

Page 1

vacon nxl
®
frekvensomformere
multistyring
applikationsvejledning
Page 2
vacon • 1
Vacon Multistyringsapplikation (Software ALFIFF20)
Ver. 3.45
INDEX
1. Indledning .......................................................................................................................... 2
2. I/O-styring.......................................................................................................................... 3
3. Multistyringsapplikation – Parameterlister ....................................................................... 4
3.1 Overvågningsværdier (Betjeningspanel: menu M1) .................................................................. 4
3.2 Basisparametre (Betjeningspanel: Menu P2 P2.1)............................................................... 5
3.3 Indgangssignaler (Betjeningspanel: Menu P2 P2.2)............................................................. 8
3.4 Udgangssignaler (Betjeningspanel: Menu P2 P2.3) ........................................................... 10
3.5 Driftsstyringsparametre (Betjeningspanel: Menu P2 P2.4) ............................................... 11
3.6 Parametre for forbudte frekvenser (Betjeningspanel: Menu P2 P2.5) .............................. 11
3.7 Motorstyringsparametre (Betjeningspanel: Menu P2 P2.6)............................................... 12
3.8 Beskyttelser (Betjeningspanel: Menu P2 P2.7)................................................................... 13
3.9 Autogenstartsparametre (Betjeningspanel: Menu P2 P2.8) .............................................. 14
3.10 PID-referenceparametre (Betjeningspanel: Menu P2 P2.9) .............................................. 14
3.11 Pumpe & ventilatorstyringsparametre (Betjeningspanel: Menu P2 P2.10) ...................... 15
3.12 Panelstyring (Betjeningspanel: Menu K3) ............................................................................... 16
3.13
Systemmenu (Betjeningspanel: Menu S6)............................................................................... 16
3.14 Udvidelseskort (Betjeningspanel: Menu E7)............................................................................ 16
4. Parameterbeskrivelser .................................................................................................... 17
4.1 BASISPARAMETRE ................................................................................................................... 17
4.2 INDGANGSSIGNALER............................................................................................................... 22
4.3 UDGANGSSIGNALER ................................................................................................................ 27
4.4 DRIFTSSTYRING........................................................................................................................ 31
4.5 FORBUDTE FREKVENSER........................................................................................................ 35
4.6 MOTORSTYRING........................................................................................................................ 36
4.7 BESKYTTELSER ........................................................................................................................ 39
4.8 AUTOGENSTARTSPARAMETRE ............................................................................................... 47
4.9 PID-REFERENCEPARAMETRE................................................................................................. 48
4.10 PUMPE- OG VENTILATORSTYRING.......................................................................................... 55
4.11 PANELSTYRINGSPARAMETRE................................................................................................. 64
5. Styresignallogik i Multistyringsapplikationen .................................................................. 65
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
Page 3

2 • vacon indledning
Multistyringsapplikation
1. INDLEDNING
Multistyringsapplikationen til Vacon NXL anvender som standard en direkte frekvensreference fra
den analoge indgang 1. En PID-controller kan imidlertid også anvendes f.eks. i pumpe- og ventilatorapplikationer, som indeholder en lang række interne måle- og tilpasningsfunktioner. Når frekvensomformeren er sat i drift, er den eneste synlige parametergruppe B2.1 (Basisparametre). De
særlige parametre er tilgængelige og kan redigeres, hvis værdien af par. 2.1.22 (Parametervisning)
ændres.
Den direkte frekvensreference kan anvendes til styring uden PID-controlleren og kan vælges fra de
analoge indgange, fieldbussen, betjeningspanelet, forudindstillede hastigheder eller motorpotentiometeret.
Særlige parametre til Pumpe- og ventilatorstyring (Gruppe P2.10) er tilgængelige og kan redigeres,
hvis værdien af par 2.9.1 ændres til 2 (Pumpe- og ventilatorstyring aktiveret).
PID-controller-referencen kan vælges fra de analoge indgange, fra fieldbussen, PID-panelreference
1 eller ved at muliggøre PID-panelreference 2 via en digital indgang. PID-controllerens aktuelle
værdi kan vælges fra de analoge indgange, fieldbussen eller motorens aktuelle værdier. PIDcontrolleren kan også anvendes, når frekvensomformeren styres via fieldbus eller betjeningspanel.
De digitale indgange DIN2, DIN3, (DIN4) og de valgfri digitale indgange DIE1, DIE2, DIE3
kan programmeres frit.
Interne og valgfri digitale/relæ- og analoge udgange kan programmeres frit.
Den analoge indgang 1 kan programmeres til strømindgang, spændingsindgang eller
digital indgang DIN4.
BEMÆRK! Hvis den analoge indgang 1 er blevet programmeret som DIN4 med parameter 2.2.6
(AI1 Signalområde), skal det kontrolleres, om jumperindstillingerne (Figur 1-1) er korrekte.
Øvrige funktioner:
PID-controlleren kan anvendes fra styrestederne I/O, betjeningspanel og fieldbus
Sovefunktion
Funktionen Overvågning af aktuel værdi: fuldt programmerbar: Fra, Advarsel, Fejl
Programmerbar signallogik til Start/Stop og Modsat omløbsretning
Referenceskalering
2 forudindstillede hastigheder
Valg af analogt indgangsområde, signalskalering, invertering og filtrering
Frekvensgrænseovervågning
Programmerbare start- og stopfunktioner
DC-bremse ved start og stop
Forbudt frekvensområde
Programmerbar U/f-kurve og U/f-optimering
Justerbar switchfrekvens
Autogenstartsfunktion efter fejl
Beskyttelser og overvågninger (alle fuldt programmerbare: Fra, Advarsel, Fejl):
Fejl på strømindgang
Ekstern fejl
Udgangsfase
Underspænding
Jordfejl
Beskyttelse mod motortermik, stall og
underbelastning
Termistor
Fieldbuskommunikation
Optionskort
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 4
i/o-styring vacon • 3
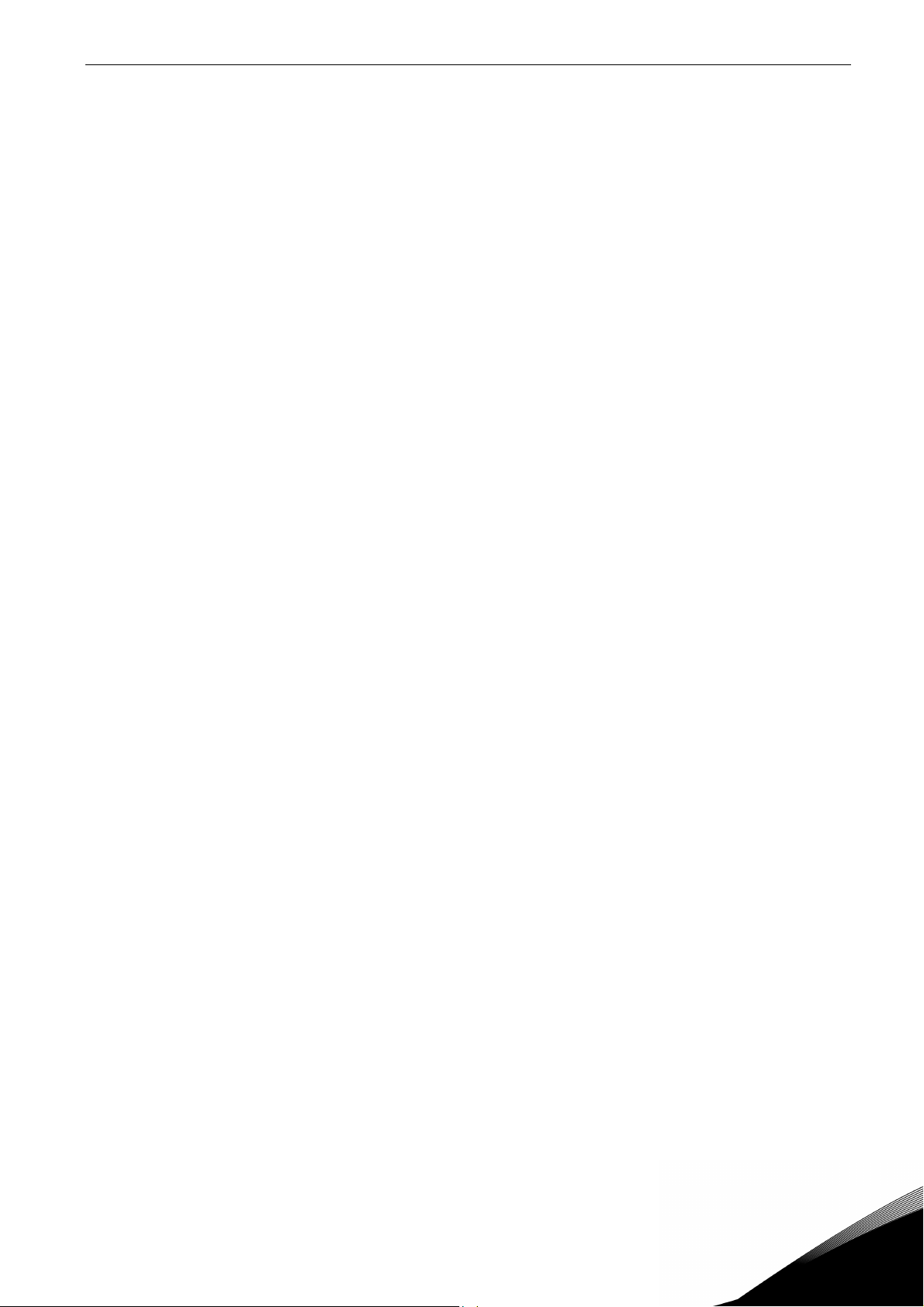
2. I/O-STYRING
Referencepotentiometer
Klemme Signal Beskrivelse
1 +10 V
2 AI1+ Analog indgangsspænding
3 AI1- I/O-jordforbindelse
4 AI2+
5 AI2-
/GND
6 +24 V Styrespændingsudgang Spænding til kontakter mv. maks 0,1 A
7
GND
8 DIN1 Start fremad
9 DIN2 Start modsat omløbsretning
10 DIN3 Multi-step-hastighedsvalg 1
11 GND I/O-jordforbindelse Jordforbindelse til reference og styringer
Reference-udgang Spænding for potentiometer mv.
ref
område 0-10 V DC
Analog indgang, strømområde
0-10 V DC, eller strømområde
0/4-20 mA
I/O-jordforbindelse Jordforbindelse til reference og styringer
(programmerbar)
(programmerbar)
Spændingsindgang frekvensreference
Kan programmeres som DIN4
Jordforbindelse til reference og styringer
Strømindgang frekvensreference
Kontakt lukket = start fremad
Kontakt lukket = start modsat omløbsretning
Kontakt lukket = multistep-hastighed
18 AO1+
19 AO1-
A RS 485 Seriel bus Differentiel modtager/sender
B RS 485 Seriel bus Differentiel modtager/sender
30 +24 V 24V fremmed
Udgangsfrekvens
Analog udgang
indgangsspænding
Programmerbar
Område 0-20 mA/R
Backup af strømforsyning til styreenhed
, maks. 500
L
21 RO1
22 RO1
23 RO1
Relæudgang 1
FEJL
Programmerbar
Tabel 1-1. Standard I/O-konfiguration i Multistyringsapplikationen.
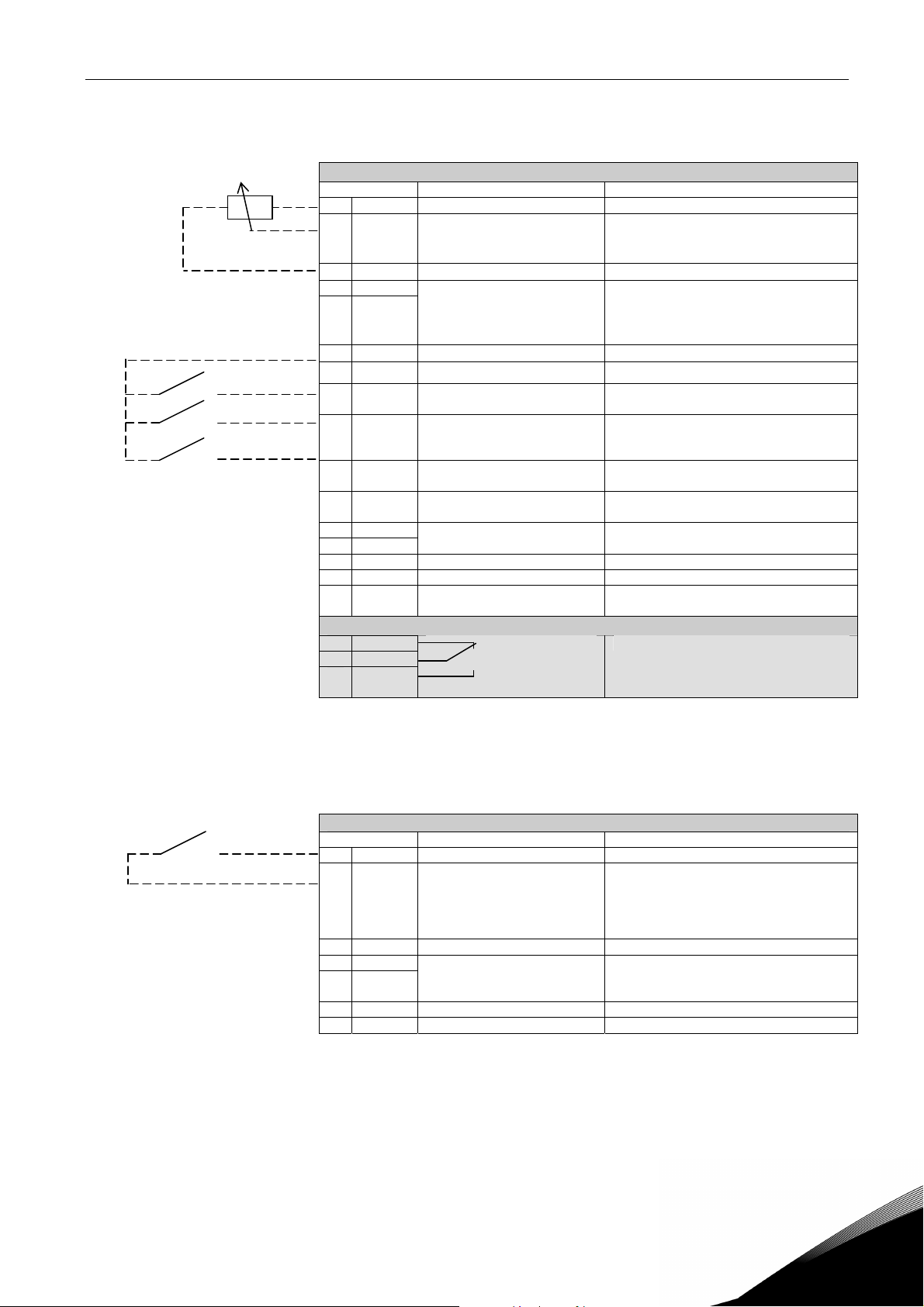
Klemme Signal Beskrivelse
1 +10V
2 AI1+
eller
DIN 4
3 AI1- I/O-jordforbindelse Jordforbindelse til reference og styringer
4 AI2+
5 AI2-
/GND
6 + 24 V Styrespændingsudgang
7 GND I/O-jordforbindelse Jordforbindelse til reference og styringer
Referenceudgang Spænding for potentiometer, osv.
ref
Analog indgang,
spændingsområde 0-10 V DC
Analog indgang, strømområde
0-20 mA
Frekvensreference for spændingsindgang
(MF2-3)
Frekvensreference spændings/strømindgang (MF4-MF6)
Kan programmeres som DIN4
Frekvensreference for strømindgang
Tabel 1-2. AI- konfiguration, når den programmeres som DIN4
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
2
Page 5
4 • vacon parameterlister
3. MULTISTYRINGSAPPLIKATION – PARAMETERLISTER
På de følgende sider er der lister over, hvilke parametre, der findes inden for de respektive
parametergrupper. Parametrene er beskrevet på side 17 til 48.
Forklaring til kolonner:
Kode = Positionsindikation på panelet: viser operatøren nummeret på den aktuelle
parameter
Parameter = Navn på parameteren
Min = Parameterens minimumsværdi
Maks = Parameterens maksimumsværdi
Enhed = Parameterværdiens enhed; hvis den er tilgængelig
Standard = Fabriksindstillet værdi
Tilp. = Kundens egen indstilling
ID = Parameterens ID-nummer (anvendes med pc-værktøjer)
= På parameterkoden: Parameterværdierne kan kun ændres, når frekvensomfor-
meren er standset.
3.1 Overvågningsværdier (Betjeningspanel: menu M1)
Overvågningsværdierne viser de aktuelle parameter- og signalværdier såvel som status og
målinger. Overvågningsværdierne kan ikke ændres.
Se Vacon NXL-betjeningsmanualens kapitel 7 for at få mere at vide.
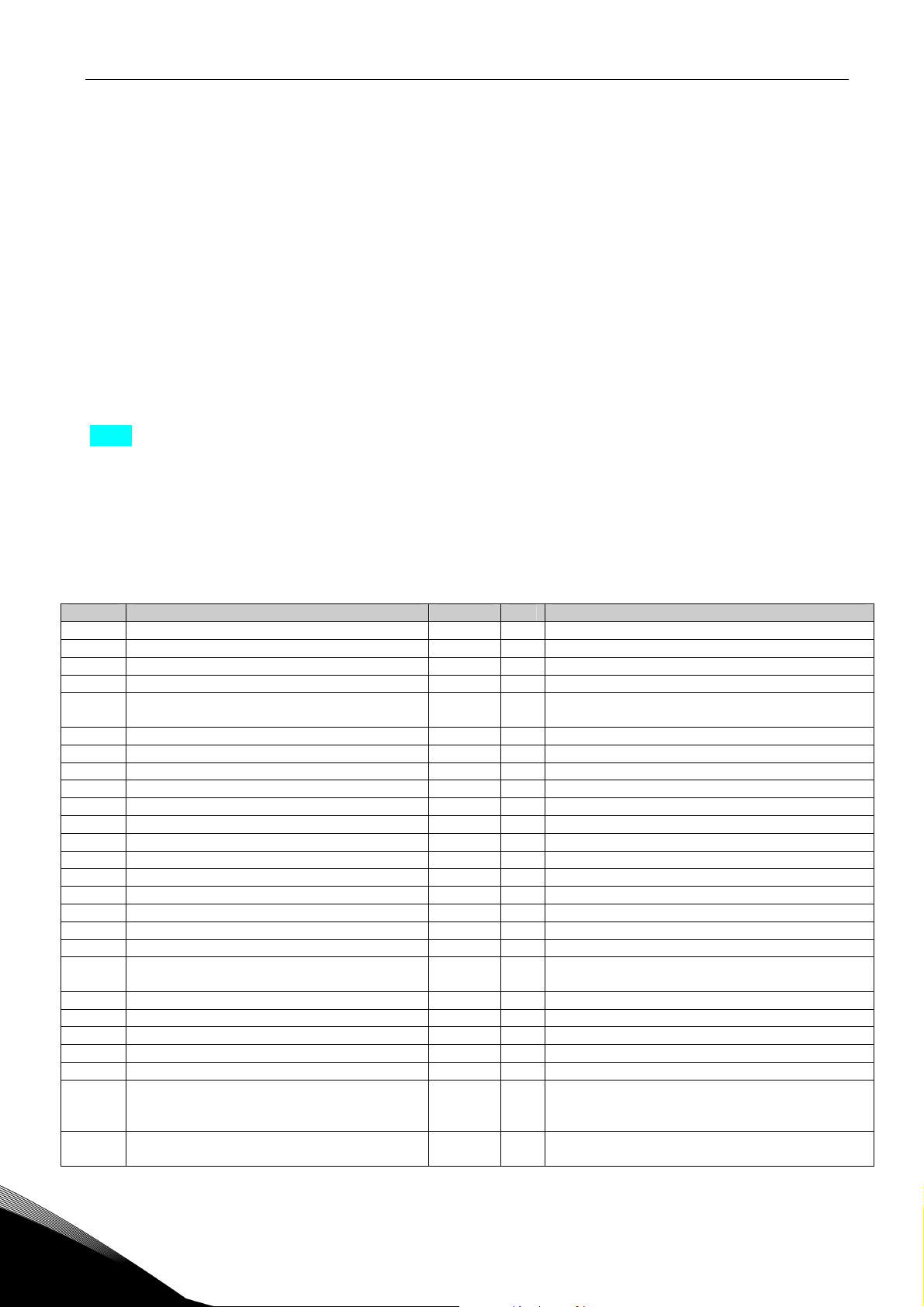
Kode Parameter Enhed ID Beskrivelse
V1.1 Udgangsfrekvens Hz 1 Frekvens til motoren
V1.2 Frekvensreference Hz 25
V1.3 Motorens hastighed rpm 2 Beregnet motorhastighed
V1.4 Motorstrøm A 3 Målt motorstrøm
V1.5
V1.6 Motoreffekt % 5 Beregnet aktuel effekt/motorens nom. effekt
V1.7 Motorspænding V 6 Beregnet motorspænding
V1.8 Jævnstrøms- spænding V 7 Målt jævnstrømsspænding
V1.9 Enhedens temperatur ºC 8 Kølepladetemperatur
V1.10 Analog indgang 1 13 AI1
V1.11 Analog indgang 2 14 AI2
V1.12 Analog udgangsstrøm mA 26 AO1
V1.13 Analog udgangsstrøm 1, udvidelseskort mA 31
V1.14 Analog udgangsstrøm 2, udvidelseskort mA 32
V1.15 DIN1, DIN2, DIN3 15 Status på digitale indgange
V1.16 DIE1, DIE2, DIE3 33 I/O-udvidelseskort: Status på digitale indgange
V1.17 RO1 34 Status på relæudgang 1
V1.18 ROE1, ROE2, ROE3 35 I/O-udvidelseskort: Status på relæudgange
V1.19
V1.20 PID Reference % 20 I procent af den maksimale procesreference
V1.21 PID Aktuel værdi % 21 I procent af den maksimale aktuelle værdi
V1.22 PID Fejlværdi % 22 I procent af den maksimale fejlværdi
V1.23 PID Udgang % 23 I procent af den maksimale udgangsværdi
V1.24 Autoskiftudgange 1, 2, 3 30 Kun anvendt til pumpe- og ventilatorstyring
V1.25 Tilstand 66
V1.26 Motortemperatur % 9
Motormoment
DOE 1
% 4
Beregnet aktuelt moment/motorens nom.
moment
I/O-udvidelseskort: Status på den digitale udgang
36
1
Viser aktuel driftstilstand, der er valgt med
opstartsguide: 0=Ingen valgt, 1=Standard,
2=Ventilator, 3=Pumpe, 4=Høj ydeevne
Beregnet motortemperatur, 1000 svarer til
100,00 % = nominel motortemperatur
Tabel 1-3. Overvågningsværdier
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 6
parameterlister vacon • 5
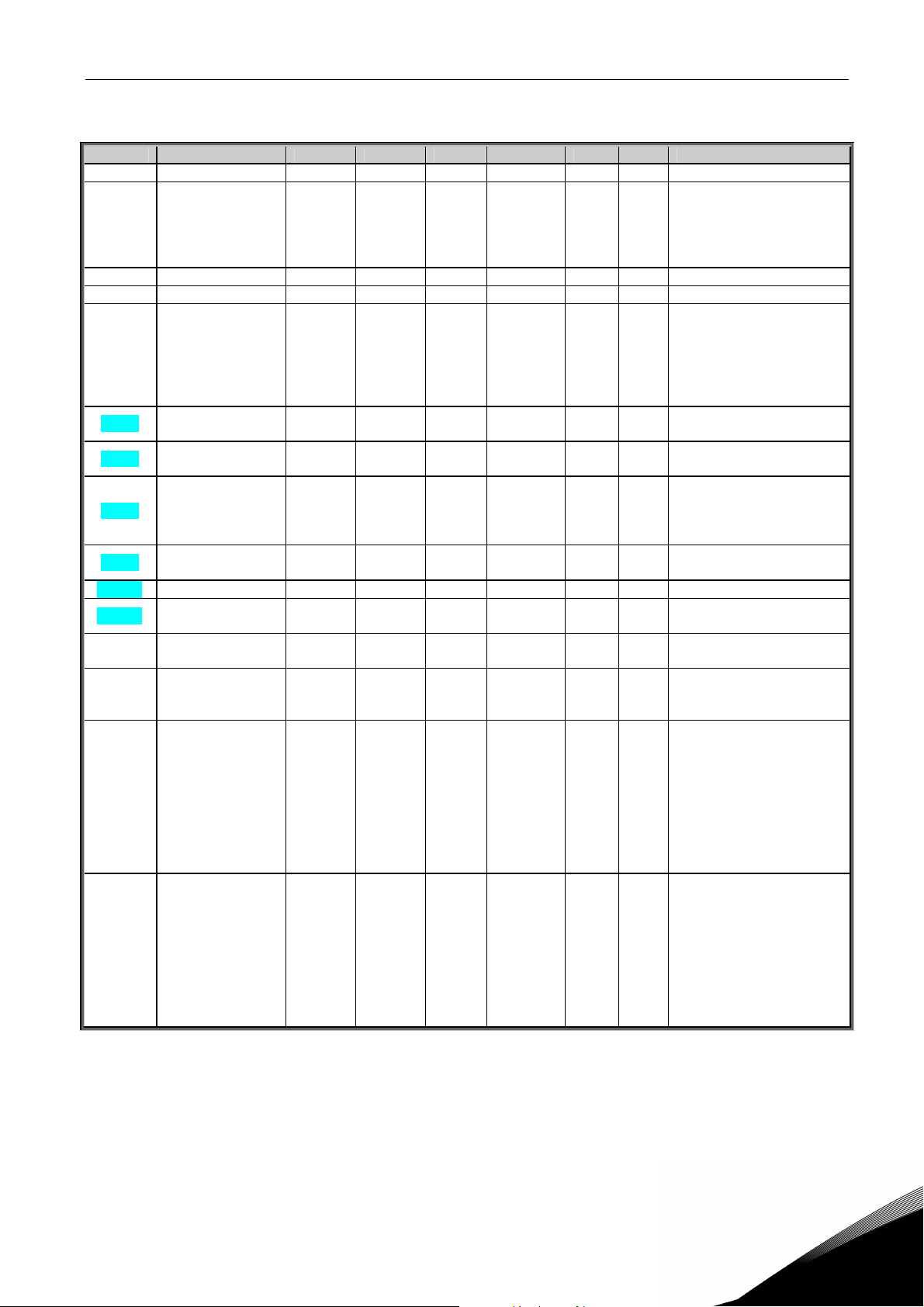
3.2 Basisparametre (Betjeningspanel: Menu P2 P2.1)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.1.1 Min frekvens 0,00 Par. 2.1.2 Hz 0,00 101
P2.1.2 Maks frekvens Par. 2.1.1 320,00 Hz 50,00
P2.1.3 Accelerationstid 1 0,1 3000,0 s 1,0 103
P2.1.4 Decelerationstid 1 0,1 3000,0 s 1,0 104
P2.1.5 Strømgrænse 0,1 x IL 1,5 x IL A IL
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
P2.1.11 Startfunktion 0 1 0
P2.1.12 Stopfunktion 0 1 0
P2.1.13 U/f-optimering 0 1 0
P2.1.14 I/O-reference 0 5 0
P2.1.15 AI2-signalområde 1 2 2
Motorens nominelle
spænding
Motorens
nominelle frekvens
Motorens
nominelle
hastighed
Motorens
nominelle strøm
Motor cos
180 690 V
30,00 320,00 Hz 50,00
300 20 000 rpm 1440
0,3 x I
0,30 1,00 0,85
1,5 x IL A I
L
NXL2:230V
NXL5:400V
L
Bem.: Hvis f
motorens synkrone
102
hastighed, så kontroller
om motoren og
drivsystemet er passende
Bem: Formlerne gælder
for frekvensomformere ca.
op til størrelse MF3.
107
Kontakt fabrikken for
oplysninger om større
størrelser.
110
Se motorens typeskilt
111
Standard gælder en
firepolet motor og en
112
nominel størrelse
frekvensomformer.
Se motorens typeskilt
113
Se motorens typeskilt
120
0=Rampe
505
1=Flyvemde start
0=Friløb
506
1=Rampe
0=Ikke anvendt
109
1=Automatisk
momentforstærkning
0=AI1
1=AI2
2=Panelreference
3=Fieldbus-reference
117
(FBSpeedReference)
4=Motorpotentiometer
5=AI1/AI2-valg. Valg af AI2
kan programmeres med
DIN3-funktion
Ikke anvendt hvis AI2
brugertilpasningsmin.
> 0 % eller AI2
brugertilpasningsmaks.
390
< 100 %
1=0mA – 20 mA
2=4mA – 20 mA
3=0V – 10 V
4=2V – 10 V
maks
>
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 7
6 • vacon parameterlister
P2.1.16
Analog
udgangsfunktion
0 12 1
P2.1.17 DIN2-funktion 0 10 1
P2.1.18 DIN3-funktion 0 17 6
0=Ikke anvendt
1=Udgangsfrekvens
(0-f
)
max
2=Frekvensreference
(0-f
)
max
3=Motorhastighed
(0-Motorens nominelle
hastighed)
4=Udgangsstrøm
(0-I
307
5=Motormoment
(0-T
6=Motoreffekt (0-P
nMotor
nMotor
)
)
)
nMotor
7=Motorspænding
(0-U
nMotor
)
8=Jævnstrømsspænding
(0-1000V)
9=PI-controller ref. værdi
10=PI-contr. akt. værdi 1
11=PI-contr. fejlværdi
12=PI-controller udgang
0=Ikke anvendt
1=Start modsat
2=Modsat omløbsretn.
3=Stoppuls
4=Ekstern fejl, (lk)
5=Ekstern fejl, (åk)
319
6=Drift mulig
7=Forudindst. hastighed 2
8=Motor pot. OP (lk)
9=Slår PID fra (Direkte
frekvensreference)
10=Interlock 1
0=Ikke anvendt
1=Modsat
2=Ekstern fejl, (lk)
3=Ekstern fejl, (åk)
4=Nulstiller fejl
5=Drift mulig
6=Forudindst.hastighed 1
7=Forudindst.hastighed 2
8=DC-bremse-kommando
9=Motorpot. OP (lk)
10=Motorpot. NED (lk)
301
11=Slår PID fra (valg af
PID-styring)
12=Valg af PID-panelref. 2
13=Interlock 2
14=Termistorindgang (Se
NXL Betjeningsmanual,
kapitel 6.2.4)
15=Tvinger styrested til I/O
16=Tvinger styrested til
fieldbus
17=AI1/AI2-valg til I/O-
reference
lk = åbner kontakt
åk = åbner kontakt
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 8
parameterlister vacon • 7
P2.1.19
P2.1.20
P2.1.21
P2.1.22 Parametervisning 0 1 0
Fast
hastighed 1
Fast
hastighed 2
Automatisk
genstart
0,00 Par. 2.1.2 Hz 10,00
0,00 Par. 2.1.2 Hz 50,00
0 1 0
105
106
0=Ikke anvendt
731
1=Anvendt
0=Alle parametre og
115
menuer synlige
1=Kun gruppe P2.1 og
menu M1 – H5 synlige
Tabel 1-4. Basisparametre P2.1
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 9
8 • vacon parameterlister
3.3 Indgangssignaler (Betjeningspanel: Menu P2 P2.2)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.2.1
P2.2.2
P2.2.3
P2.2.4 DIN4-funktion (AI1)
P2.2.5 Valg af AI1-signal
P2.2.6 AI1-signalområde
P2.2.7
P2.2.8
P2.2.9 Invertering af AI1
P2.2.10 AI1 filtreringstid
P2.2.11 Valg af AI2-signal
Udvidelseskort DIE1-
funktion
Udvidelseskort
DIE2-funktion
Udvidelseskort
DIE3-funktion
AI1-minimums-
brugerindstilling
AI1-maksimums-
brugerindstilling
0 13 7
0 13 4
0 13 11
0
0
1
0,00
0,00
0
0,00
0
13 2
10
4 3
100,00 % 0,00
100,00 % 100,00
1 0
10,00 s 0,10 378 0=Ingen filtrering
11 388 Som par. 2.2.5
0=Ikke i brug
1=Modsat omløbsretn.
2=Ekstern fejl, (lk)
3=Ekstern fejl, (åk)
4=Nulstilling af fejl
5=Drift mulig
6=Forudindst. hastighed 1
368
7=Forudindst. hastighed 2
8=DC-bremsekommando
9=Motorpot. OP (lk)
10=Motorpot. NED (lk)
11=Deaktiver PID (valg af
PID-styring)
12=Valg af PID panelref. 2
13=Interlock 1
Som par. 2.2.1, undtagen:
330
13=Interlock 2
Som par. 2.2.1, undtagen:
369
13=Interlock 3
Anvendt hvis P2.2.6 = 0
499
Valg som i par.2.2.3
10=AI1 (1=Lokal,
0=indgang 1)
11=AI2 (1=Lokal,
1= indgang 2)
20=Udv. AI1
377
21=Udv. AI2
0=Digital indgang 4
1=0mA – 20 mA (MF4-->)
2=4mA – 20 mA (MF4-->)
3=0V – 10 V
4=2V – 10 V
379
Ikke anvendt hvis AI2
brugermin. > 0 % eller AI2
brugermaks. < 100 %
Bemærk! Se NXL
Betjeningsmanual, kapitel
7.4.6: AI1 mode
380
381
0=Ikke inverteret
387
1=Inverteret
(2=udvidelseskort
0=indgang 1)
(2=udvidelseskort
1=indgang 2)
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 10
parameterlister vacon • 9
P2.2.12 AI2-signalområde
P2.2.13
P2.2.14
P2.2.15 AI2 Inverteret
P2.2.16 AI2-filtreringstid
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
AI2-minimums-
brugerindstilling
AI2-maksimums-
brugerindstilling
Motorpotentiometer-
frekvensreference
nulstilling af
hukommelse
Referenceskalering
minimumsværdi
Referenceskalering
maksimumsværdi
Referencevalg for
panelstyring
Referencevalg for
fieldbusstyring
1
0,00
0,00
0
0,00
0
0,00
P2.2.18
0 5 2
0 5 3
4 2
100,00 % 0,00
100,00 % 100,00
1 0
10,00 s 0,10 389 0=Ingen filtrering
2 1
P2.2.19 0,00
320,00 0,00
Ikke anvendt hvis AI2
Brugermin, <> 0 % eller
AI2 brugermaks. <> 100 %
390
1=0-20 mA
2=4-20 mA
3=0 V – 10 V
4=2 V – 10 V
391
392
0=Ikke inverteret
398
1=Inverteret
0=Ingen nulstilling
1= Nulstilling hvis
367
standset eller afbrudt
2=Nulstilling hvis afbrudt
Påvirker ikke fieldbus
344
referancen (skaleret
mellem P2.1.1 og P2.1.2)
Påvirker ikke fieldbus
345
referancen (skaleret
mellem P2.1.1 og P2.1.2)
0=AI1
1=AI2
2=Panelreference
121
3=Fieldbusreference
(FBSpeedReference)
4=Motorpotentiometer
5=PID-controller
122 Se ovenfor
Tabel 1- 5. Indgangssignaler, P2.2
lk=lukker kontakt
åk=åbner kontakt
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 11
10 • vacon parameterlister
3.4 Udgangssignaler (Betjeningspanel: Menu P2 P2.3)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.3.1 Funktion af relæudgang 1 0 19 3
P2.3.2
P2.3.3
P2.3.4
P2.3.5 Analog udgangsfunktion 0 12 1
P2.3.6
P2.3.7 Invertering af analog udgang 0 1 0
P2.3.8 Minimum for analog udgang 0 1 0
P2.3.9 Skalering af analog udgang 10 1000 % 100 311
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14 Analog indgang overvågning 0 2 0
P2.3.15 AI overvågning OFF- grænse 0,00 100,00 % 10,00 357
P2.3.16 AI overvågning ON- grænse 0,00 100,00 % 90,00 358
P2.3.17
P2.3.18
Funktion af udvidelseskort,
relæudgang 1
Funktion af udvidelseskort,
relæudgang 2
Funktion af udvidelseskort,
digital udgang 1
Filtreringstid for analog
udgang
Funktion af udvidelseskort,
analog udgang 1
Funktion af udvidelseskort,
analog udgang 2
Overvågning af
udgangsfrekvens-grænse 1
Overvåget værdi af
udgangsfrekvens-grænse 1
Relæudgang 1 TIL-
forsinkelse
Relæudgang 1 FRA-
forsinkelse
0 16 2
0 16 3
0 16 1
0,00 10,00 s 1,00
0 12 0 472 Som parameter 2.1.16
0 12 0
0 2 0
0,00
0,00 320,00 s 0,00
0,00 320,00 s 0,00
Par.
2.1.2
Hz 0,00
0=Ikke anvendt
1=Klar
2=Drift
3=Fejl
4=Fejl inverteret
5=Frekvensomformer
overophedningsalarm
6=Ekst. fejl eller advarsel
7=Ref.fejl eller advarsel
8=Advarsel
9=Reverseret
313
10=Fast hastighed
11=Hastighed nået
12=Motorregulator aktiv.
13=OP frek.græn. overv.1
14=Styrested: I/O-klemm
15=Termistor-fejl/advarsel
16=Overvågning af aktuel
værdi
17=Styring af autoskift 1
18=Styring af autoskift 2
19=Styring af autoskift 3
20=AI overvågning
314 Som parameter 2.3.1
317 Som parameter 2.3.1
312 Som parameter 2.3.1
307
Se par. 2.1.16
308 0=Ingen filtrering
0=Ikke inverteret
309
1=Inverteret
0=0 mA
310
1=4 mA
479 Som parameter 2.1.16
0=Ingen grænse
315
1=Nedre grænse overv.
2=Øvre grænse overv
316
0=Ikke anvendt
356
1=AI1
2=AI2
487 TIL-forsinkelse for RO1
488 FRA-forsinkelse for RO1
Tabel 1- 6. Udgangssignaler, G2.3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 12
parameterlister vacon • 11
3.5 Driftsstyringsparametre (Betjeningspanel: Menu P2 P2.4)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.4.1 Rampe 1-form 0,0 10,0 s 0,0
P2.4.2 Bremsechopper 0 3 0
P2.4.3 DC-bremsestrøm 0,15 x In 1,5 x In A Varierer 507
P2.4.4
P2.4.5
P2.4.6
P2.4.7 Fluxbremse 0 1 0
P2.4.8 Fluxbremsestrøm 0,0 Varierer A 0,0 519
DC-bremsetid ved
stop
Frekvens til start af
DC-bremse under
rampestop
DC--bremsetid ved
start
0,00 600,00 s 0,00
0,10 10,00 Hz 1,50
0,00 600,00 s 0,00
0=Lineær
500
>0=S-kurve rampetid
0=Ikke i brug
1=I brug under drift
504
3=I brug ved stop/drift
0=DC-bremse afbrudt ved
508
stop
515
0= DC-bremse afbrudt ved
516
start
0=Afbrudt
520
1=Tilsluttet
Tabel 1- 7. Driftsstyringsparametre, P2.4
3.6 Parametre for forbudte frekvenser (Betjeningspanel: Menu P2 P2.5)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
509 0=Ikke anvendt
510 0=Ikke anvendt
Multiplikator af den
aktuelt valgte rampetid
518
mellem forbudte
frekvensgrænser.
P2.5.1
P2.5.2
P2.5.3
Forbudt
frekvensområde 1,
nedre grænse
Forbudt
frekvensområde 1,
øvre grænse
Forbudte frekvenser,
acc./dec.
rampeskaleing
0,0
0,0
0,1 10,0 Gange 1,0
Par.
2.5.2
Par.
2.1.2
Hz 0,0
Hz 0,0
Tabel 1- 8. Parametre for forbudte frekvenser, P2.5
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 13
12 • vacon parameterlister
3.7 Motorstyringsparametre (Betjeningspanel: Menu P2 P2.6)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.6.1
P2.6.2 Valg af U/f -område 0 3 0
P2.6.3 Feltsvækningspunkt 30,00 320,00 Hz 50,00 602
P2.6.4
P2.6.5
P2.6.6
P2.6.7
P2.6.8 Switchfrekvens 1,0 16,0 kHz 6,0 601 Afhænger af kW
P2.6.9
P2.6.10
P2.6.11 Identifikation 0 1 0
Motorstyrings-
tilstand
Spænding ved
feltsvækningspunkt
U/f-kurvens
midtpunktsfrekvens
U/f-kurvens
midtpunkts-
spænding
Udgangsspænding
ved nulfrekvens
Overspændings-
controller
Underspændings-
controller
0 1 0
10,00 200,00 % 100,00
0,00
0,00 100,00 % 100,00
0,00 40,00 % 0,00
0 1 1
0 1 1
par.
P2.6.3
Hz 50,00
0=Frekvensstyring
600
1=Hastighedsstyring
0=Lineær
1=Kvadratisk
108
2=Programmerbar
3=Lineær med fluxoptim.
603 n% x U
604
n% x U
605
Parameterens maksimumsværdi = par. 2.6.4
606 n% x U
0=Ikke anvendt
607
1=Anvendt
0=Ikke anvendt
608
1=Anvendt
0=Ingen aktivitet
631
1=ID-ingen kørsel
nmot
nmot
nmot
Tabel 1- 9. Motorstyringsparametre, P2.6
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 14
parameterlister vacon • 13
3.8 Beskyttelser (Betjeningspanel: Menu P2 P2.7)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5 Jordfejlsbeskyttelse 0 3 2 703
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10 Motorens driftscyklus 0 100 % 100 708
P2.7.11
P2.7.12
P2.7.13 Tidsgrænse ved stall 1,00 120,00 s 15,00 711
P2.7.14
P2.7.15
P2.7.16
P2.7.17
P2.7.18
P2.7.19
P2.7.20
P2.7.21 Reaktion på slidsfejl 0 3 2 734 Som par. 2.7.1
P2.7.22
P2.7.23
P2.7.24
Reaktion på 4mA
referencefejl
Reaktion på ekstern
fejl
Reaktion på
underspændingsfejl
Udgangsfase-
overvågning
Termisk beskyttelse
af motoren
Motoromgivelses-
temperaturfaktor
Motorafkølingsfaktor
ved nulhastighed
Motortermisk
tidskonstant
Beskyttelse mod stall
(rotorblokering)
Strømgrænse ved
stall
Frekvensgrænse ved
stall
Beskyttelse mod
underbelastning
Underbelastnings-
kurve ved nominel
frekvens
Underlbelastnings-
kurve ved nulfrekvens
Tidsgrænse for
underbelastnings-
beskyttelse
Reaktion på
termistorfejl
Reaktion på
fieldbusfejl
Overvågning af aktuel
værdi
Overvågnings-grænse
for aktuel værdi
Overvågnings-
forsinkelse for aktuel
værdi
0 3 0
0 3 2
1 3 2
0 3 2
0 3 2
–100,0 100,0 % 0,0
0,0 150,0 % 40,0
1 200 min 45
0 3 1
I
x
0,1
1,0 P 2.1.2 Hz 25,0
0 3 0
10,0 150,0 % 50,0
5,0 150,0 % 10,0
2,00 600,00 s 20,00
0 3 2
0 3 2
0 4 0
0,0 100,0 % 10,0
0 3600 s 5
nmotor
2
A I
nmotor
x1.3
0=Ingen reaktion
1=Advarsel
700
2=Fejl, stop iht. 2.1.12
3=Fejl, stop ved friløb
701
727
0=Ingen reaktion
1=Advarsel
2=Fejl, stop iht. 2.1.1.2
702
3=Fejl, stop ved friløb
704
705
706
707
709 Som par. 2.7.1
710
712
713 Som par. 2.7.1
714
715
716
732 Som par. 2.7.1
733 Som par. 2.7.1
0=Ingen reaktion
1=Advarsel hvis under
grænsen
2=Advarsel hvis over
735
grænsen
3=Advarsel hvis under
grænsen
4=Advarsel hvis over
grænsen
736
737
Tabel 1- 10. Beskyttelser, P2.7
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 15
14 • vacon parameterlister
3.9 Autogenstartsparametre (Betjeningspanel: Menu P2 P2.8)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.8.1 Ventetid 0,10 10,00 s 0,50 717
P2.8.2 Forsøgstid 0,00 60,00 s 30,00 718
P2.8.3 Startfunktion 0 2 0
0=Rampe
719
1=Flyvende start
2=Iht. par. 2.4.6
Tabel 1- 11. Autogenstartsparametre, P2.8
3.10 PID-referenceparametre (Betjeningspanel: Menu P2 P2.9)
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.9.1 PID-aktivering 0 1 0
P2.9.2 PID-reference 0 3 2
P2.9.3 Aktuel værdi, indgang 0 6 1
P2.9.4
P2.9.5 PID-controller I-tid 0,00 320,00 s 10,00 119
P2.9.6 PID-controller D-tid 0,00 10,00 s 0,00 132
P2.9.7
P2.9.8
P2.9.9
P2.9.10 Sovefrekvens
P2.9.11 Soveforsinkelse 0 3600 s 30
P2.9.12 Opvågningsniveau 0,00 100,00 % 25,00
PID-controller-
forstærkning
Aktuel værdi 1
minimumsskalering
Aktuel værdi 1
maksimumsskalering
Invertering af
fejlværdi
0,0 1000,0 % 100,0
–1000,0
–1000,0
0
Par.
2.1.1
1000,0 % 0,00
1000,0 % 100,0
1 0
Par.
2.1.2
Hz 10,00
101
101
101
0=Ikke anvendt
1=PID-controller
aktiveret
163
2=Pumpe- &
ventilatorstyring
aktiv, gruppe P2.10
synlig
0=AI1
1=AI2
2=Ref. fra betjenings-
332
334
118
336
337
340
6
7
8
panel (PID Ref 1)
3=Fieldbusreference
(ProcessDataIN1)
0=AI1-signal
1=AI2-signal
2=Fieldbus
(ProcessDataIN2)
3=Motormoment
4=Motorhastighed
5=Motorstrøm
6=Motoreffekt
7=AI1-AI2
0=Ingen
minimumsskalering
100=Ingen
maksimumsskalering
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 16
parameterlister vacon • 15
P2.9.13 Opvågningsfunktion
0
3 0
0=Opvågning ved fald
under opvågnings-
niveau (2.9.12)
1=Opvågning ved
overskridelse af
opvågningsniveau
101
9
(2.9.12)
2=Opvågning ved fald
under opvågnings-
niveau (PID-ref)
3= Opvågning ved
overskridelse af
opvågningsniveau
(PID-ref)
Tabel 1- 12. PID-referenceparametre, P2.9
3.11 Pumpe & ventilatorstyringsparametre (Betjeningspanel: Menu P2 P2.10)
Bemærk! Gruppe P2.10 er kun synlig hvis værdien af par 2.9.1 er indstillet til 2.
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P2.10.1 Antal hjælpedrev 0 3 1 1001
P2.10.2
P2.10.3
P2.10.4 Autoskift 0 4 0
P2.10.5 Autoskiftinterval 0,0 3000,0 h 48,0
P2.10.6
P2.10.7
P2.10.8
P2.10.9
Startforsinkelse,
hjælpedrev
Stopforsinkelse,
hjælpedrev
Autoskift; Maksimalt
antal hjælpedrev
Autoskift,
frekvensgrænse
Startfrekvens,
hjælpedrev 1
Stopfrekvens,
hjælpedrev 1
0,0 300,0 s 4,0
0,0 300,0 s 2,0
0 3 1
0,00
Par.
2.10.9
Par.
2.1.1
par.
2.1.2
320,00 Hz 51,00
Par.
2.10.8
Hz 25,00
Hz 10,00
1010
1011
0=Ikke anvendt
1=Autoskift med
2=Autoskift med
1027
3=Autoskift og interlocker
4=Autoskift og interlocker
1029
1030
1031
1002
1003
0,0=TEST=40 s
Forløbet tid for autoskift
Autoskiftniveau for
hjælpedrev
Autoskiftfrekvensniveau for
variabelt hastighedsdrev
hjælpepumper
frekvensomformer
& hjælpepumper
(hjælpepumper)
(Frekvensomformer
& hjælpepumper)
Tabel 1- 13. Parametre for pumpe- og ventilatorstyring, P2.10
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 17
16 • vacon parameterlister
3.12 Panelstyring (Betjeningspanel: Menu K3)
Parametrene for valg af styrested og omløbsretning på panelet findes i tabellen herunder.
Se Panelstyringsmenuen i Vacon NXL-betjeningsmanualen.
Kode Parameter Min Maks Enhed Standard Tilp. ID Bemærkning
P3.1 Styrested 1 3 1
R3.2 Panelreference
P3.3
R3.4 Stopknap 0 1 1
R3.5 PID-reference 0,00 100,00 % 0,00
R3.6 PID-reference 2 0,00 100,00 % 0,00
Omløbsretning (på
panelet)
Par.
2.1.1
0 1 0
Par.
2.1.2
Hz
1=I/O-klemme
125
2=Panel
3= ieldbus
0=Fremad
123
1=Modsat omløbsretning
0= Begrænset funktion af
Stopknappen
114
1=Stopknap altid i brug
Valgt med digitale
indgange
Tabel 1- 14. Panelstyringsparametre, M3
3.13 Systemmenu (Betjeningspanel: Menu S6)
Hvad angår parametre og funktioner, der har at gøre med den generelle brug af frekvensomformeren, som f.eks. kundetilpassede parametersæt eller oplysninger om hardware og software
henvises til kapitel 7.4.6 i Vacon NXL-betjeningsmanualen.
3.14 Udvidelseskort (Betjeningspanel: Menu E7)
Menu E7 viser, hvilke udvidelseskort der er tilsluttet styrekortet, og andet vedrørende kort. Se også
kapitel 7.4.7 i Vacon NXL-betjeningsmanualen.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 18

parameterbeskrivelser vacon • 17
4. PARAMETERBESKRIVELSER
4.1 BASISPARAMETRE
2.1.1, 2.1.2 Minimums-/maksimumsfrekvens
Definerer frekvensomformerens frekvensgrænser.
Maksimumsværdien af parametrene 2.1.1 og 2.1.2 er 320 Hz.
Softwaren checker automatisk værdierne af parametrene 2.1.19, 2.1.20, 2.3.13, 2.5.1,
2.5.2 og 2.6.5.
2.1.3, 2.1.4 Accelerationstid 1, Decelerationstid 1
Disse grænseværdier svarer til den tid, udgangsfrekvensen skal bruge for at accelerere
fra nulfrekvensen til den indstillede maksimumsfrekvens (par. 2.1.2).
2.1.5 Strømgrænse
Denne parameter bestemmer frekvensomformerens maksimale motorstrøm. For at
undgå overbelastning af motoren skal denne parameter indstilles iht. motorens
mærkestrøm. Strømgrænsen svarer som standard til frekvensomformerens
mærkestrøm (I
).
L
2.1.6 Motorens nominelle spænding
Find værdien af Un på motorens typeskilt. Denne parameter indstiller spændingen ved
feltsvækningspunktet (parameter 2.6.4) til 100 % x U
2.1.7 Motorens nominelle frekvens
Find værdien af fn på motorens typeskilt. Denne parameter indstiller
feltsvækningspunktet (parameter 2.6.3) til den samme værdi.
2.1.8 Motorens nominelle hastighed
Find værdien af nn på motorens typeskilt.
nmotor
.
2.1.9 Motorens nominelle strøm
Find værdien af In på motorens typeskilt.
2.1.10 Motor cos
Find værdien af “cos ” på motorens typeskilt.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 19

18 • vacon parameterbeskrivelser
2.1.11 Startfunktion
Rampe:
0 Frekvensomformeren starter fra 0 Hz og accelererer til den indstillede
referencefrekvens inden for den indstillede accelerationstid. (Belastningsinerti
eller startfriktion kan forårsage længere accelerationstider).
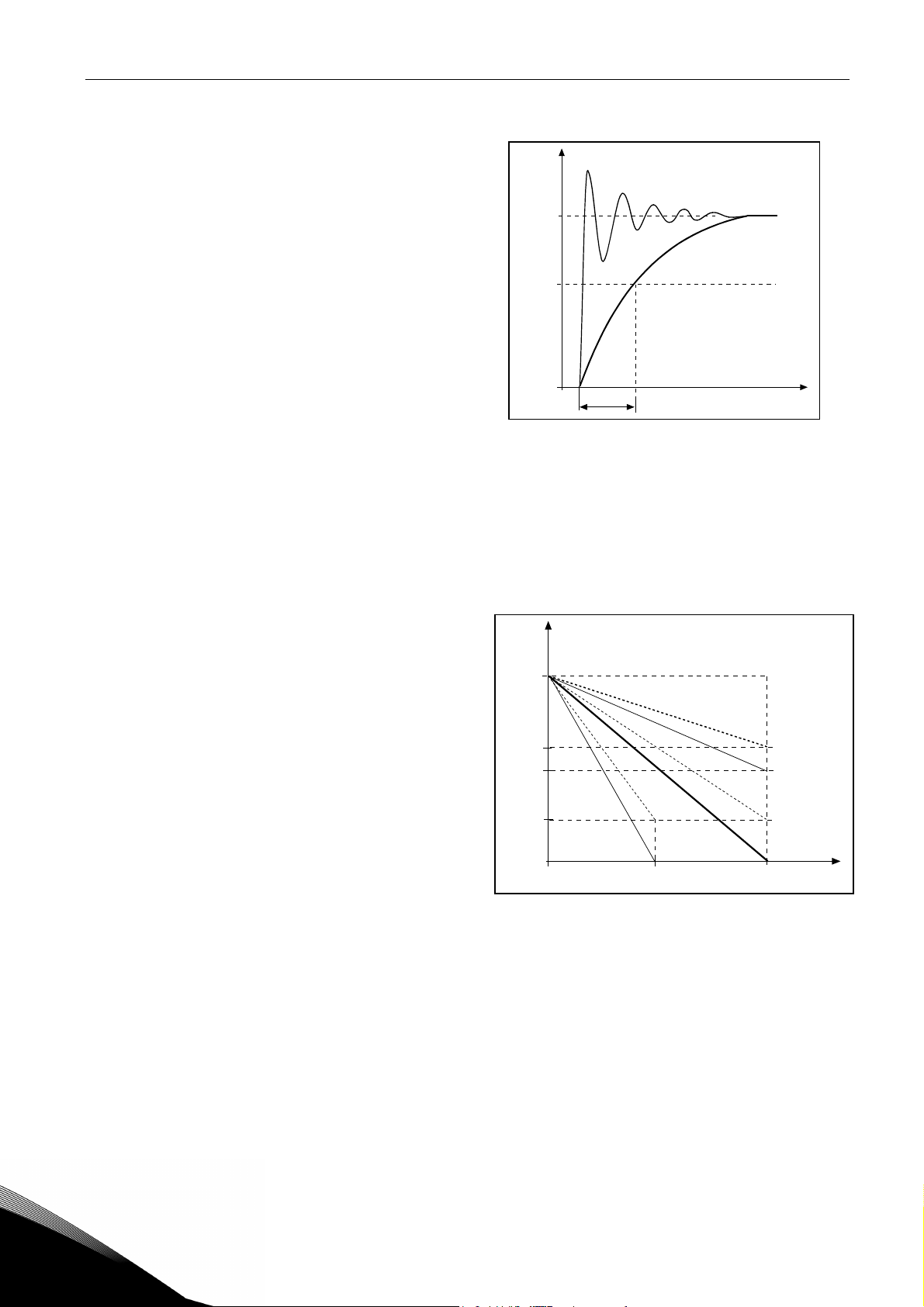
Flyvende start:
1 Det er muligt at starte frekvensomformeren på en motor, som er i drift ved at
tilføje motoren et lille moment og søge efter den frekvens, der svarer til
motorens hastighed. Søgningen begynder fra maksimumsfrekvensen hen mod
den faktiske frekvens, indtil den korrekte værdi findes. Herefter vil udgangsfrekvensen blive øget/formindsket til den indstillede referenceværdi iht. de
indstillede accelerations-/decelerations-parametre.
Brug denne metode, hvis motoren kører friløb, når der gives startkommando.
Med den flyvende start er det muligt at køre igennem korte afbrydelser
i forsyningsspændingen.
Betinget flyvende start
2 Denne tilstand gør det muligt at frakoble og tilkoble motoren fra frekvensom-
formeren, selv når startkommandoen er aktiv. Når motoren tilkobles igen,
vil frekvensomformeren fungere som beskrevet i valg 1
2.1.12 Stopfunktion
Friløb:
0 Motoren kører friløb, til den standser, uden styring fra frekvensomformeren
efter Stopkommandoen.
Rampe:
1 Efter Stopkommandoen decelererer motoren iht. de indstillede decelerations-
parametre.
Hvis den regenererede energi er høj, kan det være nødvendigt at anvende
en ekstern bremsemodstand for at opnå hurtigere deceleration.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 20

parameterbeskrivelser vacon • 19
2.1.13 U/f-optimering
0 Ikke anvendt
1 Automatisk momentforstærkning
Spændingen til motoren ændres automatisk, hvilket får motoren
til at producere tilstrækkeligt moment til at starte og køre ved
lave frekvenser. Spændingsforøgelsen afhænger af motortypen
og-effekten. Automatisk momentforstærkning kan anvendes i
applikationer, hvor startmomentet er højt pga. startfriktion, f.eks.
på transportbånd.
Bemærk!
I højmoment-lavhastighedsapplikationer er det sandsynligt, at
motoren bliver overophedet. Hvis motoren skal køre på forlænget
tid under disse omstændigheder, er det vigtigt at motoren bliver
afkølet. Brug ekstern køling til motoren, hvis temperaturen har
tendens til at blive for høj.
2.1.14 Valg af I/O-reference
Definerer, hvilken frekvensreference-kilde der er valgt, når frekvensomformeren styres
fra I/O-klemmerne.
0 AI1-reference (klemme 2 og 3, f.eks. potentiometer)
1 AI2-reference (klemme 5 og 6, f.eks. transducer)
2 Panelreference (parameter 3.2)
3 Reference fra fieldbus (FBSpeedReference)
4 Reference fra motorpotentiometer
5 AI1/AI2-valg. Valg af AI2 kan programmeres med DIN3-funktion (P2.1.18)
2.1.15 AI2 (Iin) signalområde
1 Signalområde 0…20 mA
2 Signalområde 4…20 mA
3 Signalområde 0...10 V
4 Signalområde 2...10 V
Bemærk! Indstillingerne har ingen effekt, hvis par. 2.2.12 > 0 %, eller par. 2.2.13
< 100 %.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 21

20 • vacon parameterbeskrivelser
2.1.16 Analog udgangsfunktion
Denne parameter vælger den ønskede funktion af det analoge udgangssignal.
Se parameterværdierne på side 5.
2.1.17 DIN2-function
Denne parameter har 10 indstillingsmuligheder. Hvis den digitale indgang DIN2 ikke er
nødvendig, skal parameterværdien indstilles til 0.
1 Start modsat omløbsretning
2 Reverseret
3 Stoppuls
4 Ekstern fejl
Kontakt lukket: Fejl vises, og motoren standses, når indgangen er aktiv
5 Ekstern fejl
Kontakt åben: Fejl vises, og motoren standses, når indgangen ikke er aktiv
6 Drift mulig
Kontakt åben: Start af motor ikke mulig
Kontakt lukket: Start af motor mulig
Stop ved friløb, hvis den falder under DRIFT.
7 Fast hastighed 2
8 Motorpotentiometer OP
Kontakt lukket: Referencen øges, indtil kontakten er åben.
9 Deaktiverer PID-controlleren (Direkte frekvensreference)
10 Interlock 1 (kan kun vælges, når pumpe og ventilatorstyring er aktiv, P2.9.1=2)
2.1.18 DIN3-funktion
Denne parameter har 13 indstillingsmuligheder. Hvis den digitale indgang DIN3 ikke er
nødvendig, skal parameterværdien indstilles til 0.
1 Reverseret
Kontakt åben: Fremad
Kontakt lukket: Modsat omløbsretning
2 Ekstern fejl
Kontakt lukket: Fejl vises, og motoren standses, når indgangen er aktiv
3 Ekstern fejl
Kontakt åben: Fejl vises, og motoren standses, når indgangen ikke er aktiv
4 Nulstilling af fejl
Kontakt lukket: Alle fejl nulstilles
5 Drift mulig
Kontakt åben: Start af motor ikke mulig
Kontakt lukket: Start af motor mulig
Stop ved friløb, hvis den falder under DRIFT
6 Fast hastighed 1
7 Fast hastighed 2
8 DC-bremsekommando
Kontakt lukket: I stoptilstand, fungerer DC-bremsningen, indtil kontakten er åben.
DC-bremsestrømmen er ca. 10 % af den værdi, som er valgt med par. 2.4.3.
9 Motorpotentiometer OP
Kontakt lukket: Referencen øges, indtil kontakt er åben
10 Motorpotentiometer NED
Kontakt lukket: Referencen falder, indtil kontakten er åben
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 22

parameterbeskrivelser vacon • 21
11 Deaktiverer PID-controlleren (Direkte frekvensreference)
12 Valg af PID-panelreference 2
13 Interlock 2 (kan kun vælges, når pumpe- og ventilatorstyring er aktiv, P2.9.1=2)
14 Termistorindgang Bemærk! Se NXL Betjeningsmanual, kapitel 6.2.4
15 Tvinger styrested til I/O
16 Tvinger styrested til fieldbus
17 AI1/AI2-valg til I/O-reference (
par 2.1.14)
2.1.19 Fast hastighed 1
2.1.20 Fast hastighed 2
Parameterværdierne er automatisk begrænset til at ligge imellem minimums- og
maksimumsfrekvenserne. (par. 2.1.1 og 2.1.2)
2.1.21 Automatisk genstartsfunktion
Den automatiske genstartsfunktion tages i anvendelse med denne parameter.
0 = Ikke mulig
1 = Mulig (3 automatiske genstarter, se par. 2.8.1 – 2.8.3)
2.1.22 Parametervisning
Med denne parameter kan alle parametergrupper med undtagelse af
basisparametergruppen (B2.1) skjules.
Standardindstillingen for denne parameter er 0.
0 = Deaktiveret (alle parametergrupper kan gennemses via betjeningspanelet).
1 = Aktiveret (kun basisparametrene, B2.1, kan gennemses via betjeningspanelet).
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 23

22 • vacon parameterbeskrivelser
4.2 INDGANGSSIGNALER
2.2.1 Funktion af udvidelseskort DIE1
Denne parameter har 12 indstillingsmuligheder. Hvis udvidelseskortets digitale indgang
DIN1 ikke skal anvendes, skal parameterværdien indstilles til 0.
Indstillingsmulighederne er de samme som i parameter 2.1.18, undtagen:
13 = Interlock 1
2.2.2 Funktion af udvidelseskort DIE2
Indstillingsmulighederne er de samme som parameter 2.2.1, undtagen:
13 = Interlock 2
2.2.3 Funktion af udvidelseskort DIE3
Indstillingsmulighederne er de samme som i parameter 2.2.1.
13 = Interlock 3
2.2.4
Funktion af DIN4
Hvis værdien af par. 2.2.6 indstilles til 0, fungerer AI1 som digital indgang 4.
Indstillingsmulighederne er de samme som i parameter 2.2.3.
Bemærk! Hvis den analoge indgang programmeres som DIN4, skal det
kontrolleres, at jumperne er indstillet korrekt (se figuren nedenfor).
MF2
X4:
MF3
X4:
MF4-6
X8:
RS485
programmering
Spændingsindgang
0...10V
;
Spændingsindgang
0...10V
;
Spændingsindgang
Jumperdin4.fh8
0...10V
;
Figur 1-1. Jumperindstillinger for X4/X8, når AI1 fungerer som DIN4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 24

parameterbeskrivelser vacon • 23
2.2.5 AI1 signalvalg
Forbind signalet AI1 til en analog indgang efter eget valg med denne parameter.
READY
STOP
I/O
nxlk29.fh8
term
STOP
Positionsindikator
Figur 1- 2. AI1 signalvalg
Værdien af denne parameter fremkommer af
tilsvarende indgangsklemme.
Se Figur 1-2 ovenfor.
Kortindikator 1 = Lokale indgange
Kortindikator 2 = Udvidelseskortindgange
Indgangsnummer 0 = Indgang 1
Indgangsnummer 1 = Indgang 2
READY
I/O
term
kortindikatoren
Ændre
værdi
Indgangsnummer
og
nummeret på den
Indgangsnummer 2 = Indgang 3
Indgangsnummer 9 = Indgang 10
Eksempel:
Hvis værdien af denne værdi indstilles til 10, vælges den lokale
Hvis værdien indstilles til 21, vælges udvidelseskortets
Hvis man f.eks. ønsker at anvende værdierne af det analoge indgangssignal udelukkende
til testformål, kan parameterværdien indstilles til 0-9. I det tilfælde svarer værdien 0 til
0 %, værdien 1 til 20 % og alle værdier fra 2 til 9 svarer til 100 %.
indgang 1 til AI1-signalet.
indgang 2 til AI1-signalet.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 25

24 • vacon parameterbeskrivelser
2.2.6 AI1-signalområde
Med denne parameter vælges signalområdet for AI1.
0 = DIN 4
1 = Signalområde 0…20 mA (kun til størrelse MF4 og større)
2 = Signalområde 4…20 mA (kun til størrelse MF4 og større)
3 = Signalområde 0…10 V
4 = Signalområde 2…10 V
Bemærk! Indstillingerne har ingen effekt, hvis par. 2.2.7 > 0 %, eller par. 2.2.8 < 100 %.
Hvis værdien af par. 2.2.6 indstilles til 0, fungerer AI1 som digital indgang 4.
Se par. 2.2.4
2.2.7 Minimum for brugerindstillinger af AI1
2.2.8 Maksimum for brugerindstillinger af AI1
Indstil bruger-minimums- og bruger-maksimumsniveauer for AI1-signalet inden for
0…10 V.
2.2.9 AI1-signalinvertering
Hvis parameterværdien indstilles til 1,
finder der en invertering af AI1signalet sted.
2.2.10 AI1-signalfiltreringstid
Når denne parameter gives en værdi
større end 0, aktiveres den funktion,
som bortfiltrerer forstyrrelser fra det
indkommende analoge U
-signal.
in
Lang filtreringstid gør reguleringsreaktionen langsommere.
Se Figur 1- 3.
2.2.11 AI2 signalvalg
Forbind AI2-signalet til en analog indgang efter eget valg med denne parameter.
Læs mere om indstilling af værdier under par. 2.2.5.
%
Ufiltreret signal
100%
Filtreret signal
63%
Par. 2.2.10
Figur 1- 3. AI-signalfiltrering
t [s]
nxlk30.fh8
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 26

parameterbeskrivelser vacon • 25
2.2.12 AI2 signalområde
1 = Signalområde 0…20 mA
2 = Signalområde 4…20 mA
3 = Signalområde 0…10 V
4 = Signalområde 2…10 V
Bemærk! Indstillingerne har ingen effekt, hvis par. 2.2.13 > 0 %, eller par. 2.2.14
< 100 %.
2.2.13 Minimum for brugerindstillinger af AI2
2.2.14 Maksimum for brugerindstillinger af AI2
Med disse parametre er det muligt at skalere indgangsstrømsignalet mellem 0 og 20 mA,
jvf. parametrene 2.2.7 og 2.2.8.
2.2.15 AI2-signalinvertering
Se den tilsvarende parameter 2.2.9.
2.2.16 Filtreringstid for det analoge indgangssignal AI2
Se den tilsvarende parameter 2.2.10.
2.2.17 Nulstilling af motorpotentiometrets hukommelse (Frekvensreference)
0 = Ingen nulstilling
1 = Nulstilling af hukommelsen ved standsning og afbrydelse
2 = Nulstilling af hukommelsen ved afbrydelse
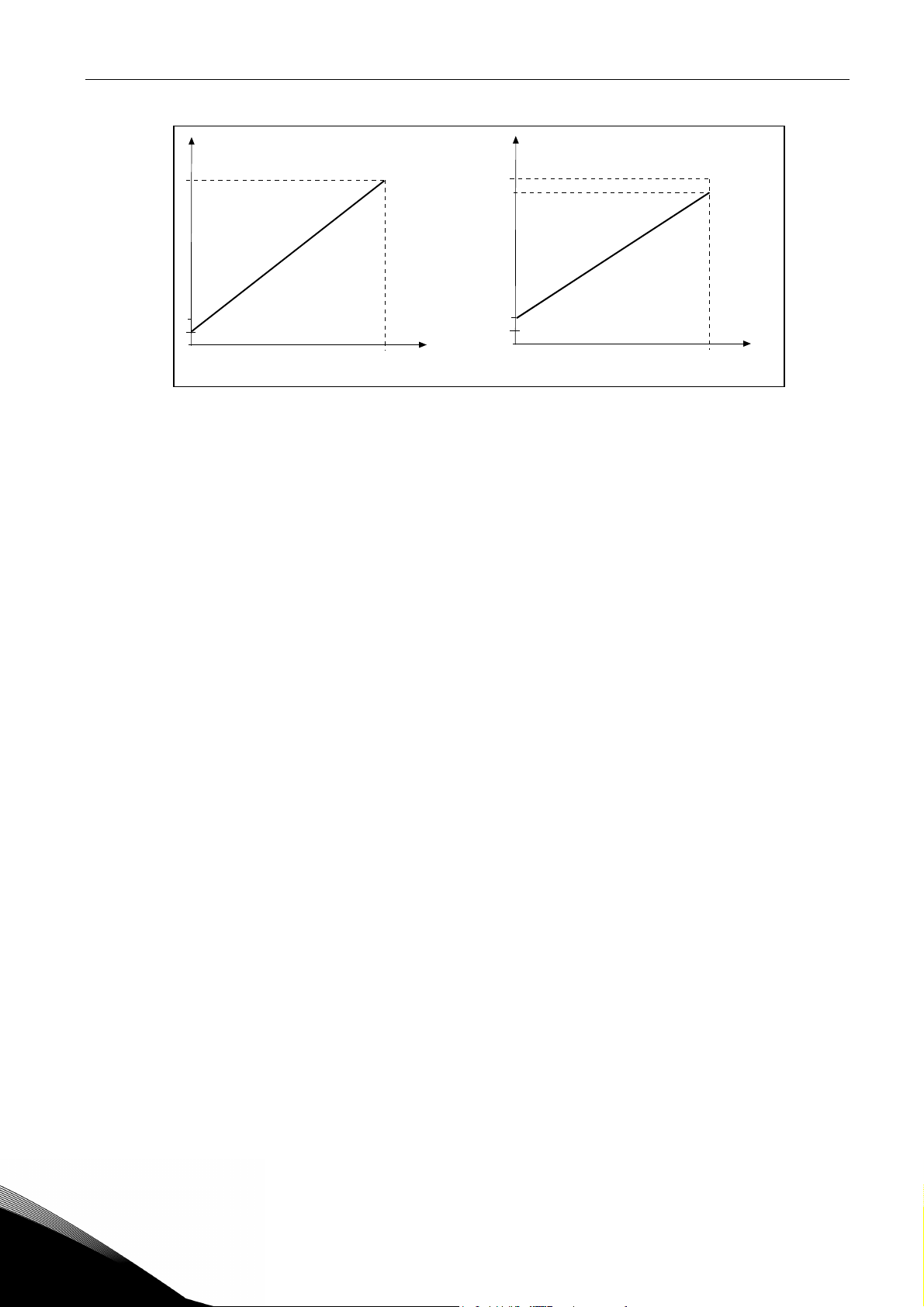
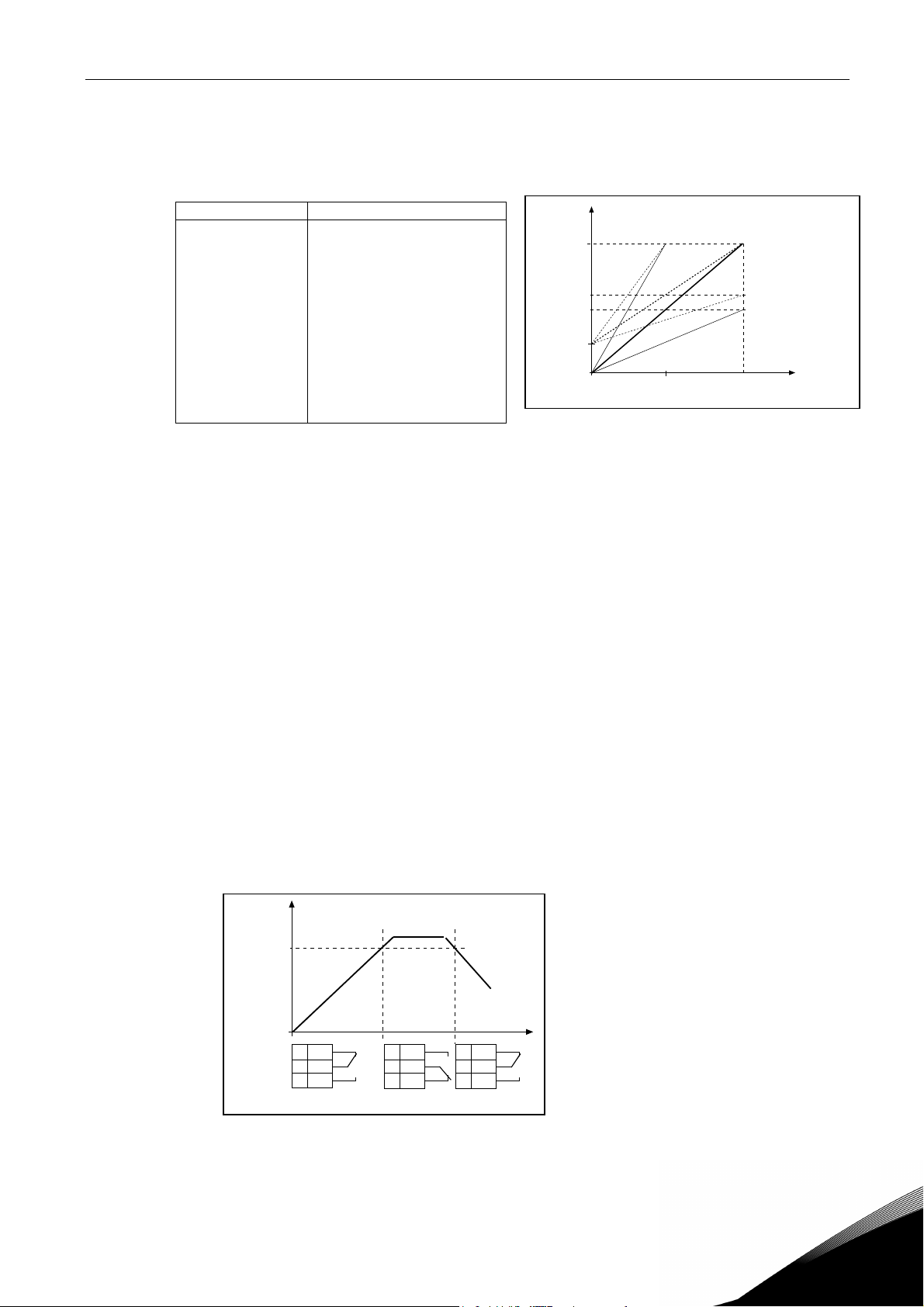
2.2.18 Minimumsværdi for referenceskalering
2.2.19 Maksimumsværdi for referenceskalering
Der kan vælges et skaleringsområde for frekvensreferencen mellem Minimums- og
Maksimums-frekvensen. Hvis der ikke er brug for skalering, skal parameterværdien
indstilles til 0.
På figurerne nedenfor er spændingsindgang AI1 med signalområde 0…10 V valgt som
reference.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 27
26 • vacon parameterbeskrivelser
Udgangs
frekvens
Maks. frekv. par 2.1.2
Min.frekv. par 2.1.1
0
Analog
indgang [V]
10
Figur 1-4. Venstre: Par. 2.1.18=0 (Ingen referenceskalering) Højre: Referenceskalering
2.2.20 Valg af panelfrekvensreference
Definerer den valgte referencekilde, når frekvensomformeren styres fra betjeningspanelet.
0 AI1-reference (standard AI1, klemme 2 og 3, f.eks. potentiometer)
1 AI2-reference (standard AI2, klemme 5 og 6, f.eks. transducer)
2 Panelreference (parameter 3.2)
3 Reference fra fieldbus (FBSpeedReference)
4 Motorpotentiometer-reference
5 PID-controllerreference
Par. 2.2.19
Par. 2.2.18
Udgangs
frekvens
Maks. frekv. par 2.1.2
Min.frekv. par 2.1.1
0
Analog
indgang [V]
10
NX12K35
2.2.21 Valg af fieldbus-frekvensreference
Definerer det valgte referencested, når frekvensomformeren styres fra fieldbussen.
Parameterværdier som par. 2.2.20.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 28

parameterbeskrivelser vacon • 27
4.3 UDGANGSSIGNALER
2.3.1 Funktion af relæudgang 1
2.3.2 Funktion af udvidelseskortets relæudgang 1
2.3.3 Funktion af udvidelseskortets relæudgang 2
2.3.4 Funktion af udvidelseskortets digitale udgang 1
Indstillingsværdi Signalindhold
0 = Ikke anvendt Ude af funktion
1 = Klar frekvensomformeren er klar til drift.
2 = Drift frekvensomformeren er i drift (motoren kører).
3 = Fejl der er opstået en fejludkobling.
4 = Fejl inverteret der ikke er opstået en fejludkobling.
5 = Overophedningsvarsel for
frekvensomformeren
6 = Ekstern fejl eller advarsel fejl eller advarsel afhængigt af par. 2.7.2
7 = Referencefejl eller advarsel
8 = Advarsel altid hvis der er en advarsel.
9 = Reverseret kommandoen til modsat omløbsretning er valgt.
10 = Fast hastighed en fast hastighed er valgt
11 = Hastighed nået
12 = Motorregulator aktiveret
Relæudgang RO1 og udvidelseskortets
programmerbare relæer O1, RO2) aktiveres når:
kølepladetemperaturen overstiger +70 C.
fejl eller advarsel afhængigt af par. 2.7.1
- hvis den analoge reference er 4-20 mA og signalet er
< 4 mA.
udgangsfrekvensen har nået den indstillede
reference.
overspændings- eller overstrømsregulatoren er
blevet aktiveret.
13 = Overvågning af
udgangsfrekvensgrænse 1
14 = Styring fra I/O-klemmer I/O-klemmer valgt som styrested (Menu K3; par. 3.1)
15 = Termistorfejl eller advarsel
16 = Overvågning af aktuel værdi aktiv parametrene 2.7.22 – 2.7.24
17 = Autoskift 1 styring styring af pumpe 1, parametrene 2.10.1 – 2.10.7
18 = Autoskift 2 styring styring af pumpe 2, parametrene 2.10.1 – 2.10.7
19 = Autoskift 3 styring styring af pumpe 3, parametrene 2.10.1 – 2.10.7
20 = AI overvågning Relæ aktiveres enligt parametrene 2.3.14 – 2.3.16
udgangsfrekvensen går uden for de indstillede
øvre/nedre grænser (se parameter 2.3.12 og 2.3.13
nedenfor)
Termistorindgangen på options-kortet viser
overtemperatur. Fejl eller advarsel afhængigt af
parameter 2.7.19.
Tabel 1-15. Udgangssignaler via RO1 og udvidelseskortene RO1, RO2 og DO1.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 29
28 • vacon parameterbeskrivelser
2.3.5 Analog udgangsfunktion
Med denne parameter vælges den
ønskede funktion af det analoge
udgangssignal.
Se tabellen på side 5 for at få mere at vide
om parameterværdierne.
2.3.6 Filtreringstid for den analoge udgang
Definerer filtreringstiden for det analoge
udgangssignal.
Hvis parameterværdien indstilles til 0,
deaktiveres filtreringsfunktionen.
2.3.7 Invertering af analog udgang
Inverterer de analoge udgangssignaler:
Maksimumsudgangssignal = 0 %
Minimumsudgangssignal = Indstillingsværdi på maksimum (parameter 2.3.9)
0 Ikke inverteret
1 Inverteret
Se parameter 2.3.9 nedenfor.
%
Ufiltreret signal
100%
Filtreret signal
63%
Par. 2.3.6
Figur 1-5. Filtrering af analog udgang
20 mA
t [s]
nxlk31.fh8
2.3.8 Analogt udgangsminimum
Definerer det mindste signal til enten at være 0 mA eller 4 mA (levende nulpunkt).
Bemærk forskellen i den analoge udgangsskalering i parameter 2.3.9.
12 mA
10 mA
4 mA
Param. 2.3.9
= 200%
0 mA
0
0.5
Figur 1-6. Invertering af analog udgang
Param. 2.3.9
= 50%
Param. 2.3.9
= 100%
1.0
NX12K17
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 30
parameterbeskrivelser vacon • 29
2.3.9 Skalering af analog udgang
Skaleringsfaktor for analog udgang.
Signal Signalets maks. værdi
Udgangsfrekvens
Motorhastighed
Udgangsstrøm
Motormoment
Motoreffekt
Motorspænding
Jævnstrømsspænding
PI-ref.-værdi
PI akt. værdi 1
PI fejlværdi
PI udgang
100 % x f
max
100 % x Motor nom. hastigh.
100 % x I
100 % x T
100 % x P
100 % x U
nMotor
nMotor
nMotor
nmotor
1000 V
100 % x ref.-værdi maks.
100 % x aktuel værdi maks.
100 % x fejlværdi maks.
100 % x udgangs maks
Analog
udgangsstrøm
20 mA
12 mA
10 mA
Par. 2.3.8 = 1
4 mA
Par. 2.3.8 = 0
0 mA
Par. 2.3.9=
200%
0
0.5
Par. 2.3.9=
100%
Par. 2.3.9=
50%
Maks.værdi af signal
valgt med param
1.0
nxlk49.fh8
. 2.1.16
Tabel 1-16. Skalering af analog udgang Figur 1-7. Skalering af analog udgang
2.3.10 Funktion af udvidelseskortets analoge udgang 1
2.3.11 Funktion af udvidelseskortets analoge udgang 2
Med denne parameter vælges de ønskede funktioner af udvidelseskortets analoge
udgangssignaler. Se par. 2.1.16 for at få mere at vide om parameterværdierne.
2.3.12 Overvågningsfunktion af udgangsfrekvensgrænse 1
0 = Ingen overvågning
1 = Overvågning af nedre grænse
2 = Overvågning af øvre grænse
Hvis udgangsfrekvensen kommer under eller overstiger den indstillede grænse
(par. 2.3.13), genererer denne funktion en advarselsbesked via relæudgangene
afhængigt af indstillingerne af parameter 2.3.1 – 2.3.4.
2.3.13 Overvåget værdi af udgangsfrekvensgrænse 1
Vælger den frekvensværdi, der overvåges med parameter 2.3.12.
f[Hz]
Par 2.3.13
Par 2.3.12 = 2
t
Eksempel:
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
nxlk33.fh8
Figur 1-8. Overvågning af udgangsfrekvens
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 31
30 • vacon parameterbeskrivelser
2.3.14 Overvågning af analog indgang
Med denne parameter kan man vælge hvilket input der skal overvåges.
0 = Ikke anvendt
1 = AI1
2 = AI2
2.3.15 Overvågning af analog indgang, OFF-grænse
Når det valgte analoge input (par. 2.3.14) falder under grænse valgt i denne parameter.
Går relæ udgangen OFF.
2.3.16 Overvågning af analog indgang, ON-grænse
Når det valgte analoge input (par. 2.3.14) falder over grænse valgt i denne parameter.
Går relæ udgangen ON.
Det betyder, at hvis ON-grænsen er 60 % og OFF-grænsen er 40 %, går relæet ON,
når signalet er over 60 % og forbliver ON, indtil signalet falder under 40 %.
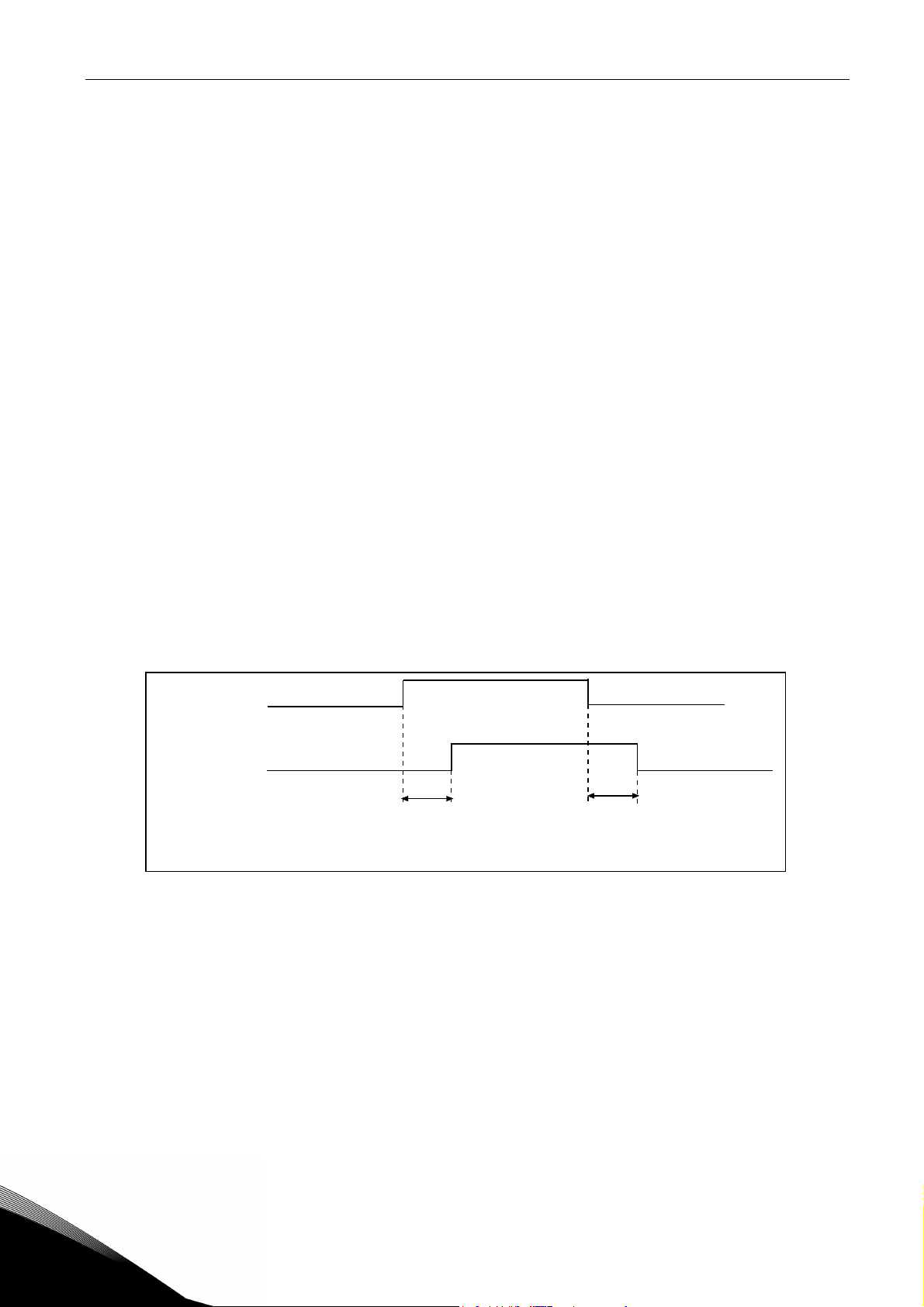
2.3.17 Relæudgang 1 TIL-forsinkelse
2.3.18 Relæudgang 1 FRA-forsinkelse
Disse parametre gør det muligt at indstille til- og fra-forsinkelse for relæudgang
1 (par 2.3.1).
Signal programmed to
relay output
RO1 output
ON-delay,
par 2.3.17
Figur 1-9. Relæudgang 1 til- og fra-forsinkelser
OFF-delay
par. 2.3.18
nxlk102
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 32

parameterbeskrivelser vacon • 31
4.4 DRIFTSSTYRING
2.4.1 Accelerations/Decelerationsrampe 1-form
Begyndelsen og slutningen på accelerations- og decelerationsramperne kan udjævnes
med denne parameter. Indstillingsværdi 0 giver en lineær rampeform, som gør, at accelerationen og decelerationen reagerer omgående på ændringer i referencesignalet.
Indstillingsværdi 0,1…10 sekunder for denne parameter giver en S-formet
acceleration/deceleration. Accelerationstiden fastsættes med parametrene
2.1.3/2.1.4
[Hz]
2.4.2
2.1.3, 2.1.4
2.4.1
2.4.1
Figur 1-10. Acceleration/Deceleration (S-formet)
Bremsechopper
NX12K20
[t]
Bemærk! Der er installeret en intern bremsechopper i alle størrelser på nær MF2.
0 Ingen bremsechopper anvendt
1 Bremsechopper anvendt i driftstilstand
3 Anvendt i drifts- og stoptilstand
Når frekvensomformeren får motoren til at decelerere, bliver inertien fra motoren
og belastningen ledt ind i den eksterne bremsemodstand. Dette muliggør, at frekvensomformeren kan få belastningen til at decelerere med et moment svarende til
accelerationen (forudsat at den korrekte bremsemodstand er valgt). Se den særskilte
installationsmanual til bremsemodstande.
2.4.3 DC-bremsestrøm
Definerer den strøm, der tilføres motoren under DC-bremsning.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 33

32 • vacon parameterbeskrivelser
2.4.4 DC-bremsetid ved stop
Definerer om bremsning er sat til TIL eller FRA samt DC-bremsens bremsetid, når
motoren standser. DC-bremsens funktion afhænger af stopfunktionen, parameter 2.1.12.
0 DC-bremse ikke i brug
>0 DC-bremsen er i brug, og dens funktion afhænger af stopfunktionen,
(par. 2.1.12). DC-bremsetiden fastsættes med denne parameter.
Par. 2.1.12 = 0; Stopfunktion = Friløb):
Efter en stopkommando kører motoren friløb til en standsning uden nogen styring
fra frekvensomformeren.
Ved at forsyne motoren med jævnstrøm kan motoren standses vha. elektricitet på
kortest mulig tid uden anvendelse af en ekstern bremsemodstand.
Bremsetiden skaleres i henhold til frekvensen når DC-bremsningen begynder. Hvis
frekvensen er højere end motorens nominelle frekvens, bestemmer værdien, der er
indstillet i parameter 2.4.4, bremsetiden. Hvis frekvensen er
≤ 10 % af den nominelle,
er bremsetiden 10 % af den værdi, der er indstillet i parameter 2.4.4.
f
out
f
n
Udgangsfrekvens
Motorhastighed
f
out
f
n
Udgangsfrekvens
Motorhastighed
Jævnstrømsbremse
t = 0,1 x Par. 2.4.4
ON
nxlk34.fh8
t
DRIFT
STOP
Jævnstrømsbremse
t = 1 x Par. 2.4.4
ON
t
0,1 x f
n
DRIFT
STOP
Figur 1-11. DC-bremsetid, når Stop-tilstand = Friløb.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 34

parameterbeskrivelser vacon • 33
Par. 2.1.12 = 1 (Stopfunktion = Rampe):
Efter stopkommandoen reduceres
motorens hastighed i henhold til indstillingen af decelerationsparametrene hurtigst muligt til den hastighed,
der er defineret med parameter 2.4.5,
hvor DC-opbremsningen begynder.
Bremsetiden defineres med
parameter 2.4.4. Hvis inertien er høj,
anbefales det at anvende en ekstern
bremsemodstand for at opnå en
hurtigere deceleration. Se Figur 1-12.
2.4.5 DC-bremsefrekvens ved rampestop
Udgangsfrekvensen ved hvilken DC-bremsen sættes ind. Se Figur 1-12.
2.4.6 DC-bremsetid ved start
DC-bremsen aktiveres, når der er givet
startkommando. Denne parameter
definerer den tid, der skal gå, før bremsen
udløses. Efter udløsningen af bremsen
øges udgangsfrekvensen iht. indstillingen
af startfunktionen med parameter 2.1.11.
Se Figur 1-13.
f
ud
Motorhastighed
Udgangsfrekvens
Jævnstrømsbremse
par. 2.4.5
t
t = Par. 2.4.4
DRIFT
STOP
nxlk50.fh8
Figur 1-12. DC-bremsetid når Stoptilstand = Rampe
Udgangsfrekvens
2.4.7 Fluxbremse
I stedet for DC-bremsning er flux-bremsning en nyttig bremsemetode med motorer
≤ 15 kW.
Når bremsning er nødvendig, reduceres frekvensen, og fluxen i motoren forøges,
hvilket igen forøger motorens bremseevne. I modsætning til jævnstrømsbremsning
forbliver motorens hastighed kontrolleret under opbremsningen.
Par 2.4.6
DRIFT
STOP
Figur 1-13. DC-bremsetid ved start
t
nxlk35.fh8
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 35

34 • vacon parameterbeskrivelser
Fluxbremsen kan indstilles til TIL eller FRA.
0 = Fluxbremse FRA
1 = Fluxbremse TIL
Bemærk: Flux-bremsning konverterer energi til varme ved motoren og bør kun bruges
i korte perioder for at undgå at beskadige motoren
2.4.8 Fluxbremsestrøm
Definerer strømværdien af fluxbremsen. Denne værdi kan ligge mellem 0,3 x IH (ca.)
og strømgrænsen.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 36

parameterbeskrivelser vacon • 35
4.5 FORBUDTE FREKVENSER
2.5.1 Forbudt frekvensområde 1; nedre grænse
2.5.2 Forbudt frekvensområde 1; øvre grænse
I nogle systemer kan det være nød-
Udgangsfrekvens
vendigt at undgå visse frekvenser pga.
mekaniske resonansproblemer. Med
disse parametre er det muligt at
afgrænse tre forbudte frekvensområder
"skip-frekvenser. Se Figur 1-14.
2.5.1 2.5.2
Reference [Hz]
nxlk36.fh8
Figur 1-14. Indstilling af forbudt frekvensområde.
2.5.3 Skaleringsområdet for accelerations-/decelerations-rampehastighed inden for
grænserne af forbudte frekvenser
Definerer accelerations-/decelerationstiden, når udgangsfrekvensen ligger inden for
grænserne af de valgte forbudte frekvensområder (parameter 2.5.1 og 2.5.2).
Rampetiden (den valgte accelerations-/ decelerationstid 1 eller 2) multipliceres med
denne faktor. Eksempel: Værdien 0,1 gør accelerationstiden 10 gange kortere end uden
for grænserne af det forbudte frekvensområde.
fud [Hz]
Par. 2.5.3 = 0,2
Par. 2.5.2
Par. 2.5.1
Par. 2.5.3 = 1,2
Figur 1-15. Skalering af rampetid inden for det forbudte frekvensområde.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
Tid [s]
nxlk37.fh8
4
Page 37

36 • vacon parameterbeskrivelser
4.6 MOTORSTYRING
2.6.1 Motorstyringstilstand
0 Frekvensstyring: I/O-klemme- og panelreferencerne er frekvensreferencer,
og frekvensomformeren styrer udgangsfrekvensen (udgangsfrekvensopløsning = 0,01 Hz).
1 Hastighedsstyring: I/O-klemme- og panelreferencerne er hastighedsreferencer,
og frekvensomformeren styrer motorhastigheden (nøjagtighed
±0,5 %).
2.6.2 Valg af U/f-område
Lineært: Motorens spænding ændres lineært med frekvensen i det konstante
0 fluxområde fra 0 Hz til feltsvækningspunktet, hvor den nominelle spænding
forsyner motoren. Lineært U/f-område bør anvendes i applikationer med
konstant moment. Se Figur 1- 16.
Denne standardindstilling bør anvendes, hvis der ikke er et særligt
behov for en anden indstilling.
Kvadratisk: Motorens spænding ændres ifølge en kvadratisk kurveform med
1 frekvensen i området fra 0 Hz til feltsvækningspunktet, hvor den nominelle
spænding også forsyner motoren. Motoren kører undermagnetiseret
under feltsvækningspunktet, og den producerer mindre moment og
elektromagnetisk støj. Det kvadratiske U/f-område kan anvendes
i applikationer, hvor momentkravet til belastningen er proportionalt
med hastighedens kvadrat, f.eks. i centrifugal-ventilatorer og pumper.
U[V]
Un
par.2.6.4
Standard: Motorens
nominelle spænding
Feltsvækningspunkt
Lineær
Kvadratisk
par.2.6.6, 2.6.7
Standard: Motorens
nominelle frekvens
par.2.6.3
f[Hz]
nxlk38.fh8
Figur 1- 16. Lineær og kvadratisk ændring af motorspændingen
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 38

parameterbeskrivelser vacon • 37
Programmerbar U/f-kurve:
2 U/f-kurven kan programmeres med tre forskellige punkter. Den program-
merbare U/f-kurve kan anvendes, hvis de andre indstillinger ikke
imødekommer kravene til applikationen.
U[V]
Un
Par 2.6.4
Par. 2.6.7
(Def. 10%)
.8
Par. 2.6
(Def. 1.3%)
Standard: Motorens
nominelle spænding
Par. 2.6.6
(Def. 5 Hz)
Feltsvækningspunkt
Standard: Motorens
nominelle frekvens
Par. 2.6.3
f[Hz]
nxlk39.fh8
Figur 1-17. Programmerbar U/f-kurve
Lineær med fluxoptimering:
3 Frekvensomformeren begynder at søge efter den mindste motorstrøm for at
spare energi og sænke niveauet for forstyrrelser og støj. Denne funktion kan
anvendes i applikationer med konstant motorbelastning, såsom ventilatorer,
pumper m.v.
2.6.3 Feltsvækningspunkt
Feltsvækningspunktet er den udgangsfrekvens, ved hvilken udgangsspændingen når
værdien, der er indstillet med par. 2.6.4.
2.6.4 Spænding ved feltsvækningspunktet
Over frekvensen ved feltsvækningspunktet forbliver udgangsspændingen på den
indstillede maksimumsværdi. Under frekvensen ved feltsvækningspunktet afhænger
udgangsspændingen af indstillingerne af U/f-kurvens parametre. Se parametrene
2.1.13, 2.6.2, 2.6.5 2.6.6 og 2.6.7 og Figur 1-17.
Når parametrene 2.1.6 og 2.1.7 (motorens nominelle spænding og nominelle frekvens)
er indstillede, indstilles parametrene 2.6.3 og 2.6.4 automatisk til de tilsvarende
værdier. Hvis der ønskes forskellige værdier for feltsvækningspunktet og spændingen,
skal disse parametre ændres efter indstillingen af parametrene 2.1.6 og 2.1.7.
2.6.5 U/f-kurve, midtpunktsfrekvens
Hvis den programmerbare U/f-kurve er valgt med parameter 2.6.2, definerer denne
parameter kurvens midtpunktsfrekvens. Se Figur 1-17.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 39

38 • vacon parameterbeskrivelser
2.6.6 U/f-kurve, midtpunktsspænding
Hvis den programmerbare U/f-kurve er valgt med parameter 2.6.2, definerer denne
parameter kurvens midtpunktsspænding. Se Figur 1-17.
2.6.7 Udgangsspænding ved nulfrekvens
Denne parameter definerer kurvens nulfrekvens-spænding. Se Figur 1-17.
2.6.8 Switchfrekvens
Motorstøj kan minimeres ved anvendelse af en høj switchfrekvens. Når switchfrekvensen øges, reduceres frekvensomformerenhedens kapacitet.
Switchfrekvens for Vacon NXL: 1…16 kHz
2.6.9 Overspændingscontroller
2.6.10 Underspændingscontroller
Disse parametre muliggør, at over-/underspændingscontrollerne kan sættes ud af drift.
Det kan være nyttigt hvis forsyningsspændingen varierer mere end -15 % til +10 %, og
applikationen ikke tolererer denne over-/underspænding. Denne regulator styrer
udgangsfrekvensen under hensyn til forsyningsudsvingene.
Bemærk: Der kan opstå fejludkoblinger som følge af over-/underspænding, når
controllerne sættes ud af drift.
0 Controller afbrudt
1 Controller tilsluttet
2.6.11 Identifikation
0 Ingen aktivitet
1 ID ingen kørsel
Når ID ingen kørsel er valgt, foretager frekvensomformeren en ID-kørsel, når den
startes fra det valgte styrested. Hvis frekvensomformeren ikke startes inden for 20
sekunder, afbrydes identifikationsprocessen.
Frekvensomformeren drejer ikke motoren ved ID ingen kørsel. Når ID-kørslen er klar,
stopper frekvensomformeren. Frekvensomformeren starter normalt, når den næste
startkommando gives.
ID-kørslen forbedrer beregningen af moment og den automatiske
momentforstærkning. Den sikrer også bedre glidekompensation ved
hastighedsregulering (mere præcis RPM).
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 40

parameterbeskrivelser vacon • 39
4.7 BESKYTTELSER
2.7.1 Reaktion på 4 mA referencefejl
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Der genereres en advarsel eller en fejlhandling og fejlmeddelelse, hvis 4…20 mA
referencesignalet er i anvendelse, og signalet kommer under 3,5 mA i 5 sekunder
eller under 0,5 mA i 0,5 sekunder. Informationen kan også programmeres ind
i relæudgangene.
2.7.2 Reaktion på ekstern fejl
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Der genereres en advarsel eller en fejlhandling og fejlmeddelelse fra det eksterne
fejlsignal i de programmerbare digitale indgange. Informationen kan også
programmeres ind i relæudgangene.
2.7.3 Reaktion på underspændingsfejl
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Se Tabel 4-3 i Vacon NXL, Betjeningsmanualen for at se grænserne for underspænding.
Bemærk: Denne beskyttelse kan ikke deaktiveres.
2.7.4 Udgangsfaseovervågning
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Udgangsfaseovervågning af motoren sikrer, at motorfaserne har omtrent ens
strømforbrug.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 41

40 • vacon parameterbeskrivelser
2.7.5 Jordfejlsbeskyttelse
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Jordfejlsbeskyttelse sikrer, at summen af motorfasestrømmene er nul. Overstrømsbeskyttelsen fungerer altid og beskytter frekvensomformeren mod jordfejl med høje
strømme.
Parameter 2.7.6-2.7.10 Termisk motorbeskyttelse:
Generelt
Den termiske motorbeskyttelse skal beskytte motoren mod overophedning. Vacon-frekvensomformeren er i stand til at forsyne motoren med strøm, der er højere end den nominelle. Hvis
belastningen kræver så høj strøm, er der risiko for, at motoren bliver termisk overbelastet. Dette
gælder især ved lave frekvenser. Ved lave frekvenser reduceres såvel motorens køleeffekt som
dens kapacitet. Hvis motoren er udstyret med en ekstern køleventilator, er belastningsreduktionen
ved lave hastigheder lille.
Den termiske motorbeskyttelse er baseret på en teoretisk model, som anvender frekvensomformerens udgangsstrøm til at beregne motorens belastning.
Den termiske motorbeskyttelse kan justeres vha. parametre. Den termiske strøm I
belastningsstrøm, motoren er overbelastet med. Denne strømgrænse er en funktion af udgangsfrekvensen.
!
Advarsel!
Den teoretiske model beskytter ikke motoren, hvis luftstrømmen til
motoren er reduceret pga. blokering af ventilationsristen.
specificerer den
T
2.7.6 Termisk motorbeskyttelse
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Hvis der er valgt udkobling, standser frekvensomformeren og aktiverer fejlstadiet.
Deaktiveres beskyttelsen, dvs. hvis parameteren sættes til 0, stilles motorens termiske
stadie tilbage til 0 %.
Indstilles parameteren til 0, deaktiveres beskyttelsen, og stalltidstælleren nulstilles.
2.7.7 Termisk motorbeskyttelse: Faktoren motor-omgivelsestemperatur
Når motorens omgivelsestemperatur skal tages i betragtning, anbefales det at indstille
en værdi for denne parameter. Værdien af faktoren kan indstilles i området mellem
-100,0 % og 100,0 % hvor -100,0 % svarer til 0
driftsomgivelsestemperatur. Indstilles parameteren til 0 % antages det, at
omgivelsestemperaturen er den samme som kølepladetemperaturen ved opstart.
C og 100,0 % til motorens maksimale
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 42

parameterbeskrivelser vacon • 41
2.7.8 Termisk motorbeskyttelse: Motorkølingsfaktor ved nulhastighed
Køleeffekten kan indstilles i området
mellem 0 og150,0 % x køleeffekten
ved nominel frekvens. Se Figur 1-18.
par.
2.7.8=40%
Figur 1-18. Motorens køleeffekt
2.7.9 Termisk motorbeskyttelse: Tidskonstant
Dette tidsrum kan indstilles i området mellem 1 og 200 minutter.
Dette er motorens termiske tidskonstant. Jo større motoren er, des større er
tidskonstanten. Tidskonstanten er det tidsrum, inden for hvilket det beregnede
termiske stadie har nået 63 % af dets endelige værdi.
100%
0
f
N X 1 2 k 6 2
f
n
Motorens termiske tid er specifik for motordesignet, og den varierer fra fabrikat til
fabrikat.
Hvis motorens t6–tid (t6 er den tid i sekunder, hvori motoren kan arbejde sikkert ved
6 gange mærkestrømmen) er kendt (givet af motorfabrikanten), kan tidskonstantparameteren indstilles ud fra den. I følge en tommelfingerregel er motorens termiske tidskonstant i minutter lig med 2xt6. Hvis frekvensomformeren er på stopstadie, øges
tidskonstanten internt til tre gange den indstillede parameterværdi. Afkølingen på
stopstadiet er baseret på konvektion, og tidskonstanten øges. Se også Figur 1-19.
Bemærk: Hvis motorens nominelle hastighed (par. 2.1.8) eller nominelle strøm
(par. 2.1.9) ændres, indstilles denne parameter automatisk til standardværdien (45).
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 43
42 • vacon parameterbeskrivelser
Motortemperatur
Udkoblingsområde
105%
Motorstrøm
I/I
T
nxlk40.fh8
Tidskonstant
Motortemperatur
Varierer efter motorstørrelse
*)
og justeres med parameter
*)
T
= (I/IT)2 x (1-e
Fejl/advarsel
par. 2.7.6
-t/T
)
2.7.11
Tid
Figur 1-19. Beregning af motortemperaturen
2.7.10 Termisk motorbeskyttelse: Motorens driftscyklus
Definerer, hvor stor en del af den nominelle motorbelastning, der tilføres.
Værdien kan indstilles til mellem 0 % og 100 %.
Parameter 2.7.11, Beskyttelse mod stall:
Generelt
Beskyttelsen mod motor-stall forhindrer, at der opstår kortvarige overbelastninger af motoren
f.eks. ved aksel-stall. Stall-beskyttelsens reaktionstid kan defineres kortere end reaktionstiden
ved termisk motorbeskyttelse. Stall-tilstanden defineres ved to parametre, 2.7.12 (Stall-strøm) og
2.7.13 (Stall-frekvens). Hvis strømmen er højere end den indstillede grænse, og udgangsfrekvensen
er lavere end den indstillede grænse, er stall-tilstanden sand. Der er ingen rigtig indikation af
akselrotationen. Stall-beskyttelsen er en slags overstrømsbeskyttelse.
2.7.11 Beskyttelse mod stall
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Indstilles parameterværdien til 0, vil beskyttelsen blive deaktiveret, og stall-tidtageren
vil blive nulstillet.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 44

parameterbeskrivelser vacon • 43
2.7.12 Stall-strømsgrænse
Strømmen kan indstilles til 0,1…I
Før et stall-stadie nås, skal strømmen
have overskredet denne grænse. Se
Figur 1-20. Softwaren muliggør ikke,
at der indtastes en større værdi end
I
*2. Hvis parameter 2.1.9, motorens
nMotor
nominelle strøm, ændres, sættes denne
parameter automatisk tilbage til
standardværdien (I
2.7.13 Stall-tid
Stall-tiden kan indstilles i området mellem 1,0 og 120,0 s.
Indstillingen definerer den maksimalt
tilladte tid for opdagelsen af et stallstadie. Stall-tiden tælles vha. en intern
op-/nedtæller.
Hvis den indstillede stall-tid overskrides,
vil beskyttelsen udløse en fejludkobling.
(Se Figur 1- 21).
nMotor
*1.3).
nMotor
*2.
Par. 2.7.12
I
Stall-område
Par. 2.7.14
Figur 1- 20. Indstilling af stall-parametre
Stalltidstæller
Udkoblingsområde
Par. 2.7.13
f
nxlk41.fh8
Udkobling/advarsel
par. 2.7.13
2.7.14 Maksimal stall-frekvens
Frekvensen kan indstilles i området 1-f
For at et stall-stadie kan udløses, skal udgangsfrekvensen være forblevet under denne
grænse.
Stall
Ingen stall
Figur 1- 21. Stall-tidtagning
(par. 2.1.2).
max
Tid
nxlk42.fh8
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 45

44 • vacon parameterbeskrivelser
Parameter 2.7.15-2.7.18 Beskyttelse mod underbelastning:
Generelt
Formålet med at beskytte motoren mod underbelastning er at sikre, at der er belastning på
motoren, når frekvensomformeren kører. Hvis motoren mister sin belastning, kan det skyldes
et problem et sted i processen, f.eks. et knækket bånd, eller en tør pumpe.
Motorunderbelastningsbeskyttelsen kan justeres ved at indstille underbelastningskurven med
parametrene 2.7.16 (Belastning i feltsvækningsområdet) og 2.7.17 (Nulfrekvensbelastning), se
nedenfor. Underbelastningskurven er en kvadratisk kurve, som ligger mellem nulfrekvensen
og feltsvækningspunktet. Beskyttelsen er ikke aktiv under 5Hz (underbelastningstidtageren
er standset).
Momentværdierne til indstilling af underbelastningskurven er angivet i procent, hvilket refererer til
motorens nominelle moment. Motorens typeskiltdata, parametrene for motorens nominelle strøm
og frekvensomformerens nominelle strøm I
anvendes til at finde skaleringsområdet for den interne
L
momentværdi. Hvis der anvendes en anden motor end den nominelle sammen med frekvensomformeren, mindskes nøjagtigheden af momentberegningen.
2.7.15 Underbelastningsbeskyttelse
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Hvis fejludkobling aktiveres, vil frekvensomformeren standse og aktivere fejlstadiet.
Deaktiveres beskyttelsen ved en indstilling af parameteren til 0, nulstilles underbelastningstidtageren.
2.7.16 Underbelastningsbeskyttelse, belastning i feltsvækningsområdet
Momentgrænsen kan indstilles i området 10,0-150, % x T
Denne parameter angiver værdien af
Moment
nMotor
.
det mindste tilladte moment, når
udgangsfrekvensen er over feltsvækningspunktet. Se Figur 1-22.
Par. 2.7.16
Hvis parameter 2.1.9 (Motorens
nominelle strøm) ændres, sættes
denne parameter automatisk tilbage
til standardværdien.
Par. 2.7.17
Underbelastningsområde
5 Hz
Feltsvækningspunkt
par. 2.6.4
f
nxlk43.fh8
Figur 1-22. Indstilling af minimumsbelastningen
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 46

parameterbeskrivelser vacon • 45
2.7.17
Underbelastningsbeskyttelse, nulfrekvensbelastning
Momentgrænsen kan indstilles i området fra 5,0-150,0 % x T
Denne parameter angiver værdien af det mindste tilladte moment med nulfrekvens.
Se Figur 1-22.
Hvis værdien af parameter 2.1.9 (Motorens nominelle strøm) ændres, sættes denne
parameter automatisk tilbage til standardværdien.
2.7.18 Underbelastningstid
Denne tid kan indstilles i området mellem 2,0 og 600,0 s.
Dette er den maksimalt tilladte tid, et
underbelastningsstadie må eksistere i.
En intern op-/nedtæller registrerer den
akkumulerede underbelastningstid.
Hvis værdien af underbelastningstidtagningen overskrider denne
grænse, vil beskyttelsen udløse en
fejludkobling iht. parameter 2.7.15).
Hvis frekvensomformeren standses,
nulstilles underbelastningstælleren.
Se Figur 1-23.
Par. 2.7.18
Underbelastning
Ingen underbel.
.
nMotor
Underbelastnings-tidtager
Udkoblingsområde
Udkobling/advarsel
par. 2.7.17
Tid
nxlk44.fh8
2.7.19 Reaktion på termistorfejl
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stoptilstand efter fejl iht. parameter 2.1.12
3 = Fejl, stoptilstand efter fejl altid ved friløb
Indstilles parameteren til 0, deaktiveres beskyttelsen.
2.7.20 Reaktion på fieldbusfejl
Her indstilles reaktionsmodus for fieldbusfejlen, hvis der bruges fieldbuskort. Læs mere
om emnet i den tilhørende fieldbuskortmanual.
Se parameter 2.7.19.
Figur 1-23. Tidtagningsfunktion
af underbelastning
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 47

46 • vacon parameterbeskrivelser
2.7.21 Reaktion på slidsfejl
Her indstilles reaktionsmodus for en kortslidsfejl, der er opstået som følge af
manglende eller defekt kort.
Se parameter 2.7.19.
2.7.22 Overvågningsfunktion af aktuel værdi
0 = Ikke anvendt
1 = Advarsel hvis den aktuelle værdi kommer under grænsen, som er indstillet med
par. 2.7.23
2 = Advarsel, hvis den aktuelle værdi overskrider den grænse, som er indstillet med
par. 2.7.23
3 = Fejl, hvis den aktuelle værdi kommer under grænsen, som er indstillet med
par. 2.7.23
4 = Fejl, hvis den aktuelle værdi overskrider den grænse, som er indstillet med
par. 2.7.23
2.7.23 Overvågningsgrænse for aktuel værdi
Med denne parameter indstilles den aktuelle værdi, der skal overvåges med par. 2.7.22.
2.7.24 Overvågningsforsinkelse for aktuel værdi
Med denne parameter defineres en forsinkelse på overvågningen af den aktuelle værdi.
(par. 2.7.22)
Hvis denne parameter er i brug, vil funktionen af par. 2.7.22 kun være aktiv, når den
aktuelle værdi forbliver uden for den definerede tidsgrænse, som er fastsat med denne
parameter.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 48

parameterbeskrivelser vacon • 47
4.8 AUTOGENSTARTSPARAMETRE
Den automatiske genstartsfunktion er aktiv, hvis værdien af par. 2.1.21 = 1. Der gives altid
genstartsforsøg.
2.8.1 Automatisk genstart: Ventetid
Definerer den tid, der skal gå, før frekvensomformeren prøver at genstarte motoren
automatisk, efter at fejlen er forsvundet.
2.8.2 Automatisk genstart: Forsøgstid
Den automatiske genstartsfunktion genstarter frekvensomformeren, når fejlene
er forsvundet, og ventetiden er udløbet.
Ven teti d
Par. 2.8.1
Genstart 3
nxlk52.fh8
Fejludløser
Motorstopsignal
Motorstartsignal
Overvågning
Fejl aktiv
RESET/
Fejlnulstilling
Ventetid
Par. 2.8.1
Genstart 1 Genstart 2
Autoresetfunktion: (3 forsøger)
Vent etid
Par. 2.8.1
Ven teti d
Par. 2.8.1
Forsøgstid
Par. 2.8.2
Figur 1- 24. Automatisk genstart
Tidtagningen begynder fra den første autogenstart. Hvis antallet af fejl, der opstår i løbet
af forsøgstiden, overstiger tre, aktiveres fejlstadiet. I alle andre tilfælde slettes fejlen
efter at forsøgstiden er udløbet, og den næste fejl starter forsøgstidtagningen igen.
Hvis en enkelt fejl forbliver aktiv under forsøgstiden, er et fejlstadie sandt.
2.8.3 Automatisk genstart, startfunktion
Startfunktion for automatisk genstart vælges med denne parameter. Parameteren
definerer start-tilstanden:
0 = Start med rampe
1 = Flyvende start
2 = Start iht. par. 2.1.11
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 49

48 • vacon parameterbeskrivelser
4.9 PID-REFERENCEPARAMETRE
2.9.1 PID-aktivering
Med denne parameter kan man enten aktivere eller deaktivere PID-controlleren eller
aktivere pumpe- og ventilatorstyringsparametrene.
0 = PID-controller deaktiveret
1 = PID-controller aktiveret
2 = Pumpe- og ventilatorstyring aktiveret. Parametergruppe P2.10 bliver synlig.
2.9.2 PID-reference
Definerer, hvilken frekvensreferencekilde der er valgt til PID-controlleren.
Standardværdien er 2.
0 = AI1-reference
1 = AI2-reference
2 = PID-reference fra panelstyringssiden (Gruppe K3, parameter P3.5)
3 = Reference fra fieldbussen (FBProcessDataIN1)
2.9.3 Indgang for aktuel værdi
1 AI1
2 AI2
3 Fieldbus (
4 Motormoment
5 Motorhastighed
6 Motorstrøm
7 AI1 – AI2
Aktuel værdi 1
: FBProcessDataIN2;
2.9.4 PID-controller-forstærkning
Aktuel værdi 2
: FBProcessDataIN3)
Denne parameter definerer PID-controller-forstærkningen. Hvis parameterværdien
indstilles til 100 %, vil en ændring på 10 % i fejlværdien forårsage en ændring
i controllerudgangen på 10 %.
Hvis parameterværdien indstilles til 0, fungerer PID-controlleren som ID-controller.
Se eksemplerne på de følgende sider.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 50

parameterbeskrivelser vacon • 49
2.9.5 PID-controllerens I-tid
Denne parameter definerer integrationstiden for PID-controlleren. Hvis parameteren
indstilles til 1,00 sekunder, vil en ændring på 10 % i fejlværdi forårsage en ændring
i controllerudgangen på 10,00 %/s. Hvis parameterværdien indstilles til 0,00 s, fungerer
PID-controlleren som PD-controller. Se eksemplerne på de følgende sider.
2.9.6 PID-controllerens D-time
Parameter 2.9.5 definerer PID-controllerens afledningstid. Hvis parameteren indstilles
til 1,00 sekunder, vil en ændring på 10 % i fejlværdien i løbet af 1,00 s. forårsage en
ændring i controllerudgangen på 10,00 %. Hvis parameterværdien indstilles til 0,00 s,
fungerer PID-controlleren som PI-controller.
Se eksemplerne på de følgende sider:
Eksempel 1:
For at reducere fejlværdien til nul med de givne værdier sker der følgende
i frekvensomformerudgangen:
Givne værdier:
Par. 2.9.4, P = 0 % PID maks.-grænse = 100,0 %
Par. 2.9.5, I-tid = 1,00 s PID min.-grænse = 0,0 %
Par. 2.9.6, D-tid = 0,00 s Min.-frekvens. = 0 Hz
Fejlværdi
(indstillingsværdi – procesværdi) = 10.00 % Maks.-frekvens = 50 Hz
I dette eksempel fungerer PID-controlleren i realiteten kun som ID-controller.
I henhold til den givne værdi af parameter 2.9.5 (I-tid) øges PID-udgangen med 5 Hz
(10 % af forskellen mellem maksimums- og minimumsfrekvensen) hvert sekund,
indtil fejlværdien er 0.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 51

50 • vacon parameterbeskrivelser
Hz
PID udgangPID
Fejlværdi
I-delen=5 Hz/s
10%
10%
10%
10%
Fejlværdi = 10%
1s
I-delen=5 Hz/s
I-delen=5 Hz/s
I-delen=5 Hz/s
I-delen=5 Hz/s
NX12k70
a
Figur 1-25. PID-controlleren fungerer som I-controller
Eksempel 2:
Givne værdier:
Par. 2.9.4, P = 100 % PID maks.-grænse = 100,0 %
Par. 2.9.5, I-tid = 1,00 s PID min.-grænse = 0,0 %
Par. 2.9.6, D-tid = 1,00 s Min.-frekvens = 0 Hz
Fejlværdi
(indstillingsværdi – procesværdi) = 10 % Maks-frekvens = 50 Hz
Når forsyningsspændingen tilsluttes, registrerer systemet forskellen mellem
indstillingsværdien og den faktiske procesværdi og begynder enten at øge eller mindske
(hvis fejlværdien er negativ) PID-udgangen iht. I-tiden. Når forskellen mellem den
indstillede værdi og procesværdien er reduceret til 0, reduceres udgangen med den
mængde, der svarer til værdien af parameter 2.9.5.
I tilfælde af at fejlværdien er negativ, reagerer frekvensomformeren ved at reducere
udgangen tilsvarende.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 52

parameterbeskrivelser vacon • 51
Hz
PID-udgang
D-delen
D-delen
D-delen
Fejlværdi
P-delen=5 Hz
Fejl=10%
Fejl= -10%
P-delen= -5 Hz
t
NX12k69
Figur 1-26. PID-udgangskurve med værdier som i eksempel 2
Eksempel 3:
Givne værdier:
Par. 2.9.4, P = 100 % PID maks.-grænse = 100,0 %
Par. 2.9.5, I-tid = 0,00 s PID min.-grænse = 0,0 %
Par. 2.9.6, D-tid = 1,00 s Min.-frekvens = 0 Hz
Fejlværdi
(indstillingsværdi – procesværdi) = 10 %/s Maks. -frekvens = 50 Hz
Når fejlværdien øges, øges PID-udgangen også iht. de indstillede værdier (D-tid= 1,00s).
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 53

52 • vacon parameterbeskrivelser
Hz
PID-udgang
Fejlværdi
D-delen=10%=5,00 Hz
D-delen= -10%= -5,00 Hz
P-delen=100% *PID fejl = 5,00Hz/s
10%
1,00 s
NX12k72
Figur 1- 27 PID-udgang med værdier som i eksempel 3.
2.9.7 Minimumsskalering af den aktuelle værdi 1
Indstiller minimumsskaleringspunktet for den aktuelle værdi 1. Se Figur 1-28.
2.9.8 Maksimumsskalering af den aktuelle værdi 1
Indstiller maksimumsskaleringspunktet for den aktuelle værdi 1. Se Figur 1-28.
Skaleret
indgangssignal [%]
100
Par.2.9.7=30%
Par.2.9.8=80%
t
Analog
indgang [%]
0
0
0
4
6,0
8,8 20,0 mA
16,0
16,8
nxlk45.fh8
1008030
10,0 V8,03,0
20,0 mA
Figur 1-28. Eksempel på signalskalering af aktuel værdi
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 54

parameterbeskrivelser vacon • 53
2.9.9 Invertering af PID-fejlværdi
Denne parameter gør det muligt at invertere fejlværdien af PID-controlleren (og dermed
driften af PID-controlleren).
0 Ingen invertering
1 Inverteret
2.9.10 Sovefrekvens
Frekvensomformeren standses automatisk, hvis frekvensen falder til under
som defineres med denne parameter, i en tidsperiode, som er længere end den, der er
fastsat med parameter 2.9.11. Under stopstadiet fungerer PID-controlleren ved at stille
frekvensomformeren på Driftsstadie, når det aktuelle værdisignal enten kommer under
eller overstiger (se par. 2.9.13) Opvågningsniveauet
2.9.12. Se Figur 1-29.
2.9.11 Soveforsinkelse
Tidsrummet i, hvilket frekvensen mindst skal ligge under soveniveauet, før frekvensomformeren standser. Se Figur 1-29.
2.9.12 Opvågningsniveau
Opvågningsniveauet definerer den frekvens, som den aktuelle værdi enten skal komme
under eller overstige, før frekvensomformerens Driftsstadie genetableres.
Se Figur 1-29.
2.9.13 Opvågningsfunktion
Denne parameter definerer, om genetableringen af Driftsstadiet skal komme, når det
aktuelle værdisignal kommer under eller overstiger
Se Figur 1-29 og Figur 1-30.
Soveniveauet,
,
som fastsættes med parameter
Opvågningsniveauet
(par. 2.9.12).
Aktuel værdi
Opvågningsniveau (param. 2.9.12)
Udgangsfrekvens
t < param. 2.9.11
Soveniveau
param. 2.9.10
Start/Stop-status for det
variable hastighedsdrev
I drift
t
< par 2.9.11
stop
Figur 1-29. Frekvensomformerens sovefunktion
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
Tid
Tid
nxlk46.fh8
4
Page 55

54 • vacon parameterbeskrivelser
Par.
værdi
0
1
Funktion Grænse
Opvågning sker,
når den aktuelle
værdi kommer
under grænsen.
Opvågning sker,
når den aktuelle
værdi overskrider
grænsen
Grænsen defineret
med parameter
2.9.12 er i procent
af den maksimale
aktuelle værdi
Grænsen defineret
med parameter
2.9.12 er i procent
af den maksimale
aktuelle værdi
Beskrivelse
Signal for aktuel værdi
100%
Start
Stop
Signal for aktuel værdi
100%
Par. 2.9.12=60%
Start
Stop
Par. 2.9.12=30%
tid
tid
Opvågning sker,
2
når den aktuelle
værdi kommer
under grænsen.
Grænsen defineret
med parameter
2.9.12 er i procent
af den nuværende
værdi af
referencesignalet.
Opvågning sker,
3
3
når den aktuelle
værdi overskrider
grænsen.
Grænsen defineret
med parameter
2.9.12 er i procent
af den nuværende
værdi af
referencesignalet
Figur 1-30. Valgfri opvågningsfunktioner
Signal for aktu el værdi
100%
reference=50%
Star t
Stop
Signal for aktuel værdi
100%
Par.2.9.12=140%
limit=14 0%*reference=70%
reference=50%
Par.2.9.12=60%
Grænse=60%*reference=30
tid
tid
Star t
Stop
NXLk59.fh8
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 56

parameterbeskrivelser vacon • 55
4.10 PUMPE- OG VENTILATORSTYRING
Pumpe- og ventilatorstyringen kan anvendes til kontrol af et variabelt hastighedsdrev og op til tre
hjælpedrev. Frekvensomformerens PID-controller styrer hastigheden af hastighedsdrevet og giver
signaler til at starte og standse hjælpedrevene for på den måde at kontrollere det totale flow.
Ud over de otte parametergrupper, der findes som standard, indeholder applikationen en parametergruppe til multi-pumpe- og ventilatorstyringsfunktioner.
Som det fremgår af navnet, anvendes Pumpe- og ventilatorstyringsapplikationen til driftsstyring af
pumper og ventilatorer. Applikationen bruger eksterne kontaktorer til at skifte mellem de motorer,
der er koblet til frekvensomformeren. Autoskiftfunktionen gør det muligt at ændre hjælpedrevenes
startrækkefølge.
4.10.1 Kort beskrivelse af Pumpe- og ventilatorstyringsfunktionen og vigtige parametre
Automatisk skift mellem drev (Autoskift & Interlockvalg, P2.10.4)
Det automatiske skift mellem start- og stoprækkefølgen kan enten indstilles til udelukkende at
tilsluttes et hjælpedrev eller både hjælpedrevet og det drev, der styres af frekvensomformeren,
afhængigt af indstillingen af parameter 2.10.4.
Autovalgfunktionen
pumpe- og ventilatorautomatikken, med bestemte intervaller. Det drev, der styres af
frekvensomformeren kan også indgå i den automatiske skifte- og tilkoblingssekvens (par 2.10.4).
Autoskiftfunktion gør det muligt at udjævne motorernes driftstid og at forhindre f.eks. pumpestall
som følge af for lange driftsophold.
Vælg Autoskiftfunktionen med parameter 2.10.4,
Autovalget foretages, når tiden, som er indstillet med parameter 2.10.5
er udløbet, og den anvendte kapacitet er under det niveau, som er indstillet med parameter
2.10.7,
De drev, som er i drift standses og genstartes i henhold til den nye rækkefølge.
Eksterne kontaktorer, som styres gennem frekvensomformerens relæudgange, tilslutter
drevene til frekvensomformeren eller til hovedforsyningen. Hvis den motor, der styres af
frekvensomformeren, inkluderes i autovalgssekvensen, vil den altid blive styret gennem den
relæudgang, der aktiveres først. Øvrige relæer, som aktiveres senere, styrer hjælpedrevene.
Denne parameter anvendes til at aktivere interlockindgangene (værdi 3 & 4). Interlock-signalerne
kommer fra motorkontakterne. Signalerne (funktioner) er forbundet til digitale indgange, der er
programmeret som interlockindgange, og som anvender de tilsvarende parametre. Pumpe- og
ventilatorstyringsautomatikken styrer kun motorer med aktive interlockdata.
Autovalgsfrekvensgrænse
gør det muligt at ændre start- og stoprækkefølgen af de drev, der styres af
Autoskift
.
.
Autovalgsinterval,
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 57

56 • vacon parameterbeskrivelser
Hvis interlock på et hjælpedrev deaktiveres, og et andet hjælpedrev er ledigt, vil det sidstnævnte
blive sat i drift, uden at frekvensomformeren standser.
Hvis interlock på det styrede drev deaktiveres, vil alle motorer blive stoppet og genstartet med
den nye opsætning.
Hvis interlock genaktiveres i driftsstatus, vil automatikkerne omgående standse alle motorer
og genstarte med en ny opsætning. Eksempel:
[P1 P3] [P2 LOCKED] [STOP] [P1
P2 P3]
Se kapitel 4.10.2, Eksempler.
Parameter 2.10.5, Autoskiftinterval
Når tiden, som er defineret med denne parameter, udløber, gennemføres der et autoskift, hvis den
anvendte kapacitet ligger under niveauet defineret med parametrene 2.10.7 (
og 2.10.6 (
foretages der ingen autoskift, før kapaciteten kommer under denne grænse.
Tidtagningen aktiveres kun, hvis anmodningen om Start/Stop er aktiv.
Tidtagningen nulstilles, efter at autoskiftet er gennemført, eller hvis startanmodningen fjernes.
Højeste antal hjælpedrev
). Skulle kapaciteten komme over værdien fra parameter 2.10.7,
Autoskiftfrekvensgrænse
)
Parameter 2.10.6, Højeste antal hjælpedrev og
2.10.7, Autoskiftfrekvensgrænse
Disse parametre definerer det niveau, som den anvendte kapacitet skal forblive under, for at der
kan foretages autoskift.
Niveauet defineres sådan:
Hvis antallet af hjælpedrev i drift er mindre end værdien af parameter 2.10.6 kan autoskiftet
gennemføres.
Hvis antallet af hjælpedrev i drift er lig med værdien af parameter 2.10.6 og frekvensen af det
styrede drev er mindre end værdien af parameter 2.10.7 kan autoskiftet gennemføres.
Hvis værdien af parameter 2.10.7 er 0,0 Hz, kan autoskiftet kun gennemføres i hvileposition
(Stop og Sove) uanset værdien af parameter 2.10.6.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 58
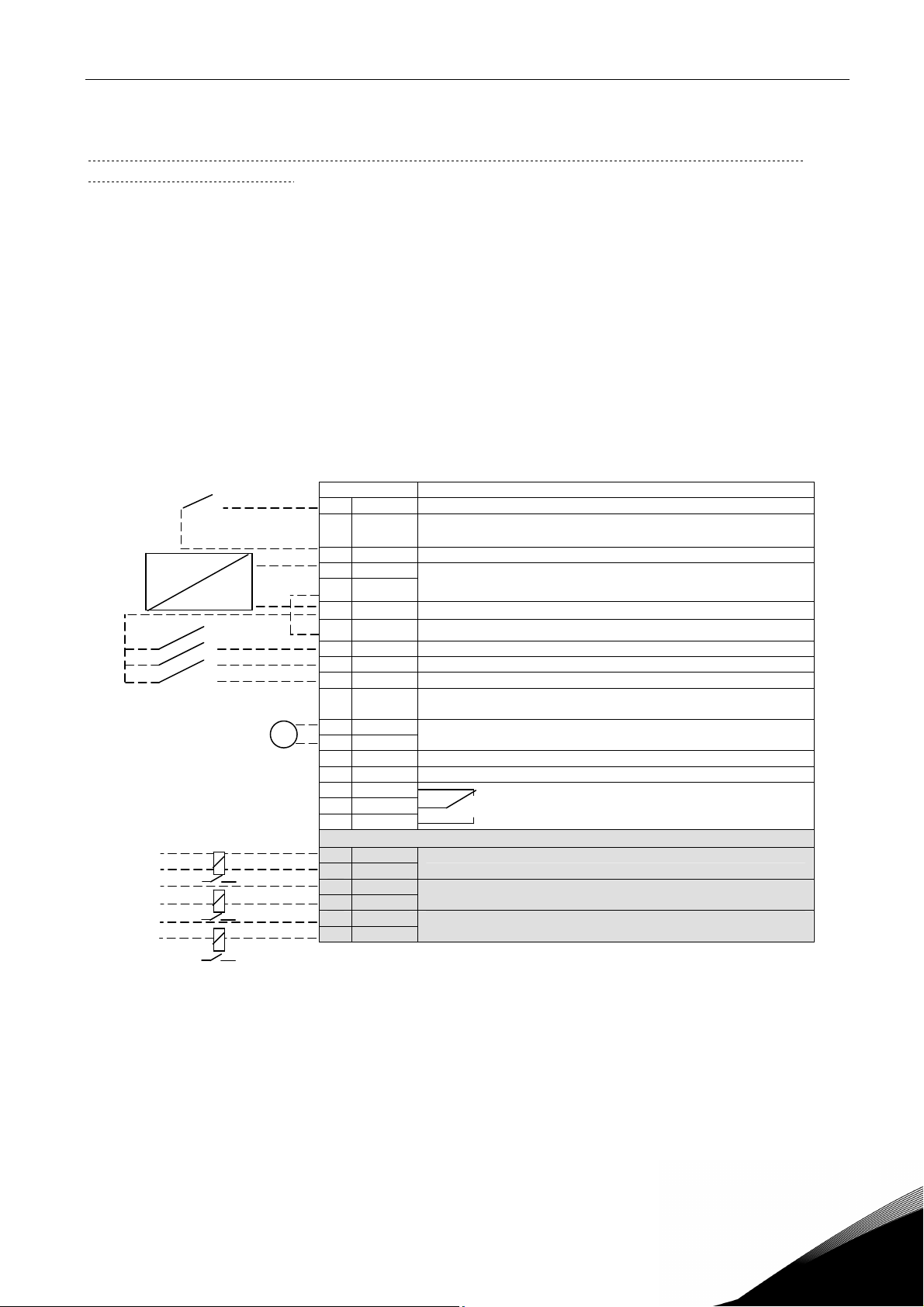
parameterbeskrivelser vacon • 57
4.10.2 Eksempler
Pumpe- og ventilatorstyring med interlocker og autoskift mellem tre pumper (kræver OPT-AA
eller OPT-B5 optionskort)
Situation: 1 styret drev og 2 hjælpedrev.
Parameterindstillinger: 2.10.1= 2
Interlock-tilbagemeldingssignaler anvendt, autoskift mellem alle drev anvendt.
Parameterindstillinger: 2.10.4=4
DIN4 aktiv (par.2.2.6=0)
Interlock-tilbagemeldingssignalerne kommer fra de digitale indgange DIN4 (AI1), DIN2
& DIN3 der er valgt med parametrene 2.1.17, 2.1.18 og 2.2.4.
Styringen af pumpe 1 (par.2.3.1=17) muliggøres gennem Interlock 1 (DIN2, 2.1.17=10),
styringen af pumpe 2 (par.2.3.2=18) gennem Interlock 2 (DIN3, par. 2.1.18=13) og
styringen af pumpe 3 (par.2.3.3=19) gennem Interlock 3 (DIN4).
Referencepotentiometer
2-ledningstransmitter
Aktuel
værdi
(0)4…20 mA
I
Klemme Signal
1 +10V
2 AI1+ Spændingsindgangs-frekvensreference/DIN4
3 AI1- I/O-jordforbindelse
+
–
4 AI2+
5 AI2-
6 +24 V Styrespændingsudgang
7
GND I/O-jordforbindelse
8 DIN1 START
9 DIN2 Interlock 1 (par 2.1.17 = 10)
10 DIN3 Interlock 2 (par 2.1.18 = 13)
11 GND I/O-jordforbindelse
Referenceudgang
ref
PID-aktuel værdi
mA
18 AO1+
19 AO1-
A RS 485 Serielbus
B RS 485 Serielbus
21 RO1
22 RO1
23 RO1
Udgangsfrekvens
Analog udgang
Relæudgang 1
FEJL
OPT-B5
22 RO1/1
23 RO1/2
25 RO2/1
26 RO2/2
28 RO3/1
29 RO3/2
Autoskift 1 (Styring af pumpe 1), par 2.3.2 = 17
Autoskift 2 (Styring af pumpe 2), par 2.3.3 = 18
Autoskift 3 (Styring af pumpe), par 2.3.4 = 19
Tabel 1-17. Eksempel på I/O-konfiguration af pumpe- og ventilatorstyring
med interlocker og autoskift mellem 3 pumper
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 59
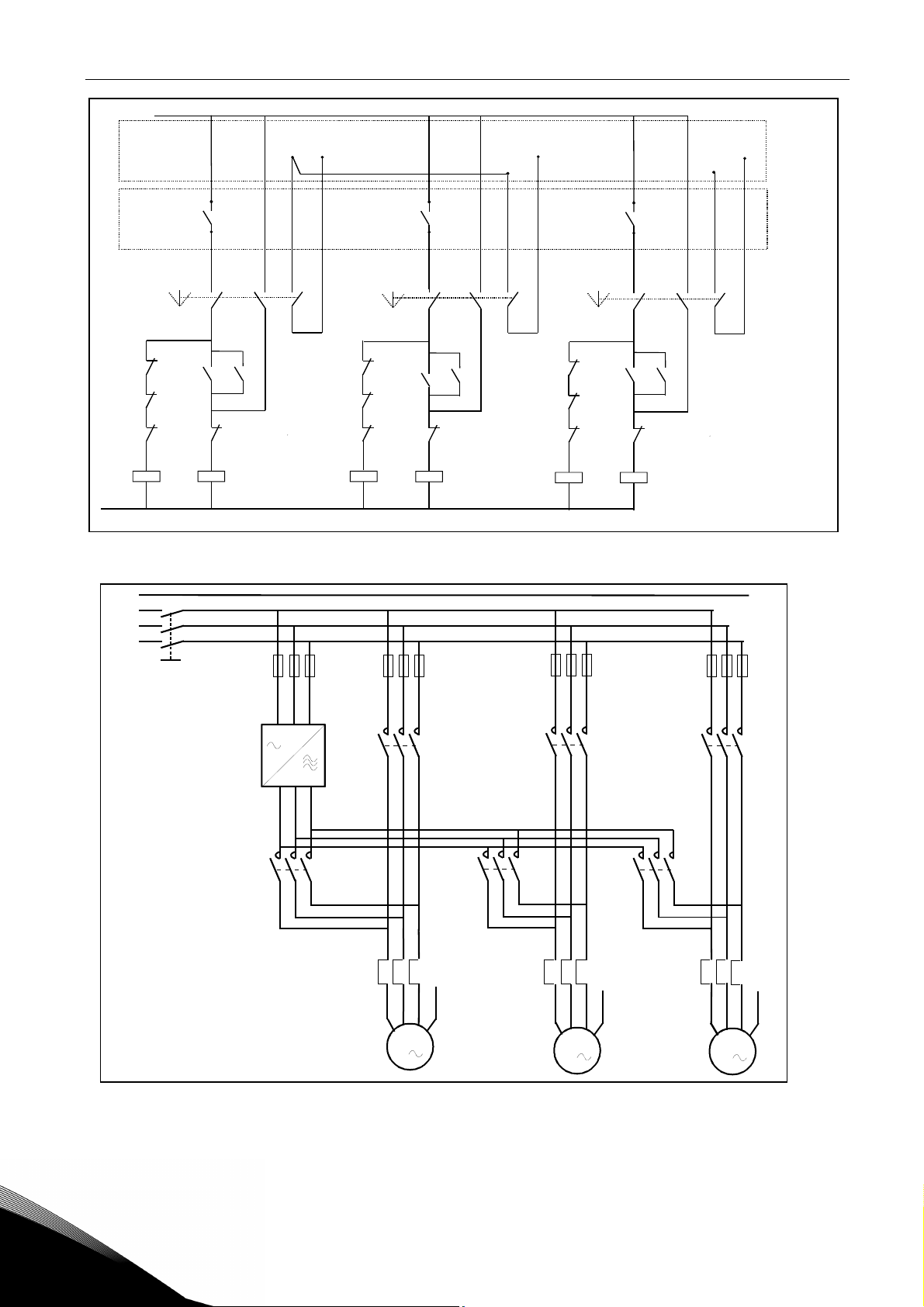
58 • vacon parameterbeskrivelser
230 VAC
VACON NXL
DIN2
24 VDC
68
DIN3
9
AI1
10V
10
K2.1
K1
K2
M2/mains
25
26
AOMains
S3
K3
K1
K2
K3.1
K3
M3/Vacon M3/mains
K3
K3.1
K2
NXOPTB5
K3
K2
K1.1
K1
M1/Vacon
AOMains
S1
K1.1
K2
K1
M1/mains
22
23
AOMains
S2
K3
K3
K1
K2.1
K2
Vacon
M2/
Figur 1-31. Autoskiftsystem med tre pumper, overordnet styrestrømsdiagram
PE
L1
L2
L3
Q1
F3
F1
F2
28
29
K1
NX12k106.dsf
F2
VACON
NX12k104.ds4
K1
L1 L2 L3
UVW
M1
K1.1
K2
PE
UVW
M
3
K2.1
UVW
M2
Figur 1-32. Eksempel på autoskift med tre pumper, hoveddiagram
K3.1
K3
PE
UVW
M
3
M2
PE
M
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 60

parameterbeskrivelser vacon • 59
Pumpe- og ventilatorstyring med interlocker og autoskift mellem to pumper (kræver OPT-AA eller
OPT-B5 optionskort)
Situation: 1 styret drev og 1 hjælpedrev.
Parameterindstillinger: 2.10.1= 1
Interlock-tilbagemeldingssignaler anvendt, autoskift mellem pumper anvendt.
Parameterindstillinger: 2.10.4=4
Interlock-tilbagemeldingssignalerne kommer fra den digitale indgang DIN2 (par. 2.1.17)
og den digitale indgang DIN3, (par. 2.1.18).
Styringen af pumpe 1 (par.2.3.1=17) muliggøres gennem Interlock 1 (DIN2, P2.1.17),
styringen af pumpe 2 (par.2.3.2=18) gennem Interlock 2 (par. 2.1.18=13)
Referencepotentiometer
2-ledningstransmitter
Aktuel
værdi
(0)4…20 mA
I
Klemme Signal
1 +10V
2 AI1+ Spændingsindgangsfrekvens reference/DIN4
3 AI1- I/O-jordforbindelse
+
–
4 AI2+
5 AI2-
6 +24 V Styrespændingsudgang
7
GND I/O-jordforbindelse
8 DIN1 START
9 DIN2 Interlock 1 (par 2.1.17 = 10)
10 DIN3 Interlock 2 (par 2.1.18 = 13)
11 GND I/O-jordforbindelse
Referenceudgang
ref
PID-aktuel værdi
mA
18 AO1+
19 AO1-
A RS 485 Serielbus
B RS 485 Serielbus
21 RO1
22 RO1
23 RO1
Udgangsfrekvens
Analog udgang
Autoskift 1 (Styring af pumpe 1)
par 2.3.1. = 17
OPT-AA
X1
1 +24V Udgangsmaksimum for styrespænding 150 mA
2 GND Jordforbindelse til styringer, f.eks. til +24V og DO
3 DIN1 Fast hastighed 2, par 2.2.1 = 7
4 DIN2 Nulstilling af fejl, par 2.2.2 = 4
5 DIN3 Deaktiver PID (Frekvensreference fra AI1), par 2.2.3 = 11
6 DO1 Klar, par 2.3.4 = 1
X2
22 RO1/NO
23 RO1/COM
Udgang for åben collector, 50 mA/48V
Autoskift 2 (Styring af pumpe 2), par 2.3.2 = 18
Tabel 1-18. Eksempel på I/O-konfiguration af pumpe- og ventilatorstyring
med interlocker og autoskift mellem 2 pumper
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 61

60 • vacon parameterbeskrivelser
230 VAC
K1
K2
K1.1
M1/Vacon
Autom.OMains
S1
K1.1
K2
K1
M1/mains
22
RO1
23
VACON NXOPTA2
24 VDC
12
OPT-AA
DIN2
9
K1
K2.1
K2
M2/
Autom.OMains
S2
Vacon
K2.1
RO1
K1
K2
M2/mains
25
RO2
26
NX12k105.dsf
DIN3
10
Figur 1-33. Autoskiftsystem med to pumper, overordnet styrestrømsdiagram
PE
L1
L2
L3
Q1
F3
F1
F2
L1 L2 L3
VACON
UVW
K1
NX12k107.ds4
M1
K1.1
K2
PE
UVW
M
3
Figur 1-34 Eksempel på autoskift med to pumper, hoveddiagram
M2
K2.1
UVW
M
3
PE
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 62
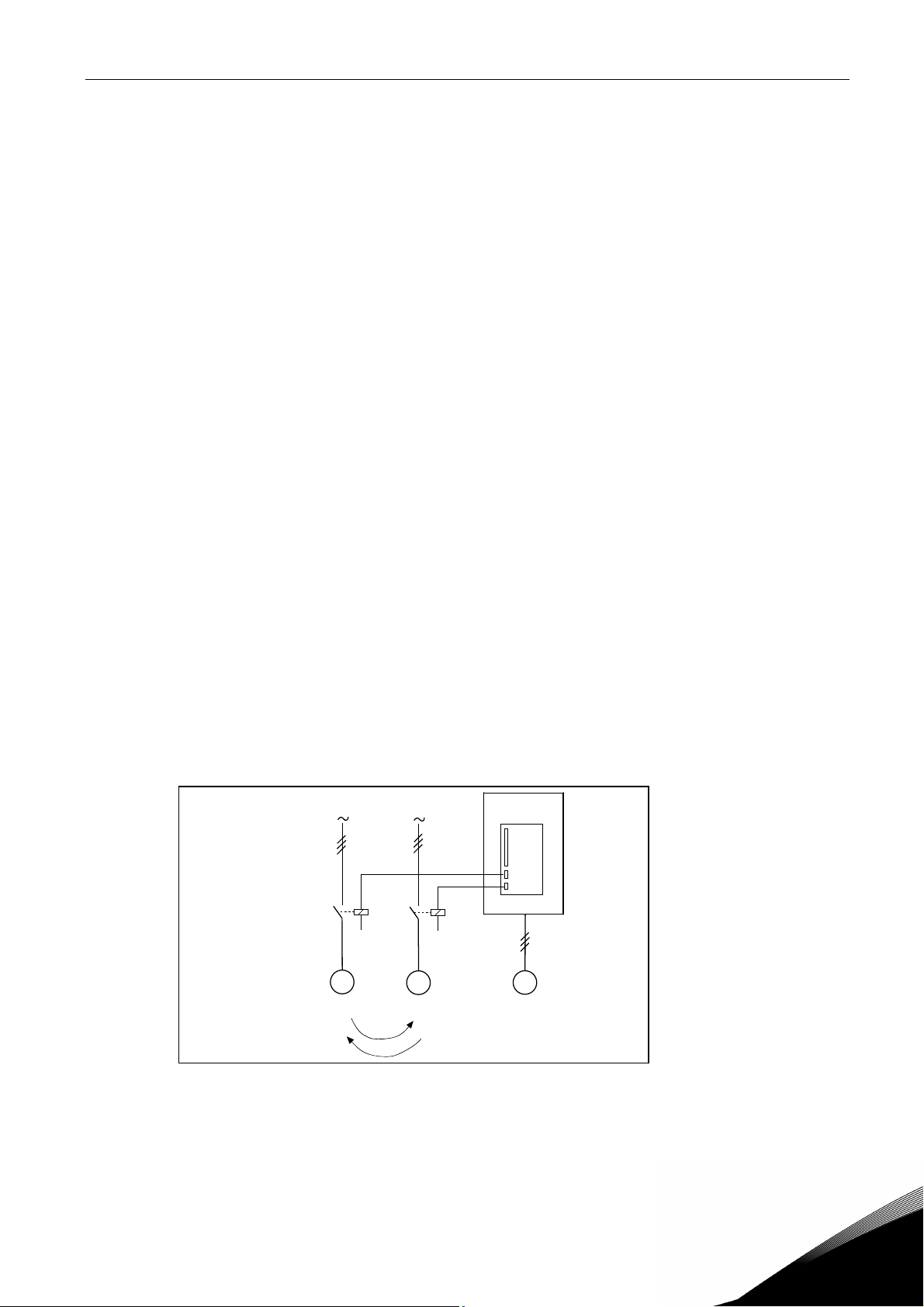
parameterbeskrivelser vacon • 61
4.10.3 Beskrivelse af parametrene til pumpe og ventilatorstyring
2.10.1 Antal hjælpedrev
Antallet af hjælpedrev, der skal anvendes, defineres med denne parameter. De funktioner, der styrer hjælpedrevene (parameter 2.10.4 til 2.10.7) kan programmeres til
relæudgange.
2.10.2 Startforsinkelse på hjælpedrev
Frekvensen på drevet, der styres af frekvensomformeren, skal forblive højere end
hjælpedrevets startfrekvens i det tidsrum, der defineres med denne parameter, før
hjælpedrevet startes. Den forsinkelse, der defineres, gælder alle hjælpedrev. Dette
forhindrer unødvendige starter som følge af momentvise overskridelser af
startgrænsen.
2.10.3 Stopforsinkelse på hjælpedrev
Frekvensen på drevet, der styres af frekvensomformeren, skal forblive under hjælpedrevets stopgrænse i det tidsrum, der defineres med denne parameter, før hjælpedrevet
standses. Den forsinkelse, der defineres, gælder alle hjælpedrev. Dette forhindrer
unødvendige stop som følge af momentvise fald under stopgrænsen.
2.10.4 Automatiske skift mellem drev
0= Ikke anvendt
1= Autoskift med hjælpepumper
Det drev, der styres af frekvensomformeren, forbliver det samme. Derfor er der kun
behov hovedkontakter til ét hjælpedrev.
M
Motor-hjælpedrev
1
M
Motor-hjælpedrev 2
Va c on
M
NX12k96.fh8
Figur 1-35. Autoskift udelukkende på hjælpedrev.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 63
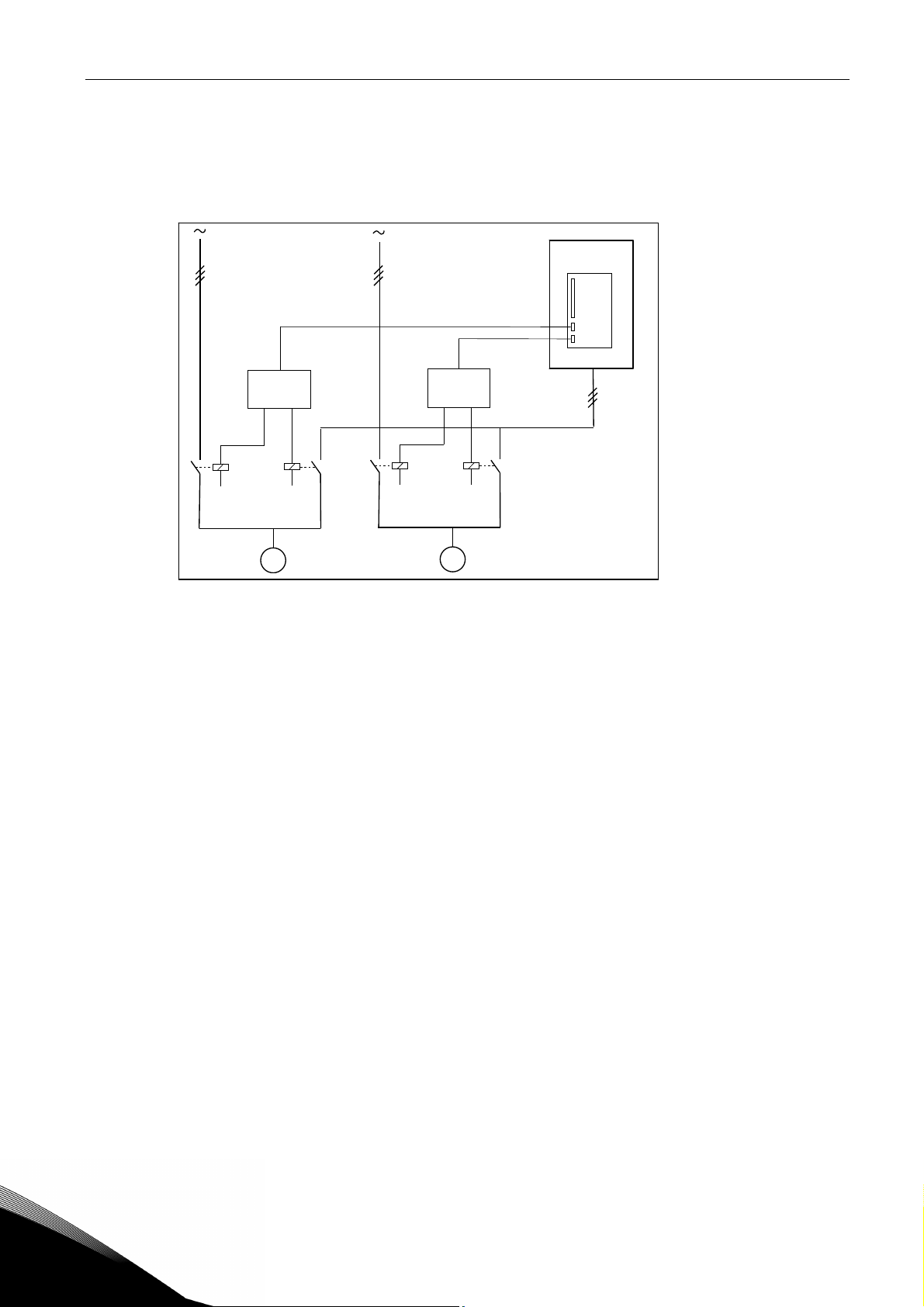
62 • vacon parameterbeskrivelser
2= Autoskift med frekvensomformer og hjælpepumper
Det drev, der styres af frekvensomformeren, inkluderes i automatikken, og der skal anvendes
en kontaktor til hvert enkelt drev til at forbinde dem til hovedforsyningen eller
frekvensomformeren.
Vacon
Hjælpeforbindelse
Drev 1 Drev 2
M
Hjælpeforbindelse
M
NX12k97.fh8
Figur 1-36. Autoskift med alle drev
3= Autoskift og interlocker (kun hjælpepumper)
Det drev, der styres af frekvensomformeren, forbliver det samme. Derfor er der kun behov
hovedkontaktor til ét hjælpedrev. Interlocker til autoskiftudgangene 1, 2, 3 (eller DIE1,2,3) kan
vælges med par.
2.1.17 og 2.1.18.
4= Autoskift og interlocker (frekvensomformer & hjælpepumper)
Det drev, der styres af frekvensomformeren, inkluderes i automatikken, og der skal
anvendes en kontaktor til hvert enkelt drev til at forbinde dem til hovedforsyningen eller
frekvensomformeren. DIN 1 er automatisk interlock for Autoskiftudgang 1. Interlocker til
Autoskiftudgang 1, 2, 3 (eller DIE1,2,3) kan vælges med par.
2.1.17 og 2.1.18.
2.10.5 Autoskiftinterval
Når tiden, som er defineret med denne parameter, er udløbet, træder autoskiftfunktionen
i kraft, hvis den anvendte kapacitet ligger under niveauet defineret med parametrene
2.10.7 (
Autoskiftfrekvensgrænse
overstige værdien af P2.10.7, udføres der ingen autoskift, før kapaciteten kommer under
denne grænse.
Nedtællingen af tid aktiveres kun hvis Start-/Stop-forespørgslen er aktiv.
Nedtællingen af tid nulstilles, når autoskiftet er udført, eller når startforespørgslen
fjernes.
) og 2.10.6 (
Højeste antal hjælpedrev
Telefon: +358-201-2121 • Fax: +358-201-212 205
). Skulle kapaciteten
Page 64

parameterbeskrivelser vacon • 63
2.10.6 Højeste antal hjælpedrev
2.10.7 Autoskiftfrekvensgrænse
Disse parametre definerer det niveau, som den anvendte kapacitet skal ligge under,
før et autoskift kan udføres.
Niveauet defineres sådan:
Hvis antallet af hjælpedrev i drift er mindre end værdien af p2.10.6, kan der udføres
et autoskift.
Hvis antallet af hjælpedrev i drift er lig med værdien af parameter 2.10.6, og
frekvensen på det styrede drev er under værdien af parameter 2.10.7, kan der
udføres et autoskift.
Hvis værdien af parameter 2.10.7 er 0,0 Hz, kan der kun udføres autoskift
i hvileposition (Stop og Sove) uanset værdien af parameter 2.10.6.
Udgangsfrekvens
Par. 2.10.6 = 1
Højeste antal
hjælpedrev
Autoskift tidsenhed
Par. 2.10.7
Autoskiftniveau,
frekvens
Par. 2.10.5
Autoskiftinterval
Styring af
hjælpedrev 1
Styring af
hjælpedrev 2
Figur 1-37 Autoskiftinterval og -grænser
2.10.8 Startfrekvens, hjælpedrev 1
Frekvensen på drevet, der styres af frekvensomformeren, skal være 1 Hz højere end
grænsen, der defineres med disse parametre, før hjælpedrevet startes. Overskridelsen
på 1 Hz frembringer en hysterese for at undgå unødvendige starter og stop. Se også
parameter 2.1.1 og 2.1.2.
2.10.9 Stopfrekvens, hjælpedrev 1
Tid
Par. 2.10.5
Autoskiftinterval
NXLK56.fh8
Frekvensen på drevet, der styres af frekvensomformeren, skal være 1Hz lavere end
grænsen, der defineres med disse parametre, før hjælpedrevet standses. Stopfrekvensgrænsen definerer også den frekvens, som drevet, der styres af frekvensomformeren, falder til, efter at hjælpedrevet startes.
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 65

64 • vacon parameterbeskrivelser
4.11 PANELSTYRINGSPARAMETRE
3.1 Styrested
Det aktive styrested kan ændres med denne parameter. Se også Vacon NXL-betjeningsmanualen, kapitel 7.4.3.
3.2 Panelreference
Frekvensreferencen kan justeres fra panelet med denne parameter. Se også Vacon
NXL-betjeningsmanualen, kapitel 7.4.3.2.
3.3 Panelretning
0 Fremad: Motorens rotation er fremad, når panelet er aktivt styrested.
1 Modsat: Motoren roterer modsat, når panelet er aktivt styrested.
Se også Vacon NXL-betjeningsmanualen, kapitel 7.4.3.3.
3.4 Stopknap aktiveret
Stopknappen kan indstilles som "hotspot", hvilket vil sige, at den altid standser frekvensomformeren, uanset hvilket styrested, der er aktivt. Det gøres ved at give denne
parameter værdien 1 (standardindstilling). Se også Vacon NXL-betjeningsmanualen,
kapitel 7.4.3.
Se også parameter 3.1.
3.5 PID-reference 1
PID-controllerens panelreference kan indstilles til mellem 0 % og 100 %. Denne
referenceværdi er den aktive PID-reference, hvis parameter 2.9.2 = 2.
3.6 PID-reference 2
PID-controllerens panelreference kan indstilles til mellem 0 % og 100 %. Denne
reference er aktiv, hvis DIN# funktionen=12 og DIN#-kontakten er lukket.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 66

parameterbeskrivelser vacon • 65
5. STYRESIGNALLOGIK I MULTISTYRINGSAPPLIKATIONEN
DIN3
Exp.DIE1
Exp.DIE3
DIN2
DIN3
AI1
AI2
DIN1
DIN2
Fast hastighed 1
Fast hastighed 2
2.2.21
2.2.20
> 1
Disable PID
Fieldbusstyringsrefe rence
Panelstyrin gsreference
2.1.14 I/O-reference
Up
Motor-
Down
potentiometer
2.9.2 PID-reference
P3.5 PID pa nel-r efer.
Refere nce f ra
fieldbus
(FBProcessData IN 1)
R3.2 Panelreference
Reference fra fieldbus
Start/Stop from fieldbus
Retning from fieldbus
Start fremad
Start modsat
(prog ramm erba r)
Programmerbar
Start/Stop og
modsat-logik
0
1
2
3
0
1
2
3
4
0
1
2
3
4
5
0
1
2
3
4
5
Panelretning
3.3
PID
I/ORef.
2.1.14
K
F
DI N3 & Ex p. DI E1
Exp.DIE1
Muliggør PID-panelref. 2 (DIN#=12)
2.1.2 Maks.-frekvens
DIN3
2.1.20
2.1.21
R3.6 PID-panelref. 2
Indgang til aktuel
værdi, par
P2.9 .1 PID aktivering
3.1 Sty rest e d
Panel
Fieldbus
E/S
Intern
frekvensref.
Nulstilknap
Start-/Stopknapper
Fast hastighe d
Fast hastighe d
. 2.9.3
Int ern Start/Stop
Intern modsat
1
2
PID
Exp. DIE2
nx lk47.fh8
Indgang ti l fejlnulstilling (programmerbar)
Figur 1- 38. Styresignallogik i Multistyringsapplikationen
24-timers support: +358-40-8371 150 • E-mail: vacon@vacon.com
Intern fejlnulstilling
> 1
4
 Loading...
Loading...