

Page 1
vacon nx
frequenzumrichter
optc6
CANopen-optionskarte
betriebsanleitung
Page 2

INHALTSVERZEICHNIS Dokumentcode: DPD01443A
Datum: 28.02.2014
1. ALLGEMEINES.............................................................................................................................. 3
2. TECHNISCHE DATEN DER CANOPEN-OPTIONSKARTE.............................................................. 4
2.1 Allgemeines................................................................................................................................. 4
2.2 CANopen-Kabel........................................................................................................................... 4
3. CANopen....................................................................................................................................... 5
4. AUFBAU UND ANSCHLÜSSE DER CANOPEN-OPTIONSKARTE.................................................. 6
4.1 CANopen-Optionskarte...............................................................................................................6
4.2 Busabschlusswiderstände..........................................................................................................6
4.3 LED-Anzeigen.............................................................................................................................. 7
4.4 Anschluss des CANopen-Buskabels.......................................................................................... 8
5. EINBAU DER CANOPEN-OPTIONSKARTE FÜR DEN VACON NX............................................... 13
5.1 Aufkleber mit Angaben zur Karte.............................................................................................15
6. INBETRIEBNAHME..................................................................................................................... 16
7. SCHNITTSTELLE ZWISCHEN CANOPEN UND DEM VACON NX ................................................ 19
7.1 CANopen Nachrichtentelegramm (Message Frame) ..............................................................19
7.2 Netzwerkmanagement (NMT) .................................................................................................. 21
7.3 Prozessdatenobjekte (PDO) ...................................................................................................... 22
7.4 Übertragungsarten ...................................................................................................................23
7.5 Den Frequenzumrichter über PDO-Nachrichten mit Umrichterprofil regeln........................ 24
7.6 Herstellerspezifische Prozessdatenobjekte (PDO) mit ByPass-Betriebsarten verwenden .. 27
7.7 Überwachung des Umrichters.................................................................................................. 29
7.8 Allparameterdienst (Anyparameter Service) ........................................................................... 30
8. Sevicedatenobjekte (SDO) .......................................................................................................... 31
9. Das Node-Guarding
-Protokoll ................................................................................................... 41
10. Elektronisches Datenblatt, EDS-Datei....................................................................................... 42
11. ANHÄNGE................................................................................................................................... 43
Anhang A: Geräteprofile für Umrichter .................................................................................................... 43
Anhang B: SDO-Nachrichten ....................................................................................................................44
Anhang C: Prozessdateninhalte................................................................................................................ 45
Anhang D: .................................................................................................................................................. 46
Tel.+358 (0)201 2121 • Fax +358 (0)201 212 205
Page 3
Allgemeines Vacon • 3
1. ALLGEMEINES
NX-Frequenzumrichter von Vacon können mit Hilfe einer Feldbuskarte mit dem CANopen-System
verbunden werden. Anschließend kann der Umrichter vom Zentralrechner aus gesteuert, überwacht
und programmiert werden.
Die CANopen-Feldbuskarte muss in Steckplatz E der Steuerkarte des Frequenzumrichters gesteckt
werden.
Interne Baugruppen und Platinen stehen unter hoher Spannung, wenn der
Frequenzumrichter an die Stromquelle angeschlossen ist. Diese Spannung ist
extrem gefährlich und kann schwere Verletzungen oder sogar Verletzungen mit
Todesfolge verursachen, wenn Personen mit spannungsführenden Teilen in
GEFAHR
HINWEIS: Bei Problemen mit Feldbusfunktionen wenden Sie sich bitte an Fieldbus@vacon.com.
Berührung kommen.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
1
Page 4
4• Vacon CANopen
2. TECHNISCHE DATEN DER CANOPEN-OPTIONSKARTE
2.1 Allgemeines
CANopenAnschlüsse
Kommunikation
Umgebungsbedingungen
Sicherheit Erfüllt die Anforderungen der Norm EN50178
Schnittstelle
Datenübertragungs
verfahren
Übertragungskabel Zweiadriges, geschirmtes Twisted-Pair-Kabel
Galvanische
Trennung
Baudrate 10 kBaud
Adressen 1 – 127
Die Spezifikationen des Frequenzumrichters müssen
Open Style Connector (Stecker, 5,08 mm)
CAN (ISO 11898)
500 VDC
CiA DS-301 CANopen
CiA DSP-402
20 kBaud
50 kBaud
100 kBaud
125 kBaud
250 kBaud
500 kBaud
1000 kBaud
beachtet werden.
Tabelle 2-1. Technische Daten der CANopen-Optionskarte
2.2 CANopen-Kabel
Gemäß der Norm ISO 1
sowie einen spezifische Nennlaufzeit von 5 ns/m aufweisen. Der Leitungsabschluss muss über
Abschlusswiderstände mit 120 an beiden Enden erfolgen. Der Leitungswiderstand sollte 70 m/m
betragen. Alle genannten Wechsel- und Gleichspannungsparameter sind für eine
Übertragungsgeschwindigkeit von 1 Mbit/s konzipiert.
Die folgende Tabelle zeigt mögliche Buslängen für CANopen-Netzwerke mit weniger als 64
Busteilnehmern:
Baudrate [Kb
1000 30
800 50
500 100
250 250
125 500
50 1000
20 2500
1898 müssen die Kabel der CAN-Busleitungen eine Nennimpedanz von 120
it/s] Max. Buslänge [m]
3
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 5

CANopen-Optionskarte Vacon • 5
3. CANOPEN
CANopen ist ein Netzwerksystem, das auf dem seriellen Bussystem Controller Area Network (CAN)
basiert. Das Kommunikationsprofil CANopen (CiA DS-301) unterstützt den direkten Zugriff auf
Geräteparameter sowie auch die Kommunikation zeitkritischer Prozessdaten. CANopen-Geräteprofile (CiA DS-40x) definieren Standards für grundlegende Gerätefunktionen und lassen gleichzeitig
viel Freiraum für zusätzliche, herstellerspezifische Gerätemerkmale. CANopen bietet die volle
Leistungsfähigkeit von CAN, da es den direkten Datenaustausch zwischen Busteilnehmern gemäß
dem Peer-to-Peer-Prinzip basierend auf einem organisierten bzw. gegebenenfalls deterministischen
Verfahren unterstützt. Die im CANopen spezifizierten Netzwerkmanagementfunktionen stellen
Standardmechanismen für die Inbetriebnahme von Netzwerken sowie für den Umgang mit Fehlern
zur Verfügung. Auf diese Weise vereinfachen sie die Konzeption von Projekten, deren Umsetzung
sowie Diagnosen.
CANopen unterstützt sowohl die zyklische als auch die ereignisgesteuerte Kommunikation. Auf diese
Weise senkt dieses Kommunikationsprotokoll die Buslast auf ein Mindestmaß und sorgt gleichzeitig
für besonders kurze Reaktionszeiten. Somit kann eine hohe Kommunikationsleistung bei relativ
geringen Baudraten erzielt werden. Probleme im Hinblick auf die elektromagnetische Verträglichkeit
(EMV) können weitgehend vermieden, und Kabelkosten entsprechend gesenkt werden.
CANopen ist das ideale Netzwerk für alle Arten von Automatisierungstechnik. CANopen unterscheidet
sich von anderen Kommunikationsprotokollen unter anderem dadurch, dass es den Datenaustausch
auf der Fernwirkebene unterstützt und die Einbindung besonders kleiner Sensoren und Befehlsgeräte
im selben physikalischen Netzwerk ermöglicht. Unnötige Kosten für Gateways zur Verbindung von
Sensor-/Befehlsgerät-Bussystemen mit übergeordneten Kommunikationsnetzwerken können
somit vermieden werden. Aus diesem Grund ist CANopen für Originalgerätehersteller (OEM)
besonders attraktiv.
Das Dokument „Geräteprofil für die Umrichter- und Bewegungssteuerung” (Device Profile Drives and
Motion Control, CiA DSP-402)
Motion-Produkte wie zum Beispiel Servoregler, Frequenzumrichter oder Schrittmotoren. Alle genannten
Geräte verwenden Kommunikationstechniken, welche die Anforderungen der CANopen-Applikationsschicht und des CANopen-Kommunikationsprofils erfüllen. Die State Machine startet und stoppt den
Umrichter und führt einige betriebsartspezifische Befehle aus. Die Betriebsart bestimmt das Verhalten
des Umrichters. Folgende Betriebsarten werden in diesem Profil definiert:
Referenzpunktfahren (Homing)
Profilposition (Profile Position)
Interpolierte Position (Interpolated Position)
Profil Geschwindigkeit (Profile Velocity)
Profil Drehmoment (Profile Torque)
Geschwindigkeit (Velocity)
Die CANopen-Optionskarte von Vacon unterstützt die Betriebsart „Geschwindigkeit“
definiert das standardisierte CANopen-Geräteprofil für digital gesteuerte
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
Page 6
6• Vacon Installation
4. AUFBAU UND ANSCHLÜSSE DER CANOPEN-OPTIONSKARTE
Die CANopen-Optionskarte von Vacon ist über eine 5-polige
Feldbus verbunden.
Die Kommunikation mit der Steuerkarte des Frequenzumrichters erfolgt über den standardmäßigen
Kartenverbindungsstecker (Interface Board Connector) von Vacon.
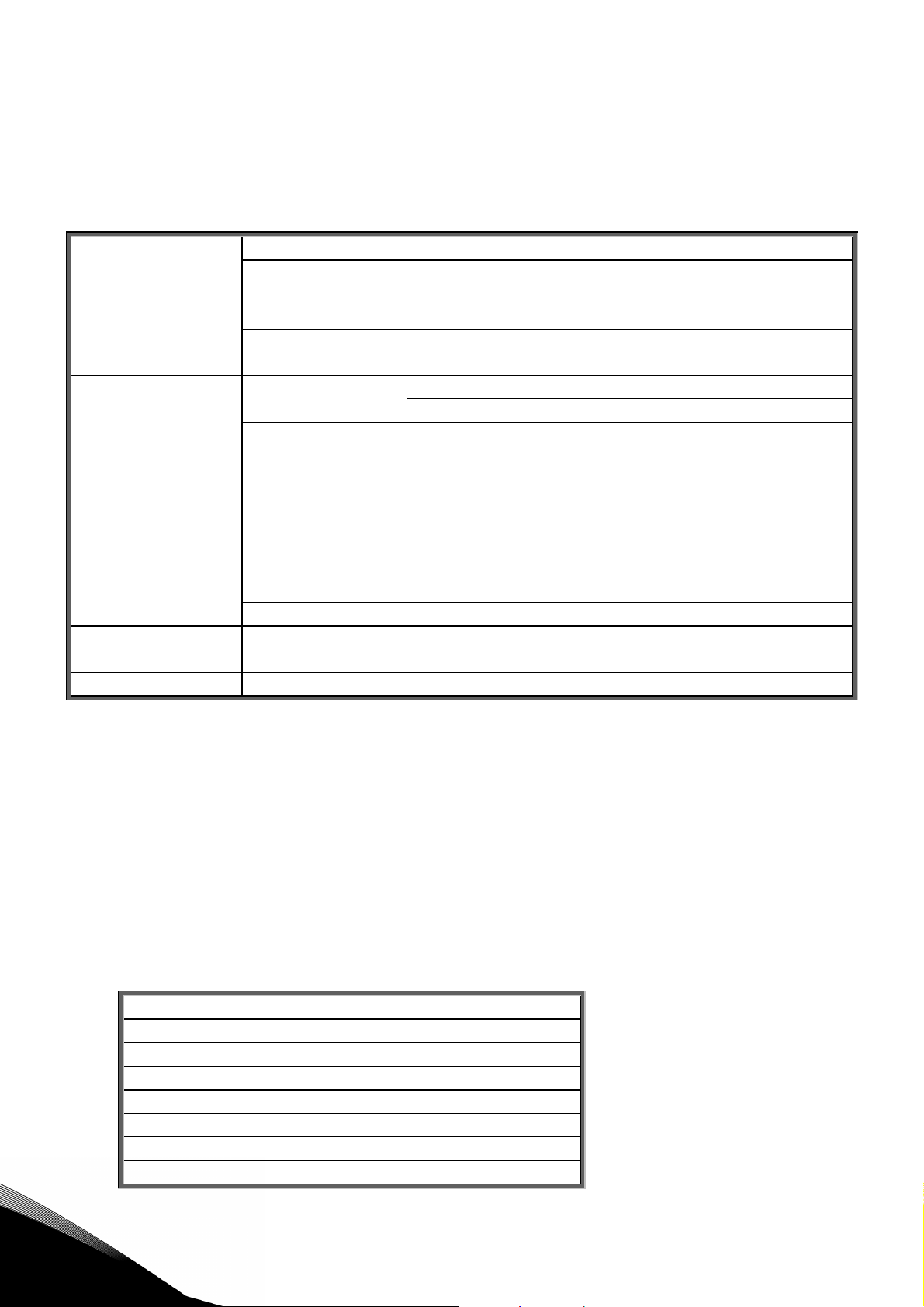
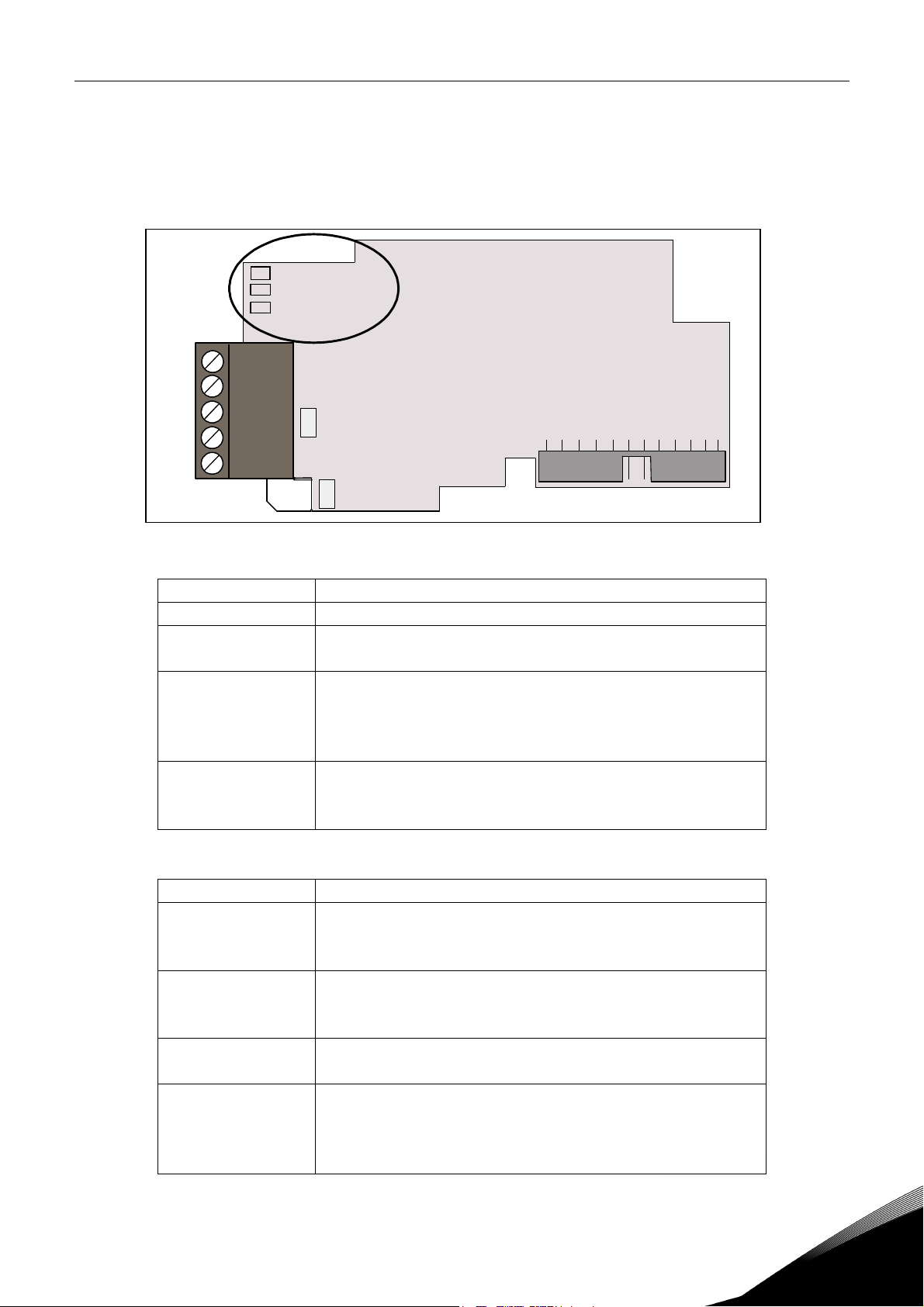
4.1 CANopen-Optionskarte
A
M
Klemmleiste (NXOPTC6-Karte) mit dem
1
2
3
4
X6
5
X1
Busstecker
Masseverbindung
Bild 4-1. Die CANopen-Optionskarte OPT-C6 von Vacon
Signal Stecker Beschreibung
CAN_GND 1 Erdung / 0V / VCAN_L 2 CAN_L Busleitung (dominant Low)
(CAN_SHLD) 3 Optionale CAN-Abschirmung
CAN_H 4 CAN_H Busleitung (dominant High)
(CAN_V+) 5 -
Tabelle 4-1.OPT-C6 – Signale des Busanschlusses
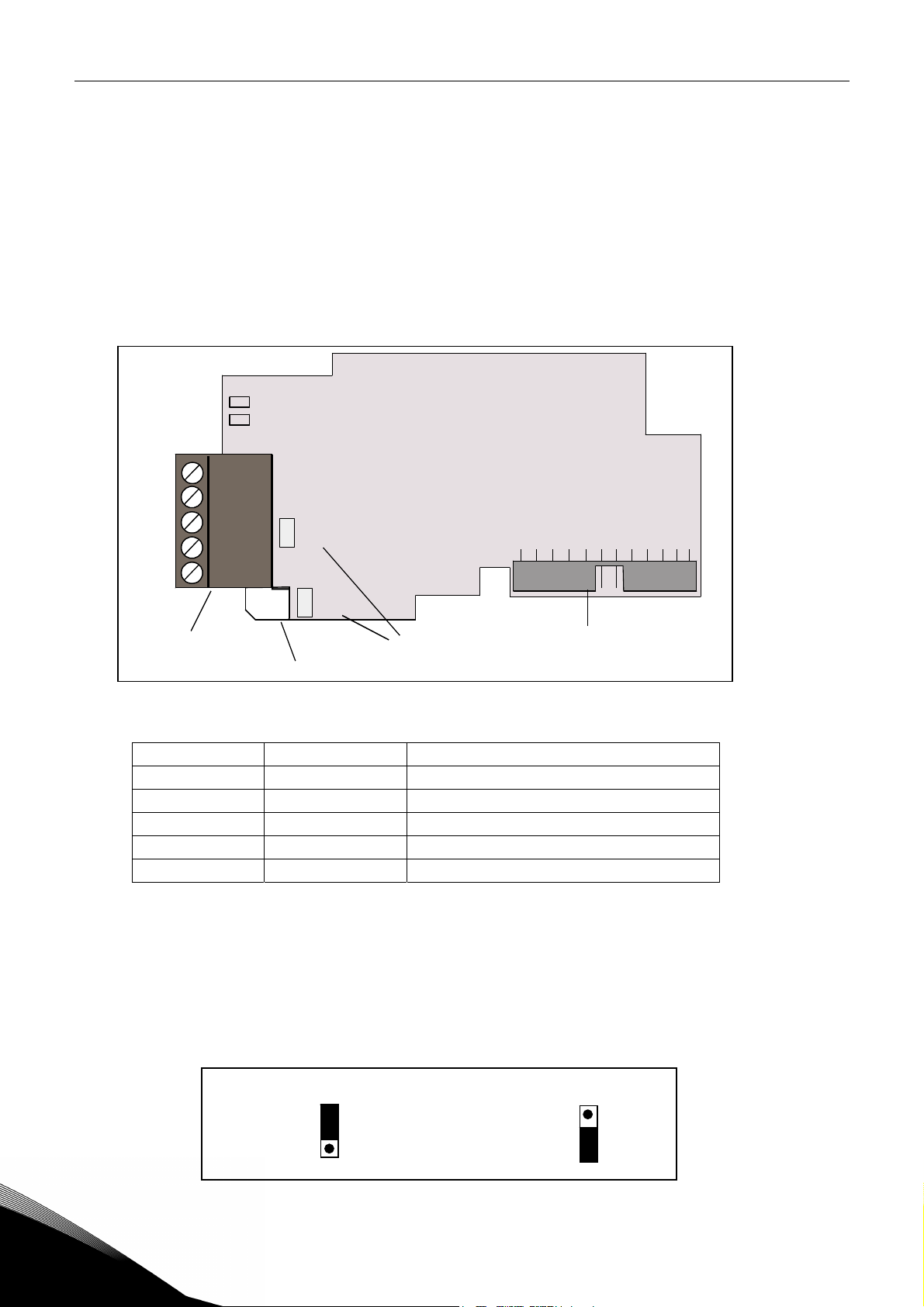
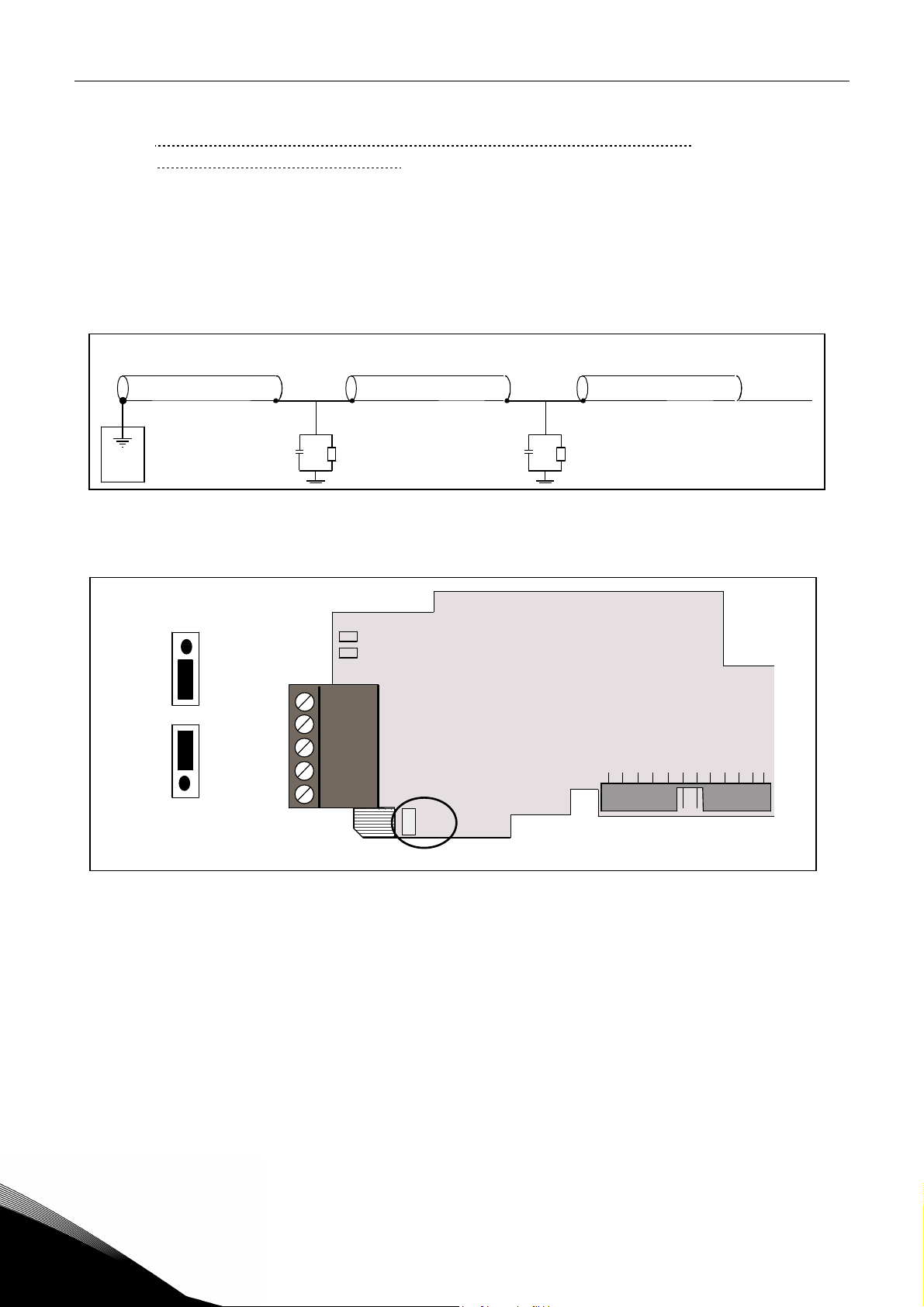
4.2 Busabschlusswiderstände
Wenn der Frequenzumrichter von Vacon das letzte Gerät an der CANopen-Leitung is
Busabschlusswiderstand eingebaut werden. Verwenden Sie die Steckbrücke X6 (Position EIN, siehe
Bild 4-1) oder einen externen Widerstand (120) an den Klemmen 2 und 4.
E
IN AUS
Steckbrücken
Kartenverbindungsstecker
t, muss ein
5
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 7
Installation Vacon • 7
4.3 LED-Anzeigen
Zur CANopen-Optionskarte gehören auch zwei LED-Statusanzeigen, die sich neben den
Anschlussklemmen befinden: Feldbuszustand (M), CANopen(A). LED N wird nicht verwendet.
N Nicht verwendet
A Grün
M Grün
1
2
3
4
X6
5
X1
Bild 4-2. LED-Anzeigen auf der CANopen-Karte
LED-Statusanzeige der CANopen-Karte (A) GRÜN
Die LED ist: Bedeutung:
AUS Optionskarte nicht aktiviert.
EIN Optionskarte im Initialisierungszustand – wartet auf
Aktivierungsbefehl vom Frequenzumrichter.
Schnell blinkend
(1 Aufleuchten / s)
Langsam blinkend
(1 Aufleuchten / 5s)
LED-Statusanzeige des Feldbusses (M) GRÜN
Die LED ist:
AUS Das Feldbusmodul wartet auf Parameter vom
EIN Das Feldbusmodul ist aktiviert.
Schnell blinkend
(1 Aufleuchten / s)
Langsam blinkend
(1 Aufleuchten/ 5s)
Die Optionskarte ist aktiviert und befindet sich im
Zustand BETRIEB (RUN).
Die Optionskarte ist für die Kommunikation mit externen
Partnern bereit.
Die Optionskarte ist aktiviert und befindet sich im
Fehlerzustand (FAULT).
Interner Fehler der Optionskarte.
Bedeutung:
Frequenzumrichter.
Keine Kommunikation mit externen Partnern.
Parameter erhalten und Modul aktiviert.
Das Modul wartet auf Nachrichten vom Bus.
Das Modul ist aktiviert und empfängt Nachrichten vom
Bus.
Das Modul befindet sich im Fehlerzustand (FAULT).
Keine Nachrichten vom Master innerhalb der Watchdog-
Zeit.
Bus defekt, Kabel lose oder Master offline.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
5
Page 8
8• Vacon Installation
4.4 Anschluss des CANopen-Buskabels
Drei verschiedene Verfahren sind möglich, um den Buskabelschirm an die Masse anzuschließen:
a) Das Kabel
wird an das Gehäuse des Frequenzumrichters geklemmt.
b) Das Kabel wird über einen RC-Filter an das Gehäuse des Frequenzumrichters geklemmt.
c) Das Kabel wird direkt an das Umrichtergehäuse geklemmt.
Hinweis: In der Regel ist die Optionskarte bereits in Steckplatz E der Steuerkarte gesteckt. Die Karte
muss nicht vollständig entfernt werden, damit der Buskabelschirm an die Masse angeschlossen
werden kann. Entfernen Sie einfach den Klemmenblock.
4.4.1
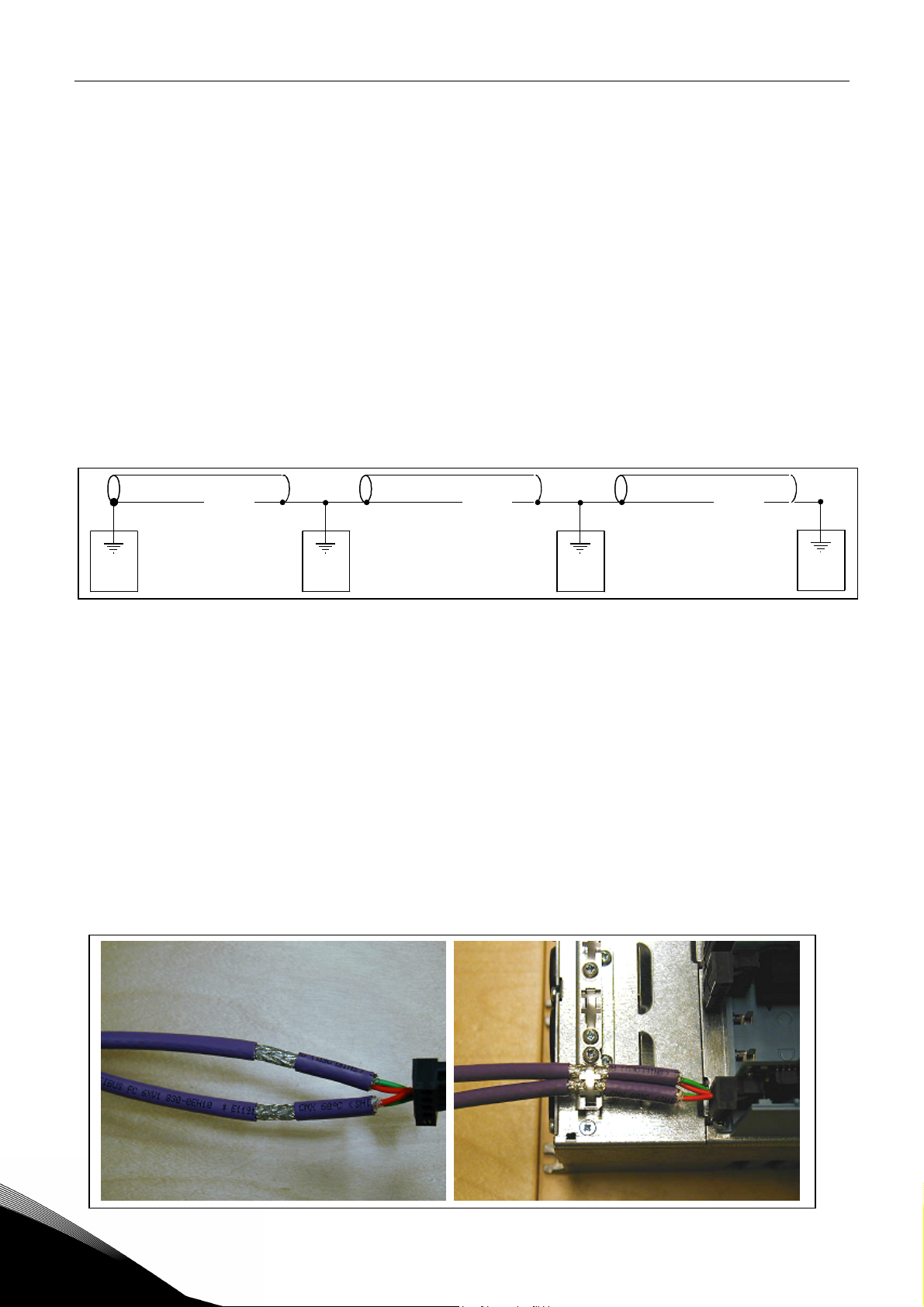
Masseanschluss durch Anklemmen des Kabels an das Umrichtergehäuse
Dieser Masseanschluss ist am effektivsten und wird bei relativ kurzen Entfernungen zwischen
Geräten besonders empfohlen (siehe 4.4.2.1).
Bei diesem
Verfahren ist die Position der Steckbrücke X1 nicht relevant.
CANopen-Kabel CANopen-Kabel CANopen-Kabel
Bild 4-3. Masseanschluss durch Anklemmen des Kabels an das Umrichtergehäuse
1 Isolieren Sie etwa 5 cm des CANopen-Kabels ab wie in Bild 4-4 gezeigt. Der Kabelschirm muss
jedoch abgeschnitten werden.
Dies muss bei beiden Buskabeln (mit Ausnahme des Kabels für das letzte Gerät) durchgeführt werden.
2 Es darf maximal 1 cm der Datenleitung außerhalb des Klemmenblocks verbleiben. Bei den
Datenleitungen müssen etwa 0,5 cm abisoliert werden, damit sie in die Klemmen gesteckt
werden können. Siehe Bilder 4-5 und 4-6.
Hinweis: Dieser Arbeitsschritt muss für beide Buskabel durchgeführt werden.
3 Stecken Sie die Datenleitungen beider CANopen-Kabel in die Klemmen #2 und #4. Siehe Bild 4-7.
4 Isolieren Sie das Kabel soweit ab, dass Sie es mit der Erdungsklemme am Gehäuse befestigen
können. Siehe Bild 4-4.
Bild 4-4.
5
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 9
Installation Vacon • 9
4.4.2
Die Schirmung des Buskabels mit Hilfe von Steckbrücke X1 direkt an das
Umrichtergehäuse anschließen
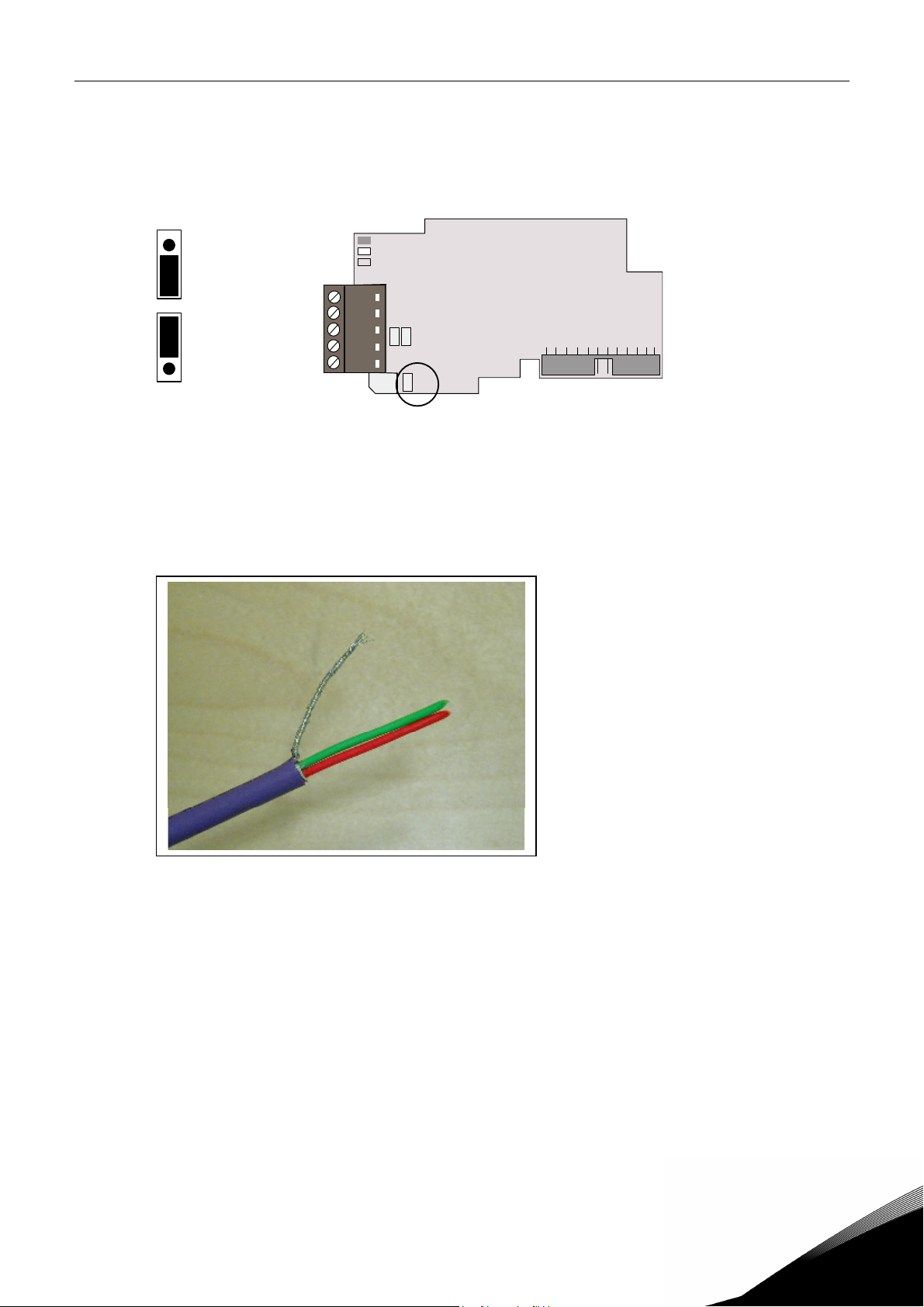
1 Bringen Sie die Steckbrücke X1 in die Position EIN (ON):
ON
OFF
X1
Bild 4-5. Positionen der Steckbrücke X1
2 Isolieren Sie 5 cm des CANopen-Kabels ab wie in der Abbildung gezeigt.
Hinweis: Dieser Arbeitsschritt muss für beide Buskabel (mit Ausnahme des Kabels für das
letzte Gerät) durchgeführt werden. Da der Masseanschluss jedoch nur an einem Kabel
erfolgen soll, schneiden Sie den freiliegenden Teil des anderen Massekabels ab.
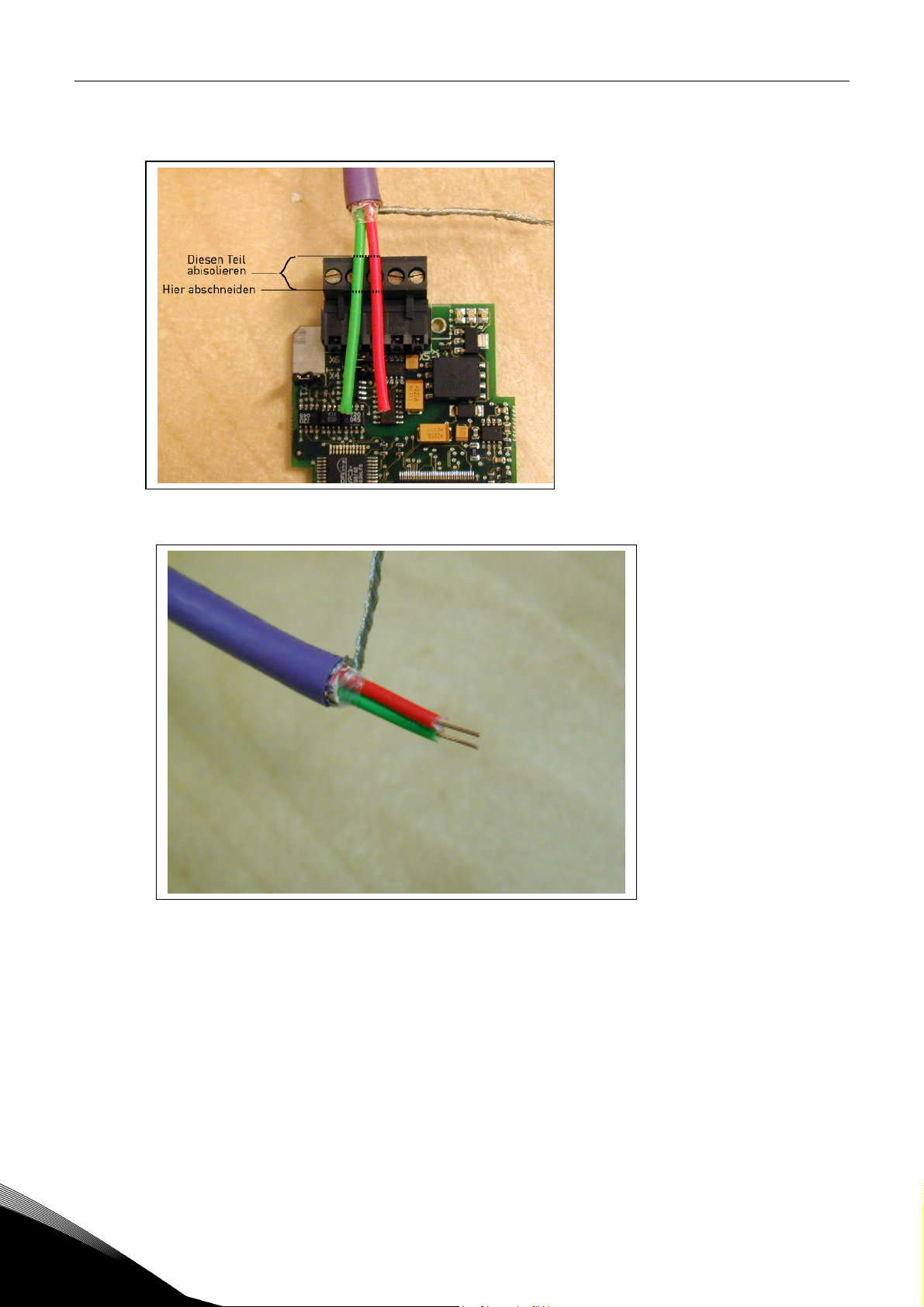
Bild 4-6.
3 Es darf maximal 1 cm der roten und grünen Datenleitung außerhalb des Klemmenblocks
verbleiben. Bei den Datenleitungen müssen etwa 0,5 cm abisoliert werden, damit sie in die
Klemmen gesteckt werden können. Siehe Abbildungen unten.
Hinweis: Dieser Arbeitsschritt muss für beide Buskabel durchgeführt werden.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
5
Page 10
10• Vacon Installation
Bild 4-7.
5
4-8.
Bild
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 11
Installation Vacon • 11
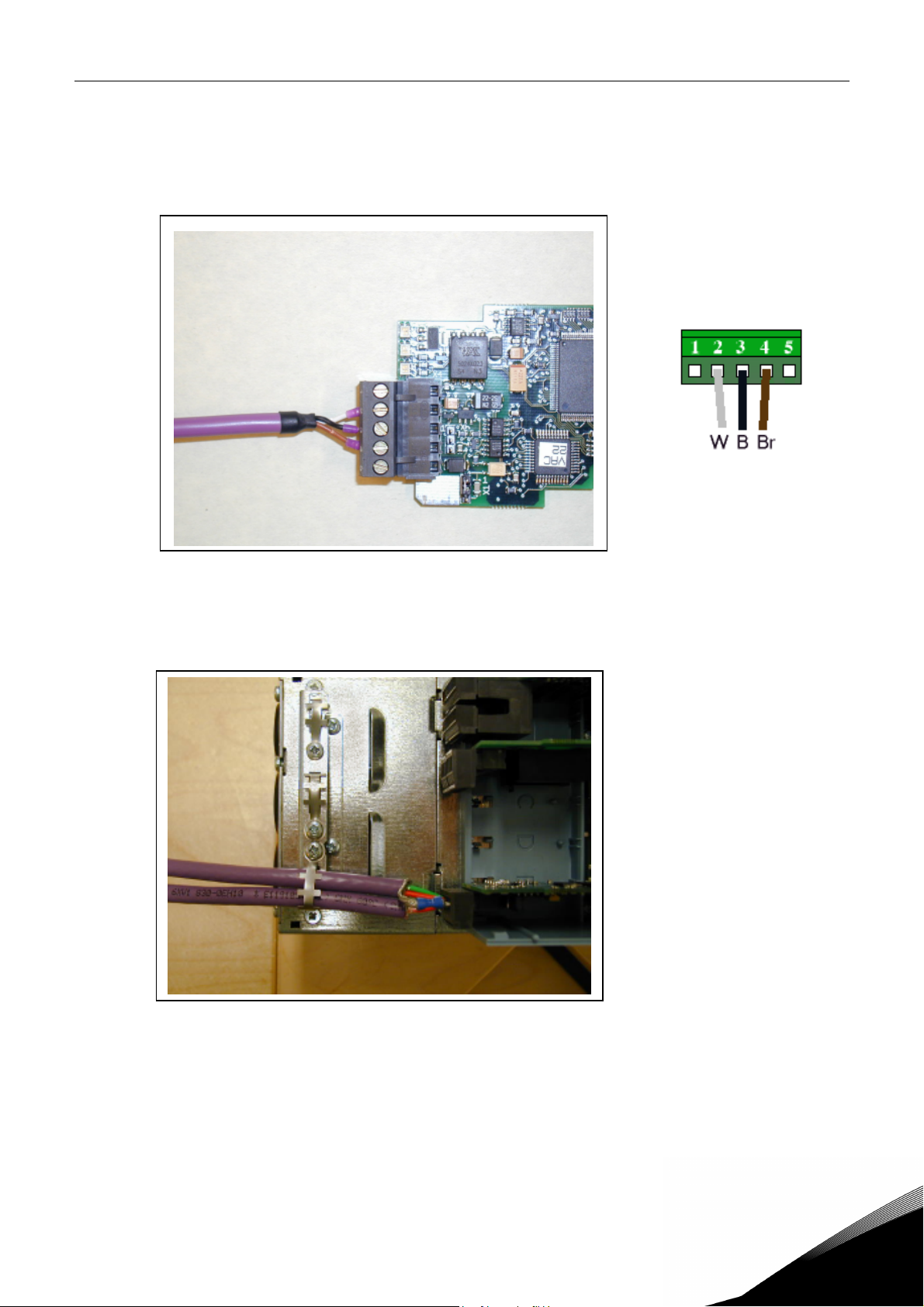
4 Wir empfehlen, Kabelschuhe von Abico zu verwenden, um das Erdungskabel in die
Erdungsklemme zu stecken (#3).
Führen Sie die weiße und die braune Datenleitung der beiden CANopen-Kabel in die
Klemmen #2 (weiß) und #4 (braun) ein.
Bild 4-9.
5 Stecken Sie die CANopen-Karte in Steckplatz E der Steuerkarte (siehe Hinweise zum Karten-
einbau auf Seite 13) und befestigen Sie die beiden CANopen-Kabel mit der Klemme am Gehäuse.
Bild 4-10.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
5
Page 12
12• Vacon Installation
4.4.2.1 Den Buskabelschirm mit Hilfe eines RC-Filters direkt an die Masse des
Umrichtergehäuses anschließen
Wir empfehlen dieses Verfahren für den Masseanschluss, wenn die Entfernung zwischen den Geräten
mehr als 50 Meter beträgt. Bei größeren Entfernungen zwischen den Geräten sind Störungen (wie zum
Beispiel Spannungsspitzen) wahrscheinlicher. Bei diesem Verfahren werden Störungen ausgefiltert.
Auch wenn die Bezugserden von A, B und C unterschiedlich sind (was z.B. während der Errichtung
bzw. des Einbaues vorkommt), fließt kein Strom zwischen ihnen, da die Punkte nicht an die Masse
angeschlossen sind.
AB C
CANopen-Kabel CANopen-Kabel CANopen-Kabel
Bild 4-11. Masseanschluss mit Hilfe eines RC-Filters
1 Bringen Sie die Steckbrücke X1 in die Position AUS (OFF):
A
M
ON
1
2
OFF
Bild 4-12. Positionen der Steckbrücke X1
2 Führen Sie den Masseanschluss wie in Kapitel 4.4.1 beschrieben durch.
3
4
5
X1
5
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 13
Installation Vacon • 13
EINBAU DER CANOPEN-OPTIONSKARTE FÜR DEN VACON NX
5.
VERGEWISSERN SIE SICH, DASS DER FREQUENZUMRICHTER
!
HINWEIS
A
AUSGESCHALTET IST, BEVOR EINE OPTIONS- ODER FELDBUSKARTE
AUSGETAUSCHT ODER HINZUGEFÜGT WIRD!
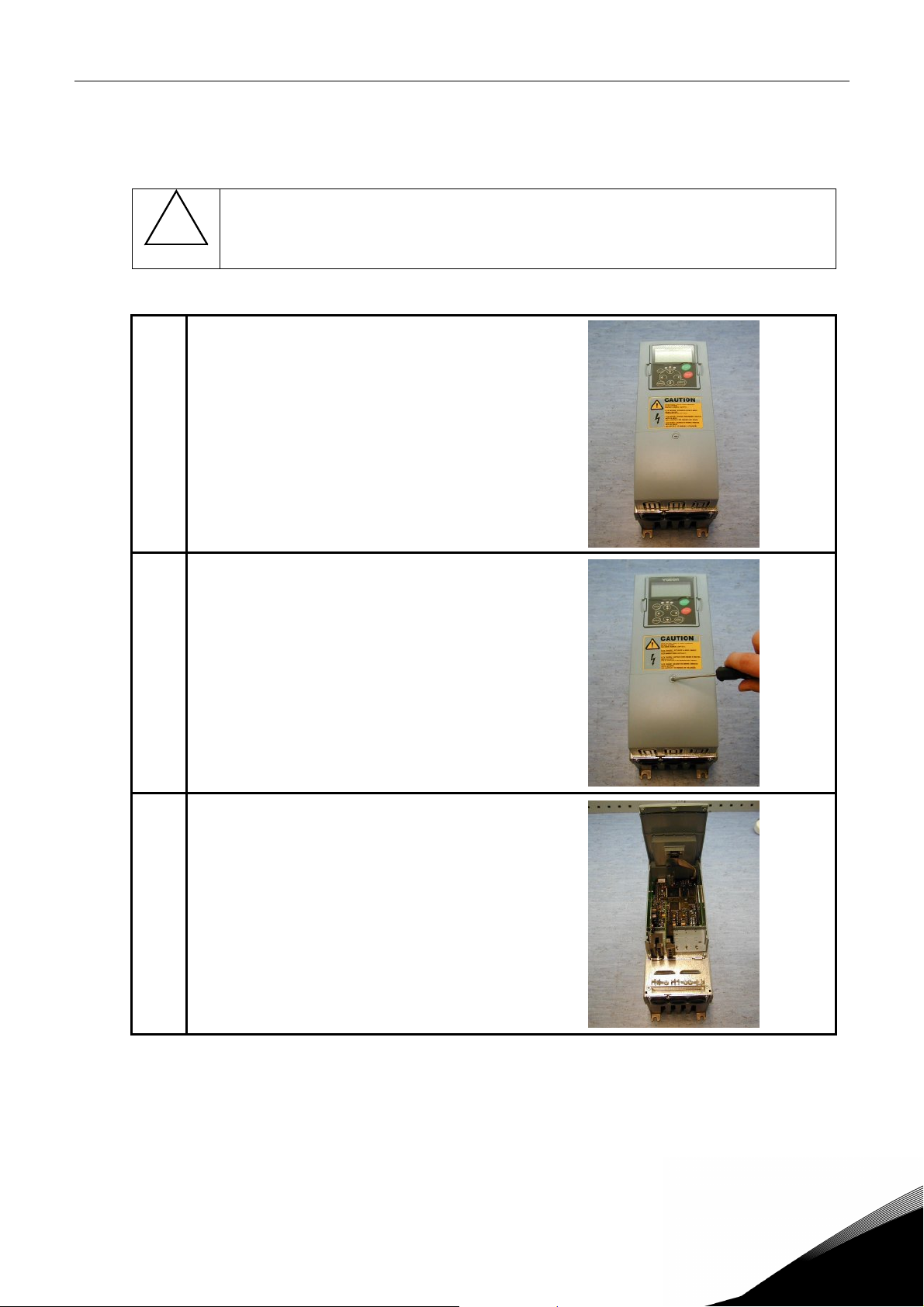
Vacon NX-Frequenzumrichter
Entfernen Sie die Kabelabdeckung.
B
Öffnen Sie die Abdeckung der
C
Steuereinheit.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
5
Page 14

14• Vacon Installation
Stecken Sie die CANopen-Optionskarte
D
in Steckplatz E an der Steuerkarte des
Frequenzumrichters. Stellen Sie eine
ordnungsgemäße Masseverbindung
(siehe unten) an der Erdungsklemme her.
1
2
3
4
5
Schneiden Sie die perforierte Kabel-
E
einführungen so weit wie erforderlich
auf, um eine ausreichend breite Öffnung
für Ihr Kabel herzustellen.
X6
X1
Schließen Sie die Abdeckung der
F
Steuereinheit und die Kabelabdeckung.
5
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 15
Installation Vacon • 15
5.1
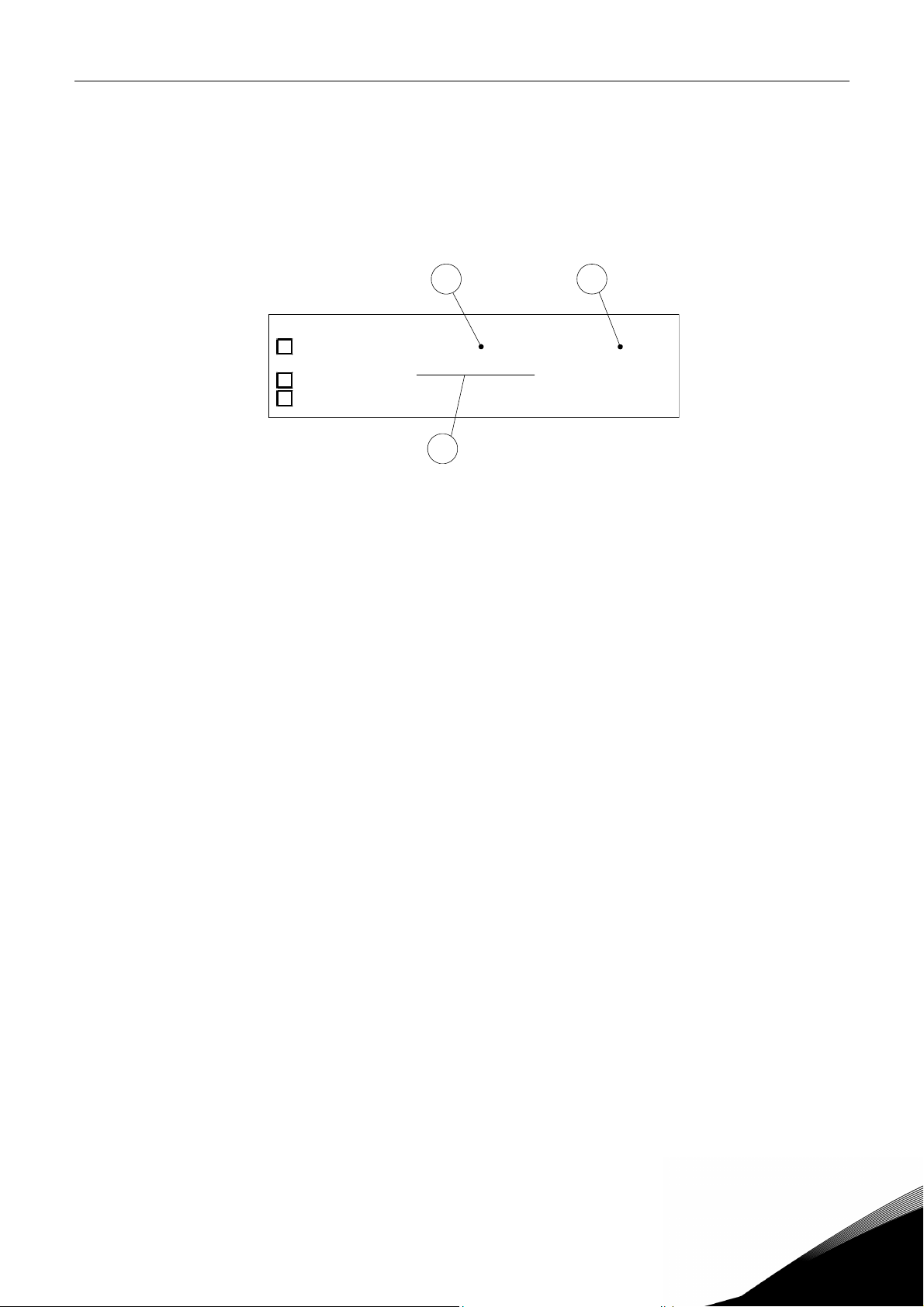
Aufkleber mit Angaben zur Karte
Zum Packungsinhalt der CANopen-Optionskarte gehört auch ein Aufkleber (siehe unten). Bitte notieren
Sie den Kartentyp (1), den Steckplatz, in den die Karte montiert wird (2), sowie das Montagedatum (3)
auf dem Aufkleber. Kleben Sie anschließend den Aufkleber auf Ihren Frequenzumrichter.
Drive modified
Option board:
in slot:
IP54 upgrade/Collar
EMC level modified: H
NXOPT................
A B C D E
1
T / T H
3
:
Date:...................
Date:...................
Date:...................
2
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
5
Page 16

16• Vacon Inbetriebnahme
6.
INBETRIEBNAHME
LESEN SIE ZUNÄCHST KAPITEL 8 „INBETRIEBNAHME” DER BETRIEBSANLEITUNG FÜR DEN VACON
NX (Dokumentnr. ud00701. Link zum Dokument: http://www.vacon.com/support/documents.html).
Hinwei
s: Der Feldbus muss als aktiver Steuerplatz ausgewählt werden, wenn der Frequenzumrichter
über den Feldbus geregelt werden soll. Weitere Informationen zu diesem Thema finden Sie in Kapitel
7.3.3.1 der Betriebsanleitung für den Vacon NX.
Verwenden Sie die Steuertafel, um die CANopen-Karte von Vacon in Betrieb zu nehmen. Geben Sie
die entsprechenden Parameterwerte im Menü M7 ein (in Kapitel 7 der Betriebsanleitung für den
Vacon NX können Sie nachlesen, wie Sie zum Menü „Erweiterungskarte” gelangen).
Das Menü für Erweiterungskarten („Expander Board”, M7)
Über das Menü
Erweiterungskarten
können Sie feststellen, welche Erweiterungskarten an die
Steuerkarte angeschlossen sind, und die zur jeweiligen Erweiterungskarte gehörigen Parameter
aufrufen und bearbeiten.
Wechseln Sie mit der
Navigationstasten
die Steckplätze A bis E durchsuchen, um festzustellen, welche Erweiterungskarten
Menütaste (rechts)
in die nächste Menüebene (G#). Dort können Sie mithilfe der
angeschlossen sind. In der untersten Zeile der Anzeige wird auch die Anzahl der zur Karte
gehörenden Parametergruppen angezeigt.
Wenn Sie die
Menütaste (rechts)
nochmals drücken, erreichen Sie die Ebene der Parametergruppen.
In diesem Fall befinden sich dort zwei Gruppen: Editierbare Parameter und überwachte Werte. Drücken
Sie nun erneut auf die
Menütaste (rechts)
, um zu einer dieser Parametergruppen zu gelangen.
CANopen-Parameter
Zur Inbetriebnahme der CANopen-Karte wechseln Sie aus der Gruppe
Parameters
(G7.5.1) auf die
Ebene P7.5.1.#. Definieren Sie die gewünschten Werte für alle CANopen-Parameter (siehe xx und xx).
READY
Erweiterungskarten
E:NXOPTC6
G1G5
READY
Busteilnehmer-ID
Busteilnehmer-ID
63
Bild 6-1. Die Parameter der CANopen-Optionskarte ändern
READY
G1G2
READY
63
Parameter
P1P3
WERT ÄNDERN
eingeben
ÄNDERUNG BESTÄTIGEN
READY
6
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 17

Inbetriebnahme Vacon • 17
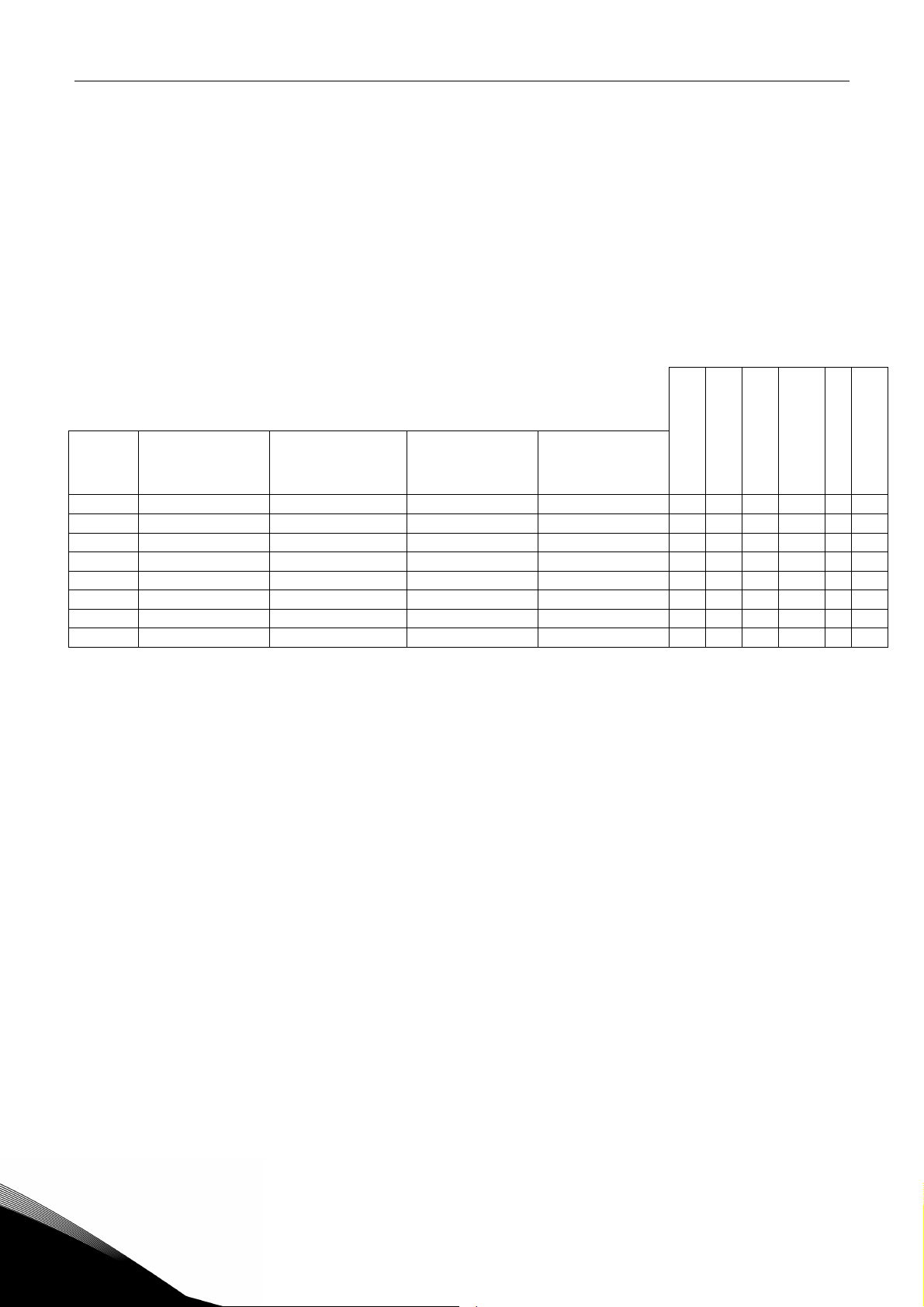
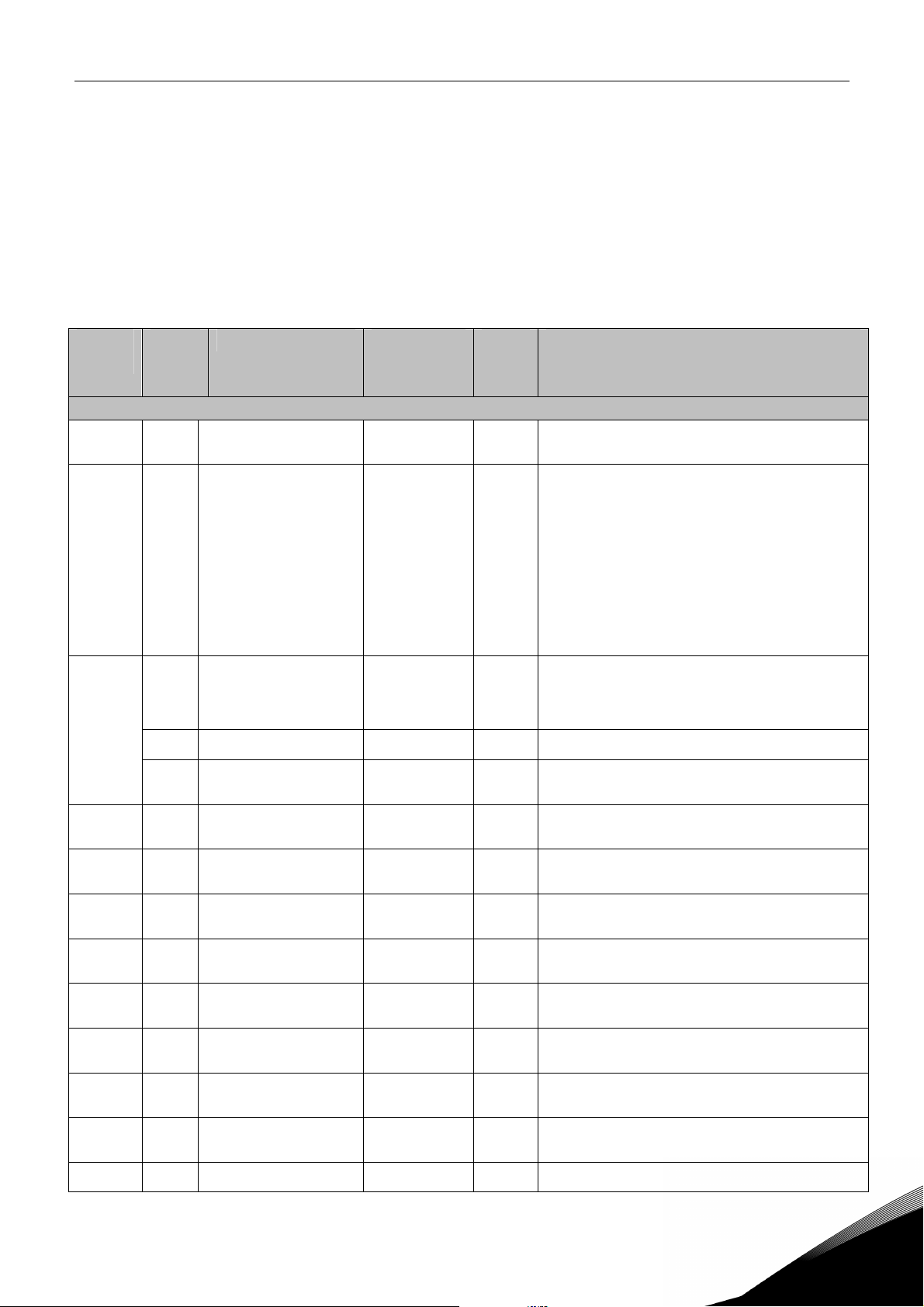
# Name Werkseinst. Bereich Beschreibung
1 Busteilnehmer-ID 1 1 – 127
2 BAUDRATE
1 – 10 kBaud
Kommunikationsgeschwindigkeit
2 – 20 kBaud
3 – 50 kBaud
6
4 – 100 kBaud
5 – 125 kBaud
6 – 250 kBaud
7 – 500 kBaud
8 – 1000 kBaud
3 Betriebsart
1
1 –
Umrichterprofil
2 – ByPass
3 – ByPass 2
Auswahl der Parametergruppen
für die Kommunikation
1 = xPDO1, xPDO6
2 = xPDO1, xPDO21, xPDO22
3 = xPDO1, xPDO21, xPDO22
Tabelle 6- 1. CANopen-Parameter
Die Betriebsart „ByPass” kann in kundenspezifischen Applikationen sowie in besonderen
Applikationen, wie zum Beispiel „Systemschnittstelle” (System Interface), verwendet werden.
Die Betriebsart „ByPass 2” eignet sich für Standardapplikationen, wie zum Beispiel MulticontrolApplikationen („NXL Multicontrol“) und „All-In-One“-Applikationen für Frequenzumrichter der
Bauarten NXS und NXP.
Die Betriebsart „ByPass 2” wird von den folgenden Systemsoftware-Versionen unterstützt:
NXL NXL00005V253
NXS NXS00001V174
NXP NXP00002V174
Die Parameter müssen für jedes Gerät eingestellt werden, bevor es an den Bus angeschlossen wird.
Insbesondere die Parameter „NODE ID” und „BAUDRATE” müssen mit der Master-Konfiguration
übereinstimmen.
CANopen-Zustandsanzeige
Öffnen Sie die Seite
CANopen Status
im
Menü „Monitor” (G7.5.2)
und prüfen Sie dort den aktuellen
Zustand des CANopen-Feldbusses. Siehe Abbildung und Tabelle weiter unten.
I/Oterm
Monitor
READY
I/Oterm
CANopen-Status
V1 V1
Bild 6-2. CANopen-Zustandsanzeige
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
READY
25.0
CANopen-Status
Meldungszähler
6
Page 18

18• Vacon Inbetriebnahme
CANopen-Zustandsanzeige
0 INITIALISIERUNG LÄUFT
(INITIALISING)
4 ANGEHALTEN (STOPPED)
5 IN BETRIEB (OPERATIONAL)
6 VOR_BETRIEB
(PRE_OPERATIONAL)
7 APPLIKATION RÜCKSETZEN
(RESET_APPLICATION)
8 KOMMUNIKATION RÜCKSETZEN
(RESET_COMM)
9 UNBEKANNT
Tabelle 6- 2. CANopen-Zustandsanzeigen
6
Tel.+358-(0)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 19

NX-Schnittstelle Vacon • 19
SCHNITTSTELLE ZWISCHEN CANOPEN UND DEM VACON NX
7.
CANopen-Kommunikationsobjekte, die über das CAN-Netzwerk übertragen werden, werden mittels
Diensten und Protokollen beschrieben. Sie sind wie folgt klassifiziert:
- Die Datenübertragung in Echtzeit erfolgt über das Protokoll „Prozessdatenobjekte” (Process
Data Objects, PDOs)
REGELUNG DES UMRICHTERS IN ECHTZEIT
- Die Servicedatenobjekt-Protokolle (Service Data Objects, SDO) ermöglichen den Lese- und
Schreibzugriff auf die Einträge in ein Geräteobjektverzeichnis
KONFIGURATION DES UMRICHTERS, SCHREIB-/LESEZUGRIFF AUF DIE
UMRICHTERPARAMETER
- Die Netzwerkmanagement-Protokolle (NMT) stellen Dienste zur Initialisierung des Netzwerks,
Fehlerkontrolle sowie Gerätestatuskontrolle zur Verfügung
CANOPEN-KOMMUNIKATION STARTEN/STOPPEN
CANopen Nachrichtentelegramm (Message Frame)
7.1
SOF COB-ID RTR CTRL Datensegment CRC ACK EOF
1bit 11bit 1bit 5bit 0-8bytes 16bits 2bits 7bits
SOF Telegrammanfangskennung (Start of Frame) CRC Zyklische
Redundanzprüfung
(Cyclic Redundancy Check)
RTR Ferndatenanforderung (Remote Transmission Request) ACK Quittieren (Acknowledge)
CTRL Steuerfeld (Control Field, d.h. Datenlänge) EOF Ende des Datentelegramms
(End of Frame)
COB-ID (Communication Object Identifier) für jedes Kommunikationsobjekt im Netzwerk
Das Identifikationsfeld der CANopen-Nachricht ist 11 Bit lang.
ID-Bit 10 9 8 7 6 5 4 3 2 1 0
COB-ID Funktionscode Modul-ID
Das standardmäßige ID-Feld besteht aus einem funktionalen Teil und einem Teil mit der Modul-ID.
Der funktionale Teil bestimmt die Objektpriorität. Diese Art von ID-Feld ermöglicht die Kommunikation
zwischen einem Master und 127 Slaves. Die Modul-ID „Null” zeigt Broadcasting an. Funktionscodes
werden mit Objektverzeichnissen in Gerätenprofilen ermittelt.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
7
Page 20

20• Vacon NX-Schnittstelle
Vordefinierte Gruppen von Kommunikationsparametern
Die CANopen-Optionskarte verfügt über zwei unterschiedliche Gruppen von Kommunikationsparametern.
Diese Gruppen werden über den Parameter „Betriebsart” (Operate Mode) über die Steuertafel
ausgewählt. Beide Gruppen erfüllen die Anforderungen des „Geräteprofils für die Umrichter- und
Motorsteuerung” (Drives And Motor Control) gemäß CiA DSP-402.
Betriebsart „Umrichterprofil”
Objekt Funktionscode
(binär)
NMT-Nachricht 0000 0x0000 Synchronisationsnachricht (Sync Message) 0001 0x0080 0x1005
Zeitstempelnachricht (Time-Stamp-Message) 0001 0x0100 PDO1, Prozessdatenobjekte (tx) 0011 0x0180 +Busteilnehmer 0x1800
PDO1, Prozessdatenobjekte (rx) 0100 0x0200 +Busteilnehmer 0x1400
PDO6, Prozessdatenobjekte (tx) 0101 0x0280 +Busteilnehmer 0x1801
PDO6, Prozessdatenobjekte (rx) 0110 0x0300 +Busteilnehmer 0x1401
SDO, Servicedatenobjekte (tx) 1011 0x0580 +Busteilnehmer
SDO, Servicedatenobjekte (rx) 1100 0x0600 +Busteilnehmer
Busteilnehmerüberwachung (Node Guarding) 1110 0x0700 +Busteilnehmer (0x100E)
COB-ID Komm.parameter an Index
Tabelle 7-1. Die Betriebsart „Umrichterprofil”
Die Betriebsart „ByPass”
Objekt Funktionscode
(binär)
NMT-Nachricht 0000 0x0000 Synchronisationsnachricht (Sync Message) 0001 0x0080 0x1005
Zeitstempelnachricht (Time-Stamp-Message) 0010 0x0100 PDO1, Prozessdatenobjekte (tx) 0011 0x0180 +Busteilnehmer 0x1800
PDO1, Prozessdatenobjekte (rx) 0100 0x0200 +Busteilnehmer 0x1400
PDO21, Prozessdatenobjekte (tx) 0111 0x0380 +Busteilnehmer 0x1814
PDO21, Prozessdatenobjekte (rx) 1000 0x0400 +Busteilnehmer 0x1414
PDO22, Prozessdatenobjekte (tx) 1001 0x0480 +Busteilnehmer 0x1815
PDO22, Prozessdatenobjekte (rx) 1010 0x0500 +Busteilnehmer 0x1415
SDO, Servicedatenobjekte (tx) 1011 0x0580 +Busteilnehmer
SDO, Servicedatenobjekte (rx) 1100 0x0600 +Busteilnehmer
Busteilnehmerüberwachung (Node Guarding) 1110 0x0700 +Busteilnehmer (0x100E)
COB-ID Komm.parameter an Index
Tabelle 7-2. Die Betriebsart „ByPass”
7
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 21
NX-Schnittstelle Vacon • 21
7.2 Netzwerkmanagement (NMT)
Das CANopen-Netzwerkmanagement orientiert sich an den Busteilnehmern und basiert auf einer
Master-/Slave-Struktur. Ein Gerät im Netzwerk muss dabei die Funktion des NMT-Master
übernehmen. Die anderen Busteilnehmer fungieren als NMT-Slaves.
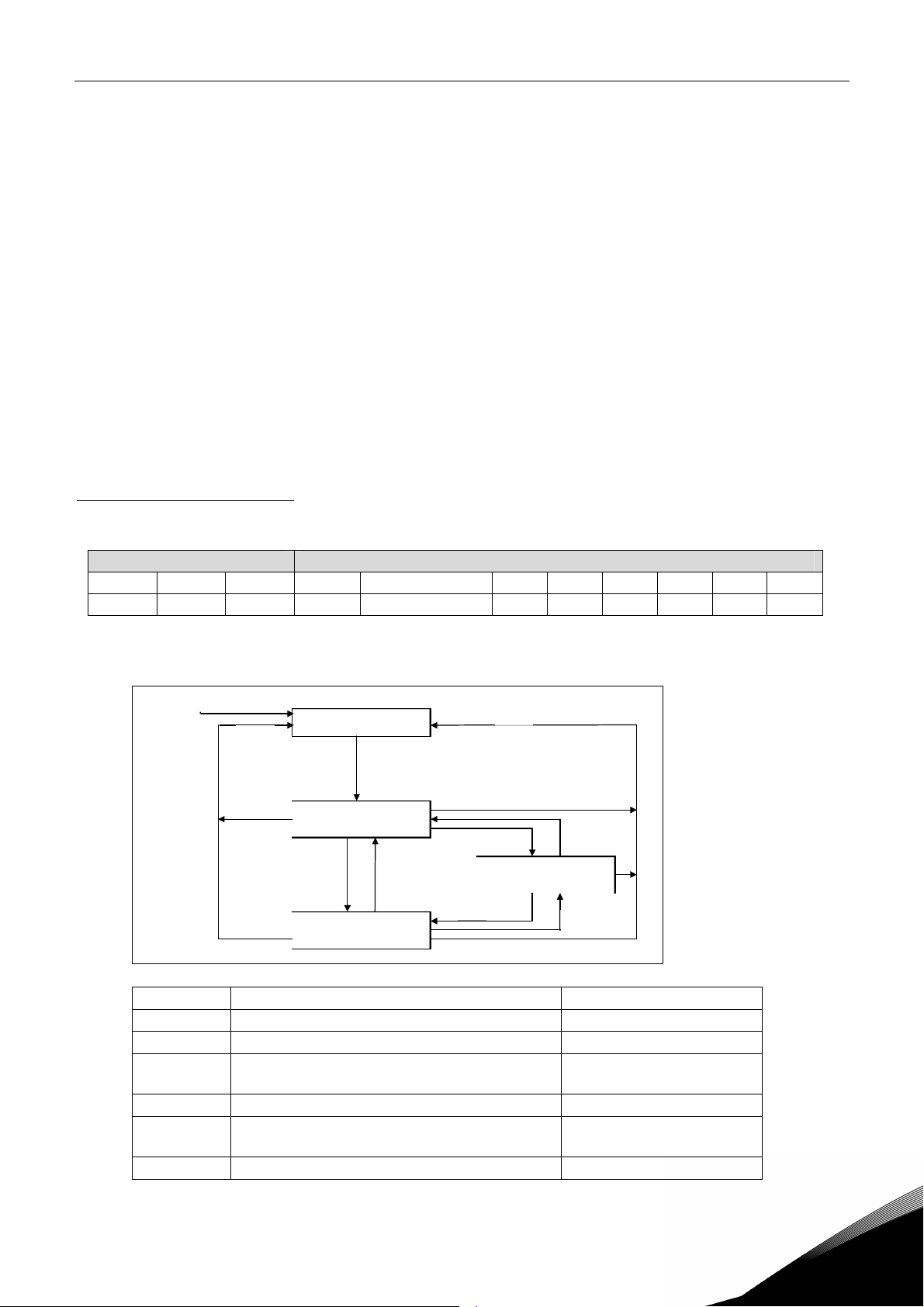
CanOpen NMT-Slaves implementieren eine State Machine, siehe Bild unten. Nach dem Einschalten
wird eine Busteilnehmer initialisiert und geht in den Zustand „Pre-operational” (vor dem Betrieb) über.
In diesem Zustand ist die Kommunikation über SDO-Kanäle zur Konfiguration des Busteilnehmers
möglich. Die Kommunikation über Prozessdatenobjekte (PDOs) ist jedoch noch nicht möglich. Mit der
NMT-Nachricht „Start Remote Node” kann/können ein ausgewählter Busteilnehmer bzw. beliebige
Busteilnehmer in den Betriebszustand („Operational”) versetzt werden. In diesem Zustand ist dann
auch der Datenaustausch über PDOs möglich. Wenn alle Busteilnehmer eines Netzwerks gleichzeitig
für den Betrieb aktiviert werden, ist ein koordinierter Betrieb des Kommunikationssystems
sichergestellt (DS301).
Folgende Nachricht muss gesendet werden, um die CANopen-Optionskarte in den Betriebszustand
(„Operational”) zu versetzen:
Nachricht: Start_Remote_Node
Master an Slave (1)
Kopf Daten
ID RTR Länge 1 = CS 2 = Busteilnehmer-ID 3 4 5 6 7 8
0000 0 2 01 01
Funktion der internen State Machine:
Strom
Netzspannung
Ein
Initialisierung
5
6
Vor dem Betrieb
13
Betriebsbereit
4
23
Vorbereitet
1
2
Änderung Nachricht / Ereignis Command Specifier (CS)
1 Starten des CAN-Knotens (Start Remote Node) CS = 1
2 Stoppen des CAN-Knotens (Stop Remote Node) CS = 2
3 In den Zustand vor dem Betrieb wechseln
(Enter Pre-operational State)
4 Gesamten CAN-Knoten zurücksetzen (Reset Node) CS = 129
5 Kommunikation des CAN-Knotens zurücksetzen
(Reset Communication)
6 Initialisierung abgeschlossen (Initialisation finished) Automatisch
CS = 128
CS = 130
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
7
Page 22
22• Vacon NX-Schnittstelle
r
7.3 Prozessdatenobjekte (PDO)
Echtzeitdaten werden mittels Prozessdatenobjekten (PDO) übertragen. Die Übertragung der PDOs
erfolgt ohne Protokoll-Overhead. Prozessdaten sind zeitkritische Daten zur Steuerung und Überwachung
des Umrichters. Sende-PDOs (Transmit PDOs) unterstützen mehrere Übertragungsarten: zyklisch,
azyklisch, synchron, asynchronon sowie Nur RTR. Die meisten PDOs unterstützen auch Ereigniszeitgeber (Event Timer) zum Senden von PDOs. TPDO1 ist die Ausnahme, die nur für den asynchronen
Betrieb gilt. Empfangs-PDOs (Receive PDOs) unterstützen ausschließlich die Übertragungsart
„asynchron” (ereignisgesteuert). Die CANopen-Optionskarte von Vacon verwendet die folgenden 8
Typen von PDOs:
PDOTyp
TPDO1 Statuswort - - - x
TPDO6 Statuswort vl_control_effort - - X X X x XX
TPDO21 nx_status_word nx_actual_speed process_data_out1 process_data_out2 X X X x XX
TPDO22 process_data_out3 process_data_out4 process_data_out5 process_data_out6 X X X x XX
RPDO1 Steuerwort - - - x
RPDO6 Steuerwort vl_target_velocity - - x
RPDO21 nx_control_word nx_speed_reference process_data_in1 process_data_in2 x
RPDO22 process_data_in3 process_data_in4 process_data_in5 process_data_in6 x
Zugeordnete
Daten
Zugeordnete Daten
Zugeordnete
Daten
Zugeordnete
Daten
Zyklisch
Azyklisch
Synchron
Asynchron
(Standard)
Nur RTR
Ereigniszeitgebe
Hinweis: Herstellerspezifische PDOs (TPDO21/RPDO21/ TPDO22/RPDO22) bestehen aus applikationsspezifischen Prozessdaten. Die Inhalte dieser Prozessdaten in verschiedenen Applikationen sind im
Anhang beschrieben. Siehe Kapitel 7.6 (Herstellerspezifische Prozessdatenobjekte (PDO)) bzw. das
Handbuch der spezifisc
hen Applikation.
Hinweis: Alle Tx-Objekte sind standardmäßig ereignisgesteuert. (Die Nachricht wird gesendet, wenn
sich ein Wert oder mehrere Werte in einer Nachricht ändern)
7
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 23

NX-Schnittstelle Vacon • 23
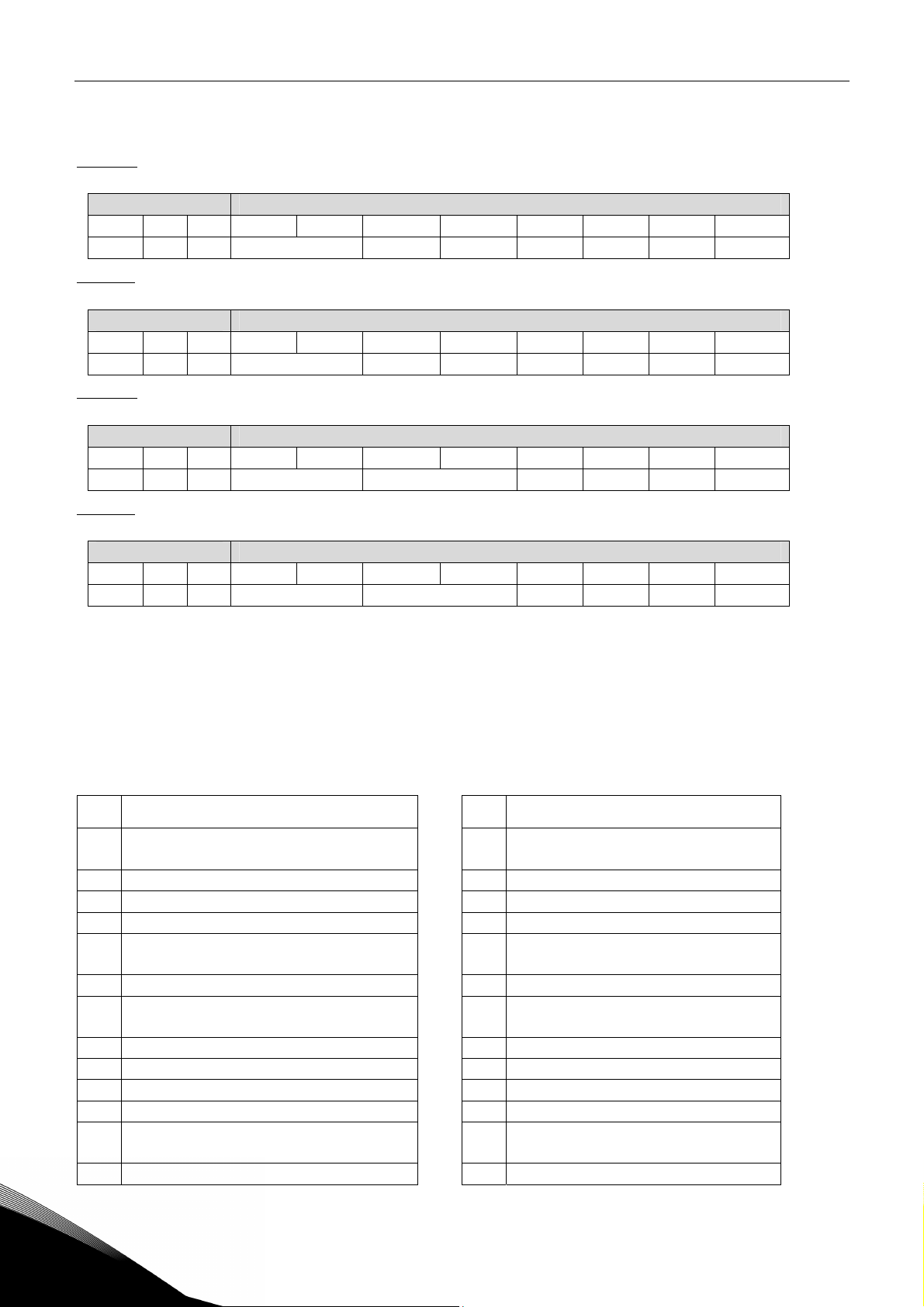
7.4 Übertragungsarten
PDO-Übertragung Übertragungsart
zyklisch azyklisch synchron asynchron Nur RTR
0 X X
1-240 X X
241-251 - Reserviert -
252 X X
253 X X
254 X
255 X
Tabelle 7-3. Beschreibung der Übertragungsart
„Synchron” (Übertragungsarten 0-240 und 252) bedeutet, dass die Übertragung des PDO mit dem
Synchronisationsobjekt (SYNC) verbunden ist. Vorzugsweise nutzen die Geräte SYNC als Auslöser zur
Ausgabe bzw. zur Betätigung auf Basis der vorherigen synchronen Empfangs-PDO, um die bei der
nachfolgenden synchronen Sende-PDO übertragenen Daten zu aktualisieren. „Asynchron” bedeutet,
dass die Übertragung des Prozessdatenobjekts (PDO) keinen Bezug zum Synchronisationsobjekt
(SYNC) hat. Die Übertragungsart „Null” bedeutet, dass die Nachricht synchron mit dem Synchronisationsobjekt (SYNC), aber nicht periodisch übertragen werden soll. Ein Wert zwischen 1 und 240
bedeutet, dass das Prozessdatenobjekt synchron und zyklisch übertragen wird. Die Übertragungsart
zeigt die Anzahl an Synchronisationsobjekten an, die erforderlich sind, um PDO-Übertragungen
anzustoßen. Unabhängig von den Übertragungsarten 0 bis 240 werden Empfangs-PDOs stets durch
das folgende Synchronisationsobjekt beim Empfang von Daten angestoßen.
Die Übertragungsarten 252 und 253 bedeuten, dass das Prozessdatenobjekt (PDO) ausschließlich bei
Vorliegen einer Fernübertragungsanforderung übertragen wird. Die Übertragungsart 252 bedeutet,
dass die Daten unmittelbar nach Empfang des Synchronisationsobjekts aktualisiert (aber nicht gesendet)
werden. Bei der Übertragungsart 253 werden die Daten beim Empfang einer Fernübertragungsanforderung aktualisiert (möglicherweise müssen Einschränkungen im Hinblick auf die Hardware
und Software berücksichtigt werden). Diese Werte sind jedoch nur für TPDOs möglich. Bei TPDOs
bedeutet die Übertragungsart 254, dass es sich um ein herstellerspezifisches Applikationsereignis
handelt (herstellerspezifischer Teil des Objektverzeichnisses). Die Übertragungsart 255 bedeutet,
dass das Applikationsereignis im Geräteprofil festgelegt ist. RPDOs dieser Art lösen die Aktualisierung
der zugeordneten Daten beim Empfang aus. Der Subindex 3h der Prozessdatenobjekte enthält die
Sperrzeit („Inhibit Time”). Diese entspricht der Mindestzeit für die PDO-Übertragung. Der Wert wird
als Vielfaches von 100
datenobjekt vorhanden ist (Bit 31 von Subindex 1 = 0).
In der Betriebsart 254/255 kann zusätzlich eine Ereigniszeit für TPDO verwendet werden. Sofern ein
Ereigniszeitgeber für ein TPDO (Wert ungleich 0) vorhanden ist, wird die abgelaufene Zeit als Ereignis
angesehen. Der Ereigniszeitgeber läuft als Vielfaches von 1 ms der Eingabe im Subindex 5h des TPDO
ab. Dieses Ereignis führt dazu, dass diese TPDO zusätzlich zu sonst definierten Ereignissen übertragen
wird. Das Auftreten des Ereignisses stellt den Zeitgeber ein. Unabhängig von der Übertragungsart
wird der RPDO-Ereigniszeitgeber verwendet, um das Ablaufen des RPDO zu erkennen.
μs angegeben. Es ist nicht zulässig, den Wert zu ändern, solange das Prozess-
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
7
Page 24
24• Vacon NX-Schnittstelle
7.5 Den Frequenzumrichter über PDO-Nachrichten mit Umrichterprofil regeln
PDO1 Rx
Master an Slave (1)
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x201 0 2
Steuerwort - - - - - -
PDO1 Tx
Slave (1) an Master
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x181 0 2
Statuswort - - - - - -
PDO6 Rx
Master an Slave (1)
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x301 0 4
Steuerwort vl_target_velocity - - - -
PDO6 Tx
Slave (1) an Master
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x281 0 4
Statuswort vl_control_effort - - - -
Der Zustand des Frequenzumrichters kann mit dem
Der Zustand des Frequenzumrichters wird im
Statuswort angezeigt.
Steuerwort
geregelt werden.
State Machine
Die
beschreibt den aktuellen Status sowie mögliche Steuersequenzen des
Frequenzumrichters.
Steuerwort
Statuswort
Bit Name Bit Name
0 Einschalten (Switch ON) 0 Bereit zum Einschalten (Ready
to Switch ON)
1 Spannung ausschalten (Disable Voltage) 1 Eingeschaltet (Switched ON)
2 Erzwungender Stopp (Quick Stop) 2 Betrieb aktivieren (Operation Enable)
3 Betrieb aktivieren (Enable Operation) 3 Fehler (Fault)
4 Betriebsartspezifisch 4 Spannung ausschalten (Voltage
Disable)
5 Betriebsartspezifisch 5 Erzwungender Stopp (Quick Stop)
6 Betriebsartspezifisch 6 Schalter EIN ausschalten (Swich ON
Disable)
7 Fehler zurücksetzen (Reset Fault) 7 Warnung
8 Halt 8 Herstellerspezifisch
9 Reserviert 9 Fern (Remote)
10 Reserviert 10 Ziel erreicht (Target Reached)
11 Herstellerspezifisch 11 Interner Grenzwert aktiv (Internal
Limit Active)
12 Herstellerspezifisch 12 Betriebsartspezifisch
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
7
Page 25
NX-Schnittstelle Vacon • 25
13 Herstellerspezifisch 13 Betriebsartspezifisch
14 Herstellerspezifisch 14 Herstellerspezifisch
15 Herstellerspezifisch 15 Herstellerspezifisch
Durch Verwendung eines Steuerworts kann der Umrichter wie folgt geregelt werden:
Befehl Steuerwort Beschreibung
BETRIEBSBEREIT vorbereiten
(Prepare READY)
BETRIEB vorbereiten
(Prepare RUN)
BETRIEB (RUN) 000Fhex Motor starten, wenn „Feldbus” der aktive
STOP 0007hex Motor anhalten
FEHLER ZURÜCKSETZEN
(FAULT RESET) (Schritt 1)
FEHLER ZURÜCKSETZEN
(FAULT RESET) (Schritt 2)
0006hex Die State Machine in den Zustand
„Einschaltbereit“ („Ready To Switch ON”)
umstellen
0007hex Die State Machine in den Zustand
„Eingeschaltet” („Switched ON”) umstellen.
Steuerplatz ist.
bit 7 = 0
bit 7 = 1
Steigende Flanke bis Bit 7
vl_target_velocity
vl_target_velocity ist der erforderliche Drehzahlsollwert für den Frequenzumrichter.
Die Einheit lautet U/min.
vl_control_effort
vl_control_effort entspricht der Istdrehzahl des Motors.
Die Einheit lautet U/min.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
7
Page 26

26• Vacon NX-Schnittstelle
State Machine
Die State Machine beschreibt den Gerätestatus und die mögliche Befehlsfolge des Frequenzumrichters.
Statusübergänge können mit dem „Steuerwort” generiert werden. Der Parameter „Statuswort” zeigt den
aktuellen Status der State Machine an. Die Betriebsarten
INIT, STOP, RUN
und
FAULT
entsprechen der
aktuellen Betriebsart des Umrichters.
SW = StatusWord – Statuswort
CW = ControlWord – Steuerwort
Fehler
Einschalten (Power ON)
Automatisch
REAKTION AUF FUNKTIONSSTÖRUNG AKTIV
FEHLER
SW:xxxFh oder xx2Fh
Automatisch
CW: 000Dh
CW: 0006h
NICHT EINSCHALTBEREIT
INIT SW:xx00h
Automatisch
EINSCHALTEN DEAKTIVIERT
STOP
NICHT EINSCHALTBEREIT
STOP
EINGESCHALTET
STOP
BETRIEB AKTIVIERT
BETRIEB SW:xx27h
SW:xx40h oder xx60h
CW: 0006h
CW: 0007h
CW: 0002h
SW:xx21h
CW: 0006h
SW: xx23h
CW: 0007hCW: 000Fh
CW: 0002
FUNKTIONSSTÖRUNG
FEHLER SW:xx08h oder xx28h
Funktionsstörung rücksetzen
CW: 0000h
CW: 0080h
CW: 0003h
ERZWUNGENER STOPP AKTIV
STOP SW:xx07h
7
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 27

NX-Schnittstelle Vacon • 27
7.6 Herstellerspezifische Prozessdatenobjekte (PDO) mit ByPass-Betriebsarten verwenden
Herstellerspezifische PDOs werden verwendet, wenn der Parameter „Betriebsart” („Operate Mode”)
in der Steuertafel auf „ByPass” oder „ByPass 2” gesetzt ist. Die Kommunikationsparameter-Gruppe,
die in den ByPass-Betriebsarten verwendet wird, ist Tabelle 7-2 zu entnehmen. Herstellerspezifische
PDOs: TPDO21, TPDO22, RPDO21 und RPDO22.
PDO21 Rx
Master an Slave (1)
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x401 0 8
nx_control_word nx_speed_reference process_data_in1 process_data_in2
PDO21 Tx
Slave (1) an Master
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x381 0 8
nx_status_word nx_actual_speed process_data_out1 process_data_out2
PDO22 Rx
Master an Slave (1)
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x501 0 8
process_data_in3 process_data_in4 process_data_in5 process_data_in6
PDO22 Tx
Slave (1) an Master
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x481 0 8
process_data_out3 process_data_out4 process_data_out5 process_data_out6
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
7
Page 28
28• Vacon NX-Schnittstelle
Regelung des Umrichters
HINWEIS: Einige Vacon-Applikationen verwenden eventuell die Betriebsart „Bypass” eher für eine
erweiterte Umsetzung der Betriebsart „Geschwindigkeit” („Velocity Mode”) anstatt für eine
herstellerspezifische Schnittstelle. Weitere Informationen zu diesem Thema finden sie im Handbuch
der jeweiligen Applikation.
Der Sollwert („Reference”) für den Umrichter kann auch über das herstellerspezifische Prozessdatenobjekt 21 (rx) eingestellt werden, wenn die Optionskarte auf „ByPass” bzw. „ByPass 2”
eingestellt ist. In der Applikation wird der Wert in Prozent des Frequenzbandes zwischen der
eingestellten Mindest- und Höchstfrequenz festgelegt.
nx_control_word wird ausschließlich mit der Betriebsart „ByPass 2” verwendet. Wenn die Betriebsart
„ByPass” verwendet wird, prüfen Sie Details zum Steuerwort im Applikationshandbuch nach.
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
- - - - - - - - - - - - - RST DIR RUN
In Applikationen von Vacon werden die ersten drei Bits des Steuerworts zur Regelung des Frequenzumrichters verwendet. Sie haben jedoch die Möglichkeit, den Inhalt des Steuerworts für Ihre eigenen
Applikationen individuell anzupassen, da das Steuerwort als solches an den Frequenzumrichter
gesendet wird.
Bit
Beschreibung
Wert = 0 Wert = 1
0 Stop Betrieb (Run)
1 Im Uhrzeigersinn (Clockwise) Gegen den Uhrzeigersinn
(Counterclockwise)
2 Die steigende Flanke dieses Bits setzt den aktiven Fehler zurück.
3….15 Nicht verwendet Nicht verwendet
nx_speed_reference
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB LSB
Hierbei handelt es sich um den Sollwert 1 des Frequenzumrichters. Dieser wird in der Regel als
Drehzahlsollwert verwendet. Der Einstellbereich beträgt –10000...10000. In der Applikation wird der
Wert in Prozent des Frequenzbandes zwischen der eingestellten Mindest- und Höchstfrequenz
festgelegt.
Processdata_in1 … Processdata_in6
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB LSB
Hierbei handelt es sich um applikationsspezifische Prozessdaten. Der Inhalt dieser Prozessdaten bei
verschiedenen Applikationen ist in ANHANG C beschrieben.
7
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 29

NX-Schnittstelle Vacon • 29
7.7 Überwachung des Umrichters
Mehrere Istwerte/Parameter des Umrichters können anhand herstellerspezifischer Prozessdatenobjekte (PDOs) überwacht werden.
nx_speed_reference
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB LSB
Hierbei handelt es sich um den Sollwert 1 des Frequenzumrichters. Dieser wird in der Regel als
Drehzahlsollwert verwendet.
Der zulässige Einstellbereich beträgt 0...10000. In der Applikation wird der Wert in Prozent des
Frequenzbandes zwischen der eingestellten Mindest- und Höchstfrequenz festgelegt.
nx_control_word, wird ausschließlich mit der Betriebsart „ByPass 2” verwendet. Wenn die Betriebsart „ByPass”
verwendet wird, sehen Sie im Applikationshandbuch nach, um weitere Einzelheiten zum Statuswort zu erfahren.
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
- - - - - UVFS DDIR TCSPDL FR Z AREF W FLT DIR RUN RDY
Das
Statuswort
Statuswort
liefert Angaben sowie Meldungen zum aktuellen Status des Umrichters. Das
besteht aus 16 Bits, die folgende Bedeutungen haben:
Beschreibung Bit
Wert = 0 Wert = 1
0 Nicht bereit Bereit
1 STOP BETRIEB
2 Im Uhrzeigersinn Gegen den Uhrzeigersinn
3 - Gestört
4 - Warnung
5 Sollfrequenz nicht erreicht Sollfrequenz erreicht
6 - Motor dreht sich nicht
7 Fluss bereit Fluss nicht bereit
8 TC Drehzahlbegrenzung aktiv (je nach
Umrichtermodell)
9 Festgestellte Richtung des Encoders: im
Uhrzeigersinn (je nach Umrichtermodell)
TC Drehzahlbegrenzung nicht aktiv
(je nach Umrichtermodell)
Festgestellte Richtung des Encoders:
gegen den Uhrzeigersinn (je nach
Umrichtermodell)
10 UV-Schnellstopp aktiv (je nach
Umrichtermodell)
UV-Schnellstopp nicht aktiv (je nach
Umrichtermodell)
11...15 Nicht verwendet Nicht verwendet
Tabelle 7-4. Beschreibung der Statuswortbits
Processdata_out1 … Processdata_out6
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB LSB
Hierbei handelt es sich um applikationsspezifische Prozessdaten. Der Inhalt dieser Prozessdaten bei
verschiedenen Applikationen ist in ANHANG C beschrieben.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
7
Page 30

30• Vacon NX-Schnittstelle
ead
de
Status
e
e
Status
de
de
de
000
7.8
Allparameterdienst (Anyparameter Service)
Das SDO-Protokoll kann dazu verwendet werden, beliebige Parameter oder Istwerte zu lesen und
beliebige Parameter zum Umrichter zu schreiben. Diese Parameter werden mit der zugehörigen, in
der Betriebsanleitung genannten ID-Nummer aus dem Umrichter gelesen. Im Objektverzeichnis sind
die folgenden drei Indizes für den Allparameterdienst (Anyparameter Service) aufgeführt.
Index Beschreibung Größe Typ Hi 16b Low 16b
2000 AnyparameterReadID U1 RW - ID lesen (Read ID)
2001 AnyparameterReadValue U32 RO Status Wert
2002 AnyparameterWrite U32 RW ID Wert schreiben
Parameter lesen
Das Schreiben eines neuen Werts an Index 2000 löst ein Leseereignis aus. Während der Lesevorgang
läuft, ist der Prozessindex 2001 gleich Null. Das Leseereignis gibt den Wert an den Index 2001 zurück.
Wenn das Lesen erfolgreich war, erhält der Status den Wert der ID, und der Wert entspricht dem
Wert der ID. Wenn das Lesen fehlschlägt, nimmt der Status den Wert 0xFFFF (dec 65535) an.
Parameter schreiben
Wenn die neue ID und der Wert an Index 2002 geschrieben werden, wird ein Schreibereignis
ausgelöst. Der Wert von Index 2002 bleibt so lange bestehen, wie das Schreiben verarbeitet wird
(normaler SDO/PDO-Betrieb während dieser Zeit). Wenn das Schreiben erfolgreich ist, werden der
Index 2002 ID und der Wert gelöscht, und ein erneutes Schreiben ist möglich. Wenn das Schreiben
fehlschlägt, geht die ID auf 0xFFFF und den Wert null.
In
In
x 2
x 2001
16 Bit
0x0066
R
ID
16
0x0066 0x0032
Bild 7-1. Parameter lesen
16
x 2002
In
16
In
x 2002
0x0000 0x0000
16 Bi
W
16 Bit
0x003C 0x0066
W
16 Bit
rt
rt ID
ID mit SDO-Protokoll
.
100 ms Verzögerung für
.
Leseereignis
Wert mit SDO-Protokoll lesen
t
.
. 100 ms Verzögerung für
0xFFFF 0x0000 =
fehlgeschlagen
ID und Wert mit SDO-Protokoll
schreiben
Schreibereignis
Ereignisstatus
Ereignisstatus Lesen/Schreiben
Lesen/Schr
0x0000 0x0000 = OK,
0x0000 0x0000 = OK,
0xFFFF 0x0000 = fehlgeschlagen
0xFFFF 0x0000 =
0x0066 0x003c = in Betrieb
eiben
7
7-2. Parameter schreiben
Bild
Tel.+358-(0)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 31

Allgemeines Vacon • 31
8. SEVICEDATENOBJEKTE (SDO)
Servicedatenobjekte (SDOs) ermöglichen den Zugriff auf Einträge eines Geräteobjektverzeichnisses.
Über SDOs können alle Punkte aus einem Objektverzeichnis gelesen bzw. geschrieben werden.
Sevicedatenobjekte (SDO) werden in der Regel zur Gerätekonfiguration sowie zum Einstellen von
Geräteparametern verwendet. Sie werden auch dazu verwendet, die Art und das Format der
Informationen, die über die Prozessdatenobjekte kommuniziert werden, vorzugeben. CANopenKonfigurationswerkzeuge mit EDS-Dateien können für diesen Zweck verwendet werden. Der Aufbau
und die Arbeitsweise der Servicedatenobjekte sind im Dokument „CANopen (DS301) Kommunikationsprofil” aufgeführt. Anhang B enthält eine kurze Beschreibung der Servicedatenobjekte, die mit der
CANopen-Optionskarte von Vacon verwendet werden.
Objektverzeichnis
Index Name Typ Attr.
hex dez
1000 4096 device_type
1001 4097 error_register
1003 4099 pre defined error field
1005 4101 cob-id sync message
100C 4108 guard_time
100D 4109 life_time_factor
1018 4120 Identitätsobjekt
1200 4608 1st_server_SDO_parameter
1400 5120 1st_receive_PDO_parameter
1405 5125 6st_receive_PDO_parameter
1414 5140 21st_receive_PDO_parameter
1415 5141 22st_receive_PDO_parameter
1600 5632 1st_receive_PDO_mapping
1605 5637 6st_receive_PDO_mapping
1614 5652 21st_receive_PDO_mapping
1615 5653 22st_receive_PDO_mapping
1800 6144 1st_transmit_PDO_parameter
1805 6149 6nd_transmit_PDO_parameter
1814 6164 21nd_transmit_PDO_parameter
1815 6165 22nd_transmit_PDO_parameter
1A00 6656 1st_transmit_PDO_mapping
1A05 6661 6st_transmit_PDO_mapping
1A14 6676 21st_transmit_PDO_mapping
1A15 6677 22st_transmit_PDO_mapping
2000 8192 AnyParameterReadID
2001 8193 AnyParameterReadValue
2002 8194 AnyParameterWrite
2003 8195 nx_current_percentage
2004 8196 nx_torque_percentage
2063 8291 nx_fault_code
27D1 10193 NX Steuerwort
27D3 10195 NX Drehzahlsollwert
27D4 10196 Process data in1
27D5 10197 Process data in2
27D6 10198 Process data in3
27D7 10199 Process data in4
Unsigned32
Unsigned8
Unsigned32 RO
Unsigned32 RO
Unsigned32 RW
Unsigned32 RW
Identität
SDO-Parameter
PDOCommPar
PDOCommPar
PDOCommPar
PDOCommPar
PDOMapping
PDOMapping
PDOMapping
PDOMapping
PDOCommPar
PDOCommPar
PDOCommPar
PDOCommPar
PDOMapping
PDOMapping
PDOMapping
PDOMapping
Integer16 RW
Integer32 RO
Integer32 RW
Integer16 RO
Integer16 RO
Integer16 RO
Integer16 RW
Integer16 RW
Integer16 RW
Integer16 RW
Integer16 RW
Integer16 RW
CO
RO
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
1
Page 32
32• Vacon Servicedatenobjekte (SDO)
27D8 10200 Process data in5
27D9 10201 Process data in6
2836 10294 NX Statuswort
2838 10296 NX Istdrehzahl
2839 10297 Process data out1
283A 10298 Process data out2
283B 10299 Process data out3
283C 10300 Process data out4
283D 10301 Process data out5
283E 10302 Process data out6
6040 24640 Steuerwort
6041 24641 Statuswort
6042 24642 vl_target_velocity
6043 24643 vl_velocity_demand
6044 24644 vl_control_effort
6046 24646 vl_velocity_min_max_amount
6048 24648 vl_velocity_acceleration
6049 24649 vl_velocity_deceleration
604A 24650 vl_velocity_quick_stop
604E 24654 vl_velocity_reference
6060 24672 modes_of_operation
6061 24673 modes_of_operation_display
Integer16 RW
Integer16 RW
Integer16 RO
Integer16 RO
Integer16 RO
Integer16 RO
Integer16 RO
Integer16 RO
Integer16 RO
Integer16 RO
Unsigned16 RW
Unsigned16 RO
Integer16 RW
Integer16 RO
Integer16 RO
Unsigned32 RW
Rampe RW
Rampe RW
Rampe RW
Unsigned32 RW
Integer8 RO
Integer8 RO
8
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 33
Servicedatenobjekte (SDO) Vacon • 33
Beschreibung des Objektverzeichnisses
Abkürzungen
ro - read only, nur Lesen i16 - Integer8
wo - write only, nur Schreiben i32 - Integer8
rw - read write, Lesen und Schreiben u8 - Unsigned8
co - constant, Konstante u16 - Unsigned16
bool - Boolesch u32 - Unsigned32
i8 - Integer8 float - Fließkomma
Index
(HEX)
SubIndex
Name Werkseinst.
Min.
Max.
Typ
Attr.
Beschreibungen
Allgemeine Parameter
1000 00 Gerätetyp 0x00010192
0x00000000
0xFFFFFFFF
1001 00 Fehlerregister 0x00
0x00
0xFF
1003 Vordefiniertes Fehlerfeld Dieses Objekt enthält Fehler, die im Gerät aufgetreten
00 Anzahl der Fehler 0x0000
0x0000 0x00FE
01 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
02 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
03 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
04 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
05 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
06 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
07 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
08 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
09 Standard-Fehlerfeld 0x00000000
0x00000000
0xFFFFFFFF
0A Standard-Fehlerfeld 0x00000000
0x00000000
u32 co Der Gerätetyp gibt die Art des Geräts an. Die unteren
16 Bits enthalten die Geräteprofilnummer. Die oberen
16 Bits enthalten zusätzliche Informationen.
u8 ro Das Fehlerregister ist ein Feld mit 8 Bit, wobei jedes für
einen bestimmten Fehlertyp vorgesehen ist. Wenn ein
Fehler auftritt, muss das Bit gesetzt werden.
Bedeutung der Bits
0 generischer Fehler
1 Strom
2 Spannung
3 Temperatur
4 Kommunikationsfehler (Nachlauf, Fehlerzustand)
5 geräteprofilspezifisch
6 reserviert
7 herstellerspezifisch
sind und über ein Notfallobjekt gemeldet wurden.
Es handelt sich um eine Fehlerhistorie. Das Schreiben
von Wert 0 an den Subindex 0 löscht die gesamte
Fehlerhistorie.
u8 rw
u32 ro
u32 ro
u32 ro
u32 ro
u32 ro
u32 ro
u32 ro
u32 ro
u32 ro
u32 ro
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
8
Page 34

34• Vacon Servicedatenobjekte (SDO)
1005 00 COB-ID Synchronisati-
onsnachricht (cob-id sync
message)
100C 00 Überwachungszeit (Guard
Time)
100D 00 Lebenszeitfaktor (Life
Time Factor)
1018 Identitätsobjekt
00 Anzahl Einträge 0x4
01 Hersteller-ID (Vendor Id) 0x00000090 0x0
02 Produktcode 0x00000119 0x0
03 Revisionsnummer 0x00000001 0x0
04 Seriennummer 0x0
0xFFFFFFFF
0x80000080
0x00000001
0xFFFFFFFF
0x03E8
0x0000
0xFFFF
0x02
0x00
0xFF
Dieses Objekt enthält allgemeine Informationen über das
0x1
0x4
0xFFFFFFFF
0xFFFFFFFF
0xFFFFFFFF
0x0
0xFFFFFFFF
u32 ro COB-ID, die zur Synchronisation von PDO-Nachrichten
verwendet wird
u16 rw Gibt die Überwachungszeit in Millisekunden an. Falls
nicht verwendet, ist diese gleich 0.
Einheit: ms
u8 rw Die Lebensdauer des Geräts errechnet sich aus dem
Lebenszeitfaktor multipliziert mit der
Überwachungszeit. Falls nicht verwendet, ist diese
gleich 0.
Gerät.
u8 ro
u32 ro Subindex 1 enthält einen eindeutigen Wert, der jedem
Hersteller zugewiesen ist.
u32 ro Subindex 2 gibt den herstellerspezifischen Code an
(Geräteversion).
u32 ro Subindex 3 enthält die Revisionsnummer. Bit 31-16
entspricht der Haupt-Revisionsnummer, und Bit 15-0
zeigt die Unter-Revisionsnummer an.
u32 ro Subindex 4 bezeichnet die herstellerspezifische
Seriennummer.
Server-SDO-Parameter
1200 Server-SDO-Parameter Das Objekt enthält die Parameter für die
00 Anzahl Einträge 0x02 0x02
0x02
01 COB-ID Client -> Server 0x600+Busteil-
nehmer-ID
0x00000601
0xFFFFFFFF
02 COB-ID Server -> Client 0x580+Busteil-
nehmer-ID
0x00000581
0xFFFFFFFF
u8 ro
u32 ro
u32 ro
Servicedatenobjekte (SDOs), für die das Gerät der Server ist.
Kommunikationsparameter der Empfangs-PDOs (Receive PDOs)
1400 Empfangs-PDO 1
Kommunikationsparameter
00 Anzahl Einträge 0x02 0x02
01 COB-ID 0x200+Busteil-
02 Übertragungsart 0xFF
1405 Kommunikations-
parameter des EmpfangsPDO 6
00 Anzahl Einträge 0x02 0x02
01 COB-ID 0x300+Busteil-
02 Übertragungsart 0xFF
1414 Kommunikations-
parameter des EmpfangsPDO 21
00 Anzahl Einträge 0x02 0x02
Enthält die Kommunikationsparameter des ersten
U8 ro Subindex 0 bezeichnet die Anzahl der implementierten
0x05
U32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
nehmer-ID
0x00000201
0xFFFFFFFF
u8 ro Subindex 2 definiert die Übertragungsart.
0x00
0xFF
Enthält die Kommunikationsparameter des zweiten
u8 ro Subindex 0 bezeichnet die Anzahl der implementierten
0x05
u32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
nehmer-ID
0x00000301
0xFFFFFFFF
u8 ro Subindex 2 definiert die Übertragungsart.
0x00
0xFF
Enthält die Kommunikationsparameter des hersteller-
u8 ro Subindex 0 bezeichnet die Anzahl der implementierten
0x05
Prozessdatenobjekts (PDO), das der Umrichter
empfangen kann.
PDO-Parameter.
wird, wird das PDO deaktiviert.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
Prozessdatenobjekts (PDO), das der Umrichter
empfangen kann.
PDO-Parameter.
wird, wird das PDO deaktiviert.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
spezifischen PDO21, das der Umrichter empfangen
kann.
PDO-Parameter.
8
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 35
Servicedatenobjekte (SDO) Vacon • 35
01 COB-ID 0x400+Busteil-
nehmer-ID
0x00000401
0xFFFFFFFF
02 Übertragungsart 0xFF 0x00
1415 Kommunikationsparameter
des Empfangs-PDO 22
00 Anzahl Einträge 0x02 0x02
01 COB-ID 0x500+Busteilne
02 Übertragungsart 0xFF 0x00
0xFF
Enthält die Kommunikationsparameter des hersteller-
0x05
hmer-ID
0x00000501
0xFFFFFFFF
0xFF
u32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
wird, wird das PDO deaktiviert.
u8 ro Subindex 2 definiert die Übertragungsart.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
spezifischen PDO22, das der Umrichter empfangen
kann.
u8 ro Subindex 0 bezeichnet die Anzahl der implementierten
PDO-Parameter.
u32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
wird, wird das PDO deaktiviert.
u8 ro Subindex 2 definiert die Übertragungsart.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
Mapping-Parameter der Empfangs-PDOs (Receive PDOs)
1600 Mapping-Parameter von
Empfangs-PDO 1
00 Anzahl Einträge 0x01 0x00
01 PDO-Mapping-Eintrag 0x60400010
1605 Mapping-Parameter von
Empfangs-PDO 6
00 Anzahl Einträge 0x02
01 PDO-Mapping-Eintrag 0x60400010
02 PDO-Mapping-Eintrag 0x60420010
1614 Empfangs-PDO 21
Mapping-Parameter
00 Anzahl Einträge 0x04
01 PDO-Mapping-Eintrag 0x27D10010
02 PDO-Mapping-Eintrag 0x27D30010
03 PDO-Mapping-Eintrag 0x27D40010
04 PDO-Mapping-Eintrag 0x27D50010
1615 Empfangs-PDO 22
Mapping-Parameter
Enthält die Mapping-Parameter des ersten Prozessda-
tenobjekts (PDO), das der Umrichter empfangen kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge.
u8 ro
0x40
u32 ro
0x00000000
0xFFFFFFFF
Enthält die Mapping-Parameter von PDO6, das der
Umrichter empfangen kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge.
u8 ro
0x0 0x40
u32 ro
0x00000000
0xFFFFFFFF
u32 ro
0x00000000
0xFFFFFFFF
Enthält die Mapping-Parameter von PDO6, das der
Umrichter empfangen kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge.
u8 ro
0x00
0x40
u32 ro
0x00000000
0xFFFFFFFF
u32 ro
0x00000000
0xFFFFFFFF
u32 ro
0x00000000
0xFFFFFFFF
u32 ro
0x00000000
0xFFFFFFFF
Enthält die Mapping-Parameter von PDO6, das der
Umrichter empfangen kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge.
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
8
Page 36

36• Vacon Servicedatenobjekte (SDO)
00 Anzahl Einträge 0x04
0x00
0x40
01 PDO-Mapping-Eintrag 0x27D60010
0x00000000
0xFFFFFFFF
02 PDO-Mapping-Eintrag 0x27D70010
0x00000000
0xFFFFFFFF
03 PDO-Mapping-Eintrag 0x27D80010
0x00000000
0xFFFFFFFF
04 PDO-Mapping-Eintrag 0x27D90010
0x00000000
0xFFFFFFFF
u8 ro
u32 ro
u32 ro
u32 ro
u32 ro
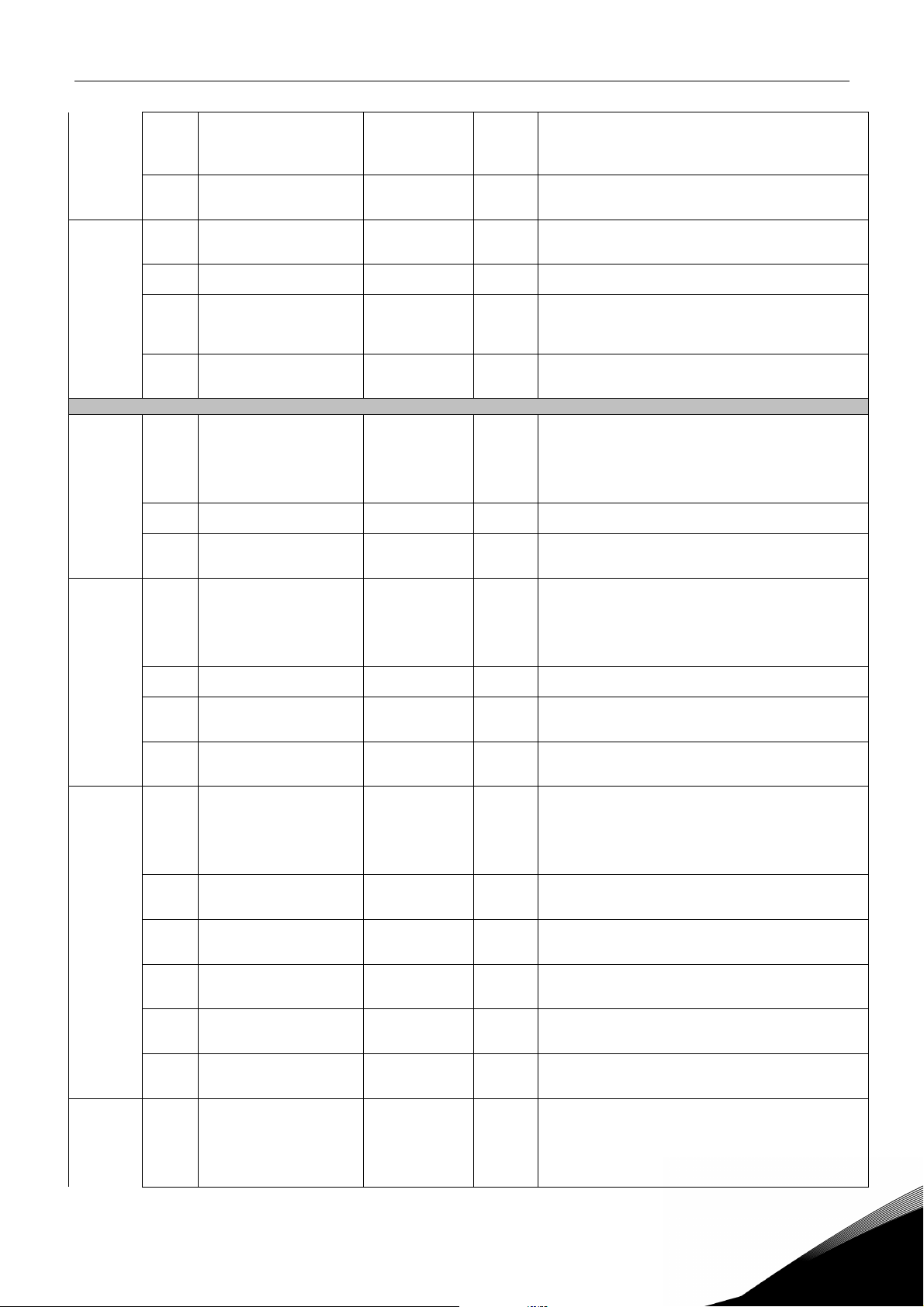
Kommunikationsparameter der Sende-PDOs (Transmit PDOs)
1800 Kommunikationsparameter
von Sende-PDO 1
00 Anzahl Einträge 0x04
01 COB-ID 0x180+Busteiln
02 Übertragungsart 0xFF
03 Sperrzeit 0x03E8
04 Kompatibilitätseingabe 0x03
1805 Kommunikationsparameter
von Sende-PDO 6
00 Anzahl Einträge 0x05
01 COB-ID 0x280+Busteiln
02 Übertragungsart 0xFF
03 Sperrzeit 0x03E8
04 Kompatibilitätseingabe 0x03
05 Ereigniszeitgeber 0x0000
1814 Kommunikationsparameter
von Sende-PDO 21
00 Anzahl Einträge 0x05
01 COB-ID 0x380+Busteiln
02 Übertragungsart 0xFF
03 Sperrzeit 0x03E8 u16 rw Eine Sperrzeit kann mit Subindex 3 in 100 μs-Schritten
Enthält die Kommunikationsparameter des ersten Proz-
0x02
0x05
ehmer-ID
0x00000181
0xFFFFFFFF
0x00
0xFF
0x0000
0xFFFF
0x00
0xFF
Enthält die Kommunikationsparameter von PDO 6, das
0x02
0x05
ehmer-ID
0x00000281
0xFFFFFFFF
0x00
0xFF
0x0000
0xFFFF
0x00
0xFF
0x0000
0xFFFF
Enthält die Kommunikationsparameter von PDO 21, das
0x02
0x05
ehmer-ID
0x00000381
0xFFFFFFFF
0x00
0xFF
u8 ro Subindex 0 bezeichnet die Anzahl der implementierten
u32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
u8 ro
u16 rw Eine Sperrzeit kann mit Subindex 3 in 100 μs-Schritten
u8 ro
u8 ro Subindex 0 bezeichnet die Anzahl der implementierten
u32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
u8 rw
u16 rw Eine Sperrzeit kann mit Subindex 3 in 100 μs-Schritten
u8 ro
u16 rw Die Ereigniszeit kann mit Subindex 5 mit einer Auflösung
u8 ro Subindex 0 bezeichnet die Anzahl der implementierten
u32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
u8 rw
essdatenobjekts (PDO), das der Umrichter senden kann.
PDO-Parameter.
wird, wird das PDO deaktiviert.
Subindex 2 definiert die Übertragungsart.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
angegeben werden. Diese entspricht der Mindestzeit für
die PDO-Übertragung.
Standard: 100 ms
der Umrichter senden kann.
PDO-Parameter.
wird, wird das PDO deaktiviert.
Subindex 2 definiert die Übertragungsart.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
angegeben werden. Diese entspricht der Mindestzeit für
die PDO-Übertragung.
Standard: 100 ms
von 1ms angegeben werden. Hierbei handelt es sich um
den Zeitraum, in dem das PDO gesendet wird.
Wert 0 = Ereigniszeitgeber ausschalten
der Umrichter senden kann.
PDO-Parameter.
wird, wird das PDO deaktiviert.
Subindex 2 definiert die Übertragungsart.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
8
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 37

Servicedatenobjekte (SDO) Vacon • 37
0x0000
0xFFFF
04 Kompatibilitätseingabe 0x03
05 Ereigniszeitgeber 0x0000
1815 Kommunikationsparameter
von Sende-PDO 22
00 Anzahl Einträge 0x05
01 COB-ID 0x480 +
02 Übertragungsart 0xFF
03 Sperrzeit 0x03E8
04 Kompatibilitätseingabe 0x03
05 Ereigniszeitgeber 0x0000
0x00
0xFF
0x0000
0xFFFF
Enthält die Kommunikationsparameter von PDO 22, das
0x02
0x05
Busteilnehmer
-ID 0x00000481
0xFFFFFFFF
0x00
0xFF
0x0000
0xFFFF
0x00
0xFF
0x0000
0xFFFF
u8 ro
u16 rw Die Ereigniszeit kann mit Subindex 5 mit einer Auflösung
u8 ro Subindex 0 bezeichnet die Anzahl der implementierten
u32 ro Subindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt
u8 rw
u16 rw Eine Sperrzeit kann mit Subindex 3 in 100 μs-Schritten
u8 ro
u16 rw Die Ereigniszeit kann mit Subindex 5 mit einer Auflösung
angegeben werden. Diese entspricht der Mindestzeit für
die PDO-Übertragung.
Standard: 100 ms
von 1ms angegeben werden. Hierbei handelt es sich um
den Zeitraum, in dem das PDO gesendet wird.
Wert 0 = Ereigniszeitgeber ausschalten
der Umrichter senden kann.
PDO-Parameter.
wird, wird das PDO deaktiviert.
Subindex 2 definiert die Übertragungsart.
Wert 0xFF (255) = asynchrone Übertragung
(=ereignisgesteuert)
angegeben werden. Diese entspricht der Mindestzeit für
die PDO-Übertragung.
Standard: 100 ms
von 1ms angegeben werden. Hierbei handelt es sich um
den Zeitraum, in dem das PDO gesendet wird.
Wert 0 = Ereigniszeitgeber ausschalten
Mapping-Parameter der Sende-PDOs (Transmit PDOs)
1A00 Sende-PDO 1
Mapping-Parameter
00 Anzahl Einträge 0x01 0x00
01 PDO-Mapping-Eintrag 0x60410010
1A05 Sende-PDO 6
Mapping-Parameter
00 Anzahl Einträge 0x02 0x0
01 PDO-Mapping-Eintrag 0x60410010
02 PDO-Mapping-Eintrag 0x60440010
1A14 Sende-PDO 21
Mapping-Parameter
00 Anzahl Einträge 0x04
01 PDO-Mapping-Eintrag 0x28360010
Enthält die Mapping-Parameter der Prozessdaten-
objekte (PDOs), die der Umrichter senden kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge. Der Mapping-Eintrag hat folgende Struktur:
Index , Subindex, Länge
u8 ro
0x40
u32 ro
0x00000000
0xFFFFFFFF
Enthält die Mapping-Parameter der Prozessdaten-
objekte (PDOs), die der Umrichter senden kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge. Der Mapping-Eintrag hat folgende Struktur:
Index , Subindex, Länge
u8 ro
0x40
u32 ro
0x00000000
0xFFFFFFFF
u32 ro
0x00000000
0xFFFFFFFF
Enthält die Mapping-Parameter der Prozessdaten-
objekte (PDOs), die der Umrichter senden kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge. Der Mapping-Eintrag hat folgende Struktur:
Index , Subindex, Länge
u8 ro
0x00 0x40
u32 ro
0x00000000
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
8
Page 38

38• Vacon Servicedatenobjekte (SDO)
02 PDO-Mapping-Eintrag 0x28380010
03 PDO-Mapping-Eintrag 0x28390010
04 PDO-Mapping-Eintrag 0x283A0010
1A15 Sende-PDO 22
Mapping-Parameter
00 Anzahl Einträge 0x04
01 PDO-Mapping-Eintrag 0x283B0010
02 PDO-Mapping-Eintrag 0x283C0010
03 PDO-Mapping-Eintrag 0x283D0010
04 PDO-Mapping-Eintrag 0x283E0010
0xFFFFFFFF
0x00000000
0xFFFFFFFF
0x00000000
0xFFFFFFFF
0x00000000
0xFFFFFFFF
Enthält die Mapping-Parameter der Prozessdaten-
0x00
0x40
0x00000000
0xFFFFFFFF
0x00000000
0xFFFFFFFF
0x00000000
0xFFFFFFFF
0x00000000
0xFFFFFFFF
u32 ro
u32 ro
u32 ro
u8 ro
u32 ro
u32 ro
u32 ro
u32 ro
objekte (PDOs), die der Umrichter senden kann.
Subindex 0 bezeichnet die Anzahl der abgebildeten
(„gemappten”) Datenobjekte. Alle weiteren Einträge
definieren die Daten anhand ihres Index, Subindex und
ihrer Länge. Der Mapping-Eintrag hat folgende Struktur:
Index, Subindex, Länge
Herstellerspezifische Parameter
2000 AnyParameterReadID 0x0000
0x0000
0xFFFF
2001 AnyParameterReadValue 0x00000000
0x00000000
0xFFFFFFFF
2002 AnyParameterWrite 0x00000000
0x00000000
0xFFFFFFFF
2003 NX Strom, in Prozent 0x0000
0x0000
0xFFFF
2004 NX Drehmoment, in Prozent 0x0000
0x0000
0xFFFF
2063 NX Fehlercode 0x0000
0x0000
0xFFFF
27D1 NX Steuerwort 0x0000
0x8000
0x7FFF
27D3 NX Drehzahlsollwert 0x0000
0x8000
0x7FFF
27D4 Process Data In1 0x0000
0x8000
0x7FFF
27D5 Process Data In2 0x0000
0x8000
0x7FFF
27D6 Process Data In3 0x0000
0x8000
0x7FFF
27D7 Process Data In4 0x0000
0x8000
0x7FFF
27D8 Process Data In5 0x0000
0x8000
u16 rw
u32 ro
u32 rw
u16 ro
u16 ro
i16 ro
i16 rw
i16 rw
i16 rw
i16 rw
i16 rw
i16 rw
i16 rw
Gemessener Motorstrom. (1 = 0,01A)
Berechnetes Drehmoment. Skaliert in 0,0%…100,0%
(0…1000)
Zeigt den Fehlercode des Umrichters an (= 0, wenn kein
aktiver Fehler)
8
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 39
Servicedatenobjekte (SDO) Vacon • 39
27D9 Process Data In6 0x0000
2836 NX Statuswort 0x0000
2838 NX Istdrehzahl 0x0000
2839 Process data out1 0x0000
283A Process data out2 0x0000
283B Process data out3 0x0000
283C Process data out4 0x0000
283D Process data out5 0x0000
283E Process data out6 0x0000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
0x8000
0x7FFF
i16 rw
i16 ro
i16 ro
i16 ro
i16 ro
i16 ro
i16 ro
i16 ro
i16 ro
Geräteprofilparameter
6040 Steuerwort 0x0000
6041 Statuswort 0x0000
6042 vl Zielgeschwindigkeit 0x0000 0x8000
6043 vl
Geschwindigkeitsanford
erung
6044 vl Regelungsaufwand 0x0000
6046 vl Geschwindigkeit min
max Betrag
00 Anzahl Einträge 0x02
01 Mindestdrehzahl 0x00000000
02 Höchstdrehzahl 0x00000000
6048 vl Geschwindigkeit
Beschleunigung
0x0000
0xFFFF
0x0000
0xFFFF
0x7FFF
0x0000
0x8000
0x7FFF
0x8000
0x7FFF
Legt die Drehzahlgrenzen des Umrichters in U/min fest.
0x00
0x02
0x00000000
0xFFFFFFFF
0x00000000
0xFFFFFFFF
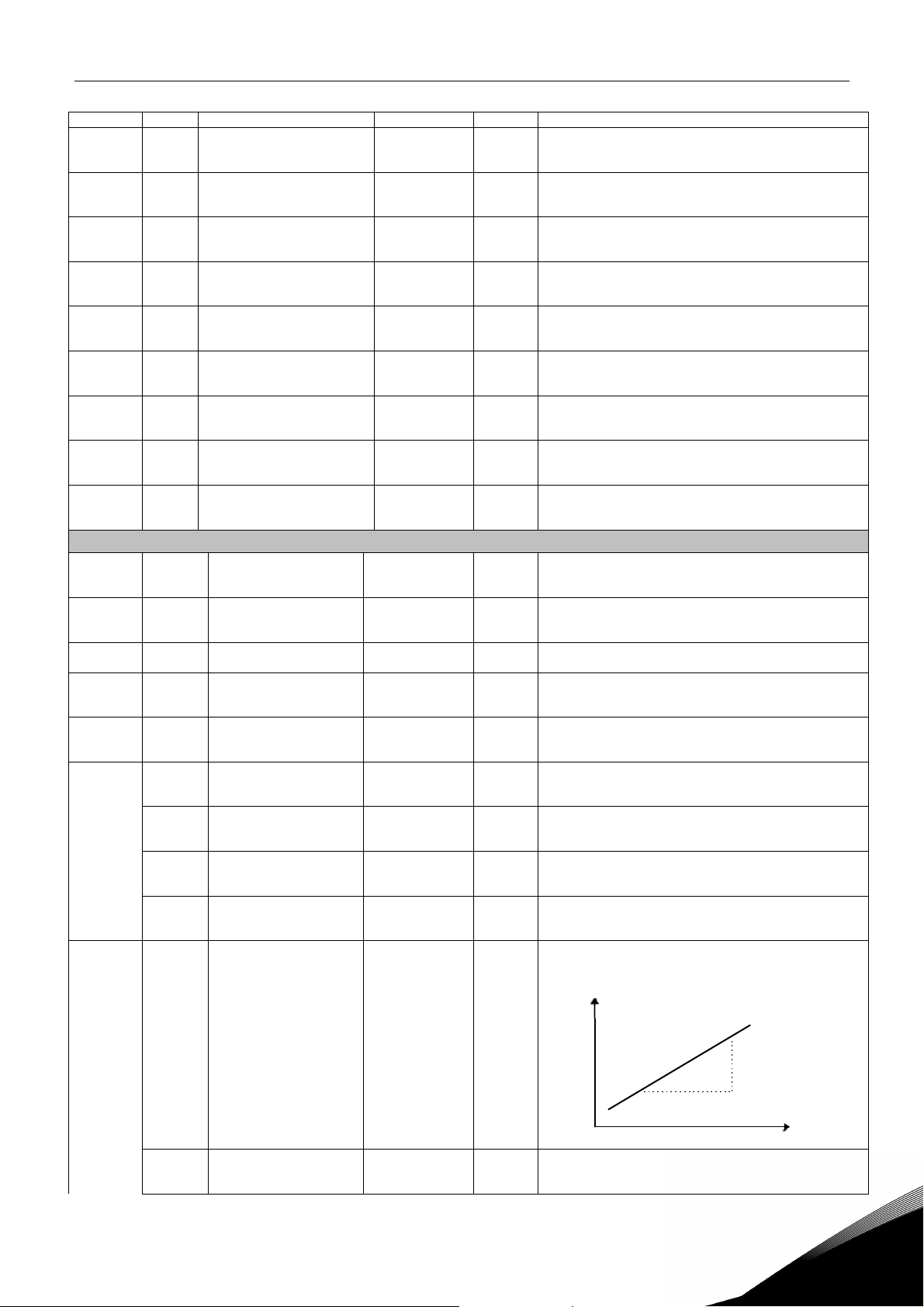
Dieser Parameter gibt die Steigung der Beschleuni-
u16 rw Steuerbefehl für die State Machine. Die State Machine
u16 ro Das Statuswort zeigt den aktuellen Status des
i16 rw Drehzahlsollwert des Umrichters.
i16 ro Drehzahlsollwert nach Rampenfunktion.
i16 ro Istdrehzahl des Motors.
u8 ro
u32 rw
u32 rw
beschreibt den aktuellen Status sowie mögliche
Steuersequenzen des Frequenzumrichters.
Umrichters an.
Einheit: U/min
Einheit: U/min
Einheit: U/min
Der Parameter besteht aus einer Mindest- und einer
Höchstdrehzahl.
gungsrampe vor. Der Parameter besteht aus zwei
Teilen: der Delta-Geschwindigkeit und der Delta-Zeit.
v / U/min
00 Anzahl Einträge 0x02
0x00
0x02
u8 ro
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
Delta-Drehzahl
Delta-Zeit
t/sek
8
Page 40
40• Vacon Servicedatenobjekte (SDO)
01 delta_speed 0x00000000
02 delta_time 0x0001
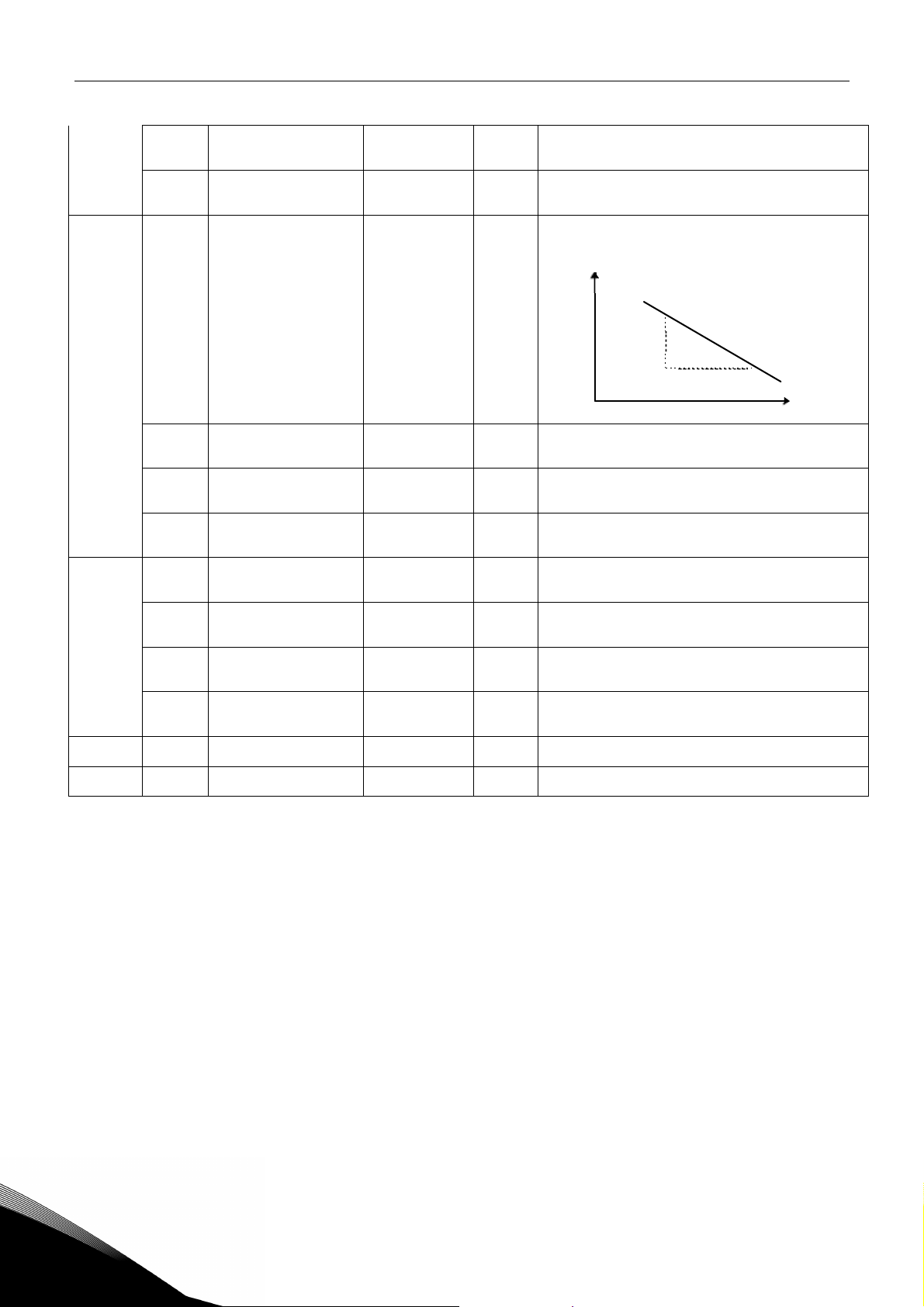
6049 vl Geschwindigkeit
Verzögerung
00 Anzahl Einträge 0x02
01 delta_speed 0x00000000
02 delta_time 0x0001
604A vl Geschwindigkeit Erzw.
Stopp
00 Anzahl Einträge 0x02
01 delta_speed 0x00000000
02 delta_time 0x0001
6060 Betriebsarten 0x02 0x80
6061 Anzeige Betriebsarten 0x02 0x80
0x00000000
0xFFFFFFFF
0x0000
0xFFFF
Dieser Parameter gibt die Steigung der Verzögerungs-
0x00
0x02
0x00000000
0xFFFFFFFF
0x0000
0xFFFF
Nicht verwendet
0x00
0x02
0x00000000
0xFFFFFFFF
0x0000
0xFFFF
0x7F
0x7F
u32 rw
u16 rw
rampe vor. Der Parameter besteht aus zwei Teilen: der
Delta-Geschwindigkeit und der Delta-Zeit.
v / U/min
u8 ro
u32 rw
u16 rw
u8 ro
u32 rw
u16 rw
i8 ro Dieser Parameter schaltet die tatsächlich gewählte
Betriebsart um.
i8 ro Dieser Parameter zeigt die aktuelle Betriebsart an.
DeltaDrehzahl
Delta-Zeit
t/sek
8
Tel.+358-(0)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 41
Servicedatenobjekte (SDO) Vacon • 41
9. DAS NODE-GUARDING-PROTOKOLL
Dieses Protokoll wird verwendet, um Fehler von entfernten Teilnehmern im Netzwerk zu ermitteln.
Der Master kann den Zustand der Slaves aktualisieren. Die Slaves überwachen den Zustand des
Masters, um festzustellen, ob dieser aktiv ist.
Jeder NMT-Slave verwendet einen Fern-COB für das Node-Guarding-Protokoll. Der NMT-Master
fragt jeden NMT-Slave zu regelmäßigen Zeitpunkten ab. Dieses Zeitintervall wird Überwachungszeit
(„Guard Time”) genannt und kann für jeden NMT-Slave anders sein. Die Reaktion des NMT-Slave
enthält den Zustand des NMT-Slaves. Der Slave beginnt mit der Überwachung, nachdem die
Busteilnehmer-Überwachungsmitteilung vom MNT-Master empfangen wurde. Wenn der Slave
(= Umrichter) danach keine Busteilnehmer-Überwachungsmitteilung während der „Lebenszeit“
empfängt, erzeugt er einen „Feldbusfehler“.
Die CANopen-Optionskarte von Vacon bietet folgende Eigenschaften für Überwachungszwecke:
Index
(HEX)
100C 00 Überwachungszeit
SubIndex
Name Werkseinst.
Min.
Max.
1000
(Guard Time)
0
65535
Typ
Attr.
u16
rw
Beschreibungen
Gibt die Überwachungszeit in
Millisekunden an. Falls nicht
verwendet, ist der Wert gleich 0.
Einheit: ms
100D 00 Lebenszeitfaktor
(Life Time Factor) 2 0
255
u8 rw Die Lebensdauer des Geräts errechnet
sich aus dem Lebenszeitfaktor
multipliziert mit der Überwachungszeit.
Falls nicht verwendet, ist der Wert
gleich 0.
Die standardmäßige „Lebenszeit” berechnet sich wie folgt: 1000ms (Überwachungszeit) * 2
(Lebenszeitfaktor) = 2 s
Beispiel – Node-Guarding-Nachrichten:
MASTER -> SLAVE (Busteilnehmer-ID = 1)
Nachricht ID Länge RTR
NMT (Busteilnehmerüberwachung)
0x701 0 1
SLAVE RESPONSE (Busteilnehmer-ID = 1)
Nachricht ID Länge 1
NMT (Busteilnehmerüberwachung)
X = bit7 0 / 1 (Toggle-Bit )
bit6…0 Slave Status (5 operational)
0x701 1 X
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
8
Page 42

42• Vacon Node-Guarding-Protokoll
10.
ELEKTRONISCHES DATENBLATT, EDS-DATEI
Geräteparameter und Kommunikationsanlagen müssen konfiguriert werden, damit Geräte in einem
Kommunikationsnetzwerk eingesetzt werden können. CANopen gibt einen standardisieren
Zugriffsweg zu diesen Parametern über das Objektverzeichnis vor.
Aufgrund der Komplexität von CANopen-Systemen ist der Einsatz von Softwaretools unumgänglich.
Diese Tools vereinfachen die Planung, Konfiguration sowie den Analyseprozess und leisten einen
wertvollen Beitrag zur Verbesserung der Sicherheit des Systems.
Um diesen Aufgaben gerecht zu werden, benötigen die Softwaretools eine elektronische Beschreibung
der CANopen-Geräte. Damit herstellerunabhängige Tools eingesetzt werden können, wird in diesem
Dokument ein standardisiertes Dateiformat festgelegt. Dieses wird als „Elektronisches Datenblatt”
(Electronic Data Sheet, EDS) bezeichnet.
Die EDS-Datei für die CANopen-Optionskarte OPTC6 steht auf der Homepage von Vacon zur
Verfügung.
9
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 43

Anhänge Vacon • 43
,
q
q
11. ANHÄNGE
Anhang A: Geräteprofile für Umrichter
Die CANopen-Optionskarte von Vacon erfüllt die Anforderungen des Geräteprofils DSP-402. Die
Betriebsart „Geschwindigkeit” wird unterstützt.
Grundlegende Gerätesteuerung und Datenschnittstelle
Umrichterschnittste
lle
Steuerwort (6040h)
Statuswort (6041h)
vl_target_velocity (6042h) U/min
vl_velocity_min_max_amount
vl_velocity_deceleration (6049h)
vl_velocity_acceleration (6048h)
vl_velocity_demand (6043h) U/min
State
Machine
U/min - %
U/min - Hz
U/min - Hz
U/min - Hz
% - U/min
BETRIEB/STOPP,
BETRIEB/STOPP
Mindestfre
Hö
chstfre
Auslaufzeit
chlaufzeit
Ho
Applikation
Grenzwert
uenz
uenz
Rampe
rehzahl
vl_control_effort (6044h) U/min
%torque (2003h)
%current (2004h)
Fehlercode (2063h)
U/min - %
Istd
Motordrehmoment
Motorstrom
lercode
Feh
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
Motor
11
Page 44
44• Vacon Anhänge
Anhang B: SDO-Nachrichten
Verzeichnisobjekt lesen: SDO1 Rx
Master an Slave (1)
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x601 0 4 Befehl Objektindex Subindex D0 D1 D2 D3
Befehl = 0x40
Befehl aaabbbbb (= 0100 0000)
aaa = 010, Hochladeanforderung einleiten
Antwort: SDO1 Tx
Slave (1) an Master
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x581 0 8
Antwort = z.B. 0x43
Antwort aaabcces (= 0100 0011)
aaa = 010 Upload Response starten
b = 0 Nicht verwendet
cc = 00 Anzahl leerer Bytes (diese Antwort besteht aus 4 Bytes)
e = 1 beschleunigte Übertragung
s = 1 Datensatzgröße ist angegeben
Daten D0…D4
Antwort
Objektindex
Subindex D0 D1 D2 D3
Verzeichnisobjekt schreiben: SDO1 Rx
Master an Slave (1)
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x601 0 8
Befehl = z.B. 0x2B
Befehl aaabcces (= 0010 1011)
aaa = 010 Download-Anforderung einleiten
b = 0 Nicht verwendet
cc = 00 Anzahl leerer Bytes (diese Antwort besteht aus 4 Bytes)
e = 1 beschleunigte Übertragung
s = 1 Datensatzgröße ist angegeben
Daten D0…D4
Befehl
Objektindex
Subindex D0 D1 D2 D3
Antwort: SDO1 Tx
Slave (1) an Master
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x581 0 4
Antwort = 0x60
Antwort aaabbbbb (= 0110 0000)
aaa = 010 Download Response starten
b
bbbb = 0 0000 Nicht verwendet
Antwort
Objektindex
Subindex D0 D1 D2 D3
11
Tel.+358-(0
)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 45

Anhänge Vacon • 45
Anhang C: Prozessdateninhalte
Process Data OUT (Slave Master)
Der Feldbus-Master kann die Istwerte des Frequenzumrichters anhand von Prozessdaten-Variablen lesen.
Die Basisapplikation, Standardapplikation, Ort/Fern-Applikation, Multi-Festdrehzahlapplikation, PIDReglerapplikation sowie Pumpen- und Lüfterapplikation
Daten Wert Einheit Skalierung
Process data OUT 1 Ausgangsfrequenz Hz 0,01 Hz
Process data OUT 2 Motordrehzahl U/min 1 U/min
Process data OUT 3 Motorstrom A 0,1 A
Process data OUT 4 Motordrehmoment % 0,1 %
Process data OUT 5 Motorleistung % 0,1 %
Process data OUT 6 Motorspannung V 0,1 V
verwenden folgende Prozessdaten:
Universalapplikation
Die
wachungswerte und Umrichterparameter können anhand der ID-Nummer ausgewählt werden (siehe
All-in-One-Applikationshandbuch für NX-Frequenzumrichter, Tabellen der Überwachungswerte und
Parameter). Die Tabelle oben zeigt die standardmäßigen Auswahlmöglichkeiten.
Process Data IN (Master -> Slave)
Steuerwort, Sollwert- und Prozessdaten werden mit den All-in-One-Applikationen wie folgt
verwendet:
verfügt über einen Auswahlparameter für alle Prozessdaten. Die Über-
Basisapplikation, Standardapplikation, Ort/Fern-Applikation, Multi-Festdrehzahlapplikationen
Daten Wert Einheit Skalierung
Sollwert Drehzahlsollwert % 0,01%
Steuerwort Start/Stopp-Befehl
Fehlerrückst.-Befehl
PD1 – PD6 Nicht verwendet - -
- -
24-Stunden-Support +358 (0)40 837 1150 • E-Mail: vacon@vacon.com
11
Page 46

46• Vacon Anhänge
Universalapplikation
Daten Wert Einheit Skalierung
Sollwert Drehzahlsollwert % 0,01%
Steuerwort Start/Stopp-Befehl
Fehlerrückst.-Befehl
Prozessdaten IN1 Drehmomentsollwert % 0,1%
Prozessdaten IN2 Freier AnalogEINGANG % 0,01%
PD3 – PD6 Nicht verwendet - -
- -
PID-Regelung sowie Pumpen- und Lüftersteuerungsapplikationen
Daten Wert Einheit Skalierung
Sollwert Drehzahlsollwert % 0,01%
Steuerwort Start/Stopp-Befehl
Fehlerrückst.-Befehl
Prozessdaten IN1 Sollwert für PID-Regler % 0,01%
Prozessdaten IN2 Istwert 1 an PID-Regler % 0,01%
Prozessdaten IN3 Istwert 2 an PID-Regler % 0,01%
PD4–PD6 Nicht verwendet - -
- -
Anhang D:
Version 8 der Optionskarte C6 Option funktioniert anders als die anderen. Es sind einige Änderungen
auf der SPS-Seite erforderlich.
11
Tel.+358-(0)201-21
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 47

Zentrale und Produktion:
Vaasa
Vacon Plc
Runsorintie 7
65380 Vaasa
Vorname.Zuname@vacon.com
Telefon: +358 (0)201 2121
Fax: +358 (0)201 212 205
Vertriebsgesellschaften und Vertriebsbüros:
Finnland
Helsinki
Vacon Plc
Äyritie 12
01510 Vantaa
Telefon: +358 (0)201 212 600
Fax: +358 (0)201 212 699
Tampere
Vacon Plc
Vehnämyllynkatu 18
33580 Tampere
Telefon: +358 (0)201 2121
Fax: +358 (0)201 212 750
Österreich
Vacon AT Antriebssysteme GmbH
Aumühlweg 21
2544 Leobersdorf
Telefon: +43 2256 651 66
Fax: +43 2256 651 66 66
Belgien
Vacon Benelux NV/SA
Interleuvenlaan 62
3001 Heverlee (Leuven)
Telefon: +32 (0)16 394 825
Fax: +32 (0)16 394 827
China
Vacon Suzhou Drives Co. Ltd.
Büro Peking (Beijing Office)
A205, Grand Pacific Garden Mansion
8A Guanhua Road
Beijing 100026
Telefon: +86 10 6581 3734
Fax: +86 10 6581 3754
Frankreich
Vacon France
ZAC du Fresne
1 Rue Jacquard – BP72
91280 Saint Pierre du Perray CDIS
Telefon: +33 (0)1 69 89 60 30
Fax: +33 (0)1 69 89 60 40
Produktion:
Suzhou, China
Vacon Suzhou Drives Co. Ltd.
Building 13CD
428 Xinglong Street
Suchun Industrial Square
Suzhou 215126
Telefon: +86 512 6283 6630
Fax: +86 512 6283 6618
Deutschland
Vacon GmbH
Gladbecker Strasse 425
45329 Essen
Telefon: +49 (0)201 806 700
Fax: +49 (0)201 806 7099
Indien
Vacon India
Flat no T1, 3rd floor
VNS Ashok Apartment
Plot no. 9A, New Beach Road
Thiruvanmiyur
Chennai-600041
Tel. +91 44 245 150 18
Italien
Vacon S.p.A.
Via F.lli Guerra, 35
42100 Reggio Emilia
Telefon: +39 0522 276811
Fax: +39 0522 276890
Niederlande
Vacon Benelux BV
Weide 40
4206 CJ Gorinchem
Telefon: +31 (0)183 642 970
Fax: +31 (0)183 642 971
Norwegen
Vacon AS
Langgata 2
3080 Holmestrand
Telefon: +47 330 96120
Fax: +47 330 96130
Russland
ZAO Vacon Drives
Bolshaja Jakimanka 31,
109180 Moscow
Telefon: +7 (095) 974 14 47
Fax: +7 (095) 974 15 54
Vacon Traction Oy
Vehnämyllynkatu 18
33580 Tampere
Telefon: +358 (0)201 2121
Fax: +358 (0)201 212 710
ZAO Vacon Drives
2ya Sovetskaya 7, office 210A
191036 St. Petersburg
Telefon: +7 (812) 332 1114
Fax: +7 (812) 279 9053
Spanien
Vacon Drives Ibérica S.A.
Miquel Servet, 2. P.I. Bufalvent
08243 Manresa
Telefon: +34 93 877 45 06
Fax: +34 93 877 00 09
Schweden
Vacon AB
Torget 1
172 67 Sundbyberg
Telefon: +46 (0)8 293 055
Fax: +46 (0)8 290 755
Thailand
Vacon South East Asia
335/32 5th-6th floor
Srinakarin Road, Prawet
Bangkok 10250
Tel. +66 (0)85 100 7090
Vereinigte Arabische Emirate
Vacon Middle East and Africa
Block A, Office 4A 226
P.O.Box 54763
Dubai Airport Free Zone
Dubai
Tel. +971 (0)4 204 5200
Fax: +971 (0)4 204 5203
Großbritannien
Vacon Drives (UK) Ltd.
18, Maizefield
Hinckley Fields Industrial Estate
Hinckley
LE10 1YF Leicestershire
Telefon: +44 (0)1455 611 515
Fax: +44 (0)1455 611 517
VaconVertriebshändler:
11
Page 48

Find your nearest Vacon office
on the Internet at:
www.vacon.com
Manual authoring:
documentation@vacon.com
Vacon Plc.
Runsorintie 7
65380 Vaasa
Finland
Subject to change without prior notice
© 2014 Vacon Plc.
Document ID:
Rev. A
Sales code: DOC-OPTC6+DLDE
 Loading...
Loading...