

Page 1

vacon nx
®
PRZEMIENNIKI CZĘSTOTLIWOŚCI
all in one
INSTRUKCJA APLIKACJI
Page 2

Page 3
A
J
B C D E F G H I
Index Min Max Unit Default
Cust
ID DescriptionParameter
PRZEDMOWA VACON · 3
PRZEDMOWA
Dokument: DPD01233E
Data: 1.12.2016
Kod oprogramowania:
Aplikacja podstawowa = ASFIFF01
•
Aplikacja standardowa = ASFIFF02
•
Aplikacja sterowania lokalnego/zdalnego
•
= ASFIFF03
Aplikacja sterowania z wieloma
•
poziomami prędkości = ASFIFF04
Aplikacja z regulatorem PID = ASFIFF05
•
Aplikacja wielozadaniowa
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Aplikacja pompowo-wentylatorowa =
•
ASFIFF07
INFORMACJE O NINIEJSZEJ INSTRUKCJI
Prawa autorskie do niniejszej instrukcji należą do Vacon Ltd. Wszelkie prawa zastrzeżone.
Instrukcja może ulec zmianie bez powiadomienia. Oryginalnym językiem tej instrukcji jest
angielski.
W instrukcji znajdują się informacje dotyczące korzystania z przemiennika częstotliwości
VACON® i jego funkcji.
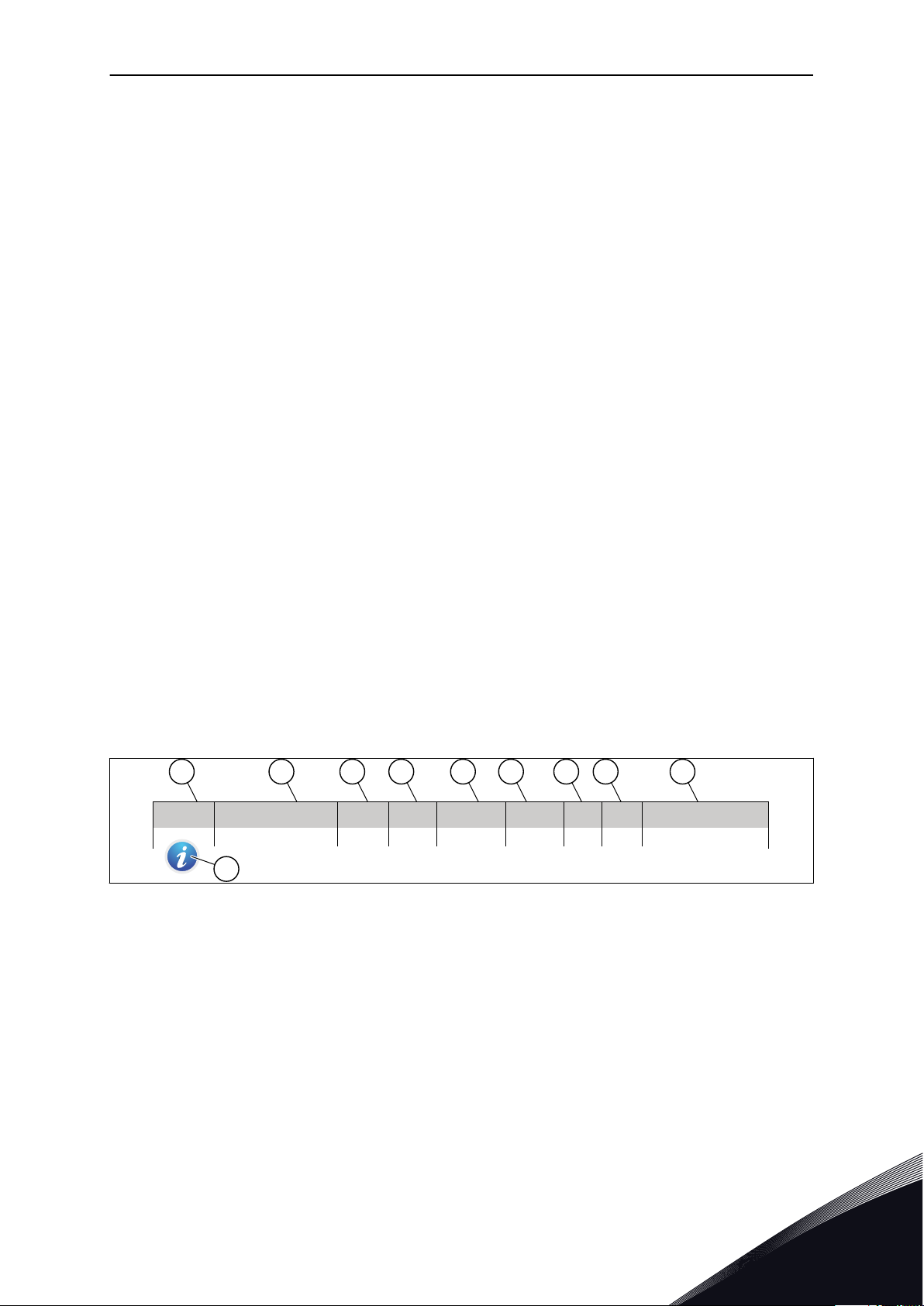
W niniejszej instrukcji znajduje się wiele tabel z parametrami. Poniżej znajdują się wskazówki
dotyczące sposobu odczytywania tabel.
A. Lokalizacja parametru w menu, tj.
numer parametru.
B. Nazwa parametru.
C. Minimalna wartość parametru.
D. Maksymalna wartość parametru.
E. Jednostka wartości parametru.
Jednostka pojawi się, gdy jest dostępna.
F. Wartość domyślna ustawiona fabrycznie.
G. Własne ustawienia użytkownika.
H. Numer identyfikacyjny parametru.
I. Krótki opis wartości parametru i/lub jego
funkcji.
J. Jeśli pojawia się ten symbol, można
uzyskać więcej danych na temat
parametru w rozdziale Opis parametrów.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 4

VACON · 4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 5
SPIS TREŚCI VACON · 5
SPIS TREŚCI
Przedmowa
Informacje o niniejszej instrukcji 3
1 Aplikacja podstawowa 10
1.1 Wprowadzenie 10
1.1.1 Funkcje zabezpieczenia silnika w aplikacji podstawowej 10
1.2 Wejścia/wyjścia sterujące 11
1.3 Logika sygnału sterowania w aplikacji podstawowej 13
1.4 Aplikacja podstawowa — listy parametrów 13
1.4.1 Monitorowanie wartości (panel sterowania: menu M1) 13
1.4.2 Parametry podstawowe (panel sterowania: menu M2 -> G2.1) 15
1.4.3 Panel sterowania (panel sterowania: menu M3) 17
1.4.4 Menu systemowe (panel sterowania: menu M6) 18
1.4.5 Karty rozszerzeń (panel sterowania: menu M7 18
2 Aplikacja standardowa 19
2.1 Wprowadzenie 19
2.2 Wejścia/wyjścia sterujące 20
2.3 Logika sygnału sterowania w aplikacji standardowej 22
2.4 Aplikacja standardowa — listy parametrów 22
2.4.1 Monitorowanie wartości (panel sterowania: menu M1) 22
2.4.2 Parametry podstawowe (panel sterowania: menu M2 -> G2.1) 24
2.4.3 Sygnały wejściowe (panel sterowania: menu M2 -> G2.2) 26
2.4.4 Sygnały wyjściowe (panel sterowania: menu M2 -> G2.3 28
2.4.5 Parametry sterowania napędem (panel sterowania: menu M2 -> G2.4
31
2.4.6 Parametry zabronionej częstotliwości (panel sterowania: menu M2 ->
G2.5) 32
2.4.7 Parametry sterowania silnikiem (panel sterowania: menu M2 -> G2.6)
33
2.4.8 Zabezpieczenia (panel sterujący: menu M2 -> G2.7 36
2.4.9 Parametry automatycznego ponownego startu (panel sterowania: menu
M2 -> G2.8) 38
2.4.10 Panel sterowania (panel sterowania: menu M3) 38
2.4.11 Menu systemowe (panel sterowania: menu M6) 39
2.4.12 Karty rozszerzeń (panel sterowania: menu M7 39
3 Aplikacja sterowania lokalnego/zdalnego 40
3.1 Wprowadzenie 40
3.2 Wejścia/wyjścia sterujące 41
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 6
VACON · 6 SPIS TREŚCI
3.3 Logika sygnału sterowania w aplikacji lokalnej/zdalnej 43
3.4 Aplikacja sterowania lokalnego/zdalnego — listy parametrów 44
3.4.1 Monitorowanie wartości (panel sterowania: menu M1) 44
3.4.2 Parametry podstawowe (panel sterowania: menu M2 -> G2.1) 45
3.4.3 Sygnały wejściowe (panel sterowania: menu M2 -> G2.2) 47
3.4.4 Sygnały wyjściowe (panel sterowania: menu M2 -> G2.3 52
3.4.5 Parametry sterowania napędem (panel sterowania: menu M2 -> G2.4
56
3.4.6 Parametry zabronionej częstotliwości (panel sterowania: menu M2 ->
G2.5) 57
3.4.7 Parametry sterowania silnikiem (panel sterowania: menu M2 -> G2.6)
58
3.4.8 Zabezpieczenia (panel sterujący: menu M2 -> G2.7 61
3.4.9 Parametry automatycznego ponownego startu (panel sterowania: menu
M2 -> G2.8) 63
3.4.10 Panel sterowania (panel sterowania: menu M3) 63
3.4.11 Menu systemowe (panel sterowania: menu M6) 64
3.4.12 Karty rozszerzeń (panel sterowania: menu M7 64
4 Aplikacja sterowania z wieloma poziomami prędkości 65
4.1 Wprowadzenie 65
4.2 Wejścia/wyjścia sterujące 66
4.3 Logika sygnału sterowania w aplikacji sterowania prędkością wielokrokową 68
4.4 Aplikacja sterowania z wieloma poziomami prędkości — listy parametrów 68
4.4.1 Monitorowanie wartości (panel sterowania: menu M1) 68
4.4.2 Parametry podstawowe (panel sterowania: menu M2 -> G2.1) 70
4.4.3 Sygnały wejściowe (panel sterowania: menu M2 -> G2.2) 72
4.4.4 Sygnały wyjściowe (panel sterowania: menu M2 -> G2.3 76
4.4.5 Parametry sterowania napędem (panel sterowania: menu M2 -> G2.4
80
4.4.6 Parametry zabronionej częstotliwości (panel sterowania: menu M2 ->
G2.5) 81
4.4.7 Parametry sterowania silnikiem (panel sterowania: menu M2 -> G2.6)
82
4.4.8 Zabezpieczenia (panel sterujący: menu M2 -> G2.7) 85
4.4.9 Parametry automatycznego ponownego startu (panel sterowania: menu
M2 -> G2.8) 88
4.4.10 Panel sterowania (panel sterowania: menu M3) 88
4.4.11 Menu systemowe (panel sterowania: menu M6) 89
4.4.12 Karty rozszerzeń (panel sterowania: menu M7 89
5 Aplikacja z regulatorem PID 90
5.1 Wprowadzenie 90
5.2 Wejścia/wyjścia sterujące 91
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 7
SPIS TREŚCI VACON · 7
5.3 Logika sygnału sterowania w aplikacji sterowania PID 93
5.4 Aplikacja z regulatorem PID — listy parametrów 93
5.4.1 Monitorowanie wartości (panel sterowania: menu M1) 93
5.4.2 Parametry podstawowe (panel sterowania: menu M2 -> G2.1) 97
5.4.3 Sygnały wejściowe 99
5.4.4 Sygnały wyjściowe (panel sterowania: menu M2 -> G2.3 106
5.4.5 Parametry sterowania napędem (panel sterowania: menu M2 -> G2.4
110
5.4.6 Parametry zabronionej częstotliwości (panel sterowania: menu M2 ->
G2.5) 111
5.4.7 Parametry sterowania silnikiem (panel sterowania: menu M2 -> G2.6)
112
5.4.8 Zabezpieczenia (panel sterujący: menu M2 -> G2.7 115
5.4.9 Parametry automatycznego ponownego startu (panel sterowania: menu
M2 -> G2.8) 118
5.4.10 Panel sterowania (panel sterowania: menu M3) 118
5.4.11 Menu systemowe (panel sterowania: menu M6) 119
5.4.12 Karty rozszerzeń (panel sterowania: menu M7 119
6 Aplikacja wielozadaniowa 120
6.1 Wprowadzenie 120
6.2 Wejścia/wyjścia sterujące 122
6.3 Logika sygnału sterowania w aplikacji sterowania uniwersalnego 124
6.4 Aplikacja wielozadaniowa — listy parametrów 124
6.4.1 Monitorowanie wartości (panel sterowania: menu M1) 124
6.4.2 Parametry podstawowe (panel sterowania: menu M2 -> G2.1) 136
6.4.3 Sygnały wejściowe 139
6.4.4 Sygnały wyjściowe 148
6.4.5 Parametry sterowania napędem (panel sterowania: menu M2 -> G2.4
159
6.4.6 Parametry zabronionej częstotliwości (panel sterowania: menu M2 ->
G2.5) 161
6.4.7 Parametry sterowania silnikiem (panel sterowania: menu M2 -> G2.6)
162
6.4.8 Zabezpieczenia (panel sterujący: menu M2 -> G2.7 173
6.4.9 Parametry automatycznego ponownego startu (panel sterowania: menu
M2 -> G2.8) 178
6.4.10 Parametry magistrali (panel sterujący: menu M2 -> G2.9) 179
6.4.11 Parametry sterowania momentem obrotowym (panel sterujący: menu
M2 -> G2.10) 181
6.4.12 Napędy NXP: Parametry nadrzędny/napędzany (panel sterujący: menu
M2 -> G2.11) 183
6.4.13 Panel sterowania (panel sterowania: menu M3) 184
6.4.14 Menu systemowe (panel sterowania: menu M6) 185
6.4.15 Karty rozszerzeń (panel sterowania: menu M7 185
7 Aplikacja pompowo-wentylatorowa 186
7.1 Wprowadzenie 186
7.2 Wejścia/wyjścia sterujące 187
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 8
VACON · 8 SPIS TREŚCI
7.3 Logika sygnału sterowania w aplikacji sterowania pompą i wentylatorem 191
7.4 Aplikacja pompowo-wentylatorowa — listy parametrów 191
7.4.1 Monitorowanie wartości (panel sterowania: menu M1) 191
7.4.2 Parametry podstawowe (panel sterowania: menu M2 -> G2.1) 195
7.4.3 Sygnały wejściowe 197
7.4.4 Sygnały wyjściowe 205
7.4.5 Parametry sterowania napędem (panel sterowania: menu M2 -> G2.4
213
7.4.6 Parametry zabronionej częstotliwości (panel sterowania: menu M2 ->
G2.5) 214
7.4.7 Parametry sterowania silnikiem (panel sterowania: menu M2 -> G2.6)
215
7.4.8 Zabezpieczenia (panel sterujący: menu M2 -> G2.7 217
7.4.9 Parametry automatycznego ponownego startu (panel sterowania: menu
M2 -> G2.8) 220
7.4.10 Parametry sterowania pompą i wentylatorem (panel sterujący: menu
M2 -> G2.9) 221
7.4.11 Panel sterowania (panel sterowania: menu M3) 224
7.4.12 Menu systemowe (panel sterowania: menu M6) 224
7.4.13 Karty rozszerzeń (panel sterowania: menu M7 225
8 Opis wartości monitorowanych 226
9 Opis parametrów 233
9.1 Parametry panelu sterującego 391
9.2 Funkcja nadrzędny/napędzany (tylko NXP) 393
9.2.1 Połączenia fizyczne z łączem nadrzędny/napędzany 393
9.2.2 Połączenie światłowodowe przemienników częstotliwości za pomocą
OPTD2 393
9.3 Kontrola hamulca zewnętrznego z dodatkowymi limitami (identyfikatory 315, 316,
346 do 349, 352, 353) 394
9.4 Parametry zabezpieczenia termicznego silnika (parametry o identyfikatorach 704
do 708) 396
9.5 Parametry zabezpieczenia silnika przed utykiem (parametry o identyfikatorach 709
do 712) 397
9.6 Parametry zabezpieczenia silnika przed niedociążeniem (parametry o
identyfikatorach 713 do 716) 397
9.7 Parametry sterowania magistralą (parametry o identyfikatorach 850 do 859) 398
9.7.1 Wyjście danych procesowych (podrzędny -> nadrzędny) 398
9.7.2 Skalowanie prądu w różnych jednostkach 399
9.7.3 Wejście danych procesowych (nadrzędny -> podrzędny) 400
9.8 Parametry pętli zamkniętej (parametry o identyfikatorach 612 do 621) 401
9.9 Zasada programowania metody TTF (Terminal to function, zacisk do funkcji) 402
9.9.1 Określanie wejścia/wyjścia dla funkcji za pomocą panelu sterującego
402
9.9.2 Określanie zacisku dla funkcji przy użyciu narzędzia do programowania
NCDrive 403
9.9.3 Określanie nieużywanych wejść/wyjść 404
9.10 Parametry sterowania prędkością (tylko aplikacja 6) 405
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 9
SPIS TREŚCI VACON · 9
9.11 Automatyczne przełączanie między napędami (tylko aplikacja 7) 407
9.12 Wybór blokady (P2.9.23) 409
9.13 Przykłady wyboru parametrów automatycznej zmiany kolejności silników i blokady
410
9.13.1 Automatyka pomp i wentylatorów z blokadami oraz bez automatycznej
zmiany 410
9.13.2 Automatyka pomp i wentylatorów z blokadami oraz automatyczną
zmianą 411
10 Śledzenie usterek 414
10.1 Kody usterek 414
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 10

VACON · 10 APLIKACJA PODSTAWOWA
1 APLIKACJA PODSTAWOWA
1.1 WPROWADZENIE
Aplikacja podstawowa jest prosta i łatwa w obsłudze. Jest to domyślne ustawienie fabryczne.
W przeciwnym razie aplikację podstawową można wybrać w menu M6 (strona S6.2). Patrz
instrukcja obsługi produktu.
Wejście cyfrowe DIN3 jest programowalne.
Objaśnienia dotyczące parametrów aplikacji podstawowej zawiera rozdział 9 Opis parametrów
niniejszej instrukcji. Objaśnienia są uporządkowane według poszczególnych numerów ID
parametrów.
1.1.1 FUNKCJE ZABEZPIECZENIA SILNIKA W APLIKACJI PODSTAWOWEJ
Aplikacja podstawowa zapewnia prawie wszystkie funkcje zabezpieczenia, które są dostępne
w innych aplikacjach:
Zabezpieczenie przed usterkami zewnętrznymi
•
Monitorowanie faz wejściowych
•
Zabezpieczenie przed zbyt niskim napięciem
•
Kontrola faz wyjściowych
•
Zabezpieczenie przed skutkami zwarć doziemnych
•
Zabezpieczenie termiczne silnika
•
Zabezpieczenie przed usterką termistora
•
Zabezpieczenie przed błędem komunikacji magistrali
•
Zabezpieczenie przed błędem gniazda
•
W odróżnieniu od innych aplikacji aplikacja podstawowa nie umożliwia wyboru parametrów
funkcji reakcji ani wartości limitów usterek. Więcej informacji na temat zabezpieczeń
termicznych silnika zawiera część ID704 w rozdziale 9 Opis parametrów.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 11
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4 DIN5
Napięcie dla potencjometru itp.
Masa dla wejść/wyjść
zadających oraz sterujących
Masa dla wejść/wyjść zadających
oraz sterujących
Masa dla wejść/wyjść
zadających oraz sterujących
Wejście analogowe 2,
częstotliwość zadana
Napięcie dla przekaźników (patrz 6)
Połącz z GND lub +24 V
USTERKA
Wejście usterki zewnętrznej
Programowalne (P2.17)
Połącz z GND lub +24 V
Styk otwarty = brak działania
Styk zamknięty = kasowanie usterki
Styk otwarty = brak usterki
Styk zamknięty = usterka
Zestyk zamknięty = start do przodu
Zestyk zamknięty = start do tyłu
Otwarty kolektor,
I≤50 mA, U≤48 V (prąd stały)
PRACA
mA
GOTOWOŚĆ
AO1–
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
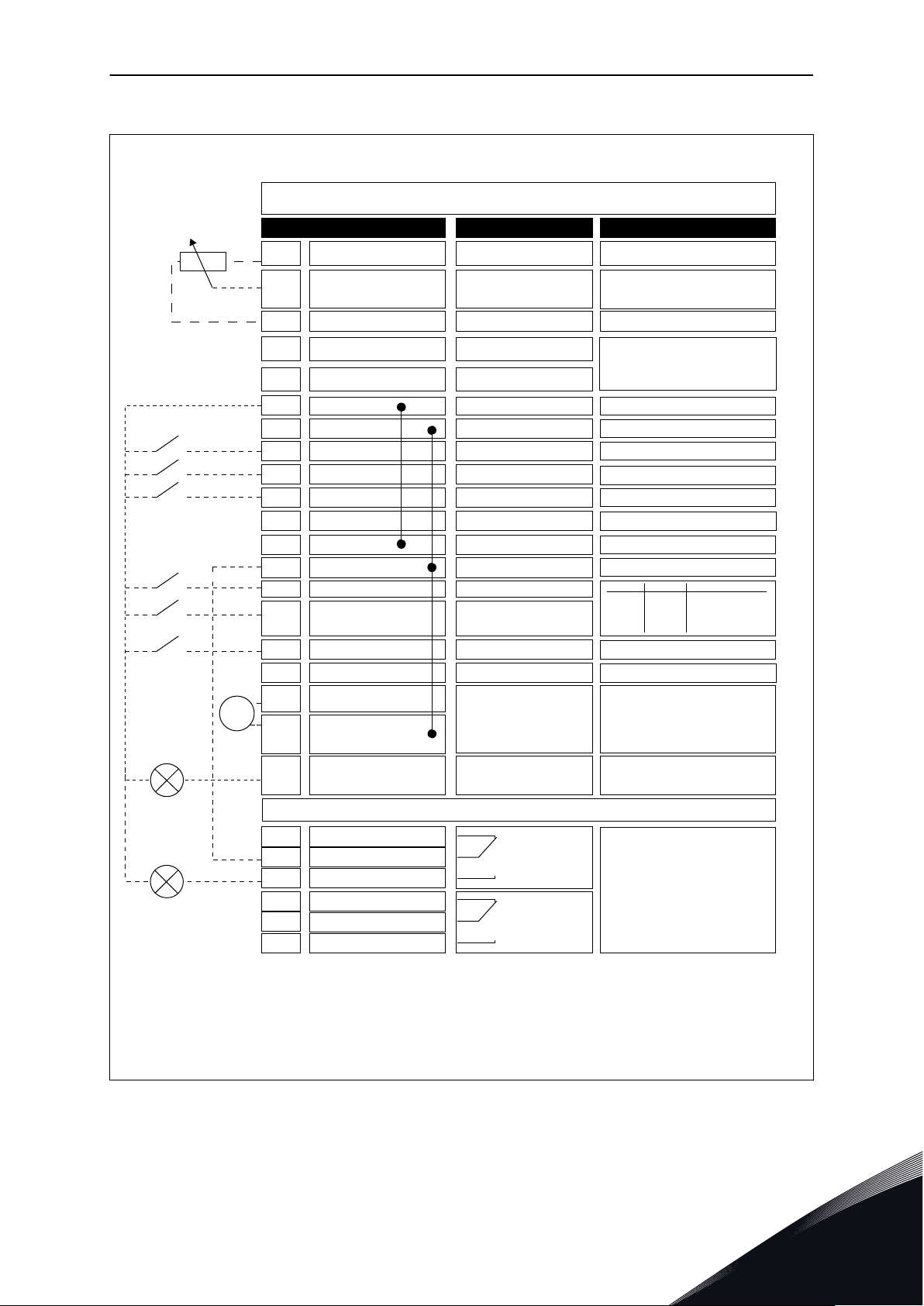
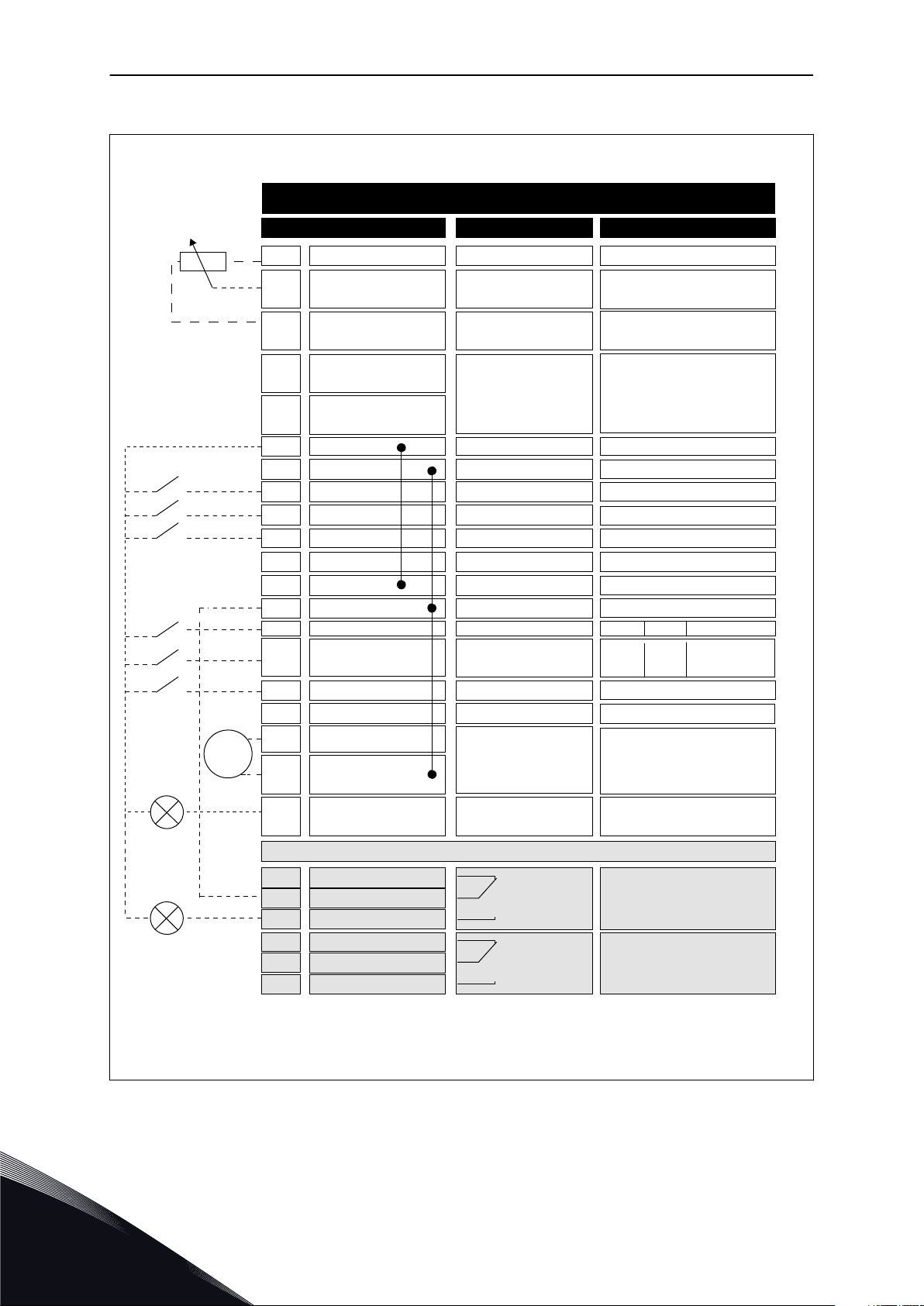
Standardowa karta we/wy
Zacisk Sygnał Opis
+10 V
ref
AI1+
AI1–
AI2+
AI2–
+24 V
Wyjściowe napięcie
odniesienia
Wejście analogowe 1
Zakres napięcia 0–10 V (prąd stały)
Programowalne (P2.14)
Wejście analogowe 2
Zakres prądu 0–20 mA
Wyjście napięcia sterującego
Masa dla WE/WY
Masa dla WE/WY
Wybierz prędkość zadawaną 1
Wybierz prędkość
zadawaną 2
Zerowanie usterki
Wspólne dla DIN 1 ‒ DIN 3
Wspólne dla zacisków
DIN4‒DIN6
Wyjście napięcia sterującego
Masa dla WE/WY
Wyjście
przekaźnikowe 1
Wyjście
przekaźnikowe 2
AO1+
Wejście analogowe 1,
częstotliwość zadana
Napięcie dla przekaźników itp.,
maks. 0,1 A
Start do przodu
Start do tyłu
Częstotliwość zadana
Otwarty
Zamknięty
Otwarty
Zamknięty
Otwarty
Otwarty
Zamknięty
Zamknięty
we/wy sterujące (P2.14)
Prędk.zadawana 1
Prędk.zadawana 2
Maksymalna częstotliwość
PRACA
Sterowanie potencjometrem,
1‒10 kΩ
Wyjście analogowe 1,
programowalna
częstotliwość
wyjściowa (P2.16)
Zakres 0–20 mA/RL,
maks. 500 Ω
Wyjście cyfrowe 1
GOTOWOŚĆ
APLIKACJA PODSTAWOWA VACON · 11
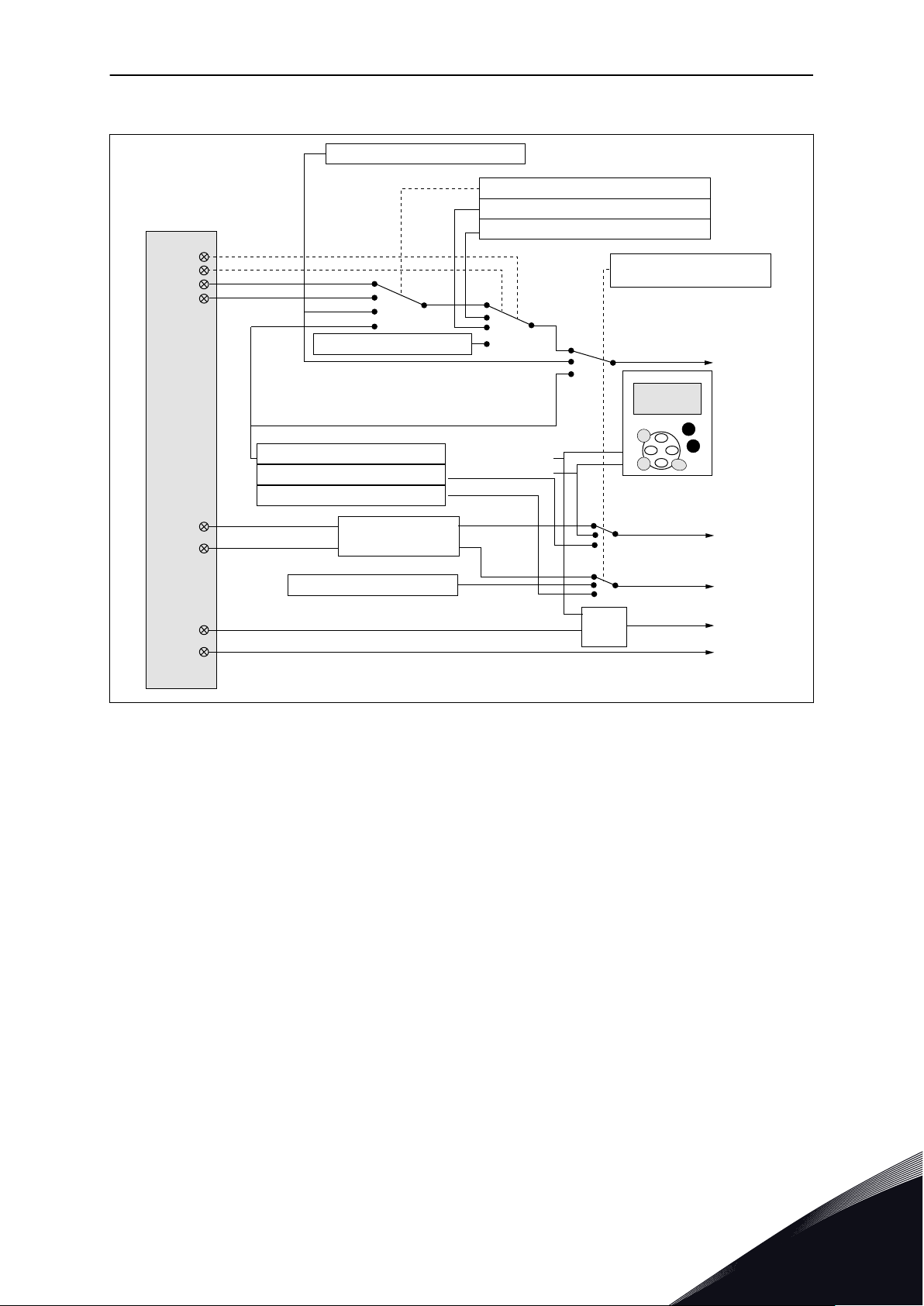
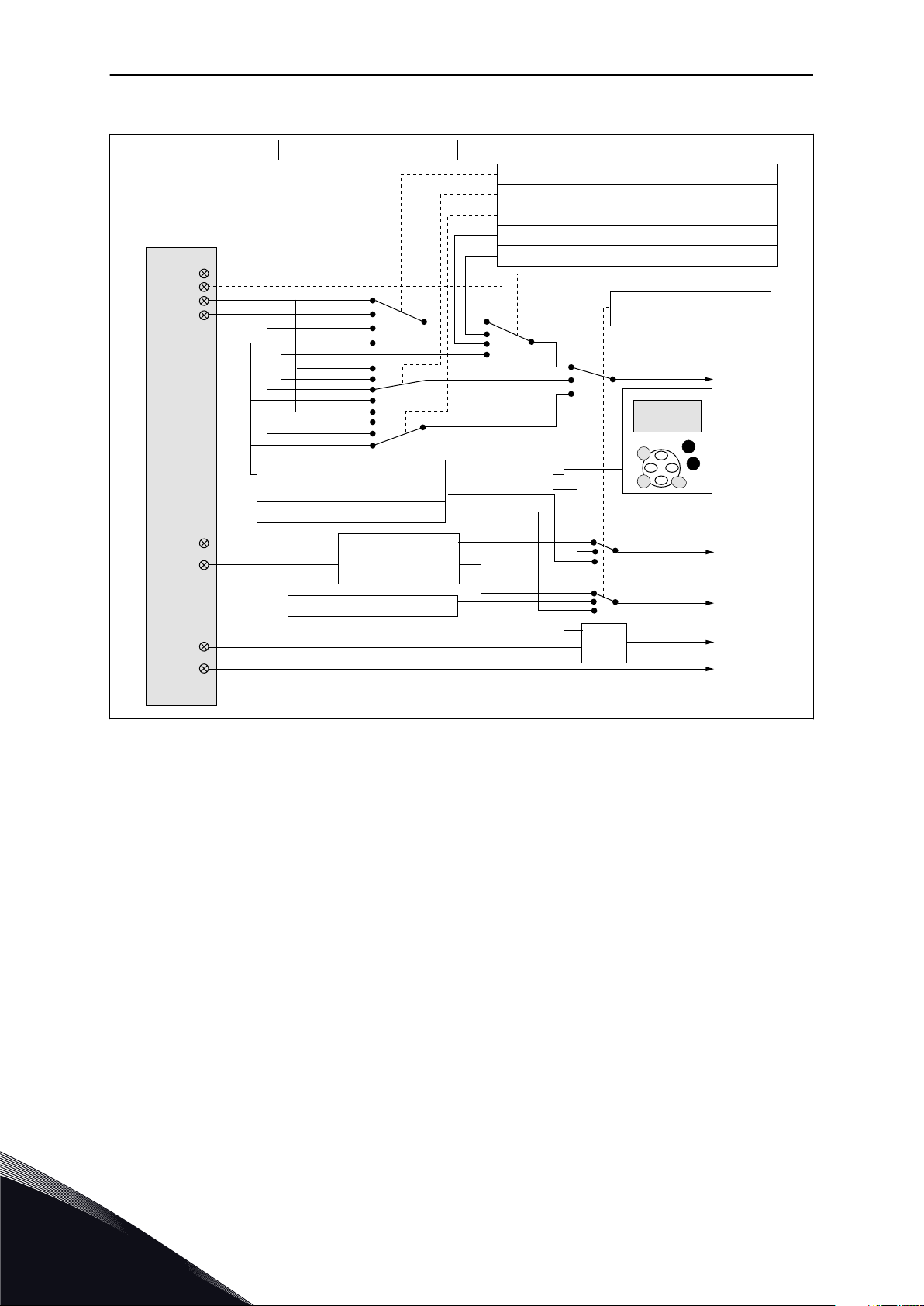
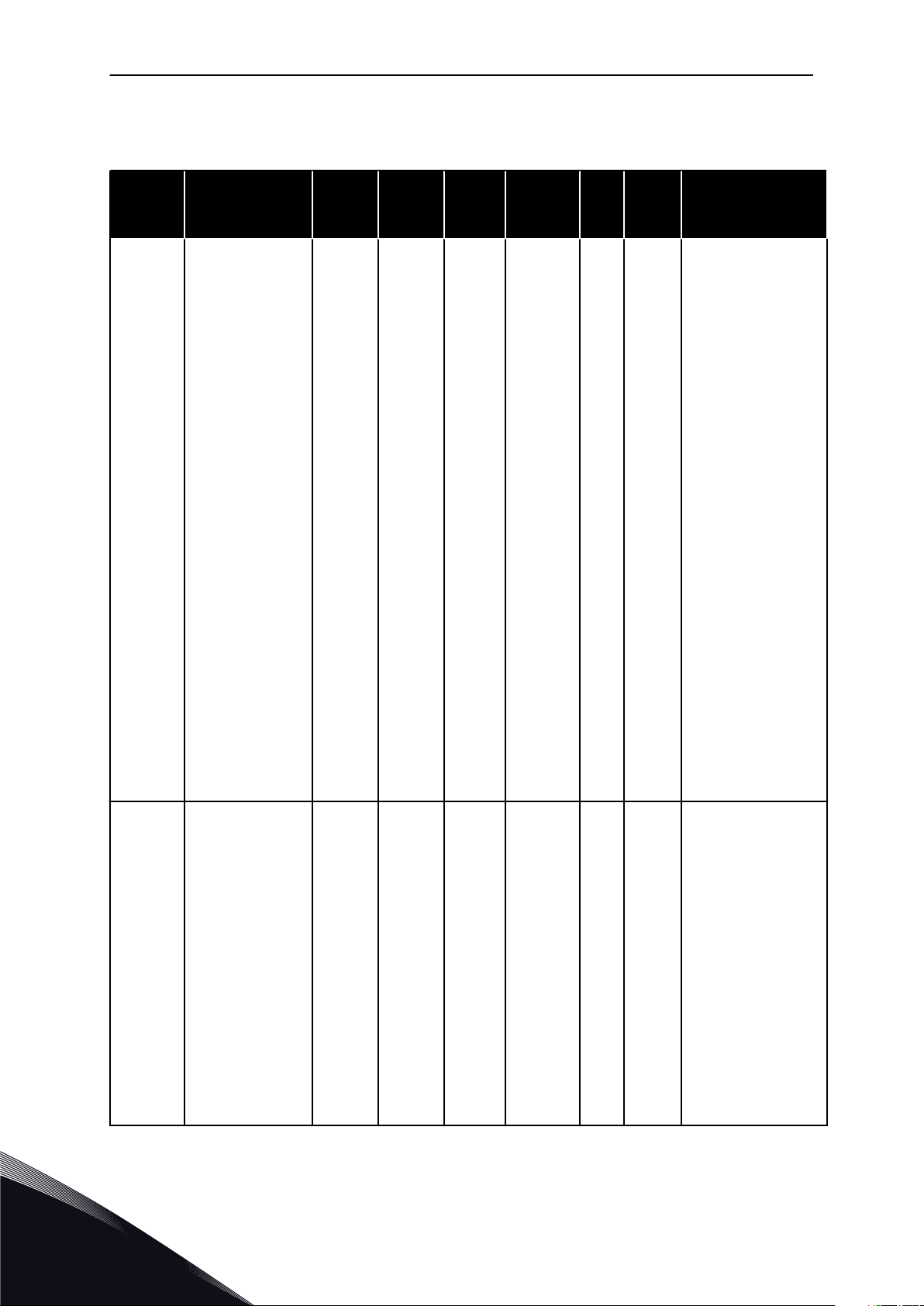
1.2 WEJŚCIA/WYJŚCIA STERUJĄCE
Rys. 1: Fabryczna konfiguracja wejść/wyjść aplikacji podstawowej
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 12
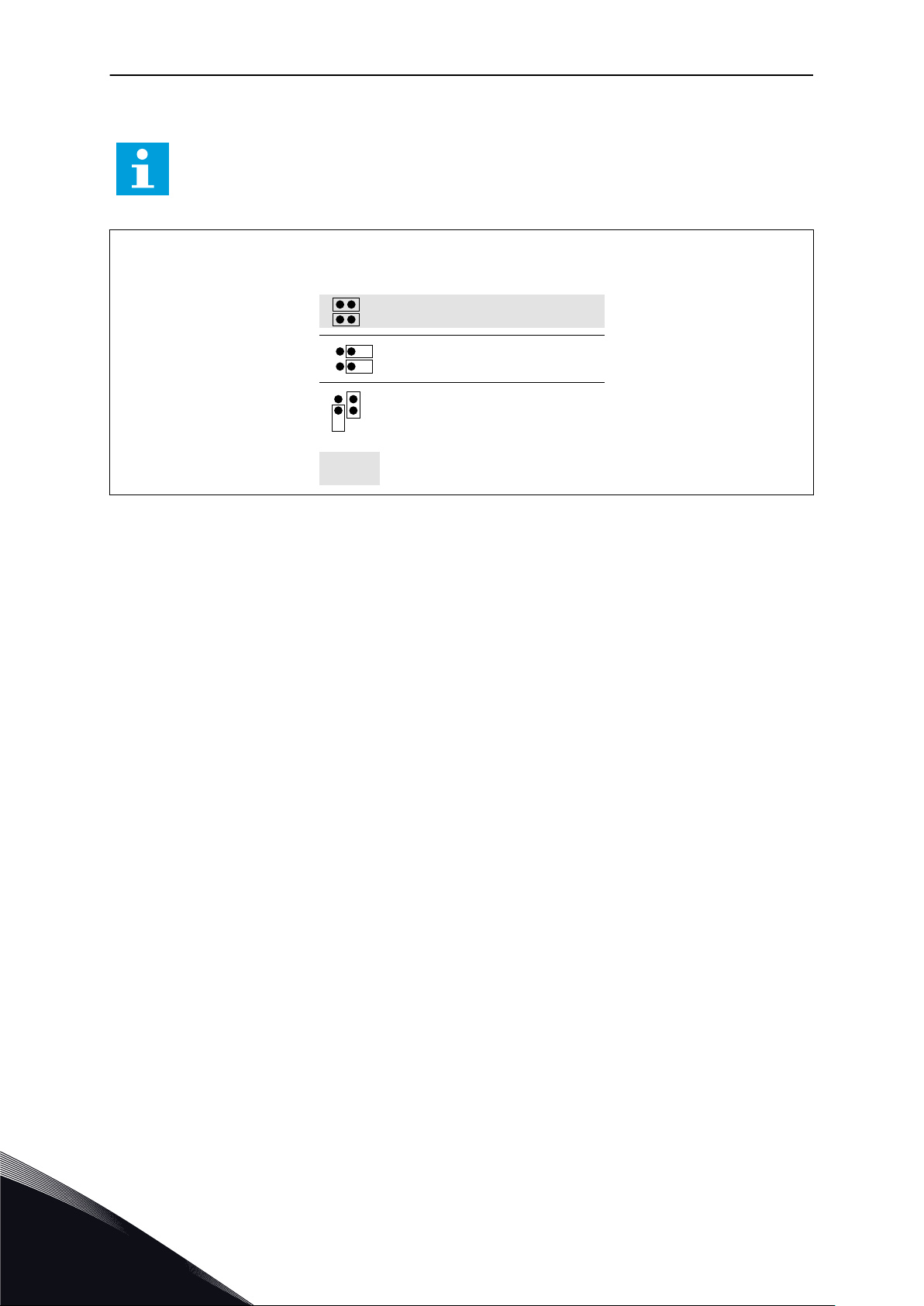
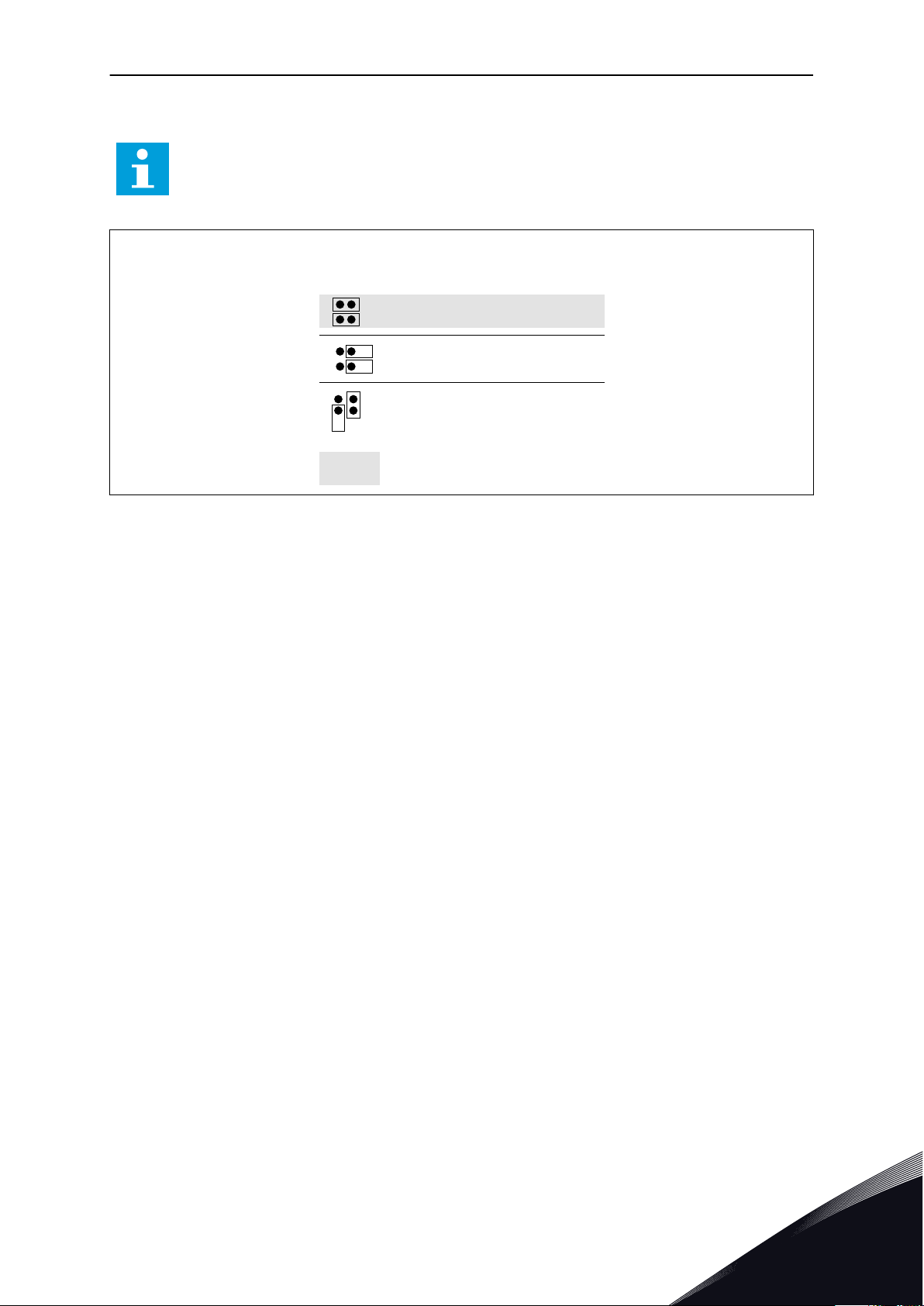
Blok zworek X3:
Uziemienie CMA i CMB
CMB połączono z GND
CMA połączono z GND
CMB izolowane od GND
CMA izolowane od GND
CMB i CMA wewnętrznie
połączone ze sobą,
izolowane od GND
= ustawienie fabryczne
VACON · 12 APLIKACJA PODSTAWOWA
*) Opcjonalna karta A3 nie ma zacisku dla styku rozwiernego na drugim wyjściu przekaźnika
(brak zacisku 24).
WSKAZÓWKA!
Patrz ustawienia zworek poniżej. Więcej informacji zawiera instrukcja obsługi
produktu.
Rys. 2: Ustawienia zworek
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 13
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Sterow. z panelu
3.1 Miejsce sterowania
Start do przodu
Start do tyłu
Start/stop
Do tyłu
Wewnętrzny Start/Stop
Wewnętrzne odwrócenie
Zerowanie usterki
wewnętrznej
Wejście kasowania usterki
Wejście usterki zewn. (programowalne)
Przycisk zerowania
(Reset)
Przyciski Start/Stop
Zadawanie z magistrali komunikacyjnej
Sygnał Start/Stop z
magistrali komunikacyjnej
Kierunek z magistrali komunikacyjnej
3.3 Kierunek obrotów
z panelu
2.14 Sterowanie częstotliwością
z zacisków we/wy
2.19 Prędkość stała 2
2.18 Prędkość stała 1
2.2 Maks. częstotl.
Logika Start/
Stop i Do tyłu
Wewnętrzna
częstotliwość zadana
APLIKACJA PODSTAWOWA VACON · 13
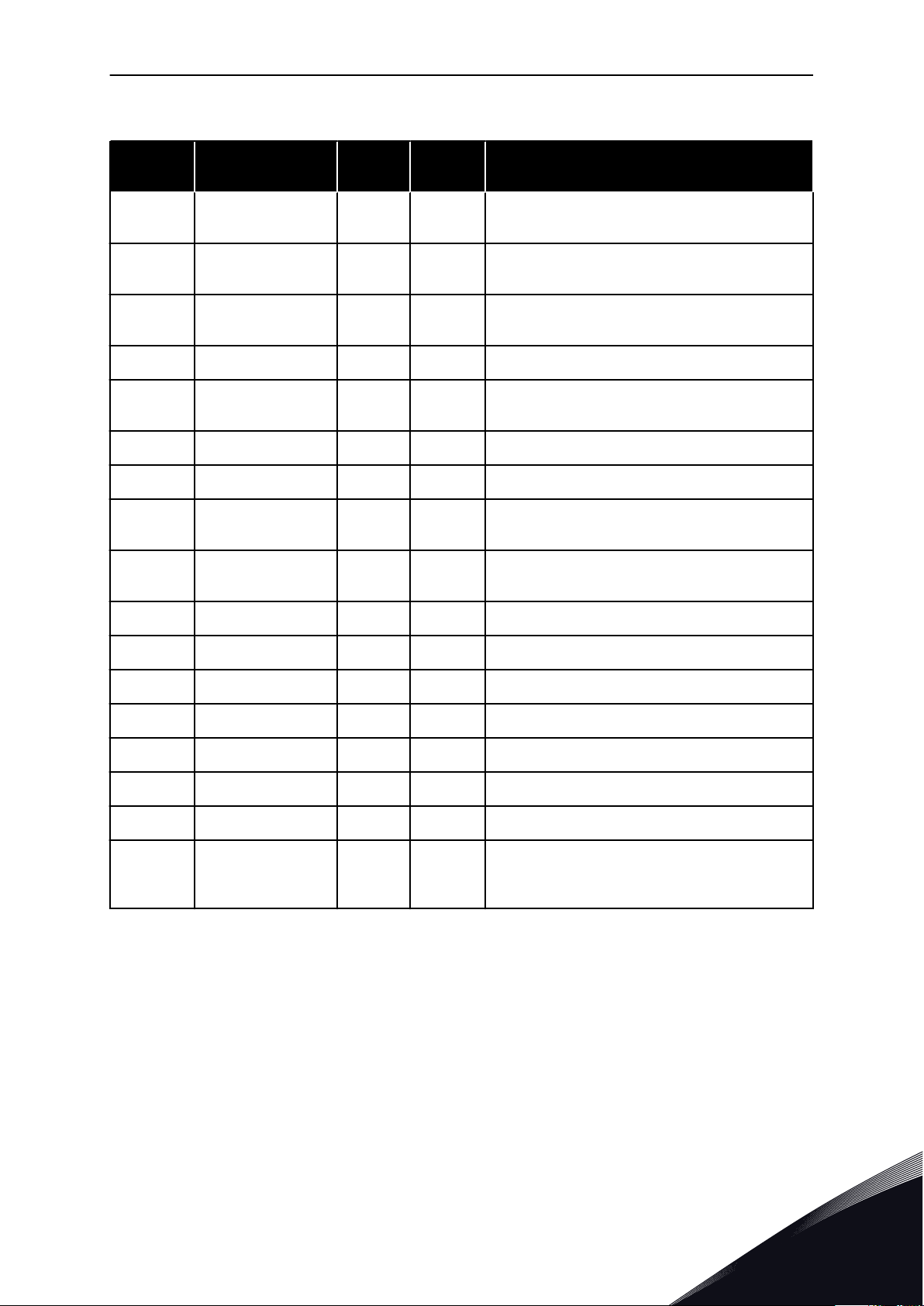
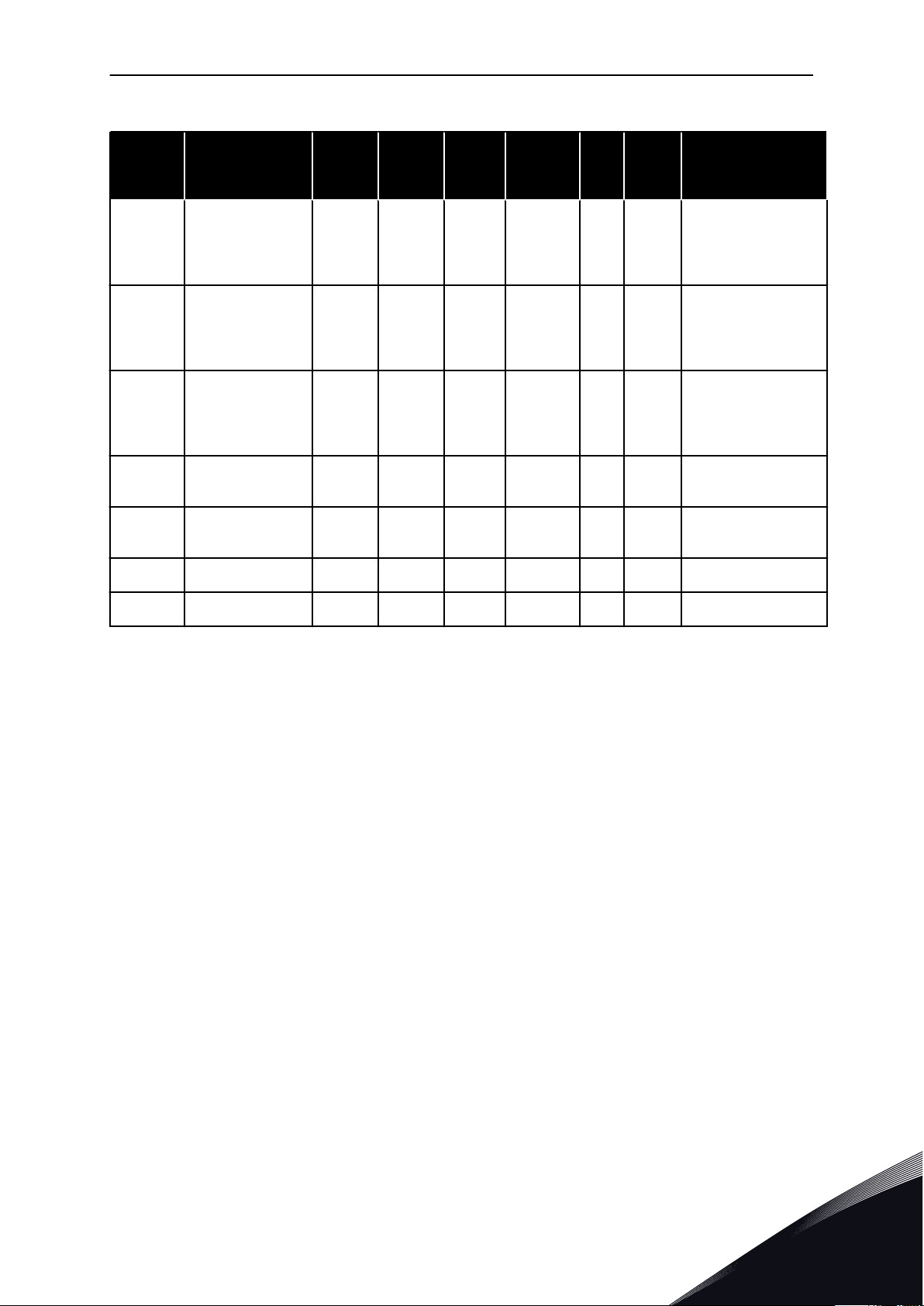
1.3 LOGIKA SYGNAŁU STEROWANIA W APLIKACJI PODSTAWOWEJ
Rys. 3: Logika sygnału sterowania aplikacji podstawowej
1.4 APLIKACJA PODSTAWOWA — LISTY PARAMETRÓW
1.4.1 MONITOROWANIE WARTOŚCI (PANEL STEROWANIA: MENU M1)
Wartości monitorowane są to aktualne wartości wybranych parametrów, jak również stany
oraz wartości wybranych sygnałów mierzonych. Wartości monitorowanych nie można
modyfikować.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 14
VACON · 14 APLIKACJA PODSTAWOWA
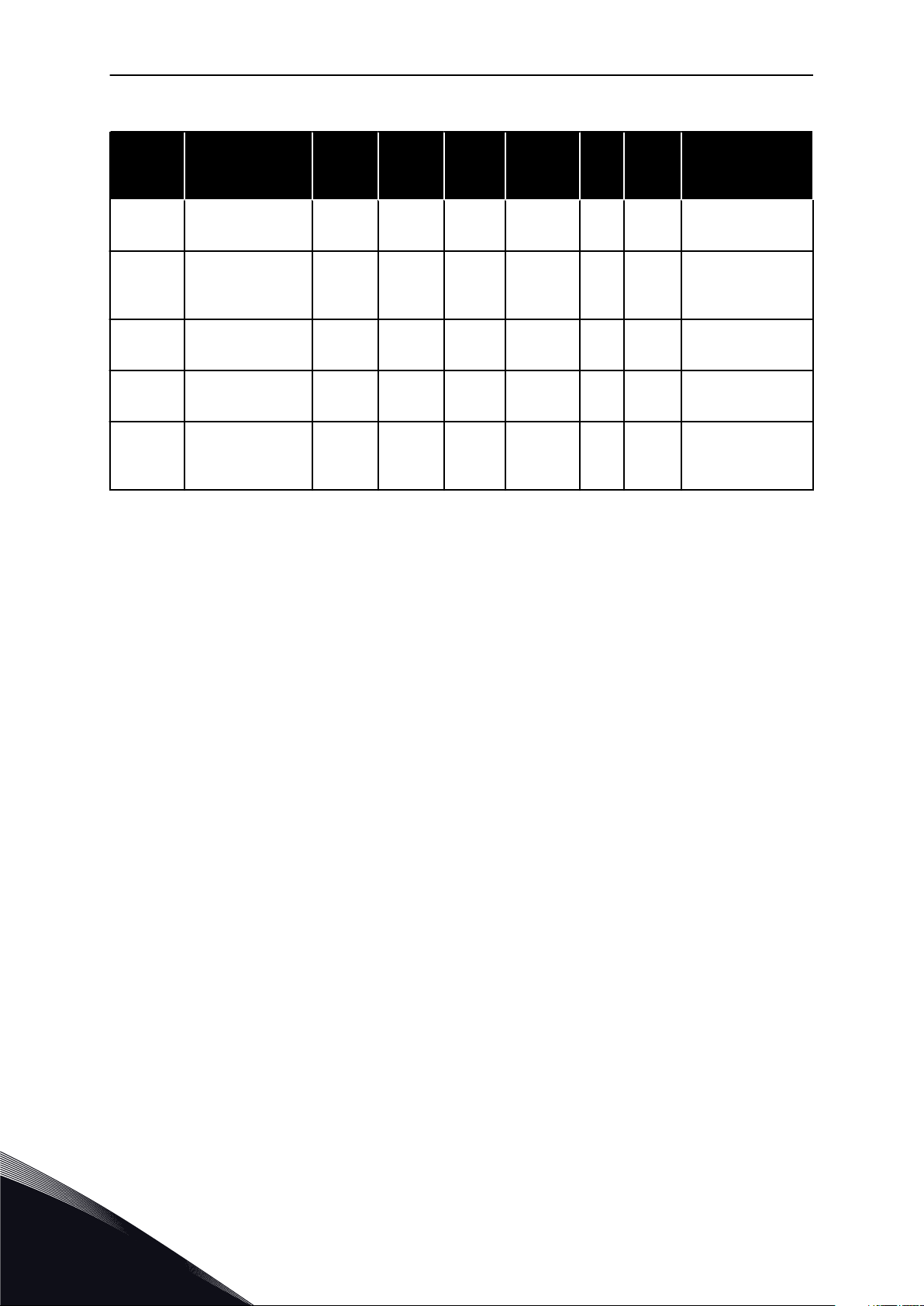
Tabela 1: Wielkości monitorowane
Indeks
V1.1
V1.2
V1.3
V1.4 Prąd silnika A 3
V1.5
V1.6 Moc silnika % 5
V1.7 Napięcie silnika V 6
V1.8
1.9
Wielkość
monitorowana
Częstotliwość wyj-
ściowa
Częstotliwość zada-
wana
Prędkość obrotowa
silnika
Moment obrotowy
silnika
Napięcie w obwodzie
prądu stałego
Temperatura prze-
miennika
Unit ID Opis
Hz 1
Hz 25
obr. 2
% 4
V 7
°C 8
1.10 Temperatura silnika % 9
V1.11 Wejście analogowe 1 V/mA 13
V1.12 Wejście analogowe 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analogowe I
Elementy monitoro-
V1.17
wania wielopozycyj-
nego
out
mA 26
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 15
APLIKACJA PODSTAWOWA VACON · 15
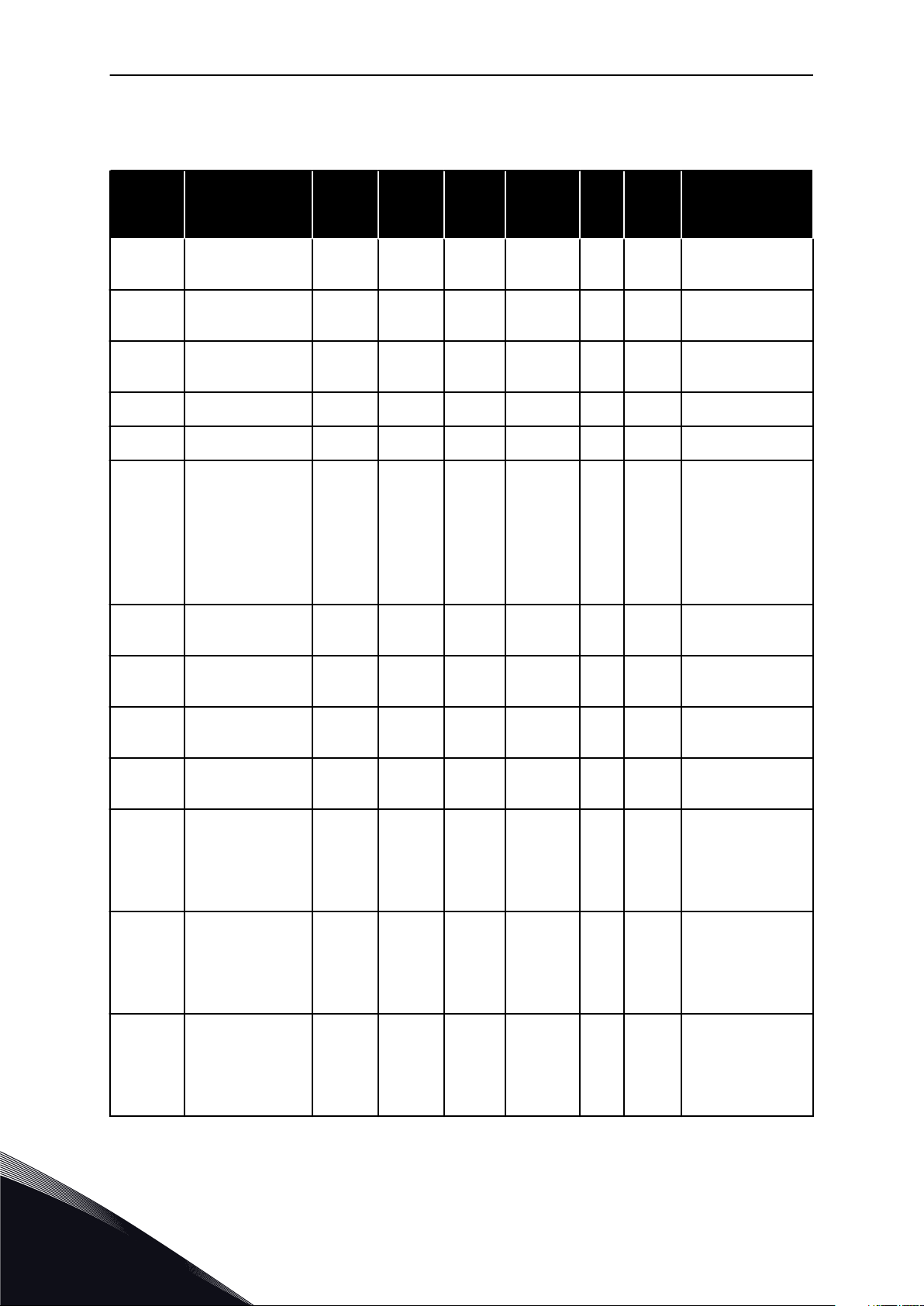
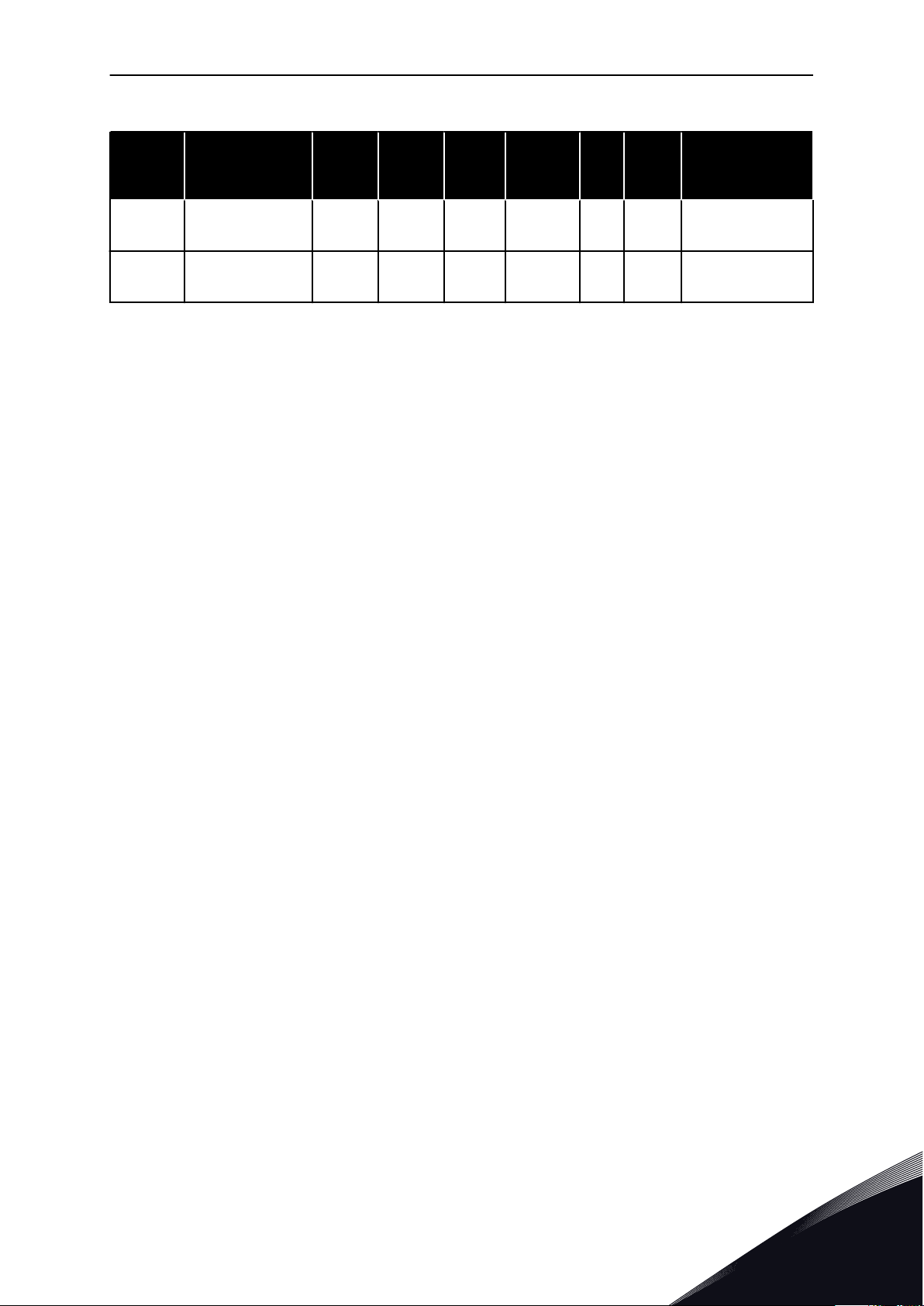
1.4.2 PARAMETRY PODSTAWOWE (PANEL STEROWANIA: MENU M2 -> G2.1)
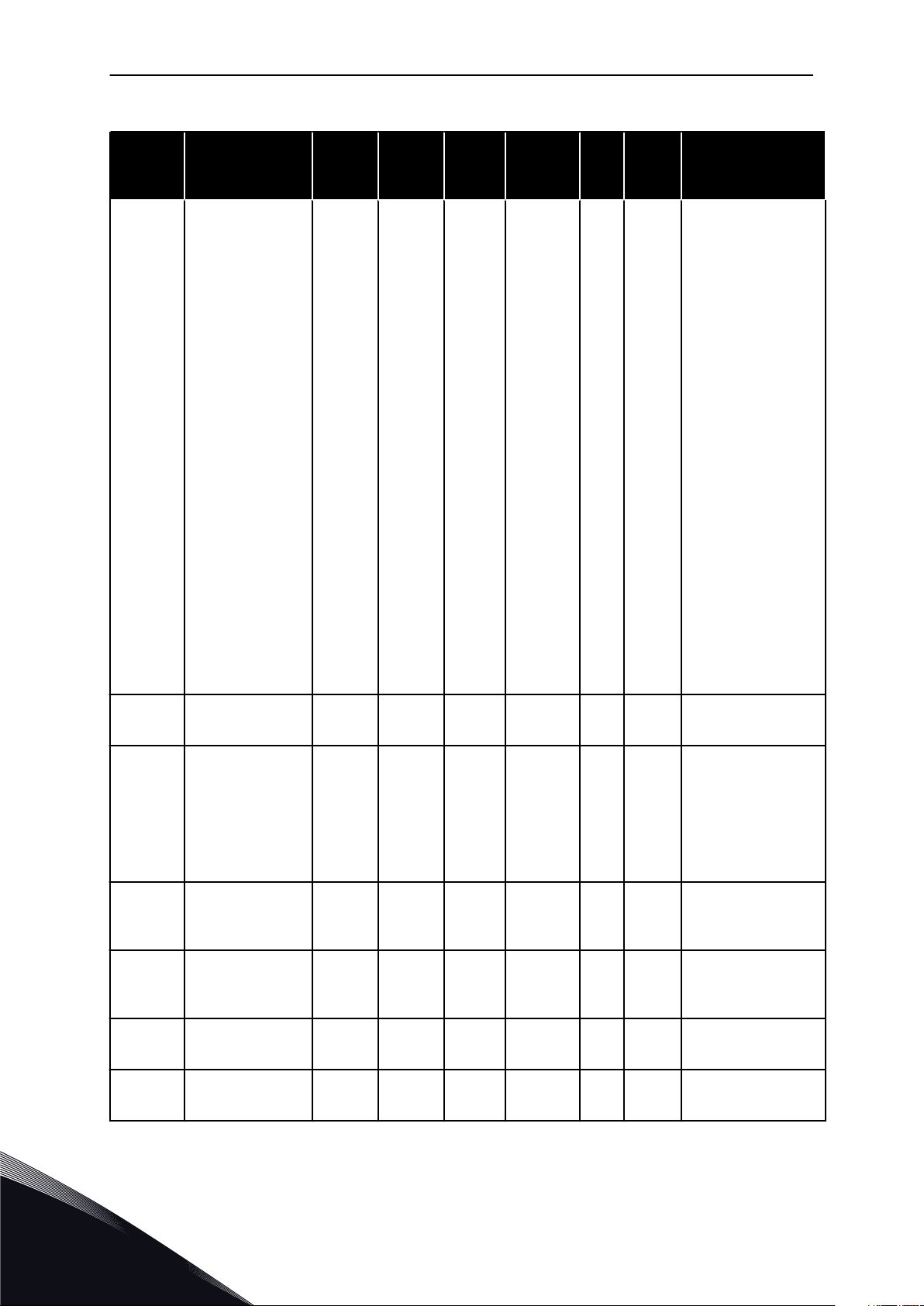
Tabela 2: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1
P2.2
P2.3
P2.4 Czas hamowania 1 0.1 3000.0 s 3.0 104
P2.5 Limit prądu 0,1 x I
P2.6
P2.7
Minimalna częs-
totliwość
Maksymalna
częstotliwość
Czas przyspiesza-
nia 1
napięcie znamio-
nowe silnika
częstotliwość zna-
mionowa silnika
0.00 P2.2 Hz 0.00 101
P2.1 320.00 Hz 50.00 102
0.1 3000.0 s 3.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
DomyślnieUst.
użyt
k.
A IL: 107
NX2: 230
V
NX5: 400
V
NX6: 690
V
Opis
ID
110
P2.8
P2.9
P2.10
P2.11 Funkcja Start 0 2 0 505
P2.12 Funkcja Stop 0 3 0 506
Prędkość znamio-
nowa silnika
Prąd znamionowy
silnika
Wartość cos SYM-
BOL silnika
24 20 000 obr. 1440 112
0,1 x I
0.30 1.00 0.85 120
2 x I
H
H
A I
H
113
0 = rampa
1 = start „w biegu”
2 = warunkowy
start „w biegu”
0 = wybieg
1 = 2 = rampa +
włączenie pracy na
wybiegu
Rampa
3 = wybieg + włączenie pracy z
rampą
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 16
VACON · 16 APLIKACJA PODSTAWOWA
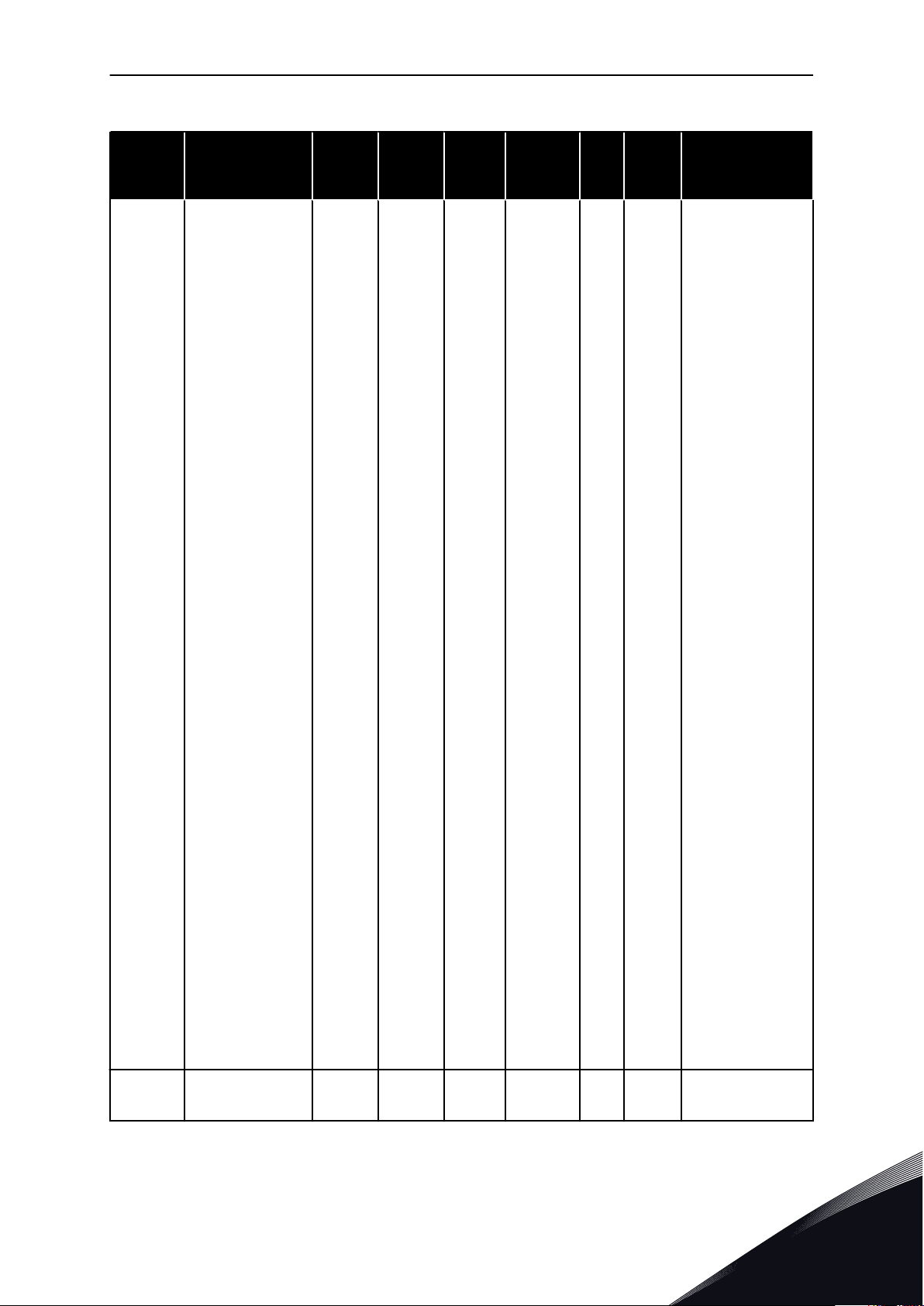
Tabela 2: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.13 Optymalizacja U/f 0 1 0 109
Sterowanie częs-
P2.14
P2.15
P2.16
totliwością z
zacisków we/wy
Wejście analo-
gowe 2, przesu-
nięcie referen-
cyjne
Funkcja wyjścia
analogowego
0 3 0 117
0 1 1 302
0 8 1 307
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = automatyczne
zwiększanie
momentu obrotowego
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
0 = 0-20 mA
1 = 4 mA–20 mA
0 = nieużywany
1 = częstotl. wyjściowa (0-f
2 = częstot. zadana
(0-f
max
3 = prędkość silnika (0–znamionowa prędkość silnika)
4 = prąd wyjściowy
(0–I
nMotor
5 = moment obr.
silnika (0–T
6 = moc silnika (0–
P
nMotor
7 = napięcie silnika
(0–U
8 = napięcie na
szynie DC (0–
1000 V)
)
)
nMotor
max
)
nMotor
)
)
)
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 17
APLIKACJA PODSTAWOWA VACON · 17
Tabela 2: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.17 Funkcja DIN3 0 7 1 301
P2.18
Prędkość zada-
wana 1
0.00 P2.2 Hz 0.00 105
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = usterka zewnętrzna, styk
zamknięty
2 = usterka zewnętrzna, styk
otwarty
3 = włączenie
pracy, styk
zamknięty
4 = włączenie
pracy, styk otwarty
5 = przestaw cp na
zaciski we/wy
6 = przestaw cp na
panel sterujący
7 = przestaw cp na
magistralę komunikacyjną
P2.19
P2.20
Prędkość zada-
wana 2
Automatyczny
ponowny start
0.00 P2.2 Hz 50.00 106
0 1 0 731
0 = wyłączony
2 = włączony
1.4.3 PANEL STEROWANIA (PANEL STEROWANIA: MENU M3)
Poniżej zostały wymienione parametry wyboru miejsca sterowania i kierunku. Patrz menu
panelu sterującego w instrukcji obsługi produktu.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 18
VACON · 18 APLIKACJA PODSTAWOWA
Tabela 3: Parametry panelu sterowania, M3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P3.1
P3.2
P3.3
R3.4
Miejsce sterowa-
nia
Sterowanie z
panelu
Kierunek (na
panelu sterują-
cym)
Przycisk zatrzy-
mania
1 3 1 125
P2.1 P2.2 Hz 0.00
0 1 0 123
0 1 1 114
DomyślnieUst.
użyt
k.
Opis
ID
1 = we/wy sterujące
2 = panel
3 = magistrala
komunikacyjna
0 = ograniczone
działanie przycisku
STOP
1 = przycisk STOP
zawsze włączony
1.4.4 MENU SYSTEMOWE (PANEL STEROWANIA: MENU M6)
Parametry i funkcje związane z ogólnym zastosowaniem przemiennika częstotliwości, takie
jak wybór języka i aplikacji, niestandardowe zestawy parametrów lub informacje o sprzęcie i
oprogramowaniu, można znaleźć w instrukcji obsługi produktu.
1.4.5 KARTY ROZSZERZEŃ (PANEL STEROWANIA: MENU M7
W menu M7 są wyświetlane karty rozszerzeń i opcjonalne karty podłączone do karty
sterującej oraz informacje związane z kartą. Więcej informacji zawiera instrukcja obsługi
produktu.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 19

APLIKACJA STANDARDOWA VACON · 19
2 APLIKACJA STANDARDOWA
2.1 WPROWADZENIE
Wybierz standardową aplikację w menu M6 na stronie S6.2.
Standardowa aplikacja jest używana zwykle w zastosowaniach związanych z pompami,
wentylatorami i przenośnikami, w których aplikacja podstawowa jest niewystarczająca, lecz
nie są też wymagane specjalne funkcje.
Aplikacja standardowa ma te same sygnały we/wy i tę samą logikę sterowania co
•
aplikacja podstawowa.
Wejście cyfrowe DIN3 i wszystkie wyjścia można swobodnie programować.
•
Funkcje dodatkowe:
Programowalna logika sygnału Start/Stop oraz Do tyłu
•
Skalowanie wartości zadawanej
•
Monitorowanie limitu częstotliwości
•
Programowanie drugich ramp i rampy o kształcie S
•
Programowalne funkcje Start i Stop
•
Hamowanie prądem stałym przy zatrzymaniu
•
Jeden obszar zabronionej częstotliwości
•
Programowalna krzywa U/f i częstotliwość przełączania
•
Automatyczne ponowne uruchomienie
•
Ochrona silnika przed przegrzaniem i utykiem: Programowalna reakcja; wyłączenie,
•
ostrzeżenie, usterka
Parametry aplikacji standardowej zostały opisane w rozdziale 9 Opis parametrów niniejszej
instrukcji. Objaśnienia są uporządkowane według poszczególnych numerów ID parametrów.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 20
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
GOTOWOŚĆ
PRACA
AO1–
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Zacisk Sygnał Opis
+10 Vref
AI1+
AI1–
AI2+
AI2–
+24 V
Wyjściowe napięcie
odniesienia
Masa dla wejścia
wyjścia
Wejście analogowe 2
Zakres prądu
0–20 mA
Wyjście napięcia sterującego
Masa dla WE/WY
Start do przodu
Programowalna logika (P2.2.1)
Start do tyłu
Ri min. = 5 kΩ
Wejście usterki zewnętrznej
Programowalne (P2.2.2)
Wybierz prędkość
zadawaną 1
Wybierz prędkość
zadawaną 2
Zerowanie usterki
Wspólne dla DIN 1 ‒ DIN 3
Wspólne dla zacisków
DIN4‒DIN6
Wyjście napięcia
sterującego
Masa dla WE/WY
Wyjście analogowe 1
Częstotliwość wyjściowa
Programowalne (P2.3.2)
Wyjście cyfrowe 1
GOTOWOŚĆ
Programowalne (P2.3.7)
Otwarty kolektor, I≤50 mA,
U≤48 V (prąd stały)
Wyjście
przekaźnikowe 1
PRACA
Programowalne
(P2.3.8)
Wyjście
przekaźnikowe 2
USTERKA
Programowalne
(P2.3.9)
Zakres 0–20 mA/RL,
maks. 500 Ω
Połącz z GND lub +24 V
Styk otwarty = brak działania
Styk zamknięty = kasowanie usterki
AO1+
Wejście analogowe 1,
częstotliwość zadana
Masa dla wejść/wyjść
zadających oraz sterujących
Wejście analogowe 2,
częstotliwość zadana
Zestyk zamknięty =
start do przodu
Zestyk zamknięty =
start do tyłu
Styk otwarty = brak usterki
Styk zamknięty = usterka
Częstotliwość
zadana
Otwarty
Zamknięty
Otwarty
Zamknięty
Otwarty
Otwarty
Zamknięty
Zamknięty
Sterowanie częstotliwością
z zacisków we/wy
Prędk.zadawana 1
Prędk.zadawana 2
Wejście analogowe 2
Napięcie dla potencjometru itp.
Wejście analogowe 1
Zakres napięcia 0–10 V
(prąd stały)
Programowalne (P2.1.11)
Napięcie dla przekaźników itp.,
maks. 0,1 A
Napięcie dla przekaźników (patrz 6)
Połącz z GND lub +24 V
Masa dla wejść/wyjść zadających
oraz sterujących
Masa dla wejść/wyjść zadających
oraz sterujących
Sterowanie
potencjometrem,
1‒10 kΩ
VACON · 20 APLIKACJA STANDARDOWA
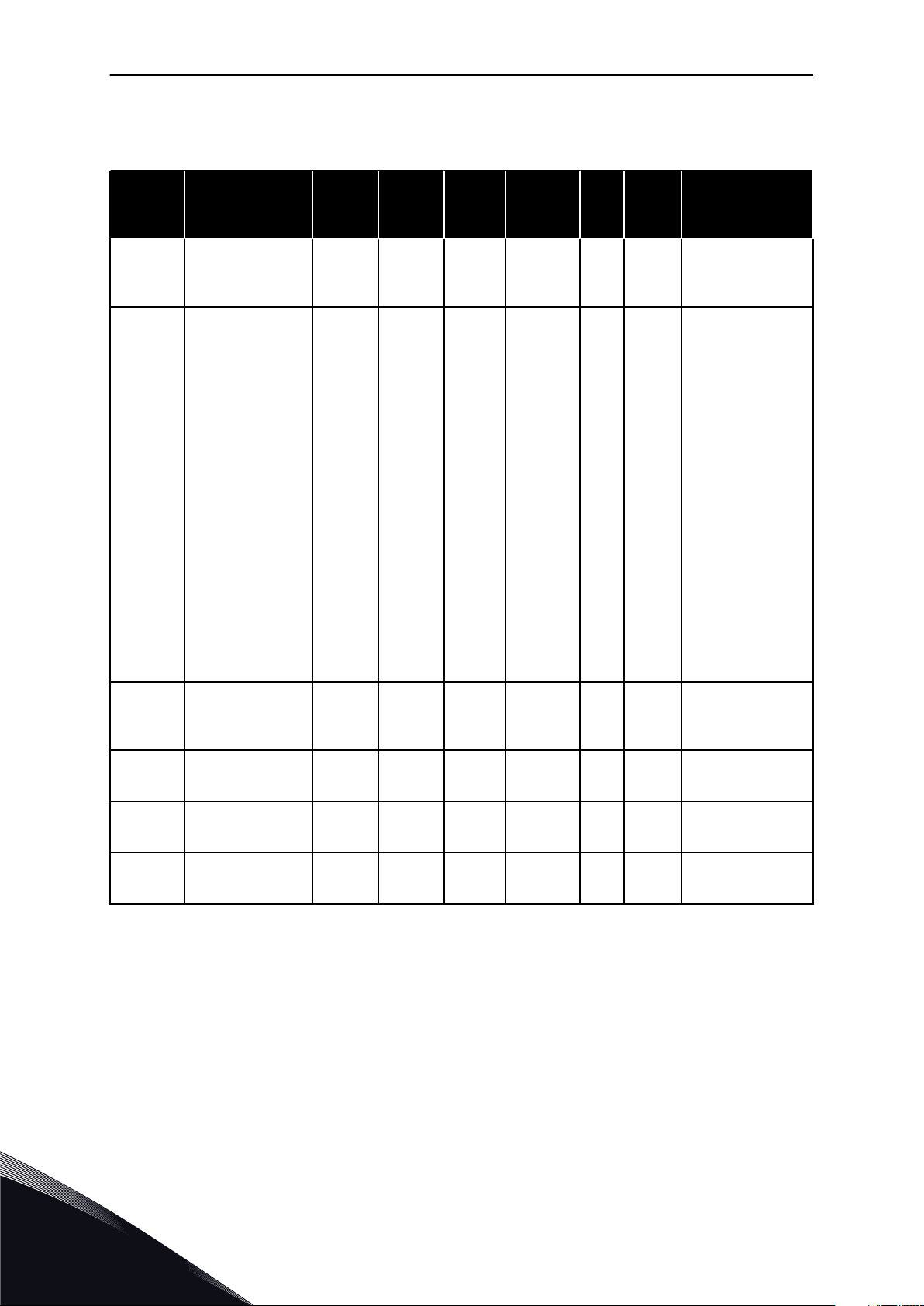
2.2 WEJŚCIA/WYJŚCIA STERUJĄCE
Rys. 4: Domyślna konfiguracja we/wy aplikacji standardowej
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 21
Blok zworek X3:
Uziemienie CMA i CMB
CMB połączono z GND
CMA połączono z GND
CMB izolowane od GND
CMA izolowane od GND
CMB i CMA wewnętrznie
połączone ze sobą,
izolowane od GND
= ustawienie fabryczne
APLIKACJA STANDARDOWA VACON · 21
*) Opcjonalna karta A3 nie ma zacisku dla styku rozwiernego na drugim wyjściu przekaźnika
(brak zacisku 24).
WSKAZÓWKA!
Patrz ustawienia zworek poniżej. Więcej informacji zawiera instrukcja obsługi
produktu.
Rys. 5: Ustawienia zworek
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 22
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Sterow. z panelu
3.1 Miejsce sterowania
Start do przodu
Start do tyłu
Start/stop
Do tyłu
Wewnętrzny Start/Stop
Wewnętrzne odwrócenie
Zerowanie usterki
wewnętrznej
Wejście kasowania usterki
Wejście usterki zewn. (programowalne)
Przycisk zerowania
(Reset)
Przyciski Start/Stop
Zadawanie z magistrali
komunikacyjnej
Sygnał Start/Stop z magistrali
komunikacyjnej
Kierunek z magistrali
komunikacyjnej
3.3 Kierunek obrotów z panelu
2.1.13 Sterowanie częstotliwością z
magistrali komunikacyjnej
2.1.15 Prędkość stała 2
2.1.14 Prędkość stała 1
2.1.11 Sterowanie częstotliwością z
zacisków we/wy
2..1.12 Prędkość ster z pan ster 1
Wewnętrzna
częstotliwość zadana
(programowalny)
(programowalny)
Programowalna
logika Start/Stop
oraz Do tyłu
VACON · 22 APLIKACJA STANDARDOWA
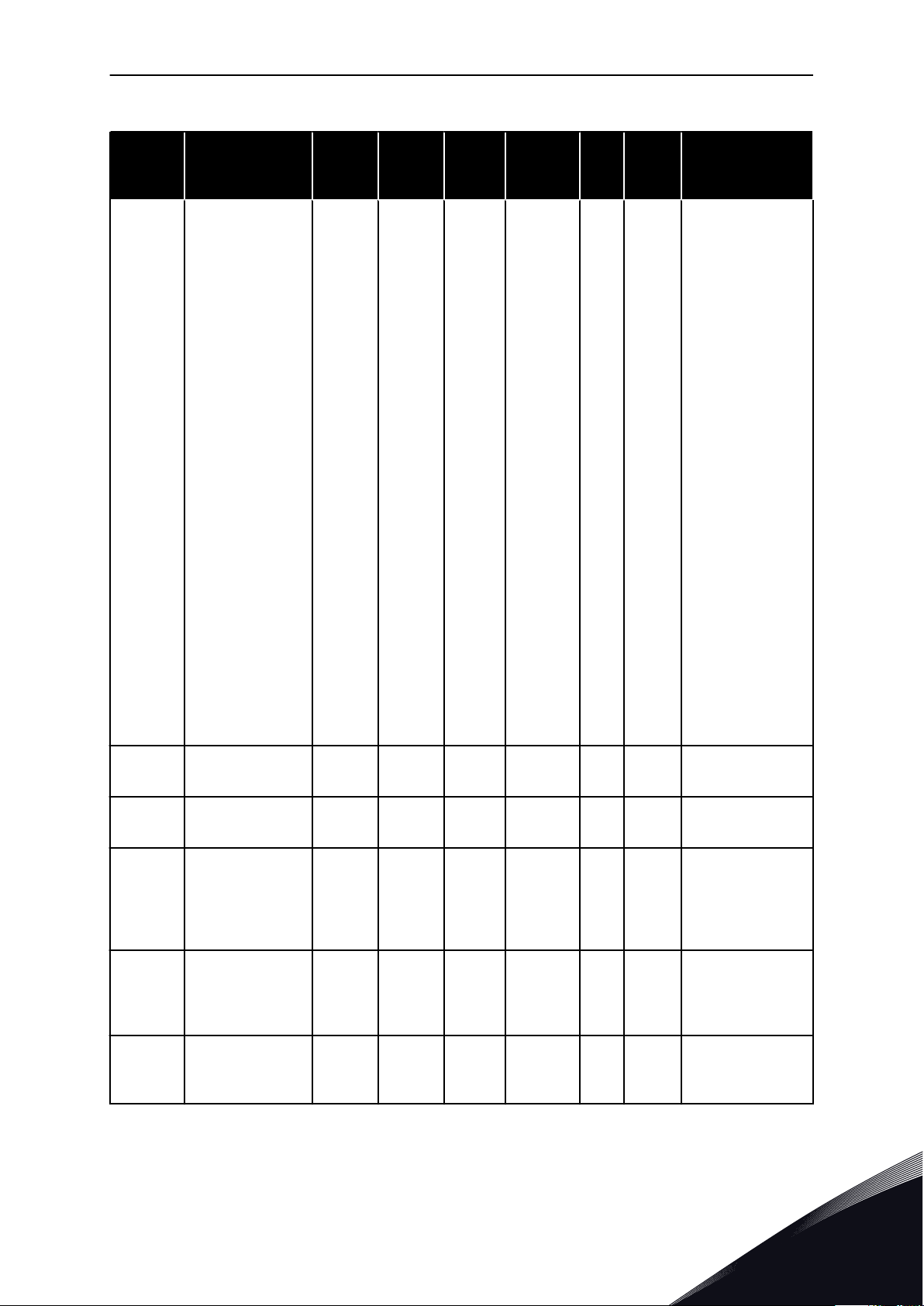
2.3 LOGIKA SYGNAŁU STEROWANIA W APLIKACJI STANDARDOWEJ
Rys. 6: Logika sygnału sterowania aplikacji standardowej
2.4 APLIKACJA STANDARDOWA — LISTY PARAMETRÓW
2.4.1 MONITOROWANIE WARTOŚCI (PANEL STEROWANIA: MENU M1)
Wartości monitorowane są to aktualne wartości wybranych parametrów, jak również stany
oraz wartości wybranych sygnałów mierzonych. Wartości monitorowanych nie można
modyfikować.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 23
APLIKACJA STANDARDOWA VACON · 23
Tabela 4: Wielkości monitorowane
Indeks
V1.1
V1.2
V1.3
V1.4 Prąd silnika A 3
V1.5
V1.6 Moc silnika % 5
V1.7 Napięcie silnika V 6
V1.8
1.9
Wielkość
monitorowana
Częstotliwość wyj-
ściowa
Częstotliwość zada-
wana
Prędkość obrotowa
silnika
Moment obrotowy
silnika
Napięcie w obwodzie
prądu stałego
Temperatura prze-
miennika
Unit ID Opis
Hz 1
Hz 25
obr. 2
% 4
V 7
°C 8
1.10 Temperatura silnika % 9
V1.11 Wejście analogowe 1 V/mA 13
V1.12 Wejście analogowe 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analogowe I
Elementy monitoro-
V1.17
wania wielopozycyj-
nego
out
mA 26
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 24
VACON · 24 APLIKACJA STANDARDOWA
2.4.2 PARAMETRY PODSTAWOWE (PANEL STEROWANIA: MENU M2 -> G2.1)
Tabela 5: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1.1
P2.1.2
P2.1.3
P2.1.4 Czas hamowania 1 0.1 3000.0 s 0.0 104
P2.1.5 Limit prądu 0,1 x I
P2.1.6
P2.1.7
Minimalna częs-
totliwość
Maksymalna
częstotliwość
Czas przyspiesza-
nia 1
napięcie znamio-
nowe silnika
częstotliwość zna-
mionowa silnika
0.00 P2.1.2 Hz 0.00 101
P2.1.1 320.00 Hz 50.00 102
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
DomyślnieUst.
użyt
k.
A IL: 107
NX2: 230
V
NX5: 400
V
NX6: 690
V
Opis
ID
110
P2.1.8
P2.1.9
P2.1.10
P2.1.11
P2.1.12
P2.1.13
Prędkość znamio-
nowa silnika
Prąd znamionowy
silnika
Wartość cos SYM-
BOL silnika
Sterowanie częs-
totliwością z
zacisków we/wy
Wartość zadana
przy sterowaniu z
panelu
Wartość zadana
przy sterowaniu z
magistrali
24 20 000 obr. 1440 112
0,1 x I
0.30 1.00 0.85 120
0 3 0 117
0 3 2 121
0 3 3 122
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 25
APLIKACJA STANDARDOWA VACON · 25
Tabela 5: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1.14
P2.1.15
Prędkość zada-
wana 1
Prędkość zada-
wana 2
0.00 P2.1.2 Hz 10.00 105
0.00 P2.1.2 Hz 50.00 106
DomyślnieUst.
użyt
k.
Opis
ID
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 26
VACON · 26 APLIKACJA STANDARDOWA
2.4.3 SYGNAŁY WEJŚCIOWE (PANEL STEROWANIA: MENU M2 -> G2.2)
Tabela 6: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.1 Logika Start/Stop 0 6 0 300
DomyślnieUst.
użyt
k.
Opis
ID
Logika = 0
Sygnał 1 = start do
przodu
Sygnał 2 = start do
tyłu
Logika = 1
Sygnał 1 = start/stop
Ctrl sgn 2 = do tyłu
Logika = 2
Sygnał 1 = start/stop
Sygnał 2 = włączenie
pracy
Logika = 3
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = impuls
Stop
Logika = 4
Sygnał 1 = impuls do
przodu (zbocze)
Sygnał 2 = impuls do
tyłu (zbocze)
Logika = 5
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = impuls do
tyłu
Logika = 6
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = włącz
impuls
2
P2.2.2
Funkcja DIN3 0 8 1 301
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = nieużywany
1 = usterka zewnętrzna, styk
zamknięty
2 = usterka zewnętrzna, styk otwarty
3 = włączenie pracy
4 = wybór czasu przyspieszania/hamowania
5 = przestaw cp na
zaciski we/wy
6 = przestaw cp na
panel sterujący
7 = przestaw cp na
magistralę komunikacyjną
8 = do tyłu
Page 27
APLIKACJA STANDARDOWA VACON · 27
Tabela 6: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
Wejście analo-
P2.2.3
P2.2.4
P2.2.5
P2.2.6
P2.2.7
P2.2.8 *** Wybór sygnału AI1 A1 377
gowe 2, przesu-
nięcie referen-
cyjne
Wartość mini-
malna skalowania
wartości zadawa-
nej
Wartość maksy-
malna skalowania
wartości zadawa-
nej
Inwersja wartości
zadanej
Czas filtrowania
wartości zadanej
0 1 1 302
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 1 0 305
0.00 10.00 s 0.10 306
DomyślnieUst.
użyt
k.
ID
Opis
0 = 0-20 mA (0-10 V)
**
1 = 4-20 mA (2-10 V)
**
0 = bez inwersji
1 = odwrócony
0 = brak filtrowania
P2.2.9 *** Wybór sygnału AI2 A2 388
** = należy pamiętać o odpowiednim ustawieniu zworek bloku X2. Patrz instrukcja obsługi
produktu.
*** = użyj metody TTF do programowania tych parametrów.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 28
VACON · 28 APLIKACJA STANDARDOWA
2.4.4 SYGNAŁY WYJŚCIOWE (PANEL STEROWANIA: MENU M2 -> G2.3
Tabela 7: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
Wybór sygnału
P2.3.1
P2.3.2
wyjścia analogo-
wego 1
Funkcja wyjścia
analogowego
0 A.1 464
0 8 1 307
DomyślnieUst.
użyt
k.
Opis
ID
0 = nie używane (20
mA/10 V)
1 = częstotl. wyjściowa (0-f
2 = częstot. zadana
(0-f
max
3 = prędkość silnika (0–znamionowa prędkość silnika)
4 = prąd silnika (0I
nMotor
5 = moment obr.
silnika (0–T
6 = moc silnika (0–
P
nMotor
7 = napięcie silnika
(0–U
8 = napięcie na
szynie DC (0–
1000 V)
)
)
)
nMotor
)
max
nMotor
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Czas filtrowania
wyjścia analogo-
wego
Inwersja wyjścia
analogowego
Minimum wyjścia
analogowego
Skala wyjścia ana-
logowego
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = brak filtrowania
0 = bez inwersji
1 = odwrócony
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 29
APLIKACJA STANDARDOWA VACON · 29
Tabela 7: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.7
Funkcja wyjścia
cyfrowego 1
0 16 1 312
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = gotowość
2 = praca
3 = usterka
4 = odwrócona
usterka
5 = ostrzeżenie o
przegrzaniu przemiennika częstotliwości
6 = usterka lub
ostrzeżenie rozsz.
7 = usterka lub
ostrzeżenie zad.
8 = ostrzeżenie
9 = odwrócone
10 = prędkość
stała 1
11 = dla prędkości
12 = aktywny regulator silnika
13 = monitorowanie limitu częstotliwości OP 1
14 = miejsce sterowania: we/wy
15 = usterka/
ostrzeżenie termistora
16 = magistrala
DIN1
P2.3.8
P2.3.9 Funkcja RO2 0 16 3 314
P2.3.10
P2.3.11
P2.3.12 *
Funkcja RO1 0 16 2 313
Monitorowanie
limitu częstotli-
wości wyjściowej 1
Limit częstotliwości wyjściowej
1; wartość moni-
torowana
Wybór sygnału
wyjścia analogo-
wego 2
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
Jak dla parametru
2.3.7
Jak dla parametru
2.3.7
0 = bez limitu
1 = monitorowanie
dolnego limitu
2 = monitorowanie
górnego limitu
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 30
VACON · 30 APLIKACJA STANDARDOWA
Tabela 7: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.13
P2.3.14
P2.3.15
P2.3.16
P.2.3.17
Funkcja wyjścia
analogowego 2
Czas filtrowania
wyjścia analogo-
wego 2
Inwersja wyjścia
analogowego 2
Minimum wyjścia
analogowego 2
Skalowanie wyj-
ścia analogowego
2
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
DomyślnieUst.
* = użyj metody TTF do programowania tych parametrów.
użyt
k.
Opis
ID
Jak dla parametru
2.3.2
0 = brak filtrowania
0 = bez inwersji
1 = odwrócony
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 31

APLIKACJA STANDARDOWA VACON · 31
2.4.5 PARAMETRY STEROWANIA NAPĘDEM (PANEL STEROWANIA: MENU M2 -> G2.4
Tabela 8: Parametry sterowania napędu, G2.4
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.4.1 Kszatłt zbocza 1 0.0 10.0 s 0.1 500
P2.4.2 Kszatłt zbocza 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4 Czas hamowania 2 0.1 3000.0 s 1.0 503
P2.4.5 Moduł hamujący 0 4 0 504
Czas przyspiesza-
nia 2
0.1 3000.0 s 1.0 502
DomyślnieUst.
użyt
k.
Opis
ID
0 = liniowa
100 = pełne czasy
przyspieszania/
zwalniania
0 = liniowa
100 = pełne czasy
przyspieszania/
zwalniania
0 = wyłączony
1 = używane podczas pracy
2 = zewnętrzny
moduł hamujący
3 = używane podczas zatrzymania/
pracy
4 = używane podczas pracy (bez
testowania)
P2.4.6 Funkcja Start 0 2 0 505
P2.4.7 Funkcja Stop 0 3 0 506
P2.4.8
P2.4.9
Prąd hamowania
prądem stałym
Czas hamowania
prądem stałym
przy zatrzymaniu
0.00 IL: A 0,7 x I
0.00 600.00 s 0.00 508
H
507
0 = rampa
1 = start „w biegu”
2 = warunkowy
start „w biegu”
0 = wybieg
1 = rampa
2 = rampa + włączenie pracy na
wybiegu
3 = wybieg + włączenie pracy z
rampą
0 = hamulec prądu
stałego jest wyłączony przy zatrzymaniu
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 32

VACON · 32 APLIKACJA STANDARDOWA
Tabela 8: Parametry sterowania napędu, G2.4
Indeks Ukrywanie AI1 AI1 Jednos
tka
Częstotliwość rozpoczęcia hamowa-
P2.4.10
P2.4.11
P2.4.12 *
P2.4.13
nia prądem sta-
łym podczas
zatrzymywania z
rampą
Czas hamowania
prądem stałym
podczas startu
Hamulec strumie-
niowy
Prąd hamowania
strumieniem
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
0 1 0 520
0.00 IL: A I
DomyślnieUst.
użyt
k.
H
Opis
ID
0 = hamulec prądu
stałego jest wyłączony podczas
startu
0 = wyłączona
0 = Wł.
519
2.4.6 PARAMETRY ZABRONIONEJ CZĘSTOTLIWOŚCI (PANEL STEROWANIA: MENU M2 > G2.5)
Tabela 9: Parametry zabronionej częstotliwości, G2.5
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.5.1 Dolna granica 1 0.00 320.00 Hz 0.00 509
P2.5.2 Górna granica 1 0.00 320.00 Hz 0.00 510
Zabronione przy-
P2.5.3
spieszanie/hamo-
wanie z rampą
0.1 10.0 x 1.0 518
DomyślnieUst.
użyt
k.
Opis
ID
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 33

APLIKACJA STANDARDOWA VACON · 33
2.4.7 PARAMETRY STEROWANIA SILNIKIEM (PANEL STEROWANIA: MENU M2 -> G2.6)
Tabela 10: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.1 *
P2.6.2 * Optymalizacja U/f 0 1 0 109
P2.6.3 *
Tryb sterowania
silnikiem
Wybór współczyn-
nika U/f
0 1/3 0 600
0 3 0 108
DomyślnieUst.
użyt
k.
Opis
ID
0 = sterowanie
częstotliwością
1 = sterowanie
prędkością
NXP:
2 = sterowanie
momentem z pętlą
otwartą
3 = kontrola prędkości z zamkniętą
pętlą
4 = sterowanie
momentem z pętlą
zamkniętą
0 = nieużywany
1 = automatyczne
zwiększanie
momentu obrotowego
0 = liniowa
1 = kwadratowa
2 = programowalna
3 = liniowy z optymalizacją strumienia
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
Punkt osłabienia
pola
Napięcie w punk-
cie osłabienia pola
Częstotliwość
punktu środko-
wego krzywej U/f
Napięcie punktu
środkowego krzy-
wej U/f
Napięcie wyj-
ściowe przy zero-
wej częstotliwości
Częstotliwość klu-
czowania
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Zmienny 606
1.0 Zmienny kHz Zmienny 601
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 34

VACON · 34 APLIKACJA STANDARDOWA
Tabela 10: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.10
P2.6.11
P2.6.12 Spadek obciążenia 0.00 100.00 % 0.00 620
P2.6.13 Identyfikacja 0 1/2 0 631
Grupa parametrów pętli zamkniętej 2.6.14
Regulator prze-
pięć
Regulator zbyt
niskiego napięcia
0 2 1 607
0 1 1 608
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = używane (bez
zmien. prędkości)
2 = używane
(zmien. prędkości)
0 = nieużywany
1 = używane
0 = brak reakcji
1 = identyfikacja
bez pracy
2 = identyfikacja
przy pracy
3 = przebieg ID
kodera
4 = brak reakcji
5 = niepowodzenie
ID przy pracy
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
Prąd magnesowa-
nia
Wzmocnienie P
sterowania pręd-
kością
Czas I sterowania
prędkością
Kompensacja
przyspieszenia
Regulacja
poślizgu
Prąd magnesowa-
nia przy starcie
Czas magnesowa-
nia przy starcie
Czas prędkości 0
przy starcie
Czas prędkości-0
przy zatrzymaniu
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 IL: A 0.00 627
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
H
A 0.00 612
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 35

APLIKACJA STANDARDOWA VACON · 35
Tabela 10: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Moment obrotowy
rozruchu
Moment obrotowy
rozruchu DO
PRZODU
Moment obrotowy
rozruchu DO TYŁU
Czas filtrowania
kodera
Bieżące wzmoc-
nienie P sterowa-
nia
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = pamięć
momentu obrotowego
2 = wartość zadana
momentu
3 = moment obrotowy rozruchu do
przodu/do tyłu
Grupa parametrów identyfikacji 2.6.15
P2.6.15.1 Prędkość krokowa -50.0 50.0 0.0 0.0 1252
* = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika częstotliwości.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 36

VACON · 36 APLIKACJA STANDARDOWA
2.4.8 ZABEZPIECZENIA (PANEL STERUJĄCY: MENU M2 -> G2.7
Tabela 11: Zabezpieczenia, G2.7
Indeks Ukrywanie AI1 AI1 Jednos
tka
Odpowiedź na
P2.7.1
P2.7.2
P2.7.3
P2.7.4
usterkę wartości
zadanej 4 mA
Częstotliwość
usterki wartości
zadanej 4 mA
Odpowiedź na
usterkę zew-
nętrzną
Monitorowanie faz
wejściowych
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
DomyślnieUst.
użyt
k.
Opis
ID
0 = brak reakcji
1 = ostrzeżenie
2 = ostrzeżenie
+poprzednia częstotliwość
3 = ostrzeżenie
+częstotliwość
stała 2.7.2
4 = usterka, stop
według 2.4.7
5 = usterka, zatrzymaj bezwładnością
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
Odpowiedź na
usterkę zbyt
niskiego napięcia
Kontrola faz wyj-
ściowych
Zabezpieczenie
przed skutkami
zwarć doziemnych
Zabezpieczenie
termiczne silnika
współczynnik
temperatury oto-
czenia silnika
Współczynnik
chłodzenia silnika
przy zerowej
prędkości
Stała czasowa
ciepła silnika
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Zmienny 707
0 = usterka zapisana w historii
Usterka niezapisana
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 37

APLIKACJA STANDARDOWA VACON · 37
Tabela 11: Zabezpieczenia, G2.7
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.7.12 cykl pracy silnika 0 150 % 100 708
P2.7.13
P2.7.14 Prąd utknięcia 0.00 2 x I
P2.7.15 Limit czasu utyku 1.00 120.00 s 15.00 711
P2.7.16
P2.7.17
Zabezpieczenie
przed utykiem
Limit prędkości
utknięcia
Zabezpieczenie
przed niedociąże-
niem
0 3 0 709
H
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
DomyślnieUst.
A I
użyt
k.
H
Opis
ID
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
710
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
Zabezpieczenie
przed niedociąże-
niem, moment
obrotowy
Zabezpieczenie
przed niedociąże-
niem, częstotli-
wość zerowa dla
obciążenia
Limit czasu
zabezpieczenia
przed niedociąże-
niem
Odpowiedź na
usterkę termis-
tora
Odpowiedź na
usterkę magistrali
komunikacyjnej
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
Patrz P2.7.21.
P2.7.23
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Odpowiedź na
usterkę gniazda
0 3 2 734
Patrz P2.7.21.
2
Page 38

VACON · 38 APLIKACJA STANDARDOWA
2.4.9 PARAMETRY AUTOMATYCZNEGO PONOWNEGO STARTU (PANEL STEROWANIA: MENU M2 -> G2.8)
Tabela 12: Parametry automatycznego ponownego startu, G2.8
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.8.1 Czas oczekiwania 0.10 10.00 s 0.50 717
P2.8.2 Czas próby 0.00 60.00 s 30.00 718
P2.8.3 Funkcja Start 0 2 0 719
Liczba prób po
P2.8.4
P2.8.5
P2.8.6
wyłączeniu z
powodu za
niskiego napięcia
Liczba prób po
wyłączeniu z
powodu przekro-
czenia napięcia
Liczba prób po
wyzwoleniu nad-
prądowym
0 10 0 720
0 10 0 721
0 3 0 722
DomyślnieUst.
użyt
k.
Opis
ID
0 = rampa
1 = start „w biegu”
2 = zgodnie z
P2.4.6
Liczba prób po
P2.8.7
P2.8.8
P2.8.9
P2.8.10
wyzwalaniu war-
tości zadanej 4
mA
Liczba prób po
wyzwalaniu
usterki tempera-
tury silnika
Liczba prób po
wyzwalaniu
usterki zewnętrz-
nej
Liczba prób po
wyzwalaniu
usterki niedocią-
żenia
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
2.4.10 PANEL STEROWANIA (PANEL STEROWANIA: MENU M3)
Poniżej zostały wymienione parametry wyboru miejsca sterowania i kierunku. Patrz menu
panelu sterującego w instrukcji obsługi produktu.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 39

APLIKACJA STANDARDOWA VACON · 39
Tabela 13: Parametry panelu sterowania, M3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P3.1
P3.2
P3.3
R3.4
Miejsce sterowa-
nia
Sterowanie z
panelu
Kierunek (na
panelu sterują-
cym)
Przycisk zatrzy-
mania
1 3 1 125
P2.1 P2.2 Hz 0.00
0 1 0 123
0 1 1 114
DomyślnieUst.
użyt
k.
Opis
ID
1 = we/wy sterujące
2 = panel
3 = magistrala
komunikacyjna
0 = ograniczone
działanie przycisku
STOP
1 = przycisk STOP
zawsze włączony
2.4.11 MENU SYSTEMOWE (PANEL STEROWANIA: MENU M6)
Parametry i funkcje związane z ogólnym zastosowaniem przemiennika częstotliwości, takie
jak wybór języka i aplikacji, niestandardowe zestawy parametrów lub informacje o sprzęcie i
oprogramowaniu, można znaleźć w instrukcji obsługi produktu.
2.4.12 KARTY ROZSZERZEŃ (PANEL STEROWANIA: MENU M7
W menu M7 są wyświetlane karty rozszerzeń i opcjonalne karty podłączone do karty
sterującej oraz informacje związane z kartą. Więcej informacji zawiera instrukcja obsługi
produktu.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 40

VACON · 40 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
3 APLIKACJA STEROWANIA LOKALNEGO/
ZDALNEGO
3.1 WPROWADZENIE
Wybierz aplikację sterowania lokalnego/zdalnego w menu M6 na stronie S6.2.
Aplikacja sterowania lokalnego/zdalnego umożliwia korzystanie z dwóch różnych miejsc
sterowania. W każdym miejscu sterowania wartość zadaną częstotliwości można wybrać z
poziomu panelu sterującego, magistrali lub we/wy sterujących. Aktywne miejsce sterowania
jest wybierane za pomocą wejścia cyfrowego DIN6.
Wszystkie wyjścia można swobodnie programować.
•
Funkcje dodatkowe:
Programowalna logika sygnału Start/Stop oraz Do tyłu
•
Skalowanie wartości zadawanej
•
Monitorowanie limitu częstotliwości
•
Programowanie drugich ramp i rampy o kształcie S
•
Programowalne funkcje Start i Stop
•
Hamowanie prądem stałym przy zatrzymaniu
•
Jeden obszar zabronionej częstotliwości
•
Programowalna krzywa U/f i częstotliwość przełączania
•
Automatyczne ponowne uruchomienie
•
Ochrona silnika przed przegrzaniem i utykiem: Programowalna reakcja; wyłączenie,
•
ostrzeżenie, usterka
Parametry aplikacji sterowania lokalnego/zdalnego zostały opisane w rozdziale 9 Opis
parametrów niniejszej instrukcji. Objaśnienia są uporządkowane według poszczególnych
numerów ID parametrów.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 41

Sterowanie potencjometre
m, 1‒10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Zadawanie zdalne
0(4) - 20 mA
PRACA
GOTOWOŚĆ
AO1–
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Zacisk Sygnał Opis
+10 V
ref
AI1+
AI1–
AI2+
AI2–
+24 V
Wyjściowe napięcie odniesienia
Masa dla wejścia/wyjścia
Wejście analogowe 2
Zakres prądu 0–20 mA
Programowalne (P2.1.11)
Wyjście napięcia sterującego
Masa dla WE/WY
Miejsce A: Start do przodu
Programowalna logika (P2.2.1)
Miejsce A: Start do tyłu
Ri min. = 5 kohm
Wejście usterki zewnętrznej
Programowalne (P2.2.2)
Miejsce B: Start do przodu
Programowalna logika (P2.2.15)
Miejsce B: Start do tyłu
Ri min. = 5 kΩ
Wybór miejsca A/B
Wspólne dla DIN 1 ‒ DIN 3
Wspólne dla zacisków DIN4‒DIN6
Wyjście napięcia sterującego
Masa dla WE/WY
Wyjście analogowe 1
Częstotliwość wyjściowa
Programowalne (P2.3.2)
Wyjście cyfrowe
GOTOWOŚĆ
Programowalne (P2.3.7)
Otwarty kolektor, I≤50 mA,
U≤48 V (prąd stały)
Wyjście przekaźnikowe 1
PRACA
Programowalne
(P2.3.8)
Wyjście przekaźnikowe 2
USTERKA
Programowalne
(P2.3.9)
Zakres 0–20 mA/RL,
maks. 500 Ω
Styk otwarty = miejsce A jest aktywne
Styk zamknięty = miejsce B jest aktywne
Zestyk zamknięty = start do przodu
Zestyk zamknięty = start do tyłu
AO1+
Wejście analogowe 1,
wartość zadana dla miejsca B
Masa dla wejść/wyjść
zadających oraz sterujących
Wejście analogowe 2,
wartość zadana dla miejsca A
Zestyk zamknięty = start do przodu
Zestyk zamknięty = start do tyłu
Styk otwarty = brak usterki
Styk zamknięty = usterka
Napięcie dla potencjometru itp.
Wejście analogowe 1
Zakres napięcia 0–10 V (prąd stały)
Programowalne (P2.1.12)
Napięcie dla przekaźników itp.,
maks. 0,1 A
Napięcie dla przekaźników (patrz 6)
Połącz z GND lub +24 V
Połącz z GND lub +24 V
Masa dla wejść/wyjść zadających
oraz sterujących
Masa dla wejść/wyjść
zadających oraz sterujących
APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 41
3.2 WEJŚCIA/WYJŚCIA STERUJĄCE
Rys. 7: Domyślna konfiguracja wejść/wyjść aplikacji sterowania lokalnego/zdalnego
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 42

Blok zworek X3:
Uziemienie CMA i CMB
CMB połączono z GND
CMA połączono z GND
CMB izolowane od GND
CMA izolowane od GND
CMB i CMA wewnętrznie
połączone ze sobą,
izolowane od GND
= ustawienie fabryczne
VACON · 42 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
*) Opcjonalna karta A3 nie ma zacisku dla styku rozwiernego na drugim wyjściu przekaźnika
(brak zacisku 24).
WSKAZÓWKA!
Patrz ustawienia zworek poniżej. Więcej informacji zawiera instrukcja obsługi
produktu.
Rys. 8: Ustawienia zworek
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 43

DIN3
≥ 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
Wewnętrzne odwrócenie
Zerowanie usterki
wewnętrznej
Wejście kasowania usterki (programowalne)
3.3 Kierunek obrotów
z panelu
Wewnętrzny Start/Stop
Zadawanie z magistrali komunikacyjnej
Sygnał Start/Stop z magistrali komunikacyjnej
Kierunek z magistrali komunikacyjnej
Przyciski Start/Stop
Przycisk zerowania
(Reset)
Start do przodu
(programowalny)
Start do tyłu
(programowalny)
Start do przodu
Start do tyłu
(programowalny)
(programowalny)
Start/stop
Do tyłu
W górę
W dół
3.1 Miejsce
sterowania
2.1.15 Wart. zad. prędk.
impulsow
2.1.14 Wartość zadana sterowania z magistrali
2.1.13 Wartość zadana sterowania z panelu
2.1.12 Wartość zadana B we/wy
2.1.11 Wartość zadana A we/wy
R3.2 Zadawanie z panelu
Potencjometr
silnika
Wewnętrzne zadawanie częstotliwości
Programowalna logika A
Start/Stop
oraz Do tyłu
Programowalna logika B
Start/Stop
oraz Do tyłu
APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 43
3.3 LOGIKA SYGNAŁU STEROWANIA W APLIKACJI LOKALNEJ/ZDALNEJ
Rys. 9: Logika sygnału sterowania aplikacji sterowania lokalnego/zdalnego
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 44

VACON · 44 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
3.4 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO — LISTY PARAMETRÓW
3.4.1 MONITOROWANIE WARTOŚCI (PANEL STEROWANIA: MENU M1)
Wartości monitorowane są to aktualne wartości wybranych parametrów, jak również stany
oraz wartości wybranych sygnałów mierzonych. Wartości monitorowanych nie można
modyfikować.
Tabela 14: Wielkości monitorowane
Indeks
V1.1
V1.2
V1.3
V1.4 Prąd silnika A 3
V1.5
V1.6 Moc silnika % 5
V1.7 Napięcie silnika V 6
V1.8
1.9
Wielkość
monitorowana
Częstotliwość wyj-
ściowa
Częstotliwość zada-
wana
Prędkość obrotowa
silnika
Moment obrotowy
silnika
Napięcie w obwodzie
prądu stałego
Temperatura prze-
miennika
Unit ID Opis
Hz 1
Hz 25
obr. 2
% 4
V 7
°C 8
1.10 Temperatura silnika % 9
V1.11 Wejście analogowe 1 V/mA 13
V1.12 Wejście analogowe 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analogowe I
Elementy monitoro-
V1.17
wania wielopozycyj-
nego
out
mA 26
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 45

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 45
3.4.2 PARAMETRY PODSTAWOWE (PANEL STEROWANIA: MENU M2 -> G2.1)
Tabela 15: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1.1
P2.1.2
P2.1.3
P2.1.4 Czas hamowania 1 0.1 3000.0 s 0.0 104
P2.1.5 Limit prądu 0,1 x I
P2.1.6 *
P2.1.7 *
Minimalna częs-
totliwość
Maksymalna
częstotliwość
Czas przyspiesza-
nia 1
napięcie znamio-
nowe silnika
częstotliwość zna-
mionowa silnika
0.00 P2.1.2 Hz 0.00 101
P2.1.1 320.00 Hz 50.00 102
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
DomyślnieUst.
użyt
k.
A IL: 107
NX2: 230
V
NX5: 400
V
NX6: 690
V
Opis
ID
110
P2.1.8 *
P2.1.9 *
P2.1.10 *
P2.1.11 *
P2.1.12 *
Prędkość znamio-
nowa silnika
Prąd znamionowy
silnika
Wartość cos SYM-
BOL silnika
Wartość zadana A
we/wy
Wartość zadana B
we/wy
24 20 000 obr. 1440 112
0,1 x I
0.30 1.00 0.85 120
0 4 1 117
0 4 0 131
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
4 = potencjometr
silnika
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
4 = potencjometr
silnika
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 46

VACON · 46 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
Tabela 15: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
Wartość zadana
P2.1.13 *
P2.1.14 *
P2.1.15 *
przy sterowaniu z
panelu
Wartość zadana
przy sterowaniu z
magistrali
Wartość zadana
prędkości impul-
sowania
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
DomyślnieUst.
użyt
k.
Opis
ID
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
* = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika częstotliwości.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 47

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 47
3.4.3 SYGNAŁY WEJŚCIOWE (PANEL STEROWANIA: MENU M2 -> G2.2)
Tabela 16: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
Wybór logiki syg-
P2.2.1 ***
nałów Start/Stop
miejsca A
0 8 0 300
DomyślnieUst.
użyt
k.
Opis
ID
Logika = 0
Sygnał 1 = start do
przodu
Sygnał 2 = start do
tyłu
Logika = 1
Sygnał 1 = start/stop
Ctrl sgn 2 = do tyłu
Logika = 2
Sygnał 1 = start/stop
Sygnał 2 = włączenie
pracy
Logika = 3
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = impuls
Stop
Logika = 4
Sygnał 1 = start do
przodu
Sygnał 2 = potencjometr silnika w górę
Logika = 5
Sygnał 1 = Start do
przodu (zbocze)
Sygnał 2 = Start do
tyłu (zbocze)
Logika = 6
Sygnał 1 = Start
(zbocze)/Stop
Ctrl sgn 2 = do tyłu
Logika = 7
Sygnał 1 = Start
(zbocze)/Stop
Sygnał 2 = włączenie
pracy
Logika = 8
Sygnał 1 = Start do
przodu (zbocze)
Sygnał 2 = potencjometr silnika w górę
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 48
VACON · 48 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
Tabela 16: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.2 Funkcja DIN3 0 13 1 301
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = usterka zewnętrzna, styk
zamknięty
2 = usterka zewnętrzna, styk otwarty
3 = włączenie pracy
4 = wybór czasu
przyspieszania/
hamowania
5 = przestaw cp na
zaciski we/wy
6 = przestaw cp na
panel sterujący
7 = przestaw cp na
magistralę komunikacyjną
8 = do tyłu
9 = prędkość impulsowania
11 = zabroniona operacja przyspieszania/
hamowania
12 = polecenie
hamowania prądem
stałym
13 = potencjometr
silnika w dół
P2.2.3
****
P2.2.4
P2.2.5
P2.2.6
P2.2.7
P2.2.8
Wybór sygnału AI1 0.1 E.10 A1 377
Zakres sygnału
AI1
Niestandardowe
minimalne usta-
wienie AI1
Niestandardowe
maksymalne
ustawienie AI1
Inwersja sygnału
AI1
Czas filtrowania
sygnału AI1
0 2 0 320
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0.00 10.00 s 0.10 324
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = zakres niestandardowego ustawienia**
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 49

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 49
Tabela 16: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.9
****
P2.2.10
P2.2.11
P2.2.12
P2.2.13
P2.2.14
Wybór sygnału AI2 0.1 E.10 A.2 388
Zakres sygnału
AI2
Niestandardowe
minimalne usta-
wienie AI2
Niestandardowe
maksymalne
ustawienie AI2
Inwersja sygnału
AI2
Czas filtrowania
sygnału AI2
0 2 1 325
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 10.00 s 0.10 329
DomyślnieUst.
użyt
k.
Opis
ID
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = zakres niestandardowego ustawienia**
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 50

VACON · 50 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
Tabela 16: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.15
***
Wybór logiki sygnałów Start/Stop
miejsca B
0 6 0 363
DomyślnieUst.
użyt
k.
Opis
ID
Logika = 0
Sygnał 1 = start do
przodu
Sygnał 2 = start do
tyłu
Logika = 1
Sygnał 1 = start/stop
Ctrl sgn 2 = do tyłu
Logika = 2
Sygnał 1 = start/stop
Sygnał 2 = włączenie
pracy
Logika = 3
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = impuls
Stop
Logika = 4
Sygnał 1 = impuls do
przodu (zbocze)
Sygnał 2 = impuls do
tyłu (zbocze)
Logika = 5
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = impuls do
tyłu
Logika = 6
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = włącz
impuls
P2.2.16
P2.2.17
P2.2.18
P2.2.19
Wartość mini-
malna skalowania
wartości zadanej
miejsca A
Wartość maksy-
malna skalowania
wartości zadanej
miejsca A
Wartość mini-
malna skalowania
wartości zadanej
miejsca B
Wartość maksy-
malna skalowania
wartości zadanej
miejsca B
0.00 320.00 Hz 0.00 303
0.00 304
0.00 320.00 Hz 0.00 364
0.00 320.00 Hz 0.00 365
0,00 = brak skalowania
>0 = skalowana wartość maksymalna
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 51

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 51
Tabela 16: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
Wolne wejście
P2.2.20
P2.2.21
P2.2.22
analogowe, wybór
sygnału
Wolne wejście
analogowe, funk-
cja
Czas rampy
potencjometru sil-
nika
0 2 0 361
0 4 0 362
0.1 2000.0 Hz/s 10.0 331
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = wejście analogowe 1
2 = wejście analogowe 2
0 = brak kasowania
1 = zmniejszenie
limitu prądu (P2.1.5)
2 = zmniejszenie
prądu hamowania
prądem stałym
3 = zmniejszenie
czasów przyspieszania i hamowania
4 = zmniejszenie
limitu monitorowania momentu obrotowego
0 = brak kasowania
1 = zerowanie po
zatrzymaniu lub
odłączeniu zasilania
2 = reset przy wyłączeniu zasilania
0 = brak kopiowania
stanu pracy
1 = skopiowano stan
pracy
P2.2.23
P2.2.24
Kasowanie
pamięci częstotli-
wości zadanej
potencjometrem
silnika
Pamięć impulsu
Start
0 2 1 367
0 1 0 498
** = należy pamiętać o odpowiednim ustawieniu zworek bloku X2. Patrz instrukcja obsługi
produktu.
*** = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika
częstotliwości.
**** = użyj metody TTF do programowania tych parametrów.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 52

VACON · 52 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
3.4.4 SYGNAŁY WYJŚCIOWE (PANEL STEROWANIA: MENU M2 -> G2.3
Tabela 17: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.1
P2.3.2
Wybór sygnału
AO1
Funkcja wyjścia
analogowego
0.1 E.10 A11 464
0 8 1 307
DomyślnieUst.
użyt
k.
Opis
ID
0 = nie używane (20
mA/10 V)
1 = częstotl. wyjściowa (0-f
2 = częstot. zadana
(0-f
max
3 = prędkość silnika (0–znamionowa prędkość silnika)
4 = prąd silnika (0I
nMotor
5 = moment obr.
silnika (0–T
6 = 7 = napięcie silnika (0–U
moc silnika (0–
P
nMotor
8 = napięcie na
szynie DC (0–
1000 V)
)
)
)
max
nMotor
nMotor
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Czas filtrowania
wyjścia analogo-
wego
Inwersja wyjścia
analogowego
Minimum wyjścia
analogowego
Skala wyjścia ana-
logowego
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = brak filtrowania
0 = bez inwersji
1 = odwrócony
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 53
APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 53
Tabela 17: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.7
Funkcja wyjścia
cyfrowego 1
0 22 1 312
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = gotowość
2 = praca
3 = usterka
4 = odwrócona
usterka
5 = ostrzeżenie o
przegrzaniu przemiennika częstotliwości
6 = usterka lub
ostrzeżenie rozsz.
7 = usterka lub
ostrzeżenie zad.
8 = ostrzeżenie
9 = odwrócone
10 = wybrano prędkość impulsowania
11 = dla prędkości
12 = aktywny regulator silnika
13 = monitorowanie limitów częstotliwości OP 1
14 = monitorowanie limitów częstotliwości OP 2
15 = monitorowanie limitów
momentu obrotowego
16 = monitorowanie limitów wartości zadanych
17 = kontrola
hamulca zewnętrznego
18 = miejsce sterowania: we/wy
19 = monitorowanie limitów temperatury FC
20 = niepożądany
kierunek obrotów
21 = odwrócona
kontrola hamulca
zewnętrznego
22 = usterka/
ostrzeżenie termistora
P2.3.8
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Funkcja RO1 0 22 2 313
Jak dla parametru
2.3.7
3
Page 54

VACON · 54 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
Tabela 17: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.9 Funkcja RO2 0 22 3 314
Monitorowanie
P2.3.10
P2.3.11
P2.3.12
P2.3.13
limitu częstotli-
wości wyjściowej 1
Limit częstotliwości wyjściowej
1; wartość moni-
torowana
Monitorowanie
limitu częstotli-
wości wyjściowej 2
Limit częstotliwości wyjściowej
2; wartość moni-
torowania
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
DomyślnieUst.
użyt
k.
Opis
ID
Jak dla parametru
2.3.7
0 = bez limitu
1 = monitorowanie
dolnego limitu
2 = monitorowanie
górnego limitu
0 = bez limitu
1 = monitorowanie
dolnego limitu
2 = monitorowanie
górnego limitu
P2.3.14
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
Funkcja monitoro-
wania limitu
momentu obroto-
wego
Wartość monito-
rowania limitu
momentu obroto-
wego
Funkcja monitoro-
wania limitów
wartości zadanych
Wartość monito-
rowania limitu
wartości zadanych
Opóźnienie wyłą-
czenia hamulca
zewnętrznego
Opóźnienie włą-
czenia hamulca
zewnętrznego
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 = nie
1 = dolny limit
2 = górny limit
0 = nie
1 = dolny limit
2 = górny limit
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 55

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 55
Tabela 17: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
Monitorowanie
P2.3.20
P2.3.21
P2.3.22
P2.3.23
P2.3.24
P2.3.25
limitów tempera-
tury przemiennika
częstotliwości
Wartość limitu
temperatury prze-
miennika częstot-
liwości
Skalowanie wyj-
ścia analogowego
2
Funkcja wyjścia
analogowego 2
Czas filtrowania
wyjścia analogo-
wego 2
Inwersja wyjścia
analogowego 2
0 2 0 354
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
DomyślnieUst.
użyt
k.
Opis
ID
0 = nie
1 = dolny limit
2 = górny limit
Jak dla parametru
2.3.2
0 = brak filtrowania
0 = bez inwersji
1 = odwrócony
P2.3.26
P.2.3.27
Minimum wyjścia
analogowego 2
Skalowanie wyj-
ścia analogowego
2
0 1 0 475
10 1000 % 1.00 476
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 56

VACON · 56 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
3.4.5 PARAMETRY STEROWANIA NAPĘDEM (PANEL STEROWANIA: MENU M2 -> G2.4
Tabela 18: Parametry sterowania napędu, G2.4
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.4.1 Kszatłt zbocza 1 0.0 10.0 s 0.1 500
P2.4.2 Kszatłt zbocza 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4 Czas hamowania 2 0.1 3000.0 s 1.0 503
P2.4.5 Moduł hamujący 0 4 0 504
Czas przyspiesza-
nia 2
0.1 3000.0 s 1.0 502
DomyślnieUst.
użyt
k.
Opis
ID
0 = liniowa
100 = pełne czasy
przyspieszania/
zwalniania
0 = liniowa
100 = pełne czasy
przyspieszania/
zwalniania
0 = wyłączony
1 = używane podczas pracy
2 = zewnętrzny
moduł hamujący
3 = używane podczas zatrzymania/
pracy
4 = używane podczas pracy (bez
testowania)
P2.4.6 Funkcja Start 0 2 0 505
P2.4.7 Funkcja Stop 0 3 0 506
P2.4.8
P2.4.9
Prąd hamowania
prądem stałym
Czas hamowania
prądem stałym
przy zatrzymaniu
0.00 IL: A 0,7 x I
0.00 600.00 s 0.00 508
H
507
0 = rampa
1 = start „w biegu”
2 = warunkowy
start „w biegu”
0 = wybieg
1 = rampa
2 = rampa + włączenie pracy na
wybiegu
3 = wybieg + włączenie pracy z
rampą
0 = hamulec prądu
stałego jest wyłączony przy zatrzymaniu
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 57

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 57
Tabela 18: Parametry sterowania napędu, G2.4
Indeks Ukrywanie AI1 AI1 Jednos
tka
Częstotliwość roz-
poczęcia hamowa-
P2.4.10
P2.4.11
P2.4.12 *
P2.4.13
nia prądem sta-
łym podczas
zatrzymywania z
rampą
Czas hamowania
prądem stałym
podczas startu
Hamulec strumie-
niowy
Prąd hamowania
strumieniem
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
0 1 0 520
0.00 IL: A I
DomyślnieUst.
użyt
k.
H
Opis
ID
0 = hamulec prądu
stałego jest wyłączony podczas
startu
0 = wyłączona
0 = Wł.
519
3.4.6 PARAMETRY ZABRONIONEJ CZĘSTOTLIWOŚCI (PANEL STEROWANIA: MENU M2 > G2.5)
Tabela 19: Parametry zabronionej częstotliwości, G2.5
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.5.1 Dolna granica 1 0.00 320.00 Hz 0.00 509
P2.5.2 Górna granica 1 0.00 320.00 Hz 0.00 510
P2.5.3 Dolna granica 2 0.00 320.00 Hz 0.00 511
P2.5.4 Górna granica 2 0.00 320.00 Hz 0.00 512
P2.5.5 Dolna granica 3 0.00 320.00 Hz 0.00 513
P2.5.6 Górna granica 3 0.00 320.00 Hz 0.00 514
Zabronione przy-
P2.5.7
spieszanie/hamo-
wanie z rampą
0.1 10.0 x 1.0 518
DomyślnieUst.
użyt
k.
Opis
ID
0 = zakres zabronionych 1 jest
wyłączony
0 = zakres zabronionych 2 jest
wyłączony
0 = zakres zabronionych 3 jest
wyłączony
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 58

VACON · 58 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
3.4.7 PARAMETRY STEROWANIA SILNIKIEM (PANEL STEROWANIA: MENU M2 -> G2.6)
Tabela 20: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.1 *
P2.6.2 * Optymalizacja U/f 0 1 0 109
P2.6.3 *
Tryb sterowania
silnikiem
Wybór współczyn-
nika U/f
0 1/3 0 600
0 3 0 108
DomyślnieUst.
użyt
k.
Opis
ID
0 = sterowanie
częstotliwością
1 = sterowanie
prędkością
NXP:
2 = sterowanie
momentem z pętlą
otwartą
3 = kontrola prędkości z zamkniętą
pętlą
4 = sterowanie
momentem z pętlą
zamkniętą
0 = nieużywany
1 = automatyczne
zwiększanie
momentu obrotowego
0 = liniowa
1 = kwadratowa
2 = programowalna
3 = liniowy z optymalizacją strumienia
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
Punkt osłabienia
pola
Napięcie w punk-
cie osłabienia pola
Częstotliwość
punktu środko-
wego krzywej U/f
Napięcie punktu
środkowego krzy-
wej U/f
Napięcie wyj-
ściowe przy zero-
wej częstotliwości
Częstotliwość klu-
czowania
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Zmienny 606
1.0 Zmienny kHz Zmienny 601
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 59

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 59
Tabela 20: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.10
P2.6.11
P2.6.12 Spadek obciążenia 0.00 100.00 % 0.00 620
P2.6.13 Identyfikacja 0 1/2 0 631
Grupa parametrów pętli zamkniętej 2.6.14
Regulator prze-
pięć
Regulator zbyt
niskiego napięcia
0 2 1 607
0 1 1 608
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = używane (bez
zmien. prędkości)
2 = używane
(zmien. prędkości)
0 = nieużywany
1 = używane
0 = brak reakcji
1 = identyfikacja
bez pracy
2 = identyfikacja
przy pracy
3 = przebieg ID
kodera
4 = brak reakcji
5 = niepowodzenie
ID przy pracy
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
Prąd magnesowa-
nia
Wzmocnienie P
sterowania pręd-
kością
Czas I sterowania
prędkością
Kompensacja
przyspieszenia
Regulacja
poślizgu
Prąd magnesowa-
nia przy starcie
Czas magnesowa-
nia przy starcie
Czas prędkości 0
przy starcie
Czas prędkości-0
przy zatrzymaniu
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 IL: A 0.00 627
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
H
A 0.00 612
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 60

VACON · 60 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
Tabela 20: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Moment obrotowy
rozruchu
Moment obrotowy
rozruchu DO
PRZODU
Moment obrotowy
rozruchu DO TYŁU
Czas filtrowania
kodera
Bieżące wzmoc-
nienie P sterowa-
nia
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = pamięć
momentu obrotowego
2 = wartość zadana
momentu
3 = moment obrotowy rozruchu do
przodu/do tyłu
Grupa parametrów identyfikacji 2.6.15
P2.6.15.1 Prędkość krokowa -50.0 50.0 0.0 0.0 1252
* = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika częstotliwości.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 61

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 61
3.4.8 ZABEZPIECZENIA (PANEL STERUJĄCY: MENU M2 -> G2.7
Tabela 21: Zabezpieczenia, G2.7
Indeks Ukrywanie AI1 AI1 Jednos
tka
Odpowiedź na
P2.7.1
P2.7.2
P2.7.3
P2.7.4
usterkę wartości
zadanej 4 mA
Częstotliwość
usterki wartości
zadanej 4 mA
Odpowiedź na
usterkę zew-
nętrzną
Monitorowanie faz
wejściowych
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
DomyślnieUst.
użyt
k.
Opis
ID
0 = brak reakcji
1 = ostrzeżenie
2 = ostrzeżenie
+poprzednia częstotliwość
3 = ostrzeżenie
+częstotliwość
stała 2.7.2
4 = usterka, stop
według 2.4.7
5 = usterka, zatrzymaj bezwładnością
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
Odpowiedź na
usterkę zbyt
niskiego napięcia
Kontrola faz wyj-
ściowych
Zabezpieczenie
przed skutkami
zwarć doziemnych
Zabezpieczenie
termiczne silnika
współczynnik
temperatury oto-
czenia silnika
Współczynnik
chłodzenia silnika
przy zerowej
prędkości
Stała czasowa
ciepła silnika
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Zmienny 707
0 = usterka zapisana w historii
Usterka niezapisana
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 62

VACON · 62 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
Tabela 21: Zabezpieczenia, G2.7
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.7.12 cykl pracy silnika 0 150 % 100 708
P2.7.13
P2.7.14 Prąd utknięcia 0.00 2 x I
P2.7.15 Limit czasu utyku 1.00 120.00 s 15.00 711
P2.7.16
P2.7.17
Zabezpieczenie
przed utykiem
Limit prędkości
utknięcia
Zabezpieczenie
przed niedociąże-
niem
0 3 0 709
H
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
DomyślnieUst.
A I
użyt
k.
H
Opis
ID
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
710
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
Zabezpieczenie
przed niedociąże-
niem, moment
obrotowy
Zabezpieczenie
przed niedociąże-
niem, częstotli-
wość zerowa dla
obciążenia
Limit czasu
zabezpieczenia
przed niedociąże-
niem
Odpowiedź na
usterkę termis-
tora
Odpowiedź na
usterkę magistrali
komunikacyjnej
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka, zatrzymaj bezwładnością
Patrz P2.7.21.
3
P2.7.23
Odpowiedź na
usterkę gniazda
0 3 2 734
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Patrz P2.7.21.
Page 63

APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO VACON · 63
3.4.9 PARAMETRY AUTOMATYCZNEGO PONOWNEGO STARTU (PANEL STEROWANIA: MENU M2 -> G2.8)
Tabela 22: Parametry automatycznego ponownego startu, G2.8
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.8.1 Czas oczekiwania 0.10 10.00 s 0.50 717
P2.8.2 Czas próby 0.00 60.00 s 30.00 718
P2.8.3 Funkcja Start 0 2 0 719
Liczba prób po
P2.8.4
P2.8.5
P2.8.6
wyłączeniu z
powodu za
niskiego napięcia
Liczba prób po
wyłączeniu z
powodu przekro-
czenia napięcia
Liczba prób po
wyzwoleniu nad-
prądowym
0 10 0 720
0 10 0 721
0 3 0 722
DomyślnieUst.
użyt
k.
Opis
ID
0 = rampa
1 = start „w biegu”
2 = zgodnie z
P2.4.6
Liczba prób po
P2.8.7
P2.8.8
P2.8.9
P2.8.10
wyzwalaniu war-
tości zadanej 4
mA
Liczba prób po
wyzwalaniu
usterki tempera-
tury silnika
Liczba prób po
wyzwalaniu
usterki zewnętrz-
nej
Liczba prób po
wyzwalaniu
usterki niedocią-
żenia
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
3.4.10 PANEL STEROWANIA (PANEL STEROWANIA: MENU M3)
Poniżej zostały wymienione parametry wyboru miejsca sterowania i kierunku. Patrz menu
panelu sterującego w instrukcji obsługi produktu.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 64

VACON · 64 APLIKACJA STEROWANIA LOKALNEGO/ZDALNEGO
Tabela 23: Parametry panelu sterowania, M3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P3.1
P3.2
P3.3
R3.4
Miejsce sterowa-
nia
Sterowanie z
panelu
Kierunek (na
panelu sterują-
cym)
Przycisk zatrzy-
mania
1 3 1 125
P2.1 P2.2 Hz 0.00
0 1 0 123
0 1 1 114
DomyślnieUst.
użyt
k.
Opis
ID
1 = we/wy sterujące
2 = panel
3 = magistrala
komunikacyjna
0 = ograniczone
działanie przycisku
STOP
1 = przycisk STOP
zawsze włączony
3.4.11 MENU SYSTEMOWE (PANEL STEROWANIA: MENU M6)
Parametry i funkcje związane z ogólnym zastosowaniem przemiennika częstotliwości, takie
jak wybór języka i aplikacji, niestandardowe zestawy parametrów lub informacje o sprzęcie i
oprogramowaniu, można znaleźć w instrukcji obsługi produktu.
3.4.12 KARTY ROZSZERZEŃ (PANEL STEROWANIA: MENU M7
W menu M7 są wyświetlane karty rozszerzeń i opcjonalne karty podłączone do karty
sterującej oraz informacje związane z kartą. Więcej informacji zawiera instrukcja obsługi
produktu.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 65

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 65
4 APLIKACJA STEROWANIA Z WIELOMA
POZIOMAMI PRĘDKOŚCI
4.1 WPROWADZENIE
Wybierz aplikację sterowania z wieloma poziomami prędkości w menu M6 na stronie S6.2.
Aplikacja sterowania z wieloma poziomami prędkości jest używana zwykle wtedy, gdy
wymagane są stałe prędkości. Można zaprogramować łącznie 15 + 2 różnych prędkości:
jedną prędkość podstawową, 15 prędkości wielokrokowych i jedną prędkość impulsowania.
Wartości prędkości są wybierane przy użyciu sygnałów cyfrowych DIN3, DIN4, DIN5 i DIN6.
Jeśli jest używana prędkość impulsowania, DIN3 można zaprogramować w zakresie od
zerowania usterki do wybranej prędkości impulsowania.
Wartość zadana prędkości podstawowej może być sygnałem napięcia lub prądu za
pośrednictwem zacisków wejścia analogowego (2/3 lub 4/5). Inne wejścia analogowe można
zaprogramować do innych celów.
Wszystkie wyjścia można swobodnie programować.
•
Funkcje dodatkowe:
Programowalna logika sygnału Start/Stop oraz Do tyłu
•
Skalowanie wartości zadawanej
•
Monitorowanie limitu częstotliwości
•
Programowanie drugich ramp i rampy o kształcie S
•
Programowalne funkcje Start i Stop
•
Hamowanie prądem stałym przy zatrzymaniu
•
Jeden obszar zabronionej częstotliwości
•
Programowalna krzywa U/f i częstotliwość przełączania
•
Automatyczne ponowne uruchomienie
•
Ochrona silnika przed przegrzaniem i utykiem: Programowalna reakcja; wyłączenie,
•
ostrzeżenie, usterka
Parametry aplikacji sterowania z wieloma poziomami prędkości zostały opisane w rozdziale
9 Opis parametrów niniejszej instrukcji. Objaśnienia są uporządkowane według
poszczególnych numerów ID parametrów.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 66

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Podstawowa
wartość zadana
(opcjonalnie)
PRACA
GOTOWOŚĆ
AO1–
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Zacisk Sygnał Opis
+10 Vwartość zadana
AI1+
AI1–
AI2+
AI2–
+24 V
Wyjściowe napięcie odniesienia
Masa dla wejścia/wyjścia
Wejście analogowe 2.
Zakres prądu 0–20 mA
Programowalne (P2.1.11)
Wyjście napięcia sterującego
Masa dla WE/WY
Start do przodu
Programowalna logika (P2.2.1)
Start do tyłu
Ri min. = 5 kΩ
Wejście usterki zewnętrznej
Programowalne (P2.2.2)
Wybierz prędkość zadawaną 1
Wybierz prędkość zadawaną 2
Wybierz prędkość zadawaną 3
Wspólne dla DIN 1 ‒ DIN 3
Wspólne dla zacisków DIN4‒DIN6
Wyjście napięcia sterującego
Masa dla WE/WY
Wyjście analogowe 1:
Częstotliwość wyjściowa
Programowalne (P2.3.2)
Wyjście cyfrowe
GOTOWOŚĆ
Programowalne (P2.3.7)
Otwarty kolektor, I≤50 mA,
U≤48 V (prąd stały)
Wyjście przekaźnikowe 1
PRACA
Programowalne
Programowalne
Programowalne
(P2.3.8)
Wyjście przekaźnikowe 2
USTERKA
Programowalne
(P2.3.9)
Zakres 0–20 mA/RL,
maks. 500 Ω
AO1+
Wejście analogowe 1,
częstotliwość zadana
Masa dla wejść/wyjść
zadających oraz sterujących
Wejście analogowe 2,
częstotliwość zadana
Domyślna wartość zadana
Zestyk zamknięty =
start do przodu
Zestyk zamknięty =
start do tyłu
Styk otwarty = brak usterki
Styk zamknięty = usterka
Sterowanie
potencjometrem,
1‒10 kΩ
Napięcie dla potencjometru itp.
Wejście analogowe 1.
Zakres napięcia 0–10 V
(prąd stały)
Napięcie dla przekaźników itp.,
maks. 0,1 A
Napięcie dla przekaźników (patrz 6)
Połącz z GND lub +24 V
Połącz z GND lub +24 V
Masa dla wejść/wyjść zadających
oraz sterujących
Masa dla wejść/wyjść zadających
oraz sterujących
wyb.1wyb.2 wyb.3 wyb.4 (z DIN3)
0 0 0 0 we/wy sterujące
1 0 0 0 Prędkość 1
0 1 0 0 Prędkość 2
---- -------
1 1 1 1 Prędkość 15
RO1
RO1
RO1
RO2
RO2
RO2
VACON · 66 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.2 WEJŚCIA/WYJŚCIA STERUJĄCE
Rys. 10: Domyślna konfiguracja wejść/wyjść aplikacji sterowania prędkością wielokrokową
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 67

Blok zworek X3:
Uziemienie CMA i CMB
CMB połączono z GND
CMA połączono z GND
CMB izolowane od GND
CMA izolowane od GND
CMB i CMA wewnętrznie
połączone ze sobą,
izolowane od GND
= ustawienie fabryczne
APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 67
*) Opcjonalna karta A3 nie ma zacisku dla styku rozwiernego na drugim wyjściu przekaźnika
(brak zacisku 24).
WSKAZÓWKA!
Patrz ustawienia zworek poniżej. Więcej informacji zawiera instrukcja obsługi
produktu.
Rys. 11: Ustawienia zworek
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 68

DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Sterow. z panelu
2.1.11 Sterowanie częstotliwością z zacisków we/wy
2.1.12 Wartość zadana sterowania z panelu
2.1.13 Sterowanie częstotliwością z magistrali komunikacyjnej
2.1.15 Prędkość stała 1
...2.1.29 Prędkość stała 15
3.1 Miejsce sterowania
Wewnętrzna
częstotliwość zadana
Start do przodu
(programowalny)
Start do tyłu
(programowalne)
Start/stop
Do tyłu
Wewnętrzny Start/Stop
Wewnętrzne odwrócenie
Zerowanie usterki
wewnętrznej
Wejście kasowania usterki
Przycisk zerowania
(Reset)
Przyciski
Start/Stop
Zadawanie z magistrali
komunikacyjnej
Sygnał Start/Stop z
magistrali komunikacyjnej
Kierunek z magistrali
komunikacyjnej
3.3 Kierunek obrotów z
panelu
Prędk.zadawana 1
Prędk.zadawana 2
Prędk.zadawana 3
Prędk.zadawana 4
2.1.14 Wartość zadana
prędkości impulsowania
(programowalny)
≥ 1
Programowalna
logika Start/
Stop oraz Do tyłu
VACON · 68 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.3 LOGIKA SYGNAŁU STEROWANIA W APLIKACJI STEROWANIA PRĘDKOŚCIĄ WIELOKROKOWĄ
Rys. 12: Logika sygnału sterowania aplikacji prędkości wielokrokowej
4.4 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI — LISTY
4.4.1 MONITOROWANIE WARTOŚCI (PANEL STEROWANIA: MENU M1)
Wartości monitorowane są to aktualne wartości wybranych parametrów, jak również stany
oraz wartości wybranych sygnałów mierzonych. Wartości monitorowanych nie można
modyfikować.
4
PARAMETRÓW
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 69

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 69
Tabela 24: Wielkości monitorowane
Indeks
V1.1
V1.2
V1.3
V1.4 Prąd silnika A 3
V1.5
V1.6 Moc silnika % 5
V1.7 Napięcie silnika V 6
V1.8
1.9
Wielkość
monitorowana
Częstotliwość wyj-
ściowa
Częstotliwość zada-
wana
Prędkość obrotowa
silnika
Moment obrotowy
silnika
Napięcie w obwodzie
prądu stałego
Temperatura prze-
miennika
Unit ID Opis
Hz 1
Hz 25
obr. 2
% 4
V 7
°C 8
1.10 Temperatura silnika % 9
V1.11 Wejście analogowe 1 V/mA 13
V1.12 Wejście analogowe 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analogowe I
Elementy monitoro-
V1.17
wania wielopozycyj-
nego
out
mA 26
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 70

VACON · 70 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.4.2 PARAMETRY PODSTAWOWE (PANEL STEROWANIA: MENU M2 -> G2.1)
Tabela 25: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1.1
P2.1.2
P2.1.3
P2.1.4 Czas hamowania 1 0.1 3000.0 s 0.0 104
P2.1.5 Limit prądu 0,1 x I
P2.1.6 *
P2.1.7 *
Minimalna częs-
totliwość
Maksymalna
częstotliwość
Czas przyspiesza-
nia 1
napięcie znamio-
nowe silnika
częstotliwość zna-
mionowa silnika
0.00 P2.1.2 Hz 0.00 101
P2.1.1 320.00 Hz 50.00 102
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
DomyślnieUst.
użyt
k.
A IL: 107
NX2: 230
V
NX5: 400
V
NX6: 690
V
Opis
ID
110
P2.1.8 *
P2.1.9 *
P2.1.10 *
P2.1.11 *
P2.1.12 *
P2.1.13 *
Prędkość znamio-
nowa silnika
Prąd znamionowy
silnika
Wartość cos SYM-
BOL silnika
Sterowanie częs-
totliwością z
zacisków we/wy
Wartość zadana
przy sterowaniu z
panelu
Wartość zadana
przy sterowaniu z
magistrali
24 20 000 obr. 1440 112
0,1 x I
0.30 1.00 0.85 120
0 3 1 117
0 3 2 121
0 3 3 122
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
0 = AI1
1 = AI2
2 = panel
3 = magistrala
komunikacyjna
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 71

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 71
Tabela 25: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1.14
P2.1.15
P2.1.16
P2.1.17
P2.1.18
P2.1.19
P2.1.20
P2.1.21
Wart. zad. prędk.
impulsow.
Prędkość zada-
wana 1
Prędkość zada-
wana 2
Prędkość zada-
wana 3
Prędkość zada-
wana 4
Prędkość zada-
wana 5
Prędkość zada-
wana 6
Prędkość zada-
wana 7
0.00 P2.1.2 Hz 0.00 124
0.00 P2.1.2 Hz 5.00 105
0.00 P2.1.2 Hz 10.00 106
0.00 P2.1.2 Hz 12.50 126
0.00 P2.1.2 Hz 15.00 127
0.00 P2.1.2 Hz 17.50 128
0.00 P2.1.2 Hz 20.00 129
0.00 P2.1.2 Hz 22.50 130
DomyślnieUst.
użyt
k.
Opis
ID
P2.1.22
P2.1.23
P2.1.24
P2.1.25
P2.1.26
P2.1.27
P2.1.28
P2.1.29
Prędkość zada-
wana 8
Prędkość zada-
wana 9
Prędkość zada-
wana 10
Prędkość zada-
wana 11
Prędkość zada-
wana 12
Prędkość zada-
wana 13
Prędkość zada-
wana 14
Prędkość zada-
wana 15
0.00 P2.1.2 Hz 25.00 133
0.00 P2.1.2 Hz 27.50 134
0.00 P2.1.2 Hz 30.00 135
0.00 P2.1.2 Hz 32.50 136
0.00 P2.1.2 Hz 35.00 137
0.00 P2.1.2 Hz 40.00 138
0.00 P2.1.2 Hz 45.00 139
0.00 P2.1.2 Hz 50.00 140
* = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika częstotliwości.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 72

VACON · 72 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.4.3 SYGNAŁY WEJŚCIOWE (PANEL STEROWANIA: MENU M2 -> G2.2)
Tabela 26: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.1 *** Logika Start/Stop 0 6 0 300
DomyślnieUst.
użyt
k.
ID
Opis
Logika = 0
Sygnał 1 = start do
przodu
Sygnał 2 = start do
tyłu
Logika = 1
Sygnał 1 = start/stop
Ctrl sgn 2 = do tyłu
Logika = 2
Sygnał 1 = start/stop
Sygnał 2 = włączenie
pracy
Logika = 3
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = impuls
Stop
Logika = 4
Sygnał 1 = impuls do
przodu (zbocze)
Sygnał 2 = impuls do
tyłu (zbocze)
Logika = 5
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = impuls do
tyłu
Logika = 6
Sygnał 1 = impuls
Start (zbocze)
Sygnał 2 = włącz
impuls
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 73

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 73
Tabela 26: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.2 Funkcja DIN3 0 13 1 301
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = usterka zewnętrzna, styk
zamknięty
2 = usterka zewnętrzna, styk otwarty
3 = włączenie pracy
4 = wybór czasu
przyspieszania/
hamowania
5 = przestaw cp na
zaciski we/wy
6 = przestaw cp na
panel sterujący
7 = przestaw cp na
magistralę komunikacyjną
8 = Rvs (jeśli P2.2.1 ≠
2, 3 lub 6)
9 = prędkość impulsowania
10 = kasowanie
usterki
11 = zabroniona operacja przyspieszania/
hamowania
12 = polecenie
hamowania prądem
stałym
13 = prędkość zadawana
P2.2.3
****
P2.2.4
P2.2.5
P2.2.6
P2.2.7
Wybór sygnału AI1 0.1 E.10 A1 377
Zakres sygnału
AI1
Niestandardowe
minimalne usta-
wienie AI1
Niestandardowe
maksymalne
ustawienie AI1
Inwersja sygnału
AI1
0 2 0 320
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = zakres niestandardowego ustawienia**
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 74

VACON · 74 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
Tabela 26: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.8
P2.2.9
****
P2.2.10
P2.2.11
P2.2.12
P2.2.13
Czas filtrowania
sygnału AI1
Wybór sygnału AI2 0.1 E.10 A.2 388
Zakres sygnału
AI2
Niestandardowe
minimalne usta-
wienie AI2
Niestandardowe
maksymalne
ustawienie AI2
Inwersja sygnału
AI2
0.00 10.00 s 0.10 324
0 2 1 325
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
DomyślnieUst.
użyt
k.
Opis
ID
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = zakres niestandardowego ustawienia**
P2.2.14
P2.2.15
P2.2.16
P2.2.17
Czas filtrowania
sygnału AI2
Wartość mini-
malna skalowania
wartości zadawa-
nej
Wartość maksy-
malna skalowania
wartości zadawa-
nej
Wolne wejście
analogowe, wybór
sygnału
0.00 10.00 s 0.10 329
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 2 0 361
0,00 = brak skalowania
>0 = skalowana wartość maksymalna
0 = nieużywany
1 = AI1
2 = AI2
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 75

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 75
Tabela 26: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
Wolne wejście
P2.2.18
analogowe, funk-
cja
0 4 0 362
DomyślnieUst.
użyt
k.
Opis
ID
0 = bez funkcji
1 = zmniejszenie
limitu prądu (P2.1.5)
2 = zmniejszenie
prądu hamowania
prądem stałym,
P2.4.8
3 = zmniejszenie
czasów przyspieszania i hamowania
4 = zmniejszenie
limitu monitorowania momentu obrotowego P2.3.15
CP= miejsce sterowania
cc = styk zamknięty
oc = styk otwarty
** = należy pamiętać o odpowiednim ustawieniu zworek bloku X2. Patrz instrukcja obsługi
produktu.
*** = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika
częstotliwości.
**** = użyj metody TTF do programowania tych parametrów.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 76

VACON · 76 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.4.4 SYGNAŁY WYJŚCIOWE (PANEL STEROWANIA: MENU M2 -> G2.3
Tabela 27: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.1 *
P2.3.2
Wybór sygnału
AO1
Funkcja wyjścia
analogowego
0.1 E.10 A11 464
0 8 1 307
DomyślnieUst.
użyt
k.
Opis
ID
0 = nie używane (20
mA/10 V)
1 = częstotl. wyjściowa (0-f
2 = częstot. zadana
(0-f
max
3 = prędkość silnika (0–znamionowa prędkość silnika)
4 = prąd silnika (0I
nMotor
5 = moment obr.
silnika (0–T
6 = moc silnika (0–
P
nMotor
7 = napięcie silnika
(0–U
8 = napięcie na
szynie DC (0–
1000 V)
)
)
)
nMotor
)
max
nMotor
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Czas filtrowania
wyjścia analogo-
wego
Inwersja wyjścia
analogowego
Minimum wyjścia
analogowego
Skala wyjścia ana-
logowego
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = brak filtrowania
0 = bez inwersji
1 = odwrócony
0 = 0 mA (0 V)
1 = 4 mA (2 V)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 77

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 77
Tabela 27: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.7
Funkcja wyjścia
cyfrowego 1
0 22 1 312
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = gotowość
2 = praca
3 = usterka
4 = odwrócona
usterka
5 = ostrzeżenie o
przegrzaniu przemiennika częstotliwości
6 = usterka lub
ostrzeżenie rozsz.
7 = usterka lub
ostrzeżenie zad.
8 = ostrzeżenie
9 = odwrócone
10 = wybrano prędkość impulsowania
11 = dla prędkości
12 = aktywny regulator silnika
13 = monitorowanie limitów częstotliwości OP 1
14 = monitorowanie limitów częstotliwości OP 2
15 = monitorowanie limitów
momentu obrotowego
16 = monitorowanie limitów wartości zadanych
17 = kontrola
hamulca zewnętrznego
18 = miejsce sterowania: we/wy
19 = monitorowanie limitów temperatury FC
20 = niepożądany
kierunek obrotów
21 = odwrócona
kontrola hamulca
zewnętrznego
22 = usterka/
ostrzeżenie termistora
P2.3.8
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Funkcja RO1 0 22 2 313
Jak dla parametru
2.3.7
4
Page 78

VACON · 78 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
Tabela 27: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.3.9 Funkcja RO2 0 22 3 314
Monitorowanie
P2.3.10
P2.3.11
P2.3.12
P2.3.13
limitu częstotli-
wości wyjściowej 1
Limit częstotliwości wyjściowej
1; wartość moni-
torowana
Monitorowanie
limitu częstotli-
wości wyjściowej 2
Limit częstotliwości wyjściowej
2; wartość moni-
torowania
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
DomyślnieUst.
użyt
k.
Opis
ID
Jak dla parametru
2.3.7
0 = bez limitu
1 = monitorowanie
dolnego limitu
2 = monitorowanie
górnego limitu
0 = bez limitu
1 = monitorowanie
dolnego limitu
2 = monitorowanie
górnego limitu
P2.3.14
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
Funkcja monitoro-
wania limitu
momentu obroto-
wego
Wartość monito-
rowania limitu
momentu obroto-
wego
Funkcja monitoro-
wania limitów
wartości zadanych
Wartość monito-
rowania limitu
wartości zadanych
Opóźnienie wyłą-
czenia hamulca
zewnętrznego
Opóźnienie włą-
czenia hamulca
zewnętrznego
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 = nie
1 = dolny limit
2 = górny limit
0 = nie
1 = dolny limit
2 = górny limit
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 79

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 79
Tabela 27: Sygnały wyjściowe, G2.3
Indeks Ukrywanie AI1 AI1 Jednos
tka
Monitorowanie
P2.3.20
P2.3.21
P2.3.22 *
P2.3.23 *
P2.3.24 *
P2.3.25 *
limitów tempera-
tury przemiennika
częstotliwości
Wartość limitu
temperatury prze-
miennika częstot-
liwości
Skalowanie wyj-
ścia analogowego
2
Funkcja wyjścia
analogowego 2
Czas filtrowania
wyjścia analogo-
wego 2
Inwersja wyjścia
analogowego 2
0 2 0 354
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
DomyślnieUst.
użyt
k.
Opis
ID
0 = nie
1 = dolny limit
2 = górny limit
Jak dla parametru
2.3.2
0 = brak filtrowania
0 = bez inwersji
1 = odwrócony
P2.3.26 *
P.2.3.27 *
Minimum wyjścia
analogowego 2
Skalowanie wyj-
ścia analogowego
2
0 1 0 475
10 1000 % 1.00 476
* = użyj metody TTF do programowania tych parametrów
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 80

VACON · 80 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.4.5 PARAMETRY STEROWANIA NAPĘDEM (PANEL STEROWANIA: MENU M2 -> G2.4
Tabela 28: Parametry sterowania napędu, G2.4
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.4.1 Kszatłt zbocza 1 0.0 10.0 s 0.1 500
P2.4.2 Kszatłt zbocza 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4 Czas hamowania 2 0.1 3000.0 s 1.0 503
P2.4.5 Moduł hamujący 0 4 0 504
Czas przyspiesza-
nia 2
0.1 3000.0 s 1.0 502
DomyślnieUst.
użyt
k.
Opis
ID
0 = liniowa
100 = pełne czasy
przyspieszania/
zwalniania
0 = liniowa
100 = pełne czasy
przyspieszania/
zwalniania
0 = wyłączony
1 = używane podczas pracy
2 = zewnętrzny
moduł hamujący
3 = używane podczas zatrzymania/
pracy
4 = używane podczas pracy (bez
testowania)
P2.4.6 Funkcja Start 0 2 0 505
P2.4.7 Funkcja Stop 0 3 0 506
P2.4.8
P2.4.9
Prąd hamowania
prądem stałym
Czas hamowania
prądem stałym
przy zatrzymaniu
0.00 IL: A 0,7 x I
0.00 600.00 s 0.00 508
H
507
0 = rampa
1 = start „w biegu”
2 = warunkowy
start „w biegu”
0 = wybieg
1 = rampa
2 = rampa + włączenie pracy na
wybiegu
3 = wybieg + włączenie pracy z
rampą
0 = hamulec prądu
stałego jest wyłączony przy zatrzymaniu
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 81
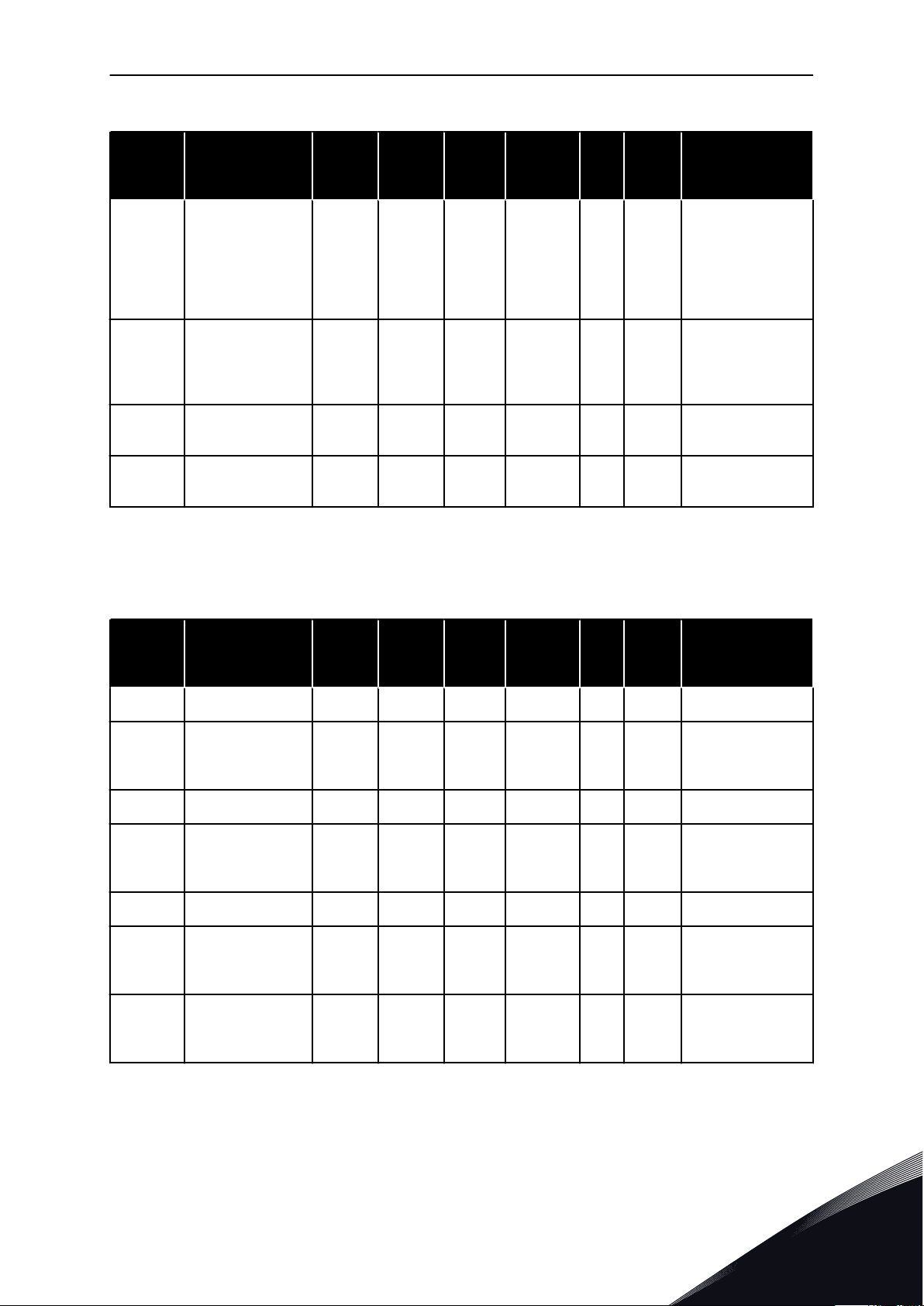
APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 81
Tabela 28: Parametry sterowania napędu, G2.4
Indeks Ukrywanie AI1 AI1 Jednos
tka
Częstotliwość roz-
poczęcia hamowa-
P2.4.10
P2.4.11
P2.4.12 *
P2.4.13
nia prądem sta-
łym podczas
zatrzymywania z
rampą
Czas hamowania
prądem stałym
podczas startu
Hamulec strumie-
niowy
Prąd hamowania
strumieniem
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
0 1 0 520
0.00 IL: A I
DomyślnieUst.
użyt
k.
H
Opis
ID
0 = hamulec prądu
stałego jest wyłączony podczas
startu
0 = wyłączona
0 = Wł.
519
4.4.6 PARAMETRY ZABRONIONEJ CZĘSTOTLIWOŚCI (PANEL STEROWANIA: MENU M2 > G2.5)
Tabela 29: Parametry zabronionej częstotliwości, G2.5
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.5.1 Dolna granica 1 0.00 320.00 Hz 0.00 509
P2.5.2 Górna granica 1 0.00 320.00 Hz 0.00 510
P2.5.3 Dolna granica 2 0.00 320.00 Hz 0.00 511
P2.5.4 Górna granica 2 0.00 320.00 Hz 0.00 512
P2.5.5 Dolna granica 3 0.00 320.00 Hz 0.00 513
P2.5.6 Górna granica 3 0.00 320.00 Hz 0.00 514
Zabronione przy-
P2.5.7
spieszanie/hamo-
wanie z rampą
0.1 10.0 x 1.0 518
DomyślnieUst.
użyt
k.
Opis
ID
0 = zakres zabronionych 1 jest
wyłączony
0 = zakres zabronionych 2 jest
wyłączony
0 = zakres zabronionych 3 jest
wyłączony
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 82

VACON · 82 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.4.7 PARAMETRY STEROWANIA SILNIKIEM (PANEL STEROWANIA: MENU M2 -> G2.6)
Tabela 30: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.1 *
P2.6.2 * Optymalizacja U/f 0 1 0 109
P2.6.3 *
Tryb sterowania
silnikiem
Wybór współczyn-
nika U/f
0 1/3 0 600
0 3 0 108
DomyślnieUst.
użyt
k.
Opis
ID
0 = sterowanie
częstotliwością
1 = sterowanie
prędkością
NXP:
2 = sterowanie
momentem z pętlą
otwartą
3 = kontrola prędkości z zamkniętą
pętlą
4 = sterowanie
momentem z pętlą
zamkniętą
0 = nieużywany
1 = automatyczne
zwiększanie
momentu obrotowego
0 = liniowa
1 = kwadratowa
2 = programowalna
3 = liniowy z optymalizacją strumienia
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
Punkt osłabienia
pola
Napięcie w punk-
cie osłabienia pola
Częstotliwość
punktu środko-
wego krzywej U/f
Napięcie punktu
środkowego krzy-
wej U/f
Napięcie wyj-
ściowe przy zero-
wej częstotliwości
Częstotliwość klu-
czowania
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Zmienny 606
1.0 Zmienny kHz Zmienny 601
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 83

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 83
Tabela 30: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.10
P2.6.11
P2.6.12 Spadek obciążenia 0.00 100.00 % 0.00 620
P2.6.13 Identyfikacja 0 1/2 0 631
Grupa parametrów pętli zamkniętej 2.6.14
Regulator prze-
pięć
Regulator zbyt
niskiego napięcia
0 2 1 607
0 1 1 608
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = używane (bez
zmien. prędkości)
2 = używane
(zmien. prędkości)
0 = nieużywany
1 = używane
0 = brak reakcji
1 = identyfikacja
bez pracy
2 = identyfikacja
przy pracy
3 = przebieg ID
kodera
4 = brak reakcji
5 = niepowodzenie
ID przy pracy
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
Prąd magnesowa-
nia
Wzmocnienie P
sterowania pręd-
kością
Czas I sterowania
prędkością
Kompensacja
przyspieszenia
Regulacja
poślizgu
Prąd magnesowa-
nia przy starcie
Czas magnesowa-
nia przy starcie
Czas prędkości 0
przy starcie
Czas prędkości-0
przy zatrzymaniu
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 IL: A 0.00 627
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
H
A 0.00 612
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 84

VACON · 84 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
Tabela 30: Parametry sterowania silnika, G2.6
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Moment obrotowy
rozruchu
Moment obrotowy
rozruchu DO
PRZODU
Moment obrotowy
rozruchu DO TYŁU
Czas filtrowania
kodera
Bieżące wzmoc-
nienie P sterowa-
nia
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = pamięć
momentu obrotowego
2 = wartość zadana
momentu
3 = moment obrotowy rozruchu do
przodu/do tyłu
Grupa parametrów identyfikacji 2.6.15
P2.6.15.1 Prędkość krokowa -50.0 50.0 0.0 0.0 1252
* = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika częstotliwości.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 85

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 85
4.4.8 ZABEZPIECZENIA (PANEL STERUJĄCY: MENU M2 -> G2.7)
Tabela 31: Zabezpieczenia, G2.7
Indeks Ukrywanie AI1 AI1 Jednos
tka
Odpowiedź na
P2.7.1
P2.7.2
P2.7.3
P2.7.4
usterkę wartości
zadanej 4 mA
Częstotliwość
usterki wartości
zadanej 4 mA
Odpowiedź na
usterkę zew-
nętrzną
Monitorowanie faz
wejściowych
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
DomyślnieUst.
użyt
k.
Opis
ID
0 = brak reakcji
1 = ostrzeżenie
2 = ostrzeżenie
+poprzednia częstotliwość
3 = ostrzeżenie
+częstotliwość
stała 2.7.2
4 = usterka, stop
według 2.4.7
5 = usterka,
zatrzymaj bezwładnością
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka,
zatrzymaj bezwładnością
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
Odpowiedź na
usterkę zbyt
niskiego napięcia
Kontrola faz wyj-
ściowych
Zabezpieczenie
przed skutkami
zwarć doziemnych
Zabezpieczenie
termiczne silnika
współczynnik
temperatury oto-
czenia silnika
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0 = usterka zapisana w historii
Usterka niezapisana
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka,
zatrzymaj bezwładnością
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 86

VACON · 86 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
Tabela 31: Zabezpieczenia, G2.7
Indeks Ukrywanie AI1 AI1 Jednos
tka
Współczynnik
P2.7.10
P2.7.11
P2.7.12 cykl pracy silnika 0 150 % 100 708
P2.7.13
P2.7.14 Prąd utknięcia 0.00 2 x I
P2.7.15 Limit czasu utyku 1.00 120.00 s 15.00 711
chłodzenia silnika
przy zerowej
prędkości
Stała czasowa
ciepła silnika
Zabezpieczenie
przed utykiem
0.0 150.0 % 40.0 706
1 200 min Zmienny 707
0 3 0 709
H
DomyślnieUst.
A 1
użyt
k.
H
Opis
ID
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka,
zatrzymaj bezwładnością
710
P2.7.16
P2.7.17
P2.7.18
P2.7.19
P2.7.20
Limit prędkości
utknięcia
Zabezpieczenie
przed niedociąże-
niem
Zabezpieczenie
przed niedociąże-
niem, moment
obrotowy
Zabezpieczenie
przed niedociąże-
niem, częstotli-
wość zerowa dla
obciążenia
Limit czasu
zabezpieczenia
przed niedociąże-
niem
1.00 P2.1.2 Hz 25.00 712
0 3 0 713
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka,
zatrzymaj bezwładnością
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 87

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 87
Tabela 31: Zabezpieczenia, G2.7
Indeks Ukrywanie AI1 AI1 Jednos
tka
Odpowiedź na
P2.7.21
P2.7.22
P2.7.23
usterkę termis-
tora
Odpowiedź na
usterkę magistrali
komunikacyjnej
Odpowiedź na
usterkę gniazda
0 3 2 732
0 3 2 733
0 3 734
DomyślnieUst.
użyt
k.
Opis
ID
0 = brak reakcji
1 = ostrzeżenie
2 = usterka, stop
według 2.4.7
3 = usterka,
zatrzymaj bezwładnością
Patrz P2.7.21.
Patrz P2.7.21.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 88

VACON · 88 APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI
4.4.9 PARAMETRY AUTOMATYCZNEGO PONOWNEGO STARTU (PANEL STEROWANIA: MENU M2 -> G2.8)
Tabela 32: Parametry automatycznego ponownego startu, G2.8
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.8.1 Czas oczekiwania 0.10 10.00 s 0.50 717
P2.8.2 Czas próby 0.00 60.00 s 30.00 718
P2.8.3 Funkcja Start 0 2 0 719
Liczba prób po
P2.8.4
P2.8.5
P2.8.6
wyłączeniu z
powodu za
niskiego napięcia
Liczba prób po
wyłączeniu z
powodu przekro-
czenia napięcia
Liczba prób po
wyzwoleniu nad-
prądowym
0 10 0 720
0 10 0 721
0 3 0 722
DomyślnieUst.
użyt
k.
Opis
ID
0 = rampa
1 = start „w biegu”
2 = zgodnie z
P2.4.6
Liczba prób po
P2.8.7
P2.8.8
P2.8.9
P2.8.10
wyzwalaniu war-
tości zadanej 4
mA
Liczba prób po
wyzwalaniu
usterki tempera-
tury silnika
Liczba prób po
wyzwalaniu
usterki zewnętrz-
nej
Liczba prób po
wyzwalaniu
usterki niedocią-
żenia
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
4.4.10 PANEL STEROWANIA (PANEL STEROWANIA: MENU M3)
Poniżej zostały wymienione parametry wyboru miejsca sterowania i kierunku. Patrz menu
panelu sterującego w instrukcji obsługi produktu.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 89

APLIKACJA STEROWANIA Z WIELOMA POZIOMAMI PRĘDKOŚCI VACON · 89
Tabela 33: Parametry panelu sterowania, M3
Indeks Ukrywanie AI1 AI1 Jednos
tka
P3.1
P3.2
P3.3
R3.4
Miejsce sterowa-
nia
Sterowanie z
panelu
Kierunek (na
panelu sterują-
cym)
Przycisk zatrzy-
mania
1 3 1 125
P2.1.1 P2.1.2 Hz 0.00
0 1 0 123
0 1 1 114
DomyślnieUst.
użyt
k.
Opis
ID
1 = we/wy sterujące
2 = panel
3 = magistrala
komunikacyjna
0 = ograniczone
działanie przycisku
STOP
1 = przycisk STOP
zawsze włączony
4.4.11 MENU SYSTEMOWE (PANEL STEROWANIA: MENU M6)
Parametry i funkcje związane z ogólnym zastosowaniem przemiennika częstotliwości, takie
jak wybór języka i aplikacji, niestandardowe zestawy parametrów lub informacje o sprzęcie i
oprogramowaniu, można znaleźć w instrukcji obsługi produktu.
4.4.12 KARTY ROZSZERZEŃ (PANEL STEROWANIA: MENU M7
W menu M7 są wyświetlane karty rozszerzeń i opcjonalne karty podłączone do karty
sterującej oraz informacje związane z kartą. Więcej informacji zawiera instrukcja obsługi
produktu.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 90

VACON · 90 APLIKACJA Z REGULATOREM PID
5 APLIKACJA Z REGULATOREM PID
5.1 WPROWADZENIE
Wybierz aplikację sterowania PID w menu M6 na stronie S6.2.
W aplikacji sterowania PID są dwa miejsca sterowania we/wy sterującymi: miejsce A to
regulator PID, a źródło B to bezpośrednia wartość zadana częstotliwości. Miejsce sterowania
A lub B jest wybierane za pomocą wejścia cyfrowego DIN6.
Wartość zadaną regulatora PID można wybrać za pomocą wejść analogowych, magistrali
komunikacyjnej, potencjometru silnika, panelu sterującego lub włączając wartość zadaną
PID 2. Wartość rzeczywistą regulatora PID można wybrać za pomocą wejść analogowych,
magistrali komunikacyjnej, wartości rzeczywistych silnika lub funkcji matematycznych.
Bezpośrednie zadanie częstotliwości można wykorzystać do sterowania bez regulatora PID
i można je wybrać dla wejść analogowych, magistrali komunikacyjnej, panelu sterującego
i potencjometru silnika.
Zwykle aplikacja PID służy do sterowania pomiarami poziomu lub pomp i wentylatorów. W
tych zastosowaniach aplikacja PID zapewnia bezproblemowe sterowanie oraz wbudowaną
funkcję pomiaru w przypadku, gdy nie są wymagane elementy dodatkowe.
Wejścia cyfrowe DIN2, DIN3, DIN5 i wszystkie wyjścia można swobodnie programować.
•
Funkcje dodatkowe:
Wybór zakresu sygnału wejścia analogowego
•
Monitorowanie limitów dwóch częstotliwości
•
Monitorowanie limitów momentu obrotowego
•
Monitorowanie limitu wartości zadanych
•
Programowanie drugich ramp i rampy o kształcie S
•
Programowalne funkcje Start i Stop
•
Hamulec prądu stałego podczas uruchamiania i zatrzymywania
•
Trzy obszary zabronionej częstotliwości
•
Programowalna krzywa U/f i częstotliwość przełączania
•
Automatyczne ponowne uruchomienie
•
Ochrona silnika przed przegrzaniem i utykiem: w pełni programowalna; wyłączenie,
•
ostrzeżenie, usterka
Zabezpieczenie silnika przed niedociążeniem
•
Monitorowanie faz wejściowych i wyjściowych
•
Dodanie sumy punktów częstotliwości do wyjścia PID
•
Regulatora PID można również użyć z miejsc sterowania we/wy B, panelu i magistrali
•
komunikacyjnej
Funkcja łatwego przełączania
•
Funkcja uśpienia
•
Parametry aplikacji sterowania PID zostały opisane w rozdziale 9 Opis parametrów niniejszej
instrukcji. Objaśnienia są uporządkowane według poszczególnych numerów ID parametrów.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 91

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
Nadajnik 2-przewodowy
Sterowanie potencjometrem,
1‒10 kΩ
mA
PRACA
GOTOWOŚĆ
AO1–
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Zacisk Sygnał Opis
+10 V
wartość zadana
AI1+
AI1–
AI2+
AI2–
+24 V
Wyjściowe napięcie odniesienia
Masa dla wejścia/wyjścia
Wejście analogowe 2
Zakres prądu 0–20 mA
Programowalne (P2.2.9)
Wyjście napięcia sterującego
Masa dla WE/WY
Miejsce A: Start do przodu
Ri min. = 5 kΩ
Zerowanie usterki
Programowalne (P2.2.2)
Wejście usterki zewnętrznej
Programowalne (P2.2.2)
Miejsce B: Start do przodu
Ri min. = 5 kΩ
Wybór prędkości impulsowania
Programowalne (P2.2.3)
Wybór miejsca sterowania A/B
Styk zamknięty =
prędkość impulsowania aktywna
Sygnał startu dla miejsca sterowania B
Częstotliwość zadana (P2.2.5.)
Wspólne dla DIN 1 ‒ DIN 3
Wspólne dla zacisków
DIN4‒DIN6
Wyjście napięcia sterującego
Masa dla WE/WY
Wyjście analogowe 1
Częstotliwość wyjściowa
Programowalne (P2.3.2)
Wyjście cyfrowe
GOTOWOŚĆ
Programowalne (P2.3.7)
Otwarty kolektor, I≤50 mA,
U≤48 V (prąd stały)
Wyjście przekaźnikowe 1
PRACA
Programowalne
(P2.3.8)
Wyjście przekaźnikowe 2
USTERKA
Programowalne
(P2.3.9)
AO1+
Wejście analogowe 1
wartość zadawana PID
Masa dla wejść/wyjść
zadających oraz sterujących
Wejście analogowe 2
Wartość rzeczywista PID 1
Zestyk zamknięty = start do przodu
Styk zamknięty = kasowanie usterki
Zestyk zamknięty = start do tyłu
Styk zamknięty = usterka
Styk otwarty = brak usterki
Napięcie wzorcowe potencjometru itp.
Wejście analogowe 1
Zakres napięcia 0–10 V (prąd stały)
Programowalne (P2.1.11)
Napięcie dla przekaźników itp.,
maks. 0,1 A
Napięcie dla przekaźników (patrz 6)
Połącz z GND lub +24 V
Rzeczywisty
wartość
(0) 4–20
mA
Połącz z GND lub +24 V
Masa dla wejść/wyjść zadających
oraz sterujących
Zakres 0–20 mA/RL,
maks. 500 Ω
Masa dla wejść/wyjść
zadających oraz sterujących
Styk otwarty = miejsce sterowania A
jest aktywne, styk zamknięty =
miejsce sterowania B jest aktywne
APLIKACJA Z REGULATOREM PID VACON · 91
5.2 WEJŚCIA/WYJŚCIA STERUJĄCE
Rys. 13: Domyślna konfiguracja we/wy aplikacji PID (za pomocą nadajnika 2-przewodowego)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 92

Blok zworek X3:
Uziemienie CMA i CMB
CMB połączono z GND
CMA połączono z GND
CMB izolowane od GND
CMA izolowane od GND
CMB i CMA wewnętrznie
połączone ze sobą,
izolowane od GND
= ustawienie fabryczne
VACON · 92 APLIKACJA Z REGULATOREM PID
*) Opcjonalna karta A3 nie ma zacisku dla styku rozwiernego na drugim wyjściu przekaźnika
(brak zacisku 24).
WSKAZÓWKA!
Patrz ustawienia zworek poniżej. Więcej informacji zawiera instrukcja obsługi
produktu.
Rys. 14: Ustawienia zworek
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 93

DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
Wewnętrzne odwrócenie
Zerowanie usterki wewnętrznej
Wejście kasowania usterki (programowalne)
3.3 Kierunek obrotów z panelu
Wewnętrzny Start/Stop
Zadawanie z magistrali
komunikacyjnej
Sygnał Start/Stop z
magistrali komunikacyjnej
Kierunek z magistrali
komunikacyjnej
Usterka zewn. (programowalna)
Prędkość impulsowania (programowalna)
Wybór miejsca A/B
2.2.4 Główna wartość zadana PID
W górę
W dół
WE/WY do tyłu
R3.4 Wartość zadana dla
regulatora PID z panelu
R3.2 War zad pan ster
Act 1
Act 2
R3.5 Zadawanie regulatora
PID z panelu 2
Włączenie zadawania regulatora
PID z panelu 2 (DIN5 = 13)
Start; Miejsce A
Start; Miejsce B
Start/stop
Przyciski Start/Stop
Wewnętrzne zadawanie
częstotliwości
2.1.19 Wart. zad. prędk. impulsow
Panel
sterujący
Magistrala
komunikacyjna
Przycisk zerowania (Reset)
3.1 Miejsce sterowania
2.2.6 Sterowanie częstotliwością
z panelu sterowania
2.2.5 Wartość zadana we/wy B
≥ 1
Potencjometr
silnika
Wybór
wartości
rzeczywistej,
par. 2.2.9 i
2.2.10
Wybór
wartości
rzeczywistej,
par. 2.2.8
2.2.7 Sterowanie częstotliwością
z magistrali komunikacyjnej
2.1.11 Wartość zadana
dla regulatora PID
APLIKACJA Z REGULATOREM PID VACON · 93
5.3 LOGIKA SYGNAŁU STEROWANIA W APLIKACJI STEROWANIA PID
Rys. 15: Logika sygnału sterowania aplikacji sterowania PID
5.4 APLIKACJA Z REGULATOREM PID — LISTY PARAMETRÓW
5.4.1 MONITOROWANIE WARTOŚCI (PANEL STEROWANIA: MENU M1)
Wartości monitorowane są to aktualne wartości wybranych parametrów, jak również stany
oraz wartości wybranych sygnałów mierzonych. Wartości monitorowanych nie można
modyfikować.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 94

VACON · 94 APLIKACJA Z REGULATOREM PID
WSKAZÓWKA!
Wartości monitorowania od V1.19 do V1.22 są dostępne tylko za pośrednictwem
aplikacji sterowania PID.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 95

APLIKACJA Z REGULATOREM PID VACON · 95
Tabela 34: Wielkości monitorowane
Indeks
V1.1
V1.2
V1.3
V1.4 Prąd silnika A 3
V1.5
V1.6 Moc silnika % 5
V1.7 Napięcie silnika V 6
V1.8
1.9
Wielkość
monitorowana
Częstotliwość wyj-
ściowa
Częstotliwość zada-
wana
Prędkość obrotowa
silnika
Moment obrotowy
silnika
Napięcie w obwodzie
prądu stałego
Temperatura prze-
miennika
Unit ID Opis
Hz 1
Hz 25
obr. 2
% 4
V 7
°C 8
1.10 Temperatura silnika % 9
V1.11 Wejście analogowe 1 V/mA 13
V1.12 Wejście analogowe 2 V/mA 14
V1.13 Wejście analogowe 3 27
V1.14 Wejście analogowe 4 28
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 Analogowe I
V1.19 Sygn.Zad.PID % 20
V1.20
V1.21
V1.22 Wyjscie PID % 23
Wartość rzeczywista
dla regulatora PID
Wartość uchybu
regulatora PID
out
mA 26
% 21
% 22
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 96

VACON · 96 APLIKACJA Z REGULATOREM PID
Tabela 34: Wielkości monitorowane
Indeks
V1.23
V1.24
G1.25
V1.26.1 Current A 1113
V1.26.2 Torque % 1125
V1.26.3 Napięcie DC V 44
V1.26.4 Słowo stanu 43
Wielkość
monitorowana
Specjalne wyświetla-
nie wartości rzeczy-
wistej
Temperatura
modułu PT100
Elementy monitoro-
wania
Unit ID Opis
29
şC 42
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 97

APLIKACJA Z REGULATOREM PID VACON · 97
5.4.2 PARAMETRY PODSTAWOWE (PANEL STEROWANIA: MENU M2 -> G2.1)
Tabela 35: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1.1
P2.1.2
P2.1.3
P2.1.4 Czas hamowania 1 0.1 3000.0 s 0.0 104
P2.1.5 Limit prądu 0,1 x I
P2.1.6 *
P2.1.7 *
Minimalna częs-
totliwość
Maksymalna
częstotliwość
Czas przyspiesza-
nia 1
napięcie znamio-
nowe silnika
częstotliwość zna-
mionowa silnika
0.00 P2.1.2 Hz 0.00 101
P2.1.1 320.00 Hz 50.00 102
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
DomyślnieUst.
użyt
k.
A IL: 107
NX2: 230
V
NX5: 400
V
NX6: 690
V
Opis
ID
110
P2.1.8 *
P2.1.9 *
P2.1.10 *
P2.1.11 *
P2.1.12
Prędkość znamio-
nowa silnika
Prąd znamionowy
silnika
Wartość cos SYM-
BOL silnika
Sygnał wartości
zadanej regula-
tora PID (miejsce
A)
Wzmocnienie
regulatora PID
24 20 000 obr. 1440 112
0,1 x I
0.30 1.00 0.85 120
0 4 1 332
0.0 1000.0 % 100.0 118
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = wartość zadana
PID ze strony sterowania panelu,
P3.4
3 = wartość zadana
PID z magistrali
komunikacyjnej
(wejście danych
procesowych 1)
4 = potencjometr
silnika
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 98

VACON · 98 APLIKACJA Z REGULATOREM PID
Tabela 35: Podstawowe parametry G2.1
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.1.13
P2.1.14
P2.1.15
P2.1.16
P2.1.17 Poziom budzenia 0.00 100.00 % 25.00 1018
P2.1.18 Funkcja budzenia 0 1 0 1019
Czas regulacji I
regulatora PID
Czas regulacji D
regulatora PID
Częstotliwość
uśpienia
Opóźnienie uśpie-
nia
0.00 320.00 s 1.00 119
0.00 100.00 s 0.00 132
0.00 P2.1.2 Hz 10.00 1016
0 3600 s 30 1017
DomyślnieUst.
użyt
k.
Opis
ID
0 = budzenie po
spadku poniżej
poziomu budzenia
(2.1.17)
1 = budzenie po
przekroczeniu
poziomu budzenia
(2.1.17)
Wartość zadana
P2.1.19
prędkości impul-
sowania
0.00 P2.1.2 Hz 10.00 124
* = wartość parametru można zmienić dopiero po zatrzymaniu przemiennika częstotliwości.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 99

APLIKACJA Z REGULATOREM PID VACON · 99
5.4.3 SYGNAŁY WEJŚCIOWE
Tabela 36: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
P2.2.1 ** Funkcja DIN2 0 13 1 319
DomyślnieUst.
użyt
k.
Opis
ID
0 = nieużywany
1 = usterka zewn.,
st. zamk.
2 = usterka zewn.,
st. rozw.
3 = włączenie
pracy
4 = wybór czasu
przyspieszania/
hamowania
5 = CP: we/wy sterujące (ID125)
6 = CP: Panel sterujący (ID125)
7 = CP: Magistrala
(ID125)
8 = do przodu/do
tyłu
9 = częstotliwość
impulsowania (styk
zamknięty)
10 = kasowanie
usterki (styk
zamknięty)
11 = zabronione
przyspieszanie/
hamowanie (styk
zamknięty)
12 = polecenie
hamowania prądem stałym
13 = potencjometr
silnika UP (góra)
(zam. zest.)
P2.2.2 **
P2.2.3 ** Funkcja DIN5 0 13 9 330
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Funkcja DIN3 0 13 10 301
Patrz powyżej z
wyjątkiem:
13 = potencjometr
silnika DOWN (dół)
(styk zamknięty)
Patrz powyżej z
wyjątkiem:
13 = Włącz wartość
zadaną PID 2
5
Page 100

VACON · 100 APLIKACJA Z REGULATOREM PID
Tabela 36: Sygnały wejściowe, G2.2
Indeks Ukrywanie AI1 AI1 Jednos
tka
Wartość zadana
P2.2.4 **
P2.2.5 **
sumy punktów
PID
Wybór wartości
zadanej B we/wy
0 7 0 376
0 7 1 343
DomyślnieUst.
użyt
k.
Opis
ID
0 = wartość bezpośredniego wyjścia
PID
1 = AI1+wyjście PID
2 = AI2+wyjście PID
3 = AI3+wyjście PID
4 = AI4+wyjście PID
5 = panel PID+wyjście PID
6 = magistrala
komunikacyjna
+wyjście PID (ProcessDataIN3)
7 = potencjometr
silnika+wyjście PID
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = zadawanie z
panelu ster.
5 = wartość zadana
z magistrali komunikacyjnej
(FBSpeedReference)
6 = potencjometr
silnika
7 = regulator PID
P2.2.6 **
P2.2.7 **
Wybór źródła war-
tości zadanej przy
sterowaniu z
panelu
Wybór źródła war-
tości zadanej przy
sterowaniu z
magistrali
Tak jak P2.2.5
0 7 4 121
Tak jak P2.2.5
0 7 5 122
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...