

Page 1

МАЛОГАБАРИТНЫЙ ПРИВОД vacon nxl
®
ПРИВОДЫ ПЕРЕМЕННОГО ТОКА
РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ
РУКОВОДСТВО ПО ПРИМЕНЕНИЮ
Page 2

vacon • 1
Многоцелевая программа управления Vacon
(Программное обеспечение alfiff20) Версия 3.45
Содержание
1. Введение..................................................................................................................................2
2. Подключение цепей управления......................................................................................... 4
3. Многоцелевая программа управления – списки параметров........................................ 5
3.1. Контролируемые значения (панель управления: меню M1) ............................................. 5
3.2. Базовые параметры (панель управления: меню P2 P2.1)............................................ 7
3.3. Входные сигналы (панель управления: меню P2 P2.2) .............................................. 10
3.4. Выходные сигналы (панель управления: меню P2
3.5. Параметры управления двигателем (панель управления: меню P2 P2.9) ...............13
3.6. Параметры запретных частот (панель управления: меню P2 P2.5) .......................... 13
3.7. Параметры управления двигателем (панель управления: меню P2 P2.6) ...............14
3.8. Защита (панель управления: меню P2 P2.7) ............................................................... 14
3.9. Параметры автоматического перезапуска (панель управления: меню P2 P2.9)...... 15
3.10. Параметры задания опорного сигнала ПИД (панель управления: меню P2
3.11. Параметры управления насосами и вентиляторами (PFC) (панель управления: меню
P2 P2.10).................................................................................................................................... 17
3.12. Панель управления (панель управления: меню K3)........................................................ 18
3.13. Системное меню (панель управления: меню S6) ............................................................ 18
3.14. Дополнительные платы (панель управления: меню E7)................................................. 18
P2.3)............................................ 12
P2.9)... 15
4. Описание параметров ......................................................................................................... 19
4.1. Базовые параметры ........................................................................................................... 19
4.2. Входные сигналы................................................................................................................ 24
4.3. Выходные сигналы ............................................................................................................. 29
4.4. Управление приводом........................................................................................................ 33
4.5. Запретные
4.6. Управление двигателем..................................................................................................... 38
4.7. Защиты................................................................................................................................41
4.8. Параметры автоматического перезапуска ....................................................................... 49
4.9. Параметры опорного значения ПИД................................................................................. 50
4.10. Управление насосами и вентиляторами (PUMP AND FAN CONTROL – PFC) .............. 57
4.11. Параметры панели управления ........................................................................................ 66
5. Логика управляющих сигналов программы управления ............................................. 67
частоты ............................................................................................................ 37
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
1
Page 3

2 • vacon Многоцелевая программа управлениядля NXL
Многоцелевая программа управления
1. ВВЕДЕНИЕ
В многоцелевой программе управления, Vacon NXL по умолчанию напрямую использует
опорный сигнал с аналогового входа 1. В то же время, ПИД-регулирование можно
использовать для управления насосами и вентиляторами (PFC), где требуются внутренние
измерения и настройка функций.
Путем прямого задания частоты можно управлять приводом без ПИД-регулирования,
например, задавая частоту с аналогового входа, интерфейсной
выбирая предустановленные скорости или с помощью псевдопотенциометра.
Специальные параметры управления насосами и вентиляторами (группа параметров 2.10)
можно просматривать и редактировать после изменения пар. 2.9.1 значения 2 (активировано
управление насосами и вентиляторами).
Опорный сигнал для ПИД-регулирования можно выбрать с аналоговых входов, интерфейсной
шины, опорное значение ПИД 1 с панели управления
управления через цифровой вход. Действительное значение ПИД-регулирования можно
задавать с аналоговых входов, интерфейсной шины или текущих параметров двигателя.
Использование ПИД-регулирования возможно, когда ПЧ управляется по интерфейсной шине
или с панели управления.
Цифровой вход DIN2, DIN3, (DIN4) и дополнительные цифровые входы DIE1, DIE2,
DIE3 - свободно программируемые.
Внутренние
свободно программируемые.
Аналоговый вход 1 может быть запрограммирован как токовый, потенциальный или
цифровой вход DIN4.
Внимание! Если аналоговый вход 1 запрограммирован как DIN4 параметром 2.2.6
(Диапазон сигнала AI1), проверьте правильность установки перемычек.
См. рис. 1-1.
Дополнительные функции:
ПИД-регулятор может использоваться с поста управления ввода/вывода,
управления или с интерфейсной шины
Идентификация
Мастер программирования
Функция «Сон - Пробуждение»
Действительное значение контролируемой функции: полностью программируется;
отключено, предупреждение, отказ
Программируемая логика сигналов Пуск/Стоп и Реверс
Масштабирование опорного сигнала
2 предустановленные скорости
Выбор диапазона аналогового входа, масштабирование сигнала, инвертирование и
фильтрация
Контроль предела частоты
Программируемые функции пуска и останова
Торможение постоянным током при пуске и останове
Один диапазон запретных частот
Программируемая U/f -кривая и U/f-оптимизация
Настраиваемая частота коммутации
Функция автоматического перезапуска после отказа
Функции защиты и контроля (все полностью программируемые; отключено,
предупреждение, отказ)
и дополнительные цифровые/релейные и аналоговые выходы –
или опорное значение ПИД 2 с панели
шины, панели управления,
панели
1
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 4

vacon • 3
Контроль токового входа
Внешний отказ
Контроль выходной фазы
Защита от низкого
напряжения
Защита от замыкания на
землю
Защита двигателя от перегрева,
опрокидывания и недогрузки
Термистор
Контроль связи по интерфейсной шине
Контроль плат расширения
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
1
Page 5
4 • vacon Многоцелевая программа управлениядля NXL
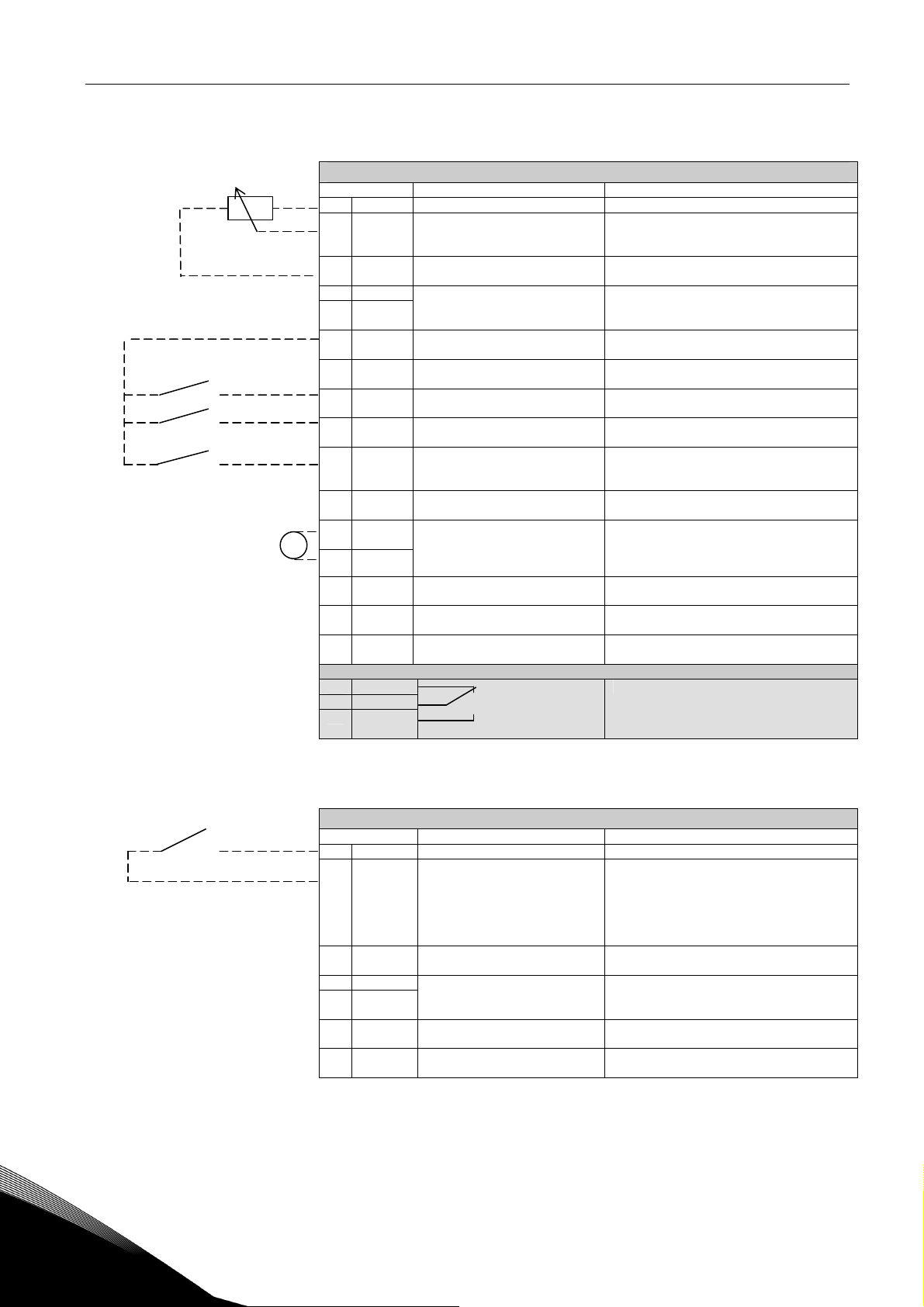
2. ПОДКЛЮЧЕНИЕ ЦЕПЕЙ УПРАВЛЕНИЯ
Потенциометр для
задания опорного
Клемма Сигнал Описание
1 +10V
2 AI1+ Аналоговый вход,
3 AI1- Заземление цепей ввода-
4 AI2+
5 AI2-/
GND
6 +24V Источник вспомогательного
7
GND
8 DIN1 Прямой ПУСК Контакт замкнут = Прямой пуск
9 DIN2 Реверсивный ПУСК
10 DIN3 Выбор фиксированной
11 GND Заземление цепей ввода-
18 AO1+
мА
19 AO1-
A RS 485 Последовательная шина Дифференциальный
B RS 485 Последовательная шина Дифференциальный
30 +24V Дополнительный источник
21 RO1
22 RO1
23 RO1
Опорное напряжение Питание потенциометра и т. д.
ref
потенциальный 0–10 В пост.
тока
вывода
Аналоговый вход,
потенциальный 0–10 В пост.
тока, или токовый 0/4–20 мА
напряжения
Заземление цепей вводавывода
(программируется)
скорости 1
(программируемый)
вывода
Выходная частота
Аналоговый выход
напряжения 24В
Релейный выход 1
НЕИСПРАВНОСТЬ
Потенциальный вход, задание частоты
Может программироваться как DIN4
Заземление цепей задания и
управления
Вход по току, задание частоты
Напряжение для переключателей и т.д.,
макс. до 0,1 А
Заземление цепей задания и
управления
Контакт замкнут = Реверсивный пуск
Контакт замкнут = Фиксированная
скорость
Заземление цепей задания и
управления
Программируемый
Диапазон 0–20 /R
приемник/передатчик
приемник/передатчик
Резервный источник питания для
управления
Программируемый
, максимум 500 Ом
L
Таблица 1-1. Стандартная конфигурация ввода/вывода программы
управления
2
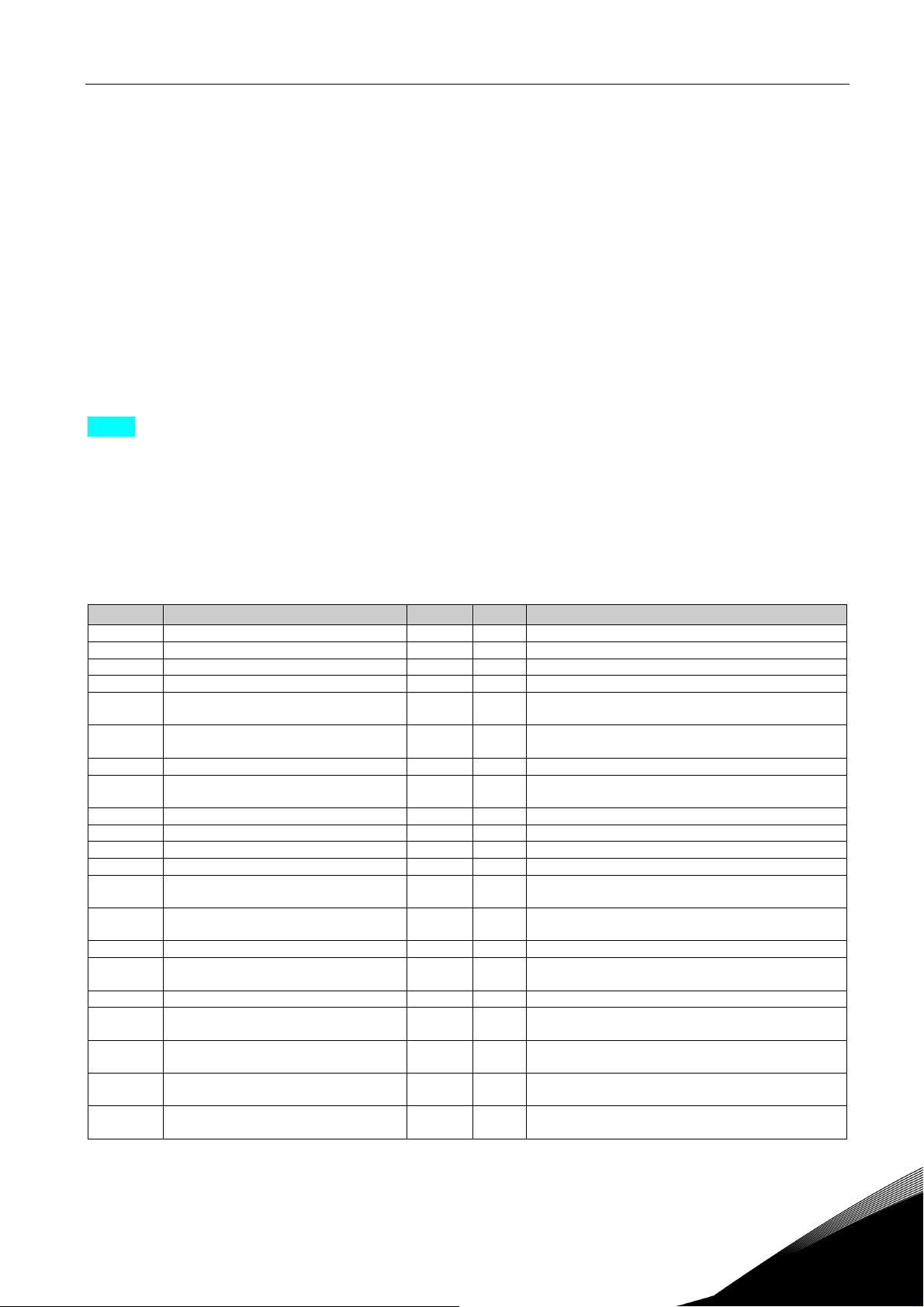
Клемма Сигнал Описание
1 +10V
2 AI1+
3 AI1- Заземление цепей ввода-
4 AI2+
5 AI2-
6 + 24 V Источник вспомогательного
7 GND Заземление цепей ввода-
Опорное напряжение Питание потенциометра и т.д.
ref
or
DIN 4
/GND
Аналоговый вход,
потенциальный 0–10 В пост.
тока
вывода
Аналоговый вход, токовый
0/4–20 mA
напряжения
вывода
Потенциальный вход задания частоты
(MF2-3)
Потенциальный /токовый вход задания
частоты
(MF4-MF6)
Может программироваться как DIN4
Заземление цепей задания и
управления
Вход по току задания частоты
Заземление цепей задания и
управления
Таблица 1-2. Конфигурация AI1, при программировании как DIN4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 6
vacon • 5
3. СПИСКИ ПАРАМЕТРОВ
На следующих страницах приведен список параметров в соответствующих группах. Описания
параметров приведены на страницах 19–50.
Пояснения к колонкам
Код = Индикатор положения на панели, показывает оператору номер текущего
параметра
Параметр = Название параметра
Мин. = Минимальное значение параметра
Макс. = Максимальное значение параметра
Ед. = Единица измерения, если она существует
По умолчанию = Заводская установка значения
параметра
Польз. = Собственная установка пользователем
ID = Идентификатор параметра (используется с ПО для ПК)
= Пометка на поле кода параметра: значение параметра может меняться
только после остановки ПЧ
3.1 Контролируемые значения (панель управления: меню M1)
Контролируемые значения – это действительные значения параметров и сигналов, а также их
состояния и результаты измерений сигналов. Контролируемые значения не могут
редактироваться.
Более подробные сведения содержатся в главе 7.4.1 Руководства пользователя Vacon NXL.
Код Параметр Ед. ID Описание
V1.1 Output frequency Гц 1 Частота для двигателя
V1.2 Frequency reference Гц 25
V1.3 Motor speed об/мин 2 Рассчитанная скорость двигателя
V1.4 Motor current A 3 Измеренный ток двигателя
V1.5 Motor torque % 4
V1.6 Motor power % 5
V1.7 Motor voltage В 6 Рассчитанное напряжение двигателя
V1.8 DC-link voltage В
V1.9 Unit temperature ºC 8 Температура радиатора
V1.10 Analogue input 1 13 AI1 – Аналоговый вход 1
V1.11 Analogue input 2 14 AI2 – Аналоговый вход 2
V1.12 Analogue output current мА 26 AO1 – Аналоговый выход 1
V1.13
V1.14
V1.15 DIN1, DIN2, DIN3 15 Состояния цифрового входа
V1.16 DIE1, DIE2, DIE3
V1.17 RO1 34 Состояние релейного выхода 1
V1.18 ROE1, ROE2, ROE3
V1.19 DOE 1
V1.20 PID Reference % 20
V1.21 PID Actual value % 21
Analogue output current 1,
expander board
Analogue output current 2,
expander board
мА
мА 32
Рассчитанный действительный момент
/номинальный крутящий момент двигателя
Рассчитанная действительная
мощность/номинальная мощность двигателя
7 Измеренное напряжение цепи постоянного
тока
31
Плата расширения ввода/вывода: cостояния
33
цифрового входа
Плата расширения ввода/вывода: cостояния
35
релейного выхода
Плата расширения ввода/вывода: cостояния
36
цифрового выхода 1
В процентах к максимальному опорному
значению процесса
В процентах к максимальному
действительному значению
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
3
Page 7
6 • vacon Многоцелевая программа управлениядля NXL
V1.22 PID Error value % 22
V1.23 PID Output % 23
V1.24 ACh 1, ACh 2, ACh 3 outputs 30
V1.25 Режим 66
V1.26
Температура двигателя
% 9
Таблица 1-3. Контролируемые значения
В процентах к максимальному значению
ошибки
В процентах к максимальному выходному
значению
Автозамена 1, 2, 3 (используется только для
управления насосами и вентиляторами)
Показывает текущий режим работы,
заданный программой мастера запуска:
, 1=,
0=
2=
, 3=,
4=
Рассчитанная температура двигателя,
1000 составляет 100,0 %, что равно
номинальной рабочей температуре
3
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 8
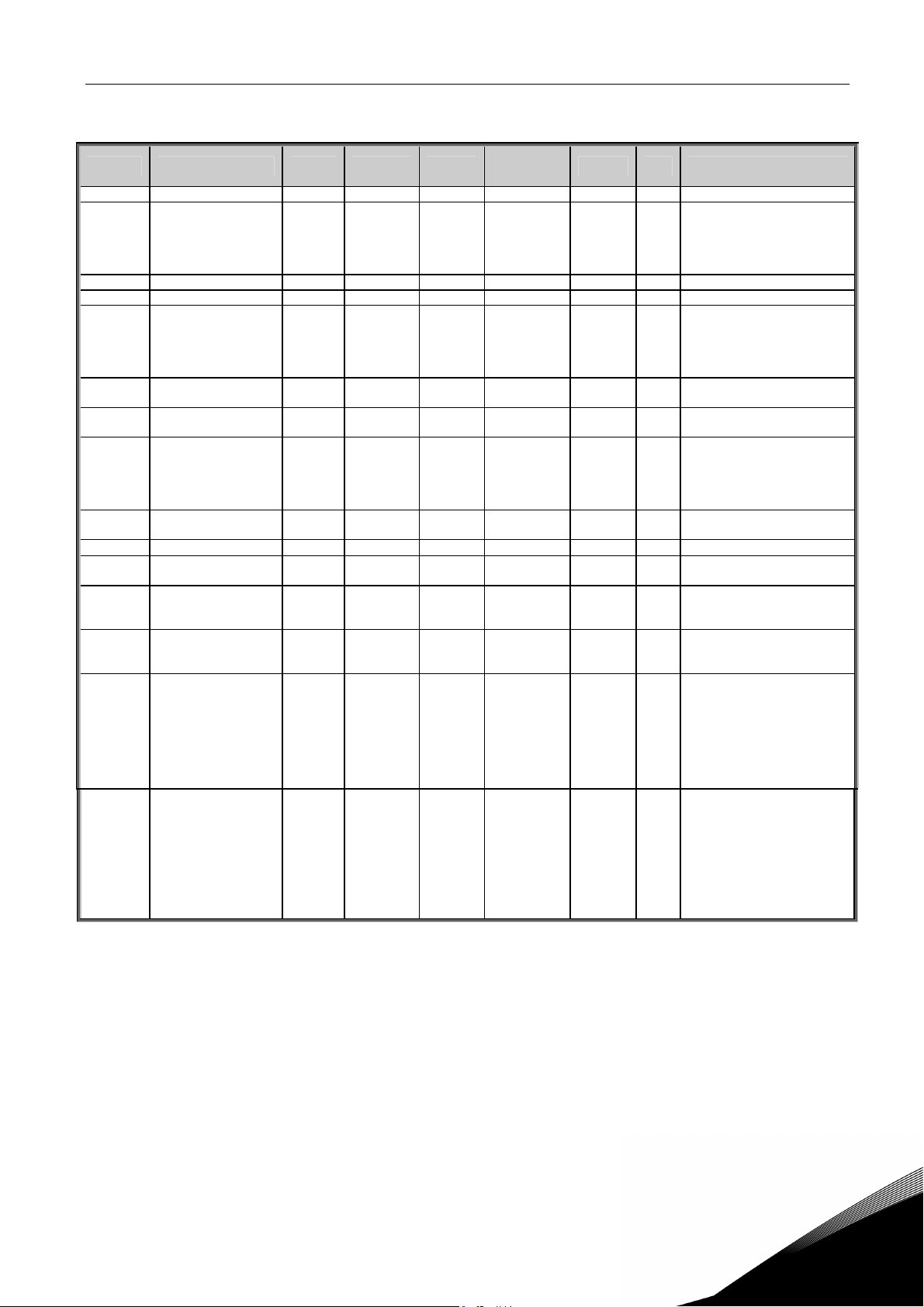
3.2 Базовые параметры (панель управления: меню P2 P2.1)
vacon • 7
Код Параметр Мин. Макс. Ед.
P2.1.1 Min frequency 0,00 Пар. 2.1.2 Гц 0,00 101
P2.1.2 Max frequency
P2.1.3 Acceleration time 1 0,1 3000,0 с 1,0 103
P2.1.4 Deceleration time 1 0,1 3000,0 с 1,0 104
P2.1.5 Current limit 0,1 x IL 1,5 x IL A IL 107
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
P2.1.11 Start function 0 1 0 505
P2.1.12 Stop function 0 1 0 506
P2.1.13 U/f optimisation 0 1 0 109
P2.1.14 I/O reference 0 4 0 117
P2.1.15 AI2 signal range 1 4 2 390
Nominal voltage of
the motor
Nominal frequency
of the motor
Nominal speed of
the motor
Nominal current of
the motor
Motor cos
Пар.
2.1.1
180 690 В
30,00 320,00 Гц 50,00 111 См. шильдик двигателя
300 20 000 об/мин 1440 112
0,3 x I
0,30 1,00 0,85 120 См. шильдик двигателя
320,00 Гц 50,00 102
1,5 x IL A I
L
По
умолч.
NXL2:230v
NXL5:400v
L
Польз. ID Примечание
Внимание. Если f
синхронной скорости
двигателя, проверьте ее
допустимость для
двигателя и привода
Внимание. Формулы
справедливы для ПЧ
габарита до MF3. При
большем габарите
уточните у изготовителя.
110
Значение по умолчанию
применимо для
4-полюсного двигателя и
ПЧ номинальной
мощности.
113 См. шильдик двигателя
0=С заданным ускорением
1=С ходу
0=Свободный выбег
1= С заданным
замедлением
0=Не используется
1=Автоматическое
увеличение момента
0=AI1
1=AI2
2=Задание от пульта
3=Задание от
интерфейсной шины
(FBSpeedReference)
4=Псевдопотенциометр
5= Выбор AI1/AI2
Не используется, если
настраиваемый минимум
AI2 <> 0% или
настраиваемый максимум
AI2 <> 100%
1=0–20 мА
2=4–20 мА
3=0–10 В
4=2–10 В
max
>
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
3
Page 9
8 • vacon Многоцелевая программа управлениядля NXL
0=Не используется
1=Выходная частота (0–
)
f
max
2=Заданная частота (0–
)
f
max
3=Скорость двигателя (0–
номинальная скорость
двигателя)
4=Выходной ток
5=Момент двигателя (0–
P2.1.16
P2.1.17 DIN2 function 0 10 1 319
Analogue output
function
0 12 1 307
6=Мощность двигателя (0–
7=Напряжение двигателя
8=Напряжение цепи
9=Значение задания
10=Действительное
11=Величина ошибки
12=Выход PI-регулятора
0=Не используется
1=Реверсивный пуск
2=Реверс (DIN1=Пуск)
3=Импульсный cтоп
4=Внешний отказ, (НЗ)
5=Внешний отказ, (НО)
6=Пуск разрешен
7=Предустановленная
8=Псевдопотенциометр,
9=Отключение ПИД
10=Блокировка 1
)
(0–I
nMotor
)
T
nMotor
)
T
nMotor
(0–T
постоянного тока (0–
1000V)
PI-регулятора
(DIN1=Прямой пуск)
(DIN1=Импульсный
пуск)
скорость 2
увел. (НЗ)
(Прямая подача
опорного сигнала)
)
nMotor
значение 1
PI-регулятора
PI-регулятора
3
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 10
0=Не используется
1=Реверс
2=Внешний отказ, (НЗ)
3=Внешний отказ, (НО)
4=Сброс кода отказа
5=Пуск разрешен
6=Предустановленная
7=Предустановленная
8=Команда на
9=Псевдопотенциометр,
10=Псевдопотенциометр,
P2.1.18 DIN3 function 0 17 6 301
P2.1.19 Preset speed 1 0,00
P2.1.20 Preset speed 2 0,00
P2.1.21 Automatic restart 0 1 0 731
P2.1.22 Parameter conceal 0 1 0 115
Пар.
2.1.2
Пар.
2.1.2
Гц 10,00 105
Гц 50,00 106
Таблица 1-4. Основные параметры P2.1
11=Отключение ПИД
12=Выбор опоного
13=Блокировка
14=Вход термистора
15=Принудительное
16=Принудительное
17=Выбор AI1/AI2 для
0=Не используется
1=Используется
0=Видны все параметры
1=Видны только
vacon • 9
скорость 1
скорость 2
торможение
постоянным током
увел. (НЗ)
увел. (НЗ)
(Прямая подача
задания частоты)
сигнала ПИД 2 с
панели
2
Примечание! См.
Руководство
пользователя NXL
Chapter 6.2.4
задание через Вх/Вых
задание по шине
Fieldbus
задания Входа /Выхода
и меню
параметры группы
P2.1 и меню от M1 до
H5
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
3
Page 11
10 • vacon Многоцелевая программа управлениядля NXL
3.3 Входные сигналы
Код Параметр Мин. Макс. Ед.
P2.2.1
P2.2.2
P2.2.3
P2.2.4 DIN4 function (AI1) 0 13 2
P2.2.5
P2.2.6 AI1 signal range 1 4 3
P2.2.7
Expander board
DIE1 function
Expander board
DIE2 function
Expander board
DIE3 function
AI1 signal
selection
AI1 custom
minimum setting
(панель управления: меню P2 P2.2)
По
умолч.
0 13 7
0 13 4
0 13 11
0 10
0,00 100,00 % 0,00
Польз. ID Примечание
0=Не используется
1=Реверс
2=Внешний отказ, (НЗ)
3=Внешний отказ, (ОС)
4=Сброс кода отказа
5=Пуск разрешен
6=Предустановленная
скорость 1
7=Предустановленная
368
330
369
499
377
379
380
скорость 2
8=Команда на торможение
постоянным током
9=Псевдопотенциометр,
увел. (НЗ)
10= Псевдопотенциометр,
увел. (НЗ)
11=Отключение ПИД (выбор
управления ПИД)
12=Выбор опорного сигнала
2 с панели ПИД
Блокировка 1
13=
Аналогично пар.2.2.1,
кроме:
13=Блокировка 2
Аналогично пар.2.2.1,
кроме:
13=Блокировка 3
Применяется, если P2.2.6 =
0
Выбирается так же, как
пар.2.2.3
10=AI1 (1=местн.,
0=вход 1)
11=AI2 (1=местн.,
1= вход 2)
20=Доп. AI1
21=Доп. AI2
0=Цифровой вход 4
1=0–20 мА (MF4-->)
2=4–20 мА (MF4-->)
3=0–10 В
4=2–10 В
Не используется, если
настраиваемый минимум
AI2 > 0% или
настраиваемый максимум
AI2 < 100%
Внимание! См. раздел 7.4.6
Руководства пользователя
Vacon NXL. Режим AI1
(2=доп. плата
0=вход 1)
(2=доп. Плата
1=вход 2)
3
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 12
vacon • 11
P2.2.8
P2.2.9 AI1 inversion 0 1 0
P2.2.10 AI1 filter time 0,00 10,00 с 0,10 378 0=Без фильтрации
P2.2.11 AI2 signal selection 0 11 388 Аналогично пар. 2.2.5
P2.2.12 AI2 signal range 1 4 2
P2.2.13
P2.2.14
P2.2.15 AI2 inversion 0 1 0
P2.2.16 AI2 filter time 0,00 10,00 с 0,10 389 0=Без фильтрации
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
AI1 custom
maximum setting
AI2 custom
minimum setting
AI2 custom
maximum setting
Motor potentiometer
frequency reference
memory reset
Reference scaling
minimum value
Reference scaling
maximum value
Keypad control
reference selection
Fieldbus control
reference selection
0,00 100,00 % 100,00
0,00 100,00 % 0,00
0,00 100,00 % 100,00
0 2 1
0,00 P2.2.19 0,00
P2.2.18 320,00 0,00
0 5 2
0 5 3
Таблица 1-5. Входные сигналы, P2.2
381
387
390
391
392
398
367
344
345
121
122 См. выше
0=Без инвертирования
1=Инвертирован
Не используется, если
настраиваемый минимум
AI2 <> 0% или
настраиваемый максимум
AI2 <> 100%
1=0–20 мА
2=4–20 мА
3=0–10В
4=2–10В
0=Без инверсии
1=Инвертирован
0=Сброса нет
1=Сброс при останове или
прекращении питания
2=Сброс при прекращении
питания
Не влияет на задание по
шине fieldbus
(Масштабирование между
пар. 2.1.1 и 2.1.2)
Не влияет на задание по
шине fieldbus
(Масштабирование между
пар. 2.1.1 и 2.1.2)
0=AI1
1=AI2
2=Опорный сигнал с панели
управления
3= Опорный сигнал с
интерфейсной шины
(FBSpeedreference)
4=Псевдопотенциометр
5=ПИД-регулятор
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
3
Page 13
12 • vacon Многоцелевая программа управлениядля NXL
3.4 Выходные сигналы (панель управления: меню P2 P2.3)
Код Параметр Мин. Макс. Ед.
P2.3.1
P2.3.2
P2.3.3
P2.3.4
P2.3.5
P2.3.6
P2.3.7
P2.3.8
P2.3.9 Analogue output scale 10 1000 % 100 311
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15 AI supervision OFF limit 0,00 100,00 % 10,00 357
P2.3.16 AI supervision ON limit 0,00 100,00 % 90,00 358
P2.3.17
P2.3.18
Relay output 1
function
Expander board relay
output 1 function
Expander board relay
output 2 function
Expander board digital
output 1 function
Analogue output
function
Analogue output filter
time
Analogue output
inversion
Analogue output
minimum
Expander board
analogue output 1
function
Expander board
analogue output 2
function
Output frequency limit
1 supervision
Output frequency limit
1;
Supervised value
Analogue input
supervision
Relay output 1 ON
delay
Relay output 1 OFF
delay
0 20 3 313
0 19 2 314 Аналогично параметру 2.3.1
0 19 3 317 Аналогично параметру 2.3.1
0 19 1 312 Аналогично параметру 2.3.1
0 12 1 307 См. пар. 2.1.16
0,00 10,00 с 1,00 308 0=Без фильтрации
0 1 0 309
0 1 0 310
0 12 0 472 Аналогично пар.2.1.16
0 12 0 479 Аналогично пар.2.1.16
0 2 0 315
0,00
0 2 0
0,00 320,00 s 0,00
0,00 320,00 s 0,00
Пар.
2.1.2
Гц 0,00 316
По
умолч.
Польз. ID Примечание
0=Не используется
1=Готов
2=Работа
3=Отказ
4=Отказ с инверсией
5=Предупреждение о
6=Внешний отказ или
7=Отказ опорного сигнала
8=Предупреждение
9=Реверс
10=Предустановленная
11=На скорости
12=Регулятор двигателя вкл.
13=Контроль 1 выхода
14=
15=Отказ термистором или
16=Контроль действительного
17=Упр-е автозаменой 1
18=Упр-е автозаменой 2
19=Упр-е автозаменой 3
20=Контроль AI
0=Не инвертирован
1=Инвертирован
0=0 мА
1=4 мА
0=Нет предела
1=Контроль нижнего предела
2=Контроль верхнего предела
0=Не используется
356
1=AI1
2=AI2
487 Задержка включения RO1
488 Задержка выключения RO1
Таблица 1-6. Выходные сигналы, G2.3
перегреве ПЧ
предупреждение
или предупреждение
скорость
частоты
Пост управления: Вх/Вых.
предупреждение
значения
3
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 14
vacon • 13
3.5 Параметры управления двигателем (панель управления: меню P2 P2.9)
Код Параметр Мин. Макс. Ед.
P2.4.1 Ramp 1 shape 0,0 10,0 с 0,0
P2.4.2 Brake chopper 0 3 0
P2.4.3 DC braking current 0,15 x In 1,5 x In A Различный 507
P2.4.4
P2.4.5
P2.4.6
P2.4.7 Flux brake 0 1 0
P2.4.8 Flux braking current 0,0 Различный A 0,0 519
DC braking time
at stop
Frequency to start DC
braking during
ramp stop
DC braking time
at start
0,00 600,00 с 0,00
0,10 10,00 Гц 1,50
0,00 600,00 с 0,00
По
умолч.
Польз. ID Примечание
0=Линейная
500
>0=S-образная
0=Отключен
1=Используется при
504
508
515
516
520
команде RUN
2=Используется при
команде RUN и
останове
0=При останове тормоз
постоянного тока не
используется
0=При пуске тормоз
постоянного тока не
используется
0=Выкл.
1=Вкл.
Таблица 1-7. Параметры управления приводом, D2.4
3.6 Параметры запретных частот (панель управления: меню P2 P2.5)
Код Параметр Мин. Макс. Ед.
P2.5.1
P2.5.2
P2.5.3
Prohibit frequency
range 1 low limit
Prohibit frequency
range 1 high limit
Prohibit frequencies
acc./dec. ramp
scaling
0,0 Пар. 2.5.2 Гц 0,0 509 0=Не используется
0,0 Пар. 2.1.2 Гц 0,0 510 0=Не используется
0,1 10,0 Раз 1,0 518
Таблица 1-8. Параметры запретных частот, G2.5
По
умолч.
Польз. ID Примечание
Изменение кривой
разгона/торможения на
запретных частотах
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
3
Page 15
14 • vacon Многоцелевая программа управлениядля NXL
3.7 Параметры управления двигателем (панель управления: меню P2 P2.6)
Код Параметр Мин. Макс. Ед.
P2.6.1 Motor control mode 0 1 0 600
P2.6.2 U/f ratio selection 0 3 0 108
P2.6.3
P2.6.4
P2.6.5
P2.6.6
P2.6.7
P2.6.8 Switching frequency 1,0 16,0 кГц 6,0 601 Зависит от мощности в кВ
P2.6.9
P2.6.10
P2.6.11 Identification 0 1 0
Field weakening
point
Voltage at field
weakening point
U/f curve midpoint
frequency
U/f curve midpoint
voltage
Output voltage at
zero frequency
Overvoltage
controller
Undervoltage
controller
30,00 320,00 Гц 50,00 602
10,00
0,00 Пар. 2.6.3 Гц 50,00 604
0,00 100,00 % 100,00 605
0,00 40,00 % 0,00 606 n% x U
0 1 1 607
0 1 1 608
200,00 % 100,00 603 n% x U
По
умолч.
Поль
з.
ID Примечание
0=Контроль частоты
1=Контроль скорости
0=Линейное
1=Квадратичное
2=Программируемое
3=Линейное с оптимизацией
потока.
nmot
n% x U
nmot
Максимальное значение
параметра = пар. 2.6.4
nmot
0=Не используется
1=Используется
0=Не используется
1=Используется
0=Не действует
631
1=Идент. без вращения
Таблица 1-9. Параметры управления двигателем, G2.6
3.8 Защита (панель управления: меню P2 P2.7)
Код Параметр Мин. Макс. Ед.
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5 Earth fault protection 0 3 2 703
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10 Motor duty cycle 0 100 % 100 708
P2.7.11 Stall protection 0 3 1 709 Аналогично пар. 2.7.1
P2.7.12 Stall current limit 0,1 I
P2.7.13 Stall time limit 1,00 120,00 s 15,00 711
P2.7.14 Stall frequency limit 1,0 Пар. 2.1.2 Гц 25,0 712
P2.7.15
P2.7.16
P2.7.17
P2.7.18
P2.7.19
Response to 4мА
reference fault
Response to
external fault
Response to
undervoltage fault
Output phase
supervision
Thermal protection
of the motor
Motor ambient
temperature factor
Motor cooling factor
at zero speed
Motor thermal time
constant
Underload
protection
Underload curve at
nominal frequency
Underload curve at
zero frequency
Underload
protection time limit
Response to
thermistor fault
0 3 0
0 3 2
1 3 2
0 3 2
0 3 2
-100,0 100,0 % 0,0
0,0 150,0 % 40,0
1 200 мин 45
x 2 A I
nMotor
0 3 0
10,0 150,0 % 50,0
5,0 150,0 % 10,0
2,00 600,00 с 20,00
0 3 2
По
умолч.
x 1,3 710
nMotor
Поль
з.
ID Примечание
0=Не используется
1=Предупреждение
700
2=Отказ, останов по пар. 2.1.12
3=Отказ, останов свободный
выбег
701
0=Не используется
727
1=Предупреждение
2=Отказ, останов по пар. 2.1.12
702
3= Отказ, останов свободный
выбег
704
705
706
707
713 Аналогично пар. 2.7.1
714
715
716
732 Аналогично пар. 2.7.1
3
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 16
vacon • 15
P2.7.20
P2.7.21
P2.7.22
P2.7.23
P2.7.24
Response to
fieldbus fault
Response to slot
fault
Actual value
supervision
Actual value
supervision limit
Actual value
supervision delay
0 3 2
0 3 2
0 4 0
0,0 100,0 % 10,0
0 3600 с 5
733 Аналогично пар. 2.7.1
734 Аналогично пар. 2.7.1
0=Не используется
1=Предупреждение если ниже
735
736
737
предела
2=Предупреждение если выше
предела
3=Отказ, если ниже предела
4=Отказ, если выше предела
Таблица 1-10. Защита, G2.7
3.9 Параметры автоматического перезапуска (панель управления: меню P2 P2.9)
Код Параметр Мин. Макс. Ед.
P2.8.1 Wait time 0,10 10,00 с 0,50 717
P2.8.2 Trial time 0,00 60,00 с 30,00 718
P2.8.3 Start function 0 2 0
Таблица 1-11. Параметры автоматического перезапуска, G2.8
По
умолч.
Польз. ID Примечание
0=С заданным ускорением
719
1=С ходу
2=В соотв. с пар. 2.4.6
3.10 Параметры задания опорного сигнала ПИД (панель управления: меню P2 P2.9)
Код Параметр Мин. Макс. Ед.
P2.9.1 PID activation 0 1 0 163
P2.9.2 PID reference 0 3 2 332
По
умолч.
Польз. ID Примечание
0=Не используется
1=Активирован
ПИД-регулятор
2=Включено управление
насосами и
вентиляторами (PFC),
видна группа P2.10
0=AI1
1=AI2
2=Задание опорного
сигнала 1 с панели
управления
(PID Ref 1)
3=Задание опорного
сигнала с
интерфейсной шины
(FBSpeedreference)
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
3
Page 17
16 • vacon Многоцелевая программа управлениядля NXL
P2.9.3 Actual value input 0 6 1 334
P2.9.4 PID controller gain 0,0 1000,0 % 100,0 118
P2.9.5
P2.9.6
P2.9.7
P2.9.8
P2.9.9 Error value inversion 0 1 0 340
P2.9.10 Sleep frequency
P2.9.11 Sleep delay 0 3600 с 30 1017
P2.9.12 Wake up level 0,00 100,00 % 25,00 1018
P2.9.13 Wake up function 0 1 0
PID controller
I-time
PID controller
D-time
Actual value 1
minimum scale
Actual value 1
maximum scale
0,00 320,00 с 10,00 119
0,00 10,00 с 0,00 132
–1000,0 1000,0 % 0,00 336
–1000,0 1000,0 % 100,0
Пар.
2.1.1
Пар. 2.1.2 Гц 10,00
337
1016
1019
0=Сигнал AI1
1=Сигнал AI2
2=Интерфейсная шина
(ProcessDataIN2)
3=Момент двигателя
4=Скорость двигателя
5=Ток двигателя
6=Мощность двигателя
7=AI1-AI2
0=Масштабирование
отсутствует
100=Масштабирование
отсутствует
0=Пробуждение при
падении ниже уровня
пробуждения (пар.
2.9.12)
0=Пробуждение при
подъеме выше уровня
пробуждения (пар.
2.9.12)
Таблица 1-12. Параметры задания опорного сигнала ПИД, G2.9
3
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 18
vacon • 17
3.11 Параметры управления насосами и вентиляторами (PFC) (панель управления:
меню P2 P2.10)
Внимание! Группа P2.10 видна, только если значение пар. 2.9.1 установлено равным 2.
Код Параметр Мин. Макс. Ед.
P2.10.1
P2.10.2
P2.10.3
P2.10.4 Autochange 0 4 0
P2.10.5
P2.10.6
P2.10.7
Number of
auxiliary drives
Start delay,
auxiliary drives
Stop delay,
auxiliary drives
Autochange
interval
Autochange;
Maximum number
of auxiliary drives
Autochange
frequency limit
0 3 1
0,0 300,0 с 4,0
0,0 300,0 с 2,0
0,0 3000,0 час. 48,0
0 3 1
0,00 Пар. 2.1.2 Гц 25,00
По
умолч.
Таблица 1-13. Параметры управления насосами и вентиляторами
Поль
з.
ID Примечание
1001
1010
1011
0=Не используется
1=Автозамена с доп.
насосами
2=Автозамена с ПЧ и доп.
1027
1029
1030
1031
насосами
3=Автозамена и
блокировки (доп.
насосов)
4=Автозамена и
блокировка (ПЧ и
доп.насосов)
0,0=ТЕСТ=40 с.
Время переключения
автозамены
Автозамена, кол-во доп.
ПЧ
Уровень частоты
автозамены для ПЧ
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
3
Page 19
18 • vacon Многоцелевая программа управлениядля NXL
3.12 Панель управления (панель управления: меню K3)
Ниже перечислены параметры для выбора поста управления и направления вращения с
панели управления. См. меню панели управления Руководства пользователя Vacon NXL.
Код Параметр Мин. Макс. Ед.
P3.1 Control place 1 3 1
R3.2 Keypad reference
P3.3
R3.4 Stop button 0 1 1
R3.5 PID reference 0,00 100,00 % 0,00
R3.6 PID reference 2 0,00 100,00 % 0,00
Direction
(on keypad)
Пар.
2.1.1
Пар. 2.1.2 Гц
0 1 0
По
умолч.
Таблица 1-14. Параметры панели управления, M3
Поль
з.
ID Примечание
1=Клеммы ввода/вывода
125
2=Панель управления
3=Интерфейсная шина
0=Вперед
123
1=Реверс
0=Ограничение функций
114
кнопки Stop
1=Кнопка Stop всегда
доступна
Выбирается с помощью
цифровых входов
3.13 Системное меню (панель управления: меню S6)
Подробнее о параметрах и функциях, связанных с общими вопросами эксплуатации ПЧ,
например, о группе настраиваемых параметров, или о программном или аппаратном
обеспечении, смотрите в разделе 7.4.6 Руководства пользователя Vacon NXL.
3.14 Дополнительные платы (панель управления: меню E7)
В меню E7 отображаются дополнительные платы, подключенные к плате управления и
относящиеся к ним данные. Для получения дополнительных сведений обратитесь к разделу
7.4.7 Руководства пользователя Vacon NXL
3
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 20

4. ОПИСАНИЕ ПАРАМЕТРОВ
4.1 Базовые параметры
2.1.1, 2.1.2 Minimum/maximum frequency
Определяет пределы изменения выходной частоты для ПЧ.
Максимальное значение параметров 2.1.1 и 2.1.2 составляет 320 Гц.
Программа будет автоматически проверять значения параметров 2.1.19, 2.1.20,
2.3.13, 2.5.1, 2.5.2 и 2.6.5.
2.1.3, 2.1.4 Acceleration time 1, deceleration time 1
Эти пределы соответствуют времени, которое требуется, чтобы выходная частота
возросла от нулевого до заданного максимального значения (пар. 2.1.2).
2.1.5 Current limit
vacon • 19
Задает максимальный ток, подаваемый
Установите этот параметр в соответствие с номинальным током двигателя, чтобы
избежать перегрузки. По умолчанию допустим ток, равный расчетному току
преобразователя (I
).
L
2.1.6 Nominal voltage of the motor
См. значение U
на заводском шильдике двигателя. Этот параметр устанавливает
n
напряжение в точке ослабления поля (пар. 2.6.4), равное 100% x U
2.1.7 Nominal frequency of the motor
См. значение f
заводском шильдике двигателя. Этот параметр устанавливает
n
такое же значение точки ослабления поля (пар. 2.6.3).
2.1.8 Nominal speed of the motor
См. значение скорости n
на заводском шильдике двигателя.
n
2.1.9 Nominal current of the motor
См. значение номинального тока I
на двигатель преобразователем частоты.
nMotor
на заводском шильдике двигателя.
n
.
2.1.10 Motor cos phi
См. значение «cos phi» на заводском шильдике двигателя.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 21
20 • vacon Многоцелевая программа управлениядля NXL
2.1.11 Start function
Ramp/Функция ускорения/замедления:
0 Преобразователь начинает работу с частоты 0 Гц и разгоняется до
максимальной частоты, в соответствии с параметром acceleration time.
(Инерция нагрузки или трение при старте могут увеличить время
разгона).
Flying start/Пуск «с ходу»:
1 Преобразователь частоты может запускаться при вращающемся
двигателе, прикладывая к нему небольшой момент и подбирая частоту,
соответствующую скорости вращения двигателя. Поиск начинается с
максимальной по отношению к действительной частоте и продолжается,
пока не будет найдено нужное значение. Затем выходная частота будет
нарастать или снижаться до заданной величины в соответствии с
заданными
Пользуйтесь этим режимом, если двигатель вращается по инерции в
момент подачи пусковой команды. При пуске «с ходу» допускаются
кратковременное пропадание питающего напряжения.
Conditional flying start/Условный пуск на ходу:
параметрами разгона/торможения.
2 В этом режиме можно отключать двигатель от преобразователя частоты
или подключать двигатель к преобразователю частоты, даже если
команда «Пуск» еще активна. При повторном подключении двигателя
привод будет функционировать, как описано в выборе 1
2.1.12 Stop function
Coasting/Свободный выбег:
0 После подачи команды Стоп двигатель находиться в свободном выбеге
без управления со стороны ПЧ до полного останова.
Ramp/Функция ускорения/замедления:
1 После подачи команды Стоп скорость двигателя снижается в
соответствии с заданными параметрами торможения.
Если энергия торможения слишком высока, то для быстрого торможения
может понадобиться внешний тормозной резистор.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 22

2.1.13 U/f optimisation
0 Не используется
vacon • 21
1 Automatic torque boost/Автоматическое усиление момента
Напряжение, подаваемое на двигатель, изменяется
автоматически, что позволяет двигателю создавать
достаточный к момент для запуска и работы на низких
частотах. Повышение напряжения зависит от типа двигателя
и его мощности. Автоматическое усиление момента
применяется при больших пусковых нагрузках, например, в
конвейерах.
Внимание!
2.1.14 I/O Reference selection
Определяет источник задающего сигнала при управлении приводом с клемм
ввода/вывода.
0 Задание AI1 (клеммы 2 и 3, например, потенциометр)
При высоком моменте и низкой скорости возможен перегрев
двигателя. Если двигатель должен работать в таком
режиме длительное время, особое внимание уделите его
охлаждению. При тенденции к быстрому нарастанию
температуры используйте внешнее охлаждение.
.
1 Задание AI2 (клеммы 5 и 6, например, датчик)
2 Задание с панели
3 Задание с интерфейсной шины (FBSpeedReference)
4 Задание с псевдопотенциометра
5 Выбор AI1/AI2.. Выбор осуществляется программно с помощью функции DIN3
(P2.1.18)
2.1.15 AI2 (I
1 Диапазон сигнала 0–20 мА
2 Диапазон сигнала 4–20 мА
3 Диапазон сигнала 0–10 В
4 Диапазон сигнала 2–10 В
Внимание! Выбор невозможен, если значение пар. 2.2.12 установлено > 0%, или пар.
2.2.13 < 100%.
2.1.16 Analogue output function
Параметр выбирает нужную функцию для сигнала аналогового выхода.
) signal range
in
управления (пар. 3.2)
Значения параметра см. в таблице на стр. 8.
2.1.17 DIN2 function
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 23

22 • vacon Многоцелевая программа управлениядля NXL
Для этого параметра можно выбрать одно из 10 значений. Если цифровой вход DIN2
использоваться не должен, значение параметра устанавливается равным 0.
1 Реверсивный пуск
2 Реверс
3 Импульсный стоп
4 Внешний отказ
НЗ контакт : отображается код отказа, двигатель останавливается при активном
входном сигнале
5 Внешний отказ
НО контакт : отображается код отказа, двигатель останавливается при
неактивном входном сигнале
6 Пуск разрешен
НО контакт: пуск двигателя запрещен
НЗ контакт: пуск двигателя разрешен
Останов свободным выбегом при пропадании сигнала RUN
7 Предустановленная скорость 2
8 Псевдопотенциометр Увеличение (UP)
НЗ контакт: увеличение опорного значения пока контакт не разомкнут.
9 Отключение ПИД-регулирования (прямая подача опорного сигнала).
10 Блокировка 1 (доступно при управлении насосами и вентиляторами
P2.9.1 = 2)
2.1.18 DIN3 function
Для этого параметра можно выбрать одно из 13 значений. Если цифровой вход DIN3
использоваться не должен, устанавливается равным 0.
(PFC),
4
1 Реверс
НО контакт: прямое направление
НЗ контакт: реверс
2 Внешний отказ
НЗ контакт: отображается код отказа, двигатель останавливается при активном
входном сигнале
3 Внешний отказ
НО контакт: отображается код отказа, двигатель останавливается при
входном сигнале
4 Сброс кода отказа
НЗ контакт: сброс всех отказов
5 Пуск разрешен
Тел.: +358-201-212 000 Факс: +358-201-212 205
неактивном
Page 24

vacon • 23
НО контакт: пуск двигателя запрещен
НЗ контакт: пуск двигателя разрешен
Останов свободным выбегом при пропадании сигнала RUN
6 Предустановленная скорость 1
7 Предустановленная скорость 2
8 Управление торможением постоянным током
НЗ контакт: в режиме останова торможение постоянным током работает до
размыкания контактов. Ток при торможении постоянным током составляет около
10% от значения, устанавливаемого
9 Псевдопотенциометр Увеличение (UP)
НЗ контакт: увеличение опорного значения пока контакт не разомкнут.
10 Псевдопотенциометр Уменьшение (DOWN)
НЗ контакт: увеличение опорного значения пока контакт не разомкнут.
11 Отключение ПИД-регулирования (прямая подача задания (опорного сигнала)).
12 Выбор опорного сигнала 2 ПИД с пульта
параметром 2.4.3.
13 Блокировка 2 (доступно при управлении насосами и вентиляторами (PFC),
P2.9.1=2)
14 Вход
15 Принудительное задание cp через Вх/Вых
16 Принудительное задание ср по шине Fieldbus
17 Выбор AI1/AI2 для задания Входа/Выхода(par 2.1.14)
2.1.19 Preset speed 1
2.1.20 Preset speed 2
Предустановленные скорости 1, 2. Значение параметра автоматически
ограничивается максимальной и минимальной частотами (пар. 2.1.1 и 2.1.2)
2.1.21 Automatic restart function
Этот параметр включает автоматический перезапуск
0 = Запрещен
1 = Разрешен (3 типа автоматического перезапуска,
термистора Примечание! См. Руководство пользователя NXL Chapter
6.2.4
см. пар. 2.8.1–2.8.3)
2.1.22 Parameter conceal
С помощью этого параметра можно скрывать остальные группы параметров, за
исключением группы базовых параметров (B2.1).
Заводская установка этого параметра 0.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 25

24 • vacon Многоцелевая программа управлениядля NXL
0 = Запрещено (все группы параметров можно просматривать с панели управления)
1 = Разрешено (с панели управления можно просматривать только основные
параметры, группы B2.1)
4.2 Входные сигналы
2.2.1 Expander board DIE1 function
Функции DIE1 платы расширения. Для этого параметра можно выбрать одно из 12
значений. Если цифровой вход дополнительной платы DIN1 использоваться не
должен, установите значение параметра равным 0.
Разделы аналогичны параметру 2.1.18, за исключением:
13 = Блокировка 1
2.2.2 Expander board DIE2 function
Разделы аналогичны параметру 2.2.1, за исключением:
13 = Блокировка 2
2.2.3 Expander board DIE3 function
Разделы аналогичны параметру 2.2.1.
13 = Блокировка 3
2.2.4 DIN4 Function
Если значение пар. 2.2.6 установлено равным 0, функции AI1 в качестве цифрового
входа 4.
Разделы аналогичны параметру 2.2.3.
Внимание! Если аналоговый вход программируется как DIN4, проверьте
правильность расположения перемычек (см. рис. ниже).
MF2
X4:
MF3
X4:
MF4-6
X8:
4
R485
программируемый
Вход напряжения, Вход напряжения, Вход напряжения,
0–10B
Рис. 1-1. Расположение перемычек X4/X8, когда AI1 функционирует как DIN4
0–10B 0–10B
Jumperdin4.fh8
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 26
2.2.5 AI1 signal selection
I/OtermI/Ote
rm
Выбор аналогового входа для подачи задающего сигнала AI1.
vacon • 25
Изменение
значений
nxlk29.fh8
Рис. 1-2. Выбор сигнала AI1
Индикатор положения
Номер входа
Значение этого параметра формируется из индикатора положения платы и номера
соответствующей клеммы ввода. См. рис. 1-2 выше.
Индикатор платы 1 = Местные входы
Индикатор платы 2 = Входы дополнительной платы
Номер входа 0 = Вход 1
Номер входа 1 = Вход 2
Номер входа 2 = Вход 3
Номер входа 9 = Вход 10
Пример:
Если значение параметра установлено равным
10, выбран местный вход 1 для
сигнала AI1. Если установлено значение 21, для сигнала AI1 выбран вход платы
расширения 2.
Если вы хотите использовать значения сигналов аналогового входа, например, для
тестирования, значение этого параметра можно установить равным 0–9. При этом
значение 0 соответствует 0%, значение 1 соответствует 20%, а любое значение от 2
до 9 соответствует 100%.
2.2.6 AI1 signal range
С помощью этого параметра устанавливается диапазон сигнала AI1.
0 = DIN 4
1 = Диапазон сигнала 0–20 мА (только для габаритов
MF4 и более)
2 = Диапазон сигнала 4–20 мА (только для габаритов MF4 и более)
3 = Диапазон сигнала 0–10 В
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 27
26 • vacon Многоцелевая программа управлениядля NXL
4 = Диапазон сигнала 2–10 В
Внимание! Этот параметр не работает, если значение параметра 2.2.7 > 0%, или
параметра 2.2.8 < 100%.
Если значение параметра 2.2.6 установлено равным 0, функции AI1 аналогичны
цифровому входу 4.
См. пар. 2.2.4
2.2.7 AI1 custom setting minimum
2.2.8 AI1 custom setting maximum
Устанавка минимального и максимального уровня для сигнала AI1 в пределах
0–10 В.
2.2.9 AI1 signal inversion
%
Нефильтрованный сигнал
При установке значения параметра,
равного 1 происходит инвертирование
100%
сигнала AI1.
2.2.10 AI1 signal filter time
Если значение этого параметра
превышает 0, включается функция
фильтрации помех входного аналогового
сигнала U
.
in
Большое время фильтрации замедляет
реакцию на регулирование (рис. 1-3)
2.2.11 AI2 signal selection
Выбор аналогового входа для подачи задающего сигнала AI2.
Установку значения см. в разделе пар. 2.2.5.
2.2.12 AI2 signal range
1 = Диапазон сигнала 0–20 мА
2 = Диапазон сигнала 4–20 мА
3 = Диапазон сигнала 0–10 В
Пар. 2.2.10
Рис. 1-3. Фильтрация сигнала AI1
Фильтрованный сигнал
t[s]
NX12K78
4
4 = Диапазон сигнала 2–10 В
Внимание! Настройка не работает, если пар. 2.2.13 > 0%, или пар. 2.2.14 < 100%.
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 28

vacon • 27
Выходная
частота
Макс. частота, пар. 2.1.2
Пар. 2.2.19
Мин. частота, пар. 2.1.1
0
Аналоговый
вход (%)
Пар. 2.2.18
2.2.13 AI2 custom minimum
2.2.14 AI2 custom maximum
Эти параметры позволяют менять ток входного сигнала в диапазоне 0–20 мА.
См. пар. 2.2.7 и 2.2.8.
2.2.15 Analogue input AI2 signal inversion
См. соответствующий пар. 2.2.9.
Выходная
частота
Макс. частота, пар. 2.1.2
Мин. частота, пар. 2.1.1
0
Аналоговый
вход (%)
NX12K35
2.2.16 Analogue input AI2 signal filter time
См. соответствующий пар. 2.2.10
2.2.17 Motor potentiometer memory reset (Frequency reference)
0 = Сброса памяти задания для псевдопотенциометра не происходит
1 = Сброс памяти задания для псевдопотенциометра при останове и отключении
питания
Сброс памяти задания для псевдопотенциометра при отключении питания
2 =
2.2.18 Reference scaling minimum value
2.2.19 Reference scaling maximum value
Масштабирование задающего сигнала между Минимальной и Максимальной
частотами. Если регулировка не требуется, установите значение параметра равным
0.
На рисунку внизу для задающего сигнала частоты выбран потенциальный вход AI1 с
уровнем сигнала 0–10 В.
Рис. 1-4. Пар. 2.1.18=0 (Масштабирования сигнала не происходит);
справа: масштабирование задающего сигнала частоты
2.2.20 Keypad frequency reference selection
Задает выбор задающего сигнала частоты при управлении привода с панели
управления
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 29

28 • vacon Многоцелевая программа управлениядля NXL
0 Задающий сигнал частоты AI1 (по умолчанию AI1, клеммы 2 и 3, например,
потенциометр)
1 Задающий сигнал частоты AI2 (по умолчанию AI2, клеммы 5 и 6, например,
датчик)
2 Задающий сигнал частоты с панели управления (пар. 3.2)
3 Задающий сигнал частоты с интерфейсной шины (FBSpeedReference)
4 Задающий сигнал частоты с псевдопотенциометра
5 Задающий сигнал ПИД-регулирования
2.2.21 Fieldbus frequency reference selection
Определяет источник задающего сигнала частоты при управлении приводом по
интерфейсной шине. Значения параметра – см. пар. 2.2.20.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 30

4.3 Выходные сигналы
2.3.1 Relay output 1 function
2.3.2 Expander board relay output 1 function
2.3.3 Expander board relay output 2 function
2.3.4 Expander board digital output 1 function
Значение параметра Значение сигнала
0 = Не используется Бездействие
vacon • 29
1 = Готовность ПЧ готов к работе
2 = Работа ПЧ работает (двигатель запущен)
3 = Отказ Произошел отказ
4 = Отказ с инверсией Отказ не произошел.
5 = Предупреждение о перегреве ПЧ
6 = Внешний отказ или
предупреждение
7 = Отказ задающего сигнала
частоты или предупреждение
8 = Предупреждение Всегда при появлении предупреждения
9 = Реверсирован Выбрана команда реверс
10 = Предустановленная скорость Выбрана предустановленная скорость
11 = В режиме
12 = Активен регулятор двигателя Регулятор перенапряжения или сверхтока активен
Релейный выход RO1 и программируемые выходы реле
дополнительной платы (RO1, RO2) активны, когда:
Температура радиатора превышает +70 C
Отказ или предупреждение в зависимости от значения
пар. 2.7.2
Отказ или предупреждение в зависимости от значения
пар. 2.7.1
- если аналоговый сигнал равен 4–20 мА и сигнал < 4 мА
Выходная частота достигла заданного установленного
значения задающего сигнала частоты
13 = Контроль предела 1 выходной
частоты
14 = Управление с клемм
ввода/вывода
15 = Отказ или предупреждение по
термистору
16 = Активен контроль
действительного значения
17 = Управление автозаменой 1 Управление насосом 1, параметры 2.10.1–2.10.7
18 = Управление автозаменой 2 Управление насосом 2, параметры 2.10.1–2.10.7
19 = Управление автозаменой 3 Управление насосом 3, параметры 2.10.1–2.10.7
20 = Контроль AI
Таблица 1-15. Выходные сигналы, поступающие через релейный выход RO1 и релейные выходы
RO1, RO2 и DO1 дополнительной платы
Значение выходной частоты вышла за установленную
верхнюю или нижнюю границу (см. пар. 2.3.12 и 2.3.13
ниже)
Выбран пост управления (Меню K3; пар. 3.1) «клемма
ввода/вывода»
Термистор, подключенный к дополнительной платы,
сообщает о перегреве. Отказ или предупреждение в
зависимости от параметра 2.7.19
Параметры 2.7.22–2.7.24
На реле подается напряжение в соответствии с
настройками параметров 2.3.14–2.3.16
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 31
30 • vacon Многоцелевая программа управлениядля NXL
2.3.5 Analogue output function
С помощью этого параметра выбирается
нужная функция для аналогового
выходного сигнала.
%
Нефильтрованный сигнал
Значения параметра см. в таблице на стр. 6.
2.3.6 Analogue output filter time
Задает время фильтрации аналогового
выходного сигнала.
Если значение параметра установлено
равным 0, фильтрации не происходит.
2.3.7 Analogue output invert
Инвертирует аналоговый выходной сигнал
Максимальный выходной сигнал = 0%
Минимальный выходной сигнал =
Максимальное установленное
значение (параметр 2.3.9)
0 Не инвертирован
1 Инвертирован
См parameter 2.3.9 ниже.
20 мА
12 мА
10 мА
4 мА
0 мА
Фильтрованный сигнал
t [s]
Пар. 2.3.6.
NX12K16
Рис. 1-5. Фильтрация
аналогового выхода
Пар. 2.3.9
= 50%
Пар. 2.3.9
= 100%
Пар. 2.3.9
= 200%
0
0,5
1,0
NX12K17
2.3.8 Analogue output minimum
Устанавливает минимум сигнала 0 мА или 4 мА («живой ноль»). Учитывайте разницу
в масштабировании аналогового выхода в пар. 2.3.9.
4
Рис. 1-6. Инверсия аналогового выхода
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 32

2.3.9 Analogue output scale
Коэффициент масштабирования аналогового выхода.
Сигнал Максимальное значение сигнала
Выходная частота 100% x f
Скорость двигателя 100% номинальной скорости
Выходной ток 100% x I
Крутящий момент
двигателя
Мощность двигателя 100% x P
Напряжение
двигателя
Напряжение цепи
постоянного тока
Опорное значение
ПИ
Действительное
значение 1 ПИ
Значение ошибки ПИ
Выход ПИ
Таблица 1-16. Масштабирование аналогового выхода
Ток
аналогового
выхода
20 мА
Пар. 2.3.9 =
200%
max
двигателя
100% x T
100% x U
1000 В
100% макс. значения опорного сигнала
100% макс. действительного значения.
100% макс. значения ошибки
100% макс. выхода
nMotor
nMotor
nMotor
nMotor
Пар. 2.3.9 =
100%
vacon • 31
12 мА
10 мА
Пар. 2.3.8 = 1
4 мА
Пар. 2.3.8 = 0
0 мА
0
0,5
Пар. 2.3.9 =
50%
Макс. значение сигнала,
выбранного пар. 2.1.16
1,0
nxlk49.fh8
Рис. 1-7. Масштабирование аналогового выхода
2.3.10 Expander board analogue output 1 function
2.3.11 Expander board analogue output 2 function
Эти параметры выбирают нужные функции для аналоговых выходных сигналов
дополнительной платы. Значения параметров см. в описании пар. 2.1.16 .
2.3.12 Output frequency limit 1 supervision function
0 Нет контроля
1 Контроль нижнего предела
2 Контроль верхнего предела
Если выходная частота вышла за границы установленного верхнего или нижнего
предела (пар. 2.3.13), эта функция формирует предупреждающее сообщение,
передаваемое через
релейный выход в зависимости от значения параметров
2.3.1–2.3.4.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 33

32 • vacon Многоцелевая программа управлениядля NXL
9
2.3.13 Output frequency limit 1 supervised value
Устанавливает значение частоты, контролируемое параметром 2.3.12
Пар. 2.3.13
Пример:
f[Гц]
21 RO1
22 RO1
23 RO1
Пар. 2.3.12 = 2
21 RO1
22 RO1
23 RO1
Рис. 1-8. Контроль выходной частоты
2.3.14 Контроль аналогового входа
С помощью этого параметра можно выбрать аналоговый вход, подлежащий
контролю.
0 = не используется
1 = AI1
2 = AI2
t
21 RO1
22 RO1
23 RO1
NX12K1
2.3.15 Предел выключения контроля аналогового входа
Если сигнал аналогового входа, выбранного в соответствии с пар. 2.3.14, падает
ниже заданного предела, выход реле выключается.
2.3.16 Предел включения контроля аналогового входа
Если сигнал аналогового входа
, выбранного в соответствии с пар. 2.3.14, превышает
предел, установленный для этого параметра, выход реле включается.
Это означает, что если, например, предел включения составляет 60%, а предел
выключения 40%, то выход реле включится, когда сигнал превысит 60% и останется
включенным, пока сигнал не упадет ниже 40%.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 34

2.3.17 Задержка включения выхода реле 1
0
2.3.18 Задержка выключения выхода реле 1
С помощью этих параметров можно установить время задержки включения и
выключения выхода реле 1 (пар. 2.3.1).
Рис. 1- 9. Задержки включения и выключения выхода реле 1
vacon • 33
4.4 Управление приводом
2.4.1 Acceleration/Deceleration ramp 1 shape
С помощью этого параметра можно сгладить начальный и конечный участки графика
разгона и торможения. При установке значения, равного 0, график принимает
линейную форму, при этом разгон или торможение начинается немедленно после
изменения опорного сигнала.
Установка для этого параметра значения, равного 0,–10 секундам придает графику
разгона/торможения S-образную форму. Время разгона
2.1.3/2.1.4
[Гц]
2.1.3, 2.1.4
определяется параметрами
2.4.1
2.4.1
Рис. 1-10. S-образный график разгона/торможения
NX12K2
[t]
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 35

34 • vacon Многоцелевая программа управлениядля NXL
2.4.2 Brake chopper
Внимание! Внутренний тормозной прерыватель устанавливается на ПЧ всех
габаритов, за исключением MF2
0 Тормозной прерыватель не используется
1 Тормозной прерыватель используется при работе
3 Используется при работе и останове
Когда преобразователь частоты тормозит двигатель, инерция двигателя и нагрузки
сбрасывется на внешний тормозной резистор. Это дает ПЧ возможность замедлять
двигатель
подобран тормозной резистор). Обратитесь к отдельному руководству по установке
тормозного резистора.
2.4.3 DC-braking current
Задает ток, подаваемый на двигатель при торможении постоянным током.
с тем же крутящим моментом, что и при разгоне (если правильно
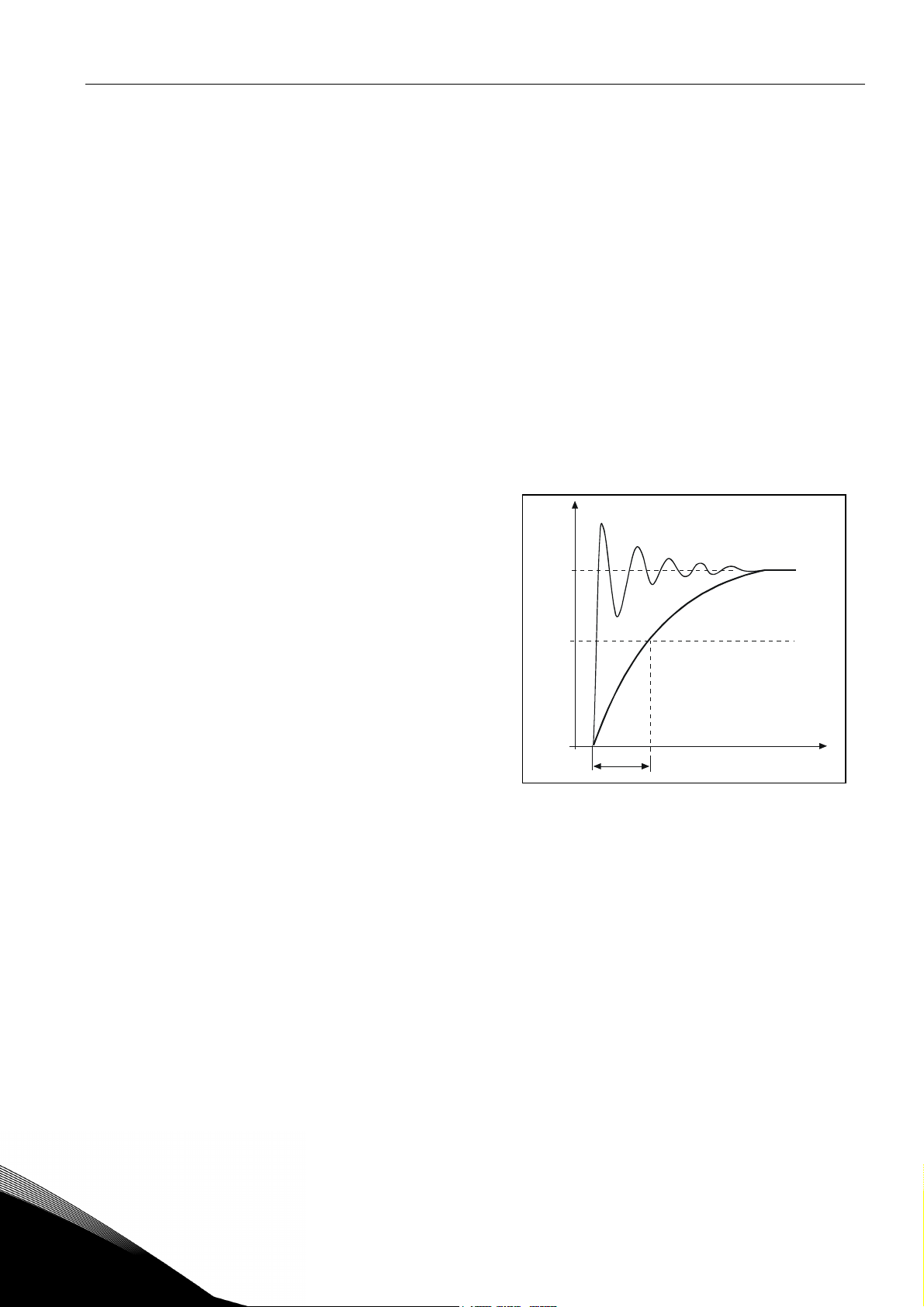
2.4.4 DC-braking time at stop
Включает/выключает режим торможения и определяет время торможения
постоянным током во время останова.
Функция тормоза постоянного
0 Тормоз постоянного тока не используется
>0 Используется тормоз постоянного тока. Его работа определяется функцией
«Стоп», (пар. 2.1.12). Время торможения постоянным током определяется
этим параметром
Пар. 2.1.12 = 0 (Функция Стоп = по инерции)
После команды «Стоп» двигатель вращается по инерции до останова без
управления с ПЧ.
С введением постоянного тока двигатель может быть остановлен электрическим
способом за минимально возможное время без использования дополнительного
внешнего тормозного резистора.
тока зависит от функции «Стоп», пар. 2.1.12.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 36

vacon • 35
3
р
Время торможения масштабируется в соответствии с частотой в начале торможения
постоянным током. Если частота превышает номинальную частоту двигателя, время
торможения определяется значением параметра 2.4.4. Если частота 10% от
номинальной, время торможения составляет10% значения параметра 2.4.4.
Рис. 1-11. Время торможения постоянным током в режиме останови = по
f
out
f
out
f
n
ПУСК
Выходная частота
Скорость
Включено
можение
то
пост.током
t = 1 x Пар. 2.4.4
t
0,1 x f
f
n
n
ПУСК
Выходная частота
Скорость
Включено торможение
пост.током
t = 0,1 x Пар. 2.4.4
t
инерции
Пар. 2.1.12 = 1 (Функция Стоп = управляемое изменение скорости):
После команды Стоп скорость двигателя
уменьшается за наименьшее время
согласно заданным параметрам
торможения до скорости, определенной
f
out
Скорость двигателя
Выходная частота
параметром 2.4.5, а затем начинается
торможение постоянным током.
Время торможения определяется
параметром 2.4.4. При большой инерции
рекомендуется применять внешний
тормозной резистор для более быстрого
снижения скорости (рис. 1-12).
2.4.5 DC-braking frequency in ramp stop
Выходная частота, при которой происходит торможение постоянным током (рис. 1-12).
Торможение
пост. током
Пар. 2.4.5
t = Пар. 2.4.4
ПУСК
СТОП
NX12K2
Рис.1-12. Время торможения постоянным
током в режиме останови =
управляемое изменение скорости
t
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 37

36 • vacon Многоцелевая программа управлениядля NXL
2.4.6 DC-braking time at start
Тормоз постоянного тока активируется при
получении команды «Пуск». Параметр
определяет промежуток времени, по
истечении которого тормоз постоянного
тока отключается. После выключения
тормоза выходная частота возрастает в
соответствии с заданной пар. 2.1.11
функцией «Пуск»
(рис. 1-13).
2.4.7 Flux brake
Вместо торможения постоянным током для двигателей мощностью не более 15 кВт
можно использовать торможение магнитным потоком.
Выходная
частота
Пар. 2.4.6
ПУСК
СТОП
Рис. 1-13. Время торможения постоянным
t
NX12K80
током при пуске
Когда требуется осуществить торможение, частота снижается, а магнитный поток
в двигателе усиливается,
что в результате повышает способность двигателя к торможению. В отличие от
торможения постоянным током
скорость при таком торможении остается контролируемой.
Торможение потоком
0 = Вихревое торможение выключено
1 = Вихревое торможение включено
Примечание. При торможении магнитным потоком в двигателе происходит
превращение энергии в теплоту, поэтому его следует использовать
с перерывами, чтобы избежать повреждения двигателя.
2.4.8 Flux braking current
Определяет силу тока торможения потоком. Он может быть установлен между
0,3 x I
(приблизительно) и Current limit.
H
может быть включено и выключено.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 38

4.5 Запретные частоты
2.5.1 Prohibit frequency area 1; Low limit
2.5.2 Prohibit frequency area 1; High limit
vacon • 37
В некоторых системах нужно избегать
определенных частот из-за проблем,
Выходная
частота [Гц]
связанных с механическим
резонансом. Эти параметры позволяют
определить границы области
пропускаемых частот (рис. 1-14).
2.5.1 2.5.2
Опорная
частота [Гц]
Рис. 1-14. Настройка области запретных
частот
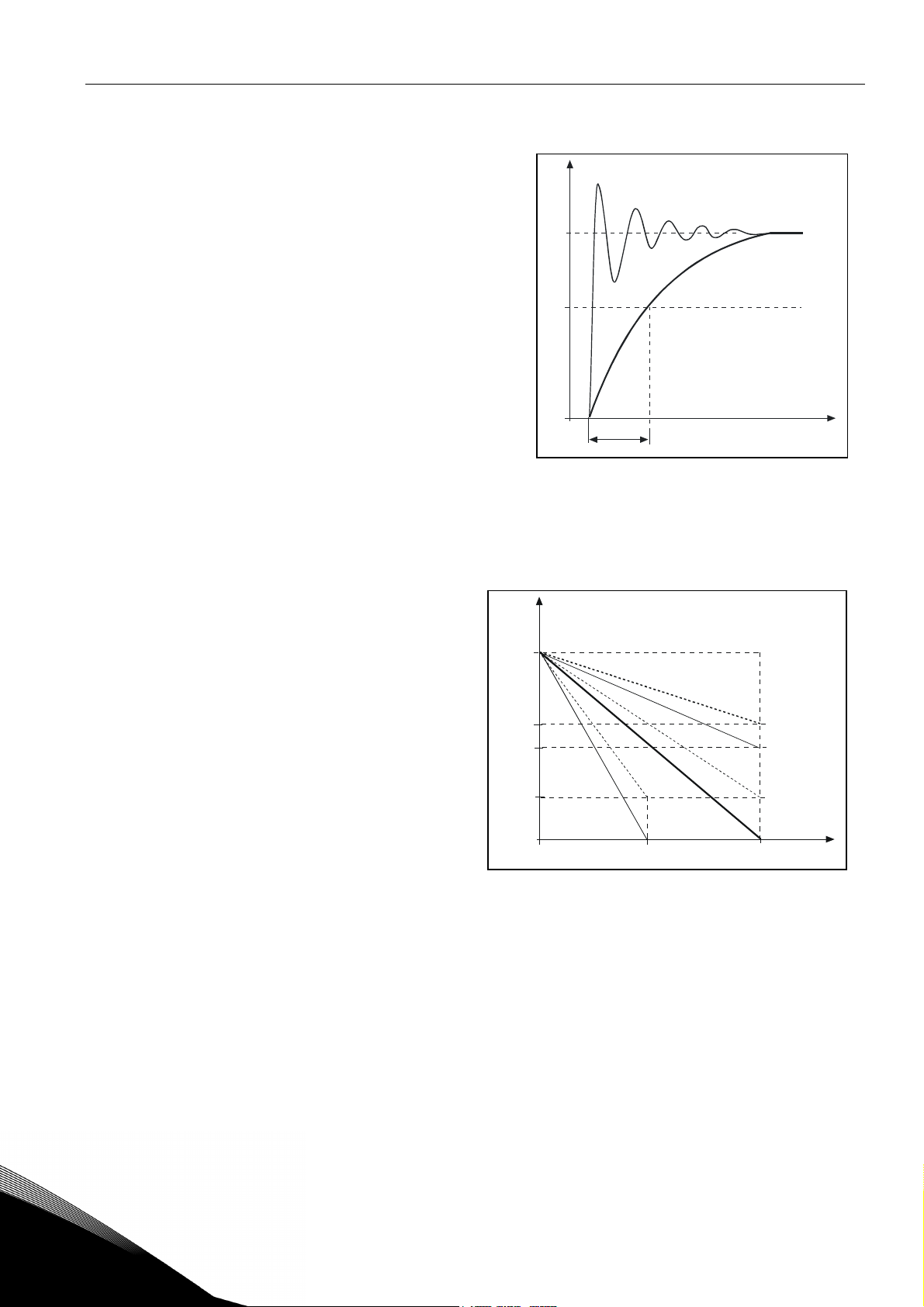
2.5.3 Acceleration/deceleration ramp speed scaling ratio between prohibit frequency
limits
Определяет время разгона/торможения, когда выходная частота попадает в
выбранную область запретных частот (пар.2.5.1 и 2.5.2). Скорость при управляемом
изменении (выбранное время разгона/торможения 1 или 2) умножается на этот
коэффициент. Например, если множитель равен 0,1 время разгона будет в 10 раз
меньше, чем для частот, не попадающих в запретную область.
fout [Гц]
Пар. 2.5.3 = 0,2
Пар. 2.5.2
Пар. 2.5.1
Рис. 1-15. Масштабирование скорости при управляемом изменении в области запретных
частот
Пар. 2.5.3 = 1,2
Время [с]
nxlk37 .fh8
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 39
38 • vacon Многоцелевая программа управлениядля NXL
]
4.6 Управление двигателем
2.6.1 Motor control mode
Управление частотой: опорные сигналы на клеммах входа-выхода и панели
управления являются опорными значениями частоты,
преобразователь частоты управляет выходной частотой
(разрешение выходной частоты = 0,01 Гц).
Управление скоростью: опорные сигналы на клеммах входа-выхода и панели
управления являются опорными значениями скорости, ПЧ
управляет скоростью двигателя (с точностью ± 0,5%).
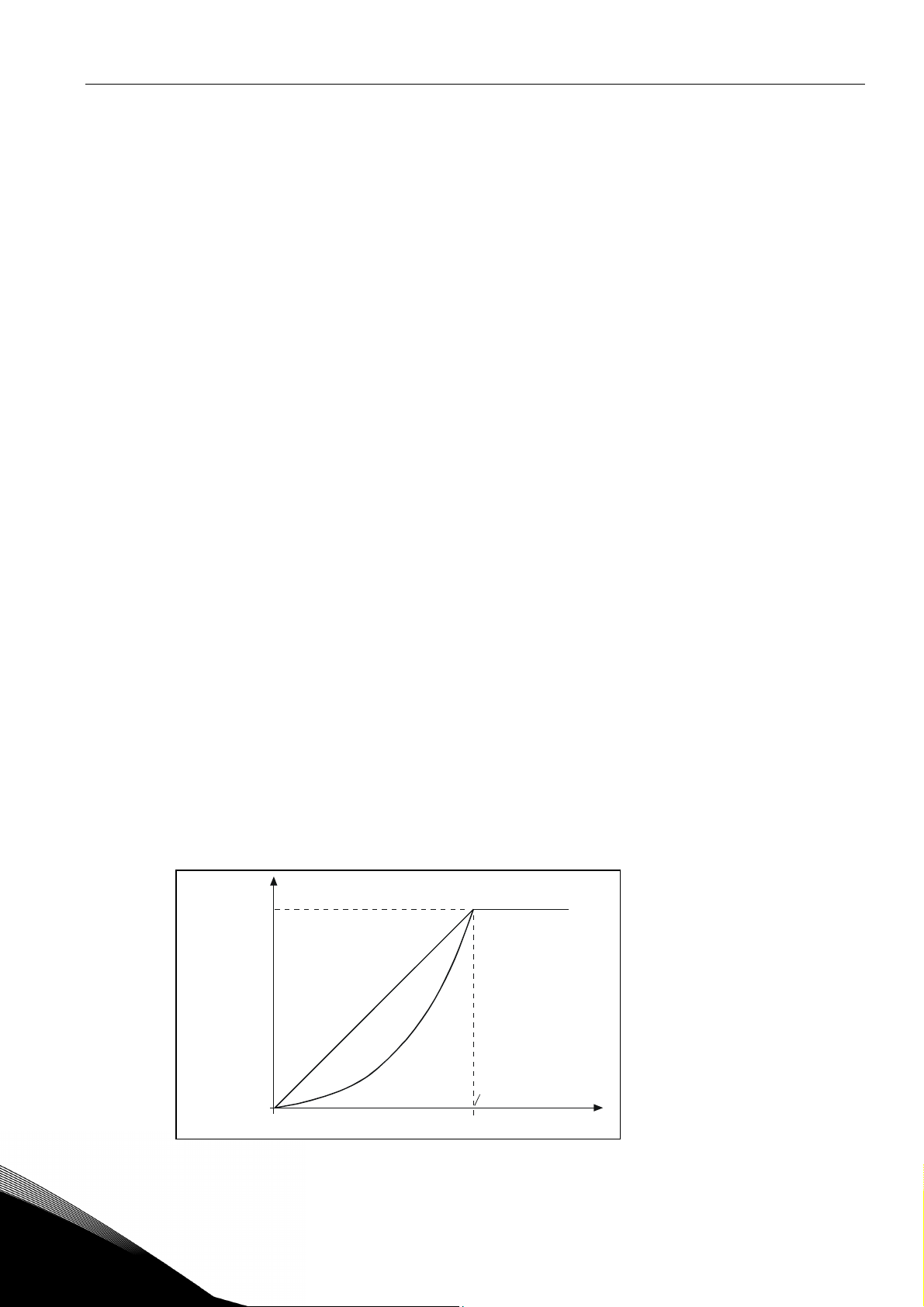
2.6.2 U/f ratio selection
Линейное:
0 Напряжение на двигателе линейно растет с увеличением частоты
от 0 Гц до точки ослабления поля, в которой на двигатель подается
номинальное напряжение. Линейное соотношение U/f следует
использовать при применениях с постоянным крутящим моментом
(рис. 1-16).
Этот стандартный параметр необходимо использовать, если
специально не требуется другая настройка.
Квадратичное:
1 Напряжение на двигателе меняется
по квадратичной зависимости с
увеличением частоты от 0 Гц до точки ослабления поля, в которой на
двигатель также подается номинальное напряжение. Двигатель
работает с меньшим магнитным потоком ниже точки ослабления
поля, создает меньший крутящий момент и электромеханические
шумы. Квадратичное соотношение U/f следует использовать при
примениях, когда крутящий момент нагрузки которых должен быть
пропорционален квадрату скорости, например в центробежных
вентиляторах и насосах.
U[V]
U
n
Пар. 2.6.4
По умолчанию: номинальное
напряжение двигателя
Точ ка ослабления
поля
Линейная
Квадратичная
Пар. 2.6.6, 2.6.7
Рис. 1-16. Линейное и квадратичное изменение напряжения двигателя
4
По умолчанию:
номинальная частота
двигателя
Пар. 2.6.3
f[Гц
nxlk38.fh8
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 40

vacon • 39
Программируемая U/f–кривая:
2 Программируемая U/f–кривая может задаваться по трем различным
точкам. Она применяется в тех случаях, когда другие настройки не
удовлетворяют требованиям задачи.
Линейная с оптимизацией потока:
U
n
Пар. 2.6.4
По умолчанию: номинальное
напряжение
Точ к а ослабления
поля
Пар. 2.6.6
(по умолч. 1,3%)
Пар. 2.6.7
(по умолч. 1,3%)
Пар. 2.6.5
(по умолч. 5 Гц)
Рис. 1-17. Программируемая U/f–кривая
3 ПЧ начинает подбирать минимальный ток двигателя для сбережения
энергии, уменьшения уровня помех и шума. Эту функцию можно
использовать в установках с постоянной нагрузкой двигателя
(вентиляторах, насосах и т. п.).
2.6.3 Field weakening point
Точка ослабления поля — выходная частота, при которой выходное напряжение
достигает максимального значения, заданного параметром 2.6.4.
2.6.4 Voltage at field weakening point
Выше частоты точки ослабления
оставаться на уровне, определяемом этим параметром. Уровень выходного
напряжения ниже частоты точки ослабления поля зависит от настройки параметров
U/f–кривой.
См. пар. 2.1.13, 2.6.2, 2.6.5 2.6.6, 2.6.7 и рис. 1-17.
По умолчанию:
номинальная частота
двигателя
Пар. 2.6.3
f[ ]Гц
NX12K08
поля, значение выходного напряжения будет
При настройке параметров 2.1.6 и 2.1.7 (номинальное напряжение и частота
двигателя), параметры 2.6.3 и 2.6.4 автоматически принимают соответствующие
значения.
Если необходимы другие значения точки ослабления поля и напряжения,
измените эти параметры после настройки параметров 2.1.6 и 2.1.7.
2.6.5 U/f curve, middle point frequency
Если параметром 2.6.2 выбрана программируемая U/f–кривая, этот параметр
определяет частоту в ее средней точки. См. рис. 1-17.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 41

40 • vacon Многоцелевая программа управлениядля NXL
2.6.6 U/f curve, middle point voltage
Если параметром 2.6.2 выбрана программируемая U/f–кривая, этот параметр
определяет напряжение в ее средней точки. См. рис. 1-17.
2.6.7 Output voltage at zero frequency
Этот параметр задает напряжение при нулевой частоте. См. рис. 1-17.
2.6.8 Switching frequency
Шум двигателя можно уменьшить, повысив частоту переключения. Повышение
частоты переключения снижает нагрузочную способность ПЧ.
Частота переключения для Vacon NXL составляет 1–16 кГц
2.6.9 Overvoltage controller
2.6.10 Undervoltage controller
параметры позволяют отключать регулятор пониженного и повышенного
Эти
напряжения. Это требуется, например, если питающее напряжение колеблется
больше чем от -15 % до +10 % от номинала, а применение не допускает таких
колебаний. Этот регулятор управляет выходной частотой, учитывая колебания
питающего напряжения.
Примечание. Если регуляторы напряжения отключены, возможно срабатывания
отказа из-за повышенного/пониженного напряжения.
Регулятор отключен
0
1 Регулятор включен
2.6.11 Идентификация
0 Не действует
1 Идентификация без вращения
Если выбрано «Идентификация без вращения», привод выполняет
идентификационный прогон, когда он запускается с выбранного места управления.
Привод должен быть включен в течение 20 секунд, иначе идентификация прервется.
4
Привод не вращает двигатель в процессе выполнения идентификациии без
вращения.
Привод запустится обычным образом, после задания следующей команды пуска.
Идентификационный прогон повышает точность вычисления моментов и
обеспечивает режим с форсированием момента, а также обеспечивает
лучшую компенсацию скольжения при регулировании скорости (более точное
регулирование частоты вращения (об/мин)).
Когда идентификационный прогон завершится, привод остановится.
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 42

4.7 Защиты
2.7.1 Response to 4мА reference fault
0 = Не используется
1 = Предупреждение
2 = Отказ, режим останова после отказа в соответствии с установками параметра 2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Предупреждение или действие при отказе с появлением сообщения возникает, если
уровень используемого опорного сигнала 4–20 мА
падает ниже 3,5 мА на 5 секунд или ниже 0,5 мА на 0,5 секунды. Эти данные можно
также запрограммировать для релейных выходов.
2.7.2 Response to external fault
0 = Не используется
vacon • 41
1 = Предупреждение
2 = Отказ, режим останова после отказа в соответствии с установками параметра 2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Предупреждение или действие при отказе с формированием сообщения
формируется сигналом внешнего отказа на программируемых цифровых входах. Эти
данные можно также запрограммировать для релейных выходов.
2.7.3 Response to undervoltage fault
1 = Предупреждение
2 = Отказ, режим останова после отказа в соответствии с установками параметра 2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Подробнее о пределах недостаточного напряжения см. в Руководстве пользователя
Vacon NXL, Таблица 4-3.
Примечание. Эта защита неотключаема.
2.7.4 Output phase supervision
0 = Не используется
1 = Предупреждение
2 = Отказ, режим останова после отказа в соответствии с установками параметра 2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Контроль выходной фазы обеспечивается примерным равенством тока выходных
фаз ПЧ.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 43
42 • vacon Многоцелевая программа управлениядля NXL
2.7.5 Earth fault protection
0 = Не используется
1 = Предупреждение
2 = Отказ, режим останова после отказа в соответствии с установками параметра
2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Защита от замыкания на землю обеспечивается нулевым значение суммы токов фаз
двигателя. Защита от повышенного тока всегда включена и защищает
сверхтоков при замыкании на землю.
Пар. 2.7.6–2.7.10, Motor thermal protection:
Общие сведения
Температурная защита предназначена для защиты двигателя от перегрева. Привод Vacon
может подавать на двигатель ток, превышающий его номинальное значение. Если нагрузка
требует повышенный то, возникает риск перегрева двигателя. Особенно это характерно для
малых частот. На малых частотах охлаждающая способность двигателя
перегрузочной способностью. Если двигатель снабжен внешним вентилятором, снижение
перегрузочной способности на малых частотах будет небольшим.
Температурная защита двигателя основана на расчетной модели и оценивает нагрузку на
двигатель по току подаваемому на него.
Температурная защита двигателя может настраиваться с помощью параметров. Тепловой ток I
определяет ток нагрузки, при превышении которого возникает перегрузка двигателя. Этот
предел тока является функцией выходной частоты.
!
Внимание! Тепловая защита на базе расчетной модели не защищает
двигатель, если его охлаждение не ухудшилось из-за нарушения
потока охлаждающего воздуха, пыли,грязи..
падает вместе с его
ПЧ от
T
2.7.6 Motor thermal protection
0 = Не используется
1 = Предупреждение
2 = Отказ, режим останов после отказа в соответствии с установками параметра
2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Если выбрана функция останова, привод будет остановлен и активирует «Отказ».
Отключение защиты, то есть выставление значения параметра в 0, сбросит
термическую модель
Установка параметра на 0 отключает защиту и сбрасывает счетчик времени
опрокидывания.
4
двигателя до 0%.
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 44

2.7.7 Motor thermal protection: Motor ambient temperature factor
Если необходимо учитывать температуру окружающей среды двигателя,
рекомендуется настроить этот параметр. Значение его можно установить в пределах
от -100,0% до 100,0% , что
соответствует интервалу от 0 C до
максимальной рабочей температуры
двигателя. Установка значения
параметра 0% подразумевает, что
100%
температура окружающей среды
равна температуре радиатора при
включенном питании.
vacon • 43
2.7.8 Motor thermal protection: Cooling
factor at zero speed
Мощность охлаждения может быть
установлена
в пределах 0–150% от
мощностии при номинальной
частоте (рис. 1-18).
2.7.9 Motor thermal protection: Time constant
Постоянная времени тепловой защиты может быть установлена в диапазоне от 1 до
200 минут.
Это постоянная времени тепловой защиты двигателя. Чем мощнее двигатель, тем
длиннее его постоянная времени. Постоянная времени – это время, за которое
расчетная модель нагрева достигнет 63% своего окончательного значения.
Температурное время двигателя определяется его конструкцией и индивидульна
для каждого
изготовителя.
Если время t6 двигателя (t6 – время, в течение которого двигатель может безопасно
работать с шестикратном превышении номинального тока), указано производителем
двигателя, то параметр постоянной времени основывается на нем. По
эмпирическому правилу, постоянная времени двигателя, выраженная в минутах,
равняется 2xt6. Если двигатель остановлен, постоянная времени самостоятельно
возрастает до трехкратного заданного значения параметра. Охлаждение
останова происходит за счет конвекции и постоянная времени увеличивается. Также
см. рис. 1-19.
Пар. 2.7.8
= 40%
NX12k62
f
0
Рис. 1-18. Мощность охлаждения двигателя
f
n
в режиме
Примечание. Если номинальная скорость (пар. 2.1.8) или номинальный ток (пар.
2.1.9) двигателя меняются, этот параметр автоматически принимает значение по
умолчанию (45).
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 45

44 • vacon Многоцелевая программа управлениядля NXL
Скорость двигател я
Зона отключения
105%
То к
двигателя
I/I
T
Температ ура двигателя
Постоянное время T
Q = (I/IT)2 x (1 - e
*) Изменяется в зависимости от габаритов двигателя
и корр ектируется пар. 2.7.9.
Отказ/пр едупреждение
(пар. 2.7.6)
*)
-t/T
)
Время
NX12 k82
Рис. 1-19. Расчет температуры двигателя
2.7.10 Motor thermal protection: Motor duty cycle
Показывает, какова нагрузка двигателя от номинальной нагрузки двигателя.
Значение может варьировать от 0% до 100%.
Пар. 2.7.11, Stall protection:
Общие сведения
Защита от опрокидывания двигателя предохраняет двигатель от кратковременных перегрузок,
возникающих, например, при заклинивании вала. Время реакции защиты от опрокидывания
может быть меньше, чем температурная защита. Защита от опрокидывания определяется
двумя параметрами, 2.7.12 (Ток
блокировки) и 2.7.13 (Частота блокировки). Если ток превышает
установленный предел, или частота снижается ниже установленного предела, фиксируется
опрокидывание двигателя. Защита от блокировки – это разновидность защиты от превышения
тока.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 46

2.7.11 Stall protection
0 = Не используется
1 = Предупреждение
2 = Отказ, режим останови после отказа в соответствии с установками параметра
2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
При задании параметра = 0, защита деактивируется и постоянная времени
опрокидывания сбрасывается.
2.7.12 Stall current limit
vacon • 45
Ток может быть задан в пределах
0,0–I
x 2. При превышении этого
nMotor
предела срабатывает защита от
опрокидывания (рис. 1-21). Программа не
позволяет вводить значения выше I
2. При изменении пар. 2.1.9
(номинального тока двигателя),
автоматически устанавливается
стандартное значение параметра
(I
x 1,3).
nMotor
2.7.13 Stall time
Время опрокидывания может быть
установлено в пределах от 1,0 до 120,0
секунд.
Это максимальное время, отводимое для
диагностики опрокидывания двигателя.
Время опрокидывания рассчитается
внутренним счетчиком (см.рис. 1-20).
Если показания счетчика превысили
установленный предел, срабатывает
отключение (рис. 1-21).
nMotor
I
x
Область
опрокидываания
Пар. 2.7.12
Рис. 1-20. Настройка характеристик
блокировки
Счетчик времени блокировки
Область отключения
Пар. 2.7.13
Блокировка
Нет блокировки
Пар. 2.7.14
Отключение/
предупреждение,
пар. 2.7.11
f
NX12k63
Время
NX12k64
Рис. 1-21. Счетчик времени блокировки
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 47

46 • vacon Многоцелевая программа управлениядля NXL
2.7.14 Maximum stall frequency
Частота опрокидывания может быть установлена в пределах 1–f
(пар. 2.1.2).
max
Для срабатывания защиты от опрокидывания выходная частота должна быть ниже
этого предела.
Пар. 2.7.15–2.7.18, Underload protection:
Общие сведения
Защита двигателя от недогрузки – контролирует нагрузку двигателя при работе. Двигатель
может потерять нагрузку из-за неполадок в процессе работы, например, оборванного ремня или
сухого насоса.
Защиту двигателя от недогрузки можно установить путем настройки кривой снижения нагрузки
параметрами 2.7.16 (Нагрузка в точке ослабления поля) и 2.7.17 (Нагрузка при нулевой
частоте), см. ниже. Кривая недогрузки
– это квадратичная кривая, построенная от точки нулевой
частоты до точки ослабления поля. Защита не работает ниже 5 Гц (счетчик времени недогрузки
остановлен).
Значение крутящего момента при настройке кривой недогрузки устанавливается в процентах от
номинального крутящего момента двигателя. Для определения внутреннего крутящего момента
необходим номинальный ток двигателя (см.шильдик двигателя) и номинальный ток привода I
L.
Если в приводе использован двигатель, отличный от указанного, точность вычисления
крутящего момента снижается.
2.7.15 Underload protection
0 = Не используется
1 = Предупреждение
2 = Отказ, режим останова после отказа в соответствии с установками параметра
2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Если выбрана функция останова, привод будет остановлен и активирует «Отказ».
При задании параметра = 0, защита деактивируется и постоянная времени
недогрузки сбрасывается.
2.7.16 Underload protection, field weakening
area load
Предел крутящего момента можно
установить в диапазоне
10,0–150,0% x T
nMotor
.
Этот параметр устанавливает
минимальное разрешенное значение
крутящего момента, когда выходная
частота больше точки ослабления поля
(рис. 1-22).
Пар. 2.7.16
Пар. 2.7.17
Крутящий
момент
5 Гц
Область
пониженной
нагрузки
Точ ка ослабления
поля (пар. 2.6.3)
f
NX12k65
4
Рис. 1-22. Настройка минимальной нагрузки
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 48
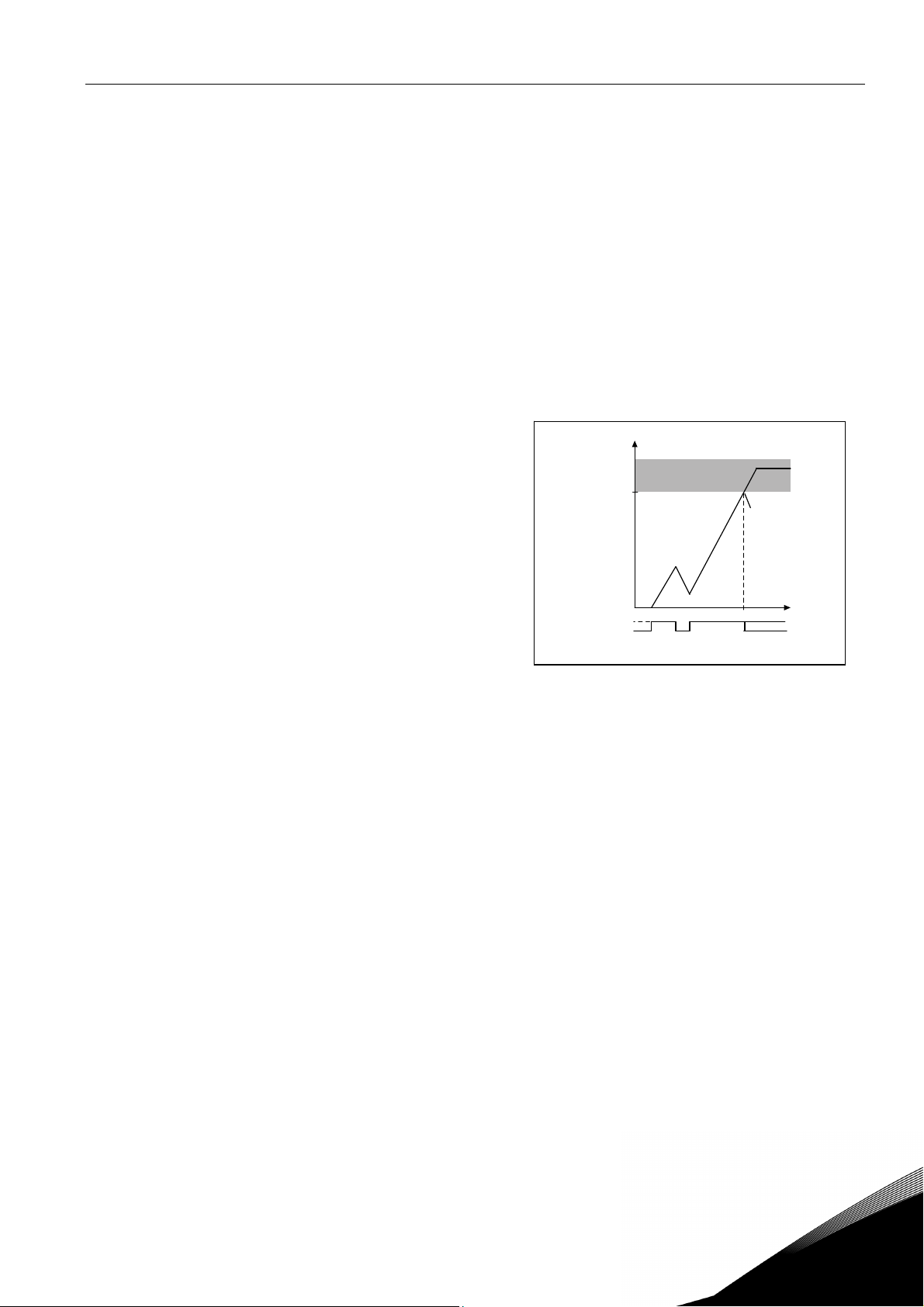
При смене пар. 2.1.9 (Motor nominal current), автоматически восстанавливается
значение этого параметра по умолчанию.
2.7.17 Underload protection, zero frequency load
vacon • 47
Предел крутящего момента можно установить в границах 5,0–150,0% x T
Этот параметр устанавливает минимальное разрешенное значение крутящего
момента при нулевой частоте. См. рис. 1-22.
При смене пар. 2.1.9 (Motor nominal current), автоматически восстанавливается
значение этого параметра по умолчанию.
2.7.18 Underload time
Это время может быть установлено в
пределах от 2,0 до 600,0 секунд.
Это максимальное время, разрешенное
для работы с пониженной нагрузкой.
Внутренний счетчик считает время работы
пониженной нагрузкой (рис. 1-23). Если
с
время пониженной нагрузки превышает
установленное значение, защита
вызывает отключение по параметру
2.7.15. При останове привода показания
счетчика сбрасываются (рис. 1-23).
nMotor
Счетчик времени
пониженной нагрузки
Зона отключения
Пар. 2.7.18
Отключение/
предупреждение
(пар. 2.7.1 5)
Пониженная
нагрузка
Без пониженной
нагрузки
Время
NX 12 k66
Рис. 1-23. Функция счетчика времени
пониженной нагрузки
2.7.19 Response to thermistor fault
Устанавливает режим ответа на отказ по температуре при использовании
дополнительного термистора.
0 = Не используется
1 = Предупреждение
2 = Отказ, останов после отказа в соответствии с установками параметра 2.1.12
3 = Отказ, всегда включается режим останова со свободным выбегом после отказа
Установка нулевого значения параметра отключает защиту.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 49

48 • vacon Многоцелевая программа управлениядля NXL
2.7.20 Response to fieldbus fault
Устанавливает режим ответа на отказ интерфейсной шины при использовании
платы интерфейсной шины. Дополнительные сведения см. в Руководстве,
прилагаемом к плате интерфейсной шины.
См. пар. 2.7.19.
2.7.21 Response to slot fault
Устанавливает режим ответа на отказ слота из-за отсутствия или неисправности
платы.
См. пар. 2.7.19
2.7.22 Actual value supervision function
0 = Не используется
1 = Предупреждение, если действительное
заданного пар. 2.7.23
2 = Предупреждение, если действительное значение превышает предел, заданный
пар. 2.7.23
3 = Отказ, если действительное значение падает ниже предела, заданного пар.
2.7.23
4 = Отказ, если действительное значение превышает предел, заданный пар. 2.7.23
2.7.23 Actual value supervision limit
Этим параметром можно установить предел действительного значения,
контролируемого пар. 2.7.22
2.7.24 Actual value supervision delay
Устанавливает запаздывание контроля действительного значения (
При включении этого параметра параметр 2.7.22 будет активным только в том
случае, когда действительное значение находится вне установленных пределов в
течение времени, заданного этим параметром.
значение падает ниже предела,
пар. 2.7.22)
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 50

vacon • 49
4.8 Параметры автоматического перезапуска
Функция автоматического перезапуска активна, если значение пар. 2.1.21 = 1. Всегда
происходит три попытки перезапуска.
2.8.1 Automatic restart: Wait time
Задает время, по истечении которого преобразователь пытается автоматически
перезапустить двигатель после отказа.
2.8.2 Automatic restart: Trial time
Функция автоматического перезапуска перезапускает ПЧ после устранения отказа и
истечения времени ожидания.
Триггер отказа
Сигнал останова
двигателя
Сигпал пуска
двигателя
Контроль
Отказ активирован
СБРОС/
Сброс отказа
Время
ожидания
(пар. 2.8.1)
Время
ожидания
(пар. 2.8.1)
Перезапуск 1
Пар 2.1.21 = 1 (Число попыток 3)
Время
ожидания
(пар. 2.8.1)
Перезапуск 2 Перезапуск 3
Время пробных
(пар. 2.8.2)
Время
ожидания
(пар. 2.8.1)
NX12k67
Рис. 1-24. Автоматический перезапуск
Счетчик времени запускается с первого перезапуска. Если в течение пробного
периода число отказов превысит три, включается состояние отказа. В противном
случае по окончании пробного периода счетчик обнуляется, а следующий отказ
запускает его заново.
Единичный отказ в течение пробного периода расценивается как режим отказа.
2.8.3 Automatic restart, start function
Этим параметром определяется тип запуска после автоматического
Параметр определяет пусковой режим:
0 = Управляемый пуск
1 = Пуск с ходу
2 = Пуск в соответствие с пар. 2.1.11
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
перезапуска:
4
Page 51

50 • vacon Многоцелевая программа управлениядля NXL
4.9 Параметры опорного значения ПИД
2.9.1 ПИД activation
С помощью этого параметра активируется и деактивируется ПИД-регулятор или
активируются параметры управления насосами и вентиляторами.
0 = ПИД–регулятор деактивирован
1 = ПИД–регулятор активирован
2 = Активировано управление насосами и вентиляторами (PFC). Становятся видимы
параметры группы P2.10.
2.9.2 PID reference
Задает выбор источника опорного сигнала для ПИД–регулирования.
Значение
0 = Опорное значение AI1
1 = Опорное значение AI2
2 = Опорное значение ПИД с панели управления (Группа K3, пар. P3.5)
3 = Опорный сигнал с интерфейсной шины (FBProcessDataIN1)
2.9.3 Actual value input
1 AI1
2 AI2
3 Интерфейсная шина (действительное значение 1: FBProcessDataIN2;
действительное значение 2: FBProcessDataIN3)
4 Крутящий момент двигателя
5 Скорость двигателя
6 Ток двигателя
7 AI1 – AI2
по умолчанию равно 2.
2.9.4 PID controller gain
Параметр задает усиление ПИД
установлено равным 100%, изменение значения ошибки на 10% приведет к 10%
изменению на выходе контроллера.
Если значение параметра установлено равным 0, ПИД–контроллер работает как
ИД–регулятор.
См. примеры ниже.
4
–регулирования. Если значение параметра
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 52

2.9.5 PID controller I-time
Параметр задает время интегрирования ПИД–регулирования. Если значение
параметра установлено равным 1 секунде, изменение значения ошибки на 10%
приведет к изменению на выходе контроллера 10,00%/с. Если значение параметра
установлено равным 0, ПИД-контроллер работает как ПД-контроллер. См. примеры
ниже.
2.9.6 PID controller D-time
Параметр 2.9.5 задает время дифференцирования ПИД–регулирования. Если
значение параметра
10% за 1 секунду приведет к 10,00% изменению на выходе контроллера. Если
значение параметра установлено равным 0, ПИД–контроллер работает как
PI–контроллер
См. примеры ниже.
Пример 1:
vacon • 51
установлено равным 1 секунде, изменение значения ошибки на
Чтобы свести к нулю значение ошибки при данных условиях, ПЧ имеет на выходе
следующее:
Исходные значения:
Пар. 2.9.4, P = 0% Макс. предел ПИД = 100,0%
Пар. 2.9.5, I-time = 1,00 с Мин. предел ПИД = 0,0%
Пар. 2.9.6, D-time = 0,00 с Мин. частота = 0 Гц
Значение ошибки (заданное – Макс. частота = 50 Гц
фактич. значение) = 10,00%
В этом примере ПИД–регулятор работает практически как ИД–контроллер.
В соответствие с установками параметра 2.9.5 (I-time), выход ПИД повышается на
5 Гц (10% разницы между максимальной и минимальной частотами) каждую секунду
пока значение ошибки не станет равным 0.
,
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 53
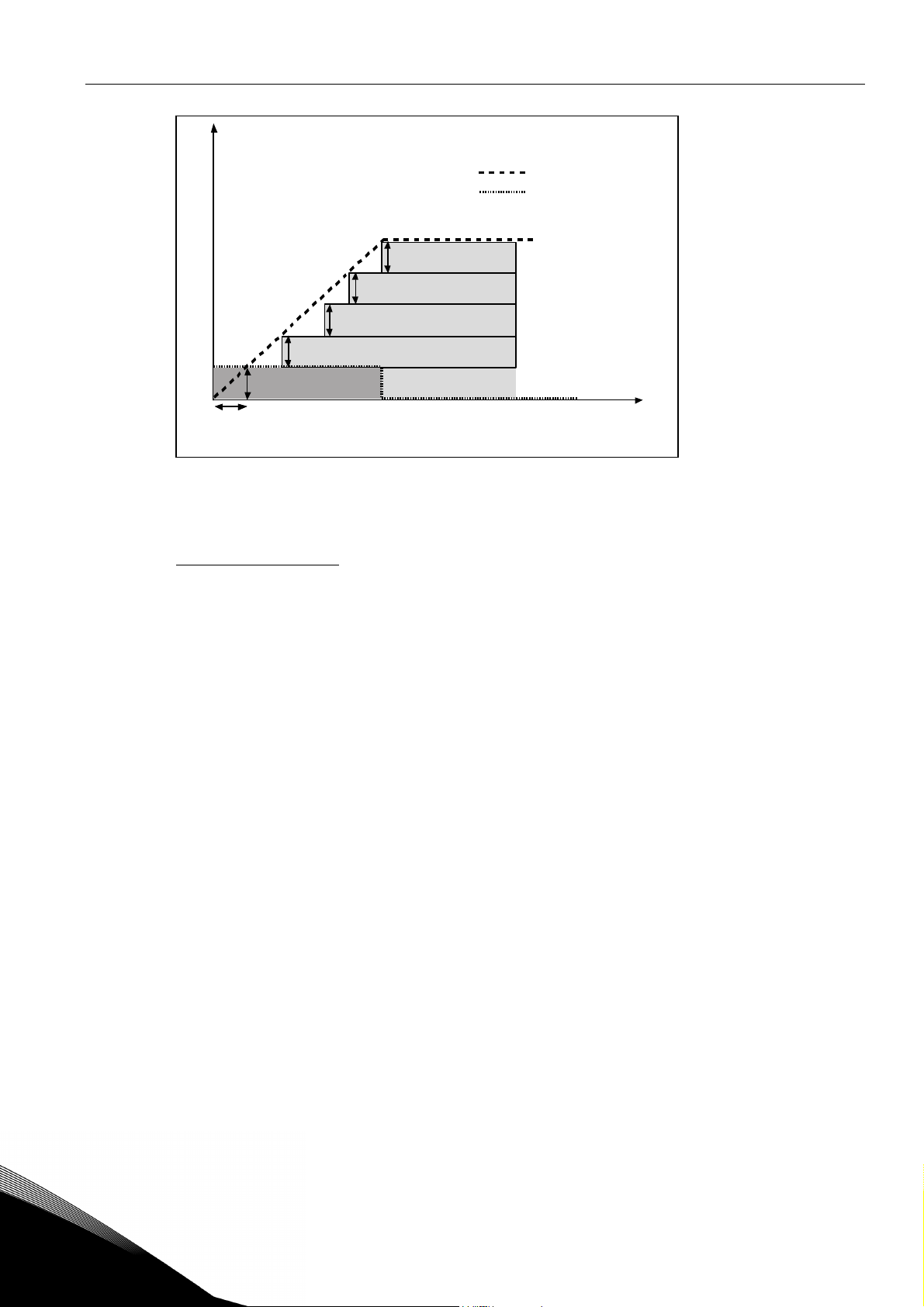
52 • vacon Многоцелевая программа управлениядля NXL
Гц
Выход ПИД
Значение ошибки
I-часть = 5 Гц/с
10%
10%
10%
10%
Оши бк а = 1 0%
1 с
Рис. 1-25. ПИД–регулятор работает как И–контроллер
I-часть = 5 Гц/с
I-часть = 5 Гц/с
I-часть = 5 Гц/с
I-часть = 5 Гц/с
NX12k70
t
Пример 2:
Исходные значения:
Пар. 2.9.4, P = 100% Макс. предел ПИД = 100,0%
Пар. 2.9.5, I-time = 1,00 с Мин. предел ПИД = 0,0%
Пар. 2.9.6, D-time = 1,00 с Мин. частота = 0 Гц
Значение ошибки (значение – Макс. частота = 50 Гц
фактич. значение) = 10%
При включении питания система измеряет разницу между установленным и
действительным значением и начинает снижение или повышение (если значение
отрицательное) выхода ПИД в соответствие с временем интегрирования.
Когда
разница между установленным и действительным значением становится равной 0,
выход снижается на величину, соответствующую значению параметра 2.9.5.
Если значение ошибки отрицательно, ПЧ реагирует, соответственно снижая выход.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 54

vacon • 53
Гц
Выход ПИД
D-часть
D-част ь
D-часть
P-часть = 5 Гц Ошибка = 10%
Ошибка = -10%
Рис. 1-26. Кривая на выходе ПИД–регулятора в примере 2
P-часть = - 5 Гц
Значение ошибки
NX12 k69
t
Пример 3:
Исходные значения:
пар. 2.9.4, P = 100%
С
пар. 2.9.5, I-time = 0,00 с
пар. 2.9.6, D-time = 1,00 с
в
Значение ошибки (заданное —
о
действительное значение) =
з
= ±10 %/с
р
Макс. предел ПИД = 100,0%
Мин. предел ПИД = 0,0%
Мин. частота = 0 Гц
Макс. частота = 50 Гц
а
С возрастанием значения ошибки, выход ПИД повышается в соответствие с
установленными значениями (D-time = 1,00 с).
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 55

54 • vacon Многоцелевая программа управлениядля NXL
А
Гц
Выход ПИД
Значение ошибки
D-часть=10%=5,00Гц
D-ча сть = -10% = -5,00 Гц
P-часть =100%xОшибка PID = 5,00 Гц/с
10%
1,00 с
Рис. 1-27. Выход ПИД–контроллера в примере 3.
2.9.7 Actual value 1 minimum scale
Устанавливает точку минимального масштабирования действительного значения 1
(рис. 1-28).
2.9.8 Actual value 1 maximum scale
Устанавливает точку макс. масштабирования действительного значения 1 (рис. 1-28).
Масштабированный
входной сигнал (%)
100
Пар. 2.9.7 = 30%
Пар. 2.9.8 = 80%
NX12k72
t
налоговый
вход (%)
0
0
0
4
6,0
8,8
16,0 20 мА
16,8 20 мА
10030
10,0 В8,03,0
Рис. 1-28. Пример масштабирования текущего значения сигнала
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 56

2.9.9 PID error value inversion
Этот параметр позволяет инвертировать значение ошибки ПИД-регулирования
(следовательно, и работу ПИД-регулирятора).
0 Без инвертирования
1 Инвертирован
2.9.10 Sleep frequency
ПЧ автоматически отключается, если частота привода падает ниже задаваемого
этим параметром уровня отключения и находится на этом значении в течение
времени, превышающем пар. 2.9.11. В режиме «сон» ПИД-регулятор
если действительное значение сигнала падает ниже или превосходит (см. пар.
2.9.13) уровень пробуждения, задаваемый параметром 2.9.12 (рис. 1-29).
2.9.11 Sleep delay
Минимальный период времени, в течение которого частота должна оставаться ниже
уровня отключения, перед тем, как остановился ПЧ (рис. 1-29).
vacon • 55
включает ПЧ,
2.9.12 Wake-up level
Уровень «пробуждения» задает частоту, которую должно превысить действительное
значение или упасть ниже которой
2.9.13 Wake-up function
Этот параметр отвечает за восстановление режима работы, если действительное
значение сигнала падает ниже или превосходит Уровень пробуждения (пар. 2.9.12)
(рис. 1-29).
Де йств ител ьн ое значе ни е
Уровень пробуждения (пар. 2.1.12)
Выходная частота
, чтобы восстановить работу ПЧ (рис. 1-29).
t
t ≤ пар.2.1.11t<пар.2.1.11
Уровень
отключения
(пар. 2.1.10)
Состояни е «Пуск/Стоп»
привода с п еременно й
скоростью
Вращение
Стоп
NX1 2k56
t
Рис. 1-29. Функция отключения ПЧ
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 57

56 • vacon Многоцелевая программа управлениядля NXL
Зна ч е н ие
параме тр а
0
1
Функция Предел
Выход из спящего
режима
происходит, когда
фактическое
значение падает
ниже предела
Выход из спящего
режима
происходит, когда
фактическое
значение
превышает предел
Предел,
определенный
параметром
2.9.12, выражен
впроцентахот
максимального
фактического
значения
Предел,
определенный
параметром
2.9.12, выражен
впроцентахот
максимального
фактического
значения
Описание
Сигнал фактического значения
100%
Параметр 2.9.12=30%
время
Пуск
Останов
Сигнал фактического значения
100%
Параметр 2.9.12=60%
время
Пуск
Останов
2
Выход из спящего
режима
происходит, когда
фактическое
значение падает
ниже предела
Предел,
определенный
параметром
2.9.12, выражен
впроцентахот
текущего
значения сигнала
задания
3
Выход из спящего
режима
происходит, когда
фактическое
значение
превышает предел
Предел,
определенный
параметром
2.9.12, выражен
впроцентахот
текущего
Сигнал фактического значения
100%
задание=50%
Параметр 2.9.12=60%
предел=60%*задание=30%
Пуск
Останов
Сигнал фактического значения
100%
Параметр 2.9.12=140%
l
предел=140%*задание=70%
задание=50%
время
значения сигнала
задания
время
4
Пуск
Останов
NXLk59.fh8
Рис. 1- 30. Выбираемые функции выхода из спящего режима
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 58

vacon • 57
4.10 Управление насосами и вентиляторами (PUMP AND FAN CONTROL – PFC)
Управление насосами и вентиляторами может использоваться для управления одним приводом
переменной скорости и дополнительными приводами (до трех). ПИД-регулятор ПЧ управляет
скоростью привода и посылает сигналы пуска и останова для дополнительных приводов, тем
самым, контролируя общий поток. В дополнении к восьми стандартным группам параметров, в
этом случае
Как следует из названия, PFC служит для управления насосами и вентиляторами. Программа
использует внешние контакторы для переключения между двигателями, подключенными к ПЧ.
Функция автозамены обеспечивает возможность изменения очередности запуска
дополнительных приводов.
4.10.1 Краткое описание функции и основных параметров PFC
доступна группа параметров управления насосами и вентиляторами.
Automatic changing between drives (Autochange & Interlockings selection, P2.10.4)
Автоматическое изменение очередности пуска и останова относиться либо только к
дополнительным приводам, либо к дополнительным приводам и ПЧ в зависимости от настройки
параметра 2.10.4.
Функция автозамены позволяет менять порядок пуска и останова через задаваемые
интервалы с помощью автоматики PFC. Привод, управляемый ПЧ, также может быть включен в
последовательность автоматической замены и
дает возможность выравнивать число пусков двигателей и предотвращать, к примеру,
заклинивание насоса из-за слишком продолжительного времени работы.
Применение функции автозамены производится с помощью пар. 2.10.4, Autochange.
Автозамена происходит, когда истекает время, заданное пар. 2.10.5, Autochange interval, а
производительность находится ниже предела, заданного пар
limit.
Работающие приводы останавливаются и перезапускаются в новом порядке.
Внешние контакторы, управляемые через релейные выходы ПЧ, подключают приводы к ПЧ
или источнику питания. Если двигатель, управляемый ПЧ, включен в очередность
автозамены, он всегда управляется через релейный выход, который активируется первым.
Остальные релейные выходы активируются позднее и управляют
приводами.
Этот параметр используется для активации входов блокировки (значения 3 и 4). Сигналы
блокировки поступают с переключателей двигателей. Сигналы (функции) подключаются к
цифровым входам, которые программируются как блокировочные входы с помощью
соответствующих параметров. Автоматика PFC управляет только двигателями с
активированной блокировкой.
блокировки (пар. 2.10.4). Функция автозамены
. 2.10.7, Autochange frequency
дополнительными
Если блокировка дополнительного привода отключена, и при этом доступен другой
неиспользуемый привод, последний будет запущен без останова ПЧ.
При отключении блокировки управляемого привода, все двигатели будут остановлены и
запущены с новыми настройками.
При восстановлении блокировки в режим работы, автоматика немедленно остановит все
двигатели и перезапустит их с новыми настройками.
Пример: [P1
См. примеры в разделе 4.10.2.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
P3] [P2 LOCKED] [STOP] [P1 P2 P3].
4
Page 59

58 • vacon Многоцелевая программа управлениядля NXL
Parameter 2.10.5, Autochange interval
После истечения интервала времени, заданного этим параметром, включается функция
автозамены, если производительность будет ниже уровня, определяемого пар. 2.10.7
(Autochange frequency limit) и 2.10.6 (Maximum number of auxiliary drives). Если
производительность превосходит значение пар. 2.10.7, автозамена не происходит, пока
производительность не упадет ниже этой границы.
Счетчик времени запускается только при активном запросе на пуск/
Счетчик времени обнуляется после автозамены или отмены запроса на пуск.
Пар. 2.10.6, Maximum number of auxiliary drives и
2.10.7, Autochange frequency limit
Эти параметры задают уровень, ниже которого должна оставаться производительность, чтобы
могла произойти автозамена.
Уровень задается следующим образом:
Если число работающих дополнительных приводов меньше значения пар. 2.10.6,
разрешена функция автозамены.
Если число работающих
частота привода меньше, чем значение параметра 2.10.7, разрешена функция автозамены.
Если значение пар. 2.10.7 равно 0,0 Гц, автозамена может произойти только в состоянии
останова (Останов и «Сон»), независимо от значения пар. 2.10.6.
дополнительных приводов равно значению параметра 2.10.6, а
останов.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 60

vacon • 59
4.10.2 Примеры
PFC с блокировкой и автозаменой 3 насосов (требуется дополнительная плата OPT-AA
или OPT-B5)
Состояние: 1 привод управляемый ПЧ и 2 дополнительных.
Настройки параметров: 2.10.1 = 2
Используется сигналы обратной связи блокировки, происходит автозамена между
всеми приводами.
Настройки параметров: 2.10.4=4
Активен DIN4 (пар.2.2.6=0)
Сигналы обратной связи блокировки поступают с цифровых входов DIN4 (AI1),
DIN2 и DIN3, выбранных с помощью параметров 2.1.17, 2.1.18 и 2.2.4.
Управление насосом 1 (пар.2.3.1=17) возможно через блокировку 1 (DIN2,
2.1.17=10), управление насосом 2 (пар
.2.3.2=18) – через блокировку 2 (DIN3, пар.
2.1.18=13) и насосом 3 (пар.2.3.3=19) – через Блокировку 3 (DIN4)
2-проводной
передатчик
Опорный
потенциометр
Фактич.
значение
I
(0)4 … 20 мА
Клемма Сигнал
+10V
1
AI1+ Задание опорной частоты с потенциального входа/DIN4
2
3
AI2+
+
–
мА
4
5
+24В Источник вспомогательного напряжения
6
GND Заземление цепей входа-выхода
7
DIN1 «ПУСК»
8
DIN2 Блокировка (Interlock) 1 (пар 2.1.17 = 10)
9
DIN3 Блокировка 2 (пар 2.1.18 = 13)
10
GND «Земля» ввода/вывода
11
AO1+
18
AO1-
19
A
B
RO1
21
RO1
22
RO1
23
OPT-B5
22 RO1/1
23 RO1/2
25 RO2/1
26 RO2/2
28 RO3/1
29 RO3/2
Опорный выход
ref
AI1- Заземление цепей входа-выхода
Действительное значение ПИД
AI2-
Выходная частота
Аналоговый выход
RS
Последовательная шина
485
RS
Последовательная шина
485
Автозамена 1 (Управление насосом 1), пар 2.3.2 = 17
Автозамена 2 (Управление насосом 2), пар 2.3.3 = 18
Автозамена 3 (Управление насосом 3), пар. 2.3.4 = 19
Релейный выход 1
ОТКАЗ
Таблица 1-17. Пример конфигурации ввода-вывода управления PFC с
блокировкой и автозаменой среди 3 насосов
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 61

60 • vacon Многоцелевая программа управлениядля NXL
230 VAC
VACON NXL
24 VDC
DIN2
68
DIN3
9
AI1
10V
10
PE
L1
L2
L3
NXOPTB5
K3
K2
K1.1
K1
M1/Vacon
AOMains
S1
Q1
K1.1
K2
K1
M1/mains
22
23
AOMains
S2
K3
K3
K1
K2.1
K2
Vacon
M2/
K2.1
K1
K2
M2/mains
25
26
AOMains
S3
K3
K1
K2
K3.1
K3
M3/Vacon M3/mains
K3.1
28
29
K1
K2
K3
NX12k106.dsf
Рис. 1-31. Система из 3 насосов с автозаменой, принципиальная схема управления
F3
F1
F2
F2
VACON
NX12k104.ds4
K1
L1 L2 L3
UVW
M1
K1.1
K2
PE
UVW
M
3
M2
K2.1
K3
PE
UVW
M
3
Рис. 1-32. Пример автозамены среди 3 насосов, силовая схема
M2
K3.1
PE
UVW
M
3
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 62
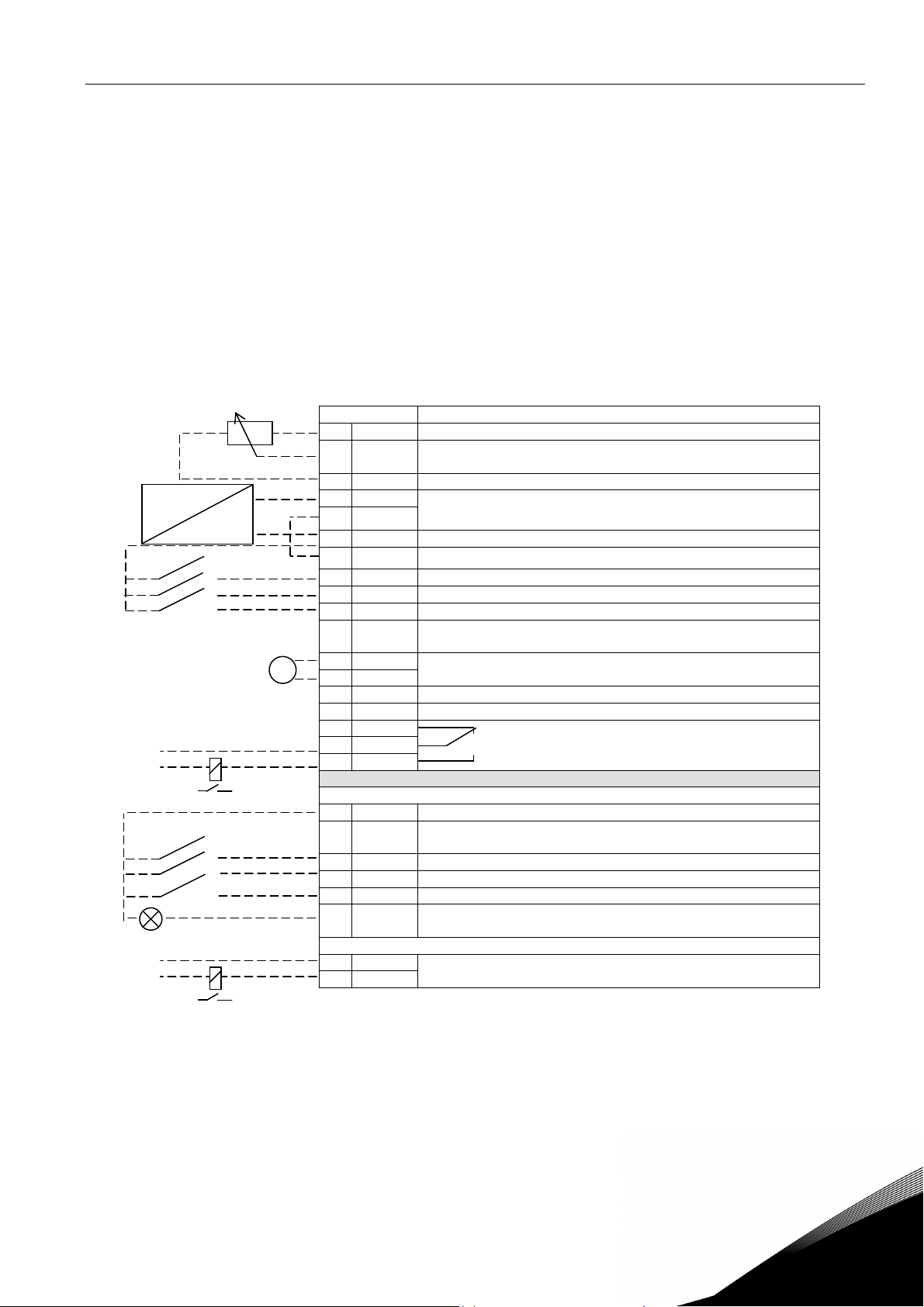
vacon • 61
PFC с блокировкой и автозаменой среди 2 насосов (требуется дополнительная плата OPT-
AA или OPT-B5)
Состояние: 1 управляемый привод и 1 дополнительный.
Настройки параметров: 2.10.1= 1
Используются сигналы обратной связи блокировки и автозамена насосов.
Настройки параметров: 2.10.4=4
Сигналы обратной связи блокировки поступают с цифрового входа DIN2 (пар.
2.1.17) и цифрового входа DIN3, (пар. 2.1.18).
Управление насосом 1 (пар. 2.3.1 = 17)
возможно через Блокировку 1 (DIN2, пар.
2.1.17), управление насосом 2 (пар.2.3.2 = 18) – через Блокировку 2 (пар.
2.1.18 = 13)
2-проводной
передатчик
Опорный
потенциометр
Фактич.
значение
I
(0)4 … 20 мА
Клемма Сигнал
1 +10V
2 AI1+ Частотный эталон потенциального входа/DIN4
3 AI1- Заземление цепей входа-выхода
+
–
4 AI2+
5 AI2-
6 +24В Источник вспомогательного напряжения
7
GND Заземление цепей входа-выхода
8 DIN1 «ПУСК»
9 DIN2 Блокировка 1 (пар 2.1.17 = 10)
10 DIN3 Блокировка 2 (пар 2.1.18 = 13)
11 GND «Земля» ввода/вывода
Опорный выход
ref
Действительное значение ПИД
мА
18 AO1+
19 AO1-
A RS 485 Последовательная шина
B RS 485 Последовательная шина
21 RO1
22 RO1
23 RO1
OPT-AA
X1
1 +24В Управляющий потенциальный выход, макс. 150 мА
2 GND Заземление цепей входа-выхода, , для +24 В и цифрового
3 DIN1 Предустановленная скорость 2, пар 2.2.1 = 7
4 DIN2 Сброс кода отказа, пар 2.2.2 = 4
5 DIN3 Отключение ПИД (Опорная частота с AI1), пар 2.2.3 = 11
6 DO1 Готов, пар 2.3.4 = 1
X2
22 RO1/NO
23 RO1/COM
Выходная частота
Аналоговый выход
Автозамена 1 (Управление насосом 1)
пар.2.3.1 = 17
выхода
Выход открытого коллектора, 50 мА/48 В
Автозамена 2 (Управление насосом 2), пар 2.3.2 = 18
Таблица 1-18. Пример конфигурации ввода-вывода управления PFC с
блокировкой и автозаменой среди 2 насосов
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 63
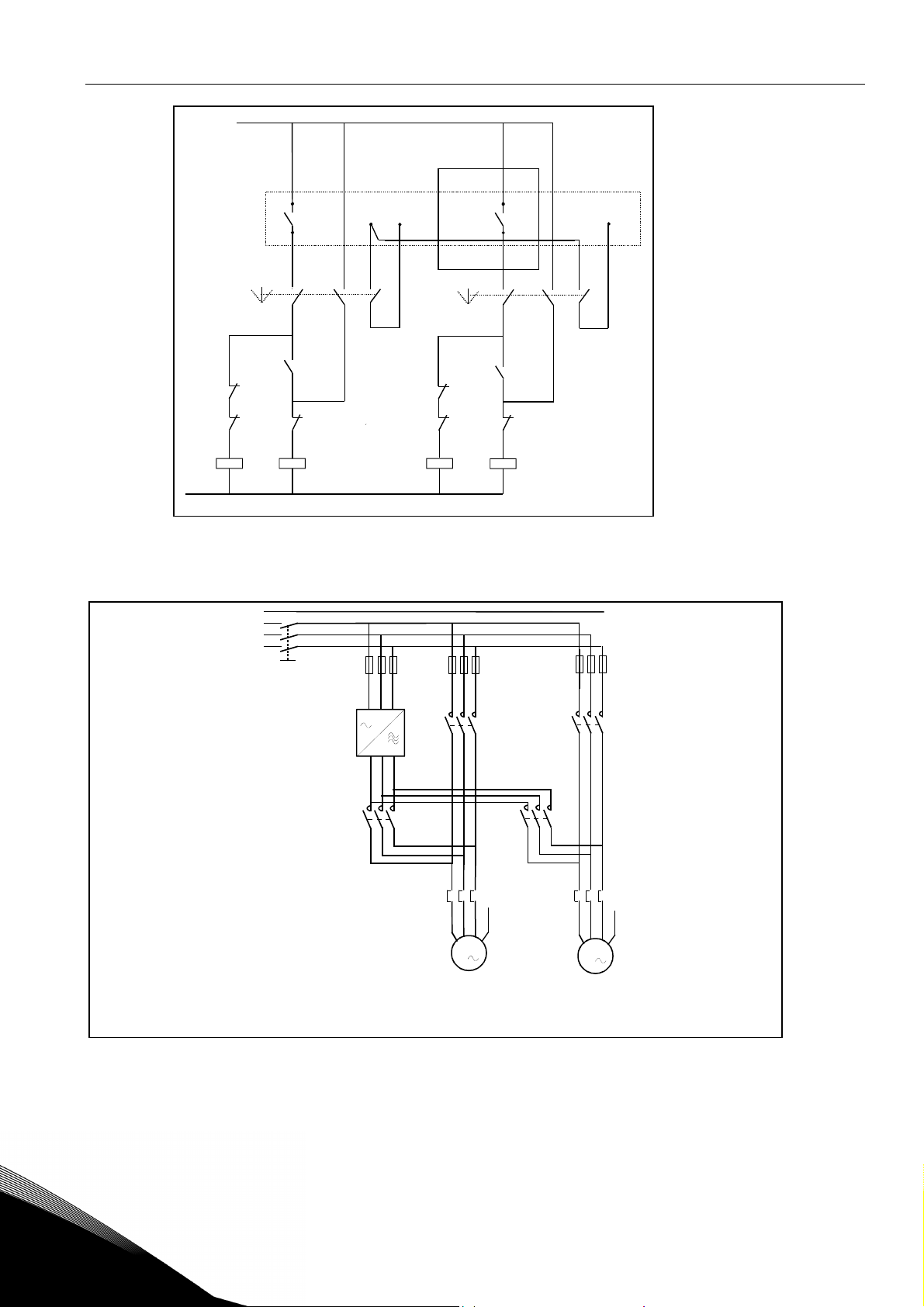
62 • vacon Многоцелевая программа управлениядля NXL
A
230 VAC
OPT-A
DIN3
DIN3
10
K1
K2
K1.1
M1/Vacon
Autom.OMains
S1
K1.1
K2
K1
M1/mains
22
RO1
23
VACON NXOPTA2
DIN2
24 VDC
12
9
DIN2
K1
K2.1
K2
M2/
Autom.OMains
S2
Vacon
K2.1
K1
K2
M2/mains
25
RO2
RO1
26
RO1
NX12k105.dsf
Рис. 1-33. Система из 2 насосов с автозаменой,
принципиальная диаграмма управления
PE
L1
L2
L3
Q1
F3
F1
F2
VACON
L1 L2 L3
UVW
K1
NX12k107.ds4
M1
K1.1
PE
UVW
M
3
K2.1
K2
PE
UVW
M2
M
3
Рис. 1-34. Пример автозамены среди 2 насосов, силовая схема
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 64

V
4.10.3 Описание параметров управления насосами и вентиляторами
2.10.1 Number of auxiliary drives
Этим параметром задается число используемых дополнительных приводов. Функции
управления дополнительными приводами (параметры 2.10.4–2.10.7) могут
программироваться на релейные выходы.
2.10.2 Start delay of auxiliary drives
Частота привода, управляемого ПЧ, перед пуском дополнительного привода должна
оставаться выше максимальной частоты в течение времени, задаваемого этим
параметром. Заданная задержка относится ко всем
дополнительным приводам.
Этим предотвращается ненужные запуски, вызванные кратковременным
превышением стартовых порогов.
2.10.3 Stop delay of auxiliary drives
Частота привода, управляемого ПЧ, перед остановом дополнительного привода
должна оставаться ниже минимальной частоты в течение времени, задаваемого
этим параметром. Заданная задержка относится ко всем дополнительным приводам.
При этом исключаются ненужные остановы, вызванные кратковременным падением
порога останова.
vacon • 63
2.10.4 Automatic changing between drives
0 = Не
используется
1 = Автозамена доп. насосов
Привод, управляемый преобразователем, не меняется. Таким образом,
контактор питания требуется только для одного дополнительного привода.
acon
M
Доп. двигатель 1 Доп. двигатель 2
M
M
Рис. 1-35. Автозамена относится только к дополнительным приводам.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 65

64 • vacon Многоцелевая программа управлениядля NXL
8
2 = Автозамена ПЧ и дополнительных насосов
Привод, управляемый преобразователем, включен в цепь автоматики. Требуется
доп. контактор для подключения каждого привода к сети или преобразователю.
Vacon
Привод 1
дополнительныи насос
Ï
M
Рис. 1-36. Автозамена всех приводов
Привод 2
дополнительный насос
M
NX12k97.fh
3 = Автозамена с блокировкой (только дополнительные насосы)
Привод, управляемый ПЧ, не меняется. Таким образом, контактор питания
требуется только для одного дополнительного привода. Блокировки для выходов
автозамены 1, 2, 3 (или DIE1,2,3) могут устанавливаться с помощью параметров
2.1.17 и 2.1.18.
4 = Автозамена и блокировки (ПЧ и дополнительные насосы)
Привод, управляемый преобразователем, включен в цепь автоматики,
контактор
нужен для подключения каждого привода к сети или преобразователю. DIN 1
автоматически блокируется с выхода автозамены 1. Блокировки для выходов
автозамены 1,2,3 (или DIE1, 2, 3) могут устанавливаться с помощью параметров
2.1.17 и 2.1.18.
2.10.5 Autochange interval
После истечения интервала, задаваемого этим параметром, активируется функция
автозамены, если производительность будет ниже границы, определяемой
параметром 2.10.7 (Autochange frequency limit) и 2.10.6 (Maximum number of auxiliary
drives). Если
производительность превысит значение параметра 2.10.7, автозамена
не произойдет, пока производительность не упадет ниже этой границы.
Счетчик времени запускается только при активном запросе на пуск/останов.
Счетчик времени сбрасывается после автозамены или отмены запроса на пуск.
4
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 66

2.10.6 Maximum number of auxiliary drives
А
2.10.7 Autochange frequency limit
Эти параметры задают уровень, ниже которого должна оставаться
производительность, чтобы могла произойти автозамена.
Уровень задается следующим образом:
Если число работающих дополнительных приводов меньше, чем значение
параметра 2.10.6, может произойти автозамена.
Если число работающих дополнительных приводов равно значению параметра
2.10.6, а частота управляемого привода меньше, чем
может произойти автозамена.
Если значение параметра 2.10.7 равно 0,0 Гц, автозамена происходит только в
состоянии останова (Останов и/или «Сон»), независимо от значения параметра
2.10.6.
vacon • 65
значение параметра 2.10.7,
Пар. 2.10.7
Уровень
автозамены
частота
Управление
доп. приводом 1
Управление
доп. приводом 2
Выходная
частота
,
Пар. 2.10.6 = 1
Макс. число
доп. приводов
Интервал автозамены
втозамена
Интервал автозамены
Рис. 1-37. Интервалы и пределы автозамены
2.10.8 Частота пуска, вспомогательный привод 1
Частота привода, контролируемого преобразователем частоты, должна превышать
предел, установленный этими параметрами, на 1 Гц до пуска вспомогательного
привода. Превышение в 1 Гц создает гистерезис, позволяющий избежать ненужных
стартов и остановок. См. также параметры 2.1.1 и 2.1.2.
2.10.9 Частота останова, вспомогательный привод 1
Время
Пар. 2.10.5Пар. 2.10.5
Частота привода, контролируемого преобразователем частоты, должна упасть на
1 Гц
ниже предела, установленного этими параметрами, до останова
вспомогательного привода. Предел частоты останова также определяет частоту, до
которой падает частота привода, контролируемого преобразователем частоты,
после пуска вспомогательного привода.
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
Page 67

66 • vacon Многоцелевая программа управлениядля NXL
4.11 Параметры панели управления
3.1 Control place
С помощью этого параметра может меняться активный пост управления. Более
подробные сведения содержатся в главе 7.4.3 Руководства пользователя
Vacon NXL.
3.2 Keypad reference
С помощью этого параметра можно настраивать опорную частоту. Боле подробные
сведения содержатся в главе 7.4.3.2 Руководства пользователя Vacon NXL.
3.3 Keypad direction
0 Вперед: двигатель вращается вперед, когда активным постом
управления служит панель
управления.
1 Назад (реверс): двигатель вращается назад, когда активным постом
Более подробные сведения содержатся в главе 7.4.3.3 Руководства пользователя
Vacon NXL.
3.4 Stop button activated
Если вы хотите назначить кнопку Stop «горячей клавишей», которая всегда будет
останавливать привод вне зависимости от выбранного поста управления, установите
для этого параметра значение 1(по умолчанию). См.
содержатся в главе 7.4.3 Руководства пользователя Vacon NXL.
Также см. пар. 3.1.
3.5 PID reference 1
Сигнал задания ПИД 1с панели управления можно устанавливать в диапазоне от 0%
до 100%. Этот опорный сигнал будет являться активным опорным сигналом ПИД,
если пар. 2.9.2 = 2.
управления служит панель управления.
Боле подробные сведения
3.6 PID reference 2
Сигнал задания ПИД 1с панели управления можно устанавливать в диапазоне от 0%
до 100% Этот опорный сигнал
DIN# = 12 и контакт DIN# замкнут.
4
будет активным, если функция
Тел.: +358-201-212 000 Факс: +358-201-212 205
Page 68

5. ЛОГИКА УПРАВЛЯЮЩИХ СИГНАЛОВ
A
A
DIN3
Exp. DIE1
Предустановл.
скорость 1
Предустановл.
скорость 2
> 1
DIN3 & Exp.DIE1
DIN3
Exp.DIE1
2.1.2 Макс. частота
2.1.20 Предустановленная
скорость 1
2.1.21 Предустановленная
скорость 2
vacon • 67
Exp. DIE3
DIN2
DIN3
I1
I2
DIN1
DIN2
Отключить ПИД
2.2.21 Опорный сигнал с
интерфейсной шины
2.2.20 Опорный сигнал с панели
управления
2.1.14 Опорный сигнал с клемм
ввода/вывода
Вверх
Псевдо
Потенциометр
Вниз
2.9.2 Опорный сигнал ПИД
R3.5
Опорный сигнал ПИД
с панели управления
Опорный сигнал с
интерфейсной шины
(FBProcessData IN1)
R3.2 Опорный сигнал с
панели управления
Опорный сигнал с
интерфейсной шины
Пуск/Стоп с
интерфейсной шины
Направление с
интерфейсной шины
Прямой пуск
Реверсивный пуск
(программируемы й)
Программируемая
логика Пуск/Стоп
и Реверс
3.3 Направление с
панели управления
0
1
2
ПИД
3
0
1
Опорный
2
сигнал с
клемм ввода-
3
вывода
2.1.14
4
0
1
2
K
3
4
5
0
1
2
3
4
5
Панель управления
Интерфейсная шина
F
Разрешить опорный сигнал 2 ( DIN# = 12)
R3.6 Опорный сигнал 2
панели управления ПИД
Действит. значение
входн. сигнала, пар. 2.9.7
Пар. 2.9.1 Активация ПИД
3.1 Пост управления
Ввод/
вывод
Внутр. опорная
частота
Кнопка Сброс
Кнопки Пуск/Стоп
Внутренний Пуск/Стоп
Внутренний реверс
ПИД
Внутренний сброс отказа
>1
Exp. DIE2
Сброс отказа (программируемый)
Рис. 1-38. Логика управляющих сигналов программы управления
Круглосуточная линия поддержки:+358-40-8371 150 • Email: vacon@vacon.com
4
 Loading...
Loading...