
1
Nota:
P2.2.6 Stop distance 1 (Distância de parada 1) ID 1777 “StopDistance1”
v [m/s]
t [s]
A = Distância de parad a 1
Figura 2. Tempo de espera de referência
= Operação normal
= Parar se DIN456 estiver desligado
Modo de parada especial quando 1 estiver selecionado. O estado de parada é ativado
quando todas as entradas de referência de velocidade estiverem desligadas (os valores
padrão são DIN4, DIN5 e DIN6; consulte o
Mesmo que DIN1 ou DIN2 estejam ligados e DIN456 esteja desligado, o estado
parâmetro 2.2.2).
de parada é ativado.
O reinício requer que DIN1 e DIN2 estejam desligados.
Distância da velocidade máxima até a velocidade de nivelamento.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

46 • VACON APFIFF33 NXP LIFT
P2.2.7 Stop distance 2 (Distância de parada 2) ID 1776 “StopDistance2”
v [m/s]
t [s]
A = Distância de parad a 2
P2.2.8 Internal Ramp switching frequency
(Frequência de comutação de rampa interna) ID 1544 "Internal Ramp sw"
0
OBSERVAÇÃO:
OBSERVAÇÃO:
A distância de parada 1 é configurada em metros. Quando o valor é definido diferente
de zero e diferente do que era, a aplicação calcula e atualiza o valor da desaceleração 1
dependendo da velocidade nominal, da velocidade de nivelamento e da arrancada DecInc 1.
O valor calculado é estimado.
Distância da velocidade de nivelamento até zero.
A distância de parada 2 é configurada em metros. Quando o valor é definido diferente
de zero e diferente do que era, a aplicação calcula e atualiza os valores DecInc Jerk 2
e DecDec Jerk 2 dependendo da velocidade de nivelamento.
Quando o valor é definido diferente de zero P2.2.8 frequência do interruptor de
rampa interna é definida como igual à frequência da velocidade de nivelamento.
O valor calculado é estimado.
= Não usado
O objetivo é obter outra rampa ao parar o elevador (da velocidade de nivelamento).
O ajuste de rampa 2 (parâmetros da curva de velocidade 2) pode ser ativado
internamente. A mudança interna para o ajuste de rampa 2 é feita quando a velocidade
é desacelerada abaixo da frequência de comutação de rampa interna e a velocidade
de estado permanente é alcançada.
Também é possível definir a frequência de comutação de rampa interna
menor ou igual à velocidade de nivelamento. Então a desaceleração na parada sempre
usará os parâmetros da curva de velocidade 2 mesmo que a velocidade nunca ultrapasse
a velocidade de nivelamento (piso curto).
O ajuste de rampa 1 (parâmetros da curva de velocidade1) é alterado de volta quando
a solicitação de funcionamento do conversor de frequência for inativada.
da comutação de rampa interna não está ativa.
Se a função Parada por distância (parâmetro 2.4.4) for usada, a função
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 47
1
Parâmetros de referência de velocidade [m/s] (M2 -> G2.2.9)
P2.2.9.1 Levelling Speed (Velocidade de Nivelamento) ID 1501 "Levelling speed"
P2.2.9.2 Full Speed (Velocidade plena) ID 1502 "Full speed"
P2.2.9.3 Limited Speed (Velocidade Limitada) ID 1503 "Limited speed"
P2.2.9.4 Inspection Speed (Velocidade de Inspeção) ID 1504 "Inspection speed"
P2.2.9.5 Speed reference 4 (Referência de velocidade 4) ID 1505 "Speed ref 4"
P2.2.9.6 Speed reference 5 (Referência de velocidade 5) ID 1506 "Speed ref 5"
P2.2.9.7 Speed reference 6 (Referência de velocidade 6) ID 1507 "Speed ref 6"
P2.2.9.8 Speed reference 7 (Referência de velocidade 7) ID 1508 "Speed ref 7"
P2.2.9.9 Override Speed (Velocidade de substituição) ID 1613 "Override speed"
7.3
Os parâmetros no grupo 2.2.9 definem a referência de velocidade em magnitudes lineares [m/s].
Os parâmetros correspondem aos parâmetros do grupo 2.2.10 e serão atualizados automaticamente
se os valores forem alterados no outro grupo. Eles também serão atualizados se o valor do
parâmetro 2.2.1 for alterado.
Este parâmetro define a velocidade máxima do elevador como unidade [m/s].
Este parâmetro também é atualizado se o parâmetro P2.2.10.1 for alterado.
Este parâmetro é a velocidade máxima do elevador e segue o parâmetro P2.2.1. A
unidade usada é [m/s]. Este parâmetro também é atualizado se P2.2.10.2 for alterado.
Este parâmetro define o nível de velocidade ativado se a entrada digital “Override Speed”
(Velocidade de substituição) estiver ativada em G: Sinais de entrada / Entradas digitais.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

48 • VACON APFIFF33 NXP LIFT
Parâmetros de referência de velocidade [Hz] (M2 -> G2.2.10)
P2.2.10.1 Levelling Speed (Velocidade de Nivelamento) ID 1604 "Levelling speed"
P2.2.10.2 Full Speed (Velocidade plena) ID 1605 "Full speed"
P2.2.10.3 Limited Speed (Velocidade Limitada) ID 1606 "Limited speed"
P2.2.10.4 Inspection Speed (Velocidade de Inspeção) ID 1607 "Inspection speed"
P2.2.10.5 Speed reference 4 (Referência de velocidade 4) ID 1608 "Speed ref 4"
P2.2.10.6 Speed reference 5 (Referência de velocidade 5) ID 1609 "Speed ref 5"
P2.2.10.7 Speed reference 6 (Referência de velocidade 6) ID 1610 "Speed ref 6"
P2.2.10.8 Speed reference 7 (Referência de velocidade 7) ID 1611 "Speed ref 7"
P2.2.10.9 Override Speed (Velocidade de substituição) ID 1612 "Override speed"
7.4
Os parâmetros no grupo 2.2.10 definem a referência de velocidade em frequência [Hz]. Os
parâmetros correspondem aos parâmetros do grupo 2.2.9 e serão atualizados automaticamente se
os valores no outro grupo forem alterados.
Este parâmetro define a velocidade máxima do elevador como unidade [Hz]. Este
parâmetro também é atualizado se o parâmetro P2.2.9.1 for alterado.
Este parâmetro é a velocidade máxima do elevador e segue o parâmetro P2.2.1. A
unidade usada é [Hz]. Este parâmetro também é atualizado se P2.2.9.2 for alterado.
Este parâmetro define o nível de velocidade ativado se a entrada digital “Override Speed”
(Velocidade de substituição) estiver ativada em G: Sinais de entrada / Entradas digitais.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 49
1
Parâmetros da curva de velocidade 1 (M2 -> G2.2.11)
P2.2.11.1 Acceleration 1 (Aceleração 1) ID 103 "Acceleration1"
P2.2.11.2 Deceleration 1 (Desaceleração 1) ID 104 "Deceleration1"
P2.2.11.3 Acc inc jerk 1 (Aum. de acel. de arrancada 1) ID 1540 "Acc Inc Jerk 1"
P2.2.11.4 Acc dec jerk 1 (Dim. de acel. de arrancada 1) ID 1541 "Acc Dec Jerk 1"
P2.2.11.5 Dec inc jerk 1 (Aum. de desacel. de arrancada 1) ID 1542 "Dec Inc Jerk 1"
P2.2.11.6 Dec dec jerk 1 (Dim. de desacel. de arrancada 1) ID 1543 "Dec Dec Jerk 1"
v [m/s
]
t [s]
a [m/s2]
t [s]
P 2.2.11.3 P 2.2.11.4
7.5
A curva de velocidade 1 é usada como valor padrão para aceleração e desaceleração e arrancadas.
A aceleração e a desaceleração do elevador são apresentadas em [m/s2]. As curvas
de aceleração e desaceleração também são afetadas pelas configurações de tempo
de arrancada.
Aumento de aceleração de arrancada 1.
Os tempos de arrancada são apresentados em [s].
Diminuição de aceleração de arrancada 1.
Aumento de desaceleração de arrancada 1.
Diminuição de desaceleração de arrancada 1.
Figura 3. Arrancadas relacionadas com velocidade e aceleração
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

50 • VACON APFIFF33 NXP LIFT
Parâmetros da curva de velocidade 2 (M2 -> G2.2.12)
P2.2.12.1 Acceleration 2 (Aceleração 2) ID 502 "Acceleration2"
P2.2.12.2 Deceleration 2 (Desaceleração 2) ID 503 "Deceleration2"
P2.2.12.3 Acc inc jerk 2 (Aum. de acel. de arrancada 2) ID 1545 "Acc Inc Jerk 2"
P2.2.12.4 Acc dec jerk 2 (Dim. de acel. de arrancada 2) ID 1546 "Acc Dec Jerk 2"
P2.2.12.5 Dec inc jerk 2 (Aum. de desacel. de arrancada 2) ID 1547 "Dec Inc Jerk 2"
P2.2.12.6 Dec dec jerk 2 (Dim. de desacel. de arrancada 2) ID 1548 "Dec Dec Jerk 2"
7.6
Os parâmetros no grupo Curva de velocidade 2 são usados quando a função da comutação de rampa
interna é ativada (consulte o parâmetro P2.2.8). Então, os parâmetros da curva de velocidade 1
serão substituídos pelos parâmetros da curva de velocidade 2. Também é possível mudar para a
curva 2 pela entrada digital (consulte o parâmetro P2.6.2.5).
A aceleração e a desaceleração do elevador são apresentadas em [m/s2]. As curvas de
aceleração e desaceleração também são afetadas pelas configurações de tempo de arrancada.
Aumento de aceleração de arrancada 2. Consulte Figura 3.
Arrancada de diminuição de aceleração 2.
Aumento de desaceleração de arrancada 2.
Arrancada de diminuição de desaceleração 2.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 51
1
Controle do freio mecânico
Frequência de
saída [Hz]
Tempo (s)
Frei o CC
Atraso de abertura/
fechamento do freio
Atraso do freio mecânico
Freio de freq.
máx. fechado
Comando de abertura do freio
Ref . fr eq.
Velocidade plena
Velocidade de
nivelamento
Saída de freq.
Freq. de parada CC
Tempo de supervisão do freio (**)
Lim. de freq. fechada
Lim. de cor./fr eq. (*)
Freio aberto
Velocidade do motor
7.7
Os parâmetros de controle do freio mecânico afetam o controle do freio mecânico, a função de
partida e parada suaves e as funções de segurança.
O freio mecânico pode ser ajustado para liberação na corrente, no torque, na frequência ou na
entrada externa. O fechamento pode ser realizado por frequência, por entrada externa ou por
sinal de solicitação de funcionamento. Em caso de falha, o freio fecha imediatamente sem atraso.
O modo de controle do freio mecânico em malha aberta e em malha fechada é diferente. Os parâmetros
são divididos em dois grupos diferentes. Os parâmetros do grupo de controle de malha fechada não são
válidos no modo de malha aberta e vice-versa. Existem também alguns parâmetros comuns. A Figura 4
e a Figura 5 fornecem uma apresentação gráfica da lógica de controle do controle do freio.
Figura 4. Lógica de controle do freio mecânico em malha aberta
(*) Sinal de partida para atraso de abertura de freio quando corrente, frequência e torque
excederem os limites definidos pelos parâmetros. A entrada externa deve estar ligada, se usada.
(**) Durante o tempo de supervisão do freio, a entrada digital deve ser ligada, se usada.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

52 • VACON APFIFF33 NXP LIFT
Frequência de
saída [Hz]
Tempo (s)
Partida/Parada OHz
Atraso de abertura/
fechamento do freio
Atraso do freio mecânico
Freio de freq.
máx. fechado
Comando de abertura do freiond
Ref . freq.
Velocidade plena
Velocidade de
nivelamento
Saída de freq.
Tempo de supervisão do freio (**)
Lim. de freq.
fechada
Cur /Freq lim (* )
Freio abertond
RollBrake ativo
Figura 5. Lógica de controle do freio mecânico em malha fechada
*) Sinal de partida para atraso de abertura de freio quando corrente, frequência e torque excederem
os limites definidos pelos parâmetros. A entrada externa deve estar ligada, se usada.
**) Durante o tempo de supervisão do freio, a entrada digital deve ser ligada, se usada.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 53
1
GE
IN 1
IN 2
P 2.3 x 1 Limite de corrente
GE
IN 1
IN 2
P 2.2. x 3 Limite de torque
GE
IN 1
IN 2
P 2.3. x 3 Limite de frequência
I/O Entrada do freio externo
V Motor em funcionamento
E
IN 1
IN 2
IN 3
IN 4
IN 5
TON
PT
QIN
ET
P 2.3 x 4 Atraso de abertura do freio
RS
LE
IN 1
IN 2
M 1.1 Frequência de saída
P
2.3 x 5 Limite de frequênc ia
fechado
TON
PT
QIN
ET
P 2.3 x 6 Atraso de fechamento do fr eio
NOT
IN
AND
IN 1
IN 2
V
Solicitação de funcionamento
do motor
OU
IN 1
IN 2
IN 3
M Torque do motor
M Frequência do motor
M Corrente do motor
I/O Supervisão do freio
V Falha ativa
V Motor em funcionamento
NOT
IN
I/O Freio aberto
Lógica do freio aberto
Lógica do freio fechado
TON
PT
QIN
ET
P 2.32 13 Atraso fechado Estop
OU
IN 1
IN 2
DEFINIR
REDEFINIR
7.7.1 Lógica de controle do freio mecânico
Figura 6. Lógica de controle do freio mecânico
O sinal de controle do freio mecânico pode ser selecionado para qualquer saída digital ou de relé
para controlar o freio mecânico externo.
Na parte superior da Figura 6 você pode encontrar a lógica de abertura do freio mecânico. Cinco
sinais e o atraso são necessários para o freio mecânico abrir. Se o sinal de corrente, torque ou
frequência não for necessário para a abertura do freio, esses parâmetros poderão ser definidos
como zero. O sinal de entrada do freio externo é programável e qualquer entrada digital pode ser
usada para essa finalidade.
Na seção inferior da Figura 6 você pode encontrar a lógica de fechamento do freio mecânico.
O circuito de fechamento do freio tem mais prioridade que o circuito aberto. Então, se o sinal de
fechamento estiver ativo, o freio mecânico será fechado.
O freio será fechado imediatamente em caso de falha ou sinal de supervisão externa, ou quando
o motor estiver parado.
Em operação normal, o freio será fechado quando a frequência cair abaixo do limite de fechamento
da frequência (P2.3.x.5) e o sinal de solicitação de execução estiver desligado. Se o sinal de limite de
fechamento de frequência não for necessário para a lógica de fechamento, ele pode ser definido
como zero. Depois que as condições forem verdadeiras, haverá um atraso no fechamento do freio
(P2.3.x.6) após o qual o freio será fechado.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

54 • VACON APFIFF33 NXP LIFT
P2.3.1.1 Current Limit (Limite de corrente) [A] ID 1551 "Current Limit"
P2.3.1.2 Torque limit (Limite de torque) [%] ID 1552 “Torque Limit”
P2.3.1.3 Frequency limit (Limite de frequência) [Hz] ID 1553 "FreqLimitOpen"
P2.3.1.4 Opening delay (Atraso de abertura) [s] ID 1554 “BrakeOpen Delay”
P2.3.1.5 Frequency limit closing (Fechamento
de limite de frequência) [Hz] ID 1555 "FreqLimitClose"
P2.3.1.6 Closing delay (Atraso no fechamento) [s] ID 1556 “BrakeClose Delay”
P2.3.1.7 Maximum frequency brake closed
(Freio de frequência máximo fechado) [Hz] ID 1557 "MaxFreqBrakeClos"
P2.3.1.8 Mechanical brake reaction time
(Tempo de reação do freio mecânico) [s] ID 1558 "BrakeReact Time"
P2.3.1.9 DC-brake current (Corrente de freio CC) [A] ID 507 "DC_Brake Current"
P2.3.1.10 DC-braking time at start
(Tempo de frenagem CC na partida) [s] ID 1559 "Start DC_Brake Tm"
7.7.2 Parâmetros de malha aberta (M2 -> G2.3.1)
Os parâmetros no grupo 2.3.1.x são válidos apenas no modo de controle de malha aberta.
(parâmetro 2.5.1= 0 ou 1).
O parâmetro define o limite de corrente real que deve ser excedido para uma liberação
do freio. Se definido como zero, essa condição será excluída. O valor é atualizado sempre
que a corrente nominal do motor (parâmetro 2.1.4) for ajustada (veja a Figura 6).
O parâmetro define o limite de torque real que deve ser excedido para uma liberação
do freio. Se definido como zero, essa condição será excluída.
100% corresponde ao torque nominal calculado do motor (veja a Figura 6).
O parâmetro define o limite de frequência real que deve ser excedido para liberação
do freio. Se definido como zero, essa condição será excluída (veja Figura 6).
O atraso começa quando as condições de abertura (consulte os parâmetros 2.3.1.1-
2.3.1.3) são atendidas (veja a Figura 6).
O limite de frequência de saída para o fechamento do freio. O sinal de solicitação de
execução precisa ser desativado para permitir que o sinal atue.
O fechamento do freio é atrasado com o tempo definido. Se for definido como zero, não
haverá atraso entre a condição de fechamento do freio e o fechamento real do freio.
A frequência de saída não excede este valor quando o freio mecânico é fechado. Ao
modificar este parâmetro, certifique-se de que a liberação do freio por frequência
(consulte o parâmetro 2.3.1.3) seja possível com o novo valor.
O tempo de reação do freio mecânico manterá a referência de velocidade por um tempo
definido. Esse tempo de espera deve ser ajustado de acordo com o tempo de reação do
freio mecânico (veja a Figura 4).
Define a corrente injetada no motor durante a frenagem CC.
A frenagem CC é ativada quando o comando de partida é dado. Este parâmetro define
o tempo antes de o freio ser liberado.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 55
1
P2.3.1.11 DC-braking time at stop
(Tempo de frenagem CC na parada) [s] ID 1560 "Stop DC_Brake Tm"
0
→0
Par. 2.4.2 = 0; Função de parada = parada por inércia:
Determina se a frenagem CC está ligada ou desligada, e o tempo de frenagem do freio
CC quando o motor está parando. A função do freio CC depende da função de parada,
parâmetro 2.4.2.
Freio CC não é usado
O freio CC está em uso e sua função depende da função de parada, (par. 2.4.2).
O tempo de frenagem CC é determinado com esse parâmetro
Após o comando de parada, o motor desacelera até uma parada sem controle do
conversor de frequência.
Com a injeção de CC, o motor pode ser parado eletricamente no menor tempo possível,
sem que se use um resistor de frenagem externo opcional.
O tempo de frenagem é escalado de acordo com a frequência quando a frenagem CC
começa. Se a frequência for ≥ a frequência nominal do motor, o valor ajustado do
parâmetro 2.3.1.11 “Frequência de frenagem CC na parada” determina o tempo de
frenagem. Quando a frequência é de ≤ 10% da nominal, o tempo de frenagem é de 10%
do valor definido do parâmetro 2.3.1.11.
Figura 7. Tempo de frenagem CC quando modo de parada = parada por inércia
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

56 • VACON APFIFF33 NXP LIFT
f
Velocidade do motor
Frenagem CC
Freqüência de saída
FUNCIONAMENTO
PARAR
Par. 2.4.2 = 1; Função de parada = Rampa
Após o comando de Parada, a velocidade do motor é reduzida de acordo com os
parâmetros de desaceleração definidos, o mais rápido possível, até a velocidade definida
com o parâmetro 2.3.1.12, onde a frenagem CC começa.
O tempo de frenagem é definido com o parâmetro 2.3.1.11. Se a inércia for alta, é
recomendável usar um resistor de frenagem externo para obter uma desaceleração
mais rápida.
saída
Figura 8. Tempo de frenagem CC quando Modo de parada = Rampa
Par. 2.4.2 = 2; Função de parada = Parada por limite de frequência
O modo de parada depende da frequência real do motor. Se a frequência estiver acima
do limite de frequência (par. 2.4.3), o modo de parada está em parada por inércia (veja a
Figura 7). Se a frequência for igual ou inferior ao limite de frequência, o modo de parada
é rampa (consulte a Figura 8).
P2.3.1.12 DC-braking frequency at stop
(Frequência de frenagem CC na parada) [Hz] ID 515 "Stop DC_BrakeFr"
O valor da frequência de saída com que a frenagem CC é aplicada (consulte a Figura 8).
P2.3.1.13 Close delay EStop (Atraso fechado Estop) [s] ID 1640 "Delayed brake"
0 = Função inativa
Pode ser usado, por exemplo, na situação de parada de emergência para obter uma
parada suave. Este atraso também está ativo em caso de falha, parada de emergência
ou se o sinal de supervisão do freio for perdido.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 57
1
P2.3.1.14 Run Request Closing (Solicitação
de funcionamento de fechamento) [ - ] ID 1641 "RunReqClosing"
0
1
OBSERVAÇÃO:
= Inativado
= Ativado
O sinal de solicitação de funcionamento durante o fechamento do freio pode ser
inativado por este parâmetro. Em operação normal, o comando de fechamento do freio
requer que o sinal de solicitação de funcionamento seja baixo. Se o parâmetro for 0,
o freio será fechado quando a frequência ficar abaixo do limite.
(P2.3.1.5 ou P2.3.2.5) deve ser menor que o freio de frequência máxima (P2.3.1.7 ou
P2.3.2.7). Caso contrário, a lógica de controle do freio não funciona.
Se for selecionado 0, então o fechamento do limite de frequência
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

58 • VACON APFIFF33 NXP LIFT
P2.3.2.1 Current Limit (Limite de corrente) [A] ID 1561 "Current Limit"
P2.3.2.2 Torque limit (Limite de torque) [%] ID 1562 “Torque Limit”
P2.3.2.3 Frequency limit (Limite de frequência) [Hz] ID 1563 "FreqLimitOpen"
P2.3.2.4 Opening delay (Atraso de abertura) [s] ID 1564 “BrakeOpen Delay”
P2.3.2.5 Frequency limit closing
(Fechamento de limite de frequência) [Hz] ID 1565 "FreqLimitClose"
P2.3.2.6 Closing delay (Atraso no fechamento) [s] ID 1566 “BrakeClose Delay”
P2.3.2.7 Maximum frequency brake closed
(Freio de frequência máximo fechado) [Hz] ID 1567 "MaxFreqBrakeClos"
P2.3.2.8 Mechanical brake reaction time
(Tempo de reação do freio mecânico) [s] ID 1558 "BrakeReact Time"
P2.3.2.9 Zero Hz time at start
(Tempo de zero Hz na partida) [s] ID 615 "0 Hz TimeAtStart"
P2.3.2.10 Zero Hz time at stop
(Tempo de zero Hz na parada) [s] ID 616 "0 Hz TimeAtStop"
7.7.3 Parâmetros de malha fechada (M2 -> G2.3.2)
Os parâmetros no grupo 2.3.2.x são válidos no modo de controle do motor de malha fechada
(parâmetro 2.5.1 = 2) apenas.
O parâmetro define o limite de corrente real que deve ser excedido para uma liberação
do freio. Se definido como zero, essa condição será excluída. O valor é atualizado sempre
que a corrente nominal do motor (parâmetro 2.1.4) for ajustada (veja a Figura 6).
O parâmetro define o limite de torque real que deve ser excedido para uma liberação
do freio. Se definido como zero, essa condição será excluída.
100% corresponde ao torque nominal calculado do motor (veja a Figura 6).
O parâmetro define o limite de frequência real que deve ser excedido para liberação
do freio. Se definido como zero, essa condição será excluída (veja Figura 6).
O atraso começa quando as condições de abertura (consulte os parâmetros 2.3.2.1-
2.3.2.3) são atendidas (veja a Figura 6).
O limite de frequência de saída para o fechamento do freio. O sinal de solicitação de
execução precisa ser desativado para permitir que o sinal atue.
O fechamento do freio é atrasado com o tempo definido. Se for definido como zero, não
haverá atraso entre a condição de fechamento do freio e o fechamento real do freio.
A frequência de saída não excede este valor quando o freio mecânico é fechado. Ao
modificar este parâmetro, certifique-se de que a liberação do freio por frequência
(consulte o parâmetro 2.3.2.3) seja possível com o novo valor.
O tempo de reação do freio mecânico manterá a referência de velocidade por um tempo
definido. Esse tempo de espera deve ser ajustado de acordo com o tempo de reação do
freio mecânico (veja a Figura 4).
Tempo de zero Hertz durante a partida e a parada. O motor pode ser magnetizado e
o torque gerado durante esse tempo. O tempo de zero Hz na partida deve ser ajustado
mais longo que o tempo de magnetização. O tempo de início suave (par 2.3.2.10)
começará imediatamente após o tempo de zero Hertz. O freio mecânico deve ser
ajustado para liberação quando esta mudança ocorrer (veja a Figura 4).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 59
1
P2.3.2.11 Smooth start time (Tempo de partida suave) [s] ID 1568 "SmoothStartTime"
P2.3.2.12 Smooth start frequency
(Frequência de partida suave) [Hz] ID 1569 "SmoothStartFreq"
P2.3.2.13 Close delay EStop (Atraso fechado Estop) [s] ID 1642 "CloseDelay Estop"
0
P2.3.2.14 Run request closing (Solicitação
de funcionamento de fechamento) [ - ] ID 1643 "RunReqClosing"
0
1
OBSERVAÇÃO:
P2.3.2.15 Start magnetizing time
(Tempo de magnetização na partida) [s] ID 628 "Start Magn Time"
P2.3.2.16 Start magnetizing current
(Corrente de magnetização na partida) [A] ID 627 "Start Magn Curr"
A função de tempo de partida suave é usada no modo de malha fechada. Não pode ser
usada em malha aberta. Após o comando de partida ter sido dado, o conversor de
frequência gira o eixo do motor com uma frequência muito baixa (par 2.3.2.12) para
superar o atrito estático.
O tempo de partida suave começará logo após o tempo de zero Hertz (par 2.3.2.9).
O freio mecânico deve ser ajustado para liberação quando esta mudança ocorrer.
Isto é conseguido ao ajustar o mesmo valor para o limite de frequência (par
2.3.2.3) e a frequência de partida suave (par 2.3.2.12).
Quando o tempo de partida suave tiver excedido, a frequência será liberada.
A frequência de partida suave é uma frequência de referência usada com a operação
de tempo de partida suave. O valor deve ser definido muito baixo.
= Função inativa
Pode ser usado, por exemplo, na situação de parada de emergência para obter uma
parada suave. Este atraso também está ativo em caso de falha ou parada de emergência,
ou se o sinal de supervisão do freio for perdido.
= Inativado
= Ativado
O sinal de solicitação de funcionamento durante o fechamento do freio pode ser
inativado por este parâmetro. Em operação normal, o comando de fechamento do freio
requer que o sinal de solicitação de funcionamento seja baixo. Se o parâmetro for 0, o
freio será fechado quando a frequência ficar abaixo do limite.
(P2.3.2.5) deve ser menor que o freio de frequência máxima (P2.3.2.7). Caso
contrário, a lógica de controle do freio não funciona.
Se for selecionado 0, então o fechamento do limite de frequência
Defina por quanto tempo a corrente de magnetização inicial definida por P2.3.2.16 é usada.
Defina a corrente de magnetização inicial. O valor comum é In. Este parâmetro
é igual a In quando a corrente nominal do motor (In) é ajustada por meio do P2.1.4.
Usando esta função, o motor é magnetizado muito mais rapidamente do que com
a corrente de magnetização comum.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

60 • VACON APFIFF33 NXP LIFT
P2.3.3.1 External brake control
(Controle de freio externo) [ - ] ID 1601 "Ext Brake Contrl"
P2.3.3.2 External brake supervision
(Supervisão de freio externo) [ - ] ID 1602 "Ext Brake SuperV"
P2.3.3.3 External brake supervision 2
(Supervisão de freio externo 2) [ - ] ID 1838 "Ext Brake SuperV2"
P2.3.4.1 External brake supervision time
(Tempo de supervisão de freio externo) [ - ] ID 1603 "ExtBrakeSuperVTime"
P2.3.4.2 External brake supervision inverted
(Supervisão invertida de freio externo) [ - ] ID 1856 "ExtBrakeSupInvr"
0
1
P2.3.4.3 Supervision fault F55 at start
(Falha de supervisão F55 na partida) [ - ] ID 1857 "F55 Spv at Start"
0
1
7.7.4 Freio externo (M2 -> G2.3.3)
Entrada digital programável para controle de freio externo. Se uma entrada digital for
selecionada, ela deverá ser ligada antes que o freio possa ser aberto. Se a entrada não
for usada, defina o parâmetro para o valor padrão (= 0,2 = VERDADEIRO constante).
Entrada digital programável para supervisão de freio externo. Depois que o freio
mecânico é liberado, a entrada selecionada pode ser usada para verificar o estado de
abertura do freio. Se a entrada não for usada, defina o parâmetro para o valor padrão
(= 0,1 = FALSO constante).
Se uma entrada digital for usada, ela deve ser ativada durante o tempo definido
(parâmetro 2.3.4.1) a partir da liberação do freio. Se não estiver ativada, é gerada uma
falha do freio externo.
A resposta à falha do freio externo pode ser definida com o parâmetro 2.8.4.1.
Consulte a supervisão de freio externo.
7.7.5 Supervisão de freio (M2 -> G2.3.4)
Uma janela de tempo dentro da entrada de supervisão de freio externo (parâmetro
2.3.3.2) deve ser ativada depois de o freio ser liberado.
= Não invertido (Interruptores de freio normalmente abertos)
= Invertido (Interruptores do freio normalmente fechados)
Este parâmetro define o estado dos interruptores do freio. As informações contidas
neste documento são baseadas com os interruptores normalmente fechados; ou seja,
o valor padrão para o parâmetro é 1 = Invertido.
= Desativado
= Ativado
O elevador pode ser parado na partida se uma falha for detectada. Se o parâmetro
estiver definido como Desativado, o elevador não será parado. A falha deve ser
desarmada quando o elevador chegar ao andar de destino.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 61
1
Partida fácil
T1: Tempo para obter as condições de abertura dos freios
T2: Tempo de reação do freio mecânico
T3: Tempo de 0 Hz na partida
7.7.6 Ajustar a abertura do freio em malha fechada:
Esse tempo começa quando o conversor de frequência recebe o comando da unidade.
Durante esse tempo, o motor está se preparando para dar partida e o conversor de
frequência está alimentando o motor para preparar o fluxo. O freio pode ser comandado para
abrir pela saída de relé 1 ou pela saída de relé 2 após o fluxo estar pronto. É possível
diminuir esse tempo usando os parâmetros
e
de partida)
definir
fluxo estará pronto mais cedo. O uso da
Corrente de magnetização de partida
magnetização de partida
Parâmetro:
que o freio mecânico leva para abrir completamente, com atrasos no contator e assim por
diante. Se este tempo for muito curto, o motor estará funcionando contra o freio e a corrente
de partida pode ser muito alta.
Este tempo não depende dos tempos T1 e T2. Este tempo começa como T1. Este tempo é
usado para garantir que o motor esteja magnetizado quando o freio for realmente aberto. Se
você definir o tempo desse parâmetro muito longo, 1,5 ou 2 s, poderá medir com segurança
os atrasos de abertura do tempo de espera do freio e do fluxo. Defina este tempo
ligeiramente acima do tempo necessário para magnetizar o motor. (O tempo para obter
o Fluxo Pronto pode ser verificado usando NcDrive e Global Variable
Start magnetizing current (Corrente de magnetização de partida)
é importante para motores grandes, a fim de acelerar a partida.
Mechanical brake reaction time (Tempo de reação de freio mecânico)
Start magnetizing time (Tempo de magnetização
maior que a
Corrente de magnetização de partida
corrente de magnetização
e do
MC_FluxReady
. Se você
, então o
Tempo de
. O tempo
).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

62 • VACON APFIFF33 NXP LIFT
Partida avançada com partida suave
T4: Partida suave
Você pode adicionar a partida suave durante a partida caso haja algum atrito mecânico em
seu sistema. O parâmetro
para a partida junto com o parâmetro
Frequência de partida suave
A
Smooth start time (Tempo de partida suave)
Smooth start frequency (Frequência de partida suave)
deve ser muito pequena, 0,01 ou 0,02 Hz.
adiciona mais tempo
.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 63
1
Controle do conversor de frequência
P2.4.1 Brake chopper (Chopper de frenagem) [ - ] ID 504 “Brake Chopper”
0 = "Not Used" - Nenhum chopper de frenagem usado
NOTA:
1 = "On, Run" - Chopper de frenagem em uso e testado em funcionamento
2 = "External" - Chopper de frenagem externo (sem teste)
3 = "On, Run+Stop" - Usado e testado no estado PRONTO e quando em
funcionamento
4 = "On, No test" = Usado quando em funcionamento (sem teste)
Nota:
P2.4.2 Stop function (Função de parada) [ - ] ID 506 “Stop Function”
0
1
2
7.8
Quando o conversor de frequência está desacelerando o motor, a inércia do motor e
a carga são alimentadas em um resistor de frenagem externo. Isso permite que o
conversor de frequência desacelere a carga com um torque igual àquele da aceleração
(desde que o resistor de frenagem correto tenha sido selecionado). Consulte o manual
de instalação separado do resistor de frenagem. O modo de teste do chopper de
frenagem gera um pulso para o resistor a cada segundo. Se o feedback de pulso estiver
incorreto (resistor ou chopper ausente), a falha F12 será gerada.
O chopper de frenagem não está ativo ou presente no barramento CC.
O nível do controlador de sobretensão está ajustado um pouco abaixo.
O chopper de frenagem do conversor de frequência está ativado e operacional
quando o conversor de frequência está no estado Em funcionamento. O conversor de
frequência também envia pulsos de teste para feedback do resistor de frenagem.
O sistema possui um item que manipula a tensão do barramento CC. Este poderia ser
um sistema com AFE ou haver uma unidade externa de BCU. Quando esta opção é
selecionada, o nível de sobretensão do conversor de frequência é definido um pouco
mais alto para que sua operação não entre em conflito com as unidades AFE ou BCU.
O chopper de frenagem também está ativo quando o inversor não está no estado
Em funcionamento. Esta opção pode ser usada, por exemplo, quando outras
unidades estiverem gerando, mas os níveis de energia estiverem baixos o
suficiente para serem manipulados com apenas uma unidade.
O chopper de frenagem está ativo no estado Em funcionamento, mas não é gerado
nenhum pulso de teste para o resistor.
No menu do sistema existe um parâmetro “InternBrakeRes” (Resistor de
frenagem interno). Este parâmetro é usado para cálculos de superaquecimento do
resistor de frenagem. Se houver um resistor de frenagem externo conectado ao
conversor de frequência, o parâmetro deve ser definido como 'Não conectado' para
desativar o cálculo de temperatura do resistor de frenagem.
Parada por inércia:
O motor desacelera e para sem qualquer controle do conversor de frequência
após o comando de Parada.
Rampa:
Após o comando de Parada, a velocidade do motor é desacelerada de acordo
com os parâmetros de desaceleração definidos.
Se a energia regenerada for alta, pode ser necessário usar um resistor de
frenagem externo para uma desaceleração mais rápida.
Limite de frequência
Parada por inércia se a frequência do motor estiver acima do limite de frequência
(par. 2.4.3) quando o pedido de parada for dado. Parada por rampa se a frequência
do motor for igual ou inferior a este parâmetro quando o pedido de parada for dado.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

64 • VACON APFIFF33 NXP LIFT
Nota: Se a função Parada por distância for usada, a função da comutação de
P2.4.3 Frequency limit (Limite de frequência) [Hz] ID 1624 “Frequency Limit”
P2.4.4 Stop distance (Distância de parada) [m] ID 1602 "StopDistance"
v[m/s]
t[s]
A
P2.4.5 > 0
A ~ Distância de parada
v[m/s]
t[s]
Solicitação de funcionamento
desligada OU Refer ência de
frequência = 0
A
Solicitação de funcionamento
desligada OU Refer ência de
frequência = 0
P2.4.5 = 0
A ~ Distância de parada
0
P2.4.5 S-curve time (Tempo da curva de v.) [s] ID 1626 "StopD Jerk Time"
Define o limite de frequência para a função de parada se selecionado como o limite de
frequência (par. 2.4.2 = 2).
Se a frequência do motor estiver acima do limite de frequência, o motor para por inércia
e, se estiver abaixo ou igual ao limite de frequência, a função de parada é rampa.
= Não usado
A função está ativa somente se a função de parada for selecionada como um limite de
frequência (parâmetro 2.4.2=2).
O parâmetro define a distância de um determinado interruptor de andar para concluir
a parada até o andar. O valor do parâmetro é apresentado em metros.
O valor de parada é calculado a partir da velocidade linear nominal (parâmetro 2.2.1) e
da frequência nominal do motor (parâmetro 2.1.2). A distância calculada estará correta
somente se esses dois parâmetros estiverem ajustados corretamente e se a rampa de
parada for linear (parâmetro 2.4.5 = 0).
Se a rampa de parada for em forma de S em vez de linear (a curva de v. é usada), a
distância de parada deve ser ajustada com o parâmetro 2.4.6.
rampa interna (
parâmetro 2.2.8)
não está ativa.
A desaceleração especial aumenta e diminui o tempo se a função parada por distância
for selecionada. Este tempo de arrancada é ativado quando a velocidade é desacelerada
abaixo do limite de frequência e a frequência de referência é atingida.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 65
1
P2.4.6 Scaling factor (Fator de escala) [%] ID 1625 "RampScaleFactor"
Parâmetros de controle do contator do motor (M2 -> G2.4.7)
P2.4.7.1 Closing time (Tempo de fechamento)
P2.4.7.2 Motor Contactor Acknowledgement (Ativação do contator do motor)
Parâmetros avançados
P2.4.8.1 Modulator Type (Tipo de modulador) ID1775 “Modulator type”
0 = Modulador ASIC
OBSERVAÇÃO:
M
FC
Conf.
Contator
do motor
Os tempos de arrancada no grupo Curva de velocidade 1 são usados se a frequência
estiver acima do limite de frequência. Os tempos de arrancada na Curva de velocidade
1 são alterados quando o conversor de frequência entra no estágio de parada.
Fator de escala de rampa para função de distância de parada. A distância de parada é
calculada com base na rampa linear. A distância de parada é precisa somente quando
os tempos de arrancada não são usados (parâmetro 2.2.3=0 ou parâmetro 2.4.5=0).
Se os tempos de arrancada forem usados, a distância de parada será maior do que
deveria. O fator de escala pode ser usado para ajustar a distância de parada. O fator
de escala recalcula o tempo de rampa.
7.9
A finalidade do controle do contator do motor é fechar o contator do motor primeiro e, em seguida,
iniciar a emitir corrente para o motor. Esta lógica estará ativa somente se houver um relé de saída
programado para controle do contator do motor (consulte o grupo de parâmetros 2.7).
Defina este tempo ligeiramente acima do tempo de reação do contator do motor. Após
esse atraso, o conversor de frequência começa a emitir corrente para o motor. Este
tempo é ignorado se o sinal de confirmação do contator do motor especificado pelo
parâmetro P2.4.7.2 for usado.
Sinal de entrada para o sinal de feedback que o contator principal está fechado. Use o
contato auxiliar do contator do motor (NA) para essa finalidade. O parâmetro P2.4.7.1
será ignorado se este sinal estiver em uso.
Se o sinal de confirmação não vier dentro do alarme de 1 s, o F64 será acionado.
Entrada
7.10
Selecione o tipo de modulador. Algumas operações exigem o uso de um modulador
de software.
Uma terceira injeção harmônica clássica O espectro é ligeiramente melhor quando
comparado ao modulador do Software 1.
Um modulador ASIC não pode ser usado ao utilizar DriveSynch ou motor
PMS com um encoder de tipo incremental.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

66 • VACON APFIFF33 NXP LIFT
1 = Modulador de software 1
OBSERVAÇÃO:
2 = Modulador de software 2
3 = Modulador de software 3
P.2.4.8.2 Advanced Options 1 (Opções Avançadas 1) ID1770 "AdvancedOptions1"
P.2.4.8.3 Advanced Options 2 (Opções Avançadas 2) ID1771 "AdvancedOptions2"
P.2.4.8.4 Advanced Options 4 (Opções Avançadas 4) ID1772 "AdvancedOptions4"
b0
b1
P.2.4.8.5 Advanced Options 5 (Opções Avançadas 5) ID1773 "AdvancedOptions5"
b0
P.2.4.8.6 Advanced Options 6 (Opções Avançadas 6) ID1774 "AdvancedOptions6"
Modulador de vetor simétrico com vetores zero simétricos.
A distorção de corrente será menor que com o modulador de software 2 se
impulsionamento for usado.
ativado) e necessário ao usar motor PMS com um encoder incremental.
Uma fase de cada vez nos comutadores IGBT não é modulada durante um período de
60 graus do ciclo de frequência. A fase não modulada é conectada a um barramento CC
positivo ou negativo.
Esse tipo de modulador reduz as perdas de comutação em até dois terços e todos os
comutadores são carregados uniformemente.
A modulação BusClamp é útil se a tensão for > 80% da tensão máxima, em outras
palavras, quando o conversor de frequência estiver operando próximo da velocidade
máxima. Então, novamente, a oscilação do motor em baixas velocidades é o dobro em
comparação com a seleção 1.
BusClamb não simétrico, no qual um interruptor sempre conduz de 120 graus a um
barramento CC negativo para reduzir as perdas de comutação. No entanto, os
interruptores superiores e inferiores são carregados de forma desigual e o espectro
é amplo.
Recomendado para DriveSynch (definido por padrão quando DS estiver
Reservado para uso futuro. Alguns bits são controlados pelo software da aplicação,
portanto, o valor pode não ser sempre zero.
Reservado para uso futuro. Alguns bits são controlados pelo software da aplicação,
portanto, o valor pode não ser sempre zero.
= + 1 = Ativar controle de prevenção contra reversão = 1
= + 2 = Fazer o PMSM iniciar a ID do ângulo apenas uma vez após a energização = 1
= + 1 = Ajuste do controle encoder ruim do motor PM, 1 = ativo
Reservado para uso futuro. Alguns bits são controlados pelo software da aplicação,
portanto, o valor pode não ser sempre zero.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 67
1
Controle do motor
P2.5.1 Motor control mode (Modo de controle do motor) ID 1572 "Motor Ctrl Mode"
0
1
2
P2.5.2 Switching frequency (Frequência de comutação) ID 601 "Switching Freq"
Tipo
Mín. [kHz]
Máx. [kHz]
Padrão [kHz]
0003—0061 NX_5
0003—0061 NX_2
0072—0520 NX_5
1.0
10.0
3.6
0041—0062 NX_6
0144—0208 NX_6
Observação!
Observação!
P2.5.3 Overvoltage controller (Controlador de sobretensão) ID 607 "Overvolt Contr"
P2.5.4 Undervoltage controller (Controlador de subtensão) ID 608 "Undervolt Contr"
7.11
Controle de frequência: O referências do terminal de E/S e do teclado são referências
de frequência, e o conversor de frequência controla a frequência
de saída (resolução da frequência de saída = 0,01 Hz).
Controle de velocidade: As referências do terminal de E/S e do teclado são referências
de velocidade, e o conversor de frequência controla a
velocidade do motor (precisão ± 0,5%).
Controle de velocidade CL: Modo de controle de velocidade de malha fechada. As
referências do terminal de E/S e do teclado são referências de
velocidade, e o conversor de frequência controla a velocidade
do motor. O encoder é necessário. Os parâmetros de malha
fechada no grupo G2.5.9 devem ser definidos de acordo.
O ruído do motor pode ser minimizado com o uso de uma frequência de comutação alta.
No entanto, note que aumentar a frequência de comutação aumenta as perdas do
conversor de frequência. Frequências mais baixas são usadas quando o cabo do motor
é longo e o motor é pequeno.
A faixa deste parâmetro depende do tamanho do conversor de frequência:
1.0 16.0 10.0
1.0 6.0 1.5
Tabela 7-4. Frequências de comutação dependentes de tamanho
A frequência de comutação real pode ser reduzida para 1,5 kHz por funções de
gerenciamento térmico. Isso deve ser considerado ao usar filtros de onda senoidais
ou outros filtros de saída com um frequência de baixa ressonância.
Se a frequência de comutação for alterada, é necessário refazer a identificação do
motor.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Esses parâmetros permitem que os controladores de sub ou sobretensão sejam
chaveados para fora de operação. Isso pode ser útil, por exemplo, se a tensão de
alimentação elétrica variar mais de – 15% a + 10% e a aplicação não tolerar essa
sobretensão/subtensão. Neste caso, o regulador controla a frequência de saída levando
em conta as flutuações de alimentação.

68 • VACON APFIFF33 NXP LIFT
Nota:
0
1
P2.5.5. Measured RS voltage drop
(Queda de tensão medida em RS) ID 662 "MeasRsVoltDrop"
P2.5.6 Open loop Speed controller ki1 (Controlador
de velocidade em malha aberta ki1) ID 1655 "SpeedContr_ki(OL)"
P2.5.7 Open loop Speed controller kp1 (Controlador
de Velocidade de malha aberta kp1) ID 1656 "SpeedContr_kp(OL)"
n
I
Disparos por sub/sobretensão podem ocorrer quando os controladores são
alterados fora de operação. O controlador de subtensão é desligado automaticamente
se a evacuação estiver ativa.
Controlador comutado desativado
Controlador comutado ativado
A queda de tensão medida na resistência do estator entre duas fases com a corrente
nominal do motor. Este parâmetro é identificado durante a identificação do motor.
Este parâmetro define a resistência do estator do motor como uma queda de tensão na
corrente nominal. O valor do parâmetro é definido de acordo com a tensão nominal do
motor e a corrente e a resistência real do estator como
n
RsVoltageD
rop
2560=
R
s
U
Define o ganho I para a velocidade controlada no modo de controle de Velocidade de
malha aberta.
Define o ganho P para a velocidade controlada no modo de controle de Velocidade de
malha aberta.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 69
1
U
N
Linear
Programável
Tensão de ponto
zer o
Frequência de
ponto médio
Tensão de ponto
médio
F
N
FWP
Tensão PEC
Impulso de torq ue
Quadrática
7.11.1 Configuração U/f
As configurações U/f são usadas principalmente em modos de controle de malha aberta, com
exceção da
tensão do ponto de enfraquecimento de campo
, que também é usada no modo de
controle de malha fechada como limite de tensão. As configurações U/f são usadas para controlar
o nível de tensão que é aplicado ao motor em diferentes frequências e em diferentes situações de
carga.
Quais alterações são necessárias para iniciar com carga de 0 Hz?
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
♦ Primeiro, defina os valores nominais do motor (grupo do parâmetro 2.1).
Opção 1: Funções automáticas
Etapa 1: Faça a identificação com o motor girando.
Etapa 2 (se necessário): Ative o controle de velocidade ou a otimização U/f
(impulso de torque).
Etapa 3 (se necessário): Ative o controle de velocidade e a otimização U/f.
Opção 2: Ajuste manual
Etapa 1:
Opere o motor usando 2/3 de sua frequência nominal como referência de frequência. Leia
a corrente do motor no menu de monitoramento ou use o VACON
monitoramento. Esta corrente deve ser definida como a corrente de magnetização do motor.
Altere a seleção da relação de curva U/f para programável (= 2).
Opere o motor com referência de frequência zero e aumente a tensão de ponto zero
do motor até que a corrente do motor seja aproximadamente igual à corrente de
magnetização do motor. (Se o motor estiver em uma área de baixa frequência somente
por curtos períodos, será possível usar até 65% da corrente nominal do motor).
®
NCDrive para o

70 • VACON APFIFF33 NXP LIFT
OBSERVAÇÃO
Em alto torque – aplicações de baixa velocidade – é improvável que o
ção especial ao resfriamento do
aumentar muito.
P2.5.8.1 U/f optimisation (Optimização V/f) ID1573 "U/f Optimization"
Impulso de
torque
automático
A tensão do motor varia proporcionalmente ao torque exigido, o que faz
após a identificação do motor quando a curva U/f programável for ativada.
P2.5.8.2 U/f ration selection (Seleção de razão U/f) ID1574 "U/f Ratio Select"
Linear:
0
ao motor.
Quadrática:
1
velocidade, por exemplo, em ventiladores e bombas centrífugos.
Curva U/f programável:
2
A curva U/f pode ser programada com três pontos diferentes.
ideal (ID631).
Em seguida, defina a tensão do ponto médio para √2 * Tensão de ponto zero
e
a frequência do ponto médio para (Tensão de ponto zero/100%)*Frequência nominal do
motor)
Etapa 2 (se necessário): Ative o controle de velocidade ou a otimização U/f (impulso de
torque).
Etapa 3 (se necessário): Ative o controle de velocidade e a otimização U/f.
motor sobreaqueça. Se o motor tiver que passar por longos períodos
nessas condições, deve-se dar uma aten
motor. Use resfriamento externo para o motor se a temperatura tende a
com que o motor produza mais torque na partida e ao funcionar em baixas
frequências. O impulso de torque automático pode ser usado em
aplicações em que o torque de partida devido ao atrito inicial é alto, por
exemplo, em esteiras transportadoras. Mesmo com a curva U/f linear, o
impulso de torque tem um efeito, mas o melhor resultado será alcançado
A tensão do motor muda linearmente da tensão do ponto zero para o
ponto de enfraquecimento de campo onde a tensão no FWP é fornecida
A tensão do motor muda da tensão do ponto zero seguindo a curva
quadrática da frequência zero para o ponto de enfraquecimento de campo.
O motor opera submagnetizado abaixo do ponto de enfraquecimento de
campo, e produz menos torque. A razão U/f quadrática pode ser usada em
aplicações onde a demanda de torque seja proporcional ao quadrado da
1. Tensão de ponto zero.
2. Frequência do ponto médio e Tensão do ponto médio.
3. Ponto de enfraquecimento de campo e tensão do ponto de
enfraquecimento de campo.
A curva U/f programável pode ser usada caso seja necessário mais torque
em frequências baixas. Faça a identificação do motor para a configuração
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 71
1
Linear com otimização de fluxo:
3
O conversor de frequência começa a pesquisar a corrente do motor mínima
P2.5.8.3 Field weakening point
(Ponto de enfraquecimento de campo) ID602 "Field WeakngPnt"
P2.5.8.4 Voltage at field weakening point
(Tensão no ponto de enfraquecimento de campo) ID603 "Voltage at FWP"
depois
P2.5.8.5 U/f curve, middle point frequency
(Curva U/f, frequência do ponto médio) ID1575 "U/f Mid Freq"
P2.5.8.6 U/f curve, middle point voltage
(Curva U/f, tensão do ponto médio) ID1576 "U/f mid Voltg"
P2.5.8.7 Output voltage at zero frequency
(Tensão de saída em frequência zero) ID1577 "Zero Freq Voltg"
OBSERVAÇÃO:
para economizar energia. Esta função pode ser usada em aplicações com
carga de motor constante, como ventiladores, bombas etc.
O ponto de enfraquecimento de campo é a frequência de saída na qual a tensão de saída
atinge a tensão do ponto de enfraquecimento de campo.
Acima da frequência no ponto de enfraquecimento de campo, a tensão de saída
permanece no valor máximo definido. Abaixo da frequência no ponto de enfraquecimento
de campo, a tensão de saída depende da configuração dos parâmetros da curva de U/f.
Quando o parâmetro
ajustado, o parâmetro
recebe automaticamente o valor correspondente. Se você precisar de valores diferentes
para o ponto de enfraquecimento de campo e a tensão de saída máxima, altere esses
parâmetros
No controle de malha fechada, isso define a tensão máxima para o motor, que pode ser
aumentada se houver tensão CC suficiente disponível.
Motor nominal frequency (Frequência nominal do motor)
Field weakening point (Ponto de enfraquecimento de campo)
de definir a
frequência nominal
.
é
Se a curva U/f programável foi selecionada com a razão U/f do parâmetro, este
parâmetro define a frequência do ponto médio da curva. Veja também o parâmetro
Middle point voltage (Tensão do ponto médio)
Quando a curva U/f programável é selecionada, este valor é ajustado para 10% da
frequência nominal do motor.
Se a curva U/f programável foi selecionada com a razão U/f do parâmetro, este
parâmetro define a tensão do ponto médio da curva. Veja também o parâmetro
point frequency (Frequência do ponto médio)
Quando a curva U/f programável é selecionada, este valor é ajustado para 10% (da
tensão nominal do motor).
Este parâmetro definirá a tensão de frequência zero da curva U/f. O valor padrão é
dependente do tamanho da unidade.
alterado, este parâmetro será definido como zero.
Se o valor do parâmetro
.
Middle
.
U/f Ratio Select (Selecione a razão de U/f)
for
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

72 • VACON APFIFF33 NXP LIFT
P2.5.9.1 Speed Control Limit 1
(Limite de controle de velocidade 1) ID 1618 "SpeedCtrlLimit1"
P2.5.9.2 Speed Control Limit 2
(Limite de controle de velocidade 2) ID 1619 "SpeedCtrlLimit2"
P2.5.9.3 Speed Control Kp 1 (Controle de velocidade Kp 1) ID 1620 "Speed Ctrl Kp 1"
P2.5.9.4 Speed Control Kp 2 (Controle de velocidade Kp 2) ID 1621 "Speed Ctrl Kp 2"
Limite
1
Limite
2
f / Hz t /
ms
Ti
1
Ti
2
7.11.2 Configurações de malha fechada
Fórmula de controle de velocidade:
1
=
1 +
()= ( 1)+ [()( 1
)
+
(
)
]
Altere os limites do ganho do controlador de velocidade e da constante de tempo integral.
Quando a frequência de saída está abaixo do ponto de alteração 1 (par 2.5.9.1), o valor do
ganho é o mesmo que o parâmetro 2.5.9.3. Se a frequência de saída for maior que o ponto
de alteração 2 (par 2.5.9.2), o valor do ganho é o mesmo que o parâmetro 2.5.9.4. Entre
esses dois pontos, a mudança é linear. Consulte Figura 9 e Figura 10
Ganho para o controlador de velocidade em operação de controle do motor de malha
fechada. Um valor de ganho de 100 significa que a referência de torque nominal é
produzida na saída do controlador de velocidade para o erro de frequência de 1 Hz.
O valor do ganho do controle de velocidade ativo (%/ Hz) é o Controle de velocidade Kp1
se a frequência de saída for menor que o Limite de controle de velocidade 1. O valor do
ganho de controle de velocidade ativo é o Controle de velocidade Kp2 se a frequência de
saída for maior que Limite de controle de velocidade 2. Entre esses dois pontos, a
mudança é linear. Veja a Figura 9 e a Figura 10.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 73
1
Lim i te 1
Lim i te 2
f/Hz
Kp
Kp2
Kp1
Figura 9. Curva de controle de velocidade Kp proporcional
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

74 • VACON APFIFF33 NXP LIFT
P2.5.9.5 Speed Control Ti 1
(Tempo de controle de velocidade 1) ID 1622 "Speed Ctrl Ti1"
P2.5.9.6 Speed Control Ti 2
(Tempo de controle de velocidade 2) ID 1623 "Speed Ctrl Ti2"
Limi te 1 Limite 2
f/Hz
t/ms
Ti 1
Ti 2
Define a constante de tempo integral para o controlador de velocidade. Aumentar
o tempo I aumenta a estabilidade, mas aumenta o tempo de resposta da velocidade.
Kp 30, Ti 100
Kp 30, Ti 300
O valor da constante de tempo integral ativa para o controlador de velocidade é Tempo
de controle de velocidade 1 se a frequência de saída for menor que o Limite de controle
de velocidade 1. Se a frequência de saída for maior que o Limite de controle de
velocidade 2, o valor é Tempo de controle de velocidade 2.
Figura 10. Curva do tempo de controle de velocidade proporcional
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 75
1
P2.5.9.7 Current control P gain
(Ganho P de controle de corrente) ID617 "CurrentControlKp"
P2.5.9.8 Current control Ti (Tempo de controle de corrente) ID657 "CurrentControlTi"
P2.5.9.9 Encoder filter time (Tempo do filtro do encoder) ID618 "Encoder1FiltTime"
P2.5.9.10 Slip adjust (Ajuste de escorregamento) ID619 "Slip Adjust"
P2.5.9.11 Torque ramp time (Tempo de rampa de torque) ID1760 "TorqueRampTime"
P2.5.9.12 Torque reference selection
(Seleção de referência de torque) ID621 "TorqueRefSelecti"
0
1
2
P2.5.9.13 AI Torque reference (Referência de torque AI) ID641 "AI Torque Ref"
P2.5.9.14 Torque reference scaling, minimum value
(Escala de referência de torque, valor mínimo) ID643 "Torq Ref Min"
Define o ganho para o controlador de corrente. O controlador gera a referência de vetor
de tensão para o modulador. O ganho também é usado na partida dinâmica em malha
aberta. Quando o parâmetro do filtro Seno (parâmetro P6.7.5 no menu Sistema) tiver
sido definido como
Conectado
, o valor deste parâmetro será alterado para 20,00%.
O valor também é identificado ao usar um motor PMS e fazer a identificação do motor
com o motor girando. Em baixa velocidade, os valores do motor podem aumentar até
300%. Em alta velocidade, o ganho do motor e motor com filtro senoidal podem ter
valores de ganho de 10 a 40%.
Constante de tempo do integrador do controlador de corrente.
Define a constante de tempo do filtro para medição de velocidade.
O parâmetro pode ser usado para eliminar o ruído do sinal do encoder. Um tempo do
filtro muito alto reduz a estabilidade do controle de velocidade. Valores acima de 10 ms
não são recomendados em casos normais.
A velocidade da placa de identificação do motor é usada para calcular o escorregamento
nominal. Esse valor é usado para ajustar a tensão do motor quando carregado. A
velocidade indicada na placa de identificação é, às vezes, imprecisa, e este parâmetro
poderá, portanto, ser usado para cortar o escorregamento. Reduzir o valor do ajuste de
escorregamento aumenta a tensão do motor quando o motor é carregado.
Tempo de rampa de torque na partida e na parada. Usado na partida se a referência de
torque for usada. Usado na parada de rampa para reduzir a etapa de torque.
= Não usado
= Memória de torque
= Referência de torque de AI1 ou AI2
A entrada analógica pode ser escolhida por meio do parâmetro P2.5.9.13 Torque
Reference (Referência de torque). Os valores mínimo e máximo podem ser escolhidos por
meio dos parâmetros P 2.5.9.14 Torq Ref Min (Referência de torque mínimo) e P2.5.9.15
Torq Ref Max (Referência de torque máximo). O tempo do filtro pode ser escolhido por
meio dos parâmetros P2.6.3.6.1 AI1 Ref Filt Time (Tempo do filtro de ref. da AI1) ou
P2.6.3.2.6 AI2 Ref Filt Time (Tempo do filtro de ref. da AI2). O sinal de referência
escalonado e o sinal filtrado podem ser vistos no valor de monitoramento V.1.25.4.
Por meio deste parâmetro pode-se selecionar a referência de torque de A1 ou A2.
Referência de torque mínimo para seleções de referência de entrada analógica.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

76 • VACON APFIFF33 NXP LIFT
P2.5.9.15 Torque reference scaling, maximum value
(Escala de referência de torque, valor máximo) ID642 "Torq Ref Max"
P2.5.9.16 Torque reference add delay (Atraso
adicional de referência de torque) ID1778 "TorqueRefAddDelay"
P2.5.9.17 Show advanced parameters
(Mostrar parâmetros avançados) ID1969 "ShowAdvancedPar"
P2.5.18.1 RollBack controller (Controlador de reversão) ID 1687 "RollBack Ctrl"
0
1
P2.5.18.2 RollBack controller Gain (Ganho do
controlador de reversão) ID 1689 "RB ctrl Gain"
P2.5.18.3 RollBack controller pretorque (Pré-torque
do controlador de reversão) ID 1691 "RB ctrl Pretorq"
P2.5.18.4 RollBack controller wake up level (Nível de ativação
do controlador de reversão) ID 1690 "RB ctrl WakeUp"
Referência de torque máximo para seleções de referência de entrada analógica.
Atraso de solicitação de funcionamento para adição de referência de torque.
Para fins de ajuste fino.
7.11.2.1 Reversão
O controle de reversão é feito para reduzir o movimento oposto à partida, principalmente
em acionamentos de elevador. Isto cobre também motores de indução, mas é mais útil
em conversores de frequência PM sem engrenagens, nos quais o movimento do eixo do
motor é transferido diretamente para o movimento do elevador; por exemplo, o
contrapeso do elevador tende a mover o elevador vazio para cima, o que não é bom se
o sentido da viagem for para baixo.
O controlador de reversão é ativado de acordo com o nível de ativação e este controlador
é desativado após uma referência de velocidade ser aumentada de zero assim que a
aceleração é iniciada. Na prática, este controlador permanece ativo durante o tempo
P2.3.2.9 0 Hz time at start (Tempo de 0 Hz na partida).
O controlador de reversão é desativado / ativado de acordo com este parâmetro.
Desativado
Ativado
RollBackCtrlGain é o ganho do controlador de reversão. Normalmente, o valor do ganho
é de 2.000 a 5.000. Esse valor depende da estrutura mecânica geral dos elevadores.
Quanto maior o ganho, maior é o impacto no circuito de controle de velocidade e menor
é o efeito de reversão real da cabine do elevador após a liberação do freio mecânico.
Pré-torque define o tamanho do passo de torque aplicado ao motor quando as condições
de ativação são excedidas. A unidade é a % do torque nominal do motor.
O nível de ativação do controlador de reversão é o limite para ativar o controle de
reversão. O valor do parâmetro é comparado com os pulsos medidos do sinal do encoder.
Valores abaixo de 1,00 não podem ser definidos quando o encoder incremental estiver
conectado. Por exemplo, ao definir o valor decimal, a interpolação de 0,50 deve ser ativada
para o encoder Endat a partir dos parâmetros da placa opcional. Valores decimais são
comparados com a fase do pulso senoidal legível a partir de, por exemplo, encoders Endat.
A parte decimal é significativa apenas quando o valor do parâmetro está abaixo de 1,00.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 77
1
P2.5.10.1 PMSM Shaft Position (Posição do eixo PMSM) ID1670 "PMSMShaftPositio"
P2.5.10.2 Start Angle Identification Mode
(Modo de identificação do ângulo de partida) ID1933 "StartAngleIdMode"
0 = Automática
1 = Forçada
2 = Ao LIGAR
3 = Definida pela entrada digital
7.11.3 Configurações de motor síncrono de ímã permanente
Existem três maneiras de saber as posições do ímã ao usar o controle de malha fechada. A primeira
identificará a posição do ímã do motor durante cada estado ao usar um encoder incremental sem
pulso Z. A segunda usa o pulso Z do encoder incremental e a terceira usa as informações absolutas
do encoder. Veja detalhes de como selecionar o modo correto no capítulo “Função de identificação
do motor síncrono de ímã permanente”.
O valor absoluto da posição do encoder correspondente à posição do eixo onde o eixo
magnético do rotor está alinhado com o eixo magnético da fase U do estator será
armazenado aqui como resultado da identificação do motor do encoder. Se for usado um
encoder incremental com um pulso z, a posição do pulso z será armazenada no lugar.
Dependendo da posição mecânica do eixo do motor, este parâmetro pode ter valores
diferentes, pois há um valor correto para cada par de polos do motor.
A identificação do ângulo de partida, isto é, a posição do eixo magnético do rotor em
relação ao eixo magnético da fase U do estator, é necessária se nenhum encoder
absoluto ou encoder incremental for usado. Esta função define como a identificação
do ângulo de partida é efetuada nesses casos. O tempo de identificação depende das
características elétricas do motor, mas normalmente demora de 50 ms a 200 ms.
No caso de encoders absolutos, o ângulo inicial será lido diretamente do valor do ângulo
absoluto do encoder. Por outro lado, o pulso z do encoder incremental será usado
automaticamente para sincronização se sua posição for definida como diferente de zero
em P2.5.10.1. Além disso, para encoders absolutos, P2.5.10.1 deverá ser diferente de
zero, caso contrário, será interpretado que a identificação do motor do encoder não foi
concluída e a execução será proibida exceto se o canal absoluto for ignorado pela
identificação de ângulo de partida.
A decisão de usar identificação de ângulo de partida é efetuada automaticamente com base
no tipo de encoder conectado ao conversor de frequência. Isso servirá a casos comuns.
Compatibilidade: placas OPT-A4, OPT-A5, OPT-A7 e OPT-AE.
Ignora a lógica automática de conversor de frequência e força a identificação do ângulo
de partida a permanecer ativa. Pode ser usada, por exemplo, com encoders absolutos
para ignorar informações de canal absoluto e usar uma identificação de ângulo de
partida como alternativa.
Como padrão, uma identificação de ângulo de partida será repetida a cada partida se
a identificação estiver ativa. Esta configuração permitirá identificação somente na
primeira partida após o conversor de frequência ser ligado. Em partidas consecutivas,
o ângulo será atualizado com base na contagem de pulsos do encoder.
A entrada digital pode ser conectada (TTF) para sinalizar ao conversor de frequência
para implementar a identificação do ângulo inicial na próxima partida.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

78 • VACON APFIFF33 NXP LIFT
P2.5.10.3 Start Angle Identification Current
(Corrente de identificação do ângulo de partida) ID1938 "StartAngleIdCurr"
P2.5.10.4 Polarity Pulse Current
(Corrente de pulso de polaridade) ID1800 "PolarityPulseCur"
P2.5.10.5 Encoder identification mode
(Modo de identificação do encoder) ID1686 "EncoderIdentMode"
0
1
P2.5.10.6 EnableRsIdentification (Habilitar a identificação Rs) ID654 "EnableRsIdentifi"
P2.5.10.7 Modulation Index Limit
(Limite do índice de modulação) ID655 "ModIndexLimit"
Este parâmetro define o nível de corrente usado na identificação do ângulo de partida.
O nível correto depende do tipo de motor usado. Em geral, 50% da corrente nominal do
motor parece suficiente, mas dependendo, por exemplo, do nível de saturação do motor,
uma corrente mais alta poderá ser necessária.
Este parâmetro define o nível de corrente para a verificação de direção de polaridade
do eixo magnético durante a identificação do ângulo de partida (P2.5.10.2). O valor 0
significa que o nível de corrente interna é usado, o que geralmente é ligeiramente mais
alto do que a corrente de identificação normal definida por P2.5.10.3. A verificação de
direção de polaridade é raramente necessária, pois a identificação em si já fornece a
direção correta. Portanto, na maioria dos casos, essa função pode ser desativada ao
definir qualquer valor de parâmetro negativo, recomendado especialmente se falhas
F1 ocorrerem durante a identificação.
Define como a identificação do encoder é feita.
= Corrente CC; o ângulo de partida do motor é definido pela alimentação da corrente
CC no motor por um certo tempo. Se o eixo do motor estiver livre, isso irá
automaticamente girar o rotor para a “posição zero”. Esse ângulo é armazenado em
P2.5.10.1.
= Injeção de pulso; A identificação é feita alimentando o motor com pulsos CC que
identificam a posição do ímã. Os pulsos CC estão em dois grupos diferentes. O primeiro
identifica a posição zero e o segundo faz a verificação da polaridade. Esses níveis de
corrente CC são ajustados por P2.5.10.3 “Start Angle Identification Current” (Corrente
de identificação do ângulo de partida) e P2.5.10.4 “Polarity Pulse current” (Corrente de
pulso da polaridade), respectivamente.
Este parâmetro habilita a identificação Rs durante operações de corrente de frenagem
CC e em controle de malha fechada para cada partida. Se a identificação do motor foi
bem-sucedida, recomenda-se manter este parâmetro desativado.
Índice de modulação em % para operação de malha fechada. Um valor maior de tensão
do terminal do motor pode ser alcançado aumentando este valor.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 79
1
P2.5.10.10 Lsd Voltage Drop (Queda de tensão em Lsd) ID1757 "Lsd Voltage Drop"
P2.5.10.11 Lsq Voltage Drop (Queda de tensão em Lsq) ID1758 "Lsq Voltage Drop"
P2.5.10.12 Flux Current Kp (Corrente de fluxo Kp) ID 651 "FluxCurrent Kp"
7.11.3.1 Quedas de tensão do eixo D e Q
Se as reatâncias do eixo d e do eixo q (quedas de tensão) forem definidas, o conversor de frequência
calcula a referência de corrente ideal do eixo d com base nos valores de reatância e no torque do
motor para considerar a parte do torque de relutância do motor. Desta forma, a relação
Torque/Corrente do motor pode ser aumentada.
Queda de tensão da reatância do eixo D 2560 = 100%.
Fornece a % de queda de tensão através da indutância do estator na corrente
e frequência nominais.
[]
[
ê
]
=
[]
[]
2560
3
Queda de tensão da reatância do eixo Q 2560 = 100%.
Fornece a % de queda de tensão através da indutância do estator na corrente
e frequência nominais.
[]
[
Escala do conversor de frequência
]
=
[]
[]
2560
3
7.11.3.2 Controlador de corrente de fluxo
O controlador de corrente de fluxo é usado com um motor PMS quando executado em controle de
malha fechada na área de enfraquecimento de campo. Esta função controla a corrente Id negativa
para o motor PM na área de enfraquecimento de campo. A tensão do terminal do motor não
aumenta acima do nível máximo (definido pela tensão do ponto de enfraquecimento de campo,
tensão de saída máxima do conversor de frequência). A operação da área de enfraquecimento de
campo depende da construção do motor, e a construção do motor pode proibir a operação acima da
área de enfraquecimento de campo.
Se houver instabilidade na área de enfraquecimento de campo, o ganho pode ser diminuído e/ou a
constante de tempo aumentada.
Define ganho para o controlador de corrente de fluxo ao usar um motor PMS.
Dependendo da construção do motor e da taxa de rampa usada para ir para a área de
enfraquecimento de campo, pode ser necessário que a tensão de saída não atinja o
limite máximo e impeça o controle adequado do motor. Um ganho muito alto também
pode levar a um controle instável. O tempo de integração é mais significativo nesse caso
para controle.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

80 • VACON APFIFF33 NXP LIFT
P2.5.10.13 Flux Current Ti (Tempo de corrente de fluxo) ID 652 "FluxCurrent Ti"
P2.5.10.14 ExtIdRef ID1730 "ExtIdRef"
P2.5.10.15 IdRefAtZeroSpeed ID1805 "IdRefAtZeroSpeed"
P2.5.10.16 IdRefMaxFreq ID1806 "IdRefAtZeroSpeed"
0
> 0
ExtIDRef [% ]
Frequência [Hz]
IdRefAtZeroSpeed
IIdRefMaxFreq
Define o tempo de integração para o controlador de corrente de fluxo ao usar um motor
PMS. Dependendo da construção do motor e da taxa de subida usadas para ir para a
área de enfraquecimento de campo, tempos de integração curtos podem ser necessários
para que a tensão de saída não atinja o limite máximo e impeça um controle adequado
do motor. Um tempo de integração muito rápido pode levar a um controle instável.
Este valor de referência pode ser usado para o controle externo da corrente de
identificação do motor, ou seja, a corrente reativa. Normalmente, não há necessidade
disso, pois o controle já usa o valor ideal. Este valor de referência é aditivo aos valores
internos do conversor de frequência, mas, por exemplo, o controlador de
enfraquecimento de campo pode substituir a referência dada na operação de
enfraquecimento de campo.
Se a corrente de rampa de identificação em frequências baixas for habilitada pela
configuração de IdRefMaxFreq > 0, esse parâmetro define o valor de referência atual
de identificação na frequência zero (Figura 11).
Frequência máxima para rampa de corrente de identificação em baixas frequências.
= A rampa de referência de corrente de identificação está desativada. O valor de
P2.5.10.15 ExtIdRef é usado.
= A referência de corrente de identificação é aumentada em baixas frequências,
conforme ilustrado na
Figura 11. A referência de corrente de identificação é 0 em
frequências superiores à frequência IdRefMaxFreq.
Figura 11. Rampa de corrente de identificação
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 81
1
P2.5.11.1 Torque stabiliser damping
(Amortecimento do estabilizador de torque) ID1413 "TorqStabDamp"
P2.5.11.2 Torque stabiliser Gain
(Ganho do estabilizador de torque) ID1412 "TorqStabGain"
7.11.4 Configurações de estabilização
7.11.4.1 Estabilizador de torque
O estabilizador de torque é basicamente um filtro passa-alta de primeira ordem para o torque
estimado []. A saída do filtro é um termo de correção de frequência adicionado à referência
de frequência de saída. O objetivo do estabilizador de torque é estabilizar as possíveis oscilações no
torque estimado. O ganho do controlador varia linearmente entre as frequências de zero e de ponto de
enfraquecimento de campo. Os ganhos do ponto zero e do ponto de enfraquecimento de campo podem
ser controlados independentemente com ganhos. O estabilizador opera em frequências acima de 3 Hz.
A implementação discreta do filtro é:
1000
(
)
+
=
(
)
+
Onde
1000
=
é o ganho total do filtro. O ganho e a frequência de corte do filtro são controlados pelos
seguintes parâmetros
Se um motor PMS for usado no modo de controle de malha aberta, recomenda-se usar
o valor 980 em vez de 800. O valor '980' é definido automaticamente quando o motor PMS
é selecionado.
Este parâmetro define a frequência de corte do filtro passa-alta. A constante de tempo
do filtro é calculada como
=
1000
Segue-se que a frequência de corte do filtro é obtida a partir de
1
=
Por exemplo, se o amortecimento do estabilizador de torque = 600, segue-se que
c = 1,5 ms e
= 667 rad/s.
Estes parâmetros definem, juntamente com o Amortecimento do estabilizador
de torque, o ganho real do filtro. O Ganho do estabilizador de torque é o ganho na
frequência zero. O Ganho do estabilizador de torque no FWP é o ganho na frequência
de enfraquecimento de campo. O ganho varia linearmente com a frequência entre
esses dois pontos, de modo que o ganho é
= TorqStabGainFWP + TorqStabGain
= TorqStabGainFWP, if f f
O ganho final é obtido considerando-se o valor do amortecimento do estabilizador de
torque e a escala em que 256 significa o ganho 1. Assim, o ganho final e real do filtro
é obtido a partir de
1000
=
256
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
= 1
/
f
1000
f
TorqStabGain, if f < f

82 • VACON APFIFF33 NXP LIFT
P2.5.11.3 Torque stabiliser Gain in FWP area
(Ganho do estabilizador de torque na área de FWP) ID1414 "TorqStabGainFWP"
P2.5.11.4 Torque stabiliser Limit (Limite do estabilizador de torque) ID1600 "TorqStabLimit"
P2.5.11.5 Flux Circle stabiliser Gain
(Ganho do estabilizador do círculo de fluxo) ID1550 "FluxCircleStabG"
P2.5.11.6 Flux Stabiliser Gain (Ganho do estabilizador de fluxo) ID1797 "Flux Stab Gain"
P2.5.11.7 Flux stabiliser TC (TC do estabilizador de fluxo) ID1699 "FluxStab TC"
Ganho do estabilizador de torque no ponto de enfraquecimento de campo na operação de
controle do motor de malha aberta. Veja os detalhes do Ganho do estabilizador de torque.
Define quanto o estabilizador de torque pode afetar a frequência de saída.
7.11.4.2 Estabilizador do círculo de fluxo
Ganho para o estabilizador do círculo de fluxo. Controlará o fluxo de origem quando um
erro for detectado. A saída do controlador é adicionada à frequência de saída. O efeito
diminui em baixas frequências onde o estabilizador de fluxo tem mais efeito. Usado em
frequências onde a tensão de saída está no limite máximo (definida pela tensão do ponto de
enfraquecimento de campo ou pela tensão de saída máxima do conversor de frequência).
7.11.4.3 Estabilizador de fluxo
O estabilizador de fluxo é um filtro passa-alta de primeira ordem para a corrente de produção de
fluxo estimada
. A saída do filtro está corrigindo o termo adicionado à referência de tensão
de saída. O ganho e a frequência de corte do filtro são controlados pelos seguintes parâmetros.
O ganho do estabilizador de fluxo é 0 na velocidade zero e é aumentado linearmente com
a frequência até o valor definido pelo Ganho do estabilizador de fluxo que é atingido a 1 Hz.
Dessa forma, o ganho é obtido de
= , < 1
= , 1
O ganho é dimensionado em 1000 e o ganho real do filtro é obtido a partir de
=
1000
=
1000
O TC do estabilizador de fluxo define a frequência de corte do filtro passa-alta. A
constante de tempo do filtro é calculada a partir de:
=
65536 2 FluxStab TC
2 FluxStab TC
= 1(
65536
2 FluxStab TC
1)
Por exemplo, se o TC do estabilizador de fluxo = 64, segue-se que T
= 511 ms e
= 1,96
rad/s.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 83
1
P2.5.11.8 Voltage stabiliser TC (TC do estabilizador de tensão) ID1698 "VoltageStab TC"
P2.5.11.9 Voltage stabiliser Gain
(Ganho do estabilizador de tensão) ID1697 "VoltStabGain"
P2.5.11.10 Voltage stabiliser Limit
(Limite do estabilizador de tensão) ID1696 "VoltStabLimit"
7.11.4.4 Estabilizador de tensão
O estabilizador de tensão é semelhante ao estabilizador de torque, controlando a variação na tensão
do barramento CC em frequências acima de 3 Hz. É um filtro passa-alta de primeira ordem para a
tensão de barramento CC medida
. A saída do filtro é um termo de correção de frequência
adicionado à referência de frequência de saída. O ganho é ajustado em relação ao torque estimado.
À medida que o torque aumenta de 10% a 50% do torque nominal do motor, o ganho do controlador
diminui do Ganho do estabilizador de tensão até zero. O ganho e a frequência de corte do filtro são
controlados pelos seguintes parâmetros:
Este parâmetro define a frequência de corte do filtro passa-alta. A constante de tempo
do filtro é calculada como
=
1000
= 1
1000
O ganho do estabilizador de tensão é uma função de um torque. Se o torque estiver
abaixo de 15%, o ganho é o valor definido pelo Ganho do estabilizador de tensão. Se
o torque estiver acima de 50%, o ganho é 0. Entre 15 e 50%, o ganho diminui linearmente
com o torque do Ganho do estabilizador de tensão até 0. Em outras palavras,
VoltStabGain
=
O ganho final é obtido considerando-se o valor do TC do estabilizador de tensão e a
escala em que 256 representa o ganho 1. Assim, o ganho final e real do filtro é obtido
a partir de
= VoltStabGain, if T < 15 %
(%)
35%
50%
, if 15 % T < 50 %
= 0, if T > 15 %
1000
=
256
Este parâmetro define os limites para a saída do estabilizador de tensão. O valor máximo
e mínimo para o termo de correção em FreqScale.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

84 • VACON APFIFF33 NXP LIFT
P2.5.12.1 a
P2.5.12.15 Flux 10…150% (Fluxo de 10 a 150%) ID1355 – ID1369
P2.5.12.16 Measured Rs voltage drop
(Queda de tensão medida em RS) ID662 "RsVoltageDrop"
P2.5.12.17 Ir: Add zero point voltage
(Adicionar tensão de ponto zero) ID664 "IrAddZeroPVoltag"
P2.5.12.18 Ir: Add generator scale (Adicionar escala do gerador) ID665 "IrAddGeneScale"
P2.5.12.19 Ir: Add motoring scale (Adicionar escala do motor) ID667 "IrAddMotorScale"
P2.5.12.20 Measured Ls voltage drop
(Queda de tensão medida em Ls) ID673 "LsVoltageDrop"
P2.5.12.21 Motor BEM Voltage (Tensão do motor BEM) ID674 "Motor BEM Voltage"
P2.5.12.22 IU Offset (Compensação de lu) ID668 "IU Offset"
P2.5.12.23 IV Offset (Compensação de Iv) ID669 "IV Offset"
P2.5.12.24 IW Offset (Compensação de Iw) ID670 "IW Offset"
n
I
7.11.5 Configurações de identificação
Tensão do motor correspondente a 10% a 150% do fluxo como um percentual da tensão
do fluxo nominal. Medido durante a identificação.
A queda de tensão medida na resistência do estator entre duas fases com a corrente
nominal do motor. Este parâmetro é identificado durante a identificação do motor.
Este parâmetro define a resistência do estator do motor como uma queda de tensão
na corrente nominal. O valor do parâmetro é definido de acordo com a tensão nominal
do motor e a corrente e a resistência real do estator como
n
RsVoltageD
rop
2560=
R
s
U
Define quanta tensão é aplicada ao motor em velocidade zero quando impulso de torque
é usado.
Define o fator de escala para a compensação IR do lado do gerador quando o impulso
de torque é usado.
Define o fator de escala para a compensação de IR do lado do motor quando o impulso
de torque é usado.
Queda de tensão de indutância de vazamento com corrente nominal e frequência do
motor. Este parâmetro define a queda de tensão em Ls entre duas fases. Use a
identificação do motor para determinar a configuração ideal.
Tensão reversa induzida pelo motor
Compensa o valor da medição de corrente de fase. Identificado durante a identificação
do motor.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 85
1
Sinais de entrada
P2.6.1 Start/Stop Logic Selection
(Seleção de lógica de partida/parada) ID 300 "Start/stop logic"
0
1
DIN1
FWD
t
DIN2
REV
7.12
DIN1: contato fechado = partida para frente (borda em elevação é necessária)
DIN2:contato fechado = partida para trás (borda em elevação é necessária)
Figura 12. Partida para frente + Partida para trás
Se ambos os interruptores DIN estiverem ligados ao mesmo tempo, a falha é ativada.
Reset de falha.
O conversor de frequência pode ser reiniciado após o reset da falha e quando ambos
os interruptores DIN estiverem na posição OFF (desligada).
DIN1: contato fechado = partida contato aberto = parada
DIN2: contato fechado = para trás contato aberto = para frente
Figura 13. Partida, Parada, Reversão
8 DIN1: contato fechado = partida para frente
DIN2:contato fechado = partida para trás
Igual à seleção 0, exceto que o pulso de borda de elevação não é necessário.
A falha não é ativada se os dois interruptores DIN estiverem ligados.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

86 • VACON APFIFF33 NXP LIFT
P2.6.2.1 External Fault closing contact
(Contato de fechamento de falha externa) ID 1513 "Ext Fault Close"
P2.6.2.2 External Fault opening contact
(Contato de abertura de falha externa) ID 1514 "Ext Fault Open"
P2.6.2.3 Fault Reset (Reset de falha) ID 1515 "Fault Reset"
P2.6.2.4 Run Enable (Permitir funcionamento) ID 1516 "Run Enable"
P2.6.2.5 Acc/Dec time selection (Sel. tempo acel./desacel.) ID 1517 "Acc/Dec Time Sel"
P2.6.2.6 Stop by coast, closing contact
(Parada por inércia, contato de fechamento) ID 1518 "StopCoasting_cc"
P2.6.2.7 Stop by coast, opening contact
(Parada por inércia, contato de abertura) ID 1519 "StopCoasting_oc"
P2.6.2.8 Override Speed (Velocidade de substituição) ID 1520 "Override Speed"
P2.6.2.9 Forced I/O control (Controle de E/S forçado) ID 1521 "Force I/O cntr"
P2.6.2.10 Speed selection input 1
(Entrada de seleção de velocidade 1) ID 1510 "Speed Sel Input1"
P2.6.2.11 Speed selection input 2
(Entrada de seleção de velocidade 2) ID 1511 "Speed Sel Input2"
P2.6.2.12 Speed selection input 3
(Entrada de seleção de velocidade 3) ID 1512 "Speed Sel Input3
P2.6.2.13 PM motor angle identification repeat (Repetição de identificação
do ângulo do motor PM) ID 1934 "AngleIDRepeat"
P2.6.2.14 Delayed DIN1 (DIN atrasado 1) ID 1833 "DIN1 ON Delay"
P2.6.2.15 Delayed DIN2 (DIN atrasado 2) ID 1834 "DIN2 ON Delay"
7.12.1 Entradas digitais (M2 -> G2.6.7)
Todas as entradas digitais (exceto DIN1 e DIN2) são programáveis. Veja as instruções
na página 8.
Curva de velocidade a ser usada quando a entrada é ativada.
Os parâmetros 2.6.2.10-2.6.2.12 são entradas de seleção de referência de velocidade
(consulte também o parâmetro 2.2.2).
Repita a identificação do ângulo na partida, se solicitado com DIN.
Define o atraso de ativação para a entrada digital DIN1.
Define o atraso de ativação para a entrada digital DIN2.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 87
1
P2.6.3.1.1 AI1 signal selection (Seleção do sinal AI1) ID 377 "AI1 Signal Sel"
P2.6.3.2.1 AI2 signal selection (Seleção do sinal AI2) ID 388 "AI2 Signal Sel"
P2.6.3.1.2 Reference offset for analogue input1
(Compensação de referência para entrada analógica 1) ID 302 "AI1 Offset"
P2.6.3.2.2 Reference offset for analogue input2
(Compensação de referência para entrada analógica 2) ID 390 "AI2 Offset"
0
1
2
P2.6.3.1.3 AI1 Reference scaling, minimum value
(Escala de referência AI1, valor mínimo) ID 303 "AI1 RefScaleMin"
P2.6.3.2.3 AI2 Reference scaling, minimum value
(Escala de referência AI2, valor mínimo) ID 393 "AI2 RefScaleMin"
P2.6.3.1.4 AI1 Reference scaling, maximum value
(Escala de referência AI1, valor máximo) ID 304 "AI1 RefScaleMax"
P2.6.3.2.4 A2 Reference scaling, maximum value
(Escala de referência AI2, valor máximo) ID 394 "AI2 RefScaleMax"
7.12.2 Entradas analógicas 1 e 2
Conecte o sinal AI1/AI2 à entrada analógica da sua escolha com este parâmetro. Para
obter mais informações sobre o método de programação de TTF, consulte o capítulo 4.
Sem compensação
Compensação de 4 mA (“zero vivo”) fornece supervisão do sinal de nível zero. A
resposta à falha de referência pode ser programada com o
Faixa personalizada, é possível ajustar livremente o nível de entrada
correspondente às frequências mínima e máxima.
parâmetro 2.8.1.1.
Escala de referência adicional. A escala de referência da entrada analógica pode ser
definida para um valor diferente das frequências mínima e máxima. Se o valor
máximo = 0, a escala é desativada.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

88 • VACON APFIFF33 NXP LIFT
P2.6.3.1.5 AI1 Reference inversion (Inversão de referência de AI1) ID305 "AI1 RefInvert"
P2.6.3.2.5 AI2 Reference inversion (Inversão de referência de AI2) ID398 "AI2 RefInvert"
0
1
P2.6.3.1.6 AI1 Reference filter time (Tempo do filtro de referência AI1) ID 306 "AI1 RefFiltTime"
P2.6.3.2.6 AI2 Reference filter time (Tempo do filtro de referência AI2) ID 389 "AI2 RefFiltTime"
P2.6.3.1.7 AI1 custom minimum setting
(Configuração mínima personalizada AI1) ID 380 "AI1 Custom Min"
P2.6.3.2.7 AI2 custom minimum setting
(Configuração mínima personalizada AI2) ID 391 "AI2 Custom Min"
P2.6.3.1.8 AI1 custom maximum setting
(Configuração máxima personalizada AI1) ID 381 "AI1 Custom Max"
P2.6.3.2.8 A2 custom maximum setting
(Configuração máxima personalizada AI2) ID 392 "AI2 Custom Max"
Inverte o sinal de referência: Sinal máx. ref. = Freq. mín. def. Sinal mín. ref. = Freq. máx. def.
Sem inversão
Referência invertida
Filtra perturbações do sinal da entrada analógica. Longos tempos de filtragem tornam
a resposta de regulação mais lenta.
Estes parâmetros definem o sinal da entrada analógica para qualquer span de sinal
de entrada em -160 a 160%. Por exemplo, se a escala de entrada do sinal estiver
configurada para 40% a 80%, a referência pode ser alterada de 8 mA (para Frequência
Mínima) para 16 mA (para Frequência Máxima).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 89
1
Sinais de saída
P2.7.1.1 Analogue output function (Função de saída analógica) ID 307 "Iout Content"
P2.7.1.2 Analogue output filter time
(Tempo do filtro de saída analógica) ID 308 "Iout Filter Time"
P2.7.1.3 Analogue output inversion (Inversão de saída analógica) ID 309 "Iout Invert"
7.13
7.13.1.1 Saída analógica
Este parâmetro seleciona a função desejada para o sinal da saída analógica. Veja a
Tabela 6-9. Sinais de saída, G2. na página 32 para obter os valores dos parâmetros.
Define o tempo de filtragem do sinal da saída analógica.
Figura 14. Filtragem de saída analógica
Inverte o sinal da saída analógica:
Sinal de saídamáx. = Valor definido mín
Sinal de saída mín. = Valor definido máx
Figura 15. Inversão de saída analógica
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

90 • VACON APFIFF33 NXP LIFT
P2.7.1.4 Analogue output minimum (Saída analógica mínima) ID 310 "Iout Minimum"
0
1
P2.7.1.5 Analogue output scale (Escala de saída analógica) ID 311 "Iout Scale"
Sinal
Valor máx. do sinal
Freqüência de saída
Frequência nom. (par. 2.1.2)
Freq. Referência
Frequência nom. (par. 2.1.2)
Velocidade do motor
Vel. nom. motor 1xn
mMotor
Corrente de saída
Corrente nom. do motor 1x
InMotor
Torque do motor
Torque nom. do motor 1xT
nMotor
Potência do motor
Potência nom. do motor 1xP
nMotor
Tensão do motor
100% x U
nmotor
Tensão do
barramento CC
1000 V
Define o sinal mínimo para 0 mA ou 4 mA (zero vivo). Observe a diferença na escala da
saída analógica no parâmetro 2.7.1.5 (veja Figura 16).
Defina o valor mínimo como 0 mA
Defina o valor mínimo como 4 mA
Fator de escala para saída analógica.
Tabela 7-5. Escala de saída analógica
Figura 16. Escala de saída analógica
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 91
1
P2.7.2.1 Digital output 1 function (Função da saída digital 1) ID 312 "DO1 Function"
Valor da configuração
Conteúdo do sinal
A saída digital DO1 dissipa a corrente e o relé
O conversor de frequência está em funcionamento
(o motor está em operação)
Falha ou aviso dependendo do par. 2.8.1.1
for < 4 mA
A frequência predefinida foi selecionada com
entrada digital.
no menu M3
O torque do motor ultrapassa o limite baixo/limite
alto de supervisão definido.
Controle ON (ligado)/OFF (desligado) do freio
externo (veja o parâmetro G2.3).
Controle ON (ligado)/OFF (desligado) do freio externo
do freio está OFF (desligado).
7.13.1.2 Saídas digitais
0 = Não usado Fora de operação
1 = Pronto O conversor de frequência está pronto para operar
2 = Executar
3 = Falha Ocorreu um acionamento de falha
4 = Falha inversa Não ocorreu um acionamento de falha
5 = Superaquecimento do VACON® A temperatura do dissipador de calor excede +70 °C
6 = Falha ou aviso externo Falha ou aviso dependendo do par. 2.8.1.3
7 = Falha ou aviso de referencia
8 = Aviso Sempre se um aviso existir
9 = Revertido O comando de reversão foi selecionado
10 = Velocidade predefinida
11 = Na velocidade A frequência de saída alcançou a referência definida
12 = Regulador do motor ativado O regulador de sobretensão ou sobrecorrente foi ativado
13 = Supervisão de frequência de saída A frequência de saída fica fora do limite baixo/limite alto
14 = Controle dos terminais de E/S
15 = Falha/aviso térmico Falha/aviso térmico ativo
programável (RO1, RO2) é ativado quando:
- se a referência analógica for de 4 a 20 mA e o sinal
Modo de controle de E/S selecionado (
)
16 = Fieldbus DIN1
17 = Limite inferior de velocidade A velocidade do elevador fica abaixo do limite
18 = Supervisão de limite de torque
19 = Controle de freio mecânico
20 = Controle do freio mecânico
invertido
21 = Controle do contator do motor Controle do contator do motor
22 = DTF inFloor Direto ao andar (Direct to Floor) InFloor
Tabela 7-6. Sinais de saída via DO1 e relés de saída RO1, RO2, ROE1 e ROE2
(veja o parâmetro G2.3). Saída ativa quando o controle
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

92 • VACON APFIFF33 NXP LIFT
P2.7.2.2 Digital output 1 function inverted
(Função da saída digital 1 invertida) ID 1530 "DO1 Inversion"
0
1
P2.7.2.3 Digital output 1 ON Delay
(Atraso de ligação da saída digital 1) ID 1531 "DO1 ON Delay"
P2.7.2.4 Digital output 1 OFF Delay
(Atraso de desligamento da saída digital 1) ID 1657 "DO1 OFF Delay"
P2.7.2.5 Relay output 1 function (Função de saída de relé 1) ID 313 "RO1 Function"
P2.7.2.6 Relay output 1 function inverted
(Função da saída de relé 1 invertida) ID 1532 "RO1 Inversion"
0
1
P2.7.2.7 Relay output 1 ON delay
(Atraso de ligação da saída a relé 1) ID 1533 "RO1 ON Delay"
P2.7.2.8 Relay output 1 OFF Delay
(Atraso de desligamento da saída a relé 1) ID 1658 "RO1 OFF Delay"
P2.7.2.9 Relay output 2 function (Função da saída de relé 2) ID 314 "RO2 Function"
P2.7.2.10 Relay output 2 function inverted
(Função da saída de relé 2 invertida) ID 1534 "RO2 Inversion"
0
1
= DO1 não invertido
= DO1 invertido
Atraso do temporizador On (ligado) para saída digital 1.
Atraso do temporizador OFF (desligado) para saída digital 1.
Consulte o parâmetro 2.7.2.1.
= RO1 não invertido
= RO1 Invertido
Atraso do temporizador On (ligado) para saída de relé 1.
Atraso do temporizador OFF (desligado) para saída digital 1.
Consulte o parâmetro 2.7.2.1.
= RO2 não invertido
= RO2 Invertido
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 93
1
P2.7.3.1 Speed supervision limit
(Limite de supervisão de torque) ID 1535 "SpeedSuperVLimit"
Error! Reference source not
found.
P2.7.3.2 Motoring torque supervision
(Supervisão de torque motorização) ID 1536 "MotorTorqSuperV"
P2.7.3.3 Generating torque supervision
(Supervisão de torque de geração) ID 1537 "GenerTorqSuperV"
P2.7.3.4 Output frequency limit supervision function
(Função de supervisão do limite de frequência de saída) ID 315 "Freq Supv Lim 1"
0
1
2
P2.7.3.5 Output frequency limit supervision value
(Valor supervisionado do limite de frequência de saída) ID 316 "Freq Supv Val1"
7.13.1.3 Limites de supervisão
A função de supervisão oferece a possibilidade de monitorar certos valores com a configuração de
limite. Quando o valor real excede ou vai abaixo do valor definido, uma mensagem através de uma
saída digital pode ser dada.
Se a velocidade do elevador estiver abaixo do limite de supervisão de velocidade, o sinal
de velocidade abaixo do limite é TRUE (Verdadeiro). Veja “
” para o sinal “Velocidade abaixo do limite”.
Limite de torque ao operar no modo de motor. Se o torque real do motor estiver acima
do limite de supervisão de torque do motor por um tempo definido (P2.8.4.7), o sinal de
“sobretorque” interno será ajustado. A resposta ao sinal pode ser dada por P2.8.4.6.
Limite de torque ao operar no modo de gerador. Se definido como 0,0%, este parâmetro
será ignorado e o limite será definido por P2.7.3.2.
Sem supervisão
Supervisão do limite inferior
Supervisão do limite superior
Se a frequência de saída for inferior/superior ao limite definido, esta função gera uma
mensagem de aviso através da saída digital DO1 e através da saída de relé RO1 ou RO2,
dependendo das configurações dos parâmetros 2.7.2.1, 2.7.2.5 e 2.7.2.9.
Selecione o valor de frequência supervisionado.
Figura 17. Supervisão de frequência de saída
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

94 • VACON APFIFF33 NXP LIFT
P2.7.4.1 Expansion relay output 1 selection
(Seleção de saída de relé de expansão 1) ID 1680 "ROE1 Selection"
P2.7.4.2 Expansion relay output 1 function
(Função de saída de relé de expansão 1) ID 1681 "ROE1 Function"
P2.7.4.3 Expansion relay output 1 inversion
(Inversão de saída de relé de expansão 1) ID 1682 "ROE1 Inversion"
P2.7.4.4 Expansion relay output 2 selection
(Seleção de saída de relé de expansão 2) ID 1683 "ROE2 Selection"
P5.7.4.5 Expansion relay output 2 function
(Função de saída de relé de expansão 2) ID 1684 "ROE2 Function"
P2.7.4.6 Expansion relay output 2 inversion
(Inversão de saída de relé de expansão 2) ID 1685 "ROE2 Inversion"
7.13.1.4 Relés de expansão
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 95
1
Proteções
Parâmetros de falhas de E/S (M2 -> G2.8.1)
P2.8.1.1 Response to the reference fault
(Resposta à falha de referência) ID 700 "4mA Input Fault"
0
1
2
3
4
5
P2.8.1.2 4 mA Fault: preset frequency reference
(Falha de 4 mA: referência de frequência predefinida) ID 728 "4mA Fault Freq"
P2.8.1.3 Response to external fault (Resposta da falha externa) ID 701 "External Fault"
0
1
2
3
Parâmetros de falhas gerais (M2 -> G2.8.2)
P2.8.2.1 Input phase supervision
(Supervisão de fases de entrada) ID 730 "Input Phase Supv"
0
1
2
3
P2.8.2.2 Response to undervoltage fault
(Resposta a falha de subtensão) ID 727 "UVolt Fault Resp"
1
2
3
7.14
= Sem resposta
= Aviso
= Aviso, a frequência de 10 segundos para trás é definida como referência
= Aviso, a frequência predefinida (Par. 2.8.1.2) é definida como referência
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
Um aviso ou ação de falha e mensagem é gerado se o sinal de referência de 4 a 20 mA
for usado e o sinal cair abaixo de 3,5 mA por 5 segundos ou abaixo de 0,5 mA por 0,5
segundo. A informação também pode ser programada na saída digital DO1 ou nas saídas
de relé RO1 e RO2.
Se o valor do parâmetro 2.8.1.1 for definido como 3 e a falha de 4 mA ocorrer, a
referência de frequência para o motor será o valor deste parâmetro.
= Sem resposta
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
Uma ação e uma mensagem de aviso ou falha serão geradas do sinal de falha externa
nas entradas digitais programáveis (consulte o parâmetro 2.6.2.1). As informações
também podem ser programadas na saída digital DO1 e nas saídas de relé RO1 e RO2.
= Sem resposta
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
A supervisão de fase de entrada garante que as fases de entrada do conversor
de frequência tenham uma corrente aproximadamente igual.
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
Para limites de subtensão, consulte o Manual do Usuário do VACON® NXS/P.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

96 • VACON APFIFF33 NXP LIFT
P2.8.2.3 Output phase supervision (Supervisão de fase de saída) ID 702 "OutputPh. Superv"
0
1
2
3
P2.8.2.4 Earth fault protection (Proteção contra falha de terra) ID 703 "Earth Fault"
0
1
2
3
P2.8.2.5 Response to fieldbus fault (Resposta a falha de fieldbus) ID 733 "FBComm FaultResp"
0
1
2
3
P2.8.2.6 Response to slot fault (Resposta a falha de slot) ID 734 'SlotComFaultResp"
0
1
2
3
P2.8.2.7 System overload limit
(Limite de sobrecarga do sistema) ID 1850 "SystemOverloadLim"
P2.8.2.8 Output phase fault delay
(Atraso da falha na fase de saída) ID 1821 "OutPhFaultDelay"
P2.8.2.9 Output phase current limit
(Limite de corrente da fase de saída) ID 1822 "OutPhFaultCurLim"
= Sem resposta
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
A supervisão de fase de saída do motor garante que as fases do motor tenham uma
corrente aproximadamente igual.
= Sem resposta
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
A proteção contra falha de terra garante que a soma das correntes de fase do motor
seja zero. A proteção contra sobrecorrente sempre funciona e protege o conversor
de frequência contra falhas de terra com altas correntes.
= Sem resposta
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
Defina aqui o modo de resposta para a falha do fieldbus se uma placa fieldbus for usada.
Para obter mais informações, consulte o respectivo Manual da Placa de Fieldbus.
= Sem resposta
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2.
= Falha, modo de parada após falha sempre por parada por inércia
Defina aqui o modo de resposta para uma falha de slot de placa devido à placa ausente
ou com defeito.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

VACON • 97
1
Parâmetros de falhas do motor (M2 -> G2.8.3)
for
P2.8.3.1 Motor thermal protection
(MTP) (Proteção térmica do motor (MTP)) ID 704 "Motor Therm Prot"
0
1
2
3
P2.8.3.2 Motor ambient temperature factor
(Fator de temperatura ambiente do motor) ID 705 "MotAmbTempFactor"
P2.8.3.3 MTP Zero frequency current
(Corrente de frequência zero MTP) ID 706 "MTP f0 Current"
!
Parâmetros 2.8.3.1—2.8.3.5, Proteção térmica do motor:
Geral
A proteção térmica do motor deve proteger o motor contra o superaquecimento. O conversor
de frequência VACON
carga exigir essa alta corrente há um risco de que o motor seja sobrecarregado termicamente. Esse
é o caso, especialmente em baixas frequências. Em baixas frequências, o efeito de arrefecimento
do motor é reduzido, bem como sua capacidade. Se o motor for equipado com um ventilador
externo, a redução de carga em velocidades baixas é menor.
A proteção térmica do motor é baseada em um modelo calculado e usa a corrente de saída do
conversor para determinar a carga do motor.
®
é capaz de fornecer uma corrente maior que a nominal para o motor. Se a
A proteção térmica do motor pode ser ajustada com parâmetros. A corrente termal I
a corrente de carga acima, que sobrecarrega o motor. Esse limite de corrente é uma função
da frequência de saída.
O estágio térmico do motor pode ser monitorado na tela do painel de controle. Consulte o Manual
do Usuário do VACON
CUIDADO!
®
NXS/P.
O modelo calculado não protegerá o motor se o fluxo de ar até o motor
reduzido por uma grade de entrada de ar bloqueada.
especifica que
T
= Sem resposta
= Aviso
= Falha, modo de parada após falha de acordo com parâmetro 2.4.2
= Falha, modo de parada após falha sempre por parada por inércia
Se o desarme estiver selecionado, o conversor de frequência parará e ativará o estágio
de falha.
Desativar a proteção, isto é, definir o parâmetro como 0, redefinirá o estágio térmico
do motor como 0%.
O fator pode ser definido entre -100,0% a 100,0%.
A corrente pode ser definida entre 0 e 150,0% x I
da corrente térmica na frequência zero. Consulte Figura 18.
O valor padrão é definido assumindo que não há ventilador externo refrigerando o motor.
Se um ventilador externo for usado, esse parâmetro pode ser definido como 90% (ou até
mesmo mais).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
. Este parâmetro define o valor
nMotor

98 • VACON APFIFF33 NXP LIFT
Nota: O valor é definido como uma porcentagem dos dados da placa de identificação do
motor,
parâmetro 2.1.4 (Corrente nominal do motor), não a corrente de saída nominal
do conversor de frequência. A corrente nominal do motor é a corrente que o motor pode
suportar em uso direto on-line sem sofrer superaquecimento.
Se você alterar o parâmetro Corrente
nominal do motor, este parâmetro será
automaticamente restaurado para seu
valor padrão.
A configuração deste parâmetro não
afeta a corrente de saída máxima do
conversor determinada pelo
parâmetro 2.1.6 somente (limite de
corrente).
Figura 18. Curva IT da corrente térmica do motor
P2.8.3.4 MTP Time constant (Constante de tempo MTP) ID 707 "MTP Motor T"
Esse tempo pode ser definido entre 1 e 200 minutos.
Esta é a constante de tempo térmica do motor. Quanto maior o motor, maior a constante
de tempo. A constante de tempo é o intervalo tempo dentro do qual o estágio térmico
calculado atinge 63% de seu valor final.
O tempo térmico do motor é especifico ao projeto do motor, e varia entre os diferentes
fabricantes de motores.
Se o tempo t6 do motor (t6 é o tempo em segundos em que o motor pode operar com
segurança com seis vezes a corrente nominal) for conhecido (fornecido pelo fabricante
do motor), o parâmetro da constante de tempo poderá ser definido com base nele. Como
regra geral, a constante de tempo térmica do motor, em minutos, equivale a 2xt6. Se
oconversor estiver no estágio de parada, a constante de tempo é aumentada
internamente para três vezes o valor definido do parâmetro. A refrigeração no estágio
de parada é baseada em convecção, e a constante de tempo é aumentada.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
 Loading...
Loading...