

Page 1

vacon nxl
®
inversores de ca
manual da aplicação
multicontrolo
Page 2

vacon • 1
Aplicação de Controlo Multifunções Vacon (Software ALFIFF20)
Ver. 3.45
ÍNDICE
1. Introdução.......................................................................................................................... 2
2. E/S de controlo .................................................................................................................. 3
3. Aplicação de Controlo Multifunções - Listas de Parâmetros............................................. 4
3.1 Valores de monitorização (Consola de Programação: menu M1)............................................. 4
3.2 Parâmetros básicos (Consola de Programação: Menu P2 P2.1) ......................................... 5
3.3 Sinais de entrada (Consola de Programação: Menu P2 P2.2).............................................. 8
3.4
3.5
3.6 Parâmetros de frequências proibidas (Consola de Programação: Menu P2 P2.5) ........... 11
3.7 Parâmetros de controlo do motor (Consola de Programação: Menu P2 P2.6) ................. 12
3.8 Protecções (Consola de Programação: Menu P2 P2.7)...................................................... 13
3.9 Parâmetros de rearranque automático (Consola de Programação: Menu P2 P2.8)......... 14
3.10 Parâmetros de referência PID (Consola de Programação: Menu P2 P2.9)....................... 14
3.11 Parâmetros de controlo da bomba e ventiladores (Consola de Prog.: Menu P2 P2.10) ... 16
3.12 Controlo da consola (Consola de Programação: Menu K3) .................................................... 17
3.13 Menu de Sistema (Consola de Programação: Menu S6)......................................................... 17
3.14 Placas de expansão (Consola de Programação: Menu E7)..................................................... 17
Sinais de saída (Consola de Programação: Menu P2 P2.3)................................................ 10
Parâmetros de controlo do accionamento (Consola de Programação: Menu P2 P2.4).... 11
4. DESCRIÇÃO DOS PARÂMETROS....................................................................................... 18
4.1 PARÂMETROS BÁSICOS ........................................................................................................... 18
4.2
4.3
4.4 CONTROLO DO ACCIONAMENTO............................................................................................. 31
4.5
4.6
4.7
4.8
4.9 PARÂMETROS DE REFERÊNCIA PID ....................................................................................... 48
4.10 CONTROLO DA BOMBAS E VENTILADORES............................................................................ 54
4.11 PARÂMETROS DE CONTROLO DA CONSOLA .......................................................................... 64
5. LÓGICA DE SINAIS DE CONTROLO NA APLICAÇÃO MULTIFUNÇÕES............................... 65
SINAIS DE ENTRADA ................................................................................................................ 23
SINAIS DE SAÍDA ...................................................................................................................... 27
FREQUÊNCIAS PROIBIDAS ...................................................................................................... 35
CONTROLO DO MOTOR............................................................................................................. 36
PROTECÇÕES............................................................................................................................ 39
PARÂMETROS DE REARRANQUE AUTOMÁTICO..................................................................... 47
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
1
Page 3

2 • vacon Introdução
Aplicação de Controlo Multifunções
1. INTRODUÇÃO
A Aplicação de Controlo Multifunções para o Vacon NXL utiliza a referência de frequência directa
a partir da entrada analógica 1 por defeito. No entanto, um controlador PID pode ser utilizado, por
exemplo, em aplicações de bombas e ventiladores, disponibilizando funções de medição e de ajuste
internas versáteis. Ao iniciar o comissionamento do conversor, o único grupo de parâmetros visível
é P2.1 (Parâmetros básicos). É possível navegar pelos parâmetros especiais e editá-los após alterar
o valor do par. 2.1.22 (Ocultar parâmetro).
A referência directa de frequência pode ser utilizada para controlo sem o controlador PID, podendo
ser seleccionada a partir das entradas analógicas, bus de campo, consola, velocidades predefinidas
ou potenciómetro motorizado.
É possível navegar pelos parâmetros especiais relativos ao Controlo da Bombas e Ventiladores
(Grupo P2.10) e editá-los depois de alterar o valor do par 2.9.1 para 2 (Controlo da bombas e
ventiladores activado).
A referência do controlador PID pode ser seleccionada a partir das entradas analógicas, bus de campo,
referência da consola PID 1 ou activando a referência da consola PID 2 através da entrada digital.
O valor real do controlador PID pode ser seleccionado a partir das entradas analógicas, bus de campo
ou os valores actuais do motor. O controlador PID também pode ser utilizado quando o conversor
de frequências é controlado através do bus de campo ou da consola de programação.
As entradas digitais DIN2, DIN3, (DIN4) e as entradas dig. opcionais DIE1, DIE2, DIE3
podem ser programadas livremente.
As saídas analógicas e de relé/digitais opcionais e internas podem ser programadas livremente.
A entrada analógica 1 pode ser programada como entrada de corrente, entrada de tensão
ou entrada digital DIN4.
NOTA! Se a entrada analógica 1 tiver sido programada como DIN4 com o parâmetro 2.2.6
(Gama de sinal AI1), verifique se as selecções de jumper (Figura 1- 1) estão correctas.
Funções adicionais:
O controlador PID pode ser utilizado a partir da E/S de locais de controlo, da consola de programação
e do bus de campo
Função adormecer
Função de supervisão do valor actual: totalmente programável; desactivado, aviso, falha
Lógica de sinal Iniciar/Parar e Inversão programável
Escala de referência
2 velocidades predefinidas
Selecção da gama de entrada analógica, ajuste do sinal, inversão e filtragem
Supervisão do limite de frequência
Funções de marcha e paragem programáveis
Travão de CC no arranque e na paragem
Área de proibição de frequência
Curva U/f e optimização U/f programáveis
Frequência de comutação ajustável
Função de rearranque automático após falha
Protecções e supervisões (toas totalmente programáveis; desactivado, aviso, falha):
Falha da entrada de corrente
Falha externa
Fase de saída
Subtensão
Falha de terra
Protecção térmica, motor bloqueado
e de subcarga do motor
Termístor
Comunicação do bus de campo
Placa opcional
1
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 4
E/S de controlo VACON • 3
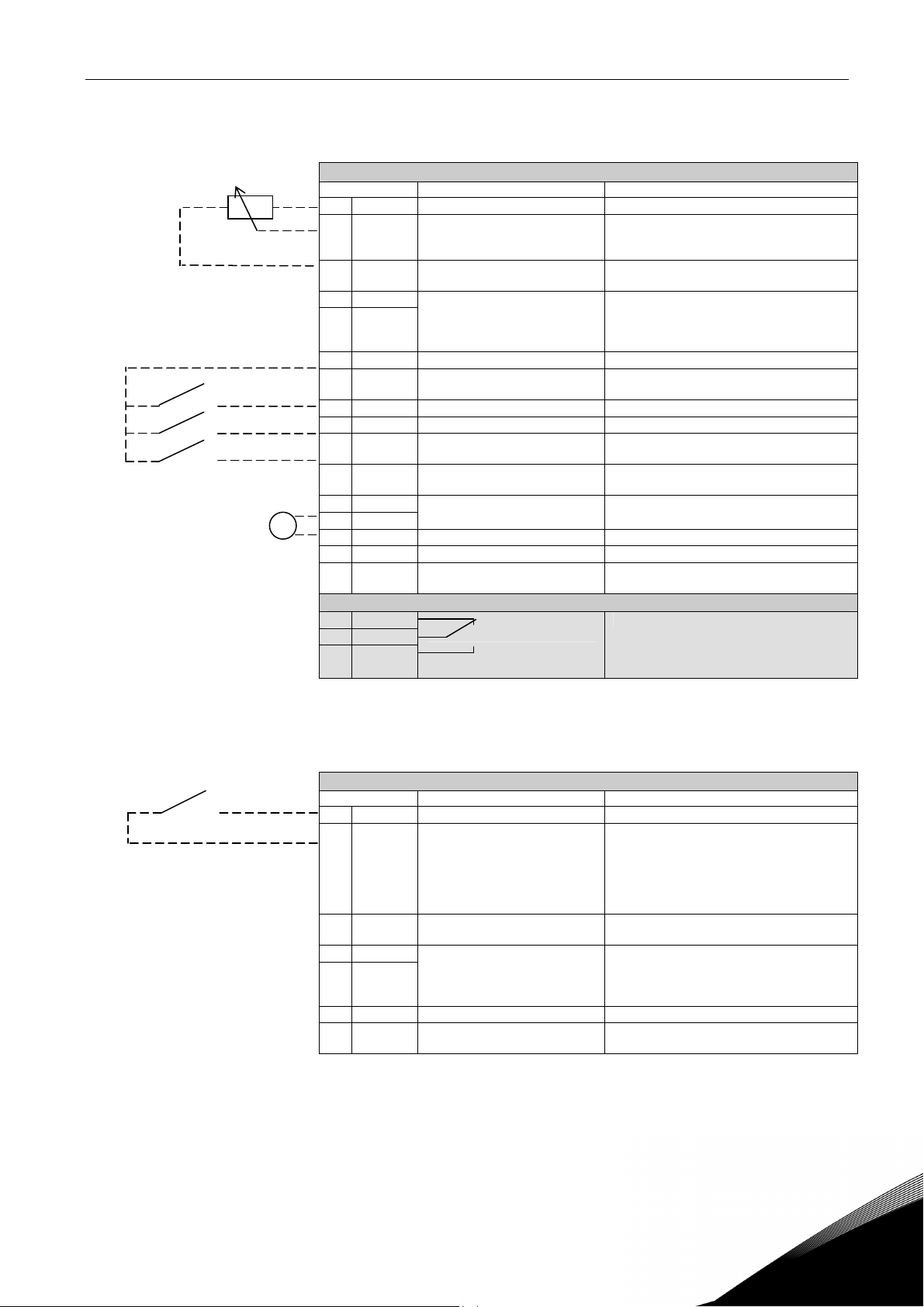
2. E/S DE CONTROLO
Potenciómetro de
referência
Terminal Sinal Descrição
+10V
Saída de referência Tensão do potenciómetro, etc.
ref
AI1+ Entrada analógica, gama de
AI1-
AI2+
AI2-
/GND
+24V
GND
DIN1
DIN2
DIN3
GND Terra para E/S
AO1+
AO1RS 485 Bus de série Receptor/transmissor diferencial
RS 485 Bus de série Receptor/transmissor diferencial
+24V Tensão auxiliar de entrada 24V Controlo da fonte de alimentação
tensão 0—10V DC.
Terra para E/S Ligação de terra para referência
Entrada analógica, gama de
tensão 0—10V CC ou gama de
corrente 0/4—20mA
Saída de tensão de controlo Tensão para comutadores, etc. máx 0.1 A
Terra para E/S
Marcha directa Contacto fechado = arranque para a frente
Marcha inversa (programável) Contacto fechado = arranque para trás
Selecção de velocidade de
vários passos 1 (programável)
Frequência de saída
Saída analógica
Ligação de terra para referência
Referência de frequência da entrada
de tensão
Pode ser programada como DIN4
e controlos
Referência de frequência de corrente
de entrada
Ligação de terra para referência
e controlos
Contacto fechado = velocidade em vários
passos 1
e controlos
Programável
Gama 0—20 mA/R
de reserva
L
mA
1
2
3
4
5
6
7
8
9
10
11
18
19
A
B
30
RO1
21
22 RO1
23 RO1
Saída relé 1
FALHA
Programável
Tabela 1-1. Configuração de E/S , por defeito, da aplicação multifunções
propósito.
, máx. 500
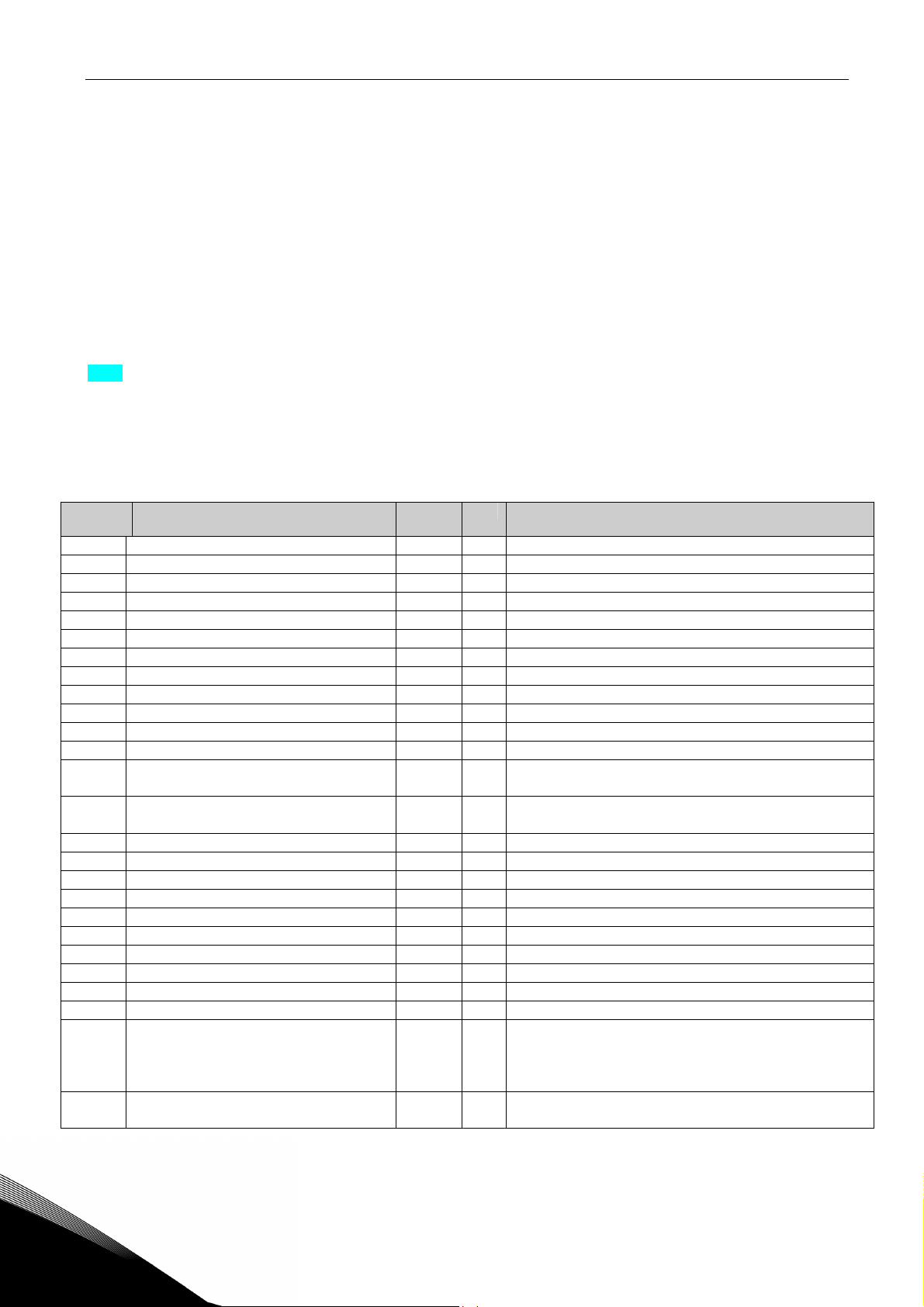
Terminal Sinal Descrição
+10V
1
AI1+
2
ou
DIN 4
AI1- Terra para E/S Ligação de terra para referência e
3
AI2+
4
AI2-
5
/GND
+ 24 V Tensão auxiliar 24V
6
GND Massa para E/S Ligação de terra para referência
7
Saída de referência Tensão do potenciómetro, etc.
ref
Entrada analógica, gama de
tensão 0—10V DC
Entrada analógica, gama de
corrente 0—20mA
Referência de frequência da entrada
de tensão (MF2-3)
Referência de frequência da corrente/
tensão de entrada
(MF4-MF6)
Pode ser programada como DIN4
controlos
Referência de frequência de corrente
de entrada
e controlos
Tabela 1-2. Configuração de AI1, quando programada como DIN4
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
2
Page 5
4 • vacon LISTAS DE PARÂMETROS
3. LISTAS DE PARÂMETROS
As páginas que se seguem contêm as listas de parâmetros nos respectivos grupos. As descrições dos
parâmetros são fornecidas nas páginas 18 a 48.
Explicações das colunas:
Código = Indicação da localização na consola; Mostra ao operador o número do parâmetro actual
Parâmetro = Nome do parâmetro
Mín = Valor mínimo do parâmetro
Máx = Valor máximo do parâmetro
Unidade = Unidade de valor do parâmetro; Fornecida se estiver disponível
Predefinição = Valor predefinido de fábrica
Clie. = Definição própria do cliente
ID = Número de ID do parâmetro (utilizado com ferramentas do PC)
= No código do parâmetro: o valor do parâmetro só pode ser alterado depois de o Conversor ter sido parado.
3.1 Valores de monitorização (Consola de programação: menu M1)
Os valores de monitorização são os valores reais dos parâmetros e sinais, bem como estados
e medições. Os valores de monitorização não podem ser editados.
Consulte o Manual de Utilizador Vacon NXL, Capítulo 7.4.1 para obter mais informações.
Código Parâmetro Uni-
dade
V1.1 Frequência de saída Hz 1 Frequência para o motor
V1.2 Referência de frequência Hz 25
V1.3 Velocidade do motor rpm 2 Velocidade calculada do motor
V1.4 Corrente do motor A 3 Corrente do motor medida
V1.5 Binário do motor % 4 Binário real/binário nominal calculado do motor
V1.6 Potência do motor % 5 Potência real/potência nominal calculada do motor
V1.7 Tensão do motor V 6 Tensão calculada do motor
V1.8 Tensão no barramento CC V 7 Tensão medida no barramento CC
V1.9 Temperatura da unidade °C 8 Temperatura do dissipador
V1.10 Entrada analógica 1 13 AI1
V1.11 Entrada analógica 2 14 AI2
V1.12 Corrente de saída analógica mA 26 AO1
V1.13
V1.14
V1.15 DIN1, DIN2, DIN3 15 Estados da entrada digital
V1.16 DIE1, DIE2, DIE3 33 Placa de expansão de E/S: Estados da entrada digital
V1.17 RO1 34 Estado da saída do relé 1
V1.18 ROE1, ROE2, ROE3 35 Placa exp. de E/S: Estados de saída do relé
V1.19 DOE 1 36 Placa exp. de E/S: Estado da saída digital 1
V1.20 Referência PID % 20 Em percentagem da frequência máxima
V1.21 Valor real PID % 21 Em percentagem do valor real máximo
V1.22 Valor de erro PID % 22 Em percentagem do valor de erro máximo
V1.23 Saída PID % 23 Em percentagem do valor de saída máximo
V1.24 Rotação das saídas 1, 2, 3 30 Utilizadas apenas no controlo bombas e ventiladores
V1.25 Modo 66
V1.26 Temperatura do motor % 9
Corrente de saída analógica 1, placa de
expansão
Corrente de saída analógica 2, placa de
expansão
mA
mA 32
Tabela 1-3. Valores de monitorização
ID Descrição
31
Apresenta o modo de funcionamento actual seleccionado
através do assistente de programação: 0=Não
seleccionado, 1=Standard, 2=ventilador (Fan), 3=bomba
(Pump), 4=alto desempenho (High performance)
Temperatura do motor calculada - 1000 equivale
a100,0% = temperatura nominal do motor
3
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 6
LISTAS DE PARÂMETROS VACON • 5
3.2 Parâmetros básicos (consola de programação: Menu P2 P2.1)
Código Parâmetro Mín Máx Unidade Prede-
finição
P2.1.1 Frequência mín 0,00 Par. 2.1.2 Hz 0,00 101
P2.1.2 Frequência máx Par. 2.1.1 320,00 Hz 50,00
P2.1.3 Tempo de aceleração 1 0,1 3000,0 s 1,0 103
P2.1.4
P2.1.5 Limite de corrente 0,1 x IL 1,5 x IL A IL
P2.1.6 Tensão nominal do motor180 690 V
P2.1.7
P2.1.8
P2.1.9
P2.1.10 Cos phi do motor 0,30 1,00 0,85
P2.1.11 Tipo de arranque 0 1 0 505
P2.1.12 Tipo de paragem 0 1 0
P2.1.13 Optimização U/f 0 1 0
P2.1.14
P2.1.15 Gama de sinal AI2 1 4 2
Tempo de desaceleração
1
Frequência nominal do
motor
Velocidade nominal do
motor
Corrente nominal do
motor
Selecção da Referência
de E/S
0,1 3000,0 s 1,0
NXL2:230v
NXL5:400v
30,00 320,00 Hz 50,00
300 20 000 rpm 1440
0,3 x I
0 5 0
1,5 x IL A I
L
L
Pers ID Nota
NOTA: Se f
velocidade síncrona do
102
motor, verifique se o motor
e do sistema de
accionamento o permitem
104
NOTA: As fórmulas
aplicam-se
aproximadamente para
107
conversores de frequência
até MF3. Para tamanhos
maiores, contacte
o fabricante.
110
Verificar a placa de
111
características do motor
A predefinição aplica-se
a um motor com 4 pólos
112
e a um conversor de
frequência de potência
nominal.
Verificar a placa de
113
características do motor
Verificar a placa de
120
características do motor
0=Rampa
1=Arranque motor girando
0=Livre
506
1=Rampa
0=Não utilizado
109
1=Binário de reforço
automático
0=AI1
1=AI2
2=Referência Consola
3=Referência Bus de
117
Campo
(ReferênciaVelocidadeFB)
4=Potenciómetro do motor
motorizado
5=Selecção de AI1/AI2
Não utilizado se o valor
mínimo do cliente para AI2
for > 0% ou se o valor
máximo do cliente para AI2
390
for < 100%
1=0—20 mA
2=4—20 mA
3=0V – 10V
4=2V – 10V
for > à
max
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
3
Page 7
6 • vacon LISTAS DE PARÂMETROS
P2.1.16
Função de saída
analógica
0 12 1
307
P2.1.17 Função DIN2 0 10 1 319
0=Não utilizado
1=Freq. de saída
)
(0—f
máx
2=Referência de freq.
(0—f
)
max
3=Velocidade do motor
(0—Velocidade nominal
do motor)
4=Corrente de saída
(0—I
nMotor
)
5=Binário do motor
(0—T
nMotor
)
5=Potência do motor
(0—P
nMotor
)
7=Tensão do motor
(0--U
nMotor
)
8=Tensão barramento CC
(0—1000V)
9=Valor de ref. do
controlador PI
10=Valor actual do
controlador PI 1
11=Valor de erro do
controlador PI
12=Saída do controlador
PI
0=Não utilizado
1=Marcha inversa
(DIN1=Marcha directa)
2= Inversa (DIN1=Marcha)
3=Impulso de paragem
(DIN1=Impulso de
marcha)
4=Falha externa, c.fech.
5=Falha externa, c.aberto
6=Autorização de marcha
7=Velocidade constante 2
8= Pot. do motor UP (cc)
9= Desactivar PID
(Referência de freq.
directa)
10=Encravamento 1
3
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 8
LISTAS DE PARÂMETROS VACON • 7
0=Não utilizado
1= Inversão
2=Falha externa, c.fech.
3=Falha externa, c.aberto
4=Reset de falhas
5=Autorização de Marcha
6=Velocidade constante 1
7=Velocidade constante 2
8=Comando da travagem
de CC
9=Pot. motorizado UP (c.f.)
10=Pot. motorizado DOWN
(c.aberto)
P2.1.18 Função DIN3 0 17 6 301
P2.1.19
P2.1.20
P2.1.21 Rearranque automático 0 1 0
P2.1.22 Ocultar parâmetros 0 1 0
Velocidade predefinida
1
Velocidade predefinida
2
0,00 Par. 2.1.2 Hz 10,00
0,00 Par. 2.1.2 Hz 50,00
11= Desactivar PID
(Referência de freq.
directa)
12=Selecção da ref. 2 da
consola PID
13=Encravamento 2
14=Entrada termístor
Nota! Consulte o
Manual de Utilizador
NXL, Capítulo 6.2.4
15= Impor lc como E/S
16= Impor lc como Bus de
campo
17= Selecção de AI1/AI2
para a Referência de E/S
105
106
0=Não utilizado
731
1=Utilizado
0=Todos os parâmetros
115
e menus visíveis
1=Apenas grupo P2.1 e
menus M1 a H5 visíveis
Tabela 1-4. Parâmetros básicos P2.1
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
lc= local de controlo
3
Page 9
8 • vacon LISTAS DE PARÂMETROS
3.3 Sinais de entrada (Consola de programação: Menu P2 P2.2)
Código Parâmetro Mín Máx Uni-
dade
P2.2.1
P2.2.2
P2.2.3
P2.2.4 Função DIN4 (AI1)
P2.2.5 Selecção de sinal AI1
P2.2.6 Gama de sinal AI1
P2.2.7
P2.2.8
P2.2.9 Inversão AI1
P2.2.10 Tempo filtragem AI1
P2.2.11 Selecção de sinal AI2
Função DIE1 da
placa de expansão
Função DIE2 da
placa de expansão
Função DIE3 da
placa de expansão
Ajuste min.cliente
AI1
Ajuste max. cliente
AI1
0 13 7
0 13 4
0 13 11
0
0
1
0,00
0,00
0
0,00
0
13 2
10
4 3
100,00 % 0,00
100,00 % 100,00
1 0
10,00 s 0,10
11 388 Como o par. 2.2.5
Predefinição
Pers ID Nota
0=Não utilizado
1=Inversão
2=Falha externa, c.f.
3=Falha externa, c.a.
4=Reset de falhas
5=Autorização de Marcha
6=Velocidade constante 1
7=Velocidade constante 2
8= Injecção de CC
368
9=Pot.motorizado UP
(c.f.)
10=Pot.motororizado DOWN
(c.f.)
11=Desactivar PID (selecção
do controlo PID)
12=Selecção da ref. 2 da
consola PID
13=Encravamento 1
Igual ao par. 2.2.1, excepto:
330
13=Encravamento 2
Igual ao par. 2.2.1, excepto:
369
13=Encravamento 3
Utilizada se P2.2.6 = 0
499
Selecções como no
par.2.2.3
10=AI1 (1=Placa ent.loc.l,
0=entrada 1)
11=AI2 (1=Placa ent local,
1= entrada 2)
20=Exp. AI1
377
21=Exp AI2
0=Entrada digital 4
1=0mA – 20mA (MF4-->)
2=4mA – 20mA (MF4-->)
3=0V – 10V
4=2V – 10V
Não utilizado se o valor
379
mínimo cliente de AI2 for
> 0% ou se o valor
máximo cliente de AI2 for
< 100%
Nota! Consulte o Manual
de Utilizador NXL, capítulo
7.4.6: Modo AI1
380
381
0=Não invertido
387
1=Invertido
378
0=Sem filtragem
(2=placa de exp.
0=entrada 1)
(2=placa de exp.
1=entrada 2)
3
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 10
LISTAS DE PARÂMETROS VACON • 9
P2.2.12 Gama de sinal AI2
P2.2.13 Ajuste min.clienteAI2
P2.2.14
P2.2.15 Inversão AI2
P2.2.16 Tempo filtragem AI2
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
juste max. cliente
AI2
Reset da memória
do potenciómetro
motorizado
Valor mínimo da
escala de referência
Valor máximo da
escala de referência
Selecção de
referência da
consola de
programação
Selecção de
referência de
controlo do bus de
campo
0,00
0,00
0,00
0,00
P2.2.18
Tabela 1-5. Sinais de entrada, P2.2
1
0
0
0 5 2
0 5 3
4 2
100,00 % 0,00 391
100,00 % 100,00
1 0
10,00 s 0,10 389 0=Sem filtragem
2 1
P2.2.19 0,00
320,00 0,00
Não utilizado se o valor
mínimo cliente de AI2 for
> 0% ou se o valor
máximo cliente de AI2 for
390
< 100%
1=0—20 mA
2=4—20 mA
3=0V – 10V
4=2V – 10V
392
0=Não invertido
398
1=Invertido
0=Sem reset
1=Reset se parado ou
367
344
345
121
122 Consulte acima
desligada alim.
2=Reset se desligada alim
0=AI1
1=AI2
2=Referência da consola
3=Referência de bus de
campo
(ReferênciaVelocidadeF
B)
4=Potenciómetro
motorizado
5=Controlador PID
CP=valor de controlo
cf=contacto fechado
oa=contacto aberto
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
3
Page 11
10 • vacon LISTAS DE PARÂMETROS
3.4 Sinais de saída (Consola de Programação: Menu P2 P2.3)
Código Parâmetro Mín Máx Uni-
dade
P2.3.1 Função da saída Relé 1 0 20 3
P2.3.2
P2.3.3
P2.3.4
P2.3.5
P2.3.6
P2.3.7
P2.3.8
P2.3.9
P2.3.10
P2.3.11
P2.3.12
P2.3.13
Função da saída Relé 1
da placa de expansão
Função da saída Relé 2
da placa de expansão
Função da saída digital
1 da placa de expansão
Função da saída
analógica
Tempo de filtragem
da saída analógico
Inversão da saída
analógica
Mínimo de saída
analógica
Escala de saída
analógica
Conteúdo da saída
analógica 1 da placa
de expansão
Conteúdo da saída
analógica 2 da placa
de expansão
Supervisão do limite
da frequência de saída 1
Valor de supervisão do
limite de frequência
de saída 1
0 19 2
0 19 3
0 19 1
0 12 1
0,00 10,00 s 1,00
0 1 0
0 1 0
10 1000 % 100
0 12 0 472 Como o parâmetro 2.1.16
0 12 0
0 2 0
0,00
Par.
2.1.2
Hz 0,00
Predefi
nição
Pers ID Nota
0=Não utilizado
1=Pronto
2=Marcha
3=Falha
4=Falha invertida
5=Aviso de
sobreaquecimento do
conversor de freq.
6=Aviso ou falha ext.
6=Aviso ou falha de ref.
8=Aviso
9=Inversão
313
10=Velocidade constante
11=Á velocidade
12=Regulador motor activo
13=Superv.de freq. saída,
limite 1
14=Local de controlo: E/S
15=Aviso/ falha do termístor
16=Supervisão do valor
actual
17=Controlo rotaç. bomba 1
18=Controlo rotaç. bomba 2
19=Controlo rotaç. bomba 3
20=Monitorização AI
314 Como o parâmetro 2.3.1
317 Como o parâmetro 2.3.1
312 Como o parâmetro 2.3.1
307
Consulte o par. 2.1.16
308 0=Sem filtragem
0=Não invertido
309
1=Invertido
0=0 mA
310
1=4 mA
311
479 Como o parâmetro 2.1.16
0=Sem supervisão
315
1=Supervisão do limite baixo
2=Supervisão do limite alto
316
3
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 12
LISTAS DE PARÂMETROS VACON • 11
P2.3.14
P2.3.15
P2.3.16
P2.3.17
P2.3.18
Supervisão de entrada
analógica
Supervisão entrada
analógica: limite
de desactivação
Supervisão entrada
analógica: limite
de activação
Atraso de activação
da saída de relé 1
Atraso de desactivação
da saída de relé 1
0 2 0
0,00 100,00 % 10,00
0,00 100,00 % 90,00
0,00 320,00 s 0,00
0,00 320,00 s 0,00
0=Não utilizado
356
1=AI1
2=AI2
357
358
Atraso de activação para
487
RO1
Atraso de desactivação para
488
RO1
Tabela 1-6. Sinais de saída, P2.3
3.5 Parâmetros de controlo do accionamento (Consola de Programação: Menu P2 P2.4)
Código Parâmetro Mín Máx Uni-
dade
P2.4.1
P2.4.2 Chopper de travagem 0 3 0
P2.4.3
P2.4.4
P2.4.5
P2.4.6
P2.4.7 Travão por fluxo 0 1 0
P2.4.8
Forma da rampa de
aceler./desacel. 1
Corrente de travagem
CC
Tempo de travagem de
CC na paragem
Frequência para iniciar
a travagem de CC na
paragem em rampa
Tempo de travagem de
CC no arranque
Corrente de travagem
por fluxo
0,0 10,0 s 0,0
0,15 x
I
n
0,00 600,00 s 0,00
0,10 10,00 Hz 1,50
0,00 600,00 s 0,00
0,0 Varia A 0,0
A Varia
1,5 x I
n
Predefini
ção
Pers ID Nota
500
504
507
508
515
516
520
519
Tabela 1-7. Parâmetros de controlo do accionamento, P2.4
3.6 Frequências proibidas (Consola de Programação: Menu P2 P2.5)
0=Linear
>0=Tempo de rampa
da curva S
0=Desactivado
1=Utilizado no estado
de Marcha
3=Utilizado no estado
de Marcha e Parar
0=travão de CC
desactivado na paragem
0=travão de CC
desactivado no arranque
0=Desactivado
1=Activado
Código Parâmetro Mín Máx Uni-
dade
P2.5.1
P2.5.2
P2.5.3
Limite inferior da
área de frequências
proibidas 1
Limite superior da
área de frequências
proibidas 1
Ajuste da rampa de
ace./desac. entre os
limites das
frequências
proibidas
0,0
0,0
0,1 10,0
Par.
2.5.2
Par.
2.1.2
Hz 0,0
Hz 0,0
Tempo
s
Prede-
finição
1,0
Tabela 1-8. Frequências proibidas, P2.5
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
Pers ID Nota
509 0=Não utilizado
510 0=Não utilizado
Multiplicador do tempo
de rampa actualmente
518
seleccionado entre limites
de frequências proibidas
3
Page 13
12 • vacon LISTAS DE PARÂMETROS
3.7 Parâmetros de controlo do motor (Consola de Programação: Menu P2 P2.6)
Código Parâmetro Mín Máx Uni-
dade
P2.6.1
P2.6.2
P2.6.3
P2.6.4
P2.6.5
P2.6.6
P2.6.7
P2.6.8
P2.6.9
P2.6.10
P2.6.11 Identificação 0 1 0
Modo de controlo do
motor
Selecção da curva
U/f
Ponto de
desexcitação
Tensão no ponto
de desexcitação
Curva U/f, frequência
no ponto intermédio
Curva U/f, tensão no
ponto intermédio
Tensão de saída
à frequência zero
Frequência de
comutação
Controlador de
sobretensão
Controlador de
subtensão
0 1 0
0 3 0
30,00 320,00 Hz 50,00
10,00 200,00 % 100,00
0,00
0,00 100,00 % 100,00
0,00 40,00 % 0,00
1,0 16,0 kHz 6,0
0 1 1
0 1 1
par.
P2.6.3
Hz 50,00
Tabela 1-9. Parâmetros de controlo do motor, P2.6
Prede-
finição
Pers ID Nota
0=Controlo de frequência
600
1=Controlo de velocidade
0=Linear
1=Quadrática
108
2=Programável
3=Linear com optimização
do fluxo
602
603 n% x U
604
n% x U
605
Valor máx. do parâmetro
= par. 2.6.4
606 n% x U
601 Depende de kW
0=Não utilizado
607
1=Utilizado
0=Não utilizado
608
1=Utilizado
0=Sem acção
631
1=ID sem rotação
nmot
nmot
nmot
3
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 14
LISTAS DE PARÂMETROS VACON • 13
3.8 Protecções (Consola de Programação: Menu P2 P2.7)
Código Parâmetro Mín Máx
P2.7.1
P2.7.2 Resposta a falha externa 0 3 2 701
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
P2.7.13
P2.7.14
P2.7.15 Protecção de subcarga 0 3 0 713 Como o par. 2.7.1
P2.7.16
P2.7.17
P2.7.18 Tempo de subcarga 2,00 600,00 s 20,00 716
P2.7.19
P2.7.20
P2.7.21
P2.7.22 Supervisão do valor real 0 4 0
P2.7.23
P2.7.24
Resposta à falha de
referência 4mA
Resposta à falha de
subtensão
Supervisão da fase
de saída
Protecção contra falhas
à terra
Protecção térmica
do motor
Protecção térmica:
Factor de temperatura
ambiente do motor
Protecção térmica: Factor
de refrigeração do motor
à velocidade zero
Constante de tempo
térmica do motor
Ciclo de funcionamento
do motor
Protecção bloqueio do
motor
Limite intensidade de
bloqueio
Limite de tempo de
bloqueio
Frequência max. de
bloqueio
Protecção de subcarga-
carga na área do ponto
de desexcitação
Protecção de subcarga-
carga na área de
frequência zero
Resposta à falha do
termístor
Resposta à falha do bus
de campo
Resposta à falha da
ranhura da placa op.
Limite supervisão valor
real
Atraso na supervisão do
valor real
0 3 0
1 3 2
0 3 2
0 3 2
0 3 2
–100,0 100,0 % 0,0
0,0 150,0 % 40,0
1 200 mín 45
0 100 % 100
0 3 1
0,1 I
1,00 120,00 s 15,00
1,0 P 2.1.2 Hz 25,0
10,0 150,0 % 50,0
5,0 150,0 % 10,0
0 3 2
0 3 2
0 3 2
0,0 100,0 % 10,0
0 3600 s 5
x 2 A I
nmotor
Uni-
dade
Predefinição
x1.3
nmotor
Pers
ID Nota
0=Sem resposta
1=Aviso
2=Falha, parar conforme
700
param. 2.1.12
3=Falha, parar por paragem
livre
0=Sem resposta
727
1=Aviso
2=Falha, parar conforme
param. 2.1.12
702
3=Falha, parar por paragem
livre
703
704
705
706
707
708
709 Como o par. 2.7.1
710
711
712
714
715
732 Como o par. 2.7.1
733 Como o par. 2.7.1
734 Como o par. 2.7.1
0=Sem resposta
1=Aviso se abaixo do limite
735
2=Aviso se acima do limite
3=Falha, se abaixo do limite
4=Falha, se acima do limite
736
737
Tabela 1-10. Protecções, P2.7
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
3
Page 15
14 • vacon LISTAS DE PARÂMETROS
3.9 Parâmetros de rearranque automático (Consola de Programação: Menu P2 P2.8)
Código Parâmetro Mín Máx
Rearranque
P2.8.1
P2.8.2
P2.8.3
automático: Tempo
de espera
Rearranque
automático: Tempo
de tentativas
Rearranque
automático: Tipo
de marcha
0,10 10,00 s 0,50
0,00 60,00 s 30,00
0 2 0
Uni-
dade
Prede-
finição
Pers
ID Nota
717
718
0=Rampa
1=Arranque motor girando
719
2=De acordo com o par.
2.4.6
Tabela 1-11. Parâmetros de reinício automático, P2.8
3.10 Parâmetros de referência PID (Consola de Programação: Menu P2 P2.9)
Código Parâmetro Mín Máx
P2.9.1 Activação PID 0 1 0
P2.9.2 Referência PID 0 3 2
P2.9.3 Entrada do valor real 0 6 1
P2.9.4
P2.9.5
P2.9.6
P2.9.7
P2.9.8
P2.9.9
P2.9.10
P2.9.11 Atraso adormecer 0 3600 s 30 1017
P2.9.12 Nível despertar 0,00 100,00 % 25,00 1018
Ganho do
controlador PID
Tempo de
integração do
controlador PID
Tempo de
derivação do
controlador PID
Escala mínima do
valor real 1
Escala máxima do
valor real 1
Inversão do valor de
erro PID
Frequência
adormecer
0,0 1000,0 % 100,0
0,00 320,00 s 10,00
0,00 10,00 s 0,00
–1000,0
–1000,0
0
Par.
2.1.1
1000,0 % 0,00
1000,0 % 100,0
1 0
Par.
2.1.2
Uni-
dade
Hz 10,00
Prede-
finição
Pers
ID Nota
0=Não utilizado
1=Controlador PID
activado
163
2=Controlo da bomba
e ventiladores activo,
grupo P2.10 visível
0=AI1
1=AI2
2=Ref. Da consola (PID
332
334
118
119
132
336 0=Sem escala mínima
337 100=Sem escala máxima
340
1016
Ref 1)
3=Referência de bus
de campo
(ProcessDataIN1)
0=Sinal AI1
1=Sinal AI2
2=Bus de campo
(ProcessDataIN2)
3=Binário do motor
4=Velocidade do motor
5=Corrente do motor
6=Potência do motor
7=AI1-AI2
3
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 16
LISTAS DE PARÂMETROS VACON • 15
P2.9.13 Função despertar
0
3 0
Tabela 1-12. Parâmetros de referência PID, P2.9
0= Despertar quando
abaixo do nível
despertar (2.9.12)
1= Despertar quando
acima do nível
1019
despertar (2.9.12)
2= Despertar abaixo do
nível despertar (ref.
PID)
3= Despertar quando
acima do nível
despertar (ref. PID)
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
3
Page 17
16 • vacon LISTAS DE PARÂMETROS
3.11 Parâmetros de controlo de Bombas e Ventiladores
(Consola de Programação: Menu P2 P2.10)
NOTA! O grupo P2.10 só está visível se o valor do par. 2.9.1 for definido para 2.
Código Parâmetro Mín Máx
P2.10.1
P2.10.2
P2.10.3
P2.10.4
P2.10.5 Intervalo de rotação 0,0 3000,0 h 48,0
P2.10.6
P2.10.7
P2.10.8
P2.10.9
Número de motores
auxiliares
Atraso de arranque,
motores auxiliares
Atraso de paragem,
motores auxiliares
Rotação automática
entre motores
Número máximo de
motores auxiliares
Limite
de frequência
de rotação
Frequência de
arranque, motor
auxiliar 1
Frequência de
paragem, motor
auxiliar 1
0 3 1
0,0 300,0 s 4,0
0,0 300,0 s 2,0
0 4 0
0 3 1
0,00 par. 2.1.2 Hz 25,00
Par.
2.10.9
Par.
2.1.1
320,00 Hz 51,00
Par.
2.10.8
Uni-
dade
Hz 10,00
Tabela 1-13. Parâmetros de controlo da bomba e ventiladores, P2.10
Predefinição
Pers
ID Nota
1001
1010
1011
0=Não utilizado
1= Rotação com bombas
auxiliares
2= Rotação com
conversores de
frequência e bombas
1027
1029
1030
1031
1002
1003
auxiliares
3= Rotação e encravamento
(bombas auxiliares)
4= Rotação e encravamento
(conversor de
frequência e bombas
auxiliares)
0,0=TEST=40 s
Tempo decorrido para
a rotação
Nível de rotação para
motores auxiliares
Nível de frequência de
rotação para accionamento
de velocidade variável
3
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 18
VACON • 17
3.12 Controlo da consola (Consola de Programação: Menu K3)
Os parâmetros de selecção do local de controlo e direcção na consola estão indicados abaixo.
Consulte o Menu de controlo da consola no Manual de Utilizador Vacon NXL.
Código Parâmetro Mín Máx
P3.1 Local do controlo 1 3 1
R3.2
P3.3
R3.4 Botão Parar 0 1 1
R3.5
R3.6
Referência da
consola
Direcção (na
consola)
Referência PID 1
Referência PID 2
Par.
2.1.1
0 1 0
0,00 100,00 % 0,00
0,00 100,00 % 0,00
Par.
2.1.2
Uni-
dade
Hz
Tabela 1-14. Parâmetros de controlo da consola, M3
Prede-
finição
Pers
ID Nota
1= Terminal de E/S
125
2= Consola
3= Bus de campo
0= Directa
123
1= Inversa
0= Função limitada do
114
botão Parar
1= Botão Parar sempre
activo
Seleccionado com
entradas digitais
3.13 Menu Sistema (Consola de programação: Menu S6)
Para parâmetros e funções relacionados com a utilização geral do conversor de frequência, tais
como conjuntos de parâmetros personalizados ou informações sobre o hardware e software,
consulte o Capítulo 7.4.6 no Manual de Utilizador Vacon NXL.
3.14 Placas de expansão (Consola de Programação: Menu E7)
O menu E7 mostra as placas de expansão instaladas e informações relacionadas com as placas.
Para obter mais informações, consulte o Capítulo 7.4.7 no Manual de Utilizador Vacon NXL.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
3
Page 19

18 • vacon DESCRIÇÃO DOS PARÂMETROS
4. DESCRIÇÃO DOS PARÂMETROS
4.1 PARÂMETROS BÁSICOS
2.1.1, 2.1.2 Frequência mínima/máxima
Define os limites de frequência do conversor de frequência.
O valor máximo dos parâmetros 2.1.1 e 2.1.2 é de 320 Hz.
O software verifica automaticamente os valores dos parâmetros 2.1.19, 2.1.20, 2.3.13,
2.5.1, 2.5.2 e 2.6.5.
2.1.3, 2.1.4 Tempo de aceleração 1, tempo de desaceleração 1
Estes limites correspondem ao tempo necessário para que a frequência de saída acelere
da frequência zero para a frequência máxima definida (par. 2.1.2). Utiliza-se a mesma
lógica para a desaceleração.
2.1.5 Limite de corrente
Este parâmetro determina a corrente máxima do motor do conversor de frequência.
Para evitar a sobrecarga do motor, defina este parâmetro de acordo com a corrente
nominal do motor. Por defeito, o limite de corrente é igual à corrente nominal do
conversor (I
).
L
2.1.6 Tensão nominal do motor
Pode encontrar este valor Un na placa de características do motor. Este parâmetro
define a tensão no ponto de desexcitação (parâmetro 2.6.4) para 100% x U
2.1.7 Frequência nominal do motor
Pode encontrar este valor fn na placa de características do motor. Este parâmetro
ajusta ponto de desexcitação (parâmetro 2.6.3) para o mesmo valor.
2.1.8 Velocidade nominal do motor
Pode encontrar este valor nn na placa de características do motor.
nmotor
.
2.1.9 Corrente nominal do motor
Pode encontrar este valor In na placa de características do motor.
2.1.10 Cos phi do motor
Pode encontrar este valor "cos phi" na placa de características do motor.
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 20

DESCRIÇÃO DOS PARÂMETROS VACON • 19
2.1.11 Função de Arranque
Rampa:
0 O conversor de frequência arranca de 0 Hz e acelera para a frequência máxima
no tempo de aceleração definido. (A inércia da carga ou a fricção de arranque
podem provocar tempos de aceleração prolongados).
Arranque com motor a girar:
1 O conversor de frequência consegue arrancar um motor girando ao aplicar
um pequeno binário ao motor e procurando a frequência correspondente
à velocidade a que o motor está a girar. A procura começa na frequência
máxima passando para a frequência real até o valor correcto ser detectado.
A partir daí, a frequência de saída será aumentada/diminuída para o valor
de referência definido de acordo com os parâmetros de
aceleração/desaceleração definidos.
Utilize este modo se o motor estiver a girar quando se dá a ordem de marcha.
Por exemplo, ventiladores que rodam livremente por acção da deslocação do
ar. Também é útil em caso de pequenas interrupções de tensão da rede.
Arranque condicional com motor a girar
2 Neste modo, é possível desligar e ligar o motor a partir do conversor de
frequência mesmo quando o comando de arranque estiver activo. Quando
a ligação ao motor for restabelecida, a unidade funcionará da forma descrita
na selecção 1
2.1.12 Função de paragem
Livre:
0 O motor gira livremente até parar sem controlo do conversor de frequência
após o comando Parar.
Rampa:
1 Após o comando Parar, a velocidade do motor é desacelerada de acordo com
os parâmetros de desaceleração definidos.
Se a energia regenerada for alta poderá ser necessário utilizar uma resistência
de travagem externa para uma desaceleração mais rápida.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 21

20 • vacon DESCRIÇÃO DOS PARÂMETROS
2.1.13 Optimização U/f
0 Não utilizada
1 Reforço automático de binário
A tensão para o motor muda automaticamente, o que faz com que
o motor produza binário suficiente para arrancar e funcionar a
baixas frequências. O aumento da tensão depende do tipo e potência
do motor. O reforço automático de binário pode ser utilizado em
aplicações onde o binário no arranque devido a fricção de arranque
seja alto, por exemplo, em transportadores.
NOTA!
Em aplicações com binário alto e velocidade baixa, é provável que
o motor sobreaqueça. Se o motor tiver de funcionar durante um
período prolongado nestas condições, terá de prestar especial
atenção ao arrefecimento do motor. Utilize refrigeração externa
para o motor se a temperatura tiver tendência a aumentar
demasiado.
2.1.14 Selecção da referência de E/S
Define a origem de referência da frequência seleccionada quando o conversor é controlado
a partir do terminal de E/S.
0 Referência AI1 (terminais 2 e 3, por exemplo, potenciómetro)
1 Referência AI2 (terminais 5 e 6, por exemplo, transdutor)
2 Referência da consola (parâmetro 3.2)
3 Referência do bus de campo (ReferênciaVelocidadeFB)
4 Referência de potenciómetro motorizado
5 Selecção de AI1/AI2. A selecção de AI2 torna-se programável pela Função DIN3
(P2.1.18).
2.1.15 Gama de sinal AI2 (Iin)
1 Gama de sinal 0…20 mA
2 Gama de sinal 4…20 mA
3 Gama de sinal 0...10V
4 Gama de sinal 2...10V
Nota! As selecções não terão qualquer efeito se o par. 2.2.12 for > 0% ou o par. 2.2.13
for < 100%.
2.1.16 Função da saída analógica
Este parâmetro selecciona a função pretendida para o sinal de saída analógica.
Consulte a tabela na página 6 para obter os valores do parâmetro.
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 22

DESCRIÇÃO DOS PARÂMETROS VACON • 21
2.1.17 Função DIN2
Este parâmetro tem 10 selecções. Se não for necessário utilizar a entrada digital DIN2,
defina o valor do parâmetro para 0.
1 Marcha inversa
2 Inversa
3 Impulso de paragem
4 Falha externa
Contacto fechado: a falha é apresentada e o motor é parado quando a entrada está activa
5 Falha externa
Contacto aberto: a falha é apresentada e o motor é parado quando a entrada não está activa
6 Autorização de marcha
Contacto aberto: marcha do motor desactivada
Contacto fechado: marcha do motor activada
Paragem em modo livre se activada durante RUN
7 Velocidade constante 2
8 Potenciómetro motorizado UP
Contacto fechado: a referência aumenta até o contacto ser aberto.
9 Desactivar o controlador PID (Referência de frequência directa)
10 Encravamento 1 (pode apenas ser seleccionado quando o controlo da bombas e ventiladores
está activo, P2.9.1=2)
2.1.18 Função DIN3
O parâmetro tem 13 selecções. Se não for necessário utilizar a entrada digital DIN3, defina o
valor do parâmetro para 0.
1 Inversão
Contacto aberto: marcha directa
Contacto fechado: marcha inversa
2 Falha externa
Contacto fechado: A falha é apresentada e o motor é parado quando a entrada está activa
3 Falha externa
Contacto aberto: A falha é apresentada e o motor é parado quando a entrada não está activa
4 Reset de falhas
Contacto fechado: Todas as falhas são apagadas
5 Autorização de Marcha
Contacto aberto: Marcha do motor desactivada
Contacto fechado: Marcha do motor activa
Paragem livre se desactivada durante RUN
6 Velocidade predefinida 1
7 Velocidade predefinida 2
8 Comando da travagem por CC
Contacto fechado: No modo Parar, a travagem de CC funciona até o contacto ser aberto.
A corrente de travagem de CC é de cerca de 10% do valor seleccionado com o par. 2.4.3.
9 Potenciómetro motorizado UP
Contacto fechado: A referência aumenta até o contacto ser aberto.
10 Potenciómetro motorizado DOWN
Contacto fechado: A referência diminui até o contacto ser aberto.
11 Desactivar o controlador PID (Referência de frequência directa)
12 Selecção da referência PID 2 da consola.
13 Encravamento 2 (pode apenas ser seleccionado quando o controlo da bombas e ventiladores
está activo, P2.9.1=2)
14 Entrada termístor NOTA! Consulte o Manual de Utilizador NXL,
15 Impor local de controlo para terminais E/S
16 Impor local do controlo para bus de campo
17 Selecção de AI1/AI2 para a Referência de E/S
Capítulo 6.2.4
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 23

22 • vacon DESCRIÇÃO DOS PARÂMETROS
2.1.19 Velocidade predefinida 1
2.1.20 Velocidade predefinida 2
Os valores do parâmetros são automaticamente limitados entre as frequências mínima
e máxima. (par. 2.1.1 e 2.1.2)
2.1.21 Função de rearranque automático
O rearraque automático é utilizado com este parâmetro
0 = Desactivado
1 = Activado (3 rearranque automáticos, consulte o par. 2.8.1 – 2.8.3)
2.1.22 Ocultar parâmetros
Com este parâmetro pode ocultar todos os outros grupos de parâmetros excepto
o grupo de parâmetros básicos (P2.1).
A predefinição de fábrica deste parâmetro é 0.
0 = Desactivado (pode navegar, com a consola, em todos os grupos de parâmetros)
1 = Activado (pode navegar, com a consola, apenas nos parâmetros básicos, P2.1)
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 24

DESCRIÇÃO DOS PARÂMETROS VACON • 23
4.2 SINAIS DE ENTRADA
2.2.1 Função DIE1 da placa de expansão
Este parâmetro tem 13 selecções. Se não for necessário utilizar a entrada digital DIN1
da placa de expansão, defina o valor do parâmetro para 0.
As selecções são semelhantes ao parâmetro 2.1.18, excepto:
13 = Encravamento 1
2.2.2 Função DIE2 da placa de expansão
As selecções são semelhantes ao parâmetro 2.2.1, excepto:
13 = Encravamento 2
2.2.3 Função DIE3 da placa de expansão
As selecções são semelhantes ao parâmetro 2.2.1.
13 = Encravamento 3
2.2.4
Função DIN4
Se o valor do par. 2.2.6 for definido para 0, AI1 funciona como a entrada digital 4.
As selecções são semelhantes ao parâmetro 2.2.3.
NOTA! Se programar a entrada analógica como DIN4, verifique se as selecções
do jumper estão correctas (consulte a figura abaixo).
MF2
X4:
MF3
X4:
MF4-6
X8:
RS485
programming
Voltage input; 0...10V
Figura 1- 1. Selecções do jumper de X4/X8 quando AI1 funciona como DIN4
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
Voltage input; 0...10V
Voltage input; 0...10V
Jumperdin4.fh8
4
Page 25

24 • vacon DESCRIÇÃO DOS PARÂMETROS
N
2.2.5 Selecção do sinal AI1
Ligue o sinal AI1 a uma das entradas analógicas com este parâmetro.
READY
I/ O
STO P
term
nxlk29.fh8
Figura 1- 2. Selecção do sinal AI1
O valor deste parâmetro é formado pelo
do terminal da entrada
. Consulte a Figura 1- 2 acima.
Indicador de placa 1 = Entradas locais
Indicador de placa 2 = Entradas da placa de expansão
Número de entrada 0 = Entrada 1
Número de entrada 1 = Entrada 2
Número de entrada 2 = Entrada 3
Número de entrada 9 = Entrada 10
READY
I/ O
STO P
Indicador de localização
term
indicador de placa
Alterar
valor
úmero de entrada
e o
respectivo número
Exemplo:
Se definir o valor deste parâmetro para 10, isso significa que seleccionou a entrada local
1 do sinal AI1. Da mesma forma, se o valor for definido para 21, a entrada 2 da placa de
expansão foi seleccionada para o sinal AI1.
Se pretender utilizar os valores do sinal de entrada analógico para, por exemplo, realizar
apenas testes, pode definir o valor do parâmetro para 0 - 9. Neste caso, o valor 0 corresponde
a 0%, o valor 1 corresponde a 20% e qualquer valor entre 2 e 9 corresponde a 100%.
2.2.6 Gama de sinal AI1
Com este parâmetro pode seleccionar a gama de sinal AI1.
0 = DIN 4
1 = Gama de sinal 0…20mA (apenas tamanhos MF4 e superior)
2 = Gama de sinal 4…20mA (apenas tamanhos MF4 e superior)
3 = Gama de sinal 0…10V
4 = Gama de sinal 2…10V
Nota! As selecções não terão qualquer efeito se o par. 2.2.7 for > 0% ou o par. 2.2.8
for < 100%.
Se o valor do par. 2.2.6par226 for definido para 0, AI1 funciona como a entrada digital 4.
Consulte o par. 2.2.4.
Telefone: +358-201-2121 • Fax:+358-201-212 205
4
Page 26

DESCRIÇÃO DOS PARÂMETROS VACON • 25
2.2.7 Ajuste mínimo cliente AI1
2.2.8 Ajuste máximo cliente AI1
Define os níveis personalizados mínimo e máximo para o sinal AI1 entre 0…10V.
2.2.9 Inversão de sinal AI1
Ao definir o valor do parâmetro para 1,
ocorre a inversão do sinal AI1.
2.2.10 Tempo de filtragem do sinal l AI1
Este parâmetro, quando atribuído um
valor superior a 0, activa a função que
filtra as interferências do sinal U
in
analógico recebido.
Tempos de filtragem longos tornam a
resposta de variação mais lenta.
Consulte a Figura 1- 3
2.2.11 Selecção do sinal AI2
Ligue o sinal AI2 a uma das entradas analógicas com este parâmetro. Consulte o par.
2.2.5 para obter o procedimento de definição do valor.
2.2.12 Gama de sinal AI2
%
Sinal não filtrado
100%
Sinal filtrado
63%
Par. 2.2.10
Figura 1- 3. Filtragem de sinal AI1
nxlk30.fh8
t [s]
1 = Gama de sinal 0…20mA
2 = Gama de sinal 4…20mA
3 = Gama de sinal 0…10V
4 = Gama de sinal 2…10V
Nota! As selecções não terão qualquer efeito se o par. 2.2.13 for> 0% ou o par. 2.2.14
for < 100%.
2.2.13 Ajuste mínimo cliente AI2
2.2.14 Ajuste máximo cliente AI2
Estes parâmetros permitem-lhe ajustar o sinal de corrente de entrada entre 0 e 20 mA.
Ver parâmetros 2.2.7 e 2.2.8.
2.2.15 Inversão do sinal de entrada analógico AI2
Consulte o parâmetro correspondente 2.2.9.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 27

26 • vacon DESCRIÇÃO DOS PARÂMETROS
2.2.16 Tempo de filtragem do sinal de entrada analógico AI2
Consulte o parâmetro correspondente 2.2.10.
2.2.17 Reset da memória do potenciómetro motorizado (referência de frequência)
0 = Sem reset
1 = Reset da memória na paragem ou ao desligar a alimentação.
2 = Reset da memória ao desligar a alimentação.
2.2.18 Valor mínimo da escala de referência
2.2.19 Valor máximo da escala de referência
Pode escolher um intervalo de ajuste para a referência de frequência entre a frequência
Mínima e Máxima. Se não pretender qualquer ajuste, defina o valor do parâmetro para 0.
Nas imagens abaixo, a entrada de tensão AI1 com a gama de sinal 0…10V está
seleccionada como referência.
Frequência
de saída
Par. 2.2.19
Freq. mín. par 2.1.1 Freq. mín. par 2.1.1
0
Entrada
analógica [%]
Par. 2.2.18
Frequência
de saída
Freq. máx. par 2.1.2Freq. máx. par 2.1.2
0
Entrada
analógica [%]
NX12K35
Figura 1-4. Esquerda: Par. 2.1.18=0 (Sem escala de referência) Direita: Escala de referência
2.2.20 Selecção da referência de frequência da consola de programação
Define a origem da referência seleccionada quando o conversor é controlado a partir da
consola.
0 Referência AI1 (por defeito, AI1, terminais 2 e - por exemplo, potenciómetro)
1 Referência AI2 (por defeito, AI2, terminais 5 e 6 - por exemplo, transdutor)
2 Referência da consola (parâmetro 3.2)
3 Referência do bus de campo (ReferênciaVelocidadeFB)
4 Referência de potenciómetro motorizado
5 Referência do controlador PID
2.2.21 Selecção da referência de frequência do bus de campo
Define a origem de referência seleccionada quando o conversor é controlado a partir
do bus de campo. Para os valores dos parâmetros, consulte o par. 2.2.20.
Telefone: +358-201-2121 • Fax:+358-201-212 205
4
Page 28

DESCRIÇÃO DOS PARÂMETROS VACON • 27
4.3 SINAIS DE SAÍDA
2.3.1 Função da saída do relé 1
2.3.2 Função da saída do relé 1 da placa de expansão
2.3.3 Função da saída do relé 2 da placa de expansão
2.3.4 Função da saída digital 1 da placa de expansão
Valor da definição
0 = Não utilizada
1 = Pronto O conversor de frequência está pronto para funcionar
2 = Marcha
3 = Falha Ocorreu um disparo por falha
4 = Inversão falha Não ocorreu um disparo por falha
5 = Aviso de sobreaquecimento do
conversor de frequência
6=Aviso ou falha externa Falha ou aviso dependendo do par. 2.7.2
7 =Aviso ou falha de referência
8 = Aviso Sempre se for emitido um aviso
9 = Inversão O comando de inversão foi seleccionado
10 = Velocidade predefinida Foi seleccionada uma velocidade predefinida
11 = Á velocidade A frequência de saída atingiu a referência definida
12 = Regulador do motor activado O regulador de sobretensão ou sobrecorrente foi activado
13 = Supervisão da frequência de saída,
limite 1
14 = Local de Controlo: E/S
15 =Aviso ou falha do termístor
16 = Supervisão do valor actual activa Parâmetros 2.7.22 – 2.7.24
Conteúdo do sinal
Não está a funcionar
A saída de relé RO1 e os relés programáveis da placa
de expansão (RO1, RO2) são activados quando:
O conversor de frequência está a funcionar (o motor está a girar)
A temperatura do dissipador excedeu +70C
Falha ou aviso dependendo do par. 2.7.1
- se a referência analógica for 4—20 mA e o sinal for <4mA
A frequência de saída fica fora do limite alto/baixo de supervisão
definido (consulte os parâmetros 2.3.12 e 2.3.13 abaixo)
Valor de controlo seleccionado (Menu K3; par. 3.1) é o “terminal
de E/S”
A entrada do termístor do painel de opções indica sobretemperatura. Falha ou aviso dependendo do parâmetro 2.7.19.
17 = Controlo rotação bomba 1 Controlo da bomba 1, parâmetros 2.10.1 – 2.10.7
18 = Controlo rotação bomba 2 Controlo da bomba 2, parâmetros 2.10.1 – 2.10.7
19 = Controlo rotação bomba 3 Controlo da bomba 3, parâmetros 2.10.1 – 2.10.7
20 = Supervisão AI
O relé fica activo de acordo com as definições dos parâmetros
2.3.14 – 2.3.16.
Tabela 1-15. Sinais de saída através de RO1 e placas de expansão RO1, RO2 e DO1.
2.3.5 Função de saída analógica
Este parâmetro selecciona a função pretendida para o sinal de saída analógica.
Consulte a tabela na página 5 para obter os valores do parâmetro.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 29

28 • vacon DESCRIÇÃO DOS PARÂMETROS
2.3.6 Tempo de filtragem da saída analógica
Define o tempo de filtragem do sinal da
saída analógica.
Se definir o valor 0 para este parâmetro,
%
Sinal não filtrado
100%
a filtragem não ocorre.
Sinal filtrado
63%
t [s]
Par. 2.3.6
nxlk31.fh8
Figura 1-5. Filtragem de saída analógica
2.3.7 Inversão da saída analógica
Inverte o sinal de saída analógico:
Sinal de saída máximo = 0 %
Sinal de saída mínimo = Valor definido máximo (parâmetro 2.3.9)
0 Não invertido
1 Invertido
Consulte o parâmetro 2.3.9 abaixo.
2.3.8 Mínimo da saída analógica
Corrent e
de saída
analógi ca
20 mA
12 mA
10 mA
4 mA
0 mA
Parâm. 2.3. 9
= 200%
0
0.5
Parâm. 2. 3.9
= 50%
Parâm. 2. 3.9
= 100%
Valor máximo do sinal
seleccionado com o par. 2. 3.2)
1.0
Figura 1-6. Inversão da saída analógica
4
Define o valor mínimo do sinal para 0 mA ou 4 mA (zero efectivo). Repare na diferença
na escala de saída analógica no parâmetro 2.3.9.
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 30

DESCRIÇÃO DOS PARÂMETROS VACON • 29
2.3.9 Escala de saída analógica
Factor de ajuste para a saída analógica.
Sinal Valor máx. do sinal
Frequência
de saída
Velocidade
do motor
Corrente de saída 100% x I
Binário do motor 100% x T
Potência do motor 100% x P
Tensão do motor 100% x U
Tensão barr. CC
Valor de ref. PI
Valor real PI 1
Valor de erro PI
Saída PI
100% x f
max
100% x Velocidade nom.
do motor
nMotor
nMotor
nMotor
nmotor
1000 V
100% x valor máx. de ref.
100% x valor máx. real
100% x valor máx. de erro
100% x saída máxima
Corrente
de saída
analógica
20 mA
12 mA
10 mA
Par. 2.3.8 = 1
4 mA
Par. 2.3.8 = 0
0 mA
Par. 2.3.9=
200%
0
0.5
Par. 2.3.9=
100%
Par. 2.3.9=
50%
Valor máximo do sinal seleccionado
com o parâm. 2.1.16
1.0
nxlk49.fh8
Tabela 1-16. Escala de saída analógica Figura 1-7. Escala de saída analógica
2.3.10 Função de saída analógica 1 da placa de expansão
2.3.11 Função de saída analógica 2 da placa de expansão
Este parâmetro selecciona as funções pretendidas para os sinais de saída analógica
da placa de expansão. Consulte o par. 2.1.16 para obter os valores do parâmetro.
2.3.12 Função de supervisão do limite de frequência de saída 1
0 Sem supervisão
1 Supervisão do limite baixo
2 Supervisão do limite alto
Se a frequência de saída ficar abaixo/acima do limite definido (par. 2.3.13) , esta função
gera uma mensagem de aviso através das saídas de relé, dependendo das definições
dos parâmetros 2.3.1 – 2.3.4.
2.3.13 Valor de supervisão do limite de frequência de saída 1
Selecciona o valor de frequência monitorizado pelo parâmetro 2.3.12.
f[Hz]
Par 2.3.13
Par 2.3.12 = 2
t
Exemplo:
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
nxlk33.fh8
Figura 1-8. Supervisão da frequência de saída
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 31

30 • vacon DESCRIÇÃO DOS PARÂMETROS
2.3.14 Supervisão de entrada analógica
Com este parâmetro pode seleccionar a entrada analógica a monitorizar.
0 = Não utilizado
1 = AI1
2 = AI2
2.3.15 Supervisão da entrada analógica: limite de desactivação
Quando o sinal da entrada analógica seleccionada com o par. 2.3.14 desce abaixo
do limite definido com este parâmetro, a saída do relé é desactivada.
2.3.16 Supervisão da entrada analógica: limite de activação
Quando o sinal da entrada analógica seleccionada com o par. 2.3.14 excede o limite
definido com este parâmetro, a saída do relé é activada.
Isto significa que, por exemplo, se o limite de activação for 60% e o limite de
desactivação for 40%, o relé fica activo quando o sinal excede os 60% e permanece
activado até descer abaixo dos 40%.
2.3.17 Atraso de activação da saída de relé 1
2.3.18 Atraso de desactivação da saída de relé 1
Com estes parâmetros, é possível definir atrasos de activação e desactivação para
a saída de relé 1 (par 2.3.1).
Sinal programado para
a saída de relé
Saída RO1
At ra so d e ac tiv a ção,
par. 2.3.17
Figura 1-9. Atrasos de activação e desactivação da saída de relé 1
Atraso de desactivação
par. 2.3.18
nxlk102
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 32

DESCRIÇÃO DOS PARÂMETROS VACON • 31
4.4 CONTROLO DO ACCIONAMENTO
2.4.1 Forma da rampa de aceleração/desaceleração 1
O início e fim da rampa de aceleração e desaceleração podem ser suavizados com este
parâmetro. Definir o valor 0 fornece uma forma de rampa linear, o que faz com que
a aceleração e a desaceleração respondam imediatamente às alterações no sinal de
referência.
Definir o valor 0.1…10 segundos para este parâmetro produz uma aceleração /
desaceleração com curva em forma de S. O tempo de aceleração é determinado pelos
parâmetros 2.1.3/2.1.4
[Hz]
2.1.3, 2.1.4
2.4.2
2.4.1
2.4.1
Figura 1-10. Aceleração/desaceleração ( curva S)
NX12K20
[t]
Chopper de travagem
Nota! Todos os tamanhos possuem um chopper de travagem interno, excepto
o tamanho MF2
0 Não é utilizado o chopper de travagem
1 Chopper de travagem utilizado no estado Marcha (Run)
3 Utilizado no estado Marcha (Run) e Parar (Stop)
Quando o conversor de frequência está a desacelerar o motor, a inércia do motor e da
carga é fornecida a uma resistência de travagem externa. Isto permite ao conversor de
frequência desacelerar a carga com um binário igual ao da aceleração (desde que a
resistência de travagem correcta tenha sido seleccionada). Consulte o manual de
instalação da resistência de travagem em separado.
2.4.3 Corrente de travagem de CC
Define a corrente injectada no motor durante a travagem de CC.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 33

32 • vacon DESCRIÇÃO DOS PARÂMETROS
2.4.4 Tempo de travagem de CC na paragem
Determina se a travagem está activada ou desactivada e o tempo de travagem do travão
de CC quando o motor está a parar. O funcionamento do travão de CC depende da função
de paragem, parâmetro 2.1.12.
0 O travão de CC não é utilizado
>0 O travão de CC está a ser utilizado e o respectivo funcionamento depende da
função de paragem, (par. 2.1.12). O tempo de travagem de CC é determinado
com este parâmetro
Par. 2.1.12 = 0 (Tipo de paragem = rotação livre ):
Depois do comando para parar, o motor roda livremente até parar sem controlo por parte
do conversor de frequência.
Com a injecção de CC, o motor pode ser parado electricamente no menor período de
tempo possível, sem utilizar uma resistência de travagem externa opcional.
O tempo de travagem é ajustado consoante a frequência quando a travagem de CC
começa. Se a frequência for superior à frequência nominal do motor, o valor definido
do parâmetro 2.4.4 determina o tempo de travagem. Quando a frequência é 10% da
nominal, o tempo de travagem é de 10% do valor definido do parâmetro 2.4.4.
saída de frequência
f
n
Travagem de CC ON
RUN
STOP
Frequência de saída
Velocidade do motor
t
t = 1 x Par. 2.4.4
0,1 x f
f
n
n
RUN
STOP
saída de frequência
Frequência de saída
Velocidade do motor
Travagem de CC ON
t = 0,1 x Par. 2.4.4
nxlk34.fh8
t
Figura 1-11. Tempo de travagem de CC no tipo de paragem livre.
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 34

DESCRIÇÃO DOS PARÂMETROS VACON • 33
Par. 2.1.12 = 1 ( Tipo de paragem = Rampa):
Depois do comando para parar, a velocidade do motor é reduzida de acordo com os
parâmetros de desaceleração definidos, o mais rápido possível, para a velocidade
definida com o parâmetro 2.4.5, onde
a travagem de CC começa.
saída de frequência
Velocidade do motor
Frequência de saída
O tempo de travagem é definido
com o parâmetro 2.4.4. Se existir
uma elevada inércia, recomenda-se
a utilização de uma resistência
de travagem externa para uma
desaceleração mais rápida. Consulte
a Figura 1- 12.
par. 2.4.5
RUN
STOP
Travão de CC
t
t = Par. 2.4.4
nxlk50.fh8
Figura 1- 12. Tempo de travagem de CC no modo
Parar = Rampa.
2.4.5 Frequência para iniciar a travagem de CC na paragem por rampa
É aplicada a frequência de saída na qual a
travagem de CC. Consulte a Figura 1- 12.
Frequência
de saída
2.4.6 Tempo de travagem de CC no arranque
O travão de CC é activado quando o
comando para arrancar é dado. Este
parâmetro define o tempo antes de o
travão ser libertado. Depois de o travão ser
libertado, a frequência de saída aumenta
de acordo com a função de arranque
definida pelo parâmetro 2.1.11. Consulte a
Figura 1- 13.
RUN
STOP
Par 2.4.6
Figura 1- 13. Tempo de travagem de CC no
arranque
2.4.7 Travão por fluxo
Em vez da travagem de CC, a travagem por fluxo é uma forma útil de travar em motores
15kW.
t
nxlk35.fh8
Quando for necessário travar, a frequência será reduzida e o fluxo no motor aumentará,
o que, por sua vez, aumentará a capacidade de travagem do motor . Ao contrário da
travagem de CC, a velocidade do motor permanece controlada durante a travagem.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 35

34 • vacon DESCRIÇÃO DOS PARÂMETROS
A travagem por fluxo pode ser definida como activada ou desactivada.
0 = Travagem por fluxo desactivada
1 = Travagem por fluxo activada
Nota: A travagem por fluxo converte a energia em calor no motor e deverá ser utilizada
de forma intermitente para evitar danos no motor.
2.4.8 Corrente de travagem por fluxo
Define o valor da corrente de travagem por fluxo. Pode ser definido entre 0,3 x IH
(aproximadamente) e o Limite de corrente.
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 36
DESCRIÇÃO DOS PARÂMETROS VACON • 35
4.5 FREQUÊNCIAS PROIBIDAS
2.5.1 Limite inferior da área de frequências proibidas 1
2.5.2 Limite superior da área de frequências proibidas 1
2.5.3
Nalguns sistemas, poderá ser
necessário evitar determinadas
Frequência
de saída [Hz]
frequências devido a problemas de
ressonância mecânica. Com estes
parâmetros, é possível definir um
limite para a região "ignorar
frequência". Consulte a Figura 1- 14.
2.5.1 2.5.2
Referência [Hz]
nxlk36.fh8
Figura 1- 14. Definição da área de frequência
proibida
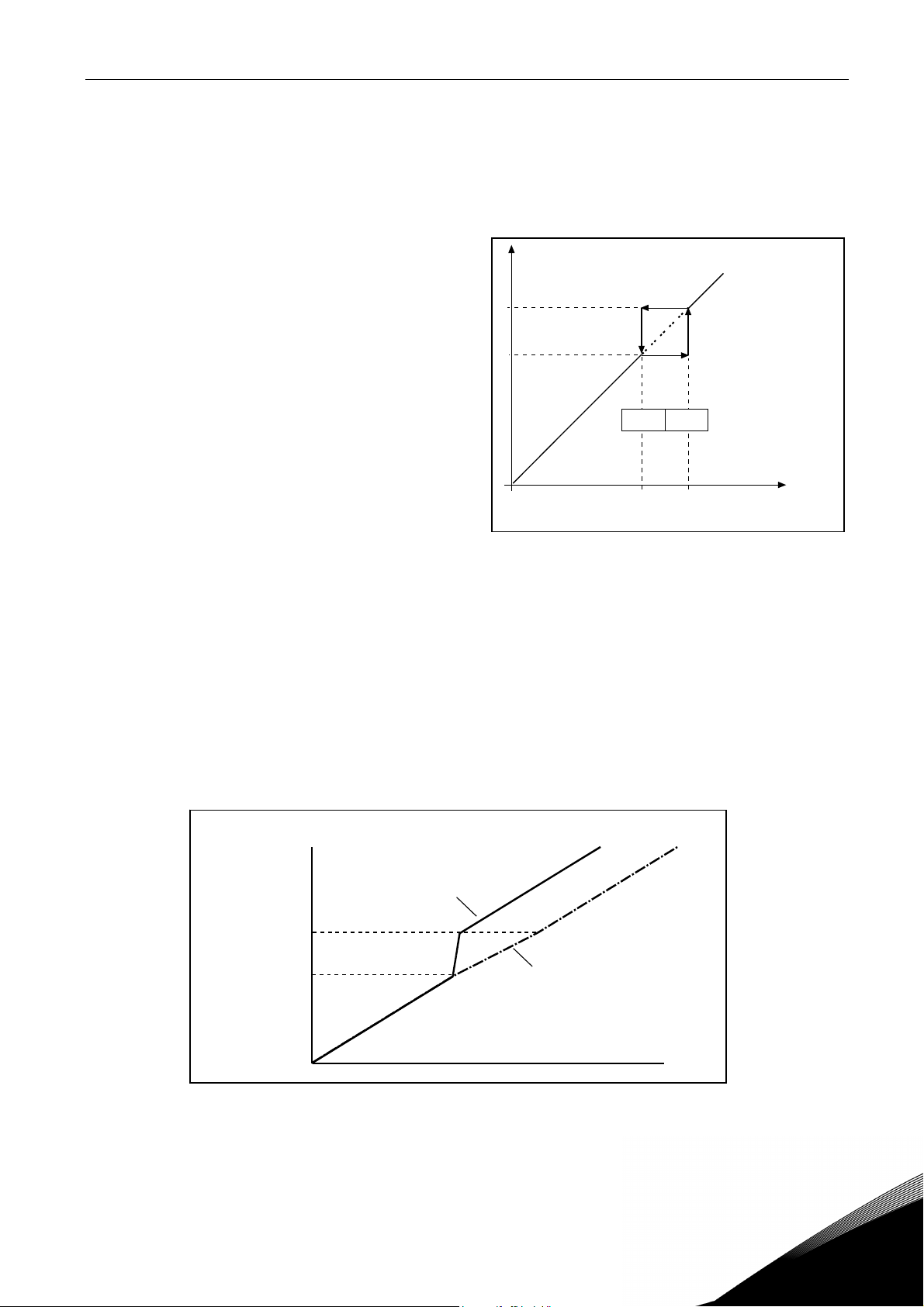
Ajuste da rampa de aceleração / desaceleração entre os limites das frequências
proibidas
Define o tempo de aceleração/desaceleração quando a frequência de saída se encontra
entre os limites da gama de frequência proibida seleccionada (parâmetros 2.5.1 e 2.5.2).
O tempo em rampa (tempo de aceleração/desaceleração seleccionado 1 ou 2) é
multiplicado por este factor. Por exemplo, o valor 0,1 torna o tempo de aceleração
10 vezes mais curto do que fora dos limites da gama de frequência proibida.
fud [Hz]
Par. 2.5.3 = 0,2
Par. 2.5.2
Par. 2.5.1
Par. 2.5.3 = 1,2
Figura 1-15. Ajuste do tempo de rampa entre frequências proibidas
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
Tempo [s]
nxlk37.fh8
4
Page 37

36 • vacon DESCRIÇÃO DOS PARÂMETROS
4.6 CONTROLO DO MOTOR
2.6.1 Modo de controlo do motor
0 Controlo de frequência: As referências, tanto das E/S como da consola, são
referências de frequência e o conversor de frequência
controla a frequência de saída (resolução da frequência
de saída = 0,01 Hz)
1 Controlo de velocidade: As referências, tanto das E/S como da consola, são
referências de velocidade e o conversor de frequência
controla a velocidade do motor (precisão ± 0,5%)
2.6.2 Selecção da curva U/f
Linear: A tensão do motor muda linearmente com a frequência na área de
0 fluxo constante de 0 Hz ao ponto de desexcitação, onde a tensão nominal
é fornecida ao motor. A taxa U/f linear deve ser utilizada em aplicações
de binários constantes. Consulte a Figura 1- 16.
Esta predefinição deve ser utilizada se não existir uma necessidade
especial de utilizar outra definição.
Quadrática: A tensão do motor muda seguindo uma forma de curva quadrática
1 com a frequência na área, de 0 Hz ao ponto de desexcitação, onde a tensão
nominal é fornecida ao motor. O motor funciona sub-magnetizado abaixo
do ponto de desexcitação e produz menos binário e ruído electromecânico.
A taxa U/f quadrática pode ser utilizada em aplicações onde a necessidade
do binário da carga seja proporcional ao quadrado da velocidade, por exemplo,
em ventiladores e bombas centrífugas.
U[V]
Un
par.2.6.4
Predefinição: Nominal
tensão do motor
Ponto de shunt
dos indutores
4
Linear
Predefinição:
par.2.6.3
Nominal
frequência
do motor
f[Hz]
nxlk38.fh8
Quadrado
par.2.6.6, 2.6.7
Figura 1- 16. Variação linear e quadrática da tensão do motor
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 38

DESCRIÇÃO DOS PARÂMETROS VACON • 37
Curva U/f programável:
2 A curva U/f pode ser programada com três pontos diferentes. A curva U/f
programável pode ser utilizada se as outras definições não preencherem as
necessidades da aplicação.
U[V]
Un
Par 2.6.4
Par. 2.6.7
(Def. 10%)
Par. 2.6.8
(Def. 1.3%)
Predefinição: Nominal
tensão do motor
Par. 2.6.6
(Def. 5 Hz)
Ponto de shunt
dos indutores
Predefinição: Nominal
frequência do motor
Par. 2.6.3
f[Hz]
nxlk39.fh8
Figura 1- 17. Curva U/f programável
Linear com optimização do fluxo:
3 O conversor de frequência começa a procurar a corrente do motor mínima e,
para poupar energia, reduz o nível de interferências e de ruído. Pode ser
utilizado em aplicações com carga do motor constante, tais como ventoinhas,
bombas, etc.
2.6.3 Ponto de desexcitação
O ponto de desexcitação corresponde à frequência de saída na qual a tensão de saída
atinge o valor definido pelo par. 2.6.4.
2.6.4 Tensão no ponto de desexcitação
Acima da frequência no ponto de desexcitação, a tensão de saída permanece no valor
definido com este parâmetro. Abaixo da frequência nesse ponto, a tensão de saída
depende da definição os parâmetros da curva U/f. Consulte os parâmetros 2.1.13, 2.6.2,
2.6.5 2.6.6 e 2.6.7 e a Figura 1- 17.
Quando os parâmetros 2.1.6 e 2.1.7 (tensão nominal e frequência nominal do motor) são
definidos, os parâmetros 2.6.3 e 2.6.4 recebem automaticamente os valores correspondentes. Se necessitar de valores diferentes para o ponto de shunt dos indutores e para
a tensão, altere estes parâmetros após definir os parâmetros 2.1.6 e 2.1.7.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 39

38 • vacon DESCRIÇÃO DOS PARÂMETROS
2.6.5 Curva U/f, frequência no ponto intermédio
Se a curva U/f programável tiver sido seleccionada com o parâmetro 2.6.2, este
parâmetro define a frequência de ponto intermédio da curva. Consulte a Figura 1- 17.
2.6.6 Curva U/f, tensão no ponto intermédio
Se a curva U/f programável tiver sido seleccionada com o parâmetro 2.6.2, este
parâmetro define a tensão no ponto intermédio da curva. Consulte a Figura 1- 17.
2.6.7 Tensão de saída à frequência zero
Este parâmetro define a tensão à frequência zero da curva. Consulte a Figura 1- 17.
2.6.8 Frequência de comutação
O ruído do motor pode ser minimizado utilizando uma frequência de comutação elevada.
O aumento da frequência de comutação reduz a capacidade da unidade do conversor
de frequência.
Frequência de comutação do Vacon NXL: 1…16 kHz
2.6.9 Controlador de sobretensão
2.6.10 Controlador de subtensão
Estes parâmetros permitem desligar os controladores de subtensão e de sobretensão.
Isto poderá ser útil para, por exemplo, se a tensão da rede variar entre –15% a +10% e a
aplicação não tolerar esta subtensão/sobretensão. Este regulador controla a frequência
de saída tendo em conta as flutuações na alimentação.
Nota: Podem ocorrer disparos por sobre-/ subtensão quando os controladores são desligados.
0 Controlador desligado
1 Controlador ligado
2.6.11 Identificação
0 Sem acção
1 ID sem rotação
Quando a opção de ID sem rotação estiver seleccionada, a unidade efectua uma identificação quando é accionada a partir do local de controlo seleccionado. A unidade deve
ser accionada no espaço de 20 segundos. Caso contrário, a identificação é abortada.
4
No caso da ID sem rotação, a unidade não faz rodar o motor. Terminada a identificação,
a unidade pára. A unidade é accionada normalmente quando é emitido o comando
seguinte para arrancar.
A ID sem rotação melhora os cálculos de binário e a função de reforço de binário
automática. Além disso, resultará numa melhor compensação de desvios do
controlo de velocidade (RPM mais precisas).
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 40

DESCRIÇÃO DOS PARÂMETROS VACON • 39
4.7 PROTECÇÕES
2.7.1 Resposta à falha de referência de 4mA
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha, de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre em rotação livre
Será gerado um aviso ou uma acção em caso de falha e uma mensagem quando o sinal
de referência 4…20 mA estiver a ser usado e o sinal cair abaixo de 3,5 mA durante
5 segundos, ou abaixo de 0,5 mA durante 0,5 segundos. A informação podem também
ser programada para saídas por relés.
2.7.2 Resposta a falha externa
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha, de acordo com o
3 = Falha, modo de paragem após falha sempre em rotação livre
Será gerado um aviso ou uma acção em caso de falha e uma mensagem a partir do sinal
de falha externa nas entradas digitais programáveis. A informação pode também ser
programada para saídas por relés.
parâmetro 2.1.12
2.7.3 Resposta a falha de subtensão
1 = Aviso
2 = Falha, modo de paragem após falha, de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre em rotação livre
Para os limites de subtensão, consulte o Manual de Utilizador Vacon NXL, Tabela 4-3.
Nota: Esta protecção não pode ser desactivada.
2.7.4 Supervisão da fase de saída
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre em rotação livre
A supervisão da fase de saída do motor assegura que as fases do motor têm uma
corrente aproximadamente igual.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 41

40 • vacon DESCRIÇÃO DOS PARÂMETROS
2.7.5 Protecção contra falhas de terra
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre em rotação livre
A protecção contra falhas à terra assegura que a soma das correntes de fases do motor
é zero. A protecção de sobre-corrente está sempre a funcionar e protege o conversor
de frequência de falhas de terra com correntes elevadas.
Parâmetros 2.7.6—2.7.10, Protecção térmica do motor:
Geral
A protecção térmica do motor serve para proteger o motor de sobreaquecimento. O conversor Vacon
tem capacidade para fornecer corrente superior à corrente nominal ao motor. Se a carga exigir esta
corrente alta, existe o risco de o motor ficar em sobrecarga térmica . Isto acontece em especial no
caso de frequências baixas. Neste caso, o efeito de refrigeração do motor é reduzido, bem como a
respectiva capacidade de carga. Se o motor estiver equipado com um ventilador externo, a redução
da carga em velocidades baixas é pequena.
A protecção térmica do motor, baseada num modelo de cálculo, utiliza a corrente de saída do
conversor para determinar a carga no motor.
A protecção térmica do motor pode ser ajustada com parâmetros. A corrente térmica I
corrente de carga acima da qual o motor está sobrecarregado. Este limite de corrente é uma função
da frequência de saída.
!
AVISO!
Este modelo de cálculo não protege o motor se o fluxo de ar para
o motor for reduzido por uma grelha de entrada de ar bloqueada.
especifica a
T
2.7.6 Protecção térmica do motor
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre em rotação livre
Se disparo estiver seleccionado, o conversor parará e o estado de falha será activado.
A desactivação da protecção, ou seja, a definição do parâmetro em 0, reporá o modelo
térmico do motor em 0%.
A definição do parâmetro em 0 desactiva a protecção e repõe o contador de tempo
de bloqueio.
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 42
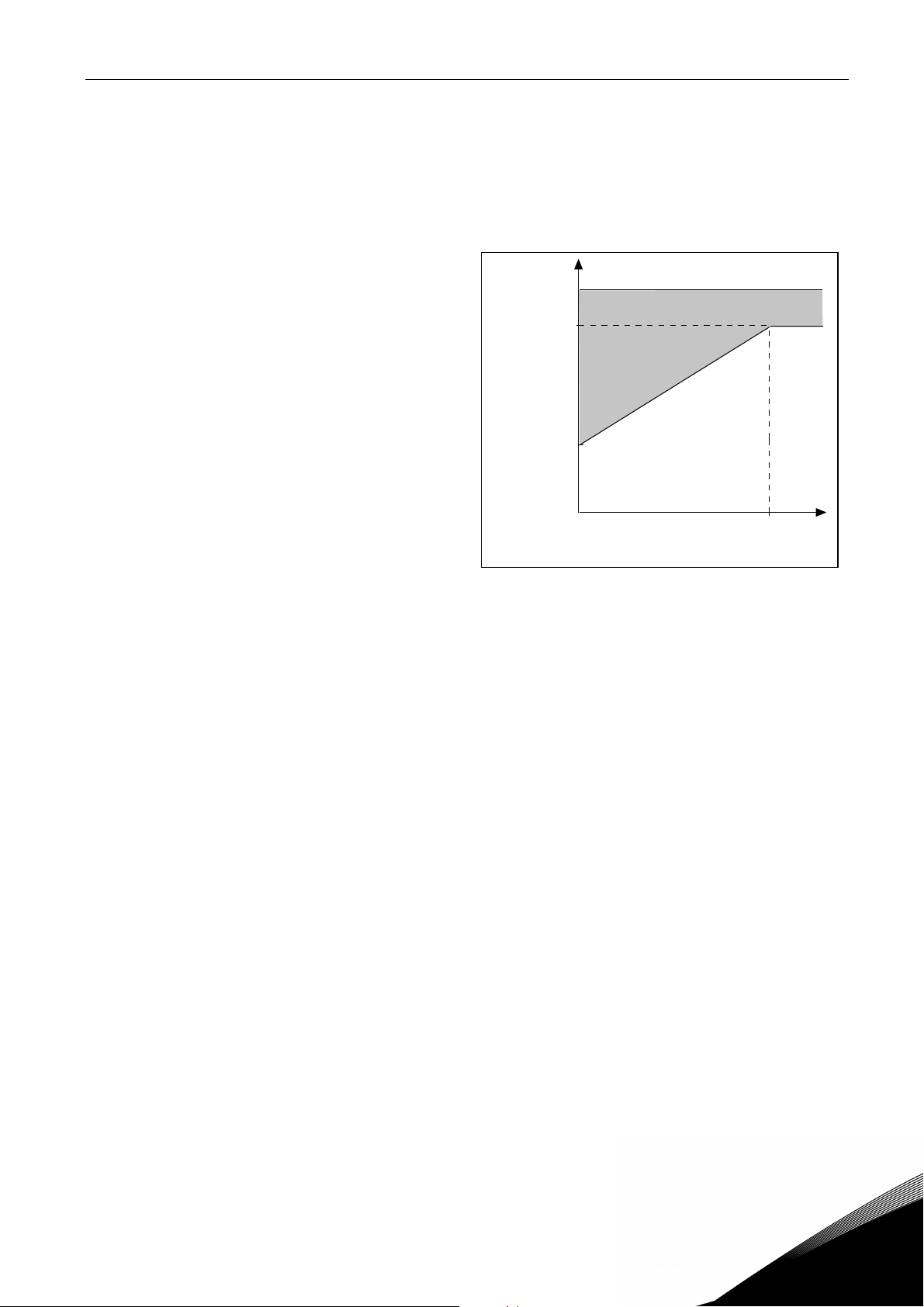
DESCRIÇÃO DOS PARÂMETROS VACON • 41
2.7.7 Protecção térmica do motor: factor de temperatura ambiente do motor
Quando a temperatura ambiente do motor tiver de ser tomada em consideração,
recomenda-se a definição de um valor para este parâmetro. O valor do factor pode ser
definido entre –100.0% e 100.0%, em que –100.0% corresponde a 0C e 100.0%
corresponde à temperatura ambiente de funcionamento máxima do motor. Definir este
parâmetro para 0% pressupõe que a temperatura ambiente é igual à temperatura do
dissipador no arranque.
100%
2.7.8 Protecção térmica do motor: factor
de refrigeração à velocidade zero
A potência de refrigeração pode ser
definida entre 0—150.0% x potência
de refrigeração à frequência nominal.
Consulte a Figura 1- 18.
par.
2.7.8=40%
Figura 1- 18. Potência de refrigeração do motor
2.7.9 Protecção térmica do motor: constante de tempo
Este tempo pode ser definido entre 1 e 200 minutos.
Esta é a constante de tempo térmica do motor. Quanto maior for o motor, maior será
a constante de tempo. A constante de tempo corresponde ao tempo no qual o modelo
térmico calculado atingiu 63% do seu valor final.
O tempo térmico do motor é específico da concepção do motor e varia consoante os
diferentes fabricantes.
Se o tempo t6 do motor (t6 corresponde ao tempo em segundos em que o motor pode
funcionar com segurança a uma corrente seis vezes superior à nominal) for conhecido
(fornecido pelo fabricante) o parâmetro da constante de tempo pode ser definido com
base no mesmo. Como regra geral, a constante de tempo térmico do motor em minutos
equivale a 2xt6. Se o conversor estiver no estado parado, a constante de tempo aumenta
internamente para uma intensidade três vezes superior ao valor do parâmetro definido.
A refrigeração no estado de paragem baseia-se na convecção e a constante de tempo
aumenta. Consulte também a Figura 1-19.
Nota: Se a velocidade nominal (par. 2.1.8) ou a corrente nominal (par. 2.1.9) do motor forem
alteradas, este parâmetro é automaticamente definido no valor predefinido (45).
0
f
N X 1 2 k 6 2
f
n
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 43

42 • vacon DESCRIÇÃO DOS PARÂMETROS
Figura 1- 19. Cálculo da temperatura do motor
2.7.10 Protecção térmica do motor: Ciclo de funcionamento do motor
Define a quantidade de carga do motor nominal que é aplicada.
O valor pode ser definido entre 0% e 100%.
Parâmetro 2.7.11, Protecção de bloqueio do motor:
Geral
A protecção de bloqueio do motor protege o motor de situações de sobrecarga breves,
tais como as provocadas pelo rotor bloqueado. O tempo de reacção da protecção pode
ser mais curto do que o da protecção térmica do motor. O estado de bloqueio é definido
com dois parâmetros, 2.7.12 (Corrente de bloqueio) e 2.7.13 (Frequência de bloqueio).
Se a corrente for superior ao limite definido e a frequência de saída for inferior ao limite
definido, o estado de bloqueio confirma-se. Na realidade, não existe uma indicação real
da rotação do rotor. A protecção de paragem é um tipo de protecção de sobrecorrente.
2.7.11 Protecção de bloqueio do motor
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha, de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre em rotação livre
Definir o parâmetro para 0 vai desactivar a protecção e repor o contador do tempo de bloqueio
Telefone: +358-201-2121 • Fax:+358-201-212 205
4
.
Page 44
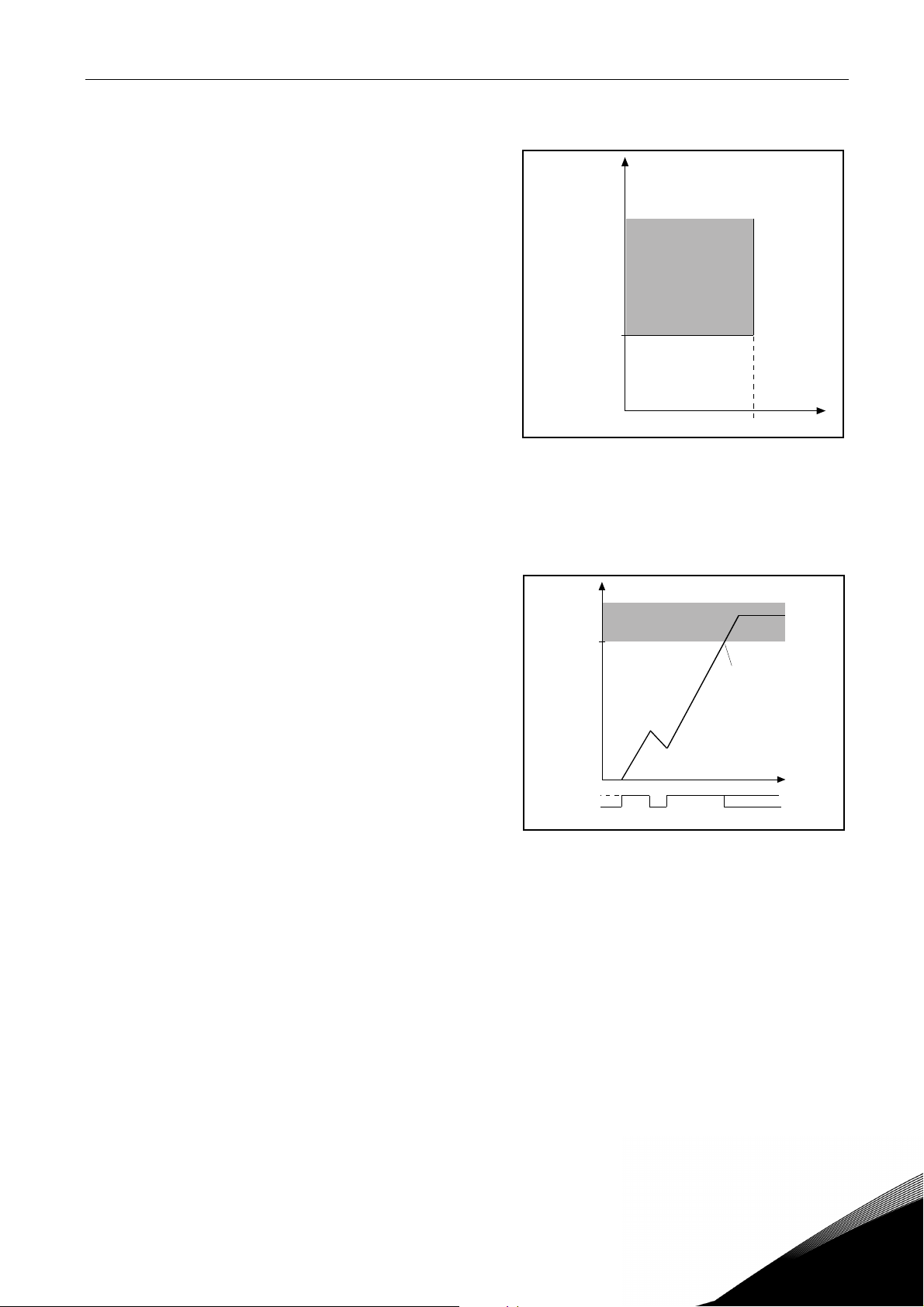
DESCRIÇÃO DOS PARÂMETROS VACON • 43
2.7.12 Limite de corrente de bloqueio
A corrente pode ser definida entre
0.0…I
*2. Para que ocorra um estado
nMotor
I
de bloqueio, a corrente tem de ter excedido
este limite. Consulte a Figura 1- 20.
O software não permite a introdução de
um valor superior a I
2.1.9 (corrente nominal do motor) for
alterado, este parâmetro é automatica-
*2. Se o parâmetro
nMotor
Área de
paragem
mente restaurado no valor predefinido
(I
nMotor
*1.3).
Par. 2.7.12
f
Par. 2.7.14
nxlk41.fh8
Figura 1-20. Definições de características de
bloqueio
2.7.13 Limite de tempo de bloqueio
Este tempo pode ser definido entre 1.0 e 120.0s.
Este é o tempo máximo permitido para uma
detecção do estado de bloqueio. O tempo de
bloqueio é contabilizado por um contador
ascendente/descendente interno.
Se o valor do contador do tempo de bloqueio
exceder este limite a protecção emitirá um
disparo (consulte a Figura 1- 21)
2.7.14 Frequência máxima de bloqueio
A frequência pode ser definida entre 1-f
Para que ocorra o estado de bloqueio, a frequência de saída tem deve ter permanecido
abaixo deste limite.
Contador de tempo de paragem
Área de
Par. 2.7.13
Paragem
Sem paragem
accionamento
Accionamento/aviso
par. 2.7.13
Figura 1- 21. Contagem do tempo de bloqueio
(par. 2.1.2).
max
Te mp o
nxlk42.fh8
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 45

44 • vacon DESCRIÇÃO DOS PARÂMETROS
Parâmetros 2.7.15—2.7.18, Protecção de subcarga:
Geral
O objectivo da protecção de subcarga do motor consiste em garantir que existe carga no motor
quando o conversor está a funcionar. Se o motor perder a respectiva carga, pode haver um
problema no processo (por exemplo, uma correia partida ou uma bomba seca).
A protecção de subcarga do motor pode ser ajustada definindo a curva de subcarga com os parâmetros
2.7.16 (carga na área de desexcitação) e 2.7.17 (carga na área de frequência zero) (ver abaixo). A curva
de subcarga é uma curva quadrática definida entre a frequência zero e o ponto de desexcitação.
A protecção não está activa abaixo de 5Hz (o contador do tempo de subcarga está inactivo).
Os valores do binário para definir a curva de subcarga são definidos em percentagem do binário
nominal do motor. Utilizam-se os dados na placa de características do motor, o parâmetro de
corrente nominal do motor e a corrente nominal IL do conversor para encontrar a taxa de ajuste
do valor de binário interno. Se for utilizado outro motor que não o motor nominal com o conversor,
a precisão de cálculo do binário diminui.
2.7.15 Protecção de subcarga
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre em rotação livre
Se o disparo estiver definido como activo, o conversor parará e activará a fase de falha.
A desactivação da protecção definindo o parâmetro em 0 reporá o contador do tempo de
subcarga.
2.7.16 Protecção de subcarga, carga na área de desexcitação
O limite do binário pode ser definido entre 10,0—150,0 % x T
Este parâmetro dá o valor para o binário mínimo permitido quando a frequência de saída
estiver acima do ponto de desexcitação. Consulte a Figura 1- 22.
Se alterar o parâmetro 2.1.9 (Corrente
Binário
nominal do motor) este parâmetro
é automaticamente restaurado para
Par. 2.7.16
o valor predefinido.
nMotor
.
4
Par. 2.7.17
Área de subcarga
f
5 Hz
Figura 1- 22. Definição da carga mínima
Telefone: +358-201-2121 • Fax:+358-201-212 205
Ponto de shunt
dos indutores
nxlk43.fh8
Page 46

DESCRIÇÃO DOS PARÂMETROS VACON • 45
2.7.17 Protecção de subcarga, carga na frequência zero
O limite do binário pode ser definido entre 5,0—150,0 % x T
Este parâmetro dá o valor para o binário mínimo permitido com a frequência zero.
Consulte a Figura 1- 22.
Se alterar o valor do parâmetro 2.1.9 (Corrente nominal do motor) este parâmetro
é automaticamente restaurado no valor predefinido.
2.7.18 Tempo de subcarga
Este tempo pode ser definido entre 2,0 e 600,0 s.
Este é o tempo máximo permitido para
a existência de um estado de subcarga.
Um contador interno ascendente/
descendente contabiliza o tempo de
subcarga acumulado. Se o valor do
contador de subcarga exceder este
limite, a protecção emitirá um disparo
de acordo com o parâmetro 2.7.15).
Se o conversor for parado, o contador
de subcarga será reposto em zero.
Consulte a Figura 1- 23.
Par. 2.7.18
Subcarga
Sem subcarga
.
nMotor
Contador do tempo de subcarga
Área de accionamento
Accionamento/aviso
par. 2.7.17
Te mp o
nxlk44.fh8
2.7.19 Resposta a falha do termístor
0 = Sem resposta
1 = Aviso
2 = Falha, modo de paragem após falha de acordo com o parâmetro 2.1.12
3 = Falha, modo de paragem após falha sempre com rotação livre
A definição do parâmetro em 0 desactivará a protecção.
2.7.20 Resposta a falha do bus de campo
Defina aqui o modo de resposta à falha do bus de campo se for utilizada uma placa
opcional bus de campo. Para obter mais informações, consulte o manual da placa
de bus de campo respectiva.
Consulte o parâmetro 2.7.19.
Figura 1- 23. Função de contador do tempo
de subcarga
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 47

46 • vacon DESCRIÇÃO DOS PARÂMETROS
2.7.21 Resposta a falha da ranhura da placa opcional
Defina aqui o modo de resposta a uma falha da ranhura da placa devido a uma placa
em falta ou danificada.
Consulte o parâmetro 2.7.19.
2.7.22 Função de supervisão do valor real
0 = Não utilizada
1 = Aviso, se o valor real descer abaixo do limite definido com o par. 2.7.23
2 = Aviso, se o valor real exceder o limite definido com o par. 2.7.23
3 = Falha, se o valor real descer abaixo do limite definido com o par. 2.7.23
4 = Falha, se o valor real exceder o limite definido com o par. 2.7.23
2.7.23 Limite de supervisão do valor real
Com este parâmetro, pode definir o limite do valor real monitorizado pelo par. 2.7.22
2.7.24 Atraso na supervisão do valor real
Defina aqui o atraso da função de supervisão do valor real (par. 2.7.22)
Se este parâmetro estiver a ser utilizado, a função do par. 2.7.22 estará apenas activa
quando o valor real permanecer fora do limite definido no tempo determinado por este
parâmetro.
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 48

DESCRIÇÃO DOS PARÂMETROS VACON • 47
4.8 PARÂMETROS DE REARRANQUE AUTOMÁTICO
A função de rearranque automático está activa se o valor do par. 2.1.21 = 1. Ocorrem sempre três
tentativas de rearranque.
2.8.1 Rearranque automático: tempo de espera
Define o tempo antes de o conversor de frequência tentar arrancar automaticamente
o motor após o desaparecimento da falha.
2.8.2 Rearranque automático: tempo de tentativas
A função de rearranque automático arranca o conversor de frequência quando as falhas
desaparecerem e o tempo de espera expirar.
Figura 1-24. Rearranque automático.
A contagem de tempo começa a partir do primeiro rearranque automático. Se o número
de falhas que ocorrem durante o tempo das tentativas for superior a três, o estado de
falha torna-se activo. Caso contrário, a falha é eliminada após a expiração do tempo
das tentativas . A falha seguinte inicia novamente a contagem do tempo das tentativas.
Se permanecer uma única falha durante o tempo das tentativas, confirma-se um estado
de falha.
2.8.3 Rearranque automático: tipo de arranque
A função de rearranque automático é seleccionada com este parâmetro. O parâmetro
define o modo de arranque:
0 = Arranque com rampa
1 = Arranque motor a girar
2= Arranque de acordo com o par. 2.1.11
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 49

48 • vacon DESCRIÇÃO DOS PARÂMETROS
4.9 PARÂMETROS DE REFERÊNCIA PID
2.9.1 Activação PID
Com este parâmetro, pode activar ou desactivar o controlador PID ou activar os
parâmetros de controlo da bomba e ventiladores
0 = Controlador PID desactivado
1 = Controlador PID activado
2 = Controlo de bombas e ventiladores activado. O grupo de parâmetros P2.10 fica
visível.
2.9.2 Referência PID
Define a origem da referência de frequência seleccionada para o controlador PID.
O valor predefinido é 2.
0 = Referência AI1
1 = Referência AI2
2 = Referência PID da página de controlo da consola (Grupo K3, parâmetro P3.5)
3 = Referência do bus de campo (FBProcessDataIN1)
2.9.3 Entrada do valor real
0 AI1
1 AI2
2 Bus de campo (Valor real 1: FBProcessDataIN2; Valor real 2: FBProcessDataIN3)
3 Binário do motor
4 Velocidade do motor
5 Corrente do motor
6 Potência do motor
7 AI1 – AI2
2.9.4 Ganho do controlador PID
Este parâmetro define o ganho do controlador PID. Se o valor do parâmetro for definido
em 100%, uma alteração de 10% no valor de erro faz com que a saída do controlador
seja alterada em 10%.
Se o valor do parâmetro for definido para 0, o controlador PID funciona como um
controlador ID.
Consulte os exemplos abaixo.
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 50

DESCRIÇÃO DOS PARÂMETROS VACON • 49
2.9.5 Tempo de integração do controlador PID
Este parâmetro define o tempo de integração do controlador PID. Se for definido em
1,00 segundos, uma alteração de 10% no valor de erro faz com que a saída do controlador
seja alterada em 10.00%/s. Se o valor do parâmetro for definido em 0.00 s, o controlador
PID funcionará com um controlador PID. Consulte os exemplos abaixo.
2.9.6 Tempo de derivação do controlador PID
O parâmetro 2.9.5 define o tempo de derivação do controlador PID. Se for definido em
1,00 segundos, uma alteração de 10% no valor de erro durante 1,00 s faz com que a
saída do motor seja alterada em 10,00%. Se o valor do parâmetro for definido em 0,00 s,
o controlador PID funciona como um controlador PI.
Consulte os exemplos abaixo.
Exemplo 1:
De modo a reduzir o valor de erro para zero, com os valores fornecidos, a saída do
conversor de frequência comporta-se da seguinte forma:
Valores fornecidos:
Par. 2.9.4, P = 0% Limite máx. PID = 100,0%
Par. 2.9.5, tempo I = 1,00 s Limite mín. PID = 0,0%
Par. 2.9.6, tempo D = 0,00 s Freq. mín. = 0 Hz
Valor de erro (ponto de referência – valor do processo) = 10,00% Freq. máx. = 50 Hz
Neste exemplo, o controlador PID funciona praticamente apenas como um controlador ID.
De acordo com o valor fornecido do parâmetro 2.9.5 (tempo I), a saída PID aumenta em
5 Hz (10% da diferença entre a frequência máxima e mínima) a cada segundo até o valor
de erro ser 0.
Hz
PID output
Error value
10% I-Part=5 Hz/s
10%
10%
10%
Error=10%
1s
Figura 1-25. Função do controlador PID como um controlador I
I-Part=5 Hz/s
I-Part=5 Hz/s
I-Part=5 Hz/s
I-Part=5 Hz/s
NX12k70
t
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 51

50 • vacon DESCRIÇÃO DOS PARÂMETROS
Exemplo 2:
Valores fornecidos:
Par. 2.9.4, P = 100% Limite máx. PID = 100,0%
Par. 2.9.5, tempo I = 1,00 s Limite mín. PID = 0,0%
Par. 2.9.6, tempo D = 1,00 s Freq. mín. = 0 Hz
Valor de erro (ponto de referência – valor do processo) = 10% Freq. máx. = 50 Hz
Quando a alimentação é ligada, o sistema detecta a diferença entre o ponto de referência
e o valor real do processo e começa a aumentar ou a diminuir (no caso de o valor de
erro ser negativo) a saída PID de acordo com o tempo I. Quando a diferença entre o
ponto de referência e valor do processo tiver sido reduzida para 0, a saída é reduzida
no montante correspondente ao valor do parâmetro 2.9.5.
No caso de o valor de erro ser negativo, o conversor de frequência reage reduzindo
a saída em conformidade.
Hz
PID output
D-part
P-part=5 Hz
D-part
Error=10%
Error= -10%
D-part
P-part= -5 Hz
Error value
NX12k69
t
Figura 1-26. Curva de saída PID com os valores do Exemplo 2
Exemplo 3:
Valores fornecidos:
Par. 2.9.4, P = 100% Limite máx. PID = 100,0%
Par. 2.9.5, tempo I = 0,00 s Limite mín. PID = 0,0%
Par. 2.9.6, tempo D = 1,00 s Freq. mín. = 0 Hz
Valor de erro (ponto de referência – valor do processo) = 10%/s Freq. máx. = 50 Hz
À medida que o valor de erro aumenta, a saída PID também aumenta de acordo com os
valores definidos (tempo D = 1,00s).
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 52

DESCRIÇÃO DOS PARÂMETROS VACON • 51
Hz
PID output
Error value
D-part=10%=5,00 Hz
D-part= -10%= -5,00 Hz
P-part=100% *PID error = 5,00Hz/s
10%
1,00 s
Figura 1-27. Saída PID com os valores do Exemplo 3.
2.9.7 Escala mínima do valor real 1
Define o ponto de escala mínimo para o Valor real 1. Consulte a Figura 1- 28.
2.9.8 Escala máxima do valor real 1
Define o ponto de escala máximo para o Valor real 1. Consulte a Figura 1- 28.
Sinal de entrada
da escala [%]
100
Par.2.9.7=30%
Par.2.9.8=80%
0
0
0
4
6,0
8,8 20,0 mA
16,0
16,8
nxlk45.fh8
NX12k72
1008030
10,0 V8,03,0
20,0 mA
Entrada
analógica [%]
t
Figura 1- 28. Exemplo de escala de sinal do valor real
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 53

52 • vacon DESCRIÇÃO DOS PARÂMETROS
2.9.9 Inversão do valor de erro PID
Este parâmetro permite inverter o valor de erro do controlador PID (e assim,
o funcionamento do controlador PID).
0 Não inversão
1 Invertido
2.9.10 Frequência adormecer
O conversor de frequência é automaticamente parado se a frequência do conversor descer
abaixo do nível de adormecimento definido com este parâmetro durante um período
de tempo superior ao determinado pelo parâmetro 2.9.11. Durante o estado de paragem,
o controlador PID está a funcionar, mudando o conversor de frequência para o estado de
Marcha quando o sinal do valor real desce abaixo ou excede (consulte o par. 2.9.13) o nível
de reactivação determinado pelo parâmetro 2.9.12. Consulte a Figura 1- 29.
2.9.11 Atraso adormecer
O período de tempo mínimo em que a frequência tem de permanecer abaixo do nível
de adormecer antes de o conversor de frequência ser parado. Consulte a Figura 1- 29.
2.9.12 Nível despertar
O nível de despertar define a frequência abaixo da qual o valor real tem de descer ou
que tem de ser excedido antes do estado de Marcha do conversor de frequência ser
restaurado. Consulte a Figura 1- 29.
2.9.13 Função despertar
Este parâmetro define se o restauro do estado de Marcha ocorre quando o sinal de valor
real desce abaixo ou excede o
Figura 1-30.
Valor real
Nível de reactivação (parâm. 2.9.12)
Frequência de saída
t < param. 2.9.11
Nível de
suspensão
param. 2.9.10
Estado Iniciar/Parar
do conversor de
velocidade de var.
nível despertar
< par 2.9.11
t
funcionamento
parar
(par. 2.9.12). Consulte a Figura 1- 29 e a
Tem po
Tem po
nxlk46.fh8
4
Figura 1- 29. Função adormecer do conversor de frequência
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 54

DESCRIÇÃO DOS PARÂMETROS VACON • 53
Par.
valor
0
1
Função Limite
A reactivação
ocorre quando
valor real desce
abaixo do limite
O limite definido
com o parâmetro
2.9.12 é uma
percentagem
do valor real
máximo
A reactivação
ocorre quando
valor real excede
o limite
O limite definido
com o parâmetro
2.9.12 é uma
percentagem
do valor real
máximo
Descrição
Sinal de valor real
100%
Iniciar
Parar
Sinal de valor real
100%
Par. 2.9.12=60%
Iniciar
Parar
Par. 2.9.12=30%
tempo
tempo
A reactivação
2
ocorre quando
valor real desce
abaixo do limite
O limite definido
com o parâmetro
2.9.12 é uma
percentagem
Sinal de valor real
do valor actual do
sinal de
referência
Sinal de valor real
A reactivação
ocorre quando
valor real excede
o limite
O limite definido
com o parâmetro
2.9.12 é uma
percentagem
do valor actual do
sinal de referência
Figura 1- 30. Funções de despertar seleccionáveis
100%
referência=50%
Par.2.9.12=60%
limite=60%*referência=30%
Iniciar
Parar
100%
Par.2.9.12=140%
limite=140%*referência=70%
referência=50%
NXLk59.fh8
Iniciar
Parar
tempo
tempo
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 55

54 • vacon DESCRIÇÃO DOS PARÂMETROS
4.10 CONTROLO DE BOMBAS E VENTILADORES
O Controlo de Bombas e Ventiladores pode ser utilizado para controlar um motor de velocidade variável e até três motores auxiliares. O controlador PID do conversor de frequência controla a velocidade do motor de velocidade variável e fornece sinais de controlo para arrancar e parar os motores
auxiliares para controlar o caudal total. Para além dos oito grupos de parâmetros de série, está
disponível um grupo de parâmetros para funções de controlo das várias bombas e ventiladores.
Como o próprio nome indica, o Controlo da Bombas e Ventiladores é utilizado para controlar o funcionamento das bombas e de ventiladores. A aplicação utiliza contactores externos para comutar
os motores ligados ao conversor de frequência. A funcionalidade de rotação automática disponibiliza
a capacidade de alterar a ordem de arranque dos motores auxiliares.
4.10.1 Breve descrição da função PFC e parâmetros essenciais
Rotação automática entre motores (selecção de comutação automática & bloqueios, P2.10.4)
A comutação automática da ordem de arranque e de paragem é activada e aplicada apenas aos
motores auxiliares ou a estas e ao motor controlado pelo conversor de frequência, dependendo
da definição do parâmetro 2.10.4.
A função de rotação automática permite que a ordem de arranque e de paragem dos motores
controlados pelos comandos automáticos de bombas e ventiladores seja alterada nos intervalos
considerados necessários. O motor controlado pelo conversor de frequência pode também ser
incluído na sequência de rotação automática (par 2.10.4). A função de rotação automática possibilita
a equalização dos tempos de funcionamento dos motores e evitar, por exemplo, o bloqueio da
bomba devido a paragens de funcionamento longas.
Aplique a função de rotação automática com o parâmetro 2.10.4,
A rotação automática tem lugar quando o tempo definido com o parâmetro 2.10.5 Intervalo de
rotação automática, expirou e a capacidade utilizada se encontra abaixo do nível definido com
o parâmetro 2.10.7, Limite de frequência de rotação automática.
Os motores em funcionamento são parados e arrancam de acordo com a nova ordem.
Os contactores externos controlados através das saídas de relés do conversor de frequência
ligam os motores ao conversor de frequência ou à rede. Se o motor controlado pelo conversor
de frequência estiver incluído na sequência de rotação automática, é sempre controlado através
da saída do relé activado primeiro. Os outros relés activados posteriormente controlam os
motores auxiliares.
Este parâmetro é utilizado para activar as entradas de encravamento (Valores 3 & 4). Os sinais de
encravamento têm origem nos comutadores Aut.-0- Man doses motor. Os sinais (funções) são
ligados a entradas digitais programadas como entradas de encravamento utilizando os parâmetros
correspondentes. Os controlos automáticos de bombas e ventiladores controlam apenas os motores
com encravamento activo.
Se o encravamento de um motor auxiliar estiver inactivo e existir outro motor auxiliar que não
esteja a ser utilizado disponível, este último será utilizado sem parar o conversor de frequência.
Rotação automática
.
Se o encravamento do motor controlado estiver inactivo, todos os motores serão parados
e voltarão a pôr-se em marcha com a nova configuração.
Se o encravamento for reactivado no estado de Marcha, os controlos automáticos vão parar
todos os motores imediatamente e voltarão a pôr-se em marcha com a nova configuração.
Exemplo: [P1 P3] [P2 LOCKED] [STOP] [P1 P2 P3]
Consulte o Capítulo 4.10.2, Exemplos.
Telefone: +358-201-2121 • Fax:+358-201-212 205
4
Page 56

DESCRIÇÃO DOS PARÂMETROS VACON • 55
Parâmetro 2.10.5, Intervalo de rotação automática
Depois de expirar o tempo definido com este parâmetro, a função de rotação automática tem lugar
se a capacidade utilizada estiver abaixo do nível definido com os parâmetros 2.10.7 (
quência de rotação automática
exceder o valor do par 2.10.7, a rotação automática não terá lugar antes de a capacidade descer
abaixo deste limite.
A contagem de tempo é apenas activada se o pedido Arrancar/Parar estiver activo.
A contagem de tempo é reposta depois de a rotação automática ter ocorrido ou quando o pedido
Arrancar for removido
) e 2.10.6 (
Número máximo de motores auxiliares
Limite de fre-
). Se a capacidade
Parâmetros 2.10.6, Número máximo de motores auxiliares e
2.10.7, Limite de frequência de rotação automática
Estes parâmetros definem o nível abaixo do qual a capacidade utilizada tem de permanecer para
que a comutação automática tenha lugar.
Este nível é definido da seguinte forma:
Se o número de motores auxiliares em funcionamento for inferior ao valor do parâmetro 2.10.6,
a função de comutação automática pode ocorrer.
Se o número de motores auxiliares em funcionamento for igual ao valor do parâmetro 2.10.6
e a frequência do motor controlado estiver abaixo do valor do parâmetro 2.10.7, a comutação
automática pode ocorrer.
Se o valor do parâmetro 2.10.7 for 0.0 Hz, a comutação automática pode ocorrer apenas na
posição de paragem (Paragem e Suspensão) independentemente do valor do parâmetro 2.10.6.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 57

56 • vacon DESCRIÇÃO DOS PARÂMETROS
4.10.2 Exemplos
PFC com encravamentos e rotação automática entre 3 bombas
(painel de opções OPT-AA ou OPT-B5 necessário)
Situação: 1 motor controlado e 2 motores auxiliares.
Ajuste do parâmetro: 2.10.1= 2
Sinais de encravamento utilizados, rotação automática entre todos os motores utilizada.
Ajuste do parâmetro: 2.10.4=4
DIN4 activo (par.2.2.6=0)
Os sinais de realimentação de encravamento têm origem nas entradas digitais DIN4
(AI1), DIN2 & DIN3 seleccionadas com os parâmetros 2.1.17, 2.1.18 e 2.2.4.
O controlo da bomba 1 (par.2.3.1=17) é activado através do Bloqueio 1 (DIN2, 2.1.17=10),
o controlo da bomba 2 (par.2.3.2=18) através do Bloqueio 2 (DIN3, par. 2.1.18=13) e o
controlo da bomba 3 (par.2.3.3=19) através do Bloqueio 3 (DIN4)
Transmissor
com 2 fios
Potenciómetro de
referência
Valor
real
I
(0)4…20 mA
Terminal Sinal
1 +10V
2 AI1+ Referência de frequência da entrada de tensão/DIN4
3 AI1- E/S de terra
–
+
4 AI2+
5 AI2-
6 +24V Saída da tensão de controlo
7
GND E/S de terra
8 DIN1 MARCHA
9 DIN2 Encravamento 1 (par 2.1.17 = 10)
10 DIN3 Encravamento 2 (par 2.1.18 = 13)
11 GND Terra das E/S
Saída de referência
ref
Valor real PID
mA
18 AO1+
19 AO1-
A RS 485 Bus de série
B RS 485 Bus de série
21 RO1
22 RO1
23 RO1
OPT-B5
22
RO1/1
23
RO1/2
25
RO2/1
26
RO2/2
28
RO3/1
29
RO2/2
Frequência de saída
Saída analógica
Saída do relé 1
FALHA
Rotação 1 (Controlo da bomba 1), par 2.3.2 = 17
Rotação 2 (Controlo da bomba 2), par 2.3.3 = 18
Rotação 3 (Controlo da bomba 3), par 2.3.4 = 19
Tabela 1-17. Exemplo de configuração de E/S do controlo PFC com
encravamento e rotação automática entre 3 bombas
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 58

DESCRIÇÃO DOS PARÂMETROS VACON • 57
230 VAC
VACON NXL
DIN2
24 VDC
68
DIN3
9
AI1
10V
10
K2.1
K1
K2
M2/mains
25
26
AOMains
S3
K3
K1
K2
K3.1
K3
M3/Vacon M3/m ains
K3.1
28
29
K1
K2
K3
NX12k106.dsf
NXOPTB5
K3
K2
K1.1
K1
M1/Vacon
AOMains
S1
K1.1
K2
K1
M1/mains
22
23
AOMains
S2
K3
K3
K1
K2.1
K2
Vacon
M2/
Figura 1-31. Sistema de rotação automática com 3 bombas, diagrama de controlo principal
PE
L1
L2
L3
Q1
F3
F1
F2
F2
VACON
NX12k104.ds4
K1
L1 L2 L3
UVW
M1
K1.1
K2
PE
UVW
M
3
M2
K2.1
UVW
M
3
K3
PE
M2
Figura 1-32. Exemplo de rotação automática com 3 bombas (diagrama principal)
K3.1
PE
UVW
M
3
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 59

58 • vacon DESCRIÇÃO DOS PARÂMETROS
PFC com encravamentos e rotação automática entre 2 bombas
(painel de opções OPT-AA ou OPT-B5 necessário)
Situação: 1 motor controlado e 1 motor auxiliar.
Definições do parâmetro: 2.10.1= 1
Sinais de feedback do encravamento utilizados, rotação automática entre as bombas
utilizada.
Definições do parâmetro: 2.10.4=4
Os sinais de feedback do encravamento têm origem na entrada digital DIN2 (par. 2.1.17)
e entrada digital DIN3, (par. 2.1.18).
O controlo da bomba 1 (par.2.3.1=17) está activo através do Encravamento 1 (DIN2, P2.1.17),
o controlo da bomba 2 (par.2.3.2=18) através do Encravamento 2 (par. 2.1.18=13)
Transmissor
com 2 fios
Potenciómetro de
referência
Valor
real
I
(0)4…20 mA
Terminal Sinal
1 +10V
2 AI1+ Referência de frequência da entrada de tensão/DIN4
3 AI1- Terra para E/S
–
+
4 AI2+
5 AI2-
6 +24V Saída da tensão de controlo
7
GND E/S de terra
8 DIN1 ARRANCAR
9 DIN2 Encravamento 1 (par 2.1.17 = 10)
10 DIN3 Encravamento 2 (par 2.1.18 = 13)
11 GND Massa para E/S
Saída de referência
ref
Valor real PID
mA
18 AO1+
19 AO1-
A RS 485 Bus de série
B RS 485 Bus de série
21 RO1
22 RO1
23 RO1
Frequência de saída
Saída analógica
Rotação automática 1 (Controlo da bomba 1)
par 2.3.1. = 17
OPT-AA
X1
1 +24V Saída da tensão de controlo máx. 150 mA
2 GND Ligação à terra para controlos, por exemplo para +24 V e DO
3 DIN1 Velocidade predefinida 2, par 2.2.1 = 7
4 DIN2 Reset de falhas, par 2.2.2 = 4
5 DIN3 Desactivar PID (Referência de frequência de AI1), par 2.2.3 = 11
6 DO1 Pronto, par 2.3.4 = 1
X2
22 RO1/NO
23 RO1/COM
Saída de colector aberto, 50 mA/48V
Comutação automática 2 (Controlo da bomba 2), par 2.3.2 = 18
Tabela 1-18. Exemplo de configuração de E/S do controlo PFC com
encravamentos e rotação automática entre 2 bombas
4
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 60

DESCRIÇÃO DOS PARÂMETROS VACON • 59
230 VAC
NXOPTAA
K1
K2
K1.1
M1/Vacon
Autom.OMains
S1
K1
K1.1
K2
M1/mains
22
23
RO1
VACON NXOPTA2
DIN2
24 VDC
12
9
DIN2
K1
K2.1
K2
Autom.OMains
S2
M2/
Vacon
K2.1
K1
K2
M2/mains
RO1
26
25
RO2
NX12k105.dsf
DIN3
DIN3
10
Figura 1-33. Sistema de rotação automática com 2 bombas, diagrama de controlo principal
PE
L1
L2
L3
Q1
F3
F1
F2
VACON
L1 L2 L3
UVW
K1
NX12k107.ds4
M1
K1.1
PE
UVW
M
3
K2.1
K2
PE
UVW
M2
M
3
Figura 1-34. Exemplo de rotação automática com 2 bombas (diagrama principal)
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 61

60 • vacon DESCRIÇÃO DOS PARÂMETROS
4.10.3 Descrição dos parâmetros de controlo da Bombas e Ventiladores
2.10.1 Número de motores auxiliares
Este parâmetro define o número de motores auxiliares em utilização. As funções que
controlam os motores auxiliares (parâmetros 2.10.4 a 2.10.7) podem ser programados
para as saídas de relés.
2.10.2 Atraso de arranque dos motores auxiliares
A frequência do motor controlado pelo conversor de frequência tem de permanecer
acima da frequência máxima durante o tempo definido com este parâmetro antes de
o motor auxiliar arrancar. O atraso definido aplica-se a todos os motores auxiliares.
Isto evita arranques desnecessários provocados por superação momentânea do limite
de marcha.
2.10.3 Atraso de paragem dos motores auxiliares
A frequência do motor controlado pelo conversor de frequência tem de permanecer
abaixo da frequência mínima durante tempo definido por este parâmetro antes de
o motor parar. O atraso definido aplica-se a todos os motores auxiliares. Isto evita
paragens desnecessárias provocadas por descidas momentâneas abaixo do limite
de paragem.
2.10.4 Rotação automática entre motores
0 = Não utilizado
1= Rotação automática com bombas auxiliares
O motor controlado pelo conversor de frequência permanece o mesmo. Assim, o
contactor de rede é necessário apenas para apenas um motor auxiliar.
M
Motor aux.1
M
Motor aux.2
Va co n
M
4
Figura 1-35. Rotação aplicada apenas a motores auxiliares.
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 62

DESCRIÇÃO DOS PARÂMETROS VACON • 61
2= Rotação automática com conversor de frequência e bombas auxiliares
O motor controlado pelo conversor de frequência está incluído nos automatismos, sendo
necessário um contactor para cada motor de modo a ligá-lo à rede ou ao conversor de
frequência.
Figura 1-36. Rotação automática com todos os motores
3= Rotação automática e encravamentos (apenas bombas auxiliares)
O motor controlado pelo conversor de frequência permanece o mesmo. Assim, o contactor
de rede é necessário apenas para um motor auxiliar. Os encravamentos para as saídas de
rotação automática 1, 2, 3 (ou DIE1,2,3) podem ser seleccionados com o par.
4= Rotação automática e encravamentos (conversor de frequência e bombas auxiliares)
O motor controlado pelo conversor de frequência está incluído nos automatismos, sendo
necessário um contactor para cada motor de modo a ligá-lo à rede ou ao conversor de
frequência. DIN 1 é o encravamento para a saída de rotação 1. Os encravamentos para a saída
de rotação 1, 2, 3 (ou DIE1,2,3) podem ser seleccionados com o par.
2.10.5 Intervalo de rotação
Uma vez expirado o tempo definido com este parâmetro, a função de rotação automática
tem lugar se a capacidade utilizada estiver abaixo do nível definido com os parâmetros
2.10.7 (
Limite de frequência de rotação automática
accionamentos auxiliares
automática não terá lugar antes de a capacidade descer abaixo deste limite.
2.1.17 e 2.1.18.
2.1.17 e 2.1.18.
) e 2.10.6 (
Número máximo de
). Se a capacidade exceder o valor do par 2.10.7, a rotação
A contagem de tempo será activada somente se a ordem Iniciar/Parar estiver activa.
A contagem de tempo é reposta depois de a rotação automática ter ocorrido ou
quando a ordem de Marcha for removida.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 63

62 • vacon DESCRIÇÃO DOS PARÂMETROS
2.10.6 Número máximo de motores auxiliares
2.10.7 Limite de frequência de rotação
Estes parâmetros definem o nível abaixo do qual a capacidade utilizada tem de
permanecer para que a rotação automática ocorra.
Este nível é definido da seguinte forma:
Se o número de motores auxiliares em marcha for inferior ao valor do parâmetro
2.10.6, a função de rotação automática pode ocorrer.
Se o número de motores auxiliares em marcha for igual ao valor do parâmetro
2.10.6 e a frequência do motor controlado estiver abaixo do valor do parâmetro
2.10.7, a comutação automática pode ocorrer.
Se o valor do parâmetro 2.10.7 for 0.0 Hz, a rotação automática pode ocorrer apenas
na posição de paragem (Paragem e Suspensão) independentemente do valor do
parâmetro 2.10.6.
4
Figura 1-37. Intervalo e limites de comutação automática
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 64

DESCRIÇÃO DOS PARÂMETROS VACON • 63
2.10.8 Frequência de arranque, motor auxiliar 1
A frequência do motor controlado pelo conversor de frequência tem de exceder o limite
definido com estes parâmetros em 1 Hz antes que o motor auxiliar se ponha em marcha.
O excesso de 1 Hz cria uma histerese para evitar arranques e paragens desnecessários.
Consulte também os parâmetros 2.1.1 e 2.1.2.
2.10.9 Frequência de paragem, motor auxiliar 1
A frequência do motor controlado pelo conversor de frequência tem de descer 1Hz abaixo
do limite definido com estes parâmetros antes que o motor auxiliar pare. O limite de
frequência de paragem define também a frequência para a qual a frequência do motor
controlado pelo conversor de frequência desce após o arranque do motor auxiliar.
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
4
Page 65

64 • vacon DESCRIÇÃO DOS PARÂMETROS
4.11 PARÂMETROS DE CONTROLO DA CONSOLA
3.1 Local de controlo
O local de controlo activo pode ser alterado com este parâmetro. Consulte o Manual
de Utilizador Vacon NXL, Capítulo 7.4.3 para obter mais informações.
3.2 Referência da consola
A referência de frequência pode ser ajustada a partir da consola com este parâmetro.
Consulte o Manual de Utilizador Vacon NXL, Capítulo 7.4.3.2 para obter mais
informações.
3.3 Direcção da consola
0 Directa: A rotação do motor é directa, quando a consola for o local de
controlo activo.
1 Inversa: A rotação do motor é inversa, quando a consola for o local de
Consulte o Manual de Utilizador Vacon NXL, Capítulo 7.4.3.3 para obter mais informações.
3.4 Botão Parar activado
Se pretender tornar o botão Parar num botão operacional que pára sempre o motor
independentemente do local de controlo seleccionado, atribua a este parâmetro o valor
1 (predefinição). Consulte o Manual de Utilizador NXL, capítulo 7.4.3.
Consulte também o parâmetro 3.1.
3.5 Referência PID 1
A referência da consola do controlador PID pode ser ajustada entre 0% e 100%.
Este valor de referência é a referência PID activa se o parâmetro for 2.9.2 = 2.
3.6 Referência PID 2
controlo activo.
4
A referência da consola do controlador PID2 pode ser ajustada entre 0% e 100%.
Esta referência está activa se a função DIN# =12 e o contacto DIN# estiver fechado.
Telefone: +358-201-2121 • Fax:+358-201-212 205
Page 66

LÓGICA DE SINAIS DE CONTROLO VACON • 65
5. LÓGICA DE SINAIS DE CONTROLO
DIN3
Exp.DIE1
Velocidade predefinida 1
Velocidade predefinida 2
DIN3 & Exp.DIE1
> 1
Exp.DIE1
2.1.2 Frequência máx.
2.1.20 Velocidade predefinida 1
DIN3
2.1.21 Velocidade predefinida 2
Exp.DIE3
DIN2
DIN3
AI1
AI2
DIN1
DIN2
Desactivar PID
2.2.21 Referência de controlo
do bus de campo
2.2.20 Referência de controlo
do teclado
2.1.14 Referência de E/S
Para
cima
Motor
Para
baixo
potenciómetro
2.9.2 Referência PID
P3.5 Refer. do teclado PID
Referência de
bus de campo
(FBProcessData IN 1)
R3.2 Referência do teclado
Referência do bus de campo
Iniciar/Parar do bus de campo
Direcção do bus de campo
Iniciar para a frente
Programável
Iniciar/Parar e
Iniciar inversão
(programável)
Lógica inversa
0
1
2
PID
3
0
1
2
Ref.
E/S
3
2.1.14
4
0
1
2
K
3
4
5
0
1
2
3
F
4
5
3.3 Direcção do teclado
Activar ref. do teclado PID 2 (DIN#=12)
R3.6 Ref. do teclado PID 2
Entrada de valor
real, par. 2.9.3
P2.9.1 Activação PID
3.1 Valor de controlo
E/S
Te cl ad o
Bus de campo
Ref. frequência
interna
Botão Repor
Botões Iniciar/Parar
Iniciar/Parar interno
Inversão interna
PID
Exp. DIE2
nxlk47.fh8
Reposição de falhas (programável)
> 1
Figura 1-38. Lógica de sinais de controlo da Aplicação de Controlo Multifunções
Suporte 24 horas por dia: +358-40-8371 150 • Email: vacon@vacon.com
Reposição de falhas interna
4
 Loading...
Loading...