

Page 1

vacon nxl
®
convertisseurs de fréquence
manuel de
l’applicatif universel
Page 2

Page 3
vacon • 1
Applicatif Universel (logiciel ALFIFF20) Ver. 1.02
TABLE DES MATIERES
1. Introduction ....................................................................................................................... 2
2. E/S de commande .............................................................................................................. 3
3. Applicatif Universel – Liste des paramètres ...................................................................... 4
3.1 Valeurs affichées (Commande Panneau : menu M1) ................................................................ 4
3.2 Paramètres de base (Commande Panneau : Menu P2 P2.1) ............................................... 5
3.3 Configuration des entrées (Commande Panneau : Menu P2 P2.2)...................................... 7
3.4 Configuration des sorties (Commande Panneau : Menu P2 P2.3) ....................................... 9
3.5 Contrôle du variateur (Commande Panneau : Menu P2 P2.4) ........................................... 10
3.6 Saut de fréquences (Commande Panneau : Menu P2 P2.5)............................................... 10
3.7 Contrôle du moteur (Commande Panneau : Menu P2 M2.6) ............................................. 11
3.8 Protections (Commande Panneau : Menu P2 P2.7)............................................................ 12
3.9 Redémarrage automatique (Commande Panneau
3.10 Régulateur PID (Commande Panneau : Menu P2 P2.9) ..................................................... 13
3.11 Régulation pompes/ventilateurs (Commande Panneau : Menu P2 -> P2.10)........................ 14
3.12 Commande par le panneau opérateur (Commande Panneau: Menu K3) .............................. 15
3.13 Menu Système (Commande Panneau: Menu S6) .................................................................... 15
3.14 Cartes d’extension (Commande Panneau: Menu E7) .............................................................. 15
: Menu P2 P2.8) .................................. 13
4. Description des paramètres............................................................................................. 16
4.1 PARAMETRES DE BASE ........................................................................................................... 16
4.2 CONFIGURATION DES ENTREES ............................................................................................. 21
CONFIGURATION DES SORTIES .......................................................................................................... 25
4.3 CONTROLE VARIATEUR............................................................................................................ 29
4.4 SAUT DE FREQUENCES............................................................................................................ 33
4.5 CONTROLE MOTEUR ................................................................................................................ 34
4.6 PROTECTIONS........................................................................................................................... 37
4.7
4.8 REGULATEUR PID..................................................................................................................... 46
4.9 REGULATION POMPES/VENTILATEURS.................................................................................. 52
4.10 COMMANDE PANNEAU ............................................................................................................ 62
5. Logique des signaux de commande de l’Applicatif Universel .......................................... 63
REDEMARRAGE AUTOMATIQUE .............................................................................................. 45
NOTE! You can download the English and French product manuals with applicable safety,
warning and caution information from
REMARQUE Vous pouvez télécharger les versions anglaise et française des manuels produit
contenant l'ensemble des informations de sécurité, avertissements et mises en garde
applicables sur le site www.vacon.com/downloads
www.vacon.com/downloads.
.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
Page 4
2 • vacon Introduction
Applicatif Universel
1. INTRODUCTION
En sortie d’usine, l’Applicatif Universel du Vacon NXL est configuré pour recevoir une référence
fréquence directe de l’entrée analogique 1. Toutefois, le NXL intègre également un régulateur PID
(ex., applications de pompage et de ventilation) qui offre des fonctions polyvalentes de mesure et de
régulation. A la mise en service du variateur, le seul groupe de paramètres affiché est P2.1
(paramètres de base). Les paramètres spéciaux sont accessibles et réglables après modification du
paramètre 2.1.22 (Param. cachés).
Les paramètres spéciaux de la Régulation pompes/ventilateurs (Groupe P2.10) peuvent être
affichés et modifiés après réglage de la valeur du par. 2.9.1 sur 2 (Régulation pompes/ventilateurs
activée). La référence fréquence directe peut servir à la commande du moteur sans régulateur PID
et peut être d’origine diverse : entrées analogiques, bus de terrain, panneau opérateur, vitesses
constantes ou motopotentiomètre.
La référence du régulateur PID peut venir de : entrées analogiques, bus de terrain, réf. PID 1 panneau
ou réf. PID 2 panneau via une entrée logique. Le retour PID peut être d’origine diverse: entrées
analogiques, bus de terrain ou valeurs de mesure du moteur. Le régulateur PID peut également être
utilisé avec le variateur commandé via le bus de terrain ou par le panneau opérateur.
• Les entrées logiques DIN2, DIN3, (DIN4) et en option DIE1, DIE2, DIE3 sont configurables.
• Les sorties relais/logiques/analogiques internes et optionnelles sont configurables.
• L’entrée analogique 1 peut être configurée comme entrée en courant, en tension ou
entrée logique DIN4.
NOTA! Si l’entrée analogique 1 est configurée comme DIN4 avec le paramètre 2.2.6 (AI1: échelle),
vérifiez que les cavaliers sont correctement positionnés (Figure 1- 1).
Fonctions supplémentaires :
• Régulateur PID utilisable depuis le bornier d’E/S, panneau opérateur et bus de terrain
• Fonction de veille
• Fonction de supervision des valeurs de retour : action paramétrable ; aucune action, alarme, défaut
• Logique des signaux Marche/Arrêt et d’inversion de sens de rotation paramétrable
• Mise à l’échelle de la référence
• 2 vitesses constantes
• Sélection de la plage du signal d’entrée analogique, mise à l’échelle, inversion et filtrage du signal
• Supervision de la limite de fréquence
• Fonctions paramétrables Marche et Arrêt
• Freinage par injection de c.c. au démarrage et à l’arrêt
• Saut d’une plage de fréquence
• Courbe U/f et optimisation U/f paramétrables
• Fréquence de découpage paramétrable
• Fonction de redémarrage automatique sur défaut
• Protections et supervisions (action paramétrable; aucune action, alarme, défaut):
Défaut entrée en courant
Défaut externe
Défaut phases moteur
Défaut sous-tension
Défaut terre
Protection thermique, contre le calage et la sous-
charge moteur
Thermistance
Communication sur bus de terrain
Carte optionnelle
1
Tél. : +33 (0)1 64 13 54 11 • Fax : +33 (0)1 64 13 54 21
Page 5
E/S de commande vacon • 3
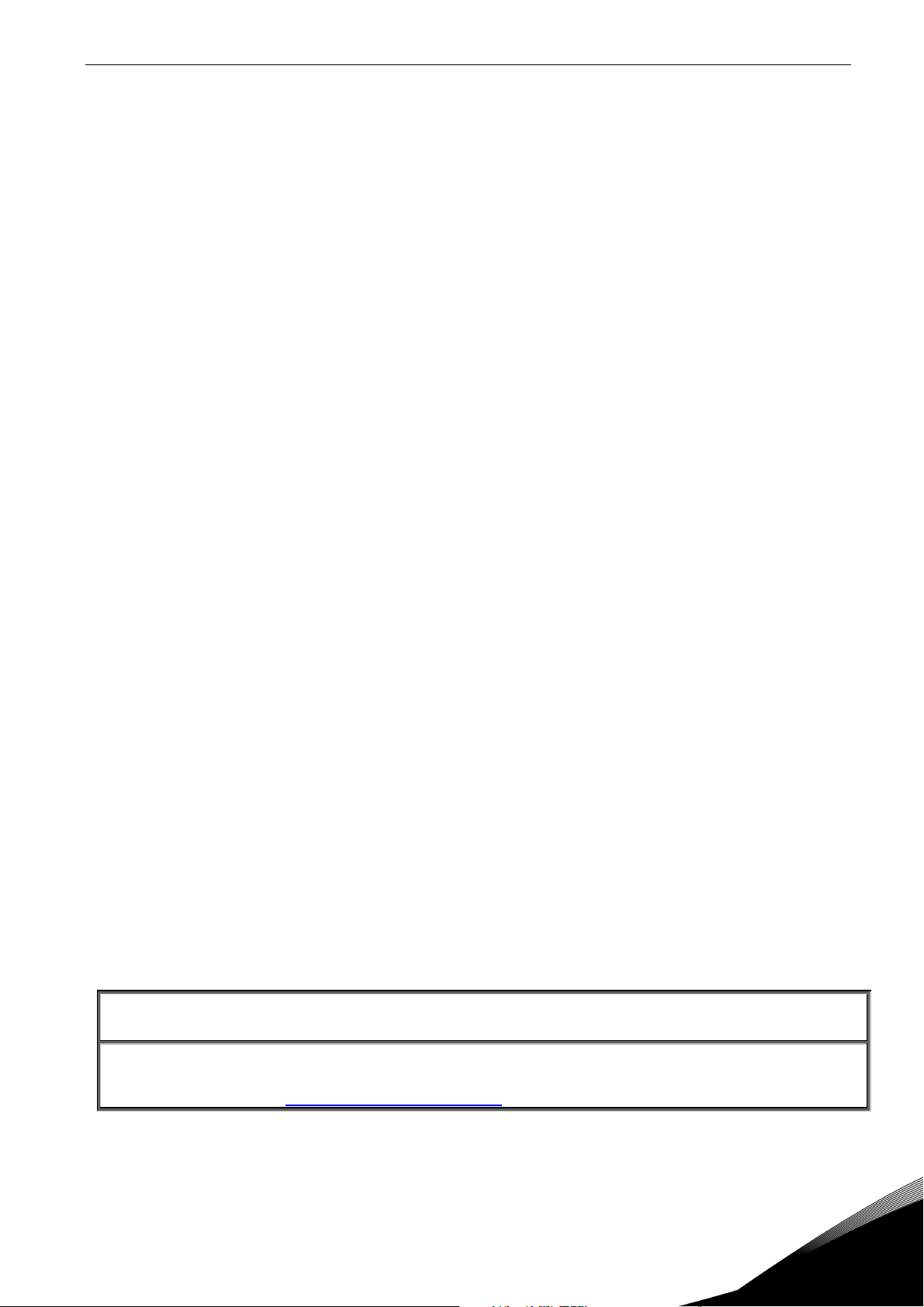
2. E/S DE COMMANDE
Potentiomètre
de référence
mA
Borne Signal Description
1 +10V
2 AI1+ Entrée analogique, gamme de
3 AI1- Masse E/S Masse pour référence et signaux de cmde
4 AI2+
5 AI2-
/GND
6 +24V Sortie de tension de cmde Tension pour interrupteurs, etc. maxi 0,1A
7
GND Masse E/S Masse pour référence et signaux de cmde
8 DIN1 Marche avant Contact fermé = marche avant
9 DIN2 Marche arrière (configurable) Contact fermé = marche arrière
10 DIN3 Sélection fréquence
11 GND Masse E/S Masse pour référence et signaux de cmde
18 AO1+
19 AO1-
A RS 485 Liaison série Emetteur/récepteur différentiel
B RS 485 Liaison série Emetteur/récepteur différentiel
30 +24V Tension d’entrée aux. 24 V Alim. de commande de secours
Sortie référence Tension pour potentiomètre, etc.
réf
tension 0-10V c.c.
Entrée analogique, gamme de
tension 0-10 V c.c., ou gamme
de courant 0/4-20mA
constante1 (configurable)
Fréquence moteur
Sortie analogique
Référence fréquence sur entrée en
tension
Peut être configurée comme DIN4
Référence fréquence sur entrée en
courant
Contact fermé = fréquence constante
Configurable
Gamme 0-20 mA/R
, maxi 500Ω
C
21 RO1
22 RO1
23 RO1
Sortie relais 1
DEFAUT
Configurable
Tableau 1- 1. Configuration usine des E/S de l’Applicatif Universel.
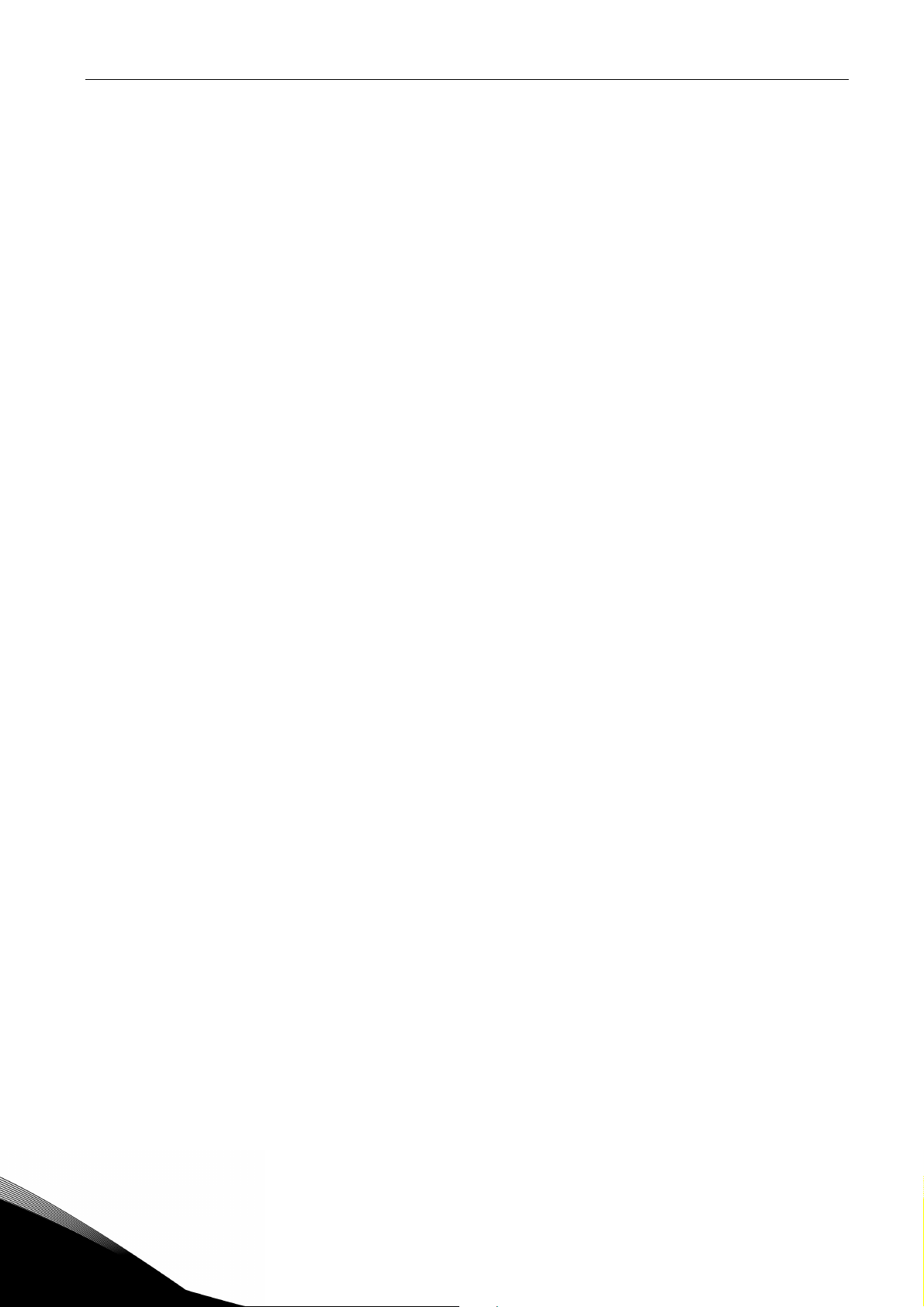
Borne Signal Description
1 +10V
2 AI1+
ou
DIN 4
3 AI1- Masse E/S Masse pour référence et signaux de cmde
4 AI2+
5 AI2-
6 + 24 V Sortie de tension de cmde
7 GND Masse E/S Masse pour référence et signaux de cmde
Sortie référence Tension pour potentiomètre, etc.
réf
Entrée analogique, gamme de
tension 0-10V c.c.
Entrée analogique, gamme de
courant 0-20mA
Référence fréquence sur entrée en
tension(MF2-3)
Référence fréquence sur entrée en
tension/courant (MF4-MF6)
Peut être configurée comme DIN4
Référence fréquence sur entrée en
courant
Tableau 1- 2. Configuration de AI1 comme DIN4
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
2
Page 6
4 • vacon Liste des parametres
3. APPLICATIF UNIVERSEL – LISTE DES PARAMETRES
Les pages suivantes donnent la liste des paramètres des différents groupes. Les paramètres sont
décrits aux pages 16 à 62.
En-tête des tableaux :
Code = Code affiché sur le panneau opérateur ; désigne le numéro du paramètre
Paramètre = Nom du paramètre
Mini = Valeur mini du paramètre
Maxi = Valeur maxi du paramètre
Unité = Unité de la valeur du paramètre (si applicable)
Prérég. usine = Valeur préréglée en usine
Régl. util. = Valeur réglée par l’utilisateur
ID = Numéro d’Identification du paramètre (utilisé avec les outils logiciels)
= Sur code du paramètre : la valeur du paramètre peut uniquement être modifiée
avec le convertisseur de fréquence à l’arrêt.
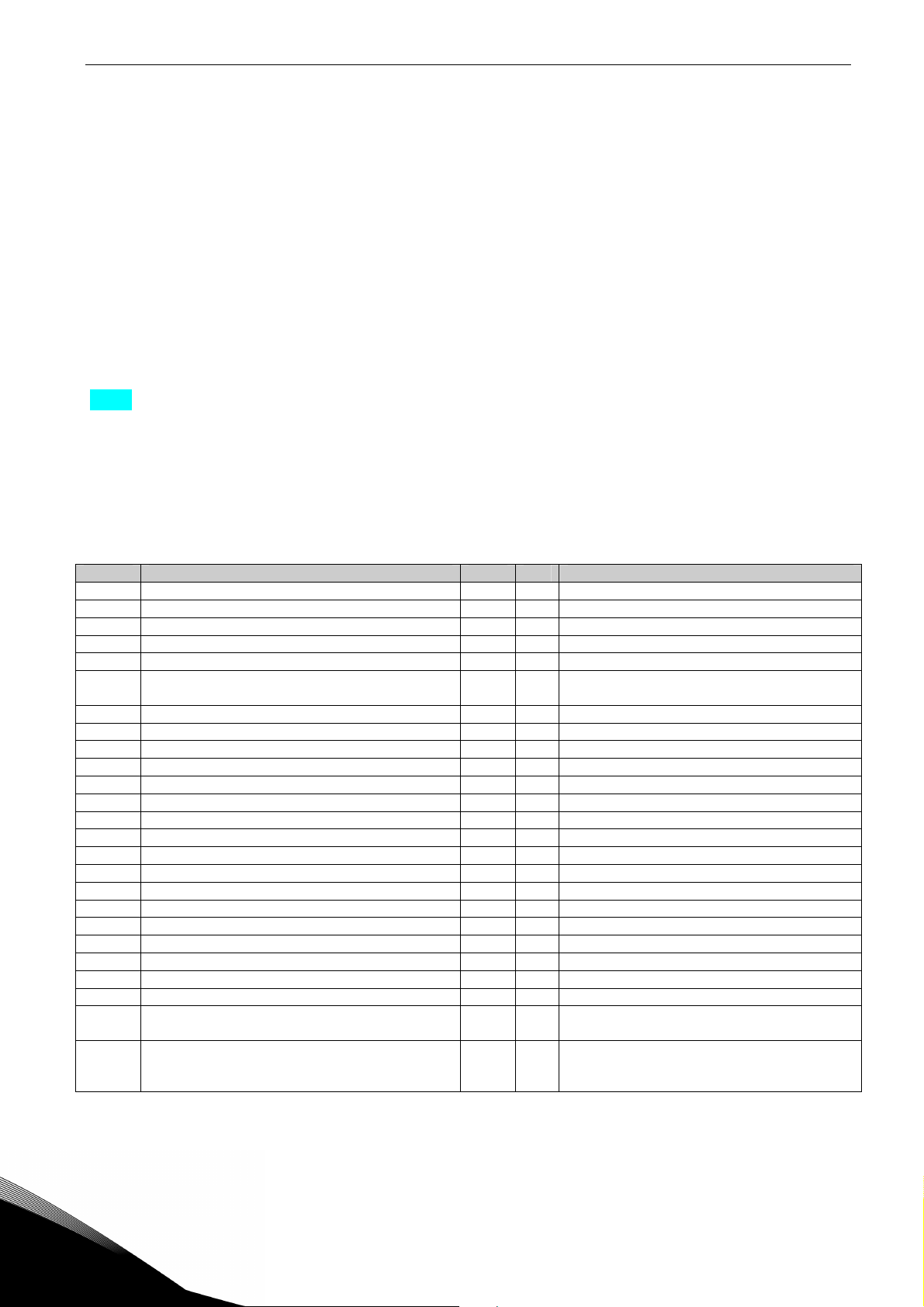
3.1 Valeurs affichées (Commande Panneau : menu M1)
Les valeurs affichées sont celles des paramètres et des signaux, ainsi que des valeurs d’état et de
mesure. L’utilisateur ne peut les modifier.
Pour en savoir plus, voir Manuel utilisateur Vacon NXL, section 7.3.1.
Code Paramètre Unité ID Description
V1.1 Fréquence moteur Hz 1 Fréquence fournie au moteur
V1.2 Référence fréquence Hz 25
V1.3 Vitesse moteur t/mn 2 Vitesse moteur calculée
V1.4 Courant moteur A 3 Courant moteur mesuré
V1.5 Couple moteur % 4 Couple réel calculé/nominal du moteur
V1.6 Puissance moteur % 5
V1.7 Tension moteur V 6 Tension moteur calculée
V1.8 Tension bus c.c. V 7 Tension bus c.c. mesurée
V1.9 Température NXL ºC 8 Température du radiateur du NXL
V1.10 Entrée analogique 1 13 AI1
V1.11 Entrée analogique 2 14 AI2
V1.12 Courant sur sortie analogique mA 26 AO1
V1.13 Courant sur sortie analog. 1, carte d’extension mA 31
V1.14 Courant sur sortie analog. 2, carte d’extension mA 32
V1.15 DIN1, DIN2, DIN3 15 Etat des entrées logiques
V1.16 DIE1, DIE2, DIE3 33 Carte d’ext. d’E/S : état des entrées logiques
V1.17 RO1 34 Etat de la sortie relais 1
V1.18 ROE1, ROE2, ROE3 35 Carte d’ext. d’E/S : état des sorties relais
V1.19 DOE 1 36 Carte d’ext. d’E/S : état de la sortie logique 1
V1.20 PID : référence % 20 En % de la référence process maxi
V1.21 PID : retour % 21 En % de la mesure maxi
V1.22 PID : erreur % 22 En % de l’erreur maxi
V1.23 PID : sortie % 23 En % de la valeur de sortie maxi
V1.24 Sorties Permut1, Permut2, Permut3 30
V1.26 Température du moteur % 9
Puissance réelle calculée/nominale du
moteur
Disponible avec le contrôle pompe/ventilateur
en cascade
Température calculée du moteur, 1 000
équivaut à 100,0 % = température nominale
du moteur
Tableau 1- 3. Valeurs affichées
3
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 7
Liste des parametres vacon • 5
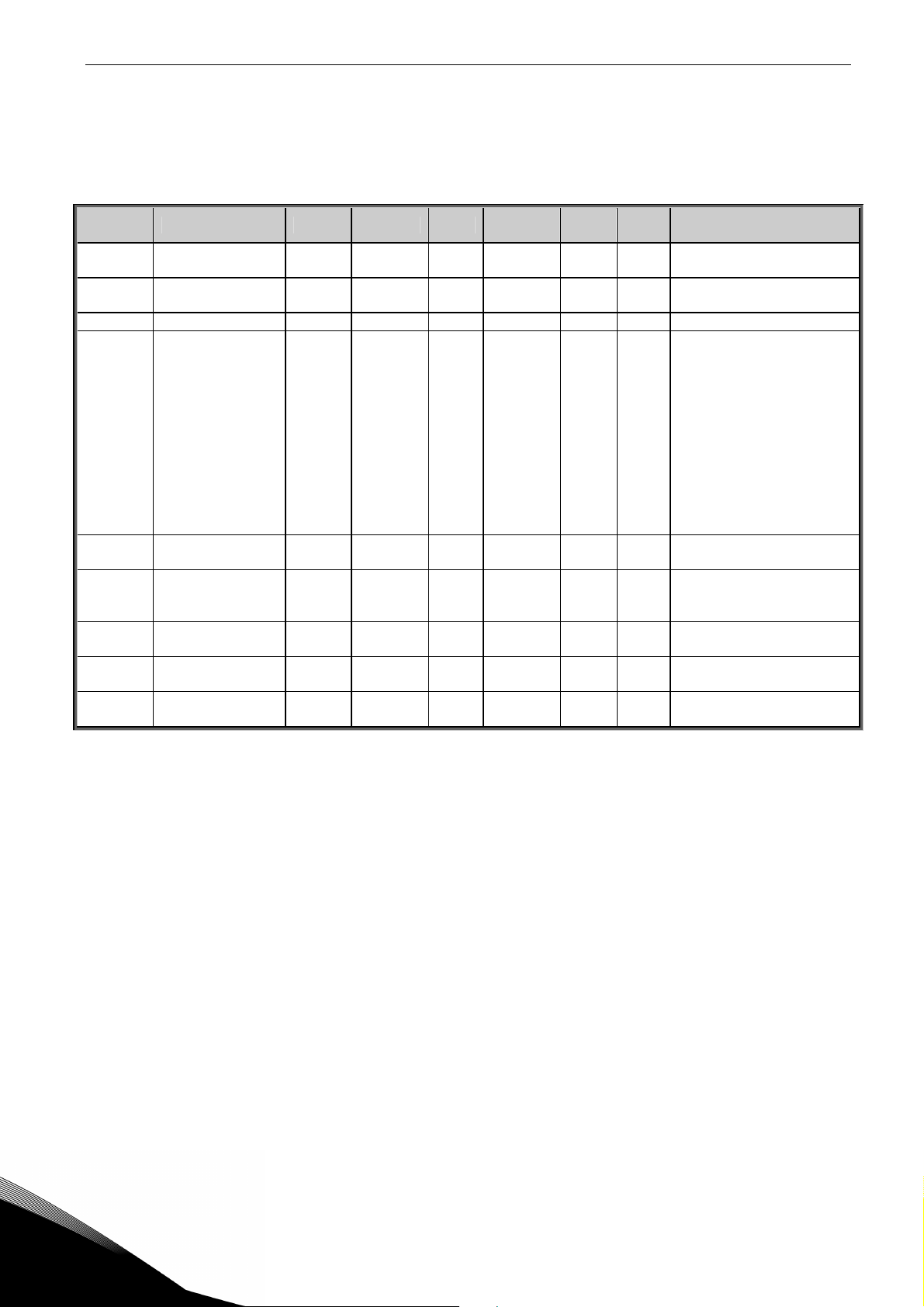
3.2 Paramètres de base (Commande Panneau : Menu P2 P2.1)
Code Paramètre Mini Maxi Unité
P2.1.1 Fréquence mini 0,00 Par. 2.1.2 Hz 0,00 101
P2.1.2 Fréquence maxi Par. 2.1.1 320,00 Hz 50,00
P2.1.3
P2.1.4
P2.1.5
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
P2.1.11 Mode Marche 0 1 0
P2.1.12 Mode Arrêt 0 1 0
P2.1.13 Optimisation U/f 0 1 0
P2.1.14 Référence E/S 0 4 0
P2.1.15 AI2 : échelle 1 4 2
Temps accélération
1
Temps décélération
1
Courant maxi de
sortie
Tension nominale
moteur
Fréquence
nominale moteur
Vitesse nominale
moteur
Courant nominal
moteur
Cosϕ moteur
0,1 3000,0 s 1,0
0,1 3000,0 s 1,0
0,1 x IL 1,5 x IL A IL
180 690 V
30,00 320,00 Hz 50,00
300 20 000 rpm 1440
0,3 x I
0,30 1,00 0,85
1,5 x IL A I
L
Prérégl.
usine
NXL2:230v
NXL5:400v
L
Régl.
util.
ID Note
NOTA : si f
102
103
104
107
110
111
112
113
120
505
506
109
117
390
synchrone du moteur, vérifiez la
compatibilité du moteur et du
système d’entraînement
NOTA : Les formules
s’appliquent approximativement
aux convertisseurs de fréquence
jusqu’à la taille MF3. Pour les
tailles supérieures, contactez
Vacon.
Voir plaque signalétique du
moteur
Le préréglage usine s’applique à
un moteur 4 pôles
correspondant au calibre du
convertisseur de fréquence.
Voir plaque signalétique du
moteur
Voir plaque signalétique du
moteur
0=Rampe
1=Reprise au vol
0=Roue libre
1=Rampe
0=Non utilisée
1=Surcouple automatique
0=Entrée analog. 1 (AI1)
1=Entrée analog. 2 (AI2)
2=Référence panneau
3=Référence bus de terrain
(FBSpeedReference)
4=Motopotentiomètre
Non utilisée si AI2 : Mini
utilisateur <> 0 % ou AI2 : Maxi
utilisateur <> 100%
1=0mA – 20mA
2=4mA – 20mA
3=0V – 10V
4=2V – 10V
> vitesse
maxi
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
3
Page 8
6 • vacon Liste des parametres
P2.1.16
Sortie analogique :
fonction
0 12 1
P2.1.17 DIN2 : fonction 0 10 1
P2.1.18 DIN3 : fonction 0 16 6
P2.1.19 Vitesse constante 1 0,00 Par. 2.1.2 Hz 10,00
P2.1.20 Vitesse constante 2 0,00 Par. 2.1.2 Hz 50,00
P2.1.21 Redémarrage auto 0 1 0
P2.1.22 Paramètres cachés 0 1 0
Tableau 1- 4. Paramètres de base P2.1
0=Non utilisée
1=Fréq. moteur (0-f
2=Référence fréq. (0-f
3=Vitesse moteur (0-n
4=Courant mot. (0-I
5=Couple mot. (0-C
307
6=Puissance mot. (0-P
7=Tension mot. (0--U
maxi
maxi
nMoteur
nMoteur
nMoteur
nMotor
)
)
)
)
nMoteur
)
)
)
8=Tension CC (0-1000V)
9=PID : référence
10=PID : retour 1
11=PID : erreur
12=PID : sortie
0=Non utilisée
1=Marche arrière (DIN1=Marche
avant)
2=Inversion sens rotation
(DIN1=Marche)
3=Arrêt sur impulsion
(DIN1=Marche sur imp.)
319
4=Défaut ext., contact n.o.
5=Défaut ext., contact n.f.
6=Validation marche
7=Vitesse constante 2
8= MotoPot.+Vite (n.o.)
9= Désactiver PID (Réf.
fréquence directe)
10=Interverrouillage 1
0=Non utilisée
1=Inversion sens rotation
2=Défaut ext., contact n.o.
3=Défaut ext., contact n.f.
4=Réarmement défauts
5=Validation Marche
6=Vitesse constante 1
7=Vitesse constante 2
8=Cmde freinage inj. c.c.
9=MotoPot. +Vite (n.o.)
301
10=MotoPot. -Vite (n.o.)
11=Désactiver PID (Réf.
fréquence directe)
12=PID : sélection référence
Panneau 2.
13=Interverrouillage 2
14=Entrée de la thermistance
moteur (Voir le Manuel
Utilisateur, Chapitre 6.2.4)
15=Forcer Cde bornier E/S
16=Forcer Cde Bus de Terrain
105
106
0=Non
731
1=Oui
0=Tous les paramètres et menus
115
sont affichés
1=Seuls le groupe P2.1 et les
menus M1 à H5
sont affichés
3
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 9
Liste des parametres vacon • 7
3.3 Configuration des entrées (Commande Panneau : Menu P2 P2.2)
Code Paramètre Mini Maxi Unité Prérégl.
usine
P2.2.1
P2.2.2
P2.2.3
P2.2.4 DIN4 : fonction (AI1)
P2.2.5 AI1 : sélection
P2.2.6 AI1 : échelle
P2.2.7 AI1 : mini utilisateur
P2.2.8 AI1 : maxi utilisateur
P2.2.9 AI1 : inversion
P2.2.10 AI1 : temps filtrage
P2.2.11 AI2 : sélection
Carte extension,
DIE1 : fonction
Carte extension,
DIE2 : fonction
Carte extension,
DIE3 : fonction
0 13 7
0 13 4
0 13 11
0
0
1
0,00
0,00
0
0,00
0
13 2
10
4 3
100,00 % 0,00 380
100,00 % 100,00 381
1 0
10,00 s 0,10 378 0=Pas de filtrage
11 388 Idem par. 2.2.5
Régl.
util.
ID Note
0=Non utilisée
1=Inversion sens rotation
2=Défaut ext., contact n.o.
3=Défaut ext., contact n.f.
4=Réarmement défauts
5=Validation marche
6=Vitesse constante 1
7=Vitesse constante 2
368
8=Cmde freinage inj. c.c.
9=MotoPot. +Vite (n.o.)
10=MotoPot. -Vite (n.f.)
11=Désactiver PID
(régulateur PID sél.)
12=PID : sélection
référence Panneau 2.
13=Interverrouillage 1
330 13=Interverrouillage 2
369 13=Interverrouillage 3
Utilisée si P2.2.6 = 0
499
Voir sélections par 2.2.3
10=AI1 (1=Local,
0=Entrée 1)
11=AI2 (1=local,
1=Entrée 2)
20=Ext. AI1
377
21=Ext. AI2
0=Entrée logique 4 (DIN4)
1=0mA – 20mA (MF4->)
2=4mA – 20mA (MF4->)
3=0V – 10V
4=2V – 10V
379
Non utilisée si P2.2.13 >
0% ou P2.2.14 < 100%
Nota ! Voir manuel
utilisateur NXL, section
7.3.6: Mode AI1
0=Pas d’inversion
387
1=Signal inversé
(2=carte ext.
0=Entrée 1)
(2=carte ext.
1=Entrée 2)
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
3
Page 10
8 • vacon Liste des parametres
P2.2.12 AI2 : échelle
P2.2.13 AI2 : mini utilisateur
P2.2.14 AI2 : maxi utilisateur
P2.2.15 AI2 : inversion
P2.2.16 AI2 : temps filtrage
Motopotentiomètre :
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
remise à zéro (RAZ)
référence fréquence
Référence : valeur
mini
Référence : valeur
maxi
Sélection référence
panneau
Sélection référence
bus de terrain
1
0,00
0,00
0
0,00
0
0,00
P2.2.18
0 5 2
0 5 3
4 2
100,00 % 0,00 391
100,00 % 100,00 392
1 0
10,00 s 0,10 389 0=Pas de filtrage
2 1
P2.2.19 0,00
320,00 0,00
Non utilisée si AI2 : mini
utilisateur <> 0% ou AI2 :
maxi utilisateur <> 100%
390
1=0-20 mA
2=4-20 mA
3=0V – 10V
4=2V – 10V
0=Pas d’inversion
398
1=Signal inversé
0=Pas de remise à zéro
1=Remise à zéro si arrêté
367
344
345
121
122 Voir infra
ou coupure
alimentation
2=Remise à zéro si
coupure alimentation
0=Entrée analog. 1 (AI1)
1=Entrée analog. 2 (AI2)
2=Référence panneau
3=Référence bus de
terrain
(FBSpeedReference)
4=Motopotentiomètre
5=Régulateur PID
Tableau 1- 5. Signaux d’entrée, P2.2
Cmde=commande
n.f.=normalement fermé
n.o.=normalement ouvert
3
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 11
Liste des parametres vacon • 9
3.4 Configuration des sorties (Commande Panneau : Menu P2 P2.3)
Code Paramètre Mini Maxi Unité Prérégl.
usine
P2.3.1 Sortie relais 1 : fonction 0 20 3
P2.3.2
P2.3.3
P2.3.4
P2.3.5
P2.3.6
P2.3.7
P2.3.8 Sortie analogique : mini 0 1 0
P2.3.9
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15
P2.3.16
Carte d’extension, sortie
relais 1 : fonction
Carte d’extension, sortie
relais 2 : fonction
Carte d’extension, sortie
logique 1 : fonction
Sortie analogique :
fonction
Sortie analogique :
temps de filtrage
Sortie analogique :
inversion
Sortie analogique :
échelle
Carte d’extension, sortie
analogique 1 : fonction
Carte d’extension, sortie
analogique 2 : fonction
Fonction supervision
fréquence 1
Valeur fréquence 1
supervisée
Entrée analogique (AI) :
supervision
Supervision AI : limite
désactivation
Supervision AI : limite
activation
0 16 2
0 16 3
0 16 1
0 12 1
0,00 10,00 s 1,00
0 1 0
10 1000 % 100
0 12 0 472 Idem paramètre 2.1.16
0 12 0
0 2 0
0,00 Par. 2.1.2 Hz 0,00
0 2 0
0,00 100,00 % 10,00
0,00 100,00 % 90,00
Tableau 1- 6. Signaux de sortie, P2.3
Régl.
util.
ID Note
0=Non utilisée
1=Prêt
2=Marche
3=Défaut
4=Défaut inversé
5=Alarme surtemp. NXL
6=Alarme ou défaut ext.
7=Alarme ou défaut réf.
8=Alarme
9=Inversé
10=Vitesse constante
313
11=Vitesse atteinte
12=Régulation active
13=Supervision fréq.1
14=Cmde bornier E/S
15=Alarme/défaut
thermistance
16=Supervision retour PID
17=Permut.1 : cmde
18=Permut.2 : cmde
19=Permut.3 : cmde
20=Supervision AI
314 Idem paramètre 2.3.1
317 Idem paramètre 2.3.1
312 Idem paramètre 2.3.1
307
Voir par. 2.1.16
308 0=Pas de filtrage
0=Pas d’inversion
309
1=Signal inversé
0=0 mA
310
1=4 mA
311
479 Idem paramètre 2.1.16
0=Pas de supervision
315
1=Supervision limite basse
2=Supervision limite haute
316
0 = Pas de supervision
356
1 = AI1
2 = AI2
357
358
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
3
Page 12
10 • vacon Liste des parametres
3.5 Contrôle du variateur (Commande Panneau : Menu P2 P2.4)
Code Paramètre Mini Maxi Unité Prérégl.
usine
P2.4.1 Forme rampe 1 0,0 10,0 s 0,0
P2.4.2 Hacheur de freinage 0 3 0
P2.4.3 Courant freinage c.c. 0,15 x In 1,5 x In A Varie 507
P2.4.4
P2.4.5
P2.4.6
P2.4.7 Freinage flux 0 1 0
P2.4.8 Courant frein. flux 0,0 Varie A 0,0 519
Durée freinage c.c. à
l’arrêt
Seuil fréquence
freinage c.c.
Durée freinage c.c.
au démarrage
0,00 600,00 s 0,00
0,10 10,00 Hz 1,50
0,00 600,00 s 0,00
Régl.
util.
ID Note
500
504
508
515
516
520
Tableau 1- 7. Paramètres de contrôle du variateur, P2.4
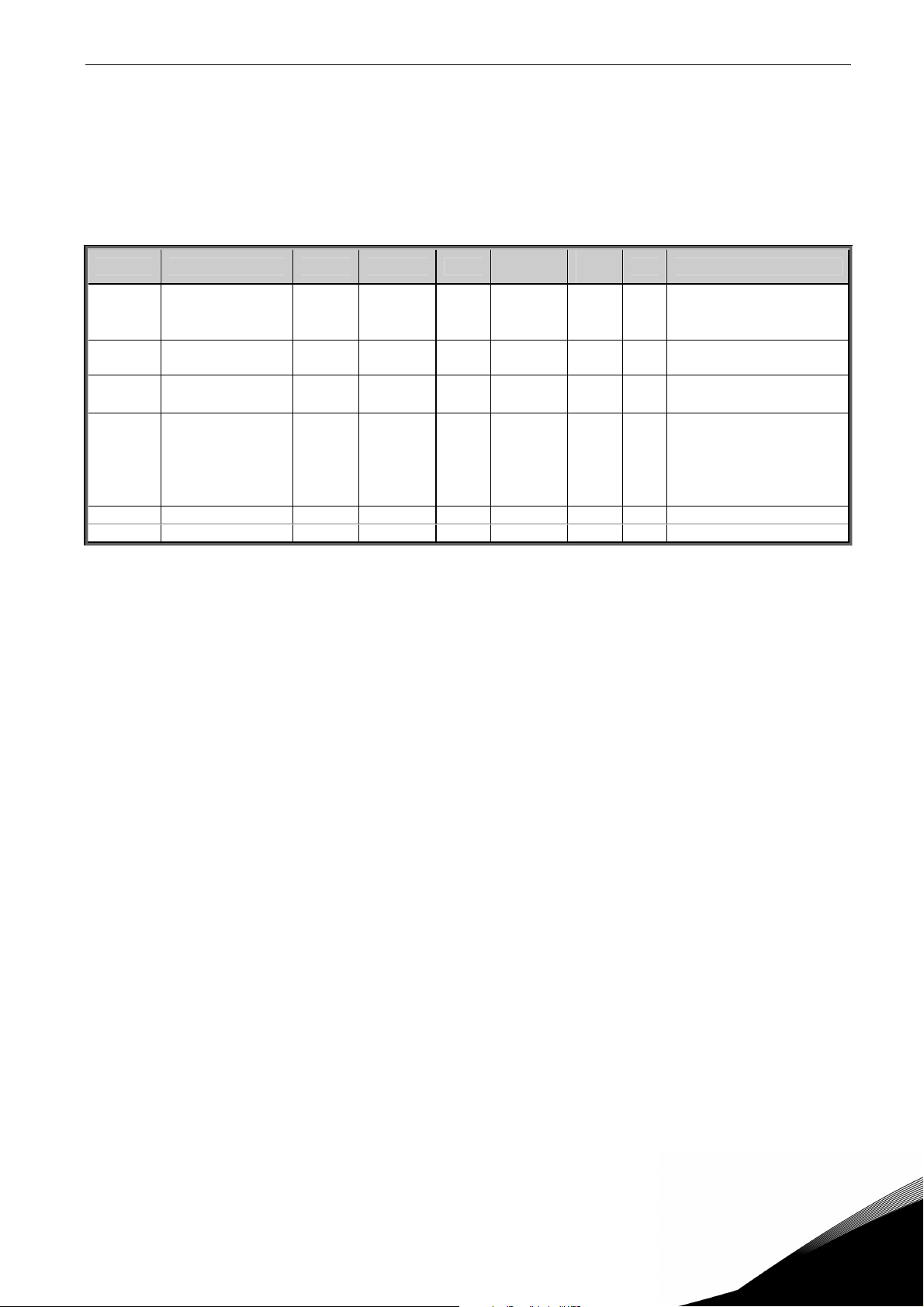
3.6 Saut de fréquences (Commande Panneau : Menu P2 P2.5)
Code Paramètre Mini Maxi Unité Prérégl.
usine
P2.5.1
P2.5.2
P2.5.3
Plage fréquence 1 :
limite basse
Plage fréquence 1 :
limite haute
Réduction Rampe
acc./déc.
0,0 Par. 2.5.2 Hz 0,0
0,0 Par. 2.1.2 Hz 0,0
0,1 10,0
Temp
s
1,0
Régl.
util.
ID Note
509 0=Non utilisé
510 0=Non utilisé
518
Tableau 1- 8. Paramètres de saut de fréquences, P2.5
0=Linéaire
>0=Temps de rampe S
0=Non validé
1=Utilisé à l’état Marche
3=Utilisé aux états Marche
et Arrêt
0=Freinage c.c. désactivé
à l’arrêt
0=Freinage c.c. désactivé
au démarrage
0=Désactivé
1=Activé
Multiplicateur du temps de
rampe sélectionné entre
les limites de la plage de
fréquence à sauter
3
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 13
Liste des parametres vacon • 11
3.7 Contrôle du moteur (Commande Panneau : Menu P2 M2.6)
Code Paramètre Mini Maxi Unité Prérégl.
usine
P2.6.1 Mode de contrôle 0 1 0
P2.6.2 Rapport U/f 0 3 0
Point
P2.6.3
P2.6.4
P2.6.5
P2.6.6
P2.6.7 U/f : tension à 0 Hz 0,00 40,00 % 0,00 606 n% x U
P2.6.8
P2.6.9
P2.6.10
d’affaiblissement du
champ
U/f : tension au point
d’affaiblissement du
champ
U/f : fréquence
intermédiaire
U/f : tension
intermédiaire
Fréquence de
découpage
Régulateur de
surtension
Régulateur de sous-
tension
30,00 320,00 Hz 50,00
10,00
0,00
0,00 100,00 % 100,00
1,0 16,0 kHz 6,0
0 1 1
0 1 1
200,00 % 100,00
par.
P2.6.3
Hz 50,00
Régl.
util.
ID Note
0=Régulation fréquence
600
1=Régulation vitesse
0=Linéaire
1=Quadratique
108
2=Configurable
3=Linéaire avec optim. flux
602
603 n% x U
604
n% x U
605
Valeur maxi du paramètre
= par. 2.6.4
601 Varie selon puissance (kW)
0=Non utilisé
607
1=Utilisé
0=Non utilisé
608
1=Utilisé
Tableau 1- 9. Paramètres de contrôle du moteur, P2.6
nmot
nmot
nmot
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
3
Page 14
12 • vacon Liste des parametres
3.8 Protections (Commande Panneau : Menu P2 P2.7)
Code Paramètre Mini Maxi Unité
Action en cas de
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7
P2.7.8 PTM : I à 0 Hz 0,0 150,0 % 40,0 706
P2.7.9
P2.7.10 Facteur Service Mot. 0 100 % 100 708
P2.7.11
P2.7.12
P2.7.13 PCM : temporisation 1,00 120,0 s 15,0 711
P2.7.14
P2.7.15
P2.7.16 PSC : couple à fnom 10,0 150,0 % 50,0 714
P2.7.17 PSC : couple à 0 Hz 5,0 150,0 % 10,0 715
P2.7.18 PSC : temporisation 2,00 600,00 s 20,00 716
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
P2.7.24
défaut référence
4mA
Action en cas de
défaut externe
Action en cas de
défaut sous-tension
Supervision phases
moteur
Protection contre les
défauts de terre
Protection
thermique du
moteur (PTM)
PTM : température
ambiante
PTM : constante de
temps
Protection contre le
calage moteur (PCM)
PCM : limite de
courant
PCM : seuil
fréquence
Protection contre les
sous-charges (PSC)
Action en cas de
défaut
thermistance
Action en cas de
défaut communic.
(sur bus de terrain)
Action en cas de
défaut carte (slot)
Supervision retour
PID
Limite supervision
retour PID
Tempo supervision
retour PID
0 3 0
0 3 2
1 3 2
0 3 2
0 3 2
0 3 2
–100,0 100,0 % 0,0
1 200 min 45
0 3 1
0,1 I
1,0 P 2.1.2 Hz 25,0
0 3 0
0 3 2
0 3 2
0 3 2
0 4 0
0,0 100,0 % 10,0
0 3600 s 5
x 2 A I
nmotor
Prérégl.
usine
nmotor
x1,3
Régl.
util.
ID Note
0=Aucune action
1=Alarme
700
2=Défaut, arrêt selon
2.1.12
3=Défaut, arrêt roue libre
701
727
0=Aucune action
1=Alarme
702
2=Défaut, arrêt selon
703
704
705
707
709 Idem par. 2.7.1
710
712
713 Idem par. 2.7.1
732 Idem par. 2.7.1
733 Idem par. 2.7.1
734 Idem par. 2.7.1
735
736
737
2.1.12
3=Défaut, arrêt roue libre
0=Aucune action
1=Alarme si < limite
2=Alarme si > limite
3=Défaut si < limite
4=Défaut si > limite
Tableau 1- 10. Protections, P2.7
3
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 15
Liste des parametres vacon • 13
3.9 Redémarrage automatique (Commande Panneau : Menu P2 P2.8)
Code Paramètre Mini Maxi Unité
P2.8.1 Temps attente 0,10 10,00 s 0,50 717
P2.8.2 Tempo réarmement 0,00 60,00 s 30,00 718
P2.8.3 Type redémarrage 0 2 0
Prérégl.
usine
Régl.
util.
ID Note
0=Rampe
719
1=Reprise au vol
2=Selon par. 2.4.6
Tableau 1- 11. Paramètres de redémarrage automatique, P2.8
3.10 Régulateur PID (Commande Panneau : Menu P2 P2.9)
Code Paramètre Mini Maxi Unité
P2.9.1 Régulateur PID 0 1 0
P2.9.2 PID : référence 0 3 2
P2.9.3 Sélection retour PID 0 6 1
P2.9.4 PID : gain 0,0 1000,0 % 100,0 118
P2.9.5 PID : tps intégration 0,00 320,00 s 10,00 119
P2.9.6 PID : tps dérivée 0,00 10,00 s 0,00 132
P2.9.7 Mini retour PID 1
P2.9.8 Maxi retour PID 1
P2.9.9 Inversion erreur
P2.9.10 Fréquence veille
P2.9.11 Tempo veille 0 3600 s 30
P2.9.12 Niveau reprise 0,00 100,00 % 25,00
P2.9.13 Mode reprise
–1000,0
–1000,0
0
Par.
2.1.1
0
1000,0 % 0,00 336 0=Pas de valeur mini
1000,0 % 100,0 337 100=Pas de valeur maxi
1 0 340
Par. 2.1.2 Hz 10,00
3 0
Prérégl.
usine
Rég.
util.
ID Note
0=Non utilisé
1 = Régulateur PID activé
2 = Régulation
163
332
334
1016
1017
1018
1019
pompes/ventilateurs
activée, groupe P2.10
accessible
0=Entrée analog. 1 (AI1)
1=Entrée analog. 2 (AI2)
2=Réf. panneau (PID Réf 1)
3=Réf. bus de terrain
(ProcessDataIN1)
0=Signal AI1 (ent. ana.1)
1=Signal AI2 (ent. ana.2)
2=Bus terr.
(ProcessDataIN2)
3=Couple moteur
4=Vitesse moteur
5=Courant moteur
6=Puissance moteur
7=AI1-AI2
0=Reprise si Mesure inf. à
niveau reprise (2.9.12)
1=Reprise si Mesure sup.
à niveau reprise (2.9.12)
2=Reprise si Mesure inf. à
RefPID% x P2.9.12
3=Reprise si Mesure sup.
à RefPID% x P2.9.12
Tableau 1- 12. Paramètres du régulateur PID, P2.9
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
3
Page 16
14 • vacon Liste des parametres
3.11 Régulation pompes/ventilateurs (Commande Panneau : Menu P2 -> P2.10)
NOTA ! Le Groupe P2.10 n’est accessible que si le par. 2.9.1 est réglé sur 2.
Code Paramètre Mini Maxi Unité
P2.10.1
P2.10.2
P2.10.3 Tempo arrêt aux. 0,0 300,0 s 2,0 1011
P2.10.4 Permutation 0 4 0
P2.10.5
P2.10.6
P2.10.7
P2.10.8
P2.10.9
Nombre moteurs
auxiliaires
Tempo démarrage
aux.
Intervalle
permutation
Permutation :
nombre maxi de
moteurs auxiliaires
Limite fréquence
permutation
Fréquence
démarrage, Aux1
Fréquence arrêt,
Aux1
0 3 1
0,0 300,0 s 4,0
0,0 3000,0 h 48,0
0 3 1
0,00 par. 2.1.2 Hz 25,00
Par.
2.10.9
Par.
2.1.1
320,00 Hz 51,00
Par.
2.10.8
Hz 10,00
Prérégl.
usine
Rég.
util.
ID Note
1001
1010
0=Non utilisée
1=Permutation avec
pompes aux.
2=Permutation avec conv.
fréq. & pompes aux.
1027
1029
1030
1031
1002
1003
3=Permutation et
interverrouillages
(pompes aux.)
4=Permutation et
interverrouillages
(conv. fréq. & pompes
aux.)
0,0=TEST=40 s
Tempo pour la permutation
Nb maxi de moteurs aux.
lors permutation
Fréquence maxi lors
permutation
Tableau 1- 13. Paramètres de la Régulation pompes/ventilateurs, P2.10
3
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 17
Liste des parametres vacon • 15
3.12 Commande par le panneau opérateur (Commande Panneau: Menu K3)
Les paramètres de sélection de la source de commande et du sens de rotation du moteur avec le
panneau opérateur sont repris ci-dessous. Voir Menu Commande Panneau dans le manuel
utilisateur du Vacon NXL.
Code Paramètre Mini Maxi Unité
P3.1 Source commande 1 3 1
R3.2 Référence panneau
P3.3
R3.4 Touche Arrêt 0 1 1
R3.5 PID : référence 1 0,00 100,00 % 0,00
R3.6 PID : référence 2 0,00 100,00 % 0,00
Sens de rotation
(Dir panneau)
Par.
2.1.1
0 1 0
Par. 2.1.2 Hz
Prérégl.
usine
Régl.
util.
ID Note
1 = Bornier d’E/S
125
2 = Panneau opérateur
3 = Bus de terrain
0 = Avant
123
1 = Arrière
0=Touche Arrêt
opérationnelle uniq. en
114
commande panneau
1=Touche Arrêt toujours
opérationnelle
Tableau 1- 14. Paramètres de commande par panneau opérateur, M3
3.13 Menu Système (Commande Panneau: Menu S6)
Pour les paramètres et fonctions d’exploitation générale du convertisseur de fréquence (ex. jeux de
paramètres utilisateur ou informations sur la configuration matérielle ou logicielle), voir section
7.3.6 du manuel utilisateur du Vacon NXL.
3.14 Cartes d’extension (Commande Panneau: Menu E7)
Le menu E7 fournit des informations sur les cartes d’extension connectées à la carte de commande.
Pour en savoir plus, voir section 7.3.7 du manuel utilisateur du Vacon NXL.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
3
Page 18

16 • vacon Description des parametres
4. DESCRIPTION DES PARAMETRES
4.1 PARAMETRES DE BASE
2.1.1, 2.1.2 Fréquence mini/maxi
Réglage des limites de fréquence de sortie du convertisseur de fréquence.
La valeur maximale des paramètres 2.1.1 et 2.1.2 est 320 Hz.
Le logiciel vérifie automatiquement les valeurs des paramètres 2.1.19, 2.1.20, 2.3.13,
2.5.1, 2.5.2 et 2.6.5.
2.1.3, 2.1.4 Temps d’accélération 1, temps de décélération 1
Ces valeurs limites correspondent au temps requis pour faire passer la fréquence
moteur de zéro à la valeur maximale réglée (par. 2.1.2) et vice versa.
2.1.5 Courant maxi sortie
Définition du courant maxi fourni au moteur par le convertisseur de fréquence. Pour
éviter toute surcharge, réglez ce paramètre sur la valeur de courant nominale du
moteur. La limite de courant préréglée en usine est égale au courant nominal (I
convertisseur.
2.1.6 Tension nominale moteur
Reprendre la valeur Un de la plaque signalétique moteur. Ce paramètre règle la tension
au point d’affaiblissement du champ (paramètre 2.6.4) sur 100 % x U
2.1.7 Fréquence nominale moteur
Reprendre la valeur fn de la plaque signalétique moteur. Ce paramètre règle le point
d’affaiblissement du champ (paramètre 2.6.3) à la même valeur.
2.1.8 Vitesse nominale moteur
Reprendre la valeur nn de la plaque signalétique du moteur.
nmoteur
) du
L
.
2.1.9 Courant nominal moteur
Reprendre la valeur In de la plaque signalétique du moteur.
2.1.10 Cos phi moteur
Reprendre la valeur “cos phi” de la plaque signalétique du moteur.
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 19

Description des parametres vacon • 17
2.1.11 Mode Marche
Rampe :
0 Le convertisseur de fréquence démarre de 0 Hz et accélère jusqu’à la
fréquence maxi dans le temps d’accélération réglé. (L’inertie de la charge ou
le frottement au démarrage peut rallonger le temps d’accélération).
Reprise au Vol :
1 Le convertisseur de fréquence est capable de démarrer un moteur en rotation
en lui appliquant un léger couple et en recherchant la fréquence qui
correspond à la vitesse de rotation du moteur. La recherche se fait de la
fréquence maxi vers la fréquence réelle jusqu’à trouver la valeur correcte.
Ensuite, la fréquence moteur est augmentée/diminuée jusqu’à la valeur de
référence réglée en suivant les valeurs des paramètres
d’accélération/décélération.
Vous utiliserez ce mode de démarrage si le moteur est susceptible d’être en
rotation sur réception d’un ordre Marche. La fonction de reprise au vol permet
de fiabiliser l’entraînement sur des coupures du réseau d’alimentation.
2.1.12 Mode Arrêt
Roue libre :
0 Sur réception d’une commande Arrêt, le moteur s’arrête en roue libre sans
aucun contrôle du convertisseur de fréquence.
Rampe :
1 Sur réception d’une commande Arrêt, le moteur décélère selon les valeurs
des paramètres de décélération.
Si l’énergie de freinage renvoyée est élevée, l’utilisation d’une résistance de
freinage externe peut s’avérer nécessaire pour une décélération plus rapide.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 20

18 • vacon Description des parametres
2.1.13 Optimisation U/f
0
1
NOTA!
Non utilisée
Surcouple automatique
La tension fournie au moteur varie automatiquement, ce qui
permet au moteur de produire un couple suffisant pour démarrer
et tourner à faibles fréquences. L’élévation de tension varie selon
le type de moteur et sa puissance. La fonction de surcouple
automatique est utilisée dans des applications caractérisées par
un couple de démarrage élevé du fait du frottement (ex.,
convoyeurs).
Dans les applications à régime couple élevé/faible vitesse, le moteur
est susceptible de s’échauffer. S’il doit fonctionner à ce régime sur
une période prolongée, son refroidissement fera l’objet d’une
attention particulière. Utilisez un dispositif de refroidissement
externe pour le moteur s’il a tendance à trop s’échauffer.
2.1.14 Sélection référence E/S
Définition de la source de la référence fréquence sélectionnée en commande par le
bornier d’E/S.
0 AI1 : référence analogique (bornes 2 et 3, ex., potentiomètre)
1 AI2 : référence analogique (bornes 5 et 6, ex., capteur)
2 Référence panneau (paramètre 3.2)
3 Référence via bus de terrain (FBSpeedReference)
4 Référence motopotentiomètre
2.1.15 Entrée analogique AI2 (Ien) : échelle
1 Plage du signal 0 à 20 mA
2 Plage du signal 4 à 20 mA
3 Plage du signal 0 à 10 V
4 Plage du signal 2 à 10 V
Nota! Le paramétrage n’a aucun effet si par. 2.2.12 > 0% ou par. 2.2.13 < 100%.
2.1.16 Sortie analogique : fonction
Paramètre de sélection de la fonction réalisée par le signal de sortie analogique.
Voir tableau page 6 pour les différents réglages.
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 21

Description des parametres vacon • 19
2.1.17 Entrée logique DIN2 : fonction
Ce paramètre propose 9 réglages. Si l’entrée DIN2 n’est pas utilisée, réglez la valeur 0.
1 Marche arrière
2 Inversion de sens de rotation
3 Arrêt sur impulsion
4 Défaut externe
Contact fermé : défaut affiché et moteur arrêté
5 Défaut externe
Contact ouvert : défaut affiché et moteur arrêté
6 Validation marche
Contact ouvert : marche moteur non validée
Contact fermé : marche moteur validée
Arrêt en roue libre si ouverture en cours de MARCHE
7 Vitesse constante 2
8 Motopotentiomètre +Vite
Contact fermé : la référence augmente jusqu’à ouverture du contact
9 Désactiver le régulateur PID (référence fréquence directe)
10 Interverrouillage 1 (peut uniquement être sélectionné lorsque la Régulation
pompes/ventilateurs est activée, P2.9.1=2)
2.1.18 Entrée logique DIN3 : fonction
Ce paramètre propose 12 réglages. Si l’entrée DIN3 n’est pas utilisée, réglez la valeur 0.
1 Inversion de sens de rotation
Contact ouvert : sens de rotation avant
Contact fermé : sens de rotation arrière
2 Défaut externe
Contact fermé : défaut affiché et moteur arrêté
3 Défaut externe
Contact ouvert : défaut affiché et moteur arrêté
4 Réarmement défauts
Contact fermé : réarmement de tous les défauts
5 Validation marche
Contact fermé : marche moteur validée
Arrêt en roue libre si ouverture en cours de MARCHE
6 Vitesse constante 1
7 Vitesse constante 2
8 Commande de freinage par injection de c.c.
Contact fermé : en mode Arrêt, le freinage par injection de c.c. reste opérationnel jusqu'à
ouverture du contact. Le courant de freinage par injection de c.c. correspond à environ 10 % de
la valeur sélectionnée au par. 2.4.3.
9 Motopotentiomètre +Vite
Contact fermé : la référence augmente jusqu’à ouverture du contact.
10 Motopotentiomètre -Vite.
Contact fermé : la référence diminue jusqu’à ouverture du contact
11 Désactiver régulateur PID (référence fréquence directe)
12 Sélection référence panneau PID 2
13 Interverrouillage 2 (peut uniquement être sélectionné lorsque la Régulation
pompes/ventilateurs est activée, P2.9.1=2)
14 Entrée de la thermistance moteur (NOTA! Voir le Manuel Utilisateur, Chapitre 6.2.4)
15 Forcer la commande par bornier d’E/S.
16 Forcer la commande via bus de terrain.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 22

20 • vacon Description des parametres
2.1.19 Vitesse constante 1
2.1.20 Vitesse constante 2
Les valeurs de ces paramètres sont automatiquement limitées entre les fréquences mini
et maxi. (par. 2.1.1 et 2.1.2)
2.1.21 Fonction de redémarrage automatique
Activation/désactivation de la fonction de redémarrage automatique
0 = Fonction désactivée
1 = Fonction activée (3 redémarrages automatiques, voir par. 2.8.1 – 2.8.3)
2.1.22 Paramètres cachés
Choix des paramètres affichés sur le panneau opérateur : tous les paramètres ou seuls
les paramètres du groupe P2.1.
Le préréglage usine de ce paramètre est 0.
0 = Tous les groupes de paramètres sont affichés sur le panneau opérateur
1 = Seuls les paramètres du groupe b2.1 sont affichés sur le panneau opérateur
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 23

Description des parametres vacon • 21
4.2 CONFIGURATION DES ENTREES
2.2.1 Carte d’extension – Entrée logique DIE1 : fonction
Ce paramètre propose 12 réglages. Si l’entrée logique DIN1 de la carte d’extension n’est
pas utilisée, réglez la valeur 0.
Mêmes valeurs de réglage que pour le paramètre 2.1.18 sauf :
13 = Interverrouillage 1
2.2.2 Carte d’extension – Entrée logique DIE2 : fonction
Les réglages sont les mêmes que pour le paramètre 2.2.1, sauf :
13 = Interverrouillage 2
2.2.3 Carte d’extension – Entrée logique DIE3 : fonction
Les réglages sont les mêmes que pour le paramètre 2.2.1, sauf :
13 = Interverrouillage 3
2.2.4
Entrée logique DIN4 : fonction
Si le par. 2.2.6 est réglé sur 0, l’entrée analogique 1 (AI1) fonctionne comme entrée
logique 4 (DIN4).
Les réglages sont les mêmes que pour le paramètre 2.2.1.
NOTA ! Si vous paramétrez l’entrée analogique comme DIN4, vérifiez que les
cavaliers sont correctement positionnés (voir figure infra).
Figure 1- 1. Positionnement des cavaliers X4 lorsque AI1 fonctionne comme DIN4
MF2
X4:
paramétrage
RS485
Entrée en tension; 0...10V
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
MF3
X4:
Entrée en tension; 0...10V
Entrée en tension; 0...10V
MF4-6
X8:
Jumperdin4.fh8
4
Page 24

22 • vacon Description des parametres
2.2.5 Entrée analogique AI1 : sélection
Avec ce paramètre, vous connectez le signal AI1 sur l’entrée analogique de votre choix.
STOP
I/O term
nxlk29.fh8
READY
STOP
READY
I/O term
Emplacement
Figure 1- 2. Entrée analogique AI1 : sélection
La valeur de ce paramètre est formée de l’emplacement et du
correspondante.
Voir Figure 1- 2.
Emplacement carte 1 = entrées locales
Emplacement carte 2 = entrées de la carte d’extension
Numéro du signal 0 = entrée 1
Numéro de l’entrée 1 = entrée 2
Numéro de l’entrée 2 = entrée 3
Numéro de l’entrée 9 = entrée 10
Modifier
valeur
Numéro de l’entrée
numéro de l’entrée
Exemple :
Si vous réglez ce paramètre sur 10, vous sélectionnez l’entrée analogique locale
pour le signal AI1. De même, si vous réglez ce paramètre sur 21, vous sélectionnez
l’entrée analogique n°2 de la carte d’extension
Si vous désirez régler une valeur fixe à ce signal d’entrée analogique (ex., uniquement à
des fins d’essai), vous pouvez régler ce paramètre sur la valeur 0 à 9. Dans ce cas, la
valeur 0 correspond à 0 %, la valeur 1 à 20 % et toute valeur entre 2 et 9 à 100 %.
2.2.6 Entrée analogique AI1 : échelle
Sélection de la plage du signal analogique AI1.
0 = DIN 4
1 = Plage du signal 0 à 20mA (uniquement pour tailles MF4 et supérieures)
2 = Plage du signal 4 à 20mA (uniquement pour tailles MF4 et supérieures)
3 = Plage du signal 0 à 10V
4 = Plage du signal 2 à 10V
Nota ! Ce paramétrage n’a aucun effet si par. 2.2.7 > 0 %, ou par. 2.2.8 < 100 %.
n°1
pour le signal AI1.
4
Si la valeur du par. 2.2.6 est réglée à 0, AI1 fonctionne comme une entrée logique . Voir
par. 2.2.4.
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 25

Description des parametres vacon • 23
2.2.7 Entrée analogique AI1 : mini utilisateur
2.2.8 Entrée analogique AI1 : maxi utilisateur
Réglage par l’utilisateur des valeurs mini et maxi de la plage du signal analogique AI1
entre 0 à 10V.
2.2.9 Entrée analogique AI1 : inversion
En réglant ce paramètre sur la valeur 1,
le signal AI1 sera inversé.
%
Signal non filtré
100%
2.2.10 Entrée analogique AI1 : temps de
filtrage du signal
Si la valeur réglée de ce paramètre est
63%
Signal filtré
supérieure à 0, il y a filtrage du signal
analogique d’entrée U
.
en
Un temps de filtrage long ralentit l’action
de la régulation. Voir Figure 1- 3.
2.2.11 Entrée analogique AI2 : sélection
Avec ce paramètre, vous connectez le signal AI2 sur l’entrée analogique de votre choix.
Voir par. 2.2.5 pour la procédure de réglage.
2.2.12 Entrée analogique AI2 : échelle
1 Plage du signal 0 à 20 mA
2 Plage du signal 4 à 20 mA
3 Plage du signal 0 à 10 V
4 Plage du signal 2 à 10 V
Nota ! Le paramétrage n’a aucun effet si par. 2.2.13 > 0 %, ou par. 2.2.14 < 100 %.
2.2.13 Entrée analogique AI2 : mini utilisateur
2.2.14 Entrée analogique AI2 : maxi utilisateur
Par. 2.2.10
Figure 1- 3. Filtrage du signal AI1
nxlk30.fh8
t [s]
Réglage par l’utilisateur du signal d’entrée en courant entre 0 et 20 mA.
Voir paramètres 2.2.7 et 2.2.8.
2.2.15 Entrée analogique AI2 : inversion
Voir paramètre correspondant 2.2.9
2.2.16 Entrée analogique AI2 : temps de filtrage du signal
Voir paramètre correspondant 2.2.10.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 26

24 • vacon Description des parametres
2.2.17 Motopotentiomètre : remise à zéro (référence fréquence)
0 = Pas de remise à zéro
1 = Remise à zéro si arrêté ou coupure d’alimentation
2 = Remise à zéro si coupure d’alimentation
2.2.18 Référence : valeur mini
2.2.19 Référence : valeur maxi
L’utilisateur peut définir une plage de réglage de la référence fréquence entre les
fréquences Mini et Maxi. Si aucune plage de réglage n’est requise, réglez sur 0.
Dans les figures ci-dessous, l’entrée en tension AI1 avec la plage de signal 0 à 10V est
sélectionnée pour la référence.
Fréquence
moteur
Fréq. maxi par 2.1.2
Fréq. mini par 2.1.1
0
Entrée
analogique
[%]
10
Par. 2.2.19
Par. 2.2.18
Fréquence
moteur
Fréq. maxi par 2.1.2
Fréq. mini par 2.1.1
0
Entrée
analogique
[%]
10
NX12K35
Figure 1- 4. Gauche : Par. 2.1.18 = 0 (sans réglage) Droite : avec réglage
2.2.20 Sélection référence fréquence en commande par panneau opérateur
Définition de la source de la référence fréquence sélectionnée en commande par le
panneau opérateur
0 AI1 : référence analogique (préréglage usine : AI1, bornes 2 et 3, ex., potentiomètre)
1 AI2 : référence analogique (préréglage usine : AI2 bornes 5 et 6, ex., capteur)
2 Référence panneau (paramètre 3.2)
3 Référence via bus de terrain (FBSpeedReference)
4 Référence motopotentiomètre
5 Référence régulateur PID
2.2.21 Sélection référence fréquence via le bus de terrain
Définition de la source de la référence fréquence sélectionnée en commande via le bus
de terrain. Pour les valeurs de réglage, voir par. 2.2.20.
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
4
Page 27

Description des parametres vacon • 25
CONFIGURATION DES SORTIES
2.3.1 Sortie relais 1 : fonction
2.3.2 Carte d’extension – sortie relais 1 : fonction
2.3.3 Carte d’extension – sortie relais 2 : fonction
2.3.4 Carte d’extension – sortie logique 1 : fonction
Valeur de réglage Fonction
0 = Non utilisé Fonction non activée
Les sorties relais (RO1 interne) et relais
1 = Prêt Le convertisseur de fréquence est prêt à fonctionner
configurables (RO1, RO2) de la carte d’extension sont
activés si :
2 = Marche
3 = Défaut Convertisseur de fréquence déclenché sur défaut
4 = Défaut inversé
5 = Alarme surtempérature NXL
6 = Alarme ou défaut externe Alarme ou défaut selon par. 2.7.2
7 = Alarme ou défaut référence
8 = Alarme Convertisseur de fréquence en alarme.
9 = Inversé Commande d’inversion sélectionnée
10 = Vitesse constante Vitesse constante sélectionnée
11 = Vitesse atteinte La fréquence moteur a atteint la référence réglée
12 = Régulation active Régulateur de surtension ou de surintensité activé
13 = Supervision fréquence 1
14 = Commande par bornier d’E/S
Le convertisseur de fréquence fonctionne (moteur en
marche)
Convertisseur de fréquence non
défaut
La température du radiateur dépasse +70°C
Alarme ou défaut selon par. 2.7.1
- si référence analogique = 4-20 mA et signal <4mA
La fréquence moteur est hors des limites
haute/basse de supervision (voir paramètres 2.3.12
et 2.3.13 ci-après)
Commande en mode Distance (Menu K3; par. 3.1)
réglée sur « Bornier E/S
déclenché sur
L’entrée thermistance de la carte optionnelle signale
15 = Alarme ou défaut thermistance
16 = Supervision retour PID Paramètres 2.7.22 – 2.7.24
17 = Permutation 1 : commande Commande pompe 1, paramètres 2.10.1 – 2.10.9
18 = Permutation 2 : commande Commande pompe 1, paramètres 2.10.1 – 2.10.9
19 = Permutation 3 : commande Commande pompe 1, paramètres 2.10.1 – 2.10.9
20 = Supervision AI
une alarme ou un défaut de surtempérature selon le
paramètre 2.7.19.
Excitation du relais selon
le réglage des paramètres 2.3.14 – 2.3.16.
Tableau 1- 15. Signaux de sortie via RO1 et RO1, RO2, DO1 de la carte d’extension.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 28

26 • vacon Description des parametres
2.3.5 Sortie analogique : fonction
Paramètre de sélection de la fonction
désirée pour le signal de sortie
analogique. Voir tableau page 6 pour les
valeurs de réglage.
2.3.6 Sortie analogique : temps de filtrage
Définition du temps de filtrage du signal
de sortie analogique.
Si vous réglez ce paramètre sur 0, il n’y a
aucun filtrage.
2.3.7 Signal analogique : inversion
Inversion du signal de sortie analogique :
Signal de sortie maxi = 0 %
Signal de sortie mini = valeur maxi réglée (paramètre 2.3.9)
%
Signal non filtré
100%
Signal filtré
63%
t [s]
Par. 2.3.6
nxlk31.fh8
Figure 1- 5. Filtrage du signal analogique
0 Pas d’inversion
1 Signal inversé
Voir paramètre 2.3.9 ci-après.
2.3.8 Sortie analogique : mini
Réglage de la valeur mini du signal : 0 mA ou 4 mA (fonction de zéro effectif). Voir les
différents facteurs d’échelle au paramètre 2.3.9.
Courant sortie
analogique
20 mA
12 mA
10 mA
4 mA
0 mA
Param. 2.3.9
= 200%
0
0.5
Param. 2.3.9
= 50%
Param. 2.3.9
= 100%
1.0
nxlk32.fh8
Figure 1- 6. Inversion de la sortie analogique
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 29

Description des parametres vacon • 27
2.3.9 Sortie analogique : échelle
Facteur de mise à l’échelle de la sortie analogique.
Courant sortie
Signal Valeur maxi du signal
Fréquence moteur 100% x f
maxi
analogique
20 mA
Par. 2.3.9=
200%
Par. 2.3.9=
100%
Vitesse moteur 100% x vitesse nom. moteur
Courant de sortie 100% x I
Couple moteur 100% x C
Puissance moteur 100% x P
Tension moteur 100% x U
Tension bus c.c.
PID : référence
PID : retour 1
PID : erreur
PID : sortie
1000 V
100% x référence maxi
100% x mesure maxi
100% x erreur maxi
100% x sortie maxi
nMoteur
nMoteur
nMoteur
nMoteur
12 mA
10 mA
Par. 2.3.8 = 1
4 mA
Par. 2.3.8 = 0
0 mA
0
0.5
Par. 2.3.9=
50%
Valeur maxi signal
sélectionnée (par. 2.1.16)
1.0
nxlk49.fh8
Tableau 1- 16. Mise à l’échelle de la SA Figure 1- 7. Mise à l’échelle de la SA
2.3.10 Carte d’extension – sortie analogique 1 : fonction
2.3.11 Carte d’extension – sortie analogique 2 : fonction
Sélection des fonctions des signaux de sortie analogique de la carte d’extension. Voir
par. 2.1.16 pour les valeurs de réglage.
2.3.12 Fonction supervision fréquence 1 moteur
0 Pas supervision
1 Supervision limite basse
2 Supervision limite haute
Si la fréquence moteur franchit la limite basse/haute réglée (par. 2.3.13), cette fonction
signale une alarme via les sorties relais selon le réglage des paramètres 2.3.1 – 2.3.4.
2.3.13 Valeur fréquence 1 moteur supervisée
Sélection de la valeur de fréquence supervisée par le paramètre 2.3.12.
f[Hz]
Par 2.3.13
Par 2.3.12 = 2
Exemple:
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
nxlk33.fh8
Figure 1- 8. Supervision de la fréquence moteur
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
t
4
Page 30

28 • vacon Description des parametres
2.3.14 Entrée analogique (AI) : supervision
Paramètre de sélection de l’entrée analogique à superviser
0 = Pas de supervision
1 = AI1
2 = AI2
2.3.15 Supervision AI : limite désactivation
Lorsque le signal d’entrée analogique sélectionné au par. 2.3.14 passe sous la limite
réglée avec ce paramètre, la sortie relais est désactivée.
2.3.16 Supervision AI : limite activation
Lorsque le signal d’entrée analogique sélectionné au par. 2.3.14 franchit la limite réglée
avec ce paramètre, la sortie relais est activée.
Exemple : si la limite d’activation est réglée sur 60 % et la limite de désactivation sur
40 %, le relais est activé lorsque le signal dépasse 60 % et reste activé jusqu’à ce qu’il
repasse sous 40 %.
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 31

Description des parametres vacon • 29
4.3 CONTROLE VARIATEUR
2.4.1 Forme rampe accélération/décélération 1
Le début et la fin de la rampe d’accélération et de décélération peuvent être amortis
avec ce paramètre. La valeur 0 donne une rampe de forme linéaire, l’accélération et la
décélération intervenant dès modification du signal de référence.
En réglant une valeur entre 0,1 et 10 secondes, la rampe d’accélération et de
décélération aura une forme en S, sans à-coups. Le temps d’accélération et de
décélération est déterminé aux paramètres 2.1.3/2.1.4
Figure 1- 9. Accélération/Décélération (rampe en S)
[Hz]
2.4.2
2.1.3, 2.1.4
2.4.1
2.4.1
Hacheur de freinage
NX12K20
[t]
Nota! Un hacheur de freinage est intégré dans toutes les tailles de variateurs, sauf MF2.
0 Pas de hacheur de freinage utilisé
1 Hacheur de freinage utilisé à l’état Marche
2 Hacheur de freinage utilisé aux états Marche et Arrêt
Lorsque le convertisseur de fréquence freine le moteur, l’énergie de freinage du moteur
et de la charge est renvoyée sur une résistance de freinage externe. Le convertisseur de
fréquence peut ainsi décélérer la charge avec un couple égal à celui de l’accélération
(pour autant qu’une résistance de freinage adéquate ait été sélectionnée). Voir document
séparé 'Brake resistor installation manual'.
2.4.3 Courant freinage c.c.
Valeur du courant injecté dans le moteur pendant le freinage c.c.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 32

30 • vacon Description des parametres
2.4.4 Durée freinage c.c. à l’arrêt
Activation/désactivation de la fonction de freinage par injection de c.c. et réglage de la
durée de freinage c.c. pendant l’arrêt du moteur. Le fonctionnement du freinage c.c.
varie selon le mode d’arrêt sélectionné au paramètre 2.1.12.
0 Freinage c.c. non utilisé (désactivé)
>0 Freinage c.c. activé et fonctionnement selon le mode d’arrêt sélectionné,
(par. 2.1.12). La durée du freinage c.c. est réglée par ce paramètre
Par. 2.1.12 = 0 (Mode Arrêt = roue libre) :
Sur réception d’une commande arrêt, le moteur s’arrête en roue libre sans aucun
contrôle du convertisseur de fréquence.
Avec le freinage par injection de c.c., le moteur peut être arrêté électriquement dans le
délai le plus court possible, sans utiliser de résistance de freinage externe (option).
Le temps de freinage varie selon la fréquence au début du freinage c.c. Si la fréquence
est supérieure à la fréquence nominale du moteur, c’est la valeur du paramètre 2.4.4 qui
détermine le temps de freinage. Lorsque la fréquence est ≤10 % de la valeur nominale,
le temps de freinage correspond à 10 % de la valeur réglée au paramètre 2.4.4.
f
f
n
MARCHE
ARRÊT
sort
Freinage CC
activé
t = 1 x Par. 2.4.4
Fréquence moteur
Vitesse moteur
0,1 x f
t
f
sort
f
n
n
MARCHE
ARRÊT
Fréquence moteur
Vitesse moteur
Freinage CC
activé
t = 0,1 x Par. 2.4.4
t
nxlk34.fh8
Figure 1- 10. Durée du freinage c.c. lorsque Mode Arrêt = roue libre.
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 33

Description des parametres vacon • 31
Par. 2.1.12 = 1 (Mode Arrêt = rampe):
f
Sur réception d’une commande Arrêt,
le moteur décélère sur la rampe
réglée, aussi rapidement que
out
Vitesse moteur
Fréquence moteur
possible, jusqu’à la vitesse définie au
paramètre 2.4.5, où débute le
freinage c.c.
Le temps de freinage est défini au
paramètre 2.4.4. En cas de forte
inertie, nous conseillons d’utiliser une
résistance de freinage externe
(option) pour une décélération plus
par. 2.4.5
MARCHE
ARRÊT
Freinage CC
t
t = Par. 2.4.4
nxlk50.fh8
rapide. Voir Figure 1- 11.
Figure 1- 11. Durée du freinage c.c. lorsque Mode
Arrêt = rampe
2.4.5 Seuil de fréquence en freinage c.c. à l’arrêt sur rampe
Valeur de fréquence moteur à laquelle le freinage c.c. est appliqué. Voir Figure 1- 11.
2.4.6 Durée freinage c.c. au démarrage
Le freinage c.c. est activé sur réception
d’une commande Marche. Ce paramètre
définit la temporisation de déblocage du
frein. Après déblocage du frein, la
fréquence moteur augmente selon le
mode Marche défini au paramètre 2.1.11.
Voir Figure 1- 12.
2.4.7 Freinage flux
Contrairement à l'injection de courant continu, le freinage par contrôle de flux est un
moyen pratique pour freiner les moteurs ≤15kW. Quand le freinage est nécessaire, la
fréquence est diminuée et le flux moteur est augmenté, ce qui permet d'augmenter la
capacité de freinage du moteur. Contrairement à l'injection de courant continu, la vitesse
moteur reste maitrisée par le convertisseur durant le freinage.
Fréquence
moteur
Par 2.4.6
MARCHE
ARRÊT
nxlk35.fh8
Figure 1- 12. Durée de freinage c.c. au
démarrage
t
La fonction de freinage par contrôle de flux peut être enclenchée ou déclenchée.
0 = Fonction déclenchée
1 = Fonction enclenchée
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 34

32 • vacon Description des parametres
Nota : Le freinage par contrôle de flux converti l'énergie en calories dans le moteur, et
ne doit donc être utilisé que de façon temporaire pour éviter tout dommage moteur
2.4.8 Courant freinage flux
Définition de la valeur de courant pour le freinage par contrôle de flux. La valeur peut
être réglée entre 0,3 x I
(environ) et le Courant Maxi Sortie.
H
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 35

Description des parametres vacon • 33
SAUT DE FREQUENCES
4.4
2.5.1 Saut plage de fréquences 1 ; Limite basse
2.5.2 Saut plage de fréquences 1 ; Limite haute
Dans certains systèmes, il peut
Fréquence
moteur [Hz]
s’avérer utile de sauter des fréquences
données pour éviter les problèmes de
résonance mécanique. Ces paramètres
servent à définir les valeurs limites de
la plage de fréquence à sauter. Voir
Figure 1- 13.
2.5.1 2.5.2
Référence [Hz]
nxlk36.fh8
Figure 1- 13. Exemple de réglage de la plage de
fréquences à sauter.
2.5.3 Facteur de réduction rampe d’accélération/décélération entre limites de saut de
fréquences
Définition du temps d’accélération/décélération lorsque la fréquence moteur se situe
dans la plage de saut de fréquences (par. 2.5.1 et 2.5.2). La vitesse de rampe (temps
d’accélération/décélération sélectionné 1 ou 2) est multipliée par ce facteur. Ex., la
valeur 0,1 divise par 10 le temps d’accélération par rapport à celui hors de la plage de
saut de fréquences.
fout [Hz]
Par. 2.5.3 = 0,2
Par. 2.5.2
Par. 2.5.1
Par. 2.5.3 = 1,2
Figure 1- 14. Facteur de réduction de la vitesse de rampe dans la plage de saut de fréquences
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
nxlk37.fh8
Temp s [s]
4
Page 36

34 • vacon Description des parametres
4.5 CONTROLE MOTEUR
2.6.1 Mode de contrôle
0 Régulation fréquence : Les références sur le bornier d’E/S et sur le panneau opérateur
sont des références fréquence, le convertisseur de fréquence
contrôle le moteur en régulation fréquence (résolution de la
fréquence moteur = 0,01 Hz)
1 Régulation vitesse : Les références sur le bornier d’E/S et sur le panneau opérateur
sont des références vitesse, le convertisseur de fréquence
contrôle le moteur en régulation vitesse (précision ± 0,5%).
2.6.2 Rapport U/f
Linéaire : La tension du moteur varie de façon linéaire avec la fréquence dans la plage de
0 flux constant entre 0 Hz et le point d’affaiblissement du champ où la tension
nominale est fournie au moteur. Un rapport U/f linéaire doit être utilisé dans
les applications à couple constant. Voir Figure 1- 15.
Ce préréglage usine doit être conservé s’il n’y a aucune raison spéciale
d’en utiliser un autre.
Quadratique : La tension du moteur varie en suivant une courbe quadratique avec la
1 fréquence dans la plage entre 0 Hz et le point d’affaiblissement du champ où
la tension nominale est également fournie au moteur. Le moteur est sous magnétisé en-dessous du point d’affaiblissement du champ et produit un
couple inférieur et moins de bruit électromagnétique. Un rapport U/f
quadratique peut être utilisé dans les applications où le couple requis par la
charge est proportionnel au carré de la vitesse (ex., ventilateurs et pompes
centrifuges).
Figure 1- 15. Variations linéaire et quadratique de la tension moteur
U[V]
Préréglage : tension nominale moteur
Un
par.2.6.4
linéaire
Point d’affaiblissement du champ
4
par.2.6.6, 2.6.7
quadratique
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Préréglage :
fréquence
nominale
moteur
par.2.6.3
f[Hz]
nxlk38.fh8
Page 37

Description des parametres vacon • 35
Courbe U/f configurable :
2 La courbe U/f est définie par trois points différents. La courbe U/f
configurable est utilisée lorsque les autres types de rapport U/f ne répondent
pas aux besoins de l’application.
U[V]
Un
Par 2.6.4
Préréglage: tension
nominale moteur
Point
d’affaiblissement du
champ
Par. 2.6.7
(Prérég. 10%)
Par. 2.6.8
(Prérég. 1.3%)
Par. 2.6.6
(Prérég. 5 Hz)
Préréglage:
Fréquence
nominale moteur
Par. 2.6.3
Figure 1- 16. Courbe U/f configurable
Linéaire avec optimisation du flux :
3 Le convertisseur de fréquence recherche le courant moteur minimal pour
économiser l’énergie, réduire le niveau des perturbations et le bruit. Cette
fonction peut être utilisée pour des applications sans variations brusques de
charge (ex., ventilateurs, pompes, etc.)
2.6.3 Point d’affaiblissement du champ
Le point d’affaiblissement du champ correspond à la fréquence moteur à laquelle la
tension de sortie atteint la valeur réglée au par. 2.6.4.
2.6.4 U/f : tension au point d’affaiblissement du champ
Au-dessus de la fréquence au point d’affaiblissement du champ, la tension de sortie
reste à la valeur réglée avec ce paramètre. Sous la fréquence au point d’affaiblissement
du champ, la tension de sortie varie selon le réglage des paramètres U/f. Voir
paramètres 2.1.13, 2.6.2, 2.6.5, 2.6.6 et 2.6.7 et Figure 1- 16.
f[Hz]
nxlk39.fh8
Lorsque les paramètres 2.1.6 et 2.1.7 (tension et fréquence nominales moteur) sont
réglés, les paramètres 2.6.3 et 2.6.4 sont automatiquement réglés à ces valeurs
correspondantes. Si vous devez modifier les valeurs de point d’affaiblissement du champ
et de tension modifiez les valeurs de ces paramètres après avoir réglé les paramètres
2.1.6 et 2.1.7.
2.6.5 U/f : fréquence intermédiaire
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 38

36 • vacon Description des parametres
Si la courbe U/f configurable a été sélectionnée au paramètre 2.6.2, ce paramètre définit
la fréquence au point intermédiaire de la courbe. Voir Figure 1- 16.
2.6.6 U/f : tension intermédiaire
Si la courbe U/f configurable a été sélectionnée au paramètre 2.6.2, ce paramètre définit
la tension au point intermédiaire de la courbe. Voir Figure 1- 16.
2.6.7 U/f : tension à fréquence nulle
Ce paramètre définit la tension à fréquence nulle de la courbe. Voir Figure 1- 16.
2.6.8 Fréquence de découpage
Le bruit du moteur peut être minimisé en réglant une fréquence de découpage élevée.
En augmentant la fréquence de découpage, vous réduisez la capacité du convertisseur
de fréquence.
Fréquence de découpage du Vacon NXL : 1 à 16 kHz
2.6.9 Régulateur de surtension
2.6.10 Régulateur de sous-tension
Paramètres de désactivation des régulateurs de surtension et de sous-tension qui sont
notamment utilisés lorsque les variations de tension réseau sont supérieures à –15 %/
+10% et que l’application ne peut tolérer les déclenchements en surtension ou soustension. Ce régulateur contrôle la fréquence moteur, prenant en compte les fluctuations
de la tension réseau.
Nota: Des déclenchements en défaut de surtension/sous-tension peuvent survenir
lorsque les régulateurs sont désactivés.
0 Régulateur désactivé
1 Régulateur activé
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 39

Description des parametres vacon • 37
4.6 PROTECTIONS
2.7.1 Action en cas de défaut référence 4 mA
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
Une alarme ou un défaut (avec message affiché) survient si le signal de référence 420 mA est utilisé et s’il est inférieur à 3,5 mA pendant 5 secondes ou inférieure à 0,5 mA
pendant 0,5 seconde. Cette information peut également être programmée pour être en
recopie sur les sorties relais.
2.7.2 Action en cas de défaut externe
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
Une alarme ou un défaut (avec message affiché) survient en cas de défaut externe
déclenché par les entrées logiques configurables. Cette information peut également être
programmée pour être en recopie sur les sorties relais.
2.7.3 Action en cas de défaut de sous-tension
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
Pour les limites de sous-tension, voir manuel utilisateur Vacon NXL, Tableau 4-3.
Nota: cette protection ne peut être désactivée.
2.7.4 Supervision phases moteur
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
La supervision phases moteur vérifie que les courants de phases moteur sont équilibrés.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 40

38 • vacon Description des parametres
2.7.5 Protection contre les défauts de terre
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
La protection contre les défauts de terre vérifie que la somme des courants de phase
moteur est égale à zéro. Par ailleurs, la protection contre les surintensités est activée en
permanence et protège le convertiseur de fréquence des défauts de terre de forte
intensité.
Paramètres 2.7.6—2.7.10, Fonction de protection thermique du moteur (PTM) :
Généralités
Comme son nom l’indique, la fonction de protection thermique du moteur protège ce dernier d’un
échauffement excessif. Le convertisseur de fréquence Vacon est capable de fournir au moteur un
courant supérieur à sa valeur nominale. Si la charge exige un niveau de courant élevé, le moteur
risque de se trouver en surcharge thermique, plus particulièrement aux basses fréquences où son
refroidissement et sa capacité sont réduites. Si le moteur est doté d’un ventilateur externe, le
déclassement thermique aux basses vitesses est minimal.
La protection thermique du moteur est basée sur un modèle calculé qui utilise le courant de sortie
du variateur pour déterminer la charge moteur.
La fonction de protection thermique du moteur est paramétrable, le courant thermique I
niveau de courant au-dessus duquel le moteur est en surcharge. Cette limite de courant est fonction
de la fréquence moteur.
spécifie le
T
ATTENTION !
!
Le modèle thermique ne protège pas le moteur si le débit d’air de
refroidissement est réduit du fait d’une obstruction des grilles de
ventilation ou si la température ambiante est excessive.
2.7.6 Protection thermique moteur (PTM)
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
En cas de défaut, le variateur déclenche et signale le défaut.
En désactivant la fonction de protection (paramètre réglé sur 0), la température calculée
du moteur est réinitialisée à 0 %.
Le réglage du paramètre sur la valeur 0 désactive la protection et réinitialise le
compteur de temporisation de calage.
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 41

Description des parametres vacon • 39
2.7.7 PTM : facteur de température ambiante
Lorsque la température ambiante du moteur doit être prise en compte, il est conseillé
de régler une valeur pour ce paramètre. Le facteur peut être réglé entre –100,0 % et
100,0 %, où –100,0 % correspond à 0
°C et 100,0 % à la température maxi de
fonctionnement du moteur. La valeur de réglage 0 % suppose que la température
ambiante est la même que la température du radiateur du convertisseur de fréquence à
la mise sous tension.
2.7.8 PTM : facteur de refroidissement à vitesse nulle
La valeur de courant thermique peut être réglée entre 0 et 150,0 % x capacité de charge
à fréquence nominale. Voir Figure 1- 17.
P
refroidissement
100%*
I
nmot
Zone de surcharge
I
T
Par.
2.7.8=40%
Figure 1- 17. Courbe de courant thermique du moteur
2.7.9 PTM : constante de temps
Ce temps peut être réglé entre 1 et 200 minutes.
Cette valeur correspond à la constante de temps thermique du moteur. Plus le moteur
est gros, plus la constante de temps est élevée. La constante de temps correspond au
temps au cours duquel la température calculée atteint 63 % de sa valeur finale.
La constante de temps thermique d’un moteur varie selon sa conception et sa
fabrication.
Si le temps t6 (temps en secondes au cours duquel le moteur peut fonctionner en toute
sécurité à six fois son courant nominal) du moteur est connu (fourni par le fabricant du
moteur), le paramètre de constante de temps peut être réglé sur la base de ce temps.
Dans la pratique, la constante de temps thermique du moteur en minutes est égale à
2xt6. Si le moteur est à l’arrêt, la constante de temps est multipliée en interne par trois
fois la valeur paramétrée. Le refroidissement à l’arrêt est basé sur la convection
naturelle et la constante de temps est augmentée. Voir égalementFigure 1- 18.
f
nxlk51.fh8
f
n
0
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 42

40 • vacon Description des parametres
Nota : Si la vitesse nominale (par. 2.1.8) ou le courant nominal (par. 2.1.9) du moteur est
modifié, ce paramètre récupère automatiquement son préréglage usine (45).
Température moteur
Zone de déclenchement
105%
Courant
moteur
I/I
T
Température moteur
nxlk40.fh8
Constante de temps T
Θ
= (I/I
)2 x (1-e
T
*) Varie selon la taille du moteur, réglée
avec paramètre 2.7.9.
Défaut/Alarme
par. 2.7.6
*)
-t/T
)
Te mps
Figure 1- 18. Calcul de la température du moteur
2.7.10 Facteur de service du moteur
Définition du niveau de charge nominale moteur appliqué.
Valeur réglable entre 0% et 100%.
Paramètre 2.7.11, Fonction de protection contre le calage du moteur (PCM) :
Généralités
La fonction de protection contre le calage du moteur protège ce dernier des surcharges de courte
durée, notamment du fait du calage de l’arbre moteur. La temporisation de la protection contre le
calage moteur peut être réglée sur une valeur inférieure à celle de la protection thermique moteur.
L’état de calage du moteur est défini par deux paramètres : 2.7.12 (PCM : Courant) et 2.7.13 (PCM :
seuil fréquence). Si le courant est supérieur à la limite réglée et la fréquence moteur inférieure au
seuil réglé, le variateur considère qu’il y a calage moteur. La rotation de l’arbre n’est pas
effectivement vérifiée ; il s’agit d’une fonction de type protection de surintensité.
2.7.11 Protection contre le calage moteur (PCM)
4
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
En réglant ce paramètre sur 0, vous désactivez la fonction et vous remettez à zéro le
compteur de temps de calage moteur.
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 43

Description des parametres vacon • 41
2.7.12 PCM : Limite de courant
La limite de courant peut être réglée entre
0.0 et I
x 2. Un défaut de calage
nMoteur
moteur est détecté lorsque le courant
franchit cette limite. Voir Figure 1- 19. Le
paramètre n‘autorise pas l’entrée d’une
valeur supérieure à I
nMotor
paramètre 2.1.9 (courant nominal moteur)
est modifié, ce paramètre est
automatiquement ramené à sa valeur par
défaut (I
nMotor
*1.3).
2.7.13 PCM : Temporisation
Cette temporisation peut être réglée
entre 1,0 et 120,0 s.
Il s’agit de la temporisation maximale
pour la détection d’un calage moteur.
La temporisation est comptée par un
compteur +/- interne.
Si la valeur du compteur franchit
cette valeur limite, la fonction de
protection déclenche le variateur. Voir
Figure 1- 20.
*2. Si le
I
Zone de calage
Par. 2.7.12
Par. 2.7.14
nxlk41.fh8
Figure 1- 19. Définition de la zone de calage
Compteur tempo
Zone de déclenchement
Par. 2.7.13
Défaut/Alarme
par. 2.7.11
Te mp s
f
2.7.14 PCM : Seuil fréquence
La fréquence peut être réglée entre 1 et f
Pour qu’un défaut de calage survienne, la fréquence moteur doit passer sous cette
valeur limite.
calage
Pas de calage
Figure 1- 20. Tempo de calage moteur
(par. 2.1.2).
maxi
nxlk42.fh8
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 44

42 • vacon Description des parametres
Paramètres 2.7.15—2.7.18, Protection contre les sous-charges :
Généralités
La fonction de protection contre les surcharges vérifie la présence d’une charge moteur lorsque le
variateur est en fonctionnement. La perte de charge moteur peut révéler un problème au niveau de
l’application (ex., rupture d’une courroie ou pompe en cavitation).
La protection contre les sous-charges moteur peut être activée en adaptant la courbe de souscharge avec les paramètres 2.7.16 (couple à fréquence nominale) et 2.7.17 (charge à fréquence
nulle), voir ci-dessous. La courbe de sous-charge est une courbe quadratique réglée entre la
fréquence nulle et le point d’affaiblissement du champ. La fonction de protection n’est pas activée
sous 5 Hz (le compteur de temporisation de sous-charge est arrêté).
Les valeurs de couple pour la courbe de sous-charge sont données en pourcentage du couple
nominal moteur. La valeur de la plaque signalétique du moteur, le courant nominal moteur
paramétré et le courant nominal du variateur (I
) sont utilisés pour déterminer le facteur d’échelle
L
de la valeur de couple interne. Si un moteur de valeurs nominales différentes est utilisé avec le
variateur, il y a perte de précision du calcul de couple.
2.7.15 Protection contre les sous-charges (PSC)
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
En cas de défaut, le variateur déclenche et active le défaut de sous-charge.
En désactivant la fonction de protection (paramètre réglé sur 0), le compteur de temps
de sous-charge est remis à zéro.
2.7.16 PSC : couple à fréquence nominale
La limite de couple peut être réglée entre 10,0 et 150,0 % x C
Ce paramètre spécifie le couple mini
autorisé lorsque la fréquence moteur
est au-dessus du point
d’affaiblissement du champ. Voir
Figure 1- 21.
Si vous modifiez la valeur du paramètre
2.1.9 (courant nominal moteur), ce
paramètre récupère automatiquement
son préréglage usine.
Par. 2.7.16
Par. 2.7.17
nMoteur
Couple
Zone de sous-charge
Point d’affaiblissement du
5 Hz
champ par. 2.6.3
.
f
nxlk43.fh8
4
Figure 1- 21. Réglage de la charge mini
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 45

Description des parametres vacon • 43
2.7.17 PSC : couple à fréquence nulle
La limite de couple peut être réglée entre 5,0 et 150,0 % x C
Ce paramètre spécifie le couple mini autorisé à fréquence nulle. Voir Figure 1- 21.
Si vous modifiez la valeur du paramètre 2.1.9 (courant nominal moteur), ce paramètre
récupère automatiquement son préréglage usine.
2.7.18 PSC : temporisation
Cette temporisation peut être réglée
entre 2,0 et 600,0 s.
Ce paramètre spécifie le temps maxi
autorisé de présence d’une souscharge. Un compteur +/- compte le
temps total de sous-charge. Si la valeur
du compteur franchit cette limite, la
fonction de protection déclenche le
variateur conformément au réglage du
paramètre 2.7.15. Si le variateur est
arrêté, le compteur de sous-charge est
remis à zéro. Voir Figure 1- 22.
Par. 2.7.18
Sous-charge
Pas de sous-charge
.
nMoteur
Compteur tempo
Zone de déclenchement
Défaut/Alarme, par.
2.7.15
Te mp s
nxlk44.fh8
Figure 1- 22. Fonction de comptage de tempo de
sous-charge
2.7.19 Action en cas de défaut thermistance
0 = Aucune action
1 = Alarme
2 = Défaut, arrêt selon le mode réglé au paramètre 2.1.12
3 = Défaut, arrêt toujours en roue libre
En réglant ce paramètre sur 0, vous désactivez la fonction de protection.
2.7.20 Action en cas de défaut de communication (sur bus de terrain)
Sélection de l’action mise en œuvre en cas de défaut de communication sur bus de
terrain. Pour en savoir plus, voir manuel de la carte bus de terrain utilisée.
Voir paramètre 2.7.19.
2.7.21 Action en cas de défaut carte (slot)
Sélection de l’action mise en œuvre en cas de défaut carte (carte absente ou
défectueuse).
Voir paramètre 2.7.19.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 46

44 • vacon Description des parametres
2.7.22 Supervision retour PID
0 = Non utilisée
1 = Alarme si retour PID inférieur à la limite réglée au par. 2.7.23
2 = Alarme si retour PID supérieur à la limite réglée au par. 2.7.23
3 = Défaut si retour PID inférieur à la limite réglée au par. 2.7.23
4 = Défaut si retour PID supérieur à la limite réglée au par. 2.7.23
2.7.23 Limite supervision PID
Réglage de la valeur limite du retour PID supervisée par le par. 2.7.22
2.7.24 Tempo supervision PID
Temporisation pour la fonction de supervision du retour PID (par. 2.7.22)
Si ce paramètre est utilisé, la fonction du par. 2.7.22 sera activée uniquement lorsque le
retour PID reste hors de la limite définie pendant la temporisation réglée avec ce
paramètre.
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 47

Description des parametres vacon • 45
REDEMARRAGE AUTOMATIQUE
4.7
La fonction de redémarrage automatique est activée si le par. 2.1.21 = 1. Il y a toujours trois
tentatives de redémarrage automatique
2.8.1 Redémarrage auto : tempo
Définition de la temporisation précédant le redémarrage automatique du moteur par le
convertisseur de fréquence après disparition du défaut.
2.8.2 Redémarrage auto : période de réarmement automatique
La fonction de redémarrage automatique redémarre le convertisseur de fréquence
après disparition des défauts et fin de la temporisation de redémarrage.
Le comptage débute au moment du premier redémarrage auto. Si le nombre de défauts
survenant au cours de cette période est supérieur à trois, le convertisseur de fréquence
passe à l’état de défaut. Dans le cas contraire, le défaut est réarmé après la fin de la
période et le défaut suivant réenclenche un comptage de période.
Si un seul défaut reste présent pendant la période de réarmement automatique, le
convertisseur de fréquence passe à l’état de défaut..
Déclencheur sur défaut
Signal Arrêt Moteur
Signal Marche Moteur
Supervision
Défaut actif
REARMEMENT
Réarmement du défaut
/
Tem p o
redém.
Par. 2.8.1
Fonction de redémarrage automatique: (Tentatives = 3)
Tem p o
redém.
Par. 2.8.1
Redémarrage 1 Redémarrage 2
Figure 1- 23. Fonction de redémarrage automatique
2.8.3 Redémarrage auto : type de redémarrage
Sélection du type de redémarrage :
0 = Redémarrage sur rampe
1 = Reprise au vol
Tem po
redém.
Par. 2.8.1
Période réarmement
Par. 2.8.2
Tem po
redém.
Par. 2.8.1
Redémarrage 3
nxlk52.fh8
2 = Redémarrage selon le par. 2.1.11
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 48

46 • vacon Description des parametres
4.8 REGULATEUR PID
2.9.1 Régulateur PID
Activation/désactivation du régulateur PID ou activation des paramètres de la Régulation
pompes/ventilateurs.
0 = Régulateur PID désactivé
1 = Régulateur PID activé
2 = Régulation pompes/ventilateurs activée. Le groupe P2.10 devient acessible.
2.9.2 PID : référence
Définition de la source de la référence fréquence pour le régulateur PID.
Préréglage usine = 2.
0 = Référence entrée analogique 1 (AI1)
1 = Référence entrée analogique 2 (AI2)
2 = Référence PID issue de la page Commande Panneau (Groupe K3, paramètre R3.5)
3 = Référence reçue via le bus de terrain (FBProcessDataIN1)
2.9.3 Sélection retour PID
0 Entrée analogique 1 (AI1)
1 Entrée analogique 2 (AI2)
2 Bus de terrain (
3 Couple moteur
4 Vitesse moteur
5 Courant moteur
6 Puissance moteur
7 AI1 – AI2
retour PID 1
: FBProcessDataIN2;
2.9.4 Régulateur PID : Gain
Définition du gain du régulateur PID. Si ce paramètre est réglé sur 100 %, une variation
de 10 % de l’erreur entraîne une variation de 10 % de la sortie du régulateur.
Si le paramètre est réglé sur 0, le régulateur PID fonctionne comme un régulateur I.
Voir exemple ci-après.
2.9.5 Régulateur PID : temps d’intégration
Définition du temps d’intégration du régulateur PID. Si ce paramètre est réglé sur 1,00
seconde, une variation de 10 % de l’erreur entraîne une variation de 10,00%/s. Si le
paramètre est réglé sur 0,00 s, le régulateur PID fonctionne comme un régulateur PD.
Voir exemple ci-après.
Retour PID 2
: FBProcessDataIN3)
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 49

Description des parametres vacon • 47
2.9.6 Régulateur PID : temps de dérivée
Définition du temps de dérivée du régulateur PID. Si ce paramètre est réglé sur 1,00
seconde, une variation de 10 % de l’erreur pendant 1,00 s entraîne une variation de
10,00% de la sortie du régulateur. Si le paramètre est réglé sur 0,00 s, le régulateur PID
fonctionne comme un régulateur PI.
Voir exemple ci-après.
Exemple 1 :
Pour ramener l’erreur à zéro, avec les valeurs réglées, la sortie du convertisseur de
fréquence agit comme suit :
Valeurs réglées :
Par. 2.9.4, P = 0% Maxi sortie PID = 100,0%
Par. 2.9.5, temps I = 1,00 s Mini sortie PID = 0,0%
Par. 2.9.6, temps D = 0,00 s Fréq. mini = 0 Hz
Erreur (consigne – mesure) = 10,00% Fréq. maxi = 50 Hz
Dans cet exemple, le régulateur PID fonctionne exclusivement en régulateur ID.
Selon la valeur réglée au paramètre 2.9.5 (temps I), la sortie PID augmente de 5 Hz (10 %
de l’écart entre la fréquence maxi et la fréquence mini) toutes les secondes jusqu’à ce
que l’erreur atteigne 0.
Hz
Sortie PID
Erreur
Action I =5 Hz/s
10%
10%
10%
10%
Erreur =10%
1s
Action I =5 Hz/s
Action I =5 Hz/s
Action I =5 Hz/s
Action I =5 Hz/s
NX12k70
Figure 1- 24. Fonctionnement du régulateur PID en régulateur I
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
a
4
Page 50

48 • vacon Description des parametres
Exemple 2 :
Valeurs réglées :
Par. 2.9.4, P = 100% Maxi sortie PID = 100,0%
Par. 2.9.5, temps I = 1,00 s Mini sortie PID = 0,0%
Par. 2.9.6, temps D = 1,00 s Fréq. mini = 0 Hz
Erreur (consigne – mesure) = ±10 % Fréq. maxi = 50 Hz
A la mise sous tension, le système calcule l’écart (erreur) entre la consigne et la valeur
de mesure et commence à augmenter ou réduire (dans le cas d’une erreur négative) la
sortie PID en fonction du temps I. Dès que l’erreur est ramenée à 0, la sortie est
diminuée de la valeur réglée au paramètre 2.9.5.
Si l’erreur est négative, le convertisseur de fréquence réagit en diminuant la sortie en
conséquence.
Hz
Sortie PID
Action D
Erreur
Action D
Action D
Action P=5 Hz
Erreur=10%
Erreur= -10%
Action P= -5 Hz
t
NX12k69
Figure 1- 25. Courbe de la sortie PID avec les valeurs de l’exemple 2
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 51

Description des parametres vacon • 49
Exemple 3 :
Valeurs réglées :
Par. 2.9.4, P = 100% Maxi sortie PID = 100,0%
Par. 2.9.5, temps I = 0,00 s Mini sortie PID = 0,0%
Par. 2.9.6, temps D = 1,00 s Fréq. mini = 0 Hz
Erreur (consigne – mesure) = ±10%/s Fréq. maxi = 50 Hz
Si l’erreur augmente, la sortie PID augmente conformément aux valeurs réglées (temps
D = 1,00s). Voir Figure 1- 26.
Hz
Sortie PID
Erreur
Action D=10%=5,00 Hz
Action D= -10%= -5,00 Hz
10%
1,00 s
Figure 1- 26. Sortie PID avec les valeurs de l’exemple 3.
2.9.7 Mini mesure 1
Réglage de la valeur mini de la mesure 1. Voir Figure 1- 27.
2.9.8 Maxi mesure 1
Réglage de la valeur maxi de la mesure 1. Voir Figure 1- 27.
100
Action P=100% *Erreur PID = 5,00Hz/s
NX12k72
Signal d’entrée à
l’échelle [%]
Par.2.9.7=30%
Par.2.9.8=80%
a
Entrée
analogique
1008030
0
0
0
4
6,0
8,8 20,0 mA
16,0
16,8
nxlk45.fh8
[%]
10,0 V8,03,0
20,0 mA
Figure 1- 27. Exemple de réglage des signaux de mesure
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 52

50 • vacon Description des parametres
2.9.9 PID : inversion erreur
Inversion de l’erreur du régulateur PID (et donc du fonctionnement du régulateur PID).
0 Pas d’inversion
1 Erreur inversée
2.9.10 Fréquence de veille
Le convertisseur de fréquence est automatiquement arrêté si la fréquence de
l’entraînement chute sous la valeur de ce paramètre pendant un temps plus long que
réglé au paramètre 2.9.11. Pendant la mise en veille, le régulateur PID surveille le signal
de mesure et repasse le convertisseur de fréquence à l’état Marche dès que le signal est
inférieur ou supérieur (voir par. 2.9.13) à la fréquence de reprise réglée au par. 2.9.12.
Voir Figure 1- 28.
2.9.11 Tempo de veille
Temporisation d’arrêt du convertisseur de fréquence après passage de la fréquence
sous la fréquence de veille. Voir Figure 1- 28.
2.9.12 Niveau de reprise
Le niveau de reprise est la valeur mini ou maxi en pourcentage que doit franchir la mesure
pour faire passer le convertisseur de fréquence à l’état Marche. Voir Figure 1- 28.
2.9.13 Mode de reprise
Définition de la condition de reprise de l’état marche du convertisseur de fréquence :
lorsque le signal de mesure est inférieur ou supérieur au
Voir Figure 1- 28 et Figure 1- 29.
Mesure
Niveau reprise (param. 2.9.12)
Fréquence moteur
t < param. 2.9.11
t
< par 2.9.11
Niveau de reprise
Tem ps
(par. 2.9.12).
4
Fréquence veille
param. 2.9.10
Etat Marche / Arrêt
entraînement
en marche
arrêt
nxlk46.fh8
Tem ps
Figure 1- 28. Fonctionnement de la Fonction veille du convertisseur de fréquence
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 53

Description des parametres vacon • 51
Val.
par.
0
1
Fonction Limite
Reprise lorsque la
mesure est
inférieure à la
limite
Reprise lorsque la
mesure est
supérieure à la
limite
Limite réglée au
paramètre 2.9.12
en pourcentage de
la mesure maxi
Limite réglée au
paramètre 2.9.12
en pourcentage de
la mesure maxi
Description
Signal de mesure
100%
Signal de mesure
100%
Par. 2.9.12=60%
Marche
Arrêt
Marche
Arrêt
Par. 2.9.12=30%
temps
temps
Reprise lorsque la
2
mesure est
inférieure à la
limite
Limite réglée au
paramètre 2.9.12
en pourcentage de
la valeur effective
du signal de
Signal de mesure
100%
référence=50%
référence
Marche
Arrêt
Signal de mesure
Reprise lorsque la
3
mesure est
supérieure à la
limite
Limite réglée au
paramètre 2.9.12
en pourcentage de
la valeur effective
du signal de
référence
100%
référence=50%
Figure 1- 29. Différentes fonctions de reprise sélectionnables
Par.2.9.12=60%
limite=60%*référence=30%
Par.2.9.12=140%
limite=140%*référence=70
Marche
Arrêt
NXLk59.fh8
temps
temps
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 54

52 • vacon Description des parametres
4.9
REGULATION POMPES/VENTILATEURS
La Régulation pompes/ventilateurs permet de commander un moteur à vitesse variable et de un à
trois moteurs auxiliaires. Le régulateur PID du convertisseur de fréquence régule la vitesse du
moteur à vitesse variable et envoie les signaux Marche et Arrêt aux moteurs auxiliaires pour réguler
le débit total. En plus des huit groupes de paramètres standards, ce groupe comporte des
paramètres avec des fonctions de commande de plusieurs pompes et ventilateurs en cascade.
Comme son nom le suggère, ce groupe de paramètres sert à la commande de pompes et de
ventilateurs. Cet applicatif utilise des contacteurs externes pour permuter entre les moteurs
connectés au convertisseur de fréquence. La fonction de permutation automatique permet de gérer
la séquence de démarrage des différents moteurs auxiliaires.
4.9.1
Description succincte de la fonction et des principaux paramètres
Permutation automatique entre moteurs (Permutation & Interverrouillages, P2.10.4)
La permutation automatique des ordres Marche et Arrêt est activée et appliquée soit aux moteurs
auxiliaires uniquement, soit aux moteurs auxiliaires et au moteur à vitesse variable, selon le réglage
du paramètre 2.10.4.
La
fonction Permutation
moteurs des pompes et des ventilateurs à intervalles requis. Le moteur commandé en vitesse
variable peut également être intégré dans la séquence de permutation et de verrouillage
automatiques (par 2.10.4). La fonction Permutation permet notamment de répartir le temps de
fonctionnement entre les moteurs pour prévenir, par exemple, le blocage d’une pompe du fait d’un
fonctionnement prolongé en standby.
• Sélectionnez la fonction de permutation automatique au paramètre 2.10.4,
• La permutation intervient automatiquement après expiration du délai réglé au paramètre 2.10.5
Interval Permut,
Fréquence Permut
• Les moteurs en marche sont arrêtés et redémarrés selon la nouvelle séquence.
• Les contacteurs externes commandés via les sorties relais du convertisseur de fréquence
connectent les moteurs au convertisseur de fréquence ou au réseau. Si le moteur commandé en
vitesse variable est inclus dans la séquence de permutation, il est toujours commandé par la
sortie relais activée en premier. Les autres relais activés ultérieurement commandent les
moteurs auxiliaires.
Ce paramètre sert à activer les entrées d’interverrouillage (valeurs 3 & 4). Les signaux
d’interverrouillage proviennent des interrupteurs des moteurs. Les signaux (fonctions) sont
connectés aux entrées logiques qui sont configurées comme entrées d’interverrouillage en utilisant
les paramètres correspondants. Les automatismes de commande des pompes et ventilateurs ne
commandent que les moteurs avec données d’interverrouillage actives.
permet de permuter automatiquement les ordres Marche et Arrêt entre les
et si la fréquence est inférieure à la valeur réglée au paramètre 2.10.7,
.
Permutation
.
Limite
• Si l’interverrouillage d’un moteur auxiliaire est désactivé et un autre moteur auxiliaire inutilisé
est disponible, ce dernier sera mis en service sans arrêter le convertisseur de fréquence.
• Si l’interverrouillage du moteur à vitesse variable est désactivé, tous les moteurs sont arrêtés et
remis en marche selon le nouveau réglage.
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
4
Page 55

Description des parametres vacon • 53
• Si l’interverrouillage est réactivé à l’état Marche, les automatismes arrêteront immédiatement
tous les moteurs et les redémarreront selon la nouvelle séquence. Exemple :
[P1 → P3] → [P2
VERROU] → [ARRET] → [P1 → P2 → P3]
Voir section 4.9.2, Exemples.
Paramètre 2.10.5, Intervalle Permutation
Après expiration du délai réglé dans ce paramètre, la fonction de permutation est exécutée si les
valeurs sont inférieures aux limites réglées aux paramètres 2.10.7 (
2.10.6 (
2.10.7, la permutation ne se fera qu’après passage sous cette limite.
• Le comptage débute uniquement si l’ordre Marche/Arrêt est activé.
• Le comptage est remis à zéro si la permutation est intervenue ou après disparition de l’ordre
Nombre maxi de moteurs auxiliaires
Marche.
). Si la fréquence est supérieure à la valeur du par
Limite fréquence permut
) et
Paramètres 2.10.6, Nombre maxi de moteurs auxiliaires et
2.10.7, Limite fréquence permutation
Ces paramètres définissent le niveau sous lequel le régime de fonctionnement doit rester pour
qu’intervienne la permutation.
Le niveau est défini comme suit :
• Si le nombre de moteurs auxiliaires en marche est inférieur à la valeur du paramètre 2.10.6, la
fonction de permutation est exécutée.
• Si le nombre de moteurs auxiliaires en marche est égal à la valeur du paramètre 2.10.6 et la
fréquence du moteur à vitesse variable est inférieure à la valeur du paramètre 2.10.7 la
permutation est exécutée.
• Si la valeur du paramètre 2.10.7 est 0.0 Hz, la fonction de permutation est exécutée uniquement
en position de repos (Arrêt et Veille) quelle que soit la valeur du paramètre 2.10.6.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 56

54 • vacon Description des parametres
4.9.2
Exemples
Régulation pompes/ventilateurs avec interverrouillages et permutation entre 3 pompes (carte
optionnelle NXOPTAA ou NXOPB5 requise)
Situation: 1 moteur à vitesse variable et 2 moteurs auxiliaires
Paramétrages : 2.10.1 = 2
Signaux d’interverrouillage utilisés ; permutation entre tous les moteurs.
Paramétrages : 2.10.4=4
DIN4 activée (par.2.2.6=0)
Les signaux d’interverrouillage proviennent des entrées logiques DIN4 (AI1), DIN2 &
DIN3 sélectionnées avec les paramètres 2.1.17, 2.1.18 et 2.2.4.
La commande de la pompe 1 (par.2.3.1=17) est validée par Interverrou 1 (DIN2,
2.1.17=10), la commande de la pompe 2 (par.2.3.2=18) par Interverrou 2 (DIN3, par.
2.1.18=13) et la commande de la pompe 3 (par.2.3.3=19) par Interverrou 3 (DIN4)
Transmetteur
2 fils
Potentiomètre
de référence
Mesure
(0)4…20 mA
I
–
+
Borne Signal
1 +10V
2 AI1+ Référence fréquence sur entrée en tension/DIN4
3 AI1- Masse E/S
4 AI2+
5 AI2-
6 +24V
7
GND Masse E/S
8 DIN1 Démarrage
9 DIN2 Interverrouillage 1 (par 2.1.17 = 10)
10 DIN3 Interverrouillage 2 (par 2.1.18 = 13)
11 GND Masse E/S
Sortie référence
ref
PID : % retour
Sortie de tension de commande
mA
18 AO1+
19 AO1-
A RS 485
B RS 485
21 RO1
22 RO1
23 RO1
NXOPTB5
22 RO1/1
23 RO1/2
25 RO2/1
26 RO2/2
28 RO3/1
29 RO3/2
Fréquence de sortie
Sortie analogique
Liaison série
Liaison série
Permutation 1 (cmde pompe 1), par 2.3.2 = 17
Permutation 2 (cmde pompe 2), par 2.3.3 = 18
Permutation 3 (cmde pompe 3), par 2.3.4 = 19
Sortie relais 1
DEFAUT
Tableau 1- 17. Exemple de configuration des E/S pour la Régulation
pompes/ventialteurs avec interverrouillages et permutation entre 3 pompes
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 57

Description des parametres vacon • 55
230 VAC
VACON NXL
24 VDC
DIN2
68
DIN3
9
AI1
10V
10
K2.1
K1
K2
M2/Réseau
25
26
AutoORéseau
S3
K3
K1
K2
K3.1
K3
M3/Vacon M3/
K3.1
28
29
K1
K2
K3
Réseau
NXOPTB5
K3
K2
K1.1
K1
M1/Vacon
AutoORéseau
S1
K1
K1.1
K2
M1/Réseau
22
23
AutoORéseau
S2
K3
K3
K1
K2.1
K2
Vacon
M2/
Figure 1- 30. Système avec permutation entre 3 pompes, schéma de commande principal
PE
L1
L2
L3
Q1
F3
F1
F2
F2
NX12k106.dsf
VACON
NX12k104.ds4
K1
L1 L2 L3
UVW
M1
K1.1
K2
PE
UVW
M
3
M2
K2.1
UVW
M
3
Figure 1- 31. Exemple de permutation entre 3 pompes, schéma fonctionnel
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
K3.1
K3
PE
UVW
M2
PE
M
3
4
Page 58

56 • vacon Description des parametres
Régulation pompes/ventilateurs avec interverrouillages et permutation entre 2 pompes (carte
optionnelle NXOPTAA ou NXOPB5 requise)
Situation: 1 moteur à vitesse variable et 1 moteur auxiliaire.
Paramétrages : 2.10.1= 1
Signaux d’interverrouillage utilisés ; permutation entre les pompes.
Paramétrages : 2.10.4=4
Les signaux d’interverrouillage proviennent des entrées logiques (par. 2.1.17) et DIN3,
(par. 2.1.18).
La commande de la pompe 1 (par.2.3.1=17) est validée par Interverrou 1 (DIN2, P2.1.17),
la commande de la pompe 2 (par.2.3.2=18) par Interverrou 2 (par. 2.1.18=13)
Transmetteur
2 fils
Potentiomètre
de référence
Mesure
(0)4…20 mA
I
–
+
Borne Signal
1 +10V
2 AI1+ Référence fréquence sur entrée en tension/DIN4
3 AI1- Masse E/S
4 AI2+
5 AI2-
6 +24V Control voltage output
7
GND Masse E/S
8 DIN1 Démarrage
9 DIN2 Interverrouillage 1 (par 2.1.17 = 10)
10 DIN3 Interverrouillage 2 (par 2.1.18 = 13)
11 GND Masse E/S
Sortie référence
ref
PID Actual value
mA
18 AO1+
19 AO1-
A RS 485
B RS 485
21 RO1
22 RO1
23 RO1
Fréquence de sortie
Sortie analogique
Liaison série
Liaison série
Permutation 1 (cmde pompe 1)
par 2.3.1. = 17
NXOPTAA
X1
1 +24V Sortie tension de commande, maxi 150 mA
2 GND Masse pour signaux de commande, ex., pour +24V et DO
3 DIN1 Vitesse const2, par 2.2.1 = 7
4 DIN2 Réarm. défaut, par 2.2.2 = 4
5 DIN3 Désactiver PID (réf. fréq. de AI1), par 2.2.3 = 11
6 DO1 Prêt, par 2.3.4 = 1
X2
22 RO1/NO
23 RO1/COM
Sortie à collecteur ouvert, 50 mA/48V
Permutation 2 (cmde pompe 2), par 2.3.2 = 18
Tableau 1- 18. Exemple de configuration des E/S pour la Régulation
pompes/ventialteurs avec interverrouillages et permutation entre 2 pompes
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 59

Description des parametres vacon • 57
230 VAC
K1
K2
K1.1
M1/Vacon
AutoOréseau
S1
K1.1
K2
K1
M1/réseau
22
RO1
23
VACON NXOPTA2
24 VDC
12
DIN2
9
K2
K1
K2.1
M2/
Vacon
AutomOréseau
S2
K2.1
K1
K2
M2/ réseau
26
25
RO2
NX12k105.dsf
DIN3
10
Figure 1- 32. Système avec permutation entre 2 pompes, schéma de commande principal
PE
L1
L2
L3
Q1
F3
F1
F2
VACON
L1 L2 L3
UVW
K1
NX12k107.ds4
M1
K1.1
PE
UVW
M
3
K2.1
K2
PE
UVW
M2
M
3
Figure 1- 33. Exemple de permutation entre 2 pompes, schéma fonctionnel
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 60

58 • vacon Description des parametres
4.9.3
Description des paramètres de la Régulation Pompes/Ventilateurs
2.10.1 Nombre de moteurs auxiliaires
Paramètre de réglage du nombre de moteurs auxiliaires utilisés. Les fonctions de
commande des moteurs auxiliaires (paramètres 2.10.4 à 2.10.7) peuvent être
paramétrées pour être en recopie sur les sorties relais.
2.10.2 Temporisation de démarrage des moteurs auxiliaires
La fréquence du moteur à vitesse variable doit rester au-dessus de la fréquence
maximale pendant la temporisation réglée dans ce paramètre avant que ce dernier ne
démarre. La temporisation réglée s'applique à tous les moteurs auxiliaires. Ainsi, on
prévient tout démarrage intempestif du fait d’un franchissement transitoire de la
fréquence de démarrage.
2.10.3 Temporisation d’arrêt des moteurs auxiliaires
La fréquence du moteur à vitesse variable doit rester sous la fréquence minimale
pendant la temporisation réglée dans ce paramètre avant que ce dernier ne s’arrête. La
temporisation réglée s’applique à tous les moteurs auxiliaires. Ainsi, on prévient tout
arrêt intempestif du fait d’un franchissement transitoire de la fréquence d’arrêt.
2.10.4 Permutation automatique entre moteurs
0 = pas de permutation
1 = permutation automatique avec pompes aux.
Le moteur commandé en vitesse variable (par le convertisseur de fréquence) reste inchangé.
Seul le contacteur réseau est requis pour un seul moteur auxiliaire
Va c on
.
4
M
Moteur aux. 1
Figure 1- 34. Permutation appliquée uniquement aux moteurs auxiliaires.
M
Moteur aux. 1
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
M
NX12k96.fh8
Page 61

Description des parametres vacon • 59
2 = Permutation automatique avec convertisseur de fréquence et pompes auxiliaires
Le moteur commandé en vitesse variable (par le convertisseur de fréquence) est inclus dans
les automatismes et un contacteur est nécessaire pour connecter chaque moteur soit au
réseau, soit au convertisseur de fréquence
Vacon
connexion
auxiliaire
Moteur 1 Moteur 2
M
connexion
auxiliaire
M
NX12k97.fh8
Figure 1- 35. Permutation avec tous les moteurs
3 = Permutation automatique et interverrouillages (uniquement pompes auxiliaires)
Le moteur commandé en vitesse variable (par le convertisseur de fréquence) reste inchangé.
Ainsi, le contacteur réseau est requis pour un seul moteur auxiliaire. Les interverrouillages
pour les sorties de permutation 1, 2, 3 (ou DIE1,2,3) peuvent être sélectionnées avec les par.
2.1.17 et 2.1.18.
4 = Permutation automatique et interverrouillages (conv. de fréq. & pompes aux.)
Le moteur commandé en vitesse variable (par le convertisseur de fréquence) est inclus dans
les automatismes et un contacteur est nécessaire pour connecter chaque moteur soit au
réseau, soit au convertisseur de fréquence. DIN 1 est automatiquement interverrouillée avec
la sortie de permutation 1. Les interverrouillages pour la sortie de permutation 1, 2, 3 (ou
DIE1,2,3) peuvent être sélectionnés avec les par.
2.1.17 et 2.1.18.
2.10.5 Intervalle de permutation
Après expiration du délai réglé dans ce paramètre, la fonction de permutation est
exécutée si les valeurs sont inférieures aux limites réglées aux paramètres 2.10.7
(
Limite fréquence permutation
) et 2.10.6 (
Nombre maxi de moteurs auxiliaires
fréquence est supérieure à la valeur de P2.10.7, la permutation ne se fera qu’après
passage sous cette limite.
• Le comptage débute uniquement si l’ordre Marche/Arrêt est activé.
• Le comptage est remis à zéro après permutation ou disparition de l’ordre Marche.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
). Si la
4
Page 62

60 • vacon Description des parametres
2.10.6 Nombre maxi de moteurs auxiliaires
2.10.7 Limite de fréquence de la permutation
Ces paramètres définissent le niveau sous lequel le régime de fonctionnement doit
rester pour qu’intervienne la permutation.
Le niveau est défini comme suit :
• Si le nombre de moteurs auxiliaires en marche est inférieur à la valeur du
paramètre 2.10.6, la fonction de permutation est exécutée.
• Si le nombre de moteurs auxiliaires en marche est égal à la valeur du paramètre
2.10.6 et la fréquence du moteur à vitesse variable est inférieure à la valeur du
paramètre 2.10.7, la permutation est exécutée.
• Si la valeur du paramètre 2.10.7 est 0,0 Hz, la fonction de permutation est exécutée
uniquement en position de repos (Arrêt et Veille) quelle que soit la valeur du
paramètre 2.10.6.
Fréquence
moteur
Instant permutation
Par. 2.10.7
Limite fréquence
permutation
Cmde moteur
1
aux.
Cmde moteur
2
aux.
Par. 2.10.6 = 1
Nombre maxi
moteurs auxiliaires
Par. 2.10.5
Intervalle permutation
Figure 1- 36. Intervalles et limites de permutation
2.10.8 Fréquence démarrage, moteur auxiliaire 1
La fréquence du moteur à vitesse variable doit être supérieure à la valeur limite réglée
dans ce paramètre (+ 1 Hz) avant démarrage du moteur auxiliaire. Le + 1 Hz est un
hystérésis pour éviter les démarrages et arrêts intempestifs. Voir également
paramètres 2.1.1 et 2.1.2.
Tem ps
Par. 2.10.5
Intervalle permutation
NXLK56.fh8
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 63

Description des parametres vacon • 61
2.10.9 Fréquence d’arrêt, moteur auxiliaire 1
La fréquence du moteur à vitesse variable doit être inférieure (- 1 Hz) à la limite réglée
dans ce paramètre avant arrêt du moteur auxiliaire. La fréquence d’arrêt définit
également la valeur de fréquence à laquelle le moteur à vitesse variable baisse après
démarrage du moteur auxiliaire.
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
Page 64

62 • vacon Description des parametres
4.10
COMMANDE PANNEAU
3.1 Source commande
La source de commande active peut être modifiée avec ce paramètre. Pour en savoir
plus, voir manuel utilisateur Vacon NXL, section 7.3.3.
3.2 Référence panneau
La référence fréquence peut être réglée au panneau opérateur avec ce paramètre. Pour
en savoir plus, voir manuel utilisateur Vacon NXL, section 7.3.3.2.
3.3 Sens de rotation Panneau
0 Avant : Le moteur tourne en sens avant lorsque le panneau opérateur est la
source de commande active.
1 Arrière : Le moteur tourne en sens arrière lorsque le panneau opérateur est la
source de commande active.
Pour en savoir plus, voir manuel utilisateur Vacon NXL, section 7.3.3.3.
3.4 Touche arrêt toujours opérationnelle
Si la touche Arrêt du panneau opérateur doit toujours être opérationnelle, quelle que soit
la source de commande sélectionnée, ce paramètre doit être réglé sur 1 (préréglage
usine). Voir Manuel utilisateur du Vacon NXL, section 7.3.3.
Voir également paramètre 3.1.
3.5 PID : référence 1
La référence Panneau du régulateur PID peut être réglée entre 0 % et 100 %. Cette
valeur de référence est la référence PID active si le paramètre 2.9.2 = 2.
3.6 PID : référence 2
La référence Panneau 2 du régulateur PID peut être réglée entre 0 % et 100 %. Cette
valeur de référence est active si DIN# : Fonction=12 (voir les pages 6 et 7) et le contact
de DIN# est fermé.
4
Tél. : +33 (0)1 64 13 54 11 Fax : +33 (0)1 64 13 54 21
Page 65

Description des parametres vacon • 63
5. LOGIQUE DES SIGNAUX DE COMMANDE DE L’APPLICATIF UNIVERSEL
DIN3
Ext.DIE1
Ext.DIE3
DIN2
DIN3
AI1
AI2
Vitesse const. 1
Vitesse const. 2
> 1
Désactiver PID
2.2.21 Réf.via bus de terrain
2.2.20 Référence panneau
2.1.14 Référence E/S
+vite
Moto-
-vite
potentiomètre
2.9.2 Référence PID
P3.5 Réf. P ID panneau
Réf. via bus de terrain
(FBProcessData IN 1)
R3.2 Référence panneau
0
1
2
3
0
1
2
3
4
PID
Réf.
E/S
2.1.14
DIN3 & Ext.DIE1
Ext.DIE1
Activer réf 2 PID panneau (DIN#=12)
2.1.2 Fréquence maxi
DIN3
2.1.20 Vitesse const. 1
2.1.21 Vitesse const. 2
R3.6 Réf PID panneau 2
Entrée mesure,
par. 2.9.3
P2.9.1 Activation PID
PID
0
1
2
K
3
4
DIN1
DIN2
Réf. via bus de terrain
Ma/Ar via bus de terrain
Sens rot. via bus de terr.
Marche avant
Logique Marche/
Arrêt et d’inversion
Marche arrière
(configurable)
de sens de rotation
paramétrable
5
0
1
2
3
F
4
5
3.3 Sens de
rotation panneau
Pa nnea u
Bu s de terrain
3.1 Source commande
I/O
Réf fréquence
interne
Touche réarmement
Touches Marche/Arrêt
Marche/Arrêt interne
Inversion de sens de
rotation interne
Ext DIE2 Entrée réarmement défaut (paramétrable) >1 Réarmement de defaut interne
Figure 1- 37. Logique des signaux de commande de l’Applicatif Universel
Support Line 24/24 : +358 40 8371 150 • E-mail: info@vacon-france.fr
4
 Loading...
Loading...