

Page 1

vacon nx
®
inverter
all in one
manuale applicativo
Page 2

Page 3
A
J
B C D E F G H I
Index Min Max Unit Default
Cust
ID DescriptionParameter
PREFAZIONE VACON · 3
PREFAZIONE
ID documento: DPD01214E
Data: 1.12.2016
Codice software:
Applicazione Base = ASFIFF01
•
Applicazione Standard = ASFIFF02
•
Applicazione di Controllo Locale/Remoto
•
= ASFIFF03
Applicazione di Controllo della Velocità
•
Multistep = ASFIFF04
Applicazione di Controllo PID = ASFIFF05
•
Applicazione di Controllo Multifunzione
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Applicazione di Controllo Pompe e
•
Ventole = ASFIFF07
INFORMAZIONI SUL MANUALE
Questo manuale è copyright di Vacon Ltd. Tutti i diritti riservati. Il manuale è soggetto a
variazioni senza preavviso. La versione originale di queste istruzioni è in lingua inglese.
Nel presente manuale, è possibile ottenere informazioni sulle funzioni dell'inverter VACON
e sul relativo utilizzo.
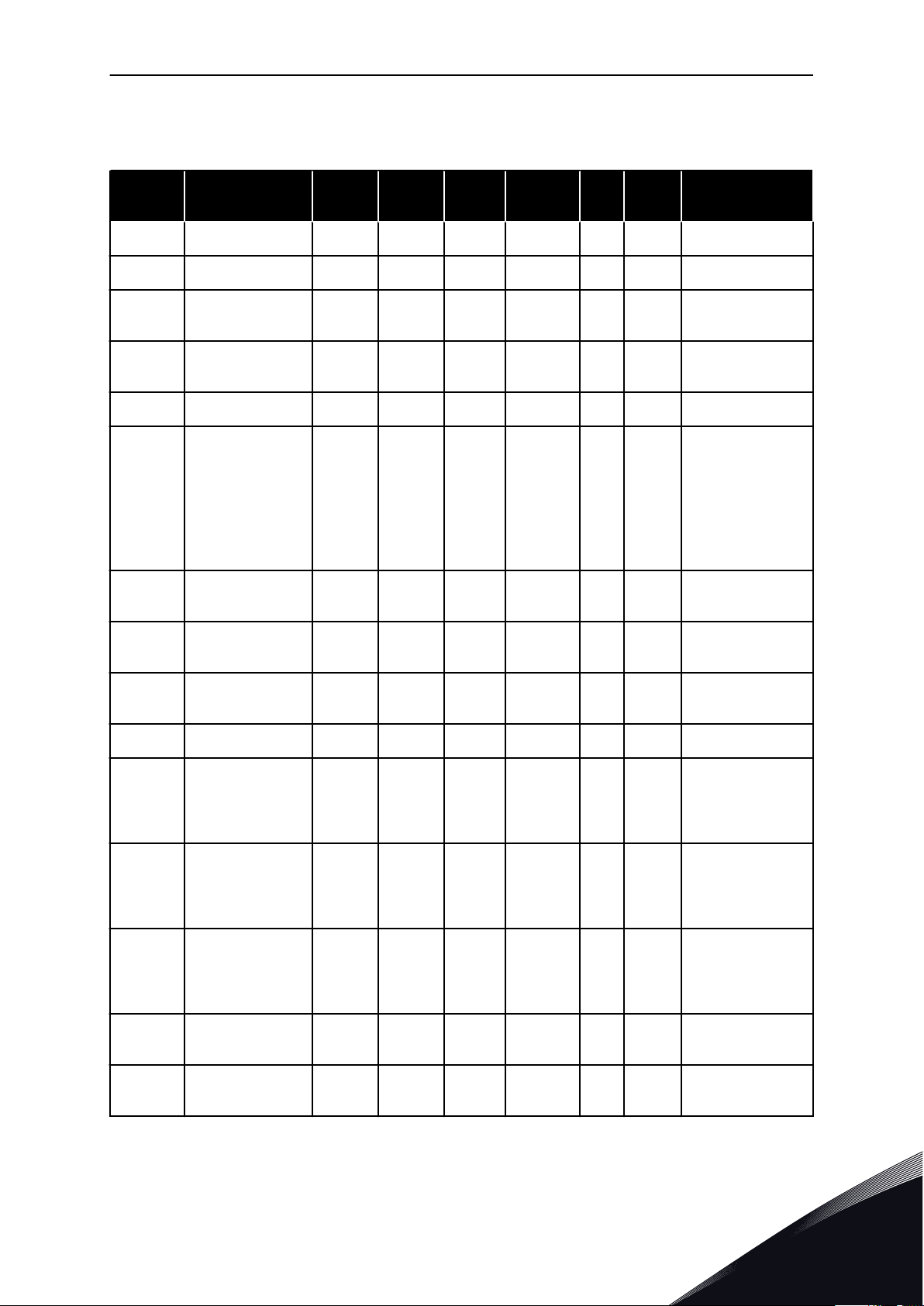
In questo manuale, sono presenti numerose tabelle di parametri. Le presenti istruzioni
indicano come leggere le tabelle.
A. La posizione del parametro nel menu;
ovvero, il numero del parametro.
B. Il nome del parametro.
C. Il valore minimo del parametro.
D. Il valore massimo del parametro.
E. L'unità del valore del parametro. L'unità
indica la disponibilità del parametro.
F. Le impostazioni predefinite del valore.
G. Impostazione personalizzata del cliente.
H. Il numero identificativo del parametro.
I. Una breve descrizione dei valori del
parametro e/o della relativa funzione.
J. Quando è presente il simbolo, è possibile
ottenere maggiori dati sul parametro
all'interno del capitolo Descrizioni dei
parametri.
®
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 4

VACON · 4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 5
SOMMARIO VACON · 5
SOMMARIO
Prefazione
Informazioni sul manuale 3
1 Applicazione Base 10
1.1 Introduzione 10
1.1.1 Funzioni di protezione del motore nell'Applicazione Base 10
1.2 I/O di controllo 11
1.3 Logica del segnale di controllo nell'Applicazione Base 13
1.4 Applicazione Base - Elenchi di parametri 13
1.4.1 Valori di monitoraggio (pannello di comando: menu M1) 13
1.4.2 Parametri di base (pannello di comando: Menu M2 - G2.1) 15
1.4.3 Controllo da pannello (pannello di comando: menu M3) 17
1.4.4 Menu di sistema (pannello di comando: menu M6) 17
1.4.5 Schede di espansione (pannello di comando: menu M7 17
2 Applicazione Standard 18
2.1 Introduzione 18
2.2 I/O di controllo 19
2.3 Logica del segnale di controllo nell'Applicazione Standard 21
2.4 Applicazione Standard - Elenchi di parametri 21
2.4.1 Valori di monitoraggio (pannello di comando: menu M1) 21
2.4.2 Parametri di base (pannello di comando: Menu M2 - G2.1) 23
2.4.3 Segnali di ingresso (pannello di comando: Menu M2 - G2.2) 24
2.4.4 Segnali di uscita (pannello di comando: menu M2 -> G2.3 26
2.4.5 Parametri per il controllo dell'inverter (pannello di comando: menu M2
-> G2.4 29
2.4.6 Parametri di frequenza proibita (pannello di comando: Menu M2 - G2.5)
30
2.4.7 Parametri per il controllo del motore (pannello di comando: Menu M2 G2.6) 31
2.4.8 Protezioni (pannello di comando: menu M2 -> G2.7 34
2.4.9 Parametri riavviamento automatico (pannello di comando: Menu M2 G2.8) 36
2.4.10 Controllo da pannello (pannello di comando: menu M3) 36
2.4.11 Menu di sistema (pannello di comando: menu M6) 37
2.4.12 Schede di espansione (pannello di comando: menu M7 37
3 Applicazione controllo locale/remoto 38
3.1 Introduzione 38
3.2 I/O di controllo 39
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 6
VACON · 6 SOMMARIO
3.3 Logica del segnale di controllo nell'Applicazione di Controllo Locale/Remoto 41
3.4 Applicazione di Controllo Locale/Remoto - Elenchi di parametri 42
3.4.1 Valori di monitoraggio (pannello di comando: menu M1) 42
3.4.2 Parametri di base (pannello di comando: Menu M2 - G2.1) 43
3.4.3 Segnali di ingresso (pannello di comando: Menu M2 - G2.2) 45
3.4.4 Segnali di uscita (pannello di comando: menu M2 -> G2.3 49
3.4.5 Parametri per il controllo dell'inverter (pannello di comando: menu M2
-> G2.4 53
3.4.6 Parametri di frequenza proibita (pannello di comando: Menu M2 - G2.5)
54
3.4.7 Parametri per il controllo del motore (pannello di comando: Menu M2 G2.6) 55
3.4.8 Protezioni (pannello di comando: menu M2 -> G2.7 58
3.4.9 Parametri riavviamento automatico (pannello di comando: Menu M2 G2.8) 60
3.4.10 Controllo da pannello (pannello di comando: menu M3) 60
3.4.11 Menu di sistema (pannello di comando: menu M6) 61
3.4.12 Schede di espansione (pannello di comando: menu M7 61
4 Applicazione di Controllo della Velocità Multistep 62
4.1 Introduzione 62
4.2 I/O di controllo 63
4.3 Logica del segnale di controllo nell'Applicazione di Controllo della Velocità
Multistep 65
4.4 Applicazione di Controllo della Velocità Multistep - Elenchi di parametri 65
4.4.1 Valori di monitoraggio (pannello di comando: menu M1) 65
4.4.2 Parametri di base (pannello di comando: Menu M2 - G2.1) 67
4.4.3 Segnali di ingresso (pannello di comando: Menu M2 - G2.2) 69
4.4.4 Segnali di uscita (pannello di comando: menu M2 -> G2.3 73
4.4.5 Parametri per il controllo dell'inverter (pannello di comando: menu M2
-> G2.4 77
4.4.6 Parametri di frequenza proibita (pannello di comando: Menu M2 - G2.5)
78
4.4.7 Parametri per il controllo del motore (pannello di comando: Menu M2 -
G2.6) 79
4.4.8 Protezioni (pannello di comando: Menu M2 - G2.7) 82
4.4.9 Parametri riavviamento automatico (pannello di comando: Menu M2 -
G2.8) 84
4.4.10 Controllo da pannello (pannello di comando: menu M3) 85
4.4.11 Menu di sistema (pannello di comando: menu M6) 85
4.4.12 Schede di espansione (pannello di comando: menu M7 85
5 Applicazione controller PID 86
5.1 Introduzione 86
5.2 I/O di controllo 87
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 7
SOMMARIO VACON · 7
5.3 Logica del segnale di controllo nell'Applicazione di Controllo PID 89
5.4 Applicazione di Controllo PID - Elenchi di parametri 89
5.4.1 Valori di monitoraggio (pannello di comando: menu M1) 89
5.4.2 Parametri di base (pannello di comando: Menu M2 - G2.1) 93
5.4.3 Segnali di ingresso 95
5.4.4 Segnali di uscita (pannello di comando: menu M2 -> G2.3 101
5.4.5 Parametri per il controllo dell'inverter (pannello di comando: menu M2
-> G2.4 105
5.4.6 Parametri di frequenza proibita (pannello di comando: Menu M2 - G2.5)
106
5.4.7 Parametri per il controllo del motore (pannello di comando: Menu M2 -
G2.6) 107
5.4.8 Protezioni (pannello di comando: menu M2 -> G2.7 110
5.4.9 Parametri riavviamento automatico (pannello di comando: Menu M2 -
G2.8) 113
5.4.10 Controllo da pannello (pannello di comando: menu M3) 113
5.4.11 Menu di sistema (pannello di comando: menu M6) 114
5.4.12 Schede di espansione (pannello di comando: menu M7 114
6 Applicazione di Controllo Multifunzione 115
6.1 Introduzione 115
6.2 I/O di controllo 117
6.3 Logica del segnale di controllo nell'Applicazione di Controllo Multifunzione 119
6.4 Applicazione di Controllo Multifunzione - Elenchi di parametri 119
6.4.1 Valori di monitoraggio (pannello di comando: menu M1) 119
6.4.2 Parametri di base (pannello di comando: Menu M2 - G2.1) 131
6.4.3 Segnali di ingresso 134
6.4.4 Segnali di uscita 143
6.4.5 Parametri per il controllo dell'inverter (pannello di comando: menu M2
-> G2.4 152
6.4.6 Parametri di frequenza proibita (pannello di comando: Menu M2 - G2.5)
154
6.4.7 Parametri per il controllo del motore (pannello di comando: Menu M2 -
G2.6) 155
6.4.8 Protezioni (pannello di comando: menu M2 -> G2.7 165
6.4.9 Parametri riavviamento automatico (pannello di comando: Menu M2 -
G2.8) 170
6.4.10 Parametri del bus di campo (pannello di comando: Menu M2 - G2.9) 171
6.4.11 Parametri per il controllo della coppia (pannello di comando: Menu M2 -
G2.10) 173
6.4.12 Inverter NXP: Parametri Master Follower (pannello di comando: Menu
M2 - G2.11) 175
6.4.13 Controllo da pannello (pannello di comando: menu M3) 176
6.4.14 Menu di sistema (pannello di comando: menu M6) 176
6.4.15 Schede di espansione (pannello di comando: menu M7 176
7 Applicazione per Controllo Pompe e Ventole 177
7.1 Introduzione 177
7.2 I/O di controllo 179
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 8
VACON · 8 SOMMARIO
7.3 Logica del segnale di controllo nell'Applicazione per Controllo Pompe e Ventole
183
7.4 Applicazione per Controllo Pompe e Ventole - Elenchi di parametri 183
7.4.1 Valori di monitoraggio (pannello di comando: menu M1) 183
7.4.2 Parametri di base (pannello di comando: Menu M2 - G2.1) 187
7.4.3 Segnali di ingresso 189
7.4.4 Segnali di uscita 196
7.4.5 Parametri per il controllo dell'inverter (pannello di comando: menu M2
-> G2.4 203
7.4.6 Parametri di frequenza proibita (pannello di comando: Menu M2 - G2.5)
204
7.4.7 Parametri per il controllo del motore (pannello di comando: Menu M2 -
G2.6) 205
7.4.8 Protezioni (pannello di comando: menu M2 -> G2.7 207
7.4.9 Parametri riavviamento automatico (pannello di comando: Menu M2 -
G2.8) 210
7.4.10 Parametri per il controllo di pompe e ventole (pannello di comando:
Menu M2 - G2.9) 211
7.4.11 Controllo da pannello (pannello di comando: menu M3) 213
7.4.12 Menu di sistema (pannello di comando: menu M6) 214
7.4.13 Schede di espansione (pannello di comando: menu M7 214
8 Descrizioni dei valori di monitoraggio 215
9 Descrizioni dei parametri 222
9.1 Parametri per il controllo da pannello 380
9.2 Funzione Master/Follower (solo NXP) 382
9.2.1 Collegamenti fisici Master/Follower 382
9.2.2 Collegamento con fibre ottiche tra inverter con scheda OPTD2 382
9.3 Controllo freno esterno con limiti aggiuntivi (ID da 315, 316, 346 a 349, 352, 353)
383
9.4 Parametri della protezione termica del motore (ID da 704 a 708) 385
9.5 Parametri della protezione da stallo (ID da 709 a 712) 386
9.6 Parametri della protezione da sottocarico (ID da 713 a 716) 386
9.7 Parametri di controllo bus di campo (ID da 850 a 859) 387
9.7.1 Uscita dati di processo (Slave -> Master) 387
9.7.2 Scalatura della corrente per le diverse taglie delle unità 388
9.7.3 Ingresso dati di processo (Master -> Slave) 388
9.8 Parametri anello chiuso (ID da 612 a 621) 389
9.9 Principio di programmazione TTF ("Da morsetto a funzione") 390
9.9.1 Definizione di un ingresso/uscita per una determinata funzione sul
pannello 390
9.9.2 Definizione di un morsetto per una determinata funzione con lo
strumento di programmazione NCDrive 391
9.9.3 Definizione degli ingressi/uscite inutilizzati 392
9.10 Parametri del regolatore di velocità (solo applicazione 6) 393
9.11 Rotazione ausiliari tra azionamenti (solo applicazione 7) 395
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 9

SOMMARIO VACON · 9
9.12 Selezione interblocco (P2.9.23) 397
9.13 Esempi di selezione di rotazione ausiliari/interblocchi 398
9.13.1 Automazione di pompa e ventola con interblocchi e nessuna rotazione
ausiliari 398
9.13.2 Automazione di pompa e ventola con interblocchi e rotazione ausiliari
399
10 Monitoraggio guasti 402
10.1 Codici dei guasti 402
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 10

VACON · 10 APPLICAZIONE BASE
1 APPLICAZIONE BASE
1.1 INTRODUZIONE
L’Applicazione Base è semplice da utilizzare. È l'impostazione predefinita del prodotto
quando esce dalla fabbrica, altrimenti può essere selezionata nel menu M6 a pagina S6.2.
Vedere il Manuale d'uso del prodotto.
L'ingresso digitale DIN3 è programmabile.
I parametri dell'Applicazione Base sono illustrati nel capitolo 9 Descrizioni dei parametri di
questo manuale. Le descrizioni sono ordinate secondo il numero identificativo del singolo
parametro.
1.1.1 FUNZIONI DI PROTEZIONE DEL MOTORE NELL'APPLICAZIONE BASE
L'Applicazione Base offre quasi tutte le stesse funzioni di protezione delle altre applicazioni:
Protezione da guasti esterni
•
Supervisione fase di ingresso
•
Protezione da sottotensione
•
Supervisione fase di uscita
•
Protezione da guasti di terra
•
Protezione termica del motore
•
Protezione da guasti al termistore
•
Protezione da guasti al bus di campo
•
Protezione da guasti slot
•
Diversamente dalle altre applicazioni, l'Applicazione Base non fornisce alcun parametro per
la selezione della funzione di risposta o dei valori limite dei guasti. Per informazioni più
dettagliate sulla protezione termica del motore, vedere ID704 nel capitolo 9 Descrizioni dei
parametri.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 11
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4
DIN5
Tensione potenziometro, ecc.
Terra per riferimento e controlli
Terra per riferimento e controlli
Terra per riferimento e controlli
Riferimento di frequenza
ingresso analogico 2
Tensione per contatti (vedere #6)
Collegare a GND o +24 V
GUASTO
Ingresso guasto esterno
Programmabile (P2.17)
Collegare a GND o +24 V
Contatto aperto = nessuna azione
Contatto chiuso = reset guasto
Contatto aperto = nessun guasto
Contatto chiuso = guasto
Contatto chiuso = marcia avanti
Contatto chiuso = marcia indietro
Collettore aperto,
I≤50 mA, U≤48 Vcc
MARCIA
mA
PRONTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
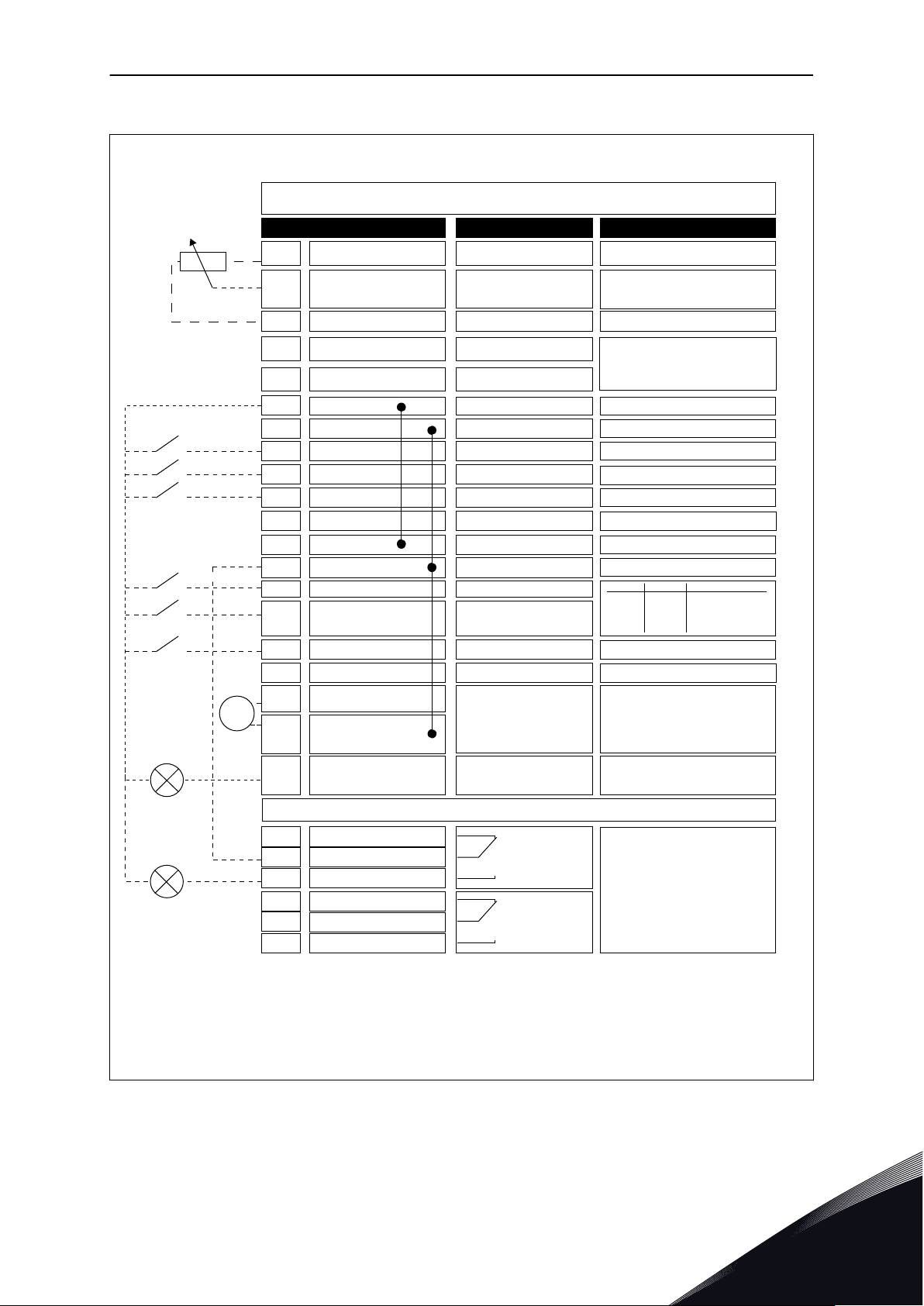
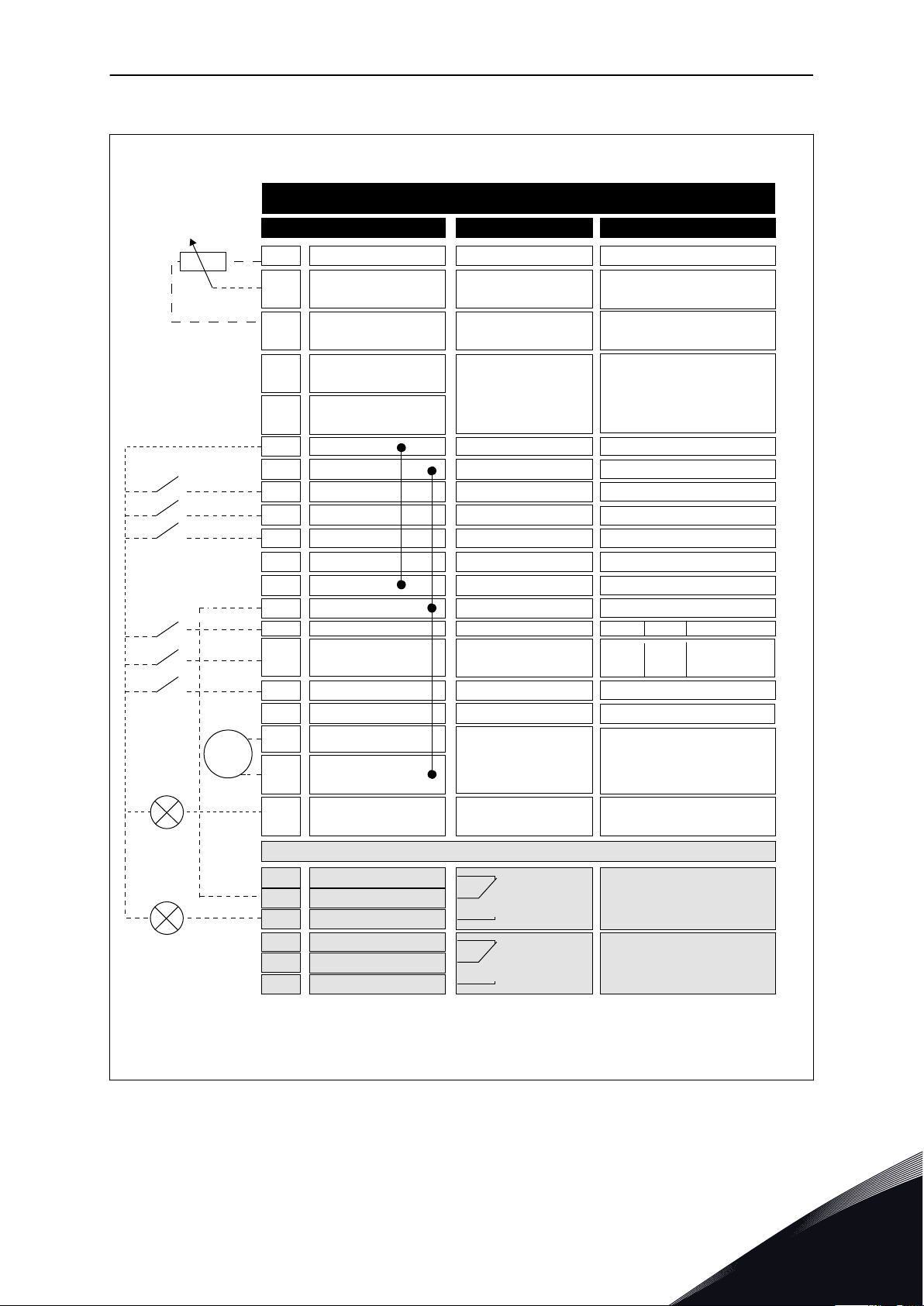
Scheda I/O standard
Morsetto Segnale Descrizione
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Uscita di riferimento
Ingresso analogico 1
Gamma di tensione 0 - 10 Vcc
Programmabile (P2.14)
Ingresso analogico 2
Gamma di corrente 0-20 mA
Uscita tensione di controllo
Massa I/O
Massa I/O
Selezione velocità
preimpostata 1
Selezione velocità
preimpostata 2
Reset guasti
Comune per DIN 1—DIN 3
Comune per DIN4-DIN6
Uscita tensione di controllo
Massa I/O
Uscita relè 1
Uscita relè 2
AO1+
Riferimento di frequenza
ingresso analogico 1
Tensione per contatti, ecc.,
max. 0,1 A
Marcia avanti
Marcia indietro
Rif. freq.
Aperto
Chiuso
Aperto
Chiuso
Aperto
Aperto
Chiuso
Chiuso
Rif I/O (P2.14)
Velocità preimpostata 1
Velocità preimpostata 2
Frequenza max.
MARCIA
Potenziometro di
riferimento, 1-10 kΩ
Uscita analogica 1
Frequenza di uscita
programmabile (P2.16)
Gamma 0 – 20 mA/RL,
max. 500 Ω
Uscita digitale 1
PRONTO
APPLICAZIONE BASE VACON · 11
1.2 I/O DI CONTROLLO
Fig. 1: Configurazione I/O predefinita dell'Applicazione Base
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 12
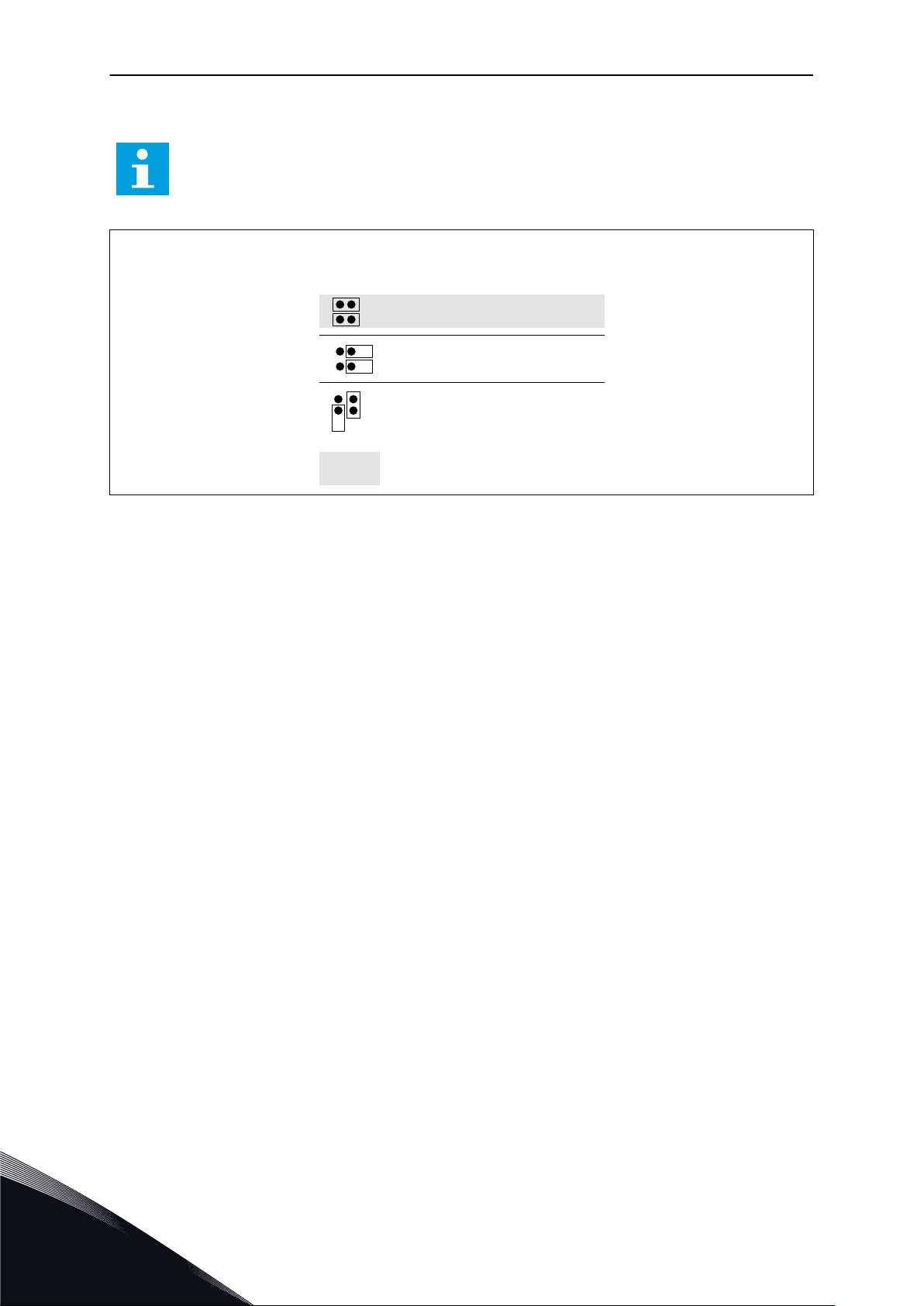
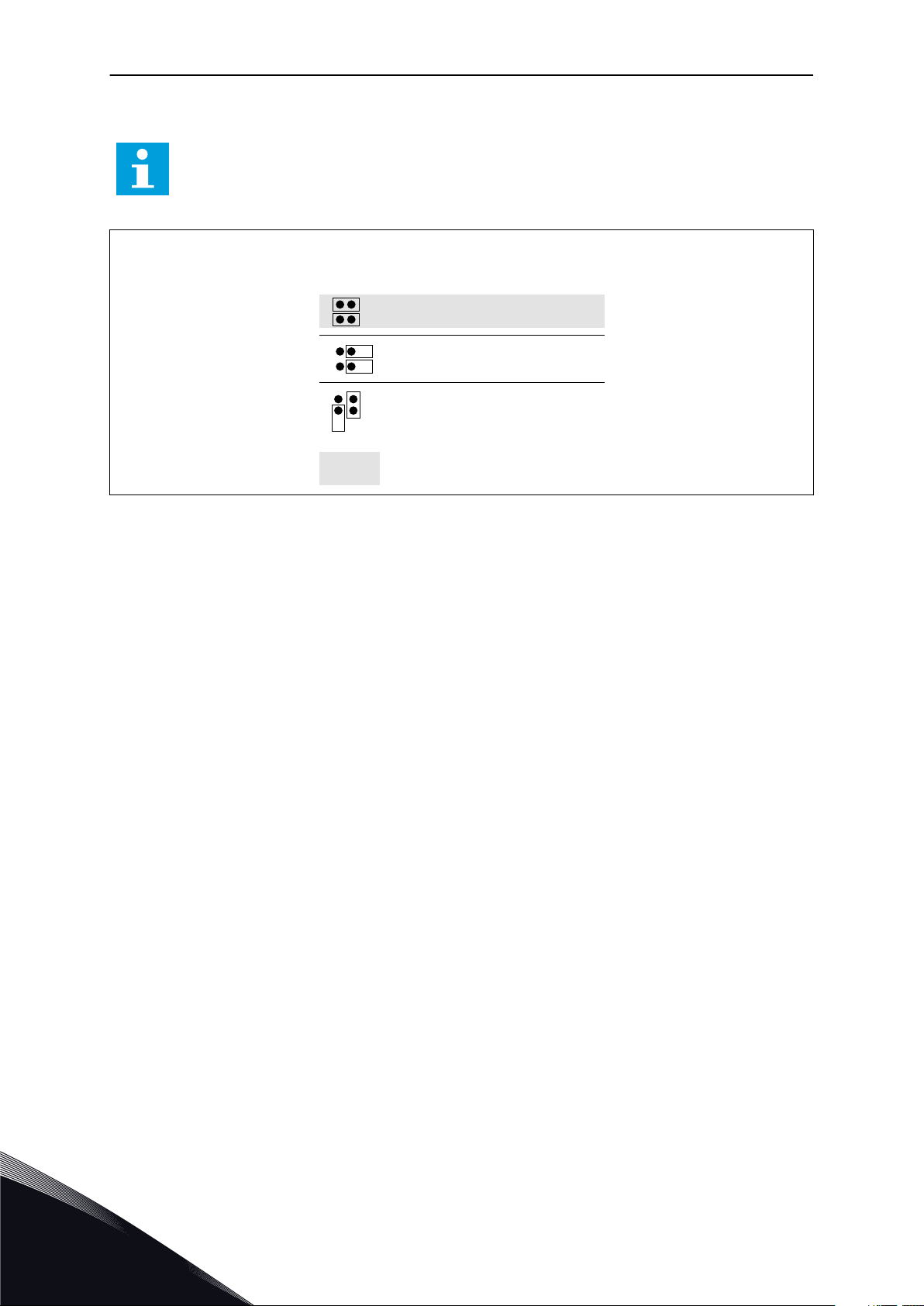
Blocco jumper X3:
coll. terra CMA e CMB
CMB collegato a GND
CMA collegato a GND
CMB isolato da GND
CMA isolato da GND
CMB e CMA collegati
internamente, isolati da GND
= Valore predefinito
VACON · 12 APPLICAZIONE BASE
*) La seconda uscita relè della scheda opzionale A3 non include un morsetto per il contatto
aperto (il morsetto 24 è mancante).
NOTA!
Vedere le selezioni jumper riportate di seguito. Altre informazioni sono disponibili
nel Manuale d'uso del prodotto.
Fig. 2: Selezioni jumper
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 13
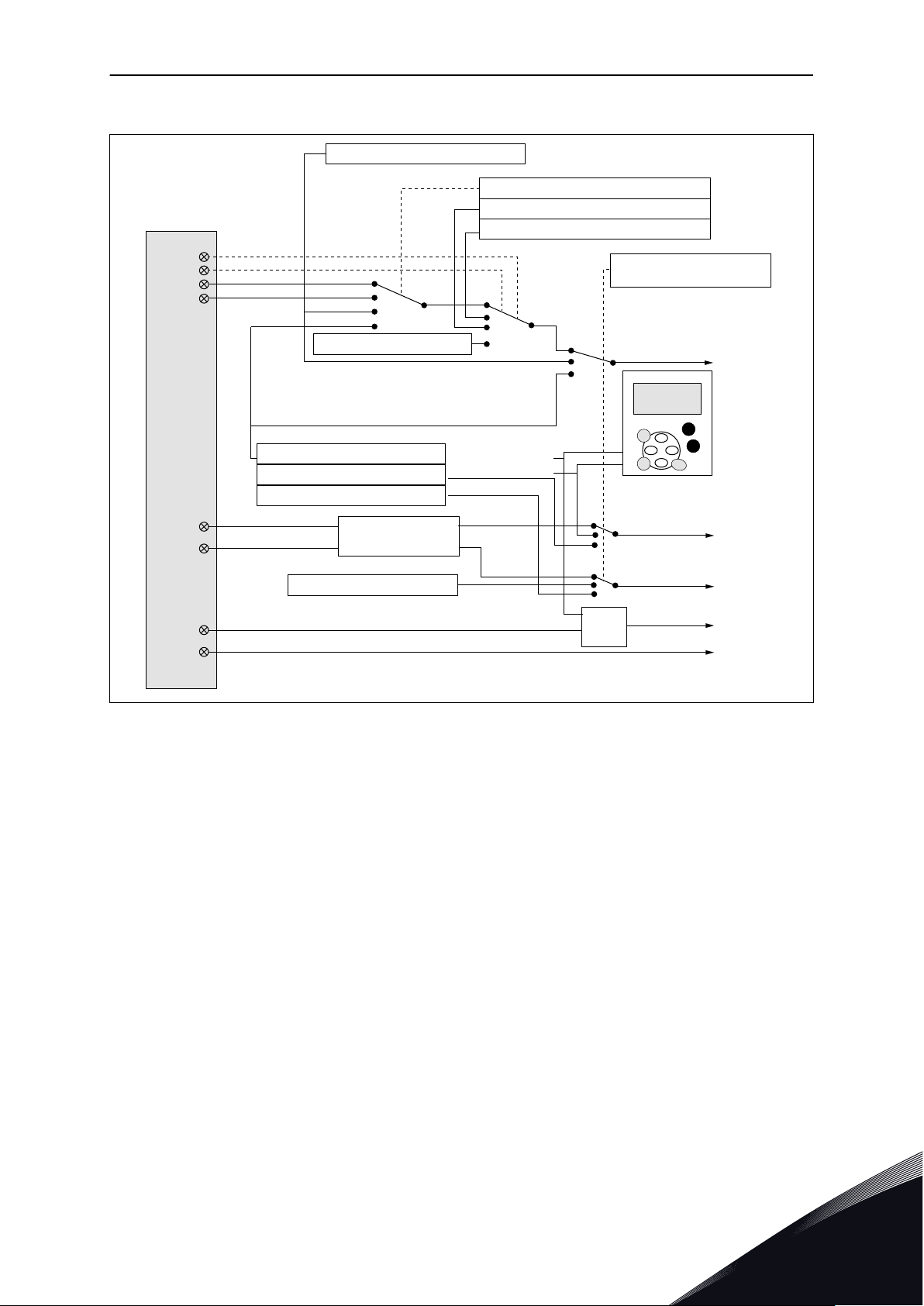
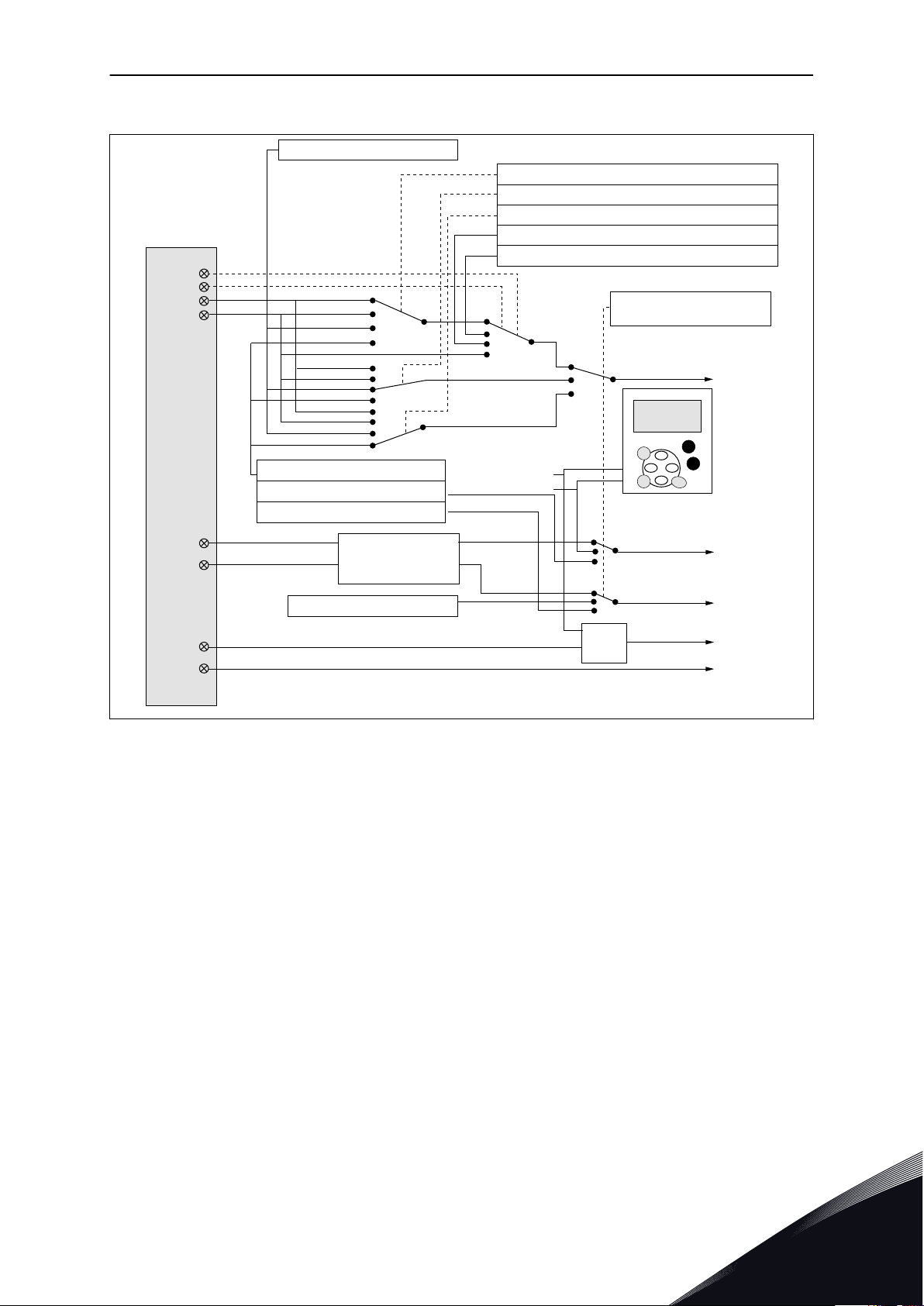
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Riferim. pannello
3.1 Post. di controllo
Marcia avanti
Marcia indietro
Avvio/Arresto
Indietro
Marcia/Arresto interno
Inversione interna
Reset guasto interno
Ingresso reset guasto
Ingresso guasto esterno (programmabile)
Tasto reset
Pulsanti Marcia/Arresto
Riferim. da bus di campo
Marc./Arr. da bus di campo
Direzione da bus di campo
3.3 Direzione pannello
2.14 Riferimento I/O
2.19 Velocità preimpostata 2
2.18 Velocità preimpostata 1
2.2 = Frequenza max.
Logica marcia/
arresto e inversione
Riferimento
freq. interno
APPLICAZIONE BASE VACON · 13
1.3 LOGICA DEL SEGNALE DI CONTROLLO NELL'APPLICAZIONE BASE
Fig. 3: Logica del segnale di controllo dell'Applicazione Base
1.4 APPLICAZIONE BASE - ELENCHI DI PARAMETRI
1.4.1 VALORI DI MONITORAGGIO (PANNELLO DI COMANDO: MENU M1)
I valori di monitoraggio sono i valori effettivi dei parametri e dei segnali, nonché degli stati e
delle misurazioni. I valori di monitoraggio non possono essere modificati.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 14
VACON · 14 APPLICAZIONE BASE
Tabella 1: Valori di monitoraggio
Indice
V1.1 Frequenza di uscita Hz 1
V1.2
V1.3 Velocità motore rpm 2
V1.4 Corrente motore A 3
V1.5 Coppia motore % 4
V1.6 Potenza motore % 5
V1.7 Tensione motore V 6
V1.8 Tensione DC-Link V 7
1.9 Temperatura unità °C 8
1.10 Temperatura motore % 9
V1.11 Ingresso analogico 1 V/mA 13
V1.12 Ingresso analogico 2 V/mA 14
Valore di
monitoraggio
Riferimento di fre-
quenza
Unità ID Descrizione
Hz 25
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Uscita a
V1.17 Valori multimonitor
nalogica
mA 26
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 15
APPLICAZIONE BASE VACON · 15
1.4.2 PARAMETRI DI BASE (PANNELLO DI COMANDO: MENU M2 - G2.1)
Tabella 2: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.1 Frequenza min. 0.00 P2.2 Hz 0.00 101
P2.2 Frequenza max. P2.1 320.00 Hz 50.00 102
P2.3
P2.4
P2.5 Limite corrente 0.1 x I
P2.6
P2.7
Tempo di accele-
razione 1
Tempo di decele-
razione 1
tensione nominale
del motore
frequenza nomi-
nale del motore
0.1 3000.0 s 3.0 103
0.1 3000.0 s 3.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
ID
107
110
Descrizione
P2.8
P2.9
P2.10 Cosfi motore 0.30 1.00 0.85 120
P2.11 Funzione marcia 0 2 0 505
P2.12 Funzione arresto 0 3 0 506
P2.13 Ottimizzazione V/f 0 1 0 109
Velocità nominale
del motore
Corrente nominale del motore
24 20 000 rpm 1440 112
0.1 x I
2 X I
H
H
A I
H
113
0 = Rampa
1 = Aggancio in vel.
2=Aggancio in
velocità condizionale
0 = inerzia
1 = 2 = rampa +
inerzia da abilitazione marcia
Rampa
3 = inerzia + rampa
abilitazione marcia
0 = Non usato
1=Boost coppia
automatico
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 16
VACON · 16 APPLICAZIONE BASE
Tabella 2: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.14 Riferimento I/O 0 3 0 117
Ingresso analo-
P2.15
P2.16
gico 2, offset di
riferimento
Funzione uscita
analogica
0 1 1 302
0 8 1 307
Descrizione
ID
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
0 = 0-20 mA
1 = 4 mA-20mA
0 = Non usato
1 = Freq. uscita (0f
max
2=Riferimento
freq. (0-f
3=Velocità motore
(0 - Velocità nominale)
4=Corrente uscita
(0-I
nMotor
5=Coppia motore
(0-T
6=Potenza motore
(0-P
7=Tensione motore
(0-U
8=Tensione DCLink (0-1000V)
)
nMotor
nMotor
nMotor
max
)
)
)
)
)
P2.17 Funzione DIN3 0 7 1 301
P2.18
P2.19
P2.20
Velocità preimpo-
stata 1
Velocità preimpo-
stata 2
Riavviamento
automatico
0.00 P2.2 Hz 0.00 105
0.00 P2.2 Hz 50.00 106
0 1 0 731
0 = Non usato
1=Guasto est.,
cont. chiuso
2=Guasto est.,
cont. aperto
3 = Abilitaz. marcia, cc
4 = Abilitaz. marcia, oc
5=Portare p.c. a IO
6=Portare p.c. a
pannello
7=Portare p.c. a
bus di c.
0 = Disabilitato
2 = Abilitato
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 17
APPLICAZIONE BASE VACON · 17
1.4.3 CONTROLLO DA PANNELLO (PANNELLO DI COMANDO: MENU M3)
I parametri per la selezione della postazione di controllo e della direzione sul pannello di
comando sono elencati di seguito. Vedere il menu di controllo da pannello nel Manuale d'uso
del prodotto.
Tabella 3: Parametri controllo da pannello, M3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P3.1
P3.2
P3.3
R3.4 Pulsante Arresto 0 1 1 114
Postazione di con-
trollo
Riferimento pan-
nello
Direzione (sul
pannello di
comando)
1 3 1 125
P2.1 P2.2 Hz 0.00
0 1 0 123
Descrizione
ID
1 = Morsetto I/0
2 = Pannello
3 = Bus di campo
0 = Funzion. limit.
pulsante Arresto
1 = Pulsante Arresto sempre abilitato
1.4.4 MENU DI SISTEMA (PANNELLO DI COMANDO: MENU M6)
Per i parametri e le funzioni relative all'utilizzo generale dell'inverter, come la selezione
dell'applicazione e della lingua, i gruppi di parametri personalizzati o le informazioni
sull'hardware e il software, vedere il Manuale d'uso del prodotto.
1.4.5 SCHEDE DI ESPANSIONE (PANNELLO DI COMANDO: MENU M7
Il menu M7 mostra le schede opzionali e di espansione collegate alla scheda di controllo e le
informazioni relative alla scheda. Per ulteriori informazioni, vedere il Manuale d'uso del
prodotto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 18

VACON · 18 APPLICAZIONE STANDARD
2 APPLICAZIONE STANDARD
2.1 INTRODUZIONE
Selezionare l'Applicazione Standard nel menu M6 a pagina S6.2.
L'Applicazione Standard è utilizzata di norma nelle applicazioni per pompe, ventole e nastri
trasportatori, per le quali l'Applicazione Base è troppo limitata ma che non richiedono
particolari funzionalità.
L'Applicazione Standard ha gli stessi segnali I/O e la stessa logica di controllo
•
dell'Applicazione Base.
L'ingresso digitale DIN3 e tutte le uscite sono programmabili liberamente.
•
Funzioni aggiuntive:
Logica programmabile del segnale di Marcia/Arresto e del segnale di inversione
•
Scalatura di riferimento
•
Supervisione di un limite frequenza
•
Programmazione della rampa a S e delle seconde rampe
•
Funzioni di marcia e arresto programmabili
•
Frenatura CC all'arresto
•
Un'area di frequenza proibita
•
Curva V/f e frequenza di commutazione programmabili
•
Riavviamento automatico
•
Protezione da stallo motore e protezione termica del motore: programmabili; disattivata,
•
allarme, guasto
I parametri dell'Applicazione Standard sono illustrati nel capitolo 9 Descrizioni dei parametri
di questo manuale. Le descrizioni sono ordinate secondo il numero identificativo del singolo
parametro.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 19
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
PRONTO
MARCIA
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Morsetto Segnale Descrizione
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24 V
Uscita di riferimento
Massa I/O
Ingresso analogico 2
Gamma di corrente
0-20mA
Uscita tensione di controllo
Massa I/O
Marcia avanti
Logica programmabile (P2.2.1)
Marcia indietro
Ri min. = 5 kΩ
Ingresso guasto esterno
Programmabile (P2.2.2)
Selezione velocità
preimpostata 1
Selezione velocità
preimpostata 2
Reset guasti
Comune per DIN 1—DIN 3
Comune per DIN4-DIN6
Uscita tensione di controllo
Massa I/O
Uscita analogica 1
Frequenza di uscita
Programmabile (P2.3.2)
Uscita digitale 1
PRONTO
Programmabile (P2.3.7)
Collettore aperto, I≤50 mA,
U≤48 Vcc
Uscita relè 1
MARCIA
Programmabile
(P2.3.8)
Uscita relè 2
GUASTO
Programmabile
(P2.3.9)
Gamma 0-20 mA/RL,
max. 500 Ω
Collegare a GND o +24 V
Contatto aperto = nessuna azione
Contatto chiuso = reset guasto
AO1+
Riferimento di frequenza
ingresso analogico 1
Terra per riferimento
e controlli
Riferimento di frequenza
ingresso analogico 2
Contatto chiuso = marcia avanti
Contatto chiuso = marcia indietro
Contatto aperto = nessun guasto
Contatto chiuso = guasto
Rif. freq.
Aperto
Chiuso
Aperto
Chiuso
Aperto
Aperto
Chiuso
Chiuso
Riferimento I/O
Velocità preimpostata 1
Velocità preimpostata 2
Ingresso anal. 2
Tensione potenziometro, ecc.
Ingresso analogico 1
Gamma di tensione 0—10 Vcc
Programmabile (P2.1.11)
Tensione per contatti, ecc.,
max. 0,1 A
Tensione per contatti (vedere #6)
Collegare a GND o +24 V
Terra per riferimento e controlli
Terra per riferimento e controlli
Potenziometro di
riferimento, 1-10 kΩ
APPLICAZIONE STANDARD VACON · 19
2.2 I/O DI CONTROLLO
Fig. 4: Configurazione I/O predefinita dell'Applicazione Standard
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 20
Blocco jumper X3:
coll. terra CMA e CMB
CMB collegato a GND
CMA collegato a GND
CMB isolato da GND
CMA isolato da GND
CMB e CMA collegati
internamente, isolati da GND
= Valore predefinito
VACON · 20 APPLICAZIONE STANDARD
*) La seconda uscita relè della scheda opzionale A3 non include un morsetto per il contatto
aperto (il morsetto 24 è mancante).
NOTA!
Vedere le selezioni jumper riportate di seguito. Altre informazioni sono disponibili
nel Manuale d'uso del prodotto.
Fig. 5: Selezioni jumper
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 21
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Riferim. pannello
3.1 Post. di controllo
Marcia avanti
Marcia indietro
Avvio/Arresto
Indietro
Marcia/Arresto interno
Inversione interna
Reset guasto interno
Ingresso reset guasto
Ingresso guasto esterno (programmabile)
Tasto
reset
Pulsanti Marcia/Arresto
Riferim. da bus di campo
Marc./Arr. da bus di campo
Direzione da bus di campo
3.3 Direzione pannello
2.1.13 Riferimento ctrl bus di campo
2.1.15 Velocità preimpostata 2
2.1.14 Velocità preimpostata 1
2.1.11 Riferimento I/O
2.1.12 Velocità ctrl pannello 1
Logica Marcia/
Arresto e inversione
programmabile
Riferimento
freq. interno
(programmabile)
(programmabile)
APPLICAZIONE STANDARD VACON · 21
2.3 LOGICA DEL SEGNALE DI CONTROLLO NELL'APPLICAZIONE STANDARD
Fig. 6: Logica del segnale di controllo dell'Applicazione Standard
2.4 APPLICAZIONE STANDARD - ELENCHI DI PARAMETRI
2.4.1 VALORI DI MONITORAGGIO (PANNELLO DI COMANDO: MENU M1)
I valori di monitoraggio sono i valori effettivi dei parametri e dei segnali, nonché degli stati e
delle misurazioni. I valori di monitoraggio non possono essere modificati.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 22
VACON · 22 APPLICAZIONE STANDARD
Tabella 4: Valori di monitoraggio
Indice
V1.1 Frequenza di uscita Hz 1
V1.2
V1.3 Velocità motore rpm 2
V1.4 Corrente motore A 3
V1.5 Coppia motore % 4
V1.6 Potenza motore % 5
V1.7 Tensione motore V 6
V1.8 Tensione DC-Link V 7
1.9 Temperatura unità °C 8
1.10 Temperatura motore % 9
V1.11 Ingresso analogico 1 V/mA 13
V1.12 Ingresso analogico 2 V/mA 14
Valore di
monitoraggio
Riferimento di fre-
quenza
Unità ID Descrizione
Hz 25
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Uscita a
V1.17 Valori multimonitor
nalogica
mA 26
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 23
APPLICAZIONE STANDARD VACON · 23
2.4.2 PARAMETRI DI BASE (PANNELLO DI COMANDO: MENU M2 - G2.1)
Tabella 5: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.1.1 Frequenza min. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frequenza max. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite corrente 0.1 x I
P2.1.6
P2.1.7
Tempo di accele-
razione 1
Tempo di decele-
razione 1
tensione nominale
del motore
frequenza nomi-
nale del motore
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
ID
107
110
Descrizione
P2.1.8
P2.1.9
P2.1.10 Cosfi motore 0.30 1.00 0.85 120
P2.1.11 Riferimento I/O 0 3 0 117
P2.1.12
P2.1.13
P2.1.14
P2.1.15
Velocità nominale
del motore
Corrente nominale del motore
Riferimento con-
trollo da pannello
Riferimento con-
trollo bus di
campo
Velocità preimpo-
stata 1
Velocità preimpo-
stata 2
24 20 000 rpm 1440 112
0.1 x I
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 10.00 105
0.00 P2.1.2 Hz 50.00 106
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 24
VACON · 24 APPLICAZIONE STANDARD
2.4.3 SEGNALI DI INGRESSO (PANNELLO DI COMANDO: MENU M2 - G2.2)
Tabella 6: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.1
Logica Marcia/
Arresto
0 6 0 300
Descrizione
ID
Logica = 0
Sgn ctrl 1 = Marcia
avanti
Sgn ctrl 2 = Marcia
indietro
Logica = 1
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Indietro
Logica = 2
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Abilitaz.
marcia
Logica = 3
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Impulso
di arresto
Logica = 4
Sgn ctrl 1 = Impulso
marcia avanti (fronte)
Sgn ctrl 2 = Impulso
marcia indietro
(fronte)
Logica = 5
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Impulso
marcia indietro
Logica = 6
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Abilitaz.
impulso
2
P2.2.2
Funzione DIN3 0 8 1 301
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Non usato
1=Guasto est., cont.
chiuso
2=Guasto est., cont.
aperto
3=Abilita esecuzione
4=Selezione tempo
acc./dec.
5=Portare p.c. a IO
6=Portare p.c. a pannello
7=Portare p.c. a bus
di c.
8 = Indietro
Page 25
APPLICAZIONE STANDARD VACON · 25
Tabella 6: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
Offset di riferi-
P2.2.3
P2.2.4
P2.2.5
P2.2.6
P2.2.7
P2.2.8 ***
P2.2.9 ***
mento ingresso
analogico 2
Scalatura di riferi-
mento, valore
minimo
Scalatura di riferi-
mento, valore
massimo
Inversione riferi-
mento
Tempo filtro di
riferimento
Selezione segnale
AI1
Selezione segnale
AI2
0 1 1 302
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 1 0 305
0.00 10.00 s 0.10 306
A1 377
A2 388
Descrizione
ID
0 = 0-20 mA (0-10 V)
**
1 = 4-20 mA (2-10 V)
**
0 = Non invertito
1 = Invertito
0 = Nessun filtro
** = Ricordarsi di posizionare i jumper del blocco X2 nella configurazione corrispondente.
Vedere il Manuale d'uso del prodotto.
*** = Usare il metodo TTF per programmare questi parametri.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 26
VACON · 26 APPLICAZIONE STANDARD
2.4.4 SEGNALI DI USCITA (PANNELLO DI COMANDO: MENU M2 -> G2.3
Tabella 7: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.1
P2.3.2
P2.3.3
Selezione segnale
uscita analogica 1
Funzione uscita
analogica
Tempo filtro
uscita analogica
0 A.1 464
0 8 1 307
0.00 10.00 s 1.00 308
Descrizione
ID
0=Non in uso (20
mA / 10 V)
1 = Freq. uscita (0f
max
2=Riferimento
freq. (0-f
3=Velocità motore
(0 - Velocità nominale)
4=Corrente motore
(0-I
nMotor
5=Coppia motore
(0-T
6=Potenza motore
(0-P
7=Tensione motore
(0-U
8=Tensione DCLink (0-1000V)
0 = Nessun filtro
)
nMotor
nMotor
nMotor
max
)
)
)
)
)
P2.3.4
P2.3.5
P2.3.6
Inversione uscita
analogica
Minimo uscita
analogica
Scala uscita ana-
logica
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Non invertito
1 = Invertito
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 27
APPLICAZIONE STANDARD VACON · 27
Tabella 7: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.7
Funzione uscita
digitale 1
0 16 1 312
Descrizione
ID
0 = Non usato
1 = Pronto
2 = Marcia
3 = Guasto
4 = Guasto invertito
5 = Allarme surriscaldamento FC
6 = Guasto esterno
o allarme
7 = Guasto di riferimento o allarme
8 = Allarme
9 = Invertito
10=Velocità preimpostata 1
11 = Alla velocità
12 = Regolatore
motore attivo
13 = Superv. limite
freq. d'uscita 1
14 = Postazione di
controllo: IO
15 = Allarme/
guasto termistore
16=Bus di campo
DIN1
P2.3.8
P2.3.9 Funzione RO2 0 16 3 314
P2.3.10
P2.3.11
P2.3.12 *
P2.3.13
P2.3.14
P2.3.15
Funzione RO1 0 16 2 313
Supervisione
limite frequenza
di uscita 1
Limite frequenza
di uscita 1; valore
supervisionato
Selezione segnale
uscita analogica 2
Funzione uscita
analogica 2
Tempo filtro
uscita analogica 2
Inversione uscita
analogica 2
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
Come il parametro
2.3.7
Come il parametro
2.3.7
0 = Nessun limite
1 = Limite supervisione inferiore
2 = Limite supervisione superiore
Come il parametro
2.3.2
0 = Nessun filtro
0 = Non invertito
1 = Invertito
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 28
VACON · 28 APPLICAZIONE STANDARD
Tabella 7: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.16
P.2.3.17
Minimo uscita
analogica 2
Scalatura uscita
analogica 2
0 1 0 475
10 1000 % 1.00 476
* = Usare il metodo TTF per programmare questi parametri.
ID
Descrizione
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 29
APPLICAZIONE STANDARD VACON · 29
2.4.5 PARAMETRI PER IL CONTROLLO DELL'INVERTER (PANNELLO DI COMANDO: MENU M2 -> G2.4
Tabella 8: Parametri per il controllo dell'azionamento, G2.4
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.4.1 Forma rampa 1 0.0 10.0 s 0.1 500
P2.4.2 Forma rampa 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5
Tempo di accele-
razione 2
Tempo di decele-
razione 2
Chopper di frena-
tura
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
0 4 0 504
Descrizione
ID
0 = Lineare
100 = Tempi aum./
dim. piena acc./
dec.
0 = Lineare
100 = Tempi aum./
dim. piena acc./
dec.
0 = Disabilitato
1 = Abilit. in marcia
2 = Chopper di frenatura esterno
3 = Abilit. durante
arresto/marcia
4 = Abilit. in marcia
(nessun test)
P2.4.6 Funzione marcia 0 2 0 505
P2.4.7 Funzione arresto 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
Corrente di frena-
tura in CC
Tempo di frena-
tura in CC all'ar-
resto
Frequenza per
l'avvio della frena-
tura CC in fase di
arresto rampa
0.00 I
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0.7 x I
H
507
0 = Rampa
1 = Aggancio in vel.
2=Aggancio in
velocità condizionale
0 = Inerzia
1 = rampa
2 = rampa + inerzia
da abilitazione
marcia
3 = inerzia + rampa
abilitazione marcia
0 = Freno CC
spento all'arresto
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 30
VACON · 30 APPLICAZIONE STANDARD
Tabella 8: Parametri per il controllo dell'azionamento, G2.4
Indice Parametro AI1 AI1 Unità PredefinitoPers
Tempo di frena-
P2.4.11
P2.4.12 * Frenatura a flusso 0 1 0 520
P2.4.13
tura in CC all'av-
vio
Corrente frena-
tura a flusso
0.00 600.00 s 0.00 516
0.00 I
L
A I
H
ID
519
Descrizione
0 = Freno CC
spento all'avvio
0 = Off
0 = On
2.4.6 PARAMETRI DI FREQUENZA PROIBITA (PANNELLO DI COMANDO: MENU M2 G2.5)
Tabella 9: Parametri di frequenza proibita, G2.5
Indice Parametro AI1 AI1 Unità PredefinitoPers
Frequenza proi-
P2.5.1
bita - Limite inf.
gamma 1
0.00 320.00 Hz 0.00 509
ID
Descrizione
P2.5.2
P2.5.3
Frequenza proi-
bita - Limite sup.
gamma 1
Rampa acc./dec.
proibita
0.00 320.00 Hz 0.00 510
0.1 10.0 x 1.0 518
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 31

APPLICAZIONE STANDARD VACON · 31
2.4.7 PARAMETRI PER IL CONTROLLO DEL MOTORE (PANNELLO DI COMANDO: MENU M2 - G2.6)
Tabella 10: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.1 *
P2.6.2 * Ottimizzazione V/f 0 1 0 109
P2.6.3 *
Modalità di con-
trollo motore
Selezione rap-
porto V/f
0 1/3 0 600
0 3 0 108
Descrizione
ID
0 = Controllo di
frequenza
1=Controllo velocità
NXP:
2 = Controllo coppia ad anello
aperto
3=Ctrl velocità
anello chiuso
4 = Controllo coppia ad anello
chiuso
0 = Non usato
1=Boost coppia
automatico
0 = Lineare
1 = Quadratico
2 = Programmabile
3 = Lineare con
ottim. flusso
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Punto di indeboli-
mento campo
Tensione al punto
di indebolimento
campo
Frequenza inter-
media curva V/f
Tensione interme-
dia curva V/f
Tensione di uscita
a frequenza 0
Frequenza di
commutazione
Regolatore di
sovratensione
Regolatore di sot-
totensione
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varie 606
1.0 Varie kHz Varie 601
0 2 1 607
0 1 1 608
0 = Non usato
1=In uso (senza
rampa)
2 = In uso (con
rampa)
0 = Non usato
1 = In uso
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 32

VACON · 32 APPLICAZIONE STANDARD
Tabella 10: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.12 Load Droop 0.00 100.00 % 0.00 620
P2.6.13 Identificazione 0 1/2 0 631
Gruppo parametri ad anello chiuso 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
Corrente magne-
tizz.
Guadagno P con-
trollo di velocità
Tempo I controllo
velocità
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
H
A 0.00 612
Descrizione
ID
0 = Nessuna azione
1=Identificazione
senza rotazione
del motore
2=Identificazione
con rotazione del
motore
3 = Identificazione
encoder
4 = Nessuna azione
5 = Identificazione
non riuscita
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11 Coppia di spunto 0 3 0 621
Compensazione
accelerazione
Correzione scor-
rim.
Corrente di
magnetiz. all'avvio
Tempo di magne-
tiz. all'avvio
Tempo vel. 0
all'avvio
Tempo vel. 0
all'arresto
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
L
A 0.00 627
0 = Non usato
1 = Memoria coppia
2 = Riferimento
coppia
3 = Coppia di
spunto avanti/
indietro
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 33

APPLICAZIONE STANDARD VACON · 33
Tabella 10: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Gruppo parametri identificazione 2.6.15
P2.6.15.1 Step di velocità -50.0 50.0 0.0 0.0 1252
Coppia di spunto
FWD
Coppia di spunto
REV
Tempo filtro enco-
der
Guadagno P con-
trollo corrente
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
ID
Descrizione
* = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 34

VACON · 34 APPLICAZIONE STANDARD
2.4.8 PROTEZIONI (PANNELLO DI COMANDO: MENU M2 -> G2.7
Tabella 11: Protezioni, G2.7
Indice Parametro AI1 AI1 Unità PredefinitoPers
Reazione a guasto
P2.7.1
P2.7.2
P2.7.3
P2.7.4
di riferimento 4
mA
Frequenza guasto
di riferimento 4
mA
Reazione guasto
esterno
Supervisione fase
di ingresso
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
Descrizione
ID
0 = Nessuna reazione
1 = Allarme
2 = Allarme + freq.
precedente
3 = All. + freq.
preimp. 2.7.2
4 = Guasto, arresto
sec. 2.4.7
5 = Guasto, arresto
per inerzia
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
Reazione a guasto
da sottotensione
Supervisione fase
di uscita
Protezione da
guasti di terra
Protezione ter-
mica del motore
Fattore servizio
motore
Fattore raffredda-
mento motore a
velocità zero
Costante tempo-
rale protezione
termica motore
Ciclo servizio
motore
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Varie 707
0 150 % 100 708
0 = Guasto memorizzato
Guasto non memorizzato
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 35

APPLICAZIONE STANDARD VACON · 35
Tabella 11: Protezioni, G2.7
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.7.13
P2.7.14 Corrente di stallo 0.00 2 x I
P2.7.15
P2.7.16
P2.7.17
Protezione da
stallo
Limite tempo di
stallo
Limite frequenza
stallo
Protezione da sot-
tocarico
0 3 0 709
H
1.00 120.00 s 15.00 711
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
A I
H
Descrizione
ID
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
710
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Protezione da sot-
tocarico, carico al
punto di indeboli-
mento campo
Protezione da sot-
tocarico, carico
frequenza zero
Limite di tempo
protezione da sot-
tocarico
Reazione a guasto
al termistore
Reazione a guasto
al bus di campo
Reazione a guasto
slot
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
Vedere P2.7.21
Vedere P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 36

VACON · 36 APPLICAZIONE STANDARD
2.4.9 PARAMETRI RIAVVIAMENTO AUTOMATICO (PANNELLO DI COMANDO: MENU M2 G2.8)
Tabella 12: Parametri riavviamento automatico, G2.8
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.8.1 Tempo di attesa 0.10 10.00 s 0.50 717
P2.8.2 Tempo tentativi 0.00 60.00 s 30.00 718
P2.8.3 Funzione marcia 0 2 0 719
Numero di tenta-
P2.8.4
P2.8.5
P2.8.6
P2.8.7
tivi dopo il blocco
da sottotensione
Numero di tenta-
tivi dopo un blocco
da sovratensione
Numero di tentativi dopo il blocco
da sovracorrente
Numero di tentativi dopo il blocco
da guasto riferi-
mento 4 mA
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
Descrizione
ID
0 = Rampa
1 = Aggancio in vel.
2 = In base a P2.4.6
Numero di tenta-
P2.8.8
P2.8.9
P2.8.10
tivi dopo il blocco
da guasto tempe-
ratura motore
Numero di tentativi dopo il blocco
da guasto esterno
Numero di tentativi dopo il blocco
da sottocarico
0 10 0 726
0 10 0 725
0 10 0 738
2.4.10 CONTROLLO DA PANNELLO (PANNELLO DI COMANDO: MENU M3)
I parametri per la selezione della postazione di controllo e della direzione sul pannello di
comando sono elencati di seguito. Vedere il menu di controllo da pannello nel Manuale d'uso
del prodotto.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 37

APPLICAZIONE STANDARD VACON · 37
Tabella 13: Parametri controllo da pannello, M3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P3.1
P3.2
P3.3
R3.4 Pulsante Arresto 0 1 1 114
Postazione di con-
trollo
Riferimento pan-
nello
Direzione (sul
pannello di
comando)
1 3 1 125
P2.1 P2.2 Hz 0.00
0 1 0 123
Descrizione
ID
1 = Morsetto I/0
2 = Pannello
3 = Bus di campo
0 = Funzion. limit.
pulsante Arresto
1 = Pulsante Arresto sempre abilitato
2.4.11 MENU DI SISTEMA (PANNELLO DI COMANDO: MENU M6)
Per i parametri e le funzioni relative all'utilizzo generale dell'inverter, come la selezione
dell'applicazione e della lingua, i gruppi di parametri personalizzati o le informazioni
sull'hardware e il software, vedere il Manuale d'uso del prodotto.
2.4.12 SCHEDE DI ESPANSIONE (PANNELLO DI COMANDO: MENU M7
Il menu M7 mostra le schede opzionali e di espansione collegate alla scheda di controllo e le
informazioni relative alla scheda. Per ulteriori informazioni, vedere il Manuale d'uso del
prodotto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 38

VACON · 38 APPLICAZIONE CONTROLLO LOCALE/REMOTO
3 APPLICAZIONE CONTROLLO LOCALE/REMOTO
3.1 INTRODUZIONE
Selezionare l'applicazione di Controllo Locale/Remoto nel menu M6 a pagina S6.2.
Con l'Applicazione di Controllo Locale/Remoto si può disporre di due diverse postazioni di
controllo. Per ciascuna di esse, il riferimento di frequenza può essere selezionato
indifferentemente dal pannello di comando, dal morsetto I/O o dal bus di campo. La
postazione di controllo attiva si seleziona tramite l'ingresso digitale DIN6.
Tutte le uscite sono programmabili liberamente.
•
Funzioni aggiuntive:
Logica programmabile del segnale di Marcia/Arresto e del segnale di inversione
•
Scalatura di riferimento
•
Supervisione di un limite frequenza
•
Programmazione della rampa a S e delle seconde rampe
•
Funzioni di marcia e arresto programmabili
•
Frenatura CC all'arresto
•
Un'area di frequenza proibita
•
Curva V/f e frequenza di commutazione programmabili
•
Riavviamento automatico
•
Protezione da stallo motore e protezione termica del motore: programmabili; disattivata,
•
allarme, guasto
I parametri dell'Applicazione di Controllo Locale/Remoto sono illustrati nel capitolo 9
Descrizioni dei parametri di questo manuale. Le descrizioni sono ordinate secondo il numero
identificativo del singolo parametro.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 39

Potenziometro di
riferimento, 1-10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Riferimento remoto
0(4) - 20 mA
MARCIA
PRONTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Morsetto Segnale Descrizione
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Uscita di riferimento
Massa I/O
Ingresso analogico 2
Gamma di corrente 0—20 mA
Programmabile (P2.1.11)
Uscita tensione di controllo
Massa I/O
Postazione A: Marcia avanti
Logica programmabile (P2.2.1)
Postazione A: Marcia indietro
Ri min = 5 kohm
Ingresso guasto esterno
Programmabile (P2.2.2)
Postazione B: Marcia avanti
Logica programmabile (P2.2.15)
Postazione B: Marcia indietro
Ri min. = 5 kΩ
Selezione postazione A/B
Comune per DIN 1—DIN 3
Comune per DIN4-DIN6
Uscita tensione di controllo
Massa I/O
Uscita analogica 1
Frequenza di uscita
Programmabile (P2.3.2)
Uscita digitale
PRONTO
Programmabile (P2.3.7)
Collettore aperto, I≤50 mA,
U≤48 Vcc
Uscita relè 1
MARCIA
Programmabile
(P2.3.8)
Uscita relè 2
GUASTO
Programmabile
(P2.3.9)
Gamma 0-20 mA/RL,
max. 500 Ω
Contatto aperto = postazione A attiva
Contatto chiuso = postazione B attiva
Contatto chiuso = marcia avanti
Contatto chiuso = marcia indietro
AO1+
Riferimento ingresso analogico
1 per postazione B
Terra per riferimento
e controlli
Riferimento ingresso analogico
2 per postazione B
Contatto chiuso = marcia avanti
Contatto chiuso = marcia indietro
Contatto aperto = nessun guasto
Contatto chiuso = guasto
Tensione potenziometro, ecc.
Ingresso analogico 1
Gamma di tensione 0—10 Vcc
Programmabile (P2.1.12)
Tensione per contatti, ecc., max. 0,1 A
Tensione per contatti (vedere #6)
Collegare a GND o +24 V
Collegare a GND o +24 V
Terra per riferimento e controlli
Terra per riferimento e controlli
APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 39
3.2 I/O DI CONTROLLO
Fig. 7: Configurazione I/O predefinita per l'Applicazione di Controllo Locale/Remoto
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 40

Blocco jumper X3:
coll. terra CMA e CMB
CMB collegato a GND
CMA collegato a GND
CMB isolato da GND
CMA isolato da GND
CMB e CMA collegati
internamente, isolati da GND
= Valore predefinito
VACON · 40 APPLICAZIONE CONTROLLO LOCALE/REMOTO
*) La seconda uscita relè della scheda opzionale A3 non include un morsetto per il contatto
aperto (il morsetto 24 è mancante).
NOTA!
Vedere le selezioni jumper riportate di seguito. Altre informazioni sono disponibili
nel Manuale d'uso del prodotto.
Fig. 8: Selezioni jumper
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 41

DIN3
≥ 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
Inversione interna
Reset guasto interno
Ingresso reset guasto (programmabile)
3.3 Direzione pannello
Marcia/Arresto interno
Riferim. da bus di campo
Marc./Arr. da bus di campo
Direzione da bus di campo
Pulsanti Marcia/Arresto
Tasto reset
Marcia avanti
(programmabile)
Marcia indietro
(programmabile)
Marcia avanti
Marcia indietro
(programmabile)
(programmabile)
Avvio/Arresto
Indietro
Su
Giù
3.1 Post. di
controllo
2.1.15 Rif. velocità di jog
2.1.14 Rifer. ctrl bus di campo
2.1.13 Rifer. ctrl pannello
2.1.12 Riferimento B I/O
2.1.11 Riferimento A I/O
R3.2 Rifer. pannello
Logica Marcia/
Arresto e
inversione A
programmabile
Logica Marcia/
Arresto e
inversione B
programmabile
Rifer. frequenza
int.
Motopotenziometro
APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 41
3.3 LOGICA DEL SEGNALE DI CONTROLLO NELL'APPLICAZIONE DI CONTROLLO LOCALE/REMOTO
Fig. 9: Logica del segnale di controllo dell'Applicazione di Controllo Locale/Remoto
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 42

VACON · 42 APPLICAZIONE CONTROLLO LOCALE/REMOTO
3.4 APPLICAZIONE DI CONTROLLO LOCALE/REMOTO - ELENCHI DI PARAMETRI
3.4.1 VALORI DI MONITORAGGIO (PANNELLO DI COMANDO: MENU M1)
I valori di monitoraggio sono i valori effettivi dei parametri e dei segnali, nonché degli stati e
delle misurazioni. I valori di monitoraggio non possono essere modificati.
Tabella 14: Valori di monitoraggio
Indice
V1.1 Frequenza di uscita Hz 1
V1.2
V1.3 Velocità motore rpm 2
V1.4 Corrente motore A 3
V1.5 Coppia motore % 4
V1.6 Potenza motore % 5
V1.7 Tensione motore V 6
V1.8 Tensione DC-Link V 7
1.9 Temperatura unità °C 8
1.10 Temperatura motore % 9
V1.11 Ingresso analogico 1 V/mA 13
V1.12 Ingresso analogico 2 V/mA 14
Valore di
monitoraggio
Riferimento di fre-
quenza
Unità ID Descrizione
Hz 25
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Uscita a
V1.17 Valori multimonitor
nalogica
mA 26
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 43

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 43
3.4.2 PARAMETRI DI BASE (PANNELLO DI COMANDO: MENU M2 - G2.1)
Tabella 15: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.1.1 Frequenza min. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frequenza max. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite corrente 0.1 x I
P2.1.6 *
P2.1.7 *
Tempo di accele-
razione 1
Tempo di decele-
razione 1
tensione nominale
del motore
frequenza nomi-
nale del motore
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
ID
107
110
Descrizione
P2.1.8 *
P2.1.9 *
P2.1.10 * Cosfi motore 0.30 1.00 0.85 120
P2.1.11 * Riferimento A I/O 0 4 1 117
P2.1.12 * Riferimento B I/O 0 4 0 131
P2.1.13 *
Velocità nominale
del motore
Corrente nominale del motore
Riferimento con-
trollo da pannello
24 20 000 rpm 1440 112
0.1 x I
0 3 2 121
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
4 = Motopotenziometro
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
4 = Motopotenziometro
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 44

VACON · 44 APPLICAZIONE CONTROLLO LOCALE/REMOTO
Tabella 15: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
Riferimento con-
P2.1.14 *
P2.1.15 *
trollo bus di
campo
Riferimento velo-
cità di jog
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
Descrizione
ID
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
* = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 45

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 45
3.4.3 SEGNALI DI INGRESSO (PANNELLO DI COMANDO: MENU M2 - G2.2)
Tabella 16: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
Selezione della
P2.2.1 ***
logica Marcia/
Arresto posta-
zione A
0 8 0 300
Descrizione
ID
Logica = 0
Sgn ctrl 1 = Marcia
avanti
Sgn ctrl 2 = Marcia
indietro
Logica = 1
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Indietro
Logica = 2
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Abilitaz.
marcia
Logica = 3
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Impulso
di arresto
Logica = 4
Sgn ctrl 1 = Marcia
avanti
Sgn ctrl 2 = Motopotenziometro su
Logica = 5
Sgn ctrl 1 = Marcia
avanti (fronte)
Sgn ctrl 2 = Marcia
indietro (fronte)
Logica = 6
Sgn ctrl 1 = Marcia
(fronte)/arresto
Sgn ctrl 2 = Indietro
Logica = 7
Sgn ctrl 1 = Marcia
(fronte)/arresto
Sgn ctrl 2 = Abilitaz.
marcia
Logica = 8
Sgn ctrl 1 = Marcia
avanti (fronte)
Sgn ctrl 2 = Motopotenziometro su
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 46

VACON · 46 APPLICAZIONE CONTROLLO LOCALE/REMOTO
Tabella 16: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.2 Funzione DIN3 0 13 1 301
P2.2.3
****
Selezione segnale
AI1
0.1 E.10 A1 377
Descrizione
ID
0 = Non usato
1=Guasto est., cont.
chiuso
2=Guasto est., cont.
aperto
3=Abilita esecuzione
4=Selezione tempo
acc./dec.
5=Portare p.c. a IO
6=Portare p.c. a pannello
7=Portare p.c. a bus
di c.
8 = Indietro
9 = Velocità di jog
11 = Operazione
acc/dec proibita
12 = Comando frenatura CC
13 = Motopotenziometro giù
P2.2.4 Escurs. segn AI1 0 2 0 320
P2.2.5
P2.2.6
P2.2.7
P2.2.8
P2.2.9
****
P2.2.10 Escurs. segn AI2 0 2 1 325
Autocalibrazione
minimo AI1
Autocalibrazione
massimo AI1
Inversione
segnale AI1
Tempo filtro
segnale AI1
Selezione segnale
AI2
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0.00 10.00 s 0.10 324
0.1 E.10 A.2 388
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2=Gamma parametri
personalizzata**
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2=Gamma parametri
personalizzata**
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 47

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 47
Tabella 16: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.11
P2.2.12
P2.2.13
P2.2.14
P2.2.15
***
Autocalibrazione
minimo AI2
Autocalibrazione
massimo AI2
Inversione
segnale AI2
Tempo filtro
segnale AI2
Selezione della
logica Marcia/
Arresto posta-
zione B
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 10.00 s 0.10 329
0 6 0 363
Descrizione
ID
Logica = 0
Sgn ctrl 1 = Marcia
avanti
Sgn ctrl 2 = Marcia
indietro
Logica = 1
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Indietro
Logica = 2
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Abilitaz.
marcia
Logica = 3
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Impulso
di arresto
Logica = 4
Sgn ctrl 1 = Impulso
marcia avanti
(fronte)
Sgn ctrl 2 = Impulso
marcia indietro
(fronte)
Logica = 5
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Impulso
marcia indietro
Logica = 6
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Abilitaz.
impulso
Scalatura di riferi-
P2.2.16
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
mento, val. min.,
postazione A
0.00 320.00 Hz 0.00 303
3
Page 48

VACON · 48 APPLICAZIONE CONTROLLO LOCALE/REMOTO
Tabella 16: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
Scalatura riferi-
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
mento, valore
max., postazione
A
Scalatura riferi-
mento, valore
minimo, posta-
zione B
Scalatura riferi-
mento, valore
massimo, posta-
zione B
Ingresso analo-
gico libero, sele-
zione segnale
Ingresso analo-
gico libero, fun-
zione
0.00 304
0.00 320.00 Hz 0.00 364
0.00 320.00 Hz 0.00 365
0 2 0 361
0 4 0 362
Descrizione
ID
0,00 = Nessuna scalatura
>0 = Valore massimo
scalato
0 = Non usato
1 = Ingresso analogico 1
2=Ingresso analogico
2
0 = Nessun reset
1 = Riduce il limite
corrente (P2.1.5)
2 = Riduce la corrente frenatura in CC
3 = Riduce i tempi di
accelerazione e
decelerazione
4 = Riduce il limite di
supervisione coppia
Tempo rampa
P2.2.22
P2.2.23
P2.2.24
motopotenziome-
tro
Reset memoria
riferimento di frequenza del moto-
potenziometro
Memoria impulso
di marcia
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 1 0 498
0 = Nessun reset
1 = Reset in caso di
arresto o spegnimento
2 = Reset in caso di
spegnimento
0 = Stato Marcia non
copiato
1 = Stato Marcia
copiato
** = Ricordarsi di posizionare i jumper del blocco X2 nella configurazione corrispondente.
Vedere il Manuale d'uso del prodotto.
*** = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
**** = Usare il metodo TTF per programmare questi parametri.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 49

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 49
3.4.4 SEGNALI DI USCITA (PANNELLO DI COMANDO: MENU M2 -> G2.3
Tabella 17: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.1
P2.3.2
P2.3.3
Selezione segnale
AO1
Funzione uscita
analogica
Tempo filtro
uscita analogica
0.1 E.10 A11 464
0 8 1 307
0.00 10.00 s 1.00 308
Descrizione
ID
0=Non in uso (20
mA / 10 V)
1 = Freq. uscita (0f
max
2=Riferimento
freq. (0-f
3=Velocità motore
(0 - Velocità nominale)
4=Corrente motore
(0-I
nMotor
5=Coppia motore
(0-T
6 = 7 = Tensione
motore (0-U
Potenza motore (0P
nMotor
8=Tensione DCLink (0-1000V)
0 = Nessun filtro
)
nMotor
)
max
)
)
)
nMotor
)
P2.3.4
P2.3.5
P2.3.6
Inversione uscita
analogica
Minimo uscita
analogica
Scala uscita ana-
logica
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Non invertito
1 = Invertito
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 50

VACON · 50 APPLICAZIONE CONTROLLO LOCALE/REMOTO
Tabella 17: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.7
Funzione uscita
digitale 1
0 22 1 312
Descrizione
ID
0 = Non usato
1 = Pronto
2 = Marcia
3 = Guasto
4 = Guasto invertito
5 = Allarme surriscaldamento FC
6 = Guasto esterno
o allarme
7 = Guasto di riferimento o allarme
8 = Allarme
9 = Invertito
10 = Velocità di jog
selezionata
11 = Alla velocità
12 = Regolatore
motore attivo
13 = Superv. limite
freq. d'uscita 1
14 = Superv. limite
freq. d'uscita 2
15 = Superv. limite
coppia
16 = Superv. limite
riferimento
17 = Controllo
freno esterno
18 = Postazione di
controllo: IO
19 = Superv. limite
temp. FC
20 = Direzione di
rotazione non
richiesta
21 = Controllo
freno est. invertito
22 = Guasto/
allarme termistore
3
P2.3.8
P2.3.9 Funzione RO2 0 22 3 314
P2.3.10
Funzione RO1 0 22 2 313
Supervisione
limite frequenza
di uscita 1
0 2 0 315
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Come il parametro
2.3.7
Come il parametro
2.3.7
0 = Nessun limite
1 = Limite supervisione inferiore
2 = Limite supervisione superiore
Page 51

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 51
Tabella 17: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
Limite frequenza
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15
P2.3.16
di uscita 1; valore
supervisionato
Supervisione
limite frequenza
di uscita 2
Limite frequenza
di uscita 2; valore
di supervisione
Funzione supervi-
sione limite cop-
pia
Valore di supervi-
sione limite di
coppia
Funzione supervi-
sione limite riferi-
mento
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
Descrizione
ID
0 = Nessun limite
1 = Limite supervisione inferiore
2 = Limite supervisione superiore
0 = No
1 = Limite inferiore
2 = Limite superiore
0 = No
1 = Limite inferiore
2 = Limite superiore
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
P2.3.22
P2.3.23
P2.3.24
Valore di supervi-
sione limite riferi-
mento
Ritardo apertura
freno esterno
Ritardo chiusura
freno esterno
Supervisione
limite tempera-
tura inverter
Valore limite tem-
peratura inverter
Scalatura uscita
analogica 2
Funzione uscita
analogica 2
Tempo filtro
uscita analogica 2
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 = No
1 = Limite inferiore
2 = Limite superiore
Come il parametro
2.3.2
0 = Nessun filtro
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 52

VACON · 52 APPLICAZIONE CONTROLLO LOCALE/REMOTO
Tabella 17: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.25
P2.3.26
P.2.3.27
Inversione uscita
analogica 2
Minimo uscita
analogica 2
Scalatura uscita
analogica 2
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
Descrizione
ID
0 = Non invertito
1 = Invertito
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 53

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 53
3.4.5 PARAMETRI PER IL CONTROLLO DELL'INVERTER (PANNELLO DI COMANDO: MENU M2 -> G2.4
Tabella 18: Parametri per il controllo dell'azionamento, G2.4
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.4.1 Forma rampa 1 0.0 10.0 s 0.1 500
P2.4.2 Forma rampa 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5
Tempo di accele-
razione 2
Tempo di decele-
razione 2
Chopper di frena-
tura
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
0 4 0 504
Descrizione
ID
0 = Lineare
100 = Tempi aum./
dim. piena acc./
dec.
0 = Lineare
100 = Tempi aum./
dim. piena acc./
dec.
0 = Disabilitato
1 = Abilit. in marcia
2 = Chopper di frenatura esterno
3 = Abilit. durante
arresto/marcia
4 = Abilit. in marcia
(nessun test)
P2.4.6 Funzione marcia 0 2 0 505
P2.4.7 Funzione arresto 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
Corrente di frena-
tura in CC
Tempo di frena-
tura in CC all'ar-
resto
Frequenza per
l'avvio della frena-
tura CC in fase di
arresto rampa
0.00 I
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0.7 x I
H
507
0 = Rampa
1 = Aggancio in vel.
2=Aggancio in
velocità condizionale
0 = Inerzia
1 = rampa
2 = rampa + inerzia
da abilitazione
marcia
3 = inerzia + rampa
abilitazione marcia
0 = Freno CC
spento all'arresto
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 54

VACON · 54 APPLICAZIONE CONTROLLO LOCALE/REMOTO
Tabella 18: Parametri per il controllo dell'azionamento, G2.4
Indice Parametro AI1 AI1 Unità PredefinitoPers
Tempo di frena-
P2.4.11
P2.4.12 * Frenatura a flusso 0 1 0 520
P2.4.13
tura in CC all'av-
vio
Corrente frena-
tura a flusso
0.00 600.00 s 0.00 516
0.00 I
L
A I
H
ID
519
Descrizione
0 = Freno CC
spento all'avvio
0 = Off
0 = On
3.4.6 PARAMETRI DI FREQUENZA PROIBITA (PANNELLO DI COMANDO: MENU M2 G2.5)
Tabella 19: Parametri di frequenza proibita, G2.5
Indice Parametro AI1 AI1 Unità PredefinitoPers
Frequenza proi-
P2.5.1
bita - Limite inf.
gamma 1
0.00 320.00 Hz 0.00 509
ID
Descrizione
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Frequenza proi-
bita - Limite sup.
gamma 1
Frequenza proibita - Limite inf.
gamma 2
Limite sup.
gamma frequenza
proibita 2
Frequenza proibita - Limite inf.
gamma 3
Limite sup.
gamma frequenza
proibita 3
Rampa acc./dec.
proibita
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Gamma frequenza proibita 1
disattivata
0 = Gamma frequenza proibita 2
disattivata
0 = Gamma frequenza proibita 3
disattivata
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 55

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 55
3.4.7 PARAMETRI PER IL CONTROLLO DEL MOTORE (PANNELLO DI COMANDO: MENU M2 - G2.6)
Tabella 20: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.1 *
P2.6.2 * Ottimizzazione V/f 0 1 0 109
P2.6.3 *
Modalità di con-
trollo motore
Selezione rap-
porto V/f
0 1/3 0 600
0 3 0 108
Descrizione
ID
0 = Controllo di
frequenza
1=Controllo velocità
NXP:
2 = Controllo coppia ad anello
aperto
3=Ctrl velocità
anello chiuso
4 = Controllo coppia ad anello
chiuso
0 = Non usato
1=Boost coppia
automatico
0 = Lineare
1 = Quadratico
2 = Programmabile
3 = Lineare con
ottim. flusso
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Punto di indeboli-
mento campo
Tensione al punto
di indebolimento
campo
Frequenza inter-
media curva V/f
Tensione interme-
dia curva V/f
Tensione di uscita
a frequenza 0
Frequenza di
commutazione
Regolatore di
sovratensione
Regolatore di sot-
totensione
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varie 606
1.0 Varie kHz Varie 601
0 2 1 607
0 1 1 608
0 = Non usato
1=In uso (senza
rampa)
2 = In uso (con
rampa)
0 = Non usato
1 = In uso
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 56

VACON · 56 APPLICAZIONE CONTROLLO LOCALE/REMOTO
Tabella 20: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.12 Load Droop 0.00 100.00 % 0.00 620
P2.6.13 Identificazione 0 1/2 0 631
Gruppo parametri ad anello chiuso 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
Corrente magne-
tizz.
Guadagno P con-
trollo di velocità
Tempo I controllo
velocità
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
H
A 0.00 612
Descrizione
ID
0 = Nessuna azione
1=Identificazione
senza rotazione
del motore
2=Identificazione
con rotazione del
motore
3 = Identificazione
encoder
4 = Nessuna azione
5 = Identificazione
non riuscita
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11 Coppia di spunto 0 3 0 621
Compensazione
accelerazione
Correzione scor-
rim.
Corrente di
magnetiz. all'avvio
Tempo di magne-
tiz. all'avvio
Tempo vel. 0
all'avvio
Tempo vel. 0
all'arresto
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
L
A 0.00 627
0 = Non usato
1 = Memoria coppia
2 = Riferimento
coppia
3 = Coppia di
spunto avanti/
indietro
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 57

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 57
Tabella 20: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Gruppo parametri identificazione 2.6.15
P2.6.15.1 Step di velocità -50.0 50.0 0.0 0.0 1252
Coppia di spunto
FWD
Coppia di spunto
REV
Tempo filtro enco-
der
Guadagno P con-
trollo corrente
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
ID
Descrizione
* = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 58

VACON · 58 APPLICAZIONE CONTROLLO LOCALE/REMOTO
3.4.8 PROTEZIONI (PANNELLO DI COMANDO: MENU M2 -> G2.7
Tabella 21: Protezioni, G2.7
Indice Parametro AI1 AI1 Unità PredefinitoPers
Reazione a guasto
P2.7.1
P2.7.2
P2.7.3
P2.7.4
di riferimento 4
mA
Frequenza guasto
di riferimento 4
mA
Reazione guasto
esterno
Supervisione fase
di ingresso
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
Descrizione
ID
0 = Nessuna reazione
1 = Allarme
2 = Allarme + freq.
precedente
3 = All. + freq.
preimp. 2.7.2
4 = Guasto, arresto
sec. 2.4.7
5 = Guasto, arresto
per inerzia
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
Reazione a guasto
da sottotensione
Supervisione fase
di uscita
Protezione da
guasti di terra
Protezione ter-
mica del motore
Fattore servizio
motore
Fattore raffredda-
mento motore a
velocità zero
Costante tempo-
rale protezione
termica motore
Ciclo servizio
motore
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Varie 707
0 150 % 100 708
0 = Guasto memorizzato
Guasto non memorizzato
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 59

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 59
Tabella 21: Protezioni, G2.7
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.7.13
P2.7.14 Corrente di stallo 0.00 2 x I
P2.7.15
P2.7.16
P2.7.17
Protezione da
stallo
Limite tempo di
stallo
Limite frequenza
stallo
Protezione da sot-
tocarico
0 3 0 709
H
1.00 120.00 s 15.00 711
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
A I
H
Descrizione
ID
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
710
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Protezione da sot-
tocarico, carico al
punto di indeboli-
mento campo
Protezione da sot-
tocarico, carico
frequenza zero
Limite di tempo
protezione da sot-
tocarico
Reazione a guasto
al termistore
Reazione a guasto
al bus di campo
Reazione a guasto
slot
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
Vedere P2.7.21
Vedere P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 60

VACON · 60 APPLICAZIONE CONTROLLO LOCALE/REMOTO
3.4.9 PARAMETRI RIAVVIAMENTO AUTOMATICO (PANNELLO DI COMANDO: MENU M2 G2.8)
Tabella 22: Parametri riavviamento automatico, G2.8
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.8.1 Tempo di attesa 0.10 10.00 s 0.50 717
P2.8.2 Tempo tentativi 0.00 60.00 s 30.00 718
P2.8.3 Funzione marcia 0 2 0 719
Numero di tenta-
P2.8.4
P2.8.5
P2.8.6
P2.8.7
tivi dopo il blocco
da sottotensione
Numero di tenta-
tivi dopo un blocco
da sovratensione
Numero di tentativi dopo il blocco
da sovracorrente
Numero di tentativi dopo il blocco
da guasto riferi-
mento 4 mA
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
Descrizione
ID
0 = Rampa
1 = Aggancio in vel.
2 = In base a P2.4.6
Numero di tenta-
P2.8.8
P2.8.9
P2.8.10
tivi dopo il blocco
da guasto tempe-
ratura motore
Numero di tentativi dopo il blocco
da guasto esterno
Numero di tentativi dopo il blocco
da sottocarico
0 10 0 726
0 10 0 725
0 10 0 738
3.4.10 CONTROLLO DA PANNELLO (PANNELLO DI COMANDO: MENU M3)
I parametri per la selezione della postazione di controllo e della direzione sul pannello di
comando sono elencati di seguito. Vedere il menu di controllo da pannello nel Manuale d'uso
del prodotto.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 61

APPLICAZIONE CONTROLLO LOCALE/REMOTO VACON · 61
Tabella 23: Parametri controllo da pannello, M3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P3.1
P3.2
P3.3
R3.4 Pulsante Arresto 0 1 1 114
Postazione di con-
trollo
Riferimento pan-
nello
Direzione (sul
pannello di
comando)
1 3 1 125
P2.1 P2.2 Hz 0.00
0 1 0 123
Descrizione
ID
1 = Morsetto I/0
2 = Pannello
3 = Bus di campo
0 = Funzion. limit.
pulsante Arresto
1 = Pulsante Arresto sempre abilitato
3.4.11 MENU DI SISTEMA (PANNELLO DI COMANDO: MENU M6)
Per i parametri e le funzioni relative all'utilizzo generale dell'inverter, come la selezione
dell'applicazione e della lingua, i gruppi di parametri personalizzati o le informazioni
sull'hardware e il software, vedere il Manuale d'uso del prodotto.
3.4.12 SCHEDE DI ESPANSIONE (PANNELLO DI COMANDO: MENU M7
Il menu M7 mostra le schede opzionali e di espansione collegate alla scheda di controllo e le
informazioni relative alla scheda. Per ulteriori informazioni, vedere il Manuale d'uso del
prodotto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 62

VACON · 62 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
4 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ
MULTISTEP
4.1 INTRODUZIONE
Selezionare l'Applicazione di Controllo della Velocità Multistep nel menu M6 a pagina S6.2.
L'Applicazione di Controllo della Velocità Multistep si può utilizzare in quelle applicazioni che
richiedono velocità fisse. Si possono programmare complessivamente 15 + 2 velocità
diverse: una velocità di base, 15 velocità multistep e una velocità di jog. Le fasi di velocità si
selezionano con i segnali digitali DIN3, DIN4, DIN5 e DIN6. Se si utilizza la velocità di jog, si
può programmare DIN3 dal ripristino per guasto alla velocità di jog.
Il riferimento di velocità di base può essere un segnale di corrente o di tensione attraverso i
morsetti di ingresso analogico (2/ 3 o 4/5). Gli altri ingressi analogici possono essere
programmati per altri scopi.
Tutte le uscite sono programmabili liberamente.
•
Funzioni aggiuntive:
Logica programmabile del segnale di Marcia/Arresto e del segnale di inversione
•
Scalatura di riferimento
•
Supervisione di un limite frequenza
•
Programmazione della rampa a S e delle seconde rampe
•
Funzioni di marcia e arresto programmabili
•
Frenatura CC all'arresto
•
Un'area di frequenza proibita
•
Curva V/f e frequenza di commutazione programmabili
•
Riavviamento automatico
•
Protezione da stallo motore e protezione termica del motore: programmabili; disattivata,
•
allarme, guasto
I parametri dell'Applicazione di Controllo della Velocità Multistep sono illustrati nel capitolo
9 Descrizioni dei parametri di questo manuale. Le descrizioni sono ordinate secondo il numero
identificativo del singolo parametro.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 63

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Riferimento di base
(opzionale)
MARCIA
PRONTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Morsetto Segnale Descrizione
+10Vref
AI1+
AI1-
AI2+
AI2-
+24 V
Uscita di riferimento
Massa I/O
Ingresso analogico 2.
Gamma di corrente
0—20 mA
Programmabile
(P2.1.11)
Uscita tensione di controllo
Massa I/O
Marcia avanti
Logica programmabile (P2.2.1)
Marcia indietro
Ri min. = 5 kΩ
Ingresso guasto esterno
Programmabile (P2.2.2)
Selezione velocità
preimpostata 1
Selezione velocità
preimpostata 2
Selezione velocità
preimpostata 3
Comune per DIN 1—DIN 3
Comune per DIN4-DIN6
Uscita tensione di controllo
Massa I/O
Uscita analogica 1:
Frequenza di uscita
Programmabile (P2.3.2)
Uscita digitale
PRONTO
Programmabile (P2.3.7)
Collettore aperto,
I≤50 mA, U≤48 Vcc
Uscita relè 1
MARCIA
Programmabile
Programmabile
Programmabile
(P2.3.8)
Uscita relè 2
GUASTO
Programmabile
(P2.3.9)
Gamma 0-20 mA/RL,
max. 500 Ω
AO1+
Riferimento di frequenza
ingresso analogico 1
Terra per riferimento
e controlli
Riferimento di frequenza
ingresso analogico 2
Riferimento predefinito
Contatto chiuso =
marcia avanti
Contatto chiuso =
marcia indietro
Contatto aperto = nessun guasto
Contatto chiuso = guasto
Potenziometro
di riferimento,
1-10 kΩ
Tensione potenziometro, ecc.
Ingresso analogico 1.
Gamma di tensione
0—10 Vcc
Tensione per contatti,
ecc., max. 0,1 A
Tensione per contatti (vedere #6)
Collegare a GND o +24 V
Collegare a GND o +24 V
Terra per riferimento e controlli
Terra per riferimento e controlli
sel1 sel2 sel3 sel4(con DIN3)
0 0 0 0 Rif. I/O
1 0 0 0 Velocità 1
0 1 0 0 Velocità 2
---- ------1 1 1 1 Velocità 15
RO1
RO1
RO1
RO2
RO2
RO2
APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 63
4.2 I/O DI CONTROLLO
Fig. 10: Configurazione I/O predefinita per l'Applicazione di Controllo della Velocità Multistep
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 64

Blocco jumper X3:
coll. terra CMA e CMB
CMB collegato a GND
CMA collegato a GND
CMB isolato da GND
CMA isolato da GND
CMB e CMA collegati
internamente, isolati da GND
= Valore predefinito
VACON · 64 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
*) La seconda uscita relè della scheda opzionale A3 non include un morsetto per il contatto
aperto (il morsetto 24 è mancante).
NOTA!
Vedere le selezioni jumper riportate di seguito. Altre informazioni sono disponibili
nel Manuale d'uso del prodotto.
Fig. 11: Selezioni jumper
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 65

DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Riferim. pannello
2.1.11 Riferimento I/O
2.1.12 Rifer. ctrl pannello
2.1.13 Riferimento ctrl bus di campo
2.1.15 Velocità preimpostata 1
2.1.29 Velocità preimpostata 15
3.1 Post. di controllo
Riferimento
freq. interno
Marcia avanti
(programmabile)
Marcia indietro
(programmabile)
Avvio/Arresto
Indietro
Marcia/Arresto interno
Inversione interna
Reset guasto interno
Ingresso reset guasto
Tasto
reset
Pulsanti
Marcia/Arresto
Riferim. da bus di campo
Marc./Arr. da bus di campo
Direzione da bus di campo
3.3 Direzione pannello
Velocità preimpostata 1
Velocità preimpostata 2
Velocità preimpostata 3
Velocità preimpostata 4
2.1.14 Riferimento
vel. di jog
(programmabile)
≥ 1
Logica Marcia/
Arresto e
inversione
programmabile
APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 65
4.3 LOGICA DEL SEGNALE DI CONTROLLO NELL'APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Fig. 12: Logica del segnale di controllo dell'Applicazione di Controllo della Velocità Multistep
4.4 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP - ELENCHI DI
4.4.1 VALORI DI MONITORAGGIO (PANNELLO DI COMANDO: MENU M1)
I valori di monitoraggio sono i valori effettivi dei parametri e dei segnali, nonché degli stati e
delle misurazioni. I valori di monitoraggio non possono essere modificati.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PARAMETRI
4
Page 66

VACON · 66 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 24: Valori di monitoraggio
Indice
V1.1 Frequenza di uscita Hz 1
V1.2
V1.3 Velocità motore rpm 2
V1.4 Corrente motore A 3
V1.5 Coppia motore % 4
V1.6 Potenza motore % 5
V1.7 Tensione motore V 6
V1.8 Tensione DC-Link V 7
1.9 Temperatura unità °C 8
1.10 Temperatura motore % 9
V1.11 Ingresso analogico 1 V/mA 13
V1.12 Ingresso analogico 2 V/mA 14
Valore di
monitoraggio
Riferimento di fre-
quenza
Unità ID Descrizione
Hz 25
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Uscita a
V1.17 Valori multimonitor
nalogica
mA 26
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 67

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 67
4.4.2 PARAMETRI DI BASE (PANNELLO DI COMANDO: MENU M2 - G2.1)
Tabella 25: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.1.1 Frequenza min. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frequenza max. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite corrente 0.1 x I
P2.1.6 *
P2.1.7 *
Tempo di accele-
razione 1
Tempo di decele-
razione 1
tensione nominale
del motore
frequenza nomi-
nale del motore
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
ID
107
110
Descrizione
P2.1.8 *
P2.1.9 *
P2.1.10 * Cosfi motore 0.30 1.00 0.85 120
P2.1.11 * Riferimento I/O 0 3 1 117
P2.1.12 *
P2.1.13 *
P2.1.14 Rif. velocità di jog 0.00 P2.1.2 Hz 0.00 124
P2.1.15
Velocità nominale
del motore
Corrente nominale del motore
Riferimento con-
trollo da pannello
Riferimento con-
trollo bus di
campo
Velocità preimpo-
stata 1
24 20 000 rpm 1440 112
0.1 x I
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 5.00 105
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
0 = AI1
1 = AI2
2 = Pannello
3 = Bus di campo
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 68

VACON · 68 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 25: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.1.16
P2.1.17
P2.1.18
P2.1.19
P2.1.20
P2.1.21
P2.1.22
P2.1.23
Velocità preimpo-
stata 2
Velocità preimpo-
stata 3
Velocità preimpo-
stata 4
Velocità preimpo-
stata 5
Velocità preimpo-
stata 6
Velocità preimpo-
stata 7
Velocità preimpo-
stata 8
Velocità preimpo-
stata 9
0.00 P2.1.2 Hz 10.00 106
0.00 P2.1.2 Hz 12.50 126
0.00 P2.1.2 Hz 15.00 127
0.00 P2.1.2 Hz 17.50 128
0.00 P2.1.2 Hz 20.00 129
0.00 P2.1.2 Hz 22.50 130
0.00 P2.1.2 Hz 25.00 133
0.00 P2.1.2 Hz 27.50 134
ID
Descrizione
P2.1.24
P2.1.25
P2.1.26
P2.1.27
P2.1.28
P2.1.29
Velocità preimpo-
stata 10
Velocità preimpo-
stata 11
Velocità preimpo-
stata 12
Velocità preimpo-
stata 13
Velocità preimpo-
stata 14
Velocità preimpo-
stata 15
0.00 P2.1.2 Hz 30.00 135
0.00 P2.1.2 Hz 32.50 136
0.00 P2.1.2 Hz 35.00 137
0.00 P2.1.2 Hz 40.00 138
0.00 P2.1.2 Hz 45.00 139
0.00 P2.1.2 Hz 50.00 140
* = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 69

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 69
4.4.3 SEGNALI DI INGRESSO (PANNELLO DI COMANDO: MENU M2 - G2.2)
Tabella 26: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.1 ***
Logica Marcia/
Arresto
0 6 0 300
Descrizione
ID
Logica = 0
Sgn ctrl 1 = Marcia
avanti
Sgn ctrl 2 = Marcia
indietro
Logica = 1
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Indietro
Logica = 2
Sgn ctrl 1 = Marcia/
Arresto
Sgn ctrl 2 = Abilitaz.
marcia
Logica = 3
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Impulso
di arresto
Logica = 4
Sgn ctrl 1 = Impulso
marcia avanti
(fronte)
Sgn ctrl 2 = Impulso
marcia indietro
(fronte)
Logica = 5
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Impulso
marcia indietro
Logica = 6
Sgn ctrl 1 = Impulso
di marcia (fronte)
Sgn ctrl 2 = Abilitaz.
impulso
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 70

VACON · 70 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 26: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.2 Funzione DIN3 0 13 1 301
Descrizione
ID
0 = Non usato
1=Guasto est., cont.
chiuso
2=Guasto est., cont.
aperto
3=Abilita esecuzione
4=Selezione tempo
acc./dec.
5=Portare p.c. a IO
6=Portare p.c. a pannello
7=Portare p.c. a bus
di c.
8 = Ind. (se P2.2.1 ≠
2,3 o 6)
9 = Velocità di jog
10=Reset guasto
11 = Operazione
acc/dec proibita
12 = Comando frenatura CC
13 = Velocità preimpostata
P2.2.3
****
P2.2.4 Escurs. segn AI1 0 2 0 320
P2.2.5
P2.2.6
P2.2.7
P2.2.8
P2.2.9
****
Selezione segnale
AI1
Autocalibrazione
minimo AI1
Autocalibrazione
massimo AI1
Inversione
segnale AI1
Tempo filtro
segnale AI1
Selezione segnale
AI2
0.1 E.10 A1 377
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0.00 10.00 s 0.10 324
0.1 E.10 A.2 388
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2=Gamma parametri
personalizzata**
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 71

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 71
Tabella 26: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.10 Escurs. segn AI2 0 2 1 325
P2.2.11
P2.2.12
P2.2.13
P2.2.14
P2.2.15
P2.2.16
Autocalibrazione
minimo AI2
Autocalibrazione
massimo AI2
Inversione
segnale AI2
Tempo filtro
segnale AI2
Scalatura di riferi-
mento, valore
minimo
Scalatura di riferi-
mento, valore
massimo
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 10.00 s 0.10 329
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
Descrizione
ID
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2=Gamma parametri
personalizzata**
0,00 = Nessuna scalatura
>0 = Valore massimo
scalato
P2.2.17
P2.2.18
Ingresso analo-
gico libero, sele-
zione segnale
Ingresso analo-
gico libero, fun-
zione
0 2 0 361
0 4 0 362
0 = Non usato
1 = AI1
2 = AI2
0 = Nessuna funzione
1 = Riduce il limite
corrente (P2.1.5)
2 = Riduce la corrente frenatura in
CC, P2.4.8
3 = Riduce i tempi di
accel. e decel.
4 = Riduce il limite di
supervisione coppia,
P2.3.15
pc = postazione di controllo
cc = contatto chiuso
oc = contatto aperto
** = Ricordarsi di posizionare i jumper del blocco X2 nella configurazione corrispondente.
Vedere il Manuale d'uso del prodotto.
*** = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 72

VACON · 72 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
**** = Usare il metodo TTF per programmare questi parametri.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 73

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 73
4.4.4 SEGNALI DI USCITA (PANNELLO DI COMANDO: MENU M2 -> G2.3
Tabella 27: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.1 *
P2.3.2
P2.3.3
Selezione segnale
AO1
Funzione uscita
analogica
Tempo filtro
uscita analogica
0.1 E.10 A11 464
0 8 1 307
0.00 10.00 s 1.00 308
Descrizione
ID
0=Non in uso (20
mA / 10 V)
1 = Freq. uscita (0f
max
2=Riferimento
freq. (0-f
3=Velocità motore
(0 - Velocità nominale)
4=Corrente motore
(0-I
nMotor
5=Coppia motore
(0-T
6=Potenza motore
(0-P
7=Tensione motore
(0-U
8=Tensione DCLink (0-1000V)
0 = Nessun filtro
)
nMotor
nMotor
nMotor
max
)
)
)
)
)
P2.3.4
P2.3.5
P2.3.6
Inversione uscita
analogica
Minimo uscita
analogica
Scala uscita ana-
logica
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Non invertito
1 = Invertito
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 74

VACON · 74 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 27: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.7
Funzione uscita
digitale 1
0 22 1 312
Descrizione
ID
0 = Non usato
1 = Pronto
2 = Marcia
3 = Guasto
4 = Guasto invertito
5 = Allarme surriscaldamento FC
6 = Guasto esterno
o allarme
7 = Guasto di riferimento o allarme
8 = Allarme
9 = Invertito
10 = Velocità di jog
selezionata
11 = Alla velocità
12 = Regolatore
motore attivo
13 = Superv. limite
freq. d'uscita 1
14 = Superv. limite
freq. d'uscita 2
15 = Superv. limite
coppia
16 = Superv. limite
riferimento
17 = Controllo
freno esterno
18 = Postazione di
controllo: IO
19 = Superv. limite
temp. FC
20 = Direzione di
rotazione non
richiesta
21 = Controllo
freno est. invertito
22 = Guasto/
allarme termistore
4
P2.3.8
P2.3.9 Funzione RO2 0 22 3 314
P2.3.10
Funzione RO1 0 22 2 313
Supervisione
limite frequenza
di uscita 1
0 2 0 315
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Come il parametro
2.3.7
Come il parametro
2.3.7
0 = Nessun limite
1 = Limite supervisione inferiore
2 = Limite supervisione superiore
Page 75

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 75
Tabella 27: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
Limite frequenza
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15
P2.3.16
di uscita 1; valore
supervisionato
Supervisione
limite frequenza
di uscita 2
Limite frequenza
di uscita 2; valore
di supervisione
Funzione supervi-
sione limite cop-
pia
Valore di supervi-
sione limite di
coppia
Funzione supervi-
sione limite riferi-
mento
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
Descrizione
ID
0 = Nessun limite
1 = Limite supervisione inferiore
2 = Limite supervisione superiore
0 = No
1 = Limite inferiore
2 = Limite superiore
0 = No
1 = Limite inferiore
2 = Limite superiore
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
P2.3.22 *
P2.3.23 *
P2.3.24 *
Valore di supervi-
sione limite riferi-
mento
Ritardo apertura
freno esterno
Ritardo chiusura
freno esterno
Supervisione
limite tempera-
tura inverter
Valore limite tem-
peratura inverter
Scalatura uscita
analogica 2
Funzione uscita
analogica 2
Tempo filtro
uscita analogica 2
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 = No
1 = Limite inferiore
2 = Limite superiore
Come il parametro
2.3.2
0 = Nessun filtro
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 76

VACON · 76 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 27: Segnali di uscita, G2.3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.3.25 *
P2.3.26 *
P.2.3.27 *
Inversione uscita
analogica 2
Minimo uscita
analogica 2
Scalatura uscita
analogica 2
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
* = Usare il metodo TTF per programmare questi parametri
Descrizione
ID
0 = Non invertito
1 = Invertito
0 = 0 mA (0 V)
1 = 4 mA (2 V)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 77

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 77
4.4.5 PARAMETRI PER IL CONTROLLO DELL'INVERTER (PANNELLO DI COMANDO: MENU M2 -> G2.4
Tabella 28: Parametri per il controllo dell'azionamento, G2.4
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.4.1 Forma rampa 1 0.0 10.0 s 0.1 500
P2.4.2 Forma rampa 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5
Tempo di accele-
razione 2
Tempo di decele-
razione 2
Chopper di frena-
tura
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
0 4 0 504
Descrizione
ID
0 = Lineare
100 = Tempi aum./
dim. piena acc./
dec.
0 = Lineare
100 = Tempi aum./
dim. piena acc./
dec.
0 = Disabilitato
1 = Abilit. in marcia
2 = Chopper di frenatura esterno
3 = Abilit. durante
arresto/marcia
4 = Abilit. in marcia
(nessun test)
P2.4.6 Funzione marcia 0 2 0 505
P2.4.7 Funzione arresto 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
Corrente di frena-
tura in CC
Tempo di frena-
tura in CC all'ar-
resto
Frequenza per
l'avvio della frena-
tura CC in fase di
arresto rampa
0.00 I
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0.7 x I
H
507
0 = Rampa
1 = Aggancio in vel.
2=Aggancio in
velocità condizionale
0 = Inerzia
1 = rampa
2 = rampa + inerzia
da abilitazione
marcia
3 = inerzia + rampa
abilitazione marcia
0 = Freno CC
spento all'arresto
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 78

VACON · 78 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 28: Parametri per il controllo dell'azionamento, G2.4
Indice Parametro AI1 AI1 Unità PredefinitoPers
Tempo di frena-
P2.4.11
P2.4.12 * Frenatura a flusso 0 1 0 520
P2.4.13
tura in CC all'av-
vio
Corrente frena-
tura a flusso
0.00 600.00 s 0.00 516
0.00 I
L
A I
H
ID
519
Descrizione
0 = Freno CC
spento all'avvio
0 = Off
0 = On
4.4.6 PARAMETRI DI FREQUENZA PROIBITA (PANNELLO DI COMANDO: MENU M2 G2.5)
Tabella 29: Parametri di frequenza proibita, G2.5
Indice Parametro AI1 AI1 Unità PredefinitoPers
Frequenza proi-
P2.5.1
bita - Limite inf.
gamma 1
0.00 320.00 Hz 0.00 509
ID
Descrizione
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Frequenza proi-
bita - Limite sup.
gamma 1
Frequenza proibita - Limite inf.
gamma 2
Limite sup.
gamma frequenza
proibita 2
Frequenza proibita - Limite inf.
gamma 3
Limite sup.
gamma frequenza
proibita 3
Rampa acc./dec.
proibita
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Gamma frequenza proibita 1
disattivata
0 = Gamma frequenza proibita 2
disattivata
0 = Gamma frequenza proibita 3
disattivata
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 79

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 79
4.4.7 PARAMETRI PER IL CONTROLLO DEL MOTORE (PANNELLO DI COMANDO: MENU M2 - G2.6)
Tabella 30: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.1 *
P2.6.2 * Ottimizzazione V/f 0 1 0 109
P2.6.3 *
Modalità di con-
trollo motore
Selezione rap-
porto V/f
0 1/3 0 600
0 3 0 108
Descrizione
ID
0 = Controllo di
frequenza
1=Controllo velocità
NXP:
2 = Controllo coppia ad anello
aperto
3=Ctrl velocità
anello chiuso
4 = Controllo coppia ad anello
chiuso
0 = Non usato
1=Boost coppia
automatico
0 = Lineare
1 = Quadratico
2 = Programmabile
3 = Lineare con
ottim. flusso
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Punto di indeboli-
mento campo
Tensione al punto
di indebolimento
campo
Frequenza inter-
media curva V/f
Tensione interme-
dia curva V/f
Tensione di uscita
a frequenza 0
Frequenza di
commutazione
Regolatore di
sovratensione
Regolatore di sot-
totensione
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varie 606
1.0 Varie kHz Varie 601
0 2 1 607
0 1 1 608
0 = Non usato
1=In uso (senza
rampa)
2 = In uso (con
rampa)
0 = Non usato
1 = In uso
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 80

VACON · 80 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 30: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.12 Load Droop 0.00 100.00 % 0.00 620
P2.6.13 Identificazione 0 1/2 0 631
Gruppo parametri ad anello chiuso 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
Corrente magne-
tizz.
Guadagno P con-
trollo di velocità
Tempo I controllo
velocità
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
H
A 0.00 612
Descrizione
ID
0 = Nessuna azione
1=Identificazione
senza rotazione
del motore
2=Identificazione
con rotazione del
motore
3 = Identificazione
encoder
4 = Nessuna azione
5 = Identificazione
non riuscita
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11 Coppia di spunto 0 3 0 621
Compensazione
accelerazione
Correzione scor-
rim.
Corrente di
magnetiz. all'avvio
Tempo di magne-
tiz. all'avvio
Tempo vel. 0
all'avvio
Tempo vel. 0
all'arresto
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
L
A 0.00 627
0 = Non usato
1 = Memoria coppia
2 = Riferimento
coppia
3 = Coppia di
spunto avanti/
indietro
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 81

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 81
Tabella 30: Parametri per il controllo del motore, G2.6
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Gruppo parametri identificazione 2.6.15
P2.6.15.1 Step di velocità -50.0 50.0 0.0 0.0 1252
Coppia di spunto
FWD
Coppia di spunto
REV
Tempo filtro enco-
der
Guadagno P con-
trollo corrente
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
ID
Descrizione
* = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 82

VACON · 82 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
4.4.8 PROTEZIONI (PANNELLO DI COMANDO: MENU M2 - G2.7)
Tabella 31: Protezioni, G2.7
Indice Parametro AI1 AI1 Unità PredefinitoPers
Reazione a guasto
P2.7.1
P2.7.2
P2.7.3
P2.7.4
di riferimento 4
mA
Frequenza guasto
di riferimento 4
mA
Reazione guasto
esterno
Supervisione fase
di ingresso
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
Descrizione
ID
0 = Nessuna reazione
1 = Allarme
2 = Allarme + freq.
precedente
3 = All. + freq.
preimp. 2.7.2
4 = Guasto, arresto
sec. 2.4.7
5 = Guasto, arresto
per inerzia
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
Reazione a guasto
da sottotensione
Supervisione fase
di uscita
Protezione da
guasti di terra
Protezione ter-
mica del motore
Fattore servizio
motore
Fattore raffredda-
mento motore a
velocità zero
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
0 = Guasto memorizzato
Guasto non
memorizzato
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 83

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 83
Tabella 31: Protezioni, G2.7
Indice Parametro AI1 AI1 Unità PredefinitoPers
Costante tempo-
P2.7.11
P2.7.12
P2.7.13
P2.7.14 Corrente di stallo 0.00 2 x I
P2.7.15
P2.7.16
rale protezione
termica motore
Ciclo servizio
motore
Protezione da
stallo
Limite tempo di
stallo
Limite frequenza
stallo
1 200 min Varie 707
0 150 % 100 708
0 3 0 709
H
1.00 120.00 s 15.00 711
1.00 P2.1.2 Hz 25.00 712
A 1
H
ID
710
Descrizione
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
P2.7.17
P2.7.18
P2.7.19
P2.7.20
P2.7.21
Protezione da sot-
tocarico
Protezione da sot-
tocarico, fre-
quenza nominale
Protezione da sot-
tocarico, carico
frequenza zero
Limite di tempo
protezione da sot-
tocarico
Reazione a guasto
al termistore
0 3 0 713
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
0 = Nessuna reazione
1 = Allarme
2=Guasto, arresto
sec 2.4.7
3 = Guasto, arresto
per inerzia
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 84

VACON · 84 APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP
Tabella 31: Protezioni, G2.7
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.7.22
P2.7.23
Reazione a guasto
al bus di campo
Reazione a guasto
slot
0 3 2 733
0 3 734
ID
Descrizione
Vedere P2.7.21
Vedere P2.7.21
4.4.9 PARAMETRI RIAVVIAMENTO AUTOMATICO (PANNELLO DI COMANDO: MENU M2 G2.8)
Tabella 32: Parametri riavviamento automatico, G2.8
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.8.1 Tempo di attesa 0.10 10.00 s 0.50 717
P2.8.2 Tempo tentativi 0.00 60.00 s 30.00 718
P2.8.3 Funzione marcia 0 2 0 719
Descrizione
ID
0 = Rampa
1 = Aggancio in vel.
2 = In base a P2.4.6
P2.8.4
P2.8.5
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Numero di tentativi dopo il blocco
da sottotensione
Numero di tenta-
tivi dopo un blocco
da sovratensione
Numero di tentativi dopo il blocco
da sovracorrente
Numero di tentativi dopo il blocco
da guasto riferi-
mento 4 mA
Numero di tentativi dopo il blocco
da guasto tempe-
ratura motore
Numero di tentativi dopo il blocco
da guasto esterno
Numero di tentativi dopo il blocco
da sottocarico
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 85

APPLICAZIONE DI CONTROLLO DELLA VELOCITÀ MULTISTEP VACON · 85
4.4.10 CONTROLLO DA PANNELLO (PANNELLO DI COMANDO: MENU M3)
I parametri per la selezione della postazione di controllo e della direzione sul pannello di
comando sono elencati di seguito. Vedere il menu di controllo da pannello nel Manuale d'uso
del prodotto.
Tabella 33: Parametri controllo da pannello, M3
Indice Parametro AI1 AI1 Unità PredefinitoPers
P3.1
P3.2
P3.3
R3.4 Pulsante Arresto 0 1 1 114
Postazione di con-
trollo
Riferimento pan-
nello
Direzione (sul
pannello di
comando)
1 3 1 125
P2.1.1 P2.1.2 Hz 0.00
0 1 0 123
Descrizione
ID
1 = Morsetto I/0
2 = Pannello
3 = Bus di campo
0 = Funzion. limit.
pulsante Arresto
1 = Pulsante Arresto sempre abilitato
4.4.11 MENU DI SISTEMA (PANNELLO DI COMANDO: MENU M6)
Per i parametri e le funzioni relative all'utilizzo generale dell'inverter, come la selezione
dell'applicazione e della lingua, i gruppi di parametri personalizzati o le informazioni
sull'hardware e il software, vedere il Manuale d'uso del prodotto.
4.4.12 SCHEDE DI ESPANSIONE (PANNELLO DI COMANDO: MENU M7
Il menu M7 mostra le schede opzionali e di espansione collegate alla scheda di controllo e le
informazioni relative alla scheda. Per ulteriori informazioni, vedere il Manuale d'uso del
prodotto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 86

VACON · 86 APPLICAZIONE CONTROLLER PID
5 APPLICAZIONE CONTROLLER PID
5.1 INTRODUZIONE
Selezionare l'applicazione di Controllo PID nel menu M6 a pagina S6.2
L'Applicazione di Controllo PID è dotata di due postazioni di controllo morsetto I/O. La
postazione A è il controllore PID e la sorgente B è il riferimento di frequenza diretto. Le
postazioni di controllo A o B vengono selezionate tramite l'ingresso digitale DIN6.
Il riferimento del controllore PID può essere selezionato tramite gli ingressi analogici, il bus
di campo, il potenziometro, attivando il Riferimento PID 2 o utilizzando il riferimento pannello
di comando. Il valore misurato del controllore PID può essere selezionato tramite gli ingressi
analogici, il bus di campo, i valori misurati del motore o attraverso le funzioni matematiche.
Il riferimento di frequenza diretto può essere usato per il controllo senza il controllore PID e
può essere selezionato tramite gli ingressi analogici, il bus di campo, il motopotenziometro o
il pannello di comando.
L'Applicazione PID viene in genere utilizzata per il controllo della misurazione del livello o
per il controllo di pompe e ventole. In queste condizioni di impiego, l'Applicazione PID è in
grado di garantire un controllo agevole e un pacchetto che riunisce funzionalità di
misurazione e di controllo, rendendo inutile l'aggiunta di ulteriori componenti.
Gli ingressi digitali DIN2, DIN3, DIN5 e tutte le uscite sono programmabili liberamente.
•
Funzioni aggiuntive:
Selezione escursione segnale ingresso analogico
•
Supervisione di due limiti di frequenza
•
Supervisione del limite di coppia
•
Supervisione del limite di riferimento
•
Programmazione della rampa a S e delle seconde rampe
•
Funzioni di marcia e arresto programmabili
•
Frenatura CC all'avvio e all'arresto
•
Tre aree di frequenza proibita
•
Curva V/f e frequenza di commutazione programmabili
•
Riavviamento automatico
•
Protezione da stallo motore e protezione termica del motore: completamente
•
programmabile; disattivata, allarme, guasto
Protezione contro sottocarico motore
•
Supervisione fasi di ingresso e di uscita
•
Aggiunta di frequenza somma all'uscita PID
•
Il controllore PID può essere inoltre utilizzato dalle postazioni di controllo I/O B, dal
•
pannello di comando e dal bus di campo.
Funzione di sostituzione facile
•
Funzione standby
•
I parametri dell'Applicazione di Controllo PID sono illustrati nel capitolo 9 Descrizioni dei
parametri di questo manuale. Le descrizioni sono ordinate secondo il numero identificativo
del singolo parametro.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 87

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
Trasmettitore a 2 fili
Potenziometro di
riferimento, 1-10 kΩ
mA
MARCIA
PRONTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Morsetto Segnale Descrizione
+10V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Uscita di riferimento
Massa I/O
Ingresso analogico 2
Gamma di corrente 0—20 mA
Programmabile (P2.2.9)
Uscita tensione di controllo
Massa I/O
Postazione A: Marcia avanti
Ri min. = 5 kΩ
Reset guasti
Programmabile (P2.2.2)
Ingresso guasto esterno
Programmabile (P2.2.2)
Postazione B: Marcia avanti
Ri min. = 5 kΩ
Selezione velocità di jog
Programmabile (P2.2.3)
Selezione postazione
di controllo A/B
Contatto chiuso = velocità di jog attiva
Segnale di avvio per postazione di controllo B
Riferimento frequenza (P2.2.5.)
Comune per DIN 1—DIN 3
Comune per DIN4-DIN6
Uscita tensione di controllo
Massa I/O
Uscita analogica 1
Frequenza di uscita
Programmabile (P2.3.2)
Uscita digitale
PRONTO
Programmabile (P2.3.7)
Collettore aperto, I≤50 mA,
U≤48 Vcc
Uscita relè 1
MARCIA
Programmabile
(P2.3.8)
Uscita relè 2
GUASTO
Programmabile
(P2.3.9)
AO1+
Ingresso analogico 1
Riferimento PID
Terra per riferimento
e controlli
Ingresso analogico 2
Valore misurato PID 1
Contatto chiuso = marcia avanti
Contatto chiuso = reset guasto
Contatto chiuso = marcia indietro
Contatto chiuso = guasto
Contatto aperto = nessun guasto
Tensione riferimento
potenziometro, ecc.
Ingresso analogico 1
Gamma di tensione 0—10 Vcc
Programmabile (P2.1.11)
Tensione per contatti,
ecc., max. 0,1 A
Tensione per contatti (vedere #6)
Collegare a GND o +24 V
Effettivo
valore
(0) 4-20
mA
Collegare a GND o +24 V
Terra per riferimento e controlli
Terra per riferimento e controlli
Gamma 0-20 mA/RL,
max. 500 Ω
Contatto aperto = postazione di
controllo A attiva Contatto chiuso =
postazione di controllo attiva B attiva
APPLICAZIONE CONTROLLER PID VACON · 87
5.2 I/O DI CONTROLLO
Fig. 13: Configurazione I/O predefinita per l'Applicazione PID (con trasmettitore a 2 fili)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 88

Blocco jumper X3:
coll. terra CMA e CMB
CMB collegato a GND
CMA collegato a GND
CMB isolato da GND
CMA isolato da GND
CMB e CMA collegati
internamente, isolati da GND
= Valore predefinito
VACON · 88 APPLICAZIONE CONTROLLER PID
*) La seconda uscita relè della scheda opzionale A3 non include un morsetto per il contatto
aperto (il morsetto 24 è mancante).
NOTA!
Vedere le selezioni jumper riportate di seguito. Altre informazioni sono disponibili
nel Manuale d'uso del prodotto.
Fig. 14: Selezioni jumper
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 89

DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
Inversione interna
Reset guasto interno
Ingresso reset guasto (programmabile)
3.3 Direzione pannello
Marcia/Arresto interno
Riferim. da bus di campo
Marc./Arr. da bus di campo
Direzione da bus di campo
Guasto esterno (programmabile)
Velocità di jog (programmabile)
Selezione postazione A/B
2.2.4 Rif. PID principale
Su
Giù
2.1.11 Riferimento PID
I/O inversione
R3.4 Rif. pannello PID
R3.2 Rif. pannello
Act 1
Act 2
R3.5 Rif pannello PID 2
Abilita rif. pannello
PID 2 (DIN5 = 13)
Marcia; post. A
Marcia; post. B
Avvio/Arresto
Pulsanti Marcia/Arresto
Rifer. frequenza
int.
2.1.19 Rif. velocità di jog
Pannello
Bus di campo
Tasto reset
3.1 Post. di controllo
2.2.7 Riferimento ctrl bus di campo
2.2.6 Rifer. ctrl pannello
2.2.5 Riferimento B I/O
≥ 1
Motopotenzio
metro
Sel. val.
misur.
par. 2.2.8
Sel. val.
misur.,
par. 2.2.9
& 2.2.10
APPLICAZIONE CONTROLLER PID VACON · 89
5.3 LOGICA DEL SEGNALE DI CONTROLLO NELL'APPLICAZIONE DI CONTROLLO PID
Fig. 15: Logica del segnale di controllo dell'Applicazione di Controllo PID
5.4 APPLICAZIONE DI CONTROLLO PID - ELENCHI DI PARAMETRI
5.4.1 VALORI DI MONITORAGGIO (PANNELLO DI COMANDO: MENU M1)
I valori di monitoraggio sono i valori effettivi dei parametri e dei segnali, nonché degli stati e
delle misurazioni. I valori di monitoraggio non possono essere modificati.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 90

VACON · 90 APPLICAZIONE CONTROLLER PID
NOTA!
I valori di monitoraggio da V1.19 a V1.22 sono disponibili unicamente
nell'Applicazione di Controllo PID.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 91

APPLICAZIONE CONTROLLER PID VACON · 91
Tabella 34: Valori di monitoraggio
Indice
V1.1 Frequenza di uscita Hz 1
V1.2
V1.3 Velocità motore rpm 2
V1.4 Corrente motore A 3
V1.5 Coppia motore % 4
V1.6 Potenza motore % 5
V1.7 Tensione motore V 6
V1.8 Tensione DC-Link V 7
1.9 Temperatura unità °C 8
1.10 Temperatura motore % 9
V1.11 Ingresso analogico 1 V/mA 13
V1.12 Ingresso analogico 2 V/mA 14
Valore di
monitoraggio
Riferimento di fre-
quenza
Unità ID Descrizione
Hz 25
V1.13 Ingresso analogico 3 27
V1.14 Ingresso analogico 4 28
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 Uscita a
V1.19 Riferim PID % 20
V1.20 Valore effettivo PID % 21
V1.21 Valore di errore PID % 22
V1.22 Uscita PID % 23
Visualizzazione spe-
V1.23
V1.24 Temperatura PT-100 ºC 42
G1.25 Voci multimonitor
ciale del valore
nalogica
misurato
mA 26
29
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 92

VACON · 92 APPLICAZIONE CONTROLLER PID
Tabella 34: Valori di monitoraggio
Indice
V1.26.1 Corrente A 1113
V1.26.2 Coppia % 1125
V1.26.3 Tensione CC V 44
V1.26.4 Status Word 43
Valore di
monitoraggio
Unità ID Descrizione
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 93

APPLICAZIONE CONTROLLER PID VACON · 93
5.4.2 PARAMETRI DI BASE (PANNELLO DI COMANDO: MENU M2 - G2.1)
Tabella 35: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.1.1 Frequenza min. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frequenza max. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite corrente 0.1 x I
P2.1.6 *
P2.1.7 *
Tempo di accele-
razione 1
Tempo di decele-
razione 1
tensione nominale
del motore
frequenza nomi-
nale del motore
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
ID
107
110
Descrizione
P2.1.8 *
P2.1.9 *
P2.1.10 * Cosfi motore 0.30 1.00 0.85 120
P2.1.11 *
P2.1.12
P2.1.13
Velocità nominale
del motore
Corrente nominale del motore
Segnale di riferi-
mento controllore
PID (postazione A)
Guadagno con-
trollore PID
Costante di tempo
integrale control-
lore PID
24 20 000 rpm 1440 112
0.1 x I
0 4 1 332
0.0 1000.0 % 100.0 118
0.00 320.00 s 1.00 119
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Rif. regol. PID
dalla pagina pan.
com., P3.4
3 = Rif. reg. PID da
bus di campo (ProcessDataIN 1)
4 = Motopotenziometro
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 94

VACON · 94 APPLICAZIONE CONTROLLER PID
Tabella 35: Parametri di base G2.1
Indice Parametro AI1 AI1 Unità PredefinitoPers
Costante di tempo
P2.1.14
P2.1.15
P2.1.16 Ritardo standby 0 3600 s 30 1017
P2.1.17 Livello Riavvio 0.00 100.00 % 25.00 1018
P2.1.18 Funzione riavvio 0 1 0 1019
P2.1.19
derivativa control-
lore PID
Frequenza
standby
Riferimento velo-
cità di jog
0.00 100.00 s 0.00 132
0.00 P2.1.2 Hz 10.00 1016
0.00 P2.1.2 Hz 10.00 124
Descrizione
ID
0 = Riavvio in caso
di valore inferiore
al livello di riavvio
(2.1.17)
1 = Riavvio in caso
di superamento
del livello di riavvio
(2.1.17)
* = Il valore del parametro può essere modificato solo dopo l'arresto dell'inverter.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 95

APPLICAZIONE CONTROLLER PID VACON · 95
5.4.3 SEGNALI DI INGRESSO
Tabella 36: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.1 ** Funzione DIN2 0 13 1 319
Descrizione
ID
0 = Non usato
1 = Guasto esterno
cc
2 = Guasto esterno
oc
3=Abilita esecuzione
4 = Selezione
tempo acc./dec.
5 = CP: Morsetto
I/O (ID125)
6 = CP: Pannello
(ID125)
7 = CP: Bus di
campo (ID125)
8 = Avanti/Indietro
9 = Frequenza di
jog (cc)
10 = Ripristino per
guasti (cc)
11 = Acc/dec proibita (cc)
12 = Comando frenatura CC
13= Pot. motore
SU (cc)
P2.2.2 **
P2.2.3 ** Funzione DIN5 0 13 9 330
P2.2.4 **
Funzione DIN3 0 13 10 301
Riferimento
somma PID
0 7 0 376
Vedere sopra
eccetto:
13= Pot. motore
GIÙ (cc)
Vedere sopra
eccetto:
13 = Abilita riferimento PID 2
0 = Valore diretto
uscita PID
1 = AI1 + uscita PID
2 = AI2 + uscita PID
3 = AI3 + uscita PID
4 = AI4 + uscita PID
5 = Pannello PID +
uscita PID
6 = Bus di campo +
uscita PID (ProcessDataIN3)
7 = Motopotenz. +
uscita PID
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 96

VACON · 96 APPLICAZIONE CONTROLLER PID
Tabella 36: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.5 **
P2.2.6 **
P2.2.7 **
P2.2.8 **
Selezione riferi-
mento I/O B
Selezione riferimento controllo
da pannello
Selezione riferimento controllo
bus di campo
Selezione valore
misurato
0 7 1 343
0 7 4 121
0 7 5 122
0 7 0 333
Descrizione
ID
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = Riferimento
pannello
5 = Riferimento
bus di campo
(FBSpeedReference)
6 = Motopotenziometro
7 = Controllore PID
Come in P2.2.5
Come in P2.2.5
0 = Valore misurato 1
1 = Misurato 1 +
Misurato 2
2 = Misurato 1 Misurato 2
3 = Misurato 1 *
Misurato 2
4=Min (Misurato 1,
Misurato 2)
5=Max (Misurato 1,
Misurato 2)
6 = Medio (misurato1, misurato2)
7 = Radice quadrata (mis1) +
Radice quadrata
(mis2)
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 97

APPLICAZIONE CONTROLLER PID VACON · 97
Tabella 36: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.9 **
P2.2.10 **
Selezione valore
misurato 1
Ingresso valore
misurato 2
0 10 2 334
0 10 0 335
Descrizione
ID
0 = Non usato
1 = Segnale AI1
(scheda di controllo)
2 = Segnale AI2
(scheda di controllo)
3 = AI3
4 = AI4
5 = Bus di campo
ProcessDataIN2
6 = Coppia motore
7 = Velocità motore
8 = Corrente
motore
9 = Potenza
motore
10 = Frequenza
encoder
0 = Non usato
1 = Segnale AI1
2 = Segnale AI2
3 = AI3
4 = AI4
5 = Bus di campo
ProcessDataIN3
6 = Coppia motore
7 = Velocità motore
8 = Corrente
motore
9 = Potenza
motore
10 = Frequenza
encoder
P2.2.11
P2.2.12
P2.2.13
P2.2.14
P2.2.15
***
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Scala minima
valore misurato 1
Scala massima
valore misurato 1
Scala minima
valore misurato 2
Scala massima
valore misurato 2
Selezione segnale
AI1
–1600.0 1600.0 % 0.0 336
–1600.0 1600.0 % 100.0 337
–1600.0 1600.0 % 0.0 338
–1600.0 1600.0 % 100.0 339
0.1 E.10 A.1 377
5
Page 98

VACON · 98 APPLICAZIONE CONTROLLER PID
Tabella 36: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.16 Escurs. segn AI1 0 2 0 320
P2.2.17
P2.2.18
P2.2.19 Inversione AI1 0 1 0 323
P2.2.20 Tempo filtro AI1 0.00 10.00 s 0.10 324
P2.2.21
Autocalibrazione
minimo AI1
Autocalibrazione
massimo AI1
Selezione segnale
AI2
–160.00 160.00 % 0.00 321
–160.00 160.00 % 100.0 322
0.1 E.10 A.2 388
Descrizione
ID
0 = 0-10 V (0-20
mA*)
1=2—10 V (4 – 20
mA*)
2=Gamma personalizzata*
0 = Non invertito
1 = Invertito
0 = 0-20 mA (0-10
V *)
1 = 4-20 mA (2-10
V *)
2=Gamma personalizzata*
P2.2.22 Escurs. segn AI2 0 2 1 325
P2.2.23
P2.2.24
P2.2.25 Inversione AI2 0 1 0 328
P2.2.26 Tempo filtro AI2 0.00 10.00 s 0.10 329
P2.2.27
P2.2.28
Autocalibrazione
minimo AI2
Autocalibrazione
massimo AI2
Tempo rampa
motopotenziome-
tro
Reset memoria
riferimento di frequenza del moto-
potenziometro
-160.00 160.00 % 0.00 326
-160.00 160.00 % 0.00 327
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 = 0-20 mA*
1 = 4-20 mA*
2=Personalizzato*
0 = Non invertito
1 = Invertito
0 = Nessun reset
1 = Reset in caso di
arresto o spegnimento
2 = Reset in caso di
spegnimento
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 99

APPLICAZIONE CONTROLLER PID VACON · 99
Tabella 36: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
Reset di memoria
P2.2.29
P2.2.30 Limite min. PID -1600.0 P2.2.31 % 0.0 359
P2.2.31 Limite max. PID P2.2.30 1600.0 % 100.0 360
P2.2.32
P2.2.33
P2.2.34
P2.2.35
riferimento PID
del motopotenzio-
metro
Inversione valore
di errore
Tempo salita rife-
rimento PID
Tempo discesa
riferimento PID
Scalatura riferi-
mento, valore
minimo, posta-
zione B
0 2 0 370
0 1 0 340
0.1 100.0 s 5.0 341
0.1 100.0 s 5.0 342
0.00 320.0 Hz 0.00 344
Descrizione
ID
0 = Nessun reset
1 = Reset in caso di
arresto o spegnimento
2 = Reset in caso di
spegnimento
0 = Nessuna inversione
1 = Inversione
Scalatura riferi-
P2.2.36
P2.2.37 Sostituzione facile 0 1 0 366
P2.2.38
***
P2.2.39
P2.2.40 Inversione AI3 0 1 0 151
P2.2.41 Tempo filtro AI3 0.00 10.00 s 0.10 142
P2.2.42
***
mento, valore
massimo, posta-
zione B
Selezione segnale
AI3
Escursione
segnale AI3
Selezione segnale
AI4
0.00 320.0 Hz 0.00 345
0.1 E.10 0.1 141
0 1 1 143
0.1 E.10 0.1 152
0 = Mantieni riferimento
1 = Copia riferimento effettivo
0 = Escursione
segnale 0-10 V
1 = Escursione
segnale 2-10 V
0 = Non invertito
1 = Invertito
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 100

VACON · 100 APPLICAZIONE CONTROLLER PID
Tabella 36: Segnali di ingresso, G2.2
Indice Parametro AI1 AI1 Unità PredefinitoPers
P2.2.43
P2.2.44 Inversione AI4 0 1 0 162
P2.2.45 Tempo filtro AI4 0.00 10.00 s 0.10 153
P2.2.46
P2.2.47
P2.2.48
Escursione
segnale AI4
Valore min. della
grandezza misu-
rata per la visua-
lizzazione speciale
Valore mass. della
grandezza misu-
rata per la visua-
lizzazione speciale
Decimali della
grandezza misu-
rata per la visua-
lizzazione speciale
0 1 1 154
0 30000 0 1033
0 30000 100 1034
0 4 1 1035
Descrizione
ID
0 = Escursione
segnale 0-10 V
1 = Escursione
segnale 2-10 V
0 = Non invertito
1 = Invertito
P2.2.49
Unità di misura
della grandezza
misurata per la
visualizzazione
speciale
0 29 4 1036
Vedere ID1036 nel
capitolo 9 Descri-
zioni dei parametri.
pc = postazione di controllo
cc = contatto chiuso
oc = contatto aperto
* = Ricordarsi di posizionare i jumper del blocco X2 nella configurazione corrispondente.
Vedere il Manuale d'uso del prodotto.
** = Il valore del parametro può essere modificato solo dopo l'arresto di FC.
*** = Usare il metodo TTF per programmare questi parametri.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...