

Page 1

vacon nxl
®
frekvensomriktare
multifunktion
applikationshandboken
Page 2

Multifunktionsapplikation för NXL vacon • 1
Vacon Multifunktionsapplikation
(Programvara ALFIFF20) Ver 1.02
INNEHÅLLSFÖRTECKNING
1. Inledning .................................................................................................................................. 2
2. Styr-I/O .................................................................................................................................... 3
3. Multifunktionsapplikation – Parameterlistor ............................................................................ 4
3.1 Övervakningsvärden (manöverpanel: Meny M1) ...................................................................... 4
3.2 Grundparametrar (manöverpanel: Meny P2 P2.1) ............................................................... 5
3.3 Ingångssignaler (manöverpanel: Meny P2 P2.2) .................................................................. 7
3.4 Utgångssignaler (manöverpanel: Meny P2 P2.3) ................................................................. 9
3.5 Frekvensomriktarens styrparametrar (manöverpanel: Meny P2 P2.4) ............................. 10
3.6 Förbjudna frekvenser (manöverpanel: Meny P2 P2.5) ....................................................... 10
3.7 Motorkontrollparametrar (manöverpanel: Meny P2 P2.6) ................................................. 11
3.8 Skyddsfunktioner (manöverpanel: Meny P2 P2.7) ............................................................. 12
3.9 Automatisk återstart (manöverpanel: Meny P2 P2.8) ........................................................ 13
3.10 Parametrar för PID-referens (manöverpanel: Meny P2 P2.9) ........................................... 13
3.11 Parametrar för pump- och fläktkontroll (manöverpanel: Meny P2 P2.10) ........................ 15
3.12 Panelstyrning (manöverpanel: Meny K3) ................................................................................ 16
3.13 Systemmeny (manöverpanel: Meny S6) .................................................................................. 16
3.14 Tilläggskort (manöverpanel: Meny E7) ................................................................................... 16
4. Beskrivning av parametrar ..................................................................................................... 17
4.1 GRUNDPARAMETRAR ............................................................................................................. 17
4.2 INGÅNGSSIGNALER ................................................................................................................ 22
4.3 UTGÅNGSSIGNALER ............................................................................................................... 27
4.4 OMRIKTARKONTROLL ............................................................................................................ 31
4.5 FÖRBJUDNA FREKVENSER .................................................................................................... 35
4.6 MOTORKONTROLL .................................................................................................................. 36
4.7 SKYDDSFUNKTIONER ............................................................................................................. 39
4.8 PARAMETRAR FÖR AUTOMATISK ÅTERSTART ...................................................................... 47
4.9 PARAMETRAR FÖR PID-REFERENS....................................................................................... 48
4.10 PUMP- OCH FLÄKTAUTOMATIK ............................................................................................. 55
4.11 PANELSTYRNINGSPARAMETRAR .......................................................................................... 64
5. Styrsignallogik i Multifunktionsapplikationen ......................................................................... 65
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 3

2 • vacon Inledning
1
Multifunktionsapplikation
1. INLEDNING
Multifunktionsapplikationen för Vacon NXL är vid leverans inställd för att använda direkt
frekvensreferens från analog ingång 1. Dock kan en PID-regulator användas t ex vid fläkt- och
pumpstyrning, vilket erbjuder mångsidiga mätnings- och justeringsmöjligheter. Detta innebär att
externa enheter inte är nödvändiga. Då omriktaren är tagen i drift, är den enda synliga
parametergruppen P2.1 (Grundparametrar). Specialparametrarna kan läsas och justeras efter
ändring av parameter 2.1.22 (Dölj parametrar).
Frekvensreferensen kan användas för styrning utan PID-regulator och kan väljas från de analoga
ingångarna, fältbussen, manöverpanelen, förvalda varvtal eller motorpotentiometer.
Specialparametrarna för pump- och fläktkontrollen (Grupp P2.10) kan läsas och justeras efter
ändring av par 2.9.1 till 2 (Pump- och fläktkontrollen aktiv).
PID-regulatorns referens kan väljas från de analoga ingångarna, fältbussen, panelreferens PID 1
eller genom att aktivera panelreferens PID 2 via en digital ingång. PID-regulatorn kan även
användas då frekvensomriktaren styrs via fältbuss eller manöverpanel.
De digitala ingångarna DIN2, DIN3, (DIN4) och de valbara digitala ingångarna DIE1, DIE2,
DIE3 kan programmeras fritt.
Interna och valbara digitala/relä- och analoga utgångar är fritt programmerbara.
Analogingång 1 kan programmeras som strömingång, spänningsingång eller som digital
ingång DIN4.
OBS! Om analogingång 1 har programmerats som DIN4 med parameter 2.2.6 (AI1 signalområde),
kontrollera att byglarnas lägen (Figur 1- 1) är korrekta.
Övriga funktioner:
PID-regulatorn kan dessutom användas från styrplats-I/O, panel och fältbuss
Insomningsfunktion
Övervakning av ärvärde: Fullt programmerbar; från, varning, fel
Programmerbar logik för start/stopp- och reversering
Referensskalning
2 förvalda varvtal
Val av analogt ingångsområde, signalskalning, invertering och filtrering
Övervakning av frekvensgräns
Programmerbara start- och stoppfunktioner
DC-bromsning vid start och stopp
Förbjudet frekvensområde
Programmerbar U/f-kurva och U/f-optimering
Justerbar kopplingsfrekvens
Automatisk återstart efter fel
Skydd och övervakningar (alla fullt programmerbara; från, varning, fel):
Strömingång
Externt fel
Utgångsfaser
Underspänning
Jordfel
Termiskt skydd, fastlåsningsskydd och
underlastskydd för motor
Termistor
Fältbusskommunikation
Tilläggskort
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 4
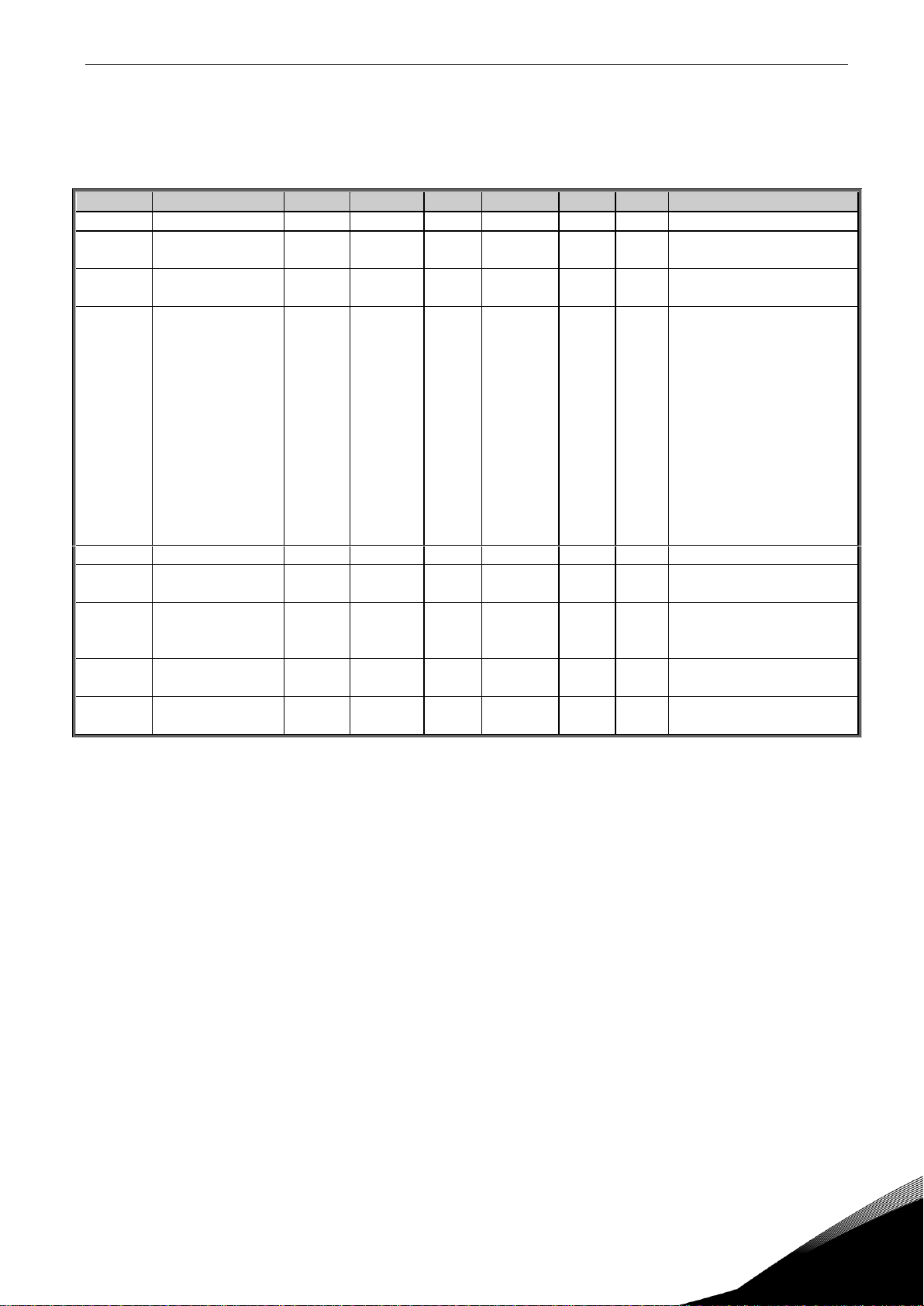
Styr-I/O vacon • 3
2
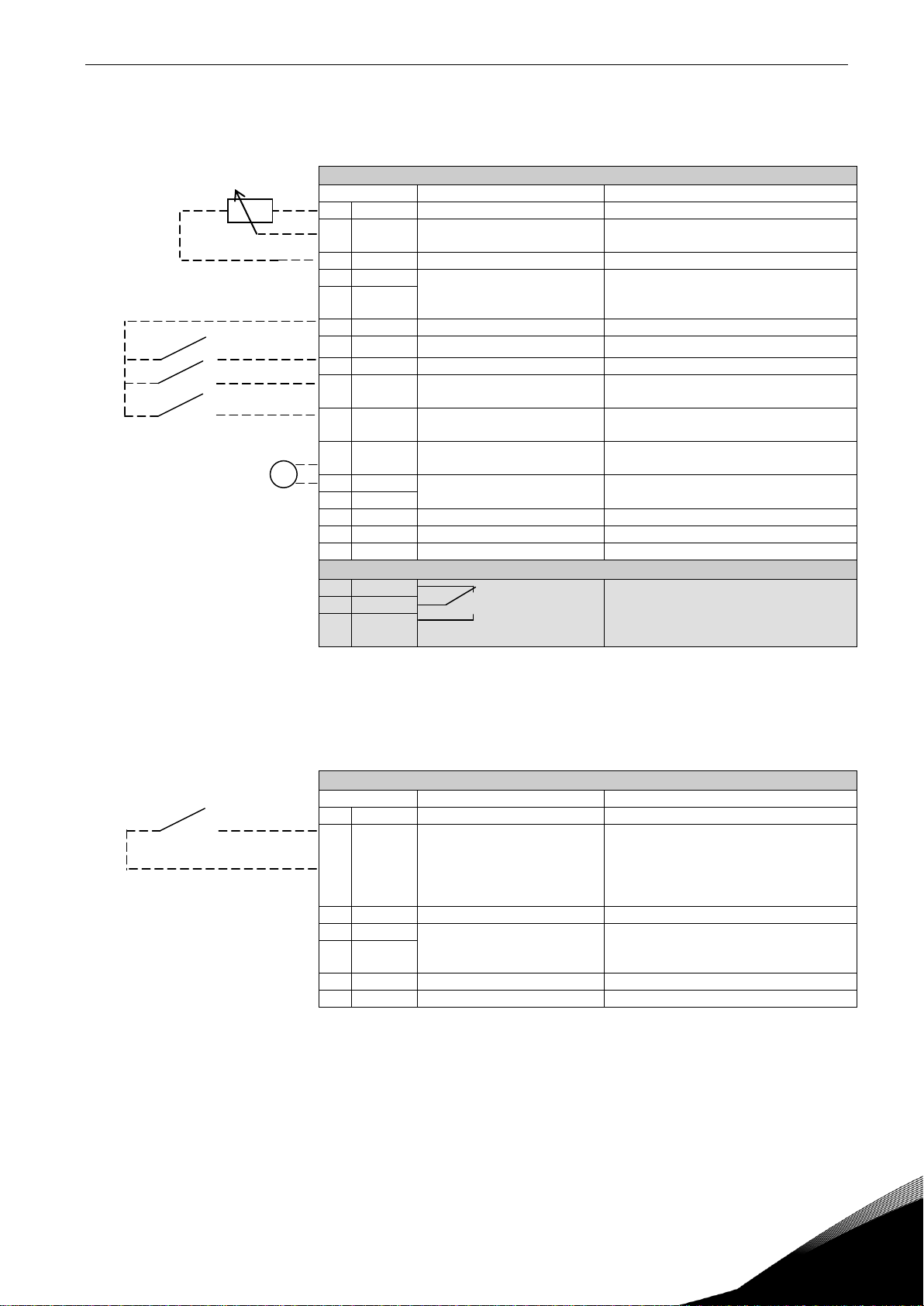
Plint
Signal
Beskrivning
1
+10 V
ref
Utgång för referensspänning
Matningsspänning till potentiometer etc
2
AI1+
Analog ingång,
spänningsområde 0—10 V DC
Spänningsingång för frekvensreferens
Kan programmeras som DIN4
3
AI1-
I/O-jord
Jord för referens- och styrspänningar
4
AI2+
Analog ingång, strömområde
0/4—20 mA, eller spänningsområde 0—10 V DC
Strömingång för frekvensreferens
(programmerbar)
5
AI2-
6
+24 V
Utgång för styrspänning
Matningsspänning till givare etc, max 0,1 A
7
GND
I/O-jord
Jord för referens- och styrspänningar
8
DIN1
Start framåt
Sluten kontakt = start framåt
9
DIN2
Start bakåt (programmerbar)
Sluten kontakt = start bakåt
10
DIN3
Konstanthastighet
val 1 (programmerbar)
Sluten kontakt = konstanthastighet
11
GND
I/O-jord
Jord för referens- och styrspänningar
18
AO1+
Utgångsfrekvens
Analog utgång
Programmerbar
Område 0—20 mA/RL, max 500
19
AO1-
A
RS 485
Seriell buss
Differentiell mottagare/transmitter
B
RS 485
Seriell buss
Differentiell mottagare/transmitter
30
+24 V
24 V aux. ingångsspänning
Hjälpspänning för styrenhet
21
RO1
Reläutgång 1
FEL
Programmerbar
22
RO1
23
RO1
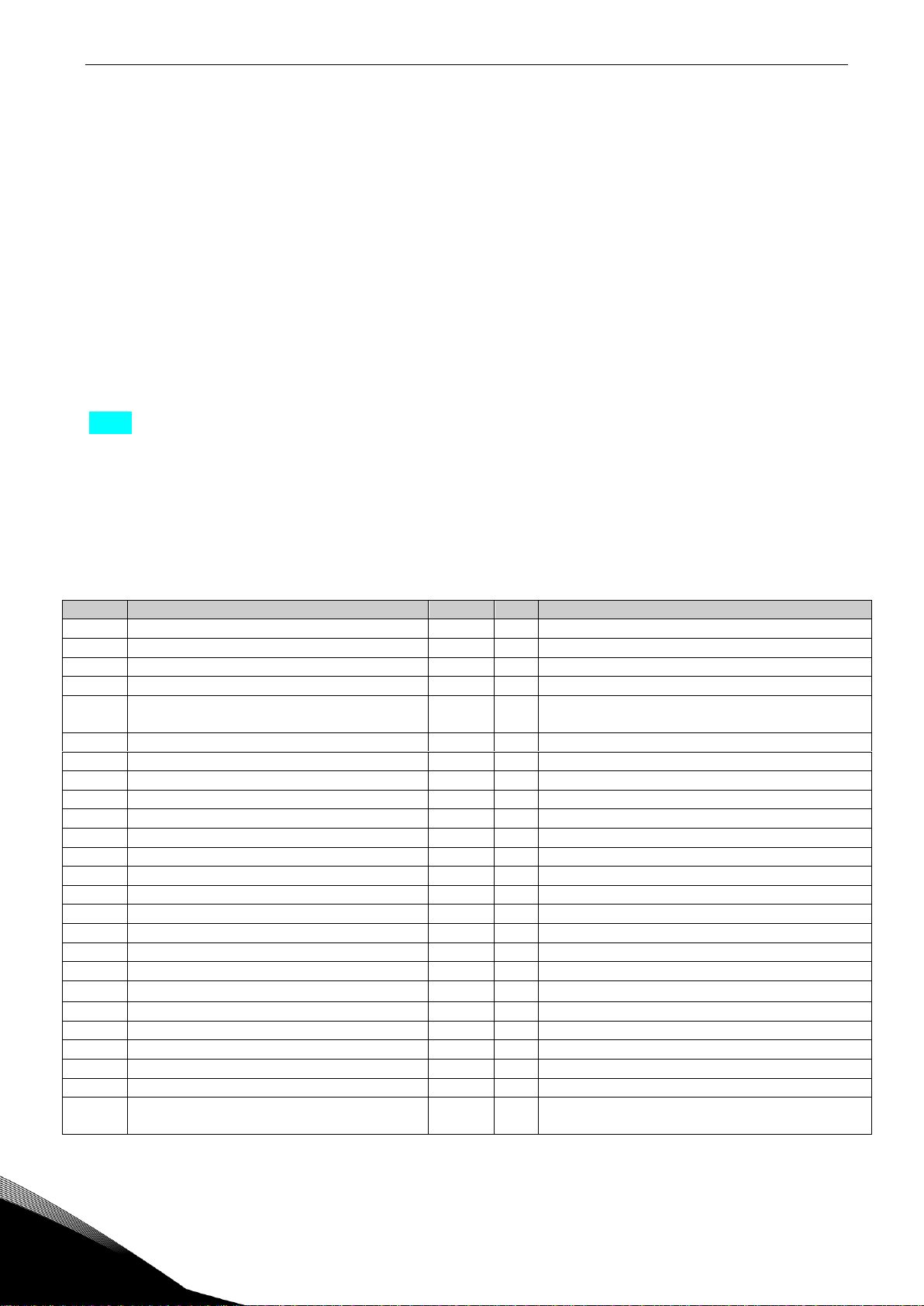
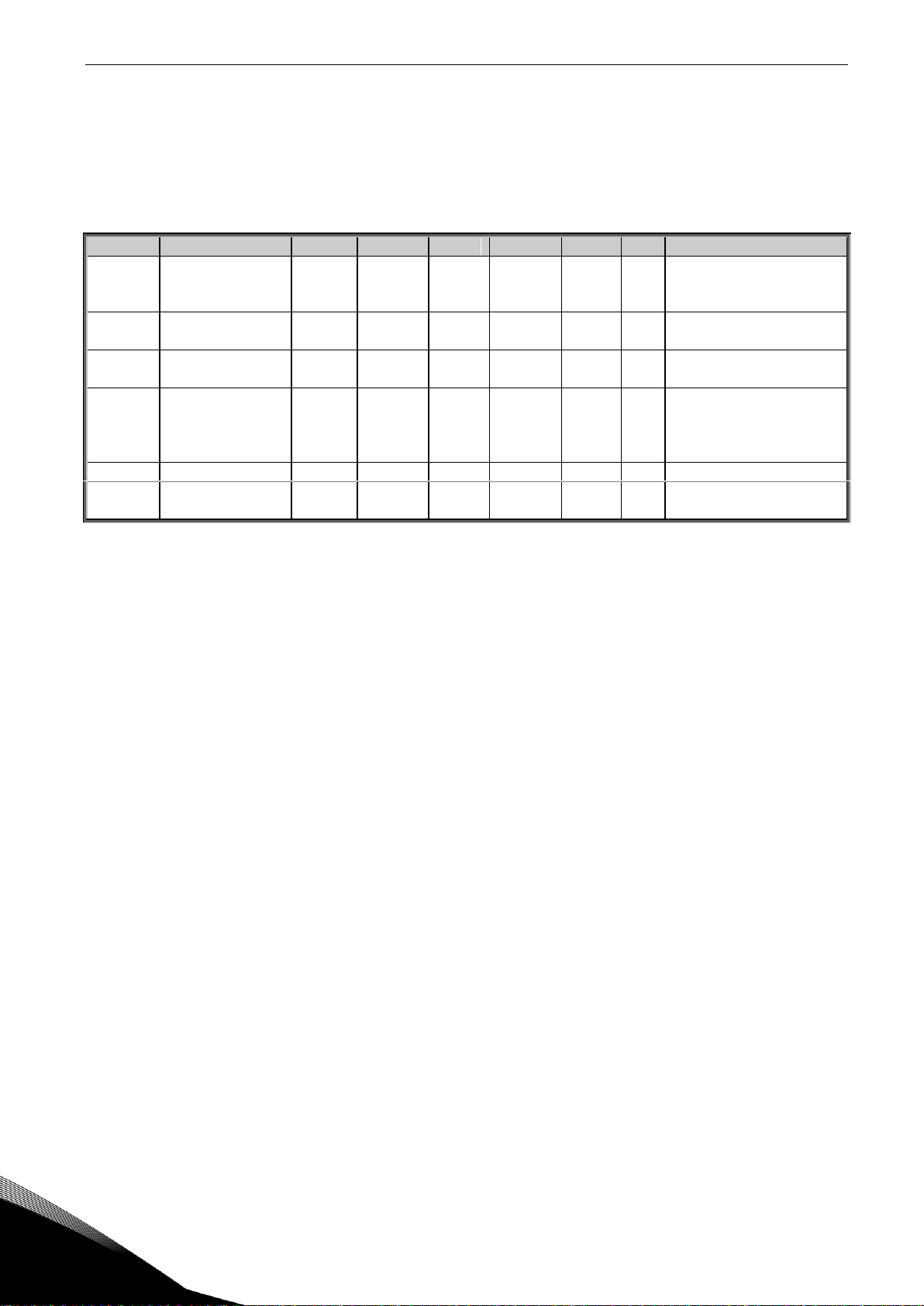
Plint
Signal
Beskrivning
1
+10 V
ref
Utgång för referensspänning
Matningsspänning till potentiometer etc
2
AI1+
eller
DIN 4
Analog ingång,
spänningsområde 0—10 V DC
Spänningsingång för frekvensreferens
(MF2-3)
Spänningsingång/strömingång för
frekvensreferens (MF4-MF6)
Kan programmeras som DIN4
3
AI1-
I/O-jord
Jord för referens- och styrspänningar
4
AI2+
Analog ingång,
strömområde 0—20 mA eller
spänningsområde 0—10 V DC
Strömingång/spänningsingång för
frekvensreferens
5
AI2-
6
+ 24 V
Utgång för styrspänning
7 GND
I/O-jord
Jord för referens- och styrspänningar
Referenspotentiometer
mA
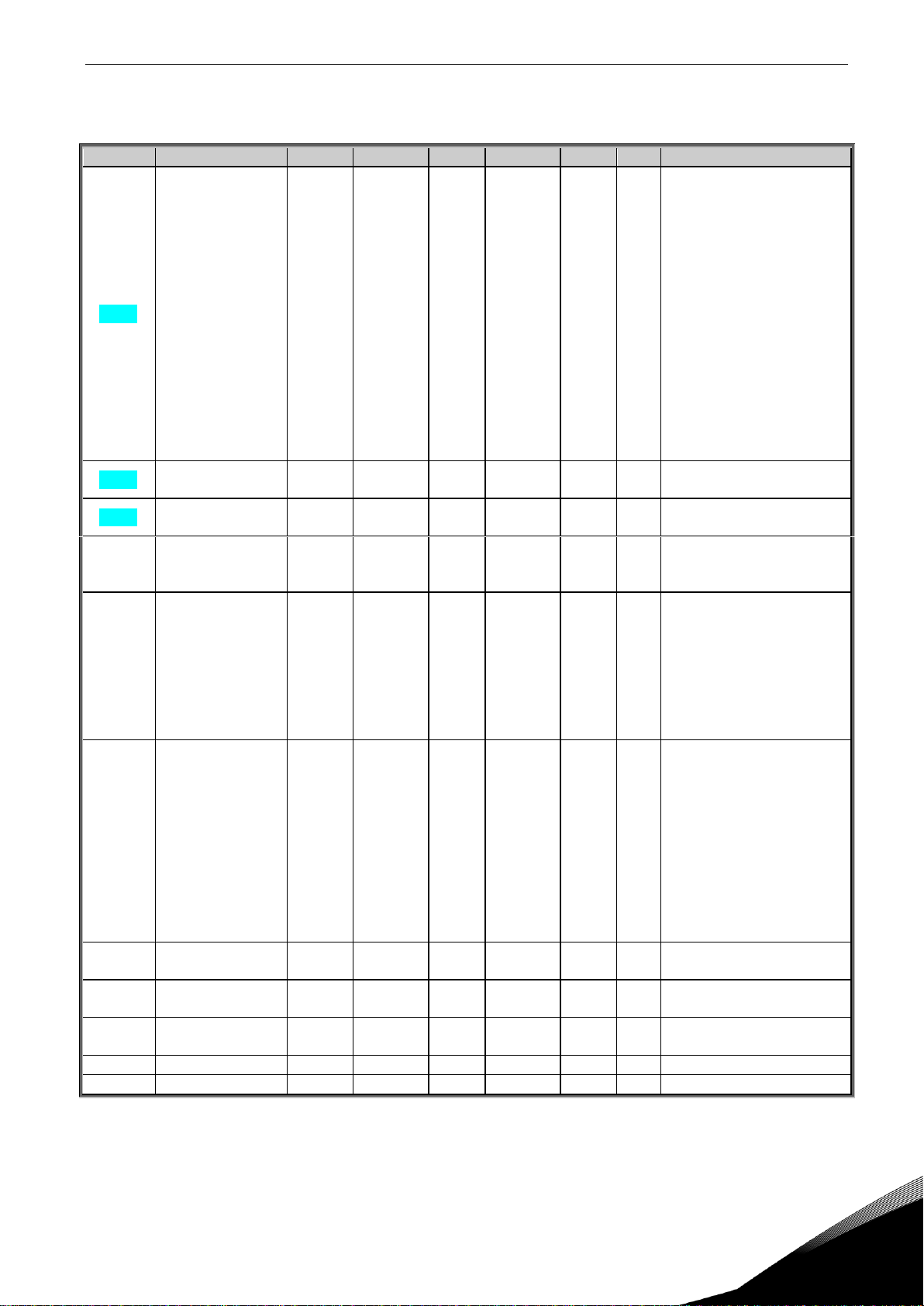
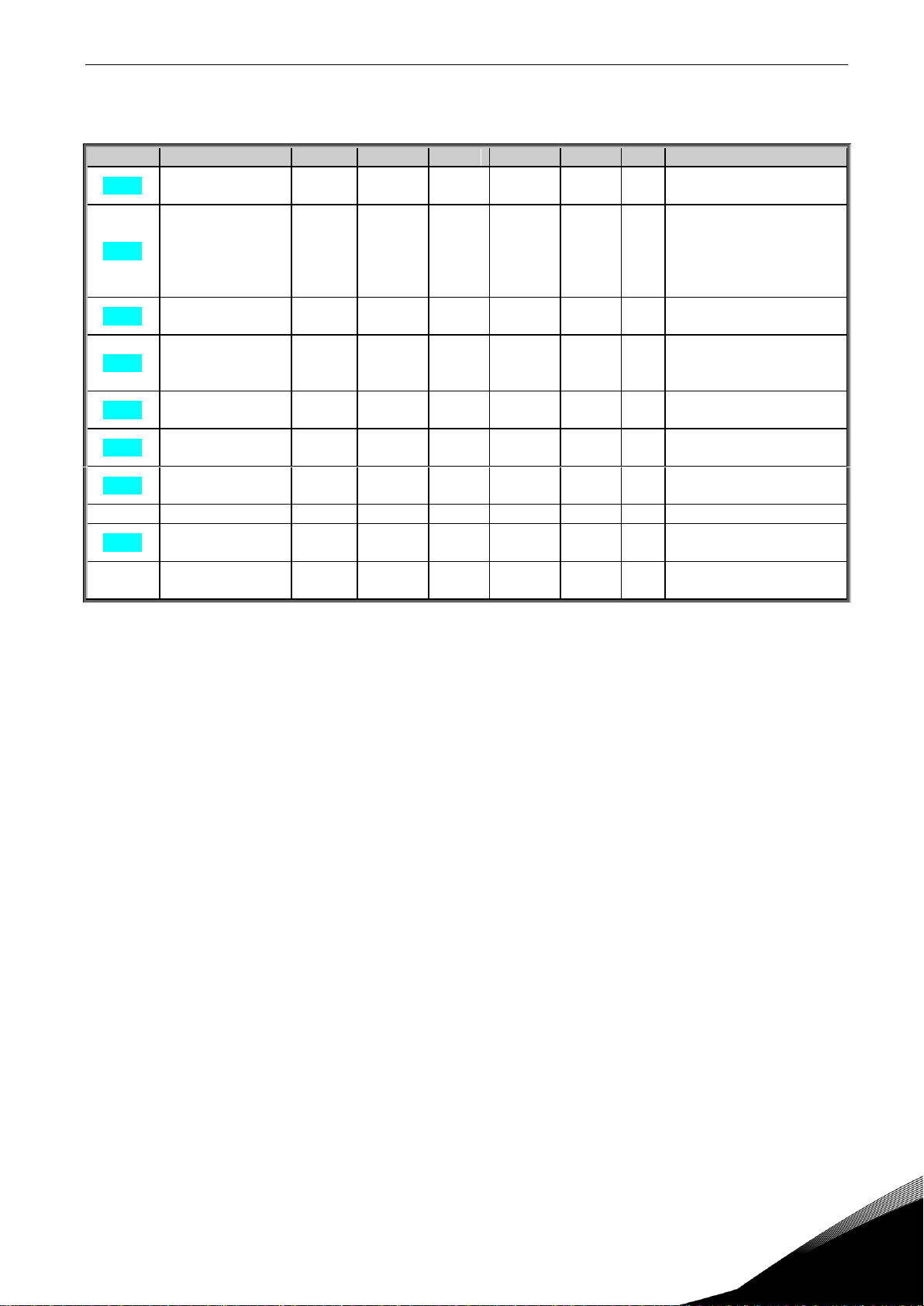
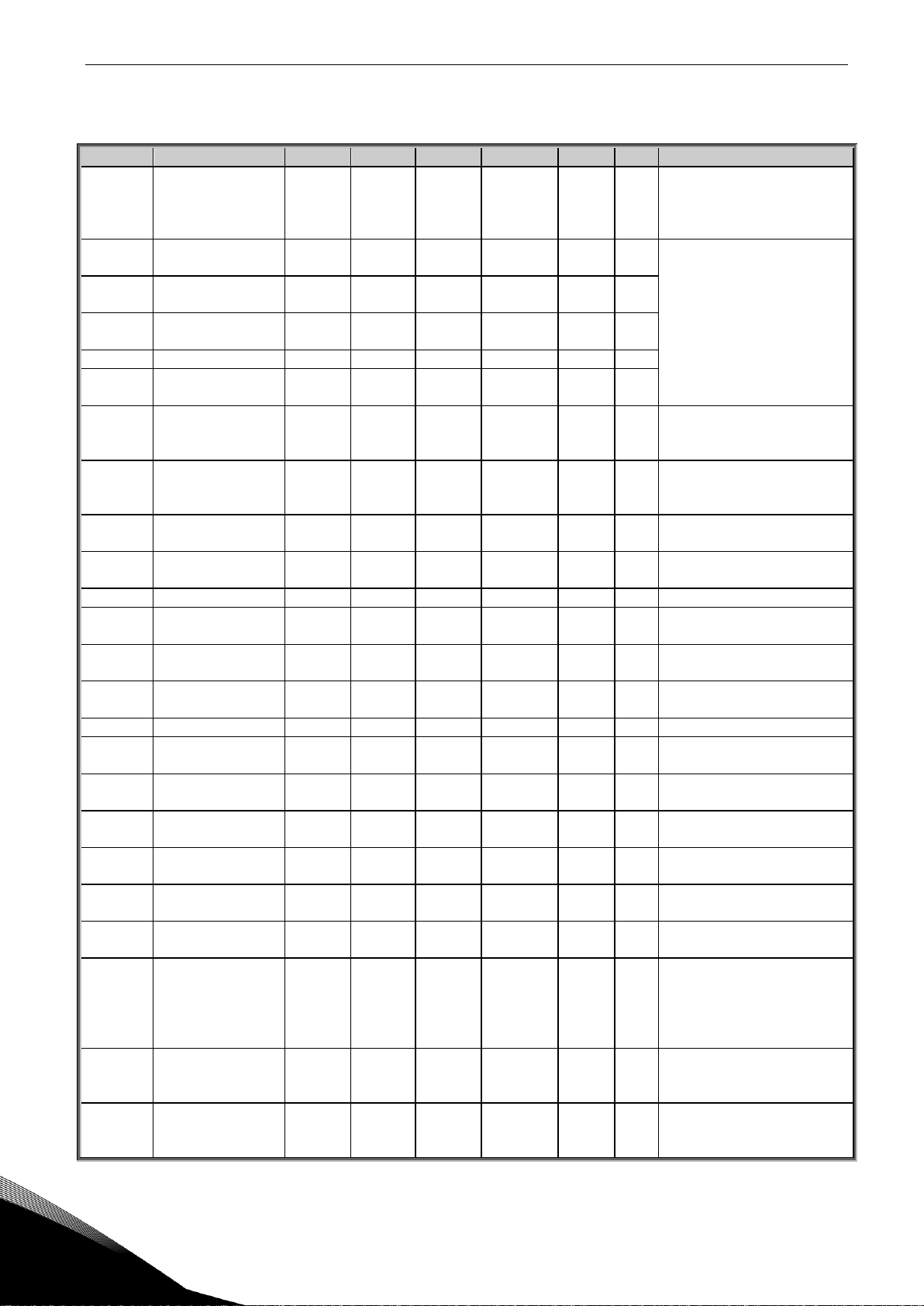
2. STYR-I/O
Tabell 1- 1. För multifunktionsapplikationen förvald I/O- konfiguration.
Tabell 1- 2. Programmering av AI1 som DIN4
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 5
4 • vacon Parameterlistor
3
Kod
Parameter
Enhet
ID
Beskrivning
V1.1
Utgångsfrekvens
Hz
1
Till motorn utmatad frekvens
V1.2
Frekvensreferens
Hz
25
V1.3
Motorvarvtal
rpm
2
Beräknat motorvarvtal
V1.4
Motorström
A
3
Uppmätt motorström
V1.5
Motormoment
%
4
Motorns beräknade momentana/nominella
moment
V1.6
Motoreffekt
%
5
Motorns beräknade momentana/nominella effekt
V1.7
Motorspänning
V
6
Beräknad motorspänning
V1.8
DC-bryggans spänning
V
7
Uppmätt spänning på DC-bryggan
V1.9
Enhetens temperatur
ºC
8
Kylflänsens temperatur
V1.10
Analog ingång 1
13
AI1
V1.11
Analog ingång 2
14
AI2
V1.12
Analog utgångsström
mA
26
AO1
V1.13
Analog utgångsström 1, expansionskort
mA
31
V1.14
Analog utgångsström 2, expansionskort
mA
32 V1.15
DIN1, DIN2, DIN3
15
Status hos digitala ingångar
V1.16
DIE1, DIE2, DIE3
33
I/O-expansionskort: Status hos digitala ingångar
V1.17
RO1 34
Status hos reläutgång 1
V1.18
ROE1, ROE2, ROE3
35
I/O-exp.kort: Reläutgångsstatus
V1.19
DOE 1
36
I/O-exp.kort: Status hos digital utgång 1
V1.20
PID-referens
%
20
I procent av max prosessreferens
V1.21
PID-återföringsvärde
%
21
I procent av max återföringsvärde
V1.22
PID-avvikelse
%
22
I procent av max avvikelse
V1.23
PID-utsignal
%
23
I procent av max utsignal
V1.24
Autoväxlingsutgångar 1, 2, 3
30
Används endast vid pump- och fläktautomatik
V1.26
Motortemperatur
%
9
Beräknad motortemperatur, 1 000 är lika med
100,0 % = motorns märktemperatur
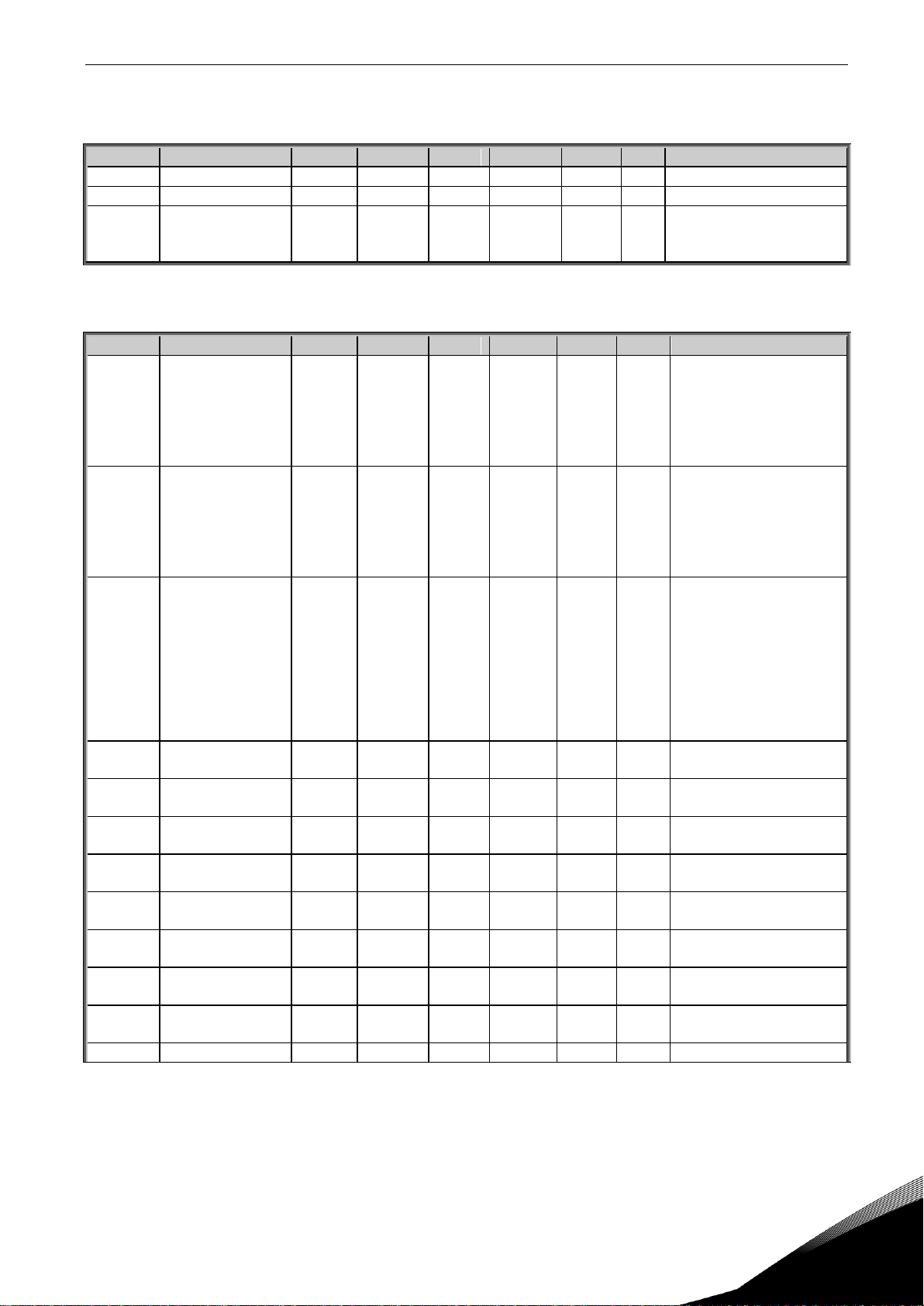
3. MULTIFUNKTIONSAPPLIKATION – PARAMETERLISTOR
På följande sidor återfinns listor över parametrarna i respektive parametergrupper. Beskrivning av
parametrarna finns på sidorna 17 till 48.
Förklaring av kolumner:
Kod = Platsindikering på manöverpanelen; visar aktuellt parameternummer
Parameter = Namnet på parametern
Min = Parameterns minimivärde
Max = Parameterns maximivärde
Enhet = Enheten för parameterns värde; ges om möjligt
Förvalt = Värde vid leverans från fabrik
Kund = Kundens egen inställning
ID = -nummer för parametern (används med PC-Tools)
= markering av parameterkoden: Parametervärde kan ändras endast med stoppad
frekvensomriktare.
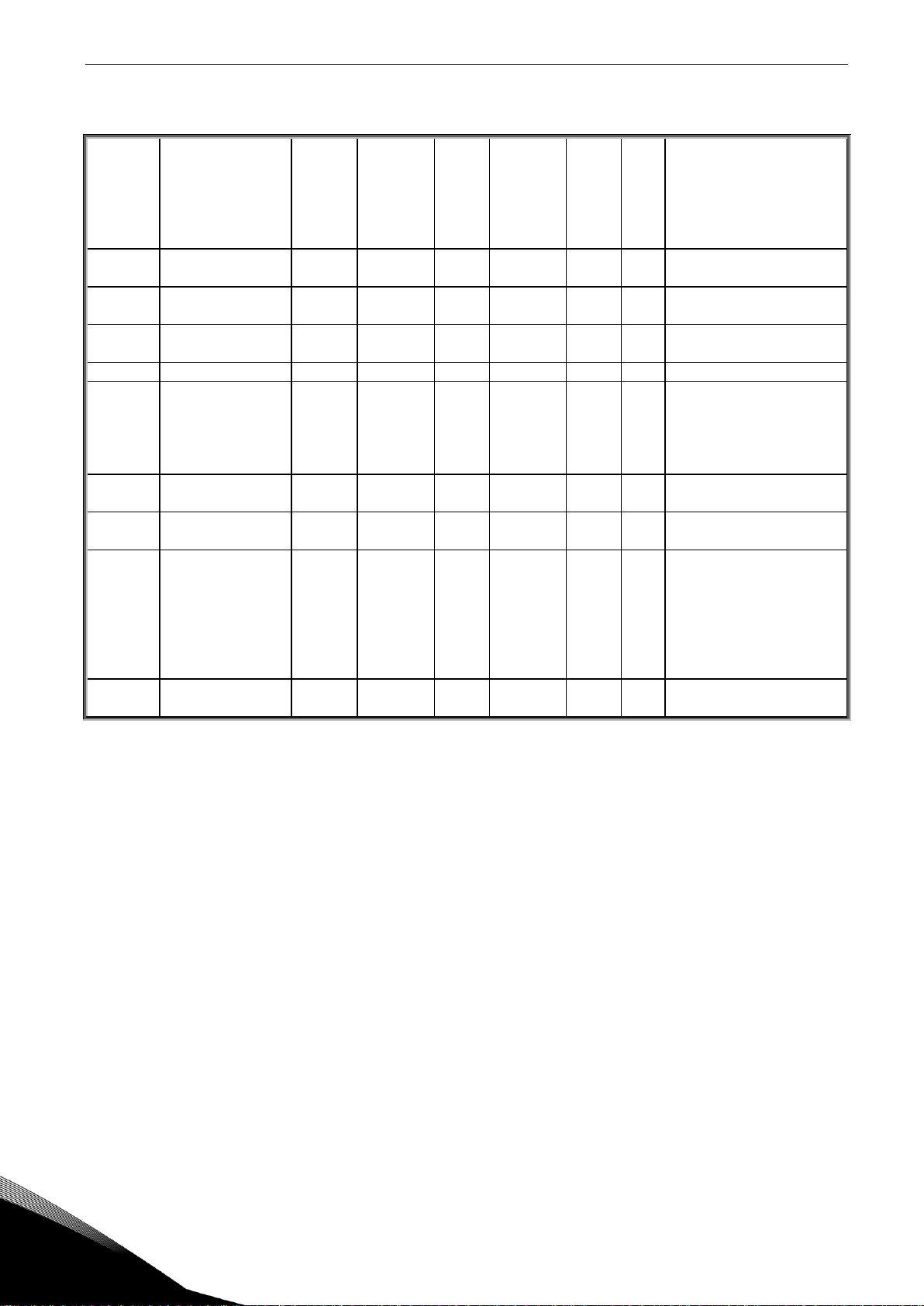
3.1 Övervakningsvärden (manöverpanel: Meny M1)
Övervakningsvärden utgörs av ärvärden för parametrar och signaler, status och uppmätta värden.
De kan inte redigeras.
Se Vacon NXL Användarhandbok, avsnitt 7.3.1 för ytterligare information.
Tabell 1- 3. Övervakade värden
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 6
Parameterlistor vacon • 5
2
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.1.1
Minfrekvens
0,00
Par. 2.1.2
Hz
0,00
101
P2.1.2
Maxfrekvens
Par. 2.1.1
320,00
Hz
50,00
102
MÄRK: Om f
max
> motorns
synkrona varvtal, kontrollera
lämplighet för motor och
frekvensomriktare
P2.1.3
Accelerationstid 1
0,1
3000,0 s 1,0
103
P2.1.4
Retardationstid 1
0,1
3000,0 s 1,0
104
P2.1.5
Strömgräns
0,1 x IL
1,5 x IL A IL
107
MÄRK: Detta gäller ungefär för
frekvensomriktare upp till MF3.
För större storlekar,
konsultera tillverkaren.
P2.1.6
Motorns nominella
spänning
180
690
V
NXL2:230 v
NXL5:400 v
110 P2.1.7
Motorns nominella
frekvens
30,00
320,00
Hz
50,00
111
Kontrollera motorns märkskylt
P2.1.8
Motorns nominella
varvtal
300
20 000
rpm
1440
112
Förvalt värde gäller för en 4polig motor och en
frekvensomriktare av nominell
storlek
P2.1.9
Motorns nominella
ström
0,3 x I
L
1,5 x IL A I
L
113
Kontrollera motorns märkskylt
P2.1.10
Motorns cos
0,30
1,00 0,85
120
Kontrollera motorns märkskylt
P2.1.11
Startfunktion
0 1
0
505
0=Ramp
1=Flygande start
P2.1.12
Stoppfunktion
0 1
0
506
0=Utrullning
1=Ramp
P2.1.13
U/f-optimering
0 1
0
109
0=Används ej
1=Automatisk
momentmaximering
P2.1.14
I/O-referens
0 4
0
117
0=AI1
1=AI2
2=Panel
3=Fältbuss
(FBSpeedReference)
4=Motorpotentiometer
P2.1.15
AI2 signalområde
1 4
2
390
Används ej om par 2.2.13 > 0 %
eller 2.2.14. < 100 %
1=0–20 mA
2=4–20 mA
3=0–10 V
4=2–10 V
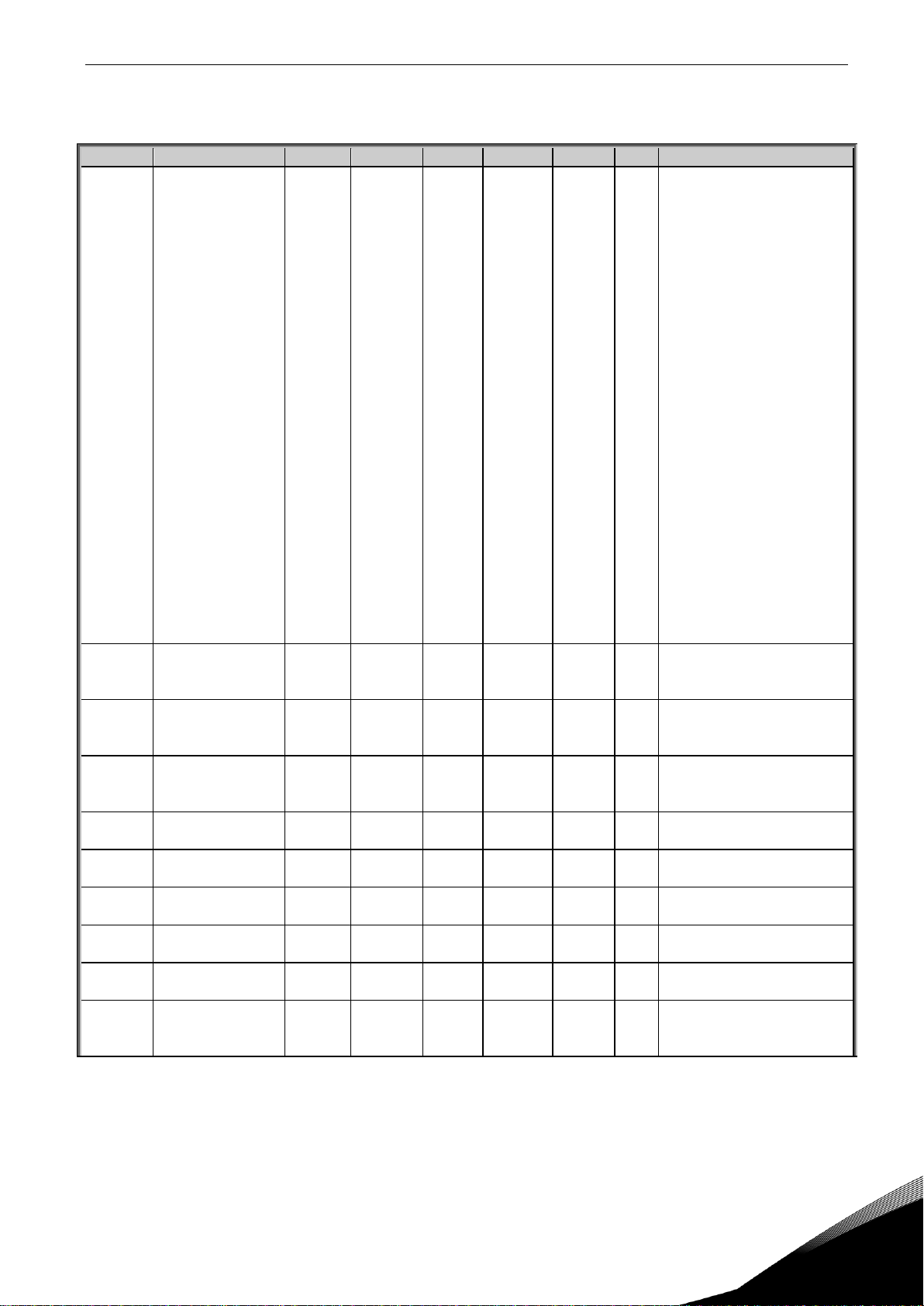
3.2 Grundparametrar (manöverpanel: Meny P2 P2.1)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 7
6 • vacon Parameterlistor
3
P2.1.16
Funktion för analog
utgång
0
12 1
307
0=Används ej
1=Utgångsfrekv (0—f
max
)
2=Frekv.referens (0—f
max
)
3=Motorvarvtal (0—Motorns
märkvarvtal)
4=Utgångsström (0—I
nMotor
)
5=Motormoment (0—T
nMotor
)
6=Motoreffekt (0—P
nMotor
)
7=Motorspänning (0--U
nMotor
)
8=DC-bryggans spänning (0—
U
nMotor
)
9=PI-reg ref.värde
10=PI-reg återf.värde 1
11=PI-reg avvikelse
12=PI-reg utsignal
P2.1.17
Funktion för DIN2
0
10 1
319
0=Används ej
1=Start bakåt (DIN1=Start
framåt)
2=Bakåt (DIN1=Start)
3=Stoppuls (DIN1=Startpuls)
4=Externt fel,
slut kont
5=Externt fel,
bryt kont
6=Frigivning
7=Förvalt varvtal 2
8=Motorpot UPP (slut kont)
9=Spärra PID (direkt
frekv.referens)
10=Förregling 1
P2.1.18
Funktion för DIN3
0
16 6
301
0=Används ej
1=Bakåt
2=Externt fel, slut kont
3=Externt fel, bryt kont
4=Felkvittering
5=Frigivning
6=Förvalt varvtal 1
7=Förvalt varvtal 2
8=Kommando för DCbromsning
9=Motorpot UPP (slut kont)
10=Motorpot NED (slut kont)
11=Spärra PID (direkt
frekv.referens)
12=Val av panelref 2 för PID
13= Förregling 2
14=Termistoringång (Se avsnitt
6.2.4 i
Användarhandboken)
15=Tvingad I/O-styrning
16=Tvingad Fältbusstyrning
P2.1.19
Förvalt varvtal 1
0,00
Par 2.1.2
Hz
10,00
105
P2.1.20
Förvalt varvtal 2
0,00
Par 2.1.2
Hz
50,00
106
P2.1.21
Automatisk
återstart
0 1
0
731
0=Används ej
1=Används
P2.1.22
Dölj parametrar
0 1
0
115
0=Alla parametrar synliga
1=Endast grupp P2.1 synlig
Tabell 1- 4. Grundparametrar P2.1
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 8
Parameterlistor vacon • 7
2
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.2.1
Funktion för DIN1 på
tilläggskort
0
13 7
368
0=Används ej
1=Bakåt
2=Externt fel, slut kont
3=Externt fel, bryt kont
4=Felkvitteing
5=Frigivning
6=Förvalt varvtal 1
7=Förvalt varvtal 2
8=Kommando för DCbromsning
9=Motorpot UPP (slut kont)
10=Motorpot NED (slut kont)
11=Spärra PID (val av PID-
styrning)
12=Val av panelref 2 för PID
13=Förregling 1
P2.2.2
Funktion för DIN2 på
tilläggskort
0
13 4
330
Se ovan
13=Förregling 2
P2.2.3
Funktion för DIN3 på
tilläggskort
0
13 11
369
Se ovan
13=Förregling 3
P2.2.4
Funktion för DIN4
(AI1)
0
13 2
499
Används om P2.2.6 = 0
Se alternativ ovan
13=Förregling 3
P2.2.5
AI1 signalval
0
10
377
10=AI1 (1=lokal, 0=plint 1)
11=AI2 (1=lokal, 1=plint 2)
20=Exp AI1
(2=exp.kort
0=plint 1)
21=Exp AI2
(2=exp.kort
1=plint 2)
P2.2.6
AI1 signalområde
1
4 3
379
0=Digital ingång 4
1=0–20 mA (MF4-->)
2=4–20 mA (MF4-->)
3=0–10 V
4=2–10 V
Används ej om AI2
kundvärde min > 0 % eller
AI2 kundvärde max < 100 %
Märk! Se NXL
Användarhandbok, avsnitt
7.3.6: AI1-mod
P2.2.7
Egen mininställning
av AI1
0,00
100,00
%
0,00
380 P2.2.8
Egen maxinställning
av AI1
0,00
100,00
%
100,00
381 P2.2.9
AI1 invertering
0
1 0
387
0=Ej invertering
1=Invertering
P2.2.10
AI1 filtertid
0,00
10,00
s
0,10
378
0=Ingen filtrering
P2.2.11
AI2 signalval
0
11
388
Se par 2.2.5
3.3 Ingångssignaler (manöverpanel: Meny P2 P2.2)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 9
8 • vacon Parameterlistor
3
P2.2.12
AI2 signalområde
1
4 2
390
Används ej om par 2.2.13 >
0 % eller 2.2.14. < 100 %
1=0 mA – 20 mA
2=4 mA – 20 mA
3=0 V – 10 V
4=2 V – 10 V
P2.2.13
Egen mininställning
av AI2
0,00
100,00
%
0,00
391
P2.2.14
Egen maxinställning
av AI2
0,00
100,00
%
100,00
392 P2.2.15
AI2 invertering
0
1 0
398
0=Ej invertering
1=Invertering
P2.2.16
AI2 filtertid
0,00
10,00
s
0,10
389
0=Ingen filtrering
P2.2.17
Nollställning av
motor-
potentiometerns
frekvens-
referensminne
0
2 1
367
0=Ingen nollställn
1=Nollställning vid stopp
eller avstängning
2= Nollställning vid
avstängning
P2.2.18
Minvärde vid
referensskalning
0,00
P2.2.19
0,00
344 P2.2.19
Maxvärde vid
referensskalning
P2.2.18
320,00
0,00
345
P2.2.20
Val av
panelstyrnings-
referens
0 5
2
121
0=AI1
1=AI2
2=Panel
3=Fältbuss
(FBSpeedreference)
4=Motorpotentiometer
5=PID-regulator
P2.2.21
Val av fältbuss-
referens
0 5
3
122
Se ovan
Tabell 1- 5. Ingångssignaler, I2.2
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 10
Parameterlistor vacon • 9
2
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.3.1
Funktion för
reläutgång 1
0
19 3
313
0=Används ej
1=Driftklar
2=Drift
3=Fel
4=Fel inverterat
5=Överhettn.varning för
frekv.omriktare
6=Externt fel eller varning
7=Ref.fel eller varning
8=Varning
9=Reverserad
10=Förvalt varvtal
11=Uppnått varvtal
12=Motorreglering aktiv
13=Övervakn av
utgångsfrekv.gräns 1
14=Styrplats: IO
15=Termistorfel/-varning
16=Övervakning av
återföringsvärde
17=Autom. alternering 1,
styrning
18=Autom. alternering 2,
styrning
19=Autom. alternering 3,
styrning
P2.3.2
Funktion för
reläutgång 1 på
tilläggskort
0
16 2
314
Se parameter 2.3.1
P2.3.3
Funktion för
reläutgång 2 på
tilläggskort
0
16 3
317
Se parameter 2.3.1
P2.3.4
Funktion för digital
utgång 1 på
tilläggskort
0
16 1
312
Se parameter 2.3.1
P2.3.5
Funktion för analog
utgång
0
12 1
307
Se parameter 2.1.16
P2.3.6
Filtertid för analog
utgång
0,00
10,00
s
1,00
308
P2.3.7
Invertering av
analog utgång
0 1
0
309
0=Ej inverterad
1=Inverterad
P2.3.8
Minvärde för analog
utgång
0 1
0
310
0=0 mA
1=4 mA
P2.3.9
Skalning av analog
utgång
10
1000 % 100
311
P2.3.10
Funktion för analog
utgång 1 på
tilläggskort
0
12 0
472
Se parameter 2.1.16
3.4 Utgångssignaler (manöverpanel: Meny P2 P2.3)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 11
10 • vacon Parameterlistor
3
P2.3.11
Funktion för analog
utgång 2 på
tilläggskort
0
12 0
479
Se parameter 2.1.16
P2.3.12
Övervakning av
utgångsfrekvens
gräns 1
0 2
0
315
0=Ingen gräns
1=Övervakning av låg gräns
2=Övervakning av hög gräns
P2.3.13
Utgångsfrekvens
gräns 1;
Övervakat värde
0,00
Par 2.1.2
Hz
0,00
316 P2.3.14
Övervakning av
analog ingång
0 2
0
356
0=Använd ej
1=AI1
2=AI2
P2.3.15
AI övervakning
frånslagsgräns
0,00
100,00
%
10,00
357 P2.3.16
AI övervakning
tillslagsgräns
0,00
100,00
%
90,00
358
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.4.1
Form ramp 1
0,0
10,0 s 0,0
500
0=Linjär
>0=S-formad ramptid
P2.4.2
Bromschopper
0 3
0
504
0=Spärrad
1=Använd under drift
3=Använd under drift och
stopp
P2.4.3
DC- bromsström
0,15 x In
1,5 x In
A
Varies
507
P2.4.4
DC-bromsningstid
vid stopp
0,00
600,00
s
0,00
508
0=DC-broms från vid stopp
P2.4.5
Frekvens för start av
DC-bromsning under
stoppramp
0,10
10,00
Hz
1,50
515
P2.4.6
DC-bromstid vid
start
0,00
600,00
s
0,00
516
0=DC-broms från vid start
P2.4.7
Flödesbroms
0 1
0
520
0=Från
1=Till
P2.4.8
Flödesbromsström
0,0
Varierar
A
0,0
519
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.5.1
Förbjudet
frekvensområde 1
låg gräns
0,0
Par
2.5.2
Hz
0,0
509
0=Används ej
P2.5.2
Förbjudet
frekvensområde 1
hög gräns
0,0
Par
2.1.2
Hz
0,0
510
0=Används ej
P2.5.3
Förbjuden acc.-
/ret.ramp, skalning
0,1
10,0
Tid
s
1,0
518
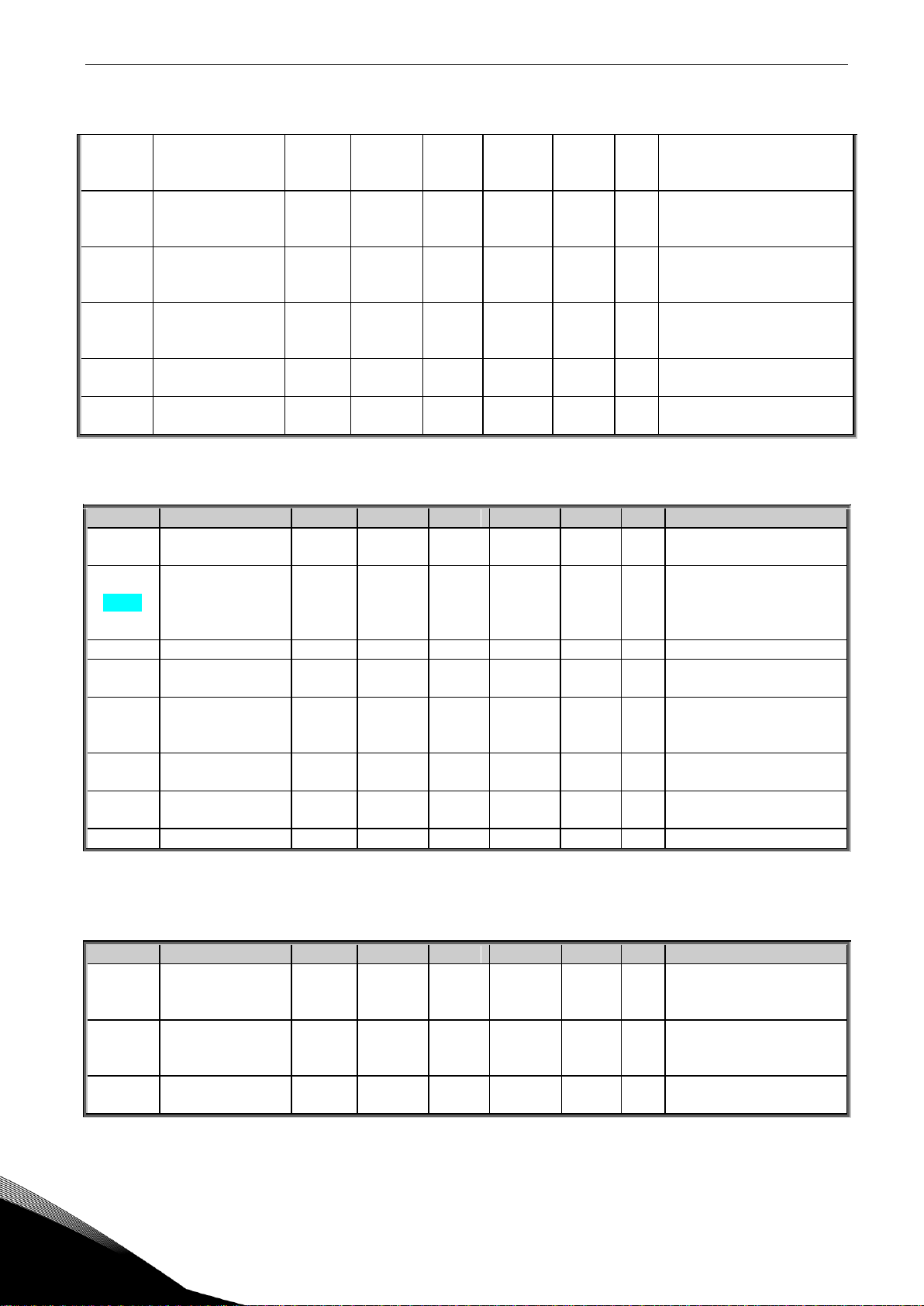
Tabell 1- 6. Utgångssignaler, G2.3
3.5 Frekvensomriktarens styrparametrar (manöverpanel: Meny P2 P2.4)
Tabell 1- 7. Omriktarens styrparametrar, D2.4
3.6 Förbjudna frekvenser (manöverpanel: Meny P2 P2.5)
Tabell 1- 8. Parametrar för förbjudna frekvenser, G2.5
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 12
Parameterlistor vacon • 11
2
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.6.1
Reglermetod
0 1
0
600
0=Frekvensstyrning
1=Varvtalsstyrning
P2.6.2
Val av U/f-
förhållande
0 3
0
108
0=Linjärt
1=Kvadratiskt
2=Programmerbart
3=Linjärt med
flödesoptimering
P2.6.3
Fältför-
svagningspunkt
30,00
320,00
Hz
50,00
602
P2.6.4
Spänning vid fältför-
svagningspunkt
10,00
200,00
%
100,00
603
n% x U
nmot
Parameterns maxvärde =
par 2.6.7
P2.6.5
U/f-kurvans
mittpunktsfrekvens
0,00
Par
P2.6.3
Hz
50,00
604 P2.6.6
U/f-kurvans
mittpunktsspänning
0,00
100,00
%
100,00
605
n% x U
nmot
P2.6.7
Utgångsspänning vid
nollfrekvens
0,00
40,00
%
0,00
606
n% x U
nmot
P2.6.8
Kopplingsfrekvens
1,0
16,0
KHz
6 kHz
601
Beroende av kW
P2.6.9
Överspännings-
regulator
0 1
1
607
0=Används ej
1=Används
P2.6.10
Underspännings-
regulator
0 1
1
608
0=Används ej
1=Används
3.7 Motorkontrollparametrar (manöverpanel: Meny P2 P2.6)
Tabell 1- 9. Motorkontrollparametrar, G2.6
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 13
12 • vacon Parameterlistor
3
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.7.1
Reaktion på
referensfel
0 3
0
700
0=Ingen reaktion
1=Varning
2=Fel, stopp enl 2.1.12
3=Fel, stopp genom utrullning
P2.7.2
Reaktion på externt
fel
0 3
2
701
0=Ingen reaktion
1=Varning
2=Fel, stopp enl 2.1.12
3=Fel, stopp genom
utrullning
P2.7.3
Reaktion på
underspänningsfel
1 3
2
727
P2.7.4
Övervakning av
utgångsfaser
0 3
2
702
P2.7.5
Jordfelsskydd
0 3 2
703
P2.7.6
Termiskt skydd av
motor
0 3
2
704
P2.7.7
Faktor för motorns
omgivnings-
temperatur
–100,0
100,0 % 0,0
705
P2.7.8
Faktor för motorns
kylning vid
nollvarvtal
0,0
150,0 % 40,0
706
P2.7.9
Motorns termiska
tidskonstant
1
200
min
45
707 P2.7.10
Motorns drift-
förhållande
0
100 % 100
708
P2.7.11
Fastlåsningsskydd
0 3 1
709
Se par 2.7.1
P2.7.12
Fastlåsningsström
0,1
I
nmotor
x
2
A
I
nmotor
x1.3
710 P2.7.13
Tidsgräns för
fastlåsning
1,00
120,00
s
15,00
711 P2.7.14
Frekvensgräns för
fastlåsning
1,0
P 2.1.2
Hz
25,0
712
P2.7.15
Underlastskydd
0 3 0
713
Se par 2.7.1
P2.7.16
Underlastkurva vid
nominell frekvens
10,0
150,0 % 50,0
714 P2.7.17
Underlastkurva vid
nollfrekvens
5,0
150,0 % 10,0
715 P2.7.18
Tidsgräns för
underlastskydd
2,00
600,00
s
20,00
716
P2.7.19
Reaktion på
termistorfel
0 3
0
732
Se par 2.7.1
P2.7.20
Reaktion på
fältbussfel
0 3
2
733
Se par 2.7.1
P2.7.21
Reaktion på
kortplatsfel
0 3
2
734
Se par 2.7.1
P2.7.22
Övervakning av
återföringsvärde
0 4
0
735
0=Ingen reaktion
1=Varning om under gräns
2=Varning om över gräns
3=Fel om under gräns
4=fel om över gräns
P2.7.23
Gräns för
övervakning av
äterföringsvärde
0,0
100,0 % 10,0
736
P2.7.24
Fördröjning vid
övervakning av
återföringsvärde
0
3600 s 5
737
3.8 Skyddsfunktioner (manöverpanel: Meny P2 P2.7)
Tabell 1- 10. Parametrar för skyddsfunktioner, G2.7
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 14
Parameterlistor vacon • 13
2
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.8.1
Väntetid
0,10
10,00
S
0,50
717
P2.8.2
Försökstid
0,00
60,00
S
30,00
718
P2.8.3
Startfunktion
0 2
0
719
0=Ramp
1=Flygande start
2=enligt par 2.4.6
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P2.9.1
PID-aktivering
0 1
0 163
0=Används ej
1=PID-regulator
aktiverad
2=Pump- och
fläktkontrollen
aktiverad
P2.9.2
PID-referens
0 3
2 332
0=AI1
1=AI2
2=Ref från panel (PID-ref
1)
3=Fältbussreferens
(ProcessDataIN1)
P2.9.3
Insignal för
återföringsvärde
0 6
1 334
0=AI1-signal
1=AI2-signal
2=Fältbuss
(ProcessDataIN2)
3=Motormoment
4=Motorvarvtal
5=Motorström
6=Motoreffekt
7=AI1-AI2
P2.9.4
PID-regulatorns
förstärkning
0,0
1000,0
%
100,0
118 P2.9.5
PID-regulatorns I-
tid
0,00
320,00
s
10,00
119
P2.9.6
PID-regulatorns D-
tid
0,00
10,00
s
0,00
132
P2.9.7
Återföringsvärde 1
minskalning
–1000,0
1000,0
%
0,00
336
0=Ingen minskalning
P2.9.8
Återföringsvärde 1
maxskalning
–1000,0
1000,0
%
100,0
337
100=Ingen maxskalning
P2.9.9
Invertering af
avvikelse
0
1 0 340 P2.9.10
Insomningsfrekvens
Par
2.1.1
Par
2.1.2
Hz
10,00
1016
P2.9.11
Insomnings-
fördröjning
0
3600 s 30
1017
P2.9.12
Uppvakningsnivå
0,00
100,00
%
25,00
1018
3.9 Automatisk återstart (manöverpanel: Meny P2 P2.8)
Tabell 1- 11. Parametrar för automatisk återstart, G2.8
3.10 Parametrar för PID-referens (manöverpanel: Meny P2 P2.9)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 15
14 • vacon Parameterlistor
3
P2.9.13
Uppvakningsfunktion
0
3 0 1019
0=Uppvakning vid
underskriden
uppvakningsgräns
(2.9.12)
1=Uppvakning vid
överskriden
uppvakningsgräns
(2.9.12)
2=Uppvakning vid
underskriden
uppvakningsgräns
(PID-referens)
3=Uppvakning vid
överskriden
uppvakningsgräns
(PID-referens)
Tabell 1- 12. Parametrar för PID-referens, G2.9
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 16
Parameterlistor vacon • 15
2
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Note
P2.10.1
Antal hjälpdrifter
0 3 1
1001
P2.10.2
Startfördröjning av
hjälpdrifter
0,0
300,0 s 4,0
1010 P2.10.3
Stoppfördröjning av
hjälpdrifter
0,0
300,0 s 2,0
1011
P2.10.4
Autoväxling
0 4
0
1027
0= Används ej
1= Autoväxling med
hjäpdrifter
2= Autoväxling med frekv.-
omriktare och
hjälpdrifter
3= Autoväxling och
förreglingar
(hjälpdrifter)
4= Autoväxling och
förreglingar (frekv.
omriktare &
hjälpdrifter)
P2.10.5
Autoväxlingsintervall
0,0
3000,0
h
48,0
1029
0,0=TEST=40 s
P2.10.6
Autoväxling: max.
antal hjälpdrifter
0 3
1
1030
Alterneringsnivå för
hjälpdrifter
P2.10.7
Autoväxling:
frekvensgräns
0,00
par.
2.1.2
Hz
25,00
1031
Alterneringens
frekvensgräns för
frekvensomriktaren
P2.10.8
Startfrekvens av
hjälpdrift 1
Par.
2.10.9
320,00
Hz
51,00
1002 P2.10.9
Stopfrekvens av
hjälpdrift 1
Par.
2.1.1
Par.
2.10.8
Hz
10,00
1003
3.11 Parametrar för pump- och fläktkontroll (manöverpanel: Meny P2 P2.10)
MÄRK! Grupp P2.10 är synlig endast om par 2.9.1 sättas till 2.
Tabell 1- 13. Parametrar för pump- och fläktkontroll
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 17
16 • vacon Parameterlistor
3
Kod
Parameter
Min
Max
Enhet
Förvalt
Kund
ID
Anmärkning
P3.1
Styrplats
1 3
1
125
1 = I/O-plint
2 = Panel
3 = Fältbuss
R3.2
Panelreferens
Par 2.1.1
Par
2.1.2
Hz
P3.3
Riktning (på panel)
0 1
0
123
0 = Framåt
1 = Bakåt
R3.4
Stoppknapp
0 1
1
114
0=Begränsad funktion hos
stoppknapp
1=Stoppknapp alltid
aktiverad
R3.5
PID-referens
0,00
100,00
%
0,00
R3.6
PID-referens 2
0,00
100,00
%
0,00
Väljs med digitala
ingångar
3.12 Panelstyrning (manöverpanel: Meny K3)
Parametrarna för val av styrplats och rotationsriktning från panelen visas nedan. Se
Panelstyrningsmeny i Vacon NXL Användarhandbok.
Tabell 1- 14. Panelstyrningsparametrar, M3
3.13 Systemmeny (manöverpanel: Meny S6)
För parametrar och funktioner kopplade till användning av frekvensomriktaren, såsom
användaranpassade parameteruppsättningar eller information om hårdvara och mjukvara, se
avsnitt 7.3.6 i Vacon NXL Användarhandbok.
3.14 Tilläggskort (manöverpanel: Meny E7)
Meny E7 visar till styrkortet anslutna tilläggskort och information om dessa. För ytterligare
information, se avsnitt 7.3.7 i Vacon NXL Användarhandbok.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 18

Beskrivning av parametrar vacon • 17
4
4. BESKRIVNING AV PARAMETRAR
4.1 GRUNDPARAMETRAR
2.1.1, 2.1.2 Min-/maxfrekvens
Definierar frekvensomriktarens frekvensgränser.
Största värde för parametrarna 2.1.1 och 2.1.2 är 320 Hz.
Programvaran kontrollerar automatiskt värdena för parametrar 2.1.19, 2.1.20, 2.3.13,
2.5.1, 2.5.2 och 2.6.5.
2.1.3, 2.1.4 Accelerationstid 1, retardationstid 1
Dessa värden anger tiden som krävs för utgångsfrekvensen att öka från noll till inställd
maxfrekvens (par 2.1.2), och på motsvarande sätt minskning från maxfrekvens till noll.
2.1.5 Strömgräns
Denna parameter bestämmer den maximala från frekvensomriktaren utmatade
strömmen. För att undvika överbelastning av motorn bör denna parameter ställas in
efter motorns märkström. Strömgränsens förvalsvärde är lika med motorns nominella
ström.
2.1.6 Motorns nominella spänning
Detta värde Un hittar man på motorns märkskylt. Denna parameter bestämmer
spänningen vid fältförsvagningspunkten (parameter 2.6.5) till 100 % × U
2.1.7 Motorns nominella frekvens
Detta värde fn hittar man på motorns märkskylt. Denna parameter sätter
fältförsvagningspunkten (parameter 2.6.4) till samma värde.
2.1.8 Motorns nominella varvtal
Detta värde nn hittar man på motorns märkskylt.
nmotor
.
2.1.9 Motorns nominella ström
Detta värde In hittar man på motorns märkskylt.
2.1.10 Motorns cos phi
Detta värde, ”cos phi” hittar man på motorns märkskylt.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 19

18 • vacon Beskrivning av parametrar
4
2.1.11 Startfunktion
Ramp:
0 Frekvensomriktaren startar från 0 Hz och accelererar till inställd referens-
frekvens inom den inställda accelerationstiden. (Lastens tröghet och
startmotstånd kan orsaka längre accelerationstider.).
Flygande start:
1 Frekvensomriktaren kan starta mot en roterande motor genom att styra ut ett
litet moment och söka den frekvens som motsvarar motorns rotationshastighet. Sökningen startar från maxfrekvens mot den aktuella frekvensen
tills det korrekta värdet detekteras. Därefter ökas/minskas utgångsfrekvensen till det inställda referensvärdet enligt de inställda accelerations/retardationsparametrarna.
Använd denna metod om motorn roterar då startkommando ges. Med flygande
start kan driften fortsätta trots korta spänningsavbrott på nätet.
2.1.12 Stoppfunktion
Utrullning:
0 Efter stoppkommando upphör frekvensomriktaren att styra motorn, som
fortsätter att rotera tills den stannar då maskinens och motorns mekaniska
energi tar slut.
Ramp:
1 Efter stoppkommando bromsas motorn enligt de inställda retardations-
parametrarna.
Om den lagrade energin är stor, kan det vara nödvändigt att använda ett
externt bromsmotstånd för snabbare retardation.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 20

Beskrivning av parametrar vacon • 19
4
1
Automatisk momentmaximering
Utgångsspänningen till motorn ändras automatiskt så att motorn
kan producera tillräckligt stort moment för start och drift vid låga
frekvenser. Spänningsökningen är beroende av motorns typ och
effekt. Automatisk momentmaximering kan användas i
applikationer med högt startmoment orsakat att stor startfriktion,
t ex transportörer.
MÄRK!
I applikationer med högt moment och låga varvtal är överhettning av
motorn sannolik. Om motorn ska gå en längre tid under dessa
förhållanden, måste särskild hänsyn tas till motorns kylning.
Använd extern kylning av motorn om den tenderar att bli för varm.
2.1.13 U/f-optimering
0 Används ej
2.1.14 Val av I/O-referens
Definierar vilken källa för frekvensreferensen som ska väljas då styrning sker via I/O.
0 AI1-referens (plintarna 2 och 3, t ex potentiometer)
1 AI2-referens (plintarna 5 och 6, t ex transmitter)
2 Panelreferens (parameter 3.2)
3 Referens från fältbussen (FBSpeedReference)
4 Motorpotentiometerreferens
2.1.15 AI2 (Iin) signalområde
1 Signalområde 0…20 mA
2 Signalområde 4…20 mA
3 Signalområde 0...10 V
4 Signalområde 2...10 V
Märk! Valen saknar betydelse om par 2.2.12 > 0 %, eller par 2.2.13 < 100 %.
2.1.16 Funktion för analog utgång
Denna parameter väljer önskad funktion för den analoga utgångssignalen. Se tabellen
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
på sidan 5 för parametervärden.
Page 21

20 • vacon Beskrivning av parametrar
4
2.1.17 Funktion för DIN2
Denna parameter has 9 alternativ. Om den digitala ingången DIN2 inte ska användas,
ska parameterns värde sättas till 0.
1 Start bakåt
2 Bakåt
3 Stoppuls
4 Externt fel
Sluten kontakt: Felet indikeras och motorn stoppas då ingången har signal
5 Externt fel
Bruten kontakt: Felet indikeras och motorn stoppas då ingången saknar signal
6 Frigivning
Bruten kontakt: Motorstart förhindrad
Sluten kontakt: Motorstart möjlig
7 Förvalt varvtal 2
8 Motorpotentiometer UPP
Sluten kontakt: Referensen ökas tills kontakten öppnas
9 Spärra PID-regulatorn (direkt frekvensreferens)
10 Förregling 1 (kan väljas bara, om pump- och fläktkontrollen är aktiv, P2.9.1=2)
2.1.18 Funktion för DIN3
Denna parameter has 12 alternativ. Om den digitala ingången DIN3 inte ska användas,
ska parameterns värde sättas till 0.
1 Bakåt
Bruten kontakt: Framåt
Sluten kontakt: Bakåt
2 Externt fel
Sluten kontakt: Felet indikeras och motorn stoppas då ingången har signal
3 Externt fel
Bruten kontakt: Felet indikeras och motorn stoppas då ingången saknar signal
4 Felkvittering
Sluten kontakt: Samtliga fel kvitteras
5 Frigivning
Bruten kontakt: Motorstart förhindrad
Sluten kontakt: Motorstart möjlig
6 Förvalt varvtal 1
7 Förvalt varvtal 2
8 Kommando för DC-bromsning
Sluten kontakt: Vid stopp arbetar DC-bromsen tills kontakten öppnas. DC-bromsström är ca
10 % av värden vald med par 2.4.3.
9 Motorpotentiometer UPP
Sluten kontakt: Referensen ökas tills kontakten öppnas
10 Motorpotentiometer NED
Sluten kontakt: Referensen minskas tills kontakten öppnas
11 Spärra PID-regulatorn (direkt frekvensreferens)
12 Val av panelreferens 2 för PID-regulatorn
13 Förregling 2 (kan väljas bara, om pump- och fläktkontrollen är aktiv, P2.9.1=2)
14 Termistoringång (Se Användarhandboken, avsnitt 6.2.4)
15 Tvingad I/O-styrning
16 Tvingad Fältbusstyrning
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 22

Beskrivning av parametrar vacon • 21
4
2.1.19 Förvalt varvtal 1
2.1.20 Förvalt varvtal 2
Automatisk begränsning av parametervärden inom min- och maxfrekvenserna (par 2.1.1
och 2.1.2).
2.1.21 Automatisk återstart
Automatisk återstart aktiveras med denna parameter.
0 = Förhindrad
1 = Tillåten (3 automatiska återstarter, se par 2.8.1 – 2.8.3)
2.1.22 Dölj parametrar
Med denna parameter kan alla parametrar med undantag av grundparametergruppen
(P2.1) döljas.
Fabriksinställning för denna parameter är 1.
0 = Förhindrad (alla parametergrupper kan läsas via panelen)
1 = Tillåten (endast grundparametrarna, P2.1, kan läsas via panelen)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 23

22 • vacon Beskrivning av parametrar
4
MF2
X4:
MF3
X4:
Jumperdin4.fh8
MF4-6
X8:
4.2 INGÅNGSSIGNALER
2.2.1 Funktion för DIN1 på tilläggskort
Denna parameter has 12 alternativ. Om den digitala ingången DIN1 på tilläggskortet inte
ska användas, ska parameterns värde sättas till 0.
Se parameter 2.1.18 beskrivning av alternativ.
13 = Förregling 1
2.2.2 Funktion för DIN2 på tilläggskort
Alternativen är de samma som för parameter 2.2.1, utom:
13 = Förregling 2
2.2.3 Funktion för DIN3 på tilläggskort
Alternativen är de samma som för parameter 2.2.1, utom:
13 = Förregling 3
2.2.4
Funktion för DIN4
Om värdet för parameter 2.2.6 sätts till 0, fungerar AI1 som digital ingång 4.
Alternativen är de samma som för parameter 2.2.3.
MÄRK! Om den analoga ingången programmeras som DIN4, kontrollera att byglarnas
lägen på X4/X8 är korrekta (se figuren nedan).
Figur 1- 1. Byglingsalternativ på X4/X8 då AI1 fungerar som DIN4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 24

Beskrivning av parametrar vacon • 23
4
STOP
I/O term
READY
STOP
I/O term
READY
nxlk29.fh8
Ändra
2.2.5 AI1 signalval
Anslut AI1-signalen till valfri analog ingång med denna parameter.
Denna parameters värde består av
Figur 1- 2.
Figur 1- 2. AI1 signalval
Kortnummer 1 = Lokala ingångar
Kortnummer 2 = Ingångar på tilläggskort
Plintnummer 0 = Ingång 1
Plintnummer 1 = Ingång 2
kortnummer
och motsvarande
plintnummer
. Se
Plintnummer 2 = Ingång 3
Plintnummer 9 = Ingång 10
Exempel:
Om parameterns värde sätts till 10, har man valt den lokala ingången 1 för AI1-signalen.
Om å andra sidan värdet sätts till 21, har man valt ingångsplint 2 på tilläggskortet för
AI1-signalen.
Om man vill använda de analoga ingångsvärdena t ex endast för teständamål, kan
parametern sättas till ett värde 0 - 9. I detta fall motsvaras värdet 0 av 0 %, värdet 1
motsvaras av 20 % och värden mellan 2 och 9 motsvaras av 100 %.
2.2.6 AI1 signalområde
Med denna parameter väljs signalområde för AI1.
0 = DIN 4
1 = Signalområde 0…20 mA (endast för MF4 och större storlekar)
2 = Signalområde 4…20 mA (endast för MF4 och större storlekar)
3 = Signalområde 0…10 V
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 25

24 • vacon Beskrivning av parametrar
4
%
100%
63%
Par. 2.2.10
t [s]
NX12K78
Filtrerad signal
Ofiltrerad signal
4 = Signalområde 2…10 V
Märk! Valen saknar betydelse om parameter 2.2.6 > 0 %, eller parameter 2.2.7 < 100 %.
Om värdet för parameter 2.2.6 sätts till 0, fungerar AI1 som digital ingång 4.
Se parameter 2.2.4
2.2.7 AI1 eget minimum
2.2.8 AI1 eget maximum
Ställer in min- och maxnivåer för AI1signal inom området 0…10 V.
2.2.9 AI1 signalinvertering
Om parametervärdet sätts till 1
inverteras signal AI1.
2.2.10 AI1 signalfiltertid
Genom att ange ett värde större än 0
för denna parameter aktiveras
funktionen som filtrerar bort
störningar från den inkommande
analoga signalen Uin.
Lång filtertid ger långsammare reglersvar.
Se Figur 1- 3.
Figur 1- 3. AI1 signalfiltrering
2.2.11 AI2 signalval
Anslut AI2-signalen till valfri analog ingång med denna parameter.
Se parameter 2.2.5 för inställning av värde.
2.2.12 AI2 signalområde
0 Signalområde 0…20 mA
1 Signalområde 4…20 mA
Märk! Valen saknar betydelse om parameter 2.2.13 > 0 %, eller parameter 2.2.14 < 100 %.
2.2.13 AI2 eget minimum
2.2.14 AI2 eget maximum
Dessa parametrar tillåter skalning av ingångssignalen mellan 0 och 20 mA.
Jämför parametrar 2.2.7 och 2.2.8.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 26

Beskrivning av parametrar vacon • 25
4
0
NX12K35
0
Utgångsfrekvens
Analogingång [V]
Max. frekv. par.2.1.2
Min. frekv. par.2.1.1
Utgångsfrekvens
Max. frekv. par.2.1.2
Min. frekv. par.2.1.1
Analogingång [V]
Par. 2.2.19
Par. 2.2.18
10
10
2.2.15 Analog ingång AI2 signalinvertering
Se motsvarande parameter 2.2.9.
2.2.16 Analog ingång AI2 signalfiltertid
Se motsvarande parameter 2.2.10.
2.2.17 Återställning av motorpotentiometerns minne (frekvensreferens)
0 = Ingen återställning
1 = Minnet återställs vid stopp och avstängning
2 = Minnet återställs vid avstängning
2.2.18 Referensskalning minvärde
2.2.19 Referensskalning maxvärde
Skalning av frekvensreferensen kan väljas mellan Minimifrekvens och Maximifrekvens.
Om ingen skalning önskas, ska parameterns värde sättas till 0.
I figurerna nedan är spänningsingång AI1 med signalområdet 0…10 V valt som referens.
Figur 1- 4. Vänster: Par 2.1.18=0 (Ingen referensskalning) Höger: Referensskalning
2.2.20 Val av panelreferens
Definierar vald referenskälla då omriktaren styrs från manöverpanelen.
0 AI1-referens (förvalt AI1, plintarna 2 och 3, t ex potentiometer)
1 AI2-referens (förvalt AI2 5 och 6, t ex transmitter)
2 Panelreferens (parameter 3.2)
3 Referens från fältbuss (FBSpeedReference)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 27

26 • vacon Beskrivning av parametrar
4
4 Motorpotentiometerreferens
5 Referens från PID-regulator
2.2.21 Val av fältbussreferens
Definierar vald referenskälla då omriktaren styrs från fältbussen. För parametervärden
se parameter 2.2.20.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 28

Beskrivning av parametrar vacon • 27
4
Inställt värde
Signalens betydelse
0 = Används ej
Saknar funktion
Reläutgång RO1 resp programmerbara reläutgångar
(RO1, RO2) på tilläggskortet aktiveras då:
1 = Driftklar
Frekvensomriktaren är klar för drift
2 = Drift
Frekvensomriktaren är i drift (motorn går)
3 = Fel
Utlösning har skett pga inträffat fel
4 = Fel inverterat
Omriktaren har inte löst ut pga fel
5 = Överhettningsvarning för omriktare
Kylflänsens temperatur överskrider +70 C
6 = Externt fel eller varning
Fel eller varning beroende på par 2.7.2
7 = Referensfel eller varning
Fel eller varning beroende på par 2.7.1
- om analog referens är 4—20 mA och signalen är <4 mA
8 = Varning
Alltid då varning finns
9 = Reverserad
Reverseringskommando har valts
10 = Förvalt varvtal
Ett förvalt varvtal har valts
11 = Uppnått varvtal
Utgångsfrekvensen har nått börvärdet
12 = Motorreglering aktiverad
Överspännings- eller överströmsregulatorn har
aktiverats
13 = Gräns 1 för övervakning av
utgångsfrekvens
Utgångsfrekvensen utanför inställd låg/hög
övervakningsgräns (se parametrar 2.3.12 och 2.3.13
nedan)
14 = Styrning från I/O-plintar
Extern styrning (Meny K3; par 3.1)
15 = Termistorfel eller varning
Tilläggskortets termistoringång indikerar
övertemperatur. Fel eller varning beroende på
parameter 2.7.19.
16 = Övervakning av återföringsvärde
aktiv
Parametrar 2.7.22 – 2.7.24
17 = Alternering 1 styrning
Pump 1 styrning, parametrar 2.10.1 – 2.10.7
18 = Alternering 2 styrning
Pump 2 styrning, parametrar 2.10.1 – 2.10.7
19 = Alternering 3 styrning
Pump 3 styrning, parametrar 2.10.1 – 2.10.7
20 = AI övervakning
Reläet aktiveras enligt inställningarna av
parametrarna 2.3.14 – 2.3.16.
4.3 UTGÅNGSSIGNALER
2.3.1 Funktion för reläutgång 1
2.3.2 Funktion för reläutgång 1 på tilläggskort
2.3.3 Funktion för reläutgång 2 på tilläggskort
2.3.4 Funktion för digital utgång 1 på tilläggskort
Tabell 1- 15. Utgångssignaler via RO1 och tilläggskortets RO1, RO2 och DO1.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 29

28 • vacon Beskrivning av parametrar
4
%
100%
63%
t [s]
NX12K16
Filtrerad signal
Ofiltrerad signal
Par. 2.3.6
1.0
0
20 mA
4 mA
10 mA
0.5
0 mA
12 mA
NX12K17
Analog
utgångsström
Param. 2.3.9
= 200%
Param. 2.3.9
= 100%
Param. 2.3.9
= 50%
2.3.5 Funktion för analog utgång
Denna parameter väljer önskad funktion
för den analoga utgångssignalen.
Se tabellen på sidan 5 för
parametervärden.
2.3.6 Filtertid för analog utgång
Definierar filtertiden för den analoga
utgångssignalen.
Om parametervärdet sätts till 0, sker
ingen filtrering.
Figur 1- 5. Filtrering av analog utgång
2.3.7 Invertering av analog utgång
Inverterar den analoga utgångssignalen:
Max utsignal = 0 %
Min utsignal = Max börvärde (parameter 2.3.9)
0 Ingen invertering
1 Invertering
Se parameter 2.3.9 nedan.
2.3.8 Minvärde för analog utgång
Figur 1- 6. Invertering av analog utgång
Definierar minimisignal till antingen 0 mA eller 4 mA (flytande nolla). Notera skillnaden i
skalning av den analoga utsignalen i parameter 2.3.9.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 30

Beskrivning av parametrar vacon • 29
4
1.0
0
20 mA
4 mA
10 mA
0.5
0 mA
nxlk49.fh8
12 mA
Par. 2.3.8 = 1
Par. 2.3.8 = 0
Par. 2.3.9=
200%
Par. 2.3.9=
100%
Par. 2.3.9=
50%
Analog
utgångsström
Valt (param. 2.1.16)
max. signal värde
Signal
Signalens maxvärde
Utgångs- frekvens
100 % x f
max
Motorvarvtal
100 % x Nominellt varvtal
Utgångs- ström
100 % x I
nMotor
Motormoment
100 % x T
nMotor
Motoreffekt
100 % x P
nMotor
Motorspänning
100 % x U
nmotor
DC-bryggans
spänning
PI-ref.värde
PI-återf. värde 1
PI-avvikelse
PI-utsignal
1000 V
100 % x max ref. värde
100 % x max återf.värde
100 % x max avvikelse
100 % x max utsignal
f[Hz]
t
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
NX12K19
Exempel:
Par 2.3.13
Par 2.3.12 = 2
2.3.9 Skalning av analog utgång
Skalningsfaktor för analog utgång.
Tabell 1- 16. Skalning av analog utgång Figur 1- 7. Skalning av analog utgång
2.3.10 Funktion för analog utgång 1 på tilläggskort
2.3.11 Funktion för analog utgång 2 på tilläggskort
Dessa parametrar väljer önskad funktion för tilläggskortets analoga utgångssignaler. Se
par. 2.1.16 för parametervärden.
2.3.12 Övervakning av utgångsfrekvens gräns 1
0 Ingen övervakning
1 Övervakning av låg gräns
2 Övervakning av hög gräns
Om utgångsfrekvensen går under/över inställd gräns (par. 2.3.13) genererar denna
funktion en varning via reläutgången beroende på inställningar av parametrarna 2.3.1 –
2.3.4.
2.3.13 Övervakningsvärde för utgångsfrekvens gräns 1
Väljer frekvensvärde som övervakas via parametrarna 2.3.12.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Figur 1- 8. Övervakning av utgångsfrekvens
Page 31

30 • vacon Beskrivning av parametrar
4
2.3.14 Övervakning av analog ingång
Med denna parameter kan man välja vilken analog ingång som ska övervakas.
0 = Används ej
1 = AI1
2 = AI2
2.3.15 Övervakning av analog ingång, frånslagsgräns
När signalen från analogingången som valts med parameter 2.3.14 sjunker under
frånslagsgränsen så deaktiveras reläutgången.
2.3.16 Övervakning av analog ingång, tillslagsgräns
När signalen från analogingången som valts med parameter 2.3.14 stiger över
tillslagsgränsen så aktiveras reläutgången.
Detta innebär att om till exempel tillslagsgränsen är 60 % och frånslagsgräns är 40 %,
aktiveras reläet då signalen stiger över 60 % och förblir aktiv tills signalen faller under
40 %.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 32

Beskrivning av parametrar vacon • 31
4
2.1.3, 2.1.4
[Hz]
[t]
2.4.1
2.4.1
NX12K20
4.4 OMRIKTARKONTROLL
2.4.1 Form för accelerations-/retardationsramp 1
Början och slutet av accelerations- och retardationsramperna kan göras mjukare med
denna parameter. Inställt värde 0 ger en linjär rampform med omedelbar reaktion hos
acceleration eller retardation på ändring av referenssignalen.
Inställda värden 0,1…10 sekunder för denna parameter ger acceleration/retardation
enligt en S-formad kurva. Accelerationstiden bestäms med parametrarna 2.1.3/2.1.4.
2.4.2
Bromschopper
Märk! Intern bromschopper installeras i alla storlekar utom MF2
0 Ingen bromschopper används
1 Bromschopper används under drift
3 Används under drift och vid stopp
Då frekvensomriktaren bromsar motorn, matas motorns och lastens lagrade energi till
ett externt bromsmotstånd. Detta gör det möjligt för frekvensomriktaren att bromsa
lasten med samma moment som vid acceleration (förutsatt att korrekt bromsmotstånd
har valts). Se separat instruktion för installation av bromsmotstånd.
2.4.3 DC-bromsström
Definierar strömmen till motorn under likströmsbromsning.
Figur 1- 9. Acceleration/Retardation (S-formad)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 33

32 • vacon Beskrivning av parametrar
4
f
n
f
n
t
t
t = 1 x Par. 2.4.4
t = 0,1 x Par. 2.4.4
NX12K21
0,1 x f
n
DRIFT
STOPP
Utfrekvens
Motorvarvtal
DC-bromsning TILL
f
ut
f
ut
Utfrekvens
Motorvarvtal
DRIFT
STOPP
DC-bromsning TILL
2.4.4 DC-bromsningstid vid stopp
Bestämmer om bromsning är TILL eller FRÅN och bromsningstiden för DC-bromsen då
motorn stoppas. DC-bromsens funktion är beroende av stoppfunktionen, parameter
2.1.12.
0 DC-broms används ej
>0 DC-broms används och dess funktion är beroende av stoppfunktionen,
(par. 2.1.12). DC-bromsningstiden bestäms med denna parameter.
Par 2.1.12 = 0; Stoppfunktion = Utrullning:
Efter stoppkommando stoppar motorn genom utrullning utan styrning från
frekvensomriktaren.
Med likströmsbromsning kan motorn stoppas elektriskt på kortast möjliga tid, utan att
använda ett extra yttre bromsmotstånd.
Bromsningstiden skalas beroende på frekvensen då DC-bromsningen påbörjas. Om
frekvensen är större än motorns nominella frekvens, bestäms bromsningstiden av det
inställda värdet för parameter 2.4.4. Då frekvensen är 10 % av den nominella, är
bromsningstiden 10 % av värdet inställt på parameter 2.4.4.
Figur 1- 10. DC-bromsningstid då stopp sker genom utrullning.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 34

Beskrivning av parametrar vacon • 33
4
t = Par. 2.4.4
t
par. 2.4.5
NX12K23
Motorvarvtal
Utfrekvens
DC-bromsning TILL
DRIFT
STOPP
f
ut
t
NX12K80
Par 2.4.6
DRIFT
STOPP
Utfrekvens
Par 2.1.12 = 1; Stoppfunktion = Ramp:
Efter stoppkommando minskas motorns varvtal enligt de inställda
retardationsparametrarna, så snabbt som möjligt, till varvtalet definierat av parameter
2.4.5, då DC-bromsning påbörjas.
Bromsningstiden är definierad av
parameter 2.4.4. Om stor tröghet
föreligger, rekommenderas
användning av yttre bromsmotstånd
för snabbare
inbromsning.
Se Figur 1- 11.
Figur 1- 11. DC-bromsningstid då stopp sker med
ramp.
2.4.5 Frekvens för DC-bromsning vid rampstopp
Utgångsfrekvensen vid vilken DC-bromsning påbörjas. Se Figur 1- 11.
2.4.6 DC-bromsningstid vid start
DC-bromsen aktiveras då startkommando
ges. Denna parameter definierar tiden
innan bromsen släpps. Efter att bromsning
har upphört, ökar utgångsfrekvensen
enligt den med parameter 2.4.6 inställda
startfunktionen.
Se Figur 1- 12.
2.4.7 Flödesbroms
I stället för likströmsbromsning är flödesbromsning en användbar bromsmetod för
motorer 15 kW. Då bromsning behövs, minskas frekvensen och flödet i motorn ökas,
som i sin tur ökar motorns möjlighet till bromsning. I motsats till vid
likströmsbromsning förblir varvtalet kontrollerat under bromsning. Flödesbroms kan
väljas TILL eller FRÅN.
0 = Flödesbromsning TILL
Figur 1- 12. DC-bromsningstid vid start
1 = Flödesbromsning FRÅN
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 35

34 • vacon Beskrivning av parametrar
4
Obs: Flödesbromsning överför energi till värme i motorn och ska enbart användas
intermittent för att undvika skador på motorn
2.4.8 Flödesbromsström
Definierar värdet för flödesbromsströmmen. Kan ställas in mellan 0,1 × I
Strömgränsen.
nMot
och
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 36

Beskrivning av parametrar vacon • 35
4
2.5.1 2.5.2
NX12K33
Referens
[Hz]
Utfrekvens
[Hz]
Par. 2.5.2
Par. 2.5.1
Par. 2.5.3 = 0,2
Par. 2.5.3 = 1,2
nxlk37.fh8
fout [Hz]
Tid [s]
4.5 FÖRBJUDNA FREKVENSER
2.5.1 Förbjudet frekvensområde 1; Låg gräns
2.5.2 Förbjudet frekvensområde 1; Hög gräns
I somliga system kan det vara
nödvändigt att undvika vissa frekvenser
pga problem med mekaniska
resonanser. Med dessa parametrar är
det möjligt att ställa in gränser för ett
förbjudet frekvensområde.
Se Figur 1- 13.
Figur 1- 13. Inställning av förbjudet
frekvensområde.
2.5.3 Skalningsfaktor för acc.-/ret.ramphastigheter mellan gränser för förbjudna frekvenser
Definierar accelerations-/retardationstid då utgångsfrekvensen är mellan gränserna för
område som valts som förbjudet frekvensområde (parametrar 2.5.1 och 2.5.2). Ramptid
(vald accelerations-/retardationstid 1 eller 2) multipliceras med denna faktor. T ex gör
värdet 0,1 accelerationstiden 10 gånger kortare än utanför det förbjudna
frekvensområdet.
Figur 1- 14. Skalning av ramptid inom förbjudna frekvenser.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 37

36 • vacon Beskrivning av parametrar
4
Un
par.2.6.4
U[V]
f[Hz]
NX12K07
par.2.6.3
Förvalt: motorns
nominella spänning
Linjär
Kvadratisk
Fältförsvagningspunkt
Förvalt: motorns
nominella frekvens
4.6 MOTORKONTROLL
2.6.1 Reglermetod
0 Frekvensstyrning: Referenserna från I/O-plintarna och manöverpanelen är
frekvensreferenser och frekvensomriktaren styr
utgångsfrekvensen (upplösning för utgångsfrekvensen = 0,01
Hz).
1 Varvtalsstyrning: Referenserna från I/O-plintarna och manöverpanelen är
varvtalsreferenser och frekvensomriktaren styr motorns varvtal
(noggrannhet ± 0,5 %).
2.6.2 Val av U/f-förhållande
Linjärt: Motorspänningen ändras linjärt med frekvensen i området med konstant
0 flöde från 0 Hz till fältförsvagningspunkten då nominell spänning läggs ut till
motorn. Linjärt U/f-förhållande bör användas i applikationer med konstant
moment. Se Figur 1- 15.
Denna förvalda inställning bör användas om speciellt behov av en annan
inställning inte föreligger.
Kvadratiskt:
1 Motorspänningen ändras med frekvensen efter en kvadratisk kurvform
i området från 0 Hz till fältförsvagningspunkten då nominell spänning läggs
ut till motorn. Under fältförsvagningspunkten går motorn undermagnetiserad
och producerar lägre moment och elektromekaniskt missljud. Kvadratiskt
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 38

Beskrivning av parametrar vacon • 37
4
Un
Par 2.6.4
Par. 2.6.3
U[V]
f[Hz]
NX12K08
Förvalt.: motorns
nominella spänning
Fältförsvagningspunkt
Förvalt: motorns
nominella frekvens
Par. 2.6.5
(Förv. 5,0 Hz)
Par. 2.6.6
(Förv.10,0%)
Par. 2.6.7
(Förv.1,3%)
U/f-förhållande kan användas i applikationer där lastens momentbehov är
proportionellt mot kvadraten på varvtalet, t ex i centrifugalfläktar och pumpar.
Figur 1- 15. Linjär och kvadratisk ändring av motorspänning.
Programmerbar U/f-kurva:
2 U/f-kurvan kan programmeras med tre olika punkter. Programmerbar U/f-
kurva kan användas om andra inställningar inte täcker applikationens krav.
Figur 1- 16. Programmerbar U/f-kurva
Linjärt med flödesoptimering:
3 Frekvensomriktaren börjar söka efter minsta motorström för att spara energi,
minska störningsnivån och ljudet. Denna funktion kan användas i
applikationer med konstant motorbelastning, såsom fläktar, pumpar etc.
2.6.3 Fältförsvagningspunkt
Fältförsvagningspunkten är den utgångsfrekvens vid vilken utgångsspänningen når det
inställda maxvärdet.
2.6.4 Spänning vid fältförsvagningspunkten
Vid frekvenser över fältförsvagningspunkten behåller utgångsspänningen sitt inställda
maxvärde. Vid frekvenser under fältförsvagningspunkten är utgångsspänningen
beroende av inställningen av parametrarna för U/f-kurvan. Se parametrar 2.1.13, 2.6.2,
2.6.5 2.6.6 och 2.6.7 samt Figur 1- 16.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 39

38 • vacon Beskrivning av parametrar
4
Då parametrarna 2.1.6 och 2.1.7 (motorns nominella spänning och nominella frekvens)
ställs in, ges parametrarna 2.6.3 och 2.6.4 automatiskt korresponderande värden. Om
andra värden för fältförsvagningspunkt och max utgångsspänning behövs, ska dessa
parametrar ändras efter inställning av parametrarna 2.1.6 och 2.1.7.
2.6.5 U/f-kurva, mittpunktsfrekvens
Om den programmerbara U/f-kurvan har valts med parameter 2.6.2, definierar denna
parameter kurvans mittpunktsfrekvens. Se Figur 1- 16.
2.6.6 U/f-kurva, mittpunktsspänning
Om den programmerbara U/f-kurvan har valts med parameter 2.6.2, definierar denna
parameter kurvans mittpunktsspänning. Se Figur 1- 16.
2.6.7 Utgångsspänning vid nollfrekvens
Denna parameter definierar kurvans spänning vid nollfrekvens. Se Figur 1- 16.
2.6.8 Kopplingsfrekvens
Ljudet från motorn kan minimeras genom användning av en hög kopplingsfrekvens.
Ökning av kopplingsfrekvensen minskar frekvensomriktarens kapacitet.
Kopplingsfrekvens för Vacon NXL: 1…16 kHz
2.6.9 Överspänningsregulator
2.6.10 Underspänningsregulator
Dessa parametrar tillåter avstängning av under-/överspänningsregulatorerna. Detta kan
vara användbart, t ex om matningsspänningen varierar mer än –15 % till +10 % och
applikationen inte tål denna över-/underspänning. I detta fall regleras
utgångsfrekvensen med hänsyn till nätvariationerna.
Märk: Över-/underspänningsutlösning kan inträffa då regulatorerna är satta ur funktion.
0 Regulator avstängd
1 Regulator tillslagen
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 40

Beskrivning av parametrar vacon • 39
4
4.7 SKYDDSFUNKTIONER
2.7.1 Reaktion på referensfel
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
En varning eller ett fel och ett larm genereras om 4…20 mA referenssignal används och
signalen faller under 3.5 mA under 5 sekunder eller under 0,5 mA under 0,5 sekunder.
Informationen kan också programmeras att aktivera reläutgångarna.
2.7.2 Reaktion på externt fel
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
En varning eller ett fel genereras med en extern felsignal på de programmerbara
digitala ingångarna. Informationen kan också programmeras att aktivera
reläutgångarna.
2.7.3 Reaktion på underspänningsfel
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
För underspänningsgränser, se Vacon NXL Användarhandbok, tabell 4-2.
Märk: Detta skydd kan inte inaktiveras.
2.7.4 Övervakning av utgångsfaser
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
Övervakningen av utgångsfaser säkerställer att motorfaserna har ungefär lika stora
strömmar.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 41

40 • vacon Beskrivning av parametrar
4
VARNING!
Den beräknade modellen skyddar inte motorn om kylluftflödet till
motorn reduceras pga igensatt luftintag.
!
2.7.5 Jordfelsskydd
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
Jordfelsskyddet säkerställer att summan av strömmarna i motorfaserna är noll.
Överströmsskyddet är alltid i funktion och skyddar frekvensomriktaren från höga
strömmar vid jordfel.
Parametrar 2.7.6—2.7.10, termiskt skydd av motor:
Allmänt
Motorns termiska skydd ska skydda motorn från överhettning. Vacon frekvensomriktare är kapabla
att mata ut en ström som är högre än motorns nominella. Om belastningen kräver hög ström, finns
det risk för att motorn blir termiskt överbelastad. Detta är fallet särskilt vid låga frekvenser, då
motorns kyleffekt och dess kylkapacitet reduceras. Om motorn utrustas med en yttre kylfläkt
minskas kravet på minskad last vid låga varvtal.
Det termiska skyddet av motorn baseras på en beräkningsmodell som använder frekvensomriktarens utgångsström för bestämning av motorns last.
Det termiska skyddet för motorn kan justeras med parametrar. Den termiska strömmen IT anger
den ström över vilken motorn är överbelastad, och denna strömgräns är en funktion av
utgångsfrekvensen.
2.7.6 Termiskt skydd av motor
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
Om utlösning är vald stoppas omriktaren och feltillstånd aktiveras.
Inaktivering av skyddet, dvs inställning av värdet 0 för parametern, återställer motorns
temperaturkurva till 0 %.
Om parametern får värdet 0 inaktiveras skyddet och låstidsräknaren återställs.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 42

Beskrivning av parametrar vacon • 41
4
f
f
n
Par.
2.7.8=40%
0
NX12k62
100%
2.7.7 Termiskt skydd av motor: Faktor för motorns omgivningstemperatur
Då hänsyn måste tas till motorns omgivningstemperatur, bör denna parameter ges ett
värde. Inställning i området -100,0—100,0 % är möjlig, där -100 % motsvarar 0 °C och
100 % motsvarar motorns maximala drifttemperatur. Om parametervärdet ställs in till
0 %, antas att omgivningstemperaturen är densamma som kylflänsens temperatur vid
tillslag av nätspänning.
2.7.8 Termiskt skydd av motor: Kyleffekt vid
nollfrekvens
Värdet kan ställas in i området 0—
150.0 % × kyleffekt vid nominell
frekvens.
Se Figur 1- 17.
2.7.9 Termiskt skydd av motor: Tidskonstant
Tiden kan ställas in mellan 1 och 200 minuter.
Detta är motorns termiska tidskontant. Ju större motor, desto större tidskonstant.
Tidskonstanten är den tid inom vilken motorns temperaturkurva har nått 63 % av sitt
slutliga värde.
Motorns termiska tidskonstant är specifik för motorns utförande och varierar mellan
olika motortillverkare.
Om motorns ’t6-tid’ (t6 är tiden i sekunder som motorn säkert kan arbeta vid sex gånger
märkströmmen) är känd (ges av motortillverkaren), kan den användas för att ställa in
parametern för tidskonstanten. Som en tumregel kan sägas att motorns termiska
tidskonstant i minuter är lika med 2 × t6. Om omriktaren är stoppad höjs tidskonstanten
internt till tre gånger parametervärdet. Kylningen i stopptillstånd är baserad på
konvektion och tidskonstanten ökas. Se också Figur 1- 18.
Figur 1- 17. Motorns kyleffekt
Märk: Om motorns nominella varvtal (par 2.1.8) eller nominella ström (par 2.1.9) ändras,
sätts denna parameter automatiskt till förvalt värde (45).
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 43

42 • vacon Beskrivning av parametrar
4
105%
par. 2.7.6
= (I/IT)2 x (1-e
-t/T
)
I/I
T
NX12k82
Motortemperatur
Motor
ström
Tidkonstant T
*)
Motor temperatur
Tid
Utlösningsområde
Utlösning/varning
*)
Ändras med motorstorlek och
kan justeras med parameter 2.7.9
Figur 1- 18. Beräkning av motortemperatur.
2.7.10 Termiskt skydd av motor: Motorns driftförhållande
Parameter 2.7.11, Fastlåsningsskydd:
Allmänt
Motorns fastlåsningsskydd skyddar motorn från kortvariga överbelastningar såsom fastlåsning av
motoraxeln. Fastlåsningsskyddets reaktionstid kan ställas in kortare än tiden för motorns termiska
skydd. Fastlåsningstillståndet definieras med två parametrar, 2.7.12 (Fastlåsningsström) och 2.7.13
(Fastlåsningsfrekvens). Om strömmen är högre än det inställda gränsvärdet och utgångsfrekvensen
är lägre än det inställda gränsvärdet, föreligger fastlåsning. I detta läge finns ingen verklig
indikation på att motoraxeln roterar. Fastlåsningsskyddet är en typ av överströmsskydd.
2.7.11 Fastlåsningsskydd
Definierar hur mycket motorn belastas i förhållande till dess nominella effekt.
Värdet kan ställas in i området 0 %…100 %.
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
Inställning av parametern till 0 inaktiverar skyddet och nollställer räknaren för
fastlåsningstid.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 44

Beskrivning av parametrar vacon • 43
4
f
I
Par. 2.7.12
Par. 2.7.14
NX12k63
Fastlåsningsområde
Par. 2.7.13
NX12k64
Utlösningsområde
Utlösning/varning
par. 2.7.11
Tid
Tidräknare för fastlåsning
Fastlåst
Ej fastlåst
2.7.12 Gräns för fastlåsningsström
Strömmen kan ställas in i området till
0,0… I
×2. För att fastlåsning ska
nMotor
föreligga, måste strömmen överstiga
detta gränsvärde. Se Figur 1- 20.
Programvaran tillåter inte inmatning av
större värde än I
×2. Om parameter
nMotor
2.1.9 (motorns nominella ström)
ändras, återställs denna parameter
automatiskt till det förvalda värdet
(I
×1,3).
nMotor
Figur 1- 19. Inställning av fastlåsningskarakteristik.
2.7.13 Fastlåsningstid
Denna tid kan ställas in mellan 1,0 och
120,0 s.
Detta är den maximalt tillåtna tiden utan
att fastlåsning föreligger.
Fastlåsningstiden räknas av en intern
upp-/nedräknare.
Om fastlåsningstiden överstiger denna
gräns, sker utlösning (se Figur 1- 20).
2.7.14 Maximal fastlåsningsfrekvens
Frekvensen kan ställas in i området 1– f
För att fastlåsning ska föreligga, måste utgångsfrekvensen ha varit under detta
gränsvärde under hela fastlåsningstiden.
Figur 1- 20. Räkning av faslåsningstid.
(par. 2.1.2).
max
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 45

44 • vacon Beskrivning av parametrar
4
Par. 2.7.16
NX12k65
Par. 2.7.17
f
5 Hz
Underlastområde
Moment
Fältförsvagningspunkt
par. 2.6.3
Parametrar 2.7.15—2.7.18, Underlastskydd:
Allmänt
Ändamålet med motorns underlastskydd är att säkerställa att motorn är belastad då omriktaren är i
drift. Om motorn tappar sin last kan det finnas ett fel i processen, t ex drivremsbrott eller torr
pump.
Motorns underlastskydd kan justeras genom inställning av underlastkurvan med parametrarna
2.7.16 (belastning vid fältförsvagning) och 2.7.17 (belastning vid nollfrekvens), se nedan.
Underlastkurvan är en kvadratisk kurva mellan nollfrekvensen och fältförsvagningspunkten.
Skyddet är inte aktivt under 5 Hz (räknaren för underlasttid är stoppad).
Momentvärdena för inställning av underlastkurvan ställs in som procentvärden av motorns
nominella moment. Märkdata, parametern för nominell motorström och omriktarens nominella
ström IL används för att finna skalningsfaktorn för det interna momentvärdet. Om en motor används
vars värden avviker från omriktarens, minskar noggrannheten i momentberäkningen.
2.7.15 Underlastskydd
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
Om utlösning är aktiverat, stoppas omriktaren och feltillstånd aktiveras.
Inaktivering av skyddet genom att sätta parametern till 0 nollställer räknaren för
underlasttid.
2.7.16 Underlastskydd, last i fältförsvagningsområde
Momentgränsen kan ställas in i
området 10,0—150,0 % × T
nMotor
.
Denna parameter anger värdet för
minsta tillåtna moment då
utgångsfrekvensen är över
fältförsvagningspunkten.
Se Figur 1- 21.
Om parameter 2.1.9 (motorns
nominella ström) ändras, återställs
denna parameter automatiskt till
förvalt värde.
Figur 1- 21. Inställning av minimilast.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 46

Beskrivning av parametrar vacon • 45
4
Par. 2.7.18
NX12k66
Utlösningsområde
Tidräknare för underlast
Tid
Underlast
Ej underlast
Utlösning/varning
par. 2.7.15
2.7.17 Underlastskydd, last vid nollfrekvens
Momentgränsen kan ställas in i området 5,0—150,0 % × T
Denna parameter anger värdet för minsta tillåtna moment vid nollfrekvens.
Se Figur 1- 21.
Om parameter 2.1.9 (motorns nominella ström) ändras, återställs denna parameter
automatiskt till förvalt värde.
2.7.18 Underlasttid
Denna tid kan ställas in mellan 2,0 och 600,0 s.
Detta är den maximalt tillåtna tiden för
underlast. En intern upp-/nedräknare
räknar den ackumulerade
underlasttiden. Om räknarens värde
överstiger gränsvärdet, löser skyddet
ut enligt parameter 2.7.15. Om
omriktaren stoppas nollställs
underlasträknaren. Se Figur 1- 22.
nMotor
.
2.7.19 Reaktion på termistorfel
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp efter fel enligt parameter 2.1.12
3 = Fel, stopp efter fel alltid genom utrullning
Skyddet inaktiveras genom att sätta parametern till 0.
2.7.20 Reaktion på fältbussfel
Här sker inställning av reaktion på fältbussfel om fältbusskort används. För mera
information, se respektive instruktion för fältbusskort.
Se parameter 2.7.19.
Figur 1- 22. Funktion för underlasttidräknare.
2.7.21 Reaktion på kortplatsfel
Här sker inställning av reaktion på kortplatsfel pga saknat eller felaktigt kort.
Se parameter 2.7.19.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 47

46 • vacon Beskrivning av parametrar
4
2.7.22 Övervakning av återföringsvärde
0 = Används ej
1 = Varning, om återföringsvärdet faller under gräns inställd med parameter 2.7.23
2 = Varning, om återföringsvärdet överskrider gräns inställd med parameter 2.7.23
3 = Fel, om återföringsvärdet faller under gräns inställd med parameter 2.7.23
4 = Fel, om återföringsvärdet överskrider gräns inställd med parameter 2.7.23
2.7.23 Gräns för övervakning av återföringsvärde
Med denna parameter ställer man in gränsen för återföringsvärdet som övervakas via
parameter 2.7.22.
2.7.24 Fördröjning vid övervakning av återföringsvärde
Här ställer man in fördröjningen för övervakning av återföringsvärde (parameter 2.7.22).
Om denna parameter används, är parameter 2.7.22 aktiv endast då återföringsvärdet
håller sig utanför de definierade gränserna under den tid som anges av denna
parameter.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 48

Beskrivning av parametrar vacon • 47
4
NX12k67
Felaktivering
Motorstoppsignal
Motorstartsignal
Övervakning
Väntetid
Par. 2.8.1
Omstart 1 Omstart 2
Försökstid
Par. 2.8.2
Fel aktivt
RESET/
Felåterställning
Parameter 2.1.21: (3 försök)
Väntetid
Par. 2.8.1
Väntetid
Par. 2.8.1
4.8 PARAMETRAR FÖR AUTOMATISK ÅTERSTART
Den automatiska återstartsfunktionen är aktiv om värdet för parameter 2.1.21 = 1. Det sker alltid tre
omstartsförsök.
2.8.1 Automatisk återstart: Väntetid
Definierar tiden innan frekvensomriktaren gör att försök att automatiskt återstarta
motorn efter att felet har försvunnit.
2.8.2 Automatisk återstart: Försökstid
Den automatiska återstartsfunktionen startar frekvensomriktaren på nytt då fel har
försvunnit och väntetiden har löpt ut.
2.8.3 Automatisk återstart, startfunktion
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Figur 1- 23. Automatisk återstart.
Tidräkningen startar vid första omstarten. Om antalet fel som uppträder under
försökstiden överstiger 3, aktiveras feltillstånd. Annars återställs felet efter att
försökstiden har löpt ut och nästa fel startar räkning av försökstiden på nytt.
Om ett enda fel varar längre än försökstiden, aktiveras feltillstånd.
Startfunktionen vid automatisk återstart väljs med denna parameter. Den definierar
startsättet:
0 = Start med ramp
1 = Flygande start
2 = Start enligt parameter 2.1.11
Page 49

48 • vacon Beskrivning av parametrar
4
4.9 PARAMETRAR FÖR PID-REFERENS
2.9.1 PID-aktivering
Med denna parameter kan man aktivera resp inaktivera PID-regulatorn.
0 = PID-regulatorn inaktiverad
1 = PID-regulatorn aktiverad
2 = Pump- och fläktkontrollen aktiverad. Parametergrupp P2.10 synlig
2.9.2 PID-referens
Definierar frekvensreferenskälla för PID-regulatorn. Förvalt värde är 2.
0 = AI1-referens
1 = AI2-referens
2 = PID-referens från panelstyrningsmenyn (grupp K3, parameter P3.5)
3 = Referens från fältbussen (FBProcessDataIN1)
2.9.3 Insignal för återföringsvärde
0 AI1
1 AI2
2 Fältbuss (
3 Motormoment
4 Motorvarvtal
5 Motorström
6 Motoreffekt
7 AI1 – AI2
Ärvärde 1
: FBProcessDataIN2;
2.9.4 PID-regulatorns förstärkning
Denna parameter definierar förstärkningen hos PID-regulatorn. Om parameterns värde
ställs in på 100 %, orsakar en avvikelse på 10 % att utsignalen ändras 10 %.
Om parametern sätts till 0, arbetar regulatorn som en ren ID-regulator.
Se exempel nedan.
2.9.5 PID-regulatorns I-tid
Denna parameter definierar PID-regulatorns integreringstid. Om parametern ställs in
på 1,00 sekunder, orsakar en avvikelse på 10 % att utsignalen ändras 10,00 %/s. Om
parameterns värde sätts till 0,00 s, arbetar regulatorn som en ren PD-regulator.
Ärvärde2
: FBProcessDataIN3)
Se exempel nedan.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 50

Beskrivning av parametrar vacon • 49
4
Hz
1s
10%
10%
10%
10%
NX12k70
a
Avvikelse=10%
I-del=5 Hz/s
I-del=5 Hz/s
I-del=5 Hz/s
I-del=5 Hz/s
I-del=5 Hz/s
PID-utgång
I
PID
Avvikelse
2.9.6 PID-regulatorns D-tid
Parameter 2.9.6 definierar PID-regulatorns deriveringstid. Om parametern ställs in på
1,00 sekunder, orsakar en avvikelse på 10 % under 1,00 s att utsignalen ändras 10 %.
Om parameterns värde sätts till 0,00 s, arbetar regulatorn som en ren PI-regulator.
Se exempel nedan.
Exempel 1:
För att avvikelsen ska minskas till noll med de givna värdena, uppför sig frekvensomriktarens utsignal enligt följande:
Givna värden:
Par 2.9.4, P = 0 % PID maxgräns = 100,0 %
Par 2.9.5, I-tid = 1,00 s PID mingräns = 0,0 %
Par 2.9.6, D-tid = 0,00 s Minfrekvens = 0 Hz
Avvikelse (börvärde – ärvärde) = 10,00 % Maxfrekvens = 50 Hz
I detta exempel arbetar PID-regulatorn praktiskt taget som en ren ID-regulator.
Enligt det givna värdet för parameter 2.9.5 (I-tid), ökar PID-utsignalen med 5 Hz (10 % av
skillnaden mellan max- och minfrekvens) varje sekund tills avvikelsen blir 0.
Figur 1- 24. PID-regulatorns funktion som I-regulator.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 51

50 • vacon Beskrivning av parametrar
4
Hz
NX12k69
t
D-del
D-del
P-del=5 Hz
Avvikelse=10%
D-del
P-del= -5 Hz
Avvikelse= -10%
PID-utgång
Avvikelse
Exempel 2:
Givna värden:
Par 2.9.4, P = 100 % PID maxgräns = 100,0 %
Par 2.9.5, I-tid = 1,00 s PID mingräns = 0,0 %
Par 2.9.6, D-tid = 1,00 s Minfrekvens = 0 Hz
Avvikelse (börvärde – ärvärde) = 10 % Maxfrekvens = 50 Hz
Då strömmen slås till, upptäcker systemet skillnaden mellan börvärdet och ärvärdet och
börjar antingen öka eller minska (om avvikelsen är negativ) PID-regulatorns
utgångsvärde i enlighet med I-tiden. Då avvikelsen har minskats till 0, har
utgångssignalen reducerats till värdet angivet av parameter 2.9.5.Om avvikelsen är
negativ, reagerar frekvensomriktaren genom att minska utgångssignalen på
motsvarande sätt.
Figur 1- 25. PID-utgångskurva med värden i exempel 2.
Exempel 3:
Givna värden:
Par 2.9.4, P = 100 % PID maxgräns = 100,0 %
Par 2.9.5, I-tid = 0,00 s PID mingräns = 0,0 %
Par 2.9.6, D-tid = 1,00 s Minfrekvens = 0 Hz
Avvikelse (börvärde – ärvärde) = 10 %/s Maxfrekvens = 50 Hz
Då avvikelsen ökar, ökas också utsignalen från PID-regulatorn enligt inställda
parametervärden (D-tid = 1,00 s)
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 52

Beskrivning av parametrar vacon • 51
4
Hz
a
1,00 s
10%
NX12k72
D-del=10%=5,00 Hz
D-del= -10%= -5,00 Hz
P-del=100% *PID-avvikelse = 5,00Hz/s
PID-utgång
Avvikelse
Figur 1- 26. PID-utgångssignal med värden i exempel 3.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 53

52 • vacon Beskrivning av parametrar
4
0
1008030
0
0
4
10,0 V8,03,0
20,0 mA
16,0
6,0
16,8
8,8 20,0 mA
Par.2.9.7=30%
Par.2.9.8=80%
nxlk45.fh8
Skalad
ingångssinal[%]
Analogingång [%]
2.9.7 Minskalning av återföringsvärde 1
Sätter minsta skalningspunkt för återföringsvärde 1. Se Figur 1- 27
2.9.8 Maxskalning av återföringsvärde 1
Sätter största skalningspunkt för återföringsvärde 1. Se Figur 1- 27
2.9.9 Invertering av PID-avvikelse
2.9.10 Insomningsfrekvens
2.9.11 Insomningsfördröjning
Figur 1- 27. Exempel på skalning av återföringsvärde
Denna parameter tillåter invertering av avvikelsevärdet för PID-regulatorn (och
därigenom dess funktion).
0 Ingen invertering
1 Invertering
Frekvensomriktaren stoppas automatiskt om utgångsfrekvensen underskrider
Insomningsnivån
, definierad med denna parameter, under längre tid än vad som anges
av parameter 2.9.11. PID-regulatorn arbetar under stopptillståndet och ställer om
frekvensomriktaren till drifttillstånd då återföringssignalen antingen underskrider eller
överskrider (se par 2.9.13)
Uppvakningsnivån
, bestämd av parameter 2.9.12.
Se Figur 1- 28.
Den minsta tid som frekvensen måste hålla sig under insomningsnivån innan
frekvensomriktaren stoppas.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 54

Beskrivning av parametrar vacon • 53
4
NX12k56
Omriktarens
Start/Stopp-status
Drift
Stopp
Tid
t
vilo
(Par. 2.9.11)
t<t
vilo
Insomn.nivå
(Par. 2.1.15)
Tid
Utgångsfrekvens
Ärvärdet
Uppvakningsnivå (Par. 2.9.12)
Se Figur 1- 28.
2.9.12 Uppvakningsnivå
Uppvakningsnivån definierar den frekvens under vilken återföringsvärdet måste falla
eller som måste överskridas innan frekvensomriktaren återtar drifttillstånd. Se Figur 1-
28.
2.9.13 Uppvakningsfunktion
Denna parameter definierar om drifttillståndet återställs då återföringssignalen
underskrider eller överskrider
Uppvakningsnivån
(par 2.9.12). Se Figur 1- 28.
Figur 1- 28. Frekvensomriktarens insomningsfunktion
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 55

54 • vacon Beskrivning av parametrar
4
NXLk59.fh8
Figur 1- 29. Välbara uppvakningsfunktioner
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 56

Beskrivning av parametrar vacon • 55
4
4.10 PUMP- OCH FLÄKTAUTOMATIK
Pump- och fläktautomatiken kan användas för att styra en motordrift med variabelt varvtal och upp
till tre hjälpdrifter. Frekvensomriktarens PID-regulator varvtalsreglerar den variabla driften och
avger styrsignaler för start och stopp av hjälpdrifterna för styrning av totalflödet. Utöver de åtta
parametergrupperna som finns som standard, finns en parametergrupp för flerpumps- och
fläktstyrning.
Som framgår av namnet, används pump- och fläktautomatiken för styrning av pump- och
fläktdrifter. Applikationen utnyttjar yttre kontaktorer för växling mellan motorer anslutna till
frekvensomriktaren. Den automatiska växlingsfunktionen medger ändring av startordningen för
hjälpdrifterna.
4.10.1 Kort beskrivning av funktion och viktiga parametrar
Automatisk växling mellan drifter (Autoväxling & förreglingar, P2.10.4)
Den automatiska växlingen av start- och stoppordning aktiveras och appliceras på antingen enbart
hjälpdrifterna eller på hjälpdrifterna och huvuddriften, beroende på inställningen av parameter
2.10.4.
Funktionen
fläktautomatik växlas med önskade intervall. Den av omriktaren varvtalsstyrda motorn kan också
ingå i den automatiska växlings- och förreglingssekvensen (par 2.10.4). Autoväxlingsfunktionen
möjliggör jämn fördelning av drifttiden på motorerna och förhindrar t ex att en pump slutar fungera
pga för långa stopp i driften.
Välj autoväxlingsfunktionen med parameter 2.10.4,
Den automatiska växlingen äger rum då tiden inställd med parameter 2.10.5
Autoväxlingsintervall,
parameter 2.10.7,
Motorer i drift stoppas och återstartas enligt den nya ordningen.
Externa kontaktorer styrda via frekvensomriktarens reläutgångar ansluter motorerna till
frekvensomriktaren eller till nätet. Om den av frekvensomriktaren styrda motorn ingår i
autoväxlingssekvensen, styrs den alltid av den först aktiverade reläutgången. De övriga reläerna
som aktiveras senare styr hjälpdrifterna
Denna parameter används för att aktivera förreglingsingångarna (värden 3 & 4).
Förreglingssignalerna kommer från motorernas arbetsbrytare. Signalerna (funktionerna) ansluts
till digitala ingångar som programmeras som förreglingsingångar med tillhörande parametrar.
Pump- och fläktautomatiken styr endast motorer med aktiva förreglingssignaler.
Autoväxling
tillåter att start- och stoppordningen för drifter styrda av pump- och
Autoväxling
har löpt ut och använd kapacitet understiger nivån definierad med
Autoväxlingsnivå
.
.
Om förreglingssignalen för en hjälpdrift inte är aktiv och en annan hjälpdrift är tillgänglig,
används den senare utan att frekvensomriktaren stoppas.
Om förreglingssignalen för huvuddriften inte är aktiv, stoppas samtliga motorer och återstartas
med den nya ordningen.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 57

56 • vacon Beskrivning av parametrar
4
Om en förreglingssignal återkommer under drift, stoppar automatiken alla motorer omedelbart
och återstartar dem i den nya ordningen. Exempel:
[P1 P3] [P2 FÖRREGLAD] [STOPP]
[P1 P2 P3]
Se avsnitt 4.10.2, Exempel.
Parameter 2.10.5, Autoväxlingsintervall
Efter att tiden definierad med denna parameter löpt ut, äger autoväxling rum om den använda
kapaciteten ligger under nivån definierad med parametrarna 2.10.7 (
(
Max antal hjälpdrifter
först då kapacitetsbehovet sjunker under denna gräns.
Tidräkningen aktiveras bara om start/stoppbegäran har aktiverats.
Tidräkningen återställs när den automatiska ändringen har gjorts eller när startbegäran tas bort.
). Om kapaciteten överstiger värdet för parameter 2.10.7, sker autoväxling
Autoväxlingsnivå
) och 2.10.6
Parametrar 2.10.6, Maximalt antal hjälpdrifter och
2.10.7, Autoväxlingsnivå
Dessa parametrar definierar den nivå under vilken kapacitetsbehovet måste ligga för att autoväxling
ska utföras.
Denna nivå definieras enligt följande:
Om antalet igångvarande hjälpdrifter är mindre än värdet för parameter 2.10.6 kan autoväxling
äga rum.
Om antalet igångvarande hjälpdrifter är lika med värdet för parameter 2.10.6 och frekvensen för
huvuddriften är under värdet för parameter 2.10.7 kan autoväxling äga rum.
Om värdet för 2.10.7 är 0,0 Hz, kan autoväxling ske endast i viloläge (Stopp och Insomning)
oavsett värdet för parameter 2.10.6.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 58

Beskrivning av parametrar vacon • 57
4
Plint
Signal
1
+10 V
ref
Utgång för referensspänning
2
AI1+
Spänningsingång för frekvensreferens /DIN4
3
AI1-
I/O-jord
4
AI2+
PID ärvärde
5
AI2-
6
+24 V
Utgång för styrspänning
7
GND
I/O-jord
8
DIN1
START
9
DIN2
Förregling 1 (par 2.1.17 = 10)
10
DIN3
Förregling 2 (par 2.1.18 = 13)
11
GND
I/O-jord
18
AO1+
Utgångsfrekvens
Analog utgång
19
AO1-
A
RS 485
Seriell buss
B
RS 485
Seriell buss
21
RO1
Reläutgång 1
FEL
22
RO1
23
RO1
NXOPTB5
22 RO1/1
Autoväxling 1 (Pump 1 styrning), par 2.3.2 = 17
23 RO1/2
25 RO2/1
Autoväxling 2 (Pump 2 styrning), par 2.3.3 = 18
26 RO2/2
28 RO3/1
Autoväxling 3 (Pump 3 styrning), par 2.3.4 = 19
29 RO3/2
Börvärdespotentiometer
Ärvärde
I
(0)4…20 mA
+
–
2-tråds
transmitter
mA
4.10.2 Exempel
Pump- och fläktautomatik med förreglingar och 3-pumps autoväxling (NXOPTB5 tilläggskort
behövs)
Situation: En varvtalsstyrd motor och två hjälpdrifter.
Parameterinställningar: 2.10.1= 2
Förreglingssignaler används, autoväxling används mellan alla drifter.
Parameterinställningar: 2.10.4=4
DIN4 aktiv (par.2.2.6=0)
Förreglingssignalerna kommer från den digitala ingångarna DIN4 (AI1), DIN2 & DIN3
valda med parametrarna 2.1.17, 2.1.18 och 2.2.4.
Styrning av pump 1 (par.2.3.1=17) tillåts via förregling 1 (DIN 2, P2.1.17=10), pump 2
(par.2.3.2=18) via förregling 2 (par. 2.1.18=13) och pump 3 (par.2.3.3=19) via förregling 3
(DIN4).
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Tabell 1- 17. Exempel av Pump- och fläktautomatikens I/O-konfiguration
med förreglingar och 3-pumps autoväxling
Page 59

58 • vacon Beskrivning av parametrar
4
PE
L1
L2
L3
U V W
PE
U V W
PE
M1
M2
F1
F2
F3
VACON
U V W
L1 L2 L3
Q1
K1
K2
K1.1
K2.1
M
M
3
3
U V W
PE
M2
F2
K3
K3.1
M
3
NX12k104.ds4
22
23
DIN2
AOMains
AOMains
25
26
230 VAC
S1
K1
K1.1
K1.1
K2
K2
K1
NXOPTB5
K1
K2
K2
K2.1
M1/Vacon
M2/Vacon
M2/mains
M1/mains
24 VDC
S2
K3
K3
K2.1
K1
K3
DIN3
K3
28
29
AOMains
S3
K3
K3.1
K3.1
K2
K2
K3
M3/Vacon M3/mains
K1
K1
AI1
NX12k106.dsf
9
6 8
10
VACON NXL
10V
Figur 1- 30. 3-pumps autoväxling, principschema
Figur 1- 31. Exempel på 3-pumps autoväxling, huvudkretsschema
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 60

Beskrivning av parametrar vacon • 59
4
Plint
Signal
1
+10 V
ref
Utgång för referensspänning
2
AI1+
Spänningsingång för frekvensreferens /DIN4
3
AI1-
I/O-jord
4
AI2+
PID Ärvärde
5
AI2-
6
+24 V
Utgång för styrspänning
7
GND
I/O-jord
8
DIN1
START
9
DIN2
Förregling 1 (par 2.1.17 = 10)
10
DIN3
Förregling 2 (par 2.1.18 = 13)
11
GND
I/O-jord
18
AO1+
Utgångsfrekvens
Analog utgång
19
AO1-
A
RS 485
Seriell buss
B
RS 485
Seriell buss
21
RO1
Autoväxling 1 (Pump 1 styrning)
par 2.3.1. = 17
22
RO1
23
RO1
NXOPTAA
X1
1
+24 V
Utgång för styrspänning max. 150 mA
2
GND
Jord för styrningarna , till exempel för +24 V och DO
3
DIN1
Konstanthastighet 2, par 2.2.1 = 7
4
DIN2
Felkvittering, par 2.2.2 = 4
5
DIN3
Disable PID (Frekvensreferens från AI1), par 2.2.3 = 11
6
DO1
Driftklar, par 2.3.4 = 1
Öppen kollektor, 50 mA/48 V
X2
22
RO1/NO
Autoväxling 2 (Pump 2 styrning), par 2.3.2 = 18
23
RO1/COM
Börvärdespotentiometer
Ärvärde
I
(0)4…20 mA
+
2-tråds
transmitter
mA
Pump- och fläktautomatik med förreglingar och 2-pumps autoväxling (NXOPTAA eller NXOPTB5
tilläggskort behövs)
Situation: En varvtalsstyrd motor och en hjälpdrift.
Parameterinställningar: 2.10.1= 1
Förreglingssignaler används, autoväxling används.
Parameterinställningar: 2.10.4=4
Förreglingssignalerna kommer från den digitala ingången DIN2 (par. 2.1.17) och DIN3
(par. 2.1.18).
Styrning av pump 1 (par.2.3.1=17) tillåts via förregling 1 (DIN2, P2.1.17) och pump 2
(par.2.3.2=18) via förregling 2 (par. 2.1.18=13)
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Tabell 1- 18. Exempel av Pump- och fläktautomatikens I/O-konfiguration
med förreglingar och 2-pumps autoväxling
Page 61

60 • vacon Beskrivning av parametrar
4
2223129Autom.OMains2526
230 VAC
S1
K1
K1.1
K1.1
K2
K2
K1
VACON NXOPTA2
K1K2K2
K2.1
M1/Vacon
M2/
Vacon
M2/mains
M1/mains
24 VDC
S2
K2.1
K1
10
RO1
RO2
DIN2
DIN3
Autom.OMains
NX12k105.dsf
PE
L1
L2
L3
U V W
PE
U V W
PE
M1
M2
F1
F2
F3
VACON
U V W
L1 L2 L3
Q1
K1
K2
K1.1
K2.1
M
M
3
3
NX12k107.ds4
RO1
Figur 1- 32. 2-pumps autoväxling, principschema
Figur 1- 33. Exempel på 2-pumps autoväxling, huvudkretsschema
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 62

Beskrivning av parametrar vacon • 61
4
M
M
Vacon
M
NX12k96.fh8
Motor
hjälpdrift 1
Motor
hjälpdrift 2
4.10.3 Beskrivning av pump- och fläktstyrningsparametrar
2.10.1 Antal hjälpdrifter
Med denna parameter definieras antalet hjälpdrifter. Funktionerna som styr
hjälpdrifterna (parametrarna 2.10.4–2.10.7) kan kopplas till reläutgångar.
2.10.2 Hjälpdrifternas startfördröjning
Huvuddriftens frekvens måste överskrida hjälpdriftens startfrekvens under den tid som
definieras med denna parameter innan hjälpdriften startas. Den angivna fördröjningen
gäller samtliga hjälpdrifter. Fördröjningen förhindrar onödiga starter orsakade av
kortvariga överskridanden av startgränsen.
2.10.3 Hjälpdrifternas stoppfördröjning
Huvuddriftens frekvens måste underskrida hjälpdriftens stoppfrekvens under den tid
som definieras med denna parameter innan hjälpdriften stoppas. Den angivna
fördröjningen gäller samtliga hjälpdrifter. Fördröjningen förhindrar onödiga stopp
orsakade av kortvariga underskridanden av stoppgränsen.
2.10.4 Autoväxling
0= Autoväxling används ej
1= Autoväxling används på hjälpdrifter
Huvuddriften förblir densamma. Endast nätkontaktor krävs för en hjälpdrift.
Figur 1- 34. Autoväxling gäller endast hjälpdrifter.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 63
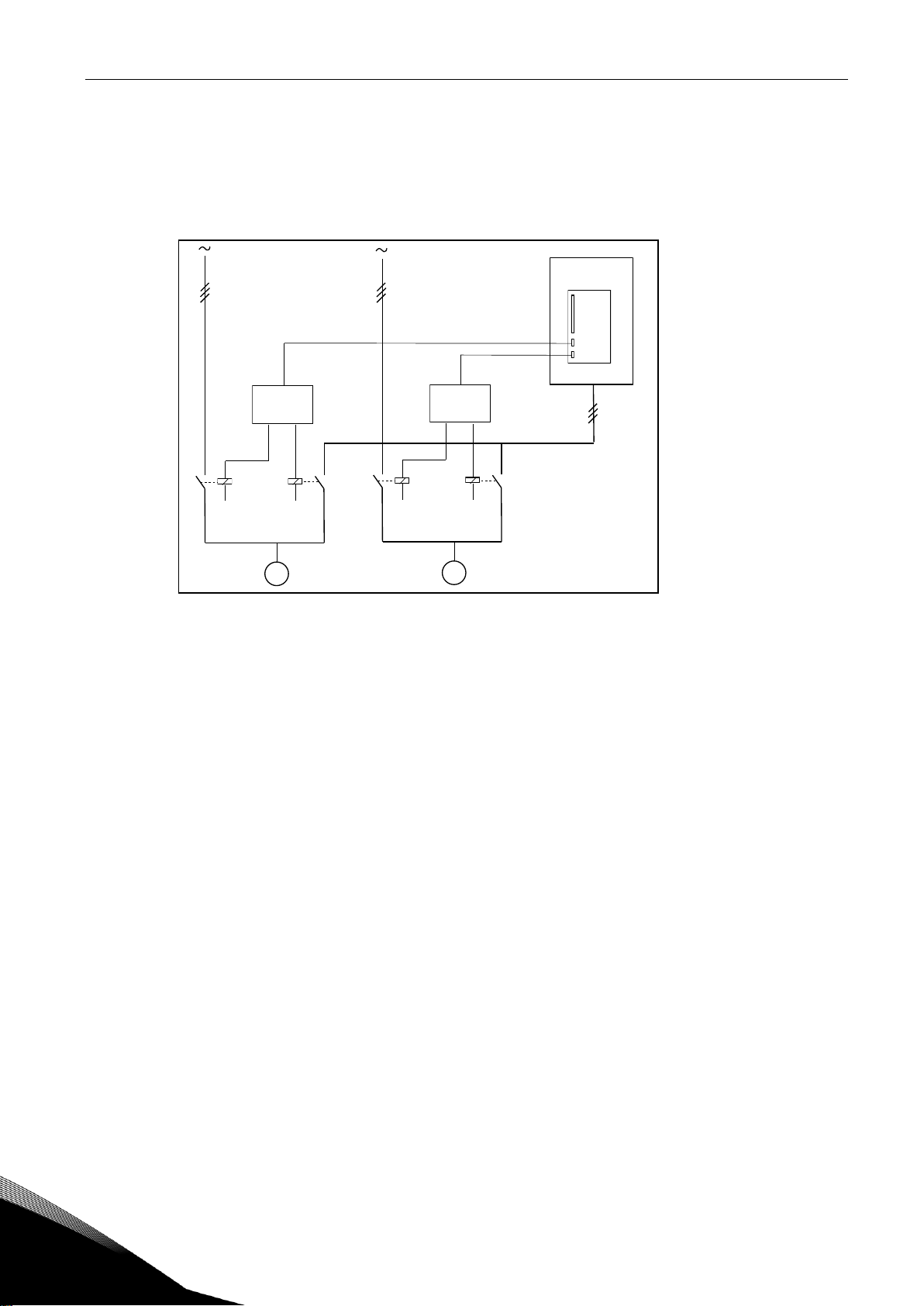
62 • vacon Beskrivning av parametrar
4
Vacon
M
M
NX12k97.fh8
Drift 2
Drift 1
Hjälpkretsar
Hjälpkretsar
2= Alla drifter inkluderas i autoväxlingssekvensen
Huvuddriften inkluderas i automatiken och en kontaktor behövs till varje drift för inkoppling
till nät eller till frekvensomriktaren.
Figure 1- 35. Autochange with all drives
3= Autoväxling med förreglingar (endast hjälpdrifter)
Huvuddriften förblir densamma. Endast nätkontaktor krävs för en hjälpdrift. Förreglingarna
för autoväxlingsutgångar 1, 2, 3 (eller DIE1, 2, 3) kan väljas med par 2.1.17, 2.1.18 och 2.2.4
4= Autoväxling med förreglingar (alla drifter)
Huvuddriften inkluderas i automatiken och en kontaktor behövs till varje drift för inkoppling
till nät eller till frekvensomriktaren. Förreglingarna för autoväxlingsutgångar 1, 2, 3 (eller
DIE1, 2, 3) kan väljas med par 2.1.17, 2.1.18 och 2.2.4
2.10.5 Autoväxlingsintervall
Efter att tiden definierad med denna parameter löpt ut, äger autoväxling rum om
kapacitetsbehovet ligger under nivån definierad med parametrarna 2.10.7
(
Frekvensgräns för autoväxling
kapacitetsbehovet överskrider värdet för P2.10.7, sker inte autoväxling förrän
kapacitetsbehovet sjunker under denna gräns.
) och 2.10.6 (
Maximalt antal hjälpdrifter
). Om
Tidräkning aktiveras endast om start-/stoppbegäran är aktiv.
Tidräkningen nollställs efter att autoväxlingen ägt rum.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 64

Beskrivning av parametrar vacon • 63
4
NXLK56.fh8
Par. 2.10.7
Par. 2.10.5
Par. 2.10.5
Tid
Utgångsfrekvens
Autoväxlingsintervall
Autoväxling sker
Autoväxlingsnivå, frekvens
Par. 2.10.6 = 1
Max. antal
hjälpdrifter
Styrning av
hjälpdrift 1
Styrning av
hjälpdrif 2
Autoväxlingsintervall
2.10.6 Maximalt antal hjälpdrifter
2.10.7 Frekvensgräns för autoväxling
Dessa parametrar definierar den nivå under vilken kapacitetsbehovet måste ligga för att
autoväxling ska kunna ske.
Denna nivå definieras enligt följande:
Om antalet igångvarande hjälpdrifter är mindre än värdet hos parameter 2.10.6 kan
autoväxling ske.
Om antalet igångvarande hjälpdrifter är lika med värdet hos parameter 2.10.6 och
huvuddriftens frekvens är under värdet för parameter 2.10.7 kan autoväxling ske.
Om värdet hos parameter 2.10.7 är 0.0 Hz, kan autoväxling ske endast i viloläge
(stopp och insomning) oavsett värdet hos parameter 2.10.6.
Figure 1- 36. Autoväxlingsintervall och –gränser
2.10.8 Startfrekvens av hjälpdrift 1
Hjälpdriften startas när frekvensomriktarens frekvens överstiger, med 1 Hz, den med
denna parameter inställda frekvensen. Onödiga start/stopp undvikes med denna 1 Hz
hysteresis. Se också parameter 2.1.1. och 2.1.2.
2.10.9 Stoppfrekvens av hjälpdrift 1
Hjälpdriften stoppas när frekvensomriktarens frekvems understiger, med 1 Hz, den med
denna parametern inställda frekvensen. Stoppgränsen bestämmer även den frekvens till
vilken den reglerade driftens frekvens minskas efter start av hjälpdriften.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
Page 65

64 • vacon Beskrivning av parametrar
4
4.11 PANELSTYRNINGSPARAMETRAR
3.1 Styrplats
Den aktiva styrplatsen kan ändras med denna parameter. For mer information, se Vacon
NXL Användarhandbok, avsnitt 7.3.3.
3.2 Panelreferens
Frekvensreferensen kan justeras från panelen med denna parameter. För mer
information, se Vacon NXL Användarhandbok, avsnitt 7.3.3.2.
3.3 Panelstyrningsriktning
0 Framåt: Motorns rotationsriktning är framåt, då manöverpanelen är aktiv
styrplats.
1 Bakåt: Motorns rotationsriktning är bakåt, då manöverpanelen är aktiv
För mer information, se Vacon NXL Användarhandbok, avsnitt 7.3.3.3.
3.4 Stoppknapp aktiverad
Om man alltid vill ha möjligheten att stoppa omriktaren med stoppknappen, oavsett vald
styrplats, ska denna parameter ges värdet 1.
Se också parameter 3.1.
3.5 PID-referens 1
Panelreferensen till PID-regulatorn kan ställas in mellan 0 % och 100 %. Detta
referensvärde är den aktiva PID-referensen (om parameter 2.9.2 = 2).
3.6 PID-referens 2
styrplats.
Panelreferens 2 till PID-regulatorn kan ställas in mellan 0 % och 100 %. Denna referens
är aktiv om funktionen för DIN# = 12 och kontakten ansluten till DIN# sluts.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 66

Styrsignallogik vacon • 65
5
DIN2
DIN3
AI1
AI2
0
1
2
3
PID
0
1
2
3
4
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
DIN1
DIN2
I/O
> 1
DIN3
DIN3
Intern reversering
3.3 Panelriktning
Intern start/stopp
Referens från fältbuss
Start/stopp från fältbuss
Riktning från fältbuss
Motorpotentiometer
Upp
Ned
2.9.2 PID-referens
P3.5 PIDpanelreferens
R3.2 Panelreferens
Återföringsingång, par. 2.9.3
R3.6 PID panelreferens 2
Frigivning PIDpanelreferens. 2 (DIN#=12)
Start framåt
Start-/stoppknappar
Intern
frekv. referens
Panel
Fältbuss
Återställningsknapp
3.1 Styrplats
2.2.21 Fältbussreferens
2.2.20 Panelreferens
2.1.14 I/O-referens
Spärra PID
2.1.2 Maxfrekvens
2.1.20 Förvalt varvtal 1
2.1.21 Förvalt varvtal 2
P2.9.1 PID-aktivering
Start bakåt
Programmerbar
Start-/stopp- och
reverseringslogik
Referens från
fältbuss
(FBProcessData IN 1)
(programmerbar)
Förvalt varvtal 1
Förvalt varvtal 2
Exp.DIE3
I/ORef.
2.1.14
Exp.DIE1
DIN3 & Exp.DIE1
Exp.DIE1
EXP DIE2 Felkvitteringsingång (programmerbar) Intern felkvittering
5. STYRSIGNALLOGIK I MULTIFUNKTIONSAPPLIKATIONEN
Figur 1- 37. Styrsignallogik i multifunktionsapplikationen.
Dygnet runt-service: +358-40-8371 150 • Epost: vacon@vacon.com
 Loading...
Loading...